
ろ過方法、ろ過装置及び試料分析前処理装置

【課題】試料の攪拌を可能とし、また自動化ができ処理速度の向上を可能にする。
【解決手段】このろ過装置70は、切り込みが形成された蓋49を有する抽出容器48と、切り込みから挿入され抽出容器48の試料を抽出するピペット65と、試料をろ過するろ過容器64と、ピペット65を保持して抽出容器48の試料を抽出してろ過容器64へ供給するピペット搬送機構とを備え、抽出容器48を振とうして抽出容器48内の試料を攪拌し、ピペット搬送機構によりピペット65を蓋49の切り込みから挿入して抽出容器48内の試料を抽出し、ピペット65により試料をろ過容器64へ供給してろ過する。
【解決手段】このろ過装置70は、切り込みが形成された蓋49を有する抽出容器48と、切り込みから挿入され抽出容器48の試料を抽出するピペット65と、試料をろ過するろ過容器64と、ピペット65を保持して抽出容器48の試料を抽出してろ過容器64へ供給するピペット搬送機構とを備え、抽出容器48を振とうして抽出容器48内の試料を攪拌し、ピペット搬送機構によりピペット65を蓋49の切り込みから挿入して抽出容器48内の試料を抽出し、ピペット65により試料をろ過容器64へ供給してろ過する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、例えば、土壌分析のための前処理を行う過程で、試料のろ過を行うろ過方法、ろ過装置及び試料分析前処理装置に関する。
【背景技術】
【0002】
例えば、ある試料液について化学実験又は水質検査、微生物検査等の各種検査を行うためにピペットでその試料液を吸引採取するには、試料を収容したビーカー、ビニール袋、バケツ等の容器の中にピペットの先端部を入れ、先端部を試料中に直接浸して所定体積の試料を吸引して採取していた (例えば特許文献1)。
【特許文献1】特開平8−332315号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
このような従来のピペットによる試料の吸引採取においては、容器に蓋を設けて振動させて試料を攪拌し、試料の吸引採取を行う場合には、容器の蓋を外してピペットの先端部を容器に収容された試料中に直接浸して吸引する必要があり、蓋の取り外し作業が複雑となると共に手間もかかり、試料の吸引採取の効率が低下すると共に、自動化が困難であった。
【0004】
この発明は、かかる点に鑑みてなされたもので、試料の攪拌を可能とし、また自動化ができ処理速度の向上を可能にするろ過方法、ろ過装置及び試料分析前処理装置を提供することを目的としている。
【課題を解決するための手段】
【0005】
前記課題を解決し、かつ目的を達成するために、この発明は、以下のように構成されている。
【0006】
請求項1に記載の発明は、切り込みが形成された蓋を有する抽出容器を振とうして前記抽出容器内の試料を攪拌し、ピペット搬送機構によりピペットを前記蓋の切り込みから挿入して前記抽出容器内の試料を抽出し、前記ピペットにより試料をろ過容器へ供給してろ過することを特徴とするろ過方法である。
【0007】
請求項2に記載の発明は、前記ピペット搬送機構は、鉛直方向の回転軸を回転し、前記回転軸に設けたアームのピペット保持部で前記ピペットを保持し、前記抽出容器の試料を抽出し、試料を前記ろ過容器へ供給することを特徴とする請求項1に記載のろ過方法である。
【0008】
請求項3に記載の発明は、前記ピペット搬送機構は、同時に複数の前記ピペットを保持して複数の前記抽出容器の試料を抽出し、試料を複数の前記ろ過容器へ供給することを特徴とする請求項1または請求項2に記載のろ過方法である。
【0009】
請求項4に記載の発明は、切り込みが形成された蓋を有する抽出容器と、前記切り込みから挿入され前記抽出容器の試料を抽出するピペットと、前記試料をろ過するろ過容器と、
前記ピペットを保持して前記抽出容器の試料を抽出して前記ろ過容器へ供給するピペット搬送機構と、を備えることを特徴とするろ過装置である。
【0010】
請求項5に記載の発明は、前記ピペット搬送機構は、鉛直方向の回転軸と、前記回転軸に設けたアームと、前記アームに設けたピペット保持部と、を有することを特徴とする請求項4に記載のろ過装置である。
【0011】
請求項6に記載の発明は、前記ピペット搬送機構は、複数の前記ピペットを保持して複数の前記抽出容器の試料を抽出し、試料を複数のろ過容器へ供給可能であることを特徴とする請求項4または請求項5に記載のろ過装置である。
【0012】
請求項7に記載の発明は、前記蓋は、円筒部と、上膜と、下膜とを有し、前記上膜と下膜とに切り込みが形成されていることを特徴とする請求項4乃至請求項6のいずれか1項に記載のろ過装置である。
【0013】
請求項8に記載の発明は、前記抽出容器の上方位置に、前記ピペットの挿入を可能とし、前記抽出容器の持ち上げを規制するジャマ板を設けたことを特徴とする請求項4乃至請求項7のいずれか1項に記載のろ過装置である。
【0014】
請求項9に記載の発明は、請求項4乃至請求項8のいずれか1項に記載のろ過装置を備えることを特徴とする試料分析前処理装置である。
【0015】
請求項10に記載の発明は、試料が土壌であることを特徴とする請求項9に記載の試料分析前処理装置である。
【発明の効果】
【0016】
前記構成により、この発明は、以下のような効果を有する。
【0017】
請求項1及び請求項4に記載の発明では、切り込みが形成された蓋を有する抽出容器を振とうして試料を攪拌しても、蓋により試料の吹き上がりを抑え、噴き出しによるコンタミを防ぐことができる。また、抽出容器から蓋を取り外すことなく、ピペットを蓋の切り込みから挿入して抽出容器の試料を抽出し、試料をろ過容器へ供給することができ、自動化ができ処理速度が向上する。
【0018】
請求項2及び請求項5に記載の発明では、鉛直方向の回転軸を回転し、回転軸に設けたアームのピペット保持部でピペットを保持し、簡単かつ確実に抽出容器の試料を抽出し、試料をろ過容器へ供給することができ、自動化ができ処理速度が向上する。
【0019】
請求項3及び請求項6に記載の発明では、同時に複数のピペットを保持して複数の抽出容器の試料を抽出して複数のろ過容器へ供給可能であり、処理速度が向上する。
【0020】
請求項7に記載の発明では、蓋は、円筒部と、上膜と、下膜とを有し、上膜と下膜とに切り込みが形成されており、抽出容器を振とうして試料を攪拌しても、蓋により試料の吹き上がりを抑え、噴き出しによるコンタミを防ぐことができる。また、抽出容器から蓋を取り外すことなく、ピペットを蓋の上膜と下膜の切り込みから挿入して抽出容器の試料を抽出し、試料をろ過容器へ供給することができる。
【0021】
請求項8に記載の発明では、抽出容器の上方位置に設けたジャマ板により、ピペットを抽出容器に挿入可能であるが、抽出容器の持ち上げを規制して連れ上がりを防ぐことができる。
【0022】
請求項9に記載の発明では、請求項4乃至請求項8のいずれか1項に記載のろ過装置を備え、試料分析の前処理において試料の攪拌を可能とし、また自動化ができ処理速度が向上する。
【0023】
請求項10に記載の発明では、試料が土壌であり、土壌分析の前処理において試料の攪拌が可能であり、また自動化ができ処理速度が向上する。
【発明を実施するための最良の形態】
【0024】
以下、この発明のろ過方法、ろ過装置及び試料分析前処理装置の実施の形態について説明するが、この発明の実施の形態は、発明の最も好ましい形態を示すものであり、この発明はこれに限定されない。
【0025】
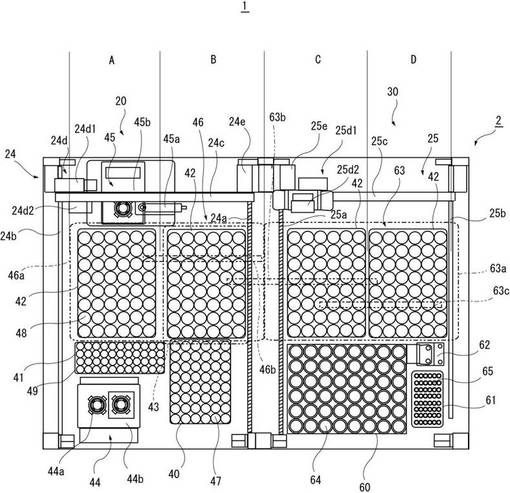
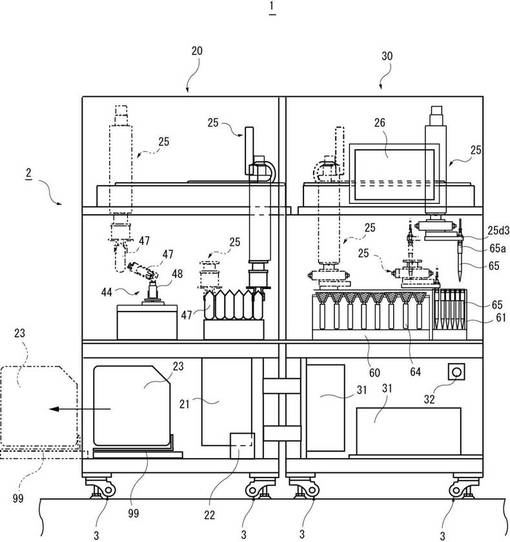
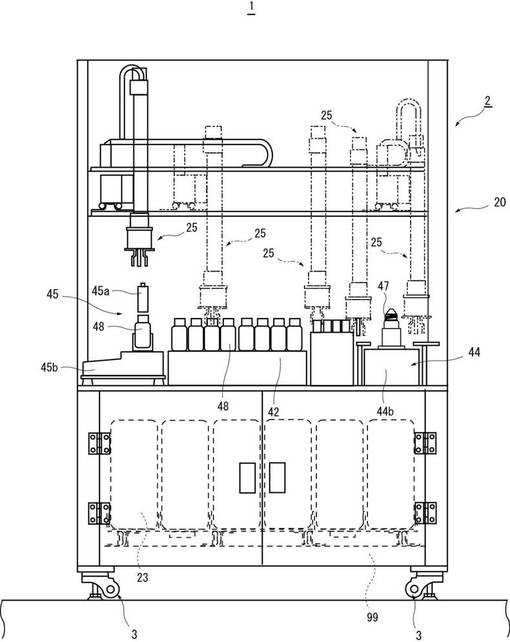
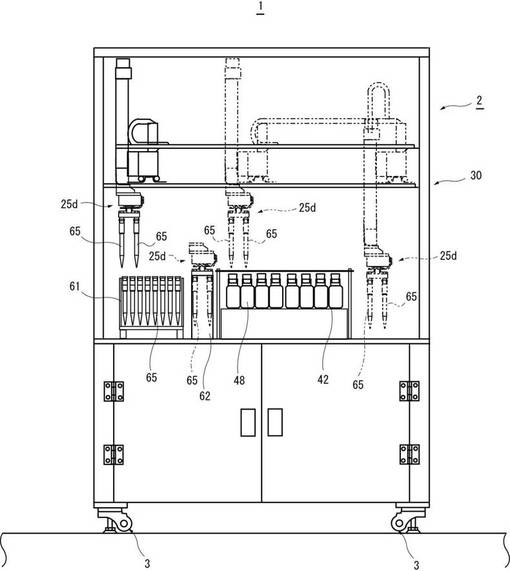
図1乃至図4は、試料分析前処理装置の構成を示し、図1は平面図、図2は正面図、図3は左側面図、図4は右側面図である。
【0026】
この試料分析前処理装置1は、試料として土壌について各種検査を行うためにピペットでその試料を吸引採取するものを示すが、ある試料について化学実験又は水質検査、微生物検査等の各種検査を行うものに適用できる。
【0027】
この試料分析前処理装置1は、枠体2を備え、この枠体2の下部にはアジャスタ付きキャスタ3が設けられ、円滑に移動して高さ調節して設置することができるようになっている。枠体2は、2分割された前段処理部20と後段処理部30とを有している。
【0028】
前段処理部20の下部には、エア機器21、ポンプ22などが配置され、さらに薬液タンク23が薬液タンク収納ラック99上に置いて収納されている。薬液タンク収納ラック99は、前段処理部20の下部に出し入れ可能になっており、薬液タンク23の薬液がなくなると薬液タンク収納ラック99を引き出して新たな薬液タンク23と交換される。
【0029】
前段処理部20の中部には、試料ラック40、蓋台41、抽出ラック42、振とう台43、秤量装置44、注液装置45、搬送機構46などが備えられている。試料ラック40は、出し入れ可能になっており、この試料ラック40には、試料を入れた試料容器47が複数個並べてセットされる。蓋台41には、抽出容器48の蓋49が複数個並べてセットされる。抽出ラック42には、空の抽出容器48が複数個並べてセットされ、試料と薬液を入れた状態で蓋49をして搬送機構46により開始ステーションAから振とうステーションBへ搬送される。搬送機構46は、ローラ搬送台46aとエアシリンダ46bから構成され、ローラ搬送台46a上に抽出ラック42がセットされ、この抽出ラック42をエアシリンダ46bの作動で搬送する。振とうステーションBには振とう台43が備えられ、この振とう台43で抽出容器48の蓋49を上方から押さえて振とうして抽出容器48に入れた試料と薬液を攪拌する。秤量装置44は、供給機構44aと、秤量機構44bとを備え、試料容器47の試料を計測して抽出容器48に設定量入れる。注液装置45は、試料を入れた抽出容器48に薬液を設定量入れる。
【0030】
前段処理部20の上部には、前段作業ロボット装置24が備えられている。この前段作業ロボット装置24は、3軸ロボットで構成され、駆動軸24a、案内軸24b、移動軸24c、ロボット24d及び駆動モータ24eを有する。駆動軸24aと案内軸24bは、平行に配置され、この駆動軸24aと案内軸24bに移動軸24cが掛け渡されている。駆動モータ24eは、例えばサーボモータが用いられ、この駆動モータ24eの駆動で駆動軸24aを正方向に回転し、あるいは負方向に回転することで移動軸24cが駆動軸24aと案内軸24bに沿って前後進する。ロボット24dは、水平方向移動モータ24d1、垂直方向移動モータ24d2を有し、水平方向移動モータ24d1の駆動で移動軸24cに沿って前後進し、垂直方向移動モータ24d2の駆動で垂直方向に移動可能になっている。水平方向移動モータ24d1、垂直方向移動モータ24d2は、例えばステッピングモータが用いられる。
【0031】
ロボット24dは、抽出ラック42の空の抽出容器48を秤量装置44の秤量機構44bにセットし、試料ラック40の試料を入れた試料容器47を試料供給装置44の供給機構44aへ運び、秤量装置44での試料の供給が終了すると、試料を入れた抽出容器48を注液装置45に運び、試料容器47を元の試料ラック40へ戻す。また、注液装置45で試料を入れた抽出容器48への薬液の供給が終了すると、抽出容器48を抽出ラック42の元の位置に戻し、抽出容器48に蓋49を挿入する。
【0032】
後段処理部30の下部には、制御装置31、非常停止ボタン32などが配置されている。制御装置31は、試料分析前処理装置1の制御をプログラムに基づいて自動的に行ない、非常停止ボタン32は作業者が例えば異常が生じた場合に押すことで、強制的に制御を停止させることができる。
【0033】
後段処理部30の中部には、ろ過ラック60、ピペットラック61、ピペット廃却部62、搬送機構63などが備えられている。ろ過ラック60には、ろ過容器64が複数個並べてセットされている。ピペットラック61には、ピペット65が複数個並べてセットされている。ピペット廃却部62からは、使用されたピペット65が廃棄される。抽出ラック42が搬送機構63により振とうステーションBからろ過ステーションCへ搬送され、ろ過ステーションCから終了ステーションDへ搬送される。すなわち、搬送機構63は、ローラ搬送台63aとエアシリンダ63b,63cから構成され、エアシリンダ63bの作動で振とうステーションBの抽出ラック42をろ過ステーションCのローラ搬送台63a上に搬送し、抽出容器48を収納した抽出ラック42がろ過作業位置で停止される。ろ過作業が終了すると、エアシリンダ63cの作動でろ過ステーションCの抽出ラック42を終了ステーションDのローラ搬送台63a上に搬送して前処理が終了する。この抽出ラック42から抽出容器48を廃棄して空の抽出容器48を抽出ラック42に入れて開始ステーションAにセットする。
【0034】
後段処理部30の上部には、後段作業ロボット装置25が備えられ、また操作部26が設けられている。操作部26は、例えばタッチパネルで構成される。後段作業ロボット装置25は、3軸ロボットで構成され、駆動軸25a、案内軸25b、移動軸25c、ロボット25d及び駆動モータ25eを有する。駆動軸25aと案内軸25bは、平行に配置され、この駆動軸25aと案内軸25bに移動軸25cが掛け渡されている。駆動モータ25eは、例えばサーボモータが用いられ、この駆動モータ25eの駆動で駆動軸25aを正方向に回転し、あるいは負方向に回転することで移動軸25cが駆動軸25aと案内軸25bに沿って前後進する。ロボット25dは、水平方向移動モータ25d1、垂直方向移動モータ25d2を有し、水平方向移動モータ25d1の駆動で移動軸25cに沿って前後進し、垂直方向移動モータ25d2の駆動で垂直方向に移動可能になっている。水平方向移動モータ25d1、垂直方向移動モータ25d2は、例えばステッピングモータが用いられる。
【0035】
ロボット25dは、ピペットラック61の2個のピペット65を保持して抽出ラック42に収納した2個の抽出容器48の蓋48から2個のピペット65を挿入し、抽出容器48の試料を吸引して抽出し、ろ過ラック60の2個のろ過容器64に試料を供給する。このろ過容器64でのろ過が終了すると、2個のピペット65をピペット廃却部62へ運び廃棄する。
【0036】
この実施の形態の試料分析前処理装置1は、図1に示すように、上方から見て開始ステーションA、振とうステーションB、ろ過ステーションC及び終了ステーションDが直線的に並べて配置され、抽出ラック42が各ステーションを直線的に搬送可能になっている。また、開始ステーションA及び振とうステーションBの一方側に試料ラック40、蓋台41及び秤量装置44が配置され、他方側に注液装置45及び前段作業ロボット装置24の駆動モータ24eが配置され、ろ過ステーションC及び終了ステーションDの一方側にろ過ラック60、ピペットラック61及びピペット廃却部62が配置され、他方側に後段作業ロボット装置25の駆動モータ25eが配置され、スペースを有効に利用したコンパクトな配置になっている。
【0037】
次に、秤量装置44を図5乃至図12に基づいて詳細に説明する。図5は秤量装置の平面図、図6は秤量装置の正面図、図7は試料容器のセット状態を示す図、図8は秤量装置の基本動作を示す図、図9は試料容器を示す図、図10は他の実施の形態の試料容器のキャップを示す図、図11は秤量装置の動作のフローチャート、図12は秤量装置の動作を示す図である。
【0038】
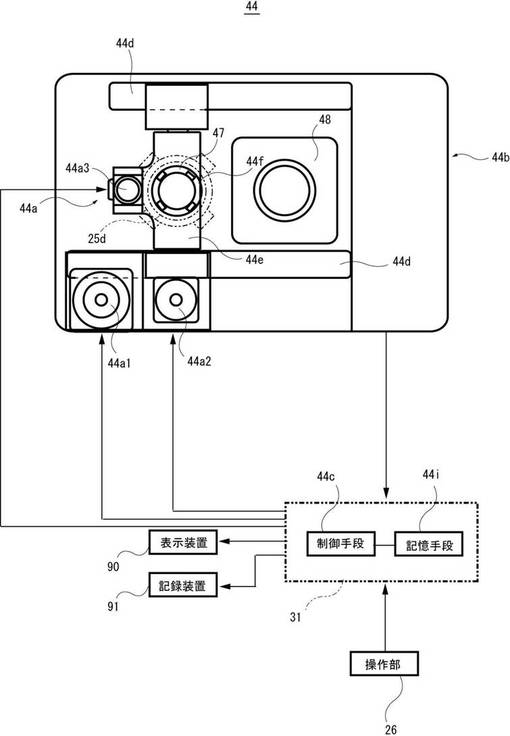
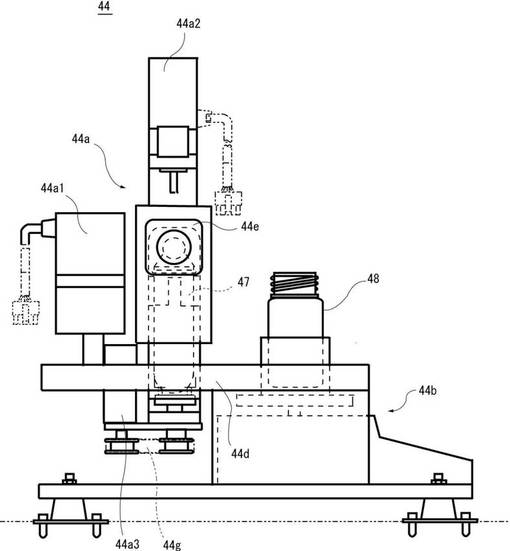
この秤量装置44は、供給機構44aと、秤量機構44bと、制御手段44cとを備え、供給機構44aには試料容器47がロボット24dによってセットされ、秤量機構44bには抽出容器48がロボット24dによってセットされる。
【0039】
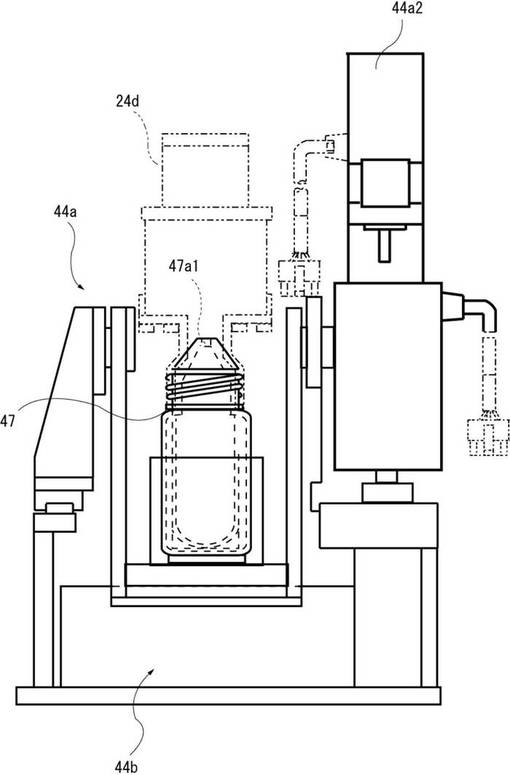
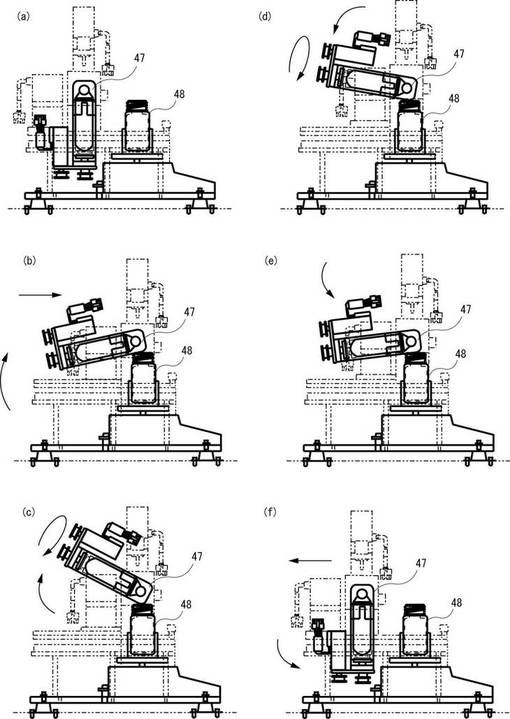
供給機構44aは、試料容器47を所定角度に傾け回転させて試料を抽出容器48に供給する試料供給手段を構成し、試料容器47を初期位置と供給位置を往復動させる移動手段44a1と、試料容器47の供給口47a1を支点に傾斜させる傾斜手段44a2と、試料容器47の供給口47a1を軸として回転させる回転手段44a3とを有する。移動手段44a1は、例えばステッピングモータから構成され、供給機構44a全体をガイド44dに沿って移動して試料容器47を図8(a)、(b)に示す初期位置と図8(c)、(d)に示す供給位置を往復させる。傾斜手段44a2は、例えばステッピングモータから構成され、ギヤ機構44hを介して試料容器47の支持軸部44eを回転させて図8(b)乃至(c)に示すように試料容器47の供給口47a1を支点に傾斜させる。回転手段44a3は、例えばステッピングモータから構成され、タイミングベルト44gを介して試料容器47の保持部44fを回転させて図8(d)に示すように試料容器47の供給口47a1を軸として回転させる。
【0040】
秤量機構44bは、抽出容器48に試料を供給して計測する計測手段を構成し、例えば電子天秤から構成され、計測情報が制御手段44cへ送られる。制御手段44cは、制御装置31に備えられ、また制御装置31には記憶手段44iが備えられている。記憶手段44iには、供給する試料の秤量値と試薬の注液量が予め登録されている。この記憶手段44iへの設定は、操作部26から作業者が入力して行なう。
【0041】
制御手段44cは、計測情報に基づき予め設定された供給する試料の秤量値になるように供給機構44aの移動手段44a1、傾斜手段44a2、回転手段44a3を制御する。
【0042】
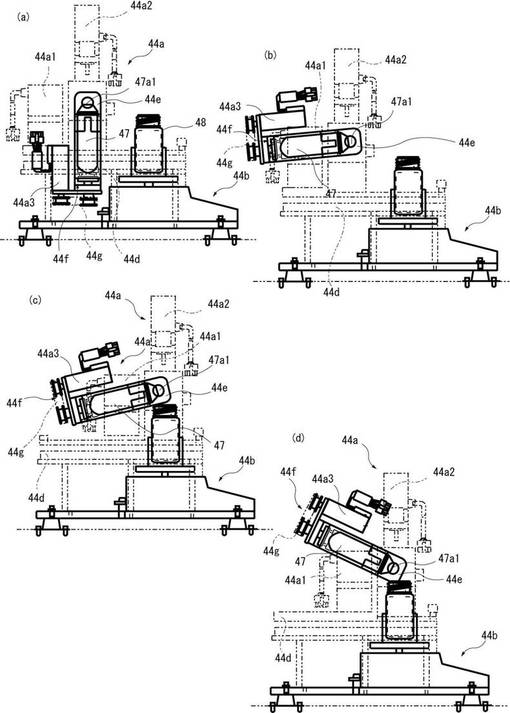
次に、秤量装置44の作動を図11及び図12に基づいて説明する。作業者が検査項目、試料である検体数を操作部26のタッチパネルにて登録し、例えば検査項目の中に土壌秤量値・試薬注液量が予め登録される。例えば、土壌秤量値1.0g・試薬注液量10ml(10mlは10gとする、比重1前提)が登録されている。
【0043】
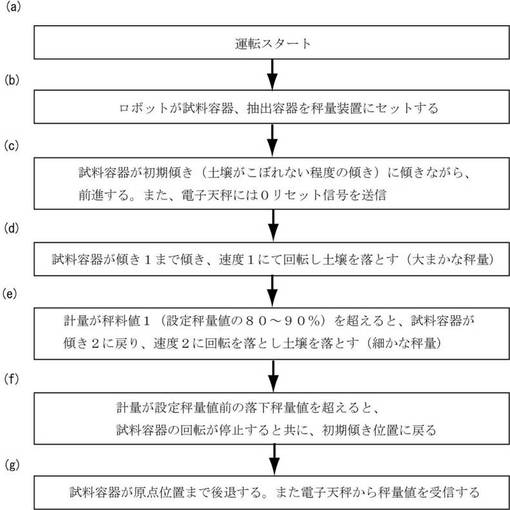
運転を開始すると、ロボット24dが試料容器47、抽出容器48を秤量装置44にセットする[図11(a), 図12(a)]。次に、試料容器47が初期傾き(土壌がこぼれない程度の傾き)に傾きながら、前進する。また、秤量機構44bの電子天秤には0リセット信号を送信する[図11(b), 図12(b)]。
【0044】
試料容器47が傾き1まで傾き、速度1にて回転し土壌を落とす大まかな秤量を行なう[図11(c), 図12(c)]。傾き1、速度1の値は、調整して設定することができる調整値であり、例えば装置の出荷時に調整する。電子天秤の計測値は通信にて秤量が終了するまで常時取り込む。
【0045】
計量が秤量値1(例えば設定秤量値の80〜90%)を超えると、試料容器47が傾き2に戻り、速度2に回転を低下させ土壌を落とす細かな秤量を行なう[図11(d), 図12(d)]。秤量値1、傾き2、速度2の値は調整して設定することができる調整値であり、例えば装置の出荷時に調整する。
【0046】
計量が設定秤量値前の落下秤量値を超えると、試料容器47の回転が停止すると共に、初期傾き位置に戻る[図11(e), 図12(e)]。設定秤量前の落下秤量値の値は、調整して設定することができる調整値であり、例えば装置の出荷時に調整する。設定秤量値になってから停止されると秤量値がオーバーしてしまうため、停止後にどの程度土が落ちるか予測して事前に停止する。ある時間経過しても、設定秤量前の落下秤量値に達しない場合はタイムオーバーでエラー通知が行なわれる。
【0047】
試料容器47が原点位置まで後退し、また電子天秤から秤量値を受信する[図11(f), 図12(f)]。受信した秤量値が顧客要求の秤量誤差をオーバーした場合は秤量エラー通知を行なう。
【0048】
このように、秤量値は、試料容器47の傾き角度と回転速度に影響を受けることから、試料容器47が第1の傾きまで傾き、第1の速度にて回転させて試料を供給して大まかな秤量を行い、計量が大まかな秤量値を超えると、試料容器47を第1の傾きから第2の傾きに戻し、第1の速度より遅い第2の速度に回転を低下させて試料を供給して細かな秤量を行い、計量が設定の秤量値前の供給秤量値を超えると、試料容器47の回転を停止させることで、試料を精度よく試料容器47から試料容器48に供給することができる。
【0049】
また、試料容器47を所定角度に傾け回転させ、計測情報に基づき予め設定された供給する試料の秤量値になるように試料を抽出容器48に供給することで、少量ずつ試料を供給し、かつ試料の供給量の調整ができ秤量の前処理精度が向上する。また、少量ずつ試料を供給することで、試料の舞い上がりを防止することができ作業環境が向上する。
【0050】
また、試料容器47の供給口47a1を支点に傾斜させ、かつ試料容器47の供給口47a1を軸として回転させることで、試料容器47の供給口47a1が抽出容器48上に常に位置することで試料の散らばりを防ぐことができ、試料を確実に抽出容器48に供給することができる。
【0051】
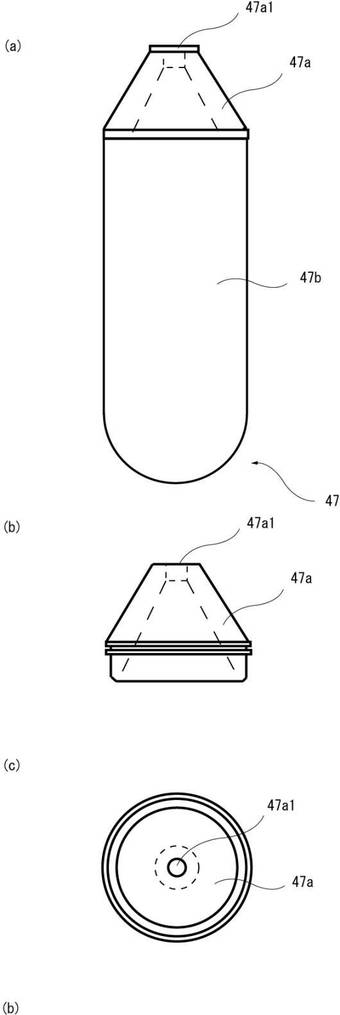
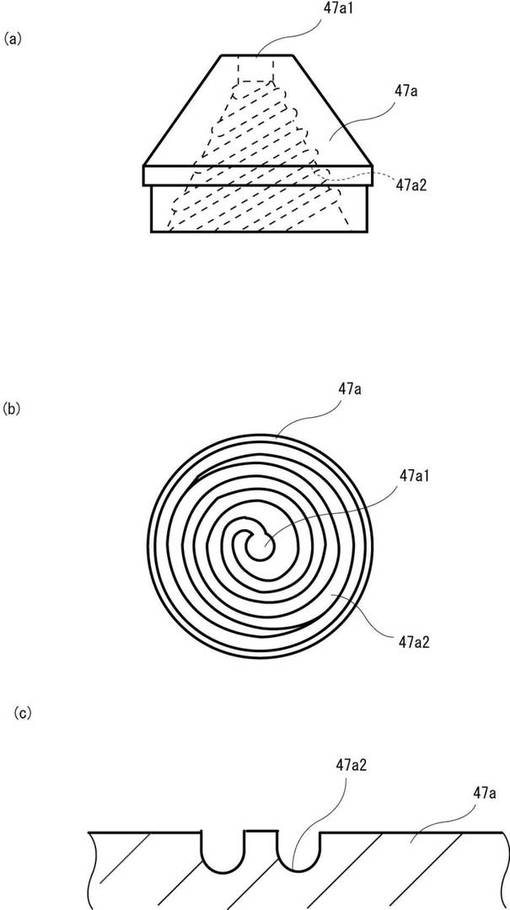
この実施の形態では、試料容器47は、図9(a)乃至(c)に示すように、容器本体47bにキャップ47aを被せた構成であり、キャップ47aを先端に供給口47a1を有する円錐状の絞り形状に形成している。キャップ47aの供給口47a1から試料を供給し、供給口47a1を小さくすることにより試料を少量ずつ供給することができる。また、図10に示すように、キャップ47aを先端に供給口47a1を有する円錐状の絞り形状に形成し、さらにキャップ47aの内側に螺旋状の溝47a2を形成してもよい。この螺旋状の溝47a2は、試料を供給するときの回転方向と同一に方向に螺旋し、供給口47a1に連続して形成されている。螺旋状の溝47a2の断面形状は、図10(c)に示すように、断面U字状に形成されているが、断面V字状などでもよく特に限定されない。このように、キャップ47aの内側に螺旋状の溝47a2を形成すると、試料容器47を回転することで試料が螺旋状の溝47a2に案内されて供給口47a1に移動し、試料の詰まりがなく供給口47a1から試料が落下して供給することができる。
【0052】
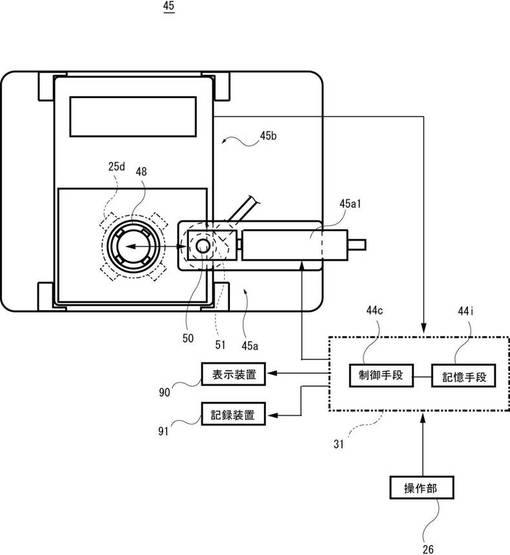
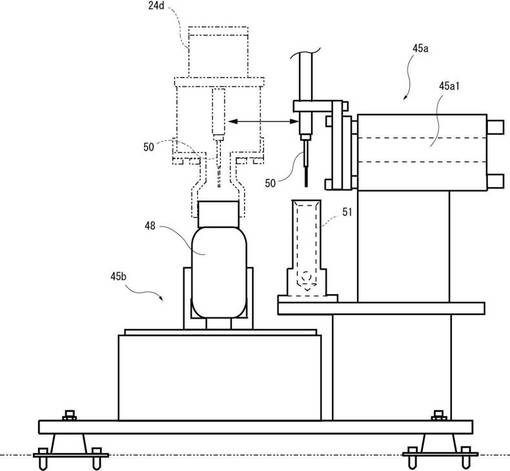
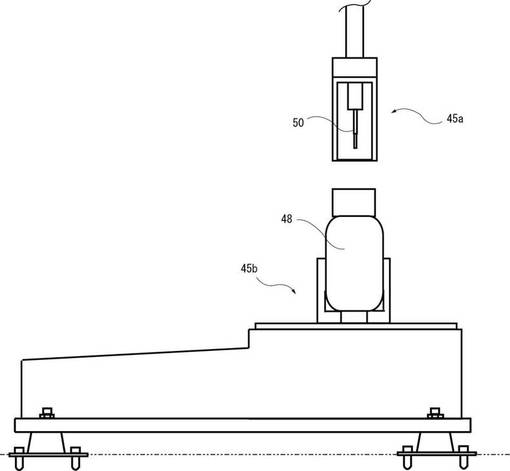
次に、注液装置45を図13乃至図16に基づいて詳細に説明する。図13は注液装置の平面図、図14は抽出容器のセット状態を示す図、図15は注液状態を示す図、図16は注液装置の動作のフローチャートである。
【0053】
この注液装置45は、供給機構45aと、秤量機構45bとを備え、供給機構45aには薬液供給ノズル50が設けられ、秤量機構45bには抽出容器48がロボット24dによってセットされる。供給機構45aが薬液供給手段を構成する。
【0054】
供給機構45aは、薬液供給ノズル50をドレン排出位置と供給位置を往復動させる移動手段45a1を有している。この移動手段45a1は、例えばエアシリンダで構成され、薬液供給ノズル50をドレン排出位置に退避させておき、薬液供給時に前進して供給位置に薬液供給ノズル50を移動させて抽出容器48に薬液を供給する。薬液供給ノズル50をドレン排出位置に退避させておくときに、薬液供給ノズル50から落下する薬液はドレン排出部51から廃棄される。
【0055】
秤量機構45bは、抽出容器48に薬液を供給して計測する計測手段を構成し、例えば電子はかりから構成され、計測情報が制御手段44cへ送られる。制御手段44cは、秤量値の計測結果から設定重量濃度となる実注液量を設定する設定手段を備え、この設定された薬液の実注液量になるように薬液供給手段を構成する供給機構45aを制御する。
【0056】
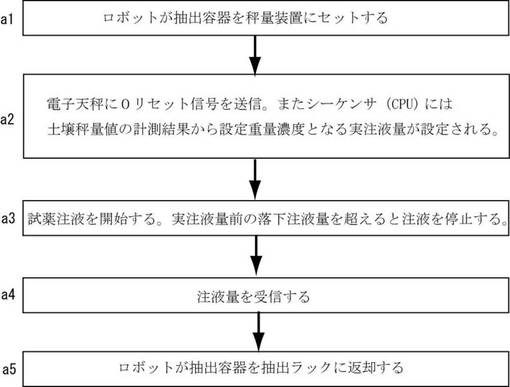
次に、注液装置45の作動を図16に基づいて説明する。注液装置45が作動する前段階として、図5乃至図11に示すように、ロボット24dが抽出容器47を秤量装置44にセットする(ステップa1)。秤量装置44では、電子天秤に0リセット信号を送信し、また制御手段44cには土壌の秤量値の計測結果から設定重量濃度となる実注液量が設定される。精度に対する要求としては、土壌の秤量値誤差の他に土液の重量濃度比がある。例えば、土壌1.0g・注液10ml設定の場合、「重量濃度10%(誤差±5%)」であることが要求される。従って、土壌の秤量値が仮に1.1gであった場合は、11ml注液する必要があり、土壌の秤量結果と設定基準重量濃度から、必要な実注液量が制御手段44c にて算出される(ステップa2)。
【0057】
そして、注液装置45において、試薬注液を開始する。実注液量前の落下注液量を超えると注液を停止する(ステップa3)。実注液量前の落下注液量は、調整して設定することができる調整値であり、例えば装置の出荷時に調整する。土壌の秤量の際と同様に、実注液量に達してから注液を停止するとオーバーしてしまうため、注液停止後にどの程度試薬が滴下するか予測して事前に停止させる。
【0058】
制御手段44cは、注液量を受信し、土液の重量濃度比が設定値、例えば10%±5%を超えた場合は表示装置90によりエラー通知する。また、試料の検体ごとに土壌の秤量値、注液量、重量濃度が表示装置90により表示、また記録装置91により記録される(ステップa4)。そして、ロボット24dが抽出容器48を抽出ラック42に返却する(ステップa5)。
このように、秤量機構45bによる試料の秤量値の計測結果から設定重量濃度となる薬液の実注液量を設定し、設定された薬液の実注液量になるように供給機構45aを制御して薬液を供給することで、注液の前処理精度が向上する。
【0059】
この注液装置45での中液が終了すると、図17及び図18に示すように、ロボット24dが蓋台41から蓋49を取り出して抽出容器48に挿入する。蓋49は、ゴムで一体に形成され、円筒部49aと、上膜49bと、下膜49cとを有する。上膜49bと下膜49cとには、十字状の切り込み49b1,49c1が形成され、さらに下膜49cにはピペット挿入孔49c2が形成されている。このように、抽出容器48に挿入した蓋49には、上膜49bと下膜49cとに切り込み49b1,49c1が形成されており、図16に示すように、抽出容器48の蓋49を振とう台43により押さえて振とうして試料と薬液を攪拌しても、蓋49により試料の吹き上がりを抑え、噴き出しによるコンタミを防ぐことができる。
【0060】
次に、ろ過装置70を図19乃至図23に基づいて詳細に説明する。図19はロボットによりピペットを保持する状態の平面図、図20はロボットによりピペットを保持する状態の側面図、図21はピペットのセット状態を示す図、図22は注液状態を示す図、図23はろ過装置の動作を示す図である。
【0061】
このろ過装置70は、抽出容器48と、ピペット65と、ろ過容器64と、ピペット搬送機構であるロボット24dとを備えている。この抽出容器48は、図17及び図18に示すように、切り込みが形成された蓋49を有する。ロボット24dは、鉛直方向の回転軸25d11と、回転軸25d11に設けたアーム25d12と、アーム25d12に設けたピペット保持部25d13とを有する。ピペット保持部25d13には、2個の抽出パイプ71が取り付けられ、この抽出パイプ71の先端部71aはピペット65の上部65aに挿入され、この挿入によってピペット65が保持されると共に、抽出容器48の上澄みの試料が抽出可能になる。
【0062】
次に、ろ過装置70の作動を図23に基づいて説明する。ロボット25dは、ピペットラック61の2個のピペット65を保持して運び[図23(a),(b)]、抽出ラック42に収納した2個の抽出容器48の蓋49から2個のピペット65を挿入し、抽出容器48の上澄みの試料を吸引して抽出し[図23(c)]、ろ過ラック60の2個のろ過容器64に試料を供給する[図23(d)]。このろ過容器64でのろ過が終了すると、2個のピペット65をピペット廃却部62へ運び廃棄する[図23(e)]。
【0063】
ろ過ステーションCには、抽出容器48の上方位置に、図22に示すように、ジャマ板72が配置されている。このジャマ板72には開口72aが形成され、この開口72aがピペット65の挿入を可能とし、抽出容器48の持ち上げを規制する大きさに形成されている。したがって、ロボット24dを作動してピペット65の先端部65bをジャマ板72の開口72aから挿入し、抽出容器48から蓋49を取り外すことなく、ピペット65の先端部65bを蓋49の上膜49bと下膜49cの切り込み49b1,49c1から挿入して抽出容器48の試料を抽出し、ピペット65を持ち上げて試料をろ過容器64へ供給することができる。このピペット65を持ち上げるときに、抽出容器48が持ち上がることがあっても抽出容器48の上方位置に設けたジャマ板42により抽出容器48の持ち上げを規制して連れ上がりを防ぐことができる。
このように、抽出容器48から蓋49を取り外すことなく、ピペット65を蓋49の切り込みから挿入して抽出容器48の試料を抽出し、試料をろ過容器64へ供給することができ、自動化ができ処理速度が向上する。
【0064】
また、ロボット24dは、鉛直方向の回転軸25d11を回転し、回転軸25d11に設けたアーム25d12のピペット保持部25d13でピペット65を保持し、簡単かつ確実に抽出容器48の試料を抽出し、試料をろ過容器64へ供給することができ、自動化ができ処理速度が向上する。また、同時に複数のピペット65を保持して複数の抽出容器48の試料を抽出して複数のろ過容器64へ供給可能であり、一回の動作で複数回の濾過処理が行え、処理時間短縮となり処理速度が向上する。
【産業上の利用可能性】
【0065】
この発明は、例えば、土壌分析のための前処理を行う過程で、試料のろ過を行うろ過方法、ろ過装置及び試料分析前処理装置に適用でき、試料の攪拌を可能とし、また自動化ができ処理速度の向上を可能にする。
【図面の簡単な説明】
【0066】
【図1】試料分析前処理装置の平面図である。
【図2】試料分析前処理装置の正面図である。
【図3】試料分析前処理装置の左側面図である。
【図4】試料分析前処理装置の右側面図である。
【図5】秤量装置の平面図である。
【図6】秤量装置の正面図である。
【図7】試料容器のセット状態を示す図である。
【図8】秤量装置の基本動作を示す図である。
【図9】試料容器を示す図である。
【図10】他の実施の形態の試料容器のキャップを示す図である。
【図11】秤量装置の動作のフローチャートである。
【図12】秤量装置の動作を示す図である。
【図13】注液装置の平面図である。
【図14】抽出容器のセット状態を示す図である。
【図15】注液状態を示す図である。
【図16】注液装置の動作のフローチャートである。
【図17】蓋を有する抽出容器の側面図である。
【図18】十字状の切り込みを有する蓋を示す図である。
【図19】ロボットによりピペットを保持する状態の平面図である。
【図20】ロボットによりピペットを保持する状態の側面図である。
【図21】ピペットのセット状態を示す図である。
【図22】注液状態を示す図である。
【図23】ろ過装置の動作を示す図である。
【符号の説明】
【0067】
1 試料分析前処理装置
2 枠体
20 前段処理部
30 後段処理部
24 前段作業ロボット装置
25 後段作業ロボット装置
40 試料ラック
41 蓋台
42 抽出ラック
43 振とう台
44 秤量装置
45 注液装置
46 搬送機構
47 試料容器
48 抽出容器
49 蓋
60 ろ過ラック
61 ピペットラック
62 ピペット廃却部
63 搬送機構
64 ろ過容器
65 ピペット
70 ろ過装置
A 開始ステーション
B 振とうステーション
C ろ過ステーション
D 終了ステーション
【技術分野】
【0001】
この発明は、例えば、土壌分析のための前処理を行う過程で、試料のろ過を行うろ過方法、ろ過装置及び試料分析前処理装置に関する。
【背景技術】
【0002】
例えば、ある試料液について化学実験又は水質検査、微生物検査等の各種検査を行うためにピペットでその試料液を吸引採取するには、試料を収容したビーカー、ビニール袋、バケツ等の容器の中にピペットの先端部を入れ、先端部を試料中に直接浸して所定体積の試料を吸引して採取していた (例えば特許文献1)。
【特許文献1】特開平8−332315号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
このような従来のピペットによる試料の吸引採取においては、容器に蓋を設けて振動させて試料を攪拌し、試料の吸引採取を行う場合には、容器の蓋を外してピペットの先端部を容器に収容された試料中に直接浸して吸引する必要があり、蓋の取り外し作業が複雑となると共に手間もかかり、試料の吸引採取の効率が低下すると共に、自動化が困難であった。
【0004】
この発明は、かかる点に鑑みてなされたもので、試料の攪拌を可能とし、また自動化ができ処理速度の向上を可能にするろ過方法、ろ過装置及び試料分析前処理装置を提供することを目的としている。
【課題を解決するための手段】
【0005】
前記課題を解決し、かつ目的を達成するために、この発明は、以下のように構成されている。
【0006】
請求項1に記載の発明は、切り込みが形成された蓋を有する抽出容器を振とうして前記抽出容器内の試料を攪拌し、ピペット搬送機構によりピペットを前記蓋の切り込みから挿入して前記抽出容器内の試料を抽出し、前記ピペットにより試料をろ過容器へ供給してろ過することを特徴とするろ過方法である。
【0007】
請求項2に記載の発明は、前記ピペット搬送機構は、鉛直方向の回転軸を回転し、前記回転軸に設けたアームのピペット保持部で前記ピペットを保持し、前記抽出容器の試料を抽出し、試料を前記ろ過容器へ供給することを特徴とする請求項1に記載のろ過方法である。
【0008】
請求項3に記載の発明は、前記ピペット搬送機構は、同時に複数の前記ピペットを保持して複数の前記抽出容器の試料を抽出し、試料を複数の前記ろ過容器へ供給することを特徴とする請求項1または請求項2に記載のろ過方法である。
【0009】
請求項4に記載の発明は、切り込みが形成された蓋を有する抽出容器と、前記切り込みから挿入され前記抽出容器の試料を抽出するピペットと、前記試料をろ過するろ過容器と、
前記ピペットを保持して前記抽出容器の試料を抽出して前記ろ過容器へ供給するピペット搬送機構と、を備えることを特徴とするろ過装置である。
【0010】
請求項5に記載の発明は、前記ピペット搬送機構は、鉛直方向の回転軸と、前記回転軸に設けたアームと、前記アームに設けたピペット保持部と、を有することを特徴とする請求項4に記載のろ過装置である。
【0011】
請求項6に記載の発明は、前記ピペット搬送機構は、複数の前記ピペットを保持して複数の前記抽出容器の試料を抽出し、試料を複数のろ過容器へ供給可能であることを特徴とする請求項4または請求項5に記載のろ過装置である。
【0012】
請求項7に記載の発明は、前記蓋は、円筒部と、上膜と、下膜とを有し、前記上膜と下膜とに切り込みが形成されていることを特徴とする請求項4乃至請求項6のいずれか1項に記載のろ過装置である。
【0013】
請求項8に記載の発明は、前記抽出容器の上方位置に、前記ピペットの挿入を可能とし、前記抽出容器の持ち上げを規制するジャマ板を設けたことを特徴とする請求項4乃至請求項7のいずれか1項に記載のろ過装置である。
【0014】
請求項9に記載の発明は、請求項4乃至請求項8のいずれか1項に記載のろ過装置を備えることを特徴とする試料分析前処理装置である。
【0015】
請求項10に記載の発明は、試料が土壌であることを特徴とする請求項9に記載の試料分析前処理装置である。
【発明の効果】
【0016】
前記構成により、この発明は、以下のような効果を有する。
【0017】
請求項1及び請求項4に記載の発明では、切り込みが形成された蓋を有する抽出容器を振とうして試料を攪拌しても、蓋により試料の吹き上がりを抑え、噴き出しによるコンタミを防ぐことができる。また、抽出容器から蓋を取り外すことなく、ピペットを蓋の切り込みから挿入して抽出容器の試料を抽出し、試料をろ過容器へ供給することができ、自動化ができ処理速度が向上する。
【0018】
請求項2及び請求項5に記載の発明では、鉛直方向の回転軸を回転し、回転軸に設けたアームのピペット保持部でピペットを保持し、簡単かつ確実に抽出容器の試料を抽出し、試料をろ過容器へ供給することができ、自動化ができ処理速度が向上する。
【0019】
請求項3及び請求項6に記載の発明では、同時に複数のピペットを保持して複数の抽出容器の試料を抽出して複数のろ過容器へ供給可能であり、処理速度が向上する。
【0020】
請求項7に記載の発明では、蓋は、円筒部と、上膜と、下膜とを有し、上膜と下膜とに切り込みが形成されており、抽出容器を振とうして試料を攪拌しても、蓋により試料の吹き上がりを抑え、噴き出しによるコンタミを防ぐことができる。また、抽出容器から蓋を取り外すことなく、ピペットを蓋の上膜と下膜の切り込みから挿入して抽出容器の試料を抽出し、試料をろ過容器へ供給することができる。
【0021】
請求項8に記載の発明では、抽出容器の上方位置に設けたジャマ板により、ピペットを抽出容器に挿入可能であるが、抽出容器の持ち上げを規制して連れ上がりを防ぐことができる。
【0022】
請求項9に記載の発明では、請求項4乃至請求項8のいずれか1項に記載のろ過装置を備え、試料分析の前処理において試料の攪拌を可能とし、また自動化ができ処理速度が向上する。
【0023】
請求項10に記載の発明では、試料が土壌であり、土壌分析の前処理において試料の攪拌が可能であり、また自動化ができ処理速度が向上する。
【発明を実施するための最良の形態】
【0024】
以下、この発明のろ過方法、ろ過装置及び試料分析前処理装置の実施の形態について説明するが、この発明の実施の形態は、発明の最も好ましい形態を示すものであり、この発明はこれに限定されない。
【0025】
図1乃至図4は、試料分析前処理装置の構成を示し、図1は平面図、図2は正面図、図3は左側面図、図4は右側面図である。
【0026】
この試料分析前処理装置1は、試料として土壌について各種検査を行うためにピペットでその試料を吸引採取するものを示すが、ある試料について化学実験又は水質検査、微生物検査等の各種検査を行うものに適用できる。
【0027】
この試料分析前処理装置1は、枠体2を備え、この枠体2の下部にはアジャスタ付きキャスタ3が設けられ、円滑に移動して高さ調節して設置することができるようになっている。枠体2は、2分割された前段処理部20と後段処理部30とを有している。
【0028】
前段処理部20の下部には、エア機器21、ポンプ22などが配置され、さらに薬液タンク23が薬液タンク収納ラック99上に置いて収納されている。薬液タンク収納ラック99は、前段処理部20の下部に出し入れ可能になっており、薬液タンク23の薬液がなくなると薬液タンク収納ラック99を引き出して新たな薬液タンク23と交換される。
【0029】
前段処理部20の中部には、試料ラック40、蓋台41、抽出ラック42、振とう台43、秤量装置44、注液装置45、搬送機構46などが備えられている。試料ラック40は、出し入れ可能になっており、この試料ラック40には、試料を入れた試料容器47が複数個並べてセットされる。蓋台41には、抽出容器48の蓋49が複数個並べてセットされる。抽出ラック42には、空の抽出容器48が複数個並べてセットされ、試料と薬液を入れた状態で蓋49をして搬送機構46により開始ステーションAから振とうステーションBへ搬送される。搬送機構46は、ローラ搬送台46aとエアシリンダ46bから構成され、ローラ搬送台46a上に抽出ラック42がセットされ、この抽出ラック42をエアシリンダ46bの作動で搬送する。振とうステーションBには振とう台43が備えられ、この振とう台43で抽出容器48の蓋49を上方から押さえて振とうして抽出容器48に入れた試料と薬液を攪拌する。秤量装置44は、供給機構44aと、秤量機構44bとを備え、試料容器47の試料を計測して抽出容器48に設定量入れる。注液装置45は、試料を入れた抽出容器48に薬液を設定量入れる。
【0030】
前段処理部20の上部には、前段作業ロボット装置24が備えられている。この前段作業ロボット装置24は、3軸ロボットで構成され、駆動軸24a、案内軸24b、移動軸24c、ロボット24d及び駆動モータ24eを有する。駆動軸24aと案内軸24bは、平行に配置され、この駆動軸24aと案内軸24bに移動軸24cが掛け渡されている。駆動モータ24eは、例えばサーボモータが用いられ、この駆動モータ24eの駆動で駆動軸24aを正方向に回転し、あるいは負方向に回転することで移動軸24cが駆動軸24aと案内軸24bに沿って前後進する。ロボット24dは、水平方向移動モータ24d1、垂直方向移動モータ24d2を有し、水平方向移動モータ24d1の駆動で移動軸24cに沿って前後進し、垂直方向移動モータ24d2の駆動で垂直方向に移動可能になっている。水平方向移動モータ24d1、垂直方向移動モータ24d2は、例えばステッピングモータが用いられる。
【0031】
ロボット24dは、抽出ラック42の空の抽出容器48を秤量装置44の秤量機構44bにセットし、試料ラック40の試料を入れた試料容器47を試料供給装置44の供給機構44aへ運び、秤量装置44での試料の供給が終了すると、試料を入れた抽出容器48を注液装置45に運び、試料容器47を元の試料ラック40へ戻す。また、注液装置45で試料を入れた抽出容器48への薬液の供給が終了すると、抽出容器48を抽出ラック42の元の位置に戻し、抽出容器48に蓋49を挿入する。
【0032】
後段処理部30の下部には、制御装置31、非常停止ボタン32などが配置されている。制御装置31は、試料分析前処理装置1の制御をプログラムに基づいて自動的に行ない、非常停止ボタン32は作業者が例えば異常が生じた場合に押すことで、強制的に制御を停止させることができる。
【0033】
後段処理部30の中部には、ろ過ラック60、ピペットラック61、ピペット廃却部62、搬送機構63などが備えられている。ろ過ラック60には、ろ過容器64が複数個並べてセットされている。ピペットラック61には、ピペット65が複数個並べてセットされている。ピペット廃却部62からは、使用されたピペット65が廃棄される。抽出ラック42が搬送機構63により振とうステーションBからろ過ステーションCへ搬送され、ろ過ステーションCから終了ステーションDへ搬送される。すなわち、搬送機構63は、ローラ搬送台63aとエアシリンダ63b,63cから構成され、エアシリンダ63bの作動で振とうステーションBの抽出ラック42をろ過ステーションCのローラ搬送台63a上に搬送し、抽出容器48を収納した抽出ラック42がろ過作業位置で停止される。ろ過作業が終了すると、エアシリンダ63cの作動でろ過ステーションCの抽出ラック42を終了ステーションDのローラ搬送台63a上に搬送して前処理が終了する。この抽出ラック42から抽出容器48を廃棄して空の抽出容器48を抽出ラック42に入れて開始ステーションAにセットする。
【0034】
後段処理部30の上部には、後段作業ロボット装置25が備えられ、また操作部26が設けられている。操作部26は、例えばタッチパネルで構成される。後段作業ロボット装置25は、3軸ロボットで構成され、駆動軸25a、案内軸25b、移動軸25c、ロボット25d及び駆動モータ25eを有する。駆動軸25aと案内軸25bは、平行に配置され、この駆動軸25aと案内軸25bに移動軸25cが掛け渡されている。駆動モータ25eは、例えばサーボモータが用いられ、この駆動モータ25eの駆動で駆動軸25aを正方向に回転し、あるいは負方向に回転することで移動軸25cが駆動軸25aと案内軸25bに沿って前後進する。ロボット25dは、水平方向移動モータ25d1、垂直方向移動モータ25d2を有し、水平方向移動モータ25d1の駆動で移動軸25cに沿って前後進し、垂直方向移動モータ25d2の駆動で垂直方向に移動可能になっている。水平方向移動モータ25d1、垂直方向移動モータ25d2は、例えばステッピングモータが用いられる。
【0035】
ロボット25dは、ピペットラック61の2個のピペット65を保持して抽出ラック42に収納した2個の抽出容器48の蓋48から2個のピペット65を挿入し、抽出容器48の試料を吸引して抽出し、ろ過ラック60の2個のろ過容器64に試料を供給する。このろ過容器64でのろ過が終了すると、2個のピペット65をピペット廃却部62へ運び廃棄する。
【0036】
この実施の形態の試料分析前処理装置1は、図1に示すように、上方から見て開始ステーションA、振とうステーションB、ろ過ステーションC及び終了ステーションDが直線的に並べて配置され、抽出ラック42が各ステーションを直線的に搬送可能になっている。また、開始ステーションA及び振とうステーションBの一方側に試料ラック40、蓋台41及び秤量装置44が配置され、他方側に注液装置45及び前段作業ロボット装置24の駆動モータ24eが配置され、ろ過ステーションC及び終了ステーションDの一方側にろ過ラック60、ピペットラック61及びピペット廃却部62が配置され、他方側に後段作業ロボット装置25の駆動モータ25eが配置され、スペースを有効に利用したコンパクトな配置になっている。
【0037】
次に、秤量装置44を図5乃至図12に基づいて詳細に説明する。図5は秤量装置の平面図、図6は秤量装置の正面図、図7は試料容器のセット状態を示す図、図8は秤量装置の基本動作を示す図、図9は試料容器を示す図、図10は他の実施の形態の試料容器のキャップを示す図、図11は秤量装置の動作のフローチャート、図12は秤量装置の動作を示す図である。
【0038】
この秤量装置44は、供給機構44aと、秤量機構44bと、制御手段44cとを備え、供給機構44aには試料容器47がロボット24dによってセットされ、秤量機構44bには抽出容器48がロボット24dによってセットされる。
【0039】
供給機構44aは、試料容器47を所定角度に傾け回転させて試料を抽出容器48に供給する試料供給手段を構成し、試料容器47を初期位置と供給位置を往復動させる移動手段44a1と、試料容器47の供給口47a1を支点に傾斜させる傾斜手段44a2と、試料容器47の供給口47a1を軸として回転させる回転手段44a3とを有する。移動手段44a1は、例えばステッピングモータから構成され、供給機構44a全体をガイド44dに沿って移動して試料容器47を図8(a)、(b)に示す初期位置と図8(c)、(d)に示す供給位置を往復させる。傾斜手段44a2は、例えばステッピングモータから構成され、ギヤ機構44hを介して試料容器47の支持軸部44eを回転させて図8(b)乃至(c)に示すように試料容器47の供給口47a1を支点に傾斜させる。回転手段44a3は、例えばステッピングモータから構成され、タイミングベルト44gを介して試料容器47の保持部44fを回転させて図8(d)に示すように試料容器47の供給口47a1を軸として回転させる。
【0040】
秤量機構44bは、抽出容器48に試料を供給して計測する計測手段を構成し、例えば電子天秤から構成され、計測情報が制御手段44cへ送られる。制御手段44cは、制御装置31に備えられ、また制御装置31には記憶手段44iが備えられている。記憶手段44iには、供給する試料の秤量値と試薬の注液量が予め登録されている。この記憶手段44iへの設定は、操作部26から作業者が入力して行なう。
【0041】
制御手段44cは、計測情報に基づき予め設定された供給する試料の秤量値になるように供給機構44aの移動手段44a1、傾斜手段44a2、回転手段44a3を制御する。
【0042】
次に、秤量装置44の作動を図11及び図12に基づいて説明する。作業者が検査項目、試料である検体数を操作部26のタッチパネルにて登録し、例えば検査項目の中に土壌秤量値・試薬注液量が予め登録される。例えば、土壌秤量値1.0g・試薬注液量10ml(10mlは10gとする、比重1前提)が登録されている。
【0043】
運転を開始すると、ロボット24dが試料容器47、抽出容器48を秤量装置44にセットする[図11(a), 図12(a)]。次に、試料容器47が初期傾き(土壌がこぼれない程度の傾き)に傾きながら、前進する。また、秤量機構44bの電子天秤には0リセット信号を送信する[図11(b), 図12(b)]。
【0044】
試料容器47が傾き1まで傾き、速度1にて回転し土壌を落とす大まかな秤量を行なう[図11(c), 図12(c)]。傾き1、速度1の値は、調整して設定することができる調整値であり、例えば装置の出荷時に調整する。電子天秤の計測値は通信にて秤量が終了するまで常時取り込む。
【0045】
計量が秤量値1(例えば設定秤量値の80〜90%)を超えると、試料容器47が傾き2に戻り、速度2に回転を低下させ土壌を落とす細かな秤量を行なう[図11(d), 図12(d)]。秤量値1、傾き2、速度2の値は調整して設定することができる調整値であり、例えば装置の出荷時に調整する。
【0046】
計量が設定秤量値前の落下秤量値を超えると、試料容器47の回転が停止すると共に、初期傾き位置に戻る[図11(e), 図12(e)]。設定秤量前の落下秤量値の値は、調整して設定することができる調整値であり、例えば装置の出荷時に調整する。設定秤量値になってから停止されると秤量値がオーバーしてしまうため、停止後にどの程度土が落ちるか予測して事前に停止する。ある時間経過しても、設定秤量前の落下秤量値に達しない場合はタイムオーバーでエラー通知が行なわれる。
【0047】
試料容器47が原点位置まで後退し、また電子天秤から秤量値を受信する[図11(f), 図12(f)]。受信した秤量値が顧客要求の秤量誤差をオーバーした場合は秤量エラー通知を行なう。
【0048】
このように、秤量値は、試料容器47の傾き角度と回転速度に影響を受けることから、試料容器47が第1の傾きまで傾き、第1の速度にて回転させて試料を供給して大まかな秤量を行い、計量が大まかな秤量値を超えると、試料容器47を第1の傾きから第2の傾きに戻し、第1の速度より遅い第2の速度に回転を低下させて試料を供給して細かな秤量を行い、計量が設定の秤量値前の供給秤量値を超えると、試料容器47の回転を停止させることで、試料を精度よく試料容器47から試料容器48に供給することができる。
【0049】
また、試料容器47を所定角度に傾け回転させ、計測情報に基づき予め設定された供給する試料の秤量値になるように試料を抽出容器48に供給することで、少量ずつ試料を供給し、かつ試料の供給量の調整ができ秤量の前処理精度が向上する。また、少量ずつ試料を供給することで、試料の舞い上がりを防止することができ作業環境が向上する。
【0050】
また、試料容器47の供給口47a1を支点に傾斜させ、かつ試料容器47の供給口47a1を軸として回転させることで、試料容器47の供給口47a1が抽出容器48上に常に位置することで試料の散らばりを防ぐことができ、試料を確実に抽出容器48に供給することができる。
【0051】
この実施の形態では、試料容器47は、図9(a)乃至(c)に示すように、容器本体47bにキャップ47aを被せた構成であり、キャップ47aを先端に供給口47a1を有する円錐状の絞り形状に形成している。キャップ47aの供給口47a1から試料を供給し、供給口47a1を小さくすることにより試料を少量ずつ供給することができる。また、図10に示すように、キャップ47aを先端に供給口47a1を有する円錐状の絞り形状に形成し、さらにキャップ47aの内側に螺旋状の溝47a2を形成してもよい。この螺旋状の溝47a2は、試料を供給するときの回転方向と同一に方向に螺旋し、供給口47a1に連続して形成されている。螺旋状の溝47a2の断面形状は、図10(c)に示すように、断面U字状に形成されているが、断面V字状などでもよく特に限定されない。このように、キャップ47aの内側に螺旋状の溝47a2を形成すると、試料容器47を回転することで試料が螺旋状の溝47a2に案内されて供給口47a1に移動し、試料の詰まりがなく供給口47a1から試料が落下して供給することができる。
【0052】
次に、注液装置45を図13乃至図16に基づいて詳細に説明する。図13は注液装置の平面図、図14は抽出容器のセット状態を示す図、図15は注液状態を示す図、図16は注液装置の動作のフローチャートである。
【0053】
この注液装置45は、供給機構45aと、秤量機構45bとを備え、供給機構45aには薬液供給ノズル50が設けられ、秤量機構45bには抽出容器48がロボット24dによってセットされる。供給機構45aが薬液供給手段を構成する。
【0054】
供給機構45aは、薬液供給ノズル50をドレン排出位置と供給位置を往復動させる移動手段45a1を有している。この移動手段45a1は、例えばエアシリンダで構成され、薬液供給ノズル50をドレン排出位置に退避させておき、薬液供給時に前進して供給位置に薬液供給ノズル50を移動させて抽出容器48に薬液を供給する。薬液供給ノズル50をドレン排出位置に退避させておくときに、薬液供給ノズル50から落下する薬液はドレン排出部51から廃棄される。
【0055】
秤量機構45bは、抽出容器48に薬液を供給して計測する計測手段を構成し、例えば電子はかりから構成され、計測情報が制御手段44cへ送られる。制御手段44cは、秤量値の計測結果から設定重量濃度となる実注液量を設定する設定手段を備え、この設定された薬液の実注液量になるように薬液供給手段を構成する供給機構45aを制御する。
【0056】
次に、注液装置45の作動を図16に基づいて説明する。注液装置45が作動する前段階として、図5乃至図11に示すように、ロボット24dが抽出容器47を秤量装置44にセットする(ステップa1)。秤量装置44では、電子天秤に0リセット信号を送信し、また制御手段44cには土壌の秤量値の計測結果から設定重量濃度となる実注液量が設定される。精度に対する要求としては、土壌の秤量値誤差の他に土液の重量濃度比がある。例えば、土壌1.0g・注液10ml設定の場合、「重量濃度10%(誤差±5%)」であることが要求される。従って、土壌の秤量値が仮に1.1gであった場合は、11ml注液する必要があり、土壌の秤量結果と設定基準重量濃度から、必要な実注液量が制御手段44c にて算出される(ステップa2)。
【0057】
そして、注液装置45において、試薬注液を開始する。実注液量前の落下注液量を超えると注液を停止する(ステップa3)。実注液量前の落下注液量は、調整して設定することができる調整値であり、例えば装置の出荷時に調整する。土壌の秤量の際と同様に、実注液量に達してから注液を停止するとオーバーしてしまうため、注液停止後にどの程度試薬が滴下するか予測して事前に停止させる。
【0058】
制御手段44cは、注液量を受信し、土液の重量濃度比が設定値、例えば10%±5%を超えた場合は表示装置90によりエラー通知する。また、試料の検体ごとに土壌の秤量値、注液量、重量濃度が表示装置90により表示、また記録装置91により記録される(ステップa4)。そして、ロボット24dが抽出容器48を抽出ラック42に返却する(ステップa5)。
このように、秤量機構45bによる試料の秤量値の計測結果から設定重量濃度となる薬液の実注液量を設定し、設定された薬液の実注液量になるように供給機構45aを制御して薬液を供給することで、注液の前処理精度が向上する。
【0059】
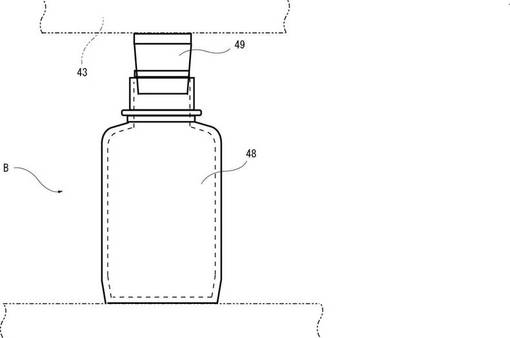
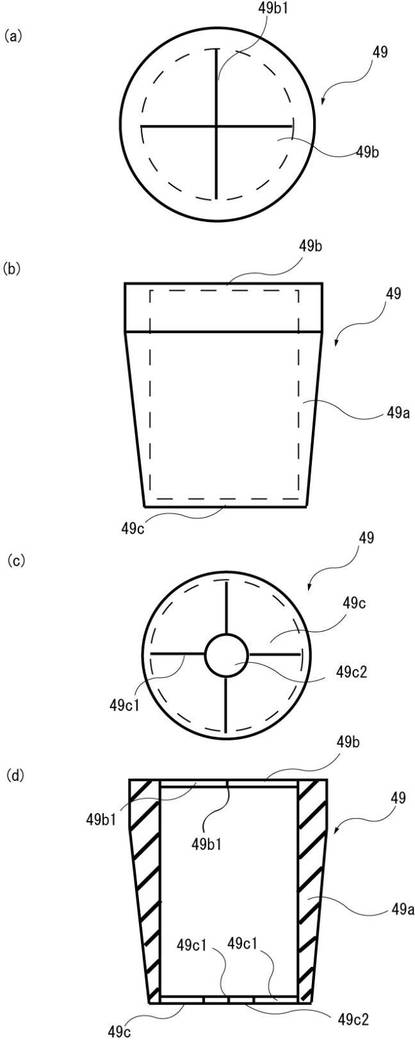
この注液装置45での中液が終了すると、図17及び図18に示すように、ロボット24dが蓋台41から蓋49を取り出して抽出容器48に挿入する。蓋49は、ゴムで一体に形成され、円筒部49aと、上膜49bと、下膜49cとを有する。上膜49bと下膜49cとには、十字状の切り込み49b1,49c1が形成され、さらに下膜49cにはピペット挿入孔49c2が形成されている。このように、抽出容器48に挿入した蓋49には、上膜49bと下膜49cとに切り込み49b1,49c1が形成されており、図16に示すように、抽出容器48の蓋49を振とう台43により押さえて振とうして試料と薬液を攪拌しても、蓋49により試料の吹き上がりを抑え、噴き出しによるコンタミを防ぐことができる。
【0060】
次に、ろ過装置70を図19乃至図23に基づいて詳細に説明する。図19はロボットによりピペットを保持する状態の平面図、図20はロボットによりピペットを保持する状態の側面図、図21はピペットのセット状態を示す図、図22は注液状態を示す図、図23はろ過装置の動作を示す図である。
【0061】
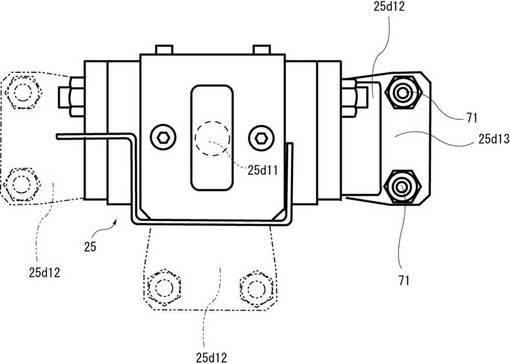
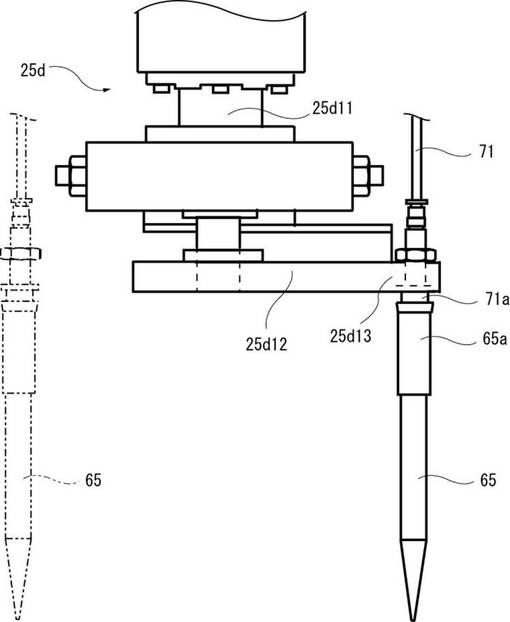
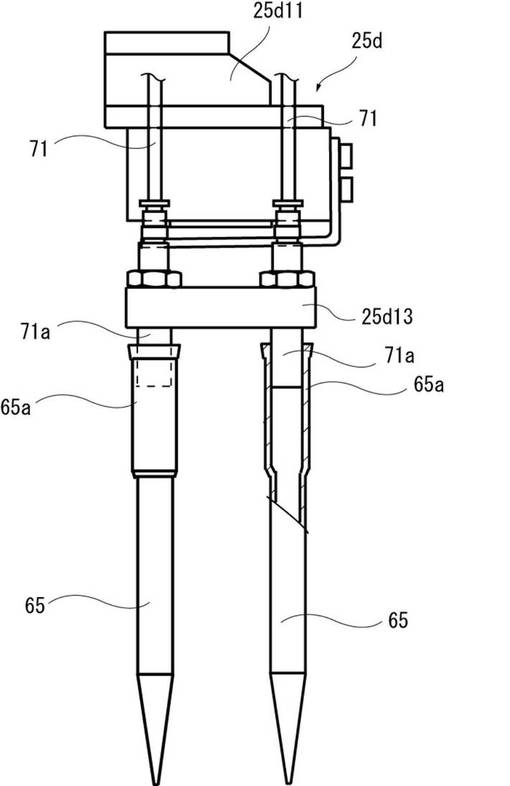
このろ過装置70は、抽出容器48と、ピペット65と、ろ過容器64と、ピペット搬送機構であるロボット24dとを備えている。この抽出容器48は、図17及び図18に示すように、切り込みが形成された蓋49を有する。ロボット24dは、鉛直方向の回転軸25d11と、回転軸25d11に設けたアーム25d12と、アーム25d12に設けたピペット保持部25d13とを有する。ピペット保持部25d13には、2個の抽出パイプ71が取り付けられ、この抽出パイプ71の先端部71aはピペット65の上部65aに挿入され、この挿入によってピペット65が保持されると共に、抽出容器48の上澄みの試料が抽出可能になる。
【0062】
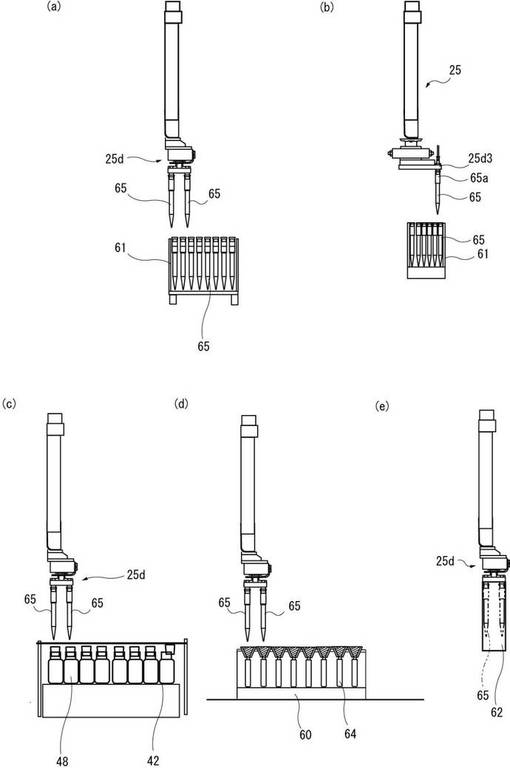
次に、ろ過装置70の作動を図23に基づいて説明する。ロボット25dは、ピペットラック61の2個のピペット65を保持して運び[図23(a),(b)]、抽出ラック42に収納した2個の抽出容器48の蓋49から2個のピペット65を挿入し、抽出容器48の上澄みの試料を吸引して抽出し[図23(c)]、ろ過ラック60の2個のろ過容器64に試料を供給する[図23(d)]。このろ過容器64でのろ過が終了すると、2個のピペット65をピペット廃却部62へ運び廃棄する[図23(e)]。
【0063】
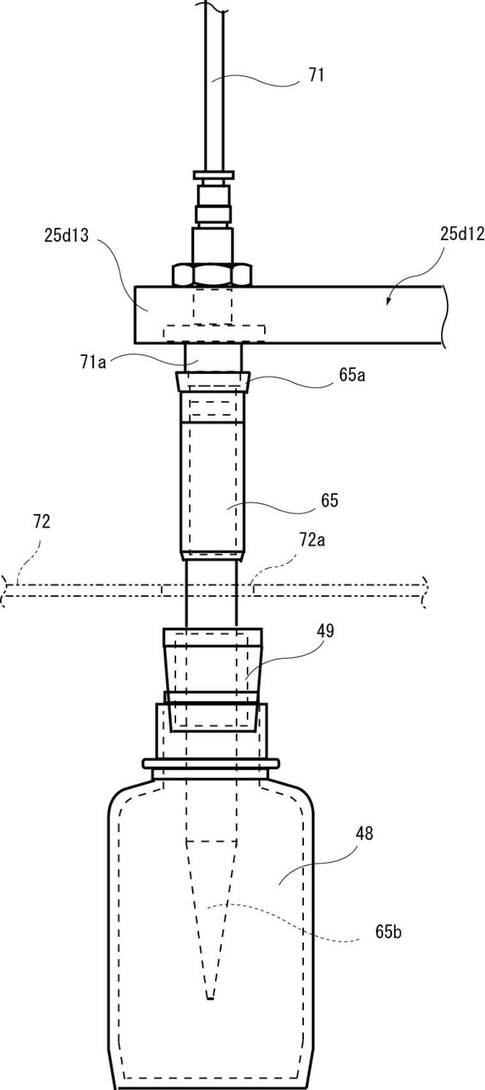
ろ過ステーションCには、抽出容器48の上方位置に、図22に示すように、ジャマ板72が配置されている。このジャマ板72には開口72aが形成され、この開口72aがピペット65の挿入を可能とし、抽出容器48の持ち上げを規制する大きさに形成されている。したがって、ロボット24dを作動してピペット65の先端部65bをジャマ板72の開口72aから挿入し、抽出容器48から蓋49を取り外すことなく、ピペット65の先端部65bを蓋49の上膜49bと下膜49cの切り込み49b1,49c1から挿入して抽出容器48の試料を抽出し、ピペット65を持ち上げて試料をろ過容器64へ供給することができる。このピペット65を持ち上げるときに、抽出容器48が持ち上がることがあっても抽出容器48の上方位置に設けたジャマ板42により抽出容器48の持ち上げを規制して連れ上がりを防ぐことができる。
このように、抽出容器48から蓋49を取り外すことなく、ピペット65を蓋49の切り込みから挿入して抽出容器48の試料を抽出し、試料をろ過容器64へ供給することができ、自動化ができ処理速度が向上する。
【0064】
また、ロボット24dは、鉛直方向の回転軸25d11を回転し、回転軸25d11に設けたアーム25d12のピペット保持部25d13でピペット65を保持し、簡単かつ確実に抽出容器48の試料を抽出し、試料をろ過容器64へ供給することができ、自動化ができ処理速度が向上する。また、同時に複数のピペット65を保持して複数の抽出容器48の試料を抽出して複数のろ過容器64へ供給可能であり、一回の動作で複数回の濾過処理が行え、処理時間短縮となり処理速度が向上する。
【産業上の利用可能性】
【0065】
この発明は、例えば、土壌分析のための前処理を行う過程で、試料のろ過を行うろ過方法、ろ過装置及び試料分析前処理装置に適用でき、試料の攪拌を可能とし、また自動化ができ処理速度の向上を可能にする。
【図面の簡単な説明】
【0066】
【図1】試料分析前処理装置の平面図である。
【図2】試料分析前処理装置の正面図である。
【図3】試料分析前処理装置の左側面図である。
【図4】試料分析前処理装置の右側面図である。
【図5】秤量装置の平面図である。
【図6】秤量装置の正面図である。
【図7】試料容器のセット状態を示す図である。
【図8】秤量装置の基本動作を示す図である。
【図9】試料容器を示す図である。
【図10】他の実施の形態の試料容器のキャップを示す図である。
【図11】秤量装置の動作のフローチャートである。
【図12】秤量装置の動作を示す図である。
【図13】注液装置の平面図である。
【図14】抽出容器のセット状態を示す図である。
【図15】注液状態を示す図である。
【図16】注液装置の動作のフローチャートである。
【図17】蓋を有する抽出容器の側面図である。
【図18】十字状の切り込みを有する蓋を示す図である。
【図19】ロボットによりピペットを保持する状態の平面図である。
【図20】ロボットによりピペットを保持する状態の側面図である。
【図21】ピペットのセット状態を示す図である。
【図22】注液状態を示す図である。
【図23】ろ過装置の動作を示す図である。
【符号の説明】
【0067】
1 試料分析前処理装置
2 枠体
20 前段処理部
30 後段処理部
24 前段作業ロボット装置
25 後段作業ロボット装置
40 試料ラック
41 蓋台
42 抽出ラック
43 振とう台
44 秤量装置
45 注液装置
46 搬送機構
47 試料容器
48 抽出容器
49 蓋
60 ろ過ラック
61 ピペットラック
62 ピペット廃却部
63 搬送機構
64 ろ過容器
65 ピペット
70 ろ過装置
A 開始ステーション
B 振とうステーション
C ろ過ステーション
D 終了ステーション
【特許請求の範囲】
【請求項1】
切り込みが形成された蓋を有する抽出容器を振とうして前記抽出容器内の試料を攪拌し、
ピペット搬送機構によりピペットを前記蓋の切り込みから挿入して前記抽出容器内の試料を抽出し、
前記ピペットにより試料をろ過容器へ供給してろ過することを特徴とするろ過方法。
【請求項2】
前記ピペット搬送機構は、鉛直方向の回転軸を回転し、前記回転軸に設けたアームのピペット保持部で前記ピペットを保持し、前記抽出容器の試料を抽出し、試料を前記ろ過容器へ供給することを特徴とする請求項1に記載のろ過方法。
【請求項3】
前記ピペット搬送機構は、同時に複数の前記ピペットを保持して複数の前記抽出容器の試料を抽出し、試料を複数の前記ろ過容器へ供給することを特徴とする請求項1または請求項2に記載のろ過方法。
【請求項4】
切り込みが形成された蓋を有する抽出容器と、
前記切り込みから挿入され前記抽出容器の試料を抽出するピペットと、
前記試料をろ過するろ過容器と、
前記ピペットを保持して前記抽出容器の試料を抽出して前記ろ過容器へ供給するピペット搬送機構と、
を備えることを特徴とするろ過装置。
【請求項5】
前記ピペット搬送機構は、
鉛直方向の回転軸と、
前記回転軸に設けたアームと、
前記アームに設けたピペット保持部と、
を有することを特徴とする請求項4に記載のろ過装置。
【請求項6】
前記ピペット搬送機構は、
複数の前記ピペットを保持して複数の前記抽出容器の試料を抽出し、試料を複数のろ過容器へ供給可能であることを特徴とする請求項4または請求項5に記載のろ過装置。
【請求項7】
前記蓋は、円筒部と、上膜と、下膜とを有し、前記上膜と下膜とに切り込みが形成されていることを特徴とする請求項4乃至請求項6のいずれか1項に記載のろ過装置。
【請求項8】
前記抽出容器の上方位置に、前記ピペットの挿入を可能とし、前記抽出容器の持ち上げを規制するジャマ板を設けたことを特徴とする請求項4乃至請求項7のいずれか1項に記載のろ過装置。
【請求項9】
請求項4乃至請求項8のいずれか1項に記載のろ過装置を備えることを特徴とする試料分析前処理装置。
【請求項10】
試料が土壌であることを特徴とする請求項9に記載の試料分析前処理装置。
【請求項1】
切り込みが形成された蓋を有する抽出容器を振とうして前記抽出容器内の試料を攪拌し、
ピペット搬送機構によりピペットを前記蓋の切り込みから挿入して前記抽出容器内の試料を抽出し、
前記ピペットにより試料をろ過容器へ供給してろ過することを特徴とするろ過方法。
【請求項2】
前記ピペット搬送機構は、鉛直方向の回転軸を回転し、前記回転軸に設けたアームのピペット保持部で前記ピペットを保持し、前記抽出容器の試料を抽出し、試料を前記ろ過容器へ供給することを特徴とする請求項1に記載のろ過方法。
【請求項3】
前記ピペット搬送機構は、同時に複数の前記ピペットを保持して複数の前記抽出容器の試料を抽出し、試料を複数の前記ろ過容器へ供給することを特徴とする請求項1または請求項2に記載のろ過方法。
【請求項4】
切り込みが形成された蓋を有する抽出容器と、
前記切り込みから挿入され前記抽出容器の試料を抽出するピペットと、
前記試料をろ過するろ過容器と、
前記ピペットを保持して前記抽出容器の試料を抽出して前記ろ過容器へ供給するピペット搬送機構と、
を備えることを特徴とするろ過装置。
【請求項5】
前記ピペット搬送機構は、
鉛直方向の回転軸と、
前記回転軸に設けたアームと、
前記アームに設けたピペット保持部と、
を有することを特徴とする請求項4に記載のろ過装置。
【請求項6】
前記ピペット搬送機構は、
複数の前記ピペットを保持して複数の前記抽出容器の試料を抽出し、試料を複数のろ過容器へ供給可能であることを特徴とする請求項4または請求項5に記載のろ過装置。
【請求項7】
前記蓋は、円筒部と、上膜と、下膜とを有し、前記上膜と下膜とに切り込みが形成されていることを特徴とする請求項4乃至請求項6のいずれか1項に記載のろ過装置。
【請求項8】
前記抽出容器の上方位置に、前記ピペットの挿入を可能とし、前記抽出容器の持ち上げを規制するジャマ板を設けたことを特徴とする請求項4乃至請求項7のいずれか1項に記載のろ過装置。
【請求項9】
請求項4乃至請求項8のいずれか1項に記載のろ過装置を備えることを特徴とする試料分析前処理装置。
【請求項10】
試料が土壌であることを特徴とする請求項9に記載の試料分析前処理装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【公開番号】特開2007−163190(P2007−163190A)
【公開日】平成19年6月28日(2007.6.28)
【国際特許分類】
【出願番号】特願2005−356969(P2005−356969)
【出願日】平成17年12月9日(2005.12.9)
【出願人】(000139355)ヤマハモーターエンジニアリング株式会社 (21)
【Fターム(参考)】
【公開日】平成19年6月28日(2007.6.28)
【国際特許分類】
【出願日】平成17年12月9日(2005.12.9)
【出願人】(000139355)ヤマハモーターエンジニアリング株式会社 (21)
【Fターム(参考)】
[ Back to top ]