
アイドリングストップ判定装置
【課題】 適切なタイミングでアイドリング運転時間を削減し、燃費を向上させる。
【解決手段】 停止開始条件が成立した時において、過去の走行経路パターン毎の経路確率及び第1停止効果係数に基づいて、過去の走行経路パターン全体としてのエンジン停止効果の度合いを示す第2停止効果係数が求められ、この第2停止効果係数が所定の閾値以上の場合にエンジンを停止すると判定される。このため、通勤経路等の走行頻度の高い走行経路においては、現在の走行経路パターンとほぼ同一の走行経路パターンが過去の走行経路パターンとして燃料損得と共に記憶されている可能性が極めて高いことから、過去の走行経路パターン毎の経路確率及び第1停止効果係数に基づく第2停止効果係数によりエンジンを停止するか否かが判定されるので、GPS装置等の高価な装置を用いることなく、適切なタイミングでアイドリング運転時間を削減し、燃費を向上させることができる。
【解決手段】 停止開始条件が成立した時において、過去の走行経路パターン毎の経路確率及び第1停止効果係数に基づいて、過去の走行経路パターン全体としてのエンジン停止効果の度合いを示す第2停止効果係数が求められ、この第2停止効果係数が所定の閾値以上の場合にエンジンを停止すると判定される。このため、通勤経路等の走行頻度の高い走行経路においては、現在の走行経路パターンとほぼ同一の走行経路パターンが過去の走行経路パターンとして燃料損得と共に記憶されている可能性が極めて高いことから、過去の走行経路パターン毎の経路確率及び第1停止効果係数に基づく第2停止効果係数によりエンジンを停止するか否かが判定されるので、GPS装置等の高価な装置を用いることなく、適切なタイミングでアイドリング運転時間を削減し、燃費を向上させることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の燃料消費量の低減(燃費向上)を図るべく、エンジンのアイドリング運転時間を削減するにあたり、エンジンを停止させるか否かを判定するアイドリングストップ判定装置に関するものである。
【背景技術】
【0002】
例えば、特許文献1に記載の発明では、車両が減速している状態でブレーキの踏み込み量が所定値以上となったときには、運転者が車両を停止させるものと予測して、エンジンを停止させることにより、車両の燃費向上を図っている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−221059号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1に記載の発明では、車速の変化及びブレーキの踏み込み量に基づいてエンジンを停止させるか否かを判定しているので、適切なタイミングでアイドリング運転時間を削減することができないおそれがある。
【0005】
本発明は、上記点に鑑み、適切なタイミングでアイドリング運転時間を削減し、燃費を向上させることを目的とする。
【課題を解決するための手段】
【0006】
本発明は、上記目的を達成するために、請求項1に記載の発明では、車両の速度情報を取得する速度情報取得手段と、車輪に作用している制動力についての情報を取得するブレーキ情報取得手段と、車両に設けられた方向指示器についての情報を取得する方向指示器情報取得手段と、操舵輪の操舵角についての情報を取得する操舵情報取得手段と、エンジンが稼働可能な状態であるか否かの情報を取得するイグニッション情報取得手段と、速度情報取得手段、方向指示器情報取得手段、操舵情報取得手段及びイグニッション情報取得手段のうち、少なくとも1つの情報取得手段にて取得された情報に基づいて車両が走行した走行経路パターンを取得する経路取得手段と、速度情報取得手段、ブレーキ情報取得手段、方向指示器情報取得手段、操舵情報取得手段及びイグニッション情報取得手段のうち、少なくとも1つの情報取得手段にて取得された情報に基づいて判定される予め設定された条件であって、エンジンを停止させるための停止開始条件及びエンジンを再始動させるための停止解除条件を判定するアイドリングストップ制御条件判定手段と、停止開始条件が成立した時から停止解除条件が成立した時までの間、仮に、エンジンを停止したならば、削減できたと推定可能な燃料の量(以下、この量を燃料損得という。)を取得する燃料損得取得手段と、少なくとも、経路取得手段により取得された走行経路パターンと、燃料損得取得手段が取得した燃料損得とを対応付けて記憶する過去情報記憶部と、過去情報記憶部に記憶されている走行経路パターン(以下、過去の走行経路パターンという。)それぞれについて、現在の走行経路パターンに該当する度合いを示す確率(以下、経路確率という。)を推定する経路推定部と、過去の走行経路パターンそれぞれについて、各走行経路パターンに対応付けられた燃料損得に基づいて、その走行経路パターンのエンジン停止効果の度合いを示す第1停止効果係数を推定するエンジン停止効果推定部と、停止開始条件が成立した時において、過去の走行経路パターン毎の経路確率及び第1停止効果係数に基づいて、過去の走行経路パターン全体としてのエンジン停止効果の度合いを示す第2停止効果係数を求めるとともに、この第2停止効果係数が所定の閾値以上の場合にエンジンを停止すると判定するエンジン停止判定部とを備えることを特徴とする。
【0007】
これにより、請求項1に記載の発明では、停止開始条件が成立した時において、過去の走行経路パターン毎の経路確率及び第1停止効果係数に基づいて、過去の走行経路パターン全体としてのエンジン停止効果の度合いを示す第2停止効果係数を求めるとともに、この第2停止効果係数が所定の閾値以上の場合にエンジンを停止すると判定するので、特許文献1に記載の発明に比べて、適切なタイミングでアイドリング運転時間を削減し、燃費を向上させることができる。
【0008】
すなわち、通勤経路やショッピングセンターへの経路等、走行頻度の高い走行経路においては、同様なタイミングで停止開始条件及び停止解除条件が成立する頻度が高いと推定でき得るので、現在の走行経路がいずれかの過去の走行経路パターンに該当するならば、その過去の走行経路パターンにて実行されたタイミングでエンジンを停止させれば、効果的に燃費を向上さることができ得る。
【0009】
ところで、「現在の走行経路がいずれの過去の走行経路パターンに該当するか」を判定する手法としては、例えばナビゲーションシステムに採用されているGPS装置を用いて判定するといった手法が考えられるが、この手法では、アイドリングストップ判定装置の製造原価上昇を招いてしまう。
【0010】
これに対して、本発明では、ブレーキ情報取得手段、方向指示器情報取得手段、操舵情報取得手段及びイグニッション情報取得手段等の多くの車両において、通常、設けられている既存の取得手段で取得された情報に基づいて走行経路パターンに関する情報が取得される。
【0011】
そして、走行中に停止開始条件が成立した場合には、記憶された走行経路パターンのうちいずれに該当するか、つまり過去の走行経路パターンに該当する確率(経路確率)が算出され、過去の走行経路パターンに対応付けられた燃料損得に基づいてその走行経路パターンのエンジン停止効果の度合いを示す第1停止効果係数が算出される。
【0012】
さらに、停止開始条件が成立した時において、過去の走行経路パターン毎の経路確率及び第1停止効果係数に基づいて、過去の走行経路パターン全体としてのエンジン停止効果の度合いを示す第2停止効果係数が求められ、この第2停止効果係数が所定の閾値以上の場合にエンジンを停止すると判定される。
【0013】
以上のように、現在の走行経路パターンが走行頻度の高い走行経路である場合には、これと同様な走行経路パターンが過去の走行経路パターンとして、燃料損得と共に記憶されている可能性が極めて高いことから、本発明のごとく、過去の走行経路パターン毎の経路確率及び第1停止効果係数に基づく第2停止効果係数によりエンジンを停止するか否かを判定すれば、GPS装置等の高価な装置を用いることなく、適切なタイミングでアイドリング運転時間を削減し、燃費を向上させることができる。
【0014】
請求項2に記載の発明では、過去情報記憶部は、少なくとも走行開始点に関する情報、車両の旋回地点に関する情報、走行終了地点に関する情報、及びこれら各地点間の距離に関する情報、並びに旋回地点における旋回の向きに関する情報を有して構成された情報を走行経路パターンとして記憶することを特徴とする。
【0015】
これにより、請求項2に記載の発明では、各取得手段からの情報を基づいて、運転者が乗車後に移動した距離、並びに旋回地点間の距離及びその向きを簡略化された経路情報として記憶するので、地図情報と及びGPS情報を用いずに、出発地点の位置を未確定としたままであっても経路情報を認識してエンジンを停止させるか否かの判定を行うことができる。
【0016】
請求項3に記載の発明では、経路推定部は、各地点間の距離に関する情報及び旋回の向きに関する情報を比較することにより、経路確率を推定することを特徴とする。
これにより、請求項3に記載の発明では、地図情報とGPS情報が得られず出発地点が分からない状況においても、旋回地点間の距離及び旋回の向きが、頻繁に利用する走行経路に該当する確率(経路確率)が大きい場合には、現在、走行している経路は、その頻繁に利用する走行経路であると推定できるので、当該経路上における現在の位置も推定でき、適切なタイミングでエンジンを停止させることが可能となる。
【0017】
請求項4に記載の発明では、経路推定部は、現在の走行経路パターンのうち走行開始後から現在までの旋回の向きに関する情報が、過去の走行経路パターンについての旋回の向きに関する情報と合致する度合いが高いほど、高い値となる旋回確率を求める旋回確率推定手段、現在の走行経路パターンのうち各地点間の距離に関する情報が、過去の走行経路パターンについての各地点間の距離に関する情報と合致する度合いが高いほど、高い値となる距離確率を求める距離確率推定手段、及び旋回確率と距離確率との積に基づいて経路確率を求める確率推定手段を有することを特徴とする。
【0018】
これにより、請求項4に記載の発明では、例えば、旋回地点間距離の差が小さいときには距離確率を高い確率となり、旋回地点間距離の差が大きいときには距離確率を小さい確率となるので、旋回地点間距離が僅かに異なる場合は、計測誤差と判断して過去の走行経路パターンに該当すると推定され、逆に、旋回地点間距離が大きく異なる場合は、異なる交差点で旋回したと判断して過去の走行経路パターンに該当しないと推定される。
【0019】
同様に、旋回の向きによっても、旋回の向きが同じであれば過去の走行経路パターンに経路に該当する、旋回の向きが異なれば過去の走行経路パターンに該当しない、又は旋回の向きに操舵角を考慮し、操舵角に応じて旋回の向きについての旋回確率が求められ、過去の走行経路パターンに該当するか否か推定される。
【0020】
したがって、請求項4に記載の発明では、地図情報とGPS情報が得られず出発地点が分からない状況においても、旋回地点間距離及び旋回の向きが、過去の走行経路パターンに該当する確率(経路確率)が大きい場合には、現在、走行している経路は、頻繁に利用する走行経路であると推定できるので、当該経路上における現在の位置も高い精度で推定でき、適切なタイミングでエンジンを停止させることが可能となる。
【0021】
請求項5に記載の発明では、経路推定部は、過去の走行経路パターンのうち最も新しい走行経路パターンについての経路確率を、それ以前の走行経路パターンについての経路確率より小さくすることを特徴とする。
【0022】
これにより、請求項5に記載の発明では、再び同じ走行経路を走行する可能性を除外し経路推定精度を高めることができるので、出発地と目的地が異なるときに、前回乗車時の経路を、今回の経路推定に合致する確率を減らすことで、今回の経路推定より除外し、今回の経路推定精度を高めることができる。
【0023】
請求項6に記載の発明では、過去情報記憶部は、過去の走行経路パターン毎に、走行開始から燃料損得が取得されたときまでに車両が旋回した回数の総合計(以下、総旋回回数という。)を走行経路パターンを示すための情報として記憶するとともに、総旋回回数と燃料損得とを対応付けて記憶することを特徴とする。
【0024】
これにより、請求項6に記載の発明では、記憶された走行経路パターンにおける現在車両位置に応じた旋回地点間(道路)の燃料損得を考慮することができ、記憶された過去の走行経路パターンにおいて、燃料損得の大きい走行経路(例えば幹線道路)や、燃料損得の小さい走行経路(例えば、住宅街)といった、走行経路毎に燃料損得を記憶できるので、適切なタイミングでエンジンを停止させることができる。
【0025】
請求項7に記載の発明では、過去の走行経路パターンについての総旋回回数であって、現在の総旋回回数と同数の総旋回回数を該当旋回回数と呼ぶとき、エンジン停止効果推定部は、過去の走行経路パターン毎に、該当旋回回数に対応付けられた燃料損得の平均値を第1停止効果係数として推定することを特徴とする。
【0026】
これにより、請求項7に記載の発明では、旋回した地点から移動距離に対応する地点についての燃料損得に基づいて、第1停止効果係数が算出されるのではなく、旋回地点と次の旋回地点との区間(1本の経路)についての燃料損得に基づいて、第1停止効果係数が算出されることとなる。
【0027】
請求項8に記載の発明では、過去情報記憶部は、過去の走行経路パターン毎に、走行開始から燃料損得が取得されたときまでに車両が旋回した回数の総合計(以下、総旋回回数という。)と、その総旋回回数のときに取得された燃料損得と、その燃料損得が取得された時に対する直前の旋回地点又は走行開始地点からの走行距離に関する情報とを対応付けて記憶するとともに、総旋回回数及び走行距離に関する情報を走行経路パターンを示すための情報として記憶することを特徴とする。
【0028】
これにより、請求項8に記載の発明では、記憶された過去の走行経路パターンにおける現在車両位置に応じた地点の燃料損得を考慮することができ、過去の走行経路パターンにおいて、燃料損得の大きい地点(例えば、信号のある交差点)や燃料損得の小さい地点(例えば、車通りの少ない一旦停止箇所、又はコンビニ駐車場の出入口)といった、走行経路毎に燃料損得を記憶できるので、適切なタイミングでエンジンを停止させることができる。
【0029】
請求項9に記載の発明では、エンジン停止効果推定部は、過去情報記憶部に記憶されている総旋回回数のうち現在の総旋回回数と同一の総旋回回数に対応付けられた走行距離に関する情報に基づいて、過去情報記憶部に記憶されている走行距離に関する情報毎に、その走行距離に関する情報が現在の走行距離に関する情報と合致する合致確率を求めた後、この合致確率と当該走行距離に関する情報に対応付けられた燃料損得との積を求め、さらに、エンジン停止効果推定部は、過去の走行経路パターン毎に第1停止効果係数を算出するとともに、走行距離に関する情報毎に求められた積の総和を第1停止効果係数として推定することを特徴とする。
【0030】
これにより、請求項9に記載の発明では、走行中に停止開始条件が成立した場合に、記憶されている過去の走行経路パターンのいずれに該当するか推定確率を算出し、記憶された過去の走行経路パターンにおける走行距離と現在車両の走行距離が近いものを重視し、走行距離が遠いものを軽視するよう、燃料損得に重み付けをして係数を算出することができるので、適切なタイミングでエンジンを停止させることができる。
【0031】
請求項10に記載の発明では、エンジン停止効果推定部は、過去の走行経路パターン毎に第1停止効果係数を算出するとともに、過去情報記憶部に記憶されている総旋回回数のうち現在の総旋回回数と同一の総旋回回数に対応付けられた走行距離に関する情報に基づいて、過去情報記憶部に記憶されている走行距離に関する情報毎に、現在の走行距離に関する情報との相違量に応じて当該走行距離に関する情報に対応付けられた燃料損得を補正した補正後燃料損得を求めた後、それら補正後燃料損得の総和を第1停止効果係数として推定し、さらに、エンジン停止効果推定部は、相違量が小さくなるほど補正後燃料損得が燃料損得に近い値となり、逆に、相違量が大きくなるほど補正後燃料損得がゼロに近い値となるように補正することを特徴とする。
【0032】
これにより、請求項10に記載の発明では、走行中に停止開始条件が成立した場合に、記憶された過去の走行経路パターンのいずれに該当するか推定確率を算出し、記憶された過去の走行経路パターンにおける走行距離と現在車両の走行距離の違いが考慮されて、走行距離の差が大きい場合の燃料損得しか記憶されていない場合には、燃料損得が0へ近づくように燃料損得が補正されるので、適切なタイミングでエンジンを停止させることができる。
【図面の簡単な説明】
【0033】
【図1】本発明の実施形態に係るアイドリングストップシステム1のブロック図である。
【図2】本発明の実施形態に係るアイドリングストップ判定装置100のブロック図である。
【図3】本発明の実施形態における過去情報記憶処理を示すフローチャートである。
【図4】本発明の実施形態における経路情報の更新処理を示すフローチャートである。
【図5】本発明の実施形態における燃料損得等の更新処理を示すフローチャートである。
【図6】本発明の実施形態における経路推定処理を示すフローチャートである。
【図7】本発明の第1実施形態における経路推定部の処理を示すフローチャートである。
【図8】本発明の実施形態におけるエンジン停止判定処理を示すフローチャートである。
【図9】本発明の第1実施形態における実施例の説明図である。
【図10】本発明の第1実施形態における実施例の説明図である。
【図11】本発明の第2実施形態における経路推定部の処理を示すフローチャートである。
【図12】本発明の第2実施形態における経路推定部の処理効果の概要を示す図である。
【発明を実施するための形態】
【0034】
以下、本発明のアイドリングストップ判定装置を用いたアイドリングストップシステムの実施形態を図面と共に説明する。
(第1実施形態)
1.全体の構成
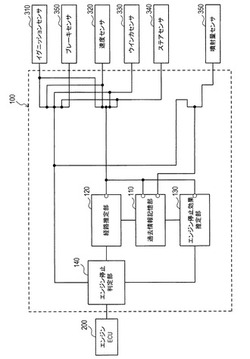
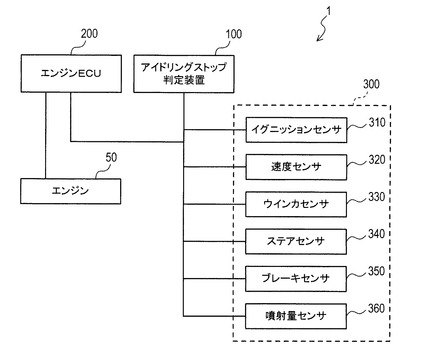
本実施形態に係るアイドリングストップシステム1は、図1に示すように、走行用のエンジン50を停止させるか否かを判定するアイドリングストップ判定装置100、エンジン50の運転状態を制御するエンジンECU200、及び車両情報を検出するセンサ類300等から構成されている。
【0035】
なお、アイドリングストップ判定装置100及びエンジンECU200は、CPU、RAM及びROM等からなる周知のマイクロコンピュータにて構成された電子制御装置であり、アイドリングストップ判定装置100及びエンジンECU200の作動プログラムは、ROM又はフラッシュメモリ等の不揮発性記憶手段に予め記憶されている。
【0036】
そして、アイドリングストップ判定装置100は、センサ類300から車両情報を取得して、アイドリングストップ、つまりエンジン50を停止させるべきか否か判定し、エンジン50を停止させると判定した場合には、エンジンECU200へエンジン停止信号を送信し、一方、エンジン50が停止しているときには、センサ類300から車両情報を取得して、アイドリングストップ解除するか否かを判定して、アイドリングストップ解除すると判定した場合には、エンジン始動信号をエンジンECU200へ送信する。
【0037】
また、エンジンECU200は、運転者によるアクセルペダル(図示せず。)の操作に応じてエンジン50の運転状態を制御するとともに、アイドリングストップ判定装置100からのエンジン停止信号又はエンジン始動信号に応じて、エンジン50を停止又は始動させる機能を有する。
【0038】
また、センサ類300は、アイドリングストップ判定装置100がエンジン停止信号又はエンジン始動信号を発するか否かの判定に用いる車両情報を取得するセンサ群であり、このセンサ群は、少なくとも以下のセンサから構成されている。
【0039】
すなわち、エンジン50が稼働可能な状態であるか否かの情報を取得するイグニッションセンサ310、車速情報を取得する速度センサ320、ウインカ(方向指示器)の状態を取得するウインカセンサ330、操舵輪の操舵角、つまりステアリングの操舵角を取得するステアセンサ340、車輪に作用している制動力、つまりブレーキペダルの踏み込み量を取得するブレーキセンサ350、及び燃料噴射量を検出する噴射量センサ360等である。
【0040】
そして、センサ類300にて取得された車両情報は、各センサからアイドリングストップ判定装置100へと至る通信路(例えば、車両ネットワーク)を介してアイドリングストップ判定装置100に送信される。
【0041】
なお、イグニッションセンサ310で検出するイグニッション状態は、運転者が車両に乗車後に車両始動操作をした際にONとなり、車両降車前の車両停止操作によってOFFとなる状態である。
【0042】
また、アイドリングストップシステム1は、アイドルストップのためのエンジン停止信号又はエンジン始動信号をエンジンECU200に向けて出力するため、アイドリングストップシステム1を構成する各機器には、エンジン50が停止している間も電力が供給される。
【0043】
同様に、アイドリングストップ判定装置100では、イグニッション状態がONからOFFへ変化した時に、エンジン停止信号又はエンジン始動信号を出力するか否かを判定する判定制御が起動されるため、本実施形態では、イグニッションOFF状態でも電力が供給される。
【0044】
なお、アイドリングストップ判定装置100への電力供給は、例えばイグニッションONからOFFへ変化したことを検知し、特定の処理が終了するまでの間のみ電力を供給するような構成として、バッテリ(図示せず。)に蓄えられた電力の消費を抑制してもよい。
【0045】
2.アイドリングストップ判定装置による処理
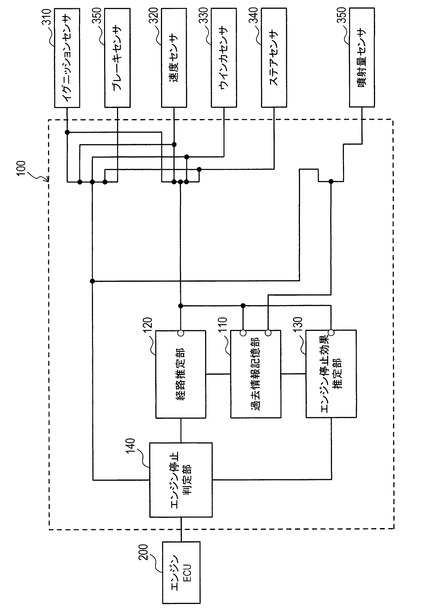
アイドリングストップ判定装置100は、図2に示すように、過去情報記憶部110、経路推定部120、エンジン停止効果推定部130、及びエンジン停止判定部140等から構成されており、これらの機能ブロックは、センサ群300からの車両信号を取得し、これらの車両信号を用いて予めROM又はフラッシュメモリ等の不揮発性記憶手段に記憶されているプログラムに従って各種処理を実行する。
【0046】
なお、以下の各処理において記憶される情報(燃料損得や移動距離等)は、フラッシュメモリ等の書き換え可能な不揮発性記憶手段に記憶される。
2.1.過去情報記憶部の処理(過去情報記憶処理)について
<過去情報記憶処理の概要>
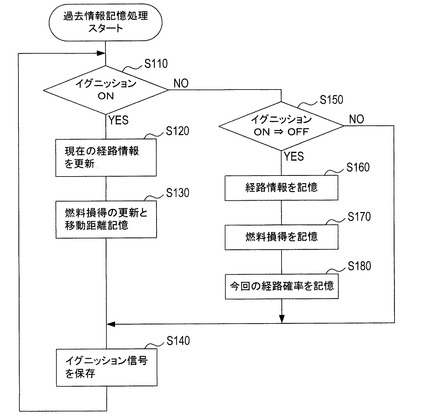
過去情報記憶処理が起動されると、図3に示すように、先ず、イグニッション信号がONであるかが判定され(S110)、イグニッションがONである場合には(S110:YES)、車両情報より現在の経路情報が更新された後(S120)、車両情報より現在の経路における燃料損得が更新されるとともに、移動距離が記録される(S130)。次に、現在のイグニッション信号(この場合はON)が保持された後(S140)、再び、S110が実行される。なお、S120及びS130の詳細は後述する。
【0047】
一方、S110にてイグニッションがOFFであると判定された場合には(S110:NO)、イグニッション信号がONからOFFへ変化した直後であるか否か、つまり、S140にて保持されたイグニッション信号がONからOFFに変化したか否かが判定される(S150)。
【0048】
そして、イグニッション信号がONからOFFへ変化した直後でない判定された場合には(S150:NO)、再び、S110が実行され、イグニッション信号がONからOFFへ変化した直後であると判定された場合には(S150:YES)、現在の経路情報が記憶された後(S160)、現在の移動距離と燃料損得が記憶される(S170)。
【0049】
次に、経路推定部120により求められた経路確率が記憶された後(S180)、現在のイグニッション信号(この場合はON)が保持された後(S140)、再び、S110が実行される。なお、S160、S170及び経路確率の詳細は後述する。
【0050】
<S120(経路情報)の詳細>
経路情報とは、イグニッションがONとなった時点から現在までの旋回方向の順序及びその旋回回数を示す情報(以下、総旋回回数という。)、イグニッションがONとなった出発地点と車両が初めて旋回した地点間の移動距離を示す情報、その後に車両が旋回した各地点間の移動距離、並びに最後に旋回した地点から現在までの移動距離を示す情報を1組とした情報ベクトル(配列)を示す走行経路パターンである。
【0051】
そして、運転者が車両に乗り込んで車両の運転を開始した時から運転者が車両から降りで運転を終了した時、つまり車両スイッチ(イグニッションスイッチ)が投入(ON)された時から車両スイッチが遮断(OFF)された時までを1周期(1サイクル)として経路情報が更新・記憶されていく。
【0052】
このため、車両スイッチがONである場合には経路情報が更新され続けるので、この場合の経路情報を経路情報R(0)と記す。また、車両スイッチがOFFとなると、経路情報は更新されないので、車両スイッチがOFFになるまで更新されてきた経路情報は、過去の経路情報R(Nr)として識別可能な状態で記憶される。なお、「Nr」は、過去の経路情報を取得したときの走行経路パターンの識別番号であり、番号が小さくなるほど、所得時が古いことを意味する。
【0053】
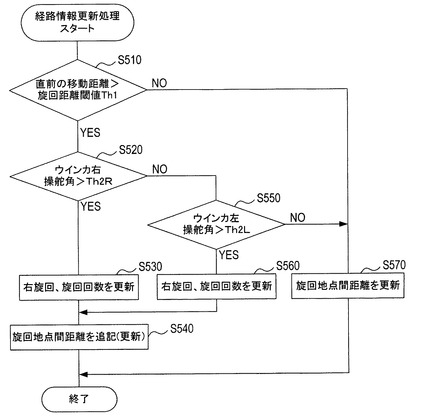
以下、現在の経路情報R(0)の更新処理(S120)を図4に基づいて説明する。
S120においては、先ず、直前の旋回地点からの移動距離、又はイグニッションONからの移動距離(以下、これらの距離を旋回地点間距離という。)が旋回距離閾値Th1を超えたか否かが判定され(S510)、旋回閾値Th1を超えていると判定された場合には(S510:YES)、ウインカセンサ330からウインカ信号が右方向を示し、かつ、ステアセンサ340からのステア信号より得られる操舵角の最大値が右方向角度閾値Th2Rを超えたか否かが判定される(S520)。
【0054】
このとき、上記右旋回判定条件を満たしていると判定された場合には(S520:YES)、現在記憶されている旋回回数を1増加させた更新値と車両が右向きに旋回したことを示す情報(例えば、R)とが対応付けられて記憶された後(S530)、車速が積算されることにより、現在の旋回地点間距離が更新され(S540)、更新処理が終了される。
【0055】
なお、S510にて、直前の旋回地点からの旋回地点間距離が旋回距離閾値Th1を超えていなかった場合には(S510:NO)、車速が積算されることにより現在の旋回地点間距離が更新された後、更新処理が終了される。
【0056】
また、上記右旋回判定条件を満たしていないと判定された場合には(S520:NO)、ウインカセンサ330からウインカ信号が左方向を示し、かつ、ステアセンサ340からのステア信号より得られる操舵角の最大値が左方向角度閾値Th2Lを超えたか否かが判定される(S550)。
【0057】
このとき、上記左旋回判定条件を満たしていると判定された場合には(S550:YES)、現在記憶されている旋回回数を1増加させた更新値と車両が左向きに旋回したことを示す情報(例えば、L)とが対応付けられて記憶された後(S560)、車速が積算されることにより、現在の旋回地点間距離が更新され(S540)、更新処理が終了される。
【0058】
したがって、更新処理では、旋回回数を示す数字が総旋回回数となり、旋回地点間距離と対応付けられて経路情報毎に記憶されていく。そこで、以下、経路情報R(Nr)の旋回地点間距離のうち、総旋回回数がkからk+1に更新される間の旋回地点間距離をd(Nr,k)と記し、経路情報R(Nr)に含まれる旋回の向きのうち総旋回回数がkの場合の旋回の向きをQ(Nr,k)と記せば、経路情報R(Nr)は、d(Nr,1)、d(Nr,2)、……、d(Nr,k)及びQ(Nr,1)、Q(Nr,2)、……、Q(Nr,k)からなる情報ベクトルとして表現される。
【0059】
なお、上記の更新処理においては、ウインカ信号が連続で右方向又は左方向を示している間を、1回の右方向旋回又は左方向旋回として旋回判定する、又は一定時間内の旋回角度を、ステア信号より得られる操舵角と速度から求めた角速度の累積として求め、この一定時間内の旋回角度が閾値を超えた場合に、旋回ありと判定してもよい。
【0060】
<S130(燃料損得及び移動距離)の詳細>
燃料損得とは、アイドリング停止開始件条件が成立した時からアイドリング停止解除条件が成立した時までの間、仮に、エンジン50を停止したならば、削減できたと推定可能な燃料の量をいう。
【0061】
なお、アイドリング停止開始件条件として、本実施形態では、例えば、車速0km/h、かつ、制動力が最大制動力の30%以上となった場合をいい、アイドリング停止解除条件として、本実施形態では、例えば、制動力が最大制動力の20%以下となった場合を採用している。
【0062】
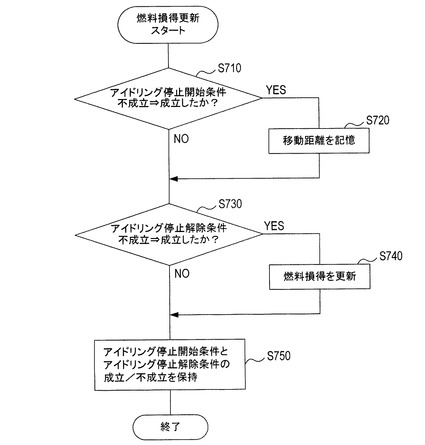
そして、S130では、図5に示すように、先ず、アイドリング停止開始件条件が不成立から成立したか否かが判定され(S710)、アイドリング停止開始件条件が不成立から成立したと判定された場合には(S710:YES)、直前の交差点からの移動距離が記憶されるとともに、その移動距離に対応する燃料損得の初期値が0とされた後(S720)アイドリング停止解除条件が不成立から成立したか否かが判定される(S730)。
【0063】
このとき、アイドリング停止解除条件が不成立から成立したと判定された場合には(S730:YES)、アイドリング停止開始件条件が成立した時からアイドリング停止解除条件が成立した時までの間、仮に、エンジン50を停止したならば、削減できたと推定可能な燃料の量、つまり、アイドルストップした場合の燃料損得が更新・記憶される(S740)。
【0064】
次に、アイドリング停止開始条件とアイドリング停止解除条件が成立しているか否かの状態が記憶された後(S750)、S130が終了され、S140(図3参照)が実行される。
【0065】
なお、アイドリング停止開始件条件が不成立から成立していないと判定された場合には(S710:NO)、移動距離が記憶されることなくS730が実行される。また、アイドリング停止解除条件が不成立から成立していないと判定された場合には(S730:NO)、S750が実行される。
【0066】
因みに、本実施形態では、アイドリング停止開始件条件が成立した時からアイドリング停止解除条件が成立した時までの時間に、アイドリング運転時に単位時間あたり消費される燃料の量(予め試験により計測した値)を乗じた値と、エンジン50を始動する際に消費する燃料とを加算した値を燃料損得として更新しているが、燃料損得の具体的な算出方法は、これに限定されるものではなく、アイドリング停止開始件条件及びアイドリング停止解除条件等に応じて、適宜、決定されるべき値であることはいうまでもない。
【0067】
ところで、S130においては、燃料損得及び移動距離は、経路情報R(Nr)と対応付けられて記憶されている。そこで、以下、例えば、経路情報R(Nr)として記憶されている走行経路パターンにおいて、総旋回回数がNtからNt+1までの区間において更新された燃料損得のうち、Nc回目に更新された燃料損得をF(Nr,Nt,Nc)と記し、この燃料損得F(Nr,Nt,Nc)に対応する移動距離をdc(Nr,Nt,Nc)と記す。
【0068】
したがって、経路情報R(Nr)の総旋回回数がkの場合には、経路情報R(Nr)は、d(Nr,1)、d(Nr,2)、……、d(Nr,k)及びQ(Nr,1)、Q(Nr,2)、……、Q(Nr,k)からなる情報ベクトルとして表現され、この経路情報R(Nr)のうち、例えば総旋回回数が「2」となる情報に対しては、F(Nr,2,1)、F(Nr,2,2)、……、F(Nr,2,Nc)及びdc(Nr,2,1)、dc(Nr,2,2)、……、dc(Nr,2,Nc)からなる情報ベクトルが対応付けられる。
【0069】
<S160及びS170について>
S160はS120にて更新された経路情報を過去の経路情報として記憶するものである。つまり、S120ではイグニッションがONとなっており、経路情報が変化していくので、アイドリングストップ判定装置100は、その経路情報を「現在の経路情報」と認識して更新・記憶していくのに対して、S160ではイグニッションがOFFとなっており、経路情報が変化しないので、アイドリングストップ判定装置100は、その経路情報を「過去の経路情報」と認識して記憶し直す。
【0070】
同様に、S170では、S130にて更新・記憶された燃料損得及び移動距離を「過去の経路情報」に対応付けられた「過去の燃料損得及び移動距離」と認識して記憶し直す。
2.2.経路推定部の処理について
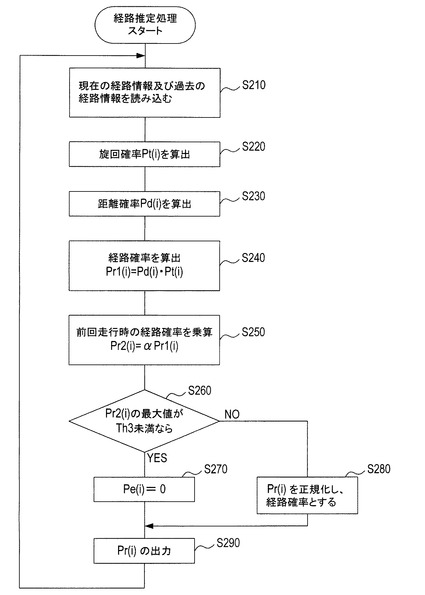
経路推定処理が起動されると、図6に示すように、先ず、過去情報記憶部110にて更新・記憶された現在の経路情報R(0)及び過去の経路情報R(1)、R(2)、…R(i)、…、R(Nr)が読み込まれ(S210)、現在の経路情報の旋回の向きと過去の経路情報の旋回の向きとが合致するする確率(以下、旋回確率Ptという。)が算出される(S220)。因みに、過去の経路情報はNr個存在するので、これらNr個の過去の経路情報のうち、i番目の経路情報をR(i)(但し、i=1、2、…、Nr)と記す。
【0071】
また、現在の経路情報R(0)についての旋回の向きに関する情報とは、具体的には、Q(0,1)、Q(0,2)、…、Q(0,k)…、Q(0,Nt)からなる情報ベクトルであり、過去の経路情報R(i)についての旋回の向きに関する情報とは、具体的には、Q(i,1)、Q(i,2)、…、Q(i,k)…、Q(i,Nt)からなる情報ベクトルである。但し、Ntは、現在の総旋回回数を示す。
【0072】
因みに、kとは、1、2、…、Ntとなるので、以下、現在の経路情報R(0)についての旋回の向きに関する情報をQ(0,k)と記し、過去の経路情報R(i)についての旋回の向きに関する情報をQ(i,k)と記す。
【0073】
そして、旋回確率Ptは、現在の経路情報のうち走行開始後から現在までの旋回の向きに関する情報が、過去の経路情報についての旋回の向きに関する情報と合致する度合いが高いほど高い値となるものである。なお、旋回確率Pt(i)は、Q(0,k)とQ(i,k)とが、総旋回回数Ntまで一致する場合にPt(i)=1とし、それ以外は、Pt(i)=0として算出される。
【0074】
旋回確率Ptの算出が終了すると、現在の経路情報と過去の経路情報との旋回地点間の距離が合致する確率(以下、距離確率Pdという。)が算出される(S230)。ここで、現在の経路情報R(0)と過去の経路情報R(i)との距離確率Pd(i)は、以下の「数1」で示される数式1にてk回目旋回地点からk+1回目旋回地点間までの距離が一致する確率Pd(i,k)を求めた後、この確率Pd(i,k)を以下の「数2」で示される数式2で積算した値である。
【0075】
なお、経路情報R(i)についての総旋回回数Nt(i)が、現在の総旋回回数Nt(0)より小さい場合には、距離確率Pd(i)=0とする。
【0076】
【数1】

【0077】
【数2】
但し、ここで、数式1の標準偏差は移動距離の数パーセントとし、σ=0.05d(0,k)とする。
【0078】
次に、旋回確率Pt(i)と距離確率Pd(i)とを、以下の「数3」で示される数式3に従って乗じ、前回時走行考慮なしの経路確率Pr1(i)が算出された後(S240)、この経路確率Pr1(i)に係数αが乗じられて正規化前経路確率Pr2(i)が算出される(S250)。なお、係数αの詳細は後述する。
【0079】
【数3】
そして、経路情報R(1)〜R(Nr)それぞれについて、正規化前経路確率Pr2(i)の最大値が閾値Th3未満であるか否かが判定され(S260)、正規化前経路確率Pr2(i)の最大値が閾値Th3(例えば、0.1)未満であると判定された場合には(S260:YES)、全ての経路情報R(i)の経路確率Pr(i)が0とされ、その値が最終的な経路確率とされる(S270)。
【0080】
一方、正規化前経路確率Pr2(i)の最大値が閾値Th3未満でないと判定された場合には(S260:NO)、全ての経路情報R(i)の経路確率Pr(i)を以下の「数4」で示される数式4に従って正規化され、最終的な経路確率Pr(i)が算出される。
【0081】
【数4】
そして、最終的な経路確率Pr(i)がエンジン停止判定部140に出力された後(S290)、再び、S210が実行される。
【0082】
<係数αについて>
係数αは、過去の経路情報のうち最も新しい経路情報についての経路確率Prを、それ以前の経路情報についての経路確率Prより小さくするための係数である。
【0083】
このため、本実施形態では、前回走行時の出発点と今回走行時の出発点が異なれば、前回走行した経路の確率を相対的に低くすることができるので、前回走行時の経路が誤って選ばれる可能性を小さくし、経路推定精度を向上させることができる。
【0084】
具体的には、係数αは、1から前回のS270又はS280にて算出された経路確率Prold(i)を減じた値、つまりα=1−Prold(i)である。
そこで、本実施形態では、前回時走行考慮なしの経路確率Pr1(i)を、次回走行時に、前回走行時の経路確率Prold(i)として利用できるよう記憶している。なお、正規化前の経路確率Pr2(i)を前回時走行考慮なしの経路確率Pr1(i)の代わりに記憶してもよく、この場合には、前回走行時の経路確率Pt1(i)が2回以降後の経路確率にも影響するようになる。
【0085】
2.3.エンジン停止効果推定部の処理について
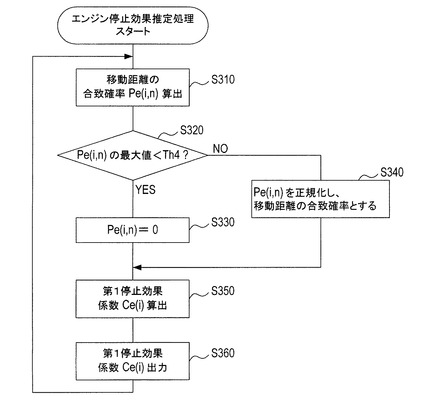
エンジン停止効果推定処理が起動されると、図7に示すように、先ず、過去の経路情報R(i)毎に合致確率Pe(i,n)が算出される(S310)。ここで、合致確率Pe(i,n)とは、経路情報R(i)に対応付けられた移動距離のうち現在の経路情報R(0)における総旋回回数Ntと一致する移動距離dc(i,Nt,n)が、現在の経路情報R(0)における直前の旋回地点からの移動距離doと合致する確率をいい、具体的には、以下の「数5」で示される数式5にて算出される値である。
【0086】
【数5】
ここで、移動距離dc(i,Nt,n)とは、経路情報R(i)に対応付けられた移動距離dcのうち総旋回回数がNtとなる移動距離を示しており、例えば、総旋回回数が「2」で、かつ、総旋回回数が2から3となるまでの区間における燃料損得の更新が2回された場合には、dc(i,2,1)及びdc(i,2,2)である。つまり、n=1、2、…、Ncとなる。
【0087】
次に、過去の経路情報R(i)毎に合致確率Pe(i,n)の最大値が閾値Th4(例えば、0.1)未満であるか否かが判定され(S320)、合致確率Pe(i,n)の最大値が閾値Th4未満であると判定された場合には(S320:YES)、合致確率Pe(i,n)が0とされて最終的な合致確率Pe(i,n)が決定される(S330)。
【0088】
一方、合致確率Pe(i,n)の最大値が閾値Th4以上であると判定された場合には(S320:NO)、過去の経路情報R(i)毎に、以下の「数6」に示す数式6にて合致確率Pe(i,n)が正規化され、最終的な合致確率Pe(i,n)が決定される(S340)。
【0089】
【数6】
但し、Mは、経路情報R(i)において、現在の総旋回回数Ntと同数の総旋回回数に対応付けられた燃料損得の更新の数をいう。例えば、現在の総旋回回数が「2」であって、かつ、経路情報R(i)における総旋回回数が2の場合に、燃料損得F(i,2,1)及び燃料損得F(i,2,2)対応付けられていた場合には、M=2となる。
【0090】
次に、過去の経路情報R(i)毎に、以下の「数7」に示す数式7にて第1停止効果係数Ce(i)が算出される(S350)。
【0091】
【数7】
そして、第1停止効果係数Ce(i)がエンジン停止判定部140に出力された後(S290)、再び、S310が実行される(S360)。
【0092】
2.4.アイドリング停止判定部の処理について
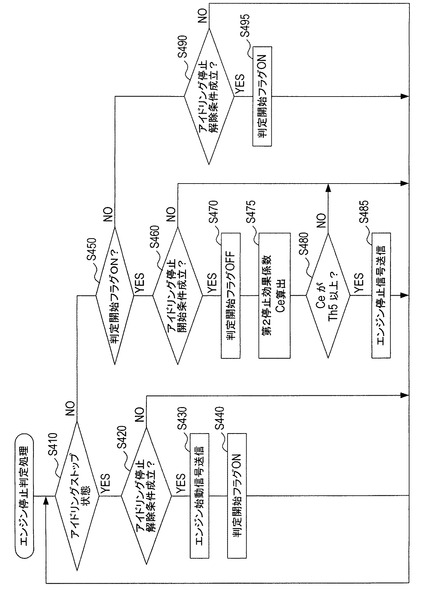
エンジン停止判定処理が起動されると、図8に示すように、先ず、現実にエンジン50が停止してアイドリングストップ状態となっているか否かが判定され(S410)、アイドリングストップ状態であると判定された場合には(410:YES)、アイドリング停止解除条件が成立したか否かが判定される(S420)。
【0093】
そして、アイドリング停止解除条件が成立しないと判定された場合には(S420:NO)、再び、S410が実行され、一方、アイドリング停止解除条件が成立したと判定された場合には(S420:YES)、エンジン始動信号がエンジンECU200に送信されるとともに(S430)、アイドリング停止開始条件の判定を許可する開始判定フラグがONとされた後(S440)、再び、S410が実行される。
【0094】
また、S410にてアイドリングストップ状態でない、つまり、現実にエンジン50が稼働していると判定された場合には(S410:NO)、開始判定フラグがONであるか否かが判定され(S450)、開始判定フラグがONの場合には(S450:YES)、アイドリング停止開始件条件が成立しているか否かが判定される(S460)。
【0095】
そして、アイドリング停止開始件条件が成立していると判定された場合には(S460:YES)、開始判定フラグがOFFとされた後(S470)、以下の「数8」で示される数式8に従って現時点における全ての経路情報R(i)が考慮された第2停止効果係数Ceが算出される(S475)。
【0096】
【数8】
因みに、開始判定フラグは、アイドリング停止開始件条件を一度満たしたことを示しており、アイドリング停止解除条件を満たすまではOFFとし、再び、アイドリングストップの判定を行わないようにするためのフラグである。
【0097】
次に、現在地点での第2停止効果係数Ceが閾値Th5(例えば、0)以上であるか否かが判定され(S480)、第2停止効果係数Ceが閾値Th5以上であると判定された場合には(S480:YES)、エンジンECU200にエンジン停止信号が送信された後(S485)、再び、S410が実行される。
【0098】
一方、第2停止効果係数Ceが閾値Th5未満であると判定された場合には(S480:NO)、エンジン停止信号が送信されることなく、再び、S410が実行される。
なお、第2停止効果係数Ceは、現在の走行経路が過去情報記憶部に記憶された過去の走行経路に該当する確率、及びそのときの燃料損得を鑑みて算出した、現在地点でエンジン50を停止した際の燃料損得の期待値である。
【0099】
そのため、第2停止効果係数Ceが0より大きければ、燃料を削減できる効果を期待できる。そこで、本実施形態では、閾値Th5を0としているが、なるべくアイドリングストップさせないのであれば、大きな燃料損得が得られる場合のみエンジン50が停止されるように、閾値Th5を0より大きな値に設定してよい。
【0100】
また、S450にて、判定開始フラグがOFFである判定された場合には(S450:NO)、アイドリング停止解除条件が成立するか否かが判定され(S490)、アイドリング停止解除条件が成立する判定された場合には(S490:YES)、判定開始フラグがONとされた後(S495)、再び、S410が実行される。
【0101】
一方、アイドリング停止解除条件が成立しないと判定された場合には(S490:NO)、又はアイドリング停止開始件条件が成立しないと判定された場合(S460:NO)には、再び、S410が実行される。
【0102】
3.アイドリングストップ判定装置の作動の具体例
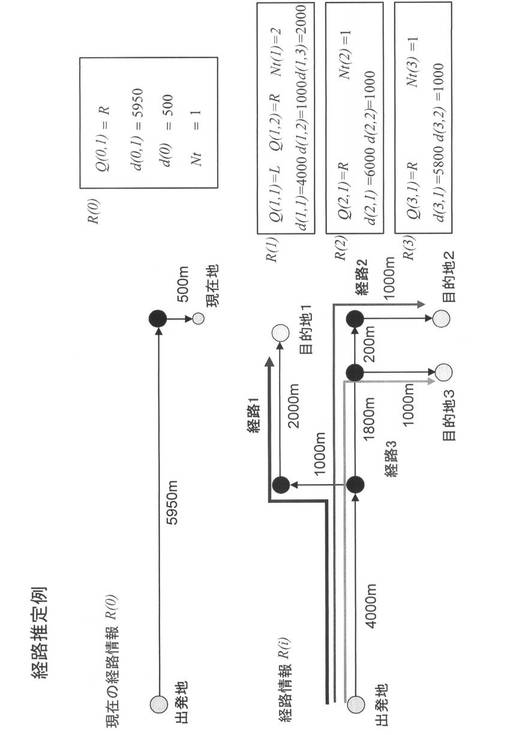
経路推定処理の具体的な実施例(作動例)を図9に基づいて説明する。
現在の経路情報R(0)は、イグニッションON後に5950m移動し、右旋回し、右旋回した地点から500m移動している。そのため、旋回の向きQ(0,1)=R、旋回地点間距離d(0,1)=5950、直前の旋回地点からの移動距離do=500、総旋回回数Nt=1である。
【0103】
そして、過去情報記憶部110に記憶された1つ目の経路情報R(1)は、旋回の向きQ(1,1)=L、Q(1,2)=R、旋回地点間距離d(1,1)=4000、d(1,2)=1000、d(1,3)=2000、総旋回回数Nt(1)=2である。
【0104】
2つ目の経路情報R(2)は、旋回の向きQ(2,1)=R、旋回地点間距離d(2,1)=6000、d(2,2)=1000、総旋回回数Nt(2)=2である。
3つ目の経路情報R(3)は、旋回の向きQ(3,1)=R、旋回地点間距離d(3,1)=5800、d(3,2)=1000、総旋回回数Nt(3)=1である。
【0105】
先ず、S210にて経路情報の読み込みが行われる。ここでは、経路情報R(1)は更新済み(直前の旋回地点からの移動距離は最新の値)とする。次にS220において、旋回確率が求められる。現在の総旋回回数Ntは1であるため、1つ目の旋回までが比較され、旋回の向きが同じ経路情報R(2)及び経路情報(3)の旋回確率Pt(2)及びPt(3)は1となり、旋回の向きが異なる経路情報R(1)の旋回確率Pt(1)は0となる。
【0106】
次に、S230にて距離確率が求められ、経路情報R(1)については、以下の「数9」に示すように「0」となる。
【0107】
【数9】
同様に経路情報R(2)については、以下の「数10」に示すように「0.99」となる。
【0108】
【数10】
同様に経路情報R(3)については、以下の「数11」に示すように「0.88」となる。
【0109】
【数11】
次に、S240において経路確率Pr(i)が求められる。
【0110】
Pr(1)=Pd(1)・Pt(1)=0
Pr(2)=Pd(2)・Pt(2)=0.99
Pr(3)=Pd(3)・Pt(3)=0.88
次に、S250において前回走行時の経路確率からなるαが乗算される。ここでは、前回の経路確率は全て0であったとし、α=1として、経路確率は変わりないとする。
【0111】
次に、S260において、経路確率の最大値が閾値以上であるかが判定される。ここでは閾値Th3=0.1とすれば、最大の経路確率Pr(2)は閾値Th3以上となる。そして、S280において、経路確率が正規化される。
【0112】
Pr(1)=0
Pr(2)=0.53
Pr(3)=0.47
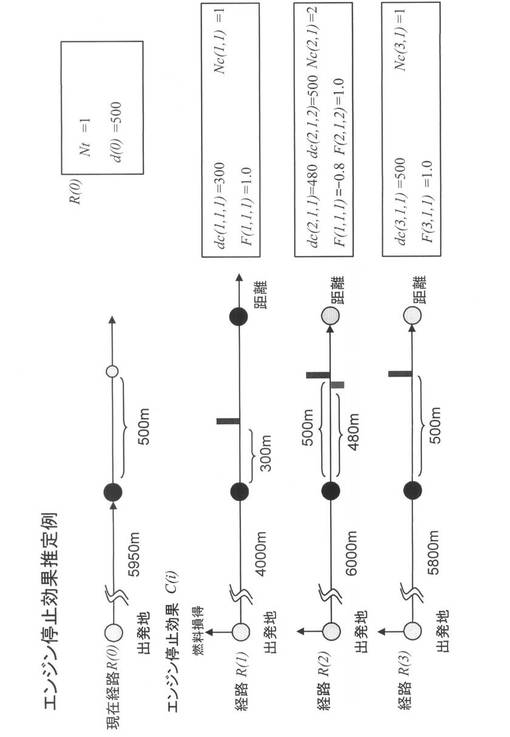
次に、エンジン停止効果推定処理の具体的な実施例(作動例)を図10に基づいて説明する。
【0113】
経路情報R(1)において、1回旋回地点から2回旋回地点までの燃料損得が更新された数はNc(1,1)=1であり、その移動距離dc(1,1,1)は300であり、そのときの燃料損得F(1,1,1)は1.0である。
【0114】
経路情報R(2)において、1回旋回地点から2回旋回地点までの燃料損得が更新された数はNc(2,1)=2であり、その移動距離dc(2,1,1)=480、dc(2,1,2)=500であり、そのときの燃料損得F(2,1,1)=−0.8、F(2,1,2)=1.0である。
【0115】
経路情報R(3)において、1回旋回地点から2回旋回地点までの燃料損得が更新された数はNc(3,1)=1であり、その移動距離dc(3,1,1)は500であり、そのときの燃料損得F(3,1,1)は1.0である。
【0116】
そして、S310において、合致確率が算出される。
経路情報R(1)の合致確率Pe(1,1)は以下の「数12」に示すように「0」となる。
【0117】
【数12】
経路情報R(2)の合致確率Pe(2,1)は以下の「数13」に示すように「0.73」となる。
【0118】
【数13】
経路情報R(2)の合致確率Pe(2,2)は以下の「数14」に示すように「1.0」となる。
【0119】
【数14】
経路情報R(3)の合致確率Pe(3,1)は以下の「数15」に示すように「1.0」となる。
【0120】
【数15】
次にS320において、経路情報毎に、合致確率Peの最大値が閾値Th4以上か否かが判定される。ここでは、閾値Th4=0.1とする。
【0121】
経路情報R(1)の合致確率の最大値は0であり、閾値Th4未満であるため、最終的な合致確率が0となる。一方、経路情報R(2)の合致確率、R(3)の合致確率の最大値は閾値Th4以上であるため、合致確率が経路情報毎に正規化され、Pe(2,1)=0.43、Pe(2,2)=0.57、Pe(3,1)=1となる。
【0122】
そして、S350において、経路情報毎の第1停止効果係数Ce(i)が算出される。具体的には、経路情報R(1)の第1停止効果係数Ce(1)は以下の「数16」に示すように「1.0」となる。
【0123】
【数16】
経路情報R(2)の第1停止効果係数Ce(2)は以下の「数17」に示すように「0.226」となる。
【0124】
【数17】
経路情報R(3)の第1停止効果係数Ce(3)は以下の「数18」に示すように「1.0」となる。
【0125】
【数18】
次に、Pr(1)=0、Pr(2)=0.53、Pr(3)=0.47、及びCe(1)=1.0、Ce(2)=0.226、Ce(3)=1.0に基づいて、エンジン停止処理のS475にて第2停止効果係数Ceが算出され、その値が閾値Th5(本実施形態では、0)以上であれば、エンジン停止信号が送信される。
【0126】
つまり、この例では、第2停止効果係数Ceは以下の「数19」に示すように「0.59」となるので、アイドリングストップすることで燃料消費量を削減できると判定され、エンジン停止信号が送信される。
【0127】
【数19】
4.本実施形態に係るアイドリングストップ判定装置の特徴
本実施形態では、アイドリング停止開始条件が成立した時において、過去の経路情報R(i)毎の経路確率及び第1停止効果係数Ce(i)に基づいて、過去の経路情報全体と
してのエンジン停止効果の度合いを示す第2停止効果係数Ceを求めるとともに、この第2停止効果係数Ceが所定の閾値以上の場合にエンジン50を停止すると判定するので、特許文献1に記載の発明に比べて、適切なタイミングでアイドリング運転時間を削減し、燃費を向上させることができる。
【0128】
すなわち、通勤経路やショッピングセンターへの経路等、走行頻度の高い走行経路においては、同様なタイミングでアイドリング停止開始条件及びアイドリング停止解除条件が成立する頻度が高いと推定でき得るので、現在の経路情報R(0)がいずれかの過去の経路情報R(i)に該当するならば、その過去の経路情報R(i)にて実行されたタイミン
グでエンジン50を停止させれば、効果的に燃費を向上さることができ得る。
【0129】
この現在の経路情報R(0)がいずれの過去の経路情報R(i)に該当するか否かを判
定する手法としては、例えばナビゲーションシステムに採用されているGPS装置を用いて判定するといった手法が考えられるが、この手法では、アイドリングストップ判定装置の製造原価上昇を招いてしまう。
【0130】
これに対して、本実施形態では、ブレーキセンサ350、ウインカセンサ330、ステアセンサ340及びイグニッションセンサ310等の多くの車両において、通常、設けられている既存のセンサで取得された情報に基づいて現在の経路情報R(0)に関する情報が取得される。
【0131】
そして、走行中にアイドリング停止開始条件が成立した場合には、記憶されている過去の経路情報R(i)のうちいずれに該当するか、つまり過去の経路情報R(i)に該当する確率(経路確率)が算出され、過去の経路情報R(i)に対応付けられた燃料損得に基づいてその経路情報のエンジン停止効果の度合いを示す第1停止効果係数Ce(i)が算出される。
【0132】
さらに、アイドリング停止開始条件が成立した時において、過去の経路情報R(i)毎の経路確率及び第1停止効果係数Ce(i)に基づいて、過去の経路情報R(i)全体としてのエンジン停止効果の度合いを示す第2停止効果係数Ceが求められ、この第2停止効果係数Ceが所定の閾値Th5以上の場合にエンジン50を停止すると判定される。
【0133】
そして、通勤経路やショッピングセンターへの経路、走行頻度の高い走行経路については、過去の経路情報R(i)が燃料損得と共に記憶されている可能性が極めて高いので、現在の経路情報R(0)について過去の経路情報R(i)毎の経路確率及び第1停止効果係数Ce(i)に基づく第2停止効果係数Ceによりエンジン50を停止するか否かが判定すれば、GPS装置等の高価な装置を用いることなく、適切なタイミングでアイドリング運転時間を削減し、燃費を向上させることができる。
【0134】
本実施形態では、各センサからの情報を基づいて運転者が乗車後に移動した距離、並びに旋回地点間の距離及びその向きを簡略化された経路情報として記憶するので、地図情報と及びGPS情報を用いずに、出発地点の位置を未確定としたままであっても経路情報を認識してエンジン50を停止させるか否かの判定を行うことができる。
【0135】
また、本実施形態では、各地点間の距離に関する情報及び旋回の向きに関する情報を比較することにより、経路確率を推定するので、地図情報とGPS情報が得られず出発地点が分からない状況においても、旋回地点間の距離及び旋回の向きが、頻繁に利用する走行経路に該当する確率(経路確率)が大きい場合には、現在、走行している経路は、その頻繁に利用する走行経路である推定する。したがって、当該経路上における現在の位置も推定できるので、適切なタイミングでエンジン50を停止させることが可能となる。
【0136】
また、本実施形態では、現在の経路情報R(0)のうち走行開始後から現在までの旋回の向きに関する情報が、過去の経路情報R(i)についての旋回の向きに関する情報と合致する度合いが高いほど高い値となる旋回確率を求め、現在の経路情報R(0)のうち各地点間の距離に関する情報が、過去の経路情報R(i)についての各地点間の距離に関する情報と合致する度合いが高いほど高い値となる距離確率を求めた後、旋回確率と距離確率との積に基づいて経路確率を求めている。
【0137】
これにより、本実施形態では、例えば、旋回地点間距離の差が小さいときには距離確率を高い確率となり、旋回地点間距離の差が大きいときには距離確率を小さい確率となるので、旋回地点間距離が僅かに異なる場合は、計測誤差と判断して過去の経路情報R(i)に該当すると推定され、逆に、旋回地点間距離が大きく異なる場合は、異なる交差点で旋回したと判断して過去の経路情報R(i)に該当しないと推定される。
【0138】
同様に、旋回の向きによっても、旋回の向きが同じであれば過去の経路情報R(i)に経路に該当する、旋回の向きが異なれば過去の経路情報R(i)に該当しない、又は旋回の向きに操舵角を考慮し、操舵角に応じて旋回の向きについての旋回確率が求められ、過去の経路情報R(i)に該当するか否か推定される。
【0139】
したがって、本実施形態では、地図情報とGPS情報が得られず出発地点が分からない状況においても、旋回地点間距離及び旋回の向きが、過去の経路情報R(i)に該当する確率(経路確率)が大きい場合には、現在、走行している経路は、頻繁に利用する走行経路であると推定できるので、当該経路上における現在の位置も高い精度で推定でき、適切なタイミングでエンジン50を停止させることが可能となる。
【0140】
また、本実施形態では、過去の経路情報R(i)のうち最も新しい経路情報についての経路確率を、それ以前の経路情報についての経路確率より小さくしているので、再び同じ走行経路を走行する可能性を除外し経路推定精度を高めることができる。したがって、出発地と目的地が異なるときに、前回乗車時の経路を、今回の経路推定に合致する確率を減らすことで、今回の経路推定より除外し、今回の経路推定精度を高めることができる。
【0141】
また、本実施形態では、過去情報記憶部は、過去の経路情報R(i)毎に、走行開始から燃料損得が取得されたときまでに車両が旋回した回数の総合計(総旋回回数)を経路情報を示すための情報として記憶するとともに、総旋回回数と燃料損得とを対応付けて記憶している。
【0142】
これにより、本実施形態では、記憶されている過去の経路情報R(i)における現在車両位置に応じた旋回地点間(道路)の燃料損得を考慮することができ、記憶された過去の経路情報R(i)において、燃料損得の大きい走行経路(例えば、幹線道路)や、燃料損得の小さい走行経路(例えば、住宅街)といった、走行経路毎に燃料損得を記憶できるので、適切なタイミングでエンジン50を停止させることができる。
【0143】
また、本実施形態では、過去の経路情報R(i)毎に、走行開始から燃料損得が取得されたときまでに車両が旋回した総旋回回数と、その総旋回回数のときに取得された燃料損得と、その燃料損得が取得された時に対する直前の旋回地点又は走行開始地点からの走行距離に関する情報とを対応付けて記憶するとともに、総旋回回数及び走行距離に関する情報を経路情報を示すための情報として記憶している。
【0144】
これにより、本実施形態では、記憶された過去の経路情報R(i)における現在車両位置に応じた地点の燃料損得を考慮することができ、過去の経路情報R(i)において、燃料損得の大きい地点(例えば、信号のある交差点)や燃料損得の小さい地点(例えば、車通りの少ない一旦停止箇所、又はコンビニ駐車場の出入口)といった、地走行経路毎に燃料損得を記憶できるので、適切なタイミングでエンジン50を停止させることができる。
【0145】
また、本実施形態では、記憶されている総旋回回数のうち現在の総旋回回数と同一の総旋回回数に対応付けられた走行距離に関する情報に基づいて、過去情報記憶部に記憶されている走行距離に関する情報毎に、その走行距離に関する情報が現在の走行距離に関する情報と合致する合致確率を求めた後、この合致確率と当該走行距離に関する情報に対応付けられた燃料損得との積を求め、さらに、エンジン停止効果推定部は、過去の経路情報R(i)毎に第1停止効果係数Ce(i)を算出するとともに、走行距離に関する情報毎に求められた積の総和を第1停止効果係数Ce(i)として推定する。
【0146】
これにより、本実施形態では、走行中にアイドリング停止開始条件が成立した場合に、記憶されている過去の経路情報R(i)のいずれに該当するか推定確率を算出し、記憶された過去の経路情報R(i)における走行距離と現在車両の走行距離が近いものを重視し、走行距離が遠いものを軽視するよう、燃料損得に重み付けをして係数を算出することができるので、適切なタイミングでエンジン50を停止させることができる。
【0147】
(第2実施形態)
第1実施形態のエンジン停止効果推定部130では、過去情報記憶部110に記憶されたエンジン停止可能な位置と燃料損得から、現在の位置が合致する確率とその燃料損得の積和からなる第1停止効果係数Ce(i)を算出していた。
【0148】
これに対して、本実施形態に係るエンジン停止効果推定部130では、過去情報記憶110に記憶されたエンジン停止可能な位置に対して現在の位置が近い場合には、現在位置についての燃料損得も記憶されている燃料損得に近い値となり、逆に、記憶されている位置に対して現在位置が遠い場合には、現在位置についての燃料損得を0に近い値になるように補正している。
【0149】
つまり、本実施形態では、過去情報記憶部110に記憶された燃料損得を、現在の位置に応じて換算(補正)して和をとることにより、第2停止効果係数Ceとする。なお、以下の説明においては、第1実施形態との相違点を重点的に説明する。
【0150】
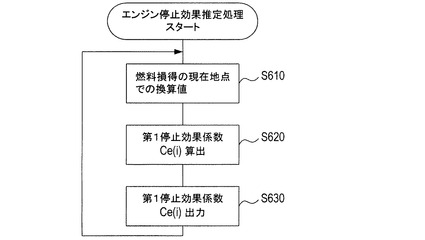
本実施形態に係るエンジン停止効果推定部では、図11に示すエンジン停止効果推定処理が実行される。そして、このエンジン停止効果推定処理が起動されると、先ず、過去の経路情報R(i)毎に、現在の経路情報R(0)における総旋回回数Ntと一致する総旋回回数に対応付けられた移動距離dc(i,Nt,n)及び燃料損得F(i,Nt,n)、並びに現在の経路情報R(0)における直前の旋回地点からの距離doに基づき、移動距離dc(i,Nt,n)と距離doとのずれに応じた燃料損得が算出される(S610)。
【0151】
つまり、燃料損得F(i,Nt,n)は移動距離dc(i,Nt,n)に対応するものであるが、現在の経路情報R(0)における直前の旋回地点からの距離doが移動距離dc(i,Nt,n)と相違している場合には、距離doに対応する燃料損得も相違すること考えられる。
【0152】
そこで、S610では、現在の経路情報R(0)における総旋回回数をNtとして、距離doと移動距離dc(i,Nt,n)との差に基づいて、以下の「数20」で示される数式20に従って燃料損得F(i,Nt,n)を換算(補正)している。以下、この換算された燃料損得Fを補正後燃料損得F1といい、燃料損得F(i,Nt,n)を基準に換算した補正後燃料損得をF1(i,Nt,n)と記す。なお、上述したように、n=1、2、…、Ncである。
【0153】
【数20】
但し、標準偏差σは距離doの定数倍(例えば、5%)とする。
【0154】
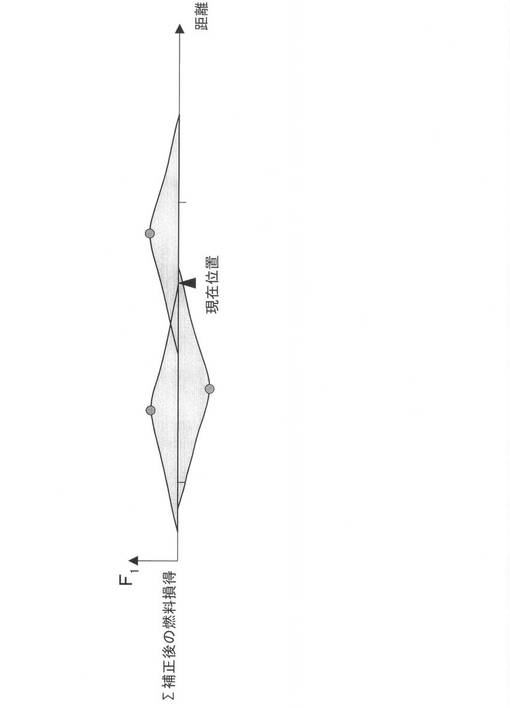
これにより、距離doと移動距離dc(i,Nt,n)との差が0の場合には、F(i,Nt,n)とF1(i,Nt,n)とは同一の値となり、距離doと移動距離dc(i,Nt,n)との差が大きくなると、F1(i,Nt,n)の値は0に近づいていく(図12参照)。
【0155】
次に、過去の経路情報R(i)毎に第1停止効果係数Ce(i)が求められた後(S620)、その第1停止効果係数Ce(i)がエンジン停止判定部140に出力され(S630)、再び、S610が実行される。
【0156】
このとき、第1停止効果係数Ce(i)は、以下の「数21」に示される数式21からも明らかなように、補正後燃料損得F1(i,Nt,n)の和として算出される。但し、上述したように、Mは、経路情報R(i)において、現在の総旋回回数Ntと同数の総旋回回数に対応付けられた燃料損得の更新の数をいう。
【0157】
【数21】
これにより、本実施形態では、距離doと移動距離dc(i,Nt,n)との差が大きく異なると、燃料損得が0に近づくので、その後、総和をとるときに無視され、適切なタイミングでエンジン停止信号を出力することができる。
【0158】
つまり、走行中にアイドリング停止開始条件が成立した場合に、記憶された過去の経路情報R(i)のいずれに該当するか推定確率を算出し、記憶された過去の経路情報R(i)における走行距離と現在車両の走行距離の違いが考慮されて、走行距離の差が大きい場合の燃料損得しか記憶されていない場合には燃料損得が0へ近づくように燃料損得が補正されるので、適切なタイミングでエンジン50を停止させることができる。
【0159】
(第3実施形態)
第1実施形態のエンジン停止効果推定部130では、過去情報記憶部110に記憶されたエンジン停止可能な位置と燃料損得から、現在の位置が合致する確率とその燃料損得の積和からなる第1停止効果係数Ce(i)を算出していた。
【0160】
これに対して、第3実施形態のエンジン停止効果推定部130では、過去情報記憶部110に記憶されたエンジン停止可能な位置の旋回回数と燃料損得から、現在の旋回回数が合致する場合の燃料損得の平均値を第1停止効果係数Ce(i)とする。具体的には、以下の「数22」で示す数式22に従って過去の経路情報R(i)毎に第1停止効果係数Ce(i)が算出される。
【0161】
【数22】
これにより、本実施形態では、旋回した地点から移動距離に対応する地点についての燃料損得に基づいて、第1停止効果係数Ce(i)が算出されるのではなく、旋回地点と次の旋回地点との区間(1本の経路)についての燃料損得に基づいて、第1停止効果係数Ce(i)が算出されることとなる。
【0162】
(その他の実施形態)
第1実施形態では、過去情報記憶部110、経路推定部120、エンジン停止効果推定部130、エンジン停止判定部140での各処理は、アイドリングストップ判定装置100が起動されて以降、個々に繰り返し実行されるとしたが、各部の処理は過去情報記憶部110、経路推定部120、エンジン停止効果推定部130、エンジン停止判定部140の順に実行され、エンジン停止判定部140の処理の終了後、再び過去情報記憶部110の処理から繰り返し実行するとしてもよい。
【0163】
また、本発明は、上述の実施形態に示されたものに限定されるものではなく、例えば上述の実施形態における旋回回地点間距離、旋回地点からの距離を、走行開始地点からの累積距離に置き換えてもよい。
【0164】
また、本発明は、特許請求の範囲に記載された発明の趣旨に合致するものであればよく、上述の実施形態に限定されるものではない。
【符号の説明】
【0165】
1…アイドリングストップシステム、50…エンジン、
100…アイドリングストップ判定装置、110…過去情報記憶、
110…過去情報記憶部、120…経路推定部、130…エンジン停止効果推定部、
140…エンジン停止判定部、310…イグニッションセンサ、
320…速度センサ、330…ウインカセンサ、340…ステアセンサ、
200…エンジンECU200。
【技術分野】
【0001】
本発明は、車両の燃料消費量の低減(燃費向上)を図るべく、エンジンのアイドリング運転時間を削減するにあたり、エンジンを停止させるか否かを判定するアイドリングストップ判定装置に関するものである。
【背景技術】
【0002】
例えば、特許文献1に記載の発明では、車両が減速している状態でブレーキの踏み込み量が所定値以上となったときには、運転者が車両を停止させるものと予測して、エンジンを停止させることにより、車両の燃費向上を図っている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−221059号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1に記載の発明では、車速の変化及びブレーキの踏み込み量に基づいてエンジンを停止させるか否かを判定しているので、適切なタイミングでアイドリング運転時間を削減することができないおそれがある。
【0005】
本発明は、上記点に鑑み、適切なタイミングでアイドリング運転時間を削減し、燃費を向上させることを目的とする。
【課題を解決するための手段】
【0006】
本発明は、上記目的を達成するために、請求項1に記載の発明では、車両の速度情報を取得する速度情報取得手段と、車輪に作用している制動力についての情報を取得するブレーキ情報取得手段と、車両に設けられた方向指示器についての情報を取得する方向指示器情報取得手段と、操舵輪の操舵角についての情報を取得する操舵情報取得手段と、エンジンが稼働可能な状態であるか否かの情報を取得するイグニッション情報取得手段と、速度情報取得手段、方向指示器情報取得手段、操舵情報取得手段及びイグニッション情報取得手段のうち、少なくとも1つの情報取得手段にて取得された情報に基づいて車両が走行した走行経路パターンを取得する経路取得手段と、速度情報取得手段、ブレーキ情報取得手段、方向指示器情報取得手段、操舵情報取得手段及びイグニッション情報取得手段のうち、少なくとも1つの情報取得手段にて取得された情報に基づいて判定される予め設定された条件であって、エンジンを停止させるための停止開始条件及びエンジンを再始動させるための停止解除条件を判定するアイドリングストップ制御条件判定手段と、停止開始条件が成立した時から停止解除条件が成立した時までの間、仮に、エンジンを停止したならば、削減できたと推定可能な燃料の量(以下、この量を燃料損得という。)を取得する燃料損得取得手段と、少なくとも、経路取得手段により取得された走行経路パターンと、燃料損得取得手段が取得した燃料損得とを対応付けて記憶する過去情報記憶部と、過去情報記憶部に記憶されている走行経路パターン(以下、過去の走行経路パターンという。)それぞれについて、現在の走行経路パターンに該当する度合いを示す確率(以下、経路確率という。)を推定する経路推定部と、過去の走行経路パターンそれぞれについて、各走行経路パターンに対応付けられた燃料損得に基づいて、その走行経路パターンのエンジン停止効果の度合いを示す第1停止効果係数を推定するエンジン停止効果推定部と、停止開始条件が成立した時において、過去の走行経路パターン毎の経路確率及び第1停止効果係数に基づいて、過去の走行経路パターン全体としてのエンジン停止効果の度合いを示す第2停止効果係数を求めるとともに、この第2停止効果係数が所定の閾値以上の場合にエンジンを停止すると判定するエンジン停止判定部とを備えることを特徴とする。
【0007】
これにより、請求項1に記載の発明では、停止開始条件が成立した時において、過去の走行経路パターン毎の経路確率及び第1停止効果係数に基づいて、過去の走行経路パターン全体としてのエンジン停止効果の度合いを示す第2停止効果係数を求めるとともに、この第2停止効果係数が所定の閾値以上の場合にエンジンを停止すると判定するので、特許文献1に記載の発明に比べて、適切なタイミングでアイドリング運転時間を削減し、燃費を向上させることができる。
【0008】
すなわち、通勤経路やショッピングセンターへの経路等、走行頻度の高い走行経路においては、同様なタイミングで停止開始条件及び停止解除条件が成立する頻度が高いと推定でき得るので、現在の走行経路がいずれかの過去の走行経路パターンに該当するならば、その過去の走行経路パターンにて実行されたタイミングでエンジンを停止させれば、効果的に燃費を向上さることができ得る。
【0009】
ところで、「現在の走行経路がいずれの過去の走行経路パターンに該当するか」を判定する手法としては、例えばナビゲーションシステムに採用されているGPS装置を用いて判定するといった手法が考えられるが、この手法では、アイドリングストップ判定装置の製造原価上昇を招いてしまう。
【0010】
これに対して、本発明では、ブレーキ情報取得手段、方向指示器情報取得手段、操舵情報取得手段及びイグニッション情報取得手段等の多くの車両において、通常、設けられている既存の取得手段で取得された情報に基づいて走行経路パターンに関する情報が取得される。
【0011】
そして、走行中に停止開始条件が成立した場合には、記憶された走行経路パターンのうちいずれに該当するか、つまり過去の走行経路パターンに該当する確率(経路確率)が算出され、過去の走行経路パターンに対応付けられた燃料損得に基づいてその走行経路パターンのエンジン停止効果の度合いを示す第1停止効果係数が算出される。
【0012】
さらに、停止開始条件が成立した時において、過去の走行経路パターン毎の経路確率及び第1停止効果係数に基づいて、過去の走行経路パターン全体としてのエンジン停止効果の度合いを示す第2停止効果係数が求められ、この第2停止効果係数が所定の閾値以上の場合にエンジンを停止すると判定される。
【0013】
以上のように、現在の走行経路パターンが走行頻度の高い走行経路である場合には、これと同様な走行経路パターンが過去の走行経路パターンとして、燃料損得と共に記憶されている可能性が極めて高いことから、本発明のごとく、過去の走行経路パターン毎の経路確率及び第1停止効果係数に基づく第2停止効果係数によりエンジンを停止するか否かを判定すれば、GPS装置等の高価な装置を用いることなく、適切なタイミングでアイドリング運転時間を削減し、燃費を向上させることができる。
【0014】
請求項2に記載の発明では、過去情報記憶部は、少なくとも走行開始点に関する情報、車両の旋回地点に関する情報、走行終了地点に関する情報、及びこれら各地点間の距離に関する情報、並びに旋回地点における旋回の向きに関する情報を有して構成された情報を走行経路パターンとして記憶することを特徴とする。
【0015】
これにより、請求項2に記載の発明では、各取得手段からの情報を基づいて、運転者が乗車後に移動した距離、並びに旋回地点間の距離及びその向きを簡略化された経路情報として記憶するので、地図情報と及びGPS情報を用いずに、出発地点の位置を未確定としたままであっても経路情報を認識してエンジンを停止させるか否かの判定を行うことができる。
【0016】
請求項3に記載の発明では、経路推定部は、各地点間の距離に関する情報及び旋回の向きに関する情報を比較することにより、経路確率を推定することを特徴とする。
これにより、請求項3に記載の発明では、地図情報とGPS情報が得られず出発地点が分からない状況においても、旋回地点間の距離及び旋回の向きが、頻繁に利用する走行経路に該当する確率(経路確率)が大きい場合には、現在、走行している経路は、その頻繁に利用する走行経路であると推定できるので、当該経路上における現在の位置も推定でき、適切なタイミングでエンジンを停止させることが可能となる。
【0017】
請求項4に記載の発明では、経路推定部は、現在の走行経路パターンのうち走行開始後から現在までの旋回の向きに関する情報が、過去の走行経路パターンについての旋回の向きに関する情報と合致する度合いが高いほど、高い値となる旋回確率を求める旋回確率推定手段、現在の走行経路パターンのうち各地点間の距離に関する情報が、過去の走行経路パターンについての各地点間の距離に関する情報と合致する度合いが高いほど、高い値となる距離確率を求める距離確率推定手段、及び旋回確率と距離確率との積に基づいて経路確率を求める確率推定手段を有することを特徴とする。
【0018】
これにより、請求項4に記載の発明では、例えば、旋回地点間距離の差が小さいときには距離確率を高い確率となり、旋回地点間距離の差が大きいときには距離確率を小さい確率となるので、旋回地点間距離が僅かに異なる場合は、計測誤差と判断して過去の走行経路パターンに該当すると推定され、逆に、旋回地点間距離が大きく異なる場合は、異なる交差点で旋回したと判断して過去の走行経路パターンに該当しないと推定される。
【0019】
同様に、旋回の向きによっても、旋回の向きが同じであれば過去の走行経路パターンに経路に該当する、旋回の向きが異なれば過去の走行経路パターンに該当しない、又は旋回の向きに操舵角を考慮し、操舵角に応じて旋回の向きについての旋回確率が求められ、過去の走行経路パターンに該当するか否か推定される。
【0020】
したがって、請求項4に記載の発明では、地図情報とGPS情報が得られず出発地点が分からない状況においても、旋回地点間距離及び旋回の向きが、過去の走行経路パターンに該当する確率(経路確率)が大きい場合には、現在、走行している経路は、頻繁に利用する走行経路であると推定できるので、当該経路上における現在の位置も高い精度で推定でき、適切なタイミングでエンジンを停止させることが可能となる。
【0021】
請求項5に記載の発明では、経路推定部は、過去の走行経路パターンのうち最も新しい走行経路パターンについての経路確率を、それ以前の走行経路パターンについての経路確率より小さくすることを特徴とする。
【0022】
これにより、請求項5に記載の発明では、再び同じ走行経路を走行する可能性を除外し経路推定精度を高めることができるので、出発地と目的地が異なるときに、前回乗車時の経路を、今回の経路推定に合致する確率を減らすことで、今回の経路推定より除外し、今回の経路推定精度を高めることができる。
【0023】
請求項6に記載の発明では、過去情報記憶部は、過去の走行経路パターン毎に、走行開始から燃料損得が取得されたときまでに車両が旋回した回数の総合計(以下、総旋回回数という。)を走行経路パターンを示すための情報として記憶するとともに、総旋回回数と燃料損得とを対応付けて記憶することを特徴とする。
【0024】
これにより、請求項6に記載の発明では、記憶された走行経路パターンにおける現在車両位置に応じた旋回地点間(道路)の燃料損得を考慮することができ、記憶された過去の走行経路パターンにおいて、燃料損得の大きい走行経路(例えば幹線道路)や、燃料損得の小さい走行経路(例えば、住宅街)といった、走行経路毎に燃料損得を記憶できるので、適切なタイミングでエンジンを停止させることができる。
【0025】
請求項7に記載の発明では、過去の走行経路パターンについての総旋回回数であって、現在の総旋回回数と同数の総旋回回数を該当旋回回数と呼ぶとき、エンジン停止効果推定部は、過去の走行経路パターン毎に、該当旋回回数に対応付けられた燃料損得の平均値を第1停止効果係数として推定することを特徴とする。
【0026】
これにより、請求項7に記載の発明では、旋回した地点から移動距離に対応する地点についての燃料損得に基づいて、第1停止効果係数が算出されるのではなく、旋回地点と次の旋回地点との区間(1本の経路)についての燃料損得に基づいて、第1停止効果係数が算出されることとなる。
【0027】
請求項8に記載の発明では、過去情報記憶部は、過去の走行経路パターン毎に、走行開始から燃料損得が取得されたときまでに車両が旋回した回数の総合計(以下、総旋回回数という。)と、その総旋回回数のときに取得された燃料損得と、その燃料損得が取得された時に対する直前の旋回地点又は走行開始地点からの走行距離に関する情報とを対応付けて記憶するとともに、総旋回回数及び走行距離に関する情報を走行経路パターンを示すための情報として記憶することを特徴とする。
【0028】
これにより、請求項8に記載の発明では、記憶された過去の走行経路パターンにおける現在車両位置に応じた地点の燃料損得を考慮することができ、過去の走行経路パターンにおいて、燃料損得の大きい地点(例えば、信号のある交差点)や燃料損得の小さい地点(例えば、車通りの少ない一旦停止箇所、又はコンビニ駐車場の出入口)といった、走行経路毎に燃料損得を記憶できるので、適切なタイミングでエンジンを停止させることができる。
【0029】
請求項9に記載の発明では、エンジン停止効果推定部は、過去情報記憶部に記憶されている総旋回回数のうち現在の総旋回回数と同一の総旋回回数に対応付けられた走行距離に関する情報に基づいて、過去情報記憶部に記憶されている走行距離に関する情報毎に、その走行距離に関する情報が現在の走行距離に関する情報と合致する合致確率を求めた後、この合致確率と当該走行距離に関する情報に対応付けられた燃料損得との積を求め、さらに、エンジン停止効果推定部は、過去の走行経路パターン毎に第1停止効果係数を算出するとともに、走行距離に関する情報毎に求められた積の総和を第1停止効果係数として推定することを特徴とする。
【0030】
これにより、請求項9に記載の発明では、走行中に停止開始条件が成立した場合に、記憶されている過去の走行経路パターンのいずれに該当するか推定確率を算出し、記憶された過去の走行経路パターンにおける走行距離と現在車両の走行距離が近いものを重視し、走行距離が遠いものを軽視するよう、燃料損得に重み付けをして係数を算出することができるので、適切なタイミングでエンジンを停止させることができる。
【0031】
請求項10に記載の発明では、エンジン停止効果推定部は、過去の走行経路パターン毎に第1停止効果係数を算出するとともに、過去情報記憶部に記憶されている総旋回回数のうち現在の総旋回回数と同一の総旋回回数に対応付けられた走行距離に関する情報に基づいて、過去情報記憶部に記憶されている走行距離に関する情報毎に、現在の走行距離に関する情報との相違量に応じて当該走行距離に関する情報に対応付けられた燃料損得を補正した補正後燃料損得を求めた後、それら補正後燃料損得の総和を第1停止効果係数として推定し、さらに、エンジン停止効果推定部は、相違量が小さくなるほど補正後燃料損得が燃料損得に近い値となり、逆に、相違量が大きくなるほど補正後燃料損得がゼロに近い値となるように補正することを特徴とする。
【0032】
これにより、請求項10に記載の発明では、走行中に停止開始条件が成立した場合に、記憶された過去の走行経路パターンのいずれに該当するか推定確率を算出し、記憶された過去の走行経路パターンにおける走行距離と現在車両の走行距離の違いが考慮されて、走行距離の差が大きい場合の燃料損得しか記憶されていない場合には、燃料損得が0へ近づくように燃料損得が補正されるので、適切なタイミングでエンジンを停止させることができる。
【図面の簡単な説明】
【0033】
【図1】本発明の実施形態に係るアイドリングストップシステム1のブロック図である。
【図2】本発明の実施形態に係るアイドリングストップ判定装置100のブロック図である。
【図3】本発明の実施形態における過去情報記憶処理を示すフローチャートである。
【図4】本発明の実施形態における経路情報の更新処理を示すフローチャートである。
【図5】本発明の実施形態における燃料損得等の更新処理を示すフローチャートである。
【図6】本発明の実施形態における経路推定処理を示すフローチャートである。
【図7】本発明の第1実施形態における経路推定部の処理を示すフローチャートである。
【図8】本発明の実施形態におけるエンジン停止判定処理を示すフローチャートである。
【図9】本発明の第1実施形態における実施例の説明図である。
【図10】本発明の第1実施形態における実施例の説明図である。
【図11】本発明の第2実施形態における経路推定部の処理を示すフローチャートである。
【図12】本発明の第2実施形態における経路推定部の処理効果の概要を示す図である。
【発明を実施するための形態】
【0034】
以下、本発明のアイドリングストップ判定装置を用いたアイドリングストップシステムの実施形態を図面と共に説明する。
(第1実施形態)
1.全体の構成
本実施形態に係るアイドリングストップシステム1は、図1に示すように、走行用のエンジン50を停止させるか否かを判定するアイドリングストップ判定装置100、エンジン50の運転状態を制御するエンジンECU200、及び車両情報を検出するセンサ類300等から構成されている。
【0035】
なお、アイドリングストップ判定装置100及びエンジンECU200は、CPU、RAM及びROM等からなる周知のマイクロコンピュータにて構成された電子制御装置であり、アイドリングストップ判定装置100及びエンジンECU200の作動プログラムは、ROM又はフラッシュメモリ等の不揮発性記憶手段に予め記憶されている。
【0036】
そして、アイドリングストップ判定装置100は、センサ類300から車両情報を取得して、アイドリングストップ、つまりエンジン50を停止させるべきか否か判定し、エンジン50を停止させると判定した場合には、エンジンECU200へエンジン停止信号を送信し、一方、エンジン50が停止しているときには、センサ類300から車両情報を取得して、アイドリングストップ解除するか否かを判定して、アイドリングストップ解除すると判定した場合には、エンジン始動信号をエンジンECU200へ送信する。
【0037】
また、エンジンECU200は、運転者によるアクセルペダル(図示せず。)の操作に応じてエンジン50の運転状態を制御するとともに、アイドリングストップ判定装置100からのエンジン停止信号又はエンジン始動信号に応じて、エンジン50を停止又は始動させる機能を有する。
【0038】
また、センサ類300は、アイドリングストップ判定装置100がエンジン停止信号又はエンジン始動信号を発するか否かの判定に用いる車両情報を取得するセンサ群であり、このセンサ群は、少なくとも以下のセンサから構成されている。
【0039】
すなわち、エンジン50が稼働可能な状態であるか否かの情報を取得するイグニッションセンサ310、車速情報を取得する速度センサ320、ウインカ(方向指示器)の状態を取得するウインカセンサ330、操舵輪の操舵角、つまりステアリングの操舵角を取得するステアセンサ340、車輪に作用している制動力、つまりブレーキペダルの踏み込み量を取得するブレーキセンサ350、及び燃料噴射量を検出する噴射量センサ360等である。
【0040】
そして、センサ類300にて取得された車両情報は、各センサからアイドリングストップ判定装置100へと至る通信路(例えば、車両ネットワーク)を介してアイドリングストップ判定装置100に送信される。
【0041】
なお、イグニッションセンサ310で検出するイグニッション状態は、運転者が車両に乗車後に車両始動操作をした際にONとなり、車両降車前の車両停止操作によってOFFとなる状態である。
【0042】
また、アイドリングストップシステム1は、アイドルストップのためのエンジン停止信号又はエンジン始動信号をエンジンECU200に向けて出力するため、アイドリングストップシステム1を構成する各機器には、エンジン50が停止している間も電力が供給される。
【0043】
同様に、アイドリングストップ判定装置100では、イグニッション状態がONからOFFへ変化した時に、エンジン停止信号又はエンジン始動信号を出力するか否かを判定する判定制御が起動されるため、本実施形態では、イグニッションOFF状態でも電力が供給される。
【0044】
なお、アイドリングストップ判定装置100への電力供給は、例えばイグニッションONからOFFへ変化したことを検知し、特定の処理が終了するまでの間のみ電力を供給するような構成として、バッテリ(図示せず。)に蓄えられた電力の消費を抑制してもよい。
【0045】
2.アイドリングストップ判定装置による処理
アイドリングストップ判定装置100は、図2に示すように、過去情報記憶部110、経路推定部120、エンジン停止効果推定部130、及びエンジン停止判定部140等から構成されており、これらの機能ブロックは、センサ群300からの車両信号を取得し、これらの車両信号を用いて予めROM又はフラッシュメモリ等の不揮発性記憶手段に記憶されているプログラムに従って各種処理を実行する。
【0046】
なお、以下の各処理において記憶される情報(燃料損得や移動距離等)は、フラッシュメモリ等の書き換え可能な不揮発性記憶手段に記憶される。
2.1.過去情報記憶部の処理(過去情報記憶処理)について
<過去情報記憶処理の概要>
過去情報記憶処理が起動されると、図3に示すように、先ず、イグニッション信号がONであるかが判定され(S110)、イグニッションがONである場合には(S110:YES)、車両情報より現在の経路情報が更新された後(S120)、車両情報より現在の経路における燃料損得が更新されるとともに、移動距離が記録される(S130)。次に、現在のイグニッション信号(この場合はON)が保持された後(S140)、再び、S110が実行される。なお、S120及びS130の詳細は後述する。
【0047】
一方、S110にてイグニッションがOFFであると判定された場合には(S110:NO)、イグニッション信号がONからOFFへ変化した直後であるか否か、つまり、S140にて保持されたイグニッション信号がONからOFFに変化したか否かが判定される(S150)。
【0048】
そして、イグニッション信号がONからOFFへ変化した直後でない判定された場合には(S150:NO)、再び、S110が実行され、イグニッション信号がONからOFFへ変化した直後であると判定された場合には(S150:YES)、現在の経路情報が記憶された後(S160)、現在の移動距離と燃料損得が記憶される(S170)。
【0049】
次に、経路推定部120により求められた経路確率が記憶された後(S180)、現在のイグニッション信号(この場合はON)が保持された後(S140)、再び、S110が実行される。なお、S160、S170及び経路確率の詳細は後述する。
【0050】
<S120(経路情報)の詳細>
経路情報とは、イグニッションがONとなった時点から現在までの旋回方向の順序及びその旋回回数を示す情報(以下、総旋回回数という。)、イグニッションがONとなった出発地点と車両が初めて旋回した地点間の移動距離を示す情報、その後に車両が旋回した各地点間の移動距離、並びに最後に旋回した地点から現在までの移動距離を示す情報を1組とした情報ベクトル(配列)を示す走行経路パターンである。
【0051】
そして、運転者が車両に乗り込んで車両の運転を開始した時から運転者が車両から降りで運転を終了した時、つまり車両スイッチ(イグニッションスイッチ)が投入(ON)された時から車両スイッチが遮断(OFF)された時までを1周期(1サイクル)として経路情報が更新・記憶されていく。
【0052】
このため、車両スイッチがONである場合には経路情報が更新され続けるので、この場合の経路情報を経路情報R(0)と記す。また、車両スイッチがOFFとなると、経路情報は更新されないので、車両スイッチがOFFになるまで更新されてきた経路情報は、過去の経路情報R(Nr)として識別可能な状態で記憶される。なお、「Nr」は、過去の経路情報を取得したときの走行経路パターンの識別番号であり、番号が小さくなるほど、所得時が古いことを意味する。
【0053】
以下、現在の経路情報R(0)の更新処理(S120)を図4に基づいて説明する。
S120においては、先ず、直前の旋回地点からの移動距離、又はイグニッションONからの移動距離(以下、これらの距離を旋回地点間距離という。)が旋回距離閾値Th1を超えたか否かが判定され(S510)、旋回閾値Th1を超えていると判定された場合には(S510:YES)、ウインカセンサ330からウインカ信号が右方向を示し、かつ、ステアセンサ340からのステア信号より得られる操舵角の最大値が右方向角度閾値Th2Rを超えたか否かが判定される(S520)。
【0054】
このとき、上記右旋回判定条件を満たしていると判定された場合には(S520:YES)、現在記憶されている旋回回数を1増加させた更新値と車両が右向きに旋回したことを示す情報(例えば、R)とが対応付けられて記憶された後(S530)、車速が積算されることにより、現在の旋回地点間距離が更新され(S540)、更新処理が終了される。
【0055】
なお、S510にて、直前の旋回地点からの旋回地点間距離が旋回距離閾値Th1を超えていなかった場合には(S510:NO)、車速が積算されることにより現在の旋回地点間距離が更新された後、更新処理が終了される。
【0056】
また、上記右旋回判定条件を満たしていないと判定された場合には(S520:NO)、ウインカセンサ330からウインカ信号が左方向を示し、かつ、ステアセンサ340からのステア信号より得られる操舵角の最大値が左方向角度閾値Th2Lを超えたか否かが判定される(S550)。
【0057】
このとき、上記左旋回判定条件を満たしていると判定された場合には(S550:YES)、現在記憶されている旋回回数を1増加させた更新値と車両が左向きに旋回したことを示す情報(例えば、L)とが対応付けられて記憶された後(S560)、車速が積算されることにより、現在の旋回地点間距離が更新され(S540)、更新処理が終了される。
【0058】
したがって、更新処理では、旋回回数を示す数字が総旋回回数となり、旋回地点間距離と対応付けられて経路情報毎に記憶されていく。そこで、以下、経路情報R(Nr)の旋回地点間距離のうち、総旋回回数がkからk+1に更新される間の旋回地点間距離をd(Nr,k)と記し、経路情報R(Nr)に含まれる旋回の向きのうち総旋回回数がkの場合の旋回の向きをQ(Nr,k)と記せば、経路情報R(Nr)は、d(Nr,1)、d(Nr,2)、……、d(Nr,k)及びQ(Nr,1)、Q(Nr,2)、……、Q(Nr,k)からなる情報ベクトルとして表現される。
【0059】
なお、上記の更新処理においては、ウインカ信号が連続で右方向又は左方向を示している間を、1回の右方向旋回又は左方向旋回として旋回判定する、又は一定時間内の旋回角度を、ステア信号より得られる操舵角と速度から求めた角速度の累積として求め、この一定時間内の旋回角度が閾値を超えた場合に、旋回ありと判定してもよい。
【0060】
<S130(燃料損得及び移動距離)の詳細>
燃料損得とは、アイドリング停止開始件条件が成立した時からアイドリング停止解除条件が成立した時までの間、仮に、エンジン50を停止したならば、削減できたと推定可能な燃料の量をいう。
【0061】
なお、アイドリング停止開始件条件として、本実施形態では、例えば、車速0km/h、かつ、制動力が最大制動力の30%以上となった場合をいい、アイドリング停止解除条件として、本実施形態では、例えば、制動力が最大制動力の20%以下となった場合を採用している。
【0062】
そして、S130では、図5に示すように、先ず、アイドリング停止開始件条件が不成立から成立したか否かが判定され(S710)、アイドリング停止開始件条件が不成立から成立したと判定された場合には(S710:YES)、直前の交差点からの移動距離が記憶されるとともに、その移動距離に対応する燃料損得の初期値が0とされた後(S720)アイドリング停止解除条件が不成立から成立したか否かが判定される(S730)。
【0063】
このとき、アイドリング停止解除条件が不成立から成立したと判定された場合には(S730:YES)、アイドリング停止開始件条件が成立した時からアイドリング停止解除条件が成立した時までの間、仮に、エンジン50を停止したならば、削減できたと推定可能な燃料の量、つまり、アイドルストップした場合の燃料損得が更新・記憶される(S740)。
【0064】
次に、アイドリング停止開始条件とアイドリング停止解除条件が成立しているか否かの状態が記憶された後(S750)、S130が終了され、S140(図3参照)が実行される。
【0065】
なお、アイドリング停止開始件条件が不成立から成立していないと判定された場合には(S710:NO)、移動距離が記憶されることなくS730が実行される。また、アイドリング停止解除条件が不成立から成立していないと判定された場合には(S730:NO)、S750が実行される。
【0066】
因みに、本実施形態では、アイドリング停止開始件条件が成立した時からアイドリング停止解除条件が成立した時までの時間に、アイドリング運転時に単位時間あたり消費される燃料の量(予め試験により計測した値)を乗じた値と、エンジン50を始動する際に消費する燃料とを加算した値を燃料損得として更新しているが、燃料損得の具体的な算出方法は、これに限定されるものではなく、アイドリング停止開始件条件及びアイドリング停止解除条件等に応じて、適宜、決定されるべき値であることはいうまでもない。
【0067】
ところで、S130においては、燃料損得及び移動距離は、経路情報R(Nr)と対応付けられて記憶されている。そこで、以下、例えば、経路情報R(Nr)として記憶されている走行経路パターンにおいて、総旋回回数がNtからNt+1までの区間において更新された燃料損得のうち、Nc回目に更新された燃料損得をF(Nr,Nt,Nc)と記し、この燃料損得F(Nr,Nt,Nc)に対応する移動距離をdc(Nr,Nt,Nc)と記す。
【0068】
したがって、経路情報R(Nr)の総旋回回数がkの場合には、経路情報R(Nr)は、d(Nr,1)、d(Nr,2)、……、d(Nr,k)及びQ(Nr,1)、Q(Nr,2)、……、Q(Nr,k)からなる情報ベクトルとして表現され、この経路情報R(Nr)のうち、例えば総旋回回数が「2」となる情報に対しては、F(Nr,2,1)、F(Nr,2,2)、……、F(Nr,2,Nc)及びdc(Nr,2,1)、dc(Nr,2,2)、……、dc(Nr,2,Nc)からなる情報ベクトルが対応付けられる。
【0069】
<S160及びS170について>
S160はS120にて更新された経路情報を過去の経路情報として記憶するものである。つまり、S120ではイグニッションがONとなっており、経路情報が変化していくので、アイドリングストップ判定装置100は、その経路情報を「現在の経路情報」と認識して更新・記憶していくのに対して、S160ではイグニッションがOFFとなっており、経路情報が変化しないので、アイドリングストップ判定装置100は、その経路情報を「過去の経路情報」と認識して記憶し直す。
【0070】
同様に、S170では、S130にて更新・記憶された燃料損得及び移動距離を「過去の経路情報」に対応付けられた「過去の燃料損得及び移動距離」と認識して記憶し直す。
2.2.経路推定部の処理について
経路推定処理が起動されると、図6に示すように、先ず、過去情報記憶部110にて更新・記憶された現在の経路情報R(0)及び過去の経路情報R(1)、R(2)、…R(i)、…、R(Nr)が読み込まれ(S210)、現在の経路情報の旋回の向きと過去の経路情報の旋回の向きとが合致するする確率(以下、旋回確率Ptという。)が算出される(S220)。因みに、過去の経路情報はNr個存在するので、これらNr個の過去の経路情報のうち、i番目の経路情報をR(i)(但し、i=1、2、…、Nr)と記す。
【0071】
また、現在の経路情報R(0)についての旋回の向きに関する情報とは、具体的には、Q(0,1)、Q(0,2)、…、Q(0,k)…、Q(0,Nt)からなる情報ベクトルであり、過去の経路情報R(i)についての旋回の向きに関する情報とは、具体的には、Q(i,1)、Q(i,2)、…、Q(i,k)…、Q(i,Nt)からなる情報ベクトルである。但し、Ntは、現在の総旋回回数を示す。
【0072】
因みに、kとは、1、2、…、Ntとなるので、以下、現在の経路情報R(0)についての旋回の向きに関する情報をQ(0,k)と記し、過去の経路情報R(i)についての旋回の向きに関する情報をQ(i,k)と記す。
【0073】
そして、旋回確率Ptは、現在の経路情報のうち走行開始後から現在までの旋回の向きに関する情報が、過去の経路情報についての旋回の向きに関する情報と合致する度合いが高いほど高い値となるものである。なお、旋回確率Pt(i)は、Q(0,k)とQ(i,k)とが、総旋回回数Ntまで一致する場合にPt(i)=1とし、それ以外は、Pt(i)=0として算出される。
【0074】
旋回確率Ptの算出が終了すると、現在の経路情報と過去の経路情報との旋回地点間の距離が合致する確率(以下、距離確率Pdという。)が算出される(S230)。ここで、現在の経路情報R(0)と過去の経路情報R(i)との距離確率Pd(i)は、以下の「数1」で示される数式1にてk回目旋回地点からk+1回目旋回地点間までの距離が一致する確率Pd(i,k)を求めた後、この確率Pd(i,k)を以下の「数2」で示される数式2で積算した値である。
【0075】
なお、経路情報R(i)についての総旋回回数Nt(i)が、現在の総旋回回数Nt(0)より小さい場合には、距離確率Pd(i)=0とする。
【0076】
【数1】
【0077】
【数2】
但し、ここで、数式1の標準偏差は移動距離の数パーセントとし、σ=0.05d(0,k)とする。
【0078】
次に、旋回確率Pt(i)と距離確率Pd(i)とを、以下の「数3」で示される数式3に従って乗じ、前回時走行考慮なしの経路確率Pr1(i)が算出された後(S240)、この経路確率Pr1(i)に係数αが乗じられて正規化前経路確率Pr2(i)が算出される(S250)。なお、係数αの詳細は後述する。
【0079】
【数3】
そして、経路情報R(1)〜R(Nr)それぞれについて、正規化前経路確率Pr2(i)の最大値が閾値Th3未満であるか否かが判定され(S260)、正規化前経路確率Pr2(i)の最大値が閾値Th3(例えば、0.1)未満であると判定された場合には(S260:YES)、全ての経路情報R(i)の経路確率Pr(i)が0とされ、その値が最終的な経路確率とされる(S270)。
【0080】
一方、正規化前経路確率Pr2(i)の最大値が閾値Th3未満でないと判定された場合には(S260:NO)、全ての経路情報R(i)の経路確率Pr(i)を以下の「数4」で示される数式4に従って正規化され、最終的な経路確率Pr(i)が算出される。
【0081】
【数4】
そして、最終的な経路確率Pr(i)がエンジン停止判定部140に出力された後(S290)、再び、S210が実行される。
【0082】
<係数αについて>
係数αは、過去の経路情報のうち最も新しい経路情報についての経路確率Prを、それ以前の経路情報についての経路確率Prより小さくするための係数である。
【0083】
このため、本実施形態では、前回走行時の出発点と今回走行時の出発点が異なれば、前回走行した経路の確率を相対的に低くすることができるので、前回走行時の経路が誤って選ばれる可能性を小さくし、経路推定精度を向上させることができる。
【0084】
具体的には、係数αは、1から前回のS270又はS280にて算出された経路確率Prold(i)を減じた値、つまりα=1−Prold(i)である。
そこで、本実施形態では、前回時走行考慮なしの経路確率Pr1(i)を、次回走行時に、前回走行時の経路確率Prold(i)として利用できるよう記憶している。なお、正規化前の経路確率Pr2(i)を前回時走行考慮なしの経路確率Pr1(i)の代わりに記憶してもよく、この場合には、前回走行時の経路確率Pt1(i)が2回以降後の経路確率にも影響するようになる。
【0085】
2.3.エンジン停止効果推定部の処理について
エンジン停止効果推定処理が起動されると、図7に示すように、先ず、過去の経路情報R(i)毎に合致確率Pe(i,n)が算出される(S310)。ここで、合致確率Pe(i,n)とは、経路情報R(i)に対応付けられた移動距離のうち現在の経路情報R(0)における総旋回回数Ntと一致する移動距離dc(i,Nt,n)が、現在の経路情報R(0)における直前の旋回地点からの移動距離doと合致する確率をいい、具体的には、以下の「数5」で示される数式5にて算出される値である。
【0086】
【数5】
ここで、移動距離dc(i,Nt,n)とは、経路情報R(i)に対応付けられた移動距離dcのうち総旋回回数がNtとなる移動距離を示しており、例えば、総旋回回数が「2」で、かつ、総旋回回数が2から3となるまでの区間における燃料損得の更新が2回された場合には、dc(i,2,1)及びdc(i,2,2)である。つまり、n=1、2、…、Ncとなる。
【0087】
次に、過去の経路情報R(i)毎に合致確率Pe(i,n)の最大値が閾値Th4(例えば、0.1)未満であるか否かが判定され(S320)、合致確率Pe(i,n)の最大値が閾値Th4未満であると判定された場合には(S320:YES)、合致確率Pe(i,n)が0とされて最終的な合致確率Pe(i,n)が決定される(S330)。
【0088】
一方、合致確率Pe(i,n)の最大値が閾値Th4以上であると判定された場合には(S320:NO)、過去の経路情報R(i)毎に、以下の「数6」に示す数式6にて合致確率Pe(i,n)が正規化され、最終的な合致確率Pe(i,n)が決定される(S340)。
【0089】
【数6】
但し、Mは、経路情報R(i)において、現在の総旋回回数Ntと同数の総旋回回数に対応付けられた燃料損得の更新の数をいう。例えば、現在の総旋回回数が「2」であって、かつ、経路情報R(i)における総旋回回数が2の場合に、燃料損得F(i,2,1)及び燃料損得F(i,2,2)対応付けられていた場合には、M=2となる。
【0090】
次に、過去の経路情報R(i)毎に、以下の「数7」に示す数式7にて第1停止効果係数Ce(i)が算出される(S350)。
【0091】
【数7】
そして、第1停止効果係数Ce(i)がエンジン停止判定部140に出力された後(S290)、再び、S310が実行される(S360)。
【0092】
2.4.アイドリング停止判定部の処理について
エンジン停止判定処理が起動されると、図8に示すように、先ず、現実にエンジン50が停止してアイドリングストップ状態となっているか否かが判定され(S410)、アイドリングストップ状態であると判定された場合には(410:YES)、アイドリング停止解除条件が成立したか否かが判定される(S420)。
【0093】
そして、アイドリング停止解除条件が成立しないと判定された場合には(S420:NO)、再び、S410が実行され、一方、アイドリング停止解除条件が成立したと判定された場合には(S420:YES)、エンジン始動信号がエンジンECU200に送信されるとともに(S430)、アイドリング停止開始条件の判定を許可する開始判定フラグがONとされた後(S440)、再び、S410が実行される。
【0094】
また、S410にてアイドリングストップ状態でない、つまり、現実にエンジン50が稼働していると判定された場合には(S410:NO)、開始判定フラグがONであるか否かが判定され(S450)、開始判定フラグがONの場合には(S450:YES)、アイドリング停止開始件条件が成立しているか否かが判定される(S460)。
【0095】
そして、アイドリング停止開始件条件が成立していると判定された場合には(S460:YES)、開始判定フラグがOFFとされた後(S470)、以下の「数8」で示される数式8に従って現時点における全ての経路情報R(i)が考慮された第2停止効果係数Ceが算出される(S475)。
【0096】
【数8】
因みに、開始判定フラグは、アイドリング停止開始件条件を一度満たしたことを示しており、アイドリング停止解除条件を満たすまではOFFとし、再び、アイドリングストップの判定を行わないようにするためのフラグである。
【0097】
次に、現在地点での第2停止効果係数Ceが閾値Th5(例えば、0)以上であるか否かが判定され(S480)、第2停止効果係数Ceが閾値Th5以上であると判定された場合には(S480:YES)、エンジンECU200にエンジン停止信号が送信された後(S485)、再び、S410が実行される。
【0098】
一方、第2停止効果係数Ceが閾値Th5未満であると判定された場合には(S480:NO)、エンジン停止信号が送信されることなく、再び、S410が実行される。
なお、第2停止効果係数Ceは、現在の走行経路が過去情報記憶部に記憶された過去の走行経路に該当する確率、及びそのときの燃料損得を鑑みて算出した、現在地点でエンジン50を停止した際の燃料損得の期待値である。
【0099】
そのため、第2停止効果係数Ceが0より大きければ、燃料を削減できる効果を期待できる。そこで、本実施形態では、閾値Th5を0としているが、なるべくアイドリングストップさせないのであれば、大きな燃料損得が得られる場合のみエンジン50が停止されるように、閾値Th5を0より大きな値に設定してよい。
【0100】
また、S450にて、判定開始フラグがOFFである判定された場合には(S450:NO)、アイドリング停止解除条件が成立するか否かが判定され(S490)、アイドリング停止解除条件が成立する判定された場合には(S490:YES)、判定開始フラグがONとされた後(S495)、再び、S410が実行される。
【0101】
一方、アイドリング停止解除条件が成立しないと判定された場合には(S490:NO)、又はアイドリング停止開始件条件が成立しないと判定された場合(S460:NO)には、再び、S410が実行される。
【0102】
3.アイドリングストップ判定装置の作動の具体例
経路推定処理の具体的な実施例(作動例)を図9に基づいて説明する。
現在の経路情報R(0)は、イグニッションON後に5950m移動し、右旋回し、右旋回した地点から500m移動している。そのため、旋回の向きQ(0,1)=R、旋回地点間距離d(0,1)=5950、直前の旋回地点からの移動距離do=500、総旋回回数Nt=1である。
【0103】
そして、過去情報記憶部110に記憶された1つ目の経路情報R(1)は、旋回の向きQ(1,1)=L、Q(1,2)=R、旋回地点間距離d(1,1)=4000、d(1,2)=1000、d(1,3)=2000、総旋回回数Nt(1)=2である。
【0104】
2つ目の経路情報R(2)は、旋回の向きQ(2,1)=R、旋回地点間距離d(2,1)=6000、d(2,2)=1000、総旋回回数Nt(2)=2である。
3つ目の経路情報R(3)は、旋回の向きQ(3,1)=R、旋回地点間距離d(3,1)=5800、d(3,2)=1000、総旋回回数Nt(3)=1である。
【0105】
先ず、S210にて経路情報の読み込みが行われる。ここでは、経路情報R(1)は更新済み(直前の旋回地点からの移動距離は最新の値)とする。次にS220において、旋回確率が求められる。現在の総旋回回数Ntは1であるため、1つ目の旋回までが比較され、旋回の向きが同じ経路情報R(2)及び経路情報(3)の旋回確率Pt(2)及びPt(3)は1となり、旋回の向きが異なる経路情報R(1)の旋回確率Pt(1)は0となる。
【0106】
次に、S230にて距離確率が求められ、経路情報R(1)については、以下の「数9」に示すように「0」となる。
【0107】
【数9】
同様に経路情報R(2)については、以下の「数10」に示すように「0.99」となる。
【0108】
【数10】
同様に経路情報R(3)については、以下の「数11」に示すように「0.88」となる。
【0109】
【数11】
次に、S240において経路確率Pr(i)が求められる。
【0110】
Pr(1)=Pd(1)・Pt(1)=0
Pr(2)=Pd(2)・Pt(2)=0.99
Pr(3)=Pd(3)・Pt(3)=0.88
次に、S250において前回走行時の経路確率からなるαが乗算される。ここでは、前回の経路確率は全て0であったとし、α=1として、経路確率は変わりないとする。
【0111】
次に、S260において、経路確率の最大値が閾値以上であるかが判定される。ここでは閾値Th3=0.1とすれば、最大の経路確率Pr(2)は閾値Th3以上となる。そして、S280において、経路確率が正規化される。
【0112】
Pr(1)=0
Pr(2)=0.53
Pr(3)=0.47
次に、エンジン停止効果推定処理の具体的な実施例(作動例)を図10に基づいて説明する。
【0113】
経路情報R(1)において、1回旋回地点から2回旋回地点までの燃料損得が更新された数はNc(1,1)=1であり、その移動距離dc(1,1,1)は300であり、そのときの燃料損得F(1,1,1)は1.0である。
【0114】
経路情報R(2)において、1回旋回地点から2回旋回地点までの燃料損得が更新された数はNc(2,1)=2であり、その移動距離dc(2,1,1)=480、dc(2,1,2)=500であり、そのときの燃料損得F(2,1,1)=−0.8、F(2,1,2)=1.0である。
【0115】
経路情報R(3)において、1回旋回地点から2回旋回地点までの燃料損得が更新された数はNc(3,1)=1であり、その移動距離dc(3,1,1)は500であり、そのときの燃料損得F(3,1,1)は1.0である。
【0116】
そして、S310において、合致確率が算出される。
経路情報R(1)の合致確率Pe(1,1)は以下の「数12」に示すように「0」となる。
【0117】
【数12】
経路情報R(2)の合致確率Pe(2,1)は以下の「数13」に示すように「0.73」となる。
【0118】
【数13】
経路情報R(2)の合致確率Pe(2,2)は以下の「数14」に示すように「1.0」となる。
【0119】
【数14】
経路情報R(3)の合致確率Pe(3,1)は以下の「数15」に示すように「1.0」となる。
【0120】
【数15】
次にS320において、経路情報毎に、合致確率Peの最大値が閾値Th4以上か否かが判定される。ここでは、閾値Th4=0.1とする。
【0121】
経路情報R(1)の合致確率の最大値は0であり、閾値Th4未満であるため、最終的な合致確率が0となる。一方、経路情報R(2)の合致確率、R(3)の合致確率の最大値は閾値Th4以上であるため、合致確率が経路情報毎に正規化され、Pe(2,1)=0.43、Pe(2,2)=0.57、Pe(3,1)=1となる。
【0122】
そして、S350において、経路情報毎の第1停止効果係数Ce(i)が算出される。具体的には、経路情報R(1)の第1停止効果係数Ce(1)は以下の「数16」に示すように「1.0」となる。
【0123】
【数16】
経路情報R(2)の第1停止効果係数Ce(2)は以下の「数17」に示すように「0.226」となる。
【0124】
【数17】
経路情報R(3)の第1停止効果係数Ce(3)は以下の「数18」に示すように「1.0」となる。
【0125】
【数18】
次に、Pr(1)=0、Pr(2)=0.53、Pr(3)=0.47、及びCe(1)=1.0、Ce(2)=0.226、Ce(3)=1.0に基づいて、エンジン停止処理のS475にて第2停止効果係数Ceが算出され、その値が閾値Th5(本実施形態では、0)以上であれば、エンジン停止信号が送信される。
【0126】
つまり、この例では、第2停止効果係数Ceは以下の「数19」に示すように「0.59」となるので、アイドリングストップすることで燃料消費量を削減できると判定され、エンジン停止信号が送信される。
【0127】
【数19】
4.本実施形態に係るアイドリングストップ判定装置の特徴
本実施形態では、アイドリング停止開始条件が成立した時において、過去の経路情報R(i)毎の経路確率及び第1停止効果係数Ce(i)に基づいて、過去の経路情報全体と
してのエンジン停止効果の度合いを示す第2停止効果係数Ceを求めるとともに、この第2停止効果係数Ceが所定の閾値以上の場合にエンジン50を停止すると判定するので、特許文献1に記載の発明に比べて、適切なタイミングでアイドリング運転時間を削減し、燃費を向上させることができる。
【0128】
すなわち、通勤経路やショッピングセンターへの経路等、走行頻度の高い走行経路においては、同様なタイミングでアイドリング停止開始条件及びアイドリング停止解除条件が成立する頻度が高いと推定でき得るので、現在の経路情報R(0)がいずれかの過去の経路情報R(i)に該当するならば、その過去の経路情報R(i)にて実行されたタイミン
グでエンジン50を停止させれば、効果的に燃費を向上さることができ得る。
【0129】
この現在の経路情報R(0)がいずれの過去の経路情報R(i)に該当するか否かを判
定する手法としては、例えばナビゲーションシステムに採用されているGPS装置を用いて判定するといった手法が考えられるが、この手法では、アイドリングストップ判定装置の製造原価上昇を招いてしまう。
【0130】
これに対して、本実施形態では、ブレーキセンサ350、ウインカセンサ330、ステアセンサ340及びイグニッションセンサ310等の多くの車両において、通常、設けられている既存のセンサで取得された情報に基づいて現在の経路情報R(0)に関する情報が取得される。
【0131】
そして、走行中にアイドリング停止開始条件が成立した場合には、記憶されている過去の経路情報R(i)のうちいずれに該当するか、つまり過去の経路情報R(i)に該当する確率(経路確率)が算出され、過去の経路情報R(i)に対応付けられた燃料損得に基づいてその経路情報のエンジン停止効果の度合いを示す第1停止効果係数Ce(i)が算出される。
【0132】
さらに、アイドリング停止開始条件が成立した時において、過去の経路情報R(i)毎の経路確率及び第1停止効果係数Ce(i)に基づいて、過去の経路情報R(i)全体としてのエンジン停止効果の度合いを示す第2停止効果係数Ceが求められ、この第2停止効果係数Ceが所定の閾値Th5以上の場合にエンジン50を停止すると判定される。
【0133】
そして、通勤経路やショッピングセンターへの経路、走行頻度の高い走行経路については、過去の経路情報R(i)が燃料損得と共に記憶されている可能性が極めて高いので、現在の経路情報R(0)について過去の経路情報R(i)毎の経路確率及び第1停止効果係数Ce(i)に基づく第2停止効果係数Ceによりエンジン50を停止するか否かが判定すれば、GPS装置等の高価な装置を用いることなく、適切なタイミングでアイドリング運転時間を削減し、燃費を向上させることができる。
【0134】
本実施形態では、各センサからの情報を基づいて運転者が乗車後に移動した距離、並びに旋回地点間の距離及びその向きを簡略化された経路情報として記憶するので、地図情報と及びGPS情報を用いずに、出発地点の位置を未確定としたままであっても経路情報を認識してエンジン50を停止させるか否かの判定を行うことができる。
【0135】
また、本実施形態では、各地点間の距離に関する情報及び旋回の向きに関する情報を比較することにより、経路確率を推定するので、地図情報とGPS情報が得られず出発地点が分からない状況においても、旋回地点間の距離及び旋回の向きが、頻繁に利用する走行経路に該当する確率(経路確率)が大きい場合には、現在、走行している経路は、その頻繁に利用する走行経路である推定する。したがって、当該経路上における現在の位置も推定できるので、適切なタイミングでエンジン50を停止させることが可能となる。
【0136】
また、本実施形態では、現在の経路情報R(0)のうち走行開始後から現在までの旋回の向きに関する情報が、過去の経路情報R(i)についての旋回の向きに関する情報と合致する度合いが高いほど高い値となる旋回確率を求め、現在の経路情報R(0)のうち各地点間の距離に関する情報が、過去の経路情報R(i)についての各地点間の距離に関する情報と合致する度合いが高いほど高い値となる距離確率を求めた後、旋回確率と距離確率との積に基づいて経路確率を求めている。
【0137】
これにより、本実施形態では、例えば、旋回地点間距離の差が小さいときには距離確率を高い確率となり、旋回地点間距離の差が大きいときには距離確率を小さい確率となるので、旋回地点間距離が僅かに異なる場合は、計測誤差と判断して過去の経路情報R(i)に該当すると推定され、逆に、旋回地点間距離が大きく異なる場合は、異なる交差点で旋回したと判断して過去の経路情報R(i)に該当しないと推定される。
【0138】
同様に、旋回の向きによっても、旋回の向きが同じであれば過去の経路情報R(i)に経路に該当する、旋回の向きが異なれば過去の経路情報R(i)に該当しない、又は旋回の向きに操舵角を考慮し、操舵角に応じて旋回の向きについての旋回確率が求められ、過去の経路情報R(i)に該当するか否か推定される。
【0139】
したがって、本実施形態では、地図情報とGPS情報が得られず出発地点が分からない状況においても、旋回地点間距離及び旋回の向きが、過去の経路情報R(i)に該当する確率(経路確率)が大きい場合には、現在、走行している経路は、頻繁に利用する走行経路であると推定できるので、当該経路上における現在の位置も高い精度で推定でき、適切なタイミングでエンジン50を停止させることが可能となる。
【0140】
また、本実施形態では、過去の経路情報R(i)のうち最も新しい経路情報についての経路確率を、それ以前の経路情報についての経路確率より小さくしているので、再び同じ走行経路を走行する可能性を除外し経路推定精度を高めることができる。したがって、出発地と目的地が異なるときに、前回乗車時の経路を、今回の経路推定に合致する確率を減らすことで、今回の経路推定より除外し、今回の経路推定精度を高めることができる。
【0141】
また、本実施形態では、過去情報記憶部は、過去の経路情報R(i)毎に、走行開始から燃料損得が取得されたときまでに車両が旋回した回数の総合計(総旋回回数)を経路情報を示すための情報として記憶するとともに、総旋回回数と燃料損得とを対応付けて記憶している。
【0142】
これにより、本実施形態では、記憶されている過去の経路情報R(i)における現在車両位置に応じた旋回地点間(道路)の燃料損得を考慮することができ、記憶された過去の経路情報R(i)において、燃料損得の大きい走行経路(例えば、幹線道路)や、燃料損得の小さい走行経路(例えば、住宅街)といった、走行経路毎に燃料損得を記憶できるので、適切なタイミングでエンジン50を停止させることができる。
【0143】
また、本実施形態では、過去の経路情報R(i)毎に、走行開始から燃料損得が取得されたときまでに車両が旋回した総旋回回数と、その総旋回回数のときに取得された燃料損得と、その燃料損得が取得された時に対する直前の旋回地点又は走行開始地点からの走行距離に関する情報とを対応付けて記憶するとともに、総旋回回数及び走行距離に関する情報を経路情報を示すための情報として記憶している。
【0144】
これにより、本実施形態では、記憶された過去の経路情報R(i)における現在車両位置に応じた地点の燃料損得を考慮することができ、過去の経路情報R(i)において、燃料損得の大きい地点(例えば、信号のある交差点)や燃料損得の小さい地点(例えば、車通りの少ない一旦停止箇所、又はコンビニ駐車場の出入口)といった、地走行経路毎に燃料損得を記憶できるので、適切なタイミングでエンジン50を停止させることができる。
【0145】
また、本実施形態では、記憶されている総旋回回数のうち現在の総旋回回数と同一の総旋回回数に対応付けられた走行距離に関する情報に基づいて、過去情報記憶部に記憶されている走行距離に関する情報毎に、その走行距離に関する情報が現在の走行距離に関する情報と合致する合致確率を求めた後、この合致確率と当該走行距離に関する情報に対応付けられた燃料損得との積を求め、さらに、エンジン停止効果推定部は、過去の経路情報R(i)毎に第1停止効果係数Ce(i)を算出するとともに、走行距離に関する情報毎に求められた積の総和を第1停止効果係数Ce(i)として推定する。
【0146】
これにより、本実施形態では、走行中にアイドリング停止開始条件が成立した場合に、記憶されている過去の経路情報R(i)のいずれに該当するか推定確率を算出し、記憶された過去の経路情報R(i)における走行距離と現在車両の走行距離が近いものを重視し、走行距離が遠いものを軽視するよう、燃料損得に重み付けをして係数を算出することができるので、適切なタイミングでエンジン50を停止させることができる。
【0147】
(第2実施形態)
第1実施形態のエンジン停止効果推定部130では、過去情報記憶部110に記憶されたエンジン停止可能な位置と燃料損得から、現在の位置が合致する確率とその燃料損得の積和からなる第1停止効果係数Ce(i)を算出していた。
【0148】
これに対して、本実施形態に係るエンジン停止効果推定部130では、過去情報記憶110に記憶されたエンジン停止可能な位置に対して現在の位置が近い場合には、現在位置についての燃料損得も記憶されている燃料損得に近い値となり、逆に、記憶されている位置に対して現在位置が遠い場合には、現在位置についての燃料損得を0に近い値になるように補正している。
【0149】
つまり、本実施形態では、過去情報記憶部110に記憶された燃料損得を、現在の位置に応じて換算(補正)して和をとることにより、第2停止効果係数Ceとする。なお、以下の説明においては、第1実施形態との相違点を重点的に説明する。
【0150】
本実施形態に係るエンジン停止効果推定部では、図11に示すエンジン停止効果推定処理が実行される。そして、このエンジン停止効果推定処理が起動されると、先ず、過去の経路情報R(i)毎に、現在の経路情報R(0)における総旋回回数Ntと一致する総旋回回数に対応付けられた移動距離dc(i,Nt,n)及び燃料損得F(i,Nt,n)、並びに現在の経路情報R(0)における直前の旋回地点からの距離doに基づき、移動距離dc(i,Nt,n)と距離doとのずれに応じた燃料損得が算出される(S610)。
【0151】
つまり、燃料損得F(i,Nt,n)は移動距離dc(i,Nt,n)に対応するものであるが、現在の経路情報R(0)における直前の旋回地点からの距離doが移動距離dc(i,Nt,n)と相違している場合には、距離doに対応する燃料損得も相違すること考えられる。
【0152】
そこで、S610では、現在の経路情報R(0)における総旋回回数をNtとして、距離doと移動距離dc(i,Nt,n)との差に基づいて、以下の「数20」で示される数式20に従って燃料損得F(i,Nt,n)を換算(補正)している。以下、この換算された燃料損得Fを補正後燃料損得F1といい、燃料損得F(i,Nt,n)を基準に換算した補正後燃料損得をF1(i,Nt,n)と記す。なお、上述したように、n=1、2、…、Ncである。
【0153】
【数20】
但し、標準偏差σは距離doの定数倍(例えば、5%)とする。
【0154】
これにより、距離doと移動距離dc(i,Nt,n)との差が0の場合には、F(i,Nt,n)とF1(i,Nt,n)とは同一の値となり、距離doと移動距離dc(i,Nt,n)との差が大きくなると、F1(i,Nt,n)の値は0に近づいていく(図12参照)。
【0155】
次に、過去の経路情報R(i)毎に第1停止効果係数Ce(i)が求められた後(S620)、その第1停止効果係数Ce(i)がエンジン停止判定部140に出力され(S630)、再び、S610が実行される。
【0156】
このとき、第1停止効果係数Ce(i)は、以下の「数21」に示される数式21からも明らかなように、補正後燃料損得F1(i,Nt,n)の和として算出される。但し、上述したように、Mは、経路情報R(i)において、現在の総旋回回数Ntと同数の総旋回回数に対応付けられた燃料損得の更新の数をいう。
【0157】
【数21】
これにより、本実施形態では、距離doと移動距離dc(i,Nt,n)との差が大きく異なると、燃料損得が0に近づくので、その後、総和をとるときに無視され、適切なタイミングでエンジン停止信号を出力することができる。
【0158】
つまり、走行中にアイドリング停止開始条件が成立した場合に、記憶された過去の経路情報R(i)のいずれに該当するか推定確率を算出し、記憶された過去の経路情報R(i)における走行距離と現在車両の走行距離の違いが考慮されて、走行距離の差が大きい場合の燃料損得しか記憶されていない場合には燃料損得が0へ近づくように燃料損得が補正されるので、適切なタイミングでエンジン50を停止させることができる。
【0159】
(第3実施形態)
第1実施形態のエンジン停止効果推定部130では、過去情報記憶部110に記憶されたエンジン停止可能な位置と燃料損得から、現在の位置が合致する確率とその燃料損得の積和からなる第1停止効果係数Ce(i)を算出していた。
【0160】
これに対して、第3実施形態のエンジン停止効果推定部130では、過去情報記憶部110に記憶されたエンジン停止可能な位置の旋回回数と燃料損得から、現在の旋回回数が合致する場合の燃料損得の平均値を第1停止効果係数Ce(i)とする。具体的には、以下の「数22」で示す数式22に従って過去の経路情報R(i)毎に第1停止効果係数Ce(i)が算出される。
【0161】
【数22】
これにより、本実施形態では、旋回した地点から移動距離に対応する地点についての燃料損得に基づいて、第1停止効果係数Ce(i)が算出されるのではなく、旋回地点と次の旋回地点との区間(1本の経路)についての燃料損得に基づいて、第1停止効果係数Ce(i)が算出されることとなる。
【0162】
(その他の実施形態)
第1実施形態では、過去情報記憶部110、経路推定部120、エンジン停止効果推定部130、エンジン停止判定部140での各処理は、アイドリングストップ判定装置100が起動されて以降、個々に繰り返し実行されるとしたが、各部の処理は過去情報記憶部110、経路推定部120、エンジン停止効果推定部130、エンジン停止判定部140の順に実行され、エンジン停止判定部140の処理の終了後、再び過去情報記憶部110の処理から繰り返し実行するとしてもよい。
【0163】
また、本発明は、上述の実施形態に示されたものに限定されるものではなく、例えば上述の実施形態における旋回回地点間距離、旋回地点からの距離を、走行開始地点からの累積距離に置き換えてもよい。
【0164】
また、本発明は、特許請求の範囲に記載された発明の趣旨に合致するものであればよく、上述の実施形態に限定されるものではない。
【符号の説明】
【0165】
1…アイドリングストップシステム、50…エンジン、
100…アイドリングストップ判定装置、110…過去情報記憶、
110…過去情報記憶部、120…経路推定部、130…エンジン停止効果推定部、
140…エンジン停止判定部、310…イグニッションセンサ、
320…速度センサ、330…ウインカセンサ、340…ステアセンサ、
200…エンジンECU200。
【特許請求の範囲】
【請求項1】
車両の速度情報を取得する速度情報取得手段と、
車輪に作用している制動力についての情報を取得するブレーキ情報取得手段と、
車両に設けられた方向指示器についての情報を取得する方向指示器情報取得手段と、
操舵輪の操舵角についての情報を取得する操舵情報取得手段と、
エンジンが稼働可能な状態であるか否かの情報を取得するイグニッション情報取得手段と、
前記速度情報取得手段、前記方向指示器情報取得手段、前記操舵情報取得手段及び前記イグニッション情報取得手段のうち、少なくとも1つの情報取得手段にて取得された情報に基づいて車両が走行した走行経路パターンを取得する経路取得手段と、
前記速度情報取得手段、前記ブレーキ情報取得手段、前記方向指示器情報取得手段、前記操舵情報取得手段及び前記イグニッション情報取得手段のうち、少なくとも1つの情報取得手段にて取得された情報に基づいて判定される予め設定された条件であって、エンジンを停止させるための停止開始条件及びエンジンを再始動させるための停止解除条件を判定するアイドリングストップ制御条件判定手段と、
前記停止開始条件が成立した時から前記停止解除条件が成立した時までの間、仮に、エンジンを停止したならば、削減できたと推定可能な燃料の量(以下、この量を燃料損得という。)を取得する燃料損得取得手段と、
少なくとも、前記経路取得手段により取得された走行経路パターンと、前記燃料損得取得手段が取得した前記燃料損得とを対応付けて記憶する過去情報記憶部と、
前記過去情報記憶部に記憶されている走行経路パターン(以下、過去の走行経路パターンという。)それぞれについて、現在の前記走行経路パターンに該当する度合いを示す確率(以下、経路確率という。)を推定する経路推定部と、
前記過去の走行経路パターンそれぞれについて、各走行経路パターンに対応付けられた前記燃料損得に基づいて、その走行経路パターンのエンジン停止効果の度合いを示す第1停止効果係数を推定するエンジン停止効果推定部と、
前記停止開始条件が成立した時において、前記過去の走行経路パターン毎の前記経路確率及び前記第1停止効果係数に基づいて、前記過去の走行経路パターン全体としてのエンジン停止効果の度合いを示す第2停止効果係数を求めるとともに、この第2停止効果係数が所定の閾値以上の場合にエンジンを停止すると判定するエンジン停止判定部と
を備えることを特徴とするアイドリングストップ判定装置。
【請求項2】
前記過去情報記憶部は、少なくとも走行開始点に関する情報、車両の旋回地点に関する情報、走行終了地点に関する情報、及びこれら各地点間の距離に関する情報、並びに前記旋回地点における旋回の向きに関する情報を有して構成された情報を前記走行経路パターンとして記憶することを特徴とする請求項1に記載のアイドリングストップ判定装置。
【請求項3】
前記経路推定部は、前記各地点間の距離に関する情報及び前記旋回の向きに関する情報を比較することにより、前記経路確率を推定することを特徴とする請求項2に記載のアイドリングストップ判定装置。
【請求項4】
前記経路推定部は、
現在の前記走行経路パターンのうち走行開始後から現在までの前記旋回の向きに関する情報が、前記過去の走行経路パターンについての前記旋回の向きに関する情報と合致する度合いが高いほど、高い値となる旋回確率を求める旋回確率推定手段、
現在の前記走行経路パターンのうち前記各地点間の距離に関する情報が、前記過去の走行経路パターンについての前記各地点間の距離に関する情報と合致する度合いが高いほど、高い値となる距離確率を求める距離確率推定手段、及び
前記旋回確率と前記距離確率との積に基づいて前記経路確率を求める確率推定手段
を有することを特徴とする請求項3に記載のアイドリングストップ判定装置。
【請求項5】
前記経路推定部は、過去の走行経路パターンのうち最も新しい走行経路パターンについての前記経路確率を、それ以前の走行経路パターンについての前記経路確率より小さくすることを特徴とする請求項1ないし4いずれか1項に記載のアイドリングストップ判定装置。
【請求項6】
前記過去情報記憶部は、
前記過去の走行経路パターン毎に、走行開始から前記燃料損得が取得されたときまでに車両が旋回した回数の総合計(以下、総旋回回数という。)を前記走行経路パターンを示すための情報として記憶するとともに、
前記総旋回回数と前記燃料損得とを対応付けて記憶することを特徴とする請求項1に記載のアイドリングストップ判定装置。
【請求項7】
前記過去の走行経路パターンについての前記総旋回回数であって、現在の前記総旋回回数と同数の総旋回回数を該当旋回回数と呼ぶとき、
前記エンジン停止効果推定部は、前記過去の走行経路パターン毎に、前記該当旋回回数に対応付けられた前記燃料損得の平均値を前記第1停止効果係数として推定することを特徴とする請求項6に記載のアイドリングストップ判定装置。
【請求項8】
前記過去情報記憶部は、
前記過去の走行経路パターン毎に、走行開始から前記燃料損得が取得されたときまでに車両が旋回した回数の総合計(以下、総旋回回数という。)と、その総旋回回数のときに取得された前記燃料損得と、その燃料損得が取得された時に対する直前の旋回地点又は走行開始地点からの走行距離に関する情報とを対応付けて記憶するとともに、
前記総旋回回数及び前記走行距離に関する情報を前記走行経路パターンを示すための情報として記憶することを特徴とする請求項1に記載のアイドリングストップ判定装置。
【請求項9】
前記エンジン停止効果推定部は、
前記過去情報記憶部に記憶されている前記総旋回回数のうち現在の前記総旋回回数と同一の総旋回回数に対応付けられた前記走行距離に関する情報に基づいて、前記過去情報記憶部に記憶されている前記走行距離に関する情報毎に、その走行距離に関する情報が現在の前記走行距離に関する情報と合致する合致確率を求めた後、この合致確率と当該走行距離に関する情報に対応付けられた前記燃料損得との積を求め、
さらに、前記エンジン停止効果推定部は、
前記過去の走行経路パターン毎に前記第1停止効果係数を算出するとともに、
前記走行距離に関する情報毎に求められた前記積の総和を前記第1停止効果係数として推定することを特徴とする請求項8に記載のアイドリングストップ判定装置。
【請求項10】
前記エンジン停止効果推定部は、
前記過去の走行経路パターン毎に前記第1停止効果係数を算出するとともに、
前記過去情報記憶部に記憶されている前記総旋回回数のうち現在の前記総旋回回数と同一の総旋回回数に対応付けられた前記走行距離に関する情報に基づいて、前記過去情報記憶部に記憶されている前記走行距離に関する情報毎に、現在の前記走行距離に関する情報との相違量に応じて当該走行距離に関する情報に対応付けられた前記燃料損得を補正した補正後燃料損得を求めた後、それら補正後燃料損得の総和を前記第1停止効果係数として推定し、
さらに、前記エンジン停止効果推定部は、前記相違量が小さくなるほど前記補正後燃料損得が前記燃料損得に近い値となり、逆に、前記相違量が大きくなるほど前記補正後燃料損得がゼロに近い値となるように補正することを特徴とする請求項8に記載のアイドリングストップ判定装置。
【請求項1】
車両の速度情報を取得する速度情報取得手段と、
車輪に作用している制動力についての情報を取得するブレーキ情報取得手段と、
車両に設けられた方向指示器についての情報を取得する方向指示器情報取得手段と、
操舵輪の操舵角についての情報を取得する操舵情報取得手段と、
エンジンが稼働可能な状態であるか否かの情報を取得するイグニッション情報取得手段と、
前記速度情報取得手段、前記方向指示器情報取得手段、前記操舵情報取得手段及び前記イグニッション情報取得手段のうち、少なくとも1つの情報取得手段にて取得された情報に基づいて車両が走行した走行経路パターンを取得する経路取得手段と、
前記速度情報取得手段、前記ブレーキ情報取得手段、前記方向指示器情報取得手段、前記操舵情報取得手段及び前記イグニッション情報取得手段のうち、少なくとも1つの情報取得手段にて取得された情報に基づいて判定される予め設定された条件であって、エンジンを停止させるための停止開始条件及びエンジンを再始動させるための停止解除条件を判定するアイドリングストップ制御条件判定手段と、
前記停止開始条件が成立した時から前記停止解除条件が成立した時までの間、仮に、エンジンを停止したならば、削減できたと推定可能な燃料の量(以下、この量を燃料損得という。)を取得する燃料損得取得手段と、
少なくとも、前記経路取得手段により取得された走行経路パターンと、前記燃料損得取得手段が取得した前記燃料損得とを対応付けて記憶する過去情報記憶部と、
前記過去情報記憶部に記憶されている走行経路パターン(以下、過去の走行経路パターンという。)それぞれについて、現在の前記走行経路パターンに該当する度合いを示す確率(以下、経路確率という。)を推定する経路推定部と、
前記過去の走行経路パターンそれぞれについて、各走行経路パターンに対応付けられた前記燃料損得に基づいて、その走行経路パターンのエンジン停止効果の度合いを示す第1停止効果係数を推定するエンジン停止効果推定部と、
前記停止開始条件が成立した時において、前記過去の走行経路パターン毎の前記経路確率及び前記第1停止効果係数に基づいて、前記過去の走行経路パターン全体としてのエンジン停止効果の度合いを示す第2停止効果係数を求めるとともに、この第2停止効果係数が所定の閾値以上の場合にエンジンを停止すると判定するエンジン停止判定部と
を備えることを特徴とするアイドリングストップ判定装置。
【請求項2】
前記過去情報記憶部は、少なくとも走行開始点に関する情報、車両の旋回地点に関する情報、走行終了地点に関する情報、及びこれら各地点間の距離に関する情報、並びに前記旋回地点における旋回の向きに関する情報を有して構成された情報を前記走行経路パターンとして記憶することを特徴とする請求項1に記載のアイドリングストップ判定装置。
【請求項3】
前記経路推定部は、前記各地点間の距離に関する情報及び前記旋回の向きに関する情報を比較することにより、前記経路確率を推定することを特徴とする請求項2に記載のアイドリングストップ判定装置。
【請求項4】
前記経路推定部は、
現在の前記走行経路パターンのうち走行開始後から現在までの前記旋回の向きに関する情報が、前記過去の走行経路パターンについての前記旋回の向きに関する情報と合致する度合いが高いほど、高い値となる旋回確率を求める旋回確率推定手段、
現在の前記走行経路パターンのうち前記各地点間の距離に関する情報が、前記過去の走行経路パターンについての前記各地点間の距離に関する情報と合致する度合いが高いほど、高い値となる距離確率を求める距離確率推定手段、及び
前記旋回確率と前記距離確率との積に基づいて前記経路確率を求める確率推定手段
を有することを特徴とする請求項3に記載のアイドリングストップ判定装置。
【請求項5】
前記経路推定部は、過去の走行経路パターンのうち最も新しい走行経路パターンについての前記経路確率を、それ以前の走行経路パターンについての前記経路確率より小さくすることを特徴とする請求項1ないし4いずれか1項に記載のアイドリングストップ判定装置。
【請求項6】
前記過去情報記憶部は、
前記過去の走行経路パターン毎に、走行開始から前記燃料損得が取得されたときまでに車両が旋回した回数の総合計(以下、総旋回回数という。)を前記走行経路パターンを示すための情報として記憶するとともに、
前記総旋回回数と前記燃料損得とを対応付けて記憶することを特徴とする請求項1に記載のアイドリングストップ判定装置。
【請求項7】
前記過去の走行経路パターンについての前記総旋回回数であって、現在の前記総旋回回数と同数の総旋回回数を該当旋回回数と呼ぶとき、
前記エンジン停止効果推定部は、前記過去の走行経路パターン毎に、前記該当旋回回数に対応付けられた前記燃料損得の平均値を前記第1停止効果係数として推定することを特徴とする請求項6に記載のアイドリングストップ判定装置。
【請求項8】
前記過去情報記憶部は、
前記過去の走行経路パターン毎に、走行開始から前記燃料損得が取得されたときまでに車両が旋回した回数の総合計(以下、総旋回回数という。)と、その総旋回回数のときに取得された前記燃料損得と、その燃料損得が取得された時に対する直前の旋回地点又は走行開始地点からの走行距離に関する情報とを対応付けて記憶するとともに、
前記総旋回回数及び前記走行距離に関する情報を前記走行経路パターンを示すための情報として記憶することを特徴とする請求項1に記載のアイドリングストップ判定装置。
【請求項9】
前記エンジン停止効果推定部は、
前記過去情報記憶部に記憶されている前記総旋回回数のうち現在の前記総旋回回数と同一の総旋回回数に対応付けられた前記走行距離に関する情報に基づいて、前記過去情報記憶部に記憶されている前記走行距離に関する情報毎に、その走行距離に関する情報が現在の前記走行距離に関する情報と合致する合致確率を求めた後、この合致確率と当該走行距離に関する情報に対応付けられた前記燃料損得との積を求め、
さらに、前記エンジン停止効果推定部は、
前記過去の走行経路パターン毎に前記第1停止効果係数を算出するとともに、
前記走行距離に関する情報毎に求められた前記積の総和を前記第1停止効果係数として推定することを特徴とする請求項8に記載のアイドリングストップ判定装置。
【請求項10】
前記エンジン停止効果推定部は、
前記過去の走行経路パターン毎に前記第1停止効果係数を算出するとともに、
前記過去情報記憶部に記憶されている前記総旋回回数のうち現在の前記総旋回回数と同一の総旋回回数に対応付けられた前記走行距離に関する情報に基づいて、前記過去情報記憶部に記憶されている前記走行距離に関する情報毎に、現在の前記走行距離に関する情報との相違量に応じて当該走行距離に関する情報に対応付けられた前記燃料損得を補正した補正後燃料損得を求めた後、それら補正後燃料損得の総和を前記第1停止効果係数として推定し、
さらに、前記エンジン停止効果推定部は、前記相違量が小さくなるほど前記補正後燃料損得が前記燃料損得に近い値となり、逆に、前記相違量が大きくなるほど前記補正後燃料損得がゼロに近い値となるように補正することを特徴とする請求項8に記載のアイドリングストップ判定装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図11】
【図9】
【図10】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図11】
【図9】
【図10】
【図12】
【公開番号】特開2011−185202(P2011−185202A)
【公開日】平成23年9月22日(2011.9.22)
【国際特許分類】
【出願番号】特願2010−53183(P2010−53183)
【出願日】平成22年3月10日(2010.3.10)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成23年9月22日(2011.9.22)
【国際特許分類】
【出願日】平成22年3月10日(2010.3.10)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]