
アイドルストップシステムの制御装置および制御方法
【課題】プリメッシュ前に再始動要求が発生した場合でも、速やかに再始動可能なアイドルストップシステムの制御装置および制御方法を提供することにある。
【解決手段】アイドルストップシステムは、エンジン運転中にアイドルストップ条件を満たした時にエンジンを停止させ、再始動要求が発生した時にはスタータモータ105のピニオン103をエンジンのクランク軸に連結されたリングギヤ104に噛み込ませ、クランキングを開始してエンジンを再始動させる。制御装置108は、エンジンが停止するまでのエンジン惰性回転期間中にスタータモータ105のピニオン103を予回転させ、スタータモータ103への予回転通電を終了させた後に、エンジンの再始動要求が発生した時にはスタータのピニオン103を追加予回転させ、その後、ピニオンをリングギヤ104に噛み込ませてクランキングを開始してエンジンを再始動させる。
【解決手段】アイドルストップシステムは、エンジン運転中にアイドルストップ条件を満たした時にエンジンを停止させ、再始動要求が発生した時にはスタータモータ105のピニオン103をエンジンのクランク軸に連結されたリングギヤ104に噛み込ませ、クランキングを開始してエンジンを再始動させる。制御装置108は、エンジンが停止するまでのエンジン惰性回転期間中にスタータモータ105のピニオン103を予回転させ、スタータモータ103への予回転通電を終了させた後に、エンジンの再始動要求が発生した時にはスタータのピニオン103を追加予回転させ、その後、ピニオンをリングギヤ104に噛み込ませてクランキングを開始してエンジンを再始動させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、エンジンの停止と再始動を自動的に行うアイドルストップシステムの制御装置および制御方法に係り、特に、プリメッシュ方式のシステムに適用するに好適なアイドルストップシステムの制御装置および制御方法に関する。
【背景技術】
【0002】
近年の自動車においては、エネルギー資源の節約と環境保全を目的として、運転中に所定の条件が成立した時にエンジンを一時停止させるアイドルストップシステムを搭載したものがある。このアイドルストップシステムは、運転者が車両を停止させる際などにエンジンを自動的に停止し、その後、運転者の再始動要求が生じた時点や、エンジンの稼働が必要になった時に自動的にエンジンを再始動するものである。エンジンを再始動させるにあたって、従来のピニオン押し出し式のスタータを用い、始動時だけピニオンを押し出してピニオンをエンジン軸と直結されているリングギヤに噛合わせ、スタータによるクランキングによってエンジンを始動させる方法がある。この方法を採る場合、大きな設計変更をする必要がなくコストが抑えられるメリットがある。ただしこのスタータを用いてエンジンを始動させる方式では、エンジン停止過程に運転者がアクセルペダルを踏むなどの再始動要求が発生した場合には惰性回転中のエンジンにスタータを連結させる必要がある。
【0003】
それに対し従来は、再始動要求に先立ってスタータを予回転させ、ピニオンギヤを回転中のリングギヤと予め連結させておくことで、再始動要求が発生した場合の再始動時間を短縮する方法が知られている(例えば、特許文献1参照)。なお以下では、再始動要求の発生に備えて、再始動要求に先立ってスタータとエンジンを連結させることを「プリメッシュ」と称し、この方式を採用しているアイドルストップシステムをプリメッシュ方式のアイドルストップシステムと称する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−242607号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、従来のプリメッシュ方式では、プリメッシュさせる際に発せられる騒音を抑制することが大きな課題となっている。再始動要求に先立ってスタータとエンジンを連結させるが、その後エンジンが停止するまでの期間中に再始動要求が発生しなかった場合は特に騒音が耳障りなので運転者には不快に感じられる。
【0006】
ここで、プリメッシュ時の騒音が、プリメッシュさせた時のエンジン回転数によって大きく変化することが発明者らの研究により判明した。すなわち、プリメッシュさせた際のエンジン回転数が高いと、プリメッシュ後にエンジン回転の脈動によりピニオンギヤとエンジン側のリングギヤとの歯打ち音が複数回発生する。そこで、プリメッシュさせるタイミングを遅らせ、プリメッシュさせる際のエンジン回転数をある程度抑えることで、プリメッシュ後の歯打ち音の回数を減らすことができる。しかし、プリメッシュのタイミングを遅らせることは、プリメッシュのタイミングより前に発生した再始動要求に対して再始動が遅れることにつながり、再始動にかかる時間が長くなる。
【0007】
本発明の目的は、プリメッシュ方式のアイドルストップシステムにおいて、プリメッシュ前に再始動要求が発生した場合でも、速やかに再始動可能なアイドルストップシステムの制御装置および制御方法を提供することにある。
【課題を解決するための手段】
【0008】
(1)上記目的を達成するために、本発明は、エンジン運転中にアイドルストップ条件を満たした時にエンジンを停止させ、前記エンジンが停止するまでの惰性回転期間中に再始動要求が発生した時にはスタータモータのピニオンを前記エンジンのクランク軸に連結されたリングギヤに噛み込ませ、クランキングを開始して前記エンジンを再始動させる方式のアイドルストップシステムに用いる制御装置であって、前記エンジンが停止するまでのエンジン惰性回転期間中に前記スタータモータのピニオンを予回転させ、前記スタータモータへの予回転通電を終了させた後に、前記エンジンの再始動要求が発生した時には前記スタータのピニオンを追加予回転させ、その後、前記ピニオンを前記リングギヤに噛み込ませてクランキングを開始して前記エンジンを再始動させるようにしたものである。
かかる構成により、プリメッシュ方式のアイドルストップシステムにおいて、プリメッシュ前に再始動要求が発生した場合でも、速やかに再始動可能となる。
【0009】
(2)上記(1)において、好ましくは、前記エンジンの再始動要求が発生して、前記スタータのピニオンを追加予回転させた後、前記ピニオンと前記リングギヤを連結させる際は、前記スタータモータへの通電を一時的に停止させ、前記ピニオンと前記リングギヤが完全に噛み合っていることを判定した後、再び前記スタータモータに通電し、クランキングを開始するようにしたものである。
【0010】
(3)上記(1)において、好ましくは、前記エンジンを停止させてからエンジンが停止するまでの惰性回転期間中に再始動要求が発生しなかった場合は、ピニオン飛出し判定条件を満たすとプリメッシュ動作を行うようにしたものである。
【0011】
(4)上記(1)において、好ましくは、前記ピニオンの回転数を検知するピニオン回転数検知手段を備え、前記再始動要求が発生すると前記エンジンへの燃料噴射を再開し、燃料噴射を再開した後のエンジン回転数の時間変化を予測したうえで、前記ピニオン回転数検知手段に基づいて前記ピニオンの前記リングギヤとの減速比を考慮して換算したピニオン回転数と、前記リングギヤの回転数が所定の速度差で接触するよう、ピニオンの押し出し手段の遅れを考慮して前記ピニオン押し出し手段の押し出しタイミングを制御するようにしたものである。
【0012】
(5)上記(1)において、好ましくは、前記予回転通電中に前記エンジンの再始動要求が発生した場合は、予回転通電から追加予回転通電に直ちに切り替えるようにしたものである。
【0013】
(6)上記(1)において、好ましくは、前記予回転通電を開始する前に前記エンジンの再始動要求が発生した場合は、直ちに追加予回転のための通電を開始するようにしたものである。
【0014】
(7)上記(1)において、好ましくは、所定のエンジン回転数を下回った後に発生した再始動要求に対してのみスタータモータへ直ちに追加予回転通電を開始し、所定のエンジン回転数を下回る以前に発生した再始動要求に対しては、所定のエンジン回転数を下回るタイミングに初めて追加予回転通電を開始するようにしたものである。
【0015】
(8)上記目的を達成するために、本発明は、エンジン運転中にアイドルストップ条件を満たした時にエンジンを停止させ、前記エンジンが停止するまでの惰性回転期間中に再始動要求が発生した時にはスタータモータのピニオンを前記エンジンのクランク軸に連結されたリングギヤに噛み込ませ、クランキングを開始して前記エンジンを再始動させる方式のアイドルストップシステムの制御方法であって、前記エンジンが停止するまでのエンジン惰性回転期間中に前記スタータモータのピニオンを予回転させ、前記スタータモータへの予回転通電を終了させた後に、前記エンジンの再始動要求が発生した時には前記スタータのピニオンを追加予回転させ、その後、前記ピニオンを前記リングギヤに噛み込ませてクランキングを開始し前記エンジンを再始動させるようにしたものである。
かかる方法により、プリメッシュ方式のアイドルストップシステムにおいて、プリメッシュ前に再始動要求が発生した場合でも、速やかに再始動可能となる。
【発明の効果】
【0016】
本発明によれば、プリメッシュ方式のアイドルストップシステムにおいて、プリメッシュ前に再始動要求が発生した場合でも、速やかに再始動可能となる。
【図面の簡単な説明】
【0017】
【図1】本発明の一実施形態によるアイドルストップシステムの構成図である。
【図2】本発明の一実施形態によるアイドルストップシステムの制御装置の動作を示すフローチャートである。
【図3】本発明の一実施形態によるアイドルストップシステムの制御装置の動作を説明する示すタイミングチャートである。
【図4】本発明の一実施形態によるアイドルストップシステムの制御装置の動作を説明する示すタイミングチャートである。
【図5】本発明の一実施形態によるアイドルストップシステムの制御装置の動作を説明する示すタイミングチャートである。
【図6】本発明の一実施形態によるアイドルストップシステムの制御装置の動作を説明する示すタイミングチャートである。
【図7】本発明の一実施形態によるアイドルストップシステムの制御装置の動作を説明する示すタイミングチャートである。
【図8】本発明の一実施形態によるアイドルストップシステムの制御装置の動作を説明する示すタイミングチャートである。
【図9】本発明の一実施形態によるアイドルストップシステムの制御装置の動作を説明する示すタイミングチャートである。
【発明を実施するための形態】
【0018】
以下、図1〜図9を用いて、本発明の一実施形態によるアイドルストップシステムの制御装置の構成及び動作について説明する。
最初に、図1を用いて、本実施形態によるアイドルストップシステムの全体構成について説明する。
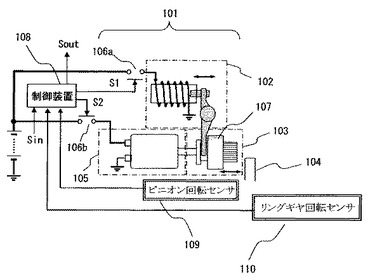
図1は、本発明の一実施形態によるアイドルストップシステムの構成図である。
【0019】
スタータ101は、いわゆるピニオン押し出し方式のスタータである。スタータ101は、モータ105と、モータ105によって回転駆動されるピニオン103と、ピニオン103を押し出すためのマグネットスイッチ102とを備えている。
【0020】
モータ105の回転は、モータ105の内部にある減速機構で減速することでトルクを増大させてピニオン103に伝達する。マグネットスイッチ102は、通電するとピニオンギア103をリングギヤ104に連結する構造となっているが、ピニオン103を図中右方向へ押し出す機能を備えるものであれば、マグネットスイッチでなくても良い。ピニオン103は、ワンウェイクラッチ107と一体化されており、モータ105と同じ回転軸を維持したまま図中右方向に移動し、エンジンのクランク軸に直結されたリングギヤ104と噛み合わせて回転することでエンジンを始動させる。
【0021】
ワンウェイクラッチ107は、正転方向においてモータ105からエンジンを回す方向にしか動力が伝わらない構成にする。これにより、ピニオン103とリングギヤ104に噛み合っている時は、リングギヤ104の回転数は、モータ105の回転数に対して、減速比に応じた同期速度になるか、もしくは、それよりも速い回転数になる。すなわち、リングギヤ104がモータ105の同期速度よりも低下しようとすると、ワンウェイクラッチ107が動力を伝達するため、リングギヤ104の回転数がモータ105に対する同期速度を下回ることはない。一方で、同期速度よりもリングギヤ104の回転数の方が速い時は、ワンウェイクラッチ107が動力を伝達しないため、リングギヤ104からモータ側へ動力が伝達することはない。なお、以下では、便宜上スタータモータの回転数またはピニオンの回転数とは、ピニオンとリングギヤとのギヤ比を考慮してエンジン軸上に換算した回転数とする。
【0022】
ピニオン回転センサ109は、ピニオン104の回転数を検出する。リングギヤ回転センサ110は、リングギア104の回転数を検出する。ピニオン回転センサ109、リングギヤ回転センサ110からの信号は、制御装置108に入力される。なお、リングギヤ104とエンジンのクランク軸は直結されているので、リングギヤ回転数とエンジン回転数は同義である。
【0023】
制御装置108は、通常の燃料噴射、点火、空気制御(電子制御スロットル)に加え、ブレーキペダル状態、車速等の各種の車両の状態を示す車両状態信号Sinに基づいて、アイドルストップを許可し、エンジンに制御信号Soutを出力し、エンジンへの燃料供給を停止する。また、制御装置108は、ピニオン押し出し指令信号S1とモータ回転指令信号S2がそれぞれ独立して出力される。ピニオン押し出し指令信号S1とモータ回転指令信号S2は、スイッチ106a,106bにそれぞれ入力され、それぞれがピニオン押し出しとモータの回転を制御する。スイッチ106a,106bとしては、機械式接点を持つリレースイッチや、半導体を用いたスイッチなどを使うことができる。
【0024】
次に、図2〜図9を用いて、本実施形態によるアイドルストップシステムの制御装置の動作について説明する。
図2は、本発明の一実施形態によるアイドルストップシステムの制御装置の動作を示すフローチャートである。図3〜図8は、本発明の一実施形態によるアイドルストップシステムの制御装置の動作を説明する示すタイミングチャートである。
【0025】
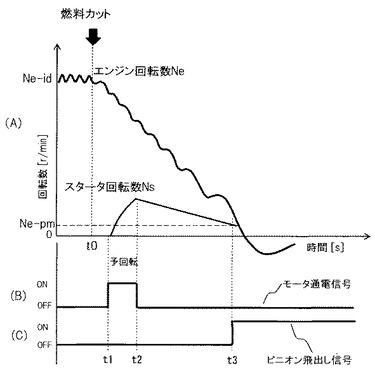
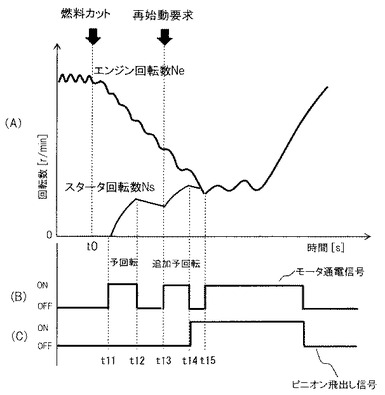
最初に、図2及び図3を用いて、アイドルストップ条件が成立し、エンジンへの燃料供給をカットしてからプリメッシュするまでにエンジンの再始動要求が発生しない場合の制御フローを説明する。図3(A)は、この制御を実施した場合のエンジン回転数Neとスタータ回転数Nsの時間変化を示し、図3(B),(C)は、その時の制御装置からの出力信号(図3(B):モータ通電信号;図3(C):ピニオン飛び出し信号)の一例を示している。
【0026】
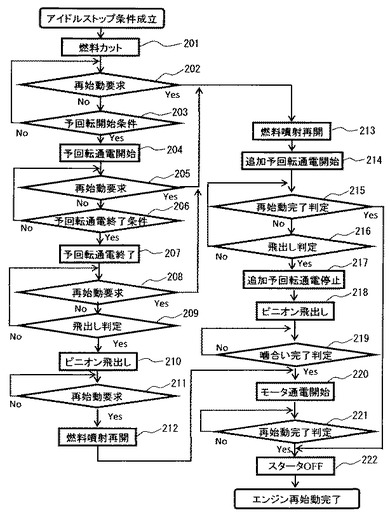
図2のフローチャートに示すように、まずアイドルストップ条件が成立したことを受けて、ステップ201において、制御装置108は、エンジンへの燃料供給を停止する。アイドルストップ条件が成立する場合としては、例えば、車両状態信号Sinに含まれる車速信号が0であり、かつ、ブレーキが踏み込まれているという信号が入力している場合である。エンジンへの燃料供給を停止するには、制御装置108は、エンジン制御信号Soutとして、燃料噴射装置に燃料噴射量を0とする信号を出力する。
【0027】
ステップ201の処理により時刻t0において燃料供給を停止すると、図3に示すように、エンジン回転数Neは脈動しながら惰性回転を続け、次第に回転数が低下する。なお、図3において、燃料カットよりも前の時点におけるエンジン回転数Ne−idは、エンジンのアイドル回転数である。アイドル回転数はエンジンにより多少異なるが、例えば、数百rpmである。
【0028】
その後、図2のステップ203において、予回転開始条件が成立すると、制御装置108は、ステップ204において、図1に示したモータ回転指令信号S2を図3(B)に示すように所定時間パルス状に出力し、スタータモータ105に通電し、スタータモータ105を所定時間だけ回転させる。予回転開始条件の判定方法としては、例えば、エンジン回転数が所定の回転数を下回ったことを条件にする。なお、アイドルストップ条件が成立し、燃料供給停止が行われたタイミングから一定の時間経過したことで予回転開始条件が成立したと判定してもよいものである。そして、図3(B)に示すように、スタータモータ105に通電したことで、図3(A)に示すように、時刻t1からスタータモータの回転数Nsは上昇し始める。この通電によるスタータモータの回転を「予回転」と称する。
【0029】
次に、ステップ203にて予回転開始判定が成立して通電を開始した後、ステップ206において、予回転通電終了条件が成立したら、制御装置108は、ステップ207において、予回転通電を終了させる。図3(B)の時刻t2に示すように、通電を終了させたことで、図3(A)に示すように、スタータモータは惰性回転を続ける。予回転通電終了条件として、例えば予回転開始から一定時間経過していることや、スタータモータの回転数が一定の回転数に達すること、スタータモータとエンジンの回転数の差が所定の値以下になることなどがある。
【0030】
ステップ207にて予回転通電を終了させると、スタータモータは惰性回転を続け、ステップ209において、所定のピニオン飛出し判定が成立したら、制御装置108は、図3(C)に示すように、時刻t3において、ピニオン飛び出し信号S1を出力して、ピニオンを飛び出させ、惰性回転中のリングギヤに惰性回転中のピニオンを噛み込ませプリメッシュを行う。ステップ209に示すピニオン飛出し判定に関しては後に詳しく述べる。プリメッシュを行った後はエンジンが停止したあともピニオンがリングギヤに噛み込んだ状態が維持される。なお、ステップ209、210のピニオン飛び出し動作は必ずしも必要ではなく、これを行わない場合はエンジンの再始動要求が発生しなければリングギヤにピニオンを噛合わせることなく両者は惰性回転を終え停止する。
【0031】
図3(A)に示す例では、プリメッシュ時のエンジン回転数Ne−pm1は、アイドル回転数よりもかなり低い値となっている。従って、プリメッシュ後の歯打ち音の回数を減らすことができ、プリメッシュ時の騒音を低減することができる。
【0032】
そして、プリメッシュを行った後に発生した再始動要求に関しては、ステップ211の再始動要求判定にて制御装置108が判定し、ステップ212にて制御装置108は燃料噴射を再開すると共に、ステップ220にて制御装置108直ちにスタータモータへ通電を開始することでクランキングを開始しエンジンを再始動させる。プリメッシュした後はピニオンとリングギヤは噛合った状態が維持されているので、直ちにモータへ通電することでエンジンへ回転力を伝える。ステップ221にて、制御装置108はエンジンの再始動が完了したことが判定すると、ステップ222でマグネットスイッチとモータへの通電を停止しスタータをオフにする。ステップ221のエンジン再始動完了判定は、例えばエンジン回転数が一定の値を超えたことでエンジンの再始動が完了したことを判定することができる。
【0033】
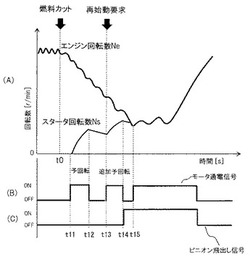
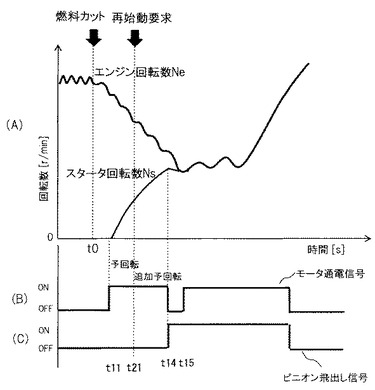
次に、図2及び図4を用いて、エンジン回転が停止するまでの期間中に、プリメッシュ動作以前に再始動要求が発生した場合の制御内容について説明する。図4(A)は、予回転通電を終えスタータモータが惰性回転を続けている最中に、エンジン再始動要求が発生した場合の制御と、その場合のエンジン回転数とスタータ回転数の時間変化を示し、図4(B),(C)は、その時の制御装置からの出力信号(図4(B):モータ通電信号;図4(C):ピニオン飛び出し信号)の一例を示している。
【0034】
時刻t11において、ステップ204の予回転通電を開始し、時刻t12において、ステップ207の予回転通電を終了する。そして、予回転通電を終えスタータモータが惰性回転を続けている最中に発生した再始動要求は、制御装置108が、図2のステップ208にて判定し、ステップ213で示すようにエンジンへの燃料噴射を再開し、ステップ214で示すようにスタータモータへ通電を行う。再始動要求の判定は、例えば、それまで踏み込まれていたブレーキの踏み込みが解除されたことにより行われる。このように再始動要求が発生したことを受けて直ちにモータへ通電を開始することを「追加予回転通電」と称する。再始動要求の発生に対し直ちに追加予回転通電を行うことで、図4(A)の時刻t13にてエンジン再始動要求が発生すると、図4(B)に示すように、スタータモータへの通電を時刻t14まで行い、スタータモータは再び回転数を上げ、エンジンの回転数に近づいていく。
【0035】
再始動要求に対して直ちにスタータモータに追加予回転通電を開始することが、本実施形態の特徴である。追加予回転通電を開始するのと同時にエンジンの燃料噴射も再開し、その後ステップ216で示す通り、所定のピニオン飛出し判定が成立したら、制御装置108は、図4(B)の時刻t14に示すように、ステップ217にて追加予回転通電を停止し、同時にステップ218にて、図4(C)に示すように、ピニオンを飛び出させ、リングギヤに噛み込ませる。ステップ216に示すピニオン飛出し判定に関しては後に詳しく述べる。
【0036】
その後、ステップ219にて制御装置108がピニオンとリングギヤの噛合いが完了したことを判定すると、図4(B)の時刻t15において、ステップ220にてスタータモータに再び通電を開始し、エンジンに回転力を伝えることでクランキングを開始する。ステップ219での噛合い完了判定は、例えばピニオン飛出しから一定時間経過したことで噛合いが完了したと判定する。また、センサなどを用いてピニオンの移動を検知し、ピニオンとリングギヤが噛合ったことを判定しても良い。
【0037】
ステップ221にて、制御装置108はエンジン再始動完了判定を行い、再始動が完了したと判定されれば、ステップ222でマグネットスイッチとモータへの通電を停止し、スタータをオフにする。エンジン再始動完了判定は、例えばエンジン回転数が一定の値を超えたことでエンジンの再始動が完了したと判定することができる。
【0038】
なお、この場合のプリメッシュ時のエンジン回転数Ne−pm2は、図3に示した場合のプリメッシュ時のエンジン回転数Ne−pm1よりは高くなっている。従って、プリメッシュ時の騒音が大きくなる可能性があるが、実際には、プリメッシュに引き続いて、エンジンに燃料が供給され、エンジンの爆発が生じるため、この一連の騒音の一部と考えられるため、運転者の耳にはあまり気にならないこととなる。図3に示した場合のプリメッシュ時は、その後エンジンの再始動が行われないため、プリメッシュは静かな環境の中で実施されるため、騒音として運転者の耳に捉えられやすいものである。
【0039】
次に、図2及び図5を用いて、予回転中に発生した再始動要求に対する制御内容いついて説明する。図5(A)〜(C)の縦軸は、図3(A)〜(C)の縦軸と同様である。
【0040】
図5(A),(B)の時刻t21に示すように、予回転通電中に発生した再始動要求については、フローチャートのステップ205にて制御装置108が判定し、前述の予回転後に再始動要求が発生した場合と同様に、ステップ213にて燃料噴射を再開し、ステップ214にて追加予回転通電を開始する。この場合、予回転通電中に追加予回転通電に切り替えるので、図5(B)に示すように、見かけ上は予回転通電開始から連続して通電しているように見える。その後前述の予回転後に再始動要求が発生した場合と同様に、ステップ216にて飛出し判定が成立すればステップ217にてモータへの通電を止め、ステップ218にてピニオンを飛込ませる。以降も前述の予回転後に再始動要求が発生した場合と同様にエンジンを再始動させる。
【0041】
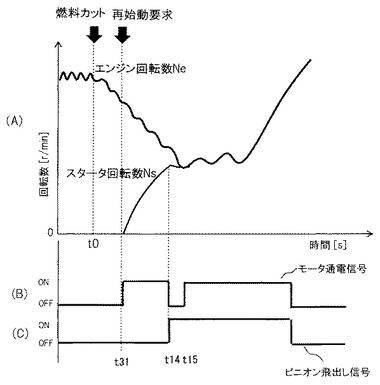
次に、図2及び図6を用いて、予回転前に発生した再始動要求に対する制御内容について説明する。図6(A)〜(C)の縦軸は、図3(A)〜(C)の縦軸と同様である。
【0042】
図6(A),(B)の時刻t31で示すように、予回転通電開始のタイミング以前に発生した再始動要求に対し、図2のステップ202にて制御装置108が判定し、前述の予回転後に再始動要求が発生した場合と同様にステップ213にて燃料噴射を再開し、ステップ214でて追加予回転通電を開始する。この場合、図6(B)の時刻t31に示すように再始動要求が発生して初めてスタータモータに通電を開始する。その後前述の予回転後に再始動要求が発生した場合と同様に、ステップ216にて飛出し判定が成立すればステップ217にてモータへの通電を止め、ステップ218にてピニオンを飛込ませる。以降も前述の予回転後に再始動要求が発生した場合と同様にエンジンを再始動させる。
【0043】
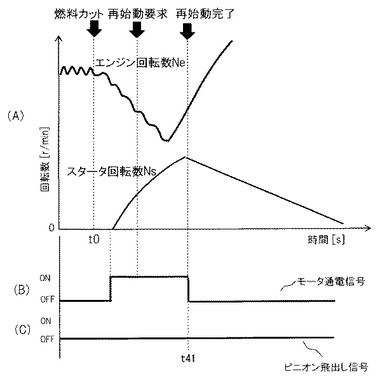
次に、図2及び図7を用いて、エンジンが惰性回転している間に、まだある程度の回転数があるうちに発生した再始動要求に対する制御内容について説明する。このようなタイミングの再始動要求であれば、燃料噴射を再開することでスタータの力を借りることなく再始動することができることがある。
【0044】
燃料噴射を再開によるエンジン再始動はフローチャートのステップ215にて、制御装置108が追加予回転中に判定している。再始動判定は、例えばエンジン回転数が所定の回転数を上回ることで再始動完了と判定することができる。
【0045】
図7の時刻t41にて、制御装置108がステップ215にて再始動が完了したと判定すれば、ステップ222にてモータへの通電を終了する。このように、燃料噴射再開のみでエンジンが再始動できた場合は、結果的にピニオンとリングギヤが連結されずにスタータモータが空転することがある。
【0046】
なおここで示した制御フローの例は、再始動要求の発生に対し直ちに追加予回転通電を開始しているが、まだエンジン回転数が高いうちであれば燃料噴射の再開による再始動を期待し、所定のエンジン回転数を下回った後に発生した再始動要求に対しのみスタータモータへ追加予回転通電を開始しても良い。その場合、所定のエンジン回転数を下回る以前に発生した再始動要求に対しては、燃料噴射の再開による再始動ができずに所定のエンジン回転数を下回るタイミングに初めて追加予回転通電を開始し前記同様スタータモータによる再始動を行う。
【0047】
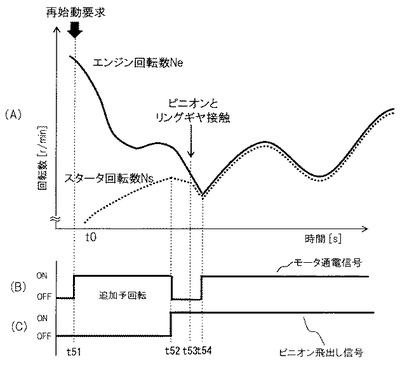
次に、図8を用いて、図2のステップ209とステップ216のピニオン飛出し判定について説明する。ステップ209とステップ216のピニオン飛出し判定は同じ判定を用いても良い。
【0048】
図8(A)は、ステップ216のピニオン飛出し判定を実施した時のエンジン回転数とピニオン回転数の時間変化をより詳しく示している。図8(B)はモータ通電信号を示し、図8(C)はピニオン飛び出し信号を示している。
【0049】
図8の時刻t51で示すように、制御装置108は再始動要求を受けてスタータモータに追加予回転通電を行う。そして、制御装置108は図8の時刻t52のタイミングでステップ216の飛出し判定が成立し、追加予回転通電を止めると同時に、ピニオン飛出し信号を出力しピニオンは飛出し始める。
【0050】
ピニオン飛出しの判定は、将来のエンジン回転数を予測し、ピニオンの移動遅れ時間を考慮して飛出しタイミングを決定する。ピニオン飛出し信号を出力してから実際にピニオンがリングギヤに到達するまでには遅れ時間があり、この遅れ時間の間にエンジン回転数は大きく変化する。エンジン回転の変化を脈動分含めて予測することで、ピニオンがリングギヤと接触したタイミングでの速度差を抑えスムーズな噛み込みを実現できる。例えば図8に示した例では、時刻t52のタイミングでピニオン飛出し信号を出力しているが、実際にピニオンがリングギヤと接触したのは時刻t53のタイミングである。ピニオン飛出し判定は時刻t52のタイミングの段階で時刻t53のタイミングのエンジン回転数を予測し、時刻t53のタイミングではピニオンとリングギヤが所定の回転数差以内であることを予測したうえでピニオン飛び出し信号を出力する。その後前記と同様ピニオンがリングギヤと完全に噛合ったことを時刻t54のタイミングで判定し、再びスタータモータへ通電しクランキングを開始する。
【0051】
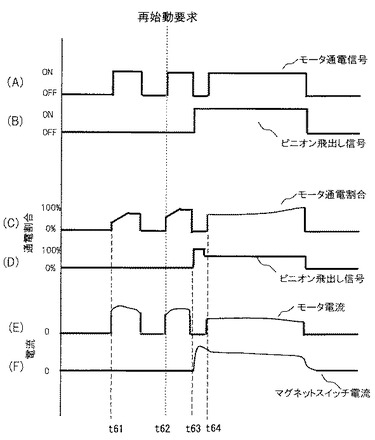
次に、図9を用いて、モータおよびマグネットスイッチへの通電方法について説明する。図9(A)はオンオフ式のスイッチを用いた場合の、モータ通電信号を示し、図9(B)はオンオフ式のスイッチを用いた場合の、ピニオン飛出し信号を示している。図9(C)〜図9(F)はスイッチングの割合を変えられるスイッチング素子を用いた場合である。図9(C)はモータ通電割合を示し、図9(D)はピニオン飛び出し信号の通電割合を示している。図9(E)はモータ電流を示し、図9(F)はマグネットスイッチ電流を示している。
【0052】
図1に示したモータ通電信号およびピニオン飛出し信号は、通電回路に半導体などのスイッチング素子を用いている場合はスイッチングの割合を変えることでも代用することもできる。
【0053】
図9では時刻t61のタイミングに再始動要求が発生した場合の例だが、図9(C),(D)に示すように、スイッチング素子を用いた場合は通電の割合を変化させる。具体的には、図9(C)に示すように、時刻t61,t62において、モータに通電する際に、最初0%〜50%程度までステップ的に電流を流した後、通電割合が100%になるまで徐々に増加する。スイッチング素子は通電開始時に電流が流れる過ぎることがあるため、このような通電制御により電流の流れすぎを回避できる。また、時刻t64において、クランキングのためスタータモータに通電する際、流し始めは、例えば、70%程度の通電割合とする。これにより補機にも電流を流している場合、補機の動作が停止したりするのを防止できる。また、時刻t63において、ピニオン飛び出し信号の通電割合を最初70%程度とすることで、ピニオンの飛び出し時の飛び出し速度をゆっくりとして、ピニオンがリングギアに衝突する際の力を弱めることができる。
【0054】
以上のように通電割合を制御した場合、図9(E),(F)は、モータおよびマグネットスイッチに流れる電流の例を示している。スイッチング素子を用いた場合はスタータモータに流れる電流を抑えることができ、バッテリの耐久性向上や他の電気機器への電力供給の影響を少なくするなどの効果がある。
【0055】
以上説明したように、本実施形態によれば、再始動にかかる時間に対する遅れを抑えることができる。
【符号の説明】
【0056】
101…スタータ本体
102…マグネットスイッチ
103…ピニオン
104…リングギヤ
105…スタータモータ
106a…マグネットスイッチ通電用スイッチ
106b…スタータモータ通電用スイッチ
107…ワンウェイクラッチ
108…制御装置
109…クランク角センサ
110…ピニオン回転センサ
111…リングギヤ回転センサ
【技術分野】
【0001】
本発明は、エンジンの停止と再始動を自動的に行うアイドルストップシステムの制御装置および制御方法に係り、特に、プリメッシュ方式のシステムに適用するに好適なアイドルストップシステムの制御装置および制御方法に関する。
【背景技術】
【0002】
近年の自動車においては、エネルギー資源の節約と環境保全を目的として、運転中に所定の条件が成立した時にエンジンを一時停止させるアイドルストップシステムを搭載したものがある。このアイドルストップシステムは、運転者が車両を停止させる際などにエンジンを自動的に停止し、その後、運転者の再始動要求が生じた時点や、エンジンの稼働が必要になった時に自動的にエンジンを再始動するものである。エンジンを再始動させるにあたって、従来のピニオン押し出し式のスタータを用い、始動時だけピニオンを押し出してピニオンをエンジン軸と直結されているリングギヤに噛合わせ、スタータによるクランキングによってエンジンを始動させる方法がある。この方法を採る場合、大きな設計変更をする必要がなくコストが抑えられるメリットがある。ただしこのスタータを用いてエンジンを始動させる方式では、エンジン停止過程に運転者がアクセルペダルを踏むなどの再始動要求が発生した場合には惰性回転中のエンジンにスタータを連結させる必要がある。
【0003】
それに対し従来は、再始動要求に先立ってスタータを予回転させ、ピニオンギヤを回転中のリングギヤと予め連結させておくことで、再始動要求が発生した場合の再始動時間を短縮する方法が知られている(例えば、特許文献1参照)。なお以下では、再始動要求の発生に備えて、再始動要求に先立ってスタータとエンジンを連結させることを「プリメッシュ」と称し、この方式を採用しているアイドルストップシステムをプリメッシュ方式のアイドルストップシステムと称する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−242607号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、従来のプリメッシュ方式では、プリメッシュさせる際に発せられる騒音を抑制することが大きな課題となっている。再始動要求に先立ってスタータとエンジンを連結させるが、その後エンジンが停止するまでの期間中に再始動要求が発生しなかった場合は特に騒音が耳障りなので運転者には不快に感じられる。
【0006】
ここで、プリメッシュ時の騒音が、プリメッシュさせた時のエンジン回転数によって大きく変化することが発明者らの研究により判明した。すなわち、プリメッシュさせた際のエンジン回転数が高いと、プリメッシュ後にエンジン回転の脈動によりピニオンギヤとエンジン側のリングギヤとの歯打ち音が複数回発生する。そこで、プリメッシュさせるタイミングを遅らせ、プリメッシュさせる際のエンジン回転数をある程度抑えることで、プリメッシュ後の歯打ち音の回数を減らすことができる。しかし、プリメッシュのタイミングを遅らせることは、プリメッシュのタイミングより前に発生した再始動要求に対して再始動が遅れることにつながり、再始動にかかる時間が長くなる。
【0007】
本発明の目的は、プリメッシュ方式のアイドルストップシステムにおいて、プリメッシュ前に再始動要求が発生した場合でも、速やかに再始動可能なアイドルストップシステムの制御装置および制御方法を提供することにある。
【課題を解決するための手段】
【0008】
(1)上記目的を達成するために、本発明は、エンジン運転中にアイドルストップ条件を満たした時にエンジンを停止させ、前記エンジンが停止するまでの惰性回転期間中に再始動要求が発生した時にはスタータモータのピニオンを前記エンジンのクランク軸に連結されたリングギヤに噛み込ませ、クランキングを開始して前記エンジンを再始動させる方式のアイドルストップシステムに用いる制御装置であって、前記エンジンが停止するまでのエンジン惰性回転期間中に前記スタータモータのピニオンを予回転させ、前記スタータモータへの予回転通電を終了させた後に、前記エンジンの再始動要求が発生した時には前記スタータのピニオンを追加予回転させ、その後、前記ピニオンを前記リングギヤに噛み込ませてクランキングを開始して前記エンジンを再始動させるようにしたものである。
かかる構成により、プリメッシュ方式のアイドルストップシステムにおいて、プリメッシュ前に再始動要求が発生した場合でも、速やかに再始動可能となる。
【0009】
(2)上記(1)において、好ましくは、前記エンジンの再始動要求が発生して、前記スタータのピニオンを追加予回転させた後、前記ピニオンと前記リングギヤを連結させる際は、前記スタータモータへの通電を一時的に停止させ、前記ピニオンと前記リングギヤが完全に噛み合っていることを判定した後、再び前記スタータモータに通電し、クランキングを開始するようにしたものである。
【0010】
(3)上記(1)において、好ましくは、前記エンジンを停止させてからエンジンが停止するまでの惰性回転期間中に再始動要求が発生しなかった場合は、ピニオン飛出し判定条件を満たすとプリメッシュ動作を行うようにしたものである。
【0011】
(4)上記(1)において、好ましくは、前記ピニオンの回転数を検知するピニオン回転数検知手段を備え、前記再始動要求が発生すると前記エンジンへの燃料噴射を再開し、燃料噴射を再開した後のエンジン回転数の時間変化を予測したうえで、前記ピニオン回転数検知手段に基づいて前記ピニオンの前記リングギヤとの減速比を考慮して換算したピニオン回転数と、前記リングギヤの回転数が所定の速度差で接触するよう、ピニオンの押し出し手段の遅れを考慮して前記ピニオン押し出し手段の押し出しタイミングを制御するようにしたものである。
【0012】
(5)上記(1)において、好ましくは、前記予回転通電中に前記エンジンの再始動要求が発生した場合は、予回転通電から追加予回転通電に直ちに切り替えるようにしたものである。
【0013】
(6)上記(1)において、好ましくは、前記予回転通電を開始する前に前記エンジンの再始動要求が発生した場合は、直ちに追加予回転のための通電を開始するようにしたものである。
【0014】
(7)上記(1)において、好ましくは、所定のエンジン回転数を下回った後に発生した再始動要求に対してのみスタータモータへ直ちに追加予回転通電を開始し、所定のエンジン回転数を下回る以前に発生した再始動要求に対しては、所定のエンジン回転数を下回るタイミングに初めて追加予回転通電を開始するようにしたものである。
【0015】
(8)上記目的を達成するために、本発明は、エンジン運転中にアイドルストップ条件を満たした時にエンジンを停止させ、前記エンジンが停止するまでの惰性回転期間中に再始動要求が発生した時にはスタータモータのピニオンを前記エンジンのクランク軸に連結されたリングギヤに噛み込ませ、クランキングを開始して前記エンジンを再始動させる方式のアイドルストップシステムの制御方法であって、前記エンジンが停止するまでのエンジン惰性回転期間中に前記スタータモータのピニオンを予回転させ、前記スタータモータへの予回転通電を終了させた後に、前記エンジンの再始動要求が発生した時には前記スタータのピニオンを追加予回転させ、その後、前記ピニオンを前記リングギヤに噛み込ませてクランキングを開始し前記エンジンを再始動させるようにしたものである。
かかる方法により、プリメッシュ方式のアイドルストップシステムにおいて、プリメッシュ前に再始動要求が発生した場合でも、速やかに再始動可能となる。
【発明の効果】
【0016】
本発明によれば、プリメッシュ方式のアイドルストップシステムにおいて、プリメッシュ前に再始動要求が発生した場合でも、速やかに再始動可能となる。
【図面の簡単な説明】
【0017】
【図1】本発明の一実施形態によるアイドルストップシステムの構成図である。
【図2】本発明の一実施形態によるアイドルストップシステムの制御装置の動作を示すフローチャートである。
【図3】本発明の一実施形態によるアイドルストップシステムの制御装置の動作を説明する示すタイミングチャートである。
【図4】本発明の一実施形態によるアイドルストップシステムの制御装置の動作を説明する示すタイミングチャートである。
【図5】本発明の一実施形態によるアイドルストップシステムの制御装置の動作を説明する示すタイミングチャートである。
【図6】本発明の一実施形態によるアイドルストップシステムの制御装置の動作を説明する示すタイミングチャートである。
【図7】本発明の一実施形態によるアイドルストップシステムの制御装置の動作を説明する示すタイミングチャートである。
【図8】本発明の一実施形態によるアイドルストップシステムの制御装置の動作を説明する示すタイミングチャートである。
【図9】本発明の一実施形態によるアイドルストップシステムの制御装置の動作を説明する示すタイミングチャートである。
【発明を実施するための形態】
【0018】
以下、図1〜図9を用いて、本発明の一実施形態によるアイドルストップシステムの制御装置の構成及び動作について説明する。
最初に、図1を用いて、本実施形態によるアイドルストップシステムの全体構成について説明する。
図1は、本発明の一実施形態によるアイドルストップシステムの構成図である。
【0019】
スタータ101は、いわゆるピニオン押し出し方式のスタータである。スタータ101は、モータ105と、モータ105によって回転駆動されるピニオン103と、ピニオン103を押し出すためのマグネットスイッチ102とを備えている。
【0020】
モータ105の回転は、モータ105の内部にある減速機構で減速することでトルクを増大させてピニオン103に伝達する。マグネットスイッチ102は、通電するとピニオンギア103をリングギヤ104に連結する構造となっているが、ピニオン103を図中右方向へ押し出す機能を備えるものであれば、マグネットスイッチでなくても良い。ピニオン103は、ワンウェイクラッチ107と一体化されており、モータ105と同じ回転軸を維持したまま図中右方向に移動し、エンジンのクランク軸に直結されたリングギヤ104と噛み合わせて回転することでエンジンを始動させる。
【0021】
ワンウェイクラッチ107は、正転方向においてモータ105からエンジンを回す方向にしか動力が伝わらない構成にする。これにより、ピニオン103とリングギヤ104に噛み合っている時は、リングギヤ104の回転数は、モータ105の回転数に対して、減速比に応じた同期速度になるか、もしくは、それよりも速い回転数になる。すなわち、リングギヤ104がモータ105の同期速度よりも低下しようとすると、ワンウェイクラッチ107が動力を伝達するため、リングギヤ104の回転数がモータ105に対する同期速度を下回ることはない。一方で、同期速度よりもリングギヤ104の回転数の方が速い時は、ワンウェイクラッチ107が動力を伝達しないため、リングギヤ104からモータ側へ動力が伝達することはない。なお、以下では、便宜上スタータモータの回転数またはピニオンの回転数とは、ピニオンとリングギヤとのギヤ比を考慮してエンジン軸上に換算した回転数とする。
【0022】
ピニオン回転センサ109は、ピニオン104の回転数を検出する。リングギヤ回転センサ110は、リングギア104の回転数を検出する。ピニオン回転センサ109、リングギヤ回転センサ110からの信号は、制御装置108に入力される。なお、リングギヤ104とエンジンのクランク軸は直結されているので、リングギヤ回転数とエンジン回転数は同義である。
【0023】
制御装置108は、通常の燃料噴射、点火、空気制御(電子制御スロットル)に加え、ブレーキペダル状態、車速等の各種の車両の状態を示す車両状態信号Sinに基づいて、アイドルストップを許可し、エンジンに制御信号Soutを出力し、エンジンへの燃料供給を停止する。また、制御装置108は、ピニオン押し出し指令信号S1とモータ回転指令信号S2がそれぞれ独立して出力される。ピニオン押し出し指令信号S1とモータ回転指令信号S2は、スイッチ106a,106bにそれぞれ入力され、それぞれがピニオン押し出しとモータの回転を制御する。スイッチ106a,106bとしては、機械式接点を持つリレースイッチや、半導体を用いたスイッチなどを使うことができる。
【0024】
次に、図2〜図9を用いて、本実施形態によるアイドルストップシステムの制御装置の動作について説明する。
図2は、本発明の一実施形態によるアイドルストップシステムの制御装置の動作を示すフローチャートである。図3〜図8は、本発明の一実施形態によるアイドルストップシステムの制御装置の動作を説明する示すタイミングチャートである。
【0025】
最初に、図2及び図3を用いて、アイドルストップ条件が成立し、エンジンへの燃料供給をカットしてからプリメッシュするまでにエンジンの再始動要求が発生しない場合の制御フローを説明する。図3(A)は、この制御を実施した場合のエンジン回転数Neとスタータ回転数Nsの時間変化を示し、図3(B),(C)は、その時の制御装置からの出力信号(図3(B):モータ通電信号;図3(C):ピニオン飛び出し信号)の一例を示している。
【0026】
図2のフローチャートに示すように、まずアイドルストップ条件が成立したことを受けて、ステップ201において、制御装置108は、エンジンへの燃料供給を停止する。アイドルストップ条件が成立する場合としては、例えば、車両状態信号Sinに含まれる車速信号が0であり、かつ、ブレーキが踏み込まれているという信号が入力している場合である。エンジンへの燃料供給を停止するには、制御装置108は、エンジン制御信号Soutとして、燃料噴射装置に燃料噴射量を0とする信号を出力する。
【0027】
ステップ201の処理により時刻t0において燃料供給を停止すると、図3に示すように、エンジン回転数Neは脈動しながら惰性回転を続け、次第に回転数が低下する。なお、図3において、燃料カットよりも前の時点におけるエンジン回転数Ne−idは、エンジンのアイドル回転数である。アイドル回転数はエンジンにより多少異なるが、例えば、数百rpmである。
【0028】
その後、図2のステップ203において、予回転開始条件が成立すると、制御装置108は、ステップ204において、図1に示したモータ回転指令信号S2を図3(B)に示すように所定時間パルス状に出力し、スタータモータ105に通電し、スタータモータ105を所定時間だけ回転させる。予回転開始条件の判定方法としては、例えば、エンジン回転数が所定の回転数を下回ったことを条件にする。なお、アイドルストップ条件が成立し、燃料供給停止が行われたタイミングから一定の時間経過したことで予回転開始条件が成立したと判定してもよいものである。そして、図3(B)に示すように、スタータモータ105に通電したことで、図3(A)に示すように、時刻t1からスタータモータの回転数Nsは上昇し始める。この通電によるスタータモータの回転を「予回転」と称する。
【0029】
次に、ステップ203にて予回転開始判定が成立して通電を開始した後、ステップ206において、予回転通電終了条件が成立したら、制御装置108は、ステップ207において、予回転通電を終了させる。図3(B)の時刻t2に示すように、通電を終了させたことで、図3(A)に示すように、スタータモータは惰性回転を続ける。予回転通電終了条件として、例えば予回転開始から一定時間経過していることや、スタータモータの回転数が一定の回転数に達すること、スタータモータとエンジンの回転数の差が所定の値以下になることなどがある。
【0030】
ステップ207にて予回転通電を終了させると、スタータモータは惰性回転を続け、ステップ209において、所定のピニオン飛出し判定が成立したら、制御装置108は、図3(C)に示すように、時刻t3において、ピニオン飛び出し信号S1を出力して、ピニオンを飛び出させ、惰性回転中のリングギヤに惰性回転中のピニオンを噛み込ませプリメッシュを行う。ステップ209に示すピニオン飛出し判定に関しては後に詳しく述べる。プリメッシュを行った後はエンジンが停止したあともピニオンがリングギヤに噛み込んだ状態が維持される。なお、ステップ209、210のピニオン飛び出し動作は必ずしも必要ではなく、これを行わない場合はエンジンの再始動要求が発生しなければリングギヤにピニオンを噛合わせることなく両者は惰性回転を終え停止する。
【0031】
図3(A)に示す例では、プリメッシュ時のエンジン回転数Ne−pm1は、アイドル回転数よりもかなり低い値となっている。従って、プリメッシュ後の歯打ち音の回数を減らすことができ、プリメッシュ時の騒音を低減することができる。
【0032】
そして、プリメッシュを行った後に発生した再始動要求に関しては、ステップ211の再始動要求判定にて制御装置108が判定し、ステップ212にて制御装置108は燃料噴射を再開すると共に、ステップ220にて制御装置108直ちにスタータモータへ通電を開始することでクランキングを開始しエンジンを再始動させる。プリメッシュした後はピニオンとリングギヤは噛合った状態が維持されているので、直ちにモータへ通電することでエンジンへ回転力を伝える。ステップ221にて、制御装置108はエンジンの再始動が完了したことが判定すると、ステップ222でマグネットスイッチとモータへの通電を停止しスタータをオフにする。ステップ221のエンジン再始動完了判定は、例えばエンジン回転数が一定の値を超えたことでエンジンの再始動が完了したことを判定することができる。
【0033】
次に、図2及び図4を用いて、エンジン回転が停止するまでの期間中に、プリメッシュ動作以前に再始動要求が発生した場合の制御内容について説明する。図4(A)は、予回転通電を終えスタータモータが惰性回転を続けている最中に、エンジン再始動要求が発生した場合の制御と、その場合のエンジン回転数とスタータ回転数の時間変化を示し、図4(B),(C)は、その時の制御装置からの出力信号(図4(B):モータ通電信号;図4(C):ピニオン飛び出し信号)の一例を示している。
【0034】
時刻t11において、ステップ204の予回転通電を開始し、時刻t12において、ステップ207の予回転通電を終了する。そして、予回転通電を終えスタータモータが惰性回転を続けている最中に発生した再始動要求は、制御装置108が、図2のステップ208にて判定し、ステップ213で示すようにエンジンへの燃料噴射を再開し、ステップ214で示すようにスタータモータへ通電を行う。再始動要求の判定は、例えば、それまで踏み込まれていたブレーキの踏み込みが解除されたことにより行われる。このように再始動要求が発生したことを受けて直ちにモータへ通電を開始することを「追加予回転通電」と称する。再始動要求の発生に対し直ちに追加予回転通電を行うことで、図4(A)の時刻t13にてエンジン再始動要求が発生すると、図4(B)に示すように、スタータモータへの通電を時刻t14まで行い、スタータモータは再び回転数を上げ、エンジンの回転数に近づいていく。
【0035】
再始動要求に対して直ちにスタータモータに追加予回転通電を開始することが、本実施形態の特徴である。追加予回転通電を開始するのと同時にエンジンの燃料噴射も再開し、その後ステップ216で示す通り、所定のピニオン飛出し判定が成立したら、制御装置108は、図4(B)の時刻t14に示すように、ステップ217にて追加予回転通電を停止し、同時にステップ218にて、図4(C)に示すように、ピニオンを飛び出させ、リングギヤに噛み込ませる。ステップ216に示すピニオン飛出し判定に関しては後に詳しく述べる。
【0036】
その後、ステップ219にて制御装置108がピニオンとリングギヤの噛合いが完了したことを判定すると、図4(B)の時刻t15において、ステップ220にてスタータモータに再び通電を開始し、エンジンに回転力を伝えることでクランキングを開始する。ステップ219での噛合い完了判定は、例えばピニオン飛出しから一定時間経過したことで噛合いが完了したと判定する。また、センサなどを用いてピニオンの移動を検知し、ピニオンとリングギヤが噛合ったことを判定しても良い。
【0037】
ステップ221にて、制御装置108はエンジン再始動完了判定を行い、再始動が完了したと判定されれば、ステップ222でマグネットスイッチとモータへの通電を停止し、スタータをオフにする。エンジン再始動完了判定は、例えばエンジン回転数が一定の値を超えたことでエンジンの再始動が完了したと判定することができる。
【0038】
なお、この場合のプリメッシュ時のエンジン回転数Ne−pm2は、図3に示した場合のプリメッシュ時のエンジン回転数Ne−pm1よりは高くなっている。従って、プリメッシュ時の騒音が大きくなる可能性があるが、実際には、プリメッシュに引き続いて、エンジンに燃料が供給され、エンジンの爆発が生じるため、この一連の騒音の一部と考えられるため、運転者の耳にはあまり気にならないこととなる。図3に示した場合のプリメッシュ時は、その後エンジンの再始動が行われないため、プリメッシュは静かな環境の中で実施されるため、騒音として運転者の耳に捉えられやすいものである。
【0039】
次に、図2及び図5を用いて、予回転中に発生した再始動要求に対する制御内容いついて説明する。図5(A)〜(C)の縦軸は、図3(A)〜(C)の縦軸と同様である。
【0040】
図5(A),(B)の時刻t21に示すように、予回転通電中に発生した再始動要求については、フローチャートのステップ205にて制御装置108が判定し、前述の予回転後に再始動要求が発生した場合と同様に、ステップ213にて燃料噴射を再開し、ステップ214にて追加予回転通電を開始する。この場合、予回転通電中に追加予回転通電に切り替えるので、図5(B)に示すように、見かけ上は予回転通電開始から連続して通電しているように見える。その後前述の予回転後に再始動要求が発生した場合と同様に、ステップ216にて飛出し判定が成立すればステップ217にてモータへの通電を止め、ステップ218にてピニオンを飛込ませる。以降も前述の予回転後に再始動要求が発生した場合と同様にエンジンを再始動させる。
【0041】
次に、図2及び図6を用いて、予回転前に発生した再始動要求に対する制御内容について説明する。図6(A)〜(C)の縦軸は、図3(A)〜(C)の縦軸と同様である。
【0042】
図6(A),(B)の時刻t31で示すように、予回転通電開始のタイミング以前に発生した再始動要求に対し、図2のステップ202にて制御装置108が判定し、前述の予回転後に再始動要求が発生した場合と同様にステップ213にて燃料噴射を再開し、ステップ214でて追加予回転通電を開始する。この場合、図6(B)の時刻t31に示すように再始動要求が発生して初めてスタータモータに通電を開始する。その後前述の予回転後に再始動要求が発生した場合と同様に、ステップ216にて飛出し判定が成立すればステップ217にてモータへの通電を止め、ステップ218にてピニオンを飛込ませる。以降も前述の予回転後に再始動要求が発生した場合と同様にエンジンを再始動させる。
【0043】
次に、図2及び図7を用いて、エンジンが惰性回転している間に、まだある程度の回転数があるうちに発生した再始動要求に対する制御内容について説明する。このようなタイミングの再始動要求であれば、燃料噴射を再開することでスタータの力を借りることなく再始動することができることがある。
【0044】
燃料噴射を再開によるエンジン再始動はフローチャートのステップ215にて、制御装置108が追加予回転中に判定している。再始動判定は、例えばエンジン回転数が所定の回転数を上回ることで再始動完了と判定することができる。
【0045】
図7の時刻t41にて、制御装置108がステップ215にて再始動が完了したと判定すれば、ステップ222にてモータへの通電を終了する。このように、燃料噴射再開のみでエンジンが再始動できた場合は、結果的にピニオンとリングギヤが連結されずにスタータモータが空転することがある。
【0046】
なおここで示した制御フローの例は、再始動要求の発生に対し直ちに追加予回転通電を開始しているが、まだエンジン回転数が高いうちであれば燃料噴射の再開による再始動を期待し、所定のエンジン回転数を下回った後に発生した再始動要求に対しのみスタータモータへ追加予回転通電を開始しても良い。その場合、所定のエンジン回転数を下回る以前に発生した再始動要求に対しては、燃料噴射の再開による再始動ができずに所定のエンジン回転数を下回るタイミングに初めて追加予回転通電を開始し前記同様スタータモータによる再始動を行う。
【0047】
次に、図8を用いて、図2のステップ209とステップ216のピニオン飛出し判定について説明する。ステップ209とステップ216のピニオン飛出し判定は同じ判定を用いても良い。
【0048】
図8(A)は、ステップ216のピニオン飛出し判定を実施した時のエンジン回転数とピニオン回転数の時間変化をより詳しく示している。図8(B)はモータ通電信号を示し、図8(C)はピニオン飛び出し信号を示している。
【0049】
図8の時刻t51で示すように、制御装置108は再始動要求を受けてスタータモータに追加予回転通電を行う。そして、制御装置108は図8の時刻t52のタイミングでステップ216の飛出し判定が成立し、追加予回転通電を止めると同時に、ピニオン飛出し信号を出力しピニオンは飛出し始める。
【0050】
ピニオン飛出しの判定は、将来のエンジン回転数を予測し、ピニオンの移動遅れ時間を考慮して飛出しタイミングを決定する。ピニオン飛出し信号を出力してから実際にピニオンがリングギヤに到達するまでには遅れ時間があり、この遅れ時間の間にエンジン回転数は大きく変化する。エンジン回転の変化を脈動分含めて予測することで、ピニオンがリングギヤと接触したタイミングでの速度差を抑えスムーズな噛み込みを実現できる。例えば図8に示した例では、時刻t52のタイミングでピニオン飛出し信号を出力しているが、実際にピニオンがリングギヤと接触したのは時刻t53のタイミングである。ピニオン飛出し判定は時刻t52のタイミングの段階で時刻t53のタイミングのエンジン回転数を予測し、時刻t53のタイミングではピニオンとリングギヤが所定の回転数差以内であることを予測したうえでピニオン飛び出し信号を出力する。その後前記と同様ピニオンがリングギヤと完全に噛合ったことを時刻t54のタイミングで判定し、再びスタータモータへ通電しクランキングを開始する。
【0051】
次に、図9を用いて、モータおよびマグネットスイッチへの通電方法について説明する。図9(A)はオンオフ式のスイッチを用いた場合の、モータ通電信号を示し、図9(B)はオンオフ式のスイッチを用いた場合の、ピニオン飛出し信号を示している。図9(C)〜図9(F)はスイッチングの割合を変えられるスイッチング素子を用いた場合である。図9(C)はモータ通電割合を示し、図9(D)はピニオン飛び出し信号の通電割合を示している。図9(E)はモータ電流を示し、図9(F)はマグネットスイッチ電流を示している。
【0052】
図1に示したモータ通電信号およびピニオン飛出し信号は、通電回路に半導体などのスイッチング素子を用いている場合はスイッチングの割合を変えることでも代用することもできる。
【0053】
図9では時刻t61のタイミングに再始動要求が発生した場合の例だが、図9(C),(D)に示すように、スイッチング素子を用いた場合は通電の割合を変化させる。具体的には、図9(C)に示すように、時刻t61,t62において、モータに通電する際に、最初0%〜50%程度までステップ的に電流を流した後、通電割合が100%になるまで徐々に増加する。スイッチング素子は通電開始時に電流が流れる過ぎることがあるため、このような通電制御により電流の流れすぎを回避できる。また、時刻t64において、クランキングのためスタータモータに通電する際、流し始めは、例えば、70%程度の通電割合とする。これにより補機にも電流を流している場合、補機の動作が停止したりするのを防止できる。また、時刻t63において、ピニオン飛び出し信号の通電割合を最初70%程度とすることで、ピニオンの飛び出し時の飛び出し速度をゆっくりとして、ピニオンがリングギアに衝突する際の力を弱めることができる。
【0054】
以上のように通電割合を制御した場合、図9(E),(F)は、モータおよびマグネットスイッチに流れる電流の例を示している。スイッチング素子を用いた場合はスタータモータに流れる電流を抑えることができ、バッテリの耐久性向上や他の電気機器への電力供給の影響を少なくするなどの効果がある。
【0055】
以上説明したように、本実施形態によれば、再始動にかかる時間に対する遅れを抑えることができる。
【符号の説明】
【0056】
101…スタータ本体
102…マグネットスイッチ
103…ピニオン
104…リングギヤ
105…スタータモータ
106a…マグネットスイッチ通電用スイッチ
106b…スタータモータ通電用スイッチ
107…ワンウェイクラッチ
108…制御装置
109…クランク角センサ
110…ピニオン回転センサ
111…リングギヤ回転センサ
【特許請求の範囲】
【請求項1】
エンジン運転中にアイドルストップ条件を満たした時にエンジンを停止させ、前記エンジンが停止するまでの惰性回転期間中に再始動要求が発生した時にはスタータモータのピニオンを前記エンジンのクランク軸に連結されたリングギヤに噛み込ませ、クランキングを開始して前記エンジンを再始動させる方式のアイドルストップシステムに用いる制御装置であって、
前記エンジンが停止するまでのエンジン惰性回転期間中に前記スタータモータのピニオンを予回転させ、
前記スタータモータへの予回転通電を終了させた後に、前記エンジンの再始動要求が発生した時には前記スタータのピニオンを追加予回転させ、
その後、前記ピニオンを前記リングギヤに噛み込ませてクランキングを開始して前記エンジンを再始動させることを特徴とするアイドルストップシステムの制御装置。
【請求項2】
請求項1に記載のアイドルストップシステムの制御装置において、
前記エンジンの再始動要求が発生して、前記スタータのピニオンを追加予回転させた後、
前記ピニオンと前記リングギヤを連結させる際は、前記スタータモータへの通電を一時的に停止させ、
前記ピニオンと前記リングギヤが完全に噛み合っていることを判定した後、再び前記スタータモータに通電し、クランキングを開始することを特徴とするアイドルストップシステムの制御装置。
【請求項3】
請求項1に記載のアイドルストップシステムの制御装置において、
前記エンジンを停止させてからエンジンが停止するまでの惰性回転期間中に再始動要求が発生しなかった場合は、ピニオン飛出し判定条件を満たすとプリメッシュ動作を行うことを特徴とするアイドルストップシステムの制御装置。
【請求項4】
請求項1に記載のアイドルストップシステムの制御装置において、
前記ピニオンの回転数を検知するピニオン回転数検知手段を備え、
前記再始動要求が発生すると前記エンジンへの燃料噴射を再開し、
燃料噴射を再開した後のエンジン回転数の時間変化を予測したうえで、前記ピニオン回転数検知手段に基づいて前記ピニオンの前記リングギヤとの減速比を考慮して換算したピニオン回転数と、前記リングギヤの回転数が所定の速度差で接触するよう、ピニオンの押し出し手段の遅れを考慮して前記ピニオン押し出し手段の押し出しタイミングを制御することを特徴とするアイドルストップシステムの制御装置。
【請求項5】
請求項1に記載のアイドルストップシステムの制御装置において、
前記予回転通電中に前記エンジンの再始動要求が発生した場合は、予回転通電から追加予回転通電に直ちに切り替えることを特徴とするアイドルストップシステムの制御装置。
【請求項6】
請求項1に記載のアイドルストップシステムの制御装置において、
前記予回転通電を開始する前に前記エンジンの再始動要求が発生した場合は、直ちに追加予回転のための通電を開始することを特徴とするアイドルストップシステムの制御装置。
【請求項7】
請求項1に記載のアイドルストップシステムの制御装置において、
所定のエンジン回転数を下回った後に発生した再始動要求に対してのみスタータモータへ直ちに追加予回転通電を開始し、所定のエンジン回転数を下回る以前に発生した再始動要求に対しては、所定のエンジン回転数を下回るタイミングに初めて追加予回転通電を開始することを特徴とするアイドルストップシステムの制御装置。
【請求項8】
エンジン運転中にアイドルストップ条件を満たした時にエンジンを停止させ、前記エンジンが停止するまでの惰性回転期間中に再始動要求が発生した時にはスタータモータのピニオンを前記エンジンのクランク軸に連結されたリングギヤに噛み込ませ、クランキングを開始して前記エンジンを再始動させる方式のアイドルストップシステムの制御方法であって、
前記エンジンが停止するまでのエンジン惰性回転期間中に前記スタータモータのピニオンを予回転させ、
前記スタータモータへの予回転通電を終了させた後に、前記エンジンの再始動要求が発生した時には前記スタータのピニオンを追加予回転させ、
その後、前記ピニオンを前記リングギヤに噛み込ませてクランキングを開始し前記エンジンを再始動させることを特徴とするアイドルストップシステムの制御方法。
【請求項1】
エンジン運転中にアイドルストップ条件を満たした時にエンジンを停止させ、前記エンジンが停止するまでの惰性回転期間中に再始動要求が発生した時にはスタータモータのピニオンを前記エンジンのクランク軸に連結されたリングギヤに噛み込ませ、クランキングを開始して前記エンジンを再始動させる方式のアイドルストップシステムに用いる制御装置であって、
前記エンジンが停止するまでのエンジン惰性回転期間中に前記スタータモータのピニオンを予回転させ、
前記スタータモータへの予回転通電を終了させた後に、前記エンジンの再始動要求が発生した時には前記スタータのピニオンを追加予回転させ、
その後、前記ピニオンを前記リングギヤに噛み込ませてクランキングを開始して前記エンジンを再始動させることを特徴とするアイドルストップシステムの制御装置。
【請求項2】
請求項1に記載のアイドルストップシステムの制御装置において、
前記エンジンの再始動要求が発生して、前記スタータのピニオンを追加予回転させた後、
前記ピニオンと前記リングギヤを連結させる際は、前記スタータモータへの通電を一時的に停止させ、
前記ピニオンと前記リングギヤが完全に噛み合っていることを判定した後、再び前記スタータモータに通電し、クランキングを開始することを特徴とするアイドルストップシステムの制御装置。
【請求項3】
請求項1に記載のアイドルストップシステムの制御装置において、
前記エンジンを停止させてからエンジンが停止するまでの惰性回転期間中に再始動要求が発生しなかった場合は、ピニオン飛出し判定条件を満たすとプリメッシュ動作を行うことを特徴とするアイドルストップシステムの制御装置。
【請求項4】
請求項1に記載のアイドルストップシステムの制御装置において、
前記ピニオンの回転数を検知するピニオン回転数検知手段を備え、
前記再始動要求が発生すると前記エンジンへの燃料噴射を再開し、
燃料噴射を再開した後のエンジン回転数の時間変化を予測したうえで、前記ピニオン回転数検知手段に基づいて前記ピニオンの前記リングギヤとの減速比を考慮して換算したピニオン回転数と、前記リングギヤの回転数が所定の速度差で接触するよう、ピニオンの押し出し手段の遅れを考慮して前記ピニオン押し出し手段の押し出しタイミングを制御することを特徴とするアイドルストップシステムの制御装置。
【請求項5】
請求項1に記載のアイドルストップシステムの制御装置において、
前記予回転通電中に前記エンジンの再始動要求が発生した場合は、予回転通電から追加予回転通電に直ちに切り替えることを特徴とするアイドルストップシステムの制御装置。
【請求項6】
請求項1に記載のアイドルストップシステムの制御装置において、
前記予回転通電を開始する前に前記エンジンの再始動要求が発生した場合は、直ちに追加予回転のための通電を開始することを特徴とするアイドルストップシステムの制御装置。
【請求項7】
請求項1に記載のアイドルストップシステムの制御装置において、
所定のエンジン回転数を下回った後に発生した再始動要求に対してのみスタータモータへ直ちに追加予回転通電を開始し、所定のエンジン回転数を下回る以前に発生した再始動要求に対しては、所定のエンジン回転数を下回るタイミングに初めて追加予回転通電を開始することを特徴とするアイドルストップシステムの制御装置。
【請求項8】
エンジン運転中にアイドルストップ条件を満たした時にエンジンを停止させ、前記エンジンが停止するまでの惰性回転期間中に再始動要求が発生した時にはスタータモータのピニオンを前記エンジンのクランク軸に連結されたリングギヤに噛み込ませ、クランキングを開始して前記エンジンを再始動させる方式のアイドルストップシステムの制御方法であって、
前記エンジンが停止するまでのエンジン惰性回転期間中に前記スタータモータのピニオンを予回転させ、
前記スタータモータへの予回転通電を終了させた後に、前記エンジンの再始動要求が発生した時には前記スタータのピニオンを追加予回転させ、
その後、前記ピニオンを前記リングギヤに噛み込ませてクランキングを開始し前記エンジンを再始動させることを特徴とするアイドルストップシステムの制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−172532(P2012−172532A)
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願番号】特願2011−32409(P2011−32409)
【出願日】平成23年2月17日(2011.2.17)
【出願人】(509186579)日立オートモティブシステムズ株式会社 (2,205)
【Fターム(参考)】
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願日】平成23年2月17日(2011.2.17)
【出願人】(509186579)日立オートモティブシステムズ株式会社 (2,205)
【Fターム(参考)】
[ Back to top ]