
アキシャルギャップモータ
【課題】小型・軽量化および組付の容易化を図りつつ、モータトルクを増大することができるアキシャルギャップモータを提供する。
【解決手段】表裏の両面の少なくともいずれか一方が磁極面であるステータ2aと、磁極面がステータ2aの磁極面に対向したロータ3aとを備え、ステータ2aは、外径側磁極9と内径側磁極10との間に少なくとも一つの中間磁極11aを有する分割磁極構造の平面視楔形のステータコア5aを周方向に配設して形成され、各ステータコア5aの外径側磁極9、内径側磁極10および中間磁極11aをコイル12により一括して励磁してアキシャルギャップモータ1Aの小型・軽量化および組付の容易化を図りつつ、モータトルクを増大する。
【解決手段】表裏の両面の少なくともいずれか一方が磁極面であるステータ2aと、磁極面がステータ2aの磁極面に対向したロータ3aとを備え、ステータ2aは、外径側磁極9と内径側磁極10との間に少なくとも一つの中間磁極11aを有する分割磁極構造の平面視楔形のステータコア5aを周方向に配設して形成され、各ステータコア5aの外径側磁極9、内径側磁極10および中間磁極11aをコイル12により一括して励磁してアキシャルギャップモータ1Aの小型・軽量化および組付の容易化を図りつつ、モータトルクを増大する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ロータとステータがモータ軸方向に対向して配置されるアキシャルギャップモータ(アキシャルギャップ構造のモータ)に関し、詳しくは、その小型・軽量化および組付の容易化に関する。
【背景技術】
【0002】
従来、電気自動車の駆動モータ等の用途があるこの種のアキシャルギャップモータにおいては、ステータの磁極を径方向の外径側(外周)と内径側(内周)に分割し、磁路を短くしてモータ損失を少なくすることが提案されている(例えば、特許文献1(段落[0010]−[0015]、[0029]−[0032]、図1、図5等)参照)。
【0003】
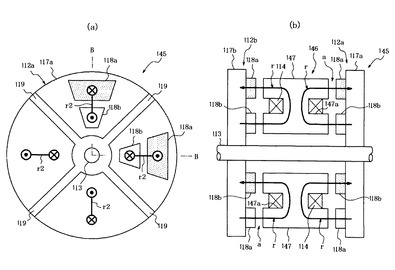
図18は前記のステータの磁極を径方向の外径側と内径側に分割したアキシャルギャップモータの一例を示し、(a)はロータのステータ側から見た平面説明図、(b)は(a)のB−B線に沿う断面図である。
【0004】
図18に示すように、この例のアキシャルギャップモータ110は、モータ軸(回転軸)113の方向に、ステータ111と、その表裏側にエアギャップ(隙間)aを設けて配置されたロータ112a、112bが設けられ、ステータ111の表裏の両面が磁極面である。そして、円盤状のロータ112a、112bは、モータ軸113に回転自在に支持されている。
【0005】
ステータ111は、ステータ巻線114を巻回した外径側ステータコア115と内径側ステータコア116が、同心円状に接近して、かつ、電気角を180度異ならせて配置され、周方向に等間隔に配設される各磁極が、それぞれモータ軸方向にコイルが巻かれた外径側と内径側磁極に分割し形成される。ロータ112a、112bは、ロータヨーク117a、117bと、ロータヨーク117a、117bのステータ111側に突設した、それぞれ複数個の外径側(外側)永久磁石118a及び内径側(内側)永久磁石118bとを有している。ロータヨーク117a、117bは、隔壁部119により磁気的に隔離された4つの区画を有している。外径側永久磁石118aは外径側ステータコア115に対応して配置され、内径側永久磁石118bは内径側ステータコア116に対応して配置されている。なお、外径側永久磁石118aと内径側永久磁石118bはステータ111に対向し、ロータの周方向及び径方向の隣り合うもの同士は異なった極性である。
【0006】
このアキシャルギャップモータ110は、図18(b)の矢印線の磁路rを、外径側ステータコア115及び内径側ステータコア116の回転軸方向磁束と、各ロータ112a、112bのロータ径方向磁束により形成し、図18(b)に示す各ロータ112a、112bの内径側永久磁石118bと外径側永久磁石118aの間の磁路r2を、内径側永久磁石118bと外径側永久磁石118aがロータ径方向に近接配置して最短距離を通るようにする。その結果、磁路r2をロータ外周縁に沿った磁路よりも確実に短くして、磁路rの長さを短くしてモータ損失を少なくしている。
【0007】
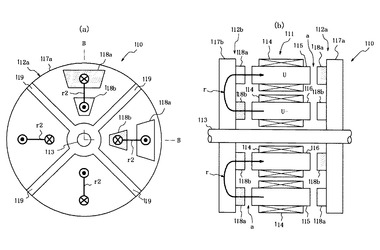
図19は前記のステータの磁極を径方向の外径側と内径側に分割したアキシャルギャップモータの他の例を示し、(a)はロータのステータ側から見た平面説明図、(b)は(a)のB−B線に沿う断面図である。
【0008】
この例のアキシャルギャップモータ145は、ステータ146が、ステータ巻線114を巻回した図18の外径側ステータコア115及びステータ巻線114を巻回した同図の内径側ステータコア116に代えて、ステータ巻線114を縦巻きした一つのステータコア147により形成されている。その他の構成及び作用はアキシャルギャップモータ110と同様であり、ステータ146の表裏の両面が磁極面である。
【0009】
そして、ステータコア147は、略等間隔の円環状に複数個配置され、各ステータコア47のステータ径方向中央部には147aが形成され、この溝147aに、縦(回転軸方向)巻きによりステータ巻線114が巻回されている。各ステータコア147の溝147aの形成部以外の端部は外側永久磁石118a、内側永久磁石118bに対向し、各永久磁石118a、118bは、ロータの周方向および径方向の隣り合うもの同士は異なった極性である。
【0010】
このアキシャルギャップモータ145は、図19(b)の矢印線に示すように、磁路rとして、ロータヨーク117bを通ってロータ112bの内側永久磁石118bへ向かうものと、ロータヨーク117aを通ってロータ112aの内径側永久磁石118bへ向かうものとを形成することで、アキシャルギャップモータ145の端面側を通る図19(a)の磁路r2をロータ外周縁に沿う場合よりも短くしてモータ損失を少なくしている。また、小さいスペースにおいてもステータ巻線114を巻回可能にしてアキシャルギャップモータ145の小型化を可能にしている。
【0011】
つぎに、アキシャルギャップモータの一例であるスイッチド・リラクタンスモータにおいて、U字型に屈曲された積層鋼板のコアを周方向に設けたステータおよびロータを備え、その際、ステータのコアを径方向に2個並べた構造に形成してこれらのコアに共通のコイルを巻き、磁極面積を2倍にしてモータの厚さに対する回転トルク比を向上し、その結果、モータの小型化(薄型化)を図ることが提案されている(例えば、特許文献2(段落[0021]―[0049]、図6、図9(d)等)参照)。
【0012】
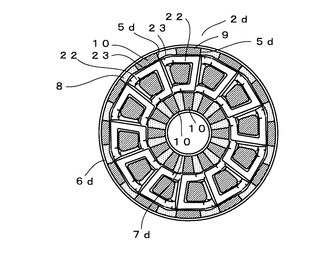
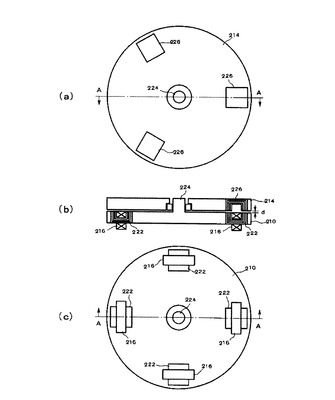
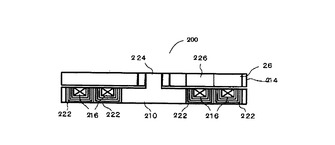
図20および図21は上記構成のスイッチド・リラクタンスモータ200を示し、図20(a)は基本構成のモータ要部の上部平面図、図20(b)は(a)のA−A線で切断した断面図、図20(c)は同図(a)のモータ要部の下部平面図であり、図21は図20の構成からの変形例を示す。
【0013】
スイッチド・リラクタンスモータ200はステータ210及びロータ214を備える。そのステータ210は、ロータ214に対向する表面(上面)のみが磁極面である。ロータ214は軸受を介してステータ210から伸びるモータ軸(回転中心軸)224に対して回転可能に接続して形成される。
【0014】
ステータ210は、モータ軸224から同一距離の位置にU字型に形成された複数のステータコア222が周方向に配設される。ステータコア222のU字型の凹部には励磁用のコイル216が巻かれる。ロータ214は、モータ軸224から同一距離にU字型に形成されたロータコア226が周方向に配設される。ロータコア226の磁極面は、ステータコア222の磁極面と、所定の間隙を介してステータコア222のU字型の両突端部を跨ぐように対向する。
【0015】
その際、図21に示すように、並置された2つのステータコア222に1つの励磁用のコイル16が共通に巻かれることで、スイッチド・リラクタンスモータ200は、磁極面積を大きくして回転トルクを高め、また、モータの厚さ対回転トルク比を向上して小型化を図っている。
【先行技術文献】
【特許文献】
【0016】
【特許文献1】特開2007−236130号公報
【特許文献2】特開2004−166354号公報
【発明の概要】
【発明が解決しようとする課題】
【0017】
図18に示した特許文献1に記載の従来例モータ(アキシャルギャップモータ110)の場合、第1に、ステータ111は、外径側磁極115と内径側磁極116に、すなわち、全ての磁極に、ステータ巻線114がそれぞれ巻かれる。しかも、外径側磁極115と内径側磁極116は平面視が内径側程先細りになる楔形であり、外径側磁極115と内径側磁極116に、異なる形状にステータ巻線114のコイルを巻く必要がある。そのため、コイル数が多く、コイル質量が大きくなるとともに、組付けが容易でなく、製造コストが高くなる。第2に、ステータ111の各磁極(外径側磁極115、内径側磁極116)がコイルにより囲まれる構成であるので、とくにモータ軸113との関係からコイルスロット幅が小さくなる内径側では磁極面積の確保が困難になり、アキシャルギャップモータ110の小型化(小径化)が制限される。
【0018】
図19に示した特許文献1に記載の従来例モータ(アキシャルギャップモータ145)の場合、ステータ146のコイル数は図18の構成より少なくなるが、ステータコア147の径方向中央部に設けられた溝147aに、ステータ巻線114の縦(モータ軸方向)巻きのコイルが配置され、ステータ146の表面側、裏面側それぞれの径方向の磁路が、図19(b)の矢印線からも明らかなようにステータコア147の共通のステータヨークを通るため、ステータヨークが十分な磁路断面積を確保できるようにステータコア147を厚くしなければならず、ステータコア147がモータ軸方向に厚くなって重くなる。
【0019】
図20、図21に示した特許文献2に記載の従来例モータ(スイッチド・リラクタンスモータ200)の場合は、ステータ210の径方向の中間の磁極(U字型に形成された各ステータコア222)毎にコイルが巻かれるので、それらの磁極の周方向の両側にコイルエンドが生じる。そして、図20、図21には駆動相の一相分の磁極(周方向に90度間隔の4磁極)のみが示されているが、実際には駆動相が3相であれば、周方向に30度間隔で各相の磁極が隣接して存在し、それらの磁極にも同じようにコイルが巻かれて両側にコイルエンドが生じるので、各コイルのコイルエンドのスペースを確保してコイルエンドどうしの干渉等を防止するため、中間の各磁極の周方向の幅を削って狭くしたり、中間の各磁極の面積を小さくする必要があり、その結果、モータトルクが減少する。
【0020】
そして、この種のアキシャルギャップモータにおいては、ステータの磁極面が、表裏の両面であるか、いずれか一方の面(片面)であるかを問わず、小型・軽量化および組付の容易化を図りつつ、モータトルクを一層増大することが望まれているが、そのための最良の構造は発明されていない。
【0021】
本発明は、アキシャルギャップモータにおいて、小型・軽量化および組付の容易化を図りつつ、モータトルクを増大することができる画期的な構造を提供することを目的とする。
【課題を解決するための手段】
【0022】
上記した目的を達成するために、本発明のアキシャルギャップモータは、表裏の両面の少なくともいずれか一方が磁極面であるステータと、磁極面が前記ステータの磁極面に対向したロータとを備え、前記ステータは、外径側磁極と内径側磁極との間に少なくとも一つの中間磁極を有する分割磁極構造の径方向に楔形の各ステータコアを周方向に配設して形成され、前記外径側磁極、前記内径側磁極および前記中間磁極が前記中間磁極のコイルにより一括して励磁されることを特徴としている(請求項1)。
【0023】
また、本発明のアキシャルギャップモータは、前記ステータの表裏の両面が磁極面であり、前記コイルは、略鞍型の形状であり、前記ステータの表裏の前記中間磁極を囲むように前記ステータコアに設けられることを特徴としている(請求項2)。
【0024】
さらに、本発明のアキシャルギャップモータは、前記ステータの表裏の両面が磁極面であり、前記コイルは、中央部が前記ステータの表裏方向に屈曲したクランク状であり、前記ステータの隣り合う異なる駆動相のステータコアのいずれか一方の表面側の前記中間磁極と他方の裏面側の前記中間磁極を囲むように、前記隣り合うステータコアに跨って設けられることを特徴としている(請求項3)。
【0025】
また、本発明のアキシャルギャップモータは、前記中間磁極が、前記外径側磁極および前記内径側磁極より周方向にずれていることを特徴としている(請求項4)。
【0026】
さらに、本発明のアキシャルギャップモータは、前記ステータの各ステータコアが磁気的に独立した状態で周方向に配設され、前記ロータの各ロータコアが磁気的に独立した状態で周方向に配設されていることを特徴としている(請求項5)。
【発明の効果】
【0027】
請求項1に係る本発明のアキシャルギャップモータの場合、ステータの表裏の両面又は片面の磁極面において、周方向に配設されたステータコアは、外径側磁極と内径側磁極との間に少なくとも一つの中間磁極を有し、それらの磁極は中間磁極のコイルにより一括して励磁される。
【0028】
この場合、各ステータコアの分割磁極毎にコイルを設けなくてよく、コイルの個数や量を低減しつつ、コイルの通電励磁で発生した磁束の磁路を、中間磁極からロータを通って外径側磁極に戻る磁路と、中間磁極からロータを通って内径側磁極に戻る磁路に分散させて二次元平面状に広げることができ、ステータを薄型化してモータトルクを増大することができる。しかも、ステータに設けるコイルの個数や量が少なく、組付けも容易である。
【0029】
したがって、小型・軽量化および組付の容易化を図りつつ、モータトルクを増大することができる画期的な構造のアキシャルギャップモータを提供できる。
【0030】
請求項2に係る本発明のアキシャルギャップモータの場合、ステータの表裏の両面が磁極面であり、ステータに周方向に配設されるステータコアの前記コイルは、略鞍型の形状である。そして、ステータコアを挟むようにして前記コイルを設けると、前記コイルがステータコアの表側および裏側の中間磁極を囲み、前記コイルの通電により、ステータコアの表裏の外径側磁極、内径側磁極および中間磁極が一括して励磁される。
【0031】
この場合、ステータコアの表裏の両面の中間磁極を囲む1つのコイルによってステータコアの表裏の外径側磁極、内径側磁極および中間磁極が一括して励磁される。そのため、ステータの表裏の両面を磁極面とする場合に、ステータに設けるコイルの個数や量を大幅に低減しつつ、ステータを薄型化してモータトルクを増大することができ、しかも、組付けも容易である。
【0032】
さらに、略鞍型のコイルを設けることにより、ステータコアの周方向の片側は、前記コイルの開口縁に望み、巻き線が存在しない。そのため、ステータの表裏の中間磁極の周方向の磁極幅は、中間磁極の全周をコイルが囲む場合に比して巻き線による制約が半減して広くなり、ステータの表裏の中間磁極の十分な磁極面積を確保しつつ、前記コイルのコイル量を多くして大きな起磁力(アンペアターン)を発生し、モータトルクを一層増大することができる。
【0033】
したがって、ステータの表裏の両面を磁極面とする場合に、一層の小型・軽量化および組付の容易化を図りつつ、モータトルクを増大することができる画期的な構造のアキシャルギャップモータを提供できる。
【0034】
請求項3に係る本発明のアキシャルギャップモータの場合、ステータの表裏の両面が磁極面であり、前記コイルは、中央部がステータの表裏方向に屈曲したクランク状であって、隣り合うステータコアに跨って設けられ、両ステータコアのいずれか一方の表側および他方の裏側の中間磁極を囲む。
【0035】
そのため、前記コイルの通電により、ステータに径方向に配設された各ステータコアは、表側の磁極面の駆動相の外径側磁極、内径側磁極および中間磁極が一括して励磁され、同時に、表側より周方向にずれた裏側の磁極面の同じ駆動相の外径側磁極、内径側磁極および中間磁極が一括して励磁される。このとき、表側の磁極面の磁束の磁路を形成するステータコアと、同時に裏側の磁極面の磁束の磁路を形成するステータコアとが異なり、各ステータコアを、ステータの表裏それぞれの片面の磁束が異なるタイミングで通る。そのため、各ステータコアの厚みを、ステータの表裏の磁束が同じステータコアを表裏から同じタイミングに通る場合に比して一層薄くすることができ、ステータの表裏の両面を磁極面とする場合に、さらにステータを薄型化してモータトルクを増大することができる。
【0036】
したがって、ステータの表裏の両面を磁極面とする場合に、一層の小型・軽量化および組付の容易化を図りつつ、モータトルクを増大することができる画期的な構造の他の例のアキシャルギャップモータを提供できる。
【0037】
請求項4に係る本発明のアキシャルギャップモータの場合、中間磁極が外径側磁極および内径側磁極より周方向にずれることにより、中間磁極を囲むコイルがより組付け易くなって組付性が一層向上し、さらには、中間磁極の周方向の少なくとも片側(好ましくはコイルエンド側)のコイル端面(側面)を外径側磁極および内径側磁極の周方向の端面(側面)と面一にすることが可能になる。
【0038】
請求項5に係る本発明のアキシャルギャップモータの場合、ステータの各ステータコアおよびロータの各ロータコアが磁気的に独立した状態で周方向に配設されるため、各ステータコアおよび各ロータを不要な磁束が通らず、とくに請求項3のコイルがクランク状で隣り合うステータコアに跨って設けられる場合に好適である。
【図面の簡単な説明】
【0039】
【図1】第1の実施形態のアキシャルギャップモータの組立状態の断面図である。
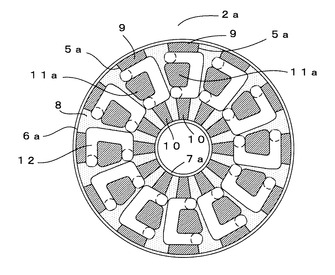
【図2】図1のステータの磁極面の説明図である。
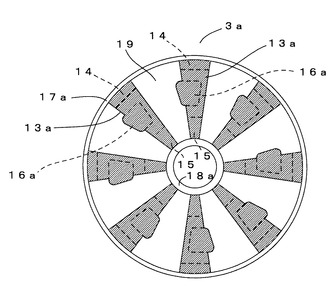
【図3】図1のロータの磁極背面の説明図である。
【図4】図2のステータの磁極の組付けの説明図である。
【図5】第2の実施形態のアキシャルギャップモータの組立状態の断面図である。
【図6】図5のステータの磁極面の説明図である。
【図7】図5のロータの磁極背面および磁極面の説明図である。
【図8】図6のステータの磁極の組付けの説明図である。
【図9】第3の実施形態のアキシャルギャップモータの組立状態の断面図である。
【図10】図9のステータの磁極面の説明図である。
【図11】図9のロータの磁極背面および磁極面の説明図である。
【図12】第4の実施形態のアキシャルギャップモータの組立状態の断面図である。
【図13】図12のステータの磁極面の説明図である。
【図14】図12のロータの磁極背面および磁極面の説明図である。
【図15】図12のステータの磁極の組付けの説明図である。
【図16】図12のアキシャルギャップモータのステータの表裏の磁極の説明図である。
【図17】図12のアキシャルギャップモータの励磁状態を示す断面図である。
【図18】従来モータの一例の説明図である。
【図19】従来モータの他の例の説明図である。
【図20】従来モータのさらに他の例の説明図である。
【図21】図19の従来モータの変形例の説明図である。
【発明を実施するための形態】
【0040】
つぎに、本発明をより詳細に説明するため、実施形態について、図1〜図17を参照して詳述する。なお、それらの図面においては、断面を示す斜線(ハッチング)等は適宜省略している。
【0041】
(第1の実施形態)
ステータの磁極面が片面である第1の実施形態について、図1〜図4を参照して説明する。
【0042】
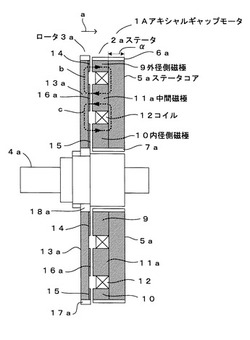
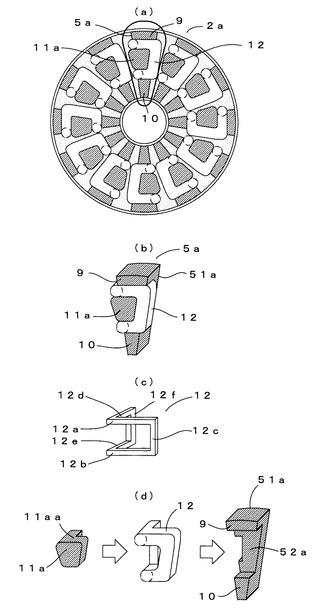
図1は本実施形態のアキシャルギャップモータ1Aの切断側面図であり、図2は図1の矢印線aの矢視方向から見たアキシャルギャップモータ1Aのステータ2aの磁極面の平面図、図3は図1の矢印線aの矢視方向から見たアキシャルギャップモータ1Aのロータ3aの磁極背面の平面図である。
【0043】
これらの図面に示すように、アキシャルギャップモータ1Aは、非磁性体(ステンレス等)のモータ軸4aに軸着された円盤状のロータ3aと、モータ軸4aが中心孔を貫通した円盤状のステータ2aとを備える。ステータ2aとロータ3aは磁極面が対向している。
【0044】
(ステータ2a)
アキシャルギャップモータ1Aが3相駆動の場合、ステータ2aは、径方向に楔形の形状の12個のステータコア5aを周方向に等間隔に並べ、この状態で同心状の外周保持リング6aと内周保持リング7aの間に嵌入して形成される。このとき、各ステータコア5aは周方向に30度の間隔で隙間を設けて配設され、周方向に順に各相の磁極のコアを形成する。そして、各ステータコア5aを磁気的に独立した状態に保持して各ステータコア5aを不要な磁束が通らないようにするため、各ステータコア5a間の隙間には例えば樹脂8を充填し、また、リング6a、7aの少なくともいずれか一方を非磁性体で形成することが好ましい。
【0045】
各ステータコア5aは、外径側磁極9と内径側磁極10との間に少なくとも一つの中間磁極11aを有する分割磁極構造であり、本実施例では中間磁極11aは1個である。この中間磁極11aは、後述するようにステータコア5aに組付けて設けられる。さらに、中間磁極11aには、各ステータコア5aそれぞれの外径側磁極9、内径側磁極10および中間磁極11aを一括して励磁するカセット式のコイル12が取り付けられて設けられる。
【0046】
励磁相のコイル12が発生した磁束は、通電により図1の破線の矢印線b、cに示すように、中間磁極11aからロータ3a、外径側磁極9を通って中間磁極11aに戻る磁束および、中間磁極11aからロータ3a、内径側磁極10を通って中間磁極11aに戻る磁束を形成する。
【0047】
図4は中間磁極11aおよびコイル12の組付けを示し、(a)はステータ2aの磁極面の注目するステータコア(以下、注目コアという)5aを太い実線で囲んで示し、(b)は注目コア5aの斜視図、(c)は注目コア5aに設けられるコイル12の斜視図、(d)は中間磁極11aおよびコイル12の組付けの説明図である。
【0048】
本実施形態の場合、ステータ2aの片面(表面)が磁極面であるので、各ステータコア5aの例えば圧粉磁心で形成される平面視楔形のコア本体51aは、磁極9、10の部分が表側に突起し、磁極9、10を繋ぐヨーク部52aは図1に示すように厚みαが薄くなって凹んでいる。
【0049】
ヨーク部52aの周方向の片側は中間磁極11aの基部11aaが嵌るように一部が凹状に切り取られている。磁極9、10、11aの磁極面積は略等しく、中間磁極11aは裏面側に基部11aaが突出したL字状である。
【0050】
コイル12は、磁極9、11a間および磁極11a、10間の隙間に嵌る周方向に伸びた横辺12a、12bと、横辺12a、12bの片側を繋ぐ径方向の縦辺12cと、横辺12a、12bの反対の片側からヨーク部52aの厚み方向(モータ軸方向)に折れ曲がった折曲辺12d、12eと、折曲辺12d、12eの端部を繋ぐ径方向の縦辺12fのループをめぐるように、エナメル線を適当回数巻回して形成されたカセットコイルタイプのL型コイルである。なお、コイルの巻き始め部と巻き終り部は引き出し線の取り回し等を考慮して、例えば縦辺12c側に形成される。
【0051】
そして、組付け時、図4(d)の矢印の順に、中間磁極11aをコイル12の内側に嵌め、この状態でコイル12をコア本体51aに取り付けると、磁極11aの基部11aaはヨーク部52aの周方向の片側の凹部に嵌り、コイル12の横辺12a、12bおよび磁極11aがヨーク部52aを覆うように嵌り、コイル12および磁極11aをコア本体51aに嵌め込む簡単な作業で注目コア5が形成される。他のステータコア5aも同様の簡単な作業で形成される。そのため、ステータ2aの組み付けが容易に行なえる。
【0052】
また、各ステータコア5aのコイル12は、ステータコア5aの周方向の片側にだけ縦辺12cの径方向のエナメル線が通るコイル幅を必要とし、ステータコア5aの周方向の反対の開口した片側にはコイル幅が不要であるので、両側にコイル幅が必要なコイル構造の場合に比して、中間磁極11aの磁極面積を広く取ることができ、モータトルクがアップする。
【0053】
(ロータ3a)
ステータ2aに対向するロータ3aは図3に示すように、ステータコア5aと同様の形状の例えば8個のロータコア13aを、周方向に等間隔(45度間隔)に配設して形成される。ロータコア13aは、ステータコア5aの磁極9、10に対向する位置に、磁極9、10と同様の外径側磁極14、内径側磁極15を有し、磁極14、15間に、ステータコア5aの中間磁極11aに対応する中間磁極16aを有する分割磁極構造である。
【0054】
そして、各ロータコア13aは、ステータ2aの外周保持リング6a、内周保持リング7aに相当する同心状の外周保持リング17、内周保持リング18の間に嵌入して固定される。なお、回転するロータ3aは極力軽量であることが好ましい。そこで、各ロータコア13a間の周方向の隙間は、樹脂を充填してもよいが、空間(ギャップ)19である。また、リング17a、18aは少なくともいずれか一方が非磁性体で形成されることが好ましい。
【0055】
そして、ロータ3aの各ロータコア13aは、略各ステータコア5aからコイル12を除いた構造であり、磁極14、15、16aの厚みは磁極9、10、11aより薄い。なお、磁極14、15、16aは表面に磁石を設けてもよい。
【0056】
上記構成のアキシャルギャップモータ1Aは、例えば周知のスイッチドリラクタンスモータの制御と同様の制御により、ロータ3aとステータ2aが磁極の対向状態になる毎に通電相が切り替わって各相の中間磁極11aのコイル12が順に通電され、この通電により、励磁相のステータコア5aの外径側磁極9、内径側磁極10および中間磁極11aが一括して励磁され、ロータ3aとステータ2aの磁気的な吸引作用によりロータ3aが回転する。
【0057】
このアキシャルギャップモータ1Aは、前記したようにステータ2aの片面が磁極面であってロータ3aとステータ2aで構成される。そして、各相のステータコア5aが外径側磁極9、内径側磁極10および中間磁極11aの分割磁極構造であるので、ステータ2aの磁極からロータ3aを通ってステータ2aに戻る磁路が、磁極を分割しない構成の場合より短くなるのは勿論、中間磁極11aに設けた1個のコイル12により、そのステータコア5aの外径側磁極9、内径側磁極10および中間磁極11aが一括して励磁されるため、各ステータコア5aそれぞれの磁極9、10、11毎にコイル12のような励磁コイルを設けなくてよく、ステータ2aのコイルの個数や量(質量)を低減して組付け性を向上できる。しかも、コイル12の通電で発生した磁束の磁路を、図1の破線の矢印線b、cに示したように、中間磁極11aからロータ3aを通って外径側磁極9に戻る磁路、中間磁極11aからロータ3aを通って内径側磁極10に戻る磁路に分散させて二次元平面状に広げることができる。
【0058】
したがって、アキシャルギャップモータ1Aは、ステータ2aの厚み(ヨーク厚)が薄くなり、小型・軽量で大きなモータトルクを発生することができ、しかも、安価になる。その上、中間磁極11aが嵌め込み式であってコイル20がカセットタイプであるため、ステータ2aの組付けが容易であり、製造が容易で製造コストが一層安価になる。
【0059】
また、図2、図4等から明らかなようにコイル12は周方向の片側が開口している。そのため、中間磁極11aのコア本体51aへの嵌め込みの位置を適当に設定し、図2に示すように、中間磁極11aの周方向の位置を外径側磁極9および内径側磁極10に対してずらし、コイル12によって中間磁極11aの磁極面積が狭くならないようにしてコイル12の巻数の増加(トルクアップ)を図るとともに、その取付け等を容易にすることができる。その際、中間磁極11aに巻かれたコイル12が周方向に突出しないようにして、磁極9、10および、コイル12が巻かれた中間磁極11aの周方向の片側の面をいわゆる「面一」の状態にして合わせることも可能である。
【0060】
(第2の実施形態)
ステータの磁極面が両面である第2の実施形態について、図5〜図8を参照して説明する。
【0061】
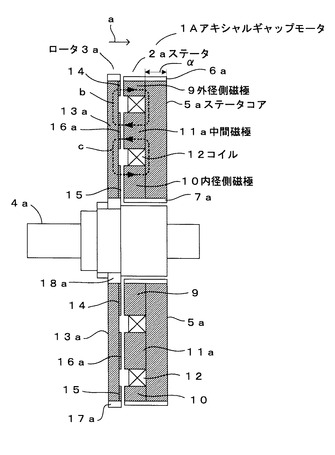
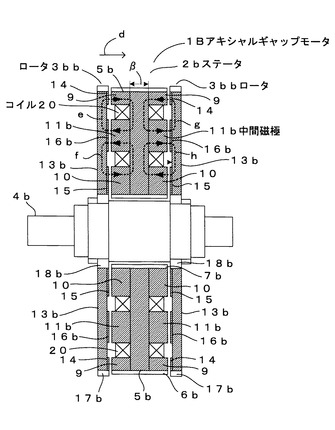
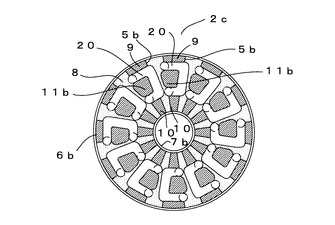
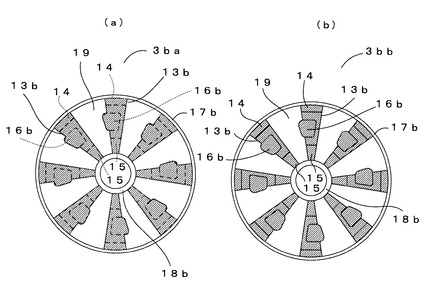
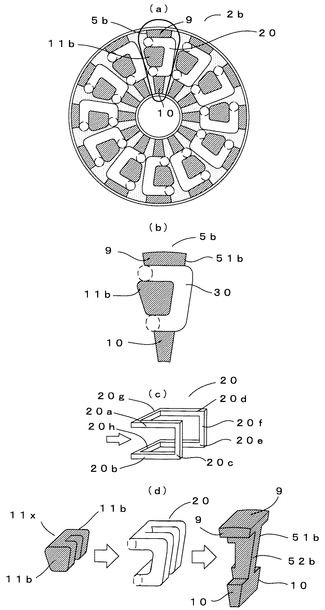
図5は本実施形態のアキシャルギャップモータ1Bの切断側面図であり、図6は図5の矢印線dの矢視方向から見たアキシャルギャップモータ1Bのステータ2bの表側の磁極面の平面図、図7の(a)、(b)は図6の矢印線dの矢視方向から見たアキシャルギャップモータ1Bのロータ3ba、3bbの磁極背面の平面図である。
【0062】
これらの図面に示すように、アキシャルギャップモータ1Bは、非磁性体のモータ軸4bに間隔を取って軸着された円盤状の2個のロータ3ba、3bbと、ロータ3ba、3bb間に配置されてモータ軸4bが中心孔を貫通した円盤状のステータ2bとを備える。そして、ロータ3baの磁極面がステータ2bの表側の磁極面に対向し、ロータ3bbの磁極面がステータ2bの裏面の磁極面に対向する。
【0063】
(ステータ2b)
そして、アキシャルギャップモータ1Bが、3相駆動であってステータ2bの表側と裏側の対称位置に磁極を配設して形成される場合、ステータ2bは、径方向に楔形の形状の12個のステータコア5bを周方向に等間隔に並べ、この状態で同心状の外周保持リング6bと内周保持リング7bの間に各ステータコア5bを嵌入して形成される。このとき、各ステータコア5bは周方向に30度の間隔で隙間を設けて配設され、周方向に順に各相の磁極のコアを形成する。そして、各ステータコア5bを磁気的に独立した状態に保持して各ステータコア5bを不要な磁束が通らないようにするため、ステータ2bの場合も、各ステータコア5b間の周方向の隙間には例えば樹脂8が充填される。また、リング6b、7bの少なくともいずれか一方は非磁性体で形成することが好ましい。
【0064】
各ステータコア5bは、表裏それぞれにおいて、ステータコア5aと同様の分割磁極構造であり、外径側磁極9と内径側磁極10との間に少なくとも一つの中間磁極11bを有する。本実施例の場合、磁極9、10間の中間磁極11bは1個である。中間磁極11bも後述するようにステータコア5bに組付けて設けられる。さらに、表裏の中間磁極11bの周囲には、表裏の外径側磁極9、内径側磁極10および中間磁極11bを一括して励磁する後述の鞍型のコイル20が装着されて設けられる。
【0065】
励磁相のコイル20が通電により発生する磁束は、図5の破線の矢印線e〜hに示すように、中間磁極11bからロータ3ba又はロータ3bb、外径側磁極9を通って中間磁極11bに戻る磁束および、中間磁極11bからロータ3ba又はロータ3bb、内径側磁極10を通って中間磁極11bに戻る磁束に分散される。
【0066】
図8は中間磁極11bおよびコイル20の組付けを示し、(a)はステータ2bの例えば表側の磁極面の注目コア5bを太い実線で示し、(b)は注目コア5bの表側の平面図、(c)は注目コア5bに設けられるコイル20の斜視図、(d)は中間磁極11bおよびコイル20の組付けの説明図である。
【0067】
本実施形態の場合、ステータ2bの表裏の両面が磁極面であるので、各ステータコア5bは例えば圧粉磁心で形成される表裏の平面視が楔形のコア本体51bを備える。コア本体51bは、中央部の図5に示す厚みβのヨーク部52bにより表側および裏側に突出した磁極9、10の部分を一体に繋いだ形状である。
【0068】
ヨーク部52bには、表裏の中間磁極11bの片側を繋いだ形状の中間磁極片11xが、周方向の片側からヨーク部52bを挟むよう差し込まれて組み付けられる。この組み付けにより、ステータ2bの表裏において、中間磁極11bがステータコア5bの磁極9、10間に設けられる。
【0069】
コイル20は、略鞍型の形状であり、図4(c)の矢印に示す周方向の片側(紙面左側)が径方向に障害物のない開口状態であり、ステータコア5bを挟んでステータ2bの表裏の中間磁極11bを囲むようにステータコア5bに設けられる。
【0070】
さらに具体的に説明すると、コイル20は、表側の磁極9、11b間、磁極11b、10間の隙間に嵌る周方向に伸びた表側の横辺20a、20bと、横辺20a、20bの周方向の片端を繋ぐ縦片20cと、裏側の磁極9、11b間、磁極11b、10間の隙間に嵌る周方向に伸びた裏側の横辺20d、20eと、横辺20d、20eの周方向の片端を繋ぐ縦片20fと、ヨーク部52bの厚み方向(モータ軸方向)に伸びて横辺20a、20dの反対側の片端を繋ぐ辺20gと、ヨーク部52bの厚み方向(モータ軸方向)に伸びて表裏の横辺20b、20eの反対側の片端を繋ぐ辺20hのループをめぐるように、エナメル線を適当回数巻回して形成されたカセットコイルタイプの鞍型コイルである。なお、各辺20a〜20hのコーナー部分は、図8(c)に示すように角張っていてもよいが、エナメル線の曲げRが制約される場合等には丸みを帯びるようにすればよい。また、コイルの巻き始め部および巻き終り部は引き出し線の取り回し等を考慮して、例えば縦辺20c、20f側に形成される。
【0071】
そして、組付け時、図8(d)の矢印の順に、中間磁極片11xをコイル20の内側に嵌め、この状態で中間磁極片11xがコア本体51bを挟むようにコイル20をコア本体51bに取り付けることにより、ステータ2bの表側では、コイル20の辺20a〜20cおよび磁極11bがヨーク部52bを覆うように嵌り、ステータ2bの裏側では、辺20d〜20fおよび磁極11bがヨーク部52bを覆うように嵌り、コイル20および中間磁極片11xをコア本体51bに嵌め込む簡単な作業で注目コア5bが形成される。他のステータコア5bも同様の簡単な作業で形成される。そのため、ステータ2bの組み付けが容易に行なえる。
【0072】
そして、形成されたステータ2bは、各ステータコア5bの鞍型のコイル20が、ステータコア5bの周方向の片側にだけ径方向のエナメル線が通る辺20c、20fのコイル幅を必要とし、ステータコア5bの周方向の反対の片側にはコイル幅が不要であるので、両側にコイル幅が必要な構造の場合に比して、中間磁極11bの磁極面積を広く取ることができ、モータトルクがアップする。
【0073】
(ロータ3ba、3bb)
ステータ2bの両面側のロータ3ba、3bbは図7(a)、(b)に示すように、第1の実施形態のロータ3aと同様の構成であり、それぞれ例えば8個のロータコア13bを、周方向に等間隔(45度間隔)に配設して形成される。ロータコア13bは、ステータコア5bの表裏の磁極9、10に対向する位置に、磁極9、10と同様の外径側磁極14、内径側磁極15を有し、磁極14、15間に、ステータコア5bの中間磁極11bに対応する中間磁極16bを有する磁極構造である。
【0074】
そして、各ロータコア13bは、図3のロータ3aのリング17a、18aに対応する同心状の外周保持リング17b、内周保持リング18bの間に嵌入して固定される。なお、回転するロータ3ba、3bbは極力軽量であることが好ましい。そこで、本実施形態の場合も、各ロータコア13b間の周方向の隙間は、樹脂を充填してもよいが、空間(ギャップ)19である。また、リング17b、18bは少なくともいずれか一方が非磁性体で形成されることが好ましい。
【0075】
そして、ロータ3ba、3bbの各ロータコア13bも、略、各ステータコア5bからコイル20を除いた構造であり、磁極14、15、16bの厚みは磁極9、10、11bより薄い。なお、磁極14、15、16bは表面に磁石を設けてもよい。
【0076】
上記構成のアキシャルギャップモータ1Bも、例えば周知のスイッチドリラクタンスモータの制御と同様の制御により、ロータ3ba、3bbとステータ2bが磁極の対向状態になる毎に通電相が切り替わって各相の中間磁極11bのコイル20が順に通電され、この通電により、励磁相のステータコア5bの表裏の外径側磁極9、内径側磁極10および中間磁極11bが一括して励磁され、ロータ3ba、bbとステータ2aの磁気的な吸引作用によりロータ3ba、bbが回転する。
【0077】
このアキシャルギャップモータ1Bは、ステータ2bの両面が磁極面であってステータ2bの両面のロータ3ba、3bbとステータ2bで構成される。そして、ステータ2bの各ステータコア5bの表裏の磁極構造が、外径側磁極9、内径側磁極10および中間磁極11bの分割磁極構造であるので、ステータ2bの表裏それぞれの磁極からロータ3ba、3bbを通ってステータ2bに戻る磁路が、磁極を分割しない構成の場合より短くなるのは勿論、中間磁極11bに装着された鞍型コイルの1個のコイル20により、ステータコア5bの表裏両面の外径側磁極9、内径側磁極10および中間磁極11bが一括して励磁されるため、励磁に必要なコイルの数や量(質量)を大幅に低減して組付け性を向上できる。しかも、コイル20の通電で発生した磁束の磁路を、図5の破線の矢印線e〜hに示すように、ステータ2bの表裏において、中間磁極11bからロータ3ba、3bbを通って外径側磁極9に戻る磁路、中間磁極11bからロータ3ba、3bbを通って内径側磁極10に戻る磁路に分散させて二次元平面状に広げることができる。
【0078】
したがって、アキシャルギャップモータ1Bも、ステータ2bのヨークの厚みが薄く、極めて小型・軽量で大きなモータトルクを発生することができる。しかも、安価に製造できる。その上、中間磁極11bが嵌め込み式であってコイル20がカセットタイプであるため、ステータ2bの組付けが容易であり、製造が容易で製造コストが一層安価になる。
【0079】
また、図6、図8等から明らかなようにコイル20も周方向の片側が開口している。そのため、中間磁極11bのコア本体51bへの嵌め込みの位置を適当に設定し、図6に示すように、中間磁極11bの周方向の位置を外径側磁極9および内径側磁極10に対してずらし、コイル20によって中間磁極11bの磁極面積が狭くならないようにしてコイル20の巻数の増加(トルクアップ)を図ったり、その取付け等を容易にすることができる。その際、中間磁極11bに巻かれたコイル20が周方向に突出しないようにして、磁極9、10およびコイル20が巻かれた中間磁極11bの周方向の片側の面をいわゆる「面一」の状態にして合わせることも可能である。
【0080】
(第3の実施形態)
第2の実施形態の変形例である第3の実施形態について、図9〜図11を参照して説明する。
【0081】
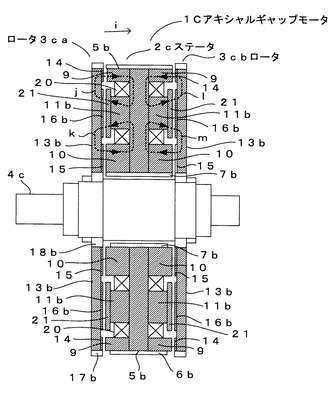
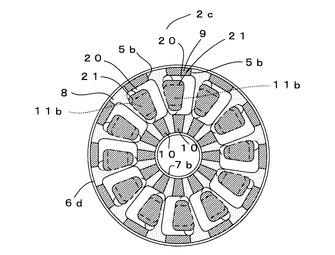
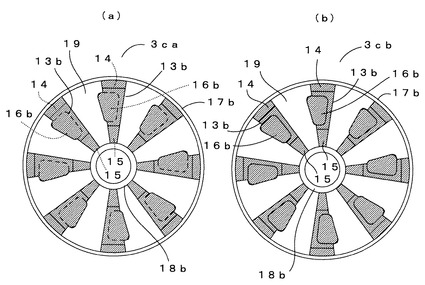
図9は本実施形態のアキシャルギャップモータ1Cの切断側面図であり、図10は図9の矢印線iの矢視方向から見たアキシャルギャップモータ1Cのステータ2cの表側の磁極面の平面図、図11(a)、(b)は図9の矢印線iの矢視方向から見たアキシャルギャップモータ1Cのロータ3ca、3cbの磁極背面および磁極面の平面図である。
【0082】
これらの図面に示すように、アキシャルギャップモータ1Cは、非磁性体のモータ軸4cに間隔を取って軸着された円盤状の2個のロータ3ca、3cbと、ロータ3ca、3cb間に配置されてモータ軸4cが中心孔を貫通した円盤状のステータ2cとを備える。そして、ロータ3caの磁極面がステータ2bの表側の磁極面に対向し、ロータ3cbの磁極面がステータ2bの裏面の磁極面に対向する。
【0083】
そして、アキシャルギャップモータ1Cのロータ3ca、3cb、ステータ2cは、第2の実施形態のアキシャルギャップモータ1Bのロータ3ba、3bb、ステータ2bに対応し、アキシャルギャップモータ1Cがアキシャルギャップモータ1Bと異なる点は、図9、図10に示したように、ステータ2cにおいて、各ステータコア5bの表裏の中間磁極11bの表面に蓋板状のフランジ板21を設けた点である。なお、フランジ板21は、例えば圧粉磁心により、予め中間磁極11bと一体に形成してもよく、中間磁極11bと別体に形成しコイル20を設けた後に中間磁極11bに接着するようにしてもよい。
【0084】
ロータ3ca、3cbは、図11(a)、(b)に示すように、中間磁極11bに対応する磁極16bがフランジ板21に合わせて外径方向および内径方向に延長されている。 本実施形態のアキシャルギャップモータ1Cは、ステータ2cの表裏の各中間磁極11bの磁極面がフランジ板21により外径方向および内径方向に延長され、各中間磁極11bの磁極面積が拡大し、併せて、ロータ3ca、3cbの対応する磁極16bの磁極面積も拡大し、磁束が図9の破線の矢印線j〜mに示す磁路を通る。この場合、アキシャルギャップモータ1Cは、磁気抵抗が小さくなってモータトルクが一層増大する利点がある。
【0085】
(第4の実施形態)
ステータの磁極面が両面である第4の実施形態について、図12〜図17を参照して説明する。
【0086】
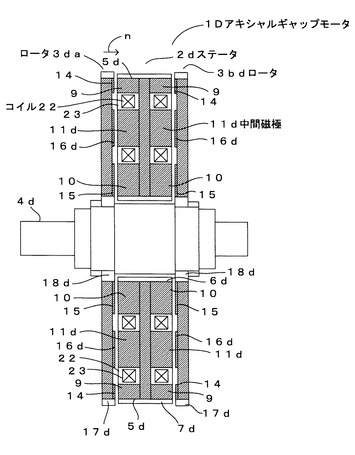
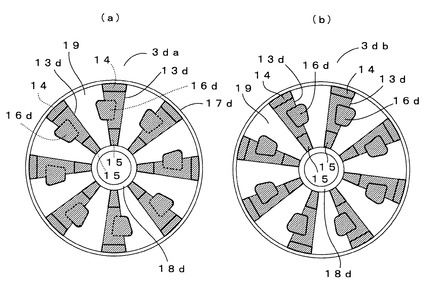
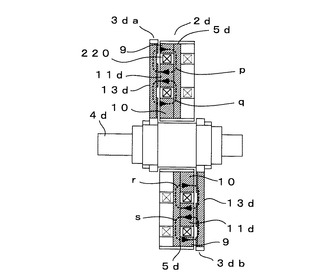
図12は本実施形態のアキシャルギャップモータ1Dの組立状態の切断側面図、図13は図12の矢印線nの矢視方向から見たアキシャルギャップモータ1Dのステータ2dの表側の磁極面の平面図、図14の(a)、(b)は図12の矢印線nの矢視方向から見たアキシャルギャップモータ1Dのロータ3da、3dbの磁極背面および磁極面の平面図である。
【0087】
これらの図面に示すように、アキシャルギャップモータ1Dも、第2の実施形態のアキシャルギャップモータ1Bと同様、非磁性体のモータ軸4dに間隔を取って軸着された円盤状の2個のロータ3da、3dbと、ロータ3da、3bb間に配置されてモータ軸4dが中心孔を貫通した円盤状のステータ2dとを備える。そして、ロータ3daの磁極面がステータ2dの表側の磁極面に対向し、ロータ3dbの磁極面がステータ2dの裏面の磁極面に対向している。
【0088】
(ステータ2d)
アキシャルギャップモータ1Dが3相駆動の場合、ステータ2dは、径方向に楔形の形状の12個のステータコア5dを周方向に等間隔に並べた状態で同心状の外周保持リング6dと内周保持リング7dの間に嵌入して形成される。このとき、各ステータコア5dは周方向に30度の間隔で隙間を設けて配設され、周方向の順に各相の磁極のコアを形成する。
【0089】
また、アキシャルギャップモータ1Dの場合、必ず各ステータコア5dを磁気的に独立した状態にする必要があるので、各ステータコア5d間の周方向の隙間には例えば樹脂8が充填される。また、リング6d、7dは少なくともいずれか一方が非磁性体で形成される。
【0090】
各ステータコア5dは、第2の実施形態のステータコア5bと同様の分割磁極構造であり、表裏それぞれにおいて、外径側磁極9と内径側磁極10との間に少なくとも一つの中間磁極11dを有する。本実施例の場合、磁極9、10間の中間磁極11dは1個である。
【0091】
ステータ2dの表裏の各中間磁極11dには、後述するクランク状のコイル22が、表側の磁極面のステータコア5dの中間磁極11dとその隣のステータコア5dの裏側の磁極面のステータコア5dの中間磁極11dとを囲むように装着される。そのため、駆動3相をU、V、Wとすると、例えばU相の各コイル22の通電により、90度間隔の各ステータコア5dの表側の外径側磁極9、内径側磁極10および中間磁極11bがU相の磁極として一括励磁され、同時に、それらのステータコア5dの隣の各ステータコア5dの裏側の外径側磁極9、内径側磁極10および中間磁極11bもU相の磁極として一括励磁される。なお、V相、W相の各コイル12dの通電の場合も同様である。
【0092】
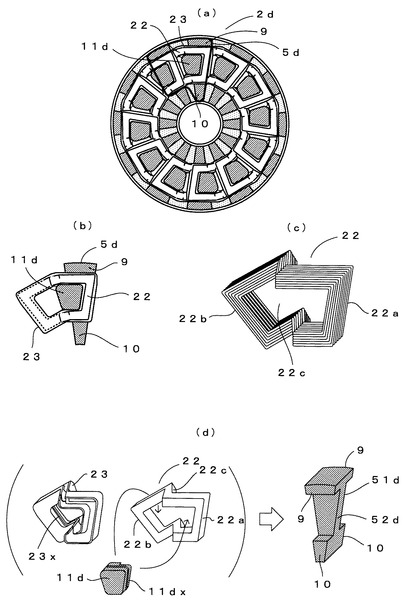
中間磁極11dおよびコイル22について、図15を参照してさらに詳述する。
【0093】
図15は中間磁極11dおよびコイル22の組付けを示し、(a)はステータ2dの例えば表側の磁極面を示し、注目コア5dおよびこのコア5dに設けられるコイル22を実線で囲んで示している。(b)は(a)の実線で囲まれた注目コア5dおよびコイル22を取り出して示した平面図、(c)はコイル22の斜視図、(d)は中間磁極11dおよびコイル22組付けの説明図である。
【0094】
ステータ2dの表裏の両面が磁極面であるので、各ステータコア5dは例えば圧粉磁心で形成された表裏の平面視が楔形のコア本体51dを備える。コア本体51dは、径方向中央のヨーク部52dにより、表側および裏側に突出した磁極9、10の部分を一体に繋いだ形状である。
【0095】
コイル22は、注目コア5dの表側の中間磁極11dを囲む平面視コ字型(表側から見て)の表側部分22aと、反時計方向に隣のステータコア5dの裏側の中間磁極11dを囲む平面視コ字型(裏側から見て)の裏側部分22bと、表側部分22aと裏側部分22bとをループ状に繋ぐ折曲部分22cのループをめぐるように、エナメル線を適当回数巻回して形成されたカセットコイルタイプのクランク状のコイルである。
【0096】
そして、コイル22は略同形状のインシュレータ23のケース凹部に収容される。また、コイル22の表側部分22a、裏側部分22bそれぞれが囲む空間部分に、第1の実施形態の中間磁極11aと略同じ形状、大きさの中間磁極11dがそれぞれ嵌め込んで取り付けられる。さらに、中間磁極11dが取り付けられたインシュレータ23は、コイル22の表側部分22aが、注目コア5dのコア本体51dの表側のコア部分52dに嵌め付けられる。その後、この状態で各ステータコア5dが周方向に配設されると、コイル22の裏側部分22bが隣のステータコア5のコア本体51dのコア部52dに嵌め付けられる。
【0097】
その結果、インシュレータ23に収容されて中央部がステータ2dの表裏方向に屈曲したクランク状の各コイル22は、ステータ2dの隣り合う異なる駆動相のステータコア5dのいずれか一方の表面側の中間磁極11dと他方の裏面側の中間磁極11dを囲むように、隣り合うステータコア5dに跨って設けられる。この場合、中間磁極11dが嵌め付けられたコイル22をコア本体52に嵌め込む簡単な作業でステータコア5d、中間磁極11dおよびコイル22の組付けが行なえ、組付け性が向上する。なお、図15に示すように、中間磁極11dのインシュレータ23と接する周面にはモータ軸方向に垂直な横溝状の溝11dxが形成され、インシュレータ23の内側には溝11dxに嵌る線状の凸部23xが形成されている。そのため、組付け時、溝11dxに凸部23xが嵌ることで簡単に位置決めが行なえるとともに、中間磁極11dを確実に保持することができる。
【0098】
そして、上記の組付けによって形成されたステータ2dは、各相のコイル22が順に通電されることにより、駆動相のコイル22の表側部分22aが中間磁極11dを囲むステータコア5dの表側の磁極面の外径側磁極9、内径側磁極10および中間磁極11dが一括して励磁され、同時に、同じコイル22の裏側部分22aが中間磁極11dを囲む隣のステータコア5dの表側の磁極面の外径側磁極9、内径側磁極10および中間磁極11dが一括して励磁される。そのため、励磁に必要なコイルの数や量(質量)を大幅に低減して組付け性を向上できる。なお、ステータ2dの表側と裏側の駆動相の磁極位置は周方向にずれる。
【0099】
また、ステータ2dの場合、表裏それぞれにおいて、ステータコア5dの周方向の片側にのみ径方向のエナメル線が通るコイル幅を必要とし、ステータコア5bの周方向の反対の開口した片側はコイル幅が不要であるので、両側にコイル幅が必要な構造の場合に比して、必要なコイル幅が半減し、中間磁極11dの磁極面積を広く取ることができ、モータトルクがアップする。なお、ステータ2dの場合、コイル22の取り付け等を考慮して表側の中間磁極11dと裏側の中間磁極11dとは周方向に互いに近づく方向にずれる。
【0100】
(ロータ3da、3db)
ステータ2dの両面側のロータ3da、3dbは図14(a)、(b)に示したように、第2の実施形態のロータ3bと同様の構成であり、それぞれ例えば8個のロータコア13dを、周方向に等間隔(45度間隔)に配設して形成されるが、上記したようにステータ2dの磁極位置が、表側と裏側とでずれるので、このずれに合わせて、ロータ3daの各ロータコア13dの配列と、ロータ3daの各ロータコア13dの配列とは、略30度ずれる。
【0101】
そして、ロータ3daの各ロータコア13dは、ステータコア5dの表側の磁極9、10に対向する位置に磁極9、10と同様の外径側磁極14、内径側磁極15を有し、磁極14、15間に中間磁極16dを有する磁極構造であり、同様に、ロータ3dbの各ロータコア13dは、ステータコア5dの裏側の磁極9、10に対向する位置に磁極9、10と同様の外径側磁極14、内径側磁極15を有し、磁極14、15間に中間磁極16dを有する磁極構造である。
【0102】
また、ロータ3da、3dbそれぞれの各ロータコア13dは、同心状の外周保持リング17d、内周保持リング18dの間に嵌入して固定される。このとき、各ロータコア13dを極力軽くして磁気的に独立のものとするため、各ロータコア13d間の周方向の隙間は空間(ギャップ)19であり、リング16d、17dは少なくともいずれか一方が非磁性体で形成されている。
【0103】
図16(a)、(b)は上記のように構成された本実施形態のアキシャルギャップモータ1Dのステータ2dの表側、裏側の各ステータコア5dと励磁相U、V、Wとの対応例を示し、図17はアキシャルギャップモータ1Dの励磁状態を示す断面図であり、U相のコイル22が通電されたときに図16(a)、(b)のZ−Z線で切断し、そのときにステータ2d、ロータ3da、3dbの励磁されている部分を斜線(ハッチング)で示している。
【0104】
すなわち、ステータ2dの各ステータコア5dおよび、ロータ3da、3dbの各ロータコア16dは、いずれも磁気的に独立している。また、前記したようにステータ2dの表側と裏側で励磁される磁極が周方向にずれる。そのため、例えばU相のコイル22が通電されるU相励磁においては、U相のコイル22の表側部分22aに中間磁極11dが囲まれたステータコア5dの表側の外径側磁極9、内径側磁極10および中間磁極11dが一括して励磁され、同時に、U相のコイル22の裏側部分22aに裏側の中間磁極11dが囲まれたステータコア5dの裏側の外径側磁極9、内径側磁極10および中間磁極11dが一括して励磁される。V相、W相のコイル22が通電されるV相、W相の励磁の場合も同様である。
【0105】
この場合、ステータ2dのステータコア5dの表裏の磁極構造が、外径側磁極9、内径側磁極10および中間磁極11dの分割磁極構造であるので、ステータ2dの表裏それぞれの磁極からロータ3da、3dbを通ってステータ2dに戻る磁路が、磁極を分割しない構成の場合より短くなるのは勿論、隣り合うステータコア5dの表側と裏側の中間磁極11dに跨って装着された1個のコイル22により、ステータコア5bの表裏の両面の外径側磁極9、内径側磁極10および中間磁極11dが一括して励磁されるため、励磁に必要なコイルの数や量(質量)を大幅に低減して組付け性を向上できる。
【0106】
さらに、励磁相のコイル22の通電で発生した磁束の磁路は、図17の破線の矢印線p〜sに示すように、ステータ2bの表裏それぞれにおいて、中間磁極11dからロータ3da、3dbを通って外径側磁極9に戻る磁路、中間磁極11dからロータ3da、3dbを通って内径側磁極10に戻る磁路に分散させて二次元平面状に広げることができる。しかも、ステータ2dの表側の磁極面の磁束の磁路を形成するステータコア5dと、同時にステータ2dの裏側の磁極面の磁束の磁路を形成するステータコア5dとが異なり、ステータ2dの表裏それぞれの片面の磁束が、各ステータコア5dを異なるタイミングで通る。そのため、各ステータコア5dの厚みを、ステータ2dの表裏の磁束が同じタイミングに通る場合に比して一層薄くすることができる。そのため、ステータ2dを極めて薄型化してモータトルクを増大することができる。
【0107】
そして、本発明は上記した各実施形態に限定されるものではなく、その趣旨を逸脱しない限りにおいて上述したもの以外に種々の変更を行なうことが可能であり、例えば、各モータ1A〜1Dにおいて、ステータコア5a、5b、5dやロータコア13a、13b、13dの個数は12個、8個それぞれに限るものではない。また、駆動相数も3相に限るものではない。
【0108】
つぎに、外径側磁極9と内径側磁極10との間の中間磁極11a、11b、11dが2個以上であってもよく、この場合、コイル12、20、22は中間磁極11a、11b、11d毎に設ければよい。
【0109】
つぎに、ステータコア5a、5b、5cはステータ2a〜2cに周方向に等間隔に配設しなくてもよく、少なくとも1組の駆動相のステータコア5a〜5dをステータ2a〜2dに周方向に配設すればよい。その際、例えば3相駆動であれば、U、V、Wの各相の3つのステータコアを少なくとも1組用意し、それらを30度間隔や120度間隔で配設すればよい。
【0110】
つぎに、コイル12、20、22の形状等は各実施形態のものに限るものではなく、各コア5a〜5dやコイル12、20、22の支持(保持)手段等はどのようであってもよい。
【0111】
そして、本発明は、電気自動車や燃料電池車の駆動モータ等の種々の用途のアキシャルギャップモータに適用することができる。
【符号の説明】
【0112】
1A〜1D アキシャルギャップモータ
2a〜2d ステータ
3a、3ba、3bb、3ca、3cb、3da、3db ロータ
5a、5b、5d ステータコア
9 外径側磁極
10 内径側磁極
11a、11b、11d 中間磁極
12、20、22 コイル
16a、16b、16d ロータコア
【技術分野】
【0001】
本発明は、ロータとステータがモータ軸方向に対向して配置されるアキシャルギャップモータ(アキシャルギャップ構造のモータ)に関し、詳しくは、その小型・軽量化および組付の容易化に関する。
【背景技術】
【0002】
従来、電気自動車の駆動モータ等の用途があるこの種のアキシャルギャップモータにおいては、ステータの磁極を径方向の外径側(外周)と内径側(内周)に分割し、磁路を短くしてモータ損失を少なくすることが提案されている(例えば、特許文献1(段落[0010]−[0015]、[0029]−[0032]、図1、図5等)参照)。
【0003】
図18は前記のステータの磁極を径方向の外径側と内径側に分割したアキシャルギャップモータの一例を示し、(a)はロータのステータ側から見た平面説明図、(b)は(a)のB−B線に沿う断面図である。
【0004】
図18に示すように、この例のアキシャルギャップモータ110は、モータ軸(回転軸)113の方向に、ステータ111と、その表裏側にエアギャップ(隙間)aを設けて配置されたロータ112a、112bが設けられ、ステータ111の表裏の両面が磁極面である。そして、円盤状のロータ112a、112bは、モータ軸113に回転自在に支持されている。
【0005】
ステータ111は、ステータ巻線114を巻回した外径側ステータコア115と内径側ステータコア116が、同心円状に接近して、かつ、電気角を180度異ならせて配置され、周方向に等間隔に配設される各磁極が、それぞれモータ軸方向にコイルが巻かれた外径側と内径側磁極に分割し形成される。ロータ112a、112bは、ロータヨーク117a、117bと、ロータヨーク117a、117bのステータ111側に突設した、それぞれ複数個の外径側(外側)永久磁石118a及び内径側(内側)永久磁石118bとを有している。ロータヨーク117a、117bは、隔壁部119により磁気的に隔離された4つの区画を有している。外径側永久磁石118aは外径側ステータコア115に対応して配置され、内径側永久磁石118bは内径側ステータコア116に対応して配置されている。なお、外径側永久磁石118aと内径側永久磁石118bはステータ111に対向し、ロータの周方向及び径方向の隣り合うもの同士は異なった極性である。
【0006】
このアキシャルギャップモータ110は、図18(b)の矢印線の磁路rを、外径側ステータコア115及び内径側ステータコア116の回転軸方向磁束と、各ロータ112a、112bのロータ径方向磁束により形成し、図18(b)に示す各ロータ112a、112bの内径側永久磁石118bと外径側永久磁石118aの間の磁路r2を、内径側永久磁石118bと外径側永久磁石118aがロータ径方向に近接配置して最短距離を通るようにする。その結果、磁路r2をロータ外周縁に沿った磁路よりも確実に短くして、磁路rの長さを短くしてモータ損失を少なくしている。
【0007】
図19は前記のステータの磁極を径方向の外径側と内径側に分割したアキシャルギャップモータの他の例を示し、(a)はロータのステータ側から見た平面説明図、(b)は(a)のB−B線に沿う断面図である。
【0008】
この例のアキシャルギャップモータ145は、ステータ146が、ステータ巻線114を巻回した図18の外径側ステータコア115及びステータ巻線114を巻回した同図の内径側ステータコア116に代えて、ステータ巻線114を縦巻きした一つのステータコア147により形成されている。その他の構成及び作用はアキシャルギャップモータ110と同様であり、ステータ146の表裏の両面が磁極面である。
【0009】
そして、ステータコア147は、略等間隔の円環状に複数個配置され、各ステータコア47のステータ径方向中央部には147aが形成され、この溝147aに、縦(回転軸方向)巻きによりステータ巻線114が巻回されている。各ステータコア147の溝147aの形成部以外の端部は外側永久磁石118a、内側永久磁石118bに対向し、各永久磁石118a、118bは、ロータの周方向および径方向の隣り合うもの同士は異なった極性である。
【0010】
このアキシャルギャップモータ145は、図19(b)の矢印線に示すように、磁路rとして、ロータヨーク117bを通ってロータ112bの内側永久磁石118bへ向かうものと、ロータヨーク117aを通ってロータ112aの内径側永久磁石118bへ向かうものとを形成することで、アキシャルギャップモータ145の端面側を通る図19(a)の磁路r2をロータ外周縁に沿う場合よりも短くしてモータ損失を少なくしている。また、小さいスペースにおいてもステータ巻線114を巻回可能にしてアキシャルギャップモータ145の小型化を可能にしている。
【0011】
つぎに、アキシャルギャップモータの一例であるスイッチド・リラクタンスモータにおいて、U字型に屈曲された積層鋼板のコアを周方向に設けたステータおよびロータを備え、その際、ステータのコアを径方向に2個並べた構造に形成してこれらのコアに共通のコイルを巻き、磁極面積を2倍にしてモータの厚さに対する回転トルク比を向上し、その結果、モータの小型化(薄型化)を図ることが提案されている(例えば、特許文献2(段落[0021]―[0049]、図6、図9(d)等)参照)。
【0012】
図20および図21は上記構成のスイッチド・リラクタンスモータ200を示し、図20(a)は基本構成のモータ要部の上部平面図、図20(b)は(a)のA−A線で切断した断面図、図20(c)は同図(a)のモータ要部の下部平面図であり、図21は図20の構成からの変形例を示す。
【0013】
スイッチド・リラクタンスモータ200はステータ210及びロータ214を備える。そのステータ210は、ロータ214に対向する表面(上面)のみが磁極面である。ロータ214は軸受を介してステータ210から伸びるモータ軸(回転中心軸)224に対して回転可能に接続して形成される。
【0014】
ステータ210は、モータ軸224から同一距離の位置にU字型に形成された複数のステータコア222が周方向に配設される。ステータコア222のU字型の凹部には励磁用のコイル216が巻かれる。ロータ214は、モータ軸224から同一距離にU字型に形成されたロータコア226が周方向に配設される。ロータコア226の磁極面は、ステータコア222の磁極面と、所定の間隙を介してステータコア222のU字型の両突端部を跨ぐように対向する。
【0015】
その際、図21に示すように、並置された2つのステータコア222に1つの励磁用のコイル16が共通に巻かれることで、スイッチド・リラクタンスモータ200は、磁極面積を大きくして回転トルクを高め、また、モータの厚さ対回転トルク比を向上して小型化を図っている。
【先行技術文献】
【特許文献】
【0016】
【特許文献1】特開2007−236130号公報
【特許文献2】特開2004−166354号公報
【発明の概要】
【発明が解決しようとする課題】
【0017】
図18に示した特許文献1に記載の従来例モータ(アキシャルギャップモータ110)の場合、第1に、ステータ111は、外径側磁極115と内径側磁極116に、すなわち、全ての磁極に、ステータ巻線114がそれぞれ巻かれる。しかも、外径側磁極115と内径側磁極116は平面視が内径側程先細りになる楔形であり、外径側磁極115と内径側磁極116に、異なる形状にステータ巻線114のコイルを巻く必要がある。そのため、コイル数が多く、コイル質量が大きくなるとともに、組付けが容易でなく、製造コストが高くなる。第2に、ステータ111の各磁極(外径側磁極115、内径側磁極116)がコイルにより囲まれる構成であるので、とくにモータ軸113との関係からコイルスロット幅が小さくなる内径側では磁極面積の確保が困難になり、アキシャルギャップモータ110の小型化(小径化)が制限される。
【0018】
図19に示した特許文献1に記載の従来例モータ(アキシャルギャップモータ145)の場合、ステータ146のコイル数は図18の構成より少なくなるが、ステータコア147の径方向中央部に設けられた溝147aに、ステータ巻線114の縦(モータ軸方向)巻きのコイルが配置され、ステータ146の表面側、裏面側それぞれの径方向の磁路が、図19(b)の矢印線からも明らかなようにステータコア147の共通のステータヨークを通るため、ステータヨークが十分な磁路断面積を確保できるようにステータコア147を厚くしなければならず、ステータコア147がモータ軸方向に厚くなって重くなる。
【0019】
図20、図21に示した特許文献2に記載の従来例モータ(スイッチド・リラクタンスモータ200)の場合は、ステータ210の径方向の中間の磁極(U字型に形成された各ステータコア222)毎にコイルが巻かれるので、それらの磁極の周方向の両側にコイルエンドが生じる。そして、図20、図21には駆動相の一相分の磁極(周方向に90度間隔の4磁極)のみが示されているが、実際には駆動相が3相であれば、周方向に30度間隔で各相の磁極が隣接して存在し、それらの磁極にも同じようにコイルが巻かれて両側にコイルエンドが生じるので、各コイルのコイルエンドのスペースを確保してコイルエンドどうしの干渉等を防止するため、中間の各磁極の周方向の幅を削って狭くしたり、中間の各磁極の面積を小さくする必要があり、その結果、モータトルクが減少する。
【0020】
そして、この種のアキシャルギャップモータにおいては、ステータの磁極面が、表裏の両面であるか、いずれか一方の面(片面)であるかを問わず、小型・軽量化および組付の容易化を図りつつ、モータトルクを一層増大することが望まれているが、そのための最良の構造は発明されていない。
【0021】
本発明は、アキシャルギャップモータにおいて、小型・軽量化および組付の容易化を図りつつ、モータトルクを増大することができる画期的な構造を提供することを目的とする。
【課題を解決するための手段】
【0022】
上記した目的を達成するために、本発明のアキシャルギャップモータは、表裏の両面の少なくともいずれか一方が磁極面であるステータと、磁極面が前記ステータの磁極面に対向したロータとを備え、前記ステータは、外径側磁極と内径側磁極との間に少なくとも一つの中間磁極を有する分割磁極構造の径方向に楔形の各ステータコアを周方向に配設して形成され、前記外径側磁極、前記内径側磁極および前記中間磁極が前記中間磁極のコイルにより一括して励磁されることを特徴としている(請求項1)。
【0023】
また、本発明のアキシャルギャップモータは、前記ステータの表裏の両面が磁極面であり、前記コイルは、略鞍型の形状であり、前記ステータの表裏の前記中間磁極を囲むように前記ステータコアに設けられることを特徴としている(請求項2)。
【0024】
さらに、本発明のアキシャルギャップモータは、前記ステータの表裏の両面が磁極面であり、前記コイルは、中央部が前記ステータの表裏方向に屈曲したクランク状であり、前記ステータの隣り合う異なる駆動相のステータコアのいずれか一方の表面側の前記中間磁極と他方の裏面側の前記中間磁極を囲むように、前記隣り合うステータコアに跨って設けられることを特徴としている(請求項3)。
【0025】
また、本発明のアキシャルギャップモータは、前記中間磁極が、前記外径側磁極および前記内径側磁極より周方向にずれていることを特徴としている(請求項4)。
【0026】
さらに、本発明のアキシャルギャップモータは、前記ステータの各ステータコアが磁気的に独立した状態で周方向に配設され、前記ロータの各ロータコアが磁気的に独立した状態で周方向に配設されていることを特徴としている(請求項5)。
【発明の効果】
【0027】
請求項1に係る本発明のアキシャルギャップモータの場合、ステータの表裏の両面又は片面の磁極面において、周方向に配設されたステータコアは、外径側磁極と内径側磁極との間に少なくとも一つの中間磁極を有し、それらの磁極は中間磁極のコイルにより一括して励磁される。
【0028】
この場合、各ステータコアの分割磁極毎にコイルを設けなくてよく、コイルの個数や量を低減しつつ、コイルの通電励磁で発生した磁束の磁路を、中間磁極からロータを通って外径側磁極に戻る磁路と、中間磁極からロータを通って内径側磁極に戻る磁路に分散させて二次元平面状に広げることができ、ステータを薄型化してモータトルクを増大することができる。しかも、ステータに設けるコイルの個数や量が少なく、組付けも容易である。
【0029】
したがって、小型・軽量化および組付の容易化を図りつつ、モータトルクを増大することができる画期的な構造のアキシャルギャップモータを提供できる。
【0030】
請求項2に係る本発明のアキシャルギャップモータの場合、ステータの表裏の両面が磁極面であり、ステータに周方向に配設されるステータコアの前記コイルは、略鞍型の形状である。そして、ステータコアを挟むようにして前記コイルを設けると、前記コイルがステータコアの表側および裏側の中間磁極を囲み、前記コイルの通電により、ステータコアの表裏の外径側磁極、内径側磁極および中間磁極が一括して励磁される。
【0031】
この場合、ステータコアの表裏の両面の中間磁極を囲む1つのコイルによってステータコアの表裏の外径側磁極、内径側磁極および中間磁極が一括して励磁される。そのため、ステータの表裏の両面を磁極面とする場合に、ステータに設けるコイルの個数や量を大幅に低減しつつ、ステータを薄型化してモータトルクを増大することができ、しかも、組付けも容易である。
【0032】
さらに、略鞍型のコイルを設けることにより、ステータコアの周方向の片側は、前記コイルの開口縁に望み、巻き線が存在しない。そのため、ステータの表裏の中間磁極の周方向の磁極幅は、中間磁極の全周をコイルが囲む場合に比して巻き線による制約が半減して広くなり、ステータの表裏の中間磁極の十分な磁極面積を確保しつつ、前記コイルのコイル量を多くして大きな起磁力(アンペアターン)を発生し、モータトルクを一層増大することができる。
【0033】
したがって、ステータの表裏の両面を磁極面とする場合に、一層の小型・軽量化および組付の容易化を図りつつ、モータトルクを増大することができる画期的な構造のアキシャルギャップモータを提供できる。
【0034】
請求項3に係る本発明のアキシャルギャップモータの場合、ステータの表裏の両面が磁極面であり、前記コイルは、中央部がステータの表裏方向に屈曲したクランク状であって、隣り合うステータコアに跨って設けられ、両ステータコアのいずれか一方の表側および他方の裏側の中間磁極を囲む。
【0035】
そのため、前記コイルの通電により、ステータに径方向に配設された各ステータコアは、表側の磁極面の駆動相の外径側磁極、内径側磁極および中間磁極が一括して励磁され、同時に、表側より周方向にずれた裏側の磁極面の同じ駆動相の外径側磁極、内径側磁極および中間磁極が一括して励磁される。このとき、表側の磁極面の磁束の磁路を形成するステータコアと、同時に裏側の磁極面の磁束の磁路を形成するステータコアとが異なり、各ステータコアを、ステータの表裏それぞれの片面の磁束が異なるタイミングで通る。そのため、各ステータコアの厚みを、ステータの表裏の磁束が同じステータコアを表裏から同じタイミングに通る場合に比して一層薄くすることができ、ステータの表裏の両面を磁極面とする場合に、さらにステータを薄型化してモータトルクを増大することができる。
【0036】
したがって、ステータの表裏の両面を磁極面とする場合に、一層の小型・軽量化および組付の容易化を図りつつ、モータトルクを増大することができる画期的な構造の他の例のアキシャルギャップモータを提供できる。
【0037】
請求項4に係る本発明のアキシャルギャップモータの場合、中間磁極が外径側磁極および内径側磁極より周方向にずれることにより、中間磁極を囲むコイルがより組付け易くなって組付性が一層向上し、さらには、中間磁極の周方向の少なくとも片側(好ましくはコイルエンド側)のコイル端面(側面)を外径側磁極および内径側磁極の周方向の端面(側面)と面一にすることが可能になる。
【0038】
請求項5に係る本発明のアキシャルギャップモータの場合、ステータの各ステータコアおよびロータの各ロータコアが磁気的に独立した状態で周方向に配設されるため、各ステータコアおよび各ロータを不要な磁束が通らず、とくに請求項3のコイルがクランク状で隣り合うステータコアに跨って設けられる場合に好適である。
【図面の簡単な説明】
【0039】
【図1】第1の実施形態のアキシャルギャップモータの組立状態の断面図である。
【図2】図1のステータの磁極面の説明図である。
【図3】図1のロータの磁極背面の説明図である。
【図4】図2のステータの磁極の組付けの説明図である。
【図5】第2の実施形態のアキシャルギャップモータの組立状態の断面図である。
【図6】図5のステータの磁極面の説明図である。
【図7】図5のロータの磁極背面および磁極面の説明図である。
【図8】図6のステータの磁極の組付けの説明図である。
【図9】第3の実施形態のアキシャルギャップモータの組立状態の断面図である。
【図10】図9のステータの磁極面の説明図である。
【図11】図9のロータの磁極背面および磁極面の説明図である。
【図12】第4の実施形態のアキシャルギャップモータの組立状態の断面図である。
【図13】図12のステータの磁極面の説明図である。
【図14】図12のロータの磁極背面および磁極面の説明図である。
【図15】図12のステータの磁極の組付けの説明図である。
【図16】図12のアキシャルギャップモータのステータの表裏の磁極の説明図である。
【図17】図12のアキシャルギャップモータの励磁状態を示す断面図である。
【図18】従来モータの一例の説明図である。
【図19】従来モータの他の例の説明図である。
【図20】従来モータのさらに他の例の説明図である。
【図21】図19の従来モータの変形例の説明図である。
【発明を実施するための形態】
【0040】
つぎに、本発明をより詳細に説明するため、実施形態について、図1〜図17を参照して詳述する。なお、それらの図面においては、断面を示す斜線(ハッチング)等は適宜省略している。
【0041】
(第1の実施形態)
ステータの磁極面が片面である第1の実施形態について、図1〜図4を参照して説明する。
【0042】
図1は本実施形態のアキシャルギャップモータ1Aの切断側面図であり、図2は図1の矢印線aの矢視方向から見たアキシャルギャップモータ1Aのステータ2aの磁極面の平面図、図3は図1の矢印線aの矢視方向から見たアキシャルギャップモータ1Aのロータ3aの磁極背面の平面図である。
【0043】
これらの図面に示すように、アキシャルギャップモータ1Aは、非磁性体(ステンレス等)のモータ軸4aに軸着された円盤状のロータ3aと、モータ軸4aが中心孔を貫通した円盤状のステータ2aとを備える。ステータ2aとロータ3aは磁極面が対向している。
【0044】
(ステータ2a)
アキシャルギャップモータ1Aが3相駆動の場合、ステータ2aは、径方向に楔形の形状の12個のステータコア5aを周方向に等間隔に並べ、この状態で同心状の外周保持リング6aと内周保持リング7aの間に嵌入して形成される。このとき、各ステータコア5aは周方向に30度の間隔で隙間を設けて配設され、周方向に順に各相の磁極のコアを形成する。そして、各ステータコア5aを磁気的に独立した状態に保持して各ステータコア5aを不要な磁束が通らないようにするため、各ステータコア5a間の隙間には例えば樹脂8を充填し、また、リング6a、7aの少なくともいずれか一方を非磁性体で形成することが好ましい。
【0045】
各ステータコア5aは、外径側磁極9と内径側磁極10との間に少なくとも一つの中間磁極11aを有する分割磁極構造であり、本実施例では中間磁極11aは1個である。この中間磁極11aは、後述するようにステータコア5aに組付けて設けられる。さらに、中間磁極11aには、各ステータコア5aそれぞれの外径側磁極9、内径側磁極10および中間磁極11aを一括して励磁するカセット式のコイル12が取り付けられて設けられる。
【0046】
励磁相のコイル12が発生した磁束は、通電により図1の破線の矢印線b、cに示すように、中間磁極11aからロータ3a、外径側磁極9を通って中間磁極11aに戻る磁束および、中間磁極11aからロータ3a、内径側磁極10を通って中間磁極11aに戻る磁束を形成する。
【0047】
図4は中間磁極11aおよびコイル12の組付けを示し、(a)はステータ2aの磁極面の注目するステータコア(以下、注目コアという)5aを太い実線で囲んで示し、(b)は注目コア5aの斜視図、(c)は注目コア5aに設けられるコイル12の斜視図、(d)は中間磁極11aおよびコイル12の組付けの説明図である。
【0048】
本実施形態の場合、ステータ2aの片面(表面)が磁極面であるので、各ステータコア5aの例えば圧粉磁心で形成される平面視楔形のコア本体51aは、磁極9、10の部分が表側に突起し、磁極9、10を繋ぐヨーク部52aは図1に示すように厚みαが薄くなって凹んでいる。
【0049】
ヨーク部52aの周方向の片側は中間磁極11aの基部11aaが嵌るように一部が凹状に切り取られている。磁極9、10、11aの磁極面積は略等しく、中間磁極11aは裏面側に基部11aaが突出したL字状である。
【0050】
コイル12は、磁極9、11a間および磁極11a、10間の隙間に嵌る周方向に伸びた横辺12a、12bと、横辺12a、12bの片側を繋ぐ径方向の縦辺12cと、横辺12a、12bの反対の片側からヨーク部52aの厚み方向(モータ軸方向)に折れ曲がった折曲辺12d、12eと、折曲辺12d、12eの端部を繋ぐ径方向の縦辺12fのループをめぐるように、エナメル線を適当回数巻回して形成されたカセットコイルタイプのL型コイルである。なお、コイルの巻き始め部と巻き終り部は引き出し線の取り回し等を考慮して、例えば縦辺12c側に形成される。
【0051】
そして、組付け時、図4(d)の矢印の順に、中間磁極11aをコイル12の内側に嵌め、この状態でコイル12をコア本体51aに取り付けると、磁極11aの基部11aaはヨーク部52aの周方向の片側の凹部に嵌り、コイル12の横辺12a、12bおよび磁極11aがヨーク部52aを覆うように嵌り、コイル12および磁極11aをコア本体51aに嵌め込む簡単な作業で注目コア5が形成される。他のステータコア5aも同様の簡単な作業で形成される。そのため、ステータ2aの組み付けが容易に行なえる。
【0052】
また、各ステータコア5aのコイル12は、ステータコア5aの周方向の片側にだけ縦辺12cの径方向のエナメル線が通るコイル幅を必要とし、ステータコア5aの周方向の反対の開口した片側にはコイル幅が不要であるので、両側にコイル幅が必要なコイル構造の場合に比して、中間磁極11aの磁極面積を広く取ることができ、モータトルクがアップする。
【0053】
(ロータ3a)
ステータ2aに対向するロータ3aは図3に示すように、ステータコア5aと同様の形状の例えば8個のロータコア13aを、周方向に等間隔(45度間隔)に配設して形成される。ロータコア13aは、ステータコア5aの磁極9、10に対向する位置に、磁極9、10と同様の外径側磁極14、内径側磁極15を有し、磁極14、15間に、ステータコア5aの中間磁極11aに対応する中間磁極16aを有する分割磁極構造である。
【0054】
そして、各ロータコア13aは、ステータ2aの外周保持リング6a、内周保持リング7aに相当する同心状の外周保持リング17、内周保持リング18の間に嵌入して固定される。なお、回転するロータ3aは極力軽量であることが好ましい。そこで、各ロータコア13a間の周方向の隙間は、樹脂を充填してもよいが、空間(ギャップ)19である。また、リング17a、18aは少なくともいずれか一方が非磁性体で形成されることが好ましい。
【0055】
そして、ロータ3aの各ロータコア13aは、略各ステータコア5aからコイル12を除いた構造であり、磁極14、15、16aの厚みは磁極9、10、11aより薄い。なお、磁極14、15、16aは表面に磁石を設けてもよい。
【0056】
上記構成のアキシャルギャップモータ1Aは、例えば周知のスイッチドリラクタンスモータの制御と同様の制御により、ロータ3aとステータ2aが磁極の対向状態になる毎に通電相が切り替わって各相の中間磁極11aのコイル12が順に通電され、この通電により、励磁相のステータコア5aの外径側磁極9、内径側磁極10および中間磁極11aが一括して励磁され、ロータ3aとステータ2aの磁気的な吸引作用によりロータ3aが回転する。
【0057】
このアキシャルギャップモータ1Aは、前記したようにステータ2aの片面が磁極面であってロータ3aとステータ2aで構成される。そして、各相のステータコア5aが外径側磁極9、内径側磁極10および中間磁極11aの分割磁極構造であるので、ステータ2aの磁極からロータ3aを通ってステータ2aに戻る磁路が、磁極を分割しない構成の場合より短くなるのは勿論、中間磁極11aに設けた1個のコイル12により、そのステータコア5aの外径側磁極9、内径側磁極10および中間磁極11aが一括して励磁されるため、各ステータコア5aそれぞれの磁極9、10、11毎にコイル12のような励磁コイルを設けなくてよく、ステータ2aのコイルの個数や量(質量)を低減して組付け性を向上できる。しかも、コイル12の通電で発生した磁束の磁路を、図1の破線の矢印線b、cに示したように、中間磁極11aからロータ3aを通って外径側磁極9に戻る磁路、中間磁極11aからロータ3aを通って内径側磁極10に戻る磁路に分散させて二次元平面状に広げることができる。
【0058】
したがって、アキシャルギャップモータ1Aは、ステータ2aの厚み(ヨーク厚)が薄くなり、小型・軽量で大きなモータトルクを発生することができ、しかも、安価になる。その上、中間磁極11aが嵌め込み式であってコイル20がカセットタイプであるため、ステータ2aの組付けが容易であり、製造が容易で製造コストが一層安価になる。
【0059】
また、図2、図4等から明らかなようにコイル12は周方向の片側が開口している。そのため、中間磁極11aのコア本体51aへの嵌め込みの位置を適当に設定し、図2に示すように、中間磁極11aの周方向の位置を外径側磁極9および内径側磁極10に対してずらし、コイル12によって中間磁極11aの磁極面積が狭くならないようにしてコイル12の巻数の増加(トルクアップ)を図るとともに、その取付け等を容易にすることができる。その際、中間磁極11aに巻かれたコイル12が周方向に突出しないようにして、磁極9、10および、コイル12が巻かれた中間磁極11aの周方向の片側の面をいわゆる「面一」の状態にして合わせることも可能である。
【0060】
(第2の実施形態)
ステータの磁極面が両面である第2の実施形態について、図5〜図8を参照して説明する。
【0061】
図5は本実施形態のアキシャルギャップモータ1Bの切断側面図であり、図6は図5の矢印線dの矢視方向から見たアキシャルギャップモータ1Bのステータ2bの表側の磁極面の平面図、図7の(a)、(b)は図6の矢印線dの矢視方向から見たアキシャルギャップモータ1Bのロータ3ba、3bbの磁極背面の平面図である。
【0062】
これらの図面に示すように、アキシャルギャップモータ1Bは、非磁性体のモータ軸4bに間隔を取って軸着された円盤状の2個のロータ3ba、3bbと、ロータ3ba、3bb間に配置されてモータ軸4bが中心孔を貫通した円盤状のステータ2bとを備える。そして、ロータ3baの磁極面がステータ2bの表側の磁極面に対向し、ロータ3bbの磁極面がステータ2bの裏面の磁極面に対向する。
【0063】
(ステータ2b)
そして、アキシャルギャップモータ1Bが、3相駆動であってステータ2bの表側と裏側の対称位置に磁極を配設して形成される場合、ステータ2bは、径方向に楔形の形状の12個のステータコア5bを周方向に等間隔に並べ、この状態で同心状の外周保持リング6bと内周保持リング7bの間に各ステータコア5bを嵌入して形成される。このとき、各ステータコア5bは周方向に30度の間隔で隙間を設けて配設され、周方向に順に各相の磁極のコアを形成する。そして、各ステータコア5bを磁気的に独立した状態に保持して各ステータコア5bを不要な磁束が通らないようにするため、ステータ2bの場合も、各ステータコア5b間の周方向の隙間には例えば樹脂8が充填される。また、リング6b、7bの少なくともいずれか一方は非磁性体で形成することが好ましい。
【0064】
各ステータコア5bは、表裏それぞれにおいて、ステータコア5aと同様の分割磁極構造であり、外径側磁極9と内径側磁極10との間に少なくとも一つの中間磁極11bを有する。本実施例の場合、磁極9、10間の中間磁極11bは1個である。中間磁極11bも後述するようにステータコア5bに組付けて設けられる。さらに、表裏の中間磁極11bの周囲には、表裏の外径側磁極9、内径側磁極10および中間磁極11bを一括して励磁する後述の鞍型のコイル20が装着されて設けられる。
【0065】
励磁相のコイル20が通電により発生する磁束は、図5の破線の矢印線e〜hに示すように、中間磁極11bからロータ3ba又はロータ3bb、外径側磁極9を通って中間磁極11bに戻る磁束および、中間磁極11bからロータ3ba又はロータ3bb、内径側磁極10を通って中間磁極11bに戻る磁束に分散される。
【0066】
図8は中間磁極11bおよびコイル20の組付けを示し、(a)はステータ2bの例えば表側の磁極面の注目コア5bを太い実線で示し、(b)は注目コア5bの表側の平面図、(c)は注目コア5bに設けられるコイル20の斜視図、(d)は中間磁極11bおよびコイル20の組付けの説明図である。
【0067】
本実施形態の場合、ステータ2bの表裏の両面が磁極面であるので、各ステータコア5bは例えば圧粉磁心で形成される表裏の平面視が楔形のコア本体51bを備える。コア本体51bは、中央部の図5に示す厚みβのヨーク部52bにより表側および裏側に突出した磁極9、10の部分を一体に繋いだ形状である。
【0068】
ヨーク部52bには、表裏の中間磁極11bの片側を繋いだ形状の中間磁極片11xが、周方向の片側からヨーク部52bを挟むよう差し込まれて組み付けられる。この組み付けにより、ステータ2bの表裏において、中間磁極11bがステータコア5bの磁極9、10間に設けられる。
【0069】
コイル20は、略鞍型の形状であり、図4(c)の矢印に示す周方向の片側(紙面左側)が径方向に障害物のない開口状態であり、ステータコア5bを挟んでステータ2bの表裏の中間磁極11bを囲むようにステータコア5bに設けられる。
【0070】
さらに具体的に説明すると、コイル20は、表側の磁極9、11b間、磁極11b、10間の隙間に嵌る周方向に伸びた表側の横辺20a、20bと、横辺20a、20bの周方向の片端を繋ぐ縦片20cと、裏側の磁極9、11b間、磁極11b、10間の隙間に嵌る周方向に伸びた裏側の横辺20d、20eと、横辺20d、20eの周方向の片端を繋ぐ縦片20fと、ヨーク部52bの厚み方向(モータ軸方向)に伸びて横辺20a、20dの反対側の片端を繋ぐ辺20gと、ヨーク部52bの厚み方向(モータ軸方向)に伸びて表裏の横辺20b、20eの反対側の片端を繋ぐ辺20hのループをめぐるように、エナメル線を適当回数巻回して形成されたカセットコイルタイプの鞍型コイルである。なお、各辺20a〜20hのコーナー部分は、図8(c)に示すように角張っていてもよいが、エナメル線の曲げRが制約される場合等には丸みを帯びるようにすればよい。また、コイルの巻き始め部および巻き終り部は引き出し線の取り回し等を考慮して、例えば縦辺20c、20f側に形成される。
【0071】
そして、組付け時、図8(d)の矢印の順に、中間磁極片11xをコイル20の内側に嵌め、この状態で中間磁極片11xがコア本体51bを挟むようにコイル20をコア本体51bに取り付けることにより、ステータ2bの表側では、コイル20の辺20a〜20cおよび磁極11bがヨーク部52bを覆うように嵌り、ステータ2bの裏側では、辺20d〜20fおよび磁極11bがヨーク部52bを覆うように嵌り、コイル20および中間磁極片11xをコア本体51bに嵌め込む簡単な作業で注目コア5bが形成される。他のステータコア5bも同様の簡単な作業で形成される。そのため、ステータ2bの組み付けが容易に行なえる。
【0072】
そして、形成されたステータ2bは、各ステータコア5bの鞍型のコイル20が、ステータコア5bの周方向の片側にだけ径方向のエナメル線が通る辺20c、20fのコイル幅を必要とし、ステータコア5bの周方向の反対の片側にはコイル幅が不要であるので、両側にコイル幅が必要な構造の場合に比して、中間磁極11bの磁極面積を広く取ることができ、モータトルクがアップする。
【0073】
(ロータ3ba、3bb)
ステータ2bの両面側のロータ3ba、3bbは図7(a)、(b)に示すように、第1の実施形態のロータ3aと同様の構成であり、それぞれ例えば8個のロータコア13bを、周方向に等間隔(45度間隔)に配設して形成される。ロータコア13bは、ステータコア5bの表裏の磁極9、10に対向する位置に、磁極9、10と同様の外径側磁極14、内径側磁極15を有し、磁極14、15間に、ステータコア5bの中間磁極11bに対応する中間磁極16bを有する磁極構造である。
【0074】
そして、各ロータコア13bは、図3のロータ3aのリング17a、18aに対応する同心状の外周保持リング17b、内周保持リング18bの間に嵌入して固定される。なお、回転するロータ3ba、3bbは極力軽量であることが好ましい。そこで、本実施形態の場合も、各ロータコア13b間の周方向の隙間は、樹脂を充填してもよいが、空間(ギャップ)19である。また、リング17b、18bは少なくともいずれか一方が非磁性体で形成されることが好ましい。
【0075】
そして、ロータ3ba、3bbの各ロータコア13bも、略、各ステータコア5bからコイル20を除いた構造であり、磁極14、15、16bの厚みは磁極9、10、11bより薄い。なお、磁極14、15、16bは表面に磁石を設けてもよい。
【0076】
上記構成のアキシャルギャップモータ1Bも、例えば周知のスイッチドリラクタンスモータの制御と同様の制御により、ロータ3ba、3bbとステータ2bが磁極の対向状態になる毎に通電相が切り替わって各相の中間磁極11bのコイル20が順に通電され、この通電により、励磁相のステータコア5bの表裏の外径側磁極9、内径側磁極10および中間磁極11bが一括して励磁され、ロータ3ba、bbとステータ2aの磁気的な吸引作用によりロータ3ba、bbが回転する。
【0077】
このアキシャルギャップモータ1Bは、ステータ2bの両面が磁極面であってステータ2bの両面のロータ3ba、3bbとステータ2bで構成される。そして、ステータ2bの各ステータコア5bの表裏の磁極構造が、外径側磁極9、内径側磁極10および中間磁極11bの分割磁極構造であるので、ステータ2bの表裏それぞれの磁極からロータ3ba、3bbを通ってステータ2bに戻る磁路が、磁極を分割しない構成の場合より短くなるのは勿論、中間磁極11bに装着された鞍型コイルの1個のコイル20により、ステータコア5bの表裏両面の外径側磁極9、内径側磁極10および中間磁極11bが一括して励磁されるため、励磁に必要なコイルの数や量(質量)を大幅に低減して組付け性を向上できる。しかも、コイル20の通電で発生した磁束の磁路を、図5の破線の矢印線e〜hに示すように、ステータ2bの表裏において、中間磁極11bからロータ3ba、3bbを通って外径側磁極9に戻る磁路、中間磁極11bからロータ3ba、3bbを通って内径側磁極10に戻る磁路に分散させて二次元平面状に広げることができる。
【0078】
したがって、アキシャルギャップモータ1Bも、ステータ2bのヨークの厚みが薄く、極めて小型・軽量で大きなモータトルクを発生することができる。しかも、安価に製造できる。その上、中間磁極11bが嵌め込み式であってコイル20がカセットタイプであるため、ステータ2bの組付けが容易であり、製造が容易で製造コストが一層安価になる。
【0079】
また、図6、図8等から明らかなようにコイル20も周方向の片側が開口している。そのため、中間磁極11bのコア本体51bへの嵌め込みの位置を適当に設定し、図6に示すように、中間磁極11bの周方向の位置を外径側磁極9および内径側磁極10に対してずらし、コイル20によって中間磁極11bの磁極面積が狭くならないようにしてコイル20の巻数の増加(トルクアップ)を図ったり、その取付け等を容易にすることができる。その際、中間磁極11bに巻かれたコイル20が周方向に突出しないようにして、磁極9、10およびコイル20が巻かれた中間磁極11bの周方向の片側の面をいわゆる「面一」の状態にして合わせることも可能である。
【0080】
(第3の実施形態)
第2の実施形態の変形例である第3の実施形態について、図9〜図11を参照して説明する。
【0081】
図9は本実施形態のアキシャルギャップモータ1Cの切断側面図であり、図10は図9の矢印線iの矢視方向から見たアキシャルギャップモータ1Cのステータ2cの表側の磁極面の平面図、図11(a)、(b)は図9の矢印線iの矢視方向から見たアキシャルギャップモータ1Cのロータ3ca、3cbの磁極背面および磁極面の平面図である。
【0082】
これらの図面に示すように、アキシャルギャップモータ1Cは、非磁性体のモータ軸4cに間隔を取って軸着された円盤状の2個のロータ3ca、3cbと、ロータ3ca、3cb間に配置されてモータ軸4cが中心孔を貫通した円盤状のステータ2cとを備える。そして、ロータ3caの磁極面がステータ2bの表側の磁極面に対向し、ロータ3cbの磁極面がステータ2bの裏面の磁極面に対向する。
【0083】
そして、アキシャルギャップモータ1Cのロータ3ca、3cb、ステータ2cは、第2の実施形態のアキシャルギャップモータ1Bのロータ3ba、3bb、ステータ2bに対応し、アキシャルギャップモータ1Cがアキシャルギャップモータ1Bと異なる点は、図9、図10に示したように、ステータ2cにおいて、各ステータコア5bの表裏の中間磁極11bの表面に蓋板状のフランジ板21を設けた点である。なお、フランジ板21は、例えば圧粉磁心により、予め中間磁極11bと一体に形成してもよく、中間磁極11bと別体に形成しコイル20を設けた後に中間磁極11bに接着するようにしてもよい。
【0084】
ロータ3ca、3cbは、図11(a)、(b)に示すように、中間磁極11bに対応する磁極16bがフランジ板21に合わせて外径方向および内径方向に延長されている。 本実施形態のアキシャルギャップモータ1Cは、ステータ2cの表裏の各中間磁極11bの磁極面がフランジ板21により外径方向および内径方向に延長され、各中間磁極11bの磁極面積が拡大し、併せて、ロータ3ca、3cbの対応する磁極16bの磁極面積も拡大し、磁束が図9の破線の矢印線j〜mに示す磁路を通る。この場合、アキシャルギャップモータ1Cは、磁気抵抗が小さくなってモータトルクが一層増大する利点がある。
【0085】
(第4の実施形態)
ステータの磁極面が両面である第4の実施形態について、図12〜図17を参照して説明する。
【0086】
図12は本実施形態のアキシャルギャップモータ1Dの組立状態の切断側面図、図13は図12の矢印線nの矢視方向から見たアキシャルギャップモータ1Dのステータ2dの表側の磁極面の平面図、図14の(a)、(b)は図12の矢印線nの矢視方向から見たアキシャルギャップモータ1Dのロータ3da、3dbの磁極背面および磁極面の平面図である。
【0087】
これらの図面に示すように、アキシャルギャップモータ1Dも、第2の実施形態のアキシャルギャップモータ1Bと同様、非磁性体のモータ軸4dに間隔を取って軸着された円盤状の2個のロータ3da、3dbと、ロータ3da、3bb間に配置されてモータ軸4dが中心孔を貫通した円盤状のステータ2dとを備える。そして、ロータ3daの磁極面がステータ2dの表側の磁極面に対向し、ロータ3dbの磁極面がステータ2dの裏面の磁極面に対向している。
【0088】
(ステータ2d)
アキシャルギャップモータ1Dが3相駆動の場合、ステータ2dは、径方向に楔形の形状の12個のステータコア5dを周方向に等間隔に並べた状態で同心状の外周保持リング6dと内周保持リング7dの間に嵌入して形成される。このとき、各ステータコア5dは周方向に30度の間隔で隙間を設けて配設され、周方向の順に各相の磁極のコアを形成する。
【0089】
また、アキシャルギャップモータ1Dの場合、必ず各ステータコア5dを磁気的に独立した状態にする必要があるので、各ステータコア5d間の周方向の隙間には例えば樹脂8が充填される。また、リング6d、7dは少なくともいずれか一方が非磁性体で形成される。
【0090】
各ステータコア5dは、第2の実施形態のステータコア5bと同様の分割磁極構造であり、表裏それぞれにおいて、外径側磁極9と内径側磁極10との間に少なくとも一つの中間磁極11dを有する。本実施例の場合、磁極9、10間の中間磁極11dは1個である。
【0091】
ステータ2dの表裏の各中間磁極11dには、後述するクランク状のコイル22が、表側の磁極面のステータコア5dの中間磁極11dとその隣のステータコア5dの裏側の磁極面のステータコア5dの中間磁極11dとを囲むように装着される。そのため、駆動3相をU、V、Wとすると、例えばU相の各コイル22の通電により、90度間隔の各ステータコア5dの表側の外径側磁極9、内径側磁極10および中間磁極11bがU相の磁極として一括励磁され、同時に、それらのステータコア5dの隣の各ステータコア5dの裏側の外径側磁極9、内径側磁極10および中間磁極11bもU相の磁極として一括励磁される。なお、V相、W相の各コイル12dの通電の場合も同様である。
【0092】
中間磁極11dおよびコイル22について、図15を参照してさらに詳述する。
【0093】
図15は中間磁極11dおよびコイル22の組付けを示し、(a)はステータ2dの例えば表側の磁極面を示し、注目コア5dおよびこのコア5dに設けられるコイル22を実線で囲んで示している。(b)は(a)の実線で囲まれた注目コア5dおよびコイル22を取り出して示した平面図、(c)はコイル22の斜視図、(d)は中間磁極11dおよびコイル22組付けの説明図である。
【0094】
ステータ2dの表裏の両面が磁極面であるので、各ステータコア5dは例えば圧粉磁心で形成された表裏の平面視が楔形のコア本体51dを備える。コア本体51dは、径方向中央のヨーク部52dにより、表側および裏側に突出した磁極9、10の部分を一体に繋いだ形状である。
【0095】
コイル22は、注目コア5dの表側の中間磁極11dを囲む平面視コ字型(表側から見て)の表側部分22aと、反時計方向に隣のステータコア5dの裏側の中間磁極11dを囲む平面視コ字型(裏側から見て)の裏側部分22bと、表側部分22aと裏側部分22bとをループ状に繋ぐ折曲部分22cのループをめぐるように、エナメル線を適当回数巻回して形成されたカセットコイルタイプのクランク状のコイルである。
【0096】
そして、コイル22は略同形状のインシュレータ23のケース凹部に収容される。また、コイル22の表側部分22a、裏側部分22bそれぞれが囲む空間部分に、第1の実施形態の中間磁極11aと略同じ形状、大きさの中間磁極11dがそれぞれ嵌め込んで取り付けられる。さらに、中間磁極11dが取り付けられたインシュレータ23は、コイル22の表側部分22aが、注目コア5dのコア本体51dの表側のコア部分52dに嵌め付けられる。その後、この状態で各ステータコア5dが周方向に配設されると、コイル22の裏側部分22bが隣のステータコア5のコア本体51dのコア部52dに嵌め付けられる。
【0097】
その結果、インシュレータ23に収容されて中央部がステータ2dの表裏方向に屈曲したクランク状の各コイル22は、ステータ2dの隣り合う異なる駆動相のステータコア5dのいずれか一方の表面側の中間磁極11dと他方の裏面側の中間磁極11dを囲むように、隣り合うステータコア5dに跨って設けられる。この場合、中間磁極11dが嵌め付けられたコイル22をコア本体52に嵌め込む簡単な作業でステータコア5d、中間磁極11dおよびコイル22の組付けが行なえ、組付け性が向上する。なお、図15に示すように、中間磁極11dのインシュレータ23と接する周面にはモータ軸方向に垂直な横溝状の溝11dxが形成され、インシュレータ23の内側には溝11dxに嵌る線状の凸部23xが形成されている。そのため、組付け時、溝11dxに凸部23xが嵌ることで簡単に位置決めが行なえるとともに、中間磁極11dを確実に保持することができる。
【0098】
そして、上記の組付けによって形成されたステータ2dは、各相のコイル22が順に通電されることにより、駆動相のコイル22の表側部分22aが中間磁極11dを囲むステータコア5dの表側の磁極面の外径側磁極9、内径側磁極10および中間磁極11dが一括して励磁され、同時に、同じコイル22の裏側部分22aが中間磁極11dを囲む隣のステータコア5dの表側の磁極面の外径側磁極9、内径側磁極10および中間磁極11dが一括して励磁される。そのため、励磁に必要なコイルの数や量(質量)を大幅に低減して組付け性を向上できる。なお、ステータ2dの表側と裏側の駆動相の磁極位置は周方向にずれる。
【0099】
また、ステータ2dの場合、表裏それぞれにおいて、ステータコア5dの周方向の片側にのみ径方向のエナメル線が通るコイル幅を必要とし、ステータコア5bの周方向の反対の開口した片側はコイル幅が不要であるので、両側にコイル幅が必要な構造の場合に比して、必要なコイル幅が半減し、中間磁極11dの磁極面積を広く取ることができ、モータトルクがアップする。なお、ステータ2dの場合、コイル22の取り付け等を考慮して表側の中間磁極11dと裏側の中間磁極11dとは周方向に互いに近づく方向にずれる。
【0100】
(ロータ3da、3db)
ステータ2dの両面側のロータ3da、3dbは図14(a)、(b)に示したように、第2の実施形態のロータ3bと同様の構成であり、それぞれ例えば8個のロータコア13dを、周方向に等間隔(45度間隔)に配設して形成されるが、上記したようにステータ2dの磁極位置が、表側と裏側とでずれるので、このずれに合わせて、ロータ3daの各ロータコア13dの配列と、ロータ3daの各ロータコア13dの配列とは、略30度ずれる。
【0101】
そして、ロータ3daの各ロータコア13dは、ステータコア5dの表側の磁極9、10に対向する位置に磁極9、10と同様の外径側磁極14、内径側磁極15を有し、磁極14、15間に中間磁極16dを有する磁極構造であり、同様に、ロータ3dbの各ロータコア13dは、ステータコア5dの裏側の磁極9、10に対向する位置に磁極9、10と同様の外径側磁極14、内径側磁極15を有し、磁極14、15間に中間磁極16dを有する磁極構造である。
【0102】
また、ロータ3da、3dbそれぞれの各ロータコア13dは、同心状の外周保持リング17d、内周保持リング18dの間に嵌入して固定される。このとき、各ロータコア13dを極力軽くして磁気的に独立のものとするため、各ロータコア13d間の周方向の隙間は空間(ギャップ)19であり、リング16d、17dは少なくともいずれか一方が非磁性体で形成されている。
【0103】
図16(a)、(b)は上記のように構成された本実施形態のアキシャルギャップモータ1Dのステータ2dの表側、裏側の各ステータコア5dと励磁相U、V、Wとの対応例を示し、図17はアキシャルギャップモータ1Dの励磁状態を示す断面図であり、U相のコイル22が通電されたときに図16(a)、(b)のZ−Z線で切断し、そのときにステータ2d、ロータ3da、3dbの励磁されている部分を斜線(ハッチング)で示している。
【0104】
すなわち、ステータ2dの各ステータコア5dおよび、ロータ3da、3dbの各ロータコア16dは、いずれも磁気的に独立している。また、前記したようにステータ2dの表側と裏側で励磁される磁極が周方向にずれる。そのため、例えばU相のコイル22が通電されるU相励磁においては、U相のコイル22の表側部分22aに中間磁極11dが囲まれたステータコア5dの表側の外径側磁極9、内径側磁極10および中間磁極11dが一括して励磁され、同時に、U相のコイル22の裏側部分22aに裏側の中間磁極11dが囲まれたステータコア5dの裏側の外径側磁極9、内径側磁極10および中間磁極11dが一括して励磁される。V相、W相のコイル22が通電されるV相、W相の励磁の場合も同様である。
【0105】
この場合、ステータ2dのステータコア5dの表裏の磁極構造が、外径側磁極9、内径側磁極10および中間磁極11dの分割磁極構造であるので、ステータ2dの表裏それぞれの磁極からロータ3da、3dbを通ってステータ2dに戻る磁路が、磁極を分割しない構成の場合より短くなるのは勿論、隣り合うステータコア5dの表側と裏側の中間磁極11dに跨って装着された1個のコイル22により、ステータコア5bの表裏の両面の外径側磁極9、内径側磁極10および中間磁極11dが一括して励磁されるため、励磁に必要なコイルの数や量(質量)を大幅に低減して組付け性を向上できる。
【0106】
さらに、励磁相のコイル22の通電で発生した磁束の磁路は、図17の破線の矢印線p〜sに示すように、ステータ2bの表裏それぞれにおいて、中間磁極11dからロータ3da、3dbを通って外径側磁極9に戻る磁路、中間磁極11dからロータ3da、3dbを通って内径側磁極10に戻る磁路に分散させて二次元平面状に広げることができる。しかも、ステータ2dの表側の磁極面の磁束の磁路を形成するステータコア5dと、同時にステータ2dの裏側の磁極面の磁束の磁路を形成するステータコア5dとが異なり、ステータ2dの表裏それぞれの片面の磁束が、各ステータコア5dを異なるタイミングで通る。そのため、各ステータコア5dの厚みを、ステータ2dの表裏の磁束が同じタイミングに通る場合に比して一層薄くすることができる。そのため、ステータ2dを極めて薄型化してモータトルクを増大することができる。
【0107】
そして、本発明は上記した各実施形態に限定されるものではなく、その趣旨を逸脱しない限りにおいて上述したもの以外に種々の変更を行なうことが可能であり、例えば、各モータ1A〜1Dにおいて、ステータコア5a、5b、5dやロータコア13a、13b、13dの個数は12個、8個それぞれに限るものではない。また、駆動相数も3相に限るものではない。
【0108】
つぎに、外径側磁極9と内径側磁極10との間の中間磁極11a、11b、11dが2個以上であってもよく、この場合、コイル12、20、22は中間磁極11a、11b、11d毎に設ければよい。
【0109】
つぎに、ステータコア5a、5b、5cはステータ2a〜2cに周方向に等間隔に配設しなくてもよく、少なくとも1組の駆動相のステータコア5a〜5dをステータ2a〜2dに周方向に配設すればよい。その際、例えば3相駆動であれば、U、V、Wの各相の3つのステータコアを少なくとも1組用意し、それらを30度間隔や120度間隔で配設すればよい。
【0110】
つぎに、コイル12、20、22の形状等は各実施形態のものに限るものではなく、各コア5a〜5dやコイル12、20、22の支持(保持)手段等はどのようであってもよい。
【0111】
そして、本発明は、電気自動車や燃料電池車の駆動モータ等の種々の用途のアキシャルギャップモータに適用することができる。
【符号の説明】
【0112】
1A〜1D アキシャルギャップモータ
2a〜2d ステータ
3a、3ba、3bb、3ca、3cb、3da、3db ロータ
5a、5b、5d ステータコア
9 外径側磁極
10 内径側磁極
11a、11b、11d 中間磁極
12、20、22 コイル
16a、16b、16d ロータコア
【特許請求の範囲】
【請求項1】
表裏の両面の少なくともいずれか一方が磁極面であるステータと、
磁極面が前記ステータの磁極面に対向したロータとを備え、
前記ステータは、外径側磁極と内径側磁極との間に少なくとも一つの中間磁極を有する分割磁極構造の径方向に楔形のステータコアを周方向に配設して形成され、
前記外径側磁極、前記内径側磁極および前記中間磁極が、前記中間磁極のコイルにより一括して励磁されることを特徴とするアキシャルギャップモータ。
【請求項2】
請求項1に記載のアキシャルギャップモータにおいて、
前記ステータの表裏の両面が磁極面であり、
前記コイルは、略鞍型の形状であり、前記ステータコアに表裏の前記中間磁極を囲むように設けられることを特徴とするアキシャルギャップモータ。
【請求項3】
請求項1に記載のアキシャルギャップモータにおいて、
前記ステータは表裏の両面が磁極面に形成され、
前記コイルは、中央部が前記ステータの表裏方向に屈曲したクランク状であり、前記ステータの隣り合うステータコアのいずれか一方の表面側の前記中間磁極と他方の裏面側の前記中間磁極を囲むように、前記隣り合う異なるステータコアに跨って設けられることを特徴とするアキシャルギャップモータ。
【請求項4】
請求項1〜3のいずれかに記載のアキシャルギャップモータにおいて、
前記中間磁極は、前記外径側磁極および前記内径側磁極より周方向にずれていることを特徴とするアキシャルギャップモータ。
【請求項5】
請求項1〜4のいずれかに記載のアキシャルギャップモータにおいて、
前記ステータは、各ステータコアが磁気的に独立した状態で周方向に配設され、
前記ロータは、各ロータコアが磁気的に独立した状態で周方向に配設されていることを特徴とするアキシャルギャップモータ。
【請求項1】
表裏の両面の少なくともいずれか一方が磁極面であるステータと、
磁極面が前記ステータの磁極面に対向したロータとを備え、
前記ステータは、外径側磁極と内径側磁極との間に少なくとも一つの中間磁極を有する分割磁極構造の径方向に楔形のステータコアを周方向に配設して形成され、
前記外径側磁極、前記内径側磁極および前記中間磁極が、前記中間磁極のコイルにより一括して励磁されることを特徴とするアキシャルギャップモータ。
【請求項2】
請求項1に記載のアキシャルギャップモータにおいて、
前記ステータの表裏の両面が磁極面であり、
前記コイルは、略鞍型の形状であり、前記ステータコアに表裏の前記中間磁極を囲むように設けられることを特徴とするアキシャルギャップモータ。
【請求項3】
請求項1に記載のアキシャルギャップモータにおいて、
前記ステータは表裏の両面が磁極面に形成され、
前記コイルは、中央部が前記ステータの表裏方向に屈曲したクランク状であり、前記ステータの隣り合うステータコアのいずれか一方の表面側の前記中間磁極と他方の裏面側の前記中間磁極を囲むように、前記隣り合う異なるステータコアに跨って設けられることを特徴とするアキシャルギャップモータ。
【請求項4】
請求項1〜3のいずれかに記載のアキシャルギャップモータにおいて、
前記中間磁極は、前記外径側磁極および前記内径側磁極より周方向にずれていることを特徴とするアキシャルギャップモータ。
【請求項5】
請求項1〜4のいずれかに記載のアキシャルギャップモータにおいて、
前記ステータは、各ステータコアが磁気的に独立した状態で周方向に配設され、
前記ロータは、各ロータコアが磁気的に独立した状態で周方向に配設されていることを特徴とするアキシャルギャップモータ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】

【図17】
【図18】
【図19】
【図20】
【図21】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2011−250651(P2011−250651A)
【公開日】平成23年12月8日(2011.12.8)
【国際特許分類】
【出願番号】特願2010−123843(P2010−123843)
【出願日】平成22年5月31日(2010.5.31)
【出願人】(000002967)ダイハツ工業株式会社 (2,560)
【Fターム(参考)】
【公開日】平成23年12月8日(2011.12.8)
【国際特許分類】
【出願日】平成22年5月31日(2010.5.31)
【出願人】(000002967)ダイハツ工業株式会社 (2,560)
【Fターム(参考)】
[ Back to top ]