
アキシャルギャップ型回転電機装置および圧縮機
【課題】ロータの回転軸方向の変動を抑制し、その変動による騒音を防止するアキシャルギャップ型回転電機装置を提供する。
【解決手段】ロータにおける回転軸方向の一方側に電機子巻線を有する第1ステータが配置され、前記ロータにおける回転軸方向の他方側に電機子巻線を有さない第2ステータが配置されたアキシャルギャップ型回転電機を使用する場合において、第1ステータおよび第2ステータとロータとの間に作用する磁気力の合力の回転軸方向の成分F1が、前記ロータが前記第1ステータ側に吸引される方向に作用する様に、前記電機子巻線に流れる電流のd軸電流Idを制御する。
【解決手段】ロータにおける回転軸方向の一方側に電機子巻線を有する第1ステータが配置され、前記ロータにおける回転軸方向の他方側に電機子巻線を有さない第2ステータが配置されたアキシャルギャップ型回転電機を使用する場合において、第1ステータおよび第2ステータとロータとの間に作用する磁気力の合力の回転軸方向の成分F1が、前記ロータが前記第1ステータ側に吸引される方向に作用する様に、前記電機子巻線に流れる電流のd軸電流Idを制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、アキシャルギャップ型回転電機装置およびそれを用いた圧縮機に関する。
【背景技術】
【0002】
アキシャルギャップ型モータは、ロータとステータとの間に作用する回転軸方向の磁気力(スラストカ)が大きいため、ロータの両側にステータを配置して、ロータに作用するスラストカを相殺するのが好ましい。しかし、ステータには通常、電機子巻線が配設されるので、電機子巻線がロータの両側に配置し、電機子巻線の結線が煩雑になる。
【0003】
この問題を解消するために、ロータの一方側だけに、電機子巻線を設けた第1ステータを配置し、ロータの他方側には、電機子巻線を設けない第2ステータを配置する構成が提案されている(特許文献1−3)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−109678号公報
【特許文献2】特開2006−296048号公報
【特許文献3】特開2006−353078号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしその様な構成では、電機子巻線に流れる電流の条件によって、ロータに作用するスラストカが変動する。例えば、ロータの中速回転状態において、ロータに作用するスラストカの合力がゼロとなる様にすると、ロータのセンサレス回転起動時では、ロータと第1ステータとの間の吸引力が中速回転状態よりも強く、ロータが第1ステータ側に吸引される。しかし弱め磁束制御が行われる高速回転状態では、ロータと第1ステータとの間の吸引力が中速回転状態よりも弱まり、ロータが第2ステータ側に吸引される。従って、ロータが回転起動時から高速回転状態に移行する過渡状態では、ロータの吸引方向が変化してロータが回転軸方向に変動し、その変動による騒音が発生する。
【0006】
また、ロータに作用するスラストカの合力がゼロをクロスして脈動すれば、ロータが回転軸方向に脈動して定常的に騒音が発生する。
【0007】
この発明は、上記のような問題点を解決するためになされたものであり、ロータの回転軸方向の変動を抑制し、その変動による騒音を防止するアキシャルギャップ型回転電機装置および圧縮機を提供することにある。
【課題を解決するための手段】
【0008】
上記課題を解決する為に、本発明の第1の態様に係るアキシャルギャップ型回転電機装置は、その回転軸(Q1)の周囲に環状に複数の界磁部材(10i)が配設されたロータ(10)と、前記ロータに対して前記回転軸方向の一方側(Q−)に配置され、その前記ロータ側の面(20d)に、前記複数の界磁部材に対向する様に、電機子巻線(20a)が巻回された複数の電機子磁芯(20b)が配設された第1ステータ(20)と、前記ロータに対して前記回転軸方向の他方側(Q+)に配置された磁性体である第2ステータ(30)と、を含むアキシャルギャップ型回転電機(90)と、前記各電機子磁芯に巻回された前記電機子巻線に選択的に電流を流すインバータ手段(80)と、前記インバータ手段を制御して前記各電機子巻線に電流を選択的に流して電機子磁界を発生させ、前記ロータを回転制御する制御手段(100)と、を備え、前記制御手段は、前記ロータの回転起動時(0<ω≦ω1)およびその後の回転状態(ω1<ω≦ωmax)において、前記第1ステータおよび前記第2ステータと前記ロータとの間に作用する磁気力の合力の前記回転軸方向の成分(F1)が、前記ロータが前記第1ステータ側に吸引される方向に作用する範囲内で、前記インバータ手段を制御するものである。
【0009】
本発明の第2の態様は、第1の態様に記載のアキシャルギャップ型回転電機装置であって、前記制御手段(100)は、前記ロータ(10)の回転起動時(0<ω≦ω1)において、前記インバータ手段(80)を制御して、前記磁気力の合力の前記回転軸方向の成分(F1)を最大値(F1max)に制御するものである。
【0010】
本発明の第3の態様は、第1または2の態様に記載のアキシャルギャップ型回転電機装置であって、前記制御手段(100)は、前記ロータ(10)の最高速回転状態(ωmax)付近において、前記インバータ手段(80)を制御して、d軸電流を負の最大値にすることで、前記磁気力の合力の前記回転軸方向の成分(F1)を最小値(F1min)に制御するものである。
【0011】
本発明の第4の態様は、第1〜3の態様の何れかに記載のアキシャルギャップ型回転電機装置であって、前記界磁部材(10i)が発生させる界磁磁束の向きにd軸方向を取り、前記電流のうち、前記電機子磁界の前記d軸方向に寄与する成分をd軸電流とし、前記界磁磁束を弱める作用を有する前記d軸電流の値を負値とし、前記制御手段(100)は、前記ロータ(10)の最高速回転状態(ωmax)からそれよりも低い所定の回転状態(ω2)までの回転状態において、前記インバータ手段(80)を制御して前記d軸電流(Id)を負値に制御するものである。
【0012】
本発明の第5の態様は、第4の態様に記載のアキシャルギャップ型回転電機装置であって、前記d軸方向に直交する方向をq軸方向とし、前記d軸方向および前記q軸方向の各々に対応する前記電機子巻線のインダクタンスをそれぞれd軸インダクタンスおよびq軸インダクタンスとし、前記q軸インダクタンスは、前記d軸インダクタンスよりも大きいものである。
【0013】
本発明の第6の態様は、第5の態様に記載のアキシャルギャップ型回転電機装置であって、前記界磁部材(10i)は、界磁磁石(10a)と、前記界磁磁石の前記第1ステータ(20)側の面(10a1)に配設され、磁性を有する第1コア部材(10c)と、を備えるものである。
【0014】
本発明の第7の態様は、第5または6の態様に記載のアキシャルギャップ型回転電機装置であって、前記ロータ(10)において、その回転軸(Q1)方向の両側の面(10h1,10h2)の間を貫通する様に、隣り合う前記各界磁部材(10i)の間に、磁性を有する第2コア部材(10f)が配設されるものである。
【0015】
本発明の第8の態様は、第1〜7の態様に何れかに記載のアキシャルギャップ型回転電機装置であって、前記電機子磁芯(20b)の前記ロータ(10)側の磁極面(20e)と前記界磁部材(10i)の前記第1ステータ(20)側の磁極面(10c1)との間隔(d1)は、前記第2ステータ(30)の前記ロータ側の面(30a)と前記界磁部材の前記第2ステータ側の磁極面(10a2)との間隔(d2)よりも小さいものである。
【0016】
本発明の第9の態様は、第1〜7の態様の何れかに記載のアキシャルギャップ型回転電機装置であって、前記ロータ(10)の前記第2ステータ(30)側の面(10a2)に、界磁磁石(10a)の磁束の一部を短絡させる鋼板(10g)が配設されるものである。
【0017】
本発明の第10の態様は、第1〜8の態様の何れかに記載のアキシャルギャップ型回転電機装置であって、前記第2ステータ(30)の前記ロータ(10)側の面(30a)に、複数の凹部(30b)が形成されるものである。
【0018】
本発明の第11の態様は、第10の態様に記載のアキシャルギャップ型回転電機装置であって、前記複数の凹部(30b)は、略同心状に配置された複数の環状溝であるものである。
【0019】
本発明の第12の態様は、第9の態様に記載のアキシャルギャップ型回転電機装置であって、前記複数の凹部(30b)は、放射状に配置された複数の略直線状溝であるものである。
【0020】
本発明の第13の態様は、第1〜10の態様の何れかに記載のアキシャルギャップ型回転電機装置であって、前記界磁部材(10i)が発生させる界磁磁束の向きにd軸方向を取り、前記電流のうち、前記電機子磁界の前記d軸方向に寄与する成分をd軸電流とし、前記界磁磁束を弱める作用を有する前記d軸電流の値を負値とし、前記制御手段(100)は、前記ロータ(10)の回転起動時(0<ω≦ω1)以外の回転状態(ω1<ω≦ωmax)において、前記インバータ手段(80)を制御して前記d軸電流を負値にするものである。
【0021】
本発明の第14の態様は、第13の態様に記載のアキシャルギャップ型回転電機装置であって、前記制御手段(100)は、更に前記ロータ(10)の回転起動時(0<ω≦ω1)において、前記インバータ手段(80)を制御して前記d軸電流を負値にするものである。
【0022】
本発明の第15の態様は、第1〜14の態様の何れかに記載のアキシャルギャップ型回転電機装置を用いた圧縮機であって、容器(300)と、前記容器に配設され、前記容器内に冷媒を供給する吸入管(301)と、前記容器に配設され、前記容器内から前記冷媒を吐出する吐出管(302)と、前記容器内において、前記第1ステータ(20)が前記ロータ(10)よりも前記冷媒の流れの下流側に配置された前記アキシャルギャップ型回転電機(90)と、前記制御手段(100)と、前記インバータ手段(80)と、を備えるものである。
【0023】
本発明の第16の態様は、第1〜14の態様の何れかに記載のアキシャルギャップ型回転電機装置を用いた圧縮機であって、前記第1ステータ(20)が前記ロータ(10)よりも鉛直方向下側に配置された前記アキシャルギャップ型回転電機(90)と、前記制御手段(100)と、前記インバータ手段(80)と、を備えるものである。
【発明の効果】
【0024】
本発明の第1の態様によれば、ロータの回転起動時およびその後の回転状態において、ロータに作用する磁気力の合力の回転軸方向の成分(スラスト力)が、ロータが第1ステータ側に吸引される方向に作用するので、当該成分の作用方向が逆転することを防止でき、これによりロータの回転軸方向の変動を防止でき、その変動による騒音を防止できる。さらに回転速度が増すほどd軸電流を小さくすれば回転速度が増すほどスラスト力が小さくなるので、特に高速時の回転時の機械損増大を抑えることができる。
【0025】
本発明の第2の態様によれば、ロータの回転起動時に発生するロータの回転軸方向の初期振動を効果的に抑える事ができ、その振動による騒音を防止できる。
【0026】
本発明の第3の態様によれば、ロータの最高速回転時において、ロータに作用する磁気力の合力の回転軸方向の成分を最小値にするので、回転シャフトの軸受けロスを最小にでき、ロータを最高速回転させ易くなる。
【0027】
本発明の第4の態様によれば、d軸電流を負値にして、ロータに作用する磁気力の合力の回転軸方向の成分を小さくするので、回転シャフトの軸受けロスを低減できて、ロータを最高速回転させ易くなる。
【0028】
本発明の第5の態様によれば、リラクタンストルクを利用してロータを回転できるので、電流位相を進めてもリラクタンストルクを併用してロータを回転でき、これによりトルク低下を防止でき且つロータを高速回転させ易くなる。
【0029】
本発明の第6の態様によれば、界磁磁石の第1ステータ側の面に第1コア部材が配設されるので、q軸インダクタンスを大きくでき、q軸インダクタンス>d軸インダクタンスの関係の実現に寄与できる。
【0030】
本発明の第7の態様によれば、q軸インダクタンスを大きくでき、q軸インダクタンス>d軸インダクタンスの関係の実現に寄与できる。
【0031】
本発明の第8の態様によれば、ロータに作用する電磁力の合力の回転軸方向の成分を、ロータが第1ステータ側に吸引される方向に作用させ易くできる。
【0032】
本発明の第9の態様によれば、鋼板により界磁磁束が部分的に短絡されるので、第2ステータとロータとの間に作用する磁気吸引力を低減でき、これによりロータに作用する磁気力の合力の回転軸方向の成分を、ロータが第1ステータ側に吸引される方向に増大させる事ができる。
【0033】
本発明の第10の態様によれば、複数の凹部により第2ステータのロータ側の面の平均的な位置がロータから後退するので、第2ステータとロータとの間隔が実質的に拡がり、ロータに作用する磁気力の合力の回転軸方向の成分を、ロータが第1ステータ側に吸引される方向に一層強く作用させる事ができる。
【0034】
本発明の第11の態様によれば、凹部は周方向に一様であるので、第2のステータとロータとの間に作用する磁気吸引力はロータの回転位置に依存せず、従って、ロータの回転に伴って当該磁気吸引力の大きさが変化する事を防止でき、その変化によるロータの回転軸方向の振動を防止できる。
【0035】
本発明の第12の態様によれば、凹部を簡単に形成できる。
【0036】
本発明の第13の態様によれば、d軸電流を負値にして、ロータに作用する磁気力の合力の回転軸方向の成分を小さくするので、ロータの回転起動時以外の回転状態において、回転シャフトの軸受けロスを低減でき、ロータを効率的に回転できる。
【0037】
本発明の第14の態様によれば、ロータの回転起動時とその後の回転状態との各々においてロータに作用する磁気力の合力の回転軸方向の成分を小さくでき、それらの成分の差を小さくできる。これにより、ロータの回転起動時からその以外の回転状態への移行する際に発生するそれらの成分の差に起因するロータの回転軸方向の揺れを抑制できる。
【0038】
本発明の第15の態様によれば、冷媒の流れによる圧力を利用してロータを第1ステータ側に吸引させる事ができ、ロータの回転軸方向の変動をより一層抑制できる。
【0039】
本発明の第16の態様によれば、重力を利用してロータを第1ステータ側に吸引させる事ができ、ロータの回転軸方向の揺れをより一層抑制できる。
【図面の簡単な説明】
【0040】
【図1】第1実施形態に係るアキシャルギャップ型回転電機装置1の構成概略図である。
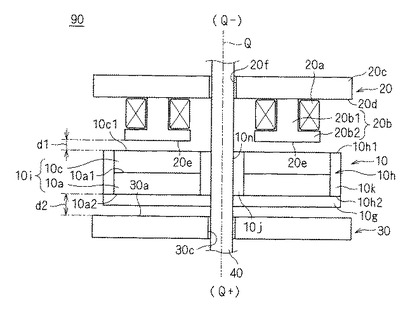
【図2】図1のモータ90についての回転軸に沿った断面の概略図である。
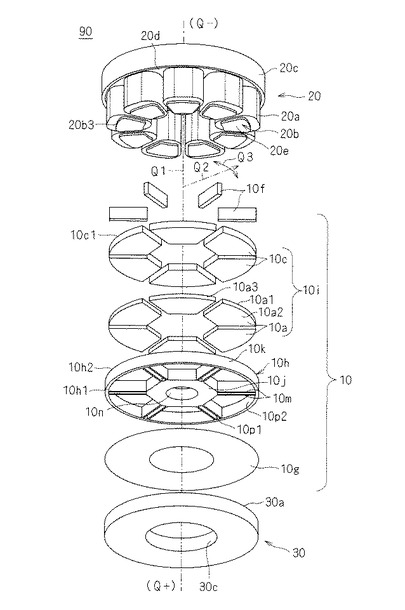
【図3】図1のモータ90の分解斜視図である。
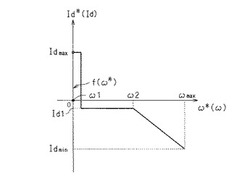
【図4】回転速度指令値ω*とd軸電流指令値Id*との関係の一例を示した図である。
【図5】d軸電流Idと、ロータ10に作用する磁気力の合力の回転軸方向の成分力F1との関係の一例を示した図である。
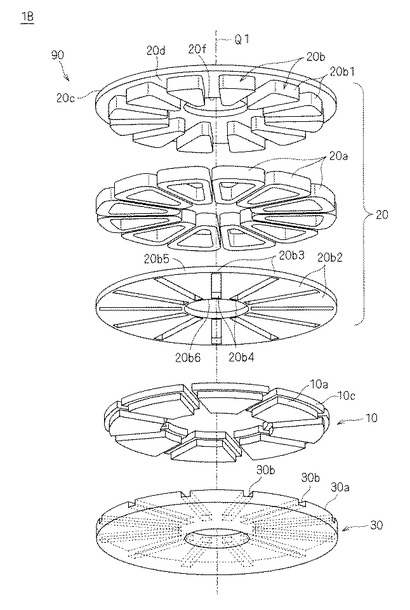
【図6】第2実施形態に係るアキシャルギャップ型回転電機装置1Bのモータ90の分解斜視図である。
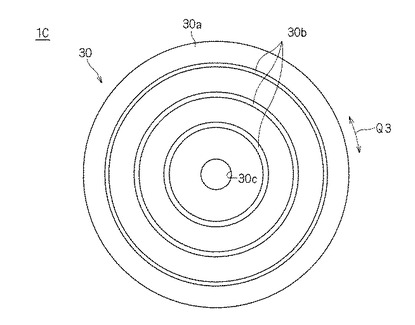
【図7】第3実施形態に係るアキシャルギャップ型回転電機装置1Cの第2ステータ30の平面視図である。
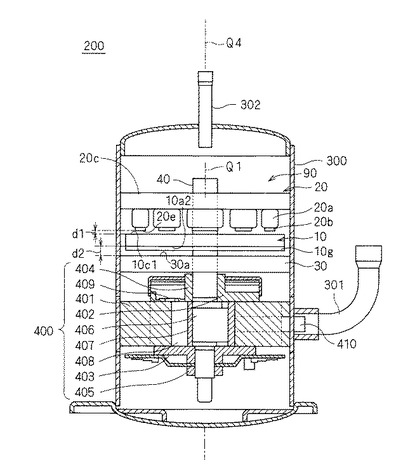
【図8】第4実施形態に係る圧縮機200の断面概略図である。
【図9】第5実施形態に係る圧縮機200Bの断面概略図である。
【図10】第6実施形態に係るアキシャルギャップ型回転電機装置1Dの構成概略図である。
【発明を実施するための形態】
【0041】
<第1実施形態>
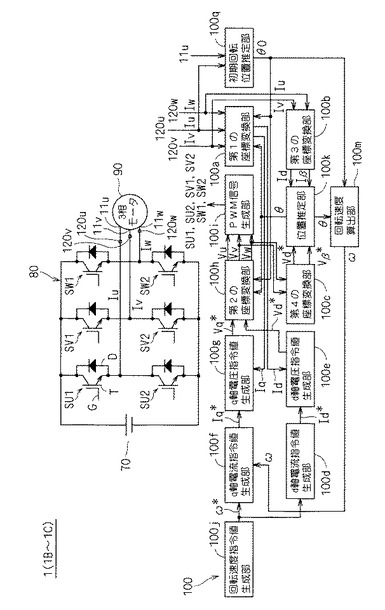
この実施形態に係るアキシャルギャップ型回転電機装置1は、図1の様に、直流電源70と、3相モータ90と、直流電源70の直流電力を3相交流電力に変換して3相モータ90の各相U,V,Wに電流を供給するインバータ回路(インバータ手段)80と、前記各相に流れる相電流Iu,Iv,Iwを検出する複数の相電流センサ120u,120v、120wと、各相電流センサ120u,120v、120wの検出結果に基づきインバータ回路80を制御する制御回路(制御手段)100とを備えている。直流電源は交流電源とコンバータによって形成されてもよい。
【0042】
3相モータ90は、ロータ(回転子)の両側にステータ(固定子)が配置された構造を有し且つセンサレス型のアキシャルギャップ型回転電機である。より詳細には、3相モータ90は、図2および図3の様に、ロータ10と、第1ステータ20と、第2ステータ30と、回転シャフト40とを備える。
【0043】
ロータ10は、複数の界磁部材10iと、複数のコア部材(第2コア部材)10fと、保持部材10hと、鋼板10gとを備えている。
【0044】
各界磁部材10iは、回転軸Q1の周囲において相互に離間して環状に配置されている。各界磁部分10iは、例えば平面視略台形状の板状に形成されており、界磁磁石10aと、コア部材(第1コア部材)10cとを備えている。
【0045】
界磁磁石10aは、例えばネオジム、鉄、ホウ素を主成分とした希土類磁石である。界磁磁石10aは、例えば平面視略台形状の板状に形成されている。ここでは、界磁磁石10aの前記略台形の下底に対応する辺10a3は、円弧状に外周側に凸形成されている。界磁磁石10aは、その両側の主面10a1,10a2が磁極面となっている。各界磁磁石10aはそれぞれ、その両側の主面10a1,10a2が回転軸Q1方向と略直交し、且つその下底に対応する辺10a3が外側を向く様にして、回転軸Q1の周囲において相互に離間して配置される。尚、各界磁磁石10aは、それらの同じ側(例えば回転軸Q1方向のQ−側)の主面(例えば主面10a1)の磁極の極性が、回転軸Q1に対する周方向Q2に沿って交互に異なる様に、配置される。
【0046】
コア部材10cは、磁性材(例えば鉄等の軟磁性材)により、界磁磁石10aと同形同大の平面視形状(ここでは略台形状)の板状に形成されている。コア部材10cは、界磁磁石10aの一方の主面10a1に配設されている。
【0047】
各コア部材10fは、磁性材(例えば鉄等の軟磁性材)により例えば略直方体状に形成されている。各コア部材10fは、その長手方向が回転軸Q1に対する径方向Q3に沿う様にして、隣合う各界磁部材10iの間に配置される。
【0048】
保持部材10hは、複数の界磁部材10iおよび複数のコア部材10fを保持するものである。保持部材10hは、非磁性材料、例えば非磁性金属からなり、内周枠部10jと、外周枠部10kと、複数の連結部10mとを備えている。
【0049】
内周枠部10jは、環状(例えば略円環板状)に形成されている。ここでは内周枠部10jの外周形状は、回転軸Q1方向に沿って見た平面視で、例えば略六角形状に形成されている。また外周枠部10kは、環状(例えば円環状)に形成されており、内周枠部10jの外周側に同心軸状に配置される。内周枠部10jの中央孔10nには、回転シャフト40が同心軸状に配設される。尚、回転シャフト40は、所定の軸受け(不図示)により回転自在に支持される。
【0050】
各連結部10mは、内周枠部10jと外周枠部10mとの間においてほぼ径方向Q3に沿って配置されて、内周枠部10jと外周枠部10mとを連結する。隣り合う各連結部10mの間隔は、相対的に小さい間隔と相対的に大きい間隔とが周方向Q2に沿って交互に繰り返されている。前記相対的に小さい間隔に対応する区間10p1には、コア部材10fが嵌合配設され、前記相対的に大きい間隔に対応する空間10p2には、界磁部材10iが嵌合配設される。
【0051】
即ち各界磁部材10iは、回転軸Q1の周囲に相互に離間して環状に配置し、且つ界磁磁石10aの一方側Q+の主面10a2が保持部材10hの同側Q+の主面10h2から露出すると共にコア部材10cの他方側Q−の主面(磁極面)10c1が保持部材10hの同側Q−の主面10h1から露出した状態で、保持部材10hに配設される。またコア部材10fは、保持部材10hの両側の主面10h1,10h2の間を貫通する様に、隣り合う各界磁部材10iの間に配設される。
【0052】
鋼板10gは、磁性材(例えば鉄等の軟磁性材)により例えば略環板状(例えば円環板状)に形成されており、各界磁磁石10aの主面10a2を被覆する様に、保持部材10hの一方側Q+の面に同心軸状に配設される。
【0053】
第1ステータ20は、例えば、バックヨーク20cと、電機子磁芯20bと、電機子巻線20aとを有している。
【0054】
バックヨーク20cは、例えば略環板状(例えば円環板状)に形成され、その中央孔20fに、ロータ10の中央孔10nに配設された回転シャフト40が挿通される。バックヨーク20cは、回転軸Q1方向の他方側Q−において、ロータ10と対向し且つロータ10と同心軸状に配置される。
【0055】
電機子磁芯20bは、例えば略台形柱状に形成されており、その外周に電機子巻線20aが巻回されている。電機子磁芯20bは、バックヨーク20cのロータ10側の主面20dにおいて、その略台形の下底に対向する側面20b3が外側を向く様にして、回転軸Q1の周りに環状に複数配置されている。尚、電機子磁芯20bは、電機子巻線20aが巻回される例えば略台形柱状の磁芯本体部20b1と、磁芯本体部20b1のロータ10側の面に、磁芯本体部20b1の外周側に張り出す様に磁芯本体部20b1と一体的に形成された例えば略台形板状の幅広磁芯部20b2とを有している。
【0056】
電機子巻線20aは、電機子磁芯20bの外周に絶縁体(図示省略)を介して巻回される。尚、本願では特に断りのない限り、電機子巻線20aは、これを構成する導線の1本1本を指すのではなく、導線が一纏まりに巻回された態様を指すものとする。また、巻始めおよび巻終わりの引出線、および、それらの結線も図面においては省略している。各電機子巻線20aは、3相モータ90を構成する様に配線接続されて、3相モータ90に備えられた各相U,V,W毎の電極11u,11v,11wに接続されている。
【0057】
第2ステータ30は、磁性材により例えば略環板状(例えば円環板状)に形成されており、その中央孔30cに、ロータ10の中央孔10nに配設された回転シャフト40が挿通される。第2ステータ30は、回転軸Q1方向の一方側Q+において、ロータ10と対向し且つロータ10と同心軸状に配置される。
【0058】
この3相モータ90では、図2の様に、電機子磁芯20bの磁極面20eと界磁部材10iの磁極面10c1との間隔d1は、第2ステータ30のロータ10側の主面30aと界磁部材10iの磁極面10a2との間隔d2よりも小さい。これにより、ロータ10と第1ステータ20および第2ステータ30との間に作用する磁気力の合力の回転軸Q1方向の成分が、ロータ10を第1ステータ20側に吸引する方向に作用し易くする。
【0059】
またこの3相モータ90では、(1)各界磁部材10i間にコア部材10fが配置され、且つ(2)鋼板10gが保持部材10hの第2ステータ30側の面10h2に配設され、且つ(3)界磁磁石10aの第1ステータ20側の主面10a1にコア部材10cが配設され、これにより3相モータ90のq軸インダクタンスLqが大きくされている。これにより、q軸インダクタンスLqがd軸インダクタンスLdよりも大きくなり、リラクタンストルクを利用して3相モータ90が回転駆動される。尚ここでは、上記(1)〜(3)の全てが実施されるが、上記(1)〜(3)のうち、少なくとも1つが実施される事が望ましい。
【0060】
尚、d軸は、界磁磁石10aが発生させる界磁磁束の向きに取った軸であり、q軸は、d軸に直交する軸である。d軸インダクタンスLdは、d軸方向に対応する電機子巻線20aのインダクタンスである。またq軸インダクタンスLqは、q軸方向に対応する電機子巻線20aのインダクタンスである。
【0061】
この3相モータ90は、各相U,V,Wの電極11u,11v,11wに、インバータ回路80から各電機子巻線20aに電流が供給されて各電機子巻線20aが励磁される。この励磁した電機子巻線20aとロータ10の各界磁部材10iとの間で磁気吸引力または磁気反発力が発生し、これらの力によりロータ10が回転軸Q1回りに回転され、この回転力が回転シャフト40を介して外部に出力される。
【0062】
インバータ回路80は、図1の様に、複数(ここでは6個)のスイッチ素子SU1,SU2,SV1,SV2,SW1,SW2を備えている。各スイッチ素子SU1,SU2は、互いに直列接続された状態で直流電源70の陽極および陰極間に接続されており、それらの間の電位が3相負荷90のU相電極11uに印加されている。また各スイッチ素子SV1,SV2は、互いに直列接続された状態で直流電源70の陽極および陰極間に接続されており、それらの間の電位が3相モータ90のV相電極11vに印加されている。また各スイッチ素子SW1,SW2は、互いに直列接続された状態で直流電源70の陽極および陰極間に接続されており、それらの間の電位が3相モータ90のW相電極11wに印加されている。
【0063】
各スイッチ素子SU1,SU2,SV1,SV2,SW1,SW2はそれぞれ、トランジスタTと、トランジスタTの主電極間に設けられたダイオードDとを備えている。ダイオードDは、その通電方向が、トランジスタTの通電方向に対して逆向きになる様にトランジスタTの主電極間に設けられている。各スイッチ素子の制御電極Gはそれぞれ、制御回路100に接続されている。スイッチ素子SU1,SU2,SV1,SV2,SW1,SW2としては、還流ダイオードを備えたIGBT等を使用する事ができる。
【0064】
このインバータ回路80は、制御回路100により、各スイッチ素子SU1,SU2,SV1,SV2,SW1,SW2の制御電極Gに電圧が印加されて、それら各スイッチ素子の導通/非導通が制御される。これにより直流電源70の直流電力が3相交流電力に変換されて、3相モータ90の各相U,V,Wの電極11u,11v,11wに電流が供給されて、3相モータ90が回転駆動される。
【0065】
制御回路100は、3相モータ90の回転速度ωが回転速度指令値ω*に一致する様に、且つロータ10と第1ステータ10および第2ステータ20との間に作用する磁気力の合力の回転軸Q1方向の成分(以後、トラスト力と呼ぶ)が第1ステータ20側に作用する様に、インバータ回路80を制御する。制御回路100は、図1の様に、回転速度指令値生成部100jと、d軸電流指令値生成部100dと、d軸電圧指令値生成部100eと、q軸電流指令値生成部100fと、q軸電圧指令値生成部100gと、第1の座標変換部100aと、第2の座標変換部100hと、PWM信号発生部100iと、第3の座標変換部100bと、第4の座標変換部100cと、位置推定出部100kと、回転速度算出部100mと、初期回転推定部100qとを備えている。
【0066】
PWM信号生成部100iは、3相モータ90の回転起動の直前に、インバータ回路80の各制御電極GにPWM信号を印加して、インバータ回路80から3相モータ90の各相電極11u,11v,11wのうちの所定の2つ(例えば11v,11w)に所定の電圧(例えば3相モータ90が動作反応しない程度の高周波電圧)を印加させる。これにより、3相モータ90の回転停止状態で、3相モータ90の各相電極11u,11v,11wのうちの所定の1つ(例えば11u)に電圧を発生させる。以後、前記所定の電圧が印加されなかった相を非導通相(ここではU相)と呼ぶ。
【0067】
初期回転位置推定部100qは、3相モータ90の非通電相に対応する相電流センサの検出結果および非導通相の相電極に発生した電圧を用いて、ロータ20の初期回転位置θ0を検出する。より詳細には、3相モータ90のインダクタンスは3相モータ90の回転位置θに依存するので、初期回転位置推定部100qは、非通電相に対応する相電流センサの検出結果および非導通相の相電極に発生した電圧から3相モータ90のインダクタンスを推定し、その推定値から3相モータ90の初期回転位置θ0を推定する。
【0068】
第3の座標変換部100bは、各相電流センサ120v,120wにより検出されたV相電流IvおよびW相電流Iwに対し、所定の座標変換(即ち各相U,V,Wに対応する3軸の3次元座標系からα軸およびβ軸の2次元座標系(2相直交固定子座標系)への座標変換)を行って、α軸電流Iαおよびβ軸電流Iβを算出する。
【0069】
第4の座標変換部100cは、第2の座標変換部100hにより算出された後述のV相電圧指令値Vv*およびW相電圧指令値Vw*に対し、所定の座標変換(即ち各相U,V,Wに対応する3軸の3次元座標系からα軸およびβ軸の2次元座標系(2相直交固定子座標系)への座標変換)を行って、α軸電圧指令値Vα*およびβ軸電圧Vβ*を算出する。
【0070】
位置推定部100kは、第3の座標変換部100bにより算出されたα軸電流Iαおよびβ軸電流Iβと、第4の座標変換部100cにより算出されたα軸電圧指令値Vα*およびβ軸電圧指令値Vβ*とに基づき、3相モータ90の回転時の回転位置(位置推定値)θを算出する。
【0071】
回転速度算出部100mは、3相モータ90の回転起動の直前は、初期回転位置推定部100gにより推定された初期回転位置θ0に基づき、また3相モータ90の回転時は、位置推定部100kにより推定された回転位置θに基づき、3相モータ90の回転速度ωを算出する。
【0072】
第1の座標変換部100aは、各相電流センサ120u,120v,120wにより検出された各相電流Iu,Iv,Iwに対し、3相モータ90の回転起動の直前は、初期位置推定部100gにより算出された初期回転位置θ0を用いて、また3相モータ90の回転時は、位置推定部100kにより算出された回転位置θを用いて所定の座標変換(即ち各相U,V,Wに対応する3軸の3次元座標系からd軸およびq軸の2次元座標系への座標変換)を行って、d軸電流Idおよびq軸電流Iqを算出する。
【0073】
尚、d軸電流Idは、電機子巻線20aの励磁により発生する磁界(電機子磁界)のd軸方向に寄与する電流成分であり、q軸電流Iqは、電機子巻線20aの励磁により発生する磁界のq軸方向に寄与する電流成分である。
【0074】
回転速度指令値生成部100jは、3相モータ90を所望の回転速度ωで回転させるための回転速度指令値ω*を生成する。
【0075】
q軸電流指令値生成部100fは、回転速度算出部100mにより算出された回転速度ωが、回転速度指令値生成部100jからの回転速度指令値ω*に近づく様に、q軸電流指令値Iq*を生成する。具体的には、q軸電流指令値生成部100fは、回転速度ωと回転速度指令値ω*との偏差を比例積分微分演算(PID)してq軸電流指令値Iq*を生成する。
【0076】
q軸電圧指令値生成部100gは、第1の座標変換部100aにより算出されたq軸電流Iqが、q軸電流指令値生成部100fにより生成されたq軸電流指令値Iq*に近づく様に、q軸電圧指令値Vq*を生成する。具体的には、q軸電圧指令値生成部100gは、q軸電流Iqとq軸電流指令値Iq*との偏差を比例積分微分演算(PID)してq軸電圧指令値Vq*を生成する。
【0077】
d軸電流指令値生成部100dは、回転速度指令値生成部100jからの回転速度指令値ω*に応じて異なる値のd軸電流指令値Id*を生成する。より詳細には、例えば図4の様に、d軸電流指令値Id*の取り得る範囲は、例えば、正値の最大値Idmaxから負値の最小値Idminまでの範囲に設定されており、また回転速度指令値ω*の取り得る範囲は、例えば、0から最高速回転ωmaxまでの範囲に設定されている。尚この設定は、図4に限定されるわけではなく、任意に設定可能であるが、例えば、d軸電流指令値Id*は、3相モータ90の回転起動時(即ち0<ω*≦ω1)には正値の最大値Idmaxを取り、ω*=ωmaxの時には負値の最小値Idminをとるものとする。尚、d軸電流Idはd軸電流指令値Id*に一致し、また回転速度ωも回転速度指令値ω*に一致する様に制御されるので、図4は、Id*とω*の関係であると共にIdとωの関係であると言える。
【0078】
尚、図5の様に、最小値Idminは、d軸電流Id=Idminのときのスラスト力F1が、ロータ10を第1ステータ20側に吸引する方向に作用する範囲内で取られた値とする。即ちd軸電流指令値Id*の取り得る範囲は、スラスト力F1が常にロータ10を第1ステータ20側に吸引する方向に作用する様に設定されている。
【0079】
尚、図4では例えば、回転速度指令値ω*が0からω1(ω1:低速回転状態)まで増加する間(即ち3相モータ90の回転起動時)は、d軸電流指令値Id*は、最大値Idmaxに生成される。そして回転指令値ω*がω1からω2(ω2:例えば中速回転状態)まで増加する間は、d軸電流指令値Id*は、3相モータ90のリラクタンストルクとマグネットトルクの和が最大になる様な値(例えば0以下で所定の負値Id1以上の範囲の値、図4ではId1の場合で図示)に生成される。そして回転指令値ω*がω2から最大値ωmaxまで増加する間は、d軸電流指令値Id*は、回転速度指令値ω*の増加に伴って減少する様に生成される。
【0080】
特に3相モータ90の回転起動時(0<ω*≦ω1)にd軸電流指令値Id*が正値の最大値Idmaxにされることで、図5の様にスラスト力F1が最大値F1maxとなり、ロータ10が第1ステータ20側に最大限に吸引されて、3相モータ90の回転起動時に発生する回転軸Q1方向の揺れが十分に抑えられる。
【0081】
また特に3相モータ90の最高速回転時(ω*=ωmax)にd軸電流指令値Id*が負値の最小値Idminにされることで、図5の様にスラスト力F1が最小値F1minになり、回転シャフト40の軸受け(不図示)でのロスが低減されて3相モータ90が高速回転し易くなる。
【0082】
尚、図4では、ω*とId*の関係を与える関数f(ω*)は、一例として、ω*=0でf(ω*)=0となり、0<ω*≦ω1の範囲ではf(ω*)=Idmaxとなり、ω1<ω*≦ω2の範囲ではf(ω*)=Id1となり、ω2<ω*≦ωmaxの範囲でf(ω*)は単調減少関数となり、ω*=ωmaxではf(ω*)=Idminとなる。
【0083】
d軸電圧指令値生成部100eは、第1の座標変換部100aにより算出されたd軸電流Idが、d軸電流指令値生成部100dにより生成されたd軸電流指令値Id*に近づく様に、d軸電圧指令値Vd*を生成する。具体的には、d軸電圧指令値生成部100eは、d軸電流Idとd軸電流指令値Id*との偏差を比例積分微分演算(PID)してd軸電圧指令値Vd*を生成する。
【0084】
第2の座標変換100hは、d軸電圧指令値生成部100eおよびq軸電圧指令値生成部100gにより生成されたd軸電圧指令値Vd*およびq軸電圧指令値Vq*に対し、3相モータ90の回転起動前は、初期位置推定部100gにより算出された初期回転位置θ0を用いて、また3相モータ90の回転時は、位置推定部100kにより算出された回転位置θを用いて所定の座標変換(即ちd軸およびq軸の2次元座標系から各相U,V,Wに対応する3軸の3次元座標系への座標変換)を行って、U相電圧指令値Vu*、V相電圧指令値Vu*およびW相電圧指令値Vw*を算出する。
【0085】
またPWM信号生成部100iは、3相モータ90の回転時は、インバータ回路80の各制御電極GにPWM信号を印加して、3相モータ90の各相電極11u,11v,11wにそれぞれ、第3の座標変換部100bにより算出された各相電圧指令値Vu*,Vv*,Vw*に一致する電圧が印加される様に、インバータ回路80を制御する。これにより、3相モータ90の回転速度ωが回転速度指令値ω*に一致する様に制御される。
【0086】
次にアキシャルギャップ型回転電機装置1の動作を説明する。
【0087】
3相モータ90の回転起動の直前に、PWM信号生成部100iおよび初期回転位置推定部100gにより、上述の様に3相モータ90の初期回転位置θ0が算出される。そして第1の座標変換部100aにより、その初期回転位置θ0を用いて、各相電流センサ120u,120v,120wにより検出された各相電流Iu,Iv,Iwからq軸電流Idおよびd軸電流Idが算出される。また回転速度算出部100mにより、その初期回転位置θ0から、3相モータ90の回転速度ωが算出される。
【0088】
そしてそれら各部100m,100mの処理に平衡して、回転速度指令値生成部100jにより回転速度指令値ω*が生成される。そしてq軸電流指令値生成部100fにより、その回転速度指令値ω*と回転速度算出部100mにより生成された回転速度ωとに基づき、q軸電流指令値Iq*が生成される。そしてq軸電圧指令値生成部100gにより、そのq軸電流指令値Iq*と第1の座標変換部100aにより生成されたq軸電流Iqとに基づき、q軸電圧指令値Vq*が生成される。
【0089】
またそれら各部100f,100gの処理に平衡して、d軸電流指令値生成部100dにより、回転速度指令値生成部100jからの回転速度指令値ω*に応じた値のd軸電流指令値Id*が生成される。そしてd軸電圧指令値生成部100eにより、そのd軸電流指令値Id*と第1の座標変換部100aにより算出されたd軸電流Idとに基づきd軸電圧指令値Vd*が生成される。
【0090】
そして第2の座標変換部100hにより、初期回転位置推定部100gにより算出された初期回転位置θ0を用いて、それらd軸電圧指令値Vd*およびq軸電圧指令値Vq*から各相電圧指令値Vu,Vv,Vwが生成される。そしてPWM信号生成部100iにより、インバータ回路80が制御されて、3相モータ90の各相電極11u,11v,11wに、各電圧指令値Vu*,Vv*,Vw*に一致する各相電圧Vu,Vv,Vwが印加される。これにより3相モータ90が回転速度指令値ω*に応じた回転速度で回転制御される。
【0091】
そして初期回転位置推定部100gが機能停止すると共に、第3の座標変換部100b、第4の座標変換部100cおよび位置推定部100kが機能開始する。即ち第3の座標変換部100bにより、各相電流センサ120v,120wにより検出されたV相電流IvおよびW相電流Iwからα軸電流Iαおよびβ軸電流Iβが算出される。またq軸電圧指令値生成部100gおよびd軸電圧指令値生成部100eにより生成されたq軸電圧指令値Vq*およびd軸電圧指令値Vd*からα軸電圧指令値Vα*およびβ軸電圧指令値Vβ*が算出される。そして位置推定部100kにより、それらα軸電流Iα,β軸電流Iβ,α軸電圧指令値Vα*およびβ軸電圧指令値Vβ*から3相モータ90の回転位置θが算出される。
【0092】
そして第1の座標変換部100aでは、3相モータ90の回転時では、初期回転位置推定部100gからの初期回転位置θ0の変わりに、位置推定部100kにより算出された回転位置θを用いて、d軸電流Idおよびq軸電流Iqが算出される。同様に第2の座標変換部100hでも、3相モータ90の回転時では、位置推定部100kにより算出された回転位置θを用いて、各相電圧指令値Vu*,Vv*,Vw*が算出される。また回転速度算出部100mでも、3相モータ90の回転時では、位置推定部100kにより算出された回転位置θから3相モータ90の回転速度ωが算出される。そして上記同様に3相モータ90が回転速度指令値ω*に応じた回転速度で回転制御される。
【0093】
この様に、このアキシャルギャップ型回転電機装置1では、制御回路100により、3相モータ90の回転速度ωが回転速度指令値ω*に近づく様に、且つ3相モータ90に流れる各相電流Iu,Iv,Iwのd軸電流Idが回転速度指令値ω*(従って3相モータ90の回転速度ω)に応じた所定の値に制御される様に、インバータ回路80を介して3相モータ90が回転制御される。
【0094】
ここでは、d軸電流Idが回転速度指令値ω*に応じて例えば図4の様に制御されることで、スラスト力F1がd軸電流Idに応じて例えば図5の様に制御される。以下、図4および図5に基づき、回転速度指令値ω*、d軸電流Idおよびスラスト力F1の関係を説明する。
【0095】
ω*=0のときは、3相モータ90は回転が停止しており、d軸電流指令値Id*=0(従ってd軸電流Id=0)である。この場合、スラスト力F1は、界磁磁石10aの磁気力からの寄与のみであり、ここではロータ10を第1ステータ20側に吸引する方向に作用している。
【0096】
0<ω*≦ω1の範囲(即ち3相モータ90の回転起動時)では、d軸電流指令値Id*は最大値Idmaxとなる。従って、d軸電流Idも最大値Idmaxとなる。図5の様に、スラスト力F1は、ロータ10が第1ステータ20側に吸引される方向に作用し、従ってこの場合は、最大値F1maxとなる。従ってこの場合は、スラスト力F1の作用方向が一定になるので、スラスト力F1の作用方向の変動に起因するロータ10の回転軸Q1方向の変動が防止される。特にロータ10が第1ステータ20側に最も強く吸引されるので、3相モータ90の回転起動時に発生する回転軸Q1方向の初期振動が十分に抑えられる。
【0097】
ω1<ω*≦ω2の範囲(即ち3相モータ90の回転起動後から所定速度の回転状態(例えば中速回転状態)までの回転状態)では、d軸電流指令値Id*は0以下で所定の負値Id1以上の範囲の値(図4ではId1)に制御される(従ってd軸電流Idも0以下で所定の負値以上の範囲の値に制御される)。具体的には、マグネットトルクとリラクタンストルクの和が最大になる電流位相になる様に、d軸電流指令値Id*が制御される。これは、例えば3相モータ90を冷媒圧縮用として低負荷で運転する場合に相当し、断熱の優れた近年の住宅に用いられるような空気調和機であれば、このような運転範囲の比率が大きくなる。必要トルクに対して電流が最小になるため、3相モータ90を低入力で運転できる。この場合は、図5の様に、スラスト力F1は、ロータ10が第1ステータ20側に吸引される方向に作用し、且つd軸電流Idが0または負値なので比較的弱い力に維持される。従ってこの場合も、スラスト力F1の作用方向が一定になるので、スラスト力F1の作用方向の変動に起因するロータ10の回転軸Q1方向の変動が防止される。尚、この範囲(ω1<ω*≦ω2)には、3相モータ90の回転起動時に動機運転からセンサレス駆動に移行した後、所定の運転速度に加速する範囲も含まれるが、この場合は、d軸電流指令値Id*を、正の範囲で、回転速度ωが増すに従って値を減少させる様に制御しても良い。
【0098】
ω1<ω*<ωmaxの範囲(即ち3相モータ90の例えば中速回転状態から高速回転状態までの回転状態)では、d軸電流指令値Id*は負値で且つ回転速度指令値ω*に反比例して減少する。具体的には、この範囲(ω1<ω*<ωmax)は、3相モータ90において誘起電圧が入力電圧値に達し、弱め磁束制御により運転範囲を拡大している範囲である。従って、d軸電流Idも負値で且つ回転速度ωに反比例して減少する。図5の様に、スラスト力F1は、ロータ10が第1ステータ20側に吸引される方向に作用し、この場合は、d軸電流Idが負値なので比較的弱い力に維持される。従ってこの場合も、スラスト力F1の作用方向が変わらないので、スラスト力F1の作用方向の変動に起因するロータ10の回転軸Q1方向の変動が防止される。特にスラスト力F1が比較的弱い力に維持されるので、軸受ロスは、一般に高速回転ほど増大するところ、スラスト力低減により回転シャフト40の軸受けロスが低減されて、3相モータ90は高速回転し易くなる。
【0099】
ω*=ωmax(即ち3相モータ90の最高速回転時)では、d軸電流指令値Id*は最小値Idmin(<0)となる。従ってd軸電流Idも最小値Idminとなる。この場合は、図5の様に、スラスト力F1は、ロータ10が第1ステータ20側に吸引される方向に作用し、且つ最小値Fminとなる。従ってこの場合も、スラスト力F1の作用方向が変わらないので、スラスト力F1の作用方向の変動に起因するロータ10の回転軸Q1方向の変動が防止される。特にスラスト力F1が最小値F1minに維持されるので、回転シャフト40の軸受けロスが最小となって、3相モータ9は高速回転し易くなる。
【0100】
この様に、制御回路100により、3相モータ90の回転起動時およびその後の回転状態に亘って、スラスト力F1が第1ステータ20側に作用する様に、インバータ回路80が制御される。
【0101】
以上の様に構成されたアキシャルギャップ型回転電機装置1によれば、ロータ10の回転起動時およびその後の回転状態において、スラスト力(即ちロータ10に作用する磁気力の合力の回転軸Q1方向の成分)F1が、ロータ10が第1ステータ20側に吸引される方向に作用するので、スラスト力F1の作用方向が逆転することを防止でき、これによりロータ10の回転軸Q1方向の変動を防止でき、その変動による騒音を防止できる。
【0102】
またロータ10の回転起動時においてスラスト力F1を最大値F1maxにするので、ロータ10の回転起動時に発生するロータ10の回転軸Q1方向の初期振動を効果的に抑制でき、その振動による騒音を防止できる。
【0103】
またロータ10の最高速回転時ωmaxにおいて、スラスト力F1を最小値F1minにするので、回転シャフト40の軸受けロスを最小にでき、ロータ10を最高速回転させ易くなる。
【0104】
またロータ10の最高速回転ωmaxからそれよりも低い所定速度の回転状態(例えば中速回転状態)ω2までの回転状態では、d軸電流Idを負値にしてスラスト力F1を小さくするので、回転シャフト40の軸受けロスを低減できて、ロータ1を高速回転させ易くなる。
【0105】
またd軸電流Idを、3相モータ90の回転起動時以外の回転状態(ω1<ω≦ωmax)において負値にするので、3相モータ90の回転起動時以外の全ての回転状態において、スラスト力F1を比較的弱く維持でき、3相モータ90を効率良く回転駆動できる。
【0106】
尚、この実施形態において、d軸電流Idを、3相モータ90の回転起動時(0<ω≦ω1)およびその後の回転状態(ω1<ω≦ωmax)において負値にしても良い。この場合は、3相モータ90の回転起動時およびその後の回転状態において、スラスト力F1を比較的弱く維持でき、3相モータ90を効率良く回転駆動できる。また3相モータ90の回転起動時およびその後の回転状態の各々でのスラスト力F1を小さくでき、それらのスラスト力F1の差を小さくできる。これにより、ロータ10の回転起動時からその後の回転状態への移行する際に発生するそれらの力1の差に起因する3相モータ90の回転軸Q1方向の揺れを抑制できる。
【0107】
またd軸電流Idを、3相モータ90の最高速回転(ωmax)以外の全ての回転状態(0<ω<ωmax)において正値にしても良い。この様にすれば、最高速回転以外の全ての回転状態において、スラスト力F1を、ロータ10が第1ステータ20側に吸引される方向に増大させる事ができ、ロータ10の回転軸Q1方向の揺れを抑制できる。
【0108】
またd軸電流Idを、3相モータ90の全ての回転状態(0<ω≦ωmax)において正値にしても良い。この場合は、各間隔d1,d2(図2)においてd1>d2の関係が満たされなくても、3相モータ90の全ての回転状態において、スラスト力F1をロータ10が第1ステータ20側に吸引される方向に作用させる事ができる。
【0109】
<第2実施形態>
この実施形態に係るアキシャルギャップ型回転電機装置1Bは、第1実施形態において、例えば図6の様に、第2ステータ30のロータ10側の主面30aに、複数の凹部30bを形成したものである。図6では、複数の凹部30bは、第2ステータ30の主面30aに、例えば、放射状に配置された複数の略直線状溝として形成されている。
【0110】
この様にすることで、複数の凹部30bにより第2ステータ30のロータ10側の主面30aの平均的な位置(回転軸Q軸方向の位置)がロータ10から後退するので、第2ステータ30とロータ10との間隔d2(図2)が実質的に拡がり、ロータ10に作用する磁気力の合力の回転軸Q1方向の成分F1を、ロータ10が第1ステータ20側に吸引される方向に一層強く作用させる事ができる。
【0111】
尚、図6では、電機子磁芯20bの磁芯本体部20b1および幅広磁芯部20b2は、互いに別体に形成されている。また、隣り合う各幅広磁芯部20b2は、互いに間隔を空けた状態で、それらの外側円弧部20b5の端部同士が連結部20b3により連結され、且つそれらの内側円弧部20b6の端部同士が連結部20b4により連結される様にして、一体的に形成されている。また図6では、ロータ10の保持部材10h、コア部材10f,10cおよび鋼板10gは図示省略されている。
【0112】
<第3実施形態>
この実施形態に係るアキシャルギャップ型回転電機装置1Cは、第2実施形態において、複数の凹部30bを、例えば図7の様に、第2ステータ30のロータ10側の主面30aに、例えば略同心状に配置された直径の異なる複数の環状溝として形成したものである。
【0113】
この様にした場合は、凹部30bは周方向Q3に一様であるので、第2のステータ30とロータ10との間に作用する磁気吸引力はロータ10の回転位置に依存せず、従って、ロータ10の回転に伴って当該磁気吸引力の大きさが変化する事を防止でき、その変化によるロータ10の回転軸Q1方向の振動を防止できる。
【0114】
<第4実施形態>
この実施形態に係る圧縮機200は、第1実施形態のアキシャルギャップ型回転電機装置1を用いたものである。
【0115】
圧縮機200は、冷媒を圧縮するものであり、図8の様に、容器300と、3相モータ90と、圧縮機構部400とを備えている。図8は、圧縮機200の断面図であるが、3相モータ90は側面視で図示されている。図8では、アキシャルギャップ型回転電機装置1の制御回路100,インバータ回路80および電源70は、図示省略されている。
【0116】
容器300は、例えば中空円柱状に形成され、その柱軸Q4が鉛直となる様に配置されている。容器300の例えば下部側面には、容器300内に冷媒を供給する吸入管301が接続されている。また容器300の天井部には、容器300内から前記冷媒を吐出する吐出管302が接続されている。尚、図8では、吸入管301および吐出管302は、側面視で図示されている。
【0117】
3相モータ90は、容器300内の上部側に収容配設されている。より詳細には、3相モータ90は、その回転軸Q1が鉛直となる様に配置されている。また3相モータ90は、第1ステータ20がロータ10の上側に配置した状態で、バックヨーク20cの外周側面が容器300の内周面に固定され、且つ第2ステータ30がロータ10の下側に配置した状態で、第2ステータ30の外周側面が容器300の内周面に固定される様にして、配設されている。
【0118】
圧縮機構部400は、容器300内において、3相モータ90の下側に位置する様に収容配設されている。圧縮機構部400は、3相モータ90の回転シャフト40に連結されており、回転シャフト40を介して3相モータ90によって駆動される。
【0119】
圧縮機構部400は、シリンダ状の本体部401と、上端板402および下端板403とを備えている。
【0120】
本体部401の側面には、本体部401内に吸入管301からの冷媒を吸入する吸入ポート410が設けられている。上端板402は、本体部401の上側開口を閉塞する様に配設されており、下端板403は、本体部401の下側開口を閉塞する様に配設されている。回転シャフト40は、上端板402および下端板403を貫通して、本体部401の内部に挿入されている。回転シャフト40は、上端板402に設けられた軸受404と、下端板403に設けられた軸受405により回転自在に支持されている。
【0121】
本体部401内では、回転シャフト40にクランクピン406が設けられ、クランクピン406の外周にはピストン407が嵌合されている。ピストン407およびこれに対応する本体部401との間の空間により、圧縮室408が形成されている。回転シャフト40の回転に伴って、ピストン407が偏芯した状態で回転しまたは公転運動を行うことで、圧縮室408の容積が変化される。この変化により、圧縮室408において、吸入管301から供給された冷媒が圧縮される。
【0122】
この圧縮機200では、3相モータ90が回転駆動して圧縮機構部400が駆動されると、吸入管301から圧縮機構部400に冷媒が供給され、圧縮機構部400(とりわけ圧縮室408)で当該冷媒が圧縮される。圧縮機構部400で圧縮された高圧冷媒は、圧縮機構部400の吐出ポート409から容器300内に吐出される。そして高圧冷媒は、第2ステータ30と回転シャフト40または容器300との間の空間を通過し、そしてロータ10と容器300との間の空間を通過し、そして第1ステータ30と容器300または回転シャフト40との間の空間、または第1ステータ30に設けられた回転軸Q1方向の貫通孔(不図示)を通過して、3相モータ90の上部空間に運ばれ、吐出管302を介して容器300の外部に吐出される。この冷媒の流れによる圧力により、ロータ10が第1ステータ30側に押し付けられて、電機子磁芯20bの磁極面20eと界磁部材10iの磁極面10c1との間隔d1が、第2ステータ30の主面30aと界磁部材10iの磁極面10a2との間隔d2よりも一層短くなる。
【0123】
以上の様に構成された圧縮機200によれば、冷媒の流れによる圧力を利用してロータ10を第1ステータ20側に一層吸引させる事ができ、ロータ10の回転軸Q1方向の変動をより一層抑制できる。
【0124】
尚、この実施形態では、第1実施形態のアキシャルギャップ型回転電機装置1を用いた場合で説明したが、第2または第3実施形態のアキシャルギャップ型回転電機装置1B,1Cを用いても良い。
【0125】
<第5実施形態>
この実施形態に係る圧縮機200Bは、第4実施形態において、図9の様に、第1ステータ20と第2ステータ30との配置を逆にしたものである。即ち3相モータ90は、第1ステータ20がロータ10の下側に配置した状態で、バックヨーク20cの外周側面が容器300の内周面に固定され、且つ第2ステータ30がロータ10の上側に配置した状態で、第2ステータ30の外周側面が容器300の内周面に固定される様にして、配設されている。この状態では、ロータ10は、重力により下方に引っ張られて、第1ステータ20側に一層吸引される。
【0126】
以上の様に構成された圧縮機200Bによれば、重力を利用してロータ10を第1ステータ20側に一層吸引させる事ができ、ロータ10の回転軸Q1方向の揺れをより一層抑制できる。
【0127】
<第6実施形態>
この実施形態に係るアキシャルギャップ型回転電機装置1Dは、図10の様に、第1実施形態において、第3の座標変換部100bおよび第4の座標変換部100cを省略したものである。以下、第1実施形態と同じ構成には同じ符号を付して、第1実施形態と異なる構成だけ説明する。
【0128】
この実施形態の位置推定部100kDは、第1座標変換部100aにより算出されたd軸電流およびq軸電流と、q軸電圧指令生成部100gにより生成されたq軸電圧指令値Vq*と、d軸電圧指令生成部100eにより生成されたd軸電圧指令値Vd*とに基づき、3相モータ90の回転時の回転位置(位置推定値)θを算出する。
【0129】
この様に構成されたアキシャルギャップ型回転電機装置1Dによれば、第1実施形態と同様の効果を得る他に、第3の座標変換部100bおよび第4の座標変換部100cが省略されるので、演算処理負担が軽減できる。
【符号の説明】
【0130】
1,1B,1C アキシャルギャップ型回転電機装置
10 ロータ
10a 界磁磁石
10a2,10c1,20e 磁極面
10c 第1コア部材
10a1 主面
10f 第2コア部材
10g 鋼板
10h 保持部材
10h1,10h2 面
10i 界磁部材
11u,11v,11w 電極
20 第1ステータ
20a 電機子巻線
20b 電機子磁芯
20c バックヨーク
30 第2ステータ
30a 主面
30b 凹部
40 回転シャフト
80 インバータ回路
90 3相モータ
100 制御回路
120u,120v,120w 相電流センサ
200,200B 圧縮機
Q1 回転軸
Q2 径方向
Q3 周方向
【技術分野】
【0001】
本発明は、アキシャルギャップ型回転電機装置およびそれを用いた圧縮機に関する。
【背景技術】
【0002】
アキシャルギャップ型モータは、ロータとステータとの間に作用する回転軸方向の磁気力(スラストカ)が大きいため、ロータの両側にステータを配置して、ロータに作用するスラストカを相殺するのが好ましい。しかし、ステータには通常、電機子巻線が配設されるので、電機子巻線がロータの両側に配置し、電機子巻線の結線が煩雑になる。
【0003】
この問題を解消するために、ロータの一方側だけに、電機子巻線を設けた第1ステータを配置し、ロータの他方側には、電機子巻線を設けない第2ステータを配置する構成が提案されている(特許文献1−3)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−109678号公報
【特許文献2】特開2006−296048号公報
【特許文献3】特開2006−353078号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしその様な構成では、電機子巻線に流れる電流の条件によって、ロータに作用するスラストカが変動する。例えば、ロータの中速回転状態において、ロータに作用するスラストカの合力がゼロとなる様にすると、ロータのセンサレス回転起動時では、ロータと第1ステータとの間の吸引力が中速回転状態よりも強く、ロータが第1ステータ側に吸引される。しかし弱め磁束制御が行われる高速回転状態では、ロータと第1ステータとの間の吸引力が中速回転状態よりも弱まり、ロータが第2ステータ側に吸引される。従って、ロータが回転起動時から高速回転状態に移行する過渡状態では、ロータの吸引方向が変化してロータが回転軸方向に変動し、その変動による騒音が発生する。
【0006】
また、ロータに作用するスラストカの合力がゼロをクロスして脈動すれば、ロータが回転軸方向に脈動して定常的に騒音が発生する。
【0007】
この発明は、上記のような問題点を解決するためになされたものであり、ロータの回転軸方向の変動を抑制し、その変動による騒音を防止するアキシャルギャップ型回転電機装置および圧縮機を提供することにある。
【課題を解決するための手段】
【0008】
上記課題を解決する為に、本発明の第1の態様に係るアキシャルギャップ型回転電機装置は、その回転軸(Q1)の周囲に環状に複数の界磁部材(10i)が配設されたロータ(10)と、前記ロータに対して前記回転軸方向の一方側(Q−)に配置され、その前記ロータ側の面(20d)に、前記複数の界磁部材に対向する様に、電機子巻線(20a)が巻回された複数の電機子磁芯(20b)が配設された第1ステータ(20)と、前記ロータに対して前記回転軸方向の他方側(Q+)に配置された磁性体である第2ステータ(30)と、を含むアキシャルギャップ型回転電機(90)と、前記各電機子磁芯に巻回された前記電機子巻線に選択的に電流を流すインバータ手段(80)と、前記インバータ手段を制御して前記各電機子巻線に電流を選択的に流して電機子磁界を発生させ、前記ロータを回転制御する制御手段(100)と、を備え、前記制御手段は、前記ロータの回転起動時(0<ω≦ω1)およびその後の回転状態(ω1<ω≦ωmax)において、前記第1ステータおよび前記第2ステータと前記ロータとの間に作用する磁気力の合力の前記回転軸方向の成分(F1)が、前記ロータが前記第1ステータ側に吸引される方向に作用する範囲内で、前記インバータ手段を制御するものである。
【0009】
本発明の第2の態様は、第1の態様に記載のアキシャルギャップ型回転電機装置であって、前記制御手段(100)は、前記ロータ(10)の回転起動時(0<ω≦ω1)において、前記インバータ手段(80)を制御して、前記磁気力の合力の前記回転軸方向の成分(F1)を最大値(F1max)に制御するものである。
【0010】
本発明の第3の態様は、第1または2の態様に記載のアキシャルギャップ型回転電機装置であって、前記制御手段(100)は、前記ロータ(10)の最高速回転状態(ωmax)付近において、前記インバータ手段(80)を制御して、d軸電流を負の最大値にすることで、前記磁気力の合力の前記回転軸方向の成分(F1)を最小値(F1min)に制御するものである。
【0011】
本発明の第4の態様は、第1〜3の態様の何れかに記載のアキシャルギャップ型回転電機装置であって、前記界磁部材(10i)が発生させる界磁磁束の向きにd軸方向を取り、前記電流のうち、前記電機子磁界の前記d軸方向に寄与する成分をd軸電流とし、前記界磁磁束を弱める作用を有する前記d軸電流の値を負値とし、前記制御手段(100)は、前記ロータ(10)の最高速回転状態(ωmax)からそれよりも低い所定の回転状態(ω2)までの回転状態において、前記インバータ手段(80)を制御して前記d軸電流(Id)を負値に制御するものである。
【0012】
本発明の第5の態様は、第4の態様に記載のアキシャルギャップ型回転電機装置であって、前記d軸方向に直交する方向をq軸方向とし、前記d軸方向および前記q軸方向の各々に対応する前記電機子巻線のインダクタンスをそれぞれd軸インダクタンスおよびq軸インダクタンスとし、前記q軸インダクタンスは、前記d軸インダクタンスよりも大きいものである。
【0013】
本発明の第6の態様は、第5の態様に記載のアキシャルギャップ型回転電機装置であって、前記界磁部材(10i)は、界磁磁石(10a)と、前記界磁磁石の前記第1ステータ(20)側の面(10a1)に配設され、磁性を有する第1コア部材(10c)と、を備えるものである。
【0014】
本発明の第7の態様は、第5または6の態様に記載のアキシャルギャップ型回転電機装置であって、前記ロータ(10)において、その回転軸(Q1)方向の両側の面(10h1,10h2)の間を貫通する様に、隣り合う前記各界磁部材(10i)の間に、磁性を有する第2コア部材(10f)が配設されるものである。
【0015】
本発明の第8の態様は、第1〜7の態様に何れかに記載のアキシャルギャップ型回転電機装置であって、前記電機子磁芯(20b)の前記ロータ(10)側の磁極面(20e)と前記界磁部材(10i)の前記第1ステータ(20)側の磁極面(10c1)との間隔(d1)は、前記第2ステータ(30)の前記ロータ側の面(30a)と前記界磁部材の前記第2ステータ側の磁極面(10a2)との間隔(d2)よりも小さいものである。
【0016】
本発明の第9の態様は、第1〜7の態様の何れかに記載のアキシャルギャップ型回転電機装置であって、前記ロータ(10)の前記第2ステータ(30)側の面(10a2)に、界磁磁石(10a)の磁束の一部を短絡させる鋼板(10g)が配設されるものである。
【0017】
本発明の第10の態様は、第1〜8の態様の何れかに記載のアキシャルギャップ型回転電機装置であって、前記第2ステータ(30)の前記ロータ(10)側の面(30a)に、複数の凹部(30b)が形成されるものである。
【0018】
本発明の第11の態様は、第10の態様に記載のアキシャルギャップ型回転電機装置であって、前記複数の凹部(30b)は、略同心状に配置された複数の環状溝であるものである。
【0019】
本発明の第12の態様は、第9の態様に記載のアキシャルギャップ型回転電機装置であって、前記複数の凹部(30b)は、放射状に配置された複数の略直線状溝であるものである。
【0020】
本発明の第13の態様は、第1〜10の態様の何れかに記載のアキシャルギャップ型回転電機装置であって、前記界磁部材(10i)が発生させる界磁磁束の向きにd軸方向を取り、前記電流のうち、前記電機子磁界の前記d軸方向に寄与する成分をd軸電流とし、前記界磁磁束を弱める作用を有する前記d軸電流の値を負値とし、前記制御手段(100)は、前記ロータ(10)の回転起動時(0<ω≦ω1)以外の回転状態(ω1<ω≦ωmax)において、前記インバータ手段(80)を制御して前記d軸電流を負値にするものである。
【0021】
本発明の第14の態様は、第13の態様に記載のアキシャルギャップ型回転電機装置であって、前記制御手段(100)は、更に前記ロータ(10)の回転起動時(0<ω≦ω1)において、前記インバータ手段(80)を制御して前記d軸電流を負値にするものである。
【0022】
本発明の第15の態様は、第1〜14の態様の何れかに記載のアキシャルギャップ型回転電機装置を用いた圧縮機であって、容器(300)と、前記容器に配設され、前記容器内に冷媒を供給する吸入管(301)と、前記容器に配設され、前記容器内から前記冷媒を吐出する吐出管(302)と、前記容器内において、前記第1ステータ(20)が前記ロータ(10)よりも前記冷媒の流れの下流側に配置された前記アキシャルギャップ型回転電機(90)と、前記制御手段(100)と、前記インバータ手段(80)と、を備えるものである。
【0023】
本発明の第16の態様は、第1〜14の態様の何れかに記載のアキシャルギャップ型回転電機装置を用いた圧縮機であって、前記第1ステータ(20)が前記ロータ(10)よりも鉛直方向下側に配置された前記アキシャルギャップ型回転電機(90)と、前記制御手段(100)と、前記インバータ手段(80)と、を備えるものである。
【発明の効果】
【0024】
本発明の第1の態様によれば、ロータの回転起動時およびその後の回転状態において、ロータに作用する磁気力の合力の回転軸方向の成分(スラスト力)が、ロータが第1ステータ側に吸引される方向に作用するので、当該成分の作用方向が逆転することを防止でき、これによりロータの回転軸方向の変動を防止でき、その変動による騒音を防止できる。さらに回転速度が増すほどd軸電流を小さくすれば回転速度が増すほどスラスト力が小さくなるので、特に高速時の回転時の機械損増大を抑えることができる。
【0025】
本発明の第2の態様によれば、ロータの回転起動時に発生するロータの回転軸方向の初期振動を効果的に抑える事ができ、その振動による騒音を防止できる。
【0026】
本発明の第3の態様によれば、ロータの最高速回転時において、ロータに作用する磁気力の合力の回転軸方向の成分を最小値にするので、回転シャフトの軸受けロスを最小にでき、ロータを最高速回転させ易くなる。
【0027】
本発明の第4の態様によれば、d軸電流を負値にして、ロータに作用する磁気力の合力の回転軸方向の成分を小さくするので、回転シャフトの軸受けロスを低減できて、ロータを最高速回転させ易くなる。
【0028】
本発明の第5の態様によれば、リラクタンストルクを利用してロータを回転できるので、電流位相を進めてもリラクタンストルクを併用してロータを回転でき、これによりトルク低下を防止でき且つロータを高速回転させ易くなる。
【0029】
本発明の第6の態様によれば、界磁磁石の第1ステータ側の面に第1コア部材が配設されるので、q軸インダクタンスを大きくでき、q軸インダクタンス>d軸インダクタンスの関係の実現に寄与できる。
【0030】
本発明の第7の態様によれば、q軸インダクタンスを大きくでき、q軸インダクタンス>d軸インダクタンスの関係の実現に寄与できる。
【0031】
本発明の第8の態様によれば、ロータに作用する電磁力の合力の回転軸方向の成分を、ロータが第1ステータ側に吸引される方向に作用させ易くできる。
【0032】
本発明の第9の態様によれば、鋼板により界磁磁束が部分的に短絡されるので、第2ステータとロータとの間に作用する磁気吸引力を低減でき、これによりロータに作用する磁気力の合力の回転軸方向の成分を、ロータが第1ステータ側に吸引される方向に増大させる事ができる。
【0033】
本発明の第10の態様によれば、複数の凹部により第2ステータのロータ側の面の平均的な位置がロータから後退するので、第2ステータとロータとの間隔が実質的に拡がり、ロータに作用する磁気力の合力の回転軸方向の成分を、ロータが第1ステータ側に吸引される方向に一層強く作用させる事ができる。
【0034】
本発明の第11の態様によれば、凹部は周方向に一様であるので、第2のステータとロータとの間に作用する磁気吸引力はロータの回転位置に依存せず、従って、ロータの回転に伴って当該磁気吸引力の大きさが変化する事を防止でき、その変化によるロータの回転軸方向の振動を防止できる。
【0035】
本発明の第12の態様によれば、凹部を簡単に形成できる。
【0036】
本発明の第13の態様によれば、d軸電流を負値にして、ロータに作用する磁気力の合力の回転軸方向の成分を小さくするので、ロータの回転起動時以外の回転状態において、回転シャフトの軸受けロスを低減でき、ロータを効率的に回転できる。
【0037】
本発明の第14の態様によれば、ロータの回転起動時とその後の回転状態との各々においてロータに作用する磁気力の合力の回転軸方向の成分を小さくでき、それらの成分の差を小さくできる。これにより、ロータの回転起動時からその以外の回転状態への移行する際に発生するそれらの成分の差に起因するロータの回転軸方向の揺れを抑制できる。
【0038】
本発明の第15の態様によれば、冷媒の流れによる圧力を利用してロータを第1ステータ側に吸引させる事ができ、ロータの回転軸方向の変動をより一層抑制できる。
【0039】
本発明の第16の態様によれば、重力を利用してロータを第1ステータ側に吸引させる事ができ、ロータの回転軸方向の揺れをより一層抑制できる。
【図面の簡単な説明】
【0040】
【図1】第1実施形態に係るアキシャルギャップ型回転電機装置1の構成概略図である。
【図2】図1のモータ90についての回転軸に沿った断面の概略図である。
【図3】図1のモータ90の分解斜視図である。
【図4】回転速度指令値ω*とd軸電流指令値Id*との関係の一例を示した図である。
【図5】d軸電流Idと、ロータ10に作用する磁気力の合力の回転軸方向の成分力F1との関係の一例を示した図である。
【図6】第2実施形態に係るアキシャルギャップ型回転電機装置1Bのモータ90の分解斜視図である。
【図7】第3実施形態に係るアキシャルギャップ型回転電機装置1Cの第2ステータ30の平面視図である。
【図8】第4実施形態に係る圧縮機200の断面概略図である。
【図9】第5実施形態に係る圧縮機200Bの断面概略図である。
【図10】第6実施形態に係るアキシャルギャップ型回転電機装置1Dの構成概略図である。
【発明を実施するための形態】
【0041】
<第1実施形態>
この実施形態に係るアキシャルギャップ型回転電機装置1は、図1の様に、直流電源70と、3相モータ90と、直流電源70の直流電力を3相交流電力に変換して3相モータ90の各相U,V,Wに電流を供給するインバータ回路(インバータ手段)80と、前記各相に流れる相電流Iu,Iv,Iwを検出する複数の相電流センサ120u,120v、120wと、各相電流センサ120u,120v、120wの検出結果に基づきインバータ回路80を制御する制御回路(制御手段)100とを備えている。直流電源は交流電源とコンバータによって形成されてもよい。
【0042】
3相モータ90は、ロータ(回転子)の両側にステータ(固定子)が配置された構造を有し且つセンサレス型のアキシャルギャップ型回転電機である。より詳細には、3相モータ90は、図2および図3の様に、ロータ10と、第1ステータ20と、第2ステータ30と、回転シャフト40とを備える。
【0043】
ロータ10は、複数の界磁部材10iと、複数のコア部材(第2コア部材)10fと、保持部材10hと、鋼板10gとを備えている。
【0044】
各界磁部材10iは、回転軸Q1の周囲において相互に離間して環状に配置されている。各界磁部分10iは、例えば平面視略台形状の板状に形成されており、界磁磁石10aと、コア部材(第1コア部材)10cとを備えている。
【0045】
界磁磁石10aは、例えばネオジム、鉄、ホウ素を主成分とした希土類磁石である。界磁磁石10aは、例えば平面視略台形状の板状に形成されている。ここでは、界磁磁石10aの前記略台形の下底に対応する辺10a3は、円弧状に外周側に凸形成されている。界磁磁石10aは、その両側の主面10a1,10a2が磁極面となっている。各界磁磁石10aはそれぞれ、その両側の主面10a1,10a2が回転軸Q1方向と略直交し、且つその下底に対応する辺10a3が外側を向く様にして、回転軸Q1の周囲において相互に離間して配置される。尚、各界磁磁石10aは、それらの同じ側(例えば回転軸Q1方向のQ−側)の主面(例えば主面10a1)の磁極の極性が、回転軸Q1に対する周方向Q2に沿って交互に異なる様に、配置される。
【0046】
コア部材10cは、磁性材(例えば鉄等の軟磁性材)により、界磁磁石10aと同形同大の平面視形状(ここでは略台形状)の板状に形成されている。コア部材10cは、界磁磁石10aの一方の主面10a1に配設されている。
【0047】
各コア部材10fは、磁性材(例えば鉄等の軟磁性材)により例えば略直方体状に形成されている。各コア部材10fは、その長手方向が回転軸Q1に対する径方向Q3に沿う様にして、隣合う各界磁部材10iの間に配置される。
【0048】
保持部材10hは、複数の界磁部材10iおよび複数のコア部材10fを保持するものである。保持部材10hは、非磁性材料、例えば非磁性金属からなり、内周枠部10jと、外周枠部10kと、複数の連結部10mとを備えている。
【0049】
内周枠部10jは、環状(例えば略円環板状)に形成されている。ここでは内周枠部10jの外周形状は、回転軸Q1方向に沿って見た平面視で、例えば略六角形状に形成されている。また外周枠部10kは、環状(例えば円環状)に形成されており、内周枠部10jの外周側に同心軸状に配置される。内周枠部10jの中央孔10nには、回転シャフト40が同心軸状に配設される。尚、回転シャフト40は、所定の軸受け(不図示)により回転自在に支持される。
【0050】
各連結部10mは、内周枠部10jと外周枠部10mとの間においてほぼ径方向Q3に沿って配置されて、内周枠部10jと外周枠部10mとを連結する。隣り合う各連結部10mの間隔は、相対的に小さい間隔と相対的に大きい間隔とが周方向Q2に沿って交互に繰り返されている。前記相対的に小さい間隔に対応する区間10p1には、コア部材10fが嵌合配設され、前記相対的に大きい間隔に対応する空間10p2には、界磁部材10iが嵌合配設される。
【0051】
即ち各界磁部材10iは、回転軸Q1の周囲に相互に離間して環状に配置し、且つ界磁磁石10aの一方側Q+の主面10a2が保持部材10hの同側Q+の主面10h2から露出すると共にコア部材10cの他方側Q−の主面(磁極面)10c1が保持部材10hの同側Q−の主面10h1から露出した状態で、保持部材10hに配設される。またコア部材10fは、保持部材10hの両側の主面10h1,10h2の間を貫通する様に、隣り合う各界磁部材10iの間に配設される。
【0052】
鋼板10gは、磁性材(例えば鉄等の軟磁性材)により例えば略環板状(例えば円環板状)に形成されており、各界磁磁石10aの主面10a2を被覆する様に、保持部材10hの一方側Q+の面に同心軸状に配設される。
【0053】
第1ステータ20は、例えば、バックヨーク20cと、電機子磁芯20bと、電機子巻線20aとを有している。
【0054】
バックヨーク20cは、例えば略環板状(例えば円環板状)に形成され、その中央孔20fに、ロータ10の中央孔10nに配設された回転シャフト40が挿通される。バックヨーク20cは、回転軸Q1方向の他方側Q−において、ロータ10と対向し且つロータ10と同心軸状に配置される。
【0055】
電機子磁芯20bは、例えば略台形柱状に形成されており、その外周に電機子巻線20aが巻回されている。電機子磁芯20bは、バックヨーク20cのロータ10側の主面20dにおいて、その略台形の下底に対向する側面20b3が外側を向く様にして、回転軸Q1の周りに環状に複数配置されている。尚、電機子磁芯20bは、電機子巻線20aが巻回される例えば略台形柱状の磁芯本体部20b1と、磁芯本体部20b1のロータ10側の面に、磁芯本体部20b1の外周側に張り出す様に磁芯本体部20b1と一体的に形成された例えば略台形板状の幅広磁芯部20b2とを有している。
【0056】
電機子巻線20aは、電機子磁芯20bの外周に絶縁体(図示省略)を介して巻回される。尚、本願では特に断りのない限り、電機子巻線20aは、これを構成する導線の1本1本を指すのではなく、導線が一纏まりに巻回された態様を指すものとする。また、巻始めおよび巻終わりの引出線、および、それらの結線も図面においては省略している。各電機子巻線20aは、3相モータ90を構成する様に配線接続されて、3相モータ90に備えられた各相U,V,W毎の電極11u,11v,11wに接続されている。
【0057】
第2ステータ30は、磁性材により例えば略環板状(例えば円環板状)に形成されており、その中央孔30cに、ロータ10の中央孔10nに配設された回転シャフト40が挿通される。第2ステータ30は、回転軸Q1方向の一方側Q+において、ロータ10と対向し且つロータ10と同心軸状に配置される。
【0058】
この3相モータ90では、図2の様に、電機子磁芯20bの磁極面20eと界磁部材10iの磁極面10c1との間隔d1は、第2ステータ30のロータ10側の主面30aと界磁部材10iの磁極面10a2との間隔d2よりも小さい。これにより、ロータ10と第1ステータ20および第2ステータ30との間に作用する磁気力の合力の回転軸Q1方向の成分が、ロータ10を第1ステータ20側に吸引する方向に作用し易くする。
【0059】
またこの3相モータ90では、(1)各界磁部材10i間にコア部材10fが配置され、且つ(2)鋼板10gが保持部材10hの第2ステータ30側の面10h2に配設され、且つ(3)界磁磁石10aの第1ステータ20側の主面10a1にコア部材10cが配設され、これにより3相モータ90のq軸インダクタンスLqが大きくされている。これにより、q軸インダクタンスLqがd軸インダクタンスLdよりも大きくなり、リラクタンストルクを利用して3相モータ90が回転駆動される。尚ここでは、上記(1)〜(3)の全てが実施されるが、上記(1)〜(3)のうち、少なくとも1つが実施される事が望ましい。
【0060】
尚、d軸は、界磁磁石10aが発生させる界磁磁束の向きに取った軸であり、q軸は、d軸に直交する軸である。d軸インダクタンスLdは、d軸方向に対応する電機子巻線20aのインダクタンスである。またq軸インダクタンスLqは、q軸方向に対応する電機子巻線20aのインダクタンスである。
【0061】
この3相モータ90は、各相U,V,Wの電極11u,11v,11wに、インバータ回路80から各電機子巻線20aに電流が供給されて各電機子巻線20aが励磁される。この励磁した電機子巻線20aとロータ10の各界磁部材10iとの間で磁気吸引力または磁気反発力が発生し、これらの力によりロータ10が回転軸Q1回りに回転され、この回転力が回転シャフト40を介して外部に出力される。
【0062】
インバータ回路80は、図1の様に、複数(ここでは6個)のスイッチ素子SU1,SU2,SV1,SV2,SW1,SW2を備えている。各スイッチ素子SU1,SU2は、互いに直列接続された状態で直流電源70の陽極および陰極間に接続されており、それらの間の電位が3相負荷90のU相電極11uに印加されている。また各スイッチ素子SV1,SV2は、互いに直列接続された状態で直流電源70の陽極および陰極間に接続されており、それらの間の電位が3相モータ90のV相電極11vに印加されている。また各スイッチ素子SW1,SW2は、互いに直列接続された状態で直流電源70の陽極および陰極間に接続されており、それらの間の電位が3相モータ90のW相電極11wに印加されている。
【0063】
各スイッチ素子SU1,SU2,SV1,SV2,SW1,SW2はそれぞれ、トランジスタTと、トランジスタTの主電極間に設けられたダイオードDとを備えている。ダイオードDは、その通電方向が、トランジスタTの通電方向に対して逆向きになる様にトランジスタTの主電極間に設けられている。各スイッチ素子の制御電極Gはそれぞれ、制御回路100に接続されている。スイッチ素子SU1,SU2,SV1,SV2,SW1,SW2としては、還流ダイオードを備えたIGBT等を使用する事ができる。
【0064】
このインバータ回路80は、制御回路100により、各スイッチ素子SU1,SU2,SV1,SV2,SW1,SW2の制御電極Gに電圧が印加されて、それら各スイッチ素子の導通/非導通が制御される。これにより直流電源70の直流電力が3相交流電力に変換されて、3相モータ90の各相U,V,Wの電極11u,11v,11wに電流が供給されて、3相モータ90が回転駆動される。
【0065】
制御回路100は、3相モータ90の回転速度ωが回転速度指令値ω*に一致する様に、且つロータ10と第1ステータ10および第2ステータ20との間に作用する磁気力の合力の回転軸Q1方向の成分(以後、トラスト力と呼ぶ)が第1ステータ20側に作用する様に、インバータ回路80を制御する。制御回路100は、図1の様に、回転速度指令値生成部100jと、d軸電流指令値生成部100dと、d軸電圧指令値生成部100eと、q軸電流指令値生成部100fと、q軸電圧指令値生成部100gと、第1の座標変換部100aと、第2の座標変換部100hと、PWM信号発生部100iと、第3の座標変換部100bと、第4の座標変換部100cと、位置推定出部100kと、回転速度算出部100mと、初期回転推定部100qとを備えている。
【0066】
PWM信号生成部100iは、3相モータ90の回転起動の直前に、インバータ回路80の各制御電極GにPWM信号を印加して、インバータ回路80から3相モータ90の各相電極11u,11v,11wのうちの所定の2つ(例えば11v,11w)に所定の電圧(例えば3相モータ90が動作反応しない程度の高周波電圧)を印加させる。これにより、3相モータ90の回転停止状態で、3相モータ90の各相電極11u,11v,11wのうちの所定の1つ(例えば11u)に電圧を発生させる。以後、前記所定の電圧が印加されなかった相を非導通相(ここではU相)と呼ぶ。
【0067】
初期回転位置推定部100qは、3相モータ90の非通電相に対応する相電流センサの検出結果および非導通相の相電極に発生した電圧を用いて、ロータ20の初期回転位置θ0を検出する。より詳細には、3相モータ90のインダクタンスは3相モータ90の回転位置θに依存するので、初期回転位置推定部100qは、非通電相に対応する相電流センサの検出結果および非導通相の相電極に発生した電圧から3相モータ90のインダクタンスを推定し、その推定値から3相モータ90の初期回転位置θ0を推定する。
【0068】
第3の座標変換部100bは、各相電流センサ120v,120wにより検出されたV相電流IvおよびW相電流Iwに対し、所定の座標変換(即ち各相U,V,Wに対応する3軸の3次元座標系からα軸およびβ軸の2次元座標系(2相直交固定子座標系)への座標変換)を行って、α軸電流Iαおよびβ軸電流Iβを算出する。
【0069】
第4の座標変換部100cは、第2の座標変換部100hにより算出された後述のV相電圧指令値Vv*およびW相電圧指令値Vw*に対し、所定の座標変換(即ち各相U,V,Wに対応する3軸の3次元座標系からα軸およびβ軸の2次元座標系(2相直交固定子座標系)への座標変換)を行って、α軸電圧指令値Vα*およびβ軸電圧Vβ*を算出する。
【0070】
位置推定部100kは、第3の座標変換部100bにより算出されたα軸電流Iαおよびβ軸電流Iβと、第4の座標変換部100cにより算出されたα軸電圧指令値Vα*およびβ軸電圧指令値Vβ*とに基づき、3相モータ90の回転時の回転位置(位置推定値)θを算出する。
【0071】
回転速度算出部100mは、3相モータ90の回転起動の直前は、初期回転位置推定部100gにより推定された初期回転位置θ0に基づき、また3相モータ90の回転時は、位置推定部100kにより推定された回転位置θに基づき、3相モータ90の回転速度ωを算出する。
【0072】
第1の座標変換部100aは、各相電流センサ120u,120v,120wにより検出された各相電流Iu,Iv,Iwに対し、3相モータ90の回転起動の直前は、初期位置推定部100gにより算出された初期回転位置θ0を用いて、また3相モータ90の回転時は、位置推定部100kにより算出された回転位置θを用いて所定の座標変換(即ち各相U,V,Wに対応する3軸の3次元座標系からd軸およびq軸の2次元座標系への座標変換)を行って、d軸電流Idおよびq軸電流Iqを算出する。
【0073】
尚、d軸電流Idは、電機子巻線20aの励磁により発生する磁界(電機子磁界)のd軸方向に寄与する電流成分であり、q軸電流Iqは、電機子巻線20aの励磁により発生する磁界のq軸方向に寄与する電流成分である。
【0074】
回転速度指令値生成部100jは、3相モータ90を所望の回転速度ωで回転させるための回転速度指令値ω*を生成する。
【0075】
q軸電流指令値生成部100fは、回転速度算出部100mにより算出された回転速度ωが、回転速度指令値生成部100jからの回転速度指令値ω*に近づく様に、q軸電流指令値Iq*を生成する。具体的には、q軸電流指令値生成部100fは、回転速度ωと回転速度指令値ω*との偏差を比例積分微分演算(PID)してq軸電流指令値Iq*を生成する。
【0076】
q軸電圧指令値生成部100gは、第1の座標変換部100aにより算出されたq軸電流Iqが、q軸電流指令値生成部100fにより生成されたq軸電流指令値Iq*に近づく様に、q軸電圧指令値Vq*を生成する。具体的には、q軸電圧指令値生成部100gは、q軸電流Iqとq軸電流指令値Iq*との偏差を比例積分微分演算(PID)してq軸電圧指令値Vq*を生成する。
【0077】
d軸電流指令値生成部100dは、回転速度指令値生成部100jからの回転速度指令値ω*に応じて異なる値のd軸電流指令値Id*を生成する。より詳細には、例えば図4の様に、d軸電流指令値Id*の取り得る範囲は、例えば、正値の最大値Idmaxから負値の最小値Idminまでの範囲に設定されており、また回転速度指令値ω*の取り得る範囲は、例えば、0から最高速回転ωmaxまでの範囲に設定されている。尚この設定は、図4に限定されるわけではなく、任意に設定可能であるが、例えば、d軸電流指令値Id*は、3相モータ90の回転起動時(即ち0<ω*≦ω1)には正値の最大値Idmaxを取り、ω*=ωmaxの時には負値の最小値Idminをとるものとする。尚、d軸電流Idはd軸電流指令値Id*に一致し、また回転速度ωも回転速度指令値ω*に一致する様に制御されるので、図4は、Id*とω*の関係であると共にIdとωの関係であると言える。
【0078】
尚、図5の様に、最小値Idminは、d軸電流Id=Idminのときのスラスト力F1が、ロータ10を第1ステータ20側に吸引する方向に作用する範囲内で取られた値とする。即ちd軸電流指令値Id*の取り得る範囲は、スラスト力F1が常にロータ10を第1ステータ20側に吸引する方向に作用する様に設定されている。
【0079】
尚、図4では例えば、回転速度指令値ω*が0からω1(ω1:低速回転状態)まで増加する間(即ち3相モータ90の回転起動時)は、d軸電流指令値Id*は、最大値Idmaxに生成される。そして回転指令値ω*がω1からω2(ω2:例えば中速回転状態)まで増加する間は、d軸電流指令値Id*は、3相モータ90のリラクタンストルクとマグネットトルクの和が最大になる様な値(例えば0以下で所定の負値Id1以上の範囲の値、図4ではId1の場合で図示)に生成される。そして回転指令値ω*がω2から最大値ωmaxまで増加する間は、d軸電流指令値Id*は、回転速度指令値ω*の増加に伴って減少する様に生成される。
【0080】
特に3相モータ90の回転起動時(0<ω*≦ω1)にd軸電流指令値Id*が正値の最大値Idmaxにされることで、図5の様にスラスト力F1が最大値F1maxとなり、ロータ10が第1ステータ20側に最大限に吸引されて、3相モータ90の回転起動時に発生する回転軸Q1方向の揺れが十分に抑えられる。
【0081】
また特に3相モータ90の最高速回転時(ω*=ωmax)にd軸電流指令値Id*が負値の最小値Idminにされることで、図5の様にスラスト力F1が最小値F1minになり、回転シャフト40の軸受け(不図示)でのロスが低減されて3相モータ90が高速回転し易くなる。
【0082】
尚、図4では、ω*とId*の関係を与える関数f(ω*)は、一例として、ω*=0でf(ω*)=0となり、0<ω*≦ω1の範囲ではf(ω*)=Idmaxとなり、ω1<ω*≦ω2の範囲ではf(ω*)=Id1となり、ω2<ω*≦ωmaxの範囲でf(ω*)は単調減少関数となり、ω*=ωmaxではf(ω*)=Idminとなる。
【0083】
d軸電圧指令値生成部100eは、第1の座標変換部100aにより算出されたd軸電流Idが、d軸電流指令値生成部100dにより生成されたd軸電流指令値Id*に近づく様に、d軸電圧指令値Vd*を生成する。具体的には、d軸電圧指令値生成部100eは、d軸電流Idとd軸電流指令値Id*との偏差を比例積分微分演算(PID)してd軸電圧指令値Vd*を生成する。
【0084】
第2の座標変換100hは、d軸電圧指令値生成部100eおよびq軸電圧指令値生成部100gにより生成されたd軸電圧指令値Vd*およびq軸電圧指令値Vq*に対し、3相モータ90の回転起動前は、初期位置推定部100gにより算出された初期回転位置θ0を用いて、また3相モータ90の回転時は、位置推定部100kにより算出された回転位置θを用いて所定の座標変換(即ちd軸およびq軸の2次元座標系から各相U,V,Wに対応する3軸の3次元座標系への座標変換)を行って、U相電圧指令値Vu*、V相電圧指令値Vu*およびW相電圧指令値Vw*を算出する。
【0085】
またPWM信号生成部100iは、3相モータ90の回転時は、インバータ回路80の各制御電極GにPWM信号を印加して、3相モータ90の各相電極11u,11v,11wにそれぞれ、第3の座標変換部100bにより算出された各相電圧指令値Vu*,Vv*,Vw*に一致する電圧が印加される様に、インバータ回路80を制御する。これにより、3相モータ90の回転速度ωが回転速度指令値ω*に一致する様に制御される。
【0086】
次にアキシャルギャップ型回転電機装置1の動作を説明する。
【0087】
3相モータ90の回転起動の直前に、PWM信号生成部100iおよび初期回転位置推定部100gにより、上述の様に3相モータ90の初期回転位置θ0が算出される。そして第1の座標変換部100aにより、その初期回転位置θ0を用いて、各相電流センサ120u,120v,120wにより検出された各相電流Iu,Iv,Iwからq軸電流Idおよびd軸電流Idが算出される。また回転速度算出部100mにより、その初期回転位置θ0から、3相モータ90の回転速度ωが算出される。
【0088】
そしてそれら各部100m,100mの処理に平衡して、回転速度指令値生成部100jにより回転速度指令値ω*が生成される。そしてq軸電流指令値生成部100fにより、その回転速度指令値ω*と回転速度算出部100mにより生成された回転速度ωとに基づき、q軸電流指令値Iq*が生成される。そしてq軸電圧指令値生成部100gにより、そのq軸電流指令値Iq*と第1の座標変換部100aにより生成されたq軸電流Iqとに基づき、q軸電圧指令値Vq*が生成される。
【0089】
またそれら各部100f,100gの処理に平衡して、d軸電流指令値生成部100dにより、回転速度指令値生成部100jからの回転速度指令値ω*に応じた値のd軸電流指令値Id*が生成される。そしてd軸電圧指令値生成部100eにより、そのd軸電流指令値Id*と第1の座標変換部100aにより算出されたd軸電流Idとに基づきd軸電圧指令値Vd*が生成される。
【0090】
そして第2の座標変換部100hにより、初期回転位置推定部100gにより算出された初期回転位置θ0を用いて、それらd軸電圧指令値Vd*およびq軸電圧指令値Vq*から各相電圧指令値Vu,Vv,Vwが生成される。そしてPWM信号生成部100iにより、インバータ回路80が制御されて、3相モータ90の各相電極11u,11v,11wに、各電圧指令値Vu*,Vv*,Vw*に一致する各相電圧Vu,Vv,Vwが印加される。これにより3相モータ90が回転速度指令値ω*に応じた回転速度で回転制御される。
【0091】
そして初期回転位置推定部100gが機能停止すると共に、第3の座標変換部100b、第4の座標変換部100cおよび位置推定部100kが機能開始する。即ち第3の座標変換部100bにより、各相電流センサ120v,120wにより検出されたV相電流IvおよびW相電流Iwからα軸電流Iαおよびβ軸電流Iβが算出される。またq軸電圧指令値生成部100gおよびd軸電圧指令値生成部100eにより生成されたq軸電圧指令値Vq*およびd軸電圧指令値Vd*からα軸電圧指令値Vα*およびβ軸電圧指令値Vβ*が算出される。そして位置推定部100kにより、それらα軸電流Iα,β軸電流Iβ,α軸電圧指令値Vα*およびβ軸電圧指令値Vβ*から3相モータ90の回転位置θが算出される。
【0092】
そして第1の座標変換部100aでは、3相モータ90の回転時では、初期回転位置推定部100gからの初期回転位置θ0の変わりに、位置推定部100kにより算出された回転位置θを用いて、d軸電流Idおよびq軸電流Iqが算出される。同様に第2の座標変換部100hでも、3相モータ90の回転時では、位置推定部100kにより算出された回転位置θを用いて、各相電圧指令値Vu*,Vv*,Vw*が算出される。また回転速度算出部100mでも、3相モータ90の回転時では、位置推定部100kにより算出された回転位置θから3相モータ90の回転速度ωが算出される。そして上記同様に3相モータ90が回転速度指令値ω*に応じた回転速度で回転制御される。
【0093】
この様に、このアキシャルギャップ型回転電機装置1では、制御回路100により、3相モータ90の回転速度ωが回転速度指令値ω*に近づく様に、且つ3相モータ90に流れる各相電流Iu,Iv,Iwのd軸電流Idが回転速度指令値ω*(従って3相モータ90の回転速度ω)に応じた所定の値に制御される様に、インバータ回路80を介して3相モータ90が回転制御される。
【0094】
ここでは、d軸電流Idが回転速度指令値ω*に応じて例えば図4の様に制御されることで、スラスト力F1がd軸電流Idに応じて例えば図5の様に制御される。以下、図4および図5に基づき、回転速度指令値ω*、d軸電流Idおよびスラスト力F1の関係を説明する。
【0095】
ω*=0のときは、3相モータ90は回転が停止しており、d軸電流指令値Id*=0(従ってd軸電流Id=0)である。この場合、スラスト力F1は、界磁磁石10aの磁気力からの寄与のみであり、ここではロータ10を第1ステータ20側に吸引する方向に作用している。
【0096】
0<ω*≦ω1の範囲(即ち3相モータ90の回転起動時)では、d軸電流指令値Id*は最大値Idmaxとなる。従って、d軸電流Idも最大値Idmaxとなる。図5の様に、スラスト力F1は、ロータ10が第1ステータ20側に吸引される方向に作用し、従ってこの場合は、最大値F1maxとなる。従ってこの場合は、スラスト力F1の作用方向が一定になるので、スラスト力F1の作用方向の変動に起因するロータ10の回転軸Q1方向の変動が防止される。特にロータ10が第1ステータ20側に最も強く吸引されるので、3相モータ90の回転起動時に発生する回転軸Q1方向の初期振動が十分に抑えられる。
【0097】
ω1<ω*≦ω2の範囲(即ち3相モータ90の回転起動後から所定速度の回転状態(例えば中速回転状態)までの回転状態)では、d軸電流指令値Id*は0以下で所定の負値Id1以上の範囲の値(図4ではId1)に制御される(従ってd軸電流Idも0以下で所定の負値以上の範囲の値に制御される)。具体的には、マグネットトルクとリラクタンストルクの和が最大になる電流位相になる様に、d軸電流指令値Id*が制御される。これは、例えば3相モータ90を冷媒圧縮用として低負荷で運転する場合に相当し、断熱の優れた近年の住宅に用いられるような空気調和機であれば、このような運転範囲の比率が大きくなる。必要トルクに対して電流が最小になるため、3相モータ90を低入力で運転できる。この場合は、図5の様に、スラスト力F1は、ロータ10が第1ステータ20側に吸引される方向に作用し、且つd軸電流Idが0または負値なので比較的弱い力に維持される。従ってこの場合も、スラスト力F1の作用方向が一定になるので、スラスト力F1の作用方向の変動に起因するロータ10の回転軸Q1方向の変動が防止される。尚、この範囲(ω1<ω*≦ω2)には、3相モータ90の回転起動時に動機運転からセンサレス駆動に移行した後、所定の運転速度に加速する範囲も含まれるが、この場合は、d軸電流指令値Id*を、正の範囲で、回転速度ωが増すに従って値を減少させる様に制御しても良い。
【0098】
ω1<ω*<ωmaxの範囲(即ち3相モータ90の例えば中速回転状態から高速回転状態までの回転状態)では、d軸電流指令値Id*は負値で且つ回転速度指令値ω*に反比例して減少する。具体的には、この範囲(ω1<ω*<ωmax)は、3相モータ90において誘起電圧が入力電圧値に達し、弱め磁束制御により運転範囲を拡大している範囲である。従って、d軸電流Idも負値で且つ回転速度ωに反比例して減少する。図5の様に、スラスト力F1は、ロータ10が第1ステータ20側に吸引される方向に作用し、この場合は、d軸電流Idが負値なので比較的弱い力に維持される。従ってこの場合も、スラスト力F1の作用方向が変わらないので、スラスト力F1の作用方向の変動に起因するロータ10の回転軸Q1方向の変動が防止される。特にスラスト力F1が比較的弱い力に維持されるので、軸受ロスは、一般に高速回転ほど増大するところ、スラスト力低減により回転シャフト40の軸受けロスが低減されて、3相モータ90は高速回転し易くなる。
【0099】
ω*=ωmax(即ち3相モータ90の最高速回転時)では、d軸電流指令値Id*は最小値Idmin(<0)となる。従ってd軸電流Idも最小値Idminとなる。この場合は、図5の様に、スラスト力F1は、ロータ10が第1ステータ20側に吸引される方向に作用し、且つ最小値Fminとなる。従ってこの場合も、スラスト力F1の作用方向が変わらないので、スラスト力F1の作用方向の変動に起因するロータ10の回転軸Q1方向の変動が防止される。特にスラスト力F1が最小値F1minに維持されるので、回転シャフト40の軸受けロスが最小となって、3相モータ9は高速回転し易くなる。
【0100】
この様に、制御回路100により、3相モータ90の回転起動時およびその後の回転状態に亘って、スラスト力F1が第1ステータ20側に作用する様に、インバータ回路80が制御される。
【0101】
以上の様に構成されたアキシャルギャップ型回転電機装置1によれば、ロータ10の回転起動時およびその後の回転状態において、スラスト力(即ちロータ10に作用する磁気力の合力の回転軸Q1方向の成分)F1が、ロータ10が第1ステータ20側に吸引される方向に作用するので、スラスト力F1の作用方向が逆転することを防止でき、これによりロータ10の回転軸Q1方向の変動を防止でき、その変動による騒音を防止できる。
【0102】
またロータ10の回転起動時においてスラスト力F1を最大値F1maxにするので、ロータ10の回転起動時に発生するロータ10の回転軸Q1方向の初期振動を効果的に抑制でき、その振動による騒音を防止できる。
【0103】
またロータ10の最高速回転時ωmaxにおいて、スラスト力F1を最小値F1minにするので、回転シャフト40の軸受けロスを最小にでき、ロータ10を最高速回転させ易くなる。
【0104】
またロータ10の最高速回転ωmaxからそれよりも低い所定速度の回転状態(例えば中速回転状態)ω2までの回転状態では、d軸電流Idを負値にしてスラスト力F1を小さくするので、回転シャフト40の軸受けロスを低減できて、ロータ1を高速回転させ易くなる。
【0105】
またd軸電流Idを、3相モータ90の回転起動時以外の回転状態(ω1<ω≦ωmax)において負値にするので、3相モータ90の回転起動時以外の全ての回転状態において、スラスト力F1を比較的弱く維持でき、3相モータ90を効率良く回転駆動できる。
【0106】
尚、この実施形態において、d軸電流Idを、3相モータ90の回転起動時(0<ω≦ω1)およびその後の回転状態(ω1<ω≦ωmax)において負値にしても良い。この場合は、3相モータ90の回転起動時およびその後の回転状態において、スラスト力F1を比較的弱く維持でき、3相モータ90を効率良く回転駆動できる。また3相モータ90の回転起動時およびその後の回転状態の各々でのスラスト力F1を小さくでき、それらのスラスト力F1の差を小さくできる。これにより、ロータ10の回転起動時からその後の回転状態への移行する際に発生するそれらの力1の差に起因する3相モータ90の回転軸Q1方向の揺れを抑制できる。
【0107】
またd軸電流Idを、3相モータ90の最高速回転(ωmax)以外の全ての回転状態(0<ω<ωmax)において正値にしても良い。この様にすれば、最高速回転以外の全ての回転状態において、スラスト力F1を、ロータ10が第1ステータ20側に吸引される方向に増大させる事ができ、ロータ10の回転軸Q1方向の揺れを抑制できる。
【0108】
またd軸電流Idを、3相モータ90の全ての回転状態(0<ω≦ωmax)において正値にしても良い。この場合は、各間隔d1,d2(図2)においてd1>d2の関係が満たされなくても、3相モータ90の全ての回転状態において、スラスト力F1をロータ10が第1ステータ20側に吸引される方向に作用させる事ができる。
【0109】
<第2実施形態>
この実施形態に係るアキシャルギャップ型回転電機装置1Bは、第1実施形態において、例えば図6の様に、第2ステータ30のロータ10側の主面30aに、複数の凹部30bを形成したものである。図6では、複数の凹部30bは、第2ステータ30の主面30aに、例えば、放射状に配置された複数の略直線状溝として形成されている。
【0110】
この様にすることで、複数の凹部30bにより第2ステータ30のロータ10側の主面30aの平均的な位置(回転軸Q軸方向の位置)がロータ10から後退するので、第2ステータ30とロータ10との間隔d2(図2)が実質的に拡がり、ロータ10に作用する磁気力の合力の回転軸Q1方向の成分F1を、ロータ10が第1ステータ20側に吸引される方向に一層強く作用させる事ができる。
【0111】
尚、図6では、電機子磁芯20bの磁芯本体部20b1および幅広磁芯部20b2は、互いに別体に形成されている。また、隣り合う各幅広磁芯部20b2は、互いに間隔を空けた状態で、それらの外側円弧部20b5の端部同士が連結部20b3により連結され、且つそれらの内側円弧部20b6の端部同士が連結部20b4により連結される様にして、一体的に形成されている。また図6では、ロータ10の保持部材10h、コア部材10f,10cおよび鋼板10gは図示省略されている。
【0112】
<第3実施形態>
この実施形態に係るアキシャルギャップ型回転電機装置1Cは、第2実施形態において、複数の凹部30bを、例えば図7の様に、第2ステータ30のロータ10側の主面30aに、例えば略同心状に配置された直径の異なる複数の環状溝として形成したものである。
【0113】
この様にした場合は、凹部30bは周方向Q3に一様であるので、第2のステータ30とロータ10との間に作用する磁気吸引力はロータ10の回転位置に依存せず、従って、ロータ10の回転に伴って当該磁気吸引力の大きさが変化する事を防止でき、その変化によるロータ10の回転軸Q1方向の振動を防止できる。
【0114】
<第4実施形態>
この実施形態に係る圧縮機200は、第1実施形態のアキシャルギャップ型回転電機装置1を用いたものである。
【0115】
圧縮機200は、冷媒を圧縮するものであり、図8の様に、容器300と、3相モータ90と、圧縮機構部400とを備えている。図8は、圧縮機200の断面図であるが、3相モータ90は側面視で図示されている。図8では、アキシャルギャップ型回転電機装置1の制御回路100,インバータ回路80および電源70は、図示省略されている。
【0116】
容器300は、例えば中空円柱状に形成され、その柱軸Q4が鉛直となる様に配置されている。容器300の例えば下部側面には、容器300内に冷媒を供給する吸入管301が接続されている。また容器300の天井部には、容器300内から前記冷媒を吐出する吐出管302が接続されている。尚、図8では、吸入管301および吐出管302は、側面視で図示されている。
【0117】
3相モータ90は、容器300内の上部側に収容配設されている。より詳細には、3相モータ90は、その回転軸Q1が鉛直となる様に配置されている。また3相モータ90は、第1ステータ20がロータ10の上側に配置した状態で、バックヨーク20cの外周側面が容器300の内周面に固定され、且つ第2ステータ30がロータ10の下側に配置した状態で、第2ステータ30の外周側面が容器300の内周面に固定される様にして、配設されている。
【0118】
圧縮機構部400は、容器300内において、3相モータ90の下側に位置する様に収容配設されている。圧縮機構部400は、3相モータ90の回転シャフト40に連結されており、回転シャフト40を介して3相モータ90によって駆動される。
【0119】
圧縮機構部400は、シリンダ状の本体部401と、上端板402および下端板403とを備えている。
【0120】
本体部401の側面には、本体部401内に吸入管301からの冷媒を吸入する吸入ポート410が設けられている。上端板402は、本体部401の上側開口を閉塞する様に配設されており、下端板403は、本体部401の下側開口を閉塞する様に配設されている。回転シャフト40は、上端板402および下端板403を貫通して、本体部401の内部に挿入されている。回転シャフト40は、上端板402に設けられた軸受404と、下端板403に設けられた軸受405により回転自在に支持されている。
【0121】
本体部401内では、回転シャフト40にクランクピン406が設けられ、クランクピン406の外周にはピストン407が嵌合されている。ピストン407およびこれに対応する本体部401との間の空間により、圧縮室408が形成されている。回転シャフト40の回転に伴って、ピストン407が偏芯した状態で回転しまたは公転運動を行うことで、圧縮室408の容積が変化される。この変化により、圧縮室408において、吸入管301から供給された冷媒が圧縮される。
【0122】
この圧縮機200では、3相モータ90が回転駆動して圧縮機構部400が駆動されると、吸入管301から圧縮機構部400に冷媒が供給され、圧縮機構部400(とりわけ圧縮室408)で当該冷媒が圧縮される。圧縮機構部400で圧縮された高圧冷媒は、圧縮機構部400の吐出ポート409から容器300内に吐出される。そして高圧冷媒は、第2ステータ30と回転シャフト40または容器300との間の空間を通過し、そしてロータ10と容器300との間の空間を通過し、そして第1ステータ30と容器300または回転シャフト40との間の空間、または第1ステータ30に設けられた回転軸Q1方向の貫通孔(不図示)を通過して、3相モータ90の上部空間に運ばれ、吐出管302を介して容器300の外部に吐出される。この冷媒の流れによる圧力により、ロータ10が第1ステータ30側に押し付けられて、電機子磁芯20bの磁極面20eと界磁部材10iの磁極面10c1との間隔d1が、第2ステータ30の主面30aと界磁部材10iの磁極面10a2との間隔d2よりも一層短くなる。
【0123】
以上の様に構成された圧縮機200によれば、冷媒の流れによる圧力を利用してロータ10を第1ステータ20側に一層吸引させる事ができ、ロータ10の回転軸Q1方向の変動をより一層抑制できる。
【0124】
尚、この実施形態では、第1実施形態のアキシャルギャップ型回転電機装置1を用いた場合で説明したが、第2または第3実施形態のアキシャルギャップ型回転電機装置1B,1Cを用いても良い。
【0125】
<第5実施形態>
この実施形態に係る圧縮機200Bは、第4実施形態において、図9の様に、第1ステータ20と第2ステータ30との配置を逆にしたものである。即ち3相モータ90は、第1ステータ20がロータ10の下側に配置した状態で、バックヨーク20cの外周側面が容器300の内周面に固定され、且つ第2ステータ30がロータ10の上側に配置した状態で、第2ステータ30の外周側面が容器300の内周面に固定される様にして、配設されている。この状態では、ロータ10は、重力により下方に引っ張られて、第1ステータ20側に一層吸引される。
【0126】
以上の様に構成された圧縮機200Bによれば、重力を利用してロータ10を第1ステータ20側に一層吸引させる事ができ、ロータ10の回転軸Q1方向の揺れをより一層抑制できる。
【0127】
<第6実施形態>
この実施形態に係るアキシャルギャップ型回転電機装置1Dは、図10の様に、第1実施形態において、第3の座標変換部100bおよび第4の座標変換部100cを省略したものである。以下、第1実施形態と同じ構成には同じ符号を付して、第1実施形態と異なる構成だけ説明する。
【0128】
この実施形態の位置推定部100kDは、第1座標変換部100aにより算出されたd軸電流およびq軸電流と、q軸電圧指令生成部100gにより生成されたq軸電圧指令値Vq*と、d軸電圧指令生成部100eにより生成されたd軸電圧指令値Vd*とに基づき、3相モータ90の回転時の回転位置(位置推定値)θを算出する。
【0129】
この様に構成されたアキシャルギャップ型回転電機装置1Dによれば、第1実施形態と同様の効果を得る他に、第3の座標変換部100bおよび第4の座標変換部100cが省略されるので、演算処理負担が軽減できる。
【符号の説明】
【0130】
1,1B,1C アキシャルギャップ型回転電機装置
10 ロータ
10a 界磁磁石
10a2,10c1,20e 磁極面
10c 第1コア部材
10a1 主面
10f 第2コア部材
10g 鋼板
10h 保持部材
10h1,10h2 面
10i 界磁部材
11u,11v,11w 電極
20 第1ステータ
20a 電機子巻線
20b 電機子磁芯
20c バックヨーク
30 第2ステータ
30a 主面
30b 凹部
40 回転シャフト
80 インバータ回路
90 3相モータ
100 制御回路
120u,120v,120w 相電流センサ
200,200B 圧縮機
Q1 回転軸
Q2 径方向
Q3 周方向
【特許請求の範囲】
【請求項1】
その回転軸(Q1)の周囲に環状に複数の界磁部材(10i)が配設されたロータ(10)と、
前記ロータに対して前記回転軸方向の一方側(Q−)に配置され、その前記ロータ側の面(20d)に、前記複数の界磁部材に対向する様に、電機子巻線(20a)が巻回された複数の電機子磁芯(20b)が配設された第1ステータ(20)と、
前記ロータに対して前記回転軸方向の他方側(Q+)に配置された磁性体である第2ステータ(30)と、
を含むアキシャルギャップ型回転電機(90)と、
前記各電機子磁芯に巻回された前記電機子巻線に選択的に電流を流すインバータ手段(80)と、
前記インバータ手段を制御して前記各電機子巻線に電流を選択的に流して電機子磁界を発生させ、前記ロータを回転制御する制御手段(100)と、
を備え、
前記制御手段は、前記ロータの回転起動時(0<ω≦ω1)およびその後の回転状態(ω1<ω≦ωmax)において、前記第1ステータおよび前記第2ステータと前記ロータとの間に作用する磁気力の合力の前記回転軸方向の成分(F1)が、前記ロータが前記第1ステータ側に吸引される方向に作用する様に、前記インバータ手段を制御することを特徴とするアキシャルギャップ型回転電機装置。
【請求項2】
請求項1に記載のアキシャルギャップ型回転電機装置であって、
前記制御手段(100)は、前記ロータ(10)の回転起動時(0<ω≦ω1)において、前記インバータ手段(80)を制御して、前記磁気力の合力の前記回転軸方向の成分(F1)を最大値(F1max)に制御することを特徴とするアキシャルギャップ型回転電機装置。
【請求項3】
請求項1または2に記載のアキシャルギャップ型回転電機装置であって、
前記制御手段(100)は、前記ロータ(10)の最高速回転状態(ωmax)において、前記インバータ手段(80)を制御して、前記磁気力の合力の前記回転軸方向の成分(F1)を最小値(F1min)に制御することを特徴とするアキシャルギャップ型回転電機装置。
【請求項4】
請求項1〜3の何れかに記載のアキシャルギャップ型回転電機装置であって、
前記界磁部材(10i)が発生させる界磁磁束の向きにd軸方向を取り、
前記電流のうち、前記電機子磁界の前記d軸方向に寄与する成分をd軸電流とし、
前記界磁磁束を弱める作用を有する前記d軸電流の値を負値とし、
前記制御手段(100)は、前記ロータ(10)の最高速回転状態(ωmax)からそれよりも低い所定の回転状態(ω2)までの回転状態において、前記インバータ手段(80)を制御して前記d軸電流(Id)を負値に制御することを特徴とするアキシャルギャップ型回転電機装置。
【請求項5】
請求項4に記載のアキシャルギャップ型回転電機装置であって、
前記d軸方向に直交する方向をq軸方向とし、前記d軸方向および前記q軸方向の各々に対応する前記電機子巻線のインダクタンスをそれぞれd軸インダクタンスおよびq軸インダクタンスとし、
前記q軸インダクタンスは、前記d軸インダクタンスよりも大きいことを特徴とするアキシャルギャップ型回転電機装置。
【請求項6】
請求項5に記載のアキシャルギャップ型回転電機装置であって、
前記界磁部材(10i)は、
界磁磁石(10a)と、
前記界磁磁石の前記第1ステータ(20)側の面(10a1)に配設され、磁性を有する第1コア部材(10c)と、
を備えることを特徴とするアキシャルギャップ型回転電機装置。
【請求項7】
請求項5または6に記載のアキシャルギャップ型回転電機装置であって、
前記ロータ(10)において、その回転軸(Q1)方向の両側の面(10h1,10h2)の間を貫通する様に、隣り合う前記各界磁部材(10i)の間に、磁性を有する第2コア部材(10f)が配設されることを特徴とするアキシャルギャップ型回転電機装置。
【請求項8】
請求項1〜7に何れかに記載のアキシャルギャップ型回転電機装置であって、
前記電機子磁芯(20b)の前記ロータ(10)側の磁極面(20e)と前記界磁部材(10i)の前記第1ステータ(20)側の磁極面(10c1)との間隔(d1)は、前記第2ステータ(30)の前記ロータ側の面(30a)と前記界磁部材の前記第2ステータ側の磁極面(10a2)との間隔(d2)よりも小さいことを特徴とするアキシャルギャップ型回転電機装置。
【請求項9】
請求項1〜7の何れかに記載のアキシャルギャップ型回転電機装置であって、
前記ロータ(10)の前記第2ステータ(30)側の面(10a2)に、鋼板(10g)が配設されることを特徴とするアキシャルギャップ型回転電機装置。
【請求項10】
請求項1〜8の何れかに記載のアキシャルギャップ型回転電機装置であって、
前記第2ステータ(30)の前記ロータ(10)側の面(30a)に、複数の凹部(30b)が形成されることを特徴とするアキシャルギャップ型回転電機装置。
【請求項11】
請求項10に記載のアキシャルギャップ型回転電機装置であって、
前記複数の凹部(30b)は、略同心状に配置された複数の環状溝であることを特徴とするアキシャルギャップ型回転電機装置。
【請求項12】
請求項9に記載のアキシャルギャップ型回転電機装置であって、
前記複数の凹部(30b)は、放射状に配置された複数の略直線状溝であることを特徴とするアキシャルギャップ型回転電機装置。
【請求項13】
請求項1〜10の何れかに記載のアキシャルギャップ型回転電機装置であって、
前記界磁部材(10i)が発生させる界磁磁束の向きにd軸方向を取り、
前記電流のうち、前記電機子磁界の前記d軸方向に寄与する成分をd軸電流とし、
前記界磁磁束を弱める作用を有する前記d軸電流の値を負値とし、
前記制御手段(100)は、前記ロータ(10)の回転起動時(0<ω≦ω1)以外の回転状態(ω1<ω≦ωmax)において、前記インバータ手段(80)を制御して前記d軸電流を負値にすることを特徴とするアキシャルギャップ型回転電機装置。
【請求項14】
請求項13に記載のアキシャルギャップ型回転電機装置であって、
前記制御手段(100)は、更に前記ロータ(10)の回転起動時(0<ω≦ω1)において、前記インバータ手段(80)を制御して前記d軸電流を負値にすることを特徴とするアキシャルギャップ型回転電機装置。
【請求項15】
請求項1〜14の何れかに記載のアキシャルギャップ型回転電機装置を用いた圧縮機であって、
容器(300)と、
前記容器に配設され、前記容器内に冷媒を供給する吸入管(301)と、
前記容器に配設され、前記容器内から前記冷媒を吐出する吐出管(302)と、
前記容器内において、前記第1ステータ(20)が前記ロータ(10)よりも前記冷媒の流れの下流側に配置された前記アキシャルギャップ型回転電機(90)と、
前記制御手段(100)と、
前記インバータ手段(80)と、
を備えることを特徴とする圧縮機。
【請求項16】
請求項1〜14の何れかに記載のアキシャルギャップ型回転電機装置を用いた圧縮機であって、
前記第1ステータ(20)が前記ロータ(10)よりも鉛直方向下側に配置された前記アキシャルギャップ型回転電機(90)と、
前記制御手段(100)と、
前記インバータ手段(80)と、
を備えることを特徴とする圧縮機。
【請求項1】
その回転軸(Q1)の周囲に環状に複数の界磁部材(10i)が配設されたロータ(10)と、
前記ロータに対して前記回転軸方向の一方側(Q−)に配置され、その前記ロータ側の面(20d)に、前記複数の界磁部材に対向する様に、電機子巻線(20a)が巻回された複数の電機子磁芯(20b)が配設された第1ステータ(20)と、
前記ロータに対して前記回転軸方向の他方側(Q+)に配置された磁性体である第2ステータ(30)と、
を含むアキシャルギャップ型回転電機(90)と、
前記各電機子磁芯に巻回された前記電機子巻線に選択的に電流を流すインバータ手段(80)と、
前記インバータ手段を制御して前記各電機子巻線に電流を選択的に流して電機子磁界を発生させ、前記ロータを回転制御する制御手段(100)と、
を備え、
前記制御手段は、前記ロータの回転起動時(0<ω≦ω1)およびその後の回転状態(ω1<ω≦ωmax)において、前記第1ステータおよび前記第2ステータと前記ロータとの間に作用する磁気力の合力の前記回転軸方向の成分(F1)が、前記ロータが前記第1ステータ側に吸引される方向に作用する様に、前記インバータ手段を制御することを特徴とするアキシャルギャップ型回転電機装置。
【請求項2】
請求項1に記載のアキシャルギャップ型回転電機装置であって、
前記制御手段(100)は、前記ロータ(10)の回転起動時(0<ω≦ω1)において、前記インバータ手段(80)を制御して、前記磁気力の合力の前記回転軸方向の成分(F1)を最大値(F1max)に制御することを特徴とするアキシャルギャップ型回転電機装置。
【請求項3】
請求項1または2に記載のアキシャルギャップ型回転電機装置であって、
前記制御手段(100)は、前記ロータ(10)の最高速回転状態(ωmax)において、前記インバータ手段(80)を制御して、前記磁気力の合力の前記回転軸方向の成分(F1)を最小値(F1min)に制御することを特徴とするアキシャルギャップ型回転電機装置。
【請求項4】
請求項1〜3の何れかに記載のアキシャルギャップ型回転電機装置であって、
前記界磁部材(10i)が発生させる界磁磁束の向きにd軸方向を取り、
前記電流のうち、前記電機子磁界の前記d軸方向に寄与する成分をd軸電流とし、
前記界磁磁束を弱める作用を有する前記d軸電流の値を負値とし、
前記制御手段(100)は、前記ロータ(10)の最高速回転状態(ωmax)からそれよりも低い所定の回転状態(ω2)までの回転状態において、前記インバータ手段(80)を制御して前記d軸電流(Id)を負値に制御することを特徴とするアキシャルギャップ型回転電機装置。
【請求項5】
請求項4に記載のアキシャルギャップ型回転電機装置であって、
前記d軸方向に直交する方向をq軸方向とし、前記d軸方向および前記q軸方向の各々に対応する前記電機子巻線のインダクタンスをそれぞれd軸インダクタンスおよびq軸インダクタンスとし、
前記q軸インダクタンスは、前記d軸インダクタンスよりも大きいことを特徴とするアキシャルギャップ型回転電機装置。
【請求項6】
請求項5に記載のアキシャルギャップ型回転電機装置であって、
前記界磁部材(10i)は、
界磁磁石(10a)と、
前記界磁磁石の前記第1ステータ(20)側の面(10a1)に配設され、磁性を有する第1コア部材(10c)と、
を備えることを特徴とするアキシャルギャップ型回転電機装置。
【請求項7】
請求項5または6に記載のアキシャルギャップ型回転電機装置であって、
前記ロータ(10)において、その回転軸(Q1)方向の両側の面(10h1,10h2)の間を貫通する様に、隣り合う前記各界磁部材(10i)の間に、磁性を有する第2コア部材(10f)が配設されることを特徴とするアキシャルギャップ型回転電機装置。
【請求項8】
請求項1〜7に何れかに記載のアキシャルギャップ型回転電機装置であって、
前記電機子磁芯(20b)の前記ロータ(10)側の磁極面(20e)と前記界磁部材(10i)の前記第1ステータ(20)側の磁極面(10c1)との間隔(d1)は、前記第2ステータ(30)の前記ロータ側の面(30a)と前記界磁部材の前記第2ステータ側の磁極面(10a2)との間隔(d2)よりも小さいことを特徴とするアキシャルギャップ型回転電機装置。
【請求項9】
請求項1〜7の何れかに記載のアキシャルギャップ型回転電機装置であって、
前記ロータ(10)の前記第2ステータ(30)側の面(10a2)に、鋼板(10g)が配設されることを特徴とするアキシャルギャップ型回転電機装置。
【請求項10】
請求項1〜8の何れかに記載のアキシャルギャップ型回転電機装置であって、
前記第2ステータ(30)の前記ロータ(10)側の面(30a)に、複数の凹部(30b)が形成されることを特徴とするアキシャルギャップ型回転電機装置。
【請求項11】
請求項10に記載のアキシャルギャップ型回転電機装置であって、
前記複数の凹部(30b)は、略同心状に配置された複数の環状溝であることを特徴とするアキシャルギャップ型回転電機装置。
【請求項12】
請求項9に記載のアキシャルギャップ型回転電機装置であって、
前記複数の凹部(30b)は、放射状に配置された複数の略直線状溝であることを特徴とするアキシャルギャップ型回転電機装置。
【請求項13】
請求項1〜10の何れかに記載のアキシャルギャップ型回転電機装置であって、
前記界磁部材(10i)が発生させる界磁磁束の向きにd軸方向を取り、
前記電流のうち、前記電機子磁界の前記d軸方向に寄与する成分をd軸電流とし、
前記界磁磁束を弱める作用を有する前記d軸電流の値を負値とし、
前記制御手段(100)は、前記ロータ(10)の回転起動時(0<ω≦ω1)以外の回転状態(ω1<ω≦ωmax)において、前記インバータ手段(80)を制御して前記d軸電流を負値にすることを特徴とするアキシャルギャップ型回転電機装置。
【請求項14】
請求項13に記載のアキシャルギャップ型回転電機装置であって、
前記制御手段(100)は、更に前記ロータ(10)の回転起動時(0<ω≦ω1)において、前記インバータ手段(80)を制御して前記d軸電流を負値にすることを特徴とするアキシャルギャップ型回転電機装置。
【請求項15】
請求項1〜14の何れかに記載のアキシャルギャップ型回転電機装置を用いた圧縮機であって、
容器(300)と、
前記容器に配設され、前記容器内に冷媒を供給する吸入管(301)と、
前記容器に配設され、前記容器内から前記冷媒を吐出する吐出管(302)と、
前記容器内において、前記第1ステータ(20)が前記ロータ(10)よりも前記冷媒の流れの下流側に配置された前記アキシャルギャップ型回転電機(90)と、
前記制御手段(100)と、
前記インバータ手段(80)と、
を備えることを特徴とする圧縮機。
【請求項16】
請求項1〜14の何れかに記載のアキシャルギャップ型回転電機装置を用いた圧縮機であって、
前記第1ステータ(20)が前記ロータ(10)よりも鉛直方向下側に配置された前記アキシャルギャップ型回転電機(90)と、
前記制御手段(100)と、
前記インバータ手段(80)と、
を備えることを特徴とする圧縮機。
【図1】


【図2】
【図3】
【図4】

【図5】

【図6】
【図7】
【図8】
【図9】

【図10】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2011−10481(P2011−10481A)
【公開日】平成23年1月13日(2011.1.13)
【国際特許分類】
【出願番号】特願2009−152324(P2009−152324)
【出願日】平成21年6月26日(2009.6.26)
【出願人】(000002853)ダイキン工業株式会社 (7,604)
【Fターム(参考)】
【公開日】平成23年1月13日(2011.1.13)
【国際特許分類】
【出願日】平成21年6月26日(2009.6.26)
【出願人】(000002853)ダイキン工業株式会社 (7,604)
【Fターム(参考)】
[ Back to top ]