
アキュームコンベヤの搬送制御方法および装置
【課題】コンベヤ上の前方のびんに後方のびんが密着する際、びんに凹みや傷を発生させないアキュームコンベヤの搬送制御方法および装置を提供する。
【解決手段】びん1を搬送するコンベヤラインの中で、上流の給びんコンベヤ2から振分装置4を介してびん1が多列に搬送供給され、各列に分割された状態でびん1が整列及びアキュームされる多列コンベヤより成るアキュームコンベヤにおいて、振分装置4後の多列コンベヤを、びん1が前後に密着するような搬送速度まで段階的に減速する減速コンベヤ部5と、減速コンベヤ部5の下流側でびんが前後に隙間をもって搬送され、アキュームが可能となるように搬送速度を増速するコンベヤを多段で直列にして成る増速アキュームコンベヤ部6とで構成し、増速アキュームコンベヤ部6の各列でびんを前後に隙間をもってばらばらな状態で搬送させ、かつ各列がほぼ均等にばらばらなびん配置となるように搬送制御する。
【解決手段】びん1を搬送するコンベヤラインの中で、上流の給びんコンベヤ2から振分装置4を介してびん1が多列に搬送供給され、各列に分割された状態でびん1が整列及びアキュームされる多列コンベヤより成るアキュームコンベヤにおいて、振分装置4後の多列コンベヤを、びん1が前後に密着するような搬送速度まで段階的に減速する減速コンベヤ部5と、減速コンベヤ部5の下流側でびんが前後に隙間をもって搬送され、アキュームが可能となるように搬送速度を増速するコンベヤを多段で直列にして成る増速アキュームコンベヤ部6とで構成し、増速アキュームコンベヤ部6の各列でびんを前後に隙間をもってばらばらな状態で搬送させ、かつ各列がほぼ均等にばらばらなびん配置となるように搬送制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、びん等の容器(以下、びんと称する。)を搬送するコンベヤラインの中で、ケースパッカ等の前でびんを整列してアキュームするアキュームコンベヤの搬送制御方法および装置に関する。
【背景技術】
【0002】
ケースパッカ等の箱詰装置において、前工程から供給されたびん(ボトル)を振分装置で振分けて整列した後、プッシャー装置により直交するアキュームコンベヤ(ボトル貯留部)へ受け渡してびんをアキュームする装置が提案されている。(特許文献1)
【特許文献1】特公平6−84211号公報(第1図、第6図)
【発明の開示】
【発明が解決しようとする課題】
【0003】
前記特許文献1によれば、びんを間欠的にびん供給整列部からプッシャー装置によりアキュームコンベヤへ受け渡す方式としているので、びん搬送能力に限界があり、アキューム効率が悪く、高能力には適していないという問題がある。
また、前記アキュームコンベヤでは、びんが所定列数押送りされるとびんを高速搬送して該アキュームコンベヤの端部にあるストッパまで一気に集積して、アキュムレート時間を短縮するとした提案をしているが、このような方式では、高速搬送によりびん同志が強く衝突或いはびんがストッパに強く衝突するので、特に液体が充填されたびんではその衝撃力によりびんの凹み、傷付き、びんに貼られたラベルの傷付きが発生するという虞がある。
【0004】
本発明の目的は、ケースパッカ等の前でびんを整列してアキュームするコンベヤラインにおいて、コンベヤ上の前方のびんに後方のびんが密着する際、びんに凹み、傷を発生させず、また、アキューム効率が高く、さらに、下流の装置にびん圧による損傷を発生させないような高能力のアキュームコンベヤの搬送制御方法および装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
前記の課題に対し、本発明は以下の手段により解決を図る。
(1)第1の手段のアキュームコンベヤの搬送制御方法および装置は、びんを搬送するコンベヤラインの中で、上流の給びんコンベヤから振分装置を介してびんが多列に搬送供給され、各列に分割された状態でびんが整列およびアキュームされる多列コンベヤよりなるアキュームコンベヤにおいて、振分装置後の多列コンベヤを、びんが前後に密着するような搬送速度まで多段で段階的に減速する減速コンベヤ部と、該減速コンベヤ部の下流側でびんが前後に隙間をもって搬送され、アキュームできるように搬送速度を増速するコンベヤを多段で直列にして成る増速アキュームコンベヤ部とで構成して、該増速アキュームコンベヤ部の各列でびんを前後に隙間をもってばらばらな状態で搬送させるようにするとともに、各列がほぼ均等にばらばらな状態のびん配置となるような搬送制御をすることを特徴とする。
(2)第2の手段のアキュームコンベヤの搬送制御方法は、前記第1の手段のアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部で搬送されるびんの前後の隙間を増速度合いにより変更して、アキューム量が変更できるようにしたことを特徴とする。
(3)第3の手段のアキュームコンベヤの搬送制御方法および装置は、前記第1および第2の手段のアキュームコンベヤの搬送制御方法および装置において、前記増速アキュームコンベヤ部の下流側に、さらに単段または直列にした多段より成る減速アキュームコンベヤ部を配置して、該減速アキュームコンベヤ部において各列でびんが前後に間隔をもったばらばらな状態からソフトにほぼ密着した状態で搬送されるとともに各列がほぼ均等に密着したびん配置となるように搬送制御するようにしたことを特徴とする。
(4)第4の手段のアキュームコンベヤの搬送制御方法および装置は、前記第1から第3の手段のアキュームコンベヤの搬送制御方法および装置において、前記増速アキュームコンベヤ部或いは前記減速アキュームコンベヤ部の少なくとも一方の直列に配置したコンベヤの各段で、該コンベヤに設けたエンコーダからの信号により制御装置でコンベヤ上のびん載置量を演算させて、該コンベヤ上でのびん載置量が満杯に相当する量になっているかどうかを検知する満杯検知センサの機能を持たせ、該制御装置からの指令によりコンベヤの停止、定常搬送、減速搬送などの運転制御ができるようにしたことを特徴とする。
【0006】
(5)第5の手段のアキュームコンベヤの搬送制御方法は、前記第4の手段のアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部の最下流段コンベヤでびん載置量が満杯に相当する量になったら最下流段コンベヤを停止させ、次いで、最下流段の直前の上流側コンベヤでびん載置量が満杯に相当する量になったら該上流側コンベヤを停止させるというように、最下流段から順次上流段へコンベヤ上のびん載置量が満杯に相当する量になったら該コンベヤを停止させてアキューム制御するようにしたことを特徴とする。
(6)第6の手段のアキュームコンベヤの搬送制御方法は、前記第4の手段のアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部または前記減速アキュームコンベヤ部の各コンベヤ上のびん載置量を、該コンベヤの先頭部からびんが進んだ距離と該コンベヤの搬送速度とから前記エンコーダと制御装置により演算するようにしたことを特徴とする。
(7)第7の手段のアキュームコンベヤの搬送制御方法は、前記第1から第6の手段のアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部のコンベヤの搬送速度をびんが前後に密着するような搬送速度にして、該コンベヤにおいて先頭から順次びんが前後に密着して搬送されるようにし、該コンベヤが前記満杯検知センサ機能により満杯に相当する状態になったら満杯停止するようにして、該コンベヤ下流段のコンベヤ上で停止しているびんに衝撃を与えない程度に自然に密着するようにアキューム制御することを特徴とする。
(8)第8の手段のアキュームコンベヤの搬送制御方法は、前記第7の手段のアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部の最下流段から順次上流段へコンベヤの満杯停止をするようにして、アキューム制御することを特徴とする。
【0007】
(9)第9の手段のアキュームコンベヤの搬送制御方法は、前記第3の手段のアキュームコンベヤの搬送制御方法において、前記多段で直列にして成る減速アキュームコンベヤ部で、各段のコンベヤに設けたエンコーダからの信号により制御装置でコンベヤ上のびん載置量を演算させて、最下流段のコンベヤでびん載置量が減少してアキュームに空きができたら最下流段から上流段のコンベヤをびん搬送にして、最下流段のコンベヤのびん載置量が満杯に相当する量になったら最下流段のコンベヤを停止し、順次下流段のコンベヤから上流段のコンベヤに向かってびん載置量が満杯に相当する量になったら該コンベヤを停止するように制御することを特徴とする。
(10)第10の手段のアキュームコンベヤの搬送制御方法は、前記第3および第9の手段のアキュームコンベヤの搬送制御方法において、前記減速アキュームコンベヤ部の多段で直列に配置したコンベヤの何れかの段のコンベヤを各列順次駆動とし、最下流段で搬送されるびんが後工程で停止しているびんに密着するときに各列が順次密着するように制御することを特徴とする。
(11)第11の手段のアキュームコンベヤの搬送制御方法は、びんを搬送するコンベヤラインの中で、上流の給びんコンベヤからびんを搬送供給される幅広のアキュームコンベヤにおいて、該アキュームコンベヤを上流側から順に、給びんコンベヤから搬送供給されるびんを一旦減速して溜めながら搬送する減速コンベヤ部と、その下流で前記減速コンベヤから搬送されるびんが前後に隙間をもって搬送されるように増速して搬送する増速アキュームコンベヤ部と、その下流で前記増速アキュームコンベヤ部から搬送されてくるびんが密着に近い状態で後工程のコンベヤに供給されていくように搬送する減速アキュームコンベヤ部で構成され、前記増速アキュームコンベヤ部または前記減速アキュームコンベヤ部をさらに複数段に分割して、分割した各段のコンベヤに設けたエンコーダからの信号により制御装置でコンベヤ上のびん載置量を演算させて、該コンベヤ上のびん載置量が満杯に相当する量になっているかどうかを検知する満杯検知センサの機能を持たせて、該制御装置からの指令によりコンベヤの停止、定常搬送、減速搬送などの運転制御ができるようにしたことを特徴とする。
(12)第12の手段のアキュームコンベヤの搬送制御方法は、前記第11の手段のアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部または前記減速アキュームコンベヤ部の最下流段コンベヤでびん載置量が満杯に相当する量になったら最下流段コンベヤを停止させ、次いで、最下流段の直前の上流側コンベヤでびん載置量が満杯に相当する量になったら該上流側コンベヤを停止させるというように、最下流段から順次上流段へコンベヤ上のびん載置量が満杯に相当する量になったら該コンベヤを停止させてアキューム制御するようにしたことを特徴とする。
【0008】
(13)第13の手段のアキュームコンベヤの搬送制御方法は、前記第11の手段のアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部または前記減速アキュームコンベヤ部の各コンベヤ上のびん載置量の演算を、該コンベヤの先頭部からびんが進んだ距離と該コンベヤの搬送速度とから前記エンコーダと制御装置により行うようにしたことを特徴とする。
(14)第14の手段のアキュームコンベヤの搬送制御方法は、前記第11から第13の手段のアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部または前記減速アキュームコンベヤ部のコンベヤの搬送速度をびんが前後に密着するような搬送速度にして、該コンベヤにおいて先頭から順次びんが前後に密着して搬送されるようにし、該コンベヤが前記満杯検知センサ機能により満杯に相当する状態になったら満杯停止するようにして、該コンベヤ下流段のコンベヤ上で停止しているびんに衝撃を与えない程度に自然に密着するようにアキューム制御することを特徴とする。
(15)第15の手段のアキュームコンベヤの搬送制御方法は、前記第14の手段のアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部または前記減速アキュームコンベヤ部の最下流段から順次上流段へコンベヤの満杯検知による停止をするようにして、アキューム制御することを特徴とする。
(16)第16の手段のアキュームコンベヤの搬送制御方法は、前記第11から第15の手段のアキュームコンベヤの搬送制御方法において、前記減速コンベヤ部を複数段で段階的に減速する構成として、搬送されるびんが該減速コンベヤ部の少なくとも最下流段で自然に密着して搬送されるように制御することを特徴とする。
【発明の効果】
【0009】
請求項1および11に係わる本発明は、びんを搬送するコンベヤラインの中で、上流の給びんコンベヤから振分装置を介してびんが多列に搬送供給され、各列に分割された状態でびんが整列およびアキュームされる多列コンベヤよりなるアキュームコンベヤにおいて、振分装置後の多列コンベヤを、びんが前後に密着するような搬送速度まで多段で段階的に減速する減速コンベヤ部と、該減速コンベヤ部の下流側でびんが前後に隙間をもって搬送され、アキュームできるように搬送速度を増速するコンベヤを多段で直列にして成る増速アキュームコンベヤ部とで構成して、該増速アキュームコンベヤ部の各列でびんを前後に隙間をもってばらばらな状態で搬送させるようにするとともに、各列がほぼ均等にばらばらな状態のびん配置となるように搬送制御することにより、搬送およびアキュームされるびんが密着時に衝撃を受けることなく、また、アキューム効率がよいアキュームコンベヤと提供できるという効果がある。
請求項2に係わる本発明は、前記増速アキュームコンベヤ部で搬送されるびんの前後の隙間を増速度合いにより変更するようにしたことにより、アキューム量が変更できるようになるという効果を有する。
請求項3および12に係わる本発明は、前記増速アキュームコンベヤ部の下流側に、さらに減速アキュームコンベヤ部を配置して搬送制御されるようにしたので、該減速アキュームコンベヤ部において各列でびんが前後に間隔をもったばらばらな状態からソフトに密着した状態で搬送されるとともに各列がほぼ均等に密着したびん配置となるように搬送制御することによりアキューム効率が良くなるという効果を有する。
請求項4、13および15に係わる本発明は、前記増速アキュームコンベヤ部或いは前記減速アキュームコンベヤ部の少なくとも一方の直列に配置したコンベヤの各段で、該コンベヤに設けたエンコーダからの信号により制御装置でコンベヤ上のびん載置量を演算させるようにしたので、該コンベヤ上でのびん載置量が満杯に相当する量になっているかどうかを検知する満杯検知センサの機能を持たせるようにすることができ、コンベヤの停止、定常搬送、減速搬送などの運転制御を効率的にできるようになったという効果を有する。
請求項5および16に係わる本発明は、前記増速アキュームコンベヤ部の最下流段コンベヤでびん載置量が満杯に相当する量になったら最下流段コンベヤを停止させ、次いで、最下流段の直前の上流側コンベヤでびん載置量が満杯に相当する量になったら該上流側コンベヤを停止させるというように、最下流段から順次上流段へコンベヤ上のびん載置量が満杯に相当する量になったら該コンベヤを停止させるようにしたことにより、下流側のコンベヤ上のびんに強いびん圧を与えることなく、アキュームが効率的に行えるという効果を有する。
【0010】
請求項6および17に係わる本発明は、前記増速アキュームコンベヤ部或いは前記減速アキュームコンベヤの各コンベヤ上のびん載置量を、該コンベヤの先頭部からびんが進んだ距離と該コンベヤの搬送速度とから前記エンコーダと制御装置により演算するようにしたことにより、該コンベヤの先頭部からアキュームする制御が行えるようになったという効果を有する。
請求項7および18に係わる本発明は、前記増速アキュームコンベヤ部の多段階で構成するコンベヤの搬送速度を、びんが自然に前後に密着するような搬送速度にして、該コンベヤにおいて先頭からびんが前後に密着して搬送されるようにし、該コンベヤが前記満杯検知センサの機能により満杯に相当する状態になったら満杯停止するようにしたことにより、該コンベヤ下流段のコンベヤ上で停止しているびんに衝撃を与えない程度に自然に密着するようにアキュームすることができるという効果を有し、さらに、請求項8および19に係わる本発明は、前記増速アキュームコンベヤ部の最下流段から順次上流段へコンベヤの満杯停止をするようにしたので、停止している前方のびんに衝撃を与えることなく、効率的にアキュームすることができるという効果を有する。
請求項9に係わる本発明は、前記多段で直列にして成る減速アキュームコンベヤ部で、各段のコンベヤに設けたエンコーダからの信号により制御装置でコンベヤ上のびん載置量を演算させて、最下流段のコンベヤでびん載置量が減少してアキュームに空きができたら最下流段から上流段のコンベヤをびん搬送にして、最下流段のコンベヤのびん載置量が満杯に相当する量になったら最下流段のコンベヤを停止し、順次下流段のコンベヤから上流段のコンベヤに向かってびん載置量が満杯に相当する量になったら該コンベヤを停止するようにしたことにより、下流側のコンベヤ上のびんに強いびん圧を与えることなく、該減速アキュームコンベヤ部のアキュームが効率的に行えるようになったという効果を有する。
請求項10および13に係わる本発明は、前記減速アキュームコンベヤ部の多段で直列に配置したコンベヤの少なくとも一つの段のコンベヤを、各列順次駆動として搬送制御できるようにしたので、最下流段で搬送されるびんが後工程で停止しているびんに密着するときに各列が順次ソフト密着するようになり、後工程の機器にびん圧による損傷を与えないという効果を有する。
請求項20に係わる本発明は、前記減速コンベヤ部を複数段で段階的に減速する構成としたので、搬送されるびんが該減速コンベヤ部の少なくとも最下流段で自然に密着して搬送され、コンベヤ長さを効率的に使用できるという効果を有する。
【発明を実施するための最良の形態】
【0011】
以下、この発明の実施の形態につき図面を参照しつつ詳細に説明する。なお、この実施の形態によりこの発明が限定されるものではない。また、下記実施の形態における構成要素には、当業者が容易に想定できるもの、あるいは実質的に同一のものが含まれる。
【0012】
本発明の実施の形態を図に基づいて説明する。
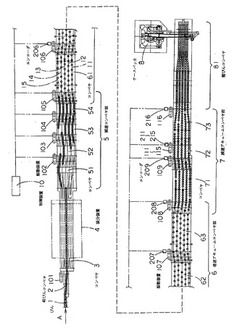
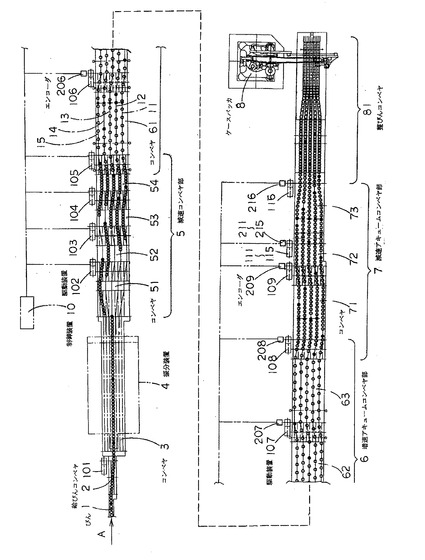
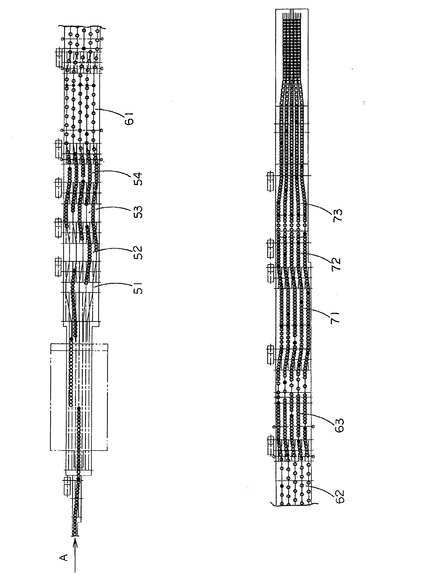
図1は、本発明に係わるアキュームコンベヤの搬送制御方法および装置を組み入れたコンベヤラインの模式平面図で、アキュームコンベヤの全長にアキュームの余地がある場合を示す。
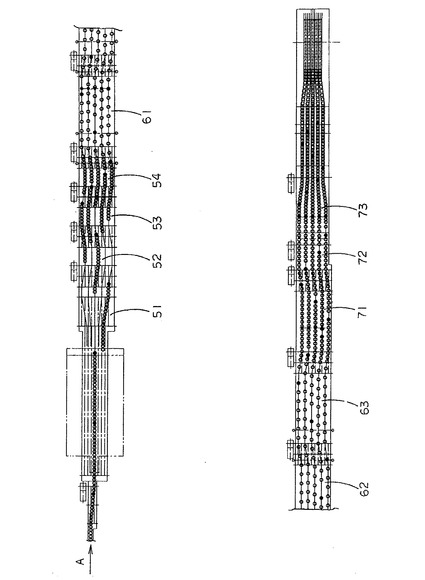
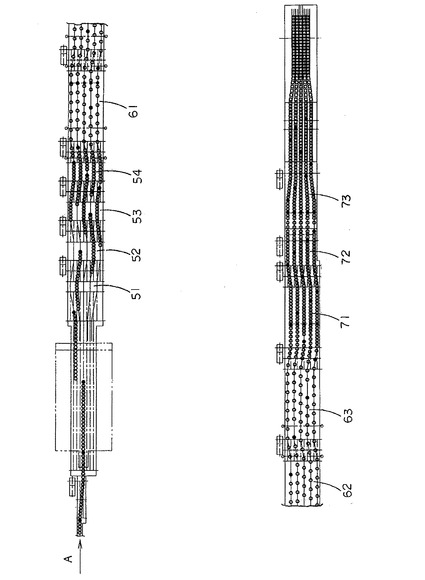
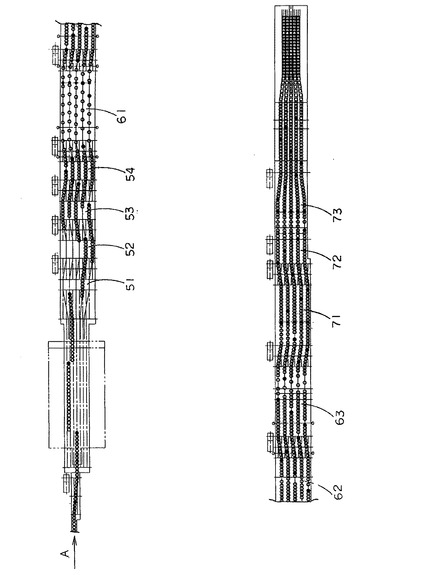
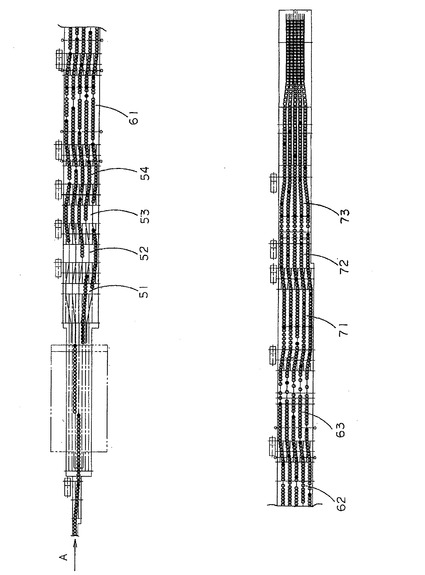
図2から図6は、該コンベヤラインで搬送され、アキュームされるびんのアキューム状態を図1からの変化で説明する図であり、図2は減速アキュームコンベヤ部で最下流段のコンベヤが満杯になる直前の状態を示す図、図3は減速アキュームコンベヤ部が満杯になる直前の状態を示す図、図4は減速アキュームコンベヤ部で満杯、増速アキュームコンベヤ部の最下流部がほぼ満杯で、その上流部がアキュームの余地がある状態を示す図、図5は図4よりも増速アキュームコンベヤ部のアキュームの余地が減った状態を示す図、図6は減速コンベヤ部の下流部まで満杯となってライン停止状態となった場合を示す図である。なお、図2から図6においては、装置の記号は、図1と同じであるので、各段のコンベヤ記号は表示してあるが、あとは表示を省略してある。図7は、コンベヤ構成の一部の説明図である。
【0013】
図において、びん(容器)1は、電気モータ等からなる駆動装置101で駆動される幅狭の給びんコンベヤ2により矢印A方向から単列の状態で5列により構成されるコンベヤ3に搬送され、コンベヤ3に設置された例えば、特開2000−272743号公報の様な振分装置4によって約20本の群で順次5列に振分けられる。
コンベヤ3の下流に配置された減速コンベヤ部5は、それぞれ電気モータ等からなる駆動装置102、103、104、105により駆動されるコンベヤ51、52、53、54の4段から成り、給びんコンベヤ2と搬送速度がほぼ同じコンベヤ51から搬送速度が段階的な速度比で減速されて、コンベヤ54でびん1が前後に密着するような搬送速度となっている。コンベヤ54での具体的な搬送速度は、連続して流れてくる給びんコンベヤ2の搬送速度の約5分の1である。
【0014】
減速コンベヤ部5の下流には、増速アキュームコンベヤ部6が配置され、該増速アキュームコンベヤ部6はそれぞれ電気モータ等からなる駆動装置106、107、108により駆動されるコンベヤ61、62、63の3段から成っている。駆動装置106、107、108の駆動軸にはそれぞれエンコーダ206、207、208が設けられており、各エンコーダ206、207、208の回転数、回転量などの信号が制御装置10に取り込まれるとともに、制御装置10から駆動装置106、107、108他に指令が出されてコンベヤ61、62、63他の搬送、停止および搬送速度の増減速が制御されるようになっている。なお、制御装置10から各駆動装置への信号線については、図示を省略してある。(以下同じ。)
コンベヤ61、62、63の搬送速度は、それぞれのコンベヤにおいてびん1のアキュームの余地があれば、目的とするアキューム能力を、びん1の前後の間隔がびん1の直径の2倍となるようにする場合には、前記コンベヤ54の約3倍の搬送速度に設定され、目的とするアキューム能力により適宜搬送速度を選択できる。また、コンベヤ63がびん1で満杯状態となったらコンベヤ63を停止するように制御される。さらに、下流のコンベヤにおいて、びん1で満杯となっている場合、或いは、下流のコンベヤが停止している場合には、コンベヤ63を停止或いは減速するなどの制御を行うことができる。
【0015】
増速アキュームコンベヤ部6の下流には、減速アキュームコンベヤ部7が配置され、該減速アキュームコンベヤ部7は電気モータ等からなる駆動装置109により駆動されるコンベヤ71、電気モータ等からなる駆動装置111、112、113、114、115により5列を各列で駆動されるコンベヤ72、電気モータ等からなる駆動装置116により駆動されるコンベヤ73の3段から成っている。
駆動装置109、111、112、113、114、115、116の駆動軸にはそれぞれエンコーダ209、211、212、213、214、215、216が設けられており、各エンコーダの回転数、回転量などの信号が制御装置10に取り込まれるとともに、制御装置10から駆動装置109、111、112、113、114、115、116に指令が出されてコンベヤ71、72、73の搬送、停止および搬送速度の増減速の制御がされるようになっている。なお、コンベヤ72は搬送、停止、搬送速度の増減速の制御が5列を個別に制御されるようになっている。
また、コンベヤ71、72、73の搬送速度は、びん1を搬送する状態にあるときは、前記コンベヤ54の1割から5割増速の速度であり、アキューム制御の目的に応じて選択できるようになっており、下流のコンベヤのびん1の詰り状態によっては搬送速度を減速、停止という制御がなされるようになっている。
なお、駆動装置101、102、103、104、105も制御装置10からの指令でライン全体の搬送制御がなされるようになっているが、詳細な説明は省略する。
【0016】
ここで、11、12、13、14、15は5列に分割されたコンベヤの列を示しており、減速コンベヤ部5以降は各列が図示しない直線或いは折れ線状のびんガイドで区分されている。
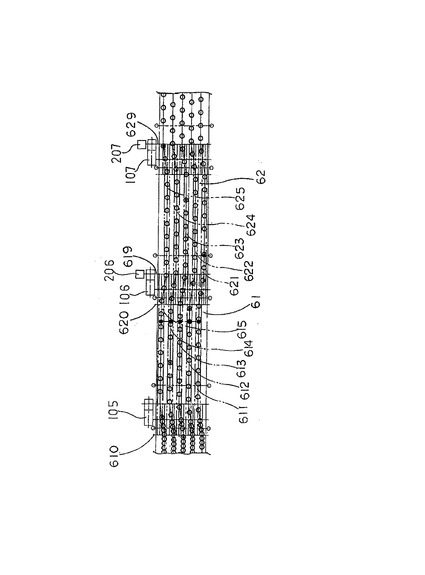
図7をもとに、減速コンベヤ部5、増速アキュームコンベヤ部6、減速アキュームコンベヤ部7の各コンベヤの前後の境界部構成を説明する。図7において、コンベヤ61は5列のコンベヤ611、612、613、614、615から成り、その始端が610、終端が619となっている。また、コンベヤ62は5列のコンベヤ621、622、623、624、625から成り、その始端が620、終端が629となっている。コンベヤ61と62の境界部は、各列のコンベヤ611から615と621から625がそれぞれ終端619と始端620がオーバーラップしており、例えばコンベヤ611上を搬送されてきたびん1は、該オーバーラップ部で図示しないびんガイドによりコンベヤ621へガイドされて搬送されるようになっている。
コンベヤ51からコンベヤ73に亘って、同様の境界部構成となっている。
【0017】
減速アキュームコンベヤ部7の下流には、ケースパッカ8の整びんコンベヤ81が配置され、整びんコンベヤ81に所定本数以上が整びんされたびん1の所定列数の所定本数が、ケースパッカ8により図示しないケースに梱包されるようになっている。
【0018】
次に、本実施の形態に係わるアキュームコンベヤの搬送制御方法および装置の作用を説明する。
図1において、給びんコンベヤ2からコンベヤ3に搬送され、振分装置4によって順次振り分けられる5列の内の列11に振分けられた約20本のびん1の一群の先頭びんが、段階的な速度比で4段階に減速される減速コンベヤ部5のコンベヤ54に到達すると、一群が減速により先頭びんから順に自然にほぼ密着状態で搬送されるようになる。同様に前記5列の内の列12、14、15、13に振分けられたびん1の一群もコンベヤ54に達すると、それぞれの一群は先頭びんから順にほぼ密着状態で搬送されるようになり、図に示すように、コンベヤ54からコンベヤ53に向けて5列が類似した形で自然な密着状態になる。
ここで、コンベヤ54の搬送速度が前記給びんコンベヤ2の搬送速度の約5分の1になっていることから、コンベヤ54において、列11から15の5列に亘って、びん1の密着した状態が大よそ均等になってびん1が搬送される。
【0019】
増速アキュームコンベヤ部6において、アキュームの余地があれば、前記コンベヤ54から送り出されてきたびん1は、コンベヤ61の搬送速度がコンベヤ54よりも増速されていることにより前後の間隔を空けて搬送される。コンベヤ61とコンベヤ54との速度比が大きい場合には、びん1の前後の間隔が大きく空けられることによりびん1のアキューム能力が大きくなる。また、コンベヤ54で列11から15に亘って大よそ均等にびん1が密着した状態なっていることから、コンベヤ61でびん1が前後に間隔を等しく空けてばらばらになって(以下、ばらばらな状態になってと表現する)搬送される状態が、列11から15に亘って大よそ均等になっている。
【0020】
増速アキュームコンベヤ部6において、駆動装置106、107、108の各駆動軸の回転数またはコンベヤ速度、或る時間からの回転量等の信号を、各駆動装置の駆動軸に設けられたエンコーダ206、207、208から制御装置10に取り込んで、該コンベヤの先頭部からびん1が進んだ距離と該コンベヤの速度等とから各コンベヤ上のびん載置量が演算して求められ、演算したコンベヤ上のびん載置量が所定量になるとびん1が満杯状態になっていると見做す満杯検知センサの機能を持たして、該コンベヤを停止、該コンベヤの上流コンベヤの搬送速度を減速とするなどの制御をすることができる。なお、見做し満杯量の設定は満杯状態から僅かに余裕をもった状態とすることもできる。
【0021】
増速アキュームコンベヤ部6でばらばらになって搬送されてきた5列のびん1は、減速アキュームコンベヤ部7に送られてくると、増速アキュームコンベヤ部6が搬送状態になっている場合には、コンベヤ71が減速されていることにより搬送されるびん1が前方のびん1にびん圧を与えることなく、自然に密着して搬送される。
減速アキュームコンベヤ部7においても、駆動装置109、111〜115、116の各駆動軸の回転数またはコンベヤ速度、或る時間からの回転量等の信号を、各駆動装置の駆動軸に設けられたエンコーダ209、211〜215、216から制御装置10に取り込んで、該コンベヤの先頭部からびん1が進んだ距離と該コンベヤの速度等とから各コンベヤ上のびん載置量が演算して求められ、演算したコンベヤ上のびん載置量が所定量になっていなければ、コンベヤ51からコンベヤ73に亘って、びん1が搬送状態になっている。図1は、この搬送状態を示している。
前記演算したコンベヤ上のびん載置量が所定量になると、びん1が満杯状態になっていると見做す満杯検知センサの機能を持たして、該コンベヤを停止、該コンベヤの上流コンベヤの搬送速度を減速するなどの制御をする。
【0022】
整びんコンベヤ81が満杯状態になっていると、減速アキュームコンベヤ部7のコンベヤ73からのびん1の補給を停めるために、コンベヤ73が停止状態に制御される。これに伴い、コンベヤ72からのびん1の搬送も停止する。
ケースパッカ8によって整びんコンベヤ81に所定本数以上が整びんされたびん1の所定列数の所定本数が図示しないケースに梱包されると、整びんコンベヤ81にびん1が補給されるように制御されるが、このとき、コンベヤ73は減速状態でびん1を搬送するので、びん1は整びんコンベヤ81上のびん1に自然に密着搬送されていく。
さらに、コンベヤ72からコンベヤ73へびん1を搬送するに際して、5列のびん1を一度に搬送すると、このびん圧により整びんコンベヤ81の図示しないびんストッパに大きな力が作用して好ましくないことがあるが、本実施の形態では、コンベヤ72の列11〜15に分割されたコンベヤを順次駆動してびん1をコンベヤ73側へ搬送するので、整びんコンベヤ81の図示しないストッパに作用するびん1のびん圧による力は、列毎に順次搬送されることにより極めて小さいものとなる。図2はコンベヤ73が満杯となる直前で、コンベヤ72が停止する直前の搬送状態を示す図である。
ここで、コンベヤ73の列13が満杯状態に達したら、それに対応するコンベヤ72の列13の駆動が停止し、列15、14、12、11も同様に順次搬送、停止して5列すべてが満杯になったらコンベヤ72からコンベヤ73へのびん1の補給が完了することになり、この時点で、コンベヤ71を減速状態で駆動してびん1を搬送し、コンベヤ72へのびん1の補給をする。図3はこの搬送状態を示す図である。
【0023】
コンベヤ71が満杯状態になったらコンベヤ71は駆動停止するように制御される。
一方、増速アキュームコンベヤ部6の最下流段のコンベヤ63では、びん1が満杯状態になっていない場合は、図3に示すように、びん1がばらばらな状態になって搬送されてくるが、コンベヤ71が停止していると、コンベヤ71の後続のびん1に密着していく。この場合、びん1の搬送速度が定常の増速状態になっていると、びん1が前方のびん1に密着するときに衝撃を与えることになるので、コンベヤ71が停止している時は、コンベヤ63の搬送速度を、前記コンベヤ54の搬送速度に相当するような速度に減速するように制御して、びん1が自然に近い状態で密着することができる。
この場合、コンベヤ63が減速状態となっているので、びん1はコンベヤ63の上流側先頭部から順次自然に密着した状態で搬送される。コンベヤ63上のびん載置量が満杯に相当する状態或いは満杯に近い設定量となったら、コンベヤ63は停止されるように制御されるが、コンベヤ63の先頭部から順次密着した状態の搬送となっているので、前方のびん1にはびん圧を与えずに一群で近づいていくことができる。図4はこの状態を示す図である。
【0024】
コンベヤ71が停止してコンベヤ63が駆動制御されると同様に、コンベヤ63が停止すると、コンベヤ62が減速、停止の駆動制御がなされる。即ち、びん1がコンベヤ62の減速状態で上流側先頭部から順次自然に密着した状態で搬送され、満杯に相当する状態となったら、コンベヤ62が停止される。図5はコンベヤ62が満杯状態となって停止したときの状態を示す図である。
コンベヤ63が停止してコンベヤ62が駆動制御されると同様に、コンベヤ62が満杯状態で停止すると、コンベヤ61が減速、停止の駆動制御がなされる。図6はコンベヤ61が満杯状態となって停止したときの状態を示す図である。
コンベヤ61が満杯状態で停止すると、減速コンベヤ部5が定常の速度よりも減速或いは停止となるように制御される。
【0025】
以上説明してきたように、本発明に係わる実施の形態は、減速コンベヤ部5を段階的に減速する多段のコンベヤとして、最終段でびん1が自然に密着するような搬送速度とすることにより該コンベヤの各列に供給されたびん1を自然に密着する状態にすることができ、びん1に与えるびん圧を極めて小さくすることができる。また、前記各列が均等して自然に密着したびん1の群とすることができるので、減速コンベヤ部5の長さが無駄なく、効率的に活用できる。
増速アキュームコンベヤ部6では、多列のコンベヤが各列とも均等にびん1の前後に間隔をもったばらばらな状態でアキュームすることができるので、アキューム機能が効率よく、コンベヤ長さが無駄なく、効率的に活用できる。
また、増速アキュームコンベヤ部6およびその下流の減速アキュームコンベヤ部7において、各コンベヤの駆動軸に該駆動軸の回転速度、或る時間からの回転量等を計測するエンコーダを設けてコンベヤ上のびん載置量を制御装置で演算することができるようにしたことにより、コンベヤ上のびんが満杯の時は該コンベヤの停止、或いは、上流側のコンベヤの搬送速度の減速によりコンベヤの上流側の先頭部から自然に密着した状態で搬送するなどコンベヤ搬送制御を効率的にすることができるとともに、密着びん列が実際に下流の既に停止しているびん列に接触する前に満杯検知して、既に停止しているびん列にびん圧をかけることなくアキュームすることができるなどの効果がある。
本実施の形態では、増速アキュームコンベヤ部6、減速アキュームコンベヤ部7に前記エンコーダを設けた場合を示したが、エンコーダの代わりにびんの搬送状態を他の検知装置で検知して搬送制御してもよいことはもちろんである。
【0026】
また、前記実施の形態では、給びんコンベヤ2から搬送されてくるびん1を振分装置4により5列に振分けて、減速コンベヤ部5、増速アキュームコンベヤ部6、減速アキュームコンベヤ部7を図示しないガイドで5列に分割して搬送する場合を説明したが、振分装置4を用いない場合でもよい。この場合、アキュームコンベヤは減速コンベヤ部、増速アキュームコンベヤ部、減速アキュームコンベヤ部がガイドで列に分割されない幅広のコンベヤとして構成されるが、このような場合でも、エンコーダと制御装置により演算したコンベヤ上のびん載置量をもとに前記と同様のアキュームコンベヤの搬送制御をすることができるが、制御方法は前記と類似するので、詳細な説明は省略する。
【図面の簡単な説明】
【0027】
【図1】本発明の実施の携帯に係わるアキュームコンベヤの搬送制御方法および装置を組み入れたコンベヤラインの模式平面図で、アキュームコンベヤの全長にアキュームの余地がある場合を示す。
【図2】減速アキュームコンベヤ部で最下流段のコンベヤが満杯になる直前の状態を示す図である。
【図3】減速アキュームコンベヤ部が満杯になる直前の状態を示す図である。
【図4】減速アキュームコンベヤ部で満杯、増速アキュームコンベヤ部の最下流部がほぼ満杯で、その上流部がアキュームの余地がある状態を示す図である。
【図5】図4よりも増速アキュームコンベヤ部のアキュームの余地が減った状態を示す図である。
【図6】減速コンベヤ部の下流部まで満杯となってライン停止状態となった場合を示す図である。
【図7】コンベヤ構成の一部の説明図である。
【符号の説明】
【0028】
1…びん(容器)、
2…給びんコンベヤ、
3…コンベヤ、
4…振分装置、
5…減速コンベヤ部、
6…増速アキュームコンベヤ部、
7…減速アキュームコンベヤ部、
10…制御装置、
101〜109…(コンベヤの)駆動装置、
111〜116…(コンベヤの)駆動装置、
206〜209…エンコーダ、
211〜216…エンコーダ
【技術分野】
【0001】
本発明は、びん等の容器(以下、びんと称する。)を搬送するコンベヤラインの中で、ケースパッカ等の前でびんを整列してアキュームするアキュームコンベヤの搬送制御方法および装置に関する。
【背景技術】
【0002】
ケースパッカ等の箱詰装置において、前工程から供給されたびん(ボトル)を振分装置で振分けて整列した後、プッシャー装置により直交するアキュームコンベヤ(ボトル貯留部)へ受け渡してびんをアキュームする装置が提案されている。(特許文献1)
【特許文献1】特公平6−84211号公報(第1図、第6図)
【発明の開示】
【発明が解決しようとする課題】
【0003】
前記特許文献1によれば、びんを間欠的にびん供給整列部からプッシャー装置によりアキュームコンベヤへ受け渡す方式としているので、びん搬送能力に限界があり、アキューム効率が悪く、高能力には適していないという問題がある。
また、前記アキュームコンベヤでは、びんが所定列数押送りされるとびんを高速搬送して該アキュームコンベヤの端部にあるストッパまで一気に集積して、アキュムレート時間を短縮するとした提案をしているが、このような方式では、高速搬送によりびん同志が強く衝突或いはびんがストッパに強く衝突するので、特に液体が充填されたびんではその衝撃力によりびんの凹み、傷付き、びんに貼られたラベルの傷付きが発生するという虞がある。
【0004】
本発明の目的は、ケースパッカ等の前でびんを整列してアキュームするコンベヤラインにおいて、コンベヤ上の前方のびんに後方のびんが密着する際、びんに凹み、傷を発生させず、また、アキューム効率が高く、さらに、下流の装置にびん圧による損傷を発生させないような高能力のアキュームコンベヤの搬送制御方法および装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
前記の課題に対し、本発明は以下の手段により解決を図る。
(1)第1の手段のアキュームコンベヤの搬送制御方法および装置は、びんを搬送するコンベヤラインの中で、上流の給びんコンベヤから振分装置を介してびんが多列に搬送供給され、各列に分割された状態でびんが整列およびアキュームされる多列コンベヤよりなるアキュームコンベヤにおいて、振分装置後の多列コンベヤを、びんが前後に密着するような搬送速度まで多段で段階的に減速する減速コンベヤ部と、該減速コンベヤ部の下流側でびんが前後に隙間をもって搬送され、アキュームできるように搬送速度を増速するコンベヤを多段で直列にして成る増速アキュームコンベヤ部とで構成して、該増速アキュームコンベヤ部の各列でびんを前後に隙間をもってばらばらな状態で搬送させるようにするとともに、各列がほぼ均等にばらばらな状態のびん配置となるような搬送制御をすることを特徴とする。
(2)第2の手段のアキュームコンベヤの搬送制御方法は、前記第1の手段のアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部で搬送されるびんの前後の隙間を増速度合いにより変更して、アキューム量が変更できるようにしたことを特徴とする。
(3)第3の手段のアキュームコンベヤの搬送制御方法および装置は、前記第1および第2の手段のアキュームコンベヤの搬送制御方法および装置において、前記増速アキュームコンベヤ部の下流側に、さらに単段または直列にした多段より成る減速アキュームコンベヤ部を配置して、該減速アキュームコンベヤ部において各列でびんが前後に間隔をもったばらばらな状態からソフトにほぼ密着した状態で搬送されるとともに各列がほぼ均等に密着したびん配置となるように搬送制御するようにしたことを特徴とする。
(4)第4の手段のアキュームコンベヤの搬送制御方法および装置は、前記第1から第3の手段のアキュームコンベヤの搬送制御方法および装置において、前記増速アキュームコンベヤ部或いは前記減速アキュームコンベヤ部の少なくとも一方の直列に配置したコンベヤの各段で、該コンベヤに設けたエンコーダからの信号により制御装置でコンベヤ上のびん載置量を演算させて、該コンベヤ上でのびん載置量が満杯に相当する量になっているかどうかを検知する満杯検知センサの機能を持たせ、該制御装置からの指令によりコンベヤの停止、定常搬送、減速搬送などの運転制御ができるようにしたことを特徴とする。
【0006】
(5)第5の手段のアキュームコンベヤの搬送制御方法は、前記第4の手段のアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部の最下流段コンベヤでびん載置量が満杯に相当する量になったら最下流段コンベヤを停止させ、次いで、最下流段の直前の上流側コンベヤでびん載置量が満杯に相当する量になったら該上流側コンベヤを停止させるというように、最下流段から順次上流段へコンベヤ上のびん載置量が満杯に相当する量になったら該コンベヤを停止させてアキューム制御するようにしたことを特徴とする。
(6)第6の手段のアキュームコンベヤの搬送制御方法は、前記第4の手段のアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部または前記減速アキュームコンベヤ部の各コンベヤ上のびん載置量を、該コンベヤの先頭部からびんが進んだ距離と該コンベヤの搬送速度とから前記エンコーダと制御装置により演算するようにしたことを特徴とする。
(7)第7の手段のアキュームコンベヤの搬送制御方法は、前記第1から第6の手段のアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部のコンベヤの搬送速度をびんが前後に密着するような搬送速度にして、該コンベヤにおいて先頭から順次びんが前後に密着して搬送されるようにし、該コンベヤが前記満杯検知センサ機能により満杯に相当する状態になったら満杯停止するようにして、該コンベヤ下流段のコンベヤ上で停止しているびんに衝撃を与えない程度に自然に密着するようにアキューム制御することを特徴とする。
(8)第8の手段のアキュームコンベヤの搬送制御方法は、前記第7の手段のアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部の最下流段から順次上流段へコンベヤの満杯停止をするようにして、アキューム制御することを特徴とする。
【0007】
(9)第9の手段のアキュームコンベヤの搬送制御方法は、前記第3の手段のアキュームコンベヤの搬送制御方法において、前記多段で直列にして成る減速アキュームコンベヤ部で、各段のコンベヤに設けたエンコーダからの信号により制御装置でコンベヤ上のびん載置量を演算させて、最下流段のコンベヤでびん載置量が減少してアキュームに空きができたら最下流段から上流段のコンベヤをびん搬送にして、最下流段のコンベヤのびん載置量が満杯に相当する量になったら最下流段のコンベヤを停止し、順次下流段のコンベヤから上流段のコンベヤに向かってびん載置量が満杯に相当する量になったら該コンベヤを停止するように制御することを特徴とする。
(10)第10の手段のアキュームコンベヤの搬送制御方法は、前記第3および第9の手段のアキュームコンベヤの搬送制御方法において、前記減速アキュームコンベヤ部の多段で直列に配置したコンベヤの何れかの段のコンベヤを各列順次駆動とし、最下流段で搬送されるびんが後工程で停止しているびんに密着するときに各列が順次密着するように制御することを特徴とする。
(11)第11の手段のアキュームコンベヤの搬送制御方法は、びんを搬送するコンベヤラインの中で、上流の給びんコンベヤからびんを搬送供給される幅広のアキュームコンベヤにおいて、該アキュームコンベヤを上流側から順に、給びんコンベヤから搬送供給されるびんを一旦減速して溜めながら搬送する減速コンベヤ部と、その下流で前記減速コンベヤから搬送されるびんが前後に隙間をもって搬送されるように増速して搬送する増速アキュームコンベヤ部と、その下流で前記増速アキュームコンベヤ部から搬送されてくるびんが密着に近い状態で後工程のコンベヤに供給されていくように搬送する減速アキュームコンベヤ部で構成され、前記増速アキュームコンベヤ部または前記減速アキュームコンベヤ部をさらに複数段に分割して、分割した各段のコンベヤに設けたエンコーダからの信号により制御装置でコンベヤ上のびん載置量を演算させて、該コンベヤ上のびん載置量が満杯に相当する量になっているかどうかを検知する満杯検知センサの機能を持たせて、該制御装置からの指令によりコンベヤの停止、定常搬送、減速搬送などの運転制御ができるようにしたことを特徴とする。
(12)第12の手段のアキュームコンベヤの搬送制御方法は、前記第11の手段のアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部または前記減速アキュームコンベヤ部の最下流段コンベヤでびん載置量が満杯に相当する量になったら最下流段コンベヤを停止させ、次いで、最下流段の直前の上流側コンベヤでびん載置量が満杯に相当する量になったら該上流側コンベヤを停止させるというように、最下流段から順次上流段へコンベヤ上のびん載置量が満杯に相当する量になったら該コンベヤを停止させてアキューム制御するようにしたことを特徴とする。
【0008】
(13)第13の手段のアキュームコンベヤの搬送制御方法は、前記第11の手段のアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部または前記減速アキュームコンベヤ部の各コンベヤ上のびん載置量の演算を、該コンベヤの先頭部からびんが進んだ距離と該コンベヤの搬送速度とから前記エンコーダと制御装置により行うようにしたことを特徴とする。
(14)第14の手段のアキュームコンベヤの搬送制御方法は、前記第11から第13の手段のアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部または前記減速アキュームコンベヤ部のコンベヤの搬送速度をびんが前後に密着するような搬送速度にして、該コンベヤにおいて先頭から順次びんが前後に密着して搬送されるようにし、該コンベヤが前記満杯検知センサ機能により満杯に相当する状態になったら満杯停止するようにして、該コンベヤ下流段のコンベヤ上で停止しているびんに衝撃を与えない程度に自然に密着するようにアキューム制御することを特徴とする。
(15)第15の手段のアキュームコンベヤの搬送制御方法は、前記第14の手段のアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部または前記減速アキュームコンベヤ部の最下流段から順次上流段へコンベヤの満杯検知による停止をするようにして、アキューム制御することを特徴とする。
(16)第16の手段のアキュームコンベヤの搬送制御方法は、前記第11から第15の手段のアキュームコンベヤの搬送制御方法において、前記減速コンベヤ部を複数段で段階的に減速する構成として、搬送されるびんが該減速コンベヤ部の少なくとも最下流段で自然に密着して搬送されるように制御することを特徴とする。
【発明の効果】
【0009】
請求項1および11に係わる本発明は、びんを搬送するコンベヤラインの中で、上流の給びんコンベヤから振分装置を介してびんが多列に搬送供給され、各列に分割された状態でびんが整列およびアキュームされる多列コンベヤよりなるアキュームコンベヤにおいて、振分装置後の多列コンベヤを、びんが前後に密着するような搬送速度まで多段で段階的に減速する減速コンベヤ部と、該減速コンベヤ部の下流側でびんが前後に隙間をもって搬送され、アキュームできるように搬送速度を増速するコンベヤを多段で直列にして成る増速アキュームコンベヤ部とで構成して、該増速アキュームコンベヤ部の各列でびんを前後に隙間をもってばらばらな状態で搬送させるようにするとともに、各列がほぼ均等にばらばらな状態のびん配置となるように搬送制御することにより、搬送およびアキュームされるびんが密着時に衝撃を受けることなく、また、アキューム効率がよいアキュームコンベヤと提供できるという効果がある。
請求項2に係わる本発明は、前記増速アキュームコンベヤ部で搬送されるびんの前後の隙間を増速度合いにより変更するようにしたことにより、アキューム量が変更できるようになるという効果を有する。
請求項3および12に係わる本発明は、前記増速アキュームコンベヤ部の下流側に、さらに減速アキュームコンベヤ部を配置して搬送制御されるようにしたので、該減速アキュームコンベヤ部において各列でびんが前後に間隔をもったばらばらな状態からソフトに密着した状態で搬送されるとともに各列がほぼ均等に密着したびん配置となるように搬送制御することによりアキューム効率が良くなるという効果を有する。
請求項4、13および15に係わる本発明は、前記増速アキュームコンベヤ部或いは前記減速アキュームコンベヤ部の少なくとも一方の直列に配置したコンベヤの各段で、該コンベヤに設けたエンコーダからの信号により制御装置でコンベヤ上のびん載置量を演算させるようにしたので、該コンベヤ上でのびん載置量が満杯に相当する量になっているかどうかを検知する満杯検知センサの機能を持たせるようにすることができ、コンベヤの停止、定常搬送、減速搬送などの運転制御を効率的にできるようになったという効果を有する。
請求項5および16に係わる本発明は、前記増速アキュームコンベヤ部の最下流段コンベヤでびん載置量が満杯に相当する量になったら最下流段コンベヤを停止させ、次いで、最下流段の直前の上流側コンベヤでびん載置量が満杯に相当する量になったら該上流側コンベヤを停止させるというように、最下流段から順次上流段へコンベヤ上のびん載置量が満杯に相当する量になったら該コンベヤを停止させるようにしたことにより、下流側のコンベヤ上のびんに強いびん圧を与えることなく、アキュームが効率的に行えるという効果を有する。
【0010】
請求項6および17に係わる本発明は、前記増速アキュームコンベヤ部或いは前記減速アキュームコンベヤの各コンベヤ上のびん載置量を、該コンベヤの先頭部からびんが進んだ距離と該コンベヤの搬送速度とから前記エンコーダと制御装置により演算するようにしたことにより、該コンベヤの先頭部からアキュームする制御が行えるようになったという効果を有する。
請求項7および18に係わる本発明は、前記増速アキュームコンベヤ部の多段階で構成するコンベヤの搬送速度を、びんが自然に前後に密着するような搬送速度にして、該コンベヤにおいて先頭からびんが前後に密着して搬送されるようにし、該コンベヤが前記満杯検知センサの機能により満杯に相当する状態になったら満杯停止するようにしたことにより、該コンベヤ下流段のコンベヤ上で停止しているびんに衝撃を与えない程度に自然に密着するようにアキュームすることができるという効果を有し、さらに、請求項8および19に係わる本発明は、前記増速アキュームコンベヤ部の最下流段から順次上流段へコンベヤの満杯停止をするようにしたので、停止している前方のびんに衝撃を与えることなく、効率的にアキュームすることができるという効果を有する。
請求項9に係わる本発明は、前記多段で直列にして成る減速アキュームコンベヤ部で、各段のコンベヤに設けたエンコーダからの信号により制御装置でコンベヤ上のびん載置量を演算させて、最下流段のコンベヤでびん載置量が減少してアキュームに空きができたら最下流段から上流段のコンベヤをびん搬送にして、最下流段のコンベヤのびん載置量が満杯に相当する量になったら最下流段のコンベヤを停止し、順次下流段のコンベヤから上流段のコンベヤに向かってびん載置量が満杯に相当する量になったら該コンベヤを停止するようにしたことにより、下流側のコンベヤ上のびんに強いびん圧を与えることなく、該減速アキュームコンベヤ部のアキュームが効率的に行えるようになったという効果を有する。
請求項10および13に係わる本発明は、前記減速アキュームコンベヤ部の多段で直列に配置したコンベヤの少なくとも一つの段のコンベヤを、各列順次駆動として搬送制御できるようにしたので、最下流段で搬送されるびんが後工程で停止しているびんに密着するときに各列が順次ソフト密着するようになり、後工程の機器にびん圧による損傷を与えないという効果を有する。
請求項20に係わる本発明は、前記減速コンベヤ部を複数段で段階的に減速する構成としたので、搬送されるびんが該減速コンベヤ部の少なくとも最下流段で自然に密着して搬送され、コンベヤ長さを効率的に使用できるという効果を有する。
【発明を実施するための最良の形態】
【0011】
以下、この発明の実施の形態につき図面を参照しつつ詳細に説明する。なお、この実施の形態によりこの発明が限定されるものではない。また、下記実施の形態における構成要素には、当業者が容易に想定できるもの、あるいは実質的に同一のものが含まれる。
【0012】
本発明の実施の形態を図に基づいて説明する。
図1は、本発明に係わるアキュームコンベヤの搬送制御方法および装置を組み入れたコンベヤラインの模式平面図で、アキュームコンベヤの全長にアキュームの余地がある場合を示す。
図2から図6は、該コンベヤラインで搬送され、アキュームされるびんのアキューム状態を図1からの変化で説明する図であり、図2は減速アキュームコンベヤ部で最下流段のコンベヤが満杯になる直前の状態を示す図、図3は減速アキュームコンベヤ部が満杯になる直前の状態を示す図、図4は減速アキュームコンベヤ部で満杯、増速アキュームコンベヤ部の最下流部がほぼ満杯で、その上流部がアキュームの余地がある状態を示す図、図5は図4よりも増速アキュームコンベヤ部のアキュームの余地が減った状態を示す図、図6は減速コンベヤ部の下流部まで満杯となってライン停止状態となった場合を示す図である。なお、図2から図6においては、装置の記号は、図1と同じであるので、各段のコンベヤ記号は表示してあるが、あとは表示を省略してある。図7は、コンベヤ構成の一部の説明図である。
【0013】
図において、びん(容器)1は、電気モータ等からなる駆動装置101で駆動される幅狭の給びんコンベヤ2により矢印A方向から単列の状態で5列により構成されるコンベヤ3に搬送され、コンベヤ3に設置された例えば、特開2000−272743号公報の様な振分装置4によって約20本の群で順次5列に振分けられる。
コンベヤ3の下流に配置された減速コンベヤ部5は、それぞれ電気モータ等からなる駆動装置102、103、104、105により駆動されるコンベヤ51、52、53、54の4段から成り、給びんコンベヤ2と搬送速度がほぼ同じコンベヤ51から搬送速度が段階的な速度比で減速されて、コンベヤ54でびん1が前後に密着するような搬送速度となっている。コンベヤ54での具体的な搬送速度は、連続して流れてくる給びんコンベヤ2の搬送速度の約5分の1である。
【0014】
減速コンベヤ部5の下流には、増速アキュームコンベヤ部6が配置され、該増速アキュームコンベヤ部6はそれぞれ電気モータ等からなる駆動装置106、107、108により駆動されるコンベヤ61、62、63の3段から成っている。駆動装置106、107、108の駆動軸にはそれぞれエンコーダ206、207、208が設けられており、各エンコーダ206、207、208の回転数、回転量などの信号が制御装置10に取り込まれるとともに、制御装置10から駆動装置106、107、108他に指令が出されてコンベヤ61、62、63他の搬送、停止および搬送速度の増減速が制御されるようになっている。なお、制御装置10から各駆動装置への信号線については、図示を省略してある。(以下同じ。)
コンベヤ61、62、63の搬送速度は、それぞれのコンベヤにおいてびん1のアキュームの余地があれば、目的とするアキューム能力を、びん1の前後の間隔がびん1の直径の2倍となるようにする場合には、前記コンベヤ54の約3倍の搬送速度に設定され、目的とするアキューム能力により適宜搬送速度を選択できる。また、コンベヤ63がびん1で満杯状態となったらコンベヤ63を停止するように制御される。さらに、下流のコンベヤにおいて、びん1で満杯となっている場合、或いは、下流のコンベヤが停止している場合には、コンベヤ63を停止或いは減速するなどの制御を行うことができる。
【0015】
増速アキュームコンベヤ部6の下流には、減速アキュームコンベヤ部7が配置され、該減速アキュームコンベヤ部7は電気モータ等からなる駆動装置109により駆動されるコンベヤ71、電気モータ等からなる駆動装置111、112、113、114、115により5列を各列で駆動されるコンベヤ72、電気モータ等からなる駆動装置116により駆動されるコンベヤ73の3段から成っている。
駆動装置109、111、112、113、114、115、116の駆動軸にはそれぞれエンコーダ209、211、212、213、214、215、216が設けられており、各エンコーダの回転数、回転量などの信号が制御装置10に取り込まれるとともに、制御装置10から駆動装置109、111、112、113、114、115、116に指令が出されてコンベヤ71、72、73の搬送、停止および搬送速度の増減速の制御がされるようになっている。なお、コンベヤ72は搬送、停止、搬送速度の増減速の制御が5列を個別に制御されるようになっている。
また、コンベヤ71、72、73の搬送速度は、びん1を搬送する状態にあるときは、前記コンベヤ54の1割から5割増速の速度であり、アキューム制御の目的に応じて選択できるようになっており、下流のコンベヤのびん1の詰り状態によっては搬送速度を減速、停止という制御がなされるようになっている。
なお、駆動装置101、102、103、104、105も制御装置10からの指令でライン全体の搬送制御がなされるようになっているが、詳細な説明は省略する。
【0016】
ここで、11、12、13、14、15は5列に分割されたコンベヤの列を示しており、減速コンベヤ部5以降は各列が図示しない直線或いは折れ線状のびんガイドで区分されている。
図7をもとに、減速コンベヤ部5、増速アキュームコンベヤ部6、減速アキュームコンベヤ部7の各コンベヤの前後の境界部構成を説明する。図7において、コンベヤ61は5列のコンベヤ611、612、613、614、615から成り、その始端が610、終端が619となっている。また、コンベヤ62は5列のコンベヤ621、622、623、624、625から成り、その始端が620、終端が629となっている。コンベヤ61と62の境界部は、各列のコンベヤ611から615と621から625がそれぞれ終端619と始端620がオーバーラップしており、例えばコンベヤ611上を搬送されてきたびん1は、該オーバーラップ部で図示しないびんガイドによりコンベヤ621へガイドされて搬送されるようになっている。
コンベヤ51からコンベヤ73に亘って、同様の境界部構成となっている。
【0017】
減速アキュームコンベヤ部7の下流には、ケースパッカ8の整びんコンベヤ81が配置され、整びんコンベヤ81に所定本数以上が整びんされたびん1の所定列数の所定本数が、ケースパッカ8により図示しないケースに梱包されるようになっている。
【0018】
次に、本実施の形態に係わるアキュームコンベヤの搬送制御方法および装置の作用を説明する。
図1において、給びんコンベヤ2からコンベヤ3に搬送され、振分装置4によって順次振り分けられる5列の内の列11に振分けられた約20本のびん1の一群の先頭びんが、段階的な速度比で4段階に減速される減速コンベヤ部5のコンベヤ54に到達すると、一群が減速により先頭びんから順に自然にほぼ密着状態で搬送されるようになる。同様に前記5列の内の列12、14、15、13に振分けられたびん1の一群もコンベヤ54に達すると、それぞれの一群は先頭びんから順にほぼ密着状態で搬送されるようになり、図に示すように、コンベヤ54からコンベヤ53に向けて5列が類似した形で自然な密着状態になる。
ここで、コンベヤ54の搬送速度が前記給びんコンベヤ2の搬送速度の約5分の1になっていることから、コンベヤ54において、列11から15の5列に亘って、びん1の密着した状態が大よそ均等になってびん1が搬送される。
【0019】
増速アキュームコンベヤ部6において、アキュームの余地があれば、前記コンベヤ54から送り出されてきたびん1は、コンベヤ61の搬送速度がコンベヤ54よりも増速されていることにより前後の間隔を空けて搬送される。コンベヤ61とコンベヤ54との速度比が大きい場合には、びん1の前後の間隔が大きく空けられることによりびん1のアキューム能力が大きくなる。また、コンベヤ54で列11から15に亘って大よそ均等にびん1が密着した状態なっていることから、コンベヤ61でびん1が前後に間隔を等しく空けてばらばらになって(以下、ばらばらな状態になってと表現する)搬送される状態が、列11から15に亘って大よそ均等になっている。
【0020】
増速アキュームコンベヤ部6において、駆動装置106、107、108の各駆動軸の回転数またはコンベヤ速度、或る時間からの回転量等の信号を、各駆動装置の駆動軸に設けられたエンコーダ206、207、208から制御装置10に取り込んで、該コンベヤの先頭部からびん1が進んだ距離と該コンベヤの速度等とから各コンベヤ上のびん載置量が演算して求められ、演算したコンベヤ上のびん載置量が所定量になるとびん1が満杯状態になっていると見做す満杯検知センサの機能を持たして、該コンベヤを停止、該コンベヤの上流コンベヤの搬送速度を減速とするなどの制御をすることができる。なお、見做し満杯量の設定は満杯状態から僅かに余裕をもった状態とすることもできる。
【0021】
増速アキュームコンベヤ部6でばらばらになって搬送されてきた5列のびん1は、減速アキュームコンベヤ部7に送られてくると、増速アキュームコンベヤ部6が搬送状態になっている場合には、コンベヤ71が減速されていることにより搬送されるびん1が前方のびん1にびん圧を与えることなく、自然に密着して搬送される。
減速アキュームコンベヤ部7においても、駆動装置109、111〜115、116の各駆動軸の回転数またはコンベヤ速度、或る時間からの回転量等の信号を、各駆動装置の駆動軸に設けられたエンコーダ209、211〜215、216から制御装置10に取り込んで、該コンベヤの先頭部からびん1が進んだ距離と該コンベヤの速度等とから各コンベヤ上のびん載置量が演算して求められ、演算したコンベヤ上のびん載置量が所定量になっていなければ、コンベヤ51からコンベヤ73に亘って、びん1が搬送状態になっている。図1は、この搬送状態を示している。
前記演算したコンベヤ上のびん載置量が所定量になると、びん1が満杯状態になっていると見做す満杯検知センサの機能を持たして、該コンベヤを停止、該コンベヤの上流コンベヤの搬送速度を減速するなどの制御をする。
【0022】
整びんコンベヤ81が満杯状態になっていると、減速アキュームコンベヤ部7のコンベヤ73からのびん1の補給を停めるために、コンベヤ73が停止状態に制御される。これに伴い、コンベヤ72からのびん1の搬送も停止する。
ケースパッカ8によって整びんコンベヤ81に所定本数以上が整びんされたびん1の所定列数の所定本数が図示しないケースに梱包されると、整びんコンベヤ81にびん1が補給されるように制御されるが、このとき、コンベヤ73は減速状態でびん1を搬送するので、びん1は整びんコンベヤ81上のびん1に自然に密着搬送されていく。
さらに、コンベヤ72からコンベヤ73へびん1を搬送するに際して、5列のびん1を一度に搬送すると、このびん圧により整びんコンベヤ81の図示しないびんストッパに大きな力が作用して好ましくないことがあるが、本実施の形態では、コンベヤ72の列11〜15に分割されたコンベヤを順次駆動してびん1をコンベヤ73側へ搬送するので、整びんコンベヤ81の図示しないストッパに作用するびん1のびん圧による力は、列毎に順次搬送されることにより極めて小さいものとなる。図2はコンベヤ73が満杯となる直前で、コンベヤ72が停止する直前の搬送状態を示す図である。
ここで、コンベヤ73の列13が満杯状態に達したら、それに対応するコンベヤ72の列13の駆動が停止し、列15、14、12、11も同様に順次搬送、停止して5列すべてが満杯になったらコンベヤ72からコンベヤ73へのびん1の補給が完了することになり、この時点で、コンベヤ71を減速状態で駆動してびん1を搬送し、コンベヤ72へのびん1の補給をする。図3はこの搬送状態を示す図である。
【0023】
コンベヤ71が満杯状態になったらコンベヤ71は駆動停止するように制御される。
一方、増速アキュームコンベヤ部6の最下流段のコンベヤ63では、びん1が満杯状態になっていない場合は、図3に示すように、びん1がばらばらな状態になって搬送されてくるが、コンベヤ71が停止していると、コンベヤ71の後続のびん1に密着していく。この場合、びん1の搬送速度が定常の増速状態になっていると、びん1が前方のびん1に密着するときに衝撃を与えることになるので、コンベヤ71が停止している時は、コンベヤ63の搬送速度を、前記コンベヤ54の搬送速度に相当するような速度に減速するように制御して、びん1が自然に近い状態で密着することができる。
この場合、コンベヤ63が減速状態となっているので、びん1はコンベヤ63の上流側先頭部から順次自然に密着した状態で搬送される。コンベヤ63上のびん載置量が満杯に相当する状態或いは満杯に近い設定量となったら、コンベヤ63は停止されるように制御されるが、コンベヤ63の先頭部から順次密着した状態の搬送となっているので、前方のびん1にはびん圧を与えずに一群で近づいていくことができる。図4はこの状態を示す図である。
【0024】
コンベヤ71が停止してコンベヤ63が駆動制御されると同様に、コンベヤ63が停止すると、コンベヤ62が減速、停止の駆動制御がなされる。即ち、びん1がコンベヤ62の減速状態で上流側先頭部から順次自然に密着した状態で搬送され、満杯に相当する状態となったら、コンベヤ62が停止される。図5はコンベヤ62が満杯状態となって停止したときの状態を示す図である。
コンベヤ63が停止してコンベヤ62が駆動制御されると同様に、コンベヤ62が満杯状態で停止すると、コンベヤ61が減速、停止の駆動制御がなされる。図6はコンベヤ61が満杯状態となって停止したときの状態を示す図である。
コンベヤ61が満杯状態で停止すると、減速コンベヤ部5が定常の速度よりも減速或いは停止となるように制御される。
【0025】
以上説明してきたように、本発明に係わる実施の形態は、減速コンベヤ部5を段階的に減速する多段のコンベヤとして、最終段でびん1が自然に密着するような搬送速度とすることにより該コンベヤの各列に供給されたびん1を自然に密着する状態にすることができ、びん1に与えるびん圧を極めて小さくすることができる。また、前記各列が均等して自然に密着したびん1の群とすることができるので、減速コンベヤ部5の長さが無駄なく、効率的に活用できる。
増速アキュームコンベヤ部6では、多列のコンベヤが各列とも均等にびん1の前後に間隔をもったばらばらな状態でアキュームすることができるので、アキューム機能が効率よく、コンベヤ長さが無駄なく、効率的に活用できる。
また、増速アキュームコンベヤ部6およびその下流の減速アキュームコンベヤ部7において、各コンベヤの駆動軸に該駆動軸の回転速度、或る時間からの回転量等を計測するエンコーダを設けてコンベヤ上のびん載置量を制御装置で演算することができるようにしたことにより、コンベヤ上のびんが満杯の時は該コンベヤの停止、或いは、上流側のコンベヤの搬送速度の減速によりコンベヤの上流側の先頭部から自然に密着した状態で搬送するなどコンベヤ搬送制御を効率的にすることができるとともに、密着びん列が実際に下流の既に停止しているびん列に接触する前に満杯検知して、既に停止しているびん列にびん圧をかけることなくアキュームすることができるなどの効果がある。
本実施の形態では、増速アキュームコンベヤ部6、減速アキュームコンベヤ部7に前記エンコーダを設けた場合を示したが、エンコーダの代わりにびんの搬送状態を他の検知装置で検知して搬送制御してもよいことはもちろんである。
【0026】
また、前記実施の形態では、給びんコンベヤ2から搬送されてくるびん1を振分装置4により5列に振分けて、減速コンベヤ部5、増速アキュームコンベヤ部6、減速アキュームコンベヤ部7を図示しないガイドで5列に分割して搬送する場合を説明したが、振分装置4を用いない場合でもよい。この場合、アキュームコンベヤは減速コンベヤ部、増速アキュームコンベヤ部、減速アキュームコンベヤ部がガイドで列に分割されない幅広のコンベヤとして構成されるが、このような場合でも、エンコーダと制御装置により演算したコンベヤ上のびん載置量をもとに前記と同様のアキュームコンベヤの搬送制御をすることができるが、制御方法は前記と類似するので、詳細な説明は省略する。
【図面の簡単な説明】
【0027】
【図1】本発明の実施の携帯に係わるアキュームコンベヤの搬送制御方法および装置を組み入れたコンベヤラインの模式平面図で、アキュームコンベヤの全長にアキュームの余地がある場合を示す。
【図2】減速アキュームコンベヤ部で最下流段のコンベヤが満杯になる直前の状態を示す図である。
【図3】減速アキュームコンベヤ部が満杯になる直前の状態を示す図である。
【図4】減速アキュームコンベヤ部で満杯、増速アキュームコンベヤ部の最下流部がほぼ満杯で、その上流部がアキュームの余地がある状態を示す図である。
【図5】図4よりも増速アキュームコンベヤ部のアキュームの余地が減った状態を示す図である。
【図6】減速コンベヤ部の下流部まで満杯となってライン停止状態となった場合を示す図である。
【図7】コンベヤ構成の一部の説明図である。
【符号の説明】
【0028】
1…びん(容器)、
2…給びんコンベヤ、
3…コンベヤ、
4…振分装置、
5…減速コンベヤ部、
6…増速アキュームコンベヤ部、
7…減速アキュームコンベヤ部、
10…制御装置、
101〜109…(コンベヤの)駆動装置、
111〜116…(コンベヤの)駆動装置、
206〜209…エンコーダ、
211〜216…エンコーダ
【特許請求の範囲】
【請求項1】
びん等の容器(以下、びんと称する。)を搬送するコンベヤラインの中で、上流の給びんコンベヤから振分装置を介してびんが多列に搬送供給され、各列に分割された状態でびんが整列およびアキュームされる多列コンベヤより成るアキュームコンベヤにおいて、振分装置後の多列コンベヤを、びんが前後に密着するような搬送速度まで多段で段階的に減速する減速コンベヤ部と、該減速コンベヤ部の下流側でびんが前後に隙間をもって搬送され、アキュームが可能となるように搬送速度を増速するコンベヤを多段で直列にして成る増速アキュームコンベヤ部とで構成して、該増速アキュームコンベヤ部の各列でびんを前後に隙間をもってばらばらな状態で搬送させるようにするとともに、各列がほぼ均等にばらばらな状態のびん配置となるような搬送制御をすることを特徴とするアキュームコンベヤの搬送制御方法。
【請求項2】
請求項1に記載するアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部で搬送されるびんの前後の隙間を増速度合いにより変更して、アキューム量が変更できるようにしたことを特徴とするアキュームコンベヤの搬送制御方法。
【請求項3】
請求項1および2に記載するアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部の下流側に、さらに単段または直列にした多段で成る減速アキュームコンベヤ部を配置して、該減速アキュームコンベヤ部において各列でびんが前後に間隔をもったばらばらな状態からソフトにほぼ密着した状態で搬送されるとともに各列がほぼ均等に密着したびん配置となるように搬送制御することを特徴とするアキュームコンベヤの搬送制御方法。
【請求項4】
請求項1から3に記載するアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部或いは前記減速アキュームコンベヤ部の少なくとも一方の直列に配置したコンベヤの各段で、該コンベヤに設けたエンコーダからの信号により制御装置でコンベヤ上のびん載置量を演算させて、該コンベヤ上でのびん載置量が満杯に相当する量になっているかどうかを検知する満杯検知センサの機能を持たせ、該制御装置からの指令によりコンベヤの停止、定常搬送、減速搬送などの運転制御ができるようにしたことを特徴とするアキュームコンベヤの搬送制御方法。
【請求項5】
請求項4に記載するアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部の最下流段コンベヤでびん載置量が満杯に相当する量になったら最下流段コンベヤを停止させ、次いで、最下流段の直前の上流側コンベヤでびん載置量が満杯に相当する量になったら該上流側コンベヤを停止させるというように、最下流段から順次上流段へコンベヤ上のびん載置量が満杯に相当する量になったら該コンベヤを停止させてアキューム制御するようにしたことを特徴とするアキュームコンベヤの搬送制御方法。
【請求項6】
請求項4に記載するアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部または前記減速アキュームコンベヤ部の各コンベヤ上のびん載置量の演算を、該コンベヤの先頭部からびんが進んだ距離と該コンベヤの搬送速度から前記エンコーダと制御装置により行うようにしたことを特徴とするアキュームコンベヤの搬送制御方法。
【請求項7】
請求項1から6に記載するアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部のコンベヤの搬送速度をびんが前後に密着するような搬送速度にして、該コンベヤにおいて先頭から順次びんが前後に密着して搬送されるようにし、該コンベヤが前記満杯検知センサ機能により満杯に相当する状態になったら満杯停止するようにして、該コンベヤ下流段のコンベヤ上で停止しているびんに衝撃を与えない程度に自然に密着するようにアキューム制御することを特徴とするアキュームコンベヤの搬送制御方法。
【請求項8】
請求項7に記載するアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部の最下流段から順次上流段へコンベヤの満杯検知による停止をするようにして、アキューム制御することを特徴とするアキュームコンベヤの搬送制御方法。
【請求項9】
請求項3に記載するアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部の下流側に配置した多段で直列にして成る減速アキュームコンベヤ部で、各段のコンベヤに設けたエンコーダからの信号により制御装置でコンベヤ上のびん載置量を演算させて、最下流段のコンベヤでびん載置量が減少してアキュームに空きができたら最下流段から上流段のコンベヤをびん搬送にして、最下流段のコンベヤのびん載置量が満杯に相当する量になったら最下流段のコンベヤを停止し、順次下流段のコンベヤから上流段のコンベヤに向かってびん載置量が満杯に相当する量になったら該コンベヤを停止するように制御することを特徴とするアキュームコンベヤの搬送制御方法。
【請求項10】
請求項3および9に記載するアキュームコンベヤの搬送制御方法において、前記減速アキュームコンベヤ部の多段で直列に配置したコンベヤの少なくとも一つの段のコンベヤを各列順次駆動とし、最下流段で搬送されるびんが後工程で停止しているびんに密着するときに各列が順次密着するように制御することを特徴とするアキュームコンベヤの搬送制御方法。
【請求項11】
びんを搬送するコンベヤラインの中で、上流の給びんコンベヤから振分装置を介してびんが多列に搬送供給され、各列に分割された状態でびんが整列およびアキュームされる多列コンベヤより成るアキュームコンベヤにおいて、振分装置後の多列コンベヤを、びんが前後に密着するような搬送速度まで多段で段階的に減速する減速コンベヤ部と、該減速コンベヤ部の下流側でびんが前後に隙間をもって搬送され、アキュームが可能となるように搬送速度を増速するコンベヤを多段で直列にして成る増速アキュームコンベヤ部とで構成したことを特徴とするアキュームコンベヤ装置。
【請求項12】
請求項11に記載するアキュームコンベヤ装置において、前記増速アキュームコンベヤ部の下流側に、各列でびんが前後に間隔をもったばらばらな状態からソフトに密着した状態で搬送されるとともに各列がほぼ均等に密着したびん配置となるように搬送制御されるようにした減速アキュームコンベヤ部を配置したことを特徴とするアキュームコンベヤ装置。
【請求項13】
請求項12に記載するアキュームコンベヤ装置において、前記前記増速アキュームコンベヤ部、前記減速アキュームコンベヤ部の少なくとも一つにおいて、直列に配置したコンベヤの各段で、該コンベヤにエンコーダを設けて、該コンベヤの先頭部からびんが進んだ距離、該コンベヤの搬送速度等の前記エンコーダからの信号を制御装置に取り込んで、該制御装置からの指令によりコンベヤを停止、定常搬送、減速搬送などの運転制御ができるように構成したことを特徴とするアキュームコンベヤ装置。
【請求項14】
請求項11から13に記載するアキュームコンベヤ装置において、前記減速アキュームコンベヤ部の多段で直列に配置したコンベヤの少なくとも一つの段のコンベヤを各列順次駆動としたことを特徴とするアキュームコンベヤ装置。
【請求項15】
びんを搬送するコンベヤラインの中で、上流の給びんコンベヤからびんを搬送供給される幅広のアキュームコンベヤにおいて、該アキュームコンベヤを上流側から順に、給びんコンベヤから搬送供給されるびんを一旦減速して溜めながら搬送する減速コンベヤ部と、その下流で前記減速コンベヤから搬送されるびんが前後に隙間をもって搬送されるように増速して搬送する増速アキュームコンベヤ部と、その下流で前記増速アキュームコンベヤ部から搬送されてくるびんが密着に近い状態で後工程のコンベヤに供給されていくように搬送する減速アキュームコンベヤ部で構成され、前記増速アキュームコンベヤ部または前記減速アキュームコンベヤ部をさらに複数段に分割して、分割した各段のコンベヤに設けたエンコーダからの信号により制御装置でコンベヤ上のびん載置量を演算させて、該コンベヤ上のびん載置量が満杯に相当する量になっているかどうかを検知する満杯検知センサの機能を持たせて、該制御装置からの指令によりコンベヤの停止、定常搬送、減速搬送などの運転制御ができるようにしたことを特徴とするアキュームコンベヤの搬送制御方法。
【請求項16】
請求項15に記載するアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部または前記減速アキュームコンベヤ部の最下流段コンベヤでびん載置量が満杯に相当する量になったら最下流段コンベヤを停止させ、次いで、最下流段の直前の上流側コンベヤでびん載置量が満杯に相当する量になったら該上流側コンベヤを停止させるというように、最下流段から順次上流段へコンベヤ上のびん載置量が満杯に相当する量になったら該コンベヤを停止させてアキューム制御するようにしたことを特徴とするアキュームコンベヤの搬送制御方法。
【請求項17】
請求項15に記載するアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部または前記減速アキュームコンベヤ部の各コンベヤ上のびん載置量の演算を、該コンベヤの先頭部からびんが進んだ距離と該コンベヤの搬送速度とから前記エンコーダと制御装置により行うようにしたことを特徴とするアキュームコンベヤの搬送制御方法。
【請求項18】
請求項15から17に記載するアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部または前記減速アキュームコンベヤ部のコンベヤの搬送速度をびんが前後に密着するような搬送速度にして、該コンベヤにおいて先頭から順次びんが前後に密着して搬送されるようにし、該コンベヤが前記満杯検知センサ機能により満杯に相当する状態になったら満杯停止するようにして、該コンベヤ下流段のコンベヤ上で停止しているびんに衝撃を与えない程度に自然に密着するようにアキューム制御することを特徴とするアキュームコンベヤの搬送制御方法。
【請求項19】
請求項18に記載するアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部または前記減速アキュームコンベヤ部の最下流段から順次上流段へコンベヤの満杯検知による停止をするようにして、アキューム制御することを特徴とするアキュームコンベヤの搬送制御方法。
【請求項20】
請求項15から19に記載するアキュームコンベヤの搬送制御方法において、前記減速コンベヤ部を複数段で段階的に減速する構成として、搬送されるびんが該減速コンベヤ部の少なくとも最下流段で自然に密着して搬送されるように制御することを特徴とするアキュームコンベヤの搬送制御方法。
【請求項1】
びん等の容器(以下、びんと称する。)を搬送するコンベヤラインの中で、上流の給びんコンベヤから振分装置を介してびんが多列に搬送供給され、各列に分割された状態でびんが整列およびアキュームされる多列コンベヤより成るアキュームコンベヤにおいて、振分装置後の多列コンベヤを、びんが前後に密着するような搬送速度まで多段で段階的に減速する減速コンベヤ部と、該減速コンベヤ部の下流側でびんが前後に隙間をもって搬送され、アキュームが可能となるように搬送速度を増速するコンベヤを多段で直列にして成る増速アキュームコンベヤ部とで構成して、該増速アキュームコンベヤ部の各列でびんを前後に隙間をもってばらばらな状態で搬送させるようにするとともに、各列がほぼ均等にばらばらな状態のびん配置となるような搬送制御をすることを特徴とするアキュームコンベヤの搬送制御方法。
【請求項2】
請求項1に記載するアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部で搬送されるびんの前後の隙間を増速度合いにより変更して、アキューム量が変更できるようにしたことを特徴とするアキュームコンベヤの搬送制御方法。
【請求項3】
請求項1および2に記載するアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部の下流側に、さらに単段または直列にした多段で成る減速アキュームコンベヤ部を配置して、該減速アキュームコンベヤ部において各列でびんが前後に間隔をもったばらばらな状態からソフトにほぼ密着した状態で搬送されるとともに各列がほぼ均等に密着したびん配置となるように搬送制御することを特徴とするアキュームコンベヤの搬送制御方法。
【請求項4】
請求項1から3に記載するアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部或いは前記減速アキュームコンベヤ部の少なくとも一方の直列に配置したコンベヤの各段で、該コンベヤに設けたエンコーダからの信号により制御装置でコンベヤ上のびん載置量を演算させて、該コンベヤ上でのびん載置量が満杯に相当する量になっているかどうかを検知する満杯検知センサの機能を持たせ、該制御装置からの指令によりコンベヤの停止、定常搬送、減速搬送などの運転制御ができるようにしたことを特徴とするアキュームコンベヤの搬送制御方法。
【請求項5】
請求項4に記載するアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部の最下流段コンベヤでびん載置量が満杯に相当する量になったら最下流段コンベヤを停止させ、次いで、最下流段の直前の上流側コンベヤでびん載置量が満杯に相当する量になったら該上流側コンベヤを停止させるというように、最下流段から順次上流段へコンベヤ上のびん載置量が満杯に相当する量になったら該コンベヤを停止させてアキューム制御するようにしたことを特徴とするアキュームコンベヤの搬送制御方法。
【請求項6】
請求項4に記載するアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部または前記減速アキュームコンベヤ部の各コンベヤ上のびん載置量の演算を、該コンベヤの先頭部からびんが進んだ距離と該コンベヤの搬送速度から前記エンコーダと制御装置により行うようにしたことを特徴とするアキュームコンベヤの搬送制御方法。
【請求項7】
請求項1から6に記載するアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部のコンベヤの搬送速度をびんが前後に密着するような搬送速度にして、該コンベヤにおいて先頭から順次びんが前後に密着して搬送されるようにし、該コンベヤが前記満杯検知センサ機能により満杯に相当する状態になったら満杯停止するようにして、該コンベヤ下流段のコンベヤ上で停止しているびんに衝撃を与えない程度に自然に密着するようにアキューム制御することを特徴とするアキュームコンベヤの搬送制御方法。
【請求項8】
請求項7に記載するアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部の最下流段から順次上流段へコンベヤの満杯検知による停止をするようにして、アキューム制御することを特徴とするアキュームコンベヤの搬送制御方法。
【請求項9】
請求項3に記載するアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部の下流側に配置した多段で直列にして成る減速アキュームコンベヤ部で、各段のコンベヤに設けたエンコーダからの信号により制御装置でコンベヤ上のびん載置量を演算させて、最下流段のコンベヤでびん載置量が減少してアキュームに空きができたら最下流段から上流段のコンベヤをびん搬送にして、最下流段のコンベヤのびん載置量が満杯に相当する量になったら最下流段のコンベヤを停止し、順次下流段のコンベヤから上流段のコンベヤに向かってびん載置量が満杯に相当する量になったら該コンベヤを停止するように制御することを特徴とするアキュームコンベヤの搬送制御方法。
【請求項10】
請求項3および9に記載するアキュームコンベヤの搬送制御方法において、前記減速アキュームコンベヤ部の多段で直列に配置したコンベヤの少なくとも一つの段のコンベヤを各列順次駆動とし、最下流段で搬送されるびんが後工程で停止しているびんに密着するときに各列が順次密着するように制御することを特徴とするアキュームコンベヤの搬送制御方法。
【請求項11】
びんを搬送するコンベヤラインの中で、上流の給びんコンベヤから振分装置を介してびんが多列に搬送供給され、各列に分割された状態でびんが整列およびアキュームされる多列コンベヤより成るアキュームコンベヤにおいて、振分装置後の多列コンベヤを、びんが前後に密着するような搬送速度まで多段で段階的に減速する減速コンベヤ部と、該減速コンベヤ部の下流側でびんが前後に隙間をもって搬送され、アキュームが可能となるように搬送速度を増速するコンベヤを多段で直列にして成る増速アキュームコンベヤ部とで構成したことを特徴とするアキュームコンベヤ装置。
【請求項12】
請求項11に記載するアキュームコンベヤ装置において、前記増速アキュームコンベヤ部の下流側に、各列でびんが前後に間隔をもったばらばらな状態からソフトに密着した状態で搬送されるとともに各列がほぼ均等に密着したびん配置となるように搬送制御されるようにした減速アキュームコンベヤ部を配置したことを特徴とするアキュームコンベヤ装置。
【請求項13】
請求項12に記載するアキュームコンベヤ装置において、前記前記増速アキュームコンベヤ部、前記減速アキュームコンベヤ部の少なくとも一つにおいて、直列に配置したコンベヤの各段で、該コンベヤにエンコーダを設けて、該コンベヤの先頭部からびんが進んだ距離、該コンベヤの搬送速度等の前記エンコーダからの信号を制御装置に取り込んで、該制御装置からの指令によりコンベヤを停止、定常搬送、減速搬送などの運転制御ができるように構成したことを特徴とするアキュームコンベヤ装置。
【請求項14】
請求項11から13に記載するアキュームコンベヤ装置において、前記減速アキュームコンベヤ部の多段で直列に配置したコンベヤの少なくとも一つの段のコンベヤを各列順次駆動としたことを特徴とするアキュームコンベヤ装置。
【請求項15】
びんを搬送するコンベヤラインの中で、上流の給びんコンベヤからびんを搬送供給される幅広のアキュームコンベヤにおいて、該アキュームコンベヤを上流側から順に、給びんコンベヤから搬送供給されるびんを一旦減速して溜めながら搬送する減速コンベヤ部と、その下流で前記減速コンベヤから搬送されるびんが前後に隙間をもって搬送されるように増速して搬送する増速アキュームコンベヤ部と、その下流で前記増速アキュームコンベヤ部から搬送されてくるびんが密着に近い状態で後工程のコンベヤに供給されていくように搬送する減速アキュームコンベヤ部で構成され、前記増速アキュームコンベヤ部または前記減速アキュームコンベヤ部をさらに複数段に分割して、分割した各段のコンベヤに設けたエンコーダからの信号により制御装置でコンベヤ上のびん載置量を演算させて、該コンベヤ上のびん載置量が満杯に相当する量になっているかどうかを検知する満杯検知センサの機能を持たせて、該制御装置からの指令によりコンベヤの停止、定常搬送、減速搬送などの運転制御ができるようにしたことを特徴とするアキュームコンベヤの搬送制御方法。
【請求項16】
請求項15に記載するアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部または前記減速アキュームコンベヤ部の最下流段コンベヤでびん載置量が満杯に相当する量になったら最下流段コンベヤを停止させ、次いで、最下流段の直前の上流側コンベヤでびん載置量が満杯に相当する量になったら該上流側コンベヤを停止させるというように、最下流段から順次上流段へコンベヤ上のびん載置量が満杯に相当する量になったら該コンベヤを停止させてアキューム制御するようにしたことを特徴とするアキュームコンベヤの搬送制御方法。
【請求項17】
請求項15に記載するアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部または前記減速アキュームコンベヤ部の各コンベヤ上のびん載置量の演算を、該コンベヤの先頭部からびんが進んだ距離と該コンベヤの搬送速度とから前記エンコーダと制御装置により行うようにしたことを特徴とするアキュームコンベヤの搬送制御方法。
【請求項18】
請求項15から17に記載するアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部または前記減速アキュームコンベヤ部のコンベヤの搬送速度をびんが前後に密着するような搬送速度にして、該コンベヤにおいて先頭から順次びんが前後に密着して搬送されるようにし、該コンベヤが前記満杯検知センサ機能により満杯に相当する状態になったら満杯停止するようにして、該コンベヤ下流段のコンベヤ上で停止しているびんに衝撃を与えない程度に自然に密着するようにアキューム制御することを特徴とするアキュームコンベヤの搬送制御方法。
【請求項19】
請求項18に記載するアキュームコンベヤの搬送制御方法において、前記増速アキュームコンベヤ部または前記減速アキュームコンベヤ部の最下流段から順次上流段へコンベヤの満杯検知による停止をするようにして、アキューム制御することを特徴とするアキュームコンベヤの搬送制御方法。
【請求項20】
請求項15から19に記載するアキュームコンベヤの搬送制御方法において、前記減速コンベヤ部を複数段で段階的に減速する構成として、搬送されるびんが該減速コンベヤ部の少なくとも最下流段で自然に密着して搬送されるように制御することを特徴とするアキュームコンベヤの搬送制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2010−70276(P2010−70276A)
【公開日】平成22年4月2日(2010.4.2)
【国際特許分類】
【出願番号】特願2008−236653(P2008−236653)
【出願日】平成20年9月16日(2008.9.16)
【出願人】(505193313)三菱重工食品包装機械株式会社 (146)
【Fターム(参考)】
【公開日】平成22年4月2日(2010.4.2)
【国際特許分類】
【出願日】平成20年9月16日(2008.9.16)
【出願人】(505193313)三菱重工食品包装機械株式会社 (146)
【Fターム(参考)】
[ Back to top ]