
アクチュエータの作動制御装置

【課題】 プレビュー制御の制御性能の悪化が抑えられるアクチュエータの作動制御装置を提供すること。
【解決手段】 プレビューセンサ63によりセンサ距離z_ssrが検出されたときに検出の対象とされた路面位置を表すプレビュー位置Dpに基づいて、そのプレビュー位置Dpにおける路面変位量x_roadを記憶するためのデータ記憶位置iが演算される。そして、RAM54の記憶領域541のうち演算されたデータ記憶位置iにより表される記憶場所に路面変位量x_roadが記録される。
【解決手段】 プレビューセンサ63によりセンサ距離z_ssrが検出されたときに検出の対象とされた路面位置を表すプレビュー位置Dpに基づいて、そのプレビュー位置Dpにおける路面変位量x_roadを記憶するためのデータ記憶位置iが演算される。そして、RAM54の記憶領域541のうち演算されたデータ記憶位置iにより表される記憶場所に路面変位量x_roadが記録される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に取り付けられたプレビューセンサにより検出されるセンサと路面との間の距離に基づいて、その路面を走行する車輪の動作を制御するためのアクチュエータを作動制御するアクチュエータの作動制御装置に関する。
【背景技術】
【0002】
プレビューセンサにより検出されるセンサと路面との間の距離に基づいて、その路面を走行する車輪の上下動作を制御するためのアクチュエータ、例えばアクティブサスペンションのアクチュエータの作動を制御するいわゆるプレビュー制御(予見制御)が知られている。
【0003】
プレビュー制御時には、例えば車両前方に設置されたプレビューセンサ(距離センサなど)によって、そのセンサの取付位置から車両が走行する予定の路面位置までの距離が検出される。また、検出された距離に基づき、その距離が検出されたときに検出の対象とされた路面位置であるプレビュー位置を車輪が走行するときにその車輪に連結されたサスペンションのアクチュエータの作動を制御するために必要な制御情報(例えばプレビュー位置における基準位置からの上下方向の変位量(路面変位量))が取得される。そして、取得された制御情報に基づいてアクチュエータの作動が制御される。
【0004】
また、プレビュー制御時には、サンプリング時間ごとに得られる複数のプレビュー位置における制御情報が、例えばサスペンションECUのメモリ(RAMやレジスタ)に一時的に記憶される。そして、アクチュエータの制御の遅れを表す補償時間を見越した適切なタイミングでメモリから読み出された制御情報に基づき、アクチュエータが作動制御される。
【0005】
特許文献1は、車速に応じた間引き率により制御情報としての路面変位量を記憶し、無駄なメモリ容量を要することなくプレビュー制御を実行し得るアクティブサスペンション制御装置を開示している。
【0006】
また、特許文献2は、制御情報の記憶領域が車速範囲に応じて分割されたメモリを用いてプレビュー制御する方法を開示している。これによれば、メモリ内における制御情報の記憶領域が複数の車速領域ごとに分割されている。また、車速が大きい範囲に対応する分割領域に記憶する路面変位量のデータサンプリング周期が、車速が小さい範囲に対応する分割領域に記憶する路面変位量のデータサンプリング周期よりも短くなるように、それぞれの領域ごとにサンプリング周期が設定される。さらに、車速が大きい範囲に対応する分割領域に記憶(保存)されるデータ数が、車速が小さい範囲に対応する分割領域に記憶されるデータ数よりも多くなるように、各分割領域が構成される。こうすることで、全車速に対してムラなく路面変位量が記録される。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平4−342612号公報
【特許文献2】特開平9−136522号公報
【発明の概要】
【0008】
プレビュー位置とそのプレビュー位置を走行する予定の車輪(制御対象輪位置)との間の距離(プレビュー距離)を車速で除算して得られる時間は、その車輪がプレビュー位置を走行するまでの余裕時間を表す。この余裕時間が、その車輪の動作を制御するためのアクチュエータの制御の遅れを表す補償時間未満であると、制御が間に合わず、適切なタイミングでアクチュエータを制御することができない。
【0009】
上記特許文献に記載のアクティブサスペンション制御装置を含む従来の制御装置によれば、プレビュー位置がプレビューセンサの直下に位置する。つまり、プレビューセンサにより出射される超音波などの検出媒体の出射方向と路面とのなす角である対地角度がほぼ直角である。この場合、特に制御対象輪が前輪である場合、プレビュー距離が比較的短い。よって、車速が速い場合は余裕時間が制御遅れ時間よりも短くなる可能性が高い。
【0010】
プレビュー距離を伸ばすためには、プレビュー位置が車両の現在位置からより前方となるように、プレビューセンサから検出媒体を斜め前方に出射すればよい。つまり対地角度が車両側から見て鋭角となるようにプレビューセンサを車両に取り付けることにより、プレビュー距離を伸ばすことができる。しかし、プレビューセンサの対地角度が鋭角である場合、プレビュー位置が車両のピッチ運動によって大きく変動する。
【0011】
図29は、ピッチ運動によるプレビュー位置の変化量の違いを、基準となる対地角度が90°の場合と30°の場合とで比較した図である。図において、プレビューセンサは路面から500mm上方に取り付けられている。また、この図は、車両姿勢が水平な状態(ピッチ角度=0°)から2°だけピッチ運動したときにおけるプレビュー位置の変化量を例示している。プレビューセンサの基準対地角度が90°である場合、2°のピッチ角度変化によりプレビュー位置は17.5mmだけ変化する。一方、プレビューセンサの基準対地角度が30°である場合、2°のピッチ角度変化によりプレビュー位置は74.3mmも変化する。車両が時速80kmで走行していると仮定すると、車両は約3.3msec.をかけて74.3mmを走行する。このことは、アクチュエータを適切なタイミングで作動させようとするときに、ピッチ運動によって3.3msec.のタイミングずれが発生してしまう可能性を示唆する。また、プレビューセンサにより検出された信号のサンプリング周期が3.3msec.以下である場合、上記のタイミングずれ量はサンプリング周期よりも大きいので、場合によっては必要な制御情報が欠如する。これによりプレビュー制御の制御性能が悪化する。
【0012】
図30は、対地角度を車両側から見て鋭角(例えば30°)に設定した場合における、プレビュー位置の時間変化を表すグラフである。このグラフによれば、ピッチ運動が発生していない場合は、時間経過とともにプレビュー位置が車両の走行方向に進行(増加)する。しかし、車両の前方が沈み込むピッチ運動が発生した場合、時間経過とともにプレビュー位置が車両の走行方向に進行せず、一旦プレビュー位置が後退(減少)する。
【0013】
プレビュー制御に用いられる制御情報は、例えばシフトレジスタなどにサンプリング時間順(演算順)に記憶(保存)される。つまり、サンプリング時間順に制御情報のメモリ内での記憶位置が決定される。そして、制御情報を読み出す際にはサンプリング時間順に読み出される。ところが、図30に示されるようにピッチ運動が発生した場合、時間が経過するにつれてプレビュー位置が後退する場合が生じる。この場合に制御情報をサンプリング時間順に読み出すと、制御対象輪が通過する路面順に制御情報が読み出されない事態を招く。これによりプレビュー制御の制御性能が悪化する。
【0014】
本発明は、上記問題に対処するためになされたものであり、プレビューセンサにより検出された距離に基づき、走行予定路面を走行する制御対象輪の動作を制御するためのアクチュエータの作動を制御するアクチュエータの作動制御装置において、プレビュー制御の制御性能の悪化が効果的に抑えられたアクチュエータの作動制御装置を提供することを目的とする。
【0015】
本発明は、車両に取り付けられ、その取付位置から車両が走行する予定の路面位置までの間の距離を予め設定されたサンプリング時間ごとに検出するプレビューセンサを備え、前記プレビューセンサにより検出された距離に基づいて、その距離が検出されたときに検出の対象とされた路面位置であるプレビュー位置を走行する車輪の動作を制御するためのアクチュエータの作動を制御するアクチュエータの作動制御装置において、車両の走行速度に基づいて車両の走行距離を演算する走行距離演算手段と、前記プレビューセンサにより検出された距離に基づいて、その距離が検出されたときに検出の対象とされた前記プレビュー位置とそのプレビュー位置を走行する予定の車輪である制御対象輪が現在接地している路面位置との間の距離であるプレビュー距離を演算するプレビュー距離演算手段と、前記車両の走行距離に前記プレビュー距離を加算した値に基づいて、前記プレビュー位置を演算するプレビュー位置演算手段と、前記プレビューセンサにより検出された距離に基づいて、その距離が検出されたときに検出の対象とされた前記プレビュー位置を前記制御対象輪が走行するときにその制御対象輪の動作を制御するためのアクチュエータの作動を制御するために必要な情報である制御情報を演算する制御情報演算手段と、前記制御情報演算手段により演算された前記制御情報を記憶する複数の記憶場所を有するメモリと、前記プレビュー位置演算手段により演算された前記プレビュー位置に基づいて、そのプレビュー位置を前記制御対象輪が走行するときにその制御対象輪の動作を制御するアクチュエータの作動を制御するために必要な情報として前記制御情報演算手段により演算された前記制御情報の前記メモリ内における記憶場所を表す記憶位置を演算する記憶位置演算手段と、前記メモリ内の記憶場所のうち、前記記憶位置演算手段により演算された記憶位置により表される記憶場所に前記制御情報を記録する制御情報記録手段と、を備えるアクチュエータの作動制御装置を提供する。
【0016】
本発明により提供されたアクチュエータの作動制御装置によれば、プレビューセンサにより検出される距離に基づいて、その距離が検出されたときに検出の対象とされた路面の位置を表すプレビュー位置を制御対象輪が走行するときにその制御対象輪の動作を制御するためのアクチュエータを作動制御するために必要な制御情報、例えばそのプレビュー位置における路面変位量などが演算される。こうして演算された制御情報がメモリに記録される。また、制御情報はプレビューセンサによってサンプリング時間ごとに検出される距離に基づいて演算されるため、異なるプレビュー位置における複数の制御情報がメモリに記録される。各制御情報のメモリ内における記憶場所を表す記憶位置は記憶位置演算手段により演算される。この場合において、記憶位置演算手段は、プレビュー位置に基づいて、そのプレビュー位置を制御対象輪が走行するときにその制御対象輪の動作を制御するアクチュエータの作動を制御するために必要な情報として制御情報演算手段によって演算された制御情報の記憶位置を演算する。つまり、制御情報の記憶位置は、その制御情報が必要とされるプレビュー位置に基づいて演算される。そして、演算された記憶位置により表される記憶場所にその制御情報が記録される。このように、本発明によれば、サンプリング時間順に制御情報の記憶位置が決定されるのではなく、プレビュー位置に基づいて制御情報の記憶位置が決定される。
【0017】
プレビュー位置に基づいて、そのプレビュー位置における制御情報のメモリ内での記憶位置が決定されるので、制御情報の記憶位置とその制御情報が必要とされるプレビュー位置との間に関連性が与えられる。例えば、最初に演算された制御情報Aが必要とされるプレビュー位置が1.5m、次に演算された制御情報Bが必要とされるプレビュー位置が1.4m、最後に演算された制御情報Cが必要とされるプレビュー位置が1.6mである場合について考察する。従来の記憶方式では、制御情報は演算順(A,B,Cの順)に記録され、その順(A,B,Cの順)に読み出される。このため走行車両から見て遠いプレビュー位置における制御情報(制御情報A)が近いプレビュー位置における制御情報(制御情報B)よりも先に読み出されてしまう。よって、制御対象輪が通過する路面順に制御情報が読み出されない事態が生じ、その結果、プレビュー制御の制御性能が悪化する。これに対し、本発明によれば、制御情報の記憶位置とプレビュー位置との間に関連性が与えられるように、プレビュー位置に基づいてそのプレビュー位置における制御情報の記憶位置が演算される。例えば、記憶位置は、プレビュー位置が大きいほど大きくなるように演算される。したがって、記憶位置1により表される記憶場所にプレビュー位置1.4mにおける制御情報Bが、記憶位置2により表される記憶場所にプレビュー位置1.5mにおける制御情報Aが、記憶位置3により表される記憶場所にプレビュー位置1.6mにおける制御情報Cが、それぞれ記録される。そして、制御情報の読出し時にその関連性に従って、例えば上記の例においては記憶位置が小さい側から順に制御情報を読み出すことにより、プレビュー位置が小さい順に制御情報が読み出される。
【0018】
すなわち、本発明によれば、制御情報の記録時に、プレビュー位置に基づいて各制御情報の記憶位置が再構成される。このようにプレビュー位置をベースに制御情報の記憶位置を決定しているので、車両のピッチ運動などの姿勢変化によってプレビュー位置が変化した場合であっても、その変化を踏まえた記憶位置により表されるメモリの記憶場所に、そのプレビュー位置における制御情報が記録される。よって、車両のピッチ運動等によりプレビュー位置が時間経過とともに後退した場合であっても、プレビュー位置に関連した記憶位置に基づいて、プレビュー位置順に制御情報を読み出すことができる。これにより、プレビュー制御の制御性能の悪化が抑えられる。
【0019】
本発明の作動制御装置により制御されるアクチュエータは、制御対象輪の動作を制御するためのアクチュエータであれば、どのようなものでも良い。例えば能動的(アクティブ)サスペンションに用いられるアクチュエータや、パッシブなサスペンションに用いられる粘性流体を利用したショックアブソーバにより発生される減衰力の特性(減衰係数)を変更するアクチュエータに本発明の作動制御装置を適用することができる。これらのアクチュエータは制御対象輪の上下動作を制御する。また、例えば、制御対象輪を回転駆動あるいは制動させるためのアクチュエータ(例えば電気モータなど)に本発明の作動制御装置を適用することもできる。この場合、アクチュエータは、制御対象輪の回転動作を制御する。
【0020】
前記制御情報は、制御対象輪がプレビュー位置を走行するときに、その制御対象輪の動作を制御するためのアクチュエータの作動制御に必要な情報であれば、どのような情報でも良い。例えば、アクチュエータがアクティブサスペンションのアクチュエータである場合、制御情報は、プレビュー位置における路面変位量(基準位置からの上下変位量)であっても良いし、あるいは、路面変位量に応じてアクチュエータが出力すべき目標制御力であっても良い。また、上記アクチュエータが、各車輪に取り付けられるショックアブソーバの減衰力特性を変更するためのアクチュエータである場合、制御情報は、上記路面変位量であっても良いし、あるいは、上記路面変位量に応じてショックアブソーバが出力すべき目標減衰力、さらにはその目標減衰力をショックアブソーバに発生させるために必要なアクチュエータの目標駆動力あるいは目標駆動量であっても良い。さらに、上記アクチュエータが、制御対象輪を回転駆動または制動させるためのアクチュエータである場合、制御情報は、上記路面変位量であっても良いし、あるいは上記路面変位に応じてアクチュエータが出力すべき目標駆動力あるいは目標制動力であっても良い。すなわち、前記制御情報は、プレビューセンサにより検出された距離に基づいて導き出され、且つ制御対象たるアクチュエータが最終的に出力すべき制御量を導き出すために必要な情報であれば、どのようなものでも良い。
【0021】
前記プレビューセンサは、超音波やレーザ光などの検出媒体を路面に向けて出射し、プレビュー位置からの反射波や反射光に基づいて、プレビュー位置とセンサの取付位置との間の距離を検出するものが好適に用いられるが、上記距離を検出できさえすれば、どのようなセンサでもよい。
【0022】
前記走行距離演算手段は、制御開始から現在までに車両が走行した距離を演算する。この走行距離演算手段は、好ましくは車両の走行速度と走行時間とを乗じることにより、前記車両の走行距離を演算するものであるとよい。この場合、車両の走行速度と前記サンプリング時間との積の累積により前記車両の走行距離を演算するものであるとよい。
【0023】
前記プレビュー距離演算手段は、プレビューセンサで検出された距離と、その距離を検出したときにおけるプレビューセンサの取付角度や取付位置を表す量に基づいて、プレビュー距離を演算するものであるとよい。例えばプレビュー距離は、プレビューセンサで検出された距離と、その距離を検出したときにおけるプレビューセンサの対地角度とから演算することができる。また、プレビューセンサで検出された距離と、その距離を検出したときにおけるプレビューセンサの路面からの高さとからでも、プレビュー距離を演算することができる。
【0024】
プレビューセンサの対地角度は、車両側から見て鋭角であるとよい。対地角度が鋭角となるようにプレビューセンサを車両に取り付けることによりプレビュー距離を伸ばすことができ、ひいては、車両の走行速度が早くても余裕時間を制御遅れ時間よりも大きくすることができる。また、上述したように対地角度を鋭角に設定した場合、車両の姿勢変化によりプレビュー位置が大きく変動する。この場合に本発明を適用することにより、本発明の効果が十分に発揮される。
【0025】
なお、プレビューセンサの対地角度を車両側から見て鋭角に設定した場合、プレビュー位置が大きく変化するので、大きく変化するプレビュー位置を正確に求めるために、本発明のアクチュエータの作動制御装置は、プレビューセンサの取り付け姿勢の変化量を取得する姿勢変化量取得手段を備えているのがよい。この姿勢変化量取得手段は、プレビューセンサの対地角度の変化量を取得する手段および、プレビューセンサの路面からの高さの変化量を取得する手段を備えるものであるとよい。
【0026】
前記記憶位置演算手段は、制御情報の記憶場所を表すメモリの記憶位置(アドレス)と、その制御情報が必要とされるプレビュー位置とが関連付けられるように、プレビュー位置に基づいて、そのプレビュー位置における制御情報が記録されるべき記憶位置を演算する。好ましくは、プレビュー位置が大きいほど、記憶位置を表す番号(アドレス番号)が大きくなるように(あるいは小さくなるように)、つまりプレビュー位置順に制御情報が整列するように、記憶位置を演算するとよい。このように記憶位置を演算し、記憶位置順に制御情報を読み出すことにより、プレビュー位置が小さい側から順にアクチュエータの作動を制御することができる。
【0027】
また、本発明のアクチュエータの作動制御装置は、車両の走行速度と、前記アクチュエータの作動の制御に関連する遅れ時間として予め設定されたプレビュー補償時間とを乗じることにより、前記プレビュー補償時間の間に車両が走行する距離であるプレビュー補償距離を演算するプレビュー補償距離演算手段と、前記車両の走行距離に前記プレビュー補償距離を加算した値に基づいて、前記プレビュー補償時間経過後に車両が走行する路面の位置を表すプレビュー補償位置を演算するプレビュー補償位置演算手段と、前記記憶位置演算手段により前記プレビュー補償位置に相当する前記プレビュー位置に基づいて演算された記憶位置を読出位置として演算する読出位置演算手段と、前記メモリ内の記憶場所のうち、前記読出位置演算手段により演算された読出位置により表される記憶場所に記録された前記制御情報に基づいて、前記アクチュエータの作動を制御するための制御量を演算する制御量演算手段と、を更に備えるのがよい。
【0028】
これによれば、記憶位置演算手段によりプレビュー補償位置に相当するプレビュー位置に基づいて演算された記憶位置が、読出位置として演算される。そして、演算された読出位置により表される記憶場所に記録された制御情報に基づいて、アクチュエータの作動を制御するための制御量が演算される。こうして演算された制御量に基づいてアクチュエータが作動制御される。
【0029】
プレビュー補償距離は、アクチュエータの応答時間や通信時間、さらに内部フィルタによる遅れ分を補償するための制御遅れ時間として予め定められたプレビュー補償時間を距離に換算した長さである。車両が現在走行している地点(現在位置)で作動を開始したアクチュエータの作動は、車両がプレビュー補償位置まで走行したときに丁度完了する。したがって、プレビュー補償位置における制御情報に基づいて得られる制御量に基づいてアクチュエータを作動制御することにより、適切なタイミングでアクチュエータの作動を完了させることができる。また、プレビュー補償距離は車両のピッチ運動などに影響されないので、車両の姿勢が変化した場合であっても時間経過とともに進行(増加)する。よって、このプレビュー補償距離に基づいて、プレビュー位置順に制御情報を読み出すことができる。
【0030】
また、前記記憶位置演算手段は、前記プレビュー位置と、前記制御対象輪が走行路面に接触している部分の車両進行方向に沿った長さであるタイヤ接地長とに基づいて、前記記憶位置を演算するものであるのがよい。特に、プレビュー位置をタイヤ接地長で除算した値に基づいて前記記憶位置を演算するものであるのがよい。同様に、前記読出位置演算手段は、前記プレビュー補償位置と前記タイヤ接地長とに基づいて、前記読出位置を演算するものであるのがよい。特に、プレビュー補償位置をタイヤ接地長で除算した値に基づいて前記読出位置を演算するものであるのがよい。
【0031】
これによれば、プレビュー位置をタイヤ接地長で除算した値に基づいて記憶位置を演算することにより、プレビュー位置がタイヤ接地長分だけ変化するごとに、記憶位置が変化する。つまり、プレビュー位置がタイヤ接地長分だけ変化するごとに、そのプレビュー位置における制御情報が異なった記憶位置に記憶される。このことは、制御情報が記録される路面間隔がタイヤ接地長であることを表す。制御情報が記録される路面間隔がタイヤ接地長よりも短い場合、記憶領域の記憶容量が増大するという問題が発生する。また、タイヤ接地長よりも短い区間内での路面変化は、その変化をタイヤが乗り越えることにより無視される場合があるため、そのような微小区間内の路面変化を記憶しておく必要性に乏しい。一方、制御情報が記録される路面間隔がタイヤ接地長よりも長い場合、制御情報が不足するため乗り心地が悪化する。これらのことから、制御情報が記録される路面間隔をタイヤ接地長とすることで、記憶容量の増大を抑えることができるとともに、過不足無い最適な距離間隔で制御情報を記憶することができる。
【0032】
この場合、プレビューセンサによる距離の検出間隔、つまりサンプリング周期(サンプリング時間)は、車両が高速で走行している時でも、少なくとも車両がタイヤ接地長分だけ進むごとに距離を検出することができるように設定されているとよい。
【0033】
また、前記走行距離演算手段は、前記車両の走行距離が予め設定された最大プレビュー距離を越えない範囲内で繰り返し変動するように、前記車両の走行速度と前記最大プレビュー距離に基づいて前記車両の走行距離を演算するものであるのがよい。この場合、前記走行距離演算手段は、前記サンプリング時間ごとに前記車両の走行距離を演算するように構成され、且つ、前記サンプリング時間と車両の走行速度を乗じることにより前記サンプリング時間の間に車両が走行した単位走行距離を演算する単位走行距離演算手段と、前回演算された車両の走行距離である走行距離前回値に前記単位走行距離を加算して得られる走行距離今回値が前記最大プレビュー距離よりも大きいか否かを判断する走行距離判断手段と、前記走行距離判断手段により前記走行距離今回値が前記最大プレビュー距離以下であると判断された場合に前記走行距離今回値を前記車両の走行距離に設定し、前記走行距離判断手段により前記走行距離今回値が前記最大プレビュー距離よりも大きいと判断された場合に前記走行距離今回値から前記最大プレビュー距離を減算した値を前記車両の走行距離に設定する走行距離設定手段を更に備えるのがよい。
【0034】
これによれば、車両の走行距離が最大プレビュー距離を越えない範囲内で繰り返し変動するので、車両の走行距離とプレビュー距離とを加算した値に基づいて演算されるプレビュー位置も、上記最大プレビュー距離により表される長さの範囲内で繰り返し変動する。また、記憶位置演算手段は、プレビュー位置に基づいて記憶位置を演算するので、演算される記憶位置は、上記最大プレビュー距離に応じた範囲内で繰り返し変動する。このことは、プレビュー位置が最大プレビュー距離だけ変化するごとに、メモリの記憶場所が繰り返して用いられることを意味する。例えば、最大プレビュー距離が2.0mであり、実路面上でのプレビュー位置が0m〜2mであるときに記録位置0〜記録位置19により表される記憶場所に制御情報がそれぞれ記憶されたとすると、実路面上でのプレビュー位置が2m〜4mであるときにも、記録位置0〜記録位置19により表される記憶場所に制御情報がそれぞれ記憶される。このように最大プレビュー距離ごとに同一の記憶場所を繰り返し用いるように構成することにより、少ない記録容量で大量の制御情報を記録することができる。
【0035】
また、前記記憶位置演算手段は、前記プレビュー位置が前記最大プレビュー距離以下である場合には、前記プレビュー位置を前記タイヤ接地長で除算した値に基づいて前記記憶位置を演算し、前記プレビュー位置が前記最大プレビュー距離を越える場合には、前記プレビュー位置から前記最大プレビュー距離を減算した値を前記タイヤ接地長で除算した値に基づいて前記記憶位置を演算するものであるのがよい。同様に、前記読出位置演算手段は、前記プレビュー補償位置が前記最大プレビュー距離以下である場合には、前記プレビュー補償位置を前記タイヤ接地長で除算した値に基づいて前記読出位置を演算し、前記プレビュー補償位置が前記最大プレビュー距離を越える場合には、前記プレビュー補償位置から前記最大プレビュー距離を減算した値を前記タイヤ接地長で除算した値に基づいて前記読出位置を演算するものであるのがよい。
【0036】
また、本発明のアクチュエータの作動制御装置は、前記メモリに記録された前記制御情報のうち、既に走行した路面を表す記憶場所に記録された前記制御情報を消去する制御情報消去手段を更に備えるものであるのがよい。既に走行してしまった路面についての制御情報は、今後の制御に必要ない。よって、このような制御情報を消去することにより、空き状態となった記憶位置により表される記憶場所に新たな制御情報を記録させることができる。
【0037】
この場合、本発明のアクチュエータの作動制御装置は、前記制御情報消去手段により前記制御情報が消去された記憶場所を表す記憶位置に基づいて、前記プレビュー補償距離の上限値である最大プレビュー補償距離を演算する最大プレビュー補償距離演算手段と、前記プレビュー補償距離が前記最大プレビュー補償距離を越えた場合に、前記プレビュー補償距離を前記最大プレビュー補償距離に設定するプレビュー補償距離上限ガード手段と、を更に備えるのがよい。
【図面の簡単な説明】
【0038】
【図1】本実施形態に係るサスペンション装置のシステム構成の概略図である。
【図2】サスペンション本体の部分断面概略図である。
【図3】アクチュエータの内部構造を表す部分断面概略図である。
【図4】バネ上部材へのプレビューセンサの取り付け状態の一例を示す図である。
【図5】サスペンションECUおよび駆動回路による電気モータの制御構成を示すブロック図である。
【図6】サスペンションECUの内部構成を示すブロック図である。
【図7】CPUを機能構成ごとに表したブロック図である。
【図8】RAMの構成を示す図である。
【図9】バネ上部材がピッチ運動したときにプレビューセンサの高さや対地角度が変化する状態を示す図である。
【図10】バネ上部材がロール運動したときにプレビューセンサの高さが変化する状態を示す図である。
【図11】バネ上部材がヒーブ運動したときにプレビューセンサの高さが変化する状態を示す図である。
【図12】プレビューセンサの対地角度、センサ高さ、プレビューセンサにより検出される距離と、プレビュー位置における路面変位量との関係を示す図である。
【図13】対地角度とプレビューセンサにより検出される距離との関係を表す図である。
【図14】走行距離演算ルーチンの流れを示すフローチャートである。
【図15】データ記録ルーチンの流れを示すフローチャートである。
【図16】プレビュー補償距離演算ルーチンの流れを示すフローチャートである。
【図17】データ読出ルーチンの流れを示すフローチャートである。
【図18】プレビュー位置とデータ記憶位置との対応関係を表す図である。
【図19】最大プレビュー距離を、RAMの記憶領域上の仮想距離として表した図である。
【図20】RAMの記憶領域の概念図である。
【図21】RAMの記憶領域の各記憶位置に記録された路面変位量と、修正路面変位量とを、実際の路面変位と対比した図である。
【図22】本実施形態のプレビュー制御によりRAMの記憶領域に路面変位量のデータが記録されていく状態を、車両の走行状態とともに示した図である。
【図23】RAMの記憶領域に記録されている路面変位量の必要時間分解能を示すグラフである。
【図24】従来手法によるプレビュー制御により用いられるサンプリング時間や記憶されるデータの個数と、本実施形態によるプレビュー制御により記憶されるデータの個数とを対比した図である。
【図25】CPUを機能構成ごとに表したブロック図である。
【図26】CPUを機能構成ごとに表したブロック図である。
【図27】CPUを機能構成ごとに表したブロック図である。
【図28】路面形状演算ルーチンの別例である。
【図29】ピッチ運動によるプレビュー位置の変化量の違いを、対地角度が90°の場合と30°の場合とで比較した図である。
【図30】対地角度を車両側から見て鋭角に設定した場合における、プレビュー位置の時間変化を表すグラフである。
【発明を実施するための形態】
【0039】
以下、本発明の一実施形態に係るアクチュエータの作動制御装置を含むサスペンション装置について図面を用いて説明する。図1は、本実施形態に係るサスペンション装置のシステム構成の概略図である。
【0040】
このサスペンション装置は、4組のサスペンション本体10FR,10FL,10RR,10RLと、各サスペンション本体10FR,10FL,10RR,10RLの作動を制御するサスペンションECU50とを備える。4組のサスペンション本体10FR,10FL,10RR,10RLは、各車輪(右前輪WFR,左前輪WFL,右後輪WRR,左後輪WRL)に接続されたバネ下部材と車体B(バネ上部材)との間にそれぞれ設けられる。本明細書において、各サスペンション本体10FR,10FL,10RR,10RLが車体Bに取り付けられている位置を各輪位置(右前輪位置、左前輪位置、右後輪位置、左後輪位置)と呼ぶ。以下、4組のサスペンション本体10FR,10FL,10RR,10RLおよび車輪WFR,WFL,WRR,WRLについては、特に前後左右を区別する場合を除いて、単にサスペンション本体10および車輪Wと総称する。
【0041】
図2は、サスペンション本体10の概略図である。図2に示されるように、サスペンション本体10は、並列的に配置されたコイルスプリング20およびアクチュエータ30を備える。コイルスプリング20は、車輪Wに連結されるロアアームLAと車体Bとの間に設けられ、路面から受ける衝撃を吸収し乗り心地を高めるとともに車体Bを弾性的に支持する。コイルスプリング20の上部側、つまり車体B側の部材を「バネ上部材」と呼び、コイルスプリング20の下部側、つまり車輪W側の部材を「バネ下部材」と呼ぶ。したがって、コイルスプリング20およびアクチュエータ30は、車両のバネ上部材とバネ下部材との間に設けられていることになる。
【0042】
図3は、アクチュエータ30の内部構造を表す部分断面概略図である。図3に示されるように、アクチュエータ30は、駆動源である電気モータ31と、電気モータ31の回転運動を直線運動に変換するボールネジ機構35を有する。電気モータ31は、モータケーシング311と、中空状の回転軸312と、永久磁石313と、極体314とを備える。モータケーシング311は、上面、下面、および側周面を有する円筒形状に形成され、電気モータ31の外壁を構成する。回転軸312はモータケーシング311内に配設され、軸受331によりモータケーシング311に回転可能に支持される。この回転軸312の外周面に永久磁石313が固定される。回転軸312および永久磁石313により電気モータ31のロータが構成される。永久磁石313に対向するように極体314(コアにコイルが巻回されたもの)が、モータケーシング311の内周面に固定される。極体314により電気モータ31のステータが構成される。
【0043】
ボールネジ機構35は、ボールネジ36と、ボールネジ36に形成された雄ネジ部分37に螺合するボールネジナット38とを備える。ボールネジ36は、回り止め機構40により、その軸方向移動が許容されつつその回転が規制される。また、ボールネジナット38はその上端面にて回転軸312の下端に連結されているとともに、軸受け332により回転軸312と一体回転可能にモータケーシング311に支持される。したがって、ボールネジ36が軸方向に沿って直線運動した場合、その直線運動がボールネジナット38および回転軸312の回転運動に変換される。逆に、回転軸312が回転した場合、この回転駆動力がボールネジナット38に伝達され、さらにボールネジナット38の回転運動がボールネジ36の直線運動に変換される。
【0044】
図2に示されるように、ボールネジ36の下端はロアアームLAに接続される。ロアアームLAは車輪側に連結されたバネ下部材である。つまりボールネジ36はバネ下部材側に連結される。また、電気モータ31のモータケーシング311には取付ブラケット41が連結される。取付ブラケット41の上面には、車体Bに連結された弾性材料からなるアッパーサポート42が取り付けられる。このような連結構造からわかるように、電気モータ31や、電気モータ31のロータに連結されたボールネジナット38は、アッパーサポート42を介して車体B側、つまりバネ上部材側に連結される。
【0045】
アクチュエータ30は、ボールネジ36の軸方向移動により伸縮する。アクチュエータ30が伸縮することにより、バネ下部材を介してそのアクチュエータ30に連結した車輪が上下動する。また、アクチュエータ30の伸縮動作が制御されることにより、そのアクチュエータ30に連結されている車輪の上下動作が制御される。
【0046】
コイルスプリング20は、バネ下部材(ロアアームLA)に連結されるボールネジ36の外周面に設けられた環状のリテーナ43と、バネ上部材(車体B)に連結される取付ブラケット41との間に介装される。
【0047】
図1に示されるように、各バネ上加速度センサ61,車速センサ62,プレビューセンサ63R,63Lが車両に取り付けられている。バネ上加速度センサ61は、バネ上部材の各輪位置に配置されており、バネ上部材の各輪位置での上下方向に沿った加速度(各輪バネ上加速度)Gbを検出する。バネ上加速度センサ61は、例えば上方向に向かう加速度を正の加速度として検出し、下方向に向かう加速度を負の加速度として検出する。車速センサ62は車両の走行速度Vを検出する。
【0048】
プレビューセンサ63R,63Lは距離センサであり、センサの取付位置から測定対象物(本実施形態においては路面位置)までの距離を検出する。プレビューセンサ63Rはバネ上部材の右前端付近に取り付けられ、右前輪WFRや右後輪WRRが走行する予定の路面(走行予定路面)位置とセンサ63Rの取付位置までの距離を検出する。プレビューセンサ63Lはバネ上部材の左前端位置に取り付けられ、左前輪WFLや左後輪WRLの走行予定路面位置とセンサ63Lの取付位置までの距離を検出する。以降の説明において、プレビューセンサ63R、63Lを区別しない場合は、これらを総称してプレビューセンサ63と称する。また、プレビューセンサ63により検出される路面位置とセンサ取付位置との間の距離をセンサ距離、センサ距離が検出されたときにその距離の検出の対象とされた路面位置をプレビュー位置と称する。
【0049】
本実施形態において、プレビューセンサ63は、例えば、超音波を出射する送波器と、超音波を受信する受波器と、距離演算回路を備えるように構成することができる。距離演算回路は、送波器から出射された超音波がプレビュー位置にて反射して受波器に受信されるまでに要した時間に基づき、予め設定されたサンプリング時間Tsごとに、センサ距離を演算する。
【0050】
図4は、バネ上部材(車体)へのプレビューセンサ63の取付状態の一例を示す図である。図に示されるように、プレビューセンサ63は、車体B(バネ上部材)の前面に取り付けられる。また、プレビューセンサ63から出射される超音波の出射方向と路面とのなす角を表す対地角度θが、車両側から見て鋭角であるように、つまり、プレビューセンサ63から検出媒体が車両の斜め前方に出射するように、プレビューセンサ63が路面に対して傾けて取り付けられる。対地角度θは例えば30度に設定することができるが、この限りでない。プレビューセンサ63は図に示されるように、プレビュー位置とセンサ63の取付位置との間の距離であるセンサ距離z_ssrを検出する。
【0051】
図1に示されるように、各バネ上加速度センサ61、車速センサ62、プレビューセンサ63は、サスペンションECU50に電気的に接続される。また、サスペンションECU50は、各サスペンション本体10毎に設けられた駆動回路70に電気的に接続される。各サスペンション本体10の各アクチュエータ30の各電気モータ31は、各駆動回路70を介してサスペンションECU50により制御される。各駆動回路70は、車載バッテリなどの蓄電装置110に電気的に接続される。
【0052】
図5は、サスペンションECU50および駆動回路70による電気モータ31の制御構成を示すブロック図である。駆動回路70は3相インバータ回路を構成し、電気モータ31(本実施形態では3相ブラシレスモータが用いられる)の3相電磁コイルCL1,CL2,CL3にそれぞれ対応したスイッチング素子SW11,SW12,SW21,SW22,SW31,SW32を有する。これらのスイッチング素子は、サスペンションECU50からの制御信号に基づきデューティ制御される(PWM制御)。これによりバッテリから電気モータ31への通電量や電気モータ31からバッテリ側へ送られる回生電力の電流量が制御される。
【0053】
図6は、サスペンションECU50の内部構成を示すブロック図である。サスペンションECU50は、プレビューセンサ63により検出されたセンサ距離に基づいて、そのセンサ距離が検出された路面(走行予定路面)を走行する制御対象輪を上下動させるために車両に取り付けられているアクチュエータ30の作動を制御する。サスペンションECU50およびプレビューセンサ63が本発明のアクチュエータの作動制御装置に相当する。図に示されるように、サスペンションECU50は、入力インターフェース51と、CPU52と、ROM53と、RAM54と、出力インターフェース55と、双方向バス56とを備える。入力インターフェース51、CPU52、ROM53、RAM54、及び出力インターフェース55は、双方向バス56によって互いに接続されている。入力インターフェース51は各センサと電気的に接続され、各センサからの信号をCPU52に伝達し得るように構成される。CPU52は、アクチュエータ30の作動を制御するためのルーチン(プログラム)を実行するように構成される。ROM53には、CPU52が実行するルーチン(プログラム)、及びCPU52がルーチンを実行する際に参照されるテーブルやパラメータ等が予め格納される。RAM54は、CPU52がルーチンを実行する際に、必要に応じてデータを一時的に記憶し得るように構成される。RAM54が本発明のメモリに相当する。出力インターフェース55は、各アクチュエータ30の作動を制御するための制御信号を、各駆動回路70に出力する。
【0054】
図7は、CPU52を機能構成ごとに表したブロック図である。図に示されるように、CPU52は、状態量演算部521、位置変化量演算部(姿勢変化量取得手段)522、走行距離演算部(走行距離演算手段)523、プレビュー補償距離演算部(プレビュー補償距離演算手段)524、路面形状演算部(制御情報演算手段)525、プレビュー距離演算部(プレビュー距離演算手段)526、データ記録部527、データ読出部528、目標制御力演算部(制御量演算手段)529を備える。
【0055】
状態量演算部521は、CPU52内で実行される演算に必要な物理量、特に、バネ上部材の姿勢変化に関連する物理量を演算する。本実施形態においては、状態量演算部521は、バネ上部材の各輪位置における上下方向に沿った基準位置からの変位量を演算する。位置変化量演算部522は、バネ上部材の姿勢変化に伴うプレビューセンサ63の取り付け姿勢の変化量を演算する。走行距離演算部523は、予め設定した距離である最大プレビュー距離Lp_max内で変動する車両の走行距離Sを演算する。プレビュー補償距離演算部524は、アクチュエータ30の作動応答時間などの制御遅れを補償するために必要な時間であるプレビュー補償時間Tpを距離に換算した値であるプレビュー補償距離Lcを演算する。路面形状演算部525は、プレビュー位置における路面変位量(基準位置からの高さ変位量)x_roadを演算する。
【0056】
プレビュー距離演算部526は、プレビュー位置と制御対象輪が現在接地している路面位置との間の距離であるプレビュー距離Lpを演算する。ここで、制御対象輪とは、そのプレビューセンサ63により距離が検出される走行予定路面を走行する予定の車輪である。プレビューセンサ63Rに対応する制御対象輪は右前輪WFRおよび右後輪WRRであり、プレビューセンサ63Lに対応する制御対象輪は左前輪WFLおよび左後輪WRLである。本実施例は、前輪を制御対象輪とする例を示す。
【0057】
データ記録部527は、路面形状演算部525で演算された路面変位量x_roadをRAM54に記憶する位置(記憶位置i)を演算するとともに、演算した記憶位置iにより表される記憶場所に路面変位量x_roadを記録する。データ読出部528は、RAM54から読み出すべき路面変位量が記憶されている場所を表す記憶位置(読出位置n)を演算するとともに、演算した読出位置nにより表される記憶場所に記憶された路面変位量x_roadを補間することにより修正路面変位量x_road_cを演算する。目標制御力演算部529は、修正路面変位量x_road_cに基づいて、各サスペンション本体10のアクチュエータ30が出力すべき目標制御力Fを演算するとともに、演算した目標制御力Fに基づいた制御信号を出力する。
【0058】
図8は、RAM54の構成を示す図である。図に示されるように、RAM54は、複数の路面変位量を記憶するための記憶領域541を有する。この記憶領域541には、例えば番号0〜番号19により記憶位置(アドレス)が表される複数の記憶場所が設けられている。そして、路面形状演算部525により演算された路面変位量x_roadが、定められた記憶位置により表される記憶場所に記録される。
【0059】
このような構成において、サスペンションECU50が各アクチュエータ30の作動を制御する場合、まず、CPU52内の状態量演算部521が、各バネ上加速度センサ61から各輪位置におけるバネ上加速度(各輪バネ上加速度)Gb_iを入力し、これを2階積分することにより、バネ上部材の各輪位置における基準位置からの上下変位量を表す各輪バネ上変位量xb_iを演算する。ここで、各輪バネ上加速度を表す符号Gb_iおよび各輪バネ上変位量を表す符号xb_iの添え字iは、バネ上部材の各輪位置に対応する車輪を表す。したがって、添え字iは、右前輪fr、左前輪fl、右後輪rr、左後輪rlのいずれかである。つまり、状態量演算部521は、右前輪位置に設置されたバネ上加速度センサ61から検出される右前輪バネ上加速度Gb_frを2階積分することにより右後輪位置におけるバネ上変位量(右前輪バネ上変位量)xb_frを、左前輪位置に設置されたバネ上加速度センサ61から検出される左前輪バネ上加速度Gb_flを2階積分することにより左前輪位置におけるバネ上変位量(左前輪バネ上変位量)xb_flを、右後輪位置に設置されたバネ上加速度センサ61から検出される右後輪バネ上加速度Gb_rrを2階積分することにより右前輪位置におけるバネ上変位量(右後輪バネ上変位量)xb_rrを、左後輪位置に設置されたバネ上加速度センサ61から検出される左後輪バネ上加速度Gb_rlを2階積分することにより左後輪位置におけるバネ上変位量(左後輪バネ上変位量)xb_rlを、それぞれ演算する。
【0060】
なお、各バネ上変位量は、その他の方法により求めることもできる。例えば各バネ下部材の上下方向に沿った加速度を検出するバネ下加速度センサによる検出値と、各アクチュエータ30の伸縮量(ストローク変位量)を検出するストロークセンサによる検出値に基づいて各バネ上変位量を求めても良い。また、オブザーバ設計し、オブザーバゲインを求めることにより各バネ上変位量を推定してもよい。
【0061】
また、位置変化量演算部522は、センサ高さ変化量dH_ssrおよび対地角度変化量dθ_ssrを演算する。センサ高さ変化量dH_ssrは、基準高さH0に対する路面からプレビューセンサ63までの高さH_ssrの変化量(H_ssr−H0)である。対地角度変化量dθ_ssrは、基準対地角度θ0に対するプレビューセンサ63の対地角度θ_ssrの変化量(θ_ssr−θ0)である。
【0062】
例えば車両走行中にバネ上部材がピッチ運動、ロール運動、ヒーブ運動した場合、その運動に伴いバネ上部材の前方に取り付けられたプレビューセンサ63の路面からの高さやプレビューセンサ63の対地角度が変化する。
【0063】
図9は、バネ上部材がピッチ運動したときにプレビューセンサ63の高さや対地角度が変化する状態を示す図である。図において、車両が水平状態であるとき(ピッチ角度=0°のとき)に、プレビューセンサ63の対地角度は基準対地角度θ0である。車両が水平状態から角度θPだけピッチ運動した場合、ピッチ角度θPは、基準対地角度θ0と実際の対地角度θ_ssrとの差である(θP=θ0−θ_ssr)。よって、ピッチ角度θPが対地角度変化量dθ_ssrに相当する。
【0064】
図10は、バネ上部材がロール運動したときにプレビューセンサ63の高さが変化する状態を示す図である。また図11は、バネ上部材がヒーブ運動したときにプレビューセンサ63の高さが変化する状態を示す図である。図9乃至図11からわかるように、プレビューセンサ63の高さは、バネ上部材のピッチ運動、ロール運動およびヒーブ運動によって変化する。したがって、高さ変化量dH_ssrは下記(1)式のように表すことができる。
【数1】

(1)式において、dHP_ssrはピッチ運動によるセンサ高さの変化量、dHR_ssrはロール運動によるセンサ高さの変化量、dHH_ssrはヒーブ運動によるセンサ高さの変化量である。車両が標準状態(ピッチ運動、ロール運動およびヒーブ運動が発生していない状態)であるときにおけるプレビューセンサ63の高さを基準高さH0と定義した場合、車両が姿勢変化したときにおけるプレビューセンサ63の高さH_ssrは、基準高さH0に高さ変化量dH_ssrを加算することにより求められる。
【0065】
ピッチ運動によるセンサ高さの変化量dHP_ssrは例えば下記(2)式により求められる。
【数2】
上記(2)式において、Laは、車両を側方から見た場合におけるバネ上部材の重心位置Oからプレビューセンサ63が配置されている位置A(図9参照)までの距離、θPはピッチ角度、αは、車両を側方から見た場合における重心位置Oとプレビューセンサ63の配置位置Aとを通る線分OAとバネ上部材の重心位置Oを通り且つ車両前後方向に水平に伸びる線分OS1とのなす角である(図9参照)。
【0066】
ロール運動によるセンサ高さの変化量dHR_ssrは例えば下記(3)式により求められる。
【数3】
上記(3)式において、Lbは、車両を前後方向から見た場合におけるバネ上部材の重心位置Oからプレビューセンサ63が配置されている位置B(図10参照)までの距離、θRはロール角度、βは、車両を前後方向から見た場合における重心位置Oとプレビューセンサ63の配置位置Bとを通る線分OBとバネ上部材の重心位置Oを通り且つ車両左右方向に水平に伸びる線分OS2とのなす角である(図10参照)。
【0067】
ヒーブ運動によるセンサ高さの変化量dHH_ssrは例えば下記(4)式により求められる。
【数4】
上記(4)式において、Lはホイールベース、LFはバネ上部材の重心位置から前輪軸位置までの前後方向距離、LRはバネ上部材の重心位置から後輪軸位置までの前後方向距離、xb_Fは右前輪バネ上変位量xb_frまたは左前輪バネ上変位量xb_fl、xb_Rは右後輪バネ上変位量xb_rrまたは左後輪バネ上変位量xb_rlである。プレビューセンサ63Rについてヒーブ運動によるセンサ高さ位置変化量dHH_ssrを演算する場合は、右前輪バネ上変位量xb_frと右後輪バネ上変位量xb_rrをそれぞれxb_F,xb_Rに代入する。プレビューセンサ63Lついてヒーブ運動によるセンサ高さ位置変化量dHH_ssrを演算する場合は、左前輪バネ上変位量xb_flと左後輪バネ上変位量xb_rlをそれぞれxb_F,xb_Rに代入する。
【0068】
なお、ピッチ角度θPおよびロール角度θRは、各輪バネ上変位量xb_iを用いて例えば下記(5)式および(6)式のように表すことができる。
【数5】
【数6】
【0069】
上記(5)式において、プレビューセンサ63Rについてのピッチ角度θPを演算する場合は、右前輪バネ上変位量xb_frと右後輪バネ上変位量xb_rrをそれぞれxb_F,xb_Rに代入する。プレビューセンサ63Lついてのピッチ角度θPを演算する場合は、左前輪バネ上変位量xb_flと左後輪バネ上変位量xb_rlをそれぞれxb_F,xb_Rに代入する。また、上記(6)式において、Tは車両のトレッドである。
【0070】
走行距離演算部523は、車両の走行速度Vに基づいて、車両が現在までの間に走行した距離を表す車両の走行距離Sを演算する。具体的には、走行距離演算部523は、図14に示される走行距離演算ルーチンを、サンプリング時間Tsごとに繰り返し実行する。このルーチンが起動すると、まず走行距離演算部523は、図のステップ(以下、ステップ番号をSと略記する)100にて、予め設定されるサンプリング時間(周期)Tsと、車速センサ62により検出された車両の走行速度Vとを乗じることにより、サンプリング時間Tsあたりに車両が走行する単位走行距離dsを演算する(単位走行距離演算手段)。次いで、S102にて、前回演算された走行距離Sに単位走行距離dsを加算することにより、単位走行距離dsの累積距離として走行距離今回値S0を演算する。
【0071】
続いて、走行距離演算部523は、S104にて、走行距離今回値S0が最大プレビュー距離Lp_maxよりも大きいか否かを判定する(走行距離判断手段)。最大プレビュー距離Lp_maxは、プレビューセンサ63がセンサ距離z_ssrを検出したときに対象とされた路面の位置であるプレビュー位置と、その路面を走行する予定の前輪との間の距離であるプレビュー距離Lpの上限値であり、任意に設定することができる。最大プレビュー距離Lp_maxは、車両が平坦な路面を走行しているときに取得されるプレビュー距離Lpよりも大きいものであるのがよい。例えば最大プレビュー距離Lp_maxは、2.0mに設定される。
【0072】
走行距離今回値S0が最大プレビュー距離Lp_max以下である場合(S104:No)は、S108にて走行距離今回値S0をそのまま車両の走行距離Sに設定する(走行距離設定手段)。その後、このルーチンを終了する。一方、走行距離今回値S0が最大プレビュー距離Lp_maxよりも大きい場合(S104:Yes)は、S106にて走行距離今回値S0から最大プレビュー距離Lp_maxを減算した値を車両の走行距離Sに設定する(走行距離設定手段)。その後、このルーチンを終了する。このような走行距離演算ルーチンの実行により演算される車両の走行距離Sは、0から車両が走行するにつれて増加する。そして、最大プレビュー距離Lp_maxを越えたときに再び0に戻り、その後車両が走行するにつれて再び増加する。すなわち車両の走行距離Sは、最大プレビュー距離Lp_maxを越えない範囲内で繰り返し増加する。
【0073】
路面形状演算部525は、プレビューセンサ63により検出されたセンサ距離z_ssrおよび、位置変化量演算部522により演算されたセンサ高さ変化量dH_ssrおよび対地角度変化量dθ_ssrを入力する。そして、入力値に基づいて、センサ距離z_ssrが検出されたときにその検出の対象とされた路面位置であるプレビュー位置における路面変位量x_roadを演算する。路面変位量x_roadは、走行路面の基準位置からの上下変位量である。本実施形態においては、例えば車両が走行時に良好な乗り心地を確保できるように、各車輪が走行する路面の変位量に応じてその車輪に連結されたサスペンション本体10のアクチュエータ30の作動が制御される。したがって、この路面変位量は、その路面変位量を持つプレビュー位置を制御対象輪が走行するときにその制御対象輪に連結され制御対象輪の動作を制御するアクチュエータ30の作動を制御するために必要な情報である。路面変位量x_roadが本発明の制御情報に相当する。
【0074】
図12は、プレビューセンサ63の対地角度θ_ssr、センサ高さH_ssr、センサ距離z_ssrと、センサ距離z_ssrが検出されたプレビュー位置における路面変位量x_roadの関係を示す図である。図からわかるように、これらの間に下記の(7)式が成立する。
【数7】
【0075】
上記(7)式中の対地角度θ_ssrは基準対地角度θ0とピッチ角度θP(=dθ_ssr)により、センサ高さH_ssrは基準高さH0と高さ変化量dH_ssrにより表される。よって、路面変位量x_roadは、下記(8)式のように表すことができる。
【数8】
路面形状演算部525は、上記(8)式に基づいて、路面変位量x_roadを演算する。
【0076】
プレビュー距離演算部526は、センサ距離z_ssrと、位置変化量演算部522にて演算されたセンサ高さ変化量dH_ssrおよび/または対地角度変化量dθ_ssrとを入力し、これらの入力値に基づいて、センサ距離z_ssrが検出されたときに検出の対象とされたプレビュー位置と制御対象輪(例えば前輪)が現在接地している路面位置との間のプレビュー距離Lpを演算する。
【0077】
図13は、対地角度θ_ssrとセンサ距離z_ssrとの関係を表す図である。図からわかるように、プレビュー距離Lpは、センサ距離z_ssrが検出されたときに検出の対象とされたプレビュー位置R1と、プレビューセンサ63の取付位置から鉛直下方に伸びた垂線と路面との交点R2との間の距離L_ssrと、上記交点R2と制御対象輪(前輪)の接地点R3との間の距離Dとの和により表される。また、距離L_ssrは、下記(9)式により表される。
【数9】
したがって、プレビュー距離Lpは、下記(10)式のように表される。
【数10】
プレビュー距離演算部526は、上記(10)式に基づいて、プレビュー距離Lpを演算する。
【0078】
なお、(10)式からわかるように、プレビュー距離Lpの計算にセンサ高さ変化量dH_ssrは用いられておらず、センサ距離z_ssrと対地角度変化量dθ_ssrに基づいてプレビュー距離Lpが計算されている。一方、センサ距離z_ssrとセンサ高さ変化量dH_ssrに基づいてプレビュー距離Lpを計算することもできる。この場合、プレビュー距離Lpは、下記(11)式のように表される。
【数11】
【0079】
データ記録部527は、図15に示されるデータ記録ルーチンを繰り返し実行する。データ記録ルーチンが起動すると、データ記録部527は、まず図15のS200にて、車両の走行距離Sとプレビュー距離Lpとを加算することによりプレビュー位置Dpを演算する。車両の走行距離Sは上述のように0〜Lp_maxの範囲内で繰り返し変動するので、プレビュー位置Dpは、Lp〜Lp+Lp_maxの範囲内(最大プレビュー距離Lp_maxにより表される長さの範囲内)で繰り返し変動する。このS200の処理が、本発明のプレビュー位置演算手段に相当する。
【0080】
次いで、データ記録部527は、プレビュー位置Dpが最大プレビュー距離Lp_maxよりも大きいか否かを判定する(S202)。プレビュー位置Dpが最大プレビュー距離Lp_max以下である場合(S202:No)は、プレビュー位置Dpを予め定められたタイヤ接地長L_tireで除算し、除算結果の小数点以下を切り捨てることにより、データ記憶位置iを演算する(S206)。一方、プレビュー位置Dpが最大プレビュー距離Lp_maxよりも大きい場合(S202:Yes)は、プレビュー位置Dpから最大プレビュー距離Lp_maxを減算した値をタイヤ接地長L_tireで除算し、除算結果の小数点以下を切り捨てることにより、データ記憶位置iを演算する(S204)。ここで、タイヤ接地長L_tireとは、そのプレビュー位置を走行する車輪のタイヤ部分が路面に接触している部分の車両進行方向に沿った長さであり、予め実験などにより測定される。タイヤ接地長L_tireは、例えば0.1m程度に設定される。
【0081】
S202からS206の処理により、プレビュー位置Dpに基づいて記憶位置iが求められる。この記憶位置iは、その記憶位置iを演算する際に用いたプレビュー位置Dpにおける路面変位量x_roadがRAM54の記憶領域541に記憶される場所を表すアドレスである。例えばS=0.2m,Lp=1.4m,Lp_max=2.0m,L_tire=0.1mである場合、S200におけるプレビュー位置Dpの演算結果は1.6mであり、この演算結果を受けたS202の判定結果はNoであり、この判定結果を受けて、S206にて記憶位置iが演算される。この場合、記憶位置i=16という演算結果が導かれる。また、例えばS=1.1m,Lp=1.4m,Lp_max=2.0m,L_tire=0.1mである場合、S200におけるプレビュー位置Dpの演算結果は2.5mであり、この演算結果を受けたS202の判定結果はYesであり、この判定結果を受けて、S204にて記憶位置iが演算される。この場合、Dp(=2.5m)からLp_max(=2.0m)を減算した値(=0.5m)をL_tire(=0.1m)で除算することにより、記憶位置i=5という演算結果が導かれる。
【0082】
図18は、プレビュー位置Dpと記憶位置iとの対応関係を表す図である。この図によれば、プレビュー位置Dpがプレビュー距離Lpから最大プレビュー距離Lp_maxまでの範囲内の大きさであるときには、そのプレビュー位置Dpに対応した大きさを表す記憶位置iが演算される。一方、プレビュー位置Dpが最大プレビュー距離Lp_maxから最大プレビュー距離Lp_maxにプレビュー距離Lpを加算した値までの範囲内の大きさであるときには、その範囲を0からプレビュー距離Lpまでの範囲にシフトし、シフト後の値に対応した大きさを表す記憶位置iが演算される。このため記憶位置iは、0からLp_max/L_tireの整数値までの範囲内でプレビュー位置Dpの増加に応じて増加し、プレビュー位置が最大プレビュー距離Lp_maxを越えたときに記憶位置iが0に戻る。そして、そこから再度プレビュー位置Dpの増加に応じて記憶位置iが増加する。つまり、記憶位置iの最小値は0、最大値はほぼLp_max/L_tireであり、記憶位置iはこれらの範囲内で、プレビュー位置Dpに応じて繰り返し変動(増加)する。
【0083】
このように、記憶位置iがプレビュー位置Dpに基づいて演算されるため、演算された記憶位置iとプレビュー位置Dpとの間に一定の関係性が生じる。よって、後述するようにこの関係性に基づいて正しい順序で路面変位量x_roadを読み出すことができる。また、路面変位量x_roadを記憶する記憶場所の個数は、記憶位置iの最大値を表す個数であれば足りる。具体的に言えば、本実施形態においては、路面変位量x_roadの記憶場所の個数は、Lp_max/L_tireの整数値である。S202〜S206の処理が、本発明の記憶位置演算手段に相当する。
【0084】
S204またはS206にて記憶位置iを演算した後は、データ記録部527は、S208にて、車両の走行距離Sをタイヤ接地長L_tireで除算し小数点以下を切り捨てることにより、現在地記憶位置jを演算する。この現在地記憶位置jは、車両が現在走行している路面位置の路面変位量がRAM54の記憶領域541に記憶されている場所を表す。
【0085】
その後、S210にて、現在地記憶位置jが前回記憶位置tmpjに等しいか否かを判定する。前回記憶位置tmpjは、このルーチンを前回実行したときに現在地記憶位置jであった記憶位置である。つまり、S210では、このルーチンを前回実行したときに現在地記憶位置であった記憶場所と今回実行しているときに現在地記憶位置である記憶場所とが等しいか否かを判定する。現在地記憶位置jと前回記憶位置tmpjが等しくない場合(S210:No)はS212に進み、前回記憶位置tmpjに記憶されている路面変位量のデータtmp_x_road[tmpj]を消去する。つまり、前回このルーチンを実行したときに現在地記憶位置に記憶されている路面変位量のデータが、今回このルーチンを実行しているときに既に過去のデータであるときは、その過去のデータは今後の制御に必要ない。よって、そのデータを消去して、その記憶場所を空の状態にする。S210およびS212の処理が、制御情報消去手段に相当する。
【0086】
一方、現在地記憶位置jが前回記憶位置tmpjと等しい場合(S210:Yes)は、S212の処理を飛ばしてS214に進む。そして、S214にて、記憶位置iに記憶されているデータtmp_x_road[i]が消去されているか、つまり記憶位置iが空の状態であるか否かを判定する。記憶位置iが空の状態である場合(S214:Yes)はS216に進み、記憶位置iにより表される記憶場所に、路面形状演算部525にて演算されたプレビュー位置Dpにおける路面変位量x_roadを記録データtmp_x_road[i]として記録する。
【0087】
一方、記憶位置iが空の状態ではない場合(S214:No)はS218に進む。S214の判定結果がNoである状況、つまり、既に記憶位置iにデータが記録されている状況は、車両のピッチ運動などによりプレビュー位置が一旦後退したか、サンプリング時間が短いか、もしくは車両の走行速度Vが小さいために、前回このルーチンを実行した時と今回このルーチンを実行している時との間に車両が走行した距離がタイヤ接地長L_tire以下である場合に生じ得る。この場合、前回このルーチンを実行した時に記憶位置iに記録された路面変位量も今回このルーチンを実行しているときに記録すべき路面変位量も有効に用いるべきである。したがって、データ記録部527は、S218にて、既に記録されているデータtmp_x_road[i]と今回演算された路面変位量x_roadとの平均値((tmp_x_road[i]+x_road)/2))を、記録データtmp_x_road[i]として、記憶位置iにより表される記憶場所に記録する。S214〜S218の処理が、本発明の制御情報記録手段に相当する。
【0088】
その後、データ記録部527はS220に進み、現在地記憶位置jを前回記憶位置tmpjに代入し、このルーチンを一旦終了する。上記からわかるように、データ記録部527は、プレビュー位置Dpをタイヤ接地長L_tireで除算した値に基づいて、そのプレビュー位置Dpにおける路面変位量x_roadについての記憶位置iを演算し、こうして演算した記憶位置iにより表される記憶場所に路面変位量x_roadを記録していく。このためRAM54の記憶領域541には、プレビュー位置Dpがタイヤ接地長L_tireだけ進むごとに、路面変位量x_roadが記録される。
【0089】
プレビュー補償距離演算部524は、図16に示されるプレビュー補償距離演算ルーチンを繰り返し実行する。プレビュー補償距離演算ルーチンが起動すると、プレビュー補償距離演算部524は、まずS300にて、車両の走行速度Vにプレビュー補償時間Tpを乗じることにより、プレビュー補償距離Lcを演算する。プレビュー補償時間Tpとは、アクチュエータ30の作動時間や通信時間、内部フィルタによる遅れ分を補償するための制御遅れ時間として予め設定される時間である。したがって、プレビュー補償距離Lcは、制御遅れ時間(プレビュー補償時間Tp)の間に車両が走行する距離を表す。
【0090】
次いで、プレビュー補償距離演算部524は、車両の走行距離Sをタイヤ接地長L_tireで除算して小数点以下を切り捨てることにより現在地記憶位置jを演算する(S302)。続いて、変数cを0に、最大プレビュー補償距離Lc_maxを最大プレビュー距離Lp_maxに、それぞれ設定する(S304)。
【0091】
その後、プレビュー補償距離演算部524は、RAM54の記憶領域541のデータ記憶位置cにより表される記憶場所に記録されている路面変位量のデータtmp_x_road[c]が消去されているか否か、つまり記憶位置cが空き状態であるか否かを判定する(S306)。記憶位置cが空き状態ではない場合(S306:No)は、変数cをインクリメントし(S314)、インクリメント後の変数cが最大プレビュー距離Lp_maxをタイヤ接地長L_tireで除算して小数点以下を切り捨てた値、つまり記憶位置の最大値よりも大きいか否かを判定する(S316)。変数cが記憶位置の最大値以下である場合(S316:No)はS306に戻る。一方、変数cが記憶位置の最大値を超えている場合(S316:Yes)はS318に進む。
【0092】
また、S306の判定にて、記憶位置cが空き状態であると判定された場合(S306:Yes)はS308に進む。S306の判定結果がYesであるときの変数cは、空き状態とされた記憶場所を表す記憶位置のうち最も小さい記憶位置を示す。S308では、プレビュー補償距離演算部524は、変数cが現在地記憶位置jよりも大きいか否かを判定する(S308)。変数cが現在地記憶位置jよりも大きい場合(S308:Yes)は、変数cと現在地記憶位置jとの差分(c−j)にタイヤ接地長L_tireを乗じることにより、最大プレビュー補償距離Lc_maxを演算する(S310)。一方、変数cが現在地記憶位置j以下である場合(S308:No)は、最大プレビュー距離Lp_maxから、現在地記憶位置jと変数cとの差分(j−c)にタイヤ接地長L_tireを乗じた値を減算することにより、最大プレビュー補償距離Lc_maxを演算する。
【0093】
図19は、上記のように演算された最大プレビュー補償距離Lc_maxを、RAM54の記憶領域541上の仮想距離として表した図である。図において、記憶領域541内のそれぞれの記憶場所が一つの升目により表示される。各升目上の数字はその記憶場所を表す記憶位置である。また、記憶場所に路面変位量のデータが記録されている場合はその記憶場所を表す升目に斜線が引かれている。記憶場所が空き状態であるときは斜線が引かれていない。図中、現在地記憶位置がjにより表され、空き状態の記憶場所を表す記憶位置のうち最も小さい記憶位置がcにより表される。このcは、プレビュー補償距離演算ルーチンのS306の判定結果がYesであるときに判定に用いられた変数cと同じ値である。
【0094】
図19(a)は、S308の判定結果がYes(c>j)であるときに、S310にて演算された最大プレビュー補償距離Lc_maxを記憶領域541上の仮想距離として示した例である。図からわかるように、路面変位量のデータが記録されている領域は記憶位置0〜記憶位置14により表される連続した領域である。記憶位置15〜記憶位置19までの領域にはデータが記録されていない。また、記憶位置0が現在地記憶位置jに該当するので、記憶領域541には、現在地記憶位置j(記憶位置0)から連続した15個(c−j個)の記憶場所にデータが記録されていることになる。各記憶場所にはプレビュー位置Dpがタイヤ接地長L_tireだけ進むごとにデータが記録されるので、各記憶場所の長さをタイヤ接地長L_tireで表すことにより、記憶領域541には、車両の現在地から、タイヤ接地長L_tireの(c−j)倍の長さにより表される距離だけ前方の路面における路面変位量のデータまで記憶されていることがわかる。逆に言えば、それ以上先の路面変位量のデータは記憶領域541に記憶されていない。したがって、制御情報(路面変位量)を記憶量の面から見て補償できる最大距離である最大プレビュー補償距離Lc_maxが、S310に示されるように、(c−j)とタイヤ接地長L_tireとの積により表されるのである。
【0095】
図19(b)は、S308の判定結果がNo(c<j)であるときに、S312にて演算された最大プレビュー補償距離Lc_maxを記憶領域541上の仮想距離として示した例である。図からわかるように、路面変位量のデータが記録されている領域は、記憶位置0〜記憶位置4により表される連続した領域と、記憶位置9〜記憶位置19により表される連続した領域とに分断されている。記憶位置5〜記憶位置8までの領域にはデータが記録されていない。記憶位置19にデータが記録された後は記憶位置0にデータが記録されるため、記憶領域541には、現在地記憶位置j(記憶位置9)から記憶位置4までの連続した16個の記憶場所にデータが記録されていることがわかる。したがって、記憶領域541には、車両の現在値から、タイヤ接地長L_tireの16倍の長さにより表される距離だけ前方の路面における路面変位量のデータまで記憶されていることがわかる。この倍率(16倍)は、記憶場所の総個数(=Lp_max/L_tire)から(j−c)個を差し引くことにより求められる。したがって、最大プレビュー補償距離Lc_maxが、S312に示されるように、最大プレビュー距離Lp_maxからタイヤ接地長L_tireと(j−c)との積を差し引いた値により表されるのである。なお、S316の判定結果がYesである場合は、記憶領域541に記録された路面変位量のデータのうち消去されたデータが存在しない場合、つまり空き状態の記憶場所がない場合であるので、最大プレビュー補償距離Lc_maxは最大プレビュー距離Lp_maxに設定される。S306〜S316の処理が、最大プレビュー補償距離演算手段に相当する。
【0096】
S306〜S316にて最大プレビュー補償距離Lc_maxを設定した後は、プレビュー補償距離演算部524は、S318にて、プレビュー補償距離Lcが最大プレビュー補償距離Lc_maxよりも大きいか否かを判定する。プレビュー補償距離Lcが最大プレビュー補償距離Lc_maxよりも大きい場合(S318:Yes)は、プレビュー補償距離Lcを最大プレビュー補償距離Lc_maxに設定する(S320)。これによりプレビュー補償距離Lcが上限規制(上限ガード)される。S320の処理が、プレビュー補償距離上限ガード手段に相当する。その後、このルーチンを終了する。一方、プレビュー補償距離Lcが最大プレビュー補償距離Lc_max以下である場合(S318:No)は、プレビュー補償距離に上限規制する必要がないためS320の処理を飛ばし、このルーチンを終了する。
【0097】
データ読出部528は、図17に示されるデータ読出ルーチンを繰り返し実行する。データ読出ルーチンが起動すると、データ読出部528は、まず、S400にて、車両の走行距離Sとプレビュー補償距離Lcとを加算することにより、プレビュー補償位置Dcを演算する。このプレビュー補償位置Dcは、プレビュー補償時間Tpの経過時に車両が走行する路面の位置を表す。S400の処理が、本発明のプレビュー補償位置演算手段に相当する。
【0098】
次いで、データ読出部528は、プレビュー補償位置Dcが最大プレビュー距離Lp_maxよりも大きいか否かを判定する(S402)。プレビュー補償位置Dcが最大プレビュー距離Lp_max以下である場合(S402:No)は、プレビュー補償位置Dcをタイヤ接地長L_tireで除算し小数点以下を切り捨てることにより、読出位置nを演算する(S404)。一方、プレビュー補償位置Dcが最大プレビュー距離Lp_maxよりも大きい場合(S402:Yes)は、プレビュー補償位置Dcから最大プレビュー距離Lp_maxを減算した値をタイヤ接地長L_tireで除算し小数点以下を切り捨てることにより、読出位置nを演算する(S406)。S404またはS406で演算された読出位置nは、RAM54の記憶領域541に記録されている路面変位量のうち、プレビュー補償時間Tp(制御遅れ時間)経過後に車両が走行する位置、すなわちプレビュー補償位置Dcに相当するプレビュー位置における路面変位量が記憶されている場所を表す。S404およびS406の処理が、本発明の読出位置演算手段に相当する。また、プレビュー補償位置Dcは車両のピッチ運動などに影響されないので、このような運動が発生した場合であっても、プレビュー補償位置Dcは、プレビュー最大距離Lp_maxにより表される長さの範囲内で繰り返し増加する。よって、このようなプレビュー補償位置Dcに基づいて演算される読出位置も、0から記憶位置の最大値の範囲内で増加を繰り返す。
【0099】
次いで、データ読出部528は、演算した読出位置nにタイヤ接地長L_tireを乗じた値にタイヤ接地長L_tireの1/2の値を加算することにより、プレビュー補償位置閾値tmpDcを演算する(S408)。ここで、プレビュー補償位置閾値tmpDcについて説明する。図20は、プレビュー補償位置閾値tmpDcを、RAM54の記憶領域541上の仮想距離として表した図である。読出位置nはプレビュー補償位置Dcをタイヤ接地長L_tireで除算した値の整数値であるので、プレビュー補償位置Dcは、記憶位置(n−1)にタイヤ接地長L_tireを乗じた値と、読出位置nにタイヤ接地長L_tireを乗じた値との間の値であると推定される。プレビュー補償位置閾値tmpDc(=n*L_tire+L_tire/2)は、上記のように推定されたプレビュー補償位置Dcの中央値である。
【0100】
プレビュー補償位置Dcがプレビュー補償位置閾値tmpDcよりも小さい場合は、真のプレビュー補償位置Dcが、読出位置nにより表される記憶場所に記録された路面変位量を持つプレビュー位置と、記憶位置(n−1)により表される記憶場所に記録された路面変位量を持つプレビュー位置との間の位置である可能性が高い。したがって、読出位置nにより表される記憶場所に記録されている路面変位量と記憶位置(n−1)により表される記憶場所に記録されている路面変位量とを用いて、真のプレビュー補償位置Dcにおけるより正しい路面変位量を演算することができる。
【0101】
また、プレビュー補償位置Dcがプレビュー補償位置閾値tmpDcよりも大きい場合は、真のプレビュー補償位置Dcが、読出位置nにより表される記憶場所に記録された路面変位量を持つプレビュー位置と、記憶位置(n+1)により表される記憶場所に記録された路面変位量を持つプレビュー位置との間の位置である可能性が高い。したがって、読出位置nにより表される記憶場所に記録されている路面変位量と記憶位置(n+1)により表される記憶場所に記録されている路面変位量とを用いて、真のプレビュー補償位置Dcにおけるより正しい路面変位が演算することができる。
【0102】
以上のことを踏まえ、本実施形態においては、S410にて、プレビュー補償位置Dcがプレビュー補償位置閾値tmpDcよりも小さいか否かを判定する。プレビュー補償位置Dcがプレビュー補償位置閾値tmpDcよりも小さい場合(S410:Yes)は、S412にて、読出位置nにより表される記憶場所に記録された路面変位量のデータtmp_x_road[n]と記憶位置(n−1)により表される記憶場所に記録された路面変位量のデータtmp_x_road[n-1]とを用いて、プレビュー補償位置Dcにおける路面変位量を演算する。具体的には、下記(12)式に示されるように、tmp_x_road[n]とtmp_x_road[n-1]とにより線形補間された修正路面変位量x_road_cを演算する。
【数12】
【0103】
一方、プレビュー補償位置Dcがプレビュー補償位置閾値tmpDcよりも大きい場合(S410:No)は、S414にて、読出位置nにより表される記憶場所に記録された路面変位量のデータtmp_x_road[n]と記録位置(n+1)により表される記憶場所に記録された路面変位量のデータtmp_x_road[n+1]とを用いて、プレビュー補償位置Dcにおける路面変位量を演算する。具体的には、下記(13)式に示されるように、tmp_x_road[n]とtmp_x_road[n+1]とにより線形補間された修正路面変位量x_road_cを演算する。
【数13】
【0104】
図21は、記憶領域541の各記憶場所に記録された路面変位量x_roadと、S412またはS414により演算された修正路面変位量x_road_cと、実際の路面変位とを対比した図である。図において、修正路面変位量x_road_cが太線により、記憶領域541に記録された路面変位量x_roadが細線により、実際の路面変位が点線により表されている。また、図中の番号は、記憶領域541に記録された路面変位量の記憶位置を表す。図からわかるように、各記憶場所に記録された路面変位量x_roadは段階的に変化しているのに対し、修正路面変位量x_road_cは、隣接する記憶場所に記録された路面変位量x_roadにより内挿補間されることにより滑らかに変化する。また、記憶位置6により表される部分に対応する実路面には窪みが形成されている。しかし、この窪みの大きさはタイヤ接地長L_tire未満であり、車輪がこの窪みを乗り越えるので、車輪はこの窪みの影響を受けない。
【0105】
上記のようにして修正路面変位量x_road_cを演算した後は、データ読出部528はこのルーチンを一旦終了する。
【0106】
目標制御力演算部529は、データ読出部528にて演算された修正路面変位量x_road_cを入力する。そして、入力した修正路面変位量x_road_cに所定のゲインを乗じることにより、アクチュエータ30が出力すべき目標制御力Fを演算する。上記所定のゲインの値は、例えば車両がその修正路面変位量x_road_cを乗り越えるときに路面入力のバネ上伝達率が小さくなるように、予め計算された値である。そして、演算した目標制御力F、あるいは目標制御力Fとアクチュエータ30が出力している制御力との偏差に応じたデューティ比で駆動回路70のスイッチング素子が開閉するように、各スイッチング素子に制御信号を出力する。これにより各スイッチング素子が指定されたデューティ比に従って開閉し、係るデューティ制御によりアクチュエータ30の作動が制御される。こうして制御されるアクチュエータ30の作動は、プレビュー補償時間Tp経過後に完了する。作動完了時に丁度車両の制御対象輪(例えば前輪)が、修正路面変位量x_road_cに対応したプレビュー位置Dpを通る。このようにして最適なタイミングでプレビュー制御が行われる。
【0107】
図22(a)〜図22(h)は、上記説明したプレビュー制御によりRAM54の記憶領域541に路面変位量のデータが記録されていく状態を、車両の走行状態とともに示した図である。図において、記憶領域541は20個のデータを記憶する記憶場所を備えている。各記憶場所を表す記憶位置は、右から順に大きくなる。つまり、右端の記憶場所を表す記憶位置が最も小さい記憶位置(i=0)であり、記憶領域541の左端の記憶場所を表す記憶位置が最も大きい記憶位置(i=19)である。最大プレビュー距離Lp_maxは2.0m、タイヤ接地長L_tireは0.1mである。
【0108】
図22(a)は、走行距離Sが0mであるときの、路面変位量の記録状態を示す。このときプレビュー距離Lpと走行距離Sとを加算して得られるプレビュー位置Dpが1.65mである。このプレビュー位置における路面変位量が、記憶領域541のうち記憶位置16により表される記憶場所に記録される。
【0109】
図22(b)は、車両の走行距離Sが0.25mであるときの、路面変位量の記録状態を示す。図からわかるように、この時点で車両の前輪が凹所に嵌り込んでいるため前方が沈み込むようなピッチ運動が発生している。したがって、センサ高さおよび対地角度が大きく変化し、その結果プレビュー位置Dpが1.55mに後退する。このプレビュー位置における路面変位量が、記憶領域541のうち記憶位置15により表される記憶場所に記録される。また、既に走行した位置を表す記憶位置(記憶位置0および記憶位置1)に路面変位量が記憶されている場合には、それらの路面変位量は消去される。図中、符合cにより表される記憶場所は、路面変位量が消去された記憶場所である。
【0110】
図22(c)は、車両の走行距離Sが0.45mであるときの、路面変位量の記録状態を示す。このときプレビュー位置Dpは1.95mである。このプレビュー位置における路面変位が、記憶位置19により表される記憶場所に記録される。また、図22(b)に示される状態のときにプレビュー位置Dpが一旦後退しているので、図22(b)から図22(c)まで車両が進行する間に、プレビュー位置Dpが1.65m付近である位置における路面変位量が再度演算されることもある。この場合は、再度演算された路面変位量と、既に記憶位置16により表される記憶場所に記録されている路面変位量の平均値が演算され、演算された平均値が記憶位置16により表される記憶場所に記録される。
【0111】
図22(d)は、車両の走行距離Sが0.65mであるときの、路面変位量の記録状態を示す。このときプレビュー距離Lpと走行距離Sとを加算した値が2.1mとなって最大プレビュー距離Lp_maxを越える。したがって、上記加算値(2.1m)から最大プレビュー距離Lp_max(2.0m)を減算した値(0.1m)がプレビュー位置Dpとして演算される。このプレビュー位置における路面変位が、記憶位置1により表される記憶場所に記録される。
【0112】
図22(e)は、車両の走行距離Sが1.3mであるときの、路面変位量の記録状態を示す。このときプレビュー距離Lpと走行距離Sとを加算した値が2.65mとなって最大プレビュー距離Lp_maxを越える。したがって、上記加算値(2.65m)から最大プレビュー距離Lp_max(2.0m)を減算した値(0.65m)がプレビュー位置Dpとして演算される。このプレビュー位置における路面変位が、記憶位置6により表される記憶場所に記録される。
【0113】
図22(f)は、車両の走行距離Sが1.95mであるときの、路面変位量の記録状態を示す。このときプレビュー距離Lpと走行距離Sとを加算した値は3.05(m)であり、最大プレビュー距離Lp_maxを越える。よって、上記加算値(3.05m)から最大プレビュー距離Lp_max(=2.0m)を減算した値(1.05m)がプレビュー位置Dpとして演算される。このプレビュー位置における路面変位量が、記憶位置10により表される記憶場所に記録される。また、図からわかるように記憶領域541には、記憶位置0〜記憶位置10までの連続した記憶領域および記憶位置19に路面変位量が記録されており、記憶位置11〜記憶位置18までの連続した記憶領域には路面変位量が記録されていない。記憶位置19が車両の現在地を表す記憶位置であるので、この記憶位置19から連続して路面変位量が記憶されている記憶場所の個数(12個)にタイヤ接地長L_tire(0.1m)を乗じた距離(1.2m)が最大プレビュー補償距離Lc_maxとして設定される。よって、演算されたプレビュー補償距離Lcが1.2mを越えている場合は、プレビュー補償距離Lcが1.2mに規制される。
【0114】
図22(g)は、車両の走行距離Sが2.15mであるときの、路面変位量の記録状態を示す。図からわかるようにこの状況において、走行距離S(2.15m)が最大プレビュー距離Lp_maxを越えているため、この走行距離Sから最大プレビュー距離Lp_max(2.0m)を減算した値(0.15m)が走行距離Sとして設定される。また、プレビュー位置Dpは1.75mである。よって、このプレビュー位置における路面変位量が記憶位置17により表される記憶場所に記憶される。また、記憶位置1〜記憶位置17までの連続した記憶領域にデータが記録されており、記憶位置18,19,0にはデータが記録されていない。記憶位置1が車両の現在地を表す記憶位置であるので、この記憶位置1から連続して路面変位量が記録されている記憶場所の個数(17個)にタイヤ接地長L_tire(0.1m)を乗じた距離(1.7m)が最大プレビュー補償距離Lc_maxとして設定される。よって、演算されたプレビュー補償距離Lcが1.7mを越えている場合に、プレビュー補償距離Lcが1.7mに規制される。
【0115】
図22(h)は、車両の走行距離Sが0.95(m)であるときの、路面変位量の記録状態を示す。このときプレビュー距離Lpと走行距離Sとを加算した値が2.75mとなって最大プレビュー距離Lp_maxを越える。したがって、上記加算値から最大プレビュー距離Lp_maxを減算した値(0.75m)がプレビュー位置Dpとして演算される。このプレビュー位置における路面変位量が記憶位置7により表される記憶場所に記録される。また、図からわかるように記憶領域541には、記憶位置0〜記憶位置7までの連続した記憶領域および記憶位置9〜記憶位置19までの連続した記憶領域に路面変位が記録されており、記憶位置8には路面変位量は記録されていない。記憶位置9が車両の現在地を表す記憶位置であるので、この記憶位置9から連続して路面変位量が記憶されている記憶場所の個数(19個)にタイヤ接地長L_tire(0.1m)を乗じた距離(1.9m)が最大プレビュー補償距離Lc_maxとして設定される。よって、演算されたプレビュー補償距離Lcが1.9mを越えている場合に、プレビュー補償距離Lcが1.9mに規制される。
【0116】
なお、図22には読出位置を示していないが、読出位置は上述のように0から記憶位置の最大値の範囲内で増加を繰り返す。つまり、記憶位置順に路面変位量が読み出される。記憶位置の順序はプレビュー位置の順序を表すので、路面変位量はプレビュー位置順に読み出されることになる。このため、例えば、図22(a)に示すようにプレビュー位置1.65mにおける路面変位量が記憶位置16に記録された後に、ピッチ運動が発生して、図22(b)に示すようにプレビュー位置が1.55mに後退し、その位置における路面変位量が記憶位置15に記録された場合であっても、あくまでプレビュー位置が小さい側の路面変位量が先に読み出される。つまり、後に記録された記憶位置15における路面変位量が先に読み出され、先に記録された記憶位置16における路面変位量が後に読み出される。このようにしてプレビュー位置順に路面変位量が読み出されることにより、車輪が路面を通過する順序(路面通過順序)とその路面位置における路面変位量の読出し順序が整合する。よって、路面通過順序と読出し順序が整合しないことに起因したプレビュー制御の制御性能の悪化を抑えることができる。
【0117】
以上のように、本実施形態によれば、プレビューセンサ63によりセンサ距離z_ssrが検出されたときに検出の対象とされた路面位置を表すプレビュー位置Dpに基づいて、そのプレビュー位置Dpにおける路面変位量x_roadを記憶するための記憶位置iが演算される。そして、複数の記憶場所を有するRAM54の記憶領域541のうち演算された記憶位置iにより表される記憶場所に路面変位量x_roadが記録される。したがって、車両のピッチ運動などの姿勢変化によってプレビュー位置Dpが変化した場合であっても、その変化を踏まえた記憶位置に路面変位量x_roadが記録される。このためプレビュー位置Dpが後退した場合であっても、プレビュー位置Dpを踏まえて演算された記憶位置に基づいて、車両に近い側(プレビュー位置が小さい側)から順に路面変位量x_roadを読み出すことができる。これにより、プレビュー制御の制御性能の悪化が抑えられる。
【0118】
図23は、RAM54の記憶領域541に記録されている路面変位量のデータの必要時間分解能を示すグラフである。ここで、必要時間分解能とは、ある路面変位量のデータが記録されてから次のデータが記録されるまでに要する時間間隔であり、この必要時間分解能が小さいほど、緻密に路面変位量のデータが記録されていることになる。図23において横軸が車両の走行速度Vであり、縦軸が必要時間分解能である。また、符合Aにより示されたグラフが、本実施形態に示したプレビュー制御を行った場合における必要時間分解能の走行速度Vに対する変化を表すグラフである。符合Bにより示されたグラフは、上記特許文献2に示したプレビュー制御を行った場合における必要時間分解能の走行速度Vに対する変化を表すグラフである。また、図24は、グラフBにより表される従来手法によるプレビュー制御のサンプリング時間Tsや各速度域において記憶される路面変位量のデータ個数と、グラフAにより表される本実施形態によるプレビュー制御により記憶される路面変位量のデータ個数とを対比した図である。
【0119】
図24からわかるように、従来手法の場合、低速度域(20〜60km/h)、中速度域(60〜130km/h)、高速度域(130〜250km/h)のそれぞれの速度領域ごとにサンプリング時間が固定されている。サンプリング時間ごとにデータを記録する場合、時間分解能はサンプリング時間に等しい。また各速度領域のサンプリング時間を比較した場合、速度が大きい領域であるほどサンプリング時間が短い。したがって、従来手法によりプレビュー制御を実行した場合における必要時間分解能は、図23のグラフBに示されるように、走行速度が大きくなるほど段階的に小さくなる。このように必要時間分解能が段階的に変化する場合、その変化の境界付近の速度における必要時間分解能が大きくなる。例えば、グラフBにおいて走行速度50km/h付近の必要時間分解能は12msであり、12msの間に車両は約0.17m進む。0.17mは一般的な車両のタイヤ接地長よりも長いため、本来制御に必要な路面変位量を網羅することができない。したがって、路面変位量に基づく制御の適切な精度確保がなされない。
【0120】
一方、本実施形態のプレビュー制御は、車両がタイヤ接地長L_tireだけ進むごとにデータ(路面変位量)を記録するので、必要時間分解能は、タイヤ接地長L_tireを走行速度で除算した値となる。したがって必要時間分解能は図23のグラフAに示されるように走行速度に対して反比例する。本実施形態のようにデータ(路面変位量)の記憶解像度(必要時間分解能)をタイヤ接地長により定義することにより、走行速度Vが大きい場合でも小さい場合でも、路面変位量の記録間隔がタイヤ接地長L_tireになる。このため常に最適な粗さでデータを記録することができる。
【0121】
また、図24からわかるように、従来手法においては、各速度領域ごとに専用の記憶領域が必要であるため、トータルで55個のデータを記憶するだけの記憶領域が必要であるのに対し、本実施形態では、全ての速度において共通の記憶領域を有していればよいので、例えば20個のデータを記憶するだけの記憶領域で足りる。このように、本実施形態のプレビュー制御を実行することにより、記憶領域を節約することができる。
【0122】
また、本実施形態によれば、プレビューセンサ63の対地角度が、車両側から見て鋭角になるようにプレビューセンサ63が車両に取り付けられているので、プレビュー距離Lpを伸ばすことができる。このため、車両の走行速度Vが大きくても余裕時間を制御遅れ時間(プレビュー補償時間Tp)よりも大きくすることができる。
【0123】
また、データ読出部528では、プレビュー補償位置Dcに相当するプレビュー位置Dpに基づいてデータ記録部527にて演算された記憶位置が、読出位置nとして演算される。そして、演算された読出位置nにより表される記憶場所に記憶された路面変位に基づいて、目標制御力演算部529にてアクチュエータ30の目標制御力Fが演算される。こうして演算された目標制御力Fに基づいてアクチュエータ30の作動が制御される。このように位置ベースでプレビュー制御の遅れを補償することで、適切なタイミングでアクチュエータ30の作動を完了させることができる。
【0124】
また、プレビュー位置Dpをタイヤ接地長L_tireで除算した値に基づいて記憶位置iを演算することにより、プレビュー位置Dpがタイヤ接地長L_tire分だけ変化するごとに、そのプレビュー位置Dpにおける路面変位量x_roadが記憶される。つまり、路面変位量x_roadが記録される路面の間隔がタイヤ接地長L_tireである。路面変位量x_roadが記録される路面間隔がタイヤ接地長よりも短い場合、記憶領域の記憶容量が増大するという問題が発生する。また、タイヤ接地長L_tireよりも短い区間内での路面変化は、図21に示されるようにその変化をタイヤが乗り越えることにより無視される場合があるため、そのような微小区間内の路面変化を記憶しておく必要性に乏しい。一方、路面変位量x_roadが記録される路面間隔がタイヤ接地長L_tireよりも長い場合、路面変位量の情報が不足するため乗り心地が悪化する。これらのことから、本実施形態のように路面変位量が記録される路面間隔をタイヤ接地長L_tireとするこで、記憶容量の増大を抑えることができるとともに、過不足の無い最適な距離間隔で路面変位量x_roadを記憶することができる。
【0125】
また、車両の走行距離Sは、最大プレビュー距離Lp_maxを越えない範囲内で繰り返し変動するように演算されるので、車両の走行距離Sとプレビュー距離Lpとに基づいて演算されるプレビュー位置Dpも、最大プレビュー距離Lp_maxにより表される長さの範囲内で繰り返し変動し、さらにプレビュー位置Dpに基づいて演算される記憶位置iも最大プレビュー距離Lp_maxに応じた範囲内で繰り返し変動する。記憶位置iが繰り返し変動することにより、記憶領域541の記憶場所が繰り返し用いられる。これにより、少ない記録容量で大量の制御情報を記録することができる。
【0126】
また、RAM54の記憶領域541に記憶された路面変位のうち、既に走行した路面を表す記憶場所に記憶された路面変位が消去される。これにより、空き状態となった記憶位置により表される記憶場所に新たな路面変位を記録させることができる。
【0127】
以上、本発明の実施形態について説明したが、本発明は上記実施形態に限定されるべきものではない。例えば、上記実施形態においては、サスペンションのアクチュエータにより発生される制御力(駆動力)を求める場合に本発明のプレビュー制御を適用した例を示した。すなわち上記実施形態では、制御対象輪を動作させるアクチュエータの作動制御に本発明のプレビュー制御を適用した例を示した。しかしながら、本発明は、制御対象輪を積極的に動かすアクチュエータの作動制御のみならず、制御対象輪の動作を制御するために用いられるアクチュエータの作動制御にも適用することができる。例えば、減衰力を発生するショックアブソーバを備えるサスペンションにおいては、アクチュエータがショックアブソーバの減衰力特性を変更することにより、外部入力による車輪の上下動作(上下振動)が制御される。このようなアクチュエータの作動制御にも本発明のプレビュー制御を適用することができる。この場合、図25に示されるように、CPU52は、目標制御力演算部に換えて目標減衰力演算部529を有する。目標減衰力演算部529は、データ読出部528が出力する修正路面変位量x_road_cを入力し、この修正路面変位量x_road_cに基づいてショックアブソーバが発生すべき目標減衰力Fを演算する。そして、演算された目標減衰力Fが発生されるように、ショックアブソーバの減衰力特性を制御するアクチュエータに制御信号を出力する。
【0128】
また、本発明は、車輪の上下動作を制御するアクチュエータのみならず、車輪の回転動作を制御するアクチュエータにも適用することができる。例えば、各車輪の内部に内蔵されたアクチュエータによって各車輪を回転させることにより走行する車両において、そのアクチュエータの駆動力や制動力を制御する際にも、本発明が適用され得る。この場合、図26に示されるように、CPU52は目標駆動力演算部(または目標制動力演算部)529を有する。この目標駆動力演算部529は、データ読出部528が出力する修正路面変位量x_road_cを入力し、この修正路面変位量x_road_cに基づいてアクチュエータが発生すべき目標駆動力(または目標制動力)Fを演算する。そして、演算された目標駆動力(または目標制動力)Fが発生されるようにアクチュエータに制御信号を出力する。
【0129】
また、上記実施形態においては、制御情報として路面変位量を演算する例を示したが、制御情報は、制御対象輪がプレビュー位置を走行するときにその制御対象輪の動作を制御するアクチュエータの作動制御に必要な情報であればどのような情報でもよい。例えば本実施形態のようにアクティブサスペンションのアクチュエータを制御する場合には、プレビュー位置における路面変位に換えて、プレビュー位置における路面勾配などを演算してもよい。また、アクチュエータが最終的に出力する目標制御力を制御情報としてもよい。この場合、図27に示されるように、目標制御力演算部529が、路面形状演算部525により演算された路面変位量x_roadに基づいて目標制御力Fを演算する。また、データ記録部527は、プレビュー位置Dpに基づいて、そのプレビュー位置Dpにおける路面変位量x_roadに基づいて演算された目標制御力Fの記憶場所を表す記憶位置iを演算する。そして、演算された記憶位置iにより表される記憶場所に、その目標制御力Fが記録される。データ読出し時には、プレビュー補償位置Dcに基づいて演算された読出位置nに記録された目標制御力Fが出力される。
【0130】
また、上記実施形態においては路面形状演算ルーチン(図15)にて、記憶位置iに既にデータが記録されていると判定された場合(S214:No)は、今回演算された路面変位量x_roadと既に記憶位置iに記録されているデータtmp_x_road[i]との平均値をその記憶位置iに記録する(S218)例を示したが、既に記録されているデータと今回演算された路面変位量とのいずれか大きい方(最大値)を、その記憶位置に記録してもよい。この場合、図28に示されるように、記憶位置iに既にデータが記録されていると判定された場合(S214:No)は、S218にて、今回演算した路面変位量x_roadが記憶位置iに記録されたデータtmp_x_road[i]よりも大きいか否かが判定され、大きい場合はその路面変位量x_roadを記憶位置iに記録し、そうでない場合は既に記録されたデータtmp_x_road[i]をそのまま記憶位置iに残すようにすればよい。
【0131】
また、センサ距離z_ssrのサンプリング時間(サンプリング周期)Tsは、少なくともタイヤ接地長L_tireごとに路面変位を記録することができる範囲において、自由に設定することができる。このように、本発明は、その趣旨を逸脱しない限りにおいて、変形可能である。
【符号の説明】
【0132】
10…サスペンション本体、20…コイルスプリング、30…アクチュエータ、31…電気モータ、35…ボールネジ機構、50…サスペンションECU、51…入力インターフェース、52…CPU、521…状態量演算部、522…位置変化量演算部、523…走行距離演算部、524…プレビュー補償距離演算部、525…路面形状演算部、526…プレビュー距離演算部、527…データ記録部、528…データ読出部、529…目標制御力演算部、53…ROM、54…RAM、541…記憶領域、55…出力インターフェース、56…双方向バス、61…バネ上加速度センサ、62…車速センサ、63…プレビューセンサ、70…駆動回路、Dc…プレビュー補償位置、Dp…プレビュー位置、L_tire…タイヤ接地長、Lc…プレビュー補償距離、Lc_max…最大プレビュー補償距離、Lp…プレビュー距離、Lp_max…最大プレビュー距離、tmpDc…プレビュー補償位置閾値、Tp…プレビュー補償時間、Ts…サンプリング時間、x_road…路面変位量、x_road_c…修正路面変位量、z_ssr…センサ距離
【技術分野】
【0001】
本発明は、車両に取り付けられたプレビューセンサにより検出されるセンサと路面との間の距離に基づいて、その路面を走行する車輪の動作を制御するためのアクチュエータを作動制御するアクチュエータの作動制御装置に関する。
【背景技術】
【0002】
プレビューセンサにより検出されるセンサと路面との間の距離に基づいて、その路面を走行する車輪の上下動作を制御するためのアクチュエータ、例えばアクティブサスペンションのアクチュエータの作動を制御するいわゆるプレビュー制御(予見制御)が知られている。
【0003】
プレビュー制御時には、例えば車両前方に設置されたプレビューセンサ(距離センサなど)によって、そのセンサの取付位置から車両が走行する予定の路面位置までの距離が検出される。また、検出された距離に基づき、その距離が検出されたときに検出の対象とされた路面位置であるプレビュー位置を車輪が走行するときにその車輪に連結されたサスペンションのアクチュエータの作動を制御するために必要な制御情報(例えばプレビュー位置における基準位置からの上下方向の変位量(路面変位量))が取得される。そして、取得された制御情報に基づいてアクチュエータの作動が制御される。
【0004】
また、プレビュー制御時には、サンプリング時間ごとに得られる複数のプレビュー位置における制御情報が、例えばサスペンションECUのメモリ(RAMやレジスタ)に一時的に記憶される。そして、アクチュエータの制御の遅れを表す補償時間を見越した適切なタイミングでメモリから読み出された制御情報に基づき、アクチュエータが作動制御される。
【0005】
特許文献1は、車速に応じた間引き率により制御情報としての路面変位量を記憶し、無駄なメモリ容量を要することなくプレビュー制御を実行し得るアクティブサスペンション制御装置を開示している。
【0006】
また、特許文献2は、制御情報の記憶領域が車速範囲に応じて分割されたメモリを用いてプレビュー制御する方法を開示している。これによれば、メモリ内における制御情報の記憶領域が複数の車速領域ごとに分割されている。また、車速が大きい範囲に対応する分割領域に記憶する路面変位量のデータサンプリング周期が、車速が小さい範囲に対応する分割領域に記憶する路面変位量のデータサンプリング周期よりも短くなるように、それぞれの領域ごとにサンプリング周期が設定される。さらに、車速が大きい範囲に対応する分割領域に記憶(保存)されるデータ数が、車速が小さい範囲に対応する分割領域に記憶されるデータ数よりも多くなるように、各分割領域が構成される。こうすることで、全車速に対してムラなく路面変位量が記録される。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平4−342612号公報
【特許文献2】特開平9−136522号公報
【発明の概要】
【0008】
プレビュー位置とそのプレビュー位置を走行する予定の車輪(制御対象輪位置)との間の距離(プレビュー距離)を車速で除算して得られる時間は、その車輪がプレビュー位置を走行するまでの余裕時間を表す。この余裕時間が、その車輪の動作を制御するためのアクチュエータの制御の遅れを表す補償時間未満であると、制御が間に合わず、適切なタイミングでアクチュエータを制御することができない。
【0009】
上記特許文献に記載のアクティブサスペンション制御装置を含む従来の制御装置によれば、プレビュー位置がプレビューセンサの直下に位置する。つまり、プレビューセンサにより出射される超音波などの検出媒体の出射方向と路面とのなす角である対地角度がほぼ直角である。この場合、特に制御対象輪が前輪である場合、プレビュー距離が比較的短い。よって、車速が速い場合は余裕時間が制御遅れ時間よりも短くなる可能性が高い。
【0010】
プレビュー距離を伸ばすためには、プレビュー位置が車両の現在位置からより前方となるように、プレビューセンサから検出媒体を斜め前方に出射すればよい。つまり対地角度が車両側から見て鋭角となるようにプレビューセンサを車両に取り付けることにより、プレビュー距離を伸ばすことができる。しかし、プレビューセンサの対地角度が鋭角である場合、プレビュー位置が車両のピッチ運動によって大きく変動する。
【0011】
図29は、ピッチ運動によるプレビュー位置の変化量の違いを、基準となる対地角度が90°の場合と30°の場合とで比較した図である。図において、プレビューセンサは路面から500mm上方に取り付けられている。また、この図は、車両姿勢が水平な状態(ピッチ角度=0°)から2°だけピッチ運動したときにおけるプレビュー位置の変化量を例示している。プレビューセンサの基準対地角度が90°である場合、2°のピッチ角度変化によりプレビュー位置は17.5mmだけ変化する。一方、プレビューセンサの基準対地角度が30°である場合、2°のピッチ角度変化によりプレビュー位置は74.3mmも変化する。車両が時速80kmで走行していると仮定すると、車両は約3.3msec.をかけて74.3mmを走行する。このことは、アクチュエータを適切なタイミングで作動させようとするときに、ピッチ運動によって3.3msec.のタイミングずれが発生してしまう可能性を示唆する。また、プレビューセンサにより検出された信号のサンプリング周期が3.3msec.以下である場合、上記のタイミングずれ量はサンプリング周期よりも大きいので、場合によっては必要な制御情報が欠如する。これによりプレビュー制御の制御性能が悪化する。
【0012】
図30は、対地角度を車両側から見て鋭角(例えば30°)に設定した場合における、プレビュー位置の時間変化を表すグラフである。このグラフによれば、ピッチ運動が発生していない場合は、時間経過とともにプレビュー位置が車両の走行方向に進行(増加)する。しかし、車両の前方が沈み込むピッチ運動が発生した場合、時間経過とともにプレビュー位置が車両の走行方向に進行せず、一旦プレビュー位置が後退(減少)する。
【0013】
プレビュー制御に用いられる制御情報は、例えばシフトレジスタなどにサンプリング時間順(演算順)に記憶(保存)される。つまり、サンプリング時間順に制御情報のメモリ内での記憶位置が決定される。そして、制御情報を読み出す際にはサンプリング時間順に読み出される。ところが、図30に示されるようにピッチ運動が発生した場合、時間が経過するにつれてプレビュー位置が後退する場合が生じる。この場合に制御情報をサンプリング時間順に読み出すと、制御対象輪が通過する路面順に制御情報が読み出されない事態を招く。これによりプレビュー制御の制御性能が悪化する。
【0014】
本発明は、上記問題に対処するためになされたものであり、プレビューセンサにより検出された距離に基づき、走行予定路面を走行する制御対象輪の動作を制御するためのアクチュエータの作動を制御するアクチュエータの作動制御装置において、プレビュー制御の制御性能の悪化が効果的に抑えられたアクチュエータの作動制御装置を提供することを目的とする。
【0015】
本発明は、車両に取り付けられ、その取付位置から車両が走行する予定の路面位置までの間の距離を予め設定されたサンプリング時間ごとに検出するプレビューセンサを備え、前記プレビューセンサにより検出された距離に基づいて、その距離が検出されたときに検出の対象とされた路面位置であるプレビュー位置を走行する車輪の動作を制御するためのアクチュエータの作動を制御するアクチュエータの作動制御装置において、車両の走行速度に基づいて車両の走行距離を演算する走行距離演算手段と、前記プレビューセンサにより検出された距離に基づいて、その距離が検出されたときに検出の対象とされた前記プレビュー位置とそのプレビュー位置を走行する予定の車輪である制御対象輪が現在接地している路面位置との間の距離であるプレビュー距離を演算するプレビュー距離演算手段と、前記車両の走行距離に前記プレビュー距離を加算した値に基づいて、前記プレビュー位置を演算するプレビュー位置演算手段と、前記プレビューセンサにより検出された距離に基づいて、その距離が検出されたときに検出の対象とされた前記プレビュー位置を前記制御対象輪が走行するときにその制御対象輪の動作を制御するためのアクチュエータの作動を制御するために必要な情報である制御情報を演算する制御情報演算手段と、前記制御情報演算手段により演算された前記制御情報を記憶する複数の記憶場所を有するメモリと、前記プレビュー位置演算手段により演算された前記プレビュー位置に基づいて、そのプレビュー位置を前記制御対象輪が走行するときにその制御対象輪の動作を制御するアクチュエータの作動を制御するために必要な情報として前記制御情報演算手段により演算された前記制御情報の前記メモリ内における記憶場所を表す記憶位置を演算する記憶位置演算手段と、前記メモリ内の記憶場所のうち、前記記憶位置演算手段により演算された記憶位置により表される記憶場所に前記制御情報を記録する制御情報記録手段と、を備えるアクチュエータの作動制御装置を提供する。
【0016】
本発明により提供されたアクチュエータの作動制御装置によれば、プレビューセンサにより検出される距離に基づいて、その距離が検出されたときに検出の対象とされた路面の位置を表すプレビュー位置を制御対象輪が走行するときにその制御対象輪の動作を制御するためのアクチュエータを作動制御するために必要な制御情報、例えばそのプレビュー位置における路面変位量などが演算される。こうして演算された制御情報がメモリに記録される。また、制御情報はプレビューセンサによってサンプリング時間ごとに検出される距離に基づいて演算されるため、異なるプレビュー位置における複数の制御情報がメモリに記録される。各制御情報のメモリ内における記憶場所を表す記憶位置は記憶位置演算手段により演算される。この場合において、記憶位置演算手段は、プレビュー位置に基づいて、そのプレビュー位置を制御対象輪が走行するときにその制御対象輪の動作を制御するアクチュエータの作動を制御するために必要な情報として制御情報演算手段によって演算された制御情報の記憶位置を演算する。つまり、制御情報の記憶位置は、その制御情報が必要とされるプレビュー位置に基づいて演算される。そして、演算された記憶位置により表される記憶場所にその制御情報が記録される。このように、本発明によれば、サンプリング時間順に制御情報の記憶位置が決定されるのではなく、プレビュー位置に基づいて制御情報の記憶位置が決定される。
【0017】
プレビュー位置に基づいて、そのプレビュー位置における制御情報のメモリ内での記憶位置が決定されるので、制御情報の記憶位置とその制御情報が必要とされるプレビュー位置との間に関連性が与えられる。例えば、最初に演算された制御情報Aが必要とされるプレビュー位置が1.5m、次に演算された制御情報Bが必要とされるプレビュー位置が1.4m、最後に演算された制御情報Cが必要とされるプレビュー位置が1.6mである場合について考察する。従来の記憶方式では、制御情報は演算順(A,B,Cの順)に記録され、その順(A,B,Cの順)に読み出される。このため走行車両から見て遠いプレビュー位置における制御情報(制御情報A)が近いプレビュー位置における制御情報(制御情報B)よりも先に読み出されてしまう。よって、制御対象輪が通過する路面順に制御情報が読み出されない事態が生じ、その結果、プレビュー制御の制御性能が悪化する。これに対し、本発明によれば、制御情報の記憶位置とプレビュー位置との間に関連性が与えられるように、プレビュー位置に基づいてそのプレビュー位置における制御情報の記憶位置が演算される。例えば、記憶位置は、プレビュー位置が大きいほど大きくなるように演算される。したがって、記憶位置1により表される記憶場所にプレビュー位置1.4mにおける制御情報Bが、記憶位置2により表される記憶場所にプレビュー位置1.5mにおける制御情報Aが、記憶位置3により表される記憶場所にプレビュー位置1.6mにおける制御情報Cが、それぞれ記録される。そして、制御情報の読出し時にその関連性に従って、例えば上記の例においては記憶位置が小さい側から順に制御情報を読み出すことにより、プレビュー位置が小さい順に制御情報が読み出される。
【0018】
すなわち、本発明によれば、制御情報の記録時に、プレビュー位置に基づいて各制御情報の記憶位置が再構成される。このようにプレビュー位置をベースに制御情報の記憶位置を決定しているので、車両のピッチ運動などの姿勢変化によってプレビュー位置が変化した場合であっても、その変化を踏まえた記憶位置により表されるメモリの記憶場所に、そのプレビュー位置における制御情報が記録される。よって、車両のピッチ運動等によりプレビュー位置が時間経過とともに後退した場合であっても、プレビュー位置に関連した記憶位置に基づいて、プレビュー位置順に制御情報を読み出すことができる。これにより、プレビュー制御の制御性能の悪化が抑えられる。
【0019】
本発明の作動制御装置により制御されるアクチュエータは、制御対象輪の動作を制御するためのアクチュエータであれば、どのようなものでも良い。例えば能動的(アクティブ)サスペンションに用いられるアクチュエータや、パッシブなサスペンションに用いられる粘性流体を利用したショックアブソーバにより発生される減衰力の特性(減衰係数)を変更するアクチュエータに本発明の作動制御装置を適用することができる。これらのアクチュエータは制御対象輪の上下動作を制御する。また、例えば、制御対象輪を回転駆動あるいは制動させるためのアクチュエータ(例えば電気モータなど)に本発明の作動制御装置を適用することもできる。この場合、アクチュエータは、制御対象輪の回転動作を制御する。
【0020】
前記制御情報は、制御対象輪がプレビュー位置を走行するときに、その制御対象輪の動作を制御するためのアクチュエータの作動制御に必要な情報であれば、どのような情報でも良い。例えば、アクチュエータがアクティブサスペンションのアクチュエータである場合、制御情報は、プレビュー位置における路面変位量(基準位置からの上下変位量)であっても良いし、あるいは、路面変位量に応じてアクチュエータが出力すべき目標制御力であっても良い。また、上記アクチュエータが、各車輪に取り付けられるショックアブソーバの減衰力特性を変更するためのアクチュエータである場合、制御情報は、上記路面変位量であっても良いし、あるいは、上記路面変位量に応じてショックアブソーバが出力すべき目標減衰力、さらにはその目標減衰力をショックアブソーバに発生させるために必要なアクチュエータの目標駆動力あるいは目標駆動量であっても良い。さらに、上記アクチュエータが、制御対象輪を回転駆動または制動させるためのアクチュエータである場合、制御情報は、上記路面変位量であっても良いし、あるいは上記路面変位に応じてアクチュエータが出力すべき目標駆動力あるいは目標制動力であっても良い。すなわち、前記制御情報は、プレビューセンサにより検出された距離に基づいて導き出され、且つ制御対象たるアクチュエータが最終的に出力すべき制御量を導き出すために必要な情報であれば、どのようなものでも良い。
【0021】
前記プレビューセンサは、超音波やレーザ光などの検出媒体を路面に向けて出射し、プレビュー位置からの反射波や反射光に基づいて、プレビュー位置とセンサの取付位置との間の距離を検出するものが好適に用いられるが、上記距離を検出できさえすれば、どのようなセンサでもよい。
【0022】
前記走行距離演算手段は、制御開始から現在までに車両が走行した距離を演算する。この走行距離演算手段は、好ましくは車両の走行速度と走行時間とを乗じることにより、前記車両の走行距離を演算するものであるとよい。この場合、車両の走行速度と前記サンプリング時間との積の累積により前記車両の走行距離を演算するものであるとよい。
【0023】
前記プレビュー距離演算手段は、プレビューセンサで検出された距離と、その距離を検出したときにおけるプレビューセンサの取付角度や取付位置を表す量に基づいて、プレビュー距離を演算するものであるとよい。例えばプレビュー距離は、プレビューセンサで検出された距離と、その距離を検出したときにおけるプレビューセンサの対地角度とから演算することができる。また、プレビューセンサで検出された距離と、その距離を検出したときにおけるプレビューセンサの路面からの高さとからでも、プレビュー距離を演算することができる。
【0024】
プレビューセンサの対地角度は、車両側から見て鋭角であるとよい。対地角度が鋭角となるようにプレビューセンサを車両に取り付けることによりプレビュー距離を伸ばすことができ、ひいては、車両の走行速度が早くても余裕時間を制御遅れ時間よりも大きくすることができる。また、上述したように対地角度を鋭角に設定した場合、車両の姿勢変化によりプレビュー位置が大きく変動する。この場合に本発明を適用することにより、本発明の効果が十分に発揮される。
【0025】
なお、プレビューセンサの対地角度を車両側から見て鋭角に設定した場合、プレビュー位置が大きく変化するので、大きく変化するプレビュー位置を正確に求めるために、本発明のアクチュエータの作動制御装置は、プレビューセンサの取り付け姿勢の変化量を取得する姿勢変化量取得手段を備えているのがよい。この姿勢変化量取得手段は、プレビューセンサの対地角度の変化量を取得する手段および、プレビューセンサの路面からの高さの変化量を取得する手段を備えるものであるとよい。
【0026】
前記記憶位置演算手段は、制御情報の記憶場所を表すメモリの記憶位置(アドレス)と、その制御情報が必要とされるプレビュー位置とが関連付けられるように、プレビュー位置に基づいて、そのプレビュー位置における制御情報が記録されるべき記憶位置を演算する。好ましくは、プレビュー位置が大きいほど、記憶位置を表す番号(アドレス番号)が大きくなるように(あるいは小さくなるように)、つまりプレビュー位置順に制御情報が整列するように、記憶位置を演算するとよい。このように記憶位置を演算し、記憶位置順に制御情報を読み出すことにより、プレビュー位置が小さい側から順にアクチュエータの作動を制御することができる。
【0027】
また、本発明のアクチュエータの作動制御装置は、車両の走行速度と、前記アクチュエータの作動の制御に関連する遅れ時間として予め設定されたプレビュー補償時間とを乗じることにより、前記プレビュー補償時間の間に車両が走行する距離であるプレビュー補償距離を演算するプレビュー補償距離演算手段と、前記車両の走行距離に前記プレビュー補償距離を加算した値に基づいて、前記プレビュー補償時間経過後に車両が走行する路面の位置を表すプレビュー補償位置を演算するプレビュー補償位置演算手段と、前記記憶位置演算手段により前記プレビュー補償位置に相当する前記プレビュー位置に基づいて演算された記憶位置を読出位置として演算する読出位置演算手段と、前記メモリ内の記憶場所のうち、前記読出位置演算手段により演算された読出位置により表される記憶場所に記録された前記制御情報に基づいて、前記アクチュエータの作動を制御するための制御量を演算する制御量演算手段と、を更に備えるのがよい。
【0028】
これによれば、記憶位置演算手段によりプレビュー補償位置に相当するプレビュー位置に基づいて演算された記憶位置が、読出位置として演算される。そして、演算された読出位置により表される記憶場所に記録された制御情報に基づいて、アクチュエータの作動を制御するための制御量が演算される。こうして演算された制御量に基づいてアクチュエータが作動制御される。
【0029】
プレビュー補償距離は、アクチュエータの応答時間や通信時間、さらに内部フィルタによる遅れ分を補償するための制御遅れ時間として予め定められたプレビュー補償時間を距離に換算した長さである。車両が現在走行している地点(現在位置)で作動を開始したアクチュエータの作動は、車両がプレビュー補償位置まで走行したときに丁度完了する。したがって、プレビュー補償位置における制御情報に基づいて得られる制御量に基づいてアクチュエータを作動制御することにより、適切なタイミングでアクチュエータの作動を完了させることができる。また、プレビュー補償距離は車両のピッチ運動などに影響されないので、車両の姿勢が変化した場合であっても時間経過とともに進行(増加)する。よって、このプレビュー補償距離に基づいて、プレビュー位置順に制御情報を読み出すことができる。
【0030】
また、前記記憶位置演算手段は、前記プレビュー位置と、前記制御対象輪が走行路面に接触している部分の車両進行方向に沿った長さであるタイヤ接地長とに基づいて、前記記憶位置を演算するものであるのがよい。特に、プレビュー位置をタイヤ接地長で除算した値に基づいて前記記憶位置を演算するものであるのがよい。同様に、前記読出位置演算手段は、前記プレビュー補償位置と前記タイヤ接地長とに基づいて、前記読出位置を演算するものであるのがよい。特に、プレビュー補償位置をタイヤ接地長で除算した値に基づいて前記読出位置を演算するものであるのがよい。
【0031】
これによれば、プレビュー位置をタイヤ接地長で除算した値に基づいて記憶位置を演算することにより、プレビュー位置がタイヤ接地長分だけ変化するごとに、記憶位置が変化する。つまり、プレビュー位置がタイヤ接地長分だけ変化するごとに、そのプレビュー位置における制御情報が異なった記憶位置に記憶される。このことは、制御情報が記録される路面間隔がタイヤ接地長であることを表す。制御情報が記録される路面間隔がタイヤ接地長よりも短い場合、記憶領域の記憶容量が増大するという問題が発生する。また、タイヤ接地長よりも短い区間内での路面変化は、その変化をタイヤが乗り越えることにより無視される場合があるため、そのような微小区間内の路面変化を記憶しておく必要性に乏しい。一方、制御情報が記録される路面間隔がタイヤ接地長よりも長い場合、制御情報が不足するため乗り心地が悪化する。これらのことから、制御情報が記録される路面間隔をタイヤ接地長とすることで、記憶容量の増大を抑えることができるとともに、過不足無い最適な距離間隔で制御情報を記憶することができる。
【0032】
この場合、プレビューセンサによる距離の検出間隔、つまりサンプリング周期(サンプリング時間)は、車両が高速で走行している時でも、少なくとも車両がタイヤ接地長分だけ進むごとに距離を検出することができるように設定されているとよい。
【0033】
また、前記走行距離演算手段は、前記車両の走行距離が予め設定された最大プレビュー距離を越えない範囲内で繰り返し変動するように、前記車両の走行速度と前記最大プレビュー距離に基づいて前記車両の走行距離を演算するものであるのがよい。この場合、前記走行距離演算手段は、前記サンプリング時間ごとに前記車両の走行距離を演算するように構成され、且つ、前記サンプリング時間と車両の走行速度を乗じることにより前記サンプリング時間の間に車両が走行した単位走行距離を演算する単位走行距離演算手段と、前回演算された車両の走行距離である走行距離前回値に前記単位走行距離を加算して得られる走行距離今回値が前記最大プレビュー距離よりも大きいか否かを判断する走行距離判断手段と、前記走行距離判断手段により前記走行距離今回値が前記最大プレビュー距離以下であると判断された場合に前記走行距離今回値を前記車両の走行距離に設定し、前記走行距離判断手段により前記走行距離今回値が前記最大プレビュー距離よりも大きいと判断された場合に前記走行距離今回値から前記最大プレビュー距離を減算した値を前記車両の走行距離に設定する走行距離設定手段を更に備えるのがよい。
【0034】
これによれば、車両の走行距離が最大プレビュー距離を越えない範囲内で繰り返し変動するので、車両の走行距離とプレビュー距離とを加算した値に基づいて演算されるプレビュー位置も、上記最大プレビュー距離により表される長さの範囲内で繰り返し変動する。また、記憶位置演算手段は、プレビュー位置に基づいて記憶位置を演算するので、演算される記憶位置は、上記最大プレビュー距離に応じた範囲内で繰り返し変動する。このことは、プレビュー位置が最大プレビュー距離だけ変化するごとに、メモリの記憶場所が繰り返して用いられることを意味する。例えば、最大プレビュー距離が2.0mであり、実路面上でのプレビュー位置が0m〜2mであるときに記録位置0〜記録位置19により表される記憶場所に制御情報がそれぞれ記憶されたとすると、実路面上でのプレビュー位置が2m〜4mであるときにも、記録位置0〜記録位置19により表される記憶場所に制御情報がそれぞれ記憶される。このように最大プレビュー距離ごとに同一の記憶場所を繰り返し用いるように構成することにより、少ない記録容量で大量の制御情報を記録することができる。
【0035】
また、前記記憶位置演算手段は、前記プレビュー位置が前記最大プレビュー距離以下である場合には、前記プレビュー位置を前記タイヤ接地長で除算した値に基づいて前記記憶位置を演算し、前記プレビュー位置が前記最大プレビュー距離を越える場合には、前記プレビュー位置から前記最大プレビュー距離を減算した値を前記タイヤ接地長で除算した値に基づいて前記記憶位置を演算するものであるのがよい。同様に、前記読出位置演算手段は、前記プレビュー補償位置が前記最大プレビュー距離以下である場合には、前記プレビュー補償位置を前記タイヤ接地長で除算した値に基づいて前記読出位置を演算し、前記プレビュー補償位置が前記最大プレビュー距離を越える場合には、前記プレビュー補償位置から前記最大プレビュー距離を減算した値を前記タイヤ接地長で除算した値に基づいて前記読出位置を演算するものであるのがよい。
【0036】
また、本発明のアクチュエータの作動制御装置は、前記メモリに記録された前記制御情報のうち、既に走行した路面を表す記憶場所に記録された前記制御情報を消去する制御情報消去手段を更に備えるものであるのがよい。既に走行してしまった路面についての制御情報は、今後の制御に必要ない。よって、このような制御情報を消去することにより、空き状態となった記憶位置により表される記憶場所に新たな制御情報を記録させることができる。
【0037】
この場合、本発明のアクチュエータの作動制御装置は、前記制御情報消去手段により前記制御情報が消去された記憶場所を表す記憶位置に基づいて、前記プレビュー補償距離の上限値である最大プレビュー補償距離を演算する最大プレビュー補償距離演算手段と、前記プレビュー補償距離が前記最大プレビュー補償距離を越えた場合に、前記プレビュー補償距離を前記最大プレビュー補償距離に設定するプレビュー補償距離上限ガード手段と、を更に備えるのがよい。
【図面の簡単な説明】
【0038】
【図1】本実施形態に係るサスペンション装置のシステム構成の概略図である。
【図2】サスペンション本体の部分断面概略図である。
【図3】アクチュエータの内部構造を表す部分断面概略図である。
【図4】バネ上部材へのプレビューセンサの取り付け状態の一例を示す図である。
【図5】サスペンションECUおよび駆動回路による電気モータの制御構成を示すブロック図である。
【図6】サスペンションECUの内部構成を示すブロック図である。
【図7】CPUを機能構成ごとに表したブロック図である。
【図8】RAMの構成を示す図である。
【図9】バネ上部材がピッチ運動したときにプレビューセンサの高さや対地角度が変化する状態を示す図である。
【図10】バネ上部材がロール運動したときにプレビューセンサの高さが変化する状態を示す図である。
【図11】バネ上部材がヒーブ運動したときにプレビューセンサの高さが変化する状態を示す図である。
【図12】プレビューセンサの対地角度、センサ高さ、プレビューセンサにより検出される距離と、プレビュー位置における路面変位量との関係を示す図である。
【図13】対地角度とプレビューセンサにより検出される距離との関係を表す図である。
【図14】走行距離演算ルーチンの流れを示すフローチャートである。
【図15】データ記録ルーチンの流れを示すフローチャートである。
【図16】プレビュー補償距離演算ルーチンの流れを示すフローチャートである。
【図17】データ読出ルーチンの流れを示すフローチャートである。
【図18】プレビュー位置とデータ記憶位置との対応関係を表す図である。
【図19】最大プレビュー距離を、RAMの記憶領域上の仮想距離として表した図である。
【図20】RAMの記憶領域の概念図である。
【図21】RAMの記憶領域の各記憶位置に記録された路面変位量と、修正路面変位量とを、実際の路面変位と対比した図である。
【図22】本実施形態のプレビュー制御によりRAMの記憶領域に路面変位量のデータが記録されていく状態を、車両の走行状態とともに示した図である。
【図23】RAMの記憶領域に記録されている路面変位量の必要時間分解能を示すグラフである。
【図24】従来手法によるプレビュー制御により用いられるサンプリング時間や記憶されるデータの個数と、本実施形態によるプレビュー制御により記憶されるデータの個数とを対比した図である。
【図25】CPUを機能構成ごとに表したブロック図である。
【図26】CPUを機能構成ごとに表したブロック図である。
【図27】CPUを機能構成ごとに表したブロック図である。
【図28】路面形状演算ルーチンの別例である。
【図29】ピッチ運動によるプレビュー位置の変化量の違いを、対地角度が90°の場合と30°の場合とで比較した図である。
【図30】対地角度を車両側から見て鋭角に設定した場合における、プレビュー位置の時間変化を表すグラフである。
【発明を実施するための形態】
【0039】
以下、本発明の一実施形態に係るアクチュエータの作動制御装置を含むサスペンション装置について図面を用いて説明する。図1は、本実施形態に係るサスペンション装置のシステム構成の概略図である。
【0040】
このサスペンション装置は、4組のサスペンション本体10FR,10FL,10RR,10RLと、各サスペンション本体10FR,10FL,10RR,10RLの作動を制御するサスペンションECU50とを備える。4組のサスペンション本体10FR,10FL,10RR,10RLは、各車輪(右前輪WFR,左前輪WFL,右後輪WRR,左後輪WRL)に接続されたバネ下部材と車体B(バネ上部材)との間にそれぞれ設けられる。本明細書において、各サスペンション本体10FR,10FL,10RR,10RLが車体Bに取り付けられている位置を各輪位置(右前輪位置、左前輪位置、右後輪位置、左後輪位置)と呼ぶ。以下、4組のサスペンション本体10FR,10FL,10RR,10RLおよび車輪WFR,WFL,WRR,WRLについては、特に前後左右を区別する場合を除いて、単にサスペンション本体10および車輪Wと総称する。
【0041】
図2は、サスペンション本体10の概略図である。図2に示されるように、サスペンション本体10は、並列的に配置されたコイルスプリング20およびアクチュエータ30を備える。コイルスプリング20は、車輪Wに連結されるロアアームLAと車体Bとの間に設けられ、路面から受ける衝撃を吸収し乗り心地を高めるとともに車体Bを弾性的に支持する。コイルスプリング20の上部側、つまり車体B側の部材を「バネ上部材」と呼び、コイルスプリング20の下部側、つまり車輪W側の部材を「バネ下部材」と呼ぶ。したがって、コイルスプリング20およびアクチュエータ30は、車両のバネ上部材とバネ下部材との間に設けられていることになる。
【0042】
図3は、アクチュエータ30の内部構造を表す部分断面概略図である。図3に示されるように、アクチュエータ30は、駆動源である電気モータ31と、電気モータ31の回転運動を直線運動に変換するボールネジ機構35を有する。電気モータ31は、モータケーシング311と、中空状の回転軸312と、永久磁石313と、極体314とを備える。モータケーシング311は、上面、下面、および側周面を有する円筒形状に形成され、電気モータ31の外壁を構成する。回転軸312はモータケーシング311内に配設され、軸受331によりモータケーシング311に回転可能に支持される。この回転軸312の外周面に永久磁石313が固定される。回転軸312および永久磁石313により電気モータ31のロータが構成される。永久磁石313に対向するように極体314(コアにコイルが巻回されたもの)が、モータケーシング311の内周面に固定される。極体314により電気モータ31のステータが構成される。
【0043】
ボールネジ機構35は、ボールネジ36と、ボールネジ36に形成された雄ネジ部分37に螺合するボールネジナット38とを備える。ボールネジ36は、回り止め機構40により、その軸方向移動が許容されつつその回転が規制される。また、ボールネジナット38はその上端面にて回転軸312の下端に連結されているとともに、軸受け332により回転軸312と一体回転可能にモータケーシング311に支持される。したがって、ボールネジ36が軸方向に沿って直線運動した場合、その直線運動がボールネジナット38および回転軸312の回転運動に変換される。逆に、回転軸312が回転した場合、この回転駆動力がボールネジナット38に伝達され、さらにボールネジナット38の回転運動がボールネジ36の直線運動に変換される。
【0044】
図2に示されるように、ボールネジ36の下端はロアアームLAに接続される。ロアアームLAは車輪側に連結されたバネ下部材である。つまりボールネジ36はバネ下部材側に連結される。また、電気モータ31のモータケーシング311には取付ブラケット41が連結される。取付ブラケット41の上面には、車体Bに連結された弾性材料からなるアッパーサポート42が取り付けられる。このような連結構造からわかるように、電気モータ31や、電気モータ31のロータに連結されたボールネジナット38は、アッパーサポート42を介して車体B側、つまりバネ上部材側に連結される。
【0045】
アクチュエータ30は、ボールネジ36の軸方向移動により伸縮する。アクチュエータ30が伸縮することにより、バネ下部材を介してそのアクチュエータ30に連結した車輪が上下動する。また、アクチュエータ30の伸縮動作が制御されることにより、そのアクチュエータ30に連結されている車輪の上下動作が制御される。
【0046】
コイルスプリング20は、バネ下部材(ロアアームLA)に連結されるボールネジ36の外周面に設けられた環状のリテーナ43と、バネ上部材(車体B)に連結される取付ブラケット41との間に介装される。
【0047】
図1に示されるように、各バネ上加速度センサ61,車速センサ62,プレビューセンサ63R,63Lが車両に取り付けられている。バネ上加速度センサ61は、バネ上部材の各輪位置に配置されており、バネ上部材の各輪位置での上下方向に沿った加速度(各輪バネ上加速度)Gbを検出する。バネ上加速度センサ61は、例えば上方向に向かう加速度を正の加速度として検出し、下方向に向かう加速度を負の加速度として検出する。車速センサ62は車両の走行速度Vを検出する。
【0048】
プレビューセンサ63R,63Lは距離センサであり、センサの取付位置から測定対象物(本実施形態においては路面位置)までの距離を検出する。プレビューセンサ63Rはバネ上部材の右前端付近に取り付けられ、右前輪WFRや右後輪WRRが走行する予定の路面(走行予定路面)位置とセンサ63Rの取付位置までの距離を検出する。プレビューセンサ63Lはバネ上部材の左前端位置に取り付けられ、左前輪WFLや左後輪WRLの走行予定路面位置とセンサ63Lの取付位置までの距離を検出する。以降の説明において、プレビューセンサ63R、63Lを区別しない場合は、これらを総称してプレビューセンサ63と称する。また、プレビューセンサ63により検出される路面位置とセンサ取付位置との間の距離をセンサ距離、センサ距離が検出されたときにその距離の検出の対象とされた路面位置をプレビュー位置と称する。
【0049】
本実施形態において、プレビューセンサ63は、例えば、超音波を出射する送波器と、超音波を受信する受波器と、距離演算回路を備えるように構成することができる。距離演算回路は、送波器から出射された超音波がプレビュー位置にて反射して受波器に受信されるまでに要した時間に基づき、予め設定されたサンプリング時間Tsごとに、センサ距離を演算する。
【0050】
図4は、バネ上部材(車体)へのプレビューセンサ63の取付状態の一例を示す図である。図に示されるように、プレビューセンサ63は、車体B(バネ上部材)の前面に取り付けられる。また、プレビューセンサ63から出射される超音波の出射方向と路面とのなす角を表す対地角度θが、車両側から見て鋭角であるように、つまり、プレビューセンサ63から検出媒体が車両の斜め前方に出射するように、プレビューセンサ63が路面に対して傾けて取り付けられる。対地角度θは例えば30度に設定することができるが、この限りでない。プレビューセンサ63は図に示されるように、プレビュー位置とセンサ63の取付位置との間の距離であるセンサ距離z_ssrを検出する。
【0051】
図1に示されるように、各バネ上加速度センサ61、車速センサ62、プレビューセンサ63は、サスペンションECU50に電気的に接続される。また、サスペンションECU50は、各サスペンション本体10毎に設けられた駆動回路70に電気的に接続される。各サスペンション本体10の各アクチュエータ30の各電気モータ31は、各駆動回路70を介してサスペンションECU50により制御される。各駆動回路70は、車載バッテリなどの蓄電装置110に電気的に接続される。
【0052】
図5は、サスペンションECU50および駆動回路70による電気モータ31の制御構成を示すブロック図である。駆動回路70は3相インバータ回路を構成し、電気モータ31(本実施形態では3相ブラシレスモータが用いられる)の3相電磁コイルCL1,CL2,CL3にそれぞれ対応したスイッチング素子SW11,SW12,SW21,SW22,SW31,SW32を有する。これらのスイッチング素子は、サスペンションECU50からの制御信号に基づきデューティ制御される(PWM制御)。これによりバッテリから電気モータ31への通電量や電気モータ31からバッテリ側へ送られる回生電力の電流量が制御される。
【0053】
図6は、サスペンションECU50の内部構成を示すブロック図である。サスペンションECU50は、プレビューセンサ63により検出されたセンサ距離に基づいて、そのセンサ距離が検出された路面(走行予定路面)を走行する制御対象輪を上下動させるために車両に取り付けられているアクチュエータ30の作動を制御する。サスペンションECU50およびプレビューセンサ63が本発明のアクチュエータの作動制御装置に相当する。図に示されるように、サスペンションECU50は、入力インターフェース51と、CPU52と、ROM53と、RAM54と、出力インターフェース55と、双方向バス56とを備える。入力インターフェース51、CPU52、ROM53、RAM54、及び出力インターフェース55は、双方向バス56によって互いに接続されている。入力インターフェース51は各センサと電気的に接続され、各センサからの信号をCPU52に伝達し得るように構成される。CPU52は、アクチュエータ30の作動を制御するためのルーチン(プログラム)を実行するように構成される。ROM53には、CPU52が実行するルーチン(プログラム)、及びCPU52がルーチンを実行する際に参照されるテーブルやパラメータ等が予め格納される。RAM54は、CPU52がルーチンを実行する際に、必要に応じてデータを一時的に記憶し得るように構成される。RAM54が本発明のメモリに相当する。出力インターフェース55は、各アクチュエータ30の作動を制御するための制御信号を、各駆動回路70に出力する。
【0054】
図7は、CPU52を機能構成ごとに表したブロック図である。図に示されるように、CPU52は、状態量演算部521、位置変化量演算部(姿勢変化量取得手段)522、走行距離演算部(走行距離演算手段)523、プレビュー補償距離演算部(プレビュー補償距離演算手段)524、路面形状演算部(制御情報演算手段)525、プレビュー距離演算部(プレビュー距離演算手段)526、データ記録部527、データ読出部528、目標制御力演算部(制御量演算手段)529を備える。
【0055】
状態量演算部521は、CPU52内で実行される演算に必要な物理量、特に、バネ上部材の姿勢変化に関連する物理量を演算する。本実施形態においては、状態量演算部521は、バネ上部材の各輪位置における上下方向に沿った基準位置からの変位量を演算する。位置変化量演算部522は、バネ上部材の姿勢変化に伴うプレビューセンサ63の取り付け姿勢の変化量を演算する。走行距離演算部523は、予め設定した距離である最大プレビュー距離Lp_max内で変動する車両の走行距離Sを演算する。プレビュー補償距離演算部524は、アクチュエータ30の作動応答時間などの制御遅れを補償するために必要な時間であるプレビュー補償時間Tpを距離に換算した値であるプレビュー補償距離Lcを演算する。路面形状演算部525は、プレビュー位置における路面変位量(基準位置からの高さ変位量)x_roadを演算する。
【0056】
プレビュー距離演算部526は、プレビュー位置と制御対象輪が現在接地している路面位置との間の距離であるプレビュー距離Lpを演算する。ここで、制御対象輪とは、そのプレビューセンサ63により距離が検出される走行予定路面を走行する予定の車輪である。プレビューセンサ63Rに対応する制御対象輪は右前輪WFRおよび右後輪WRRであり、プレビューセンサ63Lに対応する制御対象輪は左前輪WFLおよび左後輪WRLである。本実施例は、前輪を制御対象輪とする例を示す。
【0057】
データ記録部527は、路面形状演算部525で演算された路面変位量x_roadをRAM54に記憶する位置(記憶位置i)を演算するとともに、演算した記憶位置iにより表される記憶場所に路面変位量x_roadを記録する。データ読出部528は、RAM54から読み出すべき路面変位量が記憶されている場所を表す記憶位置(読出位置n)を演算するとともに、演算した読出位置nにより表される記憶場所に記憶された路面変位量x_roadを補間することにより修正路面変位量x_road_cを演算する。目標制御力演算部529は、修正路面変位量x_road_cに基づいて、各サスペンション本体10のアクチュエータ30が出力すべき目標制御力Fを演算するとともに、演算した目標制御力Fに基づいた制御信号を出力する。
【0058】
図8は、RAM54の構成を示す図である。図に示されるように、RAM54は、複数の路面変位量を記憶するための記憶領域541を有する。この記憶領域541には、例えば番号0〜番号19により記憶位置(アドレス)が表される複数の記憶場所が設けられている。そして、路面形状演算部525により演算された路面変位量x_roadが、定められた記憶位置により表される記憶場所に記録される。
【0059】
このような構成において、サスペンションECU50が各アクチュエータ30の作動を制御する場合、まず、CPU52内の状態量演算部521が、各バネ上加速度センサ61から各輪位置におけるバネ上加速度(各輪バネ上加速度)Gb_iを入力し、これを2階積分することにより、バネ上部材の各輪位置における基準位置からの上下変位量を表す各輪バネ上変位量xb_iを演算する。ここで、各輪バネ上加速度を表す符号Gb_iおよび各輪バネ上変位量を表す符号xb_iの添え字iは、バネ上部材の各輪位置に対応する車輪を表す。したがって、添え字iは、右前輪fr、左前輪fl、右後輪rr、左後輪rlのいずれかである。つまり、状態量演算部521は、右前輪位置に設置されたバネ上加速度センサ61から検出される右前輪バネ上加速度Gb_frを2階積分することにより右後輪位置におけるバネ上変位量(右前輪バネ上変位量)xb_frを、左前輪位置に設置されたバネ上加速度センサ61から検出される左前輪バネ上加速度Gb_flを2階積分することにより左前輪位置におけるバネ上変位量(左前輪バネ上変位量)xb_flを、右後輪位置に設置されたバネ上加速度センサ61から検出される右後輪バネ上加速度Gb_rrを2階積分することにより右前輪位置におけるバネ上変位量(右後輪バネ上変位量)xb_rrを、左後輪位置に設置されたバネ上加速度センサ61から検出される左後輪バネ上加速度Gb_rlを2階積分することにより左後輪位置におけるバネ上変位量(左後輪バネ上変位量)xb_rlを、それぞれ演算する。
【0060】
なお、各バネ上変位量は、その他の方法により求めることもできる。例えば各バネ下部材の上下方向に沿った加速度を検出するバネ下加速度センサによる検出値と、各アクチュエータ30の伸縮量(ストローク変位量)を検出するストロークセンサによる検出値に基づいて各バネ上変位量を求めても良い。また、オブザーバ設計し、オブザーバゲインを求めることにより各バネ上変位量を推定してもよい。
【0061】
また、位置変化量演算部522は、センサ高さ変化量dH_ssrおよび対地角度変化量dθ_ssrを演算する。センサ高さ変化量dH_ssrは、基準高さH0に対する路面からプレビューセンサ63までの高さH_ssrの変化量(H_ssr−H0)である。対地角度変化量dθ_ssrは、基準対地角度θ0に対するプレビューセンサ63の対地角度θ_ssrの変化量(θ_ssr−θ0)である。
【0062】
例えば車両走行中にバネ上部材がピッチ運動、ロール運動、ヒーブ運動した場合、その運動に伴いバネ上部材の前方に取り付けられたプレビューセンサ63の路面からの高さやプレビューセンサ63の対地角度が変化する。
【0063】
図9は、バネ上部材がピッチ運動したときにプレビューセンサ63の高さや対地角度が変化する状態を示す図である。図において、車両が水平状態であるとき(ピッチ角度=0°のとき)に、プレビューセンサ63の対地角度は基準対地角度θ0である。車両が水平状態から角度θPだけピッチ運動した場合、ピッチ角度θPは、基準対地角度θ0と実際の対地角度θ_ssrとの差である(θP=θ0−θ_ssr)。よって、ピッチ角度θPが対地角度変化量dθ_ssrに相当する。
【0064】
図10は、バネ上部材がロール運動したときにプレビューセンサ63の高さが変化する状態を示す図である。また図11は、バネ上部材がヒーブ運動したときにプレビューセンサ63の高さが変化する状態を示す図である。図9乃至図11からわかるように、プレビューセンサ63の高さは、バネ上部材のピッチ運動、ロール運動およびヒーブ運動によって変化する。したがって、高さ変化量dH_ssrは下記(1)式のように表すことができる。
【数1】
(1)式において、dHP_ssrはピッチ運動によるセンサ高さの変化量、dHR_ssrはロール運動によるセンサ高さの変化量、dHH_ssrはヒーブ運動によるセンサ高さの変化量である。車両が標準状態(ピッチ運動、ロール運動およびヒーブ運動が発生していない状態)であるときにおけるプレビューセンサ63の高さを基準高さH0と定義した場合、車両が姿勢変化したときにおけるプレビューセンサ63の高さH_ssrは、基準高さH0に高さ変化量dH_ssrを加算することにより求められる。
【0065】
ピッチ運動によるセンサ高さの変化量dHP_ssrは例えば下記(2)式により求められる。
【数2】
上記(2)式において、Laは、車両を側方から見た場合におけるバネ上部材の重心位置Oからプレビューセンサ63が配置されている位置A(図9参照)までの距離、θPはピッチ角度、αは、車両を側方から見た場合における重心位置Oとプレビューセンサ63の配置位置Aとを通る線分OAとバネ上部材の重心位置Oを通り且つ車両前後方向に水平に伸びる線分OS1とのなす角である(図9参照)。
【0066】
ロール運動によるセンサ高さの変化量dHR_ssrは例えば下記(3)式により求められる。
【数3】
上記(3)式において、Lbは、車両を前後方向から見た場合におけるバネ上部材の重心位置Oからプレビューセンサ63が配置されている位置B(図10参照)までの距離、θRはロール角度、βは、車両を前後方向から見た場合における重心位置Oとプレビューセンサ63の配置位置Bとを通る線分OBとバネ上部材の重心位置Oを通り且つ車両左右方向に水平に伸びる線分OS2とのなす角である(図10参照)。
【0067】
ヒーブ運動によるセンサ高さの変化量dHH_ssrは例えば下記(4)式により求められる。
【数4】
上記(4)式において、Lはホイールベース、LFはバネ上部材の重心位置から前輪軸位置までの前後方向距離、LRはバネ上部材の重心位置から後輪軸位置までの前後方向距離、xb_Fは右前輪バネ上変位量xb_frまたは左前輪バネ上変位量xb_fl、xb_Rは右後輪バネ上変位量xb_rrまたは左後輪バネ上変位量xb_rlである。プレビューセンサ63Rについてヒーブ運動によるセンサ高さ位置変化量dHH_ssrを演算する場合は、右前輪バネ上変位量xb_frと右後輪バネ上変位量xb_rrをそれぞれxb_F,xb_Rに代入する。プレビューセンサ63Lついてヒーブ運動によるセンサ高さ位置変化量dHH_ssrを演算する場合は、左前輪バネ上変位量xb_flと左後輪バネ上変位量xb_rlをそれぞれxb_F,xb_Rに代入する。
【0068】
なお、ピッチ角度θPおよびロール角度θRは、各輪バネ上変位量xb_iを用いて例えば下記(5)式および(6)式のように表すことができる。
【数5】
【数6】
【0069】
上記(5)式において、プレビューセンサ63Rについてのピッチ角度θPを演算する場合は、右前輪バネ上変位量xb_frと右後輪バネ上変位量xb_rrをそれぞれxb_F,xb_Rに代入する。プレビューセンサ63Lついてのピッチ角度θPを演算する場合は、左前輪バネ上変位量xb_flと左後輪バネ上変位量xb_rlをそれぞれxb_F,xb_Rに代入する。また、上記(6)式において、Tは車両のトレッドである。
【0070】
走行距離演算部523は、車両の走行速度Vに基づいて、車両が現在までの間に走行した距離を表す車両の走行距離Sを演算する。具体的には、走行距離演算部523は、図14に示される走行距離演算ルーチンを、サンプリング時間Tsごとに繰り返し実行する。このルーチンが起動すると、まず走行距離演算部523は、図のステップ(以下、ステップ番号をSと略記する)100にて、予め設定されるサンプリング時間(周期)Tsと、車速センサ62により検出された車両の走行速度Vとを乗じることにより、サンプリング時間Tsあたりに車両が走行する単位走行距離dsを演算する(単位走行距離演算手段)。次いで、S102にて、前回演算された走行距離Sに単位走行距離dsを加算することにより、単位走行距離dsの累積距離として走行距離今回値S0を演算する。
【0071】
続いて、走行距離演算部523は、S104にて、走行距離今回値S0が最大プレビュー距離Lp_maxよりも大きいか否かを判定する(走行距離判断手段)。最大プレビュー距離Lp_maxは、プレビューセンサ63がセンサ距離z_ssrを検出したときに対象とされた路面の位置であるプレビュー位置と、その路面を走行する予定の前輪との間の距離であるプレビュー距離Lpの上限値であり、任意に設定することができる。最大プレビュー距離Lp_maxは、車両が平坦な路面を走行しているときに取得されるプレビュー距離Lpよりも大きいものであるのがよい。例えば最大プレビュー距離Lp_maxは、2.0mに設定される。
【0072】
走行距離今回値S0が最大プレビュー距離Lp_max以下である場合(S104:No)は、S108にて走行距離今回値S0をそのまま車両の走行距離Sに設定する(走行距離設定手段)。その後、このルーチンを終了する。一方、走行距離今回値S0が最大プレビュー距離Lp_maxよりも大きい場合(S104:Yes)は、S106にて走行距離今回値S0から最大プレビュー距離Lp_maxを減算した値を車両の走行距離Sに設定する(走行距離設定手段)。その後、このルーチンを終了する。このような走行距離演算ルーチンの実行により演算される車両の走行距離Sは、0から車両が走行するにつれて増加する。そして、最大プレビュー距離Lp_maxを越えたときに再び0に戻り、その後車両が走行するにつれて再び増加する。すなわち車両の走行距離Sは、最大プレビュー距離Lp_maxを越えない範囲内で繰り返し増加する。
【0073】
路面形状演算部525は、プレビューセンサ63により検出されたセンサ距離z_ssrおよび、位置変化量演算部522により演算されたセンサ高さ変化量dH_ssrおよび対地角度変化量dθ_ssrを入力する。そして、入力値に基づいて、センサ距離z_ssrが検出されたときにその検出の対象とされた路面位置であるプレビュー位置における路面変位量x_roadを演算する。路面変位量x_roadは、走行路面の基準位置からの上下変位量である。本実施形態においては、例えば車両が走行時に良好な乗り心地を確保できるように、各車輪が走行する路面の変位量に応じてその車輪に連結されたサスペンション本体10のアクチュエータ30の作動が制御される。したがって、この路面変位量は、その路面変位量を持つプレビュー位置を制御対象輪が走行するときにその制御対象輪に連結され制御対象輪の動作を制御するアクチュエータ30の作動を制御するために必要な情報である。路面変位量x_roadが本発明の制御情報に相当する。
【0074】
図12は、プレビューセンサ63の対地角度θ_ssr、センサ高さH_ssr、センサ距離z_ssrと、センサ距離z_ssrが検出されたプレビュー位置における路面変位量x_roadの関係を示す図である。図からわかるように、これらの間に下記の(7)式が成立する。
【数7】
【0075】
上記(7)式中の対地角度θ_ssrは基準対地角度θ0とピッチ角度θP(=dθ_ssr)により、センサ高さH_ssrは基準高さH0と高さ変化量dH_ssrにより表される。よって、路面変位量x_roadは、下記(8)式のように表すことができる。
【数8】
路面形状演算部525は、上記(8)式に基づいて、路面変位量x_roadを演算する。
【0076】
プレビュー距離演算部526は、センサ距離z_ssrと、位置変化量演算部522にて演算されたセンサ高さ変化量dH_ssrおよび/または対地角度変化量dθ_ssrとを入力し、これらの入力値に基づいて、センサ距離z_ssrが検出されたときに検出の対象とされたプレビュー位置と制御対象輪(例えば前輪)が現在接地している路面位置との間のプレビュー距離Lpを演算する。
【0077】
図13は、対地角度θ_ssrとセンサ距離z_ssrとの関係を表す図である。図からわかるように、プレビュー距離Lpは、センサ距離z_ssrが検出されたときに検出の対象とされたプレビュー位置R1と、プレビューセンサ63の取付位置から鉛直下方に伸びた垂線と路面との交点R2との間の距離L_ssrと、上記交点R2と制御対象輪(前輪)の接地点R3との間の距離Dとの和により表される。また、距離L_ssrは、下記(9)式により表される。
【数9】
したがって、プレビュー距離Lpは、下記(10)式のように表される。
【数10】
プレビュー距離演算部526は、上記(10)式に基づいて、プレビュー距離Lpを演算する。
【0078】
なお、(10)式からわかるように、プレビュー距離Lpの計算にセンサ高さ変化量dH_ssrは用いられておらず、センサ距離z_ssrと対地角度変化量dθ_ssrに基づいてプレビュー距離Lpが計算されている。一方、センサ距離z_ssrとセンサ高さ変化量dH_ssrに基づいてプレビュー距離Lpを計算することもできる。この場合、プレビュー距離Lpは、下記(11)式のように表される。
【数11】
【0079】
データ記録部527は、図15に示されるデータ記録ルーチンを繰り返し実行する。データ記録ルーチンが起動すると、データ記録部527は、まず図15のS200にて、車両の走行距離Sとプレビュー距離Lpとを加算することによりプレビュー位置Dpを演算する。車両の走行距離Sは上述のように0〜Lp_maxの範囲内で繰り返し変動するので、プレビュー位置Dpは、Lp〜Lp+Lp_maxの範囲内(最大プレビュー距離Lp_maxにより表される長さの範囲内)で繰り返し変動する。このS200の処理が、本発明のプレビュー位置演算手段に相当する。
【0080】
次いで、データ記録部527は、プレビュー位置Dpが最大プレビュー距離Lp_maxよりも大きいか否かを判定する(S202)。プレビュー位置Dpが最大プレビュー距離Lp_max以下である場合(S202:No)は、プレビュー位置Dpを予め定められたタイヤ接地長L_tireで除算し、除算結果の小数点以下を切り捨てることにより、データ記憶位置iを演算する(S206)。一方、プレビュー位置Dpが最大プレビュー距離Lp_maxよりも大きい場合(S202:Yes)は、プレビュー位置Dpから最大プレビュー距離Lp_maxを減算した値をタイヤ接地長L_tireで除算し、除算結果の小数点以下を切り捨てることにより、データ記憶位置iを演算する(S204)。ここで、タイヤ接地長L_tireとは、そのプレビュー位置を走行する車輪のタイヤ部分が路面に接触している部分の車両進行方向に沿った長さであり、予め実験などにより測定される。タイヤ接地長L_tireは、例えば0.1m程度に設定される。
【0081】
S202からS206の処理により、プレビュー位置Dpに基づいて記憶位置iが求められる。この記憶位置iは、その記憶位置iを演算する際に用いたプレビュー位置Dpにおける路面変位量x_roadがRAM54の記憶領域541に記憶される場所を表すアドレスである。例えばS=0.2m,Lp=1.4m,Lp_max=2.0m,L_tire=0.1mである場合、S200におけるプレビュー位置Dpの演算結果は1.6mであり、この演算結果を受けたS202の判定結果はNoであり、この判定結果を受けて、S206にて記憶位置iが演算される。この場合、記憶位置i=16という演算結果が導かれる。また、例えばS=1.1m,Lp=1.4m,Lp_max=2.0m,L_tire=0.1mである場合、S200におけるプレビュー位置Dpの演算結果は2.5mであり、この演算結果を受けたS202の判定結果はYesであり、この判定結果を受けて、S204にて記憶位置iが演算される。この場合、Dp(=2.5m)からLp_max(=2.0m)を減算した値(=0.5m)をL_tire(=0.1m)で除算することにより、記憶位置i=5という演算結果が導かれる。
【0082】
図18は、プレビュー位置Dpと記憶位置iとの対応関係を表す図である。この図によれば、プレビュー位置Dpがプレビュー距離Lpから最大プレビュー距離Lp_maxまでの範囲内の大きさであるときには、そのプレビュー位置Dpに対応した大きさを表す記憶位置iが演算される。一方、プレビュー位置Dpが最大プレビュー距離Lp_maxから最大プレビュー距離Lp_maxにプレビュー距離Lpを加算した値までの範囲内の大きさであるときには、その範囲を0からプレビュー距離Lpまでの範囲にシフトし、シフト後の値に対応した大きさを表す記憶位置iが演算される。このため記憶位置iは、0からLp_max/L_tireの整数値までの範囲内でプレビュー位置Dpの増加に応じて増加し、プレビュー位置が最大プレビュー距離Lp_maxを越えたときに記憶位置iが0に戻る。そして、そこから再度プレビュー位置Dpの増加に応じて記憶位置iが増加する。つまり、記憶位置iの最小値は0、最大値はほぼLp_max/L_tireであり、記憶位置iはこれらの範囲内で、プレビュー位置Dpに応じて繰り返し変動(増加)する。
【0083】
このように、記憶位置iがプレビュー位置Dpに基づいて演算されるため、演算された記憶位置iとプレビュー位置Dpとの間に一定の関係性が生じる。よって、後述するようにこの関係性に基づいて正しい順序で路面変位量x_roadを読み出すことができる。また、路面変位量x_roadを記憶する記憶場所の個数は、記憶位置iの最大値を表す個数であれば足りる。具体的に言えば、本実施形態においては、路面変位量x_roadの記憶場所の個数は、Lp_max/L_tireの整数値である。S202〜S206の処理が、本発明の記憶位置演算手段に相当する。
【0084】
S204またはS206にて記憶位置iを演算した後は、データ記録部527は、S208にて、車両の走行距離Sをタイヤ接地長L_tireで除算し小数点以下を切り捨てることにより、現在地記憶位置jを演算する。この現在地記憶位置jは、車両が現在走行している路面位置の路面変位量がRAM54の記憶領域541に記憶されている場所を表す。
【0085】
その後、S210にて、現在地記憶位置jが前回記憶位置tmpjに等しいか否かを判定する。前回記憶位置tmpjは、このルーチンを前回実行したときに現在地記憶位置jであった記憶位置である。つまり、S210では、このルーチンを前回実行したときに現在地記憶位置であった記憶場所と今回実行しているときに現在地記憶位置である記憶場所とが等しいか否かを判定する。現在地記憶位置jと前回記憶位置tmpjが等しくない場合(S210:No)はS212に進み、前回記憶位置tmpjに記憶されている路面変位量のデータtmp_x_road[tmpj]を消去する。つまり、前回このルーチンを実行したときに現在地記憶位置に記憶されている路面変位量のデータが、今回このルーチンを実行しているときに既に過去のデータであるときは、その過去のデータは今後の制御に必要ない。よって、そのデータを消去して、その記憶場所を空の状態にする。S210およびS212の処理が、制御情報消去手段に相当する。
【0086】
一方、現在地記憶位置jが前回記憶位置tmpjと等しい場合(S210:Yes)は、S212の処理を飛ばしてS214に進む。そして、S214にて、記憶位置iに記憶されているデータtmp_x_road[i]が消去されているか、つまり記憶位置iが空の状態であるか否かを判定する。記憶位置iが空の状態である場合(S214:Yes)はS216に進み、記憶位置iにより表される記憶場所に、路面形状演算部525にて演算されたプレビュー位置Dpにおける路面変位量x_roadを記録データtmp_x_road[i]として記録する。
【0087】
一方、記憶位置iが空の状態ではない場合(S214:No)はS218に進む。S214の判定結果がNoである状況、つまり、既に記憶位置iにデータが記録されている状況は、車両のピッチ運動などによりプレビュー位置が一旦後退したか、サンプリング時間が短いか、もしくは車両の走行速度Vが小さいために、前回このルーチンを実行した時と今回このルーチンを実行している時との間に車両が走行した距離がタイヤ接地長L_tire以下である場合に生じ得る。この場合、前回このルーチンを実行した時に記憶位置iに記録された路面変位量も今回このルーチンを実行しているときに記録すべき路面変位量も有効に用いるべきである。したがって、データ記録部527は、S218にて、既に記録されているデータtmp_x_road[i]と今回演算された路面変位量x_roadとの平均値((tmp_x_road[i]+x_road)/2))を、記録データtmp_x_road[i]として、記憶位置iにより表される記憶場所に記録する。S214〜S218の処理が、本発明の制御情報記録手段に相当する。
【0088】
その後、データ記録部527はS220に進み、現在地記憶位置jを前回記憶位置tmpjに代入し、このルーチンを一旦終了する。上記からわかるように、データ記録部527は、プレビュー位置Dpをタイヤ接地長L_tireで除算した値に基づいて、そのプレビュー位置Dpにおける路面変位量x_roadについての記憶位置iを演算し、こうして演算した記憶位置iにより表される記憶場所に路面変位量x_roadを記録していく。このためRAM54の記憶領域541には、プレビュー位置Dpがタイヤ接地長L_tireだけ進むごとに、路面変位量x_roadが記録される。
【0089】
プレビュー補償距離演算部524は、図16に示されるプレビュー補償距離演算ルーチンを繰り返し実行する。プレビュー補償距離演算ルーチンが起動すると、プレビュー補償距離演算部524は、まずS300にて、車両の走行速度Vにプレビュー補償時間Tpを乗じることにより、プレビュー補償距離Lcを演算する。プレビュー補償時間Tpとは、アクチュエータ30の作動時間や通信時間、内部フィルタによる遅れ分を補償するための制御遅れ時間として予め設定される時間である。したがって、プレビュー補償距離Lcは、制御遅れ時間(プレビュー補償時間Tp)の間に車両が走行する距離を表す。
【0090】
次いで、プレビュー補償距離演算部524は、車両の走行距離Sをタイヤ接地長L_tireで除算して小数点以下を切り捨てることにより現在地記憶位置jを演算する(S302)。続いて、変数cを0に、最大プレビュー補償距離Lc_maxを最大プレビュー距離Lp_maxに、それぞれ設定する(S304)。
【0091】
その後、プレビュー補償距離演算部524は、RAM54の記憶領域541のデータ記憶位置cにより表される記憶場所に記録されている路面変位量のデータtmp_x_road[c]が消去されているか否か、つまり記憶位置cが空き状態であるか否かを判定する(S306)。記憶位置cが空き状態ではない場合(S306:No)は、変数cをインクリメントし(S314)、インクリメント後の変数cが最大プレビュー距離Lp_maxをタイヤ接地長L_tireで除算して小数点以下を切り捨てた値、つまり記憶位置の最大値よりも大きいか否かを判定する(S316)。変数cが記憶位置の最大値以下である場合(S316:No)はS306に戻る。一方、変数cが記憶位置の最大値を超えている場合(S316:Yes)はS318に進む。
【0092】
また、S306の判定にて、記憶位置cが空き状態であると判定された場合(S306:Yes)はS308に進む。S306の判定結果がYesであるときの変数cは、空き状態とされた記憶場所を表す記憶位置のうち最も小さい記憶位置を示す。S308では、プレビュー補償距離演算部524は、変数cが現在地記憶位置jよりも大きいか否かを判定する(S308)。変数cが現在地記憶位置jよりも大きい場合(S308:Yes)は、変数cと現在地記憶位置jとの差分(c−j)にタイヤ接地長L_tireを乗じることにより、最大プレビュー補償距離Lc_maxを演算する(S310)。一方、変数cが現在地記憶位置j以下である場合(S308:No)は、最大プレビュー距離Lp_maxから、現在地記憶位置jと変数cとの差分(j−c)にタイヤ接地長L_tireを乗じた値を減算することにより、最大プレビュー補償距離Lc_maxを演算する。
【0093】
図19は、上記のように演算された最大プレビュー補償距離Lc_maxを、RAM54の記憶領域541上の仮想距離として表した図である。図において、記憶領域541内のそれぞれの記憶場所が一つの升目により表示される。各升目上の数字はその記憶場所を表す記憶位置である。また、記憶場所に路面変位量のデータが記録されている場合はその記憶場所を表す升目に斜線が引かれている。記憶場所が空き状態であるときは斜線が引かれていない。図中、現在地記憶位置がjにより表され、空き状態の記憶場所を表す記憶位置のうち最も小さい記憶位置がcにより表される。このcは、プレビュー補償距離演算ルーチンのS306の判定結果がYesであるときに判定に用いられた変数cと同じ値である。
【0094】
図19(a)は、S308の判定結果がYes(c>j)であるときに、S310にて演算された最大プレビュー補償距離Lc_maxを記憶領域541上の仮想距離として示した例である。図からわかるように、路面変位量のデータが記録されている領域は記憶位置0〜記憶位置14により表される連続した領域である。記憶位置15〜記憶位置19までの領域にはデータが記録されていない。また、記憶位置0が現在地記憶位置jに該当するので、記憶領域541には、現在地記憶位置j(記憶位置0)から連続した15個(c−j個)の記憶場所にデータが記録されていることになる。各記憶場所にはプレビュー位置Dpがタイヤ接地長L_tireだけ進むごとにデータが記録されるので、各記憶場所の長さをタイヤ接地長L_tireで表すことにより、記憶領域541には、車両の現在地から、タイヤ接地長L_tireの(c−j)倍の長さにより表される距離だけ前方の路面における路面変位量のデータまで記憶されていることがわかる。逆に言えば、それ以上先の路面変位量のデータは記憶領域541に記憶されていない。したがって、制御情報(路面変位量)を記憶量の面から見て補償できる最大距離である最大プレビュー補償距離Lc_maxが、S310に示されるように、(c−j)とタイヤ接地長L_tireとの積により表されるのである。
【0095】
図19(b)は、S308の判定結果がNo(c<j)であるときに、S312にて演算された最大プレビュー補償距離Lc_maxを記憶領域541上の仮想距離として示した例である。図からわかるように、路面変位量のデータが記録されている領域は、記憶位置0〜記憶位置4により表される連続した領域と、記憶位置9〜記憶位置19により表される連続した領域とに分断されている。記憶位置5〜記憶位置8までの領域にはデータが記録されていない。記憶位置19にデータが記録された後は記憶位置0にデータが記録されるため、記憶領域541には、現在地記憶位置j(記憶位置9)から記憶位置4までの連続した16個の記憶場所にデータが記録されていることがわかる。したがって、記憶領域541には、車両の現在値から、タイヤ接地長L_tireの16倍の長さにより表される距離だけ前方の路面における路面変位量のデータまで記憶されていることがわかる。この倍率(16倍)は、記憶場所の総個数(=Lp_max/L_tire)から(j−c)個を差し引くことにより求められる。したがって、最大プレビュー補償距離Lc_maxが、S312に示されるように、最大プレビュー距離Lp_maxからタイヤ接地長L_tireと(j−c)との積を差し引いた値により表されるのである。なお、S316の判定結果がYesである場合は、記憶領域541に記録された路面変位量のデータのうち消去されたデータが存在しない場合、つまり空き状態の記憶場所がない場合であるので、最大プレビュー補償距離Lc_maxは最大プレビュー距離Lp_maxに設定される。S306〜S316の処理が、最大プレビュー補償距離演算手段に相当する。
【0096】
S306〜S316にて最大プレビュー補償距離Lc_maxを設定した後は、プレビュー補償距離演算部524は、S318にて、プレビュー補償距離Lcが最大プレビュー補償距離Lc_maxよりも大きいか否かを判定する。プレビュー補償距離Lcが最大プレビュー補償距離Lc_maxよりも大きい場合(S318:Yes)は、プレビュー補償距離Lcを最大プレビュー補償距離Lc_maxに設定する(S320)。これによりプレビュー補償距離Lcが上限規制(上限ガード)される。S320の処理が、プレビュー補償距離上限ガード手段に相当する。その後、このルーチンを終了する。一方、プレビュー補償距離Lcが最大プレビュー補償距離Lc_max以下である場合(S318:No)は、プレビュー補償距離に上限規制する必要がないためS320の処理を飛ばし、このルーチンを終了する。
【0097】
データ読出部528は、図17に示されるデータ読出ルーチンを繰り返し実行する。データ読出ルーチンが起動すると、データ読出部528は、まず、S400にて、車両の走行距離Sとプレビュー補償距離Lcとを加算することにより、プレビュー補償位置Dcを演算する。このプレビュー補償位置Dcは、プレビュー補償時間Tpの経過時に車両が走行する路面の位置を表す。S400の処理が、本発明のプレビュー補償位置演算手段に相当する。
【0098】
次いで、データ読出部528は、プレビュー補償位置Dcが最大プレビュー距離Lp_maxよりも大きいか否かを判定する(S402)。プレビュー補償位置Dcが最大プレビュー距離Lp_max以下である場合(S402:No)は、プレビュー補償位置Dcをタイヤ接地長L_tireで除算し小数点以下を切り捨てることにより、読出位置nを演算する(S404)。一方、プレビュー補償位置Dcが最大プレビュー距離Lp_maxよりも大きい場合(S402:Yes)は、プレビュー補償位置Dcから最大プレビュー距離Lp_maxを減算した値をタイヤ接地長L_tireで除算し小数点以下を切り捨てることにより、読出位置nを演算する(S406)。S404またはS406で演算された読出位置nは、RAM54の記憶領域541に記録されている路面変位量のうち、プレビュー補償時間Tp(制御遅れ時間)経過後に車両が走行する位置、すなわちプレビュー補償位置Dcに相当するプレビュー位置における路面変位量が記憶されている場所を表す。S404およびS406の処理が、本発明の読出位置演算手段に相当する。また、プレビュー補償位置Dcは車両のピッチ運動などに影響されないので、このような運動が発生した場合であっても、プレビュー補償位置Dcは、プレビュー最大距離Lp_maxにより表される長さの範囲内で繰り返し増加する。よって、このようなプレビュー補償位置Dcに基づいて演算される読出位置も、0から記憶位置の最大値の範囲内で増加を繰り返す。
【0099】
次いで、データ読出部528は、演算した読出位置nにタイヤ接地長L_tireを乗じた値にタイヤ接地長L_tireの1/2の値を加算することにより、プレビュー補償位置閾値tmpDcを演算する(S408)。ここで、プレビュー補償位置閾値tmpDcについて説明する。図20は、プレビュー補償位置閾値tmpDcを、RAM54の記憶領域541上の仮想距離として表した図である。読出位置nはプレビュー補償位置Dcをタイヤ接地長L_tireで除算した値の整数値であるので、プレビュー補償位置Dcは、記憶位置(n−1)にタイヤ接地長L_tireを乗じた値と、読出位置nにタイヤ接地長L_tireを乗じた値との間の値であると推定される。プレビュー補償位置閾値tmpDc(=n*L_tire+L_tire/2)は、上記のように推定されたプレビュー補償位置Dcの中央値である。
【0100】
プレビュー補償位置Dcがプレビュー補償位置閾値tmpDcよりも小さい場合は、真のプレビュー補償位置Dcが、読出位置nにより表される記憶場所に記録された路面変位量を持つプレビュー位置と、記憶位置(n−1)により表される記憶場所に記録された路面変位量を持つプレビュー位置との間の位置である可能性が高い。したがって、読出位置nにより表される記憶場所に記録されている路面変位量と記憶位置(n−1)により表される記憶場所に記録されている路面変位量とを用いて、真のプレビュー補償位置Dcにおけるより正しい路面変位量を演算することができる。
【0101】
また、プレビュー補償位置Dcがプレビュー補償位置閾値tmpDcよりも大きい場合は、真のプレビュー補償位置Dcが、読出位置nにより表される記憶場所に記録された路面変位量を持つプレビュー位置と、記憶位置(n+1)により表される記憶場所に記録された路面変位量を持つプレビュー位置との間の位置である可能性が高い。したがって、読出位置nにより表される記憶場所に記録されている路面変位量と記憶位置(n+1)により表される記憶場所に記録されている路面変位量とを用いて、真のプレビュー補償位置Dcにおけるより正しい路面変位が演算することができる。
【0102】
以上のことを踏まえ、本実施形態においては、S410にて、プレビュー補償位置Dcがプレビュー補償位置閾値tmpDcよりも小さいか否かを判定する。プレビュー補償位置Dcがプレビュー補償位置閾値tmpDcよりも小さい場合(S410:Yes)は、S412にて、読出位置nにより表される記憶場所に記録された路面変位量のデータtmp_x_road[n]と記憶位置(n−1)により表される記憶場所に記録された路面変位量のデータtmp_x_road[n-1]とを用いて、プレビュー補償位置Dcにおける路面変位量を演算する。具体的には、下記(12)式に示されるように、tmp_x_road[n]とtmp_x_road[n-1]とにより線形補間された修正路面変位量x_road_cを演算する。
【数12】
【0103】
一方、プレビュー補償位置Dcがプレビュー補償位置閾値tmpDcよりも大きい場合(S410:No)は、S414にて、読出位置nにより表される記憶場所に記録された路面変位量のデータtmp_x_road[n]と記録位置(n+1)により表される記憶場所に記録された路面変位量のデータtmp_x_road[n+1]とを用いて、プレビュー補償位置Dcにおける路面変位量を演算する。具体的には、下記(13)式に示されるように、tmp_x_road[n]とtmp_x_road[n+1]とにより線形補間された修正路面変位量x_road_cを演算する。
【数13】
【0104】
図21は、記憶領域541の各記憶場所に記録された路面変位量x_roadと、S412またはS414により演算された修正路面変位量x_road_cと、実際の路面変位とを対比した図である。図において、修正路面変位量x_road_cが太線により、記憶領域541に記録された路面変位量x_roadが細線により、実際の路面変位が点線により表されている。また、図中の番号は、記憶領域541に記録された路面変位量の記憶位置を表す。図からわかるように、各記憶場所に記録された路面変位量x_roadは段階的に変化しているのに対し、修正路面変位量x_road_cは、隣接する記憶場所に記録された路面変位量x_roadにより内挿補間されることにより滑らかに変化する。また、記憶位置6により表される部分に対応する実路面には窪みが形成されている。しかし、この窪みの大きさはタイヤ接地長L_tire未満であり、車輪がこの窪みを乗り越えるので、車輪はこの窪みの影響を受けない。
【0105】
上記のようにして修正路面変位量x_road_cを演算した後は、データ読出部528はこのルーチンを一旦終了する。
【0106】
目標制御力演算部529は、データ読出部528にて演算された修正路面変位量x_road_cを入力する。そして、入力した修正路面変位量x_road_cに所定のゲインを乗じることにより、アクチュエータ30が出力すべき目標制御力Fを演算する。上記所定のゲインの値は、例えば車両がその修正路面変位量x_road_cを乗り越えるときに路面入力のバネ上伝達率が小さくなるように、予め計算された値である。そして、演算した目標制御力F、あるいは目標制御力Fとアクチュエータ30が出力している制御力との偏差に応じたデューティ比で駆動回路70のスイッチング素子が開閉するように、各スイッチング素子に制御信号を出力する。これにより各スイッチング素子が指定されたデューティ比に従って開閉し、係るデューティ制御によりアクチュエータ30の作動が制御される。こうして制御されるアクチュエータ30の作動は、プレビュー補償時間Tp経過後に完了する。作動完了時に丁度車両の制御対象輪(例えば前輪)が、修正路面変位量x_road_cに対応したプレビュー位置Dpを通る。このようにして最適なタイミングでプレビュー制御が行われる。
【0107】
図22(a)〜図22(h)は、上記説明したプレビュー制御によりRAM54の記憶領域541に路面変位量のデータが記録されていく状態を、車両の走行状態とともに示した図である。図において、記憶領域541は20個のデータを記憶する記憶場所を備えている。各記憶場所を表す記憶位置は、右から順に大きくなる。つまり、右端の記憶場所を表す記憶位置が最も小さい記憶位置(i=0)であり、記憶領域541の左端の記憶場所を表す記憶位置が最も大きい記憶位置(i=19)である。最大プレビュー距離Lp_maxは2.0m、タイヤ接地長L_tireは0.1mである。
【0108】
図22(a)は、走行距離Sが0mであるときの、路面変位量の記録状態を示す。このときプレビュー距離Lpと走行距離Sとを加算して得られるプレビュー位置Dpが1.65mである。このプレビュー位置における路面変位量が、記憶領域541のうち記憶位置16により表される記憶場所に記録される。
【0109】
図22(b)は、車両の走行距離Sが0.25mであるときの、路面変位量の記録状態を示す。図からわかるように、この時点で車両の前輪が凹所に嵌り込んでいるため前方が沈み込むようなピッチ運動が発生している。したがって、センサ高さおよび対地角度が大きく変化し、その結果プレビュー位置Dpが1.55mに後退する。このプレビュー位置における路面変位量が、記憶領域541のうち記憶位置15により表される記憶場所に記録される。また、既に走行した位置を表す記憶位置(記憶位置0および記憶位置1)に路面変位量が記憶されている場合には、それらの路面変位量は消去される。図中、符合cにより表される記憶場所は、路面変位量が消去された記憶場所である。
【0110】
図22(c)は、車両の走行距離Sが0.45mであるときの、路面変位量の記録状態を示す。このときプレビュー位置Dpは1.95mである。このプレビュー位置における路面変位が、記憶位置19により表される記憶場所に記録される。また、図22(b)に示される状態のときにプレビュー位置Dpが一旦後退しているので、図22(b)から図22(c)まで車両が進行する間に、プレビュー位置Dpが1.65m付近である位置における路面変位量が再度演算されることもある。この場合は、再度演算された路面変位量と、既に記憶位置16により表される記憶場所に記録されている路面変位量の平均値が演算され、演算された平均値が記憶位置16により表される記憶場所に記録される。
【0111】
図22(d)は、車両の走行距離Sが0.65mであるときの、路面変位量の記録状態を示す。このときプレビュー距離Lpと走行距離Sとを加算した値が2.1mとなって最大プレビュー距離Lp_maxを越える。したがって、上記加算値(2.1m)から最大プレビュー距離Lp_max(2.0m)を減算した値(0.1m)がプレビュー位置Dpとして演算される。このプレビュー位置における路面変位が、記憶位置1により表される記憶場所に記録される。
【0112】
図22(e)は、車両の走行距離Sが1.3mであるときの、路面変位量の記録状態を示す。このときプレビュー距離Lpと走行距離Sとを加算した値が2.65mとなって最大プレビュー距離Lp_maxを越える。したがって、上記加算値(2.65m)から最大プレビュー距離Lp_max(2.0m)を減算した値(0.65m)がプレビュー位置Dpとして演算される。このプレビュー位置における路面変位が、記憶位置6により表される記憶場所に記録される。
【0113】
図22(f)は、車両の走行距離Sが1.95mであるときの、路面変位量の記録状態を示す。このときプレビュー距離Lpと走行距離Sとを加算した値は3.05(m)であり、最大プレビュー距離Lp_maxを越える。よって、上記加算値(3.05m)から最大プレビュー距離Lp_max(=2.0m)を減算した値(1.05m)がプレビュー位置Dpとして演算される。このプレビュー位置における路面変位量が、記憶位置10により表される記憶場所に記録される。また、図からわかるように記憶領域541には、記憶位置0〜記憶位置10までの連続した記憶領域および記憶位置19に路面変位量が記録されており、記憶位置11〜記憶位置18までの連続した記憶領域には路面変位量が記録されていない。記憶位置19が車両の現在地を表す記憶位置であるので、この記憶位置19から連続して路面変位量が記憶されている記憶場所の個数(12個)にタイヤ接地長L_tire(0.1m)を乗じた距離(1.2m)が最大プレビュー補償距離Lc_maxとして設定される。よって、演算されたプレビュー補償距離Lcが1.2mを越えている場合は、プレビュー補償距離Lcが1.2mに規制される。
【0114】
図22(g)は、車両の走行距離Sが2.15mであるときの、路面変位量の記録状態を示す。図からわかるようにこの状況において、走行距離S(2.15m)が最大プレビュー距離Lp_maxを越えているため、この走行距離Sから最大プレビュー距離Lp_max(2.0m)を減算した値(0.15m)が走行距離Sとして設定される。また、プレビュー位置Dpは1.75mである。よって、このプレビュー位置における路面変位量が記憶位置17により表される記憶場所に記憶される。また、記憶位置1〜記憶位置17までの連続した記憶領域にデータが記録されており、記憶位置18,19,0にはデータが記録されていない。記憶位置1が車両の現在地を表す記憶位置であるので、この記憶位置1から連続して路面変位量が記録されている記憶場所の個数(17個)にタイヤ接地長L_tire(0.1m)を乗じた距離(1.7m)が最大プレビュー補償距離Lc_maxとして設定される。よって、演算されたプレビュー補償距離Lcが1.7mを越えている場合に、プレビュー補償距離Lcが1.7mに規制される。
【0115】
図22(h)は、車両の走行距離Sが0.95(m)であるときの、路面変位量の記録状態を示す。このときプレビュー距離Lpと走行距離Sとを加算した値が2.75mとなって最大プレビュー距離Lp_maxを越える。したがって、上記加算値から最大プレビュー距離Lp_maxを減算した値(0.75m)がプレビュー位置Dpとして演算される。このプレビュー位置における路面変位量が記憶位置7により表される記憶場所に記録される。また、図からわかるように記憶領域541には、記憶位置0〜記憶位置7までの連続した記憶領域および記憶位置9〜記憶位置19までの連続した記憶領域に路面変位が記録されており、記憶位置8には路面変位量は記録されていない。記憶位置9が車両の現在地を表す記憶位置であるので、この記憶位置9から連続して路面変位量が記憶されている記憶場所の個数(19個)にタイヤ接地長L_tire(0.1m)を乗じた距離(1.9m)が最大プレビュー補償距離Lc_maxとして設定される。よって、演算されたプレビュー補償距離Lcが1.9mを越えている場合に、プレビュー補償距離Lcが1.9mに規制される。
【0116】
なお、図22には読出位置を示していないが、読出位置は上述のように0から記憶位置の最大値の範囲内で増加を繰り返す。つまり、記憶位置順に路面変位量が読み出される。記憶位置の順序はプレビュー位置の順序を表すので、路面変位量はプレビュー位置順に読み出されることになる。このため、例えば、図22(a)に示すようにプレビュー位置1.65mにおける路面変位量が記憶位置16に記録された後に、ピッチ運動が発生して、図22(b)に示すようにプレビュー位置が1.55mに後退し、その位置における路面変位量が記憶位置15に記録された場合であっても、あくまでプレビュー位置が小さい側の路面変位量が先に読み出される。つまり、後に記録された記憶位置15における路面変位量が先に読み出され、先に記録された記憶位置16における路面変位量が後に読み出される。このようにしてプレビュー位置順に路面変位量が読み出されることにより、車輪が路面を通過する順序(路面通過順序)とその路面位置における路面変位量の読出し順序が整合する。よって、路面通過順序と読出し順序が整合しないことに起因したプレビュー制御の制御性能の悪化を抑えることができる。
【0117】
以上のように、本実施形態によれば、プレビューセンサ63によりセンサ距離z_ssrが検出されたときに検出の対象とされた路面位置を表すプレビュー位置Dpに基づいて、そのプレビュー位置Dpにおける路面変位量x_roadを記憶するための記憶位置iが演算される。そして、複数の記憶場所を有するRAM54の記憶領域541のうち演算された記憶位置iにより表される記憶場所に路面変位量x_roadが記録される。したがって、車両のピッチ運動などの姿勢変化によってプレビュー位置Dpが変化した場合であっても、その変化を踏まえた記憶位置に路面変位量x_roadが記録される。このためプレビュー位置Dpが後退した場合であっても、プレビュー位置Dpを踏まえて演算された記憶位置に基づいて、車両に近い側(プレビュー位置が小さい側)から順に路面変位量x_roadを読み出すことができる。これにより、プレビュー制御の制御性能の悪化が抑えられる。
【0118】
図23は、RAM54の記憶領域541に記録されている路面変位量のデータの必要時間分解能を示すグラフである。ここで、必要時間分解能とは、ある路面変位量のデータが記録されてから次のデータが記録されるまでに要する時間間隔であり、この必要時間分解能が小さいほど、緻密に路面変位量のデータが記録されていることになる。図23において横軸が車両の走行速度Vであり、縦軸が必要時間分解能である。また、符合Aにより示されたグラフが、本実施形態に示したプレビュー制御を行った場合における必要時間分解能の走行速度Vに対する変化を表すグラフである。符合Bにより示されたグラフは、上記特許文献2に示したプレビュー制御を行った場合における必要時間分解能の走行速度Vに対する変化を表すグラフである。また、図24は、グラフBにより表される従来手法によるプレビュー制御のサンプリング時間Tsや各速度域において記憶される路面変位量のデータ個数と、グラフAにより表される本実施形態によるプレビュー制御により記憶される路面変位量のデータ個数とを対比した図である。
【0119】
図24からわかるように、従来手法の場合、低速度域(20〜60km/h)、中速度域(60〜130km/h)、高速度域(130〜250km/h)のそれぞれの速度領域ごとにサンプリング時間が固定されている。サンプリング時間ごとにデータを記録する場合、時間分解能はサンプリング時間に等しい。また各速度領域のサンプリング時間を比較した場合、速度が大きい領域であるほどサンプリング時間が短い。したがって、従来手法によりプレビュー制御を実行した場合における必要時間分解能は、図23のグラフBに示されるように、走行速度が大きくなるほど段階的に小さくなる。このように必要時間分解能が段階的に変化する場合、その変化の境界付近の速度における必要時間分解能が大きくなる。例えば、グラフBにおいて走行速度50km/h付近の必要時間分解能は12msであり、12msの間に車両は約0.17m進む。0.17mは一般的な車両のタイヤ接地長よりも長いため、本来制御に必要な路面変位量を網羅することができない。したがって、路面変位量に基づく制御の適切な精度確保がなされない。
【0120】
一方、本実施形態のプレビュー制御は、車両がタイヤ接地長L_tireだけ進むごとにデータ(路面変位量)を記録するので、必要時間分解能は、タイヤ接地長L_tireを走行速度で除算した値となる。したがって必要時間分解能は図23のグラフAに示されるように走行速度に対して反比例する。本実施形態のようにデータ(路面変位量)の記憶解像度(必要時間分解能)をタイヤ接地長により定義することにより、走行速度Vが大きい場合でも小さい場合でも、路面変位量の記録間隔がタイヤ接地長L_tireになる。このため常に最適な粗さでデータを記録することができる。
【0121】
また、図24からわかるように、従来手法においては、各速度領域ごとに専用の記憶領域が必要であるため、トータルで55個のデータを記憶するだけの記憶領域が必要であるのに対し、本実施形態では、全ての速度において共通の記憶領域を有していればよいので、例えば20個のデータを記憶するだけの記憶領域で足りる。このように、本実施形態のプレビュー制御を実行することにより、記憶領域を節約することができる。
【0122】
また、本実施形態によれば、プレビューセンサ63の対地角度が、車両側から見て鋭角になるようにプレビューセンサ63が車両に取り付けられているので、プレビュー距離Lpを伸ばすことができる。このため、車両の走行速度Vが大きくても余裕時間を制御遅れ時間(プレビュー補償時間Tp)よりも大きくすることができる。
【0123】
また、データ読出部528では、プレビュー補償位置Dcに相当するプレビュー位置Dpに基づいてデータ記録部527にて演算された記憶位置が、読出位置nとして演算される。そして、演算された読出位置nにより表される記憶場所に記憶された路面変位に基づいて、目標制御力演算部529にてアクチュエータ30の目標制御力Fが演算される。こうして演算された目標制御力Fに基づいてアクチュエータ30の作動が制御される。このように位置ベースでプレビュー制御の遅れを補償することで、適切なタイミングでアクチュエータ30の作動を完了させることができる。
【0124】
また、プレビュー位置Dpをタイヤ接地長L_tireで除算した値に基づいて記憶位置iを演算することにより、プレビュー位置Dpがタイヤ接地長L_tire分だけ変化するごとに、そのプレビュー位置Dpにおける路面変位量x_roadが記憶される。つまり、路面変位量x_roadが記録される路面の間隔がタイヤ接地長L_tireである。路面変位量x_roadが記録される路面間隔がタイヤ接地長よりも短い場合、記憶領域の記憶容量が増大するという問題が発生する。また、タイヤ接地長L_tireよりも短い区間内での路面変化は、図21に示されるようにその変化をタイヤが乗り越えることにより無視される場合があるため、そのような微小区間内の路面変化を記憶しておく必要性に乏しい。一方、路面変位量x_roadが記録される路面間隔がタイヤ接地長L_tireよりも長い場合、路面変位量の情報が不足するため乗り心地が悪化する。これらのことから、本実施形態のように路面変位量が記録される路面間隔をタイヤ接地長L_tireとするこで、記憶容量の増大を抑えることができるとともに、過不足の無い最適な距離間隔で路面変位量x_roadを記憶することができる。
【0125】
また、車両の走行距離Sは、最大プレビュー距離Lp_maxを越えない範囲内で繰り返し変動するように演算されるので、車両の走行距離Sとプレビュー距離Lpとに基づいて演算されるプレビュー位置Dpも、最大プレビュー距離Lp_maxにより表される長さの範囲内で繰り返し変動し、さらにプレビュー位置Dpに基づいて演算される記憶位置iも最大プレビュー距離Lp_maxに応じた範囲内で繰り返し変動する。記憶位置iが繰り返し変動することにより、記憶領域541の記憶場所が繰り返し用いられる。これにより、少ない記録容量で大量の制御情報を記録することができる。
【0126】
また、RAM54の記憶領域541に記憶された路面変位のうち、既に走行した路面を表す記憶場所に記憶された路面変位が消去される。これにより、空き状態となった記憶位置により表される記憶場所に新たな路面変位を記録させることができる。
【0127】
以上、本発明の実施形態について説明したが、本発明は上記実施形態に限定されるべきものではない。例えば、上記実施形態においては、サスペンションのアクチュエータにより発生される制御力(駆動力)を求める場合に本発明のプレビュー制御を適用した例を示した。すなわち上記実施形態では、制御対象輪を動作させるアクチュエータの作動制御に本発明のプレビュー制御を適用した例を示した。しかしながら、本発明は、制御対象輪を積極的に動かすアクチュエータの作動制御のみならず、制御対象輪の動作を制御するために用いられるアクチュエータの作動制御にも適用することができる。例えば、減衰力を発生するショックアブソーバを備えるサスペンションにおいては、アクチュエータがショックアブソーバの減衰力特性を変更することにより、外部入力による車輪の上下動作(上下振動)が制御される。このようなアクチュエータの作動制御にも本発明のプレビュー制御を適用することができる。この場合、図25に示されるように、CPU52は、目標制御力演算部に換えて目標減衰力演算部529を有する。目標減衰力演算部529は、データ読出部528が出力する修正路面変位量x_road_cを入力し、この修正路面変位量x_road_cに基づいてショックアブソーバが発生すべき目標減衰力Fを演算する。そして、演算された目標減衰力Fが発生されるように、ショックアブソーバの減衰力特性を制御するアクチュエータに制御信号を出力する。
【0128】
また、本発明は、車輪の上下動作を制御するアクチュエータのみならず、車輪の回転動作を制御するアクチュエータにも適用することができる。例えば、各車輪の内部に内蔵されたアクチュエータによって各車輪を回転させることにより走行する車両において、そのアクチュエータの駆動力や制動力を制御する際にも、本発明が適用され得る。この場合、図26に示されるように、CPU52は目標駆動力演算部(または目標制動力演算部)529を有する。この目標駆動力演算部529は、データ読出部528が出力する修正路面変位量x_road_cを入力し、この修正路面変位量x_road_cに基づいてアクチュエータが発生すべき目標駆動力(または目標制動力)Fを演算する。そして、演算された目標駆動力(または目標制動力)Fが発生されるようにアクチュエータに制御信号を出力する。
【0129】
また、上記実施形態においては、制御情報として路面変位量を演算する例を示したが、制御情報は、制御対象輪がプレビュー位置を走行するときにその制御対象輪の動作を制御するアクチュエータの作動制御に必要な情報であればどのような情報でもよい。例えば本実施形態のようにアクティブサスペンションのアクチュエータを制御する場合には、プレビュー位置における路面変位に換えて、プレビュー位置における路面勾配などを演算してもよい。また、アクチュエータが最終的に出力する目標制御力を制御情報としてもよい。この場合、図27に示されるように、目標制御力演算部529が、路面形状演算部525により演算された路面変位量x_roadに基づいて目標制御力Fを演算する。また、データ記録部527は、プレビュー位置Dpに基づいて、そのプレビュー位置Dpにおける路面変位量x_roadに基づいて演算された目標制御力Fの記憶場所を表す記憶位置iを演算する。そして、演算された記憶位置iにより表される記憶場所に、その目標制御力Fが記録される。データ読出し時には、プレビュー補償位置Dcに基づいて演算された読出位置nに記録された目標制御力Fが出力される。
【0130】
また、上記実施形態においては路面形状演算ルーチン(図15)にて、記憶位置iに既にデータが記録されていると判定された場合(S214:No)は、今回演算された路面変位量x_roadと既に記憶位置iに記録されているデータtmp_x_road[i]との平均値をその記憶位置iに記録する(S218)例を示したが、既に記録されているデータと今回演算された路面変位量とのいずれか大きい方(最大値)を、その記憶位置に記録してもよい。この場合、図28に示されるように、記憶位置iに既にデータが記録されていると判定された場合(S214:No)は、S218にて、今回演算した路面変位量x_roadが記憶位置iに記録されたデータtmp_x_road[i]よりも大きいか否かが判定され、大きい場合はその路面変位量x_roadを記憶位置iに記録し、そうでない場合は既に記録されたデータtmp_x_road[i]をそのまま記憶位置iに残すようにすればよい。
【0131】
また、センサ距離z_ssrのサンプリング時間(サンプリング周期)Tsは、少なくともタイヤ接地長L_tireごとに路面変位を記録することができる範囲において、自由に設定することができる。このように、本発明は、その趣旨を逸脱しない限りにおいて、変形可能である。
【符号の説明】
【0132】
10…サスペンション本体、20…コイルスプリング、30…アクチュエータ、31…電気モータ、35…ボールネジ機構、50…サスペンションECU、51…入力インターフェース、52…CPU、521…状態量演算部、522…位置変化量演算部、523…走行距離演算部、524…プレビュー補償距離演算部、525…路面形状演算部、526…プレビュー距離演算部、527…データ記録部、528…データ読出部、529…目標制御力演算部、53…ROM、54…RAM、541…記憶領域、55…出力インターフェース、56…双方向バス、61…バネ上加速度センサ、62…車速センサ、63…プレビューセンサ、70…駆動回路、Dc…プレビュー補償位置、Dp…プレビュー位置、L_tire…タイヤ接地長、Lc…プレビュー補償距離、Lc_max…最大プレビュー補償距離、Lp…プレビュー距離、Lp_max…最大プレビュー距離、tmpDc…プレビュー補償位置閾値、Tp…プレビュー補償時間、Ts…サンプリング時間、x_road…路面変位量、x_road_c…修正路面変位量、z_ssr…センサ距離
【特許請求の範囲】
【請求項1】
車両に取り付けられ、その取付位置から車両が走行する予定の路面位置までの間の距離を予め設定されたサンプリング時間ごとに検出するプレビューセンサを備え、前記プレビューセンサにより検出された距離に基づいて、その距離が検出されたときに検出の対象とされた路面位置であるプレビュー位置を走行する車輪の動作を制御するためのアクチュエータの作動を制御するアクチュエータの作動制御装置において、
車両の走行速度に基づいて車両の走行距離を演算する走行距離演算手段と、
前記プレビューセンサにより検出された距離に基づいて、その距離が検出されたときに検出の対象とされた前記プレビュー位置とそのプレビュー位置を走行する予定の車輪である制御対象輪が現在接地している路面位置との間の距離であるプレビュー距離を演算するプレビュー距離演算手段と、
前記車両の走行距離に前記プレビュー距離を加算した値に基づいて、前記プレビュー位置を演算するプレビュー位置演算手段と、
前記プレビューセンサにより検出された距離に基づいて、その距離が検出されたときに検出の対象とされた前記プレビュー位置を前記制御対象輪が走行するときにその制御対象輪の動作を制御するためのアクチュエータの作動を制御するために必要な情報である制御情報を演算する制御情報演算手段と、
前記制御情報演算手段により演算された前記制御情報を記憶する複数の記憶場所を有するメモリと、
前記プレビュー位置演算手段により演算された前記プレビュー位置に基づいて、そのプレビュー位置を前記制御対象輪が走行するときにその制御対象輪の動作を制御するアクチュエータの作動を制御するために必要な情報として前記制御情報演算手段により演算された前記制御情報の前記メモリ内における記憶場所を表す記憶位置を演算する記憶位置演算手段と、
前記メモリ内の記憶場所のうち、前記記憶位置演算手段により演算された記憶位置により表される記憶場所に前記制御情報を記録する制御情報記録手段と、
を備えることを特徴とする、アクチュエータの作動制御装置。
【請求項2】
請求項1に記載のアクチュエータの作動制御装置において、
車両の走行速度と、前記アクチュエータの作動の制御に関連する遅れ時間として予め設定されたプレビュー補償時間とを乗じることにより、前記プレビュー補償時間の間に車両が走行する距離であるプレビュー補償距離を演算するプレビュー補償距離演算手段と、
前記車両の走行距離に前記プレビュー補償距離を加算した値に基づいて、前記プレビュー補償時間経過後に車両が走行する路面の位置を表すプレビュー補償位置を演算するプレビュー補償位置演算手段と、
前記記憶位置演算手段により前記プレビュー補償位置に相当する前記プレビュー位置に基づいて演算された記憶位置を読出位置として演算する読出位置演算手段と、
前記メモリ内の記憶場所のうち、前記読出位置演算手段により演算された読出位置により表される記憶場所に記録された前記制御情報に基づいて、前記アクチュエータの作動を制御するための制御量を演算する制御量演算手段と、
を更に備えることを特徴とする、アクチュエータの作動制御装置。
【請求項3】
請求項1または2に記載のアクチュエータの作動制御装置において、
前記記憶位置演算手段は、前記プレビュー位置と、前記制御対象輪が走行路面に接触している部分の車両進行方向に沿った長さであるタイヤ接地長とに基づいて、前記記憶位置を演算することを特徴とする、アクチュエータの作動制御装置。
【請求項4】
請求項1乃至3のいずれか1項に記載のアクチュエータの作動制御装置において、
前記走行距離演算手段は、前記車両の走行距離が予め設定された最大プレビュー距離を越えない範囲内で繰り返し変動するように、前記車両の走行速度と前記最大プレビュー距離に基づいて前記車両の走行距離を演算することを特徴とする、アクチュエータの作動制御装置。
【請求項1】
車両に取り付けられ、その取付位置から車両が走行する予定の路面位置までの間の距離を予め設定されたサンプリング時間ごとに検出するプレビューセンサを備え、前記プレビューセンサにより検出された距離に基づいて、その距離が検出されたときに検出の対象とされた路面位置であるプレビュー位置を走行する車輪の動作を制御するためのアクチュエータの作動を制御するアクチュエータの作動制御装置において、
車両の走行速度に基づいて車両の走行距離を演算する走行距離演算手段と、
前記プレビューセンサにより検出された距離に基づいて、その距離が検出されたときに検出の対象とされた前記プレビュー位置とそのプレビュー位置を走行する予定の車輪である制御対象輪が現在接地している路面位置との間の距離であるプレビュー距離を演算するプレビュー距離演算手段と、
前記車両の走行距離に前記プレビュー距離を加算した値に基づいて、前記プレビュー位置を演算するプレビュー位置演算手段と、
前記プレビューセンサにより検出された距離に基づいて、その距離が検出されたときに検出の対象とされた前記プレビュー位置を前記制御対象輪が走行するときにその制御対象輪の動作を制御するためのアクチュエータの作動を制御するために必要な情報である制御情報を演算する制御情報演算手段と、
前記制御情報演算手段により演算された前記制御情報を記憶する複数の記憶場所を有するメモリと、
前記プレビュー位置演算手段により演算された前記プレビュー位置に基づいて、そのプレビュー位置を前記制御対象輪が走行するときにその制御対象輪の動作を制御するアクチュエータの作動を制御するために必要な情報として前記制御情報演算手段により演算された前記制御情報の前記メモリ内における記憶場所を表す記憶位置を演算する記憶位置演算手段と、
前記メモリ内の記憶場所のうち、前記記憶位置演算手段により演算された記憶位置により表される記憶場所に前記制御情報を記録する制御情報記録手段と、
を備えることを特徴とする、アクチュエータの作動制御装置。
【請求項2】
請求項1に記載のアクチュエータの作動制御装置において、
車両の走行速度と、前記アクチュエータの作動の制御に関連する遅れ時間として予め設定されたプレビュー補償時間とを乗じることにより、前記プレビュー補償時間の間に車両が走行する距離であるプレビュー補償距離を演算するプレビュー補償距離演算手段と、
前記車両の走行距離に前記プレビュー補償距離を加算した値に基づいて、前記プレビュー補償時間経過後に車両が走行する路面の位置を表すプレビュー補償位置を演算するプレビュー補償位置演算手段と、
前記記憶位置演算手段により前記プレビュー補償位置に相当する前記プレビュー位置に基づいて演算された記憶位置を読出位置として演算する読出位置演算手段と、
前記メモリ内の記憶場所のうち、前記読出位置演算手段により演算された読出位置により表される記憶場所に記録された前記制御情報に基づいて、前記アクチュエータの作動を制御するための制御量を演算する制御量演算手段と、
を更に備えることを特徴とする、アクチュエータの作動制御装置。
【請求項3】
請求項1または2に記載のアクチュエータの作動制御装置において、
前記記憶位置演算手段は、前記プレビュー位置と、前記制御対象輪が走行路面に接触している部分の車両進行方向に沿った長さであるタイヤ接地長とに基づいて、前記記憶位置を演算することを特徴とする、アクチュエータの作動制御装置。
【請求項4】
請求項1乃至3のいずれか1項に記載のアクチュエータの作動制御装置において、
前記走行距離演算手段は、前記車両の走行距離が予め設定された最大プレビュー距離を越えない範囲内で繰り返し変動するように、前記車両の走行速度と前記最大プレビュー距離に基づいて前記車両の走行距離を演算することを特徴とする、アクチュエータの作動制御装置。
【図1】

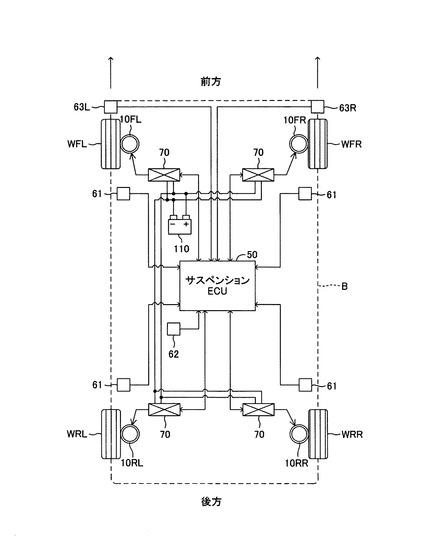
【図2】
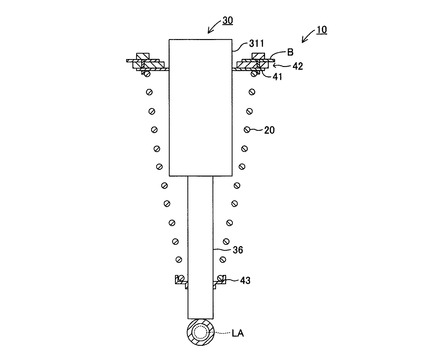
【図3】
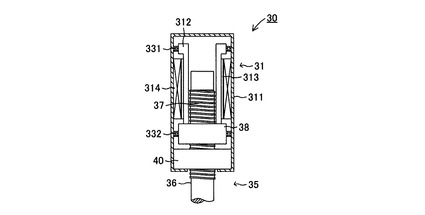
【図4】
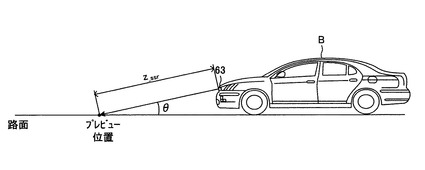
【図5】
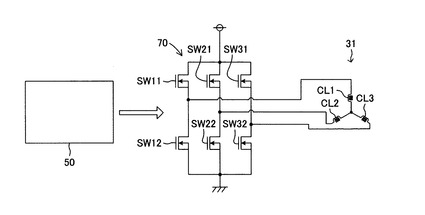
【図6】
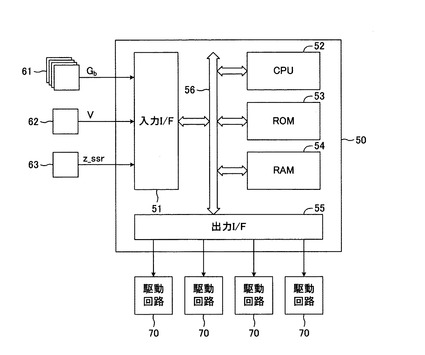
【図7】
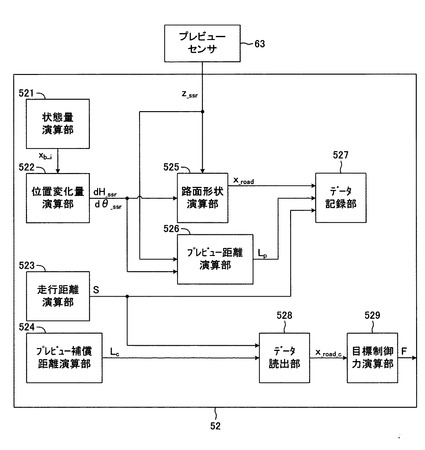
【図8】
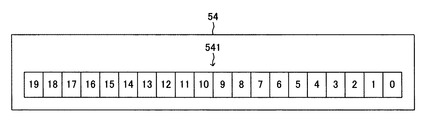
【図9】
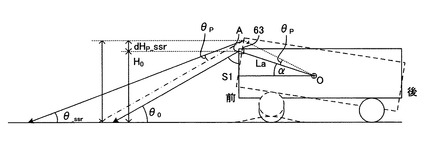
【図10】
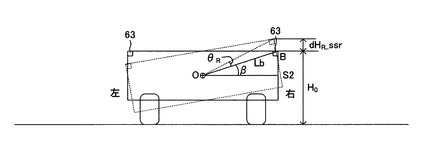
【図11】
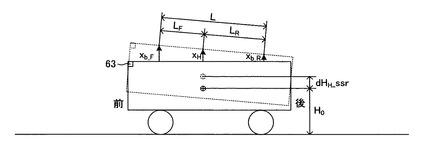
【図12】
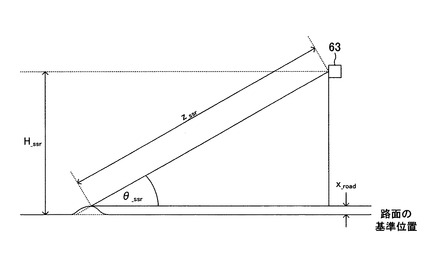
【図13】
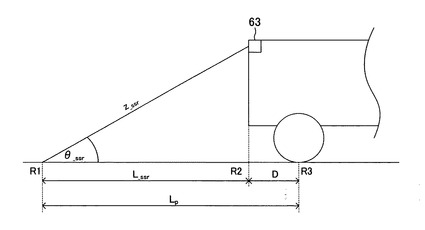
【図14】
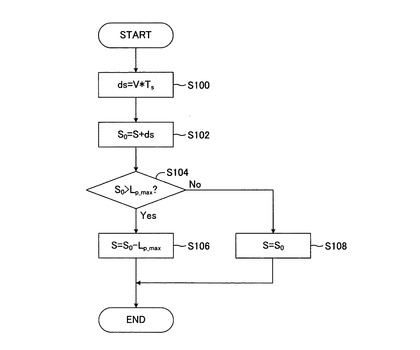
【図15】
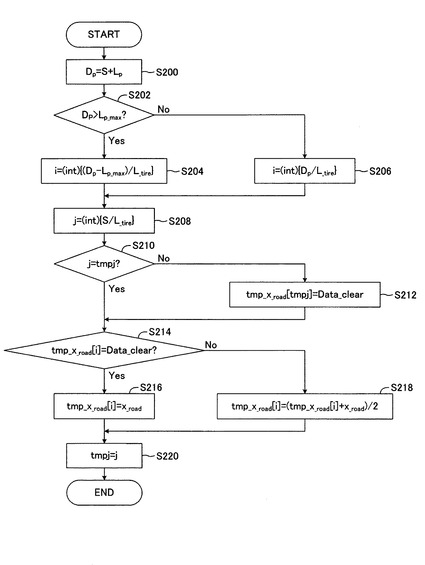
【図16】
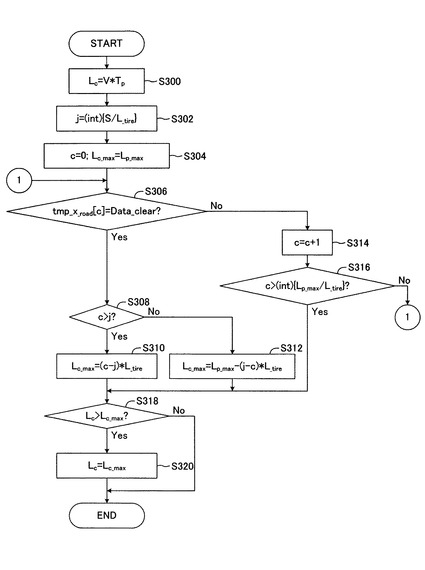
【図17】

【図18】
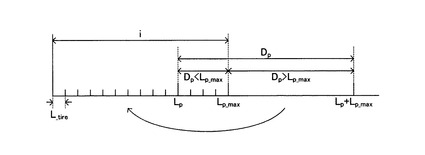
【図19】
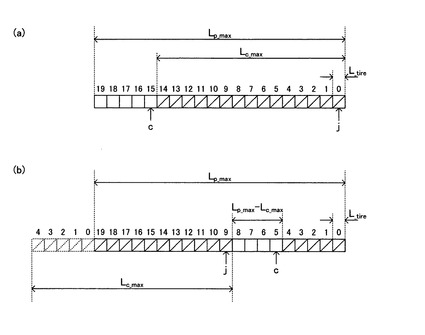
【図20】
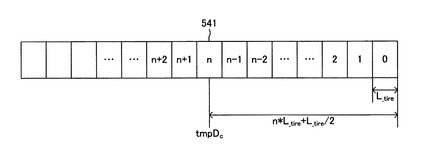
【図21】
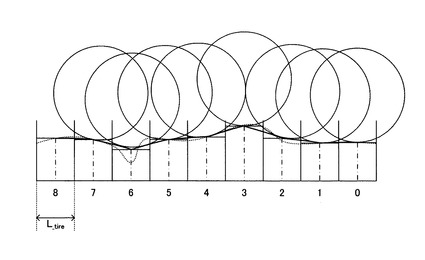
【図22】
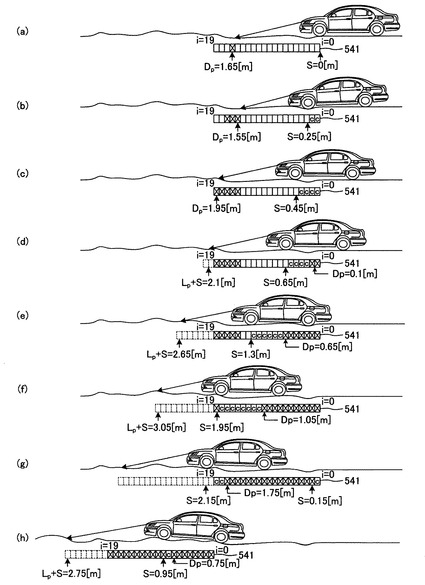
【図23】
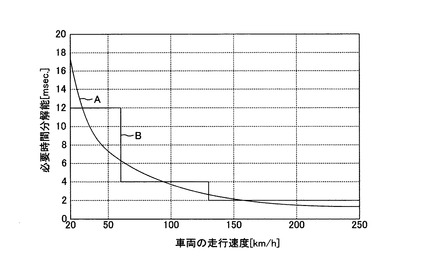
【図24】
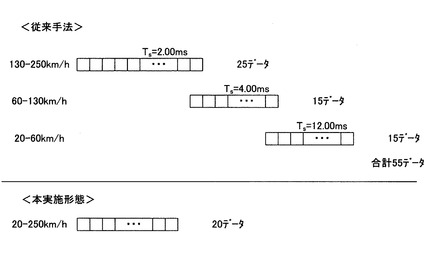
【図25】
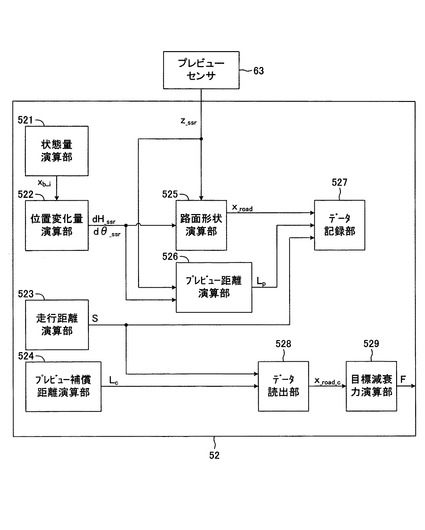
【図26】
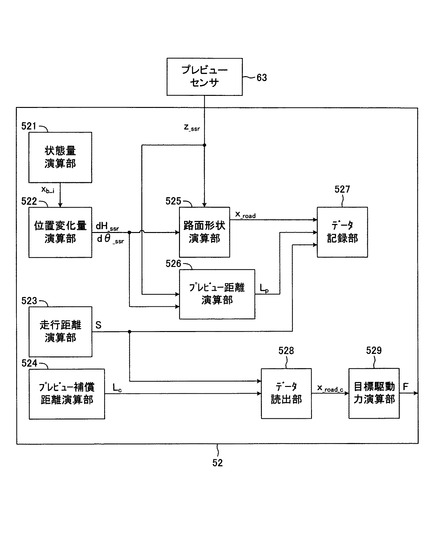
【図27】
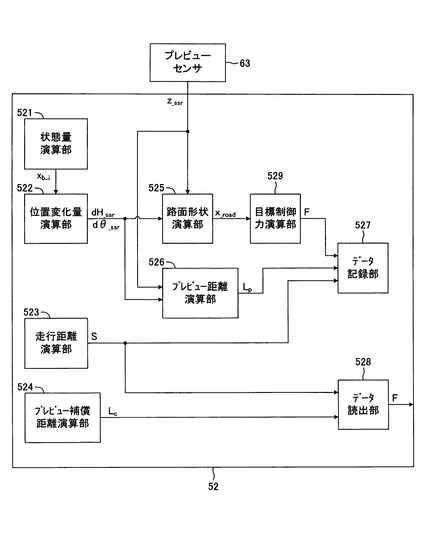
【図28】
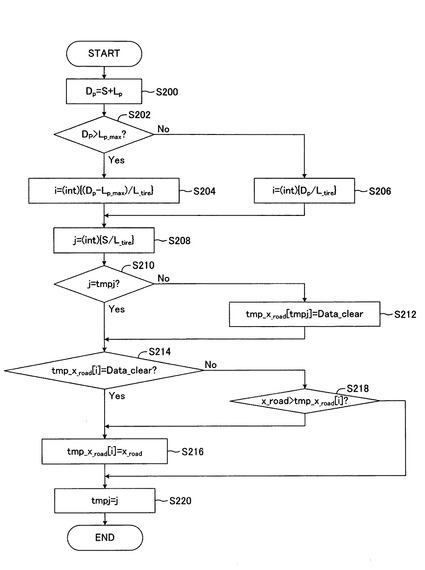
【図29】
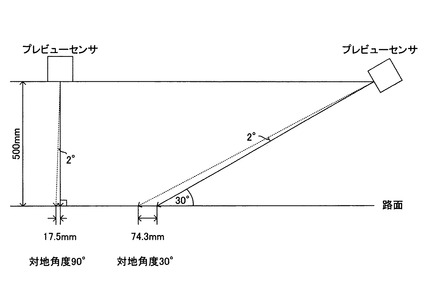
【図30】
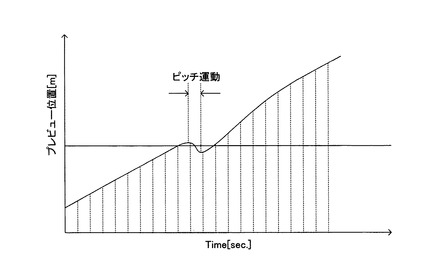
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【公開番号】特開2011−183919(P2011−183919A)
【公開日】平成23年9月22日(2011.9.22)
【国際特許分類】
【出願番号】特願2010−50606(P2010−50606)
【出願日】平成22年3月8日(2010.3.8)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年9月22日(2011.9.22)
【国際特許分類】
【出願日】平成22年3月8日(2010.3.8)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]