
アクチュエータ及びマッサージ機
【課題】多様な出力を取り出すことができるアクチュエータ及びそれを備えたマッサージ機を提供する。
【解決手段】励磁されることで磁気力を発生する固定子16〜19と、固定子が発生した磁気力にて移動する可動子21〜24と、流体を封入した状態で可動子の移動範囲内に配置され、移動する可動子に外部から押圧された場合に局所的な膨出部位を形成するように変形可能な袋状体20と、固定子を励磁制御する制御部と、を備え、袋状体における膨出部位の膨出力を出力として得るアクチュエータ11であって、変位することで膨出部位となり得る変位部が一面側に3つ以上並設され、制御部は、各変位部のうち変位して膨出部位となった変位部を順繰りに出現させる方向が、1つの変位部と他の1つの変位部とを直線的に結んだ一方向を含む複数方向となるように、各固定子を励磁制御する。
【解決手段】励磁されることで磁気力を発生する固定子16〜19と、固定子が発生した磁気力にて移動する可動子21〜24と、流体を封入した状態で可動子の移動範囲内に配置され、移動する可動子に外部から押圧された場合に局所的な膨出部位を形成するように変形可能な袋状体20と、固定子を励磁制御する制御部と、を備え、袋状体における膨出部位の膨出力を出力として得るアクチュエータ11であって、変位することで膨出部位となり得る変位部が一面側に3つ以上並設され、制御部は、各変位部のうち変位して膨出部位となった変位部を順繰りに出現させる方向が、1つの変位部と他の1つの変位部とを直線的に結んだ一方向を含む複数方向となるように、各固定子を励磁制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電磁石を用いたアクチュエータ及びそれを備えたマッサージ機に関する。
【背景技術】
【0002】
従来、電磁石を構成する固定子から発生した磁気力で可動子を移動させてマッサージ機の施療子を動作させるための出力を得るアクチュエータが知られている。例えば特許文献1には、流体を封入した1つの袋状体の下面側に2つの固定子を並設する一方、両固定子と対になる2つの可動子を袋状体の上面側に並設したアクチュエータが開示されている。この従来のアクチュエータでは、2つの固定子から交互に発生される磁気力により2つの可動子が交互に固定子側へ移動し、その移動に伴い袋状体の一部が押圧されて変形した際の袋状体における膨出部位の膨出力がマッサージ機の施療子を動作させる出力として取得される。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−227257号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、従来のアクチュエータでは、袋状体の上面における一方の可動子が配設された第1部位と他方の可動子が配設された第2部位とが交互に膨出部位となる。すなわち、各可動子の移動に伴い袋状体の上面側に形成される膨出部位が、第1部位と第2部位とを直線的に結ぶ一方向においてしか順繰りに出現せず、そのような一方向で交互に出現位置を変化させる2つの膨出部位の膨出力に応じた出力しか得ていなかった。そのため、従来のアクチュエータでは、マッサージ機における施療子の動作に利用する出力を得るという観点からすると、変化に乏しい単調な出力しか得ることができず、多様な出力を取り出せないという問題があった。
【0005】
本発明は、こうした実情に鑑みてなされたものであり、その目的は、多様な出力を取り出すことができるアクチュエータ及びそのようなアクチュエータを備えたマッサージ機を提供することにある。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明のアクチュエータは、固定子コア及びコイルを有し該コイルへの通電により励磁されることで磁気力を発生する固定子と、前記固定子が発生した磁気力により移動する可動子と、流体を封入した状態で前記可動子の移動範囲内に配置され、移動した前記可動子に外部から押圧された場合に局所的な膨出部位を形成するように変形可能な袋状体と、前記固定子を励磁制御する制御部と、を備え、前記袋状体における前記膨出部位の膨出力を出力として得るアクチュエータであって、1つの前記袋状体に複数の前記固定子と複数の前記可動子が設けられると共に、変位することで前記膨出部位となり得る変位部が一面側に3つ以上並設され、前記制御部は、前記各変位部のうち変位して前記膨出部位となった変位部を順繰りに出現させる方向が、1つの変位部と他の1つの変位部とを直線的に結んだ一方向を含む複数方向となるように、前記各固定子を励磁制御することを特徴とする。
【0007】
また、本発明のアクチュエータは、1つの前記袋状体に前記固定子と前記可動子との対が3つ以上設けられると共に、当該1つの袋状体の一面側に前記変位部が3つ以上並設されていることが好ましい。
【0008】
また、本発明のアクチュエータは、前記袋状体内における前記各可動子の移動範囲から外れた位置の一定領域が、前記流体の流動を遮断する遮断領域とされていることが好ましい。
【0009】
また、本発明のアクチュエータにおいて、前記各可動子は、並設状態で隣り合う他の可動子との間隔が、前記制御部による前記各固定子の励磁制御がされていない状態での互いに対をなす前記固定子と前記可動子との間の距離以下となるように設定されていることが好ましい。
【0010】
また、本発明のアクチュエータにおいて、前記制御部は、1つの前記袋状体に設けられた複数の前記固定子のうち励磁対象とする固定子の数を励磁タイミング毎に変更可能であることが好ましい。
【0011】
また、本発明のアクチュエータは、前記固定子と前記可動子と前記袋状体とを含んで構成される変位ユニットを複数備え、前記各変位ユニットは隣り合う変位ユニット同士が互いの前記各可動子を一面側において並設状態とするように配置されることが好ましい。
【0012】
また、本発明のアクチュエータにおいて、前記流体は磁性流体であることが好ましい。
さらに、上記目的を達成するために、本発明のマッサージ機は、上記構成のアクチュエータから得る出力を用いて使用者の身体の施療を行うことを特徴とする。
【発明の効果】
【0013】
本発明によれば、多様な出力を取り出すことができる。
【図面の簡単な説明】
【0014】
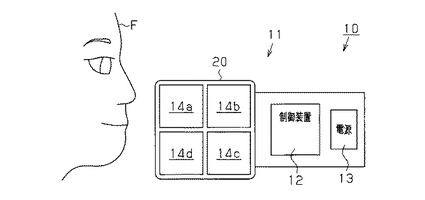
【図1】本発明の第1実施形態に係るフェイスマッサージ機の概略を示す模式図。
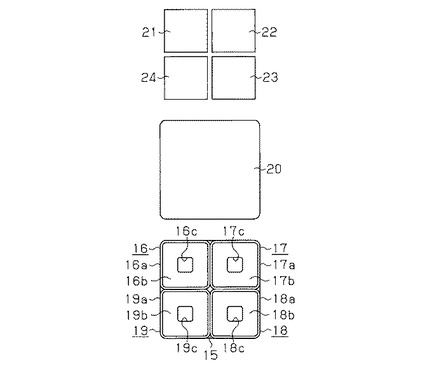
【図2】同フェイスマッサージ機におけるアクチュエータの主構成要素の概略図。
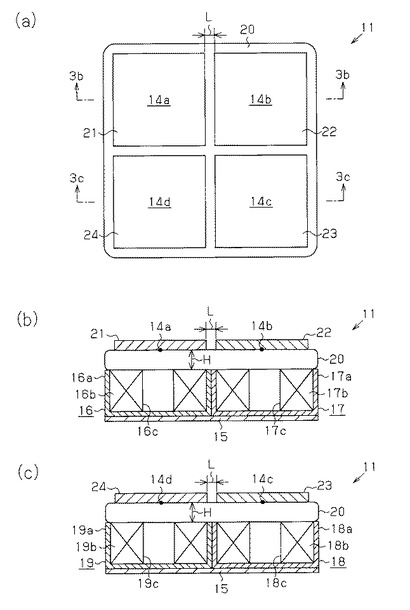
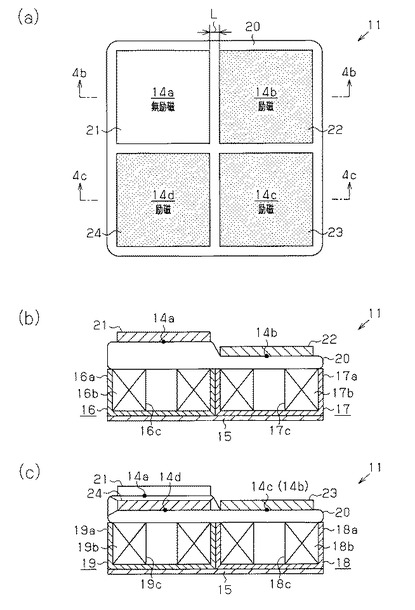
【図3】(a)は第1実施形態のアクチュエータの平面図、(b)は(a)における3b−3b線矢視断面図、(c)は(a)における3c−3c線矢視断面図。
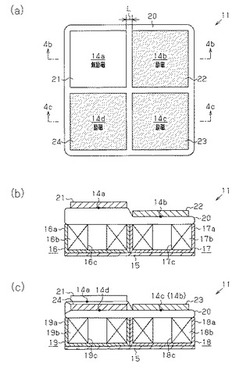
【図4】(a)は出力状態にあるアクチュエータの平面図、(b)は(a)における4b−4b線矢視断面図、(c)は(a)における4c−4c線矢視断面図。
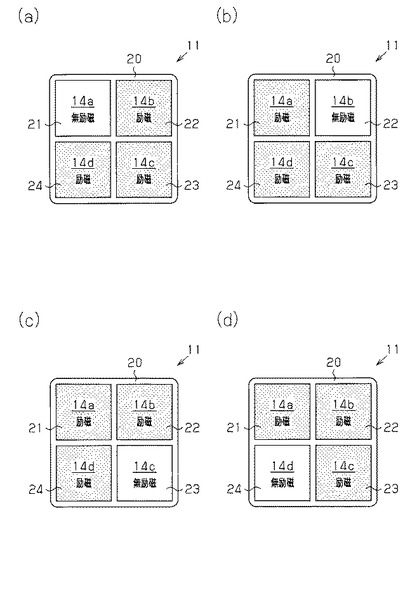
【図5】(a)(b)(c)(d)は膨出部位の出現位置が順繰りに移り変わる状態を示すアクチュエータの平面図。
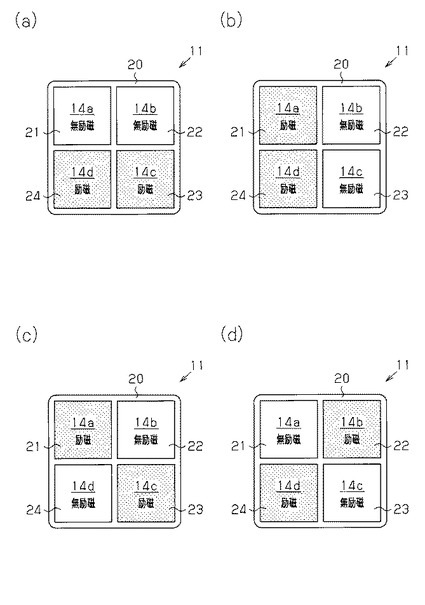
【図6】(a)(b)(c)(d)は出力態様を異ならせた場合のアクチュエータの平面図。
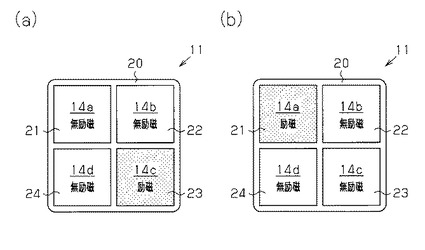
【図7】(a)(b)は更に出力態様を異ならせた場合のアクチュエータの平面図。
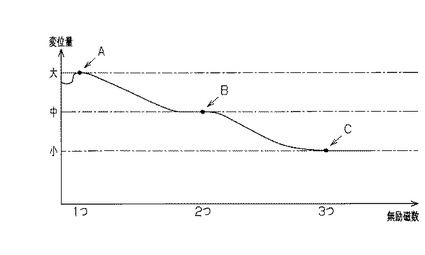
【図8】アクチュエータにおける無励磁固定子の数と変位量との関係を示すグラフ。
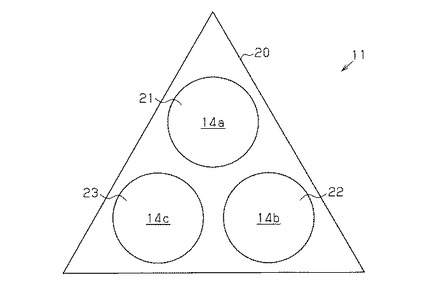
【図9】第2実施形態のフェイスマッサージ機におけるアクチュエータの平面図。
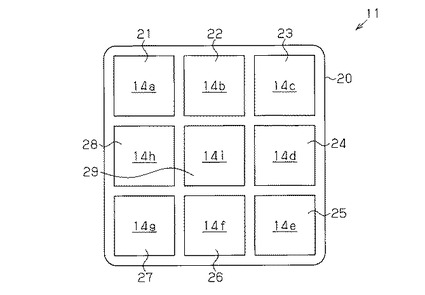
【図10】第3実施形態のフェイスマッサージ機におけるアクチュエータの平面図。
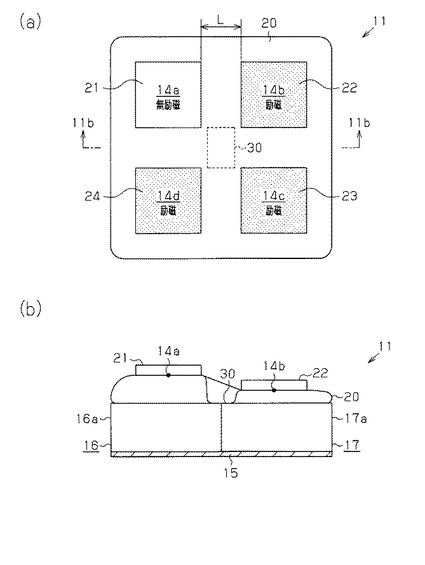
【図11】(a)は第4実施形態のアクチュエータの平面図、(b)は(a)における11b−11b線矢視断面図。
【図12】第5実施形態のアクチュエータの平面図。
【図13】第6実施形態のアクチュエータの平面図。
【図14】(a)(b)(c)(d)は膨出部位の出現位置が順繰りに移り変わる状態を示す第7実施形態のアクチュエータの平面図。
【発明を実施するための形態】
【0015】
(第1実施形態)
以下、本発明をマッサージ機の一種であるフェイスマッサージ機及びそのマッサージ機の施療子を動作させる出力を得るためのアクチュエータに具体化した第1実施形態を図1〜図8を参照しながら説明する。
【0016】
図1に示すように、本実施形態のフェイスマッサージ機10は、その変位動作から出力を得るアクチュエータ11と、アクチュエータ11の動作を制御する制御装置(制御部)12と、アクチュエータ11及び制御装置12に電力を供給する電源13を備えている。アクチュエータ11は、その一面側に並設される複数(本実施形態では4つ)の変位部14a〜14dを備えている。そして、フェイスマッサージ機10は、制御装置12の制御に基づき各変位部14a〜14dが選択的に膨出部位となるように変位することで得られる出力を用いて、使用者の身体の一部である顔Fのマッサージ(施療)を行うことが可能とされている。
【0017】
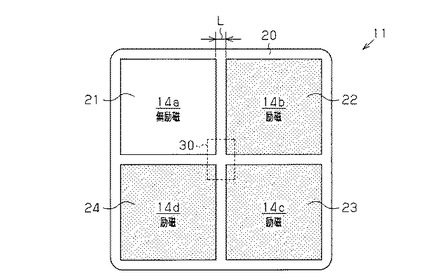
図2及び図3に示すように、アクチュエータ11は、四角形状の基板15上に2行2列のマトリクス状に並設される4つの固定子16〜19と、その固定子16〜19の上側に配置される1つの袋状体20と、その袋状体20の上側に各固定子16〜19と対をなすように並設される4つの可動子21〜24とを備えている。そして、袋状体20の一面側における、4つの可動子21〜24の並設位置と各々対応する4箇所の部位が、フェイスマッサージ機10の施療子を動作させる出力を得るために個別に変位可能な4つの変位部14a〜14dを構成している。なお、各変位部14a〜14dを変位させるときには、固定子16〜19、袋状体20、及び可動子21〜24等と同様にアクチュエータ11の構成要素である制御装置12が、各固定子16〜19を励磁制御することにより各可動子21〜24を吸引力で移動させて袋状体20を押圧変形させる。
【0018】
各固定子16〜19は、基板15をほぼ四等分した小さな四角形状の固定子コア16a〜19aと、各固定子コア16a〜19aの内部に各々収容される環状のコイル16b〜19bとによって構成されている。各コイル16b〜19bには、各固定子16〜19を励磁するときに制御装置12の制御により電源13から電力が供給される。そして、各固定子16〜19は、各コイル16b〜19bへの通電により励磁されることで磁気力を発生する。なお、各コイル16b〜19bは、中心孔16c〜19cを有するように形成されているため、これらの中心孔16c〜19cに固定鉄心を配置することも可能であり、そのようにした場合には、発生する磁気力を増大させることが可能である。
【0019】
袋状体20は、基板15と略同じ大きさの四角形状をなす、例えばシリコンゴム等からなる可撓性を有した扁平な袋であって、その内部には流体の一種である磁性流体(表面に界面活性剤を吸着させた強磁性微粒子を溶媒中に分散させたコロイド溶液)が封入されている。そして、そのように磁性流体が封入された状態で、袋状体20は、基板15上に並設されている4つの固定子16〜19の上側に、それ1つで4つの固定子16〜19全てを覆うように配置される。なお、袋状体20における磁性流体の封入量は、袋状体20の一部が外部から押圧された際には袋状体20が変形可能であり、その場合には磁性流体が袋状体20の内部を流動して他の部位を膨出させることができる程度に調整された封入量となっている。
【0020】
各可動子21〜24は、各固定子コア16a〜19aよりも僅かに小さな四角形状をなす、例えば鉄等の磁性を有する金属板状部材にて構成されている。そして、各可動子21〜24は、袋状体20の下面側に並設された各固定子16〜19と対をなして、袋状体20の上面側(一面側)に、隣り合う他の可動子との間に間隔Lをおいた2行2列のマトリクス状の配置となるように固定されている。なお、この場合の間隔Lは、制御装置12による各固定子16〜19の励磁制御がされていない状態での互いに対をなす固定子16〜19と可動子21〜24との間の距離(例えば、図3(b)(c)に示す通常状態での袋状体20の厚みH)以下となるように設定されている。
【0021】
そのため、各可動子21〜24は、コイル16b〜19bへの通電にて励磁された各固定子16〜19が発生する磁気力に吸引された場合には、その可動子21〜24が個別に対応する固定子16〜19に接近する方向へ移動し、袋状体20を局所的に押圧して変形させる。したがって、この点で、移動した可動子21〜24に押圧されて変形する袋状体20は、可動子21〜24の移動範囲内(つまり、固定子16〜19と可動子21〜24との間)に配置されていることになる。
【0022】
次に、以上のように構成されたフェイスマッサージ機10の作用について、特に使用者の顔Fをマッサージする際の出力を得るために変位動作するアクチュエータ11の作用に着目して以下説明する。
【0023】
なお、以下では説明の便宜上、各可動子21〜24の並設位置と各々対応する各変位部14a〜14dのことを、第1変位部14a〜第4変位部14dというように、それぞれが変位動作する位置ごとに区別して呼称することもある。第1実施形態のアクチュエータ11の場合は、図4(a)に示すように各可動子21〜24を並設した一面側から平面視した状態において左上隅に位置する変位部を第1変位部14a、右上隅に位置する変位部を第2変位部14b、右下隅に位置する変位部を第3変位部14c、そして左下隅に位置する変位部を第4変位部14dと呼称する。さらに、各変位部14a〜14dと位置的に対応する各固定子16〜19及び各可動子21〜24についても、第1変位部14a〜第4変位部14dに各々対応させて、第1固定子16〜第4固定子19及び第1可動子21〜第4可動子24と呼称する。
【0024】
さて、アクチュエータ11は、制御装置12の制御により、4つの固定子16〜19のうち何れかの固定子16〜19のコイル16b〜19bが通電されると、そのコイル16b〜19bを有する固定子16〜19において磁気力が発生する。すると、その磁気力を発生した固定子16〜19と対をなす可動子21〜24が、当該磁気力により吸引されて固定子16〜19側に移動する。そして、その移動した可動子21〜24が袋状体20を局所的に押圧して変形させることにより、袋状体20における所定の変位部14a〜14d(そのとき可動子21〜24により押圧されていない変位部)により上方に向けて膨出した膨出部位が形成される。そして、その際の膨出部位の膨出力がフェイスマッサージ機10の施療子を動作させるための出力として利用される。
【0025】
まず、4つの変位部14a〜14dのうち何れか1つの変位部により膨出部位が順繰りに出現位置を変化させつつ形成される場合について説明し、その後に、複数(例えば2つ又は3つ)の変位部により複数の膨出部位が順繰りに出現位置を変化させつつ形成される場合について説明する。
【0026】
さて最初に、図4(a)(b)(c)に示すように、1つの変位部として左上隅の第1変位部14aにより膨出部位を形成する場合は、第1変位部14aを除く他の3つの変位部(第2変位部14b〜第4変位部14d)と各々対応する3つの固定子(第2固定子17〜第4固定子19)が各コイル17b〜19bへの通電により励磁される。すると、それら3つの固定子17〜19において磁気力が発生し、それら3つの固定子17〜19と対をなす3つの可動子(図4(a)において「励磁」と記された第2可動子22〜第4可動子24)が、対応する各固定子17〜19の磁気力に吸引されて各固定子17〜19側となる下側に移動する。
【0027】
そして、下側に移動した3つの可動子22〜24が袋状体20の上面(一面)の3箇所(この場合は第2変位部14b〜第4変位部14d)を局所的に押圧すると、その押圧力によって袋状体20が変形し、その袋状体20内に封入されている磁性流体が流動する。すなわち、磁性流体は、図4(a)において「無励磁」と記された第1可動子21が配置された第1変位部14aの下側となる領域に集まるように袋状体20内を流動する。
【0028】
すると、袋状体20における第1変位部14aが内部の磁性流体により下側から上方に向けて押し上げられ、図4(b)(c)に示すように、第1変位部14aが他の変位部14b〜14dよりも上方に変位する。そして、アクチュエータ11では、そのように変位した第1変位部14aにより、左上隅の位置から出力側(図4(b)(c)では上側)に大きく膨出した膨出部位が形成され、その膨出部位の膨出力がフェイスマッサージ機10の施療子を動作させるための出力として利用される。
【0029】
そして次には、その時点で左上隅の第1変位部14aのみを膨出させている図5(a)に示す状態から、右上隅の第2変位部14bのみを膨出させる図5(b)に示す状態へと膨出部位の出現位置を変化させるべく、アクチュエータ11における各固定子16〜19が制御装置12により励磁制御される。すなわち、今度は、第2変位部14bを除く他の3つの変位部(第1変位部14a、第3変位部14c、第4変位部14d)と各々対応する3つの固定子(第1固定子16、第3固定子18、第4固定子19)が各コイル16b,18b,19bへの通電により励磁される。すると、それら3つの固定子16,18,19において磁気力が発生し、それら3つの固定子16,18,19と対をなす3つの可動子(図5(b)において「励磁」と記された第1可動子21、第3可動子23、第4可動子24)が、対応する各固定子16,18,19の磁気力に吸引されて各固定子16,18,19側となる下側に移動する。
【0030】
そして、下側に移動した3つの可動子21,23,24が袋状体20の上面(一面)の3箇所(今度は第1変位部14a、第3変位部14c、第4変位部14d)を局所的に押圧すると、その押圧力によって袋状体20が変形し、その袋状体20内に封入されている磁性流体が流動する。すなわち、磁性流体は、その時点で大半が滞留していた第1変位部14aの下側となる領域から、図5(b)において「無励磁」と記された第2可動子22が配置された第2変位部14bの下側となる領域に向け、同図では左側から右側への左右方向に、袋状体20内を流動する。
【0031】
すると、袋状体20における第2変位部14bが内部の磁性流体により下側から上方に向けて押し上げられ、今度は、第2変位部14bが他の変位部14a,14c,14dよりも上方に変位する。すなわち、袋状体20の一面側において、複数(4つ)の変位部14a〜14dのうちで変位して膨出部位となった変位部の出現する位置が、1つの変位部である第1変位部14aと他の1つの変位部である第2変位部14bとを直線的に結んだ一方向である左右方向において変化する。そして、アクチュエータ11では、そのように変位した第2変位部14bにより、右上隅の位置から出力側に大きく膨出した膨出部位が形成され、その膨出部位の膨出力がフェイスマッサージ機10の施療子を動作させるための出力として利用される。
【0032】
そして次には、その時点で右上隅の第2変位部14bのみを膨出させている図5(b)に示す状態から、右下隅の第3変位部14cのみを膨出させる図5(c)に示す状態へと膨出部位の出現位置を変化させるべく、アクチュエータ11における各固定子16〜19が制御装置12により励磁制御される。すなわち、今度は、第3変位部14cを除く他の3つの変位部(第1変位部14a、第2変位部14b、第4変位部14d)と各々対応する3つの固定子(第1固定子16、第2固定子17、第4固定子19)が各コイル16b,17b,19bへの通電により励磁される。すると、それら3つの固定子16,17,19において磁気力が発生し、それら3つの固定子16,17,19と対をなす3つの可動子(図5(c)において「励磁」と記された第1可動子21、第2可動子22、第4可動子24)が、対応する各固定子16,17,19の磁気力に吸引されて各固定子16,17,19側となる下側に移動する。
【0033】
そして、下側に移動した3つの可動子21,22,24が袋状体20の上面(一面)の3箇所(今度は第1変位部14a、第2変位部14b、第4変位部14d)を局所的に押圧すると、その押圧力によって袋状体20が変形し、その袋状体20内に封入されている磁性流体が流動する。すなわち、磁性流体は、その時点で大半が滞留していた第2変位部14bの下側となる領域から、図5(c)において「無励磁」と記された第3可動子23が配置された第3変位部14cの下側となる領域に向け、同図では上側から下側への上下方向に、袋状体20内を流動する。
【0034】
すると、袋状体20における第3変位部14cが内部の磁性流体により下側から上方に向けて押し上げられ、今度は、第3変位部14cが他の変位部14a,14b,14dよりも上方に変位する。すなわち、袋状体20の一面側において、複数(4つ)の変位部14a〜14dのうちで変位して膨出部位となった変位部の出現する位置が、1つの変位部である第2変位部14bと他の1つの変位部である第3変位部14cとを直線的に結んだ一方向である上下方向において変化する。そして、アクチュエータ11では、そのように変位した第3変位部14cにより、右下隅の位置から出力側に大きく膨出した膨出部位が形成され、その膨出部位の膨出力がフェイスマッサージ機10の施療子を動作させるための出力として利用される。
【0035】
そして次には、その時点で右下隅の第3変位部14cのみを膨出させている図5(c)に示す状態から、左下隅の第4変位部14dのみを膨出させる図5(d)に示す状態へと膨出部位の出現位置を変化させるべく、アクチュエータ11における各固定子16〜19が制御装置12により励磁制御される。すなわち、今度は、第4変位部14dを除く他の3つの変位部(第1変位部14a〜第3変位部14c)と各々対応する3つの固定子(第1固定子16〜第3固定子18)が各コイル16b〜18bへの通電により励磁される。すると、それら3つの固定子16〜18において磁気力が発生し、それら3つの固定子16〜18と対をなす3つの可動子(図5(d)において「励磁」と記された第1可動子21〜第3可動子23)が、対応する各固定子16〜18の磁気力に吸引されて各固定子16〜18側となる下側に移動する。
【0036】
そして、下側に移動した3つの可動子21〜23が袋状体20の上面(一面)の3箇所(今度は第1変位部14a〜第3変位部14c)を局所的に押圧すると、その押圧力によって袋状体20が変形し、その袋状体20内に封入されている磁性流体が流動する。すなわち、磁性流体は、その時点で大半が滞留していた第3変位部14cの下側となる領域から、図5(d)において「無励磁」と記された第4可動子24が配置された第4変位部14dの下側となる領域に向け、同図では右側から左側への左右方向に、袋状体20内を流動する。
【0037】
すると、袋状体20における第4変位部14dが内部の磁性流体により下側から上方に向けて押し上げられ、今度は、第4変位部14dが他の変位部14a〜14cよりも上方に変位する。すなわち、袋状体20の一面側において、複数(4つ)の変位部14a〜14dのうちで変位して膨出部位となった変位部の出現する位置が、1つの変位部である第3変位部14cと他の1つの変位部である第4変位部14dとを直線的に結んだ一方向である左右方向において変化する。そして、アクチュエータ11では、そのように変位した第3変位部14cにより、左下隅の位置から出力側に膨出した膨出部位が形成され、その膨出部位の膨出力がフェイスマッサージ機10の施療子を動作させるための出力として利用される。
【0038】
以上のように、本実施形態のアクチュエータ11では、袋状体20の一面側において、変位して膨出部位となった変位部を順繰りに出現させる方向が、例えば第1変位部14aと第2変位部14bとを直線的に結ぶ左右方向(一方向)だけに限らず、例えば第2変位部14bと第3変位部14cとを直線的に結ぶ上下方向も含んだ複数方向になっている。すなわち、図5の事例では、変位して膨出部位となった変位部の出現する位置が、第1変位部14aから第2変位部14b及び第3変位部14cを経由して第4変位部14dまで時計方向において順繰りに移り変わる。つまり、変位することで膨出部位となった変位部を出現させる方向が、左右方向(一方向)と上下方向(他の方向)とを組み合わせた回転成分を含んだ方向となる。そのため、アクチュエータ11から出力を得られる位置が回転変位することになり、直線的な一方向で交互に出現位置が変化するだけの場合に比して、多様な出力が得られるようになる。
【0039】
なお、アクチュエータ11から出力を得るために制御装置12が励磁制御する各固定子16〜19は、そのとき出力を得るために膨出部位を出現させたい位置ごとに応じて適宜に選択可能とされる。したがって、図5の事例の場合でも、その1つの変位部により膨出部位を形成するために無励磁とされる固定子は、時計方向(1つの回転方向)において順繰りに入れ替わる場合に限らず、反時計方向において順繰りに入れ替わったり、対角線方向に入れ替わったり、更には順繰り方向が途中から逆方向に戻ったりするなど、適宜変更され得る。
【0040】
次に、4つの変位部14a〜14dのうち何れか2つの変位部により2つの膨出部位を順繰りに出現位置を変化させつつ形成する場合は、例えば図6(a)〜(d)に示すように、左右方向、上下方向、又は対角線方向において隣り合う2つの変位部と各々対応する2つの固定子が各コイルへの通電により励磁される。すると、それら2つの固定子において磁気力が発生し、それら2つの固定子と対をなす2つの可動子(図6(a)〜(d)において「励磁」と記された2つの可動子)が、対応する各固定子の磁気力に吸引されて各固定子側となる下側に移動する。
【0041】
そして、下側に移動した2つの可動子が袋状体20の上面(一面)の2箇所(この場合は「励磁」と記された2つの可動子が各々配置された2つの変位部)を局所的に押圧すると、その押圧力によって袋状体20が変形し、その袋状体20内に封入されている磁性流体が流動する。すなわち、磁性流体は、図6(a)〜(d)において「無励磁」と記された2つの可動子が各々配置された2つの変位部の下側となる各領域に向けて袋状体20内を流動する。
【0042】
すると、袋状体20における2つの変位部が内部の磁性流体により下側から上方に向けて押し上げられ、その2つの変位部が他の2つの変位部よりも上方に変位する。そして、アクチュエータ11では、そのように変位した2つの変位部により出力側へ膨出した膨出部位が形成され、その2つの膨出部位の膨出力がフェイスマッサージ機10の施療子を動作させるための出力として利用される。なお、このように2つの変位部により2つの膨出部位を順繰りに出現位置を変化させつつ形成する場合も、既述した1つの変位部により1つの膨出部位を順繰りに出現位置を変化させつつ形成する場合と同様に、膨出部位を形成するために無励磁とされる固定子は、制御装置12の励磁制御により適宜変更され得る。
【0043】
さらに、4つの変位部14a〜14dのうち何れか3つの変位部により3つの膨出部位を順繰りに出現位置を変化させつつ形成する場合は、例えば図7(a)(b)に示すように、左右方向及び上下方向において隣り合う3つの変位部と各々対応する3つの固定子が各コイルへの通電により励磁される。すると、それら3つの固定子において磁気力が発生し、それら3つの固定子と対をなす3つの可動子(図7(a)(b)において「励磁」と記された1つの可動子)が、対応する1つの固定子の磁気力に吸引されて固定子側となる下側に移動する。
【0044】
そして、下側に移動した1つの可動子が袋状体20の上面(一面)の1箇所(この場合は「励磁」と記された1つの可動子が配置された1つの変位部)を局所的に押圧すると、その押圧力によって袋状体20が変形し、その袋状体20内に封入されている磁性流体が流動する。すなわち、磁性流体は、図7(a)(b)において「無励磁」と記された3つの可動子が各々配置された3つの変位部の下側となる各領域に向けて袋状体20内を流動する。
【0045】
すると、袋状体20における3つの変位部が内部の磁性流体により下側から上方に向けて押し上げられ、その3つの変位部が残る1つの変位部よりも上方に変位する。そして、アクチュエータ11では、そのように変位した3つの変位部により出力側に膨出した膨出部位が形成され、その3つの膨出部位の膨出力がフェイスマッサージ機10の施療子を動作させるための出力として利用される。なお、このように3つの変位部により3つの膨出部位を順繰りに出現位置を変化させつつ形成する場合も、既述した1つ又は2つの変位部により1つ又は2つの膨出部位を順繰りに出現位置を変化させつつ形成する場合と同様に、膨出部位を形成するために無励磁とされる固定子は、制御装置12の励磁制御により適宜変更され得る。
【0046】
以上のように、本実施形態のアクチュエータ11では、複数(この場合4つ)の固定子16〜19のうち制御装置12による励磁対象とされる固定子16〜19の数が適宜変更可能とされる。しかも、そのような励磁対象とされる固定子16〜19の数は、連続した複数回の励磁タイミングにおける励磁タイミング毎においても変更可能とされる。例えば1回目は何れか1つの固定子のみを励磁対象とし、2回目以降は励磁対象とする固定子の数を1つずつ増加させるなど、励磁対象の変更態様は任意に選択可能である。
【0047】
なお、このように励磁対象とする固定子の数を変更することは、逆の意味で、無励磁とされる固定子の数を変更することになる。そして、無励磁とされる固定子の数が違うことにより、図8に示すように、本実施形態のアクチュエータ11では、そのとき膨出部位となる変位部14a〜14dにおける上方への変位量が変化する。
【0048】
すなわち、例えば図4及び図5に示すように、無励磁とされる固定子の数が1つである場合は、図8におけるグラフ線上にA点として矢印で示すように、相対的に大きな変位量が得られる。そのため、局所的に強めの出力を得たい場合には、無励磁とされる固定子の数が1つとなるように、制御装置12は励磁対象とする固定子の数を全ての固定子16〜19の数から1つ減算した数(本実施形態では、4−1=3)に変更するとよい。
【0049】
また、例えば図6に示すように、無励磁とされる固定子の数が2つである場合は、図8におけるグラフ線上にB点として矢印で示すように、相対的に中程度の変位量が得られる。そのため、局所的に中程度の出力を得たい場合には、無励磁とされる固定子の数が半分程度となるように、制御装置12は励磁対象とする固定子の数を全ての固定子16〜19の数を2で除算した数(本実施形態では、4/2=2)に変更するとよい。
【0050】
同様に、例えば図7に示すように、無励磁とされる固定子の数が3つである場合は、図8におけるグラフ線上にC点として矢印で示すように、相対的に小さい変位量が得られる。そのため、局所的に弱めの出力を得たい場合には、無励磁とされる固定子の数が3つとなるように、制御装置12は励磁対象とする固定子の数を全ての固定子16〜19の数から3つ減算した数(本実施形態では、4−3=1)に変更するとよい。
【0051】
また、固定子16〜19と可動子21〜24に上下両側から挟まれた状態にある袋状体20の内部に封入されている流体は磁性流体であるため、各可動子21〜24は対応する固定子16〜19が磁気力を発生した場合、その流体が磁性抵抗となることを抑制され、発生した磁気力に吸引されて良好に固定子16〜19側へと移動される。
【0052】
なお、フェイスマッサージ機10のアクチュエータが本実施形態のアクチュエータ11とは異なり、モーターやエアバッグによるアクチュエータである場合は、次のような問題がある。すなわち、モーターを用いたアクチュエータの場合は、重量が重くなると共に、モーターの回転数の変動により不快な振動や音がでてしまう。また、エアバックを用いたアクチュエータの場合は、応答速度が遅く、人間のように速い動作を実現できない上に、重量も重く、吸排気音がして、顔の付近で使うと不快に感じてしまう。こうしたモーターやエアバッグによるアクチュエータとは異なり、本実施形態のアクチュエータ11では、固定子16〜19の励磁制御により可動子21〜24が袋状体20を変形させつつ袋状体20内の磁性流体を流動させてソフトな出力が簡便に得られる。
【0053】
以上のように構成された第1実施形態のフェイスマッサージ機10及びアクチュエータ11によれば、以下のような効果を得ることができる。
(1)アクチュエータ11の一面側に3つ以上並設された変位部14a〜14dのうち変位して膨出部位となった変位部が順繰りに出現する方向が、例えば第1変位部14aと第2変位部14bとを直線的に結んだ左右方向(一方向)以外に第2変位部14bと第3変位部14cとを直線的に結んだ上下方向をも含んだ複数方向になっている。そのため、膨出部位の膨出力を出力として得るアクチュエータ11では、膨出部位となった変位部を出現させる方向を、左右方向(一方向)と上下方向(他の方向)を組み合わせた回転成分を含んだ方向とすることも可能であり、従来のような直線的な一方向で交互に出現させるだけの場合に比較して、変化に富んだ多様な出力を得ることができる。
【0054】
(2)変位することで膨出部位となり得る3つ以上の変位部14a〜14dが同じ1つの袋状体20の一面側に並設されている。そのため、その1つの袋状体20に並設された各変位部14a〜14dと各々対応する各固定子16〜19のうち励磁される固定子の数を変更すれば、無励磁の固定子と対応する変位部の数を変更できる結果、変位することで膨出部位となった変位部14a〜14dにおける上方への変位量を複数段階に亘って変化させることができる。
【0055】
(3)一面側に3つ以上並設された各変位部14a〜14dと個別に対応する各固定子16〜19を選択的に励磁制御することによって、膨出部位となって変位する変位部の数を増減調整できる結果、変位部の変位に伴い膨出力を出力する面積、すなわちマッサージの際に顔Fに押圧力を付与できる面積を変更することができる。
【0056】
(4)また、制御装置12による励磁対象とされる固定子16〜19の数は、連続した複数回の励磁タイミングにおける励磁タイミング毎にも変更可能とされるので、変位して膨出部位となる変位部14a〜14dの数を励磁タイミング毎に変更すれば、更に一層、きめ細やかで多様な出力を得ることができる。
【0057】
(5)袋状体20の内部に封入されている流体は磁性流体であるため、各可動子21〜24は対応する固定子16〜19が磁気力を発生した場合、その流体が磁性抵抗となることを抑制される。したがって、各可動子21〜24を対応する固定子16〜19から発生した磁気力の吸引作用で良好に固定子16〜19側へと移動させることができる。
【0058】
(第2実施形態)
次に、本発明の第2実施形態について図9を参照しながら説明する。
第2実施形態は、アクチュエータ11における基板、固定子、袋状体及び可動子の各形状、並びに、固定子、可動子及び変位部の数が、第1実施形態とは相違し、その他の点は第1実施形態と同様である。そのため、以下では第1実施形態との相違点につき主に説明し、同様の構成については同じ符号を付すだけにして重複説明を省略する。
【0059】
図9に示すように、本実施形態のアクチュエータ11における基板(図示略)と袋状体20は三角形状に形成されている。そして、内部に磁性流体を封入した袋状体20の下面側には3つの固定子(図示略)が三点配置状態に並設される一方、袋状体20の上面側(一面側)には各固定子と個別に対応する3つの円形状をなす可動子21,22,23が三点配置状態に並設されている。そして、袋状体20における各可動子21〜23の並設位置と各々対応する3箇所の部位が、フェイスマッサージ機10の施療子を動作させる出力を得るために個別に変位可能な3つの変位部14a〜14cを構成している。
【0060】
本実施形態においても、3つの固定子が制御装置12により選択的に励磁されると、その励磁された固定子と個別に対応する可動子21〜23が移動して袋状体20を局所的に押圧する。すると、その押圧力を受けて袋状体20が変形し、その袋状体20内に封入されている磁性流体が、無励磁の固定子と個別に対応する可動子21〜23が配置された変位部14a〜14cの下側となる領域に向けて流動することにより、その無励磁の固定子と対応する変位部14a〜14cを上方に向けて押し上げる。
【0061】
その結果、無励磁の固定子と位置的に対応する1つ又は2つの変位部14a〜14cが膨出部位となって上方に変位し、そのように変位した1つ又は2つの変位部14a〜14cからなる膨出部位の膨出力がマッサージ機10の施療子を動作させる出力として利用される。したがって、本実施形態においても、第1実施形態における(1)〜(5)と同様の効果を得ることができる。
【0062】
(第3実施形態)
次に、本発明の第3実施形態について図10を参照しながら説明する。
第3実施形態は、アクチュエータ11における固定子、可動子及び変位部の数が、第1実施形態とは相違し、その他の点は第1実施形態と同様である。そのため、以下では第1実施形態との相違点につき主に説明し、同様の構成については同じ符号を付すだけにして重複説明を省略する。
【0063】
図10に示すように、本実施形態のアクチュエータ11における袋状体20の下面側には9つの固定子(図示略)が3行3列のマトリクス状に配置されると共に、袋状体20の上面側(一面側)には各固定子と各々対をなす9つの可動子21〜29が3行3列のマトリクス状に並設されている。そして、袋状体20における各可動子21〜29の並設位置と各々対応する9箇所の部位が、フェイスマッサージ機10の施療子を動作させる出力を得るために個別に変位可能な9つの変位部14a〜14iを構成している。
【0064】
本実施形態においても、9つの固定子が制御装置12により選択的に励磁されると、その励磁された固定子と個別に対応する可動子21〜29が移動して袋状体20を局所的に押圧する。すると、その押圧力を受けて袋状体20が変形し、その袋状体20内に封入されている磁性流体が、無励磁の固定子と個別に対応する可動子21〜29が配置された変位部14a〜14iの下側となる領域に向けて流動することにより、その無励磁の固定子と対応する変位部14a〜14iを上方に向けて押し上げる。
【0065】
その結果、無励磁の固定子と位置的に対応する1つ〜8つの変位部14a〜14iが膨出部位となって上方に変位し、そのように変位した1つ〜8つの変位部14a〜14iからなる膨出部位の膨出力がマッサージ機10の施療子を動作させる出力として利用される。しかも、本実施形態では、変位することで膨出部位となり得る変位部14a〜14iの数が9つと多いので、各変位部を膨出部位となるように順繰りに変位させて出現させる位置の選択肢が豊富になる。したがって、本実施形態においては、第1実施形態における(1)〜(5)と同様の効果に加えて、更に以下の効果を得ることができる。
【0066】
(6)本実施形態では、固定子、可動子及び変位部の数が、各々9つであり、各々4つであった第1実施形態の場合よりも多いため、膨出部位となって変位する変位部14a〜14iが順繰りに出現する位置を、より一層多様に変化させることが可能になり、さらに変化に富んだきめ細かい出力を得ることができる。
【0067】
(第4実施形態)
次に、本発明の第4実施形態について図11(a)(b)を参照しながら説明する。
第4実施形態は、アクチュエータ11における袋状体の内部構造、及び袋状体に対する固定子と可動子の相対的な大きさが、第1実施形態とは相違し、その他の点は第1実施形態と同様である。そのため、以下では第1実施形態との相違点につき主に説明し、同様の構成については同じ符号を付すだけにして重複説明を省略する。
【0068】
図11(a)(b)に示すように、本実施形態のアクチュエータ11における各可動子21〜24は、四角扁平状の袋状体20を四等分した四角形状よりも更に小さな四角形状に形成されている。そして、4つの可動子21〜24が袋状体20の上面側に2行2列のマトリクス状に並設された場合には、行方向及び列方向で隣り合う他の可動子との間隔Lが、第1実施形態の場合よりも広い間隔、例えば四角形状をなす各可動子の一辺の長さの半分以上の長さ間隔となるように構成されている。
【0069】
また、袋状体20においては、各固定子16〜19(図11(b)には固定子16,17のみ図示)から発生した磁気力にて移動する各可動子21〜24の移動範囲から外れた位置(図11(a)(b)では袋状体20の略中央部)の一定領域が、袋状体20の上下方向で互いに対向する内面同士を溶着した溶着部30により構成されている。すなわち、溶着部30は、袋状体20が可動子21〜24により外部から局所的に押圧されることで内部の磁性流体が流動する場合に、その磁性流体が溶着部30を迂回して袋状体20内を流動するように、その溶着部30を形成した一定領域では磁性流体の流動を遮断する遮断領域として機能する。
【0070】
本実施形態においても、制御装置12による4つの固定子の選択的な励磁制御に基づき、その励磁された固定子と個別に対応する可動子21〜24が移動した場合、4つの変位部14a〜14dのうち無励磁の固定子と位置的に対応する1つ〜3つの変位部が膨出部位となって上方に変位する。その結果、そのように変位した1つ〜3つの変位部からなる膨出部位の膨出力がマッサージ機10の施療子を動作させる出力として利用される。
【0071】
しかも、本実施形態では、袋状体20が可動子21〜24により外部から局所的に押圧されることで内部の磁性流体が流動する場合、その磁性流体は袋状体20内の溶着部30が形成された一定領域では流動が遮断されるため、その溶着部30を迂回して袋状体20内を流動する。したがって、本実施形態においても、第1実施形態における(1)〜(5)と同様の効果を得ることができると共に、更に以下の効果をも得ることができる。
【0072】
(7)袋状体20の変形に伴い磁性流体が袋状体20内を流動する場合、その磁性流体は、袋状体20内における各可動子21〜24の移動範囲から外れた位置を通過することなく、隣り合う変位部14a〜14d同士の各下側領域間を流動する。すなわち、各可動子21〜24の移動範囲から外れているために当該領域内へ磁性流体が流入したとしても変位部14a〜14dの変位には貢献しない一定領域を通過するような遠回りはせずに、隣り合う変位部14a〜14d同士の各下側領域の間を短い距離で流動する。したがって、袋状体20内を流動する磁性流体が流れる方向を、変位部14a〜14dを迅速に変位させ得る方向に規定でき、マッサージ機10の施療子の動作に利用する多様な出力をアクチュエータ11から効率良く取り出すことができる。
【0073】
(第5実施形態)
次に、本発明の第5実施形態について図12を参照しながら説明する。
第5実施形態は、アクチュエータ11における袋状体の内部構造が、第1実施形態とは相違し、その他の点は第1実施形態と同様である。また、第4実施形態との対比では、各可動子の行方向及び列方向の間隔Lが狭い点で第4実施形態と相違している。そのため、以下では第1実施形態及び第4実施形態との相違点に着目して主に説明し、同様の構成については同じ符号を付すだけにして重複説明を省略する。
【0074】
図12に示すように、本実施形態のアクチュエータ11における袋状体20は、各固定子(図示略)から発生した磁気力にて移動する各可動子21〜24の移動範囲から外れた位置(図12では袋状体20の略中央部)の一定領域が、袋状体20の上下方向で互いに対向する内面同士を溶着した溶着部30により構成されている。すなわち、第4実施形態の場合と同様に、袋状体20内における各可動子21〜24の移動範囲から外れた位置の一定領域が、磁性流体の流動を遮断する遮断領域となっている。また、各可動子21〜24は、袋状体20の上面(一面)において並設状態で隣り合う他の可動子との間隔Lが、制御装置12による各固定子16〜19の励磁制御がされていない状態での互いに対をなす固定子16〜19と可動子21〜24との間の距離(例えば、図3(b)(c)に示す通常状態での袋状体20の厚みH)以下となるように設定されている。
【0075】
そのため、本実施形態においても、袋状体20が可動子21〜24により外部から局所的に押圧されて変形した場合、磁性流体は、溶着部30が形成された領域部分を通過することなく、隣り合う変位部14a〜14d同士の各下側領域間を、第4実施形態の場合よりも更に短い距離(=間隔L)で通過するように流動する。したがって、本実施形態においても、第1実施形態における(1)〜(5)及び第4実施形態における(7)と同様の効果を得ることができると共に、更に以下の効果をも得ることができる。
【0076】
(8)袋状体20内の磁性流体が隣り合う変位部14a〜14d同士の各下側領域の間を流動する場合、各変位部14a〜14dと対応する各可動子21〜24の隣り合う他の可動子との間隔Lが狭いので、袋状体20の変形時には、より一層速く、隣り合う変位部14a〜14d同士の各下側領域間で磁性流体を流動させることができる。
【0077】
(第6実施形態)
次に、本発明の第6実施形態について図13を参照しながら説明する。
第6実施形態は、アクチュエータ11における固定子、可動子、変位部及び袋状体の数が、第1実施形態とは相違し、その他の点は第1実施形態と同様である。そのため、以下では第1実施形態との相違点に着目して主に説明し、同様の構成については同じ符号を付すだけにして重複説明を省略する。
【0078】
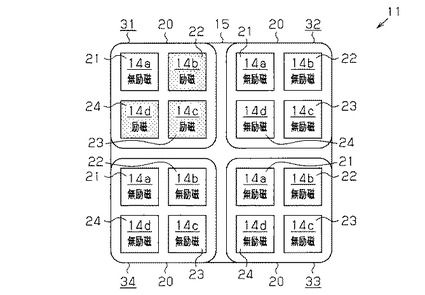
図13に示すように、本実施形態のアクチュエータ11における基板15上には、4つの固定子(図示略)と4つの可動子21〜24及び1つの袋状体20を各々備えた構成の4つの変位ユニット31〜34が2行2列のマトリクス状に並設されている。すなわち、各変位ユニット31〜34は、行方向及び列方向で隣り合う変位ユニット同士で、各々が備える各可動子21〜24をアクチュエータ11の上面側(一面側)において並設状態とするように配置されている。なお、各変位ユニット31〜34における各固定子は共通の制御装置12により励磁制御される。
【0079】
いま例えば、図13に示すアクチュエータ11において、各変位ユニット31〜34に4つずつ並設された16個全ての可動子21〜24が同じ1つの袋状体20に並設されているとした場合、図13に示すごとく左上隅の1つの変位部14aだけを変位させた出力を得るためには、それ以外の15個の変位部と対応する各固定子を励磁する必要がある。つまり、その場合は、励磁対象とする固定子の数が多くなるため、消費電力が多くなってしまう。
【0080】
この点、本実施形態の場合は、広い意味で、4つある各変位ユニット31〜34の1つ1つを個別に制御可能な変位部として捉えることも可能である。そして、その場合には、図13に示すように、左上隅の1つの変位ユニット31における第1変位部14aを除く他の3つの変位部(第2変位部14b〜第4変位部14d)と各々対応する3つの固定子だけが各コイルへの通電により励磁される。そして、左上隅の1つの変位ユニット31を除く他の3つの変位ユニット32〜34に各々並設された合計12個の各固定子は無励磁とすればよい。そのため、左上隅の1つの変位ユニット31における3つの固定子だけを励磁するだけの電力消費でよいため、省エネの面でも効率良く出力を得ることができる。
【0081】
なお、本実施形態においても、制御装置12による各固定子の選択的な励磁制御に基づき、その励磁された固定子と個別に対応する可動子21〜24が移動した場合、無励磁の固定子と位置的に対応する変位部14a〜14dが膨出部位となって上方に変位し、その膨出部位の膨出力がマッサージ機10の施療子を動作させる出力として利用される。したがって、本実施形態においても、第1実施形態における(1)〜(5)と同様の効果を得ることができると共に、更に以下の効果をも得ることができる。
【0082】
(9)複数(一例として本実施形態では4つ)の変位ユニット31〜34の1つ1つを個別に制御可能な変位部として捉え、何れかの変位ユニットで何れかの変位部を、それが対応する固定子の励磁制御により膨出部位となるように変位させると共に、他の変位ユニットでは全ての固定子を無励磁とすれば、省エネを図りつつ所望する出力を得ることができる。
【0083】
(第7実施形態)
次に、本発明の第7実施形態について図14を参照しながら説明する。
第7実施形態は、アクチュエータ11における袋状体の形態及び数、その1つの袋状体に備えられる固定子と可動子の数が、第1実施形態とは相違し、その他の点は第1実施形態と同様である。そのため、以下では第1実施形態との相違点に着目して主に説明し、同様の構成については同じ符号を付すだけにして重複説明を省略する。
【0084】
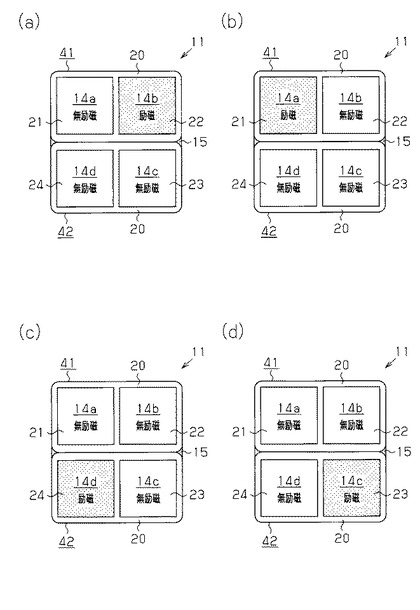
図14(a)〜(d)に示すように、本実施形態のアクチュエータ11における基板15上には、2つの固定子(図示略)と2つの可動子21,22(23,24)及び1つの袋状体20を各々備えた構成の2つの変位ユニット41,42が並設されている。すなわち、各変位ユニット41,42は、基板15をほぼ二等分した長方形状をなす2つの扁平な袋状体20が互いの対向する長辺同士を接するように並設されている。
【0085】
そして、一方(例えば図14(a)では上側)の変位ユニット41における袋状体20の上面(一面)には複数(本実施形態では2つ)の可動子21,22が袋状体20の長手方向に所定間隔をおいて並設されている。また、他方(例えば図14(a)では下側)の変位ユニット42における袋状体20の上面(一面)には複数(本実施形態では2つ)の可動子23,24が袋状体20の長手方向に所定間隔をおいて並設されている。
【0086】
そして、一方の変位ユニット41の袋状体20における第1可動子21及び第2可動子22が配置された各部位が第1変位部14a及び第2変位部14b、他方の変位ユニット42の袋状体20における第3可動子23及び第4可動子24が配置された各部位が第3変位部14c及び第4変位部14dを構成している。すなわち、本実施形態でも既述した第6実施形態の場合と同様に、隣り合う変位ユニット41,42同士が各々備える可動子21〜24は、それら全ての可動子21〜24がアクチュエータ11の上面側(一面側)において並設状態となるように配置されている。
【0087】
なお、基板15上において各袋状体20の下面側には、上面側に並設された各可動子21,22(23,24)と対をなす固定子16,17(18,19)が2つずつ並設されている。そして、制御装置12により各固定子16,17(18,19)が選択的に励磁制御された場合に、その励磁対象とされた固定子と対をなす一方の可動子が袋状体20を局所的に押圧して変形させて当該袋状体20内の磁性流体を流動させることにより、他方の可動子と対応する位置の変位部14a〜14dが変位して膨出部位を形成するようになっている。
【0088】
すなわち、図14(a)の場合は、左上隅の第1変位部14aにより膨出部位を形成する場合であり、この場合は、第2変位ユニット42の各固定子は無励磁とされ、第1変位ユニット41における第2変位部14bと対応する第2可動子22と対をなす固定子だけが励磁される。すると、第2可動子22が移動し、袋状体20を局所的に押圧して袋状体20を変形させるため、内部の磁性流体が第1変位部14aの下側領域に向けて流動し、第1変位部14aを上方に向けて押し上げる。その結果、左上隅の第1変位部14aだけが膨出部位となり、その膨出力がフェイスマッサージ機10の施療子を動作させるための出力として利用される。
【0089】
なお、その後に、右上隅の第2変位部14bにより膨出部位を形成する場合は、同様に第2変位ユニット42の各固定子は無励磁としたままで、第1変位ユニット41における第1変位部14aと対応する第1可動子21と対をなす固定子だけが励磁される。また、その後、右下隅の第3変位部14cにより膨出部位を形成する場合は、第1変位ユニット41の各固定子は無励磁としたままで、第2変位ユニット42における第4変位部14dと対応する第4可動子24と対をなす固定子だけが励磁される。更にその後、左下隅の第4変位部14dにより膨出部位を形成する場合は、同様に第1変位ユニット41の各固定子は無励磁としたままで、第2変位ユニット42における第3変位部14cと対応する第3可動子23と対をなす固定子だけが励磁される。
【0090】
したがって、本実施形態によれば、第1実施形態における(1)と(5)及び第6実施形態の(9)に示す効果と同様の効果を得ることができる。
なお、上記各実施形態は、以下のような別の実施形態に変更してもよい。
【0091】
・上記各実施形態において、袋状体20内に封入される流体は、磁性流体以外にオイルや水などの液体であってもよく、更には空気などの気体であってもよい。
・上記第6実施形態及び第7実施形態において、アクチュエータ11は、変位ユニット31〜34,41,42を2つや4つ以外に3つや5つ以上の複数備える構成であってもよい。
【0092】
・上記第1〜第3実施形態及び第5〜第7実施形態において、袋状体20の一面側に並設される各可動子21〜24間の間隔Lは袋状体20の厚みHよりも広いものであってもよい。
【0093】
・上記第4実施形態及び第5実施形態において、袋状体20内の流体の流動を遮断する遮断領域は、袋状体20の対向する内面同士を溶着させた溶着部30によらずに、袋状体20において可動子21〜24の移動範囲から外れた位置の一定領域を袋状体20の厚さ方向の両側から挟圧することで形成するようにしてもよい。
【0094】
・上記各実施形態において、1つの袋状体20に固定子と可動子の対が5つ以上設けられる構成であってもよい。
・上記各実施形態において、可動子21〜29の形状は四角形状や円形状に限らず任意の形状にしてもよい。
【0095】
・上記各実施形態において、アクチュエータ11は、フェイスマッサージ機10に限らず、例えば背中や脚部等の顔F以外の身体の一部を施療するマッサージ機に、その施療子を動作させる出力を得るために備えられる構成であってもよい。
【符号の説明】
【0096】
10…フェイスマッサージ機(マッサージ機)、11…アクチュエータ、12…制御装置(制御部)、14a〜14i…変位部、16〜19…固定子、16a〜19a…固定子コア、16b〜19b…コイル、20…袋状体、21〜29…可動子、30…溶着部(遮断領域)、31〜34,41,42…変位ユニット、L…間隔。
【技術分野】
【0001】
本発明は、電磁石を用いたアクチュエータ及びそれを備えたマッサージ機に関する。
【背景技術】
【0002】
従来、電磁石を構成する固定子から発生した磁気力で可動子を移動させてマッサージ機の施療子を動作させるための出力を得るアクチュエータが知られている。例えば特許文献1には、流体を封入した1つの袋状体の下面側に2つの固定子を並設する一方、両固定子と対になる2つの可動子を袋状体の上面側に並設したアクチュエータが開示されている。この従来のアクチュエータでは、2つの固定子から交互に発生される磁気力により2つの可動子が交互に固定子側へ移動し、その移動に伴い袋状体の一部が押圧されて変形した際の袋状体における膨出部位の膨出力がマッサージ機の施療子を動作させる出力として取得される。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−227257号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、従来のアクチュエータでは、袋状体の上面における一方の可動子が配設された第1部位と他方の可動子が配設された第2部位とが交互に膨出部位となる。すなわち、各可動子の移動に伴い袋状体の上面側に形成される膨出部位が、第1部位と第2部位とを直線的に結ぶ一方向においてしか順繰りに出現せず、そのような一方向で交互に出現位置を変化させる2つの膨出部位の膨出力に応じた出力しか得ていなかった。そのため、従来のアクチュエータでは、マッサージ機における施療子の動作に利用する出力を得るという観点からすると、変化に乏しい単調な出力しか得ることができず、多様な出力を取り出せないという問題があった。
【0005】
本発明は、こうした実情に鑑みてなされたものであり、その目的は、多様な出力を取り出すことができるアクチュエータ及びそのようなアクチュエータを備えたマッサージ機を提供することにある。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明のアクチュエータは、固定子コア及びコイルを有し該コイルへの通電により励磁されることで磁気力を発生する固定子と、前記固定子が発生した磁気力により移動する可動子と、流体を封入した状態で前記可動子の移動範囲内に配置され、移動した前記可動子に外部から押圧された場合に局所的な膨出部位を形成するように変形可能な袋状体と、前記固定子を励磁制御する制御部と、を備え、前記袋状体における前記膨出部位の膨出力を出力として得るアクチュエータであって、1つの前記袋状体に複数の前記固定子と複数の前記可動子が設けられると共に、変位することで前記膨出部位となり得る変位部が一面側に3つ以上並設され、前記制御部は、前記各変位部のうち変位して前記膨出部位となった変位部を順繰りに出現させる方向が、1つの変位部と他の1つの変位部とを直線的に結んだ一方向を含む複数方向となるように、前記各固定子を励磁制御することを特徴とする。
【0007】
また、本発明のアクチュエータは、1つの前記袋状体に前記固定子と前記可動子との対が3つ以上設けられると共に、当該1つの袋状体の一面側に前記変位部が3つ以上並設されていることが好ましい。
【0008】
また、本発明のアクチュエータは、前記袋状体内における前記各可動子の移動範囲から外れた位置の一定領域が、前記流体の流動を遮断する遮断領域とされていることが好ましい。
【0009】
また、本発明のアクチュエータにおいて、前記各可動子は、並設状態で隣り合う他の可動子との間隔が、前記制御部による前記各固定子の励磁制御がされていない状態での互いに対をなす前記固定子と前記可動子との間の距離以下となるように設定されていることが好ましい。
【0010】
また、本発明のアクチュエータにおいて、前記制御部は、1つの前記袋状体に設けられた複数の前記固定子のうち励磁対象とする固定子の数を励磁タイミング毎に変更可能であることが好ましい。
【0011】
また、本発明のアクチュエータは、前記固定子と前記可動子と前記袋状体とを含んで構成される変位ユニットを複数備え、前記各変位ユニットは隣り合う変位ユニット同士が互いの前記各可動子を一面側において並設状態とするように配置されることが好ましい。
【0012】
また、本発明のアクチュエータにおいて、前記流体は磁性流体であることが好ましい。
さらに、上記目的を達成するために、本発明のマッサージ機は、上記構成のアクチュエータから得る出力を用いて使用者の身体の施療を行うことを特徴とする。
【発明の効果】
【0013】
本発明によれば、多様な出力を取り出すことができる。
【図面の簡単な説明】
【0014】
【図1】本発明の第1実施形態に係るフェイスマッサージ機の概略を示す模式図。
【図2】同フェイスマッサージ機におけるアクチュエータの主構成要素の概略図。
【図3】(a)は第1実施形態のアクチュエータの平面図、(b)は(a)における3b−3b線矢視断面図、(c)は(a)における3c−3c線矢視断面図。
【図4】(a)は出力状態にあるアクチュエータの平面図、(b)は(a)における4b−4b線矢視断面図、(c)は(a)における4c−4c線矢視断面図。
【図5】(a)(b)(c)(d)は膨出部位の出現位置が順繰りに移り変わる状態を示すアクチュエータの平面図。
【図6】(a)(b)(c)(d)は出力態様を異ならせた場合のアクチュエータの平面図。
【図7】(a)(b)は更に出力態様を異ならせた場合のアクチュエータの平面図。
【図8】アクチュエータにおける無励磁固定子の数と変位量との関係を示すグラフ。
【図9】第2実施形態のフェイスマッサージ機におけるアクチュエータの平面図。
【図10】第3実施形態のフェイスマッサージ機におけるアクチュエータの平面図。
【図11】(a)は第4実施形態のアクチュエータの平面図、(b)は(a)における11b−11b線矢視断面図。
【図12】第5実施形態のアクチュエータの平面図。
【図13】第6実施形態のアクチュエータの平面図。
【図14】(a)(b)(c)(d)は膨出部位の出現位置が順繰りに移り変わる状態を示す第7実施形態のアクチュエータの平面図。
【発明を実施するための形態】
【0015】
(第1実施形態)
以下、本発明をマッサージ機の一種であるフェイスマッサージ機及びそのマッサージ機の施療子を動作させる出力を得るためのアクチュエータに具体化した第1実施形態を図1〜図8を参照しながら説明する。
【0016】
図1に示すように、本実施形態のフェイスマッサージ機10は、その変位動作から出力を得るアクチュエータ11と、アクチュエータ11の動作を制御する制御装置(制御部)12と、アクチュエータ11及び制御装置12に電力を供給する電源13を備えている。アクチュエータ11は、その一面側に並設される複数(本実施形態では4つ)の変位部14a〜14dを備えている。そして、フェイスマッサージ機10は、制御装置12の制御に基づき各変位部14a〜14dが選択的に膨出部位となるように変位することで得られる出力を用いて、使用者の身体の一部である顔Fのマッサージ(施療)を行うことが可能とされている。
【0017】
図2及び図3に示すように、アクチュエータ11は、四角形状の基板15上に2行2列のマトリクス状に並設される4つの固定子16〜19と、その固定子16〜19の上側に配置される1つの袋状体20と、その袋状体20の上側に各固定子16〜19と対をなすように並設される4つの可動子21〜24とを備えている。そして、袋状体20の一面側における、4つの可動子21〜24の並設位置と各々対応する4箇所の部位が、フェイスマッサージ機10の施療子を動作させる出力を得るために個別に変位可能な4つの変位部14a〜14dを構成している。なお、各変位部14a〜14dを変位させるときには、固定子16〜19、袋状体20、及び可動子21〜24等と同様にアクチュエータ11の構成要素である制御装置12が、各固定子16〜19を励磁制御することにより各可動子21〜24を吸引力で移動させて袋状体20を押圧変形させる。
【0018】
各固定子16〜19は、基板15をほぼ四等分した小さな四角形状の固定子コア16a〜19aと、各固定子コア16a〜19aの内部に各々収容される環状のコイル16b〜19bとによって構成されている。各コイル16b〜19bには、各固定子16〜19を励磁するときに制御装置12の制御により電源13から電力が供給される。そして、各固定子16〜19は、各コイル16b〜19bへの通電により励磁されることで磁気力を発生する。なお、各コイル16b〜19bは、中心孔16c〜19cを有するように形成されているため、これらの中心孔16c〜19cに固定鉄心を配置することも可能であり、そのようにした場合には、発生する磁気力を増大させることが可能である。
【0019】
袋状体20は、基板15と略同じ大きさの四角形状をなす、例えばシリコンゴム等からなる可撓性を有した扁平な袋であって、その内部には流体の一種である磁性流体(表面に界面活性剤を吸着させた強磁性微粒子を溶媒中に分散させたコロイド溶液)が封入されている。そして、そのように磁性流体が封入された状態で、袋状体20は、基板15上に並設されている4つの固定子16〜19の上側に、それ1つで4つの固定子16〜19全てを覆うように配置される。なお、袋状体20における磁性流体の封入量は、袋状体20の一部が外部から押圧された際には袋状体20が変形可能であり、その場合には磁性流体が袋状体20の内部を流動して他の部位を膨出させることができる程度に調整された封入量となっている。
【0020】
各可動子21〜24は、各固定子コア16a〜19aよりも僅かに小さな四角形状をなす、例えば鉄等の磁性を有する金属板状部材にて構成されている。そして、各可動子21〜24は、袋状体20の下面側に並設された各固定子16〜19と対をなして、袋状体20の上面側(一面側)に、隣り合う他の可動子との間に間隔Lをおいた2行2列のマトリクス状の配置となるように固定されている。なお、この場合の間隔Lは、制御装置12による各固定子16〜19の励磁制御がされていない状態での互いに対をなす固定子16〜19と可動子21〜24との間の距離(例えば、図3(b)(c)に示す通常状態での袋状体20の厚みH)以下となるように設定されている。
【0021】
そのため、各可動子21〜24は、コイル16b〜19bへの通電にて励磁された各固定子16〜19が発生する磁気力に吸引された場合には、その可動子21〜24が個別に対応する固定子16〜19に接近する方向へ移動し、袋状体20を局所的に押圧して変形させる。したがって、この点で、移動した可動子21〜24に押圧されて変形する袋状体20は、可動子21〜24の移動範囲内(つまり、固定子16〜19と可動子21〜24との間)に配置されていることになる。
【0022】
次に、以上のように構成されたフェイスマッサージ機10の作用について、特に使用者の顔Fをマッサージする際の出力を得るために変位動作するアクチュエータ11の作用に着目して以下説明する。
【0023】
なお、以下では説明の便宜上、各可動子21〜24の並設位置と各々対応する各変位部14a〜14dのことを、第1変位部14a〜第4変位部14dというように、それぞれが変位動作する位置ごとに区別して呼称することもある。第1実施形態のアクチュエータ11の場合は、図4(a)に示すように各可動子21〜24を並設した一面側から平面視した状態において左上隅に位置する変位部を第1変位部14a、右上隅に位置する変位部を第2変位部14b、右下隅に位置する変位部を第3変位部14c、そして左下隅に位置する変位部を第4変位部14dと呼称する。さらに、各変位部14a〜14dと位置的に対応する各固定子16〜19及び各可動子21〜24についても、第1変位部14a〜第4変位部14dに各々対応させて、第1固定子16〜第4固定子19及び第1可動子21〜第4可動子24と呼称する。
【0024】
さて、アクチュエータ11は、制御装置12の制御により、4つの固定子16〜19のうち何れかの固定子16〜19のコイル16b〜19bが通電されると、そのコイル16b〜19bを有する固定子16〜19において磁気力が発生する。すると、その磁気力を発生した固定子16〜19と対をなす可動子21〜24が、当該磁気力により吸引されて固定子16〜19側に移動する。そして、その移動した可動子21〜24が袋状体20を局所的に押圧して変形させることにより、袋状体20における所定の変位部14a〜14d(そのとき可動子21〜24により押圧されていない変位部)により上方に向けて膨出した膨出部位が形成される。そして、その際の膨出部位の膨出力がフェイスマッサージ機10の施療子を動作させるための出力として利用される。
【0025】
まず、4つの変位部14a〜14dのうち何れか1つの変位部により膨出部位が順繰りに出現位置を変化させつつ形成される場合について説明し、その後に、複数(例えば2つ又は3つ)の変位部により複数の膨出部位が順繰りに出現位置を変化させつつ形成される場合について説明する。
【0026】
さて最初に、図4(a)(b)(c)に示すように、1つの変位部として左上隅の第1変位部14aにより膨出部位を形成する場合は、第1変位部14aを除く他の3つの変位部(第2変位部14b〜第4変位部14d)と各々対応する3つの固定子(第2固定子17〜第4固定子19)が各コイル17b〜19bへの通電により励磁される。すると、それら3つの固定子17〜19において磁気力が発生し、それら3つの固定子17〜19と対をなす3つの可動子(図4(a)において「励磁」と記された第2可動子22〜第4可動子24)が、対応する各固定子17〜19の磁気力に吸引されて各固定子17〜19側となる下側に移動する。
【0027】
そして、下側に移動した3つの可動子22〜24が袋状体20の上面(一面)の3箇所(この場合は第2変位部14b〜第4変位部14d)を局所的に押圧すると、その押圧力によって袋状体20が変形し、その袋状体20内に封入されている磁性流体が流動する。すなわち、磁性流体は、図4(a)において「無励磁」と記された第1可動子21が配置された第1変位部14aの下側となる領域に集まるように袋状体20内を流動する。
【0028】
すると、袋状体20における第1変位部14aが内部の磁性流体により下側から上方に向けて押し上げられ、図4(b)(c)に示すように、第1変位部14aが他の変位部14b〜14dよりも上方に変位する。そして、アクチュエータ11では、そのように変位した第1変位部14aにより、左上隅の位置から出力側(図4(b)(c)では上側)に大きく膨出した膨出部位が形成され、その膨出部位の膨出力がフェイスマッサージ機10の施療子を動作させるための出力として利用される。
【0029】
そして次には、その時点で左上隅の第1変位部14aのみを膨出させている図5(a)に示す状態から、右上隅の第2変位部14bのみを膨出させる図5(b)に示す状態へと膨出部位の出現位置を変化させるべく、アクチュエータ11における各固定子16〜19が制御装置12により励磁制御される。すなわち、今度は、第2変位部14bを除く他の3つの変位部(第1変位部14a、第3変位部14c、第4変位部14d)と各々対応する3つの固定子(第1固定子16、第3固定子18、第4固定子19)が各コイル16b,18b,19bへの通電により励磁される。すると、それら3つの固定子16,18,19において磁気力が発生し、それら3つの固定子16,18,19と対をなす3つの可動子(図5(b)において「励磁」と記された第1可動子21、第3可動子23、第4可動子24)が、対応する各固定子16,18,19の磁気力に吸引されて各固定子16,18,19側となる下側に移動する。
【0030】
そして、下側に移動した3つの可動子21,23,24が袋状体20の上面(一面)の3箇所(今度は第1変位部14a、第3変位部14c、第4変位部14d)を局所的に押圧すると、その押圧力によって袋状体20が変形し、その袋状体20内に封入されている磁性流体が流動する。すなわち、磁性流体は、その時点で大半が滞留していた第1変位部14aの下側となる領域から、図5(b)において「無励磁」と記された第2可動子22が配置された第2変位部14bの下側となる領域に向け、同図では左側から右側への左右方向に、袋状体20内を流動する。
【0031】
すると、袋状体20における第2変位部14bが内部の磁性流体により下側から上方に向けて押し上げられ、今度は、第2変位部14bが他の変位部14a,14c,14dよりも上方に変位する。すなわち、袋状体20の一面側において、複数(4つ)の変位部14a〜14dのうちで変位して膨出部位となった変位部の出現する位置が、1つの変位部である第1変位部14aと他の1つの変位部である第2変位部14bとを直線的に結んだ一方向である左右方向において変化する。そして、アクチュエータ11では、そのように変位した第2変位部14bにより、右上隅の位置から出力側に大きく膨出した膨出部位が形成され、その膨出部位の膨出力がフェイスマッサージ機10の施療子を動作させるための出力として利用される。
【0032】
そして次には、その時点で右上隅の第2変位部14bのみを膨出させている図5(b)に示す状態から、右下隅の第3変位部14cのみを膨出させる図5(c)に示す状態へと膨出部位の出現位置を変化させるべく、アクチュエータ11における各固定子16〜19が制御装置12により励磁制御される。すなわち、今度は、第3変位部14cを除く他の3つの変位部(第1変位部14a、第2変位部14b、第4変位部14d)と各々対応する3つの固定子(第1固定子16、第2固定子17、第4固定子19)が各コイル16b,17b,19bへの通電により励磁される。すると、それら3つの固定子16,17,19において磁気力が発生し、それら3つの固定子16,17,19と対をなす3つの可動子(図5(c)において「励磁」と記された第1可動子21、第2可動子22、第4可動子24)が、対応する各固定子16,17,19の磁気力に吸引されて各固定子16,17,19側となる下側に移動する。
【0033】
そして、下側に移動した3つの可動子21,22,24が袋状体20の上面(一面)の3箇所(今度は第1変位部14a、第2変位部14b、第4変位部14d)を局所的に押圧すると、その押圧力によって袋状体20が変形し、その袋状体20内に封入されている磁性流体が流動する。すなわち、磁性流体は、その時点で大半が滞留していた第2変位部14bの下側となる領域から、図5(c)において「無励磁」と記された第3可動子23が配置された第3変位部14cの下側となる領域に向け、同図では上側から下側への上下方向に、袋状体20内を流動する。
【0034】
すると、袋状体20における第3変位部14cが内部の磁性流体により下側から上方に向けて押し上げられ、今度は、第3変位部14cが他の変位部14a,14b,14dよりも上方に変位する。すなわち、袋状体20の一面側において、複数(4つ)の変位部14a〜14dのうちで変位して膨出部位となった変位部の出現する位置が、1つの変位部である第2変位部14bと他の1つの変位部である第3変位部14cとを直線的に結んだ一方向である上下方向において変化する。そして、アクチュエータ11では、そのように変位した第3変位部14cにより、右下隅の位置から出力側に大きく膨出した膨出部位が形成され、その膨出部位の膨出力がフェイスマッサージ機10の施療子を動作させるための出力として利用される。
【0035】
そして次には、その時点で右下隅の第3変位部14cのみを膨出させている図5(c)に示す状態から、左下隅の第4変位部14dのみを膨出させる図5(d)に示す状態へと膨出部位の出現位置を変化させるべく、アクチュエータ11における各固定子16〜19が制御装置12により励磁制御される。すなわち、今度は、第4変位部14dを除く他の3つの変位部(第1変位部14a〜第3変位部14c)と各々対応する3つの固定子(第1固定子16〜第3固定子18)が各コイル16b〜18bへの通電により励磁される。すると、それら3つの固定子16〜18において磁気力が発生し、それら3つの固定子16〜18と対をなす3つの可動子(図5(d)において「励磁」と記された第1可動子21〜第3可動子23)が、対応する各固定子16〜18の磁気力に吸引されて各固定子16〜18側となる下側に移動する。
【0036】
そして、下側に移動した3つの可動子21〜23が袋状体20の上面(一面)の3箇所(今度は第1変位部14a〜第3変位部14c)を局所的に押圧すると、その押圧力によって袋状体20が変形し、その袋状体20内に封入されている磁性流体が流動する。すなわち、磁性流体は、その時点で大半が滞留していた第3変位部14cの下側となる領域から、図5(d)において「無励磁」と記された第4可動子24が配置された第4変位部14dの下側となる領域に向け、同図では右側から左側への左右方向に、袋状体20内を流動する。
【0037】
すると、袋状体20における第4変位部14dが内部の磁性流体により下側から上方に向けて押し上げられ、今度は、第4変位部14dが他の変位部14a〜14cよりも上方に変位する。すなわち、袋状体20の一面側において、複数(4つ)の変位部14a〜14dのうちで変位して膨出部位となった変位部の出現する位置が、1つの変位部である第3変位部14cと他の1つの変位部である第4変位部14dとを直線的に結んだ一方向である左右方向において変化する。そして、アクチュエータ11では、そのように変位した第3変位部14cにより、左下隅の位置から出力側に膨出した膨出部位が形成され、その膨出部位の膨出力がフェイスマッサージ機10の施療子を動作させるための出力として利用される。
【0038】
以上のように、本実施形態のアクチュエータ11では、袋状体20の一面側において、変位して膨出部位となった変位部を順繰りに出現させる方向が、例えば第1変位部14aと第2変位部14bとを直線的に結ぶ左右方向(一方向)だけに限らず、例えば第2変位部14bと第3変位部14cとを直線的に結ぶ上下方向も含んだ複数方向になっている。すなわち、図5の事例では、変位して膨出部位となった変位部の出現する位置が、第1変位部14aから第2変位部14b及び第3変位部14cを経由して第4変位部14dまで時計方向において順繰りに移り変わる。つまり、変位することで膨出部位となった変位部を出現させる方向が、左右方向(一方向)と上下方向(他の方向)とを組み合わせた回転成分を含んだ方向となる。そのため、アクチュエータ11から出力を得られる位置が回転変位することになり、直線的な一方向で交互に出現位置が変化するだけの場合に比して、多様な出力が得られるようになる。
【0039】
なお、アクチュエータ11から出力を得るために制御装置12が励磁制御する各固定子16〜19は、そのとき出力を得るために膨出部位を出現させたい位置ごとに応じて適宜に選択可能とされる。したがって、図5の事例の場合でも、その1つの変位部により膨出部位を形成するために無励磁とされる固定子は、時計方向(1つの回転方向)において順繰りに入れ替わる場合に限らず、反時計方向において順繰りに入れ替わったり、対角線方向に入れ替わったり、更には順繰り方向が途中から逆方向に戻ったりするなど、適宜変更され得る。
【0040】
次に、4つの変位部14a〜14dのうち何れか2つの変位部により2つの膨出部位を順繰りに出現位置を変化させつつ形成する場合は、例えば図6(a)〜(d)に示すように、左右方向、上下方向、又は対角線方向において隣り合う2つの変位部と各々対応する2つの固定子が各コイルへの通電により励磁される。すると、それら2つの固定子において磁気力が発生し、それら2つの固定子と対をなす2つの可動子(図6(a)〜(d)において「励磁」と記された2つの可動子)が、対応する各固定子の磁気力に吸引されて各固定子側となる下側に移動する。
【0041】
そして、下側に移動した2つの可動子が袋状体20の上面(一面)の2箇所(この場合は「励磁」と記された2つの可動子が各々配置された2つの変位部)を局所的に押圧すると、その押圧力によって袋状体20が変形し、その袋状体20内に封入されている磁性流体が流動する。すなわち、磁性流体は、図6(a)〜(d)において「無励磁」と記された2つの可動子が各々配置された2つの変位部の下側となる各領域に向けて袋状体20内を流動する。
【0042】
すると、袋状体20における2つの変位部が内部の磁性流体により下側から上方に向けて押し上げられ、その2つの変位部が他の2つの変位部よりも上方に変位する。そして、アクチュエータ11では、そのように変位した2つの変位部により出力側へ膨出した膨出部位が形成され、その2つの膨出部位の膨出力がフェイスマッサージ機10の施療子を動作させるための出力として利用される。なお、このように2つの変位部により2つの膨出部位を順繰りに出現位置を変化させつつ形成する場合も、既述した1つの変位部により1つの膨出部位を順繰りに出現位置を変化させつつ形成する場合と同様に、膨出部位を形成するために無励磁とされる固定子は、制御装置12の励磁制御により適宜変更され得る。
【0043】
さらに、4つの変位部14a〜14dのうち何れか3つの変位部により3つの膨出部位を順繰りに出現位置を変化させつつ形成する場合は、例えば図7(a)(b)に示すように、左右方向及び上下方向において隣り合う3つの変位部と各々対応する3つの固定子が各コイルへの通電により励磁される。すると、それら3つの固定子において磁気力が発生し、それら3つの固定子と対をなす3つの可動子(図7(a)(b)において「励磁」と記された1つの可動子)が、対応する1つの固定子の磁気力に吸引されて固定子側となる下側に移動する。
【0044】
そして、下側に移動した1つの可動子が袋状体20の上面(一面)の1箇所(この場合は「励磁」と記された1つの可動子が配置された1つの変位部)を局所的に押圧すると、その押圧力によって袋状体20が変形し、その袋状体20内に封入されている磁性流体が流動する。すなわち、磁性流体は、図7(a)(b)において「無励磁」と記された3つの可動子が各々配置された3つの変位部の下側となる各領域に向けて袋状体20内を流動する。
【0045】
すると、袋状体20における3つの変位部が内部の磁性流体により下側から上方に向けて押し上げられ、その3つの変位部が残る1つの変位部よりも上方に変位する。そして、アクチュエータ11では、そのように変位した3つの変位部により出力側に膨出した膨出部位が形成され、その3つの膨出部位の膨出力がフェイスマッサージ機10の施療子を動作させるための出力として利用される。なお、このように3つの変位部により3つの膨出部位を順繰りに出現位置を変化させつつ形成する場合も、既述した1つ又は2つの変位部により1つ又は2つの膨出部位を順繰りに出現位置を変化させつつ形成する場合と同様に、膨出部位を形成するために無励磁とされる固定子は、制御装置12の励磁制御により適宜変更され得る。
【0046】
以上のように、本実施形態のアクチュエータ11では、複数(この場合4つ)の固定子16〜19のうち制御装置12による励磁対象とされる固定子16〜19の数が適宜変更可能とされる。しかも、そのような励磁対象とされる固定子16〜19の数は、連続した複数回の励磁タイミングにおける励磁タイミング毎においても変更可能とされる。例えば1回目は何れか1つの固定子のみを励磁対象とし、2回目以降は励磁対象とする固定子の数を1つずつ増加させるなど、励磁対象の変更態様は任意に選択可能である。
【0047】
なお、このように励磁対象とする固定子の数を変更することは、逆の意味で、無励磁とされる固定子の数を変更することになる。そして、無励磁とされる固定子の数が違うことにより、図8に示すように、本実施形態のアクチュエータ11では、そのとき膨出部位となる変位部14a〜14dにおける上方への変位量が変化する。
【0048】
すなわち、例えば図4及び図5に示すように、無励磁とされる固定子の数が1つである場合は、図8におけるグラフ線上にA点として矢印で示すように、相対的に大きな変位量が得られる。そのため、局所的に強めの出力を得たい場合には、無励磁とされる固定子の数が1つとなるように、制御装置12は励磁対象とする固定子の数を全ての固定子16〜19の数から1つ減算した数(本実施形態では、4−1=3)に変更するとよい。
【0049】
また、例えば図6に示すように、無励磁とされる固定子の数が2つである場合は、図8におけるグラフ線上にB点として矢印で示すように、相対的に中程度の変位量が得られる。そのため、局所的に中程度の出力を得たい場合には、無励磁とされる固定子の数が半分程度となるように、制御装置12は励磁対象とする固定子の数を全ての固定子16〜19の数を2で除算した数(本実施形態では、4/2=2)に変更するとよい。
【0050】
同様に、例えば図7に示すように、無励磁とされる固定子の数が3つである場合は、図8におけるグラフ線上にC点として矢印で示すように、相対的に小さい変位量が得られる。そのため、局所的に弱めの出力を得たい場合には、無励磁とされる固定子の数が3つとなるように、制御装置12は励磁対象とする固定子の数を全ての固定子16〜19の数から3つ減算した数(本実施形態では、4−3=1)に変更するとよい。
【0051】
また、固定子16〜19と可動子21〜24に上下両側から挟まれた状態にある袋状体20の内部に封入されている流体は磁性流体であるため、各可動子21〜24は対応する固定子16〜19が磁気力を発生した場合、その流体が磁性抵抗となることを抑制され、発生した磁気力に吸引されて良好に固定子16〜19側へと移動される。
【0052】
なお、フェイスマッサージ機10のアクチュエータが本実施形態のアクチュエータ11とは異なり、モーターやエアバッグによるアクチュエータである場合は、次のような問題がある。すなわち、モーターを用いたアクチュエータの場合は、重量が重くなると共に、モーターの回転数の変動により不快な振動や音がでてしまう。また、エアバックを用いたアクチュエータの場合は、応答速度が遅く、人間のように速い動作を実現できない上に、重量も重く、吸排気音がして、顔の付近で使うと不快に感じてしまう。こうしたモーターやエアバッグによるアクチュエータとは異なり、本実施形態のアクチュエータ11では、固定子16〜19の励磁制御により可動子21〜24が袋状体20を変形させつつ袋状体20内の磁性流体を流動させてソフトな出力が簡便に得られる。
【0053】
以上のように構成された第1実施形態のフェイスマッサージ機10及びアクチュエータ11によれば、以下のような効果を得ることができる。
(1)アクチュエータ11の一面側に3つ以上並設された変位部14a〜14dのうち変位して膨出部位となった変位部が順繰りに出現する方向が、例えば第1変位部14aと第2変位部14bとを直線的に結んだ左右方向(一方向)以外に第2変位部14bと第3変位部14cとを直線的に結んだ上下方向をも含んだ複数方向になっている。そのため、膨出部位の膨出力を出力として得るアクチュエータ11では、膨出部位となった変位部を出現させる方向を、左右方向(一方向)と上下方向(他の方向)を組み合わせた回転成分を含んだ方向とすることも可能であり、従来のような直線的な一方向で交互に出現させるだけの場合に比較して、変化に富んだ多様な出力を得ることができる。
【0054】
(2)変位することで膨出部位となり得る3つ以上の変位部14a〜14dが同じ1つの袋状体20の一面側に並設されている。そのため、その1つの袋状体20に並設された各変位部14a〜14dと各々対応する各固定子16〜19のうち励磁される固定子の数を変更すれば、無励磁の固定子と対応する変位部の数を変更できる結果、変位することで膨出部位となった変位部14a〜14dにおける上方への変位量を複数段階に亘って変化させることができる。
【0055】
(3)一面側に3つ以上並設された各変位部14a〜14dと個別に対応する各固定子16〜19を選択的に励磁制御することによって、膨出部位となって変位する変位部の数を増減調整できる結果、変位部の変位に伴い膨出力を出力する面積、すなわちマッサージの際に顔Fに押圧力を付与できる面積を変更することができる。
【0056】
(4)また、制御装置12による励磁対象とされる固定子16〜19の数は、連続した複数回の励磁タイミングにおける励磁タイミング毎にも変更可能とされるので、変位して膨出部位となる変位部14a〜14dの数を励磁タイミング毎に変更すれば、更に一層、きめ細やかで多様な出力を得ることができる。
【0057】
(5)袋状体20の内部に封入されている流体は磁性流体であるため、各可動子21〜24は対応する固定子16〜19が磁気力を発生した場合、その流体が磁性抵抗となることを抑制される。したがって、各可動子21〜24を対応する固定子16〜19から発生した磁気力の吸引作用で良好に固定子16〜19側へと移動させることができる。
【0058】
(第2実施形態)
次に、本発明の第2実施形態について図9を参照しながら説明する。
第2実施形態は、アクチュエータ11における基板、固定子、袋状体及び可動子の各形状、並びに、固定子、可動子及び変位部の数が、第1実施形態とは相違し、その他の点は第1実施形態と同様である。そのため、以下では第1実施形態との相違点につき主に説明し、同様の構成については同じ符号を付すだけにして重複説明を省略する。
【0059】
図9に示すように、本実施形態のアクチュエータ11における基板(図示略)と袋状体20は三角形状に形成されている。そして、内部に磁性流体を封入した袋状体20の下面側には3つの固定子(図示略)が三点配置状態に並設される一方、袋状体20の上面側(一面側)には各固定子と個別に対応する3つの円形状をなす可動子21,22,23が三点配置状態に並設されている。そして、袋状体20における各可動子21〜23の並設位置と各々対応する3箇所の部位が、フェイスマッサージ機10の施療子を動作させる出力を得るために個別に変位可能な3つの変位部14a〜14cを構成している。
【0060】
本実施形態においても、3つの固定子が制御装置12により選択的に励磁されると、その励磁された固定子と個別に対応する可動子21〜23が移動して袋状体20を局所的に押圧する。すると、その押圧力を受けて袋状体20が変形し、その袋状体20内に封入されている磁性流体が、無励磁の固定子と個別に対応する可動子21〜23が配置された変位部14a〜14cの下側となる領域に向けて流動することにより、その無励磁の固定子と対応する変位部14a〜14cを上方に向けて押し上げる。
【0061】
その結果、無励磁の固定子と位置的に対応する1つ又は2つの変位部14a〜14cが膨出部位となって上方に変位し、そのように変位した1つ又は2つの変位部14a〜14cからなる膨出部位の膨出力がマッサージ機10の施療子を動作させる出力として利用される。したがって、本実施形態においても、第1実施形態における(1)〜(5)と同様の効果を得ることができる。
【0062】
(第3実施形態)
次に、本発明の第3実施形態について図10を参照しながら説明する。
第3実施形態は、アクチュエータ11における固定子、可動子及び変位部の数が、第1実施形態とは相違し、その他の点は第1実施形態と同様である。そのため、以下では第1実施形態との相違点につき主に説明し、同様の構成については同じ符号を付すだけにして重複説明を省略する。
【0063】
図10に示すように、本実施形態のアクチュエータ11における袋状体20の下面側には9つの固定子(図示略)が3行3列のマトリクス状に配置されると共に、袋状体20の上面側(一面側)には各固定子と各々対をなす9つの可動子21〜29が3行3列のマトリクス状に並設されている。そして、袋状体20における各可動子21〜29の並設位置と各々対応する9箇所の部位が、フェイスマッサージ機10の施療子を動作させる出力を得るために個別に変位可能な9つの変位部14a〜14iを構成している。
【0064】
本実施形態においても、9つの固定子が制御装置12により選択的に励磁されると、その励磁された固定子と個別に対応する可動子21〜29が移動して袋状体20を局所的に押圧する。すると、その押圧力を受けて袋状体20が変形し、その袋状体20内に封入されている磁性流体が、無励磁の固定子と個別に対応する可動子21〜29が配置された変位部14a〜14iの下側となる領域に向けて流動することにより、その無励磁の固定子と対応する変位部14a〜14iを上方に向けて押し上げる。
【0065】
その結果、無励磁の固定子と位置的に対応する1つ〜8つの変位部14a〜14iが膨出部位となって上方に変位し、そのように変位した1つ〜8つの変位部14a〜14iからなる膨出部位の膨出力がマッサージ機10の施療子を動作させる出力として利用される。しかも、本実施形態では、変位することで膨出部位となり得る変位部14a〜14iの数が9つと多いので、各変位部を膨出部位となるように順繰りに変位させて出現させる位置の選択肢が豊富になる。したがって、本実施形態においては、第1実施形態における(1)〜(5)と同様の効果に加えて、更に以下の効果を得ることができる。
【0066】
(6)本実施形態では、固定子、可動子及び変位部の数が、各々9つであり、各々4つであった第1実施形態の場合よりも多いため、膨出部位となって変位する変位部14a〜14iが順繰りに出現する位置を、より一層多様に変化させることが可能になり、さらに変化に富んだきめ細かい出力を得ることができる。
【0067】
(第4実施形態)
次に、本発明の第4実施形態について図11(a)(b)を参照しながら説明する。
第4実施形態は、アクチュエータ11における袋状体の内部構造、及び袋状体に対する固定子と可動子の相対的な大きさが、第1実施形態とは相違し、その他の点は第1実施形態と同様である。そのため、以下では第1実施形態との相違点につき主に説明し、同様の構成については同じ符号を付すだけにして重複説明を省略する。
【0068】
図11(a)(b)に示すように、本実施形態のアクチュエータ11における各可動子21〜24は、四角扁平状の袋状体20を四等分した四角形状よりも更に小さな四角形状に形成されている。そして、4つの可動子21〜24が袋状体20の上面側に2行2列のマトリクス状に並設された場合には、行方向及び列方向で隣り合う他の可動子との間隔Lが、第1実施形態の場合よりも広い間隔、例えば四角形状をなす各可動子の一辺の長さの半分以上の長さ間隔となるように構成されている。
【0069】
また、袋状体20においては、各固定子16〜19(図11(b)には固定子16,17のみ図示)から発生した磁気力にて移動する各可動子21〜24の移動範囲から外れた位置(図11(a)(b)では袋状体20の略中央部)の一定領域が、袋状体20の上下方向で互いに対向する内面同士を溶着した溶着部30により構成されている。すなわち、溶着部30は、袋状体20が可動子21〜24により外部から局所的に押圧されることで内部の磁性流体が流動する場合に、その磁性流体が溶着部30を迂回して袋状体20内を流動するように、その溶着部30を形成した一定領域では磁性流体の流動を遮断する遮断領域として機能する。
【0070】
本実施形態においても、制御装置12による4つの固定子の選択的な励磁制御に基づき、その励磁された固定子と個別に対応する可動子21〜24が移動した場合、4つの変位部14a〜14dのうち無励磁の固定子と位置的に対応する1つ〜3つの変位部が膨出部位となって上方に変位する。その結果、そのように変位した1つ〜3つの変位部からなる膨出部位の膨出力がマッサージ機10の施療子を動作させる出力として利用される。
【0071】
しかも、本実施形態では、袋状体20が可動子21〜24により外部から局所的に押圧されることで内部の磁性流体が流動する場合、その磁性流体は袋状体20内の溶着部30が形成された一定領域では流動が遮断されるため、その溶着部30を迂回して袋状体20内を流動する。したがって、本実施形態においても、第1実施形態における(1)〜(5)と同様の効果を得ることができると共に、更に以下の効果をも得ることができる。
【0072】
(7)袋状体20の変形に伴い磁性流体が袋状体20内を流動する場合、その磁性流体は、袋状体20内における各可動子21〜24の移動範囲から外れた位置を通過することなく、隣り合う変位部14a〜14d同士の各下側領域間を流動する。すなわち、各可動子21〜24の移動範囲から外れているために当該領域内へ磁性流体が流入したとしても変位部14a〜14dの変位には貢献しない一定領域を通過するような遠回りはせずに、隣り合う変位部14a〜14d同士の各下側領域の間を短い距離で流動する。したがって、袋状体20内を流動する磁性流体が流れる方向を、変位部14a〜14dを迅速に変位させ得る方向に規定でき、マッサージ機10の施療子の動作に利用する多様な出力をアクチュエータ11から効率良く取り出すことができる。
【0073】
(第5実施形態)
次に、本発明の第5実施形態について図12を参照しながら説明する。
第5実施形態は、アクチュエータ11における袋状体の内部構造が、第1実施形態とは相違し、その他の点は第1実施形態と同様である。また、第4実施形態との対比では、各可動子の行方向及び列方向の間隔Lが狭い点で第4実施形態と相違している。そのため、以下では第1実施形態及び第4実施形態との相違点に着目して主に説明し、同様の構成については同じ符号を付すだけにして重複説明を省略する。
【0074】
図12に示すように、本実施形態のアクチュエータ11における袋状体20は、各固定子(図示略)から発生した磁気力にて移動する各可動子21〜24の移動範囲から外れた位置(図12では袋状体20の略中央部)の一定領域が、袋状体20の上下方向で互いに対向する内面同士を溶着した溶着部30により構成されている。すなわち、第4実施形態の場合と同様に、袋状体20内における各可動子21〜24の移動範囲から外れた位置の一定領域が、磁性流体の流動を遮断する遮断領域となっている。また、各可動子21〜24は、袋状体20の上面(一面)において並設状態で隣り合う他の可動子との間隔Lが、制御装置12による各固定子16〜19の励磁制御がされていない状態での互いに対をなす固定子16〜19と可動子21〜24との間の距離(例えば、図3(b)(c)に示す通常状態での袋状体20の厚みH)以下となるように設定されている。
【0075】
そのため、本実施形態においても、袋状体20が可動子21〜24により外部から局所的に押圧されて変形した場合、磁性流体は、溶着部30が形成された領域部分を通過することなく、隣り合う変位部14a〜14d同士の各下側領域間を、第4実施形態の場合よりも更に短い距離(=間隔L)で通過するように流動する。したがって、本実施形態においても、第1実施形態における(1)〜(5)及び第4実施形態における(7)と同様の効果を得ることができると共に、更に以下の効果をも得ることができる。
【0076】
(8)袋状体20内の磁性流体が隣り合う変位部14a〜14d同士の各下側領域の間を流動する場合、各変位部14a〜14dと対応する各可動子21〜24の隣り合う他の可動子との間隔Lが狭いので、袋状体20の変形時には、より一層速く、隣り合う変位部14a〜14d同士の各下側領域間で磁性流体を流動させることができる。
【0077】
(第6実施形態)
次に、本発明の第6実施形態について図13を参照しながら説明する。
第6実施形態は、アクチュエータ11における固定子、可動子、変位部及び袋状体の数が、第1実施形態とは相違し、その他の点は第1実施形態と同様である。そのため、以下では第1実施形態との相違点に着目して主に説明し、同様の構成については同じ符号を付すだけにして重複説明を省略する。
【0078】
図13に示すように、本実施形態のアクチュエータ11における基板15上には、4つの固定子(図示略)と4つの可動子21〜24及び1つの袋状体20を各々備えた構成の4つの変位ユニット31〜34が2行2列のマトリクス状に並設されている。すなわち、各変位ユニット31〜34は、行方向及び列方向で隣り合う変位ユニット同士で、各々が備える各可動子21〜24をアクチュエータ11の上面側(一面側)において並設状態とするように配置されている。なお、各変位ユニット31〜34における各固定子は共通の制御装置12により励磁制御される。
【0079】
いま例えば、図13に示すアクチュエータ11において、各変位ユニット31〜34に4つずつ並設された16個全ての可動子21〜24が同じ1つの袋状体20に並設されているとした場合、図13に示すごとく左上隅の1つの変位部14aだけを変位させた出力を得るためには、それ以外の15個の変位部と対応する各固定子を励磁する必要がある。つまり、その場合は、励磁対象とする固定子の数が多くなるため、消費電力が多くなってしまう。
【0080】
この点、本実施形態の場合は、広い意味で、4つある各変位ユニット31〜34の1つ1つを個別に制御可能な変位部として捉えることも可能である。そして、その場合には、図13に示すように、左上隅の1つの変位ユニット31における第1変位部14aを除く他の3つの変位部(第2変位部14b〜第4変位部14d)と各々対応する3つの固定子だけが各コイルへの通電により励磁される。そして、左上隅の1つの変位ユニット31を除く他の3つの変位ユニット32〜34に各々並設された合計12個の各固定子は無励磁とすればよい。そのため、左上隅の1つの変位ユニット31における3つの固定子だけを励磁するだけの電力消費でよいため、省エネの面でも効率良く出力を得ることができる。
【0081】
なお、本実施形態においても、制御装置12による各固定子の選択的な励磁制御に基づき、その励磁された固定子と個別に対応する可動子21〜24が移動した場合、無励磁の固定子と位置的に対応する変位部14a〜14dが膨出部位となって上方に変位し、その膨出部位の膨出力がマッサージ機10の施療子を動作させる出力として利用される。したがって、本実施形態においても、第1実施形態における(1)〜(5)と同様の効果を得ることができると共に、更に以下の効果をも得ることができる。
【0082】
(9)複数(一例として本実施形態では4つ)の変位ユニット31〜34の1つ1つを個別に制御可能な変位部として捉え、何れかの変位ユニットで何れかの変位部を、それが対応する固定子の励磁制御により膨出部位となるように変位させると共に、他の変位ユニットでは全ての固定子を無励磁とすれば、省エネを図りつつ所望する出力を得ることができる。
【0083】
(第7実施形態)
次に、本発明の第7実施形態について図14を参照しながら説明する。
第7実施形態は、アクチュエータ11における袋状体の形態及び数、その1つの袋状体に備えられる固定子と可動子の数が、第1実施形態とは相違し、その他の点は第1実施形態と同様である。そのため、以下では第1実施形態との相違点に着目して主に説明し、同様の構成については同じ符号を付すだけにして重複説明を省略する。
【0084】
図14(a)〜(d)に示すように、本実施形態のアクチュエータ11における基板15上には、2つの固定子(図示略)と2つの可動子21,22(23,24)及び1つの袋状体20を各々備えた構成の2つの変位ユニット41,42が並設されている。すなわち、各変位ユニット41,42は、基板15をほぼ二等分した長方形状をなす2つの扁平な袋状体20が互いの対向する長辺同士を接するように並設されている。
【0085】
そして、一方(例えば図14(a)では上側)の変位ユニット41における袋状体20の上面(一面)には複数(本実施形態では2つ)の可動子21,22が袋状体20の長手方向に所定間隔をおいて並設されている。また、他方(例えば図14(a)では下側)の変位ユニット42における袋状体20の上面(一面)には複数(本実施形態では2つ)の可動子23,24が袋状体20の長手方向に所定間隔をおいて並設されている。
【0086】
そして、一方の変位ユニット41の袋状体20における第1可動子21及び第2可動子22が配置された各部位が第1変位部14a及び第2変位部14b、他方の変位ユニット42の袋状体20における第3可動子23及び第4可動子24が配置された各部位が第3変位部14c及び第4変位部14dを構成している。すなわち、本実施形態でも既述した第6実施形態の場合と同様に、隣り合う変位ユニット41,42同士が各々備える可動子21〜24は、それら全ての可動子21〜24がアクチュエータ11の上面側(一面側)において並設状態となるように配置されている。
【0087】
なお、基板15上において各袋状体20の下面側には、上面側に並設された各可動子21,22(23,24)と対をなす固定子16,17(18,19)が2つずつ並設されている。そして、制御装置12により各固定子16,17(18,19)が選択的に励磁制御された場合に、その励磁対象とされた固定子と対をなす一方の可動子が袋状体20を局所的に押圧して変形させて当該袋状体20内の磁性流体を流動させることにより、他方の可動子と対応する位置の変位部14a〜14dが変位して膨出部位を形成するようになっている。
【0088】
すなわち、図14(a)の場合は、左上隅の第1変位部14aにより膨出部位を形成する場合であり、この場合は、第2変位ユニット42の各固定子は無励磁とされ、第1変位ユニット41における第2変位部14bと対応する第2可動子22と対をなす固定子だけが励磁される。すると、第2可動子22が移動し、袋状体20を局所的に押圧して袋状体20を変形させるため、内部の磁性流体が第1変位部14aの下側領域に向けて流動し、第1変位部14aを上方に向けて押し上げる。その結果、左上隅の第1変位部14aだけが膨出部位となり、その膨出力がフェイスマッサージ機10の施療子を動作させるための出力として利用される。
【0089】
なお、その後に、右上隅の第2変位部14bにより膨出部位を形成する場合は、同様に第2変位ユニット42の各固定子は無励磁としたままで、第1変位ユニット41における第1変位部14aと対応する第1可動子21と対をなす固定子だけが励磁される。また、その後、右下隅の第3変位部14cにより膨出部位を形成する場合は、第1変位ユニット41の各固定子は無励磁としたままで、第2変位ユニット42における第4変位部14dと対応する第4可動子24と対をなす固定子だけが励磁される。更にその後、左下隅の第4変位部14dにより膨出部位を形成する場合は、同様に第1変位ユニット41の各固定子は無励磁としたままで、第2変位ユニット42における第3変位部14cと対応する第3可動子23と対をなす固定子だけが励磁される。
【0090】
したがって、本実施形態によれば、第1実施形態における(1)と(5)及び第6実施形態の(9)に示す効果と同様の効果を得ることができる。
なお、上記各実施形態は、以下のような別の実施形態に変更してもよい。
【0091】
・上記各実施形態において、袋状体20内に封入される流体は、磁性流体以外にオイルや水などの液体であってもよく、更には空気などの気体であってもよい。
・上記第6実施形態及び第7実施形態において、アクチュエータ11は、変位ユニット31〜34,41,42を2つや4つ以外に3つや5つ以上の複数備える構成であってもよい。
【0092】
・上記第1〜第3実施形態及び第5〜第7実施形態において、袋状体20の一面側に並設される各可動子21〜24間の間隔Lは袋状体20の厚みHよりも広いものであってもよい。
【0093】
・上記第4実施形態及び第5実施形態において、袋状体20内の流体の流動を遮断する遮断領域は、袋状体20の対向する内面同士を溶着させた溶着部30によらずに、袋状体20において可動子21〜24の移動範囲から外れた位置の一定領域を袋状体20の厚さ方向の両側から挟圧することで形成するようにしてもよい。
【0094】
・上記各実施形態において、1つの袋状体20に固定子と可動子の対が5つ以上設けられる構成であってもよい。
・上記各実施形態において、可動子21〜29の形状は四角形状や円形状に限らず任意の形状にしてもよい。
【0095】
・上記各実施形態において、アクチュエータ11は、フェイスマッサージ機10に限らず、例えば背中や脚部等の顔F以外の身体の一部を施療するマッサージ機に、その施療子を動作させる出力を得るために備えられる構成であってもよい。
【符号の説明】
【0096】
10…フェイスマッサージ機(マッサージ機)、11…アクチュエータ、12…制御装置(制御部)、14a〜14i…変位部、16〜19…固定子、16a〜19a…固定子コア、16b〜19b…コイル、20…袋状体、21〜29…可動子、30…溶着部(遮断領域)、31〜34,41,42…変位ユニット、L…間隔。
【特許請求の範囲】
【請求項1】
固定子コア及びコイルを有し該コイルへの通電により励磁されることで磁気力を発生する固定子と、
前記固定子が発生した磁気力により移動する可動子と、
流体を封入した状態で前記可動子の移動範囲内に配置され、移動した前記可動子に外部から押圧された場合に局所的な膨出部位を形成するように変形可能な袋状体と、
前記固定子を励磁制御する制御部と、
を備え、
前記袋状体における前記膨出部位の膨出力を出力として得るアクチュエータであって、
1つの前記袋状体に複数の前記固定子と複数の前記可動子が設けられると共に、
変位することで前記膨出部位となり得る変位部が一面側に3つ以上並設され、
前記制御部は、前記各変位部のうち変位して前記膨出部位となった変位部を順繰りに出現させる方向が、1つの変位部と他の1つの変位部とを直線的に結んだ一方向を含む複数方向となるように、前記各固定子を励磁制御することを特徴とするアクチュエータ。
【請求項2】
請求項1に記載のアクチュエータにおいて、
1つの前記袋状体に前記固定子と前記可動子との対が3つ以上設けられると共に、当該1つの袋状体の一面側に前記変位部が3つ以上並設されていることを特徴とするアクチュエータ。
【請求項3】
請求項1又は2に記載のアクチュエータにおいて、
前記袋状体内における前記各可動子の移動範囲から外れた位置の一定領域が、前記流体の流動を遮断する遮断領域とされていることを特徴とするアクチュエータ。
【請求項4】
請求項1〜3のうち何れか一項に記載のアクチュエータにおいて、
前記各可動子は、並設状態で隣り合う他の可動子との間隔が、前記制御部による前記各固定子の励磁制御がされていない状態での互いに対をなす前記固定子と前記可動子との間の距離以下となるように設定されていることを特徴とするアクチュエータ。
【請求項5】
請求項1〜4のうち何れか一項に記載のアクチュエータにおいて、
前記制御部は、1つの前記袋状体に設けられた複数の前記固定子のうち励磁対象とする固定子の数を励磁タイミング毎に変更可能であることを特徴とするアクチュエータ。
【請求項6】
請求項1〜5のうち何れか一項に記載のアクチュエータにおいて、
前記固定子と前記可動子と前記袋状体とを含んで構成される変位ユニットを複数備え、前記各変位ユニットは隣り合う変位ユニット同士が互いの前記各可動子を一面側において並設状態とするように配置されることを特徴とするアクチュエータ。
【請求項7】
請求項1〜6のうち何れか一項に記載のアクチュエータにおいて、
前記流体は磁性流体であることを特徴とするアクチュエータ。
【請求項8】
請求項1〜7のうち何れか一項に記載のアクチュエータから得る出力を用いて使用者の身体の施療を行うことを特徴とするマッサージ機。
【請求項1】
固定子コア及びコイルを有し該コイルへの通電により励磁されることで磁気力を発生する固定子と、
前記固定子が発生した磁気力により移動する可動子と、
流体を封入した状態で前記可動子の移動範囲内に配置され、移動した前記可動子に外部から押圧された場合に局所的な膨出部位を形成するように変形可能な袋状体と、
前記固定子を励磁制御する制御部と、
を備え、
前記袋状体における前記膨出部位の膨出力を出力として得るアクチュエータであって、
1つの前記袋状体に複数の前記固定子と複数の前記可動子が設けられると共に、
変位することで前記膨出部位となり得る変位部が一面側に3つ以上並設され、
前記制御部は、前記各変位部のうち変位して前記膨出部位となった変位部を順繰りに出現させる方向が、1つの変位部と他の1つの変位部とを直線的に結んだ一方向を含む複数方向となるように、前記各固定子を励磁制御することを特徴とするアクチュエータ。
【請求項2】
請求項1に記載のアクチュエータにおいて、
1つの前記袋状体に前記固定子と前記可動子との対が3つ以上設けられると共に、当該1つの袋状体の一面側に前記変位部が3つ以上並設されていることを特徴とするアクチュエータ。
【請求項3】
請求項1又は2に記載のアクチュエータにおいて、
前記袋状体内における前記各可動子の移動範囲から外れた位置の一定領域が、前記流体の流動を遮断する遮断領域とされていることを特徴とするアクチュエータ。
【請求項4】
請求項1〜3のうち何れか一項に記載のアクチュエータにおいて、
前記各可動子は、並設状態で隣り合う他の可動子との間隔が、前記制御部による前記各固定子の励磁制御がされていない状態での互いに対をなす前記固定子と前記可動子との間の距離以下となるように設定されていることを特徴とするアクチュエータ。
【請求項5】
請求項1〜4のうち何れか一項に記載のアクチュエータにおいて、
前記制御部は、1つの前記袋状体に設けられた複数の前記固定子のうち励磁対象とする固定子の数を励磁タイミング毎に変更可能であることを特徴とするアクチュエータ。
【請求項6】
請求項1〜5のうち何れか一項に記載のアクチュエータにおいて、
前記固定子と前記可動子と前記袋状体とを含んで構成される変位ユニットを複数備え、前記各変位ユニットは隣り合う変位ユニット同士が互いの前記各可動子を一面側において並設状態とするように配置されることを特徴とするアクチュエータ。
【請求項7】
請求項1〜6のうち何れか一項に記載のアクチュエータにおいて、
前記流体は磁性流体であることを特徴とするアクチュエータ。
【請求項8】
請求項1〜7のうち何れか一項に記載のアクチュエータから得る出力を用いて使用者の身体の施療を行うことを特徴とするマッサージ機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2013−27649(P2013−27649A)
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願番号】特願2011−167431(P2011−167431)
【出願日】平成23年7月29日(2011.7.29)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願日】平成23年7月29日(2011.7.29)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]