
アクチュエータ
【課題】簡素な構成で屈曲運動を生成可能なアクチュエータを提供する。
【解決手段】チューブ10は、その内部に流路12を有する。固定手段20は、チューブ10が湾曲するようにチューブ10を束ねるとともに、束ねた箇所におけるチューブ10の厚みを所定値dにて制限する。圧力源30は、チューブ10の流路12に流体を供給する。チューブ10は、その内部への加圧がない状態において偏平な形状を有しており、固定手段20は、チューブ10の一方の偏平面の2箇所が向き合うようにクランプする。
【解決手段】チューブ10は、その内部に流路12を有する。固定手段20は、チューブ10が湾曲するようにチューブ10を束ねるとともに、束ねた箇所におけるチューブ10の厚みを所定値dにて制限する。圧力源30は、チューブ10の流路12に流体を供給する。チューブ10は、その内部への加圧がない状態において偏平な形状を有しており、固定手段20は、チューブ10の一方の偏平面の2箇所が向き合うようにクランプする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、屈曲、伸展するアクチュエータに関する。
【背景技術】
【0002】
脳疾患や整形外科疾患の患者にとって、筋肉の拘縮予防は重要な課題である。拘縮予防のために、定期的に関節を曲げ伸ばしするストレッチ動作が有効であるとされている。このようなストレッチ動作にともなう関節の屈曲、伸展運動を生成するために、アクチュエータが必要となる。その他、人工ハンドをはじめとするさまざまなアプリケーションにおいて、関節の屈曲、伸展運動を生成するアクチュエータが要望されている。こうしたアクチュエータとして、チューブの内部に流体を導通させ、チューブにトルクを発生させるものが提案されている(たとえば特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−155111号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
チューブおよび流体を用いたアクチュエータの多くは、チューブに拘束素材を加えることによって、屈曲形状ではなく、湾曲形状を生成するものが一般的であった。このため、このアクチュエータを関節を有する構造に適用すると、本来必要な屈曲形状と、アクチュエータで実現される湾曲形状の不適合から、負荷が局所的に集中するなどの不具合が問題となっていた。また、一部にベローズ構造を用いて屈曲動作を生成させるアクチュエータも提案されているが、突出度を容易に小さくできる構造ではなかった。また、複数の関節への接続方法や、関節角度の調整など、複雑化する傾向にあった。
【0005】
本発明は係る課題に鑑みてなされたものであり、そのある態様の例示的な目的のひとつは、簡素な構成で屈曲運動を生成可能なアクチュエータの提供にある。
【課題を解決するための手段】
【0006】
本発明のある態様のアクチュエータは、その内部に流路を有するチューブと、チューブが湾曲するようにチューブを束ねるとともに、束ねた箇所におけるチューブの厚みを所定値にて制限する固定手段と、チューブの流路に流体を供給する圧力源と、を備える。
【0007】
この態様によると、チューブを加圧することにより、チューブを固定手段の位置にて屈曲させることができる。また最大屈曲角を、湾曲部の長さ、および/またはチューブ厚みの制限値に応じて制御できる。
【0008】
チューブは、その内部への加圧がない状態において偏平な形状を有しており、固定手段は、チューブの一方の偏平面の2箇所が向き合うようにクランプしてもよい。
偏平チューブを用いることにより、アクチュエータの突出部分を抑制して小型化できるとともに、屈曲方向に対するチューブの復元力、あるいは抗力を小さくできる。
【0009】
ある態様のアクチュエータは、チューブの流路内に設けられたガイド用のケーブルをさらに備えてもよい。ケーブルを用いることにより、湾曲部においてチューブが完全にふさがるのを防止でき、チューブ先端まで均一に加えることができる。
【0010】
固定手段は、環状部材と、環状部材の中央付近に固定して、あるいはスライド可能に取り付けられた中軸と、を有するバックルであってもよい。
バックル(コキ)を用いることにより、屈曲部分の位置の変更が容易となり、また屈曲部分のチューブの高さの調節が容易となる。
【0011】
ある態様のアクチュエータは、チューブの異なる複数の箇所に設けられた複数の固定手段を備えてもよい。固定手段の個数を増やせば、屈曲運動を生成する位置の数を増やすことができる。
【0012】
本発明の別の態様もまた、アクチュエータである。このアクチュエータは、チューブと対向して設けられ、その内部に流路を有する第2のチューブと、第2のチューブの流路に流体を供給する第2の圧力源と、をさらに備える。
この態様によると、屈曲方向に加えて伸展方向のトルクを発生できる。
【0013】
なお、以上の構成要素を任意に組み合わせたもの、あるいは本発明の表現を、方法、装置などの間で変換したものもまた、本発明の態様として有効である。
【発明の効果】
【0014】
本発明のある態様によれば、簡素な構成で屈曲運動を生成可能なアクチュエータを提供できる。
【図面の簡単な説明】
【0015】
【図1】図1(a)、(b)は、実施の形態に係るアクチュエータの基本構成を示す図である。
【図2】偏平チューブを示す正面図および平面図である。
【図3】チューブを加圧したときのアクチュエータの状態を示す図である。
【図4】図4(a)、(b)は、アクチュエータの回転角φと、長さh、制限幅d、チューブの直径Wの関係を示す図である。
【図5】図5(a)〜(e)は、アクチュエータの構成例を示す図である。
【図6】図6(a)〜(c)は、アクチュエータのトルクを示す図である。
【図7】図7(a)〜(d)は、固定手段として利用可能なバックルの構成を示す図である。
【図8】図8(a)〜(c)は、実施の形態に係るアクチュエータを備えた指の屈曲をサポートするアクチュエータ器具を示す図である。
【図9】図9(a)、(b)は、FTAの動作を示す図である。
【図10】図10(a)は、親指の屈曲の方向を示す図であり、図10(b)は、親指の屈曲に対応する第1アクチュエータの構成を示す図である。
【図11】図8(a)〜(c)のFTAの制御システムの一例を示すブロック図である。
【発明を実施するための形態】
【0016】
以下、本発明を好適な実施の形態をもとに図面を参照しながら説明する。各図面に示される同一または同等の構成要素、部材、処理には、同一の符号を付するものとし、適宜重複した説明は省略する。また、実施の形態は、発明を限定するものではなく例示であって、実施の形態に記述されるすべての特徴やその組み合わせは、必ずしも発明の本質的なものであるとは限らない。
【0017】
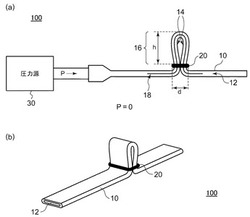
図1(a)、(b)は、実施の形態に係るアクチュエータ100の基本構成を示す図である。アクチュエータ100は、主としてチューブ10、固定手段20、圧力源30を備える。
【0018】
チューブ10は、その内部に流路(中空部)12を有する。チューブ10は、柔軟な樹脂等の材料で形成される。チューブ10の材料は特に限定されないが、変形可能であるが伸縮しないものを選択するとよく、言い換えれば流路12の周長が一定であることが望ましい。
【0019】
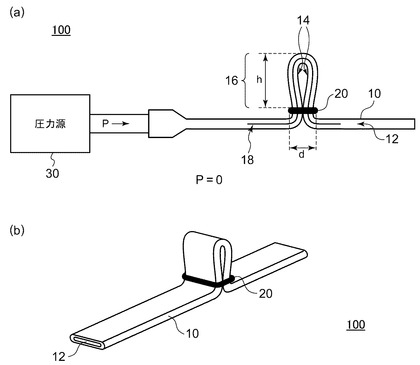
さらにチューブ10は、その内部への加圧がない状態において偏平な形状を有する偏平チューブであることが望ましい。図2は、偏平チューブを示す正面図および平面図である。上段は、圧力がゼロの状態(P=0)の形状を、下段は加圧した状態(P>0)の形状を示す。偏平チューブは無加圧状態で断面がフラットであり、加圧すると丸くなる性質を有する。無加圧状態において平面をなすチューブ10の面を偏平面14という。
【0020】
図1(a)、(b)に戻る。固定手段20は、チューブ10が湾曲するように、チューブ10の偏平面14をつまみ上げてチューブ10を束ねるとともに、束ねた箇所におけるチューブ10の厚みを所定の制限幅dにて制限する。言い換えれば固定手段20は、チューブ10の一方の偏平面14の2箇所が向き合うようにクランプする。固定手段20によってつまみ上げられた部分を湾曲部分16と称する。固定手段20は、糸であってもよいし、ゴムバンド、結束バンド、角カン、あるいは後述するバックルであってもよい。あるいは、湾曲部分16に沿った形状を有するプレートであってもよい。固定手段20によりチューブ10を湾曲させて固定した状態において、湾曲部分において束ねられたチューブ10の長さ(高さ)をhとする。
【0021】
圧力源30は、チューブ10の流路12に流体を供給し、チューブ10の内壁に与える圧力を制御する。流体はたとえば空気を用いることができるが、特に限定されず、水や油を用いてもよい。湾曲部分16の流路12内には、ガイド用のケーブル(ワイヤ)18を挿入しておくことが望ましい。このケーブル18によって、湾曲により流路12が完全にふさがるのを防止することができ、チューブ10の内壁全体に均一な圧力をかけることができる。ケーブル18は柔軟な材質であることが好ましい。なお、圧力源30そのものが圧力もしくは流体の流量を制御する機能を備えてもよいし、一定の圧力源からの流体の経路上に、圧力あるいは流量を制御するための制御弁を設けてもよい。
【0022】
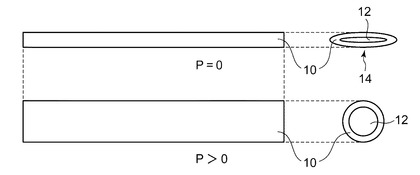
以上がアクチュエータ100の基本構成である。続いてその動作を説明する。図3は、チューブ10を加圧したときのアクチュエータ100の状態を示す図である。チューブ10を加圧すると、湾曲したチューブ10が真っ直ぐに復元しようとするため、屈曲のトルクが発生し、角度φ°まで屈曲する。このアクチュエータ100の最大屈曲角αは、180°−φ°で与えられる。φおよびαは、チューブ10を束ねる長さh、束ねた箇所におけるチューブ10の制限幅dによって制御可能である。
【0023】
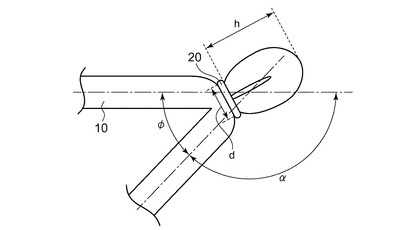
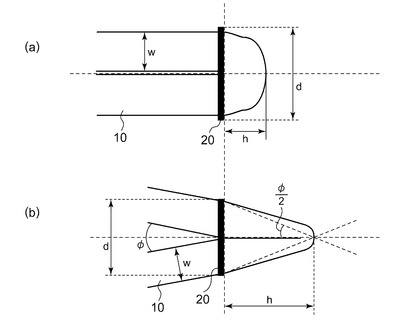
図4(a)、(b)は、アクチュエータ100の回転角φと、長さh、制限幅d、チューブの直径Wの関係を示す図である。図4(a)に示すように、制限幅dが、チューブ10の加圧により正円に変形したときの直径Wの2倍より大きいとき(d>2W)、アクチュエータ100はα=180°、φ=0°の状態まで屈曲する。
【0024】
図4(b)に示すように、制限幅dをチューブ10の直径Wの2倍より小さくすると(d<2W)、角度φの半分の角度は、底辺の長さh、高さd/2の直角三角形の頂角に相当するものと近似できる。この近似が成り立つとき、式(1)が成り立つ。
(d/2)/h≒tan(φ/2) …(1)
したがって、角度φ°は、式(2)で与えられる。
φ≒2×tan−1(d/(2h)) …(2)
【0025】
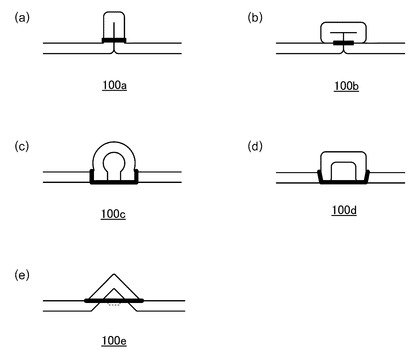
図5(a)〜(e)は、アクチュエータ100の構成例を示す図である。図5(a)のアクチュエータ100aは、チューブ10の湾曲部分が略直線状であることから、I型アクチュエータと称する。図5(b)のアクチュエータ100bは、チューブ10の湾曲部分を押しつぶして変形したものであり、湾曲部分がT字状であることから、T型アクチュエータと称する。T型アクチュエータ100bは、I型アクチュエータ100aに比べてコンパクトであるという利点を有する。図5(c)、(d)は、d>2Wが成り立つα=180°のアクチュエータ100c、100dであり、それぞれ、C型、O型のアクチュエータと称する。図5(e)のアクチュエータ100eは、湾曲部分がV字型のアクチュエータである。
【0026】
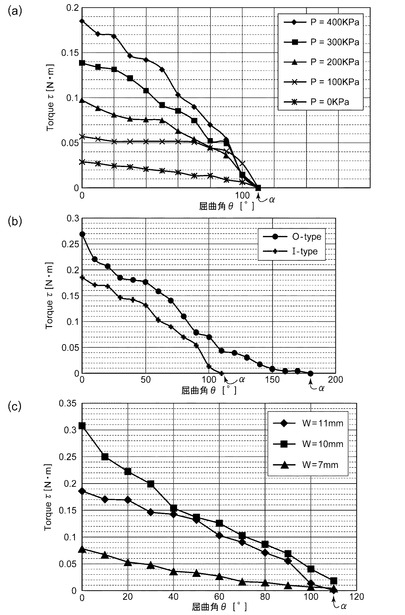
続いてアクチュエータ100の動作特性を説明する。図6(a)〜(c)は、アクチュエータ100のトルクを示す図である。図6(a)は、アクチュエータ100のトルクの回転角(θ)依存性を、圧力源30からの圧力Pをパラメータとしてプロットしたものである。実験に用いたアクチュエータは、W=12mm、d=5mm、h=20mmであり、最大屈曲角度はおよそα=120°である。
【0027】
圧力源30からの圧力Pを一定として考えると、アクチュエータ100のトルクは、回転角θが大きくなるにしたがい減少していき、最大屈曲角度αに達するとゼロとなる。またある回転角θにおいてアクチュエータ100が発生するトルクは、圧力Pにほぼ比例することがわかる。
【0028】
図6(b)は、I型およびO型のアクチュエータのトルクを示す図である。I型のアクチュエータは、W=12mm、d=5mm、h=20mm、O型のアクチュエータはW=12mm、d=25mm、h=20mmである。同じ圧力Pを印加した状態では、制限幅dを大きくすることにより、可動範囲を120°から180°近くまで広げることができることが示されている。
【0029】
図6(c)は、アクチュエータ100のトルクの、チューブ径依存性を示す。測定は、d=4mm、h=20mmとして、直径Wを変化させながら行った。図6(c)から、チューブ径Wを大きくするほど、トルクが大きくなることがわかる。
【0030】
以上がアクチュエータ100の動作である。このアクチュエータ100は、以下の利点を有する。
1. 実施の形態に係るアクチュエータ100によれば、屈曲運動を生成することができ、最大屈曲角度αを湾曲部分16の長さhや、固定手段20による制限幅dに応じて、制御することができる。
【0031】
2.またアクチュエータ100の可動部の構成は、チューブ10と固定手段20のみで足りるため、従来のアクチュエータに比べて、サイズをコンパクトにし、および/または軽量にできるという利点がある。
【0032】
3.さらに、固定手段20の位置を変更し、チューブ10を湾曲させる位置を変化させることにより、屈曲運動を発生させる可動箇所を自在に変更できる。これは、チューブそのものに加工を施したアクチュエータでは得られない利点である。
【0033】
4.さらに単一のチューブ10の複数の箇所に、複数の固定手段20を設けることにより、単一の圧力源30によって、チューブ10を複数の箇所で屈曲させることができる。この点については後述する。
【0034】
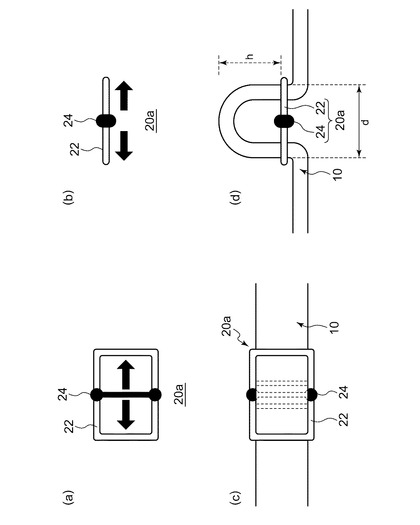
図7(a)〜(d)は、固定手段20として利用可能なバックル20aの構成を示す図である。図7(a)および(b)は、バックル20aの正面図および側面図である。バックル20aは、コキあるいはアジャスタとも称され、環状部材(角カン)22と、角カン22の中央付近をスライド可能に設けられた中軸24を備える。なお、中軸24は角カン22の中央に固定されてもよい。図7(c)、(d)に示すように、チューブ10がバックル20aに挿通された状態で、中軸24はチューブ10の束ねられた2箇所の間に位置することになる。固定手段20としてバックル20aを用いることにより、可動箇所の変更および湾曲部分16の長さhの調節が容易となる。
【0035】
続いて、上述のアクチュエータの好適なアプリケーションを説明する。
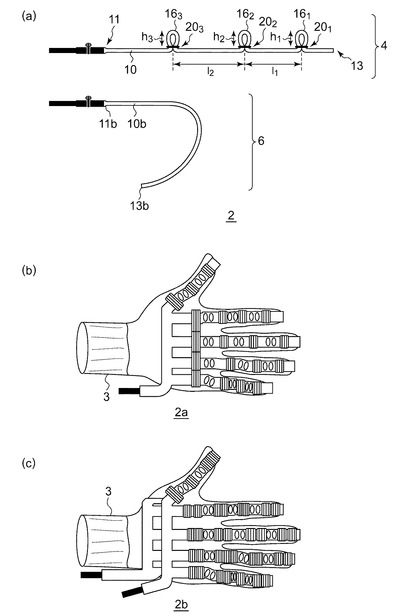
図8(a)〜(c)は、実施の形態に係るアクチュエータ100を備えた指の屈曲をサポートする指関節動作支援装置(以下、FTA(Finger Tube Actuator)とも称する)2を示す図である。このFTA2は、脳疾患や整形外科疾患の患者(以下、ユーザともいう)により使用され、筋肉の拘縮予防を目的として定期的なストレッチ動作などのリハビリテーションを支援する。
【0036】
図8(a)を参照する。FTA2は、人間の手に装着され、指が不自由なユーザが手を握る動作、および手を開く動作をサポートする。FTA2は、第1アクチュエータ4および第2アクチュエータ6を備える。第1アクチュエータ4は、ユーザの指の屈曲運動を支援するために設けられる。これは上述のアクチュエータ100に相当しており、手の内側(掌側)もしくは外側(甲側)にユーザの指に沿って装着される。チューブ10の一端11には、図示しない圧力源30が接続され、チューブ10の他端13は閉じられている。チューブ10のユーザが手に装着した状態で関節と重なるべき箇所には、複数の固定手段201〜203が設けられている。固定手段201〜203はそれぞれ、指の第1関節〜第3関節に対応しており、固定手段201〜203の間隔l1、l2は、ユーザの指の長さに応じて定められる。各関節ごとに最大屈曲角は異なっているため、固定手段201〜203により形成される湾曲部分161〜163の長さh1〜h3は個別に調節される。
【0037】
一方、第2アクチュエータ6は、指の延伸運動を支援するために設けられる。第2アクチュエータ6は、第2のチューブ10bと、図示しない第2の圧力源を備える。第2のチューブ10bは柔軟な材料で形成され、たとえば偏平チューブであってもよい。第2のチューブ10bの一端11bには第2の圧力源が接続され、第2のチューブ10bの他端13bは閉じられている。第2アクチュエータ6は、ユーザの指に沿って、手の内側(掌側)もしくは外側(甲側)に装着される。第2の圧力源によって第2のチューブ10bを加圧すると、第2のチューブ10bが延びる。
【0038】
図8(b)、(c)は、FTA2をユーザの手に装着した状態を示す。これらの図8(b)では、第1アクチュエータ4がユーザの手3の甲側に、第2アクチュエータ6(不図示)が掌側に装着されるFTA2aを示す。第1アクチュエータ4および第2アクチュエータ6は、指ごとに独立に設けられる。指ごとの第1アクチュエータ4は、共通の圧力源に接続される。指ごとの第2アクチュエータ6も同様である。これにより、手を握る動作と、手を開く動作をサポートすることができる。
【0039】
なお、指ごとの第1アクチュエータ4は、独立の圧力源に接続されてもよい。第2アクチュエータ6も同様である。この場合、指ごとに独立した曲げ伸ばしをする運動をサポートできる。
【0040】
図8(c)は、第1アクチュエータ4および第2アクチュエータ6の両方が重ねて手3の甲側に装着されるFTA2bを示す。
【0041】
なお、複数の指に対してひとつの第1アクチュエータ4を装着してもよい。第2アクチュエータ6も同様である。また、第1アクチュエータ4および第2アクチュエータ6を装着するための手段は特に限定されない。
【0042】
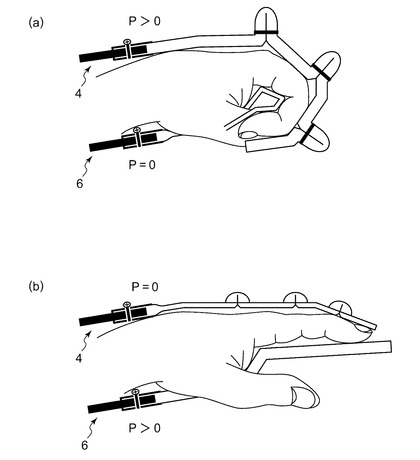
図9(a)、(b)は、FTA2の動作を示す図である。図9(a)に示すように第1アクチュエータ4に加圧し、第2アクチュエータ6を無加圧とすると、手を握るようにトルクが発生する。反対に、図9(b)に示すように第1アクチュエータ4を無加圧とし、第2アクチュエータ6に加圧すると、手を開くようにトルクが発生する。
【0043】
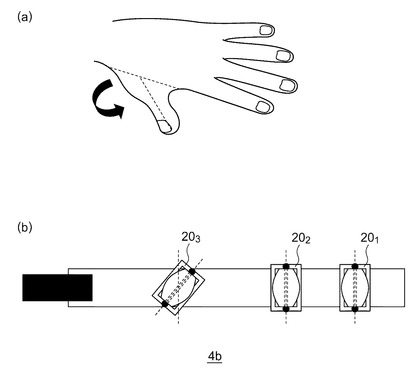
親指以外の4本の指は、複数の関節が同じ方向に屈曲するのに対して、親指は特異な屈曲をする。図10(a)は、親指の屈曲の方向を示す図である。具体的には親指の付け根である第3関節は、その第1、第2関節とは異なる方向に屈曲する。図10(b)は、親指の屈曲に対応する第1アクチュエータ4bの構成を示す図である。固定手段201〜203は上述したバックル20aであり、第1、第2関節に対応する固定手段201、202は、それぞれの中心に設けられた中軸24が、チューブ10の長さ方向に垂直に配置される。これに対して、親指の第3関節に対応する固定手段203は、その中軸24がチューブ10に対して斜めとなるように配置される。これにより、固定手段203の箇所では、斜め方向の屈曲運動が実現できる。
【0044】
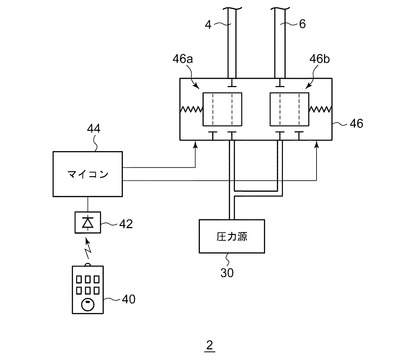
図11は、図8(a)〜(c)のFTA2の制御システムの一例を示すブロック図である。リモコン40はユーザ自身、もしくはリハビリ運動の管理者によって制御される。リモコン40によって、屈曲運動、伸展運動が切りかえられる。リモコン40からの無線制御信号は、受信部42で受信されマイコン44に入力される。
第1アクチュエータ4と圧力源30の間、第2アクチュエータ6と圧力源30の間には、ソレノイドバルブ46が設けられる。第1アクチュエータ4側のバルブ46aと、第2アクチュエータ6側のバルブ46bはマイコン44からの制御信号に応じて独立に制御可能となっている。バルブ46aによって、第1アクチュエータ4と圧力源30の間が全開の状態と、第1アクチュエータ4が大気圧に開放される状態とが、連続的に、あるいは段階的に切りかえられる。これにより第1アクチュエータ4のチューブに印加される圧力が制御される。同様にバルブ46bの制御に応じて、第2アクチュエータ6のチューブに印加される圧力が制御される。
【0045】
バルブ46a、46bの制御は、ソレノイドバルブ46のインタフェースに適合した形式で行えばよい。たとえばマイコン44によって、第1アクチュエータ4または第2アクチュエータ6に印加すべき圧力に応じたデューティ比を有するパルス制御信号を生成し、それをソレノイドバルブ46に供給してもよい。あるいは、マイコンから、圧力に応じたデジタル値を出力し、それをD/A変換器によってアナログ電圧に変換して、ソレノイドバルブ46に出力してもよい。
【0046】
以上が制御システムの構成例である。このシステムによれば、指の曲げ伸ばし運動をユーザが自在に制御できる。なお、ソレノイドバルブ46に対する制御信号は、プログラムに応じてマイコン44により自動生成されてもよい。
【0047】
このFTA2によれば、圧力源30を含めたシステム全体が非常に軽量、コンパクトであるため、医療施設のみでなく、看者の自宅の利用にも適している。また、固定手段20の位置を変更することで、屈曲部分の位置を看者の指の長さに応じて容易に変更できるため、看者ごとにFTA2を作成する必要がないという利点もある。また、屈曲部分にモータなどを用いていないため、リハビリを行わないときに装着しても、自然な動きが妨げられないという利点もある。
【0048】
実施の形態では、アクチュエータ100の用途としてリハビリテーション用のFTA2を説明したが、その用途は特に限定されず、屈曲運動が要求されるさまざまなデバイス、機構、システムに利用可能である。
【0049】
実施の形態にもとづき、具体的な用語を用いて本発明を説明したが、実施の形態は、本発明の原理、応用を示しているにすぎず、実施の形態には、請求の範囲に規定された本発明の思想を逸脱しない範囲において、多くの変形例や配置の変更が認められる。
【符号の説明】
【0050】
100…アクチュエータ、10…チューブ、12…流路、14…偏平面、16…湾曲部分、18…ケーブル、20…固定手段、30…圧力源、2…FTA、4…第1アクチュエータ、6…第2アクチュエータ。
【技術分野】
【0001】
本発明は、屈曲、伸展するアクチュエータに関する。
【背景技術】
【0002】
脳疾患や整形外科疾患の患者にとって、筋肉の拘縮予防は重要な課題である。拘縮予防のために、定期的に関節を曲げ伸ばしするストレッチ動作が有効であるとされている。このようなストレッチ動作にともなう関節の屈曲、伸展運動を生成するために、アクチュエータが必要となる。その他、人工ハンドをはじめとするさまざまなアプリケーションにおいて、関節の屈曲、伸展運動を生成するアクチュエータが要望されている。こうしたアクチュエータとして、チューブの内部に流体を導通させ、チューブにトルクを発生させるものが提案されている(たとえば特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−155111号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
チューブおよび流体を用いたアクチュエータの多くは、チューブに拘束素材を加えることによって、屈曲形状ではなく、湾曲形状を生成するものが一般的であった。このため、このアクチュエータを関節を有する構造に適用すると、本来必要な屈曲形状と、アクチュエータで実現される湾曲形状の不適合から、負荷が局所的に集中するなどの不具合が問題となっていた。また、一部にベローズ構造を用いて屈曲動作を生成させるアクチュエータも提案されているが、突出度を容易に小さくできる構造ではなかった。また、複数の関節への接続方法や、関節角度の調整など、複雑化する傾向にあった。
【0005】
本発明は係る課題に鑑みてなされたものであり、そのある態様の例示的な目的のひとつは、簡素な構成で屈曲運動を生成可能なアクチュエータの提供にある。
【課題を解決するための手段】
【0006】
本発明のある態様のアクチュエータは、その内部に流路を有するチューブと、チューブが湾曲するようにチューブを束ねるとともに、束ねた箇所におけるチューブの厚みを所定値にて制限する固定手段と、チューブの流路に流体を供給する圧力源と、を備える。
【0007】
この態様によると、チューブを加圧することにより、チューブを固定手段の位置にて屈曲させることができる。また最大屈曲角を、湾曲部の長さ、および/またはチューブ厚みの制限値に応じて制御できる。
【0008】
チューブは、その内部への加圧がない状態において偏平な形状を有しており、固定手段は、チューブの一方の偏平面の2箇所が向き合うようにクランプしてもよい。
偏平チューブを用いることにより、アクチュエータの突出部分を抑制して小型化できるとともに、屈曲方向に対するチューブの復元力、あるいは抗力を小さくできる。
【0009】
ある態様のアクチュエータは、チューブの流路内に設けられたガイド用のケーブルをさらに備えてもよい。ケーブルを用いることにより、湾曲部においてチューブが完全にふさがるのを防止でき、チューブ先端まで均一に加えることができる。
【0010】
固定手段は、環状部材と、環状部材の中央付近に固定して、あるいはスライド可能に取り付けられた中軸と、を有するバックルであってもよい。
バックル(コキ)を用いることにより、屈曲部分の位置の変更が容易となり、また屈曲部分のチューブの高さの調節が容易となる。
【0011】
ある態様のアクチュエータは、チューブの異なる複数の箇所に設けられた複数の固定手段を備えてもよい。固定手段の個数を増やせば、屈曲運動を生成する位置の数を増やすことができる。
【0012】
本発明の別の態様もまた、アクチュエータである。このアクチュエータは、チューブと対向して設けられ、その内部に流路を有する第2のチューブと、第2のチューブの流路に流体を供給する第2の圧力源と、をさらに備える。
この態様によると、屈曲方向に加えて伸展方向のトルクを発生できる。
【0013】
なお、以上の構成要素を任意に組み合わせたもの、あるいは本発明の表現を、方法、装置などの間で変換したものもまた、本発明の態様として有効である。
【発明の効果】
【0014】
本発明のある態様によれば、簡素な構成で屈曲運動を生成可能なアクチュエータを提供できる。
【図面の簡単な説明】
【0015】
【図1】図1(a)、(b)は、実施の形態に係るアクチュエータの基本構成を示す図である。
【図2】偏平チューブを示す正面図および平面図である。
【図3】チューブを加圧したときのアクチュエータの状態を示す図である。
【図4】図4(a)、(b)は、アクチュエータの回転角φと、長さh、制限幅d、チューブの直径Wの関係を示す図である。
【図5】図5(a)〜(e)は、アクチュエータの構成例を示す図である。
【図6】図6(a)〜(c)は、アクチュエータのトルクを示す図である。
【図7】図7(a)〜(d)は、固定手段として利用可能なバックルの構成を示す図である。
【図8】図8(a)〜(c)は、実施の形態に係るアクチュエータを備えた指の屈曲をサポートするアクチュエータ器具を示す図である。
【図9】図9(a)、(b)は、FTAの動作を示す図である。
【図10】図10(a)は、親指の屈曲の方向を示す図であり、図10(b)は、親指の屈曲に対応する第1アクチュエータの構成を示す図である。
【図11】図8(a)〜(c)のFTAの制御システムの一例を示すブロック図である。
【発明を実施するための形態】
【0016】
以下、本発明を好適な実施の形態をもとに図面を参照しながら説明する。各図面に示される同一または同等の構成要素、部材、処理には、同一の符号を付するものとし、適宜重複した説明は省略する。また、実施の形態は、発明を限定するものではなく例示であって、実施の形態に記述されるすべての特徴やその組み合わせは、必ずしも発明の本質的なものであるとは限らない。
【0017】
図1(a)、(b)は、実施の形態に係るアクチュエータ100の基本構成を示す図である。アクチュエータ100は、主としてチューブ10、固定手段20、圧力源30を備える。
【0018】
チューブ10は、その内部に流路(中空部)12を有する。チューブ10は、柔軟な樹脂等の材料で形成される。チューブ10の材料は特に限定されないが、変形可能であるが伸縮しないものを選択するとよく、言い換えれば流路12の周長が一定であることが望ましい。
【0019】
さらにチューブ10は、その内部への加圧がない状態において偏平な形状を有する偏平チューブであることが望ましい。図2は、偏平チューブを示す正面図および平面図である。上段は、圧力がゼロの状態(P=0)の形状を、下段は加圧した状態(P>0)の形状を示す。偏平チューブは無加圧状態で断面がフラットであり、加圧すると丸くなる性質を有する。無加圧状態において平面をなすチューブ10の面を偏平面14という。
【0020】
図1(a)、(b)に戻る。固定手段20は、チューブ10が湾曲するように、チューブ10の偏平面14をつまみ上げてチューブ10を束ねるとともに、束ねた箇所におけるチューブ10の厚みを所定の制限幅dにて制限する。言い換えれば固定手段20は、チューブ10の一方の偏平面14の2箇所が向き合うようにクランプする。固定手段20によってつまみ上げられた部分を湾曲部分16と称する。固定手段20は、糸であってもよいし、ゴムバンド、結束バンド、角カン、あるいは後述するバックルであってもよい。あるいは、湾曲部分16に沿った形状を有するプレートであってもよい。固定手段20によりチューブ10を湾曲させて固定した状態において、湾曲部分において束ねられたチューブ10の長さ(高さ)をhとする。
【0021】
圧力源30は、チューブ10の流路12に流体を供給し、チューブ10の内壁に与える圧力を制御する。流体はたとえば空気を用いることができるが、特に限定されず、水や油を用いてもよい。湾曲部分16の流路12内には、ガイド用のケーブル(ワイヤ)18を挿入しておくことが望ましい。このケーブル18によって、湾曲により流路12が完全にふさがるのを防止することができ、チューブ10の内壁全体に均一な圧力をかけることができる。ケーブル18は柔軟な材質であることが好ましい。なお、圧力源30そのものが圧力もしくは流体の流量を制御する機能を備えてもよいし、一定の圧力源からの流体の経路上に、圧力あるいは流量を制御するための制御弁を設けてもよい。
【0022】
以上がアクチュエータ100の基本構成である。続いてその動作を説明する。図3は、チューブ10を加圧したときのアクチュエータ100の状態を示す図である。チューブ10を加圧すると、湾曲したチューブ10が真っ直ぐに復元しようとするため、屈曲のトルクが発生し、角度φ°まで屈曲する。このアクチュエータ100の最大屈曲角αは、180°−φ°で与えられる。φおよびαは、チューブ10を束ねる長さh、束ねた箇所におけるチューブ10の制限幅dによって制御可能である。
【0023】
図4(a)、(b)は、アクチュエータ100の回転角φと、長さh、制限幅d、チューブの直径Wの関係を示す図である。図4(a)に示すように、制限幅dが、チューブ10の加圧により正円に変形したときの直径Wの2倍より大きいとき(d>2W)、アクチュエータ100はα=180°、φ=0°の状態まで屈曲する。
【0024】
図4(b)に示すように、制限幅dをチューブ10の直径Wの2倍より小さくすると(d<2W)、角度φの半分の角度は、底辺の長さh、高さd/2の直角三角形の頂角に相当するものと近似できる。この近似が成り立つとき、式(1)が成り立つ。
(d/2)/h≒tan(φ/2) …(1)
したがって、角度φ°は、式(2)で与えられる。
φ≒2×tan−1(d/(2h)) …(2)
【0025】
図5(a)〜(e)は、アクチュエータ100の構成例を示す図である。図5(a)のアクチュエータ100aは、チューブ10の湾曲部分が略直線状であることから、I型アクチュエータと称する。図5(b)のアクチュエータ100bは、チューブ10の湾曲部分を押しつぶして変形したものであり、湾曲部分がT字状であることから、T型アクチュエータと称する。T型アクチュエータ100bは、I型アクチュエータ100aに比べてコンパクトであるという利点を有する。図5(c)、(d)は、d>2Wが成り立つα=180°のアクチュエータ100c、100dであり、それぞれ、C型、O型のアクチュエータと称する。図5(e)のアクチュエータ100eは、湾曲部分がV字型のアクチュエータである。
【0026】
続いてアクチュエータ100の動作特性を説明する。図6(a)〜(c)は、アクチュエータ100のトルクを示す図である。図6(a)は、アクチュエータ100のトルクの回転角(θ)依存性を、圧力源30からの圧力Pをパラメータとしてプロットしたものである。実験に用いたアクチュエータは、W=12mm、d=5mm、h=20mmであり、最大屈曲角度はおよそα=120°である。
【0027】
圧力源30からの圧力Pを一定として考えると、アクチュエータ100のトルクは、回転角θが大きくなるにしたがい減少していき、最大屈曲角度αに達するとゼロとなる。またある回転角θにおいてアクチュエータ100が発生するトルクは、圧力Pにほぼ比例することがわかる。
【0028】
図6(b)は、I型およびO型のアクチュエータのトルクを示す図である。I型のアクチュエータは、W=12mm、d=5mm、h=20mm、O型のアクチュエータはW=12mm、d=25mm、h=20mmである。同じ圧力Pを印加した状態では、制限幅dを大きくすることにより、可動範囲を120°から180°近くまで広げることができることが示されている。
【0029】
図6(c)は、アクチュエータ100のトルクの、チューブ径依存性を示す。測定は、d=4mm、h=20mmとして、直径Wを変化させながら行った。図6(c)から、チューブ径Wを大きくするほど、トルクが大きくなることがわかる。
【0030】
以上がアクチュエータ100の動作である。このアクチュエータ100は、以下の利点を有する。
1. 実施の形態に係るアクチュエータ100によれば、屈曲運動を生成することができ、最大屈曲角度αを湾曲部分16の長さhや、固定手段20による制限幅dに応じて、制御することができる。
【0031】
2.またアクチュエータ100の可動部の構成は、チューブ10と固定手段20のみで足りるため、従来のアクチュエータに比べて、サイズをコンパクトにし、および/または軽量にできるという利点がある。
【0032】
3.さらに、固定手段20の位置を変更し、チューブ10を湾曲させる位置を変化させることにより、屈曲運動を発生させる可動箇所を自在に変更できる。これは、チューブそのものに加工を施したアクチュエータでは得られない利点である。
【0033】
4.さらに単一のチューブ10の複数の箇所に、複数の固定手段20を設けることにより、単一の圧力源30によって、チューブ10を複数の箇所で屈曲させることができる。この点については後述する。
【0034】
図7(a)〜(d)は、固定手段20として利用可能なバックル20aの構成を示す図である。図7(a)および(b)は、バックル20aの正面図および側面図である。バックル20aは、コキあるいはアジャスタとも称され、環状部材(角カン)22と、角カン22の中央付近をスライド可能に設けられた中軸24を備える。なお、中軸24は角カン22の中央に固定されてもよい。図7(c)、(d)に示すように、チューブ10がバックル20aに挿通された状態で、中軸24はチューブ10の束ねられた2箇所の間に位置することになる。固定手段20としてバックル20aを用いることにより、可動箇所の変更および湾曲部分16の長さhの調節が容易となる。
【0035】
続いて、上述のアクチュエータの好適なアプリケーションを説明する。
図8(a)〜(c)は、実施の形態に係るアクチュエータ100を備えた指の屈曲をサポートする指関節動作支援装置(以下、FTA(Finger Tube Actuator)とも称する)2を示す図である。このFTA2は、脳疾患や整形外科疾患の患者(以下、ユーザともいう)により使用され、筋肉の拘縮予防を目的として定期的なストレッチ動作などのリハビリテーションを支援する。
【0036】
図8(a)を参照する。FTA2は、人間の手に装着され、指が不自由なユーザが手を握る動作、および手を開く動作をサポートする。FTA2は、第1アクチュエータ4および第2アクチュエータ6を備える。第1アクチュエータ4は、ユーザの指の屈曲運動を支援するために設けられる。これは上述のアクチュエータ100に相当しており、手の内側(掌側)もしくは外側(甲側)にユーザの指に沿って装着される。チューブ10の一端11には、図示しない圧力源30が接続され、チューブ10の他端13は閉じられている。チューブ10のユーザが手に装着した状態で関節と重なるべき箇所には、複数の固定手段201〜203が設けられている。固定手段201〜203はそれぞれ、指の第1関節〜第3関節に対応しており、固定手段201〜203の間隔l1、l2は、ユーザの指の長さに応じて定められる。各関節ごとに最大屈曲角は異なっているため、固定手段201〜203により形成される湾曲部分161〜163の長さh1〜h3は個別に調節される。
【0037】
一方、第2アクチュエータ6は、指の延伸運動を支援するために設けられる。第2アクチュエータ6は、第2のチューブ10bと、図示しない第2の圧力源を備える。第2のチューブ10bは柔軟な材料で形成され、たとえば偏平チューブであってもよい。第2のチューブ10bの一端11bには第2の圧力源が接続され、第2のチューブ10bの他端13bは閉じられている。第2アクチュエータ6は、ユーザの指に沿って、手の内側(掌側)もしくは外側(甲側)に装着される。第2の圧力源によって第2のチューブ10bを加圧すると、第2のチューブ10bが延びる。
【0038】
図8(b)、(c)は、FTA2をユーザの手に装着した状態を示す。これらの図8(b)では、第1アクチュエータ4がユーザの手3の甲側に、第2アクチュエータ6(不図示)が掌側に装着されるFTA2aを示す。第1アクチュエータ4および第2アクチュエータ6は、指ごとに独立に設けられる。指ごとの第1アクチュエータ4は、共通の圧力源に接続される。指ごとの第2アクチュエータ6も同様である。これにより、手を握る動作と、手を開く動作をサポートすることができる。
【0039】
なお、指ごとの第1アクチュエータ4は、独立の圧力源に接続されてもよい。第2アクチュエータ6も同様である。この場合、指ごとに独立した曲げ伸ばしをする運動をサポートできる。
【0040】
図8(c)は、第1アクチュエータ4および第2アクチュエータ6の両方が重ねて手3の甲側に装着されるFTA2bを示す。
【0041】
なお、複数の指に対してひとつの第1アクチュエータ4を装着してもよい。第2アクチュエータ6も同様である。また、第1アクチュエータ4および第2アクチュエータ6を装着するための手段は特に限定されない。
【0042】
図9(a)、(b)は、FTA2の動作を示す図である。図9(a)に示すように第1アクチュエータ4に加圧し、第2アクチュエータ6を無加圧とすると、手を握るようにトルクが発生する。反対に、図9(b)に示すように第1アクチュエータ4を無加圧とし、第2アクチュエータ6に加圧すると、手を開くようにトルクが発生する。
【0043】
親指以外の4本の指は、複数の関節が同じ方向に屈曲するのに対して、親指は特異な屈曲をする。図10(a)は、親指の屈曲の方向を示す図である。具体的には親指の付け根である第3関節は、その第1、第2関節とは異なる方向に屈曲する。図10(b)は、親指の屈曲に対応する第1アクチュエータ4bの構成を示す図である。固定手段201〜203は上述したバックル20aであり、第1、第2関節に対応する固定手段201、202は、それぞれの中心に設けられた中軸24が、チューブ10の長さ方向に垂直に配置される。これに対して、親指の第3関節に対応する固定手段203は、その中軸24がチューブ10に対して斜めとなるように配置される。これにより、固定手段203の箇所では、斜め方向の屈曲運動が実現できる。
【0044】
図11は、図8(a)〜(c)のFTA2の制御システムの一例を示すブロック図である。リモコン40はユーザ自身、もしくはリハビリ運動の管理者によって制御される。リモコン40によって、屈曲運動、伸展運動が切りかえられる。リモコン40からの無線制御信号は、受信部42で受信されマイコン44に入力される。
第1アクチュエータ4と圧力源30の間、第2アクチュエータ6と圧力源30の間には、ソレノイドバルブ46が設けられる。第1アクチュエータ4側のバルブ46aと、第2アクチュエータ6側のバルブ46bはマイコン44からの制御信号に応じて独立に制御可能となっている。バルブ46aによって、第1アクチュエータ4と圧力源30の間が全開の状態と、第1アクチュエータ4が大気圧に開放される状態とが、連続的に、あるいは段階的に切りかえられる。これにより第1アクチュエータ4のチューブに印加される圧力が制御される。同様にバルブ46bの制御に応じて、第2アクチュエータ6のチューブに印加される圧力が制御される。
【0045】
バルブ46a、46bの制御は、ソレノイドバルブ46のインタフェースに適合した形式で行えばよい。たとえばマイコン44によって、第1アクチュエータ4または第2アクチュエータ6に印加すべき圧力に応じたデューティ比を有するパルス制御信号を生成し、それをソレノイドバルブ46に供給してもよい。あるいは、マイコンから、圧力に応じたデジタル値を出力し、それをD/A変換器によってアナログ電圧に変換して、ソレノイドバルブ46に出力してもよい。
【0046】
以上が制御システムの構成例である。このシステムによれば、指の曲げ伸ばし運動をユーザが自在に制御できる。なお、ソレノイドバルブ46に対する制御信号は、プログラムに応じてマイコン44により自動生成されてもよい。
【0047】
このFTA2によれば、圧力源30を含めたシステム全体が非常に軽量、コンパクトであるため、医療施設のみでなく、看者の自宅の利用にも適している。また、固定手段20の位置を変更することで、屈曲部分の位置を看者の指の長さに応じて容易に変更できるため、看者ごとにFTA2を作成する必要がないという利点もある。また、屈曲部分にモータなどを用いていないため、リハビリを行わないときに装着しても、自然な動きが妨げられないという利点もある。
【0048】
実施の形態では、アクチュエータ100の用途としてリハビリテーション用のFTA2を説明したが、その用途は特に限定されず、屈曲運動が要求されるさまざまなデバイス、機構、システムに利用可能である。
【0049】
実施の形態にもとづき、具体的な用語を用いて本発明を説明したが、実施の形態は、本発明の原理、応用を示しているにすぎず、実施の形態には、請求の範囲に規定された本発明の思想を逸脱しない範囲において、多くの変形例や配置の変更が認められる。
【符号の説明】
【0050】
100…アクチュエータ、10…チューブ、12…流路、14…偏平面、16…湾曲部分、18…ケーブル、20…固定手段、30…圧力源、2…FTA、4…第1アクチュエータ、6…第2アクチュエータ。
【特許請求の範囲】
【請求項1】
その内部に流路を有するチューブと、
前記チューブが湾曲するように前記チューブを束ねるとともに、束ねた箇所における前記チューブの厚みを所定値にて制限する固定手段と、
前記チューブの前記流路に流体を供給する圧力源と、
を備えることを特徴とするアクチュエータ。
【請求項2】
前記チューブは、その内部への加圧がない状態において偏平な形状を有しており、
前記固定手段は、前記チューブの一方の偏平面の2箇所が向き合うようにクランプすることを特徴とする請求項1に記載のアクチュエータ。
【請求項3】
前記チューブの前記流路内に設けられたガイド用のケーブルをさらに備えることを特徴とする請求項1または2に記載のアクチュエータ。
【請求項4】
前記固定手段は、
環状部材と、
前記環状部材の中央付近に固定して、あるいはスライド可能に取り付けられた中軸と、
を有するバックルであることを特徴とする請求項1から3のいずれかに記載のアクチュエータ。
【請求項5】
前記チューブの異なる複数の箇所に設けられた複数の固定手段を備えることを特徴とする請求項1から4のいずれかに記載のアクチュエータ。
【請求項6】
前記チューブと対向して設けられ、その内部に流路を有する第2のチューブと、
前記第2のチューブの前記流路に流体を供給する第2の圧力源と、
をさらに備えることを特徴とする請求項1から5のいずれかに記載のアクチュエータ。
【請求項1】
その内部に流路を有するチューブと、
前記チューブが湾曲するように前記チューブを束ねるとともに、束ねた箇所における前記チューブの厚みを所定値にて制限する固定手段と、
前記チューブの前記流路に流体を供給する圧力源と、
を備えることを特徴とするアクチュエータ。
【請求項2】
前記チューブは、その内部への加圧がない状態において偏平な形状を有しており、
前記固定手段は、前記チューブの一方の偏平面の2箇所が向き合うようにクランプすることを特徴とする請求項1に記載のアクチュエータ。
【請求項3】
前記チューブの前記流路内に設けられたガイド用のケーブルをさらに備えることを特徴とする請求項1または2に記載のアクチュエータ。
【請求項4】
前記固定手段は、
環状部材と、
前記環状部材の中央付近に固定して、あるいはスライド可能に取り付けられた中軸と、
を有するバックルであることを特徴とする請求項1から3のいずれかに記載のアクチュエータ。
【請求項5】
前記チューブの異なる複数の箇所に設けられた複数の固定手段を備えることを特徴とする請求項1から4のいずれかに記載のアクチュエータ。
【請求項6】
前記チューブと対向して設けられ、その内部に流路を有する第2のチューブと、
前記第2のチューブの前記流路に流体を供給する第2の圧力源と、
をさらに備えることを特徴とする請求項1から5のいずれかに記載のアクチュエータ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−82907(P2012−82907A)
【公開日】平成24年4月26日(2012.4.26)
【国際特許分類】
【出願番号】特願2010−230201(P2010−230201)
【出願日】平成22年10月13日(2010.10.13)
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【Fターム(参考)】
【公開日】平成24年4月26日(2012.4.26)
【国際特許分類】
【出願日】平成22年10月13日(2010.10.13)
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【Fターム(参考)】
[ Back to top ]