
アスベスト繊維種同定装置、アスベスト繊維種同定方法、およびアスベスト繊維種同定プログラム

【課題】実作業に用いることのできる自動化されたアスベスト繊維種同定装置を提供する。
【解決手段】アスベスト繊維種同定装置20は、ホワイトバランスをとる撮像手段110と、試料ステージ105上に載置された試料Sを任意の観測位置へ移動させるために、試料ステージ105を水平方向で移動自在とするステージ移動手段106と、位相差分散顕微鏡100の分散染色対物レンズ108と撮像手段110との間に設置されるとともに試料Sからの光の光軸を中心に試料Sに対して相対的に回転自在とされる偏光部材118と、試料ステージ105と撮像手段110との間隔を変更自在とするための間隔変更手段106と、撮像手段110によって撮影された試料像に対して画像処理を行うための画像処理部11と、を備えることにより、複屈折性を有するアスベストの繊維種同定を自動で行う。
【解決手段】アスベスト繊維種同定装置20は、ホワイトバランスをとる撮像手段110と、試料ステージ105上に載置された試料Sを任意の観測位置へ移動させるために、試料ステージ105を水平方向で移動自在とするステージ移動手段106と、位相差分散顕微鏡100の分散染色対物レンズ108と撮像手段110との間に設置されるとともに試料Sからの光の光軸を中心に試料Sに対して相対的に回転自在とされる偏光部材118と、試料ステージ105と撮像手段110との間隔を変更自在とするための間隔変更手段106と、撮像手段110によって撮影された試料像に対して画像処理を行うための画像処理部11と、を備えることにより、複屈折性を有するアスベストの繊維種同定を自動で行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複屈折性を有するアスベストの繊維種同定を、位相差分散顕微鏡を用いて自動的に行うためのアスベスト繊維種同定装置、アスベスト繊維種同定方法、およびアスベスト繊維種同定プログラムに関するものである。
【背景技術】
【0002】
従来から、位相差分散顕微鏡を用いることで、複屈折性を有するアスベストの繊維種同定を行う装置が知られている(例えば、下記特許文献1参照)。この従来技術に係るアスベスト繊維種同定装置は、光学顕微鏡として構成される装置であり、照明部に光源からの照明光を通過させるリング絞りを有し、分散対物レンズの後ろ側焦点面にリング絞りに対応する遮光リングを有している。また、試料と1次像面との間に偏光板を含むアナライザが配設されており、このアナライザを光軸廻りに回転させ、試料からの回折光のうち特定の波長の光を偏光分離して観察することで、色調が近い分散色でも明確に認識でき、複屈折性を有するアスベストの同定を正確に行うことができるとされている。
【0003】
また、下記特許文献1には、上述した光学顕微鏡を用いたアスベストの同定作業がオペレータによる目視作業であることに鑑みて、その作業負荷軽減と同定作業の精度向上のために、アスベストの定量分析を自動的に行うためのシステムおよび方法が提案されている。そこで、この従来技術に係るアスベスト繊維種同定作業の自動化のための顕微鏡システムについて、図面を用いて説明することとする。ここで、図3は、従来技術に係る顕微鏡システムの構成を模式的に示す全体構成図である。
【0004】
従来技術に係る顕微鏡システム200は、光学顕微鏡100に、デジタルカメラ110、回転機構111、制御演算装置112、画像処理装置113およびディスプレイ114を付加して構成されている。デジタルカメラ110は、観察鏡筒109に搭載され、観察面Iに結像した試料像を、波長域選択フィルタ110aを通して撮像し、画像信号を画像処理装置113へ送出するよう構成されている。また、デジタルカメラ110は、制御演算装置112からの制御信号により所定のタイミングで撮影できるように制御されている。回転機構111は、偏光板を含むアナライザ118を光軸AX廻りに回転駆動する装置である。また、ステージ駆動部106は、試料Sを載置する試料ステージ105を光軸AX廻りに回転駆動する装置であり、回転機構111によるアナライザ118の回転駆動と、ステージ駆動部106による試料ステージ105の回転駆動についても、制御演算装置112からの駆動信号により制御されている。
【0005】
アナライザ118を通して見るとき、ある回転角で例えば赤色に見えるアスベストの場合には、波長域選択フィルタ110aとして赤色を透過するフィルタを使用すると、ある回転角では、フィルタ110aを透過する赤色光の強度(輝度)は最大となる。この回転角からアナライザ118を回転すると、赤色光の強度は徐々に弱くなり、光強度が最大の角度から90°回転したところでは、光強度が最小(理想的には0)になる。さらにアナライザ118を回転すると、徐々に光強度が強くなり、また最大となる。光強度が最大となる角度は、アスベスト粒子の向き(結晶軸の方位)に依存しているので、アナライザ118を回転していくと、視野内の個々のアスベスト粒子からの分散色の明るさがランダムに変化する。つまり、ある回転角では、あるアスベスト粒子からの光強度が最大となり、別の回転角では、そのアスベスト粒子からの光強度が減少する一方で別のアスベスト粒子からの光強度が変化していく。アナライザ118を回転しながら、点滅して見えるアスベスト粒子の数を計数することによって、定量分析を行うことが可能となる。
【0006】
画像処理装置113は、デジタルカメラ110からの画像信号を不図示のフレームメモリに入力して、例えば、複数フレームの画像を重ね合わせたり、所定の輝度レベル以上の像のみを強調したりするような処理を行う。また、画像処理装置113は、処理前の画像や処理済の画像をディスプレイ114に表示させたり、処理済の画像信号を制御演算装置112へ送出したりする。制御演算装置112は、その画像信号に基づいて、重ね合わされた1フレームの画像内で所定輝度以上の像の数を計数する。
【0007】
下記特許文献1では、以上説明した顕微鏡システム200を用いることで、アスベストの定量分析を自動的に行うことができるとされており、その具体的な手順としては、回転機構111によりアナライザ118を光軸AX廻りに回転しながら、例えば回転角度30°毎に試料Sの観察像をデジタルカメラ110により撮像して複数枚の画像を取得し、さらに、画像処理装置113により各画像に対して所定輝度以上の像を抽出し、これら複数枚の画像を重畳する。回転角度範囲が180°であれば、6枚の画像が重ね合わされる。そして、制御演算装置112が、画像処理装置113からの1フレームの重畳画像について、所定種類のアスベストの像の数を自動的に計数する。この自動計数により、オペレータが視野を観察しながら像の数を計数するという作業が不要となるとされている。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2005−338567号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、光学顕微鏡を用いたアスベスト繊維種の同定作業は、現時点でオペレータによる目視作業が主流であり、自動化技術が確立されていないのが現状である。また、上記特許文献1にて提案されたアスベスト繊維種同定作業の自動化のための顕微鏡システム200については、画像処理の具体的な内容が示されておらず、アイデアの域を出るものではない。つまり、上記特許文献1の記載内容に基づいて実作業に用いることのできる自動化されたアスベスト繊維種同定装置を実現することは困難であり、自動化技術が確立されていない現状がそれを証明している。
【0010】
本発明は、上述した課題の存在に鑑みて成されたものであって、その目的は、実作業に用いることのできる自動化されたアスベスト繊維種同定装置、アスベスト繊維種同定方法、およびアスベスト繊維種同定プログラムを提供することにある。
【課題を解決するための手段】
【0011】
本発明に係るアスベスト繊維種同定装置は、複屈折性を有するアスベストの繊維種同定を、位相差分散顕微鏡を用いて自動的に行うためのアスベスト繊維種同定装置であって、色温度が異なる光源状態でも白色を正確に白く映し出せるようにするためのホワイトバランスをとることができるように、前記位相差分散顕微鏡の鏡筒に取り付けられた撮像手段と、試料ステージ上に載置された試料を任意の観測位置へ移動させるために、前記試料ステージを水平方向で移動自在とするステージ移動手段と、前記位相差分散顕微鏡の分散染色対物レンズと前記撮像手段との間に設置されるとともに前記試料からの光の光軸を中心に前記試料に対して相対的に回転自在とされる偏光部材と、前記試料ステージと前記撮像手段との間隔を変更自在とするための間隔変更手段と、前記撮像手段によって撮影された試料像に対して画像処理を行うための画像処理部と、を備え、前記偏光部材の回転角度を初期位置に設定するとともに前記撮像手段の前記試料に対する合焦点を実行した上で、前記間隔変更手段を用いて前記試料ステージと前記撮像手段との間隔を変更させながら前記撮像手段によって複数の試料像を撮影し、前記画像処理部を用いてこれら複数の試料像を合成することで前記試料の全面にピントの合った第一の深度合成画像を作成し、また、前記試料の水平方向での観測位置を維持したままで前記偏光部材を所定角度回転させ、前記合焦点を実行した後に、再び、前記間隔変更手段と前記撮像手段を用いて複数の試料像の撮影を行い、前記画像処理部を用いて第二の深度合成画像を作成し、さらに、前記画像処理部を用いて前記第一の深度合成画像と前記第二の深度合成画像との減算処理を実行することで、発色変化部位のみを抽出してアスベストの繊維種同定を行うように構成されていることを特徴とする。
【0012】
また、本発明に係るアスベスト繊維種同定装置において、前記第二の深度合成画像は、複数作成することができる。
【0013】
さらに、本発明に係るアスベスト繊維種同定装置では、前記撮像手段を用いた試料像の撮影に際して、前記試料から前記偏光部材を介して前記撮像手段に到達する光の光量に応じた露光時間を確保するために、前記撮像手段のシャッタースピードを自動的に変更自在に構成することができる。
【0014】
本発明に係るアスベスト繊維種同定方法は、複屈折性を有するアスベストの繊維種同定を、位相差分散顕微鏡を用いて自動的に行うためのアスベスト繊維種同定方法であって、前記位相差分散顕微鏡の鏡筒に取り付けた撮像手段を用い、色温度が異なる光源状態でも白色を正確に白く映し出せるようにするためのホワイトバランスをとる工程と、試料ステージを水平方向で移動自在とするためのステージ移動手段を用い、前記試料ステージ上に載置された試料を任意の観測位置へ移動させる工程と、前記位相差分散顕微鏡の分散染色対物レンズと前記撮像手段との間に設置されるとともに前記試料からの光の光軸を中心に前記試料に対して相対的に回転自在とされる偏光部材に関して、前記偏光部材の回転角度を初期位置に設定する工程と、前記撮像手段の前記試料に対する合焦点を実行する工程と、前記合焦点を実行した後に、前記試料ステージと前記撮像手段との間隔を変更自在とするための間隔変更手段を用い、前記間隔を変更させながら前記撮像手段によって複数の試料像を撮影する工程と、前記撮像手段によって撮影された試料像に対して画像処理を行うための画像処理部を用い、前記複数の試料像を合成することで前記試料の全面にピントの合った第一の深度合成画像を作成する工程と、前記試料の水平方向での観測位置を維持したままで前記偏光部材を所定角度回転させ、前記合焦点を実行した後に、再び、前記間隔変更手段と前記撮像手段を用いた複数の試料像の撮影を行い、前記画像処理部を用いて第二の深度合成画像を作成する工程と、前記画像処理部を用い、前記第一の深度合成画像と前記第二の深度合成画像との減算処理を実行し、発色変化部位のみを抽出することでアスベストの繊維種同定を行う工程と、を含む工程を実行することを特徴とする。
【0015】
また、本発明に係るアスベスト繊維種同定方法において、前記画像処理部を用いて第二の深度合成画像を作成する工程は、複数回実行することができる。
【0016】
さらに、本発明に係るアスベスト繊維種同定方法では、前記撮像手段を用いた試料像の撮影に際して、前記試料から前記偏光部材を介して前記撮像手段に到達する光の光量に応じた露光時間を確保するために、前記撮像手段のシャッタースピードを自動的に変更する工程を含むこととすることができる。
【0017】
本発明に係るアスベスト繊維種同定プログラムは、複屈折性を有するアスベストの繊維種同定を、位相差分散顕微鏡を用いて自動的に行うためのアスベスト繊維種同定プログラムであって、コンピュータに、前記位相差分散顕微鏡の鏡筒に取り付けた撮像手段を制御し、色温度が異なる光源状態でも白色を正確に白く映し出せるようにするためのホワイトバランスをとらせる処理と、試料ステージを水平方向で移動自在とするためのステージ移動手段を制御し、前記試料ステージ上に載置された試料を任意の観測位置へ移動させる処理と、前記位相差分散顕微鏡の分散染色対物レンズと前記撮像手段との間に設置されるとともに前記試料からの光の光軸を中心に前記試料に対して相対的に回転自在とされる偏光部材を制御し、当該偏光部材の回転角度を初期位置に設定させる処理と、前記撮像手段の前記試料に対する合焦点を実行させる処理と、前記合焦点を実行させた後に、前記試料ステージと前記撮像手段との間隔を変更自在とするための間隔変更手段を制御し、前記間隔を変更させながら前記撮像手段を制御して複数の試料像を撮影させる処理と、前記撮像手段によって撮影された試料像に対して画像処理を行うための画像処理部を制御し、前記複数の試料像を合成させることで前記試料の全面にピントの合った第一の深度合成画像を作成させる処理と、前記試料の水平方向での観測位置を維持したままで前記偏光部材を所定角度回転させ、前記合焦点を実行させた後に、再び、前記間隔変更手段と前記撮像手段を制御して複数の試料像の撮影を行わせ、前記画像処理部を制御することで第二の深度合成画像を作成させる処理と、前記画像処理部を制御することで、前記第一の深度合成画像と前記第二の深度合成画像との減算処理を実行させ、発色変化部位のみを抽出させてアスベストの繊維種同定を行わせる処理と、を含む処理を実行させることを特徴とする。
【0018】
また、本発明に係るアスベスト繊維種同定プログラムにおいて、前記画像処理部を制御することで第二の深度合成画像を作成させる処理は、複数回実行させることができる。
【0019】
さらに、本発明に係るアスベスト繊維種同定プログラムでは、前記撮像手段を用いた試料像の撮影に際して、前記試料から前記偏光部材を介して前記撮像手段に到達する光の光量に応じた露光時間を確保するために、コンピュータに、前記撮像手段を制御することで、前記撮像手段のシャッタースピードを自動的に変更させる処理を実行させることができる。
【発明の効果】
【0020】
本発明によれば、実作業に用いることのできる自動化されたアスベスト繊維種同定装置、アスベスト繊維種同定方法、およびアスベスト繊維種同定プログラムを提供することができる。
【図面の簡単な説明】
【0021】
【図1】本実施形態に係るアスベスト繊維種同定装置の全体構成を示す概略図である。
【図2】本実施形態に係るアスベスト繊維種同定処理を説明するためのフローチャートである。
【図3】従来技術に係る顕微鏡システムの構成を模式的に示す全体構成図である。
【発明を実施するための形態】
【0022】
以下、本発明を実施するための好適な実施形態について、図面を用いて説明する。なお、以下の実施形態は、各請求項に係る発明を限定するものではなく、実施形態の中で説明されている特徴の組み合わせの全てが発明の解決手段に必須であるとは限らない。また、上記背景技術の欄で説明した部材と同一又は類似する部材については、同一符号を付して説明を省略する場合がある。
【0023】
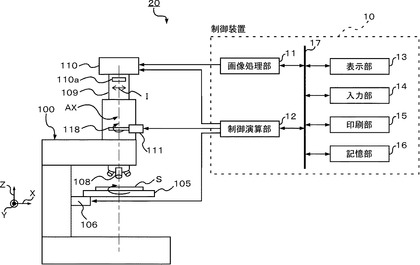
図1は、本実施形態に係るアスベスト繊維種同定装置の全体構成を示す概略図である。なお、図1では、紙面右側をX方向、紙面に対して垂直な方向をY方向、紙面上方向をZ方向として定義し、説明することとする。すなわち、位相差分散顕微鏡100の水平方向はX−Y方向と表現され、垂直方向はZ方向と表現されることとなる。
【0024】
本実施形態に係るアスベスト繊維種同定装置20は、位相差分散顕微鏡100と制御装置10とを備えて構成されている。
【0025】
位相差分散顕微鏡100は、上述した従来技術に係る光学顕微鏡とほぼ同様の構成を有しており、撮像手段としてのデジタルカメラ110と、偏光部材である偏光板を含むアナライザ118を回転駆動するための回転機構111と、ステージ移動手段および間隔変更手段としてのステージ駆動部106とが、制御装置10が有する制御演算部12からの動作指令に応じて動作するように構成されている。
【0026】
デジタルカメラ110は、観察鏡筒109に搭載され、観察面Iに結像した試料像を、波長域選択フィルタ110aを通して撮像し、画像信号を画像処理部11へ送出するよう構成されている。また、デジタルカメラ110は、制御演算部12からの制御信号により所定のタイミングで撮影を実行できるように制御される。
【0027】
回転機構111は、偏光板を含むアナライザ118を光軸AX廻りに回転駆動する装置であり、制御演算部12からの制御信号によって動作制御が実行される。なお、回転機構111によって回転駆動されるアナライザ118については、位相差分散顕微鏡100が有する分散染色対物レンズ108とデジタルカメラ110との間に設置されることで、デジタルカメラ110が取得する試料像に対して発色変化を与えることができるようになっている。
【0028】
ステージ駆動部106は、試料Sを載置する試料ステージ105を光軸AXに対して水平方向に、すなわちX−Y方向に移動させるステージ移動手段としての機能と、試料Sを載置する試料ステージ105とデジタルカメラ110との間隔、すなわちZ方向での両者105,110の間隔を変更自在とする間隔変更手段としての機能とを有する装置であり、回転機構111によるアナライザ118の回転駆動に加え、ステージ駆動部106による試料ステージ105のX−Y方向移動およびZ方向移動についても、制御演算部12からの駆動信号により、その動作制御が実行されることとなる。
【0029】
一方、制御装置10は、画像処理部11と、制御演算部12と、表示部13と、入力部14と、印刷部15と、記憶部16と、バス17とを備えて構成されている。この制御装置10については、アスベスト繊維種の同定作業を行うための試験室等に設置された位相差分散顕微鏡100と近接して設置され、さらに、パーソナルコンピュータなどの情報処理装置によって構成されている。
【0030】
画像処理部11は、撮像手段としてのデジタルカメラ110によって撮影された試料像に対して画像処理を行うなど、各種の処理を実行する機能を有しており、画像処理部11によって行われる深度合成や減算処理等の各種の画像処理については、公知の技術を利用して実行される。
【0031】
制御演算部12は、デジタルカメラ110や回転機構111、およびステージ駆動部106などの動作制御を行う機能を有しており、位相差分散顕微鏡100に所望の動作を実行させる指令を行う。なお、制御演算部12によって行われる動作制御などの各種の処理については、公知の技術を利用して実行される。
【0032】
表示部13は、例えば液晶表示装置などの情報表示装置によって構成されている。また、入力部14は、例えばキーボードやマウスなどの入力装置によって構成され、印刷部15は、プリンタなどの情報出力装置によって構成されている。さらに、記憶部16は、画像処理部11を経由して取得した試料像や、画像処理部11によって行われた減算処理の結果等を格納するための装置であり、ROMなどの記憶媒体によって構成される。
【0033】
なお、制御装置10が有する画像処理部11、制御演算部12、表示部13、入力部14、印刷部15、および記憶部16については、バス17によって接続されており、各部がバス17を通じて通信路を共有し、信号の送受信を行なうことができるようになっている。
【0034】
次に、本実施形態に係るアスベスト繊維種同定装置20の動作について、図2を用いて説明を行う。ここで、図2は、本実施形態に係るアスベスト繊維種同定処理を説明するためのフローチャートである。
【0035】
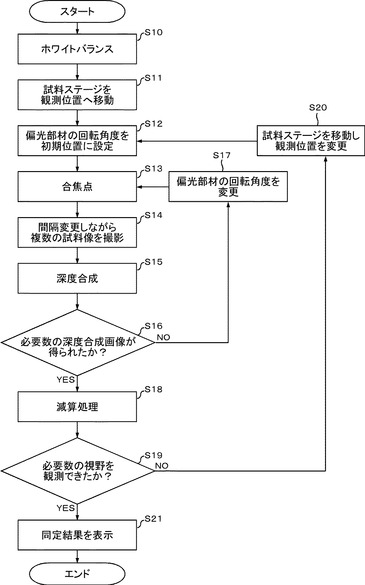
アスベスト繊維種同定処理においては、まず始めに、位相差分散顕微鏡100の鏡筒109に取り付けたデジタルカメラ110を用いて、色温度が異なる光源状態でも白色を正確に白く映し出せるようにするためのホワイトバランスをとる処理を行う(ステップS10)。このステップS10の処理は、デジタルカメラ110が制御演算部12からの動作指令を受けることで実行される。
【0036】
デジタルカメラ110がホワイトバランスをとると、制御演算部12はステージ駆動部106に対して試料ステージ105をX−Y方向に移動させることで、試料ステージ105上に載置された試料Sを初期観測位置へと移動させる(ステップS11)。
【0037】
また、制御演算部12は、回転機構111に対して動作指令信号を発信し、アナライザ118を回転移動させることでアナライザ118が有する偏光板の回転角度を初期位置(例えば、回転角度0°)に設定する(ステップS12)。
【0038】
さらに、制御演算部12からの動作指令によって、デジタルカメラ110の試料Sに対する合焦点が実行され(ステップS13)、ステップS13による合焦点が実行された後に、試料ステージ105とデジタルカメラ110との間隔を変更自在とするための間隔変更手段であるステージ駆動部106を用い、間隔を変更させながらデジタルカメラ110によって複数の試料像を撮影する(ステップS14)。
【0039】
デジタルカメラ110によって撮影された試料像は、画像処理を行うために画像処理部11に送信され、複数の試料像を取得した画像処理部11では、複数の試料像を合成することで試料Sの全面にピントの合った第一の深度合成画像が作成される(ステップS15)。
【0040】
本実施形態に係るアスベスト繊維種同定処理では、あらかじめ必要となる深度合成画像の画像数を設定できるようになっており、ステップS15にて深度合成画像が作成されると、必要数の深度合成画像が得られたか否かが確認され(ステップS16)、画像数が設定数に足りない場合には、制御演算部12が回転機構111に対して動作指令信号を発信し、アナライザ118を回転移動させることでアナライザ118が有する偏光板の回転角度を所定の回転角度だけ回転させることとなる(ステップS17)。例えば、回転角度30°毎の深度合成画像を得るように設定されている場合には、ステップS15にて第一の深度合成画像が取得された後、アナライザ118を回転角度30°で回転させた後にステップS13〜ステップS15の処理が実行され、偏光板の回転角度30°での第二の深度合成画像が作成されることとなる。
【0041】
ステップS13〜ステップS15の処理が繰り返し実行され、必要数の深度合成画像が得られたならば、これら複数の深度合成画像に対する減算処理が画像処理部11によって実行され(ステップS18)、発色変化部位のみを抽出することができる。このステップS18において実行される減算処理の結果データは、制御演算部12に送信され、抽出された発色変化部位の情報に基づいてアスベストの繊維種同定が行われることとなる。
【0042】
なお、第二の深度合成画像については、ステップS13〜ステップS15の処理が複数回実行されることで複数作成されることが可能であり、この第二の深度合成画像の作成数については、試料Sの状況や実験条件等を考えて、あらかじめ任意の個数に設定しておくことができる。
【0043】
以上説明したステップS10〜ステップS18までの処理により、ステップS11にて設定された初期観測位置での試料Sのアスベスト繊維種同定処理が完了するが、試料Sの観測位置についても複数箇所観測することができ、また、この観測位置や観測回数についても、あらかじめ任意の条件にて設定しておくことができる。すなわち、ステップS19にて必要数の視野数を観測できたかを確認し、観測の視野数が設定数に足りない場合には、制御演算部12がステージ駆動部106に動作指令して試料ステージ105を移動させ(ステップS20)、このとき設定された新たな観測位置でのアスベスト繊維種同定処理(ステップS12〜ステップS18までの処理)が実行されることとなる。
【0044】
ステップS19にて必要数の視野数を観測できたことを確認した場合には、同定結果を表示部13に表示させ(ステップS21)、本実施形態に係るアスベスト繊維種同定処理が完了することとなる。なお、制御部10では、アスベスト繊維種同定処理の結果を表示部13に表示させるほか、印刷部15を用いて同定結果の印刷処理をしたり、記憶部16に対して同定結果の格納処理をしたりすることができる。
【0045】
以上、図2を用いて本実施形態に係るアスベスト繊維種同定処理について説明したが、本実施形態には種々の改良を加えることが可能である。例えば、本実施形態に係るアスベスト繊維種同定装置20では、アナライザ118が有する偏光板を介して試料像を撮影している。したがって、撮影条件によっては、デジタルカメラ110の画像センサが取得する光量が減少し、S/N比の悪化や画質劣化が発生してしまう可能性がある。そこで、本実施形態に係るアスベスト繊維種同定処理では、デジタルカメラ110を用いた試料像の撮影に際して、試料Sから偏光板を介してデジタルカメラ110に到達する光の光量に応じた露光時間を確保するために、デジタルカメラ110のシャッタースピードを自動的に変更するように、あらかじめ制御演算部12に対して設定しておくことが好適である。具体的には、デジタルカメラ110のオートフォーカス動作時にはノーマルシャッター(例えば、シャッタースピード30fps)とし、試料像を取り込む際にはロングシャッター(例えば、シャッタースピード10fps)とするような設定を採用することで、効率良く高画質の試料像を撮影することが可能となる。
【0046】
以上に説明したように、上述した本実施形態では、複屈折性を有するアスベストの繊維種同定を、位相差分散顕微鏡100を用いて自動的に行うためのアスベスト繊維種同定装置20として、色温度が異なる光源状態でも白色を正確に白く映し出せるようにするためのホワイトバランスをとることができるように、位相差分散顕微鏡100の鏡筒109に取り付けられた撮像手段(デジタルカメラ110)と、試料ステージ105上に載置された試料Sを任意の観測位置へ移動させるために、試料ステージ105を水平方向(X−Y方向)で移動自在とするステージ移動手段(ステージ駆動部106)と、位相差分散顕微鏡100の分散染色対物レンズ108と撮像手段(デジタルカメラ110)との間に設置されるとともに試料Sからの光の光軸を中心に試料Sに対して相対的に回転自在とされる偏光部材(アナライザ118)と、試料ステージ105と撮像手段(デジタルカメラ110)との間隔を変更自在とするための間隔変更手段(ステージ駆動部106)と、撮像手段(デジタルカメラ110)によって撮影された試料像に対して画像処理を行うための画像処理部11と、を備え、偏光部材(アナライザ118)の回転角度を初期位置に設定するとともに撮像手段(デジタルカメラ110)の試料Sに対する合焦点を実行した上で、間隔変更手段(ステージ駆動部106)を用いて試料ステージ105と撮像手段(デジタルカメラ110)との間隔を変更させながら撮像手段(デジタルカメラ110)によって複数の試料像を撮影し、画像処理部11を用いてこれら複数の試料像を合成することで試料Sの全面にピントの合った第一の深度合成画像を作成し、また、試料Sの水平方向(X−Y方向)での観測位置を維持したままで偏光部材(アナライザ118)を所定角度回転させ、合焦点を実行した後に、再び、間隔変更手段(ステージ駆動部106)と撮像手段(デジタルカメラ110)を用いて複数の試料像の撮影を行い、画像処理部11を用いて第二の深度合成画像を作成し、さらに、画像処理部11を用いて第一の深度合成画像と第二の深度合成画像との減算処理を実行することで、発色変化部位のみを抽出してアスベストの繊維種同定を行うように構成したので、実作業に耐え得るアスベスト繊維種同定作業の自動化装置を実現することができた。
【0047】
また、上述した実施形態では、第二の深度合成画像を複数作成できるような構成としたので、あらゆる作業条件を容易に設定することができ、また、自動化されたアスベスト繊維種同定作業の精度向上を図ることが可能となっている。
【0048】
さらに、上述した実施形態では、撮像手段(デジタルカメラ110)を用いた試料像の撮影に際して、試料Sから偏光部材(アナライザ118)を介して撮像手段(デジタルカメラ110)に到達する光の光量に応じた露光時間を確保するために、撮像手段(デジタルカメラ110)のシャッタースピードを自動的に変更自在な構成とした。これにより、効率良く高画質の試料像を自動的に撮影することが可能となった。
【0049】
なお、上述した実施形態において、アスベスト繊維種同定装置20は、自己が備える記憶媒体に記憶されたコンピュータプログラム(アスベスト繊維種同定プログラム)に従って、上述した各種の処理(図2に示す処理など)を実行することができる。
【0050】
また、上述した実施形態では、位相差分散顕微鏡100と制御装置10とを近接した場所に設置した場合を例示して説明したが、アスベスト繊維種同定装置20が有する位相差分散顕微鏡100と制御装置10との設置場所については、それぞれを別の場所に設置し、両者100,10間の通信を無線信号によって行うことで、アスベストが取り扱われることとなる位相差分散顕微鏡100の設置場所と、位相差分散顕微鏡100に対して動作指令を行うこととなるオペレータが在室する制御装置10の設置場所とを、分離して設けることが可能である。
【0051】
以上、本発明の好適な実施形態について説明したが、本発明の技術的範囲は上記実施形態に記載の範囲には限定されない。上記実施形態には、多様な変更又は改良を加えることが可能である。その様な変更又は改良を加えた形態も本発明の技術的範囲に含まれ得ることが、特許請求の範囲の記載から明らかである。
【符号の説明】
【0052】
10 制御装置、11 画像処理部、12 制御演算部、13 表示部、14 入力部、15 印刷部、16 記憶部、17 バス、20 アスベスト繊維種同定装置、100 位相差分散顕微鏡、105 試料ステージ、106 ステージ駆動部、108 分散染色対物レンズ、109 観察鏡筒、110 デジタルカメラ、110a 波長域選択フィルタ、111 回転機構、118 アナライザ、S 試料、I 観察面、AX 光軸。
【技術分野】
【0001】
本発明は、複屈折性を有するアスベストの繊維種同定を、位相差分散顕微鏡を用いて自動的に行うためのアスベスト繊維種同定装置、アスベスト繊維種同定方法、およびアスベスト繊維種同定プログラムに関するものである。
【背景技術】
【0002】
従来から、位相差分散顕微鏡を用いることで、複屈折性を有するアスベストの繊維種同定を行う装置が知られている(例えば、下記特許文献1参照)。この従来技術に係るアスベスト繊維種同定装置は、光学顕微鏡として構成される装置であり、照明部に光源からの照明光を通過させるリング絞りを有し、分散対物レンズの後ろ側焦点面にリング絞りに対応する遮光リングを有している。また、試料と1次像面との間に偏光板を含むアナライザが配設されており、このアナライザを光軸廻りに回転させ、試料からの回折光のうち特定の波長の光を偏光分離して観察することで、色調が近い分散色でも明確に認識でき、複屈折性を有するアスベストの同定を正確に行うことができるとされている。
【0003】
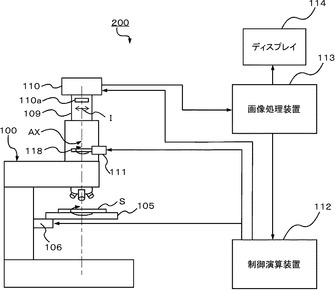
また、下記特許文献1には、上述した光学顕微鏡を用いたアスベストの同定作業がオペレータによる目視作業であることに鑑みて、その作業負荷軽減と同定作業の精度向上のために、アスベストの定量分析を自動的に行うためのシステムおよび方法が提案されている。そこで、この従来技術に係るアスベスト繊維種同定作業の自動化のための顕微鏡システムについて、図面を用いて説明することとする。ここで、図3は、従来技術に係る顕微鏡システムの構成を模式的に示す全体構成図である。
【0004】
従来技術に係る顕微鏡システム200は、光学顕微鏡100に、デジタルカメラ110、回転機構111、制御演算装置112、画像処理装置113およびディスプレイ114を付加して構成されている。デジタルカメラ110は、観察鏡筒109に搭載され、観察面Iに結像した試料像を、波長域選択フィルタ110aを通して撮像し、画像信号を画像処理装置113へ送出するよう構成されている。また、デジタルカメラ110は、制御演算装置112からの制御信号により所定のタイミングで撮影できるように制御されている。回転機構111は、偏光板を含むアナライザ118を光軸AX廻りに回転駆動する装置である。また、ステージ駆動部106は、試料Sを載置する試料ステージ105を光軸AX廻りに回転駆動する装置であり、回転機構111によるアナライザ118の回転駆動と、ステージ駆動部106による試料ステージ105の回転駆動についても、制御演算装置112からの駆動信号により制御されている。
【0005】
アナライザ118を通して見るとき、ある回転角で例えば赤色に見えるアスベストの場合には、波長域選択フィルタ110aとして赤色を透過するフィルタを使用すると、ある回転角では、フィルタ110aを透過する赤色光の強度(輝度)は最大となる。この回転角からアナライザ118を回転すると、赤色光の強度は徐々に弱くなり、光強度が最大の角度から90°回転したところでは、光強度が最小(理想的には0)になる。さらにアナライザ118を回転すると、徐々に光強度が強くなり、また最大となる。光強度が最大となる角度は、アスベスト粒子の向き(結晶軸の方位)に依存しているので、アナライザ118を回転していくと、視野内の個々のアスベスト粒子からの分散色の明るさがランダムに変化する。つまり、ある回転角では、あるアスベスト粒子からの光強度が最大となり、別の回転角では、そのアスベスト粒子からの光強度が減少する一方で別のアスベスト粒子からの光強度が変化していく。アナライザ118を回転しながら、点滅して見えるアスベスト粒子の数を計数することによって、定量分析を行うことが可能となる。
【0006】
画像処理装置113は、デジタルカメラ110からの画像信号を不図示のフレームメモリに入力して、例えば、複数フレームの画像を重ね合わせたり、所定の輝度レベル以上の像のみを強調したりするような処理を行う。また、画像処理装置113は、処理前の画像や処理済の画像をディスプレイ114に表示させたり、処理済の画像信号を制御演算装置112へ送出したりする。制御演算装置112は、その画像信号に基づいて、重ね合わされた1フレームの画像内で所定輝度以上の像の数を計数する。
【0007】
下記特許文献1では、以上説明した顕微鏡システム200を用いることで、アスベストの定量分析を自動的に行うことができるとされており、その具体的な手順としては、回転機構111によりアナライザ118を光軸AX廻りに回転しながら、例えば回転角度30°毎に試料Sの観察像をデジタルカメラ110により撮像して複数枚の画像を取得し、さらに、画像処理装置113により各画像に対して所定輝度以上の像を抽出し、これら複数枚の画像を重畳する。回転角度範囲が180°であれば、6枚の画像が重ね合わされる。そして、制御演算装置112が、画像処理装置113からの1フレームの重畳画像について、所定種類のアスベストの像の数を自動的に計数する。この自動計数により、オペレータが視野を観察しながら像の数を計数するという作業が不要となるとされている。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2005−338567号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、光学顕微鏡を用いたアスベスト繊維種の同定作業は、現時点でオペレータによる目視作業が主流であり、自動化技術が確立されていないのが現状である。また、上記特許文献1にて提案されたアスベスト繊維種同定作業の自動化のための顕微鏡システム200については、画像処理の具体的な内容が示されておらず、アイデアの域を出るものではない。つまり、上記特許文献1の記載内容に基づいて実作業に用いることのできる自動化されたアスベスト繊維種同定装置を実現することは困難であり、自動化技術が確立されていない現状がそれを証明している。
【0010】
本発明は、上述した課題の存在に鑑みて成されたものであって、その目的は、実作業に用いることのできる自動化されたアスベスト繊維種同定装置、アスベスト繊維種同定方法、およびアスベスト繊維種同定プログラムを提供することにある。
【課題を解決するための手段】
【0011】
本発明に係るアスベスト繊維種同定装置は、複屈折性を有するアスベストの繊維種同定を、位相差分散顕微鏡を用いて自動的に行うためのアスベスト繊維種同定装置であって、色温度が異なる光源状態でも白色を正確に白く映し出せるようにするためのホワイトバランスをとることができるように、前記位相差分散顕微鏡の鏡筒に取り付けられた撮像手段と、試料ステージ上に載置された試料を任意の観測位置へ移動させるために、前記試料ステージを水平方向で移動自在とするステージ移動手段と、前記位相差分散顕微鏡の分散染色対物レンズと前記撮像手段との間に設置されるとともに前記試料からの光の光軸を中心に前記試料に対して相対的に回転自在とされる偏光部材と、前記試料ステージと前記撮像手段との間隔を変更自在とするための間隔変更手段と、前記撮像手段によって撮影された試料像に対して画像処理を行うための画像処理部と、を備え、前記偏光部材の回転角度を初期位置に設定するとともに前記撮像手段の前記試料に対する合焦点を実行した上で、前記間隔変更手段を用いて前記試料ステージと前記撮像手段との間隔を変更させながら前記撮像手段によって複数の試料像を撮影し、前記画像処理部を用いてこれら複数の試料像を合成することで前記試料の全面にピントの合った第一の深度合成画像を作成し、また、前記試料の水平方向での観測位置を維持したままで前記偏光部材を所定角度回転させ、前記合焦点を実行した後に、再び、前記間隔変更手段と前記撮像手段を用いて複数の試料像の撮影を行い、前記画像処理部を用いて第二の深度合成画像を作成し、さらに、前記画像処理部を用いて前記第一の深度合成画像と前記第二の深度合成画像との減算処理を実行することで、発色変化部位のみを抽出してアスベストの繊維種同定を行うように構成されていることを特徴とする。
【0012】
また、本発明に係るアスベスト繊維種同定装置において、前記第二の深度合成画像は、複数作成することができる。
【0013】
さらに、本発明に係るアスベスト繊維種同定装置では、前記撮像手段を用いた試料像の撮影に際して、前記試料から前記偏光部材を介して前記撮像手段に到達する光の光量に応じた露光時間を確保するために、前記撮像手段のシャッタースピードを自動的に変更自在に構成することができる。
【0014】
本発明に係るアスベスト繊維種同定方法は、複屈折性を有するアスベストの繊維種同定を、位相差分散顕微鏡を用いて自動的に行うためのアスベスト繊維種同定方法であって、前記位相差分散顕微鏡の鏡筒に取り付けた撮像手段を用い、色温度が異なる光源状態でも白色を正確に白く映し出せるようにするためのホワイトバランスをとる工程と、試料ステージを水平方向で移動自在とするためのステージ移動手段を用い、前記試料ステージ上に載置された試料を任意の観測位置へ移動させる工程と、前記位相差分散顕微鏡の分散染色対物レンズと前記撮像手段との間に設置されるとともに前記試料からの光の光軸を中心に前記試料に対して相対的に回転自在とされる偏光部材に関して、前記偏光部材の回転角度を初期位置に設定する工程と、前記撮像手段の前記試料に対する合焦点を実行する工程と、前記合焦点を実行した後に、前記試料ステージと前記撮像手段との間隔を変更自在とするための間隔変更手段を用い、前記間隔を変更させながら前記撮像手段によって複数の試料像を撮影する工程と、前記撮像手段によって撮影された試料像に対して画像処理を行うための画像処理部を用い、前記複数の試料像を合成することで前記試料の全面にピントの合った第一の深度合成画像を作成する工程と、前記試料の水平方向での観測位置を維持したままで前記偏光部材を所定角度回転させ、前記合焦点を実行した後に、再び、前記間隔変更手段と前記撮像手段を用いた複数の試料像の撮影を行い、前記画像処理部を用いて第二の深度合成画像を作成する工程と、前記画像処理部を用い、前記第一の深度合成画像と前記第二の深度合成画像との減算処理を実行し、発色変化部位のみを抽出することでアスベストの繊維種同定を行う工程と、を含む工程を実行することを特徴とする。
【0015】
また、本発明に係るアスベスト繊維種同定方法において、前記画像処理部を用いて第二の深度合成画像を作成する工程は、複数回実行することができる。
【0016】
さらに、本発明に係るアスベスト繊維種同定方法では、前記撮像手段を用いた試料像の撮影に際して、前記試料から前記偏光部材を介して前記撮像手段に到達する光の光量に応じた露光時間を確保するために、前記撮像手段のシャッタースピードを自動的に変更する工程を含むこととすることができる。
【0017】
本発明に係るアスベスト繊維種同定プログラムは、複屈折性を有するアスベストの繊維種同定を、位相差分散顕微鏡を用いて自動的に行うためのアスベスト繊維種同定プログラムであって、コンピュータに、前記位相差分散顕微鏡の鏡筒に取り付けた撮像手段を制御し、色温度が異なる光源状態でも白色を正確に白く映し出せるようにするためのホワイトバランスをとらせる処理と、試料ステージを水平方向で移動自在とするためのステージ移動手段を制御し、前記試料ステージ上に載置された試料を任意の観測位置へ移動させる処理と、前記位相差分散顕微鏡の分散染色対物レンズと前記撮像手段との間に設置されるとともに前記試料からの光の光軸を中心に前記試料に対して相対的に回転自在とされる偏光部材を制御し、当該偏光部材の回転角度を初期位置に設定させる処理と、前記撮像手段の前記試料に対する合焦点を実行させる処理と、前記合焦点を実行させた後に、前記試料ステージと前記撮像手段との間隔を変更自在とするための間隔変更手段を制御し、前記間隔を変更させながら前記撮像手段を制御して複数の試料像を撮影させる処理と、前記撮像手段によって撮影された試料像に対して画像処理を行うための画像処理部を制御し、前記複数の試料像を合成させることで前記試料の全面にピントの合った第一の深度合成画像を作成させる処理と、前記試料の水平方向での観測位置を維持したままで前記偏光部材を所定角度回転させ、前記合焦点を実行させた後に、再び、前記間隔変更手段と前記撮像手段を制御して複数の試料像の撮影を行わせ、前記画像処理部を制御することで第二の深度合成画像を作成させる処理と、前記画像処理部を制御することで、前記第一の深度合成画像と前記第二の深度合成画像との減算処理を実行させ、発色変化部位のみを抽出させてアスベストの繊維種同定を行わせる処理と、を含む処理を実行させることを特徴とする。
【0018】
また、本発明に係るアスベスト繊維種同定プログラムにおいて、前記画像処理部を制御することで第二の深度合成画像を作成させる処理は、複数回実行させることができる。
【0019】
さらに、本発明に係るアスベスト繊維種同定プログラムでは、前記撮像手段を用いた試料像の撮影に際して、前記試料から前記偏光部材を介して前記撮像手段に到達する光の光量に応じた露光時間を確保するために、コンピュータに、前記撮像手段を制御することで、前記撮像手段のシャッタースピードを自動的に変更させる処理を実行させることができる。
【発明の効果】
【0020】
本発明によれば、実作業に用いることのできる自動化されたアスベスト繊維種同定装置、アスベスト繊維種同定方法、およびアスベスト繊維種同定プログラムを提供することができる。
【図面の簡単な説明】
【0021】
【図1】本実施形態に係るアスベスト繊維種同定装置の全体構成を示す概略図である。
【図2】本実施形態に係るアスベスト繊維種同定処理を説明するためのフローチャートである。
【図3】従来技術に係る顕微鏡システムの構成を模式的に示す全体構成図である。
【発明を実施するための形態】
【0022】
以下、本発明を実施するための好適な実施形態について、図面を用いて説明する。なお、以下の実施形態は、各請求項に係る発明を限定するものではなく、実施形態の中で説明されている特徴の組み合わせの全てが発明の解決手段に必須であるとは限らない。また、上記背景技術の欄で説明した部材と同一又は類似する部材については、同一符号を付して説明を省略する場合がある。
【0023】
図1は、本実施形態に係るアスベスト繊維種同定装置の全体構成を示す概略図である。なお、図1では、紙面右側をX方向、紙面に対して垂直な方向をY方向、紙面上方向をZ方向として定義し、説明することとする。すなわち、位相差分散顕微鏡100の水平方向はX−Y方向と表現され、垂直方向はZ方向と表現されることとなる。
【0024】
本実施形態に係るアスベスト繊維種同定装置20は、位相差分散顕微鏡100と制御装置10とを備えて構成されている。
【0025】
位相差分散顕微鏡100は、上述した従来技術に係る光学顕微鏡とほぼ同様の構成を有しており、撮像手段としてのデジタルカメラ110と、偏光部材である偏光板を含むアナライザ118を回転駆動するための回転機構111と、ステージ移動手段および間隔変更手段としてのステージ駆動部106とが、制御装置10が有する制御演算部12からの動作指令に応じて動作するように構成されている。
【0026】
デジタルカメラ110は、観察鏡筒109に搭載され、観察面Iに結像した試料像を、波長域選択フィルタ110aを通して撮像し、画像信号を画像処理部11へ送出するよう構成されている。また、デジタルカメラ110は、制御演算部12からの制御信号により所定のタイミングで撮影を実行できるように制御される。
【0027】
回転機構111は、偏光板を含むアナライザ118を光軸AX廻りに回転駆動する装置であり、制御演算部12からの制御信号によって動作制御が実行される。なお、回転機構111によって回転駆動されるアナライザ118については、位相差分散顕微鏡100が有する分散染色対物レンズ108とデジタルカメラ110との間に設置されることで、デジタルカメラ110が取得する試料像に対して発色変化を与えることができるようになっている。
【0028】
ステージ駆動部106は、試料Sを載置する試料ステージ105を光軸AXに対して水平方向に、すなわちX−Y方向に移動させるステージ移動手段としての機能と、試料Sを載置する試料ステージ105とデジタルカメラ110との間隔、すなわちZ方向での両者105,110の間隔を変更自在とする間隔変更手段としての機能とを有する装置であり、回転機構111によるアナライザ118の回転駆動に加え、ステージ駆動部106による試料ステージ105のX−Y方向移動およびZ方向移動についても、制御演算部12からの駆動信号により、その動作制御が実行されることとなる。
【0029】
一方、制御装置10は、画像処理部11と、制御演算部12と、表示部13と、入力部14と、印刷部15と、記憶部16と、バス17とを備えて構成されている。この制御装置10については、アスベスト繊維種の同定作業を行うための試験室等に設置された位相差分散顕微鏡100と近接して設置され、さらに、パーソナルコンピュータなどの情報処理装置によって構成されている。
【0030】
画像処理部11は、撮像手段としてのデジタルカメラ110によって撮影された試料像に対して画像処理を行うなど、各種の処理を実行する機能を有しており、画像処理部11によって行われる深度合成や減算処理等の各種の画像処理については、公知の技術を利用して実行される。
【0031】
制御演算部12は、デジタルカメラ110や回転機構111、およびステージ駆動部106などの動作制御を行う機能を有しており、位相差分散顕微鏡100に所望の動作を実行させる指令を行う。なお、制御演算部12によって行われる動作制御などの各種の処理については、公知の技術を利用して実行される。
【0032】
表示部13は、例えば液晶表示装置などの情報表示装置によって構成されている。また、入力部14は、例えばキーボードやマウスなどの入力装置によって構成され、印刷部15は、プリンタなどの情報出力装置によって構成されている。さらに、記憶部16は、画像処理部11を経由して取得した試料像や、画像処理部11によって行われた減算処理の結果等を格納するための装置であり、ROMなどの記憶媒体によって構成される。
【0033】
なお、制御装置10が有する画像処理部11、制御演算部12、表示部13、入力部14、印刷部15、および記憶部16については、バス17によって接続されており、各部がバス17を通じて通信路を共有し、信号の送受信を行なうことができるようになっている。
【0034】
次に、本実施形態に係るアスベスト繊維種同定装置20の動作について、図2を用いて説明を行う。ここで、図2は、本実施形態に係るアスベスト繊維種同定処理を説明するためのフローチャートである。
【0035】
アスベスト繊維種同定処理においては、まず始めに、位相差分散顕微鏡100の鏡筒109に取り付けたデジタルカメラ110を用いて、色温度が異なる光源状態でも白色を正確に白く映し出せるようにするためのホワイトバランスをとる処理を行う(ステップS10)。このステップS10の処理は、デジタルカメラ110が制御演算部12からの動作指令を受けることで実行される。
【0036】
デジタルカメラ110がホワイトバランスをとると、制御演算部12はステージ駆動部106に対して試料ステージ105をX−Y方向に移動させることで、試料ステージ105上に載置された試料Sを初期観測位置へと移動させる(ステップS11)。
【0037】
また、制御演算部12は、回転機構111に対して動作指令信号を発信し、アナライザ118を回転移動させることでアナライザ118が有する偏光板の回転角度を初期位置(例えば、回転角度0°)に設定する(ステップS12)。
【0038】
さらに、制御演算部12からの動作指令によって、デジタルカメラ110の試料Sに対する合焦点が実行され(ステップS13)、ステップS13による合焦点が実行された後に、試料ステージ105とデジタルカメラ110との間隔を変更自在とするための間隔変更手段であるステージ駆動部106を用い、間隔を変更させながらデジタルカメラ110によって複数の試料像を撮影する(ステップS14)。
【0039】
デジタルカメラ110によって撮影された試料像は、画像処理を行うために画像処理部11に送信され、複数の試料像を取得した画像処理部11では、複数の試料像を合成することで試料Sの全面にピントの合った第一の深度合成画像が作成される(ステップS15)。
【0040】
本実施形態に係るアスベスト繊維種同定処理では、あらかじめ必要となる深度合成画像の画像数を設定できるようになっており、ステップS15にて深度合成画像が作成されると、必要数の深度合成画像が得られたか否かが確認され(ステップS16)、画像数が設定数に足りない場合には、制御演算部12が回転機構111に対して動作指令信号を発信し、アナライザ118を回転移動させることでアナライザ118が有する偏光板の回転角度を所定の回転角度だけ回転させることとなる(ステップS17)。例えば、回転角度30°毎の深度合成画像を得るように設定されている場合には、ステップS15にて第一の深度合成画像が取得された後、アナライザ118を回転角度30°で回転させた後にステップS13〜ステップS15の処理が実行され、偏光板の回転角度30°での第二の深度合成画像が作成されることとなる。
【0041】
ステップS13〜ステップS15の処理が繰り返し実行され、必要数の深度合成画像が得られたならば、これら複数の深度合成画像に対する減算処理が画像処理部11によって実行され(ステップS18)、発色変化部位のみを抽出することができる。このステップS18において実行される減算処理の結果データは、制御演算部12に送信され、抽出された発色変化部位の情報に基づいてアスベストの繊維種同定が行われることとなる。
【0042】
なお、第二の深度合成画像については、ステップS13〜ステップS15の処理が複数回実行されることで複数作成されることが可能であり、この第二の深度合成画像の作成数については、試料Sの状況や実験条件等を考えて、あらかじめ任意の個数に設定しておくことができる。
【0043】
以上説明したステップS10〜ステップS18までの処理により、ステップS11にて設定された初期観測位置での試料Sのアスベスト繊維種同定処理が完了するが、試料Sの観測位置についても複数箇所観測することができ、また、この観測位置や観測回数についても、あらかじめ任意の条件にて設定しておくことができる。すなわち、ステップS19にて必要数の視野数を観測できたかを確認し、観測の視野数が設定数に足りない場合には、制御演算部12がステージ駆動部106に動作指令して試料ステージ105を移動させ(ステップS20)、このとき設定された新たな観測位置でのアスベスト繊維種同定処理(ステップS12〜ステップS18までの処理)が実行されることとなる。
【0044】
ステップS19にて必要数の視野数を観測できたことを確認した場合には、同定結果を表示部13に表示させ(ステップS21)、本実施形態に係るアスベスト繊維種同定処理が完了することとなる。なお、制御部10では、アスベスト繊維種同定処理の結果を表示部13に表示させるほか、印刷部15を用いて同定結果の印刷処理をしたり、記憶部16に対して同定結果の格納処理をしたりすることができる。
【0045】
以上、図2を用いて本実施形態に係るアスベスト繊維種同定処理について説明したが、本実施形態には種々の改良を加えることが可能である。例えば、本実施形態に係るアスベスト繊維種同定装置20では、アナライザ118が有する偏光板を介して試料像を撮影している。したがって、撮影条件によっては、デジタルカメラ110の画像センサが取得する光量が減少し、S/N比の悪化や画質劣化が発生してしまう可能性がある。そこで、本実施形態に係るアスベスト繊維種同定処理では、デジタルカメラ110を用いた試料像の撮影に際して、試料Sから偏光板を介してデジタルカメラ110に到達する光の光量に応じた露光時間を確保するために、デジタルカメラ110のシャッタースピードを自動的に変更するように、あらかじめ制御演算部12に対して設定しておくことが好適である。具体的には、デジタルカメラ110のオートフォーカス動作時にはノーマルシャッター(例えば、シャッタースピード30fps)とし、試料像を取り込む際にはロングシャッター(例えば、シャッタースピード10fps)とするような設定を採用することで、効率良く高画質の試料像を撮影することが可能となる。
【0046】
以上に説明したように、上述した本実施形態では、複屈折性を有するアスベストの繊維種同定を、位相差分散顕微鏡100を用いて自動的に行うためのアスベスト繊維種同定装置20として、色温度が異なる光源状態でも白色を正確に白く映し出せるようにするためのホワイトバランスをとることができるように、位相差分散顕微鏡100の鏡筒109に取り付けられた撮像手段(デジタルカメラ110)と、試料ステージ105上に載置された試料Sを任意の観測位置へ移動させるために、試料ステージ105を水平方向(X−Y方向)で移動自在とするステージ移動手段(ステージ駆動部106)と、位相差分散顕微鏡100の分散染色対物レンズ108と撮像手段(デジタルカメラ110)との間に設置されるとともに試料Sからの光の光軸を中心に試料Sに対して相対的に回転自在とされる偏光部材(アナライザ118)と、試料ステージ105と撮像手段(デジタルカメラ110)との間隔を変更自在とするための間隔変更手段(ステージ駆動部106)と、撮像手段(デジタルカメラ110)によって撮影された試料像に対して画像処理を行うための画像処理部11と、を備え、偏光部材(アナライザ118)の回転角度を初期位置に設定するとともに撮像手段(デジタルカメラ110)の試料Sに対する合焦点を実行した上で、間隔変更手段(ステージ駆動部106)を用いて試料ステージ105と撮像手段(デジタルカメラ110)との間隔を変更させながら撮像手段(デジタルカメラ110)によって複数の試料像を撮影し、画像処理部11を用いてこれら複数の試料像を合成することで試料Sの全面にピントの合った第一の深度合成画像を作成し、また、試料Sの水平方向(X−Y方向)での観測位置を維持したままで偏光部材(アナライザ118)を所定角度回転させ、合焦点を実行した後に、再び、間隔変更手段(ステージ駆動部106)と撮像手段(デジタルカメラ110)を用いて複数の試料像の撮影を行い、画像処理部11を用いて第二の深度合成画像を作成し、さらに、画像処理部11を用いて第一の深度合成画像と第二の深度合成画像との減算処理を実行することで、発色変化部位のみを抽出してアスベストの繊維種同定を行うように構成したので、実作業に耐え得るアスベスト繊維種同定作業の自動化装置を実現することができた。
【0047】
また、上述した実施形態では、第二の深度合成画像を複数作成できるような構成としたので、あらゆる作業条件を容易に設定することができ、また、自動化されたアスベスト繊維種同定作業の精度向上を図ることが可能となっている。
【0048】
さらに、上述した実施形態では、撮像手段(デジタルカメラ110)を用いた試料像の撮影に際して、試料Sから偏光部材(アナライザ118)を介して撮像手段(デジタルカメラ110)に到達する光の光量に応じた露光時間を確保するために、撮像手段(デジタルカメラ110)のシャッタースピードを自動的に変更自在な構成とした。これにより、効率良く高画質の試料像を自動的に撮影することが可能となった。
【0049】
なお、上述した実施形態において、アスベスト繊維種同定装置20は、自己が備える記憶媒体に記憶されたコンピュータプログラム(アスベスト繊維種同定プログラム)に従って、上述した各種の処理(図2に示す処理など)を実行することができる。
【0050】
また、上述した実施形態では、位相差分散顕微鏡100と制御装置10とを近接した場所に設置した場合を例示して説明したが、アスベスト繊維種同定装置20が有する位相差分散顕微鏡100と制御装置10との設置場所については、それぞれを別の場所に設置し、両者100,10間の通信を無線信号によって行うことで、アスベストが取り扱われることとなる位相差分散顕微鏡100の設置場所と、位相差分散顕微鏡100に対して動作指令を行うこととなるオペレータが在室する制御装置10の設置場所とを、分離して設けることが可能である。
【0051】
以上、本発明の好適な実施形態について説明したが、本発明の技術的範囲は上記実施形態に記載の範囲には限定されない。上記実施形態には、多様な変更又は改良を加えることが可能である。その様な変更又は改良を加えた形態も本発明の技術的範囲に含まれ得ることが、特許請求の範囲の記載から明らかである。
【符号の説明】
【0052】
10 制御装置、11 画像処理部、12 制御演算部、13 表示部、14 入力部、15 印刷部、16 記憶部、17 バス、20 アスベスト繊維種同定装置、100 位相差分散顕微鏡、105 試料ステージ、106 ステージ駆動部、108 分散染色対物レンズ、109 観察鏡筒、110 デジタルカメラ、110a 波長域選択フィルタ、111 回転機構、118 アナライザ、S 試料、I 観察面、AX 光軸。
【特許請求の範囲】
【請求項1】
複屈折性を有するアスベストの繊維種同定を、位相差分散顕微鏡を用いて自動的に行うためのアスベスト繊維種同定装置であって、
色温度が異なる光源状態でも白色を正確に白く映し出せるようにするためのホワイトバランスをとることができるように、前記位相差分散顕微鏡の鏡筒に取り付けられた撮像手段と、
試料ステージ上に載置された試料を任意の観測位置へ移動させるために、前記試料ステージを水平方向で移動自在とするステージ移動手段と、
前記位相差分散顕微鏡の分散染色対物レンズと前記撮像手段との間に設置されるとともに前記試料からの光の光軸を中心に前記試料に対して相対的に回転自在とされる偏光部材と、
前記試料ステージと前記撮像手段との間隔を変更自在とするための間隔変更手段と、
前記撮像手段によって撮影された試料像に対して画像処理を行うための画像処理部と、
を備え、
前記偏光部材の回転角度を初期位置に設定するとともに前記撮像手段の前記試料に対する合焦点を実行した上で、前記間隔変更手段を用いて前記試料ステージと前記撮像手段との間隔を変更させながら前記撮像手段によって複数の試料像を撮影し、前記画像処理部を用いてこれら複数の試料像を合成することで前記試料の全面にピントの合った第一の深度合成画像を作成し、また、
前記試料の水平方向での観測位置を維持したままで前記偏光部材を所定角度回転させ、前記合焦点を実行した後に、再び、前記間隔変更手段と前記撮像手段を用いて複数の試料像の撮影を行い、前記画像処理部を用いて第二の深度合成画像を作成し、さらに、
前記画像処理部を用いて前記第一の深度合成画像と前記第二の深度合成画像との減算処理を実行することで、発色変化部位のみを抽出してアスベストの繊維種同定を行うように構成されていることを特徴とするアスベスト繊維種同定装置。
【請求項2】
請求項1に記載のアスベスト繊維種同定装置において、
前記第二の深度合成画像は、複数作成されることを特徴とするアスベスト繊維種同定装置。
【請求項3】
請求項1又は2に記載のアスベスト繊維種同定装置において、
前記撮像手段を用いた試料像の撮影に際して、前記試料から前記偏光部材を介して前記撮像手段に到達する光の光量に応じた露光時間を確保するために、前記撮像手段のシャッタースピードを自動的に変更自在に構成されていることを特徴とするアスベスト繊維種同定装置。
【請求項4】
複屈折性を有するアスベストの繊維種同定を、位相差分散顕微鏡を用いて自動的に行うためのアスベスト繊維種同定方法であって、
前記位相差分散顕微鏡の鏡筒に取り付けた撮像手段を用い、色温度が異なる光源状態でも白色を正確に白く映し出せるようにするためのホワイトバランスをとる工程と、
試料ステージを水平方向で移動自在とするためのステージ移動手段を用い、前記試料ステージ上に載置された試料を任意の観測位置へ移動させる工程と、
前記位相差分散顕微鏡の分散染色対物レンズと前記撮像手段との間に設置されるとともに前記試料からの光の光軸を中心に前記試料に対して相対的に回転自在とされる偏光部材に関して、前記偏光部材の回転角度を初期位置に設定する工程と、
前記撮像手段の前記試料に対する合焦点を実行する工程と、
前記合焦点を実行した後に、前記試料ステージと前記撮像手段との間隔を変更自在とするための間隔変更手段を用い、前記間隔を変更させながら前記撮像手段によって複数の試料像を撮影する工程と、
前記撮像手段によって撮影された試料像に対して画像処理を行うための画像処理部を用い、前記複数の試料像を合成することで前記試料の全面にピントの合った第一の深度合成画像を作成する工程と、
前記試料の水平方向での観測位置を維持したままで前記偏光部材を所定角度回転させ、前記合焦点を実行した後に、再び、前記間隔変更手段と前記撮像手段を用いた複数の試料像の撮影を行い、前記画像処理部を用いて第二の深度合成画像を作成する工程と、
前記画像処理部を用い、前記第一の深度合成画像と前記第二の深度合成画像との減算処理を実行し、発色変化部位のみを抽出することでアスベストの繊維種同定を行う工程と、
を含む工程を実行することを特徴とするアスベスト繊維種同定方法。
【請求項5】
請求項4に記載のアスベスト繊維種同定方法において、
前記画像処理部を用いて第二の深度合成画像を作成する工程は、複数回実行されることを特徴とするアスベスト繊維種同定方法。
【請求項6】
請求項4又は5に記載のアスベスト繊維種同定方法において、
前記撮像手段を用いた試料像の撮影に際して、前記試料から前記偏光部材を介して前記撮像手段に到達する光の光量に応じた露光時間を確保するために、前記撮像手段のシャッタースピードを自動的に変更する工程を含むことを特徴とするアスベスト繊維種同定方法。
【請求項7】
複屈折性を有するアスベストの繊維種同定を、位相差分散顕微鏡を用いて自動的に行うためのアスベスト繊維種同定プログラムであって、
コンピュータに、
前記位相差分散顕微鏡の鏡筒に取り付けた撮像手段を制御し、色温度が異なる光源状態でも白色を正確に白く映し出せるようにするためのホワイトバランスをとらせる処理と、
試料ステージを水平方向で移動自在とするためのステージ移動手段を制御し、前記試料ステージ上に載置された試料を任意の観測位置へ移動させる処理と、
前記位相差分散顕微鏡の分散染色対物レンズと前記撮像手段との間に設置されるとともに前記試料からの光の光軸を中心に前記試料に対して相対的に回転自在とされる偏光部材を制御し、当該偏光部材の回転角度を初期位置に設定させる処理と、
前記撮像手段の前記試料に対する合焦点を実行させる処理と、
前記合焦点を実行させた後に、前記試料ステージと前記撮像手段との間隔を変更自在とするための間隔変更手段を制御し、前記間隔を変更させながら前記撮像手段を制御して複数の試料像を撮影させる処理と、
前記撮像手段によって撮影された試料像に対して画像処理を行うための画像処理部を制御し、前記複数の試料像を合成させることで前記試料の全面にピントの合った第一の深度合成画像を作成させる処理と、
前記試料の水平方向での観測位置を維持したままで前記偏光部材を所定角度回転させ、前記合焦点を実行させた後に、再び、前記間隔変更手段と前記撮像手段を制御して複数の試料像の撮影を行わせ、前記画像処理部を制御することで第二の深度合成画像を作成させる処理と、
前記画像処理部を制御することで、前記第一の深度合成画像と前記第二の深度合成画像との減算処理を実行させ、発色変化部位のみを抽出させてアスベストの繊維種同定を行わせる処理と、
を含む処理を実行させることを特徴とするアスベスト繊維種同定プログラム。
【請求項8】
請求項7に記載のアスベスト繊維種同定プログラムにおいて、
前記画像処理部を制御することで第二の深度合成画像を作成させる処理は、複数回実行されることを特徴とするアスベスト繊維種同定プログラム。
【請求項9】
請求項7又は8に記載のアスベスト繊維種同定プログラムにおいて、
前記撮像手段を用いた試料像の撮影に際して、前記試料から前記偏光部材を介して前記撮像手段に到達する光の光量に応じた露光時間を確保するために、
コンピュータに、
前記撮像手段を制御することで、前記撮像手段のシャッタースピードを自動的に変更させる処理を実行させることを特徴とするアスベスト繊維種同定プログラム。
【請求項1】
複屈折性を有するアスベストの繊維種同定を、位相差分散顕微鏡を用いて自動的に行うためのアスベスト繊維種同定装置であって、
色温度が異なる光源状態でも白色を正確に白く映し出せるようにするためのホワイトバランスをとることができるように、前記位相差分散顕微鏡の鏡筒に取り付けられた撮像手段と、
試料ステージ上に載置された試料を任意の観測位置へ移動させるために、前記試料ステージを水平方向で移動自在とするステージ移動手段と、
前記位相差分散顕微鏡の分散染色対物レンズと前記撮像手段との間に設置されるとともに前記試料からの光の光軸を中心に前記試料に対して相対的に回転自在とされる偏光部材と、
前記試料ステージと前記撮像手段との間隔を変更自在とするための間隔変更手段と、
前記撮像手段によって撮影された試料像に対して画像処理を行うための画像処理部と、
を備え、
前記偏光部材の回転角度を初期位置に設定するとともに前記撮像手段の前記試料に対する合焦点を実行した上で、前記間隔変更手段を用いて前記試料ステージと前記撮像手段との間隔を変更させながら前記撮像手段によって複数の試料像を撮影し、前記画像処理部を用いてこれら複数の試料像を合成することで前記試料の全面にピントの合った第一の深度合成画像を作成し、また、
前記試料の水平方向での観測位置を維持したままで前記偏光部材を所定角度回転させ、前記合焦点を実行した後に、再び、前記間隔変更手段と前記撮像手段を用いて複数の試料像の撮影を行い、前記画像処理部を用いて第二の深度合成画像を作成し、さらに、
前記画像処理部を用いて前記第一の深度合成画像と前記第二の深度合成画像との減算処理を実行することで、発色変化部位のみを抽出してアスベストの繊維種同定を行うように構成されていることを特徴とするアスベスト繊維種同定装置。
【請求項2】
請求項1に記載のアスベスト繊維種同定装置において、
前記第二の深度合成画像は、複数作成されることを特徴とするアスベスト繊維種同定装置。
【請求項3】
請求項1又は2に記載のアスベスト繊維種同定装置において、
前記撮像手段を用いた試料像の撮影に際して、前記試料から前記偏光部材を介して前記撮像手段に到達する光の光量に応じた露光時間を確保するために、前記撮像手段のシャッタースピードを自動的に変更自在に構成されていることを特徴とするアスベスト繊維種同定装置。
【請求項4】
複屈折性を有するアスベストの繊維種同定を、位相差分散顕微鏡を用いて自動的に行うためのアスベスト繊維種同定方法であって、
前記位相差分散顕微鏡の鏡筒に取り付けた撮像手段を用い、色温度が異なる光源状態でも白色を正確に白く映し出せるようにするためのホワイトバランスをとる工程と、
試料ステージを水平方向で移動自在とするためのステージ移動手段を用い、前記試料ステージ上に載置された試料を任意の観測位置へ移動させる工程と、
前記位相差分散顕微鏡の分散染色対物レンズと前記撮像手段との間に設置されるとともに前記試料からの光の光軸を中心に前記試料に対して相対的に回転自在とされる偏光部材に関して、前記偏光部材の回転角度を初期位置に設定する工程と、
前記撮像手段の前記試料に対する合焦点を実行する工程と、
前記合焦点を実行した後に、前記試料ステージと前記撮像手段との間隔を変更自在とするための間隔変更手段を用い、前記間隔を変更させながら前記撮像手段によって複数の試料像を撮影する工程と、
前記撮像手段によって撮影された試料像に対して画像処理を行うための画像処理部を用い、前記複数の試料像を合成することで前記試料の全面にピントの合った第一の深度合成画像を作成する工程と、
前記試料の水平方向での観測位置を維持したままで前記偏光部材を所定角度回転させ、前記合焦点を実行した後に、再び、前記間隔変更手段と前記撮像手段を用いた複数の試料像の撮影を行い、前記画像処理部を用いて第二の深度合成画像を作成する工程と、
前記画像処理部を用い、前記第一の深度合成画像と前記第二の深度合成画像との減算処理を実行し、発色変化部位のみを抽出することでアスベストの繊維種同定を行う工程と、
を含む工程を実行することを特徴とするアスベスト繊維種同定方法。
【請求項5】
請求項4に記載のアスベスト繊維種同定方法において、
前記画像処理部を用いて第二の深度合成画像を作成する工程は、複数回実行されることを特徴とするアスベスト繊維種同定方法。
【請求項6】
請求項4又は5に記載のアスベスト繊維種同定方法において、
前記撮像手段を用いた試料像の撮影に際して、前記試料から前記偏光部材を介して前記撮像手段に到達する光の光量に応じた露光時間を確保するために、前記撮像手段のシャッタースピードを自動的に変更する工程を含むことを特徴とするアスベスト繊維種同定方法。
【請求項7】
複屈折性を有するアスベストの繊維種同定を、位相差分散顕微鏡を用いて自動的に行うためのアスベスト繊維種同定プログラムであって、
コンピュータに、
前記位相差分散顕微鏡の鏡筒に取り付けた撮像手段を制御し、色温度が異なる光源状態でも白色を正確に白く映し出せるようにするためのホワイトバランスをとらせる処理と、
試料ステージを水平方向で移動自在とするためのステージ移動手段を制御し、前記試料ステージ上に載置された試料を任意の観測位置へ移動させる処理と、
前記位相差分散顕微鏡の分散染色対物レンズと前記撮像手段との間に設置されるとともに前記試料からの光の光軸を中心に前記試料に対して相対的に回転自在とされる偏光部材を制御し、当該偏光部材の回転角度を初期位置に設定させる処理と、
前記撮像手段の前記試料に対する合焦点を実行させる処理と、
前記合焦点を実行させた後に、前記試料ステージと前記撮像手段との間隔を変更自在とするための間隔変更手段を制御し、前記間隔を変更させながら前記撮像手段を制御して複数の試料像を撮影させる処理と、
前記撮像手段によって撮影された試料像に対して画像処理を行うための画像処理部を制御し、前記複数の試料像を合成させることで前記試料の全面にピントの合った第一の深度合成画像を作成させる処理と、
前記試料の水平方向での観測位置を維持したままで前記偏光部材を所定角度回転させ、前記合焦点を実行させた後に、再び、前記間隔変更手段と前記撮像手段を制御して複数の試料像の撮影を行わせ、前記画像処理部を制御することで第二の深度合成画像を作成させる処理と、
前記画像処理部を制御することで、前記第一の深度合成画像と前記第二の深度合成画像との減算処理を実行させ、発色変化部位のみを抽出させてアスベストの繊維種同定を行わせる処理と、
を含む処理を実行させることを特徴とするアスベスト繊維種同定プログラム。
【請求項8】
請求項7に記載のアスベスト繊維種同定プログラムにおいて、
前記画像処理部を制御することで第二の深度合成画像を作成させる処理は、複数回実行されることを特徴とするアスベスト繊維種同定プログラム。
【請求項9】
請求項7又は8に記載のアスベスト繊維種同定プログラムにおいて、
前記撮像手段を用いた試料像の撮影に際して、前記試料から前記偏光部材を介して前記撮像手段に到達する光の光量に応じた露光時間を確保するために、
コンピュータに、
前記撮像手段を制御することで、前記撮像手段のシャッタースピードを自動的に変更させる処理を実行させることを特徴とするアスベスト繊維種同定プログラム。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2011−33472(P2011−33472A)
【公開日】平成23年2月17日(2011.2.17)
【国際特許分類】
【出願番号】特願2009−179898(P2009−179898)
【出願日】平成21年7月31日(2009.7.31)
【出願人】(504014060)
【出願人】(398023874)王子計測機器株式会社 (11)
【出願人】(000181767)柴田科学株式会社 (32)
【Fターム(参考)】
【公開日】平成23年2月17日(2011.2.17)
【国際特許分類】
【出願日】平成21年7月31日(2009.7.31)
【出願人】(504014060)
【出願人】(398023874)王子計測機器株式会社 (11)
【出願人】(000181767)柴田科学株式会社 (32)
【Fターム(参考)】
[ Back to top ]