
アブソリュート変位量を算出する装置及びその方法
【課題】本発明は、移動体のアブソリュート変位量を検出することを課題とする。
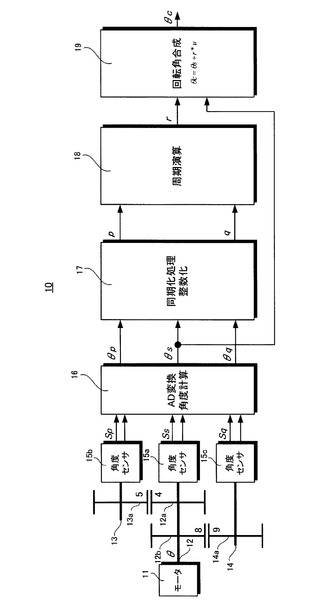
【解決手段】変位量を検出する実施例では、主軸の多回転アブソリュート回転角を主軸及び副軸に結合された角度センサによって検出された回転角度から算出する。回転駆動源11に結合された主軸12の回転は予め定める変速比で副軸13,14に伝達される。主軸12及び副軸13,14の回転角度Ss,Sp,Sqは、角度センサ15a,15b,15cによって検出され、それらはAD変換角度計算部16で角度検出値θs,θp,θqとしてそれぞれ同期化/整数化処理部17に送られ、整数化された周期信号p,qが算出される。周期信号p,qは、周期演算部18にそれぞれ送られ、主軸の周期信号rが算出される。主軸の多回転アブソリュート回転角θcは、回転角合成部19で主軸の周期信号r及び主軸の角度検出値θsに基づいて、算出される。本発明は、直線移動する移動体の変位量を検出する装置にも適用することができる。
【解決手段】変位量を検出する実施例では、主軸の多回転アブソリュート回転角を主軸及び副軸に結合された角度センサによって検出された回転角度から算出する。回転駆動源11に結合された主軸12の回転は予め定める変速比で副軸13,14に伝達される。主軸12及び副軸13,14の回転角度Ss,Sp,Sqは、角度センサ15a,15b,15cによって検出され、それらはAD変換角度計算部16で角度検出値θs,θp,θqとしてそれぞれ同期化/整数化処理部17に送られ、整数化された周期信号p,qが算出される。周期信号p,qは、周期演算部18にそれぞれ送られ、主軸の周期信号rが算出される。主軸の多回転アブソリュート回転角θcは、回転角合成部19で主軸の周期信号r及び主軸の角度検出値θsに基づいて、算出される。本発明は、直線移動する移動体の変位量を検出する装置にも適用することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、アブソリュート変位量を算出する装置及びその方法に関し、さらに詳しくは、周期の異なる複数の周期信号からより周期の長い周期信号を算出し、その周期信号からアブソリュート変位量を算出する装置及びその方法に関する。
【背景技術】
【0002】
工作機械等の分野において、移動体の変位量を検出する様々な方式が検討され、実用に供されてきた。例えば、特許第3967963号公報(特許文献1)は、アブソリュート検出周期の異なる2つのレゾルバを設け(図1)、それらから出力される変位検出信号を用いてアブソリュート変位を検出する装置を開示する。この検出装置は、2つの周期信号からそれらの最小公倍数の周期信号を得るためのデータに変換し、予めROMに記憶された数値化されたストローク値を用いてアブソリュート変位を検出する。
【0003】
また、特許第3665732号公報(特許文献2)は、主軸駆動歯車に3つの従動歯車を噛み合わせた歯車機構を用いて、主回転軸の多回転の絶対位置を検出する装置を開示する(図2)。この検出装置は、3つの従動歯車に結合されたレゾルバによって検出された機械角から各従動歯車の回転数を求め、予めROMに記憶した各従動歯車の回転数と主回転軸の回転数との関係(図9)と比較して、主回転軸の絶対位置を検出する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第3967963号公報
【特許文献2】特許第3665732号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献2に記載された発明は、ROMに数値化されたデータを記憶するので、大きな記憶容量を有する半導体装置が必要となるとともに、広い実装面積を消費する。このような理由から、検出装置のコストが高くなるという問題がある。また、特許文献1に記載された発明は、2つの周期信号からそれらの最小公倍数の周期信号を得るために必要な2次元的なデータ配列を1次元的なデータ配列にすることにより、データ量を減少させるが、ROMにデータを予め記憶させておいて処理を行うことに変わりはない。
【0006】
本発明は、上述した従来の課題を解決するためになされたもので、予め参照用データをROMに記憶させる必要はなく、変位量を検出する複数の変位検出機構によって検出される複数の変位検出信号から、複数の変位検出信号の周期より広い周期を有するアブソリュート周期信号を算出するアブソリュート変位検出装置及びアブソリュート周期信号を算出する方法である。
【課題を解決するための手段】
【0007】
本発明は、変位量を検出する複数の変位検出機構によって検出される複数の変位検出信号から、複数の変位検出信号の周期より広い周期を有するアブソリュート周期信号を算出するアブソリュート変位検出装置において、複数の変位検出信号から周期の異なる第1の周期信号及び第2の周期信号を生成する第1の計算手段であって、第1の周期信号及び第2の周期信号は、共通する基本単位量によって数値化され、かつ同期して変化する、第1の計算手段と、第1の周期信号に第1の係数を乗算した値と第2の周期信号に第2の係数を乗算した値との差を、第1の周期信号の周期と第2の周期信号の周期との公倍数で除算した第1の剰余を算出する第2の計算手段であって、第1の係数は、公倍数を第1の周期信号の周期で除算した値であり、かつ第2の係数は、公倍数を第2の周期信号の周期で除算した値である、第2の計算手段と、第1の剰余を、第1の係数と第2の係数との差で除算した第2の剰余を算出する第3の計算手段と、第1の剰余に、第2の剰余に公倍数を乗算した値を加算することにより、アブソリュート周期信号を算出する第4の計算手段と、を含むことを特徴とするアブソリュート変位検出装置である。
【0008】
本発明に係る第4の計算手段は、アブソリュート周期信号を第1の係数と第2の係数との差で除算する手段をさらに含むことを特徴とする。
【0009】
本発明に係る公倍数は、最小公倍数であることをさらに含むことを特徴とする。
【0010】
本発明に係る複数の変位検出機構は、直線運動する移動体の変位を検出するための変位センサを含むことを特徴とする。
【0011】
本発明に係る複数の変位検出機構は、回転運動する主軸、主軸の回転を第1の変速比で伝達される第1の副軸、及び、主軸の回転を第2の変速比で伝達される第2の副軸からなる変速機構を含み、複数の変位検出信号は、主軸、及び、第1及び第2の副軸の回転角度を検出するための角度センサから出力されることを特徴とする。
【0012】
本発明は、除算する手段によって得られる値に基本単位量を乗算し、さらに主軸の回転角度を加えることにより、主軸のアブソリュート回転角を検出する手段をさらに含むことを特徴とする。
【0013】
本発明は、変位量を検出する複数の変位検出機構によって検出される複数の変位検出信号から、複数の変位検出信号の周期より広い周期を有するアブソリュート周期信号を算出する方法において、複数の変位検出信号から周期の異なる第1の周期信号及び第2の周期信号を生成する第1の計算段階であって、第1の周期信号及び第2の周期信号は、共通する基本単位量によって数値化され、かつ同期して変化する、第1の計算段階と、第1の周期信号に第1の係数を乗算した値と第2の周期信号に第2の係数を乗算した値との差を、第1の周期信号の周期と第2の周期信号の周期との公倍数で除算した第1の剰余を算出する第2の計算段階であって、第1の係数は、公倍数を第1の周期信号の周期で除算した値であり、かつ第2の係数は、公倍数を第2の周期信号の周期で除算した値である、第2の計算段階と、第1の剰余を、第1の係数と第2の係数との差で除算した第2の剰余を算出する第3の計算段階と、第1の剰余に、第2の剰余に公倍数を乗算した値を加算することにより、周期信号を算出する第4の計算段階と、を含むことを特徴とする方法である。
【0014】
本発明に係る第4の計算段階は、アブソリュート周期信号を第1の係数と第2の係数との差で除算する段階を含むことを特徴とする方法である。
【0015】
本発明に係る公倍数は、最小公倍数であることを特徴とする方法である。
【0016】
本発明に係る複数の変位検出機構は、直線運動する移動体の変位を検出するための変位センサを含むことを特徴とする方法である。
【0017】
本発明に係る複数の変位検出機構は、回転運動する主軸、主軸の回転を第1の変速比で伝達される第1の副軸、及び、主軸の回転を第2の変速比で伝達される第2の副軸からなる変速機構を含み、複数の変位検出信号は、主軸、及び、第1及び第2の副軸の回転角度を検出するための角度センサから出力されることを特徴とする方法である。
【0018】
本発明に係る除算する段階によって得られる値に基本単位量を乗算し、さらに主軸の回転角度を加えることにより、主軸のアブソリュート回転角を検出する段階を含むことを特徴とする方法である。
【発明の効果】
【0019】
本発明によれば、参照データをメモリに記憶することなく、2つの周期信号から、これらの最小公倍数の周期信号を簡単な計算処理で求めることができる。メモリに記憶された参照データに対する総当り的な探索処理をする必要がないので、移動体の変位量を高速な処理で求めることができる。またデータを予め記憶させておくメモリを使用しないことにより、コストを低減させるとともにメモリ用のスペースを削減することが可能になる。
【0020】
以下、図面を参照して、本発明の実施例を説明するが、図面及びその図面に対応する説明は、あくまで本発明を実施するための例示的な記述であり、請求項に係る発明が本実施例に限定されることを意図するものではない。また、本発明は、直線運動する移動体の変位量、及び回転運動する移動体の変位量を検出することのできる発明であるが、以下の実施例では、モータ等の回転駆動源の変位量(回転角)を検出する実施例に基づいて説明する。しかしながら、特許請求の範囲で定義される発明が実施例に示される回転駆動源の変位量を検出する装置、及び方法に限定されるものではない。さらに、本発明は、請求項で定義される用語によってのみ解釈され、その用語は、その一般的な解釈に従うものである。
【図面の簡単な説明】
【0021】
【図1】本発明の一実施例である多回転アブソリュート回転角検出装置のブロック図である。
【図2】本発明の一実施例である多回転アブソリュート回転角検出装置において、周期信号p,qと主軸の回転数yの関係を説明するための波形を示す図である。
【図3】周期演算部において周期信号p,qから周期信号rを計算するフローを示すブロック図である。
【図4】主軸の回転数と数値d,eとの関係を説明するための波形を示す図である。
【図5】主軸の回転数と数値f,gとの関係を説明するための波形を示す図である。
【図6】本発明の一実施例において、周期演算部へ入力される周期信号p,qから周期信号rを算出する処理過程における計算結果を示す表である。
【図7】本発明の計算方法で処理することのできる30周期までの周期P,Qの組み合わせを一覧するための表を示す。
【図8】本発明の別の実施例において、周期演算部へ入力される周期信号p,qから周期信号rを算出する処理過程における計算結果を示す表である。
【図9】3つの周期信号の周期から最小公倍数を計算し、その周期を有する周期信号を計算する場合の計算の可否を示す表である。
【発明を実施するための形態】
【0022】
図1は、本発明の一実施例である多回転アブソリュート回転角算出装置10のブロック図である。図1の多回転アブソリュート回転角算出装置10は、回転駆動源であるモータ11の回転軸に結合された主軸12の多回転アブソリュート回転角θを算出する装置である。モータ11の回転軸に結合された主軸12には、第1主軸ギア12a及び第2主軸ギア12bが取り付けられ、それらは第1副軸13の第1副軸ギア13aと第2副軸14の第2副軸ギア14aとそれぞれ噛み合わされる。第1主軸ギア12aに対する第1副軸ギア13aの変速比は4/5であり、また第2主軸ギア12bに対する第2副軸ギア14aの変速比は8/9である。本実施例の変速比では、第1,2副軸13,14の回転速度は、主軸12に対して減速する。
【0023】
主軸12、第1副軸13、及び第2副軸14には、MR素子を使用した角度センサ15a,15b,15cが取り付けられ、各軸の回転角度を検出する。角度センサ15a,15b,15cは、回転角度を検出するセンサであればレゾルバ、光学式エンコーダ、その他のセンサでもよい。角度センサ15a,15b,15cは、軸が1回転すると1周期の2相正弦波信号(Ksinθ,Kcosθ)を出力する。角度センサ15a,15b,15cにより検出された2相正弦波信号Ss,Sp,Sqに基づいて、主軸12の多回転アブソリュート回転角θcが算出されるが、その手順は、概略以下のとおりである。なお、主軸12、第1及び第2副軸13,14、第1及び第2主軸ギア12a,12b、第1及び第2副軸ギア13a,14a、及び、角度センサ15a,15b,15cは、変位検出機構を構成し、複数の変位検出信号を出力する。
【0024】
上述のように構成されたギア機構の角度センサによって検出された各軸の2相正弦波信号は、AD変換及び角度計算部16に入力され、各回転軸の1回転内の角度を表す角度検出値θs,θp,θqが計算される。次に、これらの角度検出値θs,θp,θqは、同期化/整数化処理部17へそれぞれ送られ、周期信号p,qが算出される。周期信号pは、主軸角度検出値θsと第1副軸角度検出値θpの位相差を主軸が1回転したときの位相差量を1として計数したものである。周期信号qは、主軸角度検出値θsと第1副軸角度検出値θqの位相差を主軸が1回転した時の位相差量を1として計数した物である。周期信号p、周期信号qは主軸の1回転毎の回転数に同期して変化する。
【0025】
本実施例では、第1主軸ギア12aと第1副軸ギア13aの変速比が4/5であるので、主軸12が5回転する毎に(主軸の回転角が360×5=1800°の整数倍毎に)第1副軸13は4回転し、主軸回転角検出値θsと第1副軸角度検出値θpの位相関係は元の状態に戻る。すなわち、周期信号pは、周期P(本実施例では、5回転)を有する。また、第2主軸ギア12bと第2副軸ギア14aの変速比が8/9であるので、主軸12が9回転する毎に(主軸の回転角が360×9=3240°の整数倍毎に)第2副軸13は8回転し、主軸回転角検出値θsと第2副軸角度検出値θqの位相関係は元の状態に戻る。すなわち、周期信号qは、周期Q(本実施例では、9回転)を有する。これらの周期信号p,qは、さらに周期演算部18へ送られ、ここで周期信号p,qは、第1副軸ギア13aの回転角度と第2副軸ギア14aの回転角度が同期する周期(周期Pと周期Qの最小公倍数L、本実施例では45周期)を表す信号である周期信号rが算出される。最後に、主軸12の多回転アブソリュート回転角θcは、この周期信号rと角度検出値θsに基づいて、回転角合成部19で算出される。以下さらに各ブロックにおける計算処理を詳しく説明する。
【0026】
AD変換及び角度計算部16は、入力された2相正弦波信号Ss,Sp,Sqをデジタル値に変換し、これら2つの信号のアークタンジェント(逆正接関数)を計算することにより、各軸の角度検出値θs,θp,θqをそれぞれ求める。ここで、1回転当たりの基本単位量uを例えば360(°)とすると、軸の回転に対して、0〜360の角度検出値が出力される。なお、以下の記述において、「角度」は、1回転内の角度の表示を表し(例えば、0〜360(°))、また、「回転角」は、多回転の角度の表示(例えば、2回転の場合は720(°))を含む。なお、基本単位量uは1であってもよく、この場合、回転角1は、1回転を意味する。
【0027】
主軸12の回転角をθとすると、主軸12に取り付けられた主軸角度センサ15aの出力信号Ssから求められる角度検出値θsは、主軸12の回転角θに対する基本単位量uの剰余計算を実行することにより得られるので、次式(1)のように表すことができる。剰余とは、式(1)において、被除数θを除数uで割ったときの余りを意味する。また、第1,2副軸13,14の角度検出値θp,θqも、第1,2副軸13,14の回転角に対する基本単位量uの剰余計算を実行することにより得られる。ギアの遊び、角度センサの検出誤差を考慮すると、第1,2副軸13,14の主軸12に対する変速比が4/5、8/9であるから、角度検出値θp,θqは、次式(2),(3)のようにそれぞれ表すことができる。
【数1】

【0028】
次に、第1副軸13の主軸12に対する周期信号fpは、主軸12の角度検出値θsと第1副軸13の角度検出値θpとの差を基本単位量uで割ったときの剰余を計算することにより求められ、次式(4)で表すことができる。周期数(P=5)を掛けることにより、周期信号fpの大きさを主軸回転量に合わせることができる。式(4)から明らかなように、周期信号fpは、主軸の回転角が1800°(360°×5)を1周期とし、0から1800(°)まで単調増加するのこぎり波状の信号である。
【数2】
【0029】
また、第2副軸14の主軸12に対する周期信号fqは、主軸12の角度検出値θsと第2副軸14の角度検出値θqとの差を基本単位量uで割ったときの剰余を計算することにより求められ、次式(5)で表すことができる。周期数(P=9)を掛けることにより、周期信号fqの大きさを主軸回転量に合わせることができる。式(5)から明らかなように、周期信号fqは、主軸の回転角が3240°(360°×9)を1周期とし、0から3240(°)まで単調増加するのこぎり波状の信号である。
【数3】
【0030】
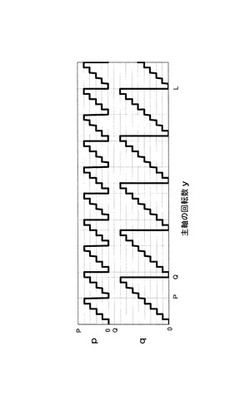
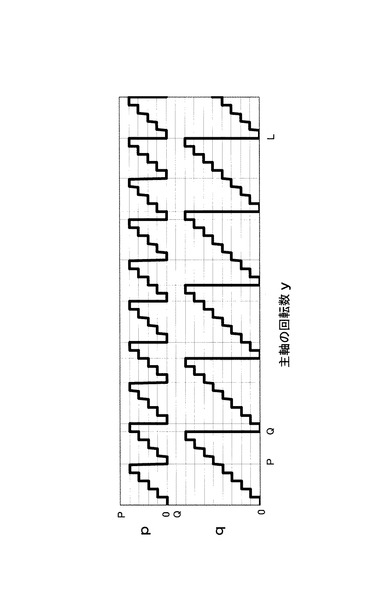
次に、上記周期信号fp,fqを基本単位量uで割って1回転単位の整数化を行い、周期信号fp,fqの整数化された周期信号p,qを計算する。周期信号fpは、上述のように0から1800まで単調増加する信号であるから、基本単位量u(=360)で割り、整数化すると、周期信号pは、図2の上段に示されるように4段の階段状波形となる。また同様に、周期信号fqは、上述のように0から3240まで単調増加する信号であるから、基本単位量u(=360)で割り、整数化すると、周期信号qは、図2の下段に示されるように8段の階段状波形となる。
【0031】
しかしながら、各角度センサからの信号は、誤差を含んでいるので、周期信号fp,fqの数値が切り換わるタイミングは完全には同期しない。そこで、主軸の角度検出値θsで同期を図り、その後整数化を実行する。つまり、次式(6),(7)に示すように、主軸の角度検出値θsとの差をとり、基本単位量uで割った値を整数化する。整数化は、整数化する値に0.5を加えて、小数点以下を切り捨てること(INT関数)により実行することができる。
【数4】
図2に示される周期信号p,qは、主軸12の回転数をyとすると、式(8),(9)のように表される。
【数5】
なお、図2において、横軸は、主軸12の回転数であり、縦軸は、周期信号fp,fqを基本単位量uで割った整数値p,q(P=5、Q=9)である。図2に示される周期信号p,qから理解されるように、周期信号p,qの組み合わせは、主軸の回転数がP(=5)とQ(=9)の最小公倍数L(=45)毎の周期を有し、周期内に同じ組み合わせとなることはない。これらの整数化された周期信号p,qは、図1に示されるように、周期演算部18へ送られる。
【0032】
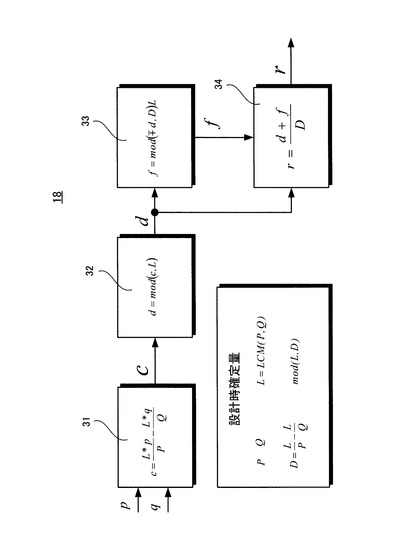
周期演算部18は、図3に示されるP(=5)回転周期の周期信号p及びQ(=9)回転周期の周期信号qからPとQの最小公倍数L(=45)の周期を有する周期信号rを出力する。具体的には、図2に示される周期信号pと周期信号qから両信号の周期P,Qの最小公倍数Lの周期を有するアブソリュート周期信号g(図5)を算出する。この周期信号gの周期信号値から主軸12の多回転回転数rを求める。最後に、回転角合成部19(図1)で、この多回転回転数rに基本単位量を乗じた値に角度検出値θsを加え、主軸12の多回転アブソリュート回転角θcを求める。
【0033】
さて図3は、周期演算部18において周期信号p,qから周期信号rを計算するフローを説明するためのブロック図である。図3に示される各ブロックは、計算内容を単に説明するために演算単位に分けて表記しているが、各ブロックがハードウェア的に個別の演算素子に分割しなければならないことを意味するものではなく、またソフトウェア的に個別のモジュールやサブルーチンに分割しなければならないことを意味するものでもない。
【0034】
まず、周期演算部18における計算に先立って、設計時の確定量として以下の数値が与えられる。すなわち、周期信号p,qの周期P(=5),Q(=9)、周期P,Qの最小公倍数L(=45)、及び周期P,Q及び最小公倍数Lから求められる次式(10)で定義される数値D(=4)である。数値Dは、最小公倍数Lを周期Pで除算した値(第1の係数)から最小公倍数Lを周期Qで除算した値(第2の係数)を引算した値と捉えることができる。
【数6】
上述した括弧内の数値は、本実施例において用いられる数値である。これらの数値は、周期演算部18に予めプログラムされていてもよく、外部から入力されるようにしてもよい。周期P,Qのみが外部から入力され、最小公倍数L及び数値Dは、内部で計算されてもよい。
【0035】
周期演算部18の第1の計算手段31は、同期化/整数化処理部17で算出された周期信号p,q(図2)を受け取り、これらの周期信号p,qから数値a,bを次式(11),(12)により計算する。その後、次式(13)により、第1の数値cを算出する。
【数7】
【0036】
次に、第1の数値cは、第2の計算手段32に送られ、次式(14)に示されるように、第1の数値cを最小公倍数Lで割ることにより余りを求める剰余計算が実行され、第2の数値dが算出される。
【数8】
式(14)で計算される第2の数値dの主軸の回転数yに対する波形は、図4に示される。なお、図4の横軸は、主軸12の回転数yを表し、縦軸は、第2の数値d、後述する第3の数値eを示す。図4から理解されるように、第2の数値dは、主軸12がL回転する間に4周期の階段状波形を示し、1つの段差は数値Dである。第2の数値dは、第3の計算手段33及び第4の計算手段34に送られる。
【0037】
第3の計算手段33は、第2の数値dを受け取ると、次式(15)により、まず第3の数値eを算出する。
【数9】
第3の数値eは、図3に示されるように、最小公倍数Lの周期を有する段差1の4段の階段状波形を示す。第3の数値eが算出されると、続いて、次式(16)に示されるように、第3の数値eに最小公倍数Lが乗じられた第4の数値fが計算される。
【数10】
第4の数値fは、図5に示されるように、最小公倍数Lの段差を有する4段の階段状波形を示す。第4の数値fは、第4の計算手段34に送られる。
【0038】
第4の計算手段34は、まず次式(17)に示すように、第4の数値fに第2の数値dを加え、第5の数値gを算出する。
【数11】
第5の数値gは、図5に示すように、主軸の回転数yが0からL回転に達する毎に、段差Dで単調に増加する階段状波形を示す。この階段状波形の第5の数値gは、次式(18)に示されるように、数値Dで割られ、段差1の階段状波形の主軸の周期信号rが求められる。この周期信号rは、回転角合成部19へ出力され、主軸の多回転アブソリュート回転角が算出される。
【数12】
【0039】
上述のように、周期演算部18によって、周期信号p,qから、周期信号p,qの周期P,Qの最小公倍数Lの周期を有する周期信号rが算出される。周期信号p,qを入力して、上述した計算の中間結果を含む計算経過が図6に示される。図6に示される表では、周期演算部18への入力信号としての周期信号p,q、数値a〜gの中間結果、及び、周期信号rの各値が主軸12の回転数に対応して示される。図3、図4、図5の各波形の値は、図6に示される表中の数値に対応する。
【0040】
さて図1に戻り、周期演算部18の出力である周期信号rは、回転角合成部19に入力され、回転角合成部19は、主軸12の多回転アブソリュート回転角θcを算出する。この回転角θcは、主軸12の回転数に主軸の回転角度を加えた値に対応するから、次式(19)に示されるように、主軸の回転角θcは、主軸の回転数に対応する周期信号r(単位を合わせるために基本単位量uが乗じられる。)に主軸の回転角度に対応する主軸の角度検出値θsが加えられる。
【数13】
以上の計算により、主軸12の多回転アブソリュート回転角θは、上式(19)により回転角θcを算出することにより得られる。
【0041】
周期信号rは式(18)により求められるが、式(18)中の数値gを式(17)で置き換えると、主軸の周期信号rは、次式(20)のようになる。
【数14】
また、式(20)中の数値fを式(16)で置き換えると、周期信号rは、次式(21)のように表すことができる。
【数15】
さらに、式(21)中の数値eを式(15)でそれぞれ置き換えると、周期信号rは、次式(22)として表現することができる。
【数16】
さらに、式(22)中の数値dを式(14)で置き換えると、周期信号rは、次式(23)のように表すことができる。
【数17】
最後に、式(23)中の数値cを式(13)で置き換えると、周期信号rは、次式(24)のように表すことができる。
【数18】
【0042】
以上のように、周期信号rは最終的に式(24)として表現でき、式(24)中の周期P,Q、最小公倍数L、及び数値Dは、設計時の確定量として与えられているので、結局、周期信号rは、周期信号p,qを式(24)に代入することにより算出することができる。
【0043】
図4に戻り、主軸の回転数yに対する数値dの波形について検討する。数値dは式(14)により計算されるが、式(14)の数値cに式(13)を代入し、さらに周期信号p,qに式(6),(7)を代入しかつ整理すると、次式(25)が得られる。
【数19】
剰余計算において、mod(mod(a,b),b)=mod(a,b)が、またmod(a,b)=mod(ab,b)が成立するから、上式は次式(25)のように変形できる。なお、Dは、式(10)で定義される数値である。
【数20】
剰余計算は、被除数を除数で割った余りを求めるのであるから、式(25)は、nを整数とすると、次式(26)のように表すことができる。
【数21】
【0044】
mod(L,D)=1が成立する場合
剰余計算において、mod(L,D)=1が成立するとき、Nを整数とすると、Lは、L=ND+1で表すことができる。このLを式(26)に代入すると、式(26)は、さらに次式(27)にように変形することができる。
【数22】
ここで、整数であるnを式(26)のように置いた場合、剰余計算の定義から、nは、次式のように表現することもできる。INT(A)は、数値Aを整数化する計算である。
【数23】
L=ND+1を代入すると、上式は、次式(28)となる。
【数24】
式(27)から、y=nN+1のときに、d=D−nとなり、そしてyが1増加する毎に、dはDずつ増加する。
【0045】
上記の考察から、図4に示される実施例を検証すると、最小公倍数のLは45、数値Dは4であるので、N=11となる。主軸の回転数yの値に対して、数値dがどのように変化するか、以下検討する。
(1)0≦y≦11(=N)のとき、式(28)から、n=0となるので、
【数25】
となる。したがって、主軸の回転数yが1ずつ増加すると、数値dは、0から44(=ND)まで4(=D)ずつ増加する。
(2)12≦y≦22(=2N)のとき、n=1となるので、
【数26】
となる。y=12のとき、d=3となるので、主軸の回転数yが12から1ずつ増加すると、数値dは、3から43(=ND−1)まで4(=D)ずつ増加する。
(3)23≦y≦33(=3N)のとき、n=2となるので、
【数27】
となる。y=23のとき、d=2となるので、主軸の回転数yが23から1ずつ増加すると、数値dは、2から42(=ND−2)まで4(=D)ずつ増加する。
(4)34≦y≦44(=4N)のとき、n=3となるので、
【数28】
となる。y=34のとき、d=1となるので、主軸の回転数yが34から1ずつ増加すると、数値dは、1から41(=ND−3)まで4(=D)ずつ増加する。
【0046】
次に、数値eとして、式(15)に示される内のe=mod(−d,D)を用いて、その数値dに式(27)を代入すると、次式(33)のように変形することができる。
【数29】
剰余計算において、mod(ab+c,b)=mod(c,b)が成立するから、式(35)中のD(y−nN)の項は削除でき、上式は、次式(34)のように整理できる。
【数30】
したがって、数値eは、図4に示されるように0,1,2,3の値を示す階段状波形となる。
【0047】
数値eが求められると、次式(35)に示されるように、数値eに最小公倍数Lを乗じて、図5に示される数値fが算出される。
【数31】
次に、数値dに数値fを加えると、次式(36)に示されるように、数値gが算出される。
【数32】
n<Dであるので、mod(n,D)=nが成立するので、次式(37)が成立する。
【数33】
最後に、数値gを数値Dで割れば、次式(38)に示されるように、主軸の周期信号rが求められる。
【数34】
ただし、主軸の回転数yは、y<Lの範囲内の数値であり、r=mod(y,L)である。
【0048】
mod(L,D)=D−1が成立する場合
剰余計算において、mod(L,D)=D−1が成立する場合、Nを整数とすると、Lは、L=ND+D−1=(N+1)×D−1で表すことができる。このLを式(26)に代入すると、式(26)は、さらに次式(39)にように変形することができる。
【数35】
ここで、整数であるnを式(26)のように置いた場合、剰余計算の定義から、nは、次式のように表現することもできる。
【数36】
L=(N+1)×D−1を代入すると、上式は、次式(40)となる。
【数37】
式(39)から、y=nN+1のときに、d=nとなり、そしてyが1増加する毎に、dはDずつ増加する。
【0049】
次に、数値eとして、式(15)に示される内のe=mod(d,D)を用いて、その数値dに式(39)を代入すると、次式(41)のように変形することができる。
【数38】
剰余計算において、式(41)中のD(y−n(N+1))の項は、上述と同様に、削除でき、上式は、次式(42)のように整理できる。
【数39】
したがって、数値eは、図4に示されるように0,1,2,3の値を示す階段状波形となる。
【0050】
以上のように、mod(L,D)=1が成立する場合、e=mod(−d,D)を、mod(L,D)=D−1が成立する場合、e=mod(−d,D)を用いることにより、主軸の回転数yを算出することができる。
【0051】
D=1が成立する場合
D=1の場合、d=mod(Dy,L)=mod(y,L)となるので、
【数40】
となる。
【0052】
次に、周期信号rは、式(24)によって算出することができるが、周期P,Qの値に対する成立性について検討する。周期信号rを求める式(24)を再掲すると、次式(44)となる。
【数41】
周期信号p,qは、式(6),(7)から、次式(45),467)のように表されるので、それらを上式(44)に代入すると、主軸の回転数をyとすると、周期信号rは、次式(47)で表される。
【数42】
剰余計算において、mod(a,b)c=mod(ac,bc)が成立するから、式(47)の分子を整理すると、周期信号rは、次式(48)のとおりとなる。
【数43】
また、mod(a,c)+mod(b,c)=mod(a+b,c)が成立するから、上式の分子をさらに整理すると、周期信号rは、次式(49)のとおりとなる。
【数44】
式(10)に示されるように、
【数45】
であるから、上式(49)に代入し整理すると、周期信号rは、次式(50)のとおりとなる。
【数46】
剰余計算において、mod(mod(a,b),b)=mod(a,b)が成立するから、上式の分子を変形すると、周期信号rは、次式(51)のとおりとなる。
【数47】
【0053】
ここで、条件1として、Dが1(例えば、P=8,Q=9)の場合、式(51)は、次式(52)となる。
【数48】
剰余計算において、aが整数であると、mod(a,1)=0が成立するから、上式(52)は、mod(−mod(y,L),1)×Lの項を削除すると、次式(53)のとおりとなる。
【数49】
y≦Lであるので、周期信号rは、次式(54)となる。
【数50】
以上のように、Dが1のとき、周期信号rは主軸の回転数yに等しいので、式(24)を用いて周期信号rを算出することにより、主軸の回転数を求めることができることが検証された。
【0054】
次に、条件2として、mod(L,D)=1あるいはmod(L,D)=D−1が成立する場合について検討する。周期信号rは、式(51)を再掲すると次式(55)となる。
【数51】
ここで、式(26)で示されるように、次式(56)を式(55)に代入すると、周期信号rは、次式(57)のように表される。
【数52】
【0055】
上記条件の内、mod(L,D)=1が成立する場合、LはDの整数倍に1を加えた値に等しいから、L=ND+1と表すことができる。また、mod(L,D)=D−1が成立する場合、LはDの整数倍に(D−1)を加えた値に等しいから、L=ND+(D−1)=(N+1)D−1と表すことができる。したがって、L=ND+1とL=(N+1)D−1を式(57)のmod項に代入すると、それぞれ式(58),(59)となる。
L=ND+1を代入する場合
【数53】
L=(N+1)D−1を代入する場合
【数54】
【0056】
mod項中のDの整数倍の項は、mod項の計算に影響を与えないので、式(58)の(−Dy+nND)及び式(59)の(Dy−nND−nD)を削除すると、式(58),(59)は、いずれも次式(60)に変形される。
【数55】
mod項中のnがDより小さい場合、mod(n,D)×L=nLが成立するので、式(60)は、次式(61)となる。
【数56】
条件2の場合、式(61)から理解されるように、周期信号rは主軸の回転数yに等しいので、式(24)を用いて周期信号rを算出することにより、主軸の回転数を求めることができることが検証された。
【0057】
図7は、本発明の計算方法で処理することのできる30周期までの周期P,Qの組み合わせを一覧するための表を示す。図7において、横軸は周期Qを、縦軸は周期Pの各値を示す。本表において表記された○印は計算が可能な組み合わせを示し、また×印は周期P,Qが互いに素であるが計算が不可能である組み合わせを示し、さらに、△印は周期P,Qが互いに素でなく、計算が不可能である組み合わせを示す。図7の表から理解されるように、互いに素な周期P,Qの多くで計算が可能なことが分かる。とりわけ周期P,Qの差が3以下の組み合わせでは、D=1又はmod(L,D)=1、mod(L,D)=D-1が必ず成立するので、計算が可能である。
【0058】
図8は、本発明の他の実施例において、周期演算部へ入力される周期信号p,qから周期信号rを算出する処理過程における計算結果を示す表を示す。本実施例では、周期信号p,qの周期がP=5、Q=7の場合の計算結果を示す。周期がP=5、Q=7の場合、それらの最小公倍数Lは、35であるので、主軸の回転数が35までの多回転アブソリュート回転角を算出することができる。
【0059】
以上の実施例では、2つの周期信号の周期からそれらの最小公倍数の周期を有する周期信号を計算し、主軸の多回転アブソリュート回転角を求める方法を説明したが、本発明は、必ずしも2つの周期信号に限定されるものではなく、3以上の周期信号の周期からそれらの最小公倍数の周期を有する周期信号を計算し、主軸の回転角を求めることも可能である。例えば、図9に示されるように、26周期、27周期、29周期の3つの周期信号から周期20358の周期信号を計算し、主軸の回転角を求めることも可能である(図9の表の最下段の組み合わせを参照)。
【0060】
しかしながら、どのような組み合わせでもよいというものではない。26周期、27周期、29周期の周期信号からいずれか2つの周期信号を選択し、それらの最小公倍数の周期(L=702,754,783)を有する周期信号を計算することは可能である(図9の上段の○印の付された各ラインの組み合わせを参照)。しかしながら、上記いずれか2つの周期信号から計算された周期信号と残りの周期信号から周期20358の周期信号を計算することは不可能である((図9の中段の×印の付された各ラインを参照)。これに対して、26周期の周期信号と29周期の周期信号から計算された周期754の周期信号と、27周期の周期信号と29周期の周期信号から計算された周期783の周期信号との間で、さらに周期20358の周期信号を計算することは可能である(図9の最下段の○印の付されたラインの組み合わせを参照)。
【0061】
以上のように適切な周期の周期信号を選択すれば、3つ以上の周期信号からそれらの最小公倍数の周期を有する周期信号を計算することが可能である。3つ以上の周期信号を計算するためには、3系統以上の副軸により形成される変速機構が必要であることはいうまでもない。このように、より多くの周期を有する周期信号を組み合わせることにより、より広い周期を有する周期信号を計算することができ、その結果より広範囲の多回転アブソリュート回転角を算出することができる。
【0062】
PとQが互いに素である場合、L=PQとなり、L/Q=P,L/P=Q
となる。上述した説明では、実施例で使用される数値は、約分された数値を採用しているが、必ずしもこれに限る必要ない。例えば、第1,第2周期信号p,qの周期がそれぞれ6と8である場合、それらの最小公倍数L=LCM(P,Q)は24であるので、D=L/P−L/Q=24/6−24/8=1として、計算を進め、主軸の回転角を算出する。しかし、最小公倍数を用いないで、公倍数、例えば、L=P×Q=48、D=Q−P=8−6=2の数値を用いて計算を進めることも可能である。この場合、最小公倍数を使用して計算を進めた場合に比べ、2倍の計算結果が得られるので、計算の途中で、調整用の比率をS(S=P×Q/LCM(P,Q)=48/24=2)で割ることにより、最終的に同じ結果を得ることが可能である。このように、主軸の多回転アブソリュート回転角を演算するに際して、計算結果の絶対値が重要ではなく、角度センサ等の検出値の物理量に対する比率が重要であり、最終的にその物理量に対する比率に適合した結果に調整することが重要となる。また、上述した実施例では、回転移動する移動体の変位量を検出する変位検出機構に基づいて説明したが、直線移動する移動体の変位量を検出する変位検出機構に置き換えても上述と同様の処理が行われる。この場合、周期の異なる周期信号が変位検出機構から出力される。
【符号の説明】
【0063】
10 多回転アブソリュート回転角算出装置
11 回転駆動源
12 主軸
13,14 副軸
12a,12b 第1,第2主軸ギア
13a,14a 第1,第2副軸ギア
15a,15b,15c 角度センサ
16 AD変換及び角度計算部
17 同期化/整数化処理部
18 周期演算部
19 回転角合成部
31〜34 第1〜第4の計算手段
p 整数化された第1周期信号
q 整数化された第2周期信号
P 第1周期信号pの周期
Q 第2周期信号qの周期
L 周期P及び周期Qの最小公倍数
【技術分野】
【0001】
本発明は、アブソリュート変位量を算出する装置及びその方法に関し、さらに詳しくは、周期の異なる複数の周期信号からより周期の長い周期信号を算出し、その周期信号からアブソリュート変位量を算出する装置及びその方法に関する。
【背景技術】
【0002】
工作機械等の分野において、移動体の変位量を検出する様々な方式が検討され、実用に供されてきた。例えば、特許第3967963号公報(特許文献1)は、アブソリュート検出周期の異なる2つのレゾルバを設け(図1)、それらから出力される変位検出信号を用いてアブソリュート変位を検出する装置を開示する。この検出装置は、2つの周期信号からそれらの最小公倍数の周期信号を得るためのデータに変換し、予めROMに記憶された数値化されたストローク値を用いてアブソリュート変位を検出する。
【0003】
また、特許第3665732号公報(特許文献2)は、主軸駆動歯車に3つの従動歯車を噛み合わせた歯車機構を用いて、主回転軸の多回転の絶対位置を検出する装置を開示する(図2)。この検出装置は、3つの従動歯車に結合されたレゾルバによって検出された機械角から各従動歯車の回転数を求め、予めROMに記憶した各従動歯車の回転数と主回転軸の回転数との関係(図9)と比較して、主回転軸の絶対位置を検出する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第3967963号公報
【特許文献2】特許第3665732号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献2に記載された発明は、ROMに数値化されたデータを記憶するので、大きな記憶容量を有する半導体装置が必要となるとともに、広い実装面積を消費する。このような理由から、検出装置のコストが高くなるという問題がある。また、特許文献1に記載された発明は、2つの周期信号からそれらの最小公倍数の周期信号を得るために必要な2次元的なデータ配列を1次元的なデータ配列にすることにより、データ量を減少させるが、ROMにデータを予め記憶させておいて処理を行うことに変わりはない。
【0006】
本発明は、上述した従来の課題を解決するためになされたもので、予め参照用データをROMに記憶させる必要はなく、変位量を検出する複数の変位検出機構によって検出される複数の変位検出信号から、複数の変位検出信号の周期より広い周期を有するアブソリュート周期信号を算出するアブソリュート変位検出装置及びアブソリュート周期信号を算出する方法である。
【課題を解決するための手段】
【0007】
本発明は、変位量を検出する複数の変位検出機構によって検出される複数の変位検出信号から、複数の変位検出信号の周期より広い周期を有するアブソリュート周期信号を算出するアブソリュート変位検出装置において、複数の変位検出信号から周期の異なる第1の周期信号及び第2の周期信号を生成する第1の計算手段であって、第1の周期信号及び第2の周期信号は、共通する基本単位量によって数値化され、かつ同期して変化する、第1の計算手段と、第1の周期信号に第1の係数を乗算した値と第2の周期信号に第2の係数を乗算した値との差を、第1の周期信号の周期と第2の周期信号の周期との公倍数で除算した第1の剰余を算出する第2の計算手段であって、第1の係数は、公倍数を第1の周期信号の周期で除算した値であり、かつ第2の係数は、公倍数を第2の周期信号の周期で除算した値である、第2の計算手段と、第1の剰余を、第1の係数と第2の係数との差で除算した第2の剰余を算出する第3の計算手段と、第1の剰余に、第2の剰余に公倍数を乗算した値を加算することにより、アブソリュート周期信号を算出する第4の計算手段と、を含むことを特徴とするアブソリュート変位検出装置である。
【0008】
本発明に係る第4の計算手段は、アブソリュート周期信号を第1の係数と第2の係数との差で除算する手段をさらに含むことを特徴とする。
【0009】
本発明に係る公倍数は、最小公倍数であることをさらに含むことを特徴とする。
【0010】
本発明に係る複数の変位検出機構は、直線運動する移動体の変位を検出するための変位センサを含むことを特徴とする。
【0011】
本発明に係る複数の変位検出機構は、回転運動する主軸、主軸の回転を第1の変速比で伝達される第1の副軸、及び、主軸の回転を第2の変速比で伝達される第2の副軸からなる変速機構を含み、複数の変位検出信号は、主軸、及び、第1及び第2の副軸の回転角度を検出するための角度センサから出力されることを特徴とする。
【0012】
本発明は、除算する手段によって得られる値に基本単位量を乗算し、さらに主軸の回転角度を加えることにより、主軸のアブソリュート回転角を検出する手段をさらに含むことを特徴とする。
【0013】
本発明は、変位量を検出する複数の変位検出機構によって検出される複数の変位検出信号から、複数の変位検出信号の周期より広い周期を有するアブソリュート周期信号を算出する方法において、複数の変位検出信号から周期の異なる第1の周期信号及び第2の周期信号を生成する第1の計算段階であって、第1の周期信号及び第2の周期信号は、共通する基本単位量によって数値化され、かつ同期して変化する、第1の計算段階と、第1の周期信号に第1の係数を乗算した値と第2の周期信号に第2の係数を乗算した値との差を、第1の周期信号の周期と第2の周期信号の周期との公倍数で除算した第1の剰余を算出する第2の計算段階であって、第1の係数は、公倍数を第1の周期信号の周期で除算した値であり、かつ第2の係数は、公倍数を第2の周期信号の周期で除算した値である、第2の計算段階と、第1の剰余を、第1の係数と第2の係数との差で除算した第2の剰余を算出する第3の計算段階と、第1の剰余に、第2の剰余に公倍数を乗算した値を加算することにより、周期信号を算出する第4の計算段階と、を含むことを特徴とする方法である。
【0014】
本発明に係る第4の計算段階は、アブソリュート周期信号を第1の係数と第2の係数との差で除算する段階を含むことを特徴とする方法である。
【0015】
本発明に係る公倍数は、最小公倍数であることを特徴とする方法である。
【0016】
本発明に係る複数の変位検出機構は、直線運動する移動体の変位を検出するための変位センサを含むことを特徴とする方法である。
【0017】
本発明に係る複数の変位検出機構は、回転運動する主軸、主軸の回転を第1の変速比で伝達される第1の副軸、及び、主軸の回転を第2の変速比で伝達される第2の副軸からなる変速機構を含み、複数の変位検出信号は、主軸、及び、第1及び第2の副軸の回転角度を検出するための角度センサから出力されることを特徴とする方法である。
【0018】
本発明に係る除算する段階によって得られる値に基本単位量を乗算し、さらに主軸の回転角度を加えることにより、主軸のアブソリュート回転角を検出する段階を含むことを特徴とする方法である。
【発明の効果】
【0019】
本発明によれば、参照データをメモリに記憶することなく、2つの周期信号から、これらの最小公倍数の周期信号を簡単な計算処理で求めることができる。メモリに記憶された参照データに対する総当り的な探索処理をする必要がないので、移動体の変位量を高速な処理で求めることができる。またデータを予め記憶させておくメモリを使用しないことにより、コストを低減させるとともにメモリ用のスペースを削減することが可能になる。
【0020】
以下、図面を参照して、本発明の実施例を説明するが、図面及びその図面に対応する説明は、あくまで本発明を実施するための例示的な記述であり、請求項に係る発明が本実施例に限定されることを意図するものではない。また、本発明は、直線運動する移動体の変位量、及び回転運動する移動体の変位量を検出することのできる発明であるが、以下の実施例では、モータ等の回転駆動源の変位量(回転角)を検出する実施例に基づいて説明する。しかしながら、特許請求の範囲で定義される発明が実施例に示される回転駆動源の変位量を検出する装置、及び方法に限定されるものではない。さらに、本発明は、請求項で定義される用語によってのみ解釈され、その用語は、その一般的な解釈に従うものである。
【図面の簡単な説明】
【0021】
【図1】本発明の一実施例である多回転アブソリュート回転角検出装置のブロック図である。
【図2】本発明の一実施例である多回転アブソリュート回転角検出装置において、周期信号p,qと主軸の回転数yの関係を説明するための波形を示す図である。
【図3】周期演算部において周期信号p,qから周期信号rを計算するフローを示すブロック図である。
【図4】主軸の回転数と数値d,eとの関係を説明するための波形を示す図である。
【図5】主軸の回転数と数値f,gとの関係を説明するための波形を示す図である。
【図6】本発明の一実施例において、周期演算部へ入力される周期信号p,qから周期信号rを算出する処理過程における計算結果を示す表である。
【図7】本発明の計算方法で処理することのできる30周期までの周期P,Qの組み合わせを一覧するための表を示す。
【図8】本発明の別の実施例において、周期演算部へ入力される周期信号p,qから周期信号rを算出する処理過程における計算結果を示す表である。
【図9】3つの周期信号の周期から最小公倍数を計算し、その周期を有する周期信号を計算する場合の計算の可否を示す表である。
【発明を実施するための形態】
【0022】
図1は、本発明の一実施例である多回転アブソリュート回転角算出装置10のブロック図である。図1の多回転アブソリュート回転角算出装置10は、回転駆動源であるモータ11の回転軸に結合された主軸12の多回転アブソリュート回転角θを算出する装置である。モータ11の回転軸に結合された主軸12には、第1主軸ギア12a及び第2主軸ギア12bが取り付けられ、それらは第1副軸13の第1副軸ギア13aと第2副軸14の第2副軸ギア14aとそれぞれ噛み合わされる。第1主軸ギア12aに対する第1副軸ギア13aの変速比は4/5であり、また第2主軸ギア12bに対する第2副軸ギア14aの変速比は8/9である。本実施例の変速比では、第1,2副軸13,14の回転速度は、主軸12に対して減速する。
【0023】
主軸12、第1副軸13、及び第2副軸14には、MR素子を使用した角度センサ15a,15b,15cが取り付けられ、各軸の回転角度を検出する。角度センサ15a,15b,15cは、回転角度を検出するセンサであればレゾルバ、光学式エンコーダ、その他のセンサでもよい。角度センサ15a,15b,15cは、軸が1回転すると1周期の2相正弦波信号(Ksinθ,Kcosθ)を出力する。角度センサ15a,15b,15cにより検出された2相正弦波信号Ss,Sp,Sqに基づいて、主軸12の多回転アブソリュート回転角θcが算出されるが、その手順は、概略以下のとおりである。なお、主軸12、第1及び第2副軸13,14、第1及び第2主軸ギア12a,12b、第1及び第2副軸ギア13a,14a、及び、角度センサ15a,15b,15cは、変位検出機構を構成し、複数の変位検出信号を出力する。
【0024】
上述のように構成されたギア機構の角度センサによって検出された各軸の2相正弦波信号は、AD変換及び角度計算部16に入力され、各回転軸の1回転内の角度を表す角度検出値θs,θp,θqが計算される。次に、これらの角度検出値θs,θp,θqは、同期化/整数化処理部17へそれぞれ送られ、周期信号p,qが算出される。周期信号pは、主軸角度検出値θsと第1副軸角度検出値θpの位相差を主軸が1回転したときの位相差量を1として計数したものである。周期信号qは、主軸角度検出値θsと第1副軸角度検出値θqの位相差を主軸が1回転した時の位相差量を1として計数した物である。周期信号p、周期信号qは主軸の1回転毎の回転数に同期して変化する。
【0025】
本実施例では、第1主軸ギア12aと第1副軸ギア13aの変速比が4/5であるので、主軸12が5回転する毎に(主軸の回転角が360×5=1800°の整数倍毎に)第1副軸13は4回転し、主軸回転角検出値θsと第1副軸角度検出値θpの位相関係は元の状態に戻る。すなわち、周期信号pは、周期P(本実施例では、5回転)を有する。また、第2主軸ギア12bと第2副軸ギア14aの変速比が8/9であるので、主軸12が9回転する毎に(主軸の回転角が360×9=3240°の整数倍毎に)第2副軸13は8回転し、主軸回転角検出値θsと第2副軸角度検出値θqの位相関係は元の状態に戻る。すなわち、周期信号qは、周期Q(本実施例では、9回転)を有する。これらの周期信号p,qは、さらに周期演算部18へ送られ、ここで周期信号p,qは、第1副軸ギア13aの回転角度と第2副軸ギア14aの回転角度が同期する周期(周期Pと周期Qの最小公倍数L、本実施例では45周期)を表す信号である周期信号rが算出される。最後に、主軸12の多回転アブソリュート回転角θcは、この周期信号rと角度検出値θsに基づいて、回転角合成部19で算出される。以下さらに各ブロックにおける計算処理を詳しく説明する。
【0026】
AD変換及び角度計算部16は、入力された2相正弦波信号Ss,Sp,Sqをデジタル値に変換し、これら2つの信号のアークタンジェント(逆正接関数)を計算することにより、各軸の角度検出値θs,θp,θqをそれぞれ求める。ここで、1回転当たりの基本単位量uを例えば360(°)とすると、軸の回転に対して、0〜360の角度検出値が出力される。なお、以下の記述において、「角度」は、1回転内の角度の表示を表し(例えば、0〜360(°))、また、「回転角」は、多回転の角度の表示(例えば、2回転の場合は720(°))を含む。なお、基本単位量uは1であってもよく、この場合、回転角1は、1回転を意味する。
【0027】
主軸12の回転角をθとすると、主軸12に取り付けられた主軸角度センサ15aの出力信号Ssから求められる角度検出値θsは、主軸12の回転角θに対する基本単位量uの剰余計算を実行することにより得られるので、次式(1)のように表すことができる。剰余とは、式(1)において、被除数θを除数uで割ったときの余りを意味する。また、第1,2副軸13,14の角度検出値θp,θqも、第1,2副軸13,14の回転角に対する基本単位量uの剰余計算を実行することにより得られる。ギアの遊び、角度センサの検出誤差を考慮すると、第1,2副軸13,14の主軸12に対する変速比が4/5、8/9であるから、角度検出値θp,θqは、次式(2),(3)のようにそれぞれ表すことができる。
【数1】
【0028】
次に、第1副軸13の主軸12に対する周期信号fpは、主軸12の角度検出値θsと第1副軸13の角度検出値θpとの差を基本単位量uで割ったときの剰余を計算することにより求められ、次式(4)で表すことができる。周期数(P=5)を掛けることにより、周期信号fpの大きさを主軸回転量に合わせることができる。式(4)から明らかなように、周期信号fpは、主軸の回転角が1800°(360°×5)を1周期とし、0から1800(°)まで単調増加するのこぎり波状の信号である。
【数2】
【0029】
また、第2副軸14の主軸12に対する周期信号fqは、主軸12の角度検出値θsと第2副軸14の角度検出値θqとの差を基本単位量uで割ったときの剰余を計算することにより求められ、次式(5)で表すことができる。周期数(P=9)を掛けることにより、周期信号fqの大きさを主軸回転量に合わせることができる。式(5)から明らかなように、周期信号fqは、主軸の回転角が3240°(360°×9)を1周期とし、0から3240(°)まで単調増加するのこぎり波状の信号である。
【数3】
【0030】
次に、上記周期信号fp,fqを基本単位量uで割って1回転単位の整数化を行い、周期信号fp,fqの整数化された周期信号p,qを計算する。周期信号fpは、上述のように0から1800まで単調増加する信号であるから、基本単位量u(=360)で割り、整数化すると、周期信号pは、図2の上段に示されるように4段の階段状波形となる。また同様に、周期信号fqは、上述のように0から3240まで単調増加する信号であるから、基本単位量u(=360)で割り、整数化すると、周期信号qは、図2の下段に示されるように8段の階段状波形となる。
【0031】
しかしながら、各角度センサからの信号は、誤差を含んでいるので、周期信号fp,fqの数値が切り換わるタイミングは完全には同期しない。そこで、主軸の角度検出値θsで同期を図り、その後整数化を実行する。つまり、次式(6),(7)に示すように、主軸の角度検出値θsとの差をとり、基本単位量uで割った値を整数化する。整数化は、整数化する値に0.5を加えて、小数点以下を切り捨てること(INT関数)により実行することができる。
【数4】
図2に示される周期信号p,qは、主軸12の回転数をyとすると、式(8),(9)のように表される。
【数5】
なお、図2において、横軸は、主軸12の回転数であり、縦軸は、周期信号fp,fqを基本単位量uで割った整数値p,q(P=5、Q=9)である。図2に示される周期信号p,qから理解されるように、周期信号p,qの組み合わせは、主軸の回転数がP(=5)とQ(=9)の最小公倍数L(=45)毎の周期を有し、周期内に同じ組み合わせとなることはない。これらの整数化された周期信号p,qは、図1に示されるように、周期演算部18へ送られる。
【0032】
周期演算部18は、図3に示されるP(=5)回転周期の周期信号p及びQ(=9)回転周期の周期信号qからPとQの最小公倍数L(=45)の周期を有する周期信号rを出力する。具体的には、図2に示される周期信号pと周期信号qから両信号の周期P,Qの最小公倍数Lの周期を有するアブソリュート周期信号g(図5)を算出する。この周期信号gの周期信号値から主軸12の多回転回転数rを求める。最後に、回転角合成部19(図1)で、この多回転回転数rに基本単位量を乗じた値に角度検出値θsを加え、主軸12の多回転アブソリュート回転角θcを求める。
【0033】
さて図3は、周期演算部18において周期信号p,qから周期信号rを計算するフローを説明するためのブロック図である。図3に示される各ブロックは、計算内容を単に説明するために演算単位に分けて表記しているが、各ブロックがハードウェア的に個別の演算素子に分割しなければならないことを意味するものではなく、またソフトウェア的に個別のモジュールやサブルーチンに分割しなければならないことを意味するものでもない。
【0034】
まず、周期演算部18における計算に先立って、設計時の確定量として以下の数値が与えられる。すなわち、周期信号p,qの周期P(=5),Q(=9)、周期P,Qの最小公倍数L(=45)、及び周期P,Q及び最小公倍数Lから求められる次式(10)で定義される数値D(=4)である。数値Dは、最小公倍数Lを周期Pで除算した値(第1の係数)から最小公倍数Lを周期Qで除算した値(第2の係数)を引算した値と捉えることができる。
【数6】
上述した括弧内の数値は、本実施例において用いられる数値である。これらの数値は、周期演算部18に予めプログラムされていてもよく、外部から入力されるようにしてもよい。周期P,Qのみが外部から入力され、最小公倍数L及び数値Dは、内部で計算されてもよい。
【0035】
周期演算部18の第1の計算手段31は、同期化/整数化処理部17で算出された周期信号p,q(図2)を受け取り、これらの周期信号p,qから数値a,bを次式(11),(12)により計算する。その後、次式(13)により、第1の数値cを算出する。
【数7】
【0036】
次に、第1の数値cは、第2の計算手段32に送られ、次式(14)に示されるように、第1の数値cを最小公倍数Lで割ることにより余りを求める剰余計算が実行され、第2の数値dが算出される。
【数8】
式(14)で計算される第2の数値dの主軸の回転数yに対する波形は、図4に示される。なお、図4の横軸は、主軸12の回転数yを表し、縦軸は、第2の数値d、後述する第3の数値eを示す。図4から理解されるように、第2の数値dは、主軸12がL回転する間に4周期の階段状波形を示し、1つの段差は数値Dである。第2の数値dは、第3の計算手段33及び第4の計算手段34に送られる。
【0037】
第3の計算手段33は、第2の数値dを受け取ると、次式(15)により、まず第3の数値eを算出する。
【数9】
第3の数値eは、図3に示されるように、最小公倍数Lの周期を有する段差1の4段の階段状波形を示す。第3の数値eが算出されると、続いて、次式(16)に示されるように、第3の数値eに最小公倍数Lが乗じられた第4の数値fが計算される。
【数10】
第4の数値fは、図5に示されるように、最小公倍数Lの段差を有する4段の階段状波形を示す。第4の数値fは、第4の計算手段34に送られる。
【0038】
第4の計算手段34は、まず次式(17)に示すように、第4の数値fに第2の数値dを加え、第5の数値gを算出する。
【数11】
第5の数値gは、図5に示すように、主軸の回転数yが0からL回転に達する毎に、段差Dで単調に増加する階段状波形を示す。この階段状波形の第5の数値gは、次式(18)に示されるように、数値Dで割られ、段差1の階段状波形の主軸の周期信号rが求められる。この周期信号rは、回転角合成部19へ出力され、主軸の多回転アブソリュート回転角が算出される。
【数12】
【0039】
上述のように、周期演算部18によって、周期信号p,qから、周期信号p,qの周期P,Qの最小公倍数Lの周期を有する周期信号rが算出される。周期信号p,qを入力して、上述した計算の中間結果を含む計算経過が図6に示される。図6に示される表では、周期演算部18への入力信号としての周期信号p,q、数値a〜gの中間結果、及び、周期信号rの各値が主軸12の回転数に対応して示される。図3、図4、図5の各波形の値は、図6に示される表中の数値に対応する。
【0040】
さて図1に戻り、周期演算部18の出力である周期信号rは、回転角合成部19に入力され、回転角合成部19は、主軸12の多回転アブソリュート回転角θcを算出する。この回転角θcは、主軸12の回転数に主軸の回転角度を加えた値に対応するから、次式(19)に示されるように、主軸の回転角θcは、主軸の回転数に対応する周期信号r(単位を合わせるために基本単位量uが乗じられる。)に主軸の回転角度に対応する主軸の角度検出値θsが加えられる。
【数13】
以上の計算により、主軸12の多回転アブソリュート回転角θは、上式(19)により回転角θcを算出することにより得られる。
【0041】
周期信号rは式(18)により求められるが、式(18)中の数値gを式(17)で置き換えると、主軸の周期信号rは、次式(20)のようになる。
【数14】
また、式(20)中の数値fを式(16)で置き換えると、周期信号rは、次式(21)のように表すことができる。
【数15】
さらに、式(21)中の数値eを式(15)でそれぞれ置き換えると、周期信号rは、次式(22)として表現することができる。
【数16】
さらに、式(22)中の数値dを式(14)で置き換えると、周期信号rは、次式(23)のように表すことができる。
【数17】
最後に、式(23)中の数値cを式(13)で置き換えると、周期信号rは、次式(24)のように表すことができる。
【数18】
【0042】
以上のように、周期信号rは最終的に式(24)として表現でき、式(24)中の周期P,Q、最小公倍数L、及び数値Dは、設計時の確定量として与えられているので、結局、周期信号rは、周期信号p,qを式(24)に代入することにより算出することができる。
【0043】
図4に戻り、主軸の回転数yに対する数値dの波形について検討する。数値dは式(14)により計算されるが、式(14)の数値cに式(13)を代入し、さらに周期信号p,qに式(6),(7)を代入しかつ整理すると、次式(25)が得られる。
【数19】
剰余計算において、mod(mod(a,b),b)=mod(a,b)が、またmod(a,b)=mod(ab,b)が成立するから、上式は次式(25)のように変形できる。なお、Dは、式(10)で定義される数値である。
【数20】
剰余計算は、被除数を除数で割った余りを求めるのであるから、式(25)は、nを整数とすると、次式(26)のように表すことができる。
【数21】
【0044】
mod(L,D)=1が成立する場合
剰余計算において、mod(L,D)=1が成立するとき、Nを整数とすると、Lは、L=ND+1で表すことができる。このLを式(26)に代入すると、式(26)は、さらに次式(27)にように変形することができる。
【数22】
ここで、整数であるnを式(26)のように置いた場合、剰余計算の定義から、nは、次式のように表現することもできる。INT(A)は、数値Aを整数化する計算である。
【数23】
L=ND+1を代入すると、上式は、次式(28)となる。
【数24】
式(27)から、y=nN+1のときに、d=D−nとなり、そしてyが1増加する毎に、dはDずつ増加する。
【0045】
上記の考察から、図4に示される実施例を検証すると、最小公倍数のLは45、数値Dは4であるので、N=11となる。主軸の回転数yの値に対して、数値dがどのように変化するか、以下検討する。
(1)0≦y≦11(=N)のとき、式(28)から、n=0となるので、
【数25】
となる。したがって、主軸の回転数yが1ずつ増加すると、数値dは、0から44(=ND)まで4(=D)ずつ増加する。
(2)12≦y≦22(=2N)のとき、n=1となるので、
【数26】
となる。y=12のとき、d=3となるので、主軸の回転数yが12から1ずつ増加すると、数値dは、3から43(=ND−1)まで4(=D)ずつ増加する。
(3)23≦y≦33(=3N)のとき、n=2となるので、
【数27】
となる。y=23のとき、d=2となるので、主軸の回転数yが23から1ずつ増加すると、数値dは、2から42(=ND−2)まで4(=D)ずつ増加する。
(4)34≦y≦44(=4N)のとき、n=3となるので、
【数28】
となる。y=34のとき、d=1となるので、主軸の回転数yが34から1ずつ増加すると、数値dは、1から41(=ND−3)まで4(=D)ずつ増加する。
【0046】
次に、数値eとして、式(15)に示される内のe=mod(−d,D)を用いて、その数値dに式(27)を代入すると、次式(33)のように変形することができる。
【数29】
剰余計算において、mod(ab+c,b)=mod(c,b)が成立するから、式(35)中のD(y−nN)の項は削除でき、上式は、次式(34)のように整理できる。
【数30】
したがって、数値eは、図4に示されるように0,1,2,3の値を示す階段状波形となる。
【0047】
数値eが求められると、次式(35)に示されるように、数値eに最小公倍数Lを乗じて、図5に示される数値fが算出される。
【数31】
次に、数値dに数値fを加えると、次式(36)に示されるように、数値gが算出される。
【数32】
n<Dであるので、mod(n,D)=nが成立するので、次式(37)が成立する。
【数33】
最後に、数値gを数値Dで割れば、次式(38)に示されるように、主軸の周期信号rが求められる。
【数34】
ただし、主軸の回転数yは、y<Lの範囲内の数値であり、r=mod(y,L)である。
【0048】
mod(L,D)=D−1が成立する場合
剰余計算において、mod(L,D)=D−1が成立する場合、Nを整数とすると、Lは、L=ND+D−1=(N+1)×D−1で表すことができる。このLを式(26)に代入すると、式(26)は、さらに次式(39)にように変形することができる。
【数35】
ここで、整数であるnを式(26)のように置いた場合、剰余計算の定義から、nは、次式のように表現することもできる。
【数36】
L=(N+1)×D−1を代入すると、上式は、次式(40)となる。
【数37】
式(39)から、y=nN+1のときに、d=nとなり、そしてyが1増加する毎に、dはDずつ増加する。
【0049】
次に、数値eとして、式(15)に示される内のe=mod(d,D)を用いて、その数値dに式(39)を代入すると、次式(41)のように変形することができる。
【数38】
剰余計算において、式(41)中のD(y−n(N+1))の項は、上述と同様に、削除でき、上式は、次式(42)のように整理できる。
【数39】
したがって、数値eは、図4に示されるように0,1,2,3の値を示す階段状波形となる。
【0050】
以上のように、mod(L,D)=1が成立する場合、e=mod(−d,D)を、mod(L,D)=D−1が成立する場合、e=mod(−d,D)を用いることにより、主軸の回転数yを算出することができる。
【0051】
D=1が成立する場合
D=1の場合、d=mod(Dy,L)=mod(y,L)となるので、
【数40】
となる。
【0052】
次に、周期信号rは、式(24)によって算出することができるが、周期P,Qの値に対する成立性について検討する。周期信号rを求める式(24)を再掲すると、次式(44)となる。
【数41】
周期信号p,qは、式(6),(7)から、次式(45),467)のように表されるので、それらを上式(44)に代入すると、主軸の回転数をyとすると、周期信号rは、次式(47)で表される。
【数42】
剰余計算において、mod(a,b)c=mod(ac,bc)が成立するから、式(47)の分子を整理すると、周期信号rは、次式(48)のとおりとなる。
【数43】
また、mod(a,c)+mod(b,c)=mod(a+b,c)が成立するから、上式の分子をさらに整理すると、周期信号rは、次式(49)のとおりとなる。
【数44】
式(10)に示されるように、
【数45】
であるから、上式(49)に代入し整理すると、周期信号rは、次式(50)のとおりとなる。
【数46】
剰余計算において、mod(mod(a,b),b)=mod(a,b)が成立するから、上式の分子を変形すると、周期信号rは、次式(51)のとおりとなる。
【数47】
【0053】
ここで、条件1として、Dが1(例えば、P=8,Q=9)の場合、式(51)は、次式(52)となる。
【数48】
剰余計算において、aが整数であると、mod(a,1)=0が成立するから、上式(52)は、mod(−mod(y,L),1)×Lの項を削除すると、次式(53)のとおりとなる。
【数49】
y≦Lであるので、周期信号rは、次式(54)となる。
【数50】
以上のように、Dが1のとき、周期信号rは主軸の回転数yに等しいので、式(24)を用いて周期信号rを算出することにより、主軸の回転数を求めることができることが検証された。
【0054】
次に、条件2として、mod(L,D)=1あるいはmod(L,D)=D−1が成立する場合について検討する。周期信号rは、式(51)を再掲すると次式(55)となる。
【数51】
ここで、式(26)で示されるように、次式(56)を式(55)に代入すると、周期信号rは、次式(57)のように表される。
【数52】
【0055】
上記条件の内、mod(L,D)=1が成立する場合、LはDの整数倍に1を加えた値に等しいから、L=ND+1と表すことができる。また、mod(L,D)=D−1が成立する場合、LはDの整数倍に(D−1)を加えた値に等しいから、L=ND+(D−1)=(N+1)D−1と表すことができる。したがって、L=ND+1とL=(N+1)D−1を式(57)のmod項に代入すると、それぞれ式(58),(59)となる。
L=ND+1を代入する場合
【数53】
L=(N+1)D−1を代入する場合
【数54】
【0056】
mod項中のDの整数倍の項は、mod項の計算に影響を与えないので、式(58)の(−Dy+nND)及び式(59)の(Dy−nND−nD)を削除すると、式(58),(59)は、いずれも次式(60)に変形される。
【数55】
mod項中のnがDより小さい場合、mod(n,D)×L=nLが成立するので、式(60)は、次式(61)となる。
【数56】
条件2の場合、式(61)から理解されるように、周期信号rは主軸の回転数yに等しいので、式(24)を用いて周期信号rを算出することにより、主軸の回転数を求めることができることが検証された。
【0057】
図7は、本発明の計算方法で処理することのできる30周期までの周期P,Qの組み合わせを一覧するための表を示す。図7において、横軸は周期Qを、縦軸は周期Pの各値を示す。本表において表記された○印は計算が可能な組み合わせを示し、また×印は周期P,Qが互いに素であるが計算が不可能である組み合わせを示し、さらに、△印は周期P,Qが互いに素でなく、計算が不可能である組み合わせを示す。図7の表から理解されるように、互いに素な周期P,Qの多くで計算が可能なことが分かる。とりわけ周期P,Qの差が3以下の組み合わせでは、D=1又はmod(L,D)=1、mod(L,D)=D-1が必ず成立するので、計算が可能である。
【0058】
図8は、本発明の他の実施例において、周期演算部へ入力される周期信号p,qから周期信号rを算出する処理過程における計算結果を示す表を示す。本実施例では、周期信号p,qの周期がP=5、Q=7の場合の計算結果を示す。周期がP=5、Q=7の場合、それらの最小公倍数Lは、35であるので、主軸の回転数が35までの多回転アブソリュート回転角を算出することができる。
【0059】
以上の実施例では、2つの周期信号の周期からそれらの最小公倍数の周期を有する周期信号を計算し、主軸の多回転アブソリュート回転角を求める方法を説明したが、本発明は、必ずしも2つの周期信号に限定されるものではなく、3以上の周期信号の周期からそれらの最小公倍数の周期を有する周期信号を計算し、主軸の回転角を求めることも可能である。例えば、図9に示されるように、26周期、27周期、29周期の3つの周期信号から周期20358の周期信号を計算し、主軸の回転角を求めることも可能である(図9の表の最下段の組み合わせを参照)。
【0060】
しかしながら、どのような組み合わせでもよいというものではない。26周期、27周期、29周期の周期信号からいずれか2つの周期信号を選択し、それらの最小公倍数の周期(L=702,754,783)を有する周期信号を計算することは可能である(図9の上段の○印の付された各ラインの組み合わせを参照)。しかしながら、上記いずれか2つの周期信号から計算された周期信号と残りの周期信号から周期20358の周期信号を計算することは不可能である((図9の中段の×印の付された各ラインを参照)。これに対して、26周期の周期信号と29周期の周期信号から計算された周期754の周期信号と、27周期の周期信号と29周期の周期信号から計算された周期783の周期信号との間で、さらに周期20358の周期信号を計算することは可能である(図9の最下段の○印の付されたラインの組み合わせを参照)。
【0061】
以上のように適切な周期の周期信号を選択すれば、3つ以上の周期信号からそれらの最小公倍数の周期を有する周期信号を計算することが可能である。3つ以上の周期信号を計算するためには、3系統以上の副軸により形成される変速機構が必要であることはいうまでもない。このように、より多くの周期を有する周期信号を組み合わせることにより、より広い周期を有する周期信号を計算することができ、その結果より広範囲の多回転アブソリュート回転角を算出することができる。
【0062】
PとQが互いに素である場合、L=PQとなり、L/Q=P,L/P=Q
となる。上述した説明では、実施例で使用される数値は、約分された数値を採用しているが、必ずしもこれに限る必要ない。例えば、第1,第2周期信号p,qの周期がそれぞれ6と8である場合、それらの最小公倍数L=LCM(P,Q)は24であるので、D=L/P−L/Q=24/6−24/8=1として、計算を進め、主軸の回転角を算出する。しかし、最小公倍数を用いないで、公倍数、例えば、L=P×Q=48、D=Q−P=8−6=2の数値を用いて計算を進めることも可能である。この場合、最小公倍数を使用して計算を進めた場合に比べ、2倍の計算結果が得られるので、計算の途中で、調整用の比率をS(S=P×Q/LCM(P,Q)=48/24=2)で割ることにより、最終的に同じ結果を得ることが可能である。このように、主軸の多回転アブソリュート回転角を演算するに際して、計算結果の絶対値が重要ではなく、角度センサ等の検出値の物理量に対する比率が重要であり、最終的にその物理量に対する比率に適合した結果に調整することが重要となる。また、上述した実施例では、回転移動する移動体の変位量を検出する変位検出機構に基づいて説明したが、直線移動する移動体の変位量を検出する変位検出機構に置き換えても上述と同様の処理が行われる。この場合、周期の異なる周期信号が変位検出機構から出力される。
【符号の説明】
【0063】
10 多回転アブソリュート回転角算出装置
11 回転駆動源
12 主軸
13,14 副軸
12a,12b 第1,第2主軸ギア
13a,14a 第1,第2副軸ギア
15a,15b,15c 角度センサ
16 AD変換及び角度計算部
17 同期化/整数化処理部
18 周期演算部
19 回転角合成部
31〜34 第1〜第4の計算手段
p 整数化された第1周期信号
q 整数化された第2周期信号
P 第1周期信号pの周期
Q 第2周期信号qの周期
L 周期P及び周期Qの最小公倍数
【特許請求の範囲】
【請求項1】
変位量を検出する複数の変位検出機構によって検出される複数の変位検出信号から、前記複数の変位検出信号の周期より広い周期を有するアブソリュート周期信号を算出するアブソリュート変位検出装置において、
前記複数の変位検出信号から周期の異なる第1の周期信号及び第2の周期信号を生成する第1の計算手段であって、前記第1の周期信号及び第2の周期信号は、共通する基本単位量によって数値化され、かつ同期して変化する、第1の計算手段と、
前記第1の周期信号に第1の係数を乗算した値と前記第2の周期信号に第2の係数を乗算した値との差を、前記第1の周期信号の周期と第2の周期信号の周期との公倍数で除算した第1の剰余を算出する第2の計算手段であって、前記第1の係数は、前記公倍数を前記第1の周期信号の周期で除算した値であり、かつ前記第2の係数は、前記公倍数を前記第2の周期信号の周期で除算した値である、第2の計算手段と、
前記第1の剰余を、前記第1の係数と前記第2の係数との差で除算した第2の剰余を算出する第3の計算手段と、
前記第1の剰余に、前記第2の剰余に前記公倍数を乗算した値を加算することにより、前記アブソリュート周期信号を算出する第4の計算手段と、
を含むことを特徴とするアブソリュート変位検出装置。
【請求項2】
前記第4の計算手段は、前記アブソリュート周期信号を前記第1の係数と前記第2の係数との差で除算する手段をさらに含むことを特徴とする請求項1記載のアブソリュート変位検出装置。
【請求項3】
前記公倍数は、最小公倍数であることを特徴とする請求項1記載のアブソリュート変位検出装置。
【請求項4】
前記複数の変位検出機構は、直線運動する移動体の変位を検出するための変位センサを含むことを特徴とする請求項1記載のアブソリュート変位検出装置。
【請求項5】
前記複数の変位検出機構は、回転運動する主軸、前記主軸の回転を第1の変速比で伝達される第1の副軸、及び、前記主軸の回転を第2の変速比で伝達される第2の副軸からなる変速機構を含み、前記複数の変位検出信号は、前記主軸、及び、第1及び第2の副軸の回転角度を検出するための角度センサから出力されることを特徴とする請求項2記載のアブソリュート変位検出装置。
【請求項6】
前記除算する手段によって得られる値に前記基本単位量を乗算し、さらに前記主軸の回転角度を加えることにより、前記主軸のアブソリュート回転角を検出する手段をさらに含むことを特徴とする請求項5記載のアブソリュート変位検出装置。
【請求項7】
変位量を検出する複数の変位検出機構によって検出される複数の変位検出信号から、前記複数の変位検出信号の周期より広い周期を有するアブソリュート周期信号を算出する方法において、
前記複数の変位検出信号から周期の異なる第1の周期信号及び第2の周期信号を生成する第1の計算段階であって、前記第1の周期信号及び第2の周期信号は、共通する基本単位量によって数値化され、かつ同期して変化する、第1の計算段階と、
前記第1の周期信号に第1の係数を乗算した値と前記第2の周期信号に第2の係数を乗算した値との差を、前記第1の周期信号の周期と第2の周期信号の周期との公倍数で除算した第1の剰余を算出する第2の計算段階であって、前記第1の係数は、前記公倍数を前記第1の周期信号の周期で除算した値であり、かつ前記第2の係数は、前記公倍数を前記第2の周期信号の周期で除算した値である、第2の計算段階と、
前記第1の剰余を、前記第1の係数と前記第2の係数との差で除算した第2の剰余を算出する第3の計算段階と、
前記第1の剰余に、前記第2の剰余に前記公倍数を乗算した値を加算することにより、前記周期信号を算出する第4の計算段階と、
を含むことを特徴とする方法。
【請求項8】
前記第4の計算手段は、前記アブソリュート周期信号を前記第1の係数と前記第2の係数との差で除算する段階をさらに含むことを特徴とする請求項7記載の方法。
【請求項9】
前記公倍数は、最小公倍数であることを特徴とする請求項7記載の方法。
【請求項10】
前記複数の変位検出機構は、直線運動する移動体の変位を検出するための変位センサを含むことを特徴とする請求項7記載の方法。
【請求項11】
前記複数の変位検出機構は、回転運動する主軸、前記主軸の回転を第1の変速比で伝達される第1の副軸、及び、前記主軸の回転を第2の変速比で伝達される第2の副軸からなる変速機構を含み、前記複数の変位検出信号は、前記主軸、及び、第1及び第2の副軸の回転角度を検出するための角度センサから出力されることを特徴とする請求項8記載の方法。
【請求項12】
前記除算する段階によって得られる値に前記基本単位量を乗算し、さらに前記主軸の回転角度を加えることにより、前記主軸のアブソリュート回転角を検出する段階をさらに含むことを特徴とする請求項11記載の方法。
【請求項1】
変位量を検出する複数の変位検出機構によって検出される複数の変位検出信号から、前記複数の変位検出信号の周期より広い周期を有するアブソリュート周期信号を算出するアブソリュート変位検出装置において、
前記複数の変位検出信号から周期の異なる第1の周期信号及び第2の周期信号を生成する第1の計算手段であって、前記第1の周期信号及び第2の周期信号は、共通する基本単位量によって数値化され、かつ同期して変化する、第1の計算手段と、
前記第1の周期信号に第1の係数を乗算した値と前記第2の周期信号に第2の係数を乗算した値との差を、前記第1の周期信号の周期と第2の周期信号の周期との公倍数で除算した第1の剰余を算出する第2の計算手段であって、前記第1の係数は、前記公倍数を前記第1の周期信号の周期で除算した値であり、かつ前記第2の係数は、前記公倍数を前記第2の周期信号の周期で除算した値である、第2の計算手段と、
前記第1の剰余を、前記第1の係数と前記第2の係数との差で除算した第2の剰余を算出する第3の計算手段と、
前記第1の剰余に、前記第2の剰余に前記公倍数を乗算した値を加算することにより、前記アブソリュート周期信号を算出する第4の計算手段と、
を含むことを特徴とするアブソリュート変位検出装置。
【請求項2】
前記第4の計算手段は、前記アブソリュート周期信号を前記第1の係数と前記第2の係数との差で除算する手段をさらに含むことを特徴とする請求項1記載のアブソリュート変位検出装置。
【請求項3】
前記公倍数は、最小公倍数であることを特徴とする請求項1記載のアブソリュート変位検出装置。
【請求項4】
前記複数の変位検出機構は、直線運動する移動体の変位を検出するための変位センサを含むことを特徴とする請求項1記載のアブソリュート変位検出装置。
【請求項5】
前記複数の変位検出機構は、回転運動する主軸、前記主軸の回転を第1の変速比で伝達される第1の副軸、及び、前記主軸の回転を第2の変速比で伝達される第2の副軸からなる変速機構を含み、前記複数の変位検出信号は、前記主軸、及び、第1及び第2の副軸の回転角度を検出するための角度センサから出力されることを特徴とする請求項2記載のアブソリュート変位検出装置。
【請求項6】
前記除算する手段によって得られる値に前記基本単位量を乗算し、さらに前記主軸の回転角度を加えることにより、前記主軸のアブソリュート回転角を検出する手段をさらに含むことを特徴とする請求項5記載のアブソリュート変位検出装置。
【請求項7】
変位量を検出する複数の変位検出機構によって検出される複数の変位検出信号から、前記複数の変位検出信号の周期より広い周期を有するアブソリュート周期信号を算出する方法において、
前記複数の変位検出信号から周期の異なる第1の周期信号及び第2の周期信号を生成する第1の計算段階であって、前記第1の周期信号及び第2の周期信号は、共通する基本単位量によって数値化され、かつ同期して変化する、第1の計算段階と、
前記第1の周期信号に第1の係数を乗算した値と前記第2の周期信号に第2の係数を乗算した値との差を、前記第1の周期信号の周期と第2の周期信号の周期との公倍数で除算した第1の剰余を算出する第2の計算段階であって、前記第1の係数は、前記公倍数を前記第1の周期信号の周期で除算した値であり、かつ前記第2の係数は、前記公倍数を前記第2の周期信号の周期で除算した値である、第2の計算段階と、
前記第1の剰余を、前記第1の係数と前記第2の係数との差で除算した第2の剰余を算出する第3の計算段階と、
前記第1の剰余に、前記第2の剰余に前記公倍数を乗算した値を加算することにより、前記周期信号を算出する第4の計算段階と、
を含むことを特徴とする方法。
【請求項8】
前記第4の計算手段は、前記アブソリュート周期信号を前記第1の係数と前記第2の係数との差で除算する段階をさらに含むことを特徴とする請求項7記載の方法。
【請求項9】
前記公倍数は、最小公倍数であることを特徴とする請求項7記載の方法。
【請求項10】
前記複数の変位検出機構は、直線運動する移動体の変位を検出するための変位センサを含むことを特徴とする請求項7記載の方法。
【請求項11】
前記複数の変位検出機構は、回転運動する主軸、前記主軸の回転を第1の変速比で伝達される第1の副軸、及び、前記主軸の回転を第2の変速比で伝達される第2の副軸からなる変速機構を含み、前記複数の変位検出信号は、前記主軸、及び、第1及び第2の副軸の回転角度を検出するための角度センサから出力されることを特徴とする請求項8記載の方法。
【請求項12】
前記除算する段階によって得られる値に前記基本単位量を乗算し、さらに前記主軸の回転角度を加えることにより、前記主軸のアブソリュート回転角を検出する段階をさらに含むことを特徴とする請求項11記載の方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図9】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−19785(P2013−19785A)
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願番号】特願2011−153739(P2011−153739)
【出願日】平成23年7月12日(2011.7.12)
【出願人】(000103792)オリエンタルモーター株式会社 (150)
【Fターム(参考)】
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願日】平成23年7月12日(2011.7.12)
【出願人】(000103792)オリエンタルモーター株式会社 (150)
【Fターム(参考)】
[ Back to top ]