
アライメントデータ作成システム及び方法
【課題】アライメントマークが複数のショットに跨って形成されている場合、完成形であるアライメントマークをCADデータから作成するためにはユーザ自身の手作業が求められる。
【解決手段】1つのアライメントマークが複数のショットに跨って作成される場合に、各アライメントマークに関連する複数のショットのCADデータを相互の位置関係に応じて合成し、アライメントマークの完成形を含む合成CADデータを自動的に作成する。
【解決手段】1つのアライメントマークが複数のショットに跨って作成される場合に、各アライメントマークに関連する複数のショットのCADデータを相互の位置関係に応じて合成し、アライメントマークの完成形を含む合成CADデータを自動的に作成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、走査型電子顕微鏡で使用する撮像レシピを作成する際のユーザの負担を軽減する技術に関する。
【背景技術】
【0002】
半導体ウェーハ上のデバイスパターン又は配線パターンは、一般に以下に示す手順により形成される。まず、半導体ウェーハの表面にレジストと呼ばれる塗布材を塗布する。次に、レジスト上にパターン形状に加工された露光用マスク(レチクル)を重ねるように配置し、可視光線、紫外線などで露光する。この後、レジストに形成された感光パターンに基づいて所定のパターンを半導体ウェーハの表面に形成する。
【0003】
ところで、これらの手順により形成されるパターンの形状は、照射する電子線の強度や絞りにより変化する。このため、高精度のパターンを形成するには、パターンの出来栄えを検査する必要がある。この検査には、測長走査型電子顕微鏡(Critical Dimension Scanning Electron Microscope:CD−SEM)が広く用いられる。一般には、検査を要する半導体パターン上の任意の評価ポイントの画像をCD−SEMで観察し、その観察画像からパターンの幅の寸法や形状データを取得することにより、パターンの出来栄えを評価する。
【0004】
CD−SEMにより半導体ウェーハに形成されたパターンの形状を評価するには、評価ポイントの位置、倍率、画質を指定するレシピの作成が必要である。従来、レシピはCD−SEMで作成されていたが、近年の高集積化に伴う評価ポイントの大幅な増加により、最近ではCADデータよりレシピを自動生成する手法が主流となりつつある。
【0005】
ところで、リソグラフィ工程では、半導体ウェーハの露光領域を複数のショットに分割し、各ショットの対応領域にレチクルを重ねて露光する手法が採用される。露光時には、半導体ウェーハの各ショット領域に設けられた位置合わせマーク(アライメントマーク)を使用し、半導体ウェーハとレチクル間で高精度の位置合せを実現している。
【0006】
一方、CADデータから作成したレシピをCD−SEMで実行する場合、半導体ウェーハの原点ずれや半導体ウェーハの回転ずれにより、CADデータとSEM像との間に位置ずれが発生する可能性がある。そこで、位置ずれを補正するため、CADデータからアライメントマーク周辺の画像データを切り出して作成したデザイン(Design)テンプレートをCD−SEMに転送し、CD−SEMで光学的に撮像されるOM像とマッチングする手法が用いられる。
【0007】
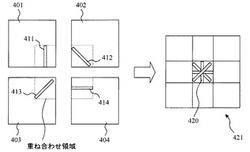
ところで、アライメントマークは、半導体素子には使用されないパターンである。従って、半導体ウェーハを素子形成用として有効利用する観点から、アライメントマークは、素子形成領域以外のスクライブ領域に形成される。スクライブ領域は、素子形成領域を分離する領域である。露光時には、隣接する複数のショットのスクライブ部同士が互いに重なり合うように位置決めし、その重ね合わせ領域に、複数のショットに分割配置された互いに異なる形状の部分パターンの合成像をアライメントマークとして完成させることにより、完成されたアライメントマークの形状から各ショットの位置ずれを調べる手法が採用されている。
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかし、従来手法では、1つのアライメントマークが複数のショットに分割配置された部分パターンの合成パターンとして作成される場合(以下、「1つのアライメントマークが複数のショットに跨って作成される場合」ともいう。)にも、1ショット分のCADデータのみに基づいてレシピを作成する。すなわち、重複的に露光される他のショットのCADデータを考慮せずにレシピを作成する。このため、デザインテンプレートとして、正確なアライメントマークの表示が不可能であった。また、同様の理由により、CADデータを参照してグローバルアライメント点を登録することができなかった。仮に、グローバルアライメント点の座標が既知であり、グローバルアライメント点を登録できたとしても、デザインテンプレートに対応する正確なアライメントマークをCADデータから形成することができなかった。このため、デザインテンプレートとCD−SEMで光学的に撮像されたOM像との差異が大きく、マッチング精度が低下する問題があった。
【0009】
この問題を解決する手法の一つとして、ユーザ自身が画像編集ソフトなどを使用して、1つのアライメントマークに関連する複数のショットの複数のCADデータから対応するデータ像をそれぞれ事前に切り出して合成し、デザインテンプレートを作成する方法が考えられる。しかし、この方法は、CADデータに対する編集作業をユーザ自身が行わなければならず、全てのグローバルアライメント点を作成するこは、手間がかかり現実的でない。また、従来手法では、グローバルアライメント点の登録の際に、ユーザ自身がCADデータを参照し、目標とする座標値を直接入力する必要があった。
【課題を解決するための手段】
【0010】
本発明は、重複露光時に1つのアライメントマークを構成する部分パターンが複数のショットに分割されている場合に、各アライメントマークに関連する複数のショットのCADデータを相互の位置関係に応じて合成し、アライメントマークの完成形を含む合成CADデータを自動的に作成する方法を提案する。
【発明の効果】
【0011】
本発明により、重複露光時に1つのアライメントマークを構成する部分パターンが複数のショットに分割されている場合でも、ユーザの負担無しにアライメントマークの完成形を含む合成CADデータを自動的に作成できる。
【図面の簡単な説明】
【0012】
【図1】測長走査型電子顕微鏡(CD−SEM)の概要構成例を説明する図。
【図2】半導体ウェーハに対する電子線の照射態様と電子線によって検出される画像を説明する図。
【図3】撮像シーケンスを説明するフローチャートと低倍画像上の各種視野位置の一例を示す図。
【図4】複数ショットの重ね合わせ例を示す図。
【図5】合成CADデータの作成シーケンスを説明するフローチャート。
【図6】グローバルアライメント点の登録シーケンスを説明するフローチャート。
【発明を実施するための形態】
【0013】
以下、図面に基づいて、本発明の実施の形態を説明する。なお、後述する装置構成や処理動作の内容は一例であり、実施の形態と既知の技術との組み合わせや置換により他の実施の形態を実現することもできる。
【実施例】
【0014】
(基本情報)
半導体ウェーハ上に配線パターンを形成する場合、以下に示す処理が順番に実行される。まず、半導体ウェーハの表面にレジストと呼ばれる塗布材が塗布され、その上に配線パターンに対応する露光用マスク(レチクル)が重ねるように配置される。その後、レチクルの上方から可視光線、紫外線又は電子ビームを照射してレジストを感光し、感光パターンと非感光パターンを形成する。この後、形成されたパターンに基づいて半導体ウェーハの表面を加工し、配線パターンを形成する。
【0015】
形成された配線パターンの形状は、照射する可視光線、紫外線又は電子ビームの強度や絞りにより変化する。このため、高精度の配線パターンを形成するには、パターンの出来栄えを検査する必要がある。
【0016】
この検査には、CD−SEMが用いられる。通常、測定を要する半導体パターン上の危険ポイントを、評価ポイント(以下、「EP」という。)としてCD−SEMで観察し、その観察画像からパターンの配線幅等の各種寸法値を計測する。ユーザは、計測された寸法値に基づいてパターンの出来栄えを評価する。
【0017】
EPを位置ずれなく、かつ、高画質で撮像するには、アドレッシングポイント(以下、「AP」という。)、オートフォーカスポイント(以下、「AF」という。)、オートスティグマポイント(以下、「AST」という。)、又はオートブライトネス・コントラストポイント(以下、「ABCC」という。)の一部又は全ての撮像ポイントを設定し、それぞれの撮像ポイントにおいてアドレッシング、オートフォーカス調整、オートスティグマ調整、オートブライトネス・コントラスト調整等を実行する。
【0018】
アドレッシング時における撮像位置のずれ量は、事前に登録テンプレートとして登録された座標既知のAPにおけるSEM画像と、実際の撮像シーケンスにおいて観察されたSEM画像(実撮像テンプレート)とのマッチングによる位置ずれ量として推定する。
【0019】
以下、EP、AP、AFC、AST、ABCCをまとめて撮像ポイントと呼ぶ。また、撮像ポイントの一部又は全てを含むポイントの座標、サイズ・形状、撮像シーケンス、撮像条件、登録テンプレートは、撮像レシピとして管理される。
【0020】
従来、撮像レシピの生成は、オペレータ自身が手動で行っており、多大な労力と時間を要している。また、各撮像ポイントの決定や登録テンプレートの撮像レシピへの登録には、実際に半導体ウェーハを低倍率で撮像する必要があり、撮像レシピの生成がSEMの稼働率低下の一因となっている。更に、パターンの微細化に伴うOPC(Optical Proximity Correction)技術等の導入により、評価を要するEPの点数は爆発的に増加し、撮像レシピのマニュアル生成は非現実的になりつつある。
【0021】
そこで、低倍率視野での半導体ウェーハ上のパターンの設計情報である回路設計データ(以下、「CADデータ(Computer Aided Design)」という。)に基づいて、EPを観察するための撮像パラメータやAPテンプレート等を登録する半導体検査システムの適用が望まれている。ここで、撮像パラメータには、撮像ポイント(AP、AFC、AST、ABCC)の(a1)点数、(a2)座標、(a3)サイズ・形状、(a4)撮像シーケンス(EPや撮像ポイントの撮像順序、電子ビーム垂直入射座標を含む。)、(a5)撮像位置変更方法(ステージシフト、ビームシフト)、(a6)撮像条件(プローブ電流、加速電圧、電子ビームのスキャン方向など)、(a7)撮像シーケンス又はテンプレートの評価値又は優先順位の一部又は全ての撮像パラメータを含む。
【0022】
この半導体検査システムでは、入力情報として、(b1)評価ポイント情報としてのEPの座標、サイズ・形状、撮像条件、(b2)設計パターン情報としてのEP周辺のCADデータ(レイヤー情報を含む。)、マスクデータのパターン抜き残し情報、パターンの線幅情報、撮像するウェーハの品種、工程、パターンや下地の材質情報、(b3)撮像レシピ自動生成エンジンの処理パラメータとしての撮像ポイント(AP、AF、AST、ABCC)の探索範囲、撮像ポイントが満たすべき選択要素指標値の必要条件(指標値の閾値等で与えられる。)、選択要素指標優先順位(指標値間の重み等で与えられる。)、撮像ポイントとして選択してはならない禁止領域、設計パターンと実パターンとの形状乖離推定量、装置条件(ステージシフト範囲、ステージシフト/ビームシフト推定誤差)、(b4)ユーザ要求仕様としての各撮像ポイントに対する撮像位置の要求位置決め精度、要求画質(フォーカス調整、スティグマ調整、ブライトネス・コントラスト調整、コンタミネーションに関する要求やEPにおける許容電子ビーム入射角に関する要求を含む。)、要求撮像時間、(b5)履歴情報(過去に成功したまたは失敗した撮像ポイントの情報等)の何れかを含むようにした。
【0023】
更に、前述した入力情報(b1)〜(b5)に加え、前述した出力情報(撮像パラメータ)(a1)〜(a7)の一部の値又はデフォルト値・設定可能範囲を入力情報とするようにした。すなわち、前述した出力情報(a1)〜(a7)と入力情報(b1)〜(b5)から任意のパラメータの組み合わせを入力情報とし、前述した出力情報(a1)〜(a7)の任意のパラメータの組み合わせを出力情報として記録する機能を有する。
【0024】
一方で、CD−SEMを用いて半導体ウェーハ上の複数の測長ポイントを順次撮像する際に使用する撮像レシピを生成する場合、以下のような課題が考えられる。まず、EPにおける半導体パターンの出来栄えを検査するためには、EPを撮像するための撮像レシピを作成しなければならないが、半導体パターンの微細化に伴い検査を要するEPの点数が増大し、撮像レシピの生成に膨大な労力と時間が必要とされている。なお、撮像レシピの自動生成に関する文献も見受けられるが、EP座標、サイズ、撮像条件等に関しては、SEMオペレータの手動作業が前提とされており、SEMオペレータの作業時間の低減には至っていない。
【0025】
続いて、予め観察箇所が指定されたデバイスに基づいて、CD−SEMのスループットを向上するために、撮像レシピに登録するEPを電気特性解析が可能な範囲で網羅的に配置する技術を説明する。予め観察箇所が指定されたデバイスに基づいて、EP(測定のためのFOV)を設定する手法の具体例は以下の通りである。
【0026】
(i)レシピ作成方法においては、CADデータ上に予め観察箇所が選択されたデバイスに基づいてEPを観察するための撮像レシピを生成する。その出力情報として、EPを観察するための撮像範囲(FOV)がデバイス形状を全て包含する評価ポイントEPの(a1)座標(位置)、(a2)点数、(a3)サイズ・形状を自動算出し、撮像レシピに登録する。
【0027】
(ii)入力情報は、(b1)測長ポイント情報として、デバイス構成情報(座標、接続情報、図形情報)、輪郭線抽出パラメータ、(b2)ユーザ要求仕様として、デフォルトとしてのEPサイズ、(b3)EPサイズの最適化有無等を任意のパラメータの組み合わせを入力情報とし、前述した(a1)〜(a3)の任意のパラメータの組み合わせを出力情報とする。
【0028】
前述した具体例の適用により、以下のような効果が得られる。
(i)回路動作上、高い信号伝送精度が要求されるためにパターンの仕上がりに要求される精度が厳しい高ペア性デバイスやクリティカルパス部の電気的特性の検証を実施することにより、付着物もなく一見すると設計データに近い形状に仕上がっているにも関わらず動作異常の原因となるような欠陥を、製造プロセスで早期に発見することができる。
【0029】
(ii)SEMオペレータを介在することなく、EPにおけるコンタミネーションの発生を抑えることが可能であり、高精度な撮像レシピを短時間に生成できる。(CD−SEMの構成例)
【0030】
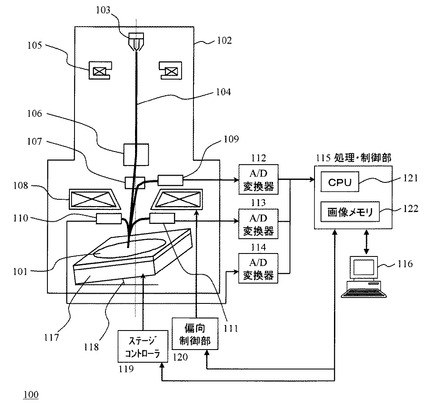
図1に、測長走査型電子顕微鏡(Critical Dimension Scanning Electron Microscope:CD−SEM)の概略構成を示す。CD−SEMは、本発明に係るアライメントデータ作成システムの適用例の一つである。CD−SEMは、半導体ウェーハ(試料)の二次電子像(Secondary Electron:SE像)又は反射電子像(Backscattered Electron:BSE像)を取得する電子線装置の一つである。以下では、SE像とBSE像を総称してSEM画像と呼ぶ。また、SEM画像には、測定対象を垂直方向から観察したトップダウン画像、任意の傾斜角方向から観察したチルト画像の一部又は全てを含むものとする。
【0031】
CD−SEM100は、電子光学系102、ステージ駆動系、信号処理系で構成される。電子銃103で発生された一次電子104は、電子線としてコンデンサ105、偏向器106、対物レンズ108を順に通過してステージ117に載置された測定試料としての半導体ウェーハ101に照射される。偏向器106と対物レンズ108は、電子線が半導体ウェーハ101上の任意の位置に焦点を結んで照射されるように、電子線の照射位置と絞りを制御する。電子線の照射位置からは二次電子と反射電子が放出される。なお、二次電子と反射電子の軌道は、E×B偏向器107により一次電子104の軌道から分離される。このうち、二次電子は二次電子検出器109により検出され、反射電子は反射電子検出器110、111により検出される。反射電子検出器110と111とは互いに異なる方向に設置されている。二次電子検出器109及び反射電子検出器110、111で検出された二次電子及び反射電子は、それぞれ対応するA/D変換機112、113、114でデジタル信号に変換され、SEM画像として画像メモリ122に格納される。なお、この実施例における画像メモリ122はSEM画像だけでなく、各ショットに対応するCADデータ、グローバルアライメント点の登録座標データ、撮像レシピその他のアライメントに関連するデータ(以下、「アライメントデータ」ともいう。)も記憶する。CPU121は、目的に応じて画像メモリ122のデジタル信号を画像処理する。このCPU121の処理には、後述するアライメントデータの作成処理やグローバルアライメント点の登録処理も含まれる。
【0032】
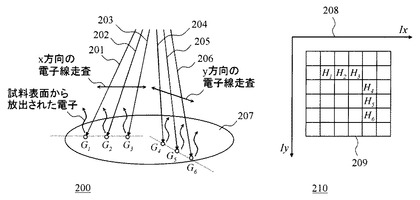
図2に、半導体ウェーハ207の表面を電子線201〜206で走査した場合に、半導体ウェーハ207の表面から放出される電子の信号量を画像化する方法を示す。斜視図200は、x方向に走査される電子線201〜203と、y方向に走査される電子線204〜206とを示す。電子線の偏向方向(走査方向)は、偏向器106によって変更することができる。斜視図200では、x方向に走査された電子線201〜203が照射した半導体ウェーハ207上の場所をそれぞれG1 〜G3 で示す。同様に、斜視図200では、y方向に走査された電子線204〜206が照射した半導体ウェーハ207上の場所をそれぞれG4 〜G6 で示す。G1 〜G6 において放出された電子の信号量は、平面図210内に示した画像209における画素H1 〜H6 の明度6値になる(G、Hの添え字1〜6は互いに対応する)。なお、平面図210には、画像上のx,y方向を示す座標系208も示す。
【0033】
前述したCPU121と画像メモリ122は処理・制御部115を構成する。処理・制御部115には、カーソル操作や情報入力のために不図示の入力装置が接続される。処理・制御部115はコンピュータシステムとして機能し、撮像レシピに基づいて所定の撮像ポイントが撮像されるようにステージコントローラ119や偏向制御部120を制御する、又は、半導体ウェーハ101上の任意の撮像ポイントについて取得された撮像画像に対する各種の画像処理や制御を行う。ここでの撮像ポイントには、AP、AFC、AST、ABCC、EPの一部又は全てが含まれる。また、処理・制御部115は、ディスプレイ116の画面上に撮像画像やレシピ設定画像等を表示するGUI(Graphic User Interface)表示機能も備える。
【0034】
XYステージ117は、ステージコントローラ119の制御に基づいて、xyzの各軸方向に移動又は各軸を中心に回転駆動される。XYステージ117の駆動制御により、半導体ウェーハ101は一次電子104による観察位置や観察方向を変更することができる。すなわち、半導体ウェーハ101上の観察位置を任意に変更できる。なお、XYステージ117による観察位置の変更をステージシフトと呼び、偏向器106による観察位置の変更をビームシフトと呼ぶ。一般に、ステージシフトは、可動範囲は広いが撮像位置の位置決め精度が低い。反対に、ビームシフトは、可動範囲は狭いが撮像位置の位置決め精度が高いという性質がある。
【0035】
図1では反射電子像の検出器を2つ備える実施例を例示しているが、反射電子像の検出器の数は1つでも3つ以上でも良い。また、この実施例における処理・制御部115は、後述する処理手順により撮像レシピの自動生成や作成された撮像レシピに基づくSEM装置の制御及び撮像を実行する。もっとも、これらの処理や制御の一部又は全てを複数台のコンピュータシステムに割り振って実行することもできる。
【0036】
なお、SEM100を用いて測定対象を任意の傾斜角方向から観察したチルト画像を得る方法には(i)電子光学系より照射する電子線を偏向し、電子線の照射角度を傾斜させて傾斜画像を撮像する方式(例えば特開2000−348658号)、(ii)半導体ウェーハを移動させるXYステージ117それ自体を傾斜させる方式(図1は、ステージチルト角118だけXYステージ117を傾斜させた様子を表している。)、(iii)電子光学系自体を機械的に傾斜させる方式等がある。
【0037】
(撮像レシピに基づいた撮像シーケンス)
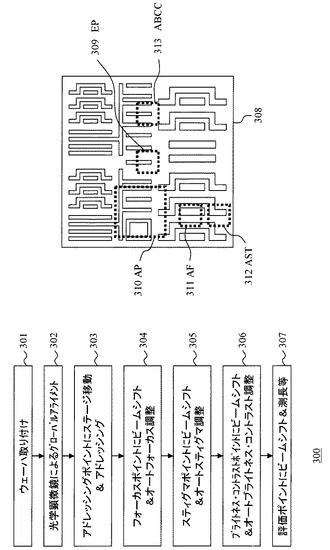
図3に、任意のEPを観察する際に実行される代表的な撮像シーケンス300を示す。撮像シーケンス300における撮像ポイント、撮像順序、撮像条件は、撮像レシピにより指定する。まず、ステップ301において、試料である半導体ウェーハ101が、XYステージ117上に載置される。ステップ302では、光学顕微鏡(OM)等でウェーハ上のグローバルアライメントマークを観察することにより、半導体ウェーハの原点ずれや半導体ウェーハの回転ずれを補正する。
【0038】
ステップ303では、処理・制御部115によるXYステージ117の移動制御により、撮像位置をAPに移動して撮像する。処理・制御部115は、撮像画像に基づいてアドレッシングのためのパラメータを求め、求められたパラメータによりアドレッシング処理を実行する。ここで、APについて説明を加えておく。EPを観察する場合、ステージシフトによりEPを直接観察しようとすると、XYステージ117の位置決め精度により、撮像ポイントが大きくずれてしまう危険性がある。
【0039】
そこで、まず位置決めのために、撮像ポイントの座標値がテンプレート(撮像ポイントのパターン)として与えられるAPを観察する。テンプレートは撮像レシピに登録されている。このため、以下では、登録テンプレートと呼ぶ。APはEPの近傍(最大でもビームシフトにより移動可能な範囲)から選択する。また、APは、EPに対して一般に低倍率視野である。このため、多少の撮像位置のずれに対しても、撮像したいパターンの全てが視野の外になる危険性は低い。そこで、予め登録されたAPの登録テンプレートと実際に撮像されたAPのSEM画像(実撮像テンプレート)をマッチングすることにより、APにおける撮像ポイントの位置ずれ量を推定する。
【0040】
APやEPの座標値は既知である。従って、APとEP間の相対変位量を求めることができる。また、APにおける撮像ポイントの位置ずれ量もマッチングにより推定することができる。このため、相対変位量から位置ずれ量を差し引くことで、実際に移動すべきAP撮像位置からEPまでの相対変位量を求めることができる。相対変位量分だけ、位置決め精度の高いビームシフトにより撮像ポイントを移動することにより、高い座標精度でEPを撮像することが可能となる。
【0041】
登録されるAPは、(i)EPからビームシフトにより移動可能な距離に存在するパターンであり(EPにおけるコンタミネーションの発生を抑えるためAP撮像時の範囲(Field of view:FOV)にEP撮像時のFOVを含まないことを追加条件とする場合もある)、(ii)APの撮像倍率はステージの位置決め精度を加味してEPの撮像倍率よりも低く、(iii)パターン形状又は明度パターンが特徴的であり、登録テンプレートと実撮像テンプレートとのマッチングが容易等の条件を満たしていることが望ましい。
【0042】
なお、APの選択には、SEMオペレータの手動設定が一般に用いられているが、APの選択と撮像シーケンスの決定を自動化しても良い。登録されるAPの画像テンプレートには、CAD画像、SEM画像を使用する。なお、特開2002−328015号公報に開示されるように、画像テンプレートの登録のためだけの撮像を避けるため、CADデータを画像テンプレートとして仮登録しておき、APを実際に撮像した際に取得されたSEM画像を画像テンプレートとして再登録する等のバリエーションが考えられる。
【0043】
前述のAP選択範囲について補足する。一般に、電子ビーム垂直入射座標は、EPの中心座標に設定される。このため、APの選択範囲は、最大でもEPを中心としたビームシフト可動範囲としたが、電子ビームの垂直入射座標がEPの中心座標と異なる場合には、当該垂直入射座標からビームシフト可動範囲が選択範囲となる。また、撮像ポイントに要求される許容電子ビームの入射角によっては、電子ビームの垂直入射座標から探索範囲もビームシフト可動範囲より小さくなることがある。これらは他のテンプレートについても同様である。
【0044】
次のステップ304では、処理・制御部115の制御によるビームシフトにより、撮像位置をAFに移動して撮像する。処理・制御部115は、撮像画像に基づいてオートフォーカス調整のためのパラメータを求め、求められたパラメータによりオートフォーカス調整を実行する。AFについても説明を追加する。オートフォーカスは、撮像時に鮮明な画像を取得するために行うが、試料である半導体ウェーハに電子線を長く照射すると、汚染物質が付着してしまう。そこで、EPに対するコンタミネーションの付着を抑えるため、EP周辺の座標をAFとして予め観察し、オートフォーカスのためのパラメータを求め、求めたパラメータに基づいてEPを観察するという手法が用いられる。そのため、登録されるAFは、(i)AP及びEPからビームシフトにより移動可能な距離に存在するパターンであり、かつ、AF撮像時のFOVにEP撮像時のFOVが含まれない、(ii)AFの撮像倍率はEPの撮像倍率と同程度である(ただし、これはEP用のAFの場合であり、AP用のAFの場合は前記APの撮像倍率と同程度の撮像倍率でAFを撮像する。後述するAST、ABCCに関しても同様)、(iii)オートフォーカスが容易なパターン形状を有する(フォーカスずれに起因する像のボケを検出し易い)等の条件を満たしていることが望ましい。
【0045】
次のステップ305では、処理・制御部115の制御によるビームシフトにより、撮像位置をASTに移動して撮像する。処理・制御部115は、撮像画像に基づいてオートスティグマ調整のためのパラメータを求め、求められたパラメータによりオートスティグマ調整を実行する。ASTについても説明を追加する。非点収差補正は、撮像時に歪みのない画像を取得するために行うが、AFの場合と同様、試料に電子線を長く照射すると汚染物質が付着してしまう。そこで、EPにおけるコンタミネーションの付着を抑えるため、EP周辺の座標をASTとして予め観察し、非点収差補正のためのパラメータを求め、求めたパラメータに基づいてEPを観察するという手法が用いられる。そのため、登録されるASTは、(i)AP及びEPからビームシフトにより移動可能な距離に存在するパターンであり、かつ、AST撮像時のFOVにEP撮像時のFOVが含まれない、(ii)ASTの撮像倍率はEPの撮像倍率と同程度である、(iii)非点収差補正が容易なパターン形状を有する(非点収差に起因する像のぼけを検出し易い)等の条件を満たしていることが望ましい。
【0046】
次のステップ306では、処理・制御部115の制御によるビームシフトにより、撮像位置をABCCに移動して撮像する。処理・制御部115は、撮像画像に基づいてブライトネス・コントラスト調整のためのパラメータを求め、求められたパラメータによりオートブライトネス・コントラスト調整を実行する。ABCCについても説明を追加する。オートブライトネス・コントラスト調整は、撮像時に適切な明度値及びコントラストを有する鮮明な画像を取得するために行う。例えば二次電子検出器109におけるフォトマルチプライヤ(光電子増倍管)の電圧値等のパラメータを調整することより、例えば画像信号の最も高い部分と最も低い部分が、フルコントラスト又はそれに近いコントラストになるように設定する。しかし、AFの場合と同様、試料に電子線を長く照射すると、汚染物質が付着してしまう。そこで、EPにおけるコンタミネーションの付着を抑えるため、EP周辺の座標をABCCとして予め観察し、ブライトネス・コントラスト調整のためのパラメータを求め、求めたパラメータに基づいてEPを観察するという手法が用いられる。そのため、登録されるABCCは、(i)AP及びEPからビームシフトにより移動可能な距離に存在するパターンであり、かつ、ABCC撮像時のFOVにEP撮像時のFOVが含まれない、(ii)ABCCの撮像倍率はEPの撮像倍率と同程度である、(iii)ABCCにおいて調整したパラメータを用いて測長ポイントにおいて撮像した画像のブライトネスやコントラストが良好であるために、ABCCは測長ポイントにおけるパターンに類似したパターンである等の条件を満たしていることが望ましい。
【0047】
なお、前述したステップ303、304、305及び306におけるAP、AF、AST、ABCCの撮像は、場合により一部若しくは全てが省略される、又は、ステップ303、304、305、306の実行順番が任意に入れ替わる、又は、AP、AF、AST、ABCCの座標で重複するものがある(例えばオートフォーカスとオートスティグマを同一箇所で行う)等のバリエーションがある。
【0048】
最後のステップ307では、処理・制御部115の制御によるビームシフトにより、撮像ポイントをEPに移動して撮像する。処理・制御部115は、例えば設定した測長条件に基づいてパターンの測長その他の処理を行う。なお、EPにおいても、新たに撮像したSEM画像と、事前に登録しておいた登録テンプレート(撮像レシピに登録されているEPに対応する画像)等との間でマッチングを行い、計測位置のずれを検出することがある。撮像レシピには、前述した撮像ポイント(EP、AP、AF、AST、ABCC)の座標や撮像シーケンス、撮像条件等の情報が書き込まれている。SEMは、撮像レシピに基づいてEPを観察する。
【0049】
なお、図3では、低倍像308について、EP309、AP310、AF311、AST312、ABCC313のテンプレート上での位置関係や倍率の違いを点線枠で図示している。
【0050】
(合成CADデータの作成)
前述したように、アライメントマークは、半導体ウェーハを素子形成領域として有効活用するために、スクライブ領域に形成される。また、各ショット間の位置ずれを検出するために、1つのアライメントマークを複数のショットに跨るように配置することがある。この実施例では、1つのアライメントマークが複数のショットに跨ることを、隣接する複数ショットの縁部又は隅部同士を重複的に露光すると1つのアライメントマークを完成させるような部分パターンが、各ショットの縁部や隅部に分割して配置されている状態をいう。なお、部分パターンの形状は、1つのアライメントマークに対応する複数のショット間でそれぞれが互いに異なっている。
【0051】
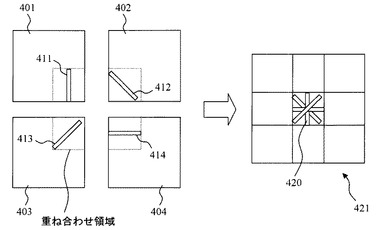
図4に、この種のアライメントマークの一例を示す。図4は、矩形形状の4つのショット401〜404の各1つの隅(角)に配置された4つの部分パターン411〜414を重ね合わせて1つのアライメントマーク420を形成する例を示す。なお、図4におけるショット401〜404は、いずれもショット全体を現すものでなく、説明の都合上、着目する1つのアライメントマークに関連する4隅を拡大して表したものである。従って、ショット401はショット全体の右下隅を拡大した図、ショット402はショット全体の左下隅を拡大した図、ショット403はショット全体の右上隅を拡大した図、ショット404はショット全体の左上隅を拡大した図を表している。
【0052】
なお、1つのショットだけを用いてレシピを作成する従来手法では、部分パターン411〜414の一つだけを用いてアライメントを行うか、SEMオペレータが手作業でこれら4つの部分パターン411〜414を合成し、アライメントマーク420を完成させる必要があった。
【0053】
以下では、アライメントマーク420を含む合成CADデータ421を自動的に作成する動作例を説明する。なお、以下の説明では、1つのアライメントマークが4つの部分パターンの合成によって構成される場合について説明するが、1つのアライメントマークは2つ以上の部分パターンの合成で構成されていれば良い。また、以下の説明では、1つのショット上には4隅に1つずつ計4つの部分パターンが形成されている場合について説明するが、1つのショット上に形成される部分パターンの数は1つ以上であれば良い。また、以下の説明では、各ショットの4隅に部分パターンが配置されるものとして説明するが、部分パターンは隣接する他のショットの重複露光が可能なスクライブ領域上であれば、どの場所に配置されていても良い。
【0054】
前述したように、アライメントマークは、隣接するショットを切り離すためのスクライブ領域に形成する。従って、隣接関係にある4つのショットの各CADデータからアライメントマークを含む合成CADデータ421を生成する場合、隣接ショットのスクライブ領域までの大きさとして作成すれば良いことが分かる。
【0055】
合成CADデータの生成の方法には、次に述べるバリエーションがあり、それぞれの作成方法は、必要に応じて選択可能である。なお、以下に列記する4つの生成方法のうち(iii)と(iv)に示す方法を選択した場合には、CADデータの合成に重ね幅を入力する等のユーザの操作を必要としない。従って、これらの生成方法を採用する場合には、合成CADデータの生成に係る全ての処理を自動化することができる。
【0056】
(i)SEMオペレータ(ユーザ)が、各ショットに対応するCADデータのそれぞれについて、隣接する他のショットとの重なり合う上下左右の4隅のサイズを個別に指定し、その入力情報に基づいて4つのCADデータを合成する。
【0057】
(ii)各ショットに対応するCADデータの画像が表示されているレシピ設定画面等の画面上において、マウスのドラッグ操作などを通じてCADデータに対応する各画像(それぞれ異なる部分パターンが形成されている。)を移動させ、1つのアライメントマークを完成させる。1つのアライメントマークが完成すると、CPU121は、各CADデータの移動後の位置座標に基づいて重ね位置を特定し、重ね位置で4枚のCADデータを合成する。
【0058】
(iii)スクライブ領域内で閉経した図形(例えば三角形、四角形等)が重なって1つのアライメントマークが作成される場合、CPU121の演算によって閉経図形の重心又は中心座標を算出し、重心又は中心座標の距離を重ね合わせ幅の情報として用い、CADデータを合成する。換言すると、閉経図形の重心又は中心座標が一致するよう4つのCADデータを合成する。
【0059】
(iv)CD−SEMでアライメントマークを撮像したOM像を取り込み、スクライブ領域の重ね幅を少しずつ調整しながら、スクライブ領域内からOM像とマッチする位置を探索し、相関値を求める。相関値がある閾値以上又はユーザが任意に指定した閾値より高いものが存在した場合、最も評価値が高かった重ね幅でCADデータを合成する。ここでは、CD−SEM上で撮像したOM像の代わりに、ユーザが作成したグローバルアライメントマークの画像ファイルを用いることも考えられる。
【0060】
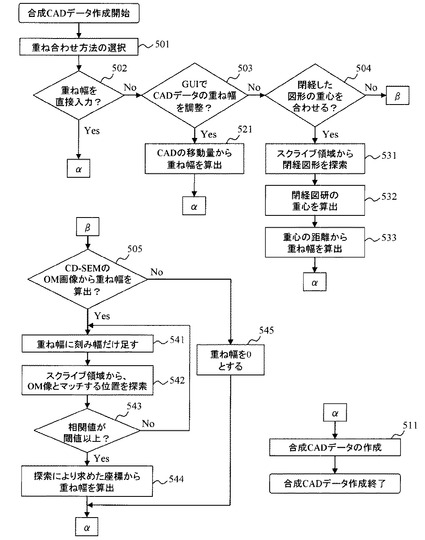
図5に、アライメントマーク420を含む合成CADデータの自動作成シーケンスの一例を示す。なお、図5に示す処理シーケンスは、CPU121で実行されるプログラムを通じて実現される。まず、CPU121は、ステップ501において、CADデータの重ね合わせ方法の選択を受け付ける。重ね合わせ方法には、前述した(i)〜(iv)がある。
【0061】
まず、重ね幅の直接入力が選択された場合(ステップ502で肯定結果の場合)、CPU121は、入力された重ね幅に基づいて4つのショットに対応するCADデータを合成し、重ね合わせ部分にアライメントマークの完成形を含む合成CADデータを作成する(ステップ511)。
【0062】
これに対し、GUI上でのCADデータの重ね幅の調整入力が選択された場合(ステップ503で肯定結果の場合)、CPU121は、画面上における各CADデータに対応する画像の移動量に基づいて重ね幅を算出する(ステップ521)。重ね幅が算出されると、CPU121は、算出された重ね幅に基づいて4つのショットに対応するCADデータを合成し、重ね合わせ部分にアライメントマークの完成形を含む合成CADデータを作成する(ステップ511)。
【0063】
これに対し、閉経した図形の重心を自動的に合わせる手法が選択された場合(ステップ504で肯定結果の場合)、CPU121は、各ショットのスクライブ領域に対応するCADデータから閉経図形を探索し(ステップ531)、閉経図形の重心を算出する(ステップ532)。この後、CPU121は、隣接する4つのショットのそれぞれについて算出された閉経図形の重心間の距離に基づいて重ね幅を算出する(ステップ533)。重ね幅が算出されると、CPU121は、算出された重ね幅に基づいて4つのショットに対応するCADデータを合成し、重ね合わせ部分にアライメントマークの完成形を含む合成CADデータを作成する(ステップ511)。
【0064】
これに対し、CD−SEMが搭載する光学顕微鏡で撮像されたグローバルアライメントマーク(OM像)に基づいて重ね幅を自動算出する手法が選択された場合(ステップ505で肯定結果の場合)、CPU121は、スクライブ領域の重ね幅の現在値(例えば初期値はゼロ)に刻み幅を加算し(ステップ541)、更新後の重ね幅だけCADデータの重ね幅を調整する。なお、OM像ではなく、メモリに格納されているグローバルアライメントマークの画像ファイルを用いても良い。その後、CPU121は、重ね幅だけ重複されたスクライブ領域の合成画像についてOM像とのマッチング処理を実行する(ステップ542)。次に、CPU121は、探索された領域とOM像との相関値が閾値以上か否かを判定し(ステップ543)、否定結果が得られている間は、相関値が閾値を超えるまで刻み幅ずつ重ね幅を調整する。OM像との相関値が閾値以上となると、その際のCADデータの座標に基づいて重ね幅を算出する(ステップ544)。もっとも、閾値以上の相関値が得られても重ね幅の更新を継続し、最終的に最も高い相関値が得られる重ね幅を最適値に決定しても良い。重ね幅が算出されると、CPU121は、算出された重ね幅に基づいて4つのショットに対応するCADデータを合成し、重ね合わせ部分にアライメントマークの完成形を含む合成CADデータを作成する(ステップ511)。
【0065】
なお、上述した4つのいずれでも無い場合(ステップ505で否定結果の場合)、CPU121は、重ね幅をゼロに設定する。その後、CPU121は、重ね幅がゼロのまま4つのショットに対応するCADデータを合成し、重ね合わせ部分にアライメントマークの完成形を含む合成CADデータを作成する(ステップ511)。
【0066】
(グローバルアライメント情報の登録)
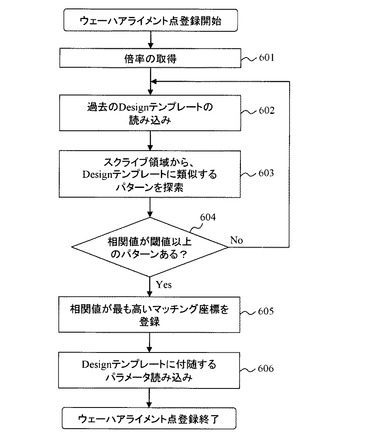
従来手法におけるグローバルアライメント点の登録は、ユーザ自身による手入力であった。これに対し、本実施例では、グローバルアライメント点の登録を自動化することができる。図6に、グローバルアライメント点の自動登録時の処理シーケンスを示す。なお、図6に示す処理シーケンスは、CPU121で実行されるプログラムを通じて実行される。因みに、過去に使用したグローバルアライメント点のデザイン(Design)テンプレート及びその時に使用したパラメータ情報がファイルとして出力され、CD−SEM100の画像メモリ122等に保持されているものとする。
【0067】
まず、ステップ601では、ユーザが入力した倍率が、CPU121により取得される。次のステップ602において、CPU121は、過去に使用されたグローバルアライメント点のデザインテンプレートとそのパラメータ情報を読み出す。ここでのデザインテンプレートは、過去に作成された合成CADデータからグローバルアライメント点とその周辺の画像を切り出したものが使用される。
【0068】
この後、CPU121は、取得された倍率に従って、半導体ウェーハのスクライブ領域又はユーザが指定した領域に対応する合成CADデータと、過去に使用されたグローバルアライメント点のデザインテンプレート(前述の通り、過去に生成された合成CADデータから切り出されたCADデータ)とを照合し、類似度の高いパターンを探索する(ステップ603)。
【0069】
次のステップ604では、検出された類似パターンの1つでも、デザインテンプレートとの相関値が閾値以上であるか否かが、CPU121において判定される。このステップ604において否定結果が得られた場合、CPU121はステップ602の処理に戻り、別のデザインテンプレートに対して同様の探索動作を実行する。一方、ステップ604において肯定結果が得られた場合、CPU121はステップ605に進み、最も高い相関値が得られたパターンの座標をマッチング座標として登録する。すなわち、グローバルアライメント点として登録する。
【0070】
この後、ステップ606において、CPU121は、グローバルアライメント点のパラメータとして、過去のデザインテンプレートで使用されたパラメータを設定する又は別のパラメータ情報のファイルを設定する。このように、この実施例では、自動生成された合成CADデータを用いることで、グローバルアライメント点の登録も自動化することができる。
【0071】
(撮像レシピの作成)
前述したように、撮像レシピは、撮像ポイントの一部又は全てを含むポイントの座標、サイズ・形状、撮像シーケンス、撮像条件、デザインテンプレートとして管理される。この実施例の場合、合成CADデータの生成処理やグローバルアライメント点の登録処理の一部又は全部を自動化できる。この際、自動生成される合成CADデータやグローバルアライメント点の一部又は全てに対応するポイントの座標、サイズ・形状、撮像シーケンス、撮像条件を撮像レシピに自動登録することにより、撮像レシピの自動生成を実現できる。
【0072】
(他の実施例)
前述の説明では、測長走査型電子顕微鏡(CD−SEM)に、合成CADデータの自動作成機能、グローバルアライメント点の自動登録機能、撮像レシピの自動作成機能を搭載する場合について説明した。しかし、合成CADデータの自動作成機能、グローバルアライメント点の自動登録機能、撮像レシピの自動作成機能の一部又は全部は、レシピ作成システムに搭載されていても良いし、いわゆるCADシステムに搭載されていても良い。
【符号の説明】
【0073】
100…CD−SEM、101…半導体ウェーハ、102…電子光学系、103…電子銃、104…一次電子、105…コンデンサ、106…偏向器、107…ExB偏向器、108…対物レンズ、109…二次電子検出器、110、111…反射電子検出器、112、113、114…A/D変換器、115…処理・制御部、116…ディスプレイ、117…XYステージ、118…ステージチルト角、119…ステージコントローラ、120…偏向制御部、121…CPU、122…画像メモリ、201〜206…電子線、207…半導体ウェーハ、208…座標系。
【技術分野】
【0001】
本発明は、走査型電子顕微鏡で使用する撮像レシピを作成する際のユーザの負担を軽減する技術に関する。
【背景技術】
【0002】
半導体ウェーハ上のデバイスパターン又は配線パターンは、一般に以下に示す手順により形成される。まず、半導体ウェーハの表面にレジストと呼ばれる塗布材を塗布する。次に、レジスト上にパターン形状に加工された露光用マスク(レチクル)を重ねるように配置し、可視光線、紫外線などで露光する。この後、レジストに形成された感光パターンに基づいて所定のパターンを半導体ウェーハの表面に形成する。
【0003】
ところで、これらの手順により形成されるパターンの形状は、照射する電子線の強度や絞りにより変化する。このため、高精度のパターンを形成するには、パターンの出来栄えを検査する必要がある。この検査には、測長走査型電子顕微鏡(Critical Dimension Scanning Electron Microscope:CD−SEM)が広く用いられる。一般には、検査を要する半導体パターン上の任意の評価ポイントの画像をCD−SEMで観察し、その観察画像からパターンの幅の寸法や形状データを取得することにより、パターンの出来栄えを評価する。
【0004】
CD−SEMにより半導体ウェーハに形成されたパターンの形状を評価するには、評価ポイントの位置、倍率、画質を指定するレシピの作成が必要である。従来、レシピはCD−SEMで作成されていたが、近年の高集積化に伴う評価ポイントの大幅な増加により、最近ではCADデータよりレシピを自動生成する手法が主流となりつつある。
【0005】
ところで、リソグラフィ工程では、半導体ウェーハの露光領域を複数のショットに分割し、各ショットの対応領域にレチクルを重ねて露光する手法が採用される。露光時には、半導体ウェーハの各ショット領域に設けられた位置合わせマーク(アライメントマーク)を使用し、半導体ウェーハとレチクル間で高精度の位置合せを実現している。
【0006】
一方、CADデータから作成したレシピをCD−SEMで実行する場合、半導体ウェーハの原点ずれや半導体ウェーハの回転ずれにより、CADデータとSEM像との間に位置ずれが発生する可能性がある。そこで、位置ずれを補正するため、CADデータからアライメントマーク周辺の画像データを切り出して作成したデザイン(Design)テンプレートをCD−SEMに転送し、CD−SEMで光学的に撮像されるOM像とマッチングする手法が用いられる。
【0007】
ところで、アライメントマークは、半導体素子には使用されないパターンである。従って、半導体ウェーハを素子形成用として有効利用する観点から、アライメントマークは、素子形成領域以外のスクライブ領域に形成される。スクライブ領域は、素子形成領域を分離する領域である。露光時には、隣接する複数のショットのスクライブ部同士が互いに重なり合うように位置決めし、その重ね合わせ領域に、複数のショットに分割配置された互いに異なる形状の部分パターンの合成像をアライメントマークとして完成させることにより、完成されたアライメントマークの形状から各ショットの位置ずれを調べる手法が採用されている。
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかし、従来手法では、1つのアライメントマークが複数のショットに分割配置された部分パターンの合成パターンとして作成される場合(以下、「1つのアライメントマークが複数のショットに跨って作成される場合」ともいう。)にも、1ショット分のCADデータのみに基づいてレシピを作成する。すなわち、重複的に露光される他のショットのCADデータを考慮せずにレシピを作成する。このため、デザインテンプレートとして、正確なアライメントマークの表示が不可能であった。また、同様の理由により、CADデータを参照してグローバルアライメント点を登録することができなかった。仮に、グローバルアライメント点の座標が既知であり、グローバルアライメント点を登録できたとしても、デザインテンプレートに対応する正確なアライメントマークをCADデータから形成することができなかった。このため、デザインテンプレートとCD−SEMで光学的に撮像されたOM像との差異が大きく、マッチング精度が低下する問題があった。
【0009】
この問題を解決する手法の一つとして、ユーザ自身が画像編集ソフトなどを使用して、1つのアライメントマークに関連する複数のショットの複数のCADデータから対応するデータ像をそれぞれ事前に切り出して合成し、デザインテンプレートを作成する方法が考えられる。しかし、この方法は、CADデータに対する編集作業をユーザ自身が行わなければならず、全てのグローバルアライメント点を作成するこは、手間がかかり現実的でない。また、従来手法では、グローバルアライメント点の登録の際に、ユーザ自身がCADデータを参照し、目標とする座標値を直接入力する必要があった。
【課題を解決するための手段】
【0010】
本発明は、重複露光時に1つのアライメントマークを構成する部分パターンが複数のショットに分割されている場合に、各アライメントマークに関連する複数のショットのCADデータを相互の位置関係に応じて合成し、アライメントマークの完成形を含む合成CADデータを自動的に作成する方法を提案する。
【発明の効果】
【0011】
本発明により、重複露光時に1つのアライメントマークを構成する部分パターンが複数のショットに分割されている場合でも、ユーザの負担無しにアライメントマークの完成形を含む合成CADデータを自動的に作成できる。
【図面の簡単な説明】
【0012】
【図1】測長走査型電子顕微鏡(CD−SEM)の概要構成例を説明する図。
【図2】半導体ウェーハに対する電子線の照射態様と電子線によって検出される画像を説明する図。
【図3】撮像シーケンスを説明するフローチャートと低倍画像上の各種視野位置の一例を示す図。
【図4】複数ショットの重ね合わせ例を示す図。
【図5】合成CADデータの作成シーケンスを説明するフローチャート。
【図6】グローバルアライメント点の登録シーケンスを説明するフローチャート。
【発明を実施するための形態】
【0013】
以下、図面に基づいて、本発明の実施の形態を説明する。なお、後述する装置構成や処理動作の内容は一例であり、実施の形態と既知の技術との組み合わせや置換により他の実施の形態を実現することもできる。
【実施例】
【0014】
(基本情報)
半導体ウェーハ上に配線パターンを形成する場合、以下に示す処理が順番に実行される。まず、半導体ウェーハの表面にレジストと呼ばれる塗布材が塗布され、その上に配線パターンに対応する露光用マスク(レチクル)が重ねるように配置される。その後、レチクルの上方から可視光線、紫外線又は電子ビームを照射してレジストを感光し、感光パターンと非感光パターンを形成する。この後、形成されたパターンに基づいて半導体ウェーハの表面を加工し、配線パターンを形成する。
【0015】
形成された配線パターンの形状は、照射する可視光線、紫外線又は電子ビームの強度や絞りにより変化する。このため、高精度の配線パターンを形成するには、パターンの出来栄えを検査する必要がある。
【0016】
この検査には、CD−SEMが用いられる。通常、測定を要する半導体パターン上の危険ポイントを、評価ポイント(以下、「EP」という。)としてCD−SEMで観察し、その観察画像からパターンの配線幅等の各種寸法値を計測する。ユーザは、計測された寸法値に基づいてパターンの出来栄えを評価する。
【0017】
EPを位置ずれなく、かつ、高画質で撮像するには、アドレッシングポイント(以下、「AP」という。)、オートフォーカスポイント(以下、「AF」という。)、オートスティグマポイント(以下、「AST」という。)、又はオートブライトネス・コントラストポイント(以下、「ABCC」という。)の一部又は全ての撮像ポイントを設定し、それぞれの撮像ポイントにおいてアドレッシング、オートフォーカス調整、オートスティグマ調整、オートブライトネス・コントラスト調整等を実行する。
【0018】
アドレッシング時における撮像位置のずれ量は、事前に登録テンプレートとして登録された座標既知のAPにおけるSEM画像と、実際の撮像シーケンスにおいて観察されたSEM画像(実撮像テンプレート)とのマッチングによる位置ずれ量として推定する。
【0019】
以下、EP、AP、AFC、AST、ABCCをまとめて撮像ポイントと呼ぶ。また、撮像ポイントの一部又は全てを含むポイントの座標、サイズ・形状、撮像シーケンス、撮像条件、登録テンプレートは、撮像レシピとして管理される。
【0020】
従来、撮像レシピの生成は、オペレータ自身が手動で行っており、多大な労力と時間を要している。また、各撮像ポイントの決定や登録テンプレートの撮像レシピへの登録には、実際に半導体ウェーハを低倍率で撮像する必要があり、撮像レシピの生成がSEMの稼働率低下の一因となっている。更に、パターンの微細化に伴うOPC(Optical Proximity Correction)技術等の導入により、評価を要するEPの点数は爆発的に増加し、撮像レシピのマニュアル生成は非現実的になりつつある。
【0021】
そこで、低倍率視野での半導体ウェーハ上のパターンの設計情報である回路設計データ(以下、「CADデータ(Computer Aided Design)」という。)に基づいて、EPを観察するための撮像パラメータやAPテンプレート等を登録する半導体検査システムの適用が望まれている。ここで、撮像パラメータには、撮像ポイント(AP、AFC、AST、ABCC)の(a1)点数、(a2)座標、(a3)サイズ・形状、(a4)撮像シーケンス(EPや撮像ポイントの撮像順序、電子ビーム垂直入射座標を含む。)、(a5)撮像位置変更方法(ステージシフト、ビームシフト)、(a6)撮像条件(プローブ電流、加速電圧、電子ビームのスキャン方向など)、(a7)撮像シーケンス又はテンプレートの評価値又は優先順位の一部又は全ての撮像パラメータを含む。
【0022】
この半導体検査システムでは、入力情報として、(b1)評価ポイント情報としてのEPの座標、サイズ・形状、撮像条件、(b2)設計パターン情報としてのEP周辺のCADデータ(レイヤー情報を含む。)、マスクデータのパターン抜き残し情報、パターンの線幅情報、撮像するウェーハの品種、工程、パターンや下地の材質情報、(b3)撮像レシピ自動生成エンジンの処理パラメータとしての撮像ポイント(AP、AF、AST、ABCC)の探索範囲、撮像ポイントが満たすべき選択要素指標値の必要条件(指標値の閾値等で与えられる。)、選択要素指標優先順位(指標値間の重み等で与えられる。)、撮像ポイントとして選択してはならない禁止領域、設計パターンと実パターンとの形状乖離推定量、装置条件(ステージシフト範囲、ステージシフト/ビームシフト推定誤差)、(b4)ユーザ要求仕様としての各撮像ポイントに対する撮像位置の要求位置決め精度、要求画質(フォーカス調整、スティグマ調整、ブライトネス・コントラスト調整、コンタミネーションに関する要求やEPにおける許容電子ビーム入射角に関する要求を含む。)、要求撮像時間、(b5)履歴情報(過去に成功したまたは失敗した撮像ポイントの情報等)の何れかを含むようにした。
【0023】
更に、前述した入力情報(b1)〜(b5)に加え、前述した出力情報(撮像パラメータ)(a1)〜(a7)の一部の値又はデフォルト値・設定可能範囲を入力情報とするようにした。すなわち、前述した出力情報(a1)〜(a7)と入力情報(b1)〜(b5)から任意のパラメータの組み合わせを入力情報とし、前述した出力情報(a1)〜(a7)の任意のパラメータの組み合わせを出力情報として記録する機能を有する。
【0024】
一方で、CD−SEMを用いて半導体ウェーハ上の複数の測長ポイントを順次撮像する際に使用する撮像レシピを生成する場合、以下のような課題が考えられる。まず、EPにおける半導体パターンの出来栄えを検査するためには、EPを撮像するための撮像レシピを作成しなければならないが、半導体パターンの微細化に伴い検査を要するEPの点数が増大し、撮像レシピの生成に膨大な労力と時間が必要とされている。なお、撮像レシピの自動生成に関する文献も見受けられるが、EP座標、サイズ、撮像条件等に関しては、SEMオペレータの手動作業が前提とされており、SEMオペレータの作業時間の低減には至っていない。
【0025】
続いて、予め観察箇所が指定されたデバイスに基づいて、CD−SEMのスループットを向上するために、撮像レシピに登録するEPを電気特性解析が可能な範囲で網羅的に配置する技術を説明する。予め観察箇所が指定されたデバイスに基づいて、EP(測定のためのFOV)を設定する手法の具体例は以下の通りである。
【0026】
(i)レシピ作成方法においては、CADデータ上に予め観察箇所が選択されたデバイスに基づいてEPを観察するための撮像レシピを生成する。その出力情報として、EPを観察するための撮像範囲(FOV)がデバイス形状を全て包含する評価ポイントEPの(a1)座標(位置)、(a2)点数、(a3)サイズ・形状を自動算出し、撮像レシピに登録する。
【0027】
(ii)入力情報は、(b1)測長ポイント情報として、デバイス構成情報(座標、接続情報、図形情報)、輪郭線抽出パラメータ、(b2)ユーザ要求仕様として、デフォルトとしてのEPサイズ、(b3)EPサイズの最適化有無等を任意のパラメータの組み合わせを入力情報とし、前述した(a1)〜(a3)の任意のパラメータの組み合わせを出力情報とする。
【0028】
前述した具体例の適用により、以下のような効果が得られる。
(i)回路動作上、高い信号伝送精度が要求されるためにパターンの仕上がりに要求される精度が厳しい高ペア性デバイスやクリティカルパス部の電気的特性の検証を実施することにより、付着物もなく一見すると設計データに近い形状に仕上がっているにも関わらず動作異常の原因となるような欠陥を、製造プロセスで早期に発見することができる。
【0029】
(ii)SEMオペレータを介在することなく、EPにおけるコンタミネーションの発生を抑えることが可能であり、高精度な撮像レシピを短時間に生成できる。(CD−SEMの構成例)
【0030】
図1に、測長走査型電子顕微鏡(Critical Dimension Scanning Electron Microscope:CD−SEM)の概略構成を示す。CD−SEMは、本発明に係るアライメントデータ作成システムの適用例の一つである。CD−SEMは、半導体ウェーハ(試料)の二次電子像(Secondary Electron:SE像)又は反射電子像(Backscattered Electron:BSE像)を取得する電子線装置の一つである。以下では、SE像とBSE像を総称してSEM画像と呼ぶ。また、SEM画像には、測定対象を垂直方向から観察したトップダウン画像、任意の傾斜角方向から観察したチルト画像の一部又は全てを含むものとする。
【0031】
CD−SEM100は、電子光学系102、ステージ駆動系、信号処理系で構成される。電子銃103で発生された一次電子104は、電子線としてコンデンサ105、偏向器106、対物レンズ108を順に通過してステージ117に載置された測定試料としての半導体ウェーハ101に照射される。偏向器106と対物レンズ108は、電子線が半導体ウェーハ101上の任意の位置に焦点を結んで照射されるように、電子線の照射位置と絞りを制御する。電子線の照射位置からは二次電子と反射電子が放出される。なお、二次電子と反射電子の軌道は、E×B偏向器107により一次電子104の軌道から分離される。このうち、二次電子は二次電子検出器109により検出され、反射電子は反射電子検出器110、111により検出される。反射電子検出器110と111とは互いに異なる方向に設置されている。二次電子検出器109及び反射電子検出器110、111で検出された二次電子及び反射電子は、それぞれ対応するA/D変換機112、113、114でデジタル信号に変換され、SEM画像として画像メモリ122に格納される。なお、この実施例における画像メモリ122はSEM画像だけでなく、各ショットに対応するCADデータ、グローバルアライメント点の登録座標データ、撮像レシピその他のアライメントに関連するデータ(以下、「アライメントデータ」ともいう。)も記憶する。CPU121は、目的に応じて画像メモリ122のデジタル信号を画像処理する。このCPU121の処理には、後述するアライメントデータの作成処理やグローバルアライメント点の登録処理も含まれる。
【0032】
図2に、半導体ウェーハ207の表面を電子線201〜206で走査した場合に、半導体ウェーハ207の表面から放出される電子の信号量を画像化する方法を示す。斜視図200は、x方向に走査される電子線201〜203と、y方向に走査される電子線204〜206とを示す。電子線の偏向方向(走査方向)は、偏向器106によって変更することができる。斜視図200では、x方向に走査された電子線201〜203が照射した半導体ウェーハ207上の場所をそれぞれG1 〜G3 で示す。同様に、斜視図200では、y方向に走査された電子線204〜206が照射した半導体ウェーハ207上の場所をそれぞれG4 〜G6 で示す。G1 〜G6 において放出された電子の信号量は、平面図210内に示した画像209における画素H1 〜H6 の明度6値になる(G、Hの添え字1〜6は互いに対応する)。なお、平面図210には、画像上のx,y方向を示す座標系208も示す。
【0033】
前述したCPU121と画像メモリ122は処理・制御部115を構成する。処理・制御部115には、カーソル操作や情報入力のために不図示の入力装置が接続される。処理・制御部115はコンピュータシステムとして機能し、撮像レシピに基づいて所定の撮像ポイントが撮像されるようにステージコントローラ119や偏向制御部120を制御する、又は、半導体ウェーハ101上の任意の撮像ポイントについて取得された撮像画像に対する各種の画像処理や制御を行う。ここでの撮像ポイントには、AP、AFC、AST、ABCC、EPの一部又は全てが含まれる。また、処理・制御部115は、ディスプレイ116の画面上に撮像画像やレシピ設定画像等を表示するGUI(Graphic User Interface)表示機能も備える。
【0034】
XYステージ117は、ステージコントローラ119の制御に基づいて、xyzの各軸方向に移動又は各軸を中心に回転駆動される。XYステージ117の駆動制御により、半導体ウェーハ101は一次電子104による観察位置や観察方向を変更することができる。すなわち、半導体ウェーハ101上の観察位置を任意に変更できる。なお、XYステージ117による観察位置の変更をステージシフトと呼び、偏向器106による観察位置の変更をビームシフトと呼ぶ。一般に、ステージシフトは、可動範囲は広いが撮像位置の位置決め精度が低い。反対に、ビームシフトは、可動範囲は狭いが撮像位置の位置決め精度が高いという性質がある。
【0035】
図1では反射電子像の検出器を2つ備える実施例を例示しているが、反射電子像の検出器の数は1つでも3つ以上でも良い。また、この実施例における処理・制御部115は、後述する処理手順により撮像レシピの自動生成や作成された撮像レシピに基づくSEM装置の制御及び撮像を実行する。もっとも、これらの処理や制御の一部又は全てを複数台のコンピュータシステムに割り振って実行することもできる。
【0036】
なお、SEM100を用いて測定対象を任意の傾斜角方向から観察したチルト画像を得る方法には(i)電子光学系より照射する電子線を偏向し、電子線の照射角度を傾斜させて傾斜画像を撮像する方式(例えば特開2000−348658号)、(ii)半導体ウェーハを移動させるXYステージ117それ自体を傾斜させる方式(図1は、ステージチルト角118だけXYステージ117を傾斜させた様子を表している。)、(iii)電子光学系自体を機械的に傾斜させる方式等がある。
【0037】
(撮像レシピに基づいた撮像シーケンス)
図3に、任意のEPを観察する際に実行される代表的な撮像シーケンス300を示す。撮像シーケンス300における撮像ポイント、撮像順序、撮像条件は、撮像レシピにより指定する。まず、ステップ301において、試料である半導体ウェーハ101が、XYステージ117上に載置される。ステップ302では、光学顕微鏡(OM)等でウェーハ上のグローバルアライメントマークを観察することにより、半導体ウェーハの原点ずれや半導体ウェーハの回転ずれを補正する。
【0038】
ステップ303では、処理・制御部115によるXYステージ117の移動制御により、撮像位置をAPに移動して撮像する。処理・制御部115は、撮像画像に基づいてアドレッシングのためのパラメータを求め、求められたパラメータによりアドレッシング処理を実行する。ここで、APについて説明を加えておく。EPを観察する場合、ステージシフトによりEPを直接観察しようとすると、XYステージ117の位置決め精度により、撮像ポイントが大きくずれてしまう危険性がある。
【0039】
そこで、まず位置決めのために、撮像ポイントの座標値がテンプレート(撮像ポイントのパターン)として与えられるAPを観察する。テンプレートは撮像レシピに登録されている。このため、以下では、登録テンプレートと呼ぶ。APはEPの近傍(最大でもビームシフトにより移動可能な範囲)から選択する。また、APは、EPに対して一般に低倍率視野である。このため、多少の撮像位置のずれに対しても、撮像したいパターンの全てが視野の外になる危険性は低い。そこで、予め登録されたAPの登録テンプレートと実際に撮像されたAPのSEM画像(実撮像テンプレート)をマッチングすることにより、APにおける撮像ポイントの位置ずれ量を推定する。
【0040】
APやEPの座標値は既知である。従って、APとEP間の相対変位量を求めることができる。また、APにおける撮像ポイントの位置ずれ量もマッチングにより推定することができる。このため、相対変位量から位置ずれ量を差し引くことで、実際に移動すべきAP撮像位置からEPまでの相対変位量を求めることができる。相対変位量分だけ、位置決め精度の高いビームシフトにより撮像ポイントを移動することにより、高い座標精度でEPを撮像することが可能となる。
【0041】
登録されるAPは、(i)EPからビームシフトにより移動可能な距離に存在するパターンであり(EPにおけるコンタミネーションの発生を抑えるためAP撮像時の範囲(Field of view:FOV)にEP撮像時のFOVを含まないことを追加条件とする場合もある)、(ii)APの撮像倍率はステージの位置決め精度を加味してEPの撮像倍率よりも低く、(iii)パターン形状又は明度パターンが特徴的であり、登録テンプレートと実撮像テンプレートとのマッチングが容易等の条件を満たしていることが望ましい。
【0042】
なお、APの選択には、SEMオペレータの手動設定が一般に用いられているが、APの選択と撮像シーケンスの決定を自動化しても良い。登録されるAPの画像テンプレートには、CAD画像、SEM画像を使用する。なお、特開2002−328015号公報に開示されるように、画像テンプレートの登録のためだけの撮像を避けるため、CADデータを画像テンプレートとして仮登録しておき、APを実際に撮像した際に取得されたSEM画像を画像テンプレートとして再登録する等のバリエーションが考えられる。
【0043】
前述のAP選択範囲について補足する。一般に、電子ビーム垂直入射座標は、EPの中心座標に設定される。このため、APの選択範囲は、最大でもEPを中心としたビームシフト可動範囲としたが、電子ビームの垂直入射座標がEPの中心座標と異なる場合には、当該垂直入射座標からビームシフト可動範囲が選択範囲となる。また、撮像ポイントに要求される許容電子ビームの入射角によっては、電子ビームの垂直入射座標から探索範囲もビームシフト可動範囲より小さくなることがある。これらは他のテンプレートについても同様である。
【0044】
次のステップ304では、処理・制御部115の制御によるビームシフトにより、撮像位置をAFに移動して撮像する。処理・制御部115は、撮像画像に基づいてオートフォーカス調整のためのパラメータを求め、求められたパラメータによりオートフォーカス調整を実行する。AFについても説明を追加する。オートフォーカスは、撮像時に鮮明な画像を取得するために行うが、試料である半導体ウェーハに電子線を長く照射すると、汚染物質が付着してしまう。そこで、EPに対するコンタミネーションの付着を抑えるため、EP周辺の座標をAFとして予め観察し、オートフォーカスのためのパラメータを求め、求めたパラメータに基づいてEPを観察するという手法が用いられる。そのため、登録されるAFは、(i)AP及びEPからビームシフトにより移動可能な距離に存在するパターンであり、かつ、AF撮像時のFOVにEP撮像時のFOVが含まれない、(ii)AFの撮像倍率はEPの撮像倍率と同程度である(ただし、これはEP用のAFの場合であり、AP用のAFの場合は前記APの撮像倍率と同程度の撮像倍率でAFを撮像する。後述するAST、ABCCに関しても同様)、(iii)オートフォーカスが容易なパターン形状を有する(フォーカスずれに起因する像のボケを検出し易い)等の条件を満たしていることが望ましい。
【0045】
次のステップ305では、処理・制御部115の制御によるビームシフトにより、撮像位置をASTに移動して撮像する。処理・制御部115は、撮像画像に基づいてオートスティグマ調整のためのパラメータを求め、求められたパラメータによりオートスティグマ調整を実行する。ASTについても説明を追加する。非点収差補正は、撮像時に歪みのない画像を取得するために行うが、AFの場合と同様、試料に電子線を長く照射すると汚染物質が付着してしまう。そこで、EPにおけるコンタミネーションの付着を抑えるため、EP周辺の座標をASTとして予め観察し、非点収差補正のためのパラメータを求め、求めたパラメータに基づいてEPを観察するという手法が用いられる。そのため、登録されるASTは、(i)AP及びEPからビームシフトにより移動可能な距離に存在するパターンであり、かつ、AST撮像時のFOVにEP撮像時のFOVが含まれない、(ii)ASTの撮像倍率はEPの撮像倍率と同程度である、(iii)非点収差補正が容易なパターン形状を有する(非点収差に起因する像のぼけを検出し易い)等の条件を満たしていることが望ましい。
【0046】
次のステップ306では、処理・制御部115の制御によるビームシフトにより、撮像位置をABCCに移動して撮像する。処理・制御部115は、撮像画像に基づいてブライトネス・コントラスト調整のためのパラメータを求め、求められたパラメータによりオートブライトネス・コントラスト調整を実行する。ABCCについても説明を追加する。オートブライトネス・コントラスト調整は、撮像時に適切な明度値及びコントラストを有する鮮明な画像を取得するために行う。例えば二次電子検出器109におけるフォトマルチプライヤ(光電子増倍管)の電圧値等のパラメータを調整することより、例えば画像信号の最も高い部分と最も低い部分が、フルコントラスト又はそれに近いコントラストになるように設定する。しかし、AFの場合と同様、試料に電子線を長く照射すると、汚染物質が付着してしまう。そこで、EPにおけるコンタミネーションの付着を抑えるため、EP周辺の座標をABCCとして予め観察し、ブライトネス・コントラスト調整のためのパラメータを求め、求めたパラメータに基づいてEPを観察するという手法が用いられる。そのため、登録されるABCCは、(i)AP及びEPからビームシフトにより移動可能な距離に存在するパターンであり、かつ、ABCC撮像時のFOVにEP撮像時のFOVが含まれない、(ii)ABCCの撮像倍率はEPの撮像倍率と同程度である、(iii)ABCCにおいて調整したパラメータを用いて測長ポイントにおいて撮像した画像のブライトネスやコントラストが良好であるために、ABCCは測長ポイントにおけるパターンに類似したパターンである等の条件を満たしていることが望ましい。
【0047】
なお、前述したステップ303、304、305及び306におけるAP、AF、AST、ABCCの撮像は、場合により一部若しくは全てが省略される、又は、ステップ303、304、305、306の実行順番が任意に入れ替わる、又は、AP、AF、AST、ABCCの座標で重複するものがある(例えばオートフォーカスとオートスティグマを同一箇所で行う)等のバリエーションがある。
【0048】
最後のステップ307では、処理・制御部115の制御によるビームシフトにより、撮像ポイントをEPに移動して撮像する。処理・制御部115は、例えば設定した測長条件に基づいてパターンの測長その他の処理を行う。なお、EPにおいても、新たに撮像したSEM画像と、事前に登録しておいた登録テンプレート(撮像レシピに登録されているEPに対応する画像)等との間でマッチングを行い、計測位置のずれを検出することがある。撮像レシピには、前述した撮像ポイント(EP、AP、AF、AST、ABCC)の座標や撮像シーケンス、撮像条件等の情報が書き込まれている。SEMは、撮像レシピに基づいてEPを観察する。
【0049】
なお、図3では、低倍像308について、EP309、AP310、AF311、AST312、ABCC313のテンプレート上での位置関係や倍率の違いを点線枠で図示している。
【0050】
(合成CADデータの作成)
前述したように、アライメントマークは、半導体ウェーハを素子形成領域として有効活用するために、スクライブ領域に形成される。また、各ショット間の位置ずれを検出するために、1つのアライメントマークを複数のショットに跨るように配置することがある。この実施例では、1つのアライメントマークが複数のショットに跨ることを、隣接する複数ショットの縁部又は隅部同士を重複的に露光すると1つのアライメントマークを完成させるような部分パターンが、各ショットの縁部や隅部に分割して配置されている状態をいう。なお、部分パターンの形状は、1つのアライメントマークに対応する複数のショット間でそれぞれが互いに異なっている。
【0051】
図4に、この種のアライメントマークの一例を示す。図4は、矩形形状の4つのショット401〜404の各1つの隅(角)に配置された4つの部分パターン411〜414を重ね合わせて1つのアライメントマーク420を形成する例を示す。なお、図4におけるショット401〜404は、いずれもショット全体を現すものでなく、説明の都合上、着目する1つのアライメントマークに関連する4隅を拡大して表したものである。従って、ショット401はショット全体の右下隅を拡大した図、ショット402はショット全体の左下隅を拡大した図、ショット403はショット全体の右上隅を拡大した図、ショット404はショット全体の左上隅を拡大した図を表している。
【0052】
なお、1つのショットだけを用いてレシピを作成する従来手法では、部分パターン411〜414の一つだけを用いてアライメントを行うか、SEMオペレータが手作業でこれら4つの部分パターン411〜414を合成し、アライメントマーク420を完成させる必要があった。
【0053】
以下では、アライメントマーク420を含む合成CADデータ421を自動的に作成する動作例を説明する。なお、以下の説明では、1つのアライメントマークが4つの部分パターンの合成によって構成される場合について説明するが、1つのアライメントマークは2つ以上の部分パターンの合成で構成されていれば良い。また、以下の説明では、1つのショット上には4隅に1つずつ計4つの部分パターンが形成されている場合について説明するが、1つのショット上に形成される部分パターンの数は1つ以上であれば良い。また、以下の説明では、各ショットの4隅に部分パターンが配置されるものとして説明するが、部分パターンは隣接する他のショットの重複露光が可能なスクライブ領域上であれば、どの場所に配置されていても良い。
【0054】
前述したように、アライメントマークは、隣接するショットを切り離すためのスクライブ領域に形成する。従って、隣接関係にある4つのショットの各CADデータからアライメントマークを含む合成CADデータ421を生成する場合、隣接ショットのスクライブ領域までの大きさとして作成すれば良いことが分かる。
【0055】
合成CADデータの生成の方法には、次に述べるバリエーションがあり、それぞれの作成方法は、必要に応じて選択可能である。なお、以下に列記する4つの生成方法のうち(iii)と(iv)に示す方法を選択した場合には、CADデータの合成に重ね幅を入力する等のユーザの操作を必要としない。従って、これらの生成方法を採用する場合には、合成CADデータの生成に係る全ての処理を自動化することができる。
【0056】
(i)SEMオペレータ(ユーザ)が、各ショットに対応するCADデータのそれぞれについて、隣接する他のショットとの重なり合う上下左右の4隅のサイズを個別に指定し、その入力情報に基づいて4つのCADデータを合成する。
【0057】
(ii)各ショットに対応するCADデータの画像が表示されているレシピ設定画面等の画面上において、マウスのドラッグ操作などを通じてCADデータに対応する各画像(それぞれ異なる部分パターンが形成されている。)を移動させ、1つのアライメントマークを完成させる。1つのアライメントマークが完成すると、CPU121は、各CADデータの移動後の位置座標に基づいて重ね位置を特定し、重ね位置で4枚のCADデータを合成する。
【0058】
(iii)スクライブ領域内で閉経した図形(例えば三角形、四角形等)が重なって1つのアライメントマークが作成される場合、CPU121の演算によって閉経図形の重心又は中心座標を算出し、重心又は中心座標の距離を重ね合わせ幅の情報として用い、CADデータを合成する。換言すると、閉経図形の重心又は中心座標が一致するよう4つのCADデータを合成する。
【0059】
(iv)CD−SEMでアライメントマークを撮像したOM像を取り込み、スクライブ領域の重ね幅を少しずつ調整しながら、スクライブ領域内からOM像とマッチする位置を探索し、相関値を求める。相関値がある閾値以上又はユーザが任意に指定した閾値より高いものが存在した場合、最も評価値が高かった重ね幅でCADデータを合成する。ここでは、CD−SEM上で撮像したOM像の代わりに、ユーザが作成したグローバルアライメントマークの画像ファイルを用いることも考えられる。
【0060】
図5に、アライメントマーク420を含む合成CADデータの自動作成シーケンスの一例を示す。なお、図5に示す処理シーケンスは、CPU121で実行されるプログラムを通じて実現される。まず、CPU121は、ステップ501において、CADデータの重ね合わせ方法の選択を受け付ける。重ね合わせ方法には、前述した(i)〜(iv)がある。
【0061】
まず、重ね幅の直接入力が選択された場合(ステップ502で肯定結果の場合)、CPU121は、入力された重ね幅に基づいて4つのショットに対応するCADデータを合成し、重ね合わせ部分にアライメントマークの完成形を含む合成CADデータを作成する(ステップ511)。
【0062】
これに対し、GUI上でのCADデータの重ね幅の調整入力が選択された場合(ステップ503で肯定結果の場合)、CPU121は、画面上における各CADデータに対応する画像の移動量に基づいて重ね幅を算出する(ステップ521)。重ね幅が算出されると、CPU121は、算出された重ね幅に基づいて4つのショットに対応するCADデータを合成し、重ね合わせ部分にアライメントマークの完成形を含む合成CADデータを作成する(ステップ511)。
【0063】
これに対し、閉経した図形の重心を自動的に合わせる手法が選択された場合(ステップ504で肯定結果の場合)、CPU121は、各ショットのスクライブ領域に対応するCADデータから閉経図形を探索し(ステップ531)、閉経図形の重心を算出する(ステップ532)。この後、CPU121は、隣接する4つのショットのそれぞれについて算出された閉経図形の重心間の距離に基づいて重ね幅を算出する(ステップ533)。重ね幅が算出されると、CPU121は、算出された重ね幅に基づいて4つのショットに対応するCADデータを合成し、重ね合わせ部分にアライメントマークの完成形を含む合成CADデータを作成する(ステップ511)。
【0064】
これに対し、CD−SEMが搭載する光学顕微鏡で撮像されたグローバルアライメントマーク(OM像)に基づいて重ね幅を自動算出する手法が選択された場合(ステップ505で肯定結果の場合)、CPU121は、スクライブ領域の重ね幅の現在値(例えば初期値はゼロ)に刻み幅を加算し(ステップ541)、更新後の重ね幅だけCADデータの重ね幅を調整する。なお、OM像ではなく、メモリに格納されているグローバルアライメントマークの画像ファイルを用いても良い。その後、CPU121は、重ね幅だけ重複されたスクライブ領域の合成画像についてOM像とのマッチング処理を実行する(ステップ542)。次に、CPU121は、探索された領域とOM像との相関値が閾値以上か否かを判定し(ステップ543)、否定結果が得られている間は、相関値が閾値を超えるまで刻み幅ずつ重ね幅を調整する。OM像との相関値が閾値以上となると、その際のCADデータの座標に基づいて重ね幅を算出する(ステップ544)。もっとも、閾値以上の相関値が得られても重ね幅の更新を継続し、最終的に最も高い相関値が得られる重ね幅を最適値に決定しても良い。重ね幅が算出されると、CPU121は、算出された重ね幅に基づいて4つのショットに対応するCADデータを合成し、重ね合わせ部分にアライメントマークの完成形を含む合成CADデータを作成する(ステップ511)。
【0065】
なお、上述した4つのいずれでも無い場合(ステップ505で否定結果の場合)、CPU121は、重ね幅をゼロに設定する。その後、CPU121は、重ね幅がゼロのまま4つのショットに対応するCADデータを合成し、重ね合わせ部分にアライメントマークの完成形を含む合成CADデータを作成する(ステップ511)。
【0066】
(グローバルアライメント情報の登録)
従来手法におけるグローバルアライメント点の登録は、ユーザ自身による手入力であった。これに対し、本実施例では、グローバルアライメント点の登録を自動化することができる。図6に、グローバルアライメント点の自動登録時の処理シーケンスを示す。なお、図6に示す処理シーケンスは、CPU121で実行されるプログラムを通じて実行される。因みに、過去に使用したグローバルアライメント点のデザイン(Design)テンプレート及びその時に使用したパラメータ情報がファイルとして出力され、CD−SEM100の画像メモリ122等に保持されているものとする。
【0067】
まず、ステップ601では、ユーザが入力した倍率が、CPU121により取得される。次のステップ602において、CPU121は、過去に使用されたグローバルアライメント点のデザインテンプレートとそのパラメータ情報を読み出す。ここでのデザインテンプレートは、過去に作成された合成CADデータからグローバルアライメント点とその周辺の画像を切り出したものが使用される。
【0068】
この後、CPU121は、取得された倍率に従って、半導体ウェーハのスクライブ領域又はユーザが指定した領域に対応する合成CADデータと、過去に使用されたグローバルアライメント点のデザインテンプレート(前述の通り、過去に生成された合成CADデータから切り出されたCADデータ)とを照合し、類似度の高いパターンを探索する(ステップ603)。
【0069】
次のステップ604では、検出された類似パターンの1つでも、デザインテンプレートとの相関値が閾値以上であるか否かが、CPU121において判定される。このステップ604において否定結果が得られた場合、CPU121はステップ602の処理に戻り、別のデザインテンプレートに対して同様の探索動作を実行する。一方、ステップ604において肯定結果が得られた場合、CPU121はステップ605に進み、最も高い相関値が得られたパターンの座標をマッチング座標として登録する。すなわち、グローバルアライメント点として登録する。
【0070】
この後、ステップ606において、CPU121は、グローバルアライメント点のパラメータとして、過去のデザインテンプレートで使用されたパラメータを設定する又は別のパラメータ情報のファイルを設定する。このように、この実施例では、自動生成された合成CADデータを用いることで、グローバルアライメント点の登録も自動化することができる。
【0071】
(撮像レシピの作成)
前述したように、撮像レシピは、撮像ポイントの一部又は全てを含むポイントの座標、サイズ・形状、撮像シーケンス、撮像条件、デザインテンプレートとして管理される。この実施例の場合、合成CADデータの生成処理やグローバルアライメント点の登録処理の一部又は全部を自動化できる。この際、自動生成される合成CADデータやグローバルアライメント点の一部又は全てに対応するポイントの座標、サイズ・形状、撮像シーケンス、撮像条件を撮像レシピに自動登録することにより、撮像レシピの自動生成を実現できる。
【0072】
(他の実施例)
前述の説明では、測長走査型電子顕微鏡(CD−SEM)に、合成CADデータの自動作成機能、グローバルアライメント点の自動登録機能、撮像レシピの自動作成機能を搭載する場合について説明した。しかし、合成CADデータの自動作成機能、グローバルアライメント点の自動登録機能、撮像レシピの自動作成機能の一部又は全部は、レシピ作成システムに搭載されていても良いし、いわゆるCADシステムに搭載されていても良い。
【符号の説明】
【0073】
100…CD−SEM、101…半導体ウェーハ、102…電子光学系、103…電子銃、104…一次電子、105…コンデンサ、106…偏向器、107…ExB偏向器、108…対物レンズ、109…二次電子検出器、110、111…反射電子検出器、112、113、114…A/D変換器、115…処理・制御部、116…ディスプレイ、117…XYステージ、118…ステージチルト角、119…ステージコントローラ、120…偏向制御部、121…CPU、122…画像メモリ、201〜206…電子線、207…半導体ウェーハ、208…座標系。
【特許請求の範囲】
【請求項1】
アライメントデータ作成システムにおいて、
隣接する複数ショットの縁部又は隅部同士を重複露光すると、1つのアライメントマークが完成する部分パターンを有する複数ショットのCADデータが少なくとも記憶されるメモリと、
処理対象とするアライメントマークを構成する前記部分パターンを有する複数ショットに対応する一組のCADデータを前記メモリから読み出すと共に、各ショット間の重ね合せ情報に基づいて前記一組のCADデータを合成し、アライメントマークの完成形を含む合成CADデータを生成する演算部と
を有するアライメントデータ作成システム。
【請求項2】
請求項1に記載のアライメントデータ作成システムにおいて、
前記部分パターンが閉経図形であり、かつ、各部分パターンの重心又は中心が一致することでアライメントマークが完成する場合、
前記演算部は、前記一組のCADデータに含まれる各閉経図形について重心又は中心座標を算出する処理と、当該重心又は中心座標間の距離情報を算出する処理と、算出された距離情報に基づいて部分パターンの重心又は中心を一致させるように前記一組のCACデータを合成する処理とを実行する
ことを特徴とするアライメントデータ作成システム。
【請求項3】
請求項1に記載のアライメントデータ作成システムにおいて、
前記演算部は、グローバルアライメントマークの撮像画像又はメモリに保持されているグローバルアライメントマークの画像ファイルと、設定された重ね幅だけ前記一組のCADデータのスクライブ領域を重複させた合成CADデータの候補とを照合し、高い類似度が得られる重ね幅を算出する処理と、算出された重ね幅に基づいて前記一組のCACデータを合成する処理とを実行する
ことを特徴とするアライメントデータ作成システム。
【請求項4】
請求項1に記載のアライメントデータ作成システムは、
過去に使用されたグローバルアライメントマークに対応するデザインテンプレートのデータを記憶する第2のメモリと、
前記演算部において作成された合成CADデータと前記第2のメモリに記憶されたデザインテンプレートのデータとを照合し、照合されたデザインテンプレートと類似度が高いアライメントマークをグローバルアライメント点に登録する第2の演算部と
を更に有することを特徴とするアライメントデータ作成システム。
【請求項5】
請求項4に記載のアライメントデータ作成システムは、
前記第2の演算部によりグローバルアライメント点として登録されたアライメントマーク周辺のパターンを、対応する合成CADデータからデザインテンプレートのデータとして切り出す
ことを特徴とするアライメントデータ作成システム。
【請求項6】
アライメントデータ作成方法において、
隣接する複数ショットの縁部又は隅部同士を重複露光すると、1つのアライメントマークが完成する部分パターンを有する複数ショットのCADデータが少なくとも記憶されるメモリから、処理対象とするアライメントマークを構成する部分パターンを有する複数ショットに対応する一組のCADデータを読み出す処理と、
各ショット間の重ね合せ情報に基づいて前記一組のCADデータを合成し、アライメントマークの完成形を含む合成CADデータを生成する処理と
を有するアライメントデータ作成方法。
【請求項7】
請求項6に記載のアライメントデータ作成方法において、
前記部分パターンが閉経図形であり、かつ、各部分パターンの重心又は中心が一致することでアライメントマークが完成する場合、
前記合成CADデータを生成する処理は、
前記一組のCADデータに含まれる各閉経図形について重心又は中心座標を算出する処理と、
当該重心又は中心座標間の距離情報を算出する処理と、
算出された距離情報に基づいて部分パターンの重心又は中心を一致させるように前記一組のCACデータを合成する処理と
有することを特徴とするアライメントデータ作成方法。
【請求項8】
請求項6に記載のアライメントデータ作成方法において、
前記合成CADデータを生成する処理は、
グローバルアライメントマークの撮像画像又はメモリに保持されているグローバルアライメントマークの画像ファイルと、設定された重ね幅だけ前記一組のCADデータのスクライブ領域を重複させた合成CADデータの候補とを照合し、高い類似度が得られる重ね幅を算出する処理と、
算出された重ね幅に基づいて前記一組のCACデータを合成する処理と
を有することを特徴とするアライメントデータ作成方法。
【請求項9】
請求項6に記載のアライメントデータ作成方法は、
過去に使用されたグローバルアライメントマークに対応するデザインテンプレートのデータと、新たに作成された合成CADデータとを照合し、照合されたデザインテンプレートと類似度が高いアライメントマークをグローバルアライメント点に登録する処理
を更に有することを特徴とするアライメントデータ作成方法。
【請求項10】
請求項9に記載のアライメントデータ作成方法は、
グローバルアライメント点として登録されたアライメントマーク周辺のパターンを、対応する合成CADデータからデザインテンプレートのデータとして切り出す処理
を更に有することを特徴とするアライメントデータ作成方法。
【請求項1】
アライメントデータ作成システムにおいて、
隣接する複数ショットの縁部又は隅部同士を重複露光すると、1つのアライメントマークが完成する部分パターンを有する複数ショットのCADデータが少なくとも記憶されるメモリと、
処理対象とするアライメントマークを構成する前記部分パターンを有する複数ショットに対応する一組のCADデータを前記メモリから読み出すと共に、各ショット間の重ね合せ情報に基づいて前記一組のCADデータを合成し、アライメントマークの完成形を含む合成CADデータを生成する演算部と
を有するアライメントデータ作成システム。
【請求項2】
請求項1に記載のアライメントデータ作成システムにおいて、
前記部分パターンが閉経図形であり、かつ、各部分パターンの重心又は中心が一致することでアライメントマークが完成する場合、
前記演算部は、前記一組のCADデータに含まれる各閉経図形について重心又は中心座標を算出する処理と、当該重心又は中心座標間の距離情報を算出する処理と、算出された距離情報に基づいて部分パターンの重心又は中心を一致させるように前記一組のCACデータを合成する処理とを実行する
ことを特徴とするアライメントデータ作成システム。
【請求項3】
請求項1に記載のアライメントデータ作成システムにおいて、
前記演算部は、グローバルアライメントマークの撮像画像又はメモリに保持されているグローバルアライメントマークの画像ファイルと、設定された重ね幅だけ前記一組のCADデータのスクライブ領域を重複させた合成CADデータの候補とを照合し、高い類似度が得られる重ね幅を算出する処理と、算出された重ね幅に基づいて前記一組のCACデータを合成する処理とを実行する
ことを特徴とするアライメントデータ作成システム。
【請求項4】
請求項1に記載のアライメントデータ作成システムは、
過去に使用されたグローバルアライメントマークに対応するデザインテンプレートのデータを記憶する第2のメモリと、
前記演算部において作成された合成CADデータと前記第2のメモリに記憶されたデザインテンプレートのデータとを照合し、照合されたデザインテンプレートと類似度が高いアライメントマークをグローバルアライメント点に登録する第2の演算部と
を更に有することを特徴とするアライメントデータ作成システム。
【請求項5】
請求項4に記載のアライメントデータ作成システムは、
前記第2の演算部によりグローバルアライメント点として登録されたアライメントマーク周辺のパターンを、対応する合成CADデータからデザインテンプレートのデータとして切り出す
ことを特徴とするアライメントデータ作成システム。
【請求項6】
アライメントデータ作成方法において、
隣接する複数ショットの縁部又は隅部同士を重複露光すると、1つのアライメントマークが完成する部分パターンを有する複数ショットのCADデータが少なくとも記憶されるメモリから、処理対象とするアライメントマークを構成する部分パターンを有する複数ショットに対応する一組のCADデータを読み出す処理と、
各ショット間の重ね合せ情報に基づいて前記一組のCADデータを合成し、アライメントマークの完成形を含む合成CADデータを生成する処理と
を有するアライメントデータ作成方法。
【請求項7】
請求項6に記載のアライメントデータ作成方法において、
前記部分パターンが閉経図形であり、かつ、各部分パターンの重心又は中心が一致することでアライメントマークが完成する場合、
前記合成CADデータを生成する処理は、
前記一組のCADデータに含まれる各閉経図形について重心又は中心座標を算出する処理と、
当該重心又は中心座標間の距離情報を算出する処理と、
算出された距離情報に基づいて部分パターンの重心又は中心を一致させるように前記一組のCACデータを合成する処理と
有することを特徴とするアライメントデータ作成方法。
【請求項8】
請求項6に記載のアライメントデータ作成方法において、
前記合成CADデータを生成する処理は、
グローバルアライメントマークの撮像画像又はメモリに保持されているグローバルアライメントマークの画像ファイルと、設定された重ね幅だけ前記一組のCADデータのスクライブ領域を重複させた合成CADデータの候補とを照合し、高い類似度が得られる重ね幅を算出する処理と、
算出された重ね幅に基づいて前記一組のCACデータを合成する処理と
を有することを特徴とするアライメントデータ作成方法。
【請求項9】
請求項6に記載のアライメントデータ作成方法は、
過去に使用されたグローバルアライメントマークに対応するデザインテンプレートのデータと、新たに作成された合成CADデータとを照合し、照合されたデザインテンプレートと類似度が高いアライメントマークをグローバルアライメント点に登録する処理
を更に有することを特徴とするアライメントデータ作成方法。
【請求項10】
請求項9に記載のアライメントデータ作成方法は、
グローバルアライメント点として登録されたアライメントマーク周辺のパターンを、対応する合成CADデータからデザインテンプレートのデータとして切り出す処理
を更に有することを特徴とするアライメントデータ作成方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2011−135022(P2011−135022A)
【公開日】平成23年7月7日(2011.7.7)
【国際特許分類】
【出願番号】特願2009−295693(P2009−295693)
【出願日】平成21年12月25日(2009.12.25)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成23年7月7日(2011.7.7)
【国際特許分類】
【出願日】平成21年12月25日(2009.12.25)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]