
アライメントマークおよび位置計測方法
【課題】時間を要せずに高精度に位置座標を測定することが可能となるアライメントマークおよび位置測定方法を提供することを目的とする。
【解決手段】本発明のアライメントマークは、高さまたは深さ方向のいずれかに左右対称の順テーパ状の斜面を備えたことを特徴とすることにより、フォーカスレンズのフォーカシングの移動範囲がアライメントマークのトップとボトムの間にあれば、輝度プロファイルの変化が最大となる点と、最小となる点とを検出でき、そこからアライメントマークの中心位置を測定することが出来る。このため、フォーカスレンズの位置を高精度に制御したり、高度な画像処理機能を必要としたりせず、高速かつ簡便にアライメントを行うことが出来る。
【解決手段】本発明のアライメントマークは、高さまたは深さ方向のいずれかに左右対称の順テーパ状の斜面を備えたことを特徴とすることにより、フォーカスレンズのフォーカシングの移動範囲がアライメントマークのトップとボトムの間にあれば、輝度プロファイルの変化が最大となる点と、最小となる点とを検出でき、そこからアライメントマークの中心位置を測定することが出来る。このため、フォーカスレンズの位置を高精度に制御したり、高度な画像処理機能を必要としたりせず、高速かつ簡便にアライメントを行うことが出来る。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、位置合わせに用いられるアライメントマークおよび位置計測方法に関するものである。
【背景技術】
【0002】
半導体素子製造用の縮小投影型の露光装置では、レチクルの回路パターンを投影レンズにより、ウェハ上に投影し露光する。このとき、投影露光に先立って測定装置(検出手段)を用いてウェハ面を観察することにより、予め形成されたウェハ上のアライメントマークを検出し、この検出結果に基づいてレチクルとウェハの位置整合、所謂アライメントを行っている。
【0003】
このとき、アライメント精度は測定装置の光学性能に大きく依存している。この為、測定装置の性能は露光装置において重要な要素となっている。特に最近は位相シフトマスクや変形照明等により高集積度の半導体デバイスを製造する露光装置が種々提案されており、このような露光装置においては、より高いアライメント精度が要望されている。
【0004】
従来、半導体素子製造用の露光装置では、ウェハの位置情報をウェハに設けたアライメントマークを観察して得ている。このときの観察方式としては、主に次の3通りの方式が用いられている。(1−イ)非露光光を用い、かつ投影レンズ系を通さない方式(OFF−AXIS方式)、(1一ロ)露光光を用い、かつ投影レンズ系を通す方式(露光光TTL方式)、(1−ハ)非露光光を用い、かつ投影レンズ系を通す方式(非露光光TTL方式)である。
【0005】
例えば、非露光光TTL方式の観察装置を利用したアライメント系としては、ウェハ面上のアライメントマークの光学像をCCDカメラ等の撮像素子上に結像し、該撮像素子から得られる画像情報を処理してアライメントマークの位置を検出する方法が提案されている。(特許文献1参照)
【0006】
また、アライメントマークの光学像をCCDカメラで結像し、該CCDカメラで得た画像情報を2値化し、その2値化画像中の特定画像パターンの位置座標をテンプレートを用いたテンプレートマッチング処理を行うことにより、アライメントマークの位置を検出する位置検出装置が提案されている。(特許文献2参照)
【0007】
また、光学レンズを具備した顕微鏡システムでは、少なくとも2箇所のマーク位置を検出し、アライメントを行う。このとき、アライメントマークの位置を計測した後、測定値と設計値を比較し、その差分を算出し、補正を行う。補正方法としては、その差分量をソフトウェアで算出し、補正した座標系をハードウェアにフィードバックする方法が一般的である。(特許文献3参照)
【特許文献1】特開平3−61802号公報
【特許文献2】特開昭62−232504号公報
【特許文献3】特開2000−269121号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、光学的手段を用いて高精度なアライメントを行おうとした場合、フォーカスレンズを光軸方向に移動させてフォーカシングを行うため、アライメントの精度はこのフォーカスレンズの送り精度に依存してしまい、要求する精度に比例してアライメントに要する時間が多くなってしまう問題がある。
【0009】
そこで、本発明は上記問題を解決するためになされたものであり、時間を要せずに高精度に位置座標を測定することが可能となるアライメントマークおよび位置測定方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
請求項1に記載の本発明は、段差を備えたアライメントマークにおいて、高さまたは深さ方向のいずれかに順テーパ状の斜面を備え、該アライメントマークの断面形状が左右対称であることを特徴とするアライメントマークである。
【0011】
請求項2に記載の本発明は、請求項1に記載のアライメントマークを備えたレチクルまたはウェハである。
【0012】
請求項3に記載の本発明は、光学的手段により所定面上に設けられたアライメントマークの像を検出し、検出された像を用いて該アライメントマークの位置情報を測定する位置計測方法において、請求項1に記載のアライメントマークを用いることを特徴とする位置計測方法である。
【0013】
請求項4に記載の本発明は、請求項3に記載の位置計測方法を用いたアライメント方法である。
【発明の効果】
【0014】
本発明のアライメントマークは、高さまたは深さ方向のいずれかに左右対称の順テーパ状の斜面を備えたことを特徴とすることにより、フォーカスレンズのフォーカシングの移動範囲がアライメントマークの段差のトップとボトムの間にあれば、輝度プロファイルの変化が最大となる点と、最小となる点とを検出でき、そこからアライメントマークの中心位置を計測することが出来る。
このため、フォーカスレンズの位置を高精度に制御したり、高度な画像処理機能を必要としたりせず、高速かつ簡便にアライメントを行うことが出来る。よって、測定装置のフォーカス位置に関係なく、高速に座標位置の測定が可能となるという優れた効果を奏する。
【発明を実施するための最良の形態】
【0015】
以下、本発明のアライメントマークについて、図2、図3を用いて説明する。
【0016】
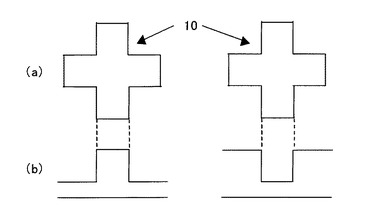
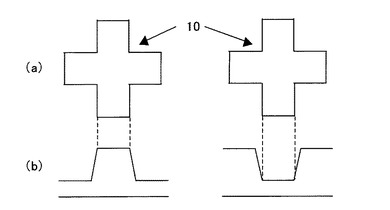
本発明のアライメントマークは、段差を備えてなり、高さまたは深さ方向のいずれかに左右対称の順テーパ状の斜面を備えたことを特徴とする。ここで、順テーパ状の斜面とは、段差のトップとボトムが直線で結ばれた斜面に限定されず、連続した線(例えば、円弧など)で結ばれた斜面であれば良い。また、アライメントマークの段差は、アライメントマークが凸形状あるいは凹形状であることによりもたらされるものであり、そのどちらか一方に限定されるものではない(図2(b)、図3(b))。
【0017】
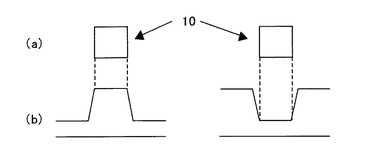
アライメントマークの平面形状は位置情報が得られやすい形状であれば特に制限されない。また、1つのマークでX,Y両方の位置情報を同時に計測できるため、マーク形状は90度回転対称が望ましい。このような形状としては、例えば、十字形(図2(a))、正方形(図3(a))などが挙げられる。
【0018】
以下、本発明のアライメントマーク(図2、図3)を用いた位置計測方法を、従来のアライメントマーク(図1)を用いた位置計測方法と比較しながら、図4を用いて説明する。
【0019】
<光学的手段を用いたアライメントマークのマーク中心位置の計測>
まず、フォーカスレンズを光軸方向に移動させて、アライメントマークに対してフォーカス位置の変更を行う。
【0020】
次に、フォーカス位置を変更しながら、CCDカメラなどの光学撮像素子上にアライメントマークを結像させ、その輝度プロファイルを得ることにより、各フォーカス位置での画像の輝度プロファイルを得る。ここで、輝度プロファイルとは指定した画像領域におけるピクセルのグレーレベル分布であり、一般にマークのエッジ部で輝度プロファイルの変化が大きくなり、極値(最大値あるいは最小値)を示す。つまり、アライメントマークのエッジ部を求める手段として、予めマークの輝度プロファイルに対して平滑化などによりノイズ成分を除去した後、微分処理を行うことで最大値や最小値を求め、アライメントマークのエッジ部を決定することが出来る。
【0021】
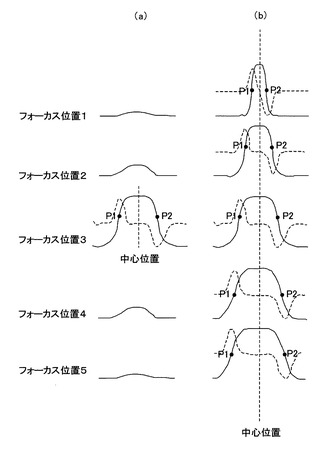
図4にフォーカス位置と輝度プロファイルの関係図を示す。図4において、実線は輝度プロファイル(指定した画像領域におけるピクセルのグレーレベル分布)であり、点線は前記輝度プロファイルを微分したものである。このとき、アライメントマークのエッジ部分において、画像の輝度プロファイルが極値となる。このため、アライメントマークのエッジ部分であるP1、P2の決定方法は、まず一定の輝度以上を持つ画像に対し(図4(a)でのフォーカス位置1,2,4,5は輝度不足のため、P1、P2を求められない)、輝度プロファイルを得て、その変化が最大となる点をP1、最小となる点をP2とする。
【0022】
なお、図4(a)は図1に示すような従来のアライメントマークにおける各フォーカス位置での画像の輝度プロファイル(実線)とその変化(点線)であり、
図4(b)は図2、図3に示すような本発明のアライメントマークにおける各フォーカス位置での画像の輝度プロファイル(実線)とその変化(点線)である。
【0023】
図4に示すように、輝度プロファイルの変化(輝度プロファイルの変化とは、図4の実線に示す輝度プロファイルの微分を取ったもので、図4の点線に示す波形である。)が最大となる点をP1、最小となる点をP2としたとき、アライメントマークの中心位置(以下、マーク中心位置)は、アライメントマークの断面形状が左右対称のため、P1とP2の中点、つまり(P1+P2)/2となる。このため、P1、P2の二つの点からマーク中心位置を計測することが出来る。
【0024】
図1に示す従来のアライメントマークの場合、断面形状がほぼ垂直であるため、ベストフォーカスの位置、つまり図4(a)におけるフォーカス位置3の場合のみ、P1およびP2を検出できる。このため、マーク中心位置を計測するためには、フォーカス位置3に焦点をあわせる必要がある。よって、フォーカスレンズの位置を高精度に制御したり、高度な画像処理機能を必要としたりするため、アライメントに時間を多大に要することになる。
【0025】
対して、図2に示すような本発明におけるアライメントマークの場合、断面形状が順テーパ状の斜面であるため、フォーカスレンズの移動範囲がパターンのトップとボトムの間にあれば、図4(b)に示すように、P1およびP2を検出出来る。このため、マーク中心位置を計測するために、厳密なフォーカス位置を必要としない。よって、フォーカスレンズの位置を高精度に制御したり、高度な画像処理機能を必要としたりせず、高速かつ簡便にアライメントを行うことが出来る。
【0026】
以下、本発明の位置計測方法を用いたアライメント方法の一例として、図5、図6を用いて説明する。
【0027】
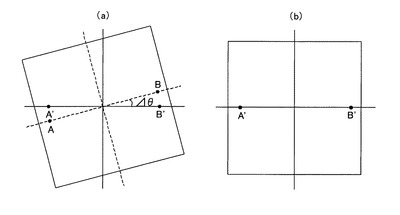
まず、レチクルまたはウェハ(以下、被測定物)に本発明のアライメントマークを設ける。このとき、被測定物上に配するアライメントマークの箇所ついては特に制限はなく、被測定物上の任意の箇所に設けてよい。また、被測定物上に配したアライメントマークは、少なくとも2箇所の任意箇所に配置する。(以下、例えば、図6に示すように、被測定物上のアライメント点の1つをA点、もう一方をB点とする)
【0028】
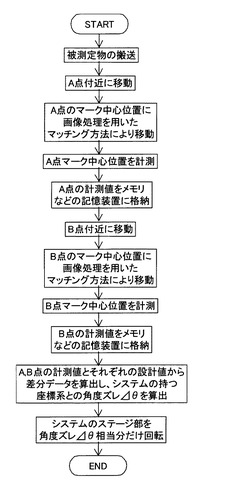
次に、該アライメントマークを用いて、被測定物の位置情報を求める計測アルゴリズムについて説明する。図5は被測定物の位置情報を求める手順を示すフローチャートである。まず、被測定物を座標測定装置のステージ上に搬送した後、被測定物に少なくとも2箇所に設けたアライメントマークのマーク中心位置の座標を計測する。
【0029】
具体的には、まず、光学レンズと角度及び位置決めが可能なステージ系を具備する座標測定装置により、A点付近に移動する。
次に、前述した本発明の位置計測方法を用いて、A点のマーク中心位置を計測し、A点の計測値をメモリなどの記憶装置に格納する。
【0030】
次にB点付近に移動し、A点の場合と同様に、前述した本発明の位置計測方法により、B点のマーク中心位置を計測し、B点の計測値をメモリなどの記憶装置に格納する。
【0031】
次に、前記A点,B点の計測値と各点の座標測定装置の座標値A’,B’を比較し、角度の偏差量Δθを算出する。(図6)
【0032】
次に、算出したΔθに相当する分だけ座標測定装置のステージを回転させ、計測値による座標系をシステムの持つ座標系に一致させ、アライメントを終了する。
【産業上の利用可能性】
【0033】
本発明のアライメントマーク及び位置計測方法は、位置合わせを必要とする場面において広範に利用可能であり、特に高精度の位置合わせが要求される各種半導体装置の製造プロセスに有用である。
【図面の簡単な説明】
【0034】
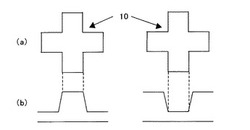
【図1】従来のアライメントマークの模式図であり、(a)は平面図、(b)は断面図である。
【図2】本発明のアライメントマークの模式図であり、(a)は平面図、(b)は断面図である。
【図3】本発明のアライメントマークの模式図であり、(a)は平面図、(b)は断面図である。
【図4】フォーカスレンズの位置を変化させた時のマーク画像輝度プロファイルよりマーク中心位置を求める方法を説明する図であり、(a)は従来マークによるもの、(b)本発明のマークによるものである。
【図5】本発明の位置計測方法を用いたアライメント方法を説明するフローチャートである。
【図6】本発明のアライメントマークを配した被測定物を用いたアライメント方法の具体例を示す説明図である。
【符号の説明】
【0035】
10…アライメントマーク
【技術分野】
【0001】
本発明は、位置合わせに用いられるアライメントマークおよび位置計測方法に関するものである。
【背景技術】
【0002】
半導体素子製造用の縮小投影型の露光装置では、レチクルの回路パターンを投影レンズにより、ウェハ上に投影し露光する。このとき、投影露光に先立って測定装置(検出手段)を用いてウェハ面を観察することにより、予め形成されたウェハ上のアライメントマークを検出し、この検出結果に基づいてレチクルとウェハの位置整合、所謂アライメントを行っている。
【0003】
このとき、アライメント精度は測定装置の光学性能に大きく依存している。この為、測定装置の性能は露光装置において重要な要素となっている。特に最近は位相シフトマスクや変形照明等により高集積度の半導体デバイスを製造する露光装置が種々提案されており、このような露光装置においては、より高いアライメント精度が要望されている。
【0004】
従来、半導体素子製造用の露光装置では、ウェハの位置情報をウェハに設けたアライメントマークを観察して得ている。このときの観察方式としては、主に次の3通りの方式が用いられている。(1−イ)非露光光を用い、かつ投影レンズ系を通さない方式(OFF−AXIS方式)、(1一ロ)露光光を用い、かつ投影レンズ系を通す方式(露光光TTL方式)、(1−ハ)非露光光を用い、かつ投影レンズ系を通す方式(非露光光TTL方式)である。
【0005】
例えば、非露光光TTL方式の観察装置を利用したアライメント系としては、ウェハ面上のアライメントマークの光学像をCCDカメラ等の撮像素子上に結像し、該撮像素子から得られる画像情報を処理してアライメントマークの位置を検出する方法が提案されている。(特許文献1参照)
【0006】
また、アライメントマークの光学像をCCDカメラで結像し、該CCDカメラで得た画像情報を2値化し、その2値化画像中の特定画像パターンの位置座標をテンプレートを用いたテンプレートマッチング処理を行うことにより、アライメントマークの位置を検出する位置検出装置が提案されている。(特許文献2参照)
【0007】
また、光学レンズを具備した顕微鏡システムでは、少なくとも2箇所のマーク位置を検出し、アライメントを行う。このとき、アライメントマークの位置を計測した後、測定値と設計値を比較し、その差分を算出し、補正を行う。補正方法としては、その差分量をソフトウェアで算出し、補正した座標系をハードウェアにフィードバックする方法が一般的である。(特許文献3参照)
【特許文献1】特開平3−61802号公報
【特許文献2】特開昭62−232504号公報
【特許文献3】特開2000−269121号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、光学的手段を用いて高精度なアライメントを行おうとした場合、フォーカスレンズを光軸方向に移動させてフォーカシングを行うため、アライメントの精度はこのフォーカスレンズの送り精度に依存してしまい、要求する精度に比例してアライメントに要する時間が多くなってしまう問題がある。
【0009】
そこで、本発明は上記問題を解決するためになされたものであり、時間を要せずに高精度に位置座標を測定することが可能となるアライメントマークおよび位置測定方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
請求項1に記載の本発明は、段差を備えたアライメントマークにおいて、高さまたは深さ方向のいずれかに順テーパ状の斜面を備え、該アライメントマークの断面形状が左右対称であることを特徴とするアライメントマークである。
【0011】
請求項2に記載の本発明は、請求項1に記載のアライメントマークを備えたレチクルまたはウェハである。
【0012】
請求項3に記載の本発明は、光学的手段により所定面上に設けられたアライメントマークの像を検出し、検出された像を用いて該アライメントマークの位置情報を測定する位置計測方法において、請求項1に記載のアライメントマークを用いることを特徴とする位置計測方法である。
【0013】
請求項4に記載の本発明は、請求項3に記載の位置計測方法を用いたアライメント方法である。
【発明の効果】
【0014】
本発明のアライメントマークは、高さまたは深さ方向のいずれかに左右対称の順テーパ状の斜面を備えたことを特徴とすることにより、フォーカスレンズのフォーカシングの移動範囲がアライメントマークの段差のトップとボトムの間にあれば、輝度プロファイルの変化が最大となる点と、最小となる点とを検出でき、そこからアライメントマークの中心位置を計測することが出来る。
このため、フォーカスレンズの位置を高精度に制御したり、高度な画像処理機能を必要としたりせず、高速かつ簡便にアライメントを行うことが出来る。よって、測定装置のフォーカス位置に関係なく、高速に座標位置の測定が可能となるという優れた効果を奏する。
【発明を実施するための最良の形態】
【0015】
以下、本発明のアライメントマークについて、図2、図3を用いて説明する。
【0016】
本発明のアライメントマークは、段差を備えてなり、高さまたは深さ方向のいずれかに左右対称の順テーパ状の斜面を備えたことを特徴とする。ここで、順テーパ状の斜面とは、段差のトップとボトムが直線で結ばれた斜面に限定されず、連続した線(例えば、円弧など)で結ばれた斜面であれば良い。また、アライメントマークの段差は、アライメントマークが凸形状あるいは凹形状であることによりもたらされるものであり、そのどちらか一方に限定されるものではない(図2(b)、図3(b))。
【0017】
アライメントマークの平面形状は位置情報が得られやすい形状であれば特に制限されない。また、1つのマークでX,Y両方の位置情報を同時に計測できるため、マーク形状は90度回転対称が望ましい。このような形状としては、例えば、十字形(図2(a))、正方形(図3(a))などが挙げられる。
【0018】
以下、本発明のアライメントマーク(図2、図3)を用いた位置計測方法を、従来のアライメントマーク(図1)を用いた位置計測方法と比較しながら、図4を用いて説明する。
【0019】
<光学的手段を用いたアライメントマークのマーク中心位置の計測>
まず、フォーカスレンズを光軸方向に移動させて、アライメントマークに対してフォーカス位置の変更を行う。
【0020】
次に、フォーカス位置を変更しながら、CCDカメラなどの光学撮像素子上にアライメントマークを結像させ、その輝度プロファイルを得ることにより、各フォーカス位置での画像の輝度プロファイルを得る。ここで、輝度プロファイルとは指定した画像領域におけるピクセルのグレーレベル分布であり、一般にマークのエッジ部で輝度プロファイルの変化が大きくなり、極値(最大値あるいは最小値)を示す。つまり、アライメントマークのエッジ部を求める手段として、予めマークの輝度プロファイルに対して平滑化などによりノイズ成分を除去した後、微分処理を行うことで最大値や最小値を求め、アライメントマークのエッジ部を決定することが出来る。
【0021】
図4にフォーカス位置と輝度プロファイルの関係図を示す。図4において、実線は輝度プロファイル(指定した画像領域におけるピクセルのグレーレベル分布)であり、点線は前記輝度プロファイルを微分したものである。このとき、アライメントマークのエッジ部分において、画像の輝度プロファイルが極値となる。このため、アライメントマークのエッジ部分であるP1、P2の決定方法は、まず一定の輝度以上を持つ画像に対し(図4(a)でのフォーカス位置1,2,4,5は輝度不足のため、P1、P2を求められない)、輝度プロファイルを得て、その変化が最大となる点をP1、最小となる点をP2とする。
【0022】
なお、図4(a)は図1に示すような従来のアライメントマークにおける各フォーカス位置での画像の輝度プロファイル(実線)とその変化(点線)であり、
図4(b)は図2、図3に示すような本発明のアライメントマークにおける各フォーカス位置での画像の輝度プロファイル(実線)とその変化(点線)である。
【0023】
図4に示すように、輝度プロファイルの変化(輝度プロファイルの変化とは、図4の実線に示す輝度プロファイルの微分を取ったもので、図4の点線に示す波形である。)が最大となる点をP1、最小となる点をP2としたとき、アライメントマークの中心位置(以下、マーク中心位置)は、アライメントマークの断面形状が左右対称のため、P1とP2の中点、つまり(P1+P2)/2となる。このため、P1、P2の二つの点からマーク中心位置を計測することが出来る。
【0024】
図1に示す従来のアライメントマークの場合、断面形状がほぼ垂直であるため、ベストフォーカスの位置、つまり図4(a)におけるフォーカス位置3の場合のみ、P1およびP2を検出できる。このため、マーク中心位置を計測するためには、フォーカス位置3に焦点をあわせる必要がある。よって、フォーカスレンズの位置を高精度に制御したり、高度な画像処理機能を必要としたりするため、アライメントに時間を多大に要することになる。
【0025】
対して、図2に示すような本発明におけるアライメントマークの場合、断面形状が順テーパ状の斜面であるため、フォーカスレンズの移動範囲がパターンのトップとボトムの間にあれば、図4(b)に示すように、P1およびP2を検出出来る。このため、マーク中心位置を計測するために、厳密なフォーカス位置を必要としない。よって、フォーカスレンズの位置を高精度に制御したり、高度な画像処理機能を必要としたりせず、高速かつ簡便にアライメントを行うことが出来る。
【0026】
以下、本発明の位置計測方法を用いたアライメント方法の一例として、図5、図6を用いて説明する。
【0027】
まず、レチクルまたはウェハ(以下、被測定物)に本発明のアライメントマークを設ける。このとき、被測定物上に配するアライメントマークの箇所ついては特に制限はなく、被測定物上の任意の箇所に設けてよい。また、被測定物上に配したアライメントマークは、少なくとも2箇所の任意箇所に配置する。(以下、例えば、図6に示すように、被測定物上のアライメント点の1つをA点、もう一方をB点とする)
【0028】
次に、該アライメントマークを用いて、被測定物の位置情報を求める計測アルゴリズムについて説明する。図5は被測定物の位置情報を求める手順を示すフローチャートである。まず、被測定物を座標測定装置のステージ上に搬送した後、被測定物に少なくとも2箇所に設けたアライメントマークのマーク中心位置の座標を計測する。
【0029】
具体的には、まず、光学レンズと角度及び位置決めが可能なステージ系を具備する座標測定装置により、A点付近に移動する。
次に、前述した本発明の位置計測方法を用いて、A点のマーク中心位置を計測し、A点の計測値をメモリなどの記憶装置に格納する。
【0030】
次にB点付近に移動し、A点の場合と同様に、前述した本発明の位置計測方法により、B点のマーク中心位置を計測し、B点の計測値をメモリなどの記憶装置に格納する。
【0031】
次に、前記A点,B点の計測値と各点の座標測定装置の座標値A’,B’を比較し、角度の偏差量Δθを算出する。(図6)
【0032】
次に、算出したΔθに相当する分だけ座標測定装置のステージを回転させ、計測値による座標系をシステムの持つ座標系に一致させ、アライメントを終了する。
【産業上の利用可能性】
【0033】
本発明のアライメントマーク及び位置計測方法は、位置合わせを必要とする場面において広範に利用可能であり、特に高精度の位置合わせが要求される各種半導体装置の製造プロセスに有用である。
【図面の簡単な説明】
【0034】
【図1】従来のアライメントマークの模式図であり、(a)は平面図、(b)は断面図である。
【図2】本発明のアライメントマークの模式図であり、(a)は平面図、(b)は断面図である。
【図3】本発明のアライメントマークの模式図であり、(a)は平面図、(b)は断面図である。
【図4】フォーカスレンズの位置を変化させた時のマーク画像輝度プロファイルよりマーク中心位置を求める方法を説明する図であり、(a)は従来マークによるもの、(b)本発明のマークによるものである。
【図5】本発明の位置計測方法を用いたアライメント方法を説明するフローチャートである。
【図6】本発明のアライメントマークを配した被測定物を用いたアライメント方法の具体例を示す説明図である。
【符号の説明】
【0035】
10…アライメントマーク
【特許請求の範囲】
【請求項1】
段差を備えたアライメントマークにおいて、
高さまたは深さ方向のいずれかに順テーパ状の斜面を備え、
該アライメントマークの断面形状が左右対称であること
を特徴とするアライメントマーク。
【請求項2】
請求項1に記載のアライメントマークを備えたレチクルまたはウェハ。
【請求項3】
光学的手段により所定面上に設けられたアライメントマークの像を検出し、
検出された像を用いて該アライメントマークの位置情報を測定する位置計測方法において、
請求項1に記載のアライメントマークを用いること
を特徴とする位置計測方法。
【請求項4】
請求項3に記載の位置計測方法を用いたアライメント方法。
【請求項1】
段差を備えたアライメントマークにおいて、
高さまたは深さ方向のいずれかに順テーパ状の斜面を備え、
該アライメントマークの断面形状が左右対称であること
を特徴とするアライメントマーク。
【請求項2】
請求項1に記載のアライメントマークを備えたレチクルまたはウェハ。
【請求項3】
光学的手段により所定面上に設けられたアライメントマークの像を検出し、
検出された像を用いて該アライメントマークの位置情報を測定する位置計測方法において、
請求項1に記載のアライメントマークを用いること
を特徴とする位置計測方法。
【請求項4】
請求項3に記載の位置計測方法を用いたアライメント方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2008−10548(P2008−10548A)
【公開日】平成20年1月17日(2008.1.17)
【国際特許分類】
【出願番号】特願2006−177939(P2006−177939)
【出願日】平成18年6月28日(2006.6.28)
【出願人】(000003193)凸版印刷株式会社 (10,630)
【Fターム(参考)】
【公開日】平成20年1月17日(2008.1.17)
【国際特許分類】
【出願日】平成18年6月28日(2006.6.28)
【出願人】(000003193)凸版印刷株式会社 (10,630)
【Fターム(参考)】
[ Back to top ]