
アライメント測定構成、アライメント測定方法、デバイス製造方法及びリソグラフィ装置
【課題】マークごとの変化の影響が低減されたアライメント構成及びアライメント方法を提供する。
【解決手段】アライメント測定構成は、光源、光学システム及び検出器を含む。光源は、複数の波長範囲を含む放射ビームを生成する。光学システムは、放射ビームを受光し、アライメントビームを生成し、アライメントビームをオブジェクト上に位置するマークに誘導し、そのマークから戻るアライメント放射を受光し、受光した放射を伝送する。検出器は、アライメント放射を受光し、アライメントマークの画像を検出し、各々が波長範囲の1つに関連付けられた複数のアライメント信号rを出力する。プロセッサは、検出器と通信し、アライメント信号を受信し、アライメント信号の信号品質を決定し、アライメント信号の整列位置を決定し、信号品質、整列位置、及び整列位置を波長範囲とマーク深さ及びマーク非対称性を含むマーク特性とに関連付けるモデルに基づいてアライメントマークの位置を計算する。
【解決手段】アライメント測定構成は、光源、光学システム及び検出器を含む。光源は、複数の波長範囲を含む放射ビームを生成する。光学システムは、放射ビームを受光し、アライメントビームを生成し、アライメントビームをオブジェクト上に位置するマークに誘導し、そのマークから戻るアライメント放射を受光し、受光した放射を伝送する。検出器は、アライメント放射を受光し、アライメントマークの画像を検出し、各々が波長範囲の1つに関連付けられた複数のアライメント信号rを出力する。プロセッサは、検出器と通信し、アライメント信号を受信し、アライメント信号の信号品質を決定し、アライメント信号の整列位置を決定し、信号品質、整列位置、及び整列位置を波長範囲とマーク深さ及びマーク非対称性を含むマーク特性とに関連付けるモデルに基づいてアライメントマークの位置を計算する。
【発明の詳細な説明】
【技術分野】
【0001】
[0001] 本発明は、リソグラフィ装置及びデバイス製造方法に関する。
【背景技術】
【0002】
[0002] リソグラフィ装置は、所望のパターンを基板に、通常は基板のターゲット部分に適用する機械である。リソグラフィ装置は、例えば、集積回路(IC)の製造に使用可能である。このような場合、代替的にマスク又はレチクルとも呼ばれるパターニングデバイスを使用して、ICの個々の層上に形成すべき回路パターンを生成することができる。このパターンを、基板(例えばシリコンウェーハ)上のターゲット部分(例えば1つ又は幾つかのダイの一部を含む)に転写することができる。パターンの転写は通常、基板に設けた放射感応性材料(レジスト)の層への結像により行われる。一般的に、1枚の基板は、順次パターンが与えられる隣接したターゲット部分のネットワークを含んでいる。従来のリソグラフィ装置は、パターン全体をターゲット部分に1回で露光することによって各ターゲット部分が照射される、いわゆるステッパと、基板を所与の方向(「スキャン」方向)と平行あるいは逆平行に同期的にスキャンしながら、パターンを所与の方向(「スキャン」方向)に放射ビームでスキャンすることにより、各ターゲット部分が照射される、いわゆるスキャナとを含む。パターンを基板にインプリントすることによっても、パターニングデバイスから基板へとパターンを転写することが可能である。
【0003】
[0003] 複数のアライメント構成を使用するリソグラフィ装置は周知である。例えば、米国特許US7,414,722B2号を参照する。US7,414,722B2号には、広帯域光源を有するアライメント測定構成、光学システム及び検出器及び関連するアライメント測定方法が記載されている。広帯域光源は、第1及び第2の波長範囲を含む放射ビームを生成するように構成されている。光学システムは、生成された放射ビームを受光し、アライメントビームを生成し、アライメントビームをオブジェクト上に位置するマークに誘導し、マークから戻るアライメント放射を受光し、アライメント放射を伝送するように構成されている。検出器は、アライメント放射を受光し、オブジェクト上に位置するアライメントマークの画像を検出するように構成されている。検出器は、さらに、それぞれ上記第1及び第2の波長範囲にそれぞれ関連付けられた第1及び第2のアライメント信号を生成する。アライメント測定構成は、最後に検出器に接続されたプロセッサを有する。プロセッサは、第1及び第2のアライメント信号を受信し、信号品質表示パラメータを用いてそれぞれ第1及び第2のアライメント信号のそれぞれ第1及び第2の信号品質を決定し、第1及び第2の信号品質に基づいてアライメントマークの位置を計算するように構成されている。
【0004】
[0004] US7,414,722B2号の一実施形態では、最良の信号品質を有するアライメント信号を選択することにより別のアライメント信号を確立することができる。別の実施形態では、それぞれ決定された第1及び第2の信号品質に基づいて、それぞれ少なくとも第1及び第2の重み係数をそれぞれ上記第1及び第2のアライメント信号に割り当て、上記第1及び第2のアライメント信号の加重和を計算することにより別のアライメント信号が確立される。
【0005】
[0005] その性能が、例えば、異なるウェーハ上のマーク間及び/又は単一のウェーハ上の複数のマークとは別のマーク間のマーク深さ及び/又はマークの非対称性の変化によって依然として制約されることがあるという点が、周知のアライメント測定構成及び周知の方法の欠点である可能性がある。しかし、その変化は、場合によって大きすぎてアライメントマークの位置の決定に実質的に影響し、その結果、実質的なミスアライメント、それ故例えば、実質的なオーバレイエラーを引き起こし、製造されたデバイスの性能の低下につながるおそれがある。マーク深さ及び/又はマークの非対称性の変化は、例えば、リソグラフィ装置を用いて第1及び第2の所望のパターンの第1及び第2の印加の間に基板上に複数の層を塗布する一方で、エッチング及び研磨などの様々な工程が集積回路で施される基板上の集積回路の製造での処理ステップの結果として生起し得る。
【発明の概要】
【0006】
[0006] 従来技術に鑑みて性能が向上したアライメント構成及びアライメント方法を提供することが望ましい。特に、マークごとの変化の影響が低減されたアライメント構成及びアライメント方法を提供することが望ましい。さらに、本発明は、改良型アライメント方法に関連付けられたアライメントアセンブリ、リソグラフィ装置、デバイス製造方法、コンピュータプログラムプロダクト、及びデータキャリアを提供する。
【0007】
[0007] 第1の態様は、
リソグラフィ装置と一緒に使用するアライメント測定方法であって、
a)複数の波長範囲を有する放射による照射時にオブジェクト上に位置する少なくとも1つのアライメントマークの画像を検出するステップと、
b)各々が複数の波長範囲のうち対応する波長範囲で検出された画像に関連付けられた複数のアライメント信号を生成するステップと、
c)少なくとも1つの信号品質表示パラメータを用いてそれぞれのアライメント信号の複数の信号品質を決定するステップと、
d)少なくとも1つのマーク位置表示パラメータを用いてそれぞれのアライメント信号から複数の整列位置を決定するステップと、
e)複数の信号品質のうち少なくとも2つの信号品質と複数の整列位置のうち少なくとも2つの整列位置に少なくとも基づいて、上記少なくとも1つのアライメントマークの位置(Pos)を決定するステップとを含み、
上記少なくとも1つのアライメントマークの位置の上記決定ステップが、複数の第1の式及び複数の第2の式を含む一組の式を解くステップを含み、
第1の式が、少なくとも信号品質(WQ)と、放射の波長範囲と少なくとも1つのアライメントマークのマーク深さ(D)との間の第1の関係に関連付けられ、
第2の式が、少なくとも整列位置(AP)と、上記少なくとも1つのアライメントマークの位置(Pos)と、放射の波長範囲と少なくとも1つのアライメントマークのマーク深さ(D)との間の第2の関係に関連付けられたアライメント測定方法を提供する。
【0008】
[0008] 第2の態様は、
複数の波長範囲を含む放射ビームを生成するように構成された光源と、
生成された上記放射ビームを受光し、アライメントビームを生成し、上記アライメントビームをオブジェクト上に位置する少なくとも1つのマークに誘導し、上記少なくとも1つのマークから戻るアライメント放射を受光し、上記アライメント放射を伝送するように構成された光学システムと、
上記アライメント放射を受光し、上記オブジェクト上に位置する上記少なくとも1つのアライメントマークの画像を検出し、それぞれが対応する波長範囲に関連付けられた複数のアライメント信号を生成するように構成された検出器と、
上記検出器に接続されたプロセッサであって、少なくともアクションc)〜e)を実行するように構成されたプロセッサとを備えるアライメント測定構成を提供する。
【0009】
[0009] 第3の態様は、パターニングデバイスから基板上にパターンを転写するように構成されたリソグラフィ装置であって、
上記プロセッサが、決定された上記少なくとも1つのアライメントマークの位置に基づいて位置信号を確立するようにさらに構成された上記アライメント測定構成と、
上記プロセッサに接続されたアクチュエータであって、
上記位置信号を受信し、
受信した上記位置信号に基づいて位置補正を計算し、
位置補正信号を確立するように構成されたアクチュエータと、
整列させる上記基板を支持するように構成され、上記アクチュエータに接続された支持構造とを備え、
上記アクチュエータが確立された上記位置補正信号に応答して上記支持構造を移動させるように構成されるリソグラフィ装置を提供する。
【0010】
[0010] 第4の態様は、上記のリソグラフィ装置を用いてパターニングデバイスから基板上にパターンを転写するステップを含むデバイス製造方法を提供する。
【0011】
[0011] 第5の態様は、リソグラフィ装置のプロセッサによってロードされるデータ及び命令を備え、上記リソグラフィ装置が上記のアライメント測定方法を実行することを可能にするように構成されるコンピュータプログラムプロダクトを提供する。
【0012】
[0012] 第6の態様は、上記のコンピュータプログラムプロダクトを備えるデータキャリアを提供する。
【図面の簡単な説明】
【0013】
[0013] 対応する参照符号が対応する部分を示す添付の図面を参照しながら以下に本発明の実施形態について説明するが、これは単に例示としてのものに過ぎない。
【図1】[0014]本発明の一実施形態によるリソグラフィ装置を示す図である。
【図2】[0015]フィールド画像アライメント構成の一例の略図である。
【図3a】[0016]図2のアライメント構成で使用することができるマークの一例を示す図である。
【図3b】[0016]図2のアライメント構成で使用することができるマークの一例を示す図である。
【図4】[0017]図2の構成で使用され、マークから戻るアライメント放射を受光する検出器の出力信号を示す図である。
【図5】[0018]図2の構成で使用することができるマークの別の例を示す図である。
【図6】[0018]図2の構成で使用することができるマークの別の例を示す図である。
【図7a】[0019]周知の方法によるアライメント測定方法のフローチャートである。
【図7b】[0020]本発明の一実施形態によるアライメント測定方法のフローチャートである。
【図8】[0021]本発明の一実施形態によるフィールド画像アライメント構成の略図である。
【図9a】[0022]図8のアライメント構成で使用することができるフィルタユニットの一例の略図である。
【図9b】[0022]図8のアライメント構成で使用することができるフィルタユニットの一例の略図である。
【図10】[0023]マルチカラーCCDカメラの分光感度に関する情報を提供するグラフである。
【図11a】[0024]CCDカメラで使用することができる空間フィルタの一例を示す図である。
【図11b】[0024]CCDカメラで使用することができる空間フィルタの一例を示す図である。
【図11c】[0025]本発明と一緒に使用するのに適切な検出器の一実施形態を示す図である。
【図12a】[0026]本発明によるアライメント構成で使用することができる例示的な光源の態様を示す図である。
【図12b】[0026]本発明によるアライメント構成で使用することができる例示的な波長範囲の態様を示す図である。
【図12c】[0026]本発明によるアライメント構成で使用することができる例示的な波長範囲の態様を示す図である。
【図13】[0027]本発明の実施形態で使用されるプロセッサを備えるコンピュータを示す図である。
【図14】[0028]本発明の別の実施形態によるアライメント測定方法のフローチャートである。
【図15】[0029]本発明のさらに別の実施形態によるアライメント測定方法のフローチャートである。
【発明を実施するための形態】
【0014】
[0030] 図1は、本発明の一実施形態によるリソグラフィ装置を概略的に示したものである。この装置は、
− 放射ビームB(例えばUV放射又はEUV放射)を調節するように構成された照明システム(イルミネータ)ILと、
− パターニングデバイス(例えばマスク)MAを支持するように構成され、特定のパラメータに従ってパターニングデバイスMAを正確に位置決めするように構成された第1のポジショナPMに接続された支持構造(例えばマスクテーブル)MTと、
− 基板(例えばレジストコートウェーハ)Wを保持するように構成され、特定のパラメータに従って基板Wを正確に位置決めするように構成された第2のポジショナPWに接続された基板テーブル(例えばウェーハテーブル)WTと、
− パターニングデバイスMAによって放射ビームBに与えられたパターンを基板Wのターゲット部分C(例えば1つ又は複数のダイを含む)に投影するように構成された投影システム(例えば屈折投影レンズシステム)PSとを含む。
【0015】
[0031] 照明システムILは、放射の誘導、整形、又は制御を行うための、屈折、反射、磁気、電磁気、静電気型等の光学コンポーネント、又はその任意の組合せなどの種々のタイプの光学コンポーネントを含んでいてもよい。
【0016】
[0032] 支持構造は、パターニングデバイスを支持、すなわちその重量を支えている。支持構造は、パターニングデバイスの方向、リソグラフィ装置の設計等の条件、例えばパターニングデバイスが真空環境で保持されているか否かに応じた方法で、パターニングデバイスを保持する。この支持構造は、パターニングデバイスを保持するために、機械的、真空、静電気等のクランプ技術を使用することができる。支持構造は、例えばフレーム又はテーブルでよく、必要に応じて固定式又は可動式でよい。支持構造は、パターニングデバイスが例えば投影システムなどに対して確実に所望の位置にくるようにできる。本明細書において「レチクル」又は「マスク」という用語を使用した場合、その用語は、より一般的な用語である「パターニングデバイス」と同義と見なすことができる。
【0017】
[0033] 本明細書において使用する「パターニングデバイス」という用語は、基板のターゲット部分にパターンを生成するように、放射ビームの断面にパターンを与えるために使用し得る任意のデバイスを指すものとして広義に解釈されるべきである。ここで、放射ビームに与えられるパターンは、例えばパターンが位相シフトフィーチャ又はいわゆるアシストフィーチャを含む場合、基板のターゲット部分における所望のパターンに正確には対応しないことがある点に留意されたい。一般的に、放射ビームに与えられるパターンは、集積回路などのターゲット部分に生成されるデバイスの特定の機能層に相当する。
【0018】
[0034] パターニングデバイスは透過性又は反射性でよい。パターニングデバイスの例には、マスク、プログラマブルミラーアレイ、及びプログラマブルLCDパネルがある。マスクはリソグラフィにおいて周知のものであり、これには、バイナリマスク、レベンソン型(alternating)位相シフトマスク、ハーフトーン型(attenuated)位相シフトマスクのようなマスクタイプ、さらには様々なハイブリッドマスクタイプも含まれる。プログラマブルミラーアレイの一例として、小さなミラーのマトリクス配列を使用し、そのミラーは各々、入射する放射ビームを異なる方向に反射するよう個々に傾斜することができる。傾斜したミラーは、ミラーマトリクスによって反射する放射ビームにパターンを与える。
【0019】
[0035] 本明細書において使用する「投影システム」という用語は、例えば使用する露光放射、又は液浸液の使用や真空の使用などの他の要因に合わせて適宜、例えば屈折光学システム、反射光学システム、反射屈折光学システム、磁気光学システム、電磁気光学システム及び静電気光学システム、又はその任意の組合せを含む任意のタイプの投影システムを網羅するものとして広義に解釈されるべきである。本明細書において「投影レンズ」という用語を使用した場合、これはさらに一般的な「投影システム」という用語と同義と見なすことができる。
【0020】
[0036] 本明細書で示すように、本装置は透過タイプである(例えば透過マスクを使用する)。あるいは、装置は反射タイプでもよい(例えば上記で言及したようなタイプのプログラマブルミラーアレイを使用する、又は反射マスクを使用する)。
【0021】
[0037] リソグラフィ装置は、2つ(デュアルステージ)又はそれ以上の基板テーブル(及び/又は2つ以上のパターニングデバイステーブル)を有するタイプでよい。このような「マルチステージ」機械においては、追加のテーブルを並行して使用するか、1つ又は複数の他のテーブルを露光に使用している間に1つ又は複数のテーブルで予備工程を実行することができる。
【0022】
[0038] リソグラフィ装置は、また、基板の少なくとも一部分が、比較的高い屈折率を有する液体、例えば水に覆われて、投影システムと基板との間の空間が満たされるタイプのものであってもよい。液浸液は、マスクと投影システムとの間などのリソグラフィ装置内の他の空間に与えてもよい。液浸技術は、投影システムの開口数を増やす技術として当技術分野では周知である。本明細書で使用する「液浸」という用語は、基板などの構造を液体中に沈めなくてはならないことを必ずしも意味するものではなく、露光中に投影システムと基板との間に液体があることを意味するものに過ぎない。
【0023】
[0039] 図1を参照すると、イルミネータILは放射源SOから放射ビームを受ける。放射源SOとリソグラフィ装置とは、例えば放射源SOがエキシマレーザである場合に、別々の構成要素であってもよい。このような場合、放射源SOはリソグラフィ装置の一部を形成すると見なされず、放射ビームは、例えば適切な誘導ミラー及び/又はビームエクスパンダなどを備えるビームデリバリシステムBDの助けにより、放射源SOからイルミネータILへと渡される。他の事例では、例えば放射源SOが水銀ランプの場合は、放射源SOがリソグラフィ装置の一体部分であってもよい。放射源SO及びイルミネータILは、必要に応じてビームデリバリシステムBDとともに放射システムと呼ぶことができる。
【0024】
[0040] イルミネータILは、放射ビームの角度強度分布を調節するアジャスタADを備えていてもよい。通常、イルミネータILの瞳面における強度分布の外側及び/又は内側半径範囲(一般にそれぞれ、σ-outer及びσ-innerと呼ばれる)を調節することができる。また、イルミネータILは、インテグレータIN及びコンデンサCOなどの他の種々のコンポーネントを備えていてもよい。イルミネータを用いて放射ビームを調整し、その断面にわたって所望の均一性と強度分布とが得られるようにしてもよい。
【0025】
[0041] 放射ビームBは、支持構造(例えば、マスクテーブルMT)上に保持されたパターニングデバイス(例えば、マスクMA)に入射し、パターニングデバイスMAによってパターニングされる。パターニングデバイスMAを横断した放射ビームBは、投影システムPSを通過し、投影システムPSは、ビームを基板Wのターゲット部分C上に合焦させる。第2のポジショナPWと位置センサIF(例えば、干渉計デバイス、リニアエンコーダ又は容量センサ)の助けを借りて、基板テーブルWTは、例えば、様々なターゲット部分Cを放射ビームBの経路に位置決めできるように正確に移動できる。同様に、第1のポジショナPMと別の位置センサ(図1には明示されていない)を用いて、マスクライブラリからの機械的な取り出し後又はスキャン中などに放射ビームBの経路に対してパターニングデバイスMAを正確に位置決めできる。一般に、支持構造MTの移動は、第1のポジショナPMの部分を形成するロングストロークモジュール(粗動位置決め)及びショートストロークモジュール(微動位置決め)の助けにより実現できる。同様に、基板テーブルWTの移動は、第2のポジショナPWの部分を形成するロングストロークモジュール及びショートストロークモジュールを用いて実現できる。ステッパの場合(スキャナとは対照的に)、支持構造MTをショートストロークアクチュエータのみに接続するか、又は固定してもよい。パターニングデバイスMA及び基板Wは、パターニングデバイスアライメントマークM1、M2及び基板アライメントマークP1、P2を使用して位置合わせすることができる。図示のような基板アライメントマークは、専用のターゲット部分を占有するが、ターゲット部分Cの間の空間に位置してもよい(スクライブレーンアライメントマークとして周知である)。同様に、パターニングデバイスMA上に複数のダイを設ける状況では、パターニングデバイスアライメントマークをダイ間に配置してもよい。
【0026】
[0042] 図示のリソグラフィ装置は以下のモードのうち少なくとも1つにて使用可能である。
【0027】
[0043] 1.ステップモードにおいては、マスクテーブルMT及び基板テーブルWTは、基本的に静止状態に維持される一方、放射ビームに与えたパターン全体が1回でターゲット部分Cに投影される(すなわち単一静的露光)。次に、別のターゲット部分Cを露光できるように、基板テーブルWTがX方向及び/又はY方向に移動される。ステップモードでは、露光フィールドの最大サイズによって、単一静的露光で像が形成されるターゲット部分Cのサイズが制限される。
【0028】
[0044] 2.スキャンモードにおいては、マスクテーブルMT及び基板テーブルWTは同期的にスキャンされる一方、放射ビームに与えられるパターンがターゲット部分Cに投影される(すなわち単一動的露光)。マスクテーブルMTに対する基板テーブルWTの速度及び方向は、投影システムPSの拡大(縮小)及び像反転特性によって求めることができる。スキャンモードでは、露光フィールドの最大サイズによって、単一動的露光におけるターゲット部分Cの(非スキャン方向における)幅が制限され、スキャン動作の長さによってターゲット部分Cの(スキャン方向における)高さが決まる。
【0029】
[0045] 3.別のモードでは、マスクテーブルMTはプログラマブルパターニングデバイスを保持して基本的に静止状態に維持され、基板テーブルWTを移動又はスキャンさせながら、放射ビームに与えられたパターンをターゲット部分Cに投影する。このモードでは、一般にパルス状放射源を使用して、基板テーブルWTを移動させる毎に、又はスキャン中に連続する放射パルスの間で、プログラマブルパターニングデバイスを必要に応じて更新する。この動作モードは、以上で言及したようなタイプのプログラマブルミラーアレイなどのプログラマブルパターニングデバイスを使用するマスクレスリソグラフィに容易に利用できる。
【0030】
[0046] 上述した使用モードの組合せ及び/又は変形、又は全く異なる使用モードも利用できる。
【0031】
[0047] 図2は、フィールド画像アライメント構成の一例を概略的に示す。このようなアライメント構成は、静的な測定に基づく。図2のフィールド画像アライメント構成は、広帯域光源である光源1を備える。光源1は、ファイバ2の一端に接続されている。送信機3が、ファイバ2の反対側の端部に接続されている。基板W上のマークM3(図3aを参照)に向けてアライメントビームを提供する光学系は、半透明のミラー4と、ミラー5とを含む。マークM3から戻るアライメント放射を受光し、検出器7、例えば電荷結合素子(CCD)に適切な光学像を提供する結像光学系6が提供される。検出器7は、プロセッサ8に接続されている。プロセッサ8は、アクチュエータ11とメモリ12とに接続されている。アクチュエータ11は、基板Wをその上に配置することができる基板テーブルWTに接続されている。図2では、プロセッサ8とメモリ12の両方が別のユニットとして提示されている。しかし、プロセッサ8及び/又はメモリ12は、物理的に検出器7内にあってもよい。さらに、これらの一方は、図13を参照して説明するコンピュータアセンブリの一部であってもよい。
【0032】
[0048] 使用時に、光源1は、ファイバ2を介して送信機3へ出力される広帯域光ビームを生成する。送信機3は、ミラー4からミラー5へ反射される広帯域光ビーム9を提供する。ミラー5は、基板W上のマークM3へ誘導される広帯域アライメントビーム10を生成する。マークM3に入射する広帯域光ビーム10は、アライメント放射としてミラー5へ反射される。ミラー5は、受光した光を半透明のミラー4へ反射し、半透明のミラー4は、受光した光の少なくとも一部を結像光学系6へ送る。結像光学系6は、受光したアライメント放射を収集して適切な光学像を検出器7に提供するように構成されている。検出器7は、結像光学系6から受光した光学像の内容に応じた出力信号をプロセッサ8に提供する。検出器7から受光した出力信号とプロセッサ8によるアクションの結果は、メモリ12に記憶することができる。プロセッサ8は、検出器7から受光する1つ又は複数の出力信号に基づいてアライメントマークM3の位置を計算する。検出器7は、次に、別の出力信号をアクチュエータ11に提供する。アクチュエータ11は、基板テーブルWTを移動させるように構成されている。別の出力信号11を受信すると、アクチュエータ11は、所望の位置へ向けて基板テーブルWTを移動させる。
【0033】
[0049] 図3aは、本発明で使用することができる基板W上にあるマークM3の上面図を示す。マークM3は、幅W3と長さL3とを有する複数の棒状の構造15を備える。これらの寸法の代表値は、W3=6μm、L3=75μmである。棒状の構造15は、ピッチP3を有する。ピッチP3の代表値は、P3=12μmである。
【0034】
[0050] 図3bは、図3aの線IIIbに沿ったマークM3の断面の一例を示す。マークM3は、マーク深さDを有する。マーク深さDは、例えば、研磨ステップなどを含む集積面の製造中の複数の材料の多層の塗布及びパターニングのために、基板Wのその後の処理中に異なる場合がある。マークM3は、実質的に対称の棒状の構造15を有するように設計されているが、図3bに示すマークM3の棒状の構造15は非対称である。この非対称性は、例えば、図3bにBで示すように、棒状の構造15の両側の側面の高さの差として表すことができる。このいわゆるマークの非対称性は、例えば、多層の塗布及びパターニングに起因する可能性がある。
【0035】
[0051] 図4は、結像光学系6から受信し、マークM3の光学像に基づいてプロセッサ8へ送信される検出器7の出力信号を示す。出力信号は、プロセッサ8へ転送される2次元画像の形態をとることができることに留意されたい。図4に示す曲線は、広帯域アライメントビーム10で照明されている時のマークM3の位置の関数としての信号強度を示す。この曲線は、強度レベルがI1の絶対最大値、強度レベルがI2の局所最大値及び強度レベルがI3の絶対最小値を示す。絶対最大値I1は、それぞれの棒状の構造15の中心に関連付けられている。局所最大値I2は、隣接する棒状の構造15間の空間の中心に関連付けられている。絶対最小値I3は、棒状の構造15間の中間空間への棒状の構造15の遷移のすぐ脇の位置に関連付けられている。したがって、絶対最大値I1と局所最大値I2との間の曲線の勾配は、棒状の構造15間の遷移によるものである。これらの遷移部分、すなわち、棒状の構造15の両側面に反射する光はほとんどない。
【0036】
[0052] したがって、検出器7は、マークM3の2D画像を受信する。検出器7のプロセッサ8への出力信号は、1D情報だけを含んでいてもよい。しかし、2D画像をプロセッサ8へ転送し、あるアルゴリズムを用いてこの画像に基づいて位置を決定することができる。様々なアルゴリズムを用いて、受信した画像情報から図4に示すように強度信号を得ることができる。例えば、検出器は、検出面を形成するマトリクスに配列されたカメラピクセルを含むCCDカメラであってもよい。例えば、検出器7は、行列状に配置されたCCD素子を備えたCCDであって、カラムのCCD素子によって受信される信号が平均されるCCDであってもよい。詳細については、K.Ota他の論文、「New Alignment Sensors for Wafer Stepper」、SPIE、Vol.1463、Optical/Laser Microlithography IV(1991年)、P.304〜314を参照されたい。別の例では、検出器は、マークの画像を検出器と共に基準構造として提供された基準パターンに一致させるように構成されていてもよい。基準構造は、例えば、複数の棒状の構造15を備えるマークM3の画像に一致する基準格子であってもよい(図3aに示す)。別の例と詳細については、軸外アライメントユニットについて記載するEP0906590号及び自己参照型干渉計について記載するEP1372040A2号を参照されたい。
【0037】
[0053] さらに、様々なアルゴリズムを用いて図4に示す強度信号に基づくアライメント位置を得ることができる。1つのアルゴリズムでは、図4に示すスライスレベルを使用する。I1とI3との間の強度値が選択され、この選択された値(スライスレベル)に基づいてマークM3の位置が決定される。
【0038】
[0054] 図5及び図6は、本発明で使用することができる別のマークM4及びM5をそれぞれ示す。図5に示すアライメントマークM4は、x方向の位置を測定するためのマーク部分M4xとy方向の位置を測定するためのマーク部分M4yとを有する。マーク部分M4xは、マークM3と同様である。マーク部分M4xは、幅W4x、長さL4x、及びピッチP4xを有する複数の棒状の構造を備える。マーク部分M4yは、マーク部分M4xと同様であるが、90°回転している。マーク部分M4yは、幅W4y、長さL4y、及びピッチP4yを有する棒状の構造を備える。幅W4x、W4y、長さL4x、L4y、及びピッチP4x、P4yは、それぞれ、マークM3のそれぞれ幅W3、長さL3、及びピッチP3と同様の値を有する。一方向の位置だけを測定したい時には、マーク部分M4x又はマーク部分M4yだけを提供すれば十分である。基板テーブルWT上にそのようなアライメントマークM4が提供される時には、アライメントマークM4をオンライン較正の目的にも使用することができる。
【0039】
[0055] 図6は、本発明で使用することができるアライメントマークM5の別の例を示す。このアライメントマークは、複数のカラムを有する。各々のカラムでは、複数の角形構造17が位置する。角形構造17は、x方向に幅W5xと、y方向にW5yを有する。x方向のマークM5の長さはL5xで、y方向のマークM5の長さはL5yである。マークM5は、x方向の隣接するカラム間のピッチP5xと、y方向のカラム間のピッチP5yとを有する。幅W5x、W5yの代表値は、4μmである。長さL5x、L5yの代表値は、40〜100μmである。ピッチP5x、P5yの代表値は、8μmである。図2のアライメント構成で使用する時には、図4に示すのと同様の強度信号がプロセッサ8のために検出器7によって生成される。マークM5は、信号対雑音比が低いためにM3又はM4より最適でないことがある。しかし、広帯域光源1を使用するため、これは小さい問題と予想される。その理由は、広帯域光源1を使用する結果、使用される帯域幅の一部で強めあう干渉が発生するからである。さらに、アライメントマークM5は、実際、x方向とy方向の両方で使用することができることに留意されたい。
【0040】
[0056] 半導体工程では、アライメントマークは様々に変更される。とりわけ、干渉によるコントラストがこれらのマークの変更の結果として劣化し、アライメントエラーを引き起こすことがある。コントラストの低下は、照明光の波長に左右される。マーク内の高さの変化が位相深さλ/2に対応する場合、弱め合う干渉が発生する。すなわち、マークは、平坦なミラーの役割を果たす。この場合、すべての光がゼロ次数に回折するため、コントラストは検出されない。さらに、λ/2に等しくない位相深さでは、光はより高い次数に回折する。
【0041】
[0057] フィールド画像アライメント構成では、図2に示すように、一般に広帯域照明源が使用される。波長によっては弱め合う干渉を発生させるが、広帯域照明源によって生成される波長範囲内の他の波長は、強めあう干渉を発生させる。したがって、常に強めあう干渉が発生する、すなわち、広帯域放射で照明されるアライメントマークの画像の検出時に検出器によって確立されるアライメント信号には、常にコントラストが存在する。フィールド画像アライメントを使用するアライメントシステムは、一般に530〜650nmの固定照明帯域幅を使用し、固定量の回折次数を検出して全波長を単一の検出器上に一体化し、こうしてアライメントマークの画像が提供される。このようなアライメントシステムの精度には限界がある。特に、精度は、マーク間でのマーク深さの変化及び/又はマーク非対称性の変化などのマーク特性の変化によって阻害される。
【0042】
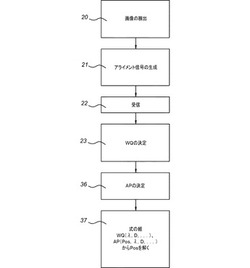
[0058] 図7aは、US7,414,722B2号に記載された周知の方法によるアライメント測定方法のフローチャートを示す。図7bは、本発明の一実施形態によるアライメント測定方法のフローチャートである。これらのアライメント方法は、図2に示すフィールド画像アライメント構成で実行することができる。3つのフローチャートのすべてで、検出器7は、最初にアクション20で複数の所定の波長範囲を有する放射、例えば、アライメントビーム10で照明されたアライメントマークの画像を検出する。検出すると、検出器7は、アクション21でアライメント信号の選択を生成する。すなわち、各アライメント信号は、異なる所定の波長範囲によって形成される少なくとも1つのアライメントマークの検出された画像に関連する。アライメント信号の選択は、少なくとも1つのアライメントマークを選択された異なる所定の波長範囲で連続的に照明することにより、例えば、各々が所定の波長範囲のみを通過させるように設計された広帯域光源1によって生成された広帯域光ビーム9をフィルタリングする異なるタイプのフィルタを連続的に当てることにより得ることができる。いくつかのフィルタを備えるフィルタユニットの例を図9a、図9bに概略的に示す。後述するように、別の実施形態では、異なる所定の波長範囲の画像が、上記の範囲を並列に測定することができる検出器7を提供することにより得られる。検出器7によって生成されるアライメント信号がアクション22でプロセッサ8によって受信される。次に、すべての生成されたアライメント信号の信号品質が、アクション23で1つ又は複数の品質表示パラメータを用いて決定される。信号品質は、ウェーハ品質WQとも呼ばれる。これは、アライメントマークがウェーハ上のマークである時に、現在の波長範囲でウェーハ上のアライメントマークを検出する品質を示すからである。以下、式と簡単な参照のために頭辞語WQを使用する。このような品質表示パラメータの例は、アライメント信号の信号強度、雑音レベル及び適合品質を含む。当業者には明らかなように、アライメント信号の信号品質は、プロセッサ8によって自動的に決定することができる。
【0043】
[0059] 図7aに示すUS7,414,722B2号に記載する方法では、次に各アライメント信号の決定された信号品質を用いて、アクション24で別のアライメント信号が確立される。US7,414,722B2号の方法の一実施形態では、別のアライメント信号は、最良の決定された信号品質を有するアライメント信号と同一である。US7,414,722B2号の方法の別の実施形態では、その値がアライメント信号ごとの決定された信号品質に基づく重み係数が、各アライメント信号に割り当てられる。次に、別のアライメント信号は、すべてのアライメント信号の加重和に対応する。最後に、少なくとも1つのアライメントマークの位置が、確立された別のアライメント信号に基づいてアクション25で計算される。複数のマークの測定、すなわち、複数マーク測定の場合、アクション24及び25をマークごとに実行して各アライメントマークに対して異なる加重和を得ることができる。アクション24及び25は、当業者には明らかなように、プロセッサ8によって自動的に実行することもできる。
【0044】
[0060] 本発明の方法の一実施形態を図7bに示す。アクション23の後で、この方法はアクション36へ進む。アライメントマークの位置推定値がアクション36で各アライメント信号について決定される。以下、位置推定値を整列位置APと呼ぶ。整列位置APは、マークが波長範囲を使用しているように見える位置であって、オブジェクト上のアライメントマークの(実際の)位置とは異なるということを明示するために、見かけの位置とも呼ばれる。複数のマークの測定の場合、マークごとにアクション36が実行される。整列位置は、関連付けられたアライメント信号が最適な信号品質を有する位置に対応する。続いて、各々の確立されたアライメント信号の計算された位置推定値APと決定された信号品質WQの両方に基づいて、プロセッサ8はアクション37でアライメントマークの位置を決定する。このために、プロセッサ8は、複数の第1の式及び複数の第2の式を含む一組の式を解く。第1の式は、少なくとも信号品質WQ、放射の波長範囲及びアライメントマークのマーク深さDの第1の関係に関連付けられ、第2の式は、少なくとも整列位置AP、上記少なくとも1つのアライメントマークの位置Pos、放射の波長範囲及びアライメントマークのマーク深さDの第2の関係に関連付けられている。
【0045】
[0061] したがって、(図7aに関連して上述したUS7,414,722B2号の周知の方法のように)信号品質WQは、アライメント信号を単に選択するか又は重み付けするのに使用されず、信号品質WQの情報内容が使用され、信号品質WQ、使用される波長範囲、及びマーク深さDを含むマーク特性間のモデル化された関係に関連付けられている。整列位置のモデル化された関係は、例えばマークの非対称性も含む。この手法によってアライメントマークの真の位置を決定する性能が向上する。複数のアライメントマークの異なるマーク間のマーク深さの変化とマークの非対称性の変化による影響は、各々の信号品質が複数のアライメントマークの1つに対応する複数の信号品質を備えたモデルを用いて波長範囲ごとに説明することができる。
【0046】
[0062] 一実施形態では、画像検出ステップは、複数の波長範囲での同時の照明時にすべての複数の波長範囲について実質的に同時に実行される。
【0047】
[0063] 別の実施形態では、画像検出ステップは、複数の波長範囲の各々の波長範囲での順次照明時に複数の波長範囲について順次実行される。
【0048】
[0064] モデルの実施形態をいくつかの例で以下に示す。選択されたモデルでは、各波長範囲は、1つの波長によってパラメータ化されることがあるため、以下の例では、波長範囲を波長と呼ぶ。
【0049】
例1−単一のアライメントマークの位置の決定
[0065] 第1の例では、単一のアライメントマーク上の、互いに近くにある、例えば、数nm離れた2つ以上の波長(λ1,λ2,...)でウェーハ品質(WQ)と整列位置(AP)とを測定することによりマーク深さの変化(D)からの独立を可能にする。
【0050】
[0066] アライメントによって以下のデータが得られる。
WQ(λ1),WQ(λ2),...及び
AP(λ1),AP(λ2),...
【0051】
[0067] WQ、マーク深さ、位相及び波長の適切な(1次の次数までの)関係が以下の式によって与えられる。
WQ(λ)=A(λ)・sin2(2πD/λ+φ) 式(a)
整列位置、「真の」アライメントマーク位置(Pos)、マーク深さ(D)、位相及び波長の適切な(1次の次数の)関係が以下の式によって与えられる。
AP(λ)=Pos+B(λ)・tan(2πD/λ+1/2*π+φ) 式(b)
ここで、
Dは、マーク深さ、
A(λ)は、通常、波長の関数としてのゆっくりと変化する係数であって、例えば、波長に依存する吸収を含んでいてもよい。
B(λ)は、マークの非対称に依存する係数であって、非対称性がない時には、B(λ)は0であり、B(λ)の代表値は0〜10nmであり、
φは、局所位相(エッチングされたウェーハでは、φ=0)である。
【0052】
[0068] この考え方を説明するために、2つの波長の簡単な例と、φ=0を取り上げる。2つの波長の場合、あるマークについて以下の一組の式を得る。
−ウェーハ品質WQ、マーク深さ、位相及び波長の関係に関連付けられた第1の複数の式:
WQ(λ1)=A(λ1)・sin2(2πD /λ1)
WQ(λ2)=A(λ2)・sin2(2πD /λ2) 式(1〜2)
−整列位置AP、「真の」アライメントマーク位置(Pos)、マーク深さ(D)、位相及び波長に関連付けられた第2の複数の式:
AP(λ1)=Pos+B(λ1)・tan(2πD/λ1+1/2*π)
AP(λ2)=Pos+B(λ2)・tan(2πD/λ2+1/2*π) 式(3〜4)
波長は互いに近くにあるため、式1及び2について以下の近似が可能である。
A(λ1)=A(λ2)
式(1〜2)を式5に転換することができる。
WQ(λ1)/WQ(λ2)=sin2(2πD/λ1)/sin2(2πD/λ2) 式(5)
これを解いて(有効)マーク深さDを得る。
【0053】
[0069] 次に、(数字的に又は分析的に)発見されたDの解を式3及び4に代入することができる。また、ここで非対称係数B(λ)がλのゆっくりと変化する係数であると仮定し、近似を行うことができる。
B(λ1)=B(λ2)
次に、式5から得たDの解を式3〜4に代入することにより、この式の組を解いてマークの位置Posを得ることができる。
【0054】
[0070] 位相モデル化を含めた場合には、3波長検出システムを使用する。実際の用途としては、この手法をとる必要がある。
【0055】
[0071] その場合、解くことでアライメントマークの位置Posを決定する式の組は以下の通りである。
WQ(λ1)=A(λ1)・sin2(2πD/λ1+φ)
WQ(λ2)=A(λ2)・sin2(2πD/λ2+φ)
WQ(λ3)=A(λ3)・sin2(2πD/λ3+φ) 式(c)
AP(λ1)=Pos+B(λ1)・tan(2πD/λ1+1/2*π+φ)
AP(λ2)=Pos+B(λ2)・tan(2πD/λ2+1/2*π+φ)
AP(λ3)=Pos+B(λ3)・tan(2πD/λ3+1/2*π+φ) 式(d)
A及びBがλから独立していると仮定して、6つの式を有する5つのパラメータが得られる。これは、様々な方法で解くことができる。例えば、
−この式の組は過剰決定系(over-determined system)として解くことができ、次に、例えば、任意の余りの尺度(最適な色の組合せのための選択に使用することができる)も提供することができる。
−5つの式を完全決定系(fully determined system)として解き、Aは定数である、及び/又はBは定数であるという仮定を検査することができる。
−別のパラメータを追加しながら6つの式を完全決定系として解く。
例えば、マークの非対称性に依存する係数は、B(λ)=B0+Bc*λとしてパラメータ化でき、ここで、B0及びBcは、波長から独立したパラメータである。その場合、B0及びBcを解く必要がある。
【0056】
[0072] (3波長)検出(位相決定を含む)によって、これらの式による局所近似に基づいて位置を計算することができる。
【0057】
[0073] また、上記の式a、b、c及びdの関数形状の選択は、1次モデルに基づいていることに留意されたい。予測深さDのテイラー展開などの別の適切な関数を使用してもよい。
【0058】
例2−単一のウェーハ上の複数のアライメントマークの位置の決定
[0074] 一実施形態によれば、この方法によって測定を単一のウェーハ上の異なるマーク間のマーク深さの変化から独立させることができる。マーク深さは、ウェーハ上の位置の関数D(x,y)として表すことができる。
【0059】
[0075] ウェーハ品質(WQ)及び整列位置(AP)は、ここでも少なくとも2つ以上の波長(λ)を用いてウェーハ上の複数のマークについて測定することができる。波長は、大きく離間していてもよい。
【0060】
[0076] 一組の関係式を(局所的に)真であると仮定することで結合し、解くことができるアライメントマーク結果を組み込んだ一組の式を含むモデルを使用する。
【0061】
[0077] アライメント信号から、以下のデータが確立される。
WQ1(λ1),WQ1(λk),...WQ1(λk0)
AP1(λ1),AP1(λk),...AP1(λk0)
...
WQn(λ1),...WQn(λk),...WQn(λk0)
APn(λ1)....APn(λk)....APn(λk0)
...
WQn0(λ1)....WQn0(λk),...WQn0(λk0)
APn0(λ1)....APn0(λk),....APn0(λk0)
ここで、
WQn(λk)は、波長λkでのマークnのウェーハ品質;
APn(λk)は、波長λkでのマークnの整列位置;
n0は、アライメントマークの数を示す;
k0は、使用する波長の数を示す;
これらの測定データを結合して簡単な(局所的な)状況で成立する追加のパラメータを含む式を導入することができる。
【0062】
[0078] ウェーハ品質WQn(λk)、マーク深さDn,k、位相φn(λk)及び波長λkの適切な(1次の次数までの)関係が以下の式によって与えられる。
WQn(λk)=An(λk)・sin2(2πDn,k/λk+φn(λk)) 式(aa)
整列位置APn(λk)、「真の」アライメントマーク位置Posn、マーク深さDn,k、及び波長λkの適切な(1次の次数の)関係が以下の式によって与えられる。
APn(λk)=Posn+Bn(λk)・tan(2πDn,k/λk+1/2*π+φn(λk)) 式(bb)
ここで、
Dn,kは、波長λkでのマークnの有効深さ;
An(λk)は、通常、波長の関数としてのゆっくりと変化する係数である。波長に依存する吸収とマークに依存する吸収層の厚さの変化は、この係数の一部である;
Bn(λk)は、マークの非対称性に依存する係数である。非対称性がない時には、B(λ)は0である;Bn(λk)の代表値は0〜10nmである;
φn(λk)は局所位相である;エッチングされたウェーハでは、φ=0である;
Posnは、アライメントマークnの「真の」アライメントマーク位置(すなわち、使用される波長から独立したアライメントマークの位置)である。
【0063】
[0079] 次に、過小決定された(underdetermined)この式の系の解を見つける必要がある。
この系は
k0*n0(WQ)+k0*n0(AP)=2*k0*n0個の式
に等しいいくつかの式と、
n0(Pos)+n0*k0(A)+n0*k0(B)++n0*k0(D)+n0*k0(φ)
=(4*k0+1)*n0個の変数
に等しいいくつかの未知数(変数)とを有する。
【0064】
[0080] この過小決定された式の組の解は、変数の数を低減できるセンシブルな近似をすることにより見つけることができる。上記の式(aa)及び(bb)の解を得るためには、少なくとも2つの色の結果の間に相関関係が存在する必要があるので、光信号の光源は等しくなければならない。これは、信号が同一の層から伝送されなければならないことを意味する。これは、常にそうであるということではないことに留意されたい。1つの色が層の重なりを通して印刷されたマーク(例えば、FIR)までを探り、別の色(例えば、緑)がウェーハの上面のトポロジの変化しか探れない場合(層がこの光を通さないため)、各色の信号の相関は十分でないという予想ができる。したがって、これらの色は、IC製造工程の段階に応じて、特に層のタイプ(材料)と厚さに応じて選択することができる。いくつかの色の相関は限られた量の波長について成立し、波長は、満足する波長の数kr0=k0である一組の満足する波長{kr}として選択される。
【0065】
[0081] この仮定は、変数の数としての両方の数を代入した式を低減し、したがって、各色がこの手法で有用であるための必要条件であることに留意されたい。
【0066】
[0082] 各色が相関すると、各変数について以下のようにいくつかの仮定が成り立つ。
−同一の(埋め込み)マーク構造に整列し、したがって相関する色の場合、有効マーク深さDは波長から独立している。
−処理は局所的な現象であるため、Dはさらにウェーハ上のマークの位置に依存する。したがって、Dnは、M次の次数モデルによって近似できる。mの選択は、例えばm=10であってもよい。mの最適な値は、例えば、使用される処理装置に応じて決定することができる。したがって、
波長k∈{kr}では、Dn,k=D(x,y,k)=d1(k)+d2*x+d3*y+......dm*fm(x,y)
−信号振幅(A)、非対称性変数(B)及び位相(φ)については、有効マーク深さ(D)のパラメータ化に関して同様の議論が成立する。
Q次の次数のモデルをAを説明するデータに適合させることができ、
S次の次数のモデルをBを説明するデータに適合させることができ、
F次の次数のモデルをφを説明するために適合させることができる。
Q、S及びFの選択の例は10である。
−信号振幅A、非対称性パラメータB及び位相φは、以下の式によって近似できると仮定する。
波長k∈{kr}では、An,k=A{kr}(x,y,k)=a1(k)+a2*x+a3*y+......aq*fq(x,y)
波長k∈{kr}では、Bn,k=B{kr}(x,y,k)=b1(k)+b2*x+b3*y+......bs*fs(x,y)
波長k∈{kr}では、φn,k=φ{kr}(x,y,k)=c1(k)+c2*x+c3*y+......cf*ff(x,y)
−さらに、異なる色で測定された位置間の任意の固定色オフセットが当業者には周知の標準の工程補正を適用して取り出される。
【0067】
[0083] 以上実行されたすべての近似によって、代入式の数は、
2*kr0*n0個の式になり、
パラメータ数は、
n0{Posより}+(m+kr0-1){Dより}+(s+kr0-1){Bより}
+(f+kr0-1){φより}+(q+kr0-1){Aより}
となる。
典型例は、n0=100、kr0=2およびm、s、f及びqはすべて10である。この結果、400の式と141の変数が得られる。これによって、すべてのフィールドが整列しアライメントマークの数が100以上である高速アライメントの典型的な状況が提供される。
【0068】
[0084] マークの最小数を決定するのに使用する仮定の数は大きいことに留意されたい。その上に、ウェーハに関するパラメータの変化は比較的小さい。したがって、一実施形態では、強度の過剰決定系を用いて変数が計算される。
【0069】
[0085] 一実施形態では、X及びY方向のアライメントマーク間の変数の数をさらに低減するリンクが作成される。ウェーハ位置の関数D(x,y)としてのマーク深さ変化は、X及びY方向で同じであるとみなしてもよい。残りの変数(A,B,φ)についても、同様の結合を使用することができる。
【0070】
[0086] いくつかのマークは、その1次の次数応答上に高次の信号(例えば、2次及び3次)を有していてもよい。いくつかの実施形態では、これらの信号を組み込んで結果を改善するためにモデルが適合される。
【0071】
[0087] 多数のマークが有益であるため、多数のアライメントマークがウェーハの実質的に表面全体に実質的に均一に分散されている格子アライメント手法を使用することが有利である。
【0072】
[0088] 図8は、本発明の一実施形態によるフィールド画像アライメント構成を概略的に示す。図2に概略的に示すフィールド画像アライメント構成と比較して、図9のフィールド画像アライメント構成は、フィルタユニット27を備える。フィルタユニット27は、基板W上のマーク(図示せず)に入射する前に、広帯域光ビーム9と、したがって、選択された異なる所定の波長範囲を有する広帯域アライメントビーム10とを提供するように構成されている。フィルタユニット27は、広帯域光源1と検出器7との間の広帯域光ビーム9の光路内の別の位置にあってもよいことに留意されたい。
【0073】
[0089] 図9a及び図9bは、図8のアライメント構成で使用することができるフィルタユニットの2つの例を概略的に示す。図9aに、フィルタユニット27の第1の例が示されている。このフィルタユニット27は、いくつかのフィルタ29a〜dを備えた回転自在のホイール28を備える。上述したように、これらのフィルタは、図7のアクション21を可能にするために本発明の一実施形態で使用される。各フィルタ29a〜dは、広帯域光ビーム9の波長範囲の異なる部分を吸収する。したがって、広帯域光ビームは、様々な所定の選択された波長範囲を備える。
【0074】
[0090] 図9bは、フィルタユニット27の第2の例を概略的に示す。ここでもフィルタユニット27は、いくつかのフィルタ29a〜dを含む。しかし、この例では、フィルタは、回転自在のホイール28上ではなく、図8の広帯域光ビーム9の方向に実質的に垂直の一次元方向に移動することができるストリップ30上に配置されている。当業者には明らかなように、フィルタ29a〜dは、他のタイプの担持体上に配置されていてもよい。さらに、図9a、図9bでは、4つのフィルタ29a〜dが示されている。当業者には明らかなように、フィルタの数は4に等しくなくてもよい。
【0075】
[0091] フィルタユニット27は、手動で又はプロセッサによって自動で制御することができる。このプロセッサは、プロセッサ8でなくてもよいがそうであってもよい。
【0076】
[0092] フィルタユニット27の代わりに、検出器7内にフィルタを施してもよい。図10は、検出器7として使用されるマルチカラーCCDカメラの分光感度に関する情報を提供するグラフを示す。CCDは、行列状に配置されたCCD素子(カメラピクセルとも呼ぶ)を備え、したがって検出面を形成する。各素子のサイズは、数ミクロン程度である。マルチカラーCCDは、個別の素子に所定の波長範囲の感度を与えるいわゆるフィルタを使用している。すなわち、素子は、(部分的に)「青」、「緑」及び「赤」を感知する。グラフで分かるように、マルチカラーCCD素子の感度は1つ又は2つの波長に限定されず、ある波長範囲をカバーすることに留意されたい。したがって、「赤」の感度とは、CCD素子が可視光スペクトルの赤の部分の波長範囲に対して感度があるということを意味する。同じことが「青」及び「緑」の感度についても言える。複数の波長範囲を有するアライメントビームで照明されたマークの画像をマルチカラーCCDで検出することで、例えば、マークの3つの画像を並行して得ることができる。
【0077】
[0093] マルチカラーCCDで使用することができるフィルタの2つの例を図11a、図11bに示す。図11aでは、検出面がいわゆるベイヤフィルタで覆われている。図示の実施形態では、ベイヤフィルタは、CCDカメラでこの実施形態が広く使用されているように、「青」又は「赤」の感度があるCCD素子の2倍の数の「緑」の感度があるCCD素子を有している。「緑」又は「赤」のCCD素子の2倍の数の「青」のCCD素子を備えた類似の構成や「青」又は「緑」のCCD素子の2倍の数の「赤」のCCD素子を備えた構成を提供することも可能であることを理解されたい。図11bで、フィルタは、同じ色の感度があるCCD素子の線を形成する。多くの他の構成も可能であることに留意されたい。
【0078】
[0094] 図11cに概略的に示すように、マルチカラーCCDを使用する代わりに、CCDを複数のモノクローム検出面30、31、32を含む検出器7として使用することができる。結像光学系6からのアライメント放射35は、スプリッタ33によって少なくとも2つのアライメント放射ビーム34に分割される。図12では、スプリッタ33は、アライメント放射を3つのアライメント放射ビーム34a〜cに分割する。各アライメント放射ビーム34a〜cは、異なる波長範囲を含む光を搬送する。各アライメント放射ビーム34a〜cは、関連する検出面30〜32で検出することができる。検出面30は、アライメント放射ビーム34aで搬送される波長範囲で形成されるアライメントマークの画像を検出する。同様に、アライメント放射ビーム34bは、検出面31上にアライメントマークの画像を形成し、アライメント放射ビーム34cは、検出面32上にアライメントマークの画像を形成する。図11cで、検出面30は「赤」を感知し、検出面31は「緑」を感知し、検出面32は「青」を感知する。この場合、ある「色」の感度は上記と同じ意味である。
【0079】
[0095] 一実施形態では、複数の波長範囲のうち少なくとも2つの波長範囲が2〜100nmの幅を有する。別の実施形態では、幅は2〜30nmである。図12aは、本発明のこのような実施形態によるフィールド画像アライメント構成で使用される広帯域光源1の一例を示す。図2に概略的に示すフィールド画像アライメント構成と比較して、図12aのフィールド画像アライメント構成の広帯域光源1は、第1の光源1Rと第2の光源1Bとを備える。
【0080】
[0096] 第1及び第2の光源は、最大30nmの波長範囲内の放射を生成する狭帯域光源であってもよい。一例では、第1の1Rは、広帯域光ビーム9に、したがって、広帯域アライメントビーム10にも所定の選択された赤の波長範囲を提供するように構成された赤色レーザ源であり、第2の狭帯域光源1Bは、広帯域光ビーム9に、したがって、広帯域アライメントビーム10にも所定の選択された青の波長範囲を提供するように構成された青色レーザ源である。
【0081】
[0097] 第1及び第2の光源は、例えば、30〜100nmの波長範囲内の放射を生成する広帯域光源であってもよい。一例では、第1の1Rは、広帯域光ビーム9に、したがって、広帯域アライメントビーム10にも所定の選択された赤の波長範囲を提供するように構成された赤色スーパールミネッセントダイオードであり、第2の狭帯域光源1Bは、広帯域光ビーム9に、したがって、広帯域アライメントビーム10にも所定の選択された青の波長範囲を提供するように構成された青色スーパールミネッセントダイオードである。
【0082】
[0098] 図12bは、本発明によるアライメント構成で使用することができる複数の例示的な波長範囲を概略的に示す。図12bは、第1の例示的な広帯域光源1によって生成された広帯域光ビームのスペクトルSBを示す。スペクトルSBは、w0で示す幅を備えた連続スペクトルである。スペクトルSBを含む放射は、フィルタ27によってフィルタリングされ、幅w1を有する第1の中心波長λ1を中心とする第1の波長範囲と幅w2を有する第2の中心波長λ2を中心とする第2の波長範囲として示される2つの狭帯域波長範囲が放射に与えられる。第1及び第2の波長範囲は、Δλ12として示す中心波長離隔距離だけ離間している。
【0083】
[0099] 一実施形態では、広帯域光源1は、広帯域光ビームに、したがって、広帯域アライメントビーム10にも少なくとも200nmの総スペクトル幅にわたる複数の所定の波長範囲を提供するように構成されたブロードスペクトルレーザを含む。
【0084】
[00100] 一実施形態では、広帯域光源1は、広帯域光ビーム9に、したがって、広帯域アライメントビーム10にも少なくとも100nmの総スペクトル幅にわたる複数の所定の波長範囲を提供するように構成されたスーパールミネッセントダイオード(SLD)を含む。SLDは、例えば、600〜680nmの範囲の赤色放射を提供する赤色SLDであってもよい。フィルタユニット27は、例えば、50nm未満、又は20nm未満の第1の狭い波長範囲と第2の狭い波長範囲の両方を選択するように構成されていてもよい。赤色SLDを使用する時には、フィルタユニット27は、例えば、620〜640nmの第1の狭い波長範囲と650〜680nmの第2の狭い波長範囲を選択するように構成されていてもよい。
【0085】
[00101] 図12cは、本発明によるアライメント構成で使用することができる複数の例示的な波長範囲を概略的に示す。図12cは、例えば、図12aに示すように、第1のスペクトルs1と第2のスペクトルs2を含む放射を提供する2つの光源を含む例示的な広帯域光源1によって生成された広帯域光ビームのスペクトルS12を示す。したがって、スペクトルS12は、2つのピークを含む不連続スペクトルである。スペクトルS12を含む放射はフィルタ27によってフィルタリングされ、第1の中心波長λ1を中心とする第1の波長範囲と第2の中心波長λ2を中心とする第2の波長範囲として示される2つの狭帯域波長範囲と、第3の中心波長λ3を中心とする第3の波長範囲と第4の中心波長λ3を中心とする第4の波長範囲として示される第2のスペクトルs3内の2つの狭帯域波長範囲が放射に与えられる。第1及び第2の波長範囲の離隔距離をΔλ12と呼ぶことができる。第3及び第4の波長範囲の離隔距離をΔλ34と呼ぶことができる。
【0086】
[00102] 一実施形態では、広帯域光源1は、広帯域光ビーム9に、したがって、広帯域アライメントビーム10にも複数の所定の波長範囲を提供するように構成された複数のSLD、例えば、赤色SLD及び緑色SLDを含み、赤色SLDは、第1のスペクトル幅にわたる第1の複数の所定の赤色波長範囲を提供するように構成され、緑色SLDは、第2のスペクトル幅にわたる第2の複数の所定の緑色波長範囲を提供するように構成されている。フィルタユニット27は、第1の複数の所定の赤色波長範囲から2つの狭い波長範囲と、第2の複数の所定の緑色波長範囲から2つの狭い波長範囲を選択するように構成されていてもよい。この結果、アライメント信号は、赤色波長の第1の狭い波長範囲、赤色波長の第2の狭い波長範囲、緑色波長の第3の狭い波長範囲及び緑色波長の第4の狭い波長範囲に対応する。プロセッサ8は、例えば、赤色波長の2つの狭い波長範囲、又は緑色波長の2つの狭い波長範囲、あるいは赤色及び緑色波長の4つの狭い波長範囲のすべてを選択するように構成してもよい。赤色波長の2つの狭い波長範囲は互いに近接して離間していてもよいが、緑色波長の2つの狭い波長範囲からは比較的大きく離間していてもよい。緑色波長の2つの狭い波長範囲は互いに近接して離間していてもよい。この文脈では、近接して離間する範囲は、非重畳範囲、又は一部が重畳しているが中心値が異なる範囲に対応していてもよい。
【0087】
[00103] 近接して離間する非重畳波長範囲は、特に、複数の波長範囲のうち最小の2つの波長範囲が、隣接する波長範囲間で最大30nmだけ離間する実施形態に対応していてもよい。
【0088】
[00104] したがって、実施形態では、複数の波長範囲を有する放射は、複数の光源によって生成することができ、各々の光源は、複数の波長範囲のうち少なくとも2つの波長範囲を含む放射を生成するように構成され、少なくとも2つの波長範囲は、2〜100nmの幅を有し、最大50nm離間した単一の光源によって生成され、少なくとも2つの波長範囲は、他の任意の光源によって生成される少なくとも2つの波長範囲から少なくとも50nm離間した単一の光源によって生成される。
【0089】
[00105] 一実施形態では、複数の波長範囲が、青紫波長範囲、赤色波長範囲、緑色波長範囲、近赤外波長範囲及び遠赤外波長範囲から選択した少なくとも2つの波長範囲に対応する。この文脈で、青紫波長範囲は、波長が385〜450nmの波長範囲であり、緑色波長範囲は、波長が450〜590nmの波長範囲であり、赤色波長範囲は、波長が590〜680nmの波長範囲であり、近赤外波長範囲は、波長が680〜800nmの波長範囲であり、遠赤外波長範囲は、波長が800〜1500nmの波長範囲である。複数の波長範囲が上記明示した波長範囲と別の波長範囲に対応してもよいことを理解されたい。
【0090】
[00106] 本明細書を通して使用されるプロセッサ8が図13に示すコンピュータアセンブリ40で実施することができることを理解されたい。プロセッサ8に接続されたメモリ12は、ハードディスク41、読み出し専用メモリ(ROM)42、EEPROM(Electrically Erasable Programmable Read Only Memory)43及びランダムアクセスメモリ(RAM)などのいくつかのメモリ構成要素を備えていてもよい。上記のすべてのメモリ構成要素が存在しなくてもよい。さらに、上記のように、上記のメモリ構成要素は、物理的にプロセッサ8に、又は互いに近接していなくてもよい。それらは離間していてもよい。
【0091】
[00107] プロセッサ8は、ある種類のユーザインターフェイス、例えば、キーボード45又はマウス46に接続していてもよい。当業者には周知のタッチスクリーン、トラックボール、音声変換装置又は他のインターフェイスも使用することができる。
【0092】
[00108] プロセッサ8は、フロッピーディスク48又はCDROM49などのデータキャリアからデータを読み出し、状況に応じてデータキャリアにデータを記憶するように構成された読み出しユニット47に接続されていてもよい。当業者には周知のDVD又はその他のデータキャリアも使用することができる。
【0093】
[00109] プロセッサ8は、出力データを紙に印字するプリンタ50及びディスプレイ51、例えば、モニタ又はLCD(液晶ディスプレイ)又は当業者には周知の任意の他のタイプのディスプレイに接続されていてもよい。
【0094】
[00110] プロセッサ8は、通信ネットワーク52、例えば、公衆交換電話網(PSTN)、ローカルエリアネットワーク(LAN)、ワイドエリアネットワーク(WAN)などに、入出力(I/O)を行う送信機/受信機53によって接続することができる。プロセッサ8は、通信ネットワーク52を介して他の通信システムと通信するように構成されていてもよい。本発明の一実施形態では、外部コンピュータ(図示せず))、例えば、オペレータのパーソナルコンピュータは、通信ネットワーク52を介してプロセッサ8にログインできる。
【0095】
[00111] プロセッサ8は、独立したシステムとして、又は各処理ユニットがより大きいプログラムのサブタスクを実行するように構成された並列に動作するいくつかの処理ユニットとして実施することができる。処理ユニットは、いくつかのサブ処理ユニットを備えた1つ又は複数のメイン処理ユニットに分割することもできる。プロセッサ8のいくつかの処理ユニットは、他の処理ユニットから距離を置いて配置することができ、通信ネットワーク52を介して通信することができる。
【0096】
[00112] 図14は、本発明の第2の実施形態によるフローチャートを概略的に示す。この実施形態では、図14に示すように、単一の基板ではなく一群のN個の基板、i=1,...,Nを連続して整列させる必要がある。この方法の上記実施形態は、一群の基板中の個別の基板上のアライメントマークの位置を測定するために使用される。こうして、基板iごとに少なくとも1つのアライメントマークを測定することによりすべての基板iが整列する。
【0097】
[00113] N個の基板のうち第1の基板、すなわち、i=1に関して、アライメント測定方法は、図7に示し、それに関連して説明した方法に対応する。したがって、最初に、アクション60で、第1の基板、すなわち、i=1の基板上のアライメントマークの画像が検出器7によって複数の所定の波長範囲を含む光を用いて検出される。続いて、アクション61で、上記複数の所定の波長範囲のうち各々の選択された波長範囲で、検出された画像に対してその選択された波長範囲でアライメント信号が生成される。すべての生成されたアライメント信号がアクション62でプロセッサによって受信される。続いて、この方法は、アクション64へ進み、ここで、受信されたアライメント信号の各々の信号品質WQが、信号品質表示パラメータを用いて決定される。このような品質表示パラメータの例は、アライメント信号の信号強度、雑音レベル及び適合品質を含む。当業者には明らかなように、アライメント信号の信号品質は、プロセッサ8によって自動的に決定することができる。次に、各アライメント信号を用いてアクション65でいわゆる整列位置APが確立される。整列位置は、図4に関連してすでに説明したように、アライメント信号が所定の条件を満たす位置に対応する。整列位置は、例えば、アライメント信号が最大値を示す位置に対応していてもよい。最後に、少なくとも1つのアライメントマークの位置Posが各々の選択された波長範囲の信号品質WQ及び整列位置APと、波長範囲とマーク特性、特にマーク深さD及びマーク非対称性Aと、別の実施形態では、例えば、局所位相φ及び/又は局所吸収Bとの間のモデル化された関係に関連付けられた式に基づいてアクション66で決定される。アクション66は、例えば、上記の例1及び例2に関して説明した数組の式を使用する。
【0098】
[00114] 整列させる基板が1つのみの場合、上記シーケンスは終了するであろうが、整列させる基板はN個あるため、N個の基板のうち第1の基板のアライメントの後、多くの場合は、この整列した第1の基板上の連続パターニングの後、アクション67で、最後のウェーハが整列したか否かが検査される。ここまでは1つの基板しか整列しておらず、N個の基板を整列させる必要があるため、検査結果は否であり、アクション68で指数iが1だけ増加する。
【0099】
[00115] 次の基板、すなわち、i=1+1=2で、アライメント測定方法が繰り返され、したがって各々の選択された波長範囲に対して検出器7によってアライメント信号が生成され、すべてのアライメント信号がそれぞれプロセッサ8によって受信される。
【0100】
[00116] 基板の指数がNに等しくなるまで、アクション68、60、61、62、64、65及び66が繰り返される。したがって、各々の基板に対して独立して位置を決定することができ、したがって異なる基板上のマーク間の差を考慮することができる。基板の各々に対して、第1の基板に対応するアライメント信号に関して決定された信号品質を用いて異なる波長範囲に対応するアライメント信号が選択又は重み付けされて、したがって異なる基板間の差が大幅に無視されるUS7,414,722B2号に記載する方法と比べてこの方法は有利である。
【0101】
[00117] アライメント信号の1つ以上で信号品質WQがしきい値を下回る場合、上記アライメント測定方法をさらに拡張して、対応するアライメント信号を使用不可にすることができる。その場合、アクション65で整列位置APを確立した後、プロセッサは、アクション66で基板上のアライメントマークの位置を計算するだけでなく、検出器7へ向けて帰還信号を送信し、検出器は、それについてアクション61でアライメント信号を生成すべき所定の波長範囲の選択をアクション69で適合させることができる。この実施形態は、拡張実施形態であることを強調するために、この問題に関連する図14のフローチャートの中の矢印は破線になっている。あるいは、アクション64で信号品質WQを確立した後で、プロセッサは、検出器7へ向けて帰還信号を送信してもよく、検出器は、それについてアクション61でアライメント信号を生成すべき所定の波長範囲の選択をアクション69で適合させることができる。
【0102】
[00118] 適合は、整列位置AP及び信号品質WQからマークの位置を決定する際のアライメント信号の使用の有効性に基づく。したがって、ある所定の波長範囲に対応するアライメント信号が有効に使用されない場合、アクション69での適合によって、検出器7はそのアライメント信号をもはや生成しない。
【0103】
[00119] 図9a、図9bに示すように、フィルタユニット27を使用する場合、異なる所定の波長範囲の選択を適合させるそのような帰還信号もフィルタユニット27の制御ユニット(図示せず)へ送信することができることを理解されたい。したがって、フィルタユニット27の制御ユニットは、アクション61で生成される対応するアライメント信号が、アクション66で、測定する別の基板i上のアライメントマークマーク上での整列位置の確立に使用されないフィルタ29a〜dをもはや適用しない。
【0104】
[00120] 図15は、本発明の第3の実施形態によるアライメント測定方法のフローチャートを示す。この実施形態では、図14に示すのと同様のフローチャートが使用されているが、この方法は、いくつかの基板の代わりにいくつかのマークj(j=1,...,M)上で使用される。この実施形態では、少なくとも1つのアライメントマークの画像を検出するステップは、画像の各々の部分がそれぞれのアライメントマークに対応する画像の複数の部分を検出するステップを含み、複数のアライメント信号の各々が、対応する波長範囲で検出される画像の対応する複数の部分に関連付けられた複数のアライメント信号成分を含む。以下、少なくとも1つのアライメントマークのj番目のアライメントマークに対応する画像の部分をj番目のアライメントマークの画像と呼び、それに関連付けられたアライメント信号成分を関連付けられたアライメント信号と呼んで、図14と図15の間の参照を容易にする。
【0105】
[00121] K個のマークのうち第1のマーク、すなわち、j=1に関して、アライメント測定方法は、図7bに示し、それに関連して説明した方法に対応する。したがって、最初に、アクション70で、第1のアライメントマーク、すなわち、j=1の画像が、検出器7によって複数の所定の波長範囲を含む光を用いて検出される。続いて、アクション71で、上記複数の所定の波長範囲のうち各々の選択された波長範囲で、検出された画像に関してその選択された波長範囲でアライメント信号が生成される。すべての生成されたアライメント信号が、アクション72でプロセッサによって受信される。続いて、この方法はアクション74へ進み、ここで、すべての受信されたアライメント信号の信号品質WQが、信号品質表示パラメータを用いて決定される。このような品質表示パラメータの例は、アライメント信号の信号強度、雑音レベル及び適合品質を含む。当業者には明らかなように、アライメント信号の信号品質は、プロセッサ8によって自動的に決定することができる。次に、図14のアクション65と同様に、各アライメント信号を用いてアクション75でいわゆる整列位置APが確立される。
【0106】
[00122] 測定するマークが1つだけであったら、上記シーケンスは終了するであろうが、測定するマークはK個あるため、K個のマークのうち第1のマークの測定の後、アクション77で、最後のマークを測定したか否か、すなわち、j=Kであるか否かが検査される。ここまでのように、第1のマークしか測定されておらず、K個のマークを整列させる必要がある場合、検査結果は否であり、アクション78で指数jが1だけ増加する。
【0107】
[00123] 次のアライメントマーク、すなわち、j=1+1=2で、アライメント測定方法はアクション70で再開する。すなわち、次のアライメントマーク、すなわち、第2のアライメントマークの画像が複数の所定の波長範囲を含む光で検出される。続いて、上記のように、アクション71及び72、すなわち、各々の選択された波長範囲に対して検出器7によってアライメント信号を生成し、すべてのアライメント信号をそれぞれプロセッサ8によって受信するステップが実行される。続いて、アクション74で、すべての受信されたアライメント信号の信号品質WQが、信号品質表示パラメータを用いて決定される。
【0108】
[00124] マークの指数がKに等しくなるまで、アクション78、70、71、72、74及び75が繰り返される。
【0109】
[00125] 最後に、アライメントマークj=1...Kの各々の位置が、各々の選択された波長範囲のすべてのアライメントマークの信号品質WQ及び整列位置APと、波長範囲とマーク特性、特にマーク深さD及びマーク非対称性Aと、別の実施形態では、例えば、局所位相φ及び/又は局所吸収Bとの間のモデル化された関係に関連付けられた式に基づいてアクション76で決定される。
【0110】
[00126] したがって、基板上の各々のアライメントマークの位置を決定することができ、したがって基板の異なる場所にあるマーク間の差を考慮することができる。すべてのアライメントマークに対して、第1のアライメントマークに対応するアライメント信号に関して決定された信号品質を用いて異なる波長範囲に対応するアライメント信号が選択及び重み付けされる、すなわち、異なるアライメントマーク間の差が大幅に無視されるUS7,414,722B2号に記載する方法と比べてこの方法は有利である。アライメントマークの1つ以上が第1のアライメントマークと実質的に異なった時には、例えば、研磨又はエッチングによって引き起こされる局所の差により実質的に異なるマーク深さ又はマーク非対称性を有する時には、この周知の方法は、低品質のアライメント信号を使用する危険がある。
【0111】
[00127] アライメント信号の1つ以上で信号品質WQがしきい値を下回る場合、上記アライメント測定方法をさらに拡張して対応するアライメント信号を使用不可にすることができる。その場合、アクション74で信号品質WQを確立した後、プロセッサは、検出器7へ向けて帰還信号を送信し、検出器は、それについてアクション71でアライメント信号を生成すべき所定の波長範囲の選択をアクション79で適合させることができる。この実施形態が拡張実施形態であることを強調するために、この問題に関連する図15のフローチャートの中の矢印は破線になっている。あるいは、アクション77でマーク位置を確立した後で、プロセッサは、検出器7へ向けて帰還信号を送信してもよく、次の基板上の複数のアライメントマークについてその後同じ方法を使用する時には、検出器は、それについてアクション71でアライメント信号を生成すべき所定の波長範囲の選択をアクション79で適合させることができる。適合は、整列位置AP及び信号品質WQからマークの位置を決定する際のアライメント信号の使用の有効性に基づく。したがって、ある所定の波長範囲に対応するアライメント信号が第1のマークのための別のアライメント信号を確立するために使用されない場合、アクション79での適合の結果、検出器7はそのアライメント信号をもはや生成しない。
【0112】
[00128] 図9a、図9bに示すように、フィルタユニット27を使用する場合、異なる所定の波長範囲の選択を適合させるそのような帰還信号もフィルタユニット27の制御ユニット(図示せず)へ送信することができることを理解されたい。したがって、フィルタユニット27の制御ユニットは、アクション61で生成される対応するアライメント信号が、測定する別のアライメントマークj上のアクション65での別のアライメント信号の確立に使用されないフィルタ29a〜dをもはや適用しない。
【0113】
[00129] US7,414,722B2号に記載されたその図14及び図15を参照する例では、第1のアライメントマークの信号品質を用いて複数のアライメントマークの各々に対応するアライメント信号の選択又は重み付けが実行されることに留意されたい。本発明による方法は、US7,414,722B2号の周知の方法よりも有利である。何故なら、周知の方法はマーク間の信号品質の差を考慮せず、異なる波長範囲間の信号品質の差だけを考慮するからである。さらに、信号品質、波長及びマークパラメータ、特にマーク深さの関係と、整列位置、マーク位置、波長及びマークパラメータ、特にマーク深さ及びマーク非対称性の関係を用いて、個別のマークに対して、アライメント信号から抽出することができる情報が最適に使用される。
【0114】
[00130] 本文ではICの製造におけるリソグラフィ装置の使用に特に言及しているが、本明細書で説明するリソグラフィ装置には他の用途もあることを理解されたい。例えば、これは、集積光学システム、磁気ドメインメモリ用誘導及び検出パターン、フラットパネルディスプレイ、液晶ディスプレイ(LCD)、薄膜磁気ヘッドなどの製造である。こうした代替的な用途に照らして、本明細書で「ウェーハ」又は「ダイ」という用語を使用している場合、それぞれ、「基板」又は「ターゲット部分」という、より一般的な用語と同義と見なしてよいことが、当業者には認識される。本明細書に述べている基板は、露光前又は露光後に、例えばトラック(通常はレジストの層を基板に塗布し、露光したレジストを現像するツール)、メトロロジーツール及び/又はインスペクションツールで処理することができる。適宜、本明細書の開示は、以上及びその他の基板処理ツールに適用することができる。さらに基板は、例えば多層ICを生成するために、複数回処理することができ、したがって本明細書で使用する基板という用語は、既に複数の処理済み層を含む基板も指すことができる。
【0115】
[00131] 光リソグラフィの分野での本発明の実施形態の使用に特に言及してきたが、本発明は、他の用途、例えばインプリントリソグラフィにも使用することができ、文脈によっては、光リソグラフィに限定されないことを理解されたい。インプリントリソグラフィでは、パターニングデバイス内のトポロジが基板上に作成されるパターンを形成する。パターニングデバイスのトポロジは、基板に供給されたレジスト層内に押圧し、電磁放射、熱、圧力又はこれらの組合せを印加することによりレジストは硬化する。パターニングデバイスはレジストから取り除かれ、レジストが硬化すると、内部にパターンが残される。
【0116】
[00132] 本明細書で使用する「放射」及び「ビーム」という用語は、イオンビーム又は電子ビームなどの粒子ビームのみならず、紫外線(UV)放射(例えば、365nm、355nm、248nm、193nm、157nm若しくは126nm、又はこれら辺りの波長を有する)及び極端紫外線光(EUV)放射(例えば、5nm〜20nmの範囲の波長を有する)を含むあらゆるタイプの電磁放射を網羅する。
【0117】
[00133] 「レンズ」という用語は、状況が許せば、屈折、反射、磁気、電磁気及び静電気光学部品を含む様々なタイプの光学部品のいずれか一つ、又はその組合せを指すことができる。
【0118】
[00134] 本明細書で使用する「広帯域光」及び「広帯域照明」という用語は、可視スペクトル及び赤外領域内の波長を含む複数の波長範囲を含む光を包含する。さらに、複数の波長範囲は、必ずしも隣り合っている必要はないことを理解されたい。
【0119】
[00135] 以上、本発明の特定の実施形態を説明したが、説明とは異なる方法でも本発明を実践できることが理解される。例えば、本発明は、上記で開示したような方法を述べる機械読み取り式命令の1つ又は複数のシーケンスを含むコンピュータプログラム、又はこのようなコンピュータプログラムを内部に記憶したデータ記憶媒体(例えば半導体メモリ、磁気又は光ディスク)の形態をとることができる。
【0120】
[00136] 図2に関連して示す構成は、アクチュエータ11が基板テーブルWTを移動させて基板Wを横切るアライメントビーム10の運動を生成することを示すが、アライメントビーム10は、適切なデバイスによって、例えば、基板W全体にアライメントビーム10を掃引するために起動されたミラーによって移動させることが可能であることを理解されたい。次に、基板テーブルWT及び基板Wは、固定した場所に残る。あるいは、別の実施形態では、基板テーブルWTとアライメントビーム10の両方が測定を実行しながら移動していてもよい。
【0121】
[00137] 上記の説明は例示的であり、限定的ではない。したがって、請求の範囲から逸脱することなく、記載されたような本発明を変更できることが当業者には明白である。特許請求の範囲では、括弧に括られたいかなる参照符号も特許請求の範囲を限定すると解釈してはならない。本明細書を通して、「及び/又は」という用語は、関連付けられたリスト項目の1つ以上のいずれか又はすべてを含む。
【技術分野】
【0001】
[0001] 本発明は、リソグラフィ装置及びデバイス製造方法に関する。
【背景技術】
【0002】
[0002] リソグラフィ装置は、所望のパターンを基板に、通常は基板のターゲット部分に適用する機械である。リソグラフィ装置は、例えば、集積回路(IC)の製造に使用可能である。このような場合、代替的にマスク又はレチクルとも呼ばれるパターニングデバイスを使用して、ICの個々の層上に形成すべき回路パターンを生成することができる。このパターンを、基板(例えばシリコンウェーハ)上のターゲット部分(例えば1つ又は幾つかのダイの一部を含む)に転写することができる。パターンの転写は通常、基板に設けた放射感応性材料(レジスト)の層への結像により行われる。一般的に、1枚の基板は、順次パターンが与えられる隣接したターゲット部分のネットワークを含んでいる。従来のリソグラフィ装置は、パターン全体をターゲット部分に1回で露光することによって各ターゲット部分が照射される、いわゆるステッパと、基板を所与の方向(「スキャン」方向)と平行あるいは逆平行に同期的にスキャンしながら、パターンを所与の方向(「スキャン」方向)に放射ビームでスキャンすることにより、各ターゲット部分が照射される、いわゆるスキャナとを含む。パターンを基板にインプリントすることによっても、パターニングデバイスから基板へとパターンを転写することが可能である。
【0003】
[0003] 複数のアライメント構成を使用するリソグラフィ装置は周知である。例えば、米国特許US7,414,722B2号を参照する。US7,414,722B2号には、広帯域光源を有するアライメント測定構成、光学システム及び検出器及び関連するアライメント測定方法が記載されている。広帯域光源は、第1及び第2の波長範囲を含む放射ビームを生成するように構成されている。光学システムは、生成された放射ビームを受光し、アライメントビームを生成し、アライメントビームをオブジェクト上に位置するマークに誘導し、マークから戻るアライメント放射を受光し、アライメント放射を伝送するように構成されている。検出器は、アライメント放射を受光し、オブジェクト上に位置するアライメントマークの画像を検出するように構成されている。検出器は、さらに、それぞれ上記第1及び第2の波長範囲にそれぞれ関連付けられた第1及び第2のアライメント信号を生成する。アライメント測定構成は、最後に検出器に接続されたプロセッサを有する。プロセッサは、第1及び第2のアライメント信号を受信し、信号品質表示パラメータを用いてそれぞれ第1及び第2のアライメント信号のそれぞれ第1及び第2の信号品質を決定し、第1及び第2の信号品質に基づいてアライメントマークの位置を計算するように構成されている。
【0004】
[0004] US7,414,722B2号の一実施形態では、最良の信号品質を有するアライメント信号を選択することにより別のアライメント信号を確立することができる。別の実施形態では、それぞれ決定された第1及び第2の信号品質に基づいて、それぞれ少なくとも第1及び第2の重み係数をそれぞれ上記第1及び第2のアライメント信号に割り当て、上記第1及び第2のアライメント信号の加重和を計算することにより別のアライメント信号が確立される。
【0005】
[0005] その性能が、例えば、異なるウェーハ上のマーク間及び/又は単一のウェーハ上の複数のマークとは別のマーク間のマーク深さ及び/又はマークの非対称性の変化によって依然として制約されることがあるという点が、周知のアライメント測定構成及び周知の方法の欠点である可能性がある。しかし、その変化は、場合によって大きすぎてアライメントマークの位置の決定に実質的に影響し、その結果、実質的なミスアライメント、それ故例えば、実質的なオーバレイエラーを引き起こし、製造されたデバイスの性能の低下につながるおそれがある。マーク深さ及び/又はマークの非対称性の変化は、例えば、リソグラフィ装置を用いて第1及び第2の所望のパターンの第1及び第2の印加の間に基板上に複数の層を塗布する一方で、エッチング及び研磨などの様々な工程が集積回路で施される基板上の集積回路の製造での処理ステップの結果として生起し得る。
【発明の概要】
【0006】
[0006] 従来技術に鑑みて性能が向上したアライメント構成及びアライメント方法を提供することが望ましい。特に、マークごとの変化の影響が低減されたアライメント構成及びアライメント方法を提供することが望ましい。さらに、本発明は、改良型アライメント方法に関連付けられたアライメントアセンブリ、リソグラフィ装置、デバイス製造方法、コンピュータプログラムプロダクト、及びデータキャリアを提供する。
【0007】
[0007] 第1の態様は、
リソグラフィ装置と一緒に使用するアライメント測定方法であって、
a)複数の波長範囲を有する放射による照射時にオブジェクト上に位置する少なくとも1つのアライメントマークの画像を検出するステップと、
b)各々が複数の波長範囲のうち対応する波長範囲で検出された画像に関連付けられた複数のアライメント信号を生成するステップと、
c)少なくとも1つの信号品質表示パラメータを用いてそれぞれのアライメント信号の複数の信号品質を決定するステップと、
d)少なくとも1つのマーク位置表示パラメータを用いてそれぞれのアライメント信号から複数の整列位置を決定するステップと、
e)複数の信号品質のうち少なくとも2つの信号品質と複数の整列位置のうち少なくとも2つの整列位置に少なくとも基づいて、上記少なくとも1つのアライメントマークの位置(Pos)を決定するステップとを含み、
上記少なくとも1つのアライメントマークの位置の上記決定ステップが、複数の第1の式及び複数の第2の式を含む一組の式を解くステップを含み、
第1の式が、少なくとも信号品質(WQ)と、放射の波長範囲と少なくとも1つのアライメントマークのマーク深さ(D)との間の第1の関係に関連付けられ、
第2の式が、少なくとも整列位置(AP)と、上記少なくとも1つのアライメントマークの位置(Pos)と、放射の波長範囲と少なくとも1つのアライメントマークのマーク深さ(D)との間の第2の関係に関連付けられたアライメント測定方法を提供する。
【0008】
[0008] 第2の態様は、
複数の波長範囲を含む放射ビームを生成するように構成された光源と、
生成された上記放射ビームを受光し、アライメントビームを生成し、上記アライメントビームをオブジェクト上に位置する少なくとも1つのマークに誘導し、上記少なくとも1つのマークから戻るアライメント放射を受光し、上記アライメント放射を伝送するように構成された光学システムと、
上記アライメント放射を受光し、上記オブジェクト上に位置する上記少なくとも1つのアライメントマークの画像を検出し、それぞれが対応する波長範囲に関連付けられた複数のアライメント信号を生成するように構成された検出器と、
上記検出器に接続されたプロセッサであって、少なくともアクションc)〜e)を実行するように構成されたプロセッサとを備えるアライメント測定構成を提供する。
【0009】
[0009] 第3の態様は、パターニングデバイスから基板上にパターンを転写するように構成されたリソグラフィ装置であって、
上記プロセッサが、決定された上記少なくとも1つのアライメントマークの位置に基づいて位置信号を確立するようにさらに構成された上記アライメント測定構成と、
上記プロセッサに接続されたアクチュエータであって、
上記位置信号を受信し、
受信した上記位置信号に基づいて位置補正を計算し、
位置補正信号を確立するように構成されたアクチュエータと、
整列させる上記基板を支持するように構成され、上記アクチュエータに接続された支持構造とを備え、
上記アクチュエータが確立された上記位置補正信号に応答して上記支持構造を移動させるように構成されるリソグラフィ装置を提供する。
【0010】
[0010] 第4の態様は、上記のリソグラフィ装置を用いてパターニングデバイスから基板上にパターンを転写するステップを含むデバイス製造方法を提供する。
【0011】
[0011] 第5の態様は、リソグラフィ装置のプロセッサによってロードされるデータ及び命令を備え、上記リソグラフィ装置が上記のアライメント測定方法を実行することを可能にするように構成されるコンピュータプログラムプロダクトを提供する。
【0012】
[0012] 第6の態様は、上記のコンピュータプログラムプロダクトを備えるデータキャリアを提供する。
【図面の簡単な説明】
【0013】
[0013] 対応する参照符号が対応する部分を示す添付の図面を参照しながら以下に本発明の実施形態について説明するが、これは単に例示としてのものに過ぎない。
【図1】[0014]本発明の一実施形態によるリソグラフィ装置を示す図である。
【図2】[0015]フィールド画像アライメント構成の一例の略図である。
【図3a】[0016]図2のアライメント構成で使用することができるマークの一例を示す図である。
【図3b】[0016]図2のアライメント構成で使用することができるマークの一例を示す図である。
【図4】[0017]図2の構成で使用され、マークから戻るアライメント放射を受光する検出器の出力信号を示す図である。
【図5】[0018]図2の構成で使用することができるマークの別の例を示す図である。
【図6】[0018]図2の構成で使用することができるマークの別の例を示す図である。
【図7a】[0019]周知の方法によるアライメント測定方法のフローチャートである。
【図7b】[0020]本発明の一実施形態によるアライメント測定方法のフローチャートである。
【図8】[0021]本発明の一実施形態によるフィールド画像アライメント構成の略図である。
【図9a】[0022]図8のアライメント構成で使用することができるフィルタユニットの一例の略図である。
【図9b】[0022]図8のアライメント構成で使用することができるフィルタユニットの一例の略図である。
【図10】[0023]マルチカラーCCDカメラの分光感度に関する情報を提供するグラフである。
【図11a】[0024]CCDカメラで使用することができる空間フィルタの一例を示す図である。
【図11b】[0024]CCDカメラで使用することができる空間フィルタの一例を示す図である。
【図11c】[0025]本発明と一緒に使用するのに適切な検出器の一実施形態を示す図である。
【図12a】[0026]本発明によるアライメント構成で使用することができる例示的な光源の態様を示す図である。
【図12b】[0026]本発明によるアライメント構成で使用することができる例示的な波長範囲の態様を示す図である。
【図12c】[0026]本発明によるアライメント構成で使用することができる例示的な波長範囲の態様を示す図である。
【図13】[0027]本発明の実施形態で使用されるプロセッサを備えるコンピュータを示す図である。
【図14】[0028]本発明の別の実施形態によるアライメント測定方法のフローチャートである。
【図15】[0029]本発明のさらに別の実施形態によるアライメント測定方法のフローチャートである。
【発明を実施するための形態】
【0014】
[0030] 図1は、本発明の一実施形態によるリソグラフィ装置を概略的に示したものである。この装置は、
− 放射ビームB(例えばUV放射又はEUV放射)を調節するように構成された照明システム(イルミネータ)ILと、
− パターニングデバイス(例えばマスク)MAを支持するように構成され、特定のパラメータに従ってパターニングデバイスMAを正確に位置決めするように構成された第1のポジショナPMに接続された支持構造(例えばマスクテーブル)MTと、
− 基板(例えばレジストコートウェーハ)Wを保持するように構成され、特定のパラメータに従って基板Wを正確に位置決めするように構成された第2のポジショナPWに接続された基板テーブル(例えばウェーハテーブル)WTと、
− パターニングデバイスMAによって放射ビームBに与えられたパターンを基板Wのターゲット部分C(例えば1つ又は複数のダイを含む)に投影するように構成された投影システム(例えば屈折投影レンズシステム)PSとを含む。
【0015】
[0031] 照明システムILは、放射の誘導、整形、又は制御を行うための、屈折、反射、磁気、電磁気、静電気型等の光学コンポーネント、又はその任意の組合せなどの種々のタイプの光学コンポーネントを含んでいてもよい。
【0016】
[0032] 支持構造は、パターニングデバイスを支持、すなわちその重量を支えている。支持構造は、パターニングデバイスの方向、リソグラフィ装置の設計等の条件、例えばパターニングデバイスが真空環境で保持されているか否かに応じた方法で、パターニングデバイスを保持する。この支持構造は、パターニングデバイスを保持するために、機械的、真空、静電気等のクランプ技術を使用することができる。支持構造は、例えばフレーム又はテーブルでよく、必要に応じて固定式又は可動式でよい。支持構造は、パターニングデバイスが例えば投影システムなどに対して確実に所望の位置にくるようにできる。本明細書において「レチクル」又は「マスク」という用語を使用した場合、その用語は、より一般的な用語である「パターニングデバイス」と同義と見なすことができる。
【0017】
[0033] 本明細書において使用する「パターニングデバイス」という用語は、基板のターゲット部分にパターンを生成するように、放射ビームの断面にパターンを与えるために使用し得る任意のデバイスを指すものとして広義に解釈されるべきである。ここで、放射ビームに与えられるパターンは、例えばパターンが位相シフトフィーチャ又はいわゆるアシストフィーチャを含む場合、基板のターゲット部分における所望のパターンに正確には対応しないことがある点に留意されたい。一般的に、放射ビームに与えられるパターンは、集積回路などのターゲット部分に生成されるデバイスの特定の機能層に相当する。
【0018】
[0034] パターニングデバイスは透過性又は反射性でよい。パターニングデバイスの例には、マスク、プログラマブルミラーアレイ、及びプログラマブルLCDパネルがある。マスクはリソグラフィにおいて周知のものであり、これには、バイナリマスク、レベンソン型(alternating)位相シフトマスク、ハーフトーン型(attenuated)位相シフトマスクのようなマスクタイプ、さらには様々なハイブリッドマスクタイプも含まれる。プログラマブルミラーアレイの一例として、小さなミラーのマトリクス配列を使用し、そのミラーは各々、入射する放射ビームを異なる方向に反射するよう個々に傾斜することができる。傾斜したミラーは、ミラーマトリクスによって反射する放射ビームにパターンを与える。
【0019】
[0035] 本明細書において使用する「投影システム」という用語は、例えば使用する露光放射、又は液浸液の使用や真空の使用などの他の要因に合わせて適宜、例えば屈折光学システム、反射光学システム、反射屈折光学システム、磁気光学システム、電磁気光学システム及び静電気光学システム、又はその任意の組合せを含む任意のタイプの投影システムを網羅するものとして広義に解釈されるべきである。本明細書において「投影レンズ」という用語を使用した場合、これはさらに一般的な「投影システム」という用語と同義と見なすことができる。
【0020】
[0036] 本明細書で示すように、本装置は透過タイプである(例えば透過マスクを使用する)。あるいは、装置は反射タイプでもよい(例えば上記で言及したようなタイプのプログラマブルミラーアレイを使用する、又は反射マスクを使用する)。
【0021】
[0037] リソグラフィ装置は、2つ(デュアルステージ)又はそれ以上の基板テーブル(及び/又は2つ以上のパターニングデバイステーブル)を有するタイプでよい。このような「マルチステージ」機械においては、追加のテーブルを並行して使用するか、1つ又は複数の他のテーブルを露光に使用している間に1つ又は複数のテーブルで予備工程を実行することができる。
【0022】
[0038] リソグラフィ装置は、また、基板の少なくとも一部分が、比較的高い屈折率を有する液体、例えば水に覆われて、投影システムと基板との間の空間が満たされるタイプのものであってもよい。液浸液は、マスクと投影システムとの間などのリソグラフィ装置内の他の空間に与えてもよい。液浸技術は、投影システムの開口数を増やす技術として当技術分野では周知である。本明細書で使用する「液浸」という用語は、基板などの構造を液体中に沈めなくてはならないことを必ずしも意味するものではなく、露光中に投影システムと基板との間に液体があることを意味するものに過ぎない。
【0023】
[0039] 図1を参照すると、イルミネータILは放射源SOから放射ビームを受ける。放射源SOとリソグラフィ装置とは、例えば放射源SOがエキシマレーザである場合に、別々の構成要素であってもよい。このような場合、放射源SOはリソグラフィ装置の一部を形成すると見なされず、放射ビームは、例えば適切な誘導ミラー及び/又はビームエクスパンダなどを備えるビームデリバリシステムBDの助けにより、放射源SOからイルミネータILへと渡される。他の事例では、例えば放射源SOが水銀ランプの場合は、放射源SOがリソグラフィ装置の一体部分であってもよい。放射源SO及びイルミネータILは、必要に応じてビームデリバリシステムBDとともに放射システムと呼ぶことができる。
【0024】
[0040] イルミネータILは、放射ビームの角度強度分布を調節するアジャスタADを備えていてもよい。通常、イルミネータILの瞳面における強度分布の外側及び/又は内側半径範囲(一般にそれぞれ、σ-outer及びσ-innerと呼ばれる)を調節することができる。また、イルミネータILは、インテグレータIN及びコンデンサCOなどの他の種々のコンポーネントを備えていてもよい。イルミネータを用いて放射ビームを調整し、その断面にわたって所望の均一性と強度分布とが得られるようにしてもよい。
【0025】
[0041] 放射ビームBは、支持構造(例えば、マスクテーブルMT)上に保持されたパターニングデバイス(例えば、マスクMA)に入射し、パターニングデバイスMAによってパターニングされる。パターニングデバイスMAを横断した放射ビームBは、投影システムPSを通過し、投影システムPSは、ビームを基板Wのターゲット部分C上に合焦させる。第2のポジショナPWと位置センサIF(例えば、干渉計デバイス、リニアエンコーダ又は容量センサ)の助けを借りて、基板テーブルWTは、例えば、様々なターゲット部分Cを放射ビームBの経路に位置決めできるように正確に移動できる。同様に、第1のポジショナPMと別の位置センサ(図1には明示されていない)を用いて、マスクライブラリからの機械的な取り出し後又はスキャン中などに放射ビームBの経路に対してパターニングデバイスMAを正確に位置決めできる。一般に、支持構造MTの移動は、第1のポジショナPMの部分を形成するロングストロークモジュール(粗動位置決め)及びショートストロークモジュール(微動位置決め)の助けにより実現できる。同様に、基板テーブルWTの移動は、第2のポジショナPWの部分を形成するロングストロークモジュール及びショートストロークモジュールを用いて実現できる。ステッパの場合(スキャナとは対照的に)、支持構造MTをショートストロークアクチュエータのみに接続するか、又は固定してもよい。パターニングデバイスMA及び基板Wは、パターニングデバイスアライメントマークM1、M2及び基板アライメントマークP1、P2を使用して位置合わせすることができる。図示のような基板アライメントマークは、専用のターゲット部分を占有するが、ターゲット部分Cの間の空間に位置してもよい(スクライブレーンアライメントマークとして周知である)。同様に、パターニングデバイスMA上に複数のダイを設ける状況では、パターニングデバイスアライメントマークをダイ間に配置してもよい。
【0026】
[0042] 図示のリソグラフィ装置は以下のモードのうち少なくとも1つにて使用可能である。
【0027】
[0043] 1.ステップモードにおいては、マスクテーブルMT及び基板テーブルWTは、基本的に静止状態に維持される一方、放射ビームに与えたパターン全体が1回でターゲット部分Cに投影される(すなわち単一静的露光)。次に、別のターゲット部分Cを露光できるように、基板テーブルWTがX方向及び/又はY方向に移動される。ステップモードでは、露光フィールドの最大サイズによって、単一静的露光で像が形成されるターゲット部分Cのサイズが制限される。
【0028】
[0044] 2.スキャンモードにおいては、マスクテーブルMT及び基板テーブルWTは同期的にスキャンされる一方、放射ビームに与えられるパターンがターゲット部分Cに投影される(すなわち単一動的露光)。マスクテーブルMTに対する基板テーブルWTの速度及び方向は、投影システムPSの拡大(縮小)及び像反転特性によって求めることができる。スキャンモードでは、露光フィールドの最大サイズによって、単一動的露光におけるターゲット部分Cの(非スキャン方向における)幅が制限され、スキャン動作の長さによってターゲット部分Cの(スキャン方向における)高さが決まる。
【0029】
[0045] 3.別のモードでは、マスクテーブルMTはプログラマブルパターニングデバイスを保持して基本的に静止状態に維持され、基板テーブルWTを移動又はスキャンさせながら、放射ビームに与えられたパターンをターゲット部分Cに投影する。このモードでは、一般にパルス状放射源を使用して、基板テーブルWTを移動させる毎に、又はスキャン中に連続する放射パルスの間で、プログラマブルパターニングデバイスを必要に応じて更新する。この動作モードは、以上で言及したようなタイプのプログラマブルミラーアレイなどのプログラマブルパターニングデバイスを使用するマスクレスリソグラフィに容易に利用できる。
【0030】
[0046] 上述した使用モードの組合せ及び/又は変形、又は全く異なる使用モードも利用できる。
【0031】
[0047] 図2は、フィールド画像アライメント構成の一例を概略的に示す。このようなアライメント構成は、静的な測定に基づく。図2のフィールド画像アライメント構成は、広帯域光源である光源1を備える。光源1は、ファイバ2の一端に接続されている。送信機3が、ファイバ2の反対側の端部に接続されている。基板W上のマークM3(図3aを参照)に向けてアライメントビームを提供する光学系は、半透明のミラー4と、ミラー5とを含む。マークM3から戻るアライメント放射を受光し、検出器7、例えば電荷結合素子(CCD)に適切な光学像を提供する結像光学系6が提供される。検出器7は、プロセッサ8に接続されている。プロセッサ8は、アクチュエータ11とメモリ12とに接続されている。アクチュエータ11は、基板Wをその上に配置することができる基板テーブルWTに接続されている。図2では、プロセッサ8とメモリ12の両方が別のユニットとして提示されている。しかし、プロセッサ8及び/又はメモリ12は、物理的に検出器7内にあってもよい。さらに、これらの一方は、図13を参照して説明するコンピュータアセンブリの一部であってもよい。
【0032】
[0048] 使用時に、光源1は、ファイバ2を介して送信機3へ出力される広帯域光ビームを生成する。送信機3は、ミラー4からミラー5へ反射される広帯域光ビーム9を提供する。ミラー5は、基板W上のマークM3へ誘導される広帯域アライメントビーム10を生成する。マークM3に入射する広帯域光ビーム10は、アライメント放射としてミラー5へ反射される。ミラー5は、受光した光を半透明のミラー4へ反射し、半透明のミラー4は、受光した光の少なくとも一部を結像光学系6へ送る。結像光学系6は、受光したアライメント放射を収集して適切な光学像を検出器7に提供するように構成されている。検出器7は、結像光学系6から受光した光学像の内容に応じた出力信号をプロセッサ8に提供する。検出器7から受光した出力信号とプロセッサ8によるアクションの結果は、メモリ12に記憶することができる。プロセッサ8は、検出器7から受光する1つ又は複数の出力信号に基づいてアライメントマークM3の位置を計算する。検出器7は、次に、別の出力信号をアクチュエータ11に提供する。アクチュエータ11は、基板テーブルWTを移動させるように構成されている。別の出力信号11を受信すると、アクチュエータ11は、所望の位置へ向けて基板テーブルWTを移動させる。
【0033】
[0049] 図3aは、本発明で使用することができる基板W上にあるマークM3の上面図を示す。マークM3は、幅W3と長さL3とを有する複数の棒状の構造15を備える。これらの寸法の代表値は、W3=6μm、L3=75μmである。棒状の構造15は、ピッチP3を有する。ピッチP3の代表値は、P3=12μmである。
【0034】
[0050] 図3bは、図3aの線IIIbに沿ったマークM3の断面の一例を示す。マークM3は、マーク深さDを有する。マーク深さDは、例えば、研磨ステップなどを含む集積面の製造中の複数の材料の多層の塗布及びパターニングのために、基板Wのその後の処理中に異なる場合がある。マークM3は、実質的に対称の棒状の構造15を有するように設計されているが、図3bに示すマークM3の棒状の構造15は非対称である。この非対称性は、例えば、図3bにBで示すように、棒状の構造15の両側の側面の高さの差として表すことができる。このいわゆるマークの非対称性は、例えば、多層の塗布及びパターニングに起因する可能性がある。
【0035】
[0051] 図4は、結像光学系6から受信し、マークM3の光学像に基づいてプロセッサ8へ送信される検出器7の出力信号を示す。出力信号は、プロセッサ8へ転送される2次元画像の形態をとることができることに留意されたい。図4に示す曲線は、広帯域アライメントビーム10で照明されている時のマークM3の位置の関数としての信号強度を示す。この曲線は、強度レベルがI1の絶対最大値、強度レベルがI2の局所最大値及び強度レベルがI3の絶対最小値を示す。絶対最大値I1は、それぞれの棒状の構造15の中心に関連付けられている。局所最大値I2は、隣接する棒状の構造15間の空間の中心に関連付けられている。絶対最小値I3は、棒状の構造15間の中間空間への棒状の構造15の遷移のすぐ脇の位置に関連付けられている。したがって、絶対最大値I1と局所最大値I2との間の曲線の勾配は、棒状の構造15間の遷移によるものである。これらの遷移部分、すなわち、棒状の構造15の両側面に反射する光はほとんどない。
【0036】
[0052] したがって、検出器7は、マークM3の2D画像を受信する。検出器7のプロセッサ8への出力信号は、1D情報だけを含んでいてもよい。しかし、2D画像をプロセッサ8へ転送し、あるアルゴリズムを用いてこの画像に基づいて位置を決定することができる。様々なアルゴリズムを用いて、受信した画像情報から図4に示すように強度信号を得ることができる。例えば、検出器は、検出面を形成するマトリクスに配列されたカメラピクセルを含むCCDカメラであってもよい。例えば、検出器7は、行列状に配置されたCCD素子を備えたCCDであって、カラムのCCD素子によって受信される信号が平均されるCCDであってもよい。詳細については、K.Ota他の論文、「New Alignment Sensors for Wafer Stepper」、SPIE、Vol.1463、Optical/Laser Microlithography IV(1991年)、P.304〜314を参照されたい。別の例では、検出器は、マークの画像を検出器と共に基準構造として提供された基準パターンに一致させるように構成されていてもよい。基準構造は、例えば、複数の棒状の構造15を備えるマークM3の画像に一致する基準格子であってもよい(図3aに示す)。別の例と詳細については、軸外アライメントユニットについて記載するEP0906590号及び自己参照型干渉計について記載するEP1372040A2号を参照されたい。
【0037】
[0053] さらに、様々なアルゴリズムを用いて図4に示す強度信号に基づくアライメント位置を得ることができる。1つのアルゴリズムでは、図4に示すスライスレベルを使用する。I1とI3との間の強度値が選択され、この選択された値(スライスレベル)に基づいてマークM3の位置が決定される。
【0038】
[0054] 図5及び図6は、本発明で使用することができる別のマークM4及びM5をそれぞれ示す。図5に示すアライメントマークM4は、x方向の位置を測定するためのマーク部分M4xとy方向の位置を測定するためのマーク部分M4yとを有する。マーク部分M4xは、マークM3と同様である。マーク部分M4xは、幅W4x、長さL4x、及びピッチP4xを有する複数の棒状の構造を備える。マーク部分M4yは、マーク部分M4xと同様であるが、90°回転している。マーク部分M4yは、幅W4y、長さL4y、及びピッチP4yを有する棒状の構造を備える。幅W4x、W4y、長さL4x、L4y、及びピッチP4x、P4yは、それぞれ、マークM3のそれぞれ幅W3、長さL3、及びピッチP3と同様の値を有する。一方向の位置だけを測定したい時には、マーク部分M4x又はマーク部分M4yだけを提供すれば十分である。基板テーブルWT上にそのようなアライメントマークM4が提供される時には、アライメントマークM4をオンライン較正の目的にも使用することができる。
【0039】
[0055] 図6は、本発明で使用することができるアライメントマークM5の別の例を示す。このアライメントマークは、複数のカラムを有する。各々のカラムでは、複数の角形構造17が位置する。角形構造17は、x方向に幅W5xと、y方向にW5yを有する。x方向のマークM5の長さはL5xで、y方向のマークM5の長さはL5yである。マークM5は、x方向の隣接するカラム間のピッチP5xと、y方向のカラム間のピッチP5yとを有する。幅W5x、W5yの代表値は、4μmである。長さL5x、L5yの代表値は、40〜100μmである。ピッチP5x、P5yの代表値は、8μmである。図2のアライメント構成で使用する時には、図4に示すのと同様の強度信号がプロセッサ8のために検出器7によって生成される。マークM5は、信号対雑音比が低いためにM3又はM4より最適でないことがある。しかし、広帯域光源1を使用するため、これは小さい問題と予想される。その理由は、広帯域光源1を使用する結果、使用される帯域幅の一部で強めあう干渉が発生するからである。さらに、アライメントマークM5は、実際、x方向とy方向の両方で使用することができることに留意されたい。
【0040】
[0056] 半導体工程では、アライメントマークは様々に変更される。とりわけ、干渉によるコントラストがこれらのマークの変更の結果として劣化し、アライメントエラーを引き起こすことがある。コントラストの低下は、照明光の波長に左右される。マーク内の高さの変化が位相深さλ/2に対応する場合、弱め合う干渉が発生する。すなわち、マークは、平坦なミラーの役割を果たす。この場合、すべての光がゼロ次数に回折するため、コントラストは検出されない。さらに、λ/2に等しくない位相深さでは、光はより高い次数に回折する。
【0041】
[0057] フィールド画像アライメント構成では、図2に示すように、一般に広帯域照明源が使用される。波長によっては弱め合う干渉を発生させるが、広帯域照明源によって生成される波長範囲内の他の波長は、強めあう干渉を発生させる。したがって、常に強めあう干渉が発生する、すなわち、広帯域放射で照明されるアライメントマークの画像の検出時に検出器によって確立されるアライメント信号には、常にコントラストが存在する。フィールド画像アライメントを使用するアライメントシステムは、一般に530〜650nmの固定照明帯域幅を使用し、固定量の回折次数を検出して全波長を単一の検出器上に一体化し、こうしてアライメントマークの画像が提供される。このようなアライメントシステムの精度には限界がある。特に、精度は、マーク間でのマーク深さの変化及び/又はマーク非対称性の変化などのマーク特性の変化によって阻害される。
【0042】
[0058] 図7aは、US7,414,722B2号に記載された周知の方法によるアライメント測定方法のフローチャートを示す。図7bは、本発明の一実施形態によるアライメント測定方法のフローチャートである。これらのアライメント方法は、図2に示すフィールド画像アライメント構成で実行することができる。3つのフローチャートのすべてで、検出器7は、最初にアクション20で複数の所定の波長範囲を有する放射、例えば、アライメントビーム10で照明されたアライメントマークの画像を検出する。検出すると、検出器7は、アクション21でアライメント信号の選択を生成する。すなわち、各アライメント信号は、異なる所定の波長範囲によって形成される少なくとも1つのアライメントマークの検出された画像に関連する。アライメント信号の選択は、少なくとも1つのアライメントマークを選択された異なる所定の波長範囲で連続的に照明することにより、例えば、各々が所定の波長範囲のみを通過させるように設計された広帯域光源1によって生成された広帯域光ビーム9をフィルタリングする異なるタイプのフィルタを連続的に当てることにより得ることができる。いくつかのフィルタを備えるフィルタユニットの例を図9a、図9bに概略的に示す。後述するように、別の実施形態では、異なる所定の波長範囲の画像が、上記の範囲を並列に測定することができる検出器7を提供することにより得られる。検出器7によって生成されるアライメント信号がアクション22でプロセッサ8によって受信される。次に、すべての生成されたアライメント信号の信号品質が、アクション23で1つ又は複数の品質表示パラメータを用いて決定される。信号品質は、ウェーハ品質WQとも呼ばれる。これは、アライメントマークがウェーハ上のマークである時に、現在の波長範囲でウェーハ上のアライメントマークを検出する品質を示すからである。以下、式と簡単な参照のために頭辞語WQを使用する。このような品質表示パラメータの例は、アライメント信号の信号強度、雑音レベル及び適合品質を含む。当業者には明らかなように、アライメント信号の信号品質は、プロセッサ8によって自動的に決定することができる。
【0043】
[0059] 図7aに示すUS7,414,722B2号に記載する方法では、次に各アライメント信号の決定された信号品質を用いて、アクション24で別のアライメント信号が確立される。US7,414,722B2号の方法の一実施形態では、別のアライメント信号は、最良の決定された信号品質を有するアライメント信号と同一である。US7,414,722B2号の方法の別の実施形態では、その値がアライメント信号ごとの決定された信号品質に基づく重み係数が、各アライメント信号に割り当てられる。次に、別のアライメント信号は、すべてのアライメント信号の加重和に対応する。最後に、少なくとも1つのアライメントマークの位置が、確立された別のアライメント信号に基づいてアクション25で計算される。複数のマークの測定、すなわち、複数マーク測定の場合、アクション24及び25をマークごとに実行して各アライメントマークに対して異なる加重和を得ることができる。アクション24及び25は、当業者には明らかなように、プロセッサ8によって自動的に実行することもできる。
【0044】
[0060] 本発明の方法の一実施形態を図7bに示す。アクション23の後で、この方法はアクション36へ進む。アライメントマークの位置推定値がアクション36で各アライメント信号について決定される。以下、位置推定値を整列位置APと呼ぶ。整列位置APは、マークが波長範囲を使用しているように見える位置であって、オブジェクト上のアライメントマークの(実際の)位置とは異なるということを明示するために、見かけの位置とも呼ばれる。複数のマークの測定の場合、マークごとにアクション36が実行される。整列位置は、関連付けられたアライメント信号が最適な信号品質を有する位置に対応する。続いて、各々の確立されたアライメント信号の計算された位置推定値APと決定された信号品質WQの両方に基づいて、プロセッサ8はアクション37でアライメントマークの位置を決定する。このために、プロセッサ8は、複数の第1の式及び複数の第2の式を含む一組の式を解く。第1の式は、少なくとも信号品質WQ、放射の波長範囲及びアライメントマークのマーク深さDの第1の関係に関連付けられ、第2の式は、少なくとも整列位置AP、上記少なくとも1つのアライメントマークの位置Pos、放射の波長範囲及びアライメントマークのマーク深さDの第2の関係に関連付けられている。
【0045】
[0061] したがって、(図7aに関連して上述したUS7,414,722B2号の周知の方法のように)信号品質WQは、アライメント信号を単に選択するか又は重み付けするのに使用されず、信号品質WQの情報内容が使用され、信号品質WQ、使用される波長範囲、及びマーク深さDを含むマーク特性間のモデル化された関係に関連付けられている。整列位置のモデル化された関係は、例えばマークの非対称性も含む。この手法によってアライメントマークの真の位置を決定する性能が向上する。複数のアライメントマークの異なるマーク間のマーク深さの変化とマークの非対称性の変化による影響は、各々の信号品質が複数のアライメントマークの1つに対応する複数の信号品質を備えたモデルを用いて波長範囲ごとに説明することができる。
【0046】
[0062] 一実施形態では、画像検出ステップは、複数の波長範囲での同時の照明時にすべての複数の波長範囲について実質的に同時に実行される。
【0047】
[0063] 別の実施形態では、画像検出ステップは、複数の波長範囲の各々の波長範囲での順次照明時に複数の波長範囲について順次実行される。
【0048】
[0064] モデルの実施形態をいくつかの例で以下に示す。選択されたモデルでは、各波長範囲は、1つの波長によってパラメータ化されることがあるため、以下の例では、波長範囲を波長と呼ぶ。
【0049】
例1−単一のアライメントマークの位置の決定
[0065] 第1の例では、単一のアライメントマーク上の、互いに近くにある、例えば、数nm離れた2つ以上の波長(λ1,λ2,...)でウェーハ品質(WQ)と整列位置(AP)とを測定することによりマーク深さの変化(D)からの独立を可能にする。
【0050】
[0066] アライメントによって以下のデータが得られる。
WQ(λ1),WQ(λ2),...及び
AP(λ1),AP(λ2),...
【0051】
[0067] WQ、マーク深さ、位相及び波長の適切な(1次の次数までの)関係が以下の式によって与えられる。
WQ(λ)=A(λ)・sin2(2πD/λ+φ) 式(a)
整列位置、「真の」アライメントマーク位置(Pos)、マーク深さ(D)、位相及び波長の適切な(1次の次数の)関係が以下の式によって与えられる。
AP(λ)=Pos+B(λ)・tan(2πD/λ+1/2*π+φ) 式(b)
ここで、
Dは、マーク深さ、
A(λ)は、通常、波長の関数としてのゆっくりと変化する係数であって、例えば、波長に依存する吸収を含んでいてもよい。
B(λ)は、マークの非対称に依存する係数であって、非対称性がない時には、B(λ)は0であり、B(λ)の代表値は0〜10nmであり、
φは、局所位相(エッチングされたウェーハでは、φ=0)である。
【0052】
[0068] この考え方を説明するために、2つの波長の簡単な例と、φ=0を取り上げる。2つの波長の場合、あるマークについて以下の一組の式を得る。
−ウェーハ品質WQ、マーク深さ、位相及び波長の関係に関連付けられた第1の複数の式:
WQ(λ1)=A(λ1)・sin2(2πD /λ1)
WQ(λ2)=A(λ2)・sin2(2πD /λ2) 式(1〜2)
−整列位置AP、「真の」アライメントマーク位置(Pos)、マーク深さ(D)、位相及び波長に関連付けられた第2の複数の式:
AP(λ1)=Pos+B(λ1)・tan(2πD/λ1+1/2*π)
AP(λ2)=Pos+B(λ2)・tan(2πD/λ2+1/2*π) 式(3〜4)
波長は互いに近くにあるため、式1及び2について以下の近似が可能である。
A(λ1)=A(λ2)
式(1〜2)を式5に転換することができる。
WQ(λ1)/WQ(λ2)=sin2(2πD/λ1)/sin2(2πD/λ2) 式(5)
これを解いて(有効)マーク深さDを得る。
【0053】
[0069] 次に、(数字的に又は分析的に)発見されたDの解を式3及び4に代入することができる。また、ここで非対称係数B(λ)がλのゆっくりと変化する係数であると仮定し、近似を行うことができる。
B(λ1)=B(λ2)
次に、式5から得たDの解を式3〜4に代入することにより、この式の組を解いてマークの位置Posを得ることができる。
【0054】
[0070] 位相モデル化を含めた場合には、3波長検出システムを使用する。実際の用途としては、この手法をとる必要がある。
【0055】
[0071] その場合、解くことでアライメントマークの位置Posを決定する式の組は以下の通りである。
WQ(λ1)=A(λ1)・sin2(2πD/λ1+φ)
WQ(λ2)=A(λ2)・sin2(2πD/λ2+φ)
WQ(λ3)=A(λ3)・sin2(2πD/λ3+φ) 式(c)
AP(λ1)=Pos+B(λ1)・tan(2πD/λ1+1/2*π+φ)
AP(λ2)=Pos+B(λ2)・tan(2πD/λ2+1/2*π+φ)
AP(λ3)=Pos+B(λ3)・tan(2πD/λ3+1/2*π+φ) 式(d)
A及びBがλから独立していると仮定して、6つの式を有する5つのパラメータが得られる。これは、様々な方法で解くことができる。例えば、
−この式の組は過剰決定系(over-determined system)として解くことができ、次に、例えば、任意の余りの尺度(最適な色の組合せのための選択に使用することができる)も提供することができる。
−5つの式を完全決定系(fully determined system)として解き、Aは定数である、及び/又はBは定数であるという仮定を検査することができる。
−別のパラメータを追加しながら6つの式を完全決定系として解く。
例えば、マークの非対称性に依存する係数は、B(λ)=B0+Bc*λとしてパラメータ化でき、ここで、B0及びBcは、波長から独立したパラメータである。その場合、B0及びBcを解く必要がある。
【0056】
[0072] (3波長)検出(位相決定を含む)によって、これらの式による局所近似に基づいて位置を計算することができる。
【0057】
[0073] また、上記の式a、b、c及びdの関数形状の選択は、1次モデルに基づいていることに留意されたい。予測深さDのテイラー展開などの別の適切な関数を使用してもよい。
【0058】
例2−単一のウェーハ上の複数のアライメントマークの位置の決定
[0074] 一実施形態によれば、この方法によって測定を単一のウェーハ上の異なるマーク間のマーク深さの変化から独立させることができる。マーク深さは、ウェーハ上の位置の関数D(x,y)として表すことができる。
【0059】
[0075] ウェーハ品質(WQ)及び整列位置(AP)は、ここでも少なくとも2つ以上の波長(λ)を用いてウェーハ上の複数のマークについて測定することができる。波長は、大きく離間していてもよい。
【0060】
[0076] 一組の関係式を(局所的に)真であると仮定することで結合し、解くことができるアライメントマーク結果を組み込んだ一組の式を含むモデルを使用する。
【0061】
[0077] アライメント信号から、以下のデータが確立される。
WQ1(λ1),WQ1(λk),...WQ1(λk0)
AP1(λ1),AP1(λk),...AP1(λk0)
...
WQn(λ1),...WQn(λk),...WQn(λk0)
APn(λ1)....APn(λk)....APn(λk0)
...
WQn0(λ1)....WQn0(λk),...WQn0(λk0)
APn0(λ1)....APn0(λk),....APn0(λk0)
ここで、
WQn(λk)は、波長λkでのマークnのウェーハ品質;
APn(λk)は、波長λkでのマークnの整列位置;
n0は、アライメントマークの数を示す;
k0は、使用する波長の数を示す;
これらの測定データを結合して簡単な(局所的な)状況で成立する追加のパラメータを含む式を導入することができる。
【0062】
[0078] ウェーハ品質WQn(λk)、マーク深さDn,k、位相φn(λk)及び波長λkの適切な(1次の次数までの)関係が以下の式によって与えられる。
WQn(λk)=An(λk)・sin2(2πDn,k/λk+φn(λk)) 式(aa)
整列位置APn(λk)、「真の」アライメントマーク位置Posn、マーク深さDn,k、及び波長λkの適切な(1次の次数の)関係が以下の式によって与えられる。
APn(λk)=Posn+Bn(λk)・tan(2πDn,k/λk+1/2*π+φn(λk)) 式(bb)
ここで、
Dn,kは、波長λkでのマークnの有効深さ;
An(λk)は、通常、波長の関数としてのゆっくりと変化する係数である。波長に依存する吸収とマークに依存する吸収層の厚さの変化は、この係数の一部である;
Bn(λk)は、マークの非対称性に依存する係数である。非対称性がない時には、B(λ)は0である;Bn(λk)の代表値は0〜10nmである;
φn(λk)は局所位相である;エッチングされたウェーハでは、φ=0である;
Posnは、アライメントマークnの「真の」アライメントマーク位置(すなわち、使用される波長から独立したアライメントマークの位置)である。
【0063】
[0079] 次に、過小決定された(underdetermined)この式の系の解を見つける必要がある。
この系は
k0*n0(WQ)+k0*n0(AP)=2*k0*n0個の式
に等しいいくつかの式と、
n0(Pos)+n0*k0(A)+n0*k0(B)++n0*k0(D)+n0*k0(φ)
=(4*k0+1)*n0個の変数
に等しいいくつかの未知数(変数)とを有する。
【0064】
[0080] この過小決定された式の組の解は、変数の数を低減できるセンシブルな近似をすることにより見つけることができる。上記の式(aa)及び(bb)の解を得るためには、少なくとも2つの色の結果の間に相関関係が存在する必要があるので、光信号の光源は等しくなければならない。これは、信号が同一の層から伝送されなければならないことを意味する。これは、常にそうであるということではないことに留意されたい。1つの色が層の重なりを通して印刷されたマーク(例えば、FIR)までを探り、別の色(例えば、緑)がウェーハの上面のトポロジの変化しか探れない場合(層がこの光を通さないため)、各色の信号の相関は十分でないという予想ができる。したがって、これらの色は、IC製造工程の段階に応じて、特に層のタイプ(材料)と厚さに応じて選択することができる。いくつかの色の相関は限られた量の波長について成立し、波長は、満足する波長の数kr0=k0である一組の満足する波長{kr}として選択される。
【0065】
[0081] この仮定は、変数の数としての両方の数を代入した式を低減し、したがって、各色がこの手法で有用であるための必要条件であることに留意されたい。
【0066】
[0082] 各色が相関すると、各変数について以下のようにいくつかの仮定が成り立つ。
−同一の(埋め込み)マーク構造に整列し、したがって相関する色の場合、有効マーク深さDは波長から独立している。
−処理は局所的な現象であるため、Dはさらにウェーハ上のマークの位置に依存する。したがって、Dnは、M次の次数モデルによって近似できる。mの選択は、例えばm=10であってもよい。mの最適な値は、例えば、使用される処理装置に応じて決定することができる。したがって、
波長k∈{kr}では、Dn,k=D(x,y,k)=d1(k)+d2*x+d3*y+......dm*fm(x,y)
−信号振幅(A)、非対称性変数(B)及び位相(φ)については、有効マーク深さ(D)のパラメータ化に関して同様の議論が成立する。
Q次の次数のモデルをAを説明するデータに適合させることができ、
S次の次数のモデルをBを説明するデータに適合させることができ、
F次の次数のモデルをφを説明するために適合させることができる。
Q、S及びFの選択の例は10である。
−信号振幅A、非対称性パラメータB及び位相φは、以下の式によって近似できると仮定する。
波長k∈{kr}では、An,k=A{kr}(x,y,k)=a1(k)+a2*x+a3*y+......aq*fq(x,y)
波長k∈{kr}では、Bn,k=B{kr}(x,y,k)=b1(k)+b2*x+b3*y+......bs*fs(x,y)
波長k∈{kr}では、φn,k=φ{kr}(x,y,k)=c1(k)+c2*x+c3*y+......cf*ff(x,y)
−さらに、異なる色で測定された位置間の任意の固定色オフセットが当業者には周知の標準の工程補正を適用して取り出される。
【0067】
[0083] 以上実行されたすべての近似によって、代入式の数は、
2*kr0*n0個の式になり、
パラメータ数は、
n0{Posより}+(m+kr0-1){Dより}+(s+kr0-1){Bより}
+(f+kr0-1){φより}+(q+kr0-1){Aより}
となる。
典型例は、n0=100、kr0=2およびm、s、f及びqはすべて10である。この結果、400の式と141の変数が得られる。これによって、すべてのフィールドが整列しアライメントマークの数が100以上である高速アライメントの典型的な状況が提供される。
【0068】
[0084] マークの最小数を決定するのに使用する仮定の数は大きいことに留意されたい。その上に、ウェーハに関するパラメータの変化は比較的小さい。したがって、一実施形態では、強度の過剰決定系を用いて変数が計算される。
【0069】
[0085] 一実施形態では、X及びY方向のアライメントマーク間の変数の数をさらに低減するリンクが作成される。ウェーハ位置の関数D(x,y)としてのマーク深さ変化は、X及びY方向で同じであるとみなしてもよい。残りの変数(A,B,φ)についても、同様の結合を使用することができる。
【0070】
[0086] いくつかのマークは、その1次の次数応答上に高次の信号(例えば、2次及び3次)を有していてもよい。いくつかの実施形態では、これらの信号を組み込んで結果を改善するためにモデルが適合される。
【0071】
[0087] 多数のマークが有益であるため、多数のアライメントマークがウェーハの実質的に表面全体に実質的に均一に分散されている格子アライメント手法を使用することが有利である。
【0072】
[0088] 図8は、本発明の一実施形態によるフィールド画像アライメント構成を概略的に示す。図2に概略的に示すフィールド画像アライメント構成と比較して、図9のフィールド画像アライメント構成は、フィルタユニット27を備える。フィルタユニット27は、基板W上のマーク(図示せず)に入射する前に、広帯域光ビーム9と、したがって、選択された異なる所定の波長範囲を有する広帯域アライメントビーム10とを提供するように構成されている。フィルタユニット27は、広帯域光源1と検出器7との間の広帯域光ビーム9の光路内の別の位置にあってもよいことに留意されたい。
【0073】
[0089] 図9a及び図9bは、図8のアライメント構成で使用することができるフィルタユニットの2つの例を概略的に示す。図9aに、フィルタユニット27の第1の例が示されている。このフィルタユニット27は、いくつかのフィルタ29a〜dを備えた回転自在のホイール28を備える。上述したように、これらのフィルタは、図7のアクション21を可能にするために本発明の一実施形態で使用される。各フィルタ29a〜dは、広帯域光ビーム9の波長範囲の異なる部分を吸収する。したがって、広帯域光ビームは、様々な所定の選択された波長範囲を備える。
【0074】
[0090] 図9bは、フィルタユニット27の第2の例を概略的に示す。ここでもフィルタユニット27は、いくつかのフィルタ29a〜dを含む。しかし、この例では、フィルタは、回転自在のホイール28上ではなく、図8の広帯域光ビーム9の方向に実質的に垂直の一次元方向に移動することができるストリップ30上に配置されている。当業者には明らかなように、フィルタ29a〜dは、他のタイプの担持体上に配置されていてもよい。さらに、図9a、図9bでは、4つのフィルタ29a〜dが示されている。当業者には明らかなように、フィルタの数は4に等しくなくてもよい。
【0075】
[0091] フィルタユニット27は、手動で又はプロセッサによって自動で制御することができる。このプロセッサは、プロセッサ8でなくてもよいがそうであってもよい。
【0076】
[0092] フィルタユニット27の代わりに、検出器7内にフィルタを施してもよい。図10は、検出器7として使用されるマルチカラーCCDカメラの分光感度に関する情報を提供するグラフを示す。CCDは、行列状に配置されたCCD素子(カメラピクセルとも呼ぶ)を備え、したがって検出面を形成する。各素子のサイズは、数ミクロン程度である。マルチカラーCCDは、個別の素子に所定の波長範囲の感度を与えるいわゆるフィルタを使用している。すなわち、素子は、(部分的に)「青」、「緑」及び「赤」を感知する。グラフで分かるように、マルチカラーCCD素子の感度は1つ又は2つの波長に限定されず、ある波長範囲をカバーすることに留意されたい。したがって、「赤」の感度とは、CCD素子が可視光スペクトルの赤の部分の波長範囲に対して感度があるということを意味する。同じことが「青」及び「緑」の感度についても言える。複数の波長範囲を有するアライメントビームで照明されたマークの画像をマルチカラーCCDで検出することで、例えば、マークの3つの画像を並行して得ることができる。
【0077】
[0093] マルチカラーCCDで使用することができるフィルタの2つの例を図11a、図11bに示す。図11aでは、検出面がいわゆるベイヤフィルタで覆われている。図示の実施形態では、ベイヤフィルタは、CCDカメラでこの実施形態が広く使用されているように、「青」又は「赤」の感度があるCCD素子の2倍の数の「緑」の感度があるCCD素子を有している。「緑」又は「赤」のCCD素子の2倍の数の「青」のCCD素子を備えた類似の構成や「青」又は「緑」のCCD素子の2倍の数の「赤」のCCD素子を備えた構成を提供することも可能であることを理解されたい。図11bで、フィルタは、同じ色の感度があるCCD素子の線を形成する。多くの他の構成も可能であることに留意されたい。
【0078】
[0094] 図11cに概略的に示すように、マルチカラーCCDを使用する代わりに、CCDを複数のモノクローム検出面30、31、32を含む検出器7として使用することができる。結像光学系6からのアライメント放射35は、スプリッタ33によって少なくとも2つのアライメント放射ビーム34に分割される。図12では、スプリッタ33は、アライメント放射を3つのアライメント放射ビーム34a〜cに分割する。各アライメント放射ビーム34a〜cは、異なる波長範囲を含む光を搬送する。各アライメント放射ビーム34a〜cは、関連する検出面30〜32で検出することができる。検出面30は、アライメント放射ビーム34aで搬送される波長範囲で形成されるアライメントマークの画像を検出する。同様に、アライメント放射ビーム34bは、検出面31上にアライメントマークの画像を形成し、アライメント放射ビーム34cは、検出面32上にアライメントマークの画像を形成する。図11cで、検出面30は「赤」を感知し、検出面31は「緑」を感知し、検出面32は「青」を感知する。この場合、ある「色」の感度は上記と同じ意味である。
【0079】
[0095] 一実施形態では、複数の波長範囲のうち少なくとも2つの波長範囲が2〜100nmの幅を有する。別の実施形態では、幅は2〜30nmである。図12aは、本発明のこのような実施形態によるフィールド画像アライメント構成で使用される広帯域光源1の一例を示す。図2に概略的に示すフィールド画像アライメント構成と比較して、図12aのフィールド画像アライメント構成の広帯域光源1は、第1の光源1Rと第2の光源1Bとを備える。
【0080】
[0096] 第1及び第2の光源は、最大30nmの波長範囲内の放射を生成する狭帯域光源であってもよい。一例では、第1の1Rは、広帯域光ビーム9に、したがって、広帯域アライメントビーム10にも所定の選択された赤の波長範囲を提供するように構成された赤色レーザ源であり、第2の狭帯域光源1Bは、広帯域光ビーム9に、したがって、広帯域アライメントビーム10にも所定の選択された青の波長範囲を提供するように構成された青色レーザ源である。
【0081】
[0097] 第1及び第2の光源は、例えば、30〜100nmの波長範囲内の放射を生成する広帯域光源であってもよい。一例では、第1の1Rは、広帯域光ビーム9に、したがって、広帯域アライメントビーム10にも所定の選択された赤の波長範囲を提供するように構成された赤色スーパールミネッセントダイオードであり、第2の狭帯域光源1Bは、広帯域光ビーム9に、したがって、広帯域アライメントビーム10にも所定の選択された青の波長範囲を提供するように構成された青色スーパールミネッセントダイオードである。
【0082】
[0098] 図12bは、本発明によるアライメント構成で使用することができる複数の例示的な波長範囲を概略的に示す。図12bは、第1の例示的な広帯域光源1によって生成された広帯域光ビームのスペクトルSBを示す。スペクトルSBは、w0で示す幅を備えた連続スペクトルである。スペクトルSBを含む放射は、フィルタ27によってフィルタリングされ、幅w1を有する第1の中心波長λ1を中心とする第1の波長範囲と幅w2を有する第2の中心波長λ2を中心とする第2の波長範囲として示される2つの狭帯域波長範囲が放射に与えられる。第1及び第2の波長範囲は、Δλ12として示す中心波長離隔距離だけ離間している。
【0083】
[0099] 一実施形態では、広帯域光源1は、広帯域光ビームに、したがって、広帯域アライメントビーム10にも少なくとも200nmの総スペクトル幅にわたる複数の所定の波長範囲を提供するように構成されたブロードスペクトルレーザを含む。
【0084】
[00100] 一実施形態では、広帯域光源1は、広帯域光ビーム9に、したがって、広帯域アライメントビーム10にも少なくとも100nmの総スペクトル幅にわたる複数の所定の波長範囲を提供するように構成されたスーパールミネッセントダイオード(SLD)を含む。SLDは、例えば、600〜680nmの範囲の赤色放射を提供する赤色SLDであってもよい。フィルタユニット27は、例えば、50nm未満、又は20nm未満の第1の狭い波長範囲と第2の狭い波長範囲の両方を選択するように構成されていてもよい。赤色SLDを使用する時には、フィルタユニット27は、例えば、620〜640nmの第1の狭い波長範囲と650〜680nmの第2の狭い波長範囲を選択するように構成されていてもよい。
【0085】
[00101] 図12cは、本発明によるアライメント構成で使用することができる複数の例示的な波長範囲を概略的に示す。図12cは、例えば、図12aに示すように、第1のスペクトルs1と第2のスペクトルs2を含む放射を提供する2つの光源を含む例示的な広帯域光源1によって生成された広帯域光ビームのスペクトルS12を示す。したがって、スペクトルS12は、2つのピークを含む不連続スペクトルである。スペクトルS12を含む放射はフィルタ27によってフィルタリングされ、第1の中心波長λ1を中心とする第1の波長範囲と第2の中心波長λ2を中心とする第2の波長範囲として示される2つの狭帯域波長範囲と、第3の中心波長λ3を中心とする第3の波長範囲と第4の中心波長λ3を中心とする第4の波長範囲として示される第2のスペクトルs3内の2つの狭帯域波長範囲が放射に与えられる。第1及び第2の波長範囲の離隔距離をΔλ12と呼ぶことができる。第3及び第4の波長範囲の離隔距離をΔλ34と呼ぶことができる。
【0086】
[00102] 一実施形態では、広帯域光源1は、広帯域光ビーム9に、したがって、広帯域アライメントビーム10にも複数の所定の波長範囲を提供するように構成された複数のSLD、例えば、赤色SLD及び緑色SLDを含み、赤色SLDは、第1のスペクトル幅にわたる第1の複数の所定の赤色波長範囲を提供するように構成され、緑色SLDは、第2のスペクトル幅にわたる第2の複数の所定の緑色波長範囲を提供するように構成されている。フィルタユニット27は、第1の複数の所定の赤色波長範囲から2つの狭い波長範囲と、第2の複数の所定の緑色波長範囲から2つの狭い波長範囲を選択するように構成されていてもよい。この結果、アライメント信号は、赤色波長の第1の狭い波長範囲、赤色波長の第2の狭い波長範囲、緑色波長の第3の狭い波長範囲及び緑色波長の第4の狭い波長範囲に対応する。プロセッサ8は、例えば、赤色波長の2つの狭い波長範囲、又は緑色波長の2つの狭い波長範囲、あるいは赤色及び緑色波長の4つの狭い波長範囲のすべてを選択するように構成してもよい。赤色波長の2つの狭い波長範囲は互いに近接して離間していてもよいが、緑色波長の2つの狭い波長範囲からは比較的大きく離間していてもよい。緑色波長の2つの狭い波長範囲は互いに近接して離間していてもよい。この文脈では、近接して離間する範囲は、非重畳範囲、又は一部が重畳しているが中心値が異なる範囲に対応していてもよい。
【0087】
[00103] 近接して離間する非重畳波長範囲は、特に、複数の波長範囲のうち最小の2つの波長範囲が、隣接する波長範囲間で最大30nmだけ離間する実施形態に対応していてもよい。
【0088】
[00104] したがって、実施形態では、複数の波長範囲を有する放射は、複数の光源によって生成することができ、各々の光源は、複数の波長範囲のうち少なくとも2つの波長範囲を含む放射を生成するように構成され、少なくとも2つの波長範囲は、2〜100nmの幅を有し、最大50nm離間した単一の光源によって生成され、少なくとも2つの波長範囲は、他の任意の光源によって生成される少なくとも2つの波長範囲から少なくとも50nm離間した単一の光源によって生成される。
【0089】
[00105] 一実施形態では、複数の波長範囲が、青紫波長範囲、赤色波長範囲、緑色波長範囲、近赤外波長範囲及び遠赤外波長範囲から選択した少なくとも2つの波長範囲に対応する。この文脈で、青紫波長範囲は、波長が385〜450nmの波長範囲であり、緑色波長範囲は、波長が450〜590nmの波長範囲であり、赤色波長範囲は、波長が590〜680nmの波長範囲であり、近赤外波長範囲は、波長が680〜800nmの波長範囲であり、遠赤外波長範囲は、波長が800〜1500nmの波長範囲である。複数の波長範囲が上記明示した波長範囲と別の波長範囲に対応してもよいことを理解されたい。
【0090】
[00106] 本明細書を通して使用されるプロセッサ8が図13に示すコンピュータアセンブリ40で実施することができることを理解されたい。プロセッサ8に接続されたメモリ12は、ハードディスク41、読み出し専用メモリ(ROM)42、EEPROM(Electrically Erasable Programmable Read Only Memory)43及びランダムアクセスメモリ(RAM)などのいくつかのメモリ構成要素を備えていてもよい。上記のすべてのメモリ構成要素が存在しなくてもよい。さらに、上記のように、上記のメモリ構成要素は、物理的にプロセッサ8に、又は互いに近接していなくてもよい。それらは離間していてもよい。
【0091】
[00107] プロセッサ8は、ある種類のユーザインターフェイス、例えば、キーボード45又はマウス46に接続していてもよい。当業者には周知のタッチスクリーン、トラックボール、音声変換装置又は他のインターフェイスも使用することができる。
【0092】
[00108] プロセッサ8は、フロッピーディスク48又はCDROM49などのデータキャリアからデータを読み出し、状況に応じてデータキャリアにデータを記憶するように構成された読み出しユニット47に接続されていてもよい。当業者には周知のDVD又はその他のデータキャリアも使用することができる。
【0093】
[00109] プロセッサ8は、出力データを紙に印字するプリンタ50及びディスプレイ51、例えば、モニタ又はLCD(液晶ディスプレイ)又は当業者には周知の任意の他のタイプのディスプレイに接続されていてもよい。
【0094】
[00110] プロセッサ8は、通信ネットワーク52、例えば、公衆交換電話網(PSTN)、ローカルエリアネットワーク(LAN)、ワイドエリアネットワーク(WAN)などに、入出力(I/O)を行う送信機/受信機53によって接続することができる。プロセッサ8は、通信ネットワーク52を介して他の通信システムと通信するように構成されていてもよい。本発明の一実施形態では、外部コンピュータ(図示せず))、例えば、オペレータのパーソナルコンピュータは、通信ネットワーク52を介してプロセッサ8にログインできる。
【0095】
[00111] プロセッサ8は、独立したシステムとして、又は各処理ユニットがより大きいプログラムのサブタスクを実行するように構成された並列に動作するいくつかの処理ユニットとして実施することができる。処理ユニットは、いくつかのサブ処理ユニットを備えた1つ又は複数のメイン処理ユニットに分割することもできる。プロセッサ8のいくつかの処理ユニットは、他の処理ユニットから距離を置いて配置することができ、通信ネットワーク52を介して通信することができる。
【0096】
[00112] 図14は、本発明の第2の実施形態によるフローチャートを概略的に示す。この実施形態では、図14に示すように、単一の基板ではなく一群のN個の基板、i=1,...,Nを連続して整列させる必要がある。この方法の上記実施形態は、一群の基板中の個別の基板上のアライメントマークの位置を測定するために使用される。こうして、基板iごとに少なくとも1つのアライメントマークを測定することによりすべての基板iが整列する。
【0097】
[00113] N個の基板のうち第1の基板、すなわち、i=1に関して、アライメント測定方法は、図7に示し、それに関連して説明した方法に対応する。したがって、最初に、アクション60で、第1の基板、すなわち、i=1の基板上のアライメントマークの画像が検出器7によって複数の所定の波長範囲を含む光を用いて検出される。続いて、アクション61で、上記複数の所定の波長範囲のうち各々の選択された波長範囲で、検出された画像に対してその選択された波長範囲でアライメント信号が生成される。すべての生成されたアライメント信号がアクション62でプロセッサによって受信される。続いて、この方法は、アクション64へ進み、ここで、受信されたアライメント信号の各々の信号品質WQが、信号品質表示パラメータを用いて決定される。このような品質表示パラメータの例は、アライメント信号の信号強度、雑音レベル及び適合品質を含む。当業者には明らかなように、アライメント信号の信号品質は、プロセッサ8によって自動的に決定することができる。次に、各アライメント信号を用いてアクション65でいわゆる整列位置APが確立される。整列位置は、図4に関連してすでに説明したように、アライメント信号が所定の条件を満たす位置に対応する。整列位置は、例えば、アライメント信号が最大値を示す位置に対応していてもよい。最後に、少なくとも1つのアライメントマークの位置Posが各々の選択された波長範囲の信号品質WQ及び整列位置APと、波長範囲とマーク特性、特にマーク深さD及びマーク非対称性Aと、別の実施形態では、例えば、局所位相φ及び/又は局所吸収Bとの間のモデル化された関係に関連付けられた式に基づいてアクション66で決定される。アクション66は、例えば、上記の例1及び例2に関して説明した数組の式を使用する。
【0098】
[00114] 整列させる基板が1つのみの場合、上記シーケンスは終了するであろうが、整列させる基板はN個あるため、N個の基板のうち第1の基板のアライメントの後、多くの場合は、この整列した第1の基板上の連続パターニングの後、アクション67で、最後のウェーハが整列したか否かが検査される。ここまでは1つの基板しか整列しておらず、N個の基板を整列させる必要があるため、検査結果は否であり、アクション68で指数iが1だけ増加する。
【0099】
[00115] 次の基板、すなわち、i=1+1=2で、アライメント測定方法が繰り返され、したがって各々の選択された波長範囲に対して検出器7によってアライメント信号が生成され、すべてのアライメント信号がそれぞれプロセッサ8によって受信される。
【0100】
[00116] 基板の指数がNに等しくなるまで、アクション68、60、61、62、64、65及び66が繰り返される。したがって、各々の基板に対して独立して位置を決定することができ、したがって異なる基板上のマーク間の差を考慮することができる。基板の各々に対して、第1の基板に対応するアライメント信号に関して決定された信号品質を用いて異なる波長範囲に対応するアライメント信号が選択又は重み付けされて、したがって異なる基板間の差が大幅に無視されるUS7,414,722B2号に記載する方法と比べてこの方法は有利である。
【0101】
[00117] アライメント信号の1つ以上で信号品質WQがしきい値を下回る場合、上記アライメント測定方法をさらに拡張して、対応するアライメント信号を使用不可にすることができる。その場合、アクション65で整列位置APを確立した後、プロセッサは、アクション66で基板上のアライメントマークの位置を計算するだけでなく、検出器7へ向けて帰還信号を送信し、検出器は、それについてアクション61でアライメント信号を生成すべき所定の波長範囲の選択をアクション69で適合させることができる。この実施形態は、拡張実施形態であることを強調するために、この問題に関連する図14のフローチャートの中の矢印は破線になっている。あるいは、アクション64で信号品質WQを確立した後で、プロセッサは、検出器7へ向けて帰還信号を送信してもよく、検出器は、それについてアクション61でアライメント信号を生成すべき所定の波長範囲の選択をアクション69で適合させることができる。
【0102】
[00118] 適合は、整列位置AP及び信号品質WQからマークの位置を決定する際のアライメント信号の使用の有効性に基づく。したがって、ある所定の波長範囲に対応するアライメント信号が有効に使用されない場合、アクション69での適合によって、検出器7はそのアライメント信号をもはや生成しない。
【0103】
[00119] 図9a、図9bに示すように、フィルタユニット27を使用する場合、異なる所定の波長範囲の選択を適合させるそのような帰還信号もフィルタユニット27の制御ユニット(図示せず)へ送信することができることを理解されたい。したがって、フィルタユニット27の制御ユニットは、アクション61で生成される対応するアライメント信号が、アクション66で、測定する別の基板i上のアライメントマークマーク上での整列位置の確立に使用されないフィルタ29a〜dをもはや適用しない。
【0104】
[00120] 図15は、本発明の第3の実施形態によるアライメント測定方法のフローチャートを示す。この実施形態では、図14に示すのと同様のフローチャートが使用されているが、この方法は、いくつかの基板の代わりにいくつかのマークj(j=1,...,M)上で使用される。この実施形態では、少なくとも1つのアライメントマークの画像を検出するステップは、画像の各々の部分がそれぞれのアライメントマークに対応する画像の複数の部分を検出するステップを含み、複数のアライメント信号の各々が、対応する波長範囲で検出される画像の対応する複数の部分に関連付けられた複数のアライメント信号成分を含む。以下、少なくとも1つのアライメントマークのj番目のアライメントマークに対応する画像の部分をj番目のアライメントマークの画像と呼び、それに関連付けられたアライメント信号成分を関連付けられたアライメント信号と呼んで、図14と図15の間の参照を容易にする。
【0105】
[00121] K個のマークのうち第1のマーク、すなわち、j=1に関して、アライメント測定方法は、図7bに示し、それに関連して説明した方法に対応する。したがって、最初に、アクション70で、第1のアライメントマーク、すなわち、j=1の画像が、検出器7によって複数の所定の波長範囲を含む光を用いて検出される。続いて、アクション71で、上記複数の所定の波長範囲のうち各々の選択された波長範囲で、検出された画像に関してその選択された波長範囲でアライメント信号が生成される。すべての生成されたアライメント信号が、アクション72でプロセッサによって受信される。続いて、この方法はアクション74へ進み、ここで、すべての受信されたアライメント信号の信号品質WQが、信号品質表示パラメータを用いて決定される。このような品質表示パラメータの例は、アライメント信号の信号強度、雑音レベル及び適合品質を含む。当業者には明らかなように、アライメント信号の信号品質は、プロセッサ8によって自動的に決定することができる。次に、図14のアクション65と同様に、各アライメント信号を用いてアクション75でいわゆる整列位置APが確立される。
【0106】
[00122] 測定するマークが1つだけであったら、上記シーケンスは終了するであろうが、測定するマークはK個あるため、K個のマークのうち第1のマークの測定の後、アクション77で、最後のマークを測定したか否か、すなわち、j=Kであるか否かが検査される。ここまでのように、第1のマークしか測定されておらず、K個のマークを整列させる必要がある場合、検査結果は否であり、アクション78で指数jが1だけ増加する。
【0107】
[00123] 次のアライメントマーク、すなわち、j=1+1=2で、アライメント測定方法はアクション70で再開する。すなわち、次のアライメントマーク、すなわち、第2のアライメントマークの画像が複数の所定の波長範囲を含む光で検出される。続いて、上記のように、アクション71及び72、すなわち、各々の選択された波長範囲に対して検出器7によってアライメント信号を生成し、すべてのアライメント信号をそれぞれプロセッサ8によって受信するステップが実行される。続いて、アクション74で、すべての受信されたアライメント信号の信号品質WQが、信号品質表示パラメータを用いて決定される。
【0108】
[00124] マークの指数がKに等しくなるまで、アクション78、70、71、72、74及び75が繰り返される。
【0109】
[00125] 最後に、アライメントマークj=1...Kの各々の位置が、各々の選択された波長範囲のすべてのアライメントマークの信号品質WQ及び整列位置APと、波長範囲とマーク特性、特にマーク深さD及びマーク非対称性Aと、別の実施形態では、例えば、局所位相φ及び/又は局所吸収Bとの間のモデル化された関係に関連付けられた式に基づいてアクション76で決定される。
【0110】
[00126] したがって、基板上の各々のアライメントマークの位置を決定することができ、したがって基板の異なる場所にあるマーク間の差を考慮することができる。すべてのアライメントマークに対して、第1のアライメントマークに対応するアライメント信号に関して決定された信号品質を用いて異なる波長範囲に対応するアライメント信号が選択及び重み付けされる、すなわち、異なるアライメントマーク間の差が大幅に無視されるUS7,414,722B2号に記載する方法と比べてこの方法は有利である。アライメントマークの1つ以上が第1のアライメントマークと実質的に異なった時には、例えば、研磨又はエッチングによって引き起こされる局所の差により実質的に異なるマーク深さ又はマーク非対称性を有する時には、この周知の方法は、低品質のアライメント信号を使用する危険がある。
【0111】
[00127] アライメント信号の1つ以上で信号品質WQがしきい値を下回る場合、上記アライメント測定方法をさらに拡張して対応するアライメント信号を使用不可にすることができる。その場合、アクション74で信号品質WQを確立した後、プロセッサは、検出器7へ向けて帰還信号を送信し、検出器は、それについてアクション71でアライメント信号を生成すべき所定の波長範囲の選択をアクション79で適合させることができる。この実施形態が拡張実施形態であることを強調するために、この問題に関連する図15のフローチャートの中の矢印は破線になっている。あるいは、アクション77でマーク位置を確立した後で、プロセッサは、検出器7へ向けて帰還信号を送信してもよく、次の基板上の複数のアライメントマークについてその後同じ方法を使用する時には、検出器は、それについてアクション71でアライメント信号を生成すべき所定の波長範囲の選択をアクション79で適合させることができる。適合は、整列位置AP及び信号品質WQからマークの位置を決定する際のアライメント信号の使用の有効性に基づく。したがって、ある所定の波長範囲に対応するアライメント信号が第1のマークのための別のアライメント信号を確立するために使用されない場合、アクション79での適合の結果、検出器7はそのアライメント信号をもはや生成しない。
【0112】
[00128] 図9a、図9bに示すように、フィルタユニット27を使用する場合、異なる所定の波長範囲の選択を適合させるそのような帰還信号もフィルタユニット27の制御ユニット(図示せず)へ送信することができることを理解されたい。したがって、フィルタユニット27の制御ユニットは、アクション61で生成される対応するアライメント信号が、測定する別のアライメントマークj上のアクション65での別のアライメント信号の確立に使用されないフィルタ29a〜dをもはや適用しない。
【0113】
[00129] US7,414,722B2号に記載されたその図14及び図15を参照する例では、第1のアライメントマークの信号品質を用いて複数のアライメントマークの各々に対応するアライメント信号の選択又は重み付けが実行されることに留意されたい。本発明による方法は、US7,414,722B2号の周知の方法よりも有利である。何故なら、周知の方法はマーク間の信号品質の差を考慮せず、異なる波長範囲間の信号品質の差だけを考慮するからである。さらに、信号品質、波長及びマークパラメータ、特にマーク深さの関係と、整列位置、マーク位置、波長及びマークパラメータ、特にマーク深さ及びマーク非対称性の関係を用いて、個別のマークに対して、アライメント信号から抽出することができる情報が最適に使用される。
【0114】
[00130] 本文ではICの製造におけるリソグラフィ装置の使用に特に言及しているが、本明細書で説明するリソグラフィ装置には他の用途もあることを理解されたい。例えば、これは、集積光学システム、磁気ドメインメモリ用誘導及び検出パターン、フラットパネルディスプレイ、液晶ディスプレイ(LCD)、薄膜磁気ヘッドなどの製造である。こうした代替的な用途に照らして、本明細書で「ウェーハ」又は「ダイ」という用語を使用している場合、それぞれ、「基板」又は「ターゲット部分」という、より一般的な用語と同義と見なしてよいことが、当業者には認識される。本明細書に述べている基板は、露光前又は露光後に、例えばトラック(通常はレジストの層を基板に塗布し、露光したレジストを現像するツール)、メトロロジーツール及び/又はインスペクションツールで処理することができる。適宜、本明細書の開示は、以上及びその他の基板処理ツールに適用することができる。さらに基板は、例えば多層ICを生成するために、複数回処理することができ、したがって本明細書で使用する基板という用語は、既に複数の処理済み層を含む基板も指すことができる。
【0115】
[00131] 光リソグラフィの分野での本発明の実施形態の使用に特に言及してきたが、本発明は、他の用途、例えばインプリントリソグラフィにも使用することができ、文脈によっては、光リソグラフィに限定されないことを理解されたい。インプリントリソグラフィでは、パターニングデバイス内のトポロジが基板上に作成されるパターンを形成する。パターニングデバイスのトポロジは、基板に供給されたレジスト層内に押圧し、電磁放射、熱、圧力又はこれらの組合せを印加することによりレジストは硬化する。パターニングデバイスはレジストから取り除かれ、レジストが硬化すると、内部にパターンが残される。
【0116】
[00132] 本明細書で使用する「放射」及び「ビーム」という用語は、イオンビーム又は電子ビームなどの粒子ビームのみならず、紫外線(UV)放射(例えば、365nm、355nm、248nm、193nm、157nm若しくは126nm、又はこれら辺りの波長を有する)及び極端紫外線光(EUV)放射(例えば、5nm〜20nmの範囲の波長を有する)を含むあらゆるタイプの電磁放射を網羅する。
【0117】
[00133] 「レンズ」という用語は、状況が許せば、屈折、反射、磁気、電磁気及び静電気光学部品を含む様々なタイプの光学部品のいずれか一つ、又はその組合せを指すことができる。
【0118】
[00134] 本明細書で使用する「広帯域光」及び「広帯域照明」という用語は、可視スペクトル及び赤外領域内の波長を含む複数の波長範囲を含む光を包含する。さらに、複数の波長範囲は、必ずしも隣り合っている必要はないことを理解されたい。
【0119】
[00135] 以上、本発明の特定の実施形態を説明したが、説明とは異なる方法でも本発明を実践できることが理解される。例えば、本発明は、上記で開示したような方法を述べる機械読み取り式命令の1つ又は複数のシーケンスを含むコンピュータプログラム、又はこのようなコンピュータプログラムを内部に記憶したデータ記憶媒体(例えば半導体メモリ、磁気又は光ディスク)の形態をとることができる。
【0120】
[00136] 図2に関連して示す構成は、アクチュエータ11が基板テーブルWTを移動させて基板Wを横切るアライメントビーム10の運動を生成することを示すが、アライメントビーム10は、適切なデバイスによって、例えば、基板W全体にアライメントビーム10を掃引するために起動されたミラーによって移動させることが可能であることを理解されたい。次に、基板テーブルWT及び基板Wは、固定した場所に残る。あるいは、別の実施形態では、基板テーブルWTとアライメントビーム10の両方が測定を実行しながら移動していてもよい。
【0121】
[00137] 上記の説明は例示的であり、限定的ではない。したがって、請求の範囲から逸脱することなく、記載されたような本発明を変更できることが当業者には明白である。特許請求の範囲では、括弧に括られたいかなる参照符号も特許請求の範囲を限定すると解釈してはならない。本明細書を通して、「及び/又は」という用語は、関連付けられたリスト項目の1つ以上のいずれか又はすべてを含む。
【特許請求の範囲】
【請求項1】
リソグラフィ装置と一緒に使用するアライメント測定方法であって、
a)複数の波長範囲を有する放射による照射時にオブジェクト上に位置する少なくとも1つのアライメントマークの画像を検出するステップと、
b)各々が前記複数の波長範囲のうち対応する波長範囲で検出された前記画像に関連付けられた複数のアライメント信号を生成するステップと、
c)少なくとも1つの信号品質表示パラメータを用いてそれぞれのアライメント信号の複数の信号品質を決定するステップと、
d)少なくとも1つのマーク位置表示パラメータを用いてそれぞれのアライメント信号から複数の整列位置を決定するステップと、
e)前記複数の信号品質のうち少なくとも2つの信号品質と前記複数の整列位置のうち少なくとも2つの整列位置に少なくとも基づいて、前記少なくとも1つのアライメントマークの位置(Pos)を決定するステップとを含み、
前記少なくとも1つのアライメントマークの前記位置の前記決定ステップが、複数の第1の式及び複数の第2の式を含む一組の式を解くステップを含み、
前記第1の式が、少なくとも前記信号品質(WQ)と、前記放射の波長範囲と前記少なくとも1つのアライメントマークのマーク深さ(D)との間の第1の関係に関連付けられ、
前記第2の式が、少なくとも前記整列位置(AP)と、前記少なくとも1つのアライメントマークの前記位置(Pos)と、前記放射の前記波長範囲と前記少なくとも1つのアライメントマークの前記マーク深さ(D)との間の第2の関係に関連付けられたアライメント測定方法。
【請求項2】
前記第2の関係が、前記少なくとも1つのアライメントマークのマーク非対称性パラメータ(B)をさらに含む、請求項1に記載のアライメント測定方法。
【請求項3】
前記非対称性パラメータが、前記放射の波長の関数である、請求項2に記載のアライメント測定方法。
【請求項4】
前記第1の関係が
WQ(λ)=A(λ)・sin2(2πD /λ+φ)
に対応し、及び/又は前記第2の関係が
AP(λ)=Pos+B(λ)・tan(2πD/λ+1/2*π+φ)
に対応し、ここで、
λが前記放射の波長に対応し、
Dが前記マークの深さに関連し、
A(λ)が正規化係数に関連し、
B(λ)が前記マーク非対称性パラメータに関連し、B(λ)=0が対称のマークを表し、φが局所位相である、請求項2又は3に記載のアライメント測定方法。
【請求項5】
A(λ)及びB(λ)の少なくとも1つが、それぞれの波長から独立した係数によって近似される、請求項4に記載のアライメント測定方法。
【請求項6】
前記式の組を解く際に使用される前記複数の信号品質と前記複数の整列位置が、事前選択された数の波長範囲の前記信号品質と整列位置とに対応し、前記事前選択された数が、前記複数の波長範囲の数より小さい、前記請求項のいずれか1項に記載のアライメント測定方法。
【請求項7】
前記式の組を解く際に使用される前記複数の信号品質と前記複数の整列位置が、対応する信号品質に基づいて選択される、請求項6に記載のアライメント測定方法。
【請求項8】
a’)前記少なくとも1つのアライメントマークの画像を検出するステップが、前記画像の各々の部分がそれぞれのアライメントマークに対応する前記画像の複数の部分を検出するステップを含み、
d’)前記複数のアライメント信号の各々が、前記対応する波長範囲で検出される前記画像の前記対応する複数の部分に関連付けられた複数のアライメント信号成分を含む、前記請求項のいずれか1項に記載のアライメント測定方法。
【請求項9】
複数の波長範囲を含む放射ビームを生成するように構成された光源と、
生成された前記放射ビームを受光し、アライメントビームを生成し、前記アライメントビームをオブジェクト上に位置する少なくとも1つのマークに誘導し、前記少なくとも1つのマークから戻るアライメント放射を受光し、前記アライメント放射を伝送するように構成された光学システムと、
前記アライメント放射を受光し、前記オブジェクト上に位置する前記少なくとも1つのアライメントマークの画像を検出し、それぞれが対応する波長範囲に関連付けられた複数のアライメント信号を生成するように構成された検出器と、
前記検出器に接続されたプロセッサであって、
少なくとも1つの信号品質表示パラメータを用いてそれぞれのアライメント信号の複数の信号品質を決定するステップと、
少なくとも1つのマーク位置表示パラメータを用いてそれぞれのアライメント信号から複数の整列位置を決定するステップと、
前記複数の信号品質のうち少なくとも2つの信号品質と前記複数の整列位置のうち少なくとも2つの整列位置に少なくとも基づいて、前記少なくとも1つのアライメントマークの位置(Pos)を決定するステップとを含む方法を実行するように構成されたプロセッサとを含み、
前記少なくとも1つのアライメントマークの位置の前記決定ステップが、複数の第1の式及び複数の第2の式を含む一組の式を解くステップを含み、前記第1の式が、少なくとも前記信号品質(WQ)と、前記放射の波長範囲と前記少なくとも1つのアライメントマークのマーク深さ(D)との間の第1の関係に関連付けられ、前記第2の式が、少なくとも前記整列位置(AP)と、前記少なくとも1つのアライメントマークの前記位置(Pos)と、前記放射の前記波長範囲と前記少なくとも1つのアライメントマークの前記マーク深さ(D)との間の第2の関係に関連付けられたアライメント測定構成。
【請求項10】
前記光源が、スーパールミネッセントダイオード及び/又は広帯域レーザを含む、請求項9に記載のアライメント測定構成。
【請求項11】
パターニングデバイスから基板上にパターンを転写するように構成されたリソグラフィ装置であって、前記リソグラフィ装置が、
前記プロセッサが、決定された前記少なくとも1つのアライメントマークの位置に基づいて位置信号を確立するようにさらに構成された請求項9〜10のいずれか1項に記載されたアライメント測定構成と、
前記プロセッサに接続されたアクチュエータであって、
前記位置信号を受信し、
受信した前記位置信号に基づいて位置補正を計算し、
位置補正信号を確立するように構成されたアクチュエータと、
整列させる前記基板を支持するように構成され、前記アクチュエータに接続された支持構造とを含み、
前記アクチュエータが、確立された前記位置補正信号に応答して前記支持構造を移動させるように構成されるリソグラフィ装置。
【請求項12】
請求項11に記載のリソグラフィ装置を用いてパターニングデバイスから基板上にパターンを転写するステップを含むデバイス製造方法。
【請求項13】
リソグラフィ装置のプロセッサによってロードされるデータ及び命令を備え、前記リソグラフィ装置が請求項1から8のいずれか1項に記載のアライメント測定方法を実行することを可能にするように構成されるコンピュータプログラムプロダクト。
【請求項14】
請求項13に記載のコンピュータプログラムプロダクトを備えるデータキャリア。
【請求項15】
請求項1から8のいずれか1項に記載のアライメント測定方法を実行するためのマシン実行可能命令を備えるマシン可読媒体。
【請求項1】
リソグラフィ装置と一緒に使用するアライメント測定方法であって、
a)複数の波長範囲を有する放射による照射時にオブジェクト上に位置する少なくとも1つのアライメントマークの画像を検出するステップと、
b)各々が前記複数の波長範囲のうち対応する波長範囲で検出された前記画像に関連付けられた複数のアライメント信号を生成するステップと、
c)少なくとも1つの信号品質表示パラメータを用いてそれぞれのアライメント信号の複数の信号品質を決定するステップと、
d)少なくとも1つのマーク位置表示パラメータを用いてそれぞれのアライメント信号から複数の整列位置を決定するステップと、
e)前記複数の信号品質のうち少なくとも2つの信号品質と前記複数の整列位置のうち少なくとも2つの整列位置に少なくとも基づいて、前記少なくとも1つのアライメントマークの位置(Pos)を決定するステップとを含み、
前記少なくとも1つのアライメントマークの前記位置の前記決定ステップが、複数の第1の式及び複数の第2の式を含む一組の式を解くステップを含み、
前記第1の式が、少なくとも前記信号品質(WQ)と、前記放射の波長範囲と前記少なくとも1つのアライメントマークのマーク深さ(D)との間の第1の関係に関連付けられ、
前記第2の式が、少なくとも前記整列位置(AP)と、前記少なくとも1つのアライメントマークの前記位置(Pos)と、前記放射の前記波長範囲と前記少なくとも1つのアライメントマークの前記マーク深さ(D)との間の第2の関係に関連付けられたアライメント測定方法。
【請求項2】
前記第2の関係が、前記少なくとも1つのアライメントマークのマーク非対称性パラメータ(B)をさらに含む、請求項1に記載のアライメント測定方法。
【請求項3】
前記非対称性パラメータが、前記放射の波長の関数である、請求項2に記載のアライメント測定方法。
【請求項4】
前記第1の関係が
WQ(λ)=A(λ)・sin2(2πD /λ+φ)
に対応し、及び/又は前記第2の関係が
AP(λ)=Pos+B(λ)・tan(2πD/λ+1/2*π+φ)
に対応し、ここで、
λが前記放射の波長に対応し、
Dが前記マークの深さに関連し、
A(λ)が正規化係数に関連し、
B(λ)が前記マーク非対称性パラメータに関連し、B(λ)=0が対称のマークを表し、φが局所位相である、請求項2又は3に記載のアライメント測定方法。
【請求項5】
A(λ)及びB(λ)の少なくとも1つが、それぞれの波長から独立した係数によって近似される、請求項4に記載のアライメント測定方法。
【請求項6】
前記式の組を解く際に使用される前記複数の信号品質と前記複数の整列位置が、事前選択された数の波長範囲の前記信号品質と整列位置とに対応し、前記事前選択された数が、前記複数の波長範囲の数より小さい、前記請求項のいずれか1項に記載のアライメント測定方法。
【請求項7】
前記式の組を解く際に使用される前記複数の信号品質と前記複数の整列位置が、対応する信号品質に基づいて選択される、請求項6に記載のアライメント測定方法。
【請求項8】
a’)前記少なくとも1つのアライメントマークの画像を検出するステップが、前記画像の各々の部分がそれぞれのアライメントマークに対応する前記画像の複数の部分を検出するステップを含み、
d’)前記複数のアライメント信号の各々が、前記対応する波長範囲で検出される前記画像の前記対応する複数の部分に関連付けられた複数のアライメント信号成分を含む、前記請求項のいずれか1項に記載のアライメント測定方法。
【請求項9】
複数の波長範囲を含む放射ビームを生成するように構成された光源と、
生成された前記放射ビームを受光し、アライメントビームを生成し、前記アライメントビームをオブジェクト上に位置する少なくとも1つのマークに誘導し、前記少なくとも1つのマークから戻るアライメント放射を受光し、前記アライメント放射を伝送するように構成された光学システムと、
前記アライメント放射を受光し、前記オブジェクト上に位置する前記少なくとも1つのアライメントマークの画像を検出し、それぞれが対応する波長範囲に関連付けられた複数のアライメント信号を生成するように構成された検出器と、
前記検出器に接続されたプロセッサであって、
少なくとも1つの信号品質表示パラメータを用いてそれぞれのアライメント信号の複数の信号品質を決定するステップと、
少なくとも1つのマーク位置表示パラメータを用いてそれぞれのアライメント信号から複数の整列位置を決定するステップと、
前記複数の信号品質のうち少なくとも2つの信号品質と前記複数の整列位置のうち少なくとも2つの整列位置に少なくとも基づいて、前記少なくとも1つのアライメントマークの位置(Pos)を決定するステップとを含む方法を実行するように構成されたプロセッサとを含み、
前記少なくとも1つのアライメントマークの位置の前記決定ステップが、複数の第1の式及び複数の第2の式を含む一組の式を解くステップを含み、前記第1の式が、少なくとも前記信号品質(WQ)と、前記放射の波長範囲と前記少なくとも1つのアライメントマークのマーク深さ(D)との間の第1の関係に関連付けられ、前記第2の式が、少なくとも前記整列位置(AP)と、前記少なくとも1つのアライメントマークの前記位置(Pos)と、前記放射の前記波長範囲と前記少なくとも1つのアライメントマークの前記マーク深さ(D)との間の第2の関係に関連付けられたアライメント測定構成。
【請求項10】
前記光源が、スーパールミネッセントダイオード及び/又は広帯域レーザを含む、請求項9に記載のアライメント測定構成。
【請求項11】
パターニングデバイスから基板上にパターンを転写するように構成されたリソグラフィ装置であって、前記リソグラフィ装置が、
前記プロセッサが、決定された前記少なくとも1つのアライメントマークの位置に基づいて位置信号を確立するようにさらに構成された請求項9〜10のいずれか1項に記載されたアライメント測定構成と、
前記プロセッサに接続されたアクチュエータであって、
前記位置信号を受信し、
受信した前記位置信号に基づいて位置補正を計算し、
位置補正信号を確立するように構成されたアクチュエータと、
整列させる前記基板を支持するように構成され、前記アクチュエータに接続された支持構造とを含み、
前記アクチュエータが、確立された前記位置補正信号に応答して前記支持構造を移動させるように構成されるリソグラフィ装置。
【請求項12】
請求項11に記載のリソグラフィ装置を用いてパターニングデバイスから基板上にパターンを転写するステップを含むデバイス製造方法。
【請求項13】
リソグラフィ装置のプロセッサによってロードされるデータ及び命令を備え、前記リソグラフィ装置が請求項1から8のいずれか1項に記載のアライメント測定方法を実行することを可能にするように構成されるコンピュータプログラムプロダクト。
【請求項14】
請求項13に記載のコンピュータプログラムプロダクトを備えるデータキャリア。
【請求項15】
請求項1から8のいずれか1項に記載のアライメント測定方法を実行するためのマシン実行可能命令を備えるマシン可読媒体。
【図1】


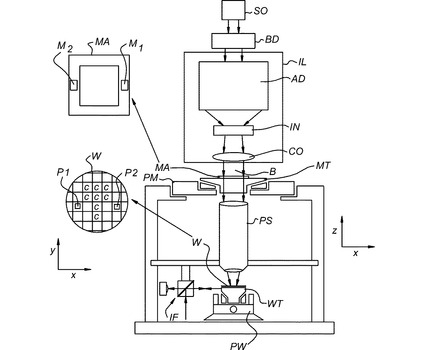
【図2】
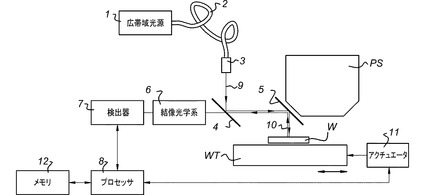
【図3a】
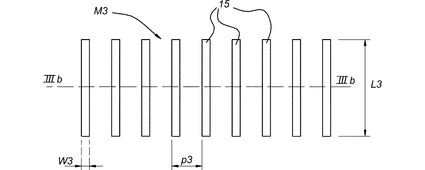
【図3b】
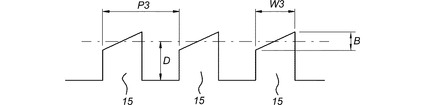
【図4】
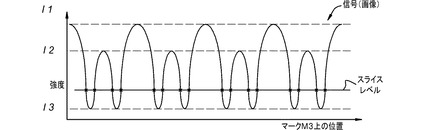
【図5】
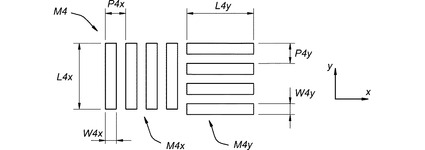
【図6】
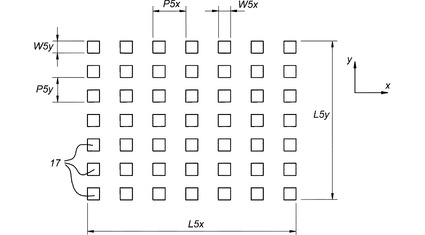
【図7a】
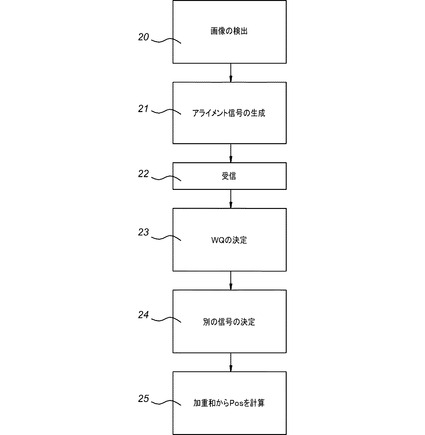
【図7b】
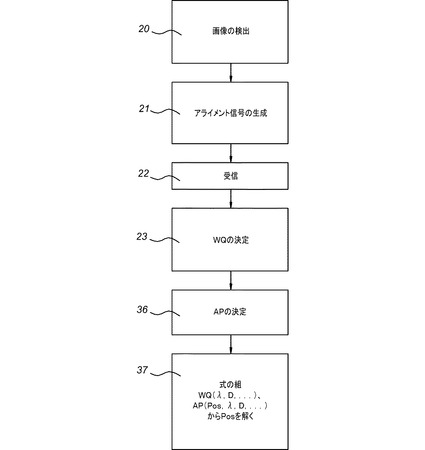
【図8】
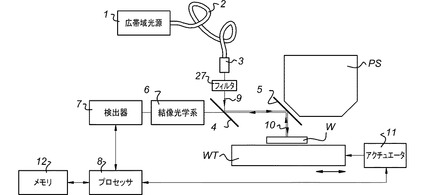
【図9a】
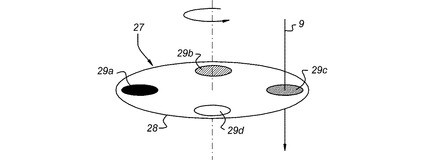
【図9b】
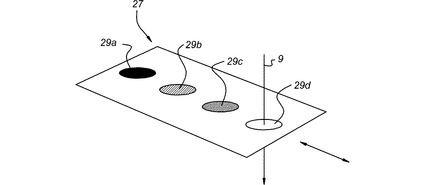
【図10】
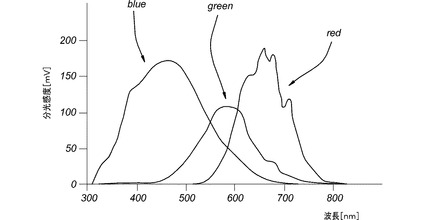
【図11a】
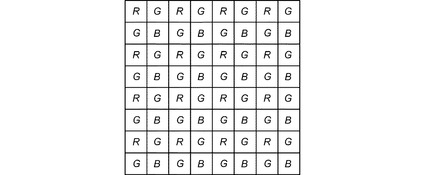
【図11b】
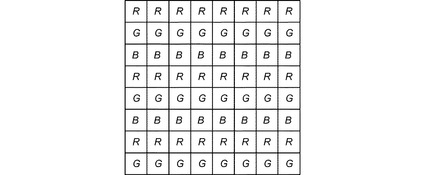
【図11c】
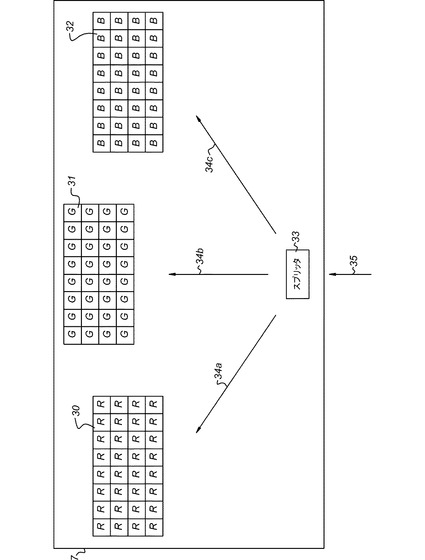
【図12a】
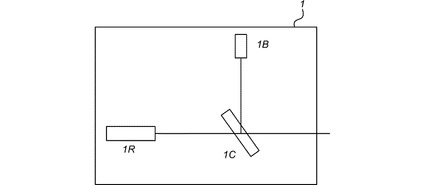
【図12b】
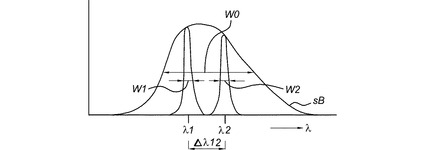
【図12c】
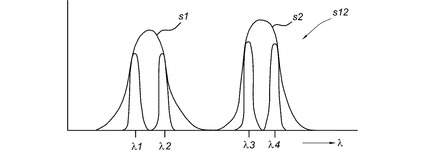
【図13】
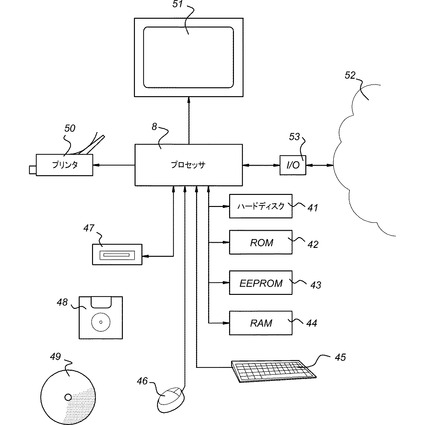
【図14】
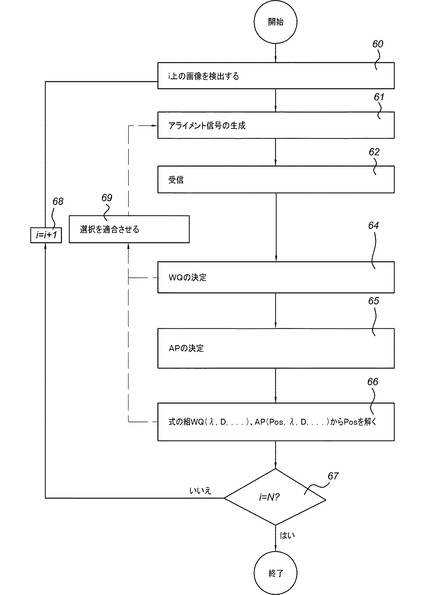
【図15】
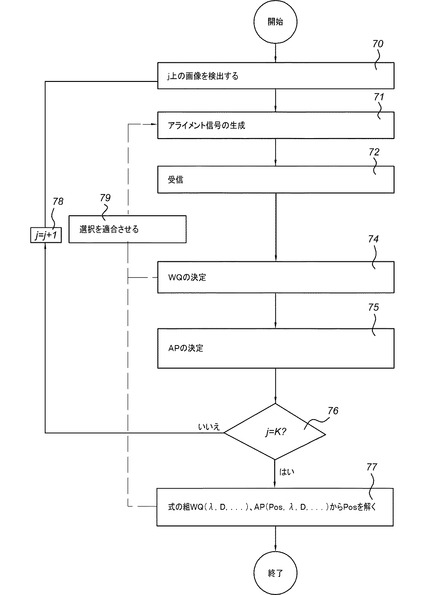
【図2】
【図3a】
【図3b】
【図4】
【図5】
【図6】
【図7a】
【図7b】
【図8】
【図9a】
【図9b】
【図10】
【図11a】
【図11b】
【図11c】
【図12a】
【図12b】
【図12c】
【図13】
【図14】
【図15】
【公開番号】特開2010−232656(P2010−232656A)
【公開日】平成22年10月14日(2010.10.14)
【国際特許分類】
【外国語出願】
【出願番号】特願2010−63391(P2010−63391)
【出願日】平成22年3月19日(2010.3.19)
【出願人】(504151804)エーエスエムエル ネザーランズ ビー.ブイ. (1,856)
【Fターム(参考)】
【公開日】平成22年10月14日(2010.10.14)
【国際特許分類】
【出願番号】特願2010−63391(P2010−63391)
【出願日】平成22年3月19日(2010.3.19)
【出願人】(504151804)エーエスエムエル ネザーランズ ビー.ブイ. (1,856)
【Fターム(参考)】
[ Back to top ]