
アライメント測定装置及びアライメント修正方法
【課題】組付工数を増加させることなく、プーリアライメントを測定できるアライメント測定装置及びそのアライメント修正する方法を提供する。
【解決手段】クランクプーリ11の回転をベルト18によって補機駆動用プーリ12、13、14に伝達する動力伝達装置10のプーリアライメントを測定するアライメント測定装置20において、幅方向断面がV字形状のリブ33をベルト長手方向に有し、そのリブ33の両方のリブ側面33A、33Bに、ひずみ応力を測定するリブ側応力測定手段31をそれぞれ設けたアライメント測定用ベルト30と、アライメント測定用ベルト30を動力伝達装置10に巻き回したときの、一方のリブ側面33Aのひずみ応力と他方のリブ側面33Bのひずみ応力との応力差に基づいてプーリアライメントを測定するアライメント測定手段42と、を備える。
【解決手段】クランクプーリ11の回転をベルト18によって補機駆動用プーリ12、13、14に伝達する動力伝達装置10のプーリアライメントを測定するアライメント測定装置20において、幅方向断面がV字形状のリブ33をベルト長手方向に有し、そのリブ33の両方のリブ側面33A、33Bに、ひずみ応力を測定するリブ側応力測定手段31をそれぞれ設けたアライメント測定用ベルト30と、アライメント測定用ベルト30を動力伝達装置10に巻き回したときの、一方のリブ側面33Aのひずみ応力と他方のリブ側面33Bのひずみ応力との応力差に基づいてプーリアライメントを測定するアライメント測定手段42と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の各種補機などを駆動するプーリの配置状態(アライメント)を測定する装置及びそのアライメントを修正する方法に関する。
【背景技術】
【0002】
従来から、クランクシャフトに設けられたクランクプーリの回転を動力伝達用ベルトによって複数のプーリに伝達することで、エアコンやオルタネータなどの補機を駆動させるエンジンの動力伝達装置が知られている。このような動力伝達装置では、プーリ同士の平行度が悪い場合には、動力伝達用ベルトが偏摩耗して動力伝達用ベルトの耐久性が低下する。
【0003】
特許文献1には、V溝にひずみゲージを設けた測定用プーリを有し、この測定用プーリが動力伝達用ベルトから受けるひずみ応力をひずみゲージによって検出することで、クランクプーリに対する測定用プーリのアライメントを測定するアライメント測定装置が開示されている。そして、検出されたひずみ応力に基づいてプーリの平行度を修正する。
【特許文献1】特開2002−349649号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載のアライメント測定装置では、アライメントを測定するプーリが複数ある場合にはその分だけ測定用プーリが必要となり、測定用プーリをエンジンに組み付けるときの組付工数が増加するという問題がある。
【0005】
そこで、本発明は、このような問題点に着目してなされたものであり、組付工数を増加させることなく、プーリのアライメントを測定できるアライメント測定装置及びそのアライメントを修正する方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は以下のような解決手段によって前記課題を解決する。なお、理解を容易にするために本発明の実施形態に対応する符号を付するが、これに限定されるものではない。
【0007】
本発明は、クランクプーリ(11)の回転をベルト(18)によって補機駆動用プーリ(12、13、14)に伝達する動力伝達装置(10)のプーリアライメントを測定するアライメント測定装置(20)において、幅方向断面がV字形状のリブ(33)をベルト長手方向に有し、そのリブ(33)の両方のリブ側面(33A、33B)に、ひずみ応力を測定するリブ側応力測定手段(31)をそれぞれ設けたアライメント測定用ベルト(30)と、アライメント測定用ベルト(30)を動力伝達装置(10)に巻き回したときの、一方のリブ側面(33A)のひずみ応力と他方のリブ側面(33B)のひずみ応力との応力差に基づいてプーリアライメントを測定するアライメント測定手段(42)と、を備えることを特徴とする。
【発明の効果】
【0008】
本発明によれば、アライメント測定時にアライメント測定用ベルトを動力伝達装置に巻き回すだけなので、アライメント測定を実施するプーリの数が増加しても、組付工数を増加させることなくアライメント測定することができる。
【発明を実施するための最良の形態】
【0009】
以下、図面を参照して本発明の実施形態について説明する。
【0010】
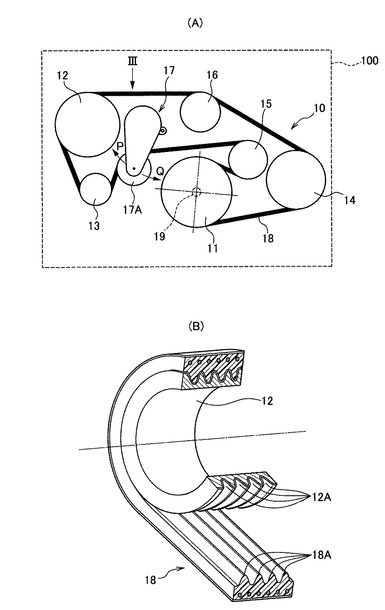
図1は、エンジン100の動力伝達装置10の概略構成図である。図1(A)は、プーリレイアウトを示す。また、図1(B)は、プーリに巻き回される動力伝達用ベルト18を示す。
【0011】
図1(A)に示すように、エンジン100は、クランクシャフト19の回転を利用して車両の各種補機を駆動する動力伝達装置10を備える。動力伝達装置10は、クランクプーリ11と、オイルポンプ用プーリ12と、オルタネータ用プーリ13と、エアコン用プーリ14と、アイドラプーリ15、16と、オートテンショナ17と、動力伝達用ベルト18とを備える。この動力伝達装置10は、動力伝達用ベルト18によってクランクプーリ11の回転をオイルポンプ用プーリ12やオルタネータ用プーリ13、エアコン用プーリ14に伝達する。
【0012】
クランクプーリ11は、エンジン100のクランクシャフト19の端部に設けられる。このクランクプーリ11が駆動プーリであって、オイルポンプ用プーリ12やオルタネータ用プーリ13、エアコン用プーリ14などの従動プーリを駆動させる。
【0013】
オイルポンプ用プーリ12は、パワーステアリング用オイルポンプを駆動するためのプーリである。
【0014】
オルタネータ用プーリ13は、オルタネータを駆動するためのプーリである。
【0015】
エアコン用プーリ14は、エアコンコンプレッサを駆動するためのプーリである。
【0016】
アイドラプーリ15、16は、動力伝達用ベルト18の経路の調整などを行うための補助的な従動プーリである。
【0017】
オートテンショナ17は、スプリングの反力により動力伝達用ベルト18を押圧するプーリ17Aを備える。したがって、動力伝達用ベルト18の張力が低下した場合には、プーリ17AがP方向に移動して動力伝達用ベルト18の張力を一定に保つ。一方、動力伝達用ベルト18の張力が増加した場合には、プーリ17AがQ方向に移動して動力伝達用ベルト18の張力を一定に保つ。
【0018】
動力伝達用ベルト18は、図1(A)に示すように複数のプーリに巻き回されるが、ここでは一例としてオイルポンプ用プーリ12に巻き回された動力伝達用ベルト18について、図1(B)を参照して説明する。
【0019】
動力伝達用ベルト18は、いわゆるVリブドベルトであって、オイルポンプ用プーリ12と接する側(内周側;以下ではベルトがプーリと接する側を内周側といい、反対側を背面側という)に略V字形状のリブ18Aをベルト幅方向に複数有する。動力伝達用ベルト18のリブ18Aは、ベルト長手方向に沿って形成される。そして、動力伝達用ベルト18のリブ18Aが、オイルポンプ用プーリ12のV字形状の溝(V溝)12Aに係合する。これにより、クランクプーリ11の駆動力が、動力伝達用ベルト18を介してオイルポンプ用プーリ12に伝達される。
【0020】
上記した動力伝達装置10では、全てのプーリが同一平面上に配置されるように構成される。しかしながら、あるプーリがその平面上からずれて配置されている場合には、動力伝達用ベルト18が偏摩耗して、動力伝達用ベルト18の耐久性が低下してしまう。
【0021】
そこで、動力伝達用ベルト18を動力伝達装置10に巻き回す前に、アライメント測定装置20によってプーリのアライメントを測定する。動力伝達装置10では、アライメント測定結果に基づいてプーリのアライメントを修正し、全てのプーリを同一平面上に配置するので、動力伝達用ベルト18の偏摩耗が抑制される。
【0022】
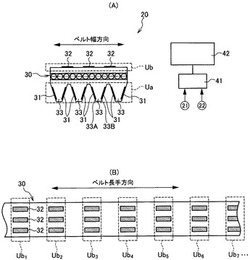
アライメント測定装置20について、図2を参照して説明する。図2(A)は、アライメント測定装置20の概略構成図である。また、図2(B)は、アライメント測定用ベルト30を示す。
【0023】
図2(A)に示すように、アライメント測定装置20は、アライメント測定用ベルト30と、データロガー41と、コントローラ42とを備える。
【0024】
アライメント測定用ベルト30は、動力伝達用ベルト18とほぼ同様の構成であるが、ひずみゲージ31、32を備える点において異なる。このアライメント測定用ベルト30は、内周側にひずみゲージ31を、背面側にひずみゲージ32を備える。
【0025】
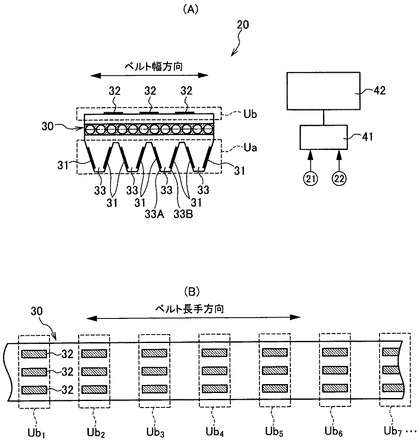
ひずみゲージ31は、アライメント測定用ベルト30のリブ33毎に設けられ、リブ33のリブ面33A、33Bに設置される。アライメント測定用ベルト30では、ベルト幅方向に8個設けられるひずみゲージ31を一つのユニットUaとする。このユニットUaはベルト長手方向に沿って等間隔で複数(ユニットUa1〜Uan)設けられる。
【0026】
ひずみゲージ32は、ひずみゲージ31の設置位置におけるアライメント測定用ベルト30の背面側に設けられる。アライメント測定用ベルト30では、ベルト幅方向に3個設けられるひずみゲージ32を一つのユニットUbとする。このユニットUbは、図2(B)に示すように、ベルト長手方向に沿ってユニットUaの配置間隔と同間隔で複数(ユニットUb1〜Ubn)設けられる。
【0027】
上記したひずみゲージ31、32はベルト変形に応じて抵抗値が変化するものであり、ひずみゲージ31、32の抵抗変化は、図2(A)に示すようにデータロガー41を介してコントローラ42に入力する。
【0028】
コントローラ42は、中央演算装置(CPU)、読み出し専用メモリ(ROM)、ランダムアクセスメモリ(RAM)及び入出力インタフェース(I/Oインタフェース)を備えたマイクロコンピュータで構成される。このコントローラ42は、ひずみゲージ31、32の抵抗変化に基づいてひずみ応力値を算出する。そして、コントローラ42は、リブ面33Aのひずみゲージ31によって検出されるひずみ応力値F1と、リブ面33Bのひずみゲージ31によってされるひずみ応力値F2との応力差ΔFの絶対値に基づいてプーリのアライメント測定を実施する。また、コントローラ42は、ひずみゲージ32のひずみ応力値F3に基づいてアライメント測定用ベルト30が巻き回されているプーリを特定する。
【0029】
次に、図3を参照して、アライメント測定装置20によるアライメント測定について説明する。図3(A)は、オイルポンプ用プーリ12の近傍を図1(A)のIII方向から見たときの図である。また、図3(B)は、図3(A)のB−B断面を示す図である。
【0030】
図3(A)は、動力伝達装置10においてオイルポンプ用プーリ12のみの平行度が悪く、その他のプーリが同一平面上に配置されている場合を例示したものである。したがって、アイドラプーリ16は平面C上に配置されているが、オイルポンプ用プーリ12ではベルト進行方向の端部12Bが平面Cに対してエンジン後方側にずれている。このようにオイルポンプ用プーリ12の平行度が悪化すると、破線領域Rにおいてアライメント測定用ベルト30は、一部が屈曲してオイルポンプ用プーリ12に巻き回されることになる。
【0031】
アライメント測定用ベルト30が屈曲する部分では、図3(B)に示すように、オイルポンプ用プーリ12がアライメント測定用ベルト30のリブ33のエンジン後方側のリブ面33Aを押圧する。そのため、リブ面33Aのひずみゲージ31によって検出されるひずみ応力値F1は、リブ面33Bのひずみゲージ31によってされるひずみ応力値F2よりも大きくなる。
【0032】
ここで、アライメント測定用ベルト30の同一リブ33におけるひずみ応力値F1とひずみ応力値F2との応力差ΔFの絶対値が所定値ΔF0よりも大きい場合には、アライメント測定装置20のコントローラ42はオイルポンプ用プーリ12のアライメントが悪いと判定する。
【0033】
このように判定された場合には、応力差ΔFの絶対値が所定値ΔF0よりも小さくなるようにオイルポンプ用プーリ12のアライメントを修正する(アライメント修正工程)。これにより、動力伝達装置10の全てのプーリを同一平面上に配置することができる。
【0034】
一方、動力伝達装置10にアライメント測定用ベルト30に巻き回すと、背面側のアライメント測定用ベルト30は巻き回されたプーリのプーリ径に応じて伸長する。コントローラ42は、この伸長時のひずみ応力値F3をひずみゲージ32によって検出し、このひずみ応力値F3に基づいて動力伝達装置10の全てのプーリのプーリ径を推定する。そのため、アライメント測定をしているプーリを特定したり、アライメント測定用ベルト30の掛け間違いなどを防止したりすることができる。
【0035】
以上により、本実施形態では下記の効果を得ることができる。
【0036】
アライメント測定装置20のアライメント測定用ベルト30は、リブ33のリブ面33A及びリブ面33Bにひずみゲージ31を備える。そして、同一リブ33におけるリブ面33Aのひずみゲージ31によって検出されるひずみ応力値F1と、リブ面33Bのひずみゲージ31によって検出されるひずみ応力値F2とから算出される応力差ΔFに基づいて動力伝達装置10の各プーリのアライメントを測定する。アライメント測定装置20では、アライメント測定時にアライメント測定用ベルト30を動力伝達装置10に巻き回すだけなので、アライメント測定を実施するプーリの数が増加しても、組付工数を増加させることなくアライメント測定することができる。
【0037】
また、算出された応力差ΔFの絶対値が所定値ΔF0よりも大きい場合に、応力差ΔFの絶対値が所定値ΔF0よりも小さくなるようにプーリアライメントを修正する。これにより、動力伝達装置10の全てのプーリを同一平面上に配置することができる。
【0038】
さらに、アライメント測定用ベルト30は、背面側にひずみゲージ32を備えるので、ひずみゲージ32によって検出されるひずみ応力値F3に基づいてプーリ径を推定することができる。これにより、アライメント測定をしているプーリを特定したり、アライメント測定用ベルト30の掛け間違いなどを防止したりすることができる。
【0039】
なお、本発明は上記の実施形態に限定されずに、その技術的な思想の範囲内において種々の変更がなしうることは明白である。
【0040】
例えば、アライメント測定装置20では、アライメント測定用ベルト30においてユニットUaを構成する各ひずみゲージ31のうち、同一リブ33におけるリブ面33A側のひずみゲージ31とリブ面33B側のひずみゲージ31とからリブ毎に応力差ΔFを算出し、リブ毎の応力差ΔFと所定値ΔF0とを比較するようにしたが、ユニットUaにおいてリブ毎に算出した応力差ΔFから応力差平均値ΔFaveを算出し、応力差平均値ΔFaveと所定値ΔF0とを比較するようにしてもよい。
【0041】
また、本実施形態では、アライメント測定用ベルト30の背面側のひずみゲージ32によって検出されたひずみ応力値F3に基づいてプーリ径を推定するようにしたが、アライメント測定用ベルト30のユニットUbごとにひずみ応力値F3の平均応力値F3aveを求め、この平均応力値F3aveに基づいてプーリ径を推定するようにしてもよい。
【0042】
さらに、アライメント測定用ベルト30のユニットUbをベルト長手方向に沿って順番にナンバリングして、コントローラ42でユニットUbのナンバリングを特定するようにしてもよい。このようにすれば動力伝達装置10において同一径のプーリがあってもプーリレイアウトとユニットUbのナンバリングとから、アライメント測定を実施しているプーリなどを特定することが可能となる。
【図面の簡単な説明】
【0043】
【図1】エンジンの動力伝達装置の概略構成図である。
【図2】アライメント測定用ベルトの概略構成図である。
【図3】アライメント測定を説明する図面である。
【符号の説明】
【0044】
100 エンジン
10 動力伝達装置
11 クランクプーリ
12 オイルポンプ用プーリ(補機駆動用プーリ)
13 オルタネータ用プーリ(補機駆動用プーリ)
14 エアコン用プーリ(補機駆動用プーリ)
19 クランクシャフト
20 アライメント測定装置
30 アライメント測定用ベルト
31 ひずみゲージ(リブ側応力測定手段)
32 ひずみゲージ(背面側応力測定手段)
33 リブ
33A リブ面(リブ側面)
33B リブ面(リブ側面)
42 コントローラ(アライメント測定手段)
【技術分野】
【0001】
本発明は、車両の各種補機などを駆動するプーリの配置状態(アライメント)を測定する装置及びそのアライメントを修正する方法に関する。
【背景技術】
【0002】
従来から、クランクシャフトに設けられたクランクプーリの回転を動力伝達用ベルトによって複数のプーリに伝達することで、エアコンやオルタネータなどの補機を駆動させるエンジンの動力伝達装置が知られている。このような動力伝達装置では、プーリ同士の平行度が悪い場合には、動力伝達用ベルトが偏摩耗して動力伝達用ベルトの耐久性が低下する。
【0003】
特許文献1には、V溝にひずみゲージを設けた測定用プーリを有し、この測定用プーリが動力伝達用ベルトから受けるひずみ応力をひずみゲージによって検出することで、クランクプーリに対する測定用プーリのアライメントを測定するアライメント測定装置が開示されている。そして、検出されたひずみ応力に基づいてプーリの平行度を修正する。
【特許文献1】特開2002−349649号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載のアライメント測定装置では、アライメントを測定するプーリが複数ある場合にはその分だけ測定用プーリが必要となり、測定用プーリをエンジンに組み付けるときの組付工数が増加するという問題がある。
【0005】
そこで、本発明は、このような問題点に着目してなされたものであり、組付工数を増加させることなく、プーリのアライメントを測定できるアライメント測定装置及びそのアライメントを修正する方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は以下のような解決手段によって前記課題を解決する。なお、理解を容易にするために本発明の実施形態に対応する符号を付するが、これに限定されるものではない。
【0007】
本発明は、クランクプーリ(11)の回転をベルト(18)によって補機駆動用プーリ(12、13、14)に伝達する動力伝達装置(10)のプーリアライメントを測定するアライメント測定装置(20)において、幅方向断面がV字形状のリブ(33)をベルト長手方向に有し、そのリブ(33)の両方のリブ側面(33A、33B)に、ひずみ応力を測定するリブ側応力測定手段(31)をそれぞれ設けたアライメント測定用ベルト(30)と、アライメント測定用ベルト(30)を動力伝達装置(10)に巻き回したときの、一方のリブ側面(33A)のひずみ応力と他方のリブ側面(33B)のひずみ応力との応力差に基づいてプーリアライメントを測定するアライメント測定手段(42)と、を備えることを特徴とする。
【発明の効果】
【0008】
本発明によれば、アライメント測定時にアライメント測定用ベルトを動力伝達装置に巻き回すだけなので、アライメント測定を実施するプーリの数が増加しても、組付工数を増加させることなくアライメント測定することができる。
【発明を実施するための最良の形態】
【0009】
以下、図面を参照して本発明の実施形態について説明する。
【0010】
図1は、エンジン100の動力伝達装置10の概略構成図である。図1(A)は、プーリレイアウトを示す。また、図1(B)は、プーリに巻き回される動力伝達用ベルト18を示す。
【0011】
図1(A)に示すように、エンジン100は、クランクシャフト19の回転を利用して車両の各種補機を駆動する動力伝達装置10を備える。動力伝達装置10は、クランクプーリ11と、オイルポンプ用プーリ12と、オルタネータ用プーリ13と、エアコン用プーリ14と、アイドラプーリ15、16と、オートテンショナ17と、動力伝達用ベルト18とを備える。この動力伝達装置10は、動力伝達用ベルト18によってクランクプーリ11の回転をオイルポンプ用プーリ12やオルタネータ用プーリ13、エアコン用プーリ14に伝達する。
【0012】
クランクプーリ11は、エンジン100のクランクシャフト19の端部に設けられる。このクランクプーリ11が駆動プーリであって、オイルポンプ用プーリ12やオルタネータ用プーリ13、エアコン用プーリ14などの従動プーリを駆動させる。
【0013】
オイルポンプ用プーリ12は、パワーステアリング用オイルポンプを駆動するためのプーリである。
【0014】
オルタネータ用プーリ13は、オルタネータを駆動するためのプーリである。
【0015】
エアコン用プーリ14は、エアコンコンプレッサを駆動するためのプーリである。
【0016】
アイドラプーリ15、16は、動力伝達用ベルト18の経路の調整などを行うための補助的な従動プーリである。
【0017】
オートテンショナ17は、スプリングの反力により動力伝達用ベルト18を押圧するプーリ17Aを備える。したがって、動力伝達用ベルト18の張力が低下した場合には、プーリ17AがP方向に移動して動力伝達用ベルト18の張力を一定に保つ。一方、動力伝達用ベルト18の張力が増加した場合には、プーリ17AがQ方向に移動して動力伝達用ベルト18の張力を一定に保つ。
【0018】
動力伝達用ベルト18は、図1(A)に示すように複数のプーリに巻き回されるが、ここでは一例としてオイルポンプ用プーリ12に巻き回された動力伝達用ベルト18について、図1(B)を参照して説明する。
【0019】
動力伝達用ベルト18は、いわゆるVリブドベルトであって、オイルポンプ用プーリ12と接する側(内周側;以下ではベルトがプーリと接する側を内周側といい、反対側を背面側という)に略V字形状のリブ18Aをベルト幅方向に複数有する。動力伝達用ベルト18のリブ18Aは、ベルト長手方向に沿って形成される。そして、動力伝達用ベルト18のリブ18Aが、オイルポンプ用プーリ12のV字形状の溝(V溝)12Aに係合する。これにより、クランクプーリ11の駆動力が、動力伝達用ベルト18を介してオイルポンプ用プーリ12に伝達される。
【0020】
上記した動力伝達装置10では、全てのプーリが同一平面上に配置されるように構成される。しかしながら、あるプーリがその平面上からずれて配置されている場合には、動力伝達用ベルト18が偏摩耗して、動力伝達用ベルト18の耐久性が低下してしまう。
【0021】
そこで、動力伝達用ベルト18を動力伝達装置10に巻き回す前に、アライメント測定装置20によってプーリのアライメントを測定する。動力伝達装置10では、アライメント測定結果に基づいてプーリのアライメントを修正し、全てのプーリを同一平面上に配置するので、動力伝達用ベルト18の偏摩耗が抑制される。
【0022】
アライメント測定装置20について、図2を参照して説明する。図2(A)は、アライメント測定装置20の概略構成図である。また、図2(B)は、アライメント測定用ベルト30を示す。
【0023】
図2(A)に示すように、アライメント測定装置20は、アライメント測定用ベルト30と、データロガー41と、コントローラ42とを備える。
【0024】
アライメント測定用ベルト30は、動力伝達用ベルト18とほぼ同様の構成であるが、ひずみゲージ31、32を備える点において異なる。このアライメント測定用ベルト30は、内周側にひずみゲージ31を、背面側にひずみゲージ32を備える。
【0025】
ひずみゲージ31は、アライメント測定用ベルト30のリブ33毎に設けられ、リブ33のリブ面33A、33Bに設置される。アライメント測定用ベルト30では、ベルト幅方向に8個設けられるひずみゲージ31を一つのユニットUaとする。このユニットUaはベルト長手方向に沿って等間隔で複数(ユニットUa1〜Uan)設けられる。
【0026】
ひずみゲージ32は、ひずみゲージ31の設置位置におけるアライメント測定用ベルト30の背面側に設けられる。アライメント測定用ベルト30では、ベルト幅方向に3個設けられるひずみゲージ32を一つのユニットUbとする。このユニットUbは、図2(B)に示すように、ベルト長手方向に沿ってユニットUaの配置間隔と同間隔で複数(ユニットUb1〜Ubn)設けられる。
【0027】
上記したひずみゲージ31、32はベルト変形に応じて抵抗値が変化するものであり、ひずみゲージ31、32の抵抗変化は、図2(A)に示すようにデータロガー41を介してコントローラ42に入力する。
【0028】
コントローラ42は、中央演算装置(CPU)、読み出し専用メモリ(ROM)、ランダムアクセスメモリ(RAM)及び入出力インタフェース(I/Oインタフェース)を備えたマイクロコンピュータで構成される。このコントローラ42は、ひずみゲージ31、32の抵抗変化に基づいてひずみ応力値を算出する。そして、コントローラ42は、リブ面33Aのひずみゲージ31によって検出されるひずみ応力値F1と、リブ面33Bのひずみゲージ31によってされるひずみ応力値F2との応力差ΔFの絶対値に基づいてプーリのアライメント測定を実施する。また、コントローラ42は、ひずみゲージ32のひずみ応力値F3に基づいてアライメント測定用ベルト30が巻き回されているプーリを特定する。
【0029】
次に、図3を参照して、アライメント測定装置20によるアライメント測定について説明する。図3(A)は、オイルポンプ用プーリ12の近傍を図1(A)のIII方向から見たときの図である。また、図3(B)は、図3(A)のB−B断面を示す図である。
【0030】
図3(A)は、動力伝達装置10においてオイルポンプ用プーリ12のみの平行度が悪く、その他のプーリが同一平面上に配置されている場合を例示したものである。したがって、アイドラプーリ16は平面C上に配置されているが、オイルポンプ用プーリ12ではベルト進行方向の端部12Bが平面Cに対してエンジン後方側にずれている。このようにオイルポンプ用プーリ12の平行度が悪化すると、破線領域Rにおいてアライメント測定用ベルト30は、一部が屈曲してオイルポンプ用プーリ12に巻き回されることになる。
【0031】
アライメント測定用ベルト30が屈曲する部分では、図3(B)に示すように、オイルポンプ用プーリ12がアライメント測定用ベルト30のリブ33のエンジン後方側のリブ面33Aを押圧する。そのため、リブ面33Aのひずみゲージ31によって検出されるひずみ応力値F1は、リブ面33Bのひずみゲージ31によってされるひずみ応力値F2よりも大きくなる。
【0032】
ここで、アライメント測定用ベルト30の同一リブ33におけるひずみ応力値F1とひずみ応力値F2との応力差ΔFの絶対値が所定値ΔF0よりも大きい場合には、アライメント測定装置20のコントローラ42はオイルポンプ用プーリ12のアライメントが悪いと判定する。
【0033】
このように判定された場合には、応力差ΔFの絶対値が所定値ΔF0よりも小さくなるようにオイルポンプ用プーリ12のアライメントを修正する(アライメント修正工程)。これにより、動力伝達装置10の全てのプーリを同一平面上に配置することができる。
【0034】
一方、動力伝達装置10にアライメント測定用ベルト30に巻き回すと、背面側のアライメント測定用ベルト30は巻き回されたプーリのプーリ径に応じて伸長する。コントローラ42は、この伸長時のひずみ応力値F3をひずみゲージ32によって検出し、このひずみ応力値F3に基づいて動力伝達装置10の全てのプーリのプーリ径を推定する。そのため、アライメント測定をしているプーリを特定したり、アライメント測定用ベルト30の掛け間違いなどを防止したりすることができる。
【0035】
以上により、本実施形態では下記の効果を得ることができる。
【0036】
アライメント測定装置20のアライメント測定用ベルト30は、リブ33のリブ面33A及びリブ面33Bにひずみゲージ31を備える。そして、同一リブ33におけるリブ面33Aのひずみゲージ31によって検出されるひずみ応力値F1と、リブ面33Bのひずみゲージ31によって検出されるひずみ応力値F2とから算出される応力差ΔFに基づいて動力伝達装置10の各プーリのアライメントを測定する。アライメント測定装置20では、アライメント測定時にアライメント測定用ベルト30を動力伝達装置10に巻き回すだけなので、アライメント測定を実施するプーリの数が増加しても、組付工数を増加させることなくアライメント測定することができる。
【0037】
また、算出された応力差ΔFの絶対値が所定値ΔF0よりも大きい場合に、応力差ΔFの絶対値が所定値ΔF0よりも小さくなるようにプーリアライメントを修正する。これにより、動力伝達装置10の全てのプーリを同一平面上に配置することができる。
【0038】
さらに、アライメント測定用ベルト30は、背面側にひずみゲージ32を備えるので、ひずみゲージ32によって検出されるひずみ応力値F3に基づいてプーリ径を推定することができる。これにより、アライメント測定をしているプーリを特定したり、アライメント測定用ベルト30の掛け間違いなどを防止したりすることができる。
【0039】
なお、本発明は上記の実施形態に限定されずに、その技術的な思想の範囲内において種々の変更がなしうることは明白である。
【0040】
例えば、アライメント測定装置20では、アライメント測定用ベルト30においてユニットUaを構成する各ひずみゲージ31のうち、同一リブ33におけるリブ面33A側のひずみゲージ31とリブ面33B側のひずみゲージ31とからリブ毎に応力差ΔFを算出し、リブ毎の応力差ΔFと所定値ΔF0とを比較するようにしたが、ユニットUaにおいてリブ毎に算出した応力差ΔFから応力差平均値ΔFaveを算出し、応力差平均値ΔFaveと所定値ΔF0とを比較するようにしてもよい。
【0041】
また、本実施形態では、アライメント測定用ベルト30の背面側のひずみゲージ32によって検出されたひずみ応力値F3に基づいてプーリ径を推定するようにしたが、アライメント測定用ベルト30のユニットUbごとにひずみ応力値F3の平均応力値F3aveを求め、この平均応力値F3aveに基づいてプーリ径を推定するようにしてもよい。
【0042】
さらに、アライメント測定用ベルト30のユニットUbをベルト長手方向に沿って順番にナンバリングして、コントローラ42でユニットUbのナンバリングを特定するようにしてもよい。このようにすれば動力伝達装置10において同一径のプーリがあってもプーリレイアウトとユニットUbのナンバリングとから、アライメント測定を実施しているプーリなどを特定することが可能となる。
【図面の簡単な説明】
【0043】
【図1】エンジンの動力伝達装置の概略構成図である。
【図2】アライメント測定用ベルトの概略構成図である。
【図3】アライメント測定を説明する図面である。
【符号の説明】
【0044】
100 エンジン
10 動力伝達装置
11 クランクプーリ
12 オイルポンプ用プーリ(補機駆動用プーリ)
13 オルタネータ用プーリ(補機駆動用プーリ)
14 エアコン用プーリ(補機駆動用プーリ)
19 クランクシャフト
20 アライメント測定装置
30 アライメント測定用ベルト
31 ひずみゲージ(リブ側応力測定手段)
32 ひずみゲージ(背面側応力測定手段)
33 リブ
33A リブ面(リブ側面)
33B リブ面(リブ側面)
42 コントローラ(アライメント測定手段)
【特許請求の範囲】
【請求項1】
クランクプーリの回転をベルトによって補機駆動用プーリに伝達する動力伝達装置のプーリアライメントを測定するアライメント測定装置において、
幅方向断面がV字形状のリブをベルト長手方向に有し、そのリブの両方のリブ側面に、ひずみ応力を測定するリブ側応力測定手段をそれぞれ設けたアライメント測定用ベルトと、
前記アライメント測定用ベルトを前記動力伝達装置に巻き回したときの、一方のリブ側面のひずみ応力と他方のリブ側面のひずみ応力との応力差に基づいてプーリアライメントを測定するアライメント測定手段と、
を備えることを特徴とするアライメント測定装置。
【請求項2】
前記アライメント測定手段は、前記応力差の絶対値が所定値よりも大きい場合に、プーリアライメントが悪化していると判定する、
ことを特徴とする請求項1に記載のアライメント測定装置。
【請求項3】
前記リブ側応力測定手段は、ベルト長手方向に所定間隔で複数設けられる、
ことを特徴とする請求項1又は請求項2に記載のアライメント測定装置。
【請求項4】
前記アライメント測定用ベルトは、ベルト背面側にひずみ応力を測定する背面側応力測定手段を備え、
前記アライメント測定手段は、前記アライメント測定用ベルトを前記動力伝達装置に巻き回したときの、前記背面側応力測定手段によって測定されたひずみ応力に基づいて前記動力伝達装置のプーリ径を推定する、
ことを特徴とする請求項1から請求項3のいずれか一つに記載のアライメント測定装置。
【請求項5】
前記背面側応力測定手段は、ベルト長手方向に所定間隔で複数設けられる、
ことを特徴とする請求項4に記載のアライメント測定装置。
【請求項6】
前記アライメント測定用ベルトは、ベルト幅方向に複数のリブを有するVリブドベルトである、
ことを特徴とする請求項1から請求項5のいずれか一つに記載のアライメント測定装置。
【請求項7】
クランクプーリの回転をベルトによって補機駆動用プーリに伝達する動力伝達装置のプーリアライメントを修正するアライメント修正方法において、
幅方向断面がV字形状のリブをベルト長手方向に有し、そのリブの両方のリブ側面に、ひずみ応力を測定するリブ側応力測定手段をそれぞれ設けたアライメント測定用ベルトを前記動力伝達装置に巻き回したときの、一方のリブ側面のひずみ応力と他方のリブ側面のひずみ応力との応力差に基づいて、その応力差が小さくなるようにプーリアライメントを修正するアライメント修正工程を備える、
ことを特徴とするアライメント修正方法。
【請求項1】
クランクプーリの回転をベルトによって補機駆動用プーリに伝達する動力伝達装置のプーリアライメントを測定するアライメント測定装置において、
幅方向断面がV字形状のリブをベルト長手方向に有し、そのリブの両方のリブ側面に、ひずみ応力を測定するリブ側応力測定手段をそれぞれ設けたアライメント測定用ベルトと、
前記アライメント測定用ベルトを前記動力伝達装置に巻き回したときの、一方のリブ側面のひずみ応力と他方のリブ側面のひずみ応力との応力差に基づいてプーリアライメントを測定するアライメント測定手段と、
を備えることを特徴とするアライメント測定装置。
【請求項2】
前記アライメント測定手段は、前記応力差の絶対値が所定値よりも大きい場合に、プーリアライメントが悪化していると判定する、
ことを特徴とする請求項1に記載のアライメント測定装置。
【請求項3】
前記リブ側応力測定手段は、ベルト長手方向に所定間隔で複数設けられる、
ことを特徴とする請求項1又は請求項2に記載のアライメント測定装置。
【請求項4】
前記アライメント測定用ベルトは、ベルト背面側にひずみ応力を測定する背面側応力測定手段を備え、
前記アライメント測定手段は、前記アライメント測定用ベルトを前記動力伝達装置に巻き回したときの、前記背面側応力測定手段によって測定されたひずみ応力に基づいて前記動力伝達装置のプーリ径を推定する、
ことを特徴とする請求項1から請求項3のいずれか一つに記載のアライメント測定装置。
【請求項5】
前記背面側応力測定手段は、ベルト長手方向に所定間隔で複数設けられる、
ことを特徴とする請求項4に記載のアライメント測定装置。
【請求項6】
前記アライメント測定用ベルトは、ベルト幅方向に複数のリブを有するVリブドベルトである、
ことを特徴とする請求項1から請求項5のいずれか一つに記載のアライメント測定装置。
【請求項7】
クランクプーリの回転をベルトによって補機駆動用プーリに伝達する動力伝達装置のプーリアライメントを修正するアライメント修正方法において、
幅方向断面がV字形状のリブをベルト長手方向に有し、そのリブの両方のリブ側面に、ひずみ応力を測定するリブ側応力測定手段をそれぞれ設けたアライメント測定用ベルトを前記動力伝達装置に巻き回したときの、一方のリブ側面のひずみ応力と他方のリブ側面のひずみ応力との応力差に基づいて、その応力差が小さくなるようにプーリアライメントを修正するアライメント修正工程を備える、
ことを特徴とするアライメント修正方法。
【図1】


【図2】
【図3】

【図2】
【図3】
【公開番号】特開2009−243665(P2009−243665A)
【公開日】平成21年10月22日(2009.10.22)
【国際特許分類】
【出願番号】特願2008−93969(P2008−93969)
【出願日】平成20年3月31日(2008.3.31)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成21年10月22日(2009.10.22)
【国際特許分類】
【出願日】平成20年3月31日(2008.3.31)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]