
アライメント自動補正方法及び装置並びに収差補正器の制御方法
【課題】 本発明はアライメント自動補正方法及び装置に関し、通常の操作員が収差補正器を意識せずに収差補正器のアライメントができるアライメント自動補正方法及び装置を提供することを目的としている。
【解決手段】 試料表面像から荷電粒子ビーム形状を抽出する抽出手段11bと、抽出された荷電粒子ビームの形状の位置から装置の軸ずれ量を算出する算出手段11cと、算出された軸ずれ量に応じて収差補正器6又は対物レンズに対してフィードバックを自動でかけるフィードバック手段11dとを有して構成される。このように構成すれば、通常の操作員が収差補正器を意識せずに収差補正器のアライメントの自動補正を行なうことができる。
【解決手段】 試料表面像から荷電粒子ビーム形状を抽出する抽出手段11bと、抽出された荷電粒子ビームの形状の位置から装置の軸ずれ量を算出する算出手段11cと、算出された軸ずれ量に応じて収差補正器6又は対物レンズに対してフィードバックを自動でかけるフィードバック手段11dとを有して構成される。このように構成すれば、通常の操作員が収差補正器を意識せずに収差補正器のアライメントの自動補正を行なうことができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動収差補正方法及び装置並びに収差補正器の制御方法に関する。
【背景技術】
【0002】
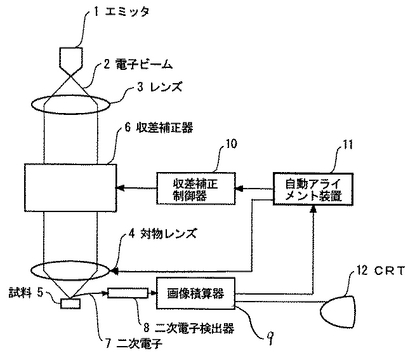
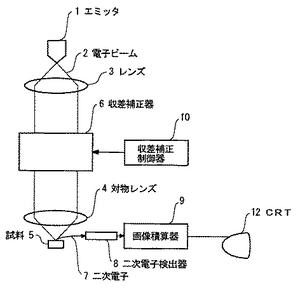
荷電粒子を用いた試料表面観察装置の一例として、走査型電子顕微鏡(SEM)を例にとって説明する。図7は従来装置の構成例を示す図である。この図は、収差補正器を搭載した走査電子顕微鏡を示している。エミッタ1より電子ビーム2が放出され、該電子ビーム2に作用するレンズ3によって収差補正器6に入射する前記電子ビーム2を制御し、前記収差補正器6から出た電子ビーム2を対物レンズ4によって試料5の表面に集束させる。
【0003】
試料表面で前記電子ビーム2を走査し、走査と同期して前記試料表面から放出される二次電子7を二次電子検出器8で検出することにより、走査信号に同期してCRT12上に画像として表示させる。前記二次電子7の検出効率は通常は低いため、通常画像積算器9によってノイズが除去される。ノイズが除去された画像がCRT12に表示される。このような収差補正器の例として多極子を用いた技術が知られている(例えば非特許文献1参照)。
【0004】
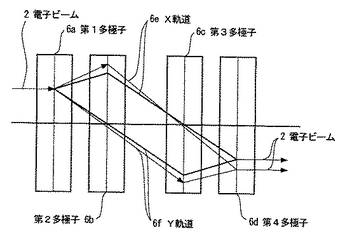
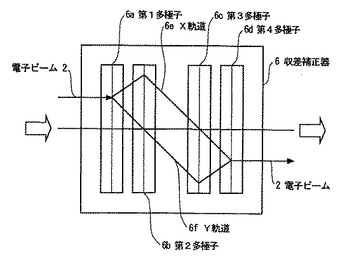
以下、非特許文献1に示す技術を例にとって説明する。図8は収差補正器の構成とその内部を通る電子ビームの軌跡を示す図である。図において、6は収差補正器である。前記多極子は4段の多極子からなり、それぞれ第1多極子6a、第2多極子6b、第3多極子6c、第4多極子6dとして示す。通常、各段の多極子は8極子以上の多極子である。電子ビーム2は第1多極子6aにより集束・発散作用を同時に受ける。今、図に示すように、発散作用を受けた電子ビーム2をX軌道6e、集束作用を受けた電子ビーム2をY軌道6fとする。
【0005】
前記Y軌道6fは、第2多極子6bの中心を通るように第1の多極子6aの強度が調節されている。また、前記X軌道6eは、第3多極子6cの中心を通るように第2多極子6bの強度が調整されている。この際、第2多極子6bでは、Y軌道6fは第2多極子6bの中心を通過しているため、前記X軌道6eのみレンズ作用を受ける。同様に、第3多極子6cでは、前記X軌道6eは第3多極子6cの中心を通過しているため、前記Y軌道6fのみレンズ作用を受ける。このように、前記電子ビーム2のY軌道6fは第2多極子6bの中心を、X軌道6eは第3多極子6cの中心を通り、かつ、それぞれの方向で集束していなければならない。
【0006】
従来、このアライメントは、各段の多極子をウォブルすることで像の移動量を見て、各段の多極子の強度を調整することで行われている。例えば、各段は機械的な中心軸ずれを必ず持っているため、通常、各段は2極子も構成されており、各段の多極子をウォブルすることで、像が移動しないようにこれらを用いて各段の中心がアライメントされる。また、前述したように、多極子のレンズ作用によって前記第2多極子中心及び第3多極子中心を通り、かつ、それぞれY方向及びX方向に集束するように各段の多極子も像が移動しないように調整されている。これらの手順はリンクしているため、操作員が経験と勘によって像の動きと像質を確認しながら多大の時間をかけることによって調節されている。
【0007】
【非特許文献1】Aberration correction in a low voltage SEM by multipole corrector(Nuclear Instrument and Methods in Physics Research A 363(1995)316-325)
【発明の開示】
【発明が解決しようとする課題】
【0008】
前述したように、多極子で構成される収差補正器では、構築上での機械的中心軸ずれが必ずあり、操作員が複数の2極子を用いて各段の多極子をウォブルすることで経験的に合わせ込んでいる。また、前記収差補正器の内部では、電子ビームのある方向成分はある段の中心を通り、かつ、集束しなければならず、これを各段の多極子の強度を調整して合わせ込んでいる。これらの手順は、複雑にリンクしており、操作員は像の移動と像質から経験と勘で多大な時間をかけて調整するという問題がある。
【0009】
本発明はこのような課題に鑑みてなされたものであって、通常の操作員が収差補正器を意識せずに収差補正器のアライメントができるアライメント自動補正方法及び装置を提供することを目的としている。
【課題を解決するための手段】
【0010】
(1)請求項1記載の発明は、試料表面像から荷電粒子ビーム形状を抽出する工程と、抽出された荷電粒子ビームの形状の位置から装置の軸ずれ量を算出する工程と、算出された軸ずれ量に応じて収差補正器又は対物レンズに対してフィードバックを自動でかける工程とを有することを特徴とする。
【0011】
(2)請求項2記載の発明は、試料表面像から荷電粒子ビーム形状を抽出する抽出手段と、抽出された荷電粒子ビームの形状の位置から装置の軸ずれ量を算出する算出手段と、算出された軸ずれ量に応じて収差補正器又は対物レンズに対してフィードバックを自動でかけるフィードバック手段とを有して構成される。
【0012】
(3)請求項3記載の発明は、使用する試料表面像は、2枚、3枚、又は5枚の何れかの枚数であることを特徴とする。
【0013】
(4)請求項4記載の発明は、前記2枚の試料表面像は、収差補正器のレンズ強度を所定量だけシフトした像と、現在値での像であることを特徴とする。
【0014】
(5)請求項5記載の発明は、前記3枚の試料表面像は、収差補正器のレンズ強度をX方向に所定量だけシフトした像と、Y方向に所定量だけシフトした像と、現在値での像であることを特徴とする。
【0015】
(6)請求項6記載の発明は、前記5枚の試料表面像は、収差補正器のレンズ強度をX方向に正負の所定量だけシフトした像2枚と、Y方向に正負の所定量だけシフトした像2枚と、現在値での像であることを特徴とする。
【0016】
(7)請求項7記載の発明は、前記収差補正器は、4段の多極子からなることを特徴とする。
【0017】
(8)請求項8記載の発明は、前記収差補正器を構成する4段の多極子は少なくとも4極子以上であることを特徴とする。
【0018】
(9)請求項9記載の発明は、前記シフトするレンズ強度は、収差補正器を構成する4段の多極子のうち、第1段の2極子、又は第2段の2極子、又は第3段の2極子、又は第4段の2極子、又は第1段の4極子、又は第2段の4極子、又は第3段の4極子、又は第4段の4極子、又は第1段の6極子、又は第2段の6極子、又は第3段の6極子、又は第4段の6極子、又は第1段の8極子、又は第2段の8極子、又は第3段の8極子、又は第4段の8極子、又は対物レンズに応じたものであることを特徴とする。
【0019】
(10)請求項10記載の発明は、レンズ強度をシフトするのと同期して試料表面像を取得することを特徴とする。
【0020】
(11)請求項11記載の発明は、1つ又は2つの荷電粒子ビーム形状を抽出し、前記装置の軸ずれ量を、前記抽出された1つ又は2つの荷電粒子ビーム形状の重心の位置と原点との差にある定数を乗じた値としたことを特徴とする。
【0021】
(12)請求項12記載の発明は、1つ又は2つの荷電粒子ビーム形状を抽出し、前記
装置の軸ずれ量を、前記抽出された1つ又は2つの荷電粒子ビーム形状の中心の位置と原点との差にある定数を乗じた値としたことを特徴とする。
【0022】
(13)請求項13記載の発明は、得られた軸ずれ量にある定数を乗じた値に応じて収差補正器に対してフィードバックをかけるようにしたことを特徴とする。
【0023】
(14)請求項14記載の発明は、フィードバックする収差補正器のレンズ強度は、収差補正器を構成する4段の多極子のうち、第1段の2極子、又は第2段の2極子、又は第3段の2極子、又は第4段の2極子、又は第1段の4極子、又は第2段の4極子、又は第3段の4極子、又は第4段の4極子、又は対物レンズに応じたものであることを特徴とする。
【0024】
(15)請求項15記載の発明は、定量化された軸ずれ量をある閾値と比較することで、装置の軸ずれが補正されたか否かを自動判定することを特徴とする。
【0025】
(16)請求項16記載の発明は、定量化された軸ずれ量がある閾値以内に入るまで自動アライメント処理を繰り返すことを特徴とする。
【0026】
(17)請求項17記載の発明は、前記試料は円状の粒子であることを特徴とする。
【0027】
(18)請求項18記載の発明は、前記試料は金粒子であることを特徴とする。
【0028】
(19)請求項19記載の発明は、前記試料はラテックスであることを特徴とする。
【0029】
(20)請求項20記載の発明は、前記2つの荷電粒子ビーム形状のうち、1つの荷電粒子ビーム形状のX方向の位置と原点との差をX方向ずれ量、もう1つの荷電粒子ビーム形状のY方向の位置と原点との差をY方向ずれ量とすることを特徴とする。
【0030】
(21)請求項21記載の発明、前記荷電粒子ビーム形状の位置は、重心又は中心であることを特徴とする。
【0031】
(22)請求項22記載の発明は、X方向、Y方向に独立に軸ずれ補正することを特徴とする。
【0032】
(23)請求項23記載の発明は、抽出された荷電粒子ビーム形状と算出された軸ずれ量とを表示することを特徴とする。
【0033】
(24)請求項24記載の発明は、系全体の収差を補正する収差補正器と、該収差補正器のレンズ強度を制御する収差補正制御器と、対物レンズと、該収差補正制御器又は対物レンズにレンズ強度を指示するアライメント制御装置と、該アライメント制御装置と同期してSEM像を取得し荷電粒子ビーム形状を抽出するビーム形状抽出装置と、得られた前記ビーム形状から軸ずれの大きさを定量化する軸ずれ定量化装置と、該定量化された軸ずれ量から前記収差補正制御器にフィードバック量を指示するフィードバック装置と、前記軸ずれ量から自動補正するか否かを判断する判断装置とを具備することを特徴とする。
【0034】
(25)請求項25記載の発明は、複数段の多極子で構成される収差補正器の制御方法において、制御器により、各段の多極子レンズ強度比を固定して、一つのレンズとして同時に制御することを特徴とする。
【0035】
(26)請求項26記載の発明は、複数段の多極子で構成される収差補正器の制御方法において、制御器により、各段の多極子と対物レンズのレンズ強度比を固定して、一つのレンズとして同時に制御することを特徴とする。
【0036】
(27)請求項27記載の発明は、前記制御器により、各段の多極子レンズ強度比を固定して組み合わされたレンズ又は各段の多極子と対物レンズのレンズ強度比を固定して組み合わせたレンズに対してフィードバックをかけることを特徴とする。
【発明の効果】
【0037】
(1)請求項1記載の発明によれば、通常の操作員が収差補正器を意識せずに収差補正器のアライメントの自動補正を行なうことができる。
【0038】
(2)請求項2記載の発明によれば、通常の操作員が収差補正器を意識せずに収差補正器のアライメントの自動補正を行なうことができる。
【0039】
(3)請求項3記載の発明によれば、使用する試料表面像として、2枚、3枚、又は5枚の内の何れかの枚数を用いることで、収差補正器による自動アライメントを行なうことができる。
【0040】
(4)請求項4記載の発明によれば、収差補正器のレンズ強度を所定量だけシフトした像と現在値での像を用いて収差補正器による自動アライメントを行なうことができる。
【0041】
(5)請求項5記載の発明によれば、収差補正器のレンズ強度をX方向及びY方向に所
定量だけシフトした像と現在値での像を用いて収差補正器又は対物レンズによる自動アライメントを行なうことができる。
【0042】
(6)請求項6記載の発明によれば、収差補正器のレンズ強度をX方向及びY方向に正負の所定量だけシフトした像と現在値での像を用いて収差補正器又は対物レンズによる自動アライメントを行うことができる。
【0043】
(7)請求項7記載の発明によれば、4段の多極子よりなる収差補正器又は対物レンズを用いて自動アライメントを行なうことができる。
【0044】
(8)請求項8記載の発明によれば、4段の多極子の各段の多極子として少なくとも4極子以上のものを用いて収差補正器又は対物レンズによる自動アライメントを行なうことができる。
【0045】
(9)請求項9記載の発明によれば、4段の多極子の内の各段の多極子数として、2極子、4極子、6極子、8極子のものを用いて収差補正器又は対物レンズによる自動アライメントを行なうことができる。
【0046】
(10)請求項10記載の発明によれば、レンズ強度をシフトした時の試料表面像を得ることができる。
【0047】
(11)請求項11記載の発明によれば、装置の軸ずれ量として、抽出された1つ又は2つの荷電粒子ビーム形状を用いて、重心の位置と原点との差にある定数を乗じて装置の軸ずれ量を求めることができる。
【0048】
(12)請求項12記載の発明によれば、装置の軸ずれ量として、抽出された1つ又は2つの荷電粒子ビーム形状を用いて、中心の位置と原点との差にある定数を乗じて装置の軸ずれ量を求めることができる。
【0049】
(13)請求項13記載の発明によれば、得られた軸ずれ量にある定数をかけた値に応じて収差補正器又は対物レンズにフィードバックをかけることにより、収差補正器による自動アライメントを行なうことができる。
【0050】
(14)請求項14記載の発明によれば、フィードバックする収差補正器又は対物レンズのレンズ強度として、4段の多極子の各段の多極子として2極子又は4極子のものを用いた収差補正器又は対物レンズによる自動アライメントを行なうことができる。
【0051】
(15)請求項15記載の発明によれば、定量化された軸ずれ量をある閾値と比較するようにして、装置の軸ずれ(アライメント)が補正されたかどうかを自動判定することができる。
【0052】
(16)請求項16記載の発明によれば、定量化された軸ずれ量がある閾値以内に入るまで自動アライメント処理を繰り返すことで、軸ずれ量を十分に小さくすることができる。
【0053】
(17)請求項17記載の発明によれば、試料として円状の粒子を用いることにより、好ましい試料表面像を得ることができる。
【0054】
(18)請求項18記載の発明によれば、試料として金粒子を用いることにより、好ましい試料表面像を得ることができる。
【0055】
(19)請求項19記載の発明によれば、試料としてラテックスを用いることにより、好ましい試料表面像を得ることができる。
【0056】
(20)請求項20記載の発明によれば、1つの荷電粒子ビーム形状のX方向の位置と原点との差をX方向ずれ量、もう1つの荷電粒子ビーム形状のY方向の位置と原点との差をY方向ずれ量としてこれら2つのずれ量を用いて軸ずれ補正(アライメント調整)を行なうことができる。
【0057】
(21)請求項21記載の発明によれば、前記荷電粒子ビーム形状の位置として重心又は中心を用いることで、収差補正器又は対物レンズによる自動アライメントを行なうことができる。
【0058】
(22)請求項22記載の発明によれば、X方向及びY方向に独立に軸ずれ補正を行なうことにより、軸ずれ補正を良好に行なうことができる。
【0059】
(23)請求項23記載の発明によれば、抽出された荷電粒子ビーム形状と算出された軸ずれ量とを表示することにより、操作員の処理を支援することができる。
【0060】
(24)請求項24記載の発明によれば、通常の操作員が収差補正器を意識せずに収差補正器のアライメントの自動補正を行なうことができる。
【0061】
(25)請求項25記載の発明によれば、各段の多極子レンズ強度比を固定することで、一つの制御信号であたかも一つのレンズを制御することができ、制御系を簡素化することで、軸ずれ補正を良好に行うことができる。
【0062】
(26)請求項26記載の発明によれば、各段の多極子レンズと対物レンズのレンズ強度比を固定することで、一つの制御信号であたかも一つのレンズを制御することができ、制御系を簡素化することで、軸ずれ補正を良好に行うことができる。
【0063】
(27)請求項27記載の発明によれば、一つの軸ずれ量に対して一つのフィードバック量で制御することができ、軸ずれ補正を良好に行うことができる。
【発明を実施するための最良の形態】
【0064】
以下、図面を参照して本発明の実施の形態例を詳細に説明する。
【0065】
図1は本発明の一実施の形態例を示す構成図である。図7と同一のものは、同一の符号を付して示す。図において、1は荷電粒子ビームを放出するエミッタ、2は該エミッタ1から放出される電子ビーム、3は該電子ビーム2に作用するレンズ、6はレンズ作用を受けた電子ビーム2の各種補正を行なう収差補正器、4は電子ビーム2を試料5上に集束させる対物レンズ、5は試料、7は該試料5から放出される二次電子、8は該二次電子7を検出する二次電子検出器である。
【0066】
9は二次電子像をノイズに強くするために画像を積算する画像積算器、10は収差補正器6に収差補正のための制御信号を与える収差補正制御器、11は収差補正制御器10又は対物レンズ4に自動アライメント制御信号を与える自動アライメント装置である。該自動アライメント装置11としては、例えばコンピュータが用いられる。12は画像積算器9と接続され、各種情報を表示するCRTである。
【0067】
なお、本発明において、試料5として円状の粒子や、金粒子や、ラテックスを用いると良好な試料表面像を得ることができる。このように構成された装置の動作を説明すれば、以下の通りである。
【0068】
エミッタ1より電子ビーム2が放出され、該電子ビーム2に作用するレンズ3によって収差補正器6に入射する電子ビーム2を制御し、前記収差補正器6から出た電子ビーム2を対物レンズ4によって試料5の表面に集束させる。試料表面で電子ビーム2を走査し、走査と同期して試料5の表面から放出される二次電子7を二次電子検出器8で検出することにより、走査信号に同期してCRT12上に画像として表示させる。前記二次電子検出器8の検出効率は通常低いため、画像積算器9によってノイズが除去される。
【0069】
収差補正制御器10は、収差補正器6のレンズ強度を制御している。自動アライメント装置11は前記画像積算器9からSEM像を取得し、前記収差補正器6の機械的軸ずれを補正するレンズ強度と前記収差補正器6で内部での電子ビーム2の軌道を所定の軌道に制御するレンズ強度とを算出して前記収差補正制御器10に指示する。収差補正器6の構成及び動作に関しては、前記非特許文献1に詳述されている。以下、本発明による前記自動アライメント装置11の構成及び動作を図2を基に詳述する。
【0070】
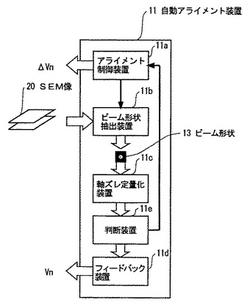
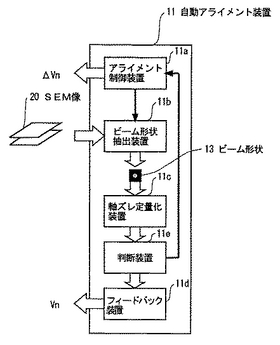
図2は自動アライメント装置の構成例を示す図である。図において、11aはアライメント制御装置であり、アライメント制御のための制御信号ΔVnを出力する。11bはアライメント制御装置の出力を受けると共に、SEM像20を受けてビーム形状を抽出するビーム形状抽出装置、13は該ビーム形状抽出装置11bから出力されるビーム形状である。11cはビーム形状13を受けて軸ずれを定量化する軸ずれ定量化装置、11eは該軸ずれ定量化装置で定量化された値を受けてフィードバック制御を行なうかどうかの判断を行なう判断装置、11dは該判断装置11eの出力を受けてフィードバック制御信号Vnを出力するフィードバック装置である。このように構成された装置を用いて、本発明の動作を説明する。
【0071】
前記自動アライメント装置11は、収差補正器6の軸ずれ量を確認するために、収差補正制御器10に対して収差補正器6を構成する複数の2極子の強度を変えるように指示し、また、前記収差補正器6の内部を前記電子ビーム2が所定の軌道を通っているかを確認するために、収差補正制御器10に対して、収差補正器6を構成する複数の多極子の強度を変えるよう指示する。ビーム形状抽出装置11bでは、アライメント制御装置11aからのレンズ強度変化指示ΔVnと同期して、その際のレンズ強度変化なしのSEM像とレンズ強度変化時のSEM像とを取得して、ビーム形状を算出する。これら2枚のSEM像からビーム形状を抽出する方法は、特許(WO 01/56057 AL)に詳述されている。ここではその概略を示す。
【0072】
レンズ強度を変化させた時のSEM像をg1とし、レンズ強度を変化させない時のSEM像をg0とする。また、試料表面形状をs、レンズ強度変化時のビーム形状をp1、レンズ強度を変化させない時のビーム形状をp0とする。この時、前記SEM像g1とg0は次式のように表わされる。
【0073】
g1=s*p1 (1)
g0=s*p0 (2)
ここで、「*」はコンボリーションを表わしている。(1),(2)式をそれぞれフーリエ変換すると、次式のようになる。大文字はフーリエ変換されたものを示している。
【0074】
G1=S・P1 (3)
G0=S・P0 (4)
ここで、「・」はフーリエ空間上での積を示す。(3)式,(4)式でSを消去すると次式が得られる。
【0075】
G1=(P1・G0/P0)=P10・G0 (5)
ここで、P1/P0=P10とした。次に(5)式を実空間に逆フーリエ変換すると次式が得られる。
【0076】
g1=F-1[P10・G0] (6)
ここで、F-1[]は逆フーリエ変換を示す。P10は既知の関数であるから、G0が分かれば、(6)式によってビーム形状g1を計算することができる。
【0077】
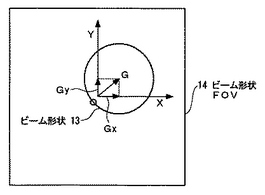
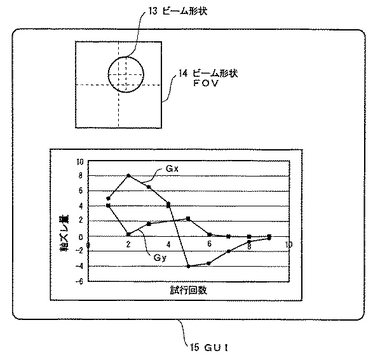
例えば、レンズ強度変化なしの時のビーム形状g0をガウス分布関数と仮定すれば、G0もガウス分布関数なので、ビーム形状13(g1)を計算することができる。図2に示すように、前記軸ずれ定量化装置11cでは、得られた前記ビーム形状13(g1)から現在の軸ずれの大きさを定量化する。定量化の方法としては、例えば図3に示すように、ビーム形状のFOV(Field Of View)の中心をOとし、ビーム形状13の重心をGとして、ベクトルOGのX軸及びY軸への射影を、X方向ずれをGx[mode]、Y方向ずれをGy[mode]とする。なお、重心の代わりに中心を用いることができる。
【0078】
ここで、Gx[mode],Gy[mode]はmodeの関数とし、modeとは前記アライメント制御装置11aが指示したレンズ強度変化の識別を意味するものである。例えば、mode=1は前記収差補正器6の第1極子の4極子を変化させたことを意味する。フィードバック装置11dは、定量化された軸ずれ量Gx[mode],Gy[mode]から次式によって前記収差補正制御器10又は対物レンズ4に指示するフィードバック量Vn[mode]を算出する。同様に、フィードバック量Vnはmodeの関数であることを示している。通常、フィードバック量Vnには方向性があり、X方向のフィードバック量をVnx、Y方向のフィードバック量をVnyとする。
【0079】
Vnx[mode]=α[mode]×Gx[mode] (7−1)
Vny[mode]=β[mode]×Gy[mode] (7−2)
ここで、α[mode],β[mode]は同様にmodeの関数である。
【0080】
このように、本発明によれば、荷電粒子ビーム形状の位置として重心又は中心を用いることで、収差補正器による自動アライメントを行なうことができる。
【0081】
判断装置11eは、modeによって識別された軸ずれ量Gx[mode],Gy[mode]から、それぞれ所定の閾値と比較してGxとGyとが閾値よりも小さくなった場合、即ち軸ずれが補正されたと判断された場合は補正を終了し、軸ずれ補正が不十分と判断された場合は、前記アライメント制御装置11aに指示して繰り返し制御する。制御の方法は、例えばmode毎に設定された閾値γ[mode]によって次式を満たす場合は終了と判断する。
|Gx[mode]|<γ[mode]かつ|Gy[mode]|<γ[mode] (8)
本発明によれば、前記GxとGyとをそれぞれ独立に軸ずれ補正を行なうことにより、軸ずれ補正を良好に行なうことができる。また、本発明によれば、定量化された軸ずれ量がある閾値以内に入るまで自動アライメント処理を繰り返すことで、軸ずれ量を十分に小さくすることができる。この場合において、定量化された軸ずれ量をある閾値と比較するようにして、装置の軸ずれ(アライメント)が補正されたかどうかを自動判定することができる。
【0082】
図8に多極子による収差補正器6の構成と収差補正器6の内部を通る電子ビーム2の軌道を示す。多極子は4段の多極子からなり、それぞれ第1多極子6a、第2多極子6b、第3多極子6c、第4多極子6dとして示してある。通常、各段の多極子は8極子以上の多極子である。前記非特許文献1によれば、電子ビーム2は前記第1多極子により集束・発散作用を同時に受ける。
【0083】
今、図8に示すように発散作用を受けた電子ビーム2をX軌道6e、集束作用を受けた電子ビームをY軌道6fとする。Y軌道6fは第2多極子6bの中心を通りかつ集束するように第1多極子6aの強度が調整されている。また、X軌道6eは第3多極子6cの中心を通りかつ集束するように多極子6bの強度が調整されている。この際、第2多極子においては、Y軌道6fは第2多極子6bの中心を通過しているため影響を受けず、X軌道6eのみレンズ作用を受ける。
【0084】
同様にして、第3多極子においては、X軌道6eは、多極子6cの中心を通過しているため影響を受けず、Y軌道6fのみレンズ作用を受ける。このように、電子ビーム2のY軌道6fは多極子6bの中心を通りかつ集束し、X軌道6eは多極子6cの中心を通りかつ集束しなければならない。図4は多極子の第1段目のレンズ強度を変化させた場合の電子ビームが軌道をずれた場合の説明図である。電子ビーム2は第2多極子6b、第3多極子6cの中心を通っているが、X軌道6eが第3多極子の中心に集束せず、Y軌道6fが第2の多極子の中心に集束していない場合を示す。
【0085】
この場合、収差補正器6から出る電子ビーム2の傾きと位置が変化し、像としてぼける。さらに、電子ビーム2が各段の多極子の中心を通っていなければ、各段の多極子のレンズ強度を変化させた場合、像が移動する。電子ビーム2は、各段の多極子のうち、前記非特許文献1では4極子で制御されている。電子ビームが多極子の中心を通っていない場合、第1段の4極子の中心は、第1段の4極子場をウォブルし、図示しない収差補正器6の電子光源側の偏向器で電子ビーム2を制御して像が動かない点を探すことで見つけられる。
【0086】
第2段の4極子中心は、第2段の4極子場をウォブルし、第1段の2極子(偏向器と同等)で電子ビーム2を制御して像が動かない点を探すことで見つけられる。同様にして第3段の4極子中心、第4段の4極子中心も探すことができる。また、収差補正器6から出た電子ビーム2を対物レンズ4の中心を通らせるために、対物レンズ強度をウォブルし、第4段の2極子で対物レンズ中心を探すことができる。本発明では、この動作を自動アライメント装置11で行なう。例えば、第2段の4極子中心を通す場合は、図2に示す自動アライメント装置11において、アライメント制御装置11aが第2段の4極子場強度をΔVnだけ変化させるように、収差補正制御器10に指示する。
【0087】
前記収差補正制御器10は、指示された通りになるように収差補正器6を制御する。該収差補正器6が第2段の多極子場をΔVnだけ変化させた結果、SEM像が移動し、そのSEM像とレンズ強度変化なしの時のSEMとを前記ビーム形状抽出装置11bが入力し、ビーム形状13を算出し、軸ずれ定量化装置11cが軸ずれ量を定量化し、前記フィードバック装置11dが第1段の2極子に対するフィードバック量を計算して収差補正器6又は対物レンズ4に指示する。判断装置11eは、前記定量化された軸ずれ量から(8)式を満たすまで補正を繰り返すようにアライメント制御装置11aに指示する。
【0088】
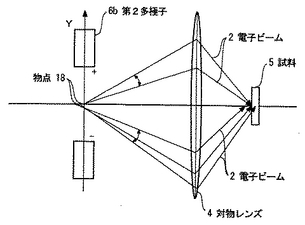
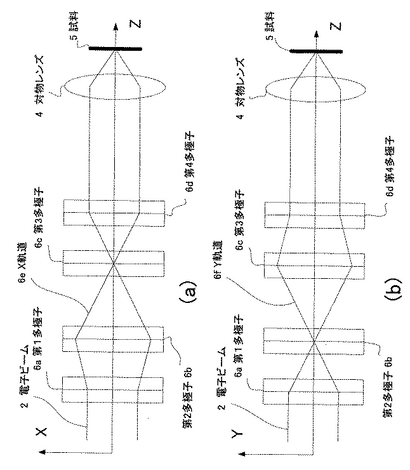
また、X軌道は前記第3多極子の中心に集束していなければならず、また、Y軌道は前記第2多極子の中心に集束していなければならない。図9に電子ビーム軌道をX−Z面及びY−Z面で示す。図9(a)に示すものがX軌道となり、図9(b)に示すものがY軌道となる。前記Y軌道6fが前記第2多極子(この場合は4極子)の中心に集束するためには、多極子のY方向の2極子中心に電子ビーム2が集束しているか否かで判断する。即ち、第2段のY方向の2極子場の強度をΔVnだけ変化させた時、図5に示すように、Y軌道6fが前記第2多極子(この場合は2極子)の中心に集束していれば、2極子場の大きさが変化しても1点から出た電子ビーム2は対物レンズ4によって試料5の表面の1点に集束するため、SEM像は動かない。
【0089】
しかしながら、前記Y軌道6fが前記第2多極子(この場合は2極子)の中心に集束していなければ図5に示す物点18が前記第2段の極子場の強度をΔVnだけ変化させた時に動いてしまい、結果としてSEM像が動く。つまり、前記第2段の2極子場の強度をΔVnだけ変化させてもSEM像が動かないように各段の4極子場強度又は対物レンズを調整すれば、前記Y軌道6fが第2多極子(この場合は4極子)の中心に集束していることになる。
【0090】
例えば、第1段の4極子場を調整することで、SEM像を動かないようにすることができる。但し、他の4極子を使用しても同様にできる。しかし、図4に示すように、多極子は電子ビーム2に対して集束作用と発散作用とを同時にかけるため、他方の軸に影響を与えるため、最終的には全段の多極子又は対物レンズを調整しなければならない。前記X軌道6eを第3多極子(この場合は4極子)の中心に集束させるのも同様である。つまり、第3段の2極子場を変化させてSEM像が動かないように各段の4極子場強度又は対物レンズを調整する。
【0091】
本発明では、この動作を前記自動アライメント装置11で行なう。つまり、例えば前記Y軌道6fを前記第2多極子(この場合は4極子)の中心に集束させる場合は、図2に示す自動アライメント装置11において、アライメント制御装置11aが前記第2段のY方向の2極子場強度をΔVnだけ変化させるように、収差補正制御器10に指示する。該収差補正制御器10は、指示された通りになるように収差補正器6を制御する。該収差補正器6が前記第2段のY方向の2極子場強度をΔnだけ変化させた結果、SEM像が移動し、そのSEM像とレンズ強度変化なしの時のSEM像とをビーム形状抽出装置11bが入力し、ビーム形状13を抽出し、軸ずれ定量化装置11cが軸ずれ量を定量化し、フィードバック装置11dが各段の4極子又は対物レンズに対するフィードバック量を計算して、収差補正制御器11又は対物レンズに指示する。前記判断装置11eは、前記定量化された軸ずれ量から(8)式を満たすまで補正動作を繰り返すように、アライメント制御装置11aに指示する。
【0092】
本発明によれば、レンズ強度をシフトした時の試料表面像を得ることができる。また、装置の軸ずれ量として、抽出された1つ又は2つの荷電粒子ビーム形状を用いて、重心の位置と原点との差にある定数を乗じて装置の軸ずれ量を求めることができる。また、装置の軸ずれ量として、抽出された1つ又は2つの荷電粒子ビーム形状を用いて、中心の位置と原点との差にある定数を乗じて装置の軸ずれ量を求めることができる。また、本発明によれば、得られた軸ずれ量にある定数をかけた値に応じて収差補正器又は対物レンズにフィードバックをかけることにより、収差補正器による自動アライメントを行なうことができる。また、フィードバックする収差補正器のレンズ強度として、4段の多極子の各段の多極子として2極子又は4極子のものを用いて収差補正器による自動アライメントを行なうことができる。
【0093】
このように、本発明による自動アライメント装置11は、複数のアライメントを行なうが、それをmodeという識別数で区別すると例えば次のようになる。
【0094】
mode=1 電子ビームを第1段多極子中心に通す
mode=2 電子ビームを第2段多極子中心に通す
mode=3 電子ビームを第3段多極子中心に通す
mode=4 電子ビームを第4段多極子中心に通す
mode=5 電子ビームを対物レンズ中心に通す
mode=6 Y軌道を第2段多極子中心に集束させる
mode=7 X軌道を第3段多極子中心に集束させる
mode=1〜7のアライメントを前記アライメント制御装置11aは監視しており、全ての条件が満たされるまで補正が繰り返される。また、アライメントの順序は、modeの数字順からしてもよいが、とくにこだわる必要はない。
【0095】
電子ビームを各極子の中心を通す、mode=1〜4の場合、例えばmode=1では、式(7−1),(7−2)で算出されるフィードバック量Vnx[mode=1],Vny[mode1]が収差補正器のエミッタ側に配置されてあるX,Y偏向器にそれぞれ印加される。
【0096】
mode=2では、式(7−1),(7−2)で算出されるフィードバック量Vnx[mode=2],Vny[mode=2]が収差補正器の第1段のX,Y方向2極子にそれぞれ印加される。
【0097】
mode=3では、式(7−1),(7−2)で算出されるフィードバック量Vnx[mode=3],Vny[mode=3]が収差補正器の第2段のX,Y方向2極子にそれぞれ印加される。
【0098】
mode=4では、式(7−1),(7−2)で算出されるフィードバック量Vnx[mode=4],Vny[mode=4]が収差補正器の第3段のX,Y方向2極子にそれぞれ印加される。
【0099】
mode=5では、式(7−1),(7−2)で算出されるフィードバック量Vnx[mode=5],Vny[mode=5]が収差補正器の第4段のX,Y方向2極子にそれぞれ印加される。
【0100】
Y軌道を第2段多極子中心に集束させる場合には、第1段、第2段、第3段の4子のレンズ強度比をAy:By:Cyに固定することで、X軌道が第3段多極子中心に集束したまま、Y軌道の集束点を第2段多極子中心近傍で移動させることができ、式(7−2)で算出されるフィードバック量Vny[mode=6]をレンズ強度比Ay:By:Cyに応じて第1段、第2段、第3段の4極子に印加する。
【0101】
すなわち、第1段4極子にAy・Vny、第2段4極子にBy・Vny、第3段4極子にCy・Vnyをそれぞれ印加する。
【0102】
前記レンズ強度比は例えば、4:−1:−1となるが、限定されるものではなく、実験的に第1段4極子場強度をAyだけずらした時、像が再度集束するように、第2段4極子場強度をBy、第3段4極子場強度をCyに設定すればよい。
【0103】
同様にして、X軌道を第3段多極子中心に集束させる場合には、第2段、第3段、第4段の4極子のレンズ強度比をBx:Cx:Dxに固定することで、Y軌道が第2段多極子中心に集束したまま、X軌道の集束点を第3段多極子中心近傍で移動させることができ、式(7−1)で算出されるフィードバック量Vnx[mode=7]をレンズ強度比Bx:Cx:Dxに応じて第2段、第3段、第4段の4極子に印加する。
【0104】
すなわち、第2段4極子にBx・Vnx、第3段4極子にCx・Vnx、第4段4極子にDx・Vnxをそれぞれ印加する。
【0105】
前記レンズ強度比は、例えば−1:−1:4となるが、限定されるものではなく、実験的に第4段4極子場強度をDxだけずらした時、像が再度集束するように、第2段4極子場強度をBx、第3段4極子場強度をCxに設定すればよい。
【0106】
また、X軌道を第3段多極子中心に集束させる別の方法として、第2段、第3段の4極子のレンズ強度比をBx:Cxに固定することで、Y軌道が第2段多極子中心に集束したまま、X軌道の集束点を第3段多極子中心近傍で移動させることができ、式(7−1)で算出されるフィードバック量Vnx[mode=7]をレンズ強度比Bx:Cxに応じて第2段、第3段の4極子に印加する。この際、試料位置でのフォーカスがずれるが対物レンズ強度を合わせることで補正できる。従って、全体として、第2段4極子、第3段4極子、対物レンズ強度をBx:Cx:Oxに固定してそれぞれフィードバックをかければよい。
【0107】
すなわち、第2段4極子にBx・Vnx、第3段4極子にCx・Vnx、対物レンズにOx・Vnxをそれぞれ印加する。
【0108】
前記レンズ強度比は例えば、−1:1:Oxとなるが、限定されるものではなく、実験的に対物レンズ強度をOxだけずらした時、像が再度集束するように、第2段4極子場強度をBx、第3段4極子場強度をCxに設定すればよい。
【0109】
本発明によれば、使用する試料表面像として2枚、3枚、又は5枚の内の何れかの枚数を用いることで、収差補正器による自動アライメントを行なうことができる。また、収差補正器のレンズ強度を所定量だけシフトした像と現在値での像を用いて収差補正器による自動アライメントを行なうことができる。また、収差補正器のレンズ強度をX方向及びY方向に所定量だけシフトした像と現在値での像を用いて収差補正器による自動アライメントを行なうことができる。また、4段の多極子よりなる収差補正器を用いて自動アライメントを行なうことができる。また、4段の多極子の各段の多極子として少なくとも4極子以上のものを用いて収差補正器による自動アライメントを行なうことができる。更に、4段の多極子の内の各段の多極子数として、2極子、4極子、6極子、8極子のものを用いて収差補正器による自動アライメントを行なうことができる。
【0110】
以上、説明したように、本発明によれば、通常の操作員が収差補正器を意識せずに収差補正器のアライメントの自動補正を行なうことができる。
【0111】
また、本発明によれば、現在の軸ずれの大きさを定量化してあるので、前記自動アライメント装置11の動作状態、例えば図6に示すように、CRT12上のGUI(Graphical User Interface)15にビーム形状13と装置の軸ずれ量の履歴を表示することで操作員を支援することができる。14はビーム形状FOVである。この図より、Gxは試行回数の増加と共に軸ずれ量が漸減しているが、Gyは途中で軸ずれ量が増加し、その後減少する特性を示していることが分かる。
【図面の簡単な説明】
【0112】
【図1】本発明の一実施の形態例を示す構成図である。
【図2】自動アライメント装置の構成例を示す図である。
【図3】定量化の方法の説明図である。
【図4】電子ビームが軌道をずれた場合の説明図である。
【図5】電子ビームの軌道を示す図である。
【図6】本発明による表示の様子を示す図である。
【図7】従来装置の構成例を示す図である。
【図8】収差補正器の構成とその内部を通る電子ビームの軌道を示す図である。
【図9】電子ビーム軌道をX−Z面及びY−Z面で示す図である。
【符号の説明】
【0113】
1 エミッタ
2 電子ビーム
3 レンズ
4 対物レンズ
5 試料
6 収差補正器
7 二次電子
8 二次電子検出器
9 画像積算器
10 収差補正制御器
11 自動アライメント装置
12 CRT
【技術分野】
【0001】
本発明は、自動収差補正方法及び装置並びに収差補正器の制御方法に関する。
【背景技術】
【0002】
荷電粒子を用いた試料表面観察装置の一例として、走査型電子顕微鏡(SEM)を例にとって説明する。図7は従来装置の構成例を示す図である。この図は、収差補正器を搭載した走査電子顕微鏡を示している。エミッタ1より電子ビーム2が放出され、該電子ビーム2に作用するレンズ3によって収差補正器6に入射する前記電子ビーム2を制御し、前記収差補正器6から出た電子ビーム2を対物レンズ4によって試料5の表面に集束させる。
【0003】
試料表面で前記電子ビーム2を走査し、走査と同期して前記試料表面から放出される二次電子7を二次電子検出器8で検出することにより、走査信号に同期してCRT12上に画像として表示させる。前記二次電子7の検出効率は通常は低いため、通常画像積算器9によってノイズが除去される。ノイズが除去された画像がCRT12に表示される。このような収差補正器の例として多極子を用いた技術が知られている(例えば非特許文献1参照)。
【0004】
以下、非特許文献1に示す技術を例にとって説明する。図8は収差補正器の構成とその内部を通る電子ビームの軌跡を示す図である。図において、6は収差補正器である。前記多極子は4段の多極子からなり、それぞれ第1多極子6a、第2多極子6b、第3多極子6c、第4多極子6dとして示す。通常、各段の多極子は8極子以上の多極子である。電子ビーム2は第1多極子6aにより集束・発散作用を同時に受ける。今、図に示すように、発散作用を受けた電子ビーム2をX軌道6e、集束作用を受けた電子ビーム2をY軌道6fとする。
【0005】
前記Y軌道6fは、第2多極子6bの中心を通るように第1の多極子6aの強度が調節されている。また、前記X軌道6eは、第3多極子6cの中心を通るように第2多極子6bの強度が調整されている。この際、第2多極子6bでは、Y軌道6fは第2多極子6bの中心を通過しているため、前記X軌道6eのみレンズ作用を受ける。同様に、第3多極子6cでは、前記X軌道6eは第3多極子6cの中心を通過しているため、前記Y軌道6fのみレンズ作用を受ける。このように、前記電子ビーム2のY軌道6fは第2多極子6bの中心を、X軌道6eは第3多極子6cの中心を通り、かつ、それぞれの方向で集束していなければならない。
【0006】
従来、このアライメントは、各段の多極子をウォブルすることで像の移動量を見て、各段の多極子の強度を調整することで行われている。例えば、各段は機械的な中心軸ずれを必ず持っているため、通常、各段は2極子も構成されており、各段の多極子をウォブルすることで、像が移動しないようにこれらを用いて各段の中心がアライメントされる。また、前述したように、多極子のレンズ作用によって前記第2多極子中心及び第3多極子中心を通り、かつ、それぞれY方向及びX方向に集束するように各段の多極子も像が移動しないように調整されている。これらの手順はリンクしているため、操作員が経験と勘によって像の動きと像質を確認しながら多大の時間をかけることによって調節されている。
【0007】
【非特許文献1】Aberration correction in a low voltage SEM by multipole corrector(Nuclear Instrument and Methods in Physics Research A 363(1995)316-325)
【発明の開示】
【発明が解決しようとする課題】
【0008】
前述したように、多極子で構成される収差補正器では、構築上での機械的中心軸ずれが必ずあり、操作員が複数の2極子を用いて各段の多極子をウォブルすることで経験的に合わせ込んでいる。また、前記収差補正器の内部では、電子ビームのある方向成分はある段の中心を通り、かつ、集束しなければならず、これを各段の多極子の強度を調整して合わせ込んでいる。これらの手順は、複雑にリンクしており、操作員は像の移動と像質から経験と勘で多大な時間をかけて調整するという問題がある。
【0009】
本発明はこのような課題に鑑みてなされたものであって、通常の操作員が収差補正器を意識せずに収差補正器のアライメントができるアライメント自動補正方法及び装置を提供することを目的としている。
【課題を解決するための手段】
【0010】
(1)請求項1記載の発明は、試料表面像から荷電粒子ビーム形状を抽出する工程と、抽出された荷電粒子ビームの形状の位置から装置の軸ずれ量を算出する工程と、算出された軸ずれ量に応じて収差補正器又は対物レンズに対してフィードバックを自動でかける工程とを有することを特徴とする。
【0011】
(2)請求項2記載の発明は、試料表面像から荷電粒子ビーム形状を抽出する抽出手段と、抽出された荷電粒子ビームの形状の位置から装置の軸ずれ量を算出する算出手段と、算出された軸ずれ量に応じて収差補正器又は対物レンズに対してフィードバックを自動でかけるフィードバック手段とを有して構成される。
【0012】
(3)請求項3記載の発明は、使用する試料表面像は、2枚、3枚、又は5枚の何れかの枚数であることを特徴とする。
【0013】
(4)請求項4記載の発明は、前記2枚の試料表面像は、収差補正器のレンズ強度を所定量だけシフトした像と、現在値での像であることを特徴とする。
【0014】
(5)請求項5記載の発明は、前記3枚の試料表面像は、収差補正器のレンズ強度をX方向に所定量だけシフトした像と、Y方向に所定量だけシフトした像と、現在値での像であることを特徴とする。
【0015】
(6)請求項6記載の発明は、前記5枚の試料表面像は、収差補正器のレンズ強度をX方向に正負の所定量だけシフトした像2枚と、Y方向に正負の所定量だけシフトした像2枚と、現在値での像であることを特徴とする。
【0016】
(7)請求項7記載の発明は、前記収差補正器は、4段の多極子からなることを特徴とする。
【0017】
(8)請求項8記載の発明は、前記収差補正器を構成する4段の多極子は少なくとも4極子以上であることを特徴とする。
【0018】
(9)請求項9記載の発明は、前記シフトするレンズ強度は、収差補正器を構成する4段の多極子のうち、第1段の2極子、又は第2段の2極子、又は第3段の2極子、又は第4段の2極子、又は第1段の4極子、又は第2段の4極子、又は第3段の4極子、又は第4段の4極子、又は第1段の6極子、又は第2段の6極子、又は第3段の6極子、又は第4段の6極子、又は第1段の8極子、又は第2段の8極子、又は第3段の8極子、又は第4段の8極子、又は対物レンズに応じたものであることを特徴とする。
【0019】
(10)請求項10記載の発明は、レンズ強度をシフトするのと同期して試料表面像を取得することを特徴とする。
【0020】
(11)請求項11記載の発明は、1つ又は2つの荷電粒子ビーム形状を抽出し、前記装置の軸ずれ量を、前記抽出された1つ又は2つの荷電粒子ビーム形状の重心の位置と原点との差にある定数を乗じた値としたことを特徴とする。
【0021】
(12)請求項12記載の発明は、1つ又は2つの荷電粒子ビーム形状を抽出し、前記
装置の軸ずれ量を、前記抽出された1つ又は2つの荷電粒子ビーム形状の中心の位置と原点との差にある定数を乗じた値としたことを特徴とする。
【0022】
(13)請求項13記載の発明は、得られた軸ずれ量にある定数を乗じた値に応じて収差補正器に対してフィードバックをかけるようにしたことを特徴とする。
【0023】
(14)請求項14記載の発明は、フィードバックする収差補正器のレンズ強度は、収差補正器を構成する4段の多極子のうち、第1段の2極子、又は第2段の2極子、又は第3段の2極子、又は第4段の2極子、又は第1段の4極子、又は第2段の4極子、又は第3段の4極子、又は第4段の4極子、又は対物レンズに応じたものであることを特徴とする。
【0024】
(15)請求項15記載の発明は、定量化された軸ずれ量をある閾値と比較することで、装置の軸ずれが補正されたか否かを自動判定することを特徴とする。
【0025】
(16)請求項16記載の発明は、定量化された軸ずれ量がある閾値以内に入るまで自動アライメント処理を繰り返すことを特徴とする。
【0026】
(17)請求項17記載の発明は、前記試料は円状の粒子であることを特徴とする。
【0027】
(18)請求項18記載の発明は、前記試料は金粒子であることを特徴とする。
【0028】
(19)請求項19記載の発明は、前記試料はラテックスであることを特徴とする。
【0029】
(20)請求項20記載の発明は、前記2つの荷電粒子ビーム形状のうち、1つの荷電粒子ビーム形状のX方向の位置と原点との差をX方向ずれ量、もう1つの荷電粒子ビーム形状のY方向の位置と原点との差をY方向ずれ量とすることを特徴とする。
【0030】
(21)請求項21記載の発明、前記荷電粒子ビーム形状の位置は、重心又は中心であることを特徴とする。
【0031】
(22)請求項22記載の発明は、X方向、Y方向に独立に軸ずれ補正することを特徴とする。
【0032】
(23)請求項23記載の発明は、抽出された荷電粒子ビーム形状と算出された軸ずれ量とを表示することを特徴とする。
【0033】
(24)請求項24記載の発明は、系全体の収差を補正する収差補正器と、該収差補正器のレンズ強度を制御する収差補正制御器と、対物レンズと、該収差補正制御器又は対物レンズにレンズ強度を指示するアライメント制御装置と、該アライメント制御装置と同期してSEM像を取得し荷電粒子ビーム形状を抽出するビーム形状抽出装置と、得られた前記ビーム形状から軸ずれの大きさを定量化する軸ずれ定量化装置と、該定量化された軸ずれ量から前記収差補正制御器にフィードバック量を指示するフィードバック装置と、前記軸ずれ量から自動補正するか否かを判断する判断装置とを具備することを特徴とする。
【0034】
(25)請求項25記載の発明は、複数段の多極子で構成される収差補正器の制御方法において、制御器により、各段の多極子レンズ強度比を固定して、一つのレンズとして同時に制御することを特徴とする。
【0035】
(26)請求項26記載の発明は、複数段の多極子で構成される収差補正器の制御方法において、制御器により、各段の多極子と対物レンズのレンズ強度比を固定して、一つのレンズとして同時に制御することを特徴とする。
【0036】
(27)請求項27記載の発明は、前記制御器により、各段の多極子レンズ強度比を固定して組み合わされたレンズ又は各段の多極子と対物レンズのレンズ強度比を固定して組み合わせたレンズに対してフィードバックをかけることを特徴とする。
【発明の効果】
【0037】
(1)請求項1記載の発明によれば、通常の操作員が収差補正器を意識せずに収差補正器のアライメントの自動補正を行なうことができる。
【0038】
(2)請求項2記載の発明によれば、通常の操作員が収差補正器を意識せずに収差補正器のアライメントの自動補正を行なうことができる。
【0039】
(3)請求項3記載の発明によれば、使用する試料表面像として、2枚、3枚、又は5枚の内の何れかの枚数を用いることで、収差補正器による自動アライメントを行なうことができる。
【0040】
(4)請求項4記載の発明によれば、収差補正器のレンズ強度を所定量だけシフトした像と現在値での像を用いて収差補正器による自動アライメントを行なうことができる。
【0041】
(5)請求項5記載の発明によれば、収差補正器のレンズ強度をX方向及びY方向に所
定量だけシフトした像と現在値での像を用いて収差補正器又は対物レンズによる自動アライメントを行なうことができる。
【0042】
(6)請求項6記載の発明によれば、収差補正器のレンズ強度をX方向及びY方向に正負の所定量だけシフトした像と現在値での像を用いて収差補正器又は対物レンズによる自動アライメントを行うことができる。
【0043】
(7)請求項7記載の発明によれば、4段の多極子よりなる収差補正器又は対物レンズを用いて自動アライメントを行なうことができる。
【0044】
(8)請求項8記載の発明によれば、4段の多極子の各段の多極子として少なくとも4極子以上のものを用いて収差補正器又は対物レンズによる自動アライメントを行なうことができる。
【0045】
(9)請求項9記載の発明によれば、4段の多極子の内の各段の多極子数として、2極子、4極子、6極子、8極子のものを用いて収差補正器又は対物レンズによる自動アライメントを行なうことができる。
【0046】
(10)請求項10記載の発明によれば、レンズ強度をシフトした時の試料表面像を得ることができる。
【0047】
(11)請求項11記載の発明によれば、装置の軸ずれ量として、抽出された1つ又は2つの荷電粒子ビーム形状を用いて、重心の位置と原点との差にある定数を乗じて装置の軸ずれ量を求めることができる。
【0048】
(12)請求項12記載の発明によれば、装置の軸ずれ量として、抽出された1つ又は2つの荷電粒子ビーム形状を用いて、中心の位置と原点との差にある定数を乗じて装置の軸ずれ量を求めることができる。
【0049】
(13)請求項13記載の発明によれば、得られた軸ずれ量にある定数をかけた値に応じて収差補正器又は対物レンズにフィードバックをかけることにより、収差補正器による自動アライメントを行なうことができる。
【0050】
(14)請求項14記載の発明によれば、フィードバックする収差補正器又は対物レンズのレンズ強度として、4段の多極子の各段の多極子として2極子又は4極子のものを用いた収差補正器又は対物レンズによる自動アライメントを行なうことができる。
【0051】
(15)請求項15記載の発明によれば、定量化された軸ずれ量をある閾値と比較するようにして、装置の軸ずれ(アライメント)が補正されたかどうかを自動判定することができる。
【0052】
(16)請求項16記載の発明によれば、定量化された軸ずれ量がある閾値以内に入るまで自動アライメント処理を繰り返すことで、軸ずれ量を十分に小さくすることができる。
【0053】
(17)請求項17記載の発明によれば、試料として円状の粒子を用いることにより、好ましい試料表面像を得ることができる。
【0054】
(18)請求項18記載の発明によれば、試料として金粒子を用いることにより、好ましい試料表面像を得ることができる。
【0055】
(19)請求項19記載の発明によれば、試料としてラテックスを用いることにより、好ましい試料表面像を得ることができる。
【0056】
(20)請求項20記載の発明によれば、1つの荷電粒子ビーム形状のX方向の位置と原点との差をX方向ずれ量、もう1つの荷電粒子ビーム形状のY方向の位置と原点との差をY方向ずれ量としてこれら2つのずれ量を用いて軸ずれ補正(アライメント調整)を行なうことができる。
【0057】
(21)請求項21記載の発明によれば、前記荷電粒子ビーム形状の位置として重心又は中心を用いることで、収差補正器又は対物レンズによる自動アライメントを行なうことができる。
【0058】
(22)請求項22記載の発明によれば、X方向及びY方向に独立に軸ずれ補正を行なうことにより、軸ずれ補正を良好に行なうことができる。
【0059】
(23)請求項23記載の発明によれば、抽出された荷電粒子ビーム形状と算出された軸ずれ量とを表示することにより、操作員の処理を支援することができる。
【0060】
(24)請求項24記載の発明によれば、通常の操作員が収差補正器を意識せずに収差補正器のアライメントの自動補正を行なうことができる。
【0061】
(25)請求項25記載の発明によれば、各段の多極子レンズ強度比を固定することで、一つの制御信号であたかも一つのレンズを制御することができ、制御系を簡素化することで、軸ずれ補正を良好に行うことができる。
【0062】
(26)請求項26記載の発明によれば、各段の多極子レンズと対物レンズのレンズ強度比を固定することで、一つの制御信号であたかも一つのレンズを制御することができ、制御系を簡素化することで、軸ずれ補正を良好に行うことができる。
【0063】
(27)請求項27記載の発明によれば、一つの軸ずれ量に対して一つのフィードバック量で制御することができ、軸ずれ補正を良好に行うことができる。
【発明を実施するための最良の形態】
【0064】
以下、図面を参照して本発明の実施の形態例を詳細に説明する。
【0065】
図1は本発明の一実施の形態例を示す構成図である。図7と同一のものは、同一の符号を付して示す。図において、1は荷電粒子ビームを放出するエミッタ、2は該エミッタ1から放出される電子ビーム、3は該電子ビーム2に作用するレンズ、6はレンズ作用を受けた電子ビーム2の各種補正を行なう収差補正器、4は電子ビーム2を試料5上に集束させる対物レンズ、5は試料、7は該試料5から放出される二次電子、8は該二次電子7を検出する二次電子検出器である。
【0066】
9は二次電子像をノイズに強くするために画像を積算する画像積算器、10は収差補正器6に収差補正のための制御信号を与える収差補正制御器、11は収差補正制御器10又は対物レンズ4に自動アライメント制御信号を与える自動アライメント装置である。該自動アライメント装置11としては、例えばコンピュータが用いられる。12は画像積算器9と接続され、各種情報を表示するCRTである。
【0067】
なお、本発明において、試料5として円状の粒子や、金粒子や、ラテックスを用いると良好な試料表面像を得ることができる。このように構成された装置の動作を説明すれば、以下の通りである。
【0068】
エミッタ1より電子ビーム2が放出され、該電子ビーム2に作用するレンズ3によって収差補正器6に入射する電子ビーム2を制御し、前記収差補正器6から出た電子ビーム2を対物レンズ4によって試料5の表面に集束させる。試料表面で電子ビーム2を走査し、走査と同期して試料5の表面から放出される二次電子7を二次電子検出器8で検出することにより、走査信号に同期してCRT12上に画像として表示させる。前記二次電子検出器8の検出効率は通常低いため、画像積算器9によってノイズが除去される。
【0069】
収差補正制御器10は、収差補正器6のレンズ強度を制御している。自動アライメント装置11は前記画像積算器9からSEM像を取得し、前記収差補正器6の機械的軸ずれを補正するレンズ強度と前記収差補正器6で内部での電子ビーム2の軌道を所定の軌道に制御するレンズ強度とを算出して前記収差補正制御器10に指示する。収差補正器6の構成及び動作に関しては、前記非特許文献1に詳述されている。以下、本発明による前記自動アライメント装置11の構成及び動作を図2を基に詳述する。
【0070】
図2は自動アライメント装置の構成例を示す図である。図において、11aはアライメント制御装置であり、アライメント制御のための制御信号ΔVnを出力する。11bはアライメント制御装置の出力を受けると共に、SEM像20を受けてビーム形状を抽出するビーム形状抽出装置、13は該ビーム形状抽出装置11bから出力されるビーム形状である。11cはビーム形状13を受けて軸ずれを定量化する軸ずれ定量化装置、11eは該軸ずれ定量化装置で定量化された値を受けてフィードバック制御を行なうかどうかの判断を行なう判断装置、11dは該判断装置11eの出力を受けてフィードバック制御信号Vnを出力するフィードバック装置である。このように構成された装置を用いて、本発明の動作を説明する。
【0071】
前記自動アライメント装置11は、収差補正器6の軸ずれ量を確認するために、収差補正制御器10に対して収差補正器6を構成する複数の2極子の強度を変えるように指示し、また、前記収差補正器6の内部を前記電子ビーム2が所定の軌道を通っているかを確認するために、収差補正制御器10に対して、収差補正器6を構成する複数の多極子の強度を変えるよう指示する。ビーム形状抽出装置11bでは、アライメント制御装置11aからのレンズ強度変化指示ΔVnと同期して、その際のレンズ強度変化なしのSEM像とレンズ強度変化時のSEM像とを取得して、ビーム形状を算出する。これら2枚のSEM像からビーム形状を抽出する方法は、特許(WO 01/56057 AL)に詳述されている。ここではその概略を示す。
【0072】
レンズ強度を変化させた時のSEM像をg1とし、レンズ強度を変化させない時のSEM像をg0とする。また、試料表面形状をs、レンズ強度変化時のビーム形状をp1、レンズ強度を変化させない時のビーム形状をp0とする。この時、前記SEM像g1とg0は次式のように表わされる。
【0073】
g1=s*p1 (1)
g0=s*p0 (2)
ここで、「*」はコンボリーションを表わしている。(1),(2)式をそれぞれフーリエ変換すると、次式のようになる。大文字はフーリエ変換されたものを示している。
【0074】
G1=S・P1 (3)
G0=S・P0 (4)
ここで、「・」はフーリエ空間上での積を示す。(3)式,(4)式でSを消去すると次式が得られる。
【0075】
G1=(P1・G0/P0)=P10・G0 (5)
ここで、P1/P0=P10とした。次に(5)式を実空間に逆フーリエ変換すると次式が得られる。
【0076】
g1=F-1[P10・G0] (6)
ここで、F-1[]は逆フーリエ変換を示す。P10は既知の関数であるから、G0が分かれば、(6)式によってビーム形状g1を計算することができる。
【0077】
例えば、レンズ強度変化なしの時のビーム形状g0をガウス分布関数と仮定すれば、G0もガウス分布関数なので、ビーム形状13(g1)を計算することができる。図2に示すように、前記軸ずれ定量化装置11cでは、得られた前記ビーム形状13(g1)から現在の軸ずれの大きさを定量化する。定量化の方法としては、例えば図3に示すように、ビーム形状のFOV(Field Of View)の中心をOとし、ビーム形状13の重心をGとして、ベクトルOGのX軸及びY軸への射影を、X方向ずれをGx[mode]、Y方向ずれをGy[mode]とする。なお、重心の代わりに中心を用いることができる。
【0078】
ここで、Gx[mode],Gy[mode]はmodeの関数とし、modeとは前記アライメント制御装置11aが指示したレンズ強度変化の識別を意味するものである。例えば、mode=1は前記収差補正器6の第1極子の4極子を変化させたことを意味する。フィードバック装置11dは、定量化された軸ずれ量Gx[mode],Gy[mode]から次式によって前記収差補正制御器10又は対物レンズ4に指示するフィードバック量Vn[mode]を算出する。同様に、フィードバック量Vnはmodeの関数であることを示している。通常、フィードバック量Vnには方向性があり、X方向のフィードバック量をVnx、Y方向のフィードバック量をVnyとする。
【0079】
Vnx[mode]=α[mode]×Gx[mode] (7−1)
Vny[mode]=β[mode]×Gy[mode] (7−2)
ここで、α[mode],β[mode]は同様にmodeの関数である。
【0080】
このように、本発明によれば、荷電粒子ビーム形状の位置として重心又は中心を用いることで、収差補正器による自動アライメントを行なうことができる。
【0081】
判断装置11eは、modeによって識別された軸ずれ量Gx[mode],Gy[mode]から、それぞれ所定の閾値と比較してGxとGyとが閾値よりも小さくなった場合、即ち軸ずれが補正されたと判断された場合は補正を終了し、軸ずれ補正が不十分と判断された場合は、前記アライメント制御装置11aに指示して繰り返し制御する。制御の方法は、例えばmode毎に設定された閾値γ[mode]によって次式を満たす場合は終了と判断する。
|Gx[mode]|<γ[mode]かつ|Gy[mode]|<γ[mode] (8)
本発明によれば、前記GxとGyとをそれぞれ独立に軸ずれ補正を行なうことにより、軸ずれ補正を良好に行なうことができる。また、本発明によれば、定量化された軸ずれ量がある閾値以内に入るまで自動アライメント処理を繰り返すことで、軸ずれ量を十分に小さくすることができる。この場合において、定量化された軸ずれ量をある閾値と比較するようにして、装置の軸ずれ(アライメント)が補正されたかどうかを自動判定することができる。
【0082】
図8に多極子による収差補正器6の構成と収差補正器6の内部を通る電子ビーム2の軌道を示す。多極子は4段の多極子からなり、それぞれ第1多極子6a、第2多極子6b、第3多極子6c、第4多極子6dとして示してある。通常、各段の多極子は8極子以上の多極子である。前記非特許文献1によれば、電子ビーム2は前記第1多極子により集束・発散作用を同時に受ける。
【0083】
今、図8に示すように発散作用を受けた電子ビーム2をX軌道6e、集束作用を受けた電子ビームをY軌道6fとする。Y軌道6fは第2多極子6bの中心を通りかつ集束するように第1多極子6aの強度が調整されている。また、X軌道6eは第3多極子6cの中心を通りかつ集束するように多極子6bの強度が調整されている。この際、第2多極子においては、Y軌道6fは第2多極子6bの中心を通過しているため影響を受けず、X軌道6eのみレンズ作用を受ける。
【0084】
同様にして、第3多極子においては、X軌道6eは、多極子6cの中心を通過しているため影響を受けず、Y軌道6fのみレンズ作用を受ける。このように、電子ビーム2のY軌道6fは多極子6bの中心を通りかつ集束し、X軌道6eは多極子6cの中心を通りかつ集束しなければならない。図4は多極子の第1段目のレンズ強度を変化させた場合の電子ビームが軌道をずれた場合の説明図である。電子ビーム2は第2多極子6b、第3多極子6cの中心を通っているが、X軌道6eが第3多極子の中心に集束せず、Y軌道6fが第2の多極子の中心に集束していない場合を示す。
【0085】
この場合、収差補正器6から出る電子ビーム2の傾きと位置が変化し、像としてぼける。さらに、電子ビーム2が各段の多極子の中心を通っていなければ、各段の多極子のレンズ強度を変化させた場合、像が移動する。電子ビーム2は、各段の多極子のうち、前記非特許文献1では4極子で制御されている。電子ビームが多極子の中心を通っていない場合、第1段の4極子の中心は、第1段の4極子場をウォブルし、図示しない収差補正器6の電子光源側の偏向器で電子ビーム2を制御して像が動かない点を探すことで見つけられる。
【0086】
第2段の4極子中心は、第2段の4極子場をウォブルし、第1段の2極子(偏向器と同等)で電子ビーム2を制御して像が動かない点を探すことで見つけられる。同様にして第3段の4極子中心、第4段の4極子中心も探すことができる。また、収差補正器6から出た電子ビーム2を対物レンズ4の中心を通らせるために、対物レンズ強度をウォブルし、第4段の2極子で対物レンズ中心を探すことができる。本発明では、この動作を自動アライメント装置11で行なう。例えば、第2段の4極子中心を通す場合は、図2に示す自動アライメント装置11において、アライメント制御装置11aが第2段の4極子場強度をΔVnだけ変化させるように、収差補正制御器10に指示する。
【0087】
前記収差補正制御器10は、指示された通りになるように収差補正器6を制御する。該収差補正器6が第2段の多極子場をΔVnだけ変化させた結果、SEM像が移動し、そのSEM像とレンズ強度変化なしの時のSEMとを前記ビーム形状抽出装置11bが入力し、ビーム形状13を算出し、軸ずれ定量化装置11cが軸ずれ量を定量化し、前記フィードバック装置11dが第1段の2極子に対するフィードバック量を計算して収差補正器6又は対物レンズ4に指示する。判断装置11eは、前記定量化された軸ずれ量から(8)式を満たすまで補正を繰り返すようにアライメント制御装置11aに指示する。
【0088】
また、X軌道は前記第3多極子の中心に集束していなければならず、また、Y軌道は前記第2多極子の中心に集束していなければならない。図9に電子ビーム軌道をX−Z面及びY−Z面で示す。図9(a)に示すものがX軌道となり、図9(b)に示すものがY軌道となる。前記Y軌道6fが前記第2多極子(この場合は4極子)の中心に集束するためには、多極子のY方向の2極子中心に電子ビーム2が集束しているか否かで判断する。即ち、第2段のY方向の2極子場の強度をΔVnだけ変化させた時、図5に示すように、Y軌道6fが前記第2多極子(この場合は2極子)の中心に集束していれば、2極子場の大きさが変化しても1点から出た電子ビーム2は対物レンズ4によって試料5の表面の1点に集束するため、SEM像は動かない。
【0089】
しかしながら、前記Y軌道6fが前記第2多極子(この場合は2極子)の中心に集束していなければ図5に示す物点18が前記第2段の極子場の強度をΔVnだけ変化させた時に動いてしまい、結果としてSEM像が動く。つまり、前記第2段の2極子場の強度をΔVnだけ変化させてもSEM像が動かないように各段の4極子場強度又は対物レンズを調整すれば、前記Y軌道6fが第2多極子(この場合は4極子)の中心に集束していることになる。
【0090】
例えば、第1段の4極子場を調整することで、SEM像を動かないようにすることができる。但し、他の4極子を使用しても同様にできる。しかし、図4に示すように、多極子は電子ビーム2に対して集束作用と発散作用とを同時にかけるため、他方の軸に影響を与えるため、最終的には全段の多極子又は対物レンズを調整しなければならない。前記X軌道6eを第3多極子(この場合は4極子)の中心に集束させるのも同様である。つまり、第3段の2極子場を変化させてSEM像が動かないように各段の4極子場強度又は対物レンズを調整する。
【0091】
本発明では、この動作を前記自動アライメント装置11で行なう。つまり、例えば前記Y軌道6fを前記第2多極子(この場合は4極子)の中心に集束させる場合は、図2に示す自動アライメント装置11において、アライメント制御装置11aが前記第2段のY方向の2極子場強度をΔVnだけ変化させるように、収差補正制御器10に指示する。該収差補正制御器10は、指示された通りになるように収差補正器6を制御する。該収差補正器6が前記第2段のY方向の2極子場強度をΔnだけ変化させた結果、SEM像が移動し、そのSEM像とレンズ強度変化なしの時のSEM像とをビーム形状抽出装置11bが入力し、ビーム形状13を抽出し、軸ずれ定量化装置11cが軸ずれ量を定量化し、フィードバック装置11dが各段の4極子又は対物レンズに対するフィードバック量を計算して、収差補正制御器11又は対物レンズに指示する。前記判断装置11eは、前記定量化された軸ずれ量から(8)式を満たすまで補正動作を繰り返すように、アライメント制御装置11aに指示する。
【0092】
本発明によれば、レンズ強度をシフトした時の試料表面像を得ることができる。また、装置の軸ずれ量として、抽出された1つ又は2つの荷電粒子ビーム形状を用いて、重心の位置と原点との差にある定数を乗じて装置の軸ずれ量を求めることができる。また、装置の軸ずれ量として、抽出された1つ又は2つの荷電粒子ビーム形状を用いて、中心の位置と原点との差にある定数を乗じて装置の軸ずれ量を求めることができる。また、本発明によれば、得られた軸ずれ量にある定数をかけた値に応じて収差補正器又は対物レンズにフィードバックをかけることにより、収差補正器による自動アライメントを行なうことができる。また、フィードバックする収差補正器のレンズ強度として、4段の多極子の各段の多極子として2極子又は4極子のものを用いて収差補正器による自動アライメントを行なうことができる。
【0093】
このように、本発明による自動アライメント装置11は、複数のアライメントを行なうが、それをmodeという識別数で区別すると例えば次のようになる。
【0094】
mode=1 電子ビームを第1段多極子中心に通す
mode=2 電子ビームを第2段多極子中心に通す
mode=3 電子ビームを第3段多極子中心に通す
mode=4 電子ビームを第4段多極子中心に通す
mode=5 電子ビームを対物レンズ中心に通す
mode=6 Y軌道を第2段多極子中心に集束させる
mode=7 X軌道を第3段多極子中心に集束させる
mode=1〜7のアライメントを前記アライメント制御装置11aは監視しており、全ての条件が満たされるまで補正が繰り返される。また、アライメントの順序は、modeの数字順からしてもよいが、とくにこだわる必要はない。
【0095】
電子ビームを各極子の中心を通す、mode=1〜4の場合、例えばmode=1では、式(7−1),(7−2)で算出されるフィードバック量Vnx[mode=1],Vny[mode1]が収差補正器のエミッタ側に配置されてあるX,Y偏向器にそれぞれ印加される。
【0096】
mode=2では、式(7−1),(7−2)で算出されるフィードバック量Vnx[mode=2],Vny[mode=2]が収差補正器の第1段のX,Y方向2極子にそれぞれ印加される。
【0097】
mode=3では、式(7−1),(7−2)で算出されるフィードバック量Vnx[mode=3],Vny[mode=3]が収差補正器の第2段のX,Y方向2極子にそれぞれ印加される。
【0098】
mode=4では、式(7−1),(7−2)で算出されるフィードバック量Vnx[mode=4],Vny[mode=4]が収差補正器の第3段のX,Y方向2極子にそれぞれ印加される。
【0099】
mode=5では、式(7−1),(7−2)で算出されるフィードバック量Vnx[mode=5],Vny[mode=5]が収差補正器の第4段のX,Y方向2極子にそれぞれ印加される。
【0100】
Y軌道を第2段多極子中心に集束させる場合には、第1段、第2段、第3段の4子のレンズ強度比をAy:By:Cyに固定することで、X軌道が第3段多極子中心に集束したまま、Y軌道の集束点を第2段多極子中心近傍で移動させることができ、式(7−2)で算出されるフィードバック量Vny[mode=6]をレンズ強度比Ay:By:Cyに応じて第1段、第2段、第3段の4極子に印加する。
【0101】
すなわち、第1段4極子にAy・Vny、第2段4極子にBy・Vny、第3段4極子にCy・Vnyをそれぞれ印加する。
【0102】
前記レンズ強度比は例えば、4:−1:−1となるが、限定されるものではなく、実験的に第1段4極子場強度をAyだけずらした時、像が再度集束するように、第2段4極子場強度をBy、第3段4極子場強度をCyに設定すればよい。
【0103】
同様にして、X軌道を第3段多極子中心に集束させる場合には、第2段、第3段、第4段の4極子のレンズ強度比をBx:Cx:Dxに固定することで、Y軌道が第2段多極子中心に集束したまま、X軌道の集束点を第3段多極子中心近傍で移動させることができ、式(7−1)で算出されるフィードバック量Vnx[mode=7]をレンズ強度比Bx:Cx:Dxに応じて第2段、第3段、第4段の4極子に印加する。
【0104】
すなわち、第2段4極子にBx・Vnx、第3段4極子にCx・Vnx、第4段4極子にDx・Vnxをそれぞれ印加する。
【0105】
前記レンズ強度比は、例えば−1:−1:4となるが、限定されるものではなく、実験的に第4段4極子場強度をDxだけずらした時、像が再度集束するように、第2段4極子場強度をBx、第3段4極子場強度をCxに設定すればよい。
【0106】
また、X軌道を第3段多極子中心に集束させる別の方法として、第2段、第3段の4極子のレンズ強度比をBx:Cxに固定することで、Y軌道が第2段多極子中心に集束したまま、X軌道の集束点を第3段多極子中心近傍で移動させることができ、式(7−1)で算出されるフィードバック量Vnx[mode=7]をレンズ強度比Bx:Cxに応じて第2段、第3段の4極子に印加する。この際、試料位置でのフォーカスがずれるが対物レンズ強度を合わせることで補正できる。従って、全体として、第2段4極子、第3段4極子、対物レンズ強度をBx:Cx:Oxに固定してそれぞれフィードバックをかければよい。
【0107】
すなわち、第2段4極子にBx・Vnx、第3段4極子にCx・Vnx、対物レンズにOx・Vnxをそれぞれ印加する。
【0108】
前記レンズ強度比は例えば、−1:1:Oxとなるが、限定されるものではなく、実験的に対物レンズ強度をOxだけずらした時、像が再度集束するように、第2段4極子場強度をBx、第3段4極子場強度をCxに設定すればよい。
【0109】
本発明によれば、使用する試料表面像として2枚、3枚、又は5枚の内の何れかの枚数を用いることで、収差補正器による自動アライメントを行なうことができる。また、収差補正器のレンズ強度を所定量だけシフトした像と現在値での像を用いて収差補正器による自動アライメントを行なうことができる。また、収差補正器のレンズ強度をX方向及びY方向に所定量だけシフトした像と現在値での像を用いて収差補正器による自動アライメントを行なうことができる。また、4段の多極子よりなる収差補正器を用いて自動アライメントを行なうことができる。また、4段の多極子の各段の多極子として少なくとも4極子以上のものを用いて収差補正器による自動アライメントを行なうことができる。更に、4段の多極子の内の各段の多極子数として、2極子、4極子、6極子、8極子のものを用いて収差補正器による自動アライメントを行なうことができる。
【0110】
以上、説明したように、本発明によれば、通常の操作員が収差補正器を意識せずに収差補正器のアライメントの自動補正を行なうことができる。
【0111】
また、本発明によれば、現在の軸ずれの大きさを定量化してあるので、前記自動アライメント装置11の動作状態、例えば図6に示すように、CRT12上のGUI(Graphical User Interface)15にビーム形状13と装置の軸ずれ量の履歴を表示することで操作員を支援することができる。14はビーム形状FOVである。この図より、Gxは試行回数の増加と共に軸ずれ量が漸減しているが、Gyは途中で軸ずれ量が増加し、その後減少する特性を示していることが分かる。
【図面の簡単な説明】
【0112】
【図1】本発明の一実施の形態例を示す構成図である。
【図2】自動アライメント装置の構成例を示す図である。
【図3】定量化の方法の説明図である。
【図4】電子ビームが軌道をずれた場合の説明図である。
【図5】電子ビームの軌道を示す図である。
【図6】本発明による表示の様子を示す図である。
【図7】従来装置の構成例を示す図である。
【図8】収差補正器の構成とその内部を通る電子ビームの軌道を示す図である。
【図9】電子ビーム軌道をX−Z面及びY−Z面で示す図である。
【符号の説明】
【0113】
1 エミッタ
2 電子ビーム
3 レンズ
4 対物レンズ
5 試料
6 収差補正器
7 二次電子
8 二次電子検出器
9 画像積算器
10 収差補正制御器
11 自動アライメント装置
12 CRT
【特許請求の範囲】
【請求項1】
試料表面像から荷電粒子ビーム形状を抽出する工程と、
抽出された荷電粒子ビームの形状の位置から装置の軸ずれ量を算出する工程と、
算出された軸ずれ量に応じて収差補正器又は対物レンズに対してフィードバックを自動でかける工程と、
を有することを特徴とするアライメント自動補正方法。
【請求項2】
試料表面像から荷電粒子ビーム形状を抽出する抽出手段と、
抽出された荷電粒子ビームの形状の位置から装置の軸ずれ量を算出する算出手段と、
算出された軸ずれ量に応じて収差補正器又は対物レンズに対してフィードバックを自動でかけるフィードバック手段と、
を有して構成されるアライメント自動補正装置。
【請求項3】
使用する試料表面像は、2枚、3枚、又は5枚の内の何れかの枚数であることを特徴とする請求項2記載のアライメント自動補正装置。
【請求項4】
前記2枚の試料表面像は、収差補正器のレンズ強度を所定量だけシフトした像と、現在値での像であることを特徴とする請求項3記載のアライメント自動補正装置。
【請求項5】
前記3枚の試料表面像は、収差補正器のレンズ強度をX方向に所定量だけシフトした像と、Y方向に所定量だけシフトした像と、現在値での像であることを特徴とする請求項3記載のアライメント自動補正装置。
【請求項6】
前記5枚の試料表面像は、収差補正器のレンズ強度をX方向に正負の所定量だけシフトした像2枚と、Y方向に正負の所定量だけシフトした像2枚と、現在値での像であることを特徴とする請求項3記載のアライメント自動補正装置。
【請求項7】
前記収差補正器は、4段の多極子からなることを特徴とする請求項2記載のアライメント自動補正装置。
【請求項8】
前記収差補正器を構成する4段の多極子は少なくとも4極子以上であることを特徴とする請求項7記載のアライメント自動補正装置。
【請求項9】
前記シフトするレンズ強度は、収差補正器を構成する4段の多極子のうち、第1段の2極子、又は第2段の2極子、又は第3段の2極子、又は第4段の2極子、又は第1段の4極子、又は第2段の4極子、又は第3段の4極子、又は第4段の4極子、又は第1段の6極子、又は第2段の6極子、又は第3段の6極子、又は第4段の6極子、又は第1段の8極子、又は第2段の8極子、又は第3段の8極子、又は第4段の8極子、又は対物レンズに応じたものであることを特徴とする請求項2又は3又は4又は7記載のアライメント自動補正装置。
【請求項10】
前記レンズ強度をシフトするのと同期して試料表面像を取得することを特徴とする請求項9記載のアライメント自動補正装置。
【請求項11】
1つ又は2つの荷電粒子ビーム形状を抽出し、前記装置の軸ずれ量を、前記抽出された1つ又は2つの荷電粒子ビーム形状の重心の位置と原点との差にある定数を乗じた値としたことを特徴とする請求項2記載のアライメント自動補正装置。
【請求項12】
1つ又は2つの荷電粒子ビーム形状を抽出し、前記装置の軸ずれ量を、前記抽出された1つ又は2つの荷電粒子ビーム形状の中心の位置と原点との差にある定数を乗じた値としたことを特徴とする請求項2記載のアライメント自動補正装置。
【請求項13】
得られた軸ずれ量にある定数を乗じた値に応じて収差補正器又は対物レンズに対してフィードバックをかけるようにしたことを特徴とする請求項2又は11又は12に記載のアライメント自動補正装置。
【請求項14】
フィードバックする収差補正器又は対物レンズのレンズ強度は、収差補正器を構成する4段の多極子のうち、第1段の2極子、又は第2段の2極子、又は第3段の2極子、又は第4段の2極子、又は第1段の4極子、又は第2段の4極子、又は第3段の4極子、又は第4段の4極子、又は対物レンズに応じたものであることを特徴とする請求項13記載のアライメント自動補正装置。
【請求項15】
定量化された軸ずれ量をある閾値と比較することで、装置の軸ずれが補正されたか否かを自動判定することを特徴とする請求項2記載のアライメント自動補正装置。
【請求項16】
定量化された軸ずれ量がある閾値以内に入るまで自動アライメント処理を繰り返すことを特徴とする請求項15記載のアライメント自動補正装置。
【請求項17】
前記試料は円状の粒子であることを特徴とする請求項2記載のアライメント自動補正装置。
【請求項18】
前記試料は金粒子であることを特徴とする請求項2記載のアライメント自動補正装置。
【請求項19】
前記試料はラテックスであることを特徴とする請求項17記載のアライメント自動補正装置。
【請求項20】
前記2つの荷電粒子ビーム形状のうち、1つの荷電粒子ビーム形状のX方向の位置と原点との差をX方向ずれ量、もう1つの荷電粒子ビーム形状のY方向の位置と原点との差をY方向ずれ量とすることを特徴とする請求項5又は11又は12記載のアライメント自動補正装置。
【請求項21】
前記荷電粒子ビーム形状の位置は、重心又は中心であることを特徴とする請求項20記載のアライメント自動補正装置。
【請求項22】
X方向、Y方向に独立に軸ずれ補正することを特徴とする請求項20記載のアライメント自動補正装置。
【請求項23】
抽出された荷電粒子ビーム形状と算出された軸ずれ量とを表示することを特徴とする請求項2記載のアライメント自動補正装置。
【請求項24】
系全体の収差を補正する収差補正器と、
該収差補正器のレンズ強度を制御する収差補正制御器と、
対物レンズと、
該収差補正制御器又は対物レンズにレンズ強度を指示するアライメント制御装置と、
該アライメント制御装置と同期してSEM像を取得し荷電粒子ビーム形状を抽出するビーム形状抽出装置と、
得られた前記ビーム形状から軸ずれの大きさを定量化する軸ずれ定量化装置と、
該定量化された軸ずれ量から前記収差補正制御器又は対物レンズにフィードバック量を指示するフィードバック装置と、
前記軸ずれ量から自動補正するか否かを判断する判断装置と、
を具備することを特徴とするアライメント自動補正装置。
【請求項25】
複数段の多極子で構成される収差補正器の制御方法において、
制御器により、各段の多極子レンズ強度比を固定して、一つのレンズとして同時に制御することを特徴とする収差補正器の制御方法。
【請求項26】
複数段の多極子で構成される収差補正器の制御方法において、
制御器により、各段の多極子と対物レンズのレンズ強度比を固定して、一つのレンズとして同時に制御することを特徴とする収差補正器の制御方法。
【請求項27】
前記制御器により、各段の多極子レンズ強度比を固定して組み合わされたレンズ又は各段の多極子と対物レンズのレンズ強度比を固定して組み合わせたレンズに対してフィードバックをかけることを特徴とする請求項25若しくは26記載の収差補正器の制御方法。
【請求項1】
試料表面像から荷電粒子ビーム形状を抽出する工程と、
抽出された荷電粒子ビームの形状の位置から装置の軸ずれ量を算出する工程と、
算出された軸ずれ量に応じて収差補正器又は対物レンズに対してフィードバックを自動でかける工程と、
を有することを特徴とするアライメント自動補正方法。
【請求項2】
試料表面像から荷電粒子ビーム形状を抽出する抽出手段と、
抽出された荷電粒子ビームの形状の位置から装置の軸ずれ量を算出する算出手段と、
算出された軸ずれ量に応じて収差補正器又は対物レンズに対してフィードバックを自動でかけるフィードバック手段と、
を有して構成されるアライメント自動補正装置。
【請求項3】
使用する試料表面像は、2枚、3枚、又は5枚の内の何れかの枚数であることを特徴とする請求項2記載のアライメント自動補正装置。
【請求項4】
前記2枚の試料表面像は、収差補正器のレンズ強度を所定量だけシフトした像と、現在値での像であることを特徴とする請求項3記載のアライメント自動補正装置。
【請求項5】
前記3枚の試料表面像は、収差補正器のレンズ強度をX方向に所定量だけシフトした像と、Y方向に所定量だけシフトした像と、現在値での像であることを特徴とする請求項3記載のアライメント自動補正装置。
【請求項6】
前記5枚の試料表面像は、収差補正器のレンズ強度をX方向に正負の所定量だけシフトした像2枚と、Y方向に正負の所定量だけシフトした像2枚と、現在値での像であることを特徴とする請求項3記載のアライメント自動補正装置。
【請求項7】
前記収差補正器は、4段の多極子からなることを特徴とする請求項2記載のアライメント自動補正装置。
【請求項8】
前記収差補正器を構成する4段の多極子は少なくとも4極子以上であることを特徴とする請求項7記載のアライメント自動補正装置。
【請求項9】
前記シフトするレンズ強度は、収差補正器を構成する4段の多極子のうち、第1段の2極子、又は第2段の2極子、又は第3段の2極子、又は第4段の2極子、又は第1段の4極子、又は第2段の4極子、又は第3段の4極子、又は第4段の4極子、又は第1段の6極子、又は第2段の6極子、又は第3段の6極子、又は第4段の6極子、又は第1段の8極子、又は第2段の8極子、又は第3段の8極子、又は第4段の8極子、又は対物レンズに応じたものであることを特徴とする請求項2又は3又は4又は7記載のアライメント自動補正装置。
【請求項10】
前記レンズ強度をシフトするのと同期して試料表面像を取得することを特徴とする請求項9記載のアライメント自動補正装置。
【請求項11】
1つ又は2つの荷電粒子ビーム形状を抽出し、前記装置の軸ずれ量を、前記抽出された1つ又は2つの荷電粒子ビーム形状の重心の位置と原点との差にある定数を乗じた値としたことを特徴とする請求項2記載のアライメント自動補正装置。
【請求項12】
1つ又は2つの荷電粒子ビーム形状を抽出し、前記装置の軸ずれ量を、前記抽出された1つ又は2つの荷電粒子ビーム形状の中心の位置と原点との差にある定数を乗じた値としたことを特徴とする請求項2記載のアライメント自動補正装置。
【請求項13】
得られた軸ずれ量にある定数を乗じた値に応じて収差補正器又は対物レンズに対してフィードバックをかけるようにしたことを特徴とする請求項2又は11又は12に記載のアライメント自動補正装置。
【請求項14】
フィードバックする収差補正器又は対物レンズのレンズ強度は、収差補正器を構成する4段の多極子のうち、第1段の2極子、又は第2段の2極子、又は第3段の2極子、又は第4段の2極子、又は第1段の4極子、又は第2段の4極子、又は第3段の4極子、又は第4段の4極子、又は対物レンズに応じたものであることを特徴とする請求項13記載のアライメント自動補正装置。
【請求項15】
定量化された軸ずれ量をある閾値と比較することで、装置の軸ずれが補正されたか否かを自動判定することを特徴とする請求項2記載のアライメント自動補正装置。
【請求項16】
定量化された軸ずれ量がある閾値以内に入るまで自動アライメント処理を繰り返すことを特徴とする請求項15記載のアライメント自動補正装置。
【請求項17】
前記試料は円状の粒子であることを特徴とする請求項2記載のアライメント自動補正装置。
【請求項18】
前記試料は金粒子であることを特徴とする請求項2記載のアライメント自動補正装置。
【請求項19】
前記試料はラテックスであることを特徴とする請求項17記載のアライメント自動補正装置。
【請求項20】
前記2つの荷電粒子ビーム形状のうち、1つの荷電粒子ビーム形状のX方向の位置と原点との差をX方向ずれ量、もう1つの荷電粒子ビーム形状のY方向の位置と原点との差をY方向ずれ量とすることを特徴とする請求項5又は11又は12記載のアライメント自動補正装置。
【請求項21】
前記荷電粒子ビーム形状の位置は、重心又は中心であることを特徴とする請求項20記載のアライメント自動補正装置。
【請求項22】
X方向、Y方向に独立に軸ずれ補正することを特徴とする請求項20記載のアライメント自動補正装置。
【請求項23】
抽出された荷電粒子ビーム形状と算出された軸ずれ量とを表示することを特徴とする請求項2記載のアライメント自動補正装置。
【請求項24】
系全体の収差を補正する収差補正器と、
該収差補正器のレンズ強度を制御する収差補正制御器と、
対物レンズと、
該収差補正制御器又は対物レンズにレンズ強度を指示するアライメント制御装置と、
該アライメント制御装置と同期してSEM像を取得し荷電粒子ビーム形状を抽出するビーム形状抽出装置と、
得られた前記ビーム形状から軸ずれの大きさを定量化する軸ずれ定量化装置と、
該定量化された軸ずれ量から前記収差補正制御器又は対物レンズにフィードバック量を指示するフィードバック装置と、
前記軸ずれ量から自動補正するか否かを判断する判断装置と、
を具備することを特徴とするアライメント自動補正装置。
【請求項25】
複数段の多極子で構成される収差補正器の制御方法において、
制御器により、各段の多極子レンズ強度比を固定して、一つのレンズとして同時に制御することを特徴とする収差補正器の制御方法。
【請求項26】
複数段の多極子で構成される収差補正器の制御方法において、
制御器により、各段の多極子と対物レンズのレンズ強度比を固定して、一つのレンズとして同時に制御することを特徴とする収差補正器の制御方法。
【請求項27】
前記制御器により、各段の多極子レンズ強度比を固定して組み合わされたレンズ又は各段の多極子と対物レンズのレンズ強度比を固定して組み合わせたレンズに対してフィードバックをかけることを特徴とする請求項25若しくは26記載の収差補正器の制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2006−140119(P2006−140119A)
【公開日】平成18年6月1日(2006.6.1)
【国際特許分類】
【出願番号】特願2004−354143(P2004−354143)
【出願日】平成16年12月7日(2004.12.7)
【出願人】(000004271)日本電子株式会社 (811)
【Fターム(参考)】
【公開日】平成18年6月1日(2006.6.1)
【国際特許分類】
【出願日】平成16年12月7日(2004.12.7)
【出願人】(000004271)日本電子株式会社 (811)
【Fターム(参考)】
[ Back to top ]