
アンチドリフト回転ロールシステム
【課題】シリンダ状のワークピースをワークピース軸線周りに回転する際に、ワークピースの軸方向のドリフトに対抗する。
【解決手段】シリンダ状のワークピースをワークピース軸線周りに回転するための回転ロールシステムは、一対のドライブローラと協働してワークピースを支持する一対のアイドラローラを備える。ワークピースの軸ドリフトに対向するために、各アイドラローラは、それぞれのアイドラ軸体に回転可能に支持され、これによってアイドラローラの回転軸線がアイドラ軸体の旋回軸線に対して傾斜する。アイドラ軸体は、それぞれの旋回軸線周りに旋回して、ワークピースに対するアイドラローラ軸線の方向を調整し、ワークピースに作用する軸方向の力成分を導入して、軸ドリフトに対抗する。アイドラ軸体の旋回を、ワークピースの軸ドリフトを検出するように設けられたドリフトセンサによって発生する信号に基づいて自動的に制御してもよい。
【解決手段】シリンダ状のワークピースをワークピース軸線周りに回転するための回転ロールシステムは、一対のドライブローラと協働してワークピースを支持する一対のアイドラローラを備える。ワークピースの軸ドリフトに対向するために、各アイドラローラは、それぞれのアイドラ軸体に回転可能に支持され、これによってアイドラローラの回転軸線がアイドラ軸体の旋回軸線に対して傾斜する。アイドラ軸体は、それぞれの旋回軸線周りに旋回して、ワークピースに対するアイドラローラ軸線の方向を調整し、ワークピースに作用する軸方向の力成分を導入して、軸ドリフトに対抗する。アイドラ軸体の旋回を、ワークピースの軸ドリフトを検出するように設けられたドリフトセンサによって発生する信号に基づいて自動的に制御してもよい。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一般的には、シリンダ状の容器を支持および回転するための回転ロールシステムに関する。このような回転ロールシステムは、一般に溶接作業中に用いられる。本発明は、より具体的には、支持された容器または他のワークピースが回転しているときの軸方向の運動(軸ドリフト:軸クリープとしても知られている)に対抗するためのアンチドリフト装置および方法に関する。
【背景技術】
【0002】
上述したタイプの回転ロールシステムは、一般的には、互いに横方向に間隔をあけて配置され、第1の軸方向位置でシリンダ状(円筒状)のワークピースの両側に摩擦係合する一対のドライブローラと、互いに横方向に間隔をあけて配置され、ワークピースの回転軸線に沿って第1の軸方向位置から離れた第2の軸方向位置でワークピースの両側で係合する一対のアイドラローラとを備える。ドライブローラは、ドライブローラを回転動作可能なドライブモータに接続され、これによりワークピースをその軸線(以下、では“ワークピース軸線”という)周りに回転させる。アイドラローラは、ドライブローラと協働してワークピースを回転支持するが、アイドラローラはモータ駆動しない。通常は、ドライブローラおよびアイドラローラは、ワークピースと平行な個々の軸線周りに回転する。主にワークピースのシリンダ形状の欠点により、ワークピースのワークピース軸線周りの回転は、溶接線のミスアライメントを生じさせるワークピースの僅かな軸ドリフト(軸方向ドリフト)を伴う。
【0003】
従来のアンチドリフト回転ロールシステムは、アイドラローラをドリフト量に比例して垂直または水平にシフトすることにより、シリンダ状のワークピースまたは容器の軸方向の運動を制御する。この方向はドリフトを制御する点では効果的であるが、ワークピースの著しい垂直または水平の移動をもたらし、溶接工程を干渉する。
【0004】
他のアンチドリフト回転ロールシステムは、ワークピースに対して傾斜してのびる一以上のローラの回転軸線を調整し、該ドリフトを打ち消す軸方向の力成分を生じさせることに基づいている。この種のタイプのアンチドリフト回転システムを以下で要約する。
【0005】
米国特許第2,865,690号公報では、一対のフォロアローラ16は、それぞれがワークピースの周側面周りに嵌められたタイヤ6の各端面に当接するように設けられている。当接フォロアローラ16は、それぞれのレベルアーム15によってワークピースの一方のローラ8を支持するトラニオンブラケット9aに連結している。トラニオンブラケット9aは、一対の平行旋回リンク9bによって、ワークピースの一方で第2のローラ8を支持する反対側のトリニオンブラケット9aに接続され、二つのトリニオンブラケット9aおよび二つのリンク9bが平行四辺形リンケージを形成する。ワークピースが望ましいニュートラル軸方向位置にあるとき、平行四辺形リンケージは長方形状になっており、ローラ8の回転の軸線a‐aはワークピースの回転軸線と平行である。ワークピースの軸ドリフトが生じ、従動ローラ16によって検出されると、レベルアーム15が平行四辺形リンケージに動作を伝えて、ローラ8およびそれらの回転軸線が、ワークピースの回転軸線に対して傾斜角をなす。ねじ効果がワークピースをニュートラル軸方向位置へ戻し、フォロアローラ16およびレベルアーム15の対応動作が平行四辺形リンケージを長方形状態に戻す。
【0006】
英国特許第940,261号公報には、さまざまな実施形態が記載されている。当該公報の図1に示される実施例では、回転ロールシステムの四つのローラ2の一つが垂直軸周りにそのサブフレーム4を旋回することにより回転して、ローラ2の回転軸線をワークピース軸線と平行なニュートラル方向からワークピース軸線と非平行な角度方向に調整し、軸ドリフトを打ち消す。図2および図3に示す他の実施形態でも同様に機能し、補償ローラ6の軸体5が垂直軸線周りに旋回するように取り付けられる。図4および図5は、さらに別の実施形態を示しており、補償ローラ13の軸体12が、ローラ13とワークピースとの接触点における接線面に対して垂直にのびる旋回ピン14によって規定される軸線周りに旋回運動可能に取り付けられる。この実施形態では、ローラ軸線はニュートラル配置でワークピース軸線に平行であり、ローラ軸線は接線面で旋回して、ワークピース軸線と非平行になり、軸ドリフトを打ち消す。図6はさらに別の実施形態を示し、ワークピースの両側の一対のローラ25が、旋回ピン29によって規定される垂直旋回軸線周りに旋回運動可能に取り付けられた共通サブフレーム28に取り付けられる。ローラ25がニュートラル状態のとき、ローラ25の回転軸線がワークピース軸線と平行であり、旋回ピン29周りにサブフレーム28を旋回することで、ローラ25の回転軸線がワークピース軸線と非平行になるように調整される。最後に、図7に示される実施形態では、ワークピースの端面に係合し、リンケージ53に連結した当接ローラ52を用い、垂直軸線周りに補償ローラ50のサブフレームを旋回させることが開示されている。ここで繰り返していうが、ローラ軸線は、ニュートラル状態でワークピース軸線に対して平行であり、ワークピースの軸ドリフトを打ち消すために平行状態から促される。
【0007】
英国特許第1,034,201号公報には、ワークピースの両端で係合する一対のローラ13を支持するトラニオンブラケット12が、ベースまたはフレーム10に旋回可能に取り付けられたアンチドリフト調整メカニズムが開示されている。トラニオンブラケット12がスクリュー機構20、21、22に連結し、スクリューの回転によりトラニオンブラケット12を旋回し、ローラ軸線を、ワークピース軸線に平行なニュートラル方向から、ローラがワークピースの軸ドリフトに対抗する斜め方向へ微調整する。
【0008】
英国特許第2,106,810号公報には、ワークピースに係合する一セットのローラ20が、ワークピースに向かって横方向に傾斜した垂直シャフト32周りに旋回するように取り付けられた支持部材30上に支持されている。スタイラス22が軸ドリフトを検出するためにワークピースの端面に係合するように付勢され、軸ドリフトを示す信号が、モータ40を作動し、シャフト32周りの支持部材30の旋回を調整するための電気制御手段に伝達され、ローラ軸線がワークピースと平行な状態から調整され、検出した軸ドリフトに対抗する。
【0009】
米国特許第4,407,621号公報には、三つのセットのローラ24が軸方向に変位可能なキャリッジ3上に取り付けられ、4つめのセットのローラ24が軸方向に固定可能なキャリッジ上に取り付けられた回転ロールシステムが開示されている。各キャリッジ3のための機構25、27、29が、キャリッジの軸方向の運動をキャリッジ上のローラホルダ15、20のスイベル軸16周りのスイベル運動に変換して、ローラ軸線をワークピース軸線に平行なニュートラル方向からワークピース軸線に非平行なドリフト対抗方向へ調整する。
【0010】
上記の解決方向は概ね適切な結果を得ることができる一方で、機械的に複雑である。例えば、ローラ支持部材を垂直または略垂直(ワークピースに向かって傾いた)軸線周りに旋回するように取り付けなければならず、さらに、ローラ支持部材全体のための旋回機構を設けなければならない。
【0011】
各ケースでは、従来技術の解決策は、ローラ軸線のニュートラル方向がワークピース軸線に対して平行であった。
【0012】
上述した従来のシステムは、ワークピースの一方側にあるローラ支持部材を、ワークピースの他方側のローラ支持部材とは反対の旋回方向に旋回し、付加的な軸方向の力成分を与え、軸ドリフトに均等に対抗するものではないこともわかる。
【発明の概要】
【0013】
本発明は、ワークピースに対して傾斜してのびる1以上のローラの回転軸線を調整して、ドリフトを打ち消す軸方向の力成分を導入する考えに基づいている。しかしながら、本発明は、上述のシステムと比較して、機械的により単純でかつより効率的な改良構成を提供する。
【0014】
本発明に係るシリンダ状のワークピースを回転するための回転ロールシステムは、概して、第1のモータドライブ;第1のモータドライブに動作可能に接続され、ワークピースをワークピース軸線周りに回転する一対のドライブローラ;および、一対のドライブローラから軸方向に間隔をあけ、ワークピースと摩擦回転係合するように設けられた一対のアイドラローラを備える。一対のアイドラローラの少なくとも一つは、ワークピース軸線と常に非平行にのびる回転軸線を有し、当該アイドラローラは、当該アイドラローラの回転軸線の方向を調整するために旋回可能なそれぞれのアイドラ軸体によって支持される。アイドラ軸体の旋回軸線はワークピース軸線に対して平行にのびる。本発明の実施形態では、一対のアイドラローラのそれぞれが、ワークピース軸線に対して常に非平行にのびる回転軸線を有し、一対のアイドラ軸体のそれぞれが、ワークピース軸線に対して平行のびるそれぞれの旋回軸線周りに旋回可能である。
【0015】
本願発明の回転ロールシステムは、さらに、一対のアイドラローラを旋回してアイドラローラ軸線の方向を調整するための第2のモータドライブ、ワークピースの軸ドリフトを検出し、検出した軸ドリフトの方向および大きさを示すドリフト信号を発生させるドリフトセンサ、および、ドリフト信号に基づいて駆動コマンドを第2のモータドライブに発するためのコントローラを備える。このようにして、フィードバック制御ループが構成され、アイドラローラの回転軸線を連続的および自動的に調整することによって、軸ドリフトが最小限になる。
【0016】
本発明は、シリンダ状のワークピースが回転ロールシステムによってワークピース軸線周りに回転しているときに、ワークピースの軸ドリフトに対抗する方法も含む。本方法は、アイドラローラが支持されるアイドラ軸体を回転することによって、アイドラローラ軸線の方向をワークピース軸線に対して調整することに基づく。
次の図面を参照して、以下で本発明を詳細に説明する。
【図面の簡単な説明】
【0017】
【図1】図1は、本発明の一実施形態の回転ロールシステムの側面図であり、回転ロールシステムがシリンダ状のワークピースを支持している様子を示す。
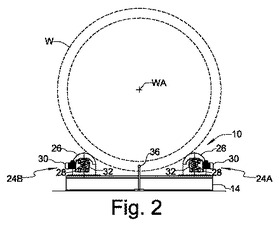
【図2】図2は、図1に示す回転ロールシステムおよびワークピースの端面図である。
【図3】図3は、図1に示す回転ロールシステムおよびワークピースの平面図である。
【図4】図4は、図1に示す回転ロールシステムの単一アイドラローラアッセンブリの拡大平面図である。
【図5A】図5Aは、回転ロールシステムのアイドラ軸体のニュートラル旋回位置を示す概略斜視図である。
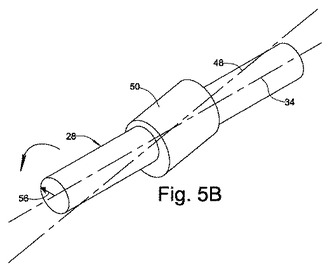
【図5B】図5Bは、図5Aと同様の図であり、アイドラ軸体がニュートラル旋回位置から離れて第一の旋回方向に旋回した様子を示す。
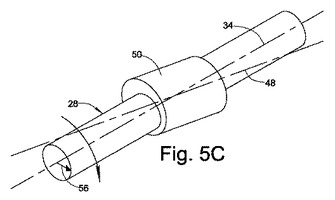
【図5C】図5Cは、図5Aと同様の図であり、アイドラ軸体がニュートラル旋回位置から離れて第二の旋回方向に旋回した様子を示す。
【図6A】図6Aは、アイドラ軸体のニュートラル旋回位置に対応しており、アイドラローラの回転軸線がシリンダ状のワークピースの回転軸線と同一平面上にある概略斜視図である。
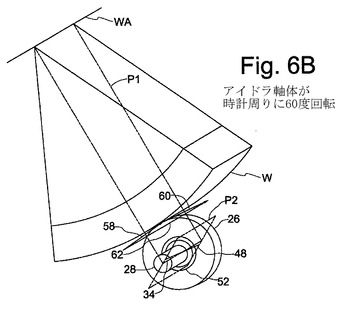
【図6B】図6Bは、図6Aと同様の図であるが、アイドラ軸体の非ニュートラル旋回位置に対応しており、アイドラローラの回転軸線がワークピースの回転軸線と同一平面上にない図である。
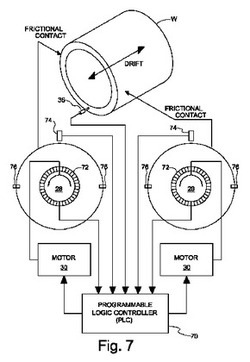
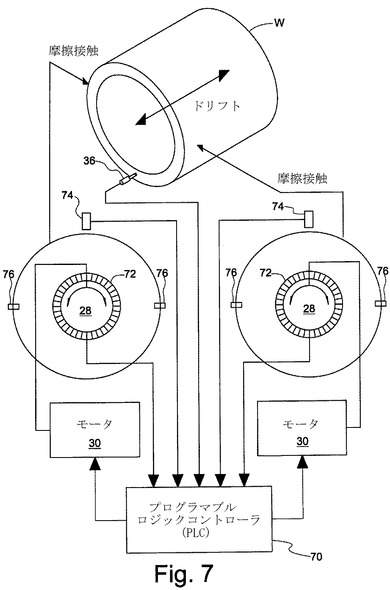
【図7】図7は、検知した軸ドリフトを打ち消すために回転ロースシステムの一対のアイドラ軸体を旋回させるための閉ループフィードバック制御システムを示す概略図である。
【発明を実施するための形態】
【0018】
まず図面の図1〜図3を参照すると、本発明の実施形態を係る回転ロールシステムが符号10により特定されている。回転ロールシステム10は、シリンダ状のワークピースWを支持し、ワークピースWをワークピース軸線WA周りに回転させることを目的とする。ワークピースWは本願発明の一部とはみなさない。
【0019】
回転ロールシステム10は、ワークピース軸線に沿って互いに間隔をあけて設けられたドライブスタンド12およびアイドラスタンド14を備える。図3に最もよく示されるように、ドライブスタンド12は、ワークピース軸線WAを中心にして両側に対称的に配置された第1のドライブローラアッセンブリ16Aおよび第2のドライブローラアッセンブリ16Bを支持する。各ドライブアッセンブリ16A、16Bは、ワークピースWの外側のシリンダ状表面と摩擦係合するドライブローラ18と、ドライブモータ20と、ドライブモータ20をドライブローラ18に接続するトランスミッション22とを備え、それによって、ドライブモータ20の動作がドライブローラ18を回転駆動し、ワークピースWをワークピース軸線WA周りに回転させる。アッセンブリ16Aおよび16Bによって設けられる一対のドライブモータ20を、ここではまとめて“第1のモータドライブ”と称する。単一のドライブモータを設け、これを適切なトランスミッションメカニズムによってアッセンブリ16Aおよび16Bの双方のドライブローラ18に接続してもよく、このような単一のモータドライブも本願発明の“第1のモータドライブ”とみなせることは、当業者であればわかるであろう。
【0020】
アイドラスタンド14は、ワークピース軸線WAを中心にして両側に対称的に配置された第1のアイドラローラアッセンブリ24Aおよび第2のアイドラローラアッセンブリ24Bを備える。各アイドラアッセンブリ24A、24Bは、ワークピースWの外側シリンダ状表面と摩擦係合するアイドラローラ26と、図4において詳細に示された斬新な方法でアイドラローラ26が回転可能に軸支されるアイドラ軸体28と、アイドラ調整モータ30と、アイドラ調整モータ30をアイドラローラ26に接続するトランスミッション32とを備え、それによって、アイドラ調整モータ30の動作が、対応するアイドラ軸体28を、アイドラ軸体の中心旋回軸線34周りに旋回させる。アッセンブリ24Aおよび24Bによって設けられる一対のアイドラ調整モータ30を、ここではまとめて“第2のモータドライブ”と称する。単一のドライブモータを設け、これを適切なトランスミッションメカニズムによってアッセンブリ24Aおよび24Bの双方のアイドラ軸体に接続してもよく、このような単一のモータドライブも本願発明の“第2のモータドライブ”とみなせることは、当業者であればわかるであろう。
【0021】
回転ロールシステム10は、さらに、ワークピースWの端面に連続的に係合するように設けられかつ付勢されたドリフトセンサ36、またはワークピースWの周側面周りに設けられたガイドリングを備え、基準位置からのワークピースの軸方向変位(ドリフト)を検出し、検出された軸ドリフトの大きさおよび方向を示すドリフト信号を生じさせる。ドリフトセンサ36は、あらゆる適切な線形変異センサの形式を取ってもよい。限定しない例として、ドリフトセンサ36は、リニアエンコーダ、リニアトランスデューサ、リニアポテンショメータ、光ファイバ変位センサ、レーザ変位センサ、LVDT変位トランデューサ、磁気スケールセンサなどでもよい。ワークピースWは、回転ロールシステム10によって回転し、ドリフトセンサ36のコンタクトチップがワークピース軸線WAから径方向に離れた位置で表面に係合しているので、ドリフトセンサ36のコンタクトチップは、ワークピースWの端部と底摩擦で接触し、摩耗を最小源に抑えるように設計するのが好ましい。例えば、ドリフトセンサ36のコンタクトチップとしてローラを用いてもよい。
【0022】
図面の図4では、アイドラローラアセンブリ24Aの詳細な断面図を示し、アイドラローラアッセンブリ24Bはアイドラローラアッセンブリ24と左右対称であることがわかる。アイドラ軸体28は、ブロック38内で、アイドラ軸体28の減径外側ジャーナル42をそれぞれ受容する一対の回転ベアリング40によって回転可能に支持され、これにより、アイドラ軸体28はその中心旋回軸線34周りに回転可能である。アイドラ調整モータ30は、トランスミッション28を介してアイドラ軸体28の減径入力部46に連結し、これにより、アイドラ調整モータが、アイドラ軸体28を旋回軸線34周りに反旋回方向に旋回するように機能する。本実施例で示されるように、アイドラ軸体28の旋回軸線34は、ワークピース軸線WAに対して平行にのびている。
【0023】
本実施例によると、アイドラローラ26はアイドラ軸体28に軸支され、アイドラ軸体28の旋回軸線34と一致しない軸線48周りに回転する。アイドラローラ26の回転軸48は、アイドラ軸体28の旋回軸線34に対して僅かに傾いている。実施形態で示されるように、アイドラ軸体28は、アイドラローラ26の回転軸線48を規定するように加工された内側シリンダ状ジャーナル50を含む。アイドラローラ軸線48は、アイドラローラ26の径および軸の中心点でアイドラ軸体28の旋回軸線34と交差するようにのびる。アイドラローラ26は、内側ジャーナル50に回転可能に取り付けられ、一対の対向プレート54に挟まれた回転ベアリング52によって軸線48周りに回転する。ローラ軸線48は、旋回軸線34と非ゼロオフセット角を形成する。限定しない例として、ローラ軸線48は旋回軸34と約1度の小さなオフセット角を形成する。
【0024】
上述のような方法でアイドラローラ26をアイドラ軸体28へ取り付けた効果は、アイドラローラ26の回転軸線48とアイドラ軸体28の旋回軸線34との間のオフセット角を図示のために誇張している図5A〜図5Cを参照することで理解できる。参照矢印56がアイドラ軸体28の略図上に付されており、アイドラ軸体28の旋回軸線34周りの旋回位置を示す。図5Aでは、参照矢印56が上を向き、そして軸線34および48が一致しているように見えるが、軸線は実際には一致していない。アイドラ軸体28が、図5Aに示す旋回位置から旋回軸線34を中心に反時計周りに90度回転すると、図5Bに示すように、オフセットジャーナル50とアイドラ軸体28の差との関係が明確になる。旋回軸線34周りにアイドラ軸体28を回転することで回転軸線48の方向を調整するが、軸線34の方向は変化しない。同様に、アイドラ軸体28が図5Aのニュートラル旋回位置から旋回軸線34を中心に時計周りに90度旋回すると、図5Cに示すように、回転軸線48の方向が図5Bと逆方向に調整される。
【0025】
図6Aおよび図6Bに、どのようにアイドラ軸体28をワークピース28に対して設けて軸線34周りに旋回し、アイドラローラ軸線48の方向を調整して、軸方向の力成分が存在しないワークピースWとのニュートラル関係(図6A)、および、ワークピースの軸ドリフトに対抗するために軸方向の力成分が導入されるワークピースWとのアンチアンチドリフト関係(図6B)の双方を達成するかを概略的に示す。図6Aでは、旋回軸線34はワークピース軸線WAに対して平行で、ワークピース軸線WAと平面P1で同一平面上にある。さらに、アイドラローラ26の回転軸線48はワークピース軸線WAおよび回転軸線34に対して非平行であるが、ワークピース軸線WAおよび旋回軸線34と平面P1で同一平面上にある。このアイドラ軸体28の旋回位置では、ワークピース回転ベクトル58およびアイドラローラ回転ベクトル60は共に各軸線WAおよび48に対して平行で、共通平面P1に対して垂直にのび、そして、アイドラローラ26によってワークピースWへ付与される正味の軸方向の力成分はない。このように、ローラ軸線48がワークピース軸線WAに対して非平行であっても、ニュートラル状態が達成される。これは、ローラの回転軸線をワークピース軸線に対して平行にしてニュートラル状態を達成する従来技術のシステムと対照的なところである。
【0026】
図6Bでは、アイドラ軸体28が旋回軸線34周りに旋回し、これによって、アイドラローラ26の回転軸線48を調整し、軸線48がワークピース軸線WAと同一平面上にないようにする。これは、旋回軸線34およびワークピース軸線WAが平面P1で互いに同一平面上にある一方で、旋回軸線34と回転軸線48とが別の平面P2で互いに同一平面上にあることからわかる。結果として、ワークピース回転ベクトル58は平面P1に対して平行のままであるが、ローラ回転ベクトル60は軸方向に僅かに傾き、これにより、合成ベクトル62が小さな軸方向の成分を含む。当該軸方向の力成分が軸ドリフトを打ち消すために用いられる。この点に関して、軸方向の力成分の方向は、アイドラ軸体28の旋回方向を選択することによって制御される。軸方向の力成分の大きさは、ニュートラル旋回位置からのアイドラ軸体28の旋回変位に比例して増加し、アイドラ軸体28がニュートラル旋回位置からいずれかの旋回方向に90度回転したときに最大に達する。ワークピースへの軸方向の力の大きさは、ワークピースWとアイドラローラ26との間の摩擦係数にも依存し、ドライブローラ18とアイドラローラ16との間のワークピース重量の分布にも依存する。
【0027】
理論上、回転ロールシステムのアンチドリフト機構は、同じ摩擦係数がドライブローラ18とアイドラローラ16とに適用される限り、すべての摩擦係数で有効であろう。アンチドリフト機構は、合成ベクトル62がワークピース軸線WAとアイドラローラ軸線48の最大ミスアライメント量以上にならない限りは、ドライブローラ18とアイドラローラ26との間の全てのワークピース重量分布で有効であろう。とはいっても、ワークピース重量がアイドラローラ26からドライブローラ18へシフトするにつれて、アンチドリフト機構は反応性が低くなることはわかる。
【0028】
例として、表1に示すローラアライメント、ワークピースの真直度およびワークピースの真円度の詳記を下に、回転ロールシステム10が作動するために、ワークピース重量の50%以上がアイドラローラ26に支持され、より具体的には、ワークピース重量の約60%がアイドラローラで支持され、ワークピース重量の約40%がドライブローラ18で支持されることが推奨される。
【表1】

上記の詳記に基づくと、ワークピースおよびローラの最大初期ミスアライメントは0.3度と予想される。これらのパラメータの下で、ドライブローラ18にワークピース重量の40%を、アイドラローラ26にワークピース重量の60%を分配する設定では、予想される最大初期ミスアライメントの0.3度を補償するために、アイドラ軸体28がニュートラルから±45度旋回することが要求され;各旋回方向の残り45度の旋回範囲は、アンチドリフト調整、または他の要因を補償するために利用することができる。
【0029】
軸ドリフトを打ち消すためのアイドラ軸体28の旋回調整は、アイドラ調整モータ30を制御するための閉ループ制御システムを用いることによって自動的に実行される。このような制御システムの一例が、図7に概略的に示される。プログラマブルロジックコントローラ(PLC)70が、各アイドラ調整モータ30に接続され、駆動コマンドをモータ30に供給し、各アイドラ軸体28の旋回位置を調整する。各アイドラ軸体28に関連したロータリエンコーダ72が、入力としての旋回位置信号をPLC70に供給し、関連するアイドラ軸体の旋回位置を示す。代わりに、回転位置センサを各アイドラ調整モータに組み込んで、旋回位置信号を供給するようにしてもよい。ドリフトセンサ36により生成されるドリフト信号もPLC70に入力される。ニュートラル位置から両旋回方向の最大旋回範囲を規定するために設けられたリミットタブ76と連携して、リミットスイッチ74を設けてもよい。図7では、リミットスイッチ74が起動して対応するモータ30が停止する前に、リミットタブはアイドラ軸体28をいずれの旋回方向にも90度旋回できるようにする。当然ながら、アイドラ軸体28の旋回動作の範囲が他の範囲になるようにリミットタブ76を設けてもよい。PLCは、アイドラ調整モータ30を駆動して、アイドラ軸体28を旋回させ、アイドラローラ軸線48の方向を調整するようにプログラムされ、これによって、ドリフトセンサ30からのドリフト信号を最小限に抑える。アイドラローラアッセンブリ24Aおよび24Bが左右対称の関係にあることから、アイドラ軸体28が両旋回方向(例えば、一方は時計周りで、他方は反時計周り)に旋回すると、ワークピースの両側に均等に分布した付加的なアンチドリフト効果が達成される。
【0030】
上記のような実施例から、本願発明は、シリンダ状のワークピースが回転ロールシステムによってワークピース軸線周りに回転している際に、ワークピースの軸ドリフトに対抗する方法を含むことがわかるであろう。本方法は、概して、ワークピースを支持係合するように一対のアイドラローラを配置するステップを備え、前記一対のアイドラローラのそれぞれは、常にワークピース軸線に対して非平行にのびる回転軸線を有し;さらに、一対のアイドラローラの回転軸線を、一対のアイドラローラが軸方向の力成分をワークピースに付与するように位置合わせするステップを含む。本発明は、さらに、ワークピースの軸ドリフトの大きさおよび方向を検出するステップを備え、一対のアイドラローラの旋回軸線の位置合わせが、検出された軸ドリフトの大きさおよび方向によって決定され、また、一つのアイドラローラをそれぞれ支持する一対のアイドラ軸体を旋回することによって実行してもよい。この点に関して、閉ループフィードバックコントロールシステムを用いてもよい。ここで記載された実施形態から明らかなように、一対のアイドラ軸体のそれぞれを、ワークピース軸線に対して平行にのびるそれぞれの旋回軸線まわりに旋回させてもよい。本発明に係る軸ドリフトに対抗する方法は、一対のアイドラローラがワークピース重量の過半数を支持するように、一対のアイドラローラを位置決めすることを含んでもよい。
【技術分野】
【0001】
本発明は、一般的には、シリンダ状の容器を支持および回転するための回転ロールシステムに関する。このような回転ロールシステムは、一般に溶接作業中に用いられる。本発明は、より具体的には、支持された容器または他のワークピースが回転しているときの軸方向の運動(軸ドリフト:軸クリープとしても知られている)に対抗するためのアンチドリフト装置および方法に関する。
【背景技術】
【0002】
上述したタイプの回転ロールシステムは、一般的には、互いに横方向に間隔をあけて配置され、第1の軸方向位置でシリンダ状(円筒状)のワークピースの両側に摩擦係合する一対のドライブローラと、互いに横方向に間隔をあけて配置され、ワークピースの回転軸線に沿って第1の軸方向位置から離れた第2の軸方向位置でワークピースの両側で係合する一対のアイドラローラとを備える。ドライブローラは、ドライブローラを回転動作可能なドライブモータに接続され、これによりワークピースをその軸線(以下、では“ワークピース軸線”という)周りに回転させる。アイドラローラは、ドライブローラと協働してワークピースを回転支持するが、アイドラローラはモータ駆動しない。通常は、ドライブローラおよびアイドラローラは、ワークピースと平行な個々の軸線周りに回転する。主にワークピースのシリンダ形状の欠点により、ワークピースのワークピース軸線周りの回転は、溶接線のミスアライメントを生じさせるワークピースの僅かな軸ドリフト(軸方向ドリフト)を伴う。
【0003】
従来のアンチドリフト回転ロールシステムは、アイドラローラをドリフト量に比例して垂直または水平にシフトすることにより、シリンダ状のワークピースまたは容器の軸方向の運動を制御する。この方向はドリフトを制御する点では効果的であるが、ワークピースの著しい垂直または水平の移動をもたらし、溶接工程を干渉する。
【0004】
他のアンチドリフト回転ロールシステムは、ワークピースに対して傾斜してのびる一以上のローラの回転軸線を調整し、該ドリフトを打ち消す軸方向の力成分を生じさせることに基づいている。この種のタイプのアンチドリフト回転システムを以下で要約する。
【0005】
米国特許第2,865,690号公報では、一対のフォロアローラ16は、それぞれがワークピースの周側面周りに嵌められたタイヤ6の各端面に当接するように設けられている。当接フォロアローラ16は、それぞれのレベルアーム15によってワークピースの一方のローラ8を支持するトラニオンブラケット9aに連結している。トラニオンブラケット9aは、一対の平行旋回リンク9bによって、ワークピースの一方で第2のローラ8を支持する反対側のトリニオンブラケット9aに接続され、二つのトリニオンブラケット9aおよび二つのリンク9bが平行四辺形リンケージを形成する。ワークピースが望ましいニュートラル軸方向位置にあるとき、平行四辺形リンケージは長方形状になっており、ローラ8の回転の軸線a‐aはワークピースの回転軸線と平行である。ワークピースの軸ドリフトが生じ、従動ローラ16によって検出されると、レベルアーム15が平行四辺形リンケージに動作を伝えて、ローラ8およびそれらの回転軸線が、ワークピースの回転軸線に対して傾斜角をなす。ねじ効果がワークピースをニュートラル軸方向位置へ戻し、フォロアローラ16およびレベルアーム15の対応動作が平行四辺形リンケージを長方形状態に戻す。
【0006】
英国特許第940,261号公報には、さまざまな実施形態が記載されている。当該公報の図1に示される実施例では、回転ロールシステムの四つのローラ2の一つが垂直軸周りにそのサブフレーム4を旋回することにより回転して、ローラ2の回転軸線をワークピース軸線と平行なニュートラル方向からワークピース軸線と非平行な角度方向に調整し、軸ドリフトを打ち消す。図2および図3に示す他の実施形態でも同様に機能し、補償ローラ6の軸体5が垂直軸線周りに旋回するように取り付けられる。図4および図5は、さらに別の実施形態を示しており、補償ローラ13の軸体12が、ローラ13とワークピースとの接触点における接線面に対して垂直にのびる旋回ピン14によって規定される軸線周りに旋回運動可能に取り付けられる。この実施形態では、ローラ軸線はニュートラル配置でワークピース軸線に平行であり、ローラ軸線は接線面で旋回して、ワークピース軸線と非平行になり、軸ドリフトを打ち消す。図6はさらに別の実施形態を示し、ワークピースの両側の一対のローラ25が、旋回ピン29によって規定される垂直旋回軸線周りに旋回運動可能に取り付けられた共通サブフレーム28に取り付けられる。ローラ25がニュートラル状態のとき、ローラ25の回転軸線がワークピース軸線と平行であり、旋回ピン29周りにサブフレーム28を旋回することで、ローラ25の回転軸線がワークピース軸線と非平行になるように調整される。最後に、図7に示される実施形態では、ワークピースの端面に係合し、リンケージ53に連結した当接ローラ52を用い、垂直軸線周りに補償ローラ50のサブフレームを旋回させることが開示されている。ここで繰り返していうが、ローラ軸線は、ニュートラル状態でワークピース軸線に対して平行であり、ワークピースの軸ドリフトを打ち消すために平行状態から促される。
【0007】
英国特許第1,034,201号公報には、ワークピースの両端で係合する一対のローラ13を支持するトラニオンブラケット12が、ベースまたはフレーム10に旋回可能に取り付けられたアンチドリフト調整メカニズムが開示されている。トラニオンブラケット12がスクリュー機構20、21、22に連結し、スクリューの回転によりトラニオンブラケット12を旋回し、ローラ軸線を、ワークピース軸線に平行なニュートラル方向から、ローラがワークピースの軸ドリフトに対抗する斜め方向へ微調整する。
【0008】
英国特許第2,106,810号公報には、ワークピースに係合する一セットのローラ20が、ワークピースに向かって横方向に傾斜した垂直シャフト32周りに旋回するように取り付けられた支持部材30上に支持されている。スタイラス22が軸ドリフトを検出するためにワークピースの端面に係合するように付勢され、軸ドリフトを示す信号が、モータ40を作動し、シャフト32周りの支持部材30の旋回を調整するための電気制御手段に伝達され、ローラ軸線がワークピースと平行な状態から調整され、検出した軸ドリフトに対抗する。
【0009】
米国特許第4,407,621号公報には、三つのセットのローラ24が軸方向に変位可能なキャリッジ3上に取り付けられ、4つめのセットのローラ24が軸方向に固定可能なキャリッジ上に取り付けられた回転ロールシステムが開示されている。各キャリッジ3のための機構25、27、29が、キャリッジの軸方向の運動をキャリッジ上のローラホルダ15、20のスイベル軸16周りのスイベル運動に変換して、ローラ軸線をワークピース軸線に平行なニュートラル方向からワークピース軸線に非平行なドリフト対抗方向へ調整する。
【0010】
上記の解決方向は概ね適切な結果を得ることができる一方で、機械的に複雑である。例えば、ローラ支持部材を垂直または略垂直(ワークピースに向かって傾いた)軸線周りに旋回するように取り付けなければならず、さらに、ローラ支持部材全体のための旋回機構を設けなければならない。
【0011】
各ケースでは、従来技術の解決策は、ローラ軸線のニュートラル方向がワークピース軸線に対して平行であった。
【0012】
上述した従来のシステムは、ワークピースの一方側にあるローラ支持部材を、ワークピースの他方側のローラ支持部材とは反対の旋回方向に旋回し、付加的な軸方向の力成分を与え、軸ドリフトに均等に対抗するものではないこともわかる。
【発明の概要】
【0013】
本発明は、ワークピースに対して傾斜してのびる1以上のローラの回転軸線を調整して、ドリフトを打ち消す軸方向の力成分を導入する考えに基づいている。しかしながら、本発明は、上述のシステムと比較して、機械的により単純でかつより効率的な改良構成を提供する。
【0014】
本発明に係るシリンダ状のワークピースを回転するための回転ロールシステムは、概して、第1のモータドライブ;第1のモータドライブに動作可能に接続され、ワークピースをワークピース軸線周りに回転する一対のドライブローラ;および、一対のドライブローラから軸方向に間隔をあけ、ワークピースと摩擦回転係合するように設けられた一対のアイドラローラを備える。一対のアイドラローラの少なくとも一つは、ワークピース軸線と常に非平行にのびる回転軸線を有し、当該アイドラローラは、当該アイドラローラの回転軸線の方向を調整するために旋回可能なそれぞれのアイドラ軸体によって支持される。アイドラ軸体の旋回軸線はワークピース軸線に対して平行にのびる。本発明の実施形態では、一対のアイドラローラのそれぞれが、ワークピース軸線に対して常に非平行にのびる回転軸線を有し、一対のアイドラ軸体のそれぞれが、ワークピース軸線に対して平行のびるそれぞれの旋回軸線周りに旋回可能である。
【0015】
本願発明の回転ロールシステムは、さらに、一対のアイドラローラを旋回してアイドラローラ軸線の方向を調整するための第2のモータドライブ、ワークピースの軸ドリフトを検出し、検出した軸ドリフトの方向および大きさを示すドリフト信号を発生させるドリフトセンサ、および、ドリフト信号に基づいて駆動コマンドを第2のモータドライブに発するためのコントローラを備える。このようにして、フィードバック制御ループが構成され、アイドラローラの回転軸線を連続的および自動的に調整することによって、軸ドリフトが最小限になる。
【0016】
本発明は、シリンダ状のワークピースが回転ロールシステムによってワークピース軸線周りに回転しているときに、ワークピースの軸ドリフトに対抗する方法も含む。本方法は、アイドラローラが支持されるアイドラ軸体を回転することによって、アイドラローラ軸線の方向をワークピース軸線に対して調整することに基づく。
次の図面を参照して、以下で本発明を詳細に説明する。
【図面の簡単な説明】
【0017】
【図1】図1は、本発明の一実施形態の回転ロールシステムの側面図であり、回転ロールシステムがシリンダ状のワークピースを支持している様子を示す。
【図2】図2は、図1に示す回転ロールシステムおよびワークピースの端面図である。
【図3】図3は、図1に示す回転ロールシステムおよびワークピースの平面図である。
【図4】図4は、図1に示す回転ロールシステムの単一アイドラローラアッセンブリの拡大平面図である。
【図5A】図5Aは、回転ロールシステムのアイドラ軸体のニュートラル旋回位置を示す概略斜視図である。
【図5B】図5Bは、図5Aと同様の図であり、アイドラ軸体がニュートラル旋回位置から離れて第一の旋回方向に旋回した様子を示す。
【図5C】図5Cは、図5Aと同様の図であり、アイドラ軸体がニュートラル旋回位置から離れて第二の旋回方向に旋回した様子を示す。
【図6A】図6Aは、アイドラ軸体のニュートラル旋回位置に対応しており、アイドラローラの回転軸線がシリンダ状のワークピースの回転軸線と同一平面上にある概略斜視図である。
【図6B】図6Bは、図6Aと同様の図であるが、アイドラ軸体の非ニュートラル旋回位置に対応しており、アイドラローラの回転軸線がワークピースの回転軸線と同一平面上にない図である。
【図7】図7は、検知した軸ドリフトを打ち消すために回転ロースシステムの一対のアイドラ軸体を旋回させるための閉ループフィードバック制御システムを示す概略図である。
【発明を実施するための形態】
【0018】
まず図面の図1〜図3を参照すると、本発明の実施形態を係る回転ロールシステムが符号10により特定されている。回転ロールシステム10は、シリンダ状のワークピースWを支持し、ワークピースWをワークピース軸線WA周りに回転させることを目的とする。ワークピースWは本願発明の一部とはみなさない。
【0019】
回転ロールシステム10は、ワークピース軸線に沿って互いに間隔をあけて設けられたドライブスタンド12およびアイドラスタンド14を備える。図3に最もよく示されるように、ドライブスタンド12は、ワークピース軸線WAを中心にして両側に対称的に配置された第1のドライブローラアッセンブリ16Aおよび第2のドライブローラアッセンブリ16Bを支持する。各ドライブアッセンブリ16A、16Bは、ワークピースWの外側のシリンダ状表面と摩擦係合するドライブローラ18と、ドライブモータ20と、ドライブモータ20をドライブローラ18に接続するトランスミッション22とを備え、それによって、ドライブモータ20の動作がドライブローラ18を回転駆動し、ワークピースWをワークピース軸線WA周りに回転させる。アッセンブリ16Aおよび16Bによって設けられる一対のドライブモータ20を、ここではまとめて“第1のモータドライブ”と称する。単一のドライブモータを設け、これを適切なトランスミッションメカニズムによってアッセンブリ16Aおよび16Bの双方のドライブローラ18に接続してもよく、このような単一のモータドライブも本願発明の“第1のモータドライブ”とみなせることは、当業者であればわかるであろう。
【0020】
アイドラスタンド14は、ワークピース軸線WAを中心にして両側に対称的に配置された第1のアイドラローラアッセンブリ24Aおよび第2のアイドラローラアッセンブリ24Bを備える。各アイドラアッセンブリ24A、24Bは、ワークピースWの外側シリンダ状表面と摩擦係合するアイドラローラ26と、図4において詳細に示された斬新な方法でアイドラローラ26が回転可能に軸支されるアイドラ軸体28と、アイドラ調整モータ30と、アイドラ調整モータ30をアイドラローラ26に接続するトランスミッション32とを備え、それによって、アイドラ調整モータ30の動作が、対応するアイドラ軸体28を、アイドラ軸体の中心旋回軸線34周りに旋回させる。アッセンブリ24Aおよび24Bによって設けられる一対のアイドラ調整モータ30を、ここではまとめて“第2のモータドライブ”と称する。単一のドライブモータを設け、これを適切なトランスミッションメカニズムによってアッセンブリ24Aおよび24Bの双方のアイドラ軸体に接続してもよく、このような単一のモータドライブも本願発明の“第2のモータドライブ”とみなせることは、当業者であればわかるであろう。
【0021】
回転ロールシステム10は、さらに、ワークピースWの端面に連続的に係合するように設けられかつ付勢されたドリフトセンサ36、またはワークピースWの周側面周りに設けられたガイドリングを備え、基準位置からのワークピースの軸方向変位(ドリフト)を検出し、検出された軸ドリフトの大きさおよび方向を示すドリフト信号を生じさせる。ドリフトセンサ36は、あらゆる適切な線形変異センサの形式を取ってもよい。限定しない例として、ドリフトセンサ36は、リニアエンコーダ、リニアトランスデューサ、リニアポテンショメータ、光ファイバ変位センサ、レーザ変位センサ、LVDT変位トランデューサ、磁気スケールセンサなどでもよい。ワークピースWは、回転ロールシステム10によって回転し、ドリフトセンサ36のコンタクトチップがワークピース軸線WAから径方向に離れた位置で表面に係合しているので、ドリフトセンサ36のコンタクトチップは、ワークピースWの端部と底摩擦で接触し、摩耗を最小源に抑えるように設計するのが好ましい。例えば、ドリフトセンサ36のコンタクトチップとしてローラを用いてもよい。
【0022】
図面の図4では、アイドラローラアセンブリ24Aの詳細な断面図を示し、アイドラローラアッセンブリ24Bはアイドラローラアッセンブリ24と左右対称であることがわかる。アイドラ軸体28は、ブロック38内で、アイドラ軸体28の減径外側ジャーナル42をそれぞれ受容する一対の回転ベアリング40によって回転可能に支持され、これにより、アイドラ軸体28はその中心旋回軸線34周りに回転可能である。アイドラ調整モータ30は、トランスミッション28を介してアイドラ軸体28の減径入力部46に連結し、これにより、アイドラ調整モータが、アイドラ軸体28を旋回軸線34周りに反旋回方向に旋回するように機能する。本実施例で示されるように、アイドラ軸体28の旋回軸線34は、ワークピース軸線WAに対して平行にのびている。
【0023】
本実施例によると、アイドラローラ26はアイドラ軸体28に軸支され、アイドラ軸体28の旋回軸線34と一致しない軸線48周りに回転する。アイドラローラ26の回転軸48は、アイドラ軸体28の旋回軸線34に対して僅かに傾いている。実施形態で示されるように、アイドラ軸体28は、アイドラローラ26の回転軸線48を規定するように加工された内側シリンダ状ジャーナル50を含む。アイドラローラ軸線48は、アイドラローラ26の径および軸の中心点でアイドラ軸体28の旋回軸線34と交差するようにのびる。アイドラローラ26は、内側ジャーナル50に回転可能に取り付けられ、一対の対向プレート54に挟まれた回転ベアリング52によって軸線48周りに回転する。ローラ軸線48は、旋回軸線34と非ゼロオフセット角を形成する。限定しない例として、ローラ軸線48は旋回軸34と約1度の小さなオフセット角を形成する。
【0024】
上述のような方法でアイドラローラ26をアイドラ軸体28へ取り付けた効果は、アイドラローラ26の回転軸線48とアイドラ軸体28の旋回軸線34との間のオフセット角を図示のために誇張している図5A〜図5Cを参照することで理解できる。参照矢印56がアイドラ軸体28の略図上に付されており、アイドラ軸体28の旋回軸線34周りの旋回位置を示す。図5Aでは、参照矢印56が上を向き、そして軸線34および48が一致しているように見えるが、軸線は実際には一致していない。アイドラ軸体28が、図5Aに示す旋回位置から旋回軸線34を中心に反時計周りに90度回転すると、図5Bに示すように、オフセットジャーナル50とアイドラ軸体28の差との関係が明確になる。旋回軸線34周りにアイドラ軸体28を回転することで回転軸線48の方向を調整するが、軸線34の方向は変化しない。同様に、アイドラ軸体28が図5Aのニュートラル旋回位置から旋回軸線34を中心に時計周りに90度旋回すると、図5Cに示すように、回転軸線48の方向が図5Bと逆方向に調整される。
【0025】
図6Aおよび図6Bに、どのようにアイドラ軸体28をワークピース28に対して設けて軸線34周りに旋回し、アイドラローラ軸線48の方向を調整して、軸方向の力成分が存在しないワークピースWとのニュートラル関係(図6A)、および、ワークピースの軸ドリフトに対抗するために軸方向の力成分が導入されるワークピースWとのアンチアンチドリフト関係(図6B)の双方を達成するかを概略的に示す。図6Aでは、旋回軸線34はワークピース軸線WAに対して平行で、ワークピース軸線WAと平面P1で同一平面上にある。さらに、アイドラローラ26の回転軸線48はワークピース軸線WAおよび回転軸線34に対して非平行であるが、ワークピース軸線WAおよび旋回軸線34と平面P1で同一平面上にある。このアイドラ軸体28の旋回位置では、ワークピース回転ベクトル58およびアイドラローラ回転ベクトル60は共に各軸線WAおよび48に対して平行で、共通平面P1に対して垂直にのび、そして、アイドラローラ26によってワークピースWへ付与される正味の軸方向の力成分はない。このように、ローラ軸線48がワークピース軸線WAに対して非平行であっても、ニュートラル状態が達成される。これは、ローラの回転軸線をワークピース軸線に対して平行にしてニュートラル状態を達成する従来技術のシステムと対照的なところである。
【0026】
図6Bでは、アイドラ軸体28が旋回軸線34周りに旋回し、これによって、アイドラローラ26の回転軸線48を調整し、軸線48がワークピース軸線WAと同一平面上にないようにする。これは、旋回軸線34およびワークピース軸線WAが平面P1で互いに同一平面上にある一方で、旋回軸線34と回転軸線48とが別の平面P2で互いに同一平面上にあることからわかる。結果として、ワークピース回転ベクトル58は平面P1に対して平行のままであるが、ローラ回転ベクトル60は軸方向に僅かに傾き、これにより、合成ベクトル62が小さな軸方向の成分を含む。当該軸方向の力成分が軸ドリフトを打ち消すために用いられる。この点に関して、軸方向の力成分の方向は、アイドラ軸体28の旋回方向を選択することによって制御される。軸方向の力成分の大きさは、ニュートラル旋回位置からのアイドラ軸体28の旋回変位に比例して増加し、アイドラ軸体28がニュートラル旋回位置からいずれかの旋回方向に90度回転したときに最大に達する。ワークピースへの軸方向の力の大きさは、ワークピースWとアイドラローラ26との間の摩擦係数にも依存し、ドライブローラ18とアイドラローラ16との間のワークピース重量の分布にも依存する。
【0027】
理論上、回転ロールシステムのアンチドリフト機構は、同じ摩擦係数がドライブローラ18とアイドラローラ16とに適用される限り、すべての摩擦係数で有効であろう。アンチドリフト機構は、合成ベクトル62がワークピース軸線WAとアイドラローラ軸線48の最大ミスアライメント量以上にならない限りは、ドライブローラ18とアイドラローラ26との間の全てのワークピース重量分布で有効であろう。とはいっても、ワークピース重量がアイドラローラ26からドライブローラ18へシフトするにつれて、アンチドリフト機構は反応性が低くなることはわかる。
【0028】
例として、表1に示すローラアライメント、ワークピースの真直度およびワークピースの真円度の詳記を下に、回転ロールシステム10が作動するために、ワークピース重量の50%以上がアイドラローラ26に支持され、より具体的には、ワークピース重量の約60%がアイドラローラで支持され、ワークピース重量の約40%がドライブローラ18で支持されることが推奨される。
【表1】
上記の詳記に基づくと、ワークピースおよびローラの最大初期ミスアライメントは0.3度と予想される。これらのパラメータの下で、ドライブローラ18にワークピース重量の40%を、アイドラローラ26にワークピース重量の60%を分配する設定では、予想される最大初期ミスアライメントの0.3度を補償するために、アイドラ軸体28がニュートラルから±45度旋回することが要求され;各旋回方向の残り45度の旋回範囲は、アンチドリフト調整、または他の要因を補償するために利用することができる。
【0029】
軸ドリフトを打ち消すためのアイドラ軸体28の旋回調整は、アイドラ調整モータ30を制御するための閉ループ制御システムを用いることによって自動的に実行される。このような制御システムの一例が、図7に概略的に示される。プログラマブルロジックコントローラ(PLC)70が、各アイドラ調整モータ30に接続され、駆動コマンドをモータ30に供給し、各アイドラ軸体28の旋回位置を調整する。各アイドラ軸体28に関連したロータリエンコーダ72が、入力としての旋回位置信号をPLC70に供給し、関連するアイドラ軸体の旋回位置を示す。代わりに、回転位置センサを各アイドラ調整モータに組み込んで、旋回位置信号を供給するようにしてもよい。ドリフトセンサ36により生成されるドリフト信号もPLC70に入力される。ニュートラル位置から両旋回方向の最大旋回範囲を規定するために設けられたリミットタブ76と連携して、リミットスイッチ74を設けてもよい。図7では、リミットスイッチ74が起動して対応するモータ30が停止する前に、リミットタブはアイドラ軸体28をいずれの旋回方向にも90度旋回できるようにする。当然ながら、アイドラ軸体28の旋回動作の範囲が他の範囲になるようにリミットタブ76を設けてもよい。PLCは、アイドラ調整モータ30を駆動して、アイドラ軸体28を旋回させ、アイドラローラ軸線48の方向を調整するようにプログラムされ、これによって、ドリフトセンサ30からのドリフト信号を最小限に抑える。アイドラローラアッセンブリ24Aおよび24Bが左右対称の関係にあることから、アイドラ軸体28が両旋回方向(例えば、一方は時計周りで、他方は反時計周り)に旋回すると、ワークピースの両側に均等に分布した付加的なアンチドリフト効果が達成される。
【0030】
上記のような実施例から、本願発明は、シリンダ状のワークピースが回転ロールシステムによってワークピース軸線周りに回転している際に、ワークピースの軸ドリフトに対抗する方法を含むことがわかるであろう。本方法は、概して、ワークピースを支持係合するように一対のアイドラローラを配置するステップを備え、前記一対のアイドラローラのそれぞれは、常にワークピース軸線に対して非平行にのびる回転軸線を有し;さらに、一対のアイドラローラの回転軸線を、一対のアイドラローラが軸方向の力成分をワークピースに付与するように位置合わせするステップを含む。本発明は、さらに、ワークピースの軸ドリフトの大きさおよび方向を検出するステップを備え、一対のアイドラローラの旋回軸線の位置合わせが、検出された軸ドリフトの大きさおよび方向によって決定され、また、一つのアイドラローラをそれぞれ支持する一対のアイドラ軸体を旋回することによって実行してもよい。この点に関して、閉ループフィードバックコントロールシステムを用いてもよい。ここで記載された実施形態から明らかなように、一対のアイドラ軸体のそれぞれを、ワークピース軸線に対して平行にのびるそれぞれの旋回軸線まわりに旋回させてもよい。本発明に係る軸ドリフトに対抗する方法は、一対のアイドラローラがワークピース重量の過半数を支持するように、一対のアイドラローラを位置決めすることを含んでもよい。
【特許請求の範囲】
【請求項1】
シリンダ状のワークピースを回転するための回転ロールシステムであって、
第1のモータドライブと、
前記第1のモータドライブに動作可能に接続された一対のドライブローラと、を備え、前記一対のドライブローラは、互いに横方向に間隔をあけ、前記ワークピースをワークピース軸線周りに回転させるために前記ワークピースと摩擦回転係合するように設けられ、さらに、
前記一対のドライブローラから軸方向に間隔をあけ、前記ワークピースと摩擦回転係合するように設けられた一対のアイドラローラを備え、前記一対のアイドラローラの少なくとも一つは、前記ワークピース軸線に対して非平行にのびる回転軸線を有し、さらに、
前記一対のアイドラローラをそれぞれ支持する一対のアイドラ軸体を備え、前記一対のアイドラ軸体の少なくとも一つは、前記アイドラローラの前記回転軸線の方向を調整するために、前記アイドラ軸体の旋回軸線周りに旋回可能であり、
前記少なくとも一つのアイドラローラの前記回転軸線は、すべての調整方向で前記ワークピース軸に対して非平行であることを特徴とする回転ロールシステム。
【請求項2】
前記少なくとも一つのアイドラ軸体の前記旋回軸線は、前記ワークピース軸線に対して平行にのびることを特徴とする請求項1に記載の回転ロールシステム。
【請求項3】
前記少なくとも一つのアイドラ軸体の前記旋回軸線は、前記アイドラローラの前記回転軸線と非ゼロオフセット角を形成することを特徴とする請求項2に記載の回転ロールシステム。
【請求項4】
前記非ゼロオフセット角は、約1度であることを特徴とする請求項2に記載の回転ロールシステム。
【請求項5】
前記一対のアイドラローラのそれぞれは、すべての調整方向で前記ワークピース軸線に対して非平行にのびる回転軸線を有することを特徴とする請求項1に記載の回転ロールシステム。
【請求項6】
前記一対のアイドラ軸体のそれぞれは、前記ワークピース軸線に対して平行にのびる旋回軸線周りに旋回可能であることを特徴とする請求項5に記載の回転ロールシステム。
【請求項7】
前記一対のアイドラ軸体のそれぞれは、前記アイドラローラの前記回転軸線が前記ワークピース軸線と同一平面上に位置するニュートラル旋回位置を有することを特徴とする請求項5に記載の回転ロールシステム。
【請求項8】
前記一対のアイドラ軸体のそれぞれは、前記ニュートラル旋回位置から第1の旋回方向に旋回して前記アイドラローラの前記回転軸線を前記ワークピース軸線と非同一平面上になるように位置させて、前記アイドラローラが力成分を前記ワークピースに対して第1の軸方向に付与するようにし、さらに、前記ニュートラル旋回位置から第2の旋回方向に旋回して前記アイドラローラの前記回転軸線を前記ワークピース軸線と非同一平面上になるように位置させて、前記アイドラローラが力成分を前記ワークピースに対して前記第1の軸方向と反対の第2の軸方向に付与することを特徴とする請求項7に記載の回転ロールシステム。
【請求項9】
前記一対のアイドラ軸体に接続された第2のモータドライブを備え、前記第2のモータドライブは、前記一対のアイドラ軸体のそれぞれを旋回可能であり、さらに、
前記第2のモータドライブに接続され、制御コマンドを前記第2のモータドライブに発して、前記一対のアイドラ軸体を旋回させるコントローラを備えることを特徴とする請求項8に記載の回転ロールシステム。
【請求項10】
前記ワークピースの軸ドリフトを検出し、検出した前記軸ドリフトの大きさおよび方向を示すドリフト信号を発生させるように設けられたドリフトセンサを備え、前記ドリフト信号は前記コントローラに入力され、前記コントローラはドリフト信号に応じて前記第2のモータドライブに指令を出し、前記検出した軸ドリフトの大きさを減少するように前記一対のアイドラ軸体を旋回させるようにプログラムされていることを特徴とする請求項9に記載の回転ロールシステム。
【請求項11】
一対のアイドラローラと協働してシリンダ状のワークピースを支持する一対の動力付きのドライブローラを有し、前記一対のドライブローラがトルクを前記ワークピースに付与して、前記ワークピースをワークピース軸線周りに回転させる回転ロールシステムにおいて、
それぞれが前記ワークピース軸線に対して平行にのびるそれぞれの旋回軸線周りに旋回可能な一対のアイドラ軸体と、
それぞれが前記一対のアイドラ軸体のそれぞれに支持されて、対応する前記アイドラ軸体の前記旋回軸線と非ゼロオフセット角を形成する軸線周りに回転可能な一対のアイドラローラと、を備えることを特徴とする改良。
【請求項12】
前記非ゼロオフセット角が約1度であることを特徴とする請求項11に記載の改良。
【請求項13】
前記アイドラ軸体のそれぞれは、前記アイドラローラの前記回転軸線が前記ワークピース軸線と同一平面上に位置するニュートラル旋回位置を有することを特徴とする請求項11に記載の改良。
【請求項14】
前記アイドラ軸体のそれぞれは、前記ニュートラル旋回位置から第1の旋回方向に旋回して前記アイドラローラの前記回転軸線を前記ワークピース軸線と非同一平面上になるように位置させて、前記アイドラローラが力成分を前記ワークピースに対して第1の軸方向に付与するようにし、さらに、前記ニュートラル旋回位置から第2の旋回方向に旋回して前記アイドラローラの前記回転軸線を前記ワークピース軸線と非同一平面上になるように位置させて、前記アイドラローラが力成分を前記ワークピースに対して前記第1の軸方向と反対の第2の軸方向に付与することを特徴とする請求項13に記載の改良。
【請求項15】
前記アイドラ軸体のそれぞれに接続されたモータドライブを備え、前記モータドライブは、前記アイドラ軸体のそれぞれをその旋回軸線周りに旋回可能であり、さらに、
前記第2のモータドライブに接続され、制御コマンドを前記第2のモータドライブに発して、前記一対のアイドラ軸体を旋回させるコントローラを備えることを特徴とする請求項11に記載の改良。
【請求項16】
前記ワークピースの軸ドリフトを検出し、検出した前記軸ドリフトの大きさおよび方向を示すドリフト信号を発生させるように設けられたドリフトセンサを備え、前記ドリフト信号は前記コントローラに入力され、前記コントローラはドリフト信号に応じて前記モータドライブに指令を出し、前記検出した軸ドリフトの大きさを減少するように前記アイドラ軸体を旋回させるようにプログラムされていることを特徴とする請求項15に記載の改良。
【請求項17】
シリンダ状のワークピースが回転ロールシステムによってワークピース軸線周りに回転している際に、前記ワークピースの軸ドリフトに対向する方法であって、
前記ワークピースに支持係合するように一対のアイドラローラを設けるステップを備え、前記一つのアイドラローラのそれぞれは、常にワークピース軸線に対して非平行にのびる回転軸線を有し、さらに、
前記一対のアイドラローラの前記回転軸線を、前記一対のアイドラローラが軸方向の力成分を前記ワークピースに付与するように位置合わせするステップを備えることを特徴とする方法。
【請求項18】
さらに、前記ワークピースの軸ドリフトの大きさおよび方向を検出するステップを備え、前記一対のアイドラローラの前記回転軸線の位置合わせが、前記検出した軸ドリフトの大きさおよび方向によって決定されることを特徴とする請求項17に記載の方法。
【請求項19】
前記一対のアイドラローラの前記回転軸線の位置合わせが、前記一対のアイドラローラをそれぞれ支持する一対のアイドラ軸体を旋回させることによって実行されることを特徴とする請求項17に記載の方法。
【請求項20】
前記一対のアイドラ軸体のそれぞれが、ワークピース軸線に対して平行にのびるそれぞれの旋回軸線周りに旋回することを特徴とする請求項19に記載の方法。
【請求項21】
前記ワークピースに支持係合するように一対のアイドラローラを設けるステップが、前記一対のアイドラローラが前記ワークピースの重量の過半数を支持するように、前記一対のアイドラローラを位置決めすることを含むことを特徴とする請求項17に記載の方法。
【請求項1】
シリンダ状のワークピースを回転するための回転ロールシステムであって、
第1のモータドライブと、
前記第1のモータドライブに動作可能に接続された一対のドライブローラと、を備え、前記一対のドライブローラは、互いに横方向に間隔をあけ、前記ワークピースをワークピース軸線周りに回転させるために前記ワークピースと摩擦回転係合するように設けられ、さらに、
前記一対のドライブローラから軸方向に間隔をあけ、前記ワークピースと摩擦回転係合するように設けられた一対のアイドラローラを備え、前記一対のアイドラローラの少なくとも一つは、前記ワークピース軸線に対して非平行にのびる回転軸線を有し、さらに、
前記一対のアイドラローラをそれぞれ支持する一対のアイドラ軸体を備え、前記一対のアイドラ軸体の少なくとも一つは、前記アイドラローラの前記回転軸線の方向を調整するために、前記アイドラ軸体の旋回軸線周りに旋回可能であり、
前記少なくとも一つのアイドラローラの前記回転軸線は、すべての調整方向で前記ワークピース軸に対して非平行であることを特徴とする回転ロールシステム。
【請求項2】
前記少なくとも一つのアイドラ軸体の前記旋回軸線は、前記ワークピース軸線に対して平行にのびることを特徴とする請求項1に記載の回転ロールシステム。
【請求項3】
前記少なくとも一つのアイドラ軸体の前記旋回軸線は、前記アイドラローラの前記回転軸線と非ゼロオフセット角を形成することを特徴とする請求項2に記載の回転ロールシステム。
【請求項4】
前記非ゼロオフセット角は、約1度であることを特徴とする請求項2に記載の回転ロールシステム。
【請求項5】
前記一対のアイドラローラのそれぞれは、すべての調整方向で前記ワークピース軸線に対して非平行にのびる回転軸線を有することを特徴とする請求項1に記載の回転ロールシステム。
【請求項6】
前記一対のアイドラ軸体のそれぞれは、前記ワークピース軸線に対して平行にのびる旋回軸線周りに旋回可能であることを特徴とする請求項5に記載の回転ロールシステム。
【請求項7】
前記一対のアイドラ軸体のそれぞれは、前記アイドラローラの前記回転軸線が前記ワークピース軸線と同一平面上に位置するニュートラル旋回位置を有することを特徴とする請求項5に記載の回転ロールシステム。
【請求項8】
前記一対のアイドラ軸体のそれぞれは、前記ニュートラル旋回位置から第1の旋回方向に旋回して前記アイドラローラの前記回転軸線を前記ワークピース軸線と非同一平面上になるように位置させて、前記アイドラローラが力成分を前記ワークピースに対して第1の軸方向に付与するようにし、さらに、前記ニュートラル旋回位置から第2の旋回方向に旋回して前記アイドラローラの前記回転軸線を前記ワークピース軸線と非同一平面上になるように位置させて、前記アイドラローラが力成分を前記ワークピースに対して前記第1の軸方向と反対の第2の軸方向に付与することを特徴とする請求項7に記載の回転ロールシステム。
【請求項9】
前記一対のアイドラ軸体に接続された第2のモータドライブを備え、前記第2のモータドライブは、前記一対のアイドラ軸体のそれぞれを旋回可能であり、さらに、
前記第2のモータドライブに接続され、制御コマンドを前記第2のモータドライブに発して、前記一対のアイドラ軸体を旋回させるコントローラを備えることを特徴とする請求項8に記載の回転ロールシステム。
【請求項10】
前記ワークピースの軸ドリフトを検出し、検出した前記軸ドリフトの大きさおよび方向を示すドリフト信号を発生させるように設けられたドリフトセンサを備え、前記ドリフト信号は前記コントローラに入力され、前記コントローラはドリフト信号に応じて前記第2のモータドライブに指令を出し、前記検出した軸ドリフトの大きさを減少するように前記一対のアイドラ軸体を旋回させるようにプログラムされていることを特徴とする請求項9に記載の回転ロールシステム。
【請求項11】
一対のアイドラローラと協働してシリンダ状のワークピースを支持する一対の動力付きのドライブローラを有し、前記一対のドライブローラがトルクを前記ワークピースに付与して、前記ワークピースをワークピース軸線周りに回転させる回転ロールシステムにおいて、
それぞれが前記ワークピース軸線に対して平行にのびるそれぞれの旋回軸線周りに旋回可能な一対のアイドラ軸体と、
それぞれが前記一対のアイドラ軸体のそれぞれに支持されて、対応する前記アイドラ軸体の前記旋回軸線と非ゼロオフセット角を形成する軸線周りに回転可能な一対のアイドラローラと、を備えることを特徴とする改良。
【請求項12】
前記非ゼロオフセット角が約1度であることを特徴とする請求項11に記載の改良。
【請求項13】
前記アイドラ軸体のそれぞれは、前記アイドラローラの前記回転軸線が前記ワークピース軸線と同一平面上に位置するニュートラル旋回位置を有することを特徴とする請求項11に記載の改良。
【請求項14】
前記アイドラ軸体のそれぞれは、前記ニュートラル旋回位置から第1の旋回方向に旋回して前記アイドラローラの前記回転軸線を前記ワークピース軸線と非同一平面上になるように位置させて、前記アイドラローラが力成分を前記ワークピースに対して第1の軸方向に付与するようにし、さらに、前記ニュートラル旋回位置から第2の旋回方向に旋回して前記アイドラローラの前記回転軸線を前記ワークピース軸線と非同一平面上になるように位置させて、前記アイドラローラが力成分を前記ワークピースに対して前記第1の軸方向と反対の第2の軸方向に付与することを特徴とする請求項13に記載の改良。
【請求項15】
前記アイドラ軸体のそれぞれに接続されたモータドライブを備え、前記モータドライブは、前記アイドラ軸体のそれぞれをその旋回軸線周りに旋回可能であり、さらに、
前記第2のモータドライブに接続され、制御コマンドを前記第2のモータドライブに発して、前記一対のアイドラ軸体を旋回させるコントローラを備えることを特徴とする請求項11に記載の改良。
【請求項16】
前記ワークピースの軸ドリフトを検出し、検出した前記軸ドリフトの大きさおよび方向を示すドリフト信号を発生させるように設けられたドリフトセンサを備え、前記ドリフト信号は前記コントローラに入力され、前記コントローラはドリフト信号に応じて前記モータドライブに指令を出し、前記検出した軸ドリフトの大きさを減少するように前記アイドラ軸体を旋回させるようにプログラムされていることを特徴とする請求項15に記載の改良。
【請求項17】
シリンダ状のワークピースが回転ロールシステムによってワークピース軸線周りに回転している際に、前記ワークピースの軸ドリフトに対向する方法であって、
前記ワークピースに支持係合するように一対のアイドラローラを設けるステップを備え、前記一つのアイドラローラのそれぞれは、常にワークピース軸線に対して非平行にのびる回転軸線を有し、さらに、
前記一対のアイドラローラの前記回転軸線を、前記一対のアイドラローラが軸方向の力成分を前記ワークピースに付与するように位置合わせするステップを備えることを特徴とする方法。
【請求項18】
さらに、前記ワークピースの軸ドリフトの大きさおよび方向を検出するステップを備え、前記一対のアイドラローラの前記回転軸線の位置合わせが、前記検出した軸ドリフトの大きさおよび方向によって決定されることを特徴とする請求項17に記載の方法。
【請求項19】
前記一対のアイドラローラの前記回転軸線の位置合わせが、前記一対のアイドラローラをそれぞれ支持する一対のアイドラ軸体を旋回させることによって実行されることを特徴とする請求項17に記載の方法。
【請求項20】
前記一対のアイドラ軸体のそれぞれが、ワークピース軸線に対して平行にのびるそれぞれの旋回軸線周りに旋回することを特徴とする請求項19に記載の方法。
【請求項21】
前記ワークピースに支持係合するように一対のアイドラローラを設けるステップが、前記一対のアイドラローラが前記ワークピースの重量の過半数を支持するように、前記一対のアイドラローラを位置決めすることを含むことを特徴とする請求項17に記載の方法。
【図1】


【図2】
【図3】

【図4】

【図5A】

【図5B】
【図5C】
【図6A】

【図6B】
【図7】
【図2】
【図3】
【図4】
【図5A】
【図5B】
【図5C】
【図6A】
【図6B】
【図7】
【公表番号】特表2013−510731(P2013−510731A)
【公表日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願番号】特願2012−538917(P2012−538917)
【出願日】平成22年11月10日(2010.11.10)
【国際出願番号】PCT/US2010/056093
【国際公開番号】WO2011/059988
【国際公開日】平成23年5月19日(2011.5.19)
【出願人】(510089672)コイケ アロンソン インコーポレイテッド (1)
【Fターム(参考)】
【公表日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願日】平成22年11月10日(2010.11.10)
【国際出願番号】PCT/US2010/056093
【国際公開番号】WO2011/059988
【国際公開日】平成23年5月19日(2011.5.19)
【出願人】(510089672)コイケ アロンソン インコーポレイテッド (1)
【Fターム(参考)】
[ Back to top ]