
イベント駆動ワイヤレス・センサ・ネットワークのための予測的デューティ・サイクル順応方法
複数のノード(12)による共有通信媒体へのアクセスを制御する方法の実施形態が開示される。この方法は、複数のノード(12)のうちの各ノード(12)に対し、イベントが将来の時点でこの各ノードのセンシング・フィールド(40)の範囲内で発生するかどうかを予測するステップと、各ノード(12)に関する予測に反応してこの各ノード(12)の通信スケジュールを順応させるステップと、を含む。複数のノード(12)による共有通信媒体へのアクセスを制御する方法の実施形態を実施するワイヤレス・センサ・ネットワーク(10)とコンピュータ読み取り可能な媒体とがさらに開示される。

【発明の詳細な説明】
【技術分野】
【0001】
本開示は、一般に、イベント駆動ワイヤレス・センサ・ネットワークのための媒体アクセス制御プロトコルに関する。より詳しくは、本開示は、予測的デューティ・サイクル順応方法を用いる媒体アクセス制御プロトコルに関する。
【背景技術】
【0002】
ワイヤレス・センサ・ネットワーク(WSN)は、それぞれが一般的なセンシング、情報処理、及び、ワイヤレス通信能力を備え、物理状態又は環境状態を協調して監視するため1つのエリアに配備されたセンサ・ノードのグループである。例えば、受動的な環境監視用のWSN内のこれらのノードは、収集され、そして、マルチホップ通信を介して中継することによりリモート・ホストに報告されることがあるセンシング測定量(例えば、温度、圧力、光度など)を作ることに充てられる。「イベント駆動」WSNと称される比較的新しいクラスのWSNは、一般的に、例えば、ターゲット追跡アプリケーションにおける人又は他のオブジェクトのような関心のあるイベントを検出し追跡するため配備される。イベント駆動WSNの特徴的な特性は、大きい移動度を有することがあり、イベントの近くで発生する空間的相関を持つ集中的なトラフィックである。このようなネットワークでは、移動中のターゲットによって引き起こされたイベントが、新しいノードのペアの間の新しい通信リンクと新しいルーティング経路の開始を連続的に引き起こす。クラスをよりよく特徴付けるイベント駆動WSNの他の実例的な実施例は、ワイヤレス・カメラ・ネットワーク(WCN)である。
【0003】
WSNのノードによる共有ワイヤレス通信媒体へのアクセスは、一般に、媒体アクセス制御(MAC)プロトコルによって調停される。WSN及びMACプロトコルの設計者は、一般的に、ノードの耐用期間及びネットワーク性能(例えば、ネットワークにおける待ち時間の最小化及びスループットの最大化)の両方を最大化することを試みる。様々なMAC技術の間で、各ノードの無線通信のデューティ・サイクリングは、一般に、エネルギーを保存し、それによって、各ノードの耐用期間を増大するために最も効率的な方法のうちの1つであると考えられる。スリープモードとアクティブモードとを交互にすることによって、そして、アクティブモード中に限りデータを送信することにより、ノードは、不必要なエネルギー消費を回避することができる。しかし、ノードのデューティ・サイクルを変更することは、ノードでの通信待ち時間に直接影響を与える。その結果として、待ち時間及びエネルギー消費の両方を最小限に抑える試みは、根本的なトレードオフを伴う。
【0004】
様々なアプローチがこのトレードオフのバランスを保つため提案されている。静的デューティ・サイクリング方法に加えて、いくつかの提案されたアプローチは、ノードのデューティ・サイクル順応が(通常は、ノードの現在のトラフィック状態に関して定義される)関心のあるイベントの検出に基づいて、順応的又は動的なデューティ・サイクリング方法を用いる。イベント駆動WSNのため具体的に設計された一部のMACプロトコルは、パケットの間の冗長性を除去することにより、又は、複数のチャネルを利用することにより、イベント駆動型メッセージの一部又は全部のいずれかの待ち時間を最小化を試行するが、これらの試行は、依然として関心のあるイベントが実際に発生した後にのみ行われる。これらの既存のデューティ・サイクル順応方法は受動的であり、よって、受動的な環境監視を対象にしたWSNによって一般的に充足される状態であるイベントの付近であっても(すなわち、通信パラメータがパス又はリンク全体に対し既に調節された状態の下で)、同じ通信リンク又はルーティング経路が繰り返し再使用されるときに、最も効果がある。しかしながら、反応的な順応に基づくこれらのアプローチは、特に、イベントの移動度が大きいときに、新しいイベントの検出とMACプロトコルの反応との間に内在する遅延が原因となって、イベント駆動WSNに適用されている状態の下で機能が不足し、待ち時間及びエネルギー保存の両方に関して、イベント駆動WSNにおける最適な性能をもたらしているとは言えない。
【0005】
上記のMACプロトコル及び関連した技術は、非特許文献1、非特許文献2、非特許文献3、非特許文献4、非特許文献5、非特許文献6、非特許文献7、非特許文献8、非特許文献9、非特許文献10、非特許文献11、非特許文献12、非特許文献13、非特許文献14及び非特許文献15に記載されている。上記の引用文献のそれぞれの開示内容全体が参照によって本明細書中に明確に組み込まれる。この一覧は、すべての関連する従来技術の完全な検索が実施されたこと、又は、この一覧に記載された文献より優れている文献が存在しないことの表現として意図されたものでなく、さらにこのような表現が推論されるべきでない。
【0006】
<関連する出願への相互参照>
本願は、合衆国法典第35巻第119条(e)の下で、2009年8月20日に出願された米国仮出願第61/235,415号に基づく優先権を主張し、この仮出願の開示内容全体が参照によって本明細書中に明確に組み込まれる。
【先行技術文献】
【非特許文献】
【0007】
【非特許文献1】G. Welch et al., An Introduction to the Kalman Filter (1995)
【非特許文献2】A. Aljadhai et al., “Predictive Mobility Support for QoS Provisioning in Mobile Wireless Environments,” 19 IEEE J. on Selected Areas Comms. 1915-1930 (2001)
【非特許文献3】M. Buettner et al., “X-Mac: A Short Preamble Mac Protocol for Duty cycled Wireless Sensor Networks,” Proc. 4th Int’l Conf. on Embedded Networked Sensor Sys. 307-320 (2006)
【非特許文献4】A. El-Hoiyadi et al., “WiseMAC: An Ultra Low Power MAC Protocol for Multi-Hop Wireless Sensor Networks,” 3121 Lecture Notes in Computer Sci. 18-31 (2004)
【非特許文献5】P. Lin et al., “Medium Access Control with a Dynamic Duty Cycle for Sensor Networks,” 3 IEEE Wireless Comms. & Networking Conf. (2004)
【非特許文献6】K. Jamieson et al., “Sift: A MAC Protocol for Event-Driven Wireless Sensor Networks,” 3868 Lecture Notes in Computer Sci. 260 (2006)
【非特許文献7】B. Kusy et al., “Elapsed Time on Arrival: A Simple and Versatile Primitive for Canonical Time Synchronization Services,” 1 Int’l J. Ad Hoc Ubiquitous Computing 239-51 (2006)
【非特許文献8】S. Liu et al., “CMAC: An Energy Efficient MAC Layer Protocol Using Convergent Packet Forwarding for Wireless Sensor Networks,” 7 Proc. IEEE Se. Conf. (2007)
【非特許文献9】T. Liu et al., “Mobility Modeling, Location Tracking, and Trajectory Prediction in Wireless ATM Networks,” 16 IEEE J. on Selected Areas Comms. 922-936 (1998)
【非特許文献10】Y. Nam et al., “An Adaptive MAC (A-MAC) Protocol Guaranteeing Network Lifetime for Wireless Sensor Networks,” Proc. 12th Eur. Wireless Conf. (2006)
【非特許文献11】V. Namboodiri et al., “Alert: An Adaptive Low-Latency Event-Driven MAC Protocol for Wireless Sensor Networks,” Proc. 7th Int’l Conf. on Info. Processing in Sensor Networks 159-170 (2008)
【非特許文献12】J. Polastre et al., “Versatile Low Power Media Access for Wireless Sensor Networks,” Proc. 2d Int’l Conf. on Embedded Networked Sensor Sys. 95-107 (2004)
【非特許文献13】I. Rhee et al., “Z-MAC: A Hybrid MAC for Wireless Sensor Networks,” 16 IEEE/ACM Transactions on Networking, 511-524 (2008)
【非特許文献14】T. Van Dam et al., “An Adaptive Energy-Efficient MAC Protocol for Wireless Sensor Networks,” Proc. 1st Int’l Conf. on Embedded Networked Sensor Sys. 171-180 (2003)
【非特許文献15】W. Ye et al., “An Energy-Efficient MAC Protocol for Wireless Sensor Networks,” 3 Proc. 21st Ann. Joint Conf. IEEE Computer & Comms. Societies (2002)
【発明の概要】
【0008】
本発明は、特許請求の範囲に記載された1つ以上の特徴、及び/又は、単独で又は組み合わせて特許可能な主題を構成する以下の特徴を含む。
【0009】
一態様によれば、複数のノードによる共有通信媒体へのアクセスを制御する方法は、複数のノードのうちの各ノードに対し、イベントが将来の時点でこの各ノードのセンシング・フィールドの範囲内で発生するかどうかを予測するステップと、各ノードに関する予測に応答してこの各ノードの通信スケジュールを順応させるステップと、を含む。
【0010】
一部の実施形態では、イベントが将来の時点でこの各ノードのセンシング・フィールドの範囲内で発生するかどうかを予測するステップは、各ノードのカメラがこの将来の時点で関心のあるオブジェクトを観測するかどうかを予測するステップを含むことがある。他の実施形態では、イベントが将来の時点でこの各ノードのセンシング・フィールドの範囲内で発生するかどうかを予測するステップは、これらの複数のノードのうちの各ノードで時空間イベント確率(STEP)を推定するステップを含むことがある。これらの複数のノードのうちの各ノードでSTEPを推定するステップは、この将来の時点で各ノードのセンシング・フィールドに亘ってイベントの位置不確定性を統合するステップを含むことがある。
【0011】
他の実施形態では、複数のノードのうちの各ノードでSTEPを推定するステップは、再帰的パラメータ推定器を使用するステップを含むことがある。再帰的パラメータ推定器を使用するステップは、カルマンフィルタと粒子フィルタとのうちの一方を使用するステップを含むことがある。この方法は、複数のノードのうちの第1のノードを用いて、複数のノードのうちの第2のノードからイベントの測定量を含むパケットを受信するか、又は、傍受するステップをさらに含むことがある。この方法は、イベントの測定量を使用して再帰的パラメータ推定器を更新することにより第1のノードで新しいSTEPを推定するステップをさらに含むことがある。この方法は、この測定量がこのイベントのため予測された不確定性領域の範囲内でないとき、再帰的パラメータ推定器の新しいインスタンスを初期化するステップをさらに含むことがある。この方法は、イベントの新しい測定量を含むパケットが第1のノードによって受信又は傍受されない所定の期間の後に、再帰的パラメータ推定器のインスタンスを終了するステップをさらに含むことがある。第1のノードの通信スケジュールは、再帰的パラメータ推定器のインスタンスの終了に応答して最低デューティ・サイクルに順応させられることがある。
【0012】
さらに他の実施形態では、各ノードの通信スケジュールを順応させるステップは、各ノードの無線機のデューティ・サイクルを調節するステップを含むことがある。各ノードの無線機のデューティ・サイクルを調節するステップは、各ノードがイベントの予測された不確定性領域の中のどの確率部分空間に属しているかを決定するステップを含むことがある。各ノードの無線機のデューティ・サイクルを調節するステップは、各無線機によって利用されるフレーム長さを指数的に変化させるステップを含むことがある。一部の実施形態では、この方法は、パケットを送信するノードがこの時点でイベントをセンシングしているかどうかを示す第1のビットを含む専用フィールドを格納するパケットを送信するステップをさらに含むことがある。専用フィールドは、パケットを送信するノードがこの時点でイベント関連データを転送しているかどうかを示す第2のビットをさらに含むことがある。
【0013】
別の態様によれば、1つ以上の有形で非一過性でコンピュータ読み取り可能な媒体は、第1のノードのプロセッサによって実行されるとき、このプロセッサに、イベントが将来の時点で第1のノードのセンシング・フィールドの範囲内で発生するかどうかを予測させ、この予測に応答して、複数のノードの間で共有される通信媒体への第1のノードによるアクセスを制御する第1のノードの通信スケジュールを順応させる複数の命令を含む。
【0014】
一部の実施形態では、イベントが将来の時点で第1のノードのセンシング・フィールドの範囲内で発生するかどうかを予測することは、第1のノードのカメラがこの将来の時点で関心のあるオブジェクトを観測するかどうかを予測することを含むことがある。他の実施形態では、イベントが将来の時点で第1のノードのセンシング・フィールドの範囲内で発生するかどうかを予測することは、第1のノードで時空間イベント確率(STEP)を推定することを含むことがある。第1のノードでSTEPを推定することは、第1のノードのセンシング・フィールドに亘ってイベントの位置不確定性を統合することを含むことがある。
【0015】
他の実施形態では、第1のノードでSTEPを推定することは、再帰的パラメータ推定器を使用することを含むことがある。再帰的パラメータ推定器を使用することは、カルマンフィルタと粒子フィルタとのうちの一方を使用することを含むことがある。これらの複数の命令は、さらにこのプロセッサに、複数のノードのうちの第2のノードからイベントの測定量を含むパケットを受信させるか、又は、傍受させることがある。これらの複数の命令は、さらにこのプロセッサに、イベントの測定量を使用して再帰的パラメータ推定器を更新することにより第1のノードで新しいSTEPを推定させることがある。これらの複数の命令は、さらにこのプロセッサに、この測定量がこのイベントのため予測された不確定性領域の範囲内でないとき、再帰的パラメータ推定器の新しいインスタンスを初期化させることがある。これらの複数の命令は、さらにこのプロセッサに、イベントの新しい測定量を含むパケットが第1のノードによって受信又は傍受されない所定の期間の後に、再帰的パラメータ推定器のインスタンスを終了させることがある。第1のノードの通信スケジュールは、再帰的パラメータ推定器のインスタンスの終了に応答して最低デューティ・サイクルに順応させられることがある。
【0016】
さらに他の実施形態では、第1のノードの通信スケジュールを順応させることは、第1のノードの無線機のデューティ・サイクルを調節することを含むことがある。第1のノードの無線機のデューティ・サイクルを調節することは、第1のノードがイベントの予測された不確定性領域の中のどの確率部分空間に属しているかを決定することを含むことがある。第1のノードの無線機のデューティ・サイクルを調節することは、第1のノードの無線機によって利用されるフレーム長さを指数的に変化させることを含むことがある。これらの複数の命令は、さらにこのプロセッサに、第1のノードがこの時点でイベントをセンシングしているかどうかを示す第1のビットを含む専用フィールドを格納するパケットを送信させることがある。専用フィールドは、第1のノードがこの時点でイベント関連データを転送しているかどうかを示す第2のビットをさらに含むことがある。
【0017】
さらに別の態様によれば、ワイヤレス・センサ・ネットワークは複数ノードを備え、各ノードは、制御回路と、複数のノードの間で共有される通信媒体にアクセスする無線機とを含み、各ノードの制御回路は、(i)イベントが将来の時点でこのノードのセンシング・フィールドの範囲内で発生するかどうかを予測し、(ii)予測に反応してこのノードの無線機のデューティ・サイクルを調節するため構成されている。
【0018】
一部の実施形態では、各ノードはカメラを含むことがあり、各ノードの制御回路は、このノードのカメラがこの将来の時点で関心のあるオブジェクトを観測するかどうかを予測するため構成されることがある。他の実施形態では、各ノードの制御回路は、このノードで時空間イベント確率(STEP)を推定することにより、イベントが将来の時点でこのノードのセンシング・フィールドの範囲内で発生するかどうかを予測するため構成されることがある。各ノードの制御回路は、このノードのセンシング・フィールドに亘ってイベントの位置不確定性を統合することにより、このノードで時空間イベント確率(STEP)を推定するため構成されることがある。
【0019】
他の実施形態では、各ノードの制御回路は、再帰的パラメータ推定器を使用してこのノードで時空間イベント確率(STEP)を推定するため構成されることがある。再帰的パラメータ推定器は、カルマンフィルタと粒子フィルタとのうちの一方でもよい。各ノードの制御回路は、無線機を介して、複数のノードのうちの別のノードからイベントの測定量を含むパケットを受信するか、又は、傍受するためさらに構成されることがある。各ノードの制御回路は、イベントの測定量を使用して再帰的パラメータ推定器を更新することによりこのノードで新しいSTEPを推定するためさらに構成されることがある。各ノードの制御回路は、この測定量がこのイベントのため予測された不確定性領域の範囲内でないとき、再帰的パラメータ推定器の新しいインスタンスを初期化するためさらに構成されることがある。各ノードの制御回路は、イベントの新しい測定量を含むパケットがこのノードによって受信又は傍受されない所定の期間の後に、再帰的パラメータ推定器のインスタンスを終了するためさらに構成されることがある。各ノードの制御回路は、再帰的パラメータ推定器のインスタンスの終了に反応して、このノードの無線機のデューティ・サイクルを最低デューティ・サイクルに調節するためさらに構成されることがある。
【0020】
さらに他の実施形態では、各ノードの制御回路は、このノードがイベントの予測された不確定性領域の中のどの確率部分空間に属しているかを決定することにより、このノードの無線機のデューティ・サイクルを調節するため構成されることがある。各ノードの制御回路は、このノードの無線機によって利用されるフレーム長さを指数的に変化させることにより、このノードの無線機のデューティ・サイクルを調節するため構成されることがある。各ノードの制御回路は、このノードがこの時点でイベントをセンシングしているかどうかを示す第1のビットを含む専用フィールドを格納するパケットを、無線機を介して送信するためさらに構成されることがある。専用フィールドは、このノードがこの時点でイベント関連データを転送しているかどうかを示す第2のビットをさらに含むことがある。
【0021】
付加的な特徴は、単独で又は上記の列挙された特徴及び請求項に列挙された特徴を含むいずれかの他の(複数の)特徴と組み合わせて、特許可能な主題を構成することがあり、そして、現時点で認められるように発明を実施するベストモードを実証する以下の実例的な実施形態の詳細な説明を考慮して、当業者にはっきりと理解されるであろう。
【0022】
詳細な説明は添付図面を特に参照する。
【図面の簡単な説明】
【0023】
【図1】実例的なWCNにおけるビジョンデータの典型的なクラスタベース分散処理のための状態遷移図である。
【図2】実例的なWCNで使用されることがあるワイヤレス・カメラベース・センサ・ノードの一実施形態を示す図である。
【図3A】実例的なWCNにおけるノードの部分的に重なり合う通信範囲を示す図である。
【図3B】図3Aの実例的なWCNのノードの部分的に重なり合うセンシング・フィールドを示す図である。
【図3C】関心のある移動オブジェクトの追跡と基地局への集計データの配信とに関与する図3A及び3Bの実例的なWCNを示す図である。
【図4】実例的なWCNノードのMACレイヤとアプリケーションレイヤ28との間の相互作用を示す図である。
【図5】図4の実例的なWCNノードのMACレイヤとアプリケーションレイヤのための状態遷移図である。
【図6】近平面及び遠平面によって囲まれた3次元空間としてピンホール・カメラ・モデルの視錐台を示す図である。
【図7A】初期時刻での図3のWCNにおける実例的なデューティ・サイクル分布を示す図である。
【図7B】図7Aの実例的なデューティ・サイクル分布と図3のWCNにおけるノードのセンシング・フィールドの中心との間の関係を示す図である。
【図7C】後の時刻での図3のWCNにおける実例的なデューティ・サイクル分布を示す図である。
【図8】4種類のデューティ・サイクル・レベルを利用する実例的なWCNの指数的に変化するフレーム長さを示す図である。
【図9】より高いデューティ・サイクルと共に新しいスケジュールを採用する実例的なタイムラインを示す図である。
【図10A】本開示による例示的なMACプロトコルと、AMACプロトコルと、異なるデューティ・サイクルを用いる4つのTMACプロトコルとを利用するWCNに関して、異なるサンプリング間隔での1ホップ当たりの平均待ち時間を比較するシミュレーションの結果を示す図である。
【図10B】図10AのMACプロトコルを利用するWCNに関して、異なるサンプリング間隔での正規化スループットを比較するシミュレーションの結果を示す図である。
【図10C】図10AのMACプロトコルを利用するWCNに関して、異なるサンプリング間隔での平均エネルギー消費量を比較するシミュレーションの結果を示す図である。
【図11A】図10AのMACプロトコルのMACプロトコルを利用するWCNに関して、毎秒3メートルの平均ターゲット速度を用いて、異なるタイムアウト期間で時間限定パラメータ推定精度(TIBPEA)を比較するシミュレーションの結果を示す図である。
【図11B】図10AのMACプロトコルのMACプロトコルを利用するWCNに関して、毎秒6メートルの平均ターゲット速度を用いて、異なるタイムアウト期間でTIBPEAを比較するシミュレーションの結果を示す図である。
【発明を実施するための形態】
【0024】
本開示の概念は、様々な変更を受けやすく、代替的な形を生じやすいが、本開示の特定の実例的な実施形態が図面に一例として表され、本明細書でより詳細に記載される。しかし、本開示の概念を開示された特有の形に限定する意図はなく、そうではなく、むしろ、特許請求の範囲に定められるような発明の趣旨及び範囲に含まれるすべての変更物、均等物、及び、代替物に及ぶことを意図してものである。
【0025】
以下の説明では、論理実装と、オペコードと、オペランドを指定する手段と、リソース分割/共有/複製実装と、システムコンポーネントのタイプ及び相互関係と、論理分割/統合選択とのような多数の特定の詳細が本開示のより徹底的な理解を行うため示される。しかし、本開示の実施形態がこのような特定の詳細を用いることなく実施されることがあることが当業者によって認められるであろう。他の事例では、制御構造、ゲートレベル回路、及び、完全なソフトウェア命令シーケンスは、発明を分かり難くすることがないように詳細には示されていない。当業者は、記載された内容があれば、必要以上に実験することなく、適切な機能を実施することができるであろう。
【0026】
開示されたシステム及び方法の実施形態は、ハードウェア、ファームウェア、ソフトウェア、又は、これらのいずれかの組み合わせで実施されることがある。一例として、開示されたシステム及び方法の実施形態は、1つ以上の有形の機械読み取り可能な媒体に記憶され、1台以上のプロセッサによって読み取られ、実行されることがある命令として実施されることがある。有形の機械読み取り可能な媒体は、機械(例えば、プロセッサ)によって読み取り可能な形で情報を記憶又は送信するメカニズムを含むことがある。有形の機械読み取り可能な媒体は、例示的に、リード・オンリー・メモリ(ROM)、ランダム・アクセス・メモリ(RAM)、磁気ディスク記憶装置、光記憶装置、フラッシュメモリ、及び/又は、他のタイプのメモリ機器を含むことがある。
【0027】
本開示は、イベント駆動WSNのため具体的に設計された予測的デューティ・サイクル順応(PDCA)方法について記載する。既存のアプローチは、その時点で受けているネットワーク状態に応じてノードのデューティ・サイクルを受動的(すなわち、反動的)に順応させるが、ここに開示されるPDCAスキームは、関心のあるイベントが近い将来にノードのセンシング・フィールドの範囲内で発生する確からしさを予測することにより、各ノードでのデューティ・サイクル・スケジュールを能動的に順応させる。この確からしさは、本明細書では、ノードでの「時空間イベント確率」(STEP)と称される。このPDCAスキームを利用するWSNは、集中的なトラフィックが予想されるノードが通信トラフィックの実際の増加前にこれらのノードの通信プロトコルパラメータを変更すること(それによって、ネットワーク全体の全般的な待ち時間を低下させること)を可能にさせる。
【0028】
ここに開示されるPDCAスキームは、各ノードにこのノードの隣接ノードを介して進行中のイベントを検出する能力を与え、各ノードの実効センシング・フィールドを拡大し、このノードの通信隣接ノードのセンシング・フィールドをさらに包含する。一部の実施形態では、このことは、より詳細に後述されるように、隣接ノードから受信されたパケットの1ビット又は2ビットフィールドを用いて達成されることがある。このPDCAスキームの下で、ノードにイベントが現れるとき、このノードの隣接ノードは、(同じイベントが直接的に現れないときでも)このイベントを認識する。このようにして、イベントが現れるノードがこのノードの隣接ノードのうち次に同じイベントが現れるノードを予測できる場合、これらの隣接ノードは、イベントが実際に到着する前に、それぞれのプロトコルパラメータを変更できる。一つの例示的な実施形態では、この予測は、MACレイヤに埋め込まれたカルマンフィルタに基づく追跡アルゴリズムを使用して実施され、各ノードが、僅かに1ビット又は2ビットの付加的な通信オーバーヘッドで、その時点で発生しているイベントを確率論的にローカライズすることを可能にする。関心のあるイベントの再帰的推定及び予測は、このPDCAスキームでは、完全分散方式で各ノードにおいて実行されることがある。さらに、提案されたPDCAスキームは、ネットワークの中の種々のノードが別個のデューティ・サイクルで動作することを可能にし、異種ノード・スケジュールを生じる。隣接ノード間の重なり合わないアクティブ期間から生じる何らかの問題を回避するため、各ノードがこのノードの隣接ノードのスケジュールの知識だけに基づいて(すなわち、付加的なメッセージ交換に頼らずに)メッセージをこのノードの隣接ノードへ送信することを許可される瞬間を計算することを可能にするメカニズムがPDCAスキームの中に組み入れられることがある。MACプロトコルパラメータの再構成のためのこの予測アプローチを詳細に説明する前に、本開示は、最初に、イベント駆動WSNの固有の特徴のうちのいくつかを概観する。PDCAスキームを利用するWCNの一つの例示的な実施形態のシミュレートされた性能評価が同様に(従来のTMACプロトコル及びAMACプロトコルとの性能比較で)ターゲット追跡との関連において以下で提示される。
【0029】
イベント駆動WSNは、ネットワーク環境の中で発生しているイベントが無線ブロードキャスト・トラフィックをイベントの付近にあるノードの間で集中的にさせる可能性があるので、より一層従来的なWSNと相違する。リアルタイムで検知されたデータを(一部の事例では、協調して)処理し、何らかのイベント関連情報を失うことを回避するために、イベント駆動WSNのノードは、これらのノードの通信プロトコルパラメータを急速に(例えば、デューティ・サイクルの範囲内で)変更できるべきである。一つ一つの個別のノードの計算能力及びセンシング能力が限定されているので、イベント駆動WSNの中のセンサ・ノードは、多くの場合に、関心のあるイベントを検出し、イベントの種々の属性を推定するため互いに協働する。この特性は、スカラ測定量が各ノードによって独立に獲得され、データ伝送における冗長性を除去するためにネットワークの中で簡単に集計されるより一層従来的なWSNのノードと対照をなすことがある。より一層従来的なWSNの一実施例は、空気品質に関して環境を監視するため設計されたワイヤレス・ネットワークである。他方では、ワイヤレス・カメラ・ネットワーク(WCN)は、イベント駆動WSNの例示的な実施例である。例示的なWCNでは、ノードは、環境内の人又は他のオブジェクトの存在を検出することだけでなく、検出された人又はオブジェクトの移動を追跡することを要請されることがある。
【0030】
例示的なWCN(又は、他のイベント駆動WSN)では、オブジェクト検出及び追跡のようなタスクは、いずれかの単一ノードでのプロセッサの能力を超えた計算を伴うことがある。このような計算は、発明の名称が“Clustering Protocol for Directional Sensor Networks”であり、開示内容全体が参照によって本明細書中に明確に組み込まれる現在係属中の米国特許出願公開第2010/007386号明細書に記載されているように、適切なアルゴリズムのクラスタベース分散実施を必要とすることがある。この明細書に記載されるように、このような協働的な処理のため使用されるクラスタは、典型的に、一つずつがイベントに関連した何らかの感覚情報を獲得することができるノードで構成される。協働的な計算は、多くの場合に、クラスタ内部での集約的なメッセージ交換を伴い、(通信プロトコルパラメータが時宜を得た形で変更されない限り)頻繁なパケット衝突によって特徴付けられることがある高度に集中的な通信を生じさせ、エネルギーの無駄遣い、及び、重要データの送信失敗という結果になる。図1に示された状態遷移図は、WCNの一つの例示的な実施形態においてオブジェクトを協働して追跡するときに実行されることがある様々な計算ステップの概要を表す。
【0031】
イベント駆動WSNは、厳しいサービス品質(QoS)要件をさらに保有する。イベント駆動WSNの目的は、主として、関心のあるイベントを検出し、時宜を得た形でイベント固有タスクを実行することである。監視目的のため広いエリアに配備された例示的なWCNに戻ると、エンドユーザへのイベント情報の時宜を得た形での伝送は、ネットワーク全体に亘る通信に関してある一定のQoSを必要とすることがある。WSNは、クラスタ通信の観点から、ノードによる協働的な問題解決のため適切なQoSメトリックをさらに必要とすることがある。ノードが期待されるピークトラフィックに応じることができるようにノードに単にオーバー・プロビジョニングすることによって高いQoSを達成することは、一般に、個々のノードのリソース制限付きの性質が原因となってWSNに対し実現不可能である。同様に、ノードのデューティ・サイクルを単に短縮することもまた、QoSに悪影響を与えることになるので、一般にWSNにおいて実現不可能な解決法である。より詳しく後述されるように、様々なQoSメトリックが従来技術の受動的なデューティ・サイクル順応方法を本明細書中に示されたPDCAスキームを利用するWCNの例示的な実施形態と比較するため使用できる。
【0032】
ここに開示されるPDCAスキームは、高い通信トラフィックを引き起こすことがあるノードのデューティ・サイクルを能動的に調節することによりイベント駆動WSNの固有の特徴を扱う。本明細書で使用されるように、ノードの「デューティ・サイクル」は、ノードの無線機が(1周期の全時間と比較して)1周期中にアウェイク状態である時間の比を指す。当業者に明らかであるように、イベントの実際の発生より極端に先行してデューティ・サイクルを増大することは、エネルギーの無駄遣いをもたらし、イベントが到着した後までデューティ・サイクルを増大させることを待つことは、重要パケットの時宜を得た形での伝送を妨げ、待ち時間を増大させる可能性がある。
【0033】
ここに開示されるPDCAスキームは、近い将来に関心のあるイベントがノードに現れる確からしさ(すなわち、より詳細に後述されるノードでの「時空間イベント確率」(STEP))に応じてノードのデューティ・サイクルを能動的に順応させることにより、これらの2つの重要であるが、しかし、補完的でない目的(すなわち、高エネルギー効率及び低通信待ち時間)のバランスを保つ。「イベント」の厳密な定義は、WSNが置かれるアプリケーションに依存することが分かるであろう。さらに、一部のアプリケーションは、複数のイベントタイプが定義されることを必要とすることがある。オブジェクト検出及び追跡アプリケーションの例示的な状況では、一例として、「イベント」は、関心のあるオブジェクト(例えば、歩行者)の存在として定義されることがある。換言すると、イベントがノードに現れる場合、関心のあるオブジェクトがノードのセンシング・フィールドの範囲内に存在する。このPDCAスキームは、ノードにまもなくイベントが現れる可能性がある場合に、このノードでのデューティ・サイクルを増加させ、そうでなければ、デューティ・サイクルを減少させる。換言すると、このPDCAスキームは、より詳細に後述されるように、ノードでのSTEPが上昇する場合、ノードのデューティ・サイクルを増加させ、STEPが下降する場合、デューティ・サイクルを適切に減少させる。
【0034】
本開示の例示されたWCN 10で利用されることがあるいくつかのワイヤレス・カメラ・ベース・センサ・ノード(ノード)12は、(方向18に移動している)関心のあるオブジェクト16を追跡する図2に示される。各ノード12は、画像センサ20と、メモリ回路22と、通信モジュール24とを例示的に含むことがある。他の実施形態では、ノード12の外部にあるコンピューティング機器(典型的に、マイクロプロセッサと、メモリと、通信回路とを含む)は、(複数の)画像センサ20から未加工画像データを受信し、処理することがある。画像センサ20は、CCDカメラ、CMOSカメラ、及び/又は、他の適当な代替物を例示的に含むことがある。通信モジュール24は、MACレイヤ上でのワイヤレス通信能力を有している無線機を含むことがある。各ノード12の画像センサ20は、未加工画像を撮影し、この未加工画像を回路22の関連付けられたマイクロプロセッサに送信することがある。回路22のマイクロプロセッサは、その後に、限定されることはないが、(a)画像センサ20によって撮影された回路22にメモリに記憶すること、(b)イベントを検出し、記憶された画像の中のこのようなイベントと関連付けられた解析データを生成するため記憶された画像を処理すること(例えば、オブジェクト16の存在を検出すること)、(c)(MACレイヤ上の隣接ノード12の通信スケジュールに基づいて)これらの隣接ノード12との間で情報を送受信するため関連付けられた通信モジュール24を制御すること、及び、(d)ノード12の全体的な機能を制御することを含む(アプリケーションレイヤに埋め込まれた手順に基づく)一連のタスクを実行することがある。
【0035】
ランダムに配備された(個別には12A〜12Hと呼ばれる)ノード12と、基地局、すなわち、「シンク」14とを備えるWCN 10の例示的な実施形態は、全体的に、図3A〜3Cの平面図から分かる。この例示的な実施形態では、ノード12のためのイベントは、ノード12のセンシング・フィールドの範囲内での関心のあるオブジェクト16の存在として定義されることがある。WCN 10が図3A〜3Cに示されたトポロジーに代わるトポロジーを有している他の実施形態が同様に考えられる。ノード12の部分的に重なり合う通信レンジは、図3Aにおいて破線円形として示されるが、ノード12、14の部分的に重なり合うセンシング・フィールドは、図3Bにおいて破線四角形として示される。図3Cは、(ノードのクラスタに現れ、方向18に移動している)関心のあるオブジェクト16を追跡し、クラスタの範囲内で集計されたデータを(破線矢印によって示されるルーティング経路に沿って)マルチホップ通信を介して基地局14へ配信するWCN 10を例示する。図3Cに示されるように、ノード12E、12Fは、この時点で、オブジェクト16を認識することが可能であり、クラスタデータ集計に能動的に参加している(すなわち、ノード12E、12Fにイベントが現れる)。このようにして、ノード12E、12Fのデューティ・サイクルが十分に高い値(例えば、最大デューティ・サイクル)にセットされる。ノード12A、12Bは、(オブジェクト16の現在の方向18への移動に基づいてオブジェクト16の期待される将来の状態のため)オブジェクト16を直ぐに検知する可能性があるので、ノード12A、12Bのデューティ・サイクルは、オブジェクト16が実際に見えるようになる前に、これらのノードで低待ち時間状態を達成するためにさらに増加されることがある。ノード12B、12C、12D、12Hは、集計データを基地局14へ配信することに能動的に参加する。このようにして、ノード12B、12C、12D、12Hのデューティ・サイクルも同様に十分に高い値(例えば、最大デューティ・サイクル)にセットされるので、オブジェクト16に関する情報を格納するパケットは、迅速かつ確実に基地局14へ配信されることができる。最後に、残りのノード12Gは、関心のあるイベントまで比較的距離があり、そして、PDCAスキームは、これに応じて、ノード12Gのデューティ・サイクルを減少させる。
【0036】
関心のあるイベントがノード12に発生するとき、PDCAスキームは、これから来る可能性がある無線トラフィックの増加に備えるため、ノード12の通信隣接ノードにこのイベントを通知する。一つの例示的な実施形態では、この時点でイベントを検出しているノード12は、このノードが送信するパケットのMACヘッダの中の専用ビットをセットすることにより、このノード12の通信隣接ノードにイベントの発生を警告することがある。このような専用ビットは、本明細書では、明示的イベント通知(EEN)ビットと称される。代替的な実施形態では、さらに、専用2ビットフィールドがMACヘッダの中で使用されることがあると考えられる。EENビットに加えて、このような代替的な実施形態は、パケットヘッダを送信しているノード12がこの時点でイベント関連データを転送しているかどうかを示すために明示的イベント・ルーティング通知(EERN)ビットをさらに含むことがある。MACレイヤ・プロトコルは、一般に、直接的なセンサ測定量を獲得する責任がないので、PDCAスキームは、関心のあるイベントがノード12のセンシング・フィールドの範囲内にあるとき、すべての送信パケットのEENビットがセットされるべきであること(そして、専用2ビットフィールドを利用する代替的な実施形態では、ノード12がイベント関連データを送信しているとき、すべての送信パケットのEERNビットがセットされるべきこと)をアプリケーションレイヤがMACレイヤに通知することを可能にするインターフェイスをアプリケーションレイヤに提供する。
【0037】
ノード12のうちの1つのノードに対するMACレイヤ26とアプリケーションレイヤ28との間のこの相互作用の概要が図4に概略的に示される。ノード12のアプリケーションレイヤ28は、イベントがノード12のセンシング・フィールドの中で検出されたかどうかをMACレイヤ26に通知するので、MACレイヤ26は、このMACレイヤが送信するパケットの中のヘッダのEENビットをセットするか、又は、セットしないことがある。同時に、いずれかの隣接ノード12がイベントを検出する場合、このような隣接ノード12は、MACレイヤ26によって受信されたパケットのヘッダの中のEENビットのセットの形でイベントをノード12にさらに通知する。より詳細に後述されるように、ノード12は、このノードが受信するEENビットがセットされているか、又は、セットされていないかに基づいて近い将来にこのノードにイベントが現れるかどうかを予測することがある。イベントがノード12のセンシング・フィールドで発生することが予想される場合、MACレイヤ26は、隣接ノード12とより効率的に通信するため、ノード12の無線機のデューティ・サイクルに関して)ノード12の通信スケジュールを順応させることがある。
【0038】
この例示的な実施形態におけるノード12のMACレイヤ26及びアプリケーションレイヤ28のための詳細な状態遷移図が図5に示される。アプリケーションレイヤ28は、2つの可能な状態、すなわち、アイドル状態30及びセンシング状態32を有している。WCN 10が動作を開始する前に、アプリケーションレイヤ28は、アイドル状態30にある。WCN 10が動作し始めると、アプリケーションレイヤ28の状態がセンシング状態32に遷移する(アルゴリズム2を参照して詳細に後述される)。このセンシング状態32では、ノード12のアプリケーションレイヤ28は、このノードのセンシング・フィールドの中でイベントを検出しようとする。関心のあるイベントが検出された場合、ノード12のアプリケーションレイヤ28は、ノード12のEENビットをセットすることをノード12のMACレイヤ26に通知する(アルゴリズム1を参照してより詳細に後述される)。
【0039】
MACレイヤ26は、2つの可能な状態、すなわち、アイドル状態34及び追跡状態36をさらに有している。ノード12のMACレイヤ26が、セットされたEENビットを介して、このノード12自体のアプリケーションレイヤ28、又は、隣接ノード12いずれかによってイベントの検出を通知されるまで、MACレイヤ26はアイドル状態34にある。MACレイヤ26がイベント通知を受信すると、状態は、追跡状態36に変更される。この追跡状態36では、MACレイヤ26は、ノード12でSTEPを使用して近い将来におけるイベントの検出の予測を実行する。近い将来にノード12のセンシング・フィールドの中で発生するイベントの確からしさに基づいて、MACレイヤ26は、ノード12の通信スケジュールを順応させる。換言すると、MACレイヤ26は、隣接ノード12との通信がWCN 10のための低減されたエネルギー消費量で効率的に実行されるように、ノード12でSTEPに基づいてこのノードの無線機のデューティ・サイクルを洗練する。MACレイヤ26のこれらの演算は、アルゴリズム3〜5を参照して詳細に後述される。なお、図5における見出しA1−1、A1−2、...、A4−4は、以下のアルゴリズム1〜4に示された演算を表現する。
【0040】
EENビットがセットされたパケットをノード12が受信又は傍受するとき、ノード12は、(必ずしもノードの固有のセンサを使用してイベントを「直接的に検知」することを要することなく)関心のあるイベントを「間接的に検知」することができる。一部の実施形態では、受信側ノード12は、送信側ノードのセンシング・フィールドの領域によって近似された、ある一定の不確定性を伴って、送信側ノード12のセンシング・フィールドの中心に位置していると仮定されることがある。WCN 10の例示的な実施形態を再び参照すると(今度は図6を参照すると)、各ワイヤレス・カメラ・ノード12のセンシング・フィールドは、オブジェクトが画像平面42の中で許容可能な鋭い焦点を使って認識できる視錐台40として定義されることがある。視錐台40は、カメラ内部の光学中心46から放射する側面44と、許容可能な鋭い焦点の限界を表現する近平面48及び遠平面50とによって境界が定められる。視錐台40が特定されると、センシング・フィールドの中心52も同様に見つけることができる。上記の方法でイベントをローカライズすることは、EENビットがセットされたパケットを受信する各ノード12のための「拡張センシング・フィールド」を提供する。当業者は、EENビットが典型的にTCP/IPで使用される明示的輻輳通知(ECN)の一般形式に機能的に類似していることが分かるであろう。このタイプの間接センシングによるイベントの検出は、カルマンフィルタ(KF)への入力と見なされることがある。イベントのKFに基づく追跡を使用するWCN 10の例示的な実施形態において各ノード12によって実行される状態推定手順は、アルゴリズム1において擬似コードとして要約される。
【0041】
アルゴリズム1(KFを使用するオブジェクト追跡)
アプリケーションレイヤ
If 関心のあるイベントがセンシング・フィールドの範囲内で検出される then
(A1−1) MACレイヤに送信パケットのEENビットをセットすることを通知する
Else
(A1−2) MACレイヤに送信パケットのEENビットをセットしないことを通知する
End if
MACレイヤ
While(1)
If パケットが受信/傍受され、かつ、EENビットがセットされるか、又は、アプリケーションレイヤによってEENビットをセットすることが通知される then
(A1−3) セットされたEENビットをアクティブにしたノードの識別子としてIDをセットする
Kalman(ID) //アルゴリズム3を呼び出す
End if
End while
【0042】
EENビットを使用するこの間接センシング・アプローチは、各ノードがこの各ノードの隣接ノードのセンシング・フィールドに関する情報を有することを仮定する。一部の実施形態では、この情報は、WCN 10の初期化段階中に各ノード12によって受信されることがある。ノード12のセンシング・パラメータを計算することは、一般にMACプロトコルの領域を超えるので、本開示は、(一部の初期キャリブレーション手順の後に)この情報がアプリケーションレイヤで利用できることを仮定する。アプリケーションレイヤは、その後、三つ組(ID;z;R)の形でこの情報をMACレイヤに配信することがあり、ここで、IDはノード12を特定し(「self」はローカル・ノード・アドレスを示す)、zはノード12のセンシング/フィールド40の中心52に対応し、Rは、ノード12のセンシング・フィールド40を近似する楕円である。ノード12は、その後、この情報をこのノードの1ホップ通信隣接ノードへブロードキャストすることがある。これらの初期化メッセージを受信するこれらのノード12は、MACレイヤ・プロトコルの範囲内でこれらの初期化メッセージを隣接ノード12のリストの中に記憶することがある。WCN 10の例示的な実施形態において各ノード12によって実行される実例的な初期化プロセスは、アルゴリズム2において擬似コードとして要約される。
【0043】
アルゴリズム2(システム初期化)
アプリケーションレイヤ
If センシング情報が隣接ノードに関して特定される then
(A2−1) MACレイヤに(ID;z;R)を通知
End if
MACレイヤ
If センシング情報が受信される then
(A2−2) (ID;z;R)を記憶
If (ID==self)
(A2−3) (ID;z;R)をブロードキャスト
End if
End if
【0044】
前述の通り、イベントの予測は、ノード12で時空間イベント確率(STEP)を使用して実行されることがあり、この手順が以下の段落で数学的に記述される。時刻tkでイベントjを仮定すると、Skjとして表示されるSTEP分布は、時点tk+1=tk+δkでのターゲットイベントの予測位置の不確からしさによって与えられ、ここで、δkは、次のセンサ測定前の期待時間間隔である。すなわち、ターゲットイベントの予測位置がpkjによって与えられると、STEPは、Skj=Pr(pkj)によって与えられる。なお、STEP Skj及び予測位置pkjの添字は、予測が行われた時を示すので、これらの添字は、k+1ではなく、kである。STEP分布は、新しい測定量が直接センシング又は間接センシングのいずれかによってノード12により取得されるときはいつでも更新される。
【0045】
イベントが追跡されているとき、各ノード12がイベントの複数の観測量を獲得すると仮定するのが妥当である。方向18に移動中のオブジェクト16の検出と関連付けられているイベントの実施例に戻ると、例示的なWCN 10の各ノード12は、オブジェクト16のロケーションの複数の観測量を獲得することになる。1つずつのこのような観測量は、共分散行列の形をした関連付けられた不確定性と共に、オブジェクト16のロケーションの期待値として特徴付けられる。オブジェクト16が追跡されているときに順次に獲得されるこれらの観測量は、近い将来にオブジェクト16が現れる可能性が最も高いノード12を予測するため再帰的な枠組みで使用されることがある。一部の実施形態では、この再帰的なフレームワークは、H. Medeiros et al., “Distributed Object Tracking Using a Cluster-Based Kalman Filter in Wireless Camera Networks,” 2 IEEE Journal of Selected Topics in Signal Processing 448-463 (2008) に記載されたフレームワークと同様に、KFフレームワークとして具現化されることがあり、この文献の開示内容全体が参照によって本明細書中に明確に組み込まれる。
【0046】
例示的な実施形態では、関心のあるオブジェクト16の観測及び追跡にこの時点で関与している各ノード12は、オブジェクト16の状態ベクトルを作成することになる。殆どの事例では、ノード12における状態ベクトルは、隣接ノード12から受信されたオブジェクト情報を用いて初期化されることになる。続いて、ノード12自体がオブジェクト16を観測し始めるとき、カルマン方程式がこの状態ベクトルを更新するため使用されることがある。この更新された状態ベクトルは、オブジェクト16が現在ノード12のセンシング・フィールド40から外れるとき、オブジェクト12が現れる場所に関する予測を行うためノード12によってその後に使用されることがある。この状態ベクトルは、離散的な時刻kで
の両方からなる4次元(4D)ベクトルを例示的に含む。換言すると、状態ベクトルは、
によって与えられることがある。この状態ベクトルを使用して、システムダイナミクスは、
によってモデル化されることがあり、式中、δkはオブジェクト16の2回の観測の間に経過した時間を表し(すなわち、測定量kが時点tkで取得された場合、測定量k+1が時点tk+1=tk+δkで獲得される)、そして、イベント加速度(ax,ay)が共分散行列Qをもつ白色ガウス雑音としてモデル化される。システムダイナミクスは、
として表されることもあり、式中:
であり、
は、共分散行列Qをもつプロセス・ノイズ・ベクトルである。PDCAスキームによって利用される測定量は、関心のあるイベントの近似位置によって与えられる。このようにして、測定モデルが
によって記述されることがあり、式中、H = [ I(2 x 2) 0(2 x 2) ]が観測行列であり、vkが測定雑音であり、共分散行列Rkをもつ白色ガウス雑音であると仮定される。
【0047】
測定量がこの測定量の対応するタイムスタンプと共に受信され、比較的緊密な同期がノード12の間で維持される実施形態では、適度に精密な測定時間が取得され、δkが正確に計算されることがある。測定量が対応するタイムスタンプを含まない他の実施形態では、測定時間の推定値がパケットの中に埋め込まれたタイムスタンプを使用して依然として取得されることがある。さらに、受信測定量自体は、イベントの実際の位置の粗い近似であり、ノード12の間の小さい時間差によって引き起こされる不正確さは、その結果、比較的無視できる。その上、同期MACプロトコルは、一般に、隣接ノードの間で少なくとも局所的に適切な動作のため適度に緊密な同期スキームを利用し、受信中の測定量の中のタイムジッタは適度に無視されることがある。
【0048】
予測された状態ベクトル及び前に推定された状態ベクトルとして、それぞれ、
を使用し、予測された共分散行列及び前に推定された共分散行列として、それぞれ、
を使用して、KFの時間更新方程式は、
によって与えられることがあり、KFの測定量更新方程式は、
によって与えられることがあり、式中、Kkはカルマン利得を示す。各ノード12によって実行される状態推定アルゴリズム(アルゴリズム1)によって呼び出されることがある例示的なKF更新関数は、アルゴリズム3として擬似コードにおいて要約され、後述される。
【0049】
【0050】
イベントがノード12のセンシング・フィールドの範囲内で時刻tkに検出されるとき、新しい測定量zkが追跡アルゴリズムに供給される。前述の通り、測定量は、ノード12がイベントを直接的に検知するか、又は、EENビットがセットされたパケットを受信することによりイベントを間接的に検知する結果でもよい。隣接ノード12のセンシング・フィールド40に関する情報は、(アルゴリズム2によれば、初期化中に)WCN 10において局所的に共有されているので、イベントの平均ロケーション(z)とこのロケーションの対応する共分散行列(R)とは、セットされたEENビットを送信したノード12のID値に基づいて(又は、ID==selfである場合にノードの固有センシング・パラメータに基づいて)推定されることがある。前述の通り、平均ロケーションは、測定ノード12のセンシング・フィールド40の中心52であると見なされることがあり、共分散行列は、測定ノード12のセンシング・フィールド40を近似する領域であると見なされることがある。新しい測定量zkを受信するノード12によってこの時点で追跡されているイベントが存在しない場合、新しいKFがインスタンス化され、初期化される。
【0051】
代替的に、KFのインスタンスがノード12に既に存在する場合、ノード12は、新しい測定量zkがこの時点で追跡されているイベント、又は、新しいイベントの最初の発生に関係するかどうかを決定する必要がある。この決定は、MACレイヤのセンシング分解能に起因してさらに一層難しくなるマルチターゲット追跡問題である。この分解能は、例示的なWCN 10におけるノード12のロケーション及びこれらのノードの対応するセンシング・レンジだけによって提供されるので、MACレイヤのセンシング分解能は、使用されるカメラのタイプ及び精度とは無関係に比較的低い。この例示的な実施形態は、WCN 10の中の複数のイベントがノード12によって区別できるように常に互いに適切に離れていることを仮定することにより、このマルチターゲット追跡問題を回避する。新しい測定量zkが前に検出されたイベント又は新しいイベントに対応するかどうかを決定する間に、PDXAスキームが時点tkにおけるイベントjの予測位置を
として定義し、
イベントjの予測x座標及びy座標に対応する(イベントの速度を含まない)。観測間の時間(δk+1)は、時点tkで未知であるので、予測が(ノード12のセンシング間隔のようなこれらのノードの1個以上のパラメータに基づいてセットされることがある)事前定義されたδk+1を使用して実行されることがある。
の対応する予測空間不確定性領域は、
を充足する領域であり、
式中、パラメータαは、不確定性領域の信頼度を定義する(すなわち、予測空間不確定性領域は、ターゲットをα以上の確率で見つけることができる(x,y)平面内のエリアに対応する)。これらの用語では、例示的な実施形態は、イベントjの予測空間不確定性領域がいずれかの他のイベントl≠jの予測空間不確定性領域と重なり合わないこと(すなわち、
を仮定する。
【0052】
さらに、例示的な実施形態では、パラメータαは十分に小さくセットされるので、
時点tkでのノードhによるイベントjの次の実際の連続的な
の範囲内で一般的に検出される。
【0053】
例示的な実施形態のこれらの仮定の下で、いくつかのイベントjに対して前に予測された
を受信するノード12は、アルゴリズム3において要約されるように、イベントjに対応するKFを更新し、イベントjの新しい状態を推定することにより反応することになる。代替的に、
がこの時点で追跡されているいずれかのイベントの前に予測された
ノード12は、新しいKFをインスタンス化し、初期化することになる。最後に、アルゴリズム3に示されるように、イベントjを追跡する責任をもつKFインスタンスが所定のスレッショルドTthreshより長い期間に亘って
ノード12は、このKFインスタンスを終了することになる(所定の時間の経過は、イベントがノードの拡張センシング・フィールドから離れたことを示唆する)。
【0054】
WCN 10の中の隣接ノードの間で重なり合うセンシング・フィールド40は、多くの場合に、ノード12によって受信される同じオブジェクト16の複数の測定量を生じる。このような状態では、ノード12で実施されるKFは、これらの測定量が受信されるときに、関連付けられたイベントの推定状態を再帰的に更新する。しかし、媒体アクセス輻輳及び/又は処理遅延が原因となって、測定量は、これらの測定量が実際に取得された順序にノード12で受信されないことがある。この可能性にもかかわらず、PDCAスキームが事前に厳しい通信輻輳を実質的に軽減するため、そして、MACレイヤの比較的低いセンシング分解能によって引き起こされる不正確さが測定量の順序が乱れた到着によって引き起こされる不正確さより典型的に優勢であるため、このような順序問題を解決するために高度なメカニズムは必要とされない。このように、PDCAスキームの例示的な実施形態では、測定量の到着順序は測定量が実際に取得された順序であるとさらに仮定される。他の実施形態では、各測定量は、ノード12による適切な順序付けのためのタイムタイムスタンプが設けられることがある。
【0055】
KFインスタンスが(アルゴリズム1及び3毎に)更新されるときはいつも各ノード12によって実行されることがある例示的なデューティ・サイクル順応手順は、アルゴリズム4として擬似コードに要約され、後述される。
【0056】
【0057】
所定の時刻でのSTEP Skjは、連続空間に分布するので、不確定性領域は、副領域に分割され、各副領域が1つのデューティ・サイクル・レベルに対応する。例えば、PDCAスキームがN個のデューティ・サイクル・レベル(d0,d1,...,dN、但し、dNは最高デューティ・サイクル)を含む実施形態では、
このノードのデューティ・サイクルをその時点のdmに調節することがある。このSTEP分布の副領域への分割は、図7A〜7Cに示されるように、たまねぎ状の層構造を生じる。殆どの実施形態では、比較的少数(例えば、3から5個)のデューティ・サイクル・レベルがPDCAスキームのために十分であろう。図7A〜7Cの例示的な実施形態では、PDCAスキームは、領域60、領域62及び領域64に対応する3つのデューティ・サイクル・レベル(すなわち、N=3)を有している。
【0058】
なお、例示的なPDCAスキームは、ノードの地理的位置ではなく、ノード12のセンシング領域40に基づき、MACプロトコルが指向性センサネットワーク(例えば、カメラネットワーク)に適用されることを可能にする。このように、図7Aの中の点は、各ノード12A〜Hの物理的ロケーションを示すが、図7Bの中の点は、各ノード12A〜Hのセンシング領域40の中心52(添字「cs」付き)を示す。図7A及び7Bに示されるように、ノード12Aのセンシング・フィールド40の中心52は、領域60の範囲内にあり、すなわち、ノード12Aは、例示的な実施形態では、最高デューティ・サイクルd3を有することになる。逆に、ノード12B、12C及び12Hのセンシング・フィールド40の中心52は、領域62の範囲内にあり、すなわち、ノード12B、12C、12Hは、中間デューティ・サイクルd2を有することになり、残りのノード12D〜12Gは、最低デューティ・サイクルd1を有することになる。
【0059】
アルゴリズム4では、ノード12の現在のデューティ・サイクル・レベルは、dc、c∈{1,...,N}と表され、対応するノード12がこの時点で
との間のSTEP副領域にある。STEP更新が行われるときはいつでも、ノード12は、新しいデューティ・サイクル・レベルdmを計算し、時点tk+1=tk+δk’に対しデューティ・サイクル修正のスケジュールを立てることがある。スケジュールが立てられた時点tk+1で、ノード12は、新しいデューティ・サイクル・レベルdmを採用し、この新しいスケジュールを隣接ノード12にブロードキャストする(その結果、隣接ノードは、ブロードキャスト側ノード12が利用できる期間を認識する)。関心のあるイベントの発生とは異なり、イベントの消失は、近くのノードの間の即時通信トラフィックを始動させることにならない。その代わり、イベントの消失は、EENビットがセットされているパケットが長期間に亘って存在しないことによって推定されることがある。このようにして、アルゴリズム4に示されるように、デューティ・サイクル順応がソフト状態アプローチを使用して実行され、デューティ・サイクル修正が行われるときはいつでも、タイムアウト期間がセットされ、タイムアウト期間の満了時に、ノード12は、関心のあるイベントがこのノードの拡張センシング・フィールドから離れたと仮定し、このノードのデューティ・サイクルを最低レベルd1にリセットする。
【0060】
時点tk及びt’kにおける(方向18に移動する)オブジェクト16の追跡に関与するWCN 10の例示的な実施形態がそれぞれ図7A〜7Cに示される。この場合も同様に、(実線円で分割された)領域60〜64は、変化するデューティ・サイクル・レベルに対応する実例的に充足されたSTEP副領域を示す。最初にノード12Fによって検出された関心のあるイベントが(図7A及び7Bに示されるように)ノード12Bのセンシング・フィールド40の中に入り、パケット伝送を始動させる場合、EENビットがノード12Bによって送信されたパケットの中でセットされ、それによって、ノード12A、12E、12Hにイベントの発生を通知する。時点tkでのノード12Bからのこのようなパケットの受信時に、この間接的に検知された測定量に起因して、KFが各ノード12A、12E、12Hで作成され、初期化され、更新されることになる。ノード12A、12E、12Hは、その後、それぞれのノードのセンシング・フィールド40の中心52に関して現在のSTEP Skjを計算することになる。
【0061】
ノード12Bから受信されたメッセージに基づいて、時点tkでノード12Aによって計算されたSTEPは、図7A及び7Bに示される。この時点で、ノード12Aは、このノードがこのノードの次の測定中に領域60の範囲内にあると予測し(すなわち、オブジェクト16を検出する可能性が非常に高い)、その結果、tk+1での最高デューティ・サイクル・レベルd3の採用するためスケジュールを立てる。図7Cに示されたその後の時刻t’kで、ノード12Aは、オブジェクト16の測定量を獲得し、新しいSTEP Skjを計算する。この時点で、ノード12Aは、このノードがこのノードの次の測定中に新しい領域62の範囲内にあると予測し(すなわち、新しいSTEPの中に反映されるように、このノードのセンシング・フィールド40から離れるオブジェクト16を検出する可能性があまり高くない)、その結果、中間デューティ・サイクル・レベルd2を採用するためスケジュールを立てる。各ノード12は、このノードの固有の測定量だけでなく、離接ノード12から受信されたメッセージにも基づいてこのノードの固有のSTEPを独立に計算するので、異なるノード12で計算されたSTEP Skjは、僅かに異なることがある。実際には、小さい不一致にもかかわらず、複数のノード12によって計算されたSTEPは、イベント位置の分布の全体の近似であり、従って、多くの場合に、非常に類似することになる。ノード12が(例えば、複数のKFインスタンスを使用して)複数のイベントを追跡する場合、ノード12は、2つ以上の予測不確定性領域60〜64の範囲内に位置することがある。一部の実施形態では、複数のイベントからの不確定性は、異なるアプローチを使用して統合されることがある。例示的な実施形態では、しかし、PDCAスキームは、より高いデューティ・サイクルに対応する領域60〜64を単に選択する。
【0062】
ノード12が関心のあるイベントを検出し、新しいデューティ・サイクル・レベルを計算すると、例示的な実施形態では、ノード12のフレーム長さは、指数的に増減される。例えば、T1がd1に対応する最低デューティ・サイクルのフレーム長さであり、Mが指数的に変化するフレーム長さの底である場合、dcに対応する現在フレームの長さTcは、
として表現されることがあり、式中、i∈{1,...,N}であり、Nがデューティ・サイクル・レベルの数を表し、M∈N*(すなわち、正整数)である。Mは、PDCAスキームにおいてはどのような数でもよいと考えられる。フレーム長さが、例えば、2倍又は3倍で変化する場合、Mは、それぞれ、2又は3になる。この指数的に変化する順応フレーム法は、ノードが異なるデューティ・サイクルで動作するとしても、ノード12のいずれかのペアが通信できることを保証する。例えば、両方ともに最初に時点t0でアクティブ状態であり、異なるデューティ・サイクル・レベルdi及びdj(i<j)で動作する2つのノードni及びnjを仮定すると、ノードniは、時点t0+kTi(k∈N)でウェイクアップし、ノードnjは、時点t0+lTj(l∈N)でウェイクアップすることになる。
その結果、WCN 10の中のあらゆるノード12は、最低可能デューティ・サイクル・レベルd1に対応するアクティブ期間である少なくとも基本フレーム時間tbfの間に、このノードの直ぐ隣のノードと通信できる。4種類のデューティ・サイクル・レベル(d1からd4)を使用する例示的な実施形態の指数的に変化するフレーム長さが図8に示される。スケジュールS1(デューティ・サイクルd1を含む)は、フレーム長さf1を有し、スケジュールS2(d2)、S3(d3)及びS4(d4)は、それぞれ、フレーム長さf2、f3及びf4を有している。これらのフレーム長さの間の指数的関係は、f4=(21)*f3=(22)*f2=(23)*f1として表現されることがある。
【0063】
ノード12が時点tk+1で新しいデューティ・サイクル・レベルdmを採用すべきことをこのノード12が決定した後、ノード12は、隣接ノード12のスケジュールからこのノードのスケジュールを非同期化することなく、この修正を許可するメカニズムをさらに利用すべきである。tk+1は、新しいフレームの始まりと一致しないことがあるので、ノード12は、新しいスケジュールを使用して次のフレームを実際に開始するため異なる時点を決定することがある。tcを現在時点として使用し、tcfを現在フレームが開始した時点として使用し、tbfを前の基本フレームが開示した時点として使用し、tnfを次のフレームが現在スケジュールに応じて開始すべき時点として使用して、ノード12が時点tcでこのノードのデューティ・サイクルを異なるレベルdmに変更することを決定した場合、ノード12は、次のフレームの始まりをt’nf=tc+Δに向けるスケジュールを立てることになり、ここで、Δは、次のフレームの始まりまでの残り時間であり、
【0064】
この最小化問題は、Uの可能な値を探索することによって素早く解決されることがある。今度は図9を参照すると、垂直の実線が現在スケジュールのアクティブ期間の始まりを示し、垂直の点線が採用されるべき新しいスケジュールのアクティブ期間の始まりを示す。本事例におけるパラメータがM=2及びN=5である場合、ノード12の現在デューティ・サイクル・レベルは、dc=1であり、時点tcで、ノード12は、このノードのデューティ・サイクルをdm=2まで増大することを決定し、パラメータUは、
Δがその後に式(14)においてU=3をセットすることにより計算されることがあり、次のフレームの開始時点t’nfはこれに応じてスケジュールが変更されることがある。
【0065】
これまでに開示されたPDCAスキームは、イベント駆動WSNにおける同期MACプロトコルのためのプラグイン機能を有するため設計される。前述の通り、異なるスケジュールを有することがあるノード12のペアの間の通信は、ノード12の間で最低デューティ・サイクルを有しているノード12のアクティブ期間である(必ずしもd1ではない)これらのノードのアクティブ期間の重なり合いの間に行われるべきである。ノード12のアクティブ期間の計算は、フレームの開始時点に基づいて、1デューティ・サイクル間隔中にフレーム番号をフレームに割り当てることによって容易化されることがある。例えば、N個のデューティ・サイクル・レベルが使用されるとき、フレームの最大数はMNであるので、フレーム番号は0からMN−1まで変化することがあり、0は、tbfで開始するフレームに対応し、MN−1は、最後のフレームに対応する。ノード12が最低デューティ・サイクル・レベルdc(c<N)で動作するとき、(より少ないフレームしか存在しないので)すべてのフレーム番号が使用されるとは限らない。実際に存在するフレームは、これらのフレームの開始時点に基づくこれらのフレームの元の番号付けを維持することがある。(すなわち、デューティ・サイクル・レベルdcにおいて時点tcfで開始するフレームは、番号fcfが付けられ、この場号は、デューティ・サイクル・レベルdNでもfcfであるが、フレーム番号fcf+1がレベルdcで用いられることがない)。次のフレーム番号fnfは、
として表現されることがある。例えば、M=2、dc=1、及び、dN=5である場合、次のフレーム番号は、fnf=(fcf+24) mod 25になる。初期フレームは番号0が付けられるので、本事例におけるフレーム番号は、0と16との間で交互に代わる。現在デューティ・サイクル・レベルがdcpeerである隣接ノード12を含むノード12に対し、両方のノード12のアクティブ期間は、以下の等式:
が成り立つときにはいつでも重なり合うことになる。ユニキャスト通信の成功のため、ノード12は、このようなフレームの間に限りパケットを互いに送信すべきである。ノード12は、後述される同期メカニズムを使用してこのノードの隣接ノード12のスケジュールを認識することがある。実際には、特に、ノード12のデューティ・サイクル変化がホット・ストップの付近で起こるとき、ノード12は、このノードの隣接ノード12の一部又は全部の現在スケジュールが分からないことがある(例えば、ノード12が知っている隣接ノードのスケジュールは陳腐化していることがある)。このような事例では、厳しい輻輳及び衝突が原因となって変化が他のノード12によって認識されるまで、有意な遅延が存在することがある。このようにして、ノード12は、このノードの固有のSTEPのどの領域に隣接ノードが位置しているかをチェックすることにより、このノードの隣接ノード12のスケジュールをさらに推定することがある。様々な送信ポリシーがブロードキャスト通信のため利用されることがある。一部の実施形態では、ノード12の隣接ノード12のすべてがパケットを受信できる場合(すなわち、式(16)がこのノードのすべての隣接ノードに対して成り立つ場合)に限り、ノード12がパケットをブロードキャストするように、通信が制約される。本実施形態は、ブロードキャストされたパケットのためより長い伝送遅延を受けることになることが分かるであろう。他の実施形態では、ノード12は、少なくとも1つの隣接ノード12がリスンすることができる最も早い時点で(すなわち、式(16)がこのノードの隣接ノードのうちの少なくとも1つに対して成り立つと直ぐに)メッセージをブロードキャストすることがある。本実施形態は、隣接ノード12がパケットを傍受又は受信する機会を大幅に削減することが分かるであろう。PDCAスキームの例示的な実施形態は、イベントの付近の隣接ノード12が対象ノード12のデューティ・サイクルと同じであるか、又は、より一層高いデューティ・サイクルを有している可能性が非常に高く、そして、イベント関連情報が通常は遅延に敏感であるので、後者のアプローチを利用する。
【0066】
PDCAスキームの例示的な実施形態では、スケジュール変更が行われるか、又は、周期的SYNCメッセージ交換が必要とされるときはいつでも、SYNCメッセージがブロードキャストされることがある。各SYNCパケットは、(より詳細に後述される)(a)スケジュール・イニシエータのIDと、(b)現在デューティ・サイクル・レベルdcと、(c)次の基本フレームの始まりまでの残り時間と、(d)現在スケジュールの経年と、(e)EEN及びEERNのための2ビットフィールドとを例示的に格納することがある。現在スケジュールの「経年」は、スケジュールが周期的交換中にイニシエータによってブロードキャストされた回数を指す。PDCAスキームの例示的な実施形態は、(複数の異なるスケジュールに属している)境界ノードに関係する起こり得る問題を回避するため、ネットワーク全体でグローバル・スケジューリング・スキームをさらに利用する。このグローバル・スケジューリング・スキームは、ノード12に「旧」スケジュールを採用させることによって実施されることがある。例えば、S0がスケジュールのイニシエータであり、S0によって開始されたスケジュールの下で動作するノード12がSi(ここで、i≠0)から発生されたスケジュール、又は、同じであるが経年が異なるスケジュールを用いて、隣接ノード12からSYNCパケットを受信する場合、ノード12は、旧スケジュールを採用することになる。
【0067】
関心のあるイベントに関する情報を基地局14へ配信する際に起こり得る待ち時間を低減するため、PDCAスキームは、この情報を配信するため使用されたルーティング経路に沿って中間ノード12をさらに明示的に区別する。前述の通り、イベント検出ノード12は、これらのノードから出て行くパケットのMACヘッダの中のEENビットをセットすることにより特定される。ノード12がイベント関連情報を基地局14へルーティングしていることを示すため、他方では、ノード12は、MACヘッダの中の明示的イベント・ルーティング通知(EERN)ビットをセットすることがある。ノード12がEENビット又はEERNビットがセットされたパケットの意図された受け手であるとき、これは、関心のあるイベントに関する情報を格納する優先順位を付けられたフローがノード12を介してルーティングされることを示唆する。このようにして、このパケットを受信し次第、ノードは、引き続き送信されるべきすべてのパケットのEERNビットをセットする。
【0068】
ノード12がルーティング経路の一部である限り、ノード12は、エンド・ツー・エンド・レイテンシーを最小限に抑えるため、このノードのデューティ・サイクルを所定のレベルdNまで増加させる。レベルdNは、一部の実施形態では、最大デューティ・サイクルdNと同じにセットされることがある。図3Cに示された例示的なWCN 10を参照すると、ノード12B、12H、12C、12Dと基地局14とは、イベント関連パケットのルーティング経路に沿っているので、ノード12E又は12Fから発生したパケットを受信し次第、これらのデューティ・サイクルは、dNまで増加することになる。ルーティング経路に沿ったノード12のメンバーシップは、EERNがセットされたパケットの受信によって周期的にリフレッシュされなければならないソフト状態として実施されることがある。換言すると、ノード12が特定の期間内にルーティングされたパケットを受信しない場合、ノード12は、このノードのデューティ・サイクルを最低レベルd1まで低下させることになる。各ノード12によって実行されることがあるイベント情報ルーティングのための例示的なデューティ・サイクル順応手順は、アルゴリズム5として擬似コードに要約される(変数isEvenRoutingは、ノード12がこの時点でルーティング経路の一部分であることを示唆する)。
【0069】
アルゴリズム5(関心のあるイベントに関連したルーティング・パケットの高速配信)
While(1)
If 近傍及び意図された受け手からのパケットYを受信し、かつ、(Y .EERN セット||Y .EENセット)
(A5−1) タイムアウト付きのisEventRoutingをセットし、かつ、デューティ・サイクルをdc=dNまで増加させる
End if
If (パケットYを送信)
(A5−2) Y .EERN = isEventRouting
End if
If (タイムアウト満了)
(A5−3) デューティ・サイクルをd1まで減少させる
End while
【0070】
MACプロトコルの例示的な実施形態は、ここに開示されるPDCAスキームをTMACフレームワークに適用することにより構築された(本明細書中では「P−TMAC」と称される)。TMACは、(現在のネットワーク状態に依拠し)フレーム長さが固定された同期順応デューティ・サイクリングMACプロトコルである。PDCAスキームをTMACに適用することにより、フレーム長さも動的になり、設計上の対立なしに、より優れた順応性をもたらす。P−TMACプロコルは、Castaliaシミュレータ上のターゲット追跡(イベント駆動WSNの典型的なアプリケーション)の状況で評価された。Castaliaシミュレータは、A. Boulis, “Castalia: Revealing Pitfalls in Designing Distributed Algorithms in WSN,” SenSys ’07: Proceedings of the 5th Int’l Conf. on Embedded Networked Sensor Sys. 407-408 (2007)に記載され、この文献の開示内容全体が参照によって本明細書中に明確に組み込まれる。特に、P−TMACプロトコルの性能は、各TelosBノードが天井の下にランダムに配備され、25m×25mのエリア内を下向きに観測するカメラを備えている60個のTelosBノードで構成されたWCNを使ってシミュレートされた。(ある程度まで、イベントが稀にしか発生しない事例及びイベントが頻繁に発生する事例の両方を受け入れるために)ランダムに移動するオブジェクトが全シミュレーション時間のうちの3分の1の期間中にネットワーク内に存在すると仮定した。
【0071】
P−TMACのシミュレートされた性能は、2つの他の既存の順応MACプロトコル:AMAC及びTMACと比較された。これらのMACプロトコルの基本フレーム長さLは、すべてがアクティブ期間30msを含む1220msになるようにセットされ、その結果、基本デューティ・サイクル2.46%が得られた。P−TMAC及びAMACは、それぞれが、それらのフレーム長さを(指数的に変化するフレーム長さの特性によって)L、L/2、L/4及びL/8の間で変更することを許容された。性能評価のための基準線を設定するため、異なるフレーム長さをもつ4つのTMACが同様に評価された。具体的には、デューティ・サイクル2.5%、4.9%、9.8%、及び、19.7%に対応するフレーム長さを有し、TMAC−0、TMAC−1、TMAC−2及びTMAC−3とそれぞれ呼ばれるTMACプロトコルが同様にシミュレートされた。シミュレーションの残りのパラメータは、以下の表1に要約される。
【0072】
さらに、関心のあるイベントを検出するノードがこのイベントをシンク・ノードに個別に、又は、隣接ノードとの協働的なデータ処理と共に報告する2種類のシナリオが評価された。第1のシナリオ(すなわち、関心のあるイベントを検出する各ノードがこのノードの測定量を個別に報告するシナリオ)は、各MACプロトコルがイベントによって始動された集中的パケットをどの程度巧く取り扱えるかを評価する。第2のシナリオ(すなわち、イベントを検出する各ノードが協働的なセンシング及び処理を実行するためこのノードの隣接ノードとメッセージを交換するシナリオ)は、イベントの付近でより一層集中的な集中的トラフィックを必然的に伴い、利用されたMACプロトコルにさらなる課題を作り出す。両方のシナリオにおけるMACプロトコルの性能特性は、待ち時間及びスループットのような従来型のメトリックに加えて、イベント駆動WSNを評価するため具体的に設計された時間限界パラメータ推定精度(TIBPEA)QoSメトリックを使用して獲得された。TIBPEAは、P.J. Shin et al., “A QoS Evaluation Testbed for MAC Protocols for Wireless Camera Networks” 235-242 (2007) に記載され、この文献の開示内容全体が参照によって本明細書中に明確に組み込まれる。TIBPEA QoS評価メトリックは、隣接ノードが互いに通信できる信頼性が高くなるのにつれて、協働的に計算されるべきパラメータの精度が高くなるという観察に基づいて設計された。TIBPEAは、ある一定のタイムアウト期間内にブロードキャスト・メッセージへの応答に成功した隣接ノードの平均的な割合を使用して計算される。様々なMACプロトコルが、待ち時間、正規化スループット、及び、エネルギー消費量のような従来型のメトリックを使用してさらに評価された。正規化スループットは、各MACプロトコルにおいて、すべてのノードからシンクへ報告されたパケットの数を上限の役目を果たすTMAC−3のパケットの数で割り算することによって計算された。
【0073】
第1のシナリオでは、WCNの各ノードは、このノードの固有のセンシング間隔を用いて環境を連続的にセンスする。関心のあるイベントがノードのセンシング間隔中にこのノードによって検出されたときはいつでも、このノードは、このノードの固有の測定量を(例えば、ネットワークの縁に位置している)WCNのシンク・ノードへ直接的に報告する。ノードのセンシング・フィールドは重なり合うことがあるので、イベントは、イベントの近傍からシンク・ノードまで、各通信フローが簡単なツリーに基づくルーティング・プロトコルによって命令される複数の通信フローを始動させる。前述されたP−TMACプロトコル、AMACプロトコル、および、4つのTMACプロトコルの性能は、この第1のシナリオにおいて、待ち時間、正規化スループット、及び、エネルギー消費量の観点から評価された。
【0074】
今度は図10Aを参照すると、シミュレーション結果は、P−TMACがTMAC−3の平均待ち時間と類似した範囲において、様々なサンプリング間隔で、非常に低い1ホップ当たりの平均待ち時間を達成することを示す。「センシング・ラウンド」は、関心のあるイベントがノードのセンシング・フィールドの中に存在している期間として定義されることがある。「リンク初期化パケット」は、各センシング・ラウンド中に最初に送信されたパケットとして定義されることがある。同じオブジェクト移動を仮定すると、より高いサンプリングレートが1センシング・ラウンド当たりより一層のパケット生成を引き起こし、パケットの全数に対するリンク初期化パケットの割合を低下させる。TMAC及びAMACは、低サンプリングレート及び/又は低速オブジェクト移動が原因となって、リンク初期化パケットの数が少ないときにそれぞれが最も良く機能するように設計される。図10Aにおいて分かるように、TMAC−0及びAMACの1ホップ当たりの平均待ち時間は、サンプリング間隔の増加に伴って逆に増加するが、P−TMACは、このプロトコルの最良性能を維持する。
【0075】
各MACプロトコルシミュレーションの正規化スループットが図10Bに示される。正規化スループットは、各MACプロトコルに対しすべてのノードからシンク・ノードへ報告されたパケットの数を(理論的な上限としての役目を果たす)TMAC−3の同じメトリックによって割り算することによって計算された。スループットの観点から、P−TMACは、AMACより優れており、TMAC−3のスループットとほぼ同じ性能を達成する。サンプリング間隔が増加するのにつれてAMACのスループットが減少する主な理由は、データパケットと比較して、制御パケット(例えば、SYNC、RTS及びCTS)の付加的な通信オーバーヘッドである。ノードのスケジュールが変化するときはいつでも、P−TMAC及びAMACは、それぞれが、現在スケジュールをブロードキャストする。P−TMACは、AMACより広いスケジュール順応範囲を有しているので、この通信オーバーヘッドは、空間全体に分散させられる。このように、制御パケットがイベントの周りのノードに与える悪影響は、AMACの場合よりP−TMACの場合に影響が小さい。
【0076】
P−TMACは、待ち時間及びスループットの観点から、TMAC−3に類似する性能メトリックを達成するが、図10Cに示されるように、P−TMACのエネルギー消費量は、TMAC−1とTMAC−2との間にある。これは、P−TMACがTMACより効率的にエネルギーと待ち時間との間のトレードオフを改善することを示唆する。最後に、AMACは、前述されるように、待ち時間及びスループットの観点で性能を犠牲にして、P−TMACより優れた性能を達成する。
【0077】
第2のシナリオでは、ノードが関心のあるイベントを検出したとき、ノードは、(通常は分散アルゴリズムを含む)協働的なデータ処理を通じてイベントのより徹底的な理解を得るため、隣接ノードと測定量を共有することを試みる。今度は図11A及び11Bを参照すると、異なる平均ターゲット速度3m/s及び6m/sを用いた2組のシミュレーションがMACプロトコルに対して実施された。シミュレーションの組毎に、TIBPEAが異なるタイムアウト限界を用いて測定された。P−TMACプロトコルは、タイムアウト限界が厳しいとき(イベント駆動WSNにおいて共通の状況)、AMACプロトコル、TMAC−0プロトコル、および、さらにTMAC−2プロトコルより優れていた。他のMACプロトコルと比較して優れているP−TMACの性能は、遅延が重要なアプリケーションに対し、この設計目標を充足する。
【0078】
ある特定の例示的な実施形態が詳細に前述されたが、変形及び変更は特許請求の範囲に記載され、規定された本開示の範囲及び趣旨に包含される。
【技術分野】
【0001】
本開示は、一般に、イベント駆動ワイヤレス・センサ・ネットワークのための媒体アクセス制御プロトコルに関する。より詳しくは、本開示は、予測的デューティ・サイクル順応方法を用いる媒体アクセス制御プロトコルに関する。
【背景技術】
【0002】
ワイヤレス・センサ・ネットワーク(WSN)は、それぞれが一般的なセンシング、情報処理、及び、ワイヤレス通信能力を備え、物理状態又は環境状態を協調して監視するため1つのエリアに配備されたセンサ・ノードのグループである。例えば、受動的な環境監視用のWSN内のこれらのノードは、収集され、そして、マルチホップ通信を介して中継することによりリモート・ホストに報告されることがあるセンシング測定量(例えば、温度、圧力、光度など)を作ることに充てられる。「イベント駆動」WSNと称される比較的新しいクラスのWSNは、一般的に、例えば、ターゲット追跡アプリケーションにおける人又は他のオブジェクトのような関心のあるイベントを検出し追跡するため配備される。イベント駆動WSNの特徴的な特性は、大きい移動度を有することがあり、イベントの近くで発生する空間的相関を持つ集中的なトラフィックである。このようなネットワークでは、移動中のターゲットによって引き起こされたイベントが、新しいノードのペアの間の新しい通信リンクと新しいルーティング経路の開始を連続的に引き起こす。クラスをよりよく特徴付けるイベント駆動WSNの他の実例的な実施例は、ワイヤレス・カメラ・ネットワーク(WCN)である。
【0003】
WSNのノードによる共有ワイヤレス通信媒体へのアクセスは、一般に、媒体アクセス制御(MAC)プロトコルによって調停される。WSN及びMACプロトコルの設計者は、一般的に、ノードの耐用期間及びネットワーク性能(例えば、ネットワークにおける待ち時間の最小化及びスループットの最大化)の両方を最大化することを試みる。様々なMAC技術の間で、各ノードの無線通信のデューティ・サイクリングは、一般に、エネルギーを保存し、それによって、各ノードの耐用期間を増大するために最も効率的な方法のうちの1つであると考えられる。スリープモードとアクティブモードとを交互にすることによって、そして、アクティブモード中に限りデータを送信することにより、ノードは、不必要なエネルギー消費を回避することができる。しかし、ノードのデューティ・サイクルを変更することは、ノードでの通信待ち時間に直接影響を与える。その結果として、待ち時間及びエネルギー消費の両方を最小限に抑える試みは、根本的なトレードオフを伴う。
【0004】
様々なアプローチがこのトレードオフのバランスを保つため提案されている。静的デューティ・サイクリング方法に加えて、いくつかの提案されたアプローチは、ノードのデューティ・サイクル順応が(通常は、ノードの現在のトラフィック状態に関して定義される)関心のあるイベントの検出に基づいて、順応的又は動的なデューティ・サイクリング方法を用いる。イベント駆動WSNのため具体的に設計された一部のMACプロトコルは、パケットの間の冗長性を除去することにより、又は、複数のチャネルを利用することにより、イベント駆動型メッセージの一部又は全部のいずれかの待ち時間を最小化を試行するが、これらの試行は、依然として関心のあるイベントが実際に発生した後にのみ行われる。これらの既存のデューティ・サイクル順応方法は受動的であり、よって、受動的な環境監視を対象にしたWSNによって一般的に充足される状態であるイベントの付近であっても(すなわち、通信パラメータがパス又はリンク全体に対し既に調節された状態の下で)、同じ通信リンク又はルーティング経路が繰り返し再使用されるときに、最も効果がある。しかしながら、反応的な順応に基づくこれらのアプローチは、特に、イベントの移動度が大きいときに、新しいイベントの検出とMACプロトコルの反応との間に内在する遅延が原因となって、イベント駆動WSNに適用されている状態の下で機能が不足し、待ち時間及びエネルギー保存の両方に関して、イベント駆動WSNにおける最適な性能をもたらしているとは言えない。
【0005】
上記のMACプロトコル及び関連した技術は、非特許文献1、非特許文献2、非特許文献3、非特許文献4、非特許文献5、非特許文献6、非特許文献7、非特許文献8、非特許文献9、非特許文献10、非特許文献11、非特許文献12、非特許文献13、非特許文献14及び非特許文献15に記載されている。上記の引用文献のそれぞれの開示内容全体が参照によって本明細書中に明確に組み込まれる。この一覧は、すべての関連する従来技術の完全な検索が実施されたこと、又は、この一覧に記載された文献より優れている文献が存在しないことの表現として意図されたものでなく、さらにこのような表現が推論されるべきでない。
【0006】
<関連する出願への相互参照>
本願は、合衆国法典第35巻第119条(e)の下で、2009年8月20日に出願された米国仮出願第61/235,415号に基づく優先権を主張し、この仮出願の開示内容全体が参照によって本明細書中に明確に組み込まれる。
【先行技術文献】
【非特許文献】
【0007】
【非特許文献1】G. Welch et al., An Introduction to the Kalman Filter (1995)
【非特許文献2】A. Aljadhai et al., “Predictive Mobility Support for QoS Provisioning in Mobile Wireless Environments,” 19 IEEE J. on Selected Areas Comms. 1915-1930 (2001)
【非特許文献3】M. Buettner et al., “X-Mac: A Short Preamble Mac Protocol for Duty cycled Wireless Sensor Networks,” Proc. 4th Int’l Conf. on Embedded Networked Sensor Sys. 307-320 (2006)
【非特許文献4】A. El-Hoiyadi et al., “WiseMAC: An Ultra Low Power MAC Protocol for Multi-Hop Wireless Sensor Networks,” 3121 Lecture Notes in Computer Sci. 18-31 (2004)
【非特許文献5】P. Lin et al., “Medium Access Control with a Dynamic Duty Cycle for Sensor Networks,” 3 IEEE Wireless Comms. & Networking Conf. (2004)
【非特許文献6】K. Jamieson et al., “Sift: A MAC Protocol for Event-Driven Wireless Sensor Networks,” 3868 Lecture Notes in Computer Sci. 260 (2006)
【非特許文献7】B. Kusy et al., “Elapsed Time on Arrival: A Simple and Versatile Primitive for Canonical Time Synchronization Services,” 1 Int’l J. Ad Hoc Ubiquitous Computing 239-51 (2006)
【非特許文献8】S. Liu et al., “CMAC: An Energy Efficient MAC Layer Protocol Using Convergent Packet Forwarding for Wireless Sensor Networks,” 7 Proc. IEEE Se. Conf. (2007)
【非特許文献9】T. Liu et al., “Mobility Modeling, Location Tracking, and Trajectory Prediction in Wireless ATM Networks,” 16 IEEE J. on Selected Areas Comms. 922-936 (1998)
【非特許文献10】Y. Nam et al., “An Adaptive MAC (A-MAC) Protocol Guaranteeing Network Lifetime for Wireless Sensor Networks,” Proc. 12th Eur. Wireless Conf. (2006)
【非特許文献11】V. Namboodiri et al., “Alert: An Adaptive Low-Latency Event-Driven MAC Protocol for Wireless Sensor Networks,” Proc. 7th Int’l Conf. on Info. Processing in Sensor Networks 159-170 (2008)
【非特許文献12】J. Polastre et al., “Versatile Low Power Media Access for Wireless Sensor Networks,” Proc. 2d Int’l Conf. on Embedded Networked Sensor Sys. 95-107 (2004)
【非特許文献13】I. Rhee et al., “Z-MAC: A Hybrid MAC for Wireless Sensor Networks,” 16 IEEE/ACM Transactions on Networking, 511-524 (2008)
【非特許文献14】T. Van Dam et al., “An Adaptive Energy-Efficient MAC Protocol for Wireless Sensor Networks,” Proc. 1st Int’l Conf. on Embedded Networked Sensor Sys. 171-180 (2003)
【非特許文献15】W. Ye et al., “An Energy-Efficient MAC Protocol for Wireless Sensor Networks,” 3 Proc. 21st Ann. Joint Conf. IEEE Computer & Comms. Societies (2002)
【発明の概要】
【0008】
本発明は、特許請求の範囲に記載された1つ以上の特徴、及び/又は、単独で又は組み合わせて特許可能な主題を構成する以下の特徴を含む。
【0009】
一態様によれば、複数のノードによる共有通信媒体へのアクセスを制御する方法は、複数のノードのうちの各ノードに対し、イベントが将来の時点でこの各ノードのセンシング・フィールドの範囲内で発生するかどうかを予測するステップと、各ノードに関する予測に応答してこの各ノードの通信スケジュールを順応させるステップと、を含む。
【0010】
一部の実施形態では、イベントが将来の時点でこの各ノードのセンシング・フィールドの範囲内で発生するかどうかを予測するステップは、各ノードのカメラがこの将来の時点で関心のあるオブジェクトを観測するかどうかを予測するステップを含むことがある。他の実施形態では、イベントが将来の時点でこの各ノードのセンシング・フィールドの範囲内で発生するかどうかを予測するステップは、これらの複数のノードのうちの各ノードで時空間イベント確率(STEP)を推定するステップを含むことがある。これらの複数のノードのうちの各ノードでSTEPを推定するステップは、この将来の時点で各ノードのセンシング・フィールドに亘ってイベントの位置不確定性を統合するステップを含むことがある。
【0011】
他の実施形態では、複数のノードのうちの各ノードでSTEPを推定するステップは、再帰的パラメータ推定器を使用するステップを含むことがある。再帰的パラメータ推定器を使用するステップは、カルマンフィルタと粒子フィルタとのうちの一方を使用するステップを含むことがある。この方法は、複数のノードのうちの第1のノードを用いて、複数のノードのうちの第2のノードからイベントの測定量を含むパケットを受信するか、又は、傍受するステップをさらに含むことがある。この方法は、イベントの測定量を使用して再帰的パラメータ推定器を更新することにより第1のノードで新しいSTEPを推定するステップをさらに含むことがある。この方法は、この測定量がこのイベントのため予測された不確定性領域の範囲内でないとき、再帰的パラメータ推定器の新しいインスタンスを初期化するステップをさらに含むことがある。この方法は、イベントの新しい測定量を含むパケットが第1のノードによって受信又は傍受されない所定の期間の後に、再帰的パラメータ推定器のインスタンスを終了するステップをさらに含むことがある。第1のノードの通信スケジュールは、再帰的パラメータ推定器のインスタンスの終了に応答して最低デューティ・サイクルに順応させられることがある。
【0012】
さらに他の実施形態では、各ノードの通信スケジュールを順応させるステップは、各ノードの無線機のデューティ・サイクルを調節するステップを含むことがある。各ノードの無線機のデューティ・サイクルを調節するステップは、各ノードがイベントの予測された不確定性領域の中のどの確率部分空間に属しているかを決定するステップを含むことがある。各ノードの無線機のデューティ・サイクルを調節するステップは、各無線機によって利用されるフレーム長さを指数的に変化させるステップを含むことがある。一部の実施形態では、この方法は、パケットを送信するノードがこの時点でイベントをセンシングしているかどうかを示す第1のビットを含む専用フィールドを格納するパケットを送信するステップをさらに含むことがある。専用フィールドは、パケットを送信するノードがこの時点でイベント関連データを転送しているかどうかを示す第2のビットをさらに含むことがある。
【0013】
別の態様によれば、1つ以上の有形で非一過性でコンピュータ読み取り可能な媒体は、第1のノードのプロセッサによって実行されるとき、このプロセッサに、イベントが将来の時点で第1のノードのセンシング・フィールドの範囲内で発生するかどうかを予測させ、この予測に応答して、複数のノードの間で共有される通信媒体への第1のノードによるアクセスを制御する第1のノードの通信スケジュールを順応させる複数の命令を含む。
【0014】
一部の実施形態では、イベントが将来の時点で第1のノードのセンシング・フィールドの範囲内で発生するかどうかを予測することは、第1のノードのカメラがこの将来の時点で関心のあるオブジェクトを観測するかどうかを予測することを含むことがある。他の実施形態では、イベントが将来の時点で第1のノードのセンシング・フィールドの範囲内で発生するかどうかを予測することは、第1のノードで時空間イベント確率(STEP)を推定することを含むことがある。第1のノードでSTEPを推定することは、第1のノードのセンシング・フィールドに亘ってイベントの位置不確定性を統合することを含むことがある。
【0015】
他の実施形態では、第1のノードでSTEPを推定することは、再帰的パラメータ推定器を使用することを含むことがある。再帰的パラメータ推定器を使用することは、カルマンフィルタと粒子フィルタとのうちの一方を使用することを含むことがある。これらの複数の命令は、さらにこのプロセッサに、複数のノードのうちの第2のノードからイベントの測定量を含むパケットを受信させるか、又は、傍受させることがある。これらの複数の命令は、さらにこのプロセッサに、イベントの測定量を使用して再帰的パラメータ推定器を更新することにより第1のノードで新しいSTEPを推定させることがある。これらの複数の命令は、さらにこのプロセッサに、この測定量がこのイベントのため予測された不確定性領域の範囲内でないとき、再帰的パラメータ推定器の新しいインスタンスを初期化させることがある。これらの複数の命令は、さらにこのプロセッサに、イベントの新しい測定量を含むパケットが第1のノードによって受信又は傍受されない所定の期間の後に、再帰的パラメータ推定器のインスタンスを終了させることがある。第1のノードの通信スケジュールは、再帰的パラメータ推定器のインスタンスの終了に応答して最低デューティ・サイクルに順応させられることがある。
【0016】
さらに他の実施形態では、第1のノードの通信スケジュールを順応させることは、第1のノードの無線機のデューティ・サイクルを調節することを含むことがある。第1のノードの無線機のデューティ・サイクルを調節することは、第1のノードがイベントの予測された不確定性領域の中のどの確率部分空間に属しているかを決定することを含むことがある。第1のノードの無線機のデューティ・サイクルを調節することは、第1のノードの無線機によって利用されるフレーム長さを指数的に変化させることを含むことがある。これらの複数の命令は、さらにこのプロセッサに、第1のノードがこの時点でイベントをセンシングしているかどうかを示す第1のビットを含む専用フィールドを格納するパケットを送信させることがある。専用フィールドは、第1のノードがこの時点でイベント関連データを転送しているかどうかを示す第2のビットをさらに含むことがある。
【0017】
さらに別の態様によれば、ワイヤレス・センサ・ネットワークは複数ノードを備え、各ノードは、制御回路と、複数のノードの間で共有される通信媒体にアクセスする無線機とを含み、各ノードの制御回路は、(i)イベントが将来の時点でこのノードのセンシング・フィールドの範囲内で発生するかどうかを予測し、(ii)予測に反応してこのノードの無線機のデューティ・サイクルを調節するため構成されている。
【0018】
一部の実施形態では、各ノードはカメラを含むことがあり、各ノードの制御回路は、このノードのカメラがこの将来の時点で関心のあるオブジェクトを観測するかどうかを予測するため構成されることがある。他の実施形態では、各ノードの制御回路は、このノードで時空間イベント確率(STEP)を推定することにより、イベントが将来の時点でこのノードのセンシング・フィールドの範囲内で発生するかどうかを予測するため構成されることがある。各ノードの制御回路は、このノードのセンシング・フィールドに亘ってイベントの位置不確定性を統合することにより、このノードで時空間イベント確率(STEP)を推定するため構成されることがある。
【0019】
他の実施形態では、各ノードの制御回路は、再帰的パラメータ推定器を使用してこのノードで時空間イベント確率(STEP)を推定するため構成されることがある。再帰的パラメータ推定器は、カルマンフィルタと粒子フィルタとのうちの一方でもよい。各ノードの制御回路は、無線機を介して、複数のノードのうちの別のノードからイベントの測定量を含むパケットを受信するか、又は、傍受するためさらに構成されることがある。各ノードの制御回路は、イベントの測定量を使用して再帰的パラメータ推定器を更新することによりこのノードで新しいSTEPを推定するためさらに構成されることがある。各ノードの制御回路は、この測定量がこのイベントのため予測された不確定性領域の範囲内でないとき、再帰的パラメータ推定器の新しいインスタンスを初期化するためさらに構成されることがある。各ノードの制御回路は、イベントの新しい測定量を含むパケットがこのノードによって受信又は傍受されない所定の期間の後に、再帰的パラメータ推定器のインスタンスを終了するためさらに構成されることがある。各ノードの制御回路は、再帰的パラメータ推定器のインスタンスの終了に反応して、このノードの無線機のデューティ・サイクルを最低デューティ・サイクルに調節するためさらに構成されることがある。
【0020】
さらに他の実施形態では、各ノードの制御回路は、このノードがイベントの予測された不確定性領域の中のどの確率部分空間に属しているかを決定することにより、このノードの無線機のデューティ・サイクルを調節するため構成されることがある。各ノードの制御回路は、このノードの無線機によって利用されるフレーム長さを指数的に変化させることにより、このノードの無線機のデューティ・サイクルを調節するため構成されることがある。各ノードの制御回路は、このノードがこの時点でイベントをセンシングしているかどうかを示す第1のビットを含む専用フィールドを格納するパケットを、無線機を介して送信するためさらに構成されることがある。専用フィールドは、このノードがこの時点でイベント関連データを転送しているかどうかを示す第2のビットをさらに含むことがある。
【0021】
付加的な特徴は、単独で又は上記の列挙された特徴及び請求項に列挙された特徴を含むいずれかの他の(複数の)特徴と組み合わせて、特許可能な主題を構成することがあり、そして、現時点で認められるように発明を実施するベストモードを実証する以下の実例的な実施形態の詳細な説明を考慮して、当業者にはっきりと理解されるであろう。
【0022】
詳細な説明は添付図面を特に参照する。
【図面の簡単な説明】
【0023】
【図1】実例的なWCNにおけるビジョンデータの典型的なクラスタベース分散処理のための状態遷移図である。
【図2】実例的なWCNで使用されることがあるワイヤレス・カメラベース・センサ・ノードの一実施形態を示す図である。
【図3A】実例的なWCNにおけるノードの部分的に重なり合う通信範囲を示す図である。
【図3B】図3Aの実例的なWCNのノードの部分的に重なり合うセンシング・フィールドを示す図である。
【図3C】関心のある移動オブジェクトの追跡と基地局への集計データの配信とに関与する図3A及び3Bの実例的なWCNを示す図である。
【図4】実例的なWCNノードのMACレイヤとアプリケーションレイヤ28との間の相互作用を示す図である。
【図5】図4の実例的なWCNノードのMACレイヤとアプリケーションレイヤのための状態遷移図である。
【図6】近平面及び遠平面によって囲まれた3次元空間としてピンホール・カメラ・モデルの視錐台を示す図である。
【図7A】初期時刻での図3のWCNにおける実例的なデューティ・サイクル分布を示す図である。
【図7B】図7Aの実例的なデューティ・サイクル分布と図3のWCNにおけるノードのセンシング・フィールドの中心との間の関係を示す図である。
【図7C】後の時刻での図3のWCNにおける実例的なデューティ・サイクル分布を示す図である。
【図8】4種類のデューティ・サイクル・レベルを利用する実例的なWCNの指数的に変化するフレーム長さを示す図である。
【図9】より高いデューティ・サイクルと共に新しいスケジュールを採用する実例的なタイムラインを示す図である。
【図10A】本開示による例示的なMACプロトコルと、AMACプロトコルと、異なるデューティ・サイクルを用いる4つのTMACプロトコルとを利用するWCNに関して、異なるサンプリング間隔での1ホップ当たりの平均待ち時間を比較するシミュレーションの結果を示す図である。
【図10B】図10AのMACプロトコルを利用するWCNに関して、異なるサンプリング間隔での正規化スループットを比較するシミュレーションの結果を示す図である。
【図10C】図10AのMACプロトコルを利用するWCNに関して、異なるサンプリング間隔での平均エネルギー消費量を比較するシミュレーションの結果を示す図である。
【図11A】図10AのMACプロトコルのMACプロトコルを利用するWCNに関して、毎秒3メートルの平均ターゲット速度を用いて、異なるタイムアウト期間で時間限定パラメータ推定精度(TIBPEA)を比較するシミュレーションの結果を示す図である。
【図11B】図10AのMACプロトコルのMACプロトコルを利用するWCNに関して、毎秒6メートルの平均ターゲット速度を用いて、異なるタイムアウト期間でTIBPEAを比較するシミュレーションの結果を示す図である。
【発明を実施するための形態】
【0024】
本開示の概念は、様々な変更を受けやすく、代替的な形を生じやすいが、本開示の特定の実例的な実施形態が図面に一例として表され、本明細書でより詳細に記載される。しかし、本開示の概念を開示された特有の形に限定する意図はなく、そうではなく、むしろ、特許請求の範囲に定められるような発明の趣旨及び範囲に含まれるすべての変更物、均等物、及び、代替物に及ぶことを意図してものである。
【0025】
以下の説明では、論理実装と、オペコードと、オペランドを指定する手段と、リソース分割/共有/複製実装と、システムコンポーネントのタイプ及び相互関係と、論理分割/統合選択とのような多数の特定の詳細が本開示のより徹底的な理解を行うため示される。しかし、本開示の実施形態がこのような特定の詳細を用いることなく実施されることがあることが当業者によって認められるであろう。他の事例では、制御構造、ゲートレベル回路、及び、完全なソフトウェア命令シーケンスは、発明を分かり難くすることがないように詳細には示されていない。当業者は、記載された内容があれば、必要以上に実験することなく、適切な機能を実施することができるであろう。
【0026】
開示されたシステム及び方法の実施形態は、ハードウェア、ファームウェア、ソフトウェア、又は、これらのいずれかの組み合わせで実施されることがある。一例として、開示されたシステム及び方法の実施形態は、1つ以上の有形の機械読み取り可能な媒体に記憶され、1台以上のプロセッサによって読み取られ、実行されることがある命令として実施されることがある。有形の機械読み取り可能な媒体は、機械(例えば、プロセッサ)によって読み取り可能な形で情報を記憶又は送信するメカニズムを含むことがある。有形の機械読み取り可能な媒体は、例示的に、リード・オンリー・メモリ(ROM)、ランダム・アクセス・メモリ(RAM)、磁気ディスク記憶装置、光記憶装置、フラッシュメモリ、及び/又は、他のタイプのメモリ機器を含むことがある。
【0027】
本開示は、イベント駆動WSNのため具体的に設計された予測的デューティ・サイクル順応(PDCA)方法について記載する。既存のアプローチは、その時点で受けているネットワーク状態に応じてノードのデューティ・サイクルを受動的(すなわち、反動的)に順応させるが、ここに開示されるPDCAスキームは、関心のあるイベントが近い将来にノードのセンシング・フィールドの範囲内で発生する確からしさを予測することにより、各ノードでのデューティ・サイクル・スケジュールを能動的に順応させる。この確からしさは、本明細書では、ノードでの「時空間イベント確率」(STEP)と称される。このPDCAスキームを利用するWSNは、集中的なトラフィックが予想されるノードが通信トラフィックの実際の増加前にこれらのノードの通信プロトコルパラメータを変更すること(それによって、ネットワーク全体の全般的な待ち時間を低下させること)を可能にさせる。
【0028】
ここに開示されるPDCAスキームは、各ノードにこのノードの隣接ノードを介して進行中のイベントを検出する能力を与え、各ノードの実効センシング・フィールドを拡大し、このノードの通信隣接ノードのセンシング・フィールドをさらに包含する。一部の実施形態では、このことは、より詳細に後述されるように、隣接ノードから受信されたパケットの1ビット又は2ビットフィールドを用いて達成されることがある。このPDCAスキームの下で、ノードにイベントが現れるとき、このノードの隣接ノードは、(同じイベントが直接的に現れないときでも)このイベントを認識する。このようにして、イベントが現れるノードがこのノードの隣接ノードのうち次に同じイベントが現れるノードを予測できる場合、これらの隣接ノードは、イベントが実際に到着する前に、それぞれのプロトコルパラメータを変更できる。一つの例示的な実施形態では、この予測は、MACレイヤに埋め込まれたカルマンフィルタに基づく追跡アルゴリズムを使用して実施され、各ノードが、僅かに1ビット又は2ビットの付加的な通信オーバーヘッドで、その時点で発生しているイベントを確率論的にローカライズすることを可能にする。関心のあるイベントの再帰的推定及び予測は、このPDCAスキームでは、完全分散方式で各ノードにおいて実行されることがある。さらに、提案されたPDCAスキームは、ネットワークの中の種々のノードが別個のデューティ・サイクルで動作することを可能にし、異種ノード・スケジュールを生じる。隣接ノード間の重なり合わないアクティブ期間から生じる何らかの問題を回避するため、各ノードがこのノードの隣接ノードのスケジュールの知識だけに基づいて(すなわち、付加的なメッセージ交換に頼らずに)メッセージをこのノードの隣接ノードへ送信することを許可される瞬間を計算することを可能にするメカニズムがPDCAスキームの中に組み入れられることがある。MACプロトコルパラメータの再構成のためのこの予測アプローチを詳細に説明する前に、本開示は、最初に、イベント駆動WSNの固有の特徴のうちのいくつかを概観する。PDCAスキームを利用するWCNの一つの例示的な実施形態のシミュレートされた性能評価が同様に(従来のTMACプロトコル及びAMACプロトコルとの性能比較で)ターゲット追跡との関連において以下で提示される。
【0029】
イベント駆動WSNは、ネットワーク環境の中で発生しているイベントが無線ブロードキャスト・トラフィックをイベントの付近にあるノードの間で集中的にさせる可能性があるので、より一層従来的なWSNと相違する。リアルタイムで検知されたデータを(一部の事例では、協調して)処理し、何らかのイベント関連情報を失うことを回避するために、イベント駆動WSNのノードは、これらのノードの通信プロトコルパラメータを急速に(例えば、デューティ・サイクルの範囲内で)変更できるべきである。一つ一つの個別のノードの計算能力及びセンシング能力が限定されているので、イベント駆動WSNの中のセンサ・ノードは、多くの場合に、関心のあるイベントを検出し、イベントの種々の属性を推定するため互いに協働する。この特性は、スカラ測定量が各ノードによって独立に獲得され、データ伝送における冗長性を除去するためにネットワークの中で簡単に集計されるより一層従来的なWSNのノードと対照をなすことがある。より一層従来的なWSNの一実施例は、空気品質に関して環境を監視するため設計されたワイヤレス・ネットワークである。他方では、ワイヤレス・カメラ・ネットワーク(WCN)は、イベント駆動WSNの例示的な実施例である。例示的なWCNでは、ノードは、環境内の人又は他のオブジェクトの存在を検出することだけでなく、検出された人又はオブジェクトの移動を追跡することを要請されることがある。
【0030】
例示的なWCN(又は、他のイベント駆動WSN)では、オブジェクト検出及び追跡のようなタスクは、いずれかの単一ノードでのプロセッサの能力を超えた計算を伴うことがある。このような計算は、発明の名称が“Clustering Protocol for Directional Sensor Networks”であり、開示内容全体が参照によって本明細書中に明確に組み込まれる現在係属中の米国特許出願公開第2010/007386号明細書に記載されているように、適切なアルゴリズムのクラスタベース分散実施を必要とすることがある。この明細書に記載されるように、このような協働的な処理のため使用されるクラスタは、典型的に、一つずつがイベントに関連した何らかの感覚情報を獲得することができるノードで構成される。協働的な計算は、多くの場合に、クラスタ内部での集約的なメッセージ交換を伴い、(通信プロトコルパラメータが時宜を得た形で変更されない限り)頻繁なパケット衝突によって特徴付けられることがある高度に集中的な通信を生じさせ、エネルギーの無駄遣い、及び、重要データの送信失敗という結果になる。図1に示された状態遷移図は、WCNの一つの例示的な実施形態においてオブジェクトを協働して追跡するときに実行されることがある様々な計算ステップの概要を表す。
【0031】
イベント駆動WSNは、厳しいサービス品質(QoS)要件をさらに保有する。イベント駆動WSNの目的は、主として、関心のあるイベントを検出し、時宜を得た形でイベント固有タスクを実行することである。監視目的のため広いエリアに配備された例示的なWCNに戻ると、エンドユーザへのイベント情報の時宜を得た形での伝送は、ネットワーク全体に亘る通信に関してある一定のQoSを必要とすることがある。WSNは、クラスタ通信の観点から、ノードによる協働的な問題解決のため適切なQoSメトリックをさらに必要とすることがある。ノードが期待されるピークトラフィックに応じることができるようにノードに単にオーバー・プロビジョニングすることによって高いQoSを達成することは、一般に、個々のノードのリソース制限付きの性質が原因となってWSNに対し実現不可能である。同様に、ノードのデューティ・サイクルを単に短縮することもまた、QoSに悪影響を与えることになるので、一般にWSNにおいて実現不可能な解決法である。より詳しく後述されるように、様々なQoSメトリックが従来技術の受動的なデューティ・サイクル順応方法を本明細書中に示されたPDCAスキームを利用するWCNの例示的な実施形態と比較するため使用できる。
【0032】
ここに開示されるPDCAスキームは、高い通信トラフィックを引き起こすことがあるノードのデューティ・サイクルを能動的に調節することによりイベント駆動WSNの固有の特徴を扱う。本明細書で使用されるように、ノードの「デューティ・サイクル」は、ノードの無線機が(1周期の全時間と比較して)1周期中にアウェイク状態である時間の比を指す。当業者に明らかであるように、イベントの実際の発生より極端に先行してデューティ・サイクルを増大することは、エネルギーの無駄遣いをもたらし、イベントが到着した後までデューティ・サイクルを増大させることを待つことは、重要パケットの時宜を得た形での伝送を妨げ、待ち時間を増大させる可能性がある。
【0033】
ここに開示されるPDCAスキームは、近い将来に関心のあるイベントがノードに現れる確からしさ(すなわち、より詳細に後述されるノードでの「時空間イベント確率」(STEP))に応じてノードのデューティ・サイクルを能動的に順応させることにより、これらの2つの重要であるが、しかし、補完的でない目的(すなわち、高エネルギー効率及び低通信待ち時間)のバランスを保つ。「イベント」の厳密な定義は、WSNが置かれるアプリケーションに依存することが分かるであろう。さらに、一部のアプリケーションは、複数のイベントタイプが定義されることを必要とすることがある。オブジェクト検出及び追跡アプリケーションの例示的な状況では、一例として、「イベント」は、関心のあるオブジェクト(例えば、歩行者)の存在として定義されることがある。換言すると、イベントがノードに現れる場合、関心のあるオブジェクトがノードのセンシング・フィールドの範囲内に存在する。このPDCAスキームは、ノードにまもなくイベントが現れる可能性がある場合に、このノードでのデューティ・サイクルを増加させ、そうでなければ、デューティ・サイクルを減少させる。換言すると、このPDCAスキームは、より詳細に後述されるように、ノードでのSTEPが上昇する場合、ノードのデューティ・サイクルを増加させ、STEPが下降する場合、デューティ・サイクルを適切に減少させる。
【0034】
本開示の例示されたWCN 10で利用されることがあるいくつかのワイヤレス・カメラ・ベース・センサ・ノード(ノード)12は、(方向18に移動している)関心のあるオブジェクト16を追跡する図2に示される。各ノード12は、画像センサ20と、メモリ回路22と、通信モジュール24とを例示的に含むことがある。他の実施形態では、ノード12の外部にあるコンピューティング機器(典型的に、マイクロプロセッサと、メモリと、通信回路とを含む)は、(複数の)画像センサ20から未加工画像データを受信し、処理することがある。画像センサ20は、CCDカメラ、CMOSカメラ、及び/又は、他の適当な代替物を例示的に含むことがある。通信モジュール24は、MACレイヤ上でのワイヤレス通信能力を有している無線機を含むことがある。各ノード12の画像センサ20は、未加工画像を撮影し、この未加工画像を回路22の関連付けられたマイクロプロセッサに送信することがある。回路22のマイクロプロセッサは、その後に、限定されることはないが、(a)画像センサ20によって撮影された回路22にメモリに記憶すること、(b)イベントを検出し、記憶された画像の中のこのようなイベントと関連付けられた解析データを生成するため記憶された画像を処理すること(例えば、オブジェクト16の存在を検出すること)、(c)(MACレイヤ上の隣接ノード12の通信スケジュールに基づいて)これらの隣接ノード12との間で情報を送受信するため関連付けられた通信モジュール24を制御すること、及び、(d)ノード12の全体的な機能を制御することを含む(アプリケーションレイヤに埋め込まれた手順に基づく)一連のタスクを実行することがある。
【0035】
ランダムに配備された(個別には12A〜12Hと呼ばれる)ノード12と、基地局、すなわち、「シンク」14とを備えるWCN 10の例示的な実施形態は、全体的に、図3A〜3Cの平面図から分かる。この例示的な実施形態では、ノード12のためのイベントは、ノード12のセンシング・フィールドの範囲内での関心のあるオブジェクト16の存在として定義されることがある。WCN 10が図3A〜3Cに示されたトポロジーに代わるトポロジーを有している他の実施形態が同様に考えられる。ノード12の部分的に重なり合う通信レンジは、図3Aにおいて破線円形として示されるが、ノード12、14の部分的に重なり合うセンシング・フィールドは、図3Bにおいて破線四角形として示される。図3Cは、(ノードのクラスタに現れ、方向18に移動している)関心のあるオブジェクト16を追跡し、クラスタの範囲内で集計されたデータを(破線矢印によって示されるルーティング経路に沿って)マルチホップ通信を介して基地局14へ配信するWCN 10を例示する。図3Cに示されるように、ノード12E、12Fは、この時点で、オブジェクト16を認識することが可能であり、クラスタデータ集計に能動的に参加している(すなわち、ノード12E、12Fにイベントが現れる)。このようにして、ノード12E、12Fのデューティ・サイクルが十分に高い値(例えば、最大デューティ・サイクル)にセットされる。ノード12A、12Bは、(オブジェクト16の現在の方向18への移動に基づいてオブジェクト16の期待される将来の状態のため)オブジェクト16を直ぐに検知する可能性があるので、ノード12A、12Bのデューティ・サイクルは、オブジェクト16が実際に見えるようになる前に、これらのノードで低待ち時間状態を達成するためにさらに増加されることがある。ノード12B、12C、12D、12Hは、集計データを基地局14へ配信することに能動的に参加する。このようにして、ノード12B、12C、12D、12Hのデューティ・サイクルも同様に十分に高い値(例えば、最大デューティ・サイクル)にセットされるので、オブジェクト16に関する情報を格納するパケットは、迅速かつ確実に基地局14へ配信されることができる。最後に、残りのノード12Gは、関心のあるイベントまで比較的距離があり、そして、PDCAスキームは、これに応じて、ノード12Gのデューティ・サイクルを減少させる。
【0036】
関心のあるイベントがノード12に発生するとき、PDCAスキームは、これから来る可能性がある無線トラフィックの増加に備えるため、ノード12の通信隣接ノードにこのイベントを通知する。一つの例示的な実施形態では、この時点でイベントを検出しているノード12は、このノードが送信するパケットのMACヘッダの中の専用ビットをセットすることにより、このノード12の通信隣接ノードにイベントの発生を警告することがある。このような専用ビットは、本明細書では、明示的イベント通知(EEN)ビットと称される。代替的な実施形態では、さらに、専用2ビットフィールドがMACヘッダの中で使用されることがあると考えられる。EENビットに加えて、このような代替的な実施形態は、パケットヘッダを送信しているノード12がこの時点でイベント関連データを転送しているかどうかを示すために明示的イベント・ルーティング通知(EERN)ビットをさらに含むことがある。MACレイヤ・プロトコルは、一般に、直接的なセンサ測定量を獲得する責任がないので、PDCAスキームは、関心のあるイベントがノード12のセンシング・フィールドの範囲内にあるとき、すべての送信パケットのEENビットがセットされるべきであること(そして、専用2ビットフィールドを利用する代替的な実施形態では、ノード12がイベント関連データを送信しているとき、すべての送信パケットのEERNビットがセットされるべきこと)をアプリケーションレイヤがMACレイヤに通知することを可能にするインターフェイスをアプリケーションレイヤに提供する。
【0037】
ノード12のうちの1つのノードに対するMACレイヤ26とアプリケーションレイヤ28との間のこの相互作用の概要が図4に概略的に示される。ノード12のアプリケーションレイヤ28は、イベントがノード12のセンシング・フィールドの中で検出されたかどうかをMACレイヤ26に通知するので、MACレイヤ26は、このMACレイヤが送信するパケットの中のヘッダのEENビットをセットするか、又は、セットしないことがある。同時に、いずれかの隣接ノード12がイベントを検出する場合、このような隣接ノード12は、MACレイヤ26によって受信されたパケットのヘッダの中のEENビットのセットの形でイベントをノード12にさらに通知する。より詳細に後述されるように、ノード12は、このノードが受信するEENビットがセットされているか、又は、セットされていないかに基づいて近い将来にこのノードにイベントが現れるかどうかを予測することがある。イベントがノード12のセンシング・フィールドで発生することが予想される場合、MACレイヤ26は、隣接ノード12とより効率的に通信するため、ノード12の無線機のデューティ・サイクルに関して)ノード12の通信スケジュールを順応させることがある。
【0038】
この例示的な実施形態におけるノード12のMACレイヤ26及びアプリケーションレイヤ28のための詳細な状態遷移図が図5に示される。アプリケーションレイヤ28は、2つの可能な状態、すなわち、アイドル状態30及びセンシング状態32を有している。WCN 10が動作を開始する前に、アプリケーションレイヤ28は、アイドル状態30にある。WCN 10が動作し始めると、アプリケーションレイヤ28の状態がセンシング状態32に遷移する(アルゴリズム2を参照して詳細に後述される)。このセンシング状態32では、ノード12のアプリケーションレイヤ28は、このノードのセンシング・フィールドの中でイベントを検出しようとする。関心のあるイベントが検出された場合、ノード12のアプリケーションレイヤ28は、ノード12のEENビットをセットすることをノード12のMACレイヤ26に通知する(アルゴリズム1を参照してより詳細に後述される)。
【0039】
MACレイヤ26は、2つの可能な状態、すなわち、アイドル状態34及び追跡状態36をさらに有している。ノード12のMACレイヤ26が、セットされたEENビットを介して、このノード12自体のアプリケーションレイヤ28、又は、隣接ノード12いずれかによってイベントの検出を通知されるまで、MACレイヤ26はアイドル状態34にある。MACレイヤ26がイベント通知を受信すると、状態は、追跡状態36に変更される。この追跡状態36では、MACレイヤ26は、ノード12でSTEPを使用して近い将来におけるイベントの検出の予測を実行する。近い将来にノード12のセンシング・フィールドの中で発生するイベントの確からしさに基づいて、MACレイヤ26は、ノード12の通信スケジュールを順応させる。換言すると、MACレイヤ26は、隣接ノード12との通信がWCN 10のための低減されたエネルギー消費量で効率的に実行されるように、ノード12でSTEPに基づいてこのノードの無線機のデューティ・サイクルを洗練する。MACレイヤ26のこれらの演算は、アルゴリズム3〜5を参照して詳細に後述される。なお、図5における見出しA1−1、A1−2、...、A4−4は、以下のアルゴリズム1〜4に示された演算を表現する。
【0040】
EENビットがセットされたパケットをノード12が受信又は傍受するとき、ノード12は、(必ずしもノードの固有のセンサを使用してイベントを「直接的に検知」することを要することなく)関心のあるイベントを「間接的に検知」することができる。一部の実施形態では、受信側ノード12は、送信側ノードのセンシング・フィールドの領域によって近似された、ある一定の不確定性を伴って、送信側ノード12のセンシング・フィールドの中心に位置していると仮定されることがある。WCN 10の例示的な実施形態を再び参照すると(今度は図6を参照すると)、各ワイヤレス・カメラ・ノード12のセンシング・フィールドは、オブジェクトが画像平面42の中で許容可能な鋭い焦点を使って認識できる視錐台40として定義されることがある。視錐台40は、カメラ内部の光学中心46から放射する側面44と、許容可能な鋭い焦点の限界を表現する近平面48及び遠平面50とによって境界が定められる。視錐台40が特定されると、センシング・フィールドの中心52も同様に見つけることができる。上記の方法でイベントをローカライズすることは、EENビットがセットされたパケットを受信する各ノード12のための「拡張センシング・フィールド」を提供する。当業者は、EENビットが典型的にTCP/IPで使用される明示的輻輳通知(ECN)の一般形式に機能的に類似していることが分かるであろう。このタイプの間接センシングによるイベントの検出は、カルマンフィルタ(KF)への入力と見なされることがある。イベントのKFに基づく追跡を使用するWCN 10の例示的な実施形態において各ノード12によって実行される状態推定手順は、アルゴリズム1において擬似コードとして要約される。
【0041】
アルゴリズム1(KFを使用するオブジェクト追跡)
アプリケーションレイヤ
If 関心のあるイベントがセンシング・フィールドの範囲内で検出される then
(A1−1) MACレイヤに送信パケットのEENビットをセットすることを通知する
Else
(A1−2) MACレイヤに送信パケットのEENビットをセットしないことを通知する
End if
MACレイヤ
While(1)
If パケットが受信/傍受され、かつ、EENビットがセットされるか、又は、アプリケーションレイヤによってEENビットをセットすることが通知される then
(A1−3) セットされたEENビットをアクティブにしたノードの識別子としてIDをセットする
Kalman(ID) //アルゴリズム3を呼び出す
End if
End while
【0042】
EENビットを使用するこの間接センシング・アプローチは、各ノードがこの各ノードの隣接ノードのセンシング・フィールドに関する情報を有することを仮定する。一部の実施形態では、この情報は、WCN 10の初期化段階中に各ノード12によって受信されることがある。ノード12のセンシング・パラメータを計算することは、一般にMACプロトコルの領域を超えるので、本開示は、(一部の初期キャリブレーション手順の後に)この情報がアプリケーションレイヤで利用できることを仮定する。アプリケーションレイヤは、その後、三つ組(ID;z;R)の形でこの情報をMACレイヤに配信することがあり、ここで、IDはノード12を特定し(「self」はローカル・ノード・アドレスを示す)、zはノード12のセンシング/フィールド40の中心52に対応し、Rは、ノード12のセンシング・フィールド40を近似する楕円である。ノード12は、その後、この情報をこのノードの1ホップ通信隣接ノードへブロードキャストすることがある。これらの初期化メッセージを受信するこれらのノード12は、MACレイヤ・プロトコルの範囲内でこれらの初期化メッセージを隣接ノード12のリストの中に記憶することがある。WCN 10の例示的な実施形態において各ノード12によって実行される実例的な初期化プロセスは、アルゴリズム2において擬似コードとして要約される。
【0043】
アルゴリズム2(システム初期化)
アプリケーションレイヤ
If センシング情報が隣接ノードに関して特定される then
(A2−1) MACレイヤに(ID;z;R)を通知
End if
MACレイヤ
If センシング情報が受信される then
(A2−2) (ID;z;R)を記憶
If (ID==self)
(A2−3) (ID;z;R)をブロードキャスト
End if
End if
【0044】
前述の通り、イベントの予測は、ノード12で時空間イベント確率(STEP)を使用して実行されることがあり、この手順が以下の段落で数学的に記述される。時刻tkでイベントjを仮定すると、Skjとして表示されるSTEP分布は、時点tk+1=tk+δkでのターゲットイベントの予測位置の不確からしさによって与えられ、ここで、δkは、次のセンサ測定前の期待時間間隔である。すなわち、ターゲットイベントの予測位置がpkjによって与えられると、STEPは、Skj=Pr(pkj)によって与えられる。なお、STEP Skj及び予測位置pkjの添字は、予測が行われた時を示すので、これらの添字は、k+1ではなく、kである。STEP分布は、新しい測定量が直接センシング又は間接センシングのいずれかによってノード12により取得されるときはいつでも更新される。
【0045】
イベントが追跡されているとき、各ノード12がイベントの複数の観測量を獲得すると仮定するのが妥当である。方向18に移動中のオブジェクト16の検出と関連付けられているイベントの実施例に戻ると、例示的なWCN 10の各ノード12は、オブジェクト16のロケーションの複数の観測量を獲得することになる。1つずつのこのような観測量は、共分散行列の形をした関連付けられた不確定性と共に、オブジェクト16のロケーションの期待値として特徴付けられる。オブジェクト16が追跡されているときに順次に獲得されるこれらの観測量は、近い将来にオブジェクト16が現れる可能性が最も高いノード12を予測するため再帰的な枠組みで使用されることがある。一部の実施形態では、この再帰的なフレームワークは、H. Medeiros et al., “Distributed Object Tracking Using a Cluster-Based Kalman Filter in Wireless Camera Networks,” 2 IEEE Journal of Selected Topics in Signal Processing 448-463 (2008) に記載されたフレームワークと同様に、KFフレームワークとして具現化されることがあり、この文献の開示内容全体が参照によって本明細書中に明確に組み込まれる。
【0046】
例示的な実施形態では、関心のあるオブジェクト16の観測及び追跡にこの時点で関与している各ノード12は、オブジェクト16の状態ベクトルを作成することになる。殆どの事例では、ノード12における状態ベクトルは、隣接ノード12から受信されたオブジェクト情報を用いて初期化されることになる。続いて、ノード12自体がオブジェクト16を観測し始めるとき、カルマン方程式がこの状態ベクトルを更新するため使用されることがある。この更新された状態ベクトルは、オブジェクト16が現在ノード12のセンシング・フィールド40から外れるとき、オブジェクト12が現れる場所に関する予測を行うためノード12によってその後に使用されることがある。この状態ベクトルは、離散的な時刻kで
の両方からなる4次元(4D)ベクトルを例示的に含む。換言すると、状態ベクトルは、
によって与えられることがある。この状態ベクトルを使用して、システムダイナミクスは、
によってモデル化されることがあり、式中、δkはオブジェクト16の2回の観測の間に経過した時間を表し(すなわち、測定量kが時点tkで取得された場合、測定量k+1が時点tk+1=tk+δkで獲得される)、そして、イベント加速度(ax,ay)が共分散行列Qをもつ白色ガウス雑音としてモデル化される。システムダイナミクスは、
として表されることもあり、式中:
であり、
は、共分散行列Qをもつプロセス・ノイズ・ベクトルである。PDCAスキームによって利用される測定量は、関心のあるイベントの近似位置によって与えられる。このようにして、測定モデルが
によって記述されることがあり、式中、H = [ I(2 x 2) 0(2 x 2) ]が観測行列であり、vkが測定雑音であり、共分散行列Rkをもつ白色ガウス雑音であると仮定される。
【0047】
測定量がこの測定量の対応するタイムスタンプと共に受信され、比較的緊密な同期がノード12の間で維持される実施形態では、適度に精密な測定時間が取得され、δkが正確に計算されることがある。測定量が対応するタイムスタンプを含まない他の実施形態では、測定時間の推定値がパケットの中に埋め込まれたタイムスタンプを使用して依然として取得されることがある。さらに、受信測定量自体は、イベントの実際の位置の粗い近似であり、ノード12の間の小さい時間差によって引き起こされる不正確さは、その結果、比較的無視できる。その上、同期MACプロトコルは、一般に、隣接ノードの間で少なくとも局所的に適切な動作のため適度に緊密な同期スキームを利用し、受信中の測定量の中のタイムジッタは適度に無視されることがある。
【0048】
予測された状態ベクトル及び前に推定された状態ベクトルとして、それぞれ、
を使用し、予測された共分散行列及び前に推定された共分散行列として、それぞれ、
を使用して、KFの時間更新方程式は、
によって与えられることがあり、KFの測定量更新方程式は、
によって与えられることがあり、式中、Kkはカルマン利得を示す。各ノード12によって実行される状態推定アルゴリズム(アルゴリズム1)によって呼び出されることがある例示的なKF更新関数は、アルゴリズム3として擬似コードにおいて要約され、後述される。
【0049】
【0050】
イベントがノード12のセンシング・フィールドの範囲内で時刻tkに検出されるとき、新しい測定量zkが追跡アルゴリズムに供給される。前述の通り、測定量は、ノード12がイベントを直接的に検知するか、又は、EENビットがセットされたパケットを受信することによりイベントを間接的に検知する結果でもよい。隣接ノード12のセンシング・フィールド40に関する情報は、(アルゴリズム2によれば、初期化中に)WCN 10において局所的に共有されているので、イベントの平均ロケーション(z)とこのロケーションの対応する共分散行列(R)とは、セットされたEENビットを送信したノード12のID値に基づいて(又は、ID==selfである場合にノードの固有センシング・パラメータに基づいて)推定されることがある。前述の通り、平均ロケーションは、測定ノード12のセンシング・フィールド40の中心52であると見なされることがあり、共分散行列は、測定ノード12のセンシング・フィールド40を近似する領域であると見なされることがある。新しい測定量zkを受信するノード12によってこの時点で追跡されているイベントが存在しない場合、新しいKFがインスタンス化され、初期化される。
【0051】
代替的に、KFのインスタンスがノード12に既に存在する場合、ノード12は、新しい測定量zkがこの時点で追跡されているイベント、又は、新しいイベントの最初の発生に関係するかどうかを決定する必要がある。この決定は、MACレイヤのセンシング分解能に起因してさらに一層難しくなるマルチターゲット追跡問題である。この分解能は、例示的なWCN 10におけるノード12のロケーション及びこれらのノードの対応するセンシング・レンジだけによって提供されるので、MACレイヤのセンシング分解能は、使用されるカメラのタイプ及び精度とは無関係に比較的低い。この例示的な実施形態は、WCN 10の中の複数のイベントがノード12によって区別できるように常に互いに適切に離れていることを仮定することにより、このマルチターゲット追跡問題を回避する。新しい測定量zkが前に検出されたイベント又は新しいイベントに対応するかどうかを決定する間に、PDXAスキームが時点tkにおけるイベントjの予測位置を
として定義し、
イベントjの予測x座標及びy座標に対応する(イベントの速度を含まない)。観測間の時間(δk+1)は、時点tkで未知であるので、予測が(ノード12のセンシング間隔のようなこれらのノードの1個以上のパラメータに基づいてセットされることがある)事前定義されたδk+1を使用して実行されることがある。
の対応する予測空間不確定性領域は、
を充足する領域であり、
式中、パラメータαは、不確定性領域の信頼度を定義する(すなわち、予測空間不確定性領域は、ターゲットをα以上の確率で見つけることができる(x,y)平面内のエリアに対応する)。これらの用語では、例示的な実施形態は、イベントjの予測空間不確定性領域がいずれかの他のイベントl≠jの予測空間不確定性領域と重なり合わないこと(すなわち、
を仮定する。
【0052】
さらに、例示的な実施形態では、パラメータαは十分に小さくセットされるので、
時点tkでのノードhによるイベントjの次の実際の連続的な
の範囲内で一般的に検出される。
【0053】
例示的な実施形態のこれらの仮定の下で、いくつかのイベントjに対して前に予測された
を受信するノード12は、アルゴリズム3において要約されるように、イベントjに対応するKFを更新し、イベントjの新しい状態を推定することにより反応することになる。代替的に、
がこの時点で追跡されているいずれかのイベントの前に予測された
ノード12は、新しいKFをインスタンス化し、初期化することになる。最後に、アルゴリズム3に示されるように、イベントjを追跡する責任をもつKFインスタンスが所定のスレッショルドTthreshより長い期間に亘って
ノード12は、このKFインスタンスを終了することになる(所定の時間の経過は、イベントがノードの拡張センシング・フィールドから離れたことを示唆する)。
【0054】
WCN 10の中の隣接ノードの間で重なり合うセンシング・フィールド40は、多くの場合に、ノード12によって受信される同じオブジェクト16の複数の測定量を生じる。このような状態では、ノード12で実施されるKFは、これらの測定量が受信されるときに、関連付けられたイベントの推定状態を再帰的に更新する。しかし、媒体アクセス輻輳及び/又は処理遅延が原因となって、測定量は、これらの測定量が実際に取得された順序にノード12で受信されないことがある。この可能性にもかかわらず、PDCAスキームが事前に厳しい通信輻輳を実質的に軽減するため、そして、MACレイヤの比較的低いセンシング分解能によって引き起こされる不正確さが測定量の順序が乱れた到着によって引き起こされる不正確さより典型的に優勢であるため、このような順序問題を解決するために高度なメカニズムは必要とされない。このように、PDCAスキームの例示的な実施形態では、測定量の到着順序は測定量が実際に取得された順序であるとさらに仮定される。他の実施形態では、各測定量は、ノード12による適切な順序付けのためのタイムタイムスタンプが設けられることがある。
【0055】
KFインスタンスが(アルゴリズム1及び3毎に)更新されるときはいつも各ノード12によって実行されることがある例示的なデューティ・サイクル順応手順は、アルゴリズム4として擬似コードに要約され、後述される。
【0056】
【0057】
所定の時刻でのSTEP Skjは、連続空間に分布するので、不確定性領域は、副領域に分割され、各副領域が1つのデューティ・サイクル・レベルに対応する。例えば、PDCAスキームがN個のデューティ・サイクル・レベル(d0,d1,...,dN、但し、dNは最高デューティ・サイクル)を含む実施形態では、
このノードのデューティ・サイクルをその時点のdmに調節することがある。このSTEP分布の副領域への分割は、図7A〜7Cに示されるように、たまねぎ状の層構造を生じる。殆どの実施形態では、比較的少数(例えば、3から5個)のデューティ・サイクル・レベルがPDCAスキームのために十分であろう。図7A〜7Cの例示的な実施形態では、PDCAスキームは、領域60、領域62及び領域64に対応する3つのデューティ・サイクル・レベル(すなわち、N=3)を有している。
【0058】
なお、例示的なPDCAスキームは、ノードの地理的位置ではなく、ノード12のセンシング領域40に基づき、MACプロトコルが指向性センサネットワーク(例えば、カメラネットワーク)に適用されることを可能にする。このように、図7Aの中の点は、各ノード12A〜Hの物理的ロケーションを示すが、図7Bの中の点は、各ノード12A〜Hのセンシング領域40の中心52(添字「cs」付き)を示す。図7A及び7Bに示されるように、ノード12Aのセンシング・フィールド40の中心52は、領域60の範囲内にあり、すなわち、ノード12Aは、例示的な実施形態では、最高デューティ・サイクルd3を有することになる。逆に、ノード12B、12C及び12Hのセンシング・フィールド40の中心52は、領域62の範囲内にあり、すなわち、ノード12B、12C、12Hは、中間デューティ・サイクルd2を有することになり、残りのノード12D〜12Gは、最低デューティ・サイクルd1を有することになる。
【0059】
アルゴリズム4では、ノード12の現在のデューティ・サイクル・レベルは、dc、c∈{1,...,N}と表され、対応するノード12がこの時点で
との間のSTEP副領域にある。STEP更新が行われるときはいつでも、ノード12は、新しいデューティ・サイクル・レベルdmを計算し、時点tk+1=tk+δk’に対しデューティ・サイクル修正のスケジュールを立てることがある。スケジュールが立てられた時点tk+1で、ノード12は、新しいデューティ・サイクル・レベルdmを採用し、この新しいスケジュールを隣接ノード12にブロードキャストする(その結果、隣接ノードは、ブロードキャスト側ノード12が利用できる期間を認識する)。関心のあるイベントの発生とは異なり、イベントの消失は、近くのノードの間の即時通信トラフィックを始動させることにならない。その代わり、イベントの消失は、EENビットがセットされているパケットが長期間に亘って存在しないことによって推定されることがある。このようにして、アルゴリズム4に示されるように、デューティ・サイクル順応がソフト状態アプローチを使用して実行され、デューティ・サイクル修正が行われるときはいつでも、タイムアウト期間がセットされ、タイムアウト期間の満了時に、ノード12は、関心のあるイベントがこのノードの拡張センシング・フィールドから離れたと仮定し、このノードのデューティ・サイクルを最低レベルd1にリセットする。
【0060】
時点tk及びt’kにおける(方向18に移動する)オブジェクト16の追跡に関与するWCN 10の例示的な実施形態がそれぞれ図7A〜7Cに示される。この場合も同様に、(実線円で分割された)領域60〜64は、変化するデューティ・サイクル・レベルに対応する実例的に充足されたSTEP副領域を示す。最初にノード12Fによって検出された関心のあるイベントが(図7A及び7Bに示されるように)ノード12Bのセンシング・フィールド40の中に入り、パケット伝送を始動させる場合、EENビットがノード12Bによって送信されたパケットの中でセットされ、それによって、ノード12A、12E、12Hにイベントの発生を通知する。時点tkでのノード12Bからのこのようなパケットの受信時に、この間接的に検知された測定量に起因して、KFが各ノード12A、12E、12Hで作成され、初期化され、更新されることになる。ノード12A、12E、12Hは、その後、それぞれのノードのセンシング・フィールド40の中心52に関して現在のSTEP Skjを計算することになる。
【0061】
ノード12Bから受信されたメッセージに基づいて、時点tkでノード12Aによって計算されたSTEPは、図7A及び7Bに示される。この時点で、ノード12Aは、このノードがこのノードの次の測定中に領域60の範囲内にあると予測し(すなわち、オブジェクト16を検出する可能性が非常に高い)、その結果、tk+1での最高デューティ・サイクル・レベルd3の採用するためスケジュールを立てる。図7Cに示されたその後の時刻t’kで、ノード12Aは、オブジェクト16の測定量を獲得し、新しいSTEP Skjを計算する。この時点で、ノード12Aは、このノードがこのノードの次の測定中に新しい領域62の範囲内にあると予測し(すなわち、新しいSTEPの中に反映されるように、このノードのセンシング・フィールド40から離れるオブジェクト16を検出する可能性があまり高くない)、その結果、中間デューティ・サイクル・レベルd2を採用するためスケジュールを立てる。各ノード12は、このノードの固有の測定量だけでなく、離接ノード12から受信されたメッセージにも基づいてこのノードの固有のSTEPを独立に計算するので、異なるノード12で計算されたSTEP Skjは、僅かに異なることがある。実際には、小さい不一致にもかかわらず、複数のノード12によって計算されたSTEPは、イベント位置の分布の全体の近似であり、従って、多くの場合に、非常に類似することになる。ノード12が(例えば、複数のKFインスタンスを使用して)複数のイベントを追跡する場合、ノード12は、2つ以上の予測不確定性領域60〜64の範囲内に位置することがある。一部の実施形態では、複数のイベントからの不確定性は、異なるアプローチを使用して統合されることがある。例示的な実施形態では、しかし、PDCAスキームは、より高いデューティ・サイクルに対応する領域60〜64を単に選択する。
【0062】
ノード12が関心のあるイベントを検出し、新しいデューティ・サイクル・レベルを計算すると、例示的な実施形態では、ノード12のフレーム長さは、指数的に増減される。例えば、T1がd1に対応する最低デューティ・サイクルのフレーム長さであり、Mが指数的に変化するフレーム長さの底である場合、dcに対応する現在フレームの長さTcは、
として表現されることがあり、式中、i∈{1,...,N}であり、Nがデューティ・サイクル・レベルの数を表し、M∈N*(すなわち、正整数)である。Mは、PDCAスキームにおいてはどのような数でもよいと考えられる。フレーム長さが、例えば、2倍又は3倍で変化する場合、Mは、それぞれ、2又は3になる。この指数的に変化する順応フレーム法は、ノードが異なるデューティ・サイクルで動作するとしても、ノード12のいずれかのペアが通信できることを保証する。例えば、両方ともに最初に時点t0でアクティブ状態であり、異なるデューティ・サイクル・レベルdi及びdj(i<j)で動作する2つのノードni及びnjを仮定すると、ノードniは、時点t0+kTi(k∈N)でウェイクアップし、ノードnjは、時点t0+lTj(l∈N)でウェイクアップすることになる。
その結果、WCN 10の中のあらゆるノード12は、最低可能デューティ・サイクル・レベルd1に対応するアクティブ期間である少なくとも基本フレーム時間tbfの間に、このノードの直ぐ隣のノードと通信できる。4種類のデューティ・サイクル・レベル(d1からd4)を使用する例示的な実施形態の指数的に変化するフレーム長さが図8に示される。スケジュールS1(デューティ・サイクルd1を含む)は、フレーム長さf1を有し、スケジュールS2(d2)、S3(d3)及びS4(d4)は、それぞれ、フレーム長さf2、f3及びf4を有している。これらのフレーム長さの間の指数的関係は、f4=(21)*f3=(22)*f2=(23)*f1として表現されることがある。
【0063】
ノード12が時点tk+1で新しいデューティ・サイクル・レベルdmを採用すべきことをこのノード12が決定した後、ノード12は、隣接ノード12のスケジュールからこのノードのスケジュールを非同期化することなく、この修正を許可するメカニズムをさらに利用すべきである。tk+1は、新しいフレームの始まりと一致しないことがあるので、ノード12は、新しいスケジュールを使用して次のフレームを実際に開始するため異なる時点を決定することがある。tcを現在時点として使用し、tcfを現在フレームが開始した時点として使用し、tbfを前の基本フレームが開示した時点として使用し、tnfを次のフレームが現在スケジュールに応じて開始すべき時点として使用して、ノード12が時点tcでこのノードのデューティ・サイクルを異なるレベルdmに変更することを決定した場合、ノード12は、次のフレームの始まりをt’nf=tc+Δに向けるスケジュールを立てることになり、ここで、Δは、次のフレームの始まりまでの残り時間であり、
【0064】
この最小化問題は、Uの可能な値を探索することによって素早く解決されることがある。今度は図9を参照すると、垂直の実線が現在スケジュールのアクティブ期間の始まりを示し、垂直の点線が採用されるべき新しいスケジュールのアクティブ期間の始まりを示す。本事例におけるパラメータがM=2及びN=5である場合、ノード12の現在デューティ・サイクル・レベルは、dc=1であり、時点tcで、ノード12は、このノードのデューティ・サイクルをdm=2まで増大することを決定し、パラメータUは、
Δがその後に式(14)においてU=3をセットすることにより計算されることがあり、次のフレームの開始時点t’nfはこれに応じてスケジュールが変更されることがある。
【0065】
これまでに開示されたPDCAスキームは、イベント駆動WSNにおける同期MACプロトコルのためのプラグイン機能を有するため設計される。前述の通り、異なるスケジュールを有することがあるノード12のペアの間の通信は、ノード12の間で最低デューティ・サイクルを有しているノード12のアクティブ期間である(必ずしもd1ではない)これらのノードのアクティブ期間の重なり合いの間に行われるべきである。ノード12のアクティブ期間の計算は、フレームの開始時点に基づいて、1デューティ・サイクル間隔中にフレーム番号をフレームに割り当てることによって容易化されることがある。例えば、N個のデューティ・サイクル・レベルが使用されるとき、フレームの最大数はMNであるので、フレーム番号は0からMN−1まで変化することがあり、0は、tbfで開始するフレームに対応し、MN−1は、最後のフレームに対応する。ノード12が最低デューティ・サイクル・レベルdc(c<N)で動作するとき、(より少ないフレームしか存在しないので)すべてのフレーム番号が使用されるとは限らない。実際に存在するフレームは、これらのフレームの開始時点に基づくこれらのフレームの元の番号付けを維持することがある。(すなわち、デューティ・サイクル・レベルdcにおいて時点tcfで開始するフレームは、番号fcfが付けられ、この場号は、デューティ・サイクル・レベルdNでもfcfであるが、フレーム番号fcf+1がレベルdcで用いられることがない)。次のフレーム番号fnfは、
として表現されることがある。例えば、M=2、dc=1、及び、dN=5である場合、次のフレーム番号は、fnf=(fcf+24) mod 25になる。初期フレームは番号0が付けられるので、本事例におけるフレーム番号は、0と16との間で交互に代わる。現在デューティ・サイクル・レベルがdcpeerである隣接ノード12を含むノード12に対し、両方のノード12のアクティブ期間は、以下の等式:
が成り立つときにはいつでも重なり合うことになる。ユニキャスト通信の成功のため、ノード12は、このようなフレームの間に限りパケットを互いに送信すべきである。ノード12は、後述される同期メカニズムを使用してこのノードの隣接ノード12のスケジュールを認識することがある。実際には、特に、ノード12のデューティ・サイクル変化がホット・ストップの付近で起こるとき、ノード12は、このノードの隣接ノード12の一部又は全部の現在スケジュールが分からないことがある(例えば、ノード12が知っている隣接ノードのスケジュールは陳腐化していることがある)。このような事例では、厳しい輻輳及び衝突が原因となって変化が他のノード12によって認識されるまで、有意な遅延が存在することがある。このようにして、ノード12は、このノードの固有のSTEPのどの領域に隣接ノードが位置しているかをチェックすることにより、このノードの隣接ノード12のスケジュールをさらに推定することがある。様々な送信ポリシーがブロードキャスト通信のため利用されることがある。一部の実施形態では、ノード12の隣接ノード12のすべてがパケットを受信できる場合(すなわち、式(16)がこのノードのすべての隣接ノードに対して成り立つ場合)に限り、ノード12がパケットをブロードキャストするように、通信が制約される。本実施形態は、ブロードキャストされたパケットのためより長い伝送遅延を受けることになることが分かるであろう。他の実施形態では、ノード12は、少なくとも1つの隣接ノード12がリスンすることができる最も早い時点で(すなわち、式(16)がこのノードの隣接ノードのうちの少なくとも1つに対して成り立つと直ぐに)メッセージをブロードキャストすることがある。本実施形態は、隣接ノード12がパケットを傍受又は受信する機会を大幅に削減することが分かるであろう。PDCAスキームの例示的な実施形態は、イベントの付近の隣接ノード12が対象ノード12のデューティ・サイクルと同じであるか、又は、より一層高いデューティ・サイクルを有している可能性が非常に高く、そして、イベント関連情報が通常は遅延に敏感であるので、後者のアプローチを利用する。
【0066】
PDCAスキームの例示的な実施形態では、スケジュール変更が行われるか、又は、周期的SYNCメッセージ交換が必要とされるときはいつでも、SYNCメッセージがブロードキャストされることがある。各SYNCパケットは、(より詳細に後述される)(a)スケジュール・イニシエータのIDと、(b)現在デューティ・サイクル・レベルdcと、(c)次の基本フレームの始まりまでの残り時間と、(d)現在スケジュールの経年と、(e)EEN及びEERNのための2ビットフィールドとを例示的に格納することがある。現在スケジュールの「経年」は、スケジュールが周期的交換中にイニシエータによってブロードキャストされた回数を指す。PDCAスキームの例示的な実施形態は、(複数の異なるスケジュールに属している)境界ノードに関係する起こり得る問題を回避するため、ネットワーク全体でグローバル・スケジューリング・スキームをさらに利用する。このグローバル・スケジューリング・スキームは、ノード12に「旧」スケジュールを採用させることによって実施されることがある。例えば、S0がスケジュールのイニシエータであり、S0によって開始されたスケジュールの下で動作するノード12がSi(ここで、i≠0)から発生されたスケジュール、又は、同じであるが経年が異なるスケジュールを用いて、隣接ノード12からSYNCパケットを受信する場合、ノード12は、旧スケジュールを採用することになる。
【0067】
関心のあるイベントに関する情報を基地局14へ配信する際に起こり得る待ち時間を低減するため、PDCAスキームは、この情報を配信するため使用されたルーティング経路に沿って中間ノード12をさらに明示的に区別する。前述の通り、イベント検出ノード12は、これらのノードから出て行くパケットのMACヘッダの中のEENビットをセットすることにより特定される。ノード12がイベント関連情報を基地局14へルーティングしていることを示すため、他方では、ノード12は、MACヘッダの中の明示的イベント・ルーティング通知(EERN)ビットをセットすることがある。ノード12がEENビット又はEERNビットがセットされたパケットの意図された受け手であるとき、これは、関心のあるイベントに関する情報を格納する優先順位を付けられたフローがノード12を介してルーティングされることを示唆する。このようにして、このパケットを受信し次第、ノードは、引き続き送信されるべきすべてのパケットのEERNビットをセットする。
【0068】
ノード12がルーティング経路の一部である限り、ノード12は、エンド・ツー・エンド・レイテンシーを最小限に抑えるため、このノードのデューティ・サイクルを所定のレベルdNまで増加させる。レベルdNは、一部の実施形態では、最大デューティ・サイクルdNと同じにセットされることがある。図3Cに示された例示的なWCN 10を参照すると、ノード12B、12H、12C、12Dと基地局14とは、イベント関連パケットのルーティング経路に沿っているので、ノード12E又は12Fから発生したパケットを受信し次第、これらのデューティ・サイクルは、dNまで増加することになる。ルーティング経路に沿ったノード12のメンバーシップは、EERNがセットされたパケットの受信によって周期的にリフレッシュされなければならないソフト状態として実施されることがある。換言すると、ノード12が特定の期間内にルーティングされたパケットを受信しない場合、ノード12は、このノードのデューティ・サイクルを最低レベルd1まで低下させることになる。各ノード12によって実行されることがあるイベント情報ルーティングのための例示的なデューティ・サイクル順応手順は、アルゴリズム5として擬似コードに要約される(変数isEvenRoutingは、ノード12がこの時点でルーティング経路の一部分であることを示唆する)。
【0069】
アルゴリズム5(関心のあるイベントに関連したルーティング・パケットの高速配信)
While(1)
If 近傍及び意図された受け手からのパケットYを受信し、かつ、(Y .EERN セット||Y .EENセット)
(A5−1) タイムアウト付きのisEventRoutingをセットし、かつ、デューティ・サイクルをdc=dNまで増加させる
End if
If (パケットYを送信)
(A5−2) Y .EERN = isEventRouting
End if
If (タイムアウト満了)
(A5−3) デューティ・サイクルをd1まで減少させる
End while
【0070】
MACプロトコルの例示的な実施形態は、ここに開示されるPDCAスキームをTMACフレームワークに適用することにより構築された(本明細書中では「P−TMAC」と称される)。TMACは、(現在のネットワーク状態に依拠し)フレーム長さが固定された同期順応デューティ・サイクリングMACプロトコルである。PDCAスキームをTMACに適用することにより、フレーム長さも動的になり、設計上の対立なしに、より優れた順応性をもたらす。P−TMACプロコルは、Castaliaシミュレータ上のターゲット追跡(イベント駆動WSNの典型的なアプリケーション)の状況で評価された。Castaliaシミュレータは、A. Boulis, “Castalia: Revealing Pitfalls in Designing Distributed Algorithms in WSN,” SenSys ’07: Proceedings of the 5th Int’l Conf. on Embedded Networked Sensor Sys. 407-408 (2007)に記載され、この文献の開示内容全体が参照によって本明細書中に明確に組み込まれる。特に、P−TMACプロトコルの性能は、各TelosBノードが天井の下にランダムに配備され、25m×25mのエリア内を下向きに観測するカメラを備えている60個のTelosBノードで構成されたWCNを使ってシミュレートされた。(ある程度まで、イベントが稀にしか発生しない事例及びイベントが頻繁に発生する事例の両方を受け入れるために)ランダムに移動するオブジェクトが全シミュレーション時間のうちの3分の1の期間中にネットワーク内に存在すると仮定した。
【0071】
P−TMACのシミュレートされた性能は、2つの他の既存の順応MACプロトコル:AMAC及びTMACと比較された。これらのMACプロトコルの基本フレーム長さLは、すべてがアクティブ期間30msを含む1220msになるようにセットされ、その結果、基本デューティ・サイクル2.46%が得られた。P−TMAC及びAMACは、それぞれが、それらのフレーム長さを(指数的に変化するフレーム長さの特性によって)L、L/2、L/4及びL/8の間で変更することを許容された。性能評価のための基準線を設定するため、異なるフレーム長さをもつ4つのTMACが同様に評価された。具体的には、デューティ・サイクル2.5%、4.9%、9.8%、及び、19.7%に対応するフレーム長さを有し、TMAC−0、TMAC−1、TMAC−2及びTMAC−3とそれぞれ呼ばれるTMACプロトコルが同様にシミュレートされた。シミュレーションの残りのパラメータは、以下の表1に要約される。
【0072】
さらに、関心のあるイベントを検出するノードがこのイベントをシンク・ノードに個別に、又は、隣接ノードとの協働的なデータ処理と共に報告する2種類のシナリオが評価された。第1のシナリオ(すなわち、関心のあるイベントを検出する各ノードがこのノードの測定量を個別に報告するシナリオ)は、各MACプロトコルがイベントによって始動された集中的パケットをどの程度巧く取り扱えるかを評価する。第2のシナリオ(すなわち、イベントを検出する各ノードが協働的なセンシング及び処理を実行するためこのノードの隣接ノードとメッセージを交換するシナリオ)は、イベントの付近でより一層集中的な集中的トラフィックを必然的に伴い、利用されたMACプロトコルにさらなる課題を作り出す。両方のシナリオにおけるMACプロトコルの性能特性は、待ち時間及びスループットのような従来型のメトリックに加えて、イベント駆動WSNを評価するため具体的に設計された時間限界パラメータ推定精度(TIBPEA)QoSメトリックを使用して獲得された。TIBPEAは、P.J. Shin et al., “A QoS Evaluation Testbed for MAC Protocols for Wireless Camera Networks” 235-242 (2007) に記載され、この文献の開示内容全体が参照によって本明細書中に明確に組み込まれる。TIBPEA QoS評価メトリックは、隣接ノードが互いに通信できる信頼性が高くなるのにつれて、協働的に計算されるべきパラメータの精度が高くなるという観察に基づいて設計された。TIBPEAは、ある一定のタイムアウト期間内にブロードキャスト・メッセージへの応答に成功した隣接ノードの平均的な割合を使用して計算される。様々なMACプロトコルが、待ち時間、正規化スループット、及び、エネルギー消費量のような従来型のメトリックを使用してさらに評価された。正規化スループットは、各MACプロトコルにおいて、すべてのノードからシンクへ報告されたパケットの数を上限の役目を果たすTMAC−3のパケットの数で割り算することによって計算された。
【0073】
第1のシナリオでは、WCNの各ノードは、このノードの固有のセンシング間隔を用いて環境を連続的にセンスする。関心のあるイベントがノードのセンシング間隔中にこのノードによって検出されたときはいつでも、このノードは、このノードの固有の測定量を(例えば、ネットワークの縁に位置している)WCNのシンク・ノードへ直接的に報告する。ノードのセンシング・フィールドは重なり合うことがあるので、イベントは、イベントの近傍からシンク・ノードまで、各通信フローが簡単なツリーに基づくルーティング・プロトコルによって命令される複数の通信フローを始動させる。前述されたP−TMACプロトコル、AMACプロトコル、および、4つのTMACプロトコルの性能は、この第1のシナリオにおいて、待ち時間、正規化スループット、及び、エネルギー消費量の観点から評価された。
【0074】
今度は図10Aを参照すると、シミュレーション結果は、P−TMACがTMAC−3の平均待ち時間と類似した範囲において、様々なサンプリング間隔で、非常に低い1ホップ当たりの平均待ち時間を達成することを示す。「センシング・ラウンド」は、関心のあるイベントがノードのセンシング・フィールドの中に存在している期間として定義されることがある。「リンク初期化パケット」は、各センシング・ラウンド中に最初に送信されたパケットとして定義されることがある。同じオブジェクト移動を仮定すると、より高いサンプリングレートが1センシング・ラウンド当たりより一層のパケット生成を引き起こし、パケットの全数に対するリンク初期化パケットの割合を低下させる。TMAC及びAMACは、低サンプリングレート及び/又は低速オブジェクト移動が原因となって、リンク初期化パケットの数が少ないときにそれぞれが最も良く機能するように設計される。図10Aにおいて分かるように、TMAC−0及びAMACの1ホップ当たりの平均待ち時間は、サンプリング間隔の増加に伴って逆に増加するが、P−TMACは、このプロトコルの最良性能を維持する。
【0075】
各MACプロトコルシミュレーションの正規化スループットが図10Bに示される。正規化スループットは、各MACプロトコルに対しすべてのノードからシンク・ノードへ報告されたパケットの数を(理論的な上限としての役目を果たす)TMAC−3の同じメトリックによって割り算することによって計算された。スループットの観点から、P−TMACは、AMACより優れており、TMAC−3のスループットとほぼ同じ性能を達成する。サンプリング間隔が増加するのにつれてAMACのスループットが減少する主な理由は、データパケットと比較して、制御パケット(例えば、SYNC、RTS及びCTS)の付加的な通信オーバーヘッドである。ノードのスケジュールが変化するときはいつでも、P−TMAC及びAMACは、それぞれが、現在スケジュールをブロードキャストする。P−TMACは、AMACより広いスケジュール順応範囲を有しているので、この通信オーバーヘッドは、空間全体に分散させられる。このように、制御パケットがイベントの周りのノードに与える悪影響は、AMACの場合よりP−TMACの場合に影響が小さい。
【0076】
P−TMACは、待ち時間及びスループットの観点から、TMAC−3に類似する性能メトリックを達成するが、図10Cに示されるように、P−TMACのエネルギー消費量は、TMAC−1とTMAC−2との間にある。これは、P−TMACがTMACより効率的にエネルギーと待ち時間との間のトレードオフを改善することを示唆する。最後に、AMACは、前述されるように、待ち時間及びスループットの観点で性能を犠牲にして、P−TMACより優れた性能を達成する。
【0077】
第2のシナリオでは、ノードが関心のあるイベントを検出したとき、ノードは、(通常は分散アルゴリズムを含む)協働的なデータ処理を通じてイベントのより徹底的な理解を得るため、隣接ノードと測定量を共有することを試みる。今度は図11A及び11Bを参照すると、異なる平均ターゲット速度3m/s及び6m/sを用いた2組のシミュレーションがMACプロトコルに対して実施された。シミュレーションの組毎に、TIBPEAが異なるタイムアウト限界を用いて測定された。P−TMACプロトコルは、タイムアウト限界が厳しいとき(イベント駆動WSNにおいて共通の状況)、AMACプロトコル、TMAC−0プロトコル、および、さらにTMAC−2プロトコルより優れていた。他のMACプロトコルと比較して優れているP−TMACの性能は、遅延が重要なアプリケーションに対し、この設計目標を充足する。
【0078】
ある特定の例示的な実施形態が詳細に前述されたが、変形及び変更は特許請求の範囲に記載され、規定された本開示の範囲及び趣旨に包含される。
【特許請求の範囲】
【請求項1】
複数のノード(12)による共有通信媒体へのアクセスを制御する方法であって、
前記複数のノード(12)のうちの各ノード(12)に対し、イベントが将来の時点でこのノード(12)のセンシング・フィールド(40)の範囲内で発生するかどうかを予測するステップと、
各ノード(12)に関する予測に反応してこのノード(12)の通信スケジュールを順応させるステップと、
を含む方法。
【請求項2】
イベントが将来の時点で各ノード(12)のセンシング・フィールド(40)の範囲内で発生するかどうかを予測するステップは、各ノード(12)のカメラ(20)が前記将来の時点で関心のあるオブジェクト(16)を観測するかどうかを予測するステップを含む、請求項1に記載の方法。
【請求項3】
イベントが将来の時点で各ノード(12)のセンシング・フィールド(40)の範囲内で発生するかどうかを予測するステップは、前記複数のノード(12)のうちの各ノード(12)で時空間イベント確率(STEP)を推定するステップを含む、請求項1に記載の方法。
【請求項4】
前記複数のノード(12)のうちの各ノード(12)で前記STEPを推定するステップは、前記将来の時点で各ノード(12)の前記センシング・フィールド(40)に亘ってイベントの位置不確定性を統合するステップを含む、請求項3に記載の方法。
【請求項5】
前記複数のノード(12)のうちの各ノード(12)で前記STEPを推定するステップは、再帰的パラメータ推定器を使用するステップを含む,請求項3に記載の方法。
【請求項6】
再帰的パラメータ推定器を使用するステップは、カルマンフィルタと粒子フィルタとのうちの一方を使用するステップを含む、請求項5に記載の方法。
【請求項7】
前記複数のノード(12)のうちの第1のノード(12)を用いて、前記複数のノード(12)のうちの第2のノード(12)からイベントの測定量を含むパケットを受信するか、又は、傍受するステップをさらに含む、請求項5に記載の方法。
【請求項8】
前記イベントの前記測定量を使用して前記再帰的パラメータ推定器を更新することにより前記第1のノード(12)で新しいSTEPを推定するステップをさらに含む、請求項7に記載の方法。
【請求項9】
前記測定量が前記イベントのため予測された不確定性領域の範囲内でないとき、前記再帰的パラメータ推定器の新しいインスタンスを初期化するステップをさらに含む、請求項7に記載の方法。
【請求項10】
前記イベントの新しい測定量を含むパケットが前記第1のノード(12)によって受信又は傍受されない所定の期間の後に、前記再帰的パラメータ推定器のインスタンスを終了するステップをさらに含む、請求項7に記載の方法。
【請求項11】
前記第1のノード(12)の前記通信スケジュールは、前記再帰的パラメータ推定器の前記インスタンスの終了に反応して最低デューティ・サイクルに順応させられる、請求項10に記載の方法。
【請求項12】
各ノード(12)の前記通信スケジュールを順応させるステップは、各ノード(12)の無線機(24)のデューティ・サイクルを調節するステップを含む、請求項1に記載の方法。
【請求項13】
各ノード(12)の前記無線機(24)のデューティ・サイクルを調節するステップは、各ノード(12)がイベントの予測された不確定性領域の中のどの確率部分空間に属しているかを決定するステップを含む、請求項12に記載の方法。
【請求項14】
各ノード(12)の前記無線機(24)のデューティ・サイクルを調節するステップは、各無線機(24)によって利用されるフレーム長さを指数的に変化させるステップを含む、請求項12に記載の方法。
【請求項15】
パケットを送信するノード(12)がこの時点でイベントを検知しているかどうかを示す第1のビットを含む専用フィールドを格納するパケットを送信するステップをさらに含む、請求項1に記載の方法。
【請求項16】
前記専用フィールドは、前記パケットを送信する前記ノード(12)がこの時点でイベント関連データを転送しているかどうかを示す第2のビットをさらに含む、請求項15に記載の方法。
【請求項17】
第1のノードのプロセッサによって実行されるとき、前記プロセッサに、
イベントが将来の時点で前記第1のノード(12)のセンシング・フィールド(40)の範囲内で発生するかどうかを予測させ、
予測に反応して、複数のノード(12)の間で共有される通信媒体への前記第1のノード(12)によるアクセスを制御する前記第1のノード(12)の通信スケジュールを順応させる複数の命令を含む、1つ以上の有形で一時的でないコンピュータ読み取り可能な媒体。
【請求項18】
イベントが将来の時点で前記第1のノード(12)のセンシング・フィールド(40)の範囲内で発生するかどうかを予測することは、前記第1のノード(12)のカメラ(20)がこの将来の時点で関心のあるオブジェクト(16)を観測するかどうかを予測することを含む、請求項17に記載の1つ以上の有形で一時的でないコンピュータ読み取り可能な媒体。
【請求項19】
イベントが将来の時点で前記第1のノード(12)のセンシング・フィールド(40)の範囲内で発生するかどうかを予測することは、前記第1のノード(12)で時空間イベント確率(STEP)を推定することを含む、請求項17に記載の1つ以上の有形で一時的でないコンピュータ読み取り可能な媒体。
【請求項20】
前記第1のノード(12)で前記STEPを推定することは、前記第1のノード(12)の前記センシング・フィールド(40)に亘ってイベントの位置不確定性を統合することを含む、請求項19に記載の1つ以上の有形で一時的でないコンピュータ読み取り可能な媒体。
【請求項21】
前記第1のノード(12)で前記STEPを推定することは、再帰的パラメータ推定器を使用することを含む、請求項19に記載の有形で一時的でないコンピュータ読み取り可能な媒体。
【請求項22】
再帰的パラメータ推定器を使用することは、カルマンフィルタと粒子フィルタとのうちの一方を使用することを含む,請求項21に記載の1つ以上の有形で一時的でないコンピュータ読み取り可能な媒体。
【請求項23】
前記複数の命令は、さらに前記プロセッサに、前記複数のノード(12)のうちの第2のノード(12)からイベントの測定量を含むパケットを受信させるか、又は、傍受させる、請求項21に記載の1つ以上の有形で一時的でないコンピュータ読み取り可能な媒体。
【請求項24】
前記複数の命令は、さらに前記プロセッサに、前記イベントの前記測定量を使用して前記再帰的パラメータ推定器を更新することにより前記第1のノード(12)で新しいSTEPを推定させる、請求項23に記載の1つ以上の有形で一時的でないコンピュータ読み取り可能な媒体。
【請求項25】
前記複数の命令は、さらに前記プロセッサに、前記測定量が前記イベントのため予測された不確定性領域の範囲内でないとき、前記再帰的パラメータ推定器の新しいインスタンスを初期化させる、請求項23に記載の1つ以上の有形で一時的でないコンピュータ読み取り可能な媒体。
【請求項26】
前記複数の命令は、さらに前記プロセッサに、前記イベントの新しい測定量を含むパケットが前記第1のノード(12)によって受信又は傍受されない所定の期間の後に、前記再帰的パラメータ推定器のインスタンスを終了させる、請求項23に記載の1つ以上の有形で一時的でないコンピュータ読み取り可能な媒体。
【請求項27】
前記第1のノード(12)の前記通信スケジュールは、前記再帰的パラメータ推定器の前記インスタンスの終了に反応して最低デューティ・サイクルに順応させられる、請求項26に記載の1つ以上の有形で一時的でないコンピュータ読み取り可能な媒体。
【請求項28】
前記第1のノード(12)の前記通信スケジュールを順応させることは、前記第1のノード(12)の無線機(24)のデューティ・サイクルを調節することを含むことがある、請求項17に記載の1つ以上の有形で一時的でないコンピュータ読み取り可能な媒体。
【請求項29】
前記第1のノード(12)の前記無線機(24)のデューティ・サイクルを調節することは、前記第1のノード(12)がイベントの予測された不確定性領域の中のどの確率部分空間に属しているかを決定することを含む、請求項28に記載の1つ以上の有形で一時的でないコンピュータ読み取り可能な媒体。
【請求項30】
前記第1のノード(12)の前記無線機(24)のデューティ・サイクルを調節することは、前記第1のノード(12)の前記無線機(24)によって利用されるフレーム長さを指数的に変化させることを含む、請求項28に記載の1つ以上の有形で一時的でないコンピュータ読み取り可能な媒体。
【請求項31】
前記複数の命令は、さらに前記プロセッサに、前記第1のノード(12)がこの時点でイベントを検知しているかどうかを示す第1のビットを含む専用フィールドを格納するパケットを送信させる、請求項17に記載の1つ以上の有形で一時的でないコンピュータ読み取り可能な媒体。
【請求項32】
前記専用フィールドは、前記第1のノード(12)がこの時点でイベント関連データを転送しているかどうかを示す第2のビットをさらに含む、請求項31に記載の1つ以上の有形で一時的でないコンピュータ読み取り可能な媒体。
【請求項33】
複数ノード(12)を備え、各ノード(12)は、制御回路(22)と、前記複数のノード(12)の間で共有される通信媒体にアクセスする無線機(24)とを含み、各ノード(12)の前記制御回路)22)は、(i)イベントが将来の時点で前記ノード(12)のセンシング・フィールド(40)の範囲内で発生するかどうかを予測し、(ii)予測に反応して前記ノード(12)の前記無線機(24)のデューティ・サイクルを調節するため構成されている、ワイヤレス・センサ・ネットワーク。
【請求項34】
各ノード(12)はカメラ(20)を含み、各ノード(12)の前記制御回路(22)は、前記ノード(12)の前記カメラがこの将来の時点で関心のあるオブジェクトを観測するかどうかを予測するため構成されている、請求項33に記載のワイヤレス・センサ・ネットワーク。
【請求項35】
各ノード(12)の前記制御回路(22)は、前記ノード(12)で時空間イベント確率(STEP)を推定することにより、イベントが将来の時点で前記ノード(12)のセンシング・フィールド(40)の範囲内で発生するかどうかを予測するため構成されている、請求項33に記載のワイヤレス・センサ・ネットワーク。
【請求項36】
各ノード(12)の前記制御回路(22)は、前記ノード(12)の前記センシング・フィールド(40)に亘ってイベントの位置不確定性を統合することにより、前記ノード(12)で時空間イベント確率(STEP)を推定するため構成されている、請求項35に記載のワイヤレス・センサ・ネットワーク。
【請求項37】
各ノード(12)の前記制御回路(22)は、再帰的パラメータ推定器を使用して前記ノード(12)で時空間イベント確率(STEP)を推定するため構成されている、請求項35に記載のワイヤレス・センサ・ネットワーク。
【請求項38】
前記再帰的パラメータ推定器は、カルマンフィルタと粒子フィルタとのうちの一方を含む、請求項37に記載のワイヤレス・センサ・ネットワーク。
【請求項39】
各ノード(12)の前記制御回路(22)は、前記無線機(24)を介して、前記複数のノード(12)のうちの別のノード(12)からイベントの測定量を含むパケットを受信するか、又は、傍受するためさらに構成されている、請求項37に記載のワイヤレス・センサ・ネットワーク。
【請求項40】
各ノード(12)の前記制御回路(22)は、前記イベントの前記測定量を使用して前記再帰的パラメータ推定器を更新することにより前記ノード(12)で新しいSTEPを推定するためさらに構成されている、請求項39に記載のワイヤレス・センサ・ネットワーク。
【請求項41】
各ノード(12)の前記制御回路(22)は、前記測定量が前記イベントのため予測された不確定性領域の範囲内でないとき、前記再帰的パラメータ推定器の新しいインスタンスを初期化するためさらに構成されている、請求項39に記載のワイヤレス・センサ・ネットワーク。
【請求項42】
各ノード(12)の前記制御回路(22)は、前記イベントの新しい測定量を含むパケットが前記ノード(12)によって受信又は傍受されない所定の期間の後に、前記再帰的パラメータ推定器のインスタンスを終了するためさらに構成されている、請求項39に記載のワイヤレス・センサ・ネットワーク。
【請求項43】
各ノード(12)の前記制御回路(22)は、前記再帰的パラメータ推定器の前記インスタンスの終了に反応して、前記ノード(12)の前記無線機(24)のデューティ・サイクルを最低デューティ・サイクルに調節するためさらに構成されている、請求項42に記載のワイヤレス・センサ・ネットワーク。
【請求項44】
各ノード(12)の前記制御回路(22)は、前記ノード(12)がイベントの予測された不確定性領域の中のどの確率部分空間に属しているかを決定することにより、前記ノード(12)の前記無線機(24)のデューティ・サイクルを調節するため構成されている、請求項33に記載のワイヤレス・センサ・ネットワーク。
【請求項45】
各ノード(12)の前記制御回路(22)は、前記ノード(12)の前記無線機(24)によって利用されるフレーム長さを指数的に変化させることにより、前記ノード(12)の前記無線機(24)のデューティ・サイクルを調節するため構成されている、請求項33に記載のワイヤレス・センサ・ネットワーク。
【請求項46】
各ノード(12)の前記制御回路(22)は、前記ノード(12)がこの時点でイベントを検知しているかどうかを示す第1のビットを含む専用フィールド(40)を格納するパケットを、前記無線機(24)を介して送信するためさらに構成されている、請求項33に記載のワイヤレス・センサ・ネットワーク。
【請求項47】
前記専用フィールドは、前記ノード(12)がこの時点でイベント関連データを転送しているかどうかを示す第2のビットをさらに含む、請求項46に記載のワイヤレス・センサ・ネットワーク。
【請求項1】
複数のノード(12)による共有通信媒体へのアクセスを制御する方法であって、
前記複数のノード(12)のうちの各ノード(12)に対し、イベントが将来の時点でこのノード(12)のセンシング・フィールド(40)の範囲内で発生するかどうかを予測するステップと、
各ノード(12)に関する予測に反応してこのノード(12)の通信スケジュールを順応させるステップと、
を含む方法。
【請求項2】
イベントが将来の時点で各ノード(12)のセンシング・フィールド(40)の範囲内で発生するかどうかを予測するステップは、各ノード(12)のカメラ(20)が前記将来の時点で関心のあるオブジェクト(16)を観測するかどうかを予測するステップを含む、請求項1に記載の方法。
【請求項3】
イベントが将来の時点で各ノード(12)のセンシング・フィールド(40)の範囲内で発生するかどうかを予測するステップは、前記複数のノード(12)のうちの各ノード(12)で時空間イベント確率(STEP)を推定するステップを含む、請求項1に記載の方法。
【請求項4】
前記複数のノード(12)のうちの各ノード(12)で前記STEPを推定するステップは、前記将来の時点で各ノード(12)の前記センシング・フィールド(40)に亘ってイベントの位置不確定性を統合するステップを含む、請求項3に記載の方法。
【請求項5】
前記複数のノード(12)のうちの各ノード(12)で前記STEPを推定するステップは、再帰的パラメータ推定器を使用するステップを含む,請求項3に記載の方法。
【請求項6】
再帰的パラメータ推定器を使用するステップは、カルマンフィルタと粒子フィルタとのうちの一方を使用するステップを含む、請求項5に記載の方法。
【請求項7】
前記複数のノード(12)のうちの第1のノード(12)を用いて、前記複数のノード(12)のうちの第2のノード(12)からイベントの測定量を含むパケットを受信するか、又は、傍受するステップをさらに含む、請求項5に記載の方法。
【請求項8】
前記イベントの前記測定量を使用して前記再帰的パラメータ推定器を更新することにより前記第1のノード(12)で新しいSTEPを推定するステップをさらに含む、請求項7に記載の方法。
【請求項9】
前記測定量が前記イベントのため予測された不確定性領域の範囲内でないとき、前記再帰的パラメータ推定器の新しいインスタンスを初期化するステップをさらに含む、請求項7に記載の方法。
【請求項10】
前記イベントの新しい測定量を含むパケットが前記第1のノード(12)によって受信又は傍受されない所定の期間の後に、前記再帰的パラメータ推定器のインスタンスを終了するステップをさらに含む、請求項7に記載の方法。
【請求項11】
前記第1のノード(12)の前記通信スケジュールは、前記再帰的パラメータ推定器の前記インスタンスの終了に反応して最低デューティ・サイクルに順応させられる、請求項10に記載の方法。
【請求項12】
各ノード(12)の前記通信スケジュールを順応させるステップは、各ノード(12)の無線機(24)のデューティ・サイクルを調節するステップを含む、請求項1に記載の方法。
【請求項13】
各ノード(12)の前記無線機(24)のデューティ・サイクルを調節するステップは、各ノード(12)がイベントの予測された不確定性領域の中のどの確率部分空間に属しているかを決定するステップを含む、請求項12に記載の方法。
【請求項14】
各ノード(12)の前記無線機(24)のデューティ・サイクルを調節するステップは、各無線機(24)によって利用されるフレーム長さを指数的に変化させるステップを含む、請求項12に記載の方法。
【請求項15】
パケットを送信するノード(12)がこの時点でイベントを検知しているかどうかを示す第1のビットを含む専用フィールドを格納するパケットを送信するステップをさらに含む、請求項1に記載の方法。
【請求項16】
前記専用フィールドは、前記パケットを送信する前記ノード(12)がこの時点でイベント関連データを転送しているかどうかを示す第2のビットをさらに含む、請求項15に記載の方法。
【請求項17】
第1のノードのプロセッサによって実行されるとき、前記プロセッサに、
イベントが将来の時点で前記第1のノード(12)のセンシング・フィールド(40)の範囲内で発生するかどうかを予測させ、
予測に反応して、複数のノード(12)の間で共有される通信媒体への前記第1のノード(12)によるアクセスを制御する前記第1のノード(12)の通信スケジュールを順応させる複数の命令を含む、1つ以上の有形で一時的でないコンピュータ読み取り可能な媒体。
【請求項18】
イベントが将来の時点で前記第1のノード(12)のセンシング・フィールド(40)の範囲内で発生するかどうかを予測することは、前記第1のノード(12)のカメラ(20)がこの将来の時点で関心のあるオブジェクト(16)を観測するかどうかを予測することを含む、請求項17に記載の1つ以上の有形で一時的でないコンピュータ読み取り可能な媒体。
【請求項19】
イベントが将来の時点で前記第1のノード(12)のセンシング・フィールド(40)の範囲内で発生するかどうかを予測することは、前記第1のノード(12)で時空間イベント確率(STEP)を推定することを含む、請求項17に記載の1つ以上の有形で一時的でないコンピュータ読み取り可能な媒体。
【請求項20】
前記第1のノード(12)で前記STEPを推定することは、前記第1のノード(12)の前記センシング・フィールド(40)に亘ってイベントの位置不確定性を統合することを含む、請求項19に記載の1つ以上の有形で一時的でないコンピュータ読み取り可能な媒体。
【請求項21】
前記第1のノード(12)で前記STEPを推定することは、再帰的パラメータ推定器を使用することを含む、請求項19に記載の有形で一時的でないコンピュータ読み取り可能な媒体。
【請求項22】
再帰的パラメータ推定器を使用することは、カルマンフィルタと粒子フィルタとのうちの一方を使用することを含む,請求項21に記載の1つ以上の有形で一時的でないコンピュータ読み取り可能な媒体。
【請求項23】
前記複数の命令は、さらに前記プロセッサに、前記複数のノード(12)のうちの第2のノード(12)からイベントの測定量を含むパケットを受信させるか、又は、傍受させる、請求項21に記載の1つ以上の有形で一時的でないコンピュータ読み取り可能な媒体。
【請求項24】
前記複数の命令は、さらに前記プロセッサに、前記イベントの前記測定量を使用して前記再帰的パラメータ推定器を更新することにより前記第1のノード(12)で新しいSTEPを推定させる、請求項23に記載の1つ以上の有形で一時的でないコンピュータ読み取り可能な媒体。
【請求項25】
前記複数の命令は、さらに前記プロセッサに、前記測定量が前記イベントのため予測された不確定性領域の範囲内でないとき、前記再帰的パラメータ推定器の新しいインスタンスを初期化させる、請求項23に記載の1つ以上の有形で一時的でないコンピュータ読み取り可能な媒体。
【請求項26】
前記複数の命令は、さらに前記プロセッサに、前記イベントの新しい測定量を含むパケットが前記第1のノード(12)によって受信又は傍受されない所定の期間の後に、前記再帰的パラメータ推定器のインスタンスを終了させる、請求項23に記載の1つ以上の有形で一時的でないコンピュータ読み取り可能な媒体。
【請求項27】
前記第1のノード(12)の前記通信スケジュールは、前記再帰的パラメータ推定器の前記インスタンスの終了に反応して最低デューティ・サイクルに順応させられる、請求項26に記載の1つ以上の有形で一時的でないコンピュータ読み取り可能な媒体。
【請求項28】
前記第1のノード(12)の前記通信スケジュールを順応させることは、前記第1のノード(12)の無線機(24)のデューティ・サイクルを調節することを含むことがある、請求項17に記載の1つ以上の有形で一時的でないコンピュータ読み取り可能な媒体。
【請求項29】
前記第1のノード(12)の前記無線機(24)のデューティ・サイクルを調節することは、前記第1のノード(12)がイベントの予測された不確定性領域の中のどの確率部分空間に属しているかを決定することを含む、請求項28に記載の1つ以上の有形で一時的でないコンピュータ読み取り可能な媒体。
【請求項30】
前記第1のノード(12)の前記無線機(24)のデューティ・サイクルを調節することは、前記第1のノード(12)の前記無線機(24)によって利用されるフレーム長さを指数的に変化させることを含む、請求項28に記載の1つ以上の有形で一時的でないコンピュータ読み取り可能な媒体。
【請求項31】
前記複数の命令は、さらに前記プロセッサに、前記第1のノード(12)がこの時点でイベントを検知しているかどうかを示す第1のビットを含む専用フィールドを格納するパケットを送信させる、請求項17に記載の1つ以上の有形で一時的でないコンピュータ読み取り可能な媒体。
【請求項32】
前記専用フィールドは、前記第1のノード(12)がこの時点でイベント関連データを転送しているかどうかを示す第2のビットをさらに含む、請求項31に記載の1つ以上の有形で一時的でないコンピュータ読み取り可能な媒体。
【請求項33】
複数ノード(12)を備え、各ノード(12)は、制御回路(22)と、前記複数のノード(12)の間で共有される通信媒体にアクセスする無線機(24)とを含み、各ノード(12)の前記制御回路)22)は、(i)イベントが将来の時点で前記ノード(12)のセンシング・フィールド(40)の範囲内で発生するかどうかを予測し、(ii)予測に反応して前記ノード(12)の前記無線機(24)のデューティ・サイクルを調節するため構成されている、ワイヤレス・センサ・ネットワーク。
【請求項34】
各ノード(12)はカメラ(20)を含み、各ノード(12)の前記制御回路(22)は、前記ノード(12)の前記カメラがこの将来の時点で関心のあるオブジェクトを観測するかどうかを予測するため構成されている、請求項33に記載のワイヤレス・センサ・ネットワーク。
【請求項35】
各ノード(12)の前記制御回路(22)は、前記ノード(12)で時空間イベント確率(STEP)を推定することにより、イベントが将来の時点で前記ノード(12)のセンシング・フィールド(40)の範囲内で発生するかどうかを予測するため構成されている、請求項33に記載のワイヤレス・センサ・ネットワーク。
【請求項36】
各ノード(12)の前記制御回路(22)は、前記ノード(12)の前記センシング・フィールド(40)に亘ってイベントの位置不確定性を統合することにより、前記ノード(12)で時空間イベント確率(STEP)を推定するため構成されている、請求項35に記載のワイヤレス・センサ・ネットワーク。
【請求項37】
各ノード(12)の前記制御回路(22)は、再帰的パラメータ推定器を使用して前記ノード(12)で時空間イベント確率(STEP)を推定するため構成されている、請求項35に記載のワイヤレス・センサ・ネットワーク。
【請求項38】
前記再帰的パラメータ推定器は、カルマンフィルタと粒子フィルタとのうちの一方を含む、請求項37に記載のワイヤレス・センサ・ネットワーク。
【請求項39】
各ノード(12)の前記制御回路(22)は、前記無線機(24)を介して、前記複数のノード(12)のうちの別のノード(12)からイベントの測定量を含むパケットを受信するか、又は、傍受するためさらに構成されている、請求項37に記載のワイヤレス・センサ・ネットワーク。
【請求項40】
各ノード(12)の前記制御回路(22)は、前記イベントの前記測定量を使用して前記再帰的パラメータ推定器を更新することにより前記ノード(12)で新しいSTEPを推定するためさらに構成されている、請求項39に記載のワイヤレス・センサ・ネットワーク。
【請求項41】
各ノード(12)の前記制御回路(22)は、前記測定量が前記イベントのため予測された不確定性領域の範囲内でないとき、前記再帰的パラメータ推定器の新しいインスタンスを初期化するためさらに構成されている、請求項39に記載のワイヤレス・センサ・ネットワーク。
【請求項42】
各ノード(12)の前記制御回路(22)は、前記イベントの新しい測定量を含むパケットが前記ノード(12)によって受信又は傍受されない所定の期間の後に、前記再帰的パラメータ推定器のインスタンスを終了するためさらに構成されている、請求項39に記載のワイヤレス・センサ・ネットワーク。
【請求項43】
各ノード(12)の前記制御回路(22)は、前記再帰的パラメータ推定器の前記インスタンスの終了に反応して、前記ノード(12)の前記無線機(24)のデューティ・サイクルを最低デューティ・サイクルに調節するためさらに構成されている、請求項42に記載のワイヤレス・センサ・ネットワーク。
【請求項44】
各ノード(12)の前記制御回路(22)は、前記ノード(12)がイベントの予測された不確定性領域の中のどの確率部分空間に属しているかを決定することにより、前記ノード(12)の前記無線機(24)のデューティ・サイクルを調節するため構成されている、請求項33に記載のワイヤレス・センサ・ネットワーク。
【請求項45】
各ノード(12)の前記制御回路(22)は、前記ノード(12)の前記無線機(24)によって利用されるフレーム長さを指数的に変化させることにより、前記ノード(12)の前記無線機(24)のデューティ・サイクルを調節するため構成されている、請求項33に記載のワイヤレス・センサ・ネットワーク。
【請求項46】
各ノード(12)の前記制御回路(22)は、前記ノード(12)がこの時点でイベントを検知しているかどうかを示す第1のビットを含む専用フィールド(40)を格納するパケットを、前記無線機(24)を介して送信するためさらに構成されている、請求項33に記載のワイヤレス・センサ・ネットワーク。
【請求項47】
前記専用フィールドは、前記ノード(12)がこの時点でイベント関連データを転送しているかどうかを示す第2のビットをさらに含む、請求項46に記載のワイヤレス・センサ・ネットワーク。
【図1】

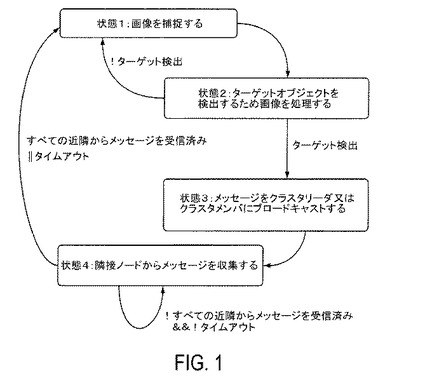
【図2】
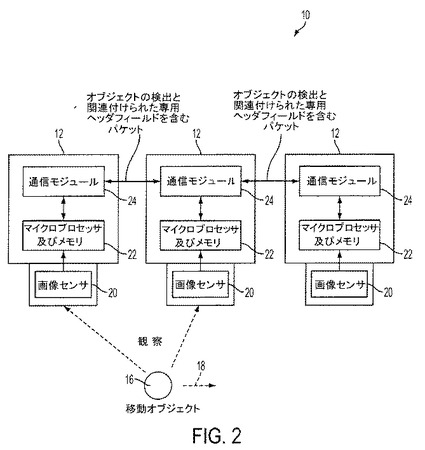
【図3A】
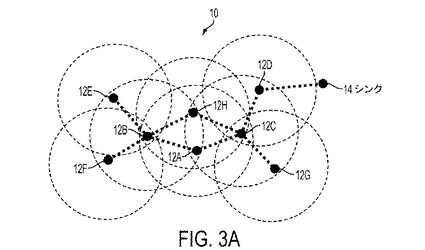
【図3B】
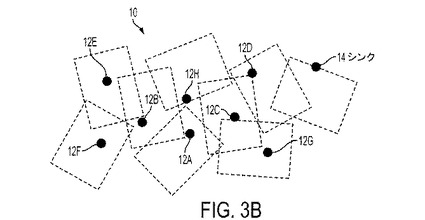
【図3C】
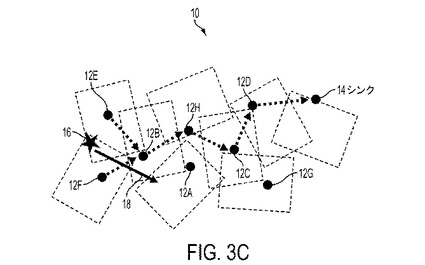
【図4】

【図5】

【図6】
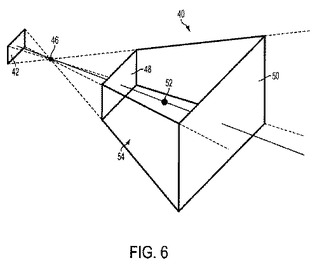
【図7A】
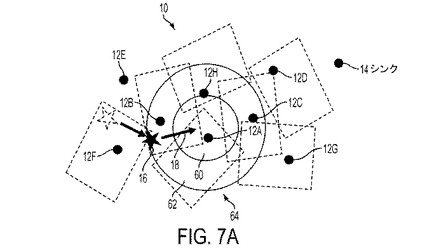
【図7B】
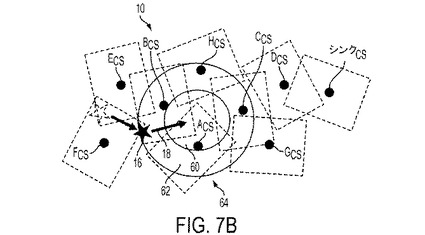
【図7C】
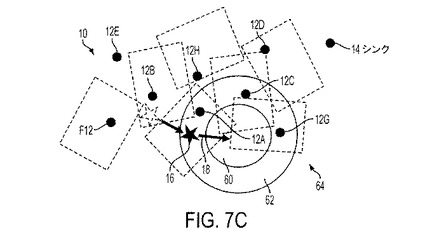
【図8】

【図9】

【図10A】
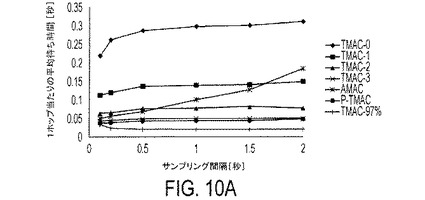
【図10B】

【図10C】

【図11A】
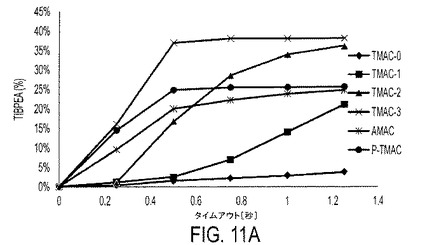
【図11B】

【図2】
【図3A】
【図3B】
【図3C】
【図4】
【図5】
【図6】
【図7A】
【図7B】
【図7C】
【図8】
【図9】
【図10A】
【図10B】
【図10C】
【図11A】
【図11B】
【公表番号】特表2013−502851(P2013−502851A)
【公表日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願番号】特願2012−525704(P2012−525704)
【出願日】平成22年8月20日(2010.8.20)
【国際出願番号】PCT/US2010/046059
【国際公開番号】WO2011/022577
【国際公開日】平成23年2月24日(2011.2.24)
【出願人】(598063203)パーデュー・リサーチ・ファウンデーション (59)
【氏名又は名称原語表記】PURDUE RESEARCH FOUNDATION
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
【公表日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願日】平成22年8月20日(2010.8.20)
【国際出願番号】PCT/US2010/046059
【国際公開番号】WO2011/022577
【国際公開日】平成23年2月24日(2011.2.24)
【出願人】(598063203)パーデュー・リサーチ・ファウンデーション (59)
【氏名又は名称原語表記】PURDUE RESEARCH FOUNDATION
【出願人】(000000376)オリンパス株式会社 (11,466)
【Fターム(参考)】
[ Back to top ]