
イメージング装置およびイメージング方法
【課題】対象物体から放射や反射されるミリ波をアンテナやアンプなどで構成されるセンサによって計測してイメージングを行うイメージング装置において、メカ機構の負担を少なくし、さらに、計測有効範囲を拡大する。
【解決手段】センサ群124A,124Bを回転物体121の回転面に配置する。回転物体121を回転させることで、センサ群124Aが誘電体レンズ110により有効範囲1に結像された第1の被写体像IM1をスキャンし、被写体像IM1の各画素の信号が取得される。また、回転物体121を回転させることで、センサ群124Bが誘電体レンズ110および反射板126により有効範囲2に結像された第2の被写体像IM2をスキャンし、被写体像IM2の各画素の信号が取得される。反射板を動かしてスキャンを実現する従来技術に比べて、メカ機構の負担を少なくできる。計測有効範囲として、有効範囲1の他に、有効範囲2が加わる。
【解決手段】センサ群124A,124Bを回転物体121の回転面に配置する。回転物体121を回転させることで、センサ群124Aが誘電体レンズ110により有効範囲1に結像された第1の被写体像IM1をスキャンし、被写体像IM1の各画素の信号が取得される。また、回転物体121を回転させることで、センサ群124Bが誘電体レンズ110および反射板126により有効範囲2に結像された第2の被写体像IM2をスキャンし、被写体像IM2の各画素の信号が取得される。反射板を動かしてスキャンを実現する従来技術に比べて、メカ機構の負担を少なくできる。計測有効範囲として、有効範囲1の他に、有効範囲2が加わる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、イメージング装置およびイメージング方法に関し、特に、対象物体から放射や反射されるミリ波またはサブミリ波(テレヘルツ波)をアンテナやアンプなどで構成されるセンサによって計測することでイメージングを行うイメージング装置等に関する。
【背景技術】
【0002】
対象となる物体(被写体)を非接触かつ非破壊で検査する技術や装置は非常に重要である。その中でも、非可視物体の検査は特に重要で、様々なアプリケーションが存在する。非可視物体の検査の代表例としては、X線を用いたイメージング装置があげられる。X線はその高い物体透過性能から、特定の物体を透過して検査する、いわゆる“透かし”を行うことができる。X線イメージングは非常に優れた非可視物体の検査方法であるが、重大な欠点を抱えている。それは、被爆の問題、つまり検査対象やその周辺の人体などの生命に悪影響を与えてしまう恐れがあるのである。そのために、生命に対する使用時には万全の注意を払う必要がある。
【0003】
一方で、ミリ波やサブミリ波(テラヘルツ波)を用いた非可視物体の検査装置がある。ミリ波は波長が1−10mmの電磁波のことであり、電磁波の周波数でいうと、30−300GHzにあたる。サブミリ波はミリ波の次に短い波長をもつ電磁波であり、ミリ波と同じような特性を有している。以後の説明はミリ波、サブミリ波を併記せず、簡略化のためミリ波のみについて記載する。したがって、以下の記述はサブミリ波にも適用され得る。
【0004】
ミリ波を用いたイメージングは、衣類や炎などを透過して観測できる利点があり、さらに、X線イメージングとは異なり被爆の問題がないという利点も併せ持てっている。そのため、人が服の下に隠し持った物体を透視する検査装置として活用されている(非特許文献1参照)。
【0005】
例えば、特許文献1、非特許文献2には、ミリ波イメージングを用いた検査装置が記載されている。これらの特許文献からも明らかなように、ミリ波イメージング装置は、ミリ波を集束する誘電体レンズ、ミリ波を受信するセンサ、そして、センサをスキャニングするためのスキャニング装置で構成されている。通常、ミリ波はアンテナを用いて計測される。
【0006】
また、パッシブ方式のミリ波イメージング装置では、アンテナによって計測されるミリ波が非常に微弱なため、アンプなどの増幅装置が必須となる。このようなアンテナとアンプを有するセンサは、サイズや価格などの問題で、数に制約が課せられることが多い。そこで、予め用意されたミリ波センサをメカ機構によるスキャニング装置でスキャン操作を行うことで、イメージングを行っている。そのため、ミリ波イメージング装置では、レンズの特性やミリ波センサの計測感度、スキャニング方法及び機構、装置が差異化要素としてあげられることとなる。
【0007】
ミリ波イメージング装置のスキャニング方法は、往復運動方式および回転方式の2種類に大別できる(特許文献1および非特許文献2参照)。往復運動方式は、ラインセンサ(1ラインもしくは複数ライン)をライン方向と垂直にスキャンすることで2次元(2D)映像を得る方法である。一方、回転運動方式は、センサ群を回転させることでスキャンさせている。
【0008】
これら2つの方法に共通しているのは、センサそのものを動かすのではなく、反射板を動かすことでスキャンを実現している点である。センサには計測可能範囲が存在するので、センサより離れた位置に存在する反射板はセンサよりも大きくなる。大きな反射板を駆動させるため、メカ機構への負担が大きくなる。
【0009】
また、往復運動方式は、メカ機構の負担が大きいことから、往復運動のスピードを上げることが難しく、従って、イメージングのスキャン速度が上がらない。回転運動方式は、円運動でイメージングするためにセンサ数を増やすこと、あるいは、非常に高速に反射板を回転させることが必要となる。そのため、ミリ波イメージング装置が大型化し、しかも高額になってしまう。
【0010】
また、上述したように、ミリ波イメージングでは、対象物体から放射や反射されるミリ波をアンテナやアンプなどで構成されたセンサによって計測することで、イメージングを行っている。イメージングにおいて、センサは1画素に相当するため、例えば、100×100ピクセル(pixel)の画像をイメージングするためには、1万個のセンサが必要となる。
【0011】
1万個ものセンサを物理的に設置するのは、コスト面、製造面からいって、特殊な用途を除いて、一般の監視ソリューションに用いる装置に適用することは困難である。そこで、一般的には、上述したように、実際の画素数よりも少ないセンサを配置して、センサをメカ的にスキャンしている(特許文献1参照)。あるいは、信号処理によってスキャン操作を行うことで、多画素化を実現している(非特許文献3参照)。
【0012】
また、画像による監視や計測の分野において、3次元情報を得ることは非常に重要である。3次元情報を得ることで、監視対象となる物体の空間的な位置が容易に把握できるからである。一方、監視や計測における非破壊検査装置として、上述したように、ミリ波イメージング装置がある。ミリ波イメージングでは、対象物体から放射や反射されるミリ波をアンテナやアンプなどで構成されたセンサによって計測することで、イメージングを行っている。
【0013】
従来のミリ波イメージング装置は、上述の特許文献1や非特許文献2のように、一般的な監視カメラと同じく、撮像対象の2次元イメージを取得する方法が多かった。ミリ波イメージング装置においても、3次元情報を得ることができる装置があれば、非常に有意義であると思われる。
【0014】
また、上述したように、ミリ波イメージングでは、対象物体から放射や反射されるミリ波をアンテナやアンプなどで構成されたセンサによって計測することで、イメージングを行っている。イメージングを高速化するには複数のセンサを用いる手段が有効であるが、複数のセンサを用いると、センサ間の感度ばらつきによって、得られる画像にムラが生じてしまい、画質が低下する。同じような問題は赤外線センサも抱えており、赤外線センサでは、例えば、特許文献2のような手段でセンサ間の感度ばらつきを補正している。
【0015】
感度ばらつきには、次の3つがある。1つ目は、センサの製造時の製造過程での品質のばらつくによって生じるものである。2つ目は、センサの経年変化によって生じるものである。3つ目は、使用時の外乱や揺らぎによって生じるものである。1つ目は、製造時の品質検査時に校正を行うことで、補正可能である。2つ目は、製品出荷後に定期的な校正作業で補正することができる。しかし、短期間での校正作業には、センサを含むシステムが本来の目的での使用が困難になるため、高頻度での校正作業の実施が困難となるという問題がある。さらには、3つ目については、2つ目よりもさらに高頻度での補正が必要であり、その校正方法が問題となる。
【先行技術文献】
【特許文献】
【0016】
【特許文献1】特表2009−526988号公報
【特許文献2】特開平02−270243号公報
【非特許文献】
【0017】
【非特許文献1】水野皓司,“ミリ波を用いたイメージング”,電子情報通信学会誌、Vol.91,No.12,2008
【非特許文献2】R.Appleby,“Millimeter-wave and Submillimetr-wave imaging for Security andSurveillance”,Proc of IEEE、Vol.95,No.08,2007.8
【非特許文献3】H. V. Nguyen, "Pencil-beam2D scanning leaky-wave antenna," Int. Symp. On Signals, Systems andElectronics (ISSSE 2007), July 30 - Aug. 2, pp. 139-142(2007)
【発明の概要】
【発明が解決しようとする課題】
【0018】
上述したように、従来のミリ波イメージング装置においては、メカ機構の負担が大きいという不都合がある。
この発明の目的は、メカ機構の負担を少なくし、さらに、計測有効範囲を拡大することにある。また、この発明の目的は、メカ機構の負担を少なくし、さらに、3次元情報を得ることにある。また、この発明の目的は、メカ機構の負担を少なくし、さらに、キャリブレーション(校正)を簡便に行うことにある。
【課題を解決するための手段】
【0019】
この発明の概念は、
被写体からのミリ波またはサブミリ波を収束して被写体像を結像する誘電体レンズと、
上記誘電体レンズにより結像される上記被写体像を撮像する撮像部とを備え、
上記撮像部は、
上記誘電体レンズの光軸に対して垂直な回転軸を持つ回転物体と、
上記回転物体を、上記回転軸を中心に回転させる回転機構部と、
上記誘電体レンズで収束されたミリ波またはサブミリ波を上記回転物体側に反射する反射板と、
上記回転物体の回転面に配置され、該回転物体の回転に伴って、上記誘電体レンズにより結像される第1の被写体像をスキャンする第1の複数のセンサと、
上記回転物体の回転面に配置され、該回転物体の回転に伴って、上記誘電体レンズおよび上記反射板により結像される第2の被写体像をスキャンする第2の複数のセンサと、
上記回転物体の回転位置を検出する回転位置検出部と、
上記回転位置検出部で得られる回転位置検出信号に基づいて、上記第1の複数のセンサの出力信号より、上記第1の被写体像上の各画素の信号を取得し、上記第2の複数のセンサの出力信号より、上記第2の被写体像上の各画素の信号を取得する画素信号取得部とを有する
イメージング装置にある。
【0020】
この発明においては、撮像部は、回転物体、回転機構部、反射板、第1、第2の複数のセンサ、回転位置検出部および画素信号取得部を有する構成とされている。回転物体は、例えば、円筒状のドラムとされる。しかし、この形状に限られるものではなく、少なくとも、複数のセンサを配置し得る回転面が存在すればよく、平板の組み合わせからなる回転物体も考えられる。誘電体レンズにより、被写体からのミリ波またはサブミリ波(テレヘルツ波)が収束されて被写体像(ミリ波またはサブミリ波の像)が結像される。回転物体の回転面には、第1の複数のセンサおよび第2の複数のセンサが配置されている。これらのセンサは、ミリ波またはサブミリ波を捉えるアンテナ、このアンテナの出力信号を増幅するアンプなどで構成される。
【0021】
誘電体レンズで収束されたミリ波またはサブミリ波を回転物体側に反射する反射板が設けられる。回転物体は、回転機構部により、回転するようにされる。回転機構部は、例えば、モータなどから構成される。この回転物体の回転に伴って、この回転物体の回転面に配置されている第1の複数のセンサにより、誘電体レンズにより結像される第1の被写体像がスキャンされる。このように、第1の複数のセンサにより第1の被写体像がスキャンされることで、第1の複数のセンサでは、第1の被写体像の各部におけるミリ波またはサブミリ波の計測が行われる。
【0022】
また、この回転物体の回転に伴って、この回転物体の回転面に配置されている第2の複数のセンサにより、誘電体レンズおよび反射板により結像される第2の被写体像がスキャンされる。このように、第2の複数のセンサにより第2の被写体像がスキャンされることで、第2の複数のセンサでは、第2の被写体像の各部におけるミリ波またはサブミリ波の計測が行われる。
【0023】
回転物体の回転位置は、回転位置検出部により検出される。上述の第1、第2の複数のセンサによる第1、第2の被写体像のスキャンは、これらのセンサが計測有効範囲にある期間で行われる。そのため、画素信号取得部により、回転位置検出信号に基づいて、第1の複数のセンサの出力信号から第1の被写体像上の各画素の信号が取得され、また、第2の複数のセンサの出力信号から第2の被写体像上の各画素の信号が取得される。
【0024】
このように、この発明においては、第1、第2の複数のセンサを回転物体の回転面に配置し、この回転物体を回転させることでスキャンを実現している。そのため、従来のように、反射板を動かすことでスキャンを実現する技術に比べて、メカ機構の負担を少なくできる。また、回転物体の回転速度を変更することで、スキャン速度を容易に変更できる。
【0025】
また、この発明においては、回転物体の回転面に誘電体レンズにより第1の被写体像を結像させる他、この回転物体の回転面に誘電体レンズおよび反射板により第2の被写体像を結像させ、これら第1、第2の被写体像上の各画素の信号を取得している。そのため、計測有効範囲の拡大を図ることができ、また、異なるフォーカス画像の画素信号を得ることができる。
【0026】
また、この発明の他の概念は、
被写体からのミリ波またはサブミリ波を収束して被写体像を結像する誘電体レンズと、
上記誘電体レンズにより結像される上記被写体像を撮像する撮像部とを備え、
上記撮像部は、
上記誘電体レンズの光軸に対して垂直な回転軸を持つ回転物体と、
上記回転物体を、上記回転軸を中心に回転させる回転機構部と、
上記回転物体の回転軸に対し、上記誘電体レンズの光軸と直交する互いに逆方向の位置に設けられ、上記誘電体レンズで収束されたミリ波またはサブミリ波を上記回転物体側に反射する第1の反射板および第2の反射板と、
上記回転物体の回転面に配置され、該回転物体の回転に伴って、上記誘電体レンズおよび上記第1の反射板により結像される第1の被写体像をスキャンする第1の複数のセンサと、
上記回転物体の回転面に配置され、該回転物体の回転に伴って、上記誘電体レンズおよび上記第2の反射板により結像される第2の被写体像をスキャンする第2の複数のセンサと、
上記回転物体の回転位置を検出する回転位置検出部と、
上記回転位置検出部で得られる回転位置検出信号に基づいて、上記第1の複数のセンサの出力信号より、上記第1の被写体像上の各画素の信号を取得し、上記第2の複数のセンサの出力信号より、上記第2の被写体像上の各画素の信号を取得する画素信号取得部とを有する
イメージング装置にある。
【0027】
この発明においては、撮像部は、回転物体、回転機構部、第1、第2反射板、複数のセンサ、回転位置検出部および画素信号取得部を有する構成とされている。回転物体は、例えば、円筒状のドラムとされる。しかし、この形状に限られるものではなく、少なくとも、複数のセンサを配置し得る回転面が存在すればよく、平板の組み合わせからなる回転物体も考えられる。誘電体レンズにより、被写体からのミリ波またはサブミリ波(テレヘルツ波)が収束されて被写体像(ミリ波またはサブミリ波の像)が結像される。回転物体の回転面には、第1の複数のセンサおよび第2の複数のセンサが配置されている。これらのセンサは、ミリ波またはサブミリ波を捉えるアンテナ、このアンテナの出力信号を増幅するアンプなどで構成される。
【0028】
第1の反射板および第2の反射板は、回転物体の回転軸に対し、誘電体レンズの光軸と直交する互いに逆方向の位置に設けられる。誘電体レンズで収束されたミリ波またはサブミリ波は、第1の反射板により回転物体側に反射され、回転物体の回転面に第1の被写体像が結像される。また、誘電体レンズで収束されたミリ波またはサブミリ波は、第2の反射板により回転物体側に反射され、回転物体の回転面に第2の被写体像が結像される。これら第1、第2の被写体像は、異なる視点から見た場合の被写体像である。
【0029】
回転物体は、回転機構部により、回転するようにされる。回転機構部は、例えば、モータなどから構成される。この回転物体の回転に伴って、この回転物体の回転面に配置されている第1の複数のセンサにより、誘電体レンズおよび第1の反射板により結像される第1の被写体像がスキャンされる。このように、第1の複数のセンサにより第1の被写体像がスキャンされることで、第1の複数のセンサでは、第1の被写体像の各部におけるミリ波またはサブミリ波の計測が行われる。
【0030】
また、この回転物体の回転に伴って、この回転物体の回転面に配置されている第2の複数のセンサにより、誘電体レンズおよび第2の反射板により結像される第2の被写体像がスキャンされる。このように、第2の複数のセンサにより第2の被写体像がスキャンされることで、第2に複数のセンサでは、第2の被写体像の各部におけるミリ波またはサブミリ波の計測が行われる。
【0031】
回転物体の回転位置は、回転位置検出部により検出される。上述の第1、第2の複数のセンサによる第1、第2の被写体像のスキャンは、これらのセンサが計測有効範囲にある期間で行われる。そのため、画素信号取得部により、回転位置検出信号に基づいて、第1の複数のセンサの出力信号から第1の被写体像上の各画素の信号が取得され、また、第2の複数のセンサの出力信号から第2の被写体像上の各画素の信号が取得される。
【0032】
このように、この発明においては、第1、第2の複数のセンサを回転物体の回転面に配置し、この回転物体を回転させることでスキャンを実現している。そのため、従来のように、反射板を動かすことでスキャンを実現する技術に比べて、メカ機構の負担を少なくできる。また、回転物体の回転速度を変更することで、スキャン速度を容易に変更できる。
【0033】
また、この発明においては、第1、第2の反射板により、回転物体の回転面に、異なる視点から見た場合の第1、第2の被写体像を結像させる。そして、これら第1、第2の被写体像上の各画素の信号を取得している。そのため、これら第1、第2の被写体像上の各画素の信号を用いて3次元情報(奥行き情報)を得ることができる。
【0034】
この発明において、例えば、誘電体レンズは、第1の被写体像を結像させるための第1の誘電体レンズと、第2の被写体像を結像させるための第2の誘電体レンズとからなる、ようにしてもよい。
【0035】
また、この発明において、撮像部は、画素信号取得部で取得された第1の被写体像上の各画素の信号および第2の被写体像上の各画素の信号に基づいて、各画素の視差を求め、被写体上の各画素までの距離を判別する距離判別部をさらに有する、ようにしてもよい。この場合、3次元情報(奥行き情報)を得ることができる。
【0036】
また、この発明の他の概念は、
被写体からのミリ波またはサブミリ波を収束して被写体像を結像する誘電体レンズと、
上記誘電体レンズにより結像される上記被写体像を撮像する撮像部とを備え、
上記撮像部は、
上記誘電体レンズの光軸に対して垂直な回転軸を持つ回転物体と、
上記回転物体を、上記回転軸を中心に回転させる回転機構部と、
上記回転物体の回転面に配置され、該回転物体の回転に伴って、上記誘電体レンズにより有効範囲に結像される被写体像をスキャンする複数のセンサと、
上記回転物体の回転位置を検出する回転位置検出部と、
上記回転物体に近接し、上記有効範囲とは異なる位置に配置され、一定レベル値のミリ波またはサブミリ波を発生する校正用物体と、
上記回転位置検出部で得られる回転位置検出信号に基づいて、上記複数のセンサの出力信号より、上記誘電体レンズにより結像される被写体像上の各画素の信号を取得する画素信号取得部と、
上記回転位置検出部で得られる回転位置検出信号に基づいて、上記複数のセンサの出力信号より、上記校正用物体が発生するミリ波またはサブミリ波を測定した校正用信号を取得し、該校正用信号に基づいて上記複数のセンサの出力信号を校正する出力信号校正部とを有する
イメージング装置にある。
【0037】
この発明においては、撮像部は、回転物体、回転機構部、複数のセンサ、回転位置検出部、画素信号取得部および出力信号校正部を有する構成とされている。回転物体は、例えば、円筒状のドラムとされる。しかし、この形状に限られるものではなく、少なくとも、複数のセンサを配置し得る回転面が存在すればよく、平板の組み合わせからなる回転物体も考えられる。誘電体レンズにより、被写体からのミリ波またはサブミリ波(テレヘルツ波)が収束されて被写体像(ミリ波またはサブミリ波の像)が結像される。回転物体の回転面には、複数のセンサが配置されている。このセンサは、ミリ波またはサブミリ波を捉えるアンテナ、このアンテナの出力信号を増幅するアンプなどで構成される。
【0038】
回転物体は、回転機構部により、回転するようにされる。回転機構部は、例えば、モータなどから構成される。この回転物体の回転に伴って、この回転物体の回転面に配置されている複数のセンサにより、誘電体レンズにより結像される被写体像がスキャンされる。このように複数のセンサにより被写体像がスキャンされることで、複数のセンサでは、被写体像の各部におけるミリ波またはサブミリ波の計測が行われる。
【0039】
回転物体の回転位置は、回転位置検出部により検出される。上述の複数のセンサによる被写体像のスキャンは、このセンサが計測有効範囲にある期間で行われる。そのため、画素信号取得部により、複数のセンサの出力信号から、回転位置検出信号に基づいて、被写体像上の各画素の信号が取得される。
【0040】
校正用物体は、上述の回転物体に近接して配置される、上述の計測有効範囲とは異なる位置に配置される。出力信号校正部により、回転検出部で得られる回転位置検出信号に基づいて、複数のセンサの出力信号より、校正用物体が発生するミリ波またはサブミリ波を測定した校正用信号が取得される。そして、この出力信号校正部により、取得された校正用信号に基づいて、複数のセンサの出力信号が校正(キャリブレーション)される。
【0041】
このように、この発明においては、複数のセンサを回転物体の回転面に配置し、この回転物体を回転させることでスキャンを実現している。そのため、従来のように、反射板を動かすことでスキャンを実現する技術に比べて、メカ機構の負担を少なくできる。また、回転物体の回転速度を変更することで、スキャン速度を容易に変更できる。
【0042】
また、この発明においては、回転物体に近接して校正用物体を配置し、回転物体の回転面に配置された複数のセンサで校正用物体が発生するミリ波またはサブミリ波を測定し、この複数のセンサの出力信号より校正用信号を取得するようにしている。そのため、複数のセンサの出力信号を簡便に校正できる。
【発明の効果】
【0043】
この発明によれば、複数のセンサを回転物体の回転面に配置し、この回転物体を回転させることでスキャンを実現しているため、メカ機構の負担を少なくでき、また、回転物体の回転速度を変更することでスキャン速度を容易に変更できる。また、この発明によれば、回転物体の回転面に誘電体レンズにより第1の被写体像を結像させる他、この回転物体の回転面に誘電体レンズおよび反射板により第2の被写体像を結像させ、これら第1、第2の被写体像上の各画素の信号を取得しているため、計測有効範囲の拡大を図ることができ、また、異なるフォーカス画像の画素信号を得ることができる。
【0044】
また、この発明によれば、第1、第2の反射板により、回転物体の回転面に、異なる視点から見た場合の第1、第2の被写体像を結像させ、これら第1、第2の被写体像上の各画素の信号を取得しているため、これら第1、第2の被写体像上の各画素の信号を用いて3次元情報(奥行き情報)を得ることができる。また、この発明によれば、回転物体に近接して校正用物体を配置し、回転物体の回転面に配置された複数のセンサで校正用物体が発生するミリ波またはサブミリ波を測定し、この複数のセンサの出力信号より校正用信号を取得するようにしているため、複数のセンサの出力信号を簡便に校正できる。
【図面の簡単な説明】
【0045】
【図1】この発明の第1の実施の形態としてのイメージング装置の全体を概略的に示す図である。
【図2】イメージング装置の撮像部を構成する回転物体と、反射板と、センサ群(複数のセンサ)を説明するための図である。
【図3】イメージング装置の構成を示すブロック図である。
【図4】誘電体レンズに対して焦点距離Dの位置に焦点範囲Lの領域だけ焦点があう範囲が存在することを示す図である。
【図5】回転物体の回転面に配置されたセンサでスキャンする場合に定義されるパラメータを示す図である。
【図6】計測有効範囲における複数のセンサのスキャニング軌跡の一例を示す図である。
【図7】焦点の異なった2つの被写体像に対応した画素信号を得ることができることを説明するための図である。
【図8】この発明の第2の実施の形態としてのイメージング装置の全体を概略的に示す図である。
【図9】イメージング装置の撮像部を構成する回転物体と反射板とセンサ群(複数のセンサ)を説明するための図である。
【図10】イメージング装置の構成を示すブロック図である。
【図11】被写体像IML,IMRが基線長だけ左右に離れた2つの視点から被写体を見た場合の画像に相当することを説明するための図である。
【図12】撮像されたイメージ例と、距離分布の作成例を示す図である。
【図13】撮像部の前面に2つの誘電体レンズを配置する構成を示す図である。
【図14】2対以上の反射板を設けて、2つ以上の3次元情報を得ることを説明するための図である。
【図15】この発明の第3の実施の形態としてのイメージング装置の全体を概略的に示す図である。
【図16】イメージング装置の撮像部を構成する回転物体と校正用物体とセンサ群(複数のセンサ)を説明するための図である。
【図17】イメージング装置の構成を示すブロック図である。
【図18】この発明の第4の実施の形態としてのイメージング装置の全体を概略的に示す図である。
【図19】イメージング装置の構成を示すブロック図である。
【図20】平板の組み合わせからなる回転物体を示す図である。
【発明を実施するための形態】
【0046】
以下、発明を実施するための形態(以下、「実施の形態」とする)について説明する。なお、説明は以下の順序で行う。
1.第1の実施の形態
2.第2の実施の形態
3.第3の実施の形態
4.第4の実施の形態
5.変形例
【0047】
<1.第1の実施の形態>
[イメージング装置の構成]
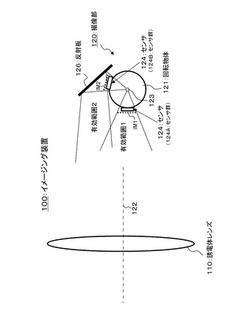
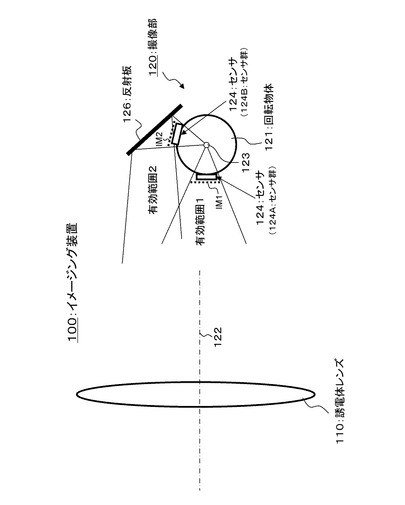
図1〜図3は、第1の実施の形態としてのイメージング装置100の構成例を示している。図1は、イメージング装置100の全体を概略的に示している。イメージング装置100は、誘電体レンズ110と、撮像部120とを備えている。誘電体レンズ110は、ミリ波またはサブミリ波(テラヘルツ波)を収束して被写体像を結像させる。なお、以下の説明では、ミリ波、サブミリ波を併記せず、簡略化のためミリ波のみについて記載する。したがって、以下の記述はサブミリ波にも適用される。
【0048】
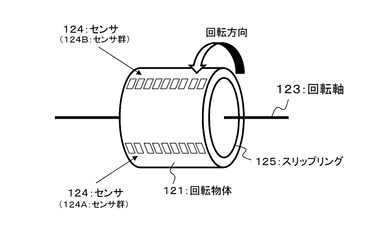
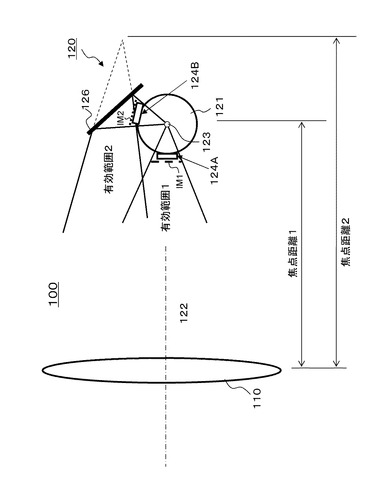
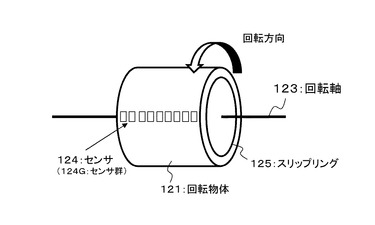
撮像部120は、誘電体レンズ110により結像される被写体像(ミリ波像)を撮像する。この撮像部120は、回転物体121を有している。この回転物体121は、図2に示すように、例えば、円筒状のドラムである。この回転物体121は、誘電体レンズ110の光軸122に対して、垂直な回転軸123を持っている。この回転物体121の回転面には、円周面方向の異なる2つの位置に、それぞれ、複数のセンサ124が配置されている。ここで、説明を容易とするため、一方の複数のセンサ124をセンサ群124Aとし、他方の複数のセンサ124をセンサ群124Bとする。各センサ124は、図示は省略するが、ミリ波を捉えるアンテナ、このアンテナの出力信号を増幅するアンプなどで構成される。
【0049】
誘電体レンズ110は、回転物体121の回転面に、被写体像IM1を結像する。回転物体121の回転面に配置されたセンサ群124Aの各センサ124は、回転物体121の回転に伴って、被写体像IM1をスキャンする。センサ群124Aの各センサ124は、このように被写体像IM1をスキャンすることで、被写体像IM1の各部におけるミリ波の計測を行って、その計測値に対応した信号を出力する。なお、センサ群124Aは、被写体像IM1のスキャンを、所定の角範囲、つまり、計測有効範囲(有効範囲1)にある期間に行う。
【0050】
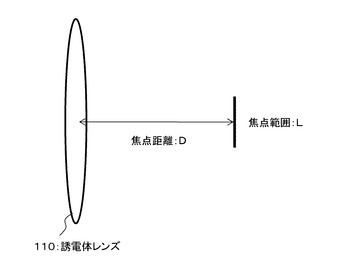
ここで、計測有効範囲について説明する。この焦点範囲Lは、センサ124と前面にある誘電体レンズ110とによって決まる。誘電体レンズ110の焦点が合う範囲内であれば、センサ124の出力信号(計測データ)をイメージングに使用できる。範囲外の場合、誘電体レンズ110の焦点が合っていないので、センサ124の出力信号(計測データ)をイメージングに使用できない。
【0051】
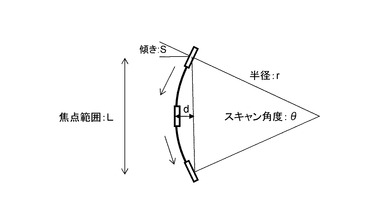
例えば、図4に示すように、誘電体レンズ110に対して焦点距離Dの位置に焦点範囲Lの領域だけ焦点があう範囲が存在する。なお、Lは、図面上では直線であるが、実際には一辺の長さがLの四角形、あるいは、直径がLの円形などの面積を持っている。この範囲を、回転物体121の回転面に配置されたセンサ124でスキャンする場合、図5に示すようなパラメータが定義される。図5のスキャン角度θが計測有効範囲である。逆に、(360−θ)度は、実際には計測が行われていない無効計測範囲となる。
【0052】
例えば、θが36度の場合、無効計測範囲は324度となり、実際にドラムの1回転でセンサ124が計測に使用されるのは10%になってしまう。つまり、θを大きくすれば、計測有効範囲を拡大することができるため、同じ焦点範囲Lが規定されているのであれば、ドラムの半径rを小さくした方がよい。しかし、回転物体121の半径rを小さくした場合、図5に示される、傾きsと距離差dが問題となる。
【0053】
半径rを小さくすると、傾きsと距離差dが大きくなってしまう。これは、誘電体レンズ110によって集められたミリ波のセンサ124への照射条件が変化してしまうため、イメージング結果が画像の場所によって変化してしまうことになる。しかし、傾きsと距離差dを小さくするために、半径rを大きくすると、スキャン角度θが小さくなってしまう問題がある。
【0054】
そこで、図1〜図3に示すイメージング装置100では、図1に示すように、撮像部120は、反射板126を有している。この反射板126は、誘電体レンズ110で収束されたミリ波を、回転物体121側に反射する。この反射板126を取り付けることで、新たな計測有効範囲(有効範囲2)でもスキャンでき、センサ124の計測有効範囲が拡大する。
【0055】
誘電体レンズ110および反射板126は、回転物体121の回転面に、被写体像IM2を結像する。回転物体121の回転面に配置されたセンサ群124Bの各センサ124は、回転物体121の回転に伴って、被写体像IM2をスキャンする。センサ群124Bの各センサ124は、このように被写体像IM2をスキャンすることで、被写体像IM2の各部におけるミリ波の計測を行って、その計測値に対応した信号を出力する。なお、センサ群124Bは、被写体像IM2のスキャンを、所定の角範囲、つまり、計測有効範囲(有効範囲2)にある期間に行う。
【0056】
センサ群124Aの各センサ124およびセンサ群124Bの各センサ124は、図2に示すように、回転物体121の回転軸に対して平行なライン上に所定の間隔をもって配置されている。回転物体121の側面には、センサ124に必要な電源および接地のため、さらにはセンサ124の出力信号を取り出すためのスリップリング125が設けられている。各センサ124の出力信号は、例えば、1本のスリップリング125から、時分割的にシリアル出力される。図2には、図面の簡単化のため、スリップリング125を1本しか示していない。なお、各センサ124の出力信号に関しては、無線で取り出すことも考えられる。その場合には、各センサ124の出力信号を取り出すためのスリップリング125は不要となる。
【0057】
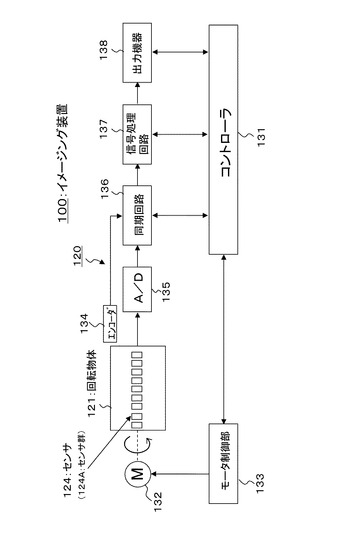
図3は、イメージング装置100の構成を示している。なお、この図3には、誘電体レンズ110および反射板126の図示を省略している。イメージング装置100は、上述した回転物体121、センサ群124A,124Bおよび反射板126の他に、コントローラ131と、モータ132と、モータ制御部133と、エンコーダ134を有している。また、イメージング装置100は、A/D変換器135と、同期回路136と、信号処理回路137と、出力機器138を有している。
【0058】
コントローラ131は、イメージング装置100の各部の動作を制御する。モータ132は、回転物体121を、回転軸123を中心に回転させる。このモータ132は、回転機構部を構成している。モータ制御部133は、コントローラ131の制御のもと、モータ132の動作を制御する。エンコーダ134は、回転物体121の回転位置を検出する。このエンコーダ134は、回転位置検出部を構成している。このエンコーダ134は、例えば、機械的、磁気的あるいは光学的に、回転物体121の回転位置を検出し、回転位置検出信号を出力する。この回転位置検出信号に基づいて、センサ群124A,124Bが上述した計測有効範囲にあるか否か、さらには、その計測有効範囲のどこにあるかがわかる。
【0059】
A/D変換器135は、回転物体121の回転面に配置されたセンサ群124A,124Bの各センサ124の出力信号を、アナログ信号からデジタル信号に変換する。同期回路136は、A/D変換器135でデジタル信号に変換された、センサ群124Aの各センサ124の出力信号より、有効範囲1に存在する被写体像IM1上の各画素の信号を、回転物体121の回転位置に同期して取得する。また、同期回路136は、A/D変換器135でデジタル信号に変換された、センサ群124Bの各センサ124の出力信号より、有効範囲2に存在する被写体像IM2上の各画素の信号を、回転物体121の回転位置に同期して取得する。
【0060】
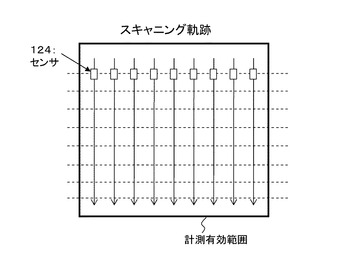
図6は、計測有効範囲における、センサ群124A,124Bの各センサ124のスキャニング軌跡の一例を垂直方向に延びる実線で示している。同期回路136は、エンコーダ134からの回転位置検信号に基づいて、例えば、垂直方向に延びる実線と、信号取得タイミングを示す水平方向に延びる破線との交点(格子点)に対応した、各画素の信号を取得する。なお、図6においては、図面の簡単化のために、信号取得タイミングの個数を8つとしているが、実際の個数とは異なる。同期回路136は、画素信号取得部を構成している。
【0061】
信号処理回路137は、同期回路136から出力される被写体像IM1,IM2上の各画素の信号(デジタルデータ)を、イメージとして出力するための処理を行う。この処理は、例えば、ノイズ除去処理、鮮鋭化処理などである。出力機器138は、信号処理回路137で処理された後の被写体像IM1,IM2上の各画素の信号を記録する記録機、あるいはその各画素の信号により被写体像を表示するモニタ等である。
【0062】
図1〜図3に示すイメージング装置100の動作を説明する。モータ制御部133によりモータ132の動作が制御され、回転物体121は回転軸123を中心に所定の速度で回転するようにされる。この回転物体121の回転により、この回転物体121の回転面に配置されたセンサ群124Aは、誘電体レンズ110により結像される被写体像IM1を、所定の周期でスキャンするようにされる。また、この回転物体121の回転により、この回転物体121の回転面に配置されたセンサ群124Bは、誘電体レンズ110および反射板126により結像される被写体像IM2を、所定の周期でスキャンするようにされる。
【0063】
センサ群124A,124Bの各センサ124では、被写体像IM1,IM2の各部におけるミリ波の計測が行われる。そして、センサ群124A,124Bの各センサ124からは、その計測値に対応した信号が出力される。この各センサ124の出力信号は、シリアル信号に変換されて、回転物体121の側面に設けられたスリップリング125を通じて外部に取り出される。回転物体121から取り出された各センサ124の出力信号は、A/D変換器135でアナログ信号からデジタル信号に変換された後に、同期回路136に供給される。
【0064】
また、エンコーダ134により、回転物体121の回転位置が検出される。このエンコーダ134から出力される回転位置検出信号は、同期回路136に供給される。同期回路136では、センサ群124Aの各センサ124の出力信号(デジタルデータ)から、回転物体121の回転位置に同期して、被写体像IM1上の各計測点(各画素)の信号が取得される(図6参照)。また、同期回路136では、センサ群124Bの各センサ124の出力信号(デジタルデータ)から、回転物体121の回転位置に同期して、被写体像IM2上の各計測点(各画素)の信号が取得される(図6参照)。この被写体像IM1,IM2上の各画素の信号は、信号処理回路137に供給される。
【0065】
信号処理回路137では、被写体像IM1,IM2上の各画素の信号(デジタルデータ)に対して、イメージとして出力するための処理、例えば、ノイズ除去処理、鮮鋭化処理などが行われる。そして、このように処理された被写体像IM1,IM2上の各画素の信号は、出力機器138に供給される。出力機器138が記録機の場合には、この被写体像IM1,IM2上の各画素の信号は記録メディアに記録される。また、出力機器138がモニタの場合には、被写体像IM1,IM2に対応した各画素の信号により、画面に被写体像が表示される。
【0066】
上述したように、図1〜図3に示すイメージング装置100においては、センサ群124A,124Bの各センサ124を回転物体121の回転面に配置し、この回転物体121を回転させることでスキャンを実現している。そのため、従来のように、反射板を動かすことでスキャンを実現する技術に比べて、メカ機構の負担を少なくできる。また、回転物体121の回転速度を変更することで、スキャン速度を容易に変更できる。
【0067】
また、図1〜図3に示すイメージング装置100においては、回転物体121の回転面に誘電体レンズ110により被写体像IM1を結像させる他、この回転物体121の回転面に誘電体レンズ110および反射板126により被写体像IM2を結像させる。そして、これら被写体像IM1,IM2上の各画素の信号を取得しているため、計測有効範囲として、有効範囲1に、さらに有効範囲2が付加され、その拡大を図ることができる。
【0068】
また、図1〜図3に示すイメージング装置100においては、有効範囲1に被写体像IM1を結像させる他、有効範囲2に被写体像IM2を結像させ、これら被写体像IM1,IM2上の各画素の信号を取得している。図7に示すように、有効範囲1と有効範囲2では、誘電体レンズ110に対する焦点距離が異なる。つまり、焦点の異なった2つの被写体像IM1,IM2に対応した画素信号を得ることができる。
【0069】
なお、図1〜図3に示すイメージング装置100においては、1枚の反射板126を設けた例を示している。しかし、同様の反射板を2枚以上設けて、さらに多くの、焦点距離を異にする被写体像の画素信号を得ることも考えられる。これにより、3つ以上のフォーカス画像を得ることができ、例えば、特許第3303128号の技術を用いて、画面全体にフォーカスの合った画像を得ることも簡単に可能となる。
【0070】
<第2の実施の形態>
[イメージング装置の構成]
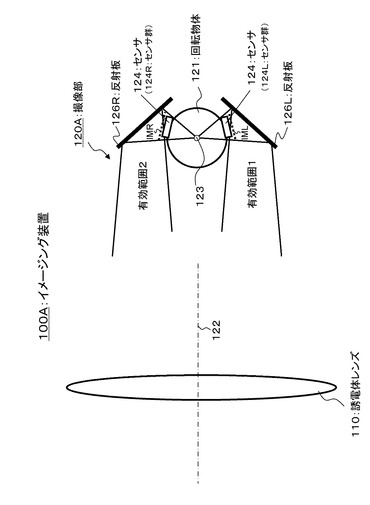
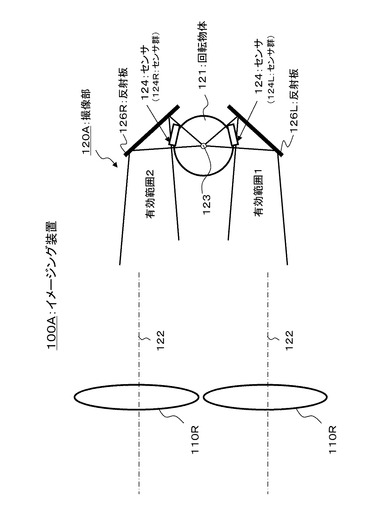
図8〜図10は、第2の実施の形態としてのイメージング装置100Aの構成例を示している。これら図8〜図10において、図1〜図3と対応する部分には、同一符号を付して示している。図8は、イメージング装置100Aの全体を概略的に示している。イメージング装置100Aは、誘電体レンズ110と、撮像部120Aとを備えている。誘電体レンズ110Aは、ミリ波またはサブミリ波(テラヘルツ波)を収束して被写体像を結像させる。なお、以下の説明では、ミリ波、サブミリ波を併記せず、簡略化のためミリ波のみについて記載する。したがって、以下の記述はサブミリ波にも適用される。
【0071】
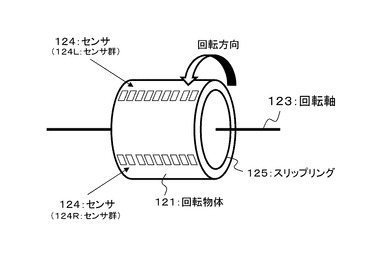
撮像部120Aは、誘電体レンズ110により結像される被写体像(ミリ波像)を撮像する。この撮像部120Aは、回転物体121を有している。この回転物体121は、図9に示すように、例えば、円筒状のドラムである。この回転物体121は、誘電体レンズ110の光軸122に対して、垂直な回転軸123を持っている。この回転物体121の回転面には、円周面方向の異なる2つの位置に、それぞれ、複数のセンサ124が配置されている。ここで、説明を容易とするため、一方の複数のセンサ124をセンサ群124Lとし、他方の複数のセンサ124をセンサ群124Rとする。各センサ124は、図示は省略するが、ミリ波を捉えるアンテナ、このアンテナの出力信号を増幅するアンプなどで構成される。
【0072】
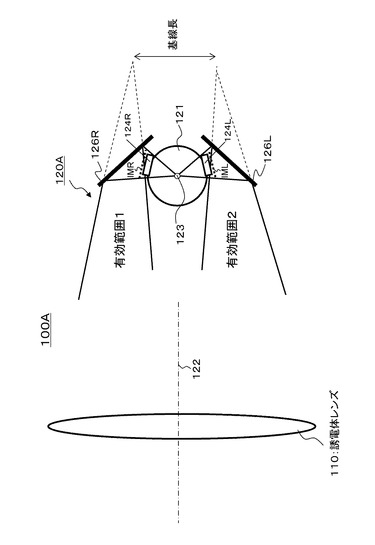
また、撮像部120Aは、反射板126L,126Rを有している。これらの反射板126L,126Rは、回転物体121の回転軸123に対し、誘電体レンズ110の光軸122と直交する互いに逆方向の位置に対照的に設けられる。誘電体レンズ110で収束されたミリ波は、反射板126Lにより回転物体121側に反射され、回転物体121の回転面(計測有効範囲1)に、左眼画像に対応した被写体像IMLが結像される。また、誘電体レンズ110で収束されたミリ波は、反射板126Rにより回転物体121側に反射され、回転物体121の回転面(計測有効範囲2)に、右眼画像に対応した被写体像IMRが結像される。これらの被写体像IML,IMRは、図11に示すように、例えば、基線長だけ左右に離れた2つの視点から被写体を見た場合の画像に相当する。
【0073】
回転物体121の回転面に配置されたセンサ群124Lの各センサ124は、回転物体121の回転に伴って、被写体像IMLをスキャンする。センサ群124Lの各センサ124は、このように被写体像IMLをスキャンすることで、被写体像IMLの各部におけるミリ波の計測を行って、その計測値に対応した信号を出力する。回転物体121の回転面に配置されたセンサ群124Rの各センサ124は、回転物体121の回転に伴って、被写体像IMRをスキャンする。センサ群124Rの各センサ124は、このように被写体像IMRをスキャンすることで、被写体像IMRの各部におけるミリ波の計測を行って、その計測値に対応した信号を出力する。
【0074】
センサ群124Lの各センサ124およびセンサ群124Rの各センサ124は、図9に示すように、回転物体121の回転軸123に対して平行なライン上に所定の間隔をもって配置されている。回転物体121の側面には、センサ124に必要な電源および接地のため、さらにはセンサ124の出力信号を取り出すためのスリップリング125が設けられている。各センサ124の出力信号は、例えば、1本のスリップリング125から、時分割的にシリアル出力される。図9には、図面の簡単化のため、スリップリング125を1本しか示していない。なお、各センサ124の出力信号に関しては、無線で取り出すことも考えられる。その場合には、各センサ124の出力信号を取り出すためのスリップリング125は不要となる。
【0075】
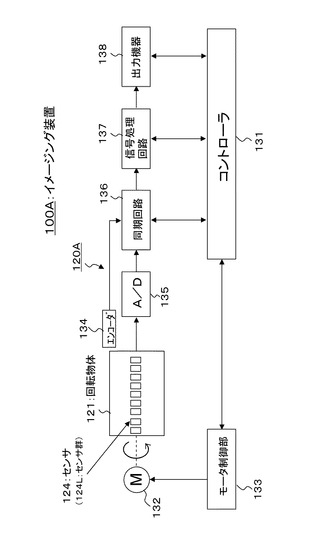
図10は、イメージング装置100Aの構成を示している。なお、この図10には、誘電体レンズ110および反射板126L,126Rの図示を省略している。イメージング装置100Aは、上述した回転物体121、センサ群124L,124Rおよび反射板126L,126Rの他に、コントローラ131と、モータ132と、モータ制御部133と、エンコーダ134を有している。また、イメージング装置100Aは、A/D変換器135と、同期回路136と、信号処理回路137と、出力機器138を有している。
【0076】
コントローラ131は、イメージング装置100Aの各部の動作を制御する。モータ132は、回転物体121を、回転軸123を中心に回転させる。このモータ132は、回転機構部を構成している。モータ制御部133は、コントローラ131の制御のもと、モータ132の動作を制御する。エンコーダ134は、回転物体121の回転位置を検出する。このエンコーダ134は、回転位置検出部を構成している。このエンコーダ134は、例えば、機械的、磁気的あるいは光学的に、回転物体121の回転位置を検出し、回転位置検出信号を出力する。この回転位置検出信号に基づいて、センサ群124L,124Rが上述した計測有効範囲にあるか否か、さらには、その計測有効範囲のどこにあるかがわかる。
【0077】
A/D変換器135は、回転物体121の回転面に配置されたセンサ群124L,124Rの各センサ124の出力信号を、アナログ信号からデジタル信号に変換する。同期回路136は、A/D変換器135でデジタル信号に変換された、センサ群124Lの各センサ124の出力信号より、計測有効範囲1に存在する被写体像IML上の各画素の信号を、回転物体121の回転位置に同期して取得する。また、同期回路136は、A/D変換器135でデジタル信号に変換された、センサ群124Rの各センサ124の出力信号より、計測有効範囲2に存在する被写体像IMR上の各画素の信号を、回転物体121の回転位置に同期して取得する。
【0078】
上述の図6は、計測有効範囲における、センサ群124L,124Rの各センサ124のスキャニング軌跡の一例を垂直方向に延びる実線で示している。同期回路136は、エンコーダ134からの回転位置検信号に基づいて、例えば、垂直方向に延びる実線と、信号取得タイミングを示す水平方向に延びる破線との交点(格子点)に対応した、各画素の信号を取得する。なお、図6においては、図面の簡単化のために、信号取得タイミングの個数を8つとしているが、実際の個数とは異なる。同期回路136は、画素信号取得部を構成している。
【0079】
信号処理回路137は、同期回路136から出力される被写体像IML,IMR上の各画素の信号(デジタルデータ)を、イメージとして出力するための処理を行う。この処理は、例えば、ノイズ除去処理、鮮鋭化処理などである。出力機器138は、信号処理回路137で処理された後の被写体像IML,IMR上の各画素の信号を記録する記録機、あるいはその各画素の信号により被写体像を表示するモニタ等である。
【0080】
図8〜図10に示すイメージング装置100Aの動作を説明する。モータ制御部133によりモータ132の動作が制御され、回転物体121は回転軸123を中心に所定の速度で回転するようにされる。この回転物体121の回転により、この回転物体121の回転面に配置されたセンサ群124Lは、誘電体レンズ110および反射板126Lにより結像される被写体像IMLを、所定の周期でスキャンするようにされる。また、この回転物体121の回転により、この回転物体121の回転面に配置されたセンサ群124Rは、誘電体レンズ110および反射板126Rにより結像される被写体像IMRを、所定の周期でスキャンするようにされる。
【0081】
センサ群124L,124Rの各センサ124では、被写体像IML,IMRの各部におけるミリ波の計測が行われる。そして、センサ群124L,124Rの各センサ124からは、その計測値に対応した信号が出力される。この各センサ124の出力信号は、シリアル信号に変換されて、回転物体121の側面に設けられたスリップリング125を通じて外部に取り出される。回転物体121から取り出された各センサ124の出力信号は、A/D変換器135でアナログ信号からデジタル信号に変換された後に、同期回路136に供給される。
【0082】
また、エンコーダ134により、回転物体121の回転位置が検出される。このエンコーダ134から出力される回転位置検出信号は、同期回路136に供給される。同期回路136では、センサ群124Lの各センサ124の出力信号(デジタルデータ)から、回転物体121の回転位置に同期して、被写体像IML上の各計測点(各画素)の信号が取得される(図6参照)。また、同期回路136では、センサ群124Rの各センサ124の出力信号(デジタルデータ)から、回転物体121の回転位置に同期して、被写体像IMR上の各計測点(各画素)の信号が取得される(図6参照)。この被写体像IML,IMR上の各画素の信号は、信号処理回路137に供給される。
【0083】
信号処理回路137では、被写体像IML,IMR上の各画素の信号(デジタルデータ)に対して、イメージとして出力するための処理、例えば、ノイズ除去処理、鮮鋭化処理などが行われる。そして、このように処理された被写体像IML,IMR上の各画素の信号は、出力機器138に供給される。出力機器138が記録機の場合には、この被写体像IML,IMR上の各画素の信号は記録メディアに記録される。また、出力機器138がモニタの場合には、被写体像IML,IMRに対応した各画素の信号により、画面に被写体像が表示される。
【0084】
なお、上述したように、2つの被写体像IML,IMRは、例えば、基線長だけ左右に離れた2つの視点から被写体を見た場合の画像に相当する(図11参照)。これら2つの被写体像IML,IMR上に存在する物体の位置は、視点からの距離に応じて変化する。この位置の差は、一般的に視差と呼ばれている。逆に言うと、これら2つの被写体像IML,IMR上に存在する物体の視差を求めることで、その物体までの距離を算出できる。
【0085】
視差から距離を算出するには、例えば、(1)式を用いることができる。ここで、Dは算出される距離、dは基線長、fはイメージング装置100Aの焦点距離、sは視差である。この(1)式から明らかなように、距離と視差は逆数の関係にある
D=d*f/s ・・・(1)
【0086】
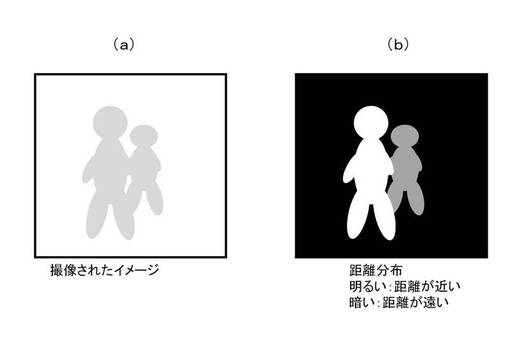
上述していないが、例えば、信号処理回路137は、被写体像IML,IMR上の各画素の信号に基づいて、各画素の視差を求め、被写体上の各画素までの距離を求め、距離分布を作成する機能を備えていてもよい。例えば、図12(a)が撮像されたイメージであるのに対して、図12(b)は作成された距離分布の一例を示している。この距離分布例では、明るい点は近く、遠い点は暗く表されている。このような距離分布を用いればイメージ中に距離は異なるが明るさが同じ物体が重なっている場合(図12(a)参照)に、2つの物体の分離が容易になる。この場合、信号処理回路137は、距離判別部を構成する。
【0087】
上述したように、図8〜図10に示すイメージング装置100Aにおいては、センサ群124L,124Rの各センサ124を回転物体121の回転面に配置し、この回転物体121を回転させることでスキャンを実現している。そのため、従来のように、反射板を動かすことでスキャンを実現する技術に比べて、メカ機構の負担を少なくできる。また、回転物体121の回転速度を変更することで、スキャン速度を容易に変更できる。
【0088】
また、図8〜図10に示すイメージング装置100Aにおいては、反射板126L,126Rにより、回転物体121の回転面に、異なる視点から見た場合の被写体像IML,IMRを結像させ、これら被写体像IML,IMR上の各画素の信号を取得している。これらの被写体像IML,IMRは、基線長だけ左右に離れた2つの視点から被写体を見た場合の画像に相当する。そのため、これらの被写体像IML,IMR上の各画素の信号を用いて、視点から被写体上の各画素までの距離、つまり3次元情報(奥行き情報)を得ることができる。そして、距離分布などを作成することが可能となる。
【0089】
なお、図8〜図10に示すイメージング装置100Aにおいては、撮像部120Aの前面に1つの誘電体レンズ110を配置したものである。しかし、例えば、図13に示すように、撮像部120Aの前面に2つの誘電体レンズ110L,100Rを配置する構成も考えられる。この場合、誘電体レンズ110Lは、反射板126Lと共同して、左側の被写体像IMLを結像させる。また、誘電体レンズ110Rは、反射板126Rと共同して、右側の被写体像IMRを結像させる。
【0090】
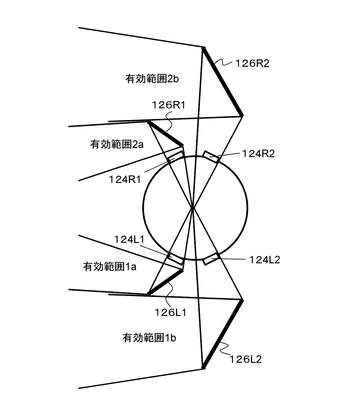
また、図8〜図10に示すイメージング装置100Aにおいては、一対の反射板126L,126Rを設けたものを示したが、2対以上の反射板を設けて、2つ以上の3次元情報を得ることも考えられる。図14は、反射板126L1,126R1と、反射板126L2,126R2との、二対の反射板が設けられた例である。この場合、回転物体121にも、センサ群124L1,124R1と、センサ群124L2,124R2との、二対のセンサ群が配置されている。
【0091】
<第3の実施の形態>
[イメージング装置の構成]
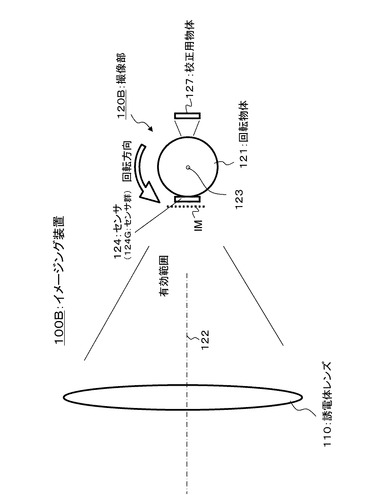
図15〜図17は、第3の実施の形態としてのイメージング装置100Bの構成例を示している。これら図15〜図17において、図1〜図3と対応する部分には、同一符号を付して示している。図15は、イメージング装置100Bの全体を概略的に示している。イメージング装置100Bは、誘電体レンズ110と、撮像部120Bとを備えている。誘電体レンズ110は、ミリ波またはサブミリ波(テラヘルツ波)を収束して被写体像を結像させる。なお、以下の説明では、ミリ波、サブミリ波を併記せず、簡略化のためミリ波のみについて記載する。したがって、以下の記述はサブミリ波にも適用される。
【0092】
撮像部120Bは、誘電体レンズ110により結像される被写体像(ミリ波像)を撮像する。この撮像部120Bは、回転物体121を有している。この回転物体121は、図16に示すように、例えば、円筒状のドラムである。この回転物体121は、誘電体レンズ110の光軸122に対して、垂直な回転軸123を持っている。この回転物体121の回転面には、複数のセンサ124が配置されている。ここで、説明を容易とするため、複数のセンサ124をセンサ群124Gとする。各センサ124は、図示は省略するが、ミリ波を捉えるアンテナ、このアンテナの出力信号を増幅するアンプなどで構成される。
【0093】
誘電体レンズ110により、回転物体121の回転面の計測有効範囲に、被写体像IMが結像される。回転物体121の回転面に配置されたセンサ群124Gは、回転物体121の回転に伴って、被写体像IMをスキャンする。センサ群124Gの各センサ124は、このように被写体像IMをスキャンすることで、被写体像IMの各部におけるミリ波の計測を行って、その計測値に対応した信号を出力する。
【0094】
また、撮像部1201Bは、一定レベル値のミリ波を発生する校正用物体127を有している。この校正用物体127は、例えば黒体板あるいは黒体テープなどのミリ波の放射レベル値が既知の物体である。この校正用物体127は、上述した計測有効範囲とは異なる位置に、回転物体121に近接して配置される。
【0095】
センサ群124Gの各センサ124は、図16に示すように、回転物体121の回転軸123に対して平行なライン上に所定の間隔をもって配置されている。回転物体121の側面には、センサ124に必要な電源および接地のため、さらにはセンサ124の出力信号を取り出すためのスリップリング125が設けられている。各センサ124の出力信号は、例えば、1本のスリップリング125から、時分割的にシリアル出力される。図16には、図面の簡単化のため、スリップリング125を1本しか示していない。なお、各センサ124の出力信号に関しては、無線で取り出すことも考えられる。その場合には、各センサ124の出力信号を取り出すためのスリップリング125は不要となる。
【0096】
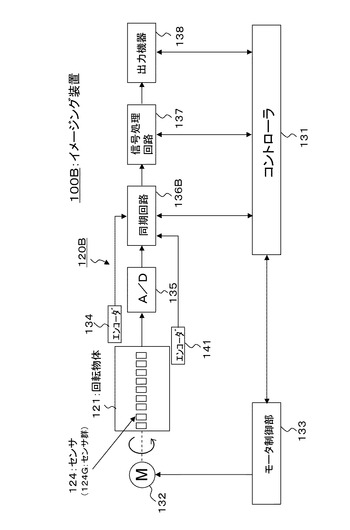
図17は、イメージング装置100Bの構成を示している。なお、この図17には、誘電体レンズ110および校正用物体127の図示を省略している。イメージング装置100Bは、上述した回転物体121、センサ群124G、校正用物体127の他に、コントローラ131と、モータ132と、モータ制御部133と、エンコーダ134,141を有している。また、イメージング装置100Bは、A/D変換器135と、同期回路136Bと、信号処理回路137と、出力機器138を有している。
【0097】
コントローラ131は、イメージング装置100Bの各部の動作を制御する。モータ132は、回転物体121を、回転軸123を中心に回転させる。このモータ132は、回転機構部を構成している。モータ制御部133は、コントローラ131の制御のもと、モータ132の動作を制御する。エンコーダ134は、回転物体121の回転位置を検出する。また、エンコーダ141も、回転物体121の回転位置を検出する。
【0098】
特に、このエンコーダ141は、センサ群124Gの各センサ124が、校正用物体127に対向した位置にあることを検出する。このように、センサ群124Gの各センサ124が校正用物体127に対向した位置にあるとき、各センサ124は校正用物体127から発生されるミリ波の測定をおこなう。エンコーダ134,141は、いずれも、回転物体121の回転位置を検出するものであり、同じ装置で併用してもよい。
【0099】
これらエンコーダ134,141は、回転位置検出部を構成している。これらエンコーダ134,141は、例えば、機械的、磁気的あるいは光学的に、回転物体121の回転位置を検出し、回転位置検出信号を出力する。この回転位置検出信号に基づいて、センサ群124Gが上述した計測有効範囲にあるか否か、さらには、その計測有効範囲のどこにあるかがわかる。また、この回転位置検出信号に基づいて、上述したように、センサ群124Gの各センサ124が校正用物体127に対向した位置にあるか否かがわかる。
【0100】
A/D変換器135は、回転物体121の回転面に配置されたセンサ群124Gの各センサ124の出力信号を、アナログ信号からデジタル信号に変換する。同期回路136Bは、A/D変換器135でデジタル信号に変換された、センサ群124Gの各センサ124の出力信号より、計測有効範囲に存在する被写体像IM上の各画素の信号を、回転物体121の回転位置に同期して取得する。この意味で、同期回路136Bは、画素信号取得部を構成している。
【0101】
上述の図6は、計測有効範囲における、センサ群124Gの各センサ124のスキャニング軌跡の一例を垂直方向に延びる実線で示している。同期回路136Bは、エンコーダ134からの回転位置検信号に基づいて、例えば、垂直方向に延びる実線と、信号取得タイミングを示す水平方向に延びる破線との交点(格子点)に対応した、各画素の信号を取得する。なお、図6においては、図面の簡単化のために、信号取得タイミングの個数を8つとしているが、実際の個数とは異なる。
【0102】
また、同期回路136Bは、A/D変換器135でデジタル信号に変換された、センサ群124Gの各センサ124の出力信号より、校正用物体127が発生するミリ波の測定信号(校正用信号)を、回転物体121の回転位置に同期して取得する。なお、校正用物体127の対向範囲における、センサ群124Gの各センサ124のスキャニング軌跡も、詳細説明は省略するが、上述の図6に示すものと同様となる。同期回路136Bは、この校正用信号に基づいて、上述したように取得された計測有効範囲に存在する被写体像IM上の各画素の信号を校正(キャリブレーション)して出力する。この意味で、同期回路136Bは、出力信号校正部を構成している。
【0103】
この場合、同期回路136Bは、センサ群124Gの各センサ124Gの間の出力のばらつきを校正する。具体的には、回転物体121のある1回転の中で、あるセンサ124が校正用物体127を撮像したデータ群をMc[k](k=1〜N)とし、またそのセンサ124が計測有効範囲で撮像したイメージング用のデータをMi[k](k=1〜N)とする。
【0104】
このとき、Mi[k](k=1〜N)は、(2)式で求められるMc[k](k=1〜N)の平均値であるMc_aveを用いて、(3)式により校正され、Mi′[k](k=1〜N)が得られる。なお、Mc_aveは同じ校正物体127を撮影したMc[k]の代表値であればよいので、平均値でなくてもよく、例えば中間値等でもよい。
Mc_ave = 1/N・ΣMc[k] ・・・(2)
Mi′[k] = Mi[k]-Mc_ref ・・・(3)
【0105】
信号処理回路137は、同期回路136Bから出力される被写体像IM上の各画素の信号(デジタルデータ)を、イメージとして出力するための処理を行う。この処理は、例えば、ノイズ除去処理、鮮鋭化処理などである。出力機器138は、信号処理回路137で処理された後の被写体像IM上の各画素の信号を記録する記録機、あるいはその各画素の信号により被写体像を表示するモニタ等である。
【0106】
図15〜図17に示すイメージング装置100Bの動作を説明する。モータ制御部133によりモータ132の動作が制御され、回転物体121は回転軸123を中心に所定の速度で回転するようにされる。この回転物体121の回転により、この回転物体121の回転面に配置されたセンサ群124Gは、誘電体レンズ110により結像される被写体像IMを、所定の周期でスキャンするようにされる。
【0107】
センサ群124Gの各センサ124では、ミリ波の計測が行われる。そして、センサ群124Gの各センサ124からは、その計測値に対応した信号が出力される。この各センサ124の出力信号は、シリアル信号に変換されて、回転物体121の側面に設けられたスリップリング125を通じて外部に取り出される。回転物体121から取り出された各センサ124の出力信号は、A/D変換器135でアナログ信号からデジタル信号に変換された後に、同期回路136に供給される。
【0108】
また、エンコーダ134,141により、回転物体121の回転位置が検出される。これらエンコーダ134,141から出力される回転位置検出信号は、同期回路136Bに供給される。同期回路136Bでは、センサ群124Gの各センサ124の出力信号(デジタルデータ)から、回転物体121の回転位置に同期して、被写体像IM上の各計測点(各画素)の信号が取得される(図6参照)。
【0109】
また、同期回路136Bでは、センサ群124Gの各センサ124の出力信号(デジタルデータ)から、回転物体121の回転位置に同期して、校正用物体127が発生するミリ波の測定信号(校正用信号)が取得される。そして、同期回路136Bでは、さらに、この校正用信号に基づいて、上述したように取得された計測有効範囲に存在する被写体像IM上の各画素の信号が校正(キャリブレーション)される((3)式参照)。このように校正された被写体像IM上の各画素の信号は、信号処理回路137に供給される。
【0110】
信号処理回路137では、被写体像IM上の各画素の信号(デジタルデータ)に対して、イメージとして出力するための処理、例えば、ノイズ除去処理、鮮鋭化処理などが行われる。そして、このように処理された被写体像IM上の各画素の信号は、出力機器138に供給される。出力機器138が記録機の場合には、この被写体像IM上の各画素の信号は記録メディアに記録される。また、出力機器138がモニタの場合には、被写体像IMに対応した各画素の信号により、画面に被写体像が表示される。
【0111】
上述したように、図15〜図17に示すイメージング装置100Bにおいては、センサ群124Gの各センサ124を回転物体121の回転面に配置し、この回転物体121を回転させることでスキャンを実現している。そのため、従来のように、反射板を動かすことでスキャンを実現する技術に比べて、メカ機構の負担を少なくできる。また、回転物体121の回転速度を変更することで、スキャン速度を容易に変更できる。
【0112】
また、図15〜図17に示すイメージング装置100Bにおいては、回転物体121に近接して校正用物体127を配置し、回転物体121の回転面に配置されたセンサ群124Gの各センサ124で校正用物体127が発生するミリ波を測定している。これにより、校正用信号を取得し、各センサ124の間の出力のばらつきを校正するようにしている。そのため、計測有効範囲に存在する被写体像IM上の各画素の信号を簡便に校正できる。
【0113】
<第4の実施の形態>
[イメージング装置の構成]
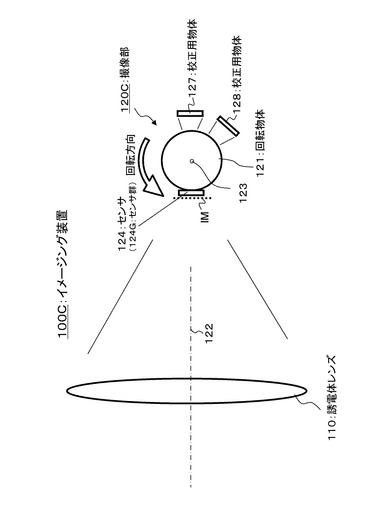
図18、図19は、第4の実施の形態としてのイメージング装置100Cの構成例を示している。これら図18、図19において、図15〜図17と対応する部分には、同一符号を付し、適宜、その詳細説明は省略する。図18は、イメージング装置100Cの全体を概略的に示している。イメージング装置100Cは、誘電体レンズ110と、撮像部120Cとを備えている。誘電体レンズ110は、ミリ波またはサブミリ波(テラヘルツ波)を収束して被写体像を結像させる。なお、以下の説明では、ミリ波、サブミリ波を併記せず、簡略化のためミリ波のみについて記載する。したがって、以下の記述はサブミリ波にも適用される。
【0114】
撮像部120Cは、誘電体レンズ110により結像される被写体像(ミリ波像)を撮像する。この撮像部120Cは、回転物体121を有している。この回転物体121は、誘電体レンズ110の光軸122に対して、垂直な回転軸123を持っている。この回転物体121の回転面には、複数のセンサ124が配置されている。ここで、説明を容易とするため、複数のセンサ124をセンサ群124Gとする。各センサ124は、図示は省略するが、ミリ波を捉えるアンテナ、このアンテナの出力信号を増幅するアンプなどで構成される。
【0115】
誘電体レンズ110により、回転物体121の回転面の計測有効範囲に、被写体像IMが結像される。回転物体121の回転面に配置されたセンサ群124Gは、回転物体121の回転に伴って、被写体像IMをスキャンする。センサ群124Gの各センサ124は、このように被写体像IMをスキャンすることで、被写体像IMの各部におけるミリ波の計測を行って、その計測値に対応した信号を出力する。
【0116】
また、撮像部1201Bは、ミリ波を発生する校正用物体127,128を有している。これら校正用物体127,128は、例えば黒体板あるいは黒体テープなどのミリ波の放射レベル値が既知の物体である。ここで、校正用物体127と構成用物体128の放射レベル値は異なるものとされる。これら校正用物体127,128は、上述した計測有効範囲とは異なる位置に、回転物体121に近接して配置される。
【0117】
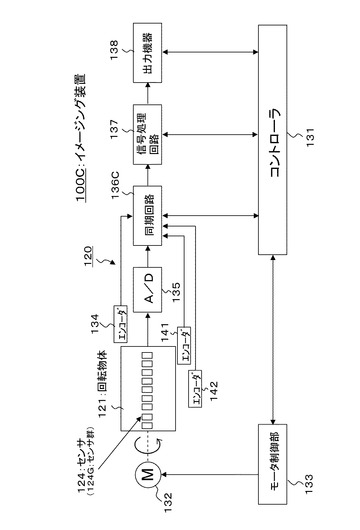
図19は、イメージング装置100Cの構成を示している。なお、この図19には、誘電体レンズ110および校正用物体127,128の図示を省略している。イメージング装置100Bは、上述した回転物体121、センサ群124G、校正用物体127,128の他に、コントローラ131と、モータ132と、モータ制御部133と、エンコーダ134,141,142を有している。また、イメージング装置100Cは、A/D変換器135と、同期回路136Cと、信号処理回路137と、出力機器138を有している。
【0118】
コントローラ131は、イメージング装置100Cの各部の動作を制御する。モータ132は、回転物体121を、回転軸123を中心に回転させる。このモータ132は、回転機構部を構成している。モータ制御部133は、コントローラ131の制御のもと、モータ132の動作を制御する。エンコーダ134は、回転物体121の回転位置を検出する。また、エンコーダ141,142も、回転物体121の回転位置を検出する。
【0119】
特に、エンコーダ141は、センサ群124Gの各センサ124が、校正用物体127に対向した位置にあることを検出する。このように、センサ群124Gの各センサ124が校正用物体127に対向した位置にあるとき、各センサ124は校正用物体127から発生されるミリ波の測定をおこなう。また、エンコーダ142は、センサ群124Gの各センサ124が、校正用物体128に対向した位置にあることを検出する。このように、センサ群124Gの各センサ124が校正用物体128に対向した位置にあるとき、各センサ124は校正用物体128から発生されるミリ波の測定をおこなう。エンコーダ134,141,n142は、いずれも、回転物体121の回転位置を検出するものであり、同じ装置で併用してもよい。
【0120】
これらエンコーダ134,141,142は、回転位置検出部を構成している。これらエンコーダ134,141,142は、例えば、機械的、磁気的あるいは光学的に、回転物体121の回転位置を検出し、回転位置検出信号を出力する。この回転位置検出信号に基づいて、センサ群124Gが上述した計測有効範囲にあるか否か、さらには、その計測有効範囲のどこにあるかがわかる。また、この回転位置検出信号に基づいて、上述したように、センサ群124Gの各センサ124が校正用物体127に対向した位置にあるか否かがわかる。さらに、この回転位置検出信号に基づいて、上述したように、センサ群124Gの各センサ124が校正用物体128に対向した位置にあるか否かがわかる。
【0121】
A/D変換器135は、回転物体121の回転面に配置されたセンサ群124Gの各センサ124の出力信号を、アナログ信号からデジタル信号に変換する。同期回路136Cは、A/D変換器135でデジタル信号に変換された、センサ群124Gの各センサ124の出力信号より、計測有効範囲に存在する被写体像IM上の各画素の信号を、回転物体121の回転位置に同期して取得する。この意味で、同期回路136Cは、画素信号取得部を構成している。
【0122】
上述の図6は、計測有効範囲における、センサ群124Gの各センサ124のスキャニング軌跡の一例を垂直方向に延びる実線で示している。同期回路136Cは、エンコーダ134からの回転位置検信号に基づいて、例えば、垂直方向に延びる実線と、信号取得タイミングを示す水平方向に延びる破線との交点(格子点)に対応した、各画素の信号を取得する。なお、図6においては、図面の簡単化のために、信号取得タイミングの個数を8つとしているが、実際の個数とは異なる。
【0123】
また、同期回路136Cは、A/D変換器135でデジタル信号に変換された、センサ群124Gの各センサ124の出力信号より、校正用物体127が発生するミリ波の測定信号(第1の校正用信号)を、回転物体121の回転位置に同期して取得する。また、同期回路136Cは、A/D変換器135でデジタル信号に変換された、センサ群124Gの各センサ124の出力信号より、校正用物体128が発生するミリ波の測定信号(第2の校正用信号)を、回転物体121の回転位置に同期して取得する。なお、校正用物体127,128の対向範囲における、センサ群124Gの各センサ124のスキャニング軌跡も、詳細説明は省略するが、上述の図6に示すものと同様となる。
【0124】
同期回路136Cは、これら第1、第2の校正用信号に基づいて、上述したように取得された計測有効範囲に存在する被写体像IM上の各画素の信号を校正(キャリブレーション)して出力する。この意味で、同期回路136Cは、出力信号校正部を構成している。この場合、同期回路136Cは、センサ群124Gの各センサ124の間のオフセット値および感度のばらつきを校正する。
【0125】
具体的には、回転物体121のある1回転の中で、あるセンサ124が校正用物体127を撮像したデータ群をMc1[k](k=1〜N)とし、また、そのセンサ124が校正用物体128を撮像したデータ群をMc2[k](k=1〜N)とする。さらに、回転物体121のある1回転の中で、そのセンサ124が計測有効範囲で撮像したイメージング用のデータをMi[k](k=1〜N)とする。
【0126】
このとき、Mi[k](k=1〜N)は、(4)式で求められるMc1[k](k=1〜N)の平均値であるMc1_aveと、(5)式で求められるMc2[k](k=1〜N)の平均値であるMc2_aveとを用いて、(6)式により校正され、Mi′[k](k=1〜N)が得られる。なお、Mc1_ref,Mc2_refは予め理想環境で撮影した校正用物体127,128の計測結果である。
Mc1_ave = 1/N・ΣMc1[k] ・・・(4)
Mc2_ave = 1/L・ΣMc2[k] ・・・(5)
Mi′[k] =(Mi[k]-Mc1_ave)*(Mc2_ref-Mc1_ref)/(Mc2_ave-Mc1_ave)
・・・(6)
【0127】
信号処理回路137は、同期回路136Cから出力される被写体像IM上の各画素の信号(デジタルデータ)を、イメージとして出力するための処理を行う。この処理は、例えば、ノイズ除去処理、鮮鋭化処理などである。出力機器138は、信号処理回路137で処理された後の被写体像IM上の各画素の信号を記録する記録機、あるいはその各画素の信号により被写体像を表示するモニタ等である。
【0128】
図18、図19に示すイメージング装置100Cの動作を説明する。モータ制御部133によりモータ132の動作が制御され、回転物体121は回転軸123を中心に所定の速度で回転するようにされる。この回転物体121の回転により、この回転物体121の回転面に配置されたセンサ群124Gは、誘電体レンズ110により結像される被写体像IMを、所定の周期でスキャンするようにされる。
【0129】
センサ群124Gの各センサ124では、ミリ波の計測が行われる。そして、センサ群124Gの各センサ124からは、その計測値に対応した信号が出力される。この各センサ124の出力信号は、シリアル信号に変換されて、回転物体121の側面に設けられたスリップリング125を通じて外部に取り出される。回転物体121から取り出された各センサ124の出力信号は、A/D変換器135でアナログ信号からデジタル信号に変換された後に、同期回路136に供給される。
【0130】
また、エンコーダ134,141,142により、回転物体121の回転位置が検出される。これらエンコーダ134,141,142から出力される回転位置検出信号は、同期回路136Cに供給される。同期回路136Cでは、センサ群124Gの各センサ124の出力信号(デジタルデータ)から、回転物体121の回転位置に同期して、被写体像IM上の各計測点(各画素)の信号が取得される(図6参照)。
【0131】
また、同期回路136Cでは、センサ群124Gの各センサ124の出力信号(デジタルデータ)から、回転物体121の回転位置に同期して、校正用物体127が発生するミリ波の測定信号(第1の校正用信号)が取得される。また、同期回路136Cでは、センサ群124Gの各センサ124の出力信号(デジタルデータ)から、回転物体121の回転位置に同期して、校正用物体128が発生するミリ波の測定信号(第2の校正用信号)が取得される。そして、同期回路136Cでは、さらに、これら第1、第2の校正用信号に基づいて、上述したように取得された計測有効範囲に存在する被写体像IM上の各画素の信号が校正(キャリブレーション)される((6)式参照)。このように校正された被写体像IM上の各画素の信号は、信号処理回路137に供給される。
【0132】
信号処理回路137では、被写体像IM上の各画素の信号(デジタルデータ)に対して、イメージとして出力するための処理、例えば、ノイズ除去処理、鮮鋭化処理などが行われる。そして、このように処理された被写体像IM上の各画素の信号は、出力機器138に供給される。出力機器138が記録機の場合には、この被写体像IM上の各画素の信号は記録メディアに記録される。また、出力機器138がモニタの場合には、被写体像IMに対応した各画素の信号により、画面に被写体像が表示される。
【0133】
上述したように、図18、図19に示すイメージング装置100Cにおいては、センサ群124Gの各センサ124を回転物体121の回転面に配置し、この回転物体121を回転させることでスキャンを実現している。そのため、従来のように、反射板を動かすことでスキャンを実現する技術に比べて、メカ機構の負担を少なくできる。また、回転物体121の回転速度を変更することで、スキャン速度を容易に変更できる。
【0134】
また、図18、図19に示すイメージング装置100Cにおいては、回転物体121に近接して校正用物体127,128を配置し、回転物体121の回転面に配置されたセンサ群124Gの各センサ124で校正用物体127が発生するミリ波を測定している。これにより、第1、第2の校正用信号を取得し、各センサ124の間の出力のばらつき、および感度のばらつきを校正するようにしている。そのため、計測有効範囲に存在する被写体像IM上の各画素の信号を簡便に校正できる。
【0135】
なお、上述のイメージング装置100B,100Cにおいては、校正用物体が1つと2つの例を示した。しかし、校正用物体の数を更に増加することで校正結果の精度を上げることができる。例えば、校正用物体が3つ以上の場合は、回帰分析などを用いて計測誤差を最小にするような校正方法を取ることができる。
【0136】
<5.変形例>
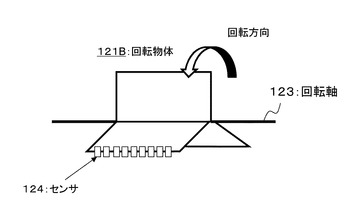
なお、上述実施の形態においては、回転物体121は、円筒状のドラムである例を示した。しかし、回転物体は円筒状のドラムに限定されるものではなく、複数のセンサ124を配置し得る回転面が存在すればよく、平板の組み合わせからなる回転物体も考えられる。図20は、平板の組み合わせからなる回転物体121Aを示している。
【産業上の利用可能性】
【0137】
この発明は、対象物体から放射や反射されるミリ波またはサブミリ波(テレヘルツ波)をアンテナやアンプなどで構成されるセンサによって計測してイメージングを行うイメージング装置等に適用できる。
【符号の説明】
【0138】
100,100A〜100C・・・イメージング装置
110・・・誘電体レンズ
120,120A〜120C・・・撮像部
121,121A・・・回転物体
122・・・光軸
123・・・回転軸
124,・・・センサ
124A,124B,124L,124L1,124L2,124R,124R1,124R2,124G・・・センサ群
125・・・スリップリング
126,126L,126L1,126L2,126R,126R1,126R2・・・反射板
127,128・・・校正用物体
131・・・コントローラ
132・・・モータ
133・・・モータ制御部
134,141,142・・・エンコーダ
135・・・A/D変換器
136,136B,136C・・・同期回路
137・・・信号処理回路
138・・・出力機器
141・・・移動機構部
【技術分野】
【0001】
この発明は、イメージング装置およびイメージング方法に関し、特に、対象物体から放射や反射されるミリ波またはサブミリ波(テレヘルツ波)をアンテナやアンプなどで構成されるセンサによって計測することでイメージングを行うイメージング装置等に関する。
【背景技術】
【0002】
対象となる物体(被写体)を非接触かつ非破壊で検査する技術や装置は非常に重要である。その中でも、非可視物体の検査は特に重要で、様々なアプリケーションが存在する。非可視物体の検査の代表例としては、X線を用いたイメージング装置があげられる。X線はその高い物体透過性能から、特定の物体を透過して検査する、いわゆる“透かし”を行うことができる。X線イメージングは非常に優れた非可視物体の検査方法であるが、重大な欠点を抱えている。それは、被爆の問題、つまり検査対象やその周辺の人体などの生命に悪影響を与えてしまう恐れがあるのである。そのために、生命に対する使用時には万全の注意を払う必要がある。
【0003】
一方で、ミリ波やサブミリ波(テラヘルツ波)を用いた非可視物体の検査装置がある。ミリ波は波長が1−10mmの電磁波のことであり、電磁波の周波数でいうと、30−300GHzにあたる。サブミリ波はミリ波の次に短い波長をもつ電磁波であり、ミリ波と同じような特性を有している。以後の説明はミリ波、サブミリ波を併記せず、簡略化のためミリ波のみについて記載する。したがって、以下の記述はサブミリ波にも適用され得る。
【0004】
ミリ波を用いたイメージングは、衣類や炎などを透過して観測できる利点があり、さらに、X線イメージングとは異なり被爆の問題がないという利点も併せ持てっている。そのため、人が服の下に隠し持った物体を透視する検査装置として活用されている(非特許文献1参照)。
【0005】
例えば、特許文献1、非特許文献2には、ミリ波イメージングを用いた検査装置が記載されている。これらの特許文献からも明らかなように、ミリ波イメージング装置は、ミリ波を集束する誘電体レンズ、ミリ波を受信するセンサ、そして、センサをスキャニングするためのスキャニング装置で構成されている。通常、ミリ波はアンテナを用いて計測される。
【0006】
また、パッシブ方式のミリ波イメージング装置では、アンテナによって計測されるミリ波が非常に微弱なため、アンプなどの増幅装置が必須となる。このようなアンテナとアンプを有するセンサは、サイズや価格などの問題で、数に制約が課せられることが多い。そこで、予め用意されたミリ波センサをメカ機構によるスキャニング装置でスキャン操作を行うことで、イメージングを行っている。そのため、ミリ波イメージング装置では、レンズの特性やミリ波センサの計測感度、スキャニング方法及び機構、装置が差異化要素としてあげられることとなる。
【0007】
ミリ波イメージング装置のスキャニング方法は、往復運動方式および回転方式の2種類に大別できる(特許文献1および非特許文献2参照)。往復運動方式は、ラインセンサ(1ラインもしくは複数ライン)をライン方向と垂直にスキャンすることで2次元(2D)映像を得る方法である。一方、回転運動方式は、センサ群を回転させることでスキャンさせている。
【0008】
これら2つの方法に共通しているのは、センサそのものを動かすのではなく、反射板を動かすことでスキャンを実現している点である。センサには計測可能範囲が存在するので、センサより離れた位置に存在する反射板はセンサよりも大きくなる。大きな反射板を駆動させるため、メカ機構への負担が大きくなる。
【0009】
また、往復運動方式は、メカ機構の負担が大きいことから、往復運動のスピードを上げることが難しく、従って、イメージングのスキャン速度が上がらない。回転運動方式は、円運動でイメージングするためにセンサ数を増やすこと、あるいは、非常に高速に反射板を回転させることが必要となる。そのため、ミリ波イメージング装置が大型化し、しかも高額になってしまう。
【0010】
また、上述したように、ミリ波イメージングでは、対象物体から放射や反射されるミリ波をアンテナやアンプなどで構成されたセンサによって計測することで、イメージングを行っている。イメージングにおいて、センサは1画素に相当するため、例えば、100×100ピクセル(pixel)の画像をイメージングするためには、1万個のセンサが必要となる。
【0011】
1万個ものセンサを物理的に設置するのは、コスト面、製造面からいって、特殊な用途を除いて、一般の監視ソリューションに用いる装置に適用することは困難である。そこで、一般的には、上述したように、実際の画素数よりも少ないセンサを配置して、センサをメカ的にスキャンしている(特許文献1参照)。あるいは、信号処理によってスキャン操作を行うことで、多画素化を実現している(非特許文献3参照)。
【0012】
また、画像による監視や計測の分野において、3次元情報を得ることは非常に重要である。3次元情報を得ることで、監視対象となる物体の空間的な位置が容易に把握できるからである。一方、監視や計測における非破壊検査装置として、上述したように、ミリ波イメージング装置がある。ミリ波イメージングでは、対象物体から放射や反射されるミリ波をアンテナやアンプなどで構成されたセンサによって計測することで、イメージングを行っている。
【0013】
従来のミリ波イメージング装置は、上述の特許文献1や非特許文献2のように、一般的な監視カメラと同じく、撮像対象の2次元イメージを取得する方法が多かった。ミリ波イメージング装置においても、3次元情報を得ることができる装置があれば、非常に有意義であると思われる。
【0014】
また、上述したように、ミリ波イメージングでは、対象物体から放射や反射されるミリ波をアンテナやアンプなどで構成されたセンサによって計測することで、イメージングを行っている。イメージングを高速化するには複数のセンサを用いる手段が有効であるが、複数のセンサを用いると、センサ間の感度ばらつきによって、得られる画像にムラが生じてしまい、画質が低下する。同じような問題は赤外線センサも抱えており、赤外線センサでは、例えば、特許文献2のような手段でセンサ間の感度ばらつきを補正している。
【0015】
感度ばらつきには、次の3つがある。1つ目は、センサの製造時の製造過程での品質のばらつくによって生じるものである。2つ目は、センサの経年変化によって生じるものである。3つ目は、使用時の外乱や揺らぎによって生じるものである。1つ目は、製造時の品質検査時に校正を行うことで、補正可能である。2つ目は、製品出荷後に定期的な校正作業で補正することができる。しかし、短期間での校正作業には、センサを含むシステムが本来の目的での使用が困難になるため、高頻度での校正作業の実施が困難となるという問題がある。さらには、3つ目については、2つ目よりもさらに高頻度での補正が必要であり、その校正方法が問題となる。
【先行技術文献】
【特許文献】
【0016】
【特許文献1】特表2009−526988号公報
【特許文献2】特開平02−270243号公報
【非特許文献】
【0017】
【非特許文献1】水野皓司,“ミリ波を用いたイメージング”,電子情報通信学会誌、Vol.91,No.12,2008
【非特許文献2】R.Appleby,“Millimeter-wave and Submillimetr-wave imaging for Security andSurveillance”,Proc of IEEE、Vol.95,No.08,2007.8
【非特許文献3】H. V. Nguyen, "Pencil-beam2D scanning leaky-wave antenna," Int. Symp. On Signals, Systems andElectronics (ISSSE 2007), July 30 - Aug. 2, pp. 139-142(2007)
【発明の概要】
【発明が解決しようとする課題】
【0018】
上述したように、従来のミリ波イメージング装置においては、メカ機構の負担が大きいという不都合がある。
この発明の目的は、メカ機構の負担を少なくし、さらに、計測有効範囲を拡大することにある。また、この発明の目的は、メカ機構の負担を少なくし、さらに、3次元情報を得ることにある。また、この発明の目的は、メカ機構の負担を少なくし、さらに、キャリブレーション(校正)を簡便に行うことにある。
【課題を解決するための手段】
【0019】
この発明の概念は、
被写体からのミリ波またはサブミリ波を収束して被写体像を結像する誘電体レンズと、
上記誘電体レンズにより結像される上記被写体像を撮像する撮像部とを備え、
上記撮像部は、
上記誘電体レンズの光軸に対して垂直な回転軸を持つ回転物体と、
上記回転物体を、上記回転軸を中心に回転させる回転機構部と、
上記誘電体レンズで収束されたミリ波またはサブミリ波を上記回転物体側に反射する反射板と、
上記回転物体の回転面に配置され、該回転物体の回転に伴って、上記誘電体レンズにより結像される第1の被写体像をスキャンする第1の複数のセンサと、
上記回転物体の回転面に配置され、該回転物体の回転に伴って、上記誘電体レンズおよび上記反射板により結像される第2の被写体像をスキャンする第2の複数のセンサと、
上記回転物体の回転位置を検出する回転位置検出部と、
上記回転位置検出部で得られる回転位置検出信号に基づいて、上記第1の複数のセンサの出力信号より、上記第1の被写体像上の各画素の信号を取得し、上記第2の複数のセンサの出力信号より、上記第2の被写体像上の各画素の信号を取得する画素信号取得部とを有する
イメージング装置にある。
【0020】
この発明においては、撮像部は、回転物体、回転機構部、反射板、第1、第2の複数のセンサ、回転位置検出部および画素信号取得部を有する構成とされている。回転物体は、例えば、円筒状のドラムとされる。しかし、この形状に限られるものではなく、少なくとも、複数のセンサを配置し得る回転面が存在すればよく、平板の組み合わせからなる回転物体も考えられる。誘電体レンズにより、被写体からのミリ波またはサブミリ波(テレヘルツ波)が収束されて被写体像(ミリ波またはサブミリ波の像)が結像される。回転物体の回転面には、第1の複数のセンサおよび第2の複数のセンサが配置されている。これらのセンサは、ミリ波またはサブミリ波を捉えるアンテナ、このアンテナの出力信号を増幅するアンプなどで構成される。
【0021】
誘電体レンズで収束されたミリ波またはサブミリ波を回転物体側に反射する反射板が設けられる。回転物体は、回転機構部により、回転するようにされる。回転機構部は、例えば、モータなどから構成される。この回転物体の回転に伴って、この回転物体の回転面に配置されている第1の複数のセンサにより、誘電体レンズにより結像される第1の被写体像がスキャンされる。このように、第1の複数のセンサにより第1の被写体像がスキャンされることで、第1の複数のセンサでは、第1の被写体像の各部におけるミリ波またはサブミリ波の計測が行われる。
【0022】
また、この回転物体の回転に伴って、この回転物体の回転面に配置されている第2の複数のセンサにより、誘電体レンズおよび反射板により結像される第2の被写体像がスキャンされる。このように、第2の複数のセンサにより第2の被写体像がスキャンされることで、第2の複数のセンサでは、第2の被写体像の各部におけるミリ波またはサブミリ波の計測が行われる。
【0023】
回転物体の回転位置は、回転位置検出部により検出される。上述の第1、第2の複数のセンサによる第1、第2の被写体像のスキャンは、これらのセンサが計測有効範囲にある期間で行われる。そのため、画素信号取得部により、回転位置検出信号に基づいて、第1の複数のセンサの出力信号から第1の被写体像上の各画素の信号が取得され、また、第2の複数のセンサの出力信号から第2の被写体像上の各画素の信号が取得される。
【0024】
このように、この発明においては、第1、第2の複数のセンサを回転物体の回転面に配置し、この回転物体を回転させることでスキャンを実現している。そのため、従来のように、反射板を動かすことでスキャンを実現する技術に比べて、メカ機構の負担を少なくできる。また、回転物体の回転速度を変更することで、スキャン速度を容易に変更できる。
【0025】
また、この発明においては、回転物体の回転面に誘電体レンズにより第1の被写体像を結像させる他、この回転物体の回転面に誘電体レンズおよび反射板により第2の被写体像を結像させ、これら第1、第2の被写体像上の各画素の信号を取得している。そのため、計測有効範囲の拡大を図ることができ、また、異なるフォーカス画像の画素信号を得ることができる。
【0026】
また、この発明の他の概念は、
被写体からのミリ波またはサブミリ波を収束して被写体像を結像する誘電体レンズと、
上記誘電体レンズにより結像される上記被写体像を撮像する撮像部とを備え、
上記撮像部は、
上記誘電体レンズの光軸に対して垂直な回転軸を持つ回転物体と、
上記回転物体を、上記回転軸を中心に回転させる回転機構部と、
上記回転物体の回転軸に対し、上記誘電体レンズの光軸と直交する互いに逆方向の位置に設けられ、上記誘電体レンズで収束されたミリ波またはサブミリ波を上記回転物体側に反射する第1の反射板および第2の反射板と、
上記回転物体の回転面に配置され、該回転物体の回転に伴って、上記誘電体レンズおよび上記第1の反射板により結像される第1の被写体像をスキャンする第1の複数のセンサと、
上記回転物体の回転面に配置され、該回転物体の回転に伴って、上記誘電体レンズおよび上記第2の反射板により結像される第2の被写体像をスキャンする第2の複数のセンサと、
上記回転物体の回転位置を検出する回転位置検出部と、
上記回転位置検出部で得られる回転位置検出信号に基づいて、上記第1の複数のセンサの出力信号より、上記第1の被写体像上の各画素の信号を取得し、上記第2の複数のセンサの出力信号より、上記第2の被写体像上の各画素の信号を取得する画素信号取得部とを有する
イメージング装置にある。
【0027】
この発明においては、撮像部は、回転物体、回転機構部、第1、第2反射板、複数のセンサ、回転位置検出部および画素信号取得部を有する構成とされている。回転物体は、例えば、円筒状のドラムとされる。しかし、この形状に限られるものではなく、少なくとも、複数のセンサを配置し得る回転面が存在すればよく、平板の組み合わせからなる回転物体も考えられる。誘電体レンズにより、被写体からのミリ波またはサブミリ波(テレヘルツ波)が収束されて被写体像(ミリ波またはサブミリ波の像)が結像される。回転物体の回転面には、第1の複数のセンサおよび第2の複数のセンサが配置されている。これらのセンサは、ミリ波またはサブミリ波を捉えるアンテナ、このアンテナの出力信号を増幅するアンプなどで構成される。
【0028】
第1の反射板および第2の反射板は、回転物体の回転軸に対し、誘電体レンズの光軸と直交する互いに逆方向の位置に設けられる。誘電体レンズで収束されたミリ波またはサブミリ波は、第1の反射板により回転物体側に反射され、回転物体の回転面に第1の被写体像が結像される。また、誘電体レンズで収束されたミリ波またはサブミリ波は、第2の反射板により回転物体側に反射され、回転物体の回転面に第2の被写体像が結像される。これら第1、第2の被写体像は、異なる視点から見た場合の被写体像である。
【0029】
回転物体は、回転機構部により、回転するようにされる。回転機構部は、例えば、モータなどから構成される。この回転物体の回転に伴って、この回転物体の回転面に配置されている第1の複数のセンサにより、誘電体レンズおよび第1の反射板により結像される第1の被写体像がスキャンされる。このように、第1の複数のセンサにより第1の被写体像がスキャンされることで、第1の複数のセンサでは、第1の被写体像の各部におけるミリ波またはサブミリ波の計測が行われる。
【0030】
また、この回転物体の回転に伴って、この回転物体の回転面に配置されている第2の複数のセンサにより、誘電体レンズおよび第2の反射板により結像される第2の被写体像がスキャンされる。このように、第2の複数のセンサにより第2の被写体像がスキャンされることで、第2に複数のセンサでは、第2の被写体像の各部におけるミリ波またはサブミリ波の計測が行われる。
【0031】
回転物体の回転位置は、回転位置検出部により検出される。上述の第1、第2の複数のセンサによる第1、第2の被写体像のスキャンは、これらのセンサが計測有効範囲にある期間で行われる。そのため、画素信号取得部により、回転位置検出信号に基づいて、第1の複数のセンサの出力信号から第1の被写体像上の各画素の信号が取得され、また、第2の複数のセンサの出力信号から第2の被写体像上の各画素の信号が取得される。
【0032】
このように、この発明においては、第1、第2の複数のセンサを回転物体の回転面に配置し、この回転物体を回転させることでスキャンを実現している。そのため、従来のように、反射板を動かすことでスキャンを実現する技術に比べて、メカ機構の負担を少なくできる。また、回転物体の回転速度を変更することで、スキャン速度を容易に変更できる。
【0033】
また、この発明においては、第1、第2の反射板により、回転物体の回転面に、異なる視点から見た場合の第1、第2の被写体像を結像させる。そして、これら第1、第2の被写体像上の各画素の信号を取得している。そのため、これら第1、第2の被写体像上の各画素の信号を用いて3次元情報(奥行き情報)を得ることができる。
【0034】
この発明において、例えば、誘電体レンズは、第1の被写体像を結像させるための第1の誘電体レンズと、第2の被写体像を結像させるための第2の誘電体レンズとからなる、ようにしてもよい。
【0035】
また、この発明において、撮像部は、画素信号取得部で取得された第1の被写体像上の各画素の信号および第2の被写体像上の各画素の信号に基づいて、各画素の視差を求め、被写体上の各画素までの距離を判別する距離判別部をさらに有する、ようにしてもよい。この場合、3次元情報(奥行き情報)を得ることができる。
【0036】
また、この発明の他の概念は、
被写体からのミリ波またはサブミリ波を収束して被写体像を結像する誘電体レンズと、
上記誘電体レンズにより結像される上記被写体像を撮像する撮像部とを備え、
上記撮像部は、
上記誘電体レンズの光軸に対して垂直な回転軸を持つ回転物体と、
上記回転物体を、上記回転軸を中心に回転させる回転機構部と、
上記回転物体の回転面に配置され、該回転物体の回転に伴って、上記誘電体レンズにより有効範囲に結像される被写体像をスキャンする複数のセンサと、
上記回転物体の回転位置を検出する回転位置検出部と、
上記回転物体に近接し、上記有効範囲とは異なる位置に配置され、一定レベル値のミリ波またはサブミリ波を発生する校正用物体と、
上記回転位置検出部で得られる回転位置検出信号に基づいて、上記複数のセンサの出力信号より、上記誘電体レンズにより結像される被写体像上の各画素の信号を取得する画素信号取得部と、
上記回転位置検出部で得られる回転位置検出信号に基づいて、上記複数のセンサの出力信号より、上記校正用物体が発生するミリ波またはサブミリ波を測定した校正用信号を取得し、該校正用信号に基づいて上記複数のセンサの出力信号を校正する出力信号校正部とを有する
イメージング装置にある。
【0037】
この発明においては、撮像部は、回転物体、回転機構部、複数のセンサ、回転位置検出部、画素信号取得部および出力信号校正部を有する構成とされている。回転物体は、例えば、円筒状のドラムとされる。しかし、この形状に限られるものではなく、少なくとも、複数のセンサを配置し得る回転面が存在すればよく、平板の組み合わせからなる回転物体も考えられる。誘電体レンズにより、被写体からのミリ波またはサブミリ波(テレヘルツ波)が収束されて被写体像(ミリ波またはサブミリ波の像)が結像される。回転物体の回転面には、複数のセンサが配置されている。このセンサは、ミリ波またはサブミリ波を捉えるアンテナ、このアンテナの出力信号を増幅するアンプなどで構成される。
【0038】
回転物体は、回転機構部により、回転するようにされる。回転機構部は、例えば、モータなどから構成される。この回転物体の回転に伴って、この回転物体の回転面に配置されている複数のセンサにより、誘電体レンズにより結像される被写体像がスキャンされる。このように複数のセンサにより被写体像がスキャンされることで、複数のセンサでは、被写体像の各部におけるミリ波またはサブミリ波の計測が行われる。
【0039】
回転物体の回転位置は、回転位置検出部により検出される。上述の複数のセンサによる被写体像のスキャンは、このセンサが計測有効範囲にある期間で行われる。そのため、画素信号取得部により、複数のセンサの出力信号から、回転位置検出信号に基づいて、被写体像上の各画素の信号が取得される。
【0040】
校正用物体は、上述の回転物体に近接して配置される、上述の計測有効範囲とは異なる位置に配置される。出力信号校正部により、回転検出部で得られる回転位置検出信号に基づいて、複数のセンサの出力信号より、校正用物体が発生するミリ波またはサブミリ波を測定した校正用信号が取得される。そして、この出力信号校正部により、取得された校正用信号に基づいて、複数のセンサの出力信号が校正(キャリブレーション)される。
【0041】
このように、この発明においては、複数のセンサを回転物体の回転面に配置し、この回転物体を回転させることでスキャンを実現している。そのため、従来のように、反射板を動かすことでスキャンを実現する技術に比べて、メカ機構の負担を少なくできる。また、回転物体の回転速度を変更することで、スキャン速度を容易に変更できる。
【0042】
また、この発明においては、回転物体に近接して校正用物体を配置し、回転物体の回転面に配置された複数のセンサで校正用物体が発生するミリ波またはサブミリ波を測定し、この複数のセンサの出力信号より校正用信号を取得するようにしている。そのため、複数のセンサの出力信号を簡便に校正できる。
【発明の効果】
【0043】
この発明によれば、複数のセンサを回転物体の回転面に配置し、この回転物体を回転させることでスキャンを実現しているため、メカ機構の負担を少なくでき、また、回転物体の回転速度を変更することでスキャン速度を容易に変更できる。また、この発明によれば、回転物体の回転面に誘電体レンズにより第1の被写体像を結像させる他、この回転物体の回転面に誘電体レンズおよび反射板により第2の被写体像を結像させ、これら第1、第2の被写体像上の各画素の信号を取得しているため、計測有効範囲の拡大を図ることができ、また、異なるフォーカス画像の画素信号を得ることができる。
【0044】
また、この発明によれば、第1、第2の反射板により、回転物体の回転面に、異なる視点から見た場合の第1、第2の被写体像を結像させ、これら第1、第2の被写体像上の各画素の信号を取得しているため、これら第1、第2の被写体像上の各画素の信号を用いて3次元情報(奥行き情報)を得ることができる。また、この発明によれば、回転物体に近接して校正用物体を配置し、回転物体の回転面に配置された複数のセンサで校正用物体が発生するミリ波またはサブミリ波を測定し、この複数のセンサの出力信号より校正用信号を取得するようにしているため、複数のセンサの出力信号を簡便に校正できる。
【図面の簡単な説明】
【0045】
【図1】この発明の第1の実施の形態としてのイメージング装置の全体を概略的に示す図である。
【図2】イメージング装置の撮像部を構成する回転物体と、反射板と、センサ群(複数のセンサ)を説明するための図である。
【図3】イメージング装置の構成を示すブロック図である。
【図4】誘電体レンズに対して焦点距離Dの位置に焦点範囲Lの領域だけ焦点があう範囲が存在することを示す図である。
【図5】回転物体の回転面に配置されたセンサでスキャンする場合に定義されるパラメータを示す図である。
【図6】計測有効範囲における複数のセンサのスキャニング軌跡の一例を示す図である。
【図7】焦点の異なった2つの被写体像に対応した画素信号を得ることができることを説明するための図である。
【図8】この発明の第2の実施の形態としてのイメージング装置の全体を概略的に示す図である。
【図9】イメージング装置の撮像部を構成する回転物体と反射板とセンサ群(複数のセンサ)を説明するための図である。
【図10】イメージング装置の構成を示すブロック図である。
【図11】被写体像IML,IMRが基線長だけ左右に離れた2つの視点から被写体を見た場合の画像に相当することを説明するための図である。
【図12】撮像されたイメージ例と、距離分布の作成例を示す図である。
【図13】撮像部の前面に2つの誘電体レンズを配置する構成を示す図である。
【図14】2対以上の反射板を設けて、2つ以上の3次元情報を得ることを説明するための図である。
【図15】この発明の第3の実施の形態としてのイメージング装置の全体を概略的に示す図である。
【図16】イメージング装置の撮像部を構成する回転物体と校正用物体とセンサ群(複数のセンサ)を説明するための図である。
【図17】イメージング装置の構成を示すブロック図である。
【図18】この発明の第4の実施の形態としてのイメージング装置の全体を概略的に示す図である。
【図19】イメージング装置の構成を示すブロック図である。
【図20】平板の組み合わせからなる回転物体を示す図である。
【発明を実施するための形態】
【0046】
以下、発明を実施するための形態(以下、「実施の形態」とする)について説明する。なお、説明は以下の順序で行う。
1.第1の実施の形態
2.第2の実施の形態
3.第3の実施の形態
4.第4の実施の形態
5.変形例
【0047】
<1.第1の実施の形態>
[イメージング装置の構成]
図1〜図3は、第1の実施の形態としてのイメージング装置100の構成例を示している。図1は、イメージング装置100の全体を概略的に示している。イメージング装置100は、誘電体レンズ110と、撮像部120とを備えている。誘電体レンズ110は、ミリ波またはサブミリ波(テラヘルツ波)を収束して被写体像を結像させる。なお、以下の説明では、ミリ波、サブミリ波を併記せず、簡略化のためミリ波のみについて記載する。したがって、以下の記述はサブミリ波にも適用される。
【0048】
撮像部120は、誘電体レンズ110により結像される被写体像(ミリ波像)を撮像する。この撮像部120は、回転物体121を有している。この回転物体121は、図2に示すように、例えば、円筒状のドラムである。この回転物体121は、誘電体レンズ110の光軸122に対して、垂直な回転軸123を持っている。この回転物体121の回転面には、円周面方向の異なる2つの位置に、それぞれ、複数のセンサ124が配置されている。ここで、説明を容易とするため、一方の複数のセンサ124をセンサ群124Aとし、他方の複数のセンサ124をセンサ群124Bとする。各センサ124は、図示は省略するが、ミリ波を捉えるアンテナ、このアンテナの出力信号を増幅するアンプなどで構成される。
【0049】
誘電体レンズ110は、回転物体121の回転面に、被写体像IM1を結像する。回転物体121の回転面に配置されたセンサ群124Aの各センサ124は、回転物体121の回転に伴って、被写体像IM1をスキャンする。センサ群124Aの各センサ124は、このように被写体像IM1をスキャンすることで、被写体像IM1の各部におけるミリ波の計測を行って、その計測値に対応した信号を出力する。なお、センサ群124Aは、被写体像IM1のスキャンを、所定の角範囲、つまり、計測有効範囲(有効範囲1)にある期間に行う。
【0050】
ここで、計測有効範囲について説明する。この焦点範囲Lは、センサ124と前面にある誘電体レンズ110とによって決まる。誘電体レンズ110の焦点が合う範囲内であれば、センサ124の出力信号(計測データ)をイメージングに使用できる。範囲外の場合、誘電体レンズ110の焦点が合っていないので、センサ124の出力信号(計測データ)をイメージングに使用できない。
【0051】
例えば、図4に示すように、誘電体レンズ110に対して焦点距離Dの位置に焦点範囲Lの領域だけ焦点があう範囲が存在する。なお、Lは、図面上では直線であるが、実際には一辺の長さがLの四角形、あるいは、直径がLの円形などの面積を持っている。この範囲を、回転物体121の回転面に配置されたセンサ124でスキャンする場合、図5に示すようなパラメータが定義される。図5のスキャン角度θが計測有効範囲である。逆に、(360−θ)度は、実際には計測が行われていない無効計測範囲となる。
【0052】
例えば、θが36度の場合、無効計測範囲は324度となり、実際にドラムの1回転でセンサ124が計測に使用されるのは10%になってしまう。つまり、θを大きくすれば、計測有効範囲を拡大することができるため、同じ焦点範囲Lが規定されているのであれば、ドラムの半径rを小さくした方がよい。しかし、回転物体121の半径rを小さくした場合、図5に示される、傾きsと距離差dが問題となる。
【0053】
半径rを小さくすると、傾きsと距離差dが大きくなってしまう。これは、誘電体レンズ110によって集められたミリ波のセンサ124への照射条件が変化してしまうため、イメージング結果が画像の場所によって変化してしまうことになる。しかし、傾きsと距離差dを小さくするために、半径rを大きくすると、スキャン角度θが小さくなってしまう問題がある。
【0054】
そこで、図1〜図3に示すイメージング装置100では、図1に示すように、撮像部120は、反射板126を有している。この反射板126は、誘電体レンズ110で収束されたミリ波を、回転物体121側に反射する。この反射板126を取り付けることで、新たな計測有効範囲(有効範囲2)でもスキャンでき、センサ124の計測有効範囲が拡大する。
【0055】
誘電体レンズ110および反射板126は、回転物体121の回転面に、被写体像IM2を結像する。回転物体121の回転面に配置されたセンサ群124Bの各センサ124は、回転物体121の回転に伴って、被写体像IM2をスキャンする。センサ群124Bの各センサ124は、このように被写体像IM2をスキャンすることで、被写体像IM2の各部におけるミリ波の計測を行って、その計測値に対応した信号を出力する。なお、センサ群124Bは、被写体像IM2のスキャンを、所定の角範囲、つまり、計測有効範囲(有効範囲2)にある期間に行う。
【0056】
センサ群124Aの各センサ124およびセンサ群124Bの各センサ124は、図2に示すように、回転物体121の回転軸に対して平行なライン上に所定の間隔をもって配置されている。回転物体121の側面には、センサ124に必要な電源および接地のため、さらにはセンサ124の出力信号を取り出すためのスリップリング125が設けられている。各センサ124の出力信号は、例えば、1本のスリップリング125から、時分割的にシリアル出力される。図2には、図面の簡単化のため、スリップリング125を1本しか示していない。なお、各センサ124の出力信号に関しては、無線で取り出すことも考えられる。その場合には、各センサ124の出力信号を取り出すためのスリップリング125は不要となる。
【0057】
図3は、イメージング装置100の構成を示している。なお、この図3には、誘電体レンズ110および反射板126の図示を省略している。イメージング装置100は、上述した回転物体121、センサ群124A,124Bおよび反射板126の他に、コントローラ131と、モータ132と、モータ制御部133と、エンコーダ134を有している。また、イメージング装置100は、A/D変換器135と、同期回路136と、信号処理回路137と、出力機器138を有している。
【0058】
コントローラ131は、イメージング装置100の各部の動作を制御する。モータ132は、回転物体121を、回転軸123を中心に回転させる。このモータ132は、回転機構部を構成している。モータ制御部133は、コントローラ131の制御のもと、モータ132の動作を制御する。エンコーダ134は、回転物体121の回転位置を検出する。このエンコーダ134は、回転位置検出部を構成している。このエンコーダ134は、例えば、機械的、磁気的あるいは光学的に、回転物体121の回転位置を検出し、回転位置検出信号を出力する。この回転位置検出信号に基づいて、センサ群124A,124Bが上述した計測有効範囲にあるか否か、さらには、その計測有効範囲のどこにあるかがわかる。
【0059】
A/D変換器135は、回転物体121の回転面に配置されたセンサ群124A,124Bの各センサ124の出力信号を、アナログ信号からデジタル信号に変換する。同期回路136は、A/D変換器135でデジタル信号に変換された、センサ群124Aの各センサ124の出力信号より、有効範囲1に存在する被写体像IM1上の各画素の信号を、回転物体121の回転位置に同期して取得する。また、同期回路136は、A/D変換器135でデジタル信号に変換された、センサ群124Bの各センサ124の出力信号より、有効範囲2に存在する被写体像IM2上の各画素の信号を、回転物体121の回転位置に同期して取得する。
【0060】
図6は、計測有効範囲における、センサ群124A,124Bの各センサ124のスキャニング軌跡の一例を垂直方向に延びる実線で示している。同期回路136は、エンコーダ134からの回転位置検信号に基づいて、例えば、垂直方向に延びる実線と、信号取得タイミングを示す水平方向に延びる破線との交点(格子点)に対応した、各画素の信号を取得する。なお、図6においては、図面の簡単化のために、信号取得タイミングの個数を8つとしているが、実際の個数とは異なる。同期回路136は、画素信号取得部を構成している。
【0061】
信号処理回路137は、同期回路136から出力される被写体像IM1,IM2上の各画素の信号(デジタルデータ)を、イメージとして出力するための処理を行う。この処理は、例えば、ノイズ除去処理、鮮鋭化処理などである。出力機器138は、信号処理回路137で処理された後の被写体像IM1,IM2上の各画素の信号を記録する記録機、あるいはその各画素の信号により被写体像を表示するモニタ等である。
【0062】
図1〜図3に示すイメージング装置100の動作を説明する。モータ制御部133によりモータ132の動作が制御され、回転物体121は回転軸123を中心に所定の速度で回転するようにされる。この回転物体121の回転により、この回転物体121の回転面に配置されたセンサ群124Aは、誘電体レンズ110により結像される被写体像IM1を、所定の周期でスキャンするようにされる。また、この回転物体121の回転により、この回転物体121の回転面に配置されたセンサ群124Bは、誘電体レンズ110および反射板126により結像される被写体像IM2を、所定の周期でスキャンするようにされる。
【0063】
センサ群124A,124Bの各センサ124では、被写体像IM1,IM2の各部におけるミリ波の計測が行われる。そして、センサ群124A,124Bの各センサ124からは、その計測値に対応した信号が出力される。この各センサ124の出力信号は、シリアル信号に変換されて、回転物体121の側面に設けられたスリップリング125を通じて外部に取り出される。回転物体121から取り出された各センサ124の出力信号は、A/D変換器135でアナログ信号からデジタル信号に変換された後に、同期回路136に供給される。
【0064】
また、エンコーダ134により、回転物体121の回転位置が検出される。このエンコーダ134から出力される回転位置検出信号は、同期回路136に供給される。同期回路136では、センサ群124Aの各センサ124の出力信号(デジタルデータ)から、回転物体121の回転位置に同期して、被写体像IM1上の各計測点(各画素)の信号が取得される(図6参照)。また、同期回路136では、センサ群124Bの各センサ124の出力信号(デジタルデータ)から、回転物体121の回転位置に同期して、被写体像IM2上の各計測点(各画素)の信号が取得される(図6参照)。この被写体像IM1,IM2上の各画素の信号は、信号処理回路137に供給される。
【0065】
信号処理回路137では、被写体像IM1,IM2上の各画素の信号(デジタルデータ)に対して、イメージとして出力するための処理、例えば、ノイズ除去処理、鮮鋭化処理などが行われる。そして、このように処理された被写体像IM1,IM2上の各画素の信号は、出力機器138に供給される。出力機器138が記録機の場合には、この被写体像IM1,IM2上の各画素の信号は記録メディアに記録される。また、出力機器138がモニタの場合には、被写体像IM1,IM2に対応した各画素の信号により、画面に被写体像が表示される。
【0066】
上述したように、図1〜図3に示すイメージング装置100においては、センサ群124A,124Bの各センサ124を回転物体121の回転面に配置し、この回転物体121を回転させることでスキャンを実現している。そのため、従来のように、反射板を動かすことでスキャンを実現する技術に比べて、メカ機構の負担を少なくできる。また、回転物体121の回転速度を変更することで、スキャン速度を容易に変更できる。
【0067】
また、図1〜図3に示すイメージング装置100においては、回転物体121の回転面に誘電体レンズ110により被写体像IM1を結像させる他、この回転物体121の回転面に誘電体レンズ110および反射板126により被写体像IM2を結像させる。そして、これら被写体像IM1,IM2上の各画素の信号を取得しているため、計測有効範囲として、有効範囲1に、さらに有効範囲2が付加され、その拡大を図ることができる。
【0068】
また、図1〜図3に示すイメージング装置100においては、有効範囲1に被写体像IM1を結像させる他、有効範囲2に被写体像IM2を結像させ、これら被写体像IM1,IM2上の各画素の信号を取得している。図7に示すように、有効範囲1と有効範囲2では、誘電体レンズ110に対する焦点距離が異なる。つまり、焦点の異なった2つの被写体像IM1,IM2に対応した画素信号を得ることができる。
【0069】
なお、図1〜図3に示すイメージング装置100においては、1枚の反射板126を設けた例を示している。しかし、同様の反射板を2枚以上設けて、さらに多くの、焦点距離を異にする被写体像の画素信号を得ることも考えられる。これにより、3つ以上のフォーカス画像を得ることができ、例えば、特許第3303128号の技術を用いて、画面全体にフォーカスの合った画像を得ることも簡単に可能となる。
【0070】
<第2の実施の形態>
[イメージング装置の構成]
図8〜図10は、第2の実施の形態としてのイメージング装置100Aの構成例を示している。これら図8〜図10において、図1〜図3と対応する部分には、同一符号を付して示している。図8は、イメージング装置100Aの全体を概略的に示している。イメージング装置100Aは、誘電体レンズ110と、撮像部120Aとを備えている。誘電体レンズ110Aは、ミリ波またはサブミリ波(テラヘルツ波)を収束して被写体像を結像させる。なお、以下の説明では、ミリ波、サブミリ波を併記せず、簡略化のためミリ波のみについて記載する。したがって、以下の記述はサブミリ波にも適用される。
【0071】
撮像部120Aは、誘電体レンズ110により結像される被写体像(ミリ波像)を撮像する。この撮像部120Aは、回転物体121を有している。この回転物体121は、図9に示すように、例えば、円筒状のドラムである。この回転物体121は、誘電体レンズ110の光軸122に対して、垂直な回転軸123を持っている。この回転物体121の回転面には、円周面方向の異なる2つの位置に、それぞれ、複数のセンサ124が配置されている。ここで、説明を容易とするため、一方の複数のセンサ124をセンサ群124Lとし、他方の複数のセンサ124をセンサ群124Rとする。各センサ124は、図示は省略するが、ミリ波を捉えるアンテナ、このアンテナの出力信号を増幅するアンプなどで構成される。
【0072】
また、撮像部120Aは、反射板126L,126Rを有している。これらの反射板126L,126Rは、回転物体121の回転軸123に対し、誘電体レンズ110の光軸122と直交する互いに逆方向の位置に対照的に設けられる。誘電体レンズ110で収束されたミリ波は、反射板126Lにより回転物体121側に反射され、回転物体121の回転面(計測有効範囲1)に、左眼画像に対応した被写体像IMLが結像される。また、誘電体レンズ110で収束されたミリ波は、反射板126Rにより回転物体121側に反射され、回転物体121の回転面(計測有効範囲2)に、右眼画像に対応した被写体像IMRが結像される。これらの被写体像IML,IMRは、図11に示すように、例えば、基線長だけ左右に離れた2つの視点から被写体を見た場合の画像に相当する。
【0073】
回転物体121の回転面に配置されたセンサ群124Lの各センサ124は、回転物体121の回転に伴って、被写体像IMLをスキャンする。センサ群124Lの各センサ124は、このように被写体像IMLをスキャンすることで、被写体像IMLの各部におけるミリ波の計測を行って、その計測値に対応した信号を出力する。回転物体121の回転面に配置されたセンサ群124Rの各センサ124は、回転物体121の回転に伴って、被写体像IMRをスキャンする。センサ群124Rの各センサ124は、このように被写体像IMRをスキャンすることで、被写体像IMRの各部におけるミリ波の計測を行って、その計測値に対応した信号を出力する。
【0074】
センサ群124Lの各センサ124およびセンサ群124Rの各センサ124は、図9に示すように、回転物体121の回転軸123に対して平行なライン上に所定の間隔をもって配置されている。回転物体121の側面には、センサ124に必要な電源および接地のため、さらにはセンサ124の出力信号を取り出すためのスリップリング125が設けられている。各センサ124の出力信号は、例えば、1本のスリップリング125から、時分割的にシリアル出力される。図9には、図面の簡単化のため、スリップリング125を1本しか示していない。なお、各センサ124の出力信号に関しては、無線で取り出すことも考えられる。その場合には、各センサ124の出力信号を取り出すためのスリップリング125は不要となる。
【0075】
図10は、イメージング装置100Aの構成を示している。なお、この図10には、誘電体レンズ110および反射板126L,126Rの図示を省略している。イメージング装置100Aは、上述した回転物体121、センサ群124L,124Rおよび反射板126L,126Rの他に、コントローラ131と、モータ132と、モータ制御部133と、エンコーダ134を有している。また、イメージング装置100Aは、A/D変換器135と、同期回路136と、信号処理回路137と、出力機器138を有している。
【0076】
コントローラ131は、イメージング装置100Aの各部の動作を制御する。モータ132は、回転物体121を、回転軸123を中心に回転させる。このモータ132は、回転機構部を構成している。モータ制御部133は、コントローラ131の制御のもと、モータ132の動作を制御する。エンコーダ134は、回転物体121の回転位置を検出する。このエンコーダ134は、回転位置検出部を構成している。このエンコーダ134は、例えば、機械的、磁気的あるいは光学的に、回転物体121の回転位置を検出し、回転位置検出信号を出力する。この回転位置検出信号に基づいて、センサ群124L,124Rが上述した計測有効範囲にあるか否か、さらには、その計測有効範囲のどこにあるかがわかる。
【0077】
A/D変換器135は、回転物体121の回転面に配置されたセンサ群124L,124Rの各センサ124の出力信号を、アナログ信号からデジタル信号に変換する。同期回路136は、A/D変換器135でデジタル信号に変換された、センサ群124Lの各センサ124の出力信号より、計測有効範囲1に存在する被写体像IML上の各画素の信号を、回転物体121の回転位置に同期して取得する。また、同期回路136は、A/D変換器135でデジタル信号に変換された、センサ群124Rの各センサ124の出力信号より、計測有効範囲2に存在する被写体像IMR上の各画素の信号を、回転物体121の回転位置に同期して取得する。
【0078】
上述の図6は、計測有効範囲における、センサ群124L,124Rの各センサ124のスキャニング軌跡の一例を垂直方向に延びる実線で示している。同期回路136は、エンコーダ134からの回転位置検信号に基づいて、例えば、垂直方向に延びる実線と、信号取得タイミングを示す水平方向に延びる破線との交点(格子点)に対応した、各画素の信号を取得する。なお、図6においては、図面の簡単化のために、信号取得タイミングの個数を8つとしているが、実際の個数とは異なる。同期回路136は、画素信号取得部を構成している。
【0079】
信号処理回路137は、同期回路136から出力される被写体像IML,IMR上の各画素の信号(デジタルデータ)を、イメージとして出力するための処理を行う。この処理は、例えば、ノイズ除去処理、鮮鋭化処理などである。出力機器138は、信号処理回路137で処理された後の被写体像IML,IMR上の各画素の信号を記録する記録機、あるいはその各画素の信号により被写体像を表示するモニタ等である。
【0080】
図8〜図10に示すイメージング装置100Aの動作を説明する。モータ制御部133によりモータ132の動作が制御され、回転物体121は回転軸123を中心に所定の速度で回転するようにされる。この回転物体121の回転により、この回転物体121の回転面に配置されたセンサ群124Lは、誘電体レンズ110および反射板126Lにより結像される被写体像IMLを、所定の周期でスキャンするようにされる。また、この回転物体121の回転により、この回転物体121の回転面に配置されたセンサ群124Rは、誘電体レンズ110および反射板126Rにより結像される被写体像IMRを、所定の周期でスキャンするようにされる。
【0081】
センサ群124L,124Rの各センサ124では、被写体像IML,IMRの各部におけるミリ波の計測が行われる。そして、センサ群124L,124Rの各センサ124からは、その計測値に対応した信号が出力される。この各センサ124の出力信号は、シリアル信号に変換されて、回転物体121の側面に設けられたスリップリング125を通じて外部に取り出される。回転物体121から取り出された各センサ124の出力信号は、A/D変換器135でアナログ信号からデジタル信号に変換された後に、同期回路136に供給される。
【0082】
また、エンコーダ134により、回転物体121の回転位置が検出される。このエンコーダ134から出力される回転位置検出信号は、同期回路136に供給される。同期回路136では、センサ群124Lの各センサ124の出力信号(デジタルデータ)から、回転物体121の回転位置に同期して、被写体像IML上の各計測点(各画素)の信号が取得される(図6参照)。また、同期回路136では、センサ群124Rの各センサ124の出力信号(デジタルデータ)から、回転物体121の回転位置に同期して、被写体像IMR上の各計測点(各画素)の信号が取得される(図6参照)。この被写体像IML,IMR上の各画素の信号は、信号処理回路137に供給される。
【0083】
信号処理回路137では、被写体像IML,IMR上の各画素の信号(デジタルデータ)に対して、イメージとして出力するための処理、例えば、ノイズ除去処理、鮮鋭化処理などが行われる。そして、このように処理された被写体像IML,IMR上の各画素の信号は、出力機器138に供給される。出力機器138が記録機の場合には、この被写体像IML,IMR上の各画素の信号は記録メディアに記録される。また、出力機器138がモニタの場合には、被写体像IML,IMRに対応した各画素の信号により、画面に被写体像が表示される。
【0084】
なお、上述したように、2つの被写体像IML,IMRは、例えば、基線長だけ左右に離れた2つの視点から被写体を見た場合の画像に相当する(図11参照)。これら2つの被写体像IML,IMR上に存在する物体の位置は、視点からの距離に応じて変化する。この位置の差は、一般的に視差と呼ばれている。逆に言うと、これら2つの被写体像IML,IMR上に存在する物体の視差を求めることで、その物体までの距離を算出できる。
【0085】
視差から距離を算出するには、例えば、(1)式を用いることができる。ここで、Dは算出される距離、dは基線長、fはイメージング装置100Aの焦点距離、sは視差である。この(1)式から明らかなように、距離と視差は逆数の関係にある
D=d*f/s ・・・(1)
【0086】
上述していないが、例えば、信号処理回路137は、被写体像IML,IMR上の各画素の信号に基づいて、各画素の視差を求め、被写体上の各画素までの距離を求め、距離分布を作成する機能を備えていてもよい。例えば、図12(a)が撮像されたイメージであるのに対して、図12(b)は作成された距離分布の一例を示している。この距離分布例では、明るい点は近く、遠い点は暗く表されている。このような距離分布を用いればイメージ中に距離は異なるが明るさが同じ物体が重なっている場合(図12(a)参照)に、2つの物体の分離が容易になる。この場合、信号処理回路137は、距離判別部を構成する。
【0087】
上述したように、図8〜図10に示すイメージング装置100Aにおいては、センサ群124L,124Rの各センサ124を回転物体121の回転面に配置し、この回転物体121を回転させることでスキャンを実現している。そのため、従来のように、反射板を動かすことでスキャンを実現する技術に比べて、メカ機構の負担を少なくできる。また、回転物体121の回転速度を変更することで、スキャン速度を容易に変更できる。
【0088】
また、図8〜図10に示すイメージング装置100Aにおいては、反射板126L,126Rにより、回転物体121の回転面に、異なる視点から見た場合の被写体像IML,IMRを結像させ、これら被写体像IML,IMR上の各画素の信号を取得している。これらの被写体像IML,IMRは、基線長だけ左右に離れた2つの視点から被写体を見た場合の画像に相当する。そのため、これらの被写体像IML,IMR上の各画素の信号を用いて、視点から被写体上の各画素までの距離、つまり3次元情報(奥行き情報)を得ることができる。そして、距離分布などを作成することが可能となる。
【0089】
なお、図8〜図10に示すイメージング装置100Aにおいては、撮像部120Aの前面に1つの誘電体レンズ110を配置したものである。しかし、例えば、図13に示すように、撮像部120Aの前面に2つの誘電体レンズ110L,100Rを配置する構成も考えられる。この場合、誘電体レンズ110Lは、反射板126Lと共同して、左側の被写体像IMLを結像させる。また、誘電体レンズ110Rは、反射板126Rと共同して、右側の被写体像IMRを結像させる。
【0090】
また、図8〜図10に示すイメージング装置100Aにおいては、一対の反射板126L,126Rを設けたものを示したが、2対以上の反射板を設けて、2つ以上の3次元情報を得ることも考えられる。図14は、反射板126L1,126R1と、反射板126L2,126R2との、二対の反射板が設けられた例である。この場合、回転物体121にも、センサ群124L1,124R1と、センサ群124L2,124R2との、二対のセンサ群が配置されている。
【0091】
<第3の実施の形態>
[イメージング装置の構成]
図15〜図17は、第3の実施の形態としてのイメージング装置100Bの構成例を示している。これら図15〜図17において、図1〜図3と対応する部分には、同一符号を付して示している。図15は、イメージング装置100Bの全体を概略的に示している。イメージング装置100Bは、誘電体レンズ110と、撮像部120Bとを備えている。誘電体レンズ110は、ミリ波またはサブミリ波(テラヘルツ波)を収束して被写体像を結像させる。なお、以下の説明では、ミリ波、サブミリ波を併記せず、簡略化のためミリ波のみについて記載する。したがって、以下の記述はサブミリ波にも適用される。
【0092】
撮像部120Bは、誘電体レンズ110により結像される被写体像(ミリ波像)を撮像する。この撮像部120Bは、回転物体121を有している。この回転物体121は、図16に示すように、例えば、円筒状のドラムである。この回転物体121は、誘電体レンズ110の光軸122に対して、垂直な回転軸123を持っている。この回転物体121の回転面には、複数のセンサ124が配置されている。ここで、説明を容易とするため、複数のセンサ124をセンサ群124Gとする。各センサ124は、図示は省略するが、ミリ波を捉えるアンテナ、このアンテナの出力信号を増幅するアンプなどで構成される。
【0093】
誘電体レンズ110により、回転物体121の回転面の計測有効範囲に、被写体像IMが結像される。回転物体121の回転面に配置されたセンサ群124Gは、回転物体121の回転に伴って、被写体像IMをスキャンする。センサ群124Gの各センサ124は、このように被写体像IMをスキャンすることで、被写体像IMの各部におけるミリ波の計測を行って、その計測値に対応した信号を出力する。
【0094】
また、撮像部1201Bは、一定レベル値のミリ波を発生する校正用物体127を有している。この校正用物体127は、例えば黒体板あるいは黒体テープなどのミリ波の放射レベル値が既知の物体である。この校正用物体127は、上述した計測有効範囲とは異なる位置に、回転物体121に近接して配置される。
【0095】
センサ群124Gの各センサ124は、図16に示すように、回転物体121の回転軸123に対して平行なライン上に所定の間隔をもって配置されている。回転物体121の側面には、センサ124に必要な電源および接地のため、さらにはセンサ124の出力信号を取り出すためのスリップリング125が設けられている。各センサ124の出力信号は、例えば、1本のスリップリング125から、時分割的にシリアル出力される。図16には、図面の簡単化のため、スリップリング125を1本しか示していない。なお、各センサ124の出力信号に関しては、無線で取り出すことも考えられる。その場合には、各センサ124の出力信号を取り出すためのスリップリング125は不要となる。
【0096】
図17は、イメージング装置100Bの構成を示している。なお、この図17には、誘電体レンズ110および校正用物体127の図示を省略している。イメージング装置100Bは、上述した回転物体121、センサ群124G、校正用物体127の他に、コントローラ131と、モータ132と、モータ制御部133と、エンコーダ134,141を有している。また、イメージング装置100Bは、A/D変換器135と、同期回路136Bと、信号処理回路137と、出力機器138を有している。
【0097】
コントローラ131は、イメージング装置100Bの各部の動作を制御する。モータ132は、回転物体121を、回転軸123を中心に回転させる。このモータ132は、回転機構部を構成している。モータ制御部133は、コントローラ131の制御のもと、モータ132の動作を制御する。エンコーダ134は、回転物体121の回転位置を検出する。また、エンコーダ141も、回転物体121の回転位置を検出する。
【0098】
特に、このエンコーダ141は、センサ群124Gの各センサ124が、校正用物体127に対向した位置にあることを検出する。このように、センサ群124Gの各センサ124が校正用物体127に対向した位置にあるとき、各センサ124は校正用物体127から発生されるミリ波の測定をおこなう。エンコーダ134,141は、いずれも、回転物体121の回転位置を検出するものであり、同じ装置で併用してもよい。
【0099】
これらエンコーダ134,141は、回転位置検出部を構成している。これらエンコーダ134,141は、例えば、機械的、磁気的あるいは光学的に、回転物体121の回転位置を検出し、回転位置検出信号を出力する。この回転位置検出信号に基づいて、センサ群124Gが上述した計測有効範囲にあるか否か、さらには、その計測有効範囲のどこにあるかがわかる。また、この回転位置検出信号に基づいて、上述したように、センサ群124Gの各センサ124が校正用物体127に対向した位置にあるか否かがわかる。
【0100】
A/D変換器135は、回転物体121の回転面に配置されたセンサ群124Gの各センサ124の出力信号を、アナログ信号からデジタル信号に変換する。同期回路136Bは、A/D変換器135でデジタル信号に変換された、センサ群124Gの各センサ124の出力信号より、計測有効範囲に存在する被写体像IM上の各画素の信号を、回転物体121の回転位置に同期して取得する。この意味で、同期回路136Bは、画素信号取得部を構成している。
【0101】
上述の図6は、計測有効範囲における、センサ群124Gの各センサ124のスキャニング軌跡の一例を垂直方向に延びる実線で示している。同期回路136Bは、エンコーダ134からの回転位置検信号に基づいて、例えば、垂直方向に延びる実線と、信号取得タイミングを示す水平方向に延びる破線との交点(格子点)に対応した、各画素の信号を取得する。なお、図6においては、図面の簡単化のために、信号取得タイミングの個数を8つとしているが、実際の個数とは異なる。
【0102】
また、同期回路136Bは、A/D変換器135でデジタル信号に変換された、センサ群124Gの各センサ124の出力信号より、校正用物体127が発生するミリ波の測定信号(校正用信号)を、回転物体121の回転位置に同期して取得する。なお、校正用物体127の対向範囲における、センサ群124Gの各センサ124のスキャニング軌跡も、詳細説明は省略するが、上述の図6に示すものと同様となる。同期回路136Bは、この校正用信号に基づいて、上述したように取得された計測有効範囲に存在する被写体像IM上の各画素の信号を校正(キャリブレーション)して出力する。この意味で、同期回路136Bは、出力信号校正部を構成している。
【0103】
この場合、同期回路136Bは、センサ群124Gの各センサ124Gの間の出力のばらつきを校正する。具体的には、回転物体121のある1回転の中で、あるセンサ124が校正用物体127を撮像したデータ群をMc[k](k=1〜N)とし、またそのセンサ124が計測有効範囲で撮像したイメージング用のデータをMi[k](k=1〜N)とする。
【0104】
このとき、Mi[k](k=1〜N)は、(2)式で求められるMc[k](k=1〜N)の平均値であるMc_aveを用いて、(3)式により校正され、Mi′[k](k=1〜N)が得られる。なお、Mc_aveは同じ校正物体127を撮影したMc[k]の代表値であればよいので、平均値でなくてもよく、例えば中間値等でもよい。
Mc_ave = 1/N・ΣMc[k] ・・・(2)
Mi′[k] = Mi[k]-Mc_ref ・・・(3)
【0105】
信号処理回路137は、同期回路136Bから出力される被写体像IM上の各画素の信号(デジタルデータ)を、イメージとして出力するための処理を行う。この処理は、例えば、ノイズ除去処理、鮮鋭化処理などである。出力機器138は、信号処理回路137で処理された後の被写体像IM上の各画素の信号を記録する記録機、あるいはその各画素の信号により被写体像を表示するモニタ等である。
【0106】
図15〜図17に示すイメージング装置100Bの動作を説明する。モータ制御部133によりモータ132の動作が制御され、回転物体121は回転軸123を中心に所定の速度で回転するようにされる。この回転物体121の回転により、この回転物体121の回転面に配置されたセンサ群124Gは、誘電体レンズ110により結像される被写体像IMを、所定の周期でスキャンするようにされる。
【0107】
センサ群124Gの各センサ124では、ミリ波の計測が行われる。そして、センサ群124Gの各センサ124からは、その計測値に対応した信号が出力される。この各センサ124の出力信号は、シリアル信号に変換されて、回転物体121の側面に設けられたスリップリング125を通じて外部に取り出される。回転物体121から取り出された各センサ124の出力信号は、A/D変換器135でアナログ信号からデジタル信号に変換された後に、同期回路136に供給される。
【0108】
また、エンコーダ134,141により、回転物体121の回転位置が検出される。これらエンコーダ134,141から出力される回転位置検出信号は、同期回路136Bに供給される。同期回路136Bでは、センサ群124Gの各センサ124の出力信号(デジタルデータ)から、回転物体121の回転位置に同期して、被写体像IM上の各計測点(各画素)の信号が取得される(図6参照)。
【0109】
また、同期回路136Bでは、センサ群124Gの各センサ124の出力信号(デジタルデータ)から、回転物体121の回転位置に同期して、校正用物体127が発生するミリ波の測定信号(校正用信号)が取得される。そして、同期回路136Bでは、さらに、この校正用信号に基づいて、上述したように取得された計測有効範囲に存在する被写体像IM上の各画素の信号が校正(キャリブレーション)される((3)式参照)。このように校正された被写体像IM上の各画素の信号は、信号処理回路137に供給される。
【0110】
信号処理回路137では、被写体像IM上の各画素の信号(デジタルデータ)に対して、イメージとして出力するための処理、例えば、ノイズ除去処理、鮮鋭化処理などが行われる。そして、このように処理された被写体像IM上の各画素の信号は、出力機器138に供給される。出力機器138が記録機の場合には、この被写体像IM上の各画素の信号は記録メディアに記録される。また、出力機器138がモニタの場合には、被写体像IMに対応した各画素の信号により、画面に被写体像が表示される。
【0111】
上述したように、図15〜図17に示すイメージング装置100Bにおいては、センサ群124Gの各センサ124を回転物体121の回転面に配置し、この回転物体121を回転させることでスキャンを実現している。そのため、従来のように、反射板を動かすことでスキャンを実現する技術に比べて、メカ機構の負担を少なくできる。また、回転物体121の回転速度を変更することで、スキャン速度を容易に変更できる。
【0112】
また、図15〜図17に示すイメージング装置100Bにおいては、回転物体121に近接して校正用物体127を配置し、回転物体121の回転面に配置されたセンサ群124Gの各センサ124で校正用物体127が発生するミリ波を測定している。これにより、校正用信号を取得し、各センサ124の間の出力のばらつきを校正するようにしている。そのため、計測有効範囲に存在する被写体像IM上の各画素の信号を簡便に校正できる。
【0113】
<第4の実施の形態>
[イメージング装置の構成]
図18、図19は、第4の実施の形態としてのイメージング装置100Cの構成例を示している。これら図18、図19において、図15〜図17と対応する部分には、同一符号を付し、適宜、その詳細説明は省略する。図18は、イメージング装置100Cの全体を概略的に示している。イメージング装置100Cは、誘電体レンズ110と、撮像部120Cとを備えている。誘電体レンズ110は、ミリ波またはサブミリ波(テラヘルツ波)を収束して被写体像を結像させる。なお、以下の説明では、ミリ波、サブミリ波を併記せず、簡略化のためミリ波のみについて記載する。したがって、以下の記述はサブミリ波にも適用される。
【0114】
撮像部120Cは、誘電体レンズ110により結像される被写体像(ミリ波像)を撮像する。この撮像部120Cは、回転物体121を有している。この回転物体121は、誘電体レンズ110の光軸122に対して、垂直な回転軸123を持っている。この回転物体121の回転面には、複数のセンサ124が配置されている。ここで、説明を容易とするため、複数のセンサ124をセンサ群124Gとする。各センサ124は、図示は省略するが、ミリ波を捉えるアンテナ、このアンテナの出力信号を増幅するアンプなどで構成される。
【0115】
誘電体レンズ110により、回転物体121の回転面の計測有効範囲に、被写体像IMが結像される。回転物体121の回転面に配置されたセンサ群124Gは、回転物体121の回転に伴って、被写体像IMをスキャンする。センサ群124Gの各センサ124は、このように被写体像IMをスキャンすることで、被写体像IMの各部におけるミリ波の計測を行って、その計測値に対応した信号を出力する。
【0116】
また、撮像部1201Bは、ミリ波を発生する校正用物体127,128を有している。これら校正用物体127,128は、例えば黒体板あるいは黒体テープなどのミリ波の放射レベル値が既知の物体である。ここで、校正用物体127と構成用物体128の放射レベル値は異なるものとされる。これら校正用物体127,128は、上述した計測有効範囲とは異なる位置に、回転物体121に近接して配置される。
【0117】
図19は、イメージング装置100Cの構成を示している。なお、この図19には、誘電体レンズ110および校正用物体127,128の図示を省略している。イメージング装置100Bは、上述した回転物体121、センサ群124G、校正用物体127,128の他に、コントローラ131と、モータ132と、モータ制御部133と、エンコーダ134,141,142を有している。また、イメージング装置100Cは、A/D変換器135と、同期回路136Cと、信号処理回路137と、出力機器138を有している。
【0118】
コントローラ131は、イメージング装置100Cの各部の動作を制御する。モータ132は、回転物体121を、回転軸123を中心に回転させる。このモータ132は、回転機構部を構成している。モータ制御部133は、コントローラ131の制御のもと、モータ132の動作を制御する。エンコーダ134は、回転物体121の回転位置を検出する。また、エンコーダ141,142も、回転物体121の回転位置を検出する。
【0119】
特に、エンコーダ141は、センサ群124Gの各センサ124が、校正用物体127に対向した位置にあることを検出する。このように、センサ群124Gの各センサ124が校正用物体127に対向した位置にあるとき、各センサ124は校正用物体127から発生されるミリ波の測定をおこなう。また、エンコーダ142は、センサ群124Gの各センサ124が、校正用物体128に対向した位置にあることを検出する。このように、センサ群124Gの各センサ124が校正用物体128に対向した位置にあるとき、各センサ124は校正用物体128から発生されるミリ波の測定をおこなう。エンコーダ134,141,n142は、いずれも、回転物体121の回転位置を検出するものであり、同じ装置で併用してもよい。
【0120】
これらエンコーダ134,141,142は、回転位置検出部を構成している。これらエンコーダ134,141,142は、例えば、機械的、磁気的あるいは光学的に、回転物体121の回転位置を検出し、回転位置検出信号を出力する。この回転位置検出信号に基づいて、センサ群124Gが上述した計測有効範囲にあるか否か、さらには、その計測有効範囲のどこにあるかがわかる。また、この回転位置検出信号に基づいて、上述したように、センサ群124Gの各センサ124が校正用物体127に対向した位置にあるか否かがわかる。さらに、この回転位置検出信号に基づいて、上述したように、センサ群124Gの各センサ124が校正用物体128に対向した位置にあるか否かがわかる。
【0121】
A/D変換器135は、回転物体121の回転面に配置されたセンサ群124Gの各センサ124の出力信号を、アナログ信号からデジタル信号に変換する。同期回路136Cは、A/D変換器135でデジタル信号に変換された、センサ群124Gの各センサ124の出力信号より、計測有効範囲に存在する被写体像IM上の各画素の信号を、回転物体121の回転位置に同期して取得する。この意味で、同期回路136Cは、画素信号取得部を構成している。
【0122】
上述の図6は、計測有効範囲における、センサ群124Gの各センサ124のスキャニング軌跡の一例を垂直方向に延びる実線で示している。同期回路136Cは、エンコーダ134からの回転位置検信号に基づいて、例えば、垂直方向に延びる実線と、信号取得タイミングを示す水平方向に延びる破線との交点(格子点)に対応した、各画素の信号を取得する。なお、図6においては、図面の簡単化のために、信号取得タイミングの個数を8つとしているが、実際の個数とは異なる。
【0123】
また、同期回路136Cは、A/D変換器135でデジタル信号に変換された、センサ群124Gの各センサ124の出力信号より、校正用物体127が発生するミリ波の測定信号(第1の校正用信号)を、回転物体121の回転位置に同期して取得する。また、同期回路136Cは、A/D変換器135でデジタル信号に変換された、センサ群124Gの各センサ124の出力信号より、校正用物体128が発生するミリ波の測定信号(第2の校正用信号)を、回転物体121の回転位置に同期して取得する。なお、校正用物体127,128の対向範囲における、センサ群124Gの各センサ124のスキャニング軌跡も、詳細説明は省略するが、上述の図6に示すものと同様となる。
【0124】
同期回路136Cは、これら第1、第2の校正用信号に基づいて、上述したように取得された計測有効範囲に存在する被写体像IM上の各画素の信号を校正(キャリブレーション)して出力する。この意味で、同期回路136Cは、出力信号校正部を構成している。この場合、同期回路136Cは、センサ群124Gの各センサ124の間のオフセット値および感度のばらつきを校正する。
【0125】
具体的には、回転物体121のある1回転の中で、あるセンサ124が校正用物体127を撮像したデータ群をMc1[k](k=1〜N)とし、また、そのセンサ124が校正用物体128を撮像したデータ群をMc2[k](k=1〜N)とする。さらに、回転物体121のある1回転の中で、そのセンサ124が計測有効範囲で撮像したイメージング用のデータをMi[k](k=1〜N)とする。
【0126】
このとき、Mi[k](k=1〜N)は、(4)式で求められるMc1[k](k=1〜N)の平均値であるMc1_aveと、(5)式で求められるMc2[k](k=1〜N)の平均値であるMc2_aveとを用いて、(6)式により校正され、Mi′[k](k=1〜N)が得られる。なお、Mc1_ref,Mc2_refは予め理想環境で撮影した校正用物体127,128の計測結果である。
Mc1_ave = 1/N・ΣMc1[k] ・・・(4)
Mc2_ave = 1/L・ΣMc2[k] ・・・(5)
Mi′[k] =(Mi[k]-Mc1_ave)*(Mc2_ref-Mc1_ref)/(Mc2_ave-Mc1_ave)
・・・(6)
【0127】
信号処理回路137は、同期回路136Cから出力される被写体像IM上の各画素の信号(デジタルデータ)を、イメージとして出力するための処理を行う。この処理は、例えば、ノイズ除去処理、鮮鋭化処理などである。出力機器138は、信号処理回路137で処理された後の被写体像IM上の各画素の信号を記録する記録機、あるいはその各画素の信号により被写体像を表示するモニタ等である。
【0128】
図18、図19に示すイメージング装置100Cの動作を説明する。モータ制御部133によりモータ132の動作が制御され、回転物体121は回転軸123を中心に所定の速度で回転するようにされる。この回転物体121の回転により、この回転物体121の回転面に配置されたセンサ群124Gは、誘電体レンズ110により結像される被写体像IMを、所定の周期でスキャンするようにされる。
【0129】
センサ群124Gの各センサ124では、ミリ波の計測が行われる。そして、センサ群124Gの各センサ124からは、その計測値に対応した信号が出力される。この各センサ124の出力信号は、シリアル信号に変換されて、回転物体121の側面に設けられたスリップリング125を通じて外部に取り出される。回転物体121から取り出された各センサ124の出力信号は、A/D変換器135でアナログ信号からデジタル信号に変換された後に、同期回路136に供給される。
【0130】
また、エンコーダ134,141,142により、回転物体121の回転位置が検出される。これらエンコーダ134,141,142から出力される回転位置検出信号は、同期回路136Cに供給される。同期回路136Cでは、センサ群124Gの各センサ124の出力信号(デジタルデータ)から、回転物体121の回転位置に同期して、被写体像IM上の各計測点(各画素)の信号が取得される(図6参照)。
【0131】
また、同期回路136Cでは、センサ群124Gの各センサ124の出力信号(デジタルデータ)から、回転物体121の回転位置に同期して、校正用物体127が発生するミリ波の測定信号(第1の校正用信号)が取得される。また、同期回路136Cでは、センサ群124Gの各センサ124の出力信号(デジタルデータ)から、回転物体121の回転位置に同期して、校正用物体128が発生するミリ波の測定信号(第2の校正用信号)が取得される。そして、同期回路136Cでは、さらに、これら第1、第2の校正用信号に基づいて、上述したように取得された計測有効範囲に存在する被写体像IM上の各画素の信号が校正(キャリブレーション)される((6)式参照)。このように校正された被写体像IM上の各画素の信号は、信号処理回路137に供給される。
【0132】
信号処理回路137では、被写体像IM上の各画素の信号(デジタルデータ)に対して、イメージとして出力するための処理、例えば、ノイズ除去処理、鮮鋭化処理などが行われる。そして、このように処理された被写体像IM上の各画素の信号は、出力機器138に供給される。出力機器138が記録機の場合には、この被写体像IM上の各画素の信号は記録メディアに記録される。また、出力機器138がモニタの場合には、被写体像IMに対応した各画素の信号により、画面に被写体像が表示される。
【0133】
上述したように、図18、図19に示すイメージング装置100Cにおいては、センサ群124Gの各センサ124を回転物体121の回転面に配置し、この回転物体121を回転させることでスキャンを実現している。そのため、従来のように、反射板を動かすことでスキャンを実現する技術に比べて、メカ機構の負担を少なくできる。また、回転物体121の回転速度を変更することで、スキャン速度を容易に変更できる。
【0134】
また、図18、図19に示すイメージング装置100Cにおいては、回転物体121に近接して校正用物体127,128を配置し、回転物体121の回転面に配置されたセンサ群124Gの各センサ124で校正用物体127が発生するミリ波を測定している。これにより、第1、第2の校正用信号を取得し、各センサ124の間の出力のばらつき、および感度のばらつきを校正するようにしている。そのため、計測有効範囲に存在する被写体像IM上の各画素の信号を簡便に校正できる。
【0135】
なお、上述のイメージング装置100B,100Cにおいては、校正用物体が1つと2つの例を示した。しかし、校正用物体の数を更に増加することで校正結果の精度を上げることができる。例えば、校正用物体が3つ以上の場合は、回帰分析などを用いて計測誤差を最小にするような校正方法を取ることができる。
【0136】
<5.変形例>
なお、上述実施の形態においては、回転物体121は、円筒状のドラムである例を示した。しかし、回転物体は円筒状のドラムに限定されるものではなく、複数のセンサ124を配置し得る回転面が存在すればよく、平板の組み合わせからなる回転物体も考えられる。図20は、平板の組み合わせからなる回転物体121Aを示している。
【産業上の利用可能性】
【0137】
この発明は、対象物体から放射や反射されるミリ波またはサブミリ波(テレヘルツ波)をアンテナやアンプなどで構成されるセンサによって計測してイメージングを行うイメージング装置等に適用できる。
【符号の説明】
【0138】
100,100A〜100C・・・イメージング装置
110・・・誘電体レンズ
120,120A〜120C・・・撮像部
121,121A・・・回転物体
122・・・光軸
123・・・回転軸
124,・・・センサ
124A,124B,124L,124L1,124L2,124R,124R1,124R2,124G・・・センサ群
125・・・スリップリング
126,126L,126L1,126L2,126R,126R1,126R2・・・反射板
127,128・・・校正用物体
131・・・コントローラ
132・・・モータ
133・・・モータ制御部
134,141,142・・・エンコーダ
135・・・A/D変換器
136,136B,136C・・・同期回路
137・・・信号処理回路
138・・・出力機器
141・・・移動機構部
【特許請求の範囲】
【請求項1】
被写体からのミリ波またはサブミリ波を収束して被写体像を結像する誘電体レンズと、
上記誘電体レンズにより結像される上記被写体像を撮像する撮像部とを備え、
上記撮像部は、
上記誘電体レンズの光軸に対して垂直な回転軸を持つ回転物体と、
上記回転物体を、上記回転軸を中心に回転させる回転機構部と、
上記誘電体レンズで収束されたミリ波またはサブミリ波を上記回転物体側に反射する反射板と、
上記回転物体の回転面に配置され、該回転物体の回転に伴って、上記誘電体レンズにより結像される第1の被写体像をスキャンする第1の複数のセンサと、
上記回転物体の回転面に配置され、該回転物体の回転に伴って、上記誘電体レンズおよび上記反射板により結像される第2の被写体像をスキャンする第2の複数のセンサと、
上記回転物体の回転位置を検出する回転位置検出部と、
上記回転位置検出部で得られる回転位置検出信号に基づいて、上記第1の複数のセンサの出力信号より、上記第1の被写体像上の各画素の信号を取得し、上記第2の複数のセンサの出力信号より、上記第2の被写体像上の各画素の信号を取得する画素信号取得部とを有する
イメージング装置。
【請求項2】
誘電体レンズの光軸に対して垂直な回転軸を持つ回転物体の回転面の互いに異なる円周方向の位置に、第1の複数のセンサおよび第2の複数のセンサを配置し、
上記誘電体レンズで収束されたミリ波またはサブミリ波を上記回転物体側に反射する反射板を設け、
上記回転物体を回転させ、該回転物体の回転に伴って、上記第1の複数のセンサにより、上記誘電体レンズにより結像される第1の被写体像をスキャンし、上記第2の複数のセンサにより、上記誘電体レンズおよび上記反射板により結像される第2の被写体像をスキャンし、
上記回転物体の回転位置を検出し、該回転位置の検出信号に基づいて、上記第1の複数のセンサの出力信号より上記第1の被写体像上の各画素の信号を取得し、上記第2の複数のセンサの出力信号より上記第2の被写体像上の各画素の信号を取得する
イメージング方法。
【請求項3】
被写体からのミリ波またはサブミリ波を収束して被写体像を結像する誘電体レンズと、
上記誘電体レンズにより結像される上記被写体像を撮像する撮像部とを備え、
上記撮像部は、
上記誘電体レンズの光軸に対して垂直な回転軸を持つ回転物体と、
上記回転物体を、上記回転軸を中心に回転させる回転機構部と、
上記回転物体の回転軸に対し、上記誘電体レンズの光軸と直交する互いに逆方向の位置に設けられ、上記誘電体レンズで収束されたミリ波またはサブミリ波を上記回転物体側に反射する第1の反射板および第2の反射板と、
上記回転物体の回転面に配置され、該回転物体の回転に伴って、上記誘電体レンズおよび上記第1の反射板により結像される第1の被写体像をスキャンする第1の複数のセンサと、
上記回転物体の回転面に配置され、該回転物体の回転に伴って、上記誘電体レンズおよび上記第2の反射板により結像される第2の被写体像をスキャンする第2の複数のセンサと、
上記回転物体の回転位置を検出する回転位置検出部と、
上記回転位置検出部で得られる回転位置検出信号に基づいて、上記第1の複数のセンサの出力信号より、上記第1の被写体像上の各画素の信号を取得し、上記第2の複数のセンサの出力信号より、上記第2の被写体像上の各画素の信号を取得する画素信号取得部とを有する
イメージング装置。
【請求項4】
上記誘電体レンズは、上記第1の被写体像を結像させるための第1の誘電体レンズと、上記第2の被写体像を結像させるための第2の誘電体レンズとからなる
請求項3に記載のイメージング装置。
【請求項5】
上記撮像部は、
上記画素信号取得部で取得された上記第1の被写体像上の各画素の信号および上記第2の被写体像上の各画素の信号に基づいて、各画素の視差を求め、被写体上の各画素までの距離を判別する距離判別部をさらに有する
請求項3に記載のイメージング装置。
【請求項6】
誘電体レンズの光軸に対して垂直な回転軸を持つ回転物体の回転面の互いに異なる円周方向の位置に第1の複数のセンサおよび第2の複数のセンサを配置し、
上記回転物体の回転軸に対し、上記誘電体レンズの光軸と直交する互いに逆方向の位置に第1の反射板および第2の反射板を設け、
上記回転物体を回転させ、該回転物体の回転に伴って、上記第1の複数のセンサにより、上記誘電体レンズおよび上記第1の反射板により結像される第1の被写体像をスキャンし、上記第2の複数のセンサにより、上記誘電体レンズおよび上記第2の反射板により結像される第2の被写体像をスキャンし、
上記回転物体の回転位置を検出し、該回転位置の検出信号に基づいて、上記第1の複数のセンサの出力信号より上記第1の被写体像上の各画素の信号を取得し、上記第2の複数のセンサの出力信号より、上記第2の被写体像上の各画素の信号を取得する
イメージング方法。
【請求項7】
被写体からのミリ波またはサブミリ波を収束して被写体像を結像する誘電体レンズと、
上記誘電体レンズにより結像される上記被写体像を撮像する撮像部とを備え、
上記撮像部は、
上記誘電体レンズの光軸に対して垂直な回転軸を持つ回転物体と、
上記回転物体を、上記回転軸を中心に回転させる回転機構部と、
上記回転物体の回転面に配置され、該回転物体の回転に伴って、上記誘電体レンズにより有効範囲に結像される被写体像をスキャンする複数のセンサと、
上記回転物体の回転位置を検出する回転位置検出部と、
上記回転物体に近接し、上記有効範囲とは異なる位置に配置され、一定レベル値のミリ波またはサブミリ波を発生する校正用物体と、
上記回転位置検出部で得られる回転位置検出信号に基づいて、上記複数のセンサの出力信号より、上記誘電体レンズにより結像される被写体像上の各画素の信号を取得する画素信号取得部と、
上記回転位置検出部で得られる回転位置検出信号に基づいて、上記複数のセンサの出力信号より、上記構成用物体が発生するミリ波またはサブミリ波を測定した校正用信号を取得し、該校正用信号に基づいて上記複数のセンサの出力信号を校正する出力信号校正部とを有する
イメージング装置。
【請求項8】
誘電体レンズの光軸に対して垂直な回転軸を持つ回転物体の回転面に複数のセンサを配置し、
上記回転物体に近接して、一定レベル値のミリ波またはサブミリ波を発生する校正用物体を設け、
上記回転物体を回転させ、該回転物体の回転に伴って、上記複数のセンサにより、上記誘電体レンズにより結像される被写体像をスキャンし、
上記回転物体の回転位置に基づいて、上記複数のセンサの出力信号より、上記誘電体レンズにより結像される被写体像上の各画素の信号を取得し、
上記回転物体の回転位置に基づいて、上記複数のセンサの出力信号より、上記校正用物体が発生するミリ波またはサブミリ波を測定した校正用信号を取得し、該校正用信号に基づいて上記複数のセンサの出力信号を校正する
イメージング方法。
【請求項1】
被写体からのミリ波またはサブミリ波を収束して被写体像を結像する誘電体レンズと、
上記誘電体レンズにより結像される上記被写体像を撮像する撮像部とを備え、
上記撮像部は、
上記誘電体レンズの光軸に対して垂直な回転軸を持つ回転物体と、
上記回転物体を、上記回転軸を中心に回転させる回転機構部と、
上記誘電体レンズで収束されたミリ波またはサブミリ波を上記回転物体側に反射する反射板と、
上記回転物体の回転面に配置され、該回転物体の回転に伴って、上記誘電体レンズにより結像される第1の被写体像をスキャンする第1の複数のセンサと、
上記回転物体の回転面に配置され、該回転物体の回転に伴って、上記誘電体レンズおよび上記反射板により結像される第2の被写体像をスキャンする第2の複数のセンサと、
上記回転物体の回転位置を検出する回転位置検出部と、
上記回転位置検出部で得られる回転位置検出信号に基づいて、上記第1の複数のセンサの出力信号より、上記第1の被写体像上の各画素の信号を取得し、上記第2の複数のセンサの出力信号より、上記第2の被写体像上の各画素の信号を取得する画素信号取得部とを有する
イメージング装置。
【請求項2】
誘電体レンズの光軸に対して垂直な回転軸を持つ回転物体の回転面の互いに異なる円周方向の位置に、第1の複数のセンサおよび第2の複数のセンサを配置し、
上記誘電体レンズで収束されたミリ波またはサブミリ波を上記回転物体側に反射する反射板を設け、
上記回転物体を回転させ、該回転物体の回転に伴って、上記第1の複数のセンサにより、上記誘電体レンズにより結像される第1の被写体像をスキャンし、上記第2の複数のセンサにより、上記誘電体レンズおよび上記反射板により結像される第2の被写体像をスキャンし、
上記回転物体の回転位置を検出し、該回転位置の検出信号に基づいて、上記第1の複数のセンサの出力信号より上記第1の被写体像上の各画素の信号を取得し、上記第2の複数のセンサの出力信号より上記第2の被写体像上の各画素の信号を取得する
イメージング方法。
【請求項3】
被写体からのミリ波またはサブミリ波を収束して被写体像を結像する誘電体レンズと、
上記誘電体レンズにより結像される上記被写体像を撮像する撮像部とを備え、
上記撮像部は、
上記誘電体レンズの光軸に対して垂直な回転軸を持つ回転物体と、
上記回転物体を、上記回転軸を中心に回転させる回転機構部と、
上記回転物体の回転軸に対し、上記誘電体レンズの光軸と直交する互いに逆方向の位置に設けられ、上記誘電体レンズで収束されたミリ波またはサブミリ波を上記回転物体側に反射する第1の反射板および第2の反射板と、
上記回転物体の回転面に配置され、該回転物体の回転に伴って、上記誘電体レンズおよび上記第1の反射板により結像される第1の被写体像をスキャンする第1の複数のセンサと、
上記回転物体の回転面に配置され、該回転物体の回転に伴って、上記誘電体レンズおよび上記第2の反射板により結像される第2の被写体像をスキャンする第2の複数のセンサと、
上記回転物体の回転位置を検出する回転位置検出部と、
上記回転位置検出部で得られる回転位置検出信号に基づいて、上記第1の複数のセンサの出力信号より、上記第1の被写体像上の各画素の信号を取得し、上記第2の複数のセンサの出力信号より、上記第2の被写体像上の各画素の信号を取得する画素信号取得部とを有する
イメージング装置。
【請求項4】
上記誘電体レンズは、上記第1の被写体像を結像させるための第1の誘電体レンズと、上記第2の被写体像を結像させるための第2の誘電体レンズとからなる
請求項3に記載のイメージング装置。
【請求項5】
上記撮像部は、
上記画素信号取得部で取得された上記第1の被写体像上の各画素の信号および上記第2の被写体像上の各画素の信号に基づいて、各画素の視差を求め、被写体上の各画素までの距離を判別する距離判別部をさらに有する
請求項3に記載のイメージング装置。
【請求項6】
誘電体レンズの光軸に対して垂直な回転軸を持つ回転物体の回転面の互いに異なる円周方向の位置に第1の複数のセンサおよび第2の複数のセンサを配置し、
上記回転物体の回転軸に対し、上記誘電体レンズの光軸と直交する互いに逆方向の位置に第1の反射板および第2の反射板を設け、
上記回転物体を回転させ、該回転物体の回転に伴って、上記第1の複数のセンサにより、上記誘電体レンズおよび上記第1の反射板により結像される第1の被写体像をスキャンし、上記第2の複数のセンサにより、上記誘電体レンズおよび上記第2の反射板により結像される第2の被写体像をスキャンし、
上記回転物体の回転位置を検出し、該回転位置の検出信号に基づいて、上記第1の複数のセンサの出力信号より上記第1の被写体像上の各画素の信号を取得し、上記第2の複数のセンサの出力信号より、上記第2の被写体像上の各画素の信号を取得する
イメージング方法。
【請求項7】
被写体からのミリ波またはサブミリ波を収束して被写体像を結像する誘電体レンズと、
上記誘電体レンズにより結像される上記被写体像を撮像する撮像部とを備え、
上記撮像部は、
上記誘電体レンズの光軸に対して垂直な回転軸を持つ回転物体と、
上記回転物体を、上記回転軸を中心に回転させる回転機構部と、
上記回転物体の回転面に配置され、該回転物体の回転に伴って、上記誘電体レンズにより有効範囲に結像される被写体像をスキャンする複数のセンサと、
上記回転物体の回転位置を検出する回転位置検出部と、
上記回転物体に近接し、上記有効範囲とは異なる位置に配置され、一定レベル値のミリ波またはサブミリ波を発生する校正用物体と、
上記回転位置検出部で得られる回転位置検出信号に基づいて、上記複数のセンサの出力信号より、上記誘電体レンズにより結像される被写体像上の各画素の信号を取得する画素信号取得部と、
上記回転位置検出部で得られる回転位置検出信号に基づいて、上記複数のセンサの出力信号より、上記構成用物体が発生するミリ波またはサブミリ波を測定した校正用信号を取得し、該校正用信号に基づいて上記複数のセンサの出力信号を校正する出力信号校正部とを有する
イメージング装置。
【請求項8】
誘電体レンズの光軸に対して垂直な回転軸を持つ回転物体の回転面に複数のセンサを配置し、
上記回転物体に近接して、一定レベル値のミリ波またはサブミリ波を発生する校正用物体を設け、
上記回転物体を回転させ、該回転物体の回転に伴って、上記複数のセンサにより、上記誘電体レンズにより結像される被写体像をスキャンし、
上記回転物体の回転位置に基づいて、上記複数のセンサの出力信号より、上記誘電体レンズにより結像される被写体像上の各画素の信号を取得し、
上記回転物体の回転位置に基づいて、上記複数のセンサの出力信号より、上記校正用物体が発生するミリ波またはサブミリ波を測定した校正用信号を取得し、該校正用信号に基づいて上記複数のセンサの出力信号を校正する
イメージング方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図12】
【公開番号】特開2011−242229(P2011−242229A)
【公開日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願番号】特願2010−113897(P2010−113897)
【出願日】平成22年5月18日(2010.5.18)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願日】平成22年5月18日(2010.5.18)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]