
インクジェットプリンタ

【課題】搬送ベルトとプリンタ本体とが別々になっても搬送ベルトの動作履歴が分かり易いインクジェットプリンタを提供する。
【解決手段】磁気記録ヘッドによって、搬送ベルトに形成された磁気記録層に所定のパターンの磁極の変化からなる磁気パターンを記録すると共にその一部分に搬送ベルトの動作履歴、例えば回転回数からなる記録内容を記録する。記録方式は、例えば磁気パターン部分を論理値0とし、記録内容を論理値1と論理値0の組合せとして磁極の変化の仕方の違いで表す。例えば、一定の周期で磁極が変化するパターンを磁気パターン=論理値0とした場合、その整数分の一の周期で磁極が変化するパターンを論理値1として搬送ベルトの磁気記録層に記録する。同様にして、磁気再生用ヘッドで読込めば、搬送ベルトを他のプリンタ本体に移植した場合でも搬送ベルトの動作履歴が容易に分かる。
【解決手段】磁気記録ヘッドによって、搬送ベルトに形成された磁気記録層に所定のパターンの磁極の変化からなる磁気パターンを記録すると共にその一部分に搬送ベルトの動作履歴、例えば回転回数からなる記録内容を記録する。記録方式は、例えば磁気パターン部分を論理値0とし、記録内容を論理値1と論理値0の組合せとして磁極の変化の仕方の違いで表す。例えば、一定の周期で磁極が変化するパターンを磁気パターン=論理値0とした場合、その整数分の一の周期で磁極が変化するパターンを論理値1として搬送ベルトの磁気記録層に記録する。同様にして、磁気再生用ヘッドで読込めば、搬送ベルトを他のプリンタ本体に移植した場合でも搬送ベルトの動作履歴が容易に分かる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば複数色の液体インクの微小なインク滴を複数のノズルから吐出してその微粒子(インクドット)を印刷媒体上に形成することにより、所定の文字や画像を描画するようにしたインクジェットプリンタに関するものである。
【背景技術】
【0002】
このようなインクジェットプリンタは、一般に安価で且つ高品質のカラー印刷物が容易に得られることから、パーソナルコンピュータやデジタルカメラなどの普及に伴い、オフィスのみならず一般ユーザにも広く普及してきている。
このようなインクジェットプリンタは、一般に、インクカートリッジと印字ヘッドとが一体的に備えられたキャリッジなどと称される移動体が印刷媒体上をその搬送方向と交差する方向に往復しながらその印字ヘッドのノズルから液体インク滴を吐出(噴射)して印刷媒体上に微小なインクドットを形成することで、当該印刷媒体上に所定の文字や画像を描画して所望の印刷物を作成するようになっている。そして、このキャリッジに黒色(ブラック)を含めた4色(イエロー、マゼンタ、シアン)のインクカートリッジと各色毎の印字ヘッドを備えることで、モノクロ印刷のみならず、各色を組み合わせたフルカラー印刷も容易に行えるようになっている(更に、これらの各色に、ライトシアンやライトマゼンタなどを加えた6色や7色、或いは8色のものも実用化されている)。
【0003】
また、このようにキャリッジ上のインクジェットヘッドを印刷媒体の搬送方向と交差する方向に往復させながら印刷を実行するようにしたタイプのインクジェットプリンタでは、1頁全体をきれいに印刷するためにインクジェットヘッドを10回程度から数十回以上も往復運動させる必要がある。これに対し、印刷媒体の幅と同じ寸法の長尺のインクジェットヘッド(一体である必要はない)を配置してキャリッジを使用しないタイプのインクジェットプリンタでは、インクジェットヘッドを印刷媒体の幅方向に移動させる必要がなく、所謂1パスでの印刷が可能となるため、レーザプリンタと同様な高速な印刷が可能となる。なお、前者方式のインクジェットプリンタを一般に「マルチパス(シリアル)型インクジェットプリンタ」、後者方式のインクジェットプリンタを一般に「ラインヘッド型インクジェットプリンタ」と呼んでいる。
【0004】
ところで、この種のラインヘッド型インクジェットプリンタでは、搬送用の搬送ベルトに印刷媒体を載置して搬送する構成がよく用いられている。このように搬送ベルトに印刷媒体を載置して搬送し、その搬送される印刷媒体にインクジェットヘッドからインク滴を吐出して高画質な印刷を行うためには印刷媒体の位置を正確に検出する必要がある。そのため、一般的には、搬送ベルトにリニアスケールなどの移動量や移動速度といった移動状態検出用マークを設け、そのマークをエンコーダで読み取って搬送ベルトの位置を検出し、その搬送ベルトの位置から印刷媒体の位置を検出する。
【0005】
搬送ベルトは、経年劣化によって、ベルトの歪みや、インクなどによる汚損が生じるため、所定の期間、例えば所定印刷枚数が経過したら、交換する必要がある。そこで、従来のインクジェットプリンタでは、搬送ベルトの使用期間が所定期間、例えば所定印刷枚数になったら、或いは搬送ベルトの回転数(回転回数)が所定回転数になったら、搬送ベルト交換時期のメッセージを表示するようにしている。また、下記特許文献1に挙げるインクジェットプリンタでは、搬送ベルトの動作履歴を制御回路中の不揮発性メモリに記録するようにしている。
【特許文献1】特開昭63−173677号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、前記特許文献1に記載される従来のインクジェットプリンタでは、制御回路中の不揮発性メモリに搬送ベルトの動作履歴を記録しているだけであるため、制御回路、即ちプリンタ本体と搬送ベルトが別々になってしまうと、搬送ベルトの動作履歴が分かりにくいという不具合が生じる。例えば、プリンタ本体に不具合が生じ、搬送ベルトだけを他のプリンタ本体に移植して使用するような場合、搬送ベルトの動作履歴をメモなどで記録し、そのメモを見ながら他のプリンタ本体の制御回路の不揮発性メモリに搬送ベルトの動作履歴を記録し直すなどの手間が生じる。
本発明は、上記のような問題点に着目してなされたものであり、搬送ベルトとプリンタ本体とが別々になっても搬送ベルトの動作履歴が分かり易いインクジェットプリンタを提供することを目的とするものである。
【課題を解決するための手段】
【0007】
[発明1]上記課題を解決するために、発明1のインクジェットプリンタは、搬送ベルトの表面に印刷媒体を載置して搬送し、その印刷媒体にインクジェットヘッドからインク滴を出して印刷を行うインクジェットプリンタにおいて、前記搬送ベルトの移動方向に沿って当該搬送ベルトに連続して形成された磁気記録層と、前記搬送ベルトの磁気記録層に対向して配設され且つ当該磁気記録層の記録内容を再生する磁気再生用ヘッドと、前記搬送ベルトの磁気記録層に対向して配設され且つ当該磁気記録層に記録する磁気記録ヘッドとを備えたことを特徴とするものである。
【0008】
この発明1に係るインクジェットプリンタによれば、搬送ベルトの移動方向に沿って当該搬送ベルトに連続して形成された磁気記録層と、搬送ベルトの磁気記録層に対向して配設され且つ当該磁気記録層の記録内容を再生する磁気再生用ヘッドと、搬送ベルトの磁気記録層に対向して配設され且つ当該磁気記録層に記録する磁気記録ヘッドとを備えたことにより、例えば搬送ベルトの動作履歴を磁気記録ヘッドによって当該搬送ベルトの磁気記録層に記録することができ、これにより搬送ベルトとプリンタ本体とが別々になっても搬送ベルトの動作履歴が分かり易い。
【0009】
[発明2]また、発明2のインクジェットプリンタは、前記発明1のインクジェットプリンタにおいて、前記搬送ベルトの動作履歴を検出する搬送ベルト動作履歴検出手段と、前記磁気記録ヘッドによる磁気記録層への記録内容を制御する制御手段とを備え、前記制御手段は、前記搬送ベルト動作履歴検出手段で検出された搬送ベルトの動作履歴を記録内容として磁気記録ヘッドによって磁気記録層に記録することを特徴とするものである。
この発明2に係るインクジェットプリンタによれば、搬送ベルト動作履歴検出手段で検出された搬送ベルトの動作履歴を記録内容として磁気記録ヘッドによって磁気記録層に記録する構成としたため、搬送ベルトとプリンタ本体とが別々になっても搬送ベルトの動作履歴が分かり易い。
【0010】
[発明3]また、発明3のインクジェットプリンタは、前記発明2のインクジェットプリンタにおいて、前記制御手段は、前記磁気記録層のうち、搬送ベルトの動作履歴からなる記録内容以外の部分に、搬送ベルトの駆動系又は回転系から得られるエンコーダ信号を基準信号として、所定のパターンの磁極の変化からなる磁気パターンを前記磁気記録ヘッドにより記録することを特徴とするものである。
【0011】
この発明3に係るインクジェットプリンタによれば、磁気記録層のうち、搬送ベルトの動作履歴からなる記録内容以外の部分に所定のパターンの磁極の変化からなる磁気パターンを記録することにより、搬送ベルトの動作履歴からなる記録内容の部分が明確になると共に、搬送ベルトの駆動系又は回転系から得られるエンコーダ信号を基準信号として、所定のパターンの磁極の変化からなる磁気パターンを磁気記録層に記録することにより、所定のパターンにおける磁気記録層上の磁極の変化の記録長さを一定にすることができる。
【0012】
[発明4]また、発明4のインクジェットプリンタは、前記発明3のインクジェットプリンタにおいて、前記所定のパターンの磁極の変化からなる磁気パターンが、所定の記録ピッチで磁極を変化させるものである場合、前記搬送ベルトの動作履歴からなる記録内容が、前記所定の記録ピッチの整数分の一の記録ピッチで磁極を変化させるものであることを特徴とするものである。
【0013】
この発明4に係るインクジェットプリンタによれば、所定のパターンの磁極の変化からなる磁気パターンが、所定の記録ピッチで磁極を変化させるものである場合、搬送ベルトの動作履歴からなる記録内容が、所定の記録ピッチの整数分の一の記録ピッチで磁極を変化させるものであることとしたため、搬送ベルトの動作履歴からなる記録内容を検出するのが容易となり、発明を実施化し易い。
【0014】
[発明5]また、発明5のインクジェットプリンタは、前記発明3のインクジェットプリンタにおいて、前記所定のパターンの磁極の変化からなる磁気パターンが、磁極変化の一周期における一方の磁極の記録長を一定とするものである場合、前記搬送ベルトの動作履歴からなる記録内容が、前記磁極変化の一周期における一方の磁極の記録長を異なるものとするものであることを特徴とするものである。
【0015】
この発明5に係るインクジェットプリンタによれば、所定のパターンの磁極の変化からなる磁気パターンが、磁極変化の一周期における一方の磁極の記録長を一定とするものである場合、搬送ベルトの動作履歴からなる記録内容が、磁極変化の一周期における一方の磁極の記録長を異なるものとするものであることとしたため、搬送ベルトの動作履歴からなる記録内容を検出するのが容易となり、発明を実施化し易い。
【0016】
[発明6]また、発明6のインクジェットプリンタは、前記発明3乃至5のインクジェットプリンタにおいて、前記制御手段が、磁気再生用ヘッドで再生された磁気記録層の記録内容を検出するものである場合、前記磁気再生用ヘッドで再生された磁気記録層の記録内容のうち、前記所定のパターンの磁極の変化からなる磁気パターンと異なる磁極の変化からなる記録内容から搬送ベルトの動作履歴を検出することを特徴とするものである。
【0017】
この発明6に係るインクジェットプリンタによれば、磁気再生用ヘッドで再生された磁気記録層の記録内容を検出するものである場合、磁気再生用ヘッドで再生された磁気記録層の記録内容のうち、所定のパターンの磁極の変化からなる磁気パターンと異なる磁極の変化からなる記録内容から搬送ベルトの動作履歴を検出する構成としたため、搬送ベルトだけを他のプリンタ本体に移植して使用するような場合であっても、搬送ベルトの動作履歴が分かり易い。
【発明を実施するための最良の形態】
【0018】
次に、本発明のシート搬送装置をインクジェットプリンタに適用した一実施形態について図面を参照しながら説明する。
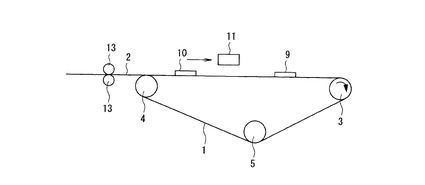
図1は、本実施形態のインクジェットプリンタの概略構成を示す正面図であり、図2は、その平面図である。図中の符号1は、印刷用紙等の印刷媒体2を搬送するための無端搬送ベルトである。この搬送ベルト1は、絶縁性ベルトであり、PETやポリイミド、フッ素系樹脂などの絶縁性樹脂で構成される。この搬送ベルト1は、図1の右端部に配設された駆動ローラ3と、図1の左端部に配設された従動ローラ4と、それらの中央部下方に配設されたテンションローラ5とに巻回されている。駆動ローラ3は、図2に示す駆動ローラモータ7によって図1の矢印方向に回転駆動され、図示しない帯電ローラなどの帯電手段で帯電された搬送ベルト1に印刷媒体2を静電吸着させ、その状態で、当該印刷媒体2を図の左方から右方に、つまり矢印方向に搬送する。従動ローラ4は、図示しない帯電ローラなどの帯電手段の当接部分との間に搬送ベルト1を挟持して電圧を印加するために接地されている。テンションローラ5は、図示しないバネによって下方に付勢されており、これにより搬送ベルト1に張力を付与している。
【0019】
搬送ベルト1には、従動ローラ4に対向するようにして、帯電手段としての図示しない帯電ローラが当接されており、帯電ローラには交流電源が接続されている。この帯電ローラの配置は、印刷媒体の給紙位置の直前に相当する。従って、この帯電ローラに所定の周期で反転する電位の電流を付与すると、搬送ベルト1の表面が搬送方向に沿って交互に逆の電位に帯電(縞状帯電)され、夫々の電荷によって印刷媒体2に誘電分極を発生させ、その誘電分極による印刷媒体2の電荷と搬送ベルト1の表面の電荷及び隣り合う搬送ベルト1の表面の電荷と印刷媒体2の電荷とを含む閉回路を構成して静電気力が発生し、印刷媒体2を搬送ベルト1の表面に吸着する。なお、帯電パターンは、印刷媒体2搬送方向に交互な縞状以外にも、例えば印刷媒体2搬送方向と交差方向に交互な縞状や、市松状などであってもよい。
【0020】
従動ローラ4の印刷媒体2搬送方向上流側にはゲートローラ13が配設されている。このゲートローラ13は、給紙部14から給紙された印刷媒体2を搬送ベルト1上に送給するタイミングを調整すると共に印刷媒体2の搬送方向に対する曲がり、所謂スキューを補正する。ゲートローラ13は、図示しないゲートローラモータによって回転駆動される。印刷媒体2は、回転していないゲートローラ13のニップ部(接合部)に当接し、更に搬送されることによって撓み、そのたわみを解放することでスキューが補正され、スキュー補正後にゲートローラモータによってゲートローラ13を回転駆動して印刷媒体2を搬送ベルト1上の所定位置に搬送する。
【0021】
搬送ベルト1の所定位置に搬送され、前述した静電気力により搬送ベルト1に印刷媒体2を吸着した状態で搬送方向下流側の印刷領域に搬送される。印刷領域にはインクジェットヘッド11が配設されており、印刷媒体2がインクジェットヘッド11の印刷媒体搬送方向最上流のノズル位置まで搬送されたら、インクジェットヘッド11のノズルから各種インクのインク滴を吐出して印刷を行う。
【0022】
このインクジェットヘッド11は、イエロー(Y)、マゼンダ(M)、シアン(C)、ライトマゼンダ(Lm)、ライトシアン(Lc)、ブラック(K)の6色の各色毎に、印刷媒体2の搬送方向にノズル列をずらして配設されている。各インクジェットヘッド11には、図示しない各色のインクタンクからインク供給チューブを介してインクが供給される。各インクジェットヘッド11には、印刷媒体2の搬送方向と交差する方向に、複数のノズルが形成されており、それらのノズルから同時に必要箇所に必要量のインク滴を吐出することにより、印刷媒体2上に微小なインクドットを形成出力する。これを各色毎に行うことにより、搬送ベルト1に吸着された印刷媒体2を一度通過させるだけで、所謂ワンパスによる印刷を行うことができる。即ち、このインクジェットヘッド11の配設領域が印字領域に相当する。
【0023】
インクジェットヘッドの各ノズルからインクを吐出出力する方法としては、静電方式、ピエゾ方式、膜沸騰インクジェット方式などがある。静電方式は、アクチュエータである静電ギャップに駆動信号を与えると、キャビティ内の振動板が変位してキャビティ内に圧力変化を生じ、その圧力変化によってインク滴がノズルから吐出出力されるというものである。ピエゾ方式は、アクチュエータであるピエゾ素子に駆動信号を与えると、キャビティ内の振動板が変位してキャビティ内に圧力変化を生じ、その圧力変化によってインク滴がノズルから吐出出力されるというものである。膜沸騰インクジェット方式は、キャビティ内に微小ヒータがあり、瞬間的に300℃以上に加熱されてインクが膜沸騰状態となって気泡が生成し、その圧力変化によってインク滴がノズルから吐出出力されるというものである。本発明は、何れのインク出力方法も適用可能である。
【0024】
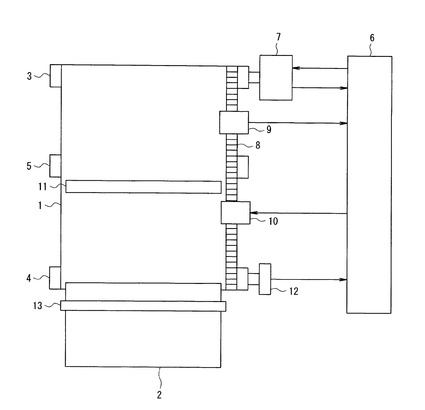
搬送ベルト1の印刷媒体搬送方向と交差する方向の一方の端部には磁気記録層8が形成されている。この磁気記録層8は、搬送ベルト1の一方の端部に、印刷媒体搬送方向に沿って連続して形成されており、この磁気記録層8に接触式の磁気再生用ヘッド9及び磁気記録ヘッド10が当接されている。本実施形態の磁気記録ヘッド10は、磁気記録層8に搬送ベルト1の動作履歴、例えば回転数(回転回数)を記録し、磁気再生用ヘッド9で、その記録内容を再生する。また、従動ローラ4には、搬送ベルト1の回転系としてロータリエンコーダ12が設けられており、このロータリエンコーダ12からのエンコーダ信号に従って、磁気記録層8への記録が制御装置6で制御され、磁気記録層8の記録内容が制御装置6で検出される。なお、インクジェットヘッド11からインク滴を印刷媒体2に吐出して行われる印刷制御は、ロータリエンコーダ12からの搬送ベルト移動情報に基づいて行われる。また、搬送ベルト1の回転系に設けるロータリエンコーダ12に代えて、搬送ベルト1の駆動系であるモータエンコーダを用いてもよい。また、本実施形態では、後述するように、磁気記録層8のほぼ全周にわたって記録される所定のパターンの磁気変化を磁気再生用ヘッド9で再生し、その所定のパターンの移動状態から搬送ベルト1の移動状態を推定すれば、これを用いて印刷制御を行うことも可能である。
【0025】
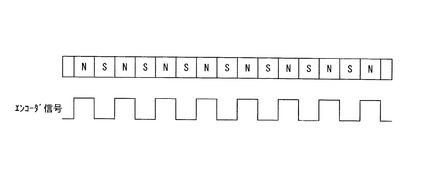
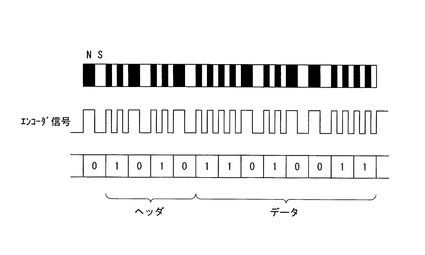
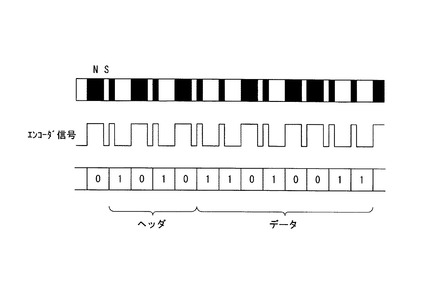
図3には、本実施形態で前記磁気記録層8に記録する磁気パターンを示す。この磁気パターンは、搬送ベルト1の磁気記録層8のほぼ全周にわたって記録されるものであり、所定のパターンの磁極変化からなる。この所定のパターンの磁気変化は、所定の記録ピッチで磁極を変化させるものであり、N極、S極、夫々の磁極を所定の記録ピッチ(記録長)で変化させるものである。この図3の磁気パターンが所定のパターンの磁極の変化からなるものであるとすると、この磁気パターンが記録されていない磁気記録層8の一部分に搬送ベルト1の動作履歴を記録する。
【0026】
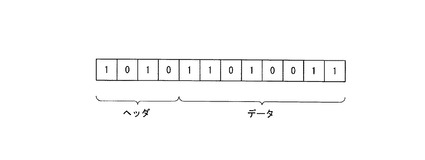
図4は、本実施形態における搬送ベルト1の動作履歴を示すデータであり、4bitのヘッダと、8ビットのデータからなる。本実施形態では、前記図3のように、N極、S極、夫々の磁極が所定の記録ピッチで変化するものを論理値0とする。一方、図5に示すように、前記図3の所定の記録ピッチの整数分の一(この場合は2分の一)の記録ピッチで磁極(N極、S極)が変化するものを論理値1とする。従って、例えば図3の所定のパターンの磁極の変化からなる磁気パターン(記録内容)に対して、N極で磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)がHiレベルとなり、S極でLowレベルになるような場合に、所定のピッチで磁極(N極、S極)が変化したら論理値0と判定し、その所定の記録ピッチの整数分の位置の記録ピッチで磁極(N極、S極)が変化したら論理値1と判定すればよい。
【0027】
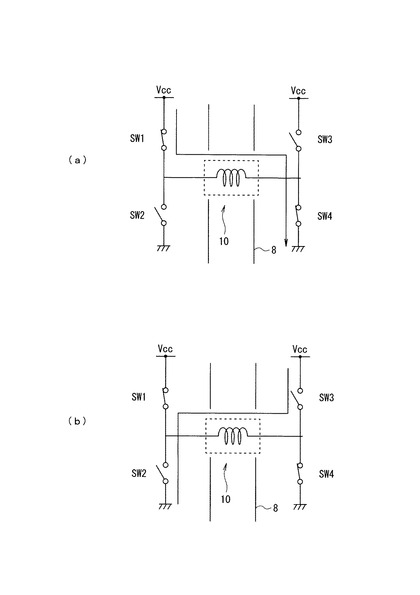
磁気記録ヘッド10による磁極(N極、S極)の記録方法を図6に示す。本実施形態では、コイルからなる磁気記録ヘッド10に対して4つのスイッチSW1〜SW4をH型ブリッジ状に配設する。例えば、第1スイッチSW1を磁気記録ヘッド10の左上側の電源Vccとの間に配設し、第2スイッチSW2を磁気記録ヘッド10の左下側の接地との間に配設し、第3スイッチSW3を磁気記録ヘッド10の右上側の電源Vccとの間に配設し、第4スイッチSW4を磁気記録ヘッド10の右下側の接地との間に配設し、図6aに示すように第1スイッチSW1と第4スイッチSW4とを閉じると磁気記録ヘッド10に図示右向きの電流が流れて磁気記録層8がN極に磁性され、図6bに示すように第2スイッチSW2と第3スイッチSW3とを閉じると磁気記録ヘッド10に図示左向きの電流が流れて磁気記録層8がS極に磁性される。
【0028】
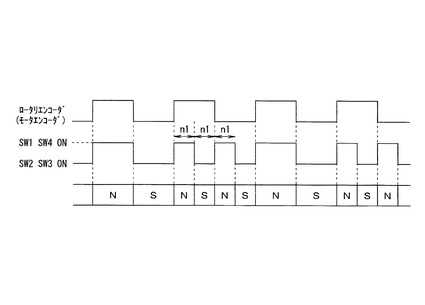
搬送ベルト1の動作履歴、具体的には回転回数からなるデータの具体的な記録方法について説明する。前述したヘッダ4bit、データ8bitの搬送ベルト1の動作履歴は、例えば図7に示すD0〜D11の12bitのビットを有するシフトレジスタに格納されている。このシフトレジスタでは、読出しはD0のビットから、書込みはD11のビットから夫々行う。一方、磁気記録ヘッド10は、通常は、図8に示すように、ロータリエンコーダ12(駆動ローラモータ7からエンコーダ信号を得る場合にはモータエンコーダ)の出力信号(以下、単にロータリエンコーダ或いはモータエンコーダと示す)がHiレベルにあるときに第1スイッチSW1及び第4スイッチSW4をONし且つ第2スイッチSW2及び第3スイッチSW3をOFFして磁気記録層8をN極に磁性し、ロータリエンコーダ(モータエンコーダ)がLowレベルにあるときに第1スイッチSW1及び第4スイッチSW4をOFFし且つ第2スイッチSW2及び第3スイッチSW3をONして磁気記録層8をS極に磁性する。即ち、通常状態では磁気記録層8は論理値0が連続して記録されていることになる。また、ロータリエンコーダ(モータエンコーダ)と同期して、所定のパターンの磁極の変化からなる磁気パターンを記録することにより、夫々の磁極の記録ピッチ(記録長)を一定にすることができる。即ち、ロータリエンコーダ(モータエンコーダ)は従動ローラ4の回転軸(又は駆動モータ7の駆動軸)の回転角と等価であり、それら回転軸(又は駆動軸)の回転角は搬送ベルト1の移動量と等価であるため、ロータリエンコーダ(モータエンコーダ)と同期して磁気パターンを記録すれば磁極の記録ピッチ(記録長)が一定になる。
【0029】
そして、搬送ベルト1の搬送速度が一定になったらシフトレジスタのD0のビットデータを読出した後、シフトレジスタのデータをシフトする。例えば、読出したD0のビットデータが1である場合には、ロータリエンコーダ(モータエンコーダ)の立上がりと同時に第1スイッチSW1及び第4スイッチSW4をONし且つ第2スイッチSW2及び第3スイッチSW3をOFFして磁気記録層8をN極に磁性すると共にタイマーを起動する。そして、タイマーの値がロータリエンコーダ(モータエンコーダ)の周期の4分の一に相当する所定値n1になったら、第1スイッチSW1及び第4スイッチSW4をOFFし且つ第2スイッチSW2及び第3スイッチSW3をONして磁気記録層8をS極に磁性する。次いで、タイマーの値が所定値n1の2倍になったら第1スイッチSW1及び第4スイッチSW4をONし且つ第2スイッチSW2及び第3スイッチSW3をOFFして磁気記録層8をN極に磁性し、タイマーの値が所定値n1の3倍になったら第1スイッチSW1及び第4スイッチSW4をOFFし且つ第2スイッチSW2及び第3スイッチSW3をONして磁気記録層8をS極に磁性する。読出したビットデータが0である場合には、前述のようにロータリエンコーダ(モータエンコーダ)と同期して磁気記録層8を磁性する。
【0030】
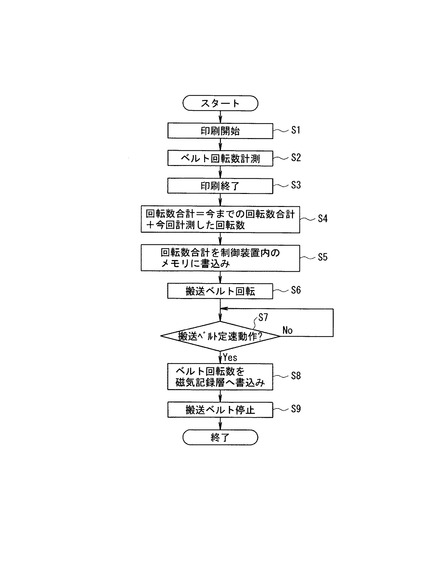
図9は、図2の制御装置6内で行われる搬送ベルト1の動作履歴の磁気記録層8への記録のためのジェネリックな演算処理を示すフローチャートであり、印刷指令と同時に開始される。この演算処理では、まずステップS1で、個別の演算処理により印刷制御を開始する。
次にステップS2に移行して、搬送ベルト1の回転数(回転回数)を計測する。
次にステップS3に移行して、個別の演算処理による印刷制御を終了する。
【0031】
次にステップS4に移行して、今回計測した搬送ベルト1の回転数(回転回数)を今までの回転数(回転回数)合計値に加算して新たな搬送ベルト1の回転数(回転回数)の合計値を算出する。
次にステップS5に移行して、ステップS4で算出された新たな搬送ベルト1の回転数(回転回数)の合計値を制御装置6内のメモリ(シフトレジスタとは異なる)に書込む。
次にステップS6に移行して、駆動ローラモータ7を回転駆動して搬送ベルト1を回転(移動)させる。
【0032】
次にステップS7に移行して、搬送ベルト1が一定速度(図では定速)の状態になったか否かを判定し、搬送ベルト1が一定速度状態になった場合にはステップS8に移行し、そうでない場合には待機する。
ステップS8では、後述する図10の演算処理に従って、搬送ベルト1の回転数(回転回数)の合計値を磁気記録層8に記録する。
次にステップS9に移行して、駆動ローラモータ7を停止することにより搬送ベルト1を停止してからメインプログラムに復帰する。
【0033】
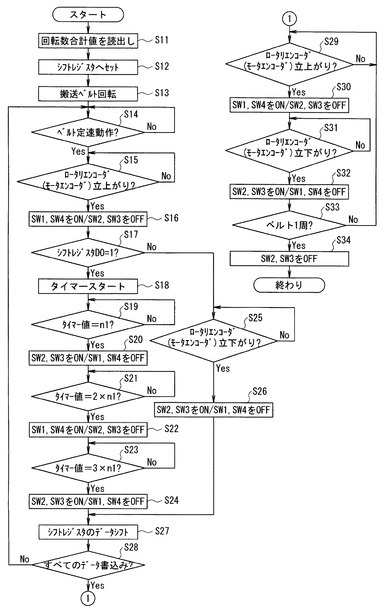
次に、図9の演算処理のステップS8で行われる図10の演算処理について説明する。
この演算処理では、まずステップS11で、搬送ベルト1の回転数(回転回数)の合計値を読出す。
次にステップS12に移行して、ステップS11で読出した搬送ベルト1の回転数(回転回数)の合計値をシフトレジスタに格納する。
次にステップS13に移行して、駆動ローラモータ7を回転駆動して搬送ベルト1を回転(移動)させる。
【0034】
次にステップS14に移行して、搬送ベルト1が一定速度(図では定速)の状態になったか否かを判定し、搬送ベルト1が一定速度状態になった場合にはステップS15に移行し、そうでない場合には待機する。
ステップS15では、ロータリエンコーダ(モータエンコーダ)の立上がりであるか否かを判定し、ロータリエンコーダ(モータエンコーダ)の立上がりである場合にはステップS16に移行し、そうでない場合には待機する。
【0035】
ステップS16では、第1スイッチSW1及び第4スイッチSW4をONし且つ第2スイッチSW2及び第3スイッチSW3をOFFして磁気記録層8をN極に磁性する。
次にステップS17に移行して、シフトレジスタのD0のビットデータが1であるか否かを判定し、シフトレジスタのD0のビットデータが1である場合にはステップS18に移行し、そうでない場合にはステップS25に移行する。
【0036】
ステップS18では、タイマーのカウントをスタートしてからステップS19に移行する。
ステップS19では、タイマーのカウント値が所定値n1であるか否かを判定し、タイマーのカウント値が所定値n1である場合にはステップS20に移行し、そうでない場合には待機する。
【0037】
ステップS20では、第1スイッチSW1及び第4スイッチSW4をOFFし且つ第2スイッチSW2及び第3スイッチSW3をONして磁気記録層8をS極に磁性してからステップS21に移行する。
ステップS21では、タイマーのカウント値が所定値n1の2倍値であるか否かを判定し、タイマーのカウント値が所定値n1の2倍値である場合にはステップS22に移行し、そうでない場合には待機する。
【0038】
ステップS22では、第1スイッチSW1及び第4スイッチSW4をONし且つ第2スイッチSW2及び第3スイッチSW3をOFFして磁気記録層8をN極に磁性してからステップS23に移行する。
ステップS23では、タイマーのカウント値が所定値n1の3倍値であるか否かを判定し、タイマーのカウント値が所定値n1の3倍値である場合にはステップS24に移行し、そうでない場合には待機する。
【0039】
ステップS24では、第1スイッチSW1及び第4スイッチSW4をOFFし且つ第2スイッチSW2及び第3スイッチSW3をONして磁気記録層8をS極に磁性してからステップS27に移行する。
一方、ステップS25では、ロータリエンコーダ(モータエンコーダ)の立下がりであるか否かを判定し、ロータリエンコーダ(モータエンコーダ)の立下がりである場合にはステップS26に移行し、そうでない場合には待機する。
【0040】
ステップS26では、第1スイッチSW1及び第4スイッチSW4をOFFし且つ第2スイッチSW2及び第3スイッチSW3をONして磁気記録層8をS極に磁性してからステップS27に移行する。
ステップS27では、シフトレジスタのデータをシフトする。
次にステップS28に移行して、搬送ベルト1の動作履歴、即ち回転数(回転回数)の合計値に関する全てのデータの書込みが終了したか否かを判定し、全てのデータの書込みが終了した場合にはステップS29に移行し、そうでない場合にはステップS15に移行する。
【0041】
ステップS29では、ロータリエンコーダ(モータエンコーダ)の立上がりであるか否かを判定し、ロータリエンコーダ(モータエンコーダ)の立上がりである場合にはステップS30に移行し、そうでない場合には待機する。
ステップS30では、第1スイッチSW1及び第4スイッチSW4をONし且つ第2スイッチSW2及び第3スイッチSW3をOFFして磁気記録層8をN極に磁性する。
【0042】
次にステップS31に移行して、ロータリエンコーダ(モータエンコーダ)の立下がりであるか否かを判定し、ロータリエンコーダ(モータエンコーダ)の立下がりである場合にはステップS32に移行し、そうでない場合には待機する。
ステップS32では、第1スイッチSW1及び第4スイッチSW4をOFFし且つ第2スイッチSW2及び第3スイッチSW3をONして磁気記録層8をS極に磁性する。
【0043】
次にステップS33に移行して、搬送ベルト1が1周したか否かを判定し、搬送ベルト1が1周した場合にはステップS34に移行し、そうでない場合にはステップS29に移行する。
ステップS34では、第2スイッチSW2及び第3スイッチSW3をOFFしてから図9の演算処理のステップS9に移行する。
【0044】
この演算処理によれば、搬送ベルト1の移動状態が一定速度状態になったら、4bitのヘッダと8bitのデータからなる搬送ベルト1の動作履歴、即ち回転数(回転回数)の情報を磁気記録層8に記録し、残りの部分にはロータリエンコーダ(モータエンコーダ)と同じ周期で磁極が変化する所定のパターンの磁気パターンを記録することができる。従って、所定のパターンの磁極の変化からなる磁気パターン以外の部分をデコードすれば、搬送ベルト1の動作履歴、例えば回転数(回転回数)の情報を検出することが可能となる。
【0045】
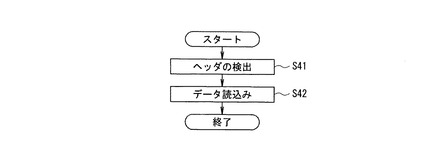
図11は、図2の制御装置6内で行われる磁気記録層8内の搬送ベルト1の動作履歴の読込み(検出)のためのジェネリックな演算処理を示すフローチャートであり、外部からの入力指令と同時に開始される。この演算処理では、まずステップS41で、図12、図13の演算処理により磁気記録層8内のヘッダの検出を行う。
次にステップS42に移行して、磁気記録層8内のデータの読込みを行ってからメインプログラムに復帰する。
【0046】
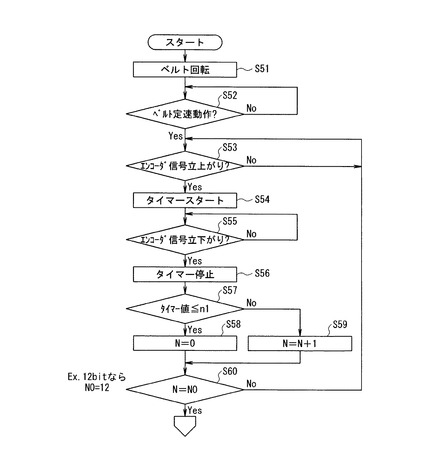
次に、図11の演算処理のステップS41で行われる図12、図13の演算処理について説明する。この演算処理では、まずステップS51で駆動ローラモータ7を回転駆動して搬送ベルト1を回転させる。
次にステップS52に移行して、搬送ベルト1が一定速度(図では定速)の状態になったか否かを判定し、搬送ベルト1が一定速度状態になった場合にはステップS53に移行し、そうでない場合には待機する。
【0047】
ステップS53では、磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)の立上がりか否かを判定し、磁気再生用ヘッド9の出力信号の立上がりである場合にはステップS54に移行し、そうでない場合には待機する。
ステップS54では、タイマーのカウントをスタートする。
次にステップS55に移行して、磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)の立下がりか否かを判定し、磁気再生用ヘッド9の出力信号の立下がりである場合にはステップS56に移行し、そうでない場合には待機する。
【0048】
ステップS56では、タイマーのカウントを停止する。
次にステップS57に移行して、タイマーのカウント値が所定値n1以下であるか否かを判定し、タイマーのカウント値が所定値n1以下である場合にはステップS58に移行し、そうでない場合にはステップS59に移行する。
ステップS58では、カウンタNを0にリセットしてからステップS60に移行する。
ステップS59では、カウンタNをインクリメントしてからステップS60に移行する。
【0049】
ステップS60では、カウンタNが所定値N0であるか否かを判定し、カウンタNが所定値N0である場合にはステップS61(図13)に移行し、そうでない場合にはステップS53に移行する。なお、所定値N0については、例えばヘッダ及びデータの総bit数が12bitである場合には、所定値N0を12とする。ここまでのフローは、論理値0のデータが少なくとも所定値N0個連続している、つまり搬送ベルト1の動作履歴、即ち回転数(回転回数)の情報がないこと、換言すれば搬送ベルト1の動作履歴のデータの途中から読込んでいないことを確認するフローである。
【0050】
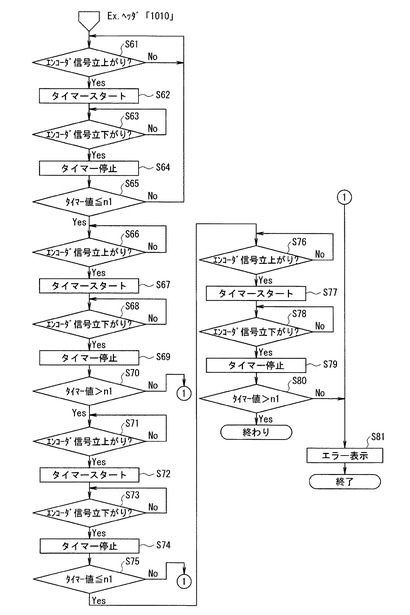
ステップS61では、磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)の立上がりか否かを判定し、磁気再生用ヘッド9の出力信号の立上がりである場合にはステップS62に移行し、そうでない場合には待機する。
ステップS62では、タイマーのカウントをスタートする。
次にステップS63に移行して、磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)の立下がりか否かを判定し、磁気再生用ヘッド9の出力信号の立下がりである場合にはステップS64に移行し、そうでない場合には待機する。
【0051】
ステップS64では、タイマーのカウントを停止する。
次にステップS65に移行して、タイマーのカウント値が所定値n1以下であるか否かを判定し、タイマーのカウント値が所定値n1以下である場合にはステップS66に移行し、そうでない場合にはステップS61に移行する。ここまでのフローは、ヘッダの最初のビットデータである論理値1を検出するフローである。
【0052】
ステップS66では、磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)の立上がりか否かを判定し、磁気再生用ヘッド9の出力信号の立上がりである場合にはステップS67に移行し、そうでない場合には待機する。
ステップS67では、タイマーのカウントをスタートする。
次にステップS68に移行して、磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)の立下がりか否かを判定し、磁気再生用ヘッド9の出力信号の立下がりである場合にはステップS69に移行し、そうでない場合には待機する。
【0053】
ステップS69では、タイマーのカウントを停止する。
次にステップS70に移行して、タイマーのカウント値が所定値n1より大きいか否かを判定し、タイマーのカウント値が所定値n1より大きい場合にはステップS71に移行し、そうでない場合にはステップS81に移行する。
ステップS71では、磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)の立上がりか否かを判定し、磁気再生用ヘッド9の出力信号の立上がりである場合にはステップS72に移行し、そうでない場合には待機する。
【0054】
ステップS72では、タイマーのカウントをスタートする。
次にステップS73に移行して、磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)の立下がりか否かを判定し、磁気再生用ヘッド9の出力信号の立下がりである場合にはステップS74に移行し、そうでない場合には待機する。
ステップS74では、タイマーのカウントを停止する。
【0055】
次にステップS75に移行して、タイマーのカウント値が所定値n1以下であるか否かを判定し、タイマーのカウント値が所定値n1以下である場合にはステップS76に移行し、そうでない場合にはステップS81に移行する。
ステップS76では、磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)の立上がりか否かを判定し、磁気再生用ヘッド9の出力信号の立上がりである場合にはステップS77に移行し、そうでない場合には待機する。
【0056】
ステップS77では、タイマーのカウントをスタートする。
次にステップS78に移行して、磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)の立下がりか否かを判定し、磁気再生用ヘッド9の出力信号の立下がりである場合にはステップS79に移行し、そうでない場合には待機する。
ステップS79では、タイマーのカウントを停止する。
【0057】
次にステップS80に移行して、タイマーのカウント値が所定値n1より大きいか否かを判定し、タイマーのカウント値が所定値n1より大きい場合には図11のステップS42に移行し、そうでない場合にはステップS81に移行する。
ステップS81では、ヘッダ部分を正確に読込めなかった(検出できなかった)としてエラー表示をしてからメインプログラムに復帰する。
【0058】
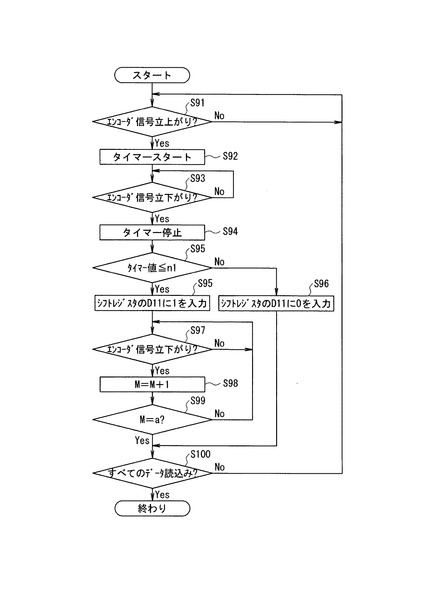
次に、図11の演算処理のステップS42で行われる図14の演算処理について説明する。この演算処理では、まずステップS91で磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)の立上がりか否かを判定し、磁気再生用ヘッド9の出力信号の立上がりである場合にはステップS92に移行し、そうでない場合には待機する。
ステップS92では、タイマーのカウントをスタートする。
【0059】
次にステップS93に移行して、磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)の立下がりか否かを判定し、磁気再生用ヘッド9の出力信号の立下がりである場合にはステップS94に移行し、そうでない場合には待機する。
ステップS94では、タイマーのカウントを停止する。
次にステップS95に移行して、タイマーのカウント値が所定値n1以下であるか否かを判定し、タイマーのカウント値が所定値n1以下である場合にはステップS95に移行し、そうでない場合にはステップS96に移行する。
【0060】
ステップS95では、シフトレジスタのD11のビットに論理値1を入力してからステップS97に移行する。なお、データ再生時には、搬送ベルト1の回転数(回転回数)を示すデータそのものが8bitであるため、シフトレジスタのD4〜D11までのビットを搬送ベルト1の回転数(回転回数)を示すデータとする。
ステップS97では、磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)の立下がりか否かを判定し、磁気再生用ヘッド9の出力信号の立下がりである場合にはステップS98に移行し、そうでない場合には待機する。
【0061】
ステップS98では、カウンタMをインクリメントしてからステップS99に移行する。
ステップS99では、カウンタMが予め設定された所定値aであるか否かを判定し、カウンタMが所定値aである場合にはステップS100に移行し、そうでない場合にはステップS97に移行する。なお、所定値aは、前記所定ピッチの整数分の一の「整数」から1を減じた値である。つまり、本実施形態の場合、「整数」が2なので、所定値aは1である。
【0062】
一方、ステップS96では、シフトレジスタのD11のビットに論理値0を入力してからステップS100に移行する。
ステップS100では、搬送ベルト1の動作履歴、即ち回転数(回転回数)の情報に関する全てのデータを読込んだか否かを判定し、全てのデータを読込んだ場合にはメインプログラムに復帰し、そうでない場合にはステップS91に移行する。
【0063】
これらの演算処理によれば、例えば図12の演算処理によって、搬送ベルト1の動作履歴、即ち回転数(回転回数)の記録内容を途中から読込んでいないことが確認されたら、図13の演算処理によって4bitのヘッダが読込まれ、次いで図14の演算処理によって8bitのデータが読込まれ、順次、シフトレジスタに格納される。その際、データが論理値1である場合には、カウンタMが所定値a(この場合は1)となるまで、エンコーダ信号を無視することで、データの誤読込みを回避することができる。
【0064】
このように本実施形態のインクジェットプリンタによれば、搬送ベルト1の移動方向に沿って当該搬送ベルト1に連続して形成された磁気記録層8と、搬送ベルト1の磁気記録層8に対向して配設され且つ当該磁気記録層8の記録内容を再生する磁気再生用ヘッド9と、搬送ベルト1の磁気記録層8に対向して配設され且つ当該磁気記録層8に記録する磁気記録ヘッド10とを備えたことにより、例えば回転数(回転回数)などの搬送ベルト1の動作履歴を磁気記録ヘッド10によって当該搬送ベルト1の磁気記録層8に記録することができ、これにより搬送ベルト1とプリンタ本体とが別々になっても搬送ベルト1の動作履歴が分かり易い。
【0065】
また、図9の演算処理のステップS2、ステップS4、ステップS5(搬送ベルト動作履歴検出手段)で検出された搬送ベルト1の回転数(回転回数、動作履歴)を記録内容として磁気記録ヘッド10によって磁気記録層8に記録することとしたため、搬送ベルト1とプリンタ本体とが別々になっても搬送ベルト1の動作履歴が分かり易い。
また、磁気記録層8のうち、搬送ベルト1の動作履歴からなる記録内容以外の部分に所定のパターンの磁極の変化からなる磁気パターンを記録することにより、搬送ベルト1の動作履歴からなる記録内容の部分が明確になると共に、搬送ベルト1の駆動系又は回転系から得られるエンコーダ信号を基準信号として、所定のパターンの磁極の変化からなる磁気パターンを磁気記録層8に記録することにより、所定のパターンにおける磁気記録層8上の磁極の変化の記録長さを一定にすることができる。
【0066】
また、所定のパターンの磁極の変化からなる磁気パターンが、所定の記録ピッチで磁極を変化させるものである場合、搬送ベルト1の動作履歴からなる記録内容が、所定の記録ピッチの整数分の一の記録ピッチで磁極を変化させるものであることとしたため、搬送ベルト1の動作履歴からなる記録内容を検出するのが容易となり、発明を実施化し易い。
また、磁気再生用ヘッド9で再生された磁気記録層8の記録内容を検出するものである場合、磁気再生用ヘッド9で再生された磁気記録層8の記録内容のうち、所定のパターンの磁極の変化からなる磁気パターンと異なる磁極の変化からなる記録内容から搬送ベルトの動作履歴を検出することとしたため、搬送ベルト1だけを他のプリンタ本体に移植して使用するような場合であっても、搬送ベルト1の動作履歴が分かり易い。
【0067】
次に、本発明のインクジェットプリンタの第2実施形態について説明する。本実施形態のインクジェットプリンタの概略構成は、前記第1実施形態の図1、図2のものと同様である。本実施形態では、まず磁気記録層8に記録する磁極変化の記録内容が第1実施形態のものと異なる。
【0068】
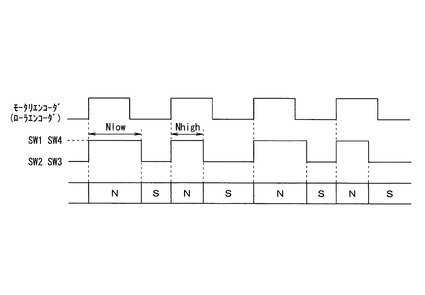
図15は、本実施形態で磁気記録層8に記録する磁極変化の記録内容を示すものである。本実施形態では、磁気記録層8全長にわたる所定のパターンの磁極の変化からなる磁気パターンを、磁極変化の一周期における一方の磁極(N極)の記録長を一定とする(磁極変化の周期が一定であれば他方の磁極(S極)の記録長も一定となる)ものとし、磁気記録層8の一部分に形成する、磁気パターンと相違する磁極の変化からなる記録内容を、磁極変化の一周期における一方の磁極(N極)の記録長を異なる(磁極変化の周期が一定であれば他方の磁極(S極)の記録長も異なる)ものとした。磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)についていえば、信号のONデューティ(又はOFFデューティ)が異なるとも言える。具体的には、磁気パターンに相当する論理値0ではN極に相当するONデューティが大きく(ON時間が長く)、磁気パターンと相違する論理値1ではS極に相当するOFFデューティが大きい(OFF時間が長い)。
【0069】
具体的な磁気記録方法を図16に示す。例えば、記録すべきデータが論理値0である場合には、ロータリエンコーダ(モータエンコーダ)の立上がりと同時に第1スイッチSW1及び第4スイッチSW4をONし且つ第2スイッチSW2及び第3スイッチSW3をOFFして磁気記録層8をN極に磁性すると共にタイマーを起動する。そして、タイマーの値が比較的大きな所定値Nlowになったら、第1スイッチSW1及び第4スイッチSW4をOFFし且つ第2スイッチSW2及び第3スイッチSW3をONして磁気記録層8をS極に磁性する。一方、記録すべきデータが論理値1である場合には、ロータリエンコーダ(モータエンコーダ)の立上がりと同時に第1スイッチSW1及び第4スイッチSW4をONし且つ第2スイッチSW2及び第3スイッチSW3をOFFして磁気記録層8をN極に磁性すると共にタイマーを起動し、タイマーの値が比較的小さな所定値Nhighになったら、第1スイッチSW1及び第4スイッチSW4をOFFし且つ第2スイッチSW2及び第3スイッチSW3をONして磁気記録層8をS極に磁性する。データを読込む場合にも、例えばN極のデューティ比の違いで論理値0、1を識別することができる。
【0070】
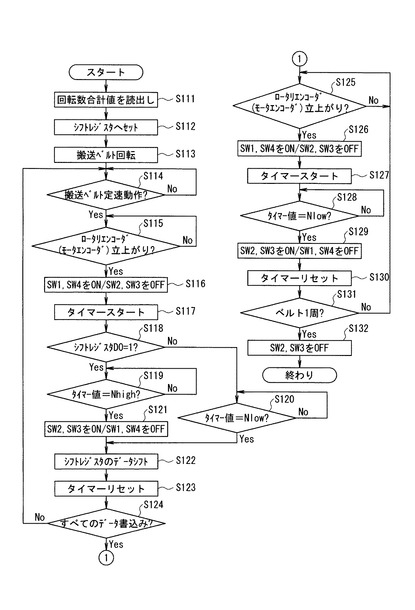
図17は、前記第1実施形態の図10の演算処理に代えて、図2の制御装置6内で行われる本実施形態の演算処理を示すフローチャートであり、まずステップS111で、搬送ベルト1の回転数(回転回数)の合計値を読出す。
次にステップS112に移行して、ステップS111で読出した搬送ベルト1の回転数(回転回数)の合計値をシフトレジスタに格納する。
【0071】
次にステップS113に移行して、駆動ローラモータ7を回転駆動して搬送ベルト1を回転(移動)させる。
次にステップS114に移行して、搬送ベルト1が一定速度(図では定速)の状態になったか否かを判定し、搬送ベルト1が一定速度状態になった場合にはステップS115に移行し、そうでない場合には待機する。
【0072】
ステップS115では、ロータリエンコーダ(モータエンコーダ)の立上がりであるか否かを判定し、ロータリエンコーダ(モータエンコーダ)の立上がりである場合にはステップS116に移行し、そうでない場合には待機する。
ステップS116では、第1スイッチSW1及び第4スイッチSW4をONし且つ第2スイッチSW2及び第3スイッチSW3をOFFして磁気記録層8をN極に磁性する。
次にステップS117に移行して、タイマーのカウントを開始する。
【0073】
次にステップS118に移行して、シフトレジスタのD0のビットデータが1であるか否かを判定し、シフトレジスタのD0のビットデータが1である場合にはステップS119に移行し、そうでない場合にはステップS120に移行する。
ステップS119では、タイマーのカウント値が比較的小さい所定値Nhighであるか否かを判定し、タイマーのカウント値が比較的小さい所定値Nhighである場合にはステップS121に移行し、そうでない場合には待機する。
【0074】
一方、ステップS120では、タイマーのカウント値が比較的大きい所定値Nlowであるか否かを判定し、タイマーのカウント値が比較的大きい所定値Nlowである場合にはステップS121に移行し、そうでない場合には待機する。
ステップS121では、第1スイッチSW1及び第4スイッチSW4をOFFし且つ第2スイッチSW2及び第3スイッチSW3をONして磁気記録層8をS極に磁性してからステップS122に移行する。
【0075】
ステップS122では、シフトレジスタのデータをシフトする。
次にステップS123に移行して、タイマーのカウントをリセットする。
次にステップS124に移行して、搬送ベルト1の動作履歴、即ち回転数(回転回数)の合計値に関する全てのデータの書込みが終了したか否かを判定し、全てのデータの書込みが終了した場合にはステップS125に移行し、そうでない場合にはステップS115に移行する。
【0076】
ステップS125では、ロータリエンコーダ(モータエンコーダ)の立上がりであるか否かを判定し、ロータリエンコーダ(モータエンコーダ)の立上がりである場合にはステップS126に移行し、そうでない場合には待機する。
ステップS126では、第1スイッチSW1及び第4スイッチSW4をONし且つ第2スイッチSW2及び第3スイッチSW3をOFFして磁気記録層8をN極に磁性する。
【0077】
次にステップS127に移行して、タイマーのカウントを開始する。
次にステップS128に移行して、タイマーのカウント値が比較的大きい所定値Nlowであるか否かを判定し、タイマーのカウント値が比較的大きい所定値Nlowである場合にはステップS129に移行し、そうでない場合には待機する。
ステップS129では、第1スイッチSW1及び第4スイッチSW4をOFFし且つ第2スイッチSW2及び第3スイッチSW3をONして磁気記録層8をS極に磁性する。
【0078】
次にステップS130に移行して、タイマーのカウントをリセットする。
次にステップS131に移行して、搬送ベルト1が1周したか否かを判定し、搬送ベルト1が1周した場合にはステップS132に移行し、そうでない場合にはステップS125に移行する。
ステップS132では、第2スイッチSW2及び第3スイッチSW3をOFFしてから図9の演算処理のステップS9に移行する。
【0079】
この演算処理によれば、搬送ベルト1の移動状態が一定速度状態になったら、4bitのヘッダと8bitのデータからなる搬送ベルト1の動作履歴、即ち回転数(回転回数)の情報を磁気記録層8に記録し、残りの部分にはデータの論理値0と同じ周期で磁極が変化する所定のパターンの磁気パターンを記録することができる。従って、所定のパターンの磁極の変化からなる磁気パターン以外の部分をデコードすれば、搬送ベルト1の動作履歴、例えば回転数(回転回数)の情報を検出することが可能となる。
【0080】
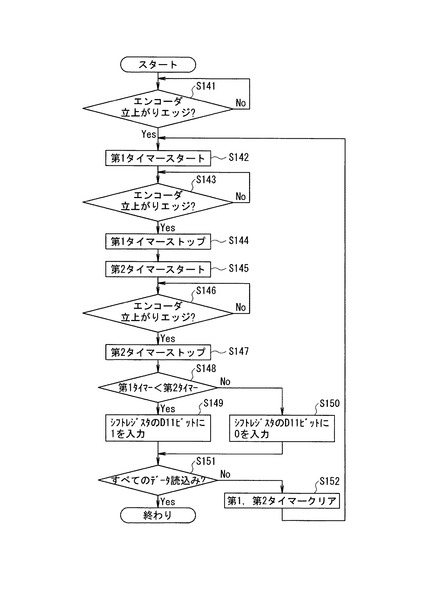
図18は、前記第1実施形態の図14の演算処理に代えて、図2の制御装置6内で行われる本実施形態の演算処理を示すフローチャートであり、まずステップS141で、磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)の立上がりか否かを判定し、磁気再生用ヘッド9の出力信号の立上がりである場合にはステップS142に移行し、そうでない場合には待機する。
【0081】
ステップS142では、第1タイマーのカウントをスタートする。
次にステップS143に移行して、磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)の立下がりか否かを判定し、磁気再生用ヘッド9の出力信号の立下がりである場合にはステップS144に移行し、そうでない場合には待機する。
ステップS144では、第1タイマーのカウントを停止する。
【0082】
次にステップS145に移行して、第2タイマーのカウントをスタートする。
次にステップS146に移行して、磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)の立上がりか否かを判定し、磁気再生用ヘッド9の出力信号の立上がりである場合にはステップS147に移行し、そうでない場合には待機する。
ステップS147では、第2タイマーのカウントを停止する。
【0083】
次にステップS148に移行して、第1タイマーのカウント値が第2タイマーのカウント値より小さいか否かを判定し、第1タイマーのカウント値が第2タイマーのカウント値より小さい場合にはステップS149に移行し、そうでない場合にはステップS149に移行する。
ステップS149では、シフトレジスタのD11のビットに論理値1を入力してからステップS151に移行する。なお、データ再生時には、搬送ベルト1の回転数(回転回数)を示すデータそのものが8bitであるため、シフトレジスタのD4〜D11までのビットを搬送ベルト1の回転数(回転回数)を示すデータとする。
【0084】
一方、ステップS150では、シフトレジスタのD11のビットに論理値0を入力してからステップS151に移行する。
ステップS151では、搬送ベルト1の動作履歴、即ち回転数(回転回数)の情報に関する全てのデータを読込んだか否かを判定し、全てのデータを読込んだ場合にはメインプログラムに復帰し、そうでない場合にはステップS152に移行する。
ステップS152では第1及び第2タイマーのカウント値をクリアしてからステップS142に移行する。
【0085】
この演算処理によれば、磁気記録層8に記録されているN極の記録長とS極の記録帳の比較によってデータが次々とデコードされ、シフトレジスタに格納される。
このように本実施形態のインクジェットプリンタによれば、前記第1実施形態の効果に加えて、所定のパターンの磁極の変化からなる磁気パターンが、磁極変化の一周期における一方の磁極の記録長を一定とするものである場合、搬送ベルト1の動作履歴からなる記録内容が、磁極変化の一周期における一方の磁極の記録長を異なるものとするものであることとしたため、搬送ベルトの動作履歴からなる記録内容を検出するのが容易となり、発明を実施化し易い。
【0086】
なお、前記実施形態では、所謂ラインヘッド型インクジェットプリンタを対象として本発明のインクジェットプリンタを適用した例についてのみ詳述したが、本発明のインクジェットプリンタは、マルチパス型を始めとして、あらゆるタイプのインクジェットプリンタを対象として適用可能である。
【図面の簡単な説明】
【0087】
【図1】本発明の搬送装置を適用したインクジェットプリンタの一実施形態の概略構成を示す正面図である。
【図2】図1のインクジェットプリンタの平面図である。
【図3】第1実施形態として図2の磁気記録層に記録する所定のパターンの磁気パターンと磁気再生用ヘッドの出力信号の説明図である。
【図4】図2の磁気記録層に記録する搬送ベルトの動作履歴記録内容の説明図である。
【図5】第1実施形態における図3の磁気パターンと図4の搬送ベルト動作履歴記録内容の記録方法の説明図である。
【図6】磁気記録ヘッドによる記録方法の説明図である。
【図7】搬送ベルト動作履歴記録内容を格納するシフトレジスタの説明図である。
【図8】第1実施形態で磁気記録ヘッドにより搬送ベルト動作履歴記録内容を記録する方法の説明図である。
【図9】搬送ベルト動作履歴記録内容を記録するためのジェネリックな演算処理を示すフローチャートである。
【図10】第1実施形態として図9の演算処理で行われるサブルーチンを示すフローチャートである。
【図11】搬送ベルト動作履歴記録内容を読込むためのジェネリックな演算処理を示すフローチャートである。
【図12】ヘッダ検出のために図11の演算処理で行われるサブルーチンのフローチャートである。
【図13】ヘッダ検出のために図11の演算処理で行われるサブルーチンのフローチャートである。
【図14】第1実施形態として図11の演算処理で行われるサブルーチンを示すフローチャートである。
【図15】第2実施形態における磁気パターンと搬送ベルト動作履歴記録内容の記録方法の説明図である。
【図16】第2実施形態で磁気記録ヘッドにより搬送ベルト動作履歴記録内容を記録する方法の説明図である。
【図17】第2実施形態として図9の演算処理で行われるサブルーチンを示すフローチャートである。
【図18】第2実施形態として図11の演算処理で行われるサブルーチンを示すフローチャートである。
【符号の説明】
【0088】
1は搬送ベルト、2は印刷媒体、3は駆動ローラ、4は従動ローラ、5はテンションローラ、6は制御装置、7は駆動ローラモータ、8は磁気記録層、9は磁気再生用ヘッド、10は磁気記録ヘッド、11はインクジェットヘッド、12はロータリエンコーダ、13はゲートローラ
【技術分野】
【0001】
本発明は、例えば複数色の液体インクの微小なインク滴を複数のノズルから吐出してその微粒子(インクドット)を印刷媒体上に形成することにより、所定の文字や画像を描画するようにしたインクジェットプリンタに関するものである。
【背景技術】
【0002】
このようなインクジェットプリンタは、一般に安価で且つ高品質のカラー印刷物が容易に得られることから、パーソナルコンピュータやデジタルカメラなどの普及に伴い、オフィスのみならず一般ユーザにも広く普及してきている。
このようなインクジェットプリンタは、一般に、インクカートリッジと印字ヘッドとが一体的に備えられたキャリッジなどと称される移動体が印刷媒体上をその搬送方向と交差する方向に往復しながらその印字ヘッドのノズルから液体インク滴を吐出(噴射)して印刷媒体上に微小なインクドットを形成することで、当該印刷媒体上に所定の文字や画像を描画して所望の印刷物を作成するようになっている。そして、このキャリッジに黒色(ブラック)を含めた4色(イエロー、マゼンタ、シアン)のインクカートリッジと各色毎の印字ヘッドを備えることで、モノクロ印刷のみならず、各色を組み合わせたフルカラー印刷も容易に行えるようになっている(更に、これらの各色に、ライトシアンやライトマゼンタなどを加えた6色や7色、或いは8色のものも実用化されている)。
【0003】
また、このようにキャリッジ上のインクジェットヘッドを印刷媒体の搬送方向と交差する方向に往復させながら印刷を実行するようにしたタイプのインクジェットプリンタでは、1頁全体をきれいに印刷するためにインクジェットヘッドを10回程度から数十回以上も往復運動させる必要がある。これに対し、印刷媒体の幅と同じ寸法の長尺のインクジェットヘッド(一体である必要はない)を配置してキャリッジを使用しないタイプのインクジェットプリンタでは、インクジェットヘッドを印刷媒体の幅方向に移動させる必要がなく、所謂1パスでの印刷が可能となるため、レーザプリンタと同様な高速な印刷が可能となる。なお、前者方式のインクジェットプリンタを一般に「マルチパス(シリアル)型インクジェットプリンタ」、後者方式のインクジェットプリンタを一般に「ラインヘッド型インクジェットプリンタ」と呼んでいる。
【0004】
ところで、この種のラインヘッド型インクジェットプリンタでは、搬送用の搬送ベルトに印刷媒体を載置して搬送する構成がよく用いられている。このように搬送ベルトに印刷媒体を載置して搬送し、その搬送される印刷媒体にインクジェットヘッドからインク滴を吐出して高画質な印刷を行うためには印刷媒体の位置を正確に検出する必要がある。そのため、一般的には、搬送ベルトにリニアスケールなどの移動量や移動速度といった移動状態検出用マークを設け、そのマークをエンコーダで読み取って搬送ベルトの位置を検出し、その搬送ベルトの位置から印刷媒体の位置を検出する。
【0005】
搬送ベルトは、経年劣化によって、ベルトの歪みや、インクなどによる汚損が生じるため、所定の期間、例えば所定印刷枚数が経過したら、交換する必要がある。そこで、従来のインクジェットプリンタでは、搬送ベルトの使用期間が所定期間、例えば所定印刷枚数になったら、或いは搬送ベルトの回転数(回転回数)が所定回転数になったら、搬送ベルト交換時期のメッセージを表示するようにしている。また、下記特許文献1に挙げるインクジェットプリンタでは、搬送ベルトの動作履歴を制御回路中の不揮発性メモリに記録するようにしている。
【特許文献1】特開昭63−173677号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、前記特許文献1に記載される従来のインクジェットプリンタでは、制御回路中の不揮発性メモリに搬送ベルトの動作履歴を記録しているだけであるため、制御回路、即ちプリンタ本体と搬送ベルトが別々になってしまうと、搬送ベルトの動作履歴が分かりにくいという不具合が生じる。例えば、プリンタ本体に不具合が生じ、搬送ベルトだけを他のプリンタ本体に移植して使用するような場合、搬送ベルトの動作履歴をメモなどで記録し、そのメモを見ながら他のプリンタ本体の制御回路の不揮発性メモリに搬送ベルトの動作履歴を記録し直すなどの手間が生じる。
本発明は、上記のような問題点に着目してなされたものであり、搬送ベルトとプリンタ本体とが別々になっても搬送ベルトの動作履歴が分かり易いインクジェットプリンタを提供することを目的とするものである。
【課題を解決するための手段】
【0007】
[発明1]上記課題を解決するために、発明1のインクジェットプリンタは、搬送ベルトの表面に印刷媒体を載置して搬送し、その印刷媒体にインクジェットヘッドからインク滴を出して印刷を行うインクジェットプリンタにおいて、前記搬送ベルトの移動方向に沿って当該搬送ベルトに連続して形成された磁気記録層と、前記搬送ベルトの磁気記録層に対向して配設され且つ当該磁気記録層の記録内容を再生する磁気再生用ヘッドと、前記搬送ベルトの磁気記録層に対向して配設され且つ当該磁気記録層に記録する磁気記録ヘッドとを備えたことを特徴とするものである。
【0008】
この発明1に係るインクジェットプリンタによれば、搬送ベルトの移動方向に沿って当該搬送ベルトに連続して形成された磁気記録層と、搬送ベルトの磁気記録層に対向して配設され且つ当該磁気記録層の記録内容を再生する磁気再生用ヘッドと、搬送ベルトの磁気記録層に対向して配設され且つ当該磁気記録層に記録する磁気記録ヘッドとを備えたことにより、例えば搬送ベルトの動作履歴を磁気記録ヘッドによって当該搬送ベルトの磁気記録層に記録することができ、これにより搬送ベルトとプリンタ本体とが別々になっても搬送ベルトの動作履歴が分かり易い。
【0009】
[発明2]また、発明2のインクジェットプリンタは、前記発明1のインクジェットプリンタにおいて、前記搬送ベルトの動作履歴を検出する搬送ベルト動作履歴検出手段と、前記磁気記録ヘッドによる磁気記録層への記録内容を制御する制御手段とを備え、前記制御手段は、前記搬送ベルト動作履歴検出手段で検出された搬送ベルトの動作履歴を記録内容として磁気記録ヘッドによって磁気記録層に記録することを特徴とするものである。
この発明2に係るインクジェットプリンタによれば、搬送ベルト動作履歴検出手段で検出された搬送ベルトの動作履歴を記録内容として磁気記録ヘッドによって磁気記録層に記録する構成としたため、搬送ベルトとプリンタ本体とが別々になっても搬送ベルトの動作履歴が分かり易い。
【0010】
[発明3]また、発明3のインクジェットプリンタは、前記発明2のインクジェットプリンタにおいて、前記制御手段は、前記磁気記録層のうち、搬送ベルトの動作履歴からなる記録内容以外の部分に、搬送ベルトの駆動系又は回転系から得られるエンコーダ信号を基準信号として、所定のパターンの磁極の変化からなる磁気パターンを前記磁気記録ヘッドにより記録することを特徴とするものである。
【0011】
この発明3に係るインクジェットプリンタによれば、磁気記録層のうち、搬送ベルトの動作履歴からなる記録内容以外の部分に所定のパターンの磁極の変化からなる磁気パターンを記録することにより、搬送ベルトの動作履歴からなる記録内容の部分が明確になると共に、搬送ベルトの駆動系又は回転系から得られるエンコーダ信号を基準信号として、所定のパターンの磁極の変化からなる磁気パターンを磁気記録層に記録することにより、所定のパターンにおける磁気記録層上の磁極の変化の記録長さを一定にすることができる。
【0012】
[発明4]また、発明4のインクジェットプリンタは、前記発明3のインクジェットプリンタにおいて、前記所定のパターンの磁極の変化からなる磁気パターンが、所定の記録ピッチで磁極を変化させるものである場合、前記搬送ベルトの動作履歴からなる記録内容が、前記所定の記録ピッチの整数分の一の記録ピッチで磁極を変化させるものであることを特徴とするものである。
【0013】
この発明4に係るインクジェットプリンタによれば、所定のパターンの磁極の変化からなる磁気パターンが、所定の記録ピッチで磁極を変化させるものである場合、搬送ベルトの動作履歴からなる記録内容が、所定の記録ピッチの整数分の一の記録ピッチで磁極を変化させるものであることとしたため、搬送ベルトの動作履歴からなる記録内容を検出するのが容易となり、発明を実施化し易い。
【0014】
[発明5]また、発明5のインクジェットプリンタは、前記発明3のインクジェットプリンタにおいて、前記所定のパターンの磁極の変化からなる磁気パターンが、磁極変化の一周期における一方の磁極の記録長を一定とするものである場合、前記搬送ベルトの動作履歴からなる記録内容が、前記磁極変化の一周期における一方の磁極の記録長を異なるものとするものであることを特徴とするものである。
【0015】
この発明5に係るインクジェットプリンタによれば、所定のパターンの磁極の変化からなる磁気パターンが、磁極変化の一周期における一方の磁極の記録長を一定とするものである場合、搬送ベルトの動作履歴からなる記録内容が、磁極変化の一周期における一方の磁極の記録長を異なるものとするものであることとしたため、搬送ベルトの動作履歴からなる記録内容を検出するのが容易となり、発明を実施化し易い。
【0016】
[発明6]また、発明6のインクジェットプリンタは、前記発明3乃至5のインクジェットプリンタにおいて、前記制御手段が、磁気再生用ヘッドで再生された磁気記録層の記録内容を検出するものである場合、前記磁気再生用ヘッドで再生された磁気記録層の記録内容のうち、前記所定のパターンの磁極の変化からなる磁気パターンと異なる磁極の変化からなる記録内容から搬送ベルトの動作履歴を検出することを特徴とするものである。
【0017】
この発明6に係るインクジェットプリンタによれば、磁気再生用ヘッドで再生された磁気記録層の記録内容を検出するものである場合、磁気再生用ヘッドで再生された磁気記録層の記録内容のうち、所定のパターンの磁極の変化からなる磁気パターンと異なる磁極の変化からなる記録内容から搬送ベルトの動作履歴を検出する構成としたため、搬送ベルトだけを他のプリンタ本体に移植して使用するような場合であっても、搬送ベルトの動作履歴が分かり易い。
【発明を実施するための最良の形態】
【0018】
次に、本発明のシート搬送装置をインクジェットプリンタに適用した一実施形態について図面を参照しながら説明する。
図1は、本実施形態のインクジェットプリンタの概略構成を示す正面図であり、図2は、その平面図である。図中の符号1は、印刷用紙等の印刷媒体2を搬送するための無端搬送ベルトである。この搬送ベルト1は、絶縁性ベルトであり、PETやポリイミド、フッ素系樹脂などの絶縁性樹脂で構成される。この搬送ベルト1は、図1の右端部に配設された駆動ローラ3と、図1の左端部に配設された従動ローラ4と、それらの中央部下方に配設されたテンションローラ5とに巻回されている。駆動ローラ3は、図2に示す駆動ローラモータ7によって図1の矢印方向に回転駆動され、図示しない帯電ローラなどの帯電手段で帯電された搬送ベルト1に印刷媒体2を静電吸着させ、その状態で、当該印刷媒体2を図の左方から右方に、つまり矢印方向に搬送する。従動ローラ4は、図示しない帯電ローラなどの帯電手段の当接部分との間に搬送ベルト1を挟持して電圧を印加するために接地されている。テンションローラ5は、図示しないバネによって下方に付勢されており、これにより搬送ベルト1に張力を付与している。
【0019】
搬送ベルト1には、従動ローラ4に対向するようにして、帯電手段としての図示しない帯電ローラが当接されており、帯電ローラには交流電源が接続されている。この帯電ローラの配置は、印刷媒体の給紙位置の直前に相当する。従って、この帯電ローラに所定の周期で反転する電位の電流を付与すると、搬送ベルト1の表面が搬送方向に沿って交互に逆の電位に帯電(縞状帯電)され、夫々の電荷によって印刷媒体2に誘電分極を発生させ、その誘電分極による印刷媒体2の電荷と搬送ベルト1の表面の電荷及び隣り合う搬送ベルト1の表面の電荷と印刷媒体2の電荷とを含む閉回路を構成して静電気力が発生し、印刷媒体2を搬送ベルト1の表面に吸着する。なお、帯電パターンは、印刷媒体2搬送方向に交互な縞状以外にも、例えば印刷媒体2搬送方向と交差方向に交互な縞状や、市松状などであってもよい。
【0020】
従動ローラ4の印刷媒体2搬送方向上流側にはゲートローラ13が配設されている。このゲートローラ13は、給紙部14から給紙された印刷媒体2を搬送ベルト1上に送給するタイミングを調整すると共に印刷媒体2の搬送方向に対する曲がり、所謂スキューを補正する。ゲートローラ13は、図示しないゲートローラモータによって回転駆動される。印刷媒体2は、回転していないゲートローラ13のニップ部(接合部)に当接し、更に搬送されることによって撓み、そのたわみを解放することでスキューが補正され、スキュー補正後にゲートローラモータによってゲートローラ13を回転駆動して印刷媒体2を搬送ベルト1上の所定位置に搬送する。
【0021】
搬送ベルト1の所定位置に搬送され、前述した静電気力により搬送ベルト1に印刷媒体2を吸着した状態で搬送方向下流側の印刷領域に搬送される。印刷領域にはインクジェットヘッド11が配設されており、印刷媒体2がインクジェットヘッド11の印刷媒体搬送方向最上流のノズル位置まで搬送されたら、インクジェットヘッド11のノズルから各種インクのインク滴を吐出して印刷を行う。
【0022】
このインクジェットヘッド11は、イエロー(Y)、マゼンダ(M)、シアン(C)、ライトマゼンダ(Lm)、ライトシアン(Lc)、ブラック(K)の6色の各色毎に、印刷媒体2の搬送方向にノズル列をずらして配設されている。各インクジェットヘッド11には、図示しない各色のインクタンクからインク供給チューブを介してインクが供給される。各インクジェットヘッド11には、印刷媒体2の搬送方向と交差する方向に、複数のノズルが形成されており、それらのノズルから同時に必要箇所に必要量のインク滴を吐出することにより、印刷媒体2上に微小なインクドットを形成出力する。これを各色毎に行うことにより、搬送ベルト1に吸着された印刷媒体2を一度通過させるだけで、所謂ワンパスによる印刷を行うことができる。即ち、このインクジェットヘッド11の配設領域が印字領域に相当する。
【0023】
インクジェットヘッドの各ノズルからインクを吐出出力する方法としては、静電方式、ピエゾ方式、膜沸騰インクジェット方式などがある。静電方式は、アクチュエータである静電ギャップに駆動信号を与えると、キャビティ内の振動板が変位してキャビティ内に圧力変化を生じ、その圧力変化によってインク滴がノズルから吐出出力されるというものである。ピエゾ方式は、アクチュエータであるピエゾ素子に駆動信号を与えると、キャビティ内の振動板が変位してキャビティ内に圧力変化を生じ、その圧力変化によってインク滴がノズルから吐出出力されるというものである。膜沸騰インクジェット方式は、キャビティ内に微小ヒータがあり、瞬間的に300℃以上に加熱されてインクが膜沸騰状態となって気泡が生成し、その圧力変化によってインク滴がノズルから吐出出力されるというものである。本発明は、何れのインク出力方法も適用可能である。
【0024】
搬送ベルト1の印刷媒体搬送方向と交差する方向の一方の端部には磁気記録層8が形成されている。この磁気記録層8は、搬送ベルト1の一方の端部に、印刷媒体搬送方向に沿って連続して形成されており、この磁気記録層8に接触式の磁気再生用ヘッド9及び磁気記録ヘッド10が当接されている。本実施形態の磁気記録ヘッド10は、磁気記録層8に搬送ベルト1の動作履歴、例えば回転数(回転回数)を記録し、磁気再生用ヘッド9で、その記録内容を再生する。また、従動ローラ4には、搬送ベルト1の回転系としてロータリエンコーダ12が設けられており、このロータリエンコーダ12からのエンコーダ信号に従って、磁気記録層8への記録が制御装置6で制御され、磁気記録層8の記録内容が制御装置6で検出される。なお、インクジェットヘッド11からインク滴を印刷媒体2に吐出して行われる印刷制御は、ロータリエンコーダ12からの搬送ベルト移動情報に基づいて行われる。また、搬送ベルト1の回転系に設けるロータリエンコーダ12に代えて、搬送ベルト1の駆動系であるモータエンコーダを用いてもよい。また、本実施形態では、後述するように、磁気記録層8のほぼ全周にわたって記録される所定のパターンの磁気変化を磁気再生用ヘッド9で再生し、その所定のパターンの移動状態から搬送ベルト1の移動状態を推定すれば、これを用いて印刷制御を行うことも可能である。
【0025】
図3には、本実施形態で前記磁気記録層8に記録する磁気パターンを示す。この磁気パターンは、搬送ベルト1の磁気記録層8のほぼ全周にわたって記録されるものであり、所定のパターンの磁極変化からなる。この所定のパターンの磁気変化は、所定の記録ピッチで磁極を変化させるものであり、N極、S極、夫々の磁極を所定の記録ピッチ(記録長)で変化させるものである。この図3の磁気パターンが所定のパターンの磁極の変化からなるものであるとすると、この磁気パターンが記録されていない磁気記録層8の一部分に搬送ベルト1の動作履歴を記録する。
【0026】
図4は、本実施形態における搬送ベルト1の動作履歴を示すデータであり、4bitのヘッダと、8ビットのデータからなる。本実施形態では、前記図3のように、N極、S極、夫々の磁極が所定の記録ピッチで変化するものを論理値0とする。一方、図5に示すように、前記図3の所定の記録ピッチの整数分の一(この場合は2分の一)の記録ピッチで磁極(N極、S極)が変化するものを論理値1とする。従って、例えば図3の所定のパターンの磁極の変化からなる磁気パターン(記録内容)に対して、N極で磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)がHiレベルとなり、S極でLowレベルになるような場合に、所定のピッチで磁極(N極、S極)が変化したら論理値0と判定し、その所定の記録ピッチの整数分の位置の記録ピッチで磁極(N極、S極)が変化したら論理値1と判定すればよい。
【0027】
磁気記録ヘッド10による磁極(N極、S極)の記録方法を図6に示す。本実施形態では、コイルからなる磁気記録ヘッド10に対して4つのスイッチSW1〜SW4をH型ブリッジ状に配設する。例えば、第1スイッチSW1を磁気記録ヘッド10の左上側の電源Vccとの間に配設し、第2スイッチSW2を磁気記録ヘッド10の左下側の接地との間に配設し、第3スイッチSW3を磁気記録ヘッド10の右上側の電源Vccとの間に配設し、第4スイッチSW4を磁気記録ヘッド10の右下側の接地との間に配設し、図6aに示すように第1スイッチSW1と第4スイッチSW4とを閉じると磁気記録ヘッド10に図示右向きの電流が流れて磁気記録層8がN極に磁性され、図6bに示すように第2スイッチSW2と第3スイッチSW3とを閉じると磁気記録ヘッド10に図示左向きの電流が流れて磁気記録層8がS極に磁性される。
【0028】
搬送ベルト1の動作履歴、具体的には回転回数からなるデータの具体的な記録方法について説明する。前述したヘッダ4bit、データ8bitの搬送ベルト1の動作履歴は、例えば図7に示すD0〜D11の12bitのビットを有するシフトレジスタに格納されている。このシフトレジスタでは、読出しはD0のビットから、書込みはD11のビットから夫々行う。一方、磁気記録ヘッド10は、通常は、図8に示すように、ロータリエンコーダ12(駆動ローラモータ7からエンコーダ信号を得る場合にはモータエンコーダ)の出力信号(以下、単にロータリエンコーダ或いはモータエンコーダと示す)がHiレベルにあるときに第1スイッチSW1及び第4スイッチSW4をONし且つ第2スイッチSW2及び第3スイッチSW3をOFFして磁気記録層8をN極に磁性し、ロータリエンコーダ(モータエンコーダ)がLowレベルにあるときに第1スイッチSW1及び第4スイッチSW4をOFFし且つ第2スイッチSW2及び第3スイッチSW3をONして磁気記録層8をS極に磁性する。即ち、通常状態では磁気記録層8は論理値0が連続して記録されていることになる。また、ロータリエンコーダ(モータエンコーダ)と同期して、所定のパターンの磁極の変化からなる磁気パターンを記録することにより、夫々の磁極の記録ピッチ(記録長)を一定にすることができる。即ち、ロータリエンコーダ(モータエンコーダ)は従動ローラ4の回転軸(又は駆動モータ7の駆動軸)の回転角と等価であり、それら回転軸(又は駆動軸)の回転角は搬送ベルト1の移動量と等価であるため、ロータリエンコーダ(モータエンコーダ)と同期して磁気パターンを記録すれば磁極の記録ピッチ(記録長)が一定になる。
【0029】
そして、搬送ベルト1の搬送速度が一定になったらシフトレジスタのD0のビットデータを読出した後、シフトレジスタのデータをシフトする。例えば、読出したD0のビットデータが1である場合には、ロータリエンコーダ(モータエンコーダ)の立上がりと同時に第1スイッチSW1及び第4スイッチSW4をONし且つ第2スイッチSW2及び第3スイッチSW3をOFFして磁気記録層8をN極に磁性すると共にタイマーを起動する。そして、タイマーの値がロータリエンコーダ(モータエンコーダ)の周期の4分の一に相当する所定値n1になったら、第1スイッチSW1及び第4スイッチSW4をOFFし且つ第2スイッチSW2及び第3スイッチSW3をONして磁気記録層8をS極に磁性する。次いで、タイマーの値が所定値n1の2倍になったら第1スイッチSW1及び第4スイッチSW4をONし且つ第2スイッチSW2及び第3スイッチSW3をOFFして磁気記録層8をN極に磁性し、タイマーの値が所定値n1の3倍になったら第1スイッチSW1及び第4スイッチSW4をOFFし且つ第2スイッチSW2及び第3スイッチSW3をONして磁気記録層8をS極に磁性する。読出したビットデータが0である場合には、前述のようにロータリエンコーダ(モータエンコーダ)と同期して磁気記録層8を磁性する。
【0030】
図9は、図2の制御装置6内で行われる搬送ベルト1の動作履歴の磁気記録層8への記録のためのジェネリックな演算処理を示すフローチャートであり、印刷指令と同時に開始される。この演算処理では、まずステップS1で、個別の演算処理により印刷制御を開始する。
次にステップS2に移行して、搬送ベルト1の回転数(回転回数)を計測する。
次にステップS3に移行して、個別の演算処理による印刷制御を終了する。
【0031】
次にステップS4に移行して、今回計測した搬送ベルト1の回転数(回転回数)を今までの回転数(回転回数)合計値に加算して新たな搬送ベルト1の回転数(回転回数)の合計値を算出する。
次にステップS5に移行して、ステップS4で算出された新たな搬送ベルト1の回転数(回転回数)の合計値を制御装置6内のメモリ(シフトレジスタとは異なる)に書込む。
次にステップS6に移行して、駆動ローラモータ7を回転駆動して搬送ベルト1を回転(移動)させる。
【0032】
次にステップS7に移行して、搬送ベルト1が一定速度(図では定速)の状態になったか否かを判定し、搬送ベルト1が一定速度状態になった場合にはステップS8に移行し、そうでない場合には待機する。
ステップS8では、後述する図10の演算処理に従って、搬送ベルト1の回転数(回転回数)の合計値を磁気記録層8に記録する。
次にステップS9に移行して、駆動ローラモータ7を停止することにより搬送ベルト1を停止してからメインプログラムに復帰する。
【0033】
次に、図9の演算処理のステップS8で行われる図10の演算処理について説明する。
この演算処理では、まずステップS11で、搬送ベルト1の回転数(回転回数)の合計値を読出す。
次にステップS12に移行して、ステップS11で読出した搬送ベルト1の回転数(回転回数)の合計値をシフトレジスタに格納する。
次にステップS13に移行して、駆動ローラモータ7を回転駆動して搬送ベルト1を回転(移動)させる。
【0034】
次にステップS14に移行して、搬送ベルト1が一定速度(図では定速)の状態になったか否かを判定し、搬送ベルト1が一定速度状態になった場合にはステップS15に移行し、そうでない場合には待機する。
ステップS15では、ロータリエンコーダ(モータエンコーダ)の立上がりであるか否かを判定し、ロータリエンコーダ(モータエンコーダ)の立上がりである場合にはステップS16に移行し、そうでない場合には待機する。
【0035】
ステップS16では、第1スイッチSW1及び第4スイッチSW4をONし且つ第2スイッチSW2及び第3スイッチSW3をOFFして磁気記録層8をN極に磁性する。
次にステップS17に移行して、シフトレジスタのD0のビットデータが1であるか否かを判定し、シフトレジスタのD0のビットデータが1である場合にはステップS18に移行し、そうでない場合にはステップS25に移行する。
【0036】
ステップS18では、タイマーのカウントをスタートしてからステップS19に移行する。
ステップS19では、タイマーのカウント値が所定値n1であるか否かを判定し、タイマーのカウント値が所定値n1である場合にはステップS20に移行し、そうでない場合には待機する。
【0037】
ステップS20では、第1スイッチSW1及び第4スイッチSW4をOFFし且つ第2スイッチSW2及び第3スイッチSW3をONして磁気記録層8をS極に磁性してからステップS21に移行する。
ステップS21では、タイマーのカウント値が所定値n1の2倍値であるか否かを判定し、タイマーのカウント値が所定値n1の2倍値である場合にはステップS22に移行し、そうでない場合には待機する。
【0038】
ステップS22では、第1スイッチSW1及び第4スイッチSW4をONし且つ第2スイッチSW2及び第3スイッチSW3をOFFして磁気記録層8をN極に磁性してからステップS23に移行する。
ステップS23では、タイマーのカウント値が所定値n1の3倍値であるか否かを判定し、タイマーのカウント値が所定値n1の3倍値である場合にはステップS24に移行し、そうでない場合には待機する。
【0039】
ステップS24では、第1スイッチSW1及び第4スイッチSW4をOFFし且つ第2スイッチSW2及び第3スイッチSW3をONして磁気記録層8をS極に磁性してからステップS27に移行する。
一方、ステップS25では、ロータリエンコーダ(モータエンコーダ)の立下がりであるか否かを判定し、ロータリエンコーダ(モータエンコーダ)の立下がりである場合にはステップS26に移行し、そうでない場合には待機する。
【0040】
ステップS26では、第1スイッチSW1及び第4スイッチSW4をOFFし且つ第2スイッチSW2及び第3スイッチSW3をONして磁気記録層8をS極に磁性してからステップS27に移行する。
ステップS27では、シフトレジスタのデータをシフトする。
次にステップS28に移行して、搬送ベルト1の動作履歴、即ち回転数(回転回数)の合計値に関する全てのデータの書込みが終了したか否かを判定し、全てのデータの書込みが終了した場合にはステップS29に移行し、そうでない場合にはステップS15に移行する。
【0041】
ステップS29では、ロータリエンコーダ(モータエンコーダ)の立上がりであるか否かを判定し、ロータリエンコーダ(モータエンコーダ)の立上がりである場合にはステップS30に移行し、そうでない場合には待機する。
ステップS30では、第1スイッチSW1及び第4スイッチSW4をONし且つ第2スイッチSW2及び第3スイッチSW3をOFFして磁気記録層8をN極に磁性する。
【0042】
次にステップS31に移行して、ロータリエンコーダ(モータエンコーダ)の立下がりであるか否かを判定し、ロータリエンコーダ(モータエンコーダ)の立下がりである場合にはステップS32に移行し、そうでない場合には待機する。
ステップS32では、第1スイッチSW1及び第4スイッチSW4をOFFし且つ第2スイッチSW2及び第3スイッチSW3をONして磁気記録層8をS極に磁性する。
【0043】
次にステップS33に移行して、搬送ベルト1が1周したか否かを判定し、搬送ベルト1が1周した場合にはステップS34に移行し、そうでない場合にはステップS29に移行する。
ステップS34では、第2スイッチSW2及び第3スイッチSW3をOFFしてから図9の演算処理のステップS9に移行する。
【0044】
この演算処理によれば、搬送ベルト1の移動状態が一定速度状態になったら、4bitのヘッダと8bitのデータからなる搬送ベルト1の動作履歴、即ち回転数(回転回数)の情報を磁気記録層8に記録し、残りの部分にはロータリエンコーダ(モータエンコーダ)と同じ周期で磁極が変化する所定のパターンの磁気パターンを記録することができる。従って、所定のパターンの磁極の変化からなる磁気パターン以外の部分をデコードすれば、搬送ベルト1の動作履歴、例えば回転数(回転回数)の情報を検出することが可能となる。
【0045】
図11は、図2の制御装置6内で行われる磁気記録層8内の搬送ベルト1の動作履歴の読込み(検出)のためのジェネリックな演算処理を示すフローチャートであり、外部からの入力指令と同時に開始される。この演算処理では、まずステップS41で、図12、図13の演算処理により磁気記録層8内のヘッダの検出を行う。
次にステップS42に移行して、磁気記録層8内のデータの読込みを行ってからメインプログラムに復帰する。
【0046】
次に、図11の演算処理のステップS41で行われる図12、図13の演算処理について説明する。この演算処理では、まずステップS51で駆動ローラモータ7を回転駆動して搬送ベルト1を回転させる。
次にステップS52に移行して、搬送ベルト1が一定速度(図では定速)の状態になったか否かを判定し、搬送ベルト1が一定速度状態になった場合にはステップS53に移行し、そうでない場合には待機する。
【0047】
ステップS53では、磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)の立上がりか否かを判定し、磁気再生用ヘッド9の出力信号の立上がりである場合にはステップS54に移行し、そうでない場合には待機する。
ステップS54では、タイマーのカウントをスタートする。
次にステップS55に移行して、磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)の立下がりか否かを判定し、磁気再生用ヘッド9の出力信号の立下がりである場合にはステップS56に移行し、そうでない場合には待機する。
【0048】
ステップS56では、タイマーのカウントを停止する。
次にステップS57に移行して、タイマーのカウント値が所定値n1以下であるか否かを判定し、タイマーのカウント値が所定値n1以下である場合にはステップS58に移行し、そうでない場合にはステップS59に移行する。
ステップS58では、カウンタNを0にリセットしてからステップS60に移行する。
ステップS59では、カウンタNをインクリメントしてからステップS60に移行する。
【0049】
ステップS60では、カウンタNが所定値N0であるか否かを判定し、カウンタNが所定値N0である場合にはステップS61(図13)に移行し、そうでない場合にはステップS53に移行する。なお、所定値N0については、例えばヘッダ及びデータの総bit数が12bitである場合には、所定値N0を12とする。ここまでのフローは、論理値0のデータが少なくとも所定値N0個連続している、つまり搬送ベルト1の動作履歴、即ち回転数(回転回数)の情報がないこと、換言すれば搬送ベルト1の動作履歴のデータの途中から読込んでいないことを確認するフローである。
【0050】
ステップS61では、磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)の立上がりか否かを判定し、磁気再生用ヘッド9の出力信号の立上がりである場合にはステップS62に移行し、そうでない場合には待機する。
ステップS62では、タイマーのカウントをスタートする。
次にステップS63に移行して、磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)の立下がりか否かを判定し、磁気再生用ヘッド9の出力信号の立下がりである場合にはステップS64に移行し、そうでない場合には待機する。
【0051】
ステップS64では、タイマーのカウントを停止する。
次にステップS65に移行して、タイマーのカウント値が所定値n1以下であるか否かを判定し、タイマーのカウント値が所定値n1以下である場合にはステップS66に移行し、そうでない場合にはステップS61に移行する。ここまでのフローは、ヘッダの最初のビットデータである論理値1を検出するフローである。
【0052】
ステップS66では、磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)の立上がりか否かを判定し、磁気再生用ヘッド9の出力信号の立上がりである場合にはステップS67に移行し、そうでない場合には待機する。
ステップS67では、タイマーのカウントをスタートする。
次にステップS68に移行して、磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)の立下がりか否かを判定し、磁気再生用ヘッド9の出力信号の立下がりである場合にはステップS69に移行し、そうでない場合には待機する。
【0053】
ステップS69では、タイマーのカウントを停止する。
次にステップS70に移行して、タイマーのカウント値が所定値n1より大きいか否かを判定し、タイマーのカウント値が所定値n1より大きい場合にはステップS71に移行し、そうでない場合にはステップS81に移行する。
ステップS71では、磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)の立上がりか否かを判定し、磁気再生用ヘッド9の出力信号の立上がりである場合にはステップS72に移行し、そうでない場合には待機する。
【0054】
ステップS72では、タイマーのカウントをスタートする。
次にステップS73に移行して、磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)の立下がりか否かを判定し、磁気再生用ヘッド9の出力信号の立下がりである場合にはステップS74に移行し、そうでない場合には待機する。
ステップS74では、タイマーのカウントを停止する。
【0055】
次にステップS75に移行して、タイマーのカウント値が所定値n1以下であるか否かを判定し、タイマーのカウント値が所定値n1以下である場合にはステップS76に移行し、そうでない場合にはステップS81に移行する。
ステップS76では、磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)の立上がりか否かを判定し、磁気再生用ヘッド9の出力信号の立上がりである場合にはステップS77に移行し、そうでない場合には待機する。
【0056】
ステップS77では、タイマーのカウントをスタートする。
次にステップS78に移行して、磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)の立下がりか否かを判定し、磁気再生用ヘッド9の出力信号の立下がりである場合にはステップS79に移行し、そうでない場合には待機する。
ステップS79では、タイマーのカウントを停止する。
【0057】
次にステップS80に移行して、タイマーのカウント値が所定値n1より大きいか否かを判定し、タイマーのカウント値が所定値n1より大きい場合には図11のステップS42に移行し、そうでない場合にはステップS81に移行する。
ステップS81では、ヘッダ部分を正確に読込めなかった(検出できなかった)としてエラー表示をしてからメインプログラムに復帰する。
【0058】
次に、図11の演算処理のステップS42で行われる図14の演算処理について説明する。この演算処理では、まずステップS91で磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)の立上がりか否かを判定し、磁気再生用ヘッド9の出力信号の立上がりである場合にはステップS92に移行し、そうでない場合には待機する。
ステップS92では、タイマーのカウントをスタートする。
【0059】
次にステップS93に移行して、磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)の立下がりか否かを判定し、磁気再生用ヘッド9の出力信号の立下がりである場合にはステップS94に移行し、そうでない場合には待機する。
ステップS94では、タイマーのカウントを停止する。
次にステップS95に移行して、タイマーのカウント値が所定値n1以下であるか否かを判定し、タイマーのカウント値が所定値n1以下である場合にはステップS95に移行し、そうでない場合にはステップS96に移行する。
【0060】
ステップS95では、シフトレジスタのD11のビットに論理値1を入力してからステップS97に移行する。なお、データ再生時には、搬送ベルト1の回転数(回転回数)を示すデータそのものが8bitであるため、シフトレジスタのD4〜D11までのビットを搬送ベルト1の回転数(回転回数)を示すデータとする。
ステップS97では、磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)の立下がりか否かを判定し、磁気再生用ヘッド9の出力信号の立下がりである場合にはステップS98に移行し、そうでない場合には待機する。
【0061】
ステップS98では、カウンタMをインクリメントしてからステップS99に移行する。
ステップS99では、カウンタMが予め設定された所定値aであるか否かを判定し、カウンタMが所定値aである場合にはステップS100に移行し、そうでない場合にはステップS97に移行する。なお、所定値aは、前記所定ピッチの整数分の一の「整数」から1を減じた値である。つまり、本実施形態の場合、「整数」が2なので、所定値aは1である。
【0062】
一方、ステップS96では、シフトレジスタのD11のビットに論理値0を入力してからステップS100に移行する。
ステップS100では、搬送ベルト1の動作履歴、即ち回転数(回転回数)の情報に関する全てのデータを読込んだか否かを判定し、全てのデータを読込んだ場合にはメインプログラムに復帰し、そうでない場合にはステップS91に移行する。
【0063】
これらの演算処理によれば、例えば図12の演算処理によって、搬送ベルト1の動作履歴、即ち回転数(回転回数)の記録内容を途中から読込んでいないことが確認されたら、図13の演算処理によって4bitのヘッダが読込まれ、次いで図14の演算処理によって8bitのデータが読込まれ、順次、シフトレジスタに格納される。その際、データが論理値1である場合には、カウンタMが所定値a(この場合は1)となるまで、エンコーダ信号を無視することで、データの誤読込みを回避することができる。
【0064】
このように本実施形態のインクジェットプリンタによれば、搬送ベルト1の移動方向に沿って当該搬送ベルト1に連続して形成された磁気記録層8と、搬送ベルト1の磁気記録層8に対向して配設され且つ当該磁気記録層8の記録内容を再生する磁気再生用ヘッド9と、搬送ベルト1の磁気記録層8に対向して配設され且つ当該磁気記録層8に記録する磁気記録ヘッド10とを備えたことにより、例えば回転数(回転回数)などの搬送ベルト1の動作履歴を磁気記録ヘッド10によって当該搬送ベルト1の磁気記録層8に記録することができ、これにより搬送ベルト1とプリンタ本体とが別々になっても搬送ベルト1の動作履歴が分かり易い。
【0065】
また、図9の演算処理のステップS2、ステップS4、ステップS5(搬送ベルト動作履歴検出手段)で検出された搬送ベルト1の回転数(回転回数、動作履歴)を記録内容として磁気記録ヘッド10によって磁気記録層8に記録することとしたため、搬送ベルト1とプリンタ本体とが別々になっても搬送ベルト1の動作履歴が分かり易い。
また、磁気記録層8のうち、搬送ベルト1の動作履歴からなる記録内容以外の部分に所定のパターンの磁極の変化からなる磁気パターンを記録することにより、搬送ベルト1の動作履歴からなる記録内容の部分が明確になると共に、搬送ベルト1の駆動系又は回転系から得られるエンコーダ信号を基準信号として、所定のパターンの磁極の変化からなる磁気パターンを磁気記録層8に記録することにより、所定のパターンにおける磁気記録層8上の磁極の変化の記録長さを一定にすることができる。
【0066】
また、所定のパターンの磁極の変化からなる磁気パターンが、所定の記録ピッチで磁極を変化させるものである場合、搬送ベルト1の動作履歴からなる記録内容が、所定の記録ピッチの整数分の一の記録ピッチで磁極を変化させるものであることとしたため、搬送ベルト1の動作履歴からなる記録内容を検出するのが容易となり、発明を実施化し易い。
また、磁気再生用ヘッド9で再生された磁気記録層8の記録内容を検出するものである場合、磁気再生用ヘッド9で再生された磁気記録層8の記録内容のうち、所定のパターンの磁極の変化からなる磁気パターンと異なる磁極の変化からなる記録内容から搬送ベルトの動作履歴を検出することとしたため、搬送ベルト1だけを他のプリンタ本体に移植して使用するような場合であっても、搬送ベルト1の動作履歴が分かり易い。
【0067】
次に、本発明のインクジェットプリンタの第2実施形態について説明する。本実施形態のインクジェットプリンタの概略構成は、前記第1実施形態の図1、図2のものと同様である。本実施形態では、まず磁気記録層8に記録する磁極変化の記録内容が第1実施形態のものと異なる。
【0068】
図15は、本実施形態で磁気記録層8に記録する磁極変化の記録内容を示すものである。本実施形態では、磁気記録層8全長にわたる所定のパターンの磁極の変化からなる磁気パターンを、磁極変化の一周期における一方の磁極(N極)の記録長を一定とする(磁極変化の周期が一定であれば他方の磁極(S極)の記録長も一定となる)ものとし、磁気記録層8の一部分に形成する、磁気パターンと相違する磁極の変化からなる記録内容を、磁極変化の一周期における一方の磁極(N極)の記録長を異なる(磁極変化の周期が一定であれば他方の磁極(S極)の記録長も異なる)ものとした。磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)についていえば、信号のONデューティ(又はOFFデューティ)が異なるとも言える。具体的には、磁気パターンに相当する論理値0ではN極に相当するONデューティが大きく(ON時間が長く)、磁気パターンと相違する論理値1ではS極に相当するOFFデューティが大きい(OFF時間が長い)。
【0069】
具体的な磁気記録方法を図16に示す。例えば、記録すべきデータが論理値0である場合には、ロータリエンコーダ(モータエンコーダ)の立上がりと同時に第1スイッチSW1及び第4スイッチSW4をONし且つ第2スイッチSW2及び第3スイッチSW3をOFFして磁気記録層8をN極に磁性すると共にタイマーを起動する。そして、タイマーの値が比較的大きな所定値Nlowになったら、第1スイッチSW1及び第4スイッチSW4をOFFし且つ第2スイッチSW2及び第3スイッチSW3をONして磁気記録層8をS極に磁性する。一方、記録すべきデータが論理値1である場合には、ロータリエンコーダ(モータエンコーダ)の立上がりと同時に第1スイッチSW1及び第4スイッチSW4をONし且つ第2スイッチSW2及び第3スイッチSW3をOFFして磁気記録層8をN極に磁性すると共にタイマーを起動し、タイマーの値が比較的小さな所定値Nhighになったら、第1スイッチSW1及び第4スイッチSW4をOFFし且つ第2スイッチSW2及び第3スイッチSW3をONして磁気記録層8をS極に磁性する。データを読込む場合にも、例えばN極のデューティ比の違いで論理値0、1を識別することができる。
【0070】
図17は、前記第1実施形態の図10の演算処理に代えて、図2の制御装置6内で行われる本実施形態の演算処理を示すフローチャートであり、まずステップS111で、搬送ベルト1の回転数(回転回数)の合計値を読出す。
次にステップS112に移行して、ステップS111で読出した搬送ベルト1の回転数(回転回数)の合計値をシフトレジスタに格納する。
【0071】
次にステップS113に移行して、駆動ローラモータ7を回転駆動して搬送ベルト1を回転(移動)させる。
次にステップS114に移行して、搬送ベルト1が一定速度(図では定速)の状態になったか否かを判定し、搬送ベルト1が一定速度状態になった場合にはステップS115に移行し、そうでない場合には待機する。
【0072】
ステップS115では、ロータリエンコーダ(モータエンコーダ)の立上がりであるか否かを判定し、ロータリエンコーダ(モータエンコーダ)の立上がりである場合にはステップS116に移行し、そうでない場合には待機する。
ステップS116では、第1スイッチSW1及び第4スイッチSW4をONし且つ第2スイッチSW2及び第3スイッチSW3をOFFして磁気記録層8をN極に磁性する。
次にステップS117に移行して、タイマーのカウントを開始する。
【0073】
次にステップS118に移行して、シフトレジスタのD0のビットデータが1であるか否かを判定し、シフトレジスタのD0のビットデータが1である場合にはステップS119に移行し、そうでない場合にはステップS120に移行する。
ステップS119では、タイマーのカウント値が比較的小さい所定値Nhighであるか否かを判定し、タイマーのカウント値が比較的小さい所定値Nhighである場合にはステップS121に移行し、そうでない場合には待機する。
【0074】
一方、ステップS120では、タイマーのカウント値が比較的大きい所定値Nlowであるか否かを判定し、タイマーのカウント値が比較的大きい所定値Nlowである場合にはステップS121に移行し、そうでない場合には待機する。
ステップS121では、第1スイッチSW1及び第4スイッチSW4をOFFし且つ第2スイッチSW2及び第3スイッチSW3をONして磁気記録層8をS極に磁性してからステップS122に移行する。
【0075】
ステップS122では、シフトレジスタのデータをシフトする。
次にステップS123に移行して、タイマーのカウントをリセットする。
次にステップS124に移行して、搬送ベルト1の動作履歴、即ち回転数(回転回数)の合計値に関する全てのデータの書込みが終了したか否かを判定し、全てのデータの書込みが終了した場合にはステップS125に移行し、そうでない場合にはステップS115に移行する。
【0076】
ステップS125では、ロータリエンコーダ(モータエンコーダ)の立上がりであるか否かを判定し、ロータリエンコーダ(モータエンコーダ)の立上がりである場合にはステップS126に移行し、そうでない場合には待機する。
ステップS126では、第1スイッチSW1及び第4スイッチSW4をONし且つ第2スイッチSW2及び第3スイッチSW3をOFFして磁気記録層8をN極に磁性する。
【0077】
次にステップS127に移行して、タイマーのカウントを開始する。
次にステップS128に移行して、タイマーのカウント値が比較的大きい所定値Nlowであるか否かを判定し、タイマーのカウント値が比較的大きい所定値Nlowである場合にはステップS129に移行し、そうでない場合には待機する。
ステップS129では、第1スイッチSW1及び第4スイッチSW4をOFFし且つ第2スイッチSW2及び第3スイッチSW3をONして磁気記録層8をS極に磁性する。
【0078】
次にステップS130に移行して、タイマーのカウントをリセットする。
次にステップS131に移行して、搬送ベルト1が1周したか否かを判定し、搬送ベルト1が1周した場合にはステップS132に移行し、そうでない場合にはステップS125に移行する。
ステップS132では、第2スイッチSW2及び第3スイッチSW3をOFFしてから図9の演算処理のステップS9に移行する。
【0079】
この演算処理によれば、搬送ベルト1の移動状態が一定速度状態になったら、4bitのヘッダと8bitのデータからなる搬送ベルト1の動作履歴、即ち回転数(回転回数)の情報を磁気記録層8に記録し、残りの部分にはデータの論理値0と同じ周期で磁極が変化する所定のパターンの磁気パターンを記録することができる。従って、所定のパターンの磁極の変化からなる磁気パターン以外の部分をデコードすれば、搬送ベルト1の動作履歴、例えば回転数(回転回数)の情報を検出することが可能となる。
【0080】
図18は、前記第1実施形態の図14の演算処理に代えて、図2の制御装置6内で行われる本実施形態の演算処理を示すフローチャートであり、まずステップS141で、磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)の立上がりか否かを判定し、磁気再生用ヘッド9の出力信号の立上がりである場合にはステップS142に移行し、そうでない場合には待機する。
【0081】
ステップS142では、第1タイマーのカウントをスタートする。
次にステップS143に移行して、磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)の立下がりか否かを判定し、磁気再生用ヘッド9の出力信号の立下がりである場合にはステップS144に移行し、そうでない場合には待機する。
ステップS144では、第1タイマーのカウントを停止する。
【0082】
次にステップS145に移行して、第2タイマーのカウントをスタートする。
次にステップS146に移行して、磁気再生用ヘッド9の出力信号(図ではエンコーダ信号)の立上がりか否かを判定し、磁気再生用ヘッド9の出力信号の立上がりである場合にはステップS147に移行し、そうでない場合には待機する。
ステップS147では、第2タイマーのカウントを停止する。
【0083】
次にステップS148に移行して、第1タイマーのカウント値が第2タイマーのカウント値より小さいか否かを判定し、第1タイマーのカウント値が第2タイマーのカウント値より小さい場合にはステップS149に移行し、そうでない場合にはステップS149に移行する。
ステップS149では、シフトレジスタのD11のビットに論理値1を入力してからステップS151に移行する。なお、データ再生時には、搬送ベルト1の回転数(回転回数)を示すデータそのものが8bitであるため、シフトレジスタのD4〜D11までのビットを搬送ベルト1の回転数(回転回数)を示すデータとする。
【0084】
一方、ステップS150では、シフトレジスタのD11のビットに論理値0を入力してからステップS151に移行する。
ステップS151では、搬送ベルト1の動作履歴、即ち回転数(回転回数)の情報に関する全てのデータを読込んだか否かを判定し、全てのデータを読込んだ場合にはメインプログラムに復帰し、そうでない場合にはステップS152に移行する。
ステップS152では第1及び第2タイマーのカウント値をクリアしてからステップS142に移行する。
【0085】
この演算処理によれば、磁気記録層8に記録されているN極の記録長とS極の記録帳の比較によってデータが次々とデコードされ、シフトレジスタに格納される。
このように本実施形態のインクジェットプリンタによれば、前記第1実施形態の効果に加えて、所定のパターンの磁極の変化からなる磁気パターンが、磁極変化の一周期における一方の磁極の記録長を一定とするものである場合、搬送ベルト1の動作履歴からなる記録内容が、磁極変化の一周期における一方の磁極の記録長を異なるものとするものであることとしたため、搬送ベルトの動作履歴からなる記録内容を検出するのが容易となり、発明を実施化し易い。
【0086】
なお、前記実施形態では、所謂ラインヘッド型インクジェットプリンタを対象として本発明のインクジェットプリンタを適用した例についてのみ詳述したが、本発明のインクジェットプリンタは、マルチパス型を始めとして、あらゆるタイプのインクジェットプリンタを対象として適用可能である。
【図面の簡単な説明】
【0087】
【図1】本発明の搬送装置を適用したインクジェットプリンタの一実施形態の概略構成を示す正面図である。
【図2】図1のインクジェットプリンタの平面図である。
【図3】第1実施形態として図2の磁気記録層に記録する所定のパターンの磁気パターンと磁気再生用ヘッドの出力信号の説明図である。
【図4】図2の磁気記録層に記録する搬送ベルトの動作履歴記録内容の説明図である。
【図5】第1実施形態における図3の磁気パターンと図4の搬送ベルト動作履歴記録内容の記録方法の説明図である。
【図6】磁気記録ヘッドによる記録方法の説明図である。
【図7】搬送ベルト動作履歴記録内容を格納するシフトレジスタの説明図である。
【図8】第1実施形態で磁気記録ヘッドにより搬送ベルト動作履歴記録内容を記録する方法の説明図である。
【図9】搬送ベルト動作履歴記録内容を記録するためのジェネリックな演算処理を示すフローチャートである。
【図10】第1実施形態として図9の演算処理で行われるサブルーチンを示すフローチャートである。
【図11】搬送ベルト動作履歴記録内容を読込むためのジェネリックな演算処理を示すフローチャートである。
【図12】ヘッダ検出のために図11の演算処理で行われるサブルーチンのフローチャートである。
【図13】ヘッダ検出のために図11の演算処理で行われるサブルーチンのフローチャートである。
【図14】第1実施形態として図11の演算処理で行われるサブルーチンを示すフローチャートである。
【図15】第2実施形態における磁気パターンと搬送ベルト動作履歴記録内容の記録方法の説明図である。
【図16】第2実施形態で磁気記録ヘッドにより搬送ベルト動作履歴記録内容を記録する方法の説明図である。
【図17】第2実施形態として図9の演算処理で行われるサブルーチンを示すフローチャートである。
【図18】第2実施形態として図11の演算処理で行われるサブルーチンを示すフローチャートである。
【符号の説明】
【0088】
1は搬送ベルト、2は印刷媒体、3は駆動ローラ、4は従動ローラ、5はテンションローラ、6は制御装置、7は駆動ローラモータ、8は磁気記録層、9は磁気再生用ヘッド、10は磁気記録ヘッド、11はインクジェットヘッド、12はロータリエンコーダ、13はゲートローラ
【特許請求の範囲】
【請求項1】
搬送ベルトの表面に印刷媒体を載置して搬送し、その印刷媒体にインクジェットヘッドからインク滴を出して印刷を行うインクジェットプリンタにおいて、前記搬送ベルトの移動方向に沿って当該搬送ベルトに連続して形成された磁気記録層と、前記搬送ベルトの磁気記録層に対向して配設され且つ当該磁気記録層の記録内容を再生する磁気再生用ヘッドと、前記搬送ベルトの磁気記録層に対向して配設され且つ当該磁気記録層に記録する磁気記録ヘッドとを備えたことを特徴とするインクジェットプリンタ。
【請求項2】
前記搬送ベルトの動作履歴を検出する搬送ベルト動作履歴検出手段と、前記磁気記録ヘッドによる磁気記録層への記録内容を制御する制御手段とを備え、前記制御手段は、前記搬送ベルト動作履歴検出手段で検出された搬送ベルトの動作履歴を記録内容として磁気記録ヘッドによって磁気記録層に記録することを特徴とする請求項1に記載のインクジェットプリンタ。
【請求項3】
前記制御手段は、前記磁気記録層のうち、搬送ベルトの動作履歴からなる記録内容以外の部分に、搬送ベルトの駆動系又は回転系から得られるエンコーダ信号を基準信号として、所定のパターンの磁極の変化からなる磁気パターンを前記磁気記録ヘッドにより記録することを特徴とする請求項2に記載のインクジェットプリンタ。
【請求項4】
前記所定のパターンの磁極の変化からなる磁気パターンが、所定の記録ピッチで磁極を変化させるものである場合、前記搬送ベルトの動作履歴からなる記録内容が、前記所定の記録ピッチの整数分の一の記録ピッチで磁極を変化させるものであることを特徴とする請求項3に記載のインクジェットプリンタ。
【請求項5】
前記所定のパターンの磁極の変化からなる磁気パターンが、磁極変化の一周期における一方の磁極の記録長を一定とするものである場合、前記搬送ベルトの動作履歴からなる記録内容が、前記磁極変化の一周期における一方の磁極の記録長を異なるものとするものであることを特徴とする請求項3に記載のインクジェットプリンタ。
【請求項6】
前記制御手段が、磁気再生用ヘッドで再生された磁気記録層の記録内容を検出するものである場合、前記磁気再生用ヘッドで再生された磁気記録層の記録内容のうち、前記所定のパターンの磁極の変化からなる磁気パターンと異なる磁極の変化からなる記録内容から搬送ベルトの動作履歴を検出することを特徴とする請求項3乃至5の何れか一項に記載のインクジェットプリンタ。
【請求項1】
搬送ベルトの表面に印刷媒体を載置して搬送し、その印刷媒体にインクジェットヘッドからインク滴を出して印刷を行うインクジェットプリンタにおいて、前記搬送ベルトの移動方向に沿って当該搬送ベルトに連続して形成された磁気記録層と、前記搬送ベルトの磁気記録層に対向して配設され且つ当該磁気記録層の記録内容を再生する磁気再生用ヘッドと、前記搬送ベルトの磁気記録層に対向して配設され且つ当該磁気記録層に記録する磁気記録ヘッドとを備えたことを特徴とするインクジェットプリンタ。
【請求項2】
前記搬送ベルトの動作履歴を検出する搬送ベルト動作履歴検出手段と、前記磁気記録ヘッドによる磁気記録層への記録内容を制御する制御手段とを備え、前記制御手段は、前記搬送ベルト動作履歴検出手段で検出された搬送ベルトの動作履歴を記録内容として磁気記録ヘッドによって磁気記録層に記録することを特徴とする請求項1に記載のインクジェットプリンタ。
【請求項3】
前記制御手段は、前記磁気記録層のうち、搬送ベルトの動作履歴からなる記録内容以外の部分に、搬送ベルトの駆動系又は回転系から得られるエンコーダ信号を基準信号として、所定のパターンの磁極の変化からなる磁気パターンを前記磁気記録ヘッドにより記録することを特徴とする請求項2に記載のインクジェットプリンタ。
【請求項4】
前記所定のパターンの磁極の変化からなる磁気パターンが、所定の記録ピッチで磁極を変化させるものである場合、前記搬送ベルトの動作履歴からなる記録内容が、前記所定の記録ピッチの整数分の一の記録ピッチで磁極を変化させるものであることを特徴とする請求項3に記載のインクジェットプリンタ。
【請求項5】
前記所定のパターンの磁極の変化からなる磁気パターンが、磁極変化の一周期における一方の磁極の記録長を一定とするものである場合、前記搬送ベルトの動作履歴からなる記録内容が、前記磁極変化の一周期における一方の磁極の記録長を異なるものとするものであることを特徴とする請求項3に記載のインクジェットプリンタ。
【請求項6】
前記制御手段が、磁気再生用ヘッドで再生された磁気記録層の記録内容を検出するものである場合、前記磁気再生用ヘッドで再生された磁気記録層の記録内容のうち、前記所定のパターンの磁極の変化からなる磁気パターンと異なる磁極の変化からなる記録内容から搬送ベルトの動作履歴を検出することを特徴とする請求項3乃至5の何れか一項に記載のインクジェットプリンタ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2008−68953(P2008−68953A)
【公開日】平成20年3月27日(2008.3.27)
【国際特許分類】
【出願番号】特願2006−247683(P2006−247683)
【出願日】平成18年9月13日(2006.9.13)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成20年3月27日(2008.3.27)
【国際特許分類】
【出願日】平成18年9月13日(2006.9.13)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]