
インクジェット印刷装置
【課題】複数個のモータによるインクジェットヘッド保持部の昇降を確実に行って、インクジェットヘッド保持部の破損を未然に防ぐことができる。
【解決手段】制御部41が2個のモータ27を操作してインクジェットヘッド保持部21を昇降させる際に、監視部43は各スリットセンサ35の信号を監視する。監視部43は、各スリットセンサ35の信号に基づいて、2個のモータ27の回転が同期していることと、2個のモータ27の回転方向が一致していることとを監視する。したがって、それらに異常が生じた場合には、インクジェットヘッド保持部21にねじれが生じたことを示すので、各モータ27の回転を停止させる等の措置をとることができる。その結果、インクジェットヘッド保持部21の破損を未然に防止できる。
【解決手段】制御部41が2個のモータ27を操作してインクジェットヘッド保持部21を昇降させる際に、監視部43は各スリットセンサ35の信号を監視する。監視部43は、各スリットセンサ35の信号に基づいて、2個のモータ27の回転が同期していることと、2個のモータ27の回転方向が一致していることとを監視する。したがって、それらに異常が生じた場合には、インクジェットヘッド保持部21にねじれが生じたことを示すので、各モータ27の回転を停止させる等の措置をとることができる。その結果、インクジェットヘッド保持部21の破損を未然に防止できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、インクジェットヘッドと印刷用紙とを相対的に移動させつつインクジェットヘッドからインク滴を吐出して印刷用紙に印刷を行うインクジェット印刷装置に関する。
【背景技術】
【0002】
インクジェットヘッドと印刷用紙とを相対的に移動させて印刷用紙に対して画像を形成する装置として、インクジェット印刷装置がある。このインクジェット印刷装置は、印刷用紙の幅方向にインクジェットヘッドを移動させつつ印刷を行うマルチパス方式と、印刷用紙の幅方向に応じたインクジェットヘッドを備え、インクジェットヘッドを印刷用紙の幅方向へ移動させないで印刷を行う1パス方式とがある。
【0003】
1パス方式の装置は、印刷用紙の印刷領域をカバーするだけのインクジェットヘッドをインクジェットヘッド保持部に備えており、インクジェットヘッドがマルチパス方式の装置に比較して長くなるのが一般的である。さらに、装置の占有面積を抑制するために、印刷位置とキャップ位置とが印刷用紙の上方に位置するように構成された装置がある。印刷位置は、印刷用紙とインクジェットヘッドとが近接した位置であり、キャップ位置は、印刷用紙とインクジェットヘッドとが離間して、インクジェットヘッドがキャップにより閉塞される位置である。そのためには、インクジェットヘッドをインクジェットヘッド保持部ごと印刷用紙に対して昇降させる構成が必要となる。
【0004】
インクジェットヘッド保持部を昇降させるには、例えば、1個のパルスモータと、インクジェットヘッド保持部の両端に回転力を伝達する伝達機構とを備える構成がある。
【0005】
1個のパルスモータを用いて上記のような昇降を行う装置として、輸液ポンプがある(例えば、特許文献1参照)。
【0006】
この輸液ポンプは、パルスモータのシャフトに取り付けられるとともに、円形状に非等間隔で配列され、回転方向の長さが互いに異なるスリットを有するスリット円板と、スリットにおける回転方向の長さとスリット間隔との少なくともいずれか一方の値を格納したテーブルと、スリット円板のスリットを検出して検知信号を出力するホトセンサと、ホトセンサの検出信号及びテーブルに基づき、ホトセンサの位置にあるスリットと、スリットの間隔との少なくともいずれか一方を特定、パルスモータの回転位置を検出する回転位置検出手段とを備えている。この構成によると、パルスモータが反転したことを検出することができる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特許第3320179号公報(段落番号「0077」、「0078」、図5〜図8)
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、このような構成を有する従来例の場合には、次のような問題がある。
すなわち、特に、上述したように1パス方式のインクジェットヘッドは、印刷用紙の幅方向に長い構成であり、1個のパルスモータの回転力を伝達機構で伝達する構成では、伝達機構が左右に長くなり過ぎて左右での回転遅れが顕著になる。したがって、上述した従来の装置では、インクジェットヘッドを保持したインクジェットヘッド保持部を適切に昇降させることはできない。
【0009】
そこで、二個のパルスモータの各々をインクジェットヘッド保持部の幅方向の両端側に備え、両パルスモータの同期をとりつつインクジェットヘッド保持部の昇降を行うことが考えられる。しかしながら、制御対象が複数個になるので、それぞれのパルスモータの反転や脱調を検出しつつ、インクジェットヘッド保持部を適切に昇降制御することが困難であるという問題がある。特に、インクジェットヘッド保持部の両端が異なる高さ位置に移動すると、インクジェットヘッド保持部がねじれた状態となり、その状態で昇降を継続すると、最悪の場合にはインクジェットヘッド保持部が破損する恐れがある。
【0010】
なお、1パス機だけでなく、マルチパス機であってもインクジェットヘッド保持部を複数個のモータで昇降する機構を備えているインクジェット印刷装置の場合には、上記と同様の問題を生じる恐れがある。
【0011】
本発明は、このような事情に鑑みてなされたものであって、複数個のモータによるインクジェットヘッド保持部の昇降を確実に行って、インクジェットヘッド保持部の破損を未然に防ぐことができるインクジェット印刷装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
本発明は、このような目的を達成するために、次のような構成をとる。
すなわち、請求項1に記載の発明は、インクジェットヘッドと印刷装置とを相対的に移動させつつインクを吐出して画像を印刷するインクジェット印刷装置において、インクジェットヘッドを保持するインクジェットヘッド保持部と、複数個のモータを操作して、前記インクジェットヘッド保持部を少なくとも印刷位置と原点位置とにわたって昇降させる制御手段と、前記制御手段による昇降の際に、前記複数個のモータの回転が同期していること、及び前記複数個のモータの回転方向が一致していることを監視する監視手段と、を備えていることを特徴とするものである。
【0013】
[作用・効果]請求項1に記載の発明によれば、制御手段が複数個のモータを操作してインクジェットヘッド保持部を昇降させる際に、監視手段は複数個のモータの回転が同期していること、及び、回転方向が一致していることを監視する。したがって、それらに異常が生じた場合には、インクジェットヘッド保持部にねじれが生じたことを示すので、各モータの回転を停止させる等の措置をとることができる。その結果、インクジェットヘッド保持部の破損を未然に防止できる。
【0014】
また、本発明において、前記複数個のモータそれぞれの回転の同期、および前記複数個のモータの回転方向を検出する検出手段を備え、前記監視手段は、前記検出手段が出力する信号を監視することにより、前記複数個のモータの回転同期および回転方向を監視することが好ましい(請求項2)。
【0015】
監視手段は、検出手段からの信号を監視することで、複数個のモータの回転同期および回転方向に異常がないかを判断できる。
【0016】
また、本発明において、前記検出手段は、前記複数個のモータそれぞれによって回転させられる少なくとも二種類の大きさのスリットを備えたスリット付の円板のスリットを検出して、前記複数個のモータの回転同期および回転方向についての信号を出力することが好ましい(請求項3)。
【0017】
スリット付の円板の二種類の大きさのスリットを検出することにより、複数個のモータの同期及び回転方向を比較的簡単に判断することができる。
【0018】
また、本発明において、前記スリット付の円板が、前記インクジェットヘッド保持部の昇降方向に延出され、前記複数個のモータによって回転させられることにより前記インクジェットヘッド保持部を昇降させる複数本のボールネジに取り付けられていることが好ましい(請求項4)。
【0019】
複数本のボールネジの回転に伴ってスリット付き円板が回転するので、スリット付きの円板を検出手段が検出することにより、複数個のモータの同期及び回転方向の一致を判断できる。
【0020】
また、本発明において、前記監視手段は、前記スリット付の円板のスリットを計数することで同期を判断し、前記スリット付の円板のスリットが出現する順番を監視することで回転方向を判断することが好ましい(請求項5)。
【0021】
スリット付の円板のスリットが現れる度に計数し、それらの値を比較することで複数個のモータの同期・非同期を判断できる。また、スリット付の円板のスリットは、少なくとも二種類の大きさである。したがって、例えば、大小大小と出現した状態から、小大と変化した場合には、逆転したことを意味するので回転方向を判断することができる。このような判断を行うことにより、比較的簡易な構成で異常を判断できる。
【発明の効果】
【0022】
本発明に係るインクジェット印刷装置によれば、制御手段が複数個のモータを操作してインクジェットヘッド保持部を昇降させる際に、監視手段は複数個のモータの回転が同期していること、及び、回転方向が一致していることを監視する。したがって、それらに異常が生じた場合には、インクジェットヘッド保持部にねじれが生じたことを示すので、各モータの回転を停止させる等の措置をとることができる。その結果、インクジェットヘッド保持部の破損を未然に防止できる。
【図面の簡単な説明】
【0023】
【図1】実施例に係るインクジェット印刷システムの全体を示す概略構成図である。
【図2】印刷ユニットの斜視図である。
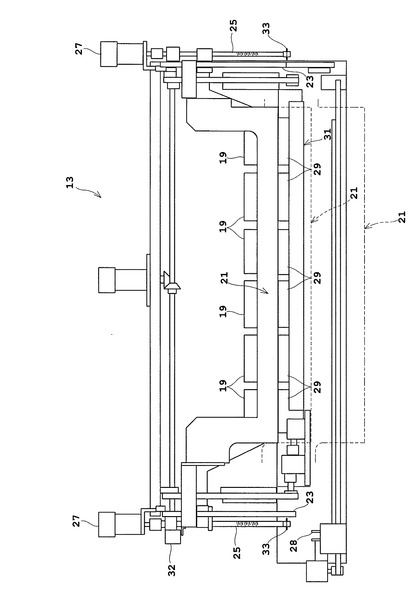
【図3】印刷ユニットの正面図である。
【図4】ボールネジの先端部を示す図である。
【図5】スリット付の円板を示す図である。
【図6】制御系を示すブロック図である。
【図7】スリットセンサの検出信号の一例を示すタイムチャートである。
【図8】動作を示すフローチャートである。
【図9】ねじれ監視を示すフローチャートである。
【発明を実施するための形態】
【0024】
以下、図面を参照して本発明の一実施例を説明する。
図1は、実施例に係るインクジェット印刷システムの全体を示す概略構成図であり、図2は、印刷ユニットの斜視図であり、図3は、印刷ユニットの正面図である。
【0025】
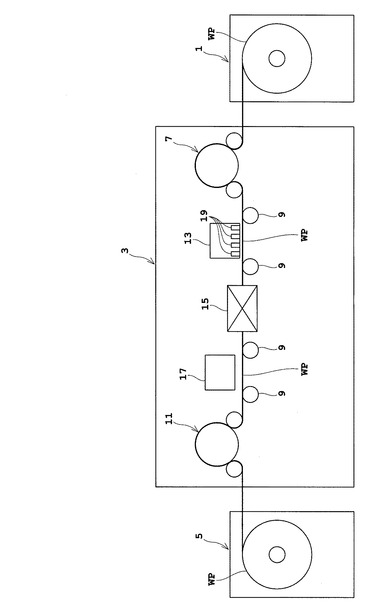
本実施例に係るインクジェット印刷システムは、ロール状の連続紙WPを供給する給紙部1と、連続紙WPに印刷を行うインクジェット印刷装置3と、印刷を終えた連続紙WPをロール状に巻き取る排紙部5とを備えている。
【0026】
給紙部1は、ロール状の連続紙WPを水平軸周りに回転可能に保持し、インクジェット印刷装置3に対して連続紙WPを巻き出して供給する。また、排紙部5は、インクジェット印刷装置3から送り出される連続紙WPを水平軸周りに巻き取る。連続紙WPの供給側を上流とし、連続紙WPの排紙側を下流とすると、給紙部1はインクジェット印刷装置3の上流側に配置されており、排紙部5はインクジェット印刷装置3の下流側に配置されている。
【0027】
インクジェット印刷装置3は、給紙部1からの連続用紙WPを取り込むための駆動ローラ7を上流側に備えている。駆動ローラ7によって給紙部1から巻き出された連続紙WPは、複数個の搬送ローラ9に沿って下流側の排紙部5に向かって搬送される。最下流の搬送ローラ9と排紙部5との間には、駆動ローラ11が配置されている。この駆動ローラ11は、搬送ローラ9上を搬送されている連続紙WPを排紙部5に向かって送り出す。
【0028】
インクジェット印刷装置3は、駆動ローラ7と駆動ローラ11との間に、印刷ユニット13と、乾燥部15と、検査部17とを上流側からその順で備えている。乾燥部15は、印刷ユニット13によって印刷された部分の乾燥を行う。検査部17は、印刷された部分に汚れや抜け等がないかを検査する。
【0029】
印刷ユニット13は、インク滴を吐出するインクジェットヘッド19を備えている。印刷ユニット13は、連続紙WPの搬送方向に沿って複数個配置されているのが一般的である。例えば、ブラック(K)、シアン(C)、マゼンタ(M)、イエロー(Y)について個別に4個の印刷ユニット13を備えている。しかし、以下の説明においては、発明の理解を容易にするために、1個の印刷ユニット13だけを備えるものとして説明する。また、印刷ユニット13は、連続紙WPの搬送方向と直交する水平方向にも複数個のインクジェットヘッド19を備えている。印刷ユニット13は、連続紙WPの幅方向における印刷領域を移動することなく印刷できるだけのインクジェットヘッド19を複数個備えている。つまり、本実施例におけるインクジェット印刷装置3は、インクジェットヘッド19が連続紙WPの搬送方向に直交する水平方向に主走査するための移動を行うことなく、位置固定のままで連続紙WPを送りながら連続紙WPに対して印刷を行う。
【0030】
ここで、上述した印刷ユニット13について図2及び図3を参照して説明する。
【0031】
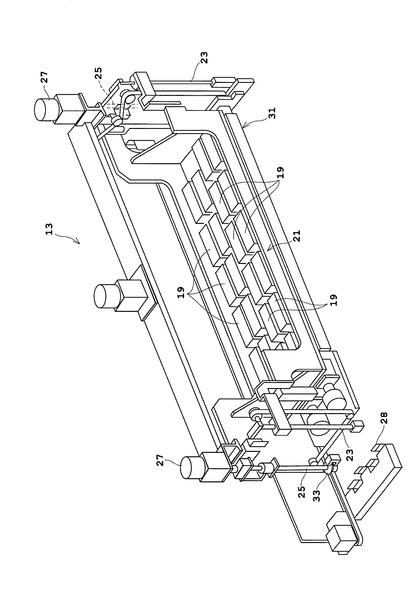
本実施例における印刷ユニット13は、22個のインクジェットヘッド19と、これらのインクジェットヘッド19を一括して保持するインクジェットヘッド保持部21とを備えている。22個のインクジェットヘッド19は、連続紙WPの搬送方向と直交する連続紙WPの幅方向に沿って5個または6個で4列に配置された状態でインクジェットヘッド保持部21に保持されている。全てのインクジェットヘッド19は、インクジェットヘッド保持部21の底面を貫通しており、インクジェットヘッド保持部21の下面からインクを連続紙WPに向けて吐出できるようになっている。なお、インクジェットヘッド保持部21が有するインクジェットヘッド19の個数は、本実施例のように22個に限定されるものではない。
【0032】
インクジェットヘッド保持部21の左右方向には、リニアガイド23がほぼ垂直姿勢で配置されている。インクジェットヘッド保持部21は、一対のリニアガイド23に案内されて昇降可能に支持されている。また、インクジェットヘッド保持部21の左右方向には、左右一対のボールネジ25がほぼ垂直姿勢で配置されている。インクジェットヘッド保持部21は、一対のボールネジ25に対して図示しないナットを介して螺合している。一対のボールネジ25は、インクジェットヘッド保持部21の左右上方に配置された一対のモータ27により鉛直軸周りに回転駆動される。したがって、一対のモータ27が作動することにより、インクジェットヘッド保持部21が昇降する。なお、上述した一対のモータ27は、以下の説明において、左右の一方を特定する場合には、左側のモータ27Lまたは右側のモータ27Rと称することにする。
【0033】
インクジェットヘッド保持部21は、図3に実線で示す「キャップ位置」と、図3に点線で示す「ワイパー位置」と、図3に二点鎖線で示す「印刷位置」とにわたり昇降移動する。なお、ワイパー位置においては、図2及び図3における左側に位置するワイパー28がインクジェットヘッド19に沿って水平方向に移動することによって、インクジェットヘッド19の吐出面に付着した異物が拭き取られる。
【0034】
印刷ユニット13は、22個のインクジェットヘッド19に対応して配置された22個のキャップ29を備えている。これらのキャップ29は、各インクジェットヘッド19におけるインクの吐出部を周囲に対して閉塞する。各キャップ29は、インクジェットヘッド19におけるインク吐出部付近の乾燥や汚染を防止する。各キャップ29は、キャップ保持部31により保持されている。
【0035】
キャップ保持部31は、複数個のキャップ29を保持した状態で、図3に示すように、インクジェットヘッド保持部21の下方の「キャップ位置」と、インクジェットヘッド保持部21の背面側の「待避位置」とにわたり移動可能に構成されている。なお、待避位置については、図示を省略している。
【0036】
また、インクジェットヘッド保持部21は、一対のモータ27の作動により、上述したキャップ位置より僅かに上昇した位置である「原点位置」にも移動する。この原点位置は、原点センサ32によって検出可能となるように、原点センサ32が上方に設けられている。なお、原点センサ32は、図2では省略し、図3にのみ記載してある。原点位置は、詳細後述するように、インクジェットヘッド保持部21にねじれが生じた後、一旦上昇される基準の位置となる。
【0037】
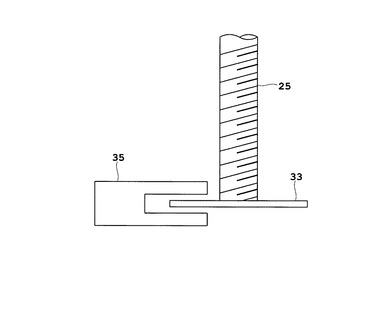
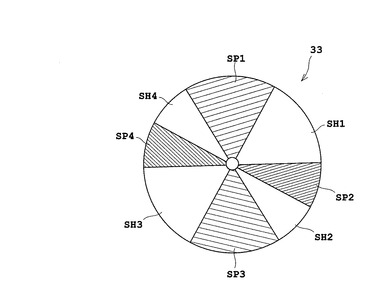
ここで、図4及び図5を参照する。なお、図4は、ボールネジの先端部を示す図であり、図5は、スリット付の円板を示す図である。
【0038】
一対のボールネジ25は、スリット付の円板33をそれぞれ下端側に取り付けられている。なお、スリット付の円板33は、ボールネジ25の下端側に取付位置が限定されるものではなく、ボールネジ25の回転が検出できればよい。したがって、ボールネジ25のうち、モータ27に近い位置にスリット付の円板33を取り付けるようにしてもよい。
【0039】
スリット付の円板33は、少なくとも二種類のスリットを形成されている。この例では、中心角60°の扇状を呈するスリットSP1と、中心角60°の扇状を呈するスリットSH1と、中心角30°の扇状を呈するスリットSP2と、中心角30°の扇状を呈するスリットSH2と、中心角60°の扇状を呈するスリットSP3と、中心角60°の扇状を呈するスリットSH3と、中心角30°の扇状を呈するスリットSP4と、中心角30°の扇状を呈するスリットSH4とが円板33に形成されている。ここで、符号S「P」としたスリット(ハッチングしたスリット)は、例えば、光を通さない部分であり、符号S「H」としたスリット(ハッチングなしのスリット)は、例えば、光を通す部分である。なお、上記のスリットの構成は、あくまでも一例であり、少なくとも二種類のスリットを円板33が備えていればよい。
【0040】
各スリット付の円板33の側方には、スリットセンサ35が配置されている。スリットセンサ35は、スリット付の円板33に形成された各スリットSP1〜SP4,SH1〜SH4を検出して信号を出力する。例えば、スリットセンサ35は、透過型のセンサであり、自身が照射した光を検出してオン(信号レベルがHIGHとなる)を出力するタイプであるとすると、スリットSH1〜SH4においてONし、スリットSP1〜SP4においてオフを出力する。なお、以下の説明においては、必要に応じて一対のスリットセンサ35を左側のスリットセンサ35Lと、右側のスリットセンサ35Rと称する。また、スリットセンサ35は、透過型でなく反射型であってもよい。また、光学式の非接触型に限定されるものはなく、接触式のセンサであってもよい。
【0041】
なお、上述したスリットセンサ35が本発明における「検出手段」に相当する。
【0042】
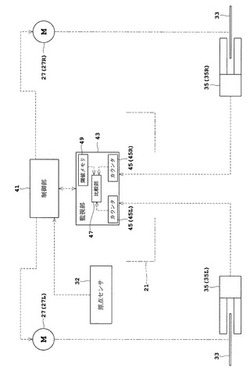
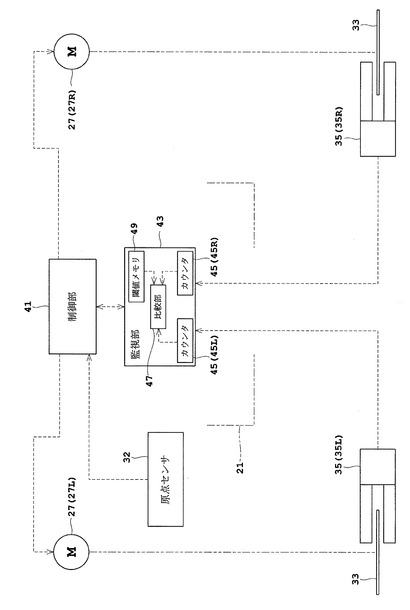
次に、図6を参照する。なお、図6は、制御系を示すブロック図である。
【0043】
本発明の「制御手段」に相当する制御部41は、CPUやメモリなどで構成されている。制御部41は、一対のモータ27を操作して、一対のボールネジ25を回転させて、インクジェットヘッド保持部21をインクジェットヘッド19ごと昇降させる。また、制御部41は、原点センサ32の出力信号を受けて、インクジェットヘッド保持部21が原点位置に移動したことを検出する。また、制御部41は、本発明における「監視手段」に相当する監視部43からの監視信号を受け取って一対のモータ27を操作する。
【0044】
監視部43は、一対のスリットセンサ35からの出力信号を受け取って、一対のモータ27が同期しているか否かの判断と、一対のモータ27の回転方向が一致していることを監視する。また、監視部43は、監視の結果に応じた監視信号を制御部41に対して出力する。
【0045】
監視部43は、一対のカウンタ45を内蔵し、一対のカウンタ45のカウント値を比較する比較部47を備えている。一対のカウンタ45は、左側のカウンタ45Lと右側のカウンタ45Rとから構成されている。比較部47は、閾値を予め記憶した閾値メモリ49から所定の閾値を読み出し、その値と一対のカウンタ45の差分とを比較し、その結果に応じた監視信号を制御部41に対して出力する。なお、監視部43は、制御部41からリセット信号を受けると、一対のカウンタ45のカウント値をリセットする。また、監視部43は、一対のスリットセンサ35の信号幅を監視して、一対のモータ27のそれぞれの回転方向が一致しているか否かを判断する。
【0046】
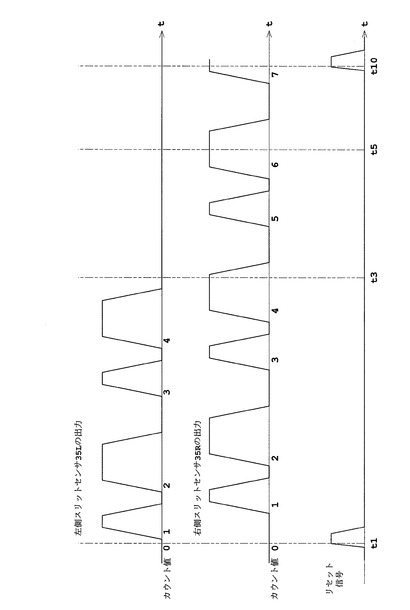
ここで、図7を参照する。なお、図7は、スリットセンサの検出信号の一例を示すタイムチャートである。
【0047】
t1時点で監視部43が制御部41からリセット信号を受けたとする。すると、監視部43は、一対のカウンタ45のカウント値をリセットし、0からのカウントを開始する。例えば、制御部41が一定方向に一対のモータ27を同速度で同方向に回転させると、通常はカウント値が一定の差分を保ったままで増加する。図7では、左側のスリットセンサ35LがスリットSH2→SP2→SH1→SP1……のように順次に検出したとすると、左側のカウンタ45Lが0→1→2→3……とカウントしてゆく。また、右側のスリットセンサ35RがSH2→SP2→SH1→SP1……のように同様に順次に検出したとすると、右側のカウンタ45Rが0→1→2→3……とカウントしてゆく。但し、スリット付の円板33の取付時の角度ずれ等により、一対のスリット付の円板33の回転角度にずれがあるので、カウントされるタイミングには「ずれ」がある。監視部43は、リセット信号を受けてから逐次に比較部47がカウント値の差分の比較を行い、閾値メモリ49の閾値以上になったか否かを監視する。
【0048】
例えば、図7のt3時点で左側のモータ27Lが停止した場合には、t5時点では、左側のスリットセンサ35のカウント値が「4」で停止する。すると、t5時点では、右側のスリットセンサ35のカウント値が「6」となる。このとき、閾値が「2」であったとすると、t5時点において監視部43は制御部41に対して異常発生を知らせる。
【0049】
また、監視部43は、一対のスリットセンサ35の出力における信号幅を監視しており、信号幅の大小の出現順序に基づいて一対のモータ27のそれぞれの回転方向を判断し、逆となった場合には制御部41に対して異常発生を知らせる。
【0050】
なお、閾値メモリ49は、第1の閾値Xと第2の閾値X+αとを予め格納している。詳細は後述するが、監視部43は、通常の監視状態における昇降時においては、第1の閾値Xによって比較部47に比較を行わせ、異常発生状態における原点位置への復帰時においては、第2の閾値X+αによって比較部47に比較を行わせる。なお、第2の閾値X+αは、第1の閾値Xよりもαだけ大きな値が設定される。これは、異常発生後における昇降であるので、通常の監視状態における第1の閾値Xでは、即座に異常発生と判断される不都合が生じるからである。このように二種類の閾値を使い分けることにより、異常発生から原点復帰時にも適切に監視を行うことが可能となっている。
【0051】
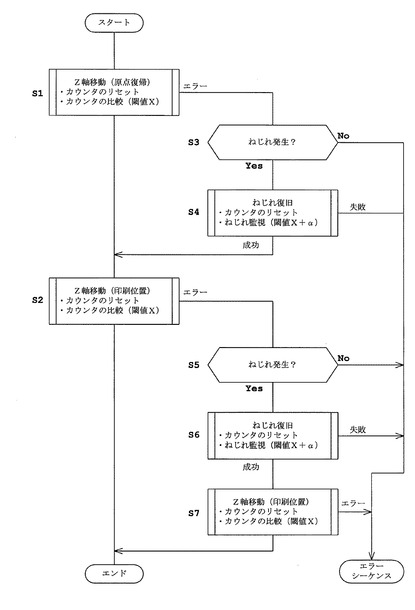
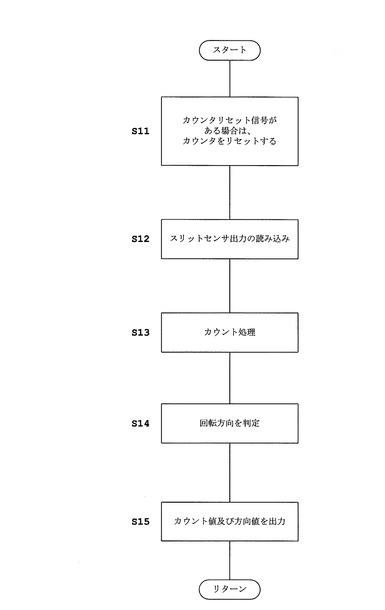
次に、図8及び図9を参照して、上述したインクジェット印刷システムの印刷ユニット13における動作について説明する。なお、図8は、動作を示すフローチャートであり、図9は、ねじれ監視を示すフローチャートである。
【0052】
以下の説明においては、インクジェットヘッド保持部21を原点位置に復帰させ、その「原点位置」から「印刷位置」にまで下降させる動作を例に採る。
【0053】
ステップS1
制御部41は、一対のモータ27を操作して、インクジェットヘッド保持部21をZ軸移動させる。なお、Z軸は、図3における上方向であり、原点センサ32が作動するまで上昇させる。このときは、異常発生した状態ではないので、閾値は第1の閾値Xである。この際には、図9における監視が行われる。
【0054】
ステップS2
上記のステップS1において異常が発生しなかった場合には、制御部41は、一対のモータ27を操作して、インクジェットヘッド21を印刷位置にまで下降させる。このときも、図9における監視が実施される。
【0055】
ここで、図9を参照する。
【0056】
ステップS11
監視部43は、一対のカウンタ45をリセットする。
【0057】
ステップS12
監視部43は、一対のスリットセンサ35の出力を読み込む。
【0058】
ステップS13
監視部43は、一対のカウンタ45による一対のスリットセンサ35の信号のカウントを行わせる。
【0059】
ステップS14
監視部43は、一対のスリットセンサ35の信号幅に基づいて回転方向を判定する。このとき、例えば、正回転であれば「+」とし、逆回転であれば「−」とする。
【0060】
ステップS15
監視部43は、一対のカウンタ45の現在のカウント値と、現在の判定における回転方向を出力する。監視部43は、比較部47において第1の閾値Xとカウント値の差分を求め、差分が第1の閾値X以上となった場合には、エラーを制御部41に出力する。また、監視部43は、回転方向が反転したと判断した場合には、同様にエラーを制御部41に出力する。また、説明を省略するが、ねじれ以外のエラーがあっても同様にエラーを制御部41に出力する。ねじれ以外のエラーとは、例えば、原点位置への移動を開始して、所定時間が経過しても原点センサ32がONしないなどのエラーが挙げられる。
【0061】
ここで、図8に戻る。
【0062】
ステップS3
監視部43からのエラーを受けた制御部41は、監視部43によるカウント値の差分と回転方向や、その他の信号に基づいて処理を分岐する。例えば、インクジェットヘッド保持部21にねじれが生じている場合、つまり、差分が第1の閾値X以上となったり、一対のモータ27の回転方向が互いに逆となったりしたような場合には、ステップS4に移行し、それ以外のエラーであれば、エラーシーケンスに移行する。このエラーシーケンスとは、例えば、一対のモータ27を停止させるとともに、図示しない表示部に「回復不能な異常が発生したので、サービスセンターに連絡!!」等の表示を行わせるシーケンスである。
【0063】
ステップS4
インクジェットヘッド保持部21に「ねじれ」が発生した場合には、ねじれ復旧処理を行う。
【0064】
具体的には、制御部41は、監視部43に対して一対のカウンタ45のリセットを行わせる。さらに、比較部47に対しては、第2の閾値X+αによる比較を行うように指示する。そして、第2の閾値X+αを設定した状態でねじれ監視を行いつつ、制御部41は、一対のモータ27を作動させて、インクジェットヘッド保持部21を原点位置にまで移動させる。その結果、インクジェットヘッド保持部21が原点位置にまで移動できた場合には、「成功」であるので、ステップS2に移行する。一方、インクジェットヘッド保持部21が原点位置に移動する際にも再びねじれが発生した場合には、「失敗」であるので、エラーシーケンスに移行する。
【0065】
以下、原点位置への移動に「成功」したとして説明する。
【0066】
ステップS2
制御部41は、一対のモータ27を操作して、インクジェットヘッド保持部21を原点位置から印刷位置にまで下降させる。このとき、第1の閾値Xが設定されて、上述したように図9の監視が実行される。このときエラーが発生したとする。
【0067】
ステップS5
監視部43からエラーが制御部41に出力された場合、監視部43によるカウント値の差分と回転方向や、その他の信号に基づいて処理を分岐する。例えば、インクジェットヘッド保持部21にねじれが生じている場合には、ステップS6に移行し、それ以外のエラーであれば、エラーシーケンスに移行する。
【0068】
ここでは「ねじれ」が生じたとする。
【0069】
ステップS6
インクジェットヘッド保持部21にねじれが生じている場合には、原点位置へ戻すことによるねじれ復旧を実行する。このとき、監視部43は、第2の閾値X+αによる監視を行う。ねじれ復旧が「失敗」の場合には、エラーシーケンスに移行する。一方、「成功」の場合には、ステップS7に移行する。
【0070】
ステップS7
制御部41は、一対のモータ27を操作して、インクジェットヘッド保持部21を印刷位置にまで下降させる。このとき、閾値としては第1の閾値Xが設定されて、図9におけるねじれ監視が実行される。その結果、印刷位置にまで移動が完了した場合には、処理を終了して印字処理に移行する。一方、エラーが生じた場合には、一対のモータ27を停止させるとともに、エラーシーケンスに移行する。
【0071】
このように本実施例装置では、制御部41は、インクジェットヘッド保持部21を移動させる際にエラーが生じても一度はリトライ(ステップS4,S6)を行わせ、ねじれ復旧を図るようにしている。したがって、エラーシーケンスに移行する頻度を抑制でき、装置の稼働率を向上できる。
【0072】
上述したように、本実施例装置は、制御部41が2個のモータ27を操作してインクジェットヘッド保持部21を昇降させる際に、監視部43は各スリットセンサ35の信号を監視する。監視部43は、各スリットセンサ35の信号に基づいて、2個のモータ27の回転が同期していることと、2個のモータ27の回転方向が一致していることとを監視する。したがって、それらに異常が生じた場合には、インクジェットヘッド保持部21にねじれが生じたことを示すので、各モータ27の回転を停止させる等の措置をとることができる。その結果、インクジェットヘッド保持部21の破損を未然に防止できる。
【0073】
また、制御部41は、異常があると判断した場合には、各モータ27を停止させるとともに、各モータ27を操作して原点位置にインクジェットヘッド保持部21を移動させる。これにより、インクジェットヘッド保持部21の昇降に異常がある状態を解消することができる場合があるので、インクジェットヘッド保持部21の昇降を再び行う等の動作を行うことができる。その結果、メンテナンスのために装置を停止させる頻度を抑制でき、装置の稼働率を向上できる。
【0074】
また、ステップS4,S6のように異常が生じた後に原点位置への移動を行うと、その移動の際にインクジェットヘッド保持部のねじれがさらに悪化して破損に至る恐れがある。しかし、その移動時にも監視部43による監視を行うことにより、そのような不都合を防止できる。
【0075】
本発明は、上記実施形態に限られることはなく、下記のように変形実施することができる。
【0076】
(1)上述した実施例では、2個のモータ27によるインクジェットヘッド保持部21の昇降を行う構成とした。しかし、本発明は2個のモータ27に限定されるものではなく、例えば、3個以上のモータ27を備える場合にも適用することができる。その場合には、2個のモータ27の全組合せ(3通り)におけるカウント値の差分と閾値とを比較してねじれを判断すればよい。
【0077】
(2)上述した実施例では、異常が発生した場合にはインクジェットヘッド保持部21を原点位置に復帰させるようにした。しかし、原点位置への復帰を行うことなく、閾値を第2の閾値X+αに設定するだけで、印刷位置への移動を継続する構成としてもよい。そして、第2の閾値X+α以上となった場合には、即座にエラーシーケンスに移行するようにしてもよい。また、原点復帰を行わずに停止させるだけにしてもよい。これにより、原点位置へ移動することによる原点復帰に要する移動時間をなくすことができる。
【0078】
(3)上述した実施例では、スリット付の円板33が扇状のスリットを備えているが、本発明はこのようなスリットに限定されるものではない。例えば、回転方向で長さが異なる線状のスリットとしてもよい。
【0079】
(4)上述した実施例では、一対のボーネジ25でインクジェットヘッド保持部21を昇降する構成とした。しかしながら、本発明はこの構成に限定されるものではない。例えば、ボールネジ25に代えて、ラックアンドピニオン、チェーン、ベルトを採用してもよい。
【0080】
(5)上述した実施例では、連続紙WPに印刷を行うインクジェット印刷システムを例に採って説明したが、例えば、単票紙に印刷を行うインクジェット印刷システムであっても本発明を適用できる。
【0081】
(6)上述した実施例では、いわゆる1パス機を例に採って説明したが、本発明は1パス機に限定されるのではなく、インクジェットヘッド保持部21を昇降する機構を備えたインクジェット印刷装置に適用することができる。
【符号の説明】
【0082】
WP … 連続紙
3 … インクジェット印刷システム
13 … 印刷ユニット
19 … インクジェットヘッド
21 … インクジェットヘッド保持部
23 … リニアガイド
25 … ボールネジ
27 … モータ
32 … 原点センサ
33 … スリット付の円板
35 … スリットセンサ
41 … 制御部
43 … 監視部
45 … カウンタ
47 … 比較部
49 … 閾値メモリ
X … 第1の閾値
X+α … 第2の閾値
【技術分野】
【0001】
本発明は、インクジェットヘッドと印刷用紙とを相対的に移動させつつインクジェットヘッドからインク滴を吐出して印刷用紙に印刷を行うインクジェット印刷装置に関する。
【背景技術】
【0002】
インクジェットヘッドと印刷用紙とを相対的に移動させて印刷用紙に対して画像を形成する装置として、インクジェット印刷装置がある。このインクジェット印刷装置は、印刷用紙の幅方向にインクジェットヘッドを移動させつつ印刷を行うマルチパス方式と、印刷用紙の幅方向に応じたインクジェットヘッドを備え、インクジェットヘッドを印刷用紙の幅方向へ移動させないで印刷を行う1パス方式とがある。
【0003】
1パス方式の装置は、印刷用紙の印刷領域をカバーするだけのインクジェットヘッドをインクジェットヘッド保持部に備えており、インクジェットヘッドがマルチパス方式の装置に比較して長くなるのが一般的である。さらに、装置の占有面積を抑制するために、印刷位置とキャップ位置とが印刷用紙の上方に位置するように構成された装置がある。印刷位置は、印刷用紙とインクジェットヘッドとが近接した位置であり、キャップ位置は、印刷用紙とインクジェットヘッドとが離間して、インクジェットヘッドがキャップにより閉塞される位置である。そのためには、インクジェットヘッドをインクジェットヘッド保持部ごと印刷用紙に対して昇降させる構成が必要となる。
【0004】
インクジェットヘッド保持部を昇降させるには、例えば、1個のパルスモータと、インクジェットヘッド保持部の両端に回転力を伝達する伝達機構とを備える構成がある。
【0005】
1個のパルスモータを用いて上記のような昇降を行う装置として、輸液ポンプがある(例えば、特許文献1参照)。
【0006】
この輸液ポンプは、パルスモータのシャフトに取り付けられるとともに、円形状に非等間隔で配列され、回転方向の長さが互いに異なるスリットを有するスリット円板と、スリットにおける回転方向の長さとスリット間隔との少なくともいずれか一方の値を格納したテーブルと、スリット円板のスリットを検出して検知信号を出力するホトセンサと、ホトセンサの検出信号及びテーブルに基づき、ホトセンサの位置にあるスリットと、スリットの間隔との少なくともいずれか一方を特定、パルスモータの回転位置を検出する回転位置検出手段とを備えている。この構成によると、パルスモータが反転したことを検出することができる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特許第3320179号公報(段落番号「0077」、「0078」、図5〜図8)
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、このような構成を有する従来例の場合には、次のような問題がある。
すなわち、特に、上述したように1パス方式のインクジェットヘッドは、印刷用紙の幅方向に長い構成であり、1個のパルスモータの回転力を伝達機構で伝達する構成では、伝達機構が左右に長くなり過ぎて左右での回転遅れが顕著になる。したがって、上述した従来の装置では、インクジェットヘッドを保持したインクジェットヘッド保持部を適切に昇降させることはできない。
【0009】
そこで、二個のパルスモータの各々をインクジェットヘッド保持部の幅方向の両端側に備え、両パルスモータの同期をとりつつインクジェットヘッド保持部の昇降を行うことが考えられる。しかしながら、制御対象が複数個になるので、それぞれのパルスモータの反転や脱調を検出しつつ、インクジェットヘッド保持部を適切に昇降制御することが困難であるという問題がある。特に、インクジェットヘッド保持部の両端が異なる高さ位置に移動すると、インクジェットヘッド保持部がねじれた状態となり、その状態で昇降を継続すると、最悪の場合にはインクジェットヘッド保持部が破損する恐れがある。
【0010】
なお、1パス機だけでなく、マルチパス機であってもインクジェットヘッド保持部を複数個のモータで昇降する機構を備えているインクジェット印刷装置の場合には、上記と同様の問題を生じる恐れがある。
【0011】
本発明は、このような事情に鑑みてなされたものであって、複数個のモータによるインクジェットヘッド保持部の昇降を確実に行って、インクジェットヘッド保持部の破損を未然に防ぐことができるインクジェット印刷装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
本発明は、このような目的を達成するために、次のような構成をとる。
すなわち、請求項1に記載の発明は、インクジェットヘッドと印刷装置とを相対的に移動させつつインクを吐出して画像を印刷するインクジェット印刷装置において、インクジェットヘッドを保持するインクジェットヘッド保持部と、複数個のモータを操作して、前記インクジェットヘッド保持部を少なくとも印刷位置と原点位置とにわたって昇降させる制御手段と、前記制御手段による昇降の際に、前記複数個のモータの回転が同期していること、及び前記複数個のモータの回転方向が一致していることを監視する監視手段と、を備えていることを特徴とするものである。
【0013】
[作用・効果]請求項1に記載の発明によれば、制御手段が複数個のモータを操作してインクジェットヘッド保持部を昇降させる際に、監視手段は複数個のモータの回転が同期していること、及び、回転方向が一致していることを監視する。したがって、それらに異常が生じた場合には、インクジェットヘッド保持部にねじれが生じたことを示すので、各モータの回転を停止させる等の措置をとることができる。その結果、インクジェットヘッド保持部の破損を未然に防止できる。
【0014】
また、本発明において、前記複数個のモータそれぞれの回転の同期、および前記複数個のモータの回転方向を検出する検出手段を備え、前記監視手段は、前記検出手段が出力する信号を監視することにより、前記複数個のモータの回転同期および回転方向を監視することが好ましい(請求項2)。
【0015】
監視手段は、検出手段からの信号を監視することで、複数個のモータの回転同期および回転方向に異常がないかを判断できる。
【0016】
また、本発明において、前記検出手段は、前記複数個のモータそれぞれによって回転させられる少なくとも二種類の大きさのスリットを備えたスリット付の円板のスリットを検出して、前記複数個のモータの回転同期および回転方向についての信号を出力することが好ましい(請求項3)。
【0017】
スリット付の円板の二種類の大きさのスリットを検出することにより、複数個のモータの同期及び回転方向を比較的簡単に判断することができる。
【0018】
また、本発明において、前記スリット付の円板が、前記インクジェットヘッド保持部の昇降方向に延出され、前記複数個のモータによって回転させられることにより前記インクジェットヘッド保持部を昇降させる複数本のボールネジに取り付けられていることが好ましい(請求項4)。
【0019】
複数本のボールネジの回転に伴ってスリット付き円板が回転するので、スリット付きの円板を検出手段が検出することにより、複数個のモータの同期及び回転方向の一致を判断できる。
【0020】
また、本発明において、前記監視手段は、前記スリット付の円板のスリットを計数することで同期を判断し、前記スリット付の円板のスリットが出現する順番を監視することで回転方向を判断することが好ましい(請求項5)。
【0021】
スリット付の円板のスリットが現れる度に計数し、それらの値を比較することで複数個のモータの同期・非同期を判断できる。また、スリット付の円板のスリットは、少なくとも二種類の大きさである。したがって、例えば、大小大小と出現した状態から、小大と変化した場合には、逆転したことを意味するので回転方向を判断することができる。このような判断を行うことにより、比較的簡易な構成で異常を判断できる。
【発明の効果】
【0022】
本発明に係るインクジェット印刷装置によれば、制御手段が複数個のモータを操作してインクジェットヘッド保持部を昇降させる際に、監視手段は複数個のモータの回転が同期していること、及び、回転方向が一致していることを監視する。したがって、それらに異常が生じた場合には、インクジェットヘッド保持部にねじれが生じたことを示すので、各モータの回転を停止させる等の措置をとることができる。その結果、インクジェットヘッド保持部の破損を未然に防止できる。
【図面の簡単な説明】
【0023】
【図1】実施例に係るインクジェット印刷システムの全体を示す概略構成図である。
【図2】印刷ユニットの斜視図である。
【図3】印刷ユニットの正面図である。
【図4】ボールネジの先端部を示す図である。
【図5】スリット付の円板を示す図である。
【図6】制御系を示すブロック図である。
【図7】スリットセンサの検出信号の一例を示すタイムチャートである。
【図8】動作を示すフローチャートである。
【図9】ねじれ監視を示すフローチャートである。
【発明を実施するための形態】
【0024】
以下、図面を参照して本発明の一実施例を説明する。
図1は、実施例に係るインクジェット印刷システムの全体を示す概略構成図であり、図2は、印刷ユニットの斜視図であり、図3は、印刷ユニットの正面図である。
【0025】
本実施例に係るインクジェット印刷システムは、ロール状の連続紙WPを供給する給紙部1と、連続紙WPに印刷を行うインクジェット印刷装置3と、印刷を終えた連続紙WPをロール状に巻き取る排紙部5とを備えている。
【0026】
給紙部1は、ロール状の連続紙WPを水平軸周りに回転可能に保持し、インクジェット印刷装置3に対して連続紙WPを巻き出して供給する。また、排紙部5は、インクジェット印刷装置3から送り出される連続紙WPを水平軸周りに巻き取る。連続紙WPの供給側を上流とし、連続紙WPの排紙側を下流とすると、給紙部1はインクジェット印刷装置3の上流側に配置されており、排紙部5はインクジェット印刷装置3の下流側に配置されている。
【0027】
インクジェット印刷装置3は、給紙部1からの連続用紙WPを取り込むための駆動ローラ7を上流側に備えている。駆動ローラ7によって給紙部1から巻き出された連続紙WPは、複数個の搬送ローラ9に沿って下流側の排紙部5に向かって搬送される。最下流の搬送ローラ9と排紙部5との間には、駆動ローラ11が配置されている。この駆動ローラ11は、搬送ローラ9上を搬送されている連続紙WPを排紙部5に向かって送り出す。
【0028】
インクジェット印刷装置3は、駆動ローラ7と駆動ローラ11との間に、印刷ユニット13と、乾燥部15と、検査部17とを上流側からその順で備えている。乾燥部15は、印刷ユニット13によって印刷された部分の乾燥を行う。検査部17は、印刷された部分に汚れや抜け等がないかを検査する。
【0029】
印刷ユニット13は、インク滴を吐出するインクジェットヘッド19を備えている。印刷ユニット13は、連続紙WPの搬送方向に沿って複数個配置されているのが一般的である。例えば、ブラック(K)、シアン(C)、マゼンタ(M)、イエロー(Y)について個別に4個の印刷ユニット13を備えている。しかし、以下の説明においては、発明の理解を容易にするために、1個の印刷ユニット13だけを備えるものとして説明する。また、印刷ユニット13は、連続紙WPの搬送方向と直交する水平方向にも複数個のインクジェットヘッド19を備えている。印刷ユニット13は、連続紙WPの幅方向における印刷領域を移動することなく印刷できるだけのインクジェットヘッド19を複数個備えている。つまり、本実施例におけるインクジェット印刷装置3は、インクジェットヘッド19が連続紙WPの搬送方向に直交する水平方向に主走査するための移動を行うことなく、位置固定のままで連続紙WPを送りながら連続紙WPに対して印刷を行う。
【0030】
ここで、上述した印刷ユニット13について図2及び図3を参照して説明する。
【0031】
本実施例における印刷ユニット13は、22個のインクジェットヘッド19と、これらのインクジェットヘッド19を一括して保持するインクジェットヘッド保持部21とを備えている。22個のインクジェットヘッド19は、連続紙WPの搬送方向と直交する連続紙WPの幅方向に沿って5個または6個で4列に配置された状態でインクジェットヘッド保持部21に保持されている。全てのインクジェットヘッド19は、インクジェットヘッド保持部21の底面を貫通しており、インクジェットヘッド保持部21の下面からインクを連続紙WPに向けて吐出できるようになっている。なお、インクジェットヘッド保持部21が有するインクジェットヘッド19の個数は、本実施例のように22個に限定されるものではない。
【0032】
インクジェットヘッド保持部21の左右方向には、リニアガイド23がほぼ垂直姿勢で配置されている。インクジェットヘッド保持部21は、一対のリニアガイド23に案内されて昇降可能に支持されている。また、インクジェットヘッド保持部21の左右方向には、左右一対のボールネジ25がほぼ垂直姿勢で配置されている。インクジェットヘッド保持部21は、一対のボールネジ25に対して図示しないナットを介して螺合している。一対のボールネジ25は、インクジェットヘッド保持部21の左右上方に配置された一対のモータ27により鉛直軸周りに回転駆動される。したがって、一対のモータ27が作動することにより、インクジェットヘッド保持部21が昇降する。なお、上述した一対のモータ27は、以下の説明において、左右の一方を特定する場合には、左側のモータ27Lまたは右側のモータ27Rと称することにする。
【0033】
インクジェットヘッド保持部21は、図3に実線で示す「キャップ位置」と、図3に点線で示す「ワイパー位置」と、図3に二点鎖線で示す「印刷位置」とにわたり昇降移動する。なお、ワイパー位置においては、図2及び図3における左側に位置するワイパー28がインクジェットヘッド19に沿って水平方向に移動することによって、インクジェットヘッド19の吐出面に付着した異物が拭き取られる。
【0034】
印刷ユニット13は、22個のインクジェットヘッド19に対応して配置された22個のキャップ29を備えている。これらのキャップ29は、各インクジェットヘッド19におけるインクの吐出部を周囲に対して閉塞する。各キャップ29は、インクジェットヘッド19におけるインク吐出部付近の乾燥や汚染を防止する。各キャップ29は、キャップ保持部31により保持されている。
【0035】
キャップ保持部31は、複数個のキャップ29を保持した状態で、図3に示すように、インクジェットヘッド保持部21の下方の「キャップ位置」と、インクジェットヘッド保持部21の背面側の「待避位置」とにわたり移動可能に構成されている。なお、待避位置については、図示を省略している。
【0036】
また、インクジェットヘッド保持部21は、一対のモータ27の作動により、上述したキャップ位置より僅かに上昇した位置である「原点位置」にも移動する。この原点位置は、原点センサ32によって検出可能となるように、原点センサ32が上方に設けられている。なお、原点センサ32は、図2では省略し、図3にのみ記載してある。原点位置は、詳細後述するように、インクジェットヘッド保持部21にねじれが生じた後、一旦上昇される基準の位置となる。
【0037】
ここで、図4及び図5を参照する。なお、図4は、ボールネジの先端部を示す図であり、図5は、スリット付の円板を示す図である。
【0038】
一対のボールネジ25は、スリット付の円板33をそれぞれ下端側に取り付けられている。なお、スリット付の円板33は、ボールネジ25の下端側に取付位置が限定されるものではなく、ボールネジ25の回転が検出できればよい。したがって、ボールネジ25のうち、モータ27に近い位置にスリット付の円板33を取り付けるようにしてもよい。
【0039】
スリット付の円板33は、少なくとも二種類のスリットを形成されている。この例では、中心角60°の扇状を呈するスリットSP1と、中心角60°の扇状を呈するスリットSH1と、中心角30°の扇状を呈するスリットSP2と、中心角30°の扇状を呈するスリットSH2と、中心角60°の扇状を呈するスリットSP3と、中心角60°の扇状を呈するスリットSH3と、中心角30°の扇状を呈するスリットSP4と、中心角30°の扇状を呈するスリットSH4とが円板33に形成されている。ここで、符号S「P」としたスリット(ハッチングしたスリット)は、例えば、光を通さない部分であり、符号S「H」としたスリット(ハッチングなしのスリット)は、例えば、光を通す部分である。なお、上記のスリットの構成は、あくまでも一例であり、少なくとも二種類のスリットを円板33が備えていればよい。
【0040】
各スリット付の円板33の側方には、スリットセンサ35が配置されている。スリットセンサ35は、スリット付の円板33に形成された各スリットSP1〜SP4,SH1〜SH4を検出して信号を出力する。例えば、スリットセンサ35は、透過型のセンサであり、自身が照射した光を検出してオン(信号レベルがHIGHとなる)を出力するタイプであるとすると、スリットSH1〜SH4においてONし、スリットSP1〜SP4においてオフを出力する。なお、以下の説明においては、必要に応じて一対のスリットセンサ35を左側のスリットセンサ35Lと、右側のスリットセンサ35Rと称する。また、スリットセンサ35は、透過型でなく反射型であってもよい。また、光学式の非接触型に限定されるものはなく、接触式のセンサであってもよい。
【0041】
なお、上述したスリットセンサ35が本発明における「検出手段」に相当する。
【0042】
次に、図6を参照する。なお、図6は、制御系を示すブロック図である。
【0043】
本発明の「制御手段」に相当する制御部41は、CPUやメモリなどで構成されている。制御部41は、一対のモータ27を操作して、一対のボールネジ25を回転させて、インクジェットヘッド保持部21をインクジェットヘッド19ごと昇降させる。また、制御部41は、原点センサ32の出力信号を受けて、インクジェットヘッド保持部21が原点位置に移動したことを検出する。また、制御部41は、本発明における「監視手段」に相当する監視部43からの監視信号を受け取って一対のモータ27を操作する。
【0044】
監視部43は、一対のスリットセンサ35からの出力信号を受け取って、一対のモータ27が同期しているか否かの判断と、一対のモータ27の回転方向が一致していることを監視する。また、監視部43は、監視の結果に応じた監視信号を制御部41に対して出力する。
【0045】
監視部43は、一対のカウンタ45を内蔵し、一対のカウンタ45のカウント値を比較する比較部47を備えている。一対のカウンタ45は、左側のカウンタ45Lと右側のカウンタ45Rとから構成されている。比較部47は、閾値を予め記憶した閾値メモリ49から所定の閾値を読み出し、その値と一対のカウンタ45の差分とを比較し、その結果に応じた監視信号を制御部41に対して出力する。なお、監視部43は、制御部41からリセット信号を受けると、一対のカウンタ45のカウント値をリセットする。また、監視部43は、一対のスリットセンサ35の信号幅を監視して、一対のモータ27のそれぞれの回転方向が一致しているか否かを判断する。
【0046】
ここで、図7を参照する。なお、図7は、スリットセンサの検出信号の一例を示すタイムチャートである。
【0047】
t1時点で監視部43が制御部41からリセット信号を受けたとする。すると、監視部43は、一対のカウンタ45のカウント値をリセットし、0からのカウントを開始する。例えば、制御部41が一定方向に一対のモータ27を同速度で同方向に回転させると、通常はカウント値が一定の差分を保ったままで増加する。図7では、左側のスリットセンサ35LがスリットSH2→SP2→SH1→SP1……のように順次に検出したとすると、左側のカウンタ45Lが0→1→2→3……とカウントしてゆく。また、右側のスリットセンサ35RがSH2→SP2→SH1→SP1……のように同様に順次に検出したとすると、右側のカウンタ45Rが0→1→2→3……とカウントしてゆく。但し、スリット付の円板33の取付時の角度ずれ等により、一対のスリット付の円板33の回転角度にずれがあるので、カウントされるタイミングには「ずれ」がある。監視部43は、リセット信号を受けてから逐次に比較部47がカウント値の差分の比較を行い、閾値メモリ49の閾値以上になったか否かを監視する。
【0048】
例えば、図7のt3時点で左側のモータ27Lが停止した場合には、t5時点では、左側のスリットセンサ35のカウント値が「4」で停止する。すると、t5時点では、右側のスリットセンサ35のカウント値が「6」となる。このとき、閾値が「2」であったとすると、t5時点において監視部43は制御部41に対して異常発生を知らせる。
【0049】
また、監視部43は、一対のスリットセンサ35の出力における信号幅を監視しており、信号幅の大小の出現順序に基づいて一対のモータ27のそれぞれの回転方向を判断し、逆となった場合には制御部41に対して異常発生を知らせる。
【0050】
なお、閾値メモリ49は、第1の閾値Xと第2の閾値X+αとを予め格納している。詳細は後述するが、監視部43は、通常の監視状態における昇降時においては、第1の閾値Xによって比較部47に比較を行わせ、異常発生状態における原点位置への復帰時においては、第2の閾値X+αによって比較部47に比較を行わせる。なお、第2の閾値X+αは、第1の閾値Xよりもαだけ大きな値が設定される。これは、異常発生後における昇降であるので、通常の監視状態における第1の閾値Xでは、即座に異常発生と判断される不都合が生じるからである。このように二種類の閾値を使い分けることにより、異常発生から原点復帰時にも適切に監視を行うことが可能となっている。
【0051】
次に、図8及び図9を参照して、上述したインクジェット印刷システムの印刷ユニット13における動作について説明する。なお、図8は、動作を示すフローチャートであり、図9は、ねじれ監視を示すフローチャートである。
【0052】
以下の説明においては、インクジェットヘッド保持部21を原点位置に復帰させ、その「原点位置」から「印刷位置」にまで下降させる動作を例に採る。
【0053】
ステップS1
制御部41は、一対のモータ27を操作して、インクジェットヘッド保持部21をZ軸移動させる。なお、Z軸は、図3における上方向であり、原点センサ32が作動するまで上昇させる。このときは、異常発生した状態ではないので、閾値は第1の閾値Xである。この際には、図9における監視が行われる。
【0054】
ステップS2
上記のステップS1において異常が発生しなかった場合には、制御部41は、一対のモータ27を操作して、インクジェットヘッド21を印刷位置にまで下降させる。このときも、図9における監視が実施される。
【0055】
ここで、図9を参照する。
【0056】
ステップS11
監視部43は、一対のカウンタ45をリセットする。
【0057】
ステップS12
監視部43は、一対のスリットセンサ35の出力を読み込む。
【0058】
ステップS13
監視部43は、一対のカウンタ45による一対のスリットセンサ35の信号のカウントを行わせる。
【0059】
ステップS14
監視部43は、一対のスリットセンサ35の信号幅に基づいて回転方向を判定する。このとき、例えば、正回転であれば「+」とし、逆回転であれば「−」とする。
【0060】
ステップS15
監視部43は、一対のカウンタ45の現在のカウント値と、現在の判定における回転方向を出力する。監視部43は、比較部47において第1の閾値Xとカウント値の差分を求め、差分が第1の閾値X以上となった場合には、エラーを制御部41に出力する。また、監視部43は、回転方向が反転したと判断した場合には、同様にエラーを制御部41に出力する。また、説明を省略するが、ねじれ以外のエラーがあっても同様にエラーを制御部41に出力する。ねじれ以外のエラーとは、例えば、原点位置への移動を開始して、所定時間が経過しても原点センサ32がONしないなどのエラーが挙げられる。
【0061】
ここで、図8に戻る。
【0062】
ステップS3
監視部43からのエラーを受けた制御部41は、監視部43によるカウント値の差分と回転方向や、その他の信号に基づいて処理を分岐する。例えば、インクジェットヘッド保持部21にねじれが生じている場合、つまり、差分が第1の閾値X以上となったり、一対のモータ27の回転方向が互いに逆となったりしたような場合には、ステップS4に移行し、それ以外のエラーであれば、エラーシーケンスに移行する。このエラーシーケンスとは、例えば、一対のモータ27を停止させるとともに、図示しない表示部に「回復不能な異常が発生したので、サービスセンターに連絡!!」等の表示を行わせるシーケンスである。
【0063】
ステップS4
インクジェットヘッド保持部21に「ねじれ」が発生した場合には、ねじれ復旧処理を行う。
【0064】
具体的には、制御部41は、監視部43に対して一対のカウンタ45のリセットを行わせる。さらに、比較部47に対しては、第2の閾値X+αによる比較を行うように指示する。そして、第2の閾値X+αを設定した状態でねじれ監視を行いつつ、制御部41は、一対のモータ27を作動させて、インクジェットヘッド保持部21を原点位置にまで移動させる。その結果、インクジェットヘッド保持部21が原点位置にまで移動できた場合には、「成功」であるので、ステップS2に移行する。一方、インクジェットヘッド保持部21が原点位置に移動する際にも再びねじれが発生した場合には、「失敗」であるので、エラーシーケンスに移行する。
【0065】
以下、原点位置への移動に「成功」したとして説明する。
【0066】
ステップS2
制御部41は、一対のモータ27を操作して、インクジェットヘッド保持部21を原点位置から印刷位置にまで下降させる。このとき、第1の閾値Xが設定されて、上述したように図9の監視が実行される。このときエラーが発生したとする。
【0067】
ステップS5
監視部43からエラーが制御部41に出力された場合、監視部43によるカウント値の差分と回転方向や、その他の信号に基づいて処理を分岐する。例えば、インクジェットヘッド保持部21にねじれが生じている場合には、ステップS6に移行し、それ以外のエラーであれば、エラーシーケンスに移行する。
【0068】
ここでは「ねじれ」が生じたとする。
【0069】
ステップS6
インクジェットヘッド保持部21にねじれが生じている場合には、原点位置へ戻すことによるねじれ復旧を実行する。このとき、監視部43は、第2の閾値X+αによる監視を行う。ねじれ復旧が「失敗」の場合には、エラーシーケンスに移行する。一方、「成功」の場合には、ステップS7に移行する。
【0070】
ステップS7
制御部41は、一対のモータ27を操作して、インクジェットヘッド保持部21を印刷位置にまで下降させる。このとき、閾値としては第1の閾値Xが設定されて、図9におけるねじれ監視が実行される。その結果、印刷位置にまで移動が完了した場合には、処理を終了して印字処理に移行する。一方、エラーが生じた場合には、一対のモータ27を停止させるとともに、エラーシーケンスに移行する。
【0071】
このように本実施例装置では、制御部41は、インクジェットヘッド保持部21を移動させる際にエラーが生じても一度はリトライ(ステップS4,S6)を行わせ、ねじれ復旧を図るようにしている。したがって、エラーシーケンスに移行する頻度を抑制でき、装置の稼働率を向上できる。
【0072】
上述したように、本実施例装置は、制御部41が2個のモータ27を操作してインクジェットヘッド保持部21を昇降させる際に、監視部43は各スリットセンサ35の信号を監視する。監視部43は、各スリットセンサ35の信号に基づいて、2個のモータ27の回転が同期していることと、2個のモータ27の回転方向が一致していることとを監視する。したがって、それらに異常が生じた場合には、インクジェットヘッド保持部21にねじれが生じたことを示すので、各モータ27の回転を停止させる等の措置をとることができる。その結果、インクジェットヘッド保持部21の破損を未然に防止できる。
【0073】
また、制御部41は、異常があると判断した場合には、各モータ27を停止させるとともに、各モータ27を操作して原点位置にインクジェットヘッド保持部21を移動させる。これにより、インクジェットヘッド保持部21の昇降に異常がある状態を解消することができる場合があるので、インクジェットヘッド保持部21の昇降を再び行う等の動作を行うことができる。その結果、メンテナンスのために装置を停止させる頻度を抑制でき、装置の稼働率を向上できる。
【0074】
また、ステップS4,S6のように異常が生じた後に原点位置への移動を行うと、その移動の際にインクジェットヘッド保持部のねじれがさらに悪化して破損に至る恐れがある。しかし、その移動時にも監視部43による監視を行うことにより、そのような不都合を防止できる。
【0075】
本発明は、上記実施形態に限られることはなく、下記のように変形実施することができる。
【0076】
(1)上述した実施例では、2個のモータ27によるインクジェットヘッド保持部21の昇降を行う構成とした。しかし、本発明は2個のモータ27に限定されるものではなく、例えば、3個以上のモータ27を備える場合にも適用することができる。その場合には、2個のモータ27の全組合せ(3通り)におけるカウント値の差分と閾値とを比較してねじれを判断すればよい。
【0077】
(2)上述した実施例では、異常が発生した場合にはインクジェットヘッド保持部21を原点位置に復帰させるようにした。しかし、原点位置への復帰を行うことなく、閾値を第2の閾値X+αに設定するだけで、印刷位置への移動を継続する構成としてもよい。そして、第2の閾値X+α以上となった場合には、即座にエラーシーケンスに移行するようにしてもよい。また、原点復帰を行わずに停止させるだけにしてもよい。これにより、原点位置へ移動することによる原点復帰に要する移動時間をなくすことができる。
【0078】
(3)上述した実施例では、スリット付の円板33が扇状のスリットを備えているが、本発明はこのようなスリットに限定されるものではない。例えば、回転方向で長さが異なる線状のスリットとしてもよい。
【0079】
(4)上述した実施例では、一対のボーネジ25でインクジェットヘッド保持部21を昇降する構成とした。しかしながら、本発明はこの構成に限定されるものではない。例えば、ボールネジ25に代えて、ラックアンドピニオン、チェーン、ベルトを採用してもよい。
【0080】
(5)上述した実施例では、連続紙WPに印刷を行うインクジェット印刷システムを例に採って説明したが、例えば、単票紙に印刷を行うインクジェット印刷システムであっても本発明を適用できる。
【0081】
(6)上述した実施例では、いわゆる1パス機を例に採って説明したが、本発明は1パス機に限定されるのではなく、インクジェットヘッド保持部21を昇降する機構を備えたインクジェット印刷装置に適用することができる。
【符号の説明】
【0082】
WP … 連続紙
3 … インクジェット印刷システム
13 … 印刷ユニット
19 … インクジェットヘッド
21 … インクジェットヘッド保持部
23 … リニアガイド
25 … ボールネジ
27 … モータ
32 … 原点センサ
33 … スリット付の円板
35 … スリットセンサ
41 … 制御部
43 … 監視部
45 … カウンタ
47 … 比較部
49 … 閾値メモリ
X … 第1の閾値
X+α … 第2の閾値
【特許請求の範囲】
【請求項1】
インクジェットヘッドと印刷装置とを相対的に移動させつつインクを吐出して画像を印刷するインクジェット印刷装置において、
インクジェットヘッドを保持するインクジェットヘッド保持部と、
複数個のモータを操作して、前記インクジェットヘッド保持部を少なくとも印刷位置と原点位置とにわたって昇降させる制御手段と、
前記制御手段による昇降の際に、前記複数個のモータの回転が同期していること、及び前記複数個のモータの回転方向が一致していることを監視する監視手段と、
を備えていることを特徴とするインクジェット印刷装置。
【請求項2】
請求項1に記載のインクジェット印刷装置において、
前記複数個のモータそれぞれの回転の同期、および前記複数個のモータの回転方向を検出する検出手段を備え、
前記監視手段は、前記検出手段が出力する信号を監視することにより、前記複数個のモータの回転同期および回転方向を監視すること、
を特徴とするインクジェット印刷装置。
【請求項3】
請求項2に記載のインクジェット印刷装置において、
前記検出手段は、前記複数個のモータそれぞれによって回転させられる少なくとも二種類の大きさのスリットを備えたスリット付の円板のスリットを検出して、前記複数個のモータの回転同期および回転方向についての信号を出力すること、
を特徴とするインクジェット印刷装置。
【請求項4】
請求項3に記載のインクジェット印刷装置であって、
前記スリット付の円板が、前記インクジェットヘッド保持部の昇降方向に延出され、前記複数個のモータによって回転させられることにより前記インクジェットヘッド保持部を昇降させる複数本のボールネジに取り付けられていること、
を特徴とするインクジェット印刷装置。
【請求項5】
請求項3または4に記載のインクジェット印刷装置において、
前記監視手段は、前記スリット付の円板のスリットを計数することで同期を判断し、前記スリット付の円板のスリットが出現する順番を監視することで回転方向を判断すること、
を特徴とするインクジェット印刷装置。
【請求項1】
インクジェットヘッドと印刷装置とを相対的に移動させつつインクを吐出して画像を印刷するインクジェット印刷装置において、
インクジェットヘッドを保持するインクジェットヘッド保持部と、
複数個のモータを操作して、前記インクジェットヘッド保持部を少なくとも印刷位置と原点位置とにわたって昇降させる制御手段と、
前記制御手段による昇降の際に、前記複数個のモータの回転が同期していること、及び前記複数個のモータの回転方向が一致していることを監視する監視手段と、
を備えていることを特徴とするインクジェット印刷装置。
【請求項2】
請求項1に記載のインクジェット印刷装置において、
前記複数個のモータそれぞれの回転の同期、および前記複数個のモータの回転方向を検出する検出手段を備え、
前記監視手段は、前記検出手段が出力する信号を監視することにより、前記複数個のモータの回転同期および回転方向を監視すること、
を特徴とするインクジェット印刷装置。
【請求項3】
請求項2に記載のインクジェット印刷装置において、
前記検出手段は、前記複数個のモータそれぞれによって回転させられる少なくとも二種類の大きさのスリットを備えたスリット付の円板のスリットを検出して、前記複数個のモータの回転同期および回転方向についての信号を出力すること、
を特徴とするインクジェット印刷装置。
【請求項4】
請求項3に記載のインクジェット印刷装置であって、
前記スリット付の円板が、前記インクジェットヘッド保持部の昇降方向に延出され、前記複数個のモータによって回転させられることにより前記インクジェットヘッド保持部を昇降させる複数本のボールネジに取り付けられていること、
を特徴とするインクジェット印刷装置。
【請求項5】
請求項3または4に記載のインクジェット印刷装置において、
前記監視手段は、前記スリット付の円板のスリットを計数することで同期を判断し、前記スリット付の円板のスリットが出現する順番を監視することで回転方向を判断すること、
を特徴とするインクジェット印刷装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−71427(P2013−71427A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−214336(P2011−214336)
【出願日】平成23年9月29日(2011.9.29)
【出願人】(000207551)大日本スクリーン製造株式会社 (2,640)
【Fターム(参考)】
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月29日(2011.9.29)
【出願人】(000207551)大日本スクリーン製造株式会社 (2,640)
【Fターム(参考)】
[ Back to top ]