
インクジェット記録方法及び装置
【課題】本発明は、複数のパターンを幅方向に編成して配列した編地に対して記録を行う場合に各パターンの伸縮の度合いに対応して画像記録を行うことができるインクジェット記録方法及び装置を提供することを目的とするものである。
【解決手段】キャリッジ11には、インクジェット記録ヘッド1に近接して識別マーク位置検知センサ15が配置されており、識別マーク位置検知センサ15は、インクジェット記録ヘッド1とともに編地T上を移動して、編地Tに編み込まれた識別マークの位置を検知するようになっている。識別マークは、主走査方向Xに配列された複数のパターンに対応して主走査方向に配列されており、識別マーク位置検知センサ15からの検知信号に基づいて各パターンの副走査方向Yのずれ量を算出し各パターンの画像の記録開始位置を調整する。
【解決手段】キャリッジ11には、インクジェット記録ヘッド1に近接して識別マーク位置検知センサ15が配置されており、識別マーク位置検知センサ15は、インクジェット記録ヘッド1とともに編地T上を移動して、編地Tに編み込まれた識別マークの位置を検知するようになっている。識別マークは、主走査方向Xに配列された複数のパターンに対応して主走査方向に配列されており、識別マーク位置検知センサ15からの検知信号に基づいて各パターンの副走査方向Yのずれ量を算出し各パターンの画像の記録開始位置を調整する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、主走査方向に複数のパターンが編成されて配列された編地の各パターンに画像を記録するインクジェット記録方法及び装置に関するものである。
【背景技術】
【0002】
インクジェット記録方式は、インクジェット記録ヘッドのインク吐出口から微小なインクを記録媒体に対して吐出して印字や画像記録を行うもので、記録媒体から離間した状態で記録動作を行うことができることから、様々な材質の記録媒体や物品に記録することが可能で、幅広い用途に使用されてきている。
【0003】
そして、布地に柄や模様といった画像を記録する場合にも他の記録方式に比べてインクジェット記録方式が低コストで様々な画像に対応できることから、布地用の記録装置として開発が進められている。例えば、特許文献1では、多重布帛により布製品を実質的に無縫製で作成する場合に、多重布帛の前身頃や後身頃に対してインクジェットでプリントする点が記載されている。また、特許文献2では、伸縮性を有する記録媒体に対して画像形成を行う場合に、分割線を形成した記録媒体を用い、搬送された記録媒体の歪みを分割線により検出することで判定し、その判定結果に基づいて画像データを補正処理し、補正された画像データに従って画像形成を行うようにした点が記載されている。
【特許文献1】特開2003−147660号公報
【特許文献2】特開平11−300949号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
布地に対してインクジェット記録を行う場合には、繊維自体の伸縮性や、編み方、織り方による伸縮性を考慮する必要があるが、布地の伸縮性は一様ではなくまた布地の一端に加えられる引張力に対しても全体に一様に伸長することはないため、用紙といった記録媒体とは異なる取り扱いをしなければならない。また、インクジェット記録を行う前に布地に糊を付与して布地の目曲がりを抑えたとしても、伸縮や斜行、湾曲などを完全になくすことはできない。
【0005】
例えば、衣服と身体の密着性の高いインナーウェアやスポーツウェアの分野では、予めほつれが生じ難い編構造に編成された布地をその端部が無裁断、無縫製のままでウェアの一部として用いるようになってきている。布地を無縫製で使用すると、縫製により生じる欠点、例えば着用時に与える違和感やファッション性の低下を招くことなく、さらに縫製作業も簡略化することができる。
【0006】
しかし、このような目的で編成される布地の幅は、最終製品の形態に依存するため30cm程度に設定されることもあり、通常1m以上の布地幅を必要とする布地の処理工程の量産設備をそのまま利用することは非常に困難であり、非効率である。幅の小さい布地を複数枚幅方向に連結し一体とした布地を使用することも考えられるが、その場合、連結する各布地の幅、編構成又は糸使いにより各布地の伸縮がそれぞれ異なるため、こうした伸縮にバラツキのある布地に対して高精度で画像を一度に形成することは困難である。
【0007】
また、布地の端部を無裁断、無縫製で使用する場合、端部における柄のプリント位置ズレがそのまま製品に反映されるため、布地を裁断して使用する場合に比べ布地の端部における高精度なプリント位置制御が要求されるようになる。
【0008】
上述した先行文献では、布地の伸縮性を考慮して画像記録を行うことが記載されているものの布地の取り扱いに関して十分な検討が行われていない。例えば、特許文献1では、布地に皺やテンション斑がある場合にプリントされた柄が歪むといった問題に対処するため、布帛の上下層を散開的な点接結により擬似的な一重組織化する点が記載されているが、複数のパターンを幅方向に編成して配列した編地の場合、各パターンの伸縮の度合いは一様ではないため、特許文献1記載のやり方では、インクジェットにより精度の高いプリントを行うことは難しい。
【0009】
また、特許文献2では、分割線を形成するようにしているが、分割線を布地全体に特殊染料で形成することは、インクジェット記録の際にインクの浸透が分割線で異なるようになり、画質が大きく劣化するようになる。また、最終製品にも分割線が含まれることになるため、使用される特殊染料に起因する各種堅牢度の低下が大きな問題となる。また、分割線を編み込むことが記載されているが、斜め方向に糸を編み込むことは特殊な設備を必要とし、一般的ではない。また、複数のパターンを幅方向に編成して配列した編地の場合、各パターンの伸縮が一様でないため、分割線が複雑に歪むようになって各パターンに対応した記録が難しくなる。
【0010】
そこで、本発明は、複数のパターンを幅方向に編成して配列した編地に対して記録を行う場合に各パターンの伸縮の度合いに対応して画像記録を行うことができるインクジェット記録方法及び装置を提供することを目的とするものである。
【課題を解決するための手段】
【0011】
本発明に係るインクジェット記録方法は、主走査方向に複数のパターンが編成されて配列された編地を副走査方向に搬送させてインクジェット記録ヘッドにより各パターンに対して画像を記録するインクジェット記録方法であって、前記パターンにそれぞれ対応して編地表面に表示されるとともに主走査方向に配列された複数の識別マークの位置関係を検知し、検知された識別マークの位置関係に基づいて識別マークに対応するパターンの記録開始位置を調整してインクジェット記録ヘッドにより各パターンに対して画像を記録することを特徴とする。さらに、前記識別マークは、前記パターンに対してその主走査方向の中間位置に表示されていることを特徴とする。さらに、前記識別マークは、前記パターンに対してその副走査方向の直前位置に表示されていることを特徴とする。さらに、前記識別マークは、編地に編成されていることを特徴とする。さらに、前記識別マークの間の副走査方向のずれ量を検知することで前記識別マークの位置関係を検知することを特徴とする。
【0012】
本発明に係るインクジェット記録装置は、主走査方向に複数のパターンが編成されて配列された編地を副走査方向に搬送させる搬送手段と、インクジェット記録ヘッドにより各パターンに対して画像を記録する記録手段と、前記パターンにそれぞれ対応して編地表面に表示されるとともに主走査方向に配列された複数の識別マークの位置関係を検知する位置検知手段と、検知された識別マークの位置関係に基づいて識別マークに対応する複数のパターンの記録開始位置を調整してインクジェット記録ヘッドにより各パターンに対して画像を記録するように記録手段を制御する記録制御手段とを備えていることを特徴とする。さらに、前記識別マークは、前記パターンに対してその主走査方向の中間位置に表示されていることを特徴とする。さらに、前記識別マークは、前記パターンに対してその副走査方向の直前位置に表示されていることを特徴とする。さらに、前記識別マークは、編地に編成されていることを特徴とする。さらに、前記位置検知手段は、前記識別マークの副走査方向のずれ量を検知することを特徴とする。
【発明の効果】
【0013】
上記のような構成を有することで、主走査方向に複数のパターンが編成されて配列された編地に各パターンに対応して編地表面に表示されるとともに主走査方向に配列された複数の識別マークを設け、これらの識別マークの位置関係を検知し、検知された識別マークの位置関係に基づいて識別マークに対応するパターンの記録開始位置を調整してインクジェット記録ヘッドにより各パターンに対して画像を記録するので、主走査方向に配列された各パターンの伸縮の度合いに応じて画像を記録することができる。
【0014】
すなわち、編地を副走査方向に搬送して画像記録を行う場合、副走査方向の伸縮のバラツキが生じやすくなるが、主走査方向に配列された各パターンに対応する識別マークを表示して識別マークの位置関係を検知するようにすれば、各パターン間の副走査方向の伸縮の度合いを識別マークの位置関係に基づいて検知することができ、検知された位置関係に基づいて調整された各パターンの記録開始位置によりそれぞれの伸縮の度合いに応じて高精度で記録動作を行なうことが可能となる。
【0015】
そして、識別マークを各パターンの主走査方向の中間位置に表示することで、各パターンの伸縮度合いの平均的な位置に識別マークを設定して記録開始位置の調整を行うことができる。ここで、主走査方向の中間位置とは、各パターンの主走査方向の最大幅に対応する両端位置を通る副走査方向に沿う1対の直線の間の領域内に設定される識別マークの表示位置であり、好ましくは当該領域の中心位置に識別マークを表示するとよい。
【0016】
また、識別マークを各パターンに対して副走査方向の直前位置に表示することで、各パターンに記録動作を行なう直前に記録開始位置の調整を行うことができるので、効率的に記録動作を行なうことが可能となり、各パターンから外れた位置に識別マークを表示することで、各パターンに対して識別マークが影響を及ぼすことがない。
【0017】
また、識別マークを編地に識別模様として編成するようにすれば、編地の編成の際に識別マークも編み込むことができ、識別マークを設けるための工程を省略することができる。
【0018】
そして、識別マークの位置関係として、識別マークの副走査方向のずれ量を検知すれば、副走査方向の伸縮の度合いを反映させて各パターンの記録開始位置の調整を行うことができる。
【発明を実施するための最良の形態】
【0019】
以下、本発明の実施形態を図面を用いて説明する。なお、以下に説明する実施形態は、本発明を実施するにあたって好ましい具体例であるから、技術的に種々の限定がなされているが、本発明は、以下の説明において特に本発明を限定する旨明記されていない限り、これらの形態に限定されるものではない。
【0020】
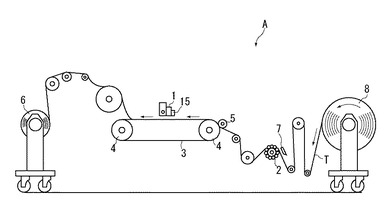
図1は、本発明に係る実施形態に関する概略構成図を示している。所定の幅を有する長尺状の編地Tに画像記録を行うインクジェット記録装置Aは、編地Tの搬送機構及びインクジェット記録ヘッド1の走査機構からなる。
【0021】
編地Tは、供給ローラ8から搬送ローラにより連続して繰出され、センタリングローラ2に巻き付けられて幅方向の位置調整が行われる。センタリングローラ2の近傍には編地Tの幅方向の端部位置検知センサ7が配置されており、端部位置検知センサ7からの検知信号に基づいて、搬送される編地Tの端部が所定位置にあるか監視される。
【0022】
センタリングローラ2において位置調整された編地Tは、一対のベルトローラ4に張架された無端搬送ベルト3上に搬入される。無端搬送ベルト3の表面には粘着テープが固定されており、押えローラ5により編地Tが無端搬送ベルト3に押圧される際に粘着テープに貼着されて、編地Tが無端搬送ベルト3上に位置決めされる。
【0023】
無端搬送ベルト3上に位置決めされた編地Tは、無端搬送ベルト3とともに搬送されてインクジェット記録ヘッド1により画像が記録されていき、画像記録が終了した編地Tは、搬送ローラにより無端搬送ベルト3から上方に搬送されて粘着テープから引き剥がされ、巻取りローラ6により順次巻き取られていく。
【0024】
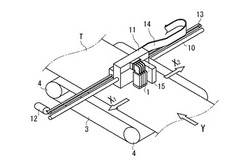
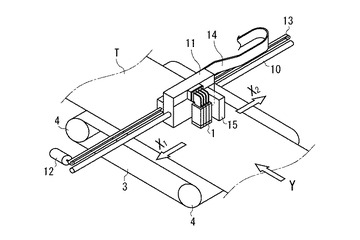
図2は、画像記録を行う機構に関する概略斜視図である。編地Tは、無端搬送ベルト3により副走査方向Yに搬送されるようになっている。インクジェット記録ヘッド1は、ガイドレール10によって支持されたキャリッジ11上に位置決め固定されており、キャリッジ11はキャリッジモータ12の駆動によりタイミングベルト13を介して編地T上を主走査方向(横切る方向X1、X2)に往復移動するようになっている。
【0025】
画像信号に応答して、キャリッジ11を主走査方向X1、X2へ移動するとともに、駆動信号がフレキシブルケーブル14を介してインクジェット記録ヘッド1に入力されてインクが編地Tの表面に向けて吐出される。
【0026】
インクジェット記録ヘッド1は、4つの記録ヘッド部1Y、1M、1C、1Kが主走査方向に順に配列されており、それぞれイエロー、マゼンタ、シアン、ブラックの異なる色を吐出するようになっている。そして、4つの色を適宜重ね合わせて記録することでフルカラーの画像を記録することができる。
【0027】
キャリッジ11には、インクジェット記録ヘッド1に近接して識別マーク位置検知センサ15が配置されており、識別マーク位置検知センサ15は、インクジェット記録ヘッド1とともに編地T上を移動して、後述するように編地Tに編成された識別マークFの位置を検知するようになっている。識別マーク位置検知センサ15としては、光学的又は電気的に識別マークを検知可能なセンサ素子を用いることができる。
【0028】
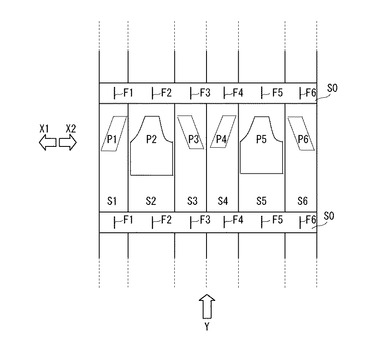
図3は、編地Tの表面の一部を示す模式図である。編地Tは、伸縮性のある編地からなっており、この例では、経編地で構成され表裏地により筒状に編成され、X方向に複数のパターンP1〜P6が編成されている。パターンP1〜P3は、この例では、衣服の両袖部のパターンP1及びP3、衣服の前身頃及び後身頃が重合した胴部のパターンP2が編成されている。パターンP1〜P3は、外形線に沿って表裏地の必要箇所を連結して編成されており、外形線に沿って切断して分離することで両袖部及び胴部を得ることができ、胴部に両袖部を縫製して取り付ければ最終製品である衣服を作成することができる。パターンP4〜P6についても別の両袖部及び胴部が編成されており、パターンP1〜P3と同様に切り離して衣服に仕上げることができるようになっている。
【0029】
パターンP1〜P6に対して、Y方向の所定長さの範囲で各パターンの幅に応じて記録領域S1〜S6が設定されており、これらの記録領域に対してY方向の直前位置には境界領域S0が全幅にわたって設定されている。境界領域S0では表裏地が一体となるように連結編成されている。
【0030】
そして、境界領域S0には、パターンP1〜P6のX方向の中間位置に識別マークF1〜F6が編成されている。すなわち、編地Tの歪みがなく、目曲がりもない状態を想定して境界領域S0に全幅にわたってX方向に沿う直線を描いた場合に、その直線に対して、各パターンのX方向の最大幅に対応する両端位置を通る副走査方向に沿う1対の直線により画定された線分の中点に、各識別マークが表示されている。また、各識別マークはY方向に所定の長さを有するライン状に形成されており、その両端位置はX方向に沿う直線上に揃うように編成されている。なお、識別マークのX方向の位置は、中点からずれた位置に設定してもよく、各パターンの最大幅に対応する両端位置の間であれば、適宜設定することができる。
【0031】
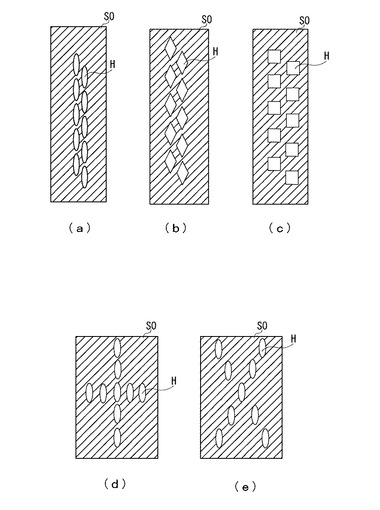
識別マークは、表裏地が一体連結された境界領域S0に設けられているので、伸縮による識別マークの歪み等を防止することができ、また、パターンから外れた位置に設けられているので、パターンに影響を及ぼすことはない。図4は、識別マークの一例を示す模式図である。この例では、表裏地が一体連結された境界領域に所定の長さにわたって長孔状の開口部Hが千鳥状に複数個配列されて識別マークが設定されている。こうした構成とすることで、開口部Hがつぶれにくくなり、開口部を光学検知する場合に確実に識別マークを検知することができる。この場合、識別マーク全体のY方向の長さは50mm〜70mmが好ましく、開口部HのY方向の長さは5mm〜30mmが好ましい。5mm未満では開口部が小さくなって光学検知が困難になり、30mmを超えると境界領域の編地部分が伸縮しやすくなってパターンが変形しやすくなる。
【0032】
開口部Hの形状は、図4(a)〜(c)に示すように、楕円形状、菱形形状、矩形状といった種々の形状にすることができる。また、編地の表面に露出する識別マークは、図4(d)及び(e)に示すように十字状や×状にしてもよく、識別可能な様々な形状に設定することができる。そして、識別マークを断続的なライン状や点状で構成するようにしてもよい。
【0033】
また、上述した開口部Hに相当する部分をメッシュ状にしたり凹凸状にすることで、識別マークを光学的に検知できるようにしてもよい。さらに、編地Tを編成した後に境界領域S0にスタンプやペン等により識別マークを着色して光学的に検知するようにしてもよく、その場合には任意の文字や記号でプリントするようにしてもよい。この場合、識別マークは記録領域の領域外に配置されているので、こうしたプリントを行っても記録領域に影響を及ぼすことはない。
【0034】
以上説明した境界領域S0及び記録領域S1〜S6がY方向に繰返し編成されることで編地Tは長尺状に編成されている。なお、両袖部のパターンのように記録領域に空きがある場合には、同一記録領域内に複数のパターンを編成するようにしてもよい。その場合でも各パターンのX方向の中間位置が一致するように編成することが望ましい。
【0035】
編地Tとしては、レーヨンに代表される再生繊維、綿に代表される天然繊維、アセテート等の半合成繊維、ポリエチレンテレフタレートに代表されるポリエステル系合成繊維、ナイロンに代表される脂肪族ポリアミド系合成繊維あるいはこれらの混合繊維を用いた薄地または厚地の編物が採用できる。
【0036】
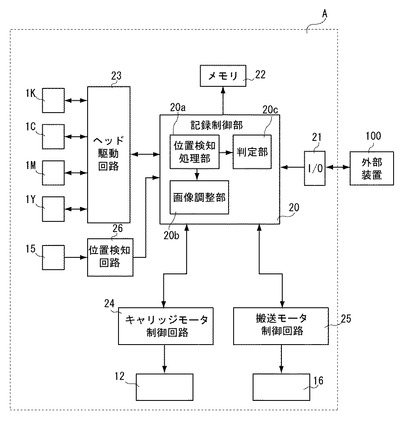
図5は、インクジェット記録装置Aのシステム構成を示すブロック図である。インクジェット記録装置Aは、記録動作を制御する記録制御部20、外部装置100との間でデータをやり取りするためのI/Oインターフェース部21、記録動作に必要なプログラムや画像データを記憶するメモリ部22、記録制御部20からのヘッド駆動制御信号を受信して各記録ヘッド部1Y〜1Kに駆動信号を出力するヘッド駆動回路23、記録制御部20からのキャリッジモータ駆動制御信号を受信してキャリッジモータ12を回転制御するキャリッジモータ制御回路24、記録制御部20からの搬送モータ駆動制御信号を受信してベルトローラ4を回転駆動する搬送モータ16を回転制御する搬送モータ制御回路25、識別マーク位置検知センサ15からの検知信号を受信して記録制御部20に送信する位置検知回路26を備えている。
【0037】
記録制御部20は、位置検知処理部20a、画像調整部20b及び判定部20cを備えている。位置検知処理部20aは、位置検知回路26からの出力信号に基づいて識別マークF1〜F6のY方向の位置データを生成して、パターンP1〜P6に対して記録する画像の記録開始位置を調整する。位置検知処理部20aでは、識別マークF1〜F6の位置を検知する所定の範囲を設定してその範囲内での位置検知回路26からの検知信号を取得して記録開始位置を調整することもできる。検知範囲を設定する場合には、前回の記録の際に得られた識別マークの位置データに基づいて次回の検知範囲を設定するようにしてもよい。検知信号の取得については、所定設定範囲内でのみ位置検知動作を行う方法、全走査範囲について得られた検知信号の中で所定設定範囲内に該当する信号のみを取得方法のいずれを用いてもよい。
【0038】
記録開始位置を調整する場合には、各識別マークのY方向の位置データに基づいて互いの位置関係をずれ量として算出し、そのずれ量に基づいて記録開始位置をY方向にずらすように調整する。編地TはY方向に搬送されるためY方向に伸縮しやすくなり、X方向に配列されたパターンP1〜P6が一様に伸縮しないと、上述したように各識別マークの両端位置が予めY方向に揃えられていた場合に各識別マークがY方向にずれるようになる。そのため、そのずれた状態に合せて各パターンの画像の記録開始位置を調整すれば、ずれた状態の各パターンに合せて精度よく記録動作を行なうことができるようになる。なお、隣接する識別マークのずれ量の平均値に基づいて位置調整するようにしてもよい。
【0039】
画像調整部20bは、位置検知処理部20aから得られた識別マークF1〜F6の位置データに基づいて各パターンの画像の記録開始位置をずらすために、ずれ量に応じて無色の画像領域を各パターンの画像に挿入する処理を行う。また、識別マークF1〜F6の位置データに基づいて各パターンに記録する画像のサイズを調整するようにしてもよい。例えば、各識別マークのX方向の間隔データにより算出される伸縮比率に応じ画像の主走査方向のサイズを調整する。
【0040】
判定部20cは、位置検知処理部20aにおいて所定の検知範囲で取得した検知信号がない場合や複数ある場合など誤検知である場合を判定して、記録動作の停止処理や異常報知処理を行う。また、識別マークの幅に対応する検知信号の幅が異常に大きい場合には、皺や汚れを検知している場合が想定されるため、基準値に対する検知信号の幅についても異常か否か判定するようにしてもよい。また、複数の検知信号が取得された場合には、前回の検知結果を用いてそれに最も近い位置データを正常な位置データとして判定したり、その前後の識別マークの位置データに基づいてその位置ずれ量から正常な位置データを選択するように判定するようにしてもよい。または、異常を検知した位置とは異なる箇所で再度識別マークの検知・判定を行うようにしてもよい。
【0041】
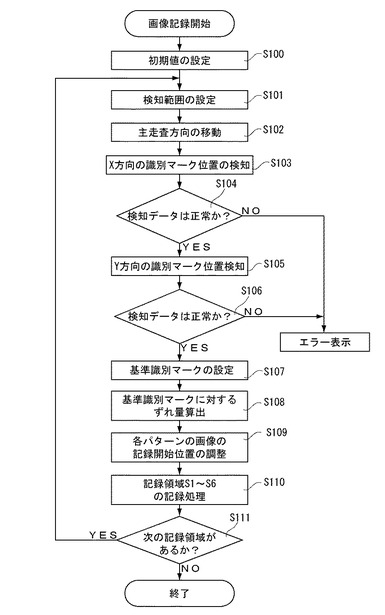
図6は、画像記録を行う処理フローを示している。画像記録を行う前に、予め主走査方向の記録領域の範囲及び識別マークに関する位置データを初期値として設定する(S100)。これらの位置データは、基準位置、例えば、無端搬送ベルト3の側端位置からの距離データとして設定される。
【0042】
初期値として他に、画像サイズ、識別マークから記録領域までの間隔データ基準値、識別マークの間隔データなど画像記録をするため基準となる位置データが挙げられる。
【0043】
初期値が設定されると、それに対応して識別マークの検知範囲を設定する(S101)。検知範囲は、例えば、識別マークの位置データの初期値の±20mm程度に設定しておくとよい。次に、キャリッジ11を初期位置に移動させて編地T上を全幅に亘って主走査方向であるX方向に移動させる(S102)。そして、設定された検知範囲に基づいてその範囲内において識別マーク位置検知センサ15により識別マークF1〜F6のX方向の位置を検知する(S103)。X方向の位置検知データは、判定部20cにおいて異常か否かチェックされて(S104)、検知範囲内で検知されなかった場合等異常であると判定されると、エラー表示を行って記録処理を停止する。
【0044】
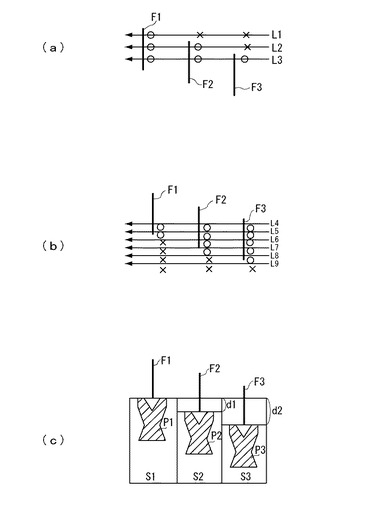
図7は、X方向に識別マーク位置検知センサ15を移動させて識別マークを検知する場合の説明図である。図7(a)に示すように、識別マークF1〜F3に対して(図7では説明を容易にするため3つの識別マークに基づいて説明する)X方向の走査ラインLに沿って識別マーク位置検知センサ15が往復動して検知を行なう。走査ラインLは、編地Tが走査するごとにY方向に所定間隔ずつ搬送されて識別マークに対して所定間隔(例えば10mm)ずつずれて検知動作が行なわれる。そのため、走査ラインLは、L1、L2、L3・・・のように編地Tの表面を検知していくようになる。識別マークF1〜F3がY方向にずれた状態では、各識別マークの先端位置が検知される最初の走査ラインは異なるようになる。この例では、走査ラインL1で識別マークF1の先端位置が検知され、走査ラインL2で識別マークF2の先端位置が検知され、走査ラインL3で識別マークF3の先端位置が検知される(各走査ラインに識別マークごとに付された○×が検知の有無を示している)。そして、走査ラインL3ですべての識別マークが検知されて識別マークのX方向の位置検知が完了する。
【0045】
X方向の位置検知データが正常と判定された場合には、各識別マークのY方向の位置検知を行なう(S105)。図7(b)は、Y方向の位置検知を行う場合の説明図である。この場合の走査ラインの間隔(例えば5mm)は図7(a)に示すX方向の位置検知に比べて小さく設定して行う。走査ラインL4ではすべての識別マークを検知しており、順次走査していき、走査ラインL6で最初に識別マークF1が検知されなくなる。続いて走査ラインL8で識別マークF2が検知されなくなり、走査ラインL9ですべての識別マークが検知されなくなる。したがって、検知されなくなった走査ラインのY方向の位置に基づいて各識別マークの後端位置に関するY方向の位置検知データを得ることができる。Y方向の位置検知データは、判定部20cにおいて異常か否かチェックされて(S106)、異常であると判定されると、エラー表示を行って記録処理を停止する。
【0046】
Y方向の位置検知データが正常と判定された場合には、識別マークのうちその後端位置が最も早く検知されなくなった識別マークを基準識別マークに設定し(S107)、Y方向の位置検知データに基づいて、基準識別マークとそれ以外の識別マークとの間のずれ量を算出する(S108)。例えば、図7(b)に示す場合では、基準識別マークには識別マークF1が設定され、識別マークF2のずれ量は走査ライン2回分(5mm×2=10mm)となり、識別マークF3のずれ量は走査ライン3回分(5mm×3=15mm)となる。
【0047】
こうして算出されたずれ量に基づいて各パターンの画像の記録開始位置をずらすように設定する(S109)。図7(c)に示すように、識別マークF2に対応するパターンP2の画像の記録開始位置は、識別マークF1に対応するパターンP1の画像の記録開始位置よりもY方向に長さd1だけずれるように、無色の画像領域が挿入される。また、識別マークF3に対応するパターンP3の画像の記録開始位置についても、パターンP1の画像の記録開始位置よりもY方向に長さd2だけずれるように無色の画像領域が挿入される。
【0048】
そして、画像記録動作を開始する走査ラインにキャリッジ11をセットするために編地TがY方向に搬送制御されて、X方向に配列された各パターンの画像記録が一度に行われる(S110)。X方向に編地Tの全幅にわたってキャリッジ11を移動し、インクジェット記録ヘッド1により1つの走査ラインに記録した後無端搬送ベルト3をY方向に1つの走査ライン分搬送させ、以後同様にX方向の記録及びY方向の搬送を繰り返して各パターンの画像を記録する。各パターンの画像は、各パターンのずれ量に対応して無色の画像領域を挿入して予め記録開始位置がずらされているため、ずれた状態の各パターンに合せて精度よく画像が記録されていくようになる。
【0049】
各パターンの画像の記録処理が終了すると、次のパターンの画像の記録領域があるか否かチェックし(S111)、次の記録領域がある場合には、ステップS101に戻り、次の記録領域の検知範囲を設定する。検知範囲を設定する場合は、前回設定した検知範囲をそのまま使用してもよいが、前回検知した識別マークの位置データに基づいて検知範囲を設定すると、さらに検知範囲を絞り込むことができ、誤検知を少なくすることができる。検知範囲は、布地の伸縮が安定していない印字スタート時や識別線位置が変化しやすい継ぎ目通過後において広く、それ以外では狭くする等の設定変更を行っても良い。
【0050】
以後、上述したように前回と同様の処理を行って、次の記録領域の記録動作を行う。そして、次の記録領域がなくなった場合には画像記録処理を終了する。
【0051】
なお、本実施例においては、識別マーク位置検知センサ15がインクジェット記録ヘッド1とともにキャリッジ上に搭載された例を示したが、識別マーク位置検知センサ15がキャリッジとは別動で走査を行うようにしてもよく、検知センサの設置方法は特に限定されない。そして、識別マーク位置検知センサを別動とする場合には、インクジェット記録ヘッドを全記録領域にわたるライン型記録ヘッドにすることも可能となる。
【図面の簡単な説明】
【0052】
【図1】本発明に係る実施形態に関する概略構成図である。
【図2】画像記録を行う機構に関する概略斜視図である。
【図3】編地の表面を示す模式図である。
【図4】識別マークを示す拡大模式図である。
【図5】インクジェット記録装置のシステム構成を示すブロック図である。
【図6】画像記録を行う処理フローである。
【図7】位置検知及び画像記録を行う場合に関する説明図である。
【符号の説明】
【0053】
F 識別マーク
P パターン
T 編地
1 インクジェット記録ヘッド
2 センタリングローラ
3 無端搬送ベルト
4 ベルトローラ
5 押えローラ
6 巻取りローラ
7 端部位置検知センサ
8 供給ローラ
10 ガイドレール
11 キャリッジ
12 キャリッジモータ
13 タイミングベルト
14 フレキシブルケーブル
15 識別マーク位置検知センサ
【技術分野】
【0001】
本発明は、主走査方向に複数のパターンが編成されて配列された編地の各パターンに画像を記録するインクジェット記録方法及び装置に関するものである。
【背景技術】
【0002】
インクジェット記録方式は、インクジェット記録ヘッドのインク吐出口から微小なインクを記録媒体に対して吐出して印字や画像記録を行うもので、記録媒体から離間した状態で記録動作を行うことができることから、様々な材質の記録媒体や物品に記録することが可能で、幅広い用途に使用されてきている。
【0003】
そして、布地に柄や模様といった画像を記録する場合にも他の記録方式に比べてインクジェット記録方式が低コストで様々な画像に対応できることから、布地用の記録装置として開発が進められている。例えば、特許文献1では、多重布帛により布製品を実質的に無縫製で作成する場合に、多重布帛の前身頃や後身頃に対してインクジェットでプリントする点が記載されている。また、特許文献2では、伸縮性を有する記録媒体に対して画像形成を行う場合に、分割線を形成した記録媒体を用い、搬送された記録媒体の歪みを分割線により検出することで判定し、その判定結果に基づいて画像データを補正処理し、補正された画像データに従って画像形成を行うようにした点が記載されている。
【特許文献1】特開2003−147660号公報
【特許文献2】特開平11−300949号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
布地に対してインクジェット記録を行う場合には、繊維自体の伸縮性や、編み方、織り方による伸縮性を考慮する必要があるが、布地の伸縮性は一様ではなくまた布地の一端に加えられる引張力に対しても全体に一様に伸長することはないため、用紙といった記録媒体とは異なる取り扱いをしなければならない。また、インクジェット記録を行う前に布地に糊を付与して布地の目曲がりを抑えたとしても、伸縮や斜行、湾曲などを完全になくすことはできない。
【0005】
例えば、衣服と身体の密着性の高いインナーウェアやスポーツウェアの分野では、予めほつれが生じ難い編構造に編成された布地をその端部が無裁断、無縫製のままでウェアの一部として用いるようになってきている。布地を無縫製で使用すると、縫製により生じる欠点、例えば着用時に与える違和感やファッション性の低下を招くことなく、さらに縫製作業も簡略化することができる。
【0006】
しかし、このような目的で編成される布地の幅は、最終製品の形態に依存するため30cm程度に設定されることもあり、通常1m以上の布地幅を必要とする布地の処理工程の量産設備をそのまま利用することは非常に困難であり、非効率である。幅の小さい布地を複数枚幅方向に連結し一体とした布地を使用することも考えられるが、その場合、連結する各布地の幅、編構成又は糸使いにより各布地の伸縮がそれぞれ異なるため、こうした伸縮にバラツキのある布地に対して高精度で画像を一度に形成することは困難である。
【0007】
また、布地の端部を無裁断、無縫製で使用する場合、端部における柄のプリント位置ズレがそのまま製品に反映されるため、布地を裁断して使用する場合に比べ布地の端部における高精度なプリント位置制御が要求されるようになる。
【0008】
上述した先行文献では、布地の伸縮性を考慮して画像記録を行うことが記載されているものの布地の取り扱いに関して十分な検討が行われていない。例えば、特許文献1では、布地に皺やテンション斑がある場合にプリントされた柄が歪むといった問題に対処するため、布帛の上下層を散開的な点接結により擬似的な一重組織化する点が記載されているが、複数のパターンを幅方向に編成して配列した編地の場合、各パターンの伸縮の度合いは一様ではないため、特許文献1記載のやり方では、インクジェットにより精度の高いプリントを行うことは難しい。
【0009】
また、特許文献2では、分割線を形成するようにしているが、分割線を布地全体に特殊染料で形成することは、インクジェット記録の際にインクの浸透が分割線で異なるようになり、画質が大きく劣化するようになる。また、最終製品にも分割線が含まれることになるため、使用される特殊染料に起因する各種堅牢度の低下が大きな問題となる。また、分割線を編み込むことが記載されているが、斜め方向に糸を編み込むことは特殊な設備を必要とし、一般的ではない。また、複数のパターンを幅方向に編成して配列した編地の場合、各パターンの伸縮が一様でないため、分割線が複雑に歪むようになって各パターンに対応した記録が難しくなる。
【0010】
そこで、本発明は、複数のパターンを幅方向に編成して配列した編地に対して記録を行う場合に各パターンの伸縮の度合いに対応して画像記録を行うことができるインクジェット記録方法及び装置を提供することを目的とするものである。
【課題を解決するための手段】
【0011】
本発明に係るインクジェット記録方法は、主走査方向に複数のパターンが編成されて配列された編地を副走査方向に搬送させてインクジェット記録ヘッドにより各パターンに対して画像を記録するインクジェット記録方法であって、前記パターンにそれぞれ対応して編地表面に表示されるとともに主走査方向に配列された複数の識別マークの位置関係を検知し、検知された識別マークの位置関係に基づいて識別マークに対応するパターンの記録開始位置を調整してインクジェット記録ヘッドにより各パターンに対して画像を記録することを特徴とする。さらに、前記識別マークは、前記パターンに対してその主走査方向の中間位置に表示されていることを特徴とする。さらに、前記識別マークは、前記パターンに対してその副走査方向の直前位置に表示されていることを特徴とする。さらに、前記識別マークは、編地に編成されていることを特徴とする。さらに、前記識別マークの間の副走査方向のずれ量を検知することで前記識別マークの位置関係を検知することを特徴とする。
【0012】
本発明に係るインクジェット記録装置は、主走査方向に複数のパターンが編成されて配列された編地を副走査方向に搬送させる搬送手段と、インクジェット記録ヘッドにより各パターンに対して画像を記録する記録手段と、前記パターンにそれぞれ対応して編地表面に表示されるとともに主走査方向に配列された複数の識別マークの位置関係を検知する位置検知手段と、検知された識別マークの位置関係に基づいて識別マークに対応する複数のパターンの記録開始位置を調整してインクジェット記録ヘッドにより各パターンに対して画像を記録するように記録手段を制御する記録制御手段とを備えていることを特徴とする。さらに、前記識別マークは、前記パターンに対してその主走査方向の中間位置に表示されていることを特徴とする。さらに、前記識別マークは、前記パターンに対してその副走査方向の直前位置に表示されていることを特徴とする。さらに、前記識別マークは、編地に編成されていることを特徴とする。さらに、前記位置検知手段は、前記識別マークの副走査方向のずれ量を検知することを特徴とする。
【発明の効果】
【0013】
上記のような構成を有することで、主走査方向に複数のパターンが編成されて配列された編地に各パターンに対応して編地表面に表示されるとともに主走査方向に配列された複数の識別マークを設け、これらの識別マークの位置関係を検知し、検知された識別マークの位置関係に基づいて識別マークに対応するパターンの記録開始位置を調整してインクジェット記録ヘッドにより各パターンに対して画像を記録するので、主走査方向に配列された各パターンの伸縮の度合いに応じて画像を記録することができる。
【0014】
すなわち、編地を副走査方向に搬送して画像記録を行う場合、副走査方向の伸縮のバラツキが生じやすくなるが、主走査方向に配列された各パターンに対応する識別マークを表示して識別マークの位置関係を検知するようにすれば、各パターン間の副走査方向の伸縮の度合いを識別マークの位置関係に基づいて検知することができ、検知された位置関係に基づいて調整された各パターンの記録開始位置によりそれぞれの伸縮の度合いに応じて高精度で記録動作を行なうことが可能となる。
【0015】
そして、識別マークを各パターンの主走査方向の中間位置に表示することで、各パターンの伸縮度合いの平均的な位置に識別マークを設定して記録開始位置の調整を行うことができる。ここで、主走査方向の中間位置とは、各パターンの主走査方向の最大幅に対応する両端位置を通る副走査方向に沿う1対の直線の間の領域内に設定される識別マークの表示位置であり、好ましくは当該領域の中心位置に識別マークを表示するとよい。
【0016】
また、識別マークを各パターンに対して副走査方向の直前位置に表示することで、各パターンに記録動作を行なう直前に記録開始位置の調整を行うことができるので、効率的に記録動作を行なうことが可能となり、各パターンから外れた位置に識別マークを表示することで、各パターンに対して識別マークが影響を及ぼすことがない。
【0017】
また、識別マークを編地に識別模様として編成するようにすれば、編地の編成の際に識別マークも編み込むことができ、識別マークを設けるための工程を省略することができる。
【0018】
そして、識別マークの位置関係として、識別マークの副走査方向のずれ量を検知すれば、副走査方向の伸縮の度合いを反映させて各パターンの記録開始位置の調整を行うことができる。
【発明を実施するための最良の形態】
【0019】
以下、本発明の実施形態を図面を用いて説明する。なお、以下に説明する実施形態は、本発明を実施するにあたって好ましい具体例であるから、技術的に種々の限定がなされているが、本発明は、以下の説明において特に本発明を限定する旨明記されていない限り、これらの形態に限定されるものではない。
【0020】
図1は、本発明に係る実施形態に関する概略構成図を示している。所定の幅を有する長尺状の編地Tに画像記録を行うインクジェット記録装置Aは、編地Tの搬送機構及びインクジェット記録ヘッド1の走査機構からなる。
【0021】
編地Tは、供給ローラ8から搬送ローラにより連続して繰出され、センタリングローラ2に巻き付けられて幅方向の位置調整が行われる。センタリングローラ2の近傍には編地Tの幅方向の端部位置検知センサ7が配置されており、端部位置検知センサ7からの検知信号に基づいて、搬送される編地Tの端部が所定位置にあるか監視される。
【0022】
センタリングローラ2において位置調整された編地Tは、一対のベルトローラ4に張架された無端搬送ベルト3上に搬入される。無端搬送ベルト3の表面には粘着テープが固定されており、押えローラ5により編地Tが無端搬送ベルト3に押圧される際に粘着テープに貼着されて、編地Tが無端搬送ベルト3上に位置決めされる。
【0023】
無端搬送ベルト3上に位置決めされた編地Tは、無端搬送ベルト3とともに搬送されてインクジェット記録ヘッド1により画像が記録されていき、画像記録が終了した編地Tは、搬送ローラにより無端搬送ベルト3から上方に搬送されて粘着テープから引き剥がされ、巻取りローラ6により順次巻き取られていく。
【0024】
図2は、画像記録を行う機構に関する概略斜視図である。編地Tは、無端搬送ベルト3により副走査方向Yに搬送されるようになっている。インクジェット記録ヘッド1は、ガイドレール10によって支持されたキャリッジ11上に位置決め固定されており、キャリッジ11はキャリッジモータ12の駆動によりタイミングベルト13を介して編地T上を主走査方向(横切る方向X1、X2)に往復移動するようになっている。
【0025】
画像信号に応答して、キャリッジ11を主走査方向X1、X2へ移動するとともに、駆動信号がフレキシブルケーブル14を介してインクジェット記録ヘッド1に入力されてインクが編地Tの表面に向けて吐出される。
【0026】
インクジェット記録ヘッド1は、4つの記録ヘッド部1Y、1M、1C、1Kが主走査方向に順に配列されており、それぞれイエロー、マゼンタ、シアン、ブラックの異なる色を吐出するようになっている。そして、4つの色を適宜重ね合わせて記録することでフルカラーの画像を記録することができる。
【0027】
キャリッジ11には、インクジェット記録ヘッド1に近接して識別マーク位置検知センサ15が配置されており、識別マーク位置検知センサ15は、インクジェット記録ヘッド1とともに編地T上を移動して、後述するように編地Tに編成された識別マークFの位置を検知するようになっている。識別マーク位置検知センサ15としては、光学的又は電気的に識別マークを検知可能なセンサ素子を用いることができる。
【0028】
図3は、編地Tの表面の一部を示す模式図である。編地Tは、伸縮性のある編地からなっており、この例では、経編地で構成され表裏地により筒状に編成され、X方向に複数のパターンP1〜P6が編成されている。パターンP1〜P3は、この例では、衣服の両袖部のパターンP1及びP3、衣服の前身頃及び後身頃が重合した胴部のパターンP2が編成されている。パターンP1〜P3は、外形線に沿って表裏地の必要箇所を連結して編成されており、外形線に沿って切断して分離することで両袖部及び胴部を得ることができ、胴部に両袖部を縫製して取り付ければ最終製品である衣服を作成することができる。パターンP4〜P6についても別の両袖部及び胴部が編成されており、パターンP1〜P3と同様に切り離して衣服に仕上げることができるようになっている。
【0029】
パターンP1〜P6に対して、Y方向の所定長さの範囲で各パターンの幅に応じて記録領域S1〜S6が設定されており、これらの記録領域に対してY方向の直前位置には境界領域S0が全幅にわたって設定されている。境界領域S0では表裏地が一体となるように連結編成されている。
【0030】
そして、境界領域S0には、パターンP1〜P6のX方向の中間位置に識別マークF1〜F6が編成されている。すなわち、編地Tの歪みがなく、目曲がりもない状態を想定して境界領域S0に全幅にわたってX方向に沿う直線を描いた場合に、その直線に対して、各パターンのX方向の最大幅に対応する両端位置を通る副走査方向に沿う1対の直線により画定された線分の中点に、各識別マークが表示されている。また、各識別マークはY方向に所定の長さを有するライン状に形成されており、その両端位置はX方向に沿う直線上に揃うように編成されている。なお、識別マークのX方向の位置は、中点からずれた位置に設定してもよく、各パターンの最大幅に対応する両端位置の間であれば、適宜設定することができる。
【0031】
識別マークは、表裏地が一体連結された境界領域S0に設けられているので、伸縮による識別マークの歪み等を防止することができ、また、パターンから外れた位置に設けられているので、パターンに影響を及ぼすことはない。図4は、識別マークの一例を示す模式図である。この例では、表裏地が一体連結された境界領域に所定の長さにわたって長孔状の開口部Hが千鳥状に複数個配列されて識別マークが設定されている。こうした構成とすることで、開口部Hがつぶれにくくなり、開口部を光学検知する場合に確実に識別マークを検知することができる。この場合、識別マーク全体のY方向の長さは50mm〜70mmが好ましく、開口部HのY方向の長さは5mm〜30mmが好ましい。5mm未満では開口部が小さくなって光学検知が困難になり、30mmを超えると境界領域の編地部分が伸縮しやすくなってパターンが変形しやすくなる。
【0032】
開口部Hの形状は、図4(a)〜(c)に示すように、楕円形状、菱形形状、矩形状といった種々の形状にすることができる。また、編地の表面に露出する識別マークは、図4(d)及び(e)に示すように十字状や×状にしてもよく、識別可能な様々な形状に設定することができる。そして、識別マークを断続的なライン状や点状で構成するようにしてもよい。
【0033】
また、上述した開口部Hに相当する部分をメッシュ状にしたり凹凸状にすることで、識別マークを光学的に検知できるようにしてもよい。さらに、編地Tを編成した後に境界領域S0にスタンプやペン等により識別マークを着色して光学的に検知するようにしてもよく、その場合には任意の文字や記号でプリントするようにしてもよい。この場合、識別マークは記録領域の領域外に配置されているので、こうしたプリントを行っても記録領域に影響を及ぼすことはない。
【0034】
以上説明した境界領域S0及び記録領域S1〜S6がY方向に繰返し編成されることで編地Tは長尺状に編成されている。なお、両袖部のパターンのように記録領域に空きがある場合には、同一記録領域内に複数のパターンを編成するようにしてもよい。その場合でも各パターンのX方向の中間位置が一致するように編成することが望ましい。
【0035】
編地Tとしては、レーヨンに代表される再生繊維、綿に代表される天然繊維、アセテート等の半合成繊維、ポリエチレンテレフタレートに代表されるポリエステル系合成繊維、ナイロンに代表される脂肪族ポリアミド系合成繊維あるいはこれらの混合繊維を用いた薄地または厚地の編物が採用できる。
【0036】
図5は、インクジェット記録装置Aのシステム構成を示すブロック図である。インクジェット記録装置Aは、記録動作を制御する記録制御部20、外部装置100との間でデータをやり取りするためのI/Oインターフェース部21、記録動作に必要なプログラムや画像データを記憶するメモリ部22、記録制御部20からのヘッド駆動制御信号を受信して各記録ヘッド部1Y〜1Kに駆動信号を出力するヘッド駆動回路23、記録制御部20からのキャリッジモータ駆動制御信号を受信してキャリッジモータ12を回転制御するキャリッジモータ制御回路24、記録制御部20からの搬送モータ駆動制御信号を受信してベルトローラ4を回転駆動する搬送モータ16を回転制御する搬送モータ制御回路25、識別マーク位置検知センサ15からの検知信号を受信して記録制御部20に送信する位置検知回路26を備えている。
【0037】
記録制御部20は、位置検知処理部20a、画像調整部20b及び判定部20cを備えている。位置検知処理部20aは、位置検知回路26からの出力信号に基づいて識別マークF1〜F6のY方向の位置データを生成して、パターンP1〜P6に対して記録する画像の記録開始位置を調整する。位置検知処理部20aでは、識別マークF1〜F6の位置を検知する所定の範囲を設定してその範囲内での位置検知回路26からの検知信号を取得して記録開始位置を調整することもできる。検知範囲を設定する場合には、前回の記録の際に得られた識別マークの位置データに基づいて次回の検知範囲を設定するようにしてもよい。検知信号の取得については、所定設定範囲内でのみ位置検知動作を行う方法、全走査範囲について得られた検知信号の中で所定設定範囲内に該当する信号のみを取得方法のいずれを用いてもよい。
【0038】
記録開始位置を調整する場合には、各識別マークのY方向の位置データに基づいて互いの位置関係をずれ量として算出し、そのずれ量に基づいて記録開始位置をY方向にずらすように調整する。編地TはY方向に搬送されるためY方向に伸縮しやすくなり、X方向に配列されたパターンP1〜P6が一様に伸縮しないと、上述したように各識別マークの両端位置が予めY方向に揃えられていた場合に各識別マークがY方向にずれるようになる。そのため、そのずれた状態に合せて各パターンの画像の記録開始位置を調整すれば、ずれた状態の各パターンに合せて精度よく記録動作を行なうことができるようになる。なお、隣接する識別マークのずれ量の平均値に基づいて位置調整するようにしてもよい。
【0039】
画像調整部20bは、位置検知処理部20aから得られた識別マークF1〜F6の位置データに基づいて各パターンの画像の記録開始位置をずらすために、ずれ量に応じて無色の画像領域を各パターンの画像に挿入する処理を行う。また、識別マークF1〜F6の位置データに基づいて各パターンに記録する画像のサイズを調整するようにしてもよい。例えば、各識別マークのX方向の間隔データにより算出される伸縮比率に応じ画像の主走査方向のサイズを調整する。
【0040】
判定部20cは、位置検知処理部20aにおいて所定の検知範囲で取得した検知信号がない場合や複数ある場合など誤検知である場合を判定して、記録動作の停止処理や異常報知処理を行う。また、識別マークの幅に対応する検知信号の幅が異常に大きい場合には、皺や汚れを検知している場合が想定されるため、基準値に対する検知信号の幅についても異常か否か判定するようにしてもよい。また、複数の検知信号が取得された場合には、前回の検知結果を用いてそれに最も近い位置データを正常な位置データとして判定したり、その前後の識別マークの位置データに基づいてその位置ずれ量から正常な位置データを選択するように判定するようにしてもよい。または、異常を検知した位置とは異なる箇所で再度識別マークの検知・判定を行うようにしてもよい。
【0041】
図6は、画像記録を行う処理フローを示している。画像記録を行う前に、予め主走査方向の記録領域の範囲及び識別マークに関する位置データを初期値として設定する(S100)。これらの位置データは、基準位置、例えば、無端搬送ベルト3の側端位置からの距離データとして設定される。
【0042】
初期値として他に、画像サイズ、識別マークから記録領域までの間隔データ基準値、識別マークの間隔データなど画像記録をするため基準となる位置データが挙げられる。
【0043】
初期値が設定されると、それに対応して識別マークの検知範囲を設定する(S101)。検知範囲は、例えば、識別マークの位置データの初期値の±20mm程度に設定しておくとよい。次に、キャリッジ11を初期位置に移動させて編地T上を全幅に亘って主走査方向であるX方向に移動させる(S102)。そして、設定された検知範囲に基づいてその範囲内において識別マーク位置検知センサ15により識別マークF1〜F6のX方向の位置を検知する(S103)。X方向の位置検知データは、判定部20cにおいて異常か否かチェックされて(S104)、検知範囲内で検知されなかった場合等異常であると判定されると、エラー表示を行って記録処理を停止する。
【0044】
図7は、X方向に識別マーク位置検知センサ15を移動させて識別マークを検知する場合の説明図である。図7(a)に示すように、識別マークF1〜F3に対して(図7では説明を容易にするため3つの識別マークに基づいて説明する)X方向の走査ラインLに沿って識別マーク位置検知センサ15が往復動して検知を行なう。走査ラインLは、編地Tが走査するごとにY方向に所定間隔ずつ搬送されて識別マークに対して所定間隔(例えば10mm)ずつずれて検知動作が行なわれる。そのため、走査ラインLは、L1、L2、L3・・・のように編地Tの表面を検知していくようになる。識別マークF1〜F3がY方向にずれた状態では、各識別マークの先端位置が検知される最初の走査ラインは異なるようになる。この例では、走査ラインL1で識別マークF1の先端位置が検知され、走査ラインL2で識別マークF2の先端位置が検知され、走査ラインL3で識別マークF3の先端位置が検知される(各走査ラインに識別マークごとに付された○×が検知の有無を示している)。そして、走査ラインL3ですべての識別マークが検知されて識別マークのX方向の位置検知が完了する。
【0045】
X方向の位置検知データが正常と判定された場合には、各識別マークのY方向の位置検知を行なう(S105)。図7(b)は、Y方向の位置検知を行う場合の説明図である。この場合の走査ラインの間隔(例えば5mm)は図7(a)に示すX方向の位置検知に比べて小さく設定して行う。走査ラインL4ではすべての識別マークを検知しており、順次走査していき、走査ラインL6で最初に識別マークF1が検知されなくなる。続いて走査ラインL8で識別マークF2が検知されなくなり、走査ラインL9ですべての識別マークが検知されなくなる。したがって、検知されなくなった走査ラインのY方向の位置に基づいて各識別マークの後端位置に関するY方向の位置検知データを得ることができる。Y方向の位置検知データは、判定部20cにおいて異常か否かチェックされて(S106)、異常であると判定されると、エラー表示を行って記録処理を停止する。
【0046】
Y方向の位置検知データが正常と判定された場合には、識別マークのうちその後端位置が最も早く検知されなくなった識別マークを基準識別マークに設定し(S107)、Y方向の位置検知データに基づいて、基準識別マークとそれ以外の識別マークとの間のずれ量を算出する(S108)。例えば、図7(b)に示す場合では、基準識別マークには識別マークF1が設定され、識別マークF2のずれ量は走査ライン2回分(5mm×2=10mm)となり、識別マークF3のずれ量は走査ライン3回分(5mm×3=15mm)となる。
【0047】
こうして算出されたずれ量に基づいて各パターンの画像の記録開始位置をずらすように設定する(S109)。図7(c)に示すように、識別マークF2に対応するパターンP2の画像の記録開始位置は、識別マークF1に対応するパターンP1の画像の記録開始位置よりもY方向に長さd1だけずれるように、無色の画像領域が挿入される。また、識別マークF3に対応するパターンP3の画像の記録開始位置についても、パターンP1の画像の記録開始位置よりもY方向に長さd2だけずれるように無色の画像領域が挿入される。
【0048】
そして、画像記録動作を開始する走査ラインにキャリッジ11をセットするために編地TがY方向に搬送制御されて、X方向に配列された各パターンの画像記録が一度に行われる(S110)。X方向に編地Tの全幅にわたってキャリッジ11を移動し、インクジェット記録ヘッド1により1つの走査ラインに記録した後無端搬送ベルト3をY方向に1つの走査ライン分搬送させ、以後同様にX方向の記録及びY方向の搬送を繰り返して各パターンの画像を記録する。各パターンの画像は、各パターンのずれ量に対応して無色の画像領域を挿入して予め記録開始位置がずらされているため、ずれた状態の各パターンに合せて精度よく画像が記録されていくようになる。
【0049】
各パターンの画像の記録処理が終了すると、次のパターンの画像の記録領域があるか否かチェックし(S111)、次の記録領域がある場合には、ステップS101に戻り、次の記録領域の検知範囲を設定する。検知範囲を設定する場合は、前回設定した検知範囲をそのまま使用してもよいが、前回検知した識別マークの位置データに基づいて検知範囲を設定すると、さらに検知範囲を絞り込むことができ、誤検知を少なくすることができる。検知範囲は、布地の伸縮が安定していない印字スタート時や識別線位置が変化しやすい継ぎ目通過後において広く、それ以外では狭くする等の設定変更を行っても良い。
【0050】
以後、上述したように前回と同様の処理を行って、次の記録領域の記録動作を行う。そして、次の記録領域がなくなった場合には画像記録処理を終了する。
【0051】
なお、本実施例においては、識別マーク位置検知センサ15がインクジェット記録ヘッド1とともにキャリッジ上に搭載された例を示したが、識別マーク位置検知センサ15がキャリッジとは別動で走査を行うようにしてもよく、検知センサの設置方法は特に限定されない。そして、識別マーク位置検知センサを別動とする場合には、インクジェット記録ヘッドを全記録領域にわたるライン型記録ヘッドにすることも可能となる。
【図面の簡単な説明】
【0052】
【図1】本発明に係る実施形態に関する概略構成図である。
【図2】画像記録を行う機構に関する概略斜視図である。
【図3】編地の表面を示す模式図である。
【図4】識別マークを示す拡大模式図である。
【図5】インクジェット記録装置のシステム構成を示すブロック図である。
【図6】画像記録を行う処理フローである。
【図7】位置検知及び画像記録を行う場合に関する説明図である。
【符号の説明】
【0053】
F 識別マーク
P パターン
T 編地
1 インクジェット記録ヘッド
2 センタリングローラ
3 無端搬送ベルト
4 ベルトローラ
5 押えローラ
6 巻取りローラ
7 端部位置検知センサ
8 供給ローラ
10 ガイドレール
11 キャリッジ
12 キャリッジモータ
13 タイミングベルト
14 フレキシブルケーブル
15 識別マーク位置検知センサ
【特許請求の範囲】
【請求項1】
主走査方向に複数のパターンが編成されて配列された編地を副走査方向に搬送させてインクジェット記録ヘッドにより各パターンに対して画像を記録するインクジェット記録方法であって、前記パターンにそれぞれ対応して編地表面に表示されるとともに主走査方向に配列された複数の識別マークの位置関係を検知し、検知された識別マークの位置関係に基づいて識別マークに対応するパターンの記録開始位置を調整してインクジェット記録ヘッドにより各パターンに対して画像を記録することを特徴とするインクジェット記録方法。
【請求項2】
前記識別マークは、前記パターンに対してその主走査方向の中間位置に表示されていることを特徴とする請求項1に記載のインクジェット記録方法。
【請求項3】
前記識別マークは、前記パターンに対してその副走査方向の直前位置に表示されていることを特徴とする請求項1又は2に記載のインクジェット記録方法。
【請求項4】
前記識別マークは、編地に編成されていることを特徴とする請求項1から3のいずれかに記載のインクジェット記録方法。
【請求項5】
前記識別マークの間の副走査方向のずれ量を検知することで前記識別マークの位置関係を検知することを特徴とする請求項1から4のいずれかに記載のインクジェット記録方法。
【請求項6】
主走査方向に複数のパターンが編成されて配列された編地を副走査方向に搬送させる搬送手段と、インクジェット記録ヘッドにより各パターンに対して画像を記録する記録手段と、前記パターンにそれぞれ対応して編地表面に表示されるとともに主走査方向に配列された複数の識別マークの位置関係を検知する位置検知手段と、検知された識別マークの位置関係に基づいて識別マークに対応する複数のパターンの記録開始位置を調整してインクジェット記録ヘッドにより各パターンに対して画像を記録するように記録手段を制御する記録制御手段とを備えていることを特徴とするインクジェット記録装置。
【請求項7】
前記識別マークは、前記パターンに対してその主走査方向の中間位置に表示されていることを特徴とする請求項6に記載のインクジェット記録装置。
【請求項8】
前記識別マークは、前記パターンに対してその副走査方向の直前位置に表示されていることを特徴とする請求項6又は7に記載のインクジェット記録装置。
【請求項9】
前記識別マークは、編地に編成されていることを特徴とする請求項6から8のいずれかに記載のインクジェット記録装置。
【請求項10】
前記位置検知手段は、前記識別マークの副走査方向のずれ量を検知することを特徴とする請求項6から9のいずれかに記載のインクジェット記録装置。
【請求項1】
主走査方向に複数のパターンが編成されて配列された編地を副走査方向に搬送させてインクジェット記録ヘッドにより各パターンに対して画像を記録するインクジェット記録方法であって、前記パターンにそれぞれ対応して編地表面に表示されるとともに主走査方向に配列された複数の識別マークの位置関係を検知し、検知された識別マークの位置関係に基づいて識別マークに対応するパターンの記録開始位置を調整してインクジェット記録ヘッドにより各パターンに対して画像を記録することを特徴とするインクジェット記録方法。
【請求項2】
前記識別マークは、前記パターンに対してその主走査方向の中間位置に表示されていることを特徴とする請求項1に記載のインクジェット記録方法。
【請求項3】
前記識別マークは、前記パターンに対してその副走査方向の直前位置に表示されていることを特徴とする請求項1又は2に記載のインクジェット記録方法。
【請求項4】
前記識別マークは、編地に編成されていることを特徴とする請求項1から3のいずれかに記載のインクジェット記録方法。
【請求項5】
前記識別マークの間の副走査方向のずれ量を検知することで前記識別マークの位置関係を検知することを特徴とする請求項1から4のいずれかに記載のインクジェット記録方法。
【請求項6】
主走査方向に複数のパターンが編成されて配列された編地を副走査方向に搬送させる搬送手段と、インクジェット記録ヘッドにより各パターンに対して画像を記録する記録手段と、前記パターンにそれぞれ対応して編地表面に表示されるとともに主走査方向に配列された複数の識別マークの位置関係を検知する位置検知手段と、検知された識別マークの位置関係に基づいて識別マークに対応する複数のパターンの記録開始位置を調整してインクジェット記録ヘッドにより各パターンに対して画像を記録するように記録手段を制御する記録制御手段とを備えていることを特徴とするインクジェット記録装置。
【請求項7】
前記識別マークは、前記パターンに対してその主走査方向の中間位置に表示されていることを特徴とする請求項6に記載のインクジェット記録装置。
【請求項8】
前記識別マークは、前記パターンに対してその副走査方向の直前位置に表示されていることを特徴とする請求項6又は7に記載のインクジェット記録装置。
【請求項9】
前記識別マークは、編地に編成されていることを特徴とする請求項6から8のいずれかに記載のインクジェット記録装置。
【請求項10】
前記位置検知手段は、前記識別マークの副走査方向のずれ量を検知することを特徴とする請求項6から9のいずれかに記載のインクジェット記録装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2008−248437(P2008−248437A)
【公開日】平成20年10月16日(2008.10.16)
【国際特許分類】
【出願番号】特願2007−91539(P2007−91539)
【出願日】平成19年3月30日(2007.3.30)
【出願人】(000107907)セーレン株式会社 (462)
【Fターム(参考)】
【公開日】平成20年10月16日(2008.10.16)
【国際特許分類】
【出願日】平成19年3月30日(2007.3.30)
【出願人】(000107907)セーレン株式会社 (462)
【Fターム(参考)】
[ Back to top ]