
インクジェット記録装置およびモータ制御方法
【課題】複数のモータを動作させる際の駆動電流の急峻な変化を抑えるインクジェット記録装置を提供する。
【解決手段】記録ヘッドを搭載したキャリッジを往復移動させるキャリッジモータと、記録ヘッドからのインク吐出に伴って生じるミストを排気するファンを駆動するファンモータとを備えるインクジェット記録装置において、キャリッジを停止状態からインク吐出による記録時の目標速度まで加速する加速期間に、ファンの回転数を低下させるようにファンモータを制御する。
【解決手段】記録ヘッドを搭載したキャリッジを往復移動させるキャリッジモータと、記録ヘッドからのインク吐出に伴って生じるミストを排気するファンを駆動するファンモータとを備えるインクジェット記録装置において、キャリッジを停止状態からインク吐出による記録時の目標速度まで加速する加速期間に、ファンの回転数を低下させるようにファンモータを制御する。
【発明の詳細な説明】
【技術分野】
【0001】
モータ制御を行うインクジェット記録装置およびモータ制御方法に関する。
【背景技術】
【0002】
記録媒体を搬送する搬送方向と交差する方向に記録ヘッドを走査し、記録媒体にインクを吐出して記録を行うインクジェット記録装置では、一般的に、記録ヘッドを等速で走査させながら記録する。ここで、記録ヘッドが往方向および復方向に走査しながら記録を行う場合に、記録ヘッドは、記録媒体上の端部で記録ヘッドを反転し、再度一定速度まで加速する。ここで、その加速期間で、キャリッジを駆動させるためのキャリッジモータに流れる駆動電流が極めて大きくなることが問題とされる。一方で、一定速度に達した後では、記録ヘッドシャフトにはグリス等の摩擦力を低減するための処理が施されているので、駆動電流は小さくてすむ。
【0003】
インクジェット記録装置には、キャリッジモータだけでなく、記録媒体を搬送するための搬送モータ等、様々なモータが構成されている。ここで、複数種類のモータの駆動が重なった場合には当然に駆動電流の合計値も大きくなるが、上記のように急峻に駆動電流が変化するキャリッジモータがあると、インクジェット記録装置全体としての消費電力量の瞬間的な増大につながってしまう。また、インクジェット記録装置に搭載される電源ユニットは、当然のことながら最大の消費電力量を考慮しているので、電源ユニット分のコストも高くなってしまう。
【0004】
特許文献1には、複数のモータについて、各モータでの電流検出結果と各電流値を加算した結果とに基づいて、各モータが同時に動作するタイミングで、全体の電流値を一定値以下に抑える方法が記載されている。また、特許文献2には、特許文献2によると、各モータの電流値を取得して電流値の合計が所定の閾値を超えた場合には、複数のモータの同時動作を抑制することによって全体の電力量を抑えることが記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−259639号公報
【特許文献2】特開2010−029013号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、各モータの電流値の測定結果に基づいて各モータの動作を制御する構成の場合には、例えば、閾値によっては、あるモータがトルク不足となってしまうことも考えられる。また、モータ間の動作タイミングを変更する構成では、インクジェット記録装置全体の動作を考慮しなくてはならない。
【0007】
本発明の目的は、このような従来の問題点を解決することにある。上記の点に鑑み、本発明は、複数のモータを動作させる際の駆動電流の急峻な変化を抑えるインクジェット記録装置およびそのインクジェット記録装置における記録方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するため、本発明に係るインクジェット記録装置は、記録ヘッドを搭載したキャリッジを往復移動させるキャリッジモータと、前記記録ヘッドからのインク吐出に伴って生じるミストを排気するファンを駆動するファンモータと、前記キャリッジを停止状態から前記インク吐出による記録時の目標速度まで加速する加速期間に、前記ファンの回転数を低下させるように前記ファンモータを制御するモータ制御手段とを備えることを特徴とする。
【発明の効果】
【0009】
本発明によると、複数のモータを動作させる際の駆動電流の急峻な変化を抑えることができる。
【図面の簡単な説明】
【0010】
【図1】記録装置全体の構成の概要を示す外観斜視図である。
【図2】記録装置の制御構成を示すブロック図である。
【図3】キャリッジ周辺の構成を上面から見た図である。
【図4】各種モータの動作状況を説明するための図である。
【図5】各種モータを制御する制御信号の波形を示す図である。
【図6】ミストファンモータを制御する制御信号を示す図である。
【発明を実施するための形態】
【0011】
以下、添付図面を参照して本発明の好適な実施例を詳しく説明する。尚、以下の実施例は特許請求の範囲に係る本発明を限定するものでなく、また本実施例で説明されている特徴の組み合わせの全てが本発明の解決手段に必須のものとは限らない。なお、同一の構成要素には同一の参照番号を付して、説明を省略する。
【0012】
〔実施例1〕
[インクジェット記録装置の説明]
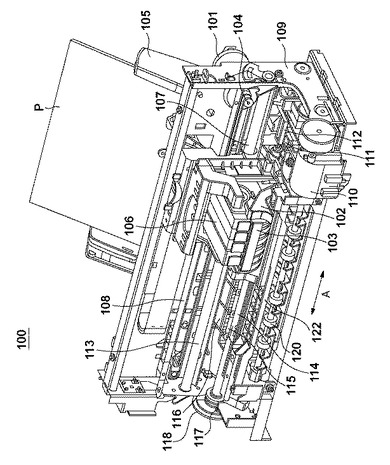
図1は、本実施例におけるインクジェット方式の記録装置全体の構成の概要を示す外観斜視図である。記録装置100は、インクジェット方式に従ってインクを吐出して記録を行なう記録ヘッド103を搭載したキャリッジ102にキャリッジモータ101によって発生する駆動力を伝達機構104より伝え、キャリッジ102を矢印A方向に往復移動させる。記録紙などの記録媒体Pを給紙機構105を介して給紙し、記録位置まで搬送し、その搬送方向と交差する走査方向にキャリッジ102を往復移動させ、記録位置において記録ヘッド103から記録媒体Pにインクを吐出することで記録を行なう。
【0013】
また、記録ヘッド103の状態を良好に維持するためにキャリッジ102を回復装置110の位置まで移動させ、間欠的に記録ヘッド103の吐出回復処理を行う。キャリッジ102には記録ヘッド103を搭載するのみならず、記録ヘッド103に供給するインクを貯留するインクカートリッジ106も搭載される。インクカートリッジ106は、キャリッジ102に対して着脱自在になっている。
【0014】
図1に示した記録装置100はカラー記録が可能であり、そのためにキャリッジ102は、マゼンタ(M)、シアン(C)、イエロー(Y)、ブラック(K)のインクを夫々収容した4つのインクカートリッジを搭載している。これら4つのインクカートリッジは夫々独立に着脱可能である。
【0015】
さて、キャリッジ102と記録ヘッド103とは、両部材の接合面が適正に接触されて所要の電気的接続を達成維持できるようになっている。記録ヘッド103は、記録信号に応じてエネルギーを印加することにより、複数の吐出口からインクを選択的に吐出して記録する。記録ヘッド103は、熱エネルギーを利用してインクを吐出するインクジェット方式を採用しており、熱エネルギーを発生するための電気熱変換体を備え、吐出口よりインクを吐出させる。この電気熱変換体は各吐出口のそれぞれに対応して設けられ、記録信号に応じて対応する電気熱変換体にパルス電圧を印加することによって対応する吐出口からインクを吐出する。なお、これに限らずピエゾ素子、静電素子などを用いたインクジェット方式の記録ヘッドを用いてもよい。
【0016】
図1に示されているように、キャリッジ102はキャリッジモータ101の駆動力を伝達する伝達機構104の駆動ベルト107の一部に連結されており、ガイドシャフト113に沿って矢印A方向に摺動自在に案内支持されるようになっている。従って、キャリッジ102は、キャリッジモータ101の正転及び逆転によってガイドシャフト113に沿って往復移動する。また、キャリッジ102の移動方向(矢印A方向)に沿ってキャリッジ102の絶対位置を示すためのエンコーダスケール108(CRエンコーダフィルム)が備えられている。この実施例では、エンコーダスケール108は透明なPETフィルムに必要なピッチで黒色のバーを印刷したものを用いており、その一方はシャーシ109に固着され、他方は板バネ(不図示)で支持されている。
【0017】
また、記録装置100には、記録ヘッド103の吐出口(不図示)が形成された吐出口面に対向してプラテン(不図示)が設けられている。キャリッジモータ101の駆動力によって記録ヘッド103を搭載したキャリッジ102が往復移動されると同時に、記録ヘッド103に記録信号を与えてインクを吐出することによって、プラテン上に搬送された記録媒体Pの全幅に渡って記録が行われる。
【0018】
さらに、図1における搬送ローラ114は、記録媒体Pを搬送するために搬送モータ118によって駆動される。また、ピンチローラ115は、バネ(不図示)により記録媒体Pを搬送ローラ114に当接する。また、ピンチローラホルダ116は、ピンチローラ115を回転自在に支持する。また、搬送ローラギヤ117は、搬送ローラ114の一端に固着されている。そして、搬送ローラギヤ117に中間ギア(不図示)を介して伝達された搬送モータ118の回転により、搬送ローラ114が駆動される。
【0019】
また、排出ローラ120は、記録ヘッド103によって画像が形成された記録媒体Pをインクジェット記録装置外ヘ排出する。排出ローラ120は、搬送モータ118の回転が伝達されることで駆動されるようになっている。なお、排出ローラ120は、記録媒体Pをバネ(不図示)により圧接する拍車ローラ(不図示)により当接する。拍車ホルダ122は、拍車ローラを回転自在に支持する。
【0020】
記録装置100には、記録ヘッド103の吐出不良を回復するための回復装置110が配設されている。回復装置110は、図1に示されているように、記録ヘッド103を搭載するキャリッジ102の記録動作のための往復運動の範囲外(記録領域外)の位置(例えば、ホームポジションに対応する位置)に設けられている。
【0021】
回復装置110は、記録ヘッド103の吐出口面をキャッピングするキャッピング機構111と記録ヘッド103の吐出口面をクリーニングするワイピング機構112を備えている。回復装置110は、キャッピング機構111による吐出口面のキャッピングに連動して回復装置110内の吸引ポンプ等により吐出口からインクを強制的に排出させる。これにより、記録ヘッド103のインク流路内の粘度の増したインクや気泡等を除去するなどの吐出回復処理を行う。
【0022】
また、非記録動作時等には、記録ヘッド103の吐出口面をキャッピング機構111によりキャッピングすることによって、記録ヘッド103を保護するとともにインクの蒸発や乾燥を防止することができる。一方、ワイピング機構112はキャッピング機構111の近傍に配され、記録ヘッド103の吐出口面に付着したインク液滴を拭き取るようになっている。これらキャッピング機構111及びワイピング機構112により、記録ヘッド103のインク吐出状態を正常に保つことが可能となる。
【0023】
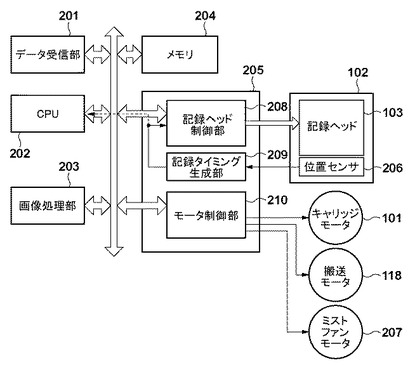
図2は、図1に示した記録装置100の制御構成を示すブロック図である。CPU202は、記録装置100全体を制御する。データ受信部201は、外部のホスト装置から記録対象の画像データを受信する。画像処理部203は、記録対象の画像データに対して各種の画像処理を行う。メモリ204は、画像処理が行われたデータ等を記憶する。機能IC205は主に、記録ヘッド103や各種モータの駆動を制御したり、記録ヘッド103に搭載された位置センサ206から出力された読取信号を入力する。キャリッジ102は、記録ヘッド103と位置センサ206を搭載している。
【0024】
ここで、位置センサ206は、エンコーダスケール108を光学的に読み取って記録ヘッド103の位置を示す読取信号を出力する。キャリッジモータ101は、キャリッジ102を記録媒体を搬送する搬送方向と交差する方向に動作させる。搬送モータ118は、記録媒体を記録位置まで搬送する。ミストファンモータ207は、記録ヘッド103から吐出され飛散したインク滴がミスト状態になった大気を回収して排気する。多機能IC205は、記録ヘッド103からインクを吐出させるための制御信号を生成する記録ヘッド制御部208を含む。また、多機能IC205は、位置センサ206からの読取信号を入力し、記録ヘッド103からのインク吐出タイミングを定めるタイミング信号を生成する記録タイミング生成部209と、各種モータの駆動信号を生成するモータ制御部210とを含む。
【0025】
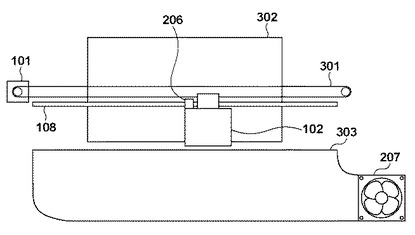
図3は、キャリッジ102周辺の構成を上面から見た図である。キャリッジモータ101は、プーリに引っかけられたベルト301を動かすためのモータである。また、ベルト301の動作に伴って、ベルト301に固定されたキャリッジ102が、記録媒体の搬送方向と交差する方向に往復動作する。キャリッジ102に搭載された位置センサ206が、エンコーダスケール108を光学的に読み取って読取信号を出力する。つまり、位置センサ206から出力される読取信号は、キャリッジ102の走査方向上での位置を表わしている。また、キャリッジ102に搭載された記録ヘッド103が記録する範囲に記録媒体302が配置される。なお、記録時においては、キャリッジ102は走査方向を等速で移動する。キャリッジ102が停止状態から一定速度まで加速する距離を確保するために、キャリッジ102の可動範囲は記録媒体302の搬送方向に対する幅よりも広く設けられている。また、記録ヘッド103がインクを吐出した際に飛散したインクがミスト状態となった気流を回収するためのダクト303と、ダクト303内の気流をファンにより吸引して装置外に排気するミストファンモータ207が設けられている。
【0026】
[モータ制御]
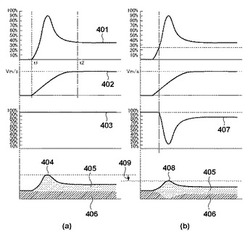
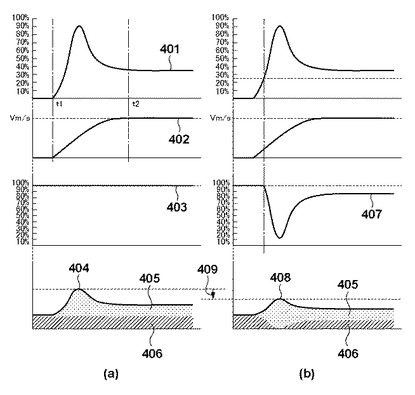
図4(a)は、従来における各種モータの制御を説明するための図であり、図4(b)は、本実施例における各種モータの制御を説明するための図である。図4(a)から説明する。グラフ401に示されるように、時間t1〜t2の間で、キャリッジモータ101を制御するPWM制御信号のデューティ比を0%から徐々に上げていき、最大90%まで上げていく。これは、キャリッジ102を停止状態から一定速度となるまで加速するためである。デューティ比が最大90%まで上がった後は、徐々にデューティ比を下げていき、40%で一定とする。
【0027】
上記のようにデューティ比を制御すると、キャリッジ102の速度は、グラフ402に示すように変化する。また、グラフ403は、ミストファンモータ207を制御するPWM制御信号のデューティ比を示している。グラフ401〜403から分かるように、従来では、キャリッジ102の加速中でもミストファンモータ207は一定に動作している(例えば、ファンの回転数が一定である。)。グラフ404は、キャリッジモータ101とミストファンモータ207の駆動電流の合計値の変化を示している。網点部405は、グラフ404で示される駆動電流値のうち、キャリッジモータ101分を示している。また、斜線部406は、グラフ404で示される駆動電流値のうち、ミストファンモータ207分を示している。
【0028】
図4(a)から分かるように、従来では、キャリッジ102の加速期間で駆動電流が急激に大きくなっている。特に、キャリッジモータ101を制御するPWM制御信号のデューティ比が最大となったときに駆動電流も最大となることが分かる。キャリッジ102の一定速度期間では、駆動電流は小さい。これは、一般的にシャフトにはグリス等の摩擦力を低減するための処理が施されていることによる。グラフ404から、記録装置100内での消費電力もその加速期間において急減に大きくなってしまう。つまり、記録装置に搭載する電源ユニットも、わずかな加速期間における最大消費電力量を考慮しなければならず、そのピーク値が高いほどコスト上昇の原因となってしまう。従って、グラフ404に示すような加速期間における駆動電流のピーク値を、できる限り抑えることが望まれる。図4においては、ミストファンモータ207とキャリッジモータ101を説明しているが、キャリッジモータ101の駆動電流がグラフ401のように変化するのであれば、搬送モータ118等他のモータを合わせて考えたとしても同じことがいえる。
【0029】
次に、図4(b)を参照しながら、本実施例を説明する。本実施例では、キャリッジ102の加速期間、ミストファンモータ207を制御するPWM制御信号のデューティ比を低減することによって、加速期間における各モータの駆動電流の合計値のピーク値を抑える。本実施例では、グラフ407に示すように、ミストファンモータ207を制御するPWM制御信号のデューティ比を、加速期間中は10%まで低下させる。その結果、グラフ408に示すように、従来のグラフ404に対して、そのピーク値が差分409分だけ低下し、駆動電流の変化が全体として平滑化する。
【0030】
ここで、CPU202がキャリッジ102の移動速度を検出する手順について説明する。キャリッジ102に搭載された位置センサ206がエンコーダスケール108を読み取って読取信号を出力すると、その読取信号は、記録タイミング生成部209に、キャリッジ102の位置情報として格納される。CPU202は、一定の時間間隔でその位置情報を読み出すことによってその時点でのキャリッジ102の移動速度を算出する。
【0031】
CPU202は、キャリッジ102の現時点での移動速度を目標速度(記録時の一定速度)と比較することによって、キャリッジモータ101を制御するPWM制御信号のデューティ比を変化させて、モータ制御部210にそのデューティ比のデータを送信する。モータ制御部210は、送信されたデューティ比に基づいてキャリッジモータ101をPWM制御して、キャリッジ102の速度を変化させる。例えば、キャリッジ102の現時点での移動速度が目標速度より下回る場合には、CPU202は、キャリッジモータ101を制御するPWM制御信号のデューティ比を大きくしていく。
【0032】
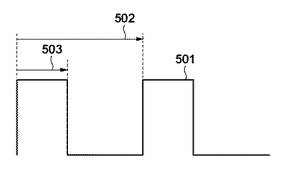
図5は、モータ制御部210が各モータを制御する制御信号の波形を示す図である。例えば、モータ制御部210は、キャリッジモータ101をPWM(Pulse Width Modulation)制御する。つまり、モータ制御部210は、パルス波形501についての周期502に対する信号のアクティブ・ハイ期間503の割合(デューティ比)で以って、キャリッジモータ101の速度を制御することができる。
【0033】
図6は、キャリッジモータ101とミストファンモータ207それぞれを制御するPWM制御信号のデューティ比の変化を示す図である。図6には合わせて、モータ制御部210が実行する各ステップ番号を併記している。図6には、図4で示したグラフ401とグラフ407を再度、示している。モータ制御部210は、キャリッジモータ101を制御するPWM制御信号のデューティ比を0%から次第に大きくしていく(S601)。キャリッジモータ101についてのデューティ比が大きくなるにつれて、キャリッジ102が加速していく。そのデューティ比が予め定められた値(図6中の25%)に達すると、モータ制御部210は、ミストファンモータ207を制御するPWM制御信号のデューティ比を徐々に下げていく(S602)。
【0034】
モータ制御部210は、キャリッジモータ101についてのデューティ比が最大の90%になったタイミングにおいて、ミストファンモータ207についてのデューティ比を大きくしていく(S603)。図6においては、キャリッジモータ101についてのデューティ比が最大の90%になったときに、ミストファンモータ207についてのデューティ比は10%に低下している。モータ制御部210は、ミストファンモータ207についてのデューティ比が80%となったときに一定とする。
【0035】
モータ制御部210は、図4(b)で説明したように、キャリッジモータ101についてのデューティ比を90%から徐々に下げていき、45%になったときに一定とする(S604)。すると、キャリッジ102は、グラフ401に示されるように一定速度となる。以上のような制御によって、図4(b)のグラフ408で示すように、駆動電流のピーク値が従来よりも抑えられる。
【0036】
本実施例によると、キャリッジ102の加速期間において、ミストファンモータ207の稼働率を低下させることによって、加速期間における駆動電流値のピーク値を抑えることができる。インクの吐出はキャリッジ102を等速で移動させる時に行われるので、記録が行われない加速期間中にミストファンモータ207の稼働率を低下させたとしても、ミスト回収の効果を低減させることはない。また、ノズルの回復動作においてもインクの吐出が行われるが、それは、キャリッジ102を等速で移動させる時の記録時に合わせて行われるか、若しくは、記録領域外にキャリッジ102を停止させて行われるかのいずれかである。従って、加速期間中にインクが吐出されることはなく、その加速期間中にミストファンモータ207の稼働率を低下させたとしても、ミスト回収の効果を低減させることはない。
【技術分野】
【0001】
モータ制御を行うインクジェット記録装置およびモータ制御方法に関する。
【背景技術】
【0002】
記録媒体を搬送する搬送方向と交差する方向に記録ヘッドを走査し、記録媒体にインクを吐出して記録を行うインクジェット記録装置では、一般的に、記録ヘッドを等速で走査させながら記録する。ここで、記録ヘッドが往方向および復方向に走査しながら記録を行う場合に、記録ヘッドは、記録媒体上の端部で記録ヘッドを反転し、再度一定速度まで加速する。ここで、その加速期間で、キャリッジを駆動させるためのキャリッジモータに流れる駆動電流が極めて大きくなることが問題とされる。一方で、一定速度に達した後では、記録ヘッドシャフトにはグリス等の摩擦力を低減するための処理が施されているので、駆動電流は小さくてすむ。
【0003】
インクジェット記録装置には、キャリッジモータだけでなく、記録媒体を搬送するための搬送モータ等、様々なモータが構成されている。ここで、複数種類のモータの駆動が重なった場合には当然に駆動電流の合計値も大きくなるが、上記のように急峻に駆動電流が変化するキャリッジモータがあると、インクジェット記録装置全体としての消費電力量の瞬間的な増大につながってしまう。また、インクジェット記録装置に搭載される電源ユニットは、当然のことながら最大の消費電力量を考慮しているので、電源ユニット分のコストも高くなってしまう。
【0004】
特許文献1には、複数のモータについて、各モータでの電流検出結果と各電流値を加算した結果とに基づいて、各モータが同時に動作するタイミングで、全体の電流値を一定値以下に抑える方法が記載されている。また、特許文献2には、特許文献2によると、各モータの電流値を取得して電流値の合計が所定の閾値を超えた場合には、複数のモータの同時動作を抑制することによって全体の電力量を抑えることが記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−259639号公報
【特許文献2】特開2010−029013号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、各モータの電流値の測定結果に基づいて各モータの動作を制御する構成の場合には、例えば、閾値によっては、あるモータがトルク不足となってしまうことも考えられる。また、モータ間の動作タイミングを変更する構成では、インクジェット記録装置全体の動作を考慮しなくてはならない。
【0007】
本発明の目的は、このような従来の問題点を解決することにある。上記の点に鑑み、本発明は、複数のモータを動作させる際の駆動電流の急峻な変化を抑えるインクジェット記録装置およびそのインクジェット記録装置における記録方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するため、本発明に係るインクジェット記録装置は、記録ヘッドを搭載したキャリッジを往復移動させるキャリッジモータと、前記記録ヘッドからのインク吐出に伴って生じるミストを排気するファンを駆動するファンモータと、前記キャリッジを停止状態から前記インク吐出による記録時の目標速度まで加速する加速期間に、前記ファンの回転数を低下させるように前記ファンモータを制御するモータ制御手段とを備えることを特徴とする。
【発明の効果】
【0009】
本発明によると、複数のモータを動作させる際の駆動電流の急峻な変化を抑えることができる。
【図面の簡単な説明】
【0010】
【図1】記録装置全体の構成の概要を示す外観斜視図である。
【図2】記録装置の制御構成を示すブロック図である。
【図3】キャリッジ周辺の構成を上面から見た図である。
【図4】各種モータの動作状況を説明するための図である。
【図5】各種モータを制御する制御信号の波形を示す図である。
【図6】ミストファンモータを制御する制御信号を示す図である。
【発明を実施するための形態】
【0011】
以下、添付図面を参照して本発明の好適な実施例を詳しく説明する。尚、以下の実施例は特許請求の範囲に係る本発明を限定するものでなく、また本実施例で説明されている特徴の組み合わせの全てが本発明の解決手段に必須のものとは限らない。なお、同一の構成要素には同一の参照番号を付して、説明を省略する。
【0012】
〔実施例1〕
[インクジェット記録装置の説明]
図1は、本実施例におけるインクジェット方式の記録装置全体の構成の概要を示す外観斜視図である。記録装置100は、インクジェット方式に従ってインクを吐出して記録を行なう記録ヘッド103を搭載したキャリッジ102にキャリッジモータ101によって発生する駆動力を伝達機構104より伝え、キャリッジ102を矢印A方向に往復移動させる。記録紙などの記録媒体Pを給紙機構105を介して給紙し、記録位置まで搬送し、その搬送方向と交差する走査方向にキャリッジ102を往復移動させ、記録位置において記録ヘッド103から記録媒体Pにインクを吐出することで記録を行なう。
【0013】
また、記録ヘッド103の状態を良好に維持するためにキャリッジ102を回復装置110の位置まで移動させ、間欠的に記録ヘッド103の吐出回復処理を行う。キャリッジ102には記録ヘッド103を搭載するのみならず、記録ヘッド103に供給するインクを貯留するインクカートリッジ106も搭載される。インクカートリッジ106は、キャリッジ102に対して着脱自在になっている。
【0014】
図1に示した記録装置100はカラー記録が可能であり、そのためにキャリッジ102は、マゼンタ(M)、シアン(C)、イエロー(Y)、ブラック(K)のインクを夫々収容した4つのインクカートリッジを搭載している。これら4つのインクカートリッジは夫々独立に着脱可能である。
【0015】
さて、キャリッジ102と記録ヘッド103とは、両部材の接合面が適正に接触されて所要の電気的接続を達成維持できるようになっている。記録ヘッド103は、記録信号に応じてエネルギーを印加することにより、複数の吐出口からインクを選択的に吐出して記録する。記録ヘッド103は、熱エネルギーを利用してインクを吐出するインクジェット方式を採用しており、熱エネルギーを発生するための電気熱変換体を備え、吐出口よりインクを吐出させる。この電気熱変換体は各吐出口のそれぞれに対応して設けられ、記録信号に応じて対応する電気熱変換体にパルス電圧を印加することによって対応する吐出口からインクを吐出する。なお、これに限らずピエゾ素子、静電素子などを用いたインクジェット方式の記録ヘッドを用いてもよい。
【0016】
図1に示されているように、キャリッジ102はキャリッジモータ101の駆動力を伝達する伝達機構104の駆動ベルト107の一部に連結されており、ガイドシャフト113に沿って矢印A方向に摺動自在に案内支持されるようになっている。従って、キャリッジ102は、キャリッジモータ101の正転及び逆転によってガイドシャフト113に沿って往復移動する。また、キャリッジ102の移動方向(矢印A方向)に沿ってキャリッジ102の絶対位置を示すためのエンコーダスケール108(CRエンコーダフィルム)が備えられている。この実施例では、エンコーダスケール108は透明なPETフィルムに必要なピッチで黒色のバーを印刷したものを用いており、その一方はシャーシ109に固着され、他方は板バネ(不図示)で支持されている。
【0017】
また、記録装置100には、記録ヘッド103の吐出口(不図示)が形成された吐出口面に対向してプラテン(不図示)が設けられている。キャリッジモータ101の駆動力によって記録ヘッド103を搭載したキャリッジ102が往復移動されると同時に、記録ヘッド103に記録信号を与えてインクを吐出することによって、プラテン上に搬送された記録媒体Pの全幅に渡って記録が行われる。
【0018】
さらに、図1における搬送ローラ114は、記録媒体Pを搬送するために搬送モータ118によって駆動される。また、ピンチローラ115は、バネ(不図示)により記録媒体Pを搬送ローラ114に当接する。また、ピンチローラホルダ116は、ピンチローラ115を回転自在に支持する。また、搬送ローラギヤ117は、搬送ローラ114の一端に固着されている。そして、搬送ローラギヤ117に中間ギア(不図示)を介して伝達された搬送モータ118の回転により、搬送ローラ114が駆動される。
【0019】
また、排出ローラ120は、記録ヘッド103によって画像が形成された記録媒体Pをインクジェット記録装置外ヘ排出する。排出ローラ120は、搬送モータ118の回転が伝達されることで駆動されるようになっている。なお、排出ローラ120は、記録媒体Pをバネ(不図示)により圧接する拍車ローラ(不図示)により当接する。拍車ホルダ122は、拍車ローラを回転自在に支持する。
【0020】
記録装置100には、記録ヘッド103の吐出不良を回復するための回復装置110が配設されている。回復装置110は、図1に示されているように、記録ヘッド103を搭載するキャリッジ102の記録動作のための往復運動の範囲外(記録領域外)の位置(例えば、ホームポジションに対応する位置)に設けられている。
【0021】
回復装置110は、記録ヘッド103の吐出口面をキャッピングするキャッピング機構111と記録ヘッド103の吐出口面をクリーニングするワイピング機構112を備えている。回復装置110は、キャッピング機構111による吐出口面のキャッピングに連動して回復装置110内の吸引ポンプ等により吐出口からインクを強制的に排出させる。これにより、記録ヘッド103のインク流路内の粘度の増したインクや気泡等を除去するなどの吐出回復処理を行う。
【0022】
また、非記録動作時等には、記録ヘッド103の吐出口面をキャッピング機構111によりキャッピングすることによって、記録ヘッド103を保護するとともにインクの蒸発や乾燥を防止することができる。一方、ワイピング機構112はキャッピング機構111の近傍に配され、記録ヘッド103の吐出口面に付着したインク液滴を拭き取るようになっている。これらキャッピング機構111及びワイピング機構112により、記録ヘッド103のインク吐出状態を正常に保つことが可能となる。
【0023】
図2は、図1に示した記録装置100の制御構成を示すブロック図である。CPU202は、記録装置100全体を制御する。データ受信部201は、外部のホスト装置から記録対象の画像データを受信する。画像処理部203は、記録対象の画像データに対して各種の画像処理を行う。メモリ204は、画像処理が行われたデータ等を記憶する。機能IC205は主に、記録ヘッド103や各種モータの駆動を制御したり、記録ヘッド103に搭載された位置センサ206から出力された読取信号を入力する。キャリッジ102は、記録ヘッド103と位置センサ206を搭載している。
【0024】
ここで、位置センサ206は、エンコーダスケール108を光学的に読み取って記録ヘッド103の位置を示す読取信号を出力する。キャリッジモータ101は、キャリッジ102を記録媒体を搬送する搬送方向と交差する方向に動作させる。搬送モータ118は、記録媒体を記録位置まで搬送する。ミストファンモータ207は、記録ヘッド103から吐出され飛散したインク滴がミスト状態になった大気を回収して排気する。多機能IC205は、記録ヘッド103からインクを吐出させるための制御信号を生成する記録ヘッド制御部208を含む。また、多機能IC205は、位置センサ206からの読取信号を入力し、記録ヘッド103からのインク吐出タイミングを定めるタイミング信号を生成する記録タイミング生成部209と、各種モータの駆動信号を生成するモータ制御部210とを含む。
【0025】
図3は、キャリッジ102周辺の構成を上面から見た図である。キャリッジモータ101は、プーリに引っかけられたベルト301を動かすためのモータである。また、ベルト301の動作に伴って、ベルト301に固定されたキャリッジ102が、記録媒体の搬送方向と交差する方向に往復動作する。キャリッジ102に搭載された位置センサ206が、エンコーダスケール108を光学的に読み取って読取信号を出力する。つまり、位置センサ206から出力される読取信号は、キャリッジ102の走査方向上での位置を表わしている。また、キャリッジ102に搭載された記録ヘッド103が記録する範囲に記録媒体302が配置される。なお、記録時においては、キャリッジ102は走査方向を等速で移動する。キャリッジ102が停止状態から一定速度まで加速する距離を確保するために、キャリッジ102の可動範囲は記録媒体302の搬送方向に対する幅よりも広く設けられている。また、記録ヘッド103がインクを吐出した際に飛散したインクがミスト状態となった気流を回収するためのダクト303と、ダクト303内の気流をファンにより吸引して装置外に排気するミストファンモータ207が設けられている。
【0026】
[モータ制御]
図4(a)は、従来における各種モータの制御を説明するための図であり、図4(b)は、本実施例における各種モータの制御を説明するための図である。図4(a)から説明する。グラフ401に示されるように、時間t1〜t2の間で、キャリッジモータ101を制御するPWM制御信号のデューティ比を0%から徐々に上げていき、最大90%まで上げていく。これは、キャリッジ102を停止状態から一定速度となるまで加速するためである。デューティ比が最大90%まで上がった後は、徐々にデューティ比を下げていき、40%で一定とする。
【0027】
上記のようにデューティ比を制御すると、キャリッジ102の速度は、グラフ402に示すように変化する。また、グラフ403は、ミストファンモータ207を制御するPWM制御信号のデューティ比を示している。グラフ401〜403から分かるように、従来では、キャリッジ102の加速中でもミストファンモータ207は一定に動作している(例えば、ファンの回転数が一定である。)。グラフ404は、キャリッジモータ101とミストファンモータ207の駆動電流の合計値の変化を示している。網点部405は、グラフ404で示される駆動電流値のうち、キャリッジモータ101分を示している。また、斜線部406は、グラフ404で示される駆動電流値のうち、ミストファンモータ207分を示している。
【0028】
図4(a)から分かるように、従来では、キャリッジ102の加速期間で駆動電流が急激に大きくなっている。特に、キャリッジモータ101を制御するPWM制御信号のデューティ比が最大となったときに駆動電流も最大となることが分かる。キャリッジ102の一定速度期間では、駆動電流は小さい。これは、一般的にシャフトにはグリス等の摩擦力を低減するための処理が施されていることによる。グラフ404から、記録装置100内での消費電力もその加速期間において急減に大きくなってしまう。つまり、記録装置に搭載する電源ユニットも、わずかな加速期間における最大消費電力量を考慮しなければならず、そのピーク値が高いほどコスト上昇の原因となってしまう。従って、グラフ404に示すような加速期間における駆動電流のピーク値を、できる限り抑えることが望まれる。図4においては、ミストファンモータ207とキャリッジモータ101を説明しているが、キャリッジモータ101の駆動電流がグラフ401のように変化するのであれば、搬送モータ118等他のモータを合わせて考えたとしても同じことがいえる。
【0029】
次に、図4(b)を参照しながら、本実施例を説明する。本実施例では、キャリッジ102の加速期間、ミストファンモータ207を制御するPWM制御信号のデューティ比を低減することによって、加速期間における各モータの駆動電流の合計値のピーク値を抑える。本実施例では、グラフ407に示すように、ミストファンモータ207を制御するPWM制御信号のデューティ比を、加速期間中は10%まで低下させる。その結果、グラフ408に示すように、従来のグラフ404に対して、そのピーク値が差分409分だけ低下し、駆動電流の変化が全体として平滑化する。
【0030】
ここで、CPU202がキャリッジ102の移動速度を検出する手順について説明する。キャリッジ102に搭載された位置センサ206がエンコーダスケール108を読み取って読取信号を出力すると、その読取信号は、記録タイミング生成部209に、キャリッジ102の位置情報として格納される。CPU202は、一定の時間間隔でその位置情報を読み出すことによってその時点でのキャリッジ102の移動速度を算出する。
【0031】
CPU202は、キャリッジ102の現時点での移動速度を目標速度(記録時の一定速度)と比較することによって、キャリッジモータ101を制御するPWM制御信号のデューティ比を変化させて、モータ制御部210にそのデューティ比のデータを送信する。モータ制御部210は、送信されたデューティ比に基づいてキャリッジモータ101をPWM制御して、キャリッジ102の速度を変化させる。例えば、キャリッジ102の現時点での移動速度が目標速度より下回る場合には、CPU202は、キャリッジモータ101を制御するPWM制御信号のデューティ比を大きくしていく。
【0032】
図5は、モータ制御部210が各モータを制御する制御信号の波形を示す図である。例えば、モータ制御部210は、キャリッジモータ101をPWM(Pulse Width Modulation)制御する。つまり、モータ制御部210は、パルス波形501についての周期502に対する信号のアクティブ・ハイ期間503の割合(デューティ比)で以って、キャリッジモータ101の速度を制御することができる。
【0033】
図6は、キャリッジモータ101とミストファンモータ207それぞれを制御するPWM制御信号のデューティ比の変化を示す図である。図6には合わせて、モータ制御部210が実行する各ステップ番号を併記している。図6には、図4で示したグラフ401とグラフ407を再度、示している。モータ制御部210は、キャリッジモータ101を制御するPWM制御信号のデューティ比を0%から次第に大きくしていく(S601)。キャリッジモータ101についてのデューティ比が大きくなるにつれて、キャリッジ102が加速していく。そのデューティ比が予め定められた値(図6中の25%)に達すると、モータ制御部210は、ミストファンモータ207を制御するPWM制御信号のデューティ比を徐々に下げていく(S602)。
【0034】
モータ制御部210は、キャリッジモータ101についてのデューティ比が最大の90%になったタイミングにおいて、ミストファンモータ207についてのデューティ比を大きくしていく(S603)。図6においては、キャリッジモータ101についてのデューティ比が最大の90%になったときに、ミストファンモータ207についてのデューティ比は10%に低下している。モータ制御部210は、ミストファンモータ207についてのデューティ比が80%となったときに一定とする。
【0035】
モータ制御部210は、図4(b)で説明したように、キャリッジモータ101についてのデューティ比を90%から徐々に下げていき、45%になったときに一定とする(S604)。すると、キャリッジ102は、グラフ401に示されるように一定速度となる。以上のような制御によって、図4(b)のグラフ408で示すように、駆動電流のピーク値が従来よりも抑えられる。
【0036】
本実施例によると、キャリッジ102の加速期間において、ミストファンモータ207の稼働率を低下させることによって、加速期間における駆動電流値のピーク値を抑えることができる。インクの吐出はキャリッジ102を等速で移動させる時に行われるので、記録が行われない加速期間中にミストファンモータ207の稼働率を低下させたとしても、ミスト回収の効果を低減させることはない。また、ノズルの回復動作においてもインクの吐出が行われるが、それは、キャリッジ102を等速で移動させる時の記録時に合わせて行われるか、若しくは、記録領域外にキャリッジ102を停止させて行われるかのいずれかである。従って、加速期間中にインクが吐出されることはなく、その加速期間中にミストファンモータ207の稼働率を低下させたとしても、ミスト回収の効果を低減させることはない。
【特許請求の範囲】
【請求項1】
記録ヘッドを搭載したキャリッジを往復移動させるキャリッジモータと、
前記記録ヘッドからのインク吐出に伴って生じるミストを排気するファンを駆動するファンモータと、
前記キャリッジを停止状態から前記インク吐出による記録時の目標速度まで加速する加速期間に、前記ファンの回転数を低下させるように前記ファンモータを制御するモータ制御手段と、
を備えることを特徴とするインクジェット記録装置。
【請求項2】
前記モータ制御手段は、
前記キャリッジモータを制御するPWM制御信号のデューティ比を徐々に大きくしていき、当該デューティ比が予め定められた値に達したときに、前記ファンモータを制御するPWM制御信号のデューティ比を徐々に小さくしていく、ことを特徴とする請求項1に記載のインクジェット記録装置。
【請求項3】
記録ヘッドを搭載したキャリッジを往復移動させるキャリッジモータと、前記記録ヘッドからのインク吐出に伴って生じるミストを排気するファンを駆動するファンモータとを備えるインクジェット記録装置において実行されるモータ制御方法であって、
前記キャリッジを停止状態から前記インク吐出による記録時の目標速度まで加速する加速期間に、前記ファンの回転数を低下させるように前記ファンモータを制御することを特徴とするモータ制御方法。
【請求項1】
記録ヘッドを搭載したキャリッジを往復移動させるキャリッジモータと、
前記記録ヘッドからのインク吐出に伴って生じるミストを排気するファンを駆動するファンモータと、
前記キャリッジを停止状態から前記インク吐出による記録時の目標速度まで加速する加速期間に、前記ファンの回転数を低下させるように前記ファンモータを制御するモータ制御手段と、
を備えることを特徴とするインクジェット記録装置。
【請求項2】
前記モータ制御手段は、
前記キャリッジモータを制御するPWM制御信号のデューティ比を徐々に大きくしていき、当該デューティ比が予め定められた値に達したときに、前記ファンモータを制御するPWM制御信号のデューティ比を徐々に小さくしていく、ことを特徴とする請求項1に記載のインクジェット記録装置。
【請求項3】
記録ヘッドを搭載したキャリッジを往復移動させるキャリッジモータと、前記記録ヘッドからのインク吐出に伴って生じるミストを排気するファンを駆動するファンモータとを備えるインクジェット記録装置において実行されるモータ制御方法であって、
前記キャリッジを停止状態から前記インク吐出による記録時の目標速度まで加速する加速期間に、前記ファンの回転数を低下させるように前記ファンモータを制御することを特徴とするモータ制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−91220(P2013−91220A)
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願番号】特願2011−234146(P2011−234146)
【出願日】平成23年10月25日(2011.10.25)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願日】平成23年10月25日(2011.10.25)
【出願人】(000001007)キヤノン株式会社 (59,756)
【Fターム(参考)】
[ Back to top ]