
インクジェット記録装置
【課題】キャリッジの原点位置設定のための時間を短く維持しつつ、ノズルに形成されたメニスカスの破壊を防止する。
【解決手段】ノズルが設けられ両壁68、69間でスライド可能なキャリッジ38と、右壁68近傍に配置されノズルを覆う第1位置と離間した第2位置に移動可能なキャップ55と、右へスライドするキャリッジ38に押されてキャップ55を第1位置に移動させる第1フレーム56とを備える。制御部はキャリッジ38を左壁69に衝突させ(C)、衝突位置を仮原点位置とする。次に、制御部はキャリッジ38を右にスライドさせる。この際、キャリッジ38は、第1フレーム56との当接位置の手前まで高速でスライドされる一方(D)、第1フレーム56と低速で当接される(E)。キャリッジ38は、低速を維持して第1フレーム56を右に押して右壁68と衝突する(F)。制御部は右壁68との衝突位置を原点位置とする。
【解決手段】ノズルが設けられ両壁68、69間でスライド可能なキャリッジ38と、右壁68近傍に配置されノズルを覆う第1位置と離間した第2位置に移動可能なキャップ55と、右へスライドするキャリッジ38に押されてキャップ55を第1位置に移動させる第1フレーム56とを備える。制御部はキャリッジ38を左壁69に衝突させ(C)、衝突位置を仮原点位置とする。次に、制御部はキャリッジ38を右にスライドさせる。この際、キャリッジ38は、第1フレーム56との当接位置の手前まで高速でスライドされる一方(D)、第1フレーム56と低速で当接される(E)。キャリッジ38は、低速を維持して第1フレーム56を右に押して右壁68と衝突する(F)。制御部は右壁68との衝突位置を原点位置とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、記録ヘッドから被記録媒体にインク滴を吐出することによって画像記録を行うインクジェット記録装置に関し、より詳細には、記録ヘッドのノズルを覆うキャップを備え、当該キャップがノズルを覆う位置とノズルから離れた位置とに移動可能なインクジェット記録装置に関する。
【背景技術】
【0002】
入力信号に基づいてインク滴を吐出して被記録媒体に画像記録を行うインクジェット記録装置が知られている。インクジェット記録装置は、記録ヘッドを搭載したキャリッジを備える。キャリッジは、被記録媒体に対向する位置に配置されており、水平方向に移動される。このとき、記録ヘッドのノズルからインク滴が選択的に吐出される。これにより、被記録媒体に画像が記録される。
【0003】
インク滴が目標位置に正確に吐出されるためには、画像の記録位置の基点が必要である。そのため、インクジェット記録装置では、電源投入の際、記録ヘッドが搭載されたキャリッジの原点位置の検出が行われる。
【0004】
例えば、特許文献1に記載されたシリアルプリンタでは、初期化時に所定位置に停止していたキャリッジは、ストッパーの方向に移動される。そして、キャリッジがストッパーと衝突して停止した位置が原点位置として設定される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第3061091号
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、インクジェット記録装置の多くは、ノズルを覆う位置とノズルから離間した位置とに上下動可能なキャップを備えている。インクジェット記録装置は、キャップでノズルを覆った状態で、ノズルを覆ったキャップ内に吸引圧を発生させるポンプを駆動する。これにより、ノズルから気泡や異物が除去される。
【0007】
キャップを上下動させる機構の一つに、キャリッジの移動を利用したものがある。当該機構では、キャップを支持するキャップホルダに、水平移動するキャリッジと当接可能な当接部が設けられている。当接部がキャリッジに押されることにより、キャップホルダも水平移動する。ここで、キャップホルダは、傾斜面が形成された支持部によって支持されている。よって、水平移動されるキャップホルダは、傾斜面に沿って上側に移動される。これにより、キャップホルダに支持されたキャップは、キャリッジに搭載された記録ヘッドのノズルを覆う。
【0008】
以上のような機構を備えたインクジェット記録装置において、上述したようなキャリッジの原点位置の設定が行われると、以下のような問題が生じる。
【0009】
初期化時に所定位置に停止していたキャリッジがストッパーの方向に移動される過程において、キャリッジは、上記の当接部に当接して当該当接部を押すおそれがある。キャリッジが当接部を押すと、キャップを支持するキャップホルダは上側に移動される。つまり、キャップホルダに上向きの力がかかる。キャップホルダの上向きの力は、当接部を介してキャリッジに伝わり、キャリッジに搭載されたノズルに伝わる。ここで、初期化時のキャリッジの移動速度は、原点位置を迅速に設定するために高速である。キャリッジが高速で移動する場合、ノズルに伝わる上向きの力が大きくなる。ノズルに大きな上向きの力が伝わると、ノズルに形成されているメニスカスが破壊されてしまうおそれがある。
【0010】
本発明は、上記問題に鑑みてなされたものであり、その目的は、キャリッジの原点位置の設定に要する時間が長くなるのを極力抑えつつ、ノズルに形成されたメニスカスの破壊を防止することができるインクジェット記録装置を提供することにある。
【課題を解決するための手段】
【0011】
(1) 本発明のインクジェット記録装置は、インク滴が吐出されるノズルを有する記録ヘッドと、駆動源と、上記記録ヘッドが搭載され、上記駆動源からの駆動力により第1向き及び上記第1向きと反対向きの第2向きへスライド可能なキャリッジと、当該装置に固定されており、上記第1向きにスライドする上記キャリッジが衝突する第1固定部材と、当該装置に固定されており、上記第2向きにスライドする上記キャリッジが衝突する第2固定部材と、上記キャリッジの位置を検知する検知部と、上記第1固定部材に近接して配置されており、上記記録ヘッドに接触して上記ノズルを覆う第1位置、及び上記記録ヘッドから離間した第2位置に移動可能なキャップと、上記キャップを上記第2位置側へ付勢する付勢部材と、上記キャリッジが当接して上記第1向きへ押圧される当接部を有し、上記キャリッジが上記当接部に当接したときの押圧力を受けることにより、上記キャップを上記第2位置から上記第1位置に移動させる移動機構と、上記キャリッジが上記第2向きへ上記第2固定部材に衝突可能な距離だけ第1速度でスライドするために必要な駆動力を、上記駆動源から上記キャリッジに付与させる第1制御手段と、上記第1制御手段によって上記キャリッジが上記第2固定部材に衝突した位置を上記検知部に検知させて、上記キャリッジの仮原点位置に設定する第1設定手段と、上記駆動源の駆動を制御して、上記第1制御手段によってスライドされた上記キャリッジを、上記仮原点位置及び上記仮原点位置によって特定される位置であって上記キャリッジが上記当接部と当接する第3位置の間において上記第1向きへ第2速度でスライドさせ、上記第3位置において上記第2速度よりも低速の第3速度で上記当接部と当接させ、上記第3位置よりも上記第1向き側において上記第1向きへ上記第3速度でスライドさせて、上記第1固定部材に衝突させる第2制御手段と、上記第2制御手段によって上記キャリッジが上記第1固定部材に衝突した位置を上記検知部に検知させて、上記キャリッジの原点位置に設定する第2設定手段と、を備える。
【0012】
本構成によれば、キャリッジは、第1制御手段によってキャップが存在しない第2固定部材側へ移動される。第1設定手段は、キャリッジが第2固定部材に衝突した位置を仮原点位置に設定する。仮原点位置によってキャリッジと当接部とが当接する第3位置の特定が可能である。そして、第2制御手段は、キャリッジが第3位置の若干手前に到達するまでの間、キャリッジを高速(第2速度)で移動させる。つまり、第2制御手段が仮原点位置及び第3位置の間において第1向きへ第2速度でキャリッジをスライドさせることには、第2制御手段が、当該間の全位置においてキャリッジを第2速度でスライドさせることに加えて、上述した第3位置の若干手前でキャリッジを減速させる場合のように、当該間の一部の位置においてキャリッジを第2速度でスライドさせることも含む。以上より、キャリッジの原点位置の設定に要する時間が長くなるのを極力抑えることができる。
【0013】
また、第2制御手段は、第3位置の若干手前からキャリッジを減速させて、キャリッジを低速(第3速度)で当接部に当接させる。これにより、キャップの第1位置から第2位置への移動によって当接部を介してノズルに伝わる上向きの力を、小さくすることができる。なお、第2速度は、第1速度と等しい速度であってもよいし、第1速度と異なる速度であってもよい。
【0014】
(2) 本発明のインクジェット記録装置は、上記キャップが上記記録ヘッドに接触して上記ノズルを覆った状態において上記キャリッジのスライドをロック可能な第1姿勢、及び当該ロックが解除された第2姿勢に姿勢変化可能なロック部材と、上記キャリッジが上記第2向きへ第1距離だけスライドするために必要な駆動力を、上記駆動源から上記キャリッジに付与させる第3制御手段と、上記第3制御手段によって上記キャリッジが上記第1距離をスライドされなかったことを条件として、上記キャリッジが上記第1向きへ上記第1固定部材に衝突可能な距離だけスライドするために必要な駆動力を、上記駆動源から上記キャリッジに付与させる第4制御手段と、を更に備える。上記第1制御手段は、上記第3制御手段によって上記キャリッジが上記第1距離をスライドされたことを条件として実行される。上記第2設定手段は、上記第4制御手段によって上記キャリッジが上記第1固定部材に衝突した位置を上記検知部に検知させて、上記キャリッジの原点位置に設定する。
【0015】
キャリッジがロック部材によってロックされている場合、キャリッジは第1制御手段の制御によって駆動力を付与されてもスライドされない。そこで、本構成においては、第3制御手段がキャリッジの第2向きへの第1距離のスライドを試みる。そして、キャリッジが第1距離をスライドされたか否かによって、キャリッジがロック部材によってロックされているか否かが判断される。そして、当該判断に基づいて、キャリッジは第1向きまたは第2向きに移動され、仮原点位置及び原点位置が設定される。以上より、本構成によれば、インクジェット記録装置の構成が、キャリッジがロック部材によってロックされ得る構成であっても、キャリッジの原点位置の設定を行うことができる。
【0016】
(3) 本発明のインクジェット記録装置は、上記キャップが上記記録ヘッドに接触して上記ノズルを覆った状態において上記キャリッジのスライドをロック可能な第1姿勢、及び当該ロックが解除された第2姿勢に姿勢変化可能なロック部材と、上記キャリッジが上記第2向きへ第1距離だけスライドするために必要な駆動力を、上記駆動源から上記キャリッジに付与させる第3制御手段と、上記第3制御手段によって上記キャリッジが上記第1距離をスライドされなかったことを条件として、上記キャリッジが上記第1向きへ第2距離だけスライドするために必要な駆動力を、上記駆動源から上記キャリッジに付与させる第5制御手段と、上記第5制御手段によって上記キャリッジが上記第2距離をスライドされなかったことを条件として、上記キャリッジが上記第1向きへ上記第1固定部材に衝突可能な距離だけスライドするために必要な駆動力を、上記駆動源から上記キャリッジに付与させる第6制御手段と、を更に備える。上記第1制御手段は、上記第3制御手段によって上記キャリッジが上記第1距離をスライドされたこと、または上記第5制御手段によって上記キャリッジが上記第2距離をスライドされたことを条件として実行される。上記第2設定手段は、上記第6制御手段によって上記キャリッジが上記第1固定部材に衝突した位置を上記検知部に検知させて、上記キャリッジの原点位置に設定する。
【0017】
原点位置の設定開始時のキャリッジが第2固定部材に当接されている場合、キャリッジは第3制御手段の制御によって駆動力を付与されてもスライドされない。つまり、第3制御手段は、ロック部材によるロックによってキャリッジがスライドされないのか、第2固定部材に当接されているためにキャリッジがスライドされないのかを判断できない。
【0018】
そこで、本構成においては、第5制御手段がキャリッジの第1向きへの第2距離のスライドを試みる。そして、キャリッジが第2距離をスライドされたか否かによって、キャリッジが第2固定部材に当接されているか否かが判断される。そして、当該判断に基づいて、キャリッジは第1向きまたは第2向きに移動され、仮原点位置及び原点位置が設定される。以上より、本構成によれば、キャリッジの当初位置が第2固定部材に当接された位置であっても、キャリッジの原点位置の設定を行うことができる。
【0019】
(4) 上記第1速度または上記第2速度の少なくとも一方は、上記駆動源からの駆動力によってスライドされる上記キャリッジの最高速度である。本構成によれば、キャリッジの原点位置の設定に要する時間を短くすることができる。
【0020】
(5) 上記第2制御手段は、上記第2速度でスライドされている上記キャリッジを一旦停止させてから、上記第3速度でスライドさせる。本構成によれば、キャリッジの速度を細かく設定できないような安価なモータが使用されていても、キャリッジを複数の速度で正確にスライドさせることができる。
【0021】
(6) 上記第2制御手段は、上記第3位置よりも上記第1向き側において、上記キャップが上記第2位置から上記第1位置に移動されたことを条件として、上記キャリッジを上記第1向きへ上記第3速度よりも高速の第4速度でスライドさせて、上記第1固定部材に衝突させる。
【0022】
キャップが第2位置から第1位置に移動されると、キャリッジは、移動機構及びキャップから上向きに力を受けない。よって、記録ヘッドのノズルに形成されたメニスカスが破壊されるおそれがない。本構成において、第2制御手段は、メニスカスが破壊されるおそれがない状態においては、キャリッジを高速でスライドさせる。これにより、キャリッジの原点位置の設定に要する時間が長くなるのを極力抑えることができる。
【発明の効果】
【0023】
本発明によれば、第2制御手段は、キャリッジが第3位置の若干手前に到達するまでの間、キャリッジを高速で移動させる。また、第2制御手段は、キャリッジを低速で当接部に当接させる。これにより、キャリッジの原点位置の設定に要する時間が長くなるのを極力抑えつつ、ノズルに形成されたメニスカスの破壊を防止することができる。
【図面の簡単な説明】
【0024】
【図1】図1は、複合機1の外観構成を示す斜視図である。
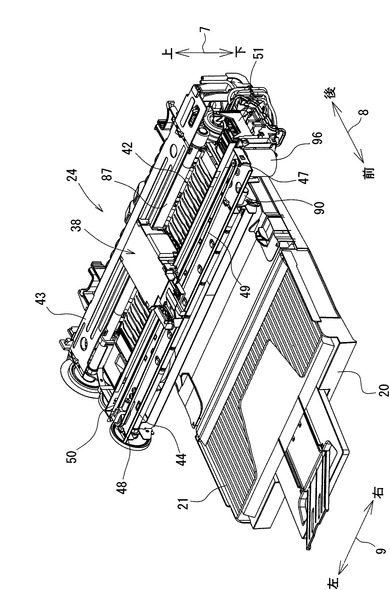
【図2】図2は、プリンタ部2の主要構成を示す部分拡大断面図である。
【図3】図3は、プリンタ部2の主要構成を示す平面図である。
【図4】図4は、プリンタ部2の主要構成を示す斜視図である。
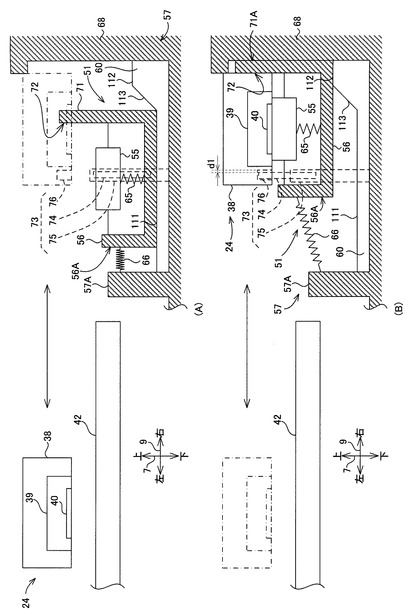
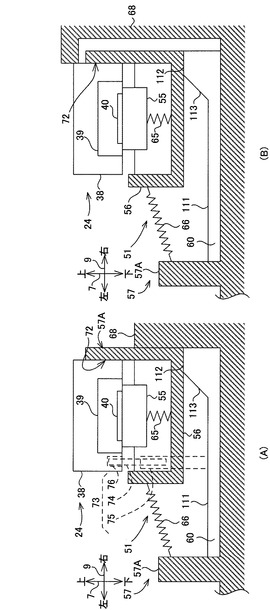
【図5】図5は、メンテナンス機構51の側面構造を模式的に示す側面図であり、(A)にはキャップが第2位置の状態が示されており、(B)にはキャップ55が第1位置の状態が示されている。
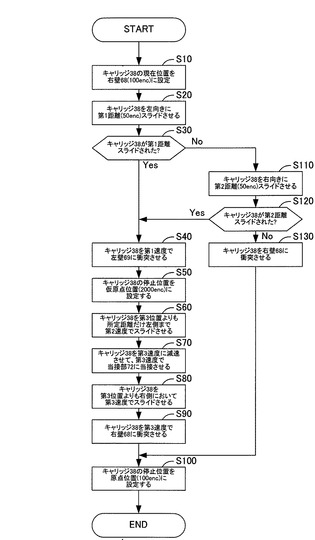
【図6】図6は、キャリッジ38の原点位置の設定について説明するためのフローチャートである。
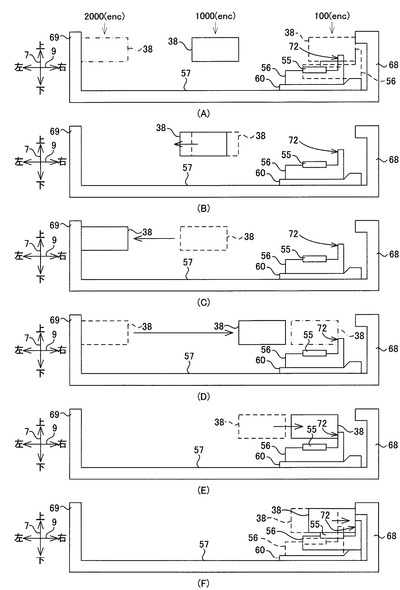
【図7】図7は、第1の処理について説明するためにメンテナンス機構51の側面構造を模式的に示す側面図である。
【図8】図8は、第2の処理及び第3の処理について説明するためにメンテナンス機構51の側面構造を模式的に示す側面図である。
【図9】図9は、メンテナンス機構51の側面構造を模式的に示す側面図であり、(A)には第1フレーム56のみが右壁68と衝突する構成が示されており、(B)にはキャリッジ38のみが右壁68と衝突する構成が示されている。
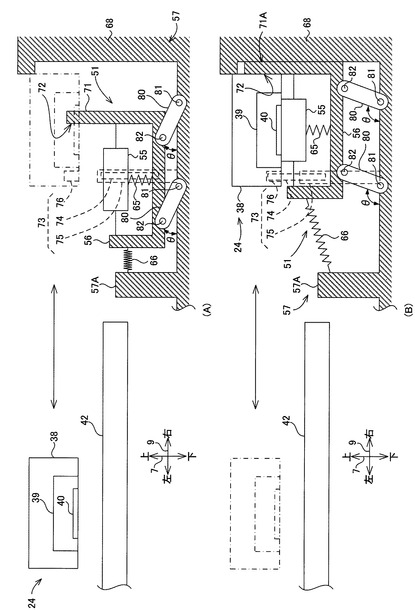
【図10】図10は、変形例2におけるメンテナンス機構51の側面構造を模式的に示す側面図であり、(A)にはキャップが第2位置の状態が示されており、(B)にはキャップ55が第1位置の状態が示されている。
【発明を実施するための最良の形態】
【0025】
以下、適宜図面を参照して本発明の実施形態について説明する。なお、以下に説明される実施形態は本発明の一例にすぎず、本発明の要旨を変更しない範囲で、本発明の実施形態を適宜変更できることは言うまでもない。また、以下の説明では、ベクトルにおいて矢印を考慮して起点から終点に向かう進みが「向き」と表現され、ベクトルにおいて矢印を考慮せずに起点と終点とを結ぶ線上の往来が「方向」と表現される。また、以下の説明においては、複合機1が使用可能に設置された状態(図1の状態)を基準として上下方向7が定義され、操作パネル4及び開口6が設けられている側を手前側(正面)として前後方向8が定義され、複合機1を手前側(正面)から見て左右方向9が定義される。
【0026】
[複合機1]
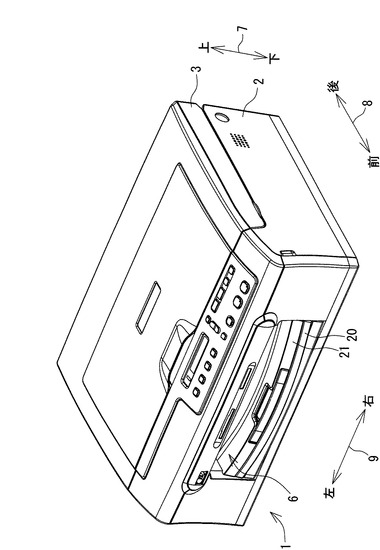
図1に示されるように、複合機1は、概ね直方体に形成されており、下部に配置されたプリンタ部2(本発明のインクジェット記録装置の一例)と、上部に配置されたスキャナ部3とを一体的に備えた多機能装置(MFP:Multi Function Product)である。複合機1は、プリント機能、スキャン機能、コピー機能、ファクシミリ機能等を有する。プリント機能以外の機能は任意のものである。例えば、本発明に係るインクジェット記録装置が、スキャナ部3が省略されたプリント機能のみを有するプリンタとして実施されてもよい。
【0027】
プリンタ部2は、コンピュータ等の外部情報機器から送信された印刷データに基づいて、記録用紙などの被記録媒体に画像を記録する。プリンタ部2は、正面に開口6が形成されている。給紙トレイ20及び排紙トレイ21が、開口9の内側に上下2段に設けられている。スキャナ部3は、所謂フラットベッドスキャナとして構成されている。なお、ここでは、スキャナ部3の詳細な説明は省略される。
【0028】
[給紙ローラ25]
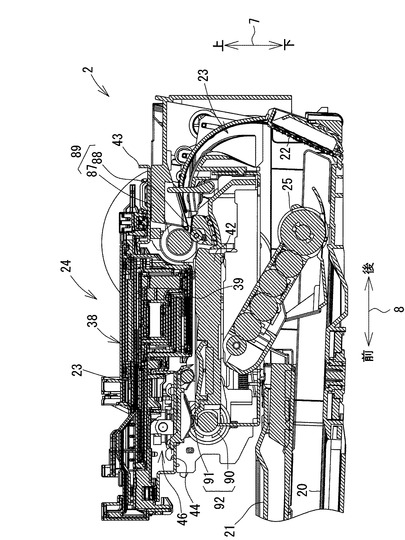
図2に示されるように、複合機1の下部に給紙トレイ20が設けられている。給紙トレイ20の上側に給紙ローラ25が設けられている。この給紙ローラ25が回転されることにより給紙トレイ20に収容された記録用紙のうち最上位置の記録用紙が傾斜板22側へ送り出される。
【0029】
[搬送路23]
図2に示されるように、傾斜板22から搬送路23が延出されている。給紙トレイ20に収容された記録用紙は、搬送路23により下方から上方へUターンするように案内されて記録部24に至り、記録部24により画像記録が行われた後、排紙トレイ21に排出される。
【0030】
[搬送ローラ対89及び排出ローラ対92]
図2および図4に示されるように、記録部24の上流側には、搬送ローラ87及びピンチローラ88よりなる搬送ローラ対89が設けられている。記録部24の下流側には、排紙ローラ90及び拍車91よりなる排出ローラ対92が設けられている。搬送路23を搬送されている記録用紙は、搬送ローラ対89によってプラテン42上へ搬送される。プラテン42で画像が記録された記録用紙は、排出ローラ対92によって排紙トレイ21へ搬送される。
【0031】
[記録部24]
図2に示されるように、搬送路23には、記録部24が配置されている。記録部24は、インクジェット方式の記録ヘッド39(本発明の記録ヘッドの一例)と、記録ヘッド39を搭載するキャリッジ38(本発明のキャリッジの一例)とを備えている。キャリッジ38は、記録用紙の搬送方向と直交する左右方向9、つまり右向き(本発明の第1向きの一例)及び左向き(本発明の第2向きの一例)へスライド可能に支持されている。
【0032】
記録ヘッド39は、キャリッジ38の下面に配置されている。記録ヘッド39は下面にノズル40(図5参照、本発明のノズルに相当)を有する。ノズル40は、キャリッジ38の下面に露出されている。複合機1の内部に配置されたインクカートリッジ(不図示)から各色のインクが記録ヘッド39へ供給される。キャリッジ38がスライドされる間に、ノズル40から各色インクが微小なインク滴として選択的に吐出される。これにより、プラテン42上を搬送される記録用紙に画像が記録される。
【0033】
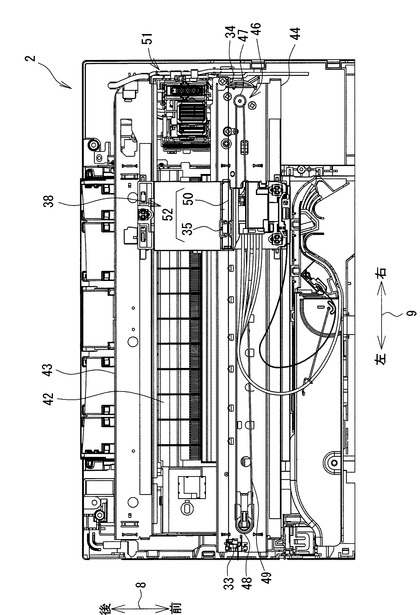
図3及び図4に示されるように、搬送路23の上側において一対のガイドレール43、44が配置されている。ガイドレール43、44は、前後方向8に所定距離を隔てられて対向しており、且つ左右方向9に延設されている。ガイドレール43、44は、プリンタ部2を構成する各部材を支持するフレームの一部である。キャリッジ38は、ガイドレール43、44を跨ぐようにして左右方向9にスライド可能に載置されている。
【0034】
ガイドレール44の上面には、ベルト駆動伝達機構46が配設されている。ベルト駆動伝達機構46は、駆動プーリ47と従動プーリ48と無端環状のベルト49とを有する。各プーリ47、48は、搬送路23の幅方向の両端付近に設けられている。各プーリ47、48との間に、無端環状のベルト49が張架されている。駆動プーリ47の軸に、プリンタ部2の内部に設けられたCRモータ96(本発明の駆動源の一例、図4参照)の駆動軸が連結されている。CRモータ96の回転駆動力が駆動プーリ47に伝達されると、駆動プーリ47の回転によりベルト49が周運動する。なお、ベルト49は無端環状のもののほか、有端のベルトの両端部をキャリッジ38に固着するものも採用され得る。
【0035】
キャリッジ38は、その底面側においてベルト49に連結されている。これにより、ベルト49が周運動すると、キャリッジ38がガイドレール43、44上を左右方向9にスライドする。つまり、キャリッジ38は、CRモータ96からの駆動力によりスライドされる。上述したように記録ヘッド39はキャリッジ38に搭載されている。よって、記録ヘッド39が、左右方向9を主走査方向として往復動される。
【0036】
[リニアエンコーダ52]
図3に示されるように、ガイドレール44には、エンコーダストリップ50が配設されている。エンコーダストリップ50は、透明な樹脂からなる帯状のものである。ガイドレール44の左右方向9の両端には、ガイドレール44の上面から起立するように一対の支持用リブ33、34が形成されている。エンコーダストリップ50は、その両端部を支持用リブ33、34に係止されて、左右方向9に架設されている。
【0037】
エンコーダストリップ50には、光を透過させる透光部と光を遮断する遮光部とが、長手方向に等ピッチで交互に配置されたパターンが記されている。キャリッジ38の上面のエンコーダストリップ50に対応する位置には、透過型センサである光学センサ35が設けられている。エンコーダストリップ50と光学センサ35とによって、キャリッジ38の位置を検知するためのリニアエンコーダ52(本発明の検知部の一例)が構成される。光学センサ35によって検知された信号は、後述する制御部(不図示)に出力される。
【0038】
[メンテナンス機構51]
図3〜図5に示されるように、搬送路23において記録用紙が通過しない範囲、すなわち記録ヘッド39による画像記録領域の外側には、メンテナンス機構51が配置されている。メンテナンス機構51は、プラテン42の右端部に配置されている。メンテナンス機構51は、記録ヘッド39のノズル40内のインクの乾燥を防止したり、ノズル40から気泡や異物を吸引除去するものである。図5に示されるように、メンテナンス機構51は、主として、キャップ55(本発明のキャップの一例)と、第1フレーム56と、第2フレーム57と、スライドカム60とにより構成されている。本発明の移動機構は、第1フレーム56及びスライドカム60によって実現される。
【0039】
第1フレーム56は箱状に形成されており、スライドカム60に支持されている。スライドカム60は、その下面を複合機1に固定された第2フレーム57に支持されている。
【0040】
スライドカム60は、第1フレーム56の下面に当接されるガイド面を有する。ガイド面は、低位置の第1ガイド面111と、高位置の第2ガイド面112と、第1ガイド面及び第2ガイド面を繋ぐ傾斜面113とで構成されている。
【0041】
第1フレーム56は、第1ガイド面111、第2ガイド面112、及び傾斜面113に支持されながら、左右方向9にスライドされる。第1フレーム56は、左右方向9にスライドするとともに、傾斜面113に支持されることによって上下方向7に移動される。
【0042】
第1フレーム56には、底面から起立したレバー71が設けられている。レバー71は、第1フレーム56の右側面に設けられている。レバー71は、キャリッジ38のスライド範囲まで延出されており、その先端に、キャリッジ38がスライド中に当接される当接部72(本発明の当接部の一例)が設けられている。
【0043】
キャップ55は、キャリッジ38がメンテナンス機構51の直上に設定されたキャッピング位置(図5(A)に一点鎖線で示される位置)に移動された際に、記録ヘッド39のノズル40を覆うものである(図5(B)参照)。キャップ55は、第1フレーム56の底面に支持されている。本実施形態では、キャップ55は、その下部と第1フレーム56の底面との間に設けられたコイルバネ65により上下方向7へ弾性的に支持されている。
【0044】
[キャップ55の移動]
図5に示されるように、第1フレーム56が第1ガイド面111に支持されているとき、第1フレーム56に支持されたキャップ55は、記録ヘッド39から離間した第2位置(図5(A)参照、本発明の第2位置に相当)に位置される。第1フレーム56が第2ガイド面112に支持されているとき、第1フレーム56に支持されたキャップ55は記録ヘッド39に接触してノズル40を覆う第1位置(図5(B)参照、本発明の第1位置に相当)に位置される。つまり、キャップ55は第1位置及び第2位置に移動可能である。
【0045】
第1フレーム56の左側面56Aから、第1フレーム56の左側において第2フレーム57から突出された凸部57Aまでを架け渡すようにコイルバネ66(本発明の付勢部材の一例)が取り付けられている。コイルバネ66は、第1フレーム56が第2ガイド面112に支持されたとき、つまりキャップ55が第2位置に配置されたときに自然長となる(図5(A)参照)。一方、コイルバネ66は、第1フレーム56が第1ガイド面111に支持されたとき、つまりキャップ55が第1位置に配置されたときに伸張される(図5(B)参照)。つまり、コイルバネ66は、キャップ55が第1位置に配置された状態で、キャップ55を第2位置側へ弾性的に付勢する。
【0046】
図5(A)に示される状態において、キャリッジ38がメンテナンス機構51側、つまり右向きへ移動されて当接部72に当接すると、当接部72は、キャリッジ38によって右向きへ押圧される。当接部72が右向きへの押圧力を受けることにより、第1フレーム56は、コイルバネ66の弾性力に抗して、右向きにスライドされる。
【0047】
これにより、第1フレーム56は、ガイド面に沿って右向きに移動される。そして、第1フレーム56は、第1ガイド面111に支持された状態から、傾斜面113に支持された状態を介して、第2ガイド面112に支持された状態となる(図5(B)参照)。つまり、キャップ55は、第2位置から第1位置へ移動される。
【0048】
[右壁68及び左壁69]
図5及び図7に示されるように、複合機1に固定された第2フレーム57の右端には、右壁68(第1固定部材の一例)が形成されている。また、図7に示されるように、第2フレーム57の左端には左壁69(第2固定部材の一例)が形成されている。右壁68はプラテン42の右方に形成されており、左壁69はプラテン42の左方に形成されている。また、図5及び図7に示されるように、キャップ55を含むメンテナンス機構51は、右壁68に近接して配置されている。
【0049】
左向きにスライドするキャリッジ38は、左壁69と衝突する。一方、右向きにスライドするキャリッジ38は、以下に詳述するように、右壁68と衝突する。上述したように、キャリッジ38が当接部72を押しながら右向きにスライドすることによって、記録ヘッド39のノズル40がキャップ55に覆われる。キャリッジ38は、ノズル40がキャップ55に覆われた状態を維持しつつ、更に右向きに若干量(具体的には後述するロック棒74及び孔76の径の違いに相当する量であるd1(図5(B)参照)だけスライドされる。これにより、第1フレーム56のレバー71の右側の側壁71Aが右壁68と衝突する(図5(B)参照)。また、本実施形態においては、右壁68の上端部が左側に突出している。これにより、キャリッジ38の右側面が右壁68の突出した部分と衝突する。以上より、キャリッジ38は、右壁68及び左壁69の間を左右方向9にスライドする。
【0050】
なお、本実施形態においては、キャリッジ38及び第1フレーム56の双方が右壁68と衝突するが、図9(A)に示されるように、第1フレーム56のみが右壁68と衝突してもよい。また、図9(B)に示されるように、キャリッジ38のみが右壁68と衝突してもよい。つまり、本発明において、第1固定部材にキャリッジ38が衝突するとは、キャリッジ38が第1固定部材(右壁68)に直接衝突すること(キャリッジ38及び第1フレーム56の双方が第1固定部材に直接衝突することを含む。)に加えて、キャリッジ38が第1フレーム56などの他の部材を介して第1固定部材(右壁68)に衝突すること、つまり間接的に衝突することを含む。
【0051】
[ロック部材73]
図5に示されるように、第2フレーム57に、ロック棒74が設けられている。第2フレーム57の底面には、ロック棒74を上下動可能に支持するロック棒支持部75が設けられている。なお、図5では、ロック棒74及びロック棒支持部75の前後方向8の位置が、メンテナンス機構51と異なる位置であることを示すために、ロック棒74及びロック棒支持部75は破線で示されている。
【0052】
本実施形態において、ロック棒74は、搬送用モータ(不図示)から駆動力が伝達されることによって上下方向7に移動されて、ロック棒支持部75に収容された収容姿勢(本発明の第2姿勢の一例、図5(A)参照)及びロック棒支持部75から上側に突出された突出姿勢(本発明の第1姿勢の一例、図5(B)参照)に姿勢変化される。一方、ロック棒74は、搬送用モータから逆転の駆動力が伝達されることによって下向きに移動され、突出姿勢から収容姿勢に姿勢変化される。なお、ロック棒74は、搬送用モータ以外の駆動源、例えばロック棒74を上下させる専用のモータによって、上下動されてもよい。
【0053】
キャリッジ38の下面に、孔76が設けられている。孔76は、キャップ55がノズル40を覆っている状態、つまりキャリッジ38が右側へスライドされた状態において、ロック棒74及びロック棒支持部75と対向する位置に設けられている。
【0054】
キャップ55が記録ヘッド39に接触してノズル40を覆った状態において、搬送用モータからロック棒74に正転の駆動力が伝達される。これにより、ロック棒74が、上向きに移動されて収容姿勢から突出姿勢となり、孔76に挿入される。その結果、キャリッジ38のスライドがロックされる。一方、キャリッジ38のスライドがロックされた状態において、搬送用モータからロック棒74に逆転の駆動力が伝達される。これにより、ロック棒74が、下向きに移動されて突出姿勢から収容姿勢となり、孔76から脱抜される。その結果、キャリッジ38のスライドのロックが解除される。
【0055】
以上より、ロック棒74とロック棒支持部75と孔76とは、本発明のロック部材73の一例である。なお、ロック部材73は、キャリッジ38のスライドをロック可能であるならば、上述したような構成に限らない。
【0056】
[制御部]
制御部(不図示)は、基板に実装されたマイクロコンピュータや種々の電子部品により実現されている。制御部は、RAMやROMなどで構成された記憶部を備えている。制御部は、光学センサ35からの検知信号に基づいてキャリッジ38の位置を検知する。制御部は、検知されたキャリッジ38の位置の情報に基づいて、CRモータ96、給紙用モータ、及び搬送用モータなどを制御する。制御部が後述するフローチャートにしたがってキャリッジ38の原点位置の設定を制御することによって、本発明が実現される。
【0057】
[キャリッジ38の原点位置の設定]
複合機1の電源がONにされると、制御部は、キャリッジ38の原点位置の設定を行う。以下、図6〜図8を参照しながら、キャリッジ38の原点位置の設定が説明される。
【0058】
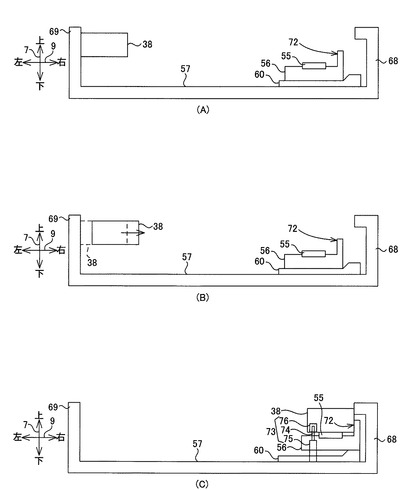
制御部は、複合機1の電源がONにされたときのキャリッジ38の位置によって、異なる処理を行う。そこで、以下の説明においては、複合機1の電源がONにされたときに、キャリッジ38がスライド範囲(右壁68及び左壁69の間)の両端部以外(本例では概ね中央部)に存在する場合(図7(A)参照)が第1の処理として説明され、キャリッジ38が上記スライド範囲の左端部に存在する場合(図8(A)参照)が第2の処理として説明され、キャリッジ38が上記スライド範囲の右端部に存在する場合(図8(C)参照)が第3の処理として説明される。
【0059】
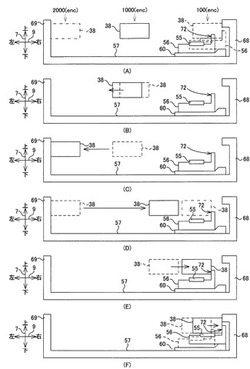
なお、以下の説明において、キャリッジ38の位置及び移動距離の単位は、エンコーダストリップ50に記されたパターンのピッチであるエンコーダ(以下、encと記す。)である。そして、図7(A)に示されるように、キャリッジ38がスライド範囲の右端部に存在する場合のキャリッジ38の位置は100(enc)であり、キャリッジ38がスライド範囲の左端部に存在する場合のキャリッジ38の位置は2000(enc)である。つまり、キャリッジ38のスライド範囲は、100(enc)から2000(enc)の間の1900(enc)である。
【0060】
[第1の処理]
複合機1の電源がONにされると、制御部は、キャリッジ38の現在位置を、右壁68に当接する位置である100(enc)に設定する(S10)。つまり、図7(A)に示されるように、キャリッジ38の現実の位置は実線で示される1000(enc)の位置であるが、当該位置を電源のON時に検知できない制御部は、キャリッジ38が破線で示される位置(100(enc))に存在すると仮定する。
【0061】
制御部は、CRモータ96の駆動を制御して、キャリッジ38が左向きに第1距離(本発明の第1距離に相当)、例えば50(enc)の距離だけスライドするために必要な駆動力を、CRモータ96からキャリッジ38に付与させる(S20)。ステップS20の処理は、本発明の第3制御手段に相当する。そして、制御部は、当該付与により、キャリッジ38が第1距離をスライドされたか否かを判定する(S30)。第1の処理では、キャリッジ38はスライド範囲の概ね中央部に存在する。そのため、キャリッジ38は、図7(B)に示されるように、破線で示される位置から第1距離をスライドされて、実線で示される位置となる(S30:Yes)。
【0062】
制御部は、CRモータ96の駆動を制御して、2000(enc)だけ第1速度(本発明の第1速度に相当)でスライドするために必要な駆動力を、CRモータ96からキャリッジ38に付与させる(S40)。ステップS40の処理は、本発明の第1制御手段に相当する。つまり、本発明の第1制御手段は、本発明の第3制御手段によってキャリッジ38が第1距離をスライドされたことを条件として実行される。
【0063】
ここで、上記の2000(enc)の値は、キャリッジ38が左向きに左壁69に衝突可能な距離として設定されたものである。つまり、当該値は、キャリッジ38が左向きに左壁69に衝突可能であるならば、2000(enc)に限らず、例えば、3000(enc)や1900(enc)であってもよい。
【0064】
また、第1速度は、本実施形態において、キャリッジ38が出すことのできる最高速度に設定されている。キャリッジ38の最高速度は、複合機1に搭載されるキャリッジ38、CRモータ96、及びベルト駆動伝達機構46の性能によって決定される。なお、第1速度は、高速であることが好ましいが、キャリッジ38が出すことのできる最高速度に限らず、最高速度よりも低速であってもよい。
【0065】
第1の処理では、上記の第1距離が50(enc)である場合、ステップS40の開始時において、キャリッジ38は1050(enc)の位置である(図7(C)の破線参照)。よって、ステップS40における駆動力の付与によって、キャリッジ38は950(enc)のスライドで左壁69に衝突する(図7(C)の実線参照)。そして、以後、駆動力の付与にもかかわらず、キャリッジ38はスライドしない。つまり、キャリッジ38のスライド中においてはパターンを読み取ることによりパルス信号だった光学センサ35からの検知信号は、キャリッジ38がスライドしなくなることで一定値(HIGHレベルまたはLOWレベル)の信号となる。制御部は、当該検知信号が一定値となったことを検知することによって、キャリッジ38が左壁69に衝突して停止したことを検知する。そして、制御部は、ステップS40の終了時におけるキャリッジ38の位置を、左壁69に当接する位置(本発明の仮原点位置に相当)である2000(enc)の位置(本発明の仮原点位置の一例)に設定する(S50)。ステップS50の処理は、本発明の第1設定手段に相当する。
【0066】
制御部は、CRモータ96の駆動を制御して、キャリッジ38を、2000(enc)の位置(図7(D)の破線参照)から所定位置(図7(D)の実線参照)まで、右向きへ第2速度(本発明の第2速度に相当)でスライドさせる(S60)。
【0067】
ここで、第2速度は、本実施形態において、キャリッジ38が出すことのできる最高速度、つまり第1速度と同速度に設定されるが、最高速度よりも低速であってもよい。もちろん、第2速度は、第1速度と異なる速度であってもよい。
【0068】
また、所定位置は、キャリッジ38が当接部72と当接する第3位置(本発明の第3位置に相当)よりも所定距離だけ左側の位置である。所定距離は、キャリッジ38が第3位置に到達するまでに第2速度から第2速度よりも低速の第3速度(本発明の第3速度に相当)に減速可能な距離に設定される。つまり、キャリッジ38が急減速可能である程、所定距離は小さくなる。第3速度は、キャリッジ38が第1フレーム56を押すときに、ノズル40に形成されたメニスカスが破壊されない程度の低速に設定される。
【0069】
なお、第3位置は、メンテナンス機構51の配置位置によって決まる値である。また、仮原点位置も、左壁69の配置位置によって決まる値である。よって、仮原点位置から第3位置までの距離は、仮原点位置が設定されることによって特定される。
【0070】
制御部は、CRモータ96の駆動を制御して、所定位置に到達したキャリッジ38(図7(E)の破線参照)を減速させる(S70)。これにより、キャリッジ38は、第3位置に到達するまでに第3速度へ減速され、第3位置において第3速度で当接部72と当接する(S70、図7(E)の実線参照)。つまり、制御部は、キャリッジ38を、仮原点位置及び第3位置の間において第2速度でスライドさせ、第3位置において第3速度で当接部72と当接させる。
【0071】
本実施形態において、第2速度から第3速度への減速は、以下のようにして実行される。制御部は、第2速度でスライドされているキャリッジ38が所定位置に到達すると、キャリッジ38を減速させて停止させる。その後、制御部は、キャリッジ38を停止状態から再駆動させる。つまり、制御部は、キャリッジ38を一旦停止させ、その後、キャリッジ38を第3速度へ加速させる。なお、第2速度から第3速度への減速方法は、本実施形態における方法に限らず、例えば、制御部は、キャリッジ38を一旦停止させることなく、第2速度から第3速度へ減速させてもよい。
【0072】
制御部は、CRモータ96の駆動を制御して、キャリッジ38が第3位置から右壁68までスライドするために必要な駆動力を、CRモータ96からキャリッジ38に付与させる。また、制御部は、キャリッジ38の第3速度でのスライドを継続させる(S80)。その結果、第3位置において当接部72と当接したキャリッジ38は(図7(F)の破線参照)、当接部72と当接した状態を維持しつつ右壁68と衝突する(S90、図7(F)の実線参照)。換言すると、キャリッジ38は、当接部72を右側へ押しながら右壁68と衝突する。つまり、制御部は、キャリッジ38を、第3位置よりも右側において右向きへ第3速度でスライドさせて、右壁68に衝突させる。ステップS60〜S90の処理は、本発明の第2制御手段に相当する。
【0073】
なお、上述したように、当接部72がキャリッジ38に押されると、キャップ55が第2位置から第1位置に移動され、ノズル40がキャップ55に覆われる(図5参照)。
【0074】
ステップS80において、キャリッジ38が第3位置から右壁68までスライドするために必要な駆動力がキャリッジ38に付与されている。よって、ステップS50での説明と同様に、キャリッジ38のスライド中においてはパルス信号だった光学センサ35からの検知信号は、キャリッジ38がスライドしなくなることで一定値の信号となる。制御部は、当該検知信号が一定値となったことを検知することによって、キャリッジ38が右壁68に衝突して停止したことを検知する。そして、制御部は、ステップS90の終了時におけるキャリッジ38の位置を、右壁68に当接する位置(本発明の原点位置に相当)である100(enc)の位置(本発明の原点位置の一例)に設定する(S100)。ステップS100の処理は、本発明の第2設定手段に相当する。
【0075】
[第2の処理]
第2の処理では、図8(A)に示されるように、複合機1の電源がONにされたとき、キャリッジ38が上記スライド範囲の左端部に存在する。よって、キャリッジ38は、ステップS20において左向きへスライドするための駆動力を付与されても、左壁69に阻まれるため、左向きへ第1距離をスライドされない(S30:No)。
【0076】
そこで、制御部は、CRモータ96の駆動を制御して、キャリッジ38が右向きに第2距離(本発明の第2距離に相当)、例えば50(enc)の距離だけスライドするために必要な駆動力を、CRモータ96からキャリッジ38に付与させる(S110)。ステップS110の処理は、本発明の第5制御手段に相当する。そして、制御部は、当該付与により、キャリッジ38が第2距離をスライドされたか否かを判定する(S120)。第2の処理では、キャリッジ38はスライド範囲の左端部に存在する。そのため、キャリッジ38は、図8(B)に示されるように、破線で示される位置から第2距離をスライドされて、実線で示される位置となる(S120:Yes)。
【0077】
ステップS120においてキャリッジ38が第2距離をスライドされたことを条件として、ステップS40以降の処理、つまり本発明の第1制御手段、第1設定手段、第2制御手段、及び第2設定手段が実行される。ここで、第1の処理の場合のステップS40では、キャリッジ38が左向きに左壁69に衝突可能な距離として2000(enc)が設定された。しかし、第2の処理では、キャリッジ38が第1の処理の場合よりも左壁69に近い位置であるため、キャリッジ38が左向きに左壁69に衝突可能な距離として、2000(enc)よりも小さい距離が設定されてもよい。
【0078】
[第3の処理]
第3の処理では、キャリッジ38が上記スライド範囲の右端部に存在する。このとき、ロック棒74が突出姿勢であると、キャリッジ38は、原則として、スライド不可能である。但し、例外として、キャリッジ38は、ロック棒74と孔76との径の違いに相当する量d1(図5(B)参照)のみスライド可能である。第3の処理では、ロック棒74が突出姿勢である場合が説明される。なお、図7及び図8のうちの図8(C)以外においては、ロック部材73が省略されている。
【0079】
第3の処理では、図8(C)に示されるように、複合機1の電源がONにされたとき、キャリッジ38は、ロック棒74によってロックされており、原則としてスライド不可能である。そのため、キャリッジ38は、ステップS30において左向きへ第1距離をスライドされず(S30:No)、且つステップS120において右向きへ第2距離をスライドされない(S120:No)。
【0080】
そこで、制御部は、CRモータ96を制御して、キャリッジ38が右向きへ右壁68に衝突可能な距離だけスライドするために必要な駆動力を、CRモータ96からキャリッジ38に付与させる(S130)。ステップS130の処理は、本発明の第6制御手段に相当する。これにより、キャリッジ38は、上記の量d1(図5(B)参照)のみスライドされ、右壁68に衝突する。なお、第3の処理においてキャリッジ38は上記の量d1のスライドによって右壁68に衝突可能であるため、キャリッジ38が右向きへ右壁68に衝突可能な距離としてステップS130で設定される距離は、小さい距離に設定される。
【0081】
ステップS130の後、ステップS100が実行される。つまり、第3の処理では、本発明の第2設定手段は、本発明の第6制御手段によってキャリッジ38が右壁68に衝突した位置をリニアエンコーダ52に検知させて、キャリッジ38の原点位置に設定する。
【0082】
[実施形態の効果]
本実施形態によれば、キャリッジ38は、第1制御手段によってキャップ55が存在しない左壁69側へ移動される。第1設定手段は、キャリッジ38が左壁69に衝突した位置を仮原点位置に設定する。仮原点位置によってキャリッジ38と当接部72とが当接する第3位置の特定が可能である。そして、第2制御手段は、キャリッジ38が第3位置の若干手前に到達するまでの間、キャリッジ38を高速(第2速度)で移動させる。つまり、第2制御手段が仮原点位置及び第3位置の間において右向きへ第2速度でキャリッジ38をスライドさせることには、第2制御手段が、当該間の全位置においてキャリッジ38を第2速度でスライドさせることに加えて、上述した第3位置の若干手前でキャリッジ38を減速させる場合のように、当該間の一部の位置においてキャリッジ38を第2速度でスライドさせることも含む。以上より、キャリッジ38の原点位置の設定に要する時間が長くなるのを極力抑えることができる。
【0083】
また、第2制御手段は、第3位置の若干手前からキャリッジ38を減速させて、キャリッジ38を低速(第3速度)で当接部72に当接させる。これにより、キャップ55の第1位置から第2位置への移動によって当接部72を介してノズル40に伝わる上向きの力を、小さくすることができる。なお、第2速度は、第1速度と等しい速度であってもよいし、第1速度と異なる速度であってもよい。以上より、本実施形態によれば、キャリッジ38の原点位置の設定に要する時間が長くなるのを極力抑えつつ、ノズル40に形成されたメニスカスの破壊を防止することができる。
【0084】
また、本実施形態においては、原点位置の設定開始時のキャリッジ38が左壁69に当接されている場合、キャリッジ38は第3制御手段の制御によって駆動力を付与されてもスライドされない。つまり、第3制御手段は、ロック部材73によるロックによってキャリッジ38がスライドされないのか、左壁69に当接されているためにキャリッジ38がスライドされないのかを判断できない。
【0085】
そこで、本実施形態においては、第5制御手段がキャリッジ38の右向きへの第2距離のスライドを試みる。そして、キャリッジ38が第2距離をスライドされたか否かによって、キャリッジ38が左壁69に当接されているか否かが判断される。そして、当該判断に基づいて、キャリッジ38は右向きまたは左向きに移動され、仮原点位置及び原点位置が設定される。以上より、本実施形態によれば、キャリッジ38の当初位置が左壁69に当接された位置であっても、キャリッジ38の原点位置の設定を行うことができる。
【0086】
また、本実施形態によれば、第1速度または第2速度の少なくとも一方がキャリッジ38の最高速度に設定されることにより、キャリッジ38の原点位置の設定に要する時間を短くすることができる。
【0087】
また、本実施形態によれば、第2制御手段は、第2速度でスライドされているキャリッジ38を一旦停止させてから、第3速度でスライドさせる。よって、CRモータ96が、キャリッジ38の速度を細かく設定できないような安価なモータであっても、キャリッジ38を複数の速度で正確にスライドさせることができる。
【0088】
[変形例1]
上述の実施形態の図6において、ステップS110、S120が実行されなくてもよい。つまり、ステップS30において、キャリッジ38が左向きへ第1距離をスライドされなかったことを条件として(S30:No)、制御部は、CRモータ96を制御して、キャリッジ38が右向きへ右壁38に衝突可能な距離だけスライドするために必要な駆動力を、CRモータ96からキャリッジ38に付与させてもよい(S130)。変形例1の場合のステップS130の処理は、本発明の第4制御手段に相当する。
【0089】
変形例1の場合も、上述の実施形態の場合と同様に、ステップS130の後、ステップS100が実行される。つまり、変形例1において、本発明の第2設定手段は、本発明の第4制御手段によってキャリッジ38が右壁68に衝突した位置をリニアエンコーダ52に検知させて、キャリッジ38の原点位置に設定する。
【0090】
キャリッジ38がロック部材73によってロックされている場合、キャリッジ38は第1制御手段の制御によって駆動力を付与されてもスライドされない。そこで、変形例1においては、第3制御手段がキャリッジ38の左向きへの第1距離のスライドを試みる。そして、キャリッジ38が第1距離をスライドされたか否かによって、キャリッジ38がロック部材73によってロックされているか否かが判断される。そして、当該判断に基づいて、キャリッジ38は右向きまたは左向きに移動され、仮原点位置及び原点位置が設定される。以上より、変形例1によれば、複合機1のプリンタ部2の構成が、キャリッジ38がロック部材73によってロックされ得る構成であっても、キャリッジ38の原点位置の設定を行うことができる。
【0091】
[変形例2]
上述の実施形態では、キャップ55はスライドカム60によって第1位置及び第2位置に移動可能に構成されていたが、キャップ55はスライドカム60以外によって第1位置及び第2位置に移動可能に構成されていてもよい。
【0092】
例えば、図10に示されるように、第1フレーム56は、4つの脚部80(図10には2つのみ記されている。)で構成されている。各脚部80の両端に軸が設けられている。一方の端部の軸81が第2フレーム57に回動自在に取り付けられており、他方の端部の軸82が、第1フレーム56に回動自在に取り付けられている。これにより、第1フレーム56及びキャップ55は、第2フレーム57の底面に近接して、第2フレーム57の底面に対する脚部67の角度θが最も小さくなる第2位置と、第2フレーム57の底面から離間して、上記角度θが最も大きくなる第1位置との間を移動可能となる。
【0093】
[変形例3]
上述の実施形態において、制御部は、キャリッジ38を、第3位置よりも右側において右向きへ第3速度でスライドさせて、右壁68に衝突させていた。しかし、制御部は、キャリッジ38を、第3位置よりも右側において、キャップ55が第2位置から第1位置に移動されるまでの間、右向きへ第3速度でスライドさせ、キャップ55が第1位置に移動されて以降、右向きへ第4速度(本発明の第4速度に相当)でスライドさせてもよい。この場合、キャリッジ38は、第4速度で右壁68と衝突する。ここで、第4速度は、第3速度よりも高速、例えば第1速度や第2速度と同速度に設定される。
【0094】
例えば、メンテナンス機構51が図5に示される構成の場合、第1フレーム56が傾斜面113に支持されている状態のとき、制御部は、キャリッジ38を第3速度でスライドさせるが、第1フレーム56が第2ガイド面112に支持されている状態のとき、制御部は、キャリッジ38を第4速度でスライドさせる。詳細には、制御部は、キャリッジ38が傾斜面113に支持された状態から第2ガイド面112に支持された状態へ遷移するよりも前において、キャリッジ38の第3速度から第4速度への加速を開始させる。或いは、制御部は、キャリッジ38が第2ガイド面112に支持された状態となった瞬間に、キャリッジ38の第3速度から第4速度への加速を開始させてもよい。
【0095】
キャップ55が第2位置から第1位置に移動されると、キャリッジ38は、第1フレーム56及びキャップ55から上向きに力を受けない。よって、記録ヘッド39のノズル40に形成されたメニスカスが破壊されるおそれがない。変形例3において、制御部は、メニスカスが破壊されるおそれがない状態においては、キャリッジ38を高速でスライドさせる。これにより、キャリッジ38の原点位置の設定に要する時間が長くなるのを極力抑えることができる。
【符号の説明】
【0096】
1・・・複合機
2・・・プリンタ部
38・・・キャリッジ
39・・・記録ヘッド
52・・・リニアエンコーダ
55・・・キャップ
56・・・第1フレーム
60・・・スライドカム
66・・・コイルバネ
68・・・右壁
69・・・左壁
【技術分野】
【0001】
本発明は、記録ヘッドから被記録媒体にインク滴を吐出することによって画像記録を行うインクジェット記録装置に関し、より詳細には、記録ヘッドのノズルを覆うキャップを備え、当該キャップがノズルを覆う位置とノズルから離れた位置とに移動可能なインクジェット記録装置に関する。
【背景技術】
【0002】
入力信号に基づいてインク滴を吐出して被記録媒体に画像記録を行うインクジェット記録装置が知られている。インクジェット記録装置は、記録ヘッドを搭載したキャリッジを備える。キャリッジは、被記録媒体に対向する位置に配置されており、水平方向に移動される。このとき、記録ヘッドのノズルからインク滴が選択的に吐出される。これにより、被記録媒体に画像が記録される。
【0003】
インク滴が目標位置に正確に吐出されるためには、画像の記録位置の基点が必要である。そのため、インクジェット記録装置では、電源投入の際、記録ヘッドが搭載されたキャリッジの原点位置の検出が行われる。
【0004】
例えば、特許文献1に記載されたシリアルプリンタでは、初期化時に所定位置に停止していたキャリッジは、ストッパーの方向に移動される。そして、キャリッジがストッパーと衝突して停止した位置が原点位置として設定される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第3061091号
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、インクジェット記録装置の多くは、ノズルを覆う位置とノズルから離間した位置とに上下動可能なキャップを備えている。インクジェット記録装置は、キャップでノズルを覆った状態で、ノズルを覆ったキャップ内に吸引圧を発生させるポンプを駆動する。これにより、ノズルから気泡や異物が除去される。
【0007】
キャップを上下動させる機構の一つに、キャリッジの移動を利用したものがある。当該機構では、キャップを支持するキャップホルダに、水平移動するキャリッジと当接可能な当接部が設けられている。当接部がキャリッジに押されることにより、キャップホルダも水平移動する。ここで、キャップホルダは、傾斜面が形成された支持部によって支持されている。よって、水平移動されるキャップホルダは、傾斜面に沿って上側に移動される。これにより、キャップホルダに支持されたキャップは、キャリッジに搭載された記録ヘッドのノズルを覆う。
【0008】
以上のような機構を備えたインクジェット記録装置において、上述したようなキャリッジの原点位置の設定が行われると、以下のような問題が生じる。
【0009】
初期化時に所定位置に停止していたキャリッジがストッパーの方向に移動される過程において、キャリッジは、上記の当接部に当接して当該当接部を押すおそれがある。キャリッジが当接部を押すと、キャップを支持するキャップホルダは上側に移動される。つまり、キャップホルダに上向きの力がかかる。キャップホルダの上向きの力は、当接部を介してキャリッジに伝わり、キャリッジに搭載されたノズルに伝わる。ここで、初期化時のキャリッジの移動速度は、原点位置を迅速に設定するために高速である。キャリッジが高速で移動する場合、ノズルに伝わる上向きの力が大きくなる。ノズルに大きな上向きの力が伝わると、ノズルに形成されているメニスカスが破壊されてしまうおそれがある。
【0010】
本発明は、上記問題に鑑みてなされたものであり、その目的は、キャリッジの原点位置の設定に要する時間が長くなるのを極力抑えつつ、ノズルに形成されたメニスカスの破壊を防止することができるインクジェット記録装置を提供することにある。
【課題を解決するための手段】
【0011】
(1) 本発明のインクジェット記録装置は、インク滴が吐出されるノズルを有する記録ヘッドと、駆動源と、上記記録ヘッドが搭載され、上記駆動源からの駆動力により第1向き及び上記第1向きと反対向きの第2向きへスライド可能なキャリッジと、当該装置に固定されており、上記第1向きにスライドする上記キャリッジが衝突する第1固定部材と、当該装置に固定されており、上記第2向きにスライドする上記キャリッジが衝突する第2固定部材と、上記キャリッジの位置を検知する検知部と、上記第1固定部材に近接して配置されており、上記記録ヘッドに接触して上記ノズルを覆う第1位置、及び上記記録ヘッドから離間した第2位置に移動可能なキャップと、上記キャップを上記第2位置側へ付勢する付勢部材と、上記キャリッジが当接して上記第1向きへ押圧される当接部を有し、上記キャリッジが上記当接部に当接したときの押圧力を受けることにより、上記キャップを上記第2位置から上記第1位置に移動させる移動機構と、上記キャリッジが上記第2向きへ上記第2固定部材に衝突可能な距離だけ第1速度でスライドするために必要な駆動力を、上記駆動源から上記キャリッジに付与させる第1制御手段と、上記第1制御手段によって上記キャリッジが上記第2固定部材に衝突した位置を上記検知部に検知させて、上記キャリッジの仮原点位置に設定する第1設定手段と、上記駆動源の駆動を制御して、上記第1制御手段によってスライドされた上記キャリッジを、上記仮原点位置及び上記仮原点位置によって特定される位置であって上記キャリッジが上記当接部と当接する第3位置の間において上記第1向きへ第2速度でスライドさせ、上記第3位置において上記第2速度よりも低速の第3速度で上記当接部と当接させ、上記第3位置よりも上記第1向き側において上記第1向きへ上記第3速度でスライドさせて、上記第1固定部材に衝突させる第2制御手段と、上記第2制御手段によって上記キャリッジが上記第1固定部材に衝突した位置を上記検知部に検知させて、上記キャリッジの原点位置に設定する第2設定手段と、を備える。
【0012】
本構成によれば、キャリッジは、第1制御手段によってキャップが存在しない第2固定部材側へ移動される。第1設定手段は、キャリッジが第2固定部材に衝突した位置を仮原点位置に設定する。仮原点位置によってキャリッジと当接部とが当接する第3位置の特定が可能である。そして、第2制御手段は、キャリッジが第3位置の若干手前に到達するまでの間、キャリッジを高速(第2速度)で移動させる。つまり、第2制御手段が仮原点位置及び第3位置の間において第1向きへ第2速度でキャリッジをスライドさせることには、第2制御手段が、当該間の全位置においてキャリッジを第2速度でスライドさせることに加えて、上述した第3位置の若干手前でキャリッジを減速させる場合のように、当該間の一部の位置においてキャリッジを第2速度でスライドさせることも含む。以上より、キャリッジの原点位置の設定に要する時間が長くなるのを極力抑えることができる。
【0013】
また、第2制御手段は、第3位置の若干手前からキャリッジを減速させて、キャリッジを低速(第3速度)で当接部に当接させる。これにより、キャップの第1位置から第2位置への移動によって当接部を介してノズルに伝わる上向きの力を、小さくすることができる。なお、第2速度は、第1速度と等しい速度であってもよいし、第1速度と異なる速度であってもよい。
【0014】
(2) 本発明のインクジェット記録装置は、上記キャップが上記記録ヘッドに接触して上記ノズルを覆った状態において上記キャリッジのスライドをロック可能な第1姿勢、及び当該ロックが解除された第2姿勢に姿勢変化可能なロック部材と、上記キャリッジが上記第2向きへ第1距離だけスライドするために必要な駆動力を、上記駆動源から上記キャリッジに付与させる第3制御手段と、上記第3制御手段によって上記キャリッジが上記第1距離をスライドされなかったことを条件として、上記キャリッジが上記第1向きへ上記第1固定部材に衝突可能な距離だけスライドするために必要な駆動力を、上記駆動源から上記キャリッジに付与させる第4制御手段と、を更に備える。上記第1制御手段は、上記第3制御手段によって上記キャリッジが上記第1距離をスライドされたことを条件として実行される。上記第2設定手段は、上記第4制御手段によって上記キャリッジが上記第1固定部材に衝突した位置を上記検知部に検知させて、上記キャリッジの原点位置に設定する。
【0015】
キャリッジがロック部材によってロックされている場合、キャリッジは第1制御手段の制御によって駆動力を付与されてもスライドされない。そこで、本構成においては、第3制御手段がキャリッジの第2向きへの第1距離のスライドを試みる。そして、キャリッジが第1距離をスライドされたか否かによって、キャリッジがロック部材によってロックされているか否かが判断される。そして、当該判断に基づいて、キャリッジは第1向きまたは第2向きに移動され、仮原点位置及び原点位置が設定される。以上より、本構成によれば、インクジェット記録装置の構成が、キャリッジがロック部材によってロックされ得る構成であっても、キャリッジの原点位置の設定を行うことができる。
【0016】
(3) 本発明のインクジェット記録装置は、上記キャップが上記記録ヘッドに接触して上記ノズルを覆った状態において上記キャリッジのスライドをロック可能な第1姿勢、及び当該ロックが解除された第2姿勢に姿勢変化可能なロック部材と、上記キャリッジが上記第2向きへ第1距離だけスライドするために必要な駆動力を、上記駆動源から上記キャリッジに付与させる第3制御手段と、上記第3制御手段によって上記キャリッジが上記第1距離をスライドされなかったことを条件として、上記キャリッジが上記第1向きへ第2距離だけスライドするために必要な駆動力を、上記駆動源から上記キャリッジに付与させる第5制御手段と、上記第5制御手段によって上記キャリッジが上記第2距離をスライドされなかったことを条件として、上記キャリッジが上記第1向きへ上記第1固定部材に衝突可能な距離だけスライドするために必要な駆動力を、上記駆動源から上記キャリッジに付与させる第6制御手段と、を更に備える。上記第1制御手段は、上記第3制御手段によって上記キャリッジが上記第1距離をスライドされたこと、または上記第5制御手段によって上記キャリッジが上記第2距離をスライドされたことを条件として実行される。上記第2設定手段は、上記第6制御手段によって上記キャリッジが上記第1固定部材に衝突した位置を上記検知部に検知させて、上記キャリッジの原点位置に設定する。
【0017】
原点位置の設定開始時のキャリッジが第2固定部材に当接されている場合、キャリッジは第3制御手段の制御によって駆動力を付与されてもスライドされない。つまり、第3制御手段は、ロック部材によるロックによってキャリッジがスライドされないのか、第2固定部材に当接されているためにキャリッジがスライドされないのかを判断できない。
【0018】
そこで、本構成においては、第5制御手段がキャリッジの第1向きへの第2距離のスライドを試みる。そして、キャリッジが第2距離をスライドされたか否かによって、キャリッジが第2固定部材に当接されているか否かが判断される。そして、当該判断に基づいて、キャリッジは第1向きまたは第2向きに移動され、仮原点位置及び原点位置が設定される。以上より、本構成によれば、キャリッジの当初位置が第2固定部材に当接された位置であっても、キャリッジの原点位置の設定を行うことができる。
【0019】
(4) 上記第1速度または上記第2速度の少なくとも一方は、上記駆動源からの駆動力によってスライドされる上記キャリッジの最高速度である。本構成によれば、キャリッジの原点位置の設定に要する時間を短くすることができる。
【0020】
(5) 上記第2制御手段は、上記第2速度でスライドされている上記キャリッジを一旦停止させてから、上記第3速度でスライドさせる。本構成によれば、キャリッジの速度を細かく設定できないような安価なモータが使用されていても、キャリッジを複数の速度で正確にスライドさせることができる。
【0021】
(6) 上記第2制御手段は、上記第3位置よりも上記第1向き側において、上記キャップが上記第2位置から上記第1位置に移動されたことを条件として、上記キャリッジを上記第1向きへ上記第3速度よりも高速の第4速度でスライドさせて、上記第1固定部材に衝突させる。
【0022】
キャップが第2位置から第1位置に移動されると、キャリッジは、移動機構及びキャップから上向きに力を受けない。よって、記録ヘッドのノズルに形成されたメニスカスが破壊されるおそれがない。本構成において、第2制御手段は、メニスカスが破壊されるおそれがない状態においては、キャリッジを高速でスライドさせる。これにより、キャリッジの原点位置の設定に要する時間が長くなるのを極力抑えることができる。
【発明の効果】
【0023】
本発明によれば、第2制御手段は、キャリッジが第3位置の若干手前に到達するまでの間、キャリッジを高速で移動させる。また、第2制御手段は、キャリッジを低速で当接部に当接させる。これにより、キャリッジの原点位置の設定に要する時間が長くなるのを極力抑えつつ、ノズルに形成されたメニスカスの破壊を防止することができる。
【図面の簡単な説明】
【0024】
【図1】図1は、複合機1の外観構成を示す斜視図である。
【図2】図2は、プリンタ部2の主要構成を示す部分拡大断面図である。
【図3】図3は、プリンタ部2の主要構成を示す平面図である。
【図4】図4は、プリンタ部2の主要構成を示す斜視図である。
【図5】図5は、メンテナンス機構51の側面構造を模式的に示す側面図であり、(A)にはキャップが第2位置の状態が示されており、(B)にはキャップ55が第1位置の状態が示されている。
【図6】図6は、キャリッジ38の原点位置の設定について説明するためのフローチャートである。
【図7】図7は、第1の処理について説明するためにメンテナンス機構51の側面構造を模式的に示す側面図である。
【図8】図8は、第2の処理及び第3の処理について説明するためにメンテナンス機構51の側面構造を模式的に示す側面図である。
【図9】図9は、メンテナンス機構51の側面構造を模式的に示す側面図であり、(A)には第1フレーム56のみが右壁68と衝突する構成が示されており、(B)にはキャリッジ38のみが右壁68と衝突する構成が示されている。
【図10】図10は、変形例2におけるメンテナンス機構51の側面構造を模式的に示す側面図であり、(A)にはキャップが第2位置の状態が示されており、(B)にはキャップ55が第1位置の状態が示されている。
【発明を実施するための最良の形態】
【0025】
以下、適宜図面を参照して本発明の実施形態について説明する。なお、以下に説明される実施形態は本発明の一例にすぎず、本発明の要旨を変更しない範囲で、本発明の実施形態を適宜変更できることは言うまでもない。また、以下の説明では、ベクトルにおいて矢印を考慮して起点から終点に向かう進みが「向き」と表現され、ベクトルにおいて矢印を考慮せずに起点と終点とを結ぶ線上の往来が「方向」と表現される。また、以下の説明においては、複合機1が使用可能に設置された状態(図1の状態)を基準として上下方向7が定義され、操作パネル4及び開口6が設けられている側を手前側(正面)として前後方向8が定義され、複合機1を手前側(正面)から見て左右方向9が定義される。
【0026】
[複合機1]
図1に示されるように、複合機1は、概ね直方体に形成されており、下部に配置されたプリンタ部2(本発明のインクジェット記録装置の一例)と、上部に配置されたスキャナ部3とを一体的に備えた多機能装置(MFP:Multi Function Product)である。複合機1は、プリント機能、スキャン機能、コピー機能、ファクシミリ機能等を有する。プリント機能以外の機能は任意のものである。例えば、本発明に係るインクジェット記録装置が、スキャナ部3が省略されたプリント機能のみを有するプリンタとして実施されてもよい。
【0027】
プリンタ部2は、コンピュータ等の外部情報機器から送信された印刷データに基づいて、記録用紙などの被記録媒体に画像を記録する。プリンタ部2は、正面に開口6が形成されている。給紙トレイ20及び排紙トレイ21が、開口9の内側に上下2段に設けられている。スキャナ部3は、所謂フラットベッドスキャナとして構成されている。なお、ここでは、スキャナ部3の詳細な説明は省略される。
【0028】
[給紙ローラ25]
図2に示されるように、複合機1の下部に給紙トレイ20が設けられている。給紙トレイ20の上側に給紙ローラ25が設けられている。この給紙ローラ25が回転されることにより給紙トレイ20に収容された記録用紙のうち最上位置の記録用紙が傾斜板22側へ送り出される。
【0029】
[搬送路23]
図2に示されるように、傾斜板22から搬送路23が延出されている。給紙トレイ20に収容された記録用紙は、搬送路23により下方から上方へUターンするように案内されて記録部24に至り、記録部24により画像記録が行われた後、排紙トレイ21に排出される。
【0030】
[搬送ローラ対89及び排出ローラ対92]
図2および図4に示されるように、記録部24の上流側には、搬送ローラ87及びピンチローラ88よりなる搬送ローラ対89が設けられている。記録部24の下流側には、排紙ローラ90及び拍車91よりなる排出ローラ対92が設けられている。搬送路23を搬送されている記録用紙は、搬送ローラ対89によってプラテン42上へ搬送される。プラテン42で画像が記録された記録用紙は、排出ローラ対92によって排紙トレイ21へ搬送される。
【0031】
[記録部24]
図2に示されるように、搬送路23には、記録部24が配置されている。記録部24は、インクジェット方式の記録ヘッド39(本発明の記録ヘッドの一例)と、記録ヘッド39を搭載するキャリッジ38(本発明のキャリッジの一例)とを備えている。キャリッジ38は、記録用紙の搬送方向と直交する左右方向9、つまり右向き(本発明の第1向きの一例)及び左向き(本発明の第2向きの一例)へスライド可能に支持されている。
【0032】
記録ヘッド39は、キャリッジ38の下面に配置されている。記録ヘッド39は下面にノズル40(図5参照、本発明のノズルに相当)を有する。ノズル40は、キャリッジ38の下面に露出されている。複合機1の内部に配置されたインクカートリッジ(不図示)から各色のインクが記録ヘッド39へ供給される。キャリッジ38がスライドされる間に、ノズル40から各色インクが微小なインク滴として選択的に吐出される。これにより、プラテン42上を搬送される記録用紙に画像が記録される。
【0033】
図3及び図4に示されるように、搬送路23の上側において一対のガイドレール43、44が配置されている。ガイドレール43、44は、前後方向8に所定距離を隔てられて対向しており、且つ左右方向9に延設されている。ガイドレール43、44は、プリンタ部2を構成する各部材を支持するフレームの一部である。キャリッジ38は、ガイドレール43、44を跨ぐようにして左右方向9にスライド可能に載置されている。
【0034】
ガイドレール44の上面には、ベルト駆動伝達機構46が配設されている。ベルト駆動伝達機構46は、駆動プーリ47と従動プーリ48と無端環状のベルト49とを有する。各プーリ47、48は、搬送路23の幅方向の両端付近に設けられている。各プーリ47、48との間に、無端環状のベルト49が張架されている。駆動プーリ47の軸に、プリンタ部2の内部に設けられたCRモータ96(本発明の駆動源の一例、図4参照)の駆動軸が連結されている。CRモータ96の回転駆動力が駆動プーリ47に伝達されると、駆動プーリ47の回転によりベルト49が周運動する。なお、ベルト49は無端環状のもののほか、有端のベルトの両端部をキャリッジ38に固着するものも採用され得る。
【0035】
キャリッジ38は、その底面側においてベルト49に連結されている。これにより、ベルト49が周運動すると、キャリッジ38がガイドレール43、44上を左右方向9にスライドする。つまり、キャリッジ38は、CRモータ96からの駆動力によりスライドされる。上述したように記録ヘッド39はキャリッジ38に搭載されている。よって、記録ヘッド39が、左右方向9を主走査方向として往復動される。
【0036】
[リニアエンコーダ52]
図3に示されるように、ガイドレール44には、エンコーダストリップ50が配設されている。エンコーダストリップ50は、透明な樹脂からなる帯状のものである。ガイドレール44の左右方向9の両端には、ガイドレール44の上面から起立するように一対の支持用リブ33、34が形成されている。エンコーダストリップ50は、その両端部を支持用リブ33、34に係止されて、左右方向9に架設されている。
【0037】
エンコーダストリップ50には、光を透過させる透光部と光を遮断する遮光部とが、長手方向に等ピッチで交互に配置されたパターンが記されている。キャリッジ38の上面のエンコーダストリップ50に対応する位置には、透過型センサである光学センサ35が設けられている。エンコーダストリップ50と光学センサ35とによって、キャリッジ38の位置を検知するためのリニアエンコーダ52(本発明の検知部の一例)が構成される。光学センサ35によって検知された信号は、後述する制御部(不図示)に出力される。
【0038】
[メンテナンス機構51]
図3〜図5に示されるように、搬送路23において記録用紙が通過しない範囲、すなわち記録ヘッド39による画像記録領域の外側には、メンテナンス機構51が配置されている。メンテナンス機構51は、プラテン42の右端部に配置されている。メンテナンス機構51は、記録ヘッド39のノズル40内のインクの乾燥を防止したり、ノズル40から気泡や異物を吸引除去するものである。図5に示されるように、メンテナンス機構51は、主として、キャップ55(本発明のキャップの一例)と、第1フレーム56と、第2フレーム57と、スライドカム60とにより構成されている。本発明の移動機構は、第1フレーム56及びスライドカム60によって実現される。
【0039】
第1フレーム56は箱状に形成されており、スライドカム60に支持されている。スライドカム60は、その下面を複合機1に固定された第2フレーム57に支持されている。
【0040】
スライドカム60は、第1フレーム56の下面に当接されるガイド面を有する。ガイド面は、低位置の第1ガイド面111と、高位置の第2ガイド面112と、第1ガイド面及び第2ガイド面を繋ぐ傾斜面113とで構成されている。
【0041】
第1フレーム56は、第1ガイド面111、第2ガイド面112、及び傾斜面113に支持されながら、左右方向9にスライドされる。第1フレーム56は、左右方向9にスライドするとともに、傾斜面113に支持されることによって上下方向7に移動される。
【0042】
第1フレーム56には、底面から起立したレバー71が設けられている。レバー71は、第1フレーム56の右側面に設けられている。レバー71は、キャリッジ38のスライド範囲まで延出されており、その先端に、キャリッジ38がスライド中に当接される当接部72(本発明の当接部の一例)が設けられている。
【0043】
キャップ55は、キャリッジ38がメンテナンス機構51の直上に設定されたキャッピング位置(図5(A)に一点鎖線で示される位置)に移動された際に、記録ヘッド39のノズル40を覆うものである(図5(B)参照)。キャップ55は、第1フレーム56の底面に支持されている。本実施形態では、キャップ55は、その下部と第1フレーム56の底面との間に設けられたコイルバネ65により上下方向7へ弾性的に支持されている。
【0044】
[キャップ55の移動]
図5に示されるように、第1フレーム56が第1ガイド面111に支持されているとき、第1フレーム56に支持されたキャップ55は、記録ヘッド39から離間した第2位置(図5(A)参照、本発明の第2位置に相当)に位置される。第1フレーム56が第2ガイド面112に支持されているとき、第1フレーム56に支持されたキャップ55は記録ヘッド39に接触してノズル40を覆う第1位置(図5(B)参照、本発明の第1位置に相当)に位置される。つまり、キャップ55は第1位置及び第2位置に移動可能である。
【0045】
第1フレーム56の左側面56Aから、第1フレーム56の左側において第2フレーム57から突出された凸部57Aまでを架け渡すようにコイルバネ66(本発明の付勢部材の一例)が取り付けられている。コイルバネ66は、第1フレーム56が第2ガイド面112に支持されたとき、つまりキャップ55が第2位置に配置されたときに自然長となる(図5(A)参照)。一方、コイルバネ66は、第1フレーム56が第1ガイド面111に支持されたとき、つまりキャップ55が第1位置に配置されたときに伸張される(図5(B)参照)。つまり、コイルバネ66は、キャップ55が第1位置に配置された状態で、キャップ55を第2位置側へ弾性的に付勢する。
【0046】
図5(A)に示される状態において、キャリッジ38がメンテナンス機構51側、つまり右向きへ移動されて当接部72に当接すると、当接部72は、キャリッジ38によって右向きへ押圧される。当接部72が右向きへの押圧力を受けることにより、第1フレーム56は、コイルバネ66の弾性力に抗して、右向きにスライドされる。
【0047】
これにより、第1フレーム56は、ガイド面に沿って右向きに移動される。そして、第1フレーム56は、第1ガイド面111に支持された状態から、傾斜面113に支持された状態を介して、第2ガイド面112に支持された状態となる(図5(B)参照)。つまり、キャップ55は、第2位置から第1位置へ移動される。
【0048】
[右壁68及び左壁69]
図5及び図7に示されるように、複合機1に固定された第2フレーム57の右端には、右壁68(第1固定部材の一例)が形成されている。また、図7に示されるように、第2フレーム57の左端には左壁69(第2固定部材の一例)が形成されている。右壁68はプラテン42の右方に形成されており、左壁69はプラテン42の左方に形成されている。また、図5及び図7に示されるように、キャップ55を含むメンテナンス機構51は、右壁68に近接して配置されている。
【0049】
左向きにスライドするキャリッジ38は、左壁69と衝突する。一方、右向きにスライドするキャリッジ38は、以下に詳述するように、右壁68と衝突する。上述したように、キャリッジ38が当接部72を押しながら右向きにスライドすることによって、記録ヘッド39のノズル40がキャップ55に覆われる。キャリッジ38は、ノズル40がキャップ55に覆われた状態を維持しつつ、更に右向きに若干量(具体的には後述するロック棒74及び孔76の径の違いに相当する量であるd1(図5(B)参照)だけスライドされる。これにより、第1フレーム56のレバー71の右側の側壁71Aが右壁68と衝突する(図5(B)参照)。また、本実施形態においては、右壁68の上端部が左側に突出している。これにより、キャリッジ38の右側面が右壁68の突出した部分と衝突する。以上より、キャリッジ38は、右壁68及び左壁69の間を左右方向9にスライドする。
【0050】
なお、本実施形態においては、キャリッジ38及び第1フレーム56の双方が右壁68と衝突するが、図9(A)に示されるように、第1フレーム56のみが右壁68と衝突してもよい。また、図9(B)に示されるように、キャリッジ38のみが右壁68と衝突してもよい。つまり、本発明において、第1固定部材にキャリッジ38が衝突するとは、キャリッジ38が第1固定部材(右壁68)に直接衝突すること(キャリッジ38及び第1フレーム56の双方が第1固定部材に直接衝突することを含む。)に加えて、キャリッジ38が第1フレーム56などの他の部材を介して第1固定部材(右壁68)に衝突すること、つまり間接的に衝突することを含む。
【0051】
[ロック部材73]
図5に示されるように、第2フレーム57に、ロック棒74が設けられている。第2フレーム57の底面には、ロック棒74を上下動可能に支持するロック棒支持部75が設けられている。なお、図5では、ロック棒74及びロック棒支持部75の前後方向8の位置が、メンテナンス機構51と異なる位置であることを示すために、ロック棒74及びロック棒支持部75は破線で示されている。
【0052】
本実施形態において、ロック棒74は、搬送用モータ(不図示)から駆動力が伝達されることによって上下方向7に移動されて、ロック棒支持部75に収容された収容姿勢(本発明の第2姿勢の一例、図5(A)参照)及びロック棒支持部75から上側に突出された突出姿勢(本発明の第1姿勢の一例、図5(B)参照)に姿勢変化される。一方、ロック棒74は、搬送用モータから逆転の駆動力が伝達されることによって下向きに移動され、突出姿勢から収容姿勢に姿勢変化される。なお、ロック棒74は、搬送用モータ以外の駆動源、例えばロック棒74を上下させる専用のモータによって、上下動されてもよい。
【0053】
キャリッジ38の下面に、孔76が設けられている。孔76は、キャップ55がノズル40を覆っている状態、つまりキャリッジ38が右側へスライドされた状態において、ロック棒74及びロック棒支持部75と対向する位置に設けられている。
【0054】
キャップ55が記録ヘッド39に接触してノズル40を覆った状態において、搬送用モータからロック棒74に正転の駆動力が伝達される。これにより、ロック棒74が、上向きに移動されて収容姿勢から突出姿勢となり、孔76に挿入される。その結果、キャリッジ38のスライドがロックされる。一方、キャリッジ38のスライドがロックされた状態において、搬送用モータからロック棒74に逆転の駆動力が伝達される。これにより、ロック棒74が、下向きに移動されて突出姿勢から収容姿勢となり、孔76から脱抜される。その結果、キャリッジ38のスライドのロックが解除される。
【0055】
以上より、ロック棒74とロック棒支持部75と孔76とは、本発明のロック部材73の一例である。なお、ロック部材73は、キャリッジ38のスライドをロック可能であるならば、上述したような構成に限らない。
【0056】
[制御部]
制御部(不図示)は、基板に実装されたマイクロコンピュータや種々の電子部品により実現されている。制御部は、RAMやROMなどで構成された記憶部を備えている。制御部は、光学センサ35からの検知信号に基づいてキャリッジ38の位置を検知する。制御部は、検知されたキャリッジ38の位置の情報に基づいて、CRモータ96、給紙用モータ、及び搬送用モータなどを制御する。制御部が後述するフローチャートにしたがってキャリッジ38の原点位置の設定を制御することによって、本発明が実現される。
【0057】
[キャリッジ38の原点位置の設定]
複合機1の電源がONにされると、制御部は、キャリッジ38の原点位置の設定を行う。以下、図6〜図8を参照しながら、キャリッジ38の原点位置の設定が説明される。
【0058】
制御部は、複合機1の電源がONにされたときのキャリッジ38の位置によって、異なる処理を行う。そこで、以下の説明においては、複合機1の電源がONにされたときに、キャリッジ38がスライド範囲(右壁68及び左壁69の間)の両端部以外(本例では概ね中央部)に存在する場合(図7(A)参照)が第1の処理として説明され、キャリッジ38が上記スライド範囲の左端部に存在する場合(図8(A)参照)が第2の処理として説明され、キャリッジ38が上記スライド範囲の右端部に存在する場合(図8(C)参照)が第3の処理として説明される。
【0059】
なお、以下の説明において、キャリッジ38の位置及び移動距離の単位は、エンコーダストリップ50に記されたパターンのピッチであるエンコーダ(以下、encと記す。)である。そして、図7(A)に示されるように、キャリッジ38がスライド範囲の右端部に存在する場合のキャリッジ38の位置は100(enc)であり、キャリッジ38がスライド範囲の左端部に存在する場合のキャリッジ38の位置は2000(enc)である。つまり、キャリッジ38のスライド範囲は、100(enc)から2000(enc)の間の1900(enc)である。
【0060】
[第1の処理]
複合機1の電源がONにされると、制御部は、キャリッジ38の現在位置を、右壁68に当接する位置である100(enc)に設定する(S10)。つまり、図7(A)に示されるように、キャリッジ38の現実の位置は実線で示される1000(enc)の位置であるが、当該位置を電源のON時に検知できない制御部は、キャリッジ38が破線で示される位置(100(enc))に存在すると仮定する。
【0061】
制御部は、CRモータ96の駆動を制御して、キャリッジ38が左向きに第1距離(本発明の第1距離に相当)、例えば50(enc)の距離だけスライドするために必要な駆動力を、CRモータ96からキャリッジ38に付与させる(S20)。ステップS20の処理は、本発明の第3制御手段に相当する。そして、制御部は、当該付与により、キャリッジ38が第1距離をスライドされたか否かを判定する(S30)。第1の処理では、キャリッジ38はスライド範囲の概ね中央部に存在する。そのため、キャリッジ38は、図7(B)に示されるように、破線で示される位置から第1距離をスライドされて、実線で示される位置となる(S30:Yes)。
【0062】
制御部は、CRモータ96の駆動を制御して、2000(enc)だけ第1速度(本発明の第1速度に相当)でスライドするために必要な駆動力を、CRモータ96からキャリッジ38に付与させる(S40)。ステップS40の処理は、本発明の第1制御手段に相当する。つまり、本発明の第1制御手段は、本発明の第3制御手段によってキャリッジ38が第1距離をスライドされたことを条件として実行される。
【0063】
ここで、上記の2000(enc)の値は、キャリッジ38が左向きに左壁69に衝突可能な距離として設定されたものである。つまり、当該値は、キャリッジ38が左向きに左壁69に衝突可能であるならば、2000(enc)に限らず、例えば、3000(enc)や1900(enc)であってもよい。
【0064】
また、第1速度は、本実施形態において、キャリッジ38が出すことのできる最高速度に設定されている。キャリッジ38の最高速度は、複合機1に搭載されるキャリッジ38、CRモータ96、及びベルト駆動伝達機構46の性能によって決定される。なお、第1速度は、高速であることが好ましいが、キャリッジ38が出すことのできる最高速度に限らず、最高速度よりも低速であってもよい。
【0065】
第1の処理では、上記の第1距離が50(enc)である場合、ステップS40の開始時において、キャリッジ38は1050(enc)の位置である(図7(C)の破線参照)。よって、ステップS40における駆動力の付与によって、キャリッジ38は950(enc)のスライドで左壁69に衝突する(図7(C)の実線参照)。そして、以後、駆動力の付与にもかかわらず、キャリッジ38はスライドしない。つまり、キャリッジ38のスライド中においてはパターンを読み取ることによりパルス信号だった光学センサ35からの検知信号は、キャリッジ38がスライドしなくなることで一定値(HIGHレベルまたはLOWレベル)の信号となる。制御部は、当該検知信号が一定値となったことを検知することによって、キャリッジ38が左壁69に衝突して停止したことを検知する。そして、制御部は、ステップS40の終了時におけるキャリッジ38の位置を、左壁69に当接する位置(本発明の仮原点位置に相当)である2000(enc)の位置(本発明の仮原点位置の一例)に設定する(S50)。ステップS50の処理は、本発明の第1設定手段に相当する。
【0066】
制御部は、CRモータ96の駆動を制御して、キャリッジ38を、2000(enc)の位置(図7(D)の破線参照)から所定位置(図7(D)の実線参照)まで、右向きへ第2速度(本発明の第2速度に相当)でスライドさせる(S60)。
【0067】
ここで、第2速度は、本実施形態において、キャリッジ38が出すことのできる最高速度、つまり第1速度と同速度に設定されるが、最高速度よりも低速であってもよい。もちろん、第2速度は、第1速度と異なる速度であってもよい。
【0068】
また、所定位置は、キャリッジ38が当接部72と当接する第3位置(本発明の第3位置に相当)よりも所定距離だけ左側の位置である。所定距離は、キャリッジ38が第3位置に到達するまでに第2速度から第2速度よりも低速の第3速度(本発明の第3速度に相当)に減速可能な距離に設定される。つまり、キャリッジ38が急減速可能である程、所定距離は小さくなる。第3速度は、キャリッジ38が第1フレーム56を押すときに、ノズル40に形成されたメニスカスが破壊されない程度の低速に設定される。
【0069】
なお、第3位置は、メンテナンス機構51の配置位置によって決まる値である。また、仮原点位置も、左壁69の配置位置によって決まる値である。よって、仮原点位置から第3位置までの距離は、仮原点位置が設定されることによって特定される。
【0070】
制御部は、CRモータ96の駆動を制御して、所定位置に到達したキャリッジ38(図7(E)の破線参照)を減速させる(S70)。これにより、キャリッジ38は、第3位置に到達するまでに第3速度へ減速され、第3位置において第3速度で当接部72と当接する(S70、図7(E)の実線参照)。つまり、制御部は、キャリッジ38を、仮原点位置及び第3位置の間において第2速度でスライドさせ、第3位置において第3速度で当接部72と当接させる。
【0071】
本実施形態において、第2速度から第3速度への減速は、以下のようにして実行される。制御部は、第2速度でスライドされているキャリッジ38が所定位置に到達すると、キャリッジ38を減速させて停止させる。その後、制御部は、キャリッジ38を停止状態から再駆動させる。つまり、制御部は、キャリッジ38を一旦停止させ、その後、キャリッジ38を第3速度へ加速させる。なお、第2速度から第3速度への減速方法は、本実施形態における方法に限らず、例えば、制御部は、キャリッジ38を一旦停止させることなく、第2速度から第3速度へ減速させてもよい。
【0072】
制御部は、CRモータ96の駆動を制御して、キャリッジ38が第3位置から右壁68までスライドするために必要な駆動力を、CRモータ96からキャリッジ38に付与させる。また、制御部は、キャリッジ38の第3速度でのスライドを継続させる(S80)。その結果、第3位置において当接部72と当接したキャリッジ38は(図7(F)の破線参照)、当接部72と当接した状態を維持しつつ右壁68と衝突する(S90、図7(F)の実線参照)。換言すると、キャリッジ38は、当接部72を右側へ押しながら右壁68と衝突する。つまり、制御部は、キャリッジ38を、第3位置よりも右側において右向きへ第3速度でスライドさせて、右壁68に衝突させる。ステップS60〜S90の処理は、本発明の第2制御手段に相当する。
【0073】
なお、上述したように、当接部72がキャリッジ38に押されると、キャップ55が第2位置から第1位置に移動され、ノズル40がキャップ55に覆われる(図5参照)。
【0074】
ステップS80において、キャリッジ38が第3位置から右壁68までスライドするために必要な駆動力がキャリッジ38に付与されている。よって、ステップS50での説明と同様に、キャリッジ38のスライド中においてはパルス信号だった光学センサ35からの検知信号は、キャリッジ38がスライドしなくなることで一定値の信号となる。制御部は、当該検知信号が一定値となったことを検知することによって、キャリッジ38が右壁68に衝突して停止したことを検知する。そして、制御部は、ステップS90の終了時におけるキャリッジ38の位置を、右壁68に当接する位置(本発明の原点位置に相当)である100(enc)の位置(本発明の原点位置の一例)に設定する(S100)。ステップS100の処理は、本発明の第2設定手段に相当する。
【0075】
[第2の処理]
第2の処理では、図8(A)に示されるように、複合機1の電源がONにされたとき、キャリッジ38が上記スライド範囲の左端部に存在する。よって、キャリッジ38は、ステップS20において左向きへスライドするための駆動力を付与されても、左壁69に阻まれるため、左向きへ第1距離をスライドされない(S30:No)。
【0076】
そこで、制御部は、CRモータ96の駆動を制御して、キャリッジ38が右向きに第2距離(本発明の第2距離に相当)、例えば50(enc)の距離だけスライドするために必要な駆動力を、CRモータ96からキャリッジ38に付与させる(S110)。ステップS110の処理は、本発明の第5制御手段に相当する。そして、制御部は、当該付与により、キャリッジ38が第2距離をスライドされたか否かを判定する(S120)。第2の処理では、キャリッジ38はスライド範囲の左端部に存在する。そのため、キャリッジ38は、図8(B)に示されるように、破線で示される位置から第2距離をスライドされて、実線で示される位置となる(S120:Yes)。
【0077】
ステップS120においてキャリッジ38が第2距離をスライドされたことを条件として、ステップS40以降の処理、つまり本発明の第1制御手段、第1設定手段、第2制御手段、及び第2設定手段が実行される。ここで、第1の処理の場合のステップS40では、キャリッジ38が左向きに左壁69に衝突可能な距離として2000(enc)が設定された。しかし、第2の処理では、キャリッジ38が第1の処理の場合よりも左壁69に近い位置であるため、キャリッジ38が左向きに左壁69に衝突可能な距離として、2000(enc)よりも小さい距離が設定されてもよい。
【0078】
[第3の処理]
第3の処理では、キャリッジ38が上記スライド範囲の右端部に存在する。このとき、ロック棒74が突出姿勢であると、キャリッジ38は、原則として、スライド不可能である。但し、例外として、キャリッジ38は、ロック棒74と孔76との径の違いに相当する量d1(図5(B)参照)のみスライド可能である。第3の処理では、ロック棒74が突出姿勢である場合が説明される。なお、図7及び図8のうちの図8(C)以外においては、ロック部材73が省略されている。
【0079】
第3の処理では、図8(C)に示されるように、複合機1の電源がONにされたとき、キャリッジ38は、ロック棒74によってロックされており、原則としてスライド不可能である。そのため、キャリッジ38は、ステップS30において左向きへ第1距離をスライドされず(S30:No)、且つステップS120において右向きへ第2距離をスライドされない(S120:No)。
【0080】
そこで、制御部は、CRモータ96を制御して、キャリッジ38が右向きへ右壁68に衝突可能な距離だけスライドするために必要な駆動力を、CRモータ96からキャリッジ38に付与させる(S130)。ステップS130の処理は、本発明の第6制御手段に相当する。これにより、キャリッジ38は、上記の量d1(図5(B)参照)のみスライドされ、右壁68に衝突する。なお、第3の処理においてキャリッジ38は上記の量d1のスライドによって右壁68に衝突可能であるため、キャリッジ38が右向きへ右壁68に衝突可能な距離としてステップS130で設定される距離は、小さい距離に設定される。
【0081】
ステップS130の後、ステップS100が実行される。つまり、第3の処理では、本発明の第2設定手段は、本発明の第6制御手段によってキャリッジ38が右壁68に衝突した位置をリニアエンコーダ52に検知させて、キャリッジ38の原点位置に設定する。
【0082】
[実施形態の効果]
本実施形態によれば、キャリッジ38は、第1制御手段によってキャップ55が存在しない左壁69側へ移動される。第1設定手段は、キャリッジ38が左壁69に衝突した位置を仮原点位置に設定する。仮原点位置によってキャリッジ38と当接部72とが当接する第3位置の特定が可能である。そして、第2制御手段は、キャリッジ38が第3位置の若干手前に到達するまでの間、キャリッジ38を高速(第2速度)で移動させる。つまり、第2制御手段が仮原点位置及び第3位置の間において右向きへ第2速度でキャリッジ38をスライドさせることには、第2制御手段が、当該間の全位置においてキャリッジ38を第2速度でスライドさせることに加えて、上述した第3位置の若干手前でキャリッジ38を減速させる場合のように、当該間の一部の位置においてキャリッジ38を第2速度でスライドさせることも含む。以上より、キャリッジ38の原点位置の設定に要する時間が長くなるのを極力抑えることができる。
【0083】
また、第2制御手段は、第3位置の若干手前からキャリッジ38を減速させて、キャリッジ38を低速(第3速度)で当接部72に当接させる。これにより、キャップ55の第1位置から第2位置への移動によって当接部72を介してノズル40に伝わる上向きの力を、小さくすることができる。なお、第2速度は、第1速度と等しい速度であってもよいし、第1速度と異なる速度であってもよい。以上より、本実施形態によれば、キャリッジ38の原点位置の設定に要する時間が長くなるのを極力抑えつつ、ノズル40に形成されたメニスカスの破壊を防止することができる。
【0084】
また、本実施形態においては、原点位置の設定開始時のキャリッジ38が左壁69に当接されている場合、キャリッジ38は第3制御手段の制御によって駆動力を付与されてもスライドされない。つまり、第3制御手段は、ロック部材73によるロックによってキャリッジ38がスライドされないのか、左壁69に当接されているためにキャリッジ38がスライドされないのかを判断できない。
【0085】
そこで、本実施形態においては、第5制御手段がキャリッジ38の右向きへの第2距離のスライドを試みる。そして、キャリッジ38が第2距離をスライドされたか否かによって、キャリッジ38が左壁69に当接されているか否かが判断される。そして、当該判断に基づいて、キャリッジ38は右向きまたは左向きに移動され、仮原点位置及び原点位置が設定される。以上より、本実施形態によれば、キャリッジ38の当初位置が左壁69に当接された位置であっても、キャリッジ38の原点位置の設定を行うことができる。
【0086】
また、本実施形態によれば、第1速度または第2速度の少なくとも一方がキャリッジ38の最高速度に設定されることにより、キャリッジ38の原点位置の設定に要する時間を短くすることができる。
【0087】
また、本実施形態によれば、第2制御手段は、第2速度でスライドされているキャリッジ38を一旦停止させてから、第3速度でスライドさせる。よって、CRモータ96が、キャリッジ38の速度を細かく設定できないような安価なモータであっても、キャリッジ38を複数の速度で正確にスライドさせることができる。
【0088】
[変形例1]
上述の実施形態の図6において、ステップS110、S120が実行されなくてもよい。つまり、ステップS30において、キャリッジ38が左向きへ第1距離をスライドされなかったことを条件として(S30:No)、制御部は、CRモータ96を制御して、キャリッジ38が右向きへ右壁38に衝突可能な距離だけスライドするために必要な駆動力を、CRモータ96からキャリッジ38に付与させてもよい(S130)。変形例1の場合のステップS130の処理は、本発明の第4制御手段に相当する。
【0089】
変形例1の場合も、上述の実施形態の場合と同様に、ステップS130の後、ステップS100が実行される。つまり、変形例1において、本発明の第2設定手段は、本発明の第4制御手段によってキャリッジ38が右壁68に衝突した位置をリニアエンコーダ52に検知させて、キャリッジ38の原点位置に設定する。
【0090】
キャリッジ38がロック部材73によってロックされている場合、キャリッジ38は第1制御手段の制御によって駆動力を付与されてもスライドされない。そこで、変形例1においては、第3制御手段がキャリッジ38の左向きへの第1距離のスライドを試みる。そして、キャリッジ38が第1距離をスライドされたか否かによって、キャリッジ38がロック部材73によってロックされているか否かが判断される。そして、当該判断に基づいて、キャリッジ38は右向きまたは左向きに移動され、仮原点位置及び原点位置が設定される。以上より、変形例1によれば、複合機1のプリンタ部2の構成が、キャリッジ38がロック部材73によってロックされ得る構成であっても、キャリッジ38の原点位置の設定を行うことができる。
【0091】
[変形例2]
上述の実施形態では、キャップ55はスライドカム60によって第1位置及び第2位置に移動可能に構成されていたが、キャップ55はスライドカム60以外によって第1位置及び第2位置に移動可能に構成されていてもよい。
【0092】
例えば、図10に示されるように、第1フレーム56は、4つの脚部80(図10には2つのみ記されている。)で構成されている。各脚部80の両端に軸が設けられている。一方の端部の軸81が第2フレーム57に回動自在に取り付けられており、他方の端部の軸82が、第1フレーム56に回動自在に取り付けられている。これにより、第1フレーム56及びキャップ55は、第2フレーム57の底面に近接して、第2フレーム57の底面に対する脚部67の角度θが最も小さくなる第2位置と、第2フレーム57の底面から離間して、上記角度θが最も大きくなる第1位置との間を移動可能となる。
【0093】
[変形例3]
上述の実施形態において、制御部は、キャリッジ38を、第3位置よりも右側において右向きへ第3速度でスライドさせて、右壁68に衝突させていた。しかし、制御部は、キャリッジ38を、第3位置よりも右側において、キャップ55が第2位置から第1位置に移動されるまでの間、右向きへ第3速度でスライドさせ、キャップ55が第1位置に移動されて以降、右向きへ第4速度(本発明の第4速度に相当)でスライドさせてもよい。この場合、キャリッジ38は、第4速度で右壁68と衝突する。ここで、第4速度は、第3速度よりも高速、例えば第1速度や第2速度と同速度に設定される。
【0094】
例えば、メンテナンス機構51が図5に示される構成の場合、第1フレーム56が傾斜面113に支持されている状態のとき、制御部は、キャリッジ38を第3速度でスライドさせるが、第1フレーム56が第2ガイド面112に支持されている状態のとき、制御部は、キャリッジ38を第4速度でスライドさせる。詳細には、制御部は、キャリッジ38が傾斜面113に支持された状態から第2ガイド面112に支持された状態へ遷移するよりも前において、キャリッジ38の第3速度から第4速度への加速を開始させる。或いは、制御部は、キャリッジ38が第2ガイド面112に支持された状態となった瞬間に、キャリッジ38の第3速度から第4速度への加速を開始させてもよい。
【0095】
キャップ55が第2位置から第1位置に移動されると、キャリッジ38は、第1フレーム56及びキャップ55から上向きに力を受けない。よって、記録ヘッド39のノズル40に形成されたメニスカスが破壊されるおそれがない。変形例3において、制御部は、メニスカスが破壊されるおそれがない状態においては、キャリッジ38を高速でスライドさせる。これにより、キャリッジ38の原点位置の設定に要する時間が長くなるのを極力抑えることができる。
【符号の説明】
【0096】
1・・・複合機
2・・・プリンタ部
38・・・キャリッジ
39・・・記録ヘッド
52・・・リニアエンコーダ
55・・・キャップ
56・・・第1フレーム
60・・・スライドカム
66・・・コイルバネ
68・・・右壁
69・・・左壁
【特許請求の範囲】
【請求項1】
インク滴が吐出されるノズルを有する記録ヘッドと、
駆動源と、
上記記録ヘッドが搭載され、上記駆動源からの駆動力により第1向き及び上記第1向きと反対向きの第2向きへスライド可能なキャリッジと、
当該装置に固定されており、上記第1向きにスライドする上記キャリッジが衝突する第1固定部材と、
当該装置に固定されており、上記第2向きにスライドする上記キャリッジが衝突する第2固定部材と、
上記キャリッジの位置を検知する検知部と、
上記第1固定部材に近接して配置されており、上記記録ヘッドに接触して上記ノズルを覆う第1位置、及び上記記録ヘッドから離間した第2位置に移動可能なキャップと、
上記キャップを上記第2位置側へ付勢する付勢部材と、
上記キャリッジが当接して上記第1向きへ押圧される当接部を有し、上記キャリッジが上記当接部に当接したときの押圧力を受けることにより、上記キャップを上記第2位置から上記第1位置に移動させる移動機構と、
上記キャリッジが上記第2向きへ上記第2固定部材に衝突可能な距離だけ第1速度でスライドするために必要な駆動力を、上記駆動源から上記キャリッジに付与させる第1制御手段と、
上記第1制御手段によって上記キャリッジが上記第2固定部材に衝突した位置を上記検知部に検知させて、上記キャリッジの仮原点位置に設定する第1設定手段と、
上記駆動源の駆動を制御して、上記第1制御手段によってスライドされた上記キャリッジを、上記仮原点位置及び上記仮原点位置によって特定される位置であって上記キャリッジが上記当接部と当接する第3位置の間において上記第1向きへ第2速度でスライドさせ、上記第3位置において上記第2速度よりも低速の第3速度で上記当接部と当接させ、上記第3位置よりも上記第1向き側において上記第1向きへ上記第3速度でスライドさせて、上記第1固定部材に衝突させる第2制御手段と、
上記第2制御手段によって上記キャリッジが上記第1固定部材に衝突した位置を上記検知部に検知させて、上記キャリッジの原点位置に設定する第2設定手段と、を備えるインクジェット記録装置。
【請求項2】
上記キャップが上記記録ヘッドに接触して上記ノズルを覆った状態において上記キャリッジのスライドをロック可能な第1姿勢、及び当該ロックが解除された第2姿勢に姿勢変化可能なロック部材と、
上記キャリッジが上記第2向きへ第1距離だけスライドするために必要な駆動力を、上記駆動源から上記キャリッジに付与させる第3制御手段と、
上記第3制御手段によって上記キャリッジが上記第1距離をスライドされなかったことを条件として、上記キャリッジが上記第1向きへ上記第1固定部材に衝突可能な距離だけスライドするために必要な駆動力を、上記駆動源から上記キャリッジに付与させる第4制御手段と、を更に備え、
上記第1制御手段は、上記第3制御手段によって上記キャリッジが上記第1距離をスライドされたことを条件として実行され、
上記第2設定手段は、上記第4制御手段によって上記キャリッジが上記第1固定部材に衝突した位置を上記検知部に検知させて、上記キャリッジの原点位置に設定する請求項1に記載のインクジェット記録装置。
【請求項3】
上記キャップが上記記録ヘッドに接触して上記ノズルを覆った状態において上記キャリッジのスライドをロック可能な第1姿勢、及び当該ロックが解除された第2姿勢に姿勢変化可能なロック部材と、
上記キャリッジが上記第2向きへ第1距離だけスライドするために必要な駆動力を、上記駆動源から上記キャリッジに付与させる第3制御手段と、
上記第3制御手段によって上記キャリッジが上記第1距離をスライドされなかったことを条件として、上記キャリッジが上記第1向きへ第2距離だけスライドするために必要な駆動力を、上記駆動源から上記キャリッジに付与させる第5制御手段と、
上記第5制御手段によって上記キャリッジが上記第2距離をスライドされなかったことを条件として、上記キャリッジが上記第1向きへ上記第1固定部材に衝突可能な距離だけスライドするために必要な駆動力を、上記駆動源から上記キャリッジに付与させる第6制御手段と、を更に備え、
上記第1制御手段は、上記第3制御手段によって上記キャリッジが上記第1距離をスライドされたこと、または上記第5制御手段によって上記キャリッジが上記第2距離をスライドされたことを条件として実行され、
上記第2設定手段は、上記第6制御手段によって上記キャリッジが上記第1固定部材に衝突した位置を上記検知部に検知させて、上記キャリッジの原点位置に設定する請求項1に記載のインクジェット記録装置。
【請求項4】
上記第1速度または上記第2速度の少なくとも一方は、上記駆動源からの駆動力によってスライドされる上記キャリッジの最高速度である請求項1から3のいずれかに記載のインクジェット記録装置。
【請求項5】
上記第2制御手段は、上記第2速度でスライドされている上記キャリッジを一旦停止させてから、上記第3速度でスライドさせる請求項1から4のいずれかに記載のインクジェット記録装置。
【請求項6】
上記第2制御手段は、上記第3位置よりも上記第1向き側において、上記キャップが上記第2位置から上記第1位置に移動されたことを条件として、上記キャリッジを上記第1向きへ上記第3速度よりも高速の第4速度でスライドさせて、上記第1固定部材に衝突させる請求項1から5のいずれかに記載のインクジェット記録装置。
【請求項1】
インク滴が吐出されるノズルを有する記録ヘッドと、
駆動源と、
上記記録ヘッドが搭載され、上記駆動源からの駆動力により第1向き及び上記第1向きと反対向きの第2向きへスライド可能なキャリッジと、
当該装置に固定されており、上記第1向きにスライドする上記キャリッジが衝突する第1固定部材と、
当該装置に固定されており、上記第2向きにスライドする上記キャリッジが衝突する第2固定部材と、
上記キャリッジの位置を検知する検知部と、
上記第1固定部材に近接して配置されており、上記記録ヘッドに接触して上記ノズルを覆う第1位置、及び上記記録ヘッドから離間した第2位置に移動可能なキャップと、
上記キャップを上記第2位置側へ付勢する付勢部材と、
上記キャリッジが当接して上記第1向きへ押圧される当接部を有し、上記キャリッジが上記当接部に当接したときの押圧力を受けることにより、上記キャップを上記第2位置から上記第1位置に移動させる移動機構と、
上記キャリッジが上記第2向きへ上記第2固定部材に衝突可能な距離だけ第1速度でスライドするために必要な駆動力を、上記駆動源から上記キャリッジに付与させる第1制御手段と、
上記第1制御手段によって上記キャリッジが上記第2固定部材に衝突した位置を上記検知部に検知させて、上記キャリッジの仮原点位置に設定する第1設定手段と、
上記駆動源の駆動を制御して、上記第1制御手段によってスライドされた上記キャリッジを、上記仮原点位置及び上記仮原点位置によって特定される位置であって上記キャリッジが上記当接部と当接する第3位置の間において上記第1向きへ第2速度でスライドさせ、上記第3位置において上記第2速度よりも低速の第3速度で上記当接部と当接させ、上記第3位置よりも上記第1向き側において上記第1向きへ上記第3速度でスライドさせて、上記第1固定部材に衝突させる第2制御手段と、
上記第2制御手段によって上記キャリッジが上記第1固定部材に衝突した位置を上記検知部に検知させて、上記キャリッジの原点位置に設定する第2設定手段と、を備えるインクジェット記録装置。
【請求項2】
上記キャップが上記記録ヘッドに接触して上記ノズルを覆った状態において上記キャリッジのスライドをロック可能な第1姿勢、及び当該ロックが解除された第2姿勢に姿勢変化可能なロック部材と、
上記キャリッジが上記第2向きへ第1距離だけスライドするために必要な駆動力を、上記駆動源から上記キャリッジに付与させる第3制御手段と、
上記第3制御手段によって上記キャリッジが上記第1距離をスライドされなかったことを条件として、上記キャリッジが上記第1向きへ上記第1固定部材に衝突可能な距離だけスライドするために必要な駆動力を、上記駆動源から上記キャリッジに付与させる第4制御手段と、を更に備え、
上記第1制御手段は、上記第3制御手段によって上記キャリッジが上記第1距離をスライドされたことを条件として実行され、
上記第2設定手段は、上記第4制御手段によって上記キャリッジが上記第1固定部材に衝突した位置を上記検知部に検知させて、上記キャリッジの原点位置に設定する請求項1に記載のインクジェット記録装置。
【請求項3】
上記キャップが上記記録ヘッドに接触して上記ノズルを覆った状態において上記キャリッジのスライドをロック可能な第1姿勢、及び当該ロックが解除された第2姿勢に姿勢変化可能なロック部材と、
上記キャリッジが上記第2向きへ第1距離だけスライドするために必要な駆動力を、上記駆動源から上記キャリッジに付与させる第3制御手段と、
上記第3制御手段によって上記キャリッジが上記第1距離をスライドされなかったことを条件として、上記キャリッジが上記第1向きへ第2距離だけスライドするために必要な駆動力を、上記駆動源から上記キャリッジに付与させる第5制御手段と、
上記第5制御手段によって上記キャリッジが上記第2距離をスライドされなかったことを条件として、上記キャリッジが上記第1向きへ上記第1固定部材に衝突可能な距離だけスライドするために必要な駆動力を、上記駆動源から上記キャリッジに付与させる第6制御手段と、を更に備え、
上記第1制御手段は、上記第3制御手段によって上記キャリッジが上記第1距離をスライドされたこと、または上記第5制御手段によって上記キャリッジが上記第2距離をスライドされたことを条件として実行され、
上記第2設定手段は、上記第6制御手段によって上記キャリッジが上記第1固定部材に衝突した位置を上記検知部に検知させて、上記キャリッジの原点位置に設定する請求項1に記載のインクジェット記録装置。
【請求項4】
上記第1速度または上記第2速度の少なくとも一方は、上記駆動源からの駆動力によってスライドされる上記キャリッジの最高速度である請求項1から3のいずれかに記載のインクジェット記録装置。
【請求項5】
上記第2制御手段は、上記第2速度でスライドされている上記キャリッジを一旦停止させてから、上記第3速度でスライドさせる請求項1から4のいずれかに記載のインクジェット記録装置。
【請求項6】
上記第2制御手段は、上記第3位置よりも上記第1向き側において、上記キャップが上記第2位置から上記第1位置に移動されたことを条件として、上記キャリッジを上記第1向きへ上記第3速度よりも高速の第4速度でスライドさせて、上記第1固定部材に衝突させる請求項1から5のいずれかに記載のインクジェット記録装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−10230(P2013−10230A)
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願番号】特願2011−143683(P2011−143683)
【出願日】平成23年6月29日(2011.6.29)
【出願人】(000005267)ブラザー工業株式会社 (13,856)
【Fターム(参考)】
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願日】平成23年6月29日(2011.6.29)
【出願人】(000005267)ブラザー工業株式会社 (13,856)
【Fターム(参考)】
[ Back to top ]