
インサイチュ式フロー検証及び較正システム及び方法
フロー制御装置のインサイチュ検証及び較正のためのシステム及び方法であって、フロー制御装置をフロー検証装置に接続する第1のネットワーク物理層を含む。フロー検証装置のコントローラは、第1のネットワーク物理層を通じてフロー制御装置のそれぞれと通信し、気体に特有の情報と伝達関数とをそれぞれのフロー制御装置から受け取り、それぞれのフロー制御装置のフローを検証するようにプログラムされている。フロー検証装置のコントローラは、更に、第1のネットワーク物理層を通じてフロー制御装置のそれぞれと通信し、必要であれば、フロー制御装置を較正する。フロー制御装置の検証及び較正は、好ましくは、フロー制御装置に接続された第2のネットワーク物理層に接続されたツール・コントローラを介して提供された単一のコマンドに基づいて実行される。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、広くは半導体処理装置に関し、更に詳しくは、汚染がなく正確に計測された量の処理及びパージ・ガスを半導体処理チャンバまで搬送するシステム及び方法に関する。更により詳しくは、本発明は、流量コントローラ装置のインサイチュ検認及び較正のためのシステム及び方法に関する。
【背景技術】
【0002】
ひとつの半導体デバイスの製造には、多くは1ダースほどの気体を処理チャンバまで注意深く同期させ正確に測定して搬送することが必要になりうる。製造プロセスでは様々な方法が用いられ、半導体デバイスが洗浄、研磨、酸化、マスキング、エッチング、ドーピング、メタライゼーションなど、多くの別々の処理ステップが必要となりうる。用いられるステップ、それらのステップの特定のシーケンス、そして用いられる材料がすべて、特定のデバイスの製造に貢献する。
【0003】
従って、ウエハ製造設備が作られるときは、化学的蒸着、プラズマ蒸着、プラズマ・エッチング、スパッタリング及びそれ以外の類似の気体製造プロセスが行われるエリアを含むように作られるのが通常である。処理用のツールは、化学的蒸着の反応装置でも、真空スパッタリング・マシンでも、プラズマ・エッチング装置でも、プラズマ・エンハンス化学的蒸着装置でも、様々なプロセス・ガスが供給されなければならない。純粋な気体が、汚染なく正確に計量された量で、これらのツールに供給されなければならない。
【0004】
典型的なウエハ製造工場では、気体はタンクに貯蔵され、このタンクは、パイピングやコンジットを経由して気体箱に接続される。気体箱は、汚染のなく正確に計量された量の純粋な不活性気体又は反応性の気体を、製造工場のタンクからプロセス・ツールに搬送する。気体箱又は気体計測システムは、弁などの気体計量ユニットを有する複数の気体経路と、圧力レギュレータ及びトランスデューサと、質量流量コントローラと、フィルタ/ピュリファイアとを含む。それぞれの気体経路は、別個の気体源に接続するためのそれ自身のインレットを有しており、すべての気体経路は、処理ツールに接続するための気体マニフォルドなどのただ1つのアウトレットに収束する。
【0005】
例えば質量流量コントローラの精度を試験したり較正したりする場合など、測定された量の気体を搬送する際には、気体の搬送に用いる気体搬送システムにおける気体流量の状態の正確な測定値を得ることができるのが望ましいし、多くの場合必要である。これを達成する方法のひとつに、容積が機知のチャンバの中にある気体の温度と圧力との変化率を測定し、これらの測定された値から質量流量を計算する、という方法がある。このいわゆる「圧力上昇率」又は「上昇率(ROR)」法によると、気体フローは、質量流量計などの被験装置(DUT)を通過して、真空化され体積が較正されたチャンバの中へ、測定された時間間隔Δtの間、導かれる。チャンバの中での気体の圧力変化率(ΔP)と温度変化率(ΔT)が測定され、標準温度(T0)と標準圧力(P0)に訂正される。ここで用いられる「標準」という用語は、273.15Kの「絶対」温度及び1気圧の「絶対」圧力として通常定義された「標準状態」を意味する。気体流率は、既知の体積における圧力の時間変化率(ΔP/Δt)と温度の時間変化率(ΔT/Δt)とから計算することができる。
【0006】
多くの気体搬送システムは、実質的に理想気体として振る舞う気体を用いる。換言すると、そのような気体の振る舞いは、PV=nRTとして表現される理想気体法則によって正確な予言が可能であり、その法則に従って正確なモデル化が可能である。ただし、Pは圧力、Vは体積、nは気体のモル数、Rは普遍気体定数、Tは絶対温度である。固定された体積の中にあるほぼ理想的な気体の時間経過に伴う圧力変化と温度変化との関係は、気体とは関係なく一定である。従って、この理想気体法則の関係は、nすなわちチャンバの中の気体のモル数である質量を決定するのに用いることができる。気体が理想気体とは異なる振る舞いをするような状況では、補正関数を用いて、圧力及び温度の時間変化の測定値をより正確にすることができる。
【0007】
フローを検証するのにROR法を用いる装置もある。例えば、本発明の譲受人に譲渡されているHinkleへの米国特許第5,684,245号には、ROR法を用いた気体搬送システムにおいて気体の質量流量を測定する装置及び方法を開示し、権利請求している。本発明の譲受人である米国マサチューセッツ州アンドーバ(Andover)所在のMKSインスツルメント社もまた、Tru-FloTMインサイチュ質量流量検証装置、GBRORTM(気体箱上昇率)インサイチュ質量流量検証装置など、RORフロー検証装置を提供している。
【0008】
依然として望まれるのは、気体計量システムにおけるフロー制御装置を検証し較正する新規で改良されたシステム及び方法である。好ましくは、この新規で改良されたシステム及び方法は、RORフロー検証装置を用いる。更に、この新規で改良されたシステム及び方法では、フロー制御装置のインサイチュ式の検証及び較正を提供する際に、その検証及び較正のためにフロー制御装置を気体計量システムから取り外すことを要しないのが好ましい。
【発明の開示】
【0009】
本発明の実施例は、フロー制御装置をフロー検証装置に接続する第1のネットワーク物理層を含むフロー制御装置のインサイチュ検証及び較正のためのシステム及び方法を提供する。フロー検証装置のコントローラは、第1のネットワーク物理層を通じてフロー制御装置のそれぞれと通信し、気体に特有の情報と伝達関数とをそれぞれのフロー制御装置から受け取り、それぞれのフロー制御装置のフローを検証するようにプログラムされている。フロー検証装置のコントローラは、更に、第1のネットワーク物理層を通じてフロー制御装置のそれぞれと通信し、必要であれば、フロー制御装置を較正するようにプログラムされている。フロー制御装置の検証及び較正は、好ましくは、フロー制御装置に接続された第2のネットワーク物理層に接続されたツール・コントローラを介して提供された単一のコマンドに基づいて実行される。
【0010】
本発明のこれらの及びそれ以外の特徴及び効果は、添付の図面に図解されている公的実施例に関する以下の詳細な説明を読めば、この技術分野の当業者にはより明らかになるはずである。
【発明を実施するための最良の形態】
【0011】
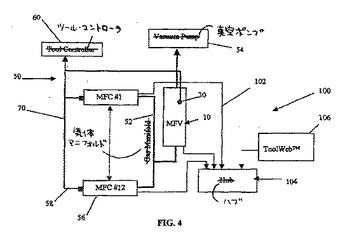
図4を参照すると、この開示には、質量流量コントローラ(MFC)などの被験装置(DUT)を通過する流体フローのインサイチュ検証及び較正のためのシステム100及び方法が提供されている。システム100及び方法は、特に、汚染がなく正確に計量されたプロセス及びパージ気体を半導体プロセス・チャンバまで搬送するための気体計量システムと共に用いられるためのものである。ある実施例では、この新規で改良されたシステム100及び方法は、上昇率(ROR)流量検証計を用いる。この新規で改良されたシステム100及び方法は、MFCのインサイチュ検証及び較正を提供するのであるが、この検証及び較正はMFCを気体計量システムから取り外すことを必要としないのである。
【0012】
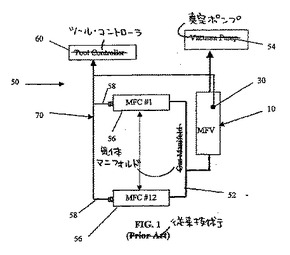
最初に図1及び図2を参照すると、従来技術によるフロー検証デバイス10が示されている。図1では、フロー検証デバイス10は、気体マニフォルド52と気体計量システム50の真空ポンプ54との間に接続されているのが示されている。気体計量システム50は、また、気体マニフォルド52に接続されたライン58を通過する気体フローを制御する複数の質量流量コントローラ(MFC)56を含む。図1の実施例では、システム50は、気体マニフォルド52に接続されMFC56を有する12のライン58を含む。しかし、システム50は、希望に応じて、12よりも多い又は少ないライン58を含むことができる。
【0013】
必要ではないのであるが、好ましくは、MFC56は、それぞれが、米国マサチューセッツ州アンドーバー(Andover)所在のMKSインスツルメンツ社(http://www.mksinst.com)から入手可能な圧力不感知型のMFC(PiMFC)を含む。PiMFCは、機能及び性能上の技術的改良を含み、半導体及び高純度の薄膜への応用分野でのユーザがツールのスループットを向上させシステム全体のコストを縮小させることを助ける。特に、PiMFCは、高度な物理的設計とデジタル制御アルゴリズムとを通じて、上流及び下流への圧力の混乱に不感知性であるリアルタイムの正確なフロー制御を提供する。PiMFCによると、プロセス気体フローのリアルタイム制御が可能になり、精度及び反復可能性が従来型のデジタル・ベースのMFCと比較して著しく改善され、結果としてよりよいチャンバ・マッチングを生じさせる。圧力不感知型の質量流量コントローラは、また、同時継続中の”Apparatus and Method for Pressure Fluctuation Insensitive Mass Flow Control”と題する2002年6月4日に出願され本発明の譲受人に譲渡されている米国特許出願第10/178,721号にも開示がある。この米国出願は、この出願において援用する。
【0014】
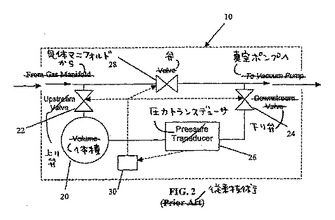
フロー検証装置10は、MFCによって生じる流率を検証するのに用いられる。図2に示されているように、装置10は、所定の体積を有する容器20と、気体マニフォルドと容器20との間のフローを制御する「上り(アップストリーム)」すなわち第1の弁22と、容器から真空ポンプ14へのフローを制御する「下り(ダウンストリーム)」すなわち第2の弁24と、容器20の体積と通信する容器圧力測定装置26とを含む。装置10は、更に、バイパス弁28も含む。
【0015】
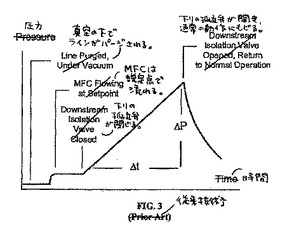
フロー検証装置10のコントローラ30は、フロー検証の上昇率法を用いるが、この方法は、縦軸が圧力(P)を示し横軸が時間(t)を示す図3に図解されている。一般に、コントローラ30は、電子メモリとクロックとを含むコンピュータ・プロセッサである。コントローラ30は、動作の際には、最初にバイパス弁28を閉じ第1及び第2の弁22、24を開いてフローがMFC12からバイパスされ容器20を通過するようにプログラムされているのが一般的である。更に、コントローラ30は、バイパスされたフローを安定化させる初期期間の後では、第2の弁24を閉じて容器20からのフローを停止させるようにプログラムされる。閉じられた容器20にMFC12からの気体が満ちるにつれて、コントローラ30は、圧力測定装置26からの容器圧力の測定値を受け取り、気体フローに起因する容器圧力の変化率を決定する。次に、コントローラは、容器圧力の変化率と容器20の既知の体積とを用いて、MFC12によって提供された実際のフローを決定する。図3のグラフは、容器20の既知の体積の中における圧力の時間変化率(ΔP/Δt)からどのようにしてコントローラ30が気体流率を計算することができるのかを示している。
【0016】
フローの測定がなされた後で、図2に示されている第1の弁22は閉じられ、第2の弁24が開かれて、真空ポンプ14を用いて容器20が真空化される。真空化の後で、第2の弁24が閉じられ、バイパス弁28が開かれて、MFC12とプロセス・チャンバ18との間の正常なフローが許容されることになる。
【0017】
フロー検証装置10は、例えば、米国マサチューセッツ州アンドーバー(Andover)所在のMKSインスツルメンツ社(http://www.mksinst.com)から入手可能なGBRORTMインサイチュ・フロー検証装置又はTru-FloTMインサイチュ・フロー検証装置を含みうる。GBRORTMは、モジュラ気体経路又はスティックであり、弁と、圧力容器と、圧力トランスデューサと、マニフォルドの上に搭載されたコントローラとを含む。GBRORTM及びTru-FloTMの両方のフロー検証装置は、共に、プロセス透過的である。すなわち、気体搬送システムの通常の処理ステップの間に動作し、よって、処理ツールのダウン時間を短縮する。圧力測定装置26は、例えば、やはりMKSインスツルメント社から入手可能なバラトロン(Baratron)(登録商標)ブランドの圧力トランスデューサを含むことがあり得る。
【0018】
図1を参照すると、MFC12のコンピュータ・コントローラ(図示せず)とフロー検証装置10のコンピュータ・コントローラ30とは、ネットワーク物理層70を介してツール・コントロール60に接続されている。ある実施例では、このネットワーク物理層は、デバイスネット(DeviceNetTM)ネットワーク物理層70で構成される。DeviceNetTMは、産業装置を配線し設定する費用と時間とを縮小させる単純なネットワーク上のソリューションであり、複数のベンダに対して「同様の」コンポーネントの相互交換可能性を提供する。DeviceNetTMは、オープン・ネットワーク・スタンダードであり、公開された仕様とプロトコルとを有する。ベンダは、DeviceNetTMを用いて装置をシステムに接続するのに、ハードウェア、ソフトウェア又はライセンスを購入する必要がない。DeviceNetTMの仕様は、オープンDeviceNetTMベンダ・アソシエーション(www.odva.org)から入手することができる。DeviceNetTMの物理層70は、より複雑な装置の相互接続可能性を与えながら、単純な装置の相互交換を可能にする。DeviceNetTMの物理層70は、ブロードキャスト指向の通信プロトコルであるコントローラ・エリア・ネットワーク(CAN)に基づく。1996年には、1千万を超えるCANチップが製造された。主なCANチップの供給企業は4社あり、インテル、モトローラ、フィリップス及び日立である。DeviceNetTMの物理層70の主な目的は2つであり、1)低レベル装置と関連付けられた制御指向情報の移動、2)コンフィギュレーションなどの制御されつつあるシステムに間接的に関係するそれ以外の情報の移動、である。
【0019】
MFC56の1つを通過するフローを検証するために、ツール・コントローラ60は、フロー検証装置10とMFC56の中の選択された1つとをDeviceNetTMの物理層70を介して制御し、よって、選択されたMFC56の流率が検証されるようにする。
【0020】
次に図4を参照すると、本発明の新規で改良されたシステム100が、MFC56のインサイチュ検証及び較正を提供するのであるが、検証及び較正によってMFC56を気体計量システム50から取り外すことが要求されない。システム100は、MFC56のそれぞれとフロー検証装置10とをハブ104に接続する第1のネットワーク物理層104を含む。そして、ハブ104は、接続性ツール106に接続することができる。
【0021】
フロー検証装置10のコンピュータ・コントローラ30は、MFC56のそれぞれと自動的に通信し、第1のネットワーク物理層104上のMFC56のそれぞれのフローを検証し、必要であれば較正するように、新たにプログラムされている。特に、すべての気体特有の情報が、(圧力不感知性を提供する)伝達関数と共に、MFC56のそれぞれからのフロー検証装置10のコンピュータ・コントローラ30から求められ、先に述べたRORの技術を用いてMFC56のそれぞれの流率の精度を検証するように処理される。この通信は、フロー検証装置10とMFC56との間で、第1のネットワーク物理層104を介してなされる。
【0022】
インサイチュフロー検証と較正とは、「第2の」物理層70上のツール制御コントローラ60からの単一のコマンドによって開始される。示されている実施例では、第2のネットワーク物理層は、DeviceNetTMのネットワーク物理層70で構成される。ただし、それ以外のプロトコルを用いることも可能である。ある動作モードでは、フロー検証データは集められ、DeviceNetTMのネットワーク物理層70を介してツール・コントローラに送られる。別の動作モードでは、フロー検証装置10のコンピュータ・コントローラ30は、ツール・コントローラ70から単一のコマンドを受け取り、検査対象のMFC56に問い合わせを行い、フローを検証し、必要であればMFCを再度較正し、較正パラメータをMFCの中にアップロードする。このシーケンスは、気体計量システム50の中のすべてのMFC56に対し、求めに応じる頻度で継続されうる。すべての継続に必要な較正データは、それぞれのMFC56に存在することになる。
【0023】
本発明のある実施例では、第1のネットワーク物理層は、EtherNet/IPネットワーク物理層104で構成される。EtherNet/IPネットワーク物理層は、商用の既製のイーサネット(登録商標)通信チップと物理媒体とを利用する産業上のネットワーク標準である。IPとは「産業プロトコル(industrial protocol)」の意味であり、このネットワークを区別するものである。産業上のイーサネット(登録商標)群の中の多くの選択肢とは異なり、EtherNet/IPネットワークは、アプリケーション層でのオープン・プロトコルを用いる。更に、複数のベンダ又は組織がEtherNet/IPを支持しており、EtherNet/IPは、コントロールネット・インタナショナル(ControlNet International=CI)、インダストリアル・イーサネット・アソシエーション(Industrial Ethernet Association=IEA)、オープン・デバイスネット・ベンダ・アソシエーション(Open DeviceNetTM Vendor Association=ODVA)という3つのネットワーク組織によって支持されている唯一の標準である。
【0024】
EtherNet/IPは、自動化の目的のためのオープンで産業的に証明されたプロトコルを備えた商用で既製のイーサネット(登録商標)を拡張するプロトコル・スタックである。同時に、HTTP、FTP、SNMPなどの一般的なオフィス・プロトコルをサポートする。TCP/IPの組に基づき、EtherNet/IPは、情報メッセージングにはTCPを用い、I/OメッセージングにはUDPを用いる。TCP/IP及びUDP/IPの両方を用いてデータをカプセル化することにより、これは、リアルタイムのI/O制御を提供する最初の産業的なイーサネット・ネットワークである。
【0025】
DeviceNetTMへのコンパニオン・ネットワークであるEtherNet/IPは、DeviceNetTMと同じオープンでロバストなアプリケーション層プロトコルであるコントロール及び情報プロトコル(CIP)を用いる。結果的に、このネットワークは、また、デバイス・プロファイルとオブジェクト・ライブラリとを共有する。これにより、EtherNet/IPの開発者は、複数のベンダからのデバイスの間でのプラグ・アンド・プレイ相互動作可能性のためにDeviceNetTMのオブジェクト及びプロファイルを用いることが可能になる。DeviceNetTMとEtherNet/IPとが結合されると、センサからエンタプライズ・ソフトウェアまでの透明性が促進される。
【0026】
本発明の別の実施例によると、ハブは、更に、ToolWebTMに接続される。ToolWebTMは、MKSインスツルメンツ社から入手可能なソフトウェア「接続性」ソリューションであり、これにより、EtherNet/IPネットワークを介してプロセス・ツール上のすべてのプログラムへの接続が可能になる。BlueBoxTMは、MKSインスツルメンツ社から入手可能でありデータ収集とルーティングとのためにToolWebTMをサポートすることができるハードウェア通信マネジャである。複数のツールを、EtherNet/IPネットワーク物理層104を介してToolWebTMに接続することが可能であり、収集されたデータを、ハブを介してEtherNet/IPネットワーク物理層104に接続された第三者のデータベースまで公表することができる。一般に、ToolWebTMは、BlueBoxTM通信マネジャなどのハードウェアと、電子診断の目的のためのデータ・モニタリング及び収集を可能にするソフトウェアとを含むシステムである。
【0027】
以上で本開示の特定の実施例について図解し説明したが、当業者であれば、多くの変更や修正が可能であろう。従って、冒頭の特許請求の範囲は、この開示の精神及び範囲の範囲に含まれるすべての変更や修正を含むことが意図されている。
【図面の簡単な説明】
【0028】
【図1】従来技術による気体計量システムの概略的な図解であり、気体マニフォルドに接続された質量流量コントローラと、気体マニフォルドと真空ポンプとの間に接続された質量流量検証装置とを含む。
【図2】図1の質量流量検証装置の例示的なコンポーネントの概略的な図解である。
【図3】圧力と時間とを軸にとり従来技術による方法を図解しているグラフであり、質量流量コントローラの1つの流率を検証している。なお、この検証は、図1の質量流量検証装置によって実行される
【図4】質量流量コントローラのインサイチュ検証及び較正のための本発明によるシステムの実施例を含む気体計量システムの概略的な図解である。なお、複数の図面にわたり、同じ参照番号は、対応するコンポーネント及びユニットを意味している。
【技術分野】
【0001】
本発明は、広くは半導体処理装置に関し、更に詳しくは、汚染がなく正確に計測された量の処理及びパージ・ガスを半導体処理チャンバまで搬送するシステム及び方法に関する。更により詳しくは、本発明は、流量コントローラ装置のインサイチュ検認及び較正のためのシステム及び方法に関する。
【背景技術】
【0002】
ひとつの半導体デバイスの製造には、多くは1ダースほどの気体を処理チャンバまで注意深く同期させ正確に測定して搬送することが必要になりうる。製造プロセスでは様々な方法が用いられ、半導体デバイスが洗浄、研磨、酸化、マスキング、エッチング、ドーピング、メタライゼーションなど、多くの別々の処理ステップが必要となりうる。用いられるステップ、それらのステップの特定のシーケンス、そして用いられる材料がすべて、特定のデバイスの製造に貢献する。
【0003】
従って、ウエハ製造設備が作られるときは、化学的蒸着、プラズマ蒸着、プラズマ・エッチング、スパッタリング及びそれ以外の類似の気体製造プロセスが行われるエリアを含むように作られるのが通常である。処理用のツールは、化学的蒸着の反応装置でも、真空スパッタリング・マシンでも、プラズマ・エッチング装置でも、プラズマ・エンハンス化学的蒸着装置でも、様々なプロセス・ガスが供給されなければならない。純粋な気体が、汚染なく正確に計量された量で、これらのツールに供給されなければならない。
【0004】
典型的なウエハ製造工場では、気体はタンクに貯蔵され、このタンクは、パイピングやコンジットを経由して気体箱に接続される。気体箱は、汚染のなく正確に計量された量の純粋な不活性気体又は反応性の気体を、製造工場のタンクからプロセス・ツールに搬送する。気体箱又は気体計測システムは、弁などの気体計量ユニットを有する複数の気体経路と、圧力レギュレータ及びトランスデューサと、質量流量コントローラと、フィルタ/ピュリファイアとを含む。それぞれの気体経路は、別個の気体源に接続するためのそれ自身のインレットを有しており、すべての気体経路は、処理ツールに接続するための気体マニフォルドなどのただ1つのアウトレットに収束する。
【0005】
例えば質量流量コントローラの精度を試験したり較正したりする場合など、測定された量の気体を搬送する際には、気体の搬送に用いる気体搬送システムにおける気体流量の状態の正確な測定値を得ることができるのが望ましいし、多くの場合必要である。これを達成する方法のひとつに、容積が機知のチャンバの中にある気体の温度と圧力との変化率を測定し、これらの測定された値から質量流量を計算する、という方法がある。このいわゆる「圧力上昇率」又は「上昇率(ROR)」法によると、気体フローは、質量流量計などの被験装置(DUT)を通過して、真空化され体積が較正されたチャンバの中へ、測定された時間間隔Δtの間、導かれる。チャンバの中での気体の圧力変化率(ΔP)と温度変化率(ΔT)が測定され、標準温度(T0)と標準圧力(P0)に訂正される。ここで用いられる「標準」という用語は、273.15Kの「絶対」温度及び1気圧の「絶対」圧力として通常定義された「標準状態」を意味する。気体流率は、既知の体積における圧力の時間変化率(ΔP/Δt)と温度の時間変化率(ΔT/Δt)とから計算することができる。
【0006】
多くの気体搬送システムは、実質的に理想気体として振る舞う気体を用いる。換言すると、そのような気体の振る舞いは、PV=nRTとして表現される理想気体法則によって正確な予言が可能であり、その法則に従って正確なモデル化が可能である。ただし、Pは圧力、Vは体積、nは気体のモル数、Rは普遍気体定数、Tは絶対温度である。固定された体積の中にあるほぼ理想的な気体の時間経過に伴う圧力変化と温度変化との関係は、気体とは関係なく一定である。従って、この理想気体法則の関係は、nすなわちチャンバの中の気体のモル数である質量を決定するのに用いることができる。気体が理想気体とは異なる振る舞いをするような状況では、補正関数を用いて、圧力及び温度の時間変化の測定値をより正確にすることができる。
【0007】
フローを検証するのにROR法を用いる装置もある。例えば、本発明の譲受人に譲渡されているHinkleへの米国特許第5,684,245号には、ROR法を用いた気体搬送システムにおいて気体の質量流量を測定する装置及び方法を開示し、権利請求している。本発明の譲受人である米国マサチューセッツ州アンドーバ(Andover)所在のMKSインスツルメント社もまた、Tru-FloTMインサイチュ質量流量検証装置、GBRORTM(気体箱上昇率)インサイチュ質量流量検証装置など、RORフロー検証装置を提供している。
【0008】
依然として望まれるのは、気体計量システムにおけるフロー制御装置を検証し較正する新規で改良されたシステム及び方法である。好ましくは、この新規で改良されたシステム及び方法は、RORフロー検証装置を用いる。更に、この新規で改良されたシステム及び方法では、フロー制御装置のインサイチュ式の検証及び較正を提供する際に、その検証及び較正のためにフロー制御装置を気体計量システムから取り外すことを要しないのが好ましい。
【発明の開示】
【0009】
本発明の実施例は、フロー制御装置をフロー検証装置に接続する第1のネットワーク物理層を含むフロー制御装置のインサイチュ検証及び較正のためのシステム及び方法を提供する。フロー検証装置のコントローラは、第1のネットワーク物理層を通じてフロー制御装置のそれぞれと通信し、気体に特有の情報と伝達関数とをそれぞれのフロー制御装置から受け取り、それぞれのフロー制御装置のフローを検証するようにプログラムされている。フロー検証装置のコントローラは、更に、第1のネットワーク物理層を通じてフロー制御装置のそれぞれと通信し、必要であれば、フロー制御装置を較正するようにプログラムされている。フロー制御装置の検証及び較正は、好ましくは、フロー制御装置に接続された第2のネットワーク物理層に接続されたツール・コントローラを介して提供された単一のコマンドに基づいて実行される。
【0010】
本発明のこれらの及びそれ以外の特徴及び効果は、添付の図面に図解されている公的実施例に関する以下の詳細な説明を読めば、この技術分野の当業者にはより明らかになるはずである。
【発明を実施するための最良の形態】
【0011】
図4を参照すると、この開示には、質量流量コントローラ(MFC)などの被験装置(DUT)を通過する流体フローのインサイチュ検証及び較正のためのシステム100及び方法が提供されている。システム100及び方法は、特に、汚染がなく正確に計量されたプロセス及びパージ気体を半導体プロセス・チャンバまで搬送するための気体計量システムと共に用いられるためのものである。ある実施例では、この新規で改良されたシステム100及び方法は、上昇率(ROR)流量検証計を用いる。この新規で改良されたシステム100及び方法は、MFCのインサイチュ検証及び較正を提供するのであるが、この検証及び較正はMFCを気体計量システムから取り外すことを必要としないのである。
【0012】
最初に図1及び図2を参照すると、従来技術によるフロー検証デバイス10が示されている。図1では、フロー検証デバイス10は、気体マニフォルド52と気体計量システム50の真空ポンプ54との間に接続されているのが示されている。気体計量システム50は、また、気体マニフォルド52に接続されたライン58を通過する気体フローを制御する複数の質量流量コントローラ(MFC)56を含む。図1の実施例では、システム50は、気体マニフォルド52に接続されMFC56を有する12のライン58を含む。しかし、システム50は、希望に応じて、12よりも多い又は少ないライン58を含むことができる。
【0013】
必要ではないのであるが、好ましくは、MFC56は、それぞれが、米国マサチューセッツ州アンドーバー(Andover)所在のMKSインスツルメンツ社(http://www.mksinst.com)から入手可能な圧力不感知型のMFC(PiMFC)を含む。PiMFCは、機能及び性能上の技術的改良を含み、半導体及び高純度の薄膜への応用分野でのユーザがツールのスループットを向上させシステム全体のコストを縮小させることを助ける。特に、PiMFCは、高度な物理的設計とデジタル制御アルゴリズムとを通じて、上流及び下流への圧力の混乱に不感知性であるリアルタイムの正確なフロー制御を提供する。PiMFCによると、プロセス気体フローのリアルタイム制御が可能になり、精度及び反復可能性が従来型のデジタル・ベースのMFCと比較して著しく改善され、結果としてよりよいチャンバ・マッチングを生じさせる。圧力不感知型の質量流量コントローラは、また、同時継続中の”Apparatus and Method for Pressure Fluctuation Insensitive Mass Flow Control”と題する2002年6月4日に出願され本発明の譲受人に譲渡されている米国特許出願第10/178,721号にも開示がある。この米国出願は、この出願において援用する。
【0014】
フロー検証装置10は、MFCによって生じる流率を検証するのに用いられる。図2に示されているように、装置10は、所定の体積を有する容器20と、気体マニフォルドと容器20との間のフローを制御する「上り(アップストリーム)」すなわち第1の弁22と、容器から真空ポンプ14へのフローを制御する「下り(ダウンストリーム)」すなわち第2の弁24と、容器20の体積と通信する容器圧力測定装置26とを含む。装置10は、更に、バイパス弁28も含む。
【0015】
フロー検証装置10のコントローラ30は、フロー検証の上昇率法を用いるが、この方法は、縦軸が圧力(P)を示し横軸が時間(t)を示す図3に図解されている。一般に、コントローラ30は、電子メモリとクロックとを含むコンピュータ・プロセッサである。コントローラ30は、動作の際には、最初にバイパス弁28を閉じ第1及び第2の弁22、24を開いてフローがMFC12からバイパスされ容器20を通過するようにプログラムされているのが一般的である。更に、コントローラ30は、バイパスされたフローを安定化させる初期期間の後では、第2の弁24を閉じて容器20からのフローを停止させるようにプログラムされる。閉じられた容器20にMFC12からの気体が満ちるにつれて、コントローラ30は、圧力測定装置26からの容器圧力の測定値を受け取り、気体フローに起因する容器圧力の変化率を決定する。次に、コントローラは、容器圧力の変化率と容器20の既知の体積とを用いて、MFC12によって提供された実際のフローを決定する。図3のグラフは、容器20の既知の体積の中における圧力の時間変化率(ΔP/Δt)からどのようにしてコントローラ30が気体流率を計算することができるのかを示している。
【0016】
フローの測定がなされた後で、図2に示されている第1の弁22は閉じられ、第2の弁24が開かれて、真空ポンプ14を用いて容器20が真空化される。真空化の後で、第2の弁24が閉じられ、バイパス弁28が開かれて、MFC12とプロセス・チャンバ18との間の正常なフローが許容されることになる。
【0017】
フロー検証装置10は、例えば、米国マサチューセッツ州アンドーバー(Andover)所在のMKSインスツルメンツ社(http://www.mksinst.com)から入手可能なGBRORTMインサイチュ・フロー検証装置又はTru-FloTMインサイチュ・フロー検証装置を含みうる。GBRORTMは、モジュラ気体経路又はスティックであり、弁と、圧力容器と、圧力トランスデューサと、マニフォルドの上に搭載されたコントローラとを含む。GBRORTM及びTru-FloTMの両方のフロー検証装置は、共に、プロセス透過的である。すなわち、気体搬送システムの通常の処理ステップの間に動作し、よって、処理ツールのダウン時間を短縮する。圧力測定装置26は、例えば、やはりMKSインスツルメント社から入手可能なバラトロン(Baratron)(登録商標)ブランドの圧力トランスデューサを含むことがあり得る。
【0018】
図1を参照すると、MFC12のコンピュータ・コントローラ(図示せず)とフロー検証装置10のコンピュータ・コントローラ30とは、ネットワーク物理層70を介してツール・コントロール60に接続されている。ある実施例では、このネットワーク物理層は、デバイスネット(DeviceNetTM)ネットワーク物理層70で構成される。DeviceNetTMは、産業装置を配線し設定する費用と時間とを縮小させる単純なネットワーク上のソリューションであり、複数のベンダに対して「同様の」コンポーネントの相互交換可能性を提供する。DeviceNetTMは、オープン・ネットワーク・スタンダードであり、公開された仕様とプロトコルとを有する。ベンダは、DeviceNetTMを用いて装置をシステムに接続するのに、ハードウェア、ソフトウェア又はライセンスを購入する必要がない。DeviceNetTMの仕様は、オープンDeviceNetTMベンダ・アソシエーション(www.odva.org)から入手することができる。DeviceNetTMの物理層70は、より複雑な装置の相互接続可能性を与えながら、単純な装置の相互交換を可能にする。DeviceNetTMの物理層70は、ブロードキャスト指向の通信プロトコルであるコントローラ・エリア・ネットワーク(CAN)に基づく。1996年には、1千万を超えるCANチップが製造された。主なCANチップの供給企業は4社あり、インテル、モトローラ、フィリップス及び日立である。DeviceNetTMの物理層70の主な目的は2つであり、1)低レベル装置と関連付けられた制御指向情報の移動、2)コンフィギュレーションなどの制御されつつあるシステムに間接的に関係するそれ以外の情報の移動、である。
【0019】
MFC56の1つを通過するフローを検証するために、ツール・コントローラ60は、フロー検証装置10とMFC56の中の選択された1つとをDeviceNetTMの物理層70を介して制御し、よって、選択されたMFC56の流率が検証されるようにする。
【0020】
次に図4を参照すると、本発明の新規で改良されたシステム100が、MFC56のインサイチュ検証及び較正を提供するのであるが、検証及び較正によってMFC56を気体計量システム50から取り外すことが要求されない。システム100は、MFC56のそれぞれとフロー検証装置10とをハブ104に接続する第1のネットワーク物理層104を含む。そして、ハブ104は、接続性ツール106に接続することができる。
【0021】
フロー検証装置10のコンピュータ・コントローラ30は、MFC56のそれぞれと自動的に通信し、第1のネットワーク物理層104上のMFC56のそれぞれのフローを検証し、必要であれば較正するように、新たにプログラムされている。特に、すべての気体特有の情報が、(圧力不感知性を提供する)伝達関数と共に、MFC56のそれぞれからのフロー検証装置10のコンピュータ・コントローラ30から求められ、先に述べたRORの技術を用いてMFC56のそれぞれの流率の精度を検証するように処理される。この通信は、フロー検証装置10とMFC56との間で、第1のネットワーク物理層104を介してなされる。
【0022】
インサイチュフロー検証と較正とは、「第2の」物理層70上のツール制御コントローラ60からの単一のコマンドによって開始される。示されている実施例では、第2のネットワーク物理層は、DeviceNetTMのネットワーク物理層70で構成される。ただし、それ以外のプロトコルを用いることも可能である。ある動作モードでは、フロー検証データは集められ、DeviceNetTMのネットワーク物理層70を介してツール・コントローラに送られる。別の動作モードでは、フロー検証装置10のコンピュータ・コントローラ30は、ツール・コントローラ70から単一のコマンドを受け取り、検査対象のMFC56に問い合わせを行い、フローを検証し、必要であればMFCを再度較正し、較正パラメータをMFCの中にアップロードする。このシーケンスは、気体計量システム50の中のすべてのMFC56に対し、求めに応じる頻度で継続されうる。すべての継続に必要な較正データは、それぞれのMFC56に存在することになる。
【0023】
本発明のある実施例では、第1のネットワーク物理層は、EtherNet/IPネットワーク物理層104で構成される。EtherNet/IPネットワーク物理層は、商用の既製のイーサネット(登録商標)通信チップと物理媒体とを利用する産業上のネットワーク標準である。IPとは「産業プロトコル(industrial protocol)」の意味であり、このネットワークを区別するものである。産業上のイーサネット(登録商標)群の中の多くの選択肢とは異なり、EtherNet/IPネットワークは、アプリケーション層でのオープン・プロトコルを用いる。更に、複数のベンダ又は組織がEtherNet/IPを支持しており、EtherNet/IPは、コントロールネット・インタナショナル(ControlNet International=CI)、インダストリアル・イーサネット・アソシエーション(Industrial Ethernet Association=IEA)、オープン・デバイスネット・ベンダ・アソシエーション(Open DeviceNetTM Vendor Association=ODVA)という3つのネットワーク組織によって支持されている唯一の標準である。
【0024】
EtherNet/IPは、自動化の目的のためのオープンで産業的に証明されたプロトコルを備えた商用で既製のイーサネット(登録商標)を拡張するプロトコル・スタックである。同時に、HTTP、FTP、SNMPなどの一般的なオフィス・プロトコルをサポートする。TCP/IPの組に基づき、EtherNet/IPは、情報メッセージングにはTCPを用い、I/OメッセージングにはUDPを用いる。TCP/IP及びUDP/IPの両方を用いてデータをカプセル化することにより、これは、リアルタイムのI/O制御を提供する最初の産業的なイーサネット・ネットワークである。
【0025】
DeviceNetTMへのコンパニオン・ネットワークであるEtherNet/IPは、DeviceNetTMと同じオープンでロバストなアプリケーション層プロトコルであるコントロール及び情報プロトコル(CIP)を用いる。結果的に、このネットワークは、また、デバイス・プロファイルとオブジェクト・ライブラリとを共有する。これにより、EtherNet/IPの開発者は、複数のベンダからのデバイスの間でのプラグ・アンド・プレイ相互動作可能性のためにDeviceNetTMのオブジェクト及びプロファイルを用いることが可能になる。DeviceNetTMとEtherNet/IPとが結合されると、センサからエンタプライズ・ソフトウェアまでの透明性が促進される。
【0026】
本発明の別の実施例によると、ハブは、更に、ToolWebTMに接続される。ToolWebTMは、MKSインスツルメンツ社から入手可能なソフトウェア「接続性」ソリューションであり、これにより、EtherNet/IPネットワークを介してプロセス・ツール上のすべてのプログラムへの接続が可能になる。BlueBoxTMは、MKSインスツルメンツ社から入手可能でありデータ収集とルーティングとのためにToolWebTMをサポートすることができるハードウェア通信マネジャである。複数のツールを、EtherNet/IPネットワーク物理層104を介してToolWebTMに接続することが可能であり、収集されたデータを、ハブを介してEtherNet/IPネットワーク物理層104に接続された第三者のデータベースまで公表することができる。一般に、ToolWebTMは、BlueBoxTM通信マネジャなどのハードウェアと、電子診断の目的のためのデータ・モニタリング及び収集を可能にするソフトウェアとを含むシステムである。
【0027】
以上で本開示の特定の実施例について図解し説明したが、当業者であれば、多くの変更や修正が可能であろう。従って、冒頭の特許請求の範囲は、この開示の精神及び範囲の範囲に含まれるすべての変更や修正を含むことが意図されている。
【図面の簡単な説明】
【0028】
【図1】従来技術による気体計量システムの概略的な図解であり、気体マニフォルドに接続された質量流量コントローラと、気体マニフォルドと真空ポンプとの間に接続された質量流量検証装置とを含む。
【図2】図1の質量流量検証装置の例示的なコンポーネントの概略的な図解である。
【図3】圧力と時間とを軸にとり従来技術による方法を図解しているグラフであり、質量流量コントローラの1つの流率を検証している。なお、この検証は、図1の質量流量検証装置によって実行される
【図4】質量流量コントローラのインサイチュ検証及び較正のための本発明によるシステムの実施例を含む気体計量システムの概略的な図解である。なお、複数の図面にわたり、同じ参照番号は、対応するコンポーネント及びユニットを意味している。
【特許請求の範囲】
【請求項1】
フロー制御装置のインサイチュ検証及び較正のためのシステムであって、
フロー検証装置と、
前記フロー制御装置を前記フロー検証装置に接続する第1のネットワーク物理層と、
前記フロー検証装置に接続された第2のネットワーク物理層と、
を備えており、前記フロー検証装置のコントローラは、前記第1のネットワーク物理層上の前記フロー制御装置を、前記第2のネットワーク物理層を通じて提供される単一のコマンドに基づいて検証し、必要であれば、較正するようにプログラムされていることを特徴とするシステム。
【請求項2】
請求項1記載のシステムにおいて、前記第1のネットワーク物理層は、EtherNet/IPネットワーク物理層を含むことを特徴とするシステム。
【請求項3】
請求項1記載のシステムにおいて、前記第2のネットワーク物理層は、DeviceNetTMデバイスネット・ネットワーク物理層を含むことを特徴とするシステム。
【請求項4】
請求項1記載のシステムにおいて、前記フロー検証装置は上昇率フロー検証装置であることを特徴とするシステム。
【請求項5】
請求項4記載のシステムにおいて、前記フロー検証装置はGBRORTMインサイチュ・フロー検証装置であることを特徴とするシステム。
【請求項6】
請求項4記載のシステムにおいて、前記フロー検証装置はTru-FloTMインサイチュ・フロー検証装置であることを特徴とするシステム。
【請求項7】
請求項1記載のシステムにおいて、前記第1のネットワーク物理層に接続されたフロー制御装置を更に備えていることを特徴とするシステム。
【請求項8】
請求項7記載のシステムにおいて、前記フロー制御装置は圧力非感知型の質量流量コントローラを備えていることを特徴とするシステム。
【請求項9】
請求項1記載のシステムにおいて、前記第1のネットワーク物理層に接続されたハブを更に備えていることを特徴とするシステム。
【請求項10】
請求項9記載のシステムにおいて、前記ハブはBlueBoxTM通信マネジャを含むことを特徴とするシステム。
【請求項11】
フロー制御装置のインサイチュ検証及び較正のための方法であって、
フロー検証装置を第1のネットワーク物理層を介して前記フロー制御装置に接続するステップと、
第2のネットワーク物理層を前記フロー検証装置に接続するステップと、
前記フロー検証装置のコントローラを、前記第1のネットワーク物理層上の前記フロー制御装置を前記第2のネットワーク物理層を通じて提供される単一のコマンドに基づいて検証し、必要であれば、較正するようにプログラムするステップと、
を含むことを特徴とする方法。
【請求項12】
請求項11記載の方法において、前記第1のネットワーク物理層は、EtherNet/IPネットワーク物理層を含むことを特徴とする方法。
【請求項13】
請求項11記載の方法において、前記第2のネットワーク物理層は、DeviceNetTMネットワーク物理層を含むことを特徴とする方法。
【請求項14】
請求項11記載の方法において、前記フロー検証装置は上昇率フロー検証装置であることを特徴とする方法。
【請求項15】
請求項14記載の方法において、前記フロー検証装置はGBRORTMインサイチュ・フロー検証装置であることを特徴とする方法。
【請求項16】
請求項14記載の方法において、前記フロー検証装置はTru-FloTMインサイチュ・フロー検証装置であることを特徴とする方法。
【請求項17】
請求項11記載の方法において、前記フロー制御装置は圧力非感知型の質量流量コントローラを備えていることを特徴とする方法。
【請求項18】
請求項11記載の方法において、ハブを前記第1のネットワーク物理層に接続するステップを更に含むことを特徴とする方法。
【請求項19】
請求項18記載の方法において、前記ハブはBlueBoxTM通信マネジャを含むことを特徴とする方法。
【請求項20】
請求項11記載の方法において、前記フロー検証装置は、気体マニフォルドを介して前記フロー制御装置と流体通信関係に配置されることを特徴とする方法。
【請求項1】
フロー制御装置のインサイチュ検証及び較正のためのシステムであって、
フロー検証装置と、
前記フロー制御装置を前記フロー検証装置に接続する第1のネットワーク物理層と、
前記フロー検証装置に接続された第2のネットワーク物理層と、
を備えており、前記フロー検証装置のコントローラは、前記第1のネットワーク物理層上の前記フロー制御装置を、前記第2のネットワーク物理層を通じて提供される単一のコマンドに基づいて検証し、必要であれば、較正するようにプログラムされていることを特徴とするシステム。
【請求項2】
請求項1記載のシステムにおいて、前記第1のネットワーク物理層は、EtherNet/IPネットワーク物理層を含むことを特徴とするシステム。
【請求項3】
請求項1記載のシステムにおいて、前記第2のネットワーク物理層は、DeviceNetTMデバイスネット・ネットワーク物理層を含むことを特徴とするシステム。
【請求項4】
請求項1記載のシステムにおいて、前記フロー検証装置は上昇率フロー検証装置であることを特徴とするシステム。
【請求項5】
請求項4記載のシステムにおいて、前記フロー検証装置はGBRORTMインサイチュ・フロー検証装置であることを特徴とするシステム。
【請求項6】
請求項4記載のシステムにおいて、前記フロー検証装置はTru-FloTMインサイチュ・フロー検証装置であることを特徴とするシステム。
【請求項7】
請求項1記載のシステムにおいて、前記第1のネットワーク物理層に接続されたフロー制御装置を更に備えていることを特徴とするシステム。
【請求項8】
請求項7記載のシステムにおいて、前記フロー制御装置は圧力非感知型の質量流量コントローラを備えていることを特徴とするシステム。
【請求項9】
請求項1記載のシステムにおいて、前記第1のネットワーク物理層に接続されたハブを更に備えていることを特徴とするシステム。
【請求項10】
請求項9記載のシステムにおいて、前記ハブはBlueBoxTM通信マネジャを含むことを特徴とするシステム。
【請求項11】
フロー制御装置のインサイチュ検証及び較正のための方法であって、
フロー検証装置を第1のネットワーク物理層を介して前記フロー制御装置に接続するステップと、
第2のネットワーク物理層を前記フロー検証装置に接続するステップと、
前記フロー検証装置のコントローラを、前記第1のネットワーク物理層上の前記フロー制御装置を前記第2のネットワーク物理層を通じて提供される単一のコマンドに基づいて検証し、必要であれば、較正するようにプログラムするステップと、
を含むことを特徴とする方法。
【請求項12】
請求項11記載の方法において、前記第1のネットワーク物理層は、EtherNet/IPネットワーク物理層を含むことを特徴とする方法。
【請求項13】
請求項11記載の方法において、前記第2のネットワーク物理層は、DeviceNetTMネットワーク物理層を含むことを特徴とする方法。
【請求項14】
請求項11記載の方法において、前記フロー検証装置は上昇率フロー検証装置であることを特徴とする方法。
【請求項15】
請求項14記載の方法において、前記フロー検証装置はGBRORTMインサイチュ・フロー検証装置であることを特徴とする方法。
【請求項16】
請求項14記載の方法において、前記フロー検証装置はTru-FloTMインサイチュ・フロー検証装置であることを特徴とする方法。
【請求項17】
請求項11記載の方法において、前記フロー制御装置は圧力非感知型の質量流量コントローラを備えていることを特徴とする方法。
【請求項18】
請求項11記載の方法において、ハブを前記第1のネットワーク物理層に接続するステップを更に含むことを特徴とする方法。
【請求項19】
請求項18記載の方法において、前記ハブはBlueBoxTM通信マネジャを含むことを特徴とする方法。
【請求項20】
請求項11記載の方法において、前記フロー検証装置は、気体マニフォルドを介して前記フロー制御装置と流体通信関係に配置されることを特徴とする方法。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公表番号】特表2007−525736(P2007−525736A)
【公表日】平成19年9月6日(2007.9.6)
【国際特許分類】
【出願番号】特願2006−517136(P2006−517136)
【出願日】平成16年5月24日(2004.5.24)
【国際出願番号】PCT/US2004/016142
【国際公開番号】WO2005/006390
【国際公開日】平成17年1月20日(2005.1.20)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.ETHERNET
【出願人】(592053963)エム ケー エス インストルメンツ インコーポレーテッド (114)
【氏名又は名称原語表記】MKS INSTRUMENTS,INCORPORATED
【Fターム(参考)】
【公表日】平成19年9月6日(2007.9.6)
【国際特許分類】
【出願日】平成16年5月24日(2004.5.24)
【国際出願番号】PCT/US2004/016142
【国際公開番号】WO2005/006390
【国際公開日】平成17年1月20日(2005.1.20)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.ETHERNET
【出願人】(592053963)エム ケー エス インストルメンツ インコーポレーテッド (114)
【氏名又は名称原語表記】MKS INSTRUMENTS,INCORPORATED
【Fターム(参考)】
[ Back to top ]