
インジェクタ制御装置
【課題】安価で、且つインジェクタによる燃料の噴射量を高精度に制御することができるインジェクタ制御装置を提供すること。
【解決手段】水晶発振回路11を有し所定のパルス幅のパルス信号である噴射指令信号を出力するマイコン10と、RC発振回路21を有しインジェクタ50のアクチュエータに対する通電を行う制御IC20とを備えるインジェクタ制御装置であって、マイコン10は、制御IC20のRC発振回路21によって生成された内部クロックを用いて計時された到達時間を、水晶発振回路11によって生成された内部クロックを用いて計時された到達時間と同等になるように補正するための補正係数を学習するとともに、インジェクタの開弁時間が開弁時間狙い値となるように、補正係数によって補正された補正済到達時間に応じて噴射指令信号のパルス幅を補正する。
【解決手段】水晶発振回路11を有し所定のパルス幅のパルス信号である噴射指令信号を出力するマイコン10と、RC発振回路21を有しインジェクタ50のアクチュエータに対する通電を行う制御IC20とを備えるインジェクタ制御装置であって、マイコン10は、制御IC20のRC発振回路21によって生成された内部クロックを用いて計時された到達時間を、水晶発振回路11によって生成された内部クロックを用いて計時された到達時間と同等になるように補正するための補正係数を学習するとともに、インジェクタの開弁時間が開弁時間狙い値となるように、補正係数によって補正された補正済到達時間に応じて噴射指令信号のパルス幅を補正する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、インジェクタ制御装置に関するものである。
【背景技術】
【0002】
従来、インジェクタ制御装置の一例として、特許文献1に開示された筒内噴射式インジェクタの制御装置(インジェクタ制御装置)があった。
【0003】
このインジェクタ制御装置は、制御パラメータ演算手段(マイコン)、複数のインジェクタコイルにそれぞれ対応して設けられた複数の気筒駆動回路(制御IC)を備える。制御ICは、過励磁信号発生手段(励磁制御部)、第1スイッチング手段、保持電流発生手段(保持制御部)、第3スイッチング手段、第2スイッチング手段などを備える。
【0004】
励磁制御部は、筒内噴射式インジェクタを初期開弁するために必要な過励磁電流をインジェクタのアクチュエータ(インジェクタコイル)に供給するものである。この励磁制御部は、マイコンより出力される制御信号のオンタイミングに同期して、高電圧発生手段から第1スイッチング手段を介して過励磁電流を供給する。
【0005】
保持制御部は、マイコンより出力される制御信号がオンの期間中であり且つ過励磁時間の経過後に、第3スイッチング手段をオン/オフスイッチング制御することで、バッテリ−電圧をアクチュエータに断続的に供給するものである。
【0006】
第2スイッチング手段は、アクチュエータに流れる電流を遮断する際に、電流を高速にオフするものである。この第2スイッチング手段は、マイコンから出力される制御信号がオンの期間中は、常時オン状態にされており、制御信号がオフするタイミングでオフ状態にされる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平11−351038号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
このインジェクタ制御装置では、アクチュエータに流れる電流の電流値が所定値に達するとインジェクタが開弁し、第2スイッチング手段がオフ状態になるとインジェクタが閉弁する。つまり、アクチュエータに流れる電流の電流値が所定値に達してから、2スイッチング手段がオフ状態になるまでの間において、インジェクタから燃料が噴射される。
【0009】
しかしながら、インジェクタ制御装置では、制御ICやアクチュエータ(インジェクタコイル)の電気的特性がばらつくことがある。つまり、制御ICやアクチュエータ(インジェクタコイル)は、製造ばらつきや経年変化によるばらつきが生じることがある。
【0010】
このように電気特性がばらつくと、インジェクタ制御装置は、アクチュエータ(インジェクタコイル)に対して過励磁電流が供給され始めてから、アクチュエータに流れる電流の電流値が所定値に達するまでの時間(到達時間)がばらつく可能性がある。よって、インジェクタ制御装置は、燃料の噴射量がばらつく可能性がある。
【0011】
そこで、アクチュエータ(インジェクタコイル)に対して過励磁電流が供給され始めてから、アクチュエータに流れる電流の電流値が所定値に達するまでの時間(到達時間)に基づいて、マイコンから出力する制御信号の時間(オン時間)を補正することも考えられる。また、この到達時間は、制御ICに設けられた発振回路によって生成されたクロックをカウントすることで計時することができる。
【0012】
この制御ICの発振回路としては、RC発振回路を採用することが考えられる。RC発振回路は、発振周波数の精度が較的低いが安価であるため、インジェクタ制御装置を安価にすることができる。しかしながら、RC発振回路によって生成されたクロックに基づいて到達時間を計時すると、精確に到達時間を計時できない可能性がある。よって、到達時間に基づいて制御信号の時間を補正したとしても、燃料の噴射量を高精度に制御できない可能性がある。
【0013】
これに対して、制御ICの発振回路として発振周波数の精度が比較的高い水晶発振回路を採用した場合、到達時間の計時精度を向上させることができ、燃料の噴射量を高精度に制御することができる。しかしながら、水晶発振回路は、RC発振回路よりも高価であるためインジェクタ制御装置が高価になるという問題がある。
【0014】
本発明は、上記問題点に鑑みなされたものであり、安価で、且つインジェクタによる燃料の噴射量を高精度に制御することができるインジェクタ制御装置を提供することを目的とする。
【課題を解決するための手段】
【0015】
上記目的を達成するために請求項1に係る発明は、
車両に搭載されるものであり、インジェクタに設けられたアクチュエータへの通電状態によって、インジェクタを開閉させて内燃機関への燃料の噴射を制御するインジェクタ制御装置であって、
内部クロックを生成する発振回路として水晶発振回路を有し、所定のパルス幅のパルス信号である噴射指令信号を出力するマイコンと、
内部クロックを生成する発振回路としてRC発振回路を有し、噴射指令信号が出力されている間、アクチュエータに対する通電を行う制御ICと、を備え、
制御ICは、
アクチュエータに流れるインジェクタ電流を検出する電流検出手段と、
RC発振回路によって生成された内部クロックを用いて、噴射指令信号が出力されてから、電流検出手段の検出結果が示す値がインジェクタが開弁する値に達するまでの到達時間を計時すると共に、この到達時間の計時結果を出力する計時手段と、を有し、
マイコンは、
RC発振回路によって生成された内部クロックを用いて計時された到達時間を、水晶発振回路によって生成された内部クロックを用いて計時された到達時間と同等になるように補正するための補正係数を学習する学習手段と、
制御ICから出力された計時結果が示す到達時間を補正係数によって補正した補正済到達時間を算出する第1補正手段と、
インジェクタの開弁時間が開弁時間狙い値となるように、第1補正手段によって補正された補正済到達時間に応じて噴射指令信号のパルス幅を補正する第2補正手段と、を備えることを特徴とする。
【0016】
このように補正係数を学習するとともに、RC発振回路によって生成された内部クロックを用いて計時された到達時間を補正係数で補正することによって、マイコンは、制御ICから出力された到達時間を実際の到達時間と同等の時間として認識することができる。つまり、RC発振回路によって生成された内部クロックを用いて計時された到達時間(制御ICから出力された到達時間)と実際の到達時間との間に誤差が生じていたとしても、マイコンは、制御ICから出力された到達時間を実際の到達時間と同等の時間として認識することができる。
【0017】
また、マイコンは、このように補正した補正済到達時間に応じて、インジェクタの開弁時間が狙い値となるように、噴射指令信号のパルス幅を補正することで、噴射指令信号のパルス幅を実際の到達時間に応じて補正した場合と同等にすることができる。よって、制御ICやアクチュエータ(インジェクタコイル)の電気的特性にばらつきが生じて到達時間が基準時間からずれたとしても、インジェクタによる燃料の噴射量を高精度に制御することができる。
【0018】
従って、本発明のインジェクタ制御装置は、制御ICの内部クロックを生成する発振回路として比較的安価なRC発振回路を採用したとしても、インジェクタの開弁時間(すなわちインジェクタによる燃料の噴射量)を高精度に制御することができる。換言すると、本発明におけるインジェクタ制御装置は、安価で、且つインジェクタによる燃料の噴射量を高精度に制御することができる。
【0019】
また、学習手段としては、請求項2に示すように、所定のパルス幅のパルス信号である誤差確認用信号を出力し、計時手段に対して、RC発振回路によって生成された内部クロックを用いて誤差確認用信号のパルス幅を計時させるともに、このパルス幅の計時結果を出力させるものであり、誤差確認用信号のパルス幅(時間)を計時手段から出力されたパルス幅の計時結果(時間)で除算した値を補正係数として学習するようにしてもよい。
【0020】
また、学習手段としては、請求項3に示すように、制御ICに対して、RC発振回路によって生成された内部クロックを所定期間出力させるものであり、制御ICが内部クロックを出力するのと同じ期間に水晶発振回路で生成された内部クロックのパルス数を、制御ICから所定期間出力された内部クロックのパルス数で除算した値を補正係数として学習するようにしてもよい。
【0021】
また、請求項4に示すように、マイコンは、内燃機関の温度を示す温度情報を取得する温度情報取得手段を備え、
学習手段は、温度情報取得手段によって取得された温度情報が予め設定された所定温度を示す場合、補正係数の学習を行うようにしてもよい。
【0022】
このようにすることによって、内燃機関の温度によってRC発振回路の精度が低下した場合であっても、RC発振回路によって計時された到達時間の誤差を補正することができる。
【0023】
また、請求項5に示すように、学習手段は、車両のイグニッションスイッチがオンになってから、イグニッションスイッチがオフになるまでの間に、少なくとも一回、補正係数の学習を行うようにしてもよい。
【0024】
このようにすることによって、経時(経年)劣化によってRC発振回路の精度が低下した場合であっても、RC発振回路によって計時された到達時間の誤差を補正することができる。
【図面の簡単な説明】
【0025】
【図1】本発明の実施の形態におけるインジェクタ制御装置の概略構成を示すブロック図である。
【図2】本発明の実施の形態におけるモニタ部の概略構成を示すブロック図である。
【図3】変形例1におけるモニタ部の概略構成を示すブロック図である。
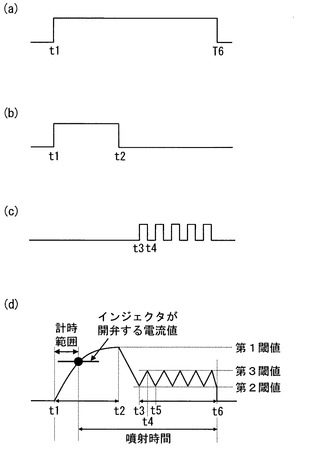
【図4】本発明の実施の形態におけるインジェクタ制御装置に各点(各信号線)における波形図であり、(a)はマイコンが制御ICに出力する噴射指令信号の電圧波形(信号線1の波形)であり、(b)は励磁制御部が第1トランジスタに出力する駆動信号の電圧波形(信号線2の波形)であり、(c)は保持制御部が第2トランジスタに出力する駆動信号の電圧波形(信号線3の波形)であり、(d)はモニタ部で求められたインジェクタ電流の電流波形(信号線4の波形)である。
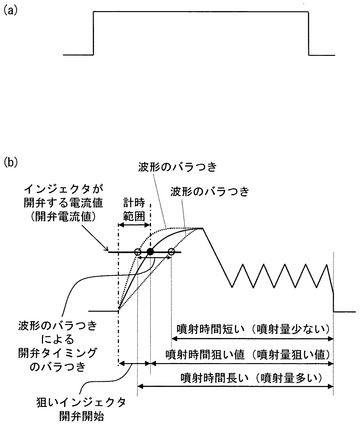
【図5】(a)はマイコンが制御ICに出力する噴射指令信号の電圧波形(信号線1の波形)を示す波形図であり、(b)はモニタ部で求められたインジェクタ電流の電流波形(信号線4の波形)のばらつきを示す波形図である。
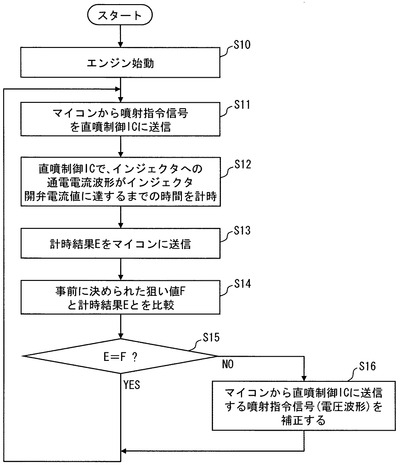
【図6】本発明の実施の形態におけるインジェクタ制御装置のばらつき補正処理を示すフローチャートである。
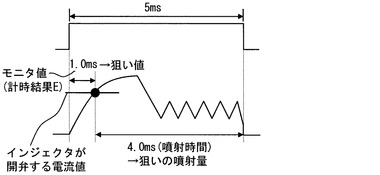
【図7】到達時間が正常値である場合のマイコン10が制御IC20に出力する噴射指令信号の電圧波形と、モニタ部25で求められたインジェクタ電流の電流波形を示す波形図である。
【図8】(a)は到達時間が正常値よりも短くなった場合のマイコン10が制御IC20に出力する噴射指令信号の電圧波形と、モニタ部25で求められたインジェクタ電流の電流波形を示す波形図であり、(b)はばらつき補正後のマイコン10が制御IC20に出力する噴射指令信号の電圧波形と、モニタ部25で求められたインジェクタ電流の電流波形を示す波形図である。
【図9】(a)は到達時間が正常値よりも長くなった場合のマイコン10が制御IC20に出力する噴射指令信号の電圧波形と、モニタ部25で求められたインジェクタ電流の電流波形を示す波形図であり、(b)はばらつき補正後のマイコン10が制御IC20に出力する噴射指令信号の電圧波形と、モニタ部25で求められたインジェクタ電流の電流波形を示す波形図である。
【図10】本発明の実施の形態におけるインジェクタ制御装置の学習処理を示すフローチャートである。
【図11】本発明の実施の形態におけるインジェクタ制御装置の学習処理及びばらつき補正処理を示すブロック図である。
【図12】本発明の実施の形態におけるインジェクタ制御装置のクロック誤差を考慮したばらつき補正処理を示すフローチャートである。
【図13】(a)はクロック誤差があった場合のマイコン10が制御IC20に出力する噴射指令信号の電圧波形と、モニタ部25で求められたインジェクタ電流の電流波形を示す波形図であり、(b)はクロック誤差に基づいて補正を行った後のマイコン10が制御IC20に出力する噴射指令信号の電圧波形と、モニタ部25で求められたインジェクタ電流の電流波形を示す波形図である。
【図14】変形例におけるインジェクタ制御装置の概略構成を示すブロック図である。
【発明を実施するための形態】
【0026】
以下、本発明の実施形態を図に基づいて説明する。本実施形態におけるインジェクタ制御装置は、車両に搭載されるものであり、エンジン(内燃機関)における複数の気筒毎に設けられた複数のインジェクタ50をそれぞれ個別に駆動制御するものである。ここでは、一例として、直噴型のインジェクタ50を駆動制御するものを採用する。このインジェクタ制御装置は、インジェクタ50を駆動して、インジェクタ50による燃料の噴射量を制御するものである。具体的には、インジェクタ制御装置は、インジェクタ50のアクチュエータ(ソレノイドコイルやピエゾ素子であり、ここではソレノイドコイルを採用する、図示省略)への通電状態(通電時間)によって、インジェクタ50を開閉させて内燃機関への燃料の噴射量を制御する(駆動制御処理)。
【0027】
また、インジェクタ制御装置は、燃料の噴射量に加えて、インジェクタ50による燃料の噴射時期を制御するものであってもよい。この場合、インジェクタ制御装置は、インジェクタ50のソレノイドコイルへの通電タイミングを制御することにより、インジェクタ50による燃料の噴射時期を制御する。
【0028】
なお、直噴型のインジェクタとは、内燃機関(ガソリンエンジン又はディーゼルエンジン)の気筒に燃料を直接噴射するインジェクタを示すものである。また、図1においては、複数のインジェクタ50のうちの一つを代表的に図示している。
【0029】
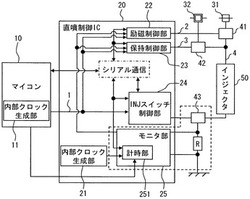
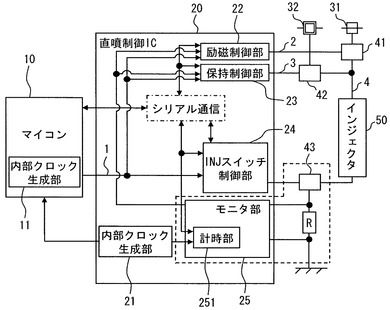
図1に示すように、インジェクタ制御装置は、マイコン10と直噴制御IC(以下、単に制御ICとも称する)20とを備えて構成される。このインジェクタ制御装置は、後ほど説明するスイッチング手段(第1トランジスタ41、第2トランジスタ42、第3トランジスタ43)を介してインジェクタ50を駆動制御する(駆動制御処理)。また、インジェクタ制御装置は、後ほど説明する制御IC20における内部クロック生成部21(RC発振回路21)で生成されたクロックを用いて計時された到達時間を補正するめの補正係数を学習する(学習処理)。具体的には、制御IC20のRC発振回路21によって生成された内部クロックを用いて計時された到達時間を、後ほど説明するマイコン10の水晶発振回路11によって生成された内部クロックを用いて計時された場合の到達時間と同等になるように補正するための補正係数を学習する。この駆動制御処理及び学習処理に関しては、後ほど詳しく説明する。
【0030】
なお、RC発振回路21で生成されたクロックは、制御IC20の内部クロック(基準クロック)であり、クロック信号、クロックパルスとも言い換えることができる。同様に、水晶発振回路11によって生成された内部クロックは、マイコン10の内部クロック(基準クロック)であり、クロック信号、クロックパルスとも言い換えることができる。
【0031】
なお、マイコン10と直噴制御IC20とは、一つのケース内において別体で設けられていてもよいし、別々のケースにそれぞれ設けられていてもよい。また、本発明のインジェクタ制御装置は、マイコン10と制御IC20に加えて、上記スイッチング手段や抵抗素子60(後ほど説明する)を備えて構成されるものであってもよい。
【0032】
マイコン10は、CPU(CentralProcessing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)、発振回路、及び記憶内容が書き換え可能な不揮発性メモリ(例えばEEPROM(Electrically Erasable Programmable Read-Only Memory)やフラッシュROM)などを備えて構成される周知のマイクロコンピュータである。なお、本実施形態においては、内部クロック生成部11である発振回路として、水晶振動子を用いた固体振動発振回路である水晶発振回路(以下、水晶発振回路11とも記載する)を採用する。この水晶発振回路11は、後ほど説明する制御IC20の内部クロック生成部21としてのRC発振回路(以下、RC発振回路21とも記載する)に比べて高価でるが、RC発振回路21よりも発振周波数の精度が高い。RC発振回路21の誤差は約20%であるのに対して、水晶発振回路11の誤差は約0.0001%である。
【0033】
マイコン10は、CPUが水晶発振回路11で生成されたクロックに同期して、予めROMに格納されたプログラムなどを読み出して、RAMを一時的記憶部として用いつつ演算処理を実行することで所定の処理動作を実行する。この処理動作としては、上述の駆動制御処理や学習処理などがある。
【0034】
マイコン10は、駆動制御処理時には、エンジン回転数、アクセル開度、エンジン水温など、各種センサ(図示省略)にて検出される内燃機関の運転情報に基づいて、気筒毎に所定のパルス幅(パルス持続時間)のパルス信号である噴射指令信号を生成する。なお、噴射指令信号は、所定時間の電圧波形と言い換えることもできる。
【0035】
そして、この生成した噴射指令信号を制御IC20に出力する(信号線1を介して出力する)。なお、インジェクタ50は、噴射指令信号が出力されている間(言い換えると、噴射指令を示す信号のレベルがハイの間)、アクチュエータが通電される。つまり、マイコン10は、内燃機関の運転情報に基づいて、気筒毎にインジェクタ50のソレノイドコイル(アクチュエータ)への通電時間(通電期間)を設定する。そして、設定した通電期間に応じた噴射指令信号を出力する。つまり、設定した通電期間、噴射指令を示す信号のレベルをハイにする。よって、噴射指令信号(パルス信号)のパルス持続時間(パルス幅)は、設定した通電期間と同等である。よって、噴射指令信号は、インジェクタ(ソレノイドコイル)50への通電時間を示す信号とも言い換えることができる。
【0036】
また、マイコン10は、学習処理時には、所定のパルス幅(時間A)のパルス信号である誤差確認用信号を制御IC20に出力する。この誤差確認用信号は、所定のパルス持続時間(時間A)のパルス信号と言い換えることもできる。また、誤差確認用信号は、所定時間(時間A)の電圧波形と言い換えることもできる。また、マイコン10は、制御IC20に対して、RC発振回路21によって生成された内部クロックを用いて誤差確認用信号のパルス幅を計時させるともに、このパルス幅の計時結果(計時結果B)を出力させる。
【0037】
そして、マイコン10は、制御IC20よって計時された、誤差確認用信号のパルス幅(パルス持続時間)を示す信号(計時結果B)を受信する。
さらに、マイコン10は、誤差確認用信号(時間A)と制御IC20からの信号(計時結果B)とに基づいて、時間A/計時結果Bを補正係数として学習(算出)する。つまり、マイコン10は、誤差確認用信号のパルス幅(時間A)を制御IC20から出力されたパルス幅の計時結果Bで除算した値を補正係数として学習する。なお、マイコン10は、学習した補正係数A/Bを不揮発性メモリに記憶しておく。なお、不揮発性メモリには、後ほど説明する基準時間Fなども記憶されている。
【0038】
制御IC20は、内部クロック生成部(RC発振回路)21、励磁制御部22、保持制御部23、INJスイッチ制御部(以下、単にスイッチ制御部とも記載する)24、モニタ部25などの機能ブロックを備える。制御IC20は、RC発振回路21にて生成されるクロックに同期して動作するものである。上述のように、制御IC20の内部クロックを生成するRC発振回路21は、マイコン10の内部クロックを生成する水晶発振回路11に比べて安価であるが、水晶発振回路11よりも発振周波数の精度が低い。このように、制御IC20の内部クロック生成部21としてRC発振回路21を用いることによって、制御IC20に水晶発振回路を用いる場合よりもインジェクタ制御装置を安価にすることができる。
【0039】
制御IC20は、マイコン10からの噴射指令信号及びモニタ部25でモニタ(計測)された電流値(電流検出手段の検出結果が示す値)に基づいてスイッチング手段(第1トランジスタ41、第2トランジスタ42、第3トランジスタ43)のそれぞれを個別にオン及びオフする。このようにスイッチング手段(第1トランジスタ41、第2トランジスタ42、第3トランジスタ43)のそれぞれを個別にオン及びオフすることで、インジェクタ50のソレノイドコイルに対して第1電源31又は第2電源32から電圧が印加(供給)される。なお、制御IC20は、マイコン10から噴射指令信号が出力されている間、インジェクタ50のソレノイドコイルに対する通電を行う。
【0040】
励磁制御部22は、第1トランジスタ41に駆動信号(オン信号、オフ信号)を出力することによって、第1トランジスタ41をオン及びオフさせる。保持制御部23は、第2トランジスタ42に駆動信号(オン信号、オフ信号)を出力することによって、第2トランジスタ42をオン及びオフさせる。また、スイッチ制御部24は、第3トランジスタ43に駆動信号(オン信号、オフ信号)を出力することによって、第3トランジスタ43をオン及びオフさせる。
【0041】
励磁制御部22が第1トランジスタ41をオンにするとともに、スイッチ制御部24が第3トランジスタ43をオンにすることで、インジェクタ50に対して第1電源31から電圧が印加される。また、スイッチ制御部24が第3トランジスタ43をオフにすることで、インジェクタ50に対する第1電源31からの電圧の印加が停止される。
【0042】
保持制御部23が第2トランジスタ42をオンにするとともに、スイッチ制御部24が第3トランジスタ43をオンにすることで、インジェクタ50に対して第2電源32から電圧が印加される。また、スイッチ制御部24が第3トランジスタ43をオフにすることで、インジェクタ50に対する第2電源32からの電圧の印加が停止される。
【0043】
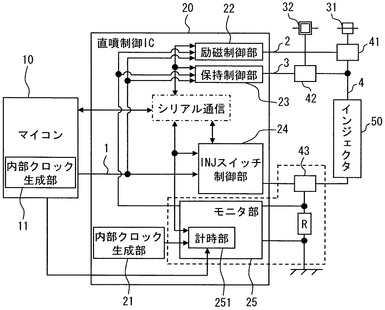
モニタ部25は、インジェクタ50に流れる電流の電流値をモニタ(計測)する(電流検出手段)とともに、インジェクタ50に対する電圧の印加から電流値(電流検出手段の検出結果が示す値)が予め決められた値(例えばインジェクタ50が開弁する値)になるまでの時間を計時する。このモニタ部25は、図2に示すように、計時部251及び電流電圧変換回路252などを備える。インジェクタ50のソレノイドコイルに流れる電流(以下、インジェクタ電流とも称する)は、第3トランジスタ43に接続された電流電圧変換回路252におけるシャント抵抗Rを経てアースに流れる。よって、電流電圧変換回路252は、シャント抵抗Rの両端に生じる電圧降下を測定し、この測定電圧をシャント抵抗Rの抵抗値で除してインジェクタ50に流れる電流値を求める。
【0044】
計時部251は、インジェクタ電流が流れ初めてから(換言すると噴射指令信号が出力されてから)、インジェクタ電流の電流値が所定値に達するまでの時間(到達時間)を、RC発振回路21で生成されたクロックをカウントすることで計測(計時)する(計時手段)。ここでの所定値としては、インジェクタ50が開弁する電流値を採用することができる。つまり、計時部251は、インジェクタ電流が流れ初めてからインジェクタ50が開弁するまでの時間を計測(計時)する。また、モニタ部25(計時部251)は、計時した時間(インジェクタ電流が流れ初めてからインジェクタ50が開弁するまでの時間)を示す信号(計時結果E)をマイコン10に送信する(例えばシリアル通信にて送信する)。
【0045】
また、モニタ部25(計時部251)は、マイコン10から送信された誤差確認用信号のパルス幅(パルス持続時間、以下、信号時間とも称する)を、RC発振回路21で生成されたクロックをカウントすることで計測(計時)する(計時手段)。そして、モニタ部25(計時部251)は、計時した時間(誤差確認用信号である電圧波形の時間(パルス信号のパルス持続時間))を示す信号(計時結果B)をマイコン10に送信する(例えばシリアル通信にて送信する)。
【0046】
また、モニタ部25は、インジェクタ電流の電流値が第1トランジスタ41をオフするための所定値(第1閾値、第1トランジスタ41のオフ条件である電流値)に達したか否かを判定する。そして、インジェクタ電流の電流値が第1閾値に達したと判定すると、インジェクタ電流の電流値が第1閾値に達したことを示す信号を励磁制御部22に送信する。
【0047】
また、モニタ部25は、インジェクタ電流の電流値が第2トランジスタ42をオンするための所定値(第2閾値、第2トランジスタ42のオン条件である電流値)に達したか否かを判定する。そして、インジェクタ電流の電流値が第2閾値に達したと判定すると、インジェクタ電流の電流値が第2閾値に達したことを示す信号を保持制御部23に送信する。
【0048】
また、モニタ部25は、インジェクタ電流の電流値が第2トランジスタ42をオフするための所定値(第3閾値、第2トランジスタ42のオフ条件である電流値)に達したか否かを判定する。そして、インジェクタ電流の電流値が第3閾値に達したと判定すると、インジェクタ電流の電流値が第3閾値に達したことを示す信号を保持制御部23に送信する。
【0049】
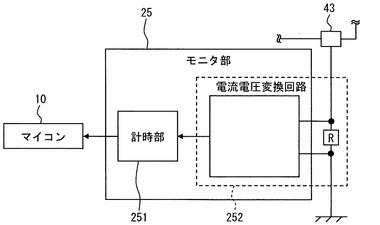
なお、モニタ部25は、図3に示すようにしてもよい。つまり、計時部251は、インジェクタ電流が流れ初めてから、インジェクタ電流の電流値が所定値に達するまでの時間を、直接電圧値(電流検出手段の検出結果が示す値)により計測(計時)するようにしてもよい。この場合も、RC発振回路21で生成されたクロックをカウントすることで計測(計時)する。例えば、電圧波形(矩形波形)の立ち上がりエッジ間或いは立ち上がりエッジと立ち下がりエッジの間の時間を、RC発振回路21で生成されたクロックをカウントすることで計測(計時)する。そして、モニタ部25(計時部251)は、計時した時間(インジェクタ電流が流れ始めてから(インジェクタ50のソレノイドコイルに通電を開始してから)インジェクタ50が開弁するまでの時間)を示す信号(計時結果E)をマイコン10に送信する(例えばシリアル通信にて送信する)。
【0050】
また、この場合、モニタ部25は、電圧値によって、インジェクタ電流の電流値が第1閾値に達したか否かを判定する。そして、インジェクタ電流の電流値が第1閾値に達したと判定すると、インジェクタ電流の電流値が第1閾値に達したことを示す信号を励磁制御部22に送信する。また、モニタ部25は、電圧値によって、インジェクタ電流の電流値が第2閾値に達したか否かを判定する。そして、インジェクタ電流の電流値が第2閾値に達したと判定すると、インジェクタ電流の電流値が第2閾値に達したことを示す信号を保持制御部23に送信する。また、モニタ部25は、電圧値によって、インジェクタ電流の電流値が第3閾値に達したか否かを判定する。そして、インジェクタ電流の電流値が第3閾値に達したと判定すると、インジェクタ電流の電流値が第3閾値に達したことを示す信号を保持制御部23に送信する。
【0051】
第1電源31及び第2電源32は、インジェクタ50(ソレノイドコイル)に電圧を印加するものである。第1電源31は、バッテリ(図示省略)の電圧(バッテリ電圧)を昇圧して、昇圧して得られた高電圧を発生(供給)するものであり、DC/DCコンバータなどのスイッチング電源を採用することができる。
【0052】
第2電源32は、バッテリ電圧を降圧して、降圧して得られた低電圧を発生(供給)するものであり、DC/DCコンバータなどのスイッチング電源を採用することができる。また、第2電源32は、バッテリ電圧を発生(供給)するものであってもよい。
【0053】
つまり、第1電源31は、第2電源32よりも高電圧を発生する高電圧発生手段である。一方、第2電源32は、第1電源31よりも低電圧を発生する低電圧発生手段である。
【0054】
第1トランジスタ41は、上述のように制御IC20の励磁制御部22からの駆動信号によってオン及びオフするものである。第2トランジスタ42は、上述のように制御IC20の保持制御部23からの駆動信号によってオン及びオフするものである。第3トランジスタ43は、制御IC20のスイッチ制御部24からの駆動信号によってオン及びオフするものである。これらの第1トランジスタ41、第2トランジスタ42、第3トランジスタ43としては、MOSFET、バイポーラトランジスタ等のスイッチング素子を採用することができる。
【0055】
インジェクタ50は、エンジン(内燃機関)の気筒毎にそれぞれに設けられ、気筒内に直接燃料を噴射する直噴型のインジェクタである。例えば、4気筒エンジン(内燃機関)の場合は、4個のインジェクタ50が設けられる。図1では、複数のインジェクタ50のうちの一つを図示している。このインジェクタ50は、内蔵されたソレノイドコイル(アクチュエータ)に通電されると、このソレノイドコイルにより弁体が開弁位置に移動する。そして、インジェクタ50は、このようにソレノイドコイルにより弁体が開弁位置に移動して開弁状態になると、燃料を噴射する。また、インジェクタ50は、内蔵されたソレノイドコイル(アクチュエータ)への通電が停止(遮断)されると、このソレノイドコイルにより弁体が閉弁位置に移動する。そして、インジェクタ50は、このようにソレノイドコイルにより弁体が閉弁位置に移動して閉弁状態になると、燃料の噴射を停止する。
【0056】
ここで、インジェクタ制御装置の処理動作に関して説明する。まず、図4(a)〜(d)の波形図に基づいて、駆動制御の基本的な処理に関して説明する。
【0057】
マイコン10は、イグニッションスイッチ(IGSW)がオンになると、スターターモータ(図示省略)を回転させることによってエンジン(内燃機関)を始動させる。そして、マイコン10は、図4(a)に示すように、インジェクタ50を開弁させるために、制御IC20に対して噴射指令信号を送信する(開弁制御、例えばパラレル通信にて送信する)。
【0058】
一方、噴射指令信号を受信した制御IC20の励磁制御部22は、第1トランジスタ41に駆動信号(オン信号)を出力して第1トランジスタ41をオンさせる(開弁制御、図4(b)のt1)。換言すると、制御IC20の励磁制御部22は、噴射指令を示す信号のレベルがハイになると、第1トランジスタ41に駆動信号(オン信号)を出力して第1トランジスタ41をオンさせる。また、噴射指令信号を受信した制御IC20のスイッチ制御部24は、第3トランジスタ43に駆動信号(オン信号)を出力して第3トランジスタ43をオンさせる(開弁制御、図示省略)。換言すると、制御IC20のスイッチ制御部24は、噴射指令を示す信号のレベルがハイになると、第3トランジスタ43に駆動信号(オン信号)を出力して第3トランジスタ43をオンさせる。つまり、制御IC10は、噴射指令信号を受信すると(噴射指令を示す信号のレベルがハイになると、噴射指令信号であるパルス信号を受信すると)、第1トランジスタ41と第3トランジスタ43とを同時にオンさせる。
【0059】
このように第1トランジスタ41と第3トランジスタ43がオンすると、インジェクタ50(ソレノイドコイル)には、第1電源31から電圧が印加されてインジェクタ電流が流れる。このインジェクタ電流は、時間の経過に伴って徐々に大きくなる(図4(d)のt1からt2)。そして、インジェクタ50は、インジェクタ電流の電流値が所定値(インジェクタ50が開弁する電流値、開弁電流値とも称する)に達すると開弁する。インジェクタ制御装置は、このように第1トランジスタ41と第3トランジスタ43とを同時にオンさせることによって、インジェクタ50を開弁させる(開弁制御)。
【0060】
また、モニタ部25は、このインジェクタ電流の電流値を求めるとともに、インジェクタ電流の電流値が第1閾値に達したか否かを判定する(図4(d)のt1からt2)。そして、インジェクタ電流の電流値が第1閾値に達したと判定すると(図4(d)のt2)、インジェクタ電流の電流値が第1閾値に達したことを示す信号を励磁制御部22に送信する。
【0061】
制御IC20の励磁制御部22は、インジェクタ電流の電流値が第1閾値に達したことを示す信号を受信すると、第1トランジスタ41に駆動信号(オフ信号)を出力して第1トランジスタ41をオフさせる(図4(b)のt2)。
【0062】
なお、上述のように第1電源31は、高電圧を発生(供給)するものである。よって、インジェクタ50(ソレノイドコイル)に流れるインジェクタ電流(開弁電流)の電流値は、比較的早く所定値(インジェクタ50が開弁する電流値)に達する(図4(d)のt1からt2)。従って、インジェクタ50を高速で開弁させることができる。つまり、インジェクタ50の開弁応答を早めることができる。換言すると、インジェクタ50を高速駆動させることができる。このように、図4(d)のt1からt2の間は、励磁制御部22によってインジェクタ50の駆動制御が行われる。
【0063】
インジェクタ制御装置は、このように第1トランジスタ41と第3トランジスタ43とをオンさせてインジェクタ50を開弁させた後は、インジェクタ50の開弁状態を保持(維持)する(開弁保持制御、開弁維持制御)。
【0064】
励磁制御部22によって第1トランジスタ41がオフされると、インジェクタ電流は徐々に低下していく(図4(d)のt2からt3)。モニタ部25は、このインジェクタ電流の電流値を求めるとともに、インジェクタ電流の電流値が第2閾値に達したか否かを判定する(図4(d)のt2からt3)。そして、インジェクタ電流の電流値が第2閾値に達したと判定すると(図4(d)のt3)、インジェクタ電流の電流値が第2閾値に達したことを示す信号を保持制御部23に送信する。
【0065】
制御IC20の保持制御部23は、インジェクタ電流の電流値が第2閾値に達したことを示す信号を受信すると、第2トランジスタ42に駆動信号(オン信号)を出力して第2トランジスタ42をオンさせる(開弁保持制御、図4(c)のt3)。第2トランジスタ42がオンすると、インジェクタ50(ソレノイドコイル)には、第2電源32から電圧が印加されてインジェクタ電流が流れる。このインジェクタ電流は、時間の経過に伴って徐々に大きくなる(図4(d)のt3からt4)。
【0066】
なお、上述のように第2電源32は、低電圧を発生(供給)するものである。つまり、第2トランジスタ42をオンさせることで、インジェクタ50(ソレノイドコイル)には比較的小さな電流値のインジェクタ電流(開弁保持電流)が流れる(図4(d)のt3からt4)。この開弁保持電流の電流値は、インジェクタ50の開弁状態を保持するのに必要な電流値である。
【0067】
モニタ部25は、このように保持制御部23によって第2トランジスタ42がオンされているときのインジェクタ電流の電流値を求めるとともに、このインジェクタ電流の電流値が第3閾値に達したか否かを判定する(図4(d)のt3からt4)。そして、インジェクタ電流の電流値が第3閾値に達したと判定すると(図4(d)のt4)、インジェクタ電流の電流値が第3閾値に達したことを示す信号を保持制御部23に送信する。
【0068】
制御IC20の保持制御部23は、インジェクタ電流の電流値が第3閾値に達したことを示す信号を受信すると、第2トランジスタ42に駆動信号(オフ信号)を出力して第2トランジスタ42をオフさせる(開弁保持制御、図4(c)のt4)。保持制御部23によって第2トランジスタ42がオフされると、インジェクタ電流は徐々に低下していく(図4(d)のt4からt5)。モニタ部25は、このインジェクタ電流の電流値を求めるとともに、インジェクタ電流の電流値が第2閾値に達したか否かを判定する(保持制御、図4(d)のt4からt5)。そして、インジェクタ電流の電流値が第2閾値に達したと判定すると(図4(d)のt5)、インジェクタ電流の電流値が第2閾値に達したことを示す信号を保持制御部23に送信する。
【0069】
制御IC20の保持制御部23は、以降同様に、モニタ部25で求められたインジェクタ電流の電流値と第2閾値及び第3閾値とを比較して、第2トランジスタ42のオン及びオフを繰り返し行う。つまり、保持制御時においては、制御IC20の保持制御部23は、インジェクタ電流の電流値が、インジェクタ50の開弁状態を保持するのに必要な電流値となるように、第2トランジスタ42のオン及びオフを繰り返し行う。インジェクタ制御装置は、このように第2トランジスタ42のオン及びオフを繰り返し行うことによって、インジェクタ50の開弁状態を保持する。
【0070】
そして、制御IC20のスイッチ制御部24は、噴射指令信号がオフ(噴射指令を示す信号のレベルがロー、噴射指令信号であるパルス信号がオフ)になると(図4(a)のt6)、第3トランジスタ43に駆動信号(オフ信号)を出力して第3トランジスタ43をオフさせる(図示省略)。このようにすることで、インジェクタ50のソレノイドコイルへの通電を遮断して、インジェクタ50を閉弁させる(図4(d)のt6)。なお、このとき、制御IC20の保持制御部23は、インジェクタ電流値の電流値に応じて、第2トランジスタ42に駆動信号(オン信号又はオフ信号)を出力する。
【0071】
このようにインジェクタ制御装置は、インジェクタ50を開弁して内燃機関に燃料を噴射する場合、開弁時には大電流値の開弁電流をインジェクタ50のソレノイドに通電して開弁動作を速める。そして、開弁完了後は開弁状態の維持に必要な小電流値の開弁保持電流に切り替え(開弁保持電流をインジェクタ50のソレノイドに通電して)、この開弁保持電流をソレノイドに所定時間(噴射指令信号がオフになるまで)通電させて噴射量を制御する。
【0072】
なお、本実施形態においては、モニタ部25が、インジェクタ電流の電流値が第1〜第3閾値に達したか否かを判定するとともに、インジェクタ電流の電流値が各閾値に達したことを励磁制御部22又は保持制御部23に通知する例を採用した。しかしながら、本発明はこれに限定されるものではない。インジェクタ電流の電流値が第1〜第3閾値の夫々に達したか否かを判定するとともに、インジェクタ電流の電流値が各閾値に達したことを励磁制御部22又は保持制御部23に通知する手段であれば採用することができる。
【0073】
ところで、制御IC20やインジェクタ50(ソレノイドコイル)は、電気的特性にばらつき(製造ばらつき、温度変化によるばらつき)が生じることがある。この制御IC20やインジェクタ50(ソレノイドコイル)の電気的特性にばらつきは、インジェクタ50による燃料の噴射量のばらつきにも繋がる可能性がある。つまり、制御IC20やインジェクタ50(ソレノイドコイル)の電気的特性にばらつきが生じた場合、インジェクタ50(ソレノイドコイル)への通電波形がばらつく可能性がある。そして、インジェクタ50(ソレノイドコイル)への通電波形がばらつくと、インジェクタ50にインジェクタ電流が流れ始めてから(つまり噴射指令信号が出力されてから)インジェクタ電流が開弁電流値に達するまでの時間がばらつき、インジェクタ50による燃料の噴射量もばらつく可能性がある。なお、このインジェクタ電流が流れ始めてからインジェクタ電流が開弁電流値に達するまでの時間を、インジェクタ開弁開始時間(開弁開始時間)又は到達時間とも称する。
【0074】
図5に示すように、例えば、インジェクタ電流が正常時よりも急に上昇した場合、開弁開始時間は狙いとする開弁開始時間(開始狙い値F、換言すると、予め設定された到達時間の基準時間F)よりも短くなる。この場合、インジェクタ50の開弁時間が長くなるため、燃料の噴射時間が長くなって、燃料の噴射量が多くなる。逆に、インジェクタ電流が正常時よりもなだらかに上昇した場合、開弁開始時間は狙いとする開弁開始時間(開始狙い値F、予め設定された到達時間の基準時間F)よりも長くなる。この場合、インジェクタ50の開弁時間が短くなるため、燃料の噴射時間が短くなって、燃料の噴射量が少なくなる。なお、開始狙い値F(基準時間F)は、燃料の噴射時間が狙い値(噴射時間狙い値、言い換えると、噴射量が狙い値(噴射量狙い値))となるように予め設定された値であり、インジェクタ50にインジェクタ電流が流れ始めてから、インジェクタ電流が開弁電流値に達するまでの時間である。なお、燃料の噴射時間は、インジェクタ50の開弁時間と同等である。よって、噴射時間狙い値は、開弁時間狙い値とも言い換えることができる。
【0075】
そこで、本実施形態におけるインジェクタ制御装置は、ばらつき補正処理を行うものである。このばらつき補正処理に関して図6〜図9を用いて説明する。図6に示すフローチャートは、イグニッションスイッチ(IGSW)がオンになるとスタートして、IGSWがオンの間実行されるものである。
【0076】
まず、ステップS10では、マイコン10は、IGSWがオンになると、スターターモータ(図示省略)を回転させることによってエンジン(内燃機関)を始動する。
【0077】
ステップS11では、マイコン10は、図4(a)に示すように、インジェクタ50を開弁させるために、信号線1を介して制御IC20に対して噴射指令信号を送信する(開弁制御、例えばパラレル通信にて送信する)。
【0078】
上述のように、噴射指令信号を受信した制御IC20の励磁制御部22は、第1トランジスタ41に駆動信号(オン信号)を出力して第1トランジスタ41をオンさせる(開弁制御、図4(b)のt1)。また、噴射指令信号を受信した制御IC20のスイッチ制御部24は、第3トランジスタ43に駆動信号(オン信号)を出力して第3トランジスタ43をオンさせる(開弁制御、図示省略)。
【0079】
ステップS12では、制御IC20(モニタ部25の計時部251)は、インジェクタ50(ソレノイドコイル)への通電電流波形(インジェクタ電流の電流値)が開弁電流値に達(到達)するまでの時間(到達時間)を計時する。つまり、インジェクタ電流が流れ初めてから、インジェクタ電流の電流値が開弁電流値にするまでにかかった時間を計時する。言い換えると、制御IC20(モニタ部25の計時部251)は、インジェクタ電流が流れ初めてからインジェクタ50が開弁するまでの時間を計時する。このとき、制御IC20(モニタ部25の計時部251)は、RC発振回路21で生成されたクロックをカウントすることで計測(計時)する。
【0080】
ステップS13では、制御IC20は、ステップS12で計時した時間を示す信号(計時結果E)をマイコン10に送信する(例えばシリアル通信にて送信する)。
【0081】
ステップS14では、マイコン10は、予め設定された到達時間の基準時間Fと計時結果Eとを比較する。つまり、マイコン10は、不揮発性メモリに記憶された基準時間Fと、制御IC20から受信した計時結果Eとを比較する(第2補正手段)。
【0082】
ステップS15では、マイコン10は、基準時間Fと計時結果Eとが一致するか否か(E=Fであるか否か)を判定する(第2補正手段)。そして、基準時間Fと計時結果Eとが一致する(E=F)と判定した場合は、狙い通りの噴射量が得られているとみなしてステップS11へ戻る(第2補正手段)。つまり、制御IC20に送信する噴射指令信号の補正は行わない。一方、基準時間Fと計時結果Eとが一致しない(E≠F)と判定した場合は、狙い通りの噴射量が得られていないとみなしてステップS16へ進む(第2補正手段)。
【0083】
ステップS16では、マイコン10は、制御IC20に送信する噴射指令信号を補正する。つまり、基準時間Fと計時結果Eとの差分に応じて、インジェクタ50の開弁時間が開弁時間狙い値となるように噴射指令信号のパルス幅を補正する(第2補正手段)。
【0084】
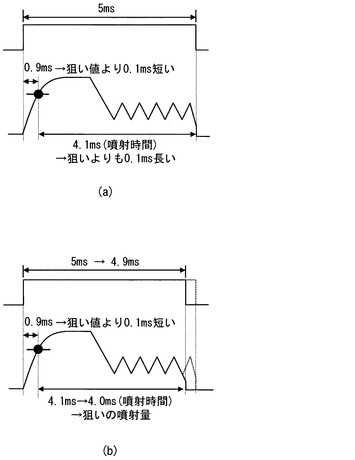
ここで、この噴射指令信号の補正に関して、波形図(図7〜図9)を用いて説明する。ここでは、5ms(初期値)の噴射指令信号(5msの電圧波形、パルス持続時間(パルス幅)が5msのパルス信号)をマイコン10から制御IC20に送信するものであり、基準時間Fが1.0ms、噴射時間狙い値が4.0msである場合を一例として採用する。
【0085】
なお、図7では、上段はマイコン10が制御IC20に出力する噴射指令信号の電圧波形(信号線1の波形)を示し、下段はモニタ部25で求められたインジェクタ電流の電流波形(信号線4の波形)を示す。また、図8(a)、図8(b)、図9(a)、図9(b)の各図でも同様に、上段はマイコン10が制御IC20に出力する噴射指令信号の電圧波形(信号線1の波形)を示し、下段はモニタ部25で求められたインジェクタ電流の電流波形(信号線4の波形)を示す。
【0086】
まず、図7に示すように、計時結果E(モニタ値)が基準時間Fと同じ1.0msであった場合(すなわち図6に示すフローチャートでは、ステップS15でYES判定)、インジェクタ50による燃料の噴射時間は4.0msとなる。つまり、インジェクタ50による燃料の噴射時間も噴射時間狙い値と同じとなる。よって、計時結果Eが基準時間Fと一致した場合、狙い通りの噴射量が得られているとみなすことができる。
【0087】
次に、図8(a)に示すように、計時結果E(モニタ値)が基準時間Fよりも0.1ms短い0.9msであった場合(すなわち図6に示すフローチャートでは、ステップS15でNO判定)、インジェクタ50による燃料の噴射時間は4.1msとなる。つまり、インジェクタ50による燃料の噴射時間は、噴射時間狙い値よりも0.1ms長くなる。よって、この場合、インジェクタ50による燃料の噴射量は、噴射量狙い値よりも多くなってしまう。
【0088】
この場合、図8(b)に示すように、噴射指令信号の時間を4.9msに補正する。すなわち、電圧波形の時間を4.9msに補正する(言い換えると、パルス持続時間(パルス幅)を4.9msに補正する)。つまり、計時結果Eが基準時間Fよりも短かった場合、計時結果Eと基準時間Fの差分時間の分だけ、噴射指令信号の時間(パルス幅)を短くする。よって、図6に示すフローチャートにおけるステップS16では、このように噴射指令信号の時間を補正する。
【0089】
このように補正することによって、計時結果Eが基準時間Fよりも0.1ms短い0.9msであっても、インジェクタ50による燃料の噴射時間は4.0msとなる。つまり、インジェクタ50による燃料の噴射時間を噴射時間狙い値と同じにすることができる。よって、インジェクタ50による燃料の噴射量を噴射量狙い値とすることができる。
【0090】
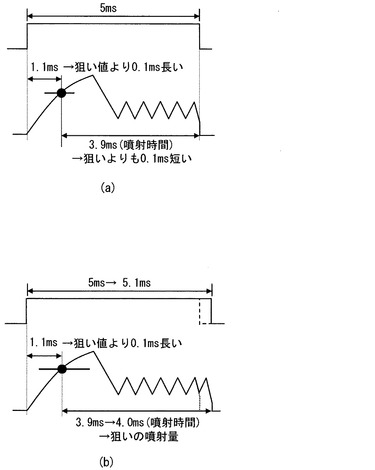
次に、図9(a)に示すように、計時結果E(モニタ値)が基準時間Fよりも0.1ms長い1.1msであった場合(すなわち図6に示すフローチャートでは、ステップS15でNO判定)、インジェクタ50による燃料の噴射時間は3.9msとなる。つまり、インジェクタ50による燃料の噴射時間は、噴射時間狙い値よりも0.1ms短くなる。よって、この場合、インジェクタ50による燃料の噴射量は、噴射量狙い値よりも少なくなってしまう。
【0091】
この場合、図9(b)に示すように、噴射指令信号の時間を5.1msに補正する。すなわち、電圧波形の時間を5.1msに補正する(言い換えると、パルス持続時間(パルス幅)を5.1msに補正する)。つまり、計時結果Eが基準時間Fよりも長かった場合、計時結果Eと基準時間Fの差分時間の分だけ、噴射指令信号の時間(パルス幅)を長くする。よって、図6に示すフローチャートにおけるステップS16では、このように噴射指令信号の時間を補正する。
【0092】
このように補正することによって、計時結果Eが基準時間Fよりも0.1ms長い1.1msであっても、インジェクタ50による燃料の噴射時間は4.0msとなる。つまり、インジェクタ50による燃料の噴射時間を噴射時間狙い値と同じにすることができる。よって、インジェクタ50による燃料の噴射量を噴射量狙い値とすることができる。
【0093】
ここまで説明したように、インジェクタ制御装置は、ばらつき補正処理を行うことによって、制御IC20やインジェクタ50に電気的特性にばらつきが生じた場合であっても、インジェクタ50による燃料の噴射量を高精度に制御することができる。よって、インジェクタ50と制御IC20との組み合わせを変更したとしても、インジェクタ50による燃料の噴射量を高精度に制御することができる。換言すると、ばらつきが生じた場合や、組み合わせを変更したとしても、インジェクタ50による燃料の噴射量を狙い値(噴射量狙い値)にすることができる。
【0094】
しかしながら、上述のように、制御IC20は、インジェクタ制御装置を安価にするために、マイコン10に設けられた水晶発振回路11よりも精度が低いRC発振回路21を用いている。従って、ばらつき補正処理時に制御IC20で到達時間を計時したとしても、この到達時間に誤差が生じている可能性がある。
【0095】
そこで、本実施形態におけるインジェクタ制御装置は、制御IC20におけるRC発振回路21による誤差(RC発振回路21のクロック誤差であり、言い換えれば、制御IC20のクロック誤差)を補正するために、学習処理を実行する。
【0096】
なお、この学習処理は、インジェクタ制御装置の生産工程で行うことができる。また、学習処理は、インジェクタ制御装置、又はインジェクタ制御装置が搭載された車両が市場に出た後(例えばインジェクタ制御装置が搭載された車両の定期メンテナンスなどのタイミング)で行うこともできる。RC発振回路21は、インジェクタ制御装置、又はインジェクタ制御装置が搭載された車両が市場に出た後に、抵抗(R)、コンデンサ(C)の劣化で精度が低下(RC発振回路21の生産時よりも低下)することもありうる。よって、インジェクタ制御装置、又はインジェクタ制御装置が搭載された車両が市場に出た後に学習処理を行うことによって、RC発振回路21の精度が低下した場合であっても、RC発振回路21の誤差を補正することができる。
【0097】
また、インジェクタ制御装置内の温度、又はエンジンの冷却水の温度が所定値(所定温度)に達した場合に、学習処理を行うようにしてもよい。RC発振回路21は、温度によって特性が変化して精度が低下する可能性がある。しかしながら、このようにすることによって、RC発振回路21の精度が低下した場合であっても、RC発振回路21が生成するクロックを用いて計時された到達時間を補正することができる。
【0098】
なお、インジェクタ制御装置内の温度が所定値に達した場合に、学習処理を行う場合には、インジェクタ制御装置内の温度を検出する温度検出装置(図示省略)を設けておく。
そして、マイコン10は、内燃機関の温度を示す温度情報として、温度検出装置からインジェクタ制御装置内の温度を示す温度情報を取得する(温度情報取得手段)。同様に、エンジンの冷却水の温度が所定値に達した場合に、学習処理を行う場合には、エンジンの冷却水の温度を検出する温度検出装置(図示省略)を設けておく。マイコン10は、内燃機関の温度を示す温度情報として、温度検出装置から冷却水の温度を示す温度情報を取得する(温度情報取得手段)。
【0099】
なお、IGSWがオン状態である間に少なくとも一回、学習処理を行うようにしてもよい。このようにすることによって、RC発振回路21が経時(経年)劣化によって精度が低下した場合であっても、RC発振回路21が生成するクロックを用いて計時された到達時間の誤差を補正することができる。
【0100】
ここで、図10〜図13を用いて、インジェクタ制御装置の学習処理に関連する処理動作を説明する。
【0101】
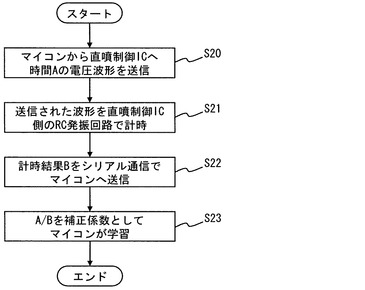
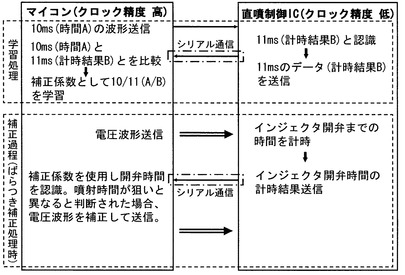
まず、図10,図11に基づいて、インジェクタ制御装置の学習処理に関して説明する。ステップS20では、マイコン10は、誤差確認用信号(時間Aの電圧波形、パルス持続時間(パルス幅)が時間Aのパルス信号)を制御IC20へ送信する(例えばパラレル通信にて送信する)。例えば、図11に示すように、マイコン10は、10msの波形(誤差確認用信号)を送信する(学習手段)。また、マイコン10は、制御IC20(モニタ部25、計時手段)に対して、RC発振回路22によって生成された内部クロックを用いて誤差確認用信号のパルス幅を計時させる(学習手段)。
【0102】
ステップS21では、制御IC20(モニタ部25の計時部251)は、マイコン10から受信した誤差確認用信号の時間を、RC発振回路21で生成されたクロックをカウントすることで計測(計時)する。つまり、制御IC20(モニタ部25の計時部251)は、誤差確認用信号が入力されてから、誤差確認用信号の入力が終了までの時間を計時する。図11に示す例では、制御IC20(モニタ部25の計時部251)は、10msの波形(誤差確認用信号)を11msと計時する。
【0103】
ステップS22では、制御IC20は、ステップS21で計時した時間を示す信号(計時結果B)をマイコン10に送信する(例えばシリアル通信にて送信する)。つまり、図11に示すように、制御IC20は、計時した11msを示す計時結果Bを送信する。このように、インジェクタ制御装置は、マイコン10から制御IC20に送信された誤差確認用信号を制御IC20内でモニタして、その結果をマイコン10に戻す。
【0104】
そして、ステップS23では、マイコン10は、送信した誤差確認用信号の時間Aと制御IC20から受信した計時結果Bとを比較して、時間Aと計時結果BとからA/Bを補正係数として学習する(学習手段)。つまり、図11に示すように、マイコン10は、誤差確認用信号の時間10msと制御IC20から受信した計時結果である11msとから補正係数10/11を学習する。なお、マイコン10は、この補正係数A/Bを不揮発性メモリに記憶する。なお、図11における補正過程とは、上述のばらつき補正処理を示すものである。
【0105】
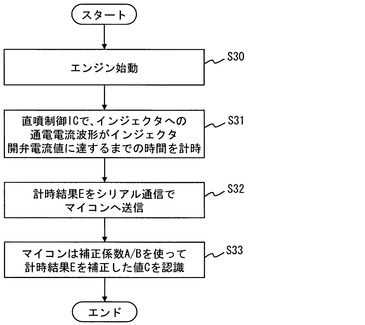
次に、図12,図13に基づいて、学習処理を行ったインジェクタ制御装置がばらつき補正処理を行う際の処理動作に関して説明する。つまり、制御IC20におけるクロック誤差を考慮して、ばらつき補正処理を行う際の処理動作に関して説明する。
【0106】
ステップS30では、図6のステップS10と同様に、マイコン10は、IGSWがオンになると、スターターモータ(図示省略)を回転させることによってエンジン(内燃機関)を始動する。その後、図6のステップS11と同様に、マイコン10は、インジェクタ50を開弁させるために、信号線1を介して制御IC20に対して噴射指令信号を送信する(開弁制御、例えばパラレル通信にて送信する)。一方、噴射指令信号を受信した制御IC20の励磁制御部22は、第1トランジスタ41に駆動信号(オン信号)を出力して第1トランジスタ41をオンさせる。また、噴射指令信号を受信した制御IC20のスイッチ制御部24は、第3トランジスタ43に駆動信号(オン信号)を出力して第3トランジスタ43をオンさせる(開弁制御、図示省略)。
【0107】
ステップS31では、図6のステップS12と同様に、制御IC20(モニタ部25の計時部251)は、インジェクタ50(ソレノイドコイル)への通電電流波形(すなわち、インジェクタ電流の電流値)が開弁電流値に達するまでの時間(到達時間)を計時する。
【0108】
ステップS32では、図6のステップS13と同様に、制御IC20は、ステップS31で計時した時間(到達時間)を示す信号(計時結果E)をマイコン10に送信する(例えばシリアル通信にて送信する)。
【0109】
ステップS33では、マイコン10は、制御IC20から送信された計時結果Eを受信する。そして、マイコン10は、受信した計時結果Eが示す到達時間を補正係数A/Bを使って補正する(第1補正手段)。この補正した値(補正済到達時間)Cは、E×A/Bである。そして、マイコン10は、この補正した値Cを制御IC20で計時された到達時間として認識する。
【0110】
その後、マイコン10は、図6のステップS14〜16の処理を行う。つまり、マイコン10は、インジェクタの開弁時間が開弁時間狙い値となるように、補正した値(補正済到達時間)Cに応じて噴射指令信号のパルス幅を補正する(第2補正手段)。具体的には、補正した値Cと基準時間Fとを比較して、一致すると判定した場合は図6のステップS11へ戻り、不一致であると判定した場合は図6のステップS16に進んで噴射指令信号を補正する(第2補正手段)。なお、マイコン10は、補正した値Cと基準時間Fとが異なる場合は、インジェクタ50の開弁時間が狙い値となるように、補正した値Cと基準時間Fとの差分に応じて、噴射指令信号のパルス幅を補正する(第2補正手段)。
【0111】
ここで、制御IC20におけるクロック誤差を考慮した、ばらつき補正処理に関して、図13に示す波形図を用いて説明する。なお、図13(a)では、上段はマイコン10が制御IC20に出力する噴射指令信号の電圧波形(信号線1の波形)を示し、下段はモニタ部25で求められたインジェクタ電流の電流波形(信号線4の波形)を示す。同様に、図13(b)では、上段はマイコン10が制御IC20に出力する噴射指令信号の電圧波形(信号線1の波形)を示し、下段はモニタ部25で求められたインジェクタ電流の電流波形(信号線4の波形)を示す。
【0112】
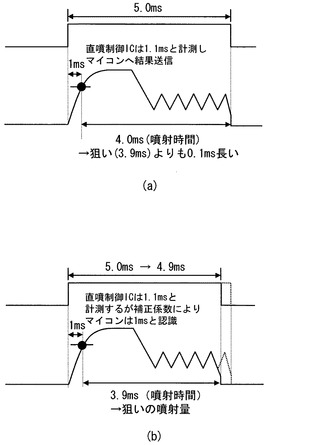
ここでは、5ms(初期値)の噴射指令信号(5msの電圧波形、パルス持続時間(パルス幅)が5msのパルス信号)をマイコン10から制御IC20に送信するものであり、基準時間Fが1.0ms、噴射時間狙い値が3.9msである場合を一例として採用する。
【0113】
クロック誤差を考慮してない場合(つまりクロック誤差の補正前)、図13(a)に示すように、制御IC20(モニタ部25の計時部251)は、RC発振回路21のクロック誤差によって、実際は1.0msである到達時間を1.1msと認識(計時)する。この場合、インジェクタ50による燃料の噴射時間は4.0msとなる。つまり、インジェクタ50による燃料の噴射時間は、噴射時間狙い値よりも0.1ms長くなる。よって、この場合、インジェクタ50による燃料の噴射量は、噴射量狙い値よりも多くなってしまう。
【0114】
その後、制御IC20は、図12のステップS32に示すように、計時した時間(ここでは1.1ms)を示す信号(計時結果E)をマイコン10に送信する。この計時結果Eを受信したマイコン10は、予め学習して不揮発性メモリに記憶しておいた補正係数A/B(ここでは10/11)で計時結果E(ここでは1.1)を補正する。つまり、マイコン10は、補正した値C(ここでは1.1(E)×10(A)/11(B))を算出する。
【0115】
これによって、マイコン10は、実際の到達時間が1.0msであることを認識する。さらに、マイコン10は、実際の到達時間が1.0msであると認識することで、5ms(初期値)の噴射指令信号では、インジェクタ50による燃料の噴射時間が狙い値(燃料噴射狙い値)よりも0.1ms長いことを認識する。
【0116】
そこで、マイコン10は、インジェクタ50による噴射時間を噴射時間狙い値とするために、図12(b)に示すように、噴射指令信号の時間を4.9msに補正する。すなわち、マイコン10は、電圧波形の時間を4.9msに補正する(言い換えると、パルス持続時間(パルス幅)を4.9msに補正する)。
【0117】
つまり、マイコン10は、噴射指令信号の時間を、制御IC20から受信した到達時間と補正係数との積(到達時間と補正係数との乗算結果、つまり、自身が認識した実際の到達時間)に対して噴射時間狙い値を足した値(時間)に補正(設定)する。
【0118】
よって、クロック誤差を考慮して補正された噴射指令信号は、制御IC20から受信した到達時間と補正係数との積が示す時間に噴射時間狙い値(時間)を足した時間の電圧波形となる。換言すると、制御IC20から受信した到達時間と補正係数との積が示す時間に噴射時間狙い値(時間)を足した時間のパルス持続時間(パルス幅)であるパルス信号である。
【0119】
このように、マイコン10は、送信した値と受信した値を比較し、それを制御IC20におけるクロックのばらつき(クロック誤差)と認識する。そして、マイコン10は、上述のばらつき補正処理の過程においてクロックのばらつきも反映する。
【0120】
ここまで説明したように、補正係数を学習するとともに、RC発振回路21によって生成された内部クロックを用いて計時された到達時間を補正係数で補正することによって、マイコン10は、制御IC20から出力された到達時間を実際の到達時間と同等の時間として認識することができる。つまり、RC発振回路21によって生成された内部クロックを用いて計時された到達時間と実際の到達時間との間に誤差が生じていたとしても、マイコン10は、制御IC20から出力された到達時間を実際の到達時間と同等の時間として認識することができる。
【0121】
また、マイコン10は、このように補正した補正済到達時間に応じて、インジェクタ50の開弁時間が狙い値となるように、噴射指令信号のパルス幅を補正することで、噴射指令信号のパルス幅を実際の到達時間に応じて補正した場合と同等にすることができる。よって、制御IC20やインジェクタ50(ソレノイドコイル)の電気的特性にばらつきが生じて到達時間が基準時間からずれたとしても、インジェクタによる燃料の噴射量を高精度に制御することができる。
【0122】
従って、本発明のインジェクタ制御装置は、制御IC20の内部クロックを生成する発振回路として比較的安価なRC発振回路21を採用したとしても、インジェクタ50の開弁時間(すなわちインジェクタによる燃料の噴射量)を高精度に制御することができる。つまり、制御IC20の内部クロック発生部としてRC発振回路21を用いた場合であっても、制御IC20の内部クロック発生部として水晶発振回路11を用いた場合と同等の精度で、インジェクタ50による燃料の噴射量を制御することができる。よって、本発明におけるインジェクタ制御装置は、安価で、且つインジェクタによる燃料の噴射量を高精度に制御することができる。
【0123】
以上、本発明の好ましい実施形態について説明したが、本発明は上述した実施形態に何ら制限されることはなく、本発明の趣旨を逸脱しない範囲において、種々の変形が可能である。
【0124】
(変形例)
上述の実施形態におけるインジェクタ制御装置では、マイコン10が誤差確認用信号を送信すると共に、誤差確認用信号の時間Aと、制御IC20から送信された経時結果Bとによって、制御IC20のクロック誤差を学習する例を採用した。しかしながら、本発明はこれに限定されるものではない。
【0125】
変形例におけるインジェクタ制御装置では、制御IC20のクロック誤差をマイコン10で直接学習するようにしてもよい。なお、変形例におけるインジェクタ制御装置と、上述の実施形態におけるインジェクタ制御装置とは、学習処理の処理動作が異なる。また、図14に示すように、RC発振回路21で生成されたクロック信号がマイコンに入力される点が異なる。その他の構成、処理動作に関しては同様であるため説明は省略する。
【0126】
変形例のインジェクタ制御装置では、マイコン10は、制御IC20に対して、RC発振回路21で生成されたクロック信号(クロックパルス)を所定期間出力させる。そして、マイコン10は、制御IC20から出力されたクロック信号と、自身に設けられた水晶発振回路11で生成されたクロック信号(クロックパルス)とに基づいて、補正係数を学習(算出)する。
【0127】
具体的には、マイコン10は、所定期間に入力されたクロック信号のパルス数B1と、同じ期間に水晶発振回路11で生成されたクロック信号のパルス数A1とを比較する。そして、マイコン10は、水晶発振回路11で生成されたクロック信号のパルス数A1とRC発振回路21で生成されたクロック信号のパルス数B1とからA1/B1を補正係数として学習する。つまり、マイコン10は、制御IC20が内部クロックを出力するのと同じ期間に水晶発振回路11で生成された内部クロックのパルス数A1を、制御IC20から所定期間出力された内部クロックのパルス数B1で除算した値を補正係数として学習する。
【0128】
このようなインジェクタ制御装置であっても、本発明の目的を達成することができる(すなわち上述の実施形態と同じ効果を奏することができる)。つまり、制御IC20の内部クロック発生部として、水晶発振回路11よりも安価で精度が低いRC発振回路21を用いつつ、インジェクタ50による燃料の噴射量を高精度に制御することができる。換言すると、制御IC20の内部クロック発生部としてRC発振回路21を用いた場合であっても、制御IC20の内部クロック発生部として水晶発振回路11を用いた場合と同等の精度で、インジェクタ50による燃料の噴射量を制御することができる。従って、変形例のインジェクタ制御装置は、安価で且つ燃料の噴射量を高精度に制御することができる。
【符号の説明】
【0129】
10 マイコン、11 内部クロック生成部(水晶発振回路)、20 制御IC、21 内部クロック生成部(RC発振回路)、22 励磁制御部、23 保持制御部、24 INJスイッチ制御部、25 モニタ部、251 計時部、252 電流電圧変換回路、31 第1電源、32 第2電源、41 第1トランジスタ、42 第2トランジスタ、43 第3トランジスタ、50 インジェクタ
【技術分野】
【0001】
本発明は、インジェクタ制御装置に関するものである。
【背景技術】
【0002】
従来、インジェクタ制御装置の一例として、特許文献1に開示された筒内噴射式インジェクタの制御装置(インジェクタ制御装置)があった。
【0003】
このインジェクタ制御装置は、制御パラメータ演算手段(マイコン)、複数のインジェクタコイルにそれぞれ対応して設けられた複数の気筒駆動回路(制御IC)を備える。制御ICは、過励磁信号発生手段(励磁制御部)、第1スイッチング手段、保持電流発生手段(保持制御部)、第3スイッチング手段、第2スイッチング手段などを備える。
【0004】
励磁制御部は、筒内噴射式インジェクタを初期開弁するために必要な過励磁電流をインジェクタのアクチュエータ(インジェクタコイル)に供給するものである。この励磁制御部は、マイコンより出力される制御信号のオンタイミングに同期して、高電圧発生手段から第1スイッチング手段を介して過励磁電流を供給する。
【0005】
保持制御部は、マイコンより出力される制御信号がオンの期間中であり且つ過励磁時間の経過後に、第3スイッチング手段をオン/オフスイッチング制御することで、バッテリ−電圧をアクチュエータに断続的に供給するものである。
【0006】
第2スイッチング手段は、アクチュエータに流れる電流を遮断する際に、電流を高速にオフするものである。この第2スイッチング手段は、マイコンから出力される制御信号がオンの期間中は、常時オン状態にされており、制御信号がオフするタイミングでオフ状態にされる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平11−351038号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
このインジェクタ制御装置では、アクチュエータに流れる電流の電流値が所定値に達するとインジェクタが開弁し、第2スイッチング手段がオフ状態になるとインジェクタが閉弁する。つまり、アクチュエータに流れる電流の電流値が所定値に達してから、2スイッチング手段がオフ状態になるまでの間において、インジェクタから燃料が噴射される。
【0009】
しかしながら、インジェクタ制御装置では、制御ICやアクチュエータ(インジェクタコイル)の電気的特性がばらつくことがある。つまり、制御ICやアクチュエータ(インジェクタコイル)は、製造ばらつきや経年変化によるばらつきが生じることがある。
【0010】
このように電気特性がばらつくと、インジェクタ制御装置は、アクチュエータ(インジェクタコイル)に対して過励磁電流が供給され始めてから、アクチュエータに流れる電流の電流値が所定値に達するまでの時間(到達時間)がばらつく可能性がある。よって、インジェクタ制御装置は、燃料の噴射量がばらつく可能性がある。
【0011】
そこで、アクチュエータ(インジェクタコイル)に対して過励磁電流が供給され始めてから、アクチュエータに流れる電流の電流値が所定値に達するまでの時間(到達時間)に基づいて、マイコンから出力する制御信号の時間(オン時間)を補正することも考えられる。また、この到達時間は、制御ICに設けられた発振回路によって生成されたクロックをカウントすることで計時することができる。
【0012】
この制御ICの発振回路としては、RC発振回路を採用することが考えられる。RC発振回路は、発振周波数の精度が較的低いが安価であるため、インジェクタ制御装置を安価にすることができる。しかしながら、RC発振回路によって生成されたクロックに基づいて到達時間を計時すると、精確に到達時間を計時できない可能性がある。よって、到達時間に基づいて制御信号の時間を補正したとしても、燃料の噴射量を高精度に制御できない可能性がある。
【0013】
これに対して、制御ICの発振回路として発振周波数の精度が比較的高い水晶発振回路を採用した場合、到達時間の計時精度を向上させることができ、燃料の噴射量を高精度に制御することができる。しかしながら、水晶発振回路は、RC発振回路よりも高価であるためインジェクタ制御装置が高価になるという問題がある。
【0014】
本発明は、上記問題点に鑑みなされたものであり、安価で、且つインジェクタによる燃料の噴射量を高精度に制御することができるインジェクタ制御装置を提供することを目的とする。
【課題を解決するための手段】
【0015】
上記目的を達成するために請求項1に係る発明は、
車両に搭載されるものであり、インジェクタに設けられたアクチュエータへの通電状態によって、インジェクタを開閉させて内燃機関への燃料の噴射を制御するインジェクタ制御装置であって、
内部クロックを生成する発振回路として水晶発振回路を有し、所定のパルス幅のパルス信号である噴射指令信号を出力するマイコンと、
内部クロックを生成する発振回路としてRC発振回路を有し、噴射指令信号が出力されている間、アクチュエータに対する通電を行う制御ICと、を備え、
制御ICは、
アクチュエータに流れるインジェクタ電流を検出する電流検出手段と、
RC発振回路によって生成された内部クロックを用いて、噴射指令信号が出力されてから、電流検出手段の検出結果が示す値がインジェクタが開弁する値に達するまでの到達時間を計時すると共に、この到達時間の計時結果を出力する計時手段と、を有し、
マイコンは、
RC発振回路によって生成された内部クロックを用いて計時された到達時間を、水晶発振回路によって生成された内部クロックを用いて計時された到達時間と同等になるように補正するための補正係数を学習する学習手段と、
制御ICから出力された計時結果が示す到達時間を補正係数によって補正した補正済到達時間を算出する第1補正手段と、
インジェクタの開弁時間が開弁時間狙い値となるように、第1補正手段によって補正された補正済到達時間に応じて噴射指令信号のパルス幅を補正する第2補正手段と、を備えることを特徴とする。
【0016】
このように補正係数を学習するとともに、RC発振回路によって生成された内部クロックを用いて計時された到達時間を補正係数で補正することによって、マイコンは、制御ICから出力された到達時間を実際の到達時間と同等の時間として認識することができる。つまり、RC発振回路によって生成された内部クロックを用いて計時された到達時間(制御ICから出力された到達時間)と実際の到達時間との間に誤差が生じていたとしても、マイコンは、制御ICから出力された到達時間を実際の到達時間と同等の時間として認識することができる。
【0017】
また、マイコンは、このように補正した補正済到達時間に応じて、インジェクタの開弁時間が狙い値となるように、噴射指令信号のパルス幅を補正することで、噴射指令信号のパルス幅を実際の到達時間に応じて補正した場合と同等にすることができる。よって、制御ICやアクチュエータ(インジェクタコイル)の電気的特性にばらつきが生じて到達時間が基準時間からずれたとしても、インジェクタによる燃料の噴射量を高精度に制御することができる。
【0018】
従って、本発明のインジェクタ制御装置は、制御ICの内部クロックを生成する発振回路として比較的安価なRC発振回路を採用したとしても、インジェクタの開弁時間(すなわちインジェクタによる燃料の噴射量)を高精度に制御することができる。換言すると、本発明におけるインジェクタ制御装置は、安価で、且つインジェクタによる燃料の噴射量を高精度に制御することができる。
【0019】
また、学習手段としては、請求項2に示すように、所定のパルス幅のパルス信号である誤差確認用信号を出力し、計時手段に対して、RC発振回路によって生成された内部クロックを用いて誤差確認用信号のパルス幅を計時させるともに、このパルス幅の計時結果を出力させるものであり、誤差確認用信号のパルス幅(時間)を計時手段から出力されたパルス幅の計時結果(時間)で除算した値を補正係数として学習するようにしてもよい。
【0020】
また、学習手段としては、請求項3に示すように、制御ICに対して、RC発振回路によって生成された内部クロックを所定期間出力させるものであり、制御ICが内部クロックを出力するのと同じ期間に水晶発振回路で生成された内部クロックのパルス数を、制御ICから所定期間出力された内部クロックのパルス数で除算した値を補正係数として学習するようにしてもよい。
【0021】
また、請求項4に示すように、マイコンは、内燃機関の温度を示す温度情報を取得する温度情報取得手段を備え、
学習手段は、温度情報取得手段によって取得された温度情報が予め設定された所定温度を示す場合、補正係数の学習を行うようにしてもよい。
【0022】
このようにすることによって、内燃機関の温度によってRC発振回路の精度が低下した場合であっても、RC発振回路によって計時された到達時間の誤差を補正することができる。
【0023】
また、請求項5に示すように、学習手段は、車両のイグニッションスイッチがオンになってから、イグニッションスイッチがオフになるまでの間に、少なくとも一回、補正係数の学習を行うようにしてもよい。
【0024】
このようにすることによって、経時(経年)劣化によってRC発振回路の精度が低下した場合であっても、RC発振回路によって計時された到達時間の誤差を補正することができる。
【図面の簡単な説明】
【0025】
【図1】本発明の実施の形態におけるインジェクタ制御装置の概略構成を示すブロック図である。
【図2】本発明の実施の形態におけるモニタ部の概略構成を示すブロック図である。
【図3】変形例1におけるモニタ部の概略構成を示すブロック図である。
【図4】本発明の実施の形態におけるインジェクタ制御装置に各点(各信号線)における波形図であり、(a)はマイコンが制御ICに出力する噴射指令信号の電圧波形(信号線1の波形)であり、(b)は励磁制御部が第1トランジスタに出力する駆動信号の電圧波形(信号線2の波形)であり、(c)は保持制御部が第2トランジスタに出力する駆動信号の電圧波形(信号線3の波形)であり、(d)はモニタ部で求められたインジェクタ電流の電流波形(信号線4の波形)である。
【図5】(a)はマイコンが制御ICに出力する噴射指令信号の電圧波形(信号線1の波形)を示す波形図であり、(b)はモニタ部で求められたインジェクタ電流の電流波形(信号線4の波形)のばらつきを示す波形図である。
【図6】本発明の実施の形態におけるインジェクタ制御装置のばらつき補正処理を示すフローチャートである。
【図7】到達時間が正常値である場合のマイコン10が制御IC20に出力する噴射指令信号の電圧波形と、モニタ部25で求められたインジェクタ電流の電流波形を示す波形図である。
【図8】(a)は到達時間が正常値よりも短くなった場合のマイコン10が制御IC20に出力する噴射指令信号の電圧波形と、モニタ部25で求められたインジェクタ電流の電流波形を示す波形図であり、(b)はばらつき補正後のマイコン10が制御IC20に出力する噴射指令信号の電圧波形と、モニタ部25で求められたインジェクタ電流の電流波形を示す波形図である。
【図9】(a)は到達時間が正常値よりも長くなった場合のマイコン10が制御IC20に出力する噴射指令信号の電圧波形と、モニタ部25で求められたインジェクタ電流の電流波形を示す波形図であり、(b)はばらつき補正後のマイコン10が制御IC20に出力する噴射指令信号の電圧波形と、モニタ部25で求められたインジェクタ電流の電流波形を示す波形図である。
【図10】本発明の実施の形態におけるインジェクタ制御装置の学習処理を示すフローチャートである。
【図11】本発明の実施の形態におけるインジェクタ制御装置の学習処理及びばらつき補正処理を示すブロック図である。
【図12】本発明の実施の形態におけるインジェクタ制御装置のクロック誤差を考慮したばらつき補正処理を示すフローチャートである。
【図13】(a)はクロック誤差があった場合のマイコン10が制御IC20に出力する噴射指令信号の電圧波形と、モニタ部25で求められたインジェクタ電流の電流波形を示す波形図であり、(b)はクロック誤差に基づいて補正を行った後のマイコン10が制御IC20に出力する噴射指令信号の電圧波形と、モニタ部25で求められたインジェクタ電流の電流波形を示す波形図である。
【図14】変形例におけるインジェクタ制御装置の概略構成を示すブロック図である。
【発明を実施するための形態】
【0026】
以下、本発明の実施形態を図に基づいて説明する。本実施形態におけるインジェクタ制御装置は、車両に搭載されるものであり、エンジン(内燃機関)における複数の気筒毎に設けられた複数のインジェクタ50をそれぞれ個別に駆動制御するものである。ここでは、一例として、直噴型のインジェクタ50を駆動制御するものを採用する。このインジェクタ制御装置は、インジェクタ50を駆動して、インジェクタ50による燃料の噴射量を制御するものである。具体的には、インジェクタ制御装置は、インジェクタ50のアクチュエータ(ソレノイドコイルやピエゾ素子であり、ここではソレノイドコイルを採用する、図示省略)への通電状態(通電時間)によって、インジェクタ50を開閉させて内燃機関への燃料の噴射量を制御する(駆動制御処理)。
【0027】
また、インジェクタ制御装置は、燃料の噴射量に加えて、インジェクタ50による燃料の噴射時期を制御するものであってもよい。この場合、インジェクタ制御装置は、インジェクタ50のソレノイドコイルへの通電タイミングを制御することにより、インジェクタ50による燃料の噴射時期を制御する。
【0028】
なお、直噴型のインジェクタとは、内燃機関(ガソリンエンジン又はディーゼルエンジン)の気筒に燃料を直接噴射するインジェクタを示すものである。また、図1においては、複数のインジェクタ50のうちの一つを代表的に図示している。
【0029】
図1に示すように、インジェクタ制御装置は、マイコン10と直噴制御IC(以下、単に制御ICとも称する)20とを備えて構成される。このインジェクタ制御装置は、後ほど説明するスイッチング手段(第1トランジスタ41、第2トランジスタ42、第3トランジスタ43)を介してインジェクタ50を駆動制御する(駆動制御処理)。また、インジェクタ制御装置は、後ほど説明する制御IC20における内部クロック生成部21(RC発振回路21)で生成されたクロックを用いて計時された到達時間を補正するめの補正係数を学習する(学習処理)。具体的には、制御IC20のRC発振回路21によって生成された内部クロックを用いて計時された到達時間を、後ほど説明するマイコン10の水晶発振回路11によって生成された内部クロックを用いて計時された場合の到達時間と同等になるように補正するための補正係数を学習する。この駆動制御処理及び学習処理に関しては、後ほど詳しく説明する。
【0030】
なお、RC発振回路21で生成されたクロックは、制御IC20の内部クロック(基準クロック)であり、クロック信号、クロックパルスとも言い換えることができる。同様に、水晶発振回路11によって生成された内部クロックは、マイコン10の内部クロック(基準クロック)であり、クロック信号、クロックパルスとも言い換えることができる。
【0031】
なお、マイコン10と直噴制御IC20とは、一つのケース内において別体で設けられていてもよいし、別々のケースにそれぞれ設けられていてもよい。また、本発明のインジェクタ制御装置は、マイコン10と制御IC20に加えて、上記スイッチング手段や抵抗素子60(後ほど説明する)を備えて構成されるものであってもよい。
【0032】
マイコン10は、CPU(CentralProcessing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)、発振回路、及び記憶内容が書き換え可能な不揮発性メモリ(例えばEEPROM(Electrically Erasable Programmable Read-Only Memory)やフラッシュROM)などを備えて構成される周知のマイクロコンピュータである。なお、本実施形態においては、内部クロック生成部11である発振回路として、水晶振動子を用いた固体振動発振回路である水晶発振回路(以下、水晶発振回路11とも記載する)を採用する。この水晶発振回路11は、後ほど説明する制御IC20の内部クロック生成部21としてのRC発振回路(以下、RC発振回路21とも記載する)に比べて高価でるが、RC発振回路21よりも発振周波数の精度が高い。RC発振回路21の誤差は約20%であるのに対して、水晶発振回路11の誤差は約0.0001%である。
【0033】
マイコン10は、CPUが水晶発振回路11で生成されたクロックに同期して、予めROMに格納されたプログラムなどを読み出して、RAMを一時的記憶部として用いつつ演算処理を実行することで所定の処理動作を実行する。この処理動作としては、上述の駆動制御処理や学習処理などがある。
【0034】
マイコン10は、駆動制御処理時には、エンジン回転数、アクセル開度、エンジン水温など、各種センサ(図示省略)にて検出される内燃機関の運転情報に基づいて、気筒毎に所定のパルス幅(パルス持続時間)のパルス信号である噴射指令信号を生成する。なお、噴射指令信号は、所定時間の電圧波形と言い換えることもできる。
【0035】
そして、この生成した噴射指令信号を制御IC20に出力する(信号線1を介して出力する)。なお、インジェクタ50は、噴射指令信号が出力されている間(言い換えると、噴射指令を示す信号のレベルがハイの間)、アクチュエータが通電される。つまり、マイコン10は、内燃機関の運転情報に基づいて、気筒毎にインジェクタ50のソレノイドコイル(アクチュエータ)への通電時間(通電期間)を設定する。そして、設定した通電期間に応じた噴射指令信号を出力する。つまり、設定した通電期間、噴射指令を示す信号のレベルをハイにする。よって、噴射指令信号(パルス信号)のパルス持続時間(パルス幅)は、設定した通電期間と同等である。よって、噴射指令信号は、インジェクタ(ソレノイドコイル)50への通電時間を示す信号とも言い換えることができる。
【0036】
また、マイコン10は、学習処理時には、所定のパルス幅(時間A)のパルス信号である誤差確認用信号を制御IC20に出力する。この誤差確認用信号は、所定のパルス持続時間(時間A)のパルス信号と言い換えることもできる。また、誤差確認用信号は、所定時間(時間A)の電圧波形と言い換えることもできる。また、マイコン10は、制御IC20に対して、RC発振回路21によって生成された内部クロックを用いて誤差確認用信号のパルス幅を計時させるともに、このパルス幅の計時結果(計時結果B)を出力させる。
【0037】
そして、マイコン10は、制御IC20よって計時された、誤差確認用信号のパルス幅(パルス持続時間)を示す信号(計時結果B)を受信する。
さらに、マイコン10は、誤差確認用信号(時間A)と制御IC20からの信号(計時結果B)とに基づいて、時間A/計時結果Bを補正係数として学習(算出)する。つまり、マイコン10は、誤差確認用信号のパルス幅(時間A)を制御IC20から出力されたパルス幅の計時結果Bで除算した値を補正係数として学習する。なお、マイコン10は、学習した補正係数A/Bを不揮発性メモリに記憶しておく。なお、不揮発性メモリには、後ほど説明する基準時間Fなども記憶されている。
【0038】
制御IC20は、内部クロック生成部(RC発振回路)21、励磁制御部22、保持制御部23、INJスイッチ制御部(以下、単にスイッチ制御部とも記載する)24、モニタ部25などの機能ブロックを備える。制御IC20は、RC発振回路21にて生成されるクロックに同期して動作するものである。上述のように、制御IC20の内部クロックを生成するRC発振回路21は、マイコン10の内部クロックを生成する水晶発振回路11に比べて安価であるが、水晶発振回路11よりも発振周波数の精度が低い。このように、制御IC20の内部クロック生成部21としてRC発振回路21を用いることによって、制御IC20に水晶発振回路を用いる場合よりもインジェクタ制御装置を安価にすることができる。
【0039】
制御IC20は、マイコン10からの噴射指令信号及びモニタ部25でモニタ(計測)された電流値(電流検出手段の検出結果が示す値)に基づいてスイッチング手段(第1トランジスタ41、第2トランジスタ42、第3トランジスタ43)のそれぞれを個別にオン及びオフする。このようにスイッチング手段(第1トランジスタ41、第2トランジスタ42、第3トランジスタ43)のそれぞれを個別にオン及びオフすることで、インジェクタ50のソレノイドコイルに対して第1電源31又は第2電源32から電圧が印加(供給)される。なお、制御IC20は、マイコン10から噴射指令信号が出力されている間、インジェクタ50のソレノイドコイルに対する通電を行う。
【0040】
励磁制御部22は、第1トランジスタ41に駆動信号(オン信号、オフ信号)を出力することによって、第1トランジスタ41をオン及びオフさせる。保持制御部23は、第2トランジスタ42に駆動信号(オン信号、オフ信号)を出力することによって、第2トランジスタ42をオン及びオフさせる。また、スイッチ制御部24は、第3トランジスタ43に駆動信号(オン信号、オフ信号)を出力することによって、第3トランジスタ43をオン及びオフさせる。
【0041】
励磁制御部22が第1トランジスタ41をオンにするとともに、スイッチ制御部24が第3トランジスタ43をオンにすることで、インジェクタ50に対して第1電源31から電圧が印加される。また、スイッチ制御部24が第3トランジスタ43をオフにすることで、インジェクタ50に対する第1電源31からの電圧の印加が停止される。
【0042】
保持制御部23が第2トランジスタ42をオンにするとともに、スイッチ制御部24が第3トランジスタ43をオンにすることで、インジェクタ50に対して第2電源32から電圧が印加される。また、スイッチ制御部24が第3トランジスタ43をオフにすることで、インジェクタ50に対する第2電源32からの電圧の印加が停止される。
【0043】
モニタ部25は、インジェクタ50に流れる電流の電流値をモニタ(計測)する(電流検出手段)とともに、インジェクタ50に対する電圧の印加から電流値(電流検出手段の検出結果が示す値)が予め決められた値(例えばインジェクタ50が開弁する値)になるまでの時間を計時する。このモニタ部25は、図2に示すように、計時部251及び電流電圧変換回路252などを備える。インジェクタ50のソレノイドコイルに流れる電流(以下、インジェクタ電流とも称する)は、第3トランジスタ43に接続された電流電圧変換回路252におけるシャント抵抗Rを経てアースに流れる。よって、電流電圧変換回路252は、シャント抵抗Rの両端に生じる電圧降下を測定し、この測定電圧をシャント抵抗Rの抵抗値で除してインジェクタ50に流れる電流値を求める。
【0044】
計時部251は、インジェクタ電流が流れ初めてから(換言すると噴射指令信号が出力されてから)、インジェクタ電流の電流値が所定値に達するまでの時間(到達時間)を、RC発振回路21で生成されたクロックをカウントすることで計測(計時)する(計時手段)。ここでの所定値としては、インジェクタ50が開弁する電流値を採用することができる。つまり、計時部251は、インジェクタ電流が流れ初めてからインジェクタ50が開弁するまでの時間を計測(計時)する。また、モニタ部25(計時部251)は、計時した時間(インジェクタ電流が流れ初めてからインジェクタ50が開弁するまでの時間)を示す信号(計時結果E)をマイコン10に送信する(例えばシリアル通信にて送信する)。
【0045】
また、モニタ部25(計時部251)は、マイコン10から送信された誤差確認用信号のパルス幅(パルス持続時間、以下、信号時間とも称する)を、RC発振回路21で生成されたクロックをカウントすることで計測(計時)する(計時手段)。そして、モニタ部25(計時部251)は、計時した時間(誤差確認用信号である電圧波形の時間(パルス信号のパルス持続時間))を示す信号(計時結果B)をマイコン10に送信する(例えばシリアル通信にて送信する)。
【0046】
また、モニタ部25は、インジェクタ電流の電流値が第1トランジスタ41をオフするための所定値(第1閾値、第1トランジスタ41のオフ条件である電流値)に達したか否かを判定する。そして、インジェクタ電流の電流値が第1閾値に達したと判定すると、インジェクタ電流の電流値が第1閾値に達したことを示す信号を励磁制御部22に送信する。
【0047】
また、モニタ部25は、インジェクタ電流の電流値が第2トランジスタ42をオンするための所定値(第2閾値、第2トランジスタ42のオン条件である電流値)に達したか否かを判定する。そして、インジェクタ電流の電流値が第2閾値に達したと判定すると、インジェクタ電流の電流値が第2閾値に達したことを示す信号を保持制御部23に送信する。
【0048】
また、モニタ部25は、インジェクタ電流の電流値が第2トランジスタ42をオフするための所定値(第3閾値、第2トランジスタ42のオフ条件である電流値)に達したか否かを判定する。そして、インジェクタ電流の電流値が第3閾値に達したと判定すると、インジェクタ電流の電流値が第3閾値に達したことを示す信号を保持制御部23に送信する。
【0049】
なお、モニタ部25は、図3に示すようにしてもよい。つまり、計時部251は、インジェクタ電流が流れ初めてから、インジェクタ電流の電流値が所定値に達するまでの時間を、直接電圧値(電流検出手段の検出結果が示す値)により計測(計時)するようにしてもよい。この場合も、RC発振回路21で生成されたクロックをカウントすることで計測(計時)する。例えば、電圧波形(矩形波形)の立ち上がりエッジ間或いは立ち上がりエッジと立ち下がりエッジの間の時間を、RC発振回路21で生成されたクロックをカウントすることで計測(計時)する。そして、モニタ部25(計時部251)は、計時した時間(インジェクタ電流が流れ始めてから(インジェクタ50のソレノイドコイルに通電を開始してから)インジェクタ50が開弁するまでの時間)を示す信号(計時結果E)をマイコン10に送信する(例えばシリアル通信にて送信する)。
【0050】
また、この場合、モニタ部25は、電圧値によって、インジェクタ電流の電流値が第1閾値に達したか否かを判定する。そして、インジェクタ電流の電流値が第1閾値に達したと判定すると、インジェクタ電流の電流値が第1閾値に達したことを示す信号を励磁制御部22に送信する。また、モニタ部25は、電圧値によって、インジェクタ電流の電流値が第2閾値に達したか否かを判定する。そして、インジェクタ電流の電流値が第2閾値に達したと判定すると、インジェクタ電流の電流値が第2閾値に達したことを示す信号を保持制御部23に送信する。また、モニタ部25は、電圧値によって、インジェクタ電流の電流値が第3閾値に達したか否かを判定する。そして、インジェクタ電流の電流値が第3閾値に達したと判定すると、インジェクタ電流の電流値が第3閾値に達したことを示す信号を保持制御部23に送信する。
【0051】
第1電源31及び第2電源32は、インジェクタ50(ソレノイドコイル)に電圧を印加するものである。第1電源31は、バッテリ(図示省略)の電圧(バッテリ電圧)を昇圧して、昇圧して得られた高電圧を発生(供給)するものであり、DC/DCコンバータなどのスイッチング電源を採用することができる。
【0052】
第2電源32は、バッテリ電圧を降圧して、降圧して得られた低電圧を発生(供給)するものであり、DC/DCコンバータなどのスイッチング電源を採用することができる。また、第2電源32は、バッテリ電圧を発生(供給)するものであってもよい。
【0053】
つまり、第1電源31は、第2電源32よりも高電圧を発生する高電圧発生手段である。一方、第2電源32は、第1電源31よりも低電圧を発生する低電圧発生手段である。
【0054】
第1トランジスタ41は、上述のように制御IC20の励磁制御部22からの駆動信号によってオン及びオフするものである。第2トランジスタ42は、上述のように制御IC20の保持制御部23からの駆動信号によってオン及びオフするものである。第3トランジスタ43は、制御IC20のスイッチ制御部24からの駆動信号によってオン及びオフするものである。これらの第1トランジスタ41、第2トランジスタ42、第3トランジスタ43としては、MOSFET、バイポーラトランジスタ等のスイッチング素子を採用することができる。
【0055】
インジェクタ50は、エンジン(内燃機関)の気筒毎にそれぞれに設けられ、気筒内に直接燃料を噴射する直噴型のインジェクタである。例えば、4気筒エンジン(内燃機関)の場合は、4個のインジェクタ50が設けられる。図1では、複数のインジェクタ50のうちの一つを図示している。このインジェクタ50は、内蔵されたソレノイドコイル(アクチュエータ)に通電されると、このソレノイドコイルにより弁体が開弁位置に移動する。そして、インジェクタ50は、このようにソレノイドコイルにより弁体が開弁位置に移動して開弁状態になると、燃料を噴射する。また、インジェクタ50は、内蔵されたソレノイドコイル(アクチュエータ)への通電が停止(遮断)されると、このソレノイドコイルにより弁体が閉弁位置に移動する。そして、インジェクタ50は、このようにソレノイドコイルにより弁体が閉弁位置に移動して閉弁状態になると、燃料の噴射を停止する。
【0056】
ここで、インジェクタ制御装置の処理動作に関して説明する。まず、図4(a)〜(d)の波形図に基づいて、駆動制御の基本的な処理に関して説明する。
【0057】
マイコン10は、イグニッションスイッチ(IGSW)がオンになると、スターターモータ(図示省略)を回転させることによってエンジン(内燃機関)を始動させる。そして、マイコン10は、図4(a)に示すように、インジェクタ50を開弁させるために、制御IC20に対して噴射指令信号を送信する(開弁制御、例えばパラレル通信にて送信する)。
【0058】
一方、噴射指令信号を受信した制御IC20の励磁制御部22は、第1トランジスタ41に駆動信号(オン信号)を出力して第1トランジスタ41をオンさせる(開弁制御、図4(b)のt1)。換言すると、制御IC20の励磁制御部22は、噴射指令を示す信号のレベルがハイになると、第1トランジスタ41に駆動信号(オン信号)を出力して第1トランジスタ41をオンさせる。また、噴射指令信号を受信した制御IC20のスイッチ制御部24は、第3トランジスタ43に駆動信号(オン信号)を出力して第3トランジスタ43をオンさせる(開弁制御、図示省略)。換言すると、制御IC20のスイッチ制御部24は、噴射指令を示す信号のレベルがハイになると、第3トランジスタ43に駆動信号(オン信号)を出力して第3トランジスタ43をオンさせる。つまり、制御IC10は、噴射指令信号を受信すると(噴射指令を示す信号のレベルがハイになると、噴射指令信号であるパルス信号を受信すると)、第1トランジスタ41と第3トランジスタ43とを同時にオンさせる。
【0059】
このように第1トランジスタ41と第3トランジスタ43がオンすると、インジェクタ50(ソレノイドコイル)には、第1電源31から電圧が印加されてインジェクタ電流が流れる。このインジェクタ電流は、時間の経過に伴って徐々に大きくなる(図4(d)のt1からt2)。そして、インジェクタ50は、インジェクタ電流の電流値が所定値(インジェクタ50が開弁する電流値、開弁電流値とも称する)に達すると開弁する。インジェクタ制御装置は、このように第1トランジスタ41と第3トランジスタ43とを同時にオンさせることによって、インジェクタ50を開弁させる(開弁制御)。
【0060】
また、モニタ部25は、このインジェクタ電流の電流値を求めるとともに、インジェクタ電流の電流値が第1閾値に達したか否かを判定する(図4(d)のt1からt2)。そして、インジェクタ電流の電流値が第1閾値に達したと判定すると(図4(d)のt2)、インジェクタ電流の電流値が第1閾値に達したことを示す信号を励磁制御部22に送信する。
【0061】
制御IC20の励磁制御部22は、インジェクタ電流の電流値が第1閾値に達したことを示す信号を受信すると、第1トランジスタ41に駆動信号(オフ信号)を出力して第1トランジスタ41をオフさせる(図4(b)のt2)。
【0062】
なお、上述のように第1電源31は、高電圧を発生(供給)するものである。よって、インジェクタ50(ソレノイドコイル)に流れるインジェクタ電流(開弁電流)の電流値は、比較的早く所定値(インジェクタ50が開弁する電流値)に達する(図4(d)のt1からt2)。従って、インジェクタ50を高速で開弁させることができる。つまり、インジェクタ50の開弁応答を早めることができる。換言すると、インジェクタ50を高速駆動させることができる。このように、図4(d)のt1からt2の間は、励磁制御部22によってインジェクタ50の駆動制御が行われる。
【0063】
インジェクタ制御装置は、このように第1トランジスタ41と第3トランジスタ43とをオンさせてインジェクタ50を開弁させた後は、インジェクタ50の開弁状態を保持(維持)する(開弁保持制御、開弁維持制御)。
【0064】
励磁制御部22によって第1トランジスタ41がオフされると、インジェクタ電流は徐々に低下していく(図4(d)のt2からt3)。モニタ部25は、このインジェクタ電流の電流値を求めるとともに、インジェクタ電流の電流値が第2閾値に達したか否かを判定する(図4(d)のt2からt3)。そして、インジェクタ電流の電流値が第2閾値に達したと判定すると(図4(d)のt3)、インジェクタ電流の電流値が第2閾値に達したことを示す信号を保持制御部23に送信する。
【0065】
制御IC20の保持制御部23は、インジェクタ電流の電流値が第2閾値に達したことを示す信号を受信すると、第2トランジスタ42に駆動信号(オン信号)を出力して第2トランジスタ42をオンさせる(開弁保持制御、図4(c)のt3)。第2トランジスタ42がオンすると、インジェクタ50(ソレノイドコイル)には、第2電源32から電圧が印加されてインジェクタ電流が流れる。このインジェクタ電流は、時間の経過に伴って徐々に大きくなる(図4(d)のt3からt4)。
【0066】
なお、上述のように第2電源32は、低電圧を発生(供給)するものである。つまり、第2トランジスタ42をオンさせることで、インジェクタ50(ソレノイドコイル)には比較的小さな電流値のインジェクタ電流(開弁保持電流)が流れる(図4(d)のt3からt4)。この開弁保持電流の電流値は、インジェクタ50の開弁状態を保持するのに必要な電流値である。
【0067】
モニタ部25は、このように保持制御部23によって第2トランジスタ42がオンされているときのインジェクタ電流の電流値を求めるとともに、このインジェクタ電流の電流値が第3閾値に達したか否かを判定する(図4(d)のt3からt4)。そして、インジェクタ電流の電流値が第3閾値に達したと判定すると(図4(d)のt4)、インジェクタ電流の電流値が第3閾値に達したことを示す信号を保持制御部23に送信する。
【0068】
制御IC20の保持制御部23は、インジェクタ電流の電流値が第3閾値に達したことを示す信号を受信すると、第2トランジスタ42に駆動信号(オフ信号)を出力して第2トランジスタ42をオフさせる(開弁保持制御、図4(c)のt4)。保持制御部23によって第2トランジスタ42がオフされると、インジェクタ電流は徐々に低下していく(図4(d)のt4からt5)。モニタ部25は、このインジェクタ電流の電流値を求めるとともに、インジェクタ電流の電流値が第2閾値に達したか否かを判定する(保持制御、図4(d)のt4からt5)。そして、インジェクタ電流の電流値が第2閾値に達したと判定すると(図4(d)のt5)、インジェクタ電流の電流値が第2閾値に達したことを示す信号を保持制御部23に送信する。
【0069】
制御IC20の保持制御部23は、以降同様に、モニタ部25で求められたインジェクタ電流の電流値と第2閾値及び第3閾値とを比較して、第2トランジスタ42のオン及びオフを繰り返し行う。つまり、保持制御時においては、制御IC20の保持制御部23は、インジェクタ電流の電流値が、インジェクタ50の開弁状態を保持するのに必要な電流値となるように、第2トランジスタ42のオン及びオフを繰り返し行う。インジェクタ制御装置は、このように第2トランジスタ42のオン及びオフを繰り返し行うことによって、インジェクタ50の開弁状態を保持する。
【0070】
そして、制御IC20のスイッチ制御部24は、噴射指令信号がオフ(噴射指令を示す信号のレベルがロー、噴射指令信号であるパルス信号がオフ)になると(図4(a)のt6)、第3トランジスタ43に駆動信号(オフ信号)を出力して第3トランジスタ43をオフさせる(図示省略)。このようにすることで、インジェクタ50のソレノイドコイルへの通電を遮断して、インジェクタ50を閉弁させる(図4(d)のt6)。なお、このとき、制御IC20の保持制御部23は、インジェクタ電流値の電流値に応じて、第2トランジスタ42に駆動信号(オン信号又はオフ信号)を出力する。
【0071】
このようにインジェクタ制御装置は、インジェクタ50を開弁して内燃機関に燃料を噴射する場合、開弁時には大電流値の開弁電流をインジェクタ50のソレノイドに通電して開弁動作を速める。そして、開弁完了後は開弁状態の維持に必要な小電流値の開弁保持電流に切り替え(開弁保持電流をインジェクタ50のソレノイドに通電して)、この開弁保持電流をソレノイドに所定時間(噴射指令信号がオフになるまで)通電させて噴射量を制御する。
【0072】
なお、本実施形態においては、モニタ部25が、インジェクタ電流の電流値が第1〜第3閾値に達したか否かを判定するとともに、インジェクタ電流の電流値が各閾値に達したことを励磁制御部22又は保持制御部23に通知する例を採用した。しかしながら、本発明はこれに限定されるものではない。インジェクタ電流の電流値が第1〜第3閾値の夫々に達したか否かを判定するとともに、インジェクタ電流の電流値が各閾値に達したことを励磁制御部22又は保持制御部23に通知する手段であれば採用することができる。
【0073】
ところで、制御IC20やインジェクタ50(ソレノイドコイル)は、電気的特性にばらつき(製造ばらつき、温度変化によるばらつき)が生じることがある。この制御IC20やインジェクタ50(ソレノイドコイル)の電気的特性にばらつきは、インジェクタ50による燃料の噴射量のばらつきにも繋がる可能性がある。つまり、制御IC20やインジェクタ50(ソレノイドコイル)の電気的特性にばらつきが生じた場合、インジェクタ50(ソレノイドコイル)への通電波形がばらつく可能性がある。そして、インジェクタ50(ソレノイドコイル)への通電波形がばらつくと、インジェクタ50にインジェクタ電流が流れ始めてから(つまり噴射指令信号が出力されてから)インジェクタ電流が開弁電流値に達するまでの時間がばらつき、インジェクタ50による燃料の噴射量もばらつく可能性がある。なお、このインジェクタ電流が流れ始めてからインジェクタ電流が開弁電流値に達するまでの時間を、インジェクタ開弁開始時間(開弁開始時間)又は到達時間とも称する。
【0074】
図5に示すように、例えば、インジェクタ電流が正常時よりも急に上昇した場合、開弁開始時間は狙いとする開弁開始時間(開始狙い値F、換言すると、予め設定された到達時間の基準時間F)よりも短くなる。この場合、インジェクタ50の開弁時間が長くなるため、燃料の噴射時間が長くなって、燃料の噴射量が多くなる。逆に、インジェクタ電流が正常時よりもなだらかに上昇した場合、開弁開始時間は狙いとする開弁開始時間(開始狙い値F、予め設定された到達時間の基準時間F)よりも長くなる。この場合、インジェクタ50の開弁時間が短くなるため、燃料の噴射時間が短くなって、燃料の噴射量が少なくなる。なお、開始狙い値F(基準時間F)は、燃料の噴射時間が狙い値(噴射時間狙い値、言い換えると、噴射量が狙い値(噴射量狙い値))となるように予め設定された値であり、インジェクタ50にインジェクタ電流が流れ始めてから、インジェクタ電流が開弁電流値に達するまでの時間である。なお、燃料の噴射時間は、インジェクタ50の開弁時間と同等である。よって、噴射時間狙い値は、開弁時間狙い値とも言い換えることができる。
【0075】
そこで、本実施形態におけるインジェクタ制御装置は、ばらつき補正処理を行うものである。このばらつき補正処理に関して図6〜図9を用いて説明する。図6に示すフローチャートは、イグニッションスイッチ(IGSW)がオンになるとスタートして、IGSWがオンの間実行されるものである。
【0076】
まず、ステップS10では、マイコン10は、IGSWがオンになると、スターターモータ(図示省略)を回転させることによってエンジン(内燃機関)を始動する。
【0077】
ステップS11では、マイコン10は、図4(a)に示すように、インジェクタ50を開弁させるために、信号線1を介して制御IC20に対して噴射指令信号を送信する(開弁制御、例えばパラレル通信にて送信する)。
【0078】
上述のように、噴射指令信号を受信した制御IC20の励磁制御部22は、第1トランジスタ41に駆動信号(オン信号)を出力して第1トランジスタ41をオンさせる(開弁制御、図4(b)のt1)。また、噴射指令信号を受信した制御IC20のスイッチ制御部24は、第3トランジスタ43に駆動信号(オン信号)を出力して第3トランジスタ43をオンさせる(開弁制御、図示省略)。
【0079】
ステップS12では、制御IC20(モニタ部25の計時部251)は、インジェクタ50(ソレノイドコイル)への通電電流波形(インジェクタ電流の電流値)が開弁電流値に達(到達)するまでの時間(到達時間)を計時する。つまり、インジェクタ電流が流れ初めてから、インジェクタ電流の電流値が開弁電流値にするまでにかかった時間を計時する。言い換えると、制御IC20(モニタ部25の計時部251)は、インジェクタ電流が流れ初めてからインジェクタ50が開弁するまでの時間を計時する。このとき、制御IC20(モニタ部25の計時部251)は、RC発振回路21で生成されたクロックをカウントすることで計測(計時)する。
【0080】
ステップS13では、制御IC20は、ステップS12で計時した時間を示す信号(計時結果E)をマイコン10に送信する(例えばシリアル通信にて送信する)。
【0081】
ステップS14では、マイコン10は、予め設定された到達時間の基準時間Fと計時結果Eとを比較する。つまり、マイコン10は、不揮発性メモリに記憶された基準時間Fと、制御IC20から受信した計時結果Eとを比較する(第2補正手段)。
【0082】
ステップS15では、マイコン10は、基準時間Fと計時結果Eとが一致するか否か(E=Fであるか否か)を判定する(第2補正手段)。そして、基準時間Fと計時結果Eとが一致する(E=F)と判定した場合は、狙い通りの噴射量が得られているとみなしてステップS11へ戻る(第2補正手段)。つまり、制御IC20に送信する噴射指令信号の補正は行わない。一方、基準時間Fと計時結果Eとが一致しない(E≠F)と判定した場合は、狙い通りの噴射量が得られていないとみなしてステップS16へ進む(第2補正手段)。
【0083】
ステップS16では、マイコン10は、制御IC20に送信する噴射指令信号を補正する。つまり、基準時間Fと計時結果Eとの差分に応じて、インジェクタ50の開弁時間が開弁時間狙い値となるように噴射指令信号のパルス幅を補正する(第2補正手段)。
【0084】
ここで、この噴射指令信号の補正に関して、波形図(図7〜図9)を用いて説明する。ここでは、5ms(初期値)の噴射指令信号(5msの電圧波形、パルス持続時間(パルス幅)が5msのパルス信号)をマイコン10から制御IC20に送信するものであり、基準時間Fが1.0ms、噴射時間狙い値が4.0msである場合を一例として採用する。
【0085】
なお、図7では、上段はマイコン10が制御IC20に出力する噴射指令信号の電圧波形(信号線1の波形)を示し、下段はモニタ部25で求められたインジェクタ電流の電流波形(信号線4の波形)を示す。また、図8(a)、図8(b)、図9(a)、図9(b)の各図でも同様に、上段はマイコン10が制御IC20に出力する噴射指令信号の電圧波形(信号線1の波形)を示し、下段はモニタ部25で求められたインジェクタ電流の電流波形(信号線4の波形)を示す。
【0086】
まず、図7に示すように、計時結果E(モニタ値)が基準時間Fと同じ1.0msであった場合(すなわち図6に示すフローチャートでは、ステップS15でYES判定)、インジェクタ50による燃料の噴射時間は4.0msとなる。つまり、インジェクタ50による燃料の噴射時間も噴射時間狙い値と同じとなる。よって、計時結果Eが基準時間Fと一致した場合、狙い通りの噴射量が得られているとみなすことができる。
【0087】
次に、図8(a)に示すように、計時結果E(モニタ値)が基準時間Fよりも0.1ms短い0.9msであった場合(すなわち図6に示すフローチャートでは、ステップS15でNO判定)、インジェクタ50による燃料の噴射時間は4.1msとなる。つまり、インジェクタ50による燃料の噴射時間は、噴射時間狙い値よりも0.1ms長くなる。よって、この場合、インジェクタ50による燃料の噴射量は、噴射量狙い値よりも多くなってしまう。
【0088】
この場合、図8(b)に示すように、噴射指令信号の時間を4.9msに補正する。すなわち、電圧波形の時間を4.9msに補正する(言い換えると、パルス持続時間(パルス幅)を4.9msに補正する)。つまり、計時結果Eが基準時間Fよりも短かった場合、計時結果Eと基準時間Fの差分時間の分だけ、噴射指令信号の時間(パルス幅)を短くする。よって、図6に示すフローチャートにおけるステップS16では、このように噴射指令信号の時間を補正する。
【0089】
このように補正することによって、計時結果Eが基準時間Fよりも0.1ms短い0.9msであっても、インジェクタ50による燃料の噴射時間は4.0msとなる。つまり、インジェクタ50による燃料の噴射時間を噴射時間狙い値と同じにすることができる。よって、インジェクタ50による燃料の噴射量を噴射量狙い値とすることができる。
【0090】
次に、図9(a)に示すように、計時結果E(モニタ値)が基準時間Fよりも0.1ms長い1.1msであった場合(すなわち図6に示すフローチャートでは、ステップS15でNO判定)、インジェクタ50による燃料の噴射時間は3.9msとなる。つまり、インジェクタ50による燃料の噴射時間は、噴射時間狙い値よりも0.1ms短くなる。よって、この場合、インジェクタ50による燃料の噴射量は、噴射量狙い値よりも少なくなってしまう。
【0091】
この場合、図9(b)に示すように、噴射指令信号の時間を5.1msに補正する。すなわち、電圧波形の時間を5.1msに補正する(言い換えると、パルス持続時間(パルス幅)を5.1msに補正する)。つまり、計時結果Eが基準時間Fよりも長かった場合、計時結果Eと基準時間Fの差分時間の分だけ、噴射指令信号の時間(パルス幅)を長くする。よって、図6に示すフローチャートにおけるステップS16では、このように噴射指令信号の時間を補正する。
【0092】
このように補正することによって、計時結果Eが基準時間Fよりも0.1ms長い1.1msであっても、インジェクタ50による燃料の噴射時間は4.0msとなる。つまり、インジェクタ50による燃料の噴射時間を噴射時間狙い値と同じにすることができる。よって、インジェクタ50による燃料の噴射量を噴射量狙い値とすることができる。
【0093】
ここまで説明したように、インジェクタ制御装置は、ばらつき補正処理を行うことによって、制御IC20やインジェクタ50に電気的特性にばらつきが生じた場合であっても、インジェクタ50による燃料の噴射量を高精度に制御することができる。よって、インジェクタ50と制御IC20との組み合わせを変更したとしても、インジェクタ50による燃料の噴射量を高精度に制御することができる。換言すると、ばらつきが生じた場合や、組み合わせを変更したとしても、インジェクタ50による燃料の噴射量を狙い値(噴射量狙い値)にすることができる。
【0094】
しかしながら、上述のように、制御IC20は、インジェクタ制御装置を安価にするために、マイコン10に設けられた水晶発振回路11よりも精度が低いRC発振回路21を用いている。従って、ばらつき補正処理時に制御IC20で到達時間を計時したとしても、この到達時間に誤差が生じている可能性がある。
【0095】
そこで、本実施形態におけるインジェクタ制御装置は、制御IC20におけるRC発振回路21による誤差(RC発振回路21のクロック誤差であり、言い換えれば、制御IC20のクロック誤差)を補正するために、学習処理を実行する。
【0096】
なお、この学習処理は、インジェクタ制御装置の生産工程で行うことができる。また、学習処理は、インジェクタ制御装置、又はインジェクタ制御装置が搭載された車両が市場に出た後(例えばインジェクタ制御装置が搭載された車両の定期メンテナンスなどのタイミング)で行うこともできる。RC発振回路21は、インジェクタ制御装置、又はインジェクタ制御装置が搭載された車両が市場に出た後に、抵抗(R)、コンデンサ(C)の劣化で精度が低下(RC発振回路21の生産時よりも低下)することもありうる。よって、インジェクタ制御装置、又はインジェクタ制御装置が搭載された車両が市場に出た後に学習処理を行うことによって、RC発振回路21の精度が低下した場合であっても、RC発振回路21の誤差を補正することができる。
【0097】
また、インジェクタ制御装置内の温度、又はエンジンの冷却水の温度が所定値(所定温度)に達した場合に、学習処理を行うようにしてもよい。RC発振回路21は、温度によって特性が変化して精度が低下する可能性がある。しかしながら、このようにすることによって、RC発振回路21の精度が低下した場合であっても、RC発振回路21が生成するクロックを用いて計時された到達時間を補正することができる。
【0098】
なお、インジェクタ制御装置内の温度が所定値に達した場合に、学習処理を行う場合には、インジェクタ制御装置内の温度を検出する温度検出装置(図示省略)を設けておく。
そして、マイコン10は、内燃機関の温度を示す温度情報として、温度検出装置からインジェクタ制御装置内の温度を示す温度情報を取得する(温度情報取得手段)。同様に、エンジンの冷却水の温度が所定値に達した場合に、学習処理を行う場合には、エンジンの冷却水の温度を検出する温度検出装置(図示省略)を設けておく。マイコン10は、内燃機関の温度を示す温度情報として、温度検出装置から冷却水の温度を示す温度情報を取得する(温度情報取得手段)。
【0099】
なお、IGSWがオン状態である間に少なくとも一回、学習処理を行うようにしてもよい。このようにすることによって、RC発振回路21が経時(経年)劣化によって精度が低下した場合であっても、RC発振回路21が生成するクロックを用いて計時された到達時間の誤差を補正することができる。
【0100】
ここで、図10〜図13を用いて、インジェクタ制御装置の学習処理に関連する処理動作を説明する。
【0101】
まず、図10,図11に基づいて、インジェクタ制御装置の学習処理に関して説明する。ステップS20では、マイコン10は、誤差確認用信号(時間Aの電圧波形、パルス持続時間(パルス幅)が時間Aのパルス信号)を制御IC20へ送信する(例えばパラレル通信にて送信する)。例えば、図11に示すように、マイコン10は、10msの波形(誤差確認用信号)を送信する(学習手段)。また、マイコン10は、制御IC20(モニタ部25、計時手段)に対して、RC発振回路22によって生成された内部クロックを用いて誤差確認用信号のパルス幅を計時させる(学習手段)。
【0102】
ステップS21では、制御IC20(モニタ部25の計時部251)は、マイコン10から受信した誤差確認用信号の時間を、RC発振回路21で生成されたクロックをカウントすることで計測(計時)する。つまり、制御IC20(モニタ部25の計時部251)は、誤差確認用信号が入力されてから、誤差確認用信号の入力が終了までの時間を計時する。図11に示す例では、制御IC20(モニタ部25の計時部251)は、10msの波形(誤差確認用信号)を11msと計時する。
【0103】
ステップS22では、制御IC20は、ステップS21で計時した時間を示す信号(計時結果B)をマイコン10に送信する(例えばシリアル通信にて送信する)。つまり、図11に示すように、制御IC20は、計時した11msを示す計時結果Bを送信する。このように、インジェクタ制御装置は、マイコン10から制御IC20に送信された誤差確認用信号を制御IC20内でモニタして、その結果をマイコン10に戻す。
【0104】
そして、ステップS23では、マイコン10は、送信した誤差確認用信号の時間Aと制御IC20から受信した計時結果Bとを比較して、時間Aと計時結果BとからA/Bを補正係数として学習する(学習手段)。つまり、図11に示すように、マイコン10は、誤差確認用信号の時間10msと制御IC20から受信した計時結果である11msとから補正係数10/11を学習する。なお、マイコン10は、この補正係数A/Bを不揮発性メモリに記憶する。なお、図11における補正過程とは、上述のばらつき補正処理を示すものである。
【0105】
次に、図12,図13に基づいて、学習処理を行ったインジェクタ制御装置がばらつき補正処理を行う際の処理動作に関して説明する。つまり、制御IC20におけるクロック誤差を考慮して、ばらつき補正処理を行う際の処理動作に関して説明する。
【0106】
ステップS30では、図6のステップS10と同様に、マイコン10は、IGSWがオンになると、スターターモータ(図示省略)を回転させることによってエンジン(内燃機関)を始動する。その後、図6のステップS11と同様に、マイコン10は、インジェクタ50を開弁させるために、信号線1を介して制御IC20に対して噴射指令信号を送信する(開弁制御、例えばパラレル通信にて送信する)。一方、噴射指令信号を受信した制御IC20の励磁制御部22は、第1トランジスタ41に駆動信号(オン信号)を出力して第1トランジスタ41をオンさせる。また、噴射指令信号を受信した制御IC20のスイッチ制御部24は、第3トランジスタ43に駆動信号(オン信号)を出力して第3トランジスタ43をオンさせる(開弁制御、図示省略)。
【0107】
ステップS31では、図6のステップS12と同様に、制御IC20(モニタ部25の計時部251)は、インジェクタ50(ソレノイドコイル)への通電電流波形(すなわち、インジェクタ電流の電流値)が開弁電流値に達するまでの時間(到達時間)を計時する。
【0108】
ステップS32では、図6のステップS13と同様に、制御IC20は、ステップS31で計時した時間(到達時間)を示す信号(計時結果E)をマイコン10に送信する(例えばシリアル通信にて送信する)。
【0109】
ステップS33では、マイコン10は、制御IC20から送信された計時結果Eを受信する。そして、マイコン10は、受信した計時結果Eが示す到達時間を補正係数A/Bを使って補正する(第1補正手段)。この補正した値(補正済到達時間)Cは、E×A/Bである。そして、マイコン10は、この補正した値Cを制御IC20で計時された到達時間として認識する。
【0110】
その後、マイコン10は、図6のステップS14〜16の処理を行う。つまり、マイコン10は、インジェクタの開弁時間が開弁時間狙い値となるように、補正した値(補正済到達時間)Cに応じて噴射指令信号のパルス幅を補正する(第2補正手段)。具体的には、補正した値Cと基準時間Fとを比較して、一致すると判定した場合は図6のステップS11へ戻り、不一致であると判定した場合は図6のステップS16に進んで噴射指令信号を補正する(第2補正手段)。なお、マイコン10は、補正した値Cと基準時間Fとが異なる場合は、インジェクタ50の開弁時間が狙い値となるように、補正した値Cと基準時間Fとの差分に応じて、噴射指令信号のパルス幅を補正する(第2補正手段)。
【0111】
ここで、制御IC20におけるクロック誤差を考慮した、ばらつき補正処理に関して、図13に示す波形図を用いて説明する。なお、図13(a)では、上段はマイコン10が制御IC20に出力する噴射指令信号の電圧波形(信号線1の波形)を示し、下段はモニタ部25で求められたインジェクタ電流の電流波形(信号線4の波形)を示す。同様に、図13(b)では、上段はマイコン10が制御IC20に出力する噴射指令信号の電圧波形(信号線1の波形)を示し、下段はモニタ部25で求められたインジェクタ電流の電流波形(信号線4の波形)を示す。
【0112】
ここでは、5ms(初期値)の噴射指令信号(5msの電圧波形、パルス持続時間(パルス幅)が5msのパルス信号)をマイコン10から制御IC20に送信するものであり、基準時間Fが1.0ms、噴射時間狙い値が3.9msである場合を一例として採用する。
【0113】
クロック誤差を考慮してない場合(つまりクロック誤差の補正前)、図13(a)に示すように、制御IC20(モニタ部25の計時部251)は、RC発振回路21のクロック誤差によって、実際は1.0msである到達時間を1.1msと認識(計時)する。この場合、インジェクタ50による燃料の噴射時間は4.0msとなる。つまり、インジェクタ50による燃料の噴射時間は、噴射時間狙い値よりも0.1ms長くなる。よって、この場合、インジェクタ50による燃料の噴射量は、噴射量狙い値よりも多くなってしまう。
【0114】
その後、制御IC20は、図12のステップS32に示すように、計時した時間(ここでは1.1ms)を示す信号(計時結果E)をマイコン10に送信する。この計時結果Eを受信したマイコン10は、予め学習して不揮発性メモリに記憶しておいた補正係数A/B(ここでは10/11)で計時結果E(ここでは1.1)を補正する。つまり、マイコン10は、補正した値C(ここでは1.1(E)×10(A)/11(B))を算出する。
【0115】
これによって、マイコン10は、実際の到達時間が1.0msであることを認識する。さらに、マイコン10は、実際の到達時間が1.0msであると認識することで、5ms(初期値)の噴射指令信号では、インジェクタ50による燃料の噴射時間が狙い値(燃料噴射狙い値)よりも0.1ms長いことを認識する。
【0116】
そこで、マイコン10は、インジェクタ50による噴射時間を噴射時間狙い値とするために、図12(b)に示すように、噴射指令信号の時間を4.9msに補正する。すなわち、マイコン10は、電圧波形の時間を4.9msに補正する(言い換えると、パルス持続時間(パルス幅)を4.9msに補正する)。
【0117】
つまり、マイコン10は、噴射指令信号の時間を、制御IC20から受信した到達時間と補正係数との積(到達時間と補正係数との乗算結果、つまり、自身が認識した実際の到達時間)に対して噴射時間狙い値を足した値(時間)に補正(設定)する。
【0118】
よって、クロック誤差を考慮して補正された噴射指令信号は、制御IC20から受信した到達時間と補正係数との積が示す時間に噴射時間狙い値(時間)を足した時間の電圧波形となる。換言すると、制御IC20から受信した到達時間と補正係数との積が示す時間に噴射時間狙い値(時間)を足した時間のパルス持続時間(パルス幅)であるパルス信号である。
【0119】
このように、マイコン10は、送信した値と受信した値を比較し、それを制御IC20におけるクロックのばらつき(クロック誤差)と認識する。そして、マイコン10は、上述のばらつき補正処理の過程においてクロックのばらつきも反映する。
【0120】
ここまで説明したように、補正係数を学習するとともに、RC発振回路21によって生成された内部クロックを用いて計時された到達時間を補正係数で補正することによって、マイコン10は、制御IC20から出力された到達時間を実際の到達時間と同等の時間として認識することができる。つまり、RC発振回路21によって生成された内部クロックを用いて計時された到達時間と実際の到達時間との間に誤差が生じていたとしても、マイコン10は、制御IC20から出力された到達時間を実際の到達時間と同等の時間として認識することができる。
【0121】
また、マイコン10は、このように補正した補正済到達時間に応じて、インジェクタ50の開弁時間が狙い値となるように、噴射指令信号のパルス幅を補正することで、噴射指令信号のパルス幅を実際の到達時間に応じて補正した場合と同等にすることができる。よって、制御IC20やインジェクタ50(ソレノイドコイル)の電気的特性にばらつきが生じて到達時間が基準時間からずれたとしても、インジェクタによる燃料の噴射量を高精度に制御することができる。
【0122】
従って、本発明のインジェクタ制御装置は、制御IC20の内部クロックを生成する発振回路として比較的安価なRC発振回路21を採用したとしても、インジェクタ50の開弁時間(すなわちインジェクタによる燃料の噴射量)を高精度に制御することができる。つまり、制御IC20の内部クロック発生部としてRC発振回路21を用いた場合であっても、制御IC20の内部クロック発生部として水晶発振回路11を用いた場合と同等の精度で、インジェクタ50による燃料の噴射量を制御することができる。よって、本発明におけるインジェクタ制御装置は、安価で、且つインジェクタによる燃料の噴射量を高精度に制御することができる。
【0123】
以上、本発明の好ましい実施形態について説明したが、本発明は上述した実施形態に何ら制限されることはなく、本発明の趣旨を逸脱しない範囲において、種々の変形が可能である。
【0124】
(変形例)
上述の実施形態におけるインジェクタ制御装置では、マイコン10が誤差確認用信号を送信すると共に、誤差確認用信号の時間Aと、制御IC20から送信された経時結果Bとによって、制御IC20のクロック誤差を学習する例を採用した。しかしながら、本発明はこれに限定されるものではない。
【0125】
変形例におけるインジェクタ制御装置では、制御IC20のクロック誤差をマイコン10で直接学習するようにしてもよい。なお、変形例におけるインジェクタ制御装置と、上述の実施形態におけるインジェクタ制御装置とは、学習処理の処理動作が異なる。また、図14に示すように、RC発振回路21で生成されたクロック信号がマイコンに入力される点が異なる。その他の構成、処理動作に関しては同様であるため説明は省略する。
【0126】
変形例のインジェクタ制御装置では、マイコン10は、制御IC20に対して、RC発振回路21で生成されたクロック信号(クロックパルス)を所定期間出力させる。そして、マイコン10は、制御IC20から出力されたクロック信号と、自身に設けられた水晶発振回路11で生成されたクロック信号(クロックパルス)とに基づいて、補正係数を学習(算出)する。
【0127】
具体的には、マイコン10は、所定期間に入力されたクロック信号のパルス数B1と、同じ期間に水晶発振回路11で生成されたクロック信号のパルス数A1とを比較する。そして、マイコン10は、水晶発振回路11で生成されたクロック信号のパルス数A1とRC発振回路21で生成されたクロック信号のパルス数B1とからA1/B1を補正係数として学習する。つまり、マイコン10は、制御IC20が内部クロックを出力するのと同じ期間に水晶発振回路11で生成された内部クロックのパルス数A1を、制御IC20から所定期間出力された内部クロックのパルス数B1で除算した値を補正係数として学習する。
【0128】
このようなインジェクタ制御装置であっても、本発明の目的を達成することができる(すなわち上述の実施形態と同じ効果を奏することができる)。つまり、制御IC20の内部クロック発生部として、水晶発振回路11よりも安価で精度が低いRC発振回路21を用いつつ、インジェクタ50による燃料の噴射量を高精度に制御することができる。換言すると、制御IC20の内部クロック発生部としてRC発振回路21を用いた場合であっても、制御IC20の内部クロック発生部として水晶発振回路11を用いた場合と同等の精度で、インジェクタ50による燃料の噴射量を制御することができる。従って、変形例のインジェクタ制御装置は、安価で且つ燃料の噴射量を高精度に制御することができる。
【符号の説明】
【0129】
10 マイコン、11 内部クロック生成部(水晶発振回路)、20 制御IC、21 内部クロック生成部(RC発振回路)、22 励磁制御部、23 保持制御部、24 INJスイッチ制御部、25 モニタ部、251 計時部、252 電流電圧変換回路、31 第1電源、32 第2電源、41 第1トランジスタ、42 第2トランジスタ、43 第3トランジスタ、50 インジェクタ
【特許請求の範囲】
【請求項1】
車両に搭載されるものであり、インジェクタに設けられたアクチュエータへの通電状態によって、当該インジェクタを開閉させて内燃機関への燃料の噴射を制御するインジェクタ制御装置であって、
内部クロックを生成する発振回路として水晶発振回路を有し、所定のパルス幅のパルス信号である噴射指令信号を出力するマイコンと、
内部クロックを生成する発振回路としてRC発振回路を有し、前記噴射指令信号が出力されている間、前記アクチュエータに対する通電を行う制御ICと、を備え、
前記制御ICは、
前記アクチュエータに流れるインジェクタ電流を検出する電流検出手段と、
前記RC発振回路によって生成された内部クロックを用いて、前記噴射指令信号が出力されてから、電流検出手段の検出結果が示す値が前記インジェクタが開弁する値に達するまでの到達時間を計時すると共に、該到達時間の計時結果を出力する計時手段と、を有し、
前記マイコンは、
前記RC発振回路によって生成された内部クロックを用いて計時された到達時間を、前記水晶発振回路によって生成された内部クロックを用いて計時した場合の到達時間と同等になるように補正するための補正係数を学習する学習手段と、
前記制御ICから出力された計時結果が示す到達時間を前記補正係数によって補正した補正済到達時間を算出する第1補正手段と、
前記インジェクタの開弁時間が開弁時間狙い値となるように、前記第1補正手段によって補正された補正済到達時間に応じて前記噴射指令信号のパルス幅を補正する第2補正手段と、を備えることを特徴とするインジェクタ制御装置。
【請求項2】
前記学習手段は、所定のパルス幅のパルス信号である誤差確認用信号を出力し、前記計時手段に対して、前記RC発振回路によって生成された内部クロックを用いて前記誤差確認用信号のパルス幅を計時させるともに、該パルス幅の計時結果を出力させるものであり、前記誤差確認用信号のパルス幅を前記計時手段から出力されたパルス幅の計時結果で除算した値を補正係数として学習することを特徴とする請求項1に記載のインジェクタ制御装置。
【請求項3】
前記学習手段は、前記制御ICに対して、前記RC発振回路によって生成された内部クロックを所定期間出力させるものであり、前記制御ICが内部クロックを出力するのと同じ期間に前記水晶発振回路で生成された内部クロックのパルス数を、前記制御ICから所定期間出力された内部クロックのパルス数で除算した値を補正係数として学習することを特徴とする請求項1に記載のインジェクタ制御装置。
【請求項4】
前記マイコンは、前記内燃機関の温度を示す温度情報を取得する温度情報取得手段を備え、
前記学習手段は、前記温度情報取得手段によって取得された温度情報が予め設定された所定温度を示す場合、補正係数の学習を行うことを特徴とする請求項1乃至3のいずれか一項に記載のインジェクタ制御装置。
【請求項5】
前記学習手段は、前記車両のイグニッションスイッチがオンになってから、当該イグニッションスイッチがオフになるまでの間に、少なくとも一回、補正係数の学習を行うことを特徴とする請求項1乃至3のいずれか一項に記載のインジェクタ制御装置。
【請求項1】
車両に搭載されるものであり、インジェクタに設けられたアクチュエータへの通電状態によって、当該インジェクタを開閉させて内燃機関への燃料の噴射を制御するインジェクタ制御装置であって、
内部クロックを生成する発振回路として水晶発振回路を有し、所定のパルス幅のパルス信号である噴射指令信号を出力するマイコンと、
内部クロックを生成する発振回路としてRC発振回路を有し、前記噴射指令信号が出力されている間、前記アクチュエータに対する通電を行う制御ICと、を備え、
前記制御ICは、
前記アクチュエータに流れるインジェクタ電流を検出する電流検出手段と、
前記RC発振回路によって生成された内部クロックを用いて、前記噴射指令信号が出力されてから、電流検出手段の検出結果が示す値が前記インジェクタが開弁する値に達するまでの到達時間を計時すると共に、該到達時間の計時結果を出力する計時手段と、を有し、
前記マイコンは、
前記RC発振回路によって生成された内部クロックを用いて計時された到達時間を、前記水晶発振回路によって生成された内部クロックを用いて計時した場合の到達時間と同等になるように補正するための補正係数を学習する学習手段と、
前記制御ICから出力された計時結果が示す到達時間を前記補正係数によって補正した補正済到達時間を算出する第1補正手段と、
前記インジェクタの開弁時間が開弁時間狙い値となるように、前記第1補正手段によって補正された補正済到達時間に応じて前記噴射指令信号のパルス幅を補正する第2補正手段と、を備えることを特徴とするインジェクタ制御装置。
【請求項2】
前記学習手段は、所定のパルス幅のパルス信号である誤差確認用信号を出力し、前記計時手段に対して、前記RC発振回路によって生成された内部クロックを用いて前記誤差確認用信号のパルス幅を計時させるともに、該パルス幅の計時結果を出力させるものであり、前記誤差確認用信号のパルス幅を前記計時手段から出力されたパルス幅の計時結果で除算した値を補正係数として学習することを特徴とする請求項1に記載のインジェクタ制御装置。
【請求項3】
前記学習手段は、前記制御ICに対して、前記RC発振回路によって生成された内部クロックを所定期間出力させるものであり、前記制御ICが内部クロックを出力するのと同じ期間に前記水晶発振回路で生成された内部クロックのパルス数を、前記制御ICから所定期間出力された内部クロックのパルス数で除算した値を補正係数として学習することを特徴とする請求項1に記載のインジェクタ制御装置。
【請求項4】
前記マイコンは、前記内燃機関の温度を示す温度情報を取得する温度情報取得手段を備え、
前記学習手段は、前記温度情報取得手段によって取得された温度情報が予め設定された所定温度を示す場合、補正係数の学習を行うことを特徴とする請求項1乃至3のいずれか一項に記載のインジェクタ制御装置。
【請求項5】
前記学習手段は、前記車両のイグニッションスイッチがオンになってから、当該イグニッションスイッチがオフになるまでの間に、少なくとも一回、補正係数の学習を行うことを特徴とする請求項1乃至3のいずれか一項に記載のインジェクタ制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2013−60884(P2013−60884A)
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願番号】特願2011−199797(P2011−199797)
【出願日】平成23年9月13日(2011.9.13)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願日】平成23年9月13日(2011.9.13)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]