
インスペクション方法
【課題】プロファイル及びそのバリエーションをユーザが設定するのを手助けするシステムを提供する。
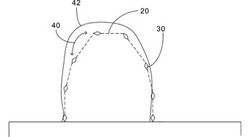
【解決手段】既知のオブジェクトのイメージ42を取り込むこと、及び、このイメージ上に、手動又は自動によって推定プロファイル20を重畳すること、を含む。推定プロファイルは数学的に定義され、かつ、上記イメージと一致するようにセグメント毎に調節される40ことによって、調節された推定プロファイルが、上記イメージに関連する当該回折スペクトルとともに記憶される。あるいは又はこれに加えて、ユーザは、既知のイメージのプロファイルをトレース(又は自由描写)し、その後、多項式、スプライン、又はベクトル等の数学関数の形状定義物を推定プロファイル上に描くことにより、未知のオブジェクトのプロファイルをその回折パターンから再構成する際に使用し得る。
【解決手段】既知のオブジェクトのイメージ42を取り込むこと、及び、このイメージ上に、手動又は自動によって推定プロファイル20を重畳すること、を含む。推定プロファイルは数学的に定義され、かつ、上記イメージと一致するようにセグメント毎に調節される40ことによって、調節された推定プロファイルが、上記イメージに関連する当該回折スペクトルとともに記憶される。あるいは又はこれに加えて、ユーザは、既知のイメージのプロファイルをトレース(又は自由描写)し、その後、多項式、スプライン、又はベクトル等の数学関数の形状定義物を推定プロファイル上に描くことにより、未知のオブジェクトのプロファイルをその回折パターンから再構成する際に使用し得る。
【発明の詳細な説明】
【技術分野】
【0001】
[0001] 本発明は、例えばリソグラフィ技術によるデバイス製造において有用なインスペクション方法、及び、リソグラフィ技術を使用したデバイス製造方法に関する。本発明は、特に、リソグラフィ技術を使用して製造されたデバイスのインスペクション、及び、デバイス上のオブジェクトを回折パターンから再構成することに言及する。
【背景技術】
【0002】
[0002] リソグラフィ装置は、所望のパターンを基板上、通常は基板のターゲット部分上に付与する機械である。リソグラフィ装置は、例えば、集積回路(IC)の製造に用いることができる。その場合、ICの個々の層上に形成される回路パターンを生成するために、マスク又はレチクルとも呼ばれるパターニングデバイスを用いることができる。このパターンは、基板(例えば、シリコンウェーハ)上のターゲット部分(例えば、一つまたは幾つかのダイの一部を含む)に転写することができる。通常、パターンの転写は、基板上に設けられた放射感応性材料(レジスト)層上への結像によってなされる。一般には、単一の基板が、連続的にパターニングされる隣接したターゲット部分のネットワークを含んでいる。既知のリソグラフィ装置としては、ターゲット部分上にパターン全体を一度に露光することにより各ターゲット部分を照射する、いわゆるステッパ、及び、放射ビームによってある特定の方向(「スキャン」方向)にパターンをスキャンすると同時にこの方向に平行又は逆平行に基板をスキャンすることにより各ターゲット部分を照射する、いわゆるスキャナが含まれる。また、パターンを基板上にインプリントすることにより、パターニングデバイスから基板にパターンを転写することも可能である。
【0003】
[0003] リソグラフィプロセスを監視するため、パターン形成された基板の一つ以上のパラメータ(例えば、基板内又は基板上に形成される連続する層と層の間のオーバーレイエラー)を測定する。リソグラフィプロセスで形成される微細構造を測定する方法はいくつもあり、走査型電子顕微鏡や様々な専用ツールを使用する方法等がある。専用インスペクションツールの一形態としてスキャトロメータがあり、このスキャトロメータでは、放射ビームを基板表面上のターゲットに放射し、散乱又は反射したビームの一つ以上の特性を測定する。基板による反射又は散乱の前後でビームの一つ以上の特性を比較することにより、基板の一つ以上の特性を判断することができる。これは、例えば、反射したビームと、既知の基板特性に関する既知の測定値のライブラリに記憶されているデータとを比較することにより実現できる。スキャトロメータとしては二つの主要タイプが知られている。分光スキャトロメータは、広帯域放射ビームを基板上にあて、ある特定の狭い角度範囲内で散乱した放射のスペクトル(波長の関数としての強度)を測定するものである。角度分解スキャトロメータは、単色放射ビームを使用し、散乱した放射の強度を角度の関数として測定するものである。エリプソメータは、偏光状態を測定するものである。
【0004】
[0004] 基板に入射する放射が回折するように、特定の形状を有するオブジェクトを基板上にプリントする。このオブジェクトは、しばしば、スキャトロメトリターゲットとして知られている。このオブジェクトは回折格子等であってよく、当該回折格子は、プロファイルとして知られる断面を有する、バー又はその他周期構造のアレイからなる。実際、プロファイルとは、通常、レジストライン等の類似構造が連続したセットである。そのような連続構造(又はユニットセル)の一つの平均プロファイルを「プロファイル」と呼ぶ。したがって、オブジェクトの実際のプロファイルは、局所的なバリエーションを有し得る多数のユニットセルの連結である。
【0005】
[0005] 通常、プロファイルは基板表面から測定されるものであり、オブジェクトが堆積される一つ以上の生成物層を含み得る。基板上にプリントされるオブジェクトは、所定の形状を有し、プリントする毎に完全にプリントされることが理想である。しかし実際は、プリントされるオブジェクトの形状及びサイズは理想のものと異なる。これは主に、使用するオブジェクトのサイズが小さいため、その小さいサイズで正確な形状を形成するのが困難なためである。そこで、オブジェクトの形状がどれほど正確かを判断するシステムを設けることが望ましい。
【0006】
[0006] 上述したように、断面走査型電子顕微鏡等を使用すれば、スキャトロメトリオブジェクトの実際の形状を判断できる。しかしこれには膨大な時間と手間、さらに特殊な装置が必要となり、例えばリソグラフィセルにおいて、通常の装置と同一直線上に別個の特殊装置を設ける必要があるため、生産環境内での測定にはふさわしくない。
【0007】
[0007] スキャトロメトリオブジェクトのプロファイルを判断する別の方法としては、放射ビームをオブジェクトから回折させ、この回折パターンと、回折パターンのライブラリに記憶されているモデル回折パターンとを、これらのモデルパターンを形成するモデルプロファイルとともに比較する方法がある。
【0008】
[0008] モデル回折パターンのライブラリを使用する方法の他に、ライブラリを使用しない方法や、ライブラリと組み合わせて使用する方法がある。その一つが反復法である。この方法では、パラメータに初期値が与えられており、これら初期値の回折パターンを計算し、それを測定された回折パターンと比較する。その後、パラメータの値を反復して変更することにより、反復してモデル化される回折パターンと測定された回折パターンとの整合性を高める。
【0009】
[0009] 米国特許出願第2003/0028358 A1(Niu et al.)には、例えば、スキャトロメトリオブジェクトからの実際の信号と、記憶された信号のライブラリとを比較するシステムが記載されており、同システムは、当該実際の信号とそれに最も近い信号との組合せを探すものである。記憶された信号は、それぞれ、オブジェクトプロファイルパラメータとリンクされる。オブジェクトプロファイルパラメータとは、例えば、クリティカルディメンション(CD)、オブジェクトの幅(高さとともに変化し得る)、オブジェクトの高さ、又は、オブジェクトの側面(又は「側壁」)の角度(この角度は、基板表面又は基板表面に対する法線から測定される)である。上記米国特許はさらに、測定された信号と、それに最も近い、スキャトロメトリオブジェクトのモデル(モデルの形状は、モデル内のプロファイルパラメータの値によって変化する)の計算された信号との組合せを見つける方法を記載している。つまり、考えられる様々なパラメータ値のセットをテストすることにより、スキャトロメトリオブジェクトから来る実際の信号になるべく近い信号を生じさせるセットを見つける。これによって、「モデル信号」の一連の反復が行われる。この方法は、モデル信号が実際の信号にできる限り近づくまで反復して繰り返され、モデル信号は、その後、使用されるパラメータとともに記憶される。
【0010】
[0010] ある特定の例では、CD、高さ及び幅の3つのパラメータからなるシンプルなパラメータのセットにおいて、CDの範囲が100〜120nmであり分解能が1nmである場合、CDについては21のパラメータ値が考えられる。また、高さについても21の値が考えられ、幅についても21の値が考えられるので、合計では、21×21×21=9261のパラメータ値の組合せが可能である。コンピュータは、9261の組合せが全てシミュレートされかつデータベース内に記憶されているか否かをチェックする。コンピュータは、すべての考えられる組合せをシミュレートすることによって、データベースを構成する。明らかに、このシステムにおける問題は、パラメータの数が大きいほどコンピュータが実行すべき反復の数が増え、また、必要となる処理力及び処理時間が増大することである。
【0011】
[0011] 米国特許出願公開第2004/0210402 A1(Opsal et al.)には、スキャトロメトリ信号からオブジェクトのプロファイルを構築する際に必要となるパラメータの数を減らすことを目的とするシステムが記載されている。パラメータの数を減らすため、同システムでは、プロファイル形状を構成するプロファイル形状の外側周囲に「制御点」を設けている。例えば、四角のプロファイルを有するオブジェクトは、基板表面からの高さを示す一つの制御点、及び、幅を示す二つの点を有する。これらの点を「点から点(dot-to-dot)」方式で結ぶことによりラインプロファイルを形成する。形状が複雑なほど、正確なラインプロファイルを構成するのに必要な制御点の数も増える。このシステムは、オーバーラッピング形状(例えば、簡単な形状が重なり合ったように見える複雑な形状、又は、コーティングを有するプロファイル)、又は、単一プロファイル内の複数の形状に対してはうまく機能しない。これは、点と点を結ぶ線が誤った点を結んでしまう可能性が高いためである。
【0012】
[0012] 米国特許出願公開第2004/0210402のシステムにおける別の問題点は、各制御点が少なくとも一つの(もしくは二つ又は三つの)自由度を有する点である。自由度の数が多いほど、各自由度に対して正しい値を確認するために必要な演算能力が増加してしまう。
【0013】
[0013] これら上述のシステムでは、一つのプロファイルのみを見つけるものである。「プロファイルスペース」、つまり、多数のプロファイルパラメータを有する一般的なプロファイルの表現とこれらパラメータの考えられる範囲との組合せを見つけるためには、さらに計算が必要となる。この組合せによって、必要とされる特定のプロファイルスペースが構成される。
【0014】
[0014] 例えば、ユーザが、幅、高さ、及び側壁角というパラメータを有する台形としてプロファイルを表現することを選択したとする。ユーザは、その後、この三つのパラメータについて範囲を定義する。同じやり方で、複雑なプロファイル(例えば、より複雑な形状、又は、一連の台形を一つに合体したもの)を構成することもできる。
【0015】
[0015] このような方法で形状を使用するプロファイル構成には、ユーザが、基板上の実際のオブジェクトのプロファイルのバリエーションを正しく表現するために、十分な大きさのかつ十分な数の自由度を有するプロファイルスペースを定義しなくてはならないという問題がある。もちろんユーザは、(オブジェクト形状が理論上同じであったとしても)各アプリケーションごとに異なるプロファイルスペースを形成してよいが、これでは非常に時間がかかってしまう。また、自由度が大きいほど、測定された回折パターンとこれに一番近いモデル回折パターンとの間の組合せを導き出す最適なパラメータ値のセットを見つけるのが困難になる。
【0016】
[0016] 上述した反復法は、ライブラリ法と組み合わせて、又はライブラリ法の代わりに使用することができる。しかし、どちらの方法においても、上述したプロファイルスペースを定義しなければならないという問題が存在する。プロファイルスペースが大きすぎると大きなライブラリが必要となり、よって、ライブラリ内での検索時間も長くなる。また、プロファイルスペースが大きすぎると、最適な組合せを見つけるために行う反復回数が増え、結果的に多くの演算能力及び時間を要してしまう。
【発明の概要】
【発明が解決しようとする課題】
【0017】
[0017] 例えば、使用可能なすべての情報を効果的に使用することによって、「プロファイルスペース」を構成する公称プロファイル及びそのバリエーションをユーザが設定するのを手助けするシステムを設けるのが望ましい。特に、「予め(upfront)」使用可能な情報であって、様々な露光設定(フォーカス、露光ドーズ、又はその他一つ以上の露光パラメータ)で露光されるオブジェクトのプロファイル、リソグラフィプロセスの数値シミュレーションによって得られるプロファイル、及び/又は、大きくかつフレキシブルなプロファイルスペースを使用したスキャトロメトリによって得られるプロファイルの断面を含んだ情報をユーザが使用するのを手助けするのが望ましい。
【0018】
[0018] 例えば、測定中にユーザの手間や演算能力をほぼ必要とせず、回折放射が検出される基板上のオブジェクトのプロファイルを正確に再形成するシステムを提供するのが望ましい。
【0019】
[0019] 例えば、ターゲット形状を再構成する際、基板上の複雑なターゲットのプロファイルを効率よくかつ迅速に判断するためには、モデルプロファイルの自由度又は未知パラメータが少ないことが望ましい。
【0020】
[0020] 例えば、公称プロファイル及びそのバリエーションを表現するのに使用されるパラメータの数を少なくすることが望ましい。
【0021】
[0021] 例えば、これらプロファイルパラメータについて考えられる値の範囲を狭くすることが望ましい。そのため、例えば、実際のオブジェクトプロファイルと一致するプロファイルか又はなるべく少ない可変パラメータで正確にオブジェクトプロファイルを再形成するのに有用なプロファイルについて、十分なスペースを有することが望ましい。従って、例えば、有用なプロファイルモデル又はプロファイルスペースを形成することが望ましい。
【課題を解決するための手段】
【0022】
[0022] 本発明の一態様によると、プロファイルの定義がオブジェクトから回折した放射から前記オブジェクトのプロファイルを再構成する際に使用され得るように、プロファイルを定義する方法が提供される。この方法は、既知のオブジェクトの情報を使用してプロファイルを定義すること、数学関数を使用して前記プロファイルの表面を表現すること、前記数学関数内の可変パラメータを選択し、前記プロファイルの計算された回折パターンが前記既知のオブジェクトの回折パターンと一致するまで前記可変パラメータを反復的に変更すること、及び、前記プロファイル及び前記可変パラメータを記憶すること、を含む。
【0023】
[0023] 「一致する(matches)」という用語から、本発明の目的が、許容範囲内、許容時間、及び、許容処理能力の範囲内で既知のオブジェクトに最も近いプロファイルを得ることであることが理解される。また「プロファイル」という用語から、オブジェクトが2次元であれば「表面」とはオブジェクトの輪郭であり、3次元であれば「表面」とは表面エリアのことであり、また、プロファイルとは、上述のように、オブジェクトの断面又はプロファイルスペース(つまり、公称プロファイル及びその可変例)であることが理解される。
【0024】
[0024] 本発明の一態様によると、プロファイルの定義がオブジェクトから回折した放射から前記オブジェクトのプロファイルを再構成する際に使用され得るように、プロファイルを定義する方法が提供される。この方法は、既知のオブジェクトのイメージを視認すること、前記既知のオブジェクト上に推定プロファイルを重畳すること、前記推定プロファイルにおける可変パラメータを定義すること、前記推定プロファイルが前記既知のオブジェクトと一致するまで、前記可変パラメータを反復的に変更すること、及び、前記プロファイル及び前記可変パラメータを記憶すること、を含む。
【0025】
[0025] 本発明の別の態様によると、プロファイルの定義がオブジェクトから回折した放射から前記オブジェクトのプロファイルを再構成する際に使用され得るように、プロファイルを定義するインスペクション装置が提供される。このインスペクション装置は、既知のオブジェクトのプロファイルを取り込むように構成された取込装置、数学関数を使用して前記プロファイルの表面を表現し、前記プロファイルが前記既知のオブジェクトと一致するまで前記数学関数内の可変パラメータを調節するように構成された、ユーザインタフェース、及び、前記プロファイル及び前記可変パラメータを記憶するように構成されたメモリ、を備える。
【図面の簡単な説明】
【0026】
【図1a】[0027] 図1aはリソグラフィ装置の図である。
【図1b】[0028] 図1bはリソグラフィセル又はクラスタの図である。
【図2】[0029] 図2は、スキャトロメータの第一実施形態を示す図である。
【図3】[0030] 図3は、スキャトロメータの第二実施形態を示す図である。
【図4】[0031] 図4は、オブジェクトプロファイルの再構成を示す図である。
【図5】[0032] 図5は、本発明の一実施形態に係るモデルプロファイルを示す図である。
【図6】[0033] 図6は、既知のプロファイルを有するモデルプロファイルの重畳を示す図である。
【図7】[0034] 図7は、本発明の一実施形態に係る複数のプロファイルイメージを示す図である。
【発明を実施するための形態】
【0027】
[0026] 以下、添付の概略図面を参照しながら、単なる例として、本発明の実施形態を説明する。図面において、同じ参照符号は同じ部分を示す。
【0028】
[0035] 図1aは、リソグラフィ装置の概略図である。このリソグラフィ装置は、
【0029】
[0036] 放射ビームB(例えば、UV放射又はEUV放射)を調節するように構成された照明システム(イルミネータ)ILと、
【0030】
[0037] パターニングデバイス(例えば、マスク)MAを支持するように構成され、かつ、特定のパラメータに従ってパターニングデバイスを正確に位置決めするように構成された第一ポジショナPMに連結された、サポート構造(例えば、マスクテーブル)MTと、
【0031】
[0038] 基板(例えば、レジストコートウェーハ)Wを保持するように構成され、かつ、特定のパラメータに従って基板を正確に位置決めするように構成された第二ポジショナPWに連結された、基板テーブル(例えば、ウェーハテーブル)WTと、
【0032】
[0039] パターニングデバイスMAによって放射ビームBに付けられたパターンを基板Wのターゲット部分C(例えば、一つ以上のダイを含む)上に投影するように構成された、投影システム(例えば、屈折投影レンズシステム)PLと、を備える。
【0033】
[0040] 照明システムは、放射を誘導、形成、又は制御するため、屈折型、反射型、磁気型、電磁型、静電型、又はその他の型の光コンポーネント、あるいはそれらのあらゆる組合せ等の様々な種類の光コンポーネントを含むことができる。
【0034】
[0041] サポート構造は、パターニングデバイスの配向、リソグラフィ装置の設計、及び、例えば、パターニングデバイスが真空環境内で保持されるか否かなどといった他の条件に応じた態様で、パターニングデバイスを保持する。サポート構造は、機械式、真空式、静電式又はその他のクランプ技術を使って、パターニングデバイスを保持することができる。サポート構造は、例えば、必要に応じて固定又は可動式にすることができるフレーム又はテーブルであってよい。サポート構造は、パターニングデバイスを、例えば、投影システムに対して所望の位置に確実に配置することができる。本明細書で使用される「レチクル」又は「マスク」という用語はすべて、より一般的な「パターニングデバイス」という用語と同義であると考えてよい。
【0035】
[0042] 本明細書で使用される「パターニングデバイス」という用語は、基板のターゲット部分内にパターンを創出する等の目的で放射ビームの断面にパターンを付ける際に使用できるあらゆるデバイスを指していると広く解釈されるべきである。なお、放射ビームに付けられたパターンは、例えば、そのパターンが位相シフトフィーチャ又はいわゆるアシストフィーチャを含む場合、基板のターゲット部分内の所望のパターンに正確に一致しない場合もある。通常、放射ビームに付けられたパターンは、集積回路等の、ターゲット部分内に作り出されるデバイス内の特定機能層に対応することになる。
【0036】
[0043] パターニングデバイスは、透過型又は反射型であってよい。パターニングデバイスの例としては、マスク、プログラマブルミラーアレイ、及びプログラマブルLCDパネルが挙げられる。マスクは、リソグラフィでは公知であり、バイナリ、レベンソン型(alternating)位相シフト、及びハーフトーン型(attenuated)位相シフトなどのマスクタイプ、並びに、各種ハイブリッドマスクタイプを含む。プログラマブルミラーアレイの一例では、小型ミラーのマトリックス配置を採用しており、各小型ミラーは、入射する放射ビームを様々な方向へ反射させるように、個別に傾斜させることができる。傾斜されたミラーは、ミラーマトリックスによって反射される放射ビームにパターンを付ける。
【0037】
[0044] 本明細書で使用される「投影システム」という用語は、使用される露光放射にとって、あるいは液浸液の使用又は真空の使用といった他の要因にとって適切な、屈折型、反射型、反射屈折型、磁気型、電磁型、及び静電型光学システム、又はそれらのあらゆる組合せを含むあらゆるタイプの投影システムを包含していると広く解釈されるべきである。本明細書で使用される「投影レンズ」という用語はすべて、より一般的な「投影システム」という用語と同義であると考えてよい。
【0038】
[0045] 本明細書に示されているとおり、リソグラフィ装置は透過型のもの(例えば、透過型マスクを採用しているもの)である。または、リソグラフィ装置は、反射型のもの(例えば、上述のタイプのプログロマブルミラーアレイを採用しているもの、又は、反射マスクを採用しているもの)であってもよい。
【0039】
[0046] リソグラフィ装置は、2つ(デュアルステージ)以上の基板テーブル(及び/又は2つ以上のサポート構造)を有するタイプのものであってよい。そのような「マルチステージ」機構においては、追加のテーブル及び/又はサポート構造を並行して使うことができ、あるいは、予備工程を一つ以上のテーブル及び/又はサポート構造で実施しつつ、別の一つ以上のテーブル及び/又はサポート構造を露光に使用することもできる。
【0040】
[0047] また、リソグラフィ装置は、投影システムと基板の間の空間を満たすように、比較的高い屈折率を有する液体、例えば、水によって基板の少なくとも一部を覆うことができるタイプのものであってもよい。さらに、リソグラフィ装置内の別の空間、例えば、マスクと投影システムの間、に液浸液を加えてもよい。液浸技術は、投影システムの開口数を増加させる技術においてよく知られている。本明細書で使用される「液浸」という用語は、基板のような構造を液体中に沈めなければならないという意味ではなく、単に、露光中、投影システムと基板の間に液体があるということを意味するものである。
【0041】
[0048] 図1aを参照すると、イルミネータILは、放射源SOから放射ビームを受ける。例えば、放射源がエキシマレーザである場合、放射源とリソグラフィ装置は、別々の構成要素であってよい。そのような場合には、放射源は、リソグラフィ装置の一部を形成しているとはみなされず、また、放射ビームは、放射源SOからイルミネータILへ、例えば、適切な誘導ミラー及び/又はビームエキスパンダを備えるビームデリバリシステムBDを使って送られる。その他の場合、例えば、放射源が水銀ランプである場合は、放射源をリソグラフィ装置の一体部分としてもよい。放射源SO及びイルミネータILは、必要であればビームデリバリシステムBDとともに、放射システムと呼ぶことができる。
【0042】
[0049] イルミネータILは、放射ビームの角強度分布を調節するアジャスタADを備え得る。一般に、イルミネータの瞳面内の強度分布の少なくとも外側及び/又は内側半径範囲(通常、それぞれσ-outer及びσ-innerと呼ばれる)を調節することができる。また、イルミネータILは、インテグレータIN及びコンデンサCO等、他の各種コンポーネントを備えてもよい。イルミネータを使って放射ビームを調節することにより、放射ビームの断面に所望の均一性及び強度分布をもたせることができる。
【0043】
[0050] 放射ビームBは、サポート構造(例えば、マスクテーブル)MT上に保持されたパターニングデバイス(例えば、マスク)MA上に入射し、このパターニングデバイスによってパターン形成される。放射ビームBは、パターニングデバイスMAを通り抜けた後、投影システムPSを通過し、当該投影システムPSによって、基板Wのターゲット部分C上にビームが集束される。第二ポジショナPW及び位置センサIF(例えば、干渉デバイス、リニアエンコーダ、又は静電容量センサ)を使用して基板テーブルWTを正確に動かすことにより、例えば、様々なターゲット部分Cを放射ビームBのパス内に位置付けることができる。同様に、第一ポジショナPM及び別の位置センサ(図1aには明示されない)を使用することにより、例えば、マスクライブラリからの機械検索後又はスキャン中に、パターニングデバイスMAを放射ビームBのパスに対して正確に位置付けることができる。通常、サポート構造MTの移動は、第一ポジショナPMの一部を形成するロングストロークモジュール(粗動位置決め)及びショートストロークモジュール(微動位置決め)を使用して行われる。同様に、基板テーブルWTの移動も、第二ポジショナPWの一部を形成するロングストロークモジュール及びショートストロークモジュールを使用して行われる。ステッパの場合は(スキャナとは対照的に)、サポート構造MTをショートストロークアクチュエータのみに連結、あるいは、固定してよい。パターニングデバイスMA及び基板Wは、パターニングデバイスアライメントマークM1、M2、及び基板アライメントマークP1、P2を使って、位置合わせしてよい。図示するように、基板アライメントマークはそれ専用のターゲット部分に置かれているが、基板アライメントマークをターゲット部分とターゲット部分の間の空間内に置くこともできる(これらは、スクライブラインアライメントマークとして公知である)。同様に、一つ以上のダイがパターニングデバイスMA上に設けられている場合、パターニングデバイスアライメントマークは、ダイとダイの間に置かれてもよい。
【0044】
[0051] 例示のリソグラフィ装置は、以下の一つ以上のモードで使用できる。
【0045】
[0052] 1. ステップモードにおいては、サポート構造MT及び基板テーブルWTを基本的に静止状態に保ちつつ、放射ビームに付けられたパターン全体を一度に(すなわち、単一静的露光)ターゲット部分C上に投影する。その後、基板テーブルWTをX及び/又はY方向に移動させることにより、別のターゲット部分Cを露光する。ステップモードでは、露光フィールドの最大サイズよって、単一静的露光時に結像されるターゲット部分Cのサイズが限定される。
【0046】
[0053] 2. スキャンモードにおいては、サポート構造MT及び基板テーブルWTを同期的にスキャンする一方で、放射ビームに付けられたパターンをターゲット部分C上に投影する(すなわち、単一動的露光)。サポート構造MTに対する基板テーブルWTの速度及び方向は、投影システムPSの(縮小)拡大率及び像反転特性によって決まる。スキャンモードにおいては、露光フィールドの最大サイズよって、単一動的露光時のターゲット部分の幅(非スキャン方向)が限定される一方、スキャン動作の長さによって、ターゲット部分の高さ(スキャン方向)が決定される。
【0047】
[0054] 3. 別のモードにおいては、サポート構造MTを、プログラマブルパターニングデバイスを保持した状態で基本的に静止状態に保ち、また、基板テーブルWTを移動又はスキャンする一方で、放射ビームに付けられたパターンをターゲット部分C上に投影する。このモードにおいては、通常、パルス放射源が採用されており、さらにプログラマブルパターニングデバイスは、基板テーブルWTの移動後ごとに、又はスキャン中の連続する放射パルスと放射パルスの間に、必要に応じて更新される。この動作モードは、前述のタイプのプログラマブルミラーアレイ等のプログラマブルパターニングデバイスを利用するマスクレスリソグラフィに容易に適用することができる。
【0048】
[0055] 上述の使用モードの組合せ及び/又はバリエーション、あるいは完全に異なる使用モードもまた採用可能である。
【0049】
[0056] 図1bに示すように、リソグラフィ装置LAはリソグラフィセルLC(しばしばリソ・セル又はリソ・クラスタとも呼ばれる)の一部を形成しており、このリソグラフィセルLCは、リソグラフィ装置LAに加えて、一つ以上の露光前及び露光後プロセスを基板上で行う装置も含んでいる。従来、これらの装置には、レジスト層を堆積するための一つ以上のスピンコータSC、露光されたレジストを現像するための一つ以上のデベロッパDE、一つ以上の冷却プレートCH、及び、一つ以上のベークプレートBKが含まれる。基板ハンドラ又はロボットROは、入出ポートI/O1、I/O2から基板を受け取ると、様々な処理デバイス間を移動させて、リソグラフィ装置のローディングベイLBへと搬送する。これらのデバイス(まとめてトラックとも呼ばれる)はトラックコントロールユニットTCUの制御下にあり、また、トラックコントロールユニット自体は監視制御システムSCSによって制御されている。監視制御システムSCSはまた、リソグラフィコントロールユニットLACUを介してリソグラフィ装置を制御している。このように、スループット及び処理効率が最大となるように様々な装置を動作させる。
【0050】
[0057] リソグラフィ装置によって基板が正しくかつ一貫して露光されるようにするため、基板を検査して、一つ以上の特性(連続する層と層との間のオーバーレイエラー、ライン幅、クリティカルディメンション(CD)等)を検査することが望ましい。エラーが検出された場合、特に、インスペクションが迅速に行われ同一バッチ内の別の基板がまだ露光される前であれば、後続の一つ以上の基板の露光に対して調整が行われる。また、既に露光済みの基板については、剥離かつ再加工する(歩留まりを良くするため)又は廃棄し、そうすることによって、欠陥品となることが明らかな基板を露光せずに済む。基板のターゲット部分の一部だけに欠陥がある場合は、良好なターゲット部分上のみに露光を行う。あるいは、エラーが補償されるように後続処理ステップの設定を変更することも可能であり、例えば、リソグラフィプロセスステップで生じる基板間のCDバリエーションを補償するために、トリムエッチステップの時間を調節することができる。
【0051】
[0058] インスペクション装置は、基板の一つ以上の特性、特に、各基板の一つ以上の特性又は同一基板内の各層の一つ以上の特性が、層ごとに及び/又は基板全体でどの程度異なるのかを確認するために使用される。インスペクション装置は、リソグラフィ装置LA又はリソ・セルLC内に組み込まれていてもよく、又は、独立型デバイスであってもよい。測定を迅速に行うには、インスペクション装置が、露光後すぐに露光されたレジスト層の一つ以上の特性を測定することが望ましい。しかし、レジスト内の潜像はコントラストが弱い、つまり、レジスト内において放射で露光された部分と露光されなかった部分との屈折率の差が非常に小さく、また、すべてのインスペクション装置が潜像を有効に測定するのに十分な感応性を有する訳でもない。そのため、ポスト露光ベークステップ(PEB)の後に測定を行うようにしてもよい。ポスト露光ベークステップとは、通常、露光された基板上で行われる第一のステップであり、このステップによって、レジストの露光済み部分と未露光部分との間のコントラストを強めることができる。この段階におけるレジスト内のイメージを半潜像と呼ぶことができる。また、現像後(この時点では、レジストの露光済み部分又は未露光部分のどちらかが除去されている)にレジストイメージを測定することもでき、あるいは、エッチング等のパターン転写ステップ後にイメージを測定することもできる。後者では、欠陥基板を再加工する可能性が限定されるものの、例えばプロセス制御の目的において、有用な情報を提供することはできる。
【0052】
[0059] 図2は、本発明の一実施形態で使用され得るスキャトロメータSM1の図である。このスキャトロメータSM1は、基板W上に放射を投影する広帯域(白光)放射プロジェクタ2を備えている。反射した放射はスペクトロメータディテクタ4へ到達する。このスペクトロメータディテクタ4は、鏡面反射した放射のスペクトル10(つまり、波長の関数としての強度の測定値)を測定する。このデータから、プロセッシングユニットPUは、例えば、厳密結合波分析及び非線形回帰によって、又は、図2にの下部に示すような擬似スペクトルのライブラリと比較することによって、検出されたスペクトルを生じさせる構造又はプロファイルを再構成する。再構成では、通常、当該構造の一般的な形状は既に分かっている状態で、また、当該構造が作られたプロセスに基づき一部のパラメータは予想できるため、当該構造のパラメータのうち少数のパラメータのみをスキャトロメトリデータから決定すればよい。このようなスキャトロメータは、法線入射スキャトロメータ又は斜め入射スキャトロメータとして構成されている。
【0053】
[0060] 図3は、本発明の一実施形態で使用され得る別のスキャトロメータSM2の図である。このスキャトロメータSM2では、放射源2から出射した放射は、レンズシステム12を使用することにより、干渉フィルタ13及び偏光子17を通過し、部分反射表面16で反射され、開口数(NA)の大きい(少なくとも0.9又は0.95が望ましい)顕微鏡対物レンズ15を介して、基板W上に集束される。液浸スキャトロメータであれば、開口数が1以上のレンズを備える場合もある。その後、反射した放射は、部分反射表面16を通過してディテクタ18に到達し、ディテクタ18において散乱スペクトルが検出される。ディテクタは、レンズ15の焦点距離に位置する後側投影瞳面11内にあってよいが、瞳面は、補助光学部品(図示されない)によってディテクタ18上へ再結像されたものであってもよい。瞳面とは、放射の半径方向の位置が入射角度を特定し、放射の角度位置が放射の方位角を特定する面のことである。ディテクタとしては、基板ターゲットの二次元角度散乱スペクトル(つまり、散乱角度の関数としての強度の測定値)を測定することができる、二次元ディテクタであるのが望ましい。ディテクタ18は、例えば、CCD又はCMOSセンサのアレイであってよく、その積分時間は、例えば40ミリ秒/フレームである。
【0054】
[0061] 例えば入射する放射の強度を測定するため、基準ビームがしばしば使用される。放射強度の測定では、放射ビームが部分反射表面16に入射する際、その一部が基準ビームとして部分反射表面16を通過して基準ミラー14へ送られる。基準ビームはその後、ディテクタ18の異なる部分へ投影される。
【0055】
[0062] 一つ以上の干渉フィルタ13は、例えば405〜790nm又はそれ以下(例えば、200〜300nm)の範囲内で所望の波長を選択するために使用される。干渉フィルタとしては、様々なフィルタを組み合わせたものよりも、調節可能なフィルタである方がよい。一つ以上の干渉フィルタの代わりに又はそれに加えて、格子を使用してもよい。
【0056】
[0063] ディテクタ18は、単一波長(又は狭い波長範囲)の散乱光の強度を測定するもの、複数の波長で強度を別々に測定するもの、又は、ある波長範囲内で積分された強度を測定するものである。また、ディテクタは、TM偏光の強度及びTE偏光の強度を別々に測定し、また/又は、TM偏光とTE偏光との位相差を測定することができる。
【0057】
[0064] 広帯域放射源2(つまり、広範囲の放射周波数又は波長、及び色を有するもの)の使用が可能であるため、エタンデュが大きく、複数の波長を混合することができる。広帯域内の複数の波長はそれぞれ、δλの帯域幅と、少なくとも2δλ(つまり、波長帯域の2倍)の間隔を有するのが望ましい。複数ある放射「ソース」は、例えばファイバーバンドルを使用して分割された拡張放射源の各部分であってよい。このようにして、角度分解された散乱スペクトルを、複数の波長で並行して測定できる。2−Dスペクトルより多くの情報を含む3−Dスペクトル(波長及び二つの異なる角度)を測定することができる。これによって多くの情報を測定できるので、メトロロジプロセスのロバスト性を高めることができる。このことは、米国特許出願公開第2006−0066855に詳述してあり、同特許出願は本記載によりその全体が本明細書中に組み込まれる。
【0058】
[0065] 基板W上のターゲットは格子であってよく、この格子はプリントされるものであるので、現像後に実線のレジストラインからバーが形成される。あるいは、基板をエッチングしてバーを形成してもよい。ターゲットパターンは、対象パラメータ(リソグラフィ装置内のフォーカス、ドーズ、オーバーレイ、色収差等)に対する感応性を有するように選択されてよく、そうすることによって、当該パラメータにおけるバリエーションが、プリントされたターゲット内のバリエーションとして現れる。例えば、ターゲットパターンは、リソグラフィ投影装置、特に、投影システム内の色収差に対して感応性を有し、照明対称性及びかかる収差の存在が、プリントされたターゲットパターン内のバリエーション内に現れる。したがって、プリントされたターゲットパターンのスキャトロメトリデータは、ターゲットパターンを再構成するのに使用される。ターゲットパターンのパラメータ(ライン幅及び形状等)は、プリントステップ及び/又はその他のスキャトロメトリプロセスから得られた情報として、プロセッシングユニットが行う再構成プロセスで使用される。
【0059】
[0066] 本発明の一実施形態は、基板W上のターゲットの再構成に関するものである。ターゲットが格子の場合、格子のバーは、通常プリズム形になることが推測されるため、それらの長さ及びそれらの断面形状を含む形状を有する。バーの断面形状は、プロファイルとして知られている。以下、バーをスキャトロメトリオブジェクトと呼ぶ。しかしながら、プロファイルは単なる断面ではなく、全体的な3−Dオブジェクトを含むことに注意しなければならない。プロファイルは、オブジェクトの輪郭だけではなく、内部形状、これら形状の細部、材料及び材料特性を備えるものである。
【0060】
[0067] 再構成のため、プロファイルは、均一の長方形断面層及び台形(又は、3−Dオブジェク用の円筒及び円錐)のスタックからなるものとして見なされてきた。本発明の一実施形態はこの発想に基づくものである。
【0061】
[0068] 通常、回折スペクトルからオブジェクトプロファイルを再構成するため、スキャトロメトリオブジェクトの表面から放射ビームを回折させる。この回折したビームはディテクタによって検出され、ディテクタはその後、回折パターンからスキャトロメトリ測定信号を生成する。この測定信号は、モデルプロファイルに基づく計算された信号と比較される。計算された信号が測定された信号と一致しない場合、モデルプロファイルを変更することによって、当該モデル信号を、実際のオブジェクトの実際のプロファイルに類似させる。このプロセスは、測定信号と計算された信号が許容範囲内において一致するまで繰り返される。
【0062】
[0069] あるいは、モデルプロファイルを、モデルプロファイル及びそれに関連するモデル信号(例えば、回折スペクトル)のライブラリから検索してもよい。ライブラリ内で補間することにより、モデルプロファイルの精度を高めることもできる。
【0063】
[0070] つまり、本発明の一実施形態は、(モデルプロファイルの回折パターンと、実際のオブジェクトの回折パターンとを比較し、オブジェクトの実際のプロファイルが得られるように)、実際のオブジェクトに最も近いモデルプロファイルを見つけるため、モデルプロファイルスペース、つまり、考えられるすべてのモデルプロファイルを定義し予測することに関する。
【0064】
[0071] 図4は、モデルプロファイルの一例を示す図である。このプロファイルは、スラブL1〜L5、L7及び台形L6、L8を積み重ねたものに似ている。このビルディングブロックの自由度(幅、高さ及び側壁角)を調節することにより、一連のビルディングブロックL1〜L8をできるかぎりオブジェクトプロファイルと一致させることができる。しかし、この方法にはいくつかの欠点がある。一つ目の欠点は、ユーザが、ビルディングブロックの数、形状、サイズを正しく選択できるような経験者でなくてはならないこと。二つ目の欠点は、ビルディングブロックの自由度が、測定されるプロファイルの実際のバリエーションに一致しない場合があること。三つめの欠点は、ユーザが、測定対象となるプロファイルのバリエーションをカバーするとみなすべき形状及びサイズの範囲を定義しなくてはならないこと。最後の欠点は、ビルディングブロック方法が、実際の所望プロファイルの非常に大まかなモデルにすぎないということである。これは主に、ビルディングブロックがプロファイル表面の曲線を考慮していないためである。
【0065】
[0072] 本発明の一実施形態に係るモデルプロファイルの構成方法は、オブジェクトの断面又は体積をビルディングブロックで構築しようとするよりも、プロファイルの輪郭を独立して決定する方法である。2次元オブジェクトの輪郭又は3次元オブジェクトの表面は、ポリゴンやスプライン等の様々な数学関数を使用して表現することができる。あるいは、ユーザは、描画システムを使用して輪郭を手書きで形成することもできる。手書き方法の場合、その後半において、手書きの描画をコンピュータ又はその他プロセッサを入力した後に、数学関数によって輪郭を求めてもよい。
【0066】
[0073] ユーザが輪郭を定義しやすくするため、測定対象であるオブジェクトの情報を使用することもできる。図5に示すように、既知のオブジェクトのイメージ42は、モデルビルダ(又はユーザ)がそれを見られるように、画面上に取り込まれる。ユーザーインタフェースは、その後、ユーザが、取り込まれた画像の上に推定されるプロファイル20を重畳できるようにする。その後、推定プロファイル20は、イメージ42と正確に一致するように調節(40)され、調節された推定プロファイルのパラメータ(つまり、公称プロファイル及びそのバリエーション)が、取り込まれたイメージ42の回折パターンとともにライブラリに記憶される。図6は、推定オブジェクト55を実際のイメージ50上に重ね合わせる様子を示している。基板表面W´の相対位置もまた、実際の基板表面Wと位置合わせされている。図6に示すように、推定プロファイル55から始めると、この場合、ユーザは、推定プロファイルを左へ移動させるとともに少し上方に移動させるだけで、推定プロファイル55を取り込まれたイメージ50と一致させることができる。
【0067】
[0074] 取り込まれたイメージ42、50は、走査型電子顕微鏡検査法(SEM)、走査型原子間力顕微鏡検査法(AFM)から決定されたオブジェクトであってよく、又は、リソグラフィ予測モデル(リソクルーザ(Lithocruiser)又はプロリス(Prolith)等)から取り込まれたものであってもよい。または、いかなる種類のシミュレーションから取り込まれたものであってもよい。あるいは、又はこれに加えて、先の測定結果、例えば、多くの自由なパラメータを含む先の測定結果から、取り込まれたものであってもよい。つまり、なるべく正確なものとなるように多くの処理がなされた先のオブジェクトプロファイルを、取り込まれたイメージとして使用することもできる。
【0068】
[0075] 上述したように、推定プロファイル及びプロファイルスペースを定義する別の方法がある。その一つは、複数のスラブ及び台形を重畳することで、取り込まれたイメージに最も整合するようにする方法である。これは、スラブ及び台形を使用してモデルを構成することと似ているが、主な違いは、ビルディングブロックが、デザイン情報又はユーザの経験から推定されるというよりは、既知のイメージと視覚的に比較される点である。また別の方法では、ユーザが、ユーザーインタフェースを使用して取り込まれたイメージ上にプロファイルを自由に描画し、描画が終わった後に、スプライン、多項式、又はベクトル、又はその他表現を描く方法である。
【0069】
[0076] 取り込まれたイメージと一致させるために、当該取り込まれたイメージ上に重畳された推定プロファイルを調節するいくつかの方法がある。図5はその一例を示している。推定プロファイル上にある「ハンドル」30を調節することにより、ハンドル30間のセグメント20を互いに独立して動かすことができる。ハンドル30を動かすことによって、さらに、符号40で示す方向にセグメント20を湾曲させることもできる。その後、このハンドルの移動は、セグメントの結果的変化を表す数学関数のバリエーションとして記憶される。これらバリエーションは、その後、公称プロファイル(つまり、ハンドルが操作される前に形成されたプロファイル)とともに記憶される。
【0070】
[0077] 各セグメント20は、所望の曲線が得られるように多項式で表現することができる。あるいは又はこれに加えて、その相対位置が容易に再現できるように、ベクトルで表現することもできる。さらには、「区分的」多項曲線として知られるスプラインとして表現することもできる。
【0071】
[0078] 同様に、ユーザが、プロファイルスペース、つまり、測定された回折パターンとそれに最も近いモデル回折パターンとの整合を見つけるためにプロファイルを調節する方法及びその量、を定義する方法もいくつかある。通常、ユーザは、一つ以上の調節パラメータ又はハンドルを選択し、少なくとも一つのパラメータに対するバリーエーションの程度(つまり、範囲)を示す。
【0072】
[0079] 図7に示すように、ユーザは、例えば、様々なスキャトロメトリオブジェクトを有するテスト基板からの多数の回折スペクトルが、複数のポテンシャルプロファイルを生じさせた場合、先の測定から複数のイメージを取り込むことができる。これらのプロファイルは、SEM、TEM(透過電子顕微鏡検査法)又はAFM等の様々な断面技術、によって、又は、多数の可変パラメータを有するモデルプロファイルを備えるスキャトロメトリを使用することによって、決定することができる。これらのプロファイルはすべて、互いに重畳することができる。これら複数のプロファイルイメージが使用可能である場合、複数のイメージが分析され、ユーザは、平均プロファイル64及びプロファイルバリエーション(例えば、5%パーセンタルライン60及び95%パーセンタルライン62を持つバリエーション)を見つけることができる。バリエーションを統計学的に分析することによって、プロファイルバリエーションを正確に表現できるプロファイル関数の最小セットを決定することができる。この利点は、イメージ内のノイズが低減できること、また、最も顕著な形状を正確に表現する可変パラメータの数をなるべく少なくできることである。これは、例えば、主成分分析を使用することによって実現できる。
【0073】
[0080] 本発明の一実施形態による別の利点は、単純な輪郭プロファイルが記録されるだけでなく、より複雑なオブジェクト(コーティング付きオブジェクト、コンタクトホール、積層オブジェクト、又は、テスト構造の産物として生じるあらゆる種類のオブジェクト等)にプロセスを使用できる点である。
【0074】
[0081] 上述したように、取り込まれたイメージを構成する使用可能なイメージの数はいくつでもよいので、複合イメージを使用することができ、その上に、コーティング等を有するオブジェクトを表す推定プロファイルを重畳することができる。例えば、図6のオブジェクト50は、同じ形状で少しサイズの大きいイメージ58と組み合わせることができる。その後、重畳プロファイル55を二回計算又は決定し(一回はオブジェクト形状50のため、もう一回は、少し大きいイメージ(例えば、コーティングのイメージ)58のため)、それによって、例えば、コーティングされたオブジェクト用のプロファイルを得ることができる。
【0075】
[0082] 上記の例では、推定プロファイルを取り込まれたイメージ上に手動で重畳するためにユーザーインタフェースを使用している。しかし、この重畳は、オブジェクトのエッジを認識又は検出するとともに同エッジのプロファイルを形成するソフトウェアとハードウェアとの組合せを使用することで、自動的に実現することもできる。
【0076】
[0083] 本発明の一実施形態は、2次元プロファイルに限定されない。推定プロファイルを重畳し調節する同一の方法を、例えば直交する方向でオブジェクトに適用することができる。その後、3Dオブジェクトを構成するために一連のプロファイルを決定することができる。
【0077】
[0084] また、推定プロファイルは、単一の取り込まれたオブジェクトに正確に一致する必要はない。一群のオブジェクトが少なくとも一つの共通パラメータ(例えば、図6に示すような五角形の形状50)を有する場合、当該少なくとも一つの共通パラメータ(例えば、五角形)を含むインデックスプロファイルが形成され、これによって、この一群のオブジェクトに対して測定すべきパラメータの数を減らすことができる。また図6の例において、一群のオブジェクトが同一の五角形の形状50を有するがその高さ58や位置52が異なる場合は、同一のインデックスプロファイル50を当該一群のオブジェクト全体に使用することにより、他にたった二つの未知のパラメータ、つまり高さ及び位置を使用すれば足りる。ソフトウェアは、取り込まれたイメージを単一の又は一連の多項式又はスプラインに自動的に変換することができる。
【0078】
[0085] 推定プロファイルと取り込まれたオブジェクトとの整合は、ユーザが手書きで行ってもよく、又は、エッジ検出ソフトウェアで自動的に行ってもよく、又は、ユーザが画素ごとに行ってもよい。
【0079】
[0086] 本発明の実施形態の利点は、プロファイルが容易に定義でき、ポテンシャルモデルプロファイルのスペースがより正確で十分なものであることであり、これによって、オブジェクトプロファイルの再構成がより正確かつ容易に、最小限の自由度(又は未知パラメータ)数で行えることである。
【0080】
[0087] 光リソグラフィの関連での本発明の実施形態の使用について上述のとおり具体的な言及がなされたが、本発明は、他の用途、例えば、インプリントリソグラフィに使用してもよく、さらに状況が許すのであれば、光リソグラフィに限定されることはない。インプリントリソグラフィにおいては、パターニングデバイス内のトポグラフィによって、基板上に創出されるパターンが定義される。パターニングデバイスのトポグラフィは、基板に供給されたレジスト層の中にプレス加工され、基板上では、電磁放射、熱、圧力、又はそれらの組合せを適用することによってレジストを硬化させる。パターニングデバイスは、レジストが硬化した後、レジスト内にパターンを残してレジストの外へ移動される。
【0081】
[0088] 本明細書で使用される「放射」及び「ビーム」という用語は、紫外線(UV)放射(例えば、約365nm、355nm、248nm、193nm、157nm、又は126nmの波長を有する)、極端紫外線(EUV)放射(例えば、5〜20nmの範囲の波長を有する)、及びイオンビームや電子ビームなどの粒子ビームを含む、あらゆる種類の電磁放射を包含している。
【0082】
[0089] 「レンズ」という用語は、文脈によっては、屈折、反射、磁気、電磁気、及び静電型光コンポーネントを含む様々な種類の光コンポーネントのどれか一つ又は組合せを指すことができる。
【0083】
[0090] 以上、本発明の具体的な実施形態を説明してきたが、本発明は、上述以外の態様で実施することも可能である。例えば、本発明は、上記に開示した方法を表す一つ以上の機械読取可能な指示のシーケンスを含むコンピュータプログラム、又は、そのようなコンピュータプログラムが記憶されたデータ記録媒体(例えば、半導体メモリ、磁気ディスク又は光ディスク)の形態であってもよい。
【0084】
[0091] 上記の説明は、制限ではなく例示を意図したものである。したがって、当業者には明らかなように、添付の特許請求の範囲を逸脱することなく本記載の発明に変更を加えることもできる。
【技術分野】
【0001】
[0001] 本発明は、例えばリソグラフィ技術によるデバイス製造において有用なインスペクション方法、及び、リソグラフィ技術を使用したデバイス製造方法に関する。本発明は、特に、リソグラフィ技術を使用して製造されたデバイスのインスペクション、及び、デバイス上のオブジェクトを回折パターンから再構成することに言及する。
【背景技術】
【0002】
[0002] リソグラフィ装置は、所望のパターンを基板上、通常は基板のターゲット部分上に付与する機械である。リソグラフィ装置は、例えば、集積回路(IC)の製造に用いることができる。その場合、ICの個々の層上に形成される回路パターンを生成するために、マスク又はレチクルとも呼ばれるパターニングデバイスを用いることができる。このパターンは、基板(例えば、シリコンウェーハ)上のターゲット部分(例えば、一つまたは幾つかのダイの一部を含む)に転写することができる。通常、パターンの転写は、基板上に設けられた放射感応性材料(レジスト)層上への結像によってなされる。一般には、単一の基板が、連続的にパターニングされる隣接したターゲット部分のネットワークを含んでいる。既知のリソグラフィ装置としては、ターゲット部分上にパターン全体を一度に露光することにより各ターゲット部分を照射する、いわゆるステッパ、及び、放射ビームによってある特定の方向(「スキャン」方向)にパターンをスキャンすると同時にこの方向に平行又は逆平行に基板をスキャンすることにより各ターゲット部分を照射する、いわゆるスキャナが含まれる。また、パターンを基板上にインプリントすることにより、パターニングデバイスから基板にパターンを転写することも可能である。
【0003】
[0003] リソグラフィプロセスを監視するため、パターン形成された基板の一つ以上のパラメータ(例えば、基板内又は基板上に形成される連続する層と層の間のオーバーレイエラー)を測定する。リソグラフィプロセスで形成される微細構造を測定する方法はいくつもあり、走査型電子顕微鏡や様々な専用ツールを使用する方法等がある。専用インスペクションツールの一形態としてスキャトロメータがあり、このスキャトロメータでは、放射ビームを基板表面上のターゲットに放射し、散乱又は反射したビームの一つ以上の特性を測定する。基板による反射又は散乱の前後でビームの一つ以上の特性を比較することにより、基板の一つ以上の特性を判断することができる。これは、例えば、反射したビームと、既知の基板特性に関する既知の測定値のライブラリに記憶されているデータとを比較することにより実現できる。スキャトロメータとしては二つの主要タイプが知られている。分光スキャトロメータは、広帯域放射ビームを基板上にあて、ある特定の狭い角度範囲内で散乱した放射のスペクトル(波長の関数としての強度)を測定するものである。角度分解スキャトロメータは、単色放射ビームを使用し、散乱した放射の強度を角度の関数として測定するものである。エリプソメータは、偏光状態を測定するものである。
【0004】
[0004] 基板に入射する放射が回折するように、特定の形状を有するオブジェクトを基板上にプリントする。このオブジェクトは、しばしば、スキャトロメトリターゲットとして知られている。このオブジェクトは回折格子等であってよく、当該回折格子は、プロファイルとして知られる断面を有する、バー又はその他周期構造のアレイからなる。実際、プロファイルとは、通常、レジストライン等の類似構造が連続したセットである。そのような連続構造(又はユニットセル)の一つの平均プロファイルを「プロファイル」と呼ぶ。したがって、オブジェクトの実際のプロファイルは、局所的なバリエーションを有し得る多数のユニットセルの連結である。
【0005】
[0005] 通常、プロファイルは基板表面から測定されるものであり、オブジェクトが堆積される一つ以上の生成物層を含み得る。基板上にプリントされるオブジェクトは、所定の形状を有し、プリントする毎に完全にプリントされることが理想である。しかし実際は、プリントされるオブジェクトの形状及びサイズは理想のものと異なる。これは主に、使用するオブジェクトのサイズが小さいため、その小さいサイズで正確な形状を形成するのが困難なためである。そこで、オブジェクトの形状がどれほど正確かを判断するシステムを設けることが望ましい。
【0006】
[0006] 上述したように、断面走査型電子顕微鏡等を使用すれば、スキャトロメトリオブジェクトの実際の形状を判断できる。しかしこれには膨大な時間と手間、さらに特殊な装置が必要となり、例えばリソグラフィセルにおいて、通常の装置と同一直線上に別個の特殊装置を設ける必要があるため、生産環境内での測定にはふさわしくない。
【0007】
[0007] スキャトロメトリオブジェクトのプロファイルを判断する別の方法としては、放射ビームをオブジェクトから回折させ、この回折パターンと、回折パターンのライブラリに記憶されているモデル回折パターンとを、これらのモデルパターンを形成するモデルプロファイルとともに比較する方法がある。
【0008】
[0008] モデル回折パターンのライブラリを使用する方法の他に、ライブラリを使用しない方法や、ライブラリと組み合わせて使用する方法がある。その一つが反復法である。この方法では、パラメータに初期値が与えられており、これら初期値の回折パターンを計算し、それを測定された回折パターンと比較する。その後、パラメータの値を反復して変更することにより、反復してモデル化される回折パターンと測定された回折パターンとの整合性を高める。
【0009】
[0009] 米国特許出願第2003/0028358 A1(Niu et al.)には、例えば、スキャトロメトリオブジェクトからの実際の信号と、記憶された信号のライブラリとを比較するシステムが記載されており、同システムは、当該実際の信号とそれに最も近い信号との組合せを探すものである。記憶された信号は、それぞれ、オブジェクトプロファイルパラメータとリンクされる。オブジェクトプロファイルパラメータとは、例えば、クリティカルディメンション(CD)、オブジェクトの幅(高さとともに変化し得る)、オブジェクトの高さ、又は、オブジェクトの側面(又は「側壁」)の角度(この角度は、基板表面又は基板表面に対する法線から測定される)である。上記米国特許はさらに、測定された信号と、それに最も近い、スキャトロメトリオブジェクトのモデル(モデルの形状は、モデル内のプロファイルパラメータの値によって変化する)の計算された信号との組合せを見つける方法を記載している。つまり、考えられる様々なパラメータ値のセットをテストすることにより、スキャトロメトリオブジェクトから来る実際の信号になるべく近い信号を生じさせるセットを見つける。これによって、「モデル信号」の一連の反復が行われる。この方法は、モデル信号が実際の信号にできる限り近づくまで反復して繰り返され、モデル信号は、その後、使用されるパラメータとともに記憶される。
【0010】
[0010] ある特定の例では、CD、高さ及び幅の3つのパラメータからなるシンプルなパラメータのセットにおいて、CDの範囲が100〜120nmであり分解能が1nmである場合、CDについては21のパラメータ値が考えられる。また、高さについても21の値が考えられ、幅についても21の値が考えられるので、合計では、21×21×21=9261のパラメータ値の組合せが可能である。コンピュータは、9261の組合せが全てシミュレートされかつデータベース内に記憶されているか否かをチェックする。コンピュータは、すべての考えられる組合せをシミュレートすることによって、データベースを構成する。明らかに、このシステムにおける問題は、パラメータの数が大きいほどコンピュータが実行すべき反復の数が増え、また、必要となる処理力及び処理時間が増大することである。
【0011】
[0011] 米国特許出願公開第2004/0210402 A1(Opsal et al.)には、スキャトロメトリ信号からオブジェクトのプロファイルを構築する際に必要となるパラメータの数を減らすことを目的とするシステムが記載されている。パラメータの数を減らすため、同システムでは、プロファイル形状を構成するプロファイル形状の外側周囲に「制御点」を設けている。例えば、四角のプロファイルを有するオブジェクトは、基板表面からの高さを示す一つの制御点、及び、幅を示す二つの点を有する。これらの点を「点から点(dot-to-dot)」方式で結ぶことによりラインプロファイルを形成する。形状が複雑なほど、正確なラインプロファイルを構成するのに必要な制御点の数も増える。このシステムは、オーバーラッピング形状(例えば、簡単な形状が重なり合ったように見える複雑な形状、又は、コーティングを有するプロファイル)、又は、単一プロファイル内の複数の形状に対してはうまく機能しない。これは、点と点を結ぶ線が誤った点を結んでしまう可能性が高いためである。
【0012】
[0012] 米国特許出願公開第2004/0210402のシステムにおける別の問題点は、各制御点が少なくとも一つの(もしくは二つ又は三つの)自由度を有する点である。自由度の数が多いほど、各自由度に対して正しい値を確認するために必要な演算能力が増加してしまう。
【0013】
[0013] これら上述のシステムでは、一つのプロファイルのみを見つけるものである。「プロファイルスペース」、つまり、多数のプロファイルパラメータを有する一般的なプロファイルの表現とこれらパラメータの考えられる範囲との組合せを見つけるためには、さらに計算が必要となる。この組合せによって、必要とされる特定のプロファイルスペースが構成される。
【0014】
[0014] 例えば、ユーザが、幅、高さ、及び側壁角というパラメータを有する台形としてプロファイルを表現することを選択したとする。ユーザは、その後、この三つのパラメータについて範囲を定義する。同じやり方で、複雑なプロファイル(例えば、より複雑な形状、又は、一連の台形を一つに合体したもの)を構成することもできる。
【0015】
[0015] このような方法で形状を使用するプロファイル構成には、ユーザが、基板上の実際のオブジェクトのプロファイルのバリエーションを正しく表現するために、十分な大きさのかつ十分な数の自由度を有するプロファイルスペースを定義しなくてはならないという問題がある。もちろんユーザは、(オブジェクト形状が理論上同じであったとしても)各アプリケーションごとに異なるプロファイルスペースを形成してよいが、これでは非常に時間がかかってしまう。また、自由度が大きいほど、測定された回折パターンとこれに一番近いモデル回折パターンとの間の組合せを導き出す最適なパラメータ値のセットを見つけるのが困難になる。
【0016】
[0016] 上述した反復法は、ライブラリ法と組み合わせて、又はライブラリ法の代わりに使用することができる。しかし、どちらの方法においても、上述したプロファイルスペースを定義しなければならないという問題が存在する。プロファイルスペースが大きすぎると大きなライブラリが必要となり、よって、ライブラリ内での検索時間も長くなる。また、プロファイルスペースが大きすぎると、最適な組合せを見つけるために行う反復回数が増え、結果的に多くの演算能力及び時間を要してしまう。
【発明の概要】
【発明が解決しようとする課題】
【0017】
[0017] 例えば、使用可能なすべての情報を効果的に使用することによって、「プロファイルスペース」を構成する公称プロファイル及びそのバリエーションをユーザが設定するのを手助けするシステムを設けるのが望ましい。特に、「予め(upfront)」使用可能な情報であって、様々な露光設定(フォーカス、露光ドーズ、又はその他一つ以上の露光パラメータ)で露光されるオブジェクトのプロファイル、リソグラフィプロセスの数値シミュレーションによって得られるプロファイル、及び/又は、大きくかつフレキシブルなプロファイルスペースを使用したスキャトロメトリによって得られるプロファイルの断面を含んだ情報をユーザが使用するのを手助けするのが望ましい。
【0018】
[0018] 例えば、測定中にユーザの手間や演算能力をほぼ必要とせず、回折放射が検出される基板上のオブジェクトのプロファイルを正確に再形成するシステムを提供するのが望ましい。
【0019】
[0019] 例えば、ターゲット形状を再構成する際、基板上の複雑なターゲットのプロファイルを効率よくかつ迅速に判断するためには、モデルプロファイルの自由度又は未知パラメータが少ないことが望ましい。
【0020】
[0020] 例えば、公称プロファイル及びそのバリエーションを表現するのに使用されるパラメータの数を少なくすることが望ましい。
【0021】
[0021] 例えば、これらプロファイルパラメータについて考えられる値の範囲を狭くすることが望ましい。そのため、例えば、実際のオブジェクトプロファイルと一致するプロファイルか又はなるべく少ない可変パラメータで正確にオブジェクトプロファイルを再形成するのに有用なプロファイルについて、十分なスペースを有することが望ましい。従って、例えば、有用なプロファイルモデル又はプロファイルスペースを形成することが望ましい。
【課題を解決するための手段】
【0022】
[0022] 本発明の一態様によると、プロファイルの定義がオブジェクトから回折した放射から前記オブジェクトのプロファイルを再構成する際に使用され得るように、プロファイルを定義する方法が提供される。この方法は、既知のオブジェクトの情報を使用してプロファイルを定義すること、数学関数を使用して前記プロファイルの表面を表現すること、前記数学関数内の可変パラメータを選択し、前記プロファイルの計算された回折パターンが前記既知のオブジェクトの回折パターンと一致するまで前記可変パラメータを反復的に変更すること、及び、前記プロファイル及び前記可変パラメータを記憶すること、を含む。
【0023】
[0023] 「一致する(matches)」という用語から、本発明の目的が、許容範囲内、許容時間、及び、許容処理能力の範囲内で既知のオブジェクトに最も近いプロファイルを得ることであることが理解される。また「プロファイル」という用語から、オブジェクトが2次元であれば「表面」とはオブジェクトの輪郭であり、3次元であれば「表面」とは表面エリアのことであり、また、プロファイルとは、上述のように、オブジェクトの断面又はプロファイルスペース(つまり、公称プロファイル及びその可変例)であることが理解される。
【0024】
[0024] 本発明の一態様によると、プロファイルの定義がオブジェクトから回折した放射から前記オブジェクトのプロファイルを再構成する際に使用され得るように、プロファイルを定義する方法が提供される。この方法は、既知のオブジェクトのイメージを視認すること、前記既知のオブジェクト上に推定プロファイルを重畳すること、前記推定プロファイルにおける可変パラメータを定義すること、前記推定プロファイルが前記既知のオブジェクトと一致するまで、前記可変パラメータを反復的に変更すること、及び、前記プロファイル及び前記可変パラメータを記憶すること、を含む。
【0025】
[0025] 本発明の別の態様によると、プロファイルの定義がオブジェクトから回折した放射から前記オブジェクトのプロファイルを再構成する際に使用され得るように、プロファイルを定義するインスペクション装置が提供される。このインスペクション装置は、既知のオブジェクトのプロファイルを取り込むように構成された取込装置、数学関数を使用して前記プロファイルの表面を表現し、前記プロファイルが前記既知のオブジェクトと一致するまで前記数学関数内の可変パラメータを調節するように構成された、ユーザインタフェース、及び、前記プロファイル及び前記可変パラメータを記憶するように構成されたメモリ、を備える。
【図面の簡単な説明】
【0026】
【図1a】[0027] 図1aはリソグラフィ装置の図である。
【図1b】[0028] 図1bはリソグラフィセル又はクラスタの図である。
【図2】[0029] 図2は、スキャトロメータの第一実施形態を示す図である。
【図3】[0030] 図3は、スキャトロメータの第二実施形態を示す図である。
【図4】[0031] 図4は、オブジェクトプロファイルの再構成を示す図である。
【図5】[0032] 図5は、本発明の一実施形態に係るモデルプロファイルを示す図である。
【図6】[0033] 図6は、既知のプロファイルを有するモデルプロファイルの重畳を示す図である。
【図7】[0034] 図7は、本発明の一実施形態に係る複数のプロファイルイメージを示す図である。
【発明を実施するための形態】
【0027】
[0026] 以下、添付の概略図面を参照しながら、単なる例として、本発明の実施形態を説明する。図面において、同じ参照符号は同じ部分を示す。
【0028】
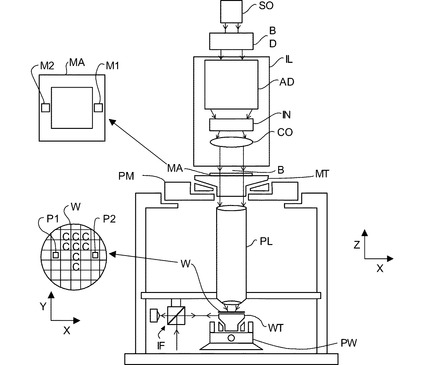
[0035] 図1aは、リソグラフィ装置の概略図である。このリソグラフィ装置は、
【0029】
[0036] 放射ビームB(例えば、UV放射又はEUV放射)を調節するように構成された照明システム(イルミネータ)ILと、
【0030】
[0037] パターニングデバイス(例えば、マスク)MAを支持するように構成され、かつ、特定のパラメータに従ってパターニングデバイスを正確に位置決めするように構成された第一ポジショナPMに連結された、サポート構造(例えば、マスクテーブル)MTと、
【0031】
[0038] 基板(例えば、レジストコートウェーハ)Wを保持するように構成され、かつ、特定のパラメータに従って基板を正確に位置決めするように構成された第二ポジショナPWに連結された、基板テーブル(例えば、ウェーハテーブル)WTと、
【0032】
[0039] パターニングデバイスMAによって放射ビームBに付けられたパターンを基板Wのターゲット部分C(例えば、一つ以上のダイを含む)上に投影するように構成された、投影システム(例えば、屈折投影レンズシステム)PLと、を備える。
【0033】
[0040] 照明システムは、放射を誘導、形成、又は制御するため、屈折型、反射型、磁気型、電磁型、静電型、又はその他の型の光コンポーネント、あるいはそれらのあらゆる組合せ等の様々な種類の光コンポーネントを含むことができる。
【0034】
[0041] サポート構造は、パターニングデバイスの配向、リソグラフィ装置の設計、及び、例えば、パターニングデバイスが真空環境内で保持されるか否かなどといった他の条件に応じた態様で、パターニングデバイスを保持する。サポート構造は、機械式、真空式、静電式又はその他のクランプ技術を使って、パターニングデバイスを保持することができる。サポート構造は、例えば、必要に応じて固定又は可動式にすることができるフレーム又はテーブルであってよい。サポート構造は、パターニングデバイスを、例えば、投影システムに対して所望の位置に確実に配置することができる。本明細書で使用される「レチクル」又は「マスク」という用語はすべて、より一般的な「パターニングデバイス」という用語と同義であると考えてよい。
【0035】
[0042] 本明細書で使用される「パターニングデバイス」という用語は、基板のターゲット部分内にパターンを創出する等の目的で放射ビームの断面にパターンを付ける際に使用できるあらゆるデバイスを指していると広く解釈されるべきである。なお、放射ビームに付けられたパターンは、例えば、そのパターンが位相シフトフィーチャ又はいわゆるアシストフィーチャを含む場合、基板のターゲット部分内の所望のパターンに正確に一致しない場合もある。通常、放射ビームに付けられたパターンは、集積回路等の、ターゲット部分内に作り出されるデバイス内の特定機能層に対応することになる。
【0036】
[0043] パターニングデバイスは、透過型又は反射型であってよい。パターニングデバイスの例としては、マスク、プログラマブルミラーアレイ、及びプログラマブルLCDパネルが挙げられる。マスクは、リソグラフィでは公知であり、バイナリ、レベンソン型(alternating)位相シフト、及びハーフトーン型(attenuated)位相シフトなどのマスクタイプ、並びに、各種ハイブリッドマスクタイプを含む。プログラマブルミラーアレイの一例では、小型ミラーのマトリックス配置を採用しており、各小型ミラーは、入射する放射ビームを様々な方向へ反射させるように、個別に傾斜させることができる。傾斜されたミラーは、ミラーマトリックスによって反射される放射ビームにパターンを付ける。
【0037】
[0044] 本明細書で使用される「投影システム」という用語は、使用される露光放射にとって、あるいは液浸液の使用又は真空の使用といった他の要因にとって適切な、屈折型、反射型、反射屈折型、磁気型、電磁型、及び静電型光学システム、又はそれらのあらゆる組合せを含むあらゆるタイプの投影システムを包含していると広く解釈されるべきである。本明細書で使用される「投影レンズ」という用語はすべて、より一般的な「投影システム」という用語と同義であると考えてよい。
【0038】
[0045] 本明細書に示されているとおり、リソグラフィ装置は透過型のもの(例えば、透過型マスクを採用しているもの)である。または、リソグラフィ装置は、反射型のもの(例えば、上述のタイプのプログロマブルミラーアレイを採用しているもの、又は、反射マスクを採用しているもの)であってもよい。
【0039】
[0046] リソグラフィ装置は、2つ(デュアルステージ)以上の基板テーブル(及び/又は2つ以上のサポート構造)を有するタイプのものであってよい。そのような「マルチステージ」機構においては、追加のテーブル及び/又はサポート構造を並行して使うことができ、あるいは、予備工程を一つ以上のテーブル及び/又はサポート構造で実施しつつ、別の一つ以上のテーブル及び/又はサポート構造を露光に使用することもできる。
【0040】
[0047] また、リソグラフィ装置は、投影システムと基板の間の空間を満たすように、比較的高い屈折率を有する液体、例えば、水によって基板の少なくとも一部を覆うことができるタイプのものであってもよい。さらに、リソグラフィ装置内の別の空間、例えば、マスクと投影システムの間、に液浸液を加えてもよい。液浸技術は、投影システムの開口数を増加させる技術においてよく知られている。本明細書で使用される「液浸」という用語は、基板のような構造を液体中に沈めなければならないという意味ではなく、単に、露光中、投影システムと基板の間に液体があるということを意味するものである。
【0041】
[0048] 図1aを参照すると、イルミネータILは、放射源SOから放射ビームを受ける。例えば、放射源がエキシマレーザである場合、放射源とリソグラフィ装置は、別々の構成要素であってよい。そのような場合には、放射源は、リソグラフィ装置の一部を形成しているとはみなされず、また、放射ビームは、放射源SOからイルミネータILへ、例えば、適切な誘導ミラー及び/又はビームエキスパンダを備えるビームデリバリシステムBDを使って送られる。その他の場合、例えば、放射源が水銀ランプである場合は、放射源をリソグラフィ装置の一体部分としてもよい。放射源SO及びイルミネータILは、必要であればビームデリバリシステムBDとともに、放射システムと呼ぶことができる。
【0042】
[0049] イルミネータILは、放射ビームの角強度分布を調節するアジャスタADを備え得る。一般に、イルミネータの瞳面内の強度分布の少なくとも外側及び/又は内側半径範囲(通常、それぞれσ-outer及びσ-innerと呼ばれる)を調節することができる。また、イルミネータILは、インテグレータIN及びコンデンサCO等、他の各種コンポーネントを備えてもよい。イルミネータを使って放射ビームを調節することにより、放射ビームの断面に所望の均一性及び強度分布をもたせることができる。
【0043】
[0050] 放射ビームBは、サポート構造(例えば、マスクテーブル)MT上に保持されたパターニングデバイス(例えば、マスク)MA上に入射し、このパターニングデバイスによってパターン形成される。放射ビームBは、パターニングデバイスMAを通り抜けた後、投影システムPSを通過し、当該投影システムPSによって、基板Wのターゲット部分C上にビームが集束される。第二ポジショナPW及び位置センサIF(例えば、干渉デバイス、リニアエンコーダ、又は静電容量センサ)を使用して基板テーブルWTを正確に動かすことにより、例えば、様々なターゲット部分Cを放射ビームBのパス内に位置付けることができる。同様に、第一ポジショナPM及び別の位置センサ(図1aには明示されない)を使用することにより、例えば、マスクライブラリからの機械検索後又はスキャン中に、パターニングデバイスMAを放射ビームBのパスに対して正確に位置付けることができる。通常、サポート構造MTの移動は、第一ポジショナPMの一部を形成するロングストロークモジュール(粗動位置決め)及びショートストロークモジュール(微動位置決め)を使用して行われる。同様に、基板テーブルWTの移動も、第二ポジショナPWの一部を形成するロングストロークモジュール及びショートストロークモジュールを使用して行われる。ステッパの場合は(スキャナとは対照的に)、サポート構造MTをショートストロークアクチュエータのみに連結、あるいは、固定してよい。パターニングデバイスMA及び基板Wは、パターニングデバイスアライメントマークM1、M2、及び基板アライメントマークP1、P2を使って、位置合わせしてよい。図示するように、基板アライメントマークはそれ専用のターゲット部分に置かれているが、基板アライメントマークをターゲット部分とターゲット部分の間の空間内に置くこともできる(これらは、スクライブラインアライメントマークとして公知である)。同様に、一つ以上のダイがパターニングデバイスMA上に設けられている場合、パターニングデバイスアライメントマークは、ダイとダイの間に置かれてもよい。
【0044】
[0051] 例示のリソグラフィ装置は、以下の一つ以上のモードで使用できる。
【0045】
[0052] 1. ステップモードにおいては、サポート構造MT及び基板テーブルWTを基本的に静止状態に保ちつつ、放射ビームに付けられたパターン全体を一度に(すなわち、単一静的露光)ターゲット部分C上に投影する。その後、基板テーブルWTをX及び/又はY方向に移動させることにより、別のターゲット部分Cを露光する。ステップモードでは、露光フィールドの最大サイズよって、単一静的露光時に結像されるターゲット部分Cのサイズが限定される。
【0046】
[0053] 2. スキャンモードにおいては、サポート構造MT及び基板テーブルWTを同期的にスキャンする一方で、放射ビームに付けられたパターンをターゲット部分C上に投影する(すなわち、単一動的露光)。サポート構造MTに対する基板テーブルWTの速度及び方向は、投影システムPSの(縮小)拡大率及び像反転特性によって決まる。スキャンモードにおいては、露光フィールドの最大サイズよって、単一動的露光時のターゲット部分の幅(非スキャン方向)が限定される一方、スキャン動作の長さによって、ターゲット部分の高さ(スキャン方向)が決定される。
【0047】
[0054] 3. 別のモードにおいては、サポート構造MTを、プログラマブルパターニングデバイスを保持した状態で基本的に静止状態に保ち、また、基板テーブルWTを移動又はスキャンする一方で、放射ビームに付けられたパターンをターゲット部分C上に投影する。このモードにおいては、通常、パルス放射源が採用されており、さらにプログラマブルパターニングデバイスは、基板テーブルWTの移動後ごとに、又はスキャン中の連続する放射パルスと放射パルスの間に、必要に応じて更新される。この動作モードは、前述のタイプのプログラマブルミラーアレイ等のプログラマブルパターニングデバイスを利用するマスクレスリソグラフィに容易に適用することができる。
【0048】
[0055] 上述の使用モードの組合せ及び/又はバリエーション、あるいは完全に異なる使用モードもまた採用可能である。
【0049】
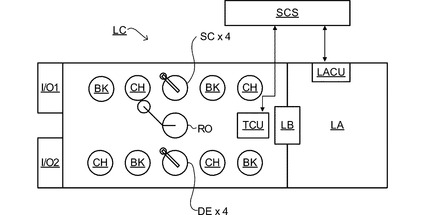
[0056] 図1bに示すように、リソグラフィ装置LAはリソグラフィセルLC(しばしばリソ・セル又はリソ・クラスタとも呼ばれる)の一部を形成しており、このリソグラフィセルLCは、リソグラフィ装置LAに加えて、一つ以上の露光前及び露光後プロセスを基板上で行う装置も含んでいる。従来、これらの装置には、レジスト層を堆積するための一つ以上のスピンコータSC、露光されたレジストを現像するための一つ以上のデベロッパDE、一つ以上の冷却プレートCH、及び、一つ以上のベークプレートBKが含まれる。基板ハンドラ又はロボットROは、入出ポートI/O1、I/O2から基板を受け取ると、様々な処理デバイス間を移動させて、リソグラフィ装置のローディングベイLBへと搬送する。これらのデバイス(まとめてトラックとも呼ばれる)はトラックコントロールユニットTCUの制御下にあり、また、トラックコントロールユニット自体は監視制御システムSCSによって制御されている。監視制御システムSCSはまた、リソグラフィコントロールユニットLACUを介してリソグラフィ装置を制御している。このように、スループット及び処理効率が最大となるように様々な装置を動作させる。
【0050】
[0057] リソグラフィ装置によって基板が正しくかつ一貫して露光されるようにするため、基板を検査して、一つ以上の特性(連続する層と層との間のオーバーレイエラー、ライン幅、クリティカルディメンション(CD)等)を検査することが望ましい。エラーが検出された場合、特に、インスペクションが迅速に行われ同一バッチ内の別の基板がまだ露光される前であれば、後続の一つ以上の基板の露光に対して調整が行われる。また、既に露光済みの基板については、剥離かつ再加工する(歩留まりを良くするため)又は廃棄し、そうすることによって、欠陥品となることが明らかな基板を露光せずに済む。基板のターゲット部分の一部だけに欠陥がある場合は、良好なターゲット部分上のみに露光を行う。あるいは、エラーが補償されるように後続処理ステップの設定を変更することも可能であり、例えば、リソグラフィプロセスステップで生じる基板間のCDバリエーションを補償するために、トリムエッチステップの時間を調節することができる。
【0051】
[0058] インスペクション装置は、基板の一つ以上の特性、特に、各基板の一つ以上の特性又は同一基板内の各層の一つ以上の特性が、層ごとに及び/又は基板全体でどの程度異なるのかを確認するために使用される。インスペクション装置は、リソグラフィ装置LA又はリソ・セルLC内に組み込まれていてもよく、又は、独立型デバイスであってもよい。測定を迅速に行うには、インスペクション装置が、露光後すぐに露光されたレジスト層の一つ以上の特性を測定することが望ましい。しかし、レジスト内の潜像はコントラストが弱い、つまり、レジスト内において放射で露光された部分と露光されなかった部分との屈折率の差が非常に小さく、また、すべてのインスペクション装置が潜像を有効に測定するのに十分な感応性を有する訳でもない。そのため、ポスト露光ベークステップ(PEB)の後に測定を行うようにしてもよい。ポスト露光ベークステップとは、通常、露光された基板上で行われる第一のステップであり、このステップによって、レジストの露光済み部分と未露光部分との間のコントラストを強めることができる。この段階におけるレジスト内のイメージを半潜像と呼ぶことができる。また、現像後(この時点では、レジストの露光済み部分又は未露光部分のどちらかが除去されている)にレジストイメージを測定することもでき、あるいは、エッチング等のパターン転写ステップ後にイメージを測定することもできる。後者では、欠陥基板を再加工する可能性が限定されるものの、例えばプロセス制御の目的において、有用な情報を提供することはできる。
【0052】
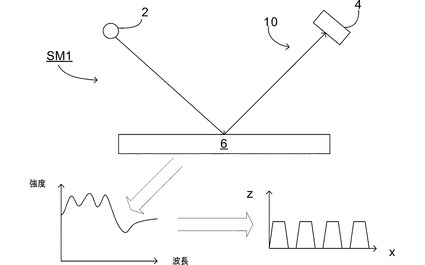
[0059] 図2は、本発明の一実施形態で使用され得るスキャトロメータSM1の図である。このスキャトロメータSM1は、基板W上に放射を投影する広帯域(白光)放射プロジェクタ2を備えている。反射した放射はスペクトロメータディテクタ4へ到達する。このスペクトロメータディテクタ4は、鏡面反射した放射のスペクトル10(つまり、波長の関数としての強度の測定値)を測定する。このデータから、プロセッシングユニットPUは、例えば、厳密結合波分析及び非線形回帰によって、又は、図2にの下部に示すような擬似スペクトルのライブラリと比較することによって、検出されたスペクトルを生じさせる構造又はプロファイルを再構成する。再構成では、通常、当該構造の一般的な形状は既に分かっている状態で、また、当該構造が作られたプロセスに基づき一部のパラメータは予想できるため、当該構造のパラメータのうち少数のパラメータのみをスキャトロメトリデータから決定すればよい。このようなスキャトロメータは、法線入射スキャトロメータ又は斜め入射スキャトロメータとして構成されている。
【0053】
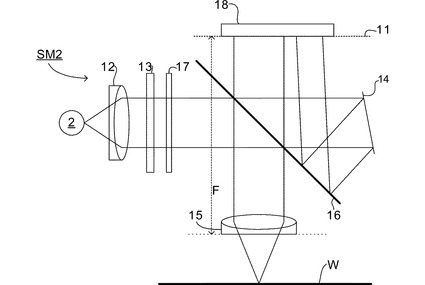
[0060] 図3は、本発明の一実施形態で使用され得る別のスキャトロメータSM2の図である。このスキャトロメータSM2では、放射源2から出射した放射は、レンズシステム12を使用することにより、干渉フィルタ13及び偏光子17を通過し、部分反射表面16で反射され、開口数(NA)の大きい(少なくとも0.9又は0.95が望ましい)顕微鏡対物レンズ15を介して、基板W上に集束される。液浸スキャトロメータであれば、開口数が1以上のレンズを備える場合もある。その後、反射した放射は、部分反射表面16を通過してディテクタ18に到達し、ディテクタ18において散乱スペクトルが検出される。ディテクタは、レンズ15の焦点距離に位置する後側投影瞳面11内にあってよいが、瞳面は、補助光学部品(図示されない)によってディテクタ18上へ再結像されたものであってもよい。瞳面とは、放射の半径方向の位置が入射角度を特定し、放射の角度位置が放射の方位角を特定する面のことである。ディテクタとしては、基板ターゲットの二次元角度散乱スペクトル(つまり、散乱角度の関数としての強度の測定値)を測定することができる、二次元ディテクタであるのが望ましい。ディテクタ18は、例えば、CCD又はCMOSセンサのアレイであってよく、その積分時間は、例えば40ミリ秒/フレームである。
【0054】
[0061] 例えば入射する放射の強度を測定するため、基準ビームがしばしば使用される。放射強度の測定では、放射ビームが部分反射表面16に入射する際、その一部が基準ビームとして部分反射表面16を通過して基準ミラー14へ送られる。基準ビームはその後、ディテクタ18の異なる部分へ投影される。
【0055】
[0062] 一つ以上の干渉フィルタ13は、例えば405〜790nm又はそれ以下(例えば、200〜300nm)の範囲内で所望の波長を選択するために使用される。干渉フィルタとしては、様々なフィルタを組み合わせたものよりも、調節可能なフィルタである方がよい。一つ以上の干渉フィルタの代わりに又はそれに加えて、格子を使用してもよい。
【0056】
[0063] ディテクタ18は、単一波長(又は狭い波長範囲)の散乱光の強度を測定するもの、複数の波長で強度を別々に測定するもの、又は、ある波長範囲内で積分された強度を測定するものである。また、ディテクタは、TM偏光の強度及びTE偏光の強度を別々に測定し、また/又は、TM偏光とTE偏光との位相差を測定することができる。
【0057】
[0064] 広帯域放射源2(つまり、広範囲の放射周波数又は波長、及び色を有するもの)の使用が可能であるため、エタンデュが大きく、複数の波長を混合することができる。広帯域内の複数の波長はそれぞれ、δλの帯域幅と、少なくとも2δλ(つまり、波長帯域の2倍)の間隔を有するのが望ましい。複数ある放射「ソース」は、例えばファイバーバンドルを使用して分割された拡張放射源の各部分であってよい。このようにして、角度分解された散乱スペクトルを、複数の波長で並行して測定できる。2−Dスペクトルより多くの情報を含む3−Dスペクトル(波長及び二つの異なる角度)を測定することができる。これによって多くの情報を測定できるので、メトロロジプロセスのロバスト性を高めることができる。このことは、米国特許出願公開第2006−0066855に詳述してあり、同特許出願は本記載によりその全体が本明細書中に組み込まれる。
【0058】
[0065] 基板W上のターゲットは格子であってよく、この格子はプリントされるものであるので、現像後に実線のレジストラインからバーが形成される。あるいは、基板をエッチングしてバーを形成してもよい。ターゲットパターンは、対象パラメータ(リソグラフィ装置内のフォーカス、ドーズ、オーバーレイ、色収差等)に対する感応性を有するように選択されてよく、そうすることによって、当該パラメータにおけるバリエーションが、プリントされたターゲット内のバリエーションとして現れる。例えば、ターゲットパターンは、リソグラフィ投影装置、特に、投影システム内の色収差に対して感応性を有し、照明対称性及びかかる収差の存在が、プリントされたターゲットパターン内のバリエーション内に現れる。したがって、プリントされたターゲットパターンのスキャトロメトリデータは、ターゲットパターンを再構成するのに使用される。ターゲットパターンのパラメータ(ライン幅及び形状等)は、プリントステップ及び/又はその他のスキャトロメトリプロセスから得られた情報として、プロセッシングユニットが行う再構成プロセスで使用される。
【0059】
[0066] 本発明の一実施形態は、基板W上のターゲットの再構成に関するものである。ターゲットが格子の場合、格子のバーは、通常プリズム形になることが推測されるため、それらの長さ及びそれらの断面形状を含む形状を有する。バーの断面形状は、プロファイルとして知られている。以下、バーをスキャトロメトリオブジェクトと呼ぶ。しかしながら、プロファイルは単なる断面ではなく、全体的な3−Dオブジェクトを含むことに注意しなければならない。プロファイルは、オブジェクトの輪郭だけではなく、内部形状、これら形状の細部、材料及び材料特性を備えるものである。
【0060】
[0067] 再構成のため、プロファイルは、均一の長方形断面層及び台形(又は、3−Dオブジェク用の円筒及び円錐)のスタックからなるものとして見なされてきた。本発明の一実施形態はこの発想に基づくものである。
【0061】
[0068] 通常、回折スペクトルからオブジェクトプロファイルを再構成するため、スキャトロメトリオブジェクトの表面から放射ビームを回折させる。この回折したビームはディテクタによって検出され、ディテクタはその後、回折パターンからスキャトロメトリ測定信号を生成する。この測定信号は、モデルプロファイルに基づく計算された信号と比較される。計算された信号が測定された信号と一致しない場合、モデルプロファイルを変更することによって、当該モデル信号を、実際のオブジェクトの実際のプロファイルに類似させる。このプロセスは、測定信号と計算された信号が許容範囲内において一致するまで繰り返される。
【0062】
[0069] あるいは、モデルプロファイルを、モデルプロファイル及びそれに関連するモデル信号(例えば、回折スペクトル)のライブラリから検索してもよい。ライブラリ内で補間することにより、モデルプロファイルの精度を高めることもできる。
【0063】
[0070] つまり、本発明の一実施形態は、(モデルプロファイルの回折パターンと、実際のオブジェクトの回折パターンとを比較し、オブジェクトの実際のプロファイルが得られるように)、実際のオブジェクトに最も近いモデルプロファイルを見つけるため、モデルプロファイルスペース、つまり、考えられるすべてのモデルプロファイルを定義し予測することに関する。
【0064】
[0071] 図4は、モデルプロファイルの一例を示す図である。このプロファイルは、スラブL1〜L5、L7及び台形L6、L8を積み重ねたものに似ている。このビルディングブロックの自由度(幅、高さ及び側壁角)を調節することにより、一連のビルディングブロックL1〜L8をできるかぎりオブジェクトプロファイルと一致させることができる。しかし、この方法にはいくつかの欠点がある。一つ目の欠点は、ユーザが、ビルディングブロックの数、形状、サイズを正しく選択できるような経験者でなくてはならないこと。二つ目の欠点は、ビルディングブロックの自由度が、測定されるプロファイルの実際のバリエーションに一致しない場合があること。三つめの欠点は、ユーザが、測定対象となるプロファイルのバリエーションをカバーするとみなすべき形状及びサイズの範囲を定義しなくてはならないこと。最後の欠点は、ビルディングブロック方法が、実際の所望プロファイルの非常に大まかなモデルにすぎないということである。これは主に、ビルディングブロックがプロファイル表面の曲線を考慮していないためである。
【0065】
[0072] 本発明の一実施形態に係るモデルプロファイルの構成方法は、オブジェクトの断面又は体積をビルディングブロックで構築しようとするよりも、プロファイルの輪郭を独立して決定する方法である。2次元オブジェクトの輪郭又は3次元オブジェクトの表面は、ポリゴンやスプライン等の様々な数学関数を使用して表現することができる。あるいは、ユーザは、描画システムを使用して輪郭を手書きで形成することもできる。手書き方法の場合、その後半において、手書きの描画をコンピュータ又はその他プロセッサを入力した後に、数学関数によって輪郭を求めてもよい。
【0066】
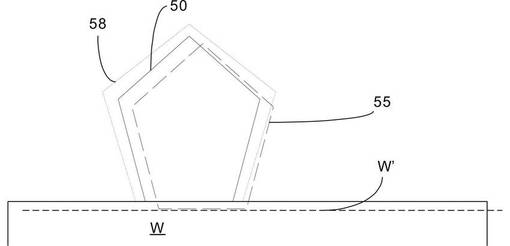
[0073] ユーザが輪郭を定義しやすくするため、測定対象であるオブジェクトの情報を使用することもできる。図5に示すように、既知のオブジェクトのイメージ42は、モデルビルダ(又はユーザ)がそれを見られるように、画面上に取り込まれる。ユーザーインタフェースは、その後、ユーザが、取り込まれた画像の上に推定されるプロファイル20を重畳できるようにする。その後、推定プロファイル20は、イメージ42と正確に一致するように調節(40)され、調節された推定プロファイルのパラメータ(つまり、公称プロファイル及びそのバリエーション)が、取り込まれたイメージ42の回折パターンとともにライブラリに記憶される。図6は、推定オブジェクト55を実際のイメージ50上に重ね合わせる様子を示している。基板表面W´の相対位置もまた、実際の基板表面Wと位置合わせされている。図6に示すように、推定プロファイル55から始めると、この場合、ユーザは、推定プロファイルを左へ移動させるとともに少し上方に移動させるだけで、推定プロファイル55を取り込まれたイメージ50と一致させることができる。
【0067】
[0074] 取り込まれたイメージ42、50は、走査型電子顕微鏡検査法(SEM)、走査型原子間力顕微鏡検査法(AFM)から決定されたオブジェクトであってよく、又は、リソグラフィ予測モデル(リソクルーザ(Lithocruiser)又はプロリス(Prolith)等)から取り込まれたものであってもよい。または、いかなる種類のシミュレーションから取り込まれたものであってもよい。あるいは、又はこれに加えて、先の測定結果、例えば、多くの自由なパラメータを含む先の測定結果から、取り込まれたものであってもよい。つまり、なるべく正確なものとなるように多くの処理がなされた先のオブジェクトプロファイルを、取り込まれたイメージとして使用することもできる。
【0068】
[0075] 上述したように、推定プロファイル及びプロファイルスペースを定義する別の方法がある。その一つは、複数のスラブ及び台形を重畳することで、取り込まれたイメージに最も整合するようにする方法である。これは、スラブ及び台形を使用してモデルを構成することと似ているが、主な違いは、ビルディングブロックが、デザイン情報又はユーザの経験から推定されるというよりは、既知のイメージと視覚的に比較される点である。また別の方法では、ユーザが、ユーザーインタフェースを使用して取り込まれたイメージ上にプロファイルを自由に描画し、描画が終わった後に、スプライン、多項式、又はベクトル、又はその他表現を描く方法である。
【0069】
[0076] 取り込まれたイメージと一致させるために、当該取り込まれたイメージ上に重畳された推定プロファイルを調節するいくつかの方法がある。図5はその一例を示している。推定プロファイル上にある「ハンドル」30を調節することにより、ハンドル30間のセグメント20を互いに独立して動かすことができる。ハンドル30を動かすことによって、さらに、符号40で示す方向にセグメント20を湾曲させることもできる。その後、このハンドルの移動は、セグメントの結果的変化を表す数学関数のバリエーションとして記憶される。これらバリエーションは、その後、公称プロファイル(つまり、ハンドルが操作される前に形成されたプロファイル)とともに記憶される。
【0070】
[0077] 各セグメント20は、所望の曲線が得られるように多項式で表現することができる。あるいは又はこれに加えて、その相対位置が容易に再現できるように、ベクトルで表現することもできる。さらには、「区分的」多項曲線として知られるスプラインとして表現することもできる。
【0071】
[0078] 同様に、ユーザが、プロファイルスペース、つまり、測定された回折パターンとそれに最も近いモデル回折パターンとの整合を見つけるためにプロファイルを調節する方法及びその量、を定義する方法もいくつかある。通常、ユーザは、一つ以上の調節パラメータ又はハンドルを選択し、少なくとも一つのパラメータに対するバリーエーションの程度(つまり、範囲)を示す。
【0072】
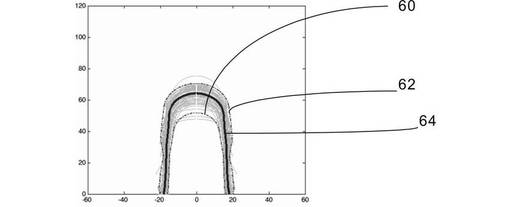
[0079] 図7に示すように、ユーザは、例えば、様々なスキャトロメトリオブジェクトを有するテスト基板からの多数の回折スペクトルが、複数のポテンシャルプロファイルを生じさせた場合、先の測定から複数のイメージを取り込むことができる。これらのプロファイルは、SEM、TEM(透過電子顕微鏡検査法)又はAFM等の様々な断面技術、によって、又は、多数の可変パラメータを有するモデルプロファイルを備えるスキャトロメトリを使用することによって、決定することができる。これらのプロファイルはすべて、互いに重畳することができる。これら複数のプロファイルイメージが使用可能である場合、複数のイメージが分析され、ユーザは、平均プロファイル64及びプロファイルバリエーション(例えば、5%パーセンタルライン60及び95%パーセンタルライン62を持つバリエーション)を見つけることができる。バリエーションを統計学的に分析することによって、プロファイルバリエーションを正確に表現できるプロファイル関数の最小セットを決定することができる。この利点は、イメージ内のノイズが低減できること、また、最も顕著な形状を正確に表現する可変パラメータの数をなるべく少なくできることである。これは、例えば、主成分分析を使用することによって実現できる。
【0073】
[0080] 本発明の一実施形態による別の利点は、単純な輪郭プロファイルが記録されるだけでなく、より複雑なオブジェクト(コーティング付きオブジェクト、コンタクトホール、積層オブジェクト、又は、テスト構造の産物として生じるあらゆる種類のオブジェクト等)にプロセスを使用できる点である。
【0074】
[0081] 上述したように、取り込まれたイメージを構成する使用可能なイメージの数はいくつでもよいので、複合イメージを使用することができ、その上に、コーティング等を有するオブジェクトを表す推定プロファイルを重畳することができる。例えば、図6のオブジェクト50は、同じ形状で少しサイズの大きいイメージ58と組み合わせることができる。その後、重畳プロファイル55を二回計算又は決定し(一回はオブジェクト形状50のため、もう一回は、少し大きいイメージ(例えば、コーティングのイメージ)58のため)、それによって、例えば、コーティングされたオブジェクト用のプロファイルを得ることができる。
【0075】
[0082] 上記の例では、推定プロファイルを取り込まれたイメージ上に手動で重畳するためにユーザーインタフェースを使用している。しかし、この重畳は、オブジェクトのエッジを認識又は検出するとともに同エッジのプロファイルを形成するソフトウェアとハードウェアとの組合せを使用することで、自動的に実現することもできる。
【0076】
[0083] 本発明の一実施形態は、2次元プロファイルに限定されない。推定プロファイルを重畳し調節する同一の方法を、例えば直交する方向でオブジェクトに適用することができる。その後、3Dオブジェクトを構成するために一連のプロファイルを決定することができる。
【0077】
[0084] また、推定プロファイルは、単一の取り込まれたオブジェクトに正確に一致する必要はない。一群のオブジェクトが少なくとも一つの共通パラメータ(例えば、図6に示すような五角形の形状50)を有する場合、当該少なくとも一つの共通パラメータ(例えば、五角形)を含むインデックスプロファイルが形成され、これによって、この一群のオブジェクトに対して測定すべきパラメータの数を減らすことができる。また図6の例において、一群のオブジェクトが同一の五角形の形状50を有するがその高さ58や位置52が異なる場合は、同一のインデックスプロファイル50を当該一群のオブジェクト全体に使用することにより、他にたった二つの未知のパラメータ、つまり高さ及び位置を使用すれば足りる。ソフトウェアは、取り込まれたイメージを単一の又は一連の多項式又はスプラインに自動的に変換することができる。
【0078】
[0085] 推定プロファイルと取り込まれたオブジェクトとの整合は、ユーザが手書きで行ってもよく、又は、エッジ検出ソフトウェアで自動的に行ってもよく、又は、ユーザが画素ごとに行ってもよい。
【0079】
[0086] 本発明の実施形態の利点は、プロファイルが容易に定義でき、ポテンシャルモデルプロファイルのスペースがより正確で十分なものであることであり、これによって、オブジェクトプロファイルの再構成がより正確かつ容易に、最小限の自由度(又は未知パラメータ)数で行えることである。
【0080】
[0087] 光リソグラフィの関連での本発明の実施形態の使用について上述のとおり具体的な言及がなされたが、本発明は、他の用途、例えば、インプリントリソグラフィに使用してもよく、さらに状況が許すのであれば、光リソグラフィに限定されることはない。インプリントリソグラフィにおいては、パターニングデバイス内のトポグラフィによって、基板上に創出されるパターンが定義される。パターニングデバイスのトポグラフィは、基板に供給されたレジスト層の中にプレス加工され、基板上では、電磁放射、熱、圧力、又はそれらの組合せを適用することによってレジストを硬化させる。パターニングデバイスは、レジストが硬化した後、レジスト内にパターンを残してレジストの外へ移動される。
【0081】
[0088] 本明細書で使用される「放射」及び「ビーム」という用語は、紫外線(UV)放射(例えば、約365nm、355nm、248nm、193nm、157nm、又は126nmの波長を有する)、極端紫外線(EUV)放射(例えば、5〜20nmの範囲の波長を有する)、及びイオンビームや電子ビームなどの粒子ビームを含む、あらゆる種類の電磁放射を包含している。
【0082】
[0089] 「レンズ」という用語は、文脈によっては、屈折、反射、磁気、電磁気、及び静電型光コンポーネントを含む様々な種類の光コンポーネントのどれか一つ又は組合せを指すことができる。
【0083】
[0090] 以上、本発明の具体的な実施形態を説明してきたが、本発明は、上述以外の態様で実施することも可能である。例えば、本発明は、上記に開示した方法を表す一つ以上の機械読取可能な指示のシーケンスを含むコンピュータプログラム、又は、そのようなコンピュータプログラムが記憶されたデータ記録媒体(例えば、半導体メモリ、磁気ディスク又は光ディスク)の形態であってもよい。
【0084】
[0091] 上記の説明は、制限ではなく例示を意図したものである。したがって、当業者には明らかなように、添付の特許請求の範囲を逸脱することなく本記載の発明に変更を加えることもできる。
【特許請求の範囲】
【請求項1】
プロファイルの定義がオブジェクトから回折した放射から前記オブジェクトのプロファイルを再構成する際に使用され得るように、プロファイルを定義する方法であって、
既知のオブジェクトの情報を使用してプロファイルを定義すること、
数学関数を使用して前記プロファイルの表面を表現すること、
前記数学関数内の可変パラメータを選択し、前記プロファイルの計算された回折パターンが前記既知のオブジェクトの回折パターンと一致するまで前記可変パラメータを反復的に変更すること、及び
前記プロファイル及び前記可変パラメータを記憶すること、
を含む、方法。
【請求項2】
前記プロファイルの表面を表現することが、2次元プロファイルの輪郭をセグメントに分割することを含み、各セグメントは、ライン、ポリゴン、スラブ、曲線、多項式、ベクトル、事前準備された形状、及び、スプラインから成る群から選択される少なくとも一つの形状定義物によって表される、請求項1に記載の方法。
【請求項3】
前記プロファイルの表面を表現することが、3次元プロファイルの表面をセグメントに分割することを含み、各セグメントは、ポリゴン、スラブ、曲線、多項式、ベクトル、事前準備された形状、及び、スプラインから成る群から選択される少なくとも一つの形状定義物によって表される、請求項1に記載の方法。
【請求項4】
前記既知のオブジェクトが、取り込まれたオブジェクトイメージである、請求項1に記載の方法。
【請求項5】
前記イメージがメトロロジツールを使用して得られる、請求項4に記載の方法。
【請求項6】
前記メトロロジツールが走査型電子顕微鏡、原子間力顕微鏡又はスキャトロメータである、請求項5に記載の方法。
【請求項7】
前記イメージがオブジェクトのシミュレーションを使用して得られる、請求項4に記載の方法。
【請求項8】
前記イメージが既知の複数のオブジェクトイメージの組合せである、請求項4に記載の方法。
【請求項9】
前記複数のイメージの平均プロファイルが使用され、前記プロファイルのバリエーションが決定され、前記バリエーションを統計学的に分析して前記プロファイル及び前記プロファイルのバリエーションを所望の精度レベル内で表現するのに必要な数学関数の最小数を決定する、請求項8に記載の方法。
【請求項10】
前記表現すること及び前記変更することを、ユーザが、ユーザインタフェース及びイメージプロセッサを使用して行う、請求項4に記載の方法。
【請求項11】
前記表現することを、前記オブジェクトの自動エッジ検出を使用して自動的に行う、請求項4に記載の方法。
【請求項12】
前記変更することを画素毎に行う、請求項4に記載の方法。
【請求項13】
プロファイルの定義がオブジェクトから回折した放射から前記オブジェクトのプロファイルを再構成する際に使用され得るように、プロファイルを定義する方法であって、
既知のオブジェクトのイメージを視認すること、
前記既知のオブジェクト上に推定プロファイルを重畳すること、
前記推定プロファイルにおける可変パラメータを定義すること、
前記推定プロファイルが前記既知のオブジェクトと一致するまで、前記可変パラメータを反復的に変更すること、及び
前記プロファイル及び前記可変パラメータを記憶すること、
を含む、方法。
【請求項14】
前記推定プロファイルが3次元であり、かつ、ポリゴン、スラブ、曲線、多項式、ベクトル、事前準備された形状、及び、スプラインから成る群から選択される少なくとも一つの形状定義物を備える、請求項13に記載の方法。
【請求項15】
前記推定プロファイルが2次元であり、かつ、ライン、ポリゴン、スラブ、曲線、多項式、ベクトル、事前準備された形状、及び、スプラインから成る群から選択される少なくとも一つの形状定義物を備える、請求項13に記載の方法。
【請求項16】
前記推定プロファイルがハンドルを備え、前記推定プロファイルの前記可変パラメータを変更することが、前記推定プロファイル上で前記ハンドルを動かして前記ハンドルの付近で前記プロファイルの形状を調節することを含む、請求項13に記載の方法。
【請求項17】
オブジェクトを照射する放射から生じる回折パターンから前記オブジェクトのプロファイルを再構成する方法であって、
前記オブジェクトから回折した放射の前記回折パターンを検出すること、
既知のオブジェクトの情報を使用してプロファイルを定義し、数学関数を使用して前記プロファイルの表面を表現し、前記数学関数内の可変パラメータを選択し、前記プロファイルの計算された回折パターンが前記既知のオブジェクトの回折パターンと一致するまで前記可変パラメータを反復的に変更することを含む、前記回折パターンからモデルプロファイルを生成すること、
前記モデルプロファイルからモデル回折パターンを導き出すこと、
前記モデル回折パターンと前記検出回折パターンとを比較すること、及び
前記モデル回折パターンと前記検出回折パターンとの差から、前記オブジェクトプロファイルの推定値を求めること、
を含む、方法。
【請求項18】
オブジェクトを照射する放射から生じる回折パターンから前記オブジェクトのプロファイルを再構成する方法であって、
前記オブジェクトから回折した放射の前記回折パターンを検出すること、
既知のオブジェクトのイメージを視認し、前記既知のオブジェクト上に推定プロファイルを重畳し、前記推定プロファイルにおける可変パラメータを定義し、前記推定プロファイルが前記既知のオブジェクトと一致するまで、前記可変パラメータを反復的に変更することを含む、前記回折パターンからモデルプロファイルを生成すること、
前記モデルプロファイルからモデル回折パターンを導き出すこと、
前記モデル回折パターンと前記検出回折パターンとを比較すること、及び
前記モデル回折パターンと前記検出回折パターンとの差から、前記オブジェクトプロファイルの推定値を求めること、
を含む、方法。
【請求項19】
プロファイルの定義がオブジェクトから回折した放射から前記オブジェクトのプロファイルを再構成する際に使用され得るように、プロファイルを定義するためのインスペクション装置であって、
既知のオブジェクトのプロファイルを取り込むように構成された取込装置、
数学関数を使用して前記プロファイルの表面を表現し、前記プロファイルが前記既知のオブジェクトと一致するまで前記数学関数内の可変パラメータを調節するように構成された、ユーザインタフェース、及び
前記プロファイル及び前記可変パラメータを記憶するように構成されたメモリ、
を備える、インスペクション装置。
【請求項20】
前記ユーザインタフェースは、ユーザが、3次元プロファイルの表面をセグメントに分割できるように構成されており、各セグメントは、ポリゴン、スラブ、曲線、多項式、ベクトル、事前準備された形状、及び、スプラインから成る群から選択される少なくとも一つの形状定義物によって表される、請求項19に記載のインスペクション装置。
【請求項21】
前記ユーザインタフェースは、ユーザが、2次元プロファイルの表面をセグメントに分割できるように構成されており、前記表面は前記プロファイルの輪郭であり、各セグメントは、ライン、ポリゴン、スラブ、曲線、多項式、ベクトル、事前準備された形状、及び、スプラインから成る群から選択される少なくとも一つの形状定義物によって表される、請求項19に記載のインスペクション装置。
【請求項1】
プロファイルの定義がオブジェクトから回折した放射から前記オブジェクトのプロファイルを再構成する際に使用され得るように、プロファイルを定義する方法であって、
既知のオブジェクトの情報を使用してプロファイルを定義すること、
数学関数を使用して前記プロファイルの表面を表現すること、
前記数学関数内の可変パラメータを選択し、前記プロファイルの計算された回折パターンが前記既知のオブジェクトの回折パターンと一致するまで前記可変パラメータを反復的に変更すること、及び
前記プロファイル及び前記可変パラメータを記憶すること、
を含む、方法。
【請求項2】
前記プロファイルの表面を表現することが、2次元プロファイルの輪郭をセグメントに分割することを含み、各セグメントは、ライン、ポリゴン、スラブ、曲線、多項式、ベクトル、事前準備された形状、及び、スプラインから成る群から選択される少なくとも一つの形状定義物によって表される、請求項1に記載の方法。
【請求項3】
前記プロファイルの表面を表現することが、3次元プロファイルの表面をセグメントに分割することを含み、各セグメントは、ポリゴン、スラブ、曲線、多項式、ベクトル、事前準備された形状、及び、スプラインから成る群から選択される少なくとも一つの形状定義物によって表される、請求項1に記載の方法。
【請求項4】
前記既知のオブジェクトが、取り込まれたオブジェクトイメージである、請求項1に記載の方法。
【請求項5】
前記イメージがメトロロジツールを使用して得られる、請求項4に記載の方法。
【請求項6】
前記メトロロジツールが走査型電子顕微鏡、原子間力顕微鏡又はスキャトロメータである、請求項5に記載の方法。
【請求項7】
前記イメージがオブジェクトのシミュレーションを使用して得られる、請求項4に記載の方法。
【請求項8】
前記イメージが既知の複数のオブジェクトイメージの組合せである、請求項4に記載の方法。
【請求項9】
前記複数のイメージの平均プロファイルが使用され、前記プロファイルのバリエーションが決定され、前記バリエーションを統計学的に分析して前記プロファイル及び前記プロファイルのバリエーションを所望の精度レベル内で表現するのに必要な数学関数の最小数を決定する、請求項8に記載の方法。
【請求項10】
前記表現すること及び前記変更することを、ユーザが、ユーザインタフェース及びイメージプロセッサを使用して行う、請求項4に記載の方法。
【請求項11】
前記表現することを、前記オブジェクトの自動エッジ検出を使用して自動的に行う、請求項4に記載の方法。
【請求項12】
前記変更することを画素毎に行う、請求項4に記載の方法。
【請求項13】
プロファイルの定義がオブジェクトから回折した放射から前記オブジェクトのプロファイルを再構成する際に使用され得るように、プロファイルを定義する方法であって、
既知のオブジェクトのイメージを視認すること、
前記既知のオブジェクト上に推定プロファイルを重畳すること、
前記推定プロファイルにおける可変パラメータを定義すること、
前記推定プロファイルが前記既知のオブジェクトと一致するまで、前記可変パラメータを反復的に変更すること、及び
前記プロファイル及び前記可変パラメータを記憶すること、
を含む、方法。
【請求項14】
前記推定プロファイルが3次元であり、かつ、ポリゴン、スラブ、曲線、多項式、ベクトル、事前準備された形状、及び、スプラインから成る群から選択される少なくとも一つの形状定義物を備える、請求項13に記載の方法。
【請求項15】
前記推定プロファイルが2次元であり、かつ、ライン、ポリゴン、スラブ、曲線、多項式、ベクトル、事前準備された形状、及び、スプラインから成る群から選択される少なくとも一つの形状定義物を備える、請求項13に記載の方法。
【請求項16】
前記推定プロファイルがハンドルを備え、前記推定プロファイルの前記可変パラメータを変更することが、前記推定プロファイル上で前記ハンドルを動かして前記ハンドルの付近で前記プロファイルの形状を調節することを含む、請求項13に記載の方法。
【請求項17】
オブジェクトを照射する放射から生じる回折パターンから前記オブジェクトのプロファイルを再構成する方法であって、
前記オブジェクトから回折した放射の前記回折パターンを検出すること、
既知のオブジェクトの情報を使用してプロファイルを定義し、数学関数を使用して前記プロファイルの表面を表現し、前記数学関数内の可変パラメータを選択し、前記プロファイルの計算された回折パターンが前記既知のオブジェクトの回折パターンと一致するまで前記可変パラメータを反復的に変更することを含む、前記回折パターンからモデルプロファイルを生成すること、
前記モデルプロファイルからモデル回折パターンを導き出すこと、
前記モデル回折パターンと前記検出回折パターンとを比較すること、及び
前記モデル回折パターンと前記検出回折パターンとの差から、前記オブジェクトプロファイルの推定値を求めること、
を含む、方法。
【請求項18】
オブジェクトを照射する放射から生じる回折パターンから前記オブジェクトのプロファイルを再構成する方法であって、
前記オブジェクトから回折した放射の前記回折パターンを検出すること、
既知のオブジェクトのイメージを視認し、前記既知のオブジェクト上に推定プロファイルを重畳し、前記推定プロファイルにおける可変パラメータを定義し、前記推定プロファイルが前記既知のオブジェクトと一致するまで、前記可変パラメータを反復的に変更することを含む、前記回折パターンからモデルプロファイルを生成すること、
前記モデルプロファイルからモデル回折パターンを導き出すこと、
前記モデル回折パターンと前記検出回折パターンとを比較すること、及び
前記モデル回折パターンと前記検出回折パターンとの差から、前記オブジェクトプロファイルの推定値を求めること、
を含む、方法。
【請求項19】
プロファイルの定義がオブジェクトから回折した放射から前記オブジェクトのプロファイルを再構成する際に使用され得るように、プロファイルを定義するためのインスペクション装置であって、
既知のオブジェクトのプロファイルを取り込むように構成された取込装置、
数学関数を使用して前記プロファイルの表面を表現し、前記プロファイルが前記既知のオブジェクトと一致するまで前記数学関数内の可変パラメータを調節するように構成された、ユーザインタフェース、及び
前記プロファイル及び前記可変パラメータを記憶するように構成されたメモリ、
を備える、インスペクション装置。
【請求項20】
前記ユーザインタフェースは、ユーザが、3次元プロファイルの表面をセグメントに分割できるように構成されており、各セグメントは、ポリゴン、スラブ、曲線、多項式、ベクトル、事前準備された形状、及び、スプラインから成る群から選択される少なくとも一つの形状定義物によって表される、請求項19に記載のインスペクション装置。
【請求項21】
前記ユーザインタフェースは、ユーザが、2次元プロファイルの表面をセグメントに分割できるように構成されており、前記表面は前記プロファイルの輪郭であり、各セグメントは、ライン、ポリゴン、スラブ、曲線、多項式、ベクトル、事前準備された形状、及び、スプラインから成る群から選択される少なくとも一つの形状定義物によって表される、請求項19に記載のインスペクション装置。
【図1a】


【図1b】
【図2】
【図3】
【図4】

【図5】

【図6】
【図7】
【図1b】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−40772(P2011−40772A)
【公開日】平成23年2月24日(2011.2.24)
【国際特許分類】
【外国語出願】
【出願番号】特願2010−218130(P2010−218130)
【出願日】平成22年9月29日(2010.9.29)
【分割の表示】特願2008−2186(P2008−2186)の分割
【原出願日】平成20年1月9日(2008.1.9)
【出願人】(504151804)エーエスエムエル ネザーランズ ビー.ブイ. (1,856)
【Fターム(参考)】
【公開日】平成23年2月24日(2011.2.24)
【国際特許分類】
【出願番号】特願2010−218130(P2010−218130)
【出願日】平成22年9月29日(2010.9.29)
【分割の表示】特願2008−2186(P2008−2186)の分割
【原出願日】平成20年1月9日(2008.1.9)
【出願人】(504151804)エーエスエムエル ネザーランズ ビー.ブイ. (1,856)
【Fターム(参考)】
[ Back to top ]