
インナーガントリー
【課題】本発明は、粒子ビーム治療システムと共に使用するためのインナーガントリーに関する。
【解決手段】本システムは、患者サポートと、アウターガントリーであって、患者サポート上の患者の周囲の、ある範囲のポジションを通って加速器が移動することを可能とするよう、加速器が搭載されるアウターガントリーとを含む。加速器は、患者内のターゲットに達するのに十分なエネルギーレベルを有する陽子あるいはイオンビームを発生させるよう構成されている。インナーガントリーは、ターゲットに向かって陽子あるいはイオンビームを導くための開口部を具備してなる。
【解決手段】本システムは、患者サポートと、アウターガントリーであって、患者サポート上の患者の周囲の、ある範囲のポジションを通って加速器が移動することを可能とするよう、加速器が搭載されるアウターガントリーとを含む。加速器は、患者内のターゲットに達するのに十分なエネルギーレベルを有する陽子あるいはイオンビームを発生させるよう構成されている。インナーガントリーは、ターゲットに向かって陽子あるいはイオンビームを導くための開口部を具備してなる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、粒子ビーム治療システムと共に使用するためのインナーガントリーに関する。
【0002】
本願は、「Charged Particle Radiation Therapy」という名称で、かつ、2006年11月17日に提出された米国特許出願第11/601056号の一部継続である。本願はまた、「Charged Particle Radiation Therapy」という名称で、かつ、2005年11月18日に提出された米国仮特許出願第60/738404号の出願日の利益が付与される。米国特許出願第11/601056号および米国仮特許出願第60/738404号の内容は、完全な形で言及されているかのように、この引用によって本明細書に組み込まれる。
【背景技術】
【0003】
臨床環境用の陽子あるいはイオン放射線治療システムの設計は、全体サイズ、コスト、複雑さを考慮する必要がある。利用可能なスペースは、たいてい、混み合った臨床環境では制限される。低コストは、より多くのシステムが、より多くの患者人口に及ぶように配備されることを可能とする。複雑さの低減は運用コストを低下させ、そして日常的な臨床使用のためにシステムの信頼性をより高くする。
【0004】
その他の事情もまた、そうした治療システムの設計に関係する。安定した、再現可能なポジションで保持された(たとえばフラットなテーブル上であお向けで横たわる)患者に対して処置を施すべくシステムを構成することによって、医師は、処置の都度、患者の組織に対して、意図されたターゲットを正確に再配置できる。各処置に関する患者のポジションの信頼性の高い再現はまた、患者に適合したカスタムモールドおよびブレースを使用することで促進できる。患者が、安定した固定ポジションにある状態では、放射線治療ビームは連続した角度から患者に向けることができ、この結果、処置過程にわたって、ターゲットにおける放射線供与量は高められ、一方、外来性放射線供与量は、非ターゲット組織に対して一面に広がる。
【0005】
従来、同心ガントリーは、患者内の単一のポイント(アイソセンターと呼ばれる)に向かって、共通垂直面内で、ある範囲の角度をなして存在する連続経路に沿って放射線ビームを向けるために、あお向けの患者の周囲で回転させられる。垂直軸線周りで、患者が横たわっているテーブルを回転させることによって、ビームは、異なる経路に沿って患者内に導くことができる。患者の周囲で放射線源のポジションを変更するために、ロボットマニピュレーションを含む、その他の技術も使用されてきた。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】米国特許出願第2009/0140672号明細書
【特許文献2】米国特許出願第11/187633号明細書
【特許文献3】米国仮特許出願第60/590089号明細書
【特許文献4】米国特許出願第2009/0140671号明細書
【特許文献5】米国特許出願第10/949734号明細書
【特許文献6】米国特許仮特許出願第60/590088号明細書
【特許文献7】米国特許出願第11/463402号明細書
【特許文献8】米国仮特許出願第60/850565号明細書
【発明の概要】
【課題を解決するための手段】
【0007】
概して、本発明は、患者サポートおよびその上に加速器が搭載されるアウターガントリーを具備してなるシステムに関する。アウターガントリーは、患者サポート上の患者の周囲の、ある範囲のポジションを経て加速器が移動することを可能にする。加速器は、患者内のターゲットに達するのに十分なエネルギーレベルを有する陽子あるいはイオンビームを発生させるよう構成されている。インナーガントリーは、ターゲットに向かって陽子あるいはイオンビームを導くための開口部を具備してなる。当該システムは、一つ以上の以下の特徴を、単独であるいは組み合わせとして含んでいてもよい。
【0008】
インナーガントリーは、開口部を保持するためのアプリケータを具備していてもよい。当該アプリケータは、インナーガントリーに沿って移動可能であってもよい。アプリケータは、患者に対して開口部を移動させるよう構成されていてもよい。たとえば、アプリケータは、患者に向かって、あるいは患者から離れる方向に、開口部を移動させるよう構成されていてもよい。
【0009】
インナーガントリーは、それに沿ってアプリケータが移動するよう構成されたトラックを具備していてもよい。カバーが、トラックに対して移動可能であってもよい。カバーは、患者サポートの下方のボールト内に物体が落下するのを阻止するためのものであってもよい。
【0010】
処理デバイスは、アウターガントリーおよび/またはインナーガントリーの動作を制御するようプログラムされてもよい。この処理デバイスは、陽子あるいはイオンビームを開口部と実質的に整列させるために、アウターガントリーおよび/またはインナーガントリーの動作を制御するよう構成されてもよい。開口部は、陽子あるいはイオンビームを実質的に平行にするよう構成されていてもよい。本システムは、インナーガントリーおよび/またはアウターガントリーに対して移動可能である患者サポートを具備していてもよい。
【0011】
概して、本発明はまた、患者サポートと、その上に粒子ビーム加速器が搭載されるガントリーとを具備してなるシステムに関する。粒子ビーム加速器は、患者サポートに向かって粒子ビームを導くためのものである。ガントリーは、患者サポートの上および下のポジションへと動くことができる。開口部が粒子ビーム加速器と患者サポートとの間に配置される。開口部は粒子ビームを変化させるためのものである。上記システムは一つ以上の以下の特徴を、単独であるいは組み合わせとして含んでいてもよい。
【0012】
本システムは、開口部を保持するための装置を具備していてもよい。本装置は患者サポートに対して移動可能であってもよい。本装置は、患者サポートに対して開口部を位置決めするようコンピューター制御されたロボットアームを具備していてもよい。本装置は開口部を保持するための、手動で位置決め可能であるスタンドを具備していてもよい。
【0013】
粒子ビーム加速器はシンクロサイクロトロンであってもよい。本システムは、開口部を保持するためのアプリケータを含む第2のガントリーを具備していてもよい。第2のガントリーは、開口部を粒子ビームと実質的に整列させるよう制御されてもよい。
【0014】
概して、本発明はまた、患者サポートと、この患者サポートに対して回動可能な第1のガントリーと、この第1のガントリーに搭載された粒子加速器とを具備してなるシステムに関する。粒子加速器は、患者サポートに向かって直接的に粒子ビームを供給するよう構成される。第2のガントリーは患者サポートに対して位置決めされる。第2のガントリーは実質的にC字形である。上記システムは一つ以上の以下の特徴を、単独であるいは組み合わせとして含んでいてもよい。
【0015】
第2のガントリーは、トラックと、開口部と、アプリケータとを具備していてもよい。アプリケータは、開口部が粒子ビームと実質的に整列するようにトラックに沿って移動可能であってもよい。開口部は、粒子ビームが患者サポート上の患者に達する前に粒子ビームを変化させてもよい。
【0016】
本システムは、第1のガントリーおよび第2のガントリーを制御するためのコンピューターを備えていてもよい。第1のガントリーは、粒子加速器が患者サポートの上方のポジションから患者サポートの下方のポジションに存在するよう動作可能であってもよい。第2のガントリーは、粒子加速器が患者サポートの下方のポジションにあるときに、粒子加速器を保護するためのカバーを備えていてもよい。インナーガントリーは、粒子ビームのサイズおよび/または形状を変えるためのデバイスを具備していてもよい。粒子ビームを変化させるためのデバイスは、シンクロサイクロトロンに対して移動可能であってもよい。
【0017】
上記特徴のいずれかが、本明細書においては詳しく説明しない実施例を形成するために組み合わされてもよい。
【0018】
以下、添付図面を参照して、一つ以上の実施例について詳しく説明する。さらなる特徴、態様および利点は、以下の説明、図面ならびに特許請求の範囲の記載から明らかとなるであろう。
[付記項1]
患者サポートと、
アウターガントリーであって、前記患者サポート上の患者の周囲の、ある範囲のポジションを通って加速器が移動することを可能とするよう、前記加速器が搭載されるアウターガントリーと、
前記ターゲットに向かって前記陽子あるいはイオンビームを導くための開口部を具備してなるインナーガントリーと、
を具備してなり、
前記加速器は、前記患者内のターゲットに達するのに十分なエネルギーレベルを有する陽子あるいはイオンビームを発生させるよう構成されていることを特徴とするシステム。
[付記項2]
前記インナーガントリーはアプリケータを具備してなり、前記アプリケータは前記開口部を保持し、前記アプリケータは前記インナーガントリーに沿って移動可能であることを特徴とする付記項1に記載のシステム。
[付記項3]
前記アプリケータは、前記患者に対して前記開口部を移動させるよう構成されていることを特徴とする付記項2に記載システム。
[付記項4]
前記アプリケータは、前記患者に向かって、あるいは前記患者から離れる方向に、前記開口部を移動させるよう構成されていることを特徴とする付記項3に記載システム。
[付記項5]
前記インナーガントリーはトラックを具備してなり、前記アプリケータは前記トラックに沿って移動するよう構成されていることを特徴とする付記項2に記載のシステム。
[付記項6]
前記トラックに対して移動可能なカバーをさらに具備してなり、前記カバーは、前記患者サポートの下方のボールト内に物体が落下するのを阻止するためのものであることを特徴とする付記項5に記載のシステム。
[付記項7]
前記アウターガントリーおよび前記インナーガントリーの動作を制御するようプログラムされた処理デバイスをさらに具備してなることを特徴とする付記項1に記載のシステム。
[付記項8]
前記処理デバイスは、前記陽子あるいはイオンビームを前記開口部と実質的に整列させるために、前記アウターガントリーおよび前記インナーガントリーの動作を制御するよう構成されていることを特徴とする付記項7に記載のシステム。
[付記項9]
前記開口部は、前記陽子あるいはイオンビームを実質的に平行にするよう構成されていることを特徴とする付記項1に記載のシステム。
[付記項10]
患者サポートをさらに具備してなり、前記患者サポートは前記インナーガントリーおよび前記アウターガントリーに対して移動可能であることを特徴とする付記項1に記載のシステム。
[付記項11]
患者サポートと、
粒子ビーム加速器が搭載されるガントリーであって、このガントリーは前記患者サポートの上方および下方のポジションへと移動可能であり、前記粒子ビーム加速器は前記患者サポートに向かって粒子ビームを向けるためのものであるガントリーと、
前記粒子ビーム加速器と前記患者サポートとの間に配置された開口部であって、前記粒子ビームを変化させるための開口部と、
を具備してなることを特徴とするシステム。
[付記項12]
前記開口部を保持するための装置をさらに具備してなり、前記装置は前記患者サポートに対して移動可能であることを特徴とする付記項11に記載のシステム。
[付記項13]
前記装置は、前記患者サポートに対して前記開口部を位置決めするようコンピューター制御されるロボットアームを具備してなることを特徴とする付記項12に記載のシステム。
[付記項14]
前記装置は前記開口部を保持するためのスタンドを具備してなり、前記スタンドは手動で位置決め可能であることを特徴とする付記項12に記載のシステム。
[付記項15]
前記粒子ビーム加速器はシンクロサイクロトロンであり、かつ、
前記システムはさらに、前記開口部を保持するためのアプリケータを含む第2のガントリーを具備してなり、前記第2のガントリーは、前記開口部を前記粒子ビームと実質的に整列させるよう制御されることを特徴とする付記項11に記載のシステム。
[付記項16]
患者サポートと、
前記患者サポートに対して回動可能な第1のガントリーと、
前記第1のガントリーに搭載された粒子加速器であって、前記患者サポートに向かって直接的に粒子ビームを提供するよう構成された粒子加速器と、
前記患者サポートに対して位置決めされる第2のガントリーであって、実質的にC字形である第2のガントリーと、
を具備してなることを特徴とするシステム。
[付記項17]
前記第2のガントリーは、トラックと、開口部と、アプリケータと、を具備してなり、前記アプリケータは、前記開口部が前記粒子ビームと実質的に整列するように前記トラックに沿って動くことができ、前記開口部は、前記粒子ビームが前記患者サポート上の患者に到達する前に前記粒子ビームを変化させるようになっていることを特徴とする付記項16に記載のシステム。
[付記項18]
前記第1のガントリーおよび前記第2のガントリーを制御するためのコンピューターをさらに具備してなることを特徴とする付記項16に記載のシステム。
[付記項19]
前記第1のガントリーは、前記粒子加速器が前記患者サポートの上方のポジションから前記患者サポートの下方のポジションに存在するように動くことができ、前記第2のガントリーは、前記粒子加速器が前記患者サポートの下方のポジションに存在するとき、前記粒子加速器を保護するためのカバーを具備してなることを特徴とする付記項16に記載のシステム。
[付記項20]
前記インナーガントリーは、前記粒子ビームのサイズおよび/または形状を変えるためのデバイスを具備してなり、前記デバイスは前記シンクロサイクロトロンに対して移動可能であることを特徴とする付記項16に記載のシステム。
【図面の簡単な説明】
【0019】
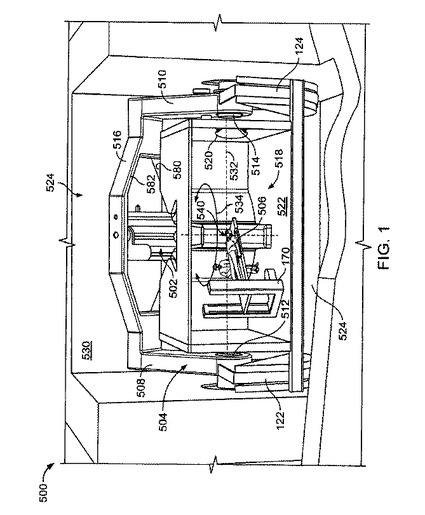
【図1】治療システムの概略図である。
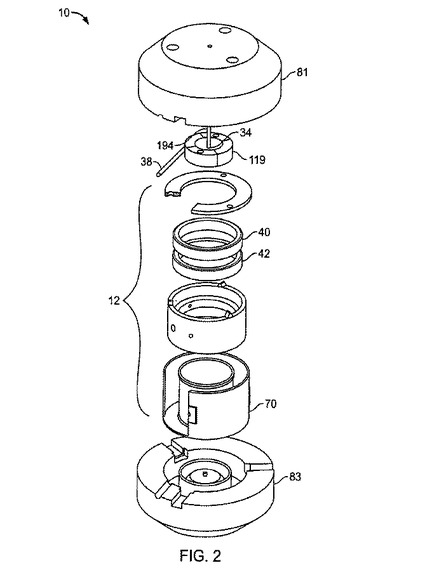
【図2】シンクロサイクロトロンのコンポーネントの分解斜視図である。
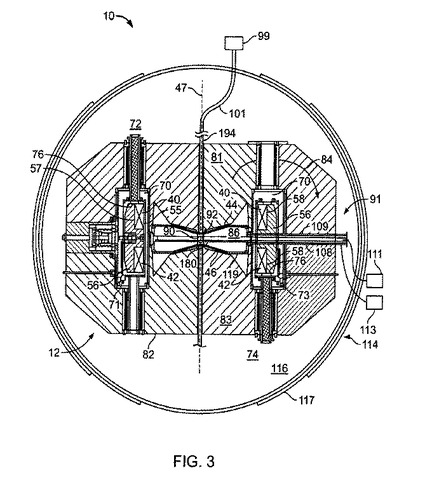
【図3】シンクロサイクロトロンの断面図である。
【図4】シンクロサイクロトロンの断面図である。
【図5】シンクロサイクロトロンの断面図である。
【図6】シンクロサイクロトロンの斜視図である。
【図7】リバースボビンおよび巻き線の一部の断面図である。
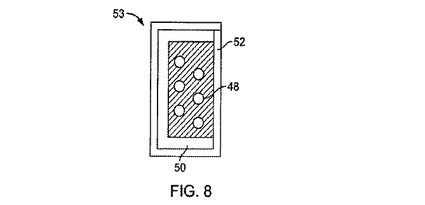
【図8】ケーブルインチャネル複合導体の断面図である。
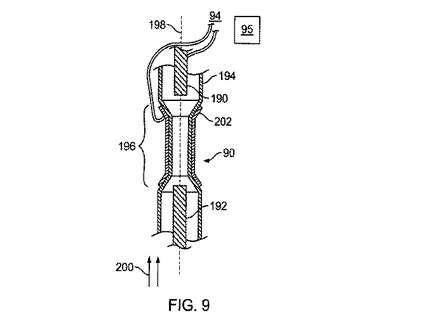
【図9】イオン源の断面図である。
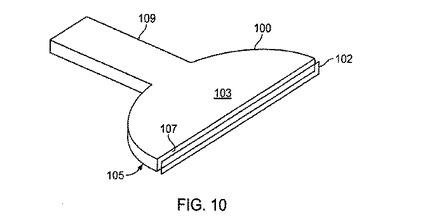
【図10】ディープレートおよびダミーディーの斜視図である。
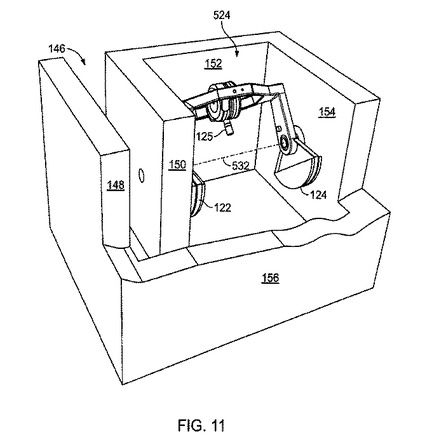
【図11】ボールトの斜視図である。
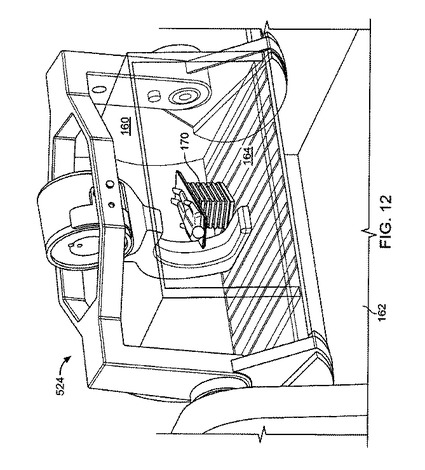
【図12】ボールトを備えた処置室の斜視図である。
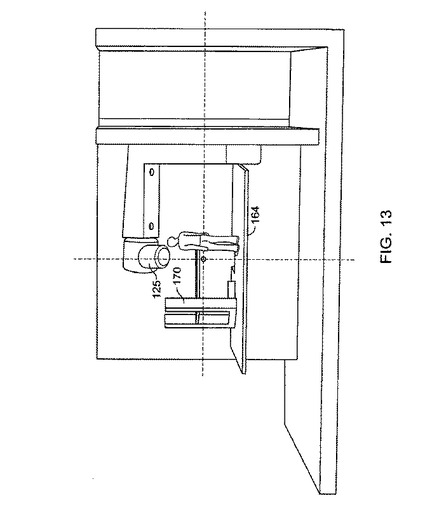
【図13】極面および極部材の対称プロファイルの半分のプロファイルを示す図である。
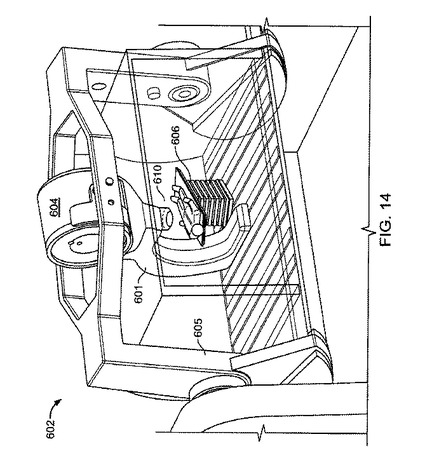
【図14】処置室内のインナーガントリー内に置かれた患者を示す図である。
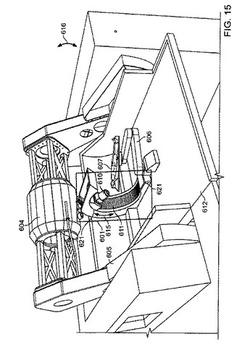
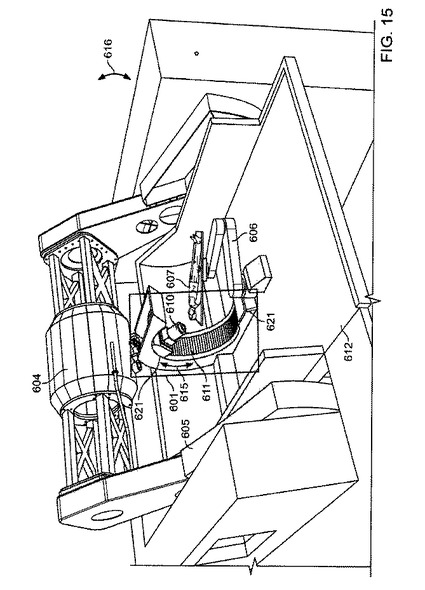
【図15】患者の上方から陽子あるいはイオンビームを作用させるべく位置決めされたアウターおよびインナーガントリーの両方を示す斜視図である。
【図16】加速器によって提供される粒子ビームの形状を示す図である。
【図17】患者の下方から陽子あるいはイオンビームを作用させるべく位置決めされたアウターおよびインナーガントリーの両方を示す斜視図である。
【図18】インナーガントリーのコンポーネントを示す図である。
【図19】インナーガントリーの機能を発揮させるために使用されるロボットアームを示す図である。
【発明を実施するための形態】
【0020】
図1に示すように、荷電粒子放射線治療システム500は、その出力部が患者506に向かって加速器ハウジングから真っ直ぐに(すなわち本質的に直線的に)向けられた状態で、それを回転ガントリー504上に搭載するのを可能とするのに十分なほど小さな重量およびサイズを有するビーム発生粒子加速器502を備える。
【0021】
ある実施例では、スチールガントリーは、患者の両側に存在する二つの個々のベアリング512,514に回転可能に搭載された二つの脚部508,510を有する。加速器はスチールトラス516によって支持されているが、これは、患者が存在する処置エリア518にまたがるのに十分な長さ(たとえば、患者の所望のターゲット領域がビームのライン内に留まった状態で、人間をスペース内で完全に回転させることを可能とするために、背が高い人間の2倍の長さ)を有し、かつ、ガントリーの回転脚部に対して両端において堅固に取り付けられている。
【0022】
ある例では、ガントリーの回転は、患者処置エリア内に治療システムを納めるボールト524の壁から床522が延在することを可能とするために、360度未満の範囲520に、たとえば約180度に制限される。ガントリーの制限された回転範囲はまた、壁のあるもの(これは決してビームを直に受けない、たとえば壁530)の必要厚みを低減するが、これは処置エリアの外に人々の放射線シールドを提供する。ガントリー回転に関する180度の範囲は、あらゆる処置アプローチ角度をカバーするのに十分なものであるが、より大きな移動範囲を実現することは有益である。たとえば回転範囲は180ないし330度であってもよく、これは依然として治療床スペースのためのクリアランスを提供する。
【0023】
ガントリーの水平回転軸線532は、名目上、患者および治療者が治療システムと相互作用する床上、1メートルに配置されている。この床は、治療システム遮蔽ボールトの底部床上、約3メートルに配置されている。加速器は、回転軸線の下方から処置ビームを供給するために、隆起した床の下方で旋回できる。患者寝台は、ガントリーの回転軸線と平行な実質的に水平面内で移動および回転する。寝台は、この構造によって、水平面内で約270度の範囲534にわたって回動できる。ガントリーおよび患者の回転範囲および自由度のこの組み合わせによって、治療者は、ビームに関するアプローチ角度を事実上選択することが可能となる。もし必要とあれば、患者を寝台上で反対方向に置くことができ、この場合、全ての可能性のある角度を使用できる。
【0024】
ある実施例では、加速器は、超強磁場超伝導電磁気構造体を有するシンクロサイクロトロン構造を使用する。所与の運動エネルギーの荷電粒子の曲がり半径は、それに作用させられる磁場の増大に直に比例して減少するので、超強磁場超伝導電磁気構造体は、加速器を、より小さくかつより軽くすることを可能とする。シンクロサイクロトロンは、回転角度に関して均一でかつ半径の増大と共に強さが減少する磁界を使用する。そうした磁界形状は、磁界の規模に関係なく実現でき、それゆえ、理論上は、シンクロサイクロトロンにおいて使用可能な磁界強さに(したがって固定半径において最終的に生じる粒子エネルギーに)対する上限は存在しない。
【0025】
ある超伝導素材は、超強磁場の存在によって、その超伝導特性を失い始める。高性能超伝導ワイヤ巻き線は、超強磁場の実現を可能とするために使用される。
【0026】
超伝導素材は、通常、その超伝導特性が発現されるように、低温まで冷却される必要がある。ここで説明する例では、クライオクーラーが、超伝導コイル巻き線を、絶対零度に近い温度まで冷やすために使用される。クライオクーラーの使用によって、複雑さおよびコストを低減できる。
【0027】
シンクロサイクロトロンは、ビームが直接的に患者と一直線をなすように発生させられるようにガントリー上で支持されている。ガントリーは、患者内の、あるいはその付近のポイント(アイソセンタ540)を含む水平回転軸線を中心としたサイクロトロンの回転を可能とする。この回転軸線と平行な分割トラスは、両側でサイクロトロンを支持する。
【0028】
ガントリーの回転範囲は制限されているので、患者サポート領域はアイソセンター周りの周囲の広範な領域に収容できる。フロアーはアイソセンターの周囲で広範囲に延在できるので、患者サポートテーブルは、アイソセンターを通って、垂直軸線542に対して移動しかつそれを中心として回転するように配置でき、この結果、ガントリーの回転ならびにテーブルの移動および回転の組み合わせによって、患者のいずれかの部位に、いかなる角度ででもビームを導くことができる。二つのガントリーアームは、背の高い患者の高さの2倍超だけ離間しており、患者が載った寝台が隆起した床の上で水平面内において回転および平行移動することが可能となっている。
【0029】
ガントリー回転角度を制限することによって、処置室を取り囲む壁の少なくとも一つの厚みを低減することが可能となる。厚い壁(通常はコンクリートから構成される)は、治療室の外部の個人に対する放射線保護をもたらす。ストッピング陽子ビームの下流の壁は、同等レベルの保護を実現するために、部屋の対向端における壁の約2倍の厚みであってもよい。ガントリーの回転範囲を制限することによって、処置室を、三つの側で、地面の下に配置することが可能となり、その一方で、治療室を構築するコストを低減する最も薄い壁に隣接する占有領域がもたらされる。
【0030】
図1に示す代表的実施例では、超伝導シンクロサイクロトロン502は、8.8テスラのシンクロサイクロトロンの極ギャップ内のピーク磁界を伴って作動する。シンクロサイクロトロンは、250MeVのエネルギーを有する陽子のビームを発生させる。他の実施例では、磁界の強さは6ないし20テスラの範囲内にあってもよく、かつ、陽子のエネルギーは150ないし300MeVの範囲にあってもよい。
【0031】
この例に関して説明する放射線治療システムは、陽子放射線治療のために使用されるが、同じ原理および詳細は、重イオン(イオン)治療システムにおいて使用される類似のシステムにおいても適用可能である。
【0032】
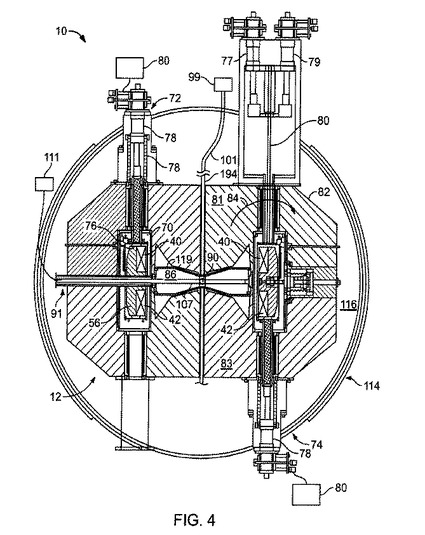
図2、図3、図4図5および図6に示すように、代表的シンクロサイクロトロン10(図1では502)はマグネットシステム12を含むが、これは、イオン源90と、高周波駆動システム91と、ビーム抽出システム38とを含む。マグネットシステムによって生み出された磁界は、環状超伝導コイル40,42の分割対および成形強磁性(たとえば低炭素鋼)極面44,46の対の組み合わせを用いて封じ込められた陽子ビームの焦点を維持するのに適した形状を有する。
【0033】
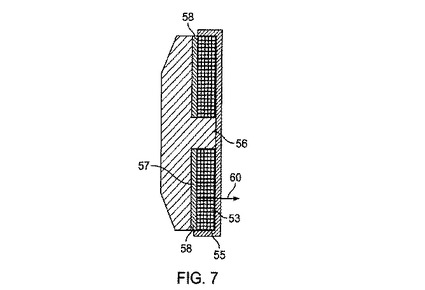
二つの超伝導マグネットコイルは共有軸線47上に中心が置かれかつ当該軸線に沿って離間させられている。図7および図8に示すように、コイルは、ラザフォードケーブルインチャネル導体構造内に配置された、(当初は銅シースによって取り囲まれたニオブ‐スズコアからなる)Nb3Snベース超伝導0.6mm径ストランドから形成される。六つの別個のストランドが銅チャネル50内に置かれた後、それらは、巻き線の最終(脆性)原料を生成する反応を生じるように加熱される。材料が反応した後、ワイヤは銅チャネル(外寸3.02×1.96mm、内寸2.05×1.27mm)内に結合され、そして絶縁材52(この例ではガラス繊維織物素材)によって覆われる。ワイヤ53を収容する銅チャネルは、30層および1層あたり47ターンを有する、6.0cm×15.25cmの矩形断面を有するコイルへと巻回される。巻回されたコイルには、続いて、エポキシコンパウンド54が真空含浸させられる。完成したコイルは、環状ステンレススチールリバースボビン56上に搭載される。ヒーターブランケット55は、マグネットクエンチの場合にアセンブリを保護するために、ボビンおよび巻き線の内面に当接した状態で保持される。別の例では、超伝導コイルは0.8mm径のNb3Snベースストランドから形成されてもよい。こうしたストランドは、4ストランドケーブル内に配置し、超伝導マトリックスを形成するために熱処理し、そして外寸3.19×2.57mmの銅チャネル内に結合できる。チャネル導体内の統合ケーブルは積層されたガラス繊維織物テープによって絶縁され、続いて、79.79mm×180.5mmの矩形断面および374.65mmの内半径を備えた、49ターンで深さ26層のコイルへと巻回される。巻回されたコイルには、続いて、エポキシコンパウンドが真空含浸させられる。コイル全体は、続いて、熱伝導性および機械的安定性を付与するために銅シートによって覆われ、そしてエポキシのさらなる層内に収められる。コイルの与圧は、ステンレススチールリバースボビンを加熱しかつリバースボビン内にコイルを嵌め込むことによって実現できる。リバースボビンの内径は、全質量が4Kまで冷却されたとき、リバースボビンがコイルと接触したままでありかつある程度の圧縮力を付与するように選択される。ステンレススチールボビンを約50度Cまで加熱し、そして室温(20度C)でコイルを嵌め込むことで、これが実現される。
【0034】
コイルの形状は、コイルを「リバース」矩形ボビン56に設置し、そしてコイルが給電されたときに生じる変形力に抗するように機能する復元力60を加えるために各コイルとボビンの内面57との間に与圧ステンレススチールブラダー58を組み込むことによって維持される。ブラダーは、このブラダー内にエポキシを充填し、そしてそれが硬化することを可能とすることによって、コイルおよびヒーターブランケットがボビン上で組み立てられた後に与圧される。ブラダーの与圧力は、クールダウンおよびマグネット給電の全ての段階を通じて、脆弱なNb3Sn超伝導マトリックスの歪みを最小限に抑えるよう設定される。
【0035】
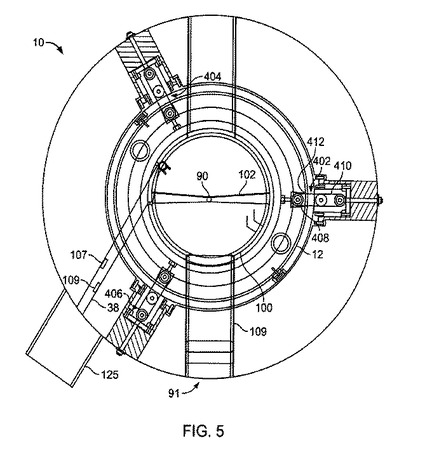
図5に示すように、コイルポジションは、ウォームトゥコールド(warm-to-cold)サポートストラップ402,404,406の組を用いて、マグネットヨークおよび低温装置に対して維持される。薄手のストラップを用いて低温質量を支持することによって、剛体サポートシステムによって低温質量に伝達される熱の漏れが低減する。ストラップは、マグネットがガントリーに載った状態で回転するとき、コイルへの変動する重力に耐えるように配置される。それらは、マグネットヨークに対して完全な対称ポジションからコイルが摂動するときに、重力およびコイルによって生じる大きな偏心力の協働作用に抗する。さらに、そのポジションが変わる場合にガントリーが加速および減速するとき、リンクは、コイルに加えられる動的な力を低減するように機能する。各ウォームトゥコールドサポートは3本のS2ガラス繊維リンクを含む。二つのリンク410,412は、ウォームヨークと中間温度(50〜70K)間のピンを横切って支持されており、かつ、一つのリンク408は中間温度ピンおよび低温質量に対して取り付けられたピンを横切って支持されている。各リンクは、10.2cmの長さ(ピン中心からピン中心まで)および20mmの幅を有する。リンク厚みは1.59mmである。各ピンはステンレススチールからなり、かつ、47.7mmの直径を有する。
【0036】
図3を参照すると、半径の関数としての場の強さのプロファイルは、概して、コイル形状の選択によって決定される。すなわち透過性ヨーク素材の極面44,46は、加速の間、粒子ビームが集束した状態を維持することを保証するために、磁界の形状を精密調整するために輪郭取りできる。
【0037】
超伝導コイルは、サポートポイント71,73の限定された対の箇所を除いて、コイル構造体を取り囲む自由なスペースを提供する、排気された環状のアルミニウム製あるいはステンレススチール製低温チャンバー70内にコイルアセンブリ(コイルおよびボビン)を封入することによって、絶対零度付近の温度(たとえば約4度ケルビン)で維持される。変形例(図4)では、低温装置の外壁は、磁界のための追加的なリターン磁束経路を提供するために低炭素鋼から構成されてもよい。絶対零度付近の温度は、コイルアセンブリ上の異なるポジションに配置された二つのGifford-McMahonクライオクーラー72,74を用いることによって実現されかつ維持される。各クライオクーラーは、コイルアセンブリと接触状態にある低温端部76を有する。クライオクーラーヘッド78にはコンプレッサー80から圧縮ヘリウムが供給される。二つの他のGifford-McMahonクライオクーラー77,79が、超伝導巻き線に電流を供給する高温(たとえば60〜80度ケルビン)リード81を冷却するために配置されている。
【0038】
コイルアセンブリおよび低温チャンバーは、ピルボックス形状マグネットヨーク82の二つの半体81,83内に搭載され、かつ、それによって完全に取り囲まれている。この例では、コイルアセンブリの内径は約140cmである。鉄ヨーク82はリターン磁束84のための経路を提供し、かつ、外部磁気作用が容積86内の磁界の形状を乱すのを阻止するために極面44,46間の容積86を磁気的に遮蔽する。ヨークはまた、加速器付近の迷走磁界を減少させる役割を果たす。
【0039】
図3および図9に示すように、シンクロサイクロトロンは、マグネット構造体82の幾何学的中心92付近に置かれたペニングイオンゲージジオメトリーのイオン源90を含む。イオン源は以下で説明するようなものであってもよく、すなわちイオン源は、「Interrupted Particle Source」という名称の特許文献1(整理番号第17970−010001)明細書に開示されるタイプのものであってもよい(その内容は、この引用によって、完全な形で言及されているかのように、本明細書中に組み込まれる)。イオン源90は、ガス状水素を供給するガスライン101およびチューブ194を経て、水素の供給源99から供給される。電気ケーブル94は、磁界200と整列させられたカソード192,190からの電子放出を誘発するために電流源95から電流を伝える。
【0040】
この例では、放出される電子は、マグネット構造体によって取り囲まれるスペースの半分にまたがる一つの半円形(ディー形状)高周波プレート100および一つのダミーディープレート102によって加速される陽イオン(陽子)の供給源を作り出すためにチューブ194から小孔を経て出てくるガスをイオン化する。断続イオン源の場合、チューブ含有プラズマの全て(あるいはかなりの部分)は加速領域において除去され、これによって、相対的に高い磁界内でイオンをより急速に加速することが可能となる。
【0041】
図10に示すように、ディープレート100は中空金属構造体であるが、これは、スペース107を取り囲む二つの半円表面103,105を有しており、スペース107内では、マグネット構造体によって取り囲まれたスペース周りのその半回転の間に陽子が加速される。スペース107内へ開口するダクト109はヨークを経て外部位置まで延在しているが、そこから、スペース107およびその中で加速が起きる真空チャンバー119内のスペースの残部を排気するために真空ポンプ111を取り付けることができる。ダミーディー102は、ディープレートの露出リムに近接して間隔が置かれた矩形金属製リングを具備してなる。ダミーディーは真空チャンバーおよびマグネットヨークに対して接地される。ディープレート100は、スペース107内に電界を作用させるための高周波伝送ラインの端部に加えられる高周波信号によって駆動される。高周波電界は、加速された粒子ビームの幾何学的中心から距離が増大する際、ちょうどよい時に変化するようなものとされる。この目的のために有用な高周波波形発生器の例は、2005年7月21日付けで提出された「A Programmable Radio Frequency Waveform Generator for a Synchrocyclotron」という名称の特許文献2、ならびに2004年7月21日付けで提出された同じ名称の特許文献3において説明されている(そのいずれもが、完全な形で言及されているかのように、この引用によって本明細書に組み込まれる)。高周波電界は、「Matching A Resonant Frequency Of A Resonant Cavity To A Frequency Of An Input Voltage」という名称の特許文献4(整理番号第17970−011001)明細書に開示される方式で制御可能である(その内容は、この引用によって、完全な形で言及されているかのように、本明細書中に組み込まれる)。
【0042】
中央に配置されたイオン源から出現するビームが、それが外側に螺旋を描き始めるときにイオン源構造体を通過するためには、高周波プレートを横切る大きな電圧差が必要になる。20,000ボルトが高周波プレートを横切って印加される。ある形態では、8,000ないし20,000ボルトが高周波プレートを横切って印加されてもよい。この大電圧を運用するために必要な電力を低減するために、マグネット構造体は、高周波プレートとアースとの間の静電容量を低減するよう構成される。これは、外側ヨークおよび低温装置ハウジングを貫通する、高周波構造体からの十分なクリアランスを伴った孔を形成し、かつ、マグネット極面間に十分なスペースを形成することによってなされる。
【0043】
ディープレートを駆動する高電圧交番電位は、増大する陽子の相対論的質量および減少する磁界を考慮するために、加速サイクルの間、下方に押しやられる周波数を有する。ダミーディーは中空半円形構造を必要としない。というのは、それは真空チャンバー壁と共に接地電位にあるからである。異なる電気的位相あるいは複数の基本周波数によって駆動される加速電極の一つ以上の対などの、その他のプレート構造を使用することもできる。RF構造体は、たとえば、噛み合うブレードを有する回転コンデンサーを用いることによって、所要の周波数スイープの間、Qを高い値で維持するよう調整できる。ブレードの各噛み合い間、静電容量は増大し、これによってRF構造体の共振周波数が低下する。ブレードは、必要とされる正確な周波数スイープを創出するような形状とすることができる。コンデンサを回転させるための駆動モーターは、正確な制御のためにRF発生器に対して位相ロックできる。粒子の一つの群は、回転コンデンサーのブレードの各噛み合いの間に加速される。
【0044】
その中で加速が生じる真空チャンバー119は、中央において薄く、リムにおいて厚い略円筒形コンテナである。真空チャンバーはRFプレートおよびイオン源を含み、かつ、真空ポンプ111によって排気される。高真空を維持することは、加速しているイオンがガス分子との衝突のために失われないことを保証し、かつ、アーク接地を要さずに、より高いレベルでRF電圧を維持することを可能とする。
【0045】
陽子は、イオン源から出発する概ね螺旋経路を通過する。螺旋経路の各ループの半分において、陽子は、それがスペース107内のRF電界を通過するときエネルギーを得る。イオンがエネルギーを得るとき、その螺旋経路の各連続ループの中心軌道の半径は、ループ半径が極面の最大半径に達するまで、先行ループよりも大きなものである。この位置において、磁界および電界の擾乱は磁界が急速に増大する領域内へイオンイオンを導き、そしてイオンは高磁界の領域を離れ、サイクロトロンのヨークを出て行くために排気されたチューブ38を経て案内される。サイクロトロンを出て行くイオンは、それがサイクロトロンの周囲の部屋内に存在する著しく減じられた磁界の領域に進入するとき、散乱する傾向がある。抽出チャネル38内のシェーピング要素107,109は、イオンを、それが制限された空間広がりの直線ビーム内に留まるように方向を変える。
【0046】
極ギャップ内の磁界は、それが加速されるとき、排気されたチャンバー内でビームを維持する所定の特性を有する必要がある。磁界指数n(これは式:n=−(r/B)dB/drによって示される)は、この「弱い」集束を維持するために正の値に維持される必要がある。ここでrはビーム半径であり、Bは磁界である。さらに、磁界指数は、0.2以下に維持される必要がある。なぜなら、この値においては、ビームの半径方向振動および垂直振動の周期性はvr=2vz共振と一致するからである。ベータトロン周波数は、vr=(1−n)1/2およびvz=n1/2によって規定される。強磁性極面は、コイルによって形成される磁界を成形するよう構成され、これによって磁界指数nは、所与の磁界中での250MeVビームと一致した最小直径において正の値でかつ0.2以下に維持される。
【0047】
ビームが抽出チャネルを出るとき、それは、ビームに関する拡散角度およびレンジモジュレーションの所望の組み合わせを作り出すようにプログラム可能に制御することができるビームフォーメーションシステム125(図5)を通過させられる。この目的にとって有用なビーム成形システムの例は、2004年9月24日提出の「A Programmable Particle Scatterer for Radiation Therapy Beam Formation」という名称の特許文献5ならびに2005年7月21日提出の特許文献6に開示されている(そのいずれもが、完全な形で言及されているかのように、この引用によって本明細書に組み込まれる)。ビームフォーメーションシステム125は、患者にビームを向けるために、インナーガントリー601(これについては以下で説明する)と連係使用が可能である。
【0048】
作動中、プレートは、その表面に沿った導電抵抗の結果として、印加された高周波場からのエネルギーを吸収する。このエネルギーは熱として現れ、そして熱交換器113(図3)において熱を放出する水冷ライン108を用いてプレートから取り除かれる。
【0049】
シンクロトロンから出る迷走磁界は、ピルボックスマグネットヨーク(これはまたシールドとして機能する)および別個のマグネットシールド114の両方によって制限される。別個のマグネットシールドは、スペース116によって隔てられた、ピルボックスヨークを取り囲む強磁性素材(たとえばスチールあるいは鉄)からなる層117を含む。ヨーク、スペースおよびシールドからなるサンドウィッチを含むこの形態は、少ない重量で、所与の漏れ磁界のための適切な遮蔽を実現する。
【0050】
上述したように、ガントリーは、水平回転軸線532を中心としてシンクロサイクロトロンが回転することを可能とする。トラス構造体516は二つの概して平行なスパン590,582を有する。シンクロサイクロトロンは、脚部間のおおよそ中間においてスパン間で支持されている。ガントリーは、トラスと向き合う脚部の端部に搭載されたカウンターウエイト122,124を用いて、ベアリングを中心とする回転のためにバランスがとられている。
【0051】
ガントリーは、ガントリー脚部の一つに搭載されかつ駆動ギアおよびベルトまたはチェーンによって支持ハウジングに対して接続された電動モーターによって回転駆動される。ガントリーの回転ポジションは、ガントリー駆動モーターおよび駆動ギアに組み込まれたシャフト角エンコーダから提供される信号から得られる。
【0052】
イオンビームがサイクロトロンを出て行く位置において、ビームフォーメーションシステム125は、イオンビームに対して患者の治療に好適な特性を付与するために、イオンビームに作用する。たとえば、所与のターゲット容積を横切って均一な放射を実現するために、ビームが広げられ、かつ、その浸透深さが変更されてもよい。ビームフォーメーションシステムは、アクティブスキャニング要素だけでなく、パッシブ拡散要素を含んでいてもよい。
【0053】
シンクロサイクロトロンのアクティブシステムの全て(たとえば、電流駆動超伝導コイル、RF駆動プレート、真空加速チャンバーおよび超伝導コイル冷却チャンバー用の真空ポンプ、電流駆動イオン源、水素ガス源、およびRFプレートクーラー)は、適当なシンクロサイクロトロン制御電子機器(図示せず)によって制御されるが、これは、たとえば、制御を実施するための適当なプログラムによってプログラムされたコンピューターを含んでいてもよい。
【0054】
ガントリー、患者サポート、アクティブビーム成形要素および治療セッションを実施するためのシンクロサイクロトロンは、適当な治療制御電子機器(図示せず)によって達成される。
【0055】
図1、図11および図12に示すように、ガントリーベアリングはサイクロトロンボールト524の壁によって支持されている。ガントリーは、患者の上、その側方の、そしてその下方のポジションを含む180度(あるいはそれ以上)の範囲520にわたってサイクロトロンが旋回することを可能とする。ボールトは、その動作の上下端においてガントリーを通過させるのに十分なほどの高さを有する。壁148,150によって側面付けされた迷路146は治療者および患者のための出入りルートを提供する。少なくとも一つの壁152はサイクロトロンから直の陽子ビームと整列状態とはならないので、それは相対的に薄くでき、そして依然としてその遮蔽機能を発揮できる。部屋の他の三つの側壁154,156,150/148(より厳重に遮蔽されることが必要であろう)は、土でできた丘(図示せず)内に埋設できる。土はそれ自体、ある程度の必要な遮蔽を実現できるので、壁154,156および158の必要厚みが低減できる。
【0056】
図12および図13を参照すると、安全および美観的理由から、治療室160は、ボールト内に構築可能である。治療室は、旋回するガントリーを通過させ、そしてさらに治療室の床スペース164の広がりを最小限に抑える様式で、ガントリー脚部間のスペース内へと、収容室の壁154,156,150およびベース162から片持ち支持されている。加速器の定期的なサービスは、隆起した床の下方のスペース内で実施できる。加速器がガントリー上で下方ポジションへと回転させられるとき、処置領域とは別個のスペース内で加速器に対する完全なアクセスが可能である。電力源、冷却機器、真空ポンプおよびその他のサポート機器は、この別個のスペース内の隆起した床の下に配置できる。
【0057】
処置室内で、患者サポート170は、サポートが上昇および降下することを可能とし、かつ、患者をさまざまなポジションおよび向きへと回転および移動させることを可能とする、さまざまな様式で設置可能である。
【0058】
図14のシステム602において、ビーム生成粒子加速器(この例ではシンクロサイクロトロン604)は、回転ガントリー605に搭載されている。回転ガントリー605は本明細書中で説明タイプのものであり、しかも患者サポート606の周囲を回転できる。この機能によって、シンクロサイクロトロン604は、さまざまな角度から患者に対して直接的に粒子ビームを提供することが可能となる。たとえば、図14に示すように、シンクロサイクロトロン604が患者サポート606の上方に存在する場合、粒子ビームは患者に向かって下方に向けられてもよい。これに代えて、シンクロサイクロトロン604が患者サポート606の下方に存在する場合、粒子ビームは患者に向かって上方に向けられてもよい。粒子ビームは、中間ビームルーティング機構が必要とされないという意味で、患者に対して直接的に作用させられる。このコンテクストでは、ルーティング機構は、シェーピングおよび/またはサイジング機構とは異なる。というのは、シェーピングまたはサイジング機構は、ビームをルート変更せず、むしろ、ビームの同一の一般的な軌道を維持しながら、ビームをあるサイズおよび/またはある形状とするものであるからである。
【0059】
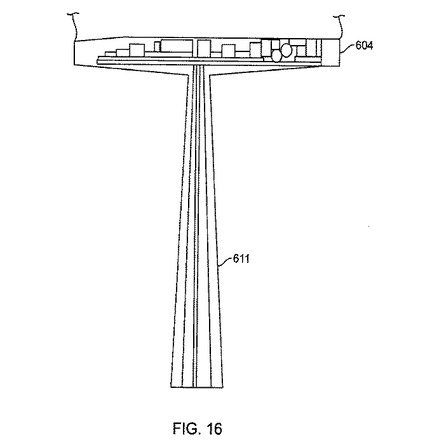
やはり図15を参照すると、インナーガントリー601はシステム602に含まれていてもよい。この例では、インナーガントリー601は図示のとおり略C字形状である。インナーガントリー601はアプリケータ610を含む。アプリケータ610は、患者サポート606(これは図12に示すものとは異なるタイプのサポートである)に対してインナーガントリー601の表面611に沿ってアプリケータ610が移動することを可能とする様式で搭載されている。これによって、たとえば、患者の周囲の半円内のどこにでも、たとえば患者607の上方、側方、あるいは下方のどこにでも、アプリケータを位置させることが可能となる。アプリケータ610は、シンクロサイクロトロン604によって供給される粒子ビームを変化させることができる。さらに詳しく言うと、図16に示すように、シンクロサイクロトロン604のビームシェーピングシステムによって提供される粒子ビーム611は、シンクロサイクロトロン604の出力から遠くなればなるほど、ますます広がる。アプリケータ610は、シンクロサイクロトロン604の出力部からの粒子ビームを受け、そして粒子ビームの特性を変化させることができる。たとえば、アプリケータ610は、粒子ビームを実質的に平行にするために、開口部および/またはその他のビーム集束機構を含んでいてもよい。この結果、粒子ビームは、患者の中のターゲットに、より正確に作用させることができる。たとえば、粒子ビームは、特定のサイズおよび/または形状の腫瘍を治療するために、あるサイズおよび/またはある形状とすることができる。これに関して、アプリケータ610は粒子ビームのコリメーティングには限定されない。たとえば、アプリケータ610は、ビームを平行にしながら、粒子ビームのサイズを縮小できる。アプリケータは、粒子ビームのサイジングおよび/またはシェーピングのためのマルチリーフコリメーターであってもよい。アプリケータはまた、改変を伴わずに、粒子ビームが通過することを可能とするだけであってもよい。アプリケータ610は、必要であれば、ビームのサイズおよび/または形状に変化をもたらすためにコンピューター制御されてもよい。
【0060】
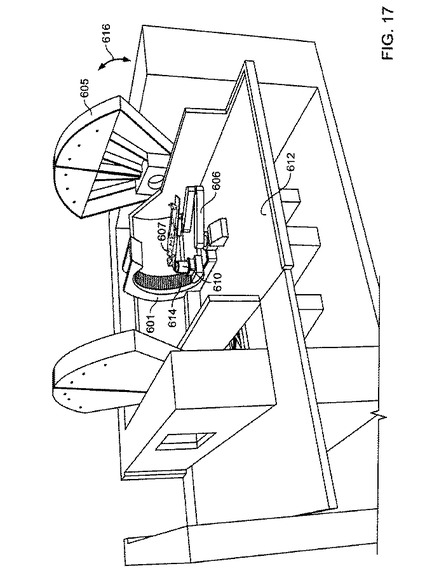
アプリケータ610およびシンクロサイクロトロン604は、患者サポートに(したがって患者に)対して、かつ、互いに移動することができる。たとえば、アプリケータ610の動きは、実質的にガントリー605の回転と符合し、あるいは一方が他方に追従し、この結果、シンクロサイクロトロン604の出力部はアプリケータ610の入力部と整列する。図15および図17は、ガントリー605の動きおよびインナーガントリー601に沿ったアプリケータ610の動きを示している。さらに詳しくは、図17は、ガントリー605が、シンクロサイクロトロン604が患者サポート606の下方のボールト内に存在するように回転させられた場合を示している。図17において、シンクロサイクロトロン604は治療室の床612の下方に存在するが、この床はコンクリートから形成されてもよい。したがって、シンクロサイクロトロン604は図17には現れない。この事例では、アプリケータ610は、このアプリケータ610がシンクロサイクロトロン604の出力部と整列するように、インナーガントリー601に沿って動かされる。シンクロサイクロトロン604は図17に示されていないので、この整列は認識できない。にもかかわらず、シンクロサイクロトロン604からの粒子ビーム出力は、インナーガントリー601のカバー614ならびに床の対応するホール(図示せず)を通過し、そして、その後、アダプター610がそれを受ける。アプリケータ610は、粒子ビームを変化させ、そして粒子ビームを患者607に供給する。
【0061】
ガントリー605(したがってシンクロサイクロトロン604)は、矢印615の方向に患者に対して回転可能である。アプリケータ610は、矢印616の方向にインナーガントリー601に沿って動くことができる。図15は、矢印615および616によって示す動作の後のシンクロサイクロトロン604およびアプリケータ610の位置を、それぞれ示している。図15においては、シンクロサイクロトロン604およびアプリケータ610はいずれも患者サポート606の上方に(したがって患者607の上方に)存在する。この形態では、シンクロサイクロトロン604は、その粒子ビームを、患者に向かって下方に向ける。アプリケータ610は、粒子ビームを受け、この粒子ビームを変化させ(たとえば平行にし)、そして最終的に得られた粒子ビームを患者に供給する。
【0062】
患者サポート606はインナーガントリー601に対して動くことができ、これによって、インナーガントリー601の上端部621が患者の上方に存在するよう、そしてインナーガントリー601の下端部622が患者の下方に存在するよう、患者を移動させることが可能となる。患者サポート606の動きは、ガントリー605およびアプリケータ610の動きと協働で、腫瘍および/または患者のその他の処置領域の相対的に正確なターゲッティングを可能とする。
【0063】
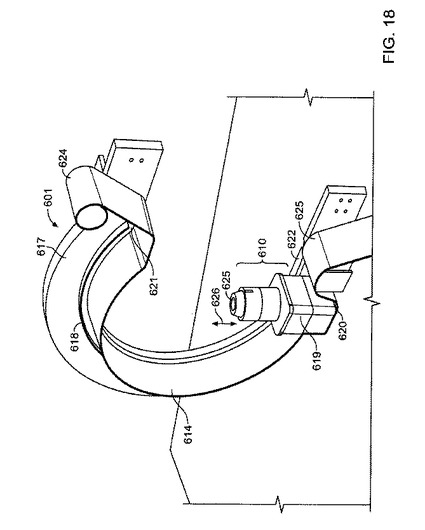
図18はインナーガントリー601の代表的構成を示している。この例では、インナーガントリーは、溶接構造体617と、高精度リニア支持レール618(たとえばTHKレール)と、カバー614と、伸長ドライブ619およびシータドライブ620を含むアプリケータ610とを備える。インナーガントリー601は、図示するものに対する付加的な機構、図示する機構の代替物、あるいはその両方を備えることができる。
【0064】
溶接構造体617は、アプリケータ610の重量を支持することができる、剛性のある素材、たとえば金属、プラスチックなどから構成可能である。この例では。溶接構造体617は実質的にC字形である(これによってインナーガントリー601の形状が画定される)。だが、溶接構造体617はその他の形状を有していてもよいことに留意されたい。たとえば、それは引き伸ばされてもあるいは縮められてもよい。基本的に、溶接構造体は、患者の上および下のポジション間でアプリケータ610の相対的に障害のない、連続的な移動を可能とする、いかなる形状を有することもできる。
【0065】
溶接構造体617は一つ以上の支持レール618を含む。使用されるであろうレールの数は、アプリケータ610にとって必要な接続部に依存する。アプリケータ610は、溶接構造体617の上端部621と溶接構造体617の下端部622との間で支持レール618に沿って移動する。移動は連続的なものであってもあるいは不連続な変化を伴うものであってもよく、患者のポジションに対するアプリケータ610の所望のポジションを実現するために、支持レール618に沿った、いかなるポイントにおいても停止可能である。
【0066】
カバー614は、床612の下方の領域に対して、さもなければオープンホールとなるであろう部位を覆う(図17参照)。ホールおよびカバーは、粒子ビームが、シンクロサイクロトロンからアプリケータまで進むことを可能とする。だが、カバー614は、物品および/またはその他の物体が、このホールを経て落下し、そしてことによると、シンクロサイクロトロンのような敏感な機器を損傷させるのを阻止する。カバー614は、支持レール618に沿ったアプリケータの610の移動を支援するかあるいはそれを制御することができる。すなわち、カバー614は、溶接構造体617の上端部621と下端部622との間の経路に沿って転がることができる。カバー614は、図18に示すように、その端部624および/または625において巻き上げられてもよい。
【0067】
アプリケータ610は伸長ドライブ619およびシータドライブ620を備える。伸長ドライブ619は、たとえば矢印626に沿って、患者に向かって、そして患者から離れるように動作する。この動作によって、伸長ドライブは、患者の上で開口部625の投影を変更することができる。たとえば、開口部のサイズは拡大あるいは縮小可能である。開口部の形状も同様に、たとえば円形状、楕円形状、多角形状などの間で変更可能である。シータドライブ620は、溶接構造体617の上端部621と下端部622との間でレール618に沿ってアプリケータ610を移動させる。カバー614はアプリケータ610と共に移動可能である。
【0068】
伸長ドライブ619およびシータドライブ620の全てあるいは一部はコンピューター制御されてもよい。たとえば、伸長ドライブ619および/またはシータドライブ620は、ガントリー605を制御するのに使用される同一のハードウエアおよび/またはソフトウエアによって制御可能である。
【0069】
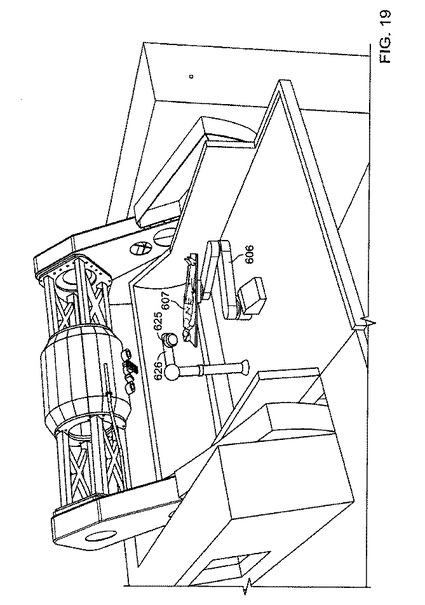
システム602はインナーガントリー601との使用に限定されない。シンクロサイクロトロン604によって提供される粒子ビームをある形状および/またはサイズとする(たとえば平行にする)ための開口部を提供するために、その他いかなる機構が利用されてもよい。たとえば、図19を参照すると、ロボットアーム626が、シンクロサイクロトロン604と患者との間で開口部625を位置決めするために使用できる。このロボットアームは、開口部を患者に対して、三次元(たとえばXYZデカルト座標)に動かすことができる。ロボットアームは、ガントリー605を制御するのに使用される同一のハードウエアおよび/またはソフトウエアによって制御可能である。さらに開口部自体が、そのサイズおよび/または形状が変化するように制御されてもよい。上述したように、開口部のサイズは拡大あるいは縮小可能である。開口部の形状も同様に、たとえば円形状、楕円形状、多角形状などの間で変更可能である。
【0070】
(上述したもののような)開口部は、手動で位置決めされかつ/または調整されてもよい。たとえば、スタンド(図示せず)が、開口部を保持するために使用されてもよい。開口部はある大きさおよび/またはある形状とされ、かつ、スタンド上に配されてもよい。スタンドおよび開口部の両方は、患者に対して、かつ、シンクロサイクロトロンによって提供される粒子ビームと一直線上に配置されてもよい。開口部を保持するための、いかなる機構が使用されてもよい。ある実施例では、開口部および/または開口部を保持するために使用されるデバイスは、シンクロサイクロトロン自体に設けられてもよい。
【0071】
インナーガントリーは有利である。なぜなら、それは、それを伴ってアウターガントリーが回転しなければならない精度を低めるからである。たとえば、インナーガントリーは、1ミリメーター未満のビーム位置決めを可能とする。インナーガントリーによって付加されるさらなる精度によって、アウターガントリーは1ミリメーター未満の精度を提供する必要はなく、むしろ、その精度は1ミリメーター、あるいはそれより大きなものであってもよい。アウターガントリーはまた、高いレベルの精度を得るために、さもなければ必要であろうほど大きなものである必要はない。
【0072】
本明細書中で説明した粒子加速器の構成に関するさらなる情報は、2006年1月20日付け提出の「High-Fileld Superconducting Synchrocyclotron」という名称の米国仮特許出願第60/760788号、2006年8月9日付け提出の「Magnet Structure For Particle Acceleration」という名称の特許文献7、ならびに2006年10月10日付け提出の「Cryogenic Vacuum Break Pneumatic Thermal Coupler」という名称の特許文献8に見出される(その全ては、完全な形で言及されているかのように、この引用によって本明細書中に組み込まれる)。
【0073】
他の実施例も特許請求の範囲内のものである。(引用によって本明細書に組み込まれた特徴を含む)異なる実施例の要素は、特に本明細書中では説明していない実施例を形作るために組み合わされてもよい。
【符号の説明】
【0074】
10 シンクロサイクロトロン
12 マグネットシステム
38 ビーム抽出システム
40 環状超伝導コイル
42 環状超伝導コイル
44 透過性ヨーク素材
46 透過性ヨーク素材
50 銅チャネル
53 ワイヤ
54 エポキシコンパウンド
55 ヒーターブランケット
56 環状ステンレススチールリバースボビン
58 与圧ステンレススチールブラダー
70 低温チャンバー
72 Gifford-McMahonクライオクーラー
74 Gifford-McMahonクライオクーラー
77 Gifford-McMahonクライオクーラー
78 クライオクーラーヘッド
79 Gifford-McMahonクライオクーラー
80 コンプレッサー
82 ピルボックス形状マグネットヨーク
84 リターン磁束
90 イオン源
91 高周波駆動システム
94 電気ケーブル
95 電流源
99 水素の供給源
100 ディープレート
101 ガスライン
102 ダミーディープレート
103 半円表面
105 半円表面
107 スペース
108 水冷ライン
109 ダクト
111 真空ポンプ
113 熱交換器
114 マグネットシールド
116 スペース
119 真空チャンバー
122 カウンターウエイト
124 カウンターウエイト
125 ビームフォーメーションシステム
146 迷路
148 壁
150 壁
152 壁
154 壁
156 壁
158 壁
160 治療室
162 ベース
164 床スペース
170 患者サポート
190 カソード
192 カソード
194 チューブ
402 ウォームトゥコールドサポートストラップ
404 ウォームトゥコールドサポートストラップ
406 ウォームトゥコールドサポートストラップ
408 リンク
410 リンク
412 リンク
500 荷電粒子放射線治療システム
502 ビーム発生粒子加速器(シンクロサイクロトロン)
504 回転ガントリー
506 患者
508 脚部
510 脚部
512 ベアリング
514 ベアリング
516 トラス構造体
518 処置エリア
522 床
524 ボールト
530 壁
540 アイソセンタ
582 スパン
590 スパン
601 インナーガントリー
604 シンクロサイクロトロン
605 回転ガントリー
606 患者サポート
607 患者
610 アプリケータ
611 粒子ビーム
614 カバー
617 溶接構造体
618 高精度リニア支持レール
619 伸長ドライブ
620 シータドライブ
625 開口部
【技術分野】
【0001】
本発明は、粒子ビーム治療システムと共に使用するためのインナーガントリーに関する。
【0002】
本願は、「Charged Particle Radiation Therapy」という名称で、かつ、2006年11月17日に提出された米国特許出願第11/601056号の一部継続である。本願はまた、「Charged Particle Radiation Therapy」という名称で、かつ、2005年11月18日に提出された米国仮特許出願第60/738404号の出願日の利益が付与される。米国特許出願第11/601056号および米国仮特許出願第60/738404号の内容は、完全な形で言及されているかのように、この引用によって本明細書に組み込まれる。
【背景技術】
【0003】
臨床環境用の陽子あるいはイオン放射線治療システムの設計は、全体サイズ、コスト、複雑さを考慮する必要がある。利用可能なスペースは、たいてい、混み合った臨床環境では制限される。低コストは、より多くのシステムが、より多くの患者人口に及ぶように配備されることを可能とする。複雑さの低減は運用コストを低下させ、そして日常的な臨床使用のためにシステムの信頼性をより高くする。
【0004】
その他の事情もまた、そうした治療システムの設計に関係する。安定した、再現可能なポジションで保持された(たとえばフラットなテーブル上であお向けで横たわる)患者に対して処置を施すべくシステムを構成することによって、医師は、処置の都度、患者の組織に対して、意図されたターゲットを正確に再配置できる。各処置に関する患者のポジションの信頼性の高い再現はまた、患者に適合したカスタムモールドおよびブレースを使用することで促進できる。患者が、安定した固定ポジションにある状態では、放射線治療ビームは連続した角度から患者に向けることができ、この結果、処置過程にわたって、ターゲットにおける放射線供与量は高められ、一方、外来性放射線供与量は、非ターゲット組織に対して一面に広がる。
【0005】
従来、同心ガントリーは、患者内の単一のポイント(アイソセンターと呼ばれる)に向かって、共通垂直面内で、ある範囲の角度をなして存在する連続経路に沿って放射線ビームを向けるために、あお向けの患者の周囲で回転させられる。垂直軸線周りで、患者が横たわっているテーブルを回転させることによって、ビームは、異なる経路に沿って患者内に導くことができる。患者の周囲で放射線源のポジションを変更するために、ロボットマニピュレーションを含む、その他の技術も使用されてきた。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】米国特許出願第2009/0140672号明細書
【特許文献2】米国特許出願第11/187633号明細書
【特許文献3】米国仮特許出願第60/590089号明細書
【特許文献4】米国特許出願第2009/0140671号明細書
【特許文献5】米国特許出願第10/949734号明細書
【特許文献6】米国特許仮特許出願第60/590088号明細書
【特許文献7】米国特許出願第11/463402号明細書
【特許文献8】米国仮特許出願第60/850565号明細書
【発明の概要】
【課題を解決するための手段】
【0007】
概して、本発明は、患者サポートおよびその上に加速器が搭載されるアウターガントリーを具備してなるシステムに関する。アウターガントリーは、患者サポート上の患者の周囲の、ある範囲のポジションを経て加速器が移動することを可能にする。加速器は、患者内のターゲットに達するのに十分なエネルギーレベルを有する陽子あるいはイオンビームを発生させるよう構成されている。インナーガントリーは、ターゲットに向かって陽子あるいはイオンビームを導くための開口部を具備してなる。当該システムは、一つ以上の以下の特徴を、単独であるいは組み合わせとして含んでいてもよい。
【0008】
インナーガントリーは、開口部を保持するためのアプリケータを具備していてもよい。当該アプリケータは、インナーガントリーに沿って移動可能であってもよい。アプリケータは、患者に対して開口部を移動させるよう構成されていてもよい。たとえば、アプリケータは、患者に向かって、あるいは患者から離れる方向に、開口部を移動させるよう構成されていてもよい。
【0009】
インナーガントリーは、それに沿ってアプリケータが移動するよう構成されたトラックを具備していてもよい。カバーが、トラックに対して移動可能であってもよい。カバーは、患者サポートの下方のボールト内に物体が落下するのを阻止するためのものであってもよい。
【0010】
処理デバイスは、アウターガントリーおよび/またはインナーガントリーの動作を制御するようプログラムされてもよい。この処理デバイスは、陽子あるいはイオンビームを開口部と実質的に整列させるために、アウターガントリーおよび/またはインナーガントリーの動作を制御するよう構成されてもよい。開口部は、陽子あるいはイオンビームを実質的に平行にするよう構成されていてもよい。本システムは、インナーガントリーおよび/またはアウターガントリーに対して移動可能である患者サポートを具備していてもよい。
【0011】
概して、本発明はまた、患者サポートと、その上に粒子ビーム加速器が搭載されるガントリーとを具備してなるシステムに関する。粒子ビーム加速器は、患者サポートに向かって粒子ビームを導くためのものである。ガントリーは、患者サポートの上および下のポジションへと動くことができる。開口部が粒子ビーム加速器と患者サポートとの間に配置される。開口部は粒子ビームを変化させるためのものである。上記システムは一つ以上の以下の特徴を、単独であるいは組み合わせとして含んでいてもよい。
【0012】
本システムは、開口部を保持するための装置を具備していてもよい。本装置は患者サポートに対して移動可能であってもよい。本装置は、患者サポートに対して開口部を位置決めするようコンピューター制御されたロボットアームを具備していてもよい。本装置は開口部を保持するための、手動で位置決め可能であるスタンドを具備していてもよい。
【0013】
粒子ビーム加速器はシンクロサイクロトロンであってもよい。本システムは、開口部を保持するためのアプリケータを含む第2のガントリーを具備していてもよい。第2のガントリーは、開口部を粒子ビームと実質的に整列させるよう制御されてもよい。
【0014】
概して、本発明はまた、患者サポートと、この患者サポートに対して回動可能な第1のガントリーと、この第1のガントリーに搭載された粒子加速器とを具備してなるシステムに関する。粒子加速器は、患者サポートに向かって直接的に粒子ビームを供給するよう構成される。第2のガントリーは患者サポートに対して位置決めされる。第2のガントリーは実質的にC字形である。上記システムは一つ以上の以下の特徴を、単独であるいは組み合わせとして含んでいてもよい。
【0015】
第2のガントリーは、トラックと、開口部と、アプリケータとを具備していてもよい。アプリケータは、開口部が粒子ビームと実質的に整列するようにトラックに沿って移動可能であってもよい。開口部は、粒子ビームが患者サポート上の患者に達する前に粒子ビームを変化させてもよい。
【0016】
本システムは、第1のガントリーおよび第2のガントリーを制御するためのコンピューターを備えていてもよい。第1のガントリーは、粒子加速器が患者サポートの上方のポジションから患者サポートの下方のポジションに存在するよう動作可能であってもよい。第2のガントリーは、粒子加速器が患者サポートの下方のポジションにあるときに、粒子加速器を保護するためのカバーを備えていてもよい。インナーガントリーは、粒子ビームのサイズおよび/または形状を変えるためのデバイスを具備していてもよい。粒子ビームを変化させるためのデバイスは、シンクロサイクロトロンに対して移動可能であってもよい。
【0017】
上記特徴のいずれかが、本明細書においては詳しく説明しない実施例を形成するために組み合わされてもよい。
【0018】
以下、添付図面を参照して、一つ以上の実施例について詳しく説明する。さらなる特徴、態様および利点は、以下の説明、図面ならびに特許請求の範囲の記載から明らかとなるであろう。
[付記項1]
患者サポートと、
アウターガントリーであって、前記患者サポート上の患者の周囲の、ある範囲のポジションを通って加速器が移動することを可能とするよう、前記加速器が搭載されるアウターガントリーと、
前記ターゲットに向かって前記陽子あるいはイオンビームを導くための開口部を具備してなるインナーガントリーと、
を具備してなり、
前記加速器は、前記患者内のターゲットに達するのに十分なエネルギーレベルを有する陽子あるいはイオンビームを発生させるよう構成されていることを特徴とするシステム。
[付記項2]
前記インナーガントリーはアプリケータを具備してなり、前記アプリケータは前記開口部を保持し、前記アプリケータは前記インナーガントリーに沿って移動可能であることを特徴とする付記項1に記載のシステム。
[付記項3]
前記アプリケータは、前記患者に対して前記開口部を移動させるよう構成されていることを特徴とする付記項2に記載システム。
[付記項4]
前記アプリケータは、前記患者に向かって、あるいは前記患者から離れる方向に、前記開口部を移動させるよう構成されていることを特徴とする付記項3に記載システム。
[付記項5]
前記インナーガントリーはトラックを具備してなり、前記アプリケータは前記トラックに沿って移動するよう構成されていることを特徴とする付記項2に記載のシステム。
[付記項6]
前記トラックに対して移動可能なカバーをさらに具備してなり、前記カバーは、前記患者サポートの下方のボールト内に物体が落下するのを阻止するためのものであることを特徴とする付記項5に記載のシステム。
[付記項7]
前記アウターガントリーおよび前記インナーガントリーの動作を制御するようプログラムされた処理デバイスをさらに具備してなることを特徴とする付記項1に記載のシステム。
[付記項8]
前記処理デバイスは、前記陽子あるいはイオンビームを前記開口部と実質的に整列させるために、前記アウターガントリーおよび前記インナーガントリーの動作を制御するよう構成されていることを特徴とする付記項7に記載のシステム。
[付記項9]
前記開口部は、前記陽子あるいはイオンビームを実質的に平行にするよう構成されていることを特徴とする付記項1に記載のシステム。
[付記項10]
患者サポートをさらに具備してなり、前記患者サポートは前記インナーガントリーおよび前記アウターガントリーに対して移動可能であることを特徴とする付記項1に記載のシステム。
[付記項11]
患者サポートと、
粒子ビーム加速器が搭載されるガントリーであって、このガントリーは前記患者サポートの上方および下方のポジションへと移動可能であり、前記粒子ビーム加速器は前記患者サポートに向かって粒子ビームを向けるためのものであるガントリーと、
前記粒子ビーム加速器と前記患者サポートとの間に配置された開口部であって、前記粒子ビームを変化させるための開口部と、
を具備してなることを特徴とするシステム。
[付記項12]
前記開口部を保持するための装置をさらに具備してなり、前記装置は前記患者サポートに対して移動可能であることを特徴とする付記項11に記載のシステム。
[付記項13]
前記装置は、前記患者サポートに対して前記開口部を位置決めするようコンピューター制御されるロボットアームを具備してなることを特徴とする付記項12に記載のシステム。
[付記項14]
前記装置は前記開口部を保持するためのスタンドを具備してなり、前記スタンドは手動で位置決め可能であることを特徴とする付記項12に記載のシステム。
[付記項15]
前記粒子ビーム加速器はシンクロサイクロトロンであり、かつ、
前記システムはさらに、前記開口部を保持するためのアプリケータを含む第2のガントリーを具備してなり、前記第2のガントリーは、前記開口部を前記粒子ビームと実質的に整列させるよう制御されることを特徴とする付記項11に記載のシステム。
[付記項16]
患者サポートと、
前記患者サポートに対して回動可能な第1のガントリーと、
前記第1のガントリーに搭載された粒子加速器であって、前記患者サポートに向かって直接的に粒子ビームを提供するよう構成された粒子加速器と、
前記患者サポートに対して位置決めされる第2のガントリーであって、実質的にC字形である第2のガントリーと、
を具備してなることを特徴とするシステム。
[付記項17]
前記第2のガントリーは、トラックと、開口部と、アプリケータと、を具備してなり、前記アプリケータは、前記開口部が前記粒子ビームと実質的に整列するように前記トラックに沿って動くことができ、前記開口部は、前記粒子ビームが前記患者サポート上の患者に到達する前に前記粒子ビームを変化させるようになっていることを特徴とする付記項16に記載のシステム。
[付記項18]
前記第1のガントリーおよび前記第2のガントリーを制御するためのコンピューターをさらに具備してなることを特徴とする付記項16に記載のシステム。
[付記項19]
前記第1のガントリーは、前記粒子加速器が前記患者サポートの上方のポジションから前記患者サポートの下方のポジションに存在するように動くことができ、前記第2のガントリーは、前記粒子加速器が前記患者サポートの下方のポジションに存在するとき、前記粒子加速器を保護するためのカバーを具備してなることを特徴とする付記項16に記載のシステム。
[付記項20]
前記インナーガントリーは、前記粒子ビームのサイズおよび/または形状を変えるためのデバイスを具備してなり、前記デバイスは前記シンクロサイクロトロンに対して移動可能であることを特徴とする付記項16に記載のシステム。
【図面の簡単な説明】
【0019】
【図1】治療システムの概略図である。
【図2】シンクロサイクロトロンのコンポーネントの分解斜視図である。
【図3】シンクロサイクロトロンの断面図である。
【図4】シンクロサイクロトロンの断面図である。
【図5】シンクロサイクロトロンの断面図である。
【図6】シンクロサイクロトロンの斜視図である。
【図7】リバースボビンおよび巻き線の一部の断面図である。
【図8】ケーブルインチャネル複合導体の断面図である。
【図9】イオン源の断面図である。
【図10】ディープレートおよびダミーディーの斜視図である。
【図11】ボールトの斜視図である。
【図12】ボールトを備えた処置室の斜視図である。
【図13】極面および極部材の対称プロファイルの半分のプロファイルを示す図である。
【図14】処置室内のインナーガントリー内に置かれた患者を示す図である。
【図15】患者の上方から陽子あるいはイオンビームを作用させるべく位置決めされたアウターおよびインナーガントリーの両方を示す斜視図である。
【図16】加速器によって提供される粒子ビームの形状を示す図である。
【図17】患者の下方から陽子あるいはイオンビームを作用させるべく位置決めされたアウターおよびインナーガントリーの両方を示す斜視図である。
【図18】インナーガントリーのコンポーネントを示す図である。
【図19】インナーガントリーの機能を発揮させるために使用されるロボットアームを示す図である。
【発明を実施するための形態】
【0020】
図1に示すように、荷電粒子放射線治療システム500は、その出力部が患者506に向かって加速器ハウジングから真っ直ぐに(すなわち本質的に直線的に)向けられた状態で、それを回転ガントリー504上に搭載するのを可能とするのに十分なほど小さな重量およびサイズを有するビーム発生粒子加速器502を備える。
【0021】
ある実施例では、スチールガントリーは、患者の両側に存在する二つの個々のベアリング512,514に回転可能に搭載された二つの脚部508,510を有する。加速器はスチールトラス516によって支持されているが、これは、患者が存在する処置エリア518にまたがるのに十分な長さ(たとえば、患者の所望のターゲット領域がビームのライン内に留まった状態で、人間をスペース内で完全に回転させることを可能とするために、背が高い人間の2倍の長さ)を有し、かつ、ガントリーの回転脚部に対して両端において堅固に取り付けられている。
【0022】
ある例では、ガントリーの回転は、患者処置エリア内に治療システムを納めるボールト524の壁から床522が延在することを可能とするために、360度未満の範囲520に、たとえば約180度に制限される。ガントリーの制限された回転範囲はまた、壁のあるもの(これは決してビームを直に受けない、たとえば壁530)の必要厚みを低減するが、これは処置エリアの外に人々の放射線シールドを提供する。ガントリー回転に関する180度の範囲は、あらゆる処置アプローチ角度をカバーするのに十分なものであるが、より大きな移動範囲を実現することは有益である。たとえば回転範囲は180ないし330度であってもよく、これは依然として治療床スペースのためのクリアランスを提供する。
【0023】
ガントリーの水平回転軸線532は、名目上、患者および治療者が治療システムと相互作用する床上、1メートルに配置されている。この床は、治療システム遮蔽ボールトの底部床上、約3メートルに配置されている。加速器は、回転軸線の下方から処置ビームを供給するために、隆起した床の下方で旋回できる。患者寝台は、ガントリーの回転軸線と平行な実質的に水平面内で移動および回転する。寝台は、この構造によって、水平面内で約270度の範囲534にわたって回動できる。ガントリーおよび患者の回転範囲および自由度のこの組み合わせによって、治療者は、ビームに関するアプローチ角度を事実上選択することが可能となる。もし必要とあれば、患者を寝台上で反対方向に置くことができ、この場合、全ての可能性のある角度を使用できる。
【0024】
ある実施例では、加速器は、超強磁場超伝導電磁気構造体を有するシンクロサイクロトロン構造を使用する。所与の運動エネルギーの荷電粒子の曲がり半径は、それに作用させられる磁場の増大に直に比例して減少するので、超強磁場超伝導電磁気構造体は、加速器を、より小さくかつより軽くすることを可能とする。シンクロサイクロトロンは、回転角度に関して均一でかつ半径の増大と共に強さが減少する磁界を使用する。そうした磁界形状は、磁界の規模に関係なく実現でき、それゆえ、理論上は、シンクロサイクロトロンにおいて使用可能な磁界強さに(したがって固定半径において最終的に生じる粒子エネルギーに)対する上限は存在しない。
【0025】
ある超伝導素材は、超強磁場の存在によって、その超伝導特性を失い始める。高性能超伝導ワイヤ巻き線は、超強磁場の実現を可能とするために使用される。
【0026】
超伝導素材は、通常、その超伝導特性が発現されるように、低温まで冷却される必要がある。ここで説明する例では、クライオクーラーが、超伝導コイル巻き線を、絶対零度に近い温度まで冷やすために使用される。クライオクーラーの使用によって、複雑さおよびコストを低減できる。
【0027】
シンクロサイクロトロンは、ビームが直接的に患者と一直線をなすように発生させられるようにガントリー上で支持されている。ガントリーは、患者内の、あるいはその付近のポイント(アイソセンタ540)を含む水平回転軸線を中心としたサイクロトロンの回転を可能とする。この回転軸線と平行な分割トラスは、両側でサイクロトロンを支持する。
【0028】
ガントリーの回転範囲は制限されているので、患者サポート領域はアイソセンター周りの周囲の広範な領域に収容できる。フロアーはアイソセンターの周囲で広範囲に延在できるので、患者サポートテーブルは、アイソセンターを通って、垂直軸線542に対して移動しかつそれを中心として回転するように配置でき、この結果、ガントリーの回転ならびにテーブルの移動および回転の組み合わせによって、患者のいずれかの部位に、いかなる角度ででもビームを導くことができる。二つのガントリーアームは、背の高い患者の高さの2倍超だけ離間しており、患者が載った寝台が隆起した床の上で水平面内において回転および平行移動することが可能となっている。
【0029】
ガントリー回転角度を制限することによって、処置室を取り囲む壁の少なくとも一つの厚みを低減することが可能となる。厚い壁(通常はコンクリートから構成される)は、治療室の外部の個人に対する放射線保護をもたらす。ストッピング陽子ビームの下流の壁は、同等レベルの保護を実現するために、部屋の対向端における壁の約2倍の厚みであってもよい。ガントリーの回転範囲を制限することによって、処置室を、三つの側で、地面の下に配置することが可能となり、その一方で、治療室を構築するコストを低減する最も薄い壁に隣接する占有領域がもたらされる。
【0030】
図1に示す代表的実施例では、超伝導シンクロサイクロトロン502は、8.8テスラのシンクロサイクロトロンの極ギャップ内のピーク磁界を伴って作動する。シンクロサイクロトロンは、250MeVのエネルギーを有する陽子のビームを発生させる。他の実施例では、磁界の強さは6ないし20テスラの範囲内にあってもよく、かつ、陽子のエネルギーは150ないし300MeVの範囲にあってもよい。
【0031】
この例に関して説明する放射線治療システムは、陽子放射線治療のために使用されるが、同じ原理および詳細は、重イオン(イオン)治療システムにおいて使用される類似のシステムにおいても適用可能である。
【0032】
図2、図3、図4図5および図6に示すように、代表的シンクロサイクロトロン10(図1では502)はマグネットシステム12を含むが、これは、イオン源90と、高周波駆動システム91と、ビーム抽出システム38とを含む。マグネットシステムによって生み出された磁界は、環状超伝導コイル40,42の分割対および成形強磁性(たとえば低炭素鋼)極面44,46の対の組み合わせを用いて封じ込められた陽子ビームの焦点を維持するのに適した形状を有する。
【0033】
二つの超伝導マグネットコイルは共有軸線47上に中心が置かれかつ当該軸線に沿って離間させられている。図7および図8に示すように、コイルは、ラザフォードケーブルインチャネル導体構造内に配置された、(当初は銅シースによって取り囲まれたニオブ‐スズコアからなる)Nb3Snベース超伝導0.6mm径ストランドから形成される。六つの別個のストランドが銅チャネル50内に置かれた後、それらは、巻き線の最終(脆性)原料を生成する反応を生じるように加熱される。材料が反応した後、ワイヤは銅チャネル(外寸3.02×1.96mm、内寸2.05×1.27mm)内に結合され、そして絶縁材52(この例ではガラス繊維織物素材)によって覆われる。ワイヤ53を収容する銅チャネルは、30層および1層あたり47ターンを有する、6.0cm×15.25cmの矩形断面を有するコイルへと巻回される。巻回されたコイルには、続いて、エポキシコンパウンド54が真空含浸させられる。完成したコイルは、環状ステンレススチールリバースボビン56上に搭載される。ヒーターブランケット55は、マグネットクエンチの場合にアセンブリを保護するために、ボビンおよび巻き線の内面に当接した状態で保持される。別の例では、超伝導コイルは0.8mm径のNb3Snベースストランドから形成されてもよい。こうしたストランドは、4ストランドケーブル内に配置し、超伝導マトリックスを形成するために熱処理し、そして外寸3.19×2.57mmの銅チャネル内に結合できる。チャネル導体内の統合ケーブルは積層されたガラス繊維織物テープによって絶縁され、続いて、79.79mm×180.5mmの矩形断面および374.65mmの内半径を備えた、49ターンで深さ26層のコイルへと巻回される。巻回されたコイルには、続いて、エポキシコンパウンドが真空含浸させられる。コイル全体は、続いて、熱伝導性および機械的安定性を付与するために銅シートによって覆われ、そしてエポキシのさらなる層内に収められる。コイルの与圧は、ステンレススチールリバースボビンを加熱しかつリバースボビン内にコイルを嵌め込むことによって実現できる。リバースボビンの内径は、全質量が4Kまで冷却されたとき、リバースボビンがコイルと接触したままでありかつある程度の圧縮力を付与するように選択される。ステンレススチールボビンを約50度Cまで加熱し、そして室温(20度C)でコイルを嵌め込むことで、これが実現される。
【0034】
コイルの形状は、コイルを「リバース」矩形ボビン56に設置し、そしてコイルが給電されたときに生じる変形力に抗するように機能する復元力60を加えるために各コイルとボビンの内面57との間に与圧ステンレススチールブラダー58を組み込むことによって維持される。ブラダーは、このブラダー内にエポキシを充填し、そしてそれが硬化することを可能とすることによって、コイルおよびヒーターブランケットがボビン上で組み立てられた後に与圧される。ブラダーの与圧力は、クールダウンおよびマグネット給電の全ての段階を通じて、脆弱なNb3Sn超伝導マトリックスの歪みを最小限に抑えるよう設定される。
【0035】
図5に示すように、コイルポジションは、ウォームトゥコールド(warm-to-cold)サポートストラップ402,404,406の組を用いて、マグネットヨークおよび低温装置に対して維持される。薄手のストラップを用いて低温質量を支持することによって、剛体サポートシステムによって低温質量に伝達される熱の漏れが低減する。ストラップは、マグネットがガントリーに載った状態で回転するとき、コイルへの変動する重力に耐えるように配置される。それらは、マグネットヨークに対して完全な対称ポジションからコイルが摂動するときに、重力およびコイルによって生じる大きな偏心力の協働作用に抗する。さらに、そのポジションが変わる場合にガントリーが加速および減速するとき、リンクは、コイルに加えられる動的な力を低減するように機能する。各ウォームトゥコールドサポートは3本のS2ガラス繊維リンクを含む。二つのリンク410,412は、ウォームヨークと中間温度(50〜70K)間のピンを横切って支持されており、かつ、一つのリンク408は中間温度ピンおよび低温質量に対して取り付けられたピンを横切って支持されている。各リンクは、10.2cmの長さ(ピン中心からピン中心まで)および20mmの幅を有する。リンク厚みは1.59mmである。各ピンはステンレススチールからなり、かつ、47.7mmの直径を有する。
【0036】
図3を参照すると、半径の関数としての場の強さのプロファイルは、概して、コイル形状の選択によって決定される。すなわち透過性ヨーク素材の極面44,46は、加速の間、粒子ビームが集束した状態を維持することを保証するために、磁界の形状を精密調整するために輪郭取りできる。
【0037】
超伝導コイルは、サポートポイント71,73の限定された対の箇所を除いて、コイル構造体を取り囲む自由なスペースを提供する、排気された環状のアルミニウム製あるいはステンレススチール製低温チャンバー70内にコイルアセンブリ(コイルおよびボビン)を封入することによって、絶対零度付近の温度(たとえば約4度ケルビン)で維持される。変形例(図4)では、低温装置の外壁は、磁界のための追加的なリターン磁束経路を提供するために低炭素鋼から構成されてもよい。絶対零度付近の温度は、コイルアセンブリ上の異なるポジションに配置された二つのGifford-McMahonクライオクーラー72,74を用いることによって実現されかつ維持される。各クライオクーラーは、コイルアセンブリと接触状態にある低温端部76を有する。クライオクーラーヘッド78にはコンプレッサー80から圧縮ヘリウムが供給される。二つの他のGifford-McMahonクライオクーラー77,79が、超伝導巻き線に電流を供給する高温(たとえば60〜80度ケルビン)リード81を冷却するために配置されている。
【0038】
コイルアセンブリおよび低温チャンバーは、ピルボックス形状マグネットヨーク82の二つの半体81,83内に搭載され、かつ、それによって完全に取り囲まれている。この例では、コイルアセンブリの内径は約140cmである。鉄ヨーク82はリターン磁束84のための経路を提供し、かつ、外部磁気作用が容積86内の磁界の形状を乱すのを阻止するために極面44,46間の容積86を磁気的に遮蔽する。ヨークはまた、加速器付近の迷走磁界を減少させる役割を果たす。
【0039】
図3および図9に示すように、シンクロサイクロトロンは、マグネット構造体82の幾何学的中心92付近に置かれたペニングイオンゲージジオメトリーのイオン源90を含む。イオン源は以下で説明するようなものであってもよく、すなわちイオン源は、「Interrupted Particle Source」という名称の特許文献1(整理番号第17970−010001)明細書に開示されるタイプのものであってもよい(その内容は、この引用によって、完全な形で言及されているかのように、本明細書中に組み込まれる)。イオン源90は、ガス状水素を供給するガスライン101およびチューブ194を経て、水素の供給源99から供給される。電気ケーブル94は、磁界200と整列させられたカソード192,190からの電子放出を誘発するために電流源95から電流を伝える。
【0040】
この例では、放出される電子は、マグネット構造体によって取り囲まれるスペースの半分にまたがる一つの半円形(ディー形状)高周波プレート100および一つのダミーディープレート102によって加速される陽イオン(陽子)の供給源を作り出すためにチューブ194から小孔を経て出てくるガスをイオン化する。断続イオン源の場合、チューブ含有プラズマの全て(あるいはかなりの部分)は加速領域において除去され、これによって、相対的に高い磁界内でイオンをより急速に加速することが可能となる。
【0041】
図10に示すように、ディープレート100は中空金属構造体であるが、これは、スペース107を取り囲む二つの半円表面103,105を有しており、スペース107内では、マグネット構造体によって取り囲まれたスペース周りのその半回転の間に陽子が加速される。スペース107内へ開口するダクト109はヨークを経て外部位置まで延在しているが、そこから、スペース107およびその中で加速が起きる真空チャンバー119内のスペースの残部を排気するために真空ポンプ111を取り付けることができる。ダミーディー102は、ディープレートの露出リムに近接して間隔が置かれた矩形金属製リングを具備してなる。ダミーディーは真空チャンバーおよびマグネットヨークに対して接地される。ディープレート100は、スペース107内に電界を作用させるための高周波伝送ラインの端部に加えられる高周波信号によって駆動される。高周波電界は、加速された粒子ビームの幾何学的中心から距離が増大する際、ちょうどよい時に変化するようなものとされる。この目的のために有用な高周波波形発生器の例は、2005年7月21日付けで提出された「A Programmable Radio Frequency Waveform Generator for a Synchrocyclotron」という名称の特許文献2、ならびに2004年7月21日付けで提出された同じ名称の特許文献3において説明されている(そのいずれもが、完全な形で言及されているかのように、この引用によって本明細書に組み込まれる)。高周波電界は、「Matching A Resonant Frequency Of A Resonant Cavity To A Frequency Of An Input Voltage」という名称の特許文献4(整理番号第17970−011001)明細書に開示される方式で制御可能である(その内容は、この引用によって、完全な形で言及されているかのように、本明細書中に組み込まれる)。
【0042】
中央に配置されたイオン源から出現するビームが、それが外側に螺旋を描き始めるときにイオン源構造体を通過するためには、高周波プレートを横切る大きな電圧差が必要になる。20,000ボルトが高周波プレートを横切って印加される。ある形態では、8,000ないし20,000ボルトが高周波プレートを横切って印加されてもよい。この大電圧を運用するために必要な電力を低減するために、マグネット構造体は、高周波プレートとアースとの間の静電容量を低減するよう構成される。これは、外側ヨークおよび低温装置ハウジングを貫通する、高周波構造体からの十分なクリアランスを伴った孔を形成し、かつ、マグネット極面間に十分なスペースを形成することによってなされる。
【0043】
ディープレートを駆動する高電圧交番電位は、増大する陽子の相対論的質量および減少する磁界を考慮するために、加速サイクルの間、下方に押しやられる周波数を有する。ダミーディーは中空半円形構造を必要としない。というのは、それは真空チャンバー壁と共に接地電位にあるからである。異なる電気的位相あるいは複数の基本周波数によって駆動される加速電極の一つ以上の対などの、その他のプレート構造を使用することもできる。RF構造体は、たとえば、噛み合うブレードを有する回転コンデンサーを用いることによって、所要の周波数スイープの間、Qを高い値で維持するよう調整できる。ブレードの各噛み合い間、静電容量は増大し、これによってRF構造体の共振周波数が低下する。ブレードは、必要とされる正確な周波数スイープを創出するような形状とすることができる。コンデンサを回転させるための駆動モーターは、正確な制御のためにRF発生器に対して位相ロックできる。粒子の一つの群は、回転コンデンサーのブレードの各噛み合いの間に加速される。
【0044】
その中で加速が生じる真空チャンバー119は、中央において薄く、リムにおいて厚い略円筒形コンテナである。真空チャンバーはRFプレートおよびイオン源を含み、かつ、真空ポンプ111によって排気される。高真空を維持することは、加速しているイオンがガス分子との衝突のために失われないことを保証し、かつ、アーク接地を要さずに、より高いレベルでRF電圧を維持することを可能とする。
【0045】
陽子は、イオン源から出発する概ね螺旋経路を通過する。螺旋経路の各ループの半分において、陽子は、それがスペース107内のRF電界を通過するときエネルギーを得る。イオンがエネルギーを得るとき、その螺旋経路の各連続ループの中心軌道の半径は、ループ半径が極面の最大半径に達するまで、先行ループよりも大きなものである。この位置において、磁界および電界の擾乱は磁界が急速に増大する領域内へイオンイオンを導き、そしてイオンは高磁界の領域を離れ、サイクロトロンのヨークを出て行くために排気されたチューブ38を経て案内される。サイクロトロンを出て行くイオンは、それがサイクロトロンの周囲の部屋内に存在する著しく減じられた磁界の領域に進入するとき、散乱する傾向がある。抽出チャネル38内のシェーピング要素107,109は、イオンを、それが制限された空間広がりの直線ビーム内に留まるように方向を変える。
【0046】
極ギャップ内の磁界は、それが加速されるとき、排気されたチャンバー内でビームを維持する所定の特性を有する必要がある。磁界指数n(これは式:n=−(r/B)dB/drによって示される)は、この「弱い」集束を維持するために正の値に維持される必要がある。ここでrはビーム半径であり、Bは磁界である。さらに、磁界指数は、0.2以下に維持される必要がある。なぜなら、この値においては、ビームの半径方向振動および垂直振動の周期性はvr=2vz共振と一致するからである。ベータトロン周波数は、vr=(1−n)1/2およびvz=n1/2によって規定される。強磁性極面は、コイルによって形成される磁界を成形するよう構成され、これによって磁界指数nは、所与の磁界中での250MeVビームと一致した最小直径において正の値でかつ0.2以下に維持される。
【0047】
ビームが抽出チャネルを出るとき、それは、ビームに関する拡散角度およびレンジモジュレーションの所望の組み合わせを作り出すようにプログラム可能に制御することができるビームフォーメーションシステム125(図5)を通過させられる。この目的にとって有用なビーム成形システムの例は、2004年9月24日提出の「A Programmable Particle Scatterer for Radiation Therapy Beam Formation」という名称の特許文献5ならびに2005年7月21日提出の特許文献6に開示されている(そのいずれもが、完全な形で言及されているかのように、この引用によって本明細書に組み込まれる)。ビームフォーメーションシステム125は、患者にビームを向けるために、インナーガントリー601(これについては以下で説明する)と連係使用が可能である。
【0048】
作動中、プレートは、その表面に沿った導電抵抗の結果として、印加された高周波場からのエネルギーを吸収する。このエネルギーは熱として現れ、そして熱交換器113(図3)において熱を放出する水冷ライン108を用いてプレートから取り除かれる。
【0049】
シンクロトロンから出る迷走磁界は、ピルボックスマグネットヨーク(これはまたシールドとして機能する)および別個のマグネットシールド114の両方によって制限される。別個のマグネットシールドは、スペース116によって隔てられた、ピルボックスヨークを取り囲む強磁性素材(たとえばスチールあるいは鉄)からなる層117を含む。ヨーク、スペースおよびシールドからなるサンドウィッチを含むこの形態は、少ない重量で、所与の漏れ磁界のための適切な遮蔽を実現する。
【0050】
上述したように、ガントリーは、水平回転軸線532を中心としてシンクロサイクロトロンが回転することを可能とする。トラス構造体516は二つの概して平行なスパン590,582を有する。シンクロサイクロトロンは、脚部間のおおよそ中間においてスパン間で支持されている。ガントリーは、トラスと向き合う脚部の端部に搭載されたカウンターウエイト122,124を用いて、ベアリングを中心とする回転のためにバランスがとられている。
【0051】
ガントリーは、ガントリー脚部の一つに搭載されかつ駆動ギアおよびベルトまたはチェーンによって支持ハウジングに対して接続された電動モーターによって回転駆動される。ガントリーの回転ポジションは、ガントリー駆動モーターおよび駆動ギアに組み込まれたシャフト角エンコーダから提供される信号から得られる。
【0052】
イオンビームがサイクロトロンを出て行く位置において、ビームフォーメーションシステム125は、イオンビームに対して患者の治療に好適な特性を付与するために、イオンビームに作用する。たとえば、所与のターゲット容積を横切って均一な放射を実現するために、ビームが広げられ、かつ、その浸透深さが変更されてもよい。ビームフォーメーションシステムは、アクティブスキャニング要素だけでなく、パッシブ拡散要素を含んでいてもよい。
【0053】
シンクロサイクロトロンのアクティブシステムの全て(たとえば、電流駆動超伝導コイル、RF駆動プレート、真空加速チャンバーおよび超伝導コイル冷却チャンバー用の真空ポンプ、電流駆動イオン源、水素ガス源、およびRFプレートクーラー)は、適当なシンクロサイクロトロン制御電子機器(図示せず)によって制御されるが、これは、たとえば、制御を実施するための適当なプログラムによってプログラムされたコンピューターを含んでいてもよい。
【0054】
ガントリー、患者サポート、アクティブビーム成形要素および治療セッションを実施するためのシンクロサイクロトロンは、適当な治療制御電子機器(図示せず)によって達成される。
【0055】
図1、図11および図12に示すように、ガントリーベアリングはサイクロトロンボールト524の壁によって支持されている。ガントリーは、患者の上、その側方の、そしてその下方のポジションを含む180度(あるいはそれ以上)の範囲520にわたってサイクロトロンが旋回することを可能とする。ボールトは、その動作の上下端においてガントリーを通過させるのに十分なほどの高さを有する。壁148,150によって側面付けされた迷路146は治療者および患者のための出入りルートを提供する。少なくとも一つの壁152はサイクロトロンから直の陽子ビームと整列状態とはならないので、それは相対的に薄くでき、そして依然としてその遮蔽機能を発揮できる。部屋の他の三つの側壁154,156,150/148(より厳重に遮蔽されることが必要であろう)は、土でできた丘(図示せず)内に埋設できる。土はそれ自体、ある程度の必要な遮蔽を実現できるので、壁154,156および158の必要厚みが低減できる。
【0056】
図12および図13を参照すると、安全および美観的理由から、治療室160は、ボールト内に構築可能である。治療室は、旋回するガントリーを通過させ、そしてさらに治療室の床スペース164の広がりを最小限に抑える様式で、ガントリー脚部間のスペース内へと、収容室の壁154,156,150およびベース162から片持ち支持されている。加速器の定期的なサービスは、隆起した床の下方のスペース内で実施できる。加速器がガントリー上で下方ポジションへと回転させられるとき、処置領域とは別個のスペース内で加速器に対する完全なアクセスが可能である。電力源、冷却機器、真空ポンプおよびその他のサポート機器は、この別個のスペース内の隆起した床の下に配置できる。
【0057】
処置室内で、患者サポート170は、サポートが上昇および降下することを可能とし、かつ、患者をさまざまなポジションおよび向きへと回転および移動させることを可能とする、さまざまな様式で設置可能である。
【0058】
図14のシステム602において、ビーム生成粒子加速器(この例ではシンクロサイクロトロン604)は、回転ガントリー605に搭載されている。回転ガントリー605は本明細書中で説明タイプのものであり、しかも患者サポート606の周囲を回転できる。この機能によって、シンクロサイクロトロン604は、さまざまな角度から患者に対して直接的に粒子ビームを提供することが可能となる。たとえば、図14に示すように、シンクロサイクロトロン604が患者サポート606の上方に存在する場合、粒子ビームは患者に向かって下方に向けられてもよい。これに代えて、シンクロサイクロトロン604が患者サポート606の下方に存在する場合、粒子ビームは患者に向かって上方に向けられてもよい。粒子ビームは、中間ビームルーティング機構が必要とされないという意味で、患者に対して直接的に作用させられる。このコンテクストでは、ルーティング機構は、シェーピングおよび/またはサイジング機構とは異なる。というのは、シェーピングまたはサイジング機構は、ビームをルート変更せず、むしろ、ビームの同一の一般的な軌道を維持しながら、ビームをあるサイズおよび/またはある形状とするものであるからである。
【0059】
やはり図15を参照すると、インナーガントリー601はシステム602に含まれていてもよい。この例では、インナーガントリー601は図示のとおり略C字形状である。インナーガントリー601はアプリケータ610を含む。アプリケータ610は、患者サポート606(これは図12に示すものとは異なるタイプのサポートである)に対してインナーガントリー601の表面611に沿ってアプリケータ610が移動することを可能とする様式で搭載されている。これによって、たとえば、患者の周囲の半円内のどこにでも、たとえば患者607の上方、側方、あるいは下方のどこにでも、アプリケータを位置させることが可能となる。アプリケータ610は、シンクロサイクロトロン604によって供給される粒子ビームを変化させることができる。さらに詳しく言うと、図16に示すように、シンクロサイクロトロン604のビームシェーピングシステムによって提供される粒子ビーム611は、シンクロサイクロトロン604の出力から遠くなればなるほど、ますます広がる。アプリケータ610は、シンクロサイクロトロン604の出力部からの粒子ビームを受け、そして粒子ビームの特性を変化させることができる。たとえば、アプリケータ610は、粒子ビームを実質的に平行にするために、開口部および/またはその他のビーム集束機構を含んでいてもよい。この結果、粒子ビームは、患者の中のターゲットに、より正確に作用させることができる。たとえば、粒子ビームは、特定のサイズおよび/または形状の腫瘍を治療するために、あるサイズおよび/またはある形状とすることができる。これに関して、アプリケータ610は粒子ビームのコリメーティングには限定されない。たとえば、アプリケータ610は、ビームを平行にしながら、粒子ビームのサイズを縮小できる。アプリケータは、粒子ビームのサイジングおよび/またはシェーピングのためのマルチリーフコリメーターであってもよい。アプリケータはまた、改変を伴わずに、粒子ビームが通過することを可能とするだけであってもよい。アプリケータ610は、必要であれば、ビームのサイズおよび/または形状に変化をもたらすためにコンピューター制御されてもよい。
【0060】
アプリケータ610およびシンクロサイクロトロン604は、患者サポートに(したがって患者に)対して、かつ、互いに移動することができる。たとえば、アプリケータ610の動きは、実質的にガントリー605の回転と符合し、あるいは一方が他方に追従し、この結果、シンクロサイクロトロン604の出力部はアプリケータ610の入力部と整列する。図15および図17は、ガントリー605の動きおよびインナーガントリー601に沿ったアプリケータ610の動きを示している。さらに詳しくは、図17は、ガントリー605が、シンクロサイクロトロン604が患者サポート606の下方のボールト内に存在するように回転させられた場合を示している。図17において、シンクロサイクロトロン604は治療室の床612の下方に存在するが、この床はコンクリートから形成されてもよい。したがって、シンクロサイクロトロン604は図17には現れない。この事例では、アプリケータ610は、このアプリケータ610がシンクロサイクロトロン604の出力部と整列するように、インナーガントリー601に沿って動かされる。シンクロサイクロトロン604は図17に示されていないので、この整列は認識できない。にもかかわらず、シンクロサイクロトロン604からの粒子ビーム出力は、インナーガントリー601のカバー614ならびに床の対応するホール(図示せず)を通過し、そして、その後、アダプター610がそれを受ける。アプリケータ610は、粒子ビームを変化させ、そして粒子ビームを患者607に供給する。
【0061】
ガントリー605(したがってシンクロサイクロトロン604)は、矢印615の方向に患者に対して回転可能である。アプリケータ610は、矢印616の方向にインナーガントリー601に沿って動くことができる。図15は、矢印615および616によって示す動作の後のシンクロサイクロトロン604およびアプリケータ610の位置を、それぞれ示している。図15においては、シンクロサイクロトロン604およびアプリケータ610はいずれも患者サポート606の上方に(したがって患者607の上方に)存在する。この形態では、シンクロサイクロトロン604は、その粒子ビームを、患者に向かって下方に向ける。アプリケータ610は、粒子ビームを受け、この粒子ビームを変化させ(たとえば平行にし)、そして最終的に得られた粒子ビームを患者に供給する。
【0062】
患者サポート606はインナーガントリー601に対して動くことができ、これによって、インナーガントリー601の上端部621が患者の上方に存在するよう、そしてインナーガントリー601の下端部622が患者の下方に存在するよう、患者を移動させることが可能となる。患者サポート606の動きは、ガントリー605およびアプリケータ610の動きと協働で、腫瘍および/または患者のその他の処置領域の相対的に正確なターゲッティングを可能とする。
【0063】
図18はインナーガントリー601の代表的構成を示している。この例では、インナーガントリーは、溶接構造体617と、高精度リニア支持レール618(たとえばTHKレール)と、カバー614と、伸長ドライブ619およびシータドライブ620を含むアプリケータ610とを備える。インナーガントリー601は、図示するものに対する付加的な機構、図示する機構の代替物、あるいはその両方を備えることができる。
【0064】
溶接構造体617は、アプリケータ610の重量を支持することができる、剛性のある素材、たとえば金属、プラスチックなどから構成可能である。この例では。溶接構造体617は実質的にC字形である(これによってインナーガントリー601の形状が画定される)。だが、溶接構造体617はその他の形状を有していてもよいことに留意されたい。たとえば、それは引き伸ばされてもあるいは縮められてもよい。基本的に、溶接構造体は、患者の上および下のポジション間でアプリケータ610の相対的に障害のない、連続的な移動を可能とする、いかなる形状を有することもできる。
【0065】
溶接構造体617は一つ以上の支持レール618を含む。使用されるであろうレールの数は、アプリケータ610にとって必要な接続部に依存する。アプリケータ610は、溶接構造体617の上端部621と溶接構造体617の下端部622との間で支持レール618に沿って移動する。移動は連続的なものであってもあるいは不連続な変化を伴うものであってもよく、患者のポジションに対するアプリケータ610の所望のポジションを実現するために、支持レール618に沿った、いかなるポイントにおいても停止可能である。
【0066】
カバー614は、床612の下方の領域に対して、さもなければオープンホールとなるであろう部位を覆う(図17参照)。ホールおよびカバーは、粒子ビームが、シンクロサイクロトロンからアプリケータまで進むことを可能とする。だが、カバー614は、物品および/またはその他の物体が、このホールを経て落下し、そしてことによると、シンクロサイクロトロンのような敏感な機器を損傷させるのを阻止する。カバー614は、支持レール618に沿ったアプリケータの610の移動を支援するかあるいはそれを制御することができる。すなわち、カバー614は、溶接構造体617の上端部621と下端部622との間の経路に沿って転がることができる。カバー614は、図18に示すように、その端部624および/または625において巻き上げられてもよい。
【0067】
アプリケータ610は伸長ドライブ619およびシータドライブ620を備える。伸長ドライブ619は、たとえば矢印626に沿って、患者に向かって、そして患者から離れるように動作する。この動作によって、伸長ドライブは、患者の上で開口部625の投影を変更することができる。たとえば、開口部のサイズは拡大あるいは縮小可能である。開口部の形状も同様に、たとえば円形状、楕円形状、多角形状などの間で変更可能である。シータドライブ620は、溶接構造体617の上端部621と下端部622との間でレール618に沿ってアプリケータ610を移動させる。カバー614はアプリケータ610と共に移動可能である。
【0068】
伸長ドライブ619およびシータドライブ620の全てあるいは一部はコンピューター制御されてもよい。たとえば、伸長ドライブ619および/またはシータドライブ620は、ガントリー605を制御するのに使用される同一のハードウエアおよび/またはソフトウエアによって制御可能である。
【0069】
システム602はインナーガントリー601との使用に限定されない。シンクロサイクロトロン604によって提供される粒子ビームをある形状および/またはサイズとする(たとえば平行にする)ための開口部を提供するために、その他いかなる機構が利用されてもよい。たとえば、図19を参照すると、ロボットアーム626が、シンクロサイクロトロン604と患者との間で開口部625を位置決めするために使用できる。このロボットアームは、開口部を患者に対して、三次元(たとえばXYZデカルト座標)に動かすことができる。ロボットアームは、ガントリー605を制御するのに使用される同一のハードウエアおよび/またはソフトウエアによって制御可能である。さらに開口部自体が、そのサイズおよび/または形状が変化するように制御されてもよい。上述したように、開口部のサイズは拡大あるいは縮小可能である。開口部の形状も同様に、たとえば円形状、楕円形状、多角形状などの間で変更可能である。
【0070】
(上述したもののような)開口部は、手動で位置決めされかつ/または調整されてもよい。たとえば、スタンド(図示せず)が、開口部を保持するために使用されてもよい。開口部はある大きさおよび/またはある形状とされ、かつ、スタンド上に配されてもよい。スタンドおよび開口部の両方は、患者に対して、かつ、シンクロサイクロトロンによって提供される粒子ビームと一直線上に配置されてもよい。開口部を保持するための、いかなる機構が使用されてもよい。ある実施例では、開口部および/または開口部を保持するために使用されるデバイスは、シンクロサイクロトロン自体に設けられてもよい。
【0071】
インナーガントリーは有利である。なぜなら、それは、それを伴ってアウターガントリーが回転しなければならない精度を低めるからである。たとえば、インナーガントリーは、1ミリメーター未満のビーム位置決めを可能とする。インナーガントリーによって付加されるさらなる精度によって、アウターガントリーは1ミリメーター未満の精度を提供する必要はなく、むしろ、その精度は1ミリメーター、あるいはそれより大きなものであってもよい。アウターガントリーはまた、高いレベルの精度を得るために、さもなければ必要であろうほど大きなものである必要はない。
【0072】
本明細書中で説明した粒子加速器の構成に関するさらなる情報は、2006年1月20日付け提出の「High-Fileld Superconducting Synchrocyclotron」という名称の米国仮特許出願第60/760788号、2006年8月9日付け提出の「Magnet Structure For Particle Acceleration」という名称の特許文献7、ならびに2006年10月10日付け提出の「Cryogenic Vacuum Break Pneumatic Thermal Coupler」という名称の特許文献8に見出される(その全ては、完全な形で言及されているかのように、この引用によって本明細書中に組み込まれる)。
【0073】
他の実施例も特許請求の範囲内のものである。(引用によって本明細書に組み込まれた特徴を含む)異なる実施例の要素は、特に本明細書中では説明していない実施例を形作るために組み合わされてもよい。
【符号の説明】
【0074】
10 シンクロサイクロトロン
12 マグネットシステム
38 ビーム抽出システム
40 環状超伝導コイル
42 環状超伝導コイル
44 透過性ヨーク素材
46 透過性ヨーク素材
50 銅チャネル
53 ワイヤ
54 エポキシコンパウンド
55 ヒーターブランケット
56 環状ステンレススチールリバースボビン
58 与圧ステンレススチールブラダー
70 低温チャンバー
72 Gifford-McMahonクライオクーラー
74 Gifford-McMahonクライオクーラー
77 Gifford-McMahonクライオクーラー
78 クライオクーラーヘッド
79 Gifford-McMahonクライオクーラー
80 コンプレッサー
82 ピルボックス形状マグネットヨーク
84 リターン磁束
90 イオン源
91 高周波駆動システム
94 電気ケーブル
95 電流源
99 水素の供給源
100 ディープレート
101 ガスライン
102 ダミーディープレート
103 半円表面
105 半円表面
107 スペース
108 水冷ライン
109 ダクト
111 真空ポンプ
113 熱交換器
114 マグネットシールド
116 スペース
119 真空チャンバー
122 カウンターウエイト
124 カウンターウエイト
125 ビームフォーメーションシステム
146 迷路
148 壁
150 壁
152 壁
154 壁
156 壁
158 壁
160 治療室
162 ベース
164 床スペース
170 患者サポート
190 カソード
192 カソード
194 チューブ
402 ウォームトゥコールドサポートストラップ
404 ウォームトゥコールドサポートストラップ
406 ウォームトゥコールドサポートストラップ
408 リンク
410 リンク
412 リンク
500 荷電粒子放射線治療システム
502 ビーム発生粒子加速器(シンクロサイクロトロン)
504 回転ガントリー
506 患者
508 脚部
510 脚部
512 ベアリング
514 ベアリング
516 トラス構造体
518 処置エリア
522 床
524 ボールト
530 壁
540 アイソセンタ
582 スパン
590 スパン
601 インナーガントリー
604 シンクロサイクロトロン
605 回転ガントリー
606 患者サポート
607 患者
610 アプリケータ
611 粒子ビーム
614 カバー
617 溶接構造体
618 高精度リニア支持レール
619 伸長ドライブ
620 シータドライブ
625 開口部
【特許請求の範囲】
【請求項1】
患者サポートと、
アウターガントリーであって、前記患者サポート上の患者の周囲の、ある範囲のポジションを通って加速器が移動することを可能とするよう、前記加速器が搭載されるアウターガントリーと、
前記ターゲットに向かって前記陽子あるいはイオンビームを導くための開口部を具備してなるインナーガントリーと、
を具備してなり、
前記加速器は、前記患者内のターゲットに達するのに十分なエネルギーレベルを有する陽子あるいはイオンビームを発生させるよう構成されていることを特徴とするシステム。
【請求項1】
患者サポートと、
アウターガントリーであって、前記患者サポート上の患者の周囲の、ある範囲のポジションを通って加速器が移動することを可能とするよう、前記加速器が搭載されるアウターガントリーと、
前記ターゲットに向かって前記陽子あるいはイオンビームを導くための開口部を具備してなるインナーガントリーと、
を具備してなり、
前記加速器は、前記患者内のターゲットに達するのに十分なエネルギーレベルを有する陽子あるいはイオンビームを発生させるよう構成されていることを特徴とするシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2013−106980(P2013−106980A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2013−45084(P2013−45084)
【出願日】平成25年3月7日(2013.3.7)
【分割の表示】特願2010−535942(P2010−535942)の分割
【原出願日】平成19年11月30日(2007.11.30)
【出願人】(508147706)メビオン・メディカル・システムズ・インコーポレーテッド (7)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成25年3月7日(2013.3.7)
【分割の表示】特願2010−535942(P2010−535942)の分割
【原出願日】平成19年11月30日(2007.11.30)
【出願人】(508147706)メビオン・メディカル・システムズ・インコーポレーテッド (7)
【Fターム(参考)】
[ Back to top ]