
インパクト回転工具
【課題】インパクト回転工具において、安価な構成でありながら、ねじを正確なトルクで締め付けることができるようにする。
【解決手段】モータ2の駆動軸17の回転角を検出する回転角検出センサ52と、ハンマ14が出力軸13を打撃するときの角速度を算出する打撃角速度算出部53と、ねじの着座を検出する着座検出部54と、ハンマ14による打撃を検出する打撃検出センサ55と、ねじの締め付けトルクに関する各種情報を表示する報知ランプ56を有する。着座検出部54は、ハンマ14の打撃間回転角と、出力軸13の角速度に基づいて締め付けトルクを推定し、この推定した締め付けトルクが所定の閾値以上になったとき、ねじが締め付け対象物と着座したと判断する。制御回路5は、着座検出部54が着座を検出した後の打撃回数を計数し、所定の打撃回数になればモータ2を停止させ、報知ランプ56を点灯させる。
【解決手段】モータ2の駆動軸17の回転角を検出する回転角検出センサ52と、ハンマ14が出力軸13を打撃するときの角速度を算出する打撃角速度算出部53と、ねじの着座を検出する着座検出部54と、ハンマ14による打撃を検出する打撃検出センサ55と、ねじの締め付けトルクに関する各種情報を表示する報知ランプ56を有する。着座検出部54は、ハンマ14の打撃間回転角と、出力軸13の角速度に基づいて締め付けトルクを推定し、この推定した締め付けトルクが所定の閾値以上になったとき、ねじが締め付け対象物と着座したと判断する。制御回路5は、着座検出部54が着座を検出した後の打撃回数を計数し、所定の打撃回数になればモータ2を停止させ、報知ランプ56を点灯させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ボルトやナット等のねじの締め付け作業に使用されるインパクトレンチやインパクトドライバ等のインパクト回転工具に関するものである。
【背景技術】
【0002】
インパクト回転工具は、モータによって回転駆動される駆動軸と連結されたハンマが、出力軸に設けられたアンビルを打撃することにより、打撃による強い衝撃力が出力軸に付加され、出力軸が回転するものである。駆動軸とハンマは、カム機構を介して互いに相対回転可能に且つ前進後退可能に連結されており、駆動軸とハンマの間には、ハンマをアンビル側に向けて付勢するハンマバネが設けられている。
【0003】
通常、ボルトやナット等のねじの締め付けにおいては、ねじ毎にその締め付けトルクが規定されており、インパクト回転工具は、設定された締め付けトルクに達したとき、自動停止するように構成されている。例えば、特許文献1には、ねじの締め付けトルクはハンマの打撃回数に依存するとして、ハンマの打撃回数を検出し、その打撃回数に基づいてモータの回転を制御する技術が示されている。
【0004】
一方、特許文献2には、自動車組み立て工場等のインパクト回転工具が実際に使用される現場において、組み立て作業者が自ら締め付けたねじの締め付けトルクを容易に確認できるように、締め付けトルクの合否判定の結果を表示する表示部を備えたインパクト回転工具が示されている。なお、締め付けトルクは、ソケット部に取付けた歪みゲージによって検出した歪量に基づいて検出する旨記載されている。
【特許文献1】特開平5−200677号公報
【特許文献2】特開2003−53678号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1に示されたハンマの打撃回数に基づいて締め付けトルクを検出するインパクト回転工具にあっては、直接的に締め付けトルクを測定しているのではないため、トルクを正確に検出できない場合がある。例えば、作業者が1本のねじを途中まで締め付けた状態で回転を一旦停止させ、その後締め付け作業を再開する、いわゆる二段階締め付け(二度打ち)を行った場合、検出した打撃数が一旦リセットされてしまうため、設定された締め付けトルクよりも大きなトルクでねじを締め付けてしまう虞がある。
【0006】
本発明は、上記課題を解決するためになされたものであり、安価な構成でありながら、ねじを正確なトルクで締め付けることができ、かつ作業者がその締め付け結果を容易に確認できるインパクト回転工具を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、請求項1の発明は、
回転する駆動軸を有するモータと、
前記駆動軸の回転を所定の減速比で減速する減速機と、この減速機を介して前記駆動軸の回転力が伝達されるハンマと、このハンマによる打撃によって付与された回転力をねじに伝達するための出力軸とを有するインパクト駆動機構と、
前記ハンマによって前記出力軸が打撃されたこと及びそのタイミングを検出する打撃検出センサと、
前記出力軸を介して伝達された回転力によって締め付けられるねじが締め付け対象物と着座したことを検出する着座検出手段と、
前記着座検出手段がねじの着座を検出した後、前記打撃検出センサが検出した打撃の回数を計数し、所定の打撃回数になれば前記駆動軸の回転を停止させる制御手段とを備えたインパクト回転工具において、
前記駆動軸の回転が一旦停止し、さらにその後、該駆動軸の回転が再開した場合に、前記制御手段が該駆動軸の回転再開から前記所定の打撃回数を計数したとき、締め付けトルクが過剰の可能性がある旨を報知する締め付け過剰報知手段をさらに備えたものである。
【0008】
請求項2の発明は、請求項1に記載のインパクト回転工具において、
前記打撃検出センサが打撃を検出する前に、前記駆動軸の回転が一旦停止した場合には、正常な締め付けトルクでねじを締め付けた旨を報知する締め付け正常報知手段をさらに備えたものである。
【0009】
請求項3の発明は、
回転する駆動軸を有するモータと、
前記駆動軸の回転を所定の減速比で減速する減速機と、この減速機を介して前記駆動軸の回転力が伝達されるハンマと、このハンマによる打撃によって付与された回転力をねじに伝達するための出力軸とを有するインパクト駆動機構と、
前記ハンマによって前記出力軸が打撃されたこと及びそのタイミングを検出する打撃検出センサと、
前記出力軸を介して伝達された回転力によって締め付けられるねじが締め付け対象物と着座したことを検出する着座検出手段と、
前記着座検出手段がねじの着座を検出した後、前記打撃検出センサが検出した打撃の回数を計数し、所定の打撃回数になれば前記駆動軸の回転を停止させる制御手段と
前記駆動軸の回転角を検出する回転角検出センサと、
前記打撃検出センサによって検出された打撃タイミング、前記回転角検出センサによって検出された前記駆動軸の回転角及び前記減速機の減速比に基づいて前記ハンマの打撃角速度を算出する打撃角速度算出手段とを備えたインパクト回転工具において、
前記着座検出手段は、
前記回転角検出センサによって検出された前記駆動軸の回転角、前記打撃検出センサによって検出された打撃タイミング及び減速機の減速比に基づいて前記ハンマの打撃間回転角を演算し、
前記打撃角速度算出手段により演算されたハンマの打撃角速度に基づいて前記出力軸の打撃間平均角速度を演算し、
前記ハンマの打撃間回転角と、前記出力軸の打撃間平均角速度に基づいて締め付けトルクを推定し、この推定した締め付けトルクが所定の閾値以上になったとき、ねじが締め付け対象物と着座したと判断するものである。
【0010】
請求項4の発明は、請求項3に記載のインパクト回転工具において、
前記打撃角速度算出手段により算出された前記ハンマの打撃角速度が所定の第1の打撃角速度以下のとき、前記制御手段は、前記駆動軸の回転停止の判断に用いる打撃回数を増やして該駆動軸の回転を制御するものである。
【0011】
請求項5の発明は、請求項4に記載のインパクト回転工具において、
前記制御手段は、前記打撃角速度算出手段により算出された前記ハンマの打撃角速度及び前記所定の第1の打撃角速度に基づいて不足している打撃エネルギを算出し、この不足している打撃エネルギを打撃回数に変換することにより前記駆動軸の回転停止の判断に用いる打撃回数を増やすものである。
【0012】
請求項6の発明は、請求項4に記載のインパクト回転工具において、
前記打撃角速度算出手段により算出された前記ハンマの打撃角速度が前記第1の打撃角速度未満の所定の第2打撃角速度以下のとき、締め付けトルクが不足の可能性がある旨を報知する締め付け不足報知手段をさらに備えたものである。
【発明の効果】
【0013】
請求項1の発明によれば、駆動軸の回転が一旦停止し、さらにその後、該駆動軸の回転が再開し、締め付けトルクが過剰の可能性がある場合に、過剰報知手段がその旨を報知するので、いわゆる二段階締め付けによる締め付けトルクの過剰を防止することができる。
【0014】
請求項2の発明によれば、作業者が形式上の二段階締め付けを行った場合であっても、打撃検出センサが打撃を検出する前に駆動軸の回転が一旦停止した場合には、ねじは正常な締め付けトルクで締結されたものとしてその旨を報知するので、締結作業をやり直す必要がなくなり、作業向上の効率化を図ることができる。
【0015】
請求項3の発明によれば、ハンマの打撃間回転角と出力軸の角速度に基づいて締め付けトルクを推定し、この推定した締め付けトルクが所定の閾値以上になったとき、ねじが締め付け対象物と着座したと判断するので、安価な構成で締め付けトルクを演算により推定することができる。また、着座後の打撃間回転角が小さい領域においては、ハンマの打撃回数で締め付けトルクを算出するので、締め付けトルクを正確に算出することが可能となる。
【0016】
請求項4の発明によれば、ハンマの打撃角速度が所定の第1の打撃角速度以下となるとき、制御手段は、駆動軸の回転停止の判断に用いる打撃回数を増やすので、例えば、インパクト回転工具の電源とする充電池の充電量が不足気味でモータの駆動電圧が低下傾向にある場合であっても、締め付けトルクの不足を抑制できるようになる。
【0017】
請求項5の発明によれば、ハンマの打撃角速度に基づいて不足している打撃エネルギを算出し、この不足している打撃エネルギを打撃回数に変換することにより駆動軸の回転停止の判断に用いる打撃回数を増やすので、適正な締め付けトルクでねじを締結することが可能となる。
【0018】
請求項6の発明によれば、打撃角速度算出手段が算出したハンマの打撃角速度が所定の第2打撃角速度以下のとき、例えば請求項4に記載の打撃回数の補正を行っても締め付けトルクの不足を解消できないとき、締め付け不足報知手段が締め付けトルクが不足の可能性がある旨を報知する。これにより、締め付けトルクの不足を防止することができる。
【発明を実施するための最良の形態】
【0019】
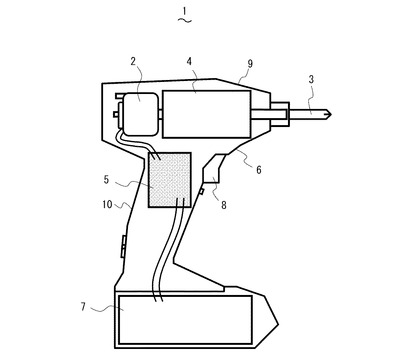
以下、本発明の第1の実施形態に係るインパクト回転工具について図1乃至図3を参照して説明する。図1は本実施形態に係るインパクト回転工具1の概略構成を示す。インパクト回転工具1は、駆動源であるモータ2と、モータ2と接続され、先端に取り付けられるビット3を打撃力を付加して回転させるインパクト駆動機構部4と、モータ2等のインパクト回転工具1の全体制御を司る制御回路5と、上記各部を収容する本体カバー6と、本体カバー6に着脱自在に取り付けられる充電池7を備える。ここで、ビット3は、ボルトやナット等のねじの種類に応じて多数の種類があり、インパクト駆動機構部4に着脱自在に取り付けられる。例えば、図1においては、+ねじに対応するビット3が、図3においては、ボルトに対応するボルトソケット3aが取付けられている。インパクト駆動機構部4は、モータ2の駆動軸17に取付けられている。
【0020】
制御回路5は、ユーザが後述するトリガスイッチ8を引き込むことで、充電池7から電力をモータ2に供給し、トリガスイッチ8の引き込み量に応じた回転速度でモータ2を回転させる。本体カバー6は、モータ2及びインパクト駆動機構部4を収容するハウジング部9と、制御回路5を収容する共に操作に際しユーザによって把持されるように形成されたグリップ部10で構成される。グリップ部10の前面には、モータ2の起動とその回転速度の調整を行うためのトリガスイッチ8が設けられている。
【0021】
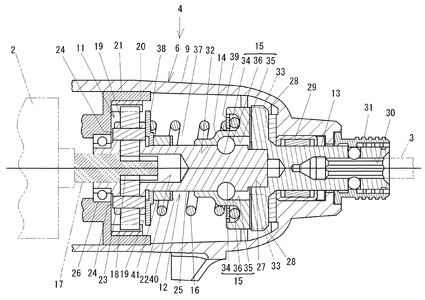
図2はインパクト駆動機構部4の内部構成を示す。インパクト駆動機構部4は、モータ2と減速機11を介して接続される駆動伝達軸12と、駆動伝達軸12の回転が出力される出力軸13と、出力軸13を打撃するハンマ14と、ハンマ14に出力軸13を打撃する動作を行わせるカム機構15と、ハンマ14を出力軸13側に向けて付勢するハンマバネ16とを備える。
【0022】
モータ2の前方に配置された減速機11は、遊星歯車機構であって、モータ2の駆動軸17に形成されたギアである太陽ギア18と、太陽ギア18と噛み合う複数の遊星ギア19、19と、遊星ギア19、19と噛み合うリングギア20と、上記各部を収容するケース21とで構成される。太陽ギア18は、駆動伝達軸12の中央に形成された孔22に差し込まれている。遊星ギア19、19は、太陽ギア18の周囲に配置され、駆動伝達軸12の後端側に形成されるキャリア23に挿通された軸24、24によってそれぞれの中心が固定されている。リングギア20はケース21の内周壁に固定されており、ケース21は本体カバー6のハウジング部9に固定されている。このように減速機11を構成することで、モータ2の回転が上記各ギアにより定められる所定の減速比で減速され、駆動伝達軸12に伝達される。
【0023】
駆動伝達軸12は、上述したキャリア23と、キャリア23の中心を通る軸部25で構成される。軸部25は、後端側が減速機11のケース21内に固定されたベアリング26により保持され、前端側が出力軸13に形成された後部穴27により回転自在に保持されている。
【0024】
出力軸13は、ハンマ14の前方に配置されており、後端側にはハンマ14によって打撃される際にハンマ14と係合するアンビル28、28が形成されている。出力軸13は、本体カバー6のハウジング部9の前端側に固定されたメタル軸受29により保持されており、前端側がハウジング部9の前端面より突出している。出力軸13の前端側には、ビット3を挿入するためのビット挿入穴30が形成されていると共に、ビット挿入穴30に挿入したビット3を固定するためのチャック機構31が設けられている。
【0025】
ハンマ14は、その中央に駆動伝達軸12の軸部25が遊嵌される貫通孔32を有しており、駆動伝達軸12に対して相対回転可能に且つ前進後退可能に連結されている。ハンマ14は、ハンマバネ16の復元力により、出力軸13側に向けて付勢されている。ハンマ14の前端側には、出力軸13のアンビル28、28と係合するハンマ爪33、33が放射状に形成されている。
【0026】
カム機構15は、軸部25の前側外周面に螺旋状に形成された軸部カム溝34、34と、ハンマ14の内周面に形成されたハンマカム溝35、35と、軸部カム溝34、34とハンマカム溝35、35の双方に係合する鋼球36、36とで構成される。軸部カム溝34、34とハンマカム溝35、35はそれぞれ、鋼球36、36の半球分が入り込めるように形成されており、軸部カム溝34、34とハンマカム溝35、35が重なって形成される空間に鋼球36、36が配設されている。上記のようなカム機構15を構成することで、駆動伝達軸12の回転が鋼球36、36を介してハンマ14に伝達される。
【0027】
ハンマバネ16は、中央の空間37に駆動伝達軸12の軸部25が挿通され、駆動伝達軸12のキャリア23部とハンマ14の間に圧縮されて配設されている。ハンマバネ16は、後端側がキャリア23部に固定されたプレート38により保持され、前端側がハンマ14に固定されたプレート39により保持されている。
【0028】
ハンマバネ16の後端側にある上記プレート38の前方には、ハンマ14が駆動伝達軸12に対して後退するときに、鋼球36、36が駆動伝達軸12の軸部カム溝34、34の後端壁(図示しない)に衝突して騒音及び振動が発生しないように、ハンマ14の後退量を制限する金属板40が弾性体41を介して設けられる。弾性体41は、金属板40とハンマ14が当接するときに生じる衝撃力を緩和するためのものである。金属板40と弾性体41は、軸部25が挿通されると共にハンマバネ16の空間37に位置するようにリング状に形成されている。ここで、上述したハンマバネ16は、その内径が弾性体41の外径の変形量を規制するように設定されており、弾性体41が上述の衝撃力を吸収して過剰に圧縮されることを防止する規制部材として機能する。
【0029】
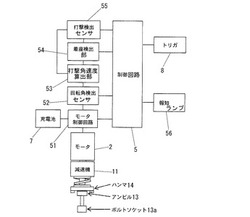
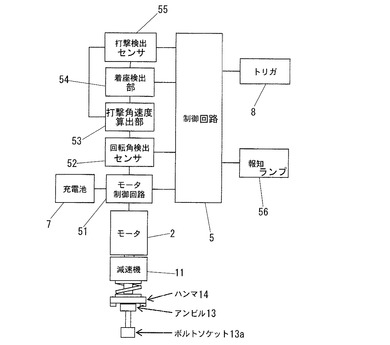
図3は、インパクト回転工具1の電気的構成を示している。インパクト回転工具1は、モータ2を制御するモータ制御回路51と、駆動軸17の回転角を検出する回転角検出センサ52と、ハンマ14が出力軸13を打撃するときの角速度を算出する打撃角速度算出部(打撃角速度算出部手段)53と、ねじが締め付け対象物と着座したことを検出する着座検出部(着座検出手段)54と、ハンマ14によって出力軸13が打撃されたこと及びそのタイミングを検出する打撃検出センサ55と、ねじの締め付けトルクに関する各種情報を表示する報知ランプ(締め付け過剰報知手段、締め付け正常報知手段、締め付け不足報知手段)56等を有している。
【0030】
モータ制御回路51は、制御回路5から出力された信号に応じてモータ2に印加する駆動電圧を制御する。回転角検出センサ52は、モータ2の駆動軸17の回転角を検出するセンサであり、モータ2がブラシモータである場合にはFG(frequency generator)センサ、ブラシレスモータである場合にはロータの位置を検出する位置検出センサ(ホール素子)が用いられる。打撃角速度算出部53は、打撃検出センサ55によって検出された打撃タイミング、回転角検出センサ52によって検出された駆動軸17の回転角及び減速機11の減速比に基づいてハンマ14の打撃角速度を算出する。
【0031】
着座検出部54は、回転角検出センサ52によって検出された駆動軸17の回転角、打撃検出センサ55によって検出された打撃タイミング及び減速機11の減速比に基づいて締め付けトルクを推定し、その推定した締め付けトルクが所定の閾値以上になったとき、ねじが締め付け対象物と着座したと判断する。締め付けトルクは、1打撃毎の運動エネルギの収支に着目し、ハンマ14の打撃により出力軸13のアンビル28に付与される回転運動エネルギと、締め付けによって消費されるエネルギが略等しいものとして、推定される。
【0032】
報知ランプ56は、例えば複数個のLED等によって構成され、個々のLEDを個別に点灯又は点滅させることにより、ねじの締め付け作業の適否等を作業者に報知する。より詳細に締め付け作業の適否等を作業者に報知する必要がある場合には、LEDの代わりにLCD等を用いることもできる。
【0033】
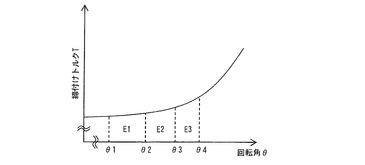
図4は、ねじの着座前後における回転角θと、締め付けトルクTとの関係を示している。出力軸13の回転角θと締付トルクT は、図4に示すように関数T = τ( θ ) で表せるとし、ハンマ14による打撃が、それぞれ出力軸13の回転角θ1 、… 、θ n の地点で発生したものとする。関数τ を区間[ θn 、θn+1 ] で積分した値En は締付け作業に消費されたエネルギであり、θn 地点で発生したハンマ14の打撃によりアンビル28(出力軸13)に与えられたエネルギに等しい。よって、区間[ θn 、θn+1 ] における平均の締付トルクT は、En と打撃間回転角Θn = (θn +1 − θn )を用いて、
T = En / Θn … ( 1 )
と推定できる。ここでE n は、打撃間の出力軸13の平均回転角速度ωnと、既知の出力軸13の慣性モーメントJaを用いて、
En = 1/2 × Ja ×(ωn)2 … ( 2 )
と求めることができる。なお、打撃間の出力軸13の平均回転角速度ωnは、出力軸13の打撃間回転角Θnを打撃間隔で除したものである。
【0034】
ハンマ14が一回転する毎に2度出力軸13のアンビル28を打撃する構成の場合、出力軸13が固定され全く回転しないと仮定した場合、モータ2を駆動すると1度の打撃でハンマ14は半回転する。出力軸13が固定されておらず回転可能な場合、モータ2を駆動すると出力軸13の回転角に半回転分の回転角を加えたものが1度の打撃でのハンマ14の回転角となる。例えば、ハンマ14がアンビル28を4度打撃した場合は、ハンマ14は、出力軸13よりも2回転分多く回転している。一方、ハンマ14の回転角は、モータ2とハンマ14の間にある減速機11の減速比から計算できるので、これにハンマ14の打撃回数に相当する回転角を減じれば出力軸13の回転角θnを算出できる。
【0035】
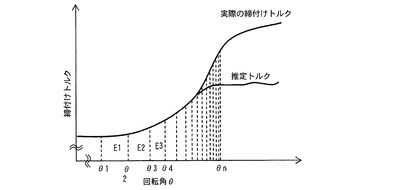
図5は、一般的なインパクト回転工具によってボルトを締結する際のボルトの回転角と締め付けトルクの関係を示している。ボルトとナットの組み合わせ等のような金属製締結具の締め付け作業の場合は、インパクト回転工具が付与する衝撃毎に締め付けトルクは徐々に上昇していく。一方、衝撃毎のボルトの回転角は徐々に減少し、最終的には微少な角度の回転になる。
【0036】
ボルトの締め付けトルクTは、上述のごとくエネルギEnを打撃間の出力軸13の打撃間回転角Θnで除算することにより推定することができるため、この推定締め付けトルクTを用いてモータ2を停止制御することにより、概略的な締め付けトルクTの管理を行うことも可能ではある。しかしながら、衝撃毎のボルトの回転角すなわち出力軸13の打撃間回転角Θnが微少な領域になると、回転角Θnのわずかな誤差が締め付けトルクTの推定値に大きな影響を及ぼすこととなり、正確な締め付けトルクTを推定することが困難となる。図5は、出力軸13の回転角 Θnが微少な領域において、推定した締め付けトルクTが実際の締め付けトルクよりも低く算出されている例を示している。
【0037】
このような場合、出力軸13の回転角θnの検出を駆動軸17の回転角検出センサ52に依存することなく、出力軸13の回転角θnそのものを高精度・高分解能の回転角センサによって検出するように構成することにより、締め付けトルクTの推定値をより正確なものとすることも可能である。しかしながら、出力軸13に回転角センサを設ける構成とすると、インパクト回転工具自体が大きく重くなることから、作業性が大幅に悪化する。また、インパクト回転工具の構成が複雑となるため、その製造コストが高騰する。そのため、本実施形態では、出力軸13に回転角センサは設けられていない。
【0038】
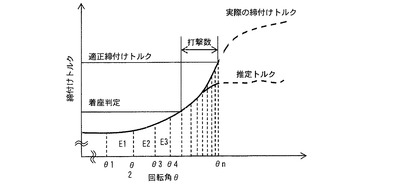
そこで、本インパクト回転工具1においては、締め付け初期段階におけるねじが着座する前後の領域では打撃間の出力軸13の回転角が比較的大きいことから、締め付けトルクを正確に推定できること、及びねじが着座すると着座面に摩擦力が発生することに着目し、締め付けトルクが上記摩擦力の発生に伴い増大して所定の閾値(着座判定値とする)以上になったことを検知することによってねじの着座を判定し、ねじが着座した後のハンマ14の打撃回数に基づいて締め付けトルクを算出し、モータ2の停止制御を行う。
【0039】
図6は、ねじを締結する際にモータ2を上述のごとくねじの着座後、所定回数打撃するように停止制御したときのボルトの回転角と締め付けトルクの関係を示している。本実施形態においては、着座検出部54がねじの着座を検出した後、ハンマ14が出力軸13を7回打撃したとき、適正な締め付けトルクでねじが締結されたものとしてモータ2の停止制御を行う。モータ2の制御にあたって判定するハンマ14の打撃回数は、締め付けトルクに応じて適宜設定される。例えば、より大きな締め付けトルクでねじを締結する際には、ハンマ14の打撃回数を増加させればよい。このように、着座検出部54がねじの着座を検出した後、ハンマ14の打撃回数に基づいて算出した締め付けトルクは、同図において破線で示す実際の締め付けトルクと略一致する。従って、インパクト回転工具の構成を複雑にすることなく、正確な締め付けトルクでねじを締結することが可能となる。
【0040】
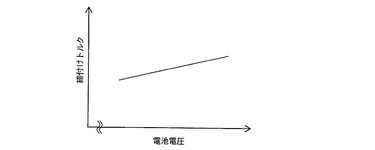
図7は、充電池の電圧と、締め付けトルクとの関係を示している。インパクト回転工具1の電源電圧が例えば商用電源のように安定している場合、締め付けトルクの繰り返し精度は比較的安定している。しかしながら、電源として充電池7を採用する場合にあっては、その電圧が低下することに起因してモータ2の出力が低下し、締め付けトルクも低下する傾向にある。従って、充電池7の電圧が所定電圧よりも高いことを前提に上記ハンマ14の打撃回数を設定した場合にあっては、充電池7の電圧が低下したとき、十分な締め付けトルクを得ることができない。その結果、電源として充電池7を採用する場合にあっては、締め付けトルクの繰り返し精度が悪化する虞がある。また、充電池の使用温度の変化や経年劣化に伴う放電特性の変化等もモータ2の出力を変動させる要因となる。
【0041】
そこで、インパクト回転工具1は、打撃角速度算出部53が算出したハンマ14の打撃角速度に応じて駆動軸17の回転停止の判断に用いる打撃回数を補正することにより、充電池7の電圧が低下したときであっても、十分な締め付けトルクでねじを締結するように構成されている。
【0042】
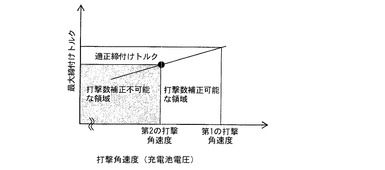
図8は、ハンマ14の打撃角速度と最大締め付けトルクとの関係を示している。ハンマ14の打撃角速度が第2の打撃角速度以上でかつ第1の打撃角速度以下のとき、制御回路5は、回転停止の判断に用いる打撃回数を補正してモータ2を制御する。すなわち、打撃角速度算出部53が算出したハンマ14の打撃角速度が第1の打撃角速度以下のとき、制御回路5は、駆動軸17の回転停止の判断に用いる打撃回数を増やして駆動軸17の回転を制御する。また、打撃角速度算出部53が算出したハンマ14の打撃角速度が第2の打撃角速度以下のとき、制御回路5は、報知ランプ56を点灯させて、締め付けトルクが不足の可能性がある旨を報知する。このとき、締め付け作業を停止させるように構成してもよい。
【0043】
打撃回数の補正値は、例えば以下に示す手法によって計算される。打撃角速度算出部53が算出したハンマ14の打撃角速度が第1の打撃角速度以下のとき、制御回路5は、まず適正な締め付けトルクを得るために不足エネルギを算出する。不足エネルギは、第1の打撃角速度、実際の打撃角速度及び所定の設定打撃数を用いて、以下の式によって算出される。
不足エネルギ=1/2×Ja×((第1の打撃角速度)2−(実際の打撃角速度)2)
×設定打撃数 ・・・(3)
さらに、制御回路5は、不足エネルギ及び実際の打撃角速度を用いて、以下の式によって打撃回数の補正値を算出する。
打撃回数の補正値=補正係数×不足エネルギ
/(1/2×Ja×(実際の打撃角速度)2) ・・・(4)
ここで、補正係数とは、個々のインパクト回転工具により異なる任意の係数である。このようにインパクト回転工具1においては、ハンマ14の打撃角速度を監視してハンマ14の打撃回数を適宜補正しているので、充電池7の電圧が低下したり、使用温度の変化や経年劣化に伴って放電特性が変化した場合にあっても、適正な締め付けトルクでねじを締結することができる。
【0044】
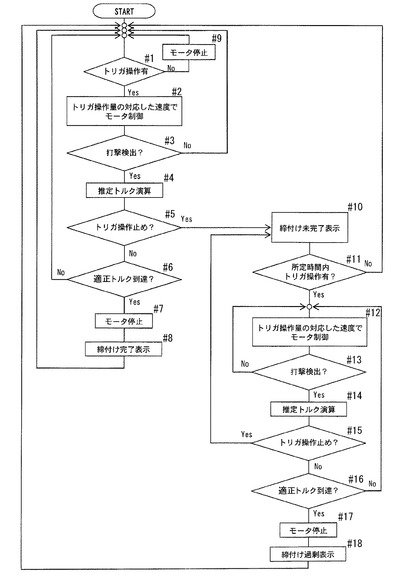
図9は、インパクト回転工具1を用いてねじを締結する際の制御回路5の動作を示している。トリガ8が操作されると(#1においてYES)、トリガ8の操作量に対応した速度でモータ2を回転制御する(#2)。その後、ハンマ14の打撃が検出されると(#3においてYES)、着座検出部54に推定締め付けトルクを演算させる(#4)。ここでトリガ8の操作が継続し(#5においてNO)、推定締め付けトルクが着座判定値に達し、その後ハンマ14が所定回数出力軸13を打撃すると、適正な締め付けトルクに到達したとして(#6においてYES)、モータ2の回転を停止させ(#7)、報知ランプ56を点灯させて正常に締め付けが完了した旨を表示させる(#8)。なお、#1においてトリガ8が操作されない場合は(#1においてNO)、モータ2を停止させたまま(#9)、#1に戻って待機する。
【0045】
一方、締め付けの途中でトリガ8の操作が止められた場合は(#5においてYES)、モータ2の回転を停止させ、さらには報知ランプ56を点灯させて締め付けが未完了である旨を表示させる(#10)。そして所定時間内にトリガ8が操作されると(#11においてYES)、トリガ8の操作量に対応した速度でモータ2を回転制御する(#12)。その後、ハンマ14の打撃が検出されると(#13においてYES)、着座検出部54に推定締め付けトルクを演算させる(#14)。ここでトリガ8の操作が継続し(#15においてNO)、推定締め付けトルクが着座判定値に達し、その後ハンマ14が所定回数出力軸13を打撃すると(#16においてYES)、モータ2の回転を停止させる(#17)。
【0046】
この場合、#2乃至#5の間でハンマ14が通常よりも過剰にアンビル28を打撃しているので、締め付けトルクが過剰の可能性がある。そこで、報知ランプ56を点灯させて締め付けトルクが過剰の可能性がある旨を表示する(#18)。なお、#11において所定時間内にトリガ8が操作されない場合は(#11においてNO)、別のねじを締結する作業に移行したものとして、#1に戻る。また、#15において、トリガ8の操作が止められた場合は(#15においてYES)、モータ2の回転を停止させ、#10に戻る。
【0047】
以上説明したように、本実施形態のインパクト回転工具1によれば、着座検出部54がねじの着座を検出した後、制御回路5がハンマ14の打撃回数を計数し、所定の打撃回数になれば駆動軸17の回転を停止させる。すなわち、打撃間回転角が小さくなる着座後においてはハンマ14の打撃回数で締め付けトルクを算出し、モータ2を制御するので、安価な構成でありながら、ねじを正確なトルクで締め付けることができる。また、ハンマ14の打撃間回転角と出力軸13の角速度に基づいて締め付けトルクを推定し、この推定した締め付けトルクが所定の閾値以上になったとき、ねじが締め付け対象物と着座したと判断するので、安価な構成で締め付けトルクを演算により推定することができる。特に、着座後の打撃間回転角が小さい領域においては、ハンマ14の打撃回数で締め付けトルクを算出するので、締め付けトルクを正確に算出することが可能となる。
【0048】
また、ハンマ14の打撃角速度が所定の第1の打撃角速度以下となるとき、制御回路5は、駆動軸17の回転停止の判断に用いる打撃回数を増やすので、例えば、インパクト回転工具の電源とする充電池7の充電量が不足気味でモータ2の駆動電圧が低下傾向にある場合であっても、締め付けトルクの不足を抑制できるようになる。また、ハンマ14の打撃角速度に基づいて不足している打撃エネルギを算出し、この不足している打撃エネルギを打撃回数に変換することにより駆動軸17の回転停止の判断に用いる打撃回数を増やすので、適正な締め付けトルクでねじを締結することが可能となる。
【0049】
また、駆動軸17の回転が一旦停止し、さらにその後、駆動軸17の回転が再開し、締め付けトルクが過剰の可能性がある場合に、報知ランプ56がその旨を報知するので、いわゆる二段階締め付けによる締め付けトルクの過剰を防止することができる。また、作業者が形式上の二段階締め付けを行った場合であっても、打撃検出センサ55が打撃を検出する前に駆動軸17の回転が一旦停止した場合には、ねじは正常な締め付けトルクで締結されたものとして報知ランプ56がその旨を報知するので、締結作業をやり直す必要がなくなり、作業向上の効率化を図ることができる。また、打撃角速度算出部53が算出したハンマ14の打撃角速度が所定の第2打撃角速度以下のとき、例えば上述した打撃回数の補正を行っても締め付けトルクの不足を解消できないとき、報知ランプ56が締め付けトルクが不足の可能性がある旨を報知する。これにより、締め付けトルクの不足を防止することができる。
【0050】
なお、本発明は上記実施形態の構成に限定されるものではなく、少なくとも着座検出部54がねじの着座を検出し、着座後の打撃回数に基づいてモータ2の回転を制御するように構成されていればよい。また、本発明は、種々の変形が可能であり、例えば、インパクト駆動機構部4の構成は、実施形態に示したものに限られることなく、同等の機能を有する他の構成を採用してもよい。
【図面の簡単な説明】
【0051】
【図1】本発明の実施形態にかかるインパクト回転工具の概略構成を示す図。
【図2】インパクト駆動機構部の内部構成を示す図。
【図3】同インパクト回転工具の電気的構成を示すブロック図。
【図4】一般的なインパクト回転工具によってボルトを締結する際のねじの着座前後における回転角と、締め付けトルクとの関係を示す図。
【図5】一般的なインパクト回転工具によってボルトを締結する際のボルトの回転角と締め付けトルクの関係を詳細に示す図。
【図6】本発明の実施形態にかかるインパクト回転工具によってねじを締結する際にモータを上述のごとく停止制御したときのボルトの回転角と締め付けトルクの関係を示す図。
【図7】充電池の電圧と、締め付けトルクとの関係を示すブロック図。
【図8】ハンマの打撃角速度と最大締め付けトルクとの関係を示す図。
【図9】同インパクト回転工具を用いてねじを締結する際の制御回路の動作を示すフローチャート。
【符号の説明】
【0052】
1 インパクト回転工具
2 モータ
4 インパクト駆動機構
5 制御回路(制御手段)
11 減速機
12 駆動軸
13 出力軸
14 ハンマ
17 駆動軸
52 回転角検出センサ
53 打撃角速度算出部(打撃角速度算出部手段)
54 着座検出部(着座検出手段)
55 打撃検出センサ
56 報知ランプ(締め付け過剰報知手段、締め付け正常報知手段、締め付け不足報知手段)
【技術分野】
【0001】
本発明は、ボルトやナット等のねじの締め付け作業に使用されるインパクトレンチやインパクトドライバ等のインパクト回転工具に関するものである。
【背景技術】
【0002】
インパクト回転工具は、モータによって回転駆動される駆動軸と連結されたハンマが、出力軸に設けられたアンビルを打撃することにより、打撃による強い衝撃力が出力軸に付加され、出力軸が回転するものである。駆動軸とハンマは、カム機構を介して互いに相対回転可能に且つ前進後退可能に連結されており、駆動軸とハンマの間には、ハンマをアンビル側に向けて付勢するハンマバネが設けられている。
【0003】
通常、ボルトやナット等のねじの締め付けにおいては、ねじ毎にその締め付けトルクが規定されており、インパクト回転工具は、設定された締め付けトルクに達したとき、自動停止するように構成されている。例えば、特許文献1には、ねじの締め付けトルクはハンマの打撃回数に依存するとして、ハンマの打撃回数を検出し、その打撃回数に基づいてモータの回転を制御する技術が示されている。
【0004】
一方、特許文献2には、自動車組み立て工場等のインパクト回転工具が実際に使用される現場において、組み立て作業者が自ら締め付けたねじの締め付けトルクを容易に確認できるように、締め付けトルクの合否判定の結果を表示する表示部を備えたインパクト回転工具が示されている。なお、締め付けトルクは、ソケット部に取付けた歪みゲージによって検出した歪量に基づいて検出する旨記載されている。
【特許文献1】特開平5−200677号公報
【特許文献2】特開2003−53678号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上記特許文献1に示されたハンマの打撃回数に基づいて締め付けトルクを検出するインパクト回転工具にあっては、直接的に締め付けトルクを測定しているのではないため、トルクを正確に検出できない場合がある。例えば、作業者が1本のねじを途中まで締め付けた状態で回転を一旦停止させ、その後締め付け作業を再開する、いわゆる二段階締め付け(二度打ち)を行った場合、検出した打撃数が一旦リセットされてしまうため、設定された締め付けトルクよりも大きなトルクでねじを締め付けてしまう虞がある。
【0006】
本発明は、上記課題を解決するためになされたものであり、安価な構成でありながら、ねじを正確なトルクで締め付けることができ、かつ作業者がその締め付け結果を容易に確認できるインパクト回転工具を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、請求項1の発明は、
回転する駆動軸を有するモータと、
前記駆動軸の回転を所定の減速比で減速する減速機と、この減速機を介して前記駆動軸の回転力が伝達されるハンマと、このハンマによる打撃によって付与された回転力をねじに伝達するための出力軸とを有するインパクト駆動機構と、
前記ハンマによって前記出力軸が打撃されたこと及びそのタイミングを検出する打撃検出センサと、
前記出力軸を介して伝達された回転力によって締め付けられるねじが締め付け対象物と着座したことを検出する着座検出手段と、
前記着座検出手段がねじの着座を検出した後、前記打撃検出センサが検出した打撃の回数を計数し、所定の打撃回数になれば前記駆動軸の回転を停止させる制御手段とを備えたインパクト回転工具において、
前記駆動軸の回転が一旦停止し、さらにその後、該駆動軸の回転が再開した場合に、前記制御手段が該駆動軸の回転再開から前記所定の打撃回数を計数したとき、締め付けトルクが過剰の可能性がある旨を報知する締め付け過剰報知手段をさらに備えたものである。
【0008】
請求項2の発明は、請求項1に記載のインパクト回転工具において、
前記打撃検出センサが打撃を検出する前に、前記駆動軸の回転が一旦停止した場合には、正常な締め付けトルクでねじを締め付けた旨を報知する締め付け正常報知手段をさらに備えたものである。
【0009】
請求項3の発明は、
回転する駆動軸を有するモータと、
前記駆動軸の回転を所定の減速比で減速する減速機と、この減速機を介して前記駆動軸の回転力が伝達されるハンマと、このハンマによる打撃によって付与された回転力をねじに伝達するための出力軸とを有するインパクト駆動機構と、
前記ハンマによって前記出力軸が打撃されたこと及びそのタイミングを検出する打撃検出センサと、
前記出力軸を介して伝達された回転力によって締め付けられるねじが締め付け対象物と着座したことを検出する着座検出手段と、
前記着座検出手段がねじの着座を検出した後、前記打撃検出センサが検出した打撃の回数を計数し、所定の打撃回数になれば前記駆動軸の回転を停止させる制御手段と
前記駆動軸の回転角を検出する回転角検出センサと、
前記打撃検出センサによって検出された打撃タイミング、前記回転角検出センサによって検出された前記駆動軸の回転角及び前記減速機の減速比に基づいて前記ハンマの打撃角速度を算出する打撃角速度算出手段とを備えたインパクト回転工具において、
前記着座検出手段は、
前記回転角検出センサによって検出された前記駆動軸の回転角、前記打撃検出センサによって検出された打撃タイミング及び減速機の減速比に基づいて前記ハンマの打撃間回転角を演算し、
前記打撃角速度算出手段により演算されたハンマの打撃角速度に基づいて前記出力軸の打撃間平均角速度を演算し、
前記ハンマの打撃間回転角と、前記出力軸の打撃間平均角速度に基づいて締め付けトルクを推定し、この推定した締め付けトルクが所定の閾値以上になったとき、ねじが締め付け対象物と着座したと判断するものである。
【0010】
請求項4の発明は、請求項3に記載のインパクト回転工具において、
前記打撃角速度算出手段により算出された前記ハンマの打撃角速度が所定の第1の打撃角速度以下のとき、前記制御手段は、前記駆動軸の回転停止の判断に用いる打撃回数を増やして該駆動軸の回転を制御するものである。
【0011】
請求項5の発明は、請求項4に記載のインパクト回転工具において、
前記制御手段は、前記打撃角速度算出手段により算出された前記ハンマの打撃角速度及び前記所定の第1の打撃角速度に基づいて不足している打撃エネルギを算出し、この不足している打撃エネルギを打撃回数に変換することにより前記駆動軸の回転停止の判断に用いる打撃回数を増やすものである。
【0012】
請求項6の発明は、請求項4に記載のインパクト回転工具において、
前記打撃角速度算出手段により算出された前記ハンマの打撃角速度が前記第1の打撃角速度未満の所定の第2打撃角速度以下のとき、締め付けトルクが不足の可能性がある旨を報知する締め付け不足報知手段をさらに備えたものである。
【発明の効果】
【0013】
請求項1の発明によれば、駆動軸の回転が一旦停止し、さらにその後、該駆動軸の回転が再開し、締め付けトルクが過剰の可能性がある場合に、過剰報知手段がその旨を報知するので、いわゆる二段階締め付けによる締め付けトルクの過剰を防止することができる。
【0014】
請求項2の発明によれば、作業者が形式上の二段階締め付けを行った場合であっても、打撃検出センサが打撃を検出する前に駆動軸の回転が一旦停止した場合には、ねじは正常な締め付けトルクで締結されたものとしてその旨を報知するので、締結作業をやり直す必要がなくなり、作業向上の効率化を図ることができる。
【0015】
請求項3の発明によれば、ハンマの打撃間回転角と出力軸の角速度に基づいて締め付けトルクを推定し、この推定した締め付けトルクが所定の閾値以上になったとき、ねじが締め付け対象物と着座したと判断するので、安価な構成で締め付けトルクを演算により推定することができる。また、着座後の打撃間回転角が小さい領域においては、ハンマの打撃回数で締め付けトルクを算出するので、締め付けトルクを正確に算出することが可能となる。
【0016】
請求項4の発明によれば、ハンマの打撃角速度が所定の第1の打撃角速度以下となるとき、制御手段は、駆動軸の回転停止の判断に用いる打撃回数を増やすので、例えば、インパクト回転工具の電源とする充電池の充電量が不足気味でモータの駆動電圧が低下傾向にある場合であっても、締め付けトルクの不足を抑制できるようになる。
【0017】
請求項5の発明によれば、ハンマの打撃角速度に基づいて不足している打撃エネルギを算出し、この不足している打撃エネルギを打撃回数に変換することにより駆動軸の回転停止の判断に用いる打撃回数を増やすので、適正な締め付けトルクでねじを締結することが可能となる。
【0018】
請求項6の発明によれば、打撃角速度算出手段が算出したハンマの打撃角速度が所定の第2打撃角速度以下のとき、例えば請求項4に記載の打撃回数の補正を行っても締め付けトルクの不足を解消できないとき、締め付け不足報知手段が締め付けトルクが不足の可能性がある旨を報知する。これにより、締め付けトルクの不足を防止することができる。
【発明を実施するための最良の形態】
【0019】
以下、本発明の第1の実施形態に係るインパクト回転工具について図1乃至図3を参照して説明する。図1は本実施形態に係るインパクト回転工具1の概略構成を示す。インパクト回転工具1は、駆動源であるモータ2と、モータ2と接続され、先端に取り付けられるビット3を打撃力を付加して回転させるインパクト駆動機構部4と、モータ2等のインパクト回転工具1の全体制御を司る制御回路5と、上記各部を収容する本体カバー6と、本体カバー6に着脱自在に取り付けられる充電池7を備える。ここで、ビット3は、ボルトやナット等のねじの種類に応じて多数の種類があり、インパクト駆動機構部4に着脱自在に取り付けられる。例えば、図1においては、+ねじに対応するビット3が、図3においては、ボルトに対応するボルトソケット3aが取付けられている。インパクト駆動機構部4は、モータ2の駆動軸17に取付けられている。
【0020】
制御回路5は、ユーザが後述するトリガスイッチ8を引き込むことで、充電池7から電力をモータ2に供給し、トリガスイッチ8の引き込み量に応じた回転速度でモータ2を回転させる。本体カバー6は、モータ2及びインパクト駆動機構部4を収容するハウジング部9と、制御回路5を収容する共に操作に際しユーザによって把持されるように形成されたグリップ部10で構成される。グリップ部10の前面には、モータ2の起動とその回転速度の調整を行うためのトリガスイッチ8が設けられている。
【0021】
図2はインパクト駆動機構部4の内部構成を示す。インパクト駆動機構部4は、モータ2と減速機11を介して接続される駆動伝達軸12と、駆動伝達軸12の回転が出力される出力軸13と、出力軸13を打撃するハンマ14と、ハンマ14に出力軸13を打撃する動作を行わせるカム機構15と、ハンマ14を出力軸13側に向けて付勢するハンマバネ16とを備える。
【0022】
モータ2の前方に配置された減速機11は、遊星歯車機構であって、モータ2の駆動軸17に形成されたギアである太陽ギア18と、太陽ギア18と噛み合う複数の遊星ギア19、19と、遊星ギア19、19と噛み合うリングギア20と、上記各部を収容するケース21とで構成される。太陽ギア18は、駆動伝達軸12の中央に形成された孔22に差し込まれている。遊星ギア19、19は、太陽ギア18の周囲に配置され、駆動伝達軸12の後端側に形成されるキャリア23に挿通された軸24、24によってそれぞれの中心が固定されている。リングギア20はケース21の内周壁に固定されており、ケース21は本体カバー6のハウジング部9に固定されている。このように減速機11を構成することで、モータ2の回転が上記各ギアにより定められる所定の減速比で減速され、駆動伝達軸12に伝達される。
【0023】
駆動伝達軸12は、上述したキャリア23と、キャリア23の中心を通る軸部25で構成される。軸部25は、後端側が減速機11のケース21内に固定されたベアリング26により保持され、前端側が出力軸13に形成された後部穴27により回転自在に保持されている。
【0024】
出力軸13は、ハンマ14の前方に配置されており、後端側にはハンマ14によって打撃される際にハンマ14と係合するアンビル28、28が形成されている。出力軸13は、本体カバー6のハウジング部9の前端側に固定されたメタル軸受29により保持されており、前端側がハウジング部9の前端面より突出している。出力軸13の前端側には、ビット3を挿入するためのビット挿入穴30が形成されていると共に、ビット挿入穴30に挿入したビット3を固定するためのチャック機構31が設けられている。
【0025】
ハンマ14は、その中央に駆動伝達軸12の軸部25が遊嵌される貫通孔32を有しており、駆動伝達軸12に対して相対回転可能に且つ前進後退可能に連結されている。ハンマ14は、ハンマバネ16の復元力により、出力軸13側に向けて付勢されている。ハンマ14の前端側には、出力軸13のアンビル28、28と係合するハンマ爪33、33が放射状に形成されている。
【0026】
カム機構15は、軸部25の前側外周面に螺旋状に形成された軸部カム溝34、34と、ハンマ14の内周面に形成されたハンマカム溝35、35と、軸部カム溝34、34とハンマカム溝35、35の双方に係合する鋼球36、36とで構成される。軸部カム溝34、34とハンマカム溝35、35はそれぞれ、鋼球36、36の半球分が入り込めるように形成されており、軸部カム溝34、34とハンマカム溝35、35が重なって形成される空間に鋼球36、36が配設されている。上記のようなカム機構15を構成することで、駆動伝達軸12の回転が鋼球36、36を介してハンマ14に伝達される。
【0027】
ハンマバネ16は、中央の空間37に駆動伝達軸12の軸部25が挿通され、駆動伝達軸12のキャリア23部とハンマ14の間に圧縮されて配設されている。ハンマバネ16は、後端側がキャリア23部に固定されたプレート38により保持され、前端側がハンマ14に固定されたプレート39により保持されている。
【0028】
ハンマバネ16の後端側にある上記プレート38の前方には、ハンマ14が駆動伝達軸12に対して後退するときに、鋼球36、36が駆動伝達軸12の軸部カム溝34、34の後端壁(図示しない)に衝突して騒音及び振動が発生しないように、ハンマ14の後退量を制限する金属板40が弾性体41を介して設けられる。弾性体41は、金属板40とハンマ14が当接するときに生じる衝撃力を緩和するためのものである。金属板40と弾性体41は、軸部25が挿通されると共にハンマバネ16の空間37に位置するようにリング状に形成されている。ここで、上述したハンマバネ16は、その内径が弾性体41の外径の変形量を規制するように設定されており、弾性体41が上述の衝撃力を吸収して過剰に圧縮されることを防止する規制部材として機能する。
【0029】
図3は、インパクト回転工具1の電気的構成を示している。インパクト回転工具1は、モータ2を制御するモータ制御回路51と、駆動軸17の回転角を検出する回転角検出センサ52と、ハンマ14が出力軸13を打撃するときの角速度を算出する打撃角速度算出部(打撃角速度算出部手段)53と、ねじが締め付け対象物と着座したことを検出する着座検出部(着座検出手段)54と、ハンマ14によって出力軸13が打撃されたこと及びそのタイミングを検出する打撃検出センサ55と、ねじの締め付けトルクに関する各種情報を表示する報知ランプ(締め付け過剰報知手段、締め付け正常報知手段、締め付け不足報知手段)56等を有している。
【0030】
モータ制御回路51は、制御回路5から出力された信号に応じてモータ2に印加する駆動電圧を制御する。回転角検出センサ52は、モータ2の駆動軸17の回転角を検出するセンサであり、モータ2がブラシモータである場合にはFG(frequency generator)センサ、ブラシレスモータである場合にはロータの位置を検出する位置検出センサ(ホール素子)が用いられる。打撃角速度算出部53は、打撃検出センサ55によって検出された打撃タイミング、回転角検出センサ52によって検出された駆動軸17の回転角及び減速機11の減速比に基づいてハンマ14の打撃角速度を算出する。
【0031】
着座検出部54は、回転角検出センサ52によって検出された駆動軸17の回転角、打撃検出センサ55によって検出された打撃タイミング及び減速機11の減速比に基づいて締め付けトルクを推定し、その推定した締め付けトルクが所定の閾値以上になったとき、ねじが締め付け対象物と着座したと判断する。締め付けトルクは、1打撃毎の運動エネルギの収支に着目し、ハンマ14の打撃により出力軸13のアンビル28に付与される回転運動エネルギと、締め付けによって消費されるエネルギが略等しいものとして、推定される。
【0032】
報知ランプ56は、例えば複数個のLED等によって構成され、個々のLEDを個別に点灯又は点滅させることにより、ねじの締め付け作業の適否等を作業者に報知する。より詳細に締め付け作業の適否等を作業者に報知する必要がある場合には、LEDの代わりにLCD等を用いることもできる。
【0033】
図4は、ねじの着座前後における回転角θと、締め付けトルクTとの関係を示している。出力軸13の回転角θと締付トルクT は、図4に示すように関数T = τ( θ ) で表せるとし、ハンマ14による打撃が、それぞれ出力軸13の回転角θ1 、… 、θ n の地点で発生したものとする。関数τ を区間[ θn 、θn+1 ] で積分した値En は締付け作業に消費されたエネルギであり、θn 地点で発生したハンマ14の打撃によりアンビル28(出力軸13)に与えられたエネルギに等しい。よって、区間[ θn 、θn+1 ] における平均の締付トルクT は、En と打撃間回転角Θn = (θn +1 − θn )を用いて、
T = En / Θn … ( 1 )
と推定できる。ここでE n は、打撃間の出力軸13の平均回転角速度ωnと、既知の出力軸13の慣性モーメントJaを用いて、
En = 1/2 × Ja ×(ωn)2 … ( 2 )
と求めることができる。なお、打撃間の出力軸13の平均回転角速度ωnは、出力軸13の打撃間回転角Θnを打撃間隔で除したものである。
【0034】
ハンマ14が一回転する毎に2度出力軸13のアンビル28を打撃する構成の場合、出力軸13が固定され全く回転しないと仮定した場合、モータ2を駆動すると1度の打撃でハンマ14は半回転する。出力軸13が固定されておらず回転可能な場合、モータ2を駆動すると出力軸13の回転角に半回転分の回転角を加えたものが1度の打撃でのハンマ14の回転角となる。例えば、ハンマ14がアンビル28を4度打撃した場合は、ハンマ14は、出力軸13よりも2回転分多く回転している。一方、ハンマ14の回転角は、モータ2とハンマ14の間にある減速機11の減速比から計算できるので、これにハンマ14の打撃回数に相当する回転角を減じれば出力軸13の回転角θnを算出できる。
【0035】
図5は、一般的なインパクト回転工具によってボルトを締結する際のボルトの回転角と締め付けトルクの関係を示している。ボルトとナットの組み合わせ等のような金属製締結具の締め付け作業の場合は、インパクト回転工具が付与する衝撃毎に締め付けトルクは徐々に上昇していく。一方、衝撃毎のボルトの回転角は徐々に減少し、最終的には微少な角度の回転になる。
【0036】
ボルトの締め付けトルクTは、上述のごとくエネルギEnを打撃間の出力軸13の打撃間回転角Θnで除算することにより推定することができるため、この推定締め付けトルクTを用いてモータ2を停止制御することにより、概略的な締め付けトルクTの管理を行うことも可能ではある。しかしながら、衝撃毎のボルトの回転角すなわち出力軸13の打撃間回転角Θnが微少な領域になると、回転角Θnのわずかな誤差が締め付けトルクTの推定値に大きな影響を及ぼすこととなり、正確な締め付けトルクTを推定することが困難となる。図5は、出力軸13の回転角 Θnが微少な領域において、推定した締め付けトルクTが実際の締め付けトルクよりも低く算出されている例を示している。
【0037】
このような場合、出力軸13の回転角θnの検出を駆動軸17の回転角検出センサ52に依存することなく、出力軸13の回転角θnそのものを高精度・高分解能の回転角センサによって検出するように構成することにより、締め付けトルクTの推定値をより正確なものとすることも可能である。しかしながら、出力軸13に回転角センサを設ける構成とすると、インパクト回転工具自体が大きく重くなることから、作業性が大幅に悪化する。また、インパクト回転工具の構成が複雑となるため、その製造コストが高騰する。そのため、本実施形態では、出力軸13に回転角センサは設けられていない。
【0038】
そこで、本インパクト回転工具1においては、締め付け初期段階におけるねじが着座する前後の領域では打撃間の出力軸13の回転角が比較的大きいことから、締め付けトルクを正確に推定できること、及びねじが着座すると着座面に摩擦力が発生することに着目し、締め付けトルクが上記摩擦力の発生に伴い増大して所定の閾値(着座判定値とする)以上になったことを検知することによってねじの着座を判定し、ねじが着座した後のハンマ14の打撃回数に基づいて締め付けトルクを算出し、モータ2の停止制御を行う。
【0039】
図6は、ねじを締結する際にモータ2を上述のごとくねじの着座後、所定回数打撃するように停止制御したときのボルトの回転角と締め付けトルクの関係を示している。本実施形態においては、着座検出部54がねじの着座を検出した後、ハンマ14が出力軸13を7回打撃したとき、適正な締め付けトルクでねじが締結されたものとしてモータ2の停止制御を行う。モータ2の制御にあたって判定するハンマ14の打撃回数は、締め付けトルクに応じて適宜設定される。例えば、より大きな締め付けトルクでねじを締結する際には、ハンマ14の打撃回数を増加させればよい。このように、着座検出部54がねじの着座を検出した後、ハンマ14の打撃回数に基づいて算出した締め付けトルクは、同図において破線で示す実際の締め付けトルクと略一致する。従って、インパクト回転工具の構成を複雑にすることなく、正確な締め付けトルクでねじを締結することが可能となる。
【0040】
図7は、充電池の電圧と、締め付けトルクとの関係を示している。インパクト回転工具1の電源電圧が例えば商用電源のように安定している場合、締め付けトルクの繰り返し精度は比較的安定している。しかしながら、電源として充電池7を採用する場合にあっては、その電圧が低下することに起因してモータ2の出力が低下し、締め付けトルクも低下する傾向にある。従って、充電池7の電圧が所定電圧よりも高いことを前提に上記ハンマ14の打撃回数を設定した場合にあっては、充電池7の電圧が低下したとき、十分な締め付けトルクを得ることができない。その結果、電源として充電池7を採用する場合にあっては、締め付けトルクの繰り返し精度が悪化する虞がある。また、充電池の使用温度の変化や経年劣化に伴う放電特性の変化等もモータ2の出力を変動させる要因となる。
【0041】
そこで、インパクト回転工具1は、打撃角速度算出部53が算出したハンマ14の打撃角速度に応じて駆動軸17の回転停止の判断に用いる打撃回数を補正することにより、充電池7の電圧が低下したときであっても、十分な締め付けトルクでねじを締結するように構成されている。
【0042】
図8は、ハンマ14の打撃角速度と最大締め付けトルクとの関係を示している。ハンマ14の打撃角速度が第2の打撃角速度以上でかつ第1の打撃角速度以下のとき、制御回路5は、回転停止の判断に用いる打撃回数を補正してモータ2を制御する。すなわち、打撃角速度算出部53が算出したハンマ14の打撃角速度が第1の打撃角速度以下のとき、制御回路5は、駆動軸17の回転停止の判断に用いる打撃回数を増やして駆動軸17の回転を制御する。また、打撃角速度算出部53が算出したハンマ14の打撃角速度が第2の打撃角速度以下のとき、制御回路5は、報知ランプ56を点灯させて、締め付けトルクが不足の可能性がある旨を報知する。このとき、締め付け作業を停止させるように構成してもよい。
【0043】
打撃回数の補正値は、例えば以下に示す手法によって計算される。打撃角速度算出部53が算出したハンマ14の打撃角速度が第1の打撃角速度以下のとき、制御回路5は、まず適正な締め付けトルクを得るために不足エネルギを算出する。不足エネルギは、第1の打撃角速度、実際の打撃角速度及び所定の設定打撃数を用いて、以下の式によって算出される。
不足エネルギ=1/2×Ja×((第1の打撃角速度)2−(実際の打撃角速度)2)
×設定打撃数 ・・・(3)
さらに、制御回路5は、不足エネルギ及び実際の打撃角速度を用いて、以下の式によって打撃回数の補正値を算出する。
打撃回数の補正値=補正係数×不足エネルギ
/(1/2×Ja×(実際の打撃角速度)2) ・・・(4)
ここで、補正係数とは、個々のインパクト回転工具により異なる任意の係数である。このようにインパクト回転工具1においては、ハンマ14の打撃角速度を監視してハンマ14の打撃回数を適宜補正しているので、充電池7の電圧が低下したり、使用温度の変化や経年劣化に伴って放電特性が変化した場合にあっても、適正な締め付けトルクでねじを締結することができる。
【0044】
図9は、インパクト回転工具1を用いてねじを締結する際の制御回路5の動作を示している。トリガ8が操作されると(#1においてYES)、トリガ8の操作量に対応した速度でモータ2を回転制御する(#2)。その後、ハンマ14の打撃が検出されると(#3においてYES)、着座検出部54に推定締め付けトルクを演算させる(#4)。ここでトリガ8の操作が継続し(#5においてNO)、推定締め付けトルクが着座判定値に達し、その後ハンマ14が所定回数出力軸13を打撃すると、適正な締め付けトルクに到達したとして(#6においてYES)、モータ2の回転を停止させ(#7)、報知ランプ56を点灯させて正常に締め付けが完了した旨を表示させる(#8)。なお、#1においてトリガ8が操作されない場合は(#1においてNO)、モータ2を停止させたまま(#9)、#1に戻って待機する。
【0045】
一方、締め付けの途中でトリガ8の操作が止められた場合は(#5においてYES)、モータ2の回転を停止させ、さらには報知ランプ56を点灯させて締め付けが未完了である旨を表示させる(#10)。そして所定時間内にトリガ8が操作されると(#11においてYES)、トリガ8の操作量に対応した速度でモータ2を回転制御する(#12)。その後、ハンマ14の打撃が検出されると(#13においてYES)、着座検出部54に推定締め付けトルクを演算させる(#14)。ここでトリガ8の操作が継続し(#15においてNO)、推定締め付けトルクが着座判定値に達し、その後ハンマ14が所定回数出力軸13を打撃すると(#16においてYES)、モータ2の回転を停止させる(#17)。
【0046】
この場合、#2乃至#5の間でハンマ14が通常よりも過剰にアンビル28を打撃しているので、締め付けトルクが過剰の可能性がある。そこで、報知ランプ56を点灯させて締め付けトルクが過剰の可能性がある旨を表示する(#18)。なお、#11において所定時間内にトリガ8が操作されない場合は(#11においてNO)、別のねじを締結する作業に移行したものとして、#1に戻る。また、#15において、トリガ8の操作が止められた場合は(#15においてYES)、モータ2の回転を停止させ、#10に戻る。
【0047】
以上説明したように、本実施形態のインパクト回転工具1によれば、着座検出部54がねじの着座を検出した後、制御回路5がハンマ14の打撃回数を計数し、所定の打撃回数になれば駆動軸17の回転を停止させる。すなわち、打撃間回転角が小さくなる着座後においてはハンマ14の打撃回数で締め付けトルクを算出し、モータ2を制御するので、安価な構成でありながら、ねじを正確なトルクで締め付けることができる。また、ハンマ14の打撃間回転角と出力軸13の角速度に基づいて締め付けトルクを推定し、この推定した締め付けトルクが所定の閾値以上になったとき、ねじが締め付け対象物と着座したと判断するので、安価な構成で締め付けトルクを演算により推定することができる。特に、着座後の打撃間回転角が小さい領域においては、ハンマ14の打撃回数で締め付けトルクを算出するので、締め付けトルクを正確に算出することが可能となる。
【0048】
また、ハンマ14の打撃角速度が所定の第1の打撃角速度以下となるとき、制御回路5は、駆動軸17の回転停止の判断に用いる打撃回数を増やすので、例えば、インパクト回転工具の電源とする充電池7の充電量が不足気味でモータ2の駆動電圧が低下傾向にある場合であっても、締め付けトルクの不足を抑制できるようになる。また、ハンマ14の打撃角速度に基づいて不足している打撃エネルギを算出し、この不足している打撃エネルギを打撃回数に変換することにより駆動軸17の回転停止の判断に用いる打撃回数を増やすので、適正な締め付けトルクでねじを締結することが可能となる。
【0049】
また、駆動軸17の回転が一旦停止し、さらにその後、駆動軸17の回転が再開し、締め付けトルクが過剰の可能性がある場合に、報知ランプ56がその旨を報知するので、いわゆる二段階締め付けによる締め付けトルクの過剰を防止することができる。また、作業者が形式上の二段階締め付けを行った場合であっても、打撃検出センサ55が打撃を検出する前に駆動軸17の回転が一旦停止した場合には、ねじは正常な締め付けトルクで締結されたものとして報知ランプ56がその旨を報知するので、締結作業をやり直す必要がなくなり、作業向上の効率化を図ることができる。また、打撃角速度算出部53が算出したハンマ14の打撃角速度が所定の第2打撃角速度以下のとき、例えば上述した打撃回数の補正を行っても締め付けトルクの不足を解消できないとき、報知ランプ56が締め付けトルクが不足の可能性がある旨を報知する。これにより、締め付けトルクの不足を防止することができる。
【0050】
なお、本発明は上記実施形態の構成に限定されるものではなく、少なくとも着座検出部54がねじの着座を検出し、着座後の打撃回数に基づいてモータ2の回転を制御するように構成されていればよい。また、本発明は、種々の変形が可能であり、例えば、インパクト駆動機構部4の構成は、実施形態に示したものに限られることなく、同等の機能を有する他の構成を採用してもよい。
【図面の簡単な説明】
【0051】
【図1】本発明の実施形態にかかるインパクト回転工具の概略構成を示す図。
【図2】インパクト駆動機構部の内部構成を示す図。
【図3】同インパクト回転工具の電気的構成を示すブロック図。
【図4】一般的なインパクト回転工具によってボルトを締結する際のねじの着座前後における回転角と、締め付けトルクとの関係を示す図。
【図5】一般的なインパクト回転工具によってボルトを締結する際のボルトの回転角と締め付けトルクの関係を詳細に示す図。
【図6】本発明の実施形態にかかるインパクト回転工具によってねじを締結する際にモータを上述のごとく停止制御したときのボルトの回転角と締め付けトルクの関係を示す図。
【図7】充電池の電圧と、締め付けトルクとの関係を示すブロック図。
【図8】ハンマの打撃角速度と最大締め付けトルクとの関係を示す図。
【図9】同インパクト回転工具を用いてねじを締結する際の制御回路の動作を示すフローチャート。
【符号の説明】
【0052】
1 インパクト回転工具
2 モータ
4 インパクト駆動機構
5 制御回路(制御手段)
11 減速機
12 駆動軸
13 出力軸
14 ハンマ
17 駆動軸
52 回転角検出センサ
53 打撃角速度算出部(打撃角速度算出部手段)
54 着座検出部(着座検出手段)
55 打撃検出センサ
56 報知ランプ(締め付け過剰報知手段、締め付け正常報知手段、締め付け不足報知手段)
【特許請求の範囲】
【請求項1】
回転する駆動軸を有するモータと、
前記駆動軸の回転を所定の減速比で減速する減速機と、この減速機を介して前記駆動軸の回転力が伝達されるハンマと、このハンマによる打撃によって付与された回転力をねじに伝達するための出力軸とを有するインパクト駆動機構と、
前記ハンマによって前記出力軸が打撃されたこと及びそのタイミングを検出する打撃検出センサと、
前記出力軸を介して伝達された回転力によって締め付けられるねじが締め付け対象物と着座したことを検出する着座検出手段と、
前記着座検出手段がねじの着座を検出した後、前記打撃検出センサが検出した打撃の回数を計数し、所定の打撃回数になれば前記駆動軸の回転を停止させる制御手段とを備えたインパクト回転工具において、
前記駆動軸の回転が一旦停止し、さらにその後、該駆動軸の回転が再開した場合に、前記制御手段が該駆動軸の回転再開から前記所定の打撃回数を計数したとき、締め付けトルクが過剰の可能性がある旨を報知する締め付け過剰報知手段をさらに備えたことを特徴とするインパクト回転工具。
【請求項2】
前記打撃検出センサが打撃を検出する前に、前記駆動軸の回転が一旦停止した場合には、正常な締め付けトルクでねじを締め付けた旨を報知する締め付け正常報知手段をさらに備えたことを特徴とする請求項1に記載のインパクト回転工具。
【請求項3】
回転する駆動軸を有するモータと、
前記駆動軸の回転を所定の減速比で減速する減速機と、この減速機を介して前記駆動軸の回転力が伝達されるハンマと、このハンマによる打撃によって付与された回転力をねじに伝達するための出力軸とを有するインパクト駆動機構と、
前記ハンマによって前記出力軸が打撃されたこと及びそのタイミングを検出する打撃検出センサと、
前記出力軸を介して伝達された回転力によって締め付けられるねじが締め付け対象物と着座したことを検出する着座検出手段と、
前記着座検出手段がねじの着座を検出した後、前記打撃検出センサが検出した打撃の回数を計数し、所定の打撃回数になれば前記駆動軸の回転を停止させる制御手段と
前記駆動軸の回転角を検出する回転角検出センサと、
前記打撃検出センサによって検出された打撃タイミング、前記回転角検出センサによって検出された前記駆動軸の回転角及び前記減速機の減速比に基づいて前記ハンマの打撃角速度を算出する打撃角速度算出手段とを備えたインパクト回転工具において、
前記着座検出手段は、
前記回転角検出センサによって検出された前記駆動軸の回転角、前記打撃検出センサによって検出された打撃タイミング及び減速機の減速比に基づいて前記ハンマの打撃間回転角を演算し、
前記打撃角速度算出手段により演算されたハンマの打撃角速度に基づいて前記出力軸の打撃間平均角速度を演算し、
前記ハンマの打撃間回転角と、前記出力軸の打撃間平均角速度に基づいて締め付けトルクを推定し、この推定した締め付けトルクが所定の閾値以上になったとき、ねじが締め付け対象物と着座したと判断することを特徴とするインパクト回転工具。
【請求項4】
前記打撃角速度算出手段により算出された前記ハンマの打撃角速度が所定の第1の打撃角速度以下のとき、前記制御手段は、前記駆動軸の回転停止の判断に用いる打撃回数を増やして該駆動軸の回転を制御することを特徴とする請求項3に記載のインパクト回転工具。
【請求項5】
前記制御手段は、前記打撃角速度算出手段により算出された前記ハンマの打撃角速度及び前記所定の第1の打撃角速度に基づいて不足している打撃エネルギを算出し、この不足している打撃エネルギを打撃回数に変換することにより前記駆動軸の回転停止の判断に用いる打撃回数を増やすことを特徴とする請求項4に記載のインパクト回転工具。
【請求項6】
前記打撃角速度算出手段により算出された前記ハンマの打撃角速度が前記第1の打撃角速度未満の所定の第2打撃角速度以下のとき、締め付けトルクが不足の可能性がある旨を報知する締め付け不足報知手段をさらに備えたことを特徴とする請求項4に記載のインパクト回転工具。
【請求項1】
回転する駆動軸を有するモータと、
前記駆動軸の回転を所定の減速比で減速する減速機と、この減速機を介して前記駆動軸の回転力が伝達されるハンマと、このハンマによる打撃によって付与された回転力をねじに伝達するための出力軸とを有するインパクト駆動機構と、
前記ハンマによって前記出力軸が打撃されたこと及びそのタイミングを検出する打撃検出センサと、
前記出力軸を介して伝達された回転力によって締め付けられるねじが締め付け対象物と着座したことを検出する着座検出手段と、
前記着座検出手段がねじの着座を検出した後、前記打撃検出センサが検出した打撃の回数を計数し、所定の打撃回数になれば前記駆動軸の回転を停止させる制御手段とを備えたインパクト回転工具において、
前記駆動軸の回転が一旦停止し、さらにその後、該駆動軸の回転が再開した場合に、前記制御手段が該駆動軸の回転再開から前記所定の打撃回数を計数したとき、締め付けトルクが過剰の可能性がある旨を報知する締め付け過剰報知手段をさらに備えたことを特徴とするインパクト回転工具。
【請求項2】
前記打撃検出センサが打撃を検出する前に、前記駆動軸の回転が一旦停止した場合には、正常な締め付けトルクでねじを締め付けた旨を報知する締め付け正常報知手段をさらに備えたことを特徴とする請求項1に記載のインパクト回転工具。
【請求項3】
回転する駆動軸を有するモータと、
前記駆動軸の回転を所定の減速比で減速する減速機と、この減速機を介して前記駆動軸の回転力が伝達されるハンマと、このハンマによる打撃によって付与された回転力をねじに伝達するための出力軸とを有するインパクト駆動機構と、
前記ハンマによって前記出力軸が打撃されたこと及びそのタイミングを検出する打撃検出センサと、
前記出力軸を介して伝達された回転力によって締め付けられるねじが締め付け対象物と着座したことを検出する着座検出手段と、
前記着座検出手段がねじの着座を検出した後、前記打撃検出センサが検出した打撃の回数を計数し、所定の打撃回数になれば前記駆動軸の回転を停止させる制御手段と
前記駆動軸の回転角を検出する回転角検出センサと、
前記打撃検出センサによって検出された打撃タイミング、前記回転角検出センサによって検出された前記駆動軸の回転角及び前記減速機の減速比に基づいて前記ハンマの打撃角速度を算出する打撃角速度算出手段とを備えたインパクト回転工具において、
前記着座検出手段は、
前記回転角検出センサによって検出された前記駆動軸の回転角、前記打撃検出センサによって検出された打撃タイミング及び減速機の減速比に基づいて前記ハンマの打撃間回転角を演算し、
前記打撃角速度算出手段により演算されたハンマの打撃角速度に基づいて前記出力軸の打撃間平均角速度を演算し、
前記ハンマの打撃間回転角と、前記出力軸の打撃間平均角速度に基づいて締め付けトルクを推定し、この推定した締め付けトルクが所定の閾値以上になったとき、ねじが締め付け対象物と着座したと判断することを特徴とするインパクト回転工具。
【請求項4】
前記打撃角速度算出手段により算出された前記ハンマの打撃角速度が所定の第1の打撃角速度以下のとき、前記制御手段は、前記駆動軸の回転停止の判断に用いる打撃回数を増やして該駆動軸の回転を制御することを特徴とする請求項3に記載のインパクト回転工具。
【請求項5】
前記制御手段は、前記打撃角速度算出手段により算出された前記ハンマの打撃角速度及び前記所定の第1の打撃角速度に基づいて不足している打撃エネルギを算出し、この不足している打撃エネルギを打撃回数に変換することにより前記駆動軸の回転停止の判断に用いる打撃回数を増やすことを特徴とする請求項4に記載のインパクト回転工具。
【請求項6】
前記打撃角速度算出手段により算出された前記ハンマの打撃角速度が前記第1の打撃角速度未満の所定の第2打撃角速度以下のとき、締め付けトルクが不足の可能性がある旨を報知する締め付け不足報知手段をさらに備えたことを特徴とする請求項4に記載のインパクト回転工具。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2009−190158(P2009−190158A)
【公開日】平成21年8月27日(2009.8.27)
【国際特許分類】
【出願番号】特願2008−36293(P2008−36293)
【出願日】平成20年2月18日(2008.2.18)
【出願人】(000005832)パナソニック電工株式会社 (17,916)
【Fターム(参考)】
【公開日】平成21年8月27日(2009.8.27)
【国際特許分類】
【出願日】平成20年2月18日(2008.2.18)
【出願人】(000005832)パナソニック電工株式会社 (17,916)
【Fターム(参考)】
[ Back to top ]