
ウィンドファーム
【課題】ウィンドファーム内の風力発電装置の発電機側トルクを適切に制御することにより、全ての風力発電装置が有している回転エネルギーを有効に活用し、高出力で平準化した電力を電力系統に供給できるウィンドファームを提供する。
【解決手段】制御可能な電力変換装置を搭載する複数の風力発電装置と、複数の風力発電装置にそれぞれ併設され、風速を測定する複数の風速計と、複数の風力発電装置をそれぞれ制御するとともに、これら風力発電装置の運転情報をそれぞれ取得して記憶する複数の個別制御装置と、ウィンドファーム全体を制御するとともに、複数の個別制御装置からの各風力発電装置の運転情報、及び仮想的エネルギー片を用いて、処理を行った上で、風力発電装置の発電機側トルクを制御するための指令値を生成し、生成した指令値を該当風力発電装置の個別制御装置に伝送するウィンドファーム制御装置とを備えるウィンドファーム。
【解決手段】制御可能な電力変換装置を搭載する複数の風力発電装置と、複数の風力発電装置にそれぞれ併設され、風速を測定する複数の風速計と、複数の風力発電装置をそれぞれ制御するとともに、これら風力発電装置の運転情報をそれぞれ取得して記憶する複数の個別制御装置と、ウィンドファーム全体を制御するとともに、複数の個別制御装置からの各風力発電装置の運転情報、及び仮想的エネルギー片を用いて、処理を行った上で、風力発電装置の発電機側トルクを制御するための指令値を生成し、生成した指令値を該当風力発電装置の個別制御装置に伝送するウィンドファーム制御装置とを備えるウィンドファーム。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、風力発電技術に関し、特に、可変速発電機と制御可能な電力変換装置を搭載し、風力エネルギーを利用して電力を発電する、風力発電装置(風力発電風車)が複数(2基以上に)設置されているウィンドファーム(風力発電システム)に関する。
【背景技術】
【0002】
近年、地球温暖化対策の一つとして、風力や太陽光などの自然エネルギー(再生可能エネルギー)を利用する発電方式が注目を浴びている。その中でも、世界的に最も導入が進んでいるのは、風力エネルギーを利用する風力発電である。
【0003】
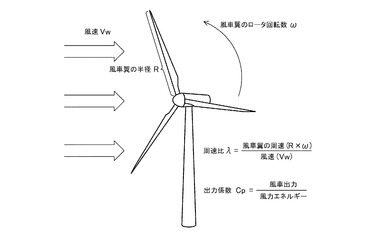
図1に示すように、風力発電装置について、風のパワーをどれだけ風車のパワーとして変換できるか表す指標として、出力係数Cpが用いられる。出力係数Cpは、風力エネルギーに対する風車出力の比で定義される。また、周速比λは、風速Vwに対する風車翼の周速(先端速度)(風車翼の半径R×風車翼のロータ回転数ω)の比で定義される。
【0004】
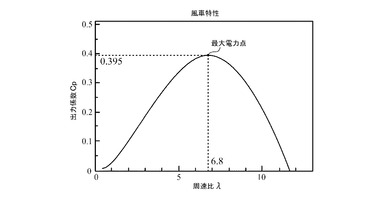
出力係数Cpは周速比λと風車翼のピッチ角θの関数として知られ、その関数の形は風車翼の断面形状に依存する。風洞実験の結果などから様々な解析的な関数の形が提案されている。図2に示されたように、一つの極大点(即ち、最大電力点)を有する曲線になる。つまり、図2から分かるように、ある風速に対して、最適な風車翼のロータ回転数が存在する。
【0005】
風力発電装置の風車翼が一定速度で回転している場合、即ち、風力発電装置が定速回転風力発電方式を採用した場合に、風速が変化する度に周速比も変化するため、風車の出力がこの最大電力点からずれることになり、よって、定速回転風力発電方式では、風力エネルギーから最大の電気エネルギー(風車が取り出せる最大の電気エネルギー)を得ることができない。
【0006】
日本の気象条件や地形の複雑さゆえに風力に脈動が多いことから、海外と比べ、日本では風力発電装置の定格風速以上で安定した風資源を得られる地域が少ない。
【0007】
地形の起伏がある地域においては、風は常時一定の速度ではなく、脈動しながら進む。このような風力に脈動が多い地域に設置されている、風力発電装置をより効率的に制御(運転)するためには、現在の主流となっている定速回転風力発電方式(定速回転運転)よりも、動的な制御方法を用いることが有効である。
【0008】
動的な制御方法の中に、風力発電装置の定格風速以下の脈動する風況のもとで、風力エネルギーから最大の電気エネルギーを得る制御方法として、最大電力点追従運転(MPPT:Maximum Power Point Track)が挙げられる。
【0009】
最大電力点追従運転とは、風の変動に合わせて、風力発電装置の風車翼のロータ回転数を変化させ、その風力発電装置の風車特性における出力係数Cpの最大値(図2に示されたような最大電力点に対応する出力係数Cpの値)を維持するように、周速比λを一定(図2に示されたような最大電力点に対応する周速比λの値)に保つ運転することで、風力エネルギーを最大限に電力エネルギーに変換できる制御方法である。
【0010】
このように、最大電力点追従運転を行うことにより、風力発電装置の発電電力量を増加させることができる。最大電力点追従運転を行うことにより、風力エネルギーを電力エネルギーに変換したときの変換効率は、定速回転風力発電方式を採用した場合より高くなる。
【0011】
しかしながら、最大電力点追従運転という制御を行う場合に、次の二つの問題点がある。
【0012】
一つの問題点として、風車翼の慣性により、風車翼のロータ回転数を素早く変化させることが出来ない。通常、風速は1秒から数秒の周期で変動している。そのため、最大電力点追従運転を行うには、その風速の変動に合わせて風車翼のロータ回転数を変化させなければならない。しかし、大型の風力発電装置では、その風車翼の慣性が非常に大きく、その時定数は数十秒あり、常に風速の変動に合わせて得られた最適なロータ回転数を保つことが困難であり、つまり、風が脈動する場合には、最大電力点追従運転の追従性が遅くなる問題点がある。
【0013】
もう一つの問題点として、最大電力点追従運転という制御を行う場合に、風力発電装置から出力された出力電力の変動が、定速回転風力発電方式よりも大きくなる。風力発電装置の風車翼が一定回転数で回転している場合では、風速が急激に変化しても、出力係数Cpが低下するため、風力発電装置から出力された出力電力はそれほど変動しない。しかし、最大電力点追従運転の場合では、出力係数Cpが常に最大値になるため、風速の3乗に比例した風力発電装置の出力電力が電力系統に出力される。
【0014】
このように、最大電力点追従運転を行う風力発電装置から、電力系統へ大きく変動する電力が出力されると、当該電力系統に接続された電源(例えば、火力発電所)や負荷(工場や家庭などの電力消費者)に電圧変動や周波数変動等の悪影響が生じる問題が発生してしまう。
【0015】
上述した二つの問題点を解決できる制御法として、例えば、特許文献1に記載されたような、風力発電装置とフライホイール発電機を搭載した風力発電設備がある。
【0016】
特許文献1に記載された風力発電設備では、エネルギーの高速充放電を可能にした上で、フライホイールのエネルギーを積極的に活用して、風力発電装置の風車翼の回転スピードの追従制御を行い、効率よく風力エネルギーを電気エネルギーに変換するという「ポンプアップ運転」を提案した。
【0017】
つまり、特許文献1に開示された風力発電設備では、フライホイール発電機から風力発電装置に対して電力を供給することにより、風力発電装置を電動機として動作させることが可能になり、最大電力点追従運転の追従性を向上させ、高効率な制御を実現した。
【先行技術文献】
【特許文献】
【0018】
【特許文献1】特許第4056713号
【発明の概要】
【発明が解決しようとする課題】
【0019】
しかしながら、特許文献1に開示された風力発電設備では、風力発電装置の外部からの電力が必要であるため、フライホイール発電機のような電力貯蔵装置を設置する必要がある。フライホイール発電機のような電力貯蔵装置の設置は、風力発電設備のコストアップの一因にもなる。
【0020】
また、特許文献1に開示された風力発電設備では、単体の風力発電装置で構成されているので、フライホイールのエネルギーの活用で改善された最大電力点追従運転の追従性により、高エネルギー変換効率を実現したが、その風力発電装置から出力される電力の変動も、定速回転風力発電方式より激しくなり、風力発電装置から出力され、激しい変動を有する電力は、フライホイール発電機のような電力貯蔵装置を介してある程度平滑化されてから、出力電力として電力系統に出力される。
【0021】
本発明は、上述のような事情よりなされたものであり、本発明の目的は、電力貯蔵装置を使用することなく、複数の風力発電装置で構成されるウィンドファーム内の風力発電装置の発電機側トルクを適切に制御することにより、ウィンドファーム内の全ての風力発電装置が有している回転エネルギーを有効に活用し、高出力で平準化した電力を電力系統に供給するようにしたウィンドファームを提供することにある。
【課題を解決するための手段】
【0022】
本発明は、風力エネルギーを利用して電力を発電するウィンドファームに関し、本発明の上記目的は、風車翼を有するとともに、可変速発電機と制御可能な電力変換装置を搭載する複数の風力発電装置と、前記複数の風力発電装置にそれぞれ併設され、風速を測定する複数の風速計と、前記複数の風力発電装置をそれぞれ制御するとともに、これら風力発電装置の運転状態を表す運転情報をそれぞれ取得して記憶する複数の個別制御装置と、前記ウィンドファーム全体を制御するとともに、前記複数の個別制御装置からの各風力発電装置の運転情報、及び仮想的エネルギー片を用いて、処理を行った上で、風力発電装置の発電機側トルクを制御するための指令値を生成し、生成した指令値を該当風力発電装置の個別制御装置に伝送するウィンドファーム制御装置とを備えることによって効果的に達成される。
【0023】
また、本発明の上記目的は、前記ウィンドファーム制御装置では、前記処理により、正の仮想エネルギー片が与えられた場合の最大の出力増加分を有する風力発電装置と、負の仮想エネルギー片が与えられた場合の最大の出力増加分を有する風力発電装置を選び出し、選び出した2基の風力発電装置の出力増加分の合計値が、所定のエネルギーリミットより大きい場合に、発電機側トルク制御処理を行うことにより、或いは、前記発電機側トルク制御処理は、前記ウィンドファーム制御装置により生成された指令値に応じて、前記電力変換装置の制御を介して行われることによってより効果的に達成される。
【発明の効果】
【0024】
本発明によれば、ウィンドファームに設置された全ての風力発電装置が有している回転エネルギーを有効に活用することで、高出力で平準化した電力を電力系統に供給することができる。
【0025】
また、本発明を更に発展させることで、ウィンドファームから脈動の無い一定出力の電力が供給されることも可能である。これによって、風力発電システムの不利点である、出力電力の脈動が大きいという問題点も改善される。
【図面の簡単な説明】
【0026】
【図1】風力発電装置(風力発電風車)の発電原理を説明するための図である。
【図2】風力発電装置の風車特性の一例を示す図である。
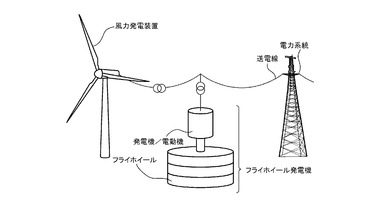
【図3】フライホイール発電機と風力発電装置を備える風力発電設備を説明するための概念図である。
【図4】図3に示された風力発電設備に行われるポンプアップ運転について、風速が急激に上昇した場合の制御を説明するための概念図である。
【図5】図3に示された風力発電設備に行われるポンプアップ運転について、風速が急激に減速した場合の制御を説明するための概念図である。
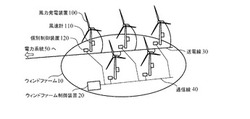
【図6】本発明に係るウィンドファームの実施形態を示す概念図である。
【図7】本発明に係るウィンドファームを説明するための模式図である。
【図8】本発明に係るウィンドファームのウィンドファーム制御装置にて行われる処理を説明するための流れ図である。
【図9】本発明に係るウィンドファームにおいて、i基目の風力発電装置とj基目の風力発電装置に対して行われる処理を説明するための模式図である。
【発明を実施するための形態】
【0027】
本発明は、可変速発電機と制御可能な電力変換装置を搭載する、複数(2基以上)の風力発電装置で構成されるウィンドファーム内の風力発電装置の発電機側トルクを適切に制御することにより、ウィンドファーム内の全ての風力発電装置が有している回転エネルギーを有効に活用し、高出力で平準化した電力を電力系統に供給するようにしたウィンドファームに関する。
【0028】
本発明の詳細説明に入る前に、まず、特許文献1に記載された風力発電設備に開示された「ポンプアップ運転」の原理について、図3、図4及び図5を用いて説明する。なお、図3、図4及び図5は、ポンプアップ運転(ポンプアップ制御)を説明するための図であるため、特許文献1の風力発電設備に備えられている電力制御装置を図示しないことにした。
【0029】
図3は、特許文献1に記載された風力発電設備を説明するための概念図である。図3に示すように、風力発電装置の出力と電力系統の間に、フライホイール発電機を電気的に並列接続した構成となっている。このフライホイール発電機により、電力系統への電力の変動を平滑化するとともに、風力発電装置に対しては風車翼のロータ回転数を素早く変化させるポンプアップ運転を行う。
【0030】
最大電力点追従運転を行うには、風速の変動に合わせて風車翼のロータ回転数を変化させる必要がある。風力エネルギーで風車翼のロータ回転数を変えることも可能であるが、風車翼の慣性が大きいため、風力エネルギーだけでは、十分な追従速度が得られない。特許文献1の風力発電設備では、フライホイールに蓄積された回転エネルギーも利用して、風車翼のロータ回転数を素早く変化させる制御を行うことで、より多くの発電電力(電力エネルギー)を得ることができる。
【0031】
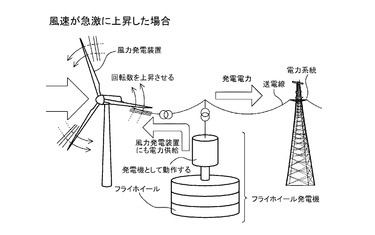
図4は、図3に示された風力発電設備に行われるポンプアップ運転について、風速が急激に上昇した場合の制御を説明するための概念図である。
【0032】
図4に示すように、風速が急激に上昇した場合には、風力発電装置の風車翼のロータ回転数を急速に上げる必要がある。この場合には、フライホイール発電機を発電機として動作させ、電力系統には一定電力を送りつつ、風力発電装置にも電力を供給する。風力発電装置を電動機として動作させ、風車翼のロータ回転数を素早く上昇させる。つまり、フライホイールに蓄積された回転エネルギーを、電気エネルギーを介して、再び風車翼の回転エネルギーに変換する。
【0033】
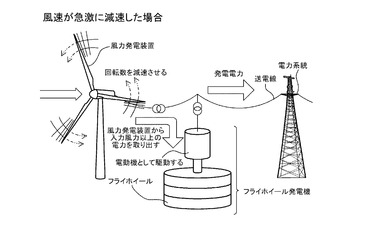
図5は、図3に示された風力発電設備に行われるポンプアップ運転について、風速が急激に減速した場合の制御を説明するための概念図である。
【0034】
図5に示すように、風速が急激に減速した場合には、風力発電装置の風車翼のロータ回転数を急速に下げる必要がある。その場合には、フライホイール発電機を電動機として駆動し、風力発電装置から入力風力以上の電力を取り出す。電力系統には一定電力を送りつつ、余った電力をフライホイールに蓄える。これにより、風力発電装置の負荷を増加させ、ロータ回転数を急激に減速させることが可能となる。つまり、風車翼の回転エネルギーを強制的に電気エネルギーに変換させ、フライホイールの回転エネルギーとして蓄えることにより、風車翼の回転数を下げる制御を行う。
【0035】
このように、ポンプアップ運転は、フライホイールと風車翼の間でエネルギーをやりとりしているだけであるが、風力発電装置の出力係数Cpの最大値を常に維持できるようになっているので、風力発電装置からのトータルでの発電電力は、定速回転風力発電方式よりも増加する。
【0036】
つまり、図3に示された風力発電設備に行われるポンプアップ運転は、電気エネルギーを介して、機械的な制約である風車翼の慣性を見かけ上小さくすることができる制御と言える。
【0037】
以下、本発明を実施するための形態について、図6、図7、図8及び図9を参照しながら詳細に説明する。
【0038】
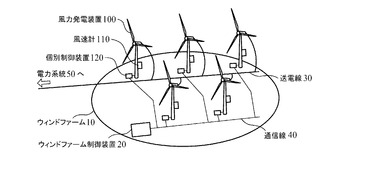
図6は本発明に係るウィンドファームの実施形態(ウィンドファーム10)の構成を簡単に示した概念図である。また、図7はウィンドファーム10に設置されたk基目の風力発電装置を説明するための模式図である。そして、図8はウィンドファーム10に設置されたウィンドファーム制御装置20にて行われる処理を説明するための流れ図である。また、図9はウィンドファーム10において、i基目の風力発電装置とj基目の風力発電装置に対して行われる処理を説明するための模式図である。
【0039】
図6及び図9に示すように、ウィンドファーム10は、
風車翼101を有するとともに、可変速発電機102と制御可能な電力変換装置103を搭載する複数の風力発電装置100と、
複数の風力発電装置100にそれぞれ併設され、風速を測定する複数の風速計110と、
複数の風力発電装置100をそれぞれ制御するとともに、これら風力発電装置100の運転状態を表す運転情報をそれぞれ取得して記憶する複数の個別制御装置120と、
ウィンドファーム10全体を制御するとともに、複数の個別制御装置120に記憶されている各風力発電装置100の運転情報を入力し、入力した各風力発電装置100の運転情報に基づいて処理を行った上で、風力発電装置100の発電機側トルクを制御するための指令値を生成し、生成した指令値を該当風力発電装置100の個別制御装置120に伝送するウィンドファーム制御装置20と、
を備えている。
【0040】
また、個別制御装置120は、ウィンドファーム制御装置20から伝送された指令値に応じて、風力発電装置100の発電機側トルクを制御する。
【0041】
なお、図6は概念図であるため、5基の風力発電装置100を概念的に示しているが、本発明のウィンドファームを構成する複数の風力発電装置は、5基の風力発電装置に限られることがなく、任意の複数の風力発電装置(例えば、N基の風力発電装置)でも良い。
【0042】
また、図6に示すように、ウィンドファーム10では、各風力発電装置100は送電線30で電気的に接続され、送電線30を介して(図中、電圧レベル変換用のトランスなどは省略している。)、電力系統50に接続され、各風力発電装置100が発電した電力は、ウィンドファーム10の出力電力として電力系統50に供給される。
【0043】
更に、図6に示すように、ウィンドファーム10では、ウィンドファーム制御装置20と各個別制御装置120とは、通信線40で接続され、互いに通信可能となっている。なお、通信線40は有線でも無線でも良い。
【0044】
ここで、本発明の要旨について説明する。
【0045】
前述したように、特許文献1の風力発電設備では、フライホイール発電機のフライホイールと、風力発電装置の風車翼の間で、エネルギーをやりとりするポンプアップ運転が行われる。
【0046】
本発明では、上述したポンプアップ運転の概念を、電力貯蔵装置(例えば、フライホイール発電機)を使用することなく、複数の風力発電装置で構成されたウィンドファームに応用している。
【0047】
つまり、本発明では、複数の風力発電装置で構成されたウィンドファームにおいて、風力発電装置の運転情報に基づいて行われた処理により選択された、風力発電装置の風車翼間で、エネルギーをやりとりするポンプアップ運転が行われる。
【0048】
本発明では、風力発電装置の運転情報に基づいて行われた処理により選択された、風力発電装置の発電機側トルクを適切に制御することにより、ウィンドファーム内の全ての風力発電装置が有している回転エネルギーを有効に活用し、ウィンドファーム全体から高出力で平準化した電力を電力系統に供給するようにしている。
【0049】
本発明では、まず、絶対値の等しい正と負の仮想的エネルギー片を設定する。
【0050】
次に、正の仮想エネルギー片(+ΔE)を、ウィンドファームに設置された全ての風力発電装置に与えたときに、風力発電装置の出力が最も増加する(ただし、増加量は負でもよい。)風力発電装置i(i基目の風力発電装置)を選び出す。
【0051】
つまり、正の仮想エネルギー片(+ΔE)が与えられた場合の最大の出力増加分を有する風力発電装置は、i基目の風力発電装置である。
【0052】
ここで、正の仮想エネルギー片(+ΔE)を風力発電装置に与えることは、正の仮想エネルギー片(+ΔE)を風力発電装置の出力から+ΔEだけくわえることよって、その風力発電装置のトルクが上昇し、発電機の出力は上がり、風車翼のロータ回転数が減少する。
【0053】
また、負の仮想エネルギー片(−ΔE)を、ウィンドファームに設置された全ての風力発電装置に与えたときに、風力発電装置の出力が最も増加する(ただし、増加量は負でもよい。)風力発電装置j(j基目の風力発電装置)を選び出す。
【0054】
つまり、負の仮想エネルギー片(−ΔE)が与えられた場合の最大の出力増加分を有する風力発電装置は、j基目の風力発電装置である。
【0055】
ここで、負の仮想エネルギー片(−ΔE)を風力発電装置に与えることは、その風力発電装置のトルクを減少させることを意味する。負の仮想エネルギー片(−ΔE)を風力発電装置に与えることによって、発電機のトルクを減少させ、出力を下げ、その風力発電装置の風車翼のロータ回転数を上昇させることができる。
【0056】
正の仮想エネルギー片を与えた場合のi基目の風力発電装置の出力増加分(ΔPi+max)と、負の仮想エネルギー片を与えた場合のj基目の風力発電装置の出力増加分(ΔPj−max)の合計値が、所定のエネルギーリミットPlim(ただし、Plim>0)より大きい場合に、i基目の風力発電装置の発電機側トルクが、正の仮想エネルギー片(+ΔE)が与えられた後の発電機側トルク(Tg*)になるように、i基目の風力発電装置を制御するとともに、j基目の風力発電装置の発電機側トルクが、負の仮想エネルギー片(−ΔE)が与えられた後の発電機側トルク(Tg*)になるように、j基目の風力発電装置を制御する。
【0057】
このような処理を、ウィンドファームに設置された全ての風力発電装置に対し、i基目の風力発電装置とj基目の風力発電装置のペア(i,j)が無くなるまで、繰り返す。
【0058】
これによって、電力貯蔵装置を使用することなく、複数の風力発電装置で構成されるウィンドファーム内の風力発電装置の発電機側トルクを適切に制御することで、全ての風力発電装置が有している回転エネルギーを有効に活用し、よって、ウィンドファーム内の全ての風力発電装置を動的に制御することが可能になる。
【0059】
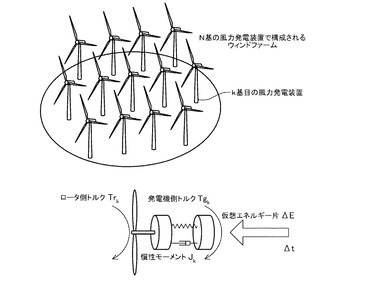
ここで、本発明に係るウィンドファーム10がN基の風力発電装置100で構成されるウィンドファームである場合のk基目の風力発電装置について、図7を参照しながら説明する。また、N基の風力発電装置100で構成される本発明のウィンドファーム10のウィンドファーム制御装置20で行われる処理について、図8及び図9を参照しながら説明する。
【0060】
まず、後述する説明に使用される記号について、説明する。
【0061】
k,i,jは、本発明のウィンドファーム10を構成する複数の風力発電装置100のインデックスである。kはk基目の風力発電装置を意味し、iはi基目の風力発電装置を意味し、そして、jはj基目の風力発電装置を意味する。
【0062】
Vwは、風速計110で測定した風速である。Vwkは、k基目の風力発電装置に併設された風速計110で測定した風速である。θは、風力発電装置100の回転翼のピッチ角である。θkは、k基目の風力発電装置の回転翼のピッチ角である。
【0063】
ΔEは仮想エネルギー片である。+ΔEは正の仮想エネルギー片であり、−ΔEは負の仮想エネルギー片である。また、ρは空気密度である。Akはk基目の風力発電装置の風車翼の受風面積である。
【0064】
ωは、風力発電装置100の回転翼のロータ回転数である。ωkは、k基目の風力発電装置の回転翼のロータ回転数である。ω*は、仮想エネルギー片が与えられた後の風力発電装置100の回転翼のロータ回転数である。ωk*は、仮想エネルギー片が与えられた後のk基目の風力発電装置の回転翼のロータ回転数である。
【0065】
Tgは、風力発電装置100の発電機側トルクである。Tgkは、k基目の風力発電装置の発電機側トルクである。また、Tg*は、仮想エネルギー片が与えられた後の風力発電装置100の発電機側トルクである。Tgk*は、仮想エネルギー片が与えられた後のk基目の風力発電装置の発電機側トルクである。
【0066】
Trは、風力発電装置100のロータ側トルクである。Trkは、k基目の風力発電装置のロータ側トルクである。また、Δtは、所定の時間を表すタイムステップである。そして、Jは、風力発電装置100の慣性モーメントである。Jkは、k基目の風力発電装置の慣性モーメントである。
【0067】
λは、風力発電装置100の周速比である。λkは、k基目の風力発電装置の周速比である。λ*は、仮想エネルギー片が与えられた後の風力発電装置100の周速比である。
λk*は、仮想エネルギー片が与えられた後のk基目の風力発電装置の周速比である。
【0068】
Cpは、風力発電装置100の出力係数(パワー係数)である。風力発電装置の出力係数は、風力発電装置の風車翼の形状で決定される。Cpkは、k基目の風力発電装置の出力係数である。Cp*は、仮想エネルギー片が与えられた後の風力発電装置100の出力係数である。Cpk*は、仮想エネルギー片が与えられた後のk基目の風力発電装置の出力係数である。
【0069】
ΔPk+は正の仮想エネルギー片を与えた場合のk基目の風力発電装置の出力増加分である。また、ΔPk−は負の仮想エネルギー片を与えた場合のk基目の風力発電装置の出力増加分である。Plimは、所定のエネルギーリミットである。ただし、Plim>0。
【0070】
ΔPi+maxは、ウィンドファーム10に設置された全ての風力発電装置100に正の仮想エネルギー片を与えた場合に、風力発電装置の出力の増加が最大になる、i基目の風力発電装置の出力増加分である。
【0071】
ΔPj−maxは、ウィンドファーム10に設置された全ての風力発電装置100に負の仮想エネルギー片を与えた場合に、風力発電装置の出力の増加が最大になる、j基目の風力発電装置の出力増加分である。ただし、i≠j。
【0072】
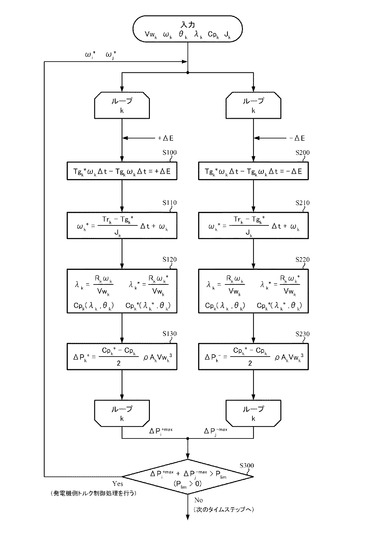
図7に示すように、N基の風力発電装置100で構成される本発明のウィンドファーム10において、k基目の風力発電装置に正の仮想エネルギー片(+ΔE)を与えた場合に、Tgk*ωkΔt−TgkωkΔt=+ΔEという関係が成立する。一方、k基目の風力発電装置に負の仮想エネルギー片(−ΔE)を与えた場合に、Tgk*ωkΔt−TgkωkΔt=−ΔEという関係が成立する。ただし、k=1〜N。
【0073】
ここで、N基の風力発電装置100の運転情報に基づいて、ウィンドファーム制御装置20が行う処理について、説明する。ただし、k=1〜N。
【0074】
前述したように、ウィンドファーム制御装置20では、各個別制御装置120に記憶されている各風力発電装置100の運転情報を入力し、入力した各風力発電装置100の運転情報に基づいて処理を行った上で、風力発電装置100の発電機側トルクを制御するための指令値を生成し、生成した指令値を該当風力発電装置100の個別制御装置120に伝送する。
【0075】
ウィンドファーム制御装置20には、各風力発電装置の風速Vwk、各風力発電装置の回転翼のロータ回転数ωk、周速比λkとピッチ角θkの関数としての各風力発電装置の出力係数Cpk(λk,θk)、及び各風力発電装置の慣性モーメントJkといった運転情報が必要である。
【0076】
各風力発電装置100に関するこれらの運転情報は、各風力発電装置100を制御する各個別制御装置120により取得され、各個別制御装置120にそれぞれ記憶されている。
【0077】
そして、ウィンドファーム制御装置20は、各個別制御装置120にそれぞれ記憶されている各風力発電装置100の運転情報を入力した上で、処理を行う。
【0078】
k基目の風力発電装置の周速比λkは、下記数1のように得られる。ただし、Rkはk基目の風力発電装置の風車翼の半径である。
【0079】
【数1】

また、風力発電装置100の出力係数(パワー係数)とは、風力発電装置100の回転面に流入する風の単位時間あたりのエネルギーPwと、風力発電装置100が風から収得できるエネルギーの比であり、風力発電装置100の風車翼の先端速度と風速の比(周速比)とピッチ角の関数であり、ある周速比の値で最大値をとることが知られている。
【0080】
ただし、Pwは下記数2のように得られる。
【0081】
【数2】
各風力発電装置の運動方程式は、風から受けるトルク(即ち、ロータ側トルクTr)と発電機側トルクTgの差が、慣性モーメントJと各運動量の時間微分の値に等しいことから与えられる。ロータ側トルクTrは、風力発電装置の回転面に流入する風のエネルギーに出力係数(パワー係数)を乗じ、回転速度で除算することによって得られる。
【0082】
発電機側トルクTgは、電気出力を回転角速度で除算することによって得られる。また、発電機側トルクTgは、制御可能な電力変換装置103の制御によって自由に制御できるとする。
【0083】
ここで、ウィンドファーム制御装置20は、各個別制御装置120にそれぞれ記憶されている各風力発電装置100の運転情報(風速Vwk、ロータ回転数ωk、周速比λk、ピッチ角θk、出力係数Cpk、及び慣性モーメントJk)を入力した上で、処理を行う。
【0084】
まず、微小な仮想エネルギー片ΔEが設定される。なお、仮想エネルギー片ΔEの絶対値の大きさは、ウィンドファーム制御装置20が有する演算機能の能力と、ウィンドファーム10に設置された風力発電装置の台数(N)に基づき、設定される。
【0085】
所定の時間Δtおきに、ウィンドファーム制御装置20が、正の仮想エネルギー片(+ΔE)をN基の風力発電装置にそれぞれ与える。ループkでの処理は、k基目の風力発電装置に対して行われる処理である。N基の風力発電装置に対する処理は、ループkでの処理と同じである。
【0086】
正の仮想エネルギー片(+ΔE)をk基目の風力発電装置に与えると、図8のステップS100に示す数式の関係が成立し、k基目の風力発電装置に+ΔEの電力を供給することになり、k基目の風力発電装置を電動機として動作させることになる。
【0087】
k基目の風力発電装置を電動機として動作させることにより、図8のステップS110に示す数式のように、ロータ回転数が上昇する。ロータ回転数の上昇により、周速比の値が変化し、出力係数(パワー係数)の値が変化することで(図8のステップS120に示す数式を参照)、風力エネルギーから得られるエネルギーが変化する。
【0088】
図8のステップS130に示す数式のように、k基目の風力発電装置が得られるエネルギーの変化分(即ち、k基目の風力発電装置の出力増加分ΔPk+)は、ウィンドファーム制御装置20により算出することができる。
【0089】
N基の風力発電装置に対し、ステップS100からステップS130までのループkを行うと、N基の風力発電装置のなかで、得られるエネルギーの変化分が最大(この変化分は負の値でもよい。)の風力発電装置をi基目の風力発電装置とし、その変化分をΔPi+maxとする。つまり、ΔPi+maxは正の仮想エネルギー片を与えた場合のi基目の風力発電装置の出力増加分である。
【0090】
同様に、所定の時間Δtおきに、ウィンドファーム制御装置20が、負の仮想エネルギー片(−ΔE)をN基の風力発電装置にそれぞれ与える。ループkでの処理は、k基目の風力発電装置に対して行われる処理である。N基の風力発電装置に対する処理は、ループkでの処理と同じである。
【0091】
負の仮想エネルギー片(−ΔE)をk基目の風力発電装置に与えると、図8のステップS200に示す数式の関係が成立し、k基目の風力発電装置に−ΔEの電力を供給することになり、k基目の風力発電装置の負荷を増加させることになる。
【0092】
k基目の風力発電装置の負荷を増加させることにより、図8のステップS210に示す数式のように、ロータ回転数が減少する。ロータ回転数の減少により、周速比の値が変化し、出力係数(パワー係数)の値が変化することで(図8のステップS220に示す数式を参照)、風力エネルギーから得られるエネルギーが変化する。
【0093】
図8のステップS230に示す数式のように、k基目の風力発電装置が得られるエネルギーの変化分(即ち、k基目の風力発電装置の出力増加分ΔPk−)は、ウィンドファーム制御装置20により算出することができる。
【0094】
N基の風力発電装置に対し、ステップS200からステップS230までのループkを行うと、N基の風力発電装置のなかで、得られるエネルギーの変化分が最大(この変化分は負の値でもよい。)の風力発電装置をj基目の風力発電装置とし、その変化分をΔPj−maxとする。つまり、ΔPj−maxは、負の仮想エネルギー片を与えた場合のj基目の風力発電装置の出力増加分である。
【0095】
このように、ウィンドファーム制御装置20での処理により、ΔPi+maxとΔPj−maxが得られた。
【0096】
次に、図8のステップS300に示すように、両者の合計値(ΔPi+max+ΔPj−max)が、所定のエネルギーリミットPlim(ただし、Plim>0)より大きい場合に、ウィンドファーム制御装置20では、発電機側トルク制御処理を行う。
【0097】
この発電機側トルク制御処理とは、i基目の風力発電装置の発電機側トルクが、正の仮想エネルギー片が与えられた後の発電機側トルク(Tg*)になるように、i基目の風力発電装置を制御するとともに、j基目の風力発電装置の発電機側トルクが、負の仮想エネルギー片が与えられた後の発電機側トルク(Tg*)になるように、j基目の風力発電装置を制御する処理である。
【0098】
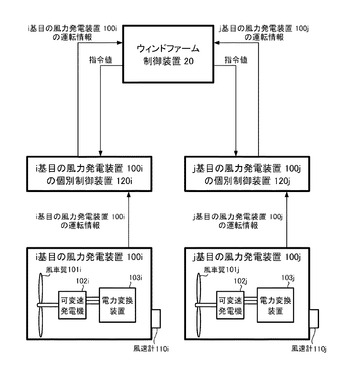
具体的に、図9に示すように、ウィンドファーム制御装置20が、正の仮想エネルギー片が与えられた後の発電機側トルク(Tg*)を算出して指令値として、i基目の風力発電装置100iの個別制御装置120iに伝送し、i基目の風力発電装置100iの個別制御装置120iは、伝送された指令値に応じて、電力変換装置103iの制御を介して、i基目の風力発電装置100iの発電機側トルクを制御する。
【0099】
また、図9に示すように、ウィンドファーム制御装置20が、負の仮想エネルギー片が与えられた後の発電機側トルク(Tg*)を算出して指令値として、j基目の風力発電装置100jの個別制御装置120jに伝送し、j基目の風力発電装置100jの個別制御装置120jは、伝送された指令値に応じて、電力変換装置103jの制御を介して、j基目の風力発電装置100jの発電機側トルクを制御する。
【0100】
一方、図8のステップS300に示すように、両者の合計値(ΔPi+max+ΔPj−max)が、所定のエネルギーリミットPlim以下の場合に、ウィンドファーム制御装置20では、次の所定の時間Δtに入って、処理を行う。
【0101】
このように、i基目の風力発電装置とj基目の風力発電装置を制御することにより、ウィンドファーム10全体の出力電力が向上する。なお、Plimの値は、ウィンドファーム制御装置20が有する演算機能の速度と、ウィンドファーム10に設置された風力発電装置の台数(N)に基づき、調整される。
【0102】
上記のような処理を、ウィンドファーム10に設置された全ての風力発電装置100に対し、i基目の風力発電装置とj基目の風力発電装置のペア(i,j)が無くなるまで繰り返すことにより、ウィンドファーム10に設置された全ての風力発電装置100が有している回転エネルギーを最大限に活用し、ウィンドファーム10からの出力電力が最大になる。
【0103】
なお、上記処理を繰り返すことによって、発電機側トルクの値が負になる場合がある。この場合は、特許文献1で提案されている風力発電装置の電動機動作(風力ポンプアップ運転)の場合であり、この場合も許容する。ただし、電力変換装置の構成によっては電力の逆流が不可の場合がある(例えば、ダイオードブリッヂなどを用いている場合)。この場合は、上記処理において、発電機側トルクの値が負にならない条件を付加することにより、本発明を適用することができる。
【符号の説明】
【0104】
10 ウィンドファーム
20 ウィンドファーム制御装置
30 送電線
40 通信線
50 電力系統
100 風力発電装置
101 風車翼
102 可変速発電機
103 電力変換装置
110 風速計
120 個別制御装置
【技術分野】
【0001】
本発明は、風力発電技術に関し、特に、可変速発電機と制御可能な電力変換装置を搭載し、風力エネルギーを利用して電力を発電する、風力発電装置(風力発電風車)が複数(2基以上に)設置されているウィンドファーム(風力発電システム)に関する。
【背景技術】
【0002】
近年、地球温暖化対策の一つとして、風力や太陽光などの自然エネルギー(再生可能エネルギー)を利用する発電方式が注目を浴びている。その中でも、世界的に最も導入が進んでいるのは、風力エネルギーを利用する風力発電である。
【0003】
図1に示すように、風力発電装置について、風のパワーをどれだけ風車のパワーとして変換できるか表す指標として、出力係数Cpが用いられる。出力係数Cpは、風力エネルギーに対する風車出力の比で定義される。また、周速比λは、風速Vwに対する風車翼の周速(先端速度)(風車翼の半径R×風車翼のロータ回転数ω)の比で定義される。
【0004】
出力係数Cpは周速比λと風車翼のピッチ角θの関数として知られ、その関数の形は風車翼の断面形状に依存する。風洞実験の結果などから様々な解析的な関数の形が提案されている。図2に示されたように、一つの極大点(即ち、最大電力点)を有する曲線になる。つまり、図2から分かるように、ある風速に対して、最適な風車翼のロータ回転数が存在する。
【0005】
風力発電装置の風車翼が一定速度で回転している場合、即ち、風力発電装置が定速回転風力発電方式を採用した場合に、風速が変化する度に周速比も変化するため、風車の出力がこの最大電力点からずれることになり、よって、定速回転風力発電方式では、風力エネルギーから最大の電気エネルギー(風車が取り出せる最大の電気エネルギー)を得ることができない。
【0006】
日本の気象条件や地形の複雑さゆえに風力に脈動が多いことから、海外と比べ、日本では風力発電装置の定格風速以上で安定した風資源を得られる地域が少ない。
【0007】
地形の起伏がある地域においては、風は常時一定の速度ではなく、脈動しながら進む。このような風力に脈動が多い地域に設置されている、風力発電装置をより効率的に制御(運転)するためには、現在の主流となっている定速回転風力発電方式(定速回転運転)よりも、動的な制御方法を用いることが有効である。
【0008】
動的な制御方法の中に、風力発電装置の定格風速以下の脈動する風況のもとで、風力エネルギーから最大の電気エネルギーを得る制御方法として、最大電力点追従運転(MPPT:Maximum Power Point Track)が挙げられる。
【0009】
最大電力点追従運転とは、風の変動に合わせて、風力発電装置の風車翼のロータ回転数を変化させ、その風力発電装置の風車特性における出力係数Cpの最大値(図2に示されたような最大電力点に対応する出力係数Cpの値)を維持するように、周速比λを一定(図2に示されたような最大電力点に対応する周速比λの値)に保つ運転することで、風力エネルギーを最大限に電力エネルギーに変換できる制御方法である。
【0010】
このように、最大電力点追従運転を行うことにより、風力発電装置の発電電力量を増加させることができる。最大電力点追従運転を行うことにより、風力エネルギーを電力エネルギーに変換したときの変換効率は、定速回転風力発電方式を採用した場合より高くなる。
【0011】
しかしながら、最大電力点追従運転という制御を行う場合に、次の二つの問題点がある。
【0012】
一つの問題点として、風車翼の慣性により、風車翼のロータ回転数を素早く変化させることが出来ない。通常、風速は1秒から数秒の周期で変動している。そのため、最大電力点追従運転を行うには、その風速の変動に合わせて風車翼のロータ回転数を変化させなければならない。しかし、大型の風力発電装置では、その風車翼の慣性が非常に大きく、その時定数は数十秒あり、常に風速の変動に合わせて得られた最適なロータ回転数を保つことが困難であり、つまり、風が脈動する場合には、最大電力点追従運転の追従性が遅くなる問題点がある。
【0013】
もう一つの問題点として、最大電力点追従運転という制御を行う場合に、風力発電装置から出力された出力電力の変動が、定速回転風力発電方式よりも大きくなる。風力発電装置の風車翼が一定回転数で回転している場合では、風速が急激に変化しても、出力係数Cpが低下するため、風力発電装置から出力された出力電力はそれほど変動しない。しかし、最大電力点追従運転の場合では、出力係数Cpが常に最大値になるため、風速の3乗に比例した風力発電装置の出力電力が電力系統に出力される。
【0014】
このように、最大電力点追従運転を行う風力発電装置から、電力系統へ大きく変動する電力が出力されると、当該電力系統に接続された電源(例えば、火力発電所)や負荷(工場や家庭などの電力消費者)に電圧変動や周波数変動等の悪影響が生じる問題が発生してしまう。
【0015】
上述した二つの問題点を解決できる制御法として、例えば、特許文献1に記載されたような、風力発電装置とフライホイール発電機を搭載した風力発電設備がある。
【0016】
特許文献1に記載された風力発電設備では、エネルギーの高速充放電を可能にした上で、フライホイールのエネルギーを積極的に活用して、風力発電装置の風車翼の回転スピードの追従制御を行い、効率よく風力エネルギーを電気エネルギーに変換するという「ポンプアップ運転」を提案した。
【0017】
つまり、特許文献1に開示された風力発電設備では、フライホイール発電機から風力発電装置に対して電力を供給することにより、風力発電装置を電動機として動作させることが可能になり、最大電力点追従運転の追従性を向上させ、高効率な制御を実現した。
【先行技術文献】
【特許文献】
【0018】
【特許文献1】特許第4056713号
【発明の概要】
【発明が解決しようとする課題】
【0019】
しかしながら、特許文献1に開示された風力発電設備では、風力発電装置の外部からの電力が必要であるため、フライホイール発電機のような電力貯蔵装置を設置する必要がある。フライホイール発電機のような電力貯蔵装置の設置は、風力発電設備のコストアップの一因にもなる。
【0020】
また、特許文献1に開示された風力発電設備では、単体の風力発電装置で構成されているので、フライホイールのエネルギーの活用で改善された最大電力点追従運転の追従性により、高エネルギー変換効率を実現したが、その風力発電装置から出力される電力の変動も、定速回転風力発電方式より激しくなり、風力発電装置から出力され、激しい変動を有する電力は、フライホイール発電機のような電力貯蔵装置を介してある程度平滑化されてから、出力電力として電力系統に出力される。
【0021】
本発明は、上述のような事情よりなされたものであり、本発明の目的は、電力貯蔵装置を使用することなく、複数の風力発電装置で構成されるウィンドファーム内の風力発電装置の発電機側トルクを適切に制御することにより、ウィンドファーム内の全ての風力発電装置が有している回転エネルギーを有効に活用し、高出力で平準化した電力を電力系統に供給するようにしたウィンドファームを提供することにある。
【課題を解決するための手段】
【0022】
本発明は、風力エネルギーを利用して電力を発電するウィンドファームに関し、本発明の上記目的は、風車翼を有するとともに、可変速発電機と制御可能な電力変換装置を搭載する複数の風力発電装置と、前記複数の風力発電装置にそれぞれ併設され、風速を測定する複数の風速計と、前記複数の風力発電装置をそれぞれ制御するとともに、これら風力発電装置の運転状態を表す運転情報をそれぞれ取得して記憶する複数の個別制御装置と、前記ウィンドファーム全体を制御するとともに、前記複数の個別制御装置からの各風力発電装置の運転情報、及び仮想的エネルギー片を用いて、処理を行った上で、風力発電装置の発電機側トルクを制御するための指令値を生成し、生成した指令値を該当風力発電装置の個別制御装置に伝送するウィンドファーム制御装置とを備えることによって効果的に達成される。
【0023】
また、本発明の上記目的は、前記ウィンドファーム制御装置では、前記処理により、正の仮想エネルギー片が与えられた場合の最大の出力増加分を有する風力発電装置と、負の仮想エネルギー片が与えられた場合の最大の出力増加分を有する風力発電装置を選び出し、選び出した2基の風力発電装置の出力増加分の合計値が、所定のエネルギーリミットより大きい場合に、発電機側トルク制御処理を行うことにより、或いは、前記発電機側トルク制御処理は、前記ウィンドファーム制御装置により生成された指令値に応じて、前記電力変換装置の制御を介して行われることによってより効果的に達成される。
【発明の効果】
【0024】
本発明によれば、ウィンドファームに設置された全ての風力発電装置が有している回転エネルギーを有効に活用することで、高出力で平準化した電力を電力系統に供給することができる。
【0025】
また、本発明を更に発展させることで、ウィンドファームから脈動の無い一定出力の電力が供給されることも可能である。これによって、風力発電システムの不利点である、出力電力の脈動が大きいという問題点も改善される。
【図面の簡単な説明】
【0026】
【図1】風力発電装置(風力発電風車)の発電原理を説明するための図である。
【図2】風力発電装置の風車特性の一例を示す図である。
【図3】フライホイール発電機と風力発電装置を備える風力発電設備を説明するための概念図である。
【図4】図3に示された風力発電設備に行われるポンプアップ運転について、風速が急激に上昇した場合の制御を説明するための概念図である。
【図5】図3に示された風力発電設備に行われるポンプアップ運転について、風速が急激に減速した場合の制御を説明するための概念図である。
【図6】本発明に係るウィンドファームの実施形態を示す概念図である。
【図7】本発明に係るウィンドファームを説明するための模式図である。
【図8】本発明に係るウィンドファームのウィンドファーム制御装置にて行われる処理を説明するための流れ図である。
【図9】本発明に係るウィンドファームにおいて、i基目の風力発電装置とj基目の風力発電装置に対して行われる処理を説明するための模式図である。
【発明を実施するための形態】
【0027】
本発明は、可変速発電機と制御可能な電力変換装置を搭載する、複数(2基以上)の風力発電装置で構成されるウィンドファーム内の風力発電装置の発電機側トルクを適切に制御することにより、ウィンドファーム内の全ての風力発電装置が有している回転エネルギーを有効に活用し、高出力で平準化した電力を電力系統に供給するようにしたウィンドファームに関する。
【0028】
本発明の詳細説明に入る前に、まず、特許文献1に記載された風力発電設備に開示された「ポンプアップ運転」の原理について、図3、図4及び図5を用いて説明する。なお、図3、図4及び図5は、ポンプアップ運転(ポンプアップ制御)を説明するための図であるため、特許文献1の風力発電設備に備えられている電力制御装置を図示しないことにした。
【0029】
図3は、特許文献1に記載された風力発電設備を説明するための概念図である。図3に示すように、風力発電装置の出力と電力系統の間に、フライホイール発電機を電気的に並列接続した構成となっている。このフライホイール発電機により、電力系統への電力の変動を平滑化するとともに、風力発電装置に対しては風車翼のロータ回転数を素早く変化させるポンプアップ運転を行う。
【0030】
最大電力点追従運転を行うには、風速の変動に合わせて風車翼のロータ回転数を変化させる必要がある。風力エネルギーで風車翼のロータ回転数を変えることも可能であるが、風車翼の慣性が大きいため、風力エネルギーだけでは、十分な追従速度が得られない。特許文献1の風力発電設備では、フライホイールに蓄積された回転エネルギーも利用して、風車翼のロータ回転数を素早く変化させる制御を行うことで、より多くの発電電力(電力エネルギー)を得ることができる。
【0031】
図4は、図3に示された風力発電設備に行われるポンプアップ運転について、風速が急激に上昇した場合の制御を説明するための概念図である。
【0032】
図4に示すように、風速が急激に上昇した場合には、風力発電装置の風車翼のロータ回転数を急速に上げる必要がある。この場合には、フライホイール発電機を発電機として動作させ、電力系統には一定電力を送りつつ、風力発電装置にも電力を供給する。風力発電装置を電動機として動作させ、風車翼のロータ回転数を素早く上昇させる。つまり、フライホイールに蓄積された回転エネルギーを、電気エネルギーを介して、再び風車翼の回転エネルギーに変換する。
【0033】
図5は、図3に示された風力発電設備に行われるポンプアップ運転について、風速が急激に減速した場合の制御を説明するための概念図である。
【0034】
図5に示すように、風速が急激に減速した場合には、風力発電装置の風車翼のロータ回転数を急速に下げる必要がある。その場合には、フライホイール発電機を電動機として駆動し、風力発電装置から入力風力以上の電力を取り出す。電力系統には一定電力を送りつつ、余った電力をフライホイールに蓄える。これにより、風力発電装置の負荷を増加させ、ロータ回転数を急激に減速させることが可能となる。つまり、風車翼の回転エネルギーを強制的に電気エネルギーに変換させ、フライホイールの回転エネルギーとして蓄えることにより、風車翼の回転数を下げる制御を行う。
【0035】
このように、ポンプアップ運転は、フライホイールと風車翼の間でエネルギーをやりとりしているだけであるが、風力発電装置の出力係数Cpの最大値を常に維持できるようになっているので、風力発電装置からのトータルでの発電電力は、定速回転風力発電方式よりも増加する。
【0036】
つまり、図3に示された風力発電設備に行われるポンプアップ運転は、電気エネルギーを介して、機械的な制約である風車翼の慣性を見かけ上小さくすることができる制御と言える。
【0037】
以下、本発明を実施するための形態について、図6、図7、図8及び図9を参照しながら詳細に説明する。
【0038】
図6は本発明に係るウィンドファームの実施形態(ウィンドファーム10)の構成を簡単に示した概念図である。また、図7はウィンドファーム10に設置されたk基目の風力発電装置を説明するための模式図である。そして、図8はウィンドファーム10に設置されたウィンドファーム制御装置20にて行われる処理を説明するための流れ図である。また、図9はウィンドファーム10において、i基目の風力発電装置とj基目の風力発電装置に対して行われる処理を説明するための模式図である。
【0039】
図6及び図9に示すように、ウィンドファーム10は、
風車翼101を有するとともに、可変速発電機102と制御可能な電力変換装置103を搭載する複数の風力発電装置100と、
複数の風力発電装置100にそれぞれ併設され、風速を測定する複数の風速計110と、
複数の風力発電装置100をそれぞれ制御するとともに、これら風力発電装置100の運転状態を表す運転情報をそれぞれ取得して記憶する複数の個別制御装置120と、
ウィンドファーム10全体を制御するとともに、複数の個別制御装置120に記憶されている各風力発電装置100の運転情報を入力し、入力した各風力発電装置100の運転情報に基づいて処理を行った上で、風力発電装置100の発電機側トルクを制御するための指令値を生成し、生成した指令値を該当風力発電装置100の個別制御装置120に伝送するウィンドファーム制御装置20と、
を備えている。
【0040】
また、個別制御装置120は、ウィンドファーム制御装置20から伝送された指令値に応じて、風力発電装置100の発電機側トルクを制御する。
【0041】
なお、図6は概念図であるため、5基の風力発電装置100を概念的に示しているが、本発明のウィンドファームを構成する複数の風力発電装置は、5基の風力発電装置に限られることがなく、任意の複数の風力発電装置(例えば、N基の風力発電装置)でも良い。
【0042】
また、図6に示すように、ウィンドファーム10では、各風力発電装置100は送電線30で電気的に接続され、送電線30を介して(図中、電圧レベル変換用のトランスなどは省略している。)、電力系統50に接続され、各風力発電装置100が発電した電力は、ウィンドファーム10の出力電力として電力系統50に供給される。
【0043】
更に、図6に示すように、ウィンドファーム10では、ウィンドファーム制御装置20と各個別制御装置120とは、通信線40で接続され、互いに通信可能となっている。なお、通信線40は有線でも無線でも良い。
【0044】
ここで、本発明の要旨について説明する。
【0045】
前述したように、特許文献1の風力発電設備では、フライホイール発電機のフライホイールと、風力発電装置の風車翼の間で、エネルギーをやりとりするポンプアップ運転が行われる。
【0046】
本発明では、上述したポンプアップ運転の概念を、電力貯蔵装置(例えば、フライホイール発電機)を使用することなく、複数の風力発電装置で構成されたウィンドファームに応用している。
【0047】
つまり、本発明では、複数の風力発電装置で構成されたウィンドファームにおいて、風力発電装置の運転情報に基づいて行われた処理により選択された、風力発電装置の風車翼間で、エネルギーをやりとりするポンプアップ運転が行われる。
【0048】
本発明では、風力発電装置の運転情報に基づいて行われた処理により選択された、風力発電装置の発電機側トルクを適切に制御することにより、ウィンドファーム内の全ての風力発電装置が有している回転エネルギーを有効に活用し、ウィンドファーム全体から高出力で平準化した電力を電力系統に供給するようにしている。
【0049】
本発明では、まず、絶対値の等しい正と負の仮想的エネルギー片を設定する。
【0050】
次に、正の仮想エネルギー片(+ΔE)を、ウィンドファームに設置された全ての風力発電装置に与えたときに、風力発電装置の出力が最も増加する(ただし、増加量は負でもよい。)風力発電装置i(i基目の風力発電装置)を選び出す。
【0051】
つまり、正の仮想エネルギー片(+ΔE)が与えられた場合の最大の出力増加分を有する風力発電装置は、i基目の風力発電装置である。
【0052】
ここで、正の仮想エネルギー片(+ΔE)を風力発電装置に与えることは、正の仮想エネルギー片(+ΔE)を風力発電装置の出力から+ΔEだけくわえることよって、その風力発電装置のトルクが上昇し、発電機の出力は上がり、風車翼のロータ回転数が減少する。
【0053】
また、負の仮想エネルギー片(−ΔE)を、ウィンドファームに設置された全ての風力発電装置に与えたときに、風力発電装置の出力が最も増加する(ただし、増加量は負でもよい。)風力発電装置j(j基目の風力発電装置)を選び出す。
【0054】
つまり、負の仮想エネルギー片(−ΔE)が与えられた場合の最大の出力増加分を有する風力発電装置は、j基目の風力発電装置である。
【0055】
ここで、負の仮想エネルギー片(−ΔE)を風力発電装置に与えることは、その風力発電装置のトルクを減少させることを意味する。負の仮想エネルギー片(−ΔE)を風力発電装置に与えることによって、発電機のトルクを減少させ、出力を下げ、その風力発電装置の風車翼のロータ回転数を上昇させることができる。
【0056】
正の仮想エネルギー片を与えた場合のi基目の風力発電装置の出力増加分(ΔPi+max)と、負の仮想エネルギー片を与えた場合のj基目の風力発電装置の出力増加分(ΔPj−max)の合計値が、所定のエネルギーリミットPlim(ただし、Plim>0)より大きい場合に、i基目の風力発電装置の発電機側トルクが、正の仮想エネルギー片(+ΔE)が与えられた後の発電機側トルク(Tg*)になるように、i基目の風力発電装置を制御するとともに、j基目の風力発電装置の発電機側トルクが、負の仮想エネルギー片(−ΔE)が与えられた後の発電機側トルク(Tg*)になるように、j基目の風力発電装置を制御する。
【0057】
このような処理を、ウィンドファームに設置された全ての風力発電装置に対し、i基目の風力発電装置とj基目の風力発電装置のペア(i,j)が無くなるまで、繰り返す。
【0058】
これによって、電力貯蔵装置を使用することなく、複数の風力発電装置で構成されるウィンドファーム内の風力発電装置の発電機側トルクを適切に制御することで、全ての風力発電装置が有している回転エネルギーを有効に活用し、よって、ウィンドファーム内の全ての風力発電装置を動的に制御することが可能になる。
【0059】
ここで、本発明に係るウィンドファーム10がN基の風力発電装置100で構成されるウィンドファームである場合のk基目の風力発電装置について、図7を参照しながら説明する。また、N基の風力発電装置100で構成される本発明のウィンドファーム10のウィンドファーム制御装置20で行われる処理について、図8及び図9を参照しながら説明する。
【0060】
まず、後述する説明に使用される記号について、説明する。
【0061】
k,i,jは、本発明のウィンドファーム10を構成する複数の風力発電装置100のインデックスである。kはk基目の風力発電装置を意味し、iはi基目の風力発電装置を意味し、そして、jはj基目の風力発電装置を意味する。
【0062】
Vwは、風速計110で測定した風速である。Vwkは、k基目の風力発電装置に併設された風速計110で測定した風速である。θは、風力発電装置100の回転翼のピッチ角である。θkは、k基目の風力発電装置の回転翼のピッチ角である。
【0063】
ΔEは仮想エネルギー片である。+ΔEは正の仮想エネルギー片であり、−ΔEは負の仮想エネルギー片である。また、ρは空気密度である。Akはk基目の風力発電装置の風車翼の受風面積である。
【0064】
ωは、風力発電装置100の回転翼のロータ回転数である。ωkは、k基目の風力発電装置の回転翼のロータ回転数である。ω*は、仮想エネルギー片が与えられた後の風力発電装置100の回転翼のロータ回転数である。ωk*は、仮想エネルギー片が与えられた後のk基目の風力発電装置の回転翼のロータ回転数である。
【0065】
Tgは、風力発電装置100の発電機側トルクである。Tgkは、k基目の風力発電装置の発電機側トルクである。また、Tg*は、仮想エネルギー片が与えられた後の風力発電装置100の発電機側トルクである。Tgk*は、仮想エネルギー片が与えられた後のk基目の風力発電装置の発電機側トルクである。
【0066】
Trは、風力発電装置100のロータ側トルクである。Trkは、k基目の風力発電装置のロータ側トルクである。また、Δtは、所定の時間を表すタイムステップである。そして、Jは、風力発電装置100の慣性モーメントである。Jkは、k基目の風力発電装置の慣性モーメントである。
【0067】
λは、風力発電装置100の周速比である。λkは、k基目の風力発電装置の周速比である。λ*は、仮想エネルギー片が与えられた後の風力発電装置100の周速比である。
λk*は、仮想エネルギー片が与えられた後のk基目の風力発電装置の周速比である。
【0068】
Cpは、風力発電装置100の出力係数(パワー係数)である。風力発電装置の出力係数は、風力発電装置の風車翼の形状で決定される。Cpkは、k基目の風力発電装置の出力係数である。Cp*は、仮想エネルギー片が与えられた後の風力発電装置100の出力係数である。Cpk*は、仮想エネルギー片が与えられた後のk基目の風力発電装置の出力係数である。
【0069】
ΔPk+は正の仮想エネルギー片を与えた場合のk基目の風力発電装置の出力増加分である。また、ΔPk−は負の仮想エネルギー片を与えた場合のk基目の風力発電装置の出力増加分である。Plimは、所定のエネルギーリミットである。ただし、Plim>0。
【0070】
ΔPi+maxは、ウィンドファーム10に設置された全ての風力発電装置100に正の仮想エネルギー片を与えた場合に、風力発電装置の出力の増加が最大になる、i基目の風力発電装置の出力増加分である。
【0071】
ΔPj−maxは、ウィンドファーム10に設置された全ての風力発電装置100に負の仮想エネルギー片を与えた場合に、風力発電装置の出力の増加が最大になる、j基目の風力発電装置の出力増加分である。ただし、i≠j。
【0072】
図7に示すように、N基の風力発電装置100で構成される本発明のウィンドファーム10において、k基目の風力発電装置に正の仮想エネルギー片(+ΔE)を与えた場合に、Tgk*ωkΔt−TgkωkΔt=+ΔEという関係が成立する。一方、k基目の風力発電装置に負の仮想エネルギー片(−ΔE)を与えた場合に、Tgk*ωkΔt−TgkωkΔt=−ΔEという関係が成立する。ただし、k=1〜N。
【0073】
ここで、N基の風力発電装置100の運転情報に基づいて、ウィンドファーム制御装置20が行う処理について、説明する。ただし、k=1〜N。
【0074】
前述したように、ウィンドファーム制御装置20では、各個別制御装置120に記憶されている各風力発電装置100の運転情報を入力し、入力した各風力発電装置100の運転情報に基づいて処理を行った上で、風力発電装置100の発電機側トルクを制御するための指令値を生成し、生成した指令値を該当風力発電装置100の個別制御装置120に伝送する。
【0075】
ウィンドファーム制御装置20には、各風力発電装置の風速Vwk、各風力発電装置の回転翼のロータ回転数ωk、周速比λkとピッチ角θkの関数としての各風力発電装置の出力係数Cpk(λk,θk)、及び各風力発電装置の慣性モーメントJkといった運転情報が必要である。
【0076】
各風力発電装置100に関するこれらの運転情報は、各風力発電装置100を制御する各個別制御装置120により取得され、各個別制御装置120にそれぞれ記憶されている。
【0077】
そして、ウィンドファーム制御装置20は、各個別制御装置120にそれぞれ記憶されている各風力発電装置100の運転情報を入力した上で、処理を行う。
【0078】
k基目の風力発電装置の周速比λkは、下記数1のように得られる。ただし、Rkはk基目の風力発電装置の風車翼の半径である。
【0079】
【数1】
また、風力発電装置100の出力係数(パワー係数)とは、風力発電装置100の回転面に流入する風の単位時間あたりのエネルギーPwと、風力発電装置100が風から収得できるエネルギーの比であり、風力発電装置100の風車翼の先端速度と風速の比(周速比)とピッチ角の関数であり、ある周速比の値で最大値をとることが知られている。
【0080】
ただし、Pwは下記数2のように得られる。
【0081】
【数2】
各風力発電装置の運動方程式は、風から受けるトルク(即ち、ロータ側トルクTr)と発電機側トルクTgの差が、慣性モーメントJと各運動量の時間微分の値に等しいことから与えられる。ロータ側トルクTrは、風力発電装置の回転面に流入する風のエネルギーに出力係数(パワー係数)を乗じ、回転速度で除算することによって得られる。
【0082】
発電機側トルクTgは、電気出力を回転角速度で除算することによって得られる。また、発電機側トルクTgは、制御可能な電力変換装置103の制御によって自由に制御できるとする。
【0083】
ここで、ウィンドファーム制御装置20は、各個別制御装置120にそれぞれ記憶されている各風力発電装置100の運転情報(風速Vwk、ロータ回転数ωk、周速比λk、ピッチ角θk、出力係数Cpk、及び慣性モーメントJk)を入力した上で、処理を行う。
【0084】
まず、微小な仮想エネルギー片ΔEが設定される。なお、仮想エネルギー片ΔEの絶対値の大きさは、ウィンドファーム制御装置20が有する演算機能の能力と、ウィンドファーム10に設置された風力発電装置の台数(N)に基づき、設定される。
【0085】
所定の時間Δtおきに、ウィンドファーム制御装置20が、正の仮想エネルギー片(+ΔE)をN基の風力発電装置にそれぞれ与える。ループkでの処理は、k基目の風力発電装置に対して行われる処理である。N基の風力発電装置に対する処理は、ループkでの処理と同じである。
【0086】
正の仮想エネルギー片(+ΔE)をk基目の風力発電装置に与えると、図8のステップS100に示す数式の関係が成立し、k基目の風力発電装置に+ΔEの電力を供給することになり、k基目の風力発電装置を電動機として動作させることになる。
【0087】
k基目の風力発電装置を電動機として動作させることにより、図8のステップS110に示す数式のように、ロータ回転数が上昇する。ロータ回転数の上昇により、周速比の値が変化し、出力係数(パワー係数)の値が変化することで(図8のステップS120に示す数式を参照)、風力エネルギーから得られるエネルギーが変化する。
【0088】
図8のステップS130に示す数式のように、k基目の風力発電装置が得られるエネルギーの変化分(即ち、k基目の風力発電装置の出力増加分ΔPk+)は、ウィンドファーム制御装置20により算出することができる。
【0089】
N基の風力発電装置に対し、ステップS100からステップS130までのループkを行うと、N基の風力発電装置のなかで、得られるエネルギーの変化分が最大(この変化分は負の値でもよい。)の風力発電装置をi基目の風力発電装置とし、その変化分をΔPi+maxとする。つまり、ΔPi+maxは正の仮想エネルギー片を与えた場合のi基目の風力発電装置の出力増加分である。
【0090】
同様に、所定の時間Δtおきに、ウィンドファーム制御装置20が、負の仮想エネルギー片(−ΔE)をN基の風力発電装置にそれぞれ与える。ループkでの処理は、k基目の風力発電装置に対して行われる処理である。N基の風力発電装置に対する処理は、ループkでの処理と同じである。
【0091】
負の仮想エネルギー片(−ΔE)をk基目の風力発電装置に与えると、図8のステップS200に示す数式の関係が成立し、k基目の風力発電装置に−ΔEの電力を供給することになり、k基目の風力発電装置の負荷を増加させることになる。
【0092】
k基目の風力発電装置の負荷を増加させることにより、図8のステップS210に示す数式のように、ロータ回転数が減少する。ロータ回転数の減少により、周速比の値が変化し、出力係数(パワー係数)の値が変化することで(図8のステップS220に示す数式を参照)、風力エネルギーから得られるエネルギーが変化する。
【0093】
図8のステップS230に示す数式のように、k基目の風力発電装置が得られるエネルギーの変化分(即ち、k基目の風力発電装置の出力増加分ΔPk−)は、ウィンドファーム制御装置20により算出することができる。
【0094】
N基の風力発電装置に対し、ステップS200からステップS230までのループkを行うと、N基の風力発電装置のなかで、得られるエネルギーの変化分が最大(この変化分は負の値でもよい。)の風力発電装置をj基目の風力発電装置とし、その変化分をΔPj−maxとする。つまり、ΔPj−maxは、負の仮想エネルギー片を与えた場合のj基目の風力発電装置の出力増加分である。
【0095】
このように、ウィンドファーム制御装置20での処理により、ΔPi+maxとΔPj−maxが得られた。
【0096】
次に、図8のステップS300に示すように、両者の合計値(ΔPi+max+ΔPj−max)が、所定のエネルギーリミットPlim(ただし、Plim>0)より大きい場合に、ウィンドファーム制御装置20では、発電機側トルク制御処理を行う。
【0097】
この発電機側トルク制御処理とは、i基目の風力発電装置の発電機側トルクが、正の仮想エネルギー片が与えられた後の発電機側トルク(Tg*)になるように、i基目の風力発電装置を制御するとともに、j基目の風力発電装置の発電機側トルクが、負の仮想エネルギー片が与えられた後の発電機側トルク(Tg*)になるように、j基目の風力発電装置を制御する処理である。
【0098】
具体的に、図9に示すように、ウィンドファーム制御装置20が、正の仮想エネルギー片が与えられた後の発電機側トルク(Tg*)を算出して指令値として、i基目の風力発電装置100iの個別制御装置120iに伝送し、i基目の風力発電装置100iの個別制御装置120iは、伝送された指令値に応じて、電力変換装置103iの制御を介して、i基目の風力発電装置100iの発電機側トルクを制御する。
【0099】
また、図9に示すように、ウィンドファーム制御装置20が、負の仮想エネルギー片が与えられた後の発電機側トルク(Tg*)を算出して指令値として、j基目の風力発電装置100jの個別制御装置120jに伝送し、j基目の風力発電装置100jの個別制御装置120jは、伝送された指令値に応じて、電力変換装置103jの制御を介して、j基目の風力発電装置100jの発電機側トルクを制御する。
【0100】
一方、図8のステップS300に示すように、両者の合計値(ΔPi+max+ΔPj−max)が、所定のエネルギーリミットPlim以下の場合に、ウィンドファーム制御装置20では、次の所定の時間Δtに入って、処理を行う。
【0101】
このように、i基目の風力発電装置とj基目の風力発電装置を制御することにより、ウィンドファーム10全体の出力電力が向上する。なお、Plimの値は、ウィンドファーム制御装置20が有する演算機能の速度と、ウィンドファーム10に設置された風力発電装置の台数(N)に基づき、調整される。
【0102】
上記のような処理を、ウィンドファーム10に設置された全ての風力発電装置100に対し、i基目の風力発電装置とj基目の風力発電装置のペア(i,j)が無くなるまで繰り返すことにより、ウィンドファーム10に設置された全ての風力発電装置100が有している回転エネルギーを最大限に活用し、ウィンドファーム10からの出力電力が最大になる。
【0103】
なお、上記処理を繰り返すことによって、発電機側トルクの値が負になる場合がある。この場合は、特許文献1で提案されている風力発電装置の電動機動作(風力ポンプアップ運転)の場合であり、この場合も許容する。ただし、電力変換装置の構成によっては電力の逆流が不可の場合がある(例えば、ダイオードブリッヂなどを用いている場合)。この場合は、上記処理において、発電機側トルクの値が負にならない条件を付加することにより、本発明を適用することができる。
【符号の説明】
【0104】
10 ウィンドファーム
20 ウィンドファーム制御装置
30 送電線
40 通信線
50 電力系統
100 風力発電装置
101 風車翼
102 可変速発電機
103 電力変換装置
110 風速計
120 個別制御装置
【特許請求の範囲】
【請求項1】
風力エネルギーを利用して電力を発電するウィンドファームであって、
風車翼を有するとともに、可変速発電機と制御可能な電力変換装置を搭載する複数の風力発電装置と、
前記複数の風力発電装置にそれぞれ併設され、風速を測定する複数の風速計と、
前記複数の風力発電装置をそれぞれ制御するとともに、これら風力発電装置の運転状態を表す運転情報をそれぞれ取得して記憶する複数の個別制御装置と、
前記ウィンドファーム全体を制御するとともに、前記複数の個別制御装置からの各風力発電装置の運転情報、及び仮想的エネルギー片を用いて、処理を行った上で、風力発電装置の発電機側トルクを制御するための指令値を生成し、生成した指令値を該当風力発電装置の個別制御装置に伝送するウィンドファーム制御装置とを備えることを特徴とするウィンドファーム。
【請求項2】
前記ウィンドファーム制御装置では、前記処理により、正の仮想エネルギー片が与えられた場合の最大の出力増加分を有する風力発電装置と、負の仮想エネルギー片が与えられた場合の最大の出力増加分を有する風力発電装置を選び出し、選び出した2基の風力発電装置の出力増加分の合計値が、所定のエネルギーリミットより大きい場合に、発電機側トルク制御処理を行う請求項1に記載のウィンドファーム。
【請求項3】
前記発電機側トルク制御処理は、前記ウィンドファーム制御装置により生成された指令値に応じて、前記電力変換装置の制御を介して行われる請求項2に記載のウィンドファーム。
【請求項1】
風力エネルギーを利用して電力を発電するウィンドファームであって、
風車翼を有するとともに、可変速発電機と制御可能な電力変換装置を搭載する複数の風力発電装置と、
前記複数の風力発電装置にそれぞれ併設され、風速を測定する複数の風速計と、
前記複数の風力発電装置をそれぞれ制御するとともに、これら風力発電装置の運転状態を表す運転情報をそれぞれ取得して記憶する複数の個別制御装置と、
前記ウィンドファーム全体を制御するとともに、前記複数の個別制御装置からの各風力発電装置の運転情報、及び仮想的エネルギー片を用いて、処理を行った上で、風力発電装置の発電機側トルクを制御するための指令値を生成し、生成した指令値を該当風力発電装置の個別制御装置に伝送するウィンドファーム制御装置とを備えることを特徴とするウィンドファーム。
【請求項2】
前記ウィンドファーム制御装置では、前記処理により、正の仮想エネルギー片が与えられた場合の最大の出力増加分を有する風力発電装置と、負の仮想エネルギー片が与えられた場合の最大の出力増加分を有する風力発電装置を選び出し、選び出した2基の風力発電装置の出力増加分の合計値が、所定のエネルギーリミットより大きい場合に、発電機側トルク制御処理を行う請求項1に記載のウィンドファーム。
【請求項3】
前記発電機側トルク制御処理は、前記ウィンドファーム制御装置により生成された指令値に応じて、前記電力変換装置の制御を介して行われる請求項2に記載のウィンドファーム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−53592(P2013−53592A)
【公開日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願番号】特願2011−193334(P2011−193334)
【出願日】平成23年9月5日(2011.9.5)
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【Fターム(参考)】
【公開日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願日】平成23年9月5日(2011.9.5)
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【Fターム(参考)】
[ Back to top ]