
ウェブ搬送装置、ウェブ搬送方法及びウェブ搬送制御プログラム
【課題】ウェブ搬送を行う際に、ウェブにしわが発生することを適切に防ぐ。
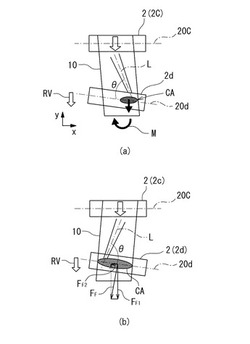
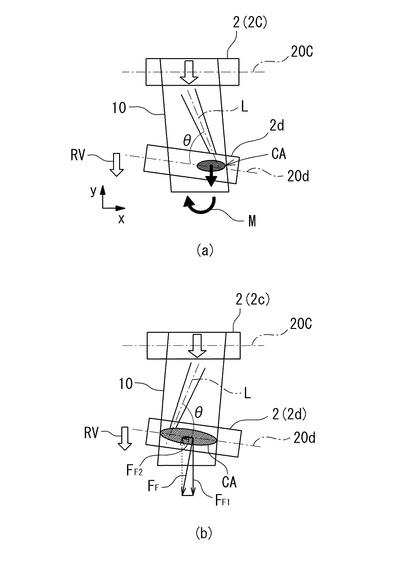
【解決手段】フリーローラ2c又は駆動ローラ2d及びウェブの合成表面粗さσと、これらローラ2に対するウェブ10の浮上量hとの大小関係を比較し、h>σのとき、すなわちローラ2に対するウェブ10の浮上量が大きくローラ2とウェブ10との摩擦力が小さくなるような条件では、(a)に示されるように、ウェブ10上に発生する波形の直線Lに対し、駆動ローラ2dの軸20dが直角となる方向に軸の角度(スキュー角θ)の調整を行う。一方、h≦σのとき、すなわちローラ2に対するウェブ10の浮上量が小さく、ローラ2とウェブ10との摩擦力がローラ2とウェブ10との接触領域の全域で均一に発生するような条件では、(b)に示されるように、波形の直線Lに対し、フリーローラ2cの軸20c又は駆動ローラ2dの軸20dが鋭角となる方向に調整する。
【解決手段】フリーローラ2c又は駆動ローラ2d及びウェブの合成表面粗さσと、これらローラ2に対するウェブ10の浮上量hとの大小関係を比較し、h>σのとき、すなわちローラ2に対するウェブ10の浮上量が大きくローラ2とウェブ10との摩擦力が小さくなるような条件では、(a)に示されるように、ウェブ10上に発生する波形の直線Lに対し、駆動ローラ2dの軸20dが直角となる方向に軸の角度(スキュー角θ)の調整を行う。一方、h≦σのとき、すなわちローラ2に対するウェブ10の浮上量が小さく、ローラ2とウェブ10との摩擦力がローラ2とウェブ10との接触領域の全域で均一に発生するような条件では、(b)に示されるように、波形の直線Lに対し、フリーローラ2cの軸20c又は駆動ローラ2dの軸20dが鋭角となる方向に調整する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ウェブ搬送装置、ウェブ搬送方法及びウェブ搬送制御プログラムに関するものである。
【背景技術】
【0002】
近年、薄膜状の柔軟な連続素材(以下、ウェブという)を用いた製品の製造ラインにおいて、複数のローラで構成された搬送路に沿ってウェブを搬送する技術が利用されている。そして、ウェブに対する張力を適切に調整する技術も発明されている(例えば、特許文献1参照。)。
【0003】
しかしながら、従来の手法は、より一層のウェブ搬送速度の高速化、高効率化、高精度化を実現するに当たり、搬送中に生じるしわ等を適宜除去してウェブの損傷をふせぐことが困難となっている。ところで、ウェブに発生するしわは、一般に、ウェブを搬送する各ローラが平行に配置されていない、いわゆるミスアライメントが一因であることが解っており、本発明者らはこの点に鑑みて、ウェブの搬送中に生じるしわの発生の前兆を検出し、しわの発生を防止することが可能な、ウェブ搬送技術を開発している(例えば、特許文献2参照。)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−212406号公報
【特許文献2】特開2007−326657号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
さて、本発明者らによる、引用文献2記載のしわ発生防止技術は、現状においても一定の効果を得られるものであるが、本発明者らの更なる研究の結果、特定の搬送条件下においては、未だしわの発生を十分に抑えることができないことも明らかとなってきている。本発明は、かかる課題に鑑みてなされたものであり、ウェブ搬送を行う際に、搬送条件の如何に関わらず、ウェブにしわが発生することを防ぐことを目的とするものである。
【課題を解決するための手段】
【0006】
(発明の態様)
以下の発明の態様は、本発明の構成を例示するものであり、本発明の多様な構成の理解を容易にするために、項別けして説明するものである。又、各項は、本発明の技術的範囲を限定するものではない。よって、発明を実施するための最良の形態を参酌しつつ、各項の構成要素の一部を置換し、削除し、又は、更に他の構成要素を付加したものについても、本願発明の技術的範囲に含まれ得るものである。
【0007】
(1)駆動ローラと該駆動ローラの上流又は下流に位置するフリーローラとを含む複数のローラによって構成されたウェブ搬送路と、該ウェブ搬送路に沿って搬送される前記ウェブを撮像する撮像手段と、前記駆動ローラあるいは前記フリーローラの軸の角度を調整するアライメント調整手段と、コントローラとを備え、該コントローラには、前記搬送路における予め定められた駆動条件を示す駆動情報と、前記ウェブの物性値とに基づいて、前記駆動ローラ又は前記フリーローラにおけるウェブの浮上量を求める浮上量算出手段と、該浮上量算出手段の算出結果に基づき、前記軸の角度の調整方向を定める軸角度調整方向判定手段と、前記撮像手段によって撮像された撮像画像から、前記ウェブ上に発生する波形の直線を検出するとともに、当該直線の前記ローラに対する進入方向を解析する画像解析手段と、該軸角度調整方向判定手段により定められた方向に、前記駆動ローラ又は前記フリーローラの軸を駆動させるように前記アライメント調整手段を制御する軸角度制御手段とが含まれるウェブ搬送装置(請求項1)。
【0008】
本項に係るウェブ搬送装置は、軸角度調整方向判定手段によって、搬送路における予め定められた駆動条件を示す駆動情報と、ウェブの物性値とに基づいて、駆動ローラ又はフリーローラにおけるウェブの浮上量を求め、その結果に基づき、最適となる軸の角度の調整方向を定める。又、ウェブ搬送路上を搬送されるウェブを、撮像手段によって撮像する。又、コントローラの画像解析手段によって、撮像画像から、ウェブ上に発生する波を打ったような波形(波打ち現象)を示す直線を検出するとともに、当該直線のローラに対する進入方向を解析する。この波形は、しわが発生する前兆となるものである。そして、波形を示す直線の進入方向に応じ、アライメント調整手段を制御して、軸角度調整方向判定手段により定められた方向に、駆動ローラ又はフリーローラの軸を駆動させる。
これによって、いわゆるミスアライメントは、しわの前兆となる波形を減衰させる状態へと補正され、しわの発生が回避される。なお、しわの前兆となる波形の発生の有無は、画像解析手段によって常時監視され、波形の直線が検出された場合には、直ちに上記各手段により定められた方向に軸を駆動し、ミスアライメント補正がなされるものである。
【0009】
(2)上記(1)項の軸角度調整方向判定手段において、ウェブの浮上量と、ローラ及びウェブの合成表面粗さとの関係に応じ、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラ又は前記フリーローラの軸が、直角又は鋭角になる方向に、前記軸の角度の調整方向が定められるウェブ搬送装置(請求項2)。
本項に係るウェブ搬送装置は、軸角度調整方向判定手段において、ウェブの浮上量とローラ及びウェブの合成表面粗さとの関係に着目し、これらの関係に応じて最適の方向へと、軸の角度の調整方向が定められる。これによって、いわゆるミスアライメントは、しわの前兆となる波形を減衰させる状態へと補正され、しわの発生が回避される。
【0010】
(3)上記(2)項の軸角度調整方向判定手段において、前記駆動ローラ及びウェブの合成表面粗さσと、前記駆動ローラに対するウェブの浮上量hとの関係がh>σのとき、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラの軸が直角となる方向に前記軸の角度の調整方向が定められ、前記駆動ローラ又は前記フリーローラ及びウェブの合成表面粗さσと、前記駆動ローラに対するウェブの浮上量hとの関係がh≦σのとき、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラ又は前記フリーローラの軸が鋭角となる方向に前記軸の角度の調整方向が定められるウェブ搬送装置(請求項3)。
本項に係るウェブ搬送装置は、駆動ローラ又はフリーローラの軸の角度の調整方向を定めるにあたり、駆動ローラ又はフリーローラ及びウェブの合成表面粗さσと、ローラに対するウェブの浮上量hとの大小関係に着目するものである。そして、h>σのとき、すなわちローラに対するウェブの浮上量が大きくローラとウェブとの摩擦力が小さくなるような条件では、ウェブ上に発生する波形の直線に対し、駆動ローラの軸が直角となる方向に軸の角度の調整方向が定められる。一方、h≦σのとき、すなわちローラに対するウェブの浮上量が小さく、ローラとウェブとの摩擦力がローラとウェブとの接触領域の全域で均一に発生するような条件では、ウェブ上に発生する波形の直線に対し、駆動ローラ又はフリーローラの軸が鋭角となる方向に軸の角度の調整方向が定められる。
【0011】
(4)駆動ローラと該駆動ローラの上流又は下流に位置するフリーローラとを含む複数のローラによって構成されたウェブ搬送路を備えるウェブ搬送装置を用いたウェブ搬送方法であって、前記搬送路の予め定められた駆動条件を示す駆動情報と、前記ウェブの物性値とに基づいて、前記駆動ローラ又は前記フリーローラにおけるウェブの浮上量を求める浮上量算出ステップと、該浮上量算出ステップの算出結果に基づき、前記軸の角度の調整方向を定める軸角度調整方向判定ステップと、前記搬送路に沿って搬送されるウェブを撮像した撮像画像から、前記ウェブ上に発生する波形の直線を検出するとともに、当該直線の前記駆動ローラに対する進入方向を解析する画像解析ステップと、該軸角度調整方向判定ステップで判定された方向に、前記駆動ローラ又は前記フリーローラの軸を駆動する軸角度制御ステップとを含むウェブ搬送方法(請求項4)。
【0012】
本項に係るウェブ搬送方法は、搬送路における予め定められた駆動条件を示す駆動情報と、ウェブの物性値とに基づいて、駆動ローラ又はフリーローラにおけるウェブの浮上量を求め、その結果に基づき、最適となる軸の角度の調整方向を定める。又、ウェブ搬送路上を搬送されるウェブを撮像して、撮像画像から、ウェブ上に発生する波を打ったような波形(波打ち現象)を示す直線を検出するとともに、当該直線のローラに対する進入方向を解析する。この波形は、しわが発生する前兆となるものである。
そして、波形を示す直線の進入方向に応じ、定められた方向に駆動ローラ又はフリーローラの軸を駆動させる。
これによって、いわゆるミスアライメントを、しわの前兆となる波形を減衰させる状態へと補正し、しわの発生を回避する。なお、しわの前兆となる波形の発生の有無を常時監視し、波形の直線が検出された場合には、直ちに上記手順により定められた方向に軸を駆動し、ミスアライメント補正を行うものである。
【0013】
(5)上記(4)項の軸角度調整方向判定ステップにおいて、ウェブの浮上量と、ローラ及びウェブの合成表面粗さとの関係に応じ、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラ又は前記フリーローラの軸が、直角又は鋭角になる方向に、前記軸の角度の調整方向が定められるウェブ搬送方法(請求項5)。
本項に係るウェブ搬送方法は、軸角度調整方向判定ステップにおいて、ウェブの浮上量とローラ及びウェブの合成表面粗さとの関係に着目し、これらの関係に応じて最適の方向へと、軸の角度の調整方向を定める。これによって、いわゆるミスアライメントを、しわの前兆となる波形を減衰させる状態へと補正し、しわの発生を回避する。
【0014】
(6)上記(5)項の軸角度調整方向判定ステップにおいて、前記駆動ローラ及びウェブの合成表面粗さσと、前記駆動ローラに対するウェブの浮上量hとの関係がh>σのとき、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラの軸が直角となる方向に前記軸の角度の調整方向が定められ、前記駆動ローラ又は前記フリーローラ及びウェブの合成表面粗さσと、前記駆動ローラに対するウェブの浮上量hとの関係がh≦σのとき、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラ又は前記フリーローラの軸が鋭角となる方向に前記軸の角度の調整方向が定められるウェブ搬送装置(請求項6)。
本項に係るウェブ搬送方法は、駆動ローラ又はフリーローラの軸の角度の調整方向を定めるにあたり、駆動ローラ又はフリーローラ及びウェブの合成表面粗さσと、ローラに対するウェブの浮上量hとの大小関係に着目するものである。そして、h>σのとき、すなわちローラに対するウェブの浮上量が大きくローラとウェブとの摩擦力が小さくなるような条件では、ウェブ上に発生する波形の直線に対し、駆動ローラの軸が直角となる方向に軸の角度の調整方向を定める。一方、h≦σのとき、すなわちローラに対するウェブの浮上量が小さく、ローラとウェブとの摩擦力がローラとウェブとの接触領域の全域で均一に発生するような条件では、ウェブ上に発生する波形の直線に対し、駆動ローラ又はフリーローラの軸が鋭角となる方向に軸の角度の調整方向を定める。
【0015】
(7)駆動ローラと該駆動ローラの上流又は下流に位置するフリーローラとを含む複数のローラによって構成されたウェブ搬送路を備えるウェブ搬送装置のコントローラを、前記搬送路の予め定められた駆動条件を示す駆動情報と、前記ウェブの物性値とに基づいて、前記駆動ローラ又は前記フリーローラにおけるウェブの浮上量を求める浮上量算出手段と、該浮上量算出手段の算出結果に基づき、前記軸の角度の調整方向を定める軸角度調整方向判定手段と、前記搬送路に沿って搬送されるウェブを撮像した撮像画像から、前記ウェブ上に発生する波形の直線を検出するとともに、当該直線の前記ローラに対する進入方向を解析する画像解析手段と、前記軸角度調整方向判定手段で判定された方向に、前記駆動ローラ又は前記フリーローラの軸を駆動する軸角度制御手段として、機能させる制御ロジックを含むウェブ搬送制御プログラム(請求項7)。
【0016】
本項に係るウェブ搬送制御プログラムは、搬送路における予め定められた駆動条件を示す駆動情報と、ウェブの物性値とに基づいて、駆動ローラ又はフリーローラにおけるウェブの浮上量を求める浮上量算出手段として機能する。更に、浮上量算出手段の算出結果に基づき、最適となる軸の角度の調整方向を定める。又、ウェブ搬送装置のコントローラが、ウェブ搬送路上を搬送されるウェブを撮像して、撮像画像から、ウェブ上に発生する波を打ったような波形(波打ち現象)を示す直線を検出するとともに、当該直線のローラに対する進入方向を解析する、画像解析手段として機能する。この波形は、しわが発生する前兆となるものである。
そして、波形を示す直線の進入方向に応じ、アライメント調整手段を制御して、適切な方向に駆動ローラ又はフリーローラの軸を駆動させるための、軸角度調整方向判定手段として機能する。
そして、軸角度調整方向判定手段で判定された方向に、前記駆動ローラ又は前記フリーローラの軸を駆動する軸角度制御手段として機能することによって、いわゆるミスアライメントは、しわの前兆となる波形を減衰させる状態へと補正され、しわの発生が回避される。なお、しわの前兆となる波形の発生の有無は、画像解析手段によって常時監視され、波形の直線が検出された場合には、直ちに上記各手段により定められた方向に軸を駆動し、ミスアライメント補正がなされるものである。
【0017】
(8)上記(7)項の軸角度調整方向判定手段において、ウェブの浮上量と、ローラ及びウェブの合成表面粗さとの関係に応じ、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラ又は前記フリーローラの軸が、直角又は鋭角になる方向に、前記軸の角度の調整方向が定められるウェブ搬送制御プログラム(請求項8)。
本項に係るウェブ搬送制御プログラムは、軸角度調整方向判定手段において、ウェブの浮上量とローラ及びウェブの合成表面粗さとの関係に着目し、これらの関係に応じて最適の方向へと、軸の角度の調整方向が定められる。これによって、いわゆるミスアライメントは、しわの前兆となる波形を減衰させる状態へと補正され、しわの発生が回避される。
【0018】
(9)上記(8)項の軸角度調整方向判定手段において、前記駆動ローラ及びウェブの合成表面粗さσと、前記駆動ローラに対するウェブの浮上量hとの関係がh>σのとき、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラの軸が直角となる方向に前記軸の角度の調整方向が定められ、前記駆動ローラ又は前記フリーローラ及びウェブの合成表面粗さσと、前記駆動ローラに対するウェブの浮上量hとの関係がh≦σのとき、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラ又は前記フリーローラの軸が鋭角となる方向に前記軸の角度の調整方向が定められるウェブ搬送制御プログラム(請求項9)。
本項に係るウェブ搬送制御プログラムは、駆動ローラ又はフリーローラの軸の角度の調整方向を定めるにあたり、駆動ローラ又はフリーローラ及びウェブの合成表面粗さσと、ローラに対するウェブの浮上量hとの大小関係に着目するものである。そして、h>σのとき、すなわちローラに対するウェブの浮上量が大きくローラとウェブとの摩擦力が小さくなるような条件では、ウェブ上に発生する波形の直線に対し、駆動ローラの軸が直角となる方向に軸の角度の調整方向が定められる。一方、h≦σのとき、すなわちローラに対するウェブの浮上量が小さく、ローラとウェブとの摩擦力がローラとウェブとの接触領域の全域で均一に発生するような条件では、ウェブ上に発生する波形の直線に対し、駆動ローラ又はフリーローラの軸が鋭角となる方向に軸の角度の調整方向が定められる。
【発明の効果】
【0019】
本発明はこのように構成したので、ウェブ搬送を行う際に、搬送条件の如何に関わらず、ウェブにしわが発生することを適切に防ぐことができる。
【図面の簡単な説明】
【0020】
【図1】ウェブにしわが発生するメカニズムを説明するための説明図であり、(a)は2つのローラとウェブとの関係を示した斜視図、(b)はその側面図、(c)はその上面図である。
【図2】しわの発生を防止し、ウェブを安定搬送させるための条件を示すグラフ図である。
【図3】本発明の実施の形態に係るウェブ搬送装置を模式的に示す側面図である。
【図4】図3に示されるウェブ搬送装置の平面図である。
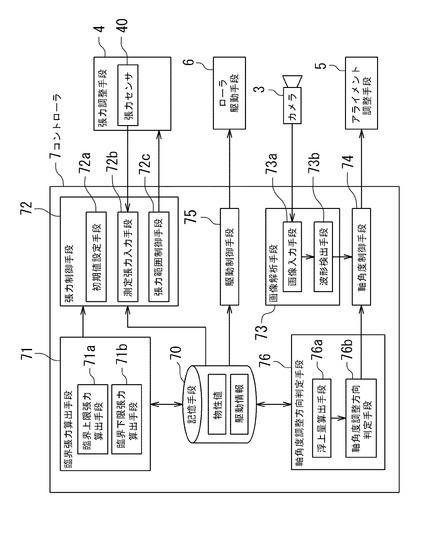
【図5】本発明の実施の形態に係るウェブ搬送装置の、コントローラの構成を示すブロック図である。
【図6】本発明の実施の形態に係るウェブ搬送装置の、作動手順を示すフローチャートである。
【図7】本発明の実施の形態に係るウェブ搬送装置において、ウェブ上にしわの前兆となる波形(波打ち現象)が発生した場合の、ガイドローラの制御手法を示す説明図であり、(a)は、ウェブ上に発生する波形の直線に対し、駆動ローラの軸が直角となる方向に軸の角度の調整を行う場合を、(b)は、ウェブ上に発生する波形の直線に対し、駆動ローラの軸が鋭角となる方向に軸の角度の調整を行う場合を示すものである。
【発明を実施するための形態】
【0021】
以下、本発明の実施の形態について、図面を参照して説明する。ここでは、最初に、本願発明者が解明したウェブのしわの発生メカニズムについて、その概略を説明した後に、しわの発生を防止しながらウェブの搬送を行うウェブ搬送装置の構成及び動作について順次説明を行う。
なお、本発明者らによる上記特許文献2記載の発明と、一部重複する構成部分については、適宜、上記特許文献2の記載を引用して説明する。
【0022】
[ウェブ搬送中のしわ発生メカニズム]
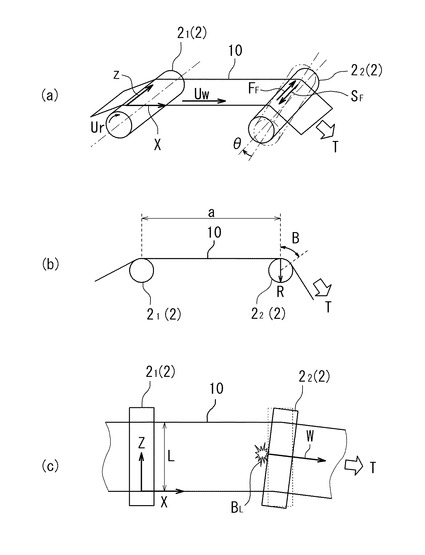
最初に、図1を参照して、ウェブ搬送中にウェブにしわが発生するメカニズムについて説明する。図1は、しわ発生のメカニズムを説明するための説明図であって、(a)は2つのローラとウェブとの関係を示した斜視図、(b)はその側面図、(c)はその上面図を示している。図1では、ウェブ10が、2つのローラ2(21,22)上を搬送されている状態を示している。ここでは、上流側のローラ21から下流側のローラ22の方向にウェブ10(図中では透明で示している)が搬送されているものであり、上流側のローラ21は受動的に回転するフリーローラ、下流側のローラ22は動力源を備える駆動ローラである。
【0023】
(しわ発生条件)
まず、ウェブ10の搬送中にウェブ10にしわが発生する条件について説明する。
通常、ローラ21,22が平行に配置されている場合は、ウェブ10にしわは発生しない。しかし、例えば、ローラ22が、ローラ21に対してゆがみ(スキュー)が発生し、ローラ21とローラ22との間でミスアライメントが発生した場合、ウェブ10はローラ22の接線上で曲げモーメントによるせん断力SFを受ける。ここで、ウェブ10を、上流側のローラ21を固定端とする極めて薄いはりと考えると、ウェブ10はせん断力SFを受け、面内でたわもうとする。このときのせん断応力がウェブ10を平板とみなしたときの臨界座屈応力を上回っていれば、スキューが発生したローラ22に進入する直前のウェブ10の中央位置に座屈BLが生じ始め、これがしわの発生点となる。
すなわち、ローラ22のスキュー角θが、以下の(1)式に示す臨界ミスアライメント角θcr以上となった場合にしわが発生する。
【0024】
【数1】

【0025】
ここで、aはローラ間のスパン[m]、Lはウェブ幅[m]、Exはウェブ搬送方向のウェブのヤング率[Pa]、σxは張力によるウェブ搬送方向の引張応力[Pa]、σzcrは臨界座屈応力[Pa]をそれぞれ示している。
なお、引張応力σxは、以下の(2)式で与えられる。
【0026】
【数2】
【0027】
ここで、Tはウェブ張力[N/m]、tfはウェブ厚[m]をそれぞれ示している。
また、臨界座屈応力σzcrは、以下の(3)式で与えられる。
【0028】
【数3】
【0029】
ただし、σe,ζ1及びζ2は、以下の(4)式で与えられる。
また、(3)式における整数iは、以下の(5)式を満たす任意の1個の整数とする。
【0030】
【数4】
【0031】
【数5】
【0032】
(しわ伝搬条件)
次に、ウェブ10に発生したしわがウェブ10の搬送方向に沿って伝搬する条件について説明する。
通常、しわが発生したウェブ10がローラ22を通過する際、ローラ22に沿って巻かれたウェブ10の臨界座屈応力は、平板の臨界座屈応力に比べてはるかに大きくなることから、ウェブ10とローラ22間に大きなせん断力を支持するための十分な摩擦力FFのうち、が作用していない場合には、ローラ22上でウェブ10は座屈せず、しわは消滅する。
しかし、ウェブ10とローラ22間に十分な摩擦力FFが作用する場合にはローラ22上でもウェブ10は座屈し続け、しわが伝搬していく。
すなわち、ウェブ10に対する張力が、以下の(6)式に示す臨界上限張力Twik以上となった場合にしわが伝搬する。
【0033】
【数6】
【0034】
ここで、tfはウェブ厚[m]、μはウェブ−ローラ間の摩擦係数、Lはウェブ幅[m]、Exはウェブ搬送方向のウェブのヤング率[Pa]、Ezはウェブ幅方向のウェブのヤング率[Pa]、vxはウェブ搬送方向のウェブのポアソン比、vzはウェブ幅方向のウェブのポアソン比をそれぞれ示している。
なお、摩擦係数μは、以下の(7)式で与えられる。
【0035】
【数7】
【0036】
ここで、Rはローラ半径[m]、Bはウェブ巻角[rad]である。また、μlは以下の(8)式で与えられる。
【0037】
【数8】
【0038】
ここで、μcはウェブ−ローラ間の境界摩擦係数、hは空気膜厚、すなわち、ローラ22に対するウェブ10の浮上量[m]、σはウェブ−ローラ間の合成表面粗さ[m]をそれぞれ示している。
ただし、表面粗さσは、以下の(9)式に示すように、ローラの表面粗さσrとウェブの表面粗さσwとの合成値である。
【0039】
【数9】
【0040】
また、空気膜厚hは、以下の(10)式で与えられる。
【0041】
【数10】
【0042】
ここで、ηは空気膜粘度(あるいは、周囲が空気以外の流体の場合はその流体の粘度)[Pa・s]、Tはウェブ張力[N/m]、kはウェブの透気率[m2]、xはウェブ搬送方向座標[m]、Uはウェブ搬送速度[m/s]をそれぞれ示している。なお、ウェブ搬送方向座標xは、巻き角の入口をx=−RB/2、出口をx=RB/2(−RB/2≦x≦RB/2)とする。また、ウェブ搬送速度Uは、ローラ速度Urとウェブ速度Uwとの加算値(Ur+Uw)である。
このように、ウェブ10に対する張力Tが、前記(6)式で示した臨界上限張力Twik未満であれば、しわは発生しない。しかし、この張力Tが逆に小さくなりすぎると、ウェブ10とローラ2間の摩擦力が低下し、スリップが生じやすくなり、ウェブ10の搬送が困難になってしまう。
そこで、ここでは、スリップが発生しない張力Tの臨界張力(臨界下限張力)Tslipについて求めておく。
一般に、スリップが発生するのは、μ=0となるときであり、それは、(8)式から、h=3σとなる場合である。
【0043】
つまり、下の(11)式の右辺が3σとなるときである。
【0044】
【数11】
【0045】
よって、臨界下限張力Tslipは、以下の(12)式により求めることができる。
【0046】
【数12】
【0047】
以上の条件を、図2にグラフ化して説明する。図2の上段の図は、しわの発生を防止し、ウェブを安定搬送させるための条件を示すグラフ図であって、横軸をウェブに対する張力T、縦軸をローラのスキュー角(ミスアライメント角)θとしたmのである。又、図2の中段の図は、横軸を張力T、縦軸をローラに対するウェブの浮上量hとしたものである。更に、図2の下段の図は、横軸を張力T、縦軸をウェブ−ローラ間の摩擦係数μとしたものである。
図2の上段の図に示すように、張力Tが、前記(12)式で算出した臨界下限張力Tslipよりも大きく、かつ、前記(6)式で算出した臨界上限張力Twikよりも小さい場合は、しわの発生やスリップが発生せず安定してウェブ10を搬送することができる。
なお、張力Tが臨界下限張力Tslipよりも小さくなった場合は、スリップが発生し、臨界上限張力Twikよりも大きくなった場合は、しわが発生する。しかし、この場合であっても、ローラ22のスキュー角θを、前記(1)式で算出した臨界ミスアライメント角θcrよりも小さくすることで、しわを発生させずに安定してウェブ10を搬送することができる。
【0048】
このように、ウェブ搬送において、しわの発生やスリップを発生させずにウェブを安定して搬送させるには、ウェブ10の張力Tやローラ22のスキュー角θが、図2のグラフにおいて、スリップ発生領域SLやしわ発生領域WRに入らないように、常に安定領域STに入るように状態を保持する必要がある。
【0049】
加えて、本発明の実施の形態では、ウェブ10とローラ22間に作用する摩擦力FFは、ローラ22とウェブ10とのと、ローラ22に対するウェブ10の浮上量h[m]との大小関係に影響を受けるものである。(なお、合成表面粗さσ[m]ローラ22の表面粗さσrとウェブ10の表面粗さσwとの合成値である。(9)式参照。)
【0050】
本発明者らによる研究によれば、h≦σのとき、すなわち駆動ローラ22又はフリーローラ21に対するウェブ10の浮上量hが、駆動ローラ22又はフリーローラ21とウェブ10との合成表面粗さσ以下の場合には、ウェブ10と駆動ローラ22又はローラ22間に作用する摩擦力FFは、接触領域全域で均一となり、h>σのとき、すなわち、駆動ローラ22に対するウェブ10の浮上量hが、ローラ22とウェブ10との合成表面粗さσ超える場合には、ミスアライメントが生ずると、ウェブ10とローラ22間に作用する摩擦力FFは、接触領域の全域で不均一となることが確認されている。すなわち、図2の中段の図に示される浮上量h=σを境として、図2の下段の図に示されるように、h≦σの領域では、張力Tの平均値TAVを基準として平均値よりも張力の高い部分TH及び低い部分TLとが生じても、ウェブ−ローラ間の摩擦係数μは一定となるが、h>σの領域では、張力が平均値TAVを中心にそれよりも低い値TLと高い値THとで不均一だと、μも不均一となる。なお、図3の下段の図にも示されるように、浮上量h>3σの領域では、μ=0で一定となる。
【0051】
そこで、本発明の実施の形態は、ミスアライメント解消のための、ローラ2の軸の修正方向を決定するにあたり、駆動ローラ22又はフリーローラ21及びウェブの合成表面粗さσと、これらローラ2に対するウェブ10の浮上量hとの大小関係に着目するものである。
以下、このウェブ10の張力Tやローラのスキュー角θを、安定領域ST内で動作させることが可能なウェブ搬送装置の構成及び動作について説明する。
【0052】
[ウェブ搬送装置の構成]
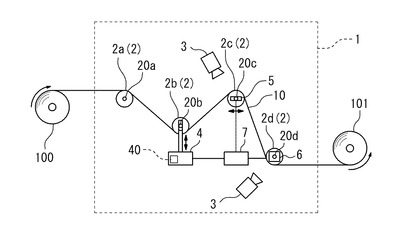
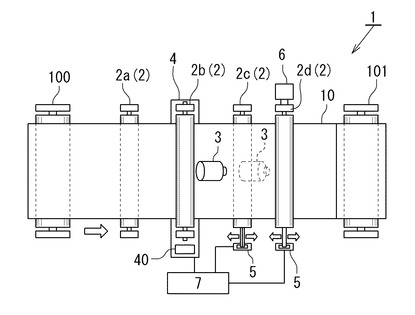
まず、図3及び図4を参照して、本発明に係るウェブ搬送装置の構成について説明する。図3は、本発明に係るウェブ搬送装置の概略の構成を示す側面図である。図4は、本発明に係るウェブ搬送装置の平面図である。
図3及び図4に示すように、ウェブ搬送装置1は、連続紙、プラスチックフィルム、金属膜等の柔軟な連続素材であるウェブ10を、しわの発生やスリップを発生させずに、複数のローラ2で搬送するものである。
ここでは、ウェブ搬送装置1は、送り出し部100から巻き取り部101へウェブ10を搬送することとしている。また、ここでは、ウェブ搬送装置1は、複数のローラ2と、カメラ3と、張力調整手段4と、アライメント調整手段5と、ローラ駆動手段6と、コントローラ7とを備えている。
【0053】
ローラ2は、軸を中心に回転することで、ウェブ10を上流から下流に対して搬送するものである。ここでは、ローラ2として、補助ローラ2aと、ダンサーローラ2bと、ガイドローラ2cと、駆動ローラ2dとを備えている。なお、これらのローラ2は、それぞれの軸が平行となるように設置されている。しかし、各軸の平行性は絶対的なものではないため、後記するガイドローラ2c又は駆動ローラ2dのスキュー角を制御することで平行性を保持することとする。
【0054】
補助ローラ2aは、その軸20aの両端がウェブ搬送装置1の本体に固定され、自身が駆動力を持たず、ウェブ10を搬送する補助的なフリーローラである。ここでは、補助ローラ2aは、送り出し部100から送出されるウェブ10を、ダンサーローラ2bへ導く役割を果たしている。
【0055】
ダンサーローラ2bは、その軸20bの位置を調整可能なフリーローラであって、ウェブ10に対する張力を発生させるものである。ここでは、ダンサーローラ2bは、後記する張力調整手段4によって、軸20bを設置面に対して鉛直方向に駆動されることで、ウェブ10に対する張力を発生させる。
【0056】
ガイドローラ2cは、その軸20cの一端がウェブ搬送装置1の本体に固定され、他端(移動端)の位置を調整可能なフリーローラである。ここでは、ガイドローラ2cは、他端の位置を後記するアライメント調整手段5によって設置面に対して水平方向に調整されることで、上流側のローラとの軸の平行性を保つ役割を果たしている。
【0057】
駆動ローラ2dは、その軸20dを後記するローラ駆動手段6によって回転駆動されることで回転し、ウェブ10との摩擦力によってウェブ10を搬送するものである。又、駆動ローラ2cも、その軸20dの一端がウェブ搬送装置1の本体に固定され、他端(移動端)の位置を調整可能なローラである。ここでは、駆動ローラ2dは、ガイドローラ2cから送出されたウェブ10を巻き取り部101に送出している。
【0058】
カメラ(撮像手段)3は、ガイドローラ2c及び駆動ローラ2d(すなわち、アライメント調整手段5が設けられたローラ)に近接して設けられ、ガイドローラ2c及び駆動ローラ2d上において搬送されるウェブ10を撮像するものである。このカメラ3で撮像された画像は逐次映像信号としてフレーム単位で後記するコントローラ7に出力される。このカメラ3で撮像された画像は、コントローラ7内で解析され、ウェブ10において、しわが発生する前兆となる波形が発生しているか否かが判定される。この解析手法の説明については、後記するコントローラ7の構成の説明において行う。
【0059】
張力調整手段4は、ダンサーローラ2bの軸20bの位置を調整することで、ウェブ10の張力を調整するものである。ここでは、張力調整手段4は、コントローラ7からの駆動信号(張力調整駆動信号)に基づいて、ダンサーローラ2bの軸20bの位置を設置面に対して鉛直方向に動作させることで、ウェブ10に対する張力を調整する。この張力調整手段4は、例えば、油圧シリンダ、空気圧シリンダ等で構成することができる。
なお、ここでは、張力調整手段4は、ダンサーローラ2bの軸20bを垂直方向に調整しているが、この方向については、これに限定されるものではなく、上流や下流のローラの配置等によって、ウェブ10に対する張力を調整することが可能な方向であればよい。
また、ここでは、張力調整手段4は、内部に張力センサ40を備え、張力センサ40によって、ウェブ10に対する張力を測定し、その張力をコントローラ7に出力する。
【0060】
アライメント調整手段5は、ガイドローラ2c及び駆動ローラ2dの軸20c及び20dのスキュー角(ミスアライメント角)を調整するものである。ここでは、アライメント調整手段5は、コントローラ7からの駆動信号(アライメント調整駆動信号)に基づいて、ガイドローラ2cの軸20c、及び、駆動ローラ2dの軸20dの移動端の位置を設置面に対して水平方向に動作させることで、軸20c及び駆動ローラ2dのスキュー角を調整する。このアライメント調整手段5は、例えば、マイクロねじによって軸20c及び駆動ローラ2dの移動端の位置を調整することとしてもよいし、ピエゾ素子を電圧、磁気等によって変形させることで軸20c及び駆動ローラ2dの移動端の位置を調整することとしてもよい。
なお、ここでは、アライメント調整手段5は、ガイドローラ2cの軸20c、及び、駆動ローラ2dの軸20dを水平方向に調整しているが、この方向は、水平方向に限定されるものではなく、ガイドローラ2cに対するウェブ10の入力方向を調整することが可能な方向であればよい。
【0061】
ローラ駆動手段6は、駆動ローラ2dの軸20dを回転駆動させるものであって、例えば、一般的なモータである。ここでは、ローラ駆動手段6は、コントローラ7からの駆動信号(電源周波数信号)に基づいて、駆動ローラ2dの軸20dを回転駆動させる。
【0062】
コントローラ7は、ウェブ搬送装置1全体を制御する制御装置であって、CPU(Central Processing Unit)、RAM(Random Access Memory)等を備えた一般的なコンピュータ等の演算手段によって実現される。
【0063】
ここで、図5を参照(適宜図3及び図4参照)して、コントローラ7の機能構成について説明する。図5は、コントローラの構成を示す機能ブロック図である。
ここでは、コントローラ7は、記憶手段70と、臨界張力算出手段71と、張力制御手段72と、画像解析手段73と、軸角度制御手段74と、駆動制御手段75と、軸角度調整方向判定手段76とを備えている。
【0064】
記憶手段70は、ウェブ10の物性値や、駆動情報等を記憶するものであって、半導体メモリ、ハードディスク等の一般的な記憶装置である。
この記憶手段70に記憶されるウェブ10の物性値は、ヤング率、ポアソン比、ウェブ厚、ウェブ幅、ウェブ表面粗さ、摩擦係数等、前記(1)〜(12)式において説明したウェブ10固有の値である。
【0065】
また、記憶手段70に記憶される駆動情報は、ローラ種別(駆動ローラ又はフリーローラ)、ローラ表面粗さ、ローラ半径、ウェブ巻角、ウェブ搬送速度、空気膜粘度等、前記(1)〜(12)式において説明したウェブ搬送装置1を運転させる際の条件を示す値である。
なお、これらの物性値や駆動情報は、予め記憶手段70に記憶しておいてもよいし、図示を省略したキーボード等の入力手段を介して外部から入力することとしてもよい。
さらに、記憶手段70には、後記する臨界張力算出手段71で算出される臨界値が記憶される。
【0066】
臨界張力算出手段71は、ウェブ10の搬送時において、ウェブ10にしわやスリップを発生させない条件を臨界条件として算出するものである。ここでは、臨界張力算出手段71は、臨界上限張力算出手段71aと、臨界下限張力算出手段71bとを備えている。
【0067】
臨界上限張力算出手段71aは、ウェブ10にしわが発生する際のウェブ10に対する張力の上限値を算出するものである。ここでは、臨界上限張力算出手段71aは、記憶手段70に記憶されているウェブ10の物性値や駆動情報に基づいて、前記(6)式で説明した臨界上限張力Twikを算出する。この臨界上限張力Twikは、張力制御手段72に出力される。
【0068】
臨界下限張力算出手段71bは、ウェブ10にスリップが発生する際のウェブ10に対する張力の下限値を算出するものである。ここでは、臨界下限張力算出手段71bは、記憶手段70に記憶されているウェブ10の物性値や駆動情報に基づいて、前記(12)式で説明した臨界下限張力Tslipを算出する。この臨界下限張力Tslipは、張力制御手段72に出力される。
【0069】
張力制御手段72は、ウェブ10に対する張力を制御するものである。ここでは、張力制御手段72は、ダンサーローラ2bの軸20bの位置を調整することで、ウェブ10に対する張力を制御する。なお、ここでは、張力制御手段72は、初期値設定手段72aと、測定張力入力手段72bと、張力範囲制御手段72cとを備えている。
【0070】
初期値設定手段72aは、ウェブ10に対する張力の初期値を設定するものである。ここでは、初期値設定手段72aは、臨界張力算出手段71で算出された臨界上限張力Twik及び臨界下限張力Tslipに基づいて、以下の(13)式を満たすような張力TOを初期値とする。例えば、臨界上限張力Twik及び臨界下限張力Tslipの平均値を張力TOとする。
【0071】
【数13】
【0072】
測定張力入力手段72bは、張力調整手段4の張力センサ40で測定されたウェブ10の張力を測定値として入力するものである。この測定張力入力手段72bで入力された張力の測定値は、張力範囲制御手段72cに出力される。
【0073】
張力範囲制御手段72cは、ウェブ10の張力が臨界上限張力Twik及び臨界下限張力Tslipの範囲に収まるように、ダンサーローラ2bを制御するものである。
ここでは、張力範囲制御手段72cは、初期値設定手段72aで設定された初期値が、ウェブ10に対する張力となるように、張力調整手段4に対して駆動信号(張力調整駆動信号)を出力する。なお、張力範囲制御手段72cは、ウェブ10の搬送中は、逐次、測定張力入力手段72bで入力された張力の範囲が、臨界上限張力Twik及び臨界下限張力Tslipの範囲に収まるように、張力調整手段4に対して駆動信号(張力調整駆動信号)を出力する。
【0074】
画像解析手段73は、カメラ3で撮像された画像の色または輝度に基づいて、当該画像から、ウェブ10上に発生する波形を検出するとともに、予め定めた座標系を基準に当該直線の方向を当該波形のガイドローラ2c又は駆動ローラ2dに対する進入方向として解析するものである。ここでは、画像解析手段73は、画像入力手段73aと、波形検出手段73bとを備えている。
【0075】
画像入力手段73aは、カメラ3で撮像された画像を入力するものである。この画像入力手段73aは、カメラ3で撮像されたフレーム単位の画像を時系列に入力し、波形検出手段73bに出力する。
【0076】
波形検出手段73bは、画像入力手段73aから入力された画像を解析することで、ウェブ10において、しわが発生する前兆となる波形と、その波形のガイドローラ2c又は駆動ローラ2dへの進入方向を検出するものである。
【0077】
ウェブ10にしわが発生する場合、前兆となる波形が予めウェブ10上に発生する。そこで、波形検出手段73bは、カメラ3で撮像された画像を解析することで、波形(図7参照)に示すを検出することとする。
例えば、波形検出手段73bは、既知の技術であるハフ変換の手法を用いることで、画像内から直線(しわが発生する前兆となる波形の直線)を検出し、その直線の方向(波形の進入方向)を求める。
【0078】
このウェブ10上に発生する波形は、画像がカラー画像である場合は、予め定めた色ベクトルに属する画素値を検出することで直線として検出することができる。また、白黒画像であれば、輝度の差に基づいて波形を直線として検出することができる。
また、波形検出手段73bは、ハフ変換により、直線の画素をx−y座標系からρ−θ座標系に変換することで、直線の傾きを求めることができる。
この波形検出手段73bで波形が検出された旨と、その波形のガイドローラ2cへの進入方向は、軸角度制御手段74に出力される。
【0079】
軸角度制御手段74は、波形検出手段73bで検出された波形の進入方向に基づいて、ガイドローラ2cのスキュー角を制御するものである。ここでは、軸角度制御手段74は、ガイドローラ2cへの波形の進入方向と、ガイドローラ2cの軸方向とのなす角が直角となる方向に、アライメント調整手段5に対して駆動信号(アライメント調整駆動信号)を出力する。
【0080】
駆動制御手段75は、ウェブ10を搬送するためにローラ駆動手段6に対して、所定速度を指示する駆動信号(電源周波数信号)を出力することで、駆動ローラ2dを駆動させるものである。また、ここでは、駆動制御手段75は、記憶手段70に記憶されているウェブ搬送速度に基づいて、駆動信号(電源周波数信号)を出力することとする。
なお、コントローラ7は、コンピュータを前記した各手段として機能させるウェブ搬送制御プログラムにより動作させることができる。
【0081】
軸角度調整方向判定手段76は、記憶手段70に何れも記憶されている、搬送路における予め定められた駆動条件を示す駆動情報とウェブ10の物性値とに基づいて、フリーローラ2c又は駆動ローラ2dにおけるウェブ10の浮上量hを求め、その結果に基づき前記軸の角度の調整方向を定めるものであり、浮上量算出手段76aと、軸角度調整方向判定手段76bとを備えている。
【0082】
浮上量算出手段76aは、前記(15)式で説明した、ローラ2に対するウェブ10の浮上量hを算出する。この浮上量hは、軸角度調整方向判定手段76bに出力される。
そして、軸角度調整方向判定手段76bにおいて、フリーローラ2c又は駆動ローラ2d及びウェブ10の合成表面粗さσと、これらローラ2に対するウェブ10の浮上量hとの大小から、画像解析手段で検出されたウェブ10上に発生する波形の直線に対する、フリーローラ2c又は駆動ローラ2dの軸20c、20dの角度の調整方向が定められ、その方向に関する情報が、軸角度制御手段74に出力される。
【0083】
[ウェブ搬送装置の動作]
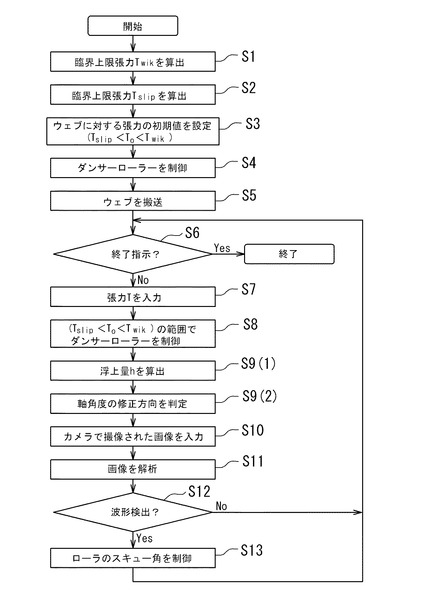
次に、図6を参照(適宜図3、図4及び図5参照)して、ウェブ搬送装置1の動作について説明する。図6は、本発明に係るウェブ搬送装置の動作を示すフローチャートである。ここでは、ウェブ搬送装置1の動作について、コントローラ7の動作を中心に説明を行う。
【0084】
(臨界張力算出ステップ)
まず、ウェブ搬送装置1は、臨界張力算出手段71の臨界上限張力算出手段71aによって、ウェブ10にしわが発生する際のウェブ10に対する張力の上限値(臨界上限張力Twik)を算出する(ステップS1)。さらに、ウェブ搬送装置1は、臨界張力算出手段71の臨界下限張力算出手段71bによって、ウェブ10にスリップが発生する際のウェブ10に対する張力の下限値(臨界下限張力Tslip)を算出する(ステップS2)。
【0085】
そして、ウェブ搬送装置1は、張力制御手段72の初期値設定手段72aによって、臨界上限張力Twikと臨界下限張力Tslipの範囲内で、ウェブ10に対する張力の初期値(張力TO)を設定する(ステップS3)。
また、ウェブ搬送装置1は、張力制御手段72の張力範囲制御手段72cによって、ウェブ10に対する張力がステップS3で設定された張力となるように、ダンサーローラ2bを制御する(ステップS4)。
以上の動作によって、ウェブ搬送装置1において張力に関する初期設定が行われたことになる。
【0086】
その後、ウェブ搬送装置1は、駆動制御手段75からローラ駆動手段6に対して駆動信号を出力することで、駆動ローラ2dを回転させ、ウェブ10を搬送させる(ステップS5)。そして、ウェブ搬送装置1は、以下の張力制御ステップ、画像解析ステップ及び軸角度制御ステップを実行する。
なお、ここで、動作の終了が指示された場合(ステップS6でYes)は、ウェブ搬送装置1は、動作を終了する。一方、動作の終了が指示されなかった場合(ステップS6でNo)は、ステップS7に進む。
【0087】
(張力制御ステップ)
まず、ウェブ搬送装置1は、ウェブ10の搬送中、張力制御手段72の測定張力入力手段72bによって、張力調整手段4の張力センサ40で測定されたウェブ10の張力Tを入力する(ステップS7)。
そして、ウェブ搬送装置1は、張力範囲制御手段72cによって、ウェブ10の張力TがステップS1で算出された臨界上限張力Twikと、ステップS2で算出された臨界下限張力Tslipの範囲に収まるように、張力調整手段4に対して駆動信号を出力することで、ダンサーローラ2bの位置を鉛直方向に変化させるように制御する(ステップS8)。
【0088】
(浮上量算出ステップ)
ウェブ搬送装置1は、ウェブ10の搬送中、軸角度調整方向判定手段76の浮上量算出手段76aによって、フリーローラ2c又は駆動ローラ2dに対するウェブ10の浮上量hを算出する(ステップS9(1))。
【0089】
(軸角度調整方向判定ステップ)
そして、軸角度調整方向判定手段76bにおいて、フリーローラ2c又は駆動ローラ2d及びウェブの合成表面粗さσと、これらローラ2に対するウェブ10の浮上量hとの大小関係を比較する。ここで、h>σのとき、すなわちローラ2に対するウェブ10の浮上量が大きくローラ2とウェブ10との摩擦力が小さくなるような条件では、図7(a)に示されるように、ウェブ10上に発生する波形の直線Lに対し、駆動ローラ2dの軸20dが直角となる方向に軸の角度(スキュー角θ)の調整方向RVが定められる。
一方、h≦σのとき、すなわちローラ2に対するウェブ10の浮上量が小さく、ローラ2とウェブ10との摩擦力がローラ2とウェブ10との接触領域の全域で均一に発生するような条件では、図7(b)に示されるように、ウェブ10上に発生する波形の直線Lに対し、フリーローラ2cの軸20c又は駆動ローラ2dの軸20dが鋭角となる方向に前記軸の角度(スキュー角θ)の調整方向RVが定められる(ステップS9(2))。
【0090】
ここで、図7を参照しながら、上述のようにガイドローラ2c又は駆動ローラ2dに対するスキュー角θの調整方向を定める理由について説明する。図7は、ウェブ上にしわの前兆となる波形(波打ち現象)が発生した場合のガイドローラ2c又は駆動ローラ2dの制御方法を説明するための説明図である。ここでは、カメラ3が撮像した画像をそれぞれ示し、図中上から下方向にウェブ10がガイドローラ2c又は駆動ローラ2d上を搬送されている状態を示している。
なお、図7では、理解を容易にするため、ガイドローラ2c又は駆動ローラ2dのスキュー角を大きく調整しているが、実際は、1度、2度等の角度で徐々に角度調整を行う。
【0091】
まず、h>σのときには、ローラ2とウェブ10との間の摩擦力が小さくなり、その際、ミスアライメントがあるとウェブ10の幅方向の各位置におけるテンションが不均一となり、フリーローラ2cと駆動ローラ2dとの間の距離が大きい部分に接触領域CAが偏り、この部分のテンションが大きくなる。そして、テンションの大きい領域は浮上量hが小さくなり、摩擦力が大きくなる。
その結果、図7(a)に示されるように、ウェブ10を回転させようとするモーメントMが発生し、下流に位置する駆動ローラ2d上で、図7(a)の例ではウェブ10を図の右側に寄せようとする力が働き、ウェブ10が変形して同図の向きに波形の直線Lが発生する。この場合には、ウェブ10上に発生する波形の直線Lに対し、特に、駆動ローラ2dの軸20dが直角となる方向に軸の角度(スキュー角θ)を調整することで、効果的にウェブ10の幅方向の各位置におけるテンションの均一化を図り、フリーローラ2cと駆動ローラ2dとの間の接触領域CAの偏りを解消する。これによって、全体の摩擦力が平均化され、波打ち現象が打ち消されてしわの発生を防止することができる。
【0092】
一方、h≦σのときは、ローラ2とウェブ10との接触領域CAは、ミスアライメントが生じても、フリーローラ2cと駆動ローラ2dとの間の距離の如何に関わらず幅方向の全域にわたり、ローラ2とウェブ10との間の摩擦力は接触領域CAの全域で均一に発生する。
その結果、駆動ローラ2dとウェブ10との間の摩擦力FFの、ウェブ搬送方向成分FF1及びそれと直交する方向成分FF2のうち、後者の成分FF2によって、図7(b)の例ではウェブ10を図の左側に寄せようとする力が働き、ウェブ10が変形して同図の向きに波形の直線Lが発生する。この場合には、ウェブ10上に発生する波形の直線Lに対し、フリーローラ2cの軸20c又は駆動ローラ2dの軸20dが鋭角となる方向に軸の角度(スキュー角θ)を調整することで、フリーローラ2cと駆動ローラ2dとを平行に修正することにより、ウェブ搬送方向と直交する方向成分FF2を打ち消す。この場合は、元々ローラ2とウェブ10との間の摩擦力は接触領域CAの全域で均一に発生していることから、フリーローラ2cと駆動ローラ2dとを平行に修正することにより、波打ち現象が打ち消されてしわの発生を防止することができる。
【0093】
(画像解析ステップ)
まず、ウェブ搬送装置1は、画像解析手段73の画像入力手段73aによって、カメラ3で撮像された、ガイドローラ2c上において搬送されるウェブ10の画像をフレーム単位で時系列に入力する(ステップS10)。
そして、ウェブ搬送装置1は、波形検出手段73bによって、しわが発生する前兆となる波形(波打ち現象)とその波形の直線のガイドローラ2cへの進入方向を検出するために、ステップS9で入力された画像を解析する(ステップS11)。
ここで、ウェブ搬送装置1は、波形検出手段73bによって、波形の直線が検出されたか否かを判定する(ステップS12)。
【0094】
(軸角度制御ステップ)
そして、ステップS11において、波形の直線が検出された場合(Yes)、ウェブ搬送装置1は、軸角度制御手段74によって、ステップS10で解析された波形(直線)の進入方向に対し、ステップS9(2)で判定された調整方向RVに、ガイドローラ2cの軸20c又は駆動ローラ2dの軸20dを動かすように、アライメント調整手段5に対して駆動信号を出力することで、ガイドローラ2c又は駆動ローラ2dのスキュー角を制御する(ステップS13)。
【0095】
以上の如く、ガイドローラ2c又は駆動ローラ2dのスキュー角を制御することで、状態が安定領域STへ移行し、しわの発生を防止することができる。
ステップS13の動作後またはステップS12において波形が検出されなかった場合(No)、ウェブ搬送装置1は、ステップS6に戻って、ウェブ10の搬送中、動作を継続する。
【0096】
以上の動作によって、ウェブ搬送装置1は、しわの発生とスリップとを防止しながら安定して、ウェブ10を搬送することができる。
なお、ここでは、張力制御ステップ、浮上量算出ステップ、軸角度調整方向判定ステップの後に、画像解析ステップ及び軸角度制御ステップを実行することとしたが、これらの各ステップは、上記説明の順序に限定されるものではない。また、それぞれの動作を並列で行うこととしてもよい。また、臨界張力算出ステップにおいて、ステップS1とステップS2との順序は、逆であっても構わないし、並列で動作しても構わない。
【0097】
上記構成をなす、本発明の実施の形態によれば、次のような作用効果を得ることが可能である。すなわち、本発明の実施の形態に係るウェブ搬送装置1は、軸角度調整方向判定手段76によって、搬送路における予め定められた駆動条件を示す駆動情報と、ウェブ10の物性値とに基づいて、駆動ローラ2d又はフリーローラ2cにおけるウェブ10の浮上量hを求め、その結果に基づき、最適となる軸20d、20cの角度の調整方向を定める。又、ウェブ搬送路上を搬送されるウェブ10を、撮像手段3によって撮像する。そして、コントローラ7の画像解析手段73によって、撮像画像から、ウェブ10上に発生する波を打ったような波形(波打ち現象)を示す直線Lを検出するとともに、当該直線Lのローラ2に対する進入方向を解析する。そして、アライメント調整手段5を制御して、軸角度調整方向判定手段76により定められた方向に、駆動ローラ2d又はフリーローラ2cの軸20d又は20cを駆動させるものである。
【0098】
又、軸角度調整方向判定手段76において、ウェブ10の浮上量hとローラ2及びウェブ10の合成表面粗さσとの関係に着目し、これらの関係に応じて最適の方向へと、適宜、軸20d又は20cの角度の調整方向が定められる。これによって、いわゆるミスアライメントは、しわの前兆となる波形を減衰させる状態へと補正され、しわの発生が回避される。
【0099】
しかも、本発明の実施の形態は、駆動ローラ2d又はフリーローラ2cの軸20d、20cの角度の調整方向RVを定めるにあたり、駆動ローラ2d又はフリーローラ2c及びウェブ10の合成表面粗さσと、ローラに対するウェブの浮上量hとの、大小関係に着目するものである。そして、h>σのとき、すなわちローラ2に対するウェブ10の浮上量hが大きくローラ2とウェブ10との摩擦力FFが小さくなるような条件では(図7(a))、ウェブ10上に発生する波形の直線Lに対し、駆動ローラ2dの軸が直角となる方向に軸の角度の調整方向RVが定められる。
一方、h≦σのとき、すなわちローラ2に対するウェブ10の浮上量が小さく、ローラ2とウェブ10との摩擦力FFがローラ2とウェブ10との接触領域の全域で均一に発生するような条件では(図7(b))、ウェブ10上に発生する波形の直線Lに対し、駆動ローラ2d又はフリーローラ2cの軸2d、2cが鋭角となる方向に軸の角度の調整方向RVが定められる。
【0100】
以上の如く、本発明の実施の形態に係るウェブ搬送装置1によれば、いわゆるミスアライメントは、しわの前兆となる波形を減衰させる状態へと補正され、しわの発生が回避される。なお、しわの前兆となる波形の発生の有無は、画像解析手段73によって常時監視され、波形の直線Lが観測された場合には、直ちに上記各手段により定められた方向に軸20d、20cを駆動し、ミスアライメント補正がなされるものである。
【符号の説明】
【0101】
1、1B:ウェブ搬送装置、2:ローラ、2c:ガイドローラ(フリーローラ)、2d:駆動ローラ、3:カメラ(撮像手段)、4:張力調整手段、40:張力センサ(張力計測手段)、5:アライメント調整手段、6:ローラ駆動手段、7:コントローラ、70:記憶手段、71:臨界張力算出手段、72:張力制御手段、73:画像解析手段、74:軸角度制御手段、75:駆動制御手段、76:軸角度調整方向判定手段
【技術分野】
【0001】
本発明は、ウェブ搬送装置、ウェブ搬送方法及びウェブ搬送制御プログラムに関するものである。
【背景技術】
【0002】
近年、薄膜状の柔軟な連続素材(以下、ウェブという)を用いた製品の製造ラインにおいて、複数のローラで構成された搬送路に沿ってウェブを搬送する技術が利用されている。そして、ウェブに対する張力を適切に調整する技術も発明されている(例えば、特許文献1参照。)。
【0003】
しかしながら、従来の手法は、より一層のウェブ搬送速度の高速化、高効率化、高精度化を実現するに当たり、搬送中に生じるしわ等を適宜除去してウェブの損傷をふせぐことが困難となっている。ところで、ウェブに発生するしわは、一般に、ウェブを搬送する各ローラが平行に配置されていない、いわゆるミスアライメントが一因であることが解っており、本発明者らはこの点に鑑みて、ウェブの搬送中に生じるしわの発生の前兆を検出し、しわの発生を防止することが可能な、ウェブ搬送技術を開発している(例えば、特許文献2参照。)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−212406号公報
【特許文献2】特開2007−326657号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
さて、本発明者らによる、引用文献2記載のしわ発生防止技術は、現状においても一定の効果を得られるものであるが、本発明者らの更なる研究の結果、特定の搬送条件下においては、未だしわの発生を十分に抑えることができないことも明らかとなってきている。本発明は、かかる課題に鑑みてなされたものであり、ウェブ搬送を行う際に、搬送条件の如何に関わらず、ウェブにしわが発生することを防ぐことを目的とするものである。
【課題を解決するための手段】
【0006】
(発明の態様)
以下の発明の態様は、本発明の構成を例示するものであり、本発明の多様な構成の理解を容易にするために、項別けして説明するものである。又、各項は、本発明の技術的範囲を限定するものではない。よって、発明を実施するための最良の形態を参酌しつつ、各項の構成要素の一部を置換し、削除し、又は、更に他の構成要素を付加したものについても、本願発明の技術的範囲に含まれ得るものである。
【0007】
(1)駆動ローラと該駆動ローラの上流又は下流に位置するフリーローラとを含む複数のローラによって構成されたウェブ搬送路と、該ウェブ搬送路に沿って搬送される前記ウェブを撮像する撮像手段と、前記駆動ローラあるいは前記フリーローラの軸の角度を調整するアライメント調整手段と、コントローラとを備え、該コントローラには、前記搬送路における予め定められた駆動条件を示す駆動情報と、前記ウェブの物性値とに基づいて、前記駆動ローラ又は前記フリーローラにおけるウェブの浮上量を求める浮上量算出手段と、該浮上量算出手段の算出結果に基づき、前記軸の角度の調整方向を定める軸角度調整方向判定手段と、前記撮像手段によって撮像された撮像画像から、前記ウェブ上に発生する波形の直線を検出するとともに、当該直線の前記ローラに対する進入方向を解析する画像解析手段と、該軸角度調整方向判定手段により定められた方向に、前記駆動ローラ又は前記フリーローラの軸を駆動させるように前記アライメント調整手段を制御する軸角度制御手段とが含まれるウェブ搬送装置(請求項1)。
【0008】
本項に係るウェブ搬送装置は、軸角度調整方向判定手段によって、搬送路における予め定められた駆動条件を示す駆動情報と、ウェブの物性値とに基づいて、駆動ローラ又はフリーローラにおけるウェブの浮上量を求め、その結果に基づき、最適となる軸の角度の調整方向を定める。又、ウェブ搬送路上を搬送されるウェブを、撮像手段によって撮像する。又、コントローラの画像解析手段によって、撮像画像から、ウェブ上に発生する波を打ったような波形(波打ち現象)を示す直線を検出するとともに、当該直線のローラに対する進入方向を解析する。この波形は、しわが発生する前兆となるものである。そして、波形を示す直線の進入方向に応じ、アライメント調整手段を制御して、軸角度調整方向判定手段により定められた方向に、駆動ローラ又はフリーローラの軸を駆動させる。
これによって、いわゆるミスアライメントは、しわの前兆となる波形を減衰させる状態へと補正され、しわの発生が回避される。なお、しわの前兆となる波形の発生の有無は、画像解析手段によって常時監視され、波形の直線が検出された場合には、直ちに上記各手段により定められた方向に軸を駆動し、ミスアライメント補正がなされるものである。
【0009】
(2)上記(1)項の軸角度調整方向判定手段において、ウェブの浮上量と、ローラ及びウェブの合成表面粗さとの関係に応じ、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラ又は前記フリーローラの軸が、直角又は鋭角になる方向に、前記軸の角度の調整方向が定められるウェブ搬送装置(請求項2)。
本項に係るウェブ搬送装置は、軸角度調整方向判定手段において、ウェブの浮上量とローラ及びウェブの合成表面粗さとの関係に着目し、これらの関係に応じて最適の方向へと、軸の角度の調整方向が定められる。これによって、いわゆるミスアライメントは、しわの前兆となる波形を減衰させる状態へと補正され、しわの発生が回避される。
【0010】
(3)上記(2)項の軸角度調整方向判定手段において、前記駆動ローラ及びウェブの合成表面粗さσと、前記駆動ローラに対するウェブの浮上量hとの関係がh>σのとき、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラの軸が直角となる方向に前記軸の角度の調整方向が定められ、前記駆動ローラ又は前記フリーローラ及びウェブの合成表面粗さσと、前記駆動ローラに対するウェブの浮上量hとの関係がh≦σのとき、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラ又は前記フリーローラの軸が鋭角となる方向に前記軸の角度の調整方向が定められるウェブ搬送装置(請求項3)。
本項に係るウェブ搬送装置は、駆動ローラ又はフリーローラの軸の角度の調整方向を定めるにあたり、駆動ローラ又はフリーローラ及びウェブの合成表面粗さσと、ローラに対するウェブの浮上量hとの大小関係に着目するものである。そして、h>σのとき、すなわちローラに対するウェブの浮上量が大きくローラとウェブとの摩擦力が小さくなるような条件では、ウェブ上に発生する波形の直線に対し、駆動ローラの軸が直角となる方向に軸の角度の調整方向が定められる。一方、h≦σのとき、すなわちローラに対するウェブの浮上量が小さく、ローラとウェブとの摩擦力がローラとウェブとの接触領域の全域で均一に発生するような条件では、ウェブ上に発生する波形の直線に対し、駆動ローラ又はフリーローラの軸が鋭角となる方向に軸の角度の調整方向が定められる。
【0011】
(4)駆動ローラと該駆動ローラの上流又は下流に位置するフリーローラとを含む複数のローラによって構成されたウェブ搬送路を備えるウェブ搬送装置を用いたウェブ搬送方法であって、前記搬送路の予め定められた駆動条件を示す駆動情報と、前記ウェブの物性値とに基づいて、前記駆動ローラ又は前記フリーローラにおけるウェブの浮上量を求める浮上量算出ステップと、該浮上量算出ステップの算出結果に基づき、前記軸の角度の調整方向を定める軸角度調整方向判定ステップと、前記搬送路に沿って搬送されるウェブを撮像した撮像画像から、前記ウェブ上に発生する波形の直線を検出するとともに、当該直線の前記駆動ローラに対する進入方向を解析する画像解析ステップと、該軸角度調整方向判定ステップで判定された方向に、前記駆動ローラ又は前記フリーローラの軸を駆動する軸角度制御ステップとを含むウェブ搬送方法(請求項4)。
【0012】
本項に係るウェブ搬送方法は、搬送路における予め定められた駆動条件を示す駆動情報と、ウェブの物性値とに基づいて、駆動ローラ又はフリーローラにおけるウェブの浮上量を求め、その結果に基づき、最適となる軸の角度の調整方向を定める。又、ウェブ搬送路上を搬送されるウェブを撮像して、撮像画像から、ウェブ上に発生する波を打ったような波形(波打ち現象)を示す直線を検出するとともに、当該直線のローラに対する進入方向を解析する。この波形は、しわが発生する前兆となるものである。
そして、波形を示す直線の進入方向に応じ、定められた方向に駆動ローラ又はフリーローラの軸を駆動させる。
これによって、いわゆるミスアライメントを、しわの前兆となる波形を減衰させる状態へと補正し、しわの発生を回避する。なお、しわの前兆となる波形の発生の有無を常時監視し、波形の直線が検出された場合には、直ちに上記手順により定められた方向に軸を駆動し、ミスアライメント補正を行うものである。
【0013】
(5)上記(4)項の軸角度調整方向判定ステップにおいて、ウェブの浮上量と、ローラ及びウェブの合成表面粗さとの関係に応じ、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラ又は前記フリーローラの軸が、直角又は鋭角になる方向に、前記軸の角度の調整方向が定められるウェブ搬送方法(請求項5)。
本項に係るウェブ搬送方法は、軸角度調整方向判定ステップにおいて、ウェブの浮上量とローラ及びウェブの合成表面粗さとの関係に着目し、これらの関係に応じて最適の方向へと、軸の角度の調整方向を定める。これによって、いわゆるミスアライメントを、しわの前兆となる波形を減衰させる状態へと補正し、しわの発生を回避する。
【0014】
(6)上記(5)項の軸角度調整方向判定ステップにおいて、前記駆動ローラ及びウェブの合成表面粗さσと、前記駆動ローラに対するウェブの浮上量hとの関係がh>σのとき、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラの軸が直角となる方向に前記軸の角度の調整方向が定められ、前記駆動ローラ又は前記フリーローラ及びウェブの合成表面粗さσと、前記駆動ローラに対するウェブの浮上量hとの関係がh≦σのとき、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラ又は前記フリーローラの軸が鋭角となる方向に前記軸の角度の調整方向が定められるウェブ搬送装置(請求項6)。
本項に係るウェブ搬送方法は、駆動ローラ又はフリーローラの軸の角度の調整方向を定めるにあたり、駆動ローラ又はフリーローラ及びウェブの合成表面粗さσと、ローラに対するウェブの浮上量hとの大小関係に着目するものである。そして、h>σのとき、すなわちローラに対するウェブの浮上量が大きくローラとウェブとの摩擦力が小さくなるような条件では、ウェブ上に発生する波形の直線に対し、駆動ローラの軸が直角となる方向に軸の角度の調整方向を定める。一方、h≦σのとき、すなわちローラに対するウェブの浮上量が小さく、ローラとウェブとの摩擦力がローラとウェブとの接触領域の全域で均一に発生するような条件では、ウェブ上に発生する波形の直線に対し、駆動ローラ又はフリーローラの軸が鋭角となる方向に軸の角度の調整方向を定める。
【0015】
(7)駆動ローラと該駆動ローラの上流又は下流に位置するフリーローラとを含む複数のローラによって構成されたウェブ搬送路を備えるウェブ搬送装置のコントローラを、前記搬送路の予め定められた駆動条件を示す駆動情報と、前記ウェブの物性値とに基づいて、前記駆動ローラ又は前記フリーローラにおけるウェブの浮上量を求める浮上量算出手段と、該浮上量算出手段の算出結果に基づき、前記軸の角度の調整方向を定める軸角度調整方向判定手段と、前記搬送路に沿って搬送されるウェブを撮像した撮像画像から、前記ウェブ上に発生する波形の直線を検出するとともに、当該直線の前記ローラに対する進入方向を解析する画像解析手段と、前記軸角度調整方向判定手段で判定された方向に、前記駆動ローラ又は前記フリーローラの軸を駆動する軸角度制御手段として、機能させる制御ロジックを含むウェブ搬送制御プログラム(請求項7)。
【0016】
本項に係るウェブ搬送制御プログラムは、搬送路における予め定められた駆動条件を示す駆動情報と、ウェブの物性値とに基づいて、駆動ローラ又はフリーローラにおけるウェブの浮上量を求める浮上量算出手段として機能する。更に、浮上量算出手段の算出結果に基づき、最適となる軸の角度の調整方向を定める。又、ウェブ搬送装置のコントローラが、ウェブ搬送路上を搬送されるウェブを撮像して、撮像画像から、ウェブ上に発生する波を打ったような波形(波打ち現象)を示す直線を検出するとともに、当該直線のローラに対する進入方向を解析する、画像解析手段として機能する。この波形は、しわが発生する前兆となるものである。
そして、波形を示す直線の進入方向に応じ、アライメント調整手段を制御して、適切な方向に駆動ローラ又はフリーローラの軸を駆動させるための、軸角度調整方向判定手段として機能する。
そして、軸角度調整方向判定手段で判定された方向に、前記駆動ローラ又は前記フリーローラの軸を駆動する軸角度制御手段として機能することによって、いわゆるミスアライメントは、しわの前兆となる波形を減衰させる状態へと補正され、しわの発生が回避される。なお、しわの前兆となる波形の発生の有無は、画像解析手段によって常時監視され、波形の直線が検出された場合には、直ちに上記各手段により定められた方向に軸を駆動し、ミスアライメント補正がなされるものである。
【0017】
(8)上記(7)項の軸角度調整方向判定手段において、ウェブの浮上量と、ローラ及びウェブの合成表面粗さとの関係に応じ、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラ又は前記フリーローラの軸が、直角又は鋭角になる方向に、前記軸の角度の調整方向が定められるウェブ搬送制御プログラム(請求項8)。
本項に係るウェブ搬送制御プログラムは、軸角度調整方向判定手段において、ウェブの浮上量とローラ及びウェブの合成表面粗さとの関係に着目し、これらの関係に応じて最適の方向へと、軸の角度の調整方向が定められる。これによって、いわゆるミスアライメントは、しわの前兆となる波形を減衰させる状態へと補正され、しわの発生が回避される。
【0018】
(9)上記(8)項の軸角度調整方向判定手段において、前記駆動ローラ及びウェブの合成表面粗さσと、前記駆動ローラに対するウェブの浮上量hとの関係がh>σのとき、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラの軸が直角となる方向に前記軸の角度の調整方向が定められ、前記駆動ローラ又は前記フリーローラ及びウェブの合成表面粗さσと、前記駆動ローラに対するウェブの浮上量hとの関係がh≦σのとき、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラ又は前記フリーローラの軸が鋭角となる方向に前記軸の角度の調整方向が定められるウェブ搬送制御プログラム(請求項9)。
本項に係るウェブ搬送制御プログラムは、駆動ローラ又はフリーローラの軸の角度の調整方向を定めるにあたり、駆動ローラ又はフリーローラ及びウェブの合成表面粗さσと、ローラに対するウェブの浮上量hとの大小関係に着目するものである。そして、h>σのとき、すなわちローラに対するウェブの浮上量が大きくローラとウェブとの摩擦力が小さくなるような条件では、ウェブ上に発生する波形の直線に対し、駆動ローラの軸が直角となる方向に軸の角度の調整方向が定められる。一方、h≦σのとき、すなわちローラに対するウェブの浮上量が小さく、ローラとウェブとの摩擦力がローラとウェブとの接触領域の全域で均一に発生するような条件では、ウェブ上に発生する波形の直線に対し、駆動ローラ又はフリーローラの軸が鋭角となる方向に軸の角度の調整方向が定められる。
【発明の効果】
【0019】
本発明はこのように構成したので、ウェブ搬送を行う際に、搬送条件の如何に関わらず、ウェブにしわが発生することを適切に防ぐことができる。
【図面の簡単な説明】
【0020】
【図1】ウェブにしわが発生するメカニズムを説明するための説明図であり、(a)は2つのローラとウェブとの関係を示した斜視図、(b)はその側面図、(c)はその上面図である。
【図2】しわの発生を防止し、ウェブを安定搬送させるための条件を示すグラフ図である。
【図3】本発明の実施の形態に係るウェブ搬送装置を模式的に示す側面図である。
【図4】図3に示されるウェブ搬送装置の平面図である。
【図5】本発明の実施の形態に係るウェブ搬送装置の、コントローラの構成を示すブロック図である。
【図6】本発明の実施の形態に係るウェブ搬送装置の、作動手順を示すフローチャートである。
【図7】本発明の実施の形態に係るウェブ搬送装置において、ウェブ上にしわの前兆となる波形(波打ち現象)が発生した場合の、ガイドローラの制御手法を示す説明図であり、(a)は、ウェブ上に発生する波形の直線に対し、駆動ローラの軸が直角となる方向に軸の角度の調整を行う場合を、(b)は、ウェブ上に発生する波形の直線に対し、駆動ローラの軸が鋭角となる方向に軸の角度の調整を行う場合を示すものである。
【発明を実施するための形態】
【0021】
以下、本発明の実施の形態について、図面を参照して説明する。ここでは、最初に、本願発明者が解明したウェブのしわの発生メカニズムについて、その概略を説明した後に、しわの発生を防止しながらウェブの搬送を行うウェブ搬送装置の構成及び動作について順次説明を行う。
なお、本発明者らによる上記特許文献2記載の発明と、一部重複する構成部分については、適宜、上記特許文献2の記載を引用して説明する。
【0022】
[ウェブ搬送中のしわ発生メカニズム]
最初に、図1を参照して、ウェブ搬送中にウェブにしわが発生するメカニズムについて説明する。図1は、しわ発生のメカニズムを説明するための説明図であって、(a)は2つのローラとウェブとの関係を示した斜視図、(b)はその側面図、(c)はその上面図を示している。図1では、ウェブ10が、2つのローラ2(21,22)上を搬送されている状態を示している。ここでは、上流側のローラ21から下流側のローラ22の方向にウェブ10(図中では透明で示している)が搬送されているものであり、上流側のローラ21は受動的に回転するフリーローラ、下流側のローラ22は動力源を備える駆動ローラである。
【0023】
(しわ発生条件)
まず、ウェブ10の搬送中にウェブ10にしわが発生する条件について説明する。
通常、ローラ21,22が平行に配置されている場合は、ウェブ10にしわは発生しない。しかし、例えば、ローラ22が、ローラ21に対してゆがみ(スキュー)が発生し、ローラ21とローラ22との間でミスアライメントが発生した場合、ウェブ10はローラ22の接線上で曲げモーメントによるせん断力SFを受ける。ここで、ウェブ10を、上流側のローラ21を固定端とする極めて薄いはりと考えると、ウェブ10はせん断力SFを受け、面内でたわもうとする。このときのせん断応力がウェブ10を平板とみなしたときの臨界座屈応力を上回っていれば、スキューが発生したローラ22に進入する直前のウェブ10の中央位置に座屈BLが生じ始め、これがしわの発生点となる。
すなわち、ローラ22のスキュー角θが、以下の(1)式に示す臨界ミスアライメント角θcr以上となった場合にしわが発生する。
【0024】
【数1】
【0025】
ここで、aはローラ間のスパン[m]、Lはウェブ幅[m]、Exはウェブ搬送方向のウェブのヤング率[Pa]、σxは張力によるウェブ搬送方向の引張応力[Pa]、σzcrは臨界座屈応力[Pa]をそれぞれ示している。
なお、引張応力σxは、以下の(2)式で与えられる。
【0026】
【数2】
【0027】
ここで、Tはウェブ張力[N/m]、tfはウェブ厚[m]をそれぞれ示している。
また、臨界座屈応力σzcrは、以下の(3)式で与えられる。
【0028】
【数3】
【0029】
ただし、σe,ζ1及びζ2は、以下の(4)式で与えられる。
また、(3)式における整数iは、以下の(5)式を満たす任意の1個の整数とする。
【0030】
【数4】
【0031】
【数5】
【0032】
(しわ伝搬条件)
次に、ウェブ10に発生したしわがウェブ10の搬送方向に沿って伝搬する条件について説明する。
通常、しわが発生したウェブ10がローラ22を通過する際、ローラ22に沿って巻かれたウェブ10の臨界座屈応力は、平板の臨界座屈応力に比べてはるかに大きくなることから、ウェブ10とローラ22間に大きなせん断力を支持するための十分な摩擦力FFのうち、が作用していない場合には、ローラ22上でウェブ10は座屈せず、しわは消滅する。
しかし、ウェブ10とローラ22間に十分な摩擦力FFが作用する場合にはローラ22上でもウェブ10は座屈し続け、しわが伝搬していく。
すなわち、ウェブ10に対する張力が、以下の(6)式に示す臨界上限張力Twik以上となった場合にしわが伝搬する。
【0033】
【数6】
【0034】
ここで、tfはウェブ厚[m]、μはウェブ−ローラ間の摩擦係数、Lはウェブ幅[m]、Exはウェブ搬送方向のウェブのヤング率[Pa]、Ezはウェブ幅方向のウェブのヤング率[Pa]、vxはウェブ搬送方向のウェブのポアソン比、vzはウェブ幅方向のウェブのポアソン比をそれぞれ示している。
なお、摩擦係数μは、以下の(7)式で与えられる。
【0035】
【数7】
【0036】
ここで、Rはローラ半径[m]、Bはウェブ巻角[rad]である。また、μlは以下の(8)式で与えられる。
【0037】
【数8】
【0038】
ここで、μcはウェブ−ローラ間の境界摩擦係数、hは空気膜厚、すなわち、ローラ22に対するウェブ10の浮上量[m]、σはウェブ−ローラ間の合成表面粗さ[m]をそれぞれ示している。
ただし、表面粗さσは、以下の(9)式に示すように、ローラの表面粗さσrとウェブの表面粗さσwとの合成値である。
【0039】
【数9】
【0040】
また、空気膜厚hは、以下の(10)式で与えられる。
【0041】
【数10】
【0042】
ここで、ηは空気膜粘度(あるいは、周囲が空気以外の流体の場合はその流体の粘度)[Pa・s]、Tはウェブ張力[N/m]、kはウェブの透気率[m2]、xはウェブ搬送方向座標[m]、Uはウェブ搬送速度[m/s]をそれぞれ示している。なお、ウェブ搬送方向座標xは、巻き角の入口をx=−RB/2、出口をx=RB/2(−RB/2≦x≦RB/2)とする。また、ウェブ搬送速度Uは、ローラ速度Urとウェブ速度Uwとの加算値(Ur+Uw)である。
このように、ウェブ10に対する張力Tが、前記(6)式で示した臨界上限張力Twik未満であれば、しわは発生しない。しかし、この張力Tが逆に小さくなりすぎると、ウェブ10とローラ2間の摩擦力が低下し、スリップが生じやすくなり、ウェブ10の搬送が困難になってしまう。
そこで、ここでは、スリップが発生しない張力Tの臨界張力(臨界下限張力)Tslipについて求めておく。
一般に、スリップが発生するのは、μ=0となるときであり、それは、(8)式から、h=3σとなる場合である。
【0043】
つまり、下の(11)式の右辺が3σとなるときである。
【0044】
【数11】
【0045】
よって、臨界下限張力Tslipは、以下の(12)式により求めることができる。
【0046】
【数12】
【0047】
以上の条件を、図2にグラフ化して説明する。図2の上段の図は、しわの発生を防止し、ウェブを安定搬送させるための条件を示すグラフ図であって、横軸をウェブに対する張力T、縦軸をローラのスキュー角(ミスアライメント角)θとしたmのである。又、図2の中段の図は、横軸を張力T、縦軸をローラに対するウェブの浮上量hとしたものである。更に、図2の下段の図は、横軸を張力T、縦軸をウェブ−ローラ間の摩擦係数μとしたものである。
図2の上段の図に示すように、張力Tが、前記(12)式で算出した臨界下限張力Tslipよりも大きく、かつ、前記(6)式で算出した臨界上限張力Twikよりも小さい場合は、しわの発生やスリップが発生せず安定してウェブ10を搬送することができる。
なお、張力Tが臨界下限張力Tslipよりも小さくなった場合は、スリップが発生し、臨界上限張力Twikよりも大きくなった場合は、しわが発生する。しかし、この場合であっても、ローラ22のスキュー角θを、前記(1)式で算出した臨界ミスアライメント角θcrよりも小さくすることで、しわを発生させずに安定してウェブ10を搬送することができる。
【0048】
このように、ウェブ搬送において、しわの発生やスリップを発生させずにウェブを安定して搬送させるには、ウェブ10の張力Tやローラ22のスキュー角θが、図2のグラフにおいて、スリップ発生領域SLやしわ発生領域WRに入らないように、常に安定領域STに入るように状態を保持する必要がある。
【0049】
加えて、本発明の実施の形態では、ウェブ10とローラ22間に作用する摩擦力FFは、ローラ22とウェブ10とのと、ローラ22に対するウェブ10の浮上量h[m]との大小関係に影響を受けるものである。(なお、合成表面粗さσ[m]ローラ22の表面粗さσrとウェブ10の表面粗さσwとの合成値である。(9)式参照。)
【0050】
本発明者らによる研究によれば、h≦σのとき、すなわち駆動ローラ22又はフリーローラ21に対するウェブ10の浮上量hが、駆動ローラ22又はフリーローラ21とウェブ10との合成表面粗さσ以下の場合には、ウェブ10と駆動ローラ22又はローラ22間に作用する摩擦力FFは、接触領域全域で均一となり、h>σのとき、すなわち、駆動ローラ22に対するウェブ10の浮上量hが、ローラ22とウェブ10との合成表面粗さσ超える場合には、ミスアライメントが生ずると、ウェブ10とローラ22間に作用する摩擦力FFは、接触領域の全域で不均一となることが確認されている。すなわち、図2の中段の図に示される浮上量h=σを境として、図2の下段の図に示されるように、h≦σの領域では、張力Tの平均値TAVを基準として平均値よりも張力の高い部分TH及び低い部分TLとが生じても、ウェブ−ローラ間の摩擦係数μは一定となるが、h>σの領域では、張力が平均値TAVを中心にそれよりも低い値TLと高い値THとで不均一だと、μも不均一となる。なお、図3の下段の図にも示されるように、浮上量h>3σの領域では、μ=0で一定となる。
【0051】
そこで、本発明の実施の形態は、ミスアライメント解消のための、ローラ2の軸の修正方向を決定するにあたり、駆動ローラ22又はフリーローラ21及びウェブの合成表面粗さσと、これらローラ2に対するウェブ10の浮上量hとの大小関係に着目するものである。
以下、このウェブ10の張力Tやローラのスキュー角θを、安定領域ST内で動作させることが可能なウェブ搬送装置の構成及び動作について説明する。
【0052】
[ウェブ搬送装置の構成]
まず、図3及び図4を参照して、本発明に係るウェブ搬送装置の構成について説明する。図3は、本発明に係るウェブ搬送装置の概略の構成を示す側面図である。図4は、本発明に係るウェブ搬送装置の平面図である。
図3及び図4に示すように、ウェブ搬送装置1は、連続紙、プラスチックフィルム、金属膜等の柔軟な連続素材であるウェブ10を、しわの発生やスリップを発生させずに、複数のローラ2で搬送するものである。
ここでは、ウェブ搬送装置1は、送り出し部100から巻き取り部101へウェブ10を搬送することとしている。また、ここでは、ウェブ搬送装置1は、複数のローラ2と、カメラ3と、張力調整手段4と、アライメント調整手段5と、ローラ駆動手段6と、コントローラ7とを備えている。
【0053】
ローラ2は、軸を中心に回転することで、ウェブ10を上流から下流に対して搬送するものである。ここでは、ローラ2として、補助ローラ2aと、ダンサーローラ2bと、ガイドローラ2cと、駆動ローラ2dとを備えている。なお、これらのローラ2は、それぞれの軸が平行となるように設置されている。しかし、各軸の平行性は絶対的なものではないため、後記するガイドローラ2c又は駆動ローラ2dのスキュー角を制御することで平行性を保持することとする。
【0054】
補助ローラ2aは、その軸20aの両端がウェブ搬送装置1の本体に固定され、自身が駆動力を持たず、ウェブ10を搬送する補助的なフリーローラである。ここでは、補助ローラ2aは、送り出し部100から送出されるウェブ10を、ダンサーローラ2bへ導く役割を果たしている。
【0055】
ダンサーローラ2bは、その軸20bの位置を調整可能なフリーローラであって、ウェブ10に対する張力を発生させるものである。ここでは、ダンサーローラ2bは、後記する張力調整手段4によって、軸20bを設置面に対して鉛直方向に駆動されることで、ウェブ10に対する張力を発生させる。
【0056】
ガイドローラ2cは、その軸20cの一端がウェブ搬送装置1の本体に固定され、他端(移動端)の位置を調整可能なフリーローラである。ここでは、ガイドローラ2cは、他端の位置を後記するアライメント調整手段5によって設置面に対して水平方向に調整されることで、上流側のローラとの軸の平行性を保つ役割を果たしている。
【0057】
駆動ローラ2dは、その軸20dを後記するローラ駆動手段6によって回転駆動されることで回転し、ウェブ10との摩擦力によってウェブ10を搬送するものである。又、駆動ローラ2cも、その軸20dの一端がウェブ搬送装置1の本体に固定され、他端(移動端)の位置を調整可能なローラである。ここでは、駆動ローラ2dは、ガイドローラ2cから送出されたウェブ10を巻き取り部101に送出している。
【0058】
カメラ(撮像手段)3は、ガイドローラ2c及び駆動ローラ2d(すなわち、アライメント調整手段5が設けられたローラ)に近接して設けられ、ガイドローラ2c及び駆動ローラ2d上において搬送されるウェブ10を撮像するものである。このカメラ3で撮像された画像は逐次映像信号としてフレーム単位で後記するコントローラ7に出力される。このカメラ3で撮像された画像は、コントローラ7内で解析され、ウェブ10において、しわが発生する前兆となる波形が発生しているか否かが判定される。この解析手法の説明については、後記するコントローラ7の構成の説明において行う。
【0059】
張力調整手段4は、ダンサーローラ2bの軸20bの位置を調整することで、ウェブ10の張力を調整するものである。ここでは、張力調整手段4は、コントローラ7からの駆動信号(張力調整駆動信号)に基づいて、ダンサーローラ2bの軸20bの位置を設置面に対して鉛直方向に動作させることで、ウェブ10に対する張力を調整する。この張力調整手段4は、例えば、油圧シリンダ、空気圧シリンダ等で構成することができる。
なお、ここでは、張力調整手段4は、ダンサーローラ2bの軸20bを垂直方向に調整しているが、この方向については、これに限定されるものではなく、上流や下流のローラの配置等によって、ウェブ10に対する張力を調整することが可能な方向であればよい。
また、ここでは、張力調整手段4は、内部に張力センサ40を備え、張力センサ40によって、ウェブ10に対する張力を測定し、その張力をコントローラ7に出力する。
【0060】
アライメント調整手段5は、ガイドローラ2c及び駆動ローラ2dの軸20c及び20dのスキュー角(ミスアライメント角)を調整するものである。ここでは、アライメント調整手段5は、コントローラ7からの駆動信号(アライメント調整駆動信号)に基づいて、ガイドローラ2cの軸20c、及び、駆動ローラ2dの軸20dの移動端の位置を設置面に対して水平方向に動作させることで、軸20c及び駆動ローラ2dのスキュー角を調整する。このアライメント調整手段5は、例えば、マイクロねじによって軸20c及び駆動ローラ2dの移動端の位置を調整することとしてもよいし、ピエゾ素子を電圧、磁気等によって変形させることで軸20c及び駆動ローラ2dの移動端の位置を調整することとしてもよい。
なお、ここでは、アライメント調整手段5は、ガイドローラ2cの軸20c、及び、駆動ローラ2dの軸20dを水平方向に調整しているが、この方向は、水平方向に限定されるものではなく、ガイドローラ2cに対するウェブ10の入力方向を調整することが可能な方向であればよい。
【0061】
ローラ駆動手段6は、駆動ローラ2dの軸20dを回転駆動させるものであって、例えば、一般的なモータである。ここでは、ローラ駆動手段6は、コントローラ7からの駆動信号(電源周波数信号)に基づいて、駆動ローラ2dの軸20dを回転駆動させる。
【0062】
コントローラ7は、ウェブ搬送装置1全体を制御する制御装置であって、CPU(Central Processing Unit)、RAM(Random Access Memory)等を備えた一般的なコンピュータ等の演算手段によって実現される。
【0063】
ここで、図5を参照(適宜図3及び図4参照)して、コントローラ7の機能構成について説明する。図5は、コントローラの構成を示す機能ブロック図である。
ここでは、コントローラ7は、記憶手段70と、臨界張力算出手段71と、張力制御手段72と、画像解析手段73と、軸角度制御手段74と、駆動制御手段75と、軸角度調整方向判定手段76とを備えている。
【0064】
記憶手段70は、ウェブ10の物性値や、駆動情報等を記憶するものであって、半導体メモリ、ハードディスク等の一般的な記憶装置である。
この記憶手段70に記憶されるウェブ10の物性値は、ヤング率、ポアソン比、ウェブ厚、ウェブ幅、ウェブ表面粗さ、摩擦係数等、前記(1)〜(12)式において説明したウェブ10固有の値である。
【0065】
また、記憶手段70に記憶される駆動情報は、ローラ種別(駆動ローラ又はフリーローラ)、ローラ表面粗さ、ローラ半径、ウェブ巻角、ウェブ搬送速度、空気膜粘度等、前記(1)〜(12)式において説明したウェブ搬送装置1を運転させる際の条件を示す値である。
なお、これらの物性値や駆動情報は、予め記憶手段70に記憶しておいてもよいし、図示を省略したキーボード等の入力手段を介して外部から入力することとしてもよい。
さらに、記憶手段70には、後記する臨界張力算出手段71で算出される臨界値が記憶される。
【0066】
臨界張力算出手段71は、ウェブ10の搬送時において、ウェブ10にしわやスリップを発生させない条件を臨界条件として算出するものである。ここでは、臨界張力算出手段71は、臨界上限張力算出手段71aと、臨界下限張力算出手段71bとを備えている。
【0067】
臨界上限張力算出手段71aは、ウェブ10にしわが発生する際のウェブ10に対する張力の上限値を算出するものである。ここでは、臨界上限張力算出手段71aは、記憶手段70に記憶されているウェブ10の物性値や駆動情報に基づいて、前記(6)式で説明した臨界上限張力Twikを算出する。この臨界上限張力Twikは、張力制御手段72に出力される。
【0068】
臨界下限張力算出手段71bは、ウェブ10にスリップが発生する際のウェブ10に対する張力の下限値を算出するものである。ここでは、臨界下限張力算出手段71bは、記憶手段70に記憶されているウェブ10の物性値や駆動情報に基づいて、前記(12)式で説明した臨界下限張力Tslipを算出する。この臨界下限張力Tslipは、張力制御手段72に出力される。
【0069】
張力制御手段72は、ウェブ10に対する張力を制御するものである。ここでは、張力制御手段72は、ダンサーローラ2bの軸20bの位置を調整することで、ウェブ10に対する張力を制御する。なお、ここでは、張力制御手段72は、初期値設定手段72aと、測定張力入力手段72bと、張力範囲制御手段72cとを備えている。
【0070】
初期値設定手段72aは、ウェブ10に対する張力の初期値を設定するものである。ここでは、初期値設定手段72aは、臨界張力算出手段71で算出された臨界上限張力Twik及び臨界下限張力Tslipに基づいて、以下の(13)式を満たすような張力TOを初期値とする。例えば、臨界上限張力Twik及び臨界下限張力Tslipの平均値を張力TOとする。
【0071】
【数13】
【0072】
測定張力入力手段72bは、張力調整手段4の張力センサ40で測定されたウェブ10の張力を測定値として入力するものである。この測定張力入力手段72bで入力された張力の測定値は、張力範囲制御手段72cに出力される。
【0073】
張力範囲制御手段72cは、ウェブ10の張力が臨界上限張力Twik及び臨界下限張力Tslipの範囲に収まるように、ダンサーローラ2bを制御するものである。
ここでは、張力範囲制御手段72cは、初期値設定手段72aで設定された初期値が、ウェブ10に対する張力となるように、張力調整手段4に対して駆動信号(張力調整駆動信号)を出力する。なお、張力範囲制御手段72cは、ウェブ10の搬送中は、逐次、測定張力入力手段72bで入力された張力の範囲が、臨界上限張力Twik及び臨界下限張力Tslipの範囲に収まるように、張力調整手段4に対して駆動信号(張力調整駆動信号)を出力する。
【0074】
画像解析手段73は、カメラ3で撮像された画像の色または輝度に基づいて、当該画像から、ウェブ10上に発生する波形を検出するとともに、予め定めた座標系を基準に当該直線の方向を当該波形のガイドローラ2c又は駆動ローラ2dに対する進入方向として解析するものである。ここでは、画像解析手段73は、画像入力手段73aと、波形検出手段73bとを備えている。
【0075】
画像入力手段73aは、カメラ3で撮像された画像を入力するものである。この画像入力手段73aは、カメラ3で撮像されたフレーム単位の画像を時系列に入力し、波形検出手段73bに出力する。
【0076】
波形検出手段73bは、画像入力手段73aから入力された画像を解析することで、ウェブ10において、しわが発生する前兆となる波形と、その波形のガイドローラ2c又は駆動ローラ2dへの進入方向を検出するものである。
【0077】
ウェブ10にしわが発生する場合、前兆となる波形が予めウェブ10上に発生する。そこで、波形検出手段73bは、カメラ3で撮像された画像を解析することで、波形(図7参照)に示すを検出することとする。
例えば、波形検出手段73bは、既知の技術であるハフ変換の手法を用いることで、画像内から直線(しわが発生する前兆となる波形の直線)を検出し、その直線の方向(波形の進入方向)を求める。
【0078】
このウェブ10上に発生する波形は、画像がカラー画像である場合は、予め定めた色ベクトルに属する画素値を検出することで直線として検出することができる。また、白黒画像であれば、輝度の差に基づいて波形を直線として検出することができる。
また、波形検出手段73bは、ハフ変換により、直線の画素をx−y座標系からρ−θ座標系に変換することで、直線の傾きを求めることができる。
この波形検出手段73bで波形が検出された旨と、その波形のガイドローラ2cへの進入方向は、軸角度制御手段74に出力される。
【0079】
軸角度制御手段74は、波形検出手段73bで検出された波形の進入方向に基づいて、ガイドローラ2cのスキュー角を制御するものである。ここでは、軸角度制御手段74は、ガイドローラ2cへの波形の進入方向と、ガイドローラ2cの軸方向とのなす角が直角となる方向に、アライメント調整手段5に対して駆動信号(アライメント調整駆動信号)を出力する。
【0080】
駆動制御手段75は、ウェブ10を搬送するためにローラ駆動手段6に対して、所定速度を指示する駆動信号(電源周波数信号)を出力することで、駆動ローラ2dを駆動させるものである。また、ここでは、駆動制御手段75は、記憶手段70に記憶されているウェブ搬送速度に基づいて、駆動信号(電源周波数信号)を出力することとする。
なお、コントローラ7は、コンピュータを前記した各手段として機能させるウェブ搬送制御プログラムにより動作させることができる。
【0081】
軸角度調整方向判定手段76は、記憶手段70に何れも記憶されている、搬送路における予め定められた駆動条件を示す駆動情報とウェブ10の物性値とに基づいて、フリーローラ2c又は駆動ローラ2dにおけるウェブ10の浮上量hを求め、その結果に基づき前記軸の角度の調整方向を定めるものであり、浮上量算出手段76aと、軸角度調整方向判定手段76bとを備えている。
【0082】
浮上量算出手段76aは、前記(15)式で説明した、ローラ2に対するウェブ10の浮上量hを算出する。この浮上量hは、軸角度調整方向判定手段76bに出力される。
そして、軸角度調整方向判定手段76bにおいて、フリーローラ2c又は駆動ローラ2d及びウェブ10の合成表面粗さσと、これらローラ2に対するウェブ10の浮上量hとの大小から、画像解析手段で検出されたウェブ10上に発生する波形の直線に対する、フリーローラ2c又は駆動ローラ2dの軸20c、20dの角度の調整方向が定められ、その方向に関する情報が、軸角度制御手段74に出力される。
【0083】
[ウェブ搬送装置の動作]
次に、図6を参照(適宜図3、図4及び図5参照)して、ウェブ搬送装置1の動作について説明する。図6は、本発明に係るウェブ搬送装置の動作を示すフローチャートである。ここでは、ウェブ搬送装置1の動作について、コントローラ7の動作を中心に説明を行う。
【0084】
(臨界張力算出ステップ)
まず、ウェブ搬送装置1は、臨界張力算出手段71の臨界上限張力算出手段71aによって、ウェブ10にしわが発生する際のウェブ10に対する張力の上限値(臨界上限張力Twik)を算出する(ステップS1)。さらに、ウェブ搬送装置1は、臨界張力算出手段71の臨界下限張力算出手段71bによって、ウェブ10にスリップが発生する際のウェブ10に対する張力の下限値(臨界下限張力Tslip)を算出する(ステップS2)。
【0085】
そして、ウェブ搬送装置1は、張力制御手段72の初期値設定手段72aによって、臨界上限張力Twikと臨界下限張力Tslipの範囲内で、ウェブ10に対する張力の初期値(張力TO)を設定する(ステップS3)。
また、ウェブ搬送装置1は、張力制御手段72の張力範囲制御手段72cによって、ウェブ10に対する張力がステップS3で設定された張力となるように、ダンサーローラ2bを制御する(ステップS4)。
以上の動作によって、ウェブ搬送装置1において張力に関する初期設定が行われたことになる。
【0086】
その後、ウェブ搬送装置1は、駆動制御手段75からローラ駆動手段6に対して駆動信号を出力することで、駆動ローラ2dを回転させ、ウェブ10を搬送させる(ステップS5)。そして、ウェブ搬送装置1は、以下の張力制御ステップ、画像解析ステップ及び軸角度制御ステップを実行する。
なお、ここで、動作の終了が指示された場合(ステップS6でYes)は、ウェブ搬送装置1は、動作を終了する。一方、動作の終了が指示されなかった場合(ステップS6でNo)は、ステップS7に進む。
【0087】
(張力制御ステップ)
まず、ウェブ搬送装置1は、ウェブ10の搬送中、張力制御手段72の測定張力入力手段72bによって、張力調整手段4の張力センサ40で測定されたウェブ10の張力Tを入力する(ステップS7)。
そして、ウェブ搬送装置1は、張力範囲制御手段72cによって、ウェブ10の張力TがステップS1で算出された臨界上限張力Twikと、ステップS2で算出された臨界下限張力Tslipの範囲に収まるように、張力調整手段4に対して駆動信号を出力することで、ダンサーローラ2bの位置を鉛直方向に変化させるように制御する(ステップS8)。
【0088】
(浮上量算出ステップ)
ウェブ搬送装置1は、ウェブ10の搬送中、軸角度調整方向判定手段76の浮上量算出手段76aによって、フリーローラ2c又は駆動ローラ2dに対するウェブ10の浮上量hを算出する(ステップS9(1))。
【0089】
(軸角度調整方向判定ステップ)
そして、軸角度調整方向判定手段76bにおいて、フリーローラ2c又は駆動ローラ2d及びウェブの合成表面粗さσと、これらローラ2に対するウェブ10の浮上量hとの大小関係を比較する。ここで、h>σのとき、すなわちローラ2に対するウェブ10の浮上量が大きくローラ2とウェブ10との摩擦力が小さくなるような条件では、図7(a)に示されるように、ウェブ10上に発生する波形の直線Lに対し、駆動ローラ2dの軸20dが直角となる方向に軸の角度(スキュー角θ)の調整方向RVが定められる。
一方、h≦σのとき、すなわちローラ2に対するウェブ10の浮上量が小さく、ローラ2とウェブ10との摩擦力がローラ2とウェブ10との接触領域の全域で均一に発生するような条件では、図7(b)に示されるように、ウェブ10上に発生する波形の直線Lに対し、フリーローラ2cの軸20c又は駆動ローラ2dの軸20dが鋭角となる方向に前記軸の角度(スキュー角θ)の調整方向RVが定められる(ステップS9(2))。
【0090】
ここで、図7を参照しながら、上述のようにガイドローラ2c又は駆動ローラ2dに対するスキュー角θの調整方向を定める理由について説明する。図7は、ウェブ上にしわの前兆となる波形(波打ち現象)が発生した場合のガイドローラ2c又は駆動ローラ2dの制御方法を説明するための説明図である。ここでは、カメラ3が撮像した画像をそれぞれ示し、図中上から下方向にウェブ10がガイドローラ2c又は駆動ローラ2d上を搬送されている状態を示している。
なお、図7では、理解を容易にするため、ガイドローラ2c又は駆動ローラ2dのスキュー角を大きく調整しているが、実際は、1度、2度等の角度で徐々に角度調整を行う。
【0091】
まず、h>σのときには、ローラ2とウェブ10との間の摩擦力が小さくなり、その際、ミスアライメントがあるとウェブ10の幅方向の各位置におけるテンションが不均一となり、フリーローラ2cと駆動ローラ2dとの間の距離が大きい部分に接触領域CAが偏り、この部分のテンションが大きくなる。そして、テンションの大きい領域は浮上量hが小さくなり、摩擦力が大きくなる。
その結果、図7(a)に示されるように、ウェブ10を回転させようとするモーメントMが発生し、下流に位置する駆動ローラ2d上で、図7(a)の例ではウェブ10を図の右側に寄せようとする力が働き、ウェブ10が変形して同図の向きに波形の直線Lが発生する。この場合には、ウェブ10上に発生する波形の直線Lに対し、特に、駆動ローラ2dの軸20dが直角となる方向に軸の角度(スキュー角θ)を調整することで、効果的にウェブ10の幅方向の各位置におけるテンションの均一化を図り、フリーローラ2cと駆動ローラ2dとの間の接触領域CAの偏りを解消する。これによって、全体の摩擦力が平均化され、波打ち現象が打ち消されてしわの発生を防止することができる。
【0092】
一方、h≦σのときは、ローラ2とウェブ10との接触領域CAは、ミスアライメントが生じても、フリーローラ2cと駆動ローラ2dとの間の距離の如何に関わらず幅方向の全域にわたり、ローラ2とウェブ10との間の摩擦力は接触領域CAの全域で均一に発生する。
その結果、駆動ローラ2dとウェブ10との間の摩擦力FFの、ウェブ搬送方向成分FF1及びそれと直交する方向成分FF2のうち、後者の成分FF2によって、図7(b)の例ではウェブ10を図の左側に寄せようとする力が働き、ウェブ10が変形して同図の向きに波形の直線Lが発生する。この場合には、ウェブ10上に発生する波形の直線Lに対し、フリーローラ2cの軸20c又は駆動ローラ2dの軸20dが鋭角となる方向に軸の角度(スキュー角θ)を調整することで、フリーローラ2cと駆動ローラ2dとを平行に修正することにより、ウェブ搬送方向と直交する方向成分FF2を打ち消す。この場合は、元々ローラ2とウェブ10との間の摩擦力は接触領域CAの全域で均一に発生していることから、フリーローラ2cと駆動ローラ2dとを平行に修正することにより、波打ち現象が打ち消されてしわの発生を防止することができる。
【0093】
(画像解析ステップ)
まず、ウェブ搬送装置1は、画像解析手段73の画像入力手段73aによって、カメラ3で撮像された、ガイドローラ2c上において搬送されるウェブ10の画像をフレーム単位で時系列に入力する(ステップS10)。
そして、ウェブ搬送装置1は、波形検出手段73bによって、しわが発生する前兆となる波形(波打ち現象)とその波形の直線のガイドローラ2cへの進入方向を検出するために、ステップS9で入力された画像を解析する(ステップS11)。
ここで、ウェブ搬送装置1は、波形検出手段73bによって、波形の直線が検出されたか否かを判定する(ステップS12)。
【0094】
(軸角度制御ステップ)
そして、ステップS11において、波形の直線が検出された場合(Yes)、ウェブ搬送装置1は、軸角度制御手段74によって、ステップS10で解析された波形(直線)の進入方向に対し、ステップS9(2)で判定された調整方向RVに、ガイドローラ2cの軸20c又は駆動ローラ2dの軸20dを動かすように、アライメント調整手段5に対して駆動信号を出力することで、ガイドローラ2c又は駆動ローラ2dのスキュー角を制御する(ステップS13)。
【0095】
以上の如く、ガイドローラ2c又は駆動ローラ2dのスキュー角を制御することで、状態が安定領域STへ移行し、しわの発生を防止することができる。
ステップS13の動作後またはステップS12において波形が検出されなかった場合(No)、ウェブ搬送装置1は、ステップS6に戻って、ウェブ10の搬送中、動作を継続する。
【0096】
以上の動作によって、ウェブ搬送装置1は、しわの発生とスリップとを防止しながら安定して、ウェブ10を搬送することができる。
なお、ここでは、張力制御ステップ、浮上量算出ステップ、軸角度調整方向判定ステップの後に、画像解析ステップ及び軸角度制御ステップを実行することとしたが、これらの各ステップは、上記説明の順序に限定されるものではない。また、それぞれの動作を並列で行うこととしてもよい。また、臨界張力算出ステップにおいて、ステップS1とステップS2との順序は、逆であっても構わないし、並列で動作しても構わない。
【0097】
上記構成をなす、本発明の実施の形態によれば、次のような作用効果を得ることが可能である。すなわち、本発明の実施の形態に係るウェブ搬送装置1は、軸角度調整方向判定手段76によって、搬送路における予め定められた駆動条件を示す駆動情報と、ウェブ10の物性値とに基づいて、駆動ローラ2d又はフリーローラ2cにおけるウェブ10の浮上量hを求め、その結果に基づき、最適となる軸20d、20cの角度の調整方向を定める。又、ウェブ搬送路上を搬送されるウェブ10を、撮像手段3によって撮像する。そして、コントローラ7の画像解析手段73によって、撮像画像から、ウェブ10上に発生する波を打ったような波形(波打ち現象)を示す直線Lを検出するとともに、当該直線Lのローラ2に対する進入方向を解析する。そして、アライメント調整手段5を制御して、軸角度調整方向判定手段76により定められた方向に、駆動ローラ2d又はフリーローラ2cの軸20d又は20cを駆動させるものである。
【0098】
又、軸角度調整方向判定手段76において、ウェブ10の浮上量hとローラ2及びウェブ10の合成表面粗さσとの関係に着目し、これらの関係に応じて最適の方向へと、適宜、軸20d又は20cの角度の調整方向が定められる。これによって、いわゆるミスアライメントは、しわの前兆となる波形を減衰させる状態へと補正され、しわの発生が回避される。
【0099】
しかも、本発明の実施の形態は、駆動ローラ2d又はフリーローラ2cの軸20d、20cの角度の調整方向RVを定めるにあたり、駆動ローラ2d又はフリーローラ2c及びウェブ10の合成表面粗さσと、ローラに対するウェブの浮上量hとの、大小関係に着目するものである。そして、h>σのとき、すなわちローラ2に対するウェブ10の浮上量hが大きくローラ2とウェブ10との摩擦力FFが小さくなるような条件では(図7(a))、ウェブ10上に発生する波形の直線Lに対し、駆動ローラ2dの軸が直角となる方向に軸の角度の調整方向RVが定められる。
一方、h≦σのとき、すなわちローラ2に対するウェブ10の浮上量が小さく、ローラ2とウェブ10との摩擦力FFがローラ2とウェブ10との接触領域の全域で均一に発生するような条件では(図7(b))、ウェブ10上に発生する波形の直線Lに対し、駆動ローラ2d又はフリーローラ2cの軸2d、2cが鋭角となる方向に軸の角度の調整方向RVが定められる。
【0100】
以上の如く、本発明の実施の形態に係るウェブ搬送装置1によれば、いわゆるミスアライメントは、しわの前兆となる波形を減衰させる状態へと補正され、しわの発生が回避される。なお、しわの前兆となる波形の発生の有無は、画像解析手段73によって常時監視され、波形の直線Lが観測された場合には、直ちに上記各手段により定められた方向に軸20d、20cを駆動し、ミスアライメント補正がなされるものである。
【符号の説明】
【0101】
1、1B:ウェブ搬送装置、2:ローラ、2c:ガイドローラ(フリーローラ)、2d:駆動ローラ、3:カメラ(撮像手段)、4:張力調整手段、40:張力センサ(張力計測手段)、5:アライメント調整手段、6:ローラ駆動手段、7:コントローラ、70:記憶手段、71:臨界張力算出手段、72:張力制御手段、73:画像解析手段、74:軸角度制御手段、75:駆動制御手段、76:軸角度調整方向判定手段
【特許請求の範囲】
【請求項1】
駆動ローラと該駆動ローラの上流又は下流に位置するフリーローラとを含む複数のローラによって構成されたウェブ搬送路と、該ウェブ搬送路に沿って搬送される前記ウェブを撮像する撮像手段と、前記駆動ローラあるいは前記フリーローラの軸の角度を調整するアライメント調整手段と、コントローラとを備え、
該コントローラには、前記搬送路における予め定められた駆動条件を示す駆動情報と、前記ウェブの物性値とに基づいて、前記駆動ローラ又は前記フリーローラにおけるウェブの浮上量を求める浮上量算出手段と、
該浮上量算出手段の算出結果に基づき、前記軸の角度の調整方向を定める軸角度調整方向判定手段と、
前記撮像手段によって撮像された撮像画像から、前記ウェブ上に発生する波形の直線を検出するとともに、当該直線の前記ローラに対する進入方向を解析する画像解析手段と、
該軸角度調整方向判定手段により定められた方向に、前記駆動ローラ又は前記フリーローラの軸を駆動させるように前記アライメント調整手段を制御する軸角度制御手段とが含まれることを特徴とするウェブ搬送装置。
【請求項2】
前記軸角度調整方向判定手段において、ウェブの浮上量と、ローラ及びウェブの合成表面粗さとの関係に応じ、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラ又は前記フリーローラの軸が、直角又は鋭角になる方向に、前記軸の角度の調整方向が定められることを特徴とする請求項1記載のウェブ搬送装置。
【請求項3】
前記軸角度調整方向判定手段において、前記駆動ローラ及びウェブの合成表面粗さσと、前記駆動ローラに対するウェブの浮上量hとの関係がh>σのとき、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラの軸が直角となる方向に前記軸の角度の調整方向が定められ、
前記駆動ローラ又は前記フリーローラ及びウェブの合成表面粗さσと、前記駆動ローラに対するウェブの浮上量hとの関係がh≦σのとき、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラ又は前記フリーローラの軸が鋭角となる方向に前記軸の角度の調整方向が定められることを特徴とする請求項2記載のウェブ搬送装置。
【請求項4】
駆動ローラと該駆動ローラの上流又は下流に位置するフリーローラとを含む複数のローラによって構成されたウェブ搬送路を備えるウェブ搬送装置を用いたウェブ搬送方法であって、
前記搬送路の予め定められた駆動条件を示す駆動情報と、前記ウェブの物性値とに基づいて、前記駆動ローラ又は前記フリーローラにおけるウェブの浮上量を求める浮上量算出ステップと、
該浮上量算出ステップの算出結果に基づき、前記軸の角度の調整方向を定める軸角度調整方向判定ステップと、
前記搬送路に沿って搬送されるウェブを撮像した撮像画像から、前記ウェブ上に発生する波形の直線を検出するとともに、当該直線の前記駆動ローラに対する進入方向を解析する画像解析ステップと、
該軸角度調整方向判定ステップで判定された方向に、前記駆動ローラ又は前記フリーローラの軸を駆動する軸角度制御ステップとを含むことを特徴とするウェブ搬送方法。
【請求項5】
前記軸角度調整方向判定ステップにおいて、ウェブの浮上量と、ローラ及びウェブの合成表面粗さとの関係に応じ、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラ又は前記フリーローラの軸が、直角又は鋭角になる方向に、前記軸の角度の調整方向を定めることを特徴とする請求項4記載のウェブ搬送方法。
【請求項6】
前記軸角度調整方向判定ステップにおいて、前記駆動ローラ及びウェブの合成表面粗さσと、前記駆動ローラに対するウェブの浮上量hとの関係がh>σのとき、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラの軸が直角となる方向に前記軸の角度の調整方向を定め、
前記駆動ローラ又は前記フリーローラ及びウェブの合成表面粗さσと、前記駆動ローラに対するウェブの浮上量hとの関係がh≦σのとき、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラ又は前記フリーローラの軸が鋭角となる方向に前記軸の角度の調整方向を定めることを特徴とする請求項5記載のウェブ搬送方法。
【請求項7】
駆動ローラと該駆動ローラの上流又は下流に位置するフリーローラとを含む複数のローラによって構成されたウェブ搬送路を備えるウェブ搬送装置のコントローラを、
前記搬送路の予め定められた駆動条件を示す駆動情報と、前記ウェブの物性値とに基づいて、前記駆動ローラ又は前記フリーローラにおけるウェブの浮上量を求める浮上量算出手段と、
該浮上量算出手段の算出結果に基づき、前記軸の角度の調整方向を定める軸角度調整方向判定手段と、
前記搬送路に沿って搬送されるウェブを撮像した撮像画像から、前記ウェブ上に発生する波形の直線を検出するとともに、当該直線の前記ローラに対する進入方向を解析する画像解析手段と、
前記軸角度調整方向判定手段で判定された方向に、前記駆動ローラ又は前記フリーローラの軸を駆動する軸角度制御手段として、機能させる制御ロジックを含むことを特徴とするウェブ搬送制御プログラム。
【請求項8】
前記軸角度調整方向判定手段において、ウェブの浮上量と、ローラ及びウェブの合成表面粗さとの関係に応じ、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラ又は前記フリーローラの軸が、直角又は鋭角になる方向に、前記軸の角度の調整方向が定められることを特徴とする請求項7記載のウェブ搬送制御プログラム。
【請求項9】
前記軸角度調整方向判定手段において、前記駆動ローラ及びウェブの合成表面粗さσと、前記駆動ローラに対するウェブの浮上量hとの関係がh>σのとき、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラの軸が直角となる方向に前記軸の角度の調整方向が定められ、
前記駆動ローラ又は前記フリーローラ及びウェブの合成表面粗さσと、前記駆動ローラに対するウェブの浮上量hとの関係がh≦σのとき、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラ又は前記フリーローラの軸が鋭角となる方向に前記軸の角度の調整方向が定められることを特徴とする請求項8記載のウェブ搬送制御プログラム。
【請求項1】
駆動ローラと該駆動ローラの上流又は下流に位置するフリーローラとを含む複数のローラによって構成されたウェブ搬送路と、該ウェブ搬送路に沿って搬送される前記ウェブを撮像する撮像手段と、前記駆動ローラあるいは前記フリーローラの軸の角度を調整するアライメント調整手段と、コントローラとを備え、
該コントローラには、前記搬送路における予め定められた駆動条件を示す駆動情報と、前記ウェブの物性値とに基づいて、前記駆動ローラ又は前記フリーローラにおけるウェブの浮上量を求める浮上量算出手段と、
該浮上量算出手段の算出結果に基づき、前記軸の角度の調整方向を定める軸角度調整方向判定手段と、
前記撮像手段によって撮像された撮像画像から、前記ウェブ上に発生する波形の直線を検出するとともに、当該直線の前記ローラに対する進入方向を解析する画像解析手段と、
該軸角度調整方向判定手段により定められた方向に、前記駆動ローラ又は前記フリーローラの軸を駆動させるように前記アライメント調整手段を制御する軸角度制御手段とが含まれることを特徴とするウェブ搬送装置。
【請求項2】
前記軸角度調整方向判定手段において、ウェブの浮上量と、ローラ及びウェブの合成表面粗さとの関係に応じ、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラ又は前記フリーローラの軸が、直角又は鋭角になる方向に、前記軸の角度の調整方向が定められることを特徴とする請求項1記載のウェブ搬送装置。
【請求項3】
前記軸角度調整方向判定手段において、前記駆動ローラ及びウェブの合成表面粗さσと、前記駆動ローラに対するウェブの浮上量hとの関係がh>σのとき、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラの軸が直角となる方向に前記軸の角度の調整方向が定められ、
前記駆動ローラ又は前記フリーローラ及びウェブの合成表面粗さσと、前記駆動ローラに対するウェブの浮上量hとの関係がh≦σのとき、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラ又は前記フリーローラの軸が鋭角となる方向に前記軸の角度の調整方向が定められることを特徴とする請求項2記載のウェブ搬送装置。
【請求項4】
駆動ローラと該駆動ローラの上流又は下流に位置するフリーローラとを含む複数のローラによって構成されたウェブ搬送路を備えるウェブ搬送装置を用いたウェブ搬送方法であって、
前記搬送路の予め定められた駆動条件を示す駆動情報と、前記ウェブの物性値とに基づいて、前記駆動ローラ又は前記フリーローラにおけるウェブの浮上量を求める浮上量算出ステップと、
該浮上量算出ステップの算出結果に基づき、前記軸の角度の調整方向を定める軸角度調整方向判定ステップと、
前記搬送路に沿って搬送されるウェブを撮像した撮像画像から、前記ウェブ上に発生する波形の直線を検出するとともに、当該直線の前記駆動ローラに対する進入方向を解析する画像解析ステップと、
該軸角度調整方向判定ステップで判定された方向に、前記駆動ローラ又は前記フリーローラの軸を駆動する軸角度制御ステップとを含むことを特徴とするウェブ搬送方法。
【請求項5】
前記軸角度調整方向判定ステップにおいて、ウェブの浮上量と、ローラ及びウェブの合成表面粗さとの関係に応じ、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラ又は前記フリーローラの軸が、直角又は鋭角になる方向に、前記軸の角度の調整方向を定めることを特徴とする請求項4記載のウェブ搬送方法。
【請求項6】
前記軸角度調整方向判定ステップにおいて、前記駆動ローラ及びウェブの合成表面粗さσと、前記駆動ローラに対するウェブの浮上量hとの関係がh>σのとき、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラの軸が直角となる方向に前記軸の角度の調整方向を定め、
前記駆動ローラ又は前記フリーローラ及びウェブの合成表面粗さσと、前記駆動ローラに対するウェブの浮上量hとの関係がh≦σのとき、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラ又は前記フリーローラの軸が鋭角となる方向に前記軸の角度の調整方向を定めることを特徴とする請求項5記載のウェブ搬送方法。
【請求項7】
駆動ローラと該駆動ローラの上流又は下流に位置するフリーローラとを含む複数のローラによって構成されたウェブ搬送路を備えるウェブ搬送装置のコントローラを、
前記搬送路の予め定められた駆動条件を示す駆動情報と、前記ウェブの物性値とに基づいて、前記駆動ローラ又は前記フリーローラにおけるウェブの浮上量を求める浮上量算出手段と、
該浮上量算出手段の算出結果に基づき、前記軸の角度の調整方向を定める軸角度調整方向判定手段と、
前記搬送路に沿って搬送されるウェブを撮像した撮像画像から、前記ウェブ上に発生する波形の直線を検出するとともに、当該直線の前記ローラに対する進入方向を解析する画像解析手段と、
前記軸角度調整方向判定手段で判定された方向に、前記駆動ローラ又は前記フリーローラの軸を駆動する軸角度制御手段として、機能させる制御ロジックを含むことを特徴とするウェブ搬送制御プログラム。
【請求項8】
前記軸角度調整方向判定手段において、ウェブの浮上量と、ローラ及びウェブの合成表面粗さとの関係に応じ、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラ又は前記フリーローラの軸が、直角又は鋭角になる方向に、前記軸の角度の調整方向が定められることを特徴とする請求項7記載のウェブ搬送制御プログラム。
【請求項9】
前記軸角度調整方向判定手段において、前記駆動ローラ及びウェブの合成表面粗さσと、前記駆動ローラに対するウェブの浮上量hとの関係がh>σのとき、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラの軸が直角となる方向に前記軸の角度の調整方向が定められ、
前記駆動ローラ又は前記フリーローラ及びウェブの合成表面粗さσと、前記駆動ローラに対するウェブの浮上量hとの関係がh≦σのとき、前記ウェブ上に発生する波形の直線に対し、前記駆動ローラ又は前記フリーローラの軸が鋭角となる方向に前記軸の角度の調整方向が定められることを特徴とする請求項8記載のウェブ搬送制御プログラム。
【図1】

【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2010−195558(P2010−195558A)
【公開日】平成22年9月9日(2010.9.9)
【国際特許分類】
【出願番号】特願2009−44536(P2009−44536)
【出願日】平成21年2月26日(2009.2.26)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000125369)学校法人東海大学 (352)
【Fターム(参考)】
【公開日】平成22年9月9日(2010.9.9)
【国際特許分類】
【出願日】平成21年2月26日(2009.2.26)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000125369)学校法人東海大学 (352)
【Fターム(参考)】
[ Back to top ]