
ウエハ搬送ロボット
【課題】半導体ウエハを対向するチャンバ間でスムーズに移動することのできる搬送ロボットを提供する。
【解決手段】ウエハ搬送ロボット100は、2本のリンク12、13で構成されているアーム10を備える。アーム10の先端にはウエハホルダ6が備えられている。アーム10の基部に相当する駆動リンク13は筐体2に回転可能に連結されている。アーム10は、駆動リンク13の回転に伴うアーム先端の運動が直線又は曲線の軌道に制限される構造を有しているとともに、その軌道は、始点Wsと終点Weが駆動リンク13の回転中心から等距離の位置にあり、始点におけるアーム先端の向きと終点におけるアーム先端の向きが、始点と終点の間の中点と前記回転中心を通る直線に対して鏡像の関係を満たしている。
【解決手段】ウエハ搬送ロボット100は、2本のリンク12、13で構成されているアーム10を備える。アーム10の先端にはウエハホルダ6が備えられている。アーム10の基部に相当する駆動リンク13は筐体2に回転可能に連結されている。アーム10は、駆動リンク13の回転に伴うアーム先端の運動が直線又は曲線の軌道に制限される構造を有しているとともに、その軌道は、始点Wsと終点Weが駆動リンク13の回転中心から等距離の位置にあり、始点におけるアーム先端の向きと終点におけるアーム先端の向きが、始点と終点の間の中点と前記回転中心を通る直線に対して鏡像の関係を満たしている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は半導体ウエハを搬送・位置決めするウエハ搬送ロボット(wafer handling robot)に関する。
【背景技術】
【0002】
半導体ウエハを搬送・位置決めするウエハ搬送ロボットが知られている。典型的なウエハ搬送ロボットは、先端にウエハホルダが取り付けられた多リンク機構のアームを備えている。例えば、特許文献1にそのようなウエハ搬送ロボットが開示されている。特許文献1のウエハ搬送ロボットは、フロッグレッグタイプと呼ばれる機構のアームを備えている。フロッグレッグタイプとは、4本のリンクが矩形を構成する閉リンク構造のアームであり、隣接する2本のリンクがなす角度を変化させることによって、アーム先端(基部に対する対角の位置)を伸縮させるものである。また、このタイプのアームは、アーム基部を回転させることによって、アーム先端を回転移動させる。なお、以下では、簡単のため、「ウエハ搬送ロボット」を単純に「搬送ロボット」と称することにする。また、「半導体ウエハ」を単純に「ウエハ」と称することにする。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−150617号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
搬送ロボットの使い方の一つに、互いに向き合っているチャンバの一方から他方へウエハを移動させることがある。即ち、搬送ロボットには、アーム基部を中心に180度の可動範囲が要求されることがよくある。他方、チャンバは正面に出し入れ口があるため、搬送ロボットは、チャンバの正面にてアーム先端が前後に動く構造を有している必要もある。上記の要求に対応するため、従来の搬送ロボットは、アームの基部が旋回するように構成されている。即ち、従来の搬送ロボットは、アーム先端を前後に動かす第1の動作と、アーム全体を旋回させる第2の動作を必要とする。従来のウエハ搬送ロボットはそのような2ステップモーションを実行するため、ウエハを対向しているチャンバ間を移動させるのに時間がかかる。本明細書が開示する技術は、ウエハを対向するチャンバ間でスムーズに移動することのできる搬送ロボットを提供する。
【課題を解決するための手段】
【0005】
本明細書が開示する搬送ロボットは、アーム先端からアーム基部までが複数のリンクで構成されているアームを備える。アーム先端にはウエハホルダが備えられている。アーム基部に相当する駆動リンクは筐体に回転可能に連結されている。なお、「駆動リンク」とは、アクチュエータの駆動力が最初に伝えられるリンクを意味する。このアームは、駆動リンクの回転に伴うアーム先端の運動が直線又は曲線の軌道に制限される構造を有しているとともに、その軌道は、始点と終点が駆動リンクの回転中心から等距離の位置にあり、始点におけるアーム先端の向きと終点におけるアーム先端の向きが、始点と終点の間の中点と上記回転中心を通る直線に対して鏡像の関係を満たしていることを特徴とする。より好ましくは、軌道の始点におけるアーム先端の向きと終点におけるアーム先端の向きが正反対になっている。
【0006】
「駆動リンクの回転に伴うアーム先端の運動が直線又は曲線の軌道に制限されるリンク構造」は、ロボットの技術分野では「限定連鎖構造」、或いは、「one degree of freedom linkage mechanism」と呼ばれている。限定連鎖構造の典型例は、閉4リンク機構のクランク−ロッカー機構(crank-rocker mechanism)である。上記のアームは、軌道始点におけるアーム先端の向きと終点におけるアーム先端の向きが正反対になっている。従って、第1のチャンバに始点を設定し、第1のチャンバに対向している第2のチャンバに終点を設定することができる。そして上記のアームは、始点から終点まで直線あるいは曲線に沿ってスムーズに移動することができる。
【0007】
また、上記の搬送ロボットは、ウエハを、一つのアクチュエータで対向する2つのチャンバ間を移動させることができる点も利点の一つである。例えば特許文献1の搬送ロボットでは、アームを伸縮させるための第1アクチュエータと、アームを旋回させるための第2アクチュエータが必要である。これに対して本明細書が開示する搬送ロボットは一つのアクチュエータでウエハを移動することができる。
【0008】
上記した搬送ロボットでは、アーム先端軌道を、始点と終点を結ぶ線分を長辺とし、短辺の長さが長辺の1/4である矩形の領域内に設定することができる。そのように設定すると、対向する2つのチャンバの間でウエハを移動させるために確保しなければならない空間を小さくすることができる。好ましくは、上記した先端軌道は直線であることが好ましい。
【0009】
アームの具体的な構造の幾つかは実施例にて説明する。また、それぞれのアームの利点についても実施例にて説明する。
【図面の簡単な説明】
【0010】
【図1】第1実施例のウエハ搬送ロボットの平面図と側面図である。
【図2】第1実施例のウエハ搬送ロボットの部分拡大平面図である。
【図3A】第1実施例のウエハ搬送ロボットの動きを説明する図である(Ta=0deg)。
【図3B】第1実施例のウエハ搬送ロボットの動きを説明する図である(Ta=45deg)。
【図3C】第1実施例のウエハ搬送ロボットの動きを説明する図である(Ta=120deg)。
【図3D】第1実施例のウエハ搬送ロボットの動きを説明する図である(Ta=180deg)。
【図4】アーム先端速度のグラフである。
【図5】第2実施例のウエハ搬送ロボットの平面図である。
【図6】第2実施例のウエハ搬送ロボットの部分拡大平面図である。
【図7A】第2実施例のウエハ搬送ロボットの動きを説明する図である(Ta=0deg)。
【図7B】第2実施例のウエハ搬送ロボットの動きを説明する図である(Ta=30deg)。
【図7C】第2実施例のウエハ搬送ロボットの動きを説明する図である(Ta=90deg)。
【図7D】第2実施例のウエハ搬送ロボットの動きを説明する図である(Ta=180deg)。
【図8】第3実施例のウエハ搬送ロボットの平面図である。
【図9】第4実施例のウエハ搬送ロボットの平面図である。
【図10】第5実施例のウエハ搬送ロボットの平面図である。
【図11A】第5実施例のウエハ搬送ロボットの動きを説明する図である(Ta=15deg)。
【図11B】第5実施例のウエハ搬送ロボットの動きを説明する図である(Ta=90deg)。
【図11C】第5実施例のウエハ搬送ロボットの動きを説明する図である(Ta=135deg)。
【図11D】第5実施例のウエハ搬送ロボットの動きを説明する図である(Ta=270deg)。
【図11E】第5実施例のウエハ搬送ロボットの動きを説明する図である(Ta=345deg)。
【図12】第5実施例のウエハ搬送ロボットの先端が動く範囲を示す図である。
【図13】第5実施例のウエハ搬送ロボットの変形例の平面図である。
【図14】図13の範囲S1の拡大図である。
【図15】第5実施例のウエハ搬送ロボットの別の変形例の平面図である。
【図16】第6実施例のウエハ搬送ロボットの平面図である。
【図17】第4実施例のウエハ搬送ロボットの軌道の範囲を示す図である。
【実施例】
【0011】
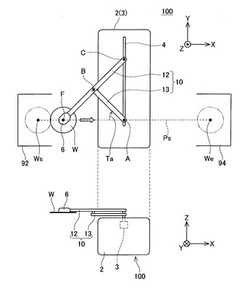
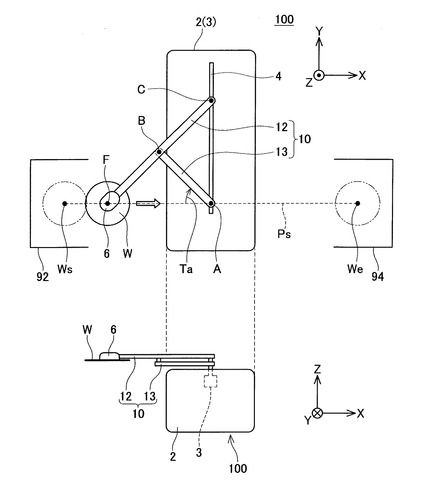
(第1実施例)図1は、第1実施例のウエハ搬送ロボット100の平面図と側面図である。図1の上側が平面図であり、下側が側面図である。このウエハ搬送ロボット100は、ウエハWを、互いに対向するチャンバ92とチャンバ94の間で搬送する。ウエハ搬送ロボット100は、ウエハWを水平面内で動かすことができる。以下、「ウエハ搬送ロボット」を単純に「ロボット」と称することがある。また、図面に記した座標軸は、XY面が水平面に相当し、Z軸が鉛直方向に相当する。
【0012】
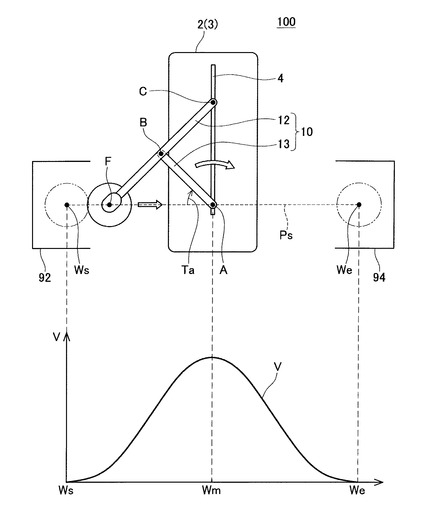
ロボット100は、筐体2と、アーム10を備える。アーム10は、駆動リンク13と従動リンク12から構成されている。駆動リンク13は、アーム10の基部に相当し、その一端が筐体2に連結している。筐体内にはモータ3(アクチュエータ)が備えられており、そのモータ3が、駆動リンク13をポイントAを中心に旋回させる。なお、ポイントAは、駆動リンク13の一端に相当するとともに、アーム10の旋回中心にも相当する。駆動リンク13の他端(ポイントB)は、従動リンク12の長手方向中間点に連結している。従動リンク12の一端(ポイントF)にはウエハホルダ6が取り付けられており、従動リンク12の他端(ポイントC)は、直線レール4に係合している。ウエハホルダ6は、空気吸着方式にてウエハWを保持する。なお、「ポイントA」、「ポイントB」等は、リンク上に設定された点であり、リンクの回転中心、或いは、他のリンクとの連結点、或いは、直線レールへの拘束点のいずれかを意味する。また、「駆動リンク」とは、アームを構成するリンク群のうち、モータ(アクチュエータ)のトルクが最初に伝達されるリンクを指す。駆動リンク以外のリンクが従動リンクに相当する。
【0013】
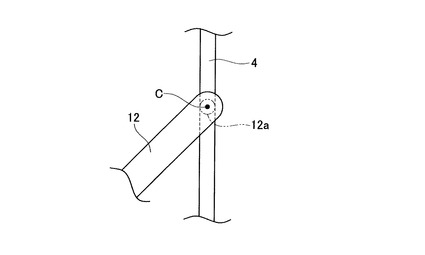
図2にポイントC付近の拡大平面図を示す。従動リンク12の他端(ポイントC)には、スライダ12aが取り付けられており、このスライダ12aが直線レール4に係合している。スライダ12aは直線レール4に沿って移動することができる。即ち、従動リンク12の一端(ポイントC)が直線レール4に沿って移動することができる。
【0014】
アーム10において、従動リンク12の一端(ポイントC)の動きが直線レール4によって制限される。そのため、駆動リンク13がポイントAを中心に時計回りに旋回すると、アーム先端(ポイントF)は、直線又は曲線に沿って動く。アーム先端の軌道Psは、各リンクの幾何学的形態(コンフィグレーション)に依存する。アーム10は、AB=BC=BFの関係を有している。この関係によって、駆動リンク13がポイントAを中心に旋回すると、アーム先端(ポイントF)が直線軌道Psに沿って動くという関係が得られる。アーム先端の軌道Psは、ポイントWsを始点とし、ポイントWeを終点とする直線となる。ポイントWsは、一方のチャンバ92のウエハセット位置に相当し、ポイントWeは、他方のチャンバ94のウエハセット位置に相当する。なお、ポイントWeを始点とし、ポイントWsを終点としてもよいことに留意されたい。
【0015】
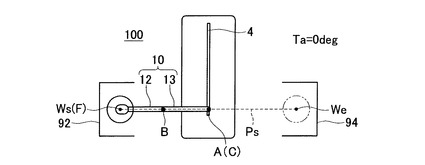
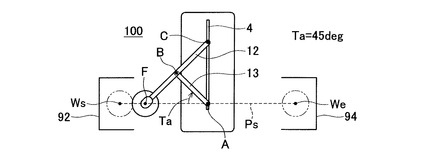
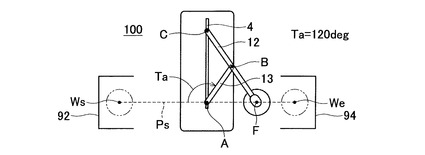
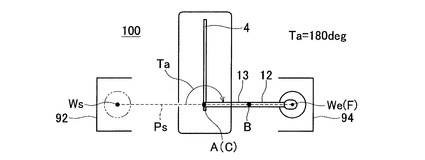
図3Aから図3Dを参照してアーム10の動きを説明する。なお、ポイントWsとポイントWeを結ぶ直線と駆動リンク13の間の角度Taを用いてアーム10の動きを説明する。最初は、アーム先端(ポイントF)は、始点Wsに位置する。この状態は、Ta=0[deg]に相当する(図3A)。Ta=45[deg]のときのアーム10の姿勢を図3Bに示す。このとき、三角形ABCは直角二等辺三角形となる。同時に、三角形ABFも直角二等辺三角形となる。また、三角形ABC=三角形ABFの関係が成立する。図3Cは、Ta=120[deg]のときのアーム姿勢を示し、図3Dは、Ta=180[deg]のときのアーム姿勢を示す。図3A〜図3Dから明らかなとおり、アーム10の先端(ポイントF)は、直線軌道Ps上を移動する。また軌道Psの始点(ポイントWs)におけるアーム先端の向きと終点(ポイントWe)におけるアーム先端の向きは互いに逆向きである。
【0016】
アーム先端の速度について説明する。図4は、駆動リンク13を一定角速度で旋回させたときの、始点(ポイントWs)から終点(ポイントWe)に移動する間におけるアーム先端の速度Vの推移を記したグラフである。図4に示すように、アーム先端の速度Vは、始点Wsから中間点Wmに向けて単調に増加し、中間点Wmから終点Weに向けて単調に減少する。このことは、図4の上側に示したアーム10の構造からも明らかである。即ち、始点Ws(終点We)において、駆動リンク13の長手方向が旋回中心(ポイントA)とアーム先端(ポイントF)を結ぶ直線上にある。そのような幾何学的関係においては、アーム先端の速度Vに対する駆動リンク13の先端の速度の寄与が最も小さくなるからである。なお、アーム先端の軌道Psの始点Wsと終点Weは、クランク−ピストン機構における「死点」に相当する。
【0017】
アーム10の構造は、次のように説明することもできる。アーム10は、駆動リンク13と従動リンク12を備えている、駆動リンク13の一端は筐体2に回転可能に連結しており、他端は従動リンク12の長手方向の途中(長手方向中央)に連結している。従動リンク12の一端は筐体2に固定された直線レール4にスライド可能に連結しており、他端にはウエハホルダ6が取り付けられている。従動リンク12の他端がアーム先端に相当する。アーム10の一点(従動リンク12の一端)が、筐体2に設けられた直線レール4に沿ってスライドするように拘束されている。この拘束により、駆動リンク13の一端が回転すると、従動リンク12の一端が直線レール4の上をスライドするとともに、他端(アーム先端)が直線運動する。従動リンク12の長さCFは駆動リンク13の長さABの2倍である。
【0018】
ロボット100の利点を説明する。ロボット100は、一つのアクチュエータで、アーム先端を始点Wsから終点Weへ直線軌道Psに沿って移動させることができる。ここで、アーム先端の向きは始点Wsと終点Weで正反対である。このことから、ロボット100は、互いに向きあう2つのチャンバの間でウエハを移動させるのに好適である。また、アーム先端の速度は、モータの回転を一定に保ったままで、始点Ws付近で徐々に速く、終点We付近で徐々に遅くなる。そのような構造も、ウエハ搬送には好都合である。
【0019】
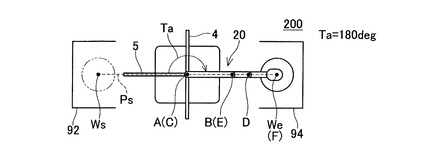
(第2実施例)図5は、第2実施例のロボット200の平面図である。第2実施例のロボット200は、3つのリンクから構成されるアーム20を備える。第2実施例の図において、第1実施例のロボット100と同じ部品には同じ符号を付している。同じ部品については説明を省略する場合がある。
【0020】
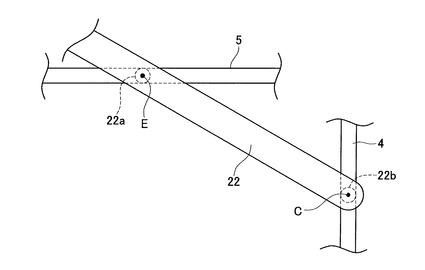
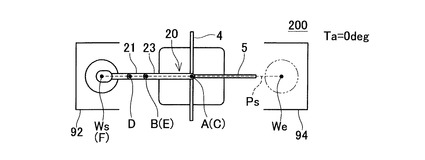
アーム20は、駆動リンク23、第1従動リンク21、及び、第2従動リンク22から構成される。駆動リンク23は、アーム20の基部に相当し、その一端(ポイントA)が筐体2に連結している。筐体2の内部にはモータ3が備えられており、そのモータ3が、駆動リンク23を、ポイントAを中心に旋回させる。駆動リンク23の他端は、第1従動リンク21の一端(ポイントB)に連結している。第1従動リンク21の他端(ポイントF)にはウエハホルダ6が取り付けられている。第1従動リンク21の他端(ポイントF)が、アーム20の先端に相当する。第1従動リンク21の中間点(ポイントD)には、第2従動リンク22の一端が連結されている。第2従動リンク22の他端(ポイントC)は、第1直線レール4に係合している。第2従動リンク22の他端(ポイントC)は、第1直線レール4に沿って移動することができる。第2従動リンク22の中間点(ポイントE)は、第2直線レール5に係合しており、第2直線レール5に沿って移動することができる。図6に、ポイントE付近とポイントC付近の拡大図を示す。第2従動リンク22の一端(ポイントC)には、スライダ22bが取り付けられており、このスライダ22bが第1直線レール4に係合している。第2従動リンク22の中間点(ポイントE)には、スライダ22aが取り付けられており、このスライダ22aが第2直線レール5に係合している。図5から明らかなとおり、第1直線レール4と第2直線レール5は直交している。
【0021】
アーム20は、第2従動リンク22の一端(ポイントC)の動きが第1直線レール4によって制限されるとともに、中間点(ポイントE)の動きが第2直線レール5によって制限される。この制限により、駆動リンク23がポイントAを中心に時計回りに旋回すると、アーム先端(ポイントF)は、直線又は曲線に沿って動く。アーム先端の軌道Psは、各リンクの幾何学的形態(コンフィグレーション)に依存する。アーム20は、AB=BF=CE=2EDの関係を有している。この関係によって、駆動リンク23がポイントAを中心に旋回するとき、アーム先端(ポイントF)は、直線軌道Psに沿って動く。アーム先端の軌道Psは、ポイントWsを始点とし、ポイントWeを終点とする直線となる。ポイントWsは、一方のチャンバ92のウエハセット位置に相当し、ポイントWeは、他方のチャンバ94のウエハセット位置に相当する。
【0022】
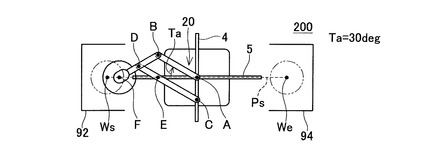
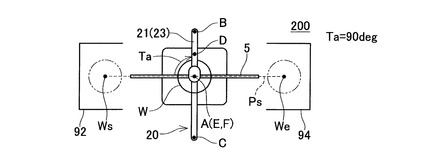
図7Aから図7Dを参照してアーム20の動きを説明する。なお、第1実施例の場合と同じように、ポイントWsとポイントWeを結ぶ直線と駆動リンク23の間の角度Taを用いてアーム20の動きを説明する。最初は、アーム先端(ポイントF)は、始点Wsに位置する。このとき、Ta=0[deg]に相当する(図7A)。Ta=30[deg]のときのアーム20の姿勢を図7Bに示す。三角形ABFは常に二等辺三角形となる。図7CはTa=90[deg]のときのアーム姿勢を示し、図7Dは、Ta=180[deg]のときのアーム姿勢を示す。Ta=90[deg]のとき、アーム先端(ポイントF)は、軌道Psの中間点に位置する。軌道Psの中間点は、アーム基部の旋回中心(ポイントA)に一致する。
【0023】
図7A〜図7Dから明らかなとおり、アーム20の先端(ポイントF)は、直線軌道Ps上を移動する。また軌道Psの始点(ポイントWs)におけるアーム先端の向きと終点(ポイントWe)におけるアーム先端の向きは互いに逆向きである。アーム20の先端の速度は、第1実施例と同様に、駆動リンク23が一定の角速度で旋回するとき、始点Wsから中間点(ポイントA)に向けて単調に増加し、中間点(ポイントA)から終点Weに向けて単調に減少する。従って、ロボット200は、第1実施例のロボット100と同じ利点を有する。
【0024】
アーム20の構造は、次のように説明することもできる。アーム20は、駆動リンク23、第1従動リンク21、第2従動リンク22を備えている。駆動リンク23の一端(ポイントA)は、筐体2に回転可能に連結しており、他端(ポイントB)は、第1従動リンク21の一端に連結している。筐体2内にはモータ3が配置されており、そのモータ3が、ポイントAを中心にして駆動リンク23を旋回させる。第1従動リンク21の他端(ポイントF)にはウエハホルダ6が取り付けられている。第1従動リンク21の他端がアーム先端に相当する。第1従動リンク21の中点(ポイントD)に、第2従動リンク22の一端が連結している。第2従動リンク22の他端(ポイントC)は、筐体2に設けられた第1直線レール4にスライド可能に拘束されている。第2従動リンク22の長手方向の途中の点(ポイントE)が、第1直線レール4に直交する第2直線レール5にスライド可能に係合されている。ポイントEは、ポイントDから、第2従動リンク22の長さの1/3の距離の位置である。第2従動リンク22のこの拘束により、駆動リンク23が旋回すると、第1従動リンク21の一端(アーム先端に相当する)が直線軌道Ps上を移動する。そして、直線軌道Psの始点Wsと終点We、及び、駆動リンク23の旋回中心(ポイントA)は一直線に並んでいる。また、始点Wsと終点Weは、旋回中心(ポイントA)から等距離の位置にある。さらに、始点Wsにおけるアーム先端の向きと、終点Weにおけるアーム先端の向きは互いに逆向きである。駆動リンク23の長さABは第1従動リンク21の長さBFに等しく、また、第2従動リンク22の2つの拘束点(ポイントCとポイントE)の間の距離CEとも等しい。第1従動リンク21と第2従動リンク22の連結点(ポイントD)は、第1従動リンク21の長手方向の中点である。これらの関係により、駆動リンク23と第2従動リンク22は常に平行に保たれる。
【0025】
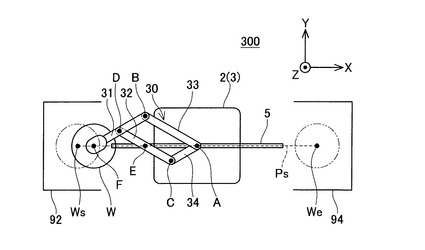
(第3実施例)図8に第3実施例のロボット300の平面図を示す。第3実施例のロボット300のアーム30は、第2実施例のアーム20の第1直線レール4の代わりに第3従動リンク34を有する。
【0026】
アーム30の構造について詳しく述べる。アーム30は、駆動リンク33、第1従動リンク31、第2従動リンク32、及び、第3従動リンク34を備えている。駆動リンク33の一端(ポイントA)は、筐体2に回転可能に連結しており、他端(ポイントB)は、第1従動リンク31の一端に連結している。筐体2内にはモータ3が配置されており、そのモータ3が、ポイントAを中心にして駆動リンク33を旋回させる。第1従動リンク31の他端(ポイントF)にはウエハホルダ6が取り付けられている。第1従動リンク31の他端(ポイントF)がアーム先端に相当する。第1従動リンク31の長手方向中点(ポイントD)に、第2従動リンク32の一端が連結している。第2従動リンク32の他端(ポイントC)は、第3従動リンク34の一端に連結している。第3従動リンク34の他端は、駆動リンク33の一端(ポイントA)に連結している。第2従動リンク32の長手方向中点(ポイントE)が、直線レール5にスライド可能に係合している。アーム30は、アーム上の定められた点(ポイントE)が、筐体2に設けられた直線レール5に沿ってスライドするように拘束されている。上記の構成により、駆動リンク33が時計回りに旋回すると、第1従動リンク31の一端(アーム先端に相当する)が直線軌道Ps上を移動する。直線軌道Psの始点Wsと終点Weは、駆動リンク33の回転中心(ポイントA)とともに一直線に並んでいる。始点Wsと終点Weは、回転中心(ポイントA)から等距離の位置にある。また、始点Wsにおけるアーム先端の向きと、終点Weにおけるアーム先端の向きは互いに逆向きである。駆動リンク33の長さABは第1従動リンク31の長さBFに等しく、また、第2従動リンク32の長さCDにも等しい。第1従動リンク31と第2従動リンク32の連結点(ポイントD)は、第1従動リンク31の長手方向の中点である。第3従動リンク34の長さACは、第1従動リンク31の長さBFの1/2である。駆動リンク33と第2従動リンク32は常に平行を保つ。
【0027】
第3実施例のロボット300のアーム30の動きは、第2実施例のロボット200のアーム20とほぼ同じ動きをする。即ち、アーム30の先端(ポイントF)は、直線軌道Ps上を移動する。また軌道Psの始点Wsにおけるアーム先端の向きと終点Weにおけるアーム先端の向きは互いに逆向きである。アーム30の先端の速度は、第1、第2実施例と同様に、駆動リンク23が一定の角速度で回転するとき、始点Wsから中間点(ポイントA)に向けて単調に増加し、中間点(ポイントA)から終点Weに向けて単調に減少する。
【0028】
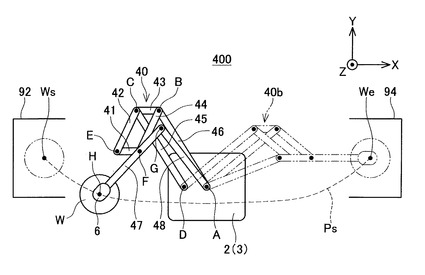
(第4実施例)図9に第4実施例のロボット400の平面図を示す。第4実施例のロボット400は、さらに多数の従動リンクを有するが、その代り、レールを備えていない。
【0029】
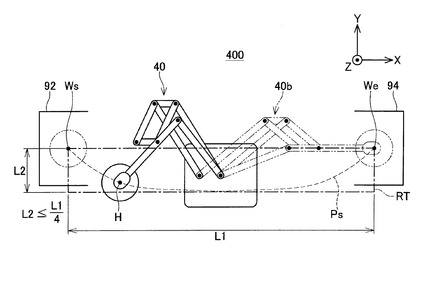
アーム40は、駆動リンク48と、7本の従動リンク41〜47を備える。駆動リンク48は、アーム40の基部に相当し、その一端(ポイントA)が筐体2に連結している。筐体2の内部にはモータ3が備えられており、そのモータ3が、駆動リンク48を、ポイントAを中心に旋回させる。駆動リンク48の他端は、第7従動リンク47の一端(ポイントG)に連結している。第7従動リンク47の他端はアームの先端に相当し、ウエハホルダ6が取り付けられている。図9の符号40bが示す破線は、アーム先端(ポイントH)が終点Weに到達したときのアームの姿勢を示している。
【0030】
従動リンク43、45、46が一つのパラレルリンクを構成している。従動リンク45の一端(ポイントD)と従動リンク46の一端(ポイントA)は筐体2に連結している。従動リンク45の他端(ポイントC)と従動リンク46の他端(ポイントB)は、夫々従動リンク43の端部に連結している。従動リンク43の長さBCと、距離ADは等しく、そのため、従動リンク45と46は常に平行を保つ。
【0031】
従動リンク41、42、44が、別のパラレルリンクを構成している。従動リンク42の一端(ポイントC)は従動リンク43の一端に連結しており、従動リンク44の一端(ポイントB)は従動リンク43の他端に連結している。従動リンク42の他端(ポイントE)は従動リンク41の一端に連結しており、従動リンク44の他端(ポイントF)は従動リンク41の他端に連結している。従動リンク42と44は常に平行を保つ。また、従動リンク44の他端(ポイントF)は、第7従動リンク47の中点に連結している。従動リンク45の長さCDと従動リンク46の長さABは等しい。また、従動リンク42の長さCEと従動リンク44の長さBFも等しい。なお、このアーム40では、[長さAB]−[長さBF]=[長さAG]−[長さFG]の関係を満たす。
【0032】
上記の構成を有するアーム40では、駆動リンク48がポイントAを中心に時計回りに旋回すると、アーム先端(ポイントH)は、曲線軌道Psに沿って動く。始点Wsは、一方のチャンバ92のウエハセット位置に相当し、終点Weは、他方のチャンバ94のウエハセット位置に相当する。軌道Psの始点Wsにおけるアーム先端の向きと終点Weにおけるアーム先端の向きは互いに逆向きである。駆動リンク48を一定の角速度で回転させたとき、アーム先端(ポイントH)の速度は、始点Wsから軌道Ps上の中間点(ポイントA)に向けて単調に増加し、中間点(ポイントA)から終点Weに向けて単調に減少する。
【0033】
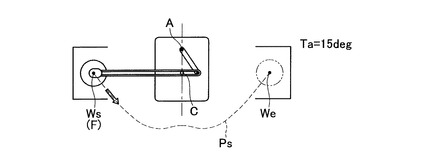
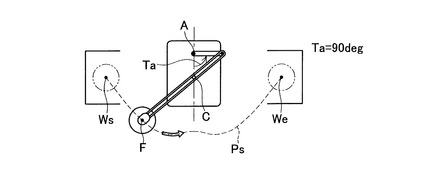
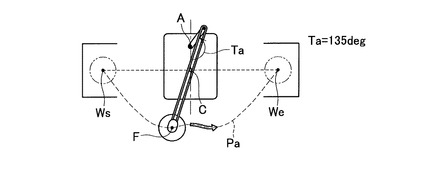
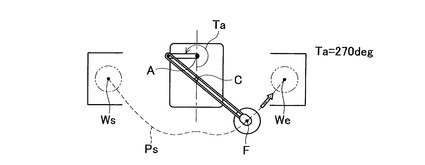
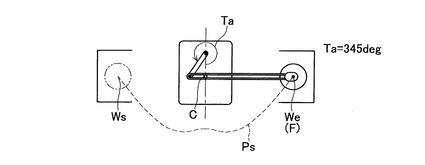
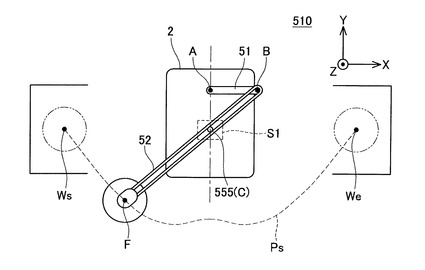
(第5実施例)図10に第5実施例のロボット500の平面図を示す。第5実施例のロボット500は、2リンクからなるアーム50を備える。アーム50は、駆動リンク51と従動リンク52で構成される。駆動リンク51は、アーム50の基部に相当し、その一端(ポイントA)が筐体2に連結している。筐体2の内部にはモータ3が備えられており、そのモータ3が、駆動リンク51を、ポイントAを中心に旋回させる。駆動リンク51の他端(ポイントB)は、従動リンク52の一端に連結している。従動リンク52の他端(ポイントF)にはウエハホルダ6が取り付けられている。従動リンク52の他端(ポイントF)が、アーム50の先端に相当する。従動リンク52は、その長手方向の中心線に沿って伸びるスリット52aを有している。スリット52aには、筐体2に支持されたローラ55が嵌合している。即ち、アーム50の従動リンク52は、筐体2の予め定められた拘束点(ローラ55)に、リンク長手方向に沿ってスライド可能に係合している。
【0034】
図11A〜図11Eを参照してアームの動きを説明する。図11A〜図11Eは夫々、Ta=15[deg]、90[deg]、135[deg]、270[deg]、345[deg]のときのアームの姿勢を示している。図11A〜図11Eから明らかなように、上記の構造により、駆動リンク51がポイントAを中心に反時計回りに旋回すると、アーム先端(ポイントF)は、図10に示す曲線軌道Psに沿って移動する。図10に示すように、アーム先端の軌道Psは、ポイントWsを始点とし、ポイントWeを終点とする。始点Wsは、一方のチャンバ92のウエハセット位置に相当し、終点Weは、他方のチャンバ94のウエハセット位置に相当する。始点Wsと終点Weは、アーム50の回転中心(ポイントA)から等距離にある。また軌道Psの始点Wsにおけるアーム先端の向きと終点Weにおけるアーム先端の向きは互いに逆向きである。
【0035】
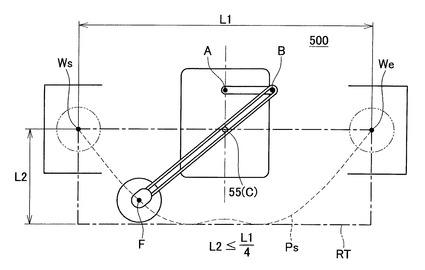
図12に、ロボット500のアーム先端(ポイントF)が移動する範囲を示す。符号RTが示す矩形が、アーム先端の軌道Psを囲む領域である。図12において、矩形RTの長辺の長さL1は、軌道Psの始点Wsと終点Weを結ぶ線分の長さに相当する。矩形RTの短辺の長さL2は、長辺の長さL1の1/4以下である。短辺の長さL2が長辺の長さL1の1/4以下であることの利点については後述する。
【0036】
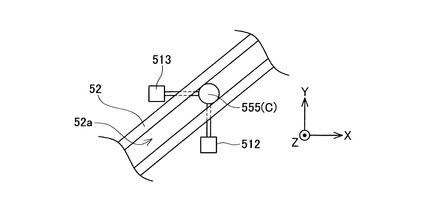
次に、第5実施例の変形例を説明する。図13は、変形例のロボット510の平面図である。図14は、図13の符号S1で囲った範囲の拡大図である。ロボット510は、従動リンク52を拘束するローラ555の構造に特徴がある。この変形例のローラ555は、2個のサブアクチュエータ512、513を介して筐体2に支持されている。サブアクチュエータ512、513は、ピエゾ素子であり、ローラ555の位置をXY平面(アーム先端の移動平面)内で僅かに移動させる。ローラ555の位置を微動させることによって、アーム50の先端位置を微調整することが可能となる。
【0037】
図15は、第5実施例のさらに別の変形例のロボット520の平面図である。このロボット520では、4本のサブリンク521、522、523、及び、524が駆動リンク529を構成している。4本のサブリンク521、522、523、及び524は、パンタグラフ構造を構成している。モータ3は、アーム基部の回転軸(ポイントA)を中心として駆動リンク529の先端(ポイントB)を旋回させる。駆動リンク529にはサブモータ525(サブアクチュエータ)が備えられている。サブモータ525は、サブリンク521と522の角度を変化させて、駆動リンク529の長さABを変化させる。駆動リンク529の長さを変化させることによって、基部(ポイントA)に対するアーム先端の位置を微調整することが可能となる。
【0038】
変形例のロボット510、520はともに、アーム先端の位置を微調整する機構とそのためのサブアクチュエータを有している。別言すれば、サブアクチュエータを含む微調整機構は、前記した拘束点を移動させるものである。この微調整機構によって、始点Wsあるいは終点Weにおけるウエハの位置を調整することができる。
【0039】
(第6実施例)以上説明したウエハ搬送ロボットは、いずれも、アーム先端の軌道の始点Wsと終点Weが駆動リンクの回転中心から等距離の位置にあり、その軌道の始点Wsにおけるアーム先端の向きと終点Weにおけるアーム先端の向きが正反対になっている。本明細書が開示する技術は、始点Wsにおけるアーム先端の向きと終点Weにおけるアーム先端の向きは180度の角度をなす場合に限られない。本明細書が開示するウエハ搬送ロボットは、アーム先端の軌道の始点Wsと終点Weが駆動リンクの回転中心から等距離の位置にあり、その軌道の始点Wsにおけるアーム先端の向きと終点Weにおけるアーム先端の向きが、始点Wsと終点Weの間の中点と回転中心を通る直線に対して鏡像の関係を満たしていればよい。
【0040】
そのような関係を満たすロボット600を説明する(第6実施例)。図16に、ロボット600の平面図を示す。ロボット600の幾何学的構造は、第5実施例のロボット500と同じである。ロボット600の構造については説明を省略する。ロボット600のアーム先端の軌道Psは、その始点Wsと終点Weの位置が第5実施例とは異なるだけである。ロボット600における始点Wsと終点Weの位置は、第5実施例のロボット500における軌道Psの途中にある。図16に示すポイントCPは、始点Wsと終点Weの間の中点である。即ち、始点WsとポイントCPの間の距離DW1は、終点WeとポイントCPの間の距離DW2に等しい(DW1=DW2)。図16の直線CLは、ポイントCPと、ポイントA(駆動リンクの回転中心)を通る直線である。図16から明らかなとおり、アーム先端(ポイントF)が始点Wsに位置するときのアーム姿勢(アーム50a)と、アーム先端が終点Weに位置するときのアーム姿勢(アーム50b)は、直線CLに関して鏡像の関係にある。このことは、始点Wsにおけるアーム先端の向きと終点Weにおけるアーム先端の向きが、直線CLに対して鏡像の関係を満たしていることを意味する。このロボット600も、他の実施例のロボットと同様の利点を有する。
【0041】
なお、始点Wsにおけるアーム先端の向きと終点Weにおけるアーム先端の向きが180度の角度をなす場合(第1実施例〜第5実施例)、始点Wsにおけるアーム先端の向きと終点Weにおけるアーム先端の向きは、必ず始点Wsと終点Weの間の中点と回転中心を通る直線に対して鏡像の関係を満たす。
【0042】
上記説明した実施例の留意点を述べる。第1〜第3実施例のロボットは、アーム先端の軌道が直線である。アーム先端の軌道は直線に限られず、曲線であってもよい。例えば、第4実施例のロボット400と第5実施例のロボット500(第6実施例のロボット600)では、アーム先端の軌道は曲線を描く。また、第1〜第3実施例のロボットにおいて、各リンクの長さを変更することによってもアーム軌道を変更できる。
【0043】
図17は、第4実施例のロボット400のアーム先端が描く軌道Psを囲む矩形RTを示した図である。図17において、矩形RTの長辺の長さL1は、軌道Psの始点Wsと終点Weを結ぶ線分の長さに相当する。矩形RTの短辺の長さL2は、長辺の長さL1の1/4以下である。即ち、アーム先端の軌道Psは、始点Wsと終点Weを結ぶ線分を長辺とし、短辺の長さが長辺の1/4である矩形RTの領域内に設定されている。
【0044】
アーム先端の軌道Psが上記した矩形RTの領域内に設定されていることの利点を説明する。先端が平面内で移動するアームでは、同じ長さの2本のリンクが直列に連結された構造が採用されることがよくある。1本のリンクアームの長さをLTとする。その場合、アーム先端の最大到達距離は基部の回転中心から2LTの距離となる。従って、アーム軌道の始点から終点までの最大距離は4LTとなる。他方、1本のリンクの長さがLTであるから、アームの動く範囲は、基部の回転中心から半径LTの範囲よりも小さくはならない。そうすると、2リンクアーム(リンク長さLT)の先端の軌道は、概ね、始点Wsと終点Weを結ぶ線分を長辺とし、短辺の長さが長辺の1/4である矩形RTの範囲内となる。本明細書が開示する実施例のウエハ搬送ロボットも、そのアーム先端の軌道は、始点Wsと終点Weを結ぶ線分を長辺とし、短辺の長さが長辺の1/4である矩形RTの範囲内に設定される。即ち、本明細書が開示する実施例のウエハ搬送ロボットも、従来の2リンクアームを有するウエハ搬送ロボットのアーム先端軌道の範囲と同等である。他方、従来のウエハ搬送ロボットは、アーム伸縮用のアクチュエータと、アーム旋回用のアクチュエータの少なくとも2個を有しており、それぞれのモータを別々に動かすために、始点から終点までアーム先端を動かすのに相当の時間を要していた。本明細書が開示する実施例のウエハ搬送用のロボットは、1つのアクチュエータでアーム先端を、始点から終点まで(しかもアーム先端の向きが始点とは正反対である終点まで)移動することができるから、アーム先端の移動がスムーズである。
【0045】
以上、本発明の具体例を詳細に説明したが、これらは例示に過ぎず、特許請求の範囲を限定するものではない。特許請求の範囲に記載の技術には、以上に例示した具体例を様々に変形、変更したものが含まれる。本明細書または図面に説明した技術要素は、単独であるいは各種の組合せによって技術的有用性を発揮するものであり、出願時請求項記載の組合せに限定されるものではない。また、本明細書または図面に例示した技術は複数目的を同時に達成し得るものであり、そのうちの一つの目的を達成すること自体で技術的有用性を持つものである。
【符号の説明】
【0046】
2:筐体
3:モータ
4、5:レール
6:ウエハホルダ
10、20、30:アーム
12、21、22、31、32、34:従動リンク
13、23、33:駆動リンク
22a、22b:スライダ
40、50:アーム
41−47:従動リンク
48、51:駆動リンク
52:従動リンク
52a:スリット
55:555:ローラ
92、94:チャンバ
100、200、300、400、500、600:ウエハ搬送ロボット
512、513、525:サブアクチュエータ
【技術分野】
【0001】
本発明は半導体ウエハを搬送・位置決めするウエハ搬送ロボット(wafer handling robot)に関する。
【背景技術】
【0002】
半導体ウエハを搬送・位置決めするウエハ搬送ロボットが知られている。典型的なウエハ搬送ロボットは、先端にウエハホルダが取り付けられた多リンク機構のアームを備えている。例えば、特許文献1にそのようなウエハ搬送ロボットが開示されている。特許文献1のウエハ搬送ロボットは、フロッグレッグタイプと呼ばれる機構のアームを備えている。フロッグレッグタイプとは、4本のリンクが矩形を構成する閉リンク構造のアームであり、隣接する2本のリンクがなす角度を変化させることによって、アーム先端(基部に対する対角の位置)を伸縮させるものである。また、このタイプのアームは、アーム基部を回転させることによって、アーム先端を回転移動させる。なお、以下では、簡単のため、「ウエハ搬送ロボット」を単純に「搬送ロボット」と称することにする。また、「半導体ウエハ」を単純に「ウエハ」と称することにする。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−150617号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
搬送ロボットの使い方の一つに、互いに向き合っているチャンバの一方から他方へウエハを移動させることがある。即ち、搬送ロボットには、アーム基部を中心に180度の可動範囲が要求されることがよくある。他方、チャンバは正面に出し入れ口があるため、搬送ロボットは、チャンバの正面にてアーム先端が前後に動く構造を有している必要もある。上記の要求に対応するため、従来の搬送ロボットは、アームの基部が旋回するように構成されている。即ち、従来の搬送ロボットは、アーム先端を前後に動かす第1の動作と、アーム全体を旋回させる第2の動作を必要とする。従来のウエハ搬送ロボットはそのような2ステップモーションを実行するため、ウエハを対向しているチャンバ間を移動させるのに時間がかかる。本明細書が開示する技術は、ウエハを対向するチャンバ間でスムーズに移動することのできる搬送ロボットを提供する。
【課題を解決するための手段】
【0005】
本明細書が開示する搬送ロボットは、アーム先端からアーム基部までが複数のリンクで構成されているアームを備える。アーム先端にはウエハホルダが備えられている。アーム基部に相当する駆動リンクは筐体に回転可能に連結されている。なお、「駆動リンク」とは、アクチュエータの駆動力が最初に伝えられるリンクを意味する。このアームは、駆動リンクの回転に伴うアーム先端の運動が直線又は曲線の軌道に制限される構造を有しているとともに、その軌道は、始点と終点が駆動リンクの回転中心から等距離の位置にあり、始点におけるアーム先端の向きと終点におけるアーム先端の向きが、始点と終点の間の中点と上記回転中心を通る直線に対して鏡像の関係を満たしていることを特徴とする。より好ましくは、軌道の始点におけるアーム先端の向きと終点におけるアーム先端の向きが正反対になっている。
【0006】
「駆動リンクの回転に伴うアーム先端の運動が直線又は曲線の軌道に制限されるリンク構造」は、ロボットの技術分野では「限定連鎖構造」、或いは、「one degree of freedom linkage mechanism」と呼ばれている。限定連鎖構造の典型例は、閉4リンク機構のクランク−ロッカー機構(crank-rocker mechanism)である。上記のアームは、軌道始点におけるアーム先端の向きと終点におけるアーム先端の向きが正反対になっている。従って、第1のチャンバに始点を設定し、第1のチャンバに対向している第2のチャンバに終点を設定することができる。そして上記のアームは、始点から終点まで直線あるいは曲線に沿ってスムーズに移動することができる。
【0007】
また、上記の搬送ロボットは、ウエハを、一つのアクチュエータで対向する2つのチャンバ間を移動させることができる点も利点の一つである。例えば特許文献1の搬送ロボットでは、アームを伸縮させるための第1アクチュエータと、アームを旋回させるための第2アクチュエータが必要である。これに対して本明細書が開示する搬送ロボットは一つのアクチュエータでウエハを移動することができる。
【0008】
上記した搬送ロボットでは、アーム先端軌道を、始点と終点を結ぶ線分を長辺とし、短辺の長さが長辺の1/4である矩形の領域内に設定することができる。そのように設定すると、対向する2つのチャンバの間でウエハを移動させるために確保しなければならない空間を小さくすることができる。好ましくは、上記した先端軌道は直線であることが好ましい。
【0009】
アームの具体的な構造の幾つかは実施例にて説明する。また、それぞれのアームの利点についても実施例にて説明する。
【図面の簡単な説明】
【0010】
【図1】第1実施例のウエハ搬送ロボットの平面図と側面図である。
【図2】第1実施例のウエハ搬送ロボットの部分拡大平面図である。
【図3A】第1実施例のウエハ搬送ロボットの動きを説明する図である(Ta=0deg)。
【図3B】第1実施例のウエハ搬送ロボットの動きを説明する図である(Ta=45deg)。
【図3C】第1実施例のウエハ搬送ロボットの動きを説明する図である(Ta=120deg)。
【図3D】第1実施例のウエハ搬送ロボットの動きを説明する図である(Ta=180deg)。
【図4】アーム先端速度のグラフである。
【図5】第2実施例のウエハ搬送ロボットの平面図である。
【図6】第2実施例のウエハ搬送ロボットの部分拡大平面図である。
【図7A】第2実施例のウエハ搬送ロボットの動きを説明する図である(Ta=0deg)。
【図7B】第2実施例のウエハ搬送ロボットの動きを説明する図である(Ta=30deg)。
【図7C】第2実施例のウエハ搬送ロボットの動きを説明する図である(Ta=90deg)。
【図7D】第2実施例のウエハ搬送ロボットの動きを説明する図である(Ta=180deg)。
【図8】第3実施例のウエハ搬送ロボットの平面図である。
【図9】第4実施例のウエハ搬送ロボットの平面図である。
【図10】第5実施例のウエハ搬送ロボットの平面図である。
【図11A】第5実施例のウエハ搬送ロボットの動きを説明する図である(Ta=15deg)。
【図11B】第5実施例のウエハ搬送ロボットの動きを説明する図である(Ta=90deg)。
【図11C】第5実施例のウエハ搬送ロボットの動きを説明する図である(Ta=135deg)。
【図11D】第5実施例のウエハ搬送ロボットの動きを説明する図である(Ta=270deg)。
【図11E】第5実施例のウエハ搬送ロボットの動きを説明する図である(Ta=345deg)。
【図12】第5実施例のウエハ搬送ロボットの先端が動く範囲を示す図である。
【図13】第5実施例のウエハ搬送ロボットの変形例の平面図である。
【図14】図13の範囲S1の拡大図である。
【図15】第5実施例のウエハ搬送ロボットの別の変形例の平面図である。
【図16】第6実施例のウエハ搬送ロボットの平面図である。
【図17】第4実施例のウエハ搬送ロボットの軌道の範囲を示す図である。
【実施例】
【0011】
(第1実施例)図1は、第1実施例のウエハ搬送ロボット100の平面図と側面図である。図1の上側が平面図であり、下側が側面図である。このウエハ搬送ロボット100は、ウエハWを、互いに対向するチャンバ92とチャンバ94の間で搬送する。ウエハ搬送ロボット100は、ウエハWを水平面内で動かすことができる。以下、「ウエハ搬送ロボット」を単純に「ロボット」と称することがある。また、図面に記した座標軸は、XY面が水平面に相当し、Z軸が鉛直方向に相当する。
【0012】
ロボット100は、筐体2と、アーム10を備える。アーム10は、駆動リンク13と従動リンク12から構成されている。駆動リンク13は、アーム10の基部に相当し、その一端が筐体2に連結している。筐体内にはモータ3(アクチュエータ)が備えられており、そのモータ3が、駆動リンク13をポイントAを中心に旋回させる。なお、ポイントAは、駆動リンク13の一端に相当するとともに、アーム10の旋回中心にも相当する。駆動リンク13の他端(ポイントB)は、従動リンク12の長手方向中間点に連結している。従動リンク12の一端(ポイントF)にはウエハホルダ6が取り付けられており、従動リンク12の他端(ポイントC)は、直線レール4に係合している。ウエハホルダ6は、空気吸着方式にてウエハWを保持する。なお、「ポイントA」、「ポイントB」等は、リンク上に設定された点であり、リンクの回転中心、或いは、他のリンクとの連結点、或いは、直線レールへの拘束点のいずれかを意味する。また、「駆動リンク」とは、アームを構成するリンク群のうち、モータ(アクチュエータ)のトルクが最初に伝達されるリンクを指す。駆動リンク以外のリンクが従動リンクに相当する。
【0013】
図2にポイントC付近の拡大平面図を示す。従動リンク12の他端(ポイントC)には、スライダ12aが取り付けられており、このスライダ12aが直線レール4に係合している。スライダ12aは直線レール4に沿って移動することができる。即ち、従動リンク12の一端(ポイントC)が直線レール4に沿って移動することができる。
【0014】
アーム10において、従動リンク12の一端(ポイントC)の動きが直線レール4によって制限される。そのため、駆動リンク13がポイントAを中心に時計回りに旋回すると、アーム先端(ポイントF)は、直線又は曲線に沿って動く。アーム先端の軌道Psは、各リンクの幾何学的形態(コンフィグレーション)に依存する。アーム10は、AB=BC=BFの関係を有している。この関係によって、駆動リンク13がポイントAを中心に旋回すると、アーム先端(ポイントF)が直線軌道Psに沿って動くという関係が得られる。アーム先端の軌道Psは、ポイントWsを始点とし、ポイントWeを終点とする直線となる。ポイントWsは、一方のチャンバ92のウエハセット位置に相当し、ポイントWeは、他方のチャンバ94のウエハセット位置に相当する。なお、ポイントWeを始点とし、ポイントWsを終点としてもよいことに留意されたい。
【0015】
図3Aから図3Dを参照してアーム10の動きを説明する。なお、ポイントWsとポイントWeを結ぶ直線と駆動リンク13の間の角度Taを用いてアーム10の動きを説明する。最初は、アーム先端(ポイントF)は、始点Wsに位置する。この状態は、Ta=0[deg]に相当する(図3A)。Ta=45[deg]のときのアーム10の姿勢を図3Bに示す。このとき、三角形ABCは直角二等辺三角形となる。同時に、三角形ABFも直角二等辺三角形となる。また、三角形ABC=三角形ABFの関係が成立する。図3Cは、Ta=120[deg]のときのアーム姿勢を示し、図3Dは、Ta=180[deg]のときのアーム姿勢を示す。図3A〜図3Dから明らかなとおり、アーム10の先端(ポイントF)は、直線軌道Ps上を移動する。また軌道Psの始点(ポイントWs)におけるアーム先端の向きと終点(ポイントWe)におけるアーム先端の向きは互いに逆向きである。
【0016】
アーム先端の速度について説明する。図4は、駆動リンク13を一定角速度で旋回させたときの、始点(ポイントWs)から終点(ポイントWe)に移動する間におけるアーム先端の速度Vの推移を記したグラフである。図4に示すように、アーム先端の速度Vは、始点Wsから中間点Wmに向けて単調に増加し、中間点Wmから終点Weに向けて単調に減少する。このことは、図4の上側に示したアーム10の構造からも明らかである。即ち、始点Ws(終点We)において、駆動リンク13の長手方向が旋回中心(ポイントA)とアーム先端(ポイントF)を結ぶ直線上にある。そのような幾何学的関係においては、アーム先端の速度Vに対する駆動リンク13の先端の速度の寄与が最も小さくなるからである。なお、アーム先端の軌道Psの始点Wsと終点Weは、クランク−ピストン機構における「死点」に相当する。
【0017】
アーム10の構造は、次のように説明することもできる。アーム10は、駆動リンク13と従動リンク12を備えている、駆動リンク13の一端は筐体2に回転可能に連結しており、他端は従動リンク12の長手方向の途中(長手方向中央)に連結している。従動リンク12の一端は筐体2に固定された直線レール4にスライド可能に連結しており、他端にはウエハホルダ6が取り付けられている。従動リンク12の他端がアーム先端に相当する。アーム10の一点(従動リンク12の一端)が、筐体2に設けられた直線レール4に沿ってスライドするように拘束されている。この拘束により、駆動リンク13の一端が回転すると、従動リンク12の一端が直線レール4の上をスライドするとともに、他端(アーム先端)が直線運動する。従動リンク12の長さCFは駆動リンク13の長さABの2倍である。
【0018】
ロボット100の利点を説明する。ロボット100は、一つのアクチュエータで、アーム先端を始点Wsから終点Weへ直線軌道Psに沿って移動させることができる。ここで、アーム先端の向きは始点Wsと終点Weで正反対である。このことから、ロボット100は、互いに向きあう2つのチャンバの間でウエハを移動させるのに好適である。また、アーム先端の速度は、モータの回転を一定に保ったままで、始点Ws付近で徐々に速く、終点We付近で徐々に遅くなる。そのような構造も、ウエハ搬送には好都合である。
【0019】
(第2実施例)図5は、第2実施例のロボット200の平面図である。第2実施例のロボット200は、3つのリンクから構成されるアーム20を備える。第2実施例の図において、第1実施例のロボット100と同じ部品には同じ符号を付している。同じ部品については説明を省略する場合がある。
【0020】
アーム20は、駆動リンク23、第1従動リンク21、及び、第2従動リンク22から構成される。駆動リンク23は、アーム20の基部に相当し、その一端(ポイントA)が筐体2に連結している。筐体2の内部にはモータ3が備えられており、そのモータ3が、駆動リンク23を、ポイントAを中心に旋回させる。駆動リンク23の他端は、第1従動リンク21の一端(ポイントB)に連結している。第1従動リンク21の他端(ポイントF)にはウエハホルダ6が取り付けられている。第1従動リンク21の他端(ポイントF)が、アーム20の先端に相当する。第1従動リンク21の中間点(ポイントD)には、第2従動リンク22の一端が連結されている。第2従動リンク22の他端(ポイントC)は、第1直線レール4に係合している。第2従動リンク22の他端(ポイントC)は、第1直線レール4に沿って移動することができる。第2従動リンク22の中間点(ポイントE)は、第2直線レール5に係合しており、第2直線レール5に沿って移動することができる。図6に、ポイントE付近とポイントC付近の拡大図を示す。第2従動リンク22の一端(ポイントC)には、スライダ22bが取り付けられており、このスライダ22bが第1直線レール4に係合している。第2従動リンク22の中間点(ポイントE)には、スライダ22aが取り付けられており、このスライダ22aが第2直線レール5に係合している。図5から明らかなとおり、第1直線レール4と第2直線レール5は直交している。
【0021】
アーム20は、第2従動リンク22の一端(ポイントC)の動きが第1直線レール4によって制限されるとともに、中間点(ポイントE)の動きが第2直線レール5によって制限される。この制限により、駆動リンク23がポイントAを中心に時計回りに旋回すると、アーム先端(ポイントF)は、直線又は曲線に沿って動く。アーム先端の軌道Psは、各リンクの幾何学的形態(コンフィグレーション)に依存する。アーム20は、AB=BF=CE=2EDの関係を有している。この関係によって、駆動リンク23がポイントAを中心に旋回するとき、アーム先端(ポイントF)は、直線軌道Psに沿って動く。アーム先端の軌道Psは、ポイントWsを始点とし、ポイントWeを終点とする直線となる。ポイントWsは、一方のチャンバ92のウエハセット位置に相当し、ポイントWeは、他方のチャンバ94のウエハセット位置に相当する。
【0022】
図7Aから図7Dを参照してアーム20の動きを説明する。なお、第1実施例の場合と同じように、ポイントWsとポイントWeを結ぶ直線と駆動リンク23の間の角度Taを用いてアーム20の動きを説明する。最初は、アーム先端(ポイントF)は、始点Wsに位置する。このとき、Ta=0[deg]に相当する(図7A)。Ta=30[deg]のときのアーム20の姿勢を図7Bに示す。三角形ABFは常に二等辺三角形となる。図7CはTa=90[deg]のときのアーム姿勢を示し、図7Dは、Ta=180[deg]のときのアーム姿勢を示す。Ta=90[deg]のとき、アーム先端(ポイントF)は、軌道Psの中間点に位置する。軌道Psの中間点は、アーム基部の旋回中心(ポイントA)に一致する。
【0023】
図7A〜図7Dから明らかなとおり、アーム20の先端(ポイントF)は、直線軌道Ps上を移動する。また軌道Psの始点(ポイントWs)におけるアーム先端の向きと終点(ポイントWe)におけるアーム先端の向きは互いに逆向きである。アーム20の先端の速度は、第1実施例と同様に、駆動リンク23が一定の角速度で旋回するとき、始点Wsから中間点(ポイントA)に向けて単調に増加し、中間点(ポイントA)から終点Weに向けて単調に減少する。従って、ロボット200は、第1実施例のロボット100と同じ利点を有する。
【0024】
アーム20の構造は、次のように説明することもできる。アーム20は、駆動リンク23、第1従動リンク21、第2従動リンク22を備えている。駆動リンク23の一端(ポイントA)は、筐体2に回転可能に連結しており、他端(ポイントB)は、第1従動リンク21の一端に連結している。筐体2内にはモータ3が配置されており、そのモータ3が、ポイントAを中心にして駆動リンク23を旋回させる。第1従動リンク21の他端(ポイントF)にはウエハホルダ6が取り付けられている。第1従動リンク21の他端がアーム先端に相当する。第1従動リンク21の中点(ポイントD)に、第2従動リンク22の一端が連結している。第2従動リンク22の他端(ポイントC)は、筐体2に設けられた第1直線レール4にスライド可能に拘束されている。第2従動リンク22の長手方向の途中の点(ポイントE)が、第1直線レール4に直交する第2直線レール5にスライド可能に係合されている。ポイントEは、ポイントDから、第2従動リンク22の長さの1/3の距離の位置である。第2従動リンク22のこの拘束により、駆動リンク23が旋回すると、第1従動リンク21の一端(アーム先端に相当する)が直線軌道Ps上を移動する。そして、直線軌道Psの始点Wsと終点We、及び、駆動リンク23の旋回中心(ポイントA)は一直線に並んでいる。また、始点Wsと終点Weは、旋回中心(ポイントA)から等距離の位置にある。さらに、始点Wsにおけるアーム先端の向きと、終点Weにおけるアーム先端の向きは互いに逆向きである。駆動リンク23の長さABは第1従動リンク21の長さBFに等しく、また、第2従動リンク22の2つの拘束点(ポイントCとポイントE)の間の距離CEとも等しい。第1従動リンク21と第2従動リンク22の連結点(ポイントD)は、第1従動リンク21の長手方向の中点である。これらの関係により、駆動リンク23と第2従動リンク22は常に平行に保たれる。
【0025】
(第3実施例)図8に第3実施例のロボット300の平面図を示す。第3実施例のロボット300のアーム30は、第2実施例のアーム20の第1直線レール4の代わりに第3従動リンク34を有する。
【0026】
アーム30の構造について詳しく述べる。アーム30は、駆動リンク33、第1従動リンク31、第2従動リンク32、及び、第3従動リンク34を備えている。駆動リンク33の一端(ポイントA)は、筐体2に回転可能に連結しており、他端(ポイントB)は、第1従動リンク31の一端に連結している。筐体2内にはモータ3が配置されており、そのモータ3が、ポイントAを中心にして駆動リンク33を旋回させる。第1従動リンク31の他端(ポイントF)にはウエハホルダ6が取り付けられている。第1従動リンク31の他端(ポイントF)がアーム先端に相当する。第1従動リンク31の長手方向中点(ポイントD)に、第2従動リンク32の一端が連結している。第2従動リンク32の他端(ポイントC)は、第3従動リンク34の一端に連結している。第3従動リンク34の他端は、駆動リンク33の一端(ポイントA)に連結している。第2従動リンク32の長手方向中点(ポイントE)が、直線レール5にスライド可能に係合している。アーム30は、アーム上の定められた点(ポイントE)が、筐体2に設けられた直線レール5に沿ってスライドするように拘束されている。上記の構成により、駆動リンク33が時計回りに旋回すると、第1従動リンク31の一端(アーム先端に相当する)が直線軌道Ps上を移動する。直線軌道Psの始点Wsと終点Weは、駆動リンク33の回転中心(ポイントA)とともに一直線に並んでいる。始点Wsと終点Weは、回転中心(ポイントA)から等距離の位置にある。また、始点Wsにおけるアーム先端の向きと、終点Weにおけるアーム先端の向きは互いに逆向きである。駆動リンク33の長さABは第1従動リンク31の長さBFに等しく、また、第2従動リンク32の長さCDにも等しい。第1従動リンク31と第2従動リンク32の連結点(ポイントD)は、第1従動リンク31の長手方向の中点である。第3従動リンク34の長さACは、第1従動リンク31の長さBFの1/2である。駆動リンク33と第2従動リンク32は常に平行を保つ。
【0027】
第3実施例のロボット300のアーム30の動きは、第2実施例のロボット200のアーム20とほぼ同じ動きをする。即ち、アーム30の先端(ポイントF)は、直線軌道Ps上を移動する。また軌道Psの始点Wsにおけるアーム先端の向きと終点Weにおけるアーム先端の向きは互いに逆向きである。アーム30の先端の速度は、第1、第2実施例と同様に、駆動リンク23が一定の角速度で回転するとき、始点Wsから中間点(ポイントA)に向けて単調に増加し、中間点(ポイントA)から終点Weに向けて単調に減少する。
【0028】
(第4実施例)図9に第4実施例のロボット400の平面図を示す。第4実施例のロボット400は、さらに多数の従動リンクを有するが、その代り、レールを備えていない。
【0029】
アーム40は、駆動リンク48と、7本の従動リンク41〜47を備える。駆動リンク48は、アーム40の基部に相当し、その一端(ポイントA)が筐体2に連結している。筐体2の内部にはモータ3が備えられており、そのモータ3が、駆動リンク48を、ポイントAを中心に旋回させる。駆動リンク48の他端は、第7従動リンク47の一端(ポイントG)に連結している。第7従動リンク47の他端はアームの先端に相当し、ウエハホルダ6が取り付けられている。図9の符号40bが示す破線は、アーム先端(ポイントH)が終点Weに到達したときのアームの姿勢を示している。
【0030】
従動リンク43、45、46が一つのパラレルリンクを構成している。従動リンク45の一端(ポイントD)と従動リンク46の一端(ポイントA)は筐体2に連結している。従動リンク45の他端(ポイントC)と従動リンク46の他端(ポイントB)は、夫々従動リンク43の端部に連結している。従動リンク43の長さBCと、距離ADは等しく、そのため、従動リンク45と46は常に平行を保つ。
【0031】
従動リンク41、42、44が、別のパラレルリンクを構成している。従動リンク42の一端(ポイントC)は従動リンク43の一端に連結しており、従動リンク44の一端(ポイントB)は従動リンク43の他端に連結している。従動リンク42の他端(ポイントE)は従動リンク41の一端に連結しており、従動リンク44の他端(ポイントF)は従動リンク41の他端に連結している。従動リンク42と44は常に平行を保つ。また、従動リンク44の他端(ポイントF)は、第7従動リンク47の中点に連結している。従動リンク45の長さCDと従動リンク46の長さABは等しい。また、従動リンク42の長さCEと従動リンク44の長さBFも等しい。なお、このアーム40では、[長さAB]−[長さBF]=[長さAG]−[長さFG]の関係を満たす。
【0032】
上記の構成を有するアーム40では、駆動リンク48がポイントAを中心に時計回りに旋回すると、アーム先端(ポイントH)は、曲線軌道Psに沿って動く。始点Wsは、一方のチャンバ92のウエハセット位置に相当し、終点Weは、他方のチャンバ94のウエハセット位置に相当する。軌道Psの始点Wsにおけるアーム先端の向きと終点Weにおけるアーム先端の向きは互いに逆向きである。駆動リンク48を一定の角速度で回転させたとき、アーム先端(ポイントH)の速度は、始点Wsから軌道Ps上の中間点(ポイントA)に向けて単調に増加し、中間点(ポイントA)から終点Weに向けて単調に減少する。
【0033】
(第5実施例)図10に第5実施例のロボット500の平面図を示す。第5実施例のロボット500は、2リンクからなるアーム50を備える。アーム50は、駆動リンク51と従動リンク52で構成される。駆動リンク51は、アーム50の基部に相当し、その一端(ポイントA)が筐体2に連結している。筐体2の内部にはモータ3が備えられており、そのモータ3が、駆動リンク51を、ポイントAを中心に旋回させる。駆動リンク51の他端(ポイントB)は、従動リンク52の一端に連結している。従動リンク52の他端(ポイントF)にはウエハホルダ6が取り付けられている。従動リンク52の他端(ポイントF)が、アーム50の先端に相当する。従動リンク52は、その長手方向の中心線に沿って伸びるスリット52aを有している。スリット52aには、筐体2に支持されたローラ55が嵌合している。即ち、アーム50の従動リンク52は、筐体2の予め定められた拘束点(ローラ55)に、リンク長手方向に沿ってスライド可能に係合している。
【0034】
図11A〜図11Eを参照してアームの動きを説明する。図11A〜図11Eは夫々、Ta=15[deg]、90[deg]、135[deg]、270[deg]、345[deg]のときのアームの姿勢を示している。図11A〜図11Eから明らかなように、上記の構造により、駆動リンク51がポイントAを中心に反時計回りに旋回すると、アーム先端(ポイントF)は、図10に示す曲線軌道Psに沿って移動する。図10に示すように、アーム先端の軌道Psは、ポイントWsを始点とし、ポイントWeを終点とする。始点Wsは、一方のチャンバ92のウエハセット位置に相当し、終点Weは、他方のチャンバ94のウエハセット位置に相当する。始点Wsと終点Weは、アーム50の回転中心(ポイントA)から等距離にある。また軌道Psの始点Wsにおけるアーム先端の向きと終点Weにおけるアーム先端の向きは互いに逆向きである。
【0035】
図12に、ロボット500のアーム先端(ポイントF)が移動する範囲を示す。符号RTが示す矩形が、アーム先端の軌道Psを囲む領域である。図12において、矩形RTの長辺の長さL1は、軌道Psの始点Wsと終点Weを結ぶ線分の長さに相当する。矩形RTの短辺の長さL2は、長辺の長さL1の1/4以下である。短辺の長さL2が長辺の長さL1の1/4以下であることの利点については後述する。
【0036】
次に、第5実施例の変形例を説明する。図13は、変形例のロボット510の平面図である。図14は、図13の符号S1で囲った範囲の拡大図である。ロボット510は、従動リンク52を拘束するローラ555の構造に特徴がある。この変形例のローラ555は、2個のサブアクチュエータ512、513を介して筐体2に支持されている。サブアクチュエータ512、513は、ピエゾ素子であり、ローラ555の位置をXY平面(アーム先端の移動平面)内で僅かに移動させる。ローラ555の位置を微動させることによって、アーム50の先端位置を微調整することが可能となる。
【0037】
図15は、第5実施例のさらに別の変形例のロボット520の平面図である。このロボット520では、4本のサブリンク521、522、523、及び、524が駆動リンク529を構成している。4本のサブリンク521、522、523、及び524は、パンタグラフ構造を構成している。モータ3は、アーム基部の回転軸(ポイントA)を中心として駆動リンク529の先端(ポイントB)を旋回させる。駆動リンク529にはサブモータ525(サブアクチュエータ)が備えられている。サブモータ525は、サブリンク521と522の角度を変化させて、駆動リンク529の長さABを変化させる。駆動リンク529の長さを変化させることによって、基部(ポイントA)に対するアーム先端の位置を微調整することが可能となる。
【0038】
変形例のロボット510、520はともに、アーム先端の位置を微調整する機構とそのためのサブアクチュエータを有している。別言すれば、サブアクチュエータを含む微調整機構は、前記した拘束点を移動させるものである。この微調整機構によって、始点Wsあるいは終点Weにおけるウエハの位置を調整することができる。
【0039】
(第6実施例)以上説明したウエハ搬送ロボットは、いずれも、アーム先端の軌道の始点Wsと終点Weが駆動リンクの回転中心から等距離の位置にあり、その軌道の始点Wsにおけるアーム先端の向きと終点Weにおけるアーム先端の向きが正反対になっている。本明細書が開示する技術は、始点Wsにおけるアーム先端の向きと終点Weにおけるアーム先端の向きは180度の角度をなす場合に限られない。本明細書が開示するウエハ搬送ロボットは、アーム先端の軌道の始点Wsと終点Weが駆動リンクの回転中心から等距離の位置にあり、その軌道の始点Wsにおけるアーム先端の向きと終点Weにおけるアーム先端の向きが、始点Wsと終点Weの間の中点と回転中心を通る直線に対して鏡像の関係を満たしていればよい。
【0040】
そのような関係を満たすロボット600を説明する(第6実施例)。図16に、ロボット600の平面図を示す。ロボット600の幾何学的構造は、第5実施例のロボット500と同じである。ロボット600の構造については説明を省略する。ロボット600のアーム先端の軌道Psは、その始点Wsと終点Weの位置が第5実施例とは異なるだけである。ロボット600における始点Wsと終点Weの位置は、第5実施例のロボット500における軌道Psの途中にある。図16に示すポイントCPは、始点Wsと終点Weの間の中点である。即ち、始点WsとポイントCPの間の距離DW1は、終点WeとポイントCPの間の距離DW2に等しい(DW1=DW2)。図16の直線CLは、ポイントCPと、ポイントA(駆動リンクの回転中心)を通る直線である。図16から明らかなとおり、アーム先端(ポイントF)が始点Wsに位置するときのアーム姿勢(アーム50a)と、アーム先端が終点Weに位置するときのアーム姿勢(アーム50b)は、直線CLに関して鏡像の関係にある。このことは、始点Wsにおけるアーム先端の向きと終点Weにおけるアーム先端の向きが、直線CLに対して鏡像の関係を満たしていることを意味する。このロボット600も、他の実施例のロボットと同様の利点を有する。
【0041】
なお、始点Wsにおけるアーム先端の向きと終点Weにおけるアーム先端の向きが180度の角度をなす場合(第1実施例〜第5実施例)、始点Wsにおけるアーム先端の向きと終点Weにおけるアーム先端の向きは、必ず始点Wsと終点Weの間の中点と回転中心を通る直線に対して鏡像の関係を満たす。
【0042】
上記説明した実施例の留意点を述べる。第1〜第3実施例のロボットは、アーム先端の軌道が直線である。アーム先端の軌道は直線に限られず、曲線であってもよい。例えば、第4実施例のロボット400と第5実施例のロボット500(第6実施例のロボット600)では、アーム先端の軌道は曲線を描く。また、第1〜第3実施例のロボットにおいて、各リンクの長さを変更することによってもアーム軌道を変更できる。
【0043】
図17は、第4実施例のロボット400のアーム先端が描く軌道Psを囲む矩形RTを示した図である。図17において、矩形RTの長辺の長さL1は、軌道Psの始点Wsと終点Weを結ぶ線分の長さに相当する。矩形RTの短辺の長さL2は、長辺の長さL1の1/4以下である。即ち、アーム先端の軌道Psは、始点Wsと終点Weを結ぶ線分を長辺とし、短辺の長さが長辺の1/4である矩形RTの領域内に設定されている。
【0044】
アーム先端の軌道Psが上記した矩形RTの領域内に設定されていることの利点を説明する。先端が平面内で移動するアームでは、同じ長さの2本のリンクが直列に連結された構造が採用されることがよくある。1本のリンクアームの長さをLTとする。その場合、アーム先端の最大到達距離は基部の回転中心から2LTの距離となる。従って、アーム軌道の始点から終点までの最大距離は4LTとなる。他方、1本のリンクの長さがLTであるから、アームの動く範囲は、基部の回転中心から半径LTの範囲よりも小さくはならない。そうすると、2リンクアーム(リンク長さLT)の先端の軌道は、概ね、始点Wsと終点Weを結ぶ線分を長辺とし、短辺の長さが長辺の1/4である矩形RTの範囲内となる。本明細書が開示する実施例のウエハ搬送ロボットも、そのアーム先端の軌道は、始点Wsと終点Weを結ぶ線分を長辺とし、短辺の長さが長辺の1/4である矩形RTの範囲内に設定される。即ち、本明細書が開示する実施例のウエハ搬送ロボットも、従来の2リンクアームを有するウエハ搬送ロボットのアーム先端軌道の範囲と同等である。他方、従来のウエハ搬送ロボットは、アーム伸縮用のアクチュエータと、アーム旋回用のアクチュエータの少なくとも2個を有しており、それぞれのモータを別々に動かすために、始点から終点までアーム先端を動かすのに相当の時間を要していた。本明細書が開示する実施例のウエハ搬送用のロボットは、1つのアクチュエータでアーム先端を、始点から終点まで(しかもアーム先端の向きが始点とは正反対である終点まで)移動することができるから、アーム先端の移動がスムーズである。
【0045】
以上、本発明の具体例を詳細に説明したが、これらは例示に過ぎず、特許請求の範囲を限定するものではない。特許請求の範囲に記載の技術には、以上に例示した具体例を様々に変形、変更したものが含まれる。本明細書または図面に説明した技術要素は、単独であるいは各種の組合せによって技術的有用性を発揮するものであり、出願時請求項記載の組合せに限定されるものではない。また、本明細書または図面に例示した技術は複数目的を同時に達成し得るものであり、そのうちの一つの目的を達成すること自体で技術的有用性を持つものである。
【符号の説明】
【0046】
2:筐体
3:モータ
4、5:レール
6:ウエハホルダ
10、20、30:アーム
12、21、22、31、32、34:従動リンク
13、23、33:駆動リンク
22a、22b:スライダ
40、50:アーム
41−47:従動リンク
48、51:駆動リンク
52:従動リンク
52a:スリット
55:555:ローラ
92、94:チャンバ
100、200、300、400、500、600:ウエハ搬送ロボット
512、513、525:サブアクチュエータ
【特許請求の範囲】
【請求項1】
半導体ウエハを搬送するためのウエハ搬送ロボットであり、
筐体と、
アーム先端にウエハホルダが取り付けられているとともに、アーム基部が筐体に連結しており、複数のリンクで構成されているアームと、
アーム基部に相当する駆動リンクを回転させるアクチュエータと、
を備えており、前記アームは、
駆動リンクの回転に伴うアーム先端の運動が直線又は曲線の軌道に制限されているリンク構造を有しており、
前記軌道の始点と終点が駆動リンクの回転中心から等距離の位置にあり、前記軌道の始点におけるアーム先端の向きと終点におけるアーム先端の向きが、始点と終点の間の中点と前記回転中心を通る直線に対して鏡像の関係を満たしている、
ことを特徴とするウエハ搬送ロボット。
【請求項2】
前記軌道の始点におけるアーム先端の向きと終点におけるアーム先端の向きが正反対になっていることを特徴とする請求項1に記載のウエハ搬送ロボット。
【請求項3】
前記軌道が、始点と終点を結ぶ線分を長辺とし、短辺の長さが長辺の1/4である矩形の領域内に設定されていることを特徴とする請求項1又は2に記載のウエハ搬送ロボット。
【請求項4】
前記軌道が、始点と終点を結ぶ直線であることを特徴とする請求項1から3のいずれか1項に記載のウエハ搬送ロボット。
【請求項5】
リンク同士の連結位置を変更するサブアクチュエータを備えていることを特徴とする請求項1から4のいずれか1項に記載のウエハ搬送ロボット。
【請求項6】
駆動リンクを一定速度で回転させたときに、先端の速度が、始点から軌道中間点に向けて単調に増加し、軌道中間点から終点に向けて単調に減少するように、アームのリンク構造が構成されていることを特徴とする請求項1から5のいずれか1項に記載のウエハ搬送ロボット。
【請求項7】
アームの一つのリンクが、筐体上の予め定められた拘束点に、リンク長手方向に沿ってスライド可能に係合していることを特徴とする請求項1から6のいずれか1項に記載のウエハ搬送ロボット。
【請求項8】
前記サブアクチュエータは、前記拘束点を移動させるものであることを特徴とする請求項7に記載のウエハ搬送ロボット。
【請求項9】
アーム上の予め定められた拘束点が、筐体上に設けられた直線レールに沿ってスライドするように拘束されていることを特徴とする請求項1から6のいずれか1項に記載のウエハ搬送ロボット。
【請求項1】
半導体ウエハを搬送するためのウエハ搬送ロボットであり、
筐体と、
アーム先端にウエハホルダが取り付けられているとともに、アーム基部が筐体に連結しており、複数のリンクで構成されているアームと、
アーム基部に相当する駆動リンクを回転させるアクチュエータと、
を備えており、前記アームは、
駆動リンクの回転に伴うアーム先端の運動が直線又は曲線の軌道に制限されているリンク構造を有しており、
前記軌道の始点と終点が駆動リンクの回転中心から等距離の位置にあり、前記軌道の始点におけるアーム先端の向きと終点におけるアーム先端の向きが、始点と終点の間の中点と前記回転中心を通る直線に対して鏡像の関係を満たしている、
ことを特徴とするウエハ搬送ロボット。
【請求項2】
前記軌道の始点におけるアーム先端の向きと終点におけるアーム先端の向きが正反対になっていることを特徴とする請求項1に記載のウエハ搬送ロボット。
【請求項3】
前記軌道が、始点と終点を結ぶ線分を長辺とし、短辺の長さが長辺の1/4である矩形の領域内に設定されていることを特徴とする請求項1又は2に記載のウエハ搬送ロボット。
【請求項4】
前記軌道が、始点と終点を結ぶ直線であることを特徴とする請求項1から3のいずれか1項に記載のウエハ搬送ロボット。
【請求項5】
リンク同士の連結位置を変更するサブアクチュエータを備えていることを特徴とする請求項1から4のいずれか1項に記載のウエハ搬送ロボット。
【請求項6】
駆動リンクを一定速度で回転させたときに、先端の速度が、始点から軌道中間点に向けて単調に増加し、軌道中間点から終点に向けて単調に減少するように、アームのリンク構造が構成されていることを特徴とする請求項1から5のいずれか1項に記載のウエハ搬送ロボット。
【請求項7】
アームの一つのリンクが、筐体上の予め定められた拘束点に、リンク長手方向に沿ってスライド可能に係合していることを特徴とする請求項1から6のいずれか1項に記載のウエハ搬送ロボット。
【請求項8】
前記サブアクチュエータは、前記拘束点を移動させるものであることを特徴とする請求項7に記載のウエハ搬送ロボット。
【請求項9】
アーム上の予め定められた拘束点が、筐体上に設けられた直線レールに沿ってスライドするように拘束されていることを特徴とする請求項1から6のいずれか1項に記載のウエハ搬送ロボット。
【図1】


【図2】
【図3A】
【図3B】
【図3C】
【図3D】
【図4】
【図5】

【図6】
【図7A】
【図7B】
【図7C】
【図7D】
【図8】
【図9】
【図10】

【図11A】
【図11B】
【図11C】
【図11D】
【図11E】
【図12】
【図13】
【図14】
【図15】

【図16】

【図17】
【図2】
【図3A】
【図3B】
【図3C】
【図3D】
【図4】
【図5】
【図6】
【図7A】
【図7B】
【図7C】
【図7D】
【図8】
【図9】
【図10】
【図11A】
【図11B】
【図11C】
【図11D】
【図11E】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2012−156308(P2012−156308A)
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願番号】特願2011−14073(P2011−14073)
【出願日】平成23年1月26日(2011.1.26)
【出願人】(503405689)ナブテスコ株式会社 (737)
【Fターム(参考)】
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願日】平成23年1月26日(2011.1.26)
【出願人】(503405689)ナブテスコ株式会社 (737)
【Fターム(参考)】
[ Back to top ]