
エアロゾル焦点化装置用の圧流レジューサ
高流束、大気圧でのサンプリングを行い、空力学的な焦点化レンズスタックを介して、真空中に十分に焦点化された粒子ビームを供給するための、圧流レジューサ、およびそのような圧流レジューサを備えるエアロゾル焦点化システム。圧流レジューサは、サンプリング流速を調整する入口ノズルと、圧力および流束を抑制するためのスキマーおよび排出ポートを備える圧流抑制領域と、エアロゾル粒子を遅延または停止させる緩和チャンバとを有し、低圧、低流束のエアロゾル焦点化装置と接することが可能である。この方法では、圧流レジューサは、流束と圧力を分離し、大気圧および1リットル/分よりも大きな速度で、エアロゾルをサンプリングすることができる。

【発明の詳細な説明】
【技術分野】
【0001】
本発明の権利は、ローレンスリバーモア国立研究所の運営のための米国エネルギー省とカリフォルニア大学の間の契約、契約番号W-7405-ENG-48に準じ、米国政府が保有する。
【0002】
本出願は、エリック(Eric E. Gard)らによって2005年6月17日に出願された、No. 60/691,521号「エアロゾル焦点化装置用の圧流レジューサ」という題目の仮出願、およびビンセント(Vincent J. Riot)らによって2005年9月6日に出願された、No.60/714,689号「空力学的焦点化レンズスタック用の設計ツール」という題目の仮出願による優先権を主張するものである。
【0003】
本発明は、エアロゾル焦点化システムに関し、特に、焦点化レンズスタック技術を取り入れ、大気圧で作動するサンプル入口を真空に結合する圧流レジューサを有し、大きなサンプリング速度を得ることが可能な、エアロゾル焦点化システムに関する。
【背景技術】
【0004】
通常エアロゾル特徴機器には、透過損失がほとんどあるいは全くない、高焦点化粒子ビームが必要となる。また、これらは、より多くのエアロゾル粒子が収集され、感度が改善されるように、極めて大きなサンプリング速度でサンプル採取環境に適合する必要がある。空力学的焦点化レンズスタックは、真空中に大きな焦点化エアロゾル粒子ビームを発生することが示されており、これは各種エアロゾルの研究[1]に有効に使用されている。しかしながら、現在の焦点化レンズスタックは、小さな粒子径で作動し、低圧で低流速である[4]。0.5μmから10μmの範囲のエアロゾル粒子用の空力学的焦点化レンズスタックは、レンズスタック内での層流を維持する際に各焦点化レンズに必要となるレイノルド数が低いため、低流速度および低圧でのみ作動するように設計される。オリフィスの寸法は、許容可能な耐久性と整合させ、導入システムに整列させるため、100μm以上1cm未満に維持する必要がある。また、低圧および低流速のため、大気圧において空力学的焦点化レンズスタックをエアロゾル源と整合させることが極めて難しくなる。通常の場合、レンズスタックを大気圧環境に整合させるため、単一の臨界オリフィス装置が使用され、このオリフィスの寸法は、レンズスタックに必要な圧力により定められる。しかしながら、圧力と流速の間の結合により、サンプリングの流束が0.05L/分未満の場合、臨界オリフィスは、サンプリング効率が極めて低く、その結果、システム全体を透過する粒子の数は、極めて少なくなる。
【発明の開示】
【発明が解決しようとする課題】
【0005】
従って、エアロゾル質量分光分析を行い得る、大気圧と真空の間で整合が可能な、大きなサンプリング速度で、大粒子焦点化導入部を有するエアロゾル焦点化システム(AFS)が必要となっている[7]。特に、高流束大気圧サンプリングとともに空力学的レンズスタック焦点化技術を取り込んだエアロゾル焦点化システムであって、1μmから10μmの粒子範囲のため、真空において、例えば300μmの焦点化粒子ビームを供給する、エアロゾル焦点化システムの設計が必要である。また、高コストで長期間にわたる計算流体力学的なベンチトップ実験を行う必要なく、異なる作動条件における各種インターフェースシステムが迅速に設計されるように、AFS(AFSの個々の各種部材、例えばレンズスタックを含む)を寸法化し、検証する設計ツールも必要である。
【課題を解決するための手段】
【0006】
本発明のある態様は、作動圧力に特徴があるエアロゾル焦点化装置とともに使用される圧流レジューサ機器を有し、前記機器は、サンプリング環境から粒子搬送空気を引き込む入口ノズルを有し、サンプリング圧力は、エアロゾル焦点化装置の作動圧力よりも大きい。前記機器は、さらに、スキマーを有し、このスキマーは、入口ノズルよりも下流に配置され整列されたオリフィスを有し、スキマーと入口ノズルの間には、ギャップが形成される。前記機器は、さらに、ギャップと流体連通された排出ポートを有し、入口ノズルからの流束および圧力を抑制する。前記機器は、さらに、スキマーのオリフィスと流体連通された緩和チャンバであって、エアロゾル焦点化装置に流体接続が可能な出口を有する緩和チャンバを有し、スキマーのオリフィスから進入する粒子の速度を、エアロゾル焦点化装置から排出される前に抑制する。
【0007】
本発明の別の態様は、エアロゾル焦点化システムを含み、このエアロゾル焦点化システムは、作動圧力に特徴があり、出口ノズルを有するエアロゾル焦点化装置を有する。エアロゾル焦点化システムは、さらに、前記エアロゾル焦点化装置の上流に圧流レジューサ機器を有する。エアロゾル焦点化システムは、さらに、サンプリング環境から粒子搬送空気を引き込む入口ノズルを有し、サンプリング圧力は、エアロゾル焦点化装置の作動圧力よりも大きい。エアロゾル焦点化システムは、さらに、入口ノズルの下流に整列され配置されたオリフィスを有するスキマーを有し、スキマーと入口ノズルの間には、ギャップが形成される。エアロゾル焦点化システムは、さらに、ギャップと流体連通され、入口ノズルからの流束および圧力を抑制する排出ポートを有する。エアロゾル焦点化システムは、さらに、スキマーのオリフィスの下流に、スキマーのオリフィスと流体連通された緩和チャンバを有し、この緩和チャンバは、エアロゾル焦点化装置と流体的に結合することが可能な出口を有し、スキマーのオリフィスから進入する粒子の速度を、エアロゾル焦点化装置から出る前に抑制する。
【0008】
明細書に含まれている添付図面は、開示の一部を構成する。
【発明を実施するための最良の形態】
【0009】
(A エアロゾル焦点化システム)
本発明のエアロゾル焦点化システム(AFS)は、高流束、大気圧サンプリングとともに、空力学的レンズスタック焦点化技術を取り込んでおり、真空状態では、1μmから10μmの粒子範囲において、例えば300μmの狭小の焦点化粒子ビームを提供する。これは、バイオエアロゾル研究の場合、人の肺に良く堆積する有機体に対応する。これは、臨界オリフィスの代わりに、AFSの2つの他の主要部分、すなわち、空力学的焦点化レンズスタックのようなエアロゾル焦点化装置、およびエアロゾル焦点化装置の出口ノズル、に連動する圧流レジューサ(PFR)を使用することにより達成される。
【0010】
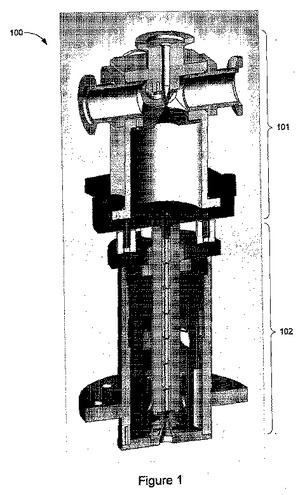
図面を参照すると、図1には、本発明のAFSの一例の3D断面図が示されている。AFSは、通常、参照番号100で示され、PFR101、およびPFRの下流に整列された空力学的焦点化レンズスタック102を有する。図2には、PFR102およびその部材部分の断面図を示す。図3には、下流端に出口ノズルを有するレンズスタックのみの断面図を示す。これらの3つのAFS部材およびそれらの構造を、以下より詳しく説明する。また、本発明は、AFSを設計する方法、すなわちレンズスタックのようなAFSの個々の各種部材を含むAFSを寸法化し、検証する方法を提供する。これにより、長期にわたる計算流体動力学およびコストのかかるベンチトップ実験を行わずに、異なる作動条件における各種インターフェースシステムが迅速に設計される。特に、解析設計方法を用いて焦点化レンズスタック、大気圧での高流束サンプリング用のPFR、および最終出口ノズルを含む、AFSの3つの主要部分が設計される。
【0011】
(B 圧流レジューサ)
本発明のAFSの第1の部材は、サンプリングノズルおよびスキマーをベースとする圧流レジューサ(PFR)であり、これは、焦点化レンズスタックが、最小限の損失で大気圧および高流速と適合するように使用される。通常、レンズスタック内での低レイノルド数による制約により、作動パラメータの設計は、低い初期圧力および流速に制限される傾向にある[4]。これは、大気圧で自発的に作動するエアロゾル収集システムでは問題となる。また、低流速により、単位時間に収集され得るエアロゾル粒子の量が減少し、このため、このタイプの導入部を用いたいかなる種類の解析機器においても感度が低下する。PFRは、高圧と高流束サンプリング条件を、低圧、低流束で作動する焦点化レンズスタックに適合させることが可能な機器である。
【0012】
通常、PFR装置は、エアロゾルサンプル(通常、760トールの圧力で、1L/分より大きな流速)と、空力学的焦点化レンズスタックのような、低圧低流速(通常、10乃至100トール、0.05L/分)で作動するエアロゾル焦点化装置の間の適合が可能なエアロゾル入口部である。特に、PFRには、サンプリング流速を調節するノズル、エアロゾル焦点化装置を収容する、圧力と流束を抑制するスキマーを有する排出領域、および最終的にエアロゾル粒子を減速化し停止させる緩和チャンバ、が使用される。圧流レジューサ技術は、排出ステージを取り込むことにより、圧力を流束から分離し、大気圧下、1L/分よりも大きな速度でのエアロゾルサンプリングを可能にする。これにより、単位時間当たりのサンプル粒子濃度は、通常の場合に比べて20倍に上昇する。従って、本システムでは、いかなるエアロゾル焦点化装置においても、粒子透過効率を高め、エアロゾル濃度を高めることが可能となる。特に、高い圧力環境での低濃度のエアロゾルのサンプリングに適した、空力学的レンズスタック焦点化技術を得ることが可能となる。
【0013】
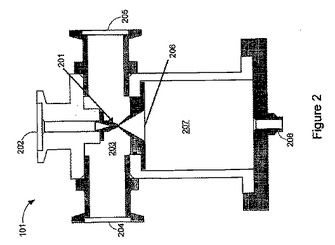
図2には、3つのステージを有するPFR101を示す。これらのステージは、図3に示す空力学的な焦点化レンズスタック102のような、エアロゾル焦点化装置の出口ノズル寸法と連動する。スタック出口ノズルは、PFRシステムの一部ではないが、PFRの構成に影響するため、適当な技術設計および作動を考慮する必要がある。
【0014】
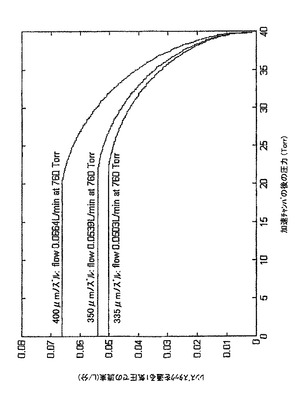
図2のPFR101の第1ステージは、入口202を介して、サンプリング環境から空気を引き込む入口ノズル201で構成される。サンプリング圧力と称する、サンプリング環境の圧力は、通常、1大気圧(760トール)である。PFRよりも低い圧力が、エアロゾル焦点化装置の作動圧力として定められる。PFRは、サンプリング圧力が、作動圧力の少なくとも2倍である限り、適性に作動し、これにより、入口流束が閉止され、超音波ジェットが形成され、エアロゾル粒子が約300m/sの速度まで加速される。入口ノズル201を介した超音波膨脹のため、サンプリング圧力および流束は、圧力下限がサンプリング圧力の少なくとも半分である限り、圧力の下限に拘わらず、入口ノズルオリフィスの寸法のみによって定められる。図4には、サンプリング圧力を1気圧に設定したときの、入口ノズル直径と流速の間の関係を示す。第1ステージの目的は、(焦点化レンズスタックのような)エアロゾル焦点化装置の作動条件とは無関係に、エアロゾルサンプリング流束を定めることである。
【0015】
図2のPFR101の第2ステージは、抑制チャンバ203であり、これは、スキマー206、および排出ポート204、205のような排出ポートにより構成される。このステージは、エアロゾル焦点化装置出口ノズルの寸法と連動し、エアロゾル焦点化装置の仕様と適合するように流束および圧力を抑制する。排出ポートは、真空ポンプ(図示されていない)に接続され、このポンプの容量は、可変である(バルブのような閉止手段を用いて)。単一の排出ポートを使用することが好ましい。あるいはこれに代えて、排出手段は、いくつかの分散ポートに分割して、より均一な圧力分布をチャンバ内に形成しても良い。排出効率、スキマー直径、および入口ノズルからの距離は、エアロゾル焦点化装置に必要な圧力により定められ、システムを通る粒子透過効率が設定される。
【0016】
スキマー206は、入口ノズル201の下流に、このノズルと間隔を空けて整列されたスキマーオリフィスを有する。スキマー206と入口ノズル201の間の距離は、ギャップを形成し、これにより、排出ポートと入口ノズルの間で流体連通が可能となる。スキマーは、図1に示すような、より効率的な排出が可能となる円錐状であることが好ましいが、この形状に限られるものではない。図5には、最大粒子発散角度を示す。この角度は、各種スキマー寸法および距離に対して、入口ノズルから、100%の粒子透過効率が可能となるように取り扱われる。寸法および距離は、所望の圧力が得られ、粒子透過率が最大となるように選定される。通常、ノズルに近いスキマーを大きくすることが好ましい。これらの2つのパラメータは、最終的には実験によって定められるが、スキマーの寸法とノズルからの距離の第1の近似は、図6に示すような基本的な流体動力学の式を用いて行われる。通常、出口ノズルを備えた焦点化レンズスタックと連動する、このPFR部材の設計に必要な処理は、以下に示すような超音波膨脹のマッハ数の予測に基づく。実際には、超音波膨脹のため、抑制チャンバの圧力は、予想値よりも小さく測定される。抑制チャンバの目的は、エアロゾルサンプリング圧力および流速とは無関係に、エアロゾル焦点化装置により認められる圧力を設定することである。これにより、エアロゾルサンプリング処理をエアロゾル焦点化装置に適合させる際に必要な分離が可能となる。
【0017】
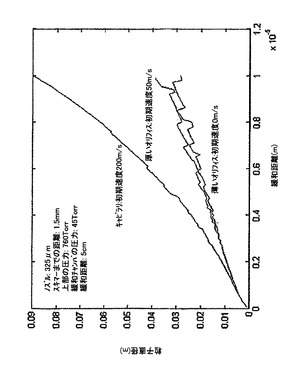
PFRの第3ステージは、緩和チャンバ207であり、この役割は、前述のスキマー206を通過した粒子を減速させることである。このステップは、空力学的なレンズスタックのような、多くのエアロゾル焦点化装置の適当な作動のため重要である。緩和チャンバに入る粒子は、500m/sを超える高速である場合がある。必要な停止距離または緩和距離は、スキマーを通り、ノズルの超音波膨脹を受けた加速粒子に依存するとともに、チャンバ内の圧力および流束に依存する。図1および2に示すように、緩和チャンバ207は、出口208を有し、この出口は、エアロゾル焦点化装置に直接設置される。図7には、第1ステージに使用され得る各種入口ノズルにおける緩和距離を示す。
【0018】
計算流体動力学(CFD)のシミュレーション時間を短縮し、第1の設計を開始するため、通常の流体動力学式は、第1近似で使用される。一般に、これは、所望のサンプリング流速に基づいて、サンプリングノズルの直径を計算するステップ;スキマーの直径、およびサンプリングノズルからの距離を設計し、緩和チャンバを介した、適切な作動圧力および流束を得るステップ;ノズルを通過する粒子の粒子速度の予測に基づいて緩和チャンバを設計するステップ;を有する。
【0019】
所望のサンプリング流束に基づくサンプリングノズルの直径の計算は、プラントル微分の式としても知られる、臨界オリフィスを介した圧力低下の予測に基づいた、以下の式1を用いて行われる:
【0020】
【数1】
ここでQは、体積流速で一定であり、Areaは、オリフィスの面積、γは、熱比(例えば、空気の場合1.4)であり、Rは、気体定数(例えば空気の場合、〜8.314)、Ttopは、オリフィスの上部の温度であり、Mは、気体の分子質量(例えば空気の場合、〜29g/モル)である。式1は、オリフィスを閉止する臨界圧力よりも低い底部圧力を算出する。断熱無摩擦の気体において、気体がオリフィスで音速に達した場合、以下の式で表される臨界圧力比が得られる:
【0021】
【数2】
スキマー直径およびサンプリングノズルからの距離は、緩和チャンバを介して、適正な作動圧力おより流束が得られるように設計される。この設計ステップの臨界パラメータは、排出手段を介してサンプリングノズルを通った後の、抑制チャンバに達した圧力を予測する。この圧力は、サンプリングノズルの流速とともに、排出システムの仕様を用いて予測される。緩和チャンバにおいて適正な圧力および流束を得るためのスキマーの直径およびノズルからの距離の計算は、アシケナ(Ashkenas)とシェルマン(Sherman)により示された膨脹ジェットの中心線のマッハ数Mの経験式を用いて行われる[5]:
【0022】
【数3】
ここでzは、長手軸に沿ったノズルからの距離であり、Pupstreamは、サンプリング圧力であり、Pdownstreamは、抑制チャンバの圧力である。上限は、マッハディスクの位置を定め、従ってサンプリングノズルからスキマーが設置された距離の上限を定める。次に、ノズルからの距離zskimmerに配置されたスキマーの所与の直径dskimerを用いて、流量が計算される。ジェット内での等エントロピー膨脹を仮定すると、気体の温度圧力および密度を、マッハ数の関数、さらにはノズルからの距離として表すことが可能となる:
【0023】
【数4】
次に、温度の関数として音速が計算され、以下の式により、距離の関数として気体速度が計算される:
【0024】
【数5】
スキマーを通る質量流量Qmは、以下の式で表される:
【0025】
【数6】
レンズスタックは、大気圧で所与の流速について設計されるため、適正な作動条件を得るためのスキマーを通る流量は、以下のようになる:
【0026】
【数7】
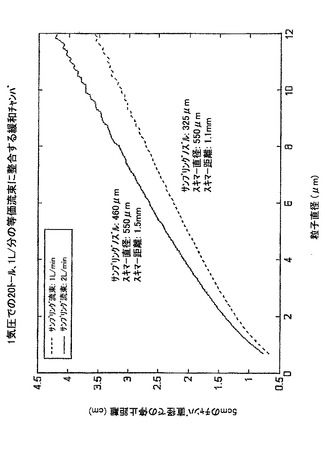
式6および7を用いて、スキマーの距離は、レンズスタックの適正な作動条件を提供するスキマー直径の関数として表される。図8には、1気圧での等価な流速、20トール、0.1L/分(または3.8L/分、20トール)で作動するレンズスタックに適合するPFRの一例を示す。スキマー直径は、サンプリングノズルよりも大きくなるように選定され、これによりエアロゾル粒子の透過効率が緩和チャンバに対して最適化される。
【0027】
最後に、緩和チャンバの設計が、ノズルを通過する際の粒子速度の予測に基づいて行われる。流体抵抗を用いて、流体中の粒子の動きを示す式が式8のように得られる[6]:
【0028】
【数8】
ここでτは、カンニンガム(Cunningham)因子Ccにより補正された、流体中の粒子緩和時間である。補正された緩和時間は、気体温度Tおよび圧力Pに依存することに留意する必要がある。次に式4を用いて、粒子が超音波膨脹を介して進行する場合の、これらのパラメータが予測される。ノズルの先端からの流体の速度を予測するため、ノズルの先端でマッハ1が得られるような多項式フィッティングを用いて、マッハ数で表現された式3の拡張式とともに、式5が使用される。しかしながら、式3の妥当性は、滑らかな拡張のため、2<(z/dnozzle)で開始した場合、低下する。以下の式3bは、空気の場合に予測されたマッハ数の拡張を示す。
【0029】
【数9】
次に式8の数値積分が行われ、粒子がスキマーを通過するときの粒子速度が得られる。次に、緩和チャンバ内に、気体速度の90%で粒子が到達した際の停止距離が予測される。緩和チャンバ内の気体速度は、体積流速、および緩和チャンバの直径を用いて算出される。この直径は、最終的な粒子発散を収容し、極めて低いガス速度が得られるように十分に大きくする必要がある。図9には、2つの異なるPFR構成において予測された、いくつかの停止距離を示す。
【0030】
(C 動力学的焦点化レンズスタック)
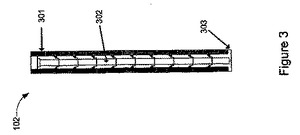
AFSの第2の部材は、空力学的焦点化レンズスタックである。図3に示したように、エアロゾル焦点化装置102のレンズスタックの種類は、積層レンズモジュール302として示された積層されたオリフィスに基づき、このオリフィスは、気体が流れるフローラインを縮小する。ストリームラインを流れる粒子は、慣性により中心に向かって収束される。レンズスタックの下流端は、出口ノズル303であり、粒子は、このノズルを通って本発明のAFSから排出される。図3において、モジュール302のスタックおよび出口ノズル303は、容器301により、垂直に整列された状態で示されている。
【0031】
前述のように、計算流体動力学(CFD)シミュレーション[2]を短時間化して、第1の設計を開始するため、通常の流体動力学の式が、第1近似で使用される。本発明では、自動設計ダイアグラムが提供され、各種レンズ直径が寸法化され、所与の粒子寸法範囲で、所与の作動条件での焦点化装置が製作され、異なる作動条件に対して、各種インターフェースシステムが迅速に設計され、長時間の計算流体動力学評価および高コストなベンチトップ実験が不要となる。オリフィスを介した圧力低下を表すストークス数およびプラントル式に基づいた、基本的な解析流体動力学の式を使用することにより、本発明は、あらゆる粒子寸法範囲における、焦点化粒子ビームの形成に必要なレンズの数および寸法を定める。
【0032】
所与の粒子寸法範囲において、レンズスタックの予備的な設計を行うため、レンズスタック内に存在する流れの種類に応じて、以下の仮定が行われる。第1の仮定は、流束が層流であり、この場合、このタイプの流束中の粒子は、ストークス数の式に従って挙動する。これは、特に、作動条件における(圧力および流速)各種レンズのレイノルド数が200未満であることを意味する。第2の仮定は、レンズを通る際の気体挙動が、断熱膨脹としてモデル化されることである。これは、膨脹の際に温度損失または温度ゲインが生じないことを意味する。これは、膨脹が速やかで、レンズ厚さが無視できる場合に成立する。第3の仮定は、気体がレンズ間で、外部温度と等しい一定の温度状態を維持することである。実際の装置が金属で製作されている場合、これは妥当な仮定である。設計手順は、気体の温度が装置の各領域内で調整される当エントロピー流束の場合、容易に変更し得ることに留意する必要がある。
【0033】
この設計方法に使用される第1の式は、所与の流束での環状オリフィスを介した圧力低下の予測に基づく。前述の仮定を使用することにより、断熱状態での無摩擦膨脹における、環状オリフィスの体積流速の値を得ることができる。以下の式が得られる:
【0034】
【数10】
ここでQは、体積流速であり、Areaは、オリフィスの面積、γは、熱比(空気の場合1.4)、Rは、気体定数(空気の場合、〜8.314)、Ttopは、オリフィスの上部温度であり、Mは、気体の分子質量(空気の場合〜29g/モル)である。この関係は、底部圧力が、オリフィスを閉止する臨界圧力以上である場合に、成立する。前述のように、気体がオリフィスで音速に達すると、断熱無摩擦の気体が臨界圧力比に達し、これは、以下に再掲示する式2で表される:
【0035】
【数11】
また、前述のように、底部圧力が臨界圧力よりも低い場合、以下に再掲示する式1で示されるように、体積流速は一定となる:
【0036】
【数12】
この式の系統は、プラントル微分として知られている。
【0037】
第2の式は、所与の流束で作動するオリフィスを通過する、所与の粒子のストークス数の式を書き直したものであり、式10で表される:
【0038】
【数13】
ここでdparticleは、粒子直径であり、ρparticleは密度、λstandardは、標準気体平均自由経路、Pは気体圧力、Tはガス温度、μは、気体動粘度、dlensは、オリフィスの直径である。この式は、ストークス数と粒子の組により与えられるオリフィスの直径を表すため、式11のように書き直すことができる:
【0039】
【数14】
この設計アルゴリズムに使用される第3の最後の式は、スタック構造を通る流束の乱流を抑え、これを評価するために使用されるレイノルド数の式である。この式は、式12で表される:
【0040】
【数15】
ここでρは、気体の密度(気体の種類に応じて、圧力で調節する)であり、μは、動粘度である。使用流束の種類に応じて、流束、温度、および密度は、圧力により調整される。一定の温度で作動する気体の場合、より単純な以下の式となる:
【0041】
【数16】
低温導電性材料で構成されたノズルを模擬し、スタック全体において気体が等エントロピーである場合、P/(ρr)は一定となることを考慮する必要がある。
【0042】
焦点化レンズスタックの設計に使用されるアルゴリズムは、ステップダウン法を使用する。大きな粒子は、第1のレンズにより焦点化され、小さな粒子は、それ以降のレンズにより焦点化されると仮定する。アルゴリズムを特徴付けるため、前述の式を形式化する必要がある。式1、2および9は、圧力低下と組み合わされ、以下のように表される:
【0043】
【数17】
ここでTは、進入気体の温度、Qは、体積流速、Ptopは、上流圧力、Pbottomは、下流圧力、dorificeは、オリフィスの直径、ガンマは、気体熱比、Rは、気体定数、Mは、分子質量である。
【0044】
式10は、以下のように形式化される:
【0045】
【数18】
ここでTは、進入気体の温度であり、Qは、体積流速、Pは上流圧力、λは、気体の標準平均自由工程、μは、気体粘度、dorificeは、オリフィスの直径、dparticleは粒子の密度、Stkは、ストークス数である。
【0046】
設計の自動化に用いられるアルゴリズムの好適実施例では、初期入力パラメータが必要であり、このリストは、以下に示される:
[dpartmin、dpartmax]として定義される、粒子寸法範囲(および設計において一定にされるその密度)。第1のレンズの上部範囲は、dpart[1]=dparttmaxとして記載される。
気体の特徴(粘度、平均自由工程、熱比、気体定数、分子質量、流束種)。
T[1]で定義されるレンズスタックの上部温度。
P[1]で定義されるレンズスタックの上部圧力。
Qequで定義される大気圧でのレンズスタック等価物を通る流束。上部圧力での実際の流速は、Q[1]で表される。温度一定での気体流束の場合、
【0047】
【数19】
ストークス数範囲で定義される焦点化の気密性。約1のストーク数では、最良の焦点化が得られる。ただし、最適ストークス数は、レイノルド数とともに変化することが示されている[3]。ストークス数範囲は、[Stkmin、Stkmax]として定められる。
【0048】
次に、第1のレンズで始まるアルゴリズムが反復される。各レンズiに対して、以下の計算ステップが行われる:
上流圧力および流束を用いて、レンズの直径dlens[i]が定められ、以下のdlens[i]の式を解くことにより、現在の最大粒子直径に対するストークス数の上限範囲が得られる:
【0049】
【数20】
前の計算されたレンズ直径を用いて、以下の式をdpart[i+1]で解くことにより、次のレンズに焦点化される粒子の最大直径が計算される。
【0050】
【数21】
以下の式をP[i+1]で解くことにより、前の計算されたレンズにわたり、圧力低下が計算される:
【0051】
【数22】
流束の種類に依存する前の計算された圧力Q[i+1]に対して、流束Q[i+1]および温度T[i+1]を更新する。温度一定の気体の場合、
【0052】
【数23】
となる。繰り返しは、次の最大粒子直径dparticle[i+1]がdpartminよりも小さくなった際に終了する。アルゴリズムの最後のステップは、検証ステップであり、このステップは、式12を用いて各レンズのレイノルド数を計算するステップを含む。レイノルド数は、低く維持される必要がある。ストークス数が1のときに最良の焦点化が得られることを保証するため、流束は、層流に維持される。
【0053】
図10には、焦点化レンズスタックの設計に際して示した前述の処理の一実施例を示す。第1ブロック1001では、上流圧力、上流流束、上流温度、粒子寸法範囲の上限、ストークス数を含む入力パラメータが受信される。次にブロック1002では、ストークス数の制限内で、粒子寸法範囲の上限に着目して、レンズ直径の計算が行われる。次に、ブロック1003では、現在のレンズに焦点化される最小粒子の計算が行われ、これが次の粒子寸法範囲の上限となる。ブロック1004では、レンズの後の新たな上流圧力となる圧力の計算が行われる。ブロック1005では、新たな上流流束および上流温度となる、レンズの後の流束および温度の計算が行われる。次に、ブロック1006では、次の粒子寸法範囲の上限が、粒子寸法範囲の下限よりも大きいかどうかについて判断がなされる。その結果、イエスの場合、制御がブロック1002まで戻される。ノーの場合、アルゴリズムは、ブロック1007に進み、ここで入口タイプが選定される。ブロック1008では、前述のように、出口ノズルが設計される。
【0054】
図11には、760トールで0.1L/分の等価流速で、ストークス範囲が[0.8、1.2]、粒子直径範囲[0.7μm、10μm]における、20トールで作動する298Kでの空気用の実際のレンズスタックの設計を示す。この特定の設計では、9個のレンズが必要である。以下の表1には、対応するレイノルド数および焦点化粒子寸法とともに、図11の実際のレンズ構成を示す。
【0055】
【表1】
[表1]760トール、0.1L/分の等価流束での、20トールの設計用の設計値
【0056】
(D 出口ノズル構成)
必要な流速が、空力学的な焦点化レンズスタックのようなエアロゾル焦点化装置に適合していることを保証するため、エアロゾル焦点化装置出口ノズルを以下のように構成した。出口ノズルは、2つの主目的を有する。一つは、PFRスキマーの後ろの緩和チャンバ内で観測される流束および圧力を固定することである。第2は、粒子を真空中で加速することであり、このため、最終的に空力学的な直径から粒子の寸法化が行われる。これは、チョークモードで作動するノズルを構成することにより行われ、流束が固定され、超音波膨脹を介して粒子が加速され、圧力から流束が分離される。この寸法は、スタック上部の圧力が一定の作動値に維持されるという事実に依存する。図12には、通常の焦点化レンズスタックとして選定されたエアロゾル焦点化装置を経た流速に対して、出口ノズルがどのような影響を及ぼすかを示す。
【0057】
ノズル直径の構成は、レンズスタックの設計パラメータにより完全に定められる。最後のレンズの後の圧力は、レンズスタック設計のアルゴリズムの間になされる繰り返しにより、予測される。次に、最後のレンズの後の圧力の式13を用いて、出口ノズルを通る際に必要な体積流速が予測される。次に、式1を用いて、チョークモードで作動する出口ノズルの直径が定められる。表2には、サンプリング流束が約1L/分に設定された際の、表1に示したレンズスタックとの適合に必要な、各種設計パラメータをまとめて示す。
【0058】
【表2】
[表2]760トールで0.1L/分の等価流束で、20トールで作動するレンズスタック用の出口ノズルおよびRFP
【0059】
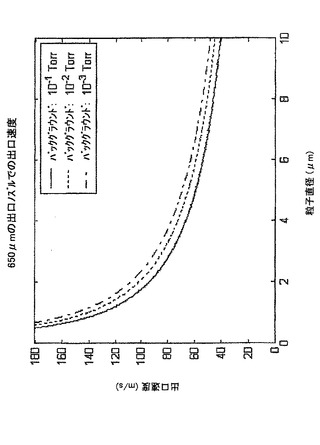
出口速度は、式8および拡張マッハ数の式を用いて予想される。この計算では、気体がバックグラウンド圧力にまで圧縮され、一度粒子がマッハディスクに到達すると、粒子は、最大速度に達すると仮定されている。バックグラウンド圧力では、出口ノズルがチョークモードで作動するようになる必要がある。しかしながら、一度これがこの要求を満たすと、出口ノズルの後のバックグラウンド圧力は、粒子の出口速度範囲を定める。図13には、各種出口速度を示す。これらの出口速度は、ノズルの後の各種バックグラウンド圧力に対して予想されたものである。
【0060】
(E 焦点化寸法範囲に対するオリフィスの寸法化の予想効果)
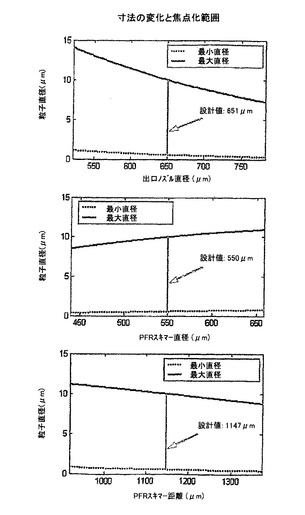
ローレンスライブモア国立研究所で実施された実験では、PFRおよび出口ノズルの寸法は、実際のレンズの正確な直径寸法よりも、焦点化装置に対してより大きな臨界効果を有することが示された。これらは、主として、スタックを通る流束および圧力を制御し、被焦点化粒子範囲に影響するためである。親指の法則として、ストークス数(式10)に基づき、レンズスタックを通る流束を抑制することにより、焦点化粒子の範囲が、より大きな粒子側にずれ、流束を増加することにより、焦点化粒子の範囲がより小さな粒子の側にずれる。圧力に関しては、緩和チャンバ内の圧力の減少により、焦点化レンズスタックの設計の範囲が、より小さな粒子側にずれ、緩和圧力を増加することにより、焦点化粒子の範囲がより大きな粒子の側にずれる。出口ノズルの設計に使用される式1は、それがレンズスタックを通る流束を定めることを示し、特に、大きなノズルが大きな流速を提供し、さらには小さな粒子が焦点化されることを示す。また圧流レジューサは、重要な役割を有し、レンズスタックの作動条件がどのように設定されるかについて、特に、緩和チャンバ内での圧力値に影響する。これは、主として、どの程度の流束がスキマーを通るかに基づいている。流束が大きくなると、出口ノズルが排出される流束を制限するため、緩和チャンバ内の圧力は増加する傾向にある。より大きなスキマーでは、より大きな流束が得られ、圧力が増加し、より大きな粒子側に範囲がシフトされる。PFRスキマーのサンプリングノズルまでの距離は、気体密度が低下するため、質量流束を低下させ、これにより緩和チャンバの圧力が低下し、焦点化範囲が小粒子側にシフトする。図13には、これらが最適設計値の周辺で変化するときの、これらの寸法に及ぼす定量的な影響を示す。出口ノズルは、最も重要な影響を有することに留意する必要がある。また、PFR設計は、一つの自由なパラメータを有し、従って、サンプリングノズルまでの距離が実験的に調節される場合、誤差を整合させ、スキマーの直径を補償することが可能となる。
【0061】
(G 検証結果および実験結果)
設計の解析予測を評価し検証するため、CDアダプコ(Adapco)からの圧縮性流れソルバーSTAR-CCM+(登録商標)により、2つの寸法、対称軸、高マッハ数を用いて、計算流体動力学(CFD)シミュレーションを実施した。また、2つの装置をステンレス鋼および黄銅で構築し、ローレンスライブモア国立研究所で評価した。真空において1μmから10μmの間の直径の焦点化粒子用、および大気圧下、1L/分でのサンプル用に設計された焦点化装置について実験結果を採取した。次に、実験結果を解析予測および計算流体動力学予想と比較したところ、理論と実験の間で、極めて良好な一致が認められた。通常、従来の臨界オリフィスサンプリングインターフェースを圧流レジューサと置換すると、空力学的なレンズスタックに基づいた設計焦点化装置のサンプリング速度および効率が有意に改善され、これにより、エアロゾル解析機器の感度が向上する。実際の装置挙動は、圧流レジューサスキマー調節、レンズスタック焦点化範囲および出口ノズル粒子出口速度用の設計ツールからの計算予測に極めて近い。
【0062】
(G1 機械的な設計および実験の構成)
表2に示した圧流レジューサを含む装置、表1に示すような9個のレンズの焦点化スタック、および出口ノズルが構成される。図2には、圧流レジューサとレンズスタックの両方の機械的な構成を示す。圧流レジューサは、サンプリングノズルまでのスキマー距離が、可変厚さのシム(shim)を用いて調整されるように構成される。レンズスタックは、積層可能なレンズモジュールの周囲に構成される。モジュールは、レンズおよび1.5cmの高さのスペーサで構成される。各モジュールは、Oリングを用いて隣と密閉される。次に、焦点化スタックを構成する9個のモジュールが容器内に挿入される。この容器は、一端が圧流レジューサと接続され、他端がノズルと接続されている。第1の装置は、ステンレス鋼で構成される。ただし、オリフィスを中心にし、組み立てられた各種レンズモジュールの間の配置を良好に維持することは、予想よりも複雑であった。第2の装置は、黄銅で構成され、各種オリフィスをより正確に中心を合わせることができた。
【0063】
(G2 圧流レジューサの圧力調整)
理論から、出口ノズルが適性に構成された場合、緩和チャンバ内での作動圧力が20トールに達し、適正な流束が得られ、適正な作動条件画得られることが予想される。圧流レジューサの設計ツールは、適正作動用の、サンプリングノズルとスキマーの間の距離の近似値を提供する。これは、中心で見られる流束特性を用いて、予測が実施されるという事実によるものである。ただし、スキマー距離は、サンプリングノズルよりも大きくなるように設計されているため、設計値からの最適実験空間が生じ、結果的にスキマー直径寸法に整合誤差が生じる。また、異なる距離で得られた圧力値により、我々の解析モデルを検証することができる。これは、スタック内の各レンズでの圧力低下の予測により定められるためである。最後に、距離さらには圧力の僅かな変化が可能となり、図14のように必要な場合、被焦点化粒子寸法が僅かに調整される。圧流レジューサの排気は、粗引きポンプV500を用いて、両方の側から実施される。MKSPDR2000ゲージコントローラとともに、MKS626Aバラトロン(Baratron)容量圧力計を用いて、各スキマー距離に対して、いくつかの測定が行われる。PFRは、340μmのサンプリングノズルおよび550μmのスキマーにより構成される。表1に示すようなレンズスタックの出口ノズルは、650μmに設定される。図15には、理論の欄で示した微分を用いた圧力予測と比較して、測定結果を示す。ゲージは、供給業者により推奨の通り、10-4トールの圧力でゼロを設定することにより補正される。20トールにするため、設計値からの僅かな調整がなされたものの、極めて良好なマッチングが得られた。
【0064】
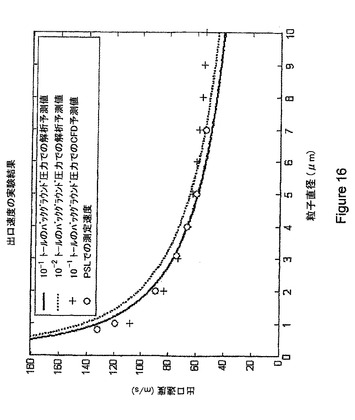
(G3 出口速度およびモデリング)
焦点化装置から排出された粒子は、その後、粒子空力学的直径による流子速度が臨界的であるかどうかを把握するため、バイオエアロゾル質量分析機器(MAMS)に捕獲され、化学分析のため解析される。粒子速度は、MAMS用にローレンスライブモア国立研究所で開発された、6つのレーザトラッキング装置を用いて測定される。各較正された空力学的直径のポリスチレンラテックス球(PSL)は、焦点化入口を介して搬送され、その速度が測定される。構成には、出口ノズルの後で真空を得るため、ターボポンプ分離フローが使用され、10-1トールのバックグラウンド圧力にされる。次に、10-4トールで作動するトラッキングシステムと連動させるため、平坦スキマーが設置される。図16には、本願の理論の欄で示した技術により算出された解析予測値と、粒子トラッキングシミュレーションと連結した計算流体動力学シミュレーションの結果を比較して示す。図からわかるように、理論、測定値、および計算シミュレーションの間に、極めて良好な一致が得られている。
【0065】
(G4 焦点化特性および透過特性)
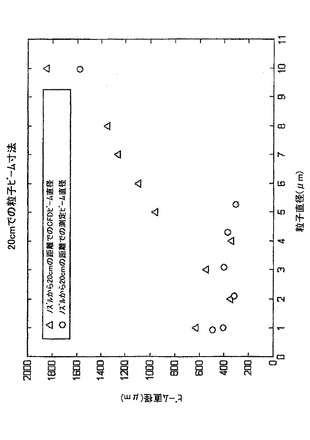
寸法範囲に関して、出口ノズルの先端から20cmの位置で得られるビーム寸法は、図17に示すように、計算流体動力学シミュレーションおよび粒子シミュレーションで得られた結果と良い一致を示した。測定は、較正されたポリスチレンラテックス球の寸法を用いて実施した。グリースで被覆されたターゲットは、出口ノズルの20cm下方に配置され、粒子は、装置を介して、10乃至20分間、高濃度で搬送される。次に、顕微鏡を用いて粒子の堆積が画像化され、その後スポットの直径が測定される。堆積物の外端からビーム直径を測定することを試みたが、残念ながら、測定精度は変動し、成膜物の終端を予測することは難しかった。これは、透過効率が小さく、予測ビーム直径では、単位面積当たりの堆積粒子が極めて少量であるため、大きな直径の粒子では、堆積が非常に僅かであることを強調する結果となった。また、ビーム直径は、緩和チャンバ内の圧力に大きく影響され、特に、小さな直径の粒子の場合、これが顕著である。圧力が20トールを超える高い値に維持されると、1μmの粒子は、焦点が合わず、ビームは、ドーナツ状となる。
【0066】
この装置の評価の間、発散角度の寸法範囲に関して、異なる粒子直径で得られる各ビームは、それらが十分に焦点化されても、配置が大きく異なることに留意する必要がある。ターゲット上の異なる粒子直径のビームスポットは、異なるレンズオリフィスが適正に整列されていない場合、1mmまで離れ得る。個々のレンズの位置の手動調整により、この問題を軽減することができ、1μmから10μmの焦点化粒子のビーム中心を500μm以内に維持することができる。
【0067】
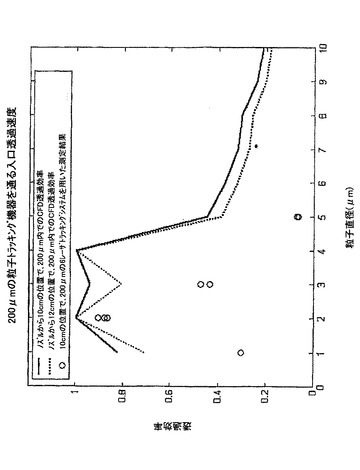
透過効率に関して、導入装置の透過効率を測定するため、MAMS機器のトラック領域が使用される。このトラック領域は、約200μmの直径の6つのレーザにより照射された際の、粒子からの散乱光を使用する。レーザは、全7.5cmの距離にわたり、第1のレーザは、入口の出口ノズルから2.5cmの位置にある。次に、各粒子が出口ノズルから10cmの位置で、200μmの直径のビーム内に位置する限り、このトラック領域は、各粒子速度を正確に検出し、計算する。システムを介して搬送された較正されたPSL、およびその濃度は、TSI社の空力学的粒子寸法測定器(APS)分光器モデル3320により監視される。PFRサンプリングシステムは、表2に示すように設定され、1L/分で引き寄せられ、これにより透過効率の計算が可能となる。一方、計算流体動力学計算は、粒子の動きと組み合わせて実施され、10cmおよび12cmで、200μmのトラッキング可能な粒子ビームの範囲内となるように、透過効率が予測される。図18には、CFD予測と比較して、測定結果を示す。トラッキングレーザに対する入口装置の位置合わせは、重要であり、測定特性に大きな影響を及ぼすことに留意する必要がある。粒子直径が異なると、異なる軌跡が得られ、異なる位置で焦点化されるという事実は、測定に影響を及ぼす。BAMSのトラック領域は、一つの軌跡についてのみ最適化されるためである。
【0068】
以下の参照文献は、本願の参照文献として取り入れられている。
[1] Tobias,H.J.,Kooima,P.M.,Dochery,K.S.,Ziemann,P.J.,「理論脱離粒子ビーム質量分光器を用いた,有機エアロゾルのリアルタイム化学解析」,Aerosol Sci.Tech,33:170-190,2000年
[2] Zhang,X.ら,「空力学的レンズノズルシステムによる粒子ビームコリメーションの計算,パート1:個々のレンズまたはノズル」,Aerosol Sci.Tech.,36:617-631,2002年
[3] Liu,P.,Ziemann,P.L.,Kittelson,D.B.McMurry,P.H.,「制御寸法の粒子ビームの形成と発散I,空力学的レンズおよびノズル膨脹での粒子の動きの理論」,Aerosol Sci.Tech.,22:293-313,1995a
[4] Schreiner,J.,Schild,U.,Voigt,C.,Mauersberger,K.,「10から150トールの圧力での粒子ビームへのエアロゾルの焦点化」,Aerosol Sci.Tech.,31,2373-382,1999
[5] H.Ashkenas,F.S.Sherman,「超音波自由ジェットの低密度風洞における構造および利用」,Rarefied Gas Dynamics国際シンポジウム,3,vol.2,pp.84-105,1966
[6] Hinds,W.,「エアロゾル技術:特性,挙動および空中粒子の測定」,Wiley-Interscience,ニューヨーク,第2版,1999年1月
[7] Fergenson,D.P,;Pitesky,M.E.;Tobias,H.J.;Steele,P.T.;Czerwieniec,G.A.;Russell,S.C.;Lebrilla,C.B.;Horn,J.M.;Coffee,K.R.;Strivastava,A.;PillaiS.P.;Shih,M.T.P.;HallH.L.;RamponiA.J.;ChangJ.T.;Langlois,R.G.;P.L.;Hadley,R.T.;FrankM.;GardE.E.,「個々のバイオエアロゾルのミリセカンド単位の無試薬同定」,Analytical Chemistry,76,373-378,2004年
【0069】
本発明は、例えば、サンプルの同定、環境促成の研究、柱状噴出化学分析、気象学、化学バイオ戦争剤検出、空気−水供給システム、オフィス建築、輸入港、輸送システム、公共イベント等に使用することができる。また、本発明は、例えば、学術的なエアロゾル研究、自主エアロゾル病原体検出システム等に使用することができる。
【0070】
特定の作動手順、材料、温度、パラメータおよび特定の実施例について説明したが、それらは、本発明を限定するものではない。当業者には、修正および変更が明らかであり、本発明は、特許請求の範囲によってのみ限定されることを意図するものである。
【図面の簡単な説明】
【0071】
【図1】圧流レジューサおよびエアロゾル焦点化レンズスタックを有する、本発明のエアロゾル焦点化システム(AFS)の一実施例の3D断面図である。
【図2】図1の圧流レジューサ101の断面図である。
【図3】図1のレンズスタック組立体102の断面図である。
【図4】760トールのサンプリング圧力での、入口ノズルのオリフィス径と流速の関係を示したグラフである。
【図5】粒子透過とスキマー寸法および入口ノズルからの距離の関係を示したグラフである。
【図6】抑制チャンバ内の各圧力に対するスキマーの直径をグラフである。
【図7】各種入口ノズルに対する緩和チャンバの寸法を示すグラフである。
【図8】1気圧での20トール、1L/分(または3.8L/分、20トール)の等価流速に整合するPFRスキマー設計を示したグラフである。
【図9】1気圧のレンズスタックでの20トール、1L/分(または3.8L/分、20トール)の等価流速に整合する各緩和距離設計を示すグラフである。緩和チャンバの直径は5cmである。
【図10】フローチャートである。
【図11】0.7μmから10μmの範囲の寸法の粒子を焦点化するステップダウンレンズスタック設計の一例を示すグラフである。
【図12】焦点化レンズスタックを通る全流束に及ぼす出口ノズルの効果を示すグラフである。
【図13】出口ノズルを出た後の出口速度に及ぼすバックグラウンド圧力の効果を示すグラフである。
【図14】表1に示すレンズスタックの焦点化範囲に及ぼす寸法の効果を示すグラフである。
【図15】650μmの出口ノズルでの緩和チャンバの圧力とPFRスキマー距離の関係を示すグラフである。
【図16】出口速度の測定結果を示すグラフである。
【図17】焦点化装置のノズルから20cmの距離での、粒子ビーム直径を示すグラフである。
【図18】焦点化装置のノズルから10cmの距離での、200μm以内の粒子透過効率を示すグラフである。
【技術分野】
【0001】
本発明の権利は、ローレンスリバーモア国立研究所の運営のための米国エネルギー省とカリフォルニア大学の間の契約、契約番号W-7405-ENG-48に準じ、米国政府が保有する。
【0002】
本出願は、エリック(Eric E. Gard)らによって2005年6月17日に出願された、No. 60/691,521号「エアロゾル焦点化装置用の圧流レジューサ」という題目の仮出願、およびビンセント(Vincent J. Riot)らによって2005年9月6日に出願された、No.60/714,689号「空力学的焦点化レンズスタック用の設計ツール」という題目の仮出願による優先権を主張するものである。
【0003】
本発明は、エアロゾル焦点化システムに関し、特に、焦点化レンズスタック技術を取り入れ、大気圧で作動するサンプル入口を真空に結合する圧流レジューサを有し、大きなサンプリング速度を得ることが可能な、エアロゾル焦点化システムに関する。
【背景技術】
【0004】
通常エアロゾル特徴機器には、透過損失がほとんどあるいは全くない、高焦点化粒子ビームが必要となる。また、これらは、より多くのエアロゾル粒子が収集され、感度が改善されるように、極めて大きなサンプリング速度でサンプル採取環境に適合する必要がある。空力学的焦点化レンズスタックは、真空中に大きな焦点化エアロゾル粒子ビームを発生することが示されており、これは各種エアロゾルの研究[1]に有効に使用されている。しかしながら、現在の焦点化レンズスタックは、小さな粒子径で作動し、低圧で低流速である[4]。0.5μmから10μmの範囲のエアロゾル粒子用の空力学的焦点化レンズスタックは、レンズスタック内での層流を維持する際に各焦点化レンズに必要となるレイノルド数が低いため、低流速度および低圧でのみ作動するように設計される。オリフィスの寸法は、許容可能な耐久性と整合させ、導入システムに整列させるため、100μm以上1cm未満に維持する必要がある。また、低圧および低流速のため、大気圧において空力学的焦点化レンズスタックをエアロゾル源と整合させることが極めて難しくなる。通常の場合、レンズスタックを大気圧環境に整合させるため、単一の臨界オリフィス装置が使用され、このオリフィスの寸法は、レンズスタックに必要な圧力により定められる。しかしながら、圧力と流速の間の結合により、サンプリングの流束が0.05L/分未満の場合、臨界オリフィスは、サンプリング効率が極めて低く、その結果、システム全体を透過する粒子の数は、極めて少なくなる。
【発明の開示】
【発明が解決しようとする課題】
【0005】
従って、エアロゾル質量分光分析を行い得る、大気圧と真空の間で整合が可能な、大きなサンプリング速度で、大粒子焦点化導入部を有するエアロゾル焦点化システム(AFS)が必要となっている[7]。特に、高流束大気圧サンプリングとともに空力学的レンズスタック焦点化技術を取り込んだエアロゾル焦点化システムであって、1μmから10μmの粒子範囲のため、真空において、例えば300μmの焦点化粒子ビームを供給する、エアロゾル焦点化システムの設計が必要である。また、高コストで長期間にわたる計算流体力学的なベンチトップ実験を行う必要なく、異なる作動条件における各種インターフェースシステムが迅速に設計されるように、AFS(AFSの個々の各種部材、例えばレンズスタックを含む)を寸法化し、検証する設計ツールも必要である。
【課題を解決するための手段】
【0006】
本発明のある態様は、作動圧力に特徴があるエアロゾル焦点化装置とともに使用される圧流レジューサ機器を有し、前記機器は、サンプリング環境から粒子搬送空気を引き込む入口ノズルを有し、サンプリング圧力は、エアロゾル焦点化装置の作動圧力よりも大きい。前記機器は、さらに、スキマーを有し、このスキマーは、入口ノズルよりも下流に配置され整列されたオリフィスを有し、スキマーと入口ノズルの間には、ギャップが形成される。前記機器は、さらに、ギャップと流体連通された排出ポートを有し、入口ノズルからの流束および圧力を抑制する。前記機器は、さらに、スキマーのオリフィスと流体連通された緩和チャンバであって、エアロゾル焦点化装置に流体接続が可能な出口を有する緩和チャンバを有し、スキマーのオリフィスから進入する粒子の速度を、エアロゾル焦点化装置から排出される前に抑制する。
【0007】
本発明の別の態様は、エアロゾル焦点化システムを含み、このエアロゾル焦点化システムは、作動圧力に特徴があり、出口ノズルを有するエアロゾル焦点化装置を有する。エアロゾル焦点化システムは、さらに、前記エアロゾル焦点化装置の上流に圧流レジューサ機器を有する。エアロゾル焦点化システムは、さらに、サンプリング環境から粒子搬送空気を引き込む入口ノズルを有し、サンプリング圧力は、エアロゾル焦点化装置の作動圧力よりも大きい。エアロゾル焦点化システムは、さらに、入口ノズルの下流に整列され配置されたオリフィスを有するスキマーを有し、スキマーと入口ノズルの間には、ギャップが形成される。エアロゾル焦点化システムは、さらに、ギャップと流体連通され、入口ノズルからの流束および圧力を抑制する排出ポートを有する。エアロゾル焦点化システムは、さらに、スキマーのオリフィスの下流に、スキマーのオリフィスと流体連通された緩和チャンバを有し、この緩和チャンバは、エアロゾル焦点化装置と流体的に結合することが可能な出口を有し、スキマーのオリフィスから進入する粒子の速度を、エアロゾル焦点化装置から出る前に抑制する。
【0008】
明細書に含まれている添付図面は、開示の一部を構成する。
【発明を実施するための最良の形態】
【0009】
(A エアロゾル焦点化システム)
本発明のエアロゾル焦点化システム(AFS)は、高流束、大気圧サンプリングとともに、空力学的レンズスタック焦点化技術を取り込んでおり、真空状態では、1μmから10μmの粒子範囲において、例えば300μmの狭小の焦点化粒子ビームを提供する。これは、バイオエアロゾル研究の場合、人の肺に良く堆積する有機体に対応する。これは、臨界オリフィスの代わりに、AFSの2つの他の主要部分、すなわち、空力学的焦点化レンズスタックのようなエアロゾル焦点化装置、およびエアロゾル焦点化装置の出口ノズル、に連動する圧流レジューサ(PFR)を使用することにより達成される。
【0010】
図面を参照すると、図1には、本発明のAFSの一例の3D断面図が示されている。AFSは、通常、参照番号100で示され、PFR101、およびPFRの下流に整列された空力学的焦点化レンズスタック102を有する。図2には、PFR102およびその部材部分の断面図を示す。図3には、下流端に出口ノズルを有するレンズスタックのみの断面図を示す。これらの3つのAFS部材およびそれらの構造を、以下より詳しく説明する。また、本発明は、AFSを設計する方法、すなわちレンズスタックのようなAFSの個々の各種部材を含むAFSを寸法化し、検証する方法を提供する。これにより、長期にわたる計算流体動力学およびコストのかかるベンチトップ実験を行わずに、異なる作動条件における各種インターフェースシステムが迅速に設計される。特に、解析設計方法を用いて焦点化レンズスタック、大気圧での高流束サンプリング用のPFR、および最終出口ノズルを含む、AFSの3つの主要部分が設計される。
【0011】
(B 圧流レジューサ)
本発明のAFSの第1の部材は、サンプリングノズルおよびスキマーをベースとする圧流レジューサ(PFR)であり、これは、焦点化レンズスタックが、最小限の損失で大気圧および高流速と適合するように使用される。通常、レンズスタック内での低レイノルド数による制約により、作動パラメータの設計は、低い初期圧力および流速に制限される傾向にある[4]。これは、大気圧で自発的に作動するエアロゾル収集システムでは問題となる。また、低流速により、単位時間に収集され得るエアロゾル粒子の量が減少し、このため、このタイプの導入部を用いたいかなる種類の解析機器においても感度が低下する。PFRは、高圧と高流束サンプリング条件を、低圧、低流束で作動する焦点化レンズスタックに適合させることが可能な機器である。
【0012】
通常、PFR装置は、エアロゾルサンプル(通常、760トールの圧力で、1L/分より大きな流速)と、空力学的焦点化レンズスタックのような、低圧低流速(通常、10乃至100トール、0.05L/分)で作動するエアロゾル焦点化装置の間の適合が可能なエアロゾル入口部である。特に、PFRには、サンプリング流速を調節するノズル、エアロゾル焦点化装置を収容する、圧力と流束を抑制するスキマーを有する排出領域、および最終的にエアロゾル粒子を減速化し停止させる緩和チャンバ、が使用される。圧流レジューサ技術は、排出ステージを取り込むことにより、圧力を流束から分離し、大気圧下、1L/分よりも大きな速度でのエアロゾルサンプリングを可能にする。これにより、単位時間当たりのサンプル粒子濃度は、通常の場合に比べて20倍に上昇する。従って、本システムでは、いかなるエアロゾル焦点化装置においても、粒子透過効率を高め、エアロゾル濃度を高めることが可能となる。特に、高い圧力環境での低濃度のエアロゾルのサンプリングに適した、空力学的レンズスタック焦点化技術を得ることが可能となる。
【0013】
図2には、3つのステージを有するPFR101を示す。これらのステージは、図3に示す空力学的な焦点化レンズスタック102のような、エアロゾル焦点化装置の出口ノズル寸法と連動する。スタック出口ノズルは、PFRシステムの一部ではないが、PFRの構成に影響するため、適当な技術設計および作動を考慮する必要がある。
【0014】
図2のPFR101の第1ステージは、入口202を介して、サンプリング環境から空気を引き込む入口ノズル201で構成される。サンプリング圧力と称する、サンプリング環境の圧力は、通常、1大気圧(760トール)である。PFRよりも低い圧力が、エアロゾル焦点化装置の作動圧力として定められる。PFRは、サンプリング圧力が、作動圧力の少なくとも2倍である限り、適性に作動し、これにより、入口流束が閉止され、超音波ジェットが形成され、エアロゾル粒子が約300m/sの速度まで加速される。入口ノズル201を介した超音波膨脹のため、サンプリング圧力および流束は、圧力下限がサンプリング圧力の少なくとも半分である限り、圧力の下限に拘わらず、入口ノズルオリフィスの寸法のみによって定められる。図4には、サンプリング圧力を1気圧に設定したときの、入口ノズル直径と流速の間の関係を示す。第1ステージの目的は、(焦点化レンズスタックのような)エアロゾル焦点化装置の作動条件とは無関係に、エアロゾルサンプリング流束を定めることである。
【0015】
図2のPFR101の第2ステージは、抑制チャンバ203であり、これは、スキマー206、および排出ポート204、205のような排出ポートにより構成される。このステージは、エアロゾル焦点化装置出口ノズルの寸法と連動し、エアロゾル焦点化装置の仕様と適合するように流束および圧力を抑制する。排出ポートは、真空ポンプ(図示されていない)に接続され、このポンプの容量は、可変である(バルブのような閉止手段を用いて)。単一の排出ポートを使用することが好ましい。あるいはこれに代えて、排出手段は、いくつかの分散ポートに分割して、より均一な圧力分布をチャンバ内に形成しても良い。排出効率、スキマー直径、および入口ノズルからの距離は、エアロゾル焦点化装置に必要な圧力により定められ、システムを通る粒子透過効率が設定される。
【0016】
スキマー206は、入口ノズル201の下流に、このノズルと間隔を空けて整列されたスキマーオリフィスを有する。スキマー206と入口ノズル201の間の距離は、ギャップを形成し、これにより、排出ポートと入口ノズルの間で流体連通が可能となる。スキマーは、図1に示すような、より効率的な排出が可能となる円錐状であることが好ましいが、この形状に限られるものではない。図5には、最大粒子発散角度を示す。この角度は、各種スキマー寸法および距離に対して、入口ノズルから、100%の粒子透過効率が可能となるように取り扱われる。寸法および距離は、所望の圧力が得られ、粒子透過率が最大となるように選定される。通常、ノズルに近いスキマーを大きくすることが好ましい。これらの2つのパラメータは、最終的には実験によって定められるが、スキマーの寸法とノズルからの距離の第1の近似は、図6に示すような基本的な流体動力学の式を用いて行われる。通常、出口ノズルを備えた焦点化レンズスタックと連動する、このPFR部材の設計に必要な処理は、以下に示すような超音波膨脹のマッハ数の予測に基づく。実際には、超音波膨脹のため、抑制チャンバの圧力は、予想値よりも小さく測定される。抑制チャンバの目的は、エアロゾルサンプリング圧力および流速とは無関係に、エアロゾル焦点化装置により認められる圧力を設定することである。これにより、エアロゾルサンプリング処理をエアロゾル焦点化装置に適合させる際に必要な分離が可能となる。
【0017】
PFRの第3ステージは、緩和チャンバ207であり、この役割は、前述のスキマー206を通過した粒子を減速させることである。このステップは、空力学的なレンズスタックのような、多くのエアロゾル焦点化装置の適当な作動のため重要である。緩和チャンバに入る粒子は、500m/sを超える高速である場合がある。必要な停止距離または緩和距離は、スキマーを通り、ノズルの超音波膨脹を受けた加速粒子に依存するとともに、チャンバ内の圧力および流束に依存する。図1および2に示すように、緩和チャンバ207は、出口208を有し、この出口は、エアロゾル焦点化装置に直接設置される。図7には、第1ステージに使用され得る各種入口ノズルにおける緩和距離を示す。
【0018】
計算流体動力学(CFD)のシミュレーション時間を短縮し、第1の設計を開始するため、通常の流体動力学式は、第1近似で使用される。一般に、これは、所望のサンプリング流速に基づいて、サンプリングノズルの直径を計算するステップ;スキマーの直径、およびサンプリングノズルからの距離を設計し、緩和チャンバを介した、適切な作動圧力および流束を得るステップ;ノズルを通過する粒子の粒子速度の予測に基づいて緩和チャンバを設計するステップ;を有する。
【0019】
所望のサンプリング流束に基づくサンプリングノズルの直径の計算は、プラントル微分の式としても知られる、臨界オリフィスを介した圧力低下の予測に基づいた、以下の式1を用いて行われる:
【0020】
【数1】
ここでQは、体積流速で一定であり、Areaは、オリフィスの面積、γは、熱比(例えば、空気の場合1.4)であり、Rは、気体定数(例えば空気の場合、〜8.314)、Ttopは、オリフィスの上部の温度であり、Mは、気体の分子質量(例えば空気の場合、〜29g/モル)である。式1は、オリフィスを閉止する臨界圧力よりも低い底部圧力を算出する。断熱無摩擦の気体において、気体がオリフィスで音速に達した場合、以下の式で表される臨界圧力比が得られる:
【0021】
【数2】
スキマー直径およびサンプリングノズルからの距離は、緩和チャンバを介して、適正な作動圧力おより流束が得られるように設計される。この設計ステップの臨界パラメータは、排出手段を介してサンプリングノズルを通った後の、抑制チャンバに達した圧力を予測する。この圧力は、サンプリングノズルの流速とともに、排出システムの仕様を用いて予測される。緩和チャンバにおいて適正な圧力および流束を得るためのスキマーの直径およびノズルからの距離の計算は、アシケナ(Ashkenas)とシェルマン(Sherman)により示された膨脹ジェットの中心線のマッハ数Mの経験式を用いて行われる[5]:
【0022】
【数3】
ここでzは、長手軸に沿ったノズルからの距離であり、Pupstreamは、サンプリング圧力であり、Pdownstreamは、抑制チャンバの圧力である。上限は、マッハディスクの位置を定め、従ってサンプリングノズルからスキマーが設置された距離の上限を定める。次に、ノズルからの距離zskimmerに配置されたスキマーの所与の直径dskimerを用いて、流量が計算される。ジェット内での等エントロピー膨脹を仮定すると、気体の温度圧力および密度を、マッハ数の関数、さらにはノズルからの距離として表すことが可能となる:
【0023】
【数4】
次に、温度の関数として音速が計算され、以下の式により、距離の関数として気体速度が計算される:
【0024】
【数5】
スキマーを通る質量流量Qmは、以下の式で表される:
【0025】
【数6】
レンズスタックは、大気圧で所与の流速について設計されるため、適正な作動条件を得るためのスキマーを通る流量は、以下のようになる:
【0026】
【数7】
式6および7を用いて、スキマーの距離は、レンズスタックの適正な作動条件を提供するスキマー直径の関数として表される。図8には、1気圧での等価な流速、20トール、0.1L/分(または3.8L/分、20トール)で作動するレンズスタックに適合するPFRの一例を示す。スキマー直径は、サンプリングノズルよりも大きくなるように選定され、これによりエアロゾル粒子の透過効率が緩和チャンバに対して最適化される。
【0027】
最後に、緩和チャンバの設計が、ノズルを通過する際の粒子速度の予測に基づいて行われる。流体抵抗を用いて、流体中の粒子の動きを示す式が式8のように得られる[6]:
【0028】
【数8】
ここでτは、カンニンガム(Cunningham)因子Ccにより補正された、流体中の粒子緩和時間である。補正された緩和時間は、気体温度Tおよび圧力Pに依存することに留意する必要がある。次に式4を用いて、粒子が超音波膨脹を介して進行する場合の、これらのパラメータが予測される。ノズルの先端からの流体の速度を予測するため、ノズルの先端でマッハ1が得られるような多項式フィッティングを用いて、マッハ数で表現された式3の拡張式とともに、式5が使用される。しかしながら、式3の妥当性は、滑らかな拡張のため、2<(z/dnozzle)で開始した場合、低下する。以下の式3bは、空気の場合に予測されたマッハ数の拡張を示す。
【0029】
【数9】
次に式8の数値積分が行われ、粒子がスキマーを通過するときの粒子速度が得られる。次に、緩和チャンバ内に、気体速度の90%で粒子が到達した際の停止距離が予測される。緩和チャンバ内の気体速度は、体積流速、および緩和チャンバの直径を用いて算出される。この直径は、最終的な粒子発散を収容し、極めて低いガス速度が得られるように十分に大きくする必要がある。図9には、2つの異なるPFR構成において予測された、いくつかの停止距離を示す。
【0030】
(C 動力学的焦点化レンズスタック)
AFSの第2の部材は、空力学的焦点化レンズスタックである。図3に示したように、エアロゾル焦点化装置102のレンズスタックの種類は、積層レンズモジュール302として示された積層されたオリフィスに基づき、このオリフィスは、気体が流れるフローラインを縮小する。ストリームラインを流れる粒子は、慣性により中心に向かって収束される。レンズスタックの下流端は、出口ノズル303であり、粒子は、このノズルを通って本発明のAFSから排出される。図3において、モジュール302のスタックおよび出口ノズル303は、容器301により、垂直に整列された状態で示されている。
【0031】
前述のように、計算流体動力学(CFD)シミュレーション[2]を短時間化して、第1の設計を開始するため、通常の流体動力学の式が、第1近似で使用される。本発明では、自動設計ダイアグラムが提供され、各種レンズ直径が寸法化され、所与の粒子寸法範囲で、所与の作動条件での焦点化装置が製作され、異なる作動条件に対して、各種インターフェースシステムが迅速に設計され、長時間の計算流体動力学評価および高コストなベンチトップ実験が不要となる。オリフィスを介した圧力低下を表すストークス数およびプラントル式に基づいた、基本的な解析流体動力学の式を使用することにより、本発明は、あらゆる粒子寸法範囲における、焦点化粒子ビームの形成に必要なレンズの数および寸法を定める。
【0032】
所与の粒子寸法範囲において、レンズスタックの予備的な設計を行うため、レンズスタック内に存在する流れの種類に応じて、以下の仮定が行われる。第1の仮定は、流束が層流であり、この場合、このタイプの流束中の粒子は、ストークス数の式に従って挙動する。これは、特に、作動条件における(圧力および流速)各種レンズのレイノルド数が200未満であることを意味する。第2の仮定は、レンズを通る際の気体挙動が、断熱膨脹としてモデル化されることである。これは、膨脹の際に温度損失または温度ゲインが生じないことを意味する。これは、膨脹が速やかで、レンズ厚さが無視できる場合に成立する。第3の仮定は、気体がレンズ間で、外部温度と等しい一定の温度状態を維持することである。実際の装置が金属で製作されている場合、これは妥当な仮定である。設計手順は、気体の温度が装置の各領域内で調整される当エントロピー流束の場合、容易に変更し得ることに留意する必要がある。
【0033】
この設計方法に使用される第1の式は、所与の流束での環状オリフィスを介した圧力低下の予測に基づく。前述の仮定を使用することにより、断熱状態での無摩擦膨脹における、環状オリフィスの体積流速の値を得ることができる。以下の式が得られる:
【0034】
【数10】
ここでQは、体積流速であり、Areaは、オリフィスの面積、γは、熱比(空気の場合1.4)、Rは、気体定数(空気の場合、〜8.314)、Ttopは、オリフィスの上部温度であり、Mは、気体の分子質量(空気の場合〜29g/モル)である。この関係は、底部圧力が、オリフィスを閉止する臨界圧力以上である場合に、成立する。前述のように、気体がオリフィスで音速に達すると、断熱無摩擦の気体が臨界圧力比に達し、これは、以下に再掲示する式2で表される:
【0035】
【数11】
また、前述のように、底部圧力が臨界圧力よりも低い場合、以下に再掲示する式1で示されるように、体積流速は一定となる:
【0036】
【数12】
この式の系統は、プラントル微分として知られている。
【0037】
第2の式は、所与の流束で作動するオリフィスを通過する、所与の粒子のストークス数の式を書き直したものであり、式10で表される:
【0038】
【数13】
ここでdparticleは、粒子直径であり、ρparticleは密度、λstandardは、標準気体平均自由経路、Pは気体圧力、Tはガス温度、μは、気体動粘度、dlensは、オリフィスの直径である。この式は、ストークス数と粒子の組により与えられるオリフィスの直径を表すため、式11のように書き直すことができる:
【0039】
【数14】
この設計アルゴリズムに使用される第3の最後の式は、スタック構造を通る流束の乱流を抑え、これを評価するために使用されるレイノルド数の式である。この式は、式12で表される:
【0040】
【数15】
ここでρは、気体の密度(気体の種類に応じて、圧力で調節する)であり、μは、動粘度である。使用流束の種類に応じて、流束、温度、および密度は、圧力により調整される。一定の温度で作動する気体の場合、より単純な以下の式となる:
【0041】
【数16】
低温導電性材料で構成されたノズルを模擬し、スタック全体において気体が等エントロピーである場合、P/(ρr)は一定となることを考慮する必要がある。
【0042】
焦点化レンズスタックの設計に使用されるアルゴリズムは、ステップダウン法を使用する。大きな粒子は、第1のレンズにより焦点化され、小さな粒子は、それ以降のレンズにより焦点化されると仮定する。アルゴリズムを特徴付けるため、前述の式を形式化する必要がある。式1、2および9は、圧力低下と組み合わされ、以下のように表される:
【0043】
【数17】
ここでTは、進入気体の温度、Qは、体積流速、Ptopは、上流圧力、Pbottomは、下流圧力、dorificeは、オリフィスの直径、ガンマは、気体熱比、Rは、気体定数、Mは、分子質量である。
【0044】
式10は、以下のように形式化される:
【0045】
【数18】
ここでTは、進入気体の温度であり、Qは、体積流速、Pは上流圧力、λは、気体の標準平均自由工程、μは、気体粘度、dorificeは、オリフィスの直径、dparticleは粒子の密度、Stkは、ストークス数である。
【0046】
設計の自動化に用いられるアルゴリズムの好適実施例では、初期入力パラメータが必要であり、このリストは、以下に示される:
[dpartmin、dpartmax]として定義される、粒子寸法範囲(および設計において一定にされるその密度)。第1のレンズの上部範囲は、dpart[1]=dparttmaxとして記載される。
気体の特徴(粘度、平均自由工程、熱比、気体定数、分子質量、流束種)。
T[1]で定義されるレンズスタックの上部温度。
P[1]で定義されるレンズスタックの上部圧力。
Qequで定義される大気圧でのレンズスタック等価物を通る流束。上部圧力での実際の流速は、Q[1]で表される。温度一定での気体流束の場合、
【0047】
【数19】
ストークス数範囲で定義される焦点化の気密性。約1のストーク数では、最良の焦点化が得られる。ただし、最適ストークス数は、レイノルド数とともに変化することが示されている[3]。ストークス数範囲は、[Stkmin、Stkmax]として定められる。
【0048】
次に、第1のレンズで始まるアルゴリズムが反復される。各レンズiに対して、以下の計算ステップが行われる:
上流圧力および流束を用いて、レンズの直径dlens[i]が定められ、以下のdlens[i]の式を解くことにより、現在の最大粒子直径に対するストークス数の上限範囲が得られる:
【0049】
【数20】
前の計算されたレンズ直径を用いて、以下の式をdpart[i+1]で解くことにより、次のレンズに焦点化される粒子の最大直径が計算される。
【0050】
【数21】
以下の式をP[i+1]で解くことにより、前の計算されたレンズにわたり、圧力低下が計算される:
【0051】
【数22】
流束の種類に依存する前の計算された圧力Q[i+1]に対して、流束Q[i+1]および温度T[i+1]を更新する。温度一定の気体の場合、
【0052】
【数23】
となる。繰り返しは、次の最大粒子直径dparticle[i+1]がdpartminよりも小さくなった際に終了する。アルゴリズムの最後のステップは、検証ステップであり、このステップは、式12を用いて各レンズのレイノルド数を計算するステップを含む。レイノルド数は、低く維持される必要がある。ストークス数が1のときに最良の焦点化が得られることを保証するため、流束は、層流に維持される。
【0053】
図10には、焦点化レンズスタックの設計に際して示した前述の処理の一実施例を示す。第1ブロック1001では、上流圧力、上流流束、上流温度、粒子寸法範囲の上限、ストークス数を含む入力パラメータが受信される。次にブロック1002では、ストークス数の制限内で、粒子寸法範囲の上限に着目して、レンズ直径の計算が行われる。次に、ブロック1003では、現在のレンズに焦点化される最小粒子の計算が行われ、これが次の粒子寸法範囲の上限となる。ブロック1004では、レンズの後の新たな上流圧力となる圧力の計算が行われる。ブロック1005では、新たな上流流束および上流温度となる、レンズの後の流束および温度の計算が行われる。次に、ブロック1006では、次の粒子寸法範囲の上限が、粒子寸法範囲の下限よりも大きいかどうかについて判断がなされる。その結果、イエスの場合、制御がブロック1002まで戻される。ノーの場合、アルゴリズムは、ブロック1007に進み、ここで入口タイプが選定される。ブロック1008では、前述のように、出口ノズルが設計される。
【0054】
図11には、760トールで0.1L/分の等価流速で、ストークス範囲が[0.8、1.2]、粒子直径範囲[0.7μm、10μm]における、20トールで作動する298Kでの空気用の実際のレンズスタックの設計を示す。この特定の設計では、9個のレンズが必要である。以下の表1には、対応するレイノルド数および焦点化粒子寸法とともに、図11の実際のレンズ構成を示す。
【0055】
【表1】
[表1]760トール、0.1L/分の等価流束での、20トールの設計用の設計値
【0056】
(D 出口ノズル構成)
必要な流速が、空力学的な焦点化レンズスタックのようなエアロゾル焦点化装置に適合していることを保証するため、エアロゾル焦点化装置出口ノズルを以下のように構成した。出口ノズルは、2つの主目的を有する。一つは、PFRスキマーの後ろの緩和チャンバ内で観測される流束および圧力を固定することである。第2は、粒子を真空中で加速することであり、このため、最終的に空力学的な直径から粒子の寸法化が行われる。これは、チョークモードで作動するノズルを構成することにより行われ、流束が固定され、超音波膨脹を介して粒子が加速され、圧力から流束が分離される。この寸法は、スタック上部の圧力が一定の作動値に維持されるという事実に依存する。図12には、通常の焦点化レンズスタックとして選定されたエアロゾル焦点化装置を経た流速に対して、出口ノズルがどのような影響を及ぼすかを示す。
【0057】
ノズル直径の構成は、レンズスタックの設計パラメータにより完全に定められる。最後のレンズの後の圧力は、レンズスタック設計のアルゴリズムの間になされる繰り返しにより、予測される。次に、最後のレンズの後の圧力の式13を用いて、出口ノズルを通る際に必要な体積流速が予測される。次に、式1を用いて、チョークモードで作動する出口ノズルの直径が定められる。表2には、サンプリング流束が約1L/分に設定された際の、表1に示したレンズスタックとの適合に必要な、各種設計パラメータをまとめて示す。
【0058】
【表2】
[表2]760トールで0.1L/分の等価流束で、20トールで作動するレンズスタック用の出口ノズルおよびRFP
【0059】
出口速度は、式8および拡張マッハ数の式を用いて予想される。この計算では、気体がバックグラウンド圧力にまで圧縮され、一度粒子がマッハディスクに到達すると、粒子は、最大速度に達すると仮定されている。バックグラウンド圧力では、出口ノズルがチョークモードで作動するようになる必要がある。しかしながら、一度これがこの要求を満たすと、出口ノズルの後のバックグラウンド圧力は、粒子の出口速度範囲を定める。図13には、各種出口速度を示す。これらの出口速度は、ノズルの後の各種バックグラウンド圧力に対して予想されたものである。
【0060】
(E 焦点化寸法範囲に対するオリフィスの寸法化の予想効果)
ローレンスライブモア国立研究所で実施された実験では、PFRおよび出口ノズルの寸法は、実際のレンズの正確な直径寸法よりも、焦点化装置に対してより大きな臨界効果を有することが示された。これらは、主として、スタックを通る流束および圧力を制御し、被焦点化粒子範囲に影響するためである。親指の法則として、ストークス数(式10)に基づき、レンズスタックを通る流束を抑制することにより、焦点化粒子の範囲が、より大きな粒子側にずれ、流束を増加することにより、焦点化粒子の範囲がより小さな粒子の側にずれる。圧力に関しては、緩和チャンバ内の圧力の減少により、焦点化レンズスタックの設計の範囲が、より小さな粒子側にずれ、緩和圧力を増加することにより、焦点化粒子の範囲がより大きな粒子の側にずれる。出口ノズルの設計に使用される式1は、それがレンズスタックを通る流束を定めることを示し、特に、大きなノズルが大きな流速を提供し、さらには小さな粒子が焦点化されることを示す。また圧流レジューサは、重要な役割を有し、レンズスタックの作動条件がどのように設定されるかについて、特に、緩和チャンバ内での圧力値に影響する。これは、主として、どの程度の流束がスキマーを通るかに基づいている。流束が大きくなると、出口ノズルが排出される流束を制限するため、緩和チャンバ内の圧力は増加する傾向にある。より大きなスキマーでは、より大きな流束が得られ、圧力が増加し、より大きな粒子側に範囲がシフトされる。PFRスキマーのサンプリングノズルまでの距離は、気体密度が低下するため、質量流束を低下させ、これにより緩和チャンバの圧力が低下し、焦点化範囲が小粒子側にシフトする。図13には、これらが最適設計値の周辺で変化するときの、これらの寸法に及ぼす定量的な影響を示す。出口ノズルは、最も重要な影響を有することに留意する必要がある。また、PFR設計は、一つの自由なパラメータを有し、従って、サンプリングノズルまでの距離が実験的に調節される場合、誤差を整合させ、スキマーの直径を補償することが可能となる。
【0061】
(G 検証結果および実験結果)
設計の解析予測を評価し検証するため、CDアダプコ(Adapco)からの圧縮性流れソルバーSTAR-CCM+(登録商標)により、2つの寸法、対称軸、高マッハ数を用いて、計算流体動力学(CFD)シミュレーションを実施した。また、2つの装置をステンレス鋼および黄銅で構築し、ローレンスライブモア国立研究所で評価した。真空において1μmから10μmの間の直径の焦点化粒子用、および大気圧下、1L/分でのサンプル用に設計された焦点化装置について実験結果を採取した。次に、実験結果を解析予測および計算流体動力学予想と比較したところ、理論と実験の間で、極めて良好な一致が認められた。通常、従来の臨界オリフィスサンプリングインターフェースを圧流レジューサと置換すると、空力学的なレンズスタックに基づいた設計焦点化装置のサンプリング速度および効率が有意に改善され、これにより、エアロゾル解析機器の感度が向上する。実際の装置挙動は、圧流レジューサスキマー調節、レンズスタック焦点化範囲および出口ノズル粒子出口速度用の設計ツールからの計算予測に極めて近い。
【0062】
(G1 機械的な設計および実験の構成)
表2に示した圧流レジューサを含む装置、表1に示すような9個のレンズの焦点化スタック、および出口ノズルが構成される。図2には、圧流レジューサとレンズスタックの両方の機械的な構成を示す。圧流レジューサは、サンプリングノズルまでのスキマー距離が、可変厚さのシム(shim)を用いて調整されるように構成される。レンズスタックは、積層可能なレンズモジュールの周囲に構成される。モジュールは、レンズおよび1.5cmの高さのスペーサで構成される。各モジュールは、Oリングを用いて隣と密閉される。次に、焦点化スタックを構成する9個のモジュールが容器内に挿入される。この容器は、一端が圧流レジューサと接続され、他端がノズルと接続されている。第1の装置は、ステンレス鋼で構成される。ただし、オリフィスを中心にし、組み立てられた各種レンズモジュールの間の配置を良好に維持することは、予想よりも複雑であった。第2の装置は、黄銅で構成され、各種オリフィスをより正確に中心を合わせることができた。
【0063】
(G2 圧流レジューサの圧力調整)
理論から、出口ノズルが適性に構成された場合、緩和チャンバ内での作動圧力が20トールに達し、適正な流束が得られ、適正な作動条件画得られることが予想される。圧流レジューサの設計ツールは、適正作動用の、サンプリングノズルとスキマーの間の距離の近似値を提供する。これは、中心で見られる流束特性を用いて、予測が実施されるという事実によるものである。ただし、スキマー距離は、サンプリングノズルよりも大きくなるように設計されているため、設計値からの最適実験空間が生じ、結果的にスキマー直径寸法に整合誤差が生じる。また、異なる距離で得られた圧力値により、我々の解析モデルを検証することができる。これは、スタック内の各レンズでの圧力低下の予測により定められるためである。最後に、距離さらには圧力の僅かな変化が可能となり、図14のように必要な場合、被焦点化粒子寸法が僅かに調整される。圧流レジューサの排気は、粗引きポンプV500を用いて、両方の側から実施される。MKSPDR2000ゲージコントローラとともに、MKS626Aバラトロン(Baratron)容量圧力計を用いて、各スキマー距離に対して、いくつかの測定が行われる。PFRは、340μmのサンプリングノズルおよび550μmのスキマーにより構成される。表1に示すようなレンズスタックの出口ノズルは、650μmに設定される。図15には、理論の欄で示した微分を用いた圧力予測と比較して、測定結果を示す。ゲージは、供給業者により推奨の通り、10-4トールの圧力でゼロを設定することにより補正される。20トールにするため、設計値からの僅かな調整がなされたものの、極めて良好なマッチングが得られた。
【0064】
(G3 出口速度およびモデリング)
焦点化装置から排出された粒子は、その後、粒子空力学的直径による流子速度が臨界的であるかどうかを把握するため、バイオエアロゾル質量分析機器(MAMS)に捕獲され、化学分析のため解析される。粒子速度は、MAMS用にローレンスライブモア国立研究所で開発された、6つのレーザトラッキング装置を用いて測定される。各較正された空力学的直径のポリスチレンラテックス球(PSL)は、焦点化入口を介して搬送され、その速度が測定される。構成には、出口ノズルの後で真空を得るため、ターボポンプ分離フローが使用され、10-1トールのバックグラウンド圧力にされる。次に、10-4トールで作動するトラッキングシステムと連動させるため、平坦スキマーが設置される。図16には、本願の理論の欄で示した技術により算出された解析予測値と、粒子トラッキングシミュレーションと連結した計算流体動力学シミュレーションの結果を比較して示す。図からわかるように、理論、測定値、および計算シミュレーションの間に、極めて良好な一致が得られている。
【0065】
(G4 焦点化特性および透過特性)
寸法範囲に関して、出口ノズルの先端から20cmの位置で得られるビーム寸法は、図17に示すように、計算流体動力学シミュレーションおよび粒子シミュレーションで得られた結果と良い一致を示した。測定は、較正されたポリスチレンラテックス球の寸法を用いて実施した。グリースで被覆されたターゲットは、出口ノズルの20cm下方に配置され、粒子は、装置を介して、10乃至20分間、高濃度で搬送される。次に、顕微鏡を用いて粒子の堆積が画像化され、その後スポットの直径が測定される。堆積物の外端からビーム直径を測定することを試みたが、残念ながら、測定精度は変動し、成膜物の終端を予測することは難しかった。これは、透過効率が小さく、予測ビーム直径では、単位面積当たりの堆積粒子が極めて少量であるため、大きな直径の粒子では、堆積が非常に僅かであることを強調する結果となった。また、ビーム直径は、緩和チャンバ内の圧力に大きく影響され、特に、小さな直径の粒子の場合、これが顕著である。圧力が20トールを超える高い値に維持されると、1μmの粒子は、焦点が合わず、ビームは、ドーナツ状となる。
【0066】
この装置の評価の間、発散角度の寸法範囲に関して、異なる粒子直径で得られる各ビームは、それらが十分に焦点化されても、配置が大きく異なることに留意する必要がある。ターゲット上の異なる粒子直径のビームスポットは、異なるレンズオリフィスが適正に整列されていない場合、1mmまで離れ得る。個々のレンズの位置の手動調整により、この問題を軽減することができ、1μmから10μmの焦点化粒子のビーム中心を500μm以内に維持することができる。
【0067】
透過効率に関して、導入装置の透過効率を測定するため、MAMS機器のトラック領域が使用される。このトラック領域は、約200μmの直径の6つのレーザにより照射された際の、粒子からの散乱光を使用する。レーザは、全7.5cmの距離にわたり、第1のレーザは、入口の出口ノズルから2.5cmの位置にある。次に、各粒子が出口ノズルから10cmの位置で、200μmの直径のビーム内に位置する限り、このトラック領域は、各粒子速度を正確に検出し、計算する。システムを介して搬送された較正されたPSL、およびその濃度は、TSI社の空力学的粒子寸法測定器(APS)分光器モデル3320により監視される。PFRサンプリングシステムは、表2に示すように設定され、1L/分で引き寄せられ、これにより透過効率の計算が可能となる。一方、計算流体動力学計算は、粒子の動きと組み合わせて実施され、10cmおよび12cmで、200μmのトラッキング可能な粒子ビームの範囲内となるように、透過効率が予測される。図18には、CFD予測と比較して、測定結果を示す。トラッキングレーザに対する入口装置の位置合わせは、重要であり、測定特性に大きな影響を及ぼすことに留意する必要がある。粒子直径が異なると、異なる軌跡が得られ、異なる位置で焦点化されるという事実は、測定に影響を及ぼす。BAMSのトラック領域は、一つの軌跡についてのみ最適化されるためである。
【0068】
以下の参照文献は、本願の参照文献として取り入れられている。
[1] Tobias,H.J.,Kooima,P.M.,Dochery,K.S.,Ziemann,P.J.,「理論脱離粒子ビーム質量分光器を用いた,有機エアロゾルのリアルタイム化学解析」,Aerosol Sci.Tech,33:170-190,2000年
[2] Zhang,X.ら,「空力学的レンズノズルシステムによる粒子ビームコリメーションの計算,パート1:個々のレンズまたはノズル」,Aerosol Sci.Tech.,36:617-631,2002年
[3] Liu,P.,Ziemann,P.L.,Kittelson,D.B.McMurry,P.H.,「制御寸法の粒子ビームの形成と発散I,空力学的レンズおよびノズル膨脹での粒子の動きの理論」,Aerosol Sci.Tech.,22:293-313,1995a
[4] Schreiner,J.,Schild,U.,Voigt,C.,Mauersberger,K.,「10から150トールの圧力での粒子ビームへのエアロゾルの焦点化」,Aerosol Sci.Tech.,31,2373-382,1999
[5] H.Ashkenas,F.S.Sherman,「超音波自由ジェットの低密度風洞における構造および利用」,Rarefied Gas Dynamics国際シンポジウム,3,vol.2,pp.84-105,1966
[6] Hinds,W.,「エアロゾル技術:特性,挙動および空中粒子の測定」,Wiley-Interscience,ニューヨーク,第2版,1999年1月
[7] Fergenson,D.P,;Pitesky,M.E.;Tobias,H.J.;Steele,P.T.;Czerwieniec,G.A.;Russell,S.C.;Lebrilla,C.B.;Horn,J.M.;Coffee,K.R.;Strivastava,A.;PillaiS.P.;Shih,M.T.P.;HallH.L.;RamponiA.J.;ChangJ.T.;Langlois,R.G.;P.L.;Hadley,R.T.;FrankM.;GardE.E.,「個々のバイオエアロゾルのミリセカンド単位の無試薬同定」,Analytical Chemistry,76,373-378,2004年
【0069】
本発明は、例えば、サンプルの同定、環境促成の研究、柱状噴出化学分析、気象学、化学バイオ戦争剤検出、空気−水供給システム、オフィス建築、輸入港、輸送システム、公共イベント等に使用することができる。また、本発明は、例えば、学術的なエアロゾル研究、自主エアロゾル病原体検出システム等に使用することができる。
【0070】
特定の作動手順、材料、温度、パラメータおよび特定の実施例について説明したが、それらは、本発明を限定するものではない。当業者には、修正および変更が明らかであり、本発明は、特許請求の範囲によってのみ限定されることを意図するものである。
【図面の簡単な説明】
【0071】
【図1】圧流レジューサおよびエアロゾル焦点化レンズスタックを有する、本発明のエアロゾル焦点化システム(AFS)の一実施例の3D断面図である。
【図2】図1の圧流レジューサ101の断面図である。
【図3】図1のレンズスタック組立体102の断面図である。
【図4】760トールのサンプリング圧力での、入口ノズルのオリフィス径と流速の関係を示したグラフである。
【図5】粒子透過とスキマー寸法および入口ノズルからの距離の関係を示したグラフである。
【図6】抑制チャンバ内の各圧力に対するスキマーの直径をグラフである。
【図7】各種入口ノズルに対する緩和チャンバの寸法を示すグラフである。
【図8】1気圧での20トール、1L/分(または3.8L/分、20トール)の等価流速に整合するPFRスキマー設計を示したグラフである。
【図9】1気圧のレンズスタックでの20トール、1L/分(または3.8L/分、20トール)の等価流速に整合する各緩和距離設計を示すグラフである。緩和チャンバの直径は5cmである。
【図10】フローチャートである。
【図11】0.7μmから10μmの範囲の寸法の粒子を焦点化するステップダウンレンズスタック設計の一例を示すグラフである。
【図12】焦点化レンズスタックを通る全流束に及ぼす出口ノズルの効果を示すグラフである。
【図13】出口ノズルを出た後の出口速度に及ぼすバックグラウンド圧力の効果を示すグラフである。
【図14】表1に示すレンズスタックの焦点化範囲に及ぼす寸法の効果を示すグラフである。
【図15】650μmの出口ノズルでの緩和チャンバの圧力とPFRスキマー距離の関係を示すグラフである。
【図16】出口速度の測定結果を示すグラフである。
【図17】焦点化装置のノズルから20cmの距離での、粒子ビーム直径を示すグラフである。
【図18】焦点化装置のノズルから10cmの距離での、200μm以内の粒子透過効率を示すグラフである。
【特許請求の範囲】
【請求項1】
エアロゾル焦点化装置とともに使用される、作動圧力に特徴のある圧流レジューサ機器であって、
サンプリング環境から、粒子搬送空気を引き込む入口ノズルであって、サンプリング圧力は、前記エアロゾル焦点化装置の作動圧力よりも高いことを特徴とする入口ノズルと、
前記入口ノズルの下流に整列され、前記入口ノズルから離間されたオリフィスを有するスキマーであって、該スキマーと前記入口ノズルの間にギャップが形成される、スキマーと、
前記入口ノズルからの圧力および流束を抑制するため、前記ギャップと流体連通された排気ポートと、
前記スキマーのオリフィスの下流の、前記スキマーのオリフィスと流体連通された緩和チャンバであって、前記エアロゾル焦点化装置と流体的に接続された出口を有し、前記スキマーのオリフィスから前記エアロゾル焦点化装置に粒子が進入する前に、前記粒子の速度を抑制する緩和チャンバと、
を有する圧流レジューサ機器。
【請求項2】
前記サンプリング環境の前記サンプリング圧力は、1atmであることを特徴とする請求項1に記載の圧流レジューサ機器。
【請求項3】
前記サンプリング圧力は、前記作動圧力の少なくとも2倍であり、前記入口ノズルを介して超音波ジェットが生じ、
前記サンプリング圧力および流束は、前記入口ノズルの前記オリフィスの寸法により、前記エアロゾル焦点化装置の作動条件に拘わらず、単独で定められることを特徴とする請求項1に記載の圧流レジューサ機器。
【請求項4】
前記圧流抑制チャンバは、少なくとも一つの追加排気ポートを有し、前記2つの排気ポートは、前記抑制チャンバ内に分配され、前記抑制チャンバ内に、より均一な圧力分布が生じることを特徴とする請求項1に記載の圧流レジューサ機器。
【請求項5】
前記スキマーは、円錐状であることを特徴とする請求項1に記載の圧流レジューサ機器。
【請求項6】
前記スキマーのオリフィスの寸法および前記入口ノズルからの距離は、所定の圧力が得られ、粒子の透過が最大となるように選定されることを特徴とする請求項1に記載の圧流レジューサ機器。
【請求項7】
前記緩和チャンバは、前記進入粒子に対して、適当な停止距離または緩和距離が得られるように寸法化されることを特徴とする請求項1に記載の圧流レジューサ機器。
【請求項8】
作動圧力に特徴のある、出口ノズルを有するエアロゾル焦点化装置と、
前記エアロゾル焦点化装置の上流の圧流レジューサ機器と、
を有するエアロゾル焦点化システムであって、
前記圧流レジューサ機器は、
サンプリング環境から、粒子搬送空気を引き込む入口ノズルであって、サンプリング圧力は、前記エアロゾル焦点化装置の作動圧力よりも高いことを特徴とする入口ノズル;
前記入口ノズルの下流に整列され、前記入口ノズルから離間されたオリフィスを有するスキマーであって、該スキマーと前記入口ノズルの間にギャップが形成される、スキマー;
前記入口ノズルからの圧力および流束を抑制するため、前記ギャップと流体連通された排気ポート;
前記スキマーのオリフィスの下流の、前記スキマーのオリフィスと流体連通された緩和チャンバであって、前記エアロゾル焦点化装置と流体的に接続された出口を有し、前記スキマーのオリフィスから前記エアロゾル焦点化装置に粒子が進入する前に、前記粒子の速度を抑制する緩和チャンバ;
を有する、エアロゾル焦点化システム。
【請求項9】
前記サンプリング環境の前記サンプリング圧力は、1atmであることを特徴とする請求項8に記載のエアロゾル焦点化システム。
【請求項10】
前記サンプリング圧力は、前記作動圧力の少なくとも2倍であり、前記入口ノズルを介して超音波ジェットが生じ、
前記サンプリング圧力および流束は、前記入口ノズルの前記オリフィスの寸法により、前記エアロゾル焦点化装置の作動条件に拘わらず、単独で定められることを特徴とする請求項8に記載のエアロゾル焦点化システム。
【請求項11】
前記圧流抑制チャンバは、少なくとも一つの追加排気ポートを有し、前記2つの排気ポートは、前記抑制チャンバ内に分配され、前記抑制チャンバ内に、より均一な圧力分布が生じることを特徴とする請求項8に記載のエアロゾル焦点化システム。
【請求項12】
前記スキマーは、円錐状であることを特徴とする請求項8に記載のエアロゾル焦点化システム。
【請求項13】
前記スキマーのオリフィスの寸法および前記入口ノズルからの距離は、所定の圧力が得られ、粒子の透過が最大となるように選定されることを特徴とする請求項8に記載のエアロゾル焦点化システム。
【請求項14】
前記緩和チャンバは、前記進入粒子に対して、適当な停止距離または緩和距離が得られるように寸法化されることを特徴とする請求項8に記載のエアロゾル焦点化システム。
【請求項1】
エアロゾル焦点化装置とともに使用される、作動圧力に特徴のある圧流レジューサ機器であって、
サンプリング環境から、粒子搬送空気を引き込む入口ノズルであって、サンプリング圧力は、前記エアロゾル焦点化装置の作動圧力よりも高いことを特徴とする入口ノズルと、
前記入口ノズルの下流に整列され、前記入口ノズルから離間されたオリフィスを有するスキマーであって、該スキマーと前記入口ノズルの間にギャップが形成される、スキマーと、
前記入口ノズルからの圧力および流束を抑制するため、前記ギャップと流体連通された排気ポートと、
前記スキマーのオリフィスの下流の、前記スキマーのオリフィスと流体連通された緩和チャンバであって、前記エアロゾル焦点化装置と流体的に接続された出口を有し、前記スキマーのオリフィスから前記エアロゾル焦点化装置に粒子が進入する前に、前記粒子の速度を抑制する緩和チャンバと、
を有する圧流レジューサ機器。
【請求項2】
前記サンプリング環境の前記サンプリング圧力は、1atmであることを特徴とする請求項1に記載の圧流レジューサ機器。
【請求項3】
前記サンプリング圧力は、前記作動圧力の少なくとも2倍であり、前記入口ノズルを介して超音波ジェットが生じ、
前記サンプリング圧力および流束は、前記入口ノズルの前記オリフィスの寸法により、前記エアロゾル焦点化装置の作動条件に拘わらず、単独で定められることを特徴とする請求項1に記載の圧流レジューサ機器。
【請求項4】
前記圧流抑制チャンバは、少なくとも一つの追加排気ポートを有し、前記2つの排気ポートは、前記抑制チャンバ内に分配され、前記抑制チャンバ内に、より均一な圧力分布が生じることを特徴とする請求項1に記載の圧流レジューサ機器。
【請求項5】
前記スキマーは、円錐状であることを特徴とする請求項1に記載の圧流レジューサ機器。
【請求項6】
前記スキマーのオリフィスの寸法および前記入口ノズルからの距離は、所定の圧力が得られ、粒子の透過が最大となるように選定されることを特徴とする請求項1に記載の圧流レジューサ機器。
【請求項7】
前記緩和チャンバは、前記進入粒子に対して、適当な停止距離または緩和距離が得られるように寸法化されることを特徴とする請求項1に記載の圧流レジューサ機器。
【請求項8】
作動圧力に特徴のある、出口ノズルを有するエアロゾル焦点化装置と、
前記エアロゾル焦点化装置の上流の圧流レジューサ機器と、
を有するエアロゾル焦点化システムであって、
前記圧流レジューサ機器は、
サンプリング環境から、粒子搬送空気を引き込む入口ノズルであって、サンプリング圧力は、前記エアロゾル焦点化装置の作動圧力よりも高いことを特徴とする入口ノズル;
前記入口ノズルの下流に整列され、前記入口ノズルから離間されたオリフィスを有するスキマーであって、該スキマーと前記入口ノズルの間にギャップが形成される、スキマー;
前記入口ノズルからの圧力および流束を抑制するため、前記ギャップと流体連通された排気ポート;
前記スキマーのオリフィスの下流の、前記スキマーのオリフィスと流体連通された緩和チャンバであって、前記エアロゾル焦点化装置と流体的に接続された出口を有し、前記スキマーのオリフィスから前記エアロゾル焦点化装置に粒子が進入する前に、前記粒子の速度を抑制する緩和チャンバ;
を有する、エアロゾル焦点化システム。
【請求項9】
前記サンプリング環境の前記サンプリング圧力は、1atmであることを特徴とする請求項8に記載のエアロゾル焦点化システム。
【請求項10】
前記サンプリング圧力は、前記作動圧力の少なくとも2倍であり、前記入口ノズルを介して超音波ジェットが生じ、
前記サンプリング圧力および流束は、前記入口ノズルの前記オリフィスの寸法により、前記エアロゾル焦点化装置の作動条件に拘わらず、単独で定められることを特徴とする請求項8に記載のエアロゾル焦点化システム。
【請求項11】
前記圧流抑制チャンバは、少なくとも一つの追加排気ポートを有し、前記2つの排気ポートは、前記抑制チャンバ内に分配され、前記抑制チャンバ内に、より均一な圧力分布が生じることを特徴とする請求項8に記載のエアロゾル焦点化システム。
【請求項12】
前記スキマーは、円錐状であることを特徴とする請求項8に記載のエアロゾル焦点化システム。
【請求項13】
前記スキマーのオリフィスの寸法および前記入口ノズルからの距離は、所定の圧力が得られ、粒子の透過が最大となるように選定されることを特徴とする請求項8に記載のエアロゾル焦点化システム。
【請求項14】
前記緩和チャンバは、前記進入粒子に対して、適当な停止距離または緩和距離が得られるように寸法化されることを特徴とする請求項8に記載のエアロゾル焦点化システム。
【図1】

【図2】
【図3】
【図4】

【図5】
【図6】

【図7】
【図8】

【図9】
【図10】

【図11】

【図12】
【図13】
【図14】
【図15】

【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公表番号】特表2008−544258(P2008−544258A)
【公表日】平成20年12月4日(2008.12.4)
【国際特許分類】
【出願番号】特願2008−517218(P2008−517218)
【出願日】平成18年6月19日(2006.6.19)
【国際出願番号】PCT/US2006/023839
【国際公開番号】WO2006/138724
【国際公開日】平成18年12月28日(2006.12.28)
【出願人】(507410009)ローレンス リヴァーモア ナショナル セキュリティ,エルエルシー (14)
【Fターム(参考)】
【公表日】平成20年12月4日(2008.12.4)
【国際特許分類】
【出願日】平成18年6月19日(2006.6.19)
【国際出願番号】PCT/US2006/023839
【国際公開番号】WO2006/138724
【国際公開日】平成18年12月28日(2006.12.28)
【出願人】(507410009)ローレンス リヴァーモア ナショナル セキュリティ,エルエルシー (14)
【Fターム(参考)】
[ Back to top ]