
エコ運転支援装置

【課題】運転者の運転操作の評価(特に車両加速時や減速時での評価)を運転者に運転時に素早く理解させて、運転者のエコ運転の関心を向上させる。
【解決手段】エコ運転支援装置201は、ディスプレイ140とECU170とを備える。ECU170は、運転者による前記車両の運転操作に応じて、総合評価点、発進評価点等のエコ度合いを変動させる。変動後のエコ度合いは、ディスプレイ140に、運転者に認識されるように認識される。
【解決手段】エコ運転支援装置201は、ディスプレイ140とECU170とを備える。ECU170は、運転者による前記車両の運転操作に応じて、総合評価点、発進評価点等のエコ度合いを変動させる。変動後のエコ度合いは、ディスプレイ140に、運転者に認識されるように認識される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、運転者による車両の運転操作のエコ度合いを報知するエコ運転支援装置に関する。
【背景技術】
【0002】
近年、環境に優しい車社会の構築(以下、車社会のエコ化と称する)が要求されてきている。その一環として、エコ運転支援装置の開発が行われている。エコ運転支援装置は、運転者による車両の運転操作が省燃費運転操作であるか否かを演算し、その演算結果を運転者に報知して、運転者の運転操作をエコ度合いの高い運転操作へ導くための装置である。ここでいう「エコ」には、エコノミー(economy)やエコロジー(ecology)の意味が含まれる。エコノミーとは、燃料の消費を抑えて(省燃費)、燃料を節約することを意味する。エコロジーとは、化石燃料(ガソリン等)の消費の抑制、化石燃料の燃焼等により生じる有害物質や二酸化炭素の発生や排出を抑制する等により、環境への負荷を抑えることを意味する。
【0003】
特許文献1、2に記載のエコ運転支援システムは、車載のECUにより実現される(特許文献1の段落0019、及び、特許文献2の段落0018参照)。
【0004】
特許文献3に記載の運転評価システムは、自車両のドライバーのエコ運転の達成度や、エコ運転に対する意識を評価するためのシステムである。この運転評価システムは、各々の車両に搭載される車載機(車載システム)と、ユーザそれぞれの車両が運転される状況やドライバーの運転操作に関する情報を車載システムから受信する情報処理センターとにより構成され、自車両のドライバーに対して、ドライバーのエコ運転可能度、熟練度及びエコ運転意識度を表示し、これらの指標に基づくアドバイスを自車両のドライバーに与えるものである。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−096187号公報
【特許文献2】特開2010−042746号公報
【特許文献3】特開2011−065527号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
車社会のエコ化を推進するためには、車社会のエコ化に対する運転者の関心を高めることが重要である。そのためには、運転者が行った車両の運転操作から求められたエコ度合いという評価が運転者にフィードバックされ、運転者の車両の運転操作が車社会のエコ化に適合していくようにすることが重要である。
【0007】
特許文献1、2に記載のいずれの技術も、運転者の運転操作の現状を運転者に向けて表示するものであり、運転者は、運転操作をどのように改善すれば「エコ」に貢献できるのかがわかりにくい。
【0008】
また、特許文献3のように、車載機と情報処理センター(サーバ)との間で通信を行うようにした場合、車両の加速時や減速時での運転者の運転操作に関する情報(特に、速度変化、加速度変化に関する情報)が短時間に多量に生じ、車載機が送信すべき情報の量が膨大となってしまう。特に、イグニッションスイッチのオン/オフに伴う通信の開始/終了では、車載機の起動等に10秒程度の時間を要し、この間に車載機が情報送信を行えないと、車載機に大きな負荷がかかり、運転者に対する評価(エコ度合い)の表示に不具合が生じやすい。
【0009】
さらに、近年、情報化社会の発達に伴って普及したインターネット環境を活用し、運転者の運転操作に関する情報を車載された無線通信設備で車両からサーバに送信し、サーバにおいて車両からの情報を集計、分析、所定の指標に基づく点数化及びランク付け等の評価を行い、携帯電話やパソコン等のインターネット接続が可能な機器で運転者がこれらの評価を閲覧できるようにして、車社会のエコ化に対する運転者の意識の向上を図ることも行われている。しかしながら、これでは、運転者は、運転しながら、加速時や減速時の運転操作の評価(エコ度合い)を認識できない。また、運転者が携帯電話やパソコン等の媒体を通して事後的に運転操作の評価(エコ度合い)を確認するのでは、運転者の運転操作が車社会のエコ化に沿うものになりにくい。
【0010】
本発明は、上記の点を鑑みてなされたものであり、運転者の運転操作の評価(特に車両加速時や減速時での評価)を運転者に運転時に素早く理解させて、運転者のエコ運転の関心を向上させることを目的とする。
【課題を解決するための手段】
【0011】
本発明のエコ運転支援装置は、運転者による車両の運転操作のエコ度合いを報知するエコ運転支援装置であって、表示を行う表示部と、情報処理を行う情報処理部と、を備え、前記情報処理部は、運転者による前記車両の運転操作に応じてエコ度合いを変動させる評価変動処理と、変動後のエコ度合いを前記表示部に表示する表示処理とを行う。
【発明の効果】
【0012】
本発明のエコ運転支援装置によれば、車両の運転操作に応じてエコ度合いが変動し、変動結果が表示部に表示されて運転者が認識できるようになり、したがって、運転者の運転操作の評価(特に車両加速時や減速時での評価)を運転者に運転時に素早く理解させて、運転者のエコ運転の関心を向上させることができる。
【図面の簡単な説明】
【0013】
【図1】エコ運転支援装置を含む車両の全体構成を示すブロック図である。
【図2】ディスプレイの表示例である。
【図3】車両の状態遷移を示す概念図である。
【図4】状態遷移条件テーブルのデータ構成を示す模式図である。
【図5】エコ判定閾値マップの模式図である。
【図6】車両が停車状態にあるときにECUが行う処理の流れを示すフローチャートである。
【図7】車両が発進状態にあるときにECUが行う処理の流れを示すフローチャートである。
【図8】車両が定常運転状態にあるときにECUが行う処理の流れを示すフローチャートである。
【図9】車両が加速状態にあるときにECUが行う処理の流れを示すフローチャートである。
【図10】車両が減速状態にあるときにECUが行う処理の流れを示すフローチャートである。
【図11】ECUが行う評価変更イベントの流れを示すフローチャートである。
【発明を実施するための形態】
【0014】
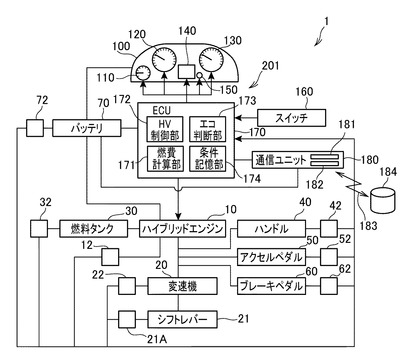
実施の一形態を、図1ないし図11に基づいて説明する。説明の便宜上、本実施の形態を第一の実施の形態と呼ぶ。図1は、エコ運転支援装置201を含む車両1の全体構成を示すブロック図である。以下、「エコ」には、エコノミー(economy)やエコロジー(ecology)の意味が含まれる。エコノミーとは、燃料の消費を抑えて(省燃費)、燃料を節約することを意味する。エコロジーとは、化石燃料(ガソリン等)の消費の抑制、化石燃料の燃焼等により生じる有害物質や二酸化炭素の発生や排出を抑制する等により、環境への負荷を抑えることを意味する。
【0015】
車両1は、ハイブリッドエンジン10と、変速機20と、燃料タンク30と、ハンドル40と、アクセルペダル50と、ブレーキペダル60と、バッテリ70と、ワイパ(図示せず)と、メータパネル100と、スイッチ類160と、ECU170(Engine Control Unit)と、通信ユニット180とを備える。
【0016】
ECU170は、演算処理を行うCPUと、プログラム等を記憶するROMと、データ等を記憶するRAMとを含み、ハイブリッドエンジン10での燃料の点火時期等の制御やメータパネル100の表示等を総合的に制御するコンピュータである。
【0017】
ハイブリッドエンジン10は、バッテリ70から給電を受けて駆動する電気モータと、ガソリンエンジン、ディーゼルエンジン、ガソリンエンジン、ディーゼルエンジン等のエンジンとを組み合わせて構成される。燃料タンク30は、ハイブリッドエンジン10に燃料を供給する。この燃料タンク30には、燃料残量センサ32が配置される。燃料残量センサ32は、燃料タンク30内の燃料残量を検出し、検出結果をECU170に伝える。また、バッテリ70は、ハイブリッドエンジン10に備わる点火プラグ(図示せず)と、ワイパ(図示せず)と、メータパネル100と、ECU170とにも給電する。バッテリ70には、バッテリ残量センサ72が配置される。バッテリ残量センサ72はバッテリ残量を検出し、検出結果をECU170に伝える。
【0018】
ハイブリッドエンジン10には、出力センサ12が配置される。出力センサ12には、ハイブリッドエンジン10のクランクシャフト付近に配置されハイブリッドエンジン10の回転数を検出する回転数センサ、ハイブリッドエンジン10の出力軸に配置されハイブリッドエンジン10の出力トルクを検出するトルクセンサ、ハイブリッドエンジン10(ハイブリッドエンジン)の電気モータに配置され電気モータのモータ回転数を検出するモータ回転数センサ、等が含まれる。出力センサ12の検出結果は、ECU170に伝わる。
【0019】
変速機20は、ハイブリッドエンジン10の出力軸に接続されている。変速機20は、一例として、自動変速機(AT)である。変速機20は、シフトレバー21の操作により、ハイブリッドエンジン10の出力軸の回転数を所望の回転数に変更したり、ハイブリッドエンジン10から出力軸への動力伝達の切り離しをしたりする。詳細には、シフトレバー21がニュートラルレンジやパーキングレンジに位置付けられると、ハイブリッドエンジン10の動力は出力軸に伝わらなくなる。また、シフトレバー21がニュートラルレンジやパーキングレンジ以外のレンジ(例えば、ドライブレンジ)に位置付けられると、ハイブリッドエンジン10の動力は出力軸に伝わり、出力軸がギア比に応じた回転数で回転する。シフトレバー21には、ポジションセンサ21Aが設けられる。ポジションセンサ21Aは、シフトレバー21のポジション(シフトポジション)を検出し、検出結果をECU170に伝える。
【0020】
変速機20の出力軸付近には、車速センサ22が配置されている。車速センサ22は、出力軸の回転に基づいて車速を検出し、検出結果をECU170に伝える。
【0021】
ハンドル40、アクセルペダル50、ブレーキペダル60及びメータパネル100は、車両1の運転席(図示せず)に配置される。ハンドル40は、車両1の運転席(図示せず)に着座した運転者が両手で把持できる位置に配置され、車両1に設けられたフロント操舵軸(図示せず)に接続される。ハンドル40には、ハンドル角を検出するハンドル角センサ42が配置される。また、アクセルペダル50及びブレーキペダル60は、いずれも、車両1の運転席に着座した運転者が足で操作できる位置に配置される。アクセルペダル50は、車両1に設けられたスロットル(図示せず)に接続される。アクセルペダル50には、アクセル開度を検出するアクセル開度センサ52が配置される。ブレーキペダル60は、車両1に設けられたブレーキ(図示せず)に接続される。ブレーキペダル60には、ブレーキ操作量を検出するブレーキ操作量センサ62が配置される。ハンドル角センサ42、アクセル開度センサ52及びブレーキ操作量センサ62の検出結果は、いずれも、ECU170に伝わる。
【0022】
メータパネル100は、運転席に着座して車両1を運転操作する運転者に対面する位置に設けられる。メータパネル100には、燃料メータ110と、速度メータ120と、タコメータ130と、ディスプレイ140と、スピーカ150とが含まれる。これにより、車両1の運転席に着座した運転者は、ディスプレイ140での表示内容を運転中に視認できることとなる。燃料メータ110は、ECU170からの指示を受けて燃料残量センサ32の検出結果を表示する。速度メータ120は、ECU170からの指示を受けて車速センサ22の検出結果を表示する。タコメータ130は、ECU170からの指示を受けて出力センサ12の検出結果を表示する。スピーカ150は、ECU170からの指示を受けて音声を発生する。
【0023】
ディスプレイ140は、ECU170からの指示を受けて、走行距離等の車両情報や、運転者にエコ運転を促すためのエコ運転支援情報を表示する。エコ運転支援情報には、運転者による車両1の運転操作のエコ度合いの一態様として、総合評価点E15、発進評価点E16、走行評価点E17、停車評価点E18(いずれも、図2に基づいて後述)が含まれる。ディスプレイ140には、例えば、液晶ディスプレイを採用することができる。
【0024】
スイッチ類160は、一例として、変速機20のシフトレバー21付近に配置されるハードウェアスイッチである。なお、スイッチ類160として、ディスプレイ140に積層配置されるタッチパネルであってもよい。スイッチ類160は、操作者(例えば、運転者)がECU170に対して操作入力を行うための入力手段として機能する。
【0025】
通信ユニット180は、ユニット内制御部181と、ユニット内通信部182とを有する。ユニット内制御部181は、CPUとROMとRAMとを含み、ECU170とは異なる独自の制御を行う。ユニット内通信部182は、キャリア網及びインターネット網等の広域通信網183を介して、サーバ装置184との通信を行う。通信ユニット180では、車両1のイグニッションスイッチ(図示せず)がオンとなると、これに伴ってユニット内制御部181が起動し始める。また、車両1のイグニッションスイッチがオフになると、これに伴ってユニット内制御部181が電源オフとなるための処理を開始し、その後、通信ユニット180が停止する。ユニット内通信部182は、ユニット内制御部181の制御を受けて、サーバ装置184とのデータの送受信を行う。ECU170は、所定のタイミングで、ECU170に記憶されているエコ度合い(総合評価点E15等)を、車両1を特定する識別子とともに通信ユニット180からサーバ装置184に送信させる。サーバ装置184では、複数の車両1から送信されるエコ度合い等の情報を、集計、分析、所定の指標に基づく点数化及びランク付け等の評価を行う。このように集計等された情報は、広域通信網183を通じて携帯電話やパソコン等の機器で閲覧可能な形態に加工される。また、サーバ装置184は、集計等した情報を、車両1を特定する識別子とともに送信出力する。車両1のECU170は、通信ユニット180で受信した情報をECU170自身に記憶し、ディスプレイ140に表示したり、各種の処理に用いたりする。また、車両1のECU170は、通信ユニット180で受信した命令信号に応じて、状態遷移条件テーブル175に格納されている遷移条件175Bの内容(図4参照)、エコ判定閾値マップ176での規定値MAP1、MAP2の値(図5参照)、評価変更イベントでのエコ度合い(総合評価点E15等)の変動幅等を変更する。
【0026】
本実施の形態の車両1では、表示部としてのディスプレイ140と、ECU170とがエコ運転支援装置201を構成する。ECU170は、エコ運転支援装置201において、情報処理を行う情報処理部として機能する。ECU170には、出力センサ12、車速センサ22、燃料残量センサ32、ハンドル角センサ42、アクセル開度センサ52、ブレーキ操作量センサ62、バッテリ残量センサ72、ポジションセンサ21A等の各種センサの検出結果と、スイッチ類160からの操作信号とが入力される。ECU170は、これらの入力に基づいて、演算や各部の制御等の情報処理を行い、燃料メータ110、速度メータ120、タコメータ130及びディスプレイ140の表示内容、並びに、スピーカ150の音声出力を総合的に制御する。
【0027】
ECU170には、燃費計算部171と、HV制御部172と、エコ判断部173と、条件記憶部174とが含まれる。燃費計算部171は、車速センサ22や燃料残量センサ32等の検出結果に基づいて、車両1の瞬間燃費や所定区間での平均燃費を算出する。算出された瞬間燃費や平均燃費は、燃費情報としてエコ判断部173に通知される。HV制御部172は、各種センサ(出力センサ12、車速センサ22、燃料残量センサ32、ハンドル角センサ42、アクセル開度センサ52、ブレーキ操作量センサ62、バッテリ残量センサ72、ポジションセンサ21A)からの信号入力に基づいて、ハイブリッドエンジン10を構成する電気モータやエンジンの制御をはじめとする車両1の各部を制御するための制御信号を生成する。また、HV制御部172は、各種センサからの信号入力に基づいて車両パワー、車両の限界出力、バッテリの充電許可電力等を算出し、算出したこれらの情報をHV状態信号としてエコ判断部173に出力する。エコ判断部173は、HV制御部172から出力されるHV状態信号の入力と、各種センサからの信号入力と、燃費計算部171から出力される燃費情報の入力とに基づいて、車両1の運転操作のエコ度合いの一態様であるエコ運転度を算出する。さらに、エコ判断部173は、算出したエコ運転度と、所定のエンジン始動閾値、エコ判定閾値、エコ判定閾値(いずれも後述)とに基づいて、車両1の現在の運転状態がエコ運転状態にあるのか、非エコ運転状態にあるのかを判定する。瞬間燃費や平均燃費の算出、エコ運転度の算出、並びに、運転状態の判定は、既知の技術であり(その一例は、特許文献1、特許文献2及び特許文献3)、説明を省略する。ECU170は、エコ判断部173によるエコ運転度や運転状態の判定結果、並びに、燃費計算部171で算出された瞬間燃費や平均燃費に基づいて、ディスプレイ140に対する表示を行う。条件記憶部174については、図4に基づいて後述する。
【0028】
なお、ECU170は、ハイブリッドエンジン10を制御するエンジンECUであっても、車両1を統合的に制御する統合ECUであってもよい。また、メータパネル100の表示制御は、ECU170が直接行っても、メータ表示を行うメータECUを設けてこのメータECUを介して行うようにしてもよい。また、ディスプレイ140として、ECU170に接続されたカーナビゲーション装置等の表示装置を用いてもよい。そして、上記の燃費計算部171、HV制御部172、エコ判断部173、条件記憶部174は、一つのECUに格納されていてもよいし、それぞれ別個のECUに格納されてこれらECUがデータ通信自在に接続されていても良い。また、条件記憶部174は、ECU内に設けられていてもよいし、ECUとデータ通信自在に接続されるハードディスクやフラッシュメモリ等の記憶媒体であっても良い。
【0029】
図2は、ディスプレイ140の表示例である。ディスプレイ140には、車両1の運転状態のエコ度合いを示すエコバー142と、燃費表示部144と、バッテリ残量表示部146と、車両1での所定時点からの積算走行距離を示すトリップメータ部148と、現在時刻を示す時計表示部149と、エコ評価表示部E10とが含まれる。
【0030】
燃費表示部144は、ディスプレイ140において上端に寄せて左右方向の略中央に設けられる。燃費表示部144には、燃費計算部171で出力された燃費情報が表示される。燃費表示部144に表示される燃費情報は、スイッチ類160(図1参照)からECUに対して行う設定に応じて瞬間燃費と平均燃費とのいずれかを選択的に表示できるようにしてもよいし、瞬間燃費と平均燃費とのどちらかのみを常時表示するようにしてもよい。
【0031】
時計表示部149は、ディスプレイ140において右上に設けられ、車両1に備わる時計回路(図示せず)に基づく現在時刻の表示が行われる。
【0032】
バッテリ残量表示部146は、バッテリ70の残量を示すものであり、ディスプレイ140において右端に寄せて上下方向の略中央に設けられる。バッテリ残量表示部146の表示態様は、バッテリ残量センサ72の検出結果に応じて変わる。
【0033】
トリップメータ部148は、ディスプレイ140において左上に設けられる。トリップメータ部148には、過去のある一時点からの車両1の積算走行距離や、総走行距離(オドメータにより定まる走行距離)が表示される。ECU170には、複数の積算走行距離の値(以下、TRIP−A値、TRIP−B値、…、と呼ぶことがある)と、総走行距離(以下、ODO値と呼ぶことがある)とが記憶されている。ECU170は、車速センサ22の検出結果に基づいて、TRIP−A値、TRIP−B値、…、やODO値を増加させる。ECU170は、スイッチ類160(図1参照)からの操作入力に応じて、トリップメータ部148での表示を、「TRIP A」という文字及びTRIP−A値、「TRIP B」という文字及びTRIP−B値、…、「ODO」という文字及びODO値の順に循環切替したり、操作入力時点でトリップメータ部148に表示されている積算走行距離(例えば、TRIP−A値)を「0」にリセットしたりする。なお、ECU170は、積算走行距離をリセットすることができるが、トリップメータ部148に「ODO」という文字及びODO値を表示しているときでも、総走行距離(ODO値)をリセットすることはない。
【0034】
エコバー142は、エコ判断部173での処理結果に基づいてECU170で作成され、ディスプレイ140において左下から右上にかけて左上が凸となるような弧を描くように表示される表示画像である。エコバー142は、エコ判定閾値等に対するエコ運転度の相対量を示す。エコバー142には、可変バー142Aと、HVエコ運転領域142Bと、エコ運転領域142Cと、非エコ運転領域142Dと、回生運転領域142Eとが含まれる。可変バー142Aは、運転者の運転操作に基づくエコ運転度を示す。車両1がモータで走行しているとき、可変バー142AはHVエコ運転領域142B内に達する。運転者の運転操作による車両出力パワーが所定のエンジン始動閾値142Fを超えると、可変バー142Aはエコ運転領域142C内に達する。運転者の運転操作による車両出力パワーが更に大きくなって所定のエコ判定閾値142Gを超えると、可変バー142Aは非エコ運転領域142D内に達する。回生ブレーキ等の操作によって車両の運転状態が回生運転状態にあると、可変バー142Aは、エコ運転度が回生限界値142H以下である、回生運転領域142E内に達する。ここで、回生限界値としては、回生によって発電可能な限界値や、充電可能な限界値などが設定される。可変バー142Aが回生運転領域142E内に達したときがエコ運転度の良い状態であり、可変バー142AがHVエコ運転領域142B、エコ運転領域142C、非エコ運転領域142Dに向かうに連れてエコ運転度が悪くなる。エンジン始動閾値142Fは、車速やバッテリ残量等によって変動し、最小のときに回生限界値142Hと一致する。
【0035】
エコ評価表示部E10は、ディスプレイ140内の右下箇所で、エコバー142よりも右下となる位置に設けられる。エコ評価表示部E10内には、上から順に、点数表示部E11、エコ発進評価部E12、安定走行評価部E13、エコ停車評価部E14が設けられる。点数表示部E11では、「評価」という文字とともに、総合評価点E15が表示される。エコ発進評価部E12では、「エコ発進」という文字とともに、発進評価点E16が表示される。安定走行評価部E13では、「安定走行」という文字とともに、走行評価点E17が表示される。エコ停車評価部E14では、「エコ停止」という文字とともに、停車評価点E18が表示される。ECU170には、総合評価点E15、発進評価点E16、走行評価点E17及び停車評価点E18の初期値が、予め記憶されている。ECU170は、総合評価点E15、発進評価点E16、走行評価点E17及び停車評価点E18を評価変更イベント(図6から図10に基づいて後述)にて増減させ、その増減後の値をECU170に書込記憶し、その増減後の値をディスプレイ140内で点数表示部E11、エコ発進評価部E12、安定走行評価部E13、エコ停車評価部E14のそれぞれに反映する。
【0036】
図2に示す例では、総合評価点E15は、百点満点に対する数値の態様で表示され、発進評価点E16と走行評価点E17と停車評価点E18とは、左端を原点として右方向に五段階に延びる棒グラフの態様で図形表示される。なお、総合評価点E15の表示態様は、数値に限られず、棒グラフやその他の態様での図形表示であってもよい。また、発進評価点E16、走行評価点E17及び停車評価点E18のいずれについても、その表示態様は、棒グラフに限られず、数値や棒グラフ以外の態様の図形表示であってもよい。
【0037】
図3は、車両1の状態遷移を示す概念図である。ECU170は、各種センサ(出力センサ12、車速センサ22、燃料残量センサ32、ハンドル角センサ42、アクセル開度センサ52、ブレーキ操作量センサ62、バッテリ残量センサ72、ポジションセンサ21A)からの信号入力に基づいて、車両1が停車状態H1、発進状態H2、定常運転状態H3、加速状態H4及び減速状態H5のいずれかの状態にあるとする。なお、車両1のイグニッションスイッチがオンになったとき、車両1は通常停止していることから、ECU170は、車両1が停車状態H1にあるとする。ECU170は、車両1で運転者によりなされる運転操作に応じて、図6から図10に示すいずれかの処理を実行し、その処理内容に応じて車両1の状態遷移をする。この状態遷移の際に、ECU170は、総合評価点E15、発進評価点E16、走行評価点E17及び停車評価点E18のそれぞれを増減し、増減後のこれらの値をECU170に書込記憶する処理(評価変更イベント)も行う。なお、総合評価点E15、発進評価点E16、走行評価点E17及び停車評価点E18は、車両1の状態遷移の際にのみ増減及び書込記憶するようにしても良いし、車両1の状態遷移の際だけでなく状態遷移をしない間でも増減及び書込記憶するようにしても良い。
【0038】
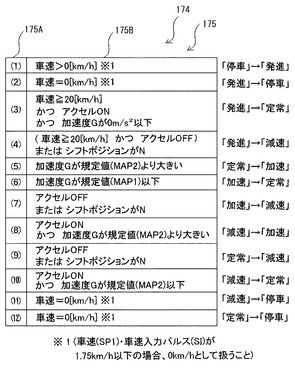
図4は、状態遷移条件テーブル175のデータ構成を示す模式図である。条件記憶部174には、状態遷移条件テーブル175が記憶されている。状態遷移条件テーブル175には、条件番号175Aと遷移条件175Bとが対応付けて記憶されている。遷移条件175Bは、ECU170が車両1の状態を遷移するための判定基準であり、その一例は、条件式である。図3には、遷移条件175Bの一例が示されているが、遷移条件はこの例以外のものを採用することが可能である。条件番号175Aは、遷移条件175Bを特定するための記号であり、図3中の丸括弧付番号に対応する。
【0039】
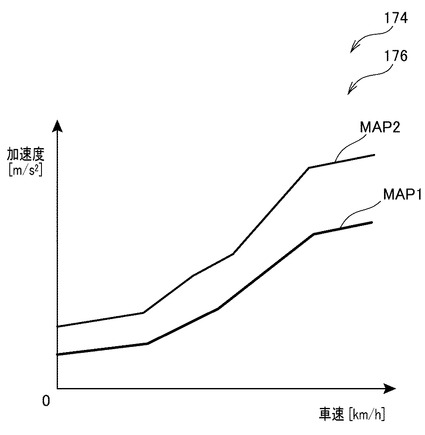
図5は、エコ判定閾値マップ176の模式図である。条件記憶部174には、エコ判定閾値マップ176が記憶されている。このエコ判定閾値マップ176は、車速と、その車速のときに対応する加速度のエコであるか否かの境界値との対応関係を示すものである。図5では、説明のために、エコ判定閾値マップ176を、車速を横軸とし、加速度を縦軸とし、車速に応じて変化する上記の境界値(規定値MAP1、MAP2)を折れ線で示す二次元グラフとして表現している。加速度が大きくなればなるほど、車両1で消費されるエネルギーが大きくなることから、ある車速のときの加速度が規定値MAP1、MAP2よりも大きい場合は「エコでない」と判定され、ある車速のときの加速度が規定値MAP1、MAP2よりも小さい場合は「エコである」と判定されることになる。
【0040】
図6は、車両1が停車状態H1にあるときにECU170が行う処理の流れを示すフローチャートである。車両1が停車状態H1にあるとき、ECU170は、図6に示す処理を実行する。ECU170は、まず、各種センサ(出力センサ12、車速センサ22、燃料残量センサ32、ハンドル角センサ42、アクセル開度センサ52、ブレーキ操作量センサ62、バッテリ残量センサ72、ポジションセンサ21A)からの信号入力に基づいて、車両1が条件(1)を満たすか否かを判定する(ステップS101)。ECU170は、条件(1)が満たされたと判定するまで処理を待機する(ステップS101のNO)。ECU170は、条件(1)が満たされたと判定したとき(ステップS101のYES)、状態遷移処理として、車両1が停車状態H1から発進状態H2に状態遷移したと扱い(ステップS102)、続いて、評価変動処理として、評価変更イベントを行なって(ステップS103)、一連の処理を終了する。図6に示す処理では、ステップS101での判定処理が、特許請求の範囲でいうところの「判定処理」に相当する。
【0041】
ステップS101で用いられる条件(1)の一例は、「車速>0km/h」である。車速は、車速センサ22からの信号入力に基づいて判定される。また、ステップS103での評価変更イベントの一例は、総合評価点E15を減少させ、発進評価点E16を増加させて、増減後のこれらの値をECU170に書込記憶し、その変動後の値をディスプレイ140に表示する処理である。
【0042】
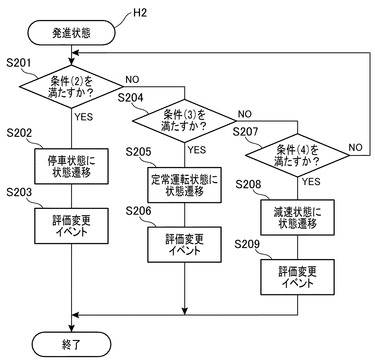
図7は、車両1が発進状態H2にあるときにECU170が行う処理の流れを示すフローチャートである。車両1が発進状態H2にあるとき、ECU170は、図7に示す処理を実行する。ECU170は、まず、各種センサ(出力センサ12、車速センサ22、燃料残量センサ32、ハンドル角センサ42、アクセル開度センサ52、ブレーキ操作量センサ62、バッテリ残量センサ72、ポジションセンサ21A)からの信号入力に基づいて、車両1が条件(2)を満たすか否かを判定する(ステップS201)。ECU170は、条件(2)が満たされたと判定したとき(ステップS201のYES)、状態遷移処理として、車両1が発進状態H2から停車状態H1に状態遷移したと扱い(ステップS202)、続いて、評価変動処理として、評価変更イベントを行なって(ステップS203)、一連の処理を終了する。
【0043】
ECU170は、ステップS201にて条件(2)が満たされていないと判定した場合(ステップS201のNO)、各種センサからの信号入力に基づいて、車両1が条件(3)を満たすか否かを判定する(ステップS204)。ECU170は、条件(3)が満たされたと判定したとき(ステップS204のYES)、状態遷移処理として、車両1が発進状態H2から定常運転状態H3に状態遷移したと扱い(ステップS205)、続いて、評価変動処理として、評価変更イベントを行なって(ステップS206)、一連の処理を終了する。
【0044】
ECU170は、ステップS204にて条件(3)が満たされていないと判定した場合(ステップS204のNO)、各種センサからの信号入力に基づいて、車両1が条件(4)を満たすか否かを判定する(ステップS207)。ECU170は、条件(4)が満たされたと判定したとき(ステップS207のYES)、状態遷移処理として、車両1が発進状態H2から減速状態H5に状態遷移したと扱い(ステップS208)、続いて、評価変動処理として、評価変更イベントを行なって(ステップS209)、一連の処理を終了する。他方、ECU170は、条件(4)が満たされていないと判定した場合(ステップS207のNO)、処理をステップS201に戻す。図7に示す処理では、ステップS201、ステップS204、ステップS207での判定処理が、特許請求の範囲でいうところの「判定処理」に相当する。
【0045】
ステップS201で用いられる条件(2)の一例は、「車速=0km/h」である。車速は、車速センサ22からの信号入力に基づいて判定される。また、ステップS203での評価変更イベントの一例は、総合評価点E15を増加させ、停車評価点E18を増加させて、増減後のこれらの値をECU170に書込記憶し、その変動後の値をディスプレイ140に表示する処理である。
【0046】
ステップS204で用いられる条件(3)の一例は、「車速≧20km/h かつ アクセル=オン かつ 加速度≧0m/s2」である。車速は、車速センサ22からの信号入力に基づいて判定される。アクセルのオン/オフは、アクセル開度センサ52からの信号入力に基づいて判定される。加速度は、出力センサ12及び車速センサ22の少なくともいずれかからの信号入力に基づいて判定される。また、ステップS206での評価変更イベントの一例は、総合評価点E15を増加させ、走行評価点E17を増加させて、増減後のこれらの値をECU170に書込記憶し、その変動後の値をディスプレイ140に表示する処理である。
【0047】
ステップS207で用いられる条件(4)の一例は、「(車速≧20km/h かつ アクセル=オフ) または シフトポジション=ニュートラルレンジ」である。車速は、車速センサ22からの信号入力に基づいて判定される。アクセルのオン/オフは、アクセル開度センサ52からの信号入力に基づいて判定される。シフトポジションは、ポジションセンサ21Aからの信号入力に基づいて判定される。また、ステップS209での評価変更イベントの一例は、総合評価点E15を増加させて、増減後のこの値をECU170に書込記憶し、その変動後の値をディスプレイ140に表示する処理である。
【0048】
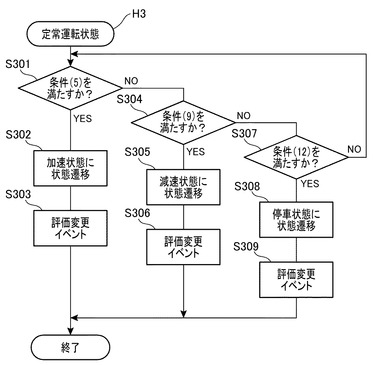
図8は、車両1が定常運転状態H3にあるときにECU170が行う処理の流れを示すフローチャートである。車両1が定常運転状態H3にあるとき、ECU170は、図8に示す処理を実行する。ECU170は、まず、各種センサ(出力センサ12、車速センサ22、燃料残量センサ32、ハンドル角センサ42、アクセル開度センサ52、ブレーキ操作量センサ62、バッテリ残量センサ72、ポジションセンサ21A)からの信号入力に基づいて、車両1が条件(5)を満たすか否かを判定する(ステップS301)。ECU170は、条件(5)が満たされたと判定したとき(ステップS301のYES)、状態遷移処理として、車両1が定常運転状態H3から加速状態H4に状態遷移したと扱い(ステップS302)、続いて、評価変動処理として、評価変更イベントを行なって(ステップS303)、一連の処理を終了する。
【0049】
ECU170は、ステップS301にて条件(5)が満たされていないと判定した場合(ステップS301のNO)、各種センサからの信号入力に基づいて、車両1が条件(9)を満たすか否かを判定する(ステップS304)。ECU170は、条件(9)が満たされたと判定したとき(ステップS304のYES)、状態遷移処理として、車両1が定常運転状態H3から減速状態H5に状態遷移したと扱い(ステップS305)、続いて、評価変動処理として、評価変更イベントを行なって(ステップS306)、一連の処理を終了する。
【0050】
ECU170は、ステップS304にて条件(9)が満たされていないと判定した場合(ステップS304のNO)、各種センサからの信号入力に基づいて、車両1が条件(12)を満たすか否かを判定する(ステップS307)。ECU170は、条件(12)が満たされたと判定したとき(ステップS307のYES)、状態遷移処理として、車両1が定常運転状態H3から停車状態H1に状態遷移したと扱い(ステップS308)、続いて、評価変動処理として、評価変更イベントを行なって(ステップS309)、一連の処理を終了する。他方、ECU170は、条件(12)が満たされていないと判定した場合(ステップS307のNO)、処理をステップS301に戻す。図8に示す処理では、ステップS301、ステップS304、ステップS307での判定処理が、特許請求の範囲でいうところの「判定処理」に相当する。
【0051】
ステップS301で用いられる条件(5)の一例は、「加速度Gが規定値MAP2より大きい」である。この条件は、出力センサ12と車速センサ22との双方の信号入力と、条件記憶部174に記憶されているエコ判定閾値マップ176とに基づいて判定される。また、ステップS303での評価変更イベントの一例は、総合評価点E15を減少させ、走行評価点E17を減少させて、増減後のこれらの値をECU170に書込記憶し、その変動後の値をディスプレイ140に表示する処理である。
【0052】
ステップS304で用いられる条件(9)の一例は、「アクセル=オフ または シフトポジション=ニュートラルレンジ」である。アクセルのオン/オフは、アクセル開度センサ52からの信号入力に基づいて判定される。シフトポジションは、ポジションセンサ21Aからの信号入力に基づいて判定される。また、ステップS306での評価変更イベントの一例は、走行評価点E17を減少させて、増減後のこの値をECU170に書込記憶し、その変動後の値をディスプレイ140に表示する処理である。
【0053】
ステップS307で用いられる条件(12)の一例は、「車速=0km/h」である。車速は、車速センサ22からの信号入力に基づいて判定される。また、ステップS309での評価変更イベントの一例は、総合評価点E15を増加させ、停車評価点E18を増加させて、増減後のこれらの値をECU170に書込記憶し、その変動後の値をディスプレイ140に表示する処理である。
【0054】
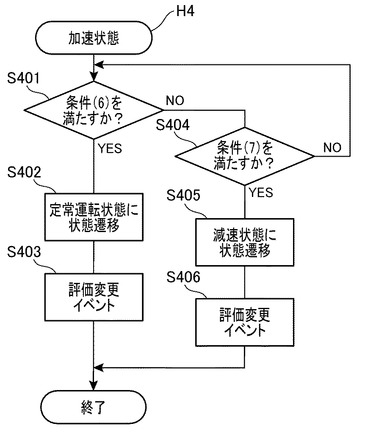
図9は、車両1が加速状態H4にあるときにECU170が行う処理の流れを示すフローチャートである。車両1が加速状態H4にあるとき、ECU170は、図9に示す処理を実行する。ECU170は、まず、各種センサ(出力センサ12、車速センサ22、燃料残量センサ32、ハンドル角センサ42、アクセル開度センサ52、ブレーキ操作量センサ62、バッテリ残量センサ72、ポジションセンサ21A)からの信号入力に基づいて、車両1が条件(6)を満たすか否かを判定する(ステップS401)。ECU170は、条件(6)が満たされたと判定したとき(ステップS401のYES)、状態遷移処理として、車両1が加速状態H4から定常運転状態H3に状態遷移したと扱い(ステップS402)、続いて、評価変動処理として、評価変更イベントを行なって(ステップS403)、一連の処理を終了する。
【0055】
ECU170は、ステップS401にて条件(6)が満たされていないと判定した場合(ステップS401のNO)、各種センサからの信号入力に基づいて、車両1が条件(7)を満たすか否かを判定する(ステップS404)。ECU170は、条件(7)が満たされたと判定したとき(ステップS404のYES)、状態遷移処理として、車両1が加速状態H4から減速状態H5に状態遷移したと扱い(ステップS405)、続いて、評価変動処理として、評価変更イベントを行なって(ステップS406)、一連の処理を終了する。他方、ECU170は、条件(7)が満たされていないと判定した場合(ステップS404のNO)、処理をステップS401に戻す。図9に示す処理では、ステップS401、ステップS404での判定処理が、特許請求の範囲でいうところの「判定処理」に相当する。
【0056】
ステップS401で用いられる条件(6)の一例は、「加速度Gが規定値MAP1以下」である。この条件は、出力センサ12と車速センサ22との双方の信号入力と、条件記憶部174に記憶されているエコ判定閾値マップ176とに基づいて判定される。また、ステップS403での評価変更イベントの一例は、走行評価点E17を増加させて、増減後のこの値をECU170に書込記憶し、その変動後の値をディスプレイ140に表示する処理である。
【0057】
ステップS404で用いられる条件(7)の一例は、「アクセル=オフ または シフトポジション=ニュートラルレンジ」である。アクセルのオン/オフは、アクセル開度センサ52からの信号入力に基づいて判定される。シフトポジションは、ポジションセンサ21Aからの信号入力に基づいて判定される。また、ステップS406での評価変更イベントの一例は、走行評価点E17を減少させて、増減後のこの値をECU170に書込記憶し、その変動後の値をディスプレイ140に表示する処理である。
【0058】
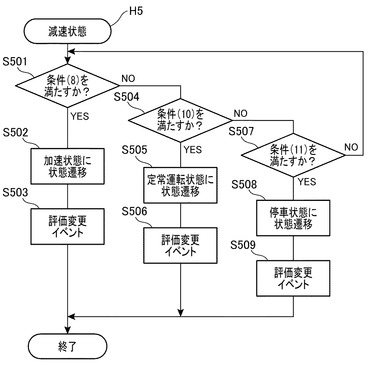
図10は、車両1が減速状態H5にあるときにECU170が行う処理の流れを示すフローチャートである。車両1が減速状態H5にあるとき、ECU170は、図10に示す処理を実行する。ECU170は、まず、各種センサ(出力センサ12、車速センサ22、燃料残量センサ32、ハンドル角センサ42、アクセル開度センサ52、ブレーキ操作量センサ62、バッテリ残量センサ72、ポジションセンサ21A)からの信号入力に基づいて、車両1が条件(8)を満たすか否かを判定する(ステップS501)。ECU170は、条件(8)が満たされたと判定したとき(ステップS501のYES)、状態遷移処理として、車両1が減速状態H5から加速状態H4に状態遷移したと扱い(ステップS502)、続いて、評価変動処理として、評価変更イベントを行なって(ステップS503)、一連の処理を終了する。
【0059】
ECU170は、ステップS501にて条件(8)が満たされていないと判定した場合(ステップS501のNO)、各種センサからの信号入力に基づいて、車両1が条件(10)を満たすか否かを判定する(ステップS504)。ECU170は、条件(10)が満たされたと判定したとき(ステップS504のYES)、状態遷移処理として、車両1が減速状態H5から定常運転状態H3に状態遷移したと扱い(ステップS505)、続いて、評価変動処理として、評価変更イベントを行なって(ステップS506)、一連の処理を終了する。
【0060】
ECU170は、ステップS504にて条件(10)が満たされていないと判定した場合(ステップS504のNO)、各種センサからの信号入力に基づいて、車両1が条件(11)を満たすか否かを判定する(ステップS507)。ECU170は、条件(11)が満たされたと判定したとき(ステップS507のYES)、状態遷移処理として、車両1が減速状態H5から停車状態H1に状態遷移したと扱い(ステップS508)、続いて、評価変動処理として、評価変更イベントを行なって(ステップS509)、一連の処理を終了する。他方、ECU170は、条件(11)が満たされていないと判定した場合(ステップS507のNO)、処理をステップS501に戻す。図10に示す処理では、ステップS501、ステップS504、ステップS507での判定処理が、特許請求の範囲でいうところの「判定処理」に相当する。
【0061】
ステップS501で用いられる条件(8)の一例は、「アクセル=オン かつ 加速度Gが規定値MAP2より大きい」である。アクセルのオン/オフは、アクセル開度センサ52からの信号入力に基づいて判定される。「加速度Gが規定値MAP2より大きい」という条件は、出力センサ12と車速センサ22との双方の信号入力と、条件記憶部174に記憶されているエコ判定閾値マップ176とに基づいて判定される。また、ステップS503での評価変更イベントの一例は、総合評価点E15を減少させ、走行評価点E17を減少させて、増減後のこれらの値をECU170に書込記憶し、その変動後の値をディスプレイ140に表示する処理である。
【0062】
ステップS504で用いられる条件(10)の一例は、「アクセル=オン かつ 加速度Gが規定値MAP2以下」である。アクセルのオン/オフは、アクセル開度センサ52からの信号入力に基づいて判定される。「加速度Gが規定値MAP2以下」という条件は、出力センサ12と車速センサ22との双方の信号入力と、条件記憶部174に記憶されているエコ判定閾値マップ176とに基づいて判定される。また、ステップS506での評価変更イベントの一例は、総合評価点E15を増加させ、走行評価点E17を増加させて、増減後のこれらの値をECU170に書込記憶し、その変動後の値をディスプレイ140に表示する処理である。
【0063】
ステップS507で用いられる条件(11)の一例は、「車速=0km/h」である。車速は、車速センサ22からの信号入力に基づいて判定される。また、ステップS509での評価変更イベントの一例は、総合評価点E15を増加させ、停車評価点E18を増加させて、増減後のこれらの値をECU170に書込記憶し、その変動後の値をディスプレイ140に表示する処理である。
【0064】
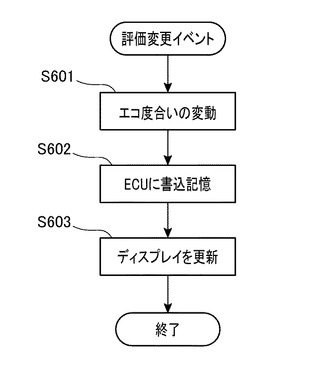
図11は、ECU170が行う評価変更イベントの流れを示すフローチャートである。ECU170は、評価変更イベント(図6でのステップS103、図7のステップS203、ステップS206、ステップS209、等)として、まず、エコ度合いを変動させる(ステップS601)。詳細には、ECU170は、ECU170自身が記憶しているエコ度合い(総合評価点E15、発進評価点E16、走行評価点E17、停車評価点E18)を読出し、これを図6から図10に基づいて述べたように増減させる。続いて、ECU170は、変動後のエコ度合いをECU170に書込記憶する(ステップS602)。続いて、ECU170は、表示処理として、変動後のエコ度合いをディスプレイ140に表示する(ステップS603)。詳細には、ECU170は、ステップS603として、総合評価点E15、発進評価点E16、走行評価点E17及び停車評価点E18の変動後の値を、ディスプレイ140内の点数表示部E11、エコ発進評価部E12、安定走行評価部E13、エコ停車評価部E14のそれぞれに反映させるよう、ディスプレイ140の表示内容を変更する。
【0065】
なお、図6から図10に示す各処理中での状態遷移は、上記に述べたものに限られない。一例として、ECU170が、各種センサからの入力信号に基づく条件判定を行なって、停車状態H1から加速状態H4に状態遷移したと扱うようにしてもよい。
【0066】
また、図6から図10に示す各処理中での評価変更イベントにおいてなされる、総合評価点E15、発進評価点E16、走行評価点E17及び停車評価点E18の増減は、上記に述べたものに限られない。一例として、減速状態H5から停車状態H1に状態遷移するとき(図10のステップS508を参照)、ECU170が、その後に行う評価変更イベント(図10のステップS509を参照)として、総合評価点E15と発進評価点E16と走行評価点E17と停車評価点E18とを増加させ、増減後のこれらの値をECU170に書込記憶するようにしてもよい。
【0067】
また、本実施の形態では、評価変更イベント(評価変動処理)は、遷移条件が満たされるか否かの判定(状態遷移処理)の後に即座に行われるが、遷移条件が満たされるか否かの判定結果を判定結果フラグとして保存し、この判定結果フラグに基づいて事後的に評価変更イベントを行なうようにしても良い。
【0068】
また、本実施の形態では、条件記憶部174に格納されている遷移条件175Bは、車両1の状態ごとに規定され、例えば条件(1)は停車状態H1から発進状態H2への状態遷移にのみ用いられるようになっているが、遷移条件175Bを車両1の状態ごとに規定する必要はない。例えば、車速の大きさと車両1の状態とを対応させる関数を遷移条件175Bとして用い、この関数を、停車状態H1〜減速状態H5からの全ての状態遷移に用いるようにしてもよい。
【0069】
運転者が、上記のような構成を備えた車両1を運転操作すると、エコ運転支援装置201によって、運転者のエコ運転の関心が向上することになる。即ち、運転者が車両1を運転操作している間、ECU170は、車両1の状態を、停車状態H1、発進状態H2、定常運転状態H3、加速状態H4、減速状態H5のいずれかの状態として扱う。そして、ECU170は、運転者が行う車両1の運転操作に応じて、(総合評価点E15等)を変動させ、その変動結果をディスプレイ140に表示する。これにより、運転者は、自分が行なっている運転操作をエコ度合いという評価で認識でき、しかも運転操作によるエコ度合いの変動も認識することができる。このように、本実施の形態のエコ運転支援装置201によれば、運転者の運転操作の評価(特に車両加速時や減速時での評価)を運転者に運転時に素早く理解させて、運転者のエコ運転の関心を向上させることができる。
【符号の説明】
【0070】
1 車両
140 ディスプレイ(表示部)
170 ECU(情報処理部)
174 条件記憶部
175B 遷移条件
201 エコ運転支援装置
E15 総合評価点(エコ度合い)
E16 発進評価点(エコ度合い)
E17 走行評価点(エコ度合い)
E18 停車評価点(エコ度合い)
【技術分野】
【0001】
本発明は、運転者による車両の運転操作のエコ度合いを報知するエコ運転支援装置に関する。
【背景技術】
【0002】
近年、環境に優しい車社会の構築(以下、車社会のエコ化と称する)が要求されてきている。その一環として、エコ運転支援装置の開発が行われている。エコ運転支援装置は、運転者による車両の運転操作が省燃費運転操作であるか否かを演算し、その演算結果を運転者に報知して、運転者の運転操作をエコ度合いの高い運転操作へ導くための装置である。ここでいう「エコ」には、エコノミー(economy)やエコロジー(ecology)の意味が含まれる。エコノミーとは、燃料の消費を抑えて(省燃費)、燃料を節約することを意味する。エコロジーとは、化石燃料(ガソリン等)の消費の抑制、化石燃料の燃焼等により生じる有害物質や二酸化炭素の発生や排出を抑制する等により、環境への負荷を抑えることを意味する。
【0003】
特許文献1、2に記載のエコ運転支援システムは、車載のECUにより実現される(特許文献1の段落0019、及び、特許文献2の段落0018参照)。
【0004】
特許文献3に記載の運転評価システムは、自車両のドライバーのエコ運転の達成度や、エコ運転に対する意識を評価するためのシステムである。この運転評価システムは、各々の車両に搭載される車載機(車載システム)と、ユーザそれぞれの車両が運転される状況やドライバーの運転操作に関する情報を車載システムから受信する情報処理センターとにより構成され、自車両のドライバーに対して、ドライバーのエコ運転可能度、熟練度及びエコ運転意識度を表示し、これらの指標に基づくアドバイスを自車両のドライバーに与えるものである。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−096187号公報
【特許文献2】特開2010−042746号公報
【特許文献3】特開2011−065527号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
車社会のエコ化を推進するためには、車社会のエコ化に対する運転者の関心を高めることが重要である。そのためには、運転者が行った車両の運転操作から求められたエコ度合いという評価が運転者にフィードバックされ、運転者の車両の運転操作が車社会のエコ化に適合していくようにすることが重要である。
【0007】
特許文献1、2に記載のいずれの技術も、運転者の運転操作の現状を運転者に向けて表示するものであり、運転者は、運転操作をどのように改善すれば「エコ」に貢献できるのかがわかりにくい。
【0008】
また、特許文献3のように、車載機と情報処理センター(サーバ)との間で通信を行うようにした場合、車両の加速時や減速時での運転者の運転操作に関する情報(特に、速度変化、加速度変化に関する情報)が短時間に多量に生じ、車載機が送信すべき情報の量が膨大となってしまう。特に、イグニッションスイッチのオン/オフに伴う通信の開始/終了では、車載機の起動等に10秒程度の時間を要し、この間に車載機が情報送信を行えないと、車載機に大きな負荷がかかり、運転者に対する評価(エコ度合い)の表示に不具合が生じやすい。
【0009】
さらに、近年、情報化社会の発達に伴って普及したインターネット環境を活用し、運転者の運転操作に関する情報を車載された無線通信設備で車両からサーバに送信し、サーバにおいて車両からの情報を集計、分析、所定の指標に基づく点数化及びランク付け等の評価を行い、携帯電話やパソコン等のインターネット接続が可能な機器で運転者がこれらの評価を閲覧できるようにして、車社会のエコ化に対する運転者の意識の向上を図ることも行われている。しかしながら、これでは、運転者は、運転しながら、加速時や減速時の運転操作の評価(エコ度合い)を認識できない。また、運転者が携帯電話やパソコン等の媒体を通して事後的に運転操作の評価(エコ度合い)を確認するのでは、運転者の運転操作が車社会のエコ化に沿うものになりにくい。
【0010】
本発明は、上記の点を鑑みてなされたものであり、運転者の運転操作の評価(特に車両加速時や減速時での評価)を運転者に運転時に素早く理解させて、運転者のエコ運転の関心を向上させることを目的とする。
【課題を解決するための手段】
【0011】
本発明のエコ運転支援装置は、運転者による車両の運転操作のエコ度合いを報知するエコ運転支援装置であって、表示を行う表示部と、情報処理を行う情報処理部と、を備え、前記情報処理部は、運転者による前記車両の運転操作に応じてエコ度合いを変動させる評価変動処理と、変動後のエコ度合いを前記表示部に表示する表示処理とを行う。
【発明の効果】
【0012】
本発明のエコ運転支援装置によれば、車両の運転操作に応じてエコ度合いが変動し、変動結果が表示部に表示されて運転者が認識できるようになり、したがって、運転者の運転操作の評価(特に車両加速時や減速時での評価)を運転者に運転時に素早く理解させて、運転者のエコ運転の関心を向上させることができる。
【図面の簡単な説明】
【0013】
【図1】エコ運転支援装置を含む車両の全体構成を示すブロック図である。
【図2】ディスプレイの表示例である。
【図3】車両の状態遷移を示す概念図である。
【図4】状態遷移条件テーブルのデータ構成を示す模式図である。
【図5】エコ判定閾値マップの模式図である。
【図6】車両が停車状態にあるときにECUが行う処理の流れを示すフローチャートである。
【図7】車両が発進状態にあるときにECUが行う処理の流れを示すフローチャートである。
【図8】車両が定常運転状態にあるときにECUが行う処理の流れを示すフローチャートである。
【図9】車両が加速状態にあるときにECUが行う処理の流れを示すフローチャートである。
【図10】車両が減速状態にあるときにECUが行う処理の流れを示すフローチャートである。
【図11】ECUが行う評価変更イベントの流れを示すフローチャートである。
【発明を実施するための形態】
【0014】
実施の一形態を、図1ないし図11に基づいて説明する。説明の便宜上、本実施の形態を第一の実施の形態と呼ぶ。図1は、エコ運転支援装置201を含む車両1の全体構成を示すブロック図である。以下、「エコ」には、エコノミー(economy)やエコロジー(ecology)の意味が含まれる。エコノミーとは、燃料の消費を抑えて(省燃費)、燃料を節約することを意味する。エコロジーとは、化石燃料(ガソリン等)の消費の抑制、化石燃料の燃焼等により生じる有害物質や二酸化炭素の発生や排出を抑制する等により、環境への負荷を抑えることを意味する。
【0015】
車両1は、ハイブリッドエンジン10と、変速機20と、燃料タンク30と、ハンドル40と、アクセルペダル50と、ブレーキペダル60と、バッテリ70と、ワイパ(図示せず)と、メータパネル100と、スイッチ類160と、ECU170(Engine Control Unit)と、通信ユニット180とを備える。
【0016】
ECU170は、演算処理を行うCPUと、プログラム等を記憶するROMと、データ等を記憶するRAMとを含み、ハイブリッドエンジン10での燃料の点火時期等の制御やメータパネル100の表示等を総合的に制御するコンピュータである。
【0017】
ハイブリッドエンジン10は、バッテリ70から給電を受けて駆動する電気モータと、ガソリンエンジン、ディーゼルエンジン、ガソリンエンジン、ディーゼルエンジン等のエンジンとを組み合わせて構成される。燃料タンク30は、ハイブリッドエンジン10に燃料を供給する。この燃料タンク30には、燃料残量センサ32が配置される。燃料残量センサ32は、燃料タンク30内の燃料残量を検出し、検出結果をECU170に伝える。また、バッテリ70は、ハイブリッドエンジン10に備わる点火プラグ(図示せず)と、ワイパ(図示せず)と、メータパネル100と、ECU170とにも給電する。バッテリ70には、バッテリ残量センサ72が配置される。バッテリ残量センサ72はバッテリ残量を検出し、検出結果をECU170に伝える。
【0018】
ハイブリッドエンジン10には、出力センサ12が配置される。出力センサ12には、ハイブリッドエンジン10のクランクシャフト付近に配置されハイブリッドエンジン10の回転数を検出する回転数センサ、ハイブリッドエンジン10の出力軸に配置されハイブリッドエンジン10の出力トルクを検出するトルクセンサ、ハイブリッドエンジン10(ハイブリッドエンジン)の電気モータに配置され電気モータのモータ回転数を検出するモータ回転数センサ、等が含まれる。出力センサ12の検出結果は、ECU170に伝わる。
【0019】
変速機20は、ハイブリッドエンジン10の出力軸に接続されている。変速機20は、一例として、自動変速機(AT)である。変速機20は、シフトレバー21の操作により、ハイブリッドエンジン10の出力軸の回転数を所望の回転数に変更したり、ハイブリッドエンジン10から出力軸への動力伝達の切り離しをしたりする。詳細には、シフトレバー21がニュートラルレンジやパーキングレンジに位置付けられると、ハイブリッドエンジン10の動力は出力軸に伝わらなくなる。また、シフトレバー21がニュートラルレンジやパーキングレンジ以外のレンジ(例えば、ドライブレンジ)に位置付けられると、ハイブリッドエンジン10の動力は出力軸に伝わり、出力軸がギア比に応じた回転数で回転する。シフトレバー21には、ポジションセンサ21Aが設けられる。ポジションセンサ21Aは、シフトレバー21のポジション(シフトポジション)を検出し、検出結果をECU170に伝える。
【0020】
変速機20の出力軸付近には、車速センサ22が配置されている。車速センサ22は、出力軸の回転に基づいて車速を検出し、検出結果をECU170に伝える。
【0021】
ハンドル40、アクセルペダル50、ブレーキペダル60及びメータパネル100は、車両1の運転席(図示せず)に配置される。ハンドル40は、車両1の運転席(図示せず)に着座した運転者が両手で把持できる位置に配置され、車両1に設けられたフロント操舵軸(図示せず)に接続される。ハンドル40には、ハンドル角を検出するハンドル角センサ42が配置される。また、アクセルペダル50及びブレーキペダル60は、いずれも、車両1の運転席に着座した運転者が足で操作できる位置に配置される。アクセルペダル50は、車両1に設けられたスロットル(図示せず)に接続される。アクセルペダル50には、アクセル開度を検出するアクセル開度センサ52が配置される。ブレーキペダル60は、車両1に設けられたブレーキ(図示せず)に接続される。ブレーキペダル60には、ブレーキ操作量を検出するブレーキ操作量センサ62が配置される。ハンドル角センサ42、アクセル開度センサ52及びブレーキ操作量センサ62の検出結果は、いずれも、ECU170に伝わる。
【0022】
メータパネル100は、運転席に着座して車両1を運転操作する運転者に対面する位置に設けられる。メータパネル100には、燃料メータ110と、速度メータ120と、タコメータ130と、ディスプレイ140と、スピーカ150とが含まれる。これにより、車両1の運転席に着座した運転者は、ディスプレイ140での表示内容を運転中に視認できることとなる。燃料メータ110は、ECU170からの指示を受けて燃料残量センサ32の検出結果を表示する。速度メータ120は、ECU170からの指示を受けて車速センサ22の検出結果を表示する。タコメータ130は、ECU170からの指示を受けて出力センサ12の検出結果を表示する。スピーカ150は、ECU170からの指示を受けて音声を発生する。
【0023】
ディスプレイ140は、ECU170からの指示を受けて、走行距離等の車両情報や、運転者にエコ運転を促すためのエコ運転支援情報を表示する。エコ運転支援情報には、運転者による車両1の運転操作のエコ度合いの一態様として、総合評価点E15、発進評価点E16、走行評価点E17、停車評価点E18(いずれも、図2に基づいて後述)が含まれる。ディスプレイ140には、例えば、液晶ディスプレイを採用することができる。
【0024】
スイッチ類160は、一例として、変速機20のシフトレバー21付近に配置されるハードウェアスイッチである。なお、スイッチ類160として、ディスプレイ140に積層配置されるタッチパネルであってもよい。スイッチ類160は、操作者(例えば、運転者)がECU170に対して操作入力を行うための入力手段として機能する。
【0025】
通信ユニット180は、ユニット内制御部181と、ユニット内通信部182とを有する。ユニット内制御部181は、CPUとROMとRAMとを含み、ECU170とは異なる独自の制御を行う。ユニット内通信部182は、キャリア網及びインターネット網等の広域通信網183を介して、サーバ装置184との通信を行う。通信ユニット180では、車両1のイグニッションスイッチ(図示せず)がオンとなると、これに伴ってユニット内制御部181が起動し始める。また、車両1のイグニッションスイッチがオフになると、これに伴ってユニット内制御部181が電源オフとなるための処理を開始し、その後、通信ユニット180が停止する。ユニット内通信部182は、ユニット内制御部181の制御を受けて、サーバ装置184とのデータの送受信を行う。ECU170は、所定のタイミングで、ECU170に記憶されているエコ度合い(総合評価点E15等)を、車両1を特定する識別子とともに通信ユニット180からサーバ装置184に送信させる。サーバ装置184では、複数の車両1から送信されるエコ度合い等の情報を、集計、分析、所定の指標に基づく点数化及びランク付け等の評価を行う。このように集計等された情報は、広域通信網183を通じて携帯電話やパソコン等の機器で閲覧可能な形態に加工される。また、サーバ装置184は、集計等した情報を、車両1を特定する識別子とともに送信出力する。車両1のECU170は、通信ユニット180で受信した情報をECU170自身に記憶し、ディスプレイ140に表示したり、各種の処理に用いたりする。また、車両1のECU170は、通信ユニット180で受信した命令信号に応じて、状態遷移条件テーブル175に格納されている遷移条件175Bの内容(図4参照)、エコ判定閾値マップ176での規定値MAP1、MAP2の値(図5参照)、評価変更イベントでのエコ度合い(総合評価点E15等)の変動幅等を変更する。
【0026】
本実施の形態の車両1では、表示部としてのディスプレイ140と、ECU170とがエコ運転支援装置201を構成する。ECU170は、エコ運転支援装置201において、情報処理を行う情報処理部として機能する。ECU170には、出力センサ12、車速センサ22、燃料残量センサ32、ハンドル角センサ42、アクセル開度センサ52、ブレーキ操作量センサ62、バッテリ残量センサ72、ポジションセンサ21A等の各種センサの検出結果と、スイッチ類160からの操作信号とが入力される。ECU170は、これらの入力に基づいて、演算や各部の制御等の情報処理を行い、燃料メータ110、速度メータ120、タコメータ130及びディスプレイ140の表示内容、並びに、スピーカ150の音声出力を総合的に制御する。
【0027】
ECU170には、燃費計算部171と、HV制御部172と、エコ判断部173と、条件記憶部174とが含まれる。燃費計算部171は、車速センサ22や燃料残量センサ32等の検出結果に基づいて、車両1の瞬間燃費や所定区間での平均燃費を算出する。算出された瞬間燃費や平均燃費は、燃費情報としてエコ判断部173に通知される。HV制御部172は、各種センサ(出力センサ12、車速センサ22、燃料残量センサ32、ハンドル角センサ42、アクセル開度センサ52、ブレーキ操作量センサ62、バッテリ残量センサ72、ポジションセンサ21A)からの信号入力に基づいて、ハイブリッドエンジン10を構成する電気モータやエンジンの制御をはじめとする車両1の各部を制御するための制御信号を生成する。また、HV制御部172は、各種センサからの信号入力に基づいて車両パワー、車両の限界出力、バッテリの充電許可電力等を算出し、算出したこれらの情報をHV状態信号としてエコ判断部173に出力する。エコ判断部173は、HV制御部172から出力されるHV状態信号の入力と、各種センサからの信号入力と、燃費計算部171から出力される燃費情報の入力とに基づいて、車両1の運転操作のエコ度合いの一態様であるエコ運転度を算出する。さらに、エコ判断部173は、算出したエコ運転度と、所定のエンジン始動閾値、エコ判定閾値、エコ判定閾値(いずれも後述)とに基づいて、車両1の現在の運転状態がエコ運転状態にあるのか、非エコ運転状態にあるのかを判定する。瞬間燃費や平均燃費の算出、エコ運転度の算出、並びに、運転状態の判定は、既知の技術であり(その一例は、特許文献1、特許文献2及び特許文献3)、説明を省略する。ECU170は、エコ判断部173によるエコ運転度や運転状態の判定結果、並びに、燃費計算部171で算出された瞬間燃費や平均燃費に基づいて、ディスプレイ140に対する表示を行う。条件記憶部174については、図4に基づいて後述する。
【0028】
なお、ECU170は、ハイブリッドエンジン10を制御するエンジンECUであっても、車両1を統合的に制御する統合ECUであってもよい。また、メータパネル100の表示制御は、ECU170が直接行っても、メータ表示を行うメータECUを設けてこのメータECUを介して行うようにしてもよい。また、ディスプレイ140として、ECU170に接続されたカーナビゲーション装置等の表示装置を用いてもよい。そして、上記の燃費計算部171、HV制御部172、エコ判断部173、条件記憶部174は、一つのECUに格納されていてもよいし、それぞれ別個のECUに格納されてこれらECUがデータ通信自在に接続されていても良い。また、条件記憶部174は、ECU内に設けられていてもよいし、ECUとデータ通信自在に接続されるハードディスクやフラッシュメモリ等の記憶媒体であっても良い。
【0029】
図2は、ディスプレイ140の表示例である。ディスプレイ140には、車両1の運転状態のエコ度合いを示すエコバー142と、燃費表示部144と、バッテリ残量表示部146と、車両1での所定時点からの積算走行距離を示すトリップメータ部148と、現在時刻を示す時計表示部149と、エコ評価表示部E10とが含まれる。
【0030】
燃費表示部144は、ディスプレイ140において上端に寄せて左右方向の略中央に設けられる。燃費表示部144には、燃費計算部171で出力された燃費情報が表示される。燃費表示部144に表示される燃費情報は、スイッチ類160(図1参照)からECUに対して行う設定に応じて瞬間燃費と平均燃費とのいずれかを選択的に表示できるようにしてもよいし、瞬間燃費と平均燃費とのどちらかのみを常時表示するようにしてもよい。
【0031】
時計表示部149は、ディスプレイ140において右上に設けられ、車両1に備わる時計回路(図示せず)に基づく現在時刻の表示が行われる。
【0032】
バッテリ残量表示部146は、バッテリ70の残量を示すものであり、ディスプレイ140において右端に寄せて上下方向の略中央に設けられる。バッテリ残量表示部146の表示態様は、バッテリ残量センサ72の検出結果に応じて変わる。
【0033】
トリップメータ部148は、ディスプレイ140において左上に設けられる。トリップメータ部148には、過去のある一時点からの車両1の積算走行距離や、総走行距離(オドメータにより定まる走行距離)が表示される。ECU170には、複数の積算走行距離の値(以下、TRIP−A値、TRIP−B値、…、と呼ぶことがある)と、総走行距離(以下、ODO値と呼ぶことがある)とが記憶されている。ECU170は、車速センサ22の検出結果に基づいて、TRIP−A値、TRIP−B値、…、やODO値を増加させる。ECU170は、スイッチ類160(図1参照)からの操作入力に応じて、トリップメータ部148での表示を、「TRIP A」という文字及びTRIP−A値、「TRIP B」という文字及びTRIP−B値、…、「ODO」という文字及びODO値の順に循環切替したり、操作入力時点でトリップメータ部148に表示されている積算走行距離(例えば、TRIP−A値)を「0」にリセットしたりする。なお、ECU170は、積算走行距離をリセットすることができるが、トリップメータ部148に「ODO」という文字及びODO値を表示しているときでも、総走行距離(ODO値)をリセットすることはない。
【0034】
エコバー142は、エコ判断部173での処理結果に基づいてECU170で作成され、ディスプレイ140において左下から右上にかけて左上が凸となるような弧を描くように表示される表示画像である。エコバー142は、エコ判定閾値等に対するエコ運転度の相対量を示す。エコバー142には、可変バー142Aと、HVエコ運転領域142Bと、エコ運転領域142Cと、非エコ運転領域142Dと、回生運転領域142Eとが含まれる。可変バー142Aは、運転者の運転操作に基づくエコ運転度を示す。車両1がモータで走行しているとき、可変バー142AはHVエコ運転領域142B内に達する。運転者の運転操作による車両出力パワーが所定のエンジン始動閾値142Fを超えると、可変バー142Aはエコ運転領域142C内に達する。運転者の運転操作による車両出力パワーが更に大きくなって所定のエコ判定閾値142Gを超えると、可変バー142Aは非エコ運転領域142D内に達する。回生ブレーキ等の操作によって車両の運転状態が回生運転状態にあると、可変バー142Aは、エコ運転度が回生限界値142H以下である、回生運転領域142E内に達する。ここで、回生限界値としては、回生によって発電可能な限界値や、充電可能な限界値などが設定される。可変バー142Aが回生運転領域142E内に達したときがエコ運転度の良い状態であり、可変バー142AがHVエコ運転領域142B、エコ運転領域142C、非エコ運転領域142Dに向かうに連れてエコ運転度が悪くなる。エンジン始動閾値142Fは、車速やバッテリ残量等によって変動し、最小のときに回生限界値142Hと一致する。
【0035】
エコ評価表示部E10は、ディスプレイ140内の右下箇所で、エコバー142よりも右下となる位置に設けられる。エコ評価表示部E10内には、上から順に、点数表示部E11、エコ発進評価部E12、安定走行評価部E13、エコ停車評価部E14が設けられる。点数表示部E11では、「評価」という文字とともに、総合評価点E15が表示される。エコ発進評価部E12では、「エコ発進」という文字とともに、発進評価点E16が表示される。安定走行評価部E13では、「安定走行」という文字とともに、走行評価点E17が表示される。エコ停車評価部E14では、「エコ停止」という文字とともに、停車評価点E18が表示される。ECU170には、総合評価点E15、発進評価点E16、走行評価点E17及び停車評価点E18の初期値が、予め記憶されている。ECU170は、総合評価点E15、発進評価点E16、走行評価点E17及び停車評価点E18を評価変更イベント(図6から図10に基づいて後述)にて増減させ、その増減後の値をECU170に書込記憶し、その増減後の値をディスプレイ140内で点数表示部E11、エコ発進評価部E12、安定走行評価部E13、エコ停車評価部E14のそれぞれに反映する。
【0036】
図2に示す例では、総合評価点E15は、百点満点に対する数値の態様で表示され、発進評価点E16と走行評価点E17と停車評価点E18とは、左端を原点として右方向に五段階に延びる棒グラフの態様で図形表示される。なお、総合評価点E15の表示態様は、数値に限られず、棒グラフやその他の態様での図形表示であってもよい。また、発進評価点E16、走行評価点E17及び停車評価点E18のいずれについても、その表示態様は、棒グラフに限られず、数値や棒グラフ以外の態様の図形表示であってもよい。
【0037】
図3は、車両1の状態遷移を示す概念図である。ECU170は、各種センサ(出力センサ12、車速センサ22、燃料残量センサ32、ハンドル角センサ42、アクセル開度センサ52、ブレーキ操作量センサ62、バッテリ残量センサ72、ポジションセンサ21A)からの信号入力に基づいて、車両1が停車状態H1、発進状態H2、定常運転状態H3、加速状態H4及び減速状態H5のいずれかの状態にあるとする。なお、車両1のイグニッションスイッチがオンになったとき、車両1は通常停止していることから、ECU170は、車両1が停車状態H1にあるとする。ECU170は、車両1で運転者によりなされる運転操作に応じて、図6から図10に示すいずれかの処理を実行し、その処理内容に応じて車両1の状態遷移をする。この状態遷移の際に、ECU170は、総合評価点E15、発進評価点E16、走行評価点E17及び停車評価点E18のそれぞれを増減し、増減後のこれらの値をECU170に書込記憶する処理(評価変更イベント)も行う。なお、総合評価点E15、発進評価点E16、走行評価点E17及び停車評価点E18は、車両1の状態遷移の際にのみ増減及び書込記憶するようにしても良いし、車両1の状態遷移の際だけでなく状態遷移をしない間でも増減及び書込記憶するようにしても良い。
【0038】
図4は、状態遷移条件テーブル175のデータ構成を示す模式図である。条件記憶部174には、状態遷移条件テーブル175が記憶されている。状態遷移条件テーブル175には、条件番号175Aと遷移条件175Bとが対応付けて記憶されている。遷移条件175Bは、ECU170が車両1の状態を遷移するための判定基準であり、その一例は、条件式である。図3には、遷移条件175Bの一例が示されているが、遷移条件はこの例以外のものを採用することが可能である。条件番号175Aは、遷移条件175Bを特定するための記号であり、図3中の丸括弧付番号に対応する。
【0039】
図5は、エコ判定閾値マップ176の模式図である。条件記憶部174には、エコ判定閾値マップ176が記憶されている。このエコ判定閾値マップ176は、車速と、その車速のときに対応する加速度のエコであるか否かの境界値との対応関係を示すものである。図5では、説明のために、エコ判定閾値マップ176を、車速を横軸とし、加速度を縦軸とし、車速に応じて変化する上記の境界値(規定値MAP1、MAP2)を折れ線で示す二次元グラフとして表現している。加速度が大きくなればなるほど、車両1で消費されるエネルギーが大きくなることから、ある車速のときの加速度が規定値MAP1、MAP2よりも大きい場合は「エコでない」と判定され、ある車速のときの加速度が規定値MAP1、MAP2よりも小さい場合は「エコである」と判定されることになる。
【0040】
図6は、車両1が停車状態H1にあるときにECU170が行う処理の流れを示すフローチャートである。車両1が停車状態H1にあるとき、ECU170は、図6に示す処理を実行する。ECU170は、まず、各種センサ(出力センサ12、車速センサ22、燃料残量センサ32、ハンドル角センサ42、アクセル開度センサ52、ブレーキ操作量センサ62、バッテリ残量センサ72、ポジションセンサ21A)からの信号入力に基づいて、車両1が条件(1)を満たすか否かを判定する(ステップS101)。ECU170は、条件(1)が満たされたと判定するまで処理を待機する(ステップS101のNO)。ECU170は、条件(1)が満たされたと判定したとき(ステップS101のYES)、状態遷移処理として、車両1が停車状態H1から発進状態H2に状態遷移したと扱い(ステップS102)、続いて、評価変動処理として、評価変更イベントを行なって(ステップS103)、一連の処理を終了する。図6に示す処理では、ステップS101での判定処理が、特許請求の範囲でいうところの「判定処理」に相当する。
【0041】
ステップS101で用いられる条件(1)の一例は、「車速>0km/h」である。車速は、車速センサ22からの信号入力に基づいて判定される。また、ステップS103での評価変更イベントの一例は、総合評価点E15を減少させ、発進評価点E16を増加させて、増減後のこれらの値をECU170に書込記憶し、その変動後の値をディスプレイ140に表示する処理である。
【0042】
図7は、車両1が発進状態H2にあるときにECU170が行う処理の流れを示すフローチャートである。車両1が発進状態H2にあるとき、ECU170は、図7に示す処理を実行する。ECU170は、まず、各種センサ(出力センサ12、車速センサ22、燃料残量センサ32、ハンドル角センサ42、アクセル開度センサ52、ブレーキ操作量センサ62、バッテリ残量センサ72、ポジションセンサ21A)からの信号入力に基づいて、車両1が条件(2)を満たすか否かを判定する(ステップS201)。ECU170は、条件(2)が満たされたと判定したとき(ステップS201のYES)、状態遷移処理として、車両1が発進状態H2から停車状態H1に状態遷移したと扱い(ステップS202)、続いて、評価変動処理として、評価変更イベントを行なって(ステップS203)、一連の処理を終了する。
【0043】
ECU170は、ステップS201にて条件(2)が満たされていないと判定した場合(ステップS201のNO)、各種センサからの信号入力に基づいて、車両1が条件(3)を満たすか否かを判定する(ステップS204)。ECU170は、条件(3)が満たされたと判定したとき(ステップS204のYES)、状態遷移処理として、車両1が発進状態H2から定常運転状態H3に状態遷移したと扱い(ステップS205)、続いて、評価変動処理として、評価変更イベントを行なって(ステップS206)、一連の処理を終了する。
【0044】
ECU170は、ステップS204にて条件(3)が満たされていないと判定した場合(ステップS204のNO)、各種センサからの信号入力に基づいて、車両1が条件(4)を満たすか否かを判定する(ステップS207)。ECU170は、条件(4)が満たされたと判定したとき(ステップS207のYES)、状態遷移処理として、車両1が発進状態H2から減速状態H5に状態遷移したと扱い(ステップS208)、続いて、評価変動処理として、評価変更イベントを行なって(ステップS209)、一連の処理を終了する。他方、ECU170は、条件(4)が満たされていないと判定した場合(ステップS207のNO)、処理をステップS201に戻す。図7に示す処理では、ステップS201、ステップS204、ステップS207での判定処理が、特許請求の範囲でいうところの「判定処理」に相当する。
【0045】
ステップS201で用いられる条件(2)の一例は、「車速=0km/h」である。車速は、車速センサ22からの信号入力に基づいて判定される。また、ステップS203での評価変更イベントの一例は、総合評価点E15を増加させ、停車評価点E18を増加させて、増減後のこれらの値をECU170に書込記憶し、その変動後の値をディスプレイ140に表示する処理である。
【0046】
ステップS204で用いられる条件(3)の一例は、「車速≧20km/h かつ アクセル=オン かつ 加速度≧0m/s2」である。車速は、車速センサ22からの信号入力に基づいて判定される。アクセルのオン/オフは、アクセル開度センサ52からの信号入力に基づいて判定される。加速度は、出力センサ12及び車速センサ22の少なくともいずれかからの信号入力に基づいて判定される。また、ステップS206での評価変更イベントの一例は、総合評価点E15を増加させ、走行評価点E17を増加させて、増減後のこれらの値をECU170に書込記憶し、その変動後の値をディスプレイ140に表示する処理である。
【0047】
ステップS207で用いられる条件(4)の一例は、「(車速≧20km/h かつ アクセル=オフ) または シフトポジション=ニュートラルレンジ」である。車速は、車速センサ22からの信号入力に基づいて判定される。アクセルのオン/オフは、アクセル開度センサ52からの信号入力に基づいて判定される。シフトポジションは、ポジションセンサ21Aからの信号入力に基づいて判定される。また、ステップS209での評価変更イベントの一例は、総合評価点E15を増加させて、増減後のこの値をECU170に書込記憶し、その変動後の値をディスプレイ140に表示する処理である。
【0048】
図8は、車両1が定常運転状態H3にあるときにECU170が行う処理の流れを示すフローチャートである。車両1が定常運転状態H3にあるとき、ECU170は、図8に示す処理を実行する。ECU170は、まず、各種センサ(出力センサ12、車速センサ22、燃料残量センサ32、ハンドル角センサ42、アクセル開度センサ52、ブレーキ操作量センサ62、バッテリ残量センサ72、ポジションセンサ21A)からの信号入力に基づいて、車両1が条件(5)を満たすか否かを判定する(ステップS301)。ECU170は、条件(5)が満たされたと判定したとき(ステップS301のYES)、状態遷移処理として、車両1が定常運転状態H3から加速状態H4に状態遷移したと扱い(ステップS302)、続いて、評価変動処理として、評価変更イベントを行なって(ステップS303)、一連の処理を終了する。
【0049】
ECU170は、ステップS301にて条件(5)が満たされていないと判定した場合(ステップS301のNO)、各種センサからの信号入力に基づいて、車両1が条件(9)を満たすか否かを判定する(ステップS304)。ECU170は、条件(9)が満たされたと判定したとき(ステップS304のYES)、状態遷移処理として、車両1が定常運転状態H3から減速状態H5に状態遷移したと扱い(ステップS305)、続いて、評価変動処理として、評価変更イベントを行なって(ステップS306)、一連の処理を終了する。
【0050】
ECU170は、ステップS304にて条件(9)が満たされていないと判定した場合(ステップS304のNO)、各種センサからの信号入力に基づいて、車両1が条件(12)を満たすか否かを判定する(ステップS307)。ECU170は、条件(12)が満たされたと判定したとき(ステップS307のYES)、状態遷移処理として、車両1が定常運転状態H3から停車状態H1に状態遷移したと扱い(ステップS308)、続いて、評価変動処理として、評価変更イベントを行なって(ステップS309)、一連の処理を終了する。他方、ECU170は、条件(12)が満たされていないと判定した場合(ステップS307のNO)、処理をステップS301に戻す。図8に示す処理では、ステップS301、ステップS304、ステップS307での判定処理が、特許請求の範囲でいうところの「判定処理」に相当する。
【0051】
ステップS301で用いられる条件(5)の一例は、「加速度Gが規定値MAP2より大きい」である。この条件は、出力センサ12と車速センサ22との双方の信号入力と、条件記憶部174に記憶されているエコ判定閾値マップ176とに基づいて判定される。また、ステップS303での評価変更イベントの一例は、総合評価点E15を減少させ、走行評価点E17を減少させて、増減後のこれらの値をECU170に書込記憶し、その変動後の値をディスプレイ140に表示する処理である。
【0052】
ステップS304で用いられる条件(9)の一例は、「アクセル=オフ または シフトポジション=ニュートラルレンジ」である。アクセルのオン/オフは、アクセル開度センサ52からの信号入力に基づいて判定される。シフトポジションは、ポジションセンサ21Aからの信号入力に基づいて判定される。また、ステップS306での評価変更イベントの一例は、走行評価点E17を減少させて、増減後のこの値をECU170に書込記憶し、その変動後の値をディスプレイ140に表示する処理である。
【0053】
ステップS307で用いられる条件(12)の一例は、「車速=0km/h」である。車速は、車速センサ22からの信号入力に基づいて判定される。また、ステップS309での評価変更イベントの一例は、総合評価点E15を増加させ、停車評価点E18を増加させて、増減後のこれらの値をECU170に書込記憶し、その変動後の値をディスプレイ140に表示する処理である。
【0054】
図9は、車両1が加速状態H4にあるときにECU170が行う処理の流れを示すフローチャートである。車両1が加速状態H4にあるとき、ECU170は、図9に示す処理を実行する。ECU170は、まず、各種センサ(出力センサ12、車速センサ22、燃料残量センサ32、ハンドル角センサ42、アクセル開度センサ52、ブレーキ操作量センサ62、バッテリ残量センサ72、ポジションセンサ21A)からの信号入力に基づいて、車両1が条件(6)を満たすか否かを判定する(ステップS401)。ECU170は、条件(6)が満たされたと判定したとき(ステップS401のYES)、状態遷移処理として、車両1が加速状態H4から定常運転状態H3に状態遷移したと扱い(ステップS402)、続いて、評価変動処理として、評価変更イベントを行なって(ステップS403)、一連の処理を終了する。
【0055】
ECU170は、ステップS401にて条件(6)が満たされていないと判定した場合(ステップS401のNO)、各種センサからの信号入力に基づいて、車両1が条件(7)を満たすか否かを判定する(ステップS404)。ECU170は、条件(7)が満たされたと判定したとき(ステップS404のYES)、状態遷移処理として、車両1が加速状態H4から減速状態H5に状態遷移したと扱い(ステップS405)、続いて、評価変動処理として、評価変更イベントを行なって(ステップS406)、一連の処理を終了する。他方、ECU170は、条件(7)が満たされていないと判定した場合(ステップS404のNO)、処理をステップS401に戻す。図9に示す処理では、ステップS401、ステップS404での判定処理が、特許請求の範囲でいうところの「判定処理」に相当する。
【0056】
ステップS401で用いられる条件(6)の一例は、「加速度Gが規定値MAP1以下」である。この条件は、出力センサ12と車速センサ22との双方の信号入力と、条件記憶部174に記憶されているエコ判定閾値マップ176とに基づいて判定される。また、ステップS403での評価変更イベントの一例は、走行評価点E17を増加させて、増減後のこの値をECU170に書込記憶し、その変動後の値をディスプレイ140に表示する処理である。
【0057】
ステップS404で用いられる条件(7)の一例は、「アクセル=オフ または シフトポジション=ニュートラルレンジ」である。アクセルのオン/オフは、アクセル開度センサ52からの信号入力に基づいて判定される。シフトポジションは、ポジションセンサ21Aからの信号入力に基づいて判定される。また、ステップS406での評価変更イベントの一例は、走行評価点E17を減少させて、増減後のこの値をECU170に書込記憶し、その変動後の値をディスプレイ140に表示する処理である。
【0058】
図10は、車両1が減速状態H5にあるときにECU170が行う処理の流れを示すフローチャートである。車両1が減速状態H5にあるとき、ECU170は、図10に示す処理を実行する。ECU170は、まず、各種センサ(出力センサ12、車速センサ22、燃料残量センサ32、ハンドル角センサ42、アクセル開度センサ52、ブレーキ操作量センサ62、バッテリ残量センサ72、ポジションセンサ21A)からの信号入力に基づいて、車両1が条件(8)を満たすか否かを判定する(ステップS501)。ECU170は、条件(8)が満たされたと判定したとき(ステップS501のYES)、状態遷移処理として、車両1が減速状態H5から加速状態H4に状態遷移したと扱い(ステップS502)、続いて、評価変動処理として、評価変更イベントを行なって(ステップS503)、一連の処理を終了する。
【0059】
ECU170は、ステップS501にて条件(8)が満たされていないと判定した場合(ステップS501のNO)、各種センサからの信号入力に基づいて、車両1が条件(10)を満たすか否かを判定する(ステップS504)。ECU170は、条件(10)が満たされたと判定したとき(ステップS504のYES)、状態遷移処理として、車両1が減速状態H5から定常運転状態H3に状態遷移したと扱い(ステップS505)、続いて、評価変動処理として、評価変更イベントを行なって(ステップS506)、一連の処理を終了する。
【0060】
ECU170は、ステップS504にて条件(10)が満たされていないと判定した場合(ステップS504のNO)、各種センサからの信号入力に基づいて、車両1が条件(11)を満たすか否かを判定する(ステップS507)。ECU170は、条件(11)が満たされたと判定したとき(ステップS507のYES)、状態遷移処理として、車両1が減速状態H5から停車状態H1に状態遷移したと扱い(ステップS508)、続いて、評価変動処理として、評価変更イベントを行なって(ステップS509)、一連の処理を終了する。他方、ECU170は、条件(11)が満たされていないと判定した場合(ステップS507のNO)、処理をステップS501に戻す。図10に示す処理では、ステップS501、ステップS504、ステップS507での判定処理が、特許請求の範囲でいうところの「判定処理」に相当する。
【0061】
ステップS501で用いられる条件(8)の一例は、「アクセル=オン かつ 加速度Gが規定値MAP2より大きい」である。アクセルのオン/オフは、アクセル開度センサ52からの信号入力に基づいて判定される。「加速度Gが規定値MAP2より大きい」という条件は、出力センサ12と車速センサ22との双方の信号入力と、条件記憶部174に記憶されているエコ判定閾値マップ176とに基づいて判定される。また、ステップS503での評価変更イベントの一例は、総合評価点E15を減少させ、走行評価点E17を減少させて、増減後のこれらの値をECU170に書込記憶し、その変動後の値をディスプレイ140に表示する処理である。
【0062】
ステップS504で用いられる条件(10)の一例は、「アクセル=オン かつ 加速度Gが規定値MAP2以下」である。アクセルのオン/オフは、アクセル開度センサ52からの信号入力に基づいて判定される。「加速度Gが規定値MAP2以下」という条件は、出力センサ12と車速センサ22との双方の信号入力と、条件記憶部174に記憶されているエコ判定閾値マップ176とに基づいて判定される。また、ステップS506での評価変更イベントの一例は、総合評価点E15を増加させ、走行評価点E17を増加させて、増減後のこれらの値をECU170に書込記憶し、その変動後の値をディスプレイ140に表示する処理である。
【0063】
ステップS507で用いられる条件(11)の一例は、「車速=0km/h」である。車速は、車速センサ22からの信号入力に基づいて判定される。また、ステップS509での評価変更イベントの一例は、総合評価点E15を増加させ、停車評価点E18を増加させて、増減後のこれらの値をECU170に書込記憶し、その変動後の値をディスプレイ140に表示する処理である。
【0064】
図11は、ECU170が行う評価変更イベントの流れを示すフローチャートである。ECU170は、評価変更イベント(図6でのステップS103、図7のステップS203、ステップS206、ステップS209、等)として、まず、エコ度合いを変動させる(ステップS601)。詳細には、ECU170は、ECU170自身が記憶しているエコ度合い(総合評価点E15、発進評価点E16、走行評価点E17、停車評価点E18)を読出し、これを図6から図10に基づいて述べたように増減させる。続いて、ECU170は、変動後のエコ度合いをECU170に書込記憶する(ステップS602)。続いて、ECU170は、表示処理として、変動後のエコ度合いをディスプレイ140に表示する(ステップS603)。詳細には、ECU170は、ステップS603として、総合評価点E15、発進評価点E16、走行評価点E17及び停車評価点E18の変動後の値を、ディスプレイ140内の点数表示部E11、エコ発進評価部E12、安定走行評価部E13、エコ停車評価部E14のそれぞれに反映させるよう、ディスプレイ140の表示内容を変更する。
【0065】
なお、図6から図10に示す各処理中での状態遷移は、上記に述べたものに限られない。一例として、ECU170が、各種センサからの入力信号に基づく条件判定を行なって、停車状態H1から加速状態H4に状態遷移したと扱うようにしてもよい。
【0066】
また、図6から図10に示す各処理中での評価変更イベントにおいてなされる、総合評価点E15、発進評価点E16、走行評価点E17及び停車評価点E18の増減は、上記に述べたものに限られない。一例として、減速状態H5から停車状態H1に状態遷移するとき(図10のステップS508を参照)、ECU170が、その後に行う評価変更イベント(図10のステップS509を参照)として、総合評価点E15と発進評価点E16と走行評価点E17と停車評価点E18とを増加させ、増減後のこれらの値をECU170に書込記憶するようにしてもよい。
【0067】
また、本実施の形態では、評価変更イベント(評価変動処理)は、遷移条件が満たされるか否かの判定(状態遷移処理)の後に即座に行われるが、遷移条件が満たされるか否かの判定結果を判定結果フラグとして保存し、この判定結果フラグに基づいて事後的に評価変更イベントを行なうようにしても良い。
【0068】
また、本実施の形態では、条件記憶部174に格納されている遷移条件175Bは、車両1の状態ごとに規定され、例えば条件(1)は停車状態H1から発進状態H2への状態遷移にのみ用いられるようになっているが、遷移条件175Bを車両1の状態ごとに規定する必要はない。例えば、車速の大きさと車両1の状態とを対応させる関数を遷移条件175Bとして用い、この関数を、停車状態H1〜減速状態H5からの全ての状態遷移に用いるようにしてもよい。
【0069】
運転者が、上記のような構成を備えた車両1を運転操作すると、エコ運転支援装置201によって、運転者のエコ運転の関心が向上することになる。即ち、運転者が車両1を運転操作している間、ECU170は、車両1の状態を、停車状態H1、発進状態H2、定常運転状態H3、加速状態H4、減速状態H5のいずれかの状態として扱う。そして、ECU170は、運転者が行う車両1の運転操作に応じて、(総合評価点E15等)を変動させ、その変動結果をディスプレイ140に表示する。これにより、運転者は、自分が行なっている運転操作をエコ度合いという評価で認識でき、しかも運転操作によるエコ度合いの変動も認識することができる。このように、本実施の形態のエコ運転支援装置201によれば、運転者の運転操作の評価(特に車両加速時や減速時での評価)を運転者に運転時に素早く理解させて、運転者のエコ運転の関心を向上させることができる。
【符号の説明】
【0070】
1 車両
140 ディスプレイ(表示部)
170 ECU(情報処理部)
174 条件記憶部
175B 遷移条件
201 エコ運転支援装置
E15 総合評価点(エコ度合い)
E16 発進評価点(エコ度合い)
E17 走行評価点(エコ度合い)
E18 停車評価点(エコ度合い)
【特許請求の範囲】
【請求項1】
運転者による車両の運転操作のエコ度合いを報知するエコ運転支援装置であって、
表示を行う表示部と、
情報処理を行う情報処理部と、
を備え、
前記情報処理部は、
運転者による前記車両の運転操作に応じてエコ度合いを変動させる評価変動処理と、
変動後のエコ度合いを前記表示部に表示する表示処理と
を行う、エコ運転支援装置。
【請求項2】
前記車両の状態を遷移するための遷移条件を記憶する条件記憶部を更に備え、
前記情報処理部は、更に、
前記条件記憶部に記憶された遷移条件を満たすか否かを判定する判定処理と、
前記判定処理で前記遷移条件を満たすと判定した場合に前記車両の状態を遷移させる状態遷移処理と、
を行い、
前記評価変動処理は、前記状態遷移処理とともに実行される、
請求項1記載のエコ運転支援装置。
【請求項3】
前記遷移条件は、前記車両の状態ごとに規定される、
請求項2記載のエコ運転支援装置。
【請求項4】
前記表示部は、前記車両を運転操作する運転者に対面する位置に設けられる、
請求項1から3のいずれか一に記載のエコ運転支援装置。
【請求項1】
運転者による車両の運転操作のエコ度合いを報知するエコ運転支援装置であって、
表示を行う表示部と、
情報処理を行う情報処理部と、
を備え、
前記情報処理部は、
運転者による前記車両の運転操作に応じてエコ度合いを変動させる評価変動処理と、
変動後のエコ度合いを前記表示部に表示する表示処理と
を行う、エコ運転支援装置。
【請求項2】
前記車両の状態を遷移するための遷移条件を記憶する条件記憶部を更に備え、
前記情報処理部は、更に、
前記条件記憶部に記憶された遷移条件を満たすか否かを判定する判定処理と、
前記判定処理で前記遷移条件を満たすと判定した場合に前記車両の状態を遷移させる状態遷移処理と、
を行い、
前記評価変動処理は、前記状態遷移処理とともに実行される、
請求項1記載のエコ運転支援装置。
【請求項3】
前記遷移条件は、前記車両の状態ごとに規定される、
請求項2記載のエコ運転支援装置。
【請求項4】
前記表示部は、前記車両を運転操作する運転者に対面する位置に設けられる、
請求項1から3のいずれか一に記載のエコ運転支援装置。
【図1】


【図2】

【図3】

【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−92127(P2013−92127A)
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願番号】特願2011−235390(P2011−235390)
【出願日】平成23年10月26日(2011.10.26)
【出願人】(000157083)トヨタ自動車東日本株式会社 (1,164)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願日】平成23年10月26日(2011.10.26)
【出願人】(000157083)トヨタ自動車東日本株式会社 (1,164)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]