
エスカレーター監視制御システム
【課題】運転スケジュールとエスカレーターの実際の運転状態とを随時比較して、これらに不一致が生じている場合に、運転スケジュールにエスカレーターの運転状態を自動的に制御するエスカレーター監視制御システムを得る。
【解決手段】エスカレーターの運転を制御する運転制御手段とエスカレーターから運転状態を取得する監視端末手段を備えたエスカレーター監視制御システムであって、監視端末手段は、スケジュールデータを記録する記録部と、スケジュールデータに従って運転状態を制御する制御信号を運転制御手段へと出力し、同時に制御信号と同内容の内部信号を出力する出力部と、運転状態と内部信号が不一致の場合に、これらを一致させる旨の制御指令を出力部へと出力する比較部と、を備え、出力部は制御指令を受けてスケジュールデータに従って運転状態を制御する制御信号を運転制御手段へと出力する構成とする。
【解決手段】エスカレーターの運転を制御する運転制御手段とエスカレーターから運転状態を取得する監視端末手段を備えたエスカレーター監視制御システムであって、監視端末手段は、スケジュールデータを記録する記録部と、スケジュールデータに従って運転状態を制御する制御信号を運転制御手段へと出力し、同時に制御信号と同内容の内部信号を出力する出力部と、運転状態と内部信号が不一致の場合に、これらを一致させる旨の制御指令を出力部へと出力する比較部と、を備え、出力部は制御指令を受けてスケジュールデータに従って運転状態を制御する制御信号を運転制御手段へと出力する構成とする。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、エスカレーター監視制御システムに関するものである。
【背景技術】
【0002】
一般に駅等では、利用者の利便性向上、駅員等の省力化及びエネルギーの節約等を目的として、エスカレーターのスケジュール制御を実施している。例えば、通勤時間帯等の利用者の多い場合はエスカレーターの速度を速くするようにスケジュール制御を行ったり、利用者の少ない時間帯やお年寄りの多い時間帯は速度を遅くするようにスケジュール制御を行ったりしている。また、駅員等によるエスカレーターの起動、停止や速度切り替え作業の手間を省くためにも、スケジュール制御が行われる。このようなスケジュール制御は、遠隔地等にある監視センターから遠隔制御される場合が多い。
そして、従来におけるエスカレーター監視制御システムに関しては、建屋に、乗客コンベアの運転を制御する運転制御手段と、駆動部に接続され速度及び加速度の制御を行う速度制御手段と、前記運転制御手段と接続され乗客の有無を検出する乗客検出手段と、前記運転制御手段と接続され乗客コンベアの運行状態を検知する乗客コンベア監視端末手段とを備えた乗客コンベアの運転制御装置において、前記乗客コンベア監視端末手段に運転スケジュールを記憶可能なメモリを設け、前記運転制御手段は前記運転スケジュールに応じて、スケジュール設定時刻と現在時刻とが一致したときに制御を行うとともに、前記運転制御手段が前記運転スケジュールに応じた制御を行うことができず異常終了となった場合に、その旨を遠隔地の保守会社管理センターに通信回線を通じて通報する通報手段を備えたものが知られている(例えば、特許文献1参照)。
【0003】
【特許文献1】特開2004−010259号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、従来におけるスケジュール制御が行われているエスカレーターにおいて、故障による停止が発生し、監視制御装置から監視センターになされるその旨の通報に基づいて故障対応を行った場合に、故障対応が完了してエスカレーターを復帰する際には、例えば監視センターのオペレーターがスケジュール設定を確認して、スケジュール設定に合わせて遠隔地からエスカレーターを制御する等の必要があるため、作業に煩雑な手数が掛かるという課題がある。
そして、例えば車椅子利用時に車椅子用踏段等を用いて行われる車椅子運転等の特殊運転から通常運転に復帰する際には、例えば、現地の駅員が監視センターにその旨を伝え、これを受けた監視センターのオペレーターがスケジュール設定を確認して、スケジュール設定に合わせて遠隔地からエスカレーターを制御する等の必要があるため、作業に煩雑な手数が掛かるという課題がある。
また、特許文献1に示された従来におけるエスカレーター監視制御システムにおいては、スケジュール設定時刻と現在時刻とが一致したときのみに制御を行い、運転制御手段が運転スケジュールに応じた制御を行うことができたか否かを確認し、エスカレーターが常にスケジュール設定通りに制御されているか否かは監視していないため、例えば、前述の特殊運転から通常運転に復帰する際等に、現地の駅員が監視センターにその旨を伝え、これを受けた監視センターのオペレーターがスケジュール設定を確認して、スケジュール設定に合わせて遠隔地からエスカレーターを制御する等の必要があり、作業に煩雑な手数が掛かるという、前述同様の課題がある。そして、万一、現地の駅員が監視センターに連絡をしなかった場合には、スケジュール設定とエスカレーターの実際の運転状態とが異なってしまい、スケジュール制御の目的である利用者の利便性の向上やエネルギーの節約等を実現することが困難となるという課題がある。
【0005】
この発明は、前述のような課題を解決するためになされたもので、設定された運転スケジュールとエスカレーターの実際の運転状態とを随時比較して、これらに不一致が生じている場合に、設定された運転スケジュールにエスカレーターの運転状態を自動的に制御することができるエスカレーター監視制御システムを得るものである。
【課題を解決するための手段】
【0006】
この発明に係る、エスカレーター監視制御システムに関しては、エスカレーターの運転を制御する運転制御手段と、前記エスカレーターから前記エスカレーターの運転状態を取得する監視端末手段を備えたエスカレーター監視制御システムであって、前記監視端末手段は、前記エスカレーターの運転スケジュールをスケジュールデータとして記録する記録部と、前記記録部に記録された前記スケジュールデータを読み取り、前記スケジュールデータに設定された運転状態へと前記エスカレーターの運転状態を変更する旨の制御信号を前記運転制御手段へと出力し、同時に前記制御信号の示す運転状態と同一の運転状態を表す内部信号を出力する出力部と、前記エスカレーターの運転状態と前記内部信号の示す運転状態とを比較し、前記エスカレーターの運転状態と前記内部信号の示す運転状態とが一致していない場合に、前記エスカレーターの運転状態を前記スケジュールデータに設定された運転状態と一致させるべく制御するように制御指令を前記出力部へと出力する比較部と、を備え、前記出力部は、前記比較部の出力する前記制御指令を受けて、前記スケジュールデータに設定された運転状態へと前記エスカレーターの運転状態を変更する旨の制御信号を前記運転制御手段へと出力する構成とする。
【発明の効果】
【0007】
この発明はエスカレーター監視制御システムに関し、エスカレーターの運転を制御する運転制御手段と、前記エスカレーターから前記エスカレーターの運転状態を取得する監視端末手段を備えたエスカレーター監視制御システムであって、前記監視端末手段は、前記エスカレーターの運転スケジュールをスケジュールデータとして記録する記録部と、前記記録部に記録された前記スケジュールデータを読み取り、前記スケジュールデータに設定された運転状態へと前記エスカレーターの運転状態を変更する旨の制御信号を前記運転制御手段へと出力し、同時に前記制御信号の示す運転状態と同一の運転状態を表す内部信号を出力する出力部と、前記エスカレーターの運転状態と前記内部信号の示す運転状態とを比較し、前記エスカレーターの運転状態と前記内部信号の示す運転状態とが一致していない場合に、前記エスカレーターの運転状態を前記スケジュールデータに設定された運転状態と一致させるべく制御するように制御指令を前記出力部へと出力する比較部と、を備え、前記出力部は、前記比較部の出力する前記制御指令を受けて、前記スケジュールデータに設定された運転状態へと前記エスカレーターの運転状態を変更する旨の制御信号を前記運転制御手段へと出力する構成としたことで、設定された運転スケジュールとエスカレーターの実際の運転状態とを随時比較して、これらに不一致が生じている場合に、設定された運転スケジュールにエスカレーターの運転状態を自動的に制御することができるという効果を奏する。
【発明を実施するための最良の形態】
【0008】
実施の形態1.
図1から図4は、この発明の実施の形態1に関するもので、図1はエスカレーター監視制御システムの全体構成を示すブロック図、図2は監視端末手段の詳細構成を示すブロック図、図3は監視端末手段の出力部におけるスケジュール制御動作を示すフロー図、図4は監視端末手段における設定された運転スケジュールとエスカレーターの運転状態との比較動作、及び、設定された運転スケジュールにエスカレーターの運転状態を自動制御する動作を示すフロー図である。
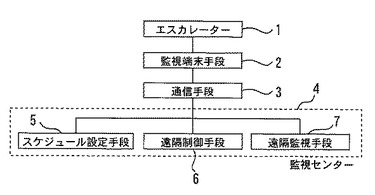
図において1はエスカレーターであり、このエスカレーター1には、前記エスカレーター1から前記エスカレーター1の運転状態を取得する監視端末手段2が接続されている。そして、前記監視端末手段2は通信手段3を介して遠隔地の監視センター4にあるスケジュール設定手段5、遠隔制御手段6及び遠隔監視手段7と通信可能に接続されている。
【0009】
前記監視端末手段2は、前記エスカレーター1の運転状態から異常や変調を検知した場合には前記遠隔監視手段7へと通知し、前記監視センター4のオペレーターは、前記遠隔監視手段7に表示された情報を元に対応が可能である。
そして、前記オペレーターは、前記遠隔制御手段6を操作して前記通信手段3を経由して前記監視端末手段2へと制御指令を送信し、これを受信した前記監視端末手段2は前記エスカレーター1へと制御信号を出力することで、前記監視センター4から前記エスカレーター1の運転を制御することができる。
また、前記オペレーターは、前記スケジュール設定手段5を用いて運転スケジュールを設定し、前記通信手段3を経由して前記監視端末手段2へと設定した運転スケジュールをスケジュールデータとして送信する。このスケジュールデータは前記監視端末手段2に記録され、前記監視端末手段2はこの記録された前記スケジュールデータに従って前記エスカレーター1へと制御信号を出力することで、前記エスカレーター1の運転を制御する。なお、前記スケジュールデータには、曜日毎、時間帯毎における前記エスカレーター1の例えば、起動及び停止、運転速度、運転方向、照明点灯状態並びにアナウンス内容等に関する情報が含まれている。
【0010】
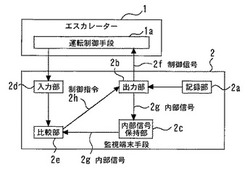
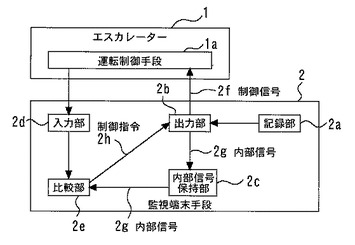
図2は監視端末手段の詳細構成を示すもので、1aは前記エスカレーター1の運転を制御する運転制御手段であり、2aは前記スケジュールデータを記録する記録部である。
出力部2bは、前記記録部2aに記録された前記スケジュールデータを読み取って、これに従い前記エスカレーター1の前記運転制御手段1aへと制御信号2fを出力し、同時に内部信号保持部2cへと内部信号2gを出力する。この内部信号保持部2cは、前記出力部2bから出力された前記内部信号2gを保持するとともに、必要に応じて、保持している前記内部信号2gを比較部2eへと出力する。
入力部2dは前記エスカレーター1の前記運転制御手段1aから前記エスカレーター1の運転状態を取得する。そして、比較部2eは、前記入力部2dから出力された前記エスカレーター1の運転状態と、前記内部信号保持手段0から出力された前記内部信号の示す運転状態とを比較し、必要に応じて前記出力部2bへと制御指令2hを出力する。
【0011】
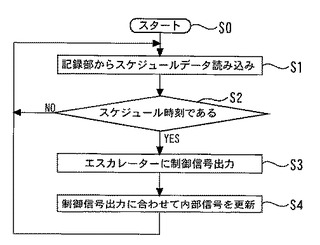
図3は前記監視端末手段2の前記出力部2bにおけるスケジュール制御動作を示すフロー図である。
まず、ステップS1において、前記出力部2bは前記記録部2aに記録されている前記スケジュールデータを読み込む。
次に、ステップS2へと移り、現在時刻が前記スケジュールデータに設定されたスケジュール時刻であるか否かを判断する。この判断において、現在時刻が前記スケジュールデータに設定されたスケジュール時刻であると判断された場合には、ステップS3へと進み、前記出力部2bは、このスケジュール時刻において設定された運転状態へと前記エスカレーター1の運転状態を変更する旨の前記制御信号2fを前記運転制御手段1aへと出力する。例えば、スケジュール時刻において設定された運転状態が、運転速度を30m/sとする、という内容であった場合は、前記出力部2bは前記エスカレーター1の運転速度を30m/sに変更する旨の前記制御信号2fを前記運転制御手段1aへと出力する。
そして、次のステップS4へと移行して、前記出力部2bは、ステップS3において前記運転制御手段1aへと出力した前記制御信号2fの示す運転状態と同一の運転状態を表す前記内部信号2gを前記内部信号保持部2cへと出力し、前記内部信号保持部2cはこの内部信号2gを保持する。例えば、前述の例でいえば、前記出力部2bは、運転速度を30m/sとする、という内容の前記内部信号2gを前記内部信号保持部2cへと出力し、前記内部信号保持部2cはこの内部信号2gを保持する。その後、ステップS1へと戻り、以上のステップを再び繰り返す。
一方、ステップS2の判断において、現在時刻が前記スケジュールデータに設定されたスケジュール時刻でないと判断された場合には、ステップS3及びステップS4を経ることなくステップS1へと戻り、以上のステップを再び繰り返す。
以上のような動作フローにより、前記スケジュールデータに設定された運転状態と、前記内部信号保持部2cに保持された前記内部信号2gの示す運転状態とが常に一致することとなる。
【0012】
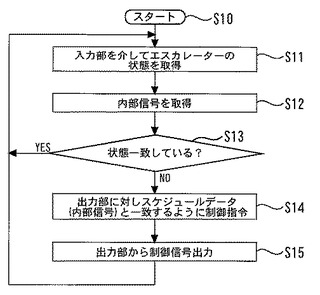
図4は前記監視端末手段2における、設定された運転スケジュールとエスカレーターの運転状態との比較動作、及び、設定された運転スケジュールにエスカレーターの運転状態を自動制御する動作を示すフロー図である。
まず、ステップS11において、前記比較部2eは前記入力部2dを介して前記運転制御手段1aより前記エスカレーター1の運転状態を取得する。次に、ステップS12へと進み、前記比較部2eは前記内部信号保持部2cより前記内部信号2gを取得する。
次に、ステップS13へと移り、前記比較部2eは、ステップS11において取得した前記エスカレーター1の運転状態と、ステップS12取得した前記内部信号2gの示す運転状態とを比較する。この比較において、前記エスカレーター1の運転状態と前記内部信号2gの示す運転状態とが一致していないと判断された場合は、ステップS14へと進み、前記比較部2eは、前記エスカレーター1の運転状態を前記スケジュールデータに設定された運転状態と一致させるべく制御するように前記制御指令2hを前記出力部2bへと出力する。そして、ステップS15へと移行して、前記比較部2eの出力した前記制御指令2hを受けた前記出力部2bは、前記スケジュールデータに設定された運転状態へと前記エスカレーター1の運転状態を変更する旨の前記制御信号2fを前記運転制御手段1aへと出力する。
なお、前述したように前記スケジュールデータに設定された運転状態と、前記内部信号保持部2cに保持された前記内部信号2gの示す運転状態とは常に一致しているため、ステップS14において、前記エスカレーター1の運転状態を前記スケジュールデータに設定された運転状態と一致させるべく制御する、とは、前記エスカレーター1の運転状態を前記内部信号2gの示す運転状態と一致させるべく制御する、ことと実質的に同一である。また、ステップS15を経ることにより、前記エスカレーター1の運転状態、前記スケジュールデータに設定された運転状態及び前記内部信号2gの示す運転状態の三者は互いに一致することになる。
一方、ステップS13の比較において、前記エスカレーター1の運転状態と前記内部信号2gの示す運転状態とが一致していると判断された場合には、ステップS14及びステップS15を経ることなくステップS11へと戻り、以上のステップを再び繰り返す。
【0013】
以上のように構成されたエスカレーター監視制御システムにおいては、現在時刻が前記スケジュールデータに設定されたスケジュール時刻となった時に、出力部がこのスケジュール時刻において設定された運転状態へとエスカレーターの運転状態を変更する旨の制御信号を運転制御手段へと出力すると同時に、この制御信号と同内容の内部信号を内部信号保持部へと出力して、内部信号保持部はこの内部信号を保持することによりスケジュールデータに設定された運転状態と、内部信号保持部に保持された内部信号の示す運転状態とを常に一致させることができる。
そして、比較部がエスカレーターの運転状態と内部信号の示す運転状態とを随時比較し、この比較においてエスカレーターの運転状態と内部信号の示す運転状態とが一致していないと判断された場合は、比較部の制御指令を受けた出力部がスケジュールデータに設定された運転状態へとエスカレーターの運転状態を変更する旨の前記制御信号を運転制御手段へと出力することにより、設定された運転スケジュールとエスカレーターの実際の運転状態とを随時比較して、これらに不一致が生じている場合に、設定された運転スケジュールにエスカレーターの運転状態を自動的に制御することが可能である。
【0014】
従って、例えば、車椅子利用時に車椅子用踏段等を用いて行われる車椅子運転等の特殊運転から通常運転に復帰する際に、現地の駅員が監視センターにその旨を伝え、これを受けた監視センターのオペレーターがスケジュール設定を確認して、スケジュール設定に合わせて遠隔地からエスカレーターを制御する等の復帰作業を行わなくとも、自動的に設定された運転スケジュールにエスカレーターの運転状態が設定された運転スケジュールに従って自動的に制御される。このため、スケジュール制御の目的である利用者の利便性の向上やエネルギーの節約等を実現することが可能である。
【図面の簡単な説明】
【0015】
【図1】この発明の実施の形態1に関しエスカレーター監視制御システムの全体構成を示すブロック図である。
【図2】この発明の実施の形態1に関し監視端末手段の詳細構成を示すブロック図である。
【図3】この発明の実施の形態1に関し監視端末手段の出力部におけるスケジュール制御動作を示すフロー図である。
【図4】この発明の実施の形態1に関し監視端末手段における設定された運転スケジュールとエスカレーターの運転状態との比較動作及び設定された運転スケジュールにエスカレーターの運転状態を自動制御する動作を示すフロー図である。
【符号の説明】
【0016】
1 エスカレーター
1a 運転制御手段
2 監視端末手段
2a 記録部
2b 出力部
2c 内部信号保持部
2d 入力部
2e 比較部
2f 制御信号
2g 内部信号
2h 制御指令
3 通信手段
4 監視センター
5 スケジュール設定手段
6 遠隔制御手段
7 遠隔監視手段
【技術分野】
【0001】
この発明は、エスカレーター監視制御システムに関するものである。
【背景技術】
【0002】
一般に駅等では、利用者の利便性向上、駅員等の省力化及びエネルギーの節約等を目的として、エスカレーターのスケジュール制御を実施している。例えば、通勤時間帯等の利用者の多い場合はエスカレーターの速度を速くするようにスケジュール制御を行ったり、利用者の少ない時間帯やお年寄りの多い時間帯は速度を遅くするようにスケジュール制御を行ったりしている。また、駅員等によるエスカレーターの起動、停止や速度切り替え作業の手間を省くためにも、スケジュール制御が行われる。このようなスケジュール制御は、遠隔地等にある監視センターから遠隔制御される場合が多い。
そして、従来におけるエスカレーター監視制御システムに関しては、建屋に、乗客コンベアの運転を制御する運転制御手段と、駆動部に接続され速度及び加速度の制御を行う速度制御手段と、前記運転制御手段と接続され乗客の有無を検出する乗客検出手段と、前記運転制御手段と接続され乗客コンベアの運行状態を検知する乗客コンベア監視端末手段とを備えた乗客コンベアの運転制御装置において、前記乗客コンベア監視端末手段に運転スケジュールを記憶可能なメモリを設け、前記運転制御手段は前記運転スケジュールに応じて、スケジュール設定時刻と現在時刻とが一致したときに制御を行うとともに、前記運転制御手段が前記運転スケジュールに応じた制御を行うことができず異常終了となった場合に、その旨を遠隔地の保守会社管理センターに通信回線を通じて通報する通報手段を備えたものが知られている(例えば、特許文献1参照)。
【0003】
【特許文献1】特開2004−010259号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、従来におけるスケジュール制御が行われているエスカレーターにおいて、故障による停止が発生し、監視制御装置から監視センターになされるその旨の通報に基づいて故障対応を行った場合に、故障対応が完了してエスカレーターを復帰する際には、例えば監視センターのオペレーターがスケジュール設定を確認して、スケジュール設定に合わせて遠隔地からエスカレーターを制御する等の必要があるため、作業に煩雑な手数が掛かるという課題がある。
そして、例えば車椅子利用時に車椅子用踏段等を用いて行われる車椅子運転等の特殊運転から通常運転に復帰する際には、例えば、現地の駅員が監視センターにその旨を伝え、これを受けた監視センターのオペレーターがスケジュール設定を確認して、スケジュール設定に合わせて遠隔地からエスカレーターを制御する等の必要があるため、作業に煩雑な手数が掛かるという課題がある。
また、特許文献1に示された従来におけるエスカレーター監視制御システムにおいては、スケジュール設定時刻と現在時刻とが一致したときのみに制御を行い、運転制御手段が運転スケジュールに応じた制御を行うことができたか否かを確認し、エスカレーターが常にスケジュール設定通りに制御されているか否かは監視していないため、例えば、前述の特殊運転から通常運転に復帰する際等に、現地の駅員が監視センターにその旨を伝え、これを受けた監視センターのオペレーターがスケジュール設定を確認して、スケジュール設定に合わせて遠隔地からエスカレーターを制御する等の必要があり、作業に煩雑な手数が掛かるという、前述同様の課題がある。そして、万一、現地の駅員が監視センターに連絡をしなかった場合には、スケジュール設定とエスカレーターの実際の運転状態とが異なってしまい、スケジュール制御の目的である利用者の利便性の向上やエネルギーの節約等を実現することが困難となるという課題がある。
【0005】
この発明は、前述のような課題を解決するためになされたもので、設定された運転スケジュールとエスカレーターの実際の運転状態とを随時比較して、これらに不一致が生じている場合に、設定された運転スケジュールにエスカレーターの運転状態を自動的に制御することができるエスカレーター監視制御システムを得るものである。
【課題を解決するための手段】
【0006】
この発明に係る、エスカレーター監視制御システムに関しては、エスカレーターの運転を制御する運転制御手段と、前記エスカレーターから前記エスカレーターの運転状態を取得する監視端末手段を備えたエスカレーター監視制御システムであって、前記監視端末手段は、前記エスカレーターの運転スケジュールをスケジュールデータとして記録する記録部と、前記記録部に記録された前記スケジュールデータを読み取り、前記スケジュールデータに設定された運転状態へと前記エスカレーターの運転状態を変更する旨の制御信号を前記運転制御手段へと出力し、同時に前記制御信号の示す運転状態と同一の運転状態を表す内部信号を出力する出力部と、前記エスカレーターの運転状態と前記内部信号の示す運転状態とを比較し、前記エスカレーターの運転状態と前記内部信号の示す運転状態とが一致していない場合に、前記エスカレーターの運転状態を前記スケジュールデータに設定された運転状態と一致させるべく制御するように制御指令を前記出力部へと出力する比較部と、を備え、前記出力部は、前記比較部の出力する前記制御指令を受けて、前記スケジュールデータに設定された運転状態へと前記エスカレーターの運転状態を変更する旨の制御信号を前記運転制御手段へと出力する構成とする。
【発明の効果】
【0007】
この発明はエスカレーター監視制御システムに関し、エスカレーターの運転を制御する運転制御手段と、前記エスカレーターから前記エスカレーターの運転状態を取得する監視端末手段を備えたエスカレーター監視制御システムであって、前記監視端末手段は、前記エスカレーターの運転スケジュールをスケジュールデータとして記録する記録部と、前記記録部に記録された前記スケジュールデータを読み取り、前記スケジュールデータに設定された運転状態へと前記エスカレーターの運転状態を変更する旨の制御信号を前記運転制御手段へと出力し、同時に前記制御信号の示す運転状態と同一の運転状態を表す内部信号を出力する出力部と、前記エスカレーターの運転状態と前記内部信号の示す運転状態とを比較し、前記エスカレーターの運転状態と前記内部信号の示す運転状態とが一致していない場合に、前記エスカレーターの運転状態を前記スケジュールデータに設定された運転状態と一致させるべく制御するように制御指令を前記出力部へと出力する比較部と、を備え、前記出力部は、前記比較部の出力する前記制御指令を受けて、前記スケジュールデータに設定された運転状態へと前記エスカレーターの運転状態を変更する旨の制御信号を前記運転制御手段へと出力する構成としたことで、設定された運転スケジュールとエスカレーターの実際の運転状態とを随時比較して、これらに不一致が生じている場合に、設定された運転スケジュールにエスカレーターの運転状態を自動的に制御することができるという効果を奏する。
【発明を実施するための最良の形態】
【0008】
実施の形態1.
図1から図4は、この発明の実施の形態1に関するもので、図1はエスカレーター監視制御システムの全体構成を示すブロック図、図2は監視端末手段の詳細構成を示すブロック図、図3は監視端末手段の出力部におけるスケジュール制御動作を示すフロー図、図4は監視端末手段における設定された運転スケジュールとエスカレーターの運転状態との比較動作、及び、設定された運転スケジュールにエスカレーターの運転状態を自動制御する動作を示すフロー図である。
図において1はエスカレーターであり、このエスカレーター1には、前記エスカレーター1から前記エスカレーター1の運転状態を取得する監視端末手段2が接続されている。そして、前記監視端末手段2は通信手段3を介して遠隔地の監視センター4にあるスケジュール設定手段5、遠隔制御手段6及び遠隔監視手段7と通信可能に接続されている。
【0009】
前記監視端末手段2は、前記エスカレーター1の運転状態から異常や変調を検知した場合には前記遠隔監視手段7へと通知し、前記監視センター4のオペレーターは、前記遠隔監視手段7に表示された情報を元に対応が可能である。
そして、前記オペレーターは、前記遠隔制御手段6を操作して前記通信手段3を経由して前記監視端末手段2へと制御指令を送信し、これを受信した前記監視端末手段2は前記エスカレーター1へと制御信号を出力することで、前記監視センター4から前記エスカレーター1の運転を制御することができる。
また、前記オペレーターは、前記スケジュール設定手段5を用いて運転スケジュールを設定し、前記通信手段3を経由して前記監視端末手段2へと設定した運転スケジュールをスケジュールデータとして送信する。このスケジュールデータは前記監視端末手段2に記録され、前記監視端末手段2はこの記録された前記スケジュールデータに従って前記エスカレーター1へと制御信号を出力することで、前記エスカレーター1の運転を制御する。なお、前記スケジュールデータには、曜日毎、時間帯毎における前記エスカレーター1の例えば、起動及び停止、運転速度、運転方向、照明点灯状態並びにアナウンス内容等に関する情報が含まれている。
【0010】
図2は監視端末手段の詳細構成を示すもので、1aは前記エスカレーター1の運転を制御する運転制御手段であり、2aは前記スケジュールデータを記録する記録部である。
出力部2bは、前記記録部2aに記録された前記スケジュールデータを読み取って、これに従い前記エスカレーター1の前記運転制御手段1aへと制御信号2fを出力し、同時に内部信号保持部2cへと内部信号2gを出力する。この内部信号保持部2cは、前記出力部2bから出力された前記内部信号2gを保持するとともに、必要に応じて、保持している前記内部信号2gを比較部2eへと出力する。
入力部2dは前記エスカレーター1の前記運転制御手段1aから前記エスカレーター1の運転状態を取得する。そして、比較部2eは、前記入力部2dから出力された前記エスカレーター1の運転状態と、前記内部信号保持手段0から出力された前記内部信号の示す運転状態とを比較し、必要に応じて前記出力部2bへと制御指令2hを出力する。
【0011】
図3は前記監視端末手段2の前記出力部2bにおけるスケジュール制御動作を示すフロー図である。
まず、ステップS1において、前記出力部2bは前記記録部2aに記録されている前記スケジュールデータを読み込む。
次に、ステップS2へと移り、現在時刻が前記スケジュールデータに設定されたスケジュール時刻であるか否かを判断する。この判断において、現在時刻が前記スケジュールデータに設定されたスケジュール時刻であると判断された場合には、ステップS3へと進み、前記出力部2bは、このスケジュール時刻において設定された運転状態へと前記エスカレーター1の運転状態を変更する旨の前記制御信号2fを前記運転制御手段1aへと出力する。例えば、スケジュール時刻において設定された運転状態が、運転速度を30m/sとする、という内容であった場合は、前記出力部2bは前記エスカレーター1の運転速度を30m/sに変更する旨の前記制御信号2fを前記運転制御手段1aへと出力する。
そして、次のステップS4へと移行して、前記出力部2bは、ステップS3において前記運転制御手段1aへと出力した前記制御信号2fの示す運転状態と同一の運転状態を表す前記内部信号2gを前記内部信号保持部2cへと出力し、前記内部信号保持部2cはこの内部信号2gを保持する。例えば、前述の例でいえば、前記出力部2bは、運転速度を30m/sとする、という内容の前記内部信号2gを前記内部信号保持部2cへと出力し、前記内部信号保持部2cはこの内部信号2gを保持する。その後、ステップS1へと戻り、以上のステップを再び繰り返す。
一方、ステップS2の判断において、現在時刻が前記スケジュールデータに設定されたスケジュール時刻でないと判断された場合には、ステップS3及びステップS4を経ることなくステップS1へと戻り、以上のステップを再び繰り返す。
以上のような動作フローにより、前記スケジュールデータに設定された運転状態と、前記内部信号保持部2cに保持された前記内部信号2gの示す運転状態とが常に一致することとなる。
【0012】
図4は前記監視端末手段2における、設定された運転スケジュールとエスカレーターの運転状態との比較動作、及び、設定された運転スケジュールにエスカレーターの運転状態を自動制御する動作を示すフロー図である。
まず、ステップS11において、前記比較部2eは前記入力部2dを介して前記運転制御手段1aより前記エスカレーター1の運転状態を取得する。次に、ステップS12へと進み、前記比較部2eは前記内部信号保持部2cより前記内部信号2gを取得する。
次に、ステップS13へと移り、前記比較部2eは、ステップS11において取得した前記エスカレーター1の運転状態と、ステップS12取得した前記内部信号2gの示す運転状態とを比較する。この比較において、前記エスカレーター1の運転状態と前記内部信号2gの示す運転状態とが一致していないと判断された場合は、ステップS14へと進み、前記比較部2eは、前記エスカレーター1の運転状態を前記スケジュールデータに設定された運転状態と一致させるべく制御するように前記制御指令2hを前記出力部2bへと出力する。そして、ステップS15へと移行して、前記比較部2eの出力した前記制御指令2hを受けた前記出力部2bは、前記スケジュールデータに設定された運転状態へと前記エスカレーター1の運転状態を変更する旨の前記制御信号2fを前記運転制御手段1aへと出力する。
なお、前述したように前記スケジュールデータに設定された運転状態と、前記内部信号保持部2cに保持された前記内部信号2gの示す運転状態とは常に一致しているため、ステップS14において、前記エスカレーター1の運転状態を前記スケジュールデータに設定された運転状態と一致させるべく制御する、とは、前記エスカレーター1の運転状態を前記内部信号2gの示す運転状態と一致させるべく制御する、ことと実質的に同一である。また、ステップS15を経ることにより、前記エスカレーター1の運転状態、前記スケジュールデータに設定された運転状態及び前記内部信号2gの示す運転状態の三者は互いに一致することになる。
一方、ステップS13の比較において、前記エスカレーター1の運転状態と前記内部信号2gの示す運転状態とが一致していると判断された場合には、ステップS14及びステップS15を経ることなくステップS11へと戻り、以上のステップを再び繰り返す。
【0013】
以上のように構成されたエスカレーター監視制御システムにおいては、現在時刻が前記スケジュールデータに設定されたスケジュール時刻となった時に、出力部がこのスケジュール時刻において設定された運転状態へとエスカレーターの運転状態を変更する旨の制御信号を運転制御手段へと出力すると同時に、この制御信号と同内容の内部信号を内部信号保持部へと出力して、内部信号保持部はこの内部信号を保持することによりスケジュールデータに設定された運転状態と、内部信号保持部に保持された内部信号の示す運転状態とを常に一致させることができる。
そして、比較部がエスカレーターの運転状態と内部信号の示す運転状態とを随時比較し、この比較においてエスカレーターの運転状態と内部信号の示す運転状態とが一致していないと判断された場合は、比較部の制御指令を受けた出力部がスケジュールデータに設定された運転状態へとエスカレーターの運転状態を変更する旨の前記制御信号を運転制御手段へと出力することにより、設定された運転スケジュールとエスカレーターの実際の運転状態とを随時比較して、これらに不一致が生じている場合に、設定された運転スケジュールにエスカレーターの運転状態を自動的に制御することが可能である。
【0014】
従って、例えば、車椅子利用時に車椅子用踏段等を用いて行われる車椅子運転等の特殊運転から通常運転に復帰する際に、現地の駅員が監視センターにその旨を伝え、これを受けた監視センターのオペレーターがスケジュール設定を確認して、スケジュール設定に合わせて遠隔地からエスカレーターを制御する等の復帰作業を行わなくとも、自動的に設定された運転スケジュールにエスカレーターの運転状態が設定された運転スケジュールに従って自動的に制御される。このため、スケジュール制御の目的である利用者の利便性の向上やエネルギーの節約等を実現することが可能である。
【図面の簡単な説明】
【0015】
【図1】この発明の実施の形態1に関しエスカレーター監視制御システムの全体構成を示すブロック図である。
【図2】この発明の実施の形態1に関し監視端末手段の詳細構成を示すブロック図である。
【図3】この発明の実施の形態1に関し監視端末手段の出力部におけるスケジュール制御動作を示すフロー図である。
【図4】この発明の実施の形態1に関し監視端末手段における設定された運転スケジュールとエスカレーターの運転状態との比較動作及び設定された運転スケジュールにエスカレーターの運転状態を自動制御する動作を示すフロー図である。
【符号の説明】
【0016】
1 エスカレーター
1a 運転制御手段
2 監視端末手段
2a 記録部
2b 出力部
2c 内部信号保持部
2d 入力部
2e 比較部
2f 制御信号
2g 内部信号
2h 制御指令
3 通信手段
4 監視センター
5 スケジュール設定手段
6 遠隔制御手段
7 遠隔監視手段
【特許請求の範囲】
【請求項1】
エスカレーターの運転を制御する運転制御手段と、前記エスカレーターから前記エスカレーターの運転状態を取得する監視端末手段を備えたエスカレーター監視制御システムであって、
前記監視端末手段は、
前記エスカレーターの運転スケジュールをスケジュールデータとして記録する記録部と、
前記記録部に記録された前記スケジュールデータを読み取り、前記スケジュールデータに設定された運転状態へと前記エスカレーターの運転状態を変更する旨の制御信号を前記運転制御手段へと出力し、同時に前記制御信号の示す運転状態と同一の運転状態を表す内部信号を出力する出力部と、
前記エスカレーターの運転状態と前記内部信号の示す運転状態とを比較し、前記エスカレーターの運転状態と前記内部信号の示す運転状態とが一致していない場合に、前記エスカレーターの運転状態を前記スケジュールデータに設定された運転状態と一致させるべく制御するように制御指令を前記出力部へと出力する比較部と、を備え、
前記出力部は、前記比較部の出力する前記制御指令を受けて、前記スケジュールデータに設定された運転状態へと前記エスカレーターの運転状態を変更する旨の制御信号を前記運転制御手段へと出力することを特徴とするエスカレーター監視制御システム。
【請求項2】
前記監視端末手段は、前記出力部が出力する前記内部信号を保持し、保持している前記内部信号を前記比較部へと出力する内部信号保持部を備えたことを特徴とする請求項1に記載のエスカレーター監視制御システム。
【請求項3】
前記監視端末手段は、前記エスカレーターから前記エスカレーターの運転状態を取得し、取得した前記エスカレーターの運転状態を前記比較部へと出力する入力部を備えたことを特徴とする請求項1又は請求項2のいずれかに記載のエスカレーター監視制御システム。
【請求項4】
車椅子運転等の特殊運転から通常運転に復帰する際に、前記エスカレーターの運転状態を前記スケジュールデータに設定された運転状態と一致させるよう自動的に制御することを特徴とする請求項1から請求項3のいずれかに記載のエスカレーター監視制御システム。
【請求項5】
遠隔地の監視センターに、前記監視端末手段と通信手段を介して接続されたスケジュール設定手段を備え、
前記スケジュール設定手段を用いて前記運転スケジュールを設定し、
前記スケジュール設定手段は、設定された前記運転スケジュールをスケジュールデータとして前記通信手段を介して前記監視端末手段へと送信することを特徴とする請求項1から請求項4のいずれかに記載のエスカレーター監視制御システム。
【請求項1】
エスカレーターの運転を制御する運転制御手段と、前記エスカレーターから前記エスカレーターの運転状態を取得する監視端末手段を備えたエスカレーター監視制御システムであって、
前記監視端末手段は、
前記エスカレーターの運転スケジュールをスケジュールデータとして記録する記録部と、
前記記録部に記録された前記スケジュールデータを読み取り、前記スケジュールデータに設定された運転状態へと前記エスカレーターの運転状態を変更する旨の制御信号を前記運転制御手段へと出力し、同時に前記制御信号の示す運転状態と同一の運転状態を表す内部信号を出力する出力部と、
前記エスカレーターの運転状態と前記内部信号の示す運転状態とを比較し、前記エスカレーターの運転状態と前記内部信号の示す運転状態とが一致していない場合に、前記エスカレーターの運転状態を前記スケジュールデータに設定された運転状態と一致させるべく制御するように制御指令を前記出力部へと出力する比較部と、を備え、
前記出力部は、前記比較部の出力する前記制御指令を受けて、前記スケジュールデータに設定された運転状態へと前記エスカレーターの運転状態を変更する旨の制御信号を前記運転制御手段へと出力することを特徴とするエスカレーター監視制御システム。
【請求項2】
前記監視端末手段は、前記出力部が出力する前記内部信号を保持し、保持している前記内部信号を前記比較部へと出力する内部信号保持部を備えたことを特徴とする請求項1に記載のエスカレーター監視制御システム。
【請求項3】
前記監視端末手段は、前記エスカレーターから前記エスカレーターの運転状態を取得し、取得した前記エスカレーターの運転状態を前記比較部へと出力する入力部を備えたことを特徴とする請求項1又は請求項2のいずれかに記載のエスカレーター監視制御システム。
【請求項4】
車椅子運転等の特殊運転から通常運転に復帰する際に、前記エスカレーターの運転状態を前記スケジュールデータに設定された運転状態と一致させるよう自動的に制御することを特徴とする請求項1から請求項3のいずれかに記載のエスカレーター監視制御システム。
【請求項5】
遠隔地の監視センターに、前記監視端末手段と通信手段を介して接続されたスケジュール設定手段を備え、
前記スケジュール設定手段を用いて前記運転スケジュールを設定し、
前記スケジュール設定手段は、設定された前記運転スケジュールをスケジュールデータとして前記通信手段を介して前記監視端末手段へと送信することを特徴とする請求項1から請求項4のいずれかに記載のエスカレーター監視制御システム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2009−143697(P2009−143697A)
【公開日】平成21年7月2日(2009.7.2)
【国際特許分類】
【出願番号】特願2007−323807(P2007−323807)
【出願日】平成19年12月14日(2007.12.14)
【出願人】(000236056)三菱電機ビルテクノサービス株式会社 (1,792)
【Fターム(参考)】
【公開日】平成21年7月2日(2009.7.2)
【国際特許分類】
【出願日】平成19年12月14日(2007.12.14)
【出願人】(000236056)三菱電機ビルテクノサービス株式会社 (1,792)
【Fターム(参考)】
[ Back to top ]