
エッジの検出と強調を行うイメージ処理の方法および装置
【課題】イメージ内のピクセルがスムージング・アルゴリズムを適用するべき均質な組織を表しているか否かを決定するための技術を提供する。
【解決手段】超音波イメージの複数のピクセルのうちの少なくとも1つに対してエッジ検出フィルタを適用し、大きさを含むエッジ検出値を算出し、エッジ検出値の大きさがスレッショルド値よりも大きい場合に、複数のピクセルの少なくとも1つに対して、方向性エッジ強調フィルタを適用し、エッジ検出値の大きさがスレッショルド値よりも小さい場合に、当該大きさに基づいて、複数の非方向性スムージング・フィルタの中から1つの非方向性スムージング・フィルタを選択し、前記複数のピクセルの少なくとも1つに対して、選択された非方向性スムージング・フィルタを適用する。
【解決手段】超音波イメージの複数のピクセルのうちの少なくとも1つに対してエッジ検出フィルタを適用し、大きさを含むエッジ検出値を算出し、エッジ検出値の大きさがスレッショルド値よりも大きい場合に、複数のピクセルの少なくとも1つに対して、方向性エッジ強調フィルタを適用し、エッジ検出値の大きさがスレッショルド値よりも小さい場合に、当該大きさに基づいて、複数の非方向性スムージング・フィルタの中から1つの非方向性スムージング・フィルタを選択し、前記複数のピクセルの少なくとも1つに対して、選択された非方向性スムージング・フィルタを適用する。
【発明の詳細な説明】
【技術分野】
【0001】
本件出願は、2004年7月9日に出願された米国特許仮出願第60/586,589号の特典を主張する。
【0002】
本発明は、超音波イメージングにおけるエッジの検出、強調およびノイズの低減を行うイメージ処理の方法、ならびに、当該方法を実行するための装置に関する。より詳細に述べれば、ノイズの多いイメージ内のエッジの検出、ならびに、当該エッジおよびイメージの画質向上に関する。
【背景技術】
【0003】
超音波イメージは、標本ボリューム(またはイメージ・セル)内の多くの散乱からの後方散乱信号からなる。それらの多くの信号の干渉効果は、信号を互いに強調し、または相殺して粒子の粗いイメージを作ることができる。これらの粒子は、スペックルと呼ばれ、したがって超音波イメージは、イメージ領域が単調なコントラストを伴う均質の組織であると考えられる場合であっても、それらの粒子またはスペックルによって表される。その種の場合においては、ノイズを除去するイメージ処理なしでは真の組織がこの粒子ノイズのカーテンの後ろに隠れることから、超音波イメージがノイズだらけに見える。概して言えば、超音波イメージにスムージング・フィルタを適用し、粒子またはノイズをスムージングにより除去することによってスペックルを低減している。肝臓等の臓器の中心部では、肝臓組織が均質であり、したがって単調なコントラストを有していると考えてよく、この領域内のスペックルはスムージングされる必要がある。同じスムージング・フィルタがイメージ内の肝臓の境界または全領域に適用された場合には、肝臓の境界もしくはエッジが不鮮明になるか、またはぼやける。
【発明の概要】
【発明が解決しようとする課題】
【0004】
したがって、必要とされていることは、イメージ内のピクセルがスムージング・アルゴリズムを適用するべき均質な組織を表しているか否かを決定するための技術である。
【課題を解決するための手段】
【0005】
上記目的にかなう好適な方法は、超音波イメージの複数のピクセルのうちの少なくとも1つに対してエッジ検出フィルタを適用し、大きさを含むエッジ検出値を算出し、前記エッジ検出値の大きさがスレッショルド値よりも大きい場合に、前記複数のピクセルの少なくとも1つに対して、非方向性スムージング・フィルタではなく方向性エッジ強調フィルタを適用し、前記エッジ検出値の大きさがスレッショルド値よりも小さい場合に、当該大きさに基づいて、複数の非方向性スムージング・フィルタの中から1つの非方向性スムージング・フィルタを選択し、前記複数のピクセルの少なくとも1つに対して、方向性エッジ強調フィルタではなく選択された非方向性スムージング・フィルタを適用する、ことを特徴とする。また、超音波イメージの複数のピクセルのうちの少なくとも1つに対して2次元エッジ検出フィルタを適用し、大きさを含むエッジ検出値を算出し、前記エッジ検出値の大きさがスレッショルド値よりも大きい場合に、前記複数のピクセルの少なくとも1つをエッジと判定し、そのエッジに、非方向性スムージング・フィルタではなく方向性エッジ強調フィルタを適用し、前記エッジ検出値の大きさがスレッショルド値よりも小さい場合に、前記複数のピクセルの少なくとも1つを均質な領域と判定し、前記エッジ検出値の大きさに基づいて、複数の非方向性スムージング・フィルタの中から1つの非方向性スムージング・フィルタを選択し、その均質な領域に、方向性エッジ強調フィルタではなく前記選択された非方向性スムージング・フィルタを適用する、ことを特徴とする。
【0006】
また、上記目的にかなう好適な装置は、エッジ検出フィルタと、方向性エッジ強調フィルタと、複数の非方向性スムージング・フィルタと、イメージ・プロセッサと、を有する装置であって、前記イメージ・プロセッサは、超音波イメージの複数のピクセルのうちの少なくとも1つに対して前記エッジ検出フィルタを適用し、大きさを含むエッジ検出値を算出し、前記エッジ検出値の大きさがスレッショルド値よりも大きい場合に、前記複数のピクセルの少なくとも1つに対して、前記非方向性スムージング・フィルタではなく前記方向性エッジ強調フィルタを適用し、前記エッジ検出値の大きさがスレッショルド値よりも小さい場合に、当該大きさに基づいて、前記複数の非方向性スムージング・フィルタの中から1つの非方向性スムージング・フィルタを選択し、前記複数のピクセルの少なくとも1つに対して、前記方向性エッジ強調フィルタではなく選択された前記非方向性スムージング・フィルタを適用する、ことを特徴とする。また、上記目的にかなう好適なプログラムは、超音波イメージの複数のピクセルのうちの少なくとも1つに対してエッジ検出フィルタを適用し、大きさを含むエッジ検出値を算出する機能と、前記エッジ検出値の大きさがスレッショルド値よりも大きい場合に、前記複数のピクセルの少なくとも1つに対して、非方向性スムージング・フィルタではなく方向性エッジ強調フィルタを適用する機能と、前記エッジ検出値の大きさがスレッショルド値よりも小さい場合に、当該大きさに基づいて、複数の非方向性スムージング・フィルタの中から1つの非方向性スムージング・フィルタを選択し、前記複数のピクセルの少なくとも1つに対して、方向性エッジ強調フィルタではなく選択された非方向性スムージング・フィルタを適用する機能と、をコンピュータに実現させる、ことを特徴とする。前記プログラムは、例えば、コンピュータが読み取り可能な記憶媒体に記録される。
【発明の効果】
【0007】
本発明により、イメージ内のピクセルがスムージング・アルゴリズムを適用するべき均質な組織を表しているか否かを決定するための技術が提供される。
【図面の簡単な説明】
【0008】
【図1a】従来技術のエッジ検出フィルタを図示した説明図である。
【図1b】従来技術のエッジ検出フィルタを図示した説明図である。
【図1c】従来技術のエッジ検出フィルタを図示した説明図である。
【図2a】従来技術のスムージング・フィルタを図示した説明図である。
【図2b】従来技術のスムージング・フィルタを図示した説明図である。
【図2c】従来技術のスムージング・フィルタを図示した説明図である。
【図3a】従来技術の1×3エッジ検出フィルタを図示した説明図である。
【図3b】従来技術の5×5ロー‐パス・フィルタを図示した説明図である。
【図3c】‐1のエッジ検出フィルタ係数と図3bの5×5ロー‐パス・フィルタの結合による従来技術の別のエッジ検出フィルタを例示した説明図である。
【図3d】+1のエッジ検出フィルタ係数と図3bの5×5ロー‐パス・フィルタの結合による従来技術のさらに別のエッジ検出フィルタを例示した説明図である。
【図3e】図3cと3dのエッジ検出フィルタの結合による従来技術のさらに別のエッジ検出フィルタを例示した説明図である。
【図4】本発明のエッジ検出フィルタを例示した説明図である。
【図5a】本発明に従った種々の方向のエッジ検出フィルタの種々の例示的な実施態様を示した説明図である。
【図5b】本発明に従った種々の方向のエッジ検出フィルタの種々の例示的な実施態様を示した説明図である。
【図5c】本発明に従った種々の方向のエッジ検出フィルタの種々の例示的な実施態様を示した説明図である。
【図5d】本発明に従った種々の方向のエッジ検出フィルタの種々の例示的な実施態様を示した説明図である。
【図5e】本発明に従った種々の方向のエッジ検出フィルタの種々の例示的な実施態様を示した説明図である。
【図5f】本発明に従った種々の方向のエッジ検出フィルタの種々の例示的な実施態様を示した説明図である。
【図5g】本発明に従った種々の方向のエッジ検出フィルタの種々の例示的な実施態様を示した説明図である。
【図5h】本発明に従った種々の方向のエッジ検出フィルタの種々の例示的な実施態様を示した説明図である。
【図6a】本発明の水平および垂直方向のエッジ検出フィルタの例示的な実施態様を示した説明図である。
【図6b】本発明の水平および垂直方向のエッジ検出フィルタの例示的な実施態様を示した説明図である。
【図7a】本発明の水平および垂直両方向のエッジ検出フィルタの別の例示的な実施態様を示した説明図である。
【図7b】本発明の水平および垂直両方向のエッジ検出フィルタの別の例示的な実施態様を示した説明図である。
【図8a】水平および垂直両方向のエッジ検出フィルタのさらに別の例示的な実施態様を示した説明図である。
【図8b】水平および垂直両方向のエッジ検出フィルタのさらに別の例示的な実施態様を示した説明図である。
【図9a】本発明に従ったフィルタ係数のセット(‐1,0,1)を使用する垂直エッジを検出する方法に関するフローチャートである。
【図9b】本発明に従ったフィルタ係数のセット(‐1,0,1)を使用する水平エッジを検出する方法に関するフローチャートである。
【図10a】本発明に従ったフィルタ係数のセット(‐a,0,a)を使用する水平エッジを検出するための方法に関するフローチャートである。
【図10b】本発明に従ったフィルタ係数のセット(‐a,0,a)を使用する垂直エッジを検出するための方法に関するフローチャートである。
【図11】新旧のフィルタ・ポジションの間の関係を図示した説明図である。
【図12】超音波イメージにわたる本発明の例示的なフィルタの移動を示した説明図である。
【図13】本発明の垂直エッジ検出フィルタのハードウエアの例示的な実施態様を示したブロック図である。
【図14】本発明の効率的な垂直エッジ検出フィルタの例示的な実施態様を示したブロック図である。
【図15】本発明の水平エッジ検出フィルタのハードウエアの例示的な実施態様を示したブロック図である。
【図16】本発明の効率的な水平エッジ検出フィルタの例示的な実施態様を示したブロック図である。
【図17】biのフィルタ係数を伴う本発明の水平エッジ検出フィルタの例示的な実施態様を示したブロック図である。
【図18】biのフィルタ係数を伴う本発明の垂直エッジ検出フィルタの例示的な実施態様を示したブロック図である。
【図19a】本発明の垂直エッジ検出フィルタを図示した説明図である。
【図19b】本発明の水平エッジ検出フィルタを図示した説明図である。
【図19c】本発明の+45度エッジ検出フィルタの例示的な実施態様を図示した説明図である。
【図19d】本発明の‐45度エッジ検出フィルタの例示的な実施態様を図示した説明図である。
【図20a】本発明の強い水平エッジ強調フィルタを図示した説明図である。
【図20b】本発明の弱い水平エッジ強調フィルタを図示した説明図である。
【図21a】本発明の強い垂直エッジ強調フィルタを図示した説明図である。
【図21b】本発明の弱い垂直エッジ強調フィルタを図示した説明図である。
【図22a】本発明の強い+45度エッジ強調フィルタを図示した説明図である。
【図22b】本発明の弱い45度エッジ強調フィルタを図示した説明図である。
【図23a】本発明の強い‐45度エッジ強調フィルタの例示的な実施態様を図示した説明図である。
【図23b】本発明の弱い‐45度エッジ強調フィルタの例示的な実施態様を図示した説明図である。
【図24a】本発明の強いスムージング・フィルタの例示的な実施態様を図示した説明図である。
【図24b】本発明の弱いスムージング・フィルタの例示的な実施態様を図示した説明図である。
【図25a】本発明の例示的な方法を図示したロジック図である。
【図25b】本発明のエッジ強調の例示的な方法を図示したロジック図である。
【図25c】本発明のノイズ低減の例示的な方法を図示したロジック図である。
【図26】本発明のイメージ・プロセッサの例示的な実施態様を図示したブロック図である。
【図27】本発明のフィルタ選択ルックアップ・テーブルの例示的な実施態様を図示した説明図である。
【発明を実施するための形態】
【0009】
本発明の1ないしは複数の実施態様の詳細を添付図面に示し、以下に説明する。本発明のこのほかの特徴、目的、および利点については、これらの説明および図面から、また特許請求の範囲から明らかになるであろう。
【0010】
したがって本発明の目的は、超音波イメージングにおけるエッジの検出、強調およびノイズの低減のためのイメージ処理の方法、ならびに、当該方法を実行するための装置を提供することである。特に、その方法は、ノイズの多いイメージ内のエッジの検出、ならびに、当該エッジおよびイメージの画質向上に関する。
【0011】
したがって本発明の教示は、エッジ検出フィルタの出力に応じて超音波イメージにスムージング・フィルタを適用するべきか否かを決定するための方法を提供することである。このエッジ検出フィルタは、イメージ・ピクセルがエッジに属するか、均質な組織領域の中間に属するかを決定する。エッジ検出フィルタの出力の大きさは、そのピクセルがエッジに属するか否かまたは「強い」または「急峻な」エッジに属するか否かの決定に使用される。ピクセルが均質な組織領域に属する場合には、そのピクセルにスムージング・フィルタが適用される。超音波イメージは、1ないしは複数の任意タイプの超音波イメージまたはその組み合わせを包含することがあり、それには、限定の意図ではないがイメージを構成する超音波信号から導出されるBモード組織イメージ、ドプラ・スペクトル・イメージ、血流イメージ、弾性イメージ、および任意形式のグレイスケールまたは輝度イメージ、ならびに、これらのイメージの少なくとも1つの組み合わせ、ならびに、その類が含まれる。
【0012】
物体または臓器のエッジは方向を有する。したがって、エッジ検出は方向をもって実行されることを必要とする。図5a〜5hを参照すると、本発明の8つの方向(それぞれ‐45°、45°、67.5°、22.5°、‐67.5°、‐22.5°、0°、90°)のエッジ検出フィルタが例示されている。各フィルタは、フィルタのサイズが大きいことからロー‐パス・フィルタリングの効果をもたらすように実装され、従来技術より良好な信号対ノイズ比を伴い、信頼性をもってエッジを検出できる。しかも従来技術のロー‐パス・フィルタリング後のエッジ検出フィルタとは異なり、本発明は互いにオーバーライドしないようにイメージ・ピクセルに対して微分演算を適用する。ロー‐パス・フィルタの前処理のこの問題を例示するため、1×3の水平方向のエッジ検出フィルタ31を図3aに示すが、これは図1aのフィルタ11の一部(または列)である。フィルタ11の3つの列を使用すると、検出するエッジの平均の効果および、より高い信号対ノイズ比がもたらされる。しかしながら簡明のために図3aのエッジ検出フィルタ31を、オーバーライド問題を例示するために使用する。図3bは、エッジ検出フィルタ31の前にイメージに適用される5×5ロー‐パス・フィルタ33を示している。図3cは、エッジ検出フィルタ31の‐1のフィルタ係数値とロー‐パス・フィルタ33のフィルタ係数値の組み合わせを示しており、図3dは、エッジ検出フィルタ31の1のフィルタ係数値とロー‐パス・フィルタ33のフィルタ係数値の組み合わせを示している。フィルタ31の0のフィルタ係数値は効果を有していないか、または出力を有していない。図3eは、オリジナルのイメージに対するエッジ検出フィルタ31とロー‐パス・フィルタ33の組み合わせの全体的な効果を示している。中心の3行がオーバーライドされ、フィルタ係数が互いに相殺し合って0になっている。中心の0の3行は、1行のゼロだけを有しているオリジナルの1×3のフィルタより空間分解能が約3倍悪いエッジ検出フィルタのように作用する。したがって検出されたエッジがぼやけることになる。エッジの空間分解能(鋭さ)および位置合わせ(ポジション)を維持するためには、係数0の行を可能な限り狭くする必要がある。3行のゼロは、0の係数について2行も過多である。同一サイズの配列(7×5)について、改良されたエッジ検出フィルタ41を図4に示す。この改良されたフィルタ41は、エッジのポジションの検出において図3eのそれより正確であり、しかも0の行を取り囲む上側および下側の領域内にロー‐パス・フィルタリングの特徴を有することからエッジの検出においてより良好な信号対ノイズ比(SNR)を有する。一般にエッジ検出フィルタは、イメージに適用されるとエッジ検出フィルタの中心を表すピクセルに割り当てられるフィルタ演算の結果を伴う。通常、エッジ検出フィルタの中心がエッジ上に置かれているとき、中心ピクセルの値は、大きな相対的な大きさを持った値になる。
【0013】
ここで図5a〜5hを参照すると、本発明の8個のエッジ検出フィルタが示されている。フィルタまたは方向の数は、図5a〜5hに示されている8個の例のフィルタを用いて20もしくはそれを超える数に拡張することができる。20個のフィルタは、方向において約9度のステップ、または増分を伴って設計することが可能である。エッジ検出フィルタ51〜59は、各行と列の交差に、迅速な計算を提供する整数値、たとえば1、‐1、または0を包含するフィルタ係数値を有する。1、‐1、または0のフィルタ係数値は乗算を必要とせず、それに代えて加算および減算のみを使用してイメージに適用することができる。しかしながらフィルタ係数値が整数に限定される必要はなく、小数値または浮動小数点数としてもよい。これらすべてのフィルタ51〜59のフィルタ係数は、符号、すなわちプラス(+)またはマイナス(‐)は異なるが、垂直、水平、またはフィルタが検出するべく設計されたエッジの方向のいずれかにおいて対称である。ここで注意を要するが、中心ポジションはすべて0である。たとえば図5gに例示されているとおり、水平エッジ検出フィルタの場合であれば中心の行のフィルタ係数がすべて0である。また図5hに例示されているとおり、垂直エッジ検出フィルタの場合であれば中心の列のフィルタ係数がすべて0である。0°、90°、45°、および‐45°の方向を除けば、エッジ検出フィルタ51のゼロの係数は、検出方向57と整列する行および列ポジション内に位置することに注意を要する。
【0014】
多くの方向を有するエッジ検出フィルタは、方向に関する高い精度および感度を伴ってエッジを検出するために理想的であるが、リアルタイム実装についてある程度の制限がある。各フィルタは、与えられたイメージのために多くの計算を必要とし、全体的な計算の数は、フィルタの数に伴って増加する。したがって本発明の代替実施態様は、2つのフィルタだけ、すなわち垂直方向の1つと水平方向の1つだけを使用する。このほかの方向のエッジは、フィルタ・サイズ(2M+1)×(2N+1)を使用して次のように検出することが可能である。
【0015】
【数1】

【数2】
【0016】
これにおいてMおよびNは整数であり、互いに等しいとすることができる。Zijは、ポイント(i,j)においてこのフィルタが適用されるイメージ値であり、RXおよびRYは、それぞれ水平および垂直方向におけるフィルタ出力である。
【0017】
エッジの方向は、次式によって決定される。
【数3】
【0018】
エッジの大きさまたは強さは、次式によって決定される。
【数4】
【0019】
組み合わされた水平(RX)および垂直(RY)エッジ検出結果の大きさは、エッジの存在を示す。
【0020】
これら2つのエッジ検出フィルタだけを使用すれば、従来技術に開示されているような20個のフィルタの使用と比較して処理速度を10倍に上げることができる。さらに、これら2つのエッジ検出フィルタの使用は、異なるフィルタ・ポジションにおいて実行されるがまったく同一の計算の数を減らすことによってさらに速度を向上させることを可能にする。たとえば、約11×11のフィルタ・マスク・サイズについて言えば、以下のセクションにおいて説明するとおり、この速度向上が10倍に達する。したがって、この速度向上と使用されるフィルタの数の減少を組み合わせれば、速度における全体的な向上が100倍の速さに達することもあり得る。これは、イメージ処理のリアルタイム実装を可能にする。
【0021】
本発明の1ないしは複数のエッジ検出フィルタの適用に必要な計算の速度を向上させる本発明の1つの例示的な方法は反復を伴う。エッジ検出フィルタの一般形式は次式によって表される。
【0022】
【数5】
【0023】
これにおいてiはフィルタ・マスク内のx座標を、jはy座標をそれぞれ表し;M、Nは整数であり;Rはフィルタ出力を表し;wijは座標(i,j)におけるフィルタ係数を表し;zijは座標(i,j)におけるイメージ値を表す。
【0024】
図5gに示されている水平エッジ検出フィルタ58について言えば、このフィルタは次のように表現することができる。
【0025】
【数6】
【0026】
またこれは、さらに各行について次のように表現することができる。
【0027】
【数7】
【数8】
・・・
・・・
【数9】
【0028】
その場合には各行の計算の結果が次のとおりに合計される。
【0029】
【数10】
【0030】
これにおいて中心行(j=N+1)の係数は0である。
【0031】
図12に例示されているとおり、全体のイメージ領域10について多くのフィルタ・ポジション13、13’のフィルタ計算速度を向上させるために、最初のポジションにおいてフィルタ15が計算された後、メモリの内容を1つシフトし、(フィルタが下方へ1行分移動したときの)もっとも新しい行だけを計算することによって次のポジションにおけるフィルタが効率的に計算される。これが図11に図式的に例示されている。メモリの内容は次のとおりにシフトされる。
【数11】
【数12】
・・・
・・・
【数13】
【0032】
最後に、もっとも新しい行が次のとおりに計算される。
【0033】
【数14】
【0034】
その後、これらの項またはメモリの内容が次のとおりに合計される。
【0035】
【数15】
【0036】
この効率的なフィルタ計算は、図9bに示されているフローチャートで例示することができる。その計算は、図5gに例示されているエッジ検出フィルタ58等の水平エッジ検出フィルタを使用して例示することができる。図9bに示されているとおり、‐1、0、および1の係数からなる水平エッジ検出フィルタを使用するエッジ検出を実行する方法は、イメージの開始列1行1において開始する。最初に、エッジ検出フィルタ内の列に対応するイメージ内のすべての列を加算し、その結果をメモリ#1内にストアすることによって第1行を計算することができる。したがって次の行jは、エッジ検出フィルタ内のすべての対応する列を加算し、その結果をメモリ#j内にストアすることによって計算することができる。これらのステップを、第(2N+1)行が計算されるまで反復することができる。行j=2N+1になった後、フィルタ係数の符号(+/‐)に応じてメモリ内容の必要な加算または減算を行い、結果がメモリ#1から#2N+1まで合計される。この計算結果は、フィルタ出力として出力される。次に、図11に例示されて説明されているとおり、メモリがシフトされる。図9bに戻るが、続いてエッジ検出フィルタ58をイメージ上で1行下側に移動することができる。ここでチェックを行い、エッジ検出フィルタ58が行の、またはイメージの境界を越えていないことを確認する。フィルタ58がいずれかの境界を越えている場合には、フィルタを1列分移動し、再び新しい列および行1においてこのプロセスが開始される。それに加えて、エッジ検出フィルタが列の、またはイメージの境界を越えていないことを確認するチェックが行われる。フィルタ58がいずれかの境界を越えている場合にはこのプロセスが終了する。しかしながら、エッジ検出フィルタ58がいずれの境界も越えていない場合には、もっとも新しい行2N+1が計算されてメモリ#2N+1にストアされる。ここで再びメモリ#1〜#2N+1のメモリ内容がフィルタ係数の符号に応じて加算または減算され、フィルタ出力結果が獲得される。このプロセスが、水平エッジ検出フィルタの効率的な計算を例証する例示的な電子回路図として図15に例示されている。図示されているとおり、イメージ・ピクセル・データをイメージ・メモリから読み出してメモリ#2M+1に供給し、メモリ#2M、...#1へとシフトすることができる。同一行内のイメージを形成するすべてのピクセル・データを合計器141において加算し、合計器141の出力をメモリ#2N+1に供給し、メモリ#N+2、...#1へとシフトすることができる。フィルタ出力を計算するために、合計器においてメモリ#2N+1〜#N+2の内容を加算し、#N〜#1を減算する。エッジ検出フィルタ58が、イメージの上端から下端まで垂直に単一単位で進み、その後左から右へ一度に1単位で進み、さらにその後プロセスを反復することに関して例示されているが、本発明の例示のフィルタがそのように限定されることはない。むしろ本発明のエッジ検出フィルタは、広く、2つの直交する方向における移動、好ましくは上端から下端および左から右への移動を描く。
【0037】
これは、図6a〜bに示されているとおりの係数61、63を有するより一般的な形式のエッジ検出フィルタに拡張することが可能であり、それにおいて『a』は、正または負の整数または浮動小数点数の値とすることができる。次のセクションでは、別の例の効率的なフィルタ動作について記述する。
【0038】
水平エッジ検出について、すべての係数が1であるかのように行を計算した後、行の結果に係数aを乗じ、それによって各行の結果が、各ピクセル・データの乗算を行うより効率的になる。
【0039】
【数16】
【数17】
【数18】
・・・
・・・
【数19】
【数20】
【0040】
水平エッジ検出フィルタが最初のポジションについて計算された後、メモリの内容が1つ分シフトされ、フィルタが1行分下方へ移動したときのもっとも新しい行だけが計算される。
【数21】
【数22】
・・・
・・・
【数23】
【0041】
この場合においても次のとおりにもっとも新しい行だけを計算することができる。
【0042】
【数24】
【0043】
その後、これらの項を合計することができる。
【0044】
【数25】
【0045】
この効率的な計算は、図10aに示されているフローチャートによって例示され、それにおいてaは、上に述べたとおり、1、‐1、またはそのほかのフィルタ係数値とすることができる。
【0046】
類似の反復テクニックを使用し、より一般的なajを使用するフィルタについてRを効率的に計算することができる。
【0047】
【数26】
【0048】
これは、次のとおりに効率的に計算することができる。
【0049】
【数27】
【数28】
・・・
・・・
【数29】
【数30】
【0050】
最初のポジションにおけるフィルタが計算された後は、メモリの内容を1つ分シフトし、フィルタが下方に1行分移動したときのもっとも新しい行を計算すればよい。
【数31】
【数32】
・・・
・・・
【数33】
【0051】
この場合においても次のとおりにもっとも新しい行だけを計算することができる。
【0052】
【数34】
【0053】
その後、これらの項を合計することができる。
【0054】
【数35】
【0055】
フィルタ・ポジションがイメージの行またはイメージの境界を越えるまで連続的にフィルタが1行分下方へ移動し、この計算が続けられる。その後、フィルタ・ポジションが次の列ポジションの最初の行へ移動し、同一の演算が続けられる。
【0056】
垂直エッジについて言えば、図5hのフィルタを次式によって表すことができる。
【0057】
【数36】
【0058】
この計算は、前述したとおりの反復テクニックによって効率的に実行することができる。
【0059】
【数37】
【数38】
・・・
・・・
【数39】
【数40】
【0060】
最初のポジションにおけるフィルタが計算された後は、メモリの内容をシフトし、かつもっとも新しい行だけを以下のとおりに計算することによって次のポジションにおけるフィルタを計算することができる。
【数41】
【数42】
・・・
・・・
【数43】
これに加えて、もっとも新しい行だけが次のとおりに計算される。
【0061】
【数44】
【0062】
この演算が図11に図示されている。さらに図9aのフローチャートは、全体のイメージ領域内の多くのポジションにおける反復方法を記述している。図9aに例示されている方法は、上に例示した図9bのそれに極めて類似している。それらの例示的な方法の間における主要な相違は、垂直エッジ検出フィルタ係数‐1、0、1の配置に関係するわずかに異なる計算から生じる。ここで強調しておく必要があるが、本発明は、図5gおよび5hに例示されているとおりの係数の配列を有する任意サイズの水平および垂直のエッジ検出フィルタの使用に指向されている。当業者には、ここに概説されている同じ方法を使用して本発明によって定義されるとおりに構成される任意の水平または垂直のエッジ検出フィルタの応用を拡張することが明白となろう。
【0063】
図9aに戻るが、垂直エッジ検出フィルタは、列1行1においてイメージに対して適用することができる。最初の行は、フィルタ係数値、すなわち‐1、0、または1に応じてイメージ・ピクセル値の加算または減算を行い、さらにこの合計の結果をメモリ#1にストアすることによって合計を通じて計算することができる。次に行jを、フィルタ係数値、すなわち‐1、0、または1に応じてイメージ・ピクセル値の加算または減算を行い、さらにこの合計の結果をメモリjにストアすることによって合計を通じて計算することができる。図9bを参照して前述したとおり、ここでチェックを行って第(2N+1)行が計算されているか否かを決定する。計算されていなければ、次の行jを計算し、第(2N+1)行が計算されるまで反復態様で連続して次の行を計算することができる。j=2N+1になると、メモリ#1から#2N+1まですべてのメモリが合計される。結果として得られる合計は、フィルタ出力をもたらす。続いてメモリが、水平エッジ検出フィルタを参照して前述したとおりにシフトされる。フィルタを1行分移動することができるが、ここでチェックを行い、フィルタがイメージ行の外であるか否かを確認し、該当しなければ次の行2N+1を、フィルタ係数値、すなわち‐1、0、または1に応じてイメージ・ピクセル値の加算または減算を行い、その結果をメモリ#2N+1にストアすることによって合計を通じて計算することができる。図13は、垂直エッジ検出フィルタ出力を効率的に計算する本発明の例示的な方法を例証する電子回路の例示的な回路図を示している。同一行内のすべてのイメージ・ピクセル・データがイメージ・メモリから読み出されてメモリ#2M+1に供給され、メモリ#2M、...#1へとシフトされる。この同一行内のイメージ・ピクセル・データは、合計器において加算または減算を行うことができる。次の行のすべてのピクセル・データについても同じ態様で読み出し、合計器において加算することができる。この演算が、1つのフィルタ・ポジションについてフィルタの最後の行まで続く。合計器の出力、または結果をメモリ#2N+1に供給し、メモリ#2N、...#1へとシフトすることができる。メモリ#2N+1から1までの内容を合計してフィルタ出力を計算することができる。
【0064】
フィルタのポジションが1行分下方へ移動され、フィルタがイメージ行またはイメージ境界を越えるまでフィルタ計算が続けられる。
【0065】
手前で述べたとおり、フィルタ係数値が‐1、0、1に限定されることはなく、下の式45に示されるとおり、aまたはajを使用する任意の形式をとることができる。
【0066】
【数45】
【0067】
これにおいてaは、1、‐1、またはそのほかの値とすることができる。この場合においても、前述したとおりの反復テクニックを使用してこのフィルタを効率的に計算することができる。フィルタ・マスク内の第1行から2N+1行までは次のとおりに計算される。
【0068】
【数46】
【数47】
・・・
・・・
【数48】
【数49】
【0069】
フィルタが1行分下側へ移動するとき、次のとおりに反復演算を使用することができる。
【数50】
【数51】
・・・
・・・
【数52】
これに加えて、もっとも新しい行だけを次のとおりに計算することができる。
【0070】
【数53】
【0071】
aiを使用し、
【0072】
【数54】
【数55】
【数56】
・・・
・・・
【数57】
【数58】
【0073】
フィルタを下側へ1行分移動するとき、次のとおりに反復演算を使用することができる。
【数59】
【数60】
・・・
・・・
【数61】
これに加えて、もっとも新しい行だけを次のとおりに計算することができる。
【0074】
【数62】
【0075】
当業者によって認識されることになろうが、ほかの形式の反復を使用して全体のイメージ領域内のフィルタ計算の速度を向上させることもできる。たとえば垂直エッジの場合に、最初のポジションにおけるフィルタ結果を計算した後、新しい行を最初のポジションの結果に加算し、最初のポジション内の最後の行を減算することによって次の行ポジションを計算することができる。
【0076】
垂直エッジ検出フィルタは、次のとおりに計算することができる。
【0077】
【数63】
【0078】
この結果のRYがメモリ内にストアされる。以下によって表される各行の計算結果もまたメモリ#1〜#2N+1内にストアすることができる。
【0079】
【数64】
【数65】
・・・
・・・
【数66】
【0080】
次に、フィルタを1行分下側へ移動し、以下に述べるとおりに新しいポジションのフィルタを計算することができる。最初に、次のとおりにメモリの内容をシフトすることができる。
【数67】
【数68】
【数69】
・・・
・・・
【数70】
【数71】
【0081】
これにおいて矢印記号は、右辺の項を左辺の項にストアすることを示し;RY,0は、以前のポジションの第1行の結果を示し;最後の演算のRY,2N+1は、もっとも新しい行についてのもっとも新しい計算結果を表す。このもっとも新しい行RY,2N+1の計算は実際に実行される。しかしながら合計演算が必要とするものは、前述の反復方法における2N+1個の加算ではなく、行の結果の1つの加算および1つの減算だけである。以前のポジションから獲得されてメモリ内にストアされているRYの値を使用し、合計演算によって更新し、再度メモリ内にストアすることができる。この反復テクニックは、前述とまったく同様にaまたはajのフィルタ係数に拡張することができる。この演算、すなわちもっとも新しい行の加算およびもっとも古い行の減算は、図11にもっともよく例示されている。
【0082】
図14は、本発明の例示的な方法を図示した電子回路図のさらに別の例を示している。この電子回路は、メモリ・ロケーション、アキュームレータ、合計器、乗算器、加算器、ディジタル信号プロセッサ、メモリ・ストレージ・デバイス、これらの少なくとも1つを包含する組み合わせ、およびその類を包含し、この垂直エッジ検出フィルタを効率的に計算することができる。ここではその種の物理的回路コンポーネントを参照して図解しているが、本発明の演算が全体として、または部分的にディジタル信号プロセッサ(DSP)によって実行できることが認識される。同一行内のすべてのピクセル(イメージ)データをイメージ・メモリから読み出してメモリ#2M+1に供給し、メモリ#2M、...#1へとシフトすることができる。この同一行内のピクセル・データは、合計器141において加算または減算を行うことができる。次の行のすべてのピクセル・データについても同じ態様で読み出し、合計器において加算することができる。この演算が、1つのフィルタ・ポジションについてフィルタの最後の行に到達するまで続く。合計器の出力(結果)がメモリ#2N+1に供給され、メモリ#2N、...および#0へとシフトされる。最初のフィルタ・ポジションについては、メモリ#1〜#2N+1のスイッチがすべて閉じられ、メモリ#0が開いていることから、メモリ#2N+1から1までの内容が合計されてフィルタ出力が計算される。次のフィルタ・ポジションについては、メモリ#0および#2N+1のスイッチが閉じられ、メモリ#1〜#2Nのスイッチが開かれて、合計器の内容の以前のフィルタ結果、または出力に対するもっとも新しい行データ(メモリ#2N+1)の加算およびもっとも古い行(メモリ#0)の減算によって新しいフィルタ出力が計算される。
【0083】
前述したとおり、水平エッジ検出フィルタは以下のとおりに効率的に計算することができる。
【0084】
【数72】
【数73】
【数74】
・・・
・・・
【数75】
【数76】
【0085】
最初のポジションのフィルタ出力は、メモリ内にストアすることができる。また、各行の計算結果もメモリ#1〜#2N+1内にストアすることができる。その後フィルタを下側へ1行分移動し、新しいポジションにおけるフィルタ出力を次のとおりに効率的に計算することができる。最初に、メモリ#1〜#2N+1の内容を以下のとおりにシフトすることができる。
【数77】
【数78】
【数79】
・・・
・・・
【数80】
【数81】
【0086】
新しいポジションにおいてRX,2N+1だけが実際に計算され、メモリ#2N+1内にストアされるが、ほかのすべての右辺の項はメモリ内にある。以前のポジションから得られてメモリ内に最近ストアされたRX値を使用し、合計演算によって更新して再度メモリ内にストアすることができる。図16は、本発明の例示的な方法のさらに別の例示的な電子回路図を示している。この電子回路は、メモリ・ロケーション、アキュームレータ、合計器、乗算器、加算器、ディジタル信号プロセッサ、メモリ・ストレージ・デバイス、これらの少なくとも1つを包含する組み合わせ、およびその類を包含し、この水平エッジ検出フィルタを効率的に計算することができる。イメージ・ピクセル・データをイメージ・メモリから読み出してメモリ#2M+1に供給し、メモリ#2M、...#1へとシフトすることができる。同一行内のすべてのピクセル・データを合計器において合計し、合計器の出力をメモリ#2N+1に供給し、メモリ#N+2、...および#0へとシフトすることができる。最初のフィルタ・ポジションについて、フィルタ出力を計算するために、合計器においてメモリ#2N+1から#N+2までの内容が加算され、メモリ#Nから#1までの内容が減算される。メモリのスイッチがこの演算を達成するべく機能する。最初のフィルタ・ポジションの場合には、メモリ#N+1および#0を除くすべてのスイッチが閉じられる。そのフィルタ出力が計算された後は、次の行内の新しいピクセル・データがメモリ#2M+1〜#1に入力され、合計器において合計され、次のフィルタ・ポジションからのこの出力またはもっとも新しい合計の行データをメモリ#2N+1に入力することができる。一方、メモリ#2N+1〜0の内容は、すべて1メモリ分右へシフトすることができる。以前のフィルタ・ポジションからのフィルタ結果の出力または合計器の内容は、その後、メモリ#2N+1および#0の内容を加算し、メモリ#N+1および#Nの内容を減算することによって更新することができる。この場合においても上に述べたとおり、スイッチがこの演算を達成するべく機能する。スイッチ#2N+1、#N+1、#N、および#0が閉じられ、残りすべてのスイッチが開かれる。
【0087】
この反復方法は、加算の数を節約する。これらの垂直および水平のエッジの演算は、前述同様にa、‐a、0、またはajの係数を有するべく拡張することができる。これらの係数を用いる場合には、反復方法が加算はもとより乗算の数を節約し、したがってフィルタの速度を増加させる。
【0088】
エッジ検出フィルタのもっとも一般的な形式は次のとおりである。
【0089】
【数82】
【0090】
しかしながら、フィルタを次のように対称形式とすることが可能である。すなわち水平エッジ検出フィルタであれば、
【数83】
および
【数84】
ただし、i=1〜2M+1、かつj=1〜N
および
【数85】
ただし、i=1〜M、かつj=1〜2N+1。この水平エッジ検出フィルタを図7aに、本発明の例示的な9×9フィルタ71として例示する。
【0091】
さらにaijは、次のとおり、水平エッジ検出フィルタについてxおよびy成分に分けられる。
【数86】
【数87】
ただし、i=1〜M
また
【数88】
ただし、j=1〜N
最終的に水平エッジ検出フィルタは、次のとおりに表すことができる。
【0092】
【数89】
【0093】
この場合においても、最初の方で述べたとおりこのフィルタは、前述の反復テクニックを使用して計算速度を増加させることができる。
【0094】
垂直エッジ検出フィルタについてもフィルタ係数aijが対称性を有するが、符号(+/‐)が異なる。
【数90】
および
【数91】
ただし、i=1〜M、かつj=1〜2N+1。
また、
【数92】
ただし、i=1〜2M+1、かつj=1〜N。
この垂直エッジ検出フィルタを図7bに、本発明の別の例示的な9×9フィルタ73として例示する。
【0095】
さらにaijは、次のとおり、垂直エッジ検出フィルタについてxおよびy成分に分けられる。
【数93】
【数94】
ただし、i=1〜M
【数95】
ただし、j=1〜N
最終的に垂直エッジ検出フィルタは、次のとおりに表すことができる。
【0096】
【数96】
【0097】
さらにこのフィルタは、前述の反復テクニックを使用して計算速度を増加させることができる。
【0098】
フィルタが正方マスクでありM=Nとなる状況においては、両方のエッジ検出フィルタ、すなわち2方向のエッジ検出フィルタが方向において等しく重み付けされる必要があり、したがって、
【数97】
となるが、水平エッジ検出フィルタについて中心の行、および垂直エッジ検出フィルタについて中心の列はその例外である。また、すでに上で述べた同じ対称特性がこれらの係数にも適用される。したがってM=Nのエッジ検出フィルタは次のとおりに表すことができる。
【0099】
【数98】
【0100】
この水平エッジ検出フィルタが、本発明の例示的な9×9フィルタ81の実施態様を図示した図8aに例示されている。この水平エッジ検出フィルタは、図17に示されている例示的な電子回路図によって示される例示的な方法を使用して効率的に計算することができる。イメージ・データをイメージ・メモリから読み出してメモリ#2M+1に供給し、メモリ#2M、...#1へとシフトすることができる。これらのメモリの内容に係数b1、...、b2M+1を乗じ、合計器で合計することができる。合計器の出力をメモリ#2N+1に供給し、メモリ#2N、...および#0へとシフトすることができる。最初のフィルタ・ポジションについて、メモリ#N+1を除くメモリ#2N+1〜#1の内容に係数を乗じ、合計器において合計してフィルタ出力を計算することができる。次のフィルタ・ポジションについては、もっとも新しい行のためにイメージ・メモリから新しいイメージ・データを読み出してメモリ#2M+1に供給し、シフトすることができる。続いてメモリ#2M+1〜1の内容に係数を乗じ、合計器において合計し、合計器の出力をメモリ#2N+1に供給することができる。一方、メモリ#2N+1〜#0の内容は、1メモリ分右へシフトすることができる。フィルタ出力または合計器の内容は、以前のポジションのフィルタ出力、または合計器の内容に対して係数b1が乗じられたメモリ#2N+1の値を加算し、bNが乗じられたメモリ#N+1および#Nの値を減算し、係数b1が乗じられたメモリ#0の値を加算することによって更新することができる。
【0101】
【数99】
【0102】
これにおいてM=Nである。
【0103】
この垂直エッジ検出フィルタが、本発明の例示的な9×9フィルタ83の実施態様を図示した図8bに例示されている。図18に示されている例示的な電子回路図によって示される例示的な方法は、この垂直エッジ検出フィルタの出力を効率的に計算することができる。イメージ・データをイメージ・メモリから読み出してメモリ#2M+1に供給し、メモリ#2M、...#1へとシフトすることができる。同一行内のこれらの列ピクセル・データは、図18に示されているとおり、係数を乗じ、合計器において合計、すなわち加算または減算を行うことができる。合計器の出力をメモリ#2N+1に供給し、追加の行内の合計データをメモリ#2N+1に供給するために1メモリ分右方へシフトすることができる。最初のフィルタ・ポジションについて、メモリ#2N+1〜1の内容に乗算を行い、合計器において合計し、フィルタ出力を計算することができる。次のポジションについては、最初のフィルタ・ポジションの結果を、次の結果の効率的な計算のために使用することができる。新しいフィルタ・ポジションについて、もっとも新しい行の新しい合計データがメモリ#2N+1に供給されるとき、すべてのメモリ内容が右方へシフトされ、新しいフィルタ出力が、係数b1が乗じられたメモリ#2N+1の内容の加算、およびb1が乗じられたメモリ#0の減算を以前のフィルタ結果または合計器の内容に対して行うことによって計算される。
【0104】
さらに別の例示的な実施態様においては、下端の行から開始して上方へフィルタを移動することができる。別の実施態様においては、フィルタを横方向へ、たとえば最左翼の列から開始して右方へ移動することができる。さらに別の例示的な実施態様においては、フィルタを横方向へ、たとえば最右翼の列から開始して左方へ移動することができる。
【0105】
本発明のさらに別の実施態様においては、エッジをエッジ検出フィルタによって検出し、エッジ強調フィルタによって強調することができる。その種のエッジ強調フィルタは、限定の意図ではないが、2次元ハイ‐パス・フィルタ、ロー‐パス・フィルタ、バンド‐パス・フィルタ、およびその類を含む。
【0106】
採用されるそれらのエッジ強調フィルタの強度および型は、エッジ検出フィルタ(1ないしは複数)の出力、すなわち大きさおよび方向によって決定される。好ましい実施態様においては、エッジ強調フィルタが、次式で表される空間的2次元フィルタとすることができる。
【0107】
【数100】
【0108】
これにおいてzipは、処理後のデータのイメージ輝度を表し;wijは、座標(i,j)におけるフィルタ係数を表し;zijは、座標(i,j)における処理前のイメージ・データを表す。
【0109】
好ましい実施態様においては、エッジ強調フィルタのフィルタ係数がエッジ検出フィルタとまったく同様に方向性である。通常、検出されたエッジの方向は、イメージ処理のフィールド内におけるもっとも高い空間微分の方向によって定義される。しかしながら本発明においては、検出されたエッジの方向が、ターゲット・ピクセルのイメージ輝度のもっとも高い空間微分の方向に対して垂直の方向として定義される。したがって、エッジ強調フィルタは方向性であり、かつスムージング効果、または前述したとおり検出されたエッジの方向θ、またはターゲット・ピクセルにおけるもっとも高い空間微分の方向に対して垂直の方向においてロー‐パス・フィルタリングを有する。さらに、検出されたエッジは、もっとも高い空間微分の方向においてシャープニング効果を有するハイ‐パス・フィルタリングの適用によって強調することができる。それに代えて、方向θにおけるものより度数の小さいロー‐パス・フィルタを、もっとも高い空間微分の方向内で適用してもよい。θの方向およびもっとも高い空間微分の方向は、たとえば10度高いかまたは低いというように数度内で近似される。この近似は、θの方向およびもっとも高い空間微分の方向において、30度または40度程度だけ高いか又は小さくなることもある。さらに別の代替実施態様においては、バンド‐パス・フィルタリングをもっとも高い空間微分の方向のエッジの強調に適用することができる。さらに別の代替実施態様においては、もっとも高い空間微分の方向においてフィルタリングを適用しない(すなわち全パス・フィルタ)こともできる。もっとも高い空間微分の方向におけるエッジ強調の強度は、検出されたエッジの大きさに比例するとしてもよく、言い換えるとこの強度は、エッジの大きさが高いときに高く;または、エッジの大きさが低いときに低いということになる。
【0110】
たとえば、図19bに示されている水平エッジ検出フィルタ193がイメージ内に強い水平エッジを検出した場合には、その強い水平エッジを強調するために図20aに示されているロー‐パス・フィルタ201が適用されることになる。水平エッジ検出フィルタ193の出力は、水平エッジ検出フィルタ193内の1に等しいフィルタ係数の合計数に対応する5のフィルタ正規化因数によって正規化される。より小さい大きさを伴うが同一の方向を有するより弱い水平エッジが検出された場合には、図20bに例示されているようなより弱いロー‐パス水平フィルタ203が使用されることになる。このより弱いロー‐パス水平フィルタ203の出力は、3のフィルタ正規化因数によって正規化される。水平エッジ検出フィルタに代わり図19aの垂直エッジ検出フィルタ191がイメージ内に強い垂直エッジを検出した場合には、そのエッジを強調するために図21aに示されている垂直エッジ強調フィルタ211が適用されることになる。より大きさが小さいが同一の方向を伴うより弱い垂直エッジが検出された場合には、図21bに例示されているようなより弱いロー‐パス垂直フィルタ213が使用されることになる。+45度の斜め方向については、図19cに示されているエッジ検出フィルタがエッジの検出に使用され、そのエッジは、図22aおよび22bに示されている例示的なエッジ強調フィルタのうちの1ないしは複数によって強調することができる。‐45度の斜め方向については、図19dに示されているエッジ検出フィルタがエッジの検出に使用され、そのエッジは、図23aおよび23bに示されている例示的なエッジ強調フィルタのうちの1ないしは複数によって強調することができる。
【0111】
好ましい実施態様においては、エッジの方向θを式103(後述)によって決定し、垂直対水平のエッジ検出フィルタ出力の比(RX/RY)を使用して計算する。2つのエッジ検出フィルタだけ、すなわち水平および垂直フィルタだけを使用するこの計算方法は、2つのエッジ検出フィルタからのデータを使用する計算の実行が、前述したとおり、たとえば20の方向のために20のエッジ検出フィルタを計算するよりはるかに高速であることから好ましい。本発明のこれら2つのエッジ検出フィルタは、次の式101および102のとおりに表される。
【0112】
【数101】
【数102】
【0113】
エッジの方向(θ)および大きさは、次の式103および104によって決定される。
【数103】
【数104】
RXおよびRYの値が各フィルタそれぞれのサイズおよび係数に依存することから、RXおよびRYは、式105、106において正規化、またはすべてのフィルタ係数の絶対値の合計による除算が行われ、正規化後のNRXおよびNRYがもたらされる。この場合において合計は、すべての非ゼロ係数が1もしくは‐1のいずれかになることから、非ゼロ係数の数になる。したがって正規化後のエッジの大きさは、式107によって得られる。
【0114】
【数105】
【数106】
【0115】
【数107】
【0116】
しかしながら所定のサイズおよび所定のフィルタ係数のエッジ検出フィルタについては、この正規化、または除算ステップが必要なく、削除して処理速度を向上させることができる。垂直および水平のエッジ検出フィルタの例が図19aおよび19bに例示されている。例示目的のため、フィルタのサイズを5×5とし、M=N=2とすることができる。当業者であれば認識することになろうが、フィルタ・サイズは、このサイズより小さくまたは大きくすることが可能であり、たとえば3×3、7×7、9×9、またはそれより大きくすることができる。
【0117】
式103に定義されているとおり、エッジの方向は‐90度から90度まで、または180度の範囲でアナログまたは連続態様で変化する。しかしながらエッジ強調フィルタの方向の数を約18に限定し、約10度の増分で180度すべてをカバーすることができる。たとえば、第1の方向を‐90度から‐80度までの範囲とすることができる。第2の方向は‐80度から‐70度までを含むことができる。また18番目の方向は80度から90度までを含むことができる。このほかの角度または方向の選択を行ってもよい。例示目的のために図20aおよび20bには2つしか示されていないが、1つの方向内のフィルタの数は1ないしは複数、通常は数個として種々の程度のフィルタ強度を提供することができる。別の実施態様においては、角度増分を約20度またはそれより大きくし、フィルタの方向の数を約9またはそれ未満に低減することができる。垂直および水平のエッジ強調フィルタの有限数の方向および程度、すなわちより強い、またはより弱い等の強度は、限定する意図ではないがエッジ強調およびノイズ低減を含むイメージ処理の実行に必要とされるすべてのイメージ・フィルタおよびそれらのフィルタ係数をメモリ・ストレージ・デバイス内またはルックアップ・テーブル(LUT)内にストアすることを可能にする。
【0118】
好ましい実施態様においては、式104に記述されているエッジの大きさがいずれかのスレッショルドより低い場合に、前述した方向性エッジ強調フィルタではなく、スペックル・ノイズ低減フィルタまたは非方向性スムージング・フィルタが適用される。また本発明の方法は、非方向性スムージング・フィルタを適用するべきか否かについての決定を、前述した本発明の垂直および水平のエッジ検出フィルタの出力、すなわち大きさに基づいて行う。
【0119】
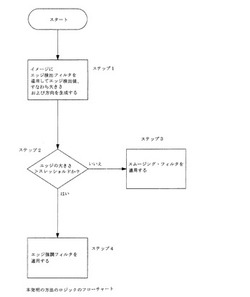
図25aを参照すると、本発明の方法のロジックのフローチャートが例示されている。以下においてより完全に説明するとおり、ステップ1を参照すると、エッジ検出フィルタがイメージに適用され、与えられたターゲット・ピクセルのためのエッジ検出値、または式104における大きさが求められる。次にステップ2を参照すると、エッジ検出値がチェックされ、それがスレッショルド値より大きいか否かについて調べられる。スレッショルド値は、任意の値をとることができるが、そのスレッショルド値より大きいエッジ検出値がターゲット・ピクセルのその部位におけるエッジの存在を示すように選択される。逆を言えば、スレッショルド値がエッジ検出値より小さいかそれに等しいことは、エッジの部分ではなく、むしろ均質な領域の部分を形成するターゲット・ピクセルを示す。エッジ検出値がスレッショルド値より大きくなく、均質な領域の部分を形成するターゲット・ピクセルを示している場合には、ステップ3においてスムージング・フィルタによるスムージングがそのターゲット・ピクセルに適用される。逆を言えば、エッジ検出値がスレッショルド値より大きく、ターゲット・ピクセルがエッジの部分であることを示している場合には、ステップ4において、エッジ強調フィルタによるエッジ強調を適用することができる。図25aに例示されている方法を適用し、エッジの大きさがスレッショルド値より大きいか否か、およびターゲット・ピクセルがエッジに属するか否かを決定した後のエッジ強調フィルタを選択する方法が図25bに例示されている。
【0120】
図25bを参照すると、最初にエッジ検出が評価され、方向の値が、下側の方向スレッショルド値である方向J(『DirJ』)より大きいか又はそれに等しく、かつ、上側の方向スレッショルド値である方向J+1(『Dir(J+1)』)より小さいという条件を満たすか否かについて決定される。方向の値が下側の方向スレッショルド値より大きいか又はそれに等しく、かつ、上側の方向スレッショルド値より小さい場合には方向Jが選択されることになる。次にエッジの大きさについても評価され、適切な強度のエッジ強調フィルタが選択されることになる。ここで図25cを参照するが、この図25cは、本発明の非方向性スムージング・フィルタの選択のためのフローチャートを例示している。この選択は、図25aの方法が、イメージのターゲット・ピクセルがエッジではなく、したがって非方向性スムージングが必要であると決定した場合に実行される。必要な非方向性スムージングの強度は、図25cのフローチャートに示されているとおりにエッジの大きさを評価することによって決定される。
【0121】
エッジ検出フィルタ191、193が、イメージのターゲット・ピクセルがエッジに属するか否か、または均質な組織領域を構成するか否かを決定する。式104に表されているとおりのエッジ検出フィルタ出力の大きさが使用されて、ターゲット・ピクセルがエッジに属するか否か、または「強い」もしくは「急な」エッジに属するか否かについて決定される。ターゲット・ピクセルが均質な組織領域に属する場合には、図24aおよび24bに示されているとおりの2次元非方向性スムージング・フィルタ241、243をターゲット・ピクセルに適用することができる。エッジ検出フィルタが、有意なエッジを構成する大きさを検出しなかった場合には、スペックルを低減するべく非方向性スムージング・フィルタ241、243が使用されることになる。スムージング・フィルタは、2次元フィルタ、たとえばロー‐パス、メディアン、スムージング、およびその類を包含することができる。さらに、スムージング・フィルタの強度または次数は、前述した垂直および水平のエッジ検出フィルタの出力、すなわち式104における大きさによって決定される。式104における大きさの低下に従って、スムージング・フィルタの次数または強度が増加される。言い換えると、検出された大きさが小さいときには、より大きな次数のスムージングが適用されることになる。この2次元スムージング・フィルタは、非方向性である。図24aにおいては、フィルタ出力が25の因数によって正規化される。より強いスムージングが必要とされる場合には、より弱い図24bのフィルタに代えてより強い図24aのフィルタを使用することができる。
【0122】
ここで図26を参照するが、この図26は、前述したイメージ処理方法を具体化する本発明のイメージ・フィルタリング・システムの図解を例示している。エッジの方向および大きさがエッジ検出フィルタによって計算され、フィルタ選択ルックアップ・テーブルに供給された後は、フィルタ選択ルックアップ・テーブル263による2次元イメージ・フィルタ、または2次元イメージ・フィルタに対応するフィルタ係数値の選択を実行することができる。概して言えば、イメージ・フィルタのセットは、任意数のイメージ・フィルタ、たとえば約30のイメージ・フィルタを包含することができる。このイメージ・フィルタのセットは、肝臓イメージ、胸部イメージ、そのほかの任意の臓器イメージ、およびその類といった単一の臨床応用に対応する。各イメージ・フィルタは、複数のフィルタ係数、たとえば約100のフィルタ係数を包含することができる。たとえば、図27のルックアップ・テーブルを参照すると、各セルが、それぞれのイメージ・フィルタ係数を含む1つのイメージ・フィルタを表している。
【0123】
複数のフィルタ係数がLUT263からイメージ処理フィルタ261へダウンロードされ、オリジナルのイメージに適用されて1ピクセルずつをベースとして出力イメージがもたらされる。一方イメージ処理フィルタ261は、エッジ検出フィルタの出力、すなわち大きさおよび方向に基づいて、1ピクセルずつをベースとして、そのイメージ・フィルタ係数を更新または変更する。イメージ処理フィルタ261は、前述したとおりターゲット・ピクセルにおけるエッジの方向および大きさに基づき、1ピクセルずつをベースとして、非方向性スムージング・フィルタまたは方向性エッジ強調フィルタを包含することができる。イメージ処理フィルタ261およびイメージ・プロセッサ269は、ディジタル信号プロセッサ、乗算器、加算器、メモリ・ストレージ・デバイス、およびこれらの類等の1ないしは複数の装置によって、かつ好ましくはディジタル信号プロセッサによって具体化できる。超音波システムがその応用モードを1つの臨床応用から別の臨床応用へ、たとえば胸部イメージングから肝臓イメージングへ、または心臓イメージングへ変更するとき、ルックアップ・テーブル内の新しいフィルタのセットおよびそれらのフィルタ係数がメモリ・ストレージ・デバイス265等の別のデバイスからダウンロードされるか、または入力される必要がある。
【0124】
フィルタ選択ルックアップ・テーブル263は、複数のイメージ・フィルタ、または当該複数のイメージ・フィルタに対応するフィルタ係数値を包含でき、それらを一時的にストアして各臨床応用に従って、すなわち肝臓イメージ、胸部イメージ、そのほか任意の臓器、およびその類に従って使用できる。ルックアップ・テーブルに割り当てられるメモリのサイズが限られるため、好ましくはフィルタ選択ルックアップ・テーブル263が、一度に1つの臨床応用のためのイメージ・フィルタのセットだけを含み、一度に、限られた数のイメージ・フィルタおよびそれらのフィルタ係数を含む。代替においては、ルックアップ・テーブル263が現在使用中の臨床応用のためのイメージ・フィルタのセットを含み、かつルックアップ・テーブル263のストレージ容量に従ってほかの臨床応用のためのイメージ・フィルタの1ないしは複数の追加のセットをストアする。フィルタ選択ルックアップ・テーブル263は、一度に1つの臨床応用のためのイメージ・フィルタのセットをメモリ・ストレージ・デバイス265および(または)、複数のイメージ・フィルタのおよび複数セットのイメージ・フィルタ係数を生成することができる装置267から受領する。その種の装置267は、中央処理ユニット(CPU)、ディジタル信号プロセッサ、およびその類を伴い、好ましくはディジタル信号プロセッサを伴うデバイスを包含することができる。
【0125】
1ないしは複数のメモリ・ストレージ・デバイス265は、複数の臨床応用のための複数セットのイメージ・フィルタをストアしており、要求に応じて1つの臨床応用のための1セットの、たとえば約30のイメージ・フィルタおよびそれらのフィルタ係数をフィルタ選択ルックアップ・テーブル263へ転送する。ルックアップ・テーブル263と通信するメモリ・ストレージ・デバイス265は、1ないしは複数のセットのイメージ・フィルタをルックアップ・テーブル263にダウンロードまたは入力することができる。イメージ・フィルタまたはイメージ・フィルタ係数を生成できる1ないしは複数の装置267は、ルックアップ・テーブル263およびメモリ・ストレージ・デバイス265、またはルックアップ・テーブル263のみと通信することができる。たとえば装置267は、ルックアップ・テーブル263への転送に先行して一時ストレージのためにメモリ・ストレージ・デバイス265内に、またはルックアップ・テーブル263に直接、1ないしは複数セットのイメージ・フィルタをダウンロードまたは入力することができる。装置267からメモリ・ストレージ・デバイス265またはテーブル263へ、またはメモリ・ストレージ・デバイス265からテーブル263へ、電子回路、有線、ケーブル、無線経由、およびその類といったこの種のデータの転送、入力、および(または)ダウンロードを容易にする任意のマニュアルまたは電子操作をはじめ、そのほかの当業者に周知のその種の操作を利用することができる。
【0126】
ここで図27を参照するが、図27は、LUT263の例示的な実施態様を示している。1つのイメージ・フィルタは、それの、LUT内にストアされているフィルタ係数のセットを表し、かつ含んでいる。このLUTは、例示目的だけのためのものであり、それより大きいこともあれば、小さいこともある。言い換えると、方向および大きさのレベルの数は、この例の9方向および5レベルの大きさより小さく、または大きくすることが可能である。この例においては方向が等しく20度の間隔で離隔されているが、均等でない間隔を使用することも可能である。
【0127】
この例示のLUTの実施態様においては、9つのフィルタ方向(‐80、‐60、‐40、‐20、0、20、40、60、80度)が水平軸に図示されており、5レベルのエッジの大きさが垂直軸に示されている。LUT内の各セルは、スムージング、たとえばSM2、エッジ強調、たとえばE6M4のいずれかのためのイメージ・フィルタおよびそれらのフィルタ係数表す。たとえば、‐60度のフィルタ方向は、エッジ検出フィルタによって獲得されるエッジ方向θの‐70から‐50度までを包含する。言い換えると、1つの方向値は、明示された方向の値のプラス/マイナス(+/‐)10度、つまり20度の範囲を表す。エッジの大きさが大きさ1(『Mag1』)より低い場合には、エッジ方向の値によらず非方向性スムージング・フィルタSM1が選択されることになる。エッジの大きさが大きさ2(『Mag2』)より低いが、Mag1に等しいかそれを超える場合には、エッジ方向の値によらず非方向性スムージング・フィルタSM2が選択されることになる。しかしながらエッジの大きさがMag2に等しいかそれを超える場合には、エッジ強調フィルタが選択されることになる。たとえばθが25度であり、エッジの大きさがMag3より高いかそれに等しく、Mag4より低い場合には、エッジ強調フィルタE2M4が選択されることになる。
【0128】
以上、本発明の1ないしは複数の実施態様を説明してきた。しかしながら本発明の精神および範囲から逸脱することなく、種々の修正を行うことができる。したがって、このほかの実施態様は、特許請求の範囲内となる。例えば、以下に説明する内容も本発明の好適な態様である。
(態様1)超音波イメージ内のエッジの検出および強調を行うための方法であって、超音波イメージの複数のピクセルのうちの少なくとも1つに対してエッジ検出フィルタを適用し、大きさおよび方向を含むエッジ検出値を計算するステップと、前記超音波イメージの前記複数のピクセルのうちの前記少なくとも1つに対して方向性エッジ強調フィルタまたは非方向性スムージング・フィルタのいずれかを適用するステップと、を含む方法。
(態様2)前記超音波イメージは、Bモード組織イメージ、ドプラ・スペクトル・イメージ、血流イメージ、弾性イメージ、グレイスケール・イメージ、輝度イメージ、およびこれらのイメージの少なくとも1つを包含する組み合わせからなるグループから選択される、ことを特徴とする態様1に記載の方法。
(態様3)前記方向性エッジ強調フィルタまたは前記非方向性スムージング・フィルタのいずれかを適用する前記ステップは、さらに、ハイ‐パス・フィルタ、ロー‐パス・フィルタ、およびバンド‐パス・フィルタからなるグループから選択される方向性エッジ強調フィルタを適用することを含む、ことを特徴とする態様1に記載の方法。
(態様4)前記エッジ検出フィルタを適用する前記ステップは、出力をRYとする垂直エッジ検出フィルタを適用することを含む、ことを特徴とする態様1に記載の方法。
(態様5)前記方向性エッジ検出フィルタを適用する前記ステップは、出力をRXとする水平エッジ検出フィルタを適用することを含むことを特徴とする態様1に記載の方法。
(態様6)エッジの方向を計算する追加のステップであって、前記追加のステップが、水平エッジ検出フィルタから出力RXを計算することと、垂直エッジ検出フィルタから出力RYを計算することと、前記エッジの前記方向θを、式θ=tan‐1(RY/RX)を使用して計算することと、を含む、ことを特徴とする態様1に記載の方法。
(態様7)前記エッジの前記方向は、前記超音波イメージの前記複数のピクセルのターゲット・イメージ・ピクセルにおけるイメージ輝度のもっとも高い空間微分の方向に対して垂直の方向を含む、ことを特徴とする態様1に記載の方法。
(態様8)前記方向は主方向であり、それにおいて前記主方向は、‐90度〜+90度の範囲を構成する概略の方向に関連付けされ、前記範囲は、さらに複数の方向を包含し、前記主方向に対して、前記範囲内に入る方向が割り当てられる、ことを特徴とする態様1に記載の方法。
(態様9)前記範囲は複数の増分に計り分けられ、それにおいて前記複数の増分は、有限数の方向を表す、ことを特徴とする態様8に記載の方法。
(態様10)エッジの前記大きさを式|RX|+|RY|を使用して計算する追加のステップを含むことを特徴とする態様1に記載の方法。
(態様11)エッジの前記大きさを、式(RX2+RY2)0.5を使用して計算する追加のステップを含むことを特徴とする態様1に記載の方法。
(態様12)前記方向性エッジ強調フィルタまたは前記非方向性スムージング・フィルタのいずれかを適用する前記ステップは、前記大きさとスレッショルド値を比較するステップと、前記大きさが前記スレッショルド値より大きいとき、前記複数のピクセルのうちの前記少なくとも1つにおいてエッジを検出するステップと、前記エッジを、前記方向性エッジ強調フィルタを使用して強調するステップと、を含む、ことを特徴とする態様1に記載の方法。
(態様13)前記複数のピクセルのうちの前記少なくとも1つのピクセルの検出されたエッジを、ターゲット・ピクセルのイメージ輝度のもっとも高い空間微分の方向に対して垂直の方向において、前記検出されたエッジのスムージングを行うことによって強調する追加のステップと、全パス・フィルタ、ハイ‐パス・フィルタ、バンド‐パス・フィルタ、スムージング・フィルタ、ロー‐パス・フィルタ、およびこれらのフィルタの少なくとも1つを包含する組み合わせからなるグループから選択されたフィルタを、ターゲットのイメージ輝度の前記もっとも高い空間微分の前記方向において適用する追加のステップと、を含むことを特徴とする態様1に記載の方法。
(態様14)前記強調するステップに先行して方向性エッジ強調フィルタを選択する追加のステップであって、前記追加のステップが、前記検出されたエッジの前記方向および前記大きさを、前記エッジ検出フィルタによって計算するステップと、前記検出されたエッジの前記方向および前記大きさをフィルタ選択ルックアップ・テーブルに供給するステップと、前記方向性エッジ強調フィルタを、前記検出されたエッジの前記方向および前記大きさに基づいて選択するステップと、を含むことを特徴とする態様13に記載の方法。
(態様15)前記方向性エッジ強調フィルタの前記選択は、前記エッジの前記大きさが高いとき、強いエッジ強調フィルタを選択することを含む、ことを特徴とする態様14に記載の方法。
(態様16)前記方向性エッジ強調フィルタの前記選択は、前記エッジの前記大きさが低いとき、弱いエッジ強調フィルタを選択することを含む、ことを特徴とする態様14に記載の方法。
(態様17)前記複数のピクセルの前記少なくとも1つのピクセルの検出されたエッジを、方向の範囲の近似された上側方向境界と近似された下側方向境界の内側に入る近似された方向において前記検出されたエッジのスムージングを行うことによって強調する追加のステップを含み、それにおいて前記範囲は、前記検出されたエッジの主方向を含む、ことを特徴とする態様1に記載の方法。
(態様18)前記強調するステップは、全パス・フィルタ、ハイ‐パス・フィルタ、バンド‐パス・フィルタ、ロー‐パス・フィルタ、スムージング・フィルタ、およびこれらのフィルタの少なくとも1つを包含する組み合わせからなるグループから選択されたフィルタを、前記近似された方向に対して略垂直の方向において追加的に適用するステップを含む、ことを特徴とする態様17に記載の方法。
(態様19)前記強調するステップに先行して前記エッジ強調フィルタを選択する追加のステップを含み、前記追加のステップが、下側方向境界Dir(J)と上側方向境界Dir(J+1)からなる方向の範囲を選択し、それにおいて当該範囲が前記検出されたエッジの前記方向を含み、下側の大きさの境界(#P)と上側方向境界(#P+1)からなる大きさの範囲を選択し、それにおいて当該範囲が前記検出されたエッジの大きさを含むステップと、前記検出されたエッジの前記方向の近似である前記選択された方向の範囲に基づき、かつ、前記検出されたエッジの前記検出された大きさの近似である前記選択された大きさの範囲に基づいて前記方向性エッジ強調フィルタを選択するステップと、を含むことを特徴とする態様13に記載の方法。
(態様20)前記複数のピクセルのうちの前記少なくとも1つのピクセルの検出された均質な領域を、前記非方向性スムージング・フィルタを使用する前記検出された均質な領域のスムージングによって向上させる追加のステップを含み、それにおいて前記非方向性スムージング・フィルタは、非方向性ロー‐パス・フィルタ、非方向性バンド‐パス・フィルタ、メディアン・フィルタ、およびこれらのフィルタのうちの少なくとも1つを包含する組み合わせからなるグループから選択されることを特徴とする態様1に記載の方法。
(態様21)前記向上させるステップに先行して前記非方向性スムージング・フィルタを選択する追加のステップを含み、前記追加のステップが、前記エッジ検出フィルタによって検出された均質な領域の前記大きさを計算するステップと、前記検出された均質な領域の前記大きさをフィルタ選択ルックアップ・テーブルに供給するステップと、前記均質な領域の前記大きさに基づいて前記非方向性スムージング・フィルタを選択するステップと、を含むことを特徴とする態様20に記載の方法。
(態様22)前記非方向性スムージング・フィルタの前記選択は、前記均質な領域の前記大きさが低いとき、強い非方向性スムージング・フィルタを選択することを含む、ことを特徴とする態様21に記載の方法。
(態様23)前記非方向性スムージング・フィルタの前記選択は、前記均質な領域の前記大きさが高いとき、弱い非方向性スムージング・フィルタを選択することを含む、ことを特徴とする態様21に記載の方法。
(態様24)前記向上させるステップに先行して前記非方向性スムージング・フィルタを選択する追加のステップを含み、前記追加のステップが、下側スレッショルド値(#Q‐1)と上側スレッショルド値(#Q)からなる大きさの範囲を選択し、それにおいて前記範囲が前記検出されたエッジの大きさを含むことを特徴とするステップと、前記選択されたエッジの前記大きさの近似である前記選択された大きさの範囲に基づいて非方向性スムージング・フィルタを選択するステップと、を含むことを特徴とする態様20に記載の方法。
(態様25)図25aに例示されているとおりのステップを包含する超音波イメージ内のエッジの検出および強調を行うための方法。
(態様26)前記超音波イメージの前記複数のピクセルの前記少なくとも1つに前記エッジ強調フィルタを適用するステップは、図20a、図20b、図21a、図21b、図22a、図22b、図23a、および図23bからなるグループから選択されたエッジ強調フィルタを適用することを含む、ことを特徴とする態様1に記載の方法。
(態様27)超音波イメージ内のエッジの検出および強調を行うための方法であって、超音波イメージの複数のピクセルのうちの少なくとも1つに対して2次元エッジ検出フィルタを適用し、大きさおよび方向を含むエッジ検出値を計算するステップと、前記超音波イメージの前記複数のピクセルのうちの前記少なくとも1つのピクセルのエッジに対して方向性エッジ強調フィルタを適用するステップと、前記超音波イメージの前記複数のピクセルのうちの前記少なくとも1つのピクセルの均質な領域に対して非方向性スムージング・フィルタを適用するステップと、を含むことを特徴とする方法。
(態様28)前記2次元エッジ検出フィルタの前記適用は、垂直方向または水平方向のいずれかにおいて前記2次元エッジ検出フィルタを適用することを含む、ことを特徴とする態様27に記載の方法。
(態様29)前記方向性エッジ強調の前記適用に先行して、前記複数のピクセルの前記少なくとも1つにおいてエッジを検出する追加のステップを含み、前記追加のステップは、 前記エッジ検出値の前記大きさとスレッショルド値を比較するステップと、前記大きさが前記スレッショルド値より大きいとき、前記イメージの前記複数のピクセルの前記少なくとも1つにおいて前記エッジを検出するステップと、を含む、ことを特徴とする態様27に記載の方法。
(態様30)前記方向性エッジ強調フィルタの前記適用は、前記エッジ検出値の前記大きさに比例した強度の方向性エッジ強調フィルタを適用することを含む、ことを特徴とする態様27に記載の方法。
(態様31)超音波デバイス用のイメージ・プロセッサであって、エッジ検出フィルタと、フィルタ選択ルックアップ・テーブルと、イメージ処理フィルタと、を含み、それにおいて前記エッジ検出フィルタ、前記フィルタ選択ルックアップ・テーブル、および前記イメージ処理フィルタが互いに情報を受け取りあう、ことを特徴とするイメージ・プロセッサ。
(態様32)前記エッジ検出フィルタは、超音波イメージの複数のピクセルのうちの少なくとも1つにおけるエッジの存在または不在のいずれかを検出し、前記エッジの大きさおよび方向を生成する、ことを特徴とする態様31に記載のイメージ・プロセッサ。
(態様33)前記大きさは前記エッジの強度に比例する、ことを特徴とする態様32に記載のイメージ・プロセッサ。
(態様34)前記超音波イメージは、Bモード組織イメージ、ドプラ・スペクトル・イメージ、血流イメージ、弾性イメージ、グレイスケール・イメージ、輝度イメージ、およびこれらのイメージの少なくとも1つを包含する組み合わせからなるグループから選択される、ことを特徴とする態様32に記載のイメージ・プロセッサ。
(態様35)前記フィルタ選択ルックアップ・テーブルは、多くのフィルタ係数を包含するイメージ・フィルタを、超音波イメージの複数のピクセルのうちの少なくとも1つにおいて検出されたエッジまたは均質な領域についてエッジ検出値の方向および大きさを基礎として選択する、ことを特徴とする態様31に記載のイメージ・プロセッサ。
(態様36)前記フィルタ選択ルックアップ・テーブルは、1ないしは複数の臨床応用のために1ないしは複数セットのイメージ・フィルタを含み、それにおいて前記イメージ・フィルタのそれぞれは、フィルタ係数のセットを包含する、ことを特徴とする態様31に記載のイメージ・プロセッサ。
(態様37)前記イメージ処理フィルタは、前記フィルタ選択ルックアップ・テーブルによって選択されたイメージ・フィルタを含む、ことを特徴とする態様31に記載のイメージ・プロセッサ。
(態様38)前記フィルタ選択ルックアップ・テーブルは、さらに、各臨床応用のために前記フィルタ選択ルックアップ・テーブル内にストアされる複数セットのイメージ・フィルタ係数を更新するための手段を含む、ことを特徴とする態様31に記載のイメージ・プロセッサ。
(態様39)前記フィルタ選択ルックアップ・テーブルは、さらに、各臨床応用のために前記テーブル内にストアされる複数のイメージ・フィルタを更新するための手段を含む、ことを特徴とする態様31に記載のイメージ・プロセッサ。
(態様40)さらに、複数のイメージ・フィルタおよび複数セットのイメージ・フィルタ係数を生成することのできる装置を含む、ことを特徴とする態様31に記載のイメージ・プロセッサ。
(態様41)前記装置は、1ないしは複数のディジタル信号プロセッサ、中央処理ユニットを有するデバイス、およびこれらのデバイスの少なくとも1つを包含する組み合わせを含む、ことを特徴とする態様40に記載のイメージ・プロセッサ。
(態様42)前記イメージ処理フィルタは、複数のフィルタリング後のイメージ・ピクセル輝度値を計算し、フィルタリング後の超音波イメージを生成する、ことを特徴とする態様31に記載のイメージ・プロセッサ。
(態様43)さらに、前記フィルタ選択ルックアップ・テーブルと通信するメモリ・ストレージ・デバイスを含む、ことを特徴とする態様31に記載のイメージ・プロセッサ。
(態様44)前記メモリ・ストレージ・デバイスは、複数の臨床応用のための複数セットのイメージ・フィルタを包含し、それにおいて前記イメージ・フィルタのそれぞれは、フィルタ係数のセットを含むことを特徴とする態様43に記載のイメージ・プロセッサ。
(態様45)さらに、前記フィルタ選択ルックアップ・テーブルと通信して、複数のイメージ・フィルタおよび複数セットのイメージ・フィルタ係数を生成する手段を含む、ことを特徴とする態様31に記載のイメージ・プロセッサ。
(態様46)複数のイメージ・フィルタおよび複数セットのイメージ・フィルタ係数を生成するための前記手段は、メモリ・ストレージ・デバイスと通信する、ことを特徴とする態様45に記載のイメージ・プロセッサ。
(態様47)前記エッジ検出フィルタ、前記フィルタ選択ルックアップ・テーブル、および前記イメージ処理フィルタは、乗算器、加算器、メモリ・ストレージ・デバイス、ディジタル信号プロセッサ、およびこれらのデバイスの少なくとも1つを包含する組み合わせからなるグループから選択される、ことを特徴とする態様31に記載のイメージ・プロセッサ。
(態様48)超音波イメージ内のエッジの検出および強調、ならびに、均質な領域の検出およびスムージングを行うための装置であって、超音波イメージ内の1ないしは複数のエッジの検出および強調、ならびに、均質な領域の検出およびスムージングを行うためのインストラクションのセットを含む、ことを特徴とする装置。
(態様49)前記インストラクションのセットは、超音波イメージの複数のピクセルのうちの少なくとも1つに対してエッジ検出フィルタを適用し、大きさおよび方向を包含するエッジ検出値を計算するインストラクションと、前記超音波イメージの前記複数のピクセルのうちの前記少なくとも1つに対して方向性エッジ強調フィルタまたは非方向性スムージング・フィルタのいずれかを適用するインストラクションと、を含む、ことを特徴とする態様48に記載の装置。
(態様50)さらに、前記装置のメモリ・デバイスから複数の応用のうちの1つのためのフィルタ係数を包含する少なくとも1セットのイメージ・フィルタを抽出するインストラクションと、前記抽出した1セットのイメージ・フィルタを前記装置のフィルタ選択ルックアップ・テーブルへ転送するインストラクションと、フィルタ係数を包含するフィルタをイメージ処理フィルタへ転送するインストラクションと、を含む、ことを特徴とする態様49に記載の装置。
(態様51)超音波イメージ内の1ないしは複数のエッジの検出および強調を行うため、ならびに、1ないしは複数の均質な領域の検出およびスムージングを行うためのインストラクションが組み入れられたインストラクション手段のセットを有するコンピュータ使用可能媒体を含む製品であって、前記コンピュータ使用可能媒体が、前記インストラクションのセットに超音波イメージの複数のピクセルのうちの少なくとも1つにわたってエッジ検出フィルタを適用させ、大きさおよび方向を包含するエッジ検出値を計算させるためのインストラクション手段のセットと、前記インストラクションのセットに前記超音波イメージの前記複数のピクセルのうちの前記少なくとも1つに対して方向性エッジ強調フィルタまたは非方向性スムージング・フィルタのいずれかを適用させるためのインストラクション手段のセットと、を含む、ことを特徴とする製品。
(態様52)超音波イメージ内の1ないしは複数のエッジの検出および強調を行うため、ならびに、1ないしは複数の均質な領域の検出およびスムージングを行うためのインストラクションのセットを有するコンピュータ使用可能媒体を含むシステム。
(態様53)前記インストラクションのセットは、超音波イメージの複数のピクセルのうちの少なくとも1つにわたってエッジ検出フィルタを適用し、大きさおよび方向を包含するエッジ検出値を計算するインストラクションと、前記超音波イメージの前記複数のピクセルのうちの前記少なくとも1つに対して方向性エッジ強調フィルタまたは非方向性スムージング・フィルタのいずれかを適用するインストラクションと、を含む、ことを特徴とする態様52に記載のシステム。
(態様54)マシンによる読み取りが可能なプログラム・ストレージ・デバイスであって、超音波イメージ内の1ないしは複数のエッジの検出および強調を行うため、ならびに、1ないしは複数の均質な領域の検出およびスムージングを行うための方法のステップを実行するべく前記マシンによって実行可能なインストラクションのプログラムを有形に具体化するものであり、超音波イメージの複数のピクセルのうちの少なくとも1つにわたってエッジ検出フィルタを適用し、大きさおよび方向を包含するエッジ検出値を計算することと、前記超音波イメージの前記複数のピクセルのうちの前記少なくとも1つに対して方向性エッジ強調フィルタまたは非方向性スムージング・フィルタのいずれかを適用することと、を含むことを特徴とするプログラム・ストレージ・デバイス。
【符号の説明】
【0129】
41 エッジ検出フィルタ、201 水平エッジ強調フィルタ、211 垂直エッジ強調フィルタ、241,243 2次元非方向性スムージング・フィルタ、263 フィルタ選択ルックアップ・テーブル。
【技術分野】
【0001】
本件出願は、2004年7月9日に出願された米国特許仮出願第60/586,589号の特典を主張する。
【0002】
本発明は、超音波イメージングにおけるエッジの検出、強調およびノイズの低減を行うイメージ処理の方法、ならびに、当該方法を実行するための装置に関する。より詳細に述べれば、ノイズの多いイメージ内のエッジの検出、ならびに、当該エッジおよびイメージの画質向上に関する。
【背景技術】
【0003】
超音波イメージは、標本ボリューム(またはイメージ・セル)内の多くの散乱からの後方散乱信号からなる。それらの多くの信号の干渉効果は、信号を互いに強調し、または相殺して粒子の粗いイメージを作ることができる。これらの粒子は、スペックルと呼ばれ、したがって超音波イメージは、イメージ領域が単調なコントラストを伴う均質の組織であると考えられる場合であっても、それらの粒子またはスペックルによって表される。その種の場合においては、ノイズを除去するイメージ処理なしでは真の組織がこの粒子ノイズのカーテンの後ろに隠れることから、超音波イメージがノイズだらけに見える。概して言えば、超音波イメージにスムージング・フィルタを適用し、粒子またはノイズをスムージングにより除去することによってスペックルを低減している。肝臓等の臓器の中心部では、肝臓組織が均質であり、したがって単調なコントラストを有していると考えてよく、この領域内のスペックルはスムージングされる必要がある。同じスムージング・フィルタがイメージ内の肝臓の境界または全領域に適用された場合には、肝臓の境界もしくはエッジが不鮮明になるか、またはぼやける。
【発明の概要】
【発明が解決しようとする課題】
【0004】
したがって、必要とされていることは、イメージ内のピクセルがスムージング・アルゴリズムを適用するべき均質な組織を表しているか否かを決定するための技術である。
【課題を解決するための手段】
【0005】
上記目的にかなう好適な方法は、超音波イメージの複数のピクセルのうちの少なくとも1つに対してエッジ検出フィルタを適用し、大きさを含むエッジ検出値を算出し、前記エッジ検出値の大きさがスレッショルド値よりも大きい場合に、前記複数のピクセルの少なくとも1つに対して、非方向性スムージング・フィルタではなく方向性エッジ強調フィルタを適用し、前記エッジ検出値の大きさがスレッショルド値よりも小さい場合に、当該大きさに基づいて、複数の非方向性スムージング・フィルタの中から1つの非方向性スムージング・フィルタを選択し、前記複数のピクセルの少なくとも1つに対して、方向性エッジ強調フィルタではなく選択された非方向性スムージング・フィルタを適用する、ことを特徴とする。また、超音波イメージの複数のピクセルのうちの少なくとも1つに対して2次元エッジ検出フィルタを適用し、大きさを含むエッジ検出値を算出し、前記エッジ検出値の大きさがスレッショルド値よりも大きい場合に、前記複数のピクセルの少なくとも1つをエッジと判定し、そのエッジに、非方向性スムージング・フィルタではなく方向性エッジ強調フィルタを適用し、前記エッジ検出値の大きさがスレッショルド値よりも小さい場合に、前記複数のピクセルの少なくとも1つを均質な領域と判定し、前記エッジ検出値の大きさに基づいて、複数の非方向性スムージング・フィルタの中から1つの非方向性スムージング・フィルタを選択し、その均質な領域に、方向性エッジ強調フィルタではなく前記選択された非方向性スムージング・フィルタを適用する、ことを特徴とする。
【0006】
また、上記目的にかなう好適な装置は、エッジ検出フィルタと、方向性エッジ強調フィルタと、複数の非方向性スムージング・フィルタと、イメージ・プロセッサと、を有する装置であって、前記イメージ・プロセッサは、超音波イメージの複数のピクセルのうちの少なくとも1つに対して前記エッジ検出フィルタを適用し、大きさを含むエッジ検出値を算出し、前記エッジ検出値の大きさがスレッショルド値よりも大きい場合に、前記複数のピクセルの少なくとも1つに対して、前記非方向性スムージング・フィルタではなく前記方向性エッジ強調フィルタを適用し、前記エッジ検出値の大きさがスレッショルド値よりも小さい場合に、当該大きさに基づいて、前記複数の非方向性スムージング・フィルタの中から1つの非方向性スムージング・フィルタを選択し、前記複数のピクセルの少なくとも1つに対して、前記方向性エッジ強調フィルタではなく選択された前記非方向性スムージング・フィルタを適用する、ことを特徴とする。また、上記目的にかなう好適なプログラムは、超音波イメージの複数のピクセルのうちの少なくとも1つに対してエッジ検出フィルタを適用し、大きさを含むエッジ検出値を算出する機能と、前記エッジ検出値の大きさがスレッショルド値よりも大きい場合に、前記複数のピクセルの少なくとも1つに対して、非方向性スムージング・フィルタではなく方向性エッジ強調フィルタを適用する機能と、前記エッジ検出値の大きさがスレッショルド値よりも小さい場合に、当該大きさに基づいて、複数の非方向性スムージング・フィルタの中から1つの非方向性スムージング・フィルタを選択し、前記複数のピクセルの少なくとも1つに対して、方向性エッジ強調フィルタではなく選択された非方向性スムージング・フィルタを適用する機能と、をコンピュータに実現させる、ことを特徴とする。前記プログラムは、例えば、コンピュータが読み取り可能な記憶媒体に記録される。
【発明の効果】
【0007】
本発明により、イメージ内のピクセルがスムージング・アルゴリズムを適用するべき均質な組織を表しているか否かを決定するための技術が提供される。
【図面の簡単な説明】
【0008】
【図1a】従来技術のエッジ検出フィルタを図示した説明図である。
【図1b】従来技術のエッジ検出フィルタを図示した説明図である。
【図1c】従来技術のエッジ検出フィルタを図示した説明図である。
【図2a】従来技術のスムージング・フィルタを図示した説明図である。
【図2b】従来技術のスムージング・フィルタを図示した説明図である。
【図2c】従来技術のスムージング・フィルタを図示した説明図である。
【図3a】従来技術の1×3エッジ検出フィルタを図示した説明図である。
【図3b】従来技術の5×5ロー‐パス・フィルタを図示した説明図である。
【図3c】‐1のエッジ検出フィルタ係数と図3bの5×5ロー‐パス・フィルタの結合による従来技術の別のエッジ検出フィルタを例示した説明図である。
【図3d】+1のエッジ検出フィルタ係数と図3bの5×5ロー‐パス・フィルタの結合による従来技術のさらに別のエッジ検出フィルタを例示した説明図である。
【図3e】図3cと3dのエッジ検出フィルタの結合による従来技術のさらに別のエッジ検出フィルタを例示した説明図である。
【図4】本発明のエッジ検出フィルタを例示した説明図である。
【図5a】本発明に従った種々の方向のエッジ検出フィルタの種々の例示的な実施態様を示した説明図である。
【図5b】本発明に従った種々の方向のエッジ検出フィルタの種々の例示的な実施態様を示した説明図である。
【図5c】本発明に従った種々の方向のエッジ検出フィルタの種々の例示的な実施態様を示した説明図である。
【図5d】本発明に従った種々の方向のエッジ検出フィルタの種々の例示的な実施態様を示した説明図である。
【図5e】本発明に従った種々の方向のエッジ検出フィルタの種々の例示的な実施態様を示した説明図である。
【図5f】本発明に従った種々の方向のエッジ検出フィルタの種々の例示的な実施態様を示した説明図である。
【図5g】本発明に従った種々の方向のエッジ検出フィルタの種々の例示的な実施態様を示した説明図である。
【図5h】本発明に従った種々の方向のエッジ検出フィルタの種々の例示的な実施態様を示した説明図である。
【図6a】本発明の水平および垂直方向のエッジ検出フィルタの例示的な実施態様を示した説明図である。
【図6b】本発明の水平および垂直方向のエッジ検出フィルタの例示的な実施態様を示した説明図である。
【図7a】本発明の水平および垂直両方向のエッジ検出フィルタの別の例示的な実施態様を示した説明図である。
【図7b】本発明の水平および垂直両方向のエッジ検出フィルタの別の例示的な実施態様を示した説明図である。
【図8a】水平および垂直両方向のエッジ検出フィルタのさらに別の例示的な実施態様を示した説明図である。
【図8b】水平および垂直両方向のエッジ検出フィルタのさらに別の例示的な実施態様を示した説明図である。
【図9a】本発明に従ったフィルタ係数のセット(‐1,0,1)を使用する垂直エッジを検出する方法に関するフローチャートである。
【図9b】本発明に従ったフィルタ係数のセット(‐1,0,1)を使用する水平エッジを検出する方法に関するフローチャートである。
【図10a】本発明に従ったフィルタ係数のセット(‐a,0,a)を使用する水平エッジを検出するための方法に関するフローチャートである。
【図10b】本発明に従ったフィルタ係数のセット(‐a,0,a)を使用する垂直エッジを検出するための方法に関するフローチャートである。
【図11】新旧のフィルタ・ポジションの間の関係を図示した説明図である。
【図12】超音波イメージにわたる本発明の例示的なフィルタの移動を示した説明図である。
【図13】本発明の垂直エッジ検出フィルタのハードウエアの例示的な実施態様を示したブロック図である。
【図14】本発明の効率的な垂直エッジ検出フィルタの例示的な実施態様を示したブロック図である。
【図15】本発明の水平エッジ検出フィルタのハードウエアの例示的な実施態様を示したブロック図である。
【図16】本発明の効率的な水平エッジ検出フィルタの例示的な実施態様を示したブロック図である。
【図17】biのフィルタ係数を伴う本発明の水平エッジ検出フィルタの例示的な実施態様を示したブロック図である。
【図18】biのフィルタ係数を伴う本発明の垂直エッジ検出フィルタの例示的な実施態様を示したブロック図である。
【図19a】本発明の垂直エッジ検出フィルタを図示した説明図である。
【図19b】本発明の水平エッジ検出フィルタを図示した説明図である。
【図19c】本発明の+45度エッジ検出フィルタの例示的な実施態様を図示した説明図である。
【図19d】本発明の‐45度エッジ検出フィルタの例示的な実施態様を図示した説明図である。
【図20a】本発明の強い水平エッジ強調フィルタを図示した説明図である。
【図20b】本発明の弱い水平エッジ強調フィルタを図示した説明図である。
【図21a】本発明の強い垂直エッジ強調フィルタを図示した説明図である。
【図21b】本発明の弱い垂直エッジ強調フィルタを図示した説明図である。
【図22a】本発明の強い+45度エッジ強調フィルタを図示した説明図である。
【図22b】本発明の弱い45度エッジ強調フィルタを図示した説明図である。
【図23a】本発明の強い‐45度エッジ強調フィルタの例示的な実施態様を図示した説明図である。
【図23b】本発明の弱い‐45度エッジ強調フィルタの例示的な実施態様を図示した説明図である。
【図24a】本発明の強いスムージング・フィルタの例示的な実施態様を図示した説明図である。
【図24b】本発明の弱いスムージング・フィルタの例示的な実施態様を図示した説明図である。
【図25a】本発明の例示的な方法を図示したロジック図である。
【図25b】本発明のエッジ強調の例示的な方法を図示したロジック図である。
【図25c】本発明のノイズ低減の例示的な方法を図示したロジック図である。
【図26】本発明のイメージ・プロセッサの例示的な実施態様を図示したブロック図である。
【図27】本発明のフィルタ選択ルックアップ・テーブルの例示的な実施態様を図示した説明図である。
【発明を実施するための形態】
【0009】
本発明の1ないしは複数の実施態様の詳細を添付図面に示し、以下に説明する。本発明のこのほかの特徴、目的、および利点については、これらの説明および図面から、また特許請求の範囲から明らかになるであろう。
【0010】
したがって本発明の目的は、超音波イメージングにおけるエッジの検出、強調およびノイズの低減のためのイメージ処理の方法、ならびに、当該方法を実行するための装置を提供することである。特に、その方法は、ノイズの多いイメージ内のエッジの検出、ならびに、当該エッジおよびイメージの画質向上に関する。
【0011】
したがって本発明の教示は、エッジ検出フィルタの出力に応じて超音波イメージにスムージング・フィルタを適用するべきか否かを決定するための方法を提供することである。このエッジ検出フィルタは、イメージ・ピクセルがエッジに属するか、均質な組織領域の中間に属するかを決定する。エッジ検出フィルタの出力の大きさは、そのピクセルがエッジに属するか否かまたは「強い」または「急峻な」エッジに属するか否かの決定に使用される。ピクセルが均質な組織領域に属する場合には、そのピクセルにスムージング・フィルタが適用される。超音波イメージは、1ないしは複数の任意タイプの超音波イメージまたはその組み合わせを包含することがあり、それには、限定の意図ではないがイメージを構成する超音波信号から導出されるBモード組織イメージ、ドプラ・スペクトル・イメージ、血流イメージ、弾性イメージ、および任意形式のグレイスケールまたは輝度イメージ、ならびに、これらのイメージの少なくとも1つの組み合わせ、ならびに、その類が含まれる。
【0012】
物体または臓器のエッジは方向を有する。したがって、エッジ検出は方向をもって実行されることを必要とする。図5a〜5hを参照すると、本発明の8つの方向(それぞれ‐45°、45°、67.5°、22.5°、‐67.5°、‐22.5°、0°、90°)のエッジ検出フィルタが例示されている。各フィルタは、フィルタのサイズが大きいことからロー‐パス・フィルタリングの効果をもたらすように実装され、従来技術より良好な信号対ノイズ比を伴い、信頼性をもってエッジを検出できる。しかも従来技術のロー‐パス・フィルタリング後のエッジ検出フィルタとは異なり、本発明は互いにオーバーライドしないようにイメージ・ピクセルに対して微分演算を適用する。ロー‐パス・フィルタの前処理のこの問題を例示するため、1×3の水平方向のエッジ検出フィルタ31を図3aに示すが、これは図1aのフィルタ11の一部(または列)である。フィルタ11の3つの列を使用すると、検出するエッジの平均の効果および、より高い信号対ノイズ比がもたらされる。しかしながら簡明のために図3aのエッジ検出フィルタ31を、オーバーライド問題を例示するために使用する。図3bは、エッジ検出フィルタ31の前にイメージに適用される5×5ロー‐パス・フィルタ33を示している。図3cは、エッジ検出フィルタ31の‐1のフィルタ係数値とロー‐パス・フィルタ33のフィルタ係数値の組み合わせを示しており、図3dは、エッジ検出フィルタ31の1のフィルタ係数値とロー‐パス・フィルタ33のフィルタ係数値の組み合わせを示している。フィルタ31の0のフィルタ係数値は効果を有していないか、または出力を有していない。図3eは、オリジナルのイメージに対するエッジ検出フィルタ31とロー‐パス・フィルタ33の組み合わせの全体的な効果を示している。中心の3行がオーバーライドされ、フィルタ係数が互いに相殺し合って0になっている。中心の0の3行は、1行のゼロだけを有しているオリジナルの1×3のフィルタより空間分解能が約3倍悪いエッジ検出フィルタのように作用する。したがって検出されたエッジがぼやけることになる。エッジの空間分解能(鋭さ)および位置合わせ(ポジション)を維持するためには、係数0の行を可能な限り狭くする必要がある。3行のゼロは、0の係数について2行も過多である。同一サイズの配列(7×5)について、改良されたエッジ検出フィルタ41を図4に示す。この改良されたフィルタ41は、エッジのポジションの検出において図3eのそれより正確であり、しかも0の行を取り囲む上側および下側の領域内にロー‐パス・フィルタリングの特徴を有することからエッジの検出においてより良好な信号対ノイズ比(SNR)を有する。一般にエッジ検出フィルタは、イメージに適用されるとエッジ検出フィルタの中心を表すピクセルに割り当てられるフィルタ演算の結果を伴う。通常、エッジ検出フィルタの中心がエッジ上に置かれているとき、中心ピクセルの値は、大きな相対的な大きさを持った値になる。
【0013】
ここで図5a〜5hを参照すると、本発明の8個のエッジ検出フィルタが示されている。フィルタまたは方向の数は、図5a〜5hに示されている8個の例のフィルタを用いて20もしくはそれを超える数に拡張することができる。20個のフィルタは、方向において約9度のステップ、または増分を伴って設計することが可能である。エッジ検出フィルタ51〜59は、各行と列の交差に、迅速な計算を提供する整数値、たとえば1、‐1、または0を包含するフィルタ係数値を有する。1、‐1、または0のフィルタ係数値は乗算を必要とせず、それに代えて加算および減算のみを使用してイメージに適用することができる。しかしながらフィルタ係数値が整数に限定される必要はなく、小数値または浮動小数点数としてもよい。これらすべてのフィルタ51〜59のフィルタ係数は、符号、すなわちプラス(+)またはマイナス(‐)は異なるが、垂直、水平、またはフィルタが検出するべく設計されたエッジの方向のいずれかにおいて対称である。ここで注意を要するが、中心ポジションはすべて0である。たとえば図5gに例示されているとおり、水平エッジ検出フィルタの場合であれば中心の行のフィルタ係数がすべて0である。また図5hに例示されているとおり、垂直エッジ検出フィルタの場合であれば中心の列のフィルタ係数がすべて0である。0°、90°、45°、および‐45°の方向を除けば、エッジ検出フィルタ51のゼロの係数は、検出方向57と整列する行および列ポジション内に位置することに注意を要する。
【0014】
多くの方向を有するエッジ検出フィルタは、方向に関する高い精度および感度を伴ってエッジを検出するために理想的であるが、リアルタイム実装についてある程度の制限がある。各フィルタは、与えられたイメージのために多くの計算を必要とし、全体的な計算の数は、フィルタの数に伴って増加する。したがって本発明の代替実施態様は、2つのフィルタだけ、すなわち垂直方向の1つと水平方向の1つだけを使用する。このほかの方向のエッジは、フィルタ・サイズ(2M+1)×(2N+1)を使用して次のように検出することが可能である。
【0015】
【数1】
【数2】
【0016】
これにおいてMおよびNは整数であり、互いに等しいとすることができる。Zijは、ポイント(i,j)においてこのフィルタが適用されるイメージ値であり、RXおよびRYは、それぞれ水平および垂直方向におけるフィルタ出力である。
【0017】
エッジの方向は、次式によって決定される。
【数3】
【0018】
エッジの大きさまたは強さは、次式によって決定される。
【数4】
【0019】
組み合わされた水平(RX)および垂直(RY)エッジ検出結果の大きさは、エッジの存在を示す。
【0020】
これら2つのエッジ検出フィルタだけを使用すれば、従来技術に開示されているような20個のフィルタの使用と比較して処理速度を10倍に上げることができる。さらに、これら2つのエッジ検出フィルタの使用は、異なるフィルタ・ポジションにおいて実行されるがまったく同一の計算の数を減らすことによってさらに速度を向上させることを可能にする。たとえば、約11×11のフィルタ・マスク・サイズについて言えば、以下のセクションにおいて説明するとおり、この速度向上が10倍に達する。したがって、この速度向上と使用されるフィルタの数の減少を組み合わせれば、速度における全体的な向上が100倍の速さに達することもあり得る。これは、イメージ処理のリアルタイム実装を可能にする。
【0021】
本発明の1ないしは複数のエッジ検出フィルタの適用に必要な計算の速度を向上させる本発明の1つの例示的な方法は反復を伴う。エッジ検出フィルタの一般形式は次式によって表される。
【0022】
【数5】
【0023】
これにおいてiはフィルタ・マスク内のx座標を、jはy座標をそれぞれ表し;M、Nは整数であり;Rはフィルタ出力を表し;wijは座標(i,j)におけるフィルタ係数を表し;zijは座標(i,j)におけるイメージ値を表す。
【0024】
図5gに示されている水平エッジ検出フィルタ58について言えば、このフィルタは次のように表現することができる。
【0025】
【数6】
【0026】
またこれは、さらに各行について次のように表現することができる。
【0027】
【数7】
【数8】
・・・
・・・
【数9】
【0028】
その場合には各行の計算の結果が次のとおりに合計される。
【0029】
【数10】
【0030】
これにおいて中心行(j=N+1)の係数は0である。
【0031】
図12に例示されているとおり、全体のイメージ領域10について多くのフィルタ・ポジション13、13’のフィルタ計算速度を向上させるために、最初のポジションにおいてフィルタ15が計算された後、メモリの内容を1つシフトし、(フィルタが下方へ1行分移動したときの)もっとも新しい行だけを計算することによって次のポジションにおけるフィルタが効率的に計算される。これが図11に図式的に例示されている。メモリの内容は次のとおりにシフトされる。
【数11】
【数12】
・・・
・・・
【数13】
【0032】
最後に、もっとも新しい行が次のとおりに計算される。
【0033】
【数14】
【0034】
その後、これらの項またはメモリの内容が次のとおりに合計される。
【0035】
【数15】
【0036】
この効率的なフィルタ計算は、図9bに示されているフローチャートで例示することができる。その計算は、図5gに例示されているエッジ検出フィルタ58等の水平エッジ検出フィルタを使用して例示することができる。図9bに示されているとおり、‐1、0、および1の係数からなる水平エッジ検出フィルタを使用するエッジ検出を実行する方法は、イメージの開始列1行1において開始する。最初に、エッジ検出フィルタ内の列に対応するイメージ内のすべての列を加算し、その結果をメモリ#1内にストアすることによって第1行を計算することができる。したがって次の行jは、エッジ検出フィルタ内のすべての対応する列を加算し、その結果をメモリ#j内にストアすることによって計算することができる。これらのステップを、第(2N+1)行が計算されるまで反復することができる。行j=2N+1になった後、フィルタ係数の符号(+/‐)に応じてメモリ内容の必要な加算または減算を行い、結果がメモリ#1から#2N+1まで合計される。この計算結果は、フィルタ出力として出力される。次に、図11に例示されて説明されているとおり、メモリがシフトされる。図9bに戻るが、続いてエッジ検出フィルタ58をイメージ上で1行下側に移動することができる。ここでチェックを行い、エッジ検出フィルタ58が行の、またはイメージの境界を越えていないことを確認する。フィルタ58がいずれかの境界を越えている場合には、フィルタを1列分移動し、再び新しい列および行1においてこのプロセスが開始される。それに加えて、エッジ検出フィルタが列の、またはイメージの境界を越えていないことを確認するチェックが行われる。フィルタ58がいずれかの境界を越えている場合にはこのプロセスが終了する。しかしながら、エッジ検出フィルタ58がいずれの境界も越えていない場合には、もっとも新しい行2N+1が計算されてメモリ#2N+1にストアされる。ここで再びメモリ#1〜#2N+1のメモリ内容がフィルタ係数の符号に応じて加算または減算され、フィルタ出力結果が獲得される。このプロセスが、水平エッジ検出フィルタの効率的な計算を例証する例示的な電子回路図として図15に例示されている。図示されているとおり、イメージ・ピクセル・データをイメージ・メモリから読み出してメモリ#2M+1に供給し、メモリ#2M、...#1へとシフトすることができる。同一行内のイメージを形成するすべてのピクセル・データを合計器141において加算し、合計器141の出力をメモリ#2N+1に供給し、メモリ#N+2、...#1へとシフトすることができる。フィルタ出力を計算するために、合計器においてメモリ#2N+1〜#N+2の内容を加算し、#N〜#1を減算する。エッジ検出フィルタ58が、イメージの上端から下端まで垂直に単一単位で進み、その後左から右へ一度に1単位で進み、さらにその後プロセスを反復することに関して例示されているが、本発明の例示のフィルタがそのように限定されることはない。むしろ本発明のエッジ検出フィルタは、広く、2つの直交する方向における移動、好ましくは上端から下端および左から右への移動を描く。
【0037】
これは、図6a〜bに示されているとおりの係数61、63を有するより一般的な形式のエッジ検出フィルタに拡張することが可能であり、それにおいて『a』は、正または負の整数または浮動小数点数の値とすることができる。次のセクションでは、別の例の効率的なフィルタ動作について記述する。
【0038】
水平エッジ検出について、すべての係数が1であるかのように行を計算した後、行の結果に係数aを乗じ、それによって各行の結果が、各ピクセル・データの乗算を行うより効率的になる。
【0039】
【数16】
【数17】
【数18】
・・・
・・・
【数19】
【数20】
【0040】
水平エッジ検出フィルタが最初のポジションについて計算された後、メモリの内容が1つ分シフトされ、フィルタが1行分下方へ移動したときのもっとも新しい行だけが計算される。
【数21】
【数22】
・・・
・・・
【数23】
【0041】
この場合においても次のとおりにもっとも新しい行だけを計算することができる。
【0042】
【数24】
【0043】
その後、これらの項を合計することができる。
【0044】
【数25】
【0045】
この効率的な計算は、図10aに示されているフローチャートによって例示され、それにおいてaは、上に述べたとおり、1、‐1、またはそのほかのフィルタ係数値とすることができる。
【0046】
類似の反復テクニックを使用し、より一般的なajを使用するフィルタについてRを効率的に計算することができる。
【0047】
【数26】
【0048】
これは、次のとおりに効率的に計算することができる。
【0049】
【数27】
【数28】
・・・
・・・
【数29】
【数30】
【0050】
最初のポジションにおけるフィルタが計算された後は、メモリの内容を1つ分シフトし、フィルタが下方に1行分移動したときのもっとも新しい行を計算すればよい。
【数31】
【数32】
・・・
・・・
【数33】
【0051】
この場合においても次のとおりにもっとも新しい行だけを計算することができる。
【0052】
【数34】
【0053】
その後、これらの項を合計することができる。
【0054】
【数35】
【0055】
フィルタ・ポジションがイメージの行またはイメージの境界を越えるまで連続的にフィルタが1行分下方へ移動し、この計算が続けられる。その後、フィルタ・ポジションが次の列ポジションの最初の行へ移動し、同一の演算が続けられる。
【0056】
垂直エッジについて言えば、図5hのフィルタを次式によって表すことができる。
【0057】
【数36】
【0058】
この計算は、前述したとおりの反復テクニックによって効率的に実行することができる。
【0059】
【数37】
【数38】
・・・
・・・
【数39】
【数40】
【0060】
最初のポジションにおけるフィルタが計算された後は、メモリの内容をシフトし、かつもっとも新しい行だけを以下のとおりに計算することによって次のポジションにおけるフィルタを計算することができる。
【数41】
【数42】
・・・
・・・
【数43】
これに加えて、もっとも新しい行だけが次のとおりに計算される。
【0061】
【数44】
【0062】
この演算が図11に図示されている。さらに図9aのフローチャートは、全体のイメージ領域内の多くのポジションにおける反復方法を記述している。図9aに例示されている方法は、上に例示した図9bのそれに極めて類似している。それらの例示的な方法の間における主要な相違は、垂直エッジ検出フィルタ係数‐1、0、1の配置に関係するわずかに異なる計算から生じる。ここで強調しておく必要があるが、本発明は、図5gおよび5hに例示されているとおりの係数の配列を有する任意サイズの水平および垂直のエッジ検出フィルタの使用に指向されている。当業者には、ここに概説されている同じ方法を使用して本発明によって定義されるとおりに構成される任意の水平または垂直のエッジ検出フィルタの応用を拡張することが明白となろう。
【0063】
図9aに戻るが、垂直エッジ検出フィルタは、列1行1においてイメージに対して適用することができる。最初の行は、フィルタ係数値、すなわち‐1、0、または1に応じてイメージ・ピクセル値の加算または減算を行い、さらにこの合計の結果をメモリ#1にストアすることによって合計を通じて計算することができる。次に行jを、フィルタ係数値、すなわち‐1、0、または1に応じてイメージ・ピクセル値の加算または減算を行い、さらにこの合計の結果をメモリjにストアすることによって合計を通じて計算することができる。図9bを参照して前述したとおり、ここでチェックを行って第(2N+1)行が計算されているか否かを決定する。計算されていなければ、次の行jを計算し、第(2N+1)行が計算されるまで反復態様で連続して次の行を計算することができる。j=2N+1になると、メモリ#1から#2N+1まですべてのメモリが合計される。結果として得られる合計は、フィルタ出力をもたらす。続いてメモリが、水平エッジ検出フィルタを参照して前述したとおりにシフトされる。フィルタを1行分移動することができるが、ここでチェックを行い、フィルタがイメージ行の外であるか否かを確認し、該当しなければ次の行2N+1を、フィルタ係数値、すなわち‐1、0、または1に応じてイメージ・ピクセル値の加算または減算を行い、その結果をメモリ#2N+1にストアすることによって合計を通じて計算することができる。図13は、垂直エッジ検出フィルタ出力を効率的に計算する本発明の例示的な方法を例証する電子回路の例示的な回路図を示している。同一行内のすべてのイメージ・ピクセル・データがイメージ・メモリから読み出されてメモリ#2M+1に供給され、メモリ#2M、...#1へとシフトされる。この同一行内のイメージ・ピクセル・データは、合計器において加算または減算を行うことができる。次の行のすべてのピクセル・データについても同じ態様で読み出し、合計器において加算することができる。この演算が、1つのフィルタ・ポジションについてフィルタの最後の行まで続く。合計器の出力、または結果をメモリ#2N+1に供給し、メモリ#2N、...#1へとシフトすることができる。メモリ#2N+1から1までの内容を合計してフィルタ出力を計算することができる。
【0064】
フィルタのポジションが1行分下方へ移動され、フィルタがイメージ行またはイメージ境界を越えるまでフィルタ計算が続けられる。
【0065】
手前で述べたとおり、フィルタ係数値が‐1、0、1に限定されることはなく、下の式45に示されるとおり、aまたはajを使用する任意の形式をとることができる。
【0066】
【数45】
【0067】
これにおいてaは、1、‐1、またはそのほかの値とすることができる。この場合においても、前述したとおりの反復テクニックを使用してこのフィルタを効率的に計算することができる。フィルタ・マスク内の第1行から2N+1行までは次のとおりに計算される。
【0068】
【数46】
【数47】
・・・
・・・
【数48】
【数49】
【0069】
フィルタが1行分下側へ移動するとき、次のとおりに反復演算を使用することができる。
【数50】
【数51】
・・・
・・・
【数52】
これに加えて、もっとも新しい行だけを次のとおりに計算することができる。
【0070】
【数53】
【0071】
aiを使用し、
【0072】
【数54】
【数55】
【数56】
・・・
・・・
【数57】
【数58】
【0073】
フィルタを下側へ1行分移動するとき、次のとおりに反復演算を使用することができる。
【数59】
【数60】
・・・
・・・
【数61】
これに加えて、もっとも新しい行だけを次のとおりに計算することができる。
【0074】
【数62】
【0075】
当業者によって認識されることになろうが、ほかの形式の反復を使用して全体のイメージ領域内のフィルタ計算の速度を向上させることもできる。たとえば垂直エッジの場合に、最初のポジションにおけるフィルタ結果を計算した後、新しい行を最初のポジションの結果に加算し、最初のポジション内の最後の行を減算することによって次の行ポジションを計算することができる。
【0076】
垂直エッジ検出フィルタは、次のとおりに計算することができる。
【0077】
【数63】
【0078】
この結果のRYがメモリ内にストアされる。以下によって表される各行の計算結果もまたメモリ#1〜#2N+1内にストアすることができる。
【0079】
【数64】
【数65】
・・・
・・・
【数66】
【0080】
次に、フィルタを1行分下側へ移動し、以下に述べるとおりに新しいポジションのフィルタを計算することができる。最初に、次のとおりにメモリの内容をシフトすることができる。
【数67】
【数68】
【数69】
・・・
・・・
【数70】
【数71】
【0081】
これにおいて矢印記号は、右辺の項を左辺の項にストアすることを示し;RY,0は、以前のポジションの第1行の結果を示し;最後の演算のRY,2N+1は、もっとも新しい行についてのもっとも新しい計算結果を表す。このもっとも新しい行RY,2N+1の計算は実際に実行される。しかしながら合計演算が必要とするものは、前述の反復方法における2N+1個の加算ではなく、行の結果の1つの加算および1つの減算だけである。以前のポジションから獲得されてメモリ内にストアされているRYの値を使用し、合計演算によって更新し、再度メモリ内にストアすることができる。この反復テクニックは、前述とまったく同様にaまたはajのフィルタ係数に拡張することができる。この演算、すなわちもっとも新しい行の加算およびもっとも古い行の減算は、図11にもっともよく例示されている。
【0082】
図14は、本発明の例示的な方法を図示した電子回路図のさらに別の例を示している。この電子回路は、メモリ・ロケーション、アキュームレータ、合計器、乗算器、加算器、ディジタル信号プロセッサ、メモリ・ストレージ・デバイス、これらの少なくとも1つを包含する組み合わせ、およびその類を包含し、この垂直エッジ検出フィルタを効率的に計算することができる。ここではその種の物理的回路コンポーネントを参照して図解しているが、本発明の演算が全体として、または部分的にディジタル信号プロセッサ(DSP)によって実行できることが認識される。同一行内のすべてのピクセル(イメージ)データをイメージ・メモリから読み出してメモリ#2M+1に供給し、メモリ#2M、...#1へとシフトすることができる。この同一行内のピクセル・データは、合計器141において加算または減算を行うことができる。次の行のすべてのピクセル・データについても同じ態様で読み出し、合計器において加算することができる。この演算が、1つのフィルタ・ポジションについてフィルタの最後の行に到達するまで続く。合計器の出力(結果)がメモリ#2N+1に供給され、メモリ#2N、...および#0へとシフトされる。最初のフィルタ・ポジションについては、メモリ#1〜#2N+1のスイッチがすべて閉じられ、メモリ#0が開いていることから、メモリ#2N+1から1までの内容が合計されてフィルタ出力が計算される。次のフィルタ・ポジションについては、メモリ#0および#2N+1のスイッチが閉じられ、メモリ#1〜#2Nのスイッチが開かれて、合計器の内容の以前のフィルタ結果、または出力に対するもっとも新しい行データ(メモリ#2N+1)の加算およびもっとも古い行(メモリ#0)の減算によって新しいフィルタ出力が計算される。
【0083】
前述したとおり、水平エッジ検出フィルタは以下のとおりに効率的に計算することができる。
【0084】
【数72】
【数73】
【数74】
・・・
・・・
【数75】
【数76】
【0085】
最初のポジションのフィルタ出力は、メモリ内にストアすることができる。また、各行の計算結果もメモリ#1〜#2N+1内にストアすることができる。その後フィルタを下側へ1行分移動し、新しいポジションにおけるフィルタ出力を次のとおりに効率的に計算することができる。最初に、メモリ#1〜#2N+1の内容を以下のとおりにシフトすることができる。
【数77】
【数78】
【数79】
・・・
・・・
【数80】
【数81】
【0086】
新しいポジションにおいてRX,2N+1だけが実際に計算され、メモリ#2N+1内にストアされるが、ほかのすべての右辺の項はメモリ内にある。以前のポジションから得られてメモリ内に最近ストアされたRX値を使用し、合計演算によって更新して再度メモリ内にストアすることができる。図16は、本発明の例示的な方法のさらに別の例示的な電子回路図を示している。この電子回路は、メモリ・ロケーション、アキュームレータ、合計器、乗算器、加算器、ディジタル信号プロセッサ、メモリ・ストレージ・デバイス、これらの少なくとも1つを包含する組み合わせ、およびその類を包含し、この水平エッジ検出フィルタを効率的に計算することができる。イメージ・ピクセル・データをイメージ・メモリから読み出してメモリ#2M+1に供給し、メモリ#2M、...#1へとシフトすることができる。同一行内のすべてのピクセル・データを合計器において合計し、合計器の出力をメモリ#2N+1に供給し、メモリ#N+2、...および#0へとシフトすることができる。最初のフィルタ・ポジションについて、フィルタ出力を計算するために、合計器においてメモリ#2N+1から#N+2までの内容が加算され、メモリ#Nから#1までの内容が減算される。メモリのスイッチがこの演算を達成するべく機能する。最初のフィルタ・ポジションの場合には、メモリ#N+1および#0を除くすべてのスイッチが閉じられる。そのフィルタ出力が計算された後は、次の行内の新しいピクセル・データがメモリ#2M+1〜#1に入力され、合計器において合計され、次のフィルタ・ポジションからのこの出力またはもっとも新しい合計の行データをメモリ#2N+1に入力することができる。一方、メモリ#2N+1〜0の内容は、すべて1メモリ分右へシフトすることができる。以前のフィルタ・ポジションからのフィルタ結果の出力または合計器の内容は、その後、メモリ#2N+1および#0の内容を加算し、メモリ#N+1および#Nの内容を減算することによって更新することができる。この場合においても上に述べたとおり、スイッチがこの演算を達成するべく機能する。スイッチ#2N+1、#N+1、#N、および#0が閉じられ、残りすべてのスイッチが開かれる。
【0087】
この反復方法は、加算の数を節約する。これらの垂直および水平のエッジの演算は、前述同様にa、‐a、0、またはajの係数を有するべく拡張することができる。これらの係数を用いる場合には、反復方法が加算はもとより乗算の数を節約し、したがってフィルタの速度を増加させる。
【0088】
エッジ検出フィルタのもっとも一般的な形式は次のとおりである。
【0089】
【数82】
【0090】
しかしながら、フィルタを次のように対称形式とすることが可能である。すなわち水平エッジ検出フィルタであれば、
【数83】
および
【数84】
ただし、i=1〜2M+1、かつj=1〜N
および
【数85】
ただし、i=1〜M、かつj=1〜2N+1。この水平エッジ検出フィルタを図7aに、本発明の例示的な9×9フィルタ71として例示する。
【0091】
さらにaijは、次のとおり、水平エッジ検出フィルタについてxおよびy成分に分けられる。
【数86】
【数87】
ただし、i=1〜M
また
【数88】
ただし、j=1〜N
最終的に水平エッジ検出フィルタは、次のとおりに表すことができる。
【0092】
【数89】
【0093】
この場合においても、最初の方で述べたとおりこのフィルタは、前述の反復テクニックを使用して計算速度を増加させることができる。
【0094】
垂直エッジ検出フィルタについてもフィルタ係数aijが対称性を有するが、符号(+/‐)が異なる。
【数90】
および
【数91】
ただし、i=1〜M、かつj=1〜2N+1。
また、
【数92】
ただし、i=1〜2M+1、かつj=1〜N。
この垂直エッジ検出フィルタを図7bに、本発明の別の例示的な9×9フィルタ73として例示する。
【0095】
さらにaijは、次のとおり、垂直エッジ検出フィルタについてxおよびy成分に分けられる。
【数93】
【数94】
ただし、i=1〜M
【数95】
ただし、j=1〜N
最終的に垂直エッジ検出フィルタは、次のとおりに表すことができる。
【0096】
【数96】
【0097】
さらにこのフィルタは、前述の反復テクニックを使用して計算速度を増加させることができる。
【0098】
フィルタが正方マスクでありM=Nとなる状況においては、両方のエッジ検出フィルタ、すなわち2方向のエッジ検出フィルタが方向において等しく重み付けされる必要があり、したがって、
【数97】
となるが、水平エッジ検出フィルタについて中心の行、および垂直エッジ検出フィルタについて中心の列はその例外である。また、すでに上で述べた同じ対称特性がこれらの係数にも適用される。したがってM=Nのエッジ検出フィルタは次のとおりに表すことができる。
【0099】
【数98】
【0100】
この水平エッジ検出フィルタが、本発明の例示的な9×9フィルタ81の実施態様を図示した図8aに例示されている。この水平エッジ検出フィルタは、図17に示されている例示的な電子回路図によって示される例示的な方法を使用して効率的に計算することができる。イメージ・データをイメージ・メモリから読み出してメモリ#2M+1に供給し、メモリ#2M、...#1へとシフトすることができる。これらのメモリの内容に係数b1、...、b2M+1を乗じ、合計器で合計することができる。合計器の出力をメモリ#2N+1に供給し、メモリ#2N、...および#0へとシフトすることができる。最初のフィルタ・ポジションについて、メモリ#N+1を除くメモリ#2N+1〜#1の内容に係数を乗じ、合計器において合計してフィルタ出力を計算することができる。次のフィルタ・ポジションについては、もっとも新しい行のためにイメージ・メモリから新しいイメージ・データを読み出してメモリ#2M+1に供給し、シフトすることができる。続いてメモリ#2M+1〜1の内容に係数を乗じ、合計器において合計し、合計器の出力をメモリ#2N+1に供給することができる。一方、メモリ#2N+1〜#0の内容は、1メモリ分右へシフトすることができる。フィルタ出力または合計器の内容は、以前のポジションのフィルタ出力、または合計器の内容に対して係数b1が乗じられたメモリ#2N+1の値を加算し、bNが乗じられたメモリ#N+1および#Nの値を減算し、係数b1が乗じられたメモリ#0の値を加算することによって更新することができる。
【0101】
【数99】
【0102】
これにおいてM=Nである。
【0103】
この垂直エッジ検出フィルタが、本発明の例示的な9×9フィルタ83の実施態様を図示した図8bに例示されている。図18に示されている例示的な電子回路図によって示される例示的な方法は、この垂直エッジ検出フィルタの出力を効率的に計算することができる。イメージ・データをイメージ・メモリから読み出してメモリ#2M+1に供給し、メモリ#2M、...#1へとシフトすることができる。同一行内のこれらの列ピクセル・データは、図18に示されているとおり、係数を乗じ、合計器において合計、すなわち加算または減算を行うことができる。合計器の出力をメモリ#2N+1に供給し、追加の行内の合計データをメモリ#2N+1に供給するために1メモリ分右方へシフトすることができる。最初のフィルタ・ポジションについて、メモリ#2N+1〜1の内容に乗算を行い、合計器において合計し、フィルタ出力を計算することができる。次のポジションについては、最初のフィルタ・ポジションの結果を、次の結果の効率的な計算のために使用することができる。新しいフィルタ・ポジションについて、もっとも新しい行の新しい合計データがメモリ#2N+1に供給されるとき、すべてのメモリ内容が右方へシフトされ、新しいフィルタ出力が、係数b1が乗じられたメモリ#2N+1の内容の加算、およびb1が乗じられたメモリ#0の減算を以前のフィルタ結果または合計器の内容に対して行うことによって計算される。
【0104】
さらに別の例示的な実施態様においては、下端の行から開始して上方へフィルタを移動することができる。別の実施態様においては、フィルタを横方向へ、たとえば最左翼の列から開始して右方へ移動することができる。さらに別の例示的な実施態様においては、フィルタを横方向へ、たとえば最右翼の列から開始して左方へ移動することができる。
【0105】
本発明のさらに別の実施態様においては、エッジをエッジ検出フィルタによって検出し、エッジ強調フィルタによって強調することができる。その種のエッジ強調フィルタは、限定の意図ではないが、2次元ハイ‐パス・フィルタ、ロー‐パス・フィルタ、バンド‐パス・フィルタ、およびその類を含む。
【0106】
採用されるそれらのエッジ強調フィルタの強度および型は、エッジ検出フィルタ(1ないしは複数)の出力、すなわち大きさおよび方向によって決定される。好ましい実施態様においては、エッジ強調フィルタが、次式で表される空間的2次元フィルタとすることができる。
【0107】
【数100】
【0108】
これにおいてzipは、処理後のデータのイメージ輝度を表し;wijは、座標(i,j)におけるフィルタ係数を表し;zijは、座標(i,j)における処理前のイメージ・データを表す。
【0109】
好ましい実施態様においては、エッジ強調フィルタのフィルタ係数がエッジ検出フィルタとまったく同様に方向性である。通常、検出されたエッジの方向は、イメージ処理のフィールド内におけるもっとも高い空間微分の方向によって定義される。しかしながら本発明においては、検出されたエッジの方向が、ターゲット・ピクセルのイメージ輝度のもっとも高い空間微分の方向に対して垂直の方向として定義される。したがって、エッジ強調フィルタは方向性であり、かつスムージング効果、または前述したとおり検出されたエッジの方向θ、またはターゲット・ピクセルにおけるもっとも高い空間微分の方向に対して垂直の方向においてロー‐パス・フィルタリングを有する。さらに、検出されたエッジは、もっとも高い空間微分の方向においてシャープニング効果を有するハイ‐パス・フィルタリングの適用によって強調することができる。それに代えて、方向θにおけるものより度数の小さいロー‐パス・フィルタを、もっとも高い空間微分の方向内で適用してもよい。θの方向およびもっとも高い空間微分の方向は、たとえば10度高いかまたは低いというように数度内で近似される。この近似は、θの方向およびもっとも高い空間微分の方向において、30度または40度程度だけ高いか又は小さくなることもある。さらに別の代替実施態様においては、バンド‐パス・フィルタリングをもっとも高い空間微分の方向のエッジの強調に適用することができる。さらに別の代替実施態様においては、もっとも高い空間微分の方向においてフィルタリングを適用しない(すなわち全パス・フィルタ)こともできる。もっとも高い空間微分の方向におけるエッジ強調の強度は、検出されたエッジの大きさに比例するとしてもよく、言い換えるとこの強度は、エッジの大きさが高いときに高く;または、エッジの大きさが低いときに低いということになる。
【0110】
たとえば、図19bに示されている水平エッジ検出フィルタ193がイメージ内に強い水平エッジを検出した場合には、その強い水平エッジを強調するために図20aに示されているロー‐パス・フィルタ201が適用されることになる。水平エッジ検出フィルタ193の出力は、水平エッジ検出フィルタ193内の1に等しいフィルタ係数の合計数に対応する5のフィルタ正規化因数によって正規化される。より小さい大きさを伴うが同一の方向を有するより弱い水平エッジが検出された場合には、図20bに例示されているようなより弱いロー‐パス水平フィルタ203が使用されることになる。このより弱いロー‐パス水平フィルタ203の出力は、3のフィルタ正規化因数によって正規化される。水平エッジ検出フィルタに代わり図19aの垂直エッジ検出フィルタ191がイメージ内に強い垂直エッジを検出した場合には、そのエッジを強調するために図21aに示されている垂直エッジ強調フィルタ211が適用されることになる。より大きさが小さいが同一の方向を伴うより弱い垂直エッジが検出された場合には、図21bに例示されているようなより弱いロー‐パス垂直フィルタ213が使用されることになる。+45度の斜め方向については、図19cに示されているエッジ検出フィルタがエッジの検出に使用され、そのエッジは、図22aおよび22bに示されている例示的なエッジ強調フィルタのうちの1ないしは複数によって強調することができる。‐45度の斜め方向については、図19dに示されているエッジ検出フィルタがエッジの検出に使用され、そのエッジは、図23aおよび23bに示されている例示的なエッジ強調フィルタのうちの1ないしは複数によって強調することができる。
【0111】
好ましい実施態様においては、エッジの方向θを式103(後述)によって決定し、垂直対水平のエッジ検出フィルタ出力の比(RX/RY)を使用して計算する。2つのエッジ検出フィルタだけ、すなわち水平および垂直フィルタだけを使用するこの計算方法は、2つのエッジ検出フィルタからのデータを使用する計算の実行が、前述したとおり、たとえば20の方向のために20のエッジ検出フィルタを計算するよりはるかに高速であることから好ましい。本発明のこれら2つのエッジ検出フィルタは、次の式101および102のとおりに表される。
【0112】
【数101】
【数102】
【0113】
エッジの方向(θ)および大きさは、次の式103および104によって決定される。
【数103】
【数104】
RXおよびRYの値が各フィルタそれぞれのサイズおよび係数に依存することから、RXおよびRYは、式105、106において正規化、またはすべてのフィルタ係数の絶対値の合計による除算が行われ、正規化後のNRXおよびNRYがもたらされる。この場合において合計は、すべての非ゼロ係数が1もしくは‐1のいずれかになることから、非ゼロ係数の数になる。したがって正規化後のエッジの大きさは、式107によって得られる。
【0114】
【数105】
【数106】
【0115】
【数107】
【0116】
しかしながら所定のサイズおよび所定のフィルタ係数のエッジ検出フィルタについては、この正規化、または除算ステップが必要なく、削除して処理速度を向上させることができる。垂直および水平のエッジ検出フィルタの例が図19aおよび19bに例示されている。例示目的のため、フィルタのサイズを5×5とし、M=N=2とすることができる。当業者であれば認識することになろうが、フィルタ・サイズは、このサイズより小さくまたは大きくすることが可能であり、たとえば3×3、7×7、9×9、またはそれより大きくすることができる。
【0117】
式103に定義されているとおり、エッジの方向は‐90度から90度まで、または180度の範囲でアナログまたは連続態様で変化する。しかしながらエッジ強調フィルタの方向の数を約18に限定し、約10度の増分で180度すべてをカバーすることができる。たとえば、第1の方向を‐90度から‐80度までの範囲とすることができる。第2の方向は‐80度から‐70度までを含むことができる。また18番目の方向は80度から90度までを含むことができる。このほかの角度または方向の選択を行ってもよい。例示目的のために図20aおよび20bには2つしか示されていないが、1つの方向内のフィルタの数は1ないしは複数、通常は数個として種々の程度のフィルタ強度を提供することができる。別の実施態様においては、角度増分を約20度またはそれより大きくし、フィルタの方向の数を約9またはそれ未満に低減することができる。垂直および水平のエッジ強調フィルタの有限数の方向および程度、すなわちより強い、またはより弱い等の強度は、限定する意図ではないがエッジ強調およびノイズ低減を含むイメージ処理の実行に必要とされるすべてのイメージ・フィルタおよびそれらのフィルタ係数をメモリ・ストレージ・デバイス内またはルックアップ・テーブル(LUT)内にストアすることを可能にする。
【0118】
好ましい実施態様においては、式104に記述されているエッジの大きさがいずれかのスレッショルドより低い場合に、前述した方向性エッジ強調フィルタではなく、スペックル・ノイズ低減フィルタまたは非方向性スムージング・フィルタが適用される。また本発明の方法は、非方向性スムージング・フィルタを適用するべきか否かについての決定を、前述した本発明の垂直および水平のエッジ検出フィルタの出力、すなわち大きさに基づいて行う。
【0119】
図25aを参照すると、本発明の方法のロジックのフローチャートが例示されている。以下においてより完全に説明するとおり、ステップ1を参照すると、エッジ検出フィルタがイメージに適用され、与えられたターゲット・ピクセルのためのエッジ検出値、または式104における大きさが求められる。次にステップ2を参照すると、エッジ検出値がチェックされ、それがスレッショルド値より大きいか否かについて調べられる。スレッショルド値は、任意の値をとることができるが、そのスレッショルド値より大きいエッジ検出値がターゲット・ピクセルのその部位におけるエッジの存在を示すように選択される。逆を言えば、スレッショルド値がエッジ検出値より小さいかそれに等しいことは、エッジの部分ではなく、むしろ均質な領域の部分を形成するターゲット・ピクセルを示す。エッジ検出値がスレッショルド値より大きくなく、均質な領域の部分を形成するターゲット・ピクセルを示している場合には、ステップ3においてスムージング・フィルタによるスムージングがそのターゲット・ピクセルに適用される。逆を言えば、エッジ検出値がスレッショルド値より大きく、ターゲット・ピクセルがエッジの部分であることを示している場合には、ステップ4において、エッジ強調フィルタによるエッジ強調を適用することができる。図25aに例示されている方法を適用し、エッジの大きさがスレッショルド値より大きいか否か、およびターゲット・ピクセルがエッジに属するか否かを決定した後のエッジ強調フィルタを選択する方法が図25bに例示されている。
【0120】
図25bを参照すると、最初にエッジ検出が評価され、方向の値が、下側の方向スレッショルド値である方向J(『DirJ』)より大きいか又はそれに等しく、かつ、上側の方向スレッショルド値である方向J+1(『Dir(J+1)』)より小さいという条件を満たすか否かについて決定される。方向の値が下側の方向スレッショルド値より大きいか又はそれに等しく、かつ、上側の方向スレッショルド値より小さい場合には方向Jが選択されることになる。次にエッジの大きさについても評価され、適切な強度のエッジ強調フィルタが選択されることになる。ここで図25cを参照するが、この図25cは、本発明の非方向性スムージング・フィルタの選択のためのフローチャートを例示している。この選択は、図25aの方法が、イメージのターゲット・ピクセルがエッジではなく、したがって非方向性スムージングが必要であると決定した場合に実行される。必要な非方向性スムージングの強度は、図25cのフローチャートに示されているとおりにエッジの大きさを評価することによって決定される。
【0121】
エッジ検出フィルタ191、193が、イメージのターゲット・ピクセルがエッジに属するか否か、または均質な組織領域を構成するか否かを決定する。式104に表されているとおりのエッジ検出フィルタ出力の大きさが使用されて、ターゲット・ピクセルがエッジに属するか否か、または「強い」もしくは「急な」エッジに属するか否かについて決定される。ターゲット・ピクセルが均質な組織領域に属する場合には、図24aおよび24bに示されているとおりの2次元非方向性スムージング・フィルタ241、243をターゲット・ピクセルに適用することができる。エッジ検出フィルタが、有意なエッジを構成する大きさを検出しなかった場合には、スペックルを低減するべく非方向性スムージング・フィルタ241、243が使用されることになる。スムージング・フィルタは、2次元フィルタ、たとえばロー‐パス、メディアン、スムージング、およびその類を包含することができる。さらに、スムージング・フィルタの強度または次数は、前述した垂直および水平のエッジ検出フィルタの出力、すなわち式104における大きさによって決定される。式104における大きさの低下に従って、スムージング・フィルタの次数または強度が増加される。言い換えると、検出された大きさが小さいときには、より大きな次数のスムージングが適用されることになる。この2次元スムージング・フィルタは、非方向性である。図24aにおいては、フィルタ出力が25の因数によって正規化される。より強いスムージングが必要とされる場合には、より弱い図24bのフィルタに代えてより強い図24aのフィルタを使用することができる。
【0122】
ここで図26を参照するが、この図26は、前述したイメージ処理方法を具体化する本発明のイメージ・フィルタリング・システムの図解を例示している。エッジの方向および大きさがエッジ検出フィルタによって計算され、フィルタ選択ルックアップ・テーブルに供給された後は、フィルタ選択ルックアップ・テーブル263による2次元イメージ・フィルタ、または2次元イメージ・フィルタに対応するフィルタ係数値の選択を実行することができる。概して言えば、イメージ・フィルタのセットは、任意数のイメージ・フィルタ、たとえば約30のイメージ・フィルタを包含することができる。このイメージ・フィルタのセットは、肝臓イメージ、胸部イメージ、そのほかの任意の臓器イメージ、およびその類といった単一の臨床応用に対応する。各イメージ・フィルタは、複数のフィルタ係数、たとえば約100のフィルタ係数を包含することができる。たとえば、図27のルックアップ・テーブルを参照すると、各セルが、それぞれのイメージ・フィルタ係数を含む1つのイメージ・フィルタを表している。
【0123】
複数のフィルタ係数がLUT263からイメージ処理フィルタ261へダウンロードされ、オリジナルのイメージに適用されて1ピクセルずつをベースとして出力イメージがもたらされる。一方イメージ処理フィルタ261は、エッジ検出フィルタの出力、すなわち大きさおよび方向に基づいて、1ピクセルずつをベースとして、そのイメージ・フィルタ係数を更新または変更する。イメージ処理フィルタ261は、前述したとおりターゲット・ピクセルにおけるエッジの方向および大きさに基づき、1ピクセルずつをベースとして、非方向性スムージング・フィルタまたは方向性エッジ強調フィルタを包含することができる。イメージ処理フィルタ261およびイメージ・プロセッサ269は、ディジタル信号プロセッサ、乗算器、加算器、メモリ・ストレージ・デバイス、およびこれらの類等の1ないしは複数の装置によって、かつ好ましくはディジタル信号プロセッサによって具体化できる。超音波システムがその応用モードを1つの臨床応用から別の臨床応用へ、たとえば胸部イメージングから肝臓イメージングへ、または心臓イメージングへ変更するとき、ルックアップ・テーブル内の新しいフィルタのセットおよびそれらのフィルタ係数がメモリ・ストレージ・デバイス265等の別のデバイスからダウンロードされるか、または入力される必要がある。
【0124】
フィルタ選択ルックアップ・テーブル263は、複数のイメージ・フィルタ、または当該複数のイメージ・フィルタに対応するフィルタ係数値を包含でき、それらを一時的にストアして各臨床応用に従って、すなわち肝臓イメージ、胸部イメージ、そのほか任意の臓器、およびその類に従って使用できる。ルックアップ・テーブルに割り当てられるメモリのサイズが限られるため、好ましくはフィルタ選択ルックアップ・テーブル263が、一度に1つの臨床応用のためのイメージ・フィルタのセットだけを含み、一度に、限られた数のイメージ・フィルタおよびそれらのフィルタ係数を含む。代替においては、ルックアップ・テーブル263が現在使用中の臨床応用のためのイメージ・フィルタのセットを含み、かつルックアップ・テーブル263のストレージ容量に従ってほかの臨床応用のためのイメージ・フィルタの1ないしは複数の追加のセットをストアする。フィルタ選択ルックアップ・テーブル263は、一度に1つの臨床応用のためのイメージ・フィルタのセットをメモリ・ストレージ・デバイス265および(または)、複数のイメージ・フィルタのおよび複数セットのイメージ・フィルタ係数を生成することができる装置267から受領する。その種の装置267は、中央処理ユニット(CPU)、ディジタル信号プロセッサ、およびその類を伴い、好ましくはディジタル信号プロセッサを伴うデバイスを包含することができる。
【0125】
1ないしは複数のメモリ・ストレージ・デバイス265は、複数の臨床応用のための複数セットのイメージ・フィルタをストアしており、要求に応じて1つの臨床応用のための1セットの、たとえば約30のイメージ・フィルタおよびそれらのフィルタ係数をフィルタ選択ルックアップ・テーブル263へ転送する。ルックアップ・テーブル263と通信するメモリ・ストレージ・デバイス265は、1ないしは複数のセットのイメージ・フィルタをルックアップ・テーブル263にダウンロードまたは入力することができる。イメージ・フィルタまたはイメージ・フィルタ係数を生成できる1ないしは複数の装置267は、ルックアップ・テーブル263およびメモリ・ストレージ・デバイス265、またはルックアップ・テーブル263のみと通信することができる。たとえば装置267は、ルックアップ・テーブル263への転送に先行して一時ストレージのためにメモリ・ストレージ・デバイス265内に、またはルックアップ・テーブル263に直接、1ないしは複数セットのイメージ・フィルタをダウンロードまたは入力することができる。装置267からメモリ・ストレージ・デバイス265またはテーブル263へ、またはメモリ・ストレージ・デバイス265からテーブル263へ、電子回路、有線、ケーブル、無線経由、およびその類といったこの種のデータの転送、入力、および(または)ダウンロードを容易にする任意のマニュアルまたは電子操作をはじめ、そのほかの当業者に周知のその種の操作を利用することができる。
【0126】
ここで図27を参照するが、図27は、LUT263の例示的な実施態様を示している。1つのイメージ・フィルタは、それの、LUT内にストアされているフィルタ係数のセットを表し、かつ含んでいる。このLUTは、例示目的だけのためのものであり、それより大きいこともあれば、小さいこともある。言い換えると、方向および大きさのレベルの数は、この例の9方向および5レベルの大きさより小さく、または大きくすることが可能である。この例においては方向が等しく20度の間隔で離隔されているが、均等でない間隔を使用することも可能である。
【0127】
この例示のLUTの実施態様においては、9つのフィルタ方向(‐80、‐60、‐40、‐20、0、20、40、60、80度)が水平軸に図示されており、5レベルのエッジの大きさが垂直軸に示されている。LUT内の各セルは、スムージング、たとえばSM2、エッジ強調、たとえばE6M4のいずれかのためのイメージ・フィルタおよびそれらのフィルタ係数表す。たとえば、‐60度のフィルタ方向は、エッジ検出フィルタによって獲得されるエッジ方向θの‐70から‐50度までを包含する。言い換えると、1つの方向値は、明示された方向の値のプラス/マイナス(+/‐)10度、つまり20度の範囲を表す。エッジの大きさが大きさ1(『Mag1』)より低い場合には、エッジ方向の値によらず非方向性スムージング・フィルタSM1が選択されることになる。エッジの大きさが大きさ2(『Mag2』)より低いが、Mag1に等しいかそれを超える場合には、エッジ方向の値によらず非方向性スムージング・フィルタSM2が選択されることになる。しかしながらエッジの大きさがMag2に等しいかそれを超える場合には、エッジ強調フィルタが選択されることになる。たとえばθが25度であり、エッジの大きさがMag3より高いかそれに等しく、Mag4より低い場合には、エッジ強調フィルタE2M4が選択されることになる。
【0128】
以上、本発明の1ないしは複数の実施態様を説明してきた。しかしながら本発明の精神および範囲から逸脱することなく、種々の修正を行うことができる。したがって、このほかの実施態様は、特許請求の範囲内となる。例えば、以下に説明する内容も本発明の好適な態様である。
(態様1)超音波イメージ内のエッジの検出および強調を行うための方法であって、超音波イメージの複数のピクセルのうちの少なくとも1つに対してエッジ検出フィルタを適用し、大きさおよび方向を含むエッジ検出値を計算するステップと、前記超音波イメージの前記複数のピクセルのうちの前記少なくとも1つに対して方向性エッジ強調フィルタまたは非方向性スムージング・フィルタのいずれかを適用するステップと、を含む方法。
(態様2)前記超音波イメージは、Bモード組織イメージ、ドプラ・スペクトル・イメージ、血流イメージ、弾性イメージ、グレイスケール・イメージ、輝度イメージ、およびこれらのイメージの少なくとも1つを包含する組み合わせからなるグループから選択される、ことを特徴とする態様1に記載の方法。
(態様3)前記方向性エッジ強調フィルタまたは前記非方向性スムージング・フィルタのいずれかを適用する前記ステップは、さらに、ハイ‐パス・フィルタ、ロー‐パス・フィルタ、およびバンド‐パス・フィルタからなるグループから選択される方向性エッジ強調フィルタを適用することを含む、ことを特徴とする態様1に記載の方法。
(態様4)前記エッジ検出フィルタを適用する前記ステップは、出力をRYとする垂直エッジ検出フィルタを適用することを含む、ことを特徴とする態様1に記載の方法。
(態様5)前記方向性エッジ検出フィルタを適用する前記ステップは、出力をRXとする水平エッジ検出フィルタを適用することを含むことを特徴とする態様1に記載の方法。
(態様6)エッジの方向を計算する追加のステップであって、前記追加のステップが、水平エッジ検出フィルタから出力RXを計算することと、垂直エッジ検出フィルタから出力RYを計算することと、前記エッジの前記方向θを、式θ=tan‐1(RY/RX)を使用して計算することと、を含む、ことを特徴とする態様1に記載の方法。
(態様7)前記エッジの前記方向は、前記超音波イメージの前記複数のピクセルのターゲット・イメージ・ピクセルにおけるイメージ輝度のもっとも高い空間微分の方向に対して垂直の方向を含む、ことを特徴とする態様1に記載の方法。
(態様8)前記方向は主方向であり、それにおいて前記主方向は、‐90度〜+90度の範囲を構成する概略の方向に関連付けされ、前記範囲は、さらに複数の方向を包含し、前記主方向に対して、前記範囲内に入る方向が割り当てられる、ことを特徴とする態様1に記載の方法。
(態様9)前記範囲は複数の増分に計り分けられ、それにおいて前記複数の増分は、有限数の方向を表す、ことを特徴とする態様8に記載の方法。
(態様10)エッジの前記大きさを式|RX|+|RY|を使用して計算する追加のステップを含むことを特徴とする態様1に記載の方法。
(態様11)エッジの前記大きさを、式(RX2+RY2)0.5を使用して計算する追加のステップを含むことを特徴とする態様1に記載の方法。
(態様12)前記方向性エッジ強調フィルタまたは前記非方向性スムージング・フィルタのいずれかを適用する前記ステップは、前記大きさとスレッショルド値を比較するステップと、前記大きさが前記スレッショルド値より大きいとき、前記複数のピクセルのうちの前記少なくとも1つにおいてエッジを検出するステップと、前記エッジを、前記方向性エッジ強調フィルタを使用して強調するステップと、を含む、ことを特徴とする態様1に記載の方法。
(態様13)前記複数のピクセルのうちの前記少なくとも1つのピクセルの検出されたエッジを、ターゲット・ピクセルのイメージ輝度のもっとも高い空間微分の方向に対して垂直の方向において、前記検出されたエッジのスムージングを行うことによって強調する追加のステップと、全パス・フィルタ、ハイ‐パス・フィルタ、バンド‐パス・フィルタ、スムージング・フィルタ、ロー‐パス・フィルタ、およびこれらのフィルタの少なくとも1つを包含する組み合わせからなるグループから選択されたフィルタを、ターゲットのイメージ輝度の前記もっとも高い空間微分の前記方向において適用する追加のステップと、を含むことを特徴とする態様1に記載の方法。
(態様14)前記強調するステップに先行して方向性エッジ強調フィルタを選択する追加のステップであって、前記追加のステップが、前記検出されたエッジの前記方向および前記大きさを、前記エッジ検出フィルタによって計算するステップと、前記検出されたエッジの前記方向および前記大きさをフィルタ選択ルックアップ・テーブルに供給するステップと、前記方向性エッジ強調フィルタを、前記検出されたエッジの前記方向および前記大きさに基づいて選択するステップと、を含むことを特徴とする態様13に記載の方法。
(態様15)前記方向性エッジ強調フィルタの前記選択は、前記エッジの前記大きさが高いとき、強いエッジ強調フィルタを選択することを含む、ことを特徴とする態様14に記載の方法。
(態様16)前記方向性エッジ強調フィルタの前記選択は、前記エッジの前記大きさが低いとき、弱いエッジ強調フィルタを選択することを含む、ことを特徴とする態様14に記載の方法。
(態様17)前記複数のピクセルの前記少なくとも1つのピクセルの検出されたエッジを、方向の範囲の近似された上側方向境界と近似された下側方向境界の内側に入る近似された方向において前記検出されたエッジのスムージングを行うことによって強調する追加のステップを含み、それにおいて前記範囲は、前記検出されたエッジの主方向を含む、ことを特徴とする態様1に記載の方法。
(態様18)前記強調するステップは、全パス・フィルタ、ハイ‐パス・フィルタ、バンド‐パス・フィルタ、ロー‐パス・フィルタ、スムージング・フィルタ、およびこれらのフィルタの少なくとも1つを包含する組み合わせからなるグループから選択されたフィルタを、前記近似された方向に対して略垂直の方向において追加的に適用するステップを含む、ことを特徴とする態様17に記載の方法。
(態様19)前記強調するステップに先行して前記エッジ強調フィルタを選択する追加のステップを含み、前記追加のステップが、下側方向境界Dir(J)と上側方向境界Dir(J+1)からなる方向の範囲を選択し、それにおいて当該範囲が前記検出されたエッジの前記方向を含み、下側の大きさの境界(#P)と上側方向境界(#P+1)からなる大きさの範囲を選択し、それにおいて当該範囲が前記検出されたエッジの大きさを含むステップと、前記検出されたエッジの前記方向の近似である前記選択された方向の範囲に基づき、かつ、前記検出されたエッジの前記検出された大きさの近似である前記選択された大きさの範囲に基づいて前記方向性エッジ強調フィルタを選択するステップと、を含むことを特徴とする態様13に記載の方法。
(態様20)前記複数のピクセルのうちの前記少なくとも1つのピクセルの検出された均質な領域を、前記非方向性スムージング・フィルタを使用する前記検出された均質な領域のスムージングによって向上させる追加のステップを含み、それにおいて前記非方向性スムージング・フィルタは、非方向性ロー‐パス・フィルタ、非方向性バンド‐パス・フィルタ、メディアン・フィルタ、およびこれらのフィルタのうちの少なくとも1つを包含する組み合わせからなるグループから選択されることを特徴とする態様1に記載の方法。
(態様21)前記向上させるステップに先行して前記非方向性スムージング・フィルタを選択する追加のステップを含み、前記追加のステップが、前記エッジ検出フィルタによって検出された均質な領域の前記大きさを計算するステップと、前記検出された均質な領域の前記大きさをフィルタ選択ルックアップ・テーブルに供給するステップと、前記均質な領域の前記大きさに基づいて前記非方向性スムージング・フィルタを選択するステップと、を含むことを特徴とする態様20に記載の方法。
(態様22)前記非方向性スムージング・フィルタの前記選択は、前記均質な領域の前記大きさが低いとき、強い非方向性スムージング・フィルタを選択することを含む、ことを特徴とする態様21に記載の方法。
(態様23)前記非方向性スムージング・フィルタの前記選択は、前記均質な領域の前記大きさが高いとき、弱い非方向性スムージング・フィルタを選択することを含む、ことを特徴とする態様21に記載の方法。
(態様24)前記向上させるステップに先行して前記非方向性スムージング・フィルタを選択する追加のステップを含み、前記追加のステップが、下側スレッショルド値(#Q‐1)と上側スレッショルド値(#Q)からなる大きさの範囲を選択し、それにおいて前記範囲が前記検出されたエッジの大きさを含むことを特徴とするステップと、前記選択されたエッジの前記大きさの近似である前記選択された大きさの範囲に基づいて非方向性スムージング・フィルタを選択するステップと、を含むことを特徴とする態様20に記載の方法。
(態様25)図25aに例示されているとおりのステップを包含する超音波イメージ内のエッジの検出および強調を行うための方法。
(態様26)前記超音波イメージの前記複数のピクセルの前記少なくとも1つに前記エッジ強調フィルタを適用するステップは、図20a、図20b、図21a、図21b、図22a、図22b、図23a、および図23bからなるグループから選択されたエッジ強調フィルタを適用することを含む、ことを特徴とする態様1に記載の方法。
(態様27)超音波イメージ内のエッジの検出および強調を行うための方法であって、超音波イメージの複数のピクセルのうちの少なくとも1つに対して2次元エッジ検出フィルタを適用し、大きさおよび方向を含むエッジ検出値を計算するステップと、前記超音波イメージの前記複数のピクセルのうちの前記少なくとも1つのピクセルのエッジに対して方向性エッジ強調フィルタを適用するステップと、前記超音波イメージの前記複数のピクセルのうちの前記少なくとも1つのピクセルの均質な領域に対して非方向性スムージング・フィルタを適用するステップと、を含むことを特徴とする方法。
(態様28)前記2次元エッジ検出フィルタの前記適用は、垂直方向または水平方向のいずれかにおいて前記2次元エッジ検出フィルタを適用することを含む、ことを特徴とする態様27に記載の方法。
(態様29)前記方向性エッジ強調の前記適用に先行して、前記複数のピクセルの前記少なくとも1つにおいてエッジを検出する追加のステップを含み、前記追加のステップは、 前記エッジ検出値の前記大きさとスレッショルド値を比較するステップと、前記大きさが前記スレッショルド値より大きいとき、前記イメージの前記複数のピクセルの前記少なくとも1つにおいて前記エッジを検出するステップと、を含む、ことを特徴とする態様27に記載の方法。
(態様30)前記方向性エッジ強調フィルタの前記適用は、前記エッジ検出値の前記大きさに比例した強度の方向性エッジ強調フィルタを適用することを含む、ことを特徴とする態様27に記載の方法。
(態様31)超音波デバイス用のイメージ・プロセッサであって、エッジ検出フィルタと、フィルタ選択ルックアップ・テーブルと、イメージ処理フィルタと、を含み、それにおいて前記エッジ検出フィルタ、前記フィルタ選択ルックアップ・テーブル、および前記イメージ処理フィルタが互いに情報を受け取りあう、ことを特徴とするイメージ・プロセッサ。
(態様32)前記エッジ検出フィルタは、超音波イメージの複数のピクセルのうちの少なくとも1つにおけるエッジの存在または不在のいずれかを検出し、前記エッジの大きさおよび方向を生成する、ことを特徴とする態様31に記載のイメージ・プロセッサ。
(態様33)前記大きさは前記エッジの強度に比例する、ことを特徴とする態様32に記載のイメージ・プロセッサ。
(態様34)前記超音波イメージは、Bモード組織イメージ、ドプラ・スペクトル・イメージ、血流イメージ、弾性イメージ、グレイスケール・イメージ、輝度イメージ、およびこれらのイメージの少なくとも1つを包含する組み合わせからなるグループから選択される、ことを特徴とする態様32に記載のイメージ・プロセッサ。
(態様35)前記フィルタ選択ルックアップ・テーブルは、多くのフィルタ係数を包含するイメージ・フィルタを、超音波イメージの複数のピクセルのうちの少なくとも1つにおいて検出されたエッジまたは均質な領域についてエッジ検出値の方向および大きさを基礎として選択する、ことを特徴とする態様31に記載のイメージ・プロセッサ。
(態様36)前記フィルタ選択ルックアップ・テーブルは、1ないしは複数の臨床応用のために1ないしは複数セットのイメージ・フィルタを含み、それにおいて前記イメージ・フィルタのそれぞれは、フィルタ係数のセットを包含する、ことを特徴とする態様31に記載のイメージ・プロセッサ。
(態様37)前記イメージ処理フィルタは、前記フィルタ選択ルックアップ・テーブルによって選択されたイメージ・フィルタを含む、ことを特徴とする態様31に記載のイメージ・プロセッサ。
(態様38)前記フィルタ選択ルックアップ・テーブルは、さらに、各臨床応用のために前記フィルタ選択ルックアップ・テーブル内にストアされる複数セットのイメージ・フィルタ係数を更新するための手段を含む、ことを特徴とする態様31に記載のイメージ・プロセッサ。
(態様39)前記フィルタ選択ルックアップ・テーブルは、さらに、各臨床応用のために前記テーブル内にストアされる複数のイメージ・フィルタを更新するための手段を含む、ことを特徴とする態様31に記載のイメージ・プロセッサ。
(態様40)さらに、複数のイメージ・フィルタおよび複数セットのイメージ・フィルタ係数を生成することのできる装置を含む、ことを特徴とする態様31に記載のイメージ・プロセッサ。
(態様41)前記装置は、1ないしは複数のディジタル信号プロセッサ、中央処理ユニットを有するデバイス、およびこれらのデバイスの少なくとも1つを包含する組み合わせを含む、ことを特徴とする態様40に記載のイメージ・プロセッサ。
(態様42)前記イメージ処理フィルタは、複数のフィルタリング後のイメージ・ピクセル輝度値を計算し、フィルタリング後の超音波イメージを生成する、ことを特徴とする態様31に記載のイメージ・プロセッサ。
(態様43)さらに、前記フィルタ選択ルックアップ・テーブルと通信するメモリ・ストレージ・デバイスを含む、ことを特徴とする態様31に記載のイメージ・プロセッサ。
(態様44)前記メモリ・ストレージ・デバイスは、複数の臨床応用のための複数セットのイメージ・フィルタを包含し、それにおいて前記イメージ・フィルタのそれぞれは、フィルタ係数のセットを含むことを特徴とする態様43に記載のイメージ・プロセッサ。
(態様45)さらに、前記フィルタ選択ルックアップ・テーブルと通信して、複数のイメージ・フィルタおよび複数セットのイメージ・フィルタ係数を生成する手段を含む、ことを特徴とする態様31に記載のイメージ・プロセッサ。
(態様46)複数のイメージ・フィルタおよび複数セットのイメージ・フィルタ係数を生成するための前記手段は、メモリ・ストレージ・デバイスと通信する、ことを特徴とする態様45に記載のイメージ・プロセッサ。
(態様47)前記エッジ検出フィルタ、前記フィルタ選択ルックアップ・テーブル、および前記イメージ処理フィルタは、乗算器、加算器、メモリ・ストレージ・デバイス、ディジタル信号プロセッサ、およびこれらのデバイスの少なくとも1つを包含する組み合わせからなるグループから選択される、ことを特徴とする態様31に記載のイメージ・プロセッサ。
(態様48)超音波イメージ内のエッジの検出および強調、ならびに、均質な領域の検出およびスムージングを行うための装置であって、超音波イメージ内の1ないしは複数のエッジの検出および強調、ならびに、均質な領域の検出およびスムージングを行うためのインストラクションのセットを含む、ことを特徴とする装置。
(態様49)前記インストラクションのセットは、超音波イメージの複数のピクセルのうちの少なくとも1つに対してエッジ検出フィルタを適用し、大きさおよび方向を包含するエッジ検出値を計算するインストラクションと、前記超音波イメージの前記複数のピクセルのうちの前記少なくとも1つに対して方向性エッジ強調フィルタまたは非方向性スムージング・フィルタのいずれかを適用するインストラクションと、を含む、ことを特徴とする態様48に記載の装置。
(態様50)さらに、前記装置のメモリ・デバイスから複数の応用のうちの1つのためのフィルタ係数を包含する少なくとも1セットのイメージ・フィルタを抽出するインストラクションと、前記抽出した1セットのイメージ・フィルタを前記装置のフィルタ選択ルックアップ・テーブルへ転送するインストラクションと、フィルタ係数を包含するフィルタをイメージ処理フィルタへ転送するインストラクションと、を含む、ことを特徴とする態様49に記載の装置。
(態様51)超音波イメージ内の1ないしは複数のエッジの検出および強調を行うため、ならびに、1ないしは複数の均質な領域の検出およびスムージングを行うためのインストラクションが組み入れられたインストラクション手段のセットを有するコンピュータ使用可能媒体を含む製品であって、前記コンピュータ使用可能媒体が、前記インストラクションのセットに超音波イメージの複数のピクセルのうちの少なくとも1つにわたってエッジ検出フィルタを適用させ、大きさおよび方向を包含するエッジ検出値を計算させるためのインストラクション手段のセットと、前記インストラクションのセットに前記超音波イメージの前記複数のピクセルのうちの前記少なくとも1つに対して方向性エッジ強調フィルタまたは非方向性スムージング・フィルタのいずれかを適用させるためのインストラクション手段のセットと、を含む、ことを特徴とする製品。
(態様52)超音波イメージ内の1ないしは複数のエッジの検出および強調を行うため、ならびに、1ないしは複数の均質な領域の検出およびスムージングを行うためのインストラクションのセットを有するコンピュータ使用可能媒体を含むシステム。
(態様53)前記インストラクションのセットは、超音波イメージの複数のピクセルのうちの少なくとも1つにわたってエッジ検出フィルタを適用し、大きさおよび方向を包含するエッジ検出値を計算するインストラクションと、前記超音波イメージの前記複数のピクセルのうちの前記少なくとも1つに対して方向性エッジ強調フィルタまたは非方向性スムージング・フィルタのいずれかを適用するインストラクションと、を含む、ことを特徴とする態様52に記載のシステム。
(態様54)マシンによる読み取りが可能なプログラム・ストレージ・デバイスであって、超音波イメージ内の1ないしは複数のエッジの検出および強調を行うため、ならびに、1ないしは複数の均質な領域の検出およびスムージングを行うための方法のステップを実行するべく前記マシンによって実行可能なインストラクションのプログラムを有形に具体化するものであり、超音波イメージの複数のピクセルのうちの少なくとも1つにわたってエッジ検出フィルタを適用し、大きさおよび方向を包含するエッジ検出値を計算することと、前記超音波イメージの前記複数のピクセルのうちの前記少なくとも1つに対して方向性エッジ強調フィルタまたは非方向性スムージング・フィルタのいずれかを適用することと、を含むことを特徴とするプログラム・ストレージ・デバイス。
【符号の説明】
【0129】
41 エッジ検出フィルタ、201 水平エッジ強調フィルタ、211 垂直エッジ強調フィルタ、241,243 2次元非方向性スムージング・フィルタ、263 フィルタ選択ルックアップ・テーブル。
【特許請求の範囲】
【請求項1】
超音波イメージの複数のピクセルのうちの少なくとも1つに対してエッジ検出フィルタを適用し、大きさを含むエッジ検出値を算出し、
前記エッジ検出値の大きさがスレッショルド値よりも大きい場合に、前記超音波イメージの前記複数のピクセルの少なくとも1つに対して、非方向性スムージング・フィルタではなく方向性エッジ強調フィルタを適用し、
前記エッジ検出値の大きさがスレッショルド値よりも小さい場合に、当該大きさに基づいて、複数の非方向性スムージング・フィルタの中から1つの非方向性スムージング・フィルタを選択し、前記超音波イメージの前記複数のピクセルの少なくとも1つに対して、方向性エッジ強調フィルタではなく選択された非方向性スムージング・フィルタを適用する、
ことを特徴とする方法。
【請求項2】
前記超音波イメージは、Bモード組織イメージ、ドプラ・スペクトル・イメージ、血流イメージ、弾性イメージ、グレイスケール・イメージ、輝度イメージ、およびこれらのイメージの少なくとも1つを包含する組み合わせからなるグループから選択される、
ことを特徴とする請求項1に記載の方法。
【請求項3】
前記方向性エッジ強調フィルタの適用において、ハイ‐パス・フィルタ、ロー‐パス・フィルタ、およびバンド‐パス・フィルタからなるグループから選択される方向性エッジ強調フィルタを適用する、
ことを特徴とする請求項1に記載の方法。
【請求項4】
前記エッジ検出フィルタの適用において、出力をRYとする垂直エッジ検出フィルタを適用する、
ことを特徴とする請求項1に記載の方法。
【請求項5】
前記エッジ検出フィルタの適用において、出力をRXとする水平エッジ検出フィルタを適用する、
ことを特徴とする請求項1に記載の方法。
【請求項6】
前記エッジ検出値に含まれるエッジの方向を計算する追加のステップであって、
前記追加のステップが、
水平エッジ検出フィルタから出力RXを計算することと、
垂直エッジ検出フィルタから出力RYを計算することと、
前記エッジの方向θを、式
θ=tan‐1(RY/RX)
を使用して計算することと、
を含む、
ことを特徴とする請求項1に記載の方法。
【請求項7】
前記算出されたエッジの検出値にはエッジの方向が含まれ、
前記エッジの前記方向は、前記超音波イメージの複数のピクセルのターゲット・イメージ・ピクセルにおけるイメージ輝度のもっとも高い空間微分の方向に対して垂直の方向を含む、
ことを特徴とする請求項1に記載の方法。
【請求項8】
前記算出されたエッジ検出値にはエッジの方向が含まれ、
前記方向性エッジ強調フィルタの適用において、−90度〜+90度の範囲内の複数方向に対応した複数の方向性エッジ強調フィルタの中から、前記算出されたエッジの方向に対応した方向性エッジ強調フィルタを選択し、選択した方向性エッジ強調フィルタを適用する、
ことを特徴とする請求項1に記載の方法。
【請求項9】
前記範囲は、複数の角度範囲に区分けされ、
前記複数の方向性エッジ強調フィルタの各々が各角度範囲に対応付けられる、
ことを特徴とする請求項8に記載の方法。
【請求項10】
前記エッジ検出値に含まれるエッジの大きさを計算する追加のステップであって、
前記追加のステップが、
水平エッジ検出フィルタから出力RXを計算することと、
垂直エッジ検出フィルタから出力RYを計算することと、
エッジの前記大きさを式|RX|+|RY|を使用して計算すること、
を含むことを特徴とする請求項1に記載の方法。
【請求項11】
前記エッジ検出値に含まれるエッジの大きさを計算する追加のステップであって、
前記追加のステップが、
水平エッジ検出フィルタから出力RXを計算することと、
垂直エッジ検出フィルタから出力RYを計算することと、
エッジの前記大きさを、式(RX2+RY2)0.5を使用して計算すること、
を含むことを特徴とする請求項1に記載の方法。
【請求項12】
前記方向性エッジ強調フィルタの適用において、方向性エッジ強調フィルタにより前記エッジを強調する、
ことを特徴とする請求項1に記載の方法。
【請求項13】
前記複数のピクセルのうちの前記少なくとも1つのピクセルの検出されたエッジを、ターゲット・ピクセルのイメージ輝度のもっとも高い空間微分の方向に対して垂直の方向において、前記検出されたエッジのスムージングを行うことによって強調する追加のステップと、
全パス・フィルタ、ハイ‐パス・フィルタ、バンド‐パス・フィルタ、スムージング・フィルタ、ロー‐パス・フィルタ、およびこれらのフィルタの少なくとも1つを包含する組み合わせからなるグループから選択されたフィルタを、ターゲットのイメージ輝度の前記もっとも高い空間微分の前記方向において適用する追加のステップと、
を含むことを特徴とする請求項1に記載の方法。
【請求項14】
前記強調するステップに先行して方向性エッジ強調フィルタを選択する追加のステップであって、前記追加のステップが、
前記検出されたエッジの方向および大きさを、前記エッジ検出フィルタによって計算するステップと、
前記検出されたエッジの前記方向および前記大きさをフィルタ選択ルックアップ・テーブルに供給するステップと、
前記方向性エッジ強調フィルタを、前記検出されたエッジの前記方向および前記大きさに基づいて選択するステップと、
を含むことを特徴とする請求項13に記載の方法。
【請求項15】
前記方向性エッジ強調フィルタの前記選択は、前記エッジの前記大きさが大きいとき強いエッジ強調フィルタを選択することを含む、
ことを特徴とする請求項14に記載の方法。
【請求項16】
前記方向性エッジ強調フィルタの前記選択は、前記エッジの前記大きさが小さいとき、弱いエッジ強調フィルタを選択することを含む、
ことを特徴とする請求項14に記載の方法。
【請求項17】
前記複数のピクセルの前記少なくとも1つのピクセルの検出されたエッジを、方向の範囲の上側方向境界と下側方向境界の内側に入る近似された方向において前記検出されたエッジのスムージングを行うことによって強調する追加のステップを含み、それにおいて前記範囲は、前記検出されたエッジの方向を含む、
ことを特徴とする請求項1に記載の方法。
【請求項18】
前記強調するステップは、全パス・フィルタ、ハイ‐パス・フィルタ、バンド‐パス・フィルタ、ロー‐パス・フィルタ、スムージング・フィルタ、およびこれらのフィルタの少なくとも1つを包含する組み合わせからなるグループから選択されたフィルタを、前記近似された方向に対して略垂直の方向において追加的に適用するステップを含む、
ことを特徴とする請求項17に記載の方法。
【請求項19】
算出した前記エッジ検出値は方向を含み、非方向性スムージング・フィルタではなく方向性エッジ強調フィルタを適用することが、
下側方向境界Dir(J)と上側方向境界Dir(J+1)からなる方向の範囲を選択し、それにおいて当該範囲が前記検出されたエッジの前記方向を含み、下側の大きさの境界(#P)と上側方向境界(#P+1)からなる大きさの範囲を選択し、それにおいて当該範囲が前記検出されたエッジの大きさを含むステップと、
前記検出されたエッジの前記方向の近似である前記選択された方向の範囲に基づき、かつ、前記検出されたエッジの前記検出された大きさの近似である前記選択された大きさの範囲に基づいて前記方向性エッジ強調フィルタを選択するステップと、
を含むことを特徴とする請求項1に記載の方法。
【請求項20】
前記複数のピクセルのうちの前記少なくとも1つのピクセルの検出された均質な領域を、前記非方向性スムージング・フィルタを使用するスムージングによって向上させる追加のステップを含み、それにおいて前記非方向性スムージング・フィルタは、非方向性ロー‐パス・フィルタ、非方向性バンド‐パス・フィルタ、メディアン・フィルタ、およびこれらのフィルタのうちの少なくとも1つを包含する組み合わせからなるグループから選択される、
ことを特徴とする請求項1に記載の方法。
【請求項21】
前記スムージングするステップに先行して前記非方向性スムージング・フィルタを選択する追加のステップを含み、前記追加のステップが、
前記エッジ検出フィルタによって検出された均質な領域における前記エッジ検出値の大きさを計算するステップと、
前記均質な領域の前記大きさに基づいて前記非方向性スムージング・フィルタを選択するステップと、
を含むことを特徴とする請求項20に記載の方法。
【請求項22】
前記非方向性スムージング・フィルタの前記選択は、前記均質な領域の前記大きさに応じて、強い非方向性スムージング・フィルタまたは弱い非方向性スムージング・フィルタ を選択することを含む、
ことを特徴とする請求項21に記載の方法。
【請求項23】
前記非方向性スムージング・フィルタの前記選択は、前記均質な領域の前記大きさが大きいとき、弱い非方向性スムージング・フィルタを選択し、前記均質な領域の前記大きさが小さいとき、強い非方向性スムージング・フィルタを選択することを含む、
ことを特徴とする請求項21に記載の方法。
【請求項24】
前記向上させるステップに先行して前記非方向性スムージング・フィルタを選択する追加のステップを含み、前記追加のステップが、
下側スレッショルド値(#Q‐1)と上側スレッショルド値(#Q)からなる大きさの範囲を選択し、それにおいて前記範囲が前記検出されたエッジの大きさを含むことを特徴とするステップと、
前記選択されたエッジの前記大きさの近似である前記選択された大きさの範囲に基づいて非方向性スムージング・フィルタを選択するステップと、
を含むことを特徴とする請求項20に記載の方法。
【請求項25】
超音波イメージの複数のピクセルのうちの少なくとも1つに対して2次元エッジ検出フィルタを適用し、大きさを含むエッジ検出値を算出し、
前記エッジ検出値の大きさがスレッショルド値よりも大きい場合に、前記複数のピクセルの少なくとも1つをエッジと判定し、そのエッジに、非方向性スムージング・フィルタではなく方向性エッジ強調フィルタを適用し、
前記エッジ検出値の大きさがスレッショルド値よりも小さい場合に、前記複数のピクセルの少なくとも1つを均質な領域と判定し、前記エッジ検出値の大きさに基づいて、複数の非方向性スムージング・フィルタの中から1つの非方向性スムージング・フィルタを選択し、その均質な領域に、方向性エッジ強調フィルタではなく前記選択された非方向性スムージング・フィルタを適用する、
ことを特徴とする方法。
【請求項26】
前記2次元エッジ検出フィルタの前記適用は、垂直エッジ検出フィルタまたは水平エッジ検出フィルタを適用することを含む、
ことを特徴とする請求項25に記載の方法。
【請求項27】
前記方向性エッジ強調フィルタの前記適用は、前記エッジ検出値の前記大きさに比例した強度の方向性エッジ強調フィルタを適用することを含む、
ことを特徴とする請求項25に記載の方法。
【請求項28】
エッジ検出フィルタと、
方向性エッジ強調フィルタと、
複数の非方向性スムージング・フィルタと、
イメージ・プロセッサと、
を有する装置であって、
前記イメージ・プロセッサは、
超音波イメージの複数のピクセルのうちの少なくとも1つに対して前記エッジ検出フィルタを適用し、大きさを含むエッジ検出値を算出し、
前記エッジ検出値の大きさがスレッショルド値よりも大きい場合に、前記複数のピクセルの少なくとも1つに対して、前記非方向性スムージング・フィルタではなく前記方向性エッジ強調フィルタを適用し、
前記エッジ検出値の大きさがスレッショルド値よりも小さい場合に、当該大きさに基づいて、前記複数の非方向性スムージング・フィルタの中から1つの非方向性スムージング・フィルタを選択し、前記複数のピクセルの少なくとも1つに対して、前記方向性エッジ強調フィルタではなく選択された前記非方向性スムージング・フィルタを適用する、
ことを特徴とする装置。
【請求項29】
前記エッジ検出値にはエッジの方向が含まれ、
前記イメージ・プロセッサは、前記方向に基づいて前記方向性エッジ強調フィルタを選択する、
ことを特徴とする請求項28に記載の装置。
【請求項30】
前記イメージ・プロセッサは、
前記装置のメモリ・デバイスから、複数の応用のうちの1つのためのフィルタ係数を備えた少なくとも1セットのイメージ・フィルタを抽出し、
前記抽出した1セットのイメージ・フィルタを前記装置のフィルタ選択ルックアップ・テーブルへ転送し、
フィルタ係数を備えたフィルタをイメージ処理フィルタへ転送する、
ことを特徴とする請求項29に記載の装置。
【請求項31】
超音波イメージの複数のピクセルのうちの少なくとも1つに対してエッジ検出フィルタを適用し、大きさを含むエッジ検出値を算出する機能と、
前記エッジ検出値の大きさがスレッショルド値よりも大きい場合に、前記複数のピクセルの少なくとも1つに対して、非方向性スムージング・フィルタではなく方向性エッジ強調フィルタを適用する機能と、
前記エッジ検出値の大きさがスレッショルド値よりも小さい場合に、当該大きさに基づいて、複数の非方向性スムージング・フィルタの中から1つの非方向性スムージング・フィルタを選択し、前記複数のピクセルの少なくとも1つに対して、方向性エッジ強調フィルタではなく選択された非方向性スムージング・フィルタを適用する機能と、
をコンピュータに実現させる、
ことを特徴とするプログラム。
【請求項32】
前記エッジ検出値にはエッジの方向が含まれ、
前記方向に基づいて前記方向性エッジ強調フィルタを選択する機能をコンピュータに実現させる、
ことを特徴とする請求項31に記載のプログラム。
【請求項33】
コンピュータに、
超音波イメージの複数のピクセルのうちの少なくとも1つに対してエッジ検出フィルタを適用し、大きさを含むエッジ検出値を算出する機能と、
前記エッジ検出値の大きさがスレッショルド値よりも大きい場合に、前記複数のピクセルの少なくとも1つに対して、非方向性スムージング・フィルタではなく方向性エッジ強調フィルタを適用する機能と、
前記エッジ検出値の大きさがスレッショルド値よりも小さい場合に、当該大きさに基づいて、複数の非方向性スムージング・フィルタの中から1つの非方向性スムージング・フィルタを選択し、前記複数のピクセルの少なくとも1つに対して、方向性エッジ強調フィルタではなく選択された非方向性スムージング・フィルタを適用する機能と、
を実現させるプログラムを記録したコンピュータが読み取り可能な記憶媒体。
【請求項34】
前記エッジ検出フィルタは、
第1の奇数の行と第2の奇数の列を有するフィルタ係数のアレイと、
前記アレイの中央位置を通って前記アレイを通り抜ける方向に沿って延在し、第1および第2の側を形成する、ゼロ係数の第1のセットと、
を有し、
前記第1の側は、各々が+1である複数の係数からなる第2のセットを備え、
前記第2の側は、各々が−1である複数の係数からなる第3のセットを備える、
ことを特徴とする請求項1に記載の方法。
【請求項35】
前記方向が、前記アレイに水平に延在する、
ことを特徴とする請求項34に記載の方法。
【請求項36】
前記方向が、前記アレイに垂直に延在する、
ことを特徴とする請求項34に記載の方法。
【請求項37】
前記2次元エッジ検出フィルタは、
第1の奇数の行と第2の奇数の列を有するフィルタ係数のアレイと、
前記アレイの中央位置を通って前記アレイを通り抜ける方向に沿って延在し、第1および第2の側を形成する、ゼロ係数の第1のセットと、
を有し、
前記第1の側は、各々が+1である複数の係数からなる第2のセットを備え、
前記第2の側は、各々が−1である複数の係数からなる第3のセットを備える、
ことを特徴とする請求項25に記載の方法。
【請求項38】
前記方向が、前記アレイに水平に延在する、
ことを特徴とする請求項37に記載の方法。
【請求項39】
前記方向が、前記アレイに垂直に延在する、
ことを特徴とする請求項37に記載の方法。
【請求項40】
前記エッジ検出フィルタは、
第1の奇数の行と第2の奇数の列を有するフィルタ係数のアレイと、
前記アレイの中央位置を通って前記アレイを通り抜ける方向に沿って延在し、第1および第2の側を形成する、ゼロ係数の第1のセットと、
を有し、
前記第1の側は、各々が+1である複数の係数からなる第2のセットを備え、
前記第2の側は、各々が−1である複数の係数からなる第3のセットを備える、
ことを特徴とする請求項28に記載の装置。
【請求項41】
前記方向が、前記アレイに水平に延在する、
ことを特徴とする請求項40に記載の装置。
【請求項42】
前記方向が、前記アレイに垂直に延在する、
ことを特徴とする請求項40に記載の装置。
【請求項43】
前記エッジ検出フィルタは、
第1の奇数の行と第2の奇数の列を有するフィルタ係数のアレイと、
前記アレイの中央位置を通って前記アレイを通り抜ける方向に沿って延在し、第1および第2の側を形成する、ゼロ係数の第1のセットと、
を有し、
前記第1の側は、各々が+1である複数の係数からなる第2のセットを備え、
前記第2の側は、各々が−1である複数の係数からなる第3のセットを備える、
ことを特徴とする請求項31に記載のプログラム。
【請求項44】
前記方向が、前記アレイに水平に延在する、
ことを特徴とする請求項43に記載のプログラム。
【請求項45】
前記方向が、前記アレイに垂直に延在する、
ことを特徴とする請求項43に記載のプログラム。
【請求項46】
前記エッジ検出フィルタは、
第1の奇数の行と第2の奇数の列を有するフィルタ係数のアレイと、
前記アレイの中央位置を通って前記アレイを横断する方向に沿って延在し、第1および第2の側を形成する、ゼロ係数の第1のセットと、
を有し、
前記第1の側は、各々が+1である複数の係数からなる第2のセットを備え、
前記第2の側は、各々が−1である複数の係数からなる第3のセットを備える、
ことを特徴とする請求項33に記載の記憶媒体。
【請求項47】
前記方向が、前記アレイに水平に延在する、
ことを特徴とする請求項46に記載の記憶媒体。
【請求項48】
前記方向が、前記アレイに垂直に延在する、
ことを特徴とする請求項46に記載の記憶媒体。
【請求項1】
超音波イメージの複数のピクセルのうちの少なくとも1つに対してエッジ検出フィルタを適用し、大きさを含むエッジ検出値を算出し、
前記エッジ検出値の大きさがスレッショルド値よりも大きい場合に、前記超音波イメージの前記複数のピクセルの少なくとも1つに対して、非方向性スムージング・フィルタではなく方向性エッジ強調フィルタを適用し、
前記エッジ検出値の大きさがスレッショルド値よりも小さい場合に、当該大きさに基づいて、複数の非方向性スムージング・フィルタの中から1つの非方向性スムージング・フィルタを選択し、前記超音波イメージの前記複数のピクセルの少なくとも1つに対して、方向性エッジ強調フィルタではなく選択された非方向性スムージング・フィルタを適用する、
ことを特徴とする方法。
【請求項2】
前記超音波イメージは、Bモード組織イメージ、ドプラ・スペクトル・イメージ、血流イメージ、弾性イメージ、グレイスケール・イメージ、輝度イメージ、およびこれらのイメージの少なくとも1つを包含する組み合わせからなるグループから選択される、
ことを特徴とする請求項1に記載の方法。
【請求項3】
前記方向性エッジ強調フィルタの適用において、ハイ‐パス・フィルタ、ロー‐パス・フィルタ、およびバンド‐パス・フィルタからなるグループから選択される方向性エッジ強調フィルタを適用する、
ことを特徴とする請求項1に記載の方法。
【請求項4】
前記エッジ検出フィルタの適用において、出力をRYとする垂直エッジ検出フィルタを適用する、
ことを特徴とする請求項1に記載の方法。
【請求項5】
前記エッジ検出フィルタの適用において、出力をRXとする水平エッジ検出フィルタを適用する、
ことを特徴とする請求項1に記載の方法。
【請求項6】
前記エッジ検出値に含まれるエッジの方向を計算する追加のステップであって、
前記追加のステップが、
水平エッジ検出フィルタから出力RXを計算することと、
垂直エッジ検出フィルタから出力RYを計算することと、
前記エッジの方向θを、式
θ=tan‐1(RY/RX)
を使用して計算することと、
を含む、
ことを特徴とする請求項1に記載の方法。
【請求項7】
前記算出されたエッジの検出値にはエッジの方向が含まれ、
前記エッジの前記方向は、前記超音波イメージの複数のピクセルのターゲット・イメージ・ピクセルにおけるイメージ輝度のもっとも高い空間微分の方向に対して垂直の方向を含む、
ことを特徴とする請求項1に記載の方法。
【請求項8】
前記算出されたエッジ検出値にはエッジの方向が含まれ、
前記方向性エッジ強調フィルタの適用において、−90度〜+90度の範囲内の複数方向に対応した複数の方向性エッジ強調フィルタの中から、前記算出されたエッジの方向に対応した方向性エッジ強調フィルタを選択し、選択した方向性エッジ強調フィルタを適用する、
ことを特徴とする請求項1に記載の方法。
【請求項9】
前記範囲は、複数の角度範囲に区分けされ、
前記複数の方向性エッジ強調フィルタの各々が各角度範囲に対応付けられる、
ことを特徴とする請求項8に記載の方法。
【請求項10】
前記エッジ検出値に含まれるエッジの大きさを計算する追加のステップであって、
前記追加のステップが、
水平エッジ検出フィルタから出力RXを計算することと、
垂直エッジ検出フィルタから出力RYを計算することと、
エッジの前記大きさを式|RX|+|RY|を使用して計算すること、
を含むことを特徴とする請求項1に記載の方法。
【請求項11】
前記エッジ検出値に含まれるエッジの大きさを計算する追加のステップであって、
前記追加のステップが、
水平エッジ検出フィルタから出力RXを計算することと、
垂直エッジ検出フィルタから出力RYを計算することと、
エッジの前記大きさを、式(RX2+RY2)0.5を使用して計算すること、
を含むことを特徴とする請求項1に記載の方法。
【請求項12】
前記方向性エッジ強調フィルタの適用において、方向性エッジ強調フィルタにより前記エッジを強調する、
ことを特徴とする請求項1に記載の方法。
【請求項13】
前記複数のピクセルのうちの前記少なくとも1つのピクセルの検出されたエッジを、ターゲット・ピクセルのイメージ輝度のもっとも高い空間微分の方向に対して垂直の方向において、前記検出されたエッジのスムージングを行うことによって強調する追加のステップと、
全パス・フィルタ、ハイ‐パス・フィルタ、バンド‐パス・フィルタ、スムージング・フィルタ、ロー‐パス・フィルタ、およびこれらのフィルタの少なくとも1つを包含する組み合わせからなるグループから選択されたフィルタを、ターゲットのイメージ輝度の前記もっとも高い空間微分の前記方向において適用する追加のステップと、
を含むことを特徴とする請求項1に記載の方法。
【請求項14】
前記強調するステップに先行して方向性エッジ強調フィルタを選択する追加のステップであって、前記追加のステップが、
前記検出されたエッジの方向および大きさを、前記エッジ検出フィルタによって計算するステップと、
前記検出されたエッジの前記方向および前記大きさをフィルタ選択ルックアップ・テーブルに供給するステップと、
前記方向性エッジ強調フィルタを、前記検出されたエッジの前記方向および前記大きさに基づいて選択するステップと、
を含むことを特徴とする請求項13に記載の方法。
【請求項15】
前記方向性エッジ強調フィルタの前記選択は、前記エッジの前記大きさが大きいとき強いエッジ強調フィルタを選択することを含む、
ことを特徴とする請求項14に記載の方法。
【請求項16】
前記方向性エッジ強調フィルタの前記選択は、前記エッジの前記大きさが小さいとき、弱いエッジ強調フィルタを選択することを含む、
ことを特徴とする請求項14に記載の方法。
【請求項17】
前記複数のピクセルの前記少なくとも1つのピクセルの検出されたエッジを、方向の範囲の上側方向境界と下側方向境界の内側に入る近似された方向において前記検出されたエッジのスムージングを行うことによって強調する追加のステップを含み、それにおいて前記範囲は、前記検出されたエッジの方向を含む、
ことを特徴とする請求項1に記載の方法。
【請求項18】
前記強調するステップは、全パス・フィルタ、ハイ‐パス・フィルタ、バンド‐パス・フィルタ、ロー‐パス・フィルタ、スムージング・フィルタ、およびこれらのフィルタの少なくとも1つを包含する組み合わせからなるグループから選択されたフィルタを、前記近似された方向に対して略垂直の方向において追加的に適用するステップを含む、
ことを特徴とする請求項17に記載の方法。
【請求項19】
算出した前記エッジ検出値は方向を含み、非方向性スムージング・フィルタではなく方向性エッジ強調フィルタを適用することが、
下側方向境界Dir(J)と上側方向境界Dir(J+1)からなる方向の範囲を選択し、それにおいて当該範囲が前記検出されたエッジの前記方向を含み、下側の大きさの境界(#P)と上側方向境界(#P+1)からなる大きさの範囲を選択し、それにおいて当該範囲が前記検出されたエッジの大きさを含むステップと、
前記検出されたエッジの前記方向の近似である前記選択された方向の範囲に基づき、かつ、前記検出されたエッジの前記検出された大きさの近似である前記選択された大きさの範囲に基づいて前記方向性エッジ強調フィルタを選択するステップと、
を含むことを特徴とする請求項1に記載の方法。
【請求項20】
前記複数のピクセルのうちの前記少なくとも1つのピクセルの検出された均質な領域を、前記非方向性スムージング・フィルタを使用するスムージングによって向上させる追加のステップを含み、それにおいて前記非方向性スムージング・フィルタは、非方向性ロー‐パス・フィルタ、非方向性バンド‐パス・フィルタ、メディアン・フィルタ、およびこれらのフィルタのうちの少なくとも1つを包含する組み合わせからなるグループから選択される、
ことを特徴とする請求項1に記載の方法。
【請求項21】
前記スムージングするステップに先行して前記非方向性スムージング・フィルタを選択する追加のステップを含み、前記追加のステップが、
前記エッジ検出フィルタによって検出された均質な領域における前記エッジ検出値の大きさを計算するステップと、
前記均質な領域の前記大きさに基づいて前記非方向性スムージング・フィルタを選択するステップと、
を含むことを特徴とする請求項20に記載の方法。
【請求項22】
前記非方向性スムージング・フィルタの前記選択は、前記均質な領域の前記大きさに応じて、強い非方向性スムージング・フィルタまたは弱い非方向性スムージング・フィルタ を選択することを含む、
ことを特徴とする請求項21に記載の方法。
【請求項23】
前記非方向性スムージング・フィルタの前記選択は、前記均質な領域の前記大きさが大きいとき、弱い非方向性スムージング・フィルタを選択し、前記均質な領域の前記大きさが小さいとき、強い非方向性スムージング・フィルタを選択することを含む、
ことを特徴とする請求項21に記載の方法。
【請求項24】
前記向上させるステップに先行して前記非方向性スムージング・フィルタを選択する追加のステップを含み、前記追加のステップが、
下側スレッショルド値(#Q‐1)と上側スレッショルド値(#Q)からなる大きさの範囲を選択し、それにおいて前記範囲が前記検出されたエッジの大きさを含むことを特徴とするステップと、
前記選択されたエッジの前記大きさの近似である前記選択された大きさの範囲に基づいて非方向性スムージング・フィルタを選択するステップと、
を含むことを特徴とする請求項20に記載の方法。
【請求項25】
超音波イメージの複数のピクセルのうちの少なくとも1つに対して2次元エッジ検出フィルタを適用し、大きさを含むエッジ検出値を算出し、
前記エッジ検出値の大きさがスレッショルド値よりも大きい場合に、前記複数のピクセルの少なくとも1つをエッジと判定し、そのエッジに、非方向性スムージング・フィルタではなく方向性エッジ強調フィルタを適用し、
前記エッジ検出値の大きさがスレッショルド値よりも小さい場合に、前記複数のピクセルの少なくとも1つを均質な領域と判定し、前記エッジ検出値の大きさに基づいて、複数の非方向性スムージング・フィルタの中から1つの非方向性スムージング・フィルタを選択し、その均質な領域に、方向性エッジ強調フィルタではなく前記選択された非方向性スムージング・フィルタを適用する、
ことを特徴とする方法。
【請求項26】
前記2次元エッジ検出フィルタの前記適用は、垂直エッジ検出フィルタまたは水平エッジ検出フィルタを適用することを含む、
ことを特徴とする請求項25に記載の方法。
【請求項27】
前記方向性エッジ強調フィルタの前記適用は、前記エッジ検出値の前記大きさに比例した強度の方向性エッジ強調フィルタを適用することを含む、
ことを特徴とする請求項25に記載の方法。
【請求項28】
エッジ検出フィルタと、
方向性エッジ強調フィルタと、
複数の非方向性スムージング・フィルタと、
イメージ・プロセッサと、
を有する装置であって、
前記イメージ・プロセッサは、
超音波イメージの複数のピクセルのうちの少なくとも1つに対して前記エッジ検出フィルタを適用し、大きさを含むエッジ検出値を算出し、
前記エッジ検出値の大きさがスレッショルド値よりも大きい場合に、前記複数のピクセルの少なくとも1つに対して、前記非方向性スムージング・フィルタではなく前記方向性エッジ強調フィルタを適用し、
前記エッジ検出値の大きさがスレッショルド値よりも小さい場合に、当該大きさに基づいて、前記複数の非方向性スムージング・フィルタの中から1つの非方向性スムージング・フィルタを選択し、前記複数のピクセルの少なくとも1つに対して、前記方向性エッジ強調フィルタではなく選択された前記非方向性スムージング・フィルタを適用する、
ことを特徴とする装置。
【請求項29】
前記エッジ検出値にはエッジの方向が含まれ、
前記イメージ・プロセッサは、前記方向に基づいて前記方向性エッジ強調フィルタを選択する、
ことを特徴とする請求項28に記載の装置。
【請求項30】
前記イメージ・プロセッサは、
前記装置のメモリ・デバイスから、複数の応用のうちの1つのためのフィルタ係数を備えた少なくとも1セットのイメージ・フィルタを抽出し、
前記抽出した1セットのイメージ・フィルタを前記装置のフィルタ選択ルックアップ・テーブルへ転送し、
フィルタ係数を備えたフィルタをイメージ処理フィルタへ転送する、
ことを特徴とする請求項29に記載の装置。
【請求項31】
超音波イメージの複数のピクセルのうちの少なくとも1つに対してエッジ検出フィルタを適用し、大きさを含むエッジ検出値を算出する機能と、
前記エッジ検出値の大きさがスレッショルド値よりも大きい場合に、前記複数のピクセルの少なくとも1つに対して、非方向性スムージング・フィルタではなく方向性エッジ強調フィルタを適用する機能と、
前記エッジ検出値の大きさがスレッショルド値よりも小さい場合に、当該大きさに基づいて、複数の非方向性スムージング・フィルタの中から1つの非方向性スムージング・フィルタを選択し、前記複数のピクセルの少なくとも1つに対して、方向性エッジ強調フィルタではなく選択された非方向性スムージング・フィルタを適用する機能と、
をコンピュータに実現させる、
ことを特徴とするプログラム。
【請求項32】
前記エッジ検出値にはエッジの方向が含まれ、
前記方向に基づいて前記方向性エッジ強調フィルタを選択する機能をコンピュータに実現させる、
ことを特徴とする請求項31に記載のプログラム。
【請求項33】
コンピュータに、
超音波イメージの複数のピクセルのうちの少なくとも1つに対してエッジ検出フィルタを適用し、大きさを含むエッジ検出値を算出する機能と、
前記エッジ検出値の大きさがスレッショルド値よりも大きい場合に、前記複数のピクセルの少なくとも1つに対して、非方向性スムージング・フィルタではなく方向性エッジ強調フィルタを適用する機能と、
前記エッジ検出値の大きさがスレッショルド値よりも小さい場合に、当該大きさに基づいて、複数の非方向性スムージング・フィルタの中から1つの非方向性スムージング・フィルタを選択し、前記複数のピクセルの少なくとも1つに対して、方向性エッジ強調フィルタではなく選択された非方向性スムージング・フィルタを適用する機能と、
を実現させるプログラムを記録したコンピュータが読み取り可能な記憶媒体。
【請求項34】
前記エッジ検出フィルタは、
第1の奇数の行と第2の奇数の列を有するフィルタ係数のアレイと、
前記アレイの中央位置を通って前記アレイを通り抜ける方向に沿って延在し、第1および第2の側を形成する、ゼロ係数の第1のセットと、
を有し、
前記第1の側は、各々が+1である複数の係数からなる第2のセットを備え、
前記第2の側は、各々が−1である複数の係数からなる第3のセットを備える、
ことを特徴とする請求項1に記載の方法。
【請求項35】
前記方向が、前記アレイに水平に延在する、
ことを特徴とする請求項34に記載の方法。
【請求項36】
前記方向が、前記アレイに垂直に延在する、
ことを特徴とする請求項34に記載の方法。
【請求項37】
前記2次元エッジ検出フィルタは、
第1の奇数の行と第2の奇数の列を有するフィルタ係数のアレイと、
前記アレイの中央位置を通って前記アレイを通り抜ける方向に沿って延在し、第1および第2の側を形成する、ゼロ係数の第1のセットと、
を有し、
前記第1の側は、各々が+1である複数の係数からなる第2のセットを備え、
前記第2の側は、各々が−1である複数の係数からなる第3のセットを備える、
ことを特徴とする請求項25に記載の方法。
【請求項38】
前記方向が、前記アレイに水平に延在する、
ことを特徴とする請求項37に記載の方法。
【請求項39】
前記方向が、前記アレイに垂直に延在する、
ことを特徴とする請求項37に記載の方法。
【請求項40】
前記エッジ検出フィルタは、
第1の奇数の行と第2の奇数の列を有するフィルタ係数のアレイと、
前記アレイの中央位置を通って前記アレイを通り抜ける方向に沿って延在し、第1および第2の側を形成する、ゼロ係数の第1のセットと、
を有し、
前記第1の側は、各々が+1である複数の係数からなる第2のセットを備え、
前記第2の側は、各々が−1である複数の係数からなる第3のセットを備える、
ことを特徴とする請求項28に記載の装置。
【請求項41】
前記方向が、前記アレイに水平に延在する、
ことを特徴とする請求項40に記載の装置。
【請求項42】
前記方向が、前記アレイに垂直に延在する、
ことを特徴とする請求項40に記載の装置。
【請求項43】
前記エッジ検出フィルタは、
第1の奇数の行と第2の奇数の列を有するフィルタ係数のアレイと、
前記アレイの中央位置を通って前記アレイを通り抜ける方向に沿って延在し、第1および第2の側を形成する、ゼロ係数の第1のセットと、
を有し、
前記第1の側は、各々が+1である複数の係数からなる第2のセットを備え、
前記第2の側は、各々が−1である複数の係数からなる第3のセットを備える、
ことを特徴とする請求項31に記載のプログラム。
【請求項44】
前記方向が、前記アレイに水平に延在する、
ことを特徴とする請求項43に記載のプログラム。
【請求項45】
前記方向が、前記アレイに垂直に延在する、
ことを特徴とする請求項43に記載のプログラム。
【請求項46】
前記エッジ検出フィルタは、
第1の奇数の行と第2の奇数の列を有するフィルタ係数のアレイと、
前記アレイの中央位置を通って前記アレイを横断する方向に沿って延在し、第1および第2の側を形成する、ゼロ係数の第1のセットと、
を有し、
前記第1の側は、各々が+1である複数の係数からなる第2のセットを備え、
前記第2の側は、各々が−1である複数の係数からなる第3のセットを備える、
ことを特徴とする請求項33に記載の記憶媒体。
【請求項47】
前記方向が、前記アレイに水平に延在する、
ことを特徴とする請求項46に記載の記憶媒体。
【請求項48】
前記方向が、前記アレイに垂直に延在する、
ことを特徴とする請求項46に記載の記憶媒体。
【図1a】

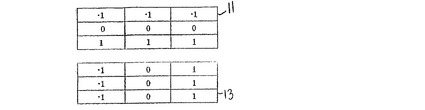
【図1b】
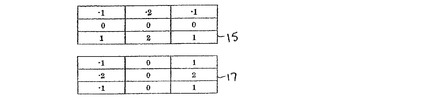
【図1c】

【図2a】

【図2b】
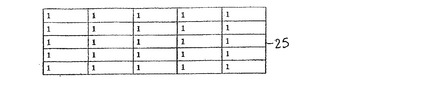
【図2c】
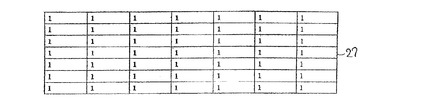
【図3a】

【図3b】

【図3c】
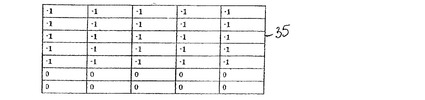
【図3d】
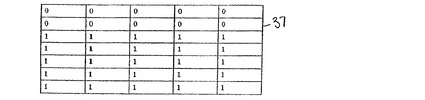
【図3e】
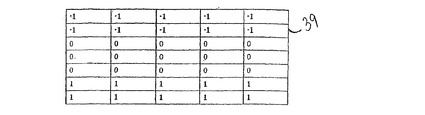
【図4】
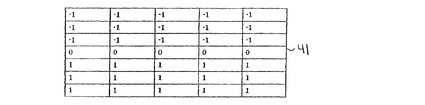
【図5a】
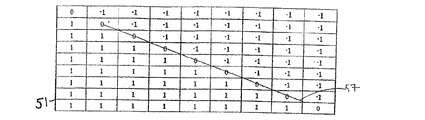
【図5b】
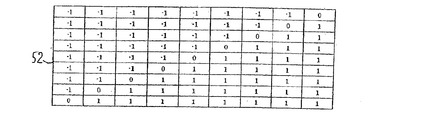
【図5c】
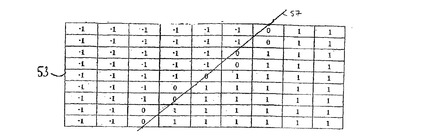
【図5d】
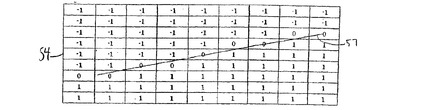
【図5e】
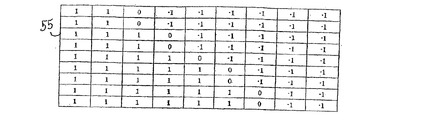
【図5f】
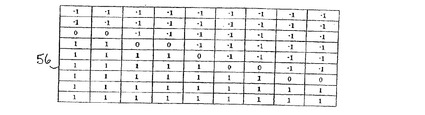
【図5g】
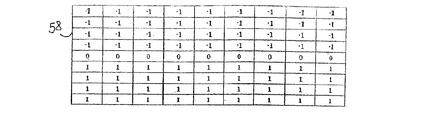
【図5h】
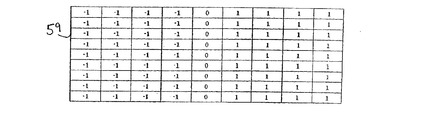
【図6a】
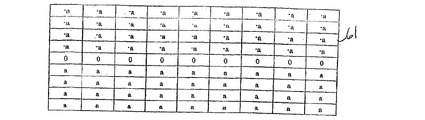
【図6b】
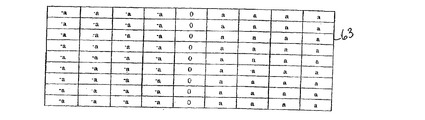
【図7a】
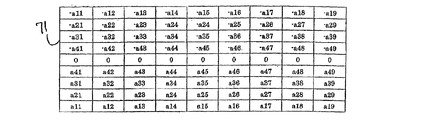
【図7b】
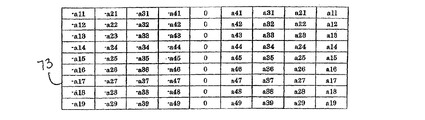
【図8a】
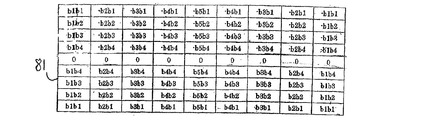
【図8b】
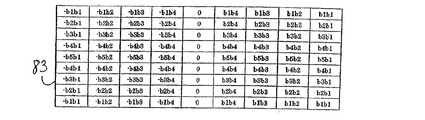
【図9a】
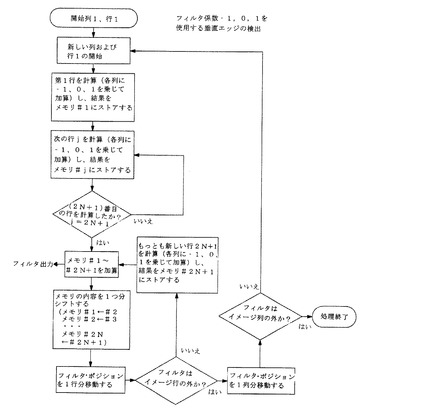
【図9b】
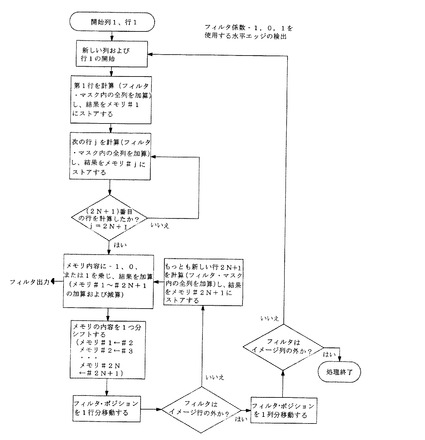
【図10a】
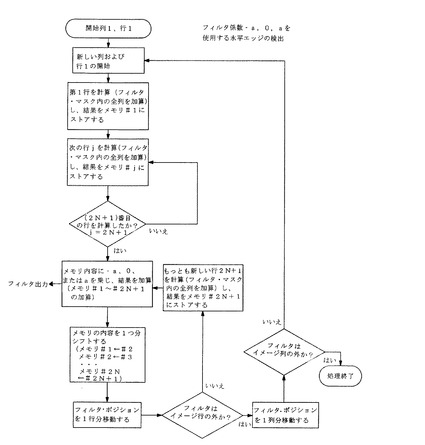
【図10b】
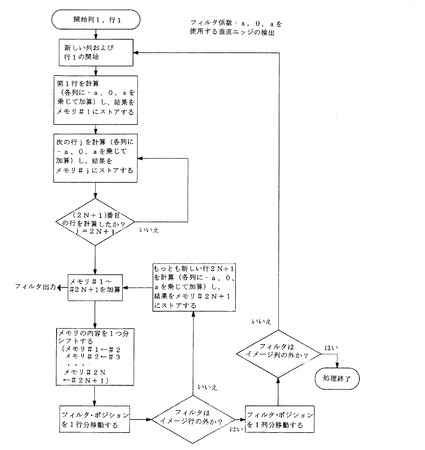
【図11】
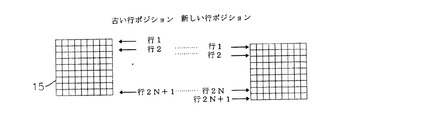
【図12】
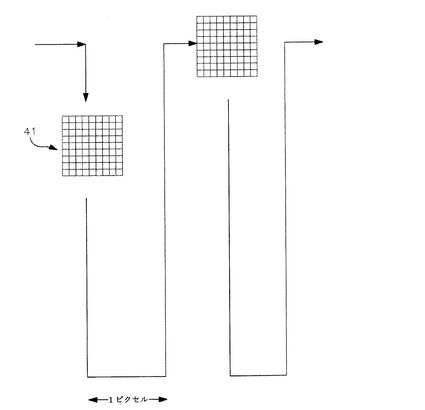
【図13】
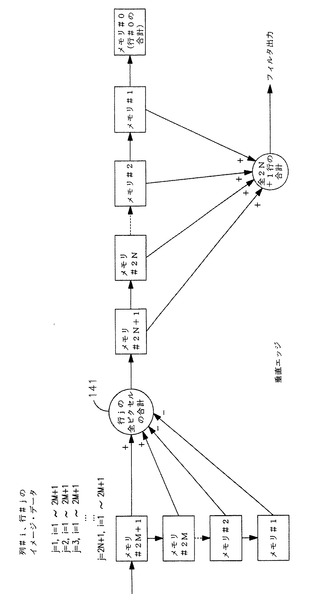
【図14】
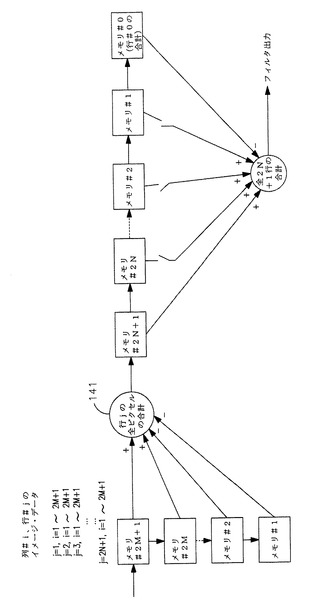
【図15】
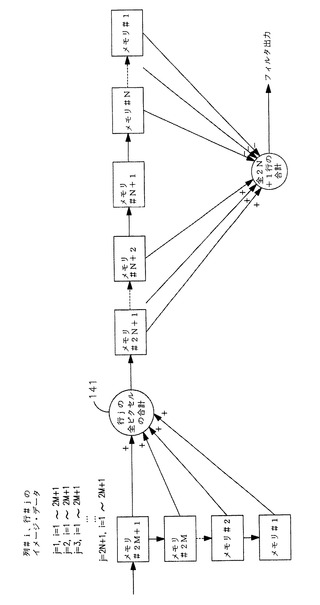
【図16】
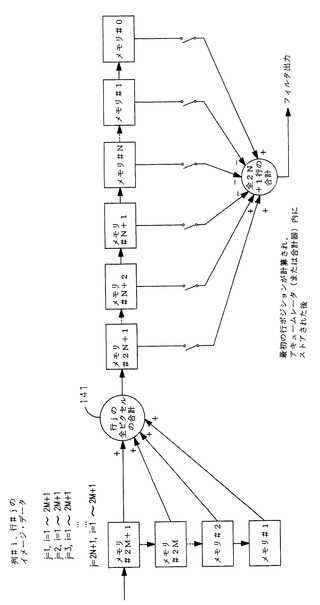
【図17】
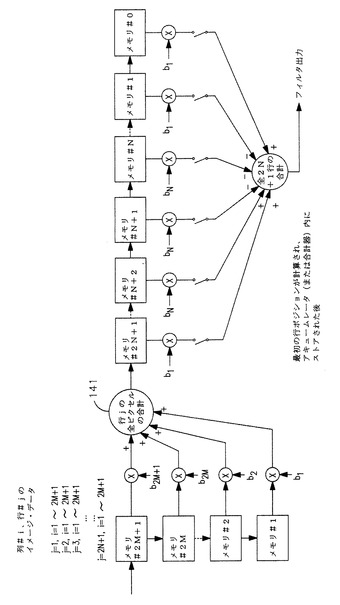
【図18】
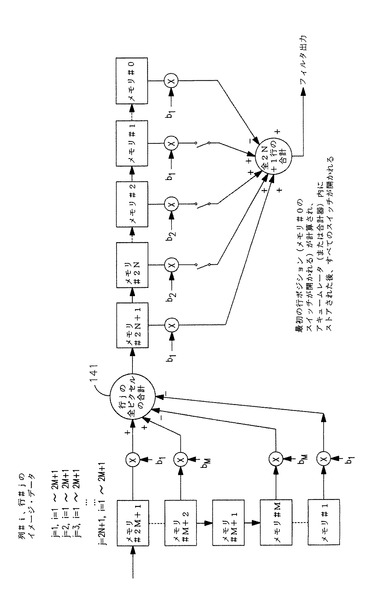
【図19a】
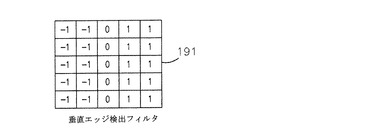
【図19b】
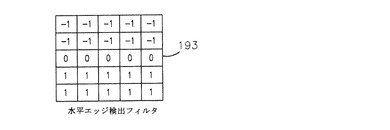
【図19c】
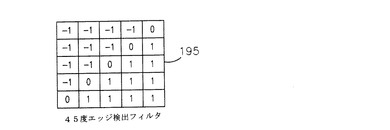
【図19d】
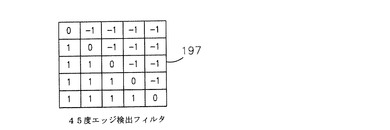
【図20a】
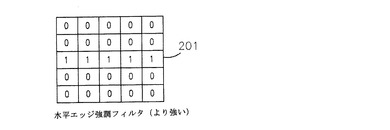
【図20b】
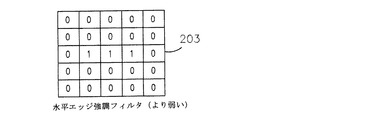
【図21a】
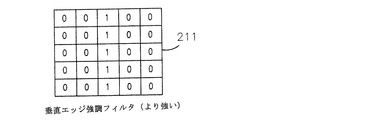
【図21b】
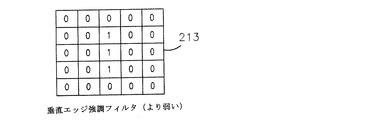
【図22a】
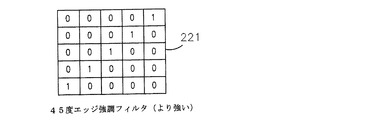
【図22b】
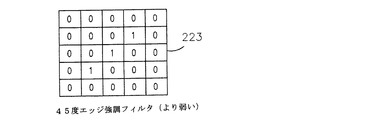
【図23a】
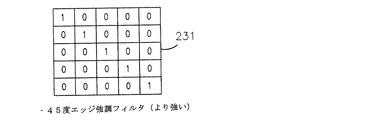
【図23b】
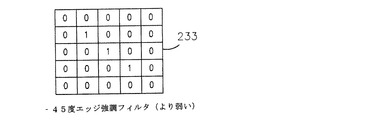
【図24a】
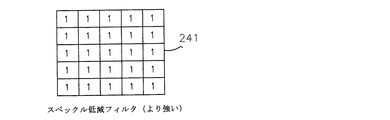
【図24b】
【図25a】
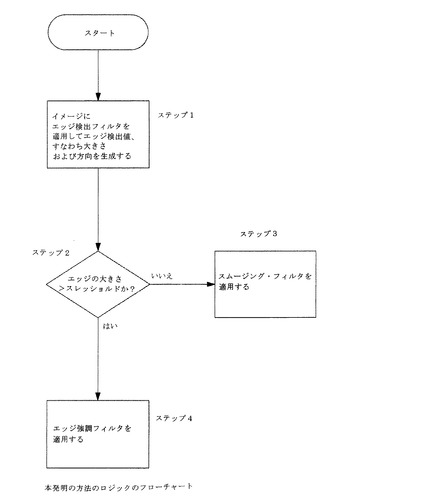
【図25b】
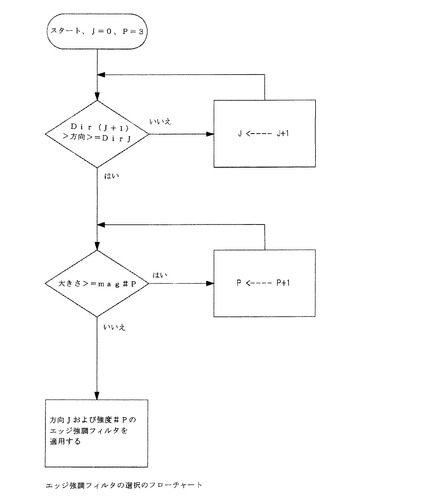
【図25c】
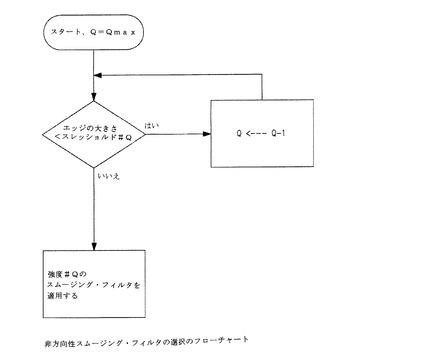
【図26】
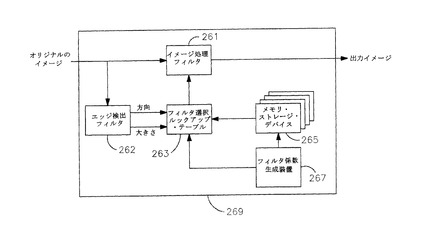
【図27】
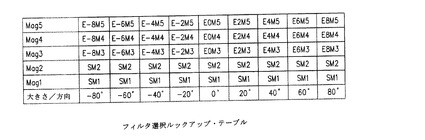
【図1b】
【図1c】
【図2a】
【図2b】
【図2c】
【図3a】
【図3b】
【図3c】
【図3d】
【図3e】
【図4】
【図5a】
【図5b】
【図5c】
【図5d】
【図5e】
【図5f】
【図5g】
【図5h】
【図6a】
【図6b】
【図7a】
【図7b】
【図8a】
【図8b】
【図9a】
【図9b】
【図10a】
【図10b】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19a】
【図19b】
【図19c】
【図19d】
【図20a】
【図20b】
【図21a】
【図21b】
【図22a】
【図22b】
【図23a】
【図23b】
【図24a】
【図24b】
【図25a】
【図25b】
【図25c】
【図26】
【図27】
【公開番号】特開2013−99604(P2013−99604A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2013−31871(P2013−31871)
【出願日】平成25年2月21日(2013.2.21)
【分割の表示】特願2012−22842(P2012−22842)の分割
【原出願日】平成17年6月28日(2005.6.28)
【出願人】(390029791)日立アロカメディカル株式会社 (899)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成25年2月21日(2013.2.21)
【分割の表示】特願2012−22842(P2012−22842)の分割
【原出願日】平成17年6月28日(2005.6.28)
【出願人】(390029791)日立アロカメディカル株式会社 (899)
【Fターム(参考)】
[ Back to top ]