
エッジ位置検出装置

【課題】帯状体の走行を継続させながら省スペースでメンテナンスを行うことができるエッジ位置検出装置を提供する。
【解決手段】帯状体10の一方の面側に、直線偏光を投射する投光器2と偏光フィルタを介して光を受光する受光器4とを配置し、帯状体10の他方の面側に、投光器2から投射される直線偏光が入射され、入射された直線偏光の偏光方向を偏光フィルタの透過軸に一致する方向に変化させて反射する偏光反射板3を配置する。そして、受光器4の各受光素子で得られた受光量が帯状体10の幅方向でする位置を検出し、その位置を帯状体10のエッジ位置として検出する。
【解決手段】帯状体10の一方の面側に、直線偏光を投射する投光器2と偏光フィルタを介して光を受光する受光器4とを配置し、帯状体10の他方の面側に、投光器2から投射される直線偏光が入射され、入射された直線偏光の偏光方向を偏光フィルタの透過軸に一致する方向に変化させて反射する偏光反射板3を配置する。そして、受光器4の各受光素子で得られた受光量が帯状体10の幅方向でする位置を検出し、その位置を帯状体10のエッジ位置として検出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、連続的に走行する帯状体のエッジ位置を検出するエッジ位置検出装置に関する。
【背景技術】
【0002】
帯状体のエッジ位置を検出する方法として、例えば特許文献1に記載の技術がある。この技術は、帯状体のエッジ部に光を投射する投光器と、帯状体のエッジ部を挟んで投光器に対向配置され、当該投光器からの光を受光する受光器とを用い、受光器で受光した受光量に応じて帯状体のエッジ位置を検出するものである。
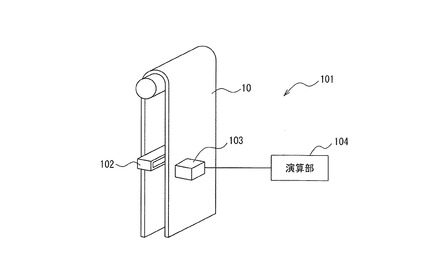
図4は、従来の帯状体のエッジ位置検出装置の概略構成を示す図である。
この図4に示すように、従来のエッジ位置検出装置101は、投光器102と、受光器103と、演算部104とを備える。受光器103は、帯状体10の幅方向(帯状体10の走行方向とほぼ直交する方向)に配列した複数の受光素子を有し、各受光素子の受光量が演算部104に入力される。
【0003】
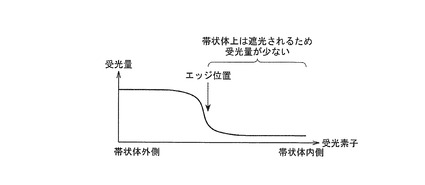
演算部104は、図5に示すように、帯状体10の幅方向での各受光素子から得られた受光量の変化に基づいて、帯状体10のエッジ位置を検出する。例えば、受光器103で得られる受光量の幅方向合計値や、幅方向で受光量が変化する位置から、帯状体10のエッジ位置を求める。すなわち、このエッジ位置検出装置101は、帯状体10により遮光される範囲を求めることで、帯状体10のエッジ位置を検出している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−340781号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記従来のエッジ位置検出装置にあっては、投光器と受光器とを帯状体を挟んで対向配置しているため、帯状体の走行を継続しながら投光器や受光器のメンテナンスを行うためには、帯状体の両側に、投光器や受光器に対するメンテナンススペースをそれぞれ設けなければならない。そのため、エッジ位置検出装置の設置スペースが多く必要となる。
【0006】
ところが、設置制約上、図4に示すような位置に投光器102と受光器103とを配置した場合、一般に受光器103側のメンテナンススペースは確保できるが、投光器102側のメンテナンススペースは確保できない場合が多い。このように、投光器102側のメンテナンススペースが確保できない場合、投光器102の異常発生時には、メンテナンスのためにラインを停止させなければならず、生産性が低下する。
そこで、本発明は、帯状体の走行を継続させながら省スペースでメンテナンスを行うことができるエッジ位置検出装置を提供することを課題としている。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明に係るエッジ位置検出装置は、帯状体のエッジ位置を検出するエッジ位置検出装置であって、前記帯状体の一方の面側に配置し、前記帯状体のエッジ部と当該エッジ部よりも幅方向外側とを含む領域に直線偏光を投射する投光手段と、前記帯状体を挟んで前記投光手段に対向する側に、前記投光手段から投射される直線偏光が入射されるように、一部を前記帯状体のエッジ部よりも幅方向外側に位置して配置し、入射された前記直線偏光の偏光方向を特定方向に変化させて反射する偏光反射板と、前記帯状体の前記一方の面側に配置し、前記特定方向に一致する透過軸を有する偏光フィルタを介して、前記投光手段から投射される直線偏光の反射光を受光する複数の受光素子を有する受光手段と、前記受光手段の各受光素子の受光量に基づいて、前記帯状体のエッジ位置を検出する演算手段と、を備えることを特徴としている。
【0008】
このように、帯状体の一方の面側にメンテナンスが不要な偏光反射板を配置し、他方の面側にメンテナンスが必要となり得る投光手段および受光手段を設けるので、メンテナンススペースを帯状体の片側(投光手段および受光手段側)のみに確保すればよい。したがって、帯状体を挟んで投光器と受光器とを対向配置するエッジ位置検出装置のように、帯状体の両側にメンテナンススペースを確保する必要がなくなり、省スペース化を図ることができる。
【0009】
さらに、設備制約上、帯状体の片側にしかメンテナンススペースを確保できない場合であっても、メンテナンススペースが確保可能な側に投光手段および受光手段を配置することで、帯状体走行中の投光手段および受光手段へのアクセスが可能となる。したがって、投光手段や受光手段に異常が発生した場合には、帯状体の走行を継続させながら投光手段や受光手段のメンテナンスが可能となる。このように、ラインを停止させずに投光手段や受光手段の復旧作業を行うことができるので、生産性の低下を軽減することができる。
【0010】
また、上記において、前記演算手段は、前記帯状体の幅方向に配列された前記各受光素子の受光量が、前記投光手段から投射され前記偏光反射板で反射された反射光を受光した受光素子の受光量を示す最大値から、前記投光手段から投射され前記帯状体で反射された反射光を受光した受光素子の受光量を示す最小値へ変化する位置を検出し、検出した位置を前記帯状体のエッジ位置に対応する位置として検出することを特徴としている。
このように、各受光素子の受光量が帯状体の幅方向で変化することを利用するので、帯状体のエッジ位置を適切に検出することができる。
【0011】
さらに、上記において、前記受光手段は、前記偏光フィルタを介して光を受光するCCDカメラであることを特徴としている。
これにより、投光手段から投射された直線偏光を精度良く受光することができ、帯状体のエッジ位置を適切に検出することができる。
また、上記において、前記受光手段は、前記偏光フィルタを介して光を受光するCMOSカメラであることを特徴としている。
これにより、比較的安価な構成で投光手段から投射された直線偏光を精度良く受光することができ、帯状体のエッジ位置を適切に検出することができる。
【発明の効果】
【0012】
本発明によれば、メンテナンスが必要となり得る部品を帯状体の片側のみに配置するので、メンテナンススペースを帯状体の片側のみに設けるだけでよく、装置の省スペース化が図れる。また、片側にしかメンテナンススペースを確保することができない場合でも、メンテナンススペースを確保可能な側にメンテナンスが必要となり得る部品を配置することで、帯状体走行中にメンテナンスが可能となり、生産性低下を軽減することができる。
【図面の簡単な説明】
【0013】
【図1】本実施形態における帯状体のエッジ位置検出装置の概略構成を示す図である。
【図2】受光器における受光原理を示す図である。
【図3】本実施形態におけるエッジ位置検出方法を説明する図である。
【図4】従来の帯状体のエッジ位置検出装置の概略構成を示す図である。
【図5】従来のエッジ位置検出方法を説明する図である。
【発明を実施するための形態】
【0014】
以下、本発明の実施の形態を図面に基づいて説明する。
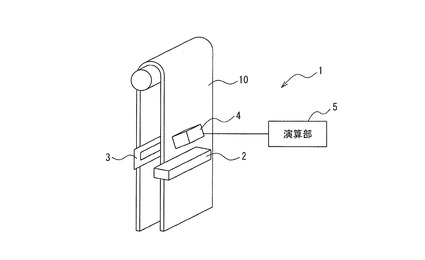
図1は、本実施形態における帯状体のエッジ位置検出装置の概略構成を示す図である。
図中、符号1は、製造ライン上を走行する帯状体(鋼板)10の蛇行制御等を行うために、帯状体10のエッジ位置を検出するエッジ位置検出装置である。このエッジ位置検出装置1は、投光器(投光手段)2と、偏光反射板3と、受光器(受光手段)4と、演算部(演算手段)5とを備える。
【0015】
投光器2は、走行する帯状体10の一方の側(ここでは表面側)に配置され、帯状体10の表面に向けて所定角度をもつ直線偏光を投射する。このとき、帯状体10のエッジ部および帯状体10のエッジ部よりも外側を含む領域を、直線偏光の投射領域とする。
偏光反射板3は、帯状体10を挟んで投光器2に対向配置する。このとき、投光器2から投射される直線偏光が入射されるように、偏光反射板3の一部を帯状体10のエッジ部よりも幅方向外側に位置して配置する。この偏光反射板3は、入射光の偏光方向を特定方向に変化させて反射するものである。ここで、上記特定方向は、入射光の偏光方向とは90°異なる方向であることが好ましい。
【0016】
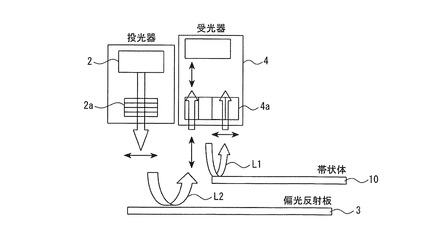
すなわち、図2に示すように、投光器2から直線偏光子2aを通過して投射された直線偏光のうち、投射領域の幅方向内側に投射された直線偏光は、帯状体10の表面で反射され、残りの投射領域の幅方向外側に投射された直線偏光は、偏光反射板3で反射される。このとき、帯状体10の表面で反射された光L1の偏光方向は、投光器2から投射された光の偏光方向と等しい。一方、偏光反射板3で反射された光L2の偏光方向は、投光器2から投射された光の偏光方向とは90°異なる。
【0017】
また、受光器4は、図1に示すように、走行する帯状体10に対して投光器2と同一側に配置する。この受光器4は、偏光フィルタ付きCCDカメラであって、帯状体10の幅方向に一致するように配列された複数の受光素子(CCD)と、複数の受光素子の前に配置された偏光フィルタ(図2の符号4a)とを備える。当該偏光フィルタ4aは、入射された光のうち、投光器2から投射され偏光反射板3で反射された光の偏光方向と同じ角度成分の光のみを透過する透過軸を有する。受光器4で受光した光の受光量は、演算部4に入力される。
【0018】
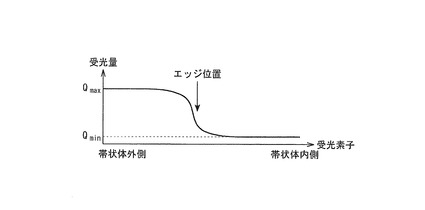
演算部5は、例えば製造ラインから離れた制御室等に設置されており、受光器4の各受光素子で得られた受光量に基づいて、帯状体10の幅方向のエッジ位置を検出する。以下、帯状体10のエッジ位置検出方法について、図3を参照しながら説明する。
図3は、帯状体10の幅方向に配列された各受光素子の受光量の変化を示している。帯状体10の幅方向外側の領域では、受光器4に、投光器2から投射され偏光反射板3で反射された光が入射される。この光は受光器4の偏光フィルタ4aを通過するため、この領域に配置された受光素子から得られる受光量は、最大値Qmaxとなる。一方、帯状体10の幅方向内側の領域では、受光器4に、投光器2から投射され帯状体10で反射された光が入射されるが、この光は受光器4の偏光フィルタ4aを通過できないため、この領域に配置された受光素子から得られる受光量は、最小値Qminとなる。
【0019】
演算部4は、各受光素子の受光量が、帯状体10の幅方向で、最大値Qmaxから最小値Qminへ向けて低下する位置を検出し、検出した位置を帯状体10のエッジ位置に対応する位置として検出する。
例えば、各受光素子のうち、受光量が最大値Qmaxと最小値Qminとの間の所定値となる受光素子を検出し、検出した受光素子の位置を帯状体10のエッジ位置に対応する位置とする。ここで、上記所定値は、最大値Qmaxと最小値Qminとの中間値(Qmax−Qmin)/2+Qminとしてもよいし、最大値Qmaxと最小値Qminとの間の任意の値としてもよい。
【0020】
また、ここでは受光量が帯状体10の幅方向で変化する位置から帯状体10のエッジ位置を検出する場合について説明したが、これに限定されるものではなく、受光量の幅方向合計値から帯状体10のエッジ位置を検出するようにしてもよい。
このように、エッジ位置検出装置1は、帯状体10に対して同一側に、直線偏光を投射する投光器2と、投光器2から投射される直線偏光の偏光方向とは異なる方向の透過軸を有する偏光フィルタ4aを備えた受光器4とを配置し、帯状体10を挟んで投光器2の対向側に、投光器2から投射される直線偏光の偏向方向を、受光器4の偏光フィルタ4aの透過軸に一致する方向に変化させる偏光反射板3を配置する。そして、受光器4の各受光素子から得られる受光量が、帯状体10の幅方向で低下する位置を捉え、その位置を帯状体10のエッジ位置として検出する。したがって、帯状体10のエッジ位置を適切に検出することができる。
【0021】
このとき、投光器2から投射され偏光反射板3で反射された光の透過強度が最大となり、投光器2から投射され帯状体10で反射された光の透過強度が最小となるように、偏光反射板3で反射された光の偏光方向、及び受光器4の偏光フィルタ4aの透過軸を設定する。これにより、受光量の最大値Qmaxと最小値Qminとの差を大きくとることができ、帯状体10の幅方向で受光量低下する位置、即ち帯状体10のエッジ位置を精度良く検出することができる。
【0022】
ところで、帯状体10のエッジ位置を検出するエッジ位置検出装置として、図4に示すように、投光器102と受光器103とを走行する帯状体10のエッジ部を挟んで対向配置し、受光器103で得られる受光量の帯状体10の幅方向での変化に基づいて帯状体10のエッジ位置を検出するエッジ位置検出装置101が広く用いられている。しかしながら、このようなエッジ位置検出装置101では、メンテナンスが必要となり得る投光器102と受光器103とが、帯状体10を挟んで対向配置されているため、メンテナンススペースを帯状体10の両側に設ける必要がある。
【0023】
これに対して、本実施形態では、製造ライン内に設置したエッジ位置検出装置1の部品のうち、メンテナンスが必要となり得る投光器2及び受光器4は帯状体10の片側のみに配置されるため、メンテナンススペースは帯状体10の片側のみに設ければよい。このように、従来、帯状体10に対向する両側に確保していたメンテナンススペースを、片側のみに確保するだけでよいため、省スペース化が図れる。
【0024】
また、図4に示すように、鉛直上昇した帯状体10が進行方向を反転させて下降するような位置でエッジ位置検出を行う場合、帯状体10の表面側にはメンテナンススペースを確保できるが、帯状体10の裏面側にメンテナンススペースを確保することはできない。すなわち、図4に示すエッジ位置検出装置101にあっては、投光器102側にメンテナンススペースを確保することができない。
【0025】
したがって、この場合、投光器102に異常が発生すると、製造ラインを停止して投光器102のメンテナンスを行うか、エッジ位置検出装置101を不使用状態で操業しなければならない。ところが、製造ラインを停止してメンテナンスを行うと、生産性が大幅に低下してしまう。また、エッジ位置検出装置101を不使用状態で操業する場合、帯状体10の速度低下が必要であるなどの操業制約が発生する期間が長期に亘って発生してしまうため、やはり生産性が低下する。さらに、エッジ位置検出装置101が機能しないため、帯状体10の蛇行制御等を停止しなければならない。
【0026】
これに対して、本実施形態におけるエッジ位置検出装置1は、メンテナンスが必要となり得る部品(投光器2及び受光器4)を帯状体10の片側のみに配置する構成である。そのため、メンテナンススペースを帯状体10の片側のみにしか確保できない場合でも、メンテナンススペースを確保可能な帯状体10の表面側に投光器2及び受光器4を配置することで、帯状体10の走行中でも投光器2及び受光器4にアクセス可能となる。
【0027】
したがって、投光器2や受光器4に異常が発生した場合には、ラインを停止させることなく投光器2や受光器4のメンテナンスを行うことができる。その結果、生産性の低下を軽減することができる。また、エッジ位置検出装置1を不使用とする期間を、投光器2や受光器4に異常が発生してから復旧作業が完了するまでの短期間とすることができ、図4に示すエッジ位置検出装置101と比較して、上記操業制約が発生する期間の削減が図れる。
なお、上記実施形態においては、受光器4としてCCDカメラを適用する場合について説明したが、これに限定されるものではなく、例えば受光素子としてフォトダイオード等の光電変換素子を用いた受光器を適用することもできる。さらに、受光器4としてCMOSカメラを適用しても同様の効果が得られる。
【符号の説明】
【0028】
1…エッジ位置検出装置、2…投光器(投光手段)、2a…直線偏光子、3…偏光反射板、4…受光器(受光手段)、4a…偏光フィルタ、5…演算部(演算手段)、10…帯状体
【技術分野】
【0001】
本発明は、連続的に走行する帯状体のエッジ位置を検出するエッジ位置検出装置に関する。
【背景技術】
【0002】
帯状体のエッジ位置を検出する方法として、例えば特許文献1に記載の技術がある。この技術は、帯状体のエッジ部に光を投射する投光器と、帯状体のエッジ部を挟んで投光器に対向配置され、当該投光器からの光を受光する受光器とを用い、受光器で受光した受光量に応じて帯状体のエッジ位置を検出するものである。
図4は、従来の帯状体のエッジ位置検出装置の概略構成を示す図である。
この図4に示すように、従来のエッジ位置検出装置101は、投光器102と、受光器103と、演算部104とを備える。受光器103は、帯状体10の幅方向(帯状体10の走行方向とほぼ直交する方向)に配列した複数の受光素子を有し、各受光素子の受光量が演算部104に入力される。
【0003】
演算部104は、図5に示すように、帯状体10の幅方向での各受光素子から得られた受光量の変化に基づいて、帯状体10のエッジ位置を検出する。例えば、受光器103で得られる受光量の幅方向合計値や、幅方向で受光量が変化する位置から、帯状体10のエッジ位置を求める。すなわち、このエッジ位置検出装置101は、帯状体10により遮光される範囲を求めることで、帯状体10のエッジ位置を検出している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−340781号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記従来のエッジ位置検出装置にあっては、投光器と受光器とを帯状体を挟んで対向配置しているため、帯状体の走行を継続しながら投光器や受光器のメンテナンスを行うためには、帯状体の両側に、投光器や受光器に対するメンテナンススペースをそれぞれ設けなければならない。そのため、エッジ位置検出装置の設置スペースが多く必要となる。
【0006】
ところが、設置制約上、図4に示すような位置に投光器102と受光器103とを配置した場合、一般に受光器103側のメンテナンススペースは確保できるが、投光器102側のメンテナンススペースは確保できない場合が多い。このように、投光器102側のメンテナンススペースが確保できない場合、投光器102の異常発生時には、メンテナンスのためにラインを停止させなければならず、生産性が低下する。
そこで、本発明は、帯状体の走行を継続させながら省スペースでメンテナンスを行うことができるエッジ位置検出装置を提供することを課題としている。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明に係るエッジ位置検出装置は、帯状体のエッジ位置を検出するエッジ位置検出装置であって、前記帯状体の一方の面側に配置し、前記帯状体のエッジ部と当該エッジ部よりも幅方向外側とを含む領域に直線偏光を投射する投光手段と、前記帯状体を挟んで前記投光手段に対向する側に、前記投光手段から投射される直線偏光が入射されるように、一部を前記帯状体のエッジ部よりも幅方向外側に位置して配置し、入射された前記直線偏光の偏光方向を特定方向に変化させて反射する偏光反射板と、前記帯状体の前記一方の面側に配置し、前記特定方向に一致する透過軸を有する偏光フィルタを介して、前記投光手段から投射される直線偏光の反射光を受光する複数の受光素子を有する受光手段と、前記受光手段の各受光素子の受光量に基づいて、前記帯状体のエッジ位置を検出する演算手段と、を備えることを特徴としている。
【0008】
このように、帯状体の一方の面側にメンテナンスが不要な偏光反射板を配置し、他方の面側にメンテナンスが必要となり得る投光手段および受光手段を設けるので、メンテナンススペースを帯状体の片側(投光手段および受光手段側)のみに確保すればよい。したがって、帯状体を挟んで投光器と受光器とを対向配置するエッジ位置検出装置のように、帯状体の両側にメンテナンススペースを確保する必要がなくなり、省スペース化を図ることができる。
【0009】
さらに、設備制約上、帯状体の片側にしかメンテナンススペースを確保できない場合であっても、メンテナンススペースが確保可能な側に投光手段および受光手段を配置することで、帯状体走行中の投光手段および受光手段へのアクセスが可能となる。したがって、投光手段や受光手段に異常が発生した場合には、帯状体の走行を継続させながら投光手段や受光手段のメンテナンスが可能となる。このように、ラインを停止させずに投光手段や受光手段の復旧作業を行うことができるので、生産性の低下を軽減することができる。
【0010】
また、上記において、前記演算手段は、前記帯状体の幅方向に配列された前記各受光素子の受光量が、前記投光手段から投射され前記偏光反射板で反射された反射光を受光した受光素子の受光量を示す最大値から、前記投光手段から投射され前記帯状体で反射された反射光を受光した受光素子の受光量を示す最小値へ変化する位置を検出し、検出した位置を前記帯状体のエッジ位置に対応する位置として検出することを特徴としている。
このように、各受光素子の受光量が帯状体の幅方向で変化することを利用するので、帯状体のエッジ位置を適切に検出することができる。
【0011】
さらに、上記において、前記受光手段は、前記偏光フィルタを介して光を受光するCCDカメラであることを特徴としている。
これにより、投光手段から投射された直線偏光を精度良く受光することができ、帯状体のエッジ位置を適切に検出することができる。
また、上記において、前記受光手段は、前記偏光フィルタを介して光を受光するCMOSカメラであることを特徴としている。
これにより、比較的安価な構成で投光手段から投射された直線偏光を精度良く受光することができ、帯状体のエッジ位置を適切に検出することができる。
【発明の効果】
【0012】
本発明によれば、メンテナンスが必要となり得る部品を帯状体の片側のみに配置するので、メンテナンススペースを帯状体の片側のみに設けるだけでよく、装置の省スペース化が図れる。また、片側にしかメンテナンススペースを確保することができない場合でも、メンテナンススペースを確保可能な側にメンテナンスが必要となり得る部品を配置することで、帯状体走行中にメンテナンスが可能となり、生産性低下を軽減することができる。
【図面の簡単な説明】
【0013】
【図1】本実施形態における帯状体のエッジ位置検出装置の概略構成を示す図である。
【図2】受光器における受光原理を示す図である。
【図3】本実施形態におけるエッジ位置検出方法を説明する図である。
【図4】従来の帯状体のエッジ位置検出装置の概略構成を示す図である。
【図5】従来のエッジ位置検出方法を説明する図である。
【発明を実施するための形態】
【0014】
以下、本発明の実施の形態を図面に基づいて説明する。
図1は、本実施形態における帯状体のエッジ位置検出装置の概略構成を示す図である。
図中、符号1は、製造ライン上を走行する帯状体(鋼板)10の蛇行制御等を行うために、帯状体10のエッジ位置を検出するエッジ位置検出装置である。このエッジ位置検出装置1は、投光器(投光手段)2と、偏光反射板3と、受光器(受光手段)4と、演算部(演算手段)5とを備える。
【0015】
投光器2は、走行する帯状体10の一方の側(ここでは表面側)に配置され、帯状体10の表面に向けて所定角度をもつ直線偏光を投射する。このとき、帯状体10のエッジ部および帯状体10のエッジ部よりも外側を含む領域を、直線偏光の投射領域とする。
偏光反射板3は、帯状体10を挟んで投光器2に対向配置する。このとき、投光器2から投射される直線偏光が入射されるように、偏光反射板3の一部を帯状体10のエッジ部よりも幅方向外側に位置して配置する。この偏光反射板3は、入射光の偏光方向を特定方向に変化させて反射するものである。ここで、上記特定方向は、入射光の偏光方向とは90°異なる方向であることが好ましい。
【0016】
すなわち、図2に示すように、投光器2から直線偏光子2aを通過して投射された直線偏光のうち、投射領域の幅方向内側に投射された直線偏光は、帯状体10の表面で反射され、残りの投射領域の幅方向外側に投射された直線偏光は、偏光反射板3で反射される。このとき、帯状体10の表面で反射された光L1の偏光方向は、投光器2から投射された光の偏光方向と等しい。一方、偏光反射板3で反射された光L2の偏光方向は、投光器2から投射された光の偏光方向とは90°異なる。
【0017】
また、受光器4は、図1に示すように、走行する帯状体10に対して投光器2と同一側に配置する。この受光器4は、偏光フィルタ付きCCDカメラであって、帯状体10の幅方向に一致するように配列された複数の受光素子(CCD)と、複数の受光素子の前に配置された偏光フィルタ(図2の符号4a)とを備える。当該偏光フィルタ4aは、入射された光のうち、投光器2から投射され偏光反射板3で反射された光の偏光方向と同じ角度成分の光のみを透過する透過軸を有する。受光器4で受光した光の受光量は、演算部4に入力される。
【0018】
演算部5は、例えば製造ラインから離れた制御室等に設置されており、受光器4の各受光素子で得られた受光量に基づいて、帯状体10の幅方向のエッジ位置を検出する。以下、帯状体10のエッジ位置検出方法について、図3を参照しながら説明する。
図3は、帯状体10の幅方向に配列された各受光素子の受光量の変化を示している。帯状体10の幅方向外側の領域では、受光器4に、投光器2から投射され偏光反射板3で反射された光が入射される。この光は受光器4の偏光フィルタ4aを通過するため、この領域に配置された受光素子から得られる受光量は、最大値Qmaxとなる。一方、帯状体10の幅方向内側の領域では、受光器4に、投光器2から投射され帯状体10で反射された光が入射されるが、この光は受光器4の偏光フィルタ4aを通過できないため、この領域に配置された受光素子から得られる受光量は、最小値Qminとなる。
【0019】
演算部4は、各受光素子の受光量が、帯状体10の幅方向で、最大値Qmaxから最小値Qminへ向けて低下する位置を検出し、検出した位置を帯状体10のエッジ位置に対応する位置として検出する。
例えば、各受光素子のうち、受光量が最大値Qmaxと最小値Qminとの間の所定値となる受光素子を検出し、検出した受光素子の位置を帯状体10のエッジ位置に対応する位置とする。ここで、上記所定値は、最大値Qmaxと最小値Qminとの中間値(Qmax−Qmin)/2+Qminとしてもよいし、最大値Qmaxと最小値Qminとの間の任意の値としてもよい。
【0020】
また、ここでは受光量が帯状体10の幅方向で変化する位置から帯状体10のエッジ位置を検出する場合について説明したが、これに限定されるものではなく、受光量の幅方向合計値から帯状体10のエッジ位置を検出するようにしてもよい。
このように、エッジ位置検出装置1は、帯状体10に対して同一側に、直線偏光を投射する投光器2と、投光器2から投射される直線偏光の偏光方向とは異なる方向の透過軸を有する偏光フィルタ4aを備えた受光器4とを配置し、帯状体10を挟んで投光器2の対向側に、投光器2から投射される直線偏光の偏向方向を、受光器4の偏光フィルタ4aの透過軸に一致する方向に変化させる偏光反射板3を配置する。そして、受光器4の各受光素子から得られる受光量が、帯状体10の幅方向で低下する位置を捉え、その位置を帯状体10のエッジ位置として検出する。したがって、帯状体10のエッジ位置を適切に検出することができる。
【0021】
このとき、投光器2から投射され偏光反射板3で反射された光の透過強度が最大となり、投光器2から投射され帯状体10で反射された光の透過強度が最小となるように、偏光反射板3で反射された光の偏光方向、及び受光器4の偏光フィルタ4aの透過軸を設定する。これにより、受光量の最大値Qmaxと最小値Qminとの差を大きくとることができ、帯状体10の幅方向で受光量低下する位置、即ち帯状体10のエッジ位置を精度良く検出することができる。
【0022】
ところで、帯状体10のエッジ位置を検出するエッジ位置検出装置として、図4に示すように、投光器102と受光器103とを走行する帯状体10のエッジ部を挟んで対向配置し、受光器103で得られる受光量の帯状体10の幅方向での変化に基づいて帯状体10のエッジ位置を検出するエッジ位置検出装置101が広く用いられている。しかしながら、このようなエッジ位置検出装置101では、メンテナンスが必要となり得る投光器102と受光器103とが、帯状体10を挟んで対向配置されているため、メンテナンススペースを帯状体10の両側に設ける必要がある。
【0023】
これに対して、本実施形態では、製造ライン内に設置したエッジ位置検出装置1の部品のうち、メンテナンスが必要となり得る投光器2及び受光器4は帯状体10の片側のみに配置されるため、メンテナンススペースは帯状体10の片側のみに設ければよい。このように、従来、帯状体10に対向する両側に確保していたメンテナンススペースを、片側のみに確保するだけでよいため、省スペース化が図れる。
【0024】
また、図4に示すように、鉛直上昇した帯状体10が進行方向を反転させて下降するような位置でエッジ位置検出を行う場合、帯状体10の表面側にはメンテナンススペースを確保できるが、帯状体10の裏面側にメンテナンススペースを確保することはできない。すなわち、図4に示すエッジ位置検出装置101にあっては、投光器102側にメンテナンススペースを確保することができない。
【0025】
したがって、この場合、投光器102に異常が発生すると、製造ラインを停止して投光器102のメンテナンスを行うか、エッジ位置検出装置101を不使用状態で操業しなければならない。ところが、製造ラインを停止してメンテナンスを行うと、生産性が大幅に低下してしまう。また、エッジ位置検出装置101を不使用状態で操業する場合、帯状体10の速度低下が必要であるなどの操業制約が発生する期間が長期に亘って発生してしまうため、やはり生産性が低下する。さらに、エッジ位置検出装置101が機能しないため、帯状体10の蛇行制御等を停止しなければならない。
【0026】
これに対して、本実施形態におけるエッジ位置検出装置1は、メンテナンスが必要となり得る部品(投光器2及び受光器4)を帯状体10の片側のみに配置する構成である。そのため、メンテナンススペースを帯状体10の片側のみにしか確保できない場合でも、メンテナンススペースを確保可能な帯状体10の表面側に投光器2及び受光器4を配置することで、帯状体10の走行中でも投光器2及び受光器4にアクセス可能となる。
【0027】
したがって、投光器2や受光器4に異常が発生した場合には、ラインを停止させることなく投光器2や受光器4のメンテナンスを行うことができる。その結果、生産性の低下を軽減することができる。また、エッジ位置検出装置1を不使用とする期間を、投光器2や受光器4に異常が発生してから復旧作業が完了するまでの短期間とすることができ、図4に示すエッジ位置検出装置101と比較して、上記操業制約が発生する期間の削減が図れる。
なお、上記実施形態においては、受光器4としてCCDカメラを適用する場合について説明したが、これに限定されるものではなく、例えば受光素子としてフォトダイオード等の光電変換素子を用いた受光器を適用することもできる。さらに、受光器4としてCMOSカメラを適用しても同様の効果が得られる。
【符号の説明】
【0028】
1…エッジ位置検出装置、2…投光器(投光手段)、2a…直線偏光子、3…偏光反射板、4…受光器(受光手段)、4a…偏光フィルタ、5…演算部(演算手段)、10…帯状体
【特許請求の範囲】
【請求項1】
帯状体のエッジ位置を検出するエッジ位置検出装置であって、
前記帯状体の一方の面側に配置し、前記帯状体のエッジ部と当該エッジ部よりも幅方向外側とを含む領域に直線偏光を投射する投光手段と、
前記帯状体を挟んで前記投光手段に対向する側に、前記投光手段から投射される直線偏光が入射されるように、一部を前記帯状体のエッジ部よりも幅方向外側に位置して配置し、入射された前記直線偏光の偏光方向を特定方向に変化させて反射する偏光反射板と、
前記帯状体の前記一方の面側に配置し、前記特定方向に一致する透過軸を有する偏光フィルタを介して、前記投光手段から投射される直線偏光の反射光を受光する複数の受光素子を有する受光手段と、
前記受光手段の各受光素子の受光量に基づいて、前記帯状体のエッジ位置を検出する演算手段と、を備えることを特徴とするエッジ位置検出装置。
【請求項2】
前記演算手段は、前記帯状体の幅方向に配列された前記各受光素子の受光量が、前記投光手段から投射され前記偏光反射板で反射された反射光を受光した受光素子の受光量を示す最大値から、前記投光手段から投射され前記帯状体で反射された反射光を受光した受光素子の受光量を示す最小値へ変化する位置を検出し、検出した位置を前記帯状体のエッジ位置に対応する位置として検出することを特徴とする請求項1に記載のエッジ位置検出装置。
【請求項3】
前記受光手段は、前記偏光フィルタを介して光を受光するCCDカメラであることを特徴とする請求項1又は2に記載のエッジ位置検出装置。
【請求項4】
前記受光手段は、前記偏光フィルタを介して光を受光するCMOSカメラであることを特徴とする請求項1又は2に記載のエッジ位置検出装置。
【請求項1】
帯状体のエッジ位置を検出するエッジ位置検出装置であって、
前記帯状体の一方の面側に配置し、前記帯状体のエッジ部と当該エッジ部よりも幅方向外側とを含む領域に直線偏光を投射する投光手段と、
前記帯状体を挟んで前記投光手段に対向する側に、前記投光手段から投射される直線偏光が入射されるように、一部を前記帯状体のエッジ部よりも幅方向外側に位置して配置し、入射された前記直線偏光の偏光方向を特定方向に変化させて反射する偏光反射板と、
前記帯状体の前記一方の面側に配置し、前記特定方向に一致する透過軸を有する偏光フィルタを介して、前記投光手段から投射される直線偏光の反射光を受光する複数の受光素子を有する受光手段と、
前記受光手段の各受光素子の受光量に基づいて、前記帯状体のエッジ位置を検出する演算手段と、を備えることを特徴とするエッジ位置検出装置。
【請求項2】
前記演算手段は、前記帯状体の幅方向に配列された前記各受光素子の受光量が、前記投光手段から投射され前記偏光反射板で反射された反射光を受光した受光素子の受光量を示す最大値から、前記投光手段から投射され前記帯状体で反射された反射光を受光した受光素子の受光量を示す最小値へ変化する位置を検出し、検出した位置を前記帯状体のエッジ位置に対応する位置として検出することを特徴とする請求項1に記載のエッジ位置検出装置。
【請求項3】
前記受光手段は、前記偏光フィルタを介して光を受光するCCDカメラであることを特徴とする請求項1又は2に記載のエッジ位置検出装置。
【請求項4】
前記受光手段は、前記偏光フィルタを介して光を受光するCMOSカメラであることを特徴とする請求項1又は2に記載のエッジ位置検出装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−88354(P2013−88354A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−230952(P2011−230952)
【出願日】平成23年10月20日(2011.10.20)
【出願人】(000001258)JFEスチール株式会社 (8,589)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月20日(2011.10.20)
【出願人】(000001258)JFEスチール株式会社 (8,589)
【Fターム(参考)】
[ Back to top ]