
エネルギーベースの脈管封鎖向上のための脈管壁の破壊
【課題】外科手術処置に対して組織を封鎖するかまたは溶解するために用いられる電気外科器具を提供すること。
【解決手段】組織を封鎖するために器具と共に用いるエンドエフェクタアセンブリであって、エンドエフェクタアセンブリは、一対の向かい合うジョー部材であって、それらの間に組織を把持するように構成され、少なくとも1つのジョー部材は、封鎖プロセス中、ジョー部材間に配置された組織を封鎖するために電気外科エネルギーの供給源に接続するように適合される、一対の向かい合うジョー部材と、アクチベータであって、少なくとも1つのジョー部材に連結され、封鎖プロセス中、少なくとも1つのジョー部材に機械的摂動を選択可能に与えるように構成される、アクチベータとを備えている、エンドエフェクタアセンブリ。
【解決手段】組織を封鎖するために器具と共に用いるエンドエフェクタアセンブリであって、エンドエフェクタアセンブリは、一対の向かい合うジョー部材であって、それらの間に組織を把持するように構成され、少なくとも1つのジョー部材は、封鎖プロセス中、ジョー部材間に配置された組織を封鎖するために電気外科エネルギーの供給源に接続するように適合される、一対の向かい合うジョー部材と、アクチベータであって、少なくとも1つのジョー部材に連結され、封鎖プロセス中、少なくとも1つのジョー部材に機械的摂動を選択可能に与えるように構成される、アクチベータとを備えている、エンドエフェクタアセンブリ。
【発明の詳細な説明】
【技術分野】
【0001】
(背景)
(1.技術分野)
本開示は、開放および内視鏡の外科手術処置に対して組織を封鎖するかまたは溶解するために用いられる電気外科器具に関する。より詳細には、本開示は、電気外科処置中、脈管壁を破壊しコラーゲンおよびエラスチンの抽出を容易にするために機械的振動および/または音響振動を加えることによって、脈管、脈管組織および軟組織を封鎖する双極鉗子に関する。
【背景技術】
【0002】
(2.関連技術の背景)
開放または内視鏡の外科手術鉗子は、止血を達成するために機械的クランプ締め動作および電気的エネルギーの両方を利用する。各向かい合うジョー部材の電極は、ジョー部材が組織を把持したとき、電気エネルギーが組織を通って選択可能に転送され得るように、異なる電位に帯電させられる。外科医は、電極と通過組織との間に加えられる電気外科エネルギーの強度、周波数および継続時間を制御することによって、出血を焼灼し、凝固/乾燥させ、かつ/または単に減少させるかもしくは遅くし得る。
【0003】
特定の外科手術処置は、単に組織を焼灼すること以上のことを必要とし、組織、脈管および特定の脈管束を「封鎖する」ために、クランプ締め圧力、電気外科エネルギーおよび間隙距離の組み合わせに頼る。より詳細には、脈管封鎖または組織封鎖は、2つの向かい合うジョー部材または封鎖プレート間の組織を効果的に封鎖するかまたは溶解するために、無線周波数(RF)エネルギー、クランプ締め圧力および間隙距離(すなわち、組織の周りに閉じられた場合、向かい合うジョー部材間の距離)の正確な制御の固有の組み合わせを利用する。脈管または組織の封鎖は、「焼灼」以上であり、「焼灼」は、組織を破壊するために熱を用いること(「ジアテルミー」または「電気ジアテルミー」とも呼ばれる)を伴う。脈管封鎖もまた、「凝固」以上であり、「凝固」は、組織を乾燥させるプロセスであり、この場合、組織細胞は、破裂させられ乾燥させられる。「脈管封鎖」は、組織が、向かい合う組織構造間に有意に減少させられた境界を有する溶解した質量に改質するように、組織におけるコラーゲン、エラスチンおよび基質を液化するプロセスとして定義される。
【0004】
エネルギーベースの脈管封鎖は、いくつのステップからなる。脈管封鎖処置中、向かい合う脈管壁は近づくように一緒に動かされる。次いで、通常、脈管壁の接着を防ぐ脈管壁の内層が破壊される。エラスチンおよびコラーゲンは、脈管を封鎖するために、解放され、混合され、エネルギーに露出される。脈管壁を一緒に動かし、脈管壁の内層を破壊し、コラーゲンを解放し混合することは、ジョー間の脈管を加圧することによって従来から達成されている。脈管壁の内層の破壊は、有意の量の力の印加を必要とする。脈管が組織の比較的厚い層内に位置をしている場合、有意の量の力は、封鎖が完了する前に上部組織層を損傷し得るかまたは切断さえし得る。
【発明の概要】
【課題を解決するための手段】
【0005】
(概要)
本開示の一実施形態において、エンドエフェクタアセンブリが提供される。エンドエフェクタアセンブリは、一対の向かい合うジョー部材であって、それらの間に組織を把持するように構成される、ジョー部材を含み、少なくとも1つのジョー部材は、封鎖プロセス中、ジョー部材間に配置された組織を効果的に封鎖するために電気外科エネルギーの供給源に接続するように適合される。ジョー部材のうちの少なくとも1つは、封鎖プロセス中、少なくとも1つのジョー部材に機械的摂動を選択可能に与えるように構成されるアクチベータを含む。
【0006】
本開示の別の実施形態において、組織を封鎖する電気外科器具が提供される。電気外科器具は、少なくとも1つのシャフトであって、少なくとも1つのシャフトは、シャフトの遠位端においてエンドエフェクタアセンブリを支持し、エンドエフェクタアセンブリは、一対の向かい合うジョー部材を含み、ジョー部材のうちの少なくとも1つは、それらの間に組織を把持するために他方に対して可動であり、ジョー部材のうちの少なくとも1つは、封鎖プロセス中、ジョー部材間に配置される組織を効果的に封鎖するために電気外科エネルギーの供給源に接続するように適合される。ジョー部材のうちの少なくとも1つは、封鎖プロセス中、少なくとも1つのジョー部材に機械的摂動を選択可能に与えるように構成されるアクチベータを含む。
【0007】
本開示のさらに別の実施形態において、一対の向かい合うジョー部材を有するエンドエフェクタアセンブリを用いて組織を封鎖する方法が提供され、少なくとも1つのジョー部材は、少なくとも1つのジョー部材に機械的摂動を与えるように構成される部材を有する。方法は、一対の向かい合うジョー部材間に組織を把持することと、アクチベータを作動させて、少なくとも1つのジョー部材を動かすことと、電気外科エネルギーを適用して、ジョー部材間に配置される組織を封鎖することとを含む。
【0008】
アクチベータは、長手方向軸に沿う少なくとも1つのジョー部材の前進および/または後退の動きによって引き起こされる剪断力を提供し得る。あるいは、アクチベータは、トランスデューサであり得、トランスデューサは、超音波を提供して、少なくとも1つのジョー部材に機械的摂動を与える。
【0009】
例えば、本発明は以下の項目を提供する。
(項目1)
組織を封鎖するために器具と共に用いるエンドエフェクタアセンブリであって、該エンドエフェクタアセンブリは、
一対の向かい合うジョー部材であって、該ジョー部材は、それらの間に組織を把持するように構成され、少なくとも1つのジョー部材は、封鎖プロセス中、ジョー部材間に配置された組織を封鎖するために電気外科エネルギーの供給源に接続するように適合される、一対の向かい合うジョー部材と、
アクチベータであって、少なくとも1つのジョー部材に連結され、該封鎖プロセス中、少なくとも1つのジョー部材に機械的摂動を選択可能に与えるように構成される、アクチベータと
を備えている、エンドエフェクタアセンブリ。
(項目2)
上記アクチベータは、上記少なくとも1つのジョー部材を通って規定される長手方向軸に沿う、該少なくとも1つのジョー部材の前進および/または後退の動きによって引き起される剪断力を提供する、上記項目のいずれかに記載のエンドエフェクタアセンブリ。
(項目3)
上記アクチベータは、トランスデューサであり、該トランスデューサは、上記封鎖プロセス中、超音波を提供して、上記少なくとも1つのジョー部材に機械的摂動を与える、上記項目のいずれかに記載のエンドエフェクタアセンブリ。
(項目4)
上記アクチベータは、上記少なくとも1つのジョー部材に磁気的に連結される、上記項目のいずれかに記載のエンドエフェクタアセンブリ。
(項目5)
上記アクチベータは、上記少なくとも1つのジョー部材に機械的に連結される、上記項目のいずれかに記載のエンドエフェクタアセンブリ。
(項目6)
少なくとも1つのシャフトであって、該少なくとも1つのシャフトは、該シャフトの遠位端においてエンドエフェクタアセンブリを支持し、該エンドエフェクタアセンブリは、一対の向かい合うジョー部材を含み、該ジョー部材のうちの少なくとも1つは、それらの間に組織を把持するために他方に対して可動であり、該ジョー部材のうちの少なくとも1つは、封鎖プロセス中、ジョー部材間に配置される組織を封鎖するために電気外科エネルギーの供給源に接続するように適合される、シャフトと、
アクチベータであって、少なくとも1つのジョー部材に連結され、該封鎖プロセス中、該少なくとも1つのジョー部材に機械的摂動を選択可能に与えるように構成される、アクチベータと
を備えている、電気外科器具。
(項目7)
上記アクチベータは、上記少なくとも1つのジョー部材を通って規定される長手方向軸に沿う、該少なくとも1つのジョー部材の前進および/または後退の動きによって引き起される剪断力を提供する、上記項目のいずれかに記載の電気外科器具。
(項目8)
上記アクチベータは、トランスデューサであり、該トランスデューサは、上記封鎖プロセス中、超音波を提供して、上記少なくとも1つのジョー部材に機械的摂動を与える、上記項目のいずれかに記載の電気外科器具。
(項目9)
上記アクチベータに連結されるアクチュエータをさらに備えている、上記項目のいずれかに記載の電気外科器具。
(項目10)
上記アクチュエータは、モータである、上記項目のいずれかに記載の電気外科器具。
(項目11)
上記アクチュエータは、電磁石である、上記項目のいずれかに記載の電気外科器具。
(項目12)
上記アクチュエータは、上記アクチベータに機械的に連結される、上記項目のいずれかに記載の電気外科器具。
(項目13)
上記アクチュエータは、上記アクチベータに磁気的に連結される、上記項目のいずれかに記載の電気外科器具。
(項目14)
上記アクチュエータは、上記アクチベータに電気的に連結される、上記項目のいずれかに記載の電気外科器具。
(項目15)
組織を封鎖する方法であって、
エンドエフェクタアセンブリを提供することであって、該エンドエフェクタアセンブリは、一対の向かい合うジョー部材であって、それらの間に配置される組織を把持するために互いに対して可動であるジョー部材を有し、少なくとも1つのジョー部材は、該ジョー部材に配置されるアクチベータを含む、ことと、
該一対の向かい合うジョー部材の間に組織を把持することと、
該アクチベータを作動させて、該少なくとも1つのジョー部材に機械的摂動を与えることと、
電気外科エネルギーを適用して、該ジョー部材間に配置される該組織を封鎖することと
を包含する、方法。
(項目16)
上記アクチベータを作動させることは、上記少なくとも1つのジョー部材を通って規定される長手方向軸に沿って該少なくとも1つのジョー部材を動かす、上記項目のいずれかに記載の方法。
(項目17)
上記アクチベータを作動させることは、上記アクチベータに超音波を上記少なくとも1つのジョー部材に提供させて、該少なくとも1つのジョー部材の周期的な動きを引き起こす、上記項目のいずれかに記載の方法。
【0010】
(摘要)
電気外科器具と共に用いるエンドエフェクタアセンブリが提供される。エンドエフェクタアセンブリは、一対の向かい合うジョー部材であって、それらの間に組織を把持するように構成される、ジョー部材を含み、少なくとも1つのジョー部材は、封鎖プロセス中、ジョー部材間に配置された組織を封鎖するために電気外科エネルギーの供給源に接続するように適合される。ジョー部材のうちの少なくとも1つは、封鎖プロセス中、少なくとも1つのジョー部材に機械的摂動を選択可能に与えるように構成されるアクチベータを含む。
【0011】
本開示されるシステムおよび方法の目的および特徴は、このシステムおよび方法の様々な実施形態の説明が添付の図面を参照して読まれると、当業者に明らかとなる。
【図面の簡単な説明】
【0012】
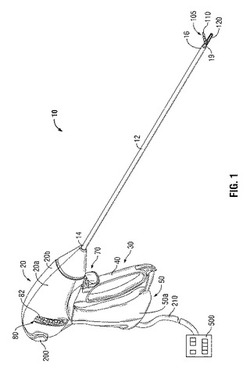
【図1】図1は、ハウジングと、シャフトと、シャフトの遠位端に取り付けられた一対のジョー部材とを有する内視鏡双極鉗子の右斜視図であり、ジョー部材はそれらの間に配置された電極アセンブリを含む。
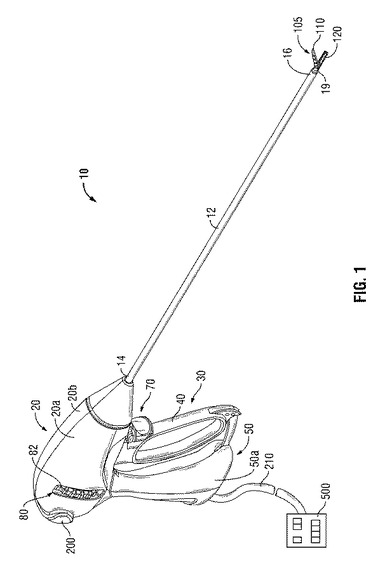
【図2】図2は、開放双極鉗子の左斜視図であり、一対の第1および第2のシャフトであって、その各々がシャフトの遠位端に取り付けられたジョー部材を有し、それらのジョー部材間に電極アセンブリが配置される、第1および第2のシャフトを示す。
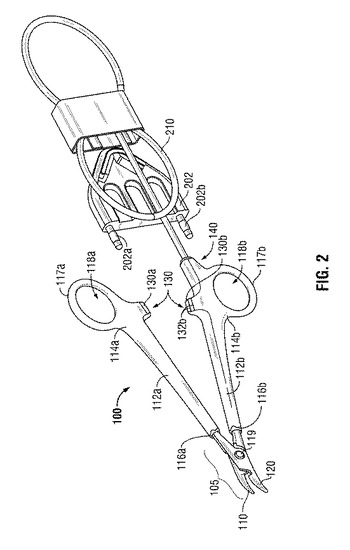
【図3】図3は、本開示の一実施形態に従う一対のジョー部材を有するエンドエフェクタアセンブリの概略図である。
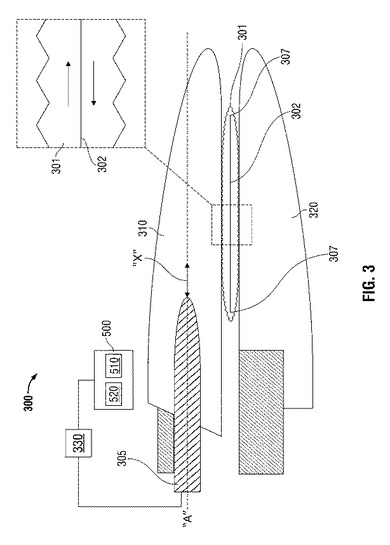
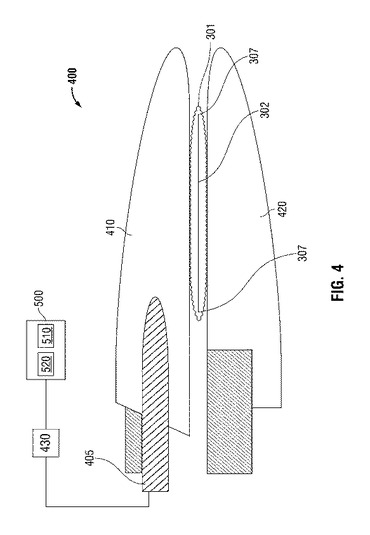
【図4】図4は、本開示の別の実施形態に従う一対のジョー部材を有するエンドエフェクタアセンブリの概略図である。
【発明を実施するための形態】
【0013】
(詳細な説明)
本開示の特定の実施形態は、添付の図面を参照して本明細書おいて以下に説明されるが、開示される実施形態は、単なる本開示の実施例であり、様々な形態で実施され得る。周知の機能または構造は、不要な詳細で本開示を不明瞭にすることを避けるために説明されない。従って、本明細書において開示される特定の構造および機能の詳細は、限定することとして解釈されるべきではなく、単に、特許請求の範囲の基礎および事実上任意の適切な詳細構造で本開示を様々に用いるように当業者に教示する代表的な基礎として解釈されるべきである。類似の参照数字は、図の説明全体を通じて類似するかまたは同一の要素を参照し得る。
【0014】
電磁エネルギーは、概して、周波数を増加させるかまたは波長を減少させることによって、電波、マイクロ波、赤外線、可視光線、紫外線、X線およびガンマ線に分類される。本明細書において用いられる場合、用語「マイクロ波」は、概して、300メガヘルツ(MHz)(3×108サイクル/秒)〜300ギガヘルツ(GHz)(3×1011サイクル/秒)の周波数範囲における電磁波をいう。本明細書において用いられる場合、用語「RF」は、概してマイクロ波より低い周波数を有する電磁波をいう。本明細書において用いられる場合、用語「超音波」は、概して、人間の聴力の上限より大きい周波数を有する周期的音圧をいう。用語「組織」および「脈管」は、互いに交換可能に用いられ得る。なぜなら、本明細書において説明される同じ原理を利用して、本開示が組織を封鎖および切断し、脈管を封鎖および切断するために用いられ得ると考えられるからである。
【0015】
添付の図を参照してより詳細に以下に説明されるように、本開示は、脈管壁を破壊しコラーゲンおよびエラスチンの放出を強化するために、機械的振動または音響振動を用いることに関する。
【0016】
ここで図1および図2を参照すると、図1は、内視鏡外科手術処置に関連して用いられる双極鉗子10を描き、図2は、従来の開放外科手術処置に関連して用いられるように企図される開放鉗子100を描く。本明細書における目的のために、内視鏡器具または開放器具のどちらでも、本明細書に説明される電極アセンブリと共に利用され得る。異なる電気的および機械的な接続および考慮が各特定のタイプの器具に適用され得るが、電極アセンブリに関する局面およびその動作特性は、概して開放または内視鏡の設計の両方に関して一致したままである。
【0017】
図1は、様々な内視鏡外科手術処置と共に用いる双極鉗子10を示し、双極鉗子10は、概して、ハウジング20と、ハンドルアセンブリ30と、回転アセンブリ80と、ナイフアクチュエータ70と、向かい合うジョー部材110および120を有する電極アセンブリ105とを含み、ジョー部材110および120は、互いに協働して管状脈管および脈管組織を把持し、封鎖し、分割する。ジョー部材110および120は、旋回ピン19の周りに接続され、旋回ピン19は、ジョー部材110および120が組織を治療するために第1の位置から第2の位置まで互いに対して旋回することを可能にする。より詳細には、鉗子10は、シャフト12を含み、シャフト12は、電極アセンブリ105を機械的に係合するように構成される遠位端16と、ハウジング20を機械的に係合する近位端14とを有する。シャフト12は、1つ以上の適切な機械的に係合する構成要素を含み得、1つ以上の適切な機械的に係合する構成要素は、ジョー部材110および120がそれらの間に組織を係合し把持するため、互いに対して旋回可能であるように電極アセンブリ105を確実に受け取り係合するように設計される。
【0018】
シャフト12の近位端14は、回転アセンブリ80を機械的に係合して、電極アセンブリ105の回転を容易にする。図面およびそれらに続く説明において、用語「近位」は、従来のように、ユーザにより近い、鉗子10の端部をいい、一方、用語「遠位」は、ユーザからより遠くにある端部をいう。シャフト12および回転アセンブリ80の機械的に協働する構成要素に関する詳細は、2003年6月13日に出願され、表題が「VESSEL SEALER AND DIVIDER FOR USE WITH SMALL TROCARS AND CANNULAS」である、同一出願人所有の米国特許出願第10/460,926号(現在、米国特許第7,156,846号)に説明されている。
【0019】
ハンドルアセンブリ30は、固定ハンドル50と、可動ハンドル40とを含む。より詳細に以下に説明されるように、固定ハンドル50は、ハウジング20と一体に関連付けられ、ハンドル40は、電極アセンブリ105の向かい合うジョー部材110および120を作動させるように固定ハンドル50に対して可動である。可動ハンドル40およびナイフアクチュエータ70は、単体構造であり、組み立て工程中にハウジング20および固定ハンドル50に動作可能に接続される。ハウジング20は、組み立て工程中にシャフト12の近位端14の周りに組み立てられる2つの構成要素半分20aおよび20bから構成される。スイッチアセンブリ200は、電気エネルギーを電極アセンブリ105に選択可能に提供するように構成される。
【0020】
上記に言及されたように、電極アセンブリ105は、シャフト12の遠位端16に取り付けられ、向かい合うジョー部材110および120を含む。ハンドルアセンブリ30の可動ハンドル40は、ジョー部材110および120が互いに対して間隔を空けた関係で配置される開放位置からジョー部材110および120がそれらの間に組織を把持するように協働するクランプ締め位置または閉鎖位置までのジョー部材110および120を動きを与える。
【0021】
ここで図2を参照すると、開放鉗子100は、一対の細長いシャフト部分112aおよび112bを含み、細長いシャフト部分112aは近位端114aと遠位端116aとを有し、細長いシャフト部分112bは近位端114bと遠位端116bとを有する。鉗子100は、ジョー部材120および110を含み、ジョー部材120はシャフト112aの遠位端116aに取り付けられ、ジョー部材110はシャフト112bの遠位端116bに取り付けられる。ジョー部材110および120は、旋回ピン119の周りに接続され、旋回ピン119は、ジョー部材110および120が組織を治療するために第1の位置から第2の位置まで互いに対して旋回することを可能にする。電極アセンブリ105は、向かい合うジョー部材110および120に接続され、旋回ピン119を介するかまたは旋回ピン119の周りに電気的接続を含み得る。ジョー部材との様々な電気的接続の実施例は、同一出願人所有の米国特許出願第10/474,170号(現在、米国特許第7,582,087号)、第10/284,562号(現在、米国特許第7,267,677号)、第10/472,295号(現在、米国特許第7,101,372号)、第10/116,944号(現在、米国特許第7,083,618号)および第10/179,863号(現在、米国特許第7,101,371号)に示されている。
【0022】
シャフト112aはシャフト112aの近位端114aに配置されるハンドル117aを含み、ハンドル117aはユーザの指を受け取る指穴118aを規定し、シャフト112bはシャフト112bの近位端114bに配置されるハンドル117bを含み、ハンドル117bはユーザの指を受け取る指穴118bを規定する。理解され得るように、指穴118aおよび118bは、シャフト112aおよび112bの互いに対する動きを容易にし、このことは、次いでジョー部材110および120が互いに対して間隔を空けた関係で配置される開放位置からジョー部材110および120がそれらの間に組織を把持するように協働するクランプ締め位置または閉鎖位置までジョー部材110および120を旋回させる。旋回中、様々な位置に互いに対してジョー部材110および120を選択可能にロックするために、ラチェット130が含まれ得る。
【0023】
より詳細には、ラチェット130は、シャフト112aに関連付けられる第1の機械的インターフェイス130aと、シャフト112bに関連付けられる第2の嵌合する機械的インターフェイス130bとを含む。協働するラチェットインターフェイス130aおよび130bに関連付けられる各位置は、シャフト部材112aおよび112bにおける特定のすなわち一定のひずみエネルギーを保持し、このことは、次いで特定の閉鎖する力をジョー部材110および120に伝える。ラチェット130は、目盛または他の視覚マーキングを含み得、それらは、ジョー部材110と120との間における所望の閉鎖力の量をユーザが容易にかつ迅速に確認し制御することを可能にする。
【0024】
図2に最も良く見られるように、鉗子100はまた、電気インターフェイスまたはプラグ200を含み、電気インターフェイスまたはプラグ200は、例えば、図1に示される発電機500と類似した電気外科発電機などの電気外科エネルギーの供給源に鉗子100を接続する。プラグ202は、少なくとも2つのプロング部材202aおよび202bを含み、2つのプロング部材202aおよび202bは、鉗子100を電気外科発電機500(図1を参照されたい)に機械的かつ電気的に接続するように寸法設定される。電気ケーブル210はプラグ202から延び、ケーブル210は鉗子100に確実に接続する。ケーブル210は、シャフト112b内において内部的に分割され、様々な電気供給経路を通って電極アセンブリ105に電気外科エネルギーを伝える。
【0025】
例えば112bなどのシャフトのうちの1つは、近位シャフトコネクタ/フランジ140を含み、近位シャフトコネクタ/フランジ140は、電気外科発電機500などの電気外科エネルギーの供給源に鉗子100を接続するように設計される。より詳細には、フランジ140は、ユーザが必要に応じて選択可能に電気外科エネルギーを加え得るように電気外科ケーブル210を鉗子100に機械的に固定する。
【0026】
図3を参照すると、本開示の一実施形態に従うエンドエフェクタアセンブリが、全体的にエンドエフェクタ300として示される。エンドエフェクタアセンブリ300は、鉗子10および/または鉗子100の遠位端に示される電極アセンブリ105と実質的に類似している。エンドエフェクタアセンブリ300は、上部ジョー部材310と、下部ジョー部材320とを含む。ジョー部材310および320は、その間に脈管301を把持するために用いられる。ジョー部材310および320は、RFエネルギーを脈管301に提供して脈管301を封鎖するために1つ以上の電極(図示されていない)を含み得る。
【0027】
図3に示されるように、ジョー部材310は、機械的摂動をジョー部材310に与えるアクチベータ305を含む。アクチベータ305は、ジョー部材310に機械的または磁気的に連結され得る。例えば、アクチベータ305は、ジョー部材310の中に挿入される前にアクチベータ305に接着剤が塗布され得るか、またはアクチベータ305は、ジョー部材310に半田付けされ得る。さらに、アクチベータ305は、例えば、ジョー部材310における対応する機械的インターフェイスと協働するノッチまたは突起部などの機械的インターフェイスを有し得る。図示されていないが、アクチベータ305はまた、ジョー部材320またはジョー部材310および320の両方に含まれ得る。アクチベータ305は、ジョー部材320に対する、ジョー部材310を通って規定される長手方向軸「A」に沿う、ジョー部材310の前進および/または後退の動きを提供する(図3の矢印「X」を参照されたい)。ジョー部材310と320との互いに対する前進および/または後退の動きは、圧縮力および剪断力により脈管301を変形させる。圧縮力および剪断力の印加は、脈管301の内層302の破壊を引き起こし、この破壊は、封鎖サイクル中、エラスチンおよび/またはコラーゲンを解放し混合する。
【0028】
剪断力は、長手方向軸「A」に沿うジョー部材310の動きによって生成される。内層302の最大変形は、圧縮された脈管の湾曲が最大である場合に起る(307)。剪断力は、領域307を広げ、内層302の破壊を加速し、ならびに内層に配置されるエラスチンおよびコラーゲンの解放を加速する。さらに、ジョー部材320の前進および後退の動きによって組織に生成される脈管301の内壁間の摩擦は、内層302の破壊の一因となる。
【0029】
アクチベータ305は、アクチュエータ330に機械的、電気的、または磁気的に連結され得る。アクチュエータ330は、モータ、電磁石、またはアクチベータ305に動きを与え、それによって、軸「X」に沿う長手方向にアクチベータ305を動かす任意の他のデバイスであり得る。アクチュエータ330は、発電機500によって制御され得るか、またはユーザによって制御され得る。
【0030】
発電機500は、メモリ510と、プロセッサ520とを含む。メモリ510は、プロセッサ520によって実行される脈管封鎖手順を行うプログラムまたはルーチンを格納し得る。発電機500は、メモリ510に格納されているプログラムまたはルーチンに従ってエンドエフェクタアセンブリ300に電気外科エネルギーを提供する。発電機500はまた、メモリ510に格納されているプログラムまたはルーチンに従ってアクチュエータ330を制御する。封鎖が完了する前に外組織層を損傷することを避けるために、発電機500は、アクチュータ330を制御して、アクチベータ305の動きを制限する。
【0031】
図4を参照すると、本開示の別の実施形態に従うエンドエフェクタアセンブリが、全体的に400として示される。エンドエフェクタアセンブリ400は、上部ジョー部材410と、下部ジョー部材420とを含む。上部ジョー部材410は、トランスデューサ405を含み、トランスデューサ405は、エネルギー源430から電気エネルギーを受け取り、電気エネルギーを超音波に変換して、機械的摂動をジョー部材410に与える。エネルギー源430は、スタンドアロンユニットであり得るか、鉗子10もしくは鉗子100に組み込まれ得るか、または発電機500に含まれ得る。
【0032】
トランスデューサ405は、ジョー部材410に機械的または磁気的に連結され得る。
例えば、トランスデューサ405は、ジョー部材410の中に挿入される前にトランスデューサ405に接着剤が塗布され得るか、またはトランスデューサ405は、ジョー部材410に半田付けされ得る。さらに、トランスデューサ405は、例えば、ジョー部材410における対応する機械的インターフェイスと協働するノッチまたは突起部などの機械的インターフェイスを有し得る。
【0033】
トランスデューサ405によって提供される超音波は、上部ジョー部材410に周期的な動きを引き起こし、結果として、脈管301の内層302の付加的な加熱および破壊をもたらす。トランスデューサ405は、上部ジョー部材310、下部ジョー部材320または両方のジョー部材に位置を定められ得る。
【0034】
上記に説明されたように、発電機500は、メモリ510と、プロセッサ520とを含む。メモリ510は、プロセッサ520によって実行される脈管封鎖手順を行うプログラムまたはルーチンを格納し得る。発電機500は、メモリ510に格納されているプログラムまたはルーチンに従ってエンドエフェクタアセンブリ400に電気外科エネルギーを提供する。発電機500はまた、メモリ510に格納されているプログラムまたはルーチンに従ってエネルギー源430を制御する。封鎖が完了する前に外側組織層を損傷することを避けるために、発電機500は、エネルギー源430を制御して、トランスデューサ405の周期的な動きの振幅を制限する。
【0035】
本開示のいくつかの実施形態が、図面に示されかつ/または本明細書において考察されたが、本開示がそれらの実施形態に限定されることは意図されないで、開示の範囲は技術が許容される限りできるだけ広くあるべきこと、および明細書は同様に読まれるべきことが意図される。従って、上記の説明は、限定することとしてではなく、単に特定の実施形態の例証として解釈されるべきである。特許請求の範囲は、ハードウェア、ソフトウェア、またはこれらの組み合わせにおける複数の実施形態を包含し得る。当業者は、本明細書に添付された特許請求の範囲の範囲および精神内における他の修正形態を想定する。
【符号の説明】
【0036】
10 双極鉗子
12 シャフト
20 ハウジング
30 ハンドルアセンブリ
40 ハンドル
50 固定ハンドル
70 ナイフアクチュエータ
80 回転アセンブリ
105 電気アセンブリ
110 ジョー部材
120 ジョー部材
【技術分野】
【0001】
(背景)
(1.技術分野)
本開示は、開放および内視鏡の外科手術処置に対して組織を封鎖するかまたは溶解するために用いられる電気外科器具に関する。より詳細には、本開示は、電気外科処置中、脈管壁を破壊しコラーゲンおよびエラスチンの抽出を容易にするために機械的振動および/または音響振動を加えることによって、脈管、脈管組織および軟組織を封鎖する双極鉗子に関する。
【背景技術】
【0002】
(2.関連技術の背景)
開放または内視鏡の外科手術鉗子は、止血を達成するために機械的クランプ締め動作および電気的エネルギーの両方を利用する。各向かい合うジョー部材の電極は、ジョー部材が組織を把持したとき、電気エネルギーが組織を通って選択可能に転送され得るように、異なる電位に帯電させられる。外科医は、電極と通過組織との間に加えられる電気外科エネルギーの強度、周波数および継続時間を制御することによって、出血を焼灼し、凝固/乾燥させ、かつ/または単に減少させるかもしくは遅くし得る。
【0003】
特定の外科手術処置は、単に組織を焼灼すること以上のことを必要とし、組織、脈管および特定の脈管束を「封鎖する」ために、クランプ締め圧力、電気外科エネルギーおよび間隙距離の組み合わせに頼る。より詳細には、脈管封鎖または組織封鎖は、2つの向かい合うジョー部材または封鎖プレート間の組織を効果的に封鎖するかまたは溶解するために、無線周波数(RF)エネルギー、クランプ締め圧力および間隙距離(すなわち、組織の周りに閉じられた場合、向かい合うジョー部材間の距離)の正確な制御の固有の組み合わせを利用する。脈管または組織の封鎖は、「焼灼」以上であり、「焼灼」は、組織を破壊するために熱を用いること(「ジアテルミー」または「電気ジアテルミー」とも呼ばれる)を伴う。脈管封鎖もまた、「凝固」以上であり、「凝固」は、組織を乾燥させるプロセスであり、この場合、組織細胞は、破裂させられ乾燥させられる。「脈管封鎖」は、組織が、向かい合う組織構造間に有意に減少させられた境界を有する溶解した質量に改質するように、組織におけるコラーゲン、エラスチンおよび基質を液化するプロセスとして定義される。
【0004】
エネルギーベースの脈管封鎖は、いくつのステップからなる。脈管封鎖処置中、向かい合う脈管壁は近づくように一緒に動かされる。次いで、通常、脈管壁の接着を防ぐ脈管壁の内層が破壊される。エラスチンおよびコラーゲンは、脈管を封鎖するために、解放され、混合され、エネルギーに露出される。脈管壁を一緒に動かし、脈管壁の内層を破壊し、コラーゲンを解放し混合することは、ジョー間の脈管を加圧することによって従来から達成されている。脈管壁の内層の破壊は、有意の量の力の印加を必要とする。脈管が組織の比較的厚い層内に位置をしている場合、有意の量の力は、封鎖が完了する前に上部組織層を損傷し得るかまたは切断さえし得る。
【発明の概要】
【課題を解決するための手段】
【0005】
(概要)
本開示の一実施形態において、エンドエフェクタアセンブリが提供される。エンドエフェクタアセンブリは、一対の向かい合うジョー部材であって、それらの間に組織を把持するように構成される、ジョー部材を含み、少なくとも1つのジョー部材は、封鎖プロセス中、ジョー部材間に配置された組織を効果的に封鎖するために電気外科エネルギーの供給源に接続するように適合される。ジョー部材のうちの少なくとも1つは、封鎖プロセス中、少なくとも1つのジョー部材に機械的摂動を選択可能に与えるように構成されるアクチベータを含む。
【0006】
本開示の別の実施形態において、組織を封鎖する電気外科器具が提供される。電気外科器具は、少なくとも1つのシャフトであって、少なくとも1つのシャフトは、シャフトの遠位端においてエンドエフェクタアセンブリを支持し、エンドエフェクタアセンブリは、一対の向かい合うジョー部材を含み、ジョー部材のうちの少なくとも1つは、それらの間に組織を把持するために他方に対して可動であり、ジョー部材のうちの少なくとも1つは、封鎖プロセス中、ジョー部材間に配置される組織を効果的に封鎖するために電気外科エネルギーの供給源に接続するように適合される。ジョー部材のうちの少なくとも1つは、封鎖プロセス中、少なくとも1つのジョー部材に機械的摂動を選択可能に与えるように構成されるアクチベータを含む。
【0007】
本開示のさらに別の実施形態において、一対の向かい合うジョー部材を有するエンドエフェクタアセンブリを用いて組織を封鎖する方法が提供され、少なくとも1つのジョー部材は、少なくとも1つのジョー部材に機械的摂動を与えるように構成される部材を有する。方法は、一対の向かい合うジョー部材間に組織を把持することと、アクチベータを作動させて、少なくとも1つのジョー部材を動かすことと、電気外科エネルギーを適用して、ジョー部材間に配置される組織を封鎖することとを含む。
【0008】
アクチベータは、長手方向軸に沿う少なくとも1つのジョー部材の前進および/または後退の動きによって引き起こされる剪断力を提供し得る。あるいは、アクチベータは、トランスデューサであり得、トランスデューサは、超音波を提供して、少なくとも1つのジョー部材に機械的摂動を与える。
【0009】
例えば、本発明は以下の項目を提供する。
(項目1)
組織を封鎖するために器具と共に用いるエンドエフェクタアセンブリであって、該エンドエフェクタアセンブリは、
一対の向かい合うジョー部材であって、該ジョー部材は、それらの間に組織を把持するように構成され、少なくとも1つのジョー部材は、封鎖プロセス中、ジョー部材間に配置された組織を封鎖するために電気外科エネルギーの供給源に接続するように適合される、一対の向かい合うジョー部材と、
アクチベータであって、少なくとも1つのジョー部材に連結され、該封鎖プロセス中、少なくとも1つのジョー部材に機械的摂動を選択可能に与えるように構成される、アクチベータと
を備えている、エンドエフェクタアセンブリ。
(項目2)
上記アクチベータは、上記少なくとも1つのジョー部材を通って規定される長手方向軸に沿う、該少なくとも1つのジョー部材の前進および/または後退の動きによって引き起される剪断力を提供する、上記項目のいずれかに記載のエンドエフェクタアセンブリ。
(項目3)
上記アクチベータは、トランスデューサであり、該トランスデューサは、上記封鎖プロセス中、超音波を提供して、上記少なくとも1つのジョー部材に機械的摂動を与える、上記項目のいずれかに記載のエンドエフェクタアセンブリ。
(項目4)
上記アクチベータは、上記少なくとも1つのジョー部材に磁気的に連結される、上記項目のいずれかに記載のエンドエフェクタアセンブリ。
(項目5)
上記アクチベータは、上記少なくとも1つのジョー部材に機械的に連結される、上記項目のいずれかに記載のエンドエフェクタアセンブリ。
(項目6)
少なくとも1つのシャフトであって、該少なくとも1つのシャフトは、該シャフトの遠位端においてエンドエフェクタアセンブリを支持し、該エンドエフェクタアセンブリは、一対の向かい合うジョー部材を含み、該ジョー部材のうちの少なくとも1つは、それらの間に組織を把持するために他方に対して可動であり、該ジョー部材のうちの少なくとも1つは、封鎖プロセス中、ジョー部材間に配置される組織を封鎖するために電気外科エネルギーの供給源に接続するように適合される、シャフトと、
アクチベータであって、少なくとも1つのジョー部材に連結され、該封鎖プロセス中、該少なくとも1つのジョー部材に機械的摂動を選択可能に与えるように構成される、アクチベータと
を備えている、電気外科器具。
(項目7)
上記アクチベータは、上記少なくとも1つのジョー部材を通って規定される長手方向軸に沿う、該少なくとも1つのジョー部材の前進および/または後退の動きによって引き起される剪断力を提供する、上記項目のいずれかに記載の電気外科器具。
(項目8)
上記アクチベータは、トランスデューサであり、該トランスデューサは、上記封鎖プロセス中、超音波を提供して、上記少なくとも1つのジョー部材に機械的摂動を与える、上記項目のいずれかに記載の電気外科器具。
(項目9)
上記アクチベータに連結されるアクチュエータをさらに備えている、上記項目のいずれかに記載の電気外科器具。
(項目10)
上記アクチュエータは、モータである、上記項目のいずれかに記載の電気外科器具。
(項目11)
上記アクチュエータは、電磁石である、上記項目のいずれかに記載の電気外科器具。
(項目12)
上記アクチュエータは、上記アクチベータに機械的に連結される、上記項目のいずれかに記載の電気外科器具。
(項目13)
上記アクチュエータは、上記アクチベータに磁気的に連結される、上記項目のいずれかに記載の電気外科器具。
(項目14)
上記アクチュエータは、上記アクチベータに電気的に連結される、上記項目のいずれかに記載の電気外科器具。
(項目15)
組織を封鎖する方法であって、
エンドエフェクタアセンブリを提供することであって、該エンドエフェクタアセンブリは、一対の向かい合うジョー部材であって、それらの間に配置される組織を把持するために互いに対して可動であるジョー部材を有し、少なくとも1つのジョー部材は、該ジョー部材に配置されるアクチベータを含む、ことと、
該一対の向かい合うジョー部材の間に組織を把持することと、
該アクチベータを作動させて、該少なくとも1つのジョー部材に機械的摂動を与えることと、
電気外科エネルギーを適用して、該ジョー部材間に配置される該組織を封鎖することと
を包含する、方法。
(項目16)
上記アクチベータを作動させることは、上記少なくとも1つのジョー部材を通って規定される長手方向軸に沿って該少なくとも1つのジョー部材を動かす、上記項目のいずれかに記載の方法。
(項目17)
上記アクチベータを作動させることは、上記アクチベータに超音波を上記少なくとも1つのジョー部材に提供させて、該少なくとも1つのジョー部材の周期的な動きを引き起こす、上記項目のいずれかに記載の方法。
【0010】
(摘要)
電気外科器具と共に用いるエンドエフェクタアセンブリが提供される。エンドエフェクタアセンブリは、一対の向かい合うジョー部材であって、それらの間に組織を把持するように構成される、ジョー部材を含み、少なくとも1つのジョー部材は、封鎖プロセス中、ジョー部材間に配置された組織を封鎖するために電気外科エネルギーの供給源に接続するように適合される。ジョー部材のうちの少なくとも1つは、封鎖プロセス中、少なくとも1つのジョー部材に機械的摂動を選択可能に与えるように構成されるアクチベータを含む。
【0011】
本開示されるシステムおよび方法の目的および特徴は、このシステムおよび方法の様々な実施形態の説明が添付の図面を参照して読まれると、当業者に明らかとなる。
【図面の簡単な説明】
【0012】
【図1】図1は、ハウジングと、シャフトと、シャフトの遠位端に取り付けられた一対のジョー部材とを有する内視鏡双極鉗子の右斜視図であり、ジョー部材はそれらの間に配置された電極アセンブリを含む。
【図2】図2は、開放双極鉗子の左斜視図であり、一対の第1および第2のシャフトであって、その各々がシャフトの遠位端に取り付けられたジョー部材を有し、それらのジョー部材間に電極アセンブリが配置される、第1および第2のシャフトを示す。
【図3】図3は、本開示の一実施形態に従う一対のジョー部材を有するエンドエフェクタアセンブリの概略図である。
【図4】図4は、本開示の別の実施形態に従う一対のジョー部材を有するエンドエフェクタアセンブリの概略図である。
【発明を実施するための形態】
【0013】
(詳細な説明)
本開示の特定の実施形態は、添付の図面を参照して本明細書おいて以下に説明されるが、開示される実施形態は、単なる本開示の実施例であり、様々な形態で実施され得る。周知の機能または構造は、不要な詳細で本開示を不明瞭にすることを避けるために説明されない。従って、本明細書において開示される特定の構造および機能の詳細は、限定することとして解釈されるべきではなく、単に、特許請求の範囲の基礎および事実上任意の適切な詳細構造で本開示を様々に用いるように当業者に教示する代表的な基礎として解釈されるべきである。類似の参照数字は、図の説明全体を通じて類似するかまたは同一の要素を参照し得る。
【0014】
電磁エネルギーは、概して、周波数を増加させるかまたは波長を減少させることによって、電波、マイクロ波、赤外線、可視光線、紫外線、X線およびガンマ線に分類される。本明細書において用いられる場合、用語「マイクロ波」は、概して、300メガヘルツ(MHz)(3×108サイクル/秒)〜300ギガヘルツ(GHz)(3×1011サイクル/秒)の周波数範囲における電磁波をいう。本明細書において用いられる場合、用語「RF」は、概してマイクロ波より低い周波数を有する電磁波をいう。本明細書において用いられる場合、用語「超音波」は、概して、人間の聴力の上限より大きい周波数を有する周期的音圧をいう。用語「組織」および「脈管」は、互いに交換可能に用いられ得る。なぜなら、本明細書において説明される同じ原理を利用して、本開示が組織を封鎖および切断し、脈管を封鎖および切断するために用いられ得ると考えられるからである。
【0015】
添付の図を参照してより詳細に以下に説明されるように、本開示は、脈管壁を破壊しコラーゲンおよびエラスチンの放出を強化するために、機械的振動または音響振動を用いることに関する。
【0016】
ここで図1および図2を参照すると、図1は、内視鏡外科手術処置に関連して用いられる双極鉗子10を描き、図2は、従来の開放外科手術処置に関連して用いられるように企図される開放鉗子100を描く。本明細書における目的のために、内視鏡器具または開放器具のどちらでも、本明細書に説明される電極アセンブリと共に利用され得る。異なる電気的および機械的な接続および考慮が各特定のタイプの器具に適用され得るが、電極アセンブリに関する局面およびその動作特性は、概して開放または内視鏡の設計の両方に関して一致したままである。
【0017】
図1は、様々な内視鏡外科手術処置と共に用いる双極鉗子10を示し、双極鉗子10は、概して、ハウジング20と、ハンドルアセンブリ30と、回転アセンブリ80と、ナイフアクチュエータ70と、向かい合うジョー部材110および120を有する電極アセンブリ105とを含み、ジョー部材110および120は、互いに協働して管状脈管および脈管組織を把持し、封鎖し、分割する。ジョー部材110および120は、旋回ピン19の周りに接続され、旋回ピン19は、ジョー部材110および120が組織を治療するために第1の位置から第2の位置まで互いに対して旋回することを可能にする。より詳細には、鉗子10は、シャフト12を含み、シャフト12は、電極アセンブリ105を機械的に係合するように構成される遠位端16と、ハウジング20を機械的に係合する近位端14とを有する。シャフト12は、1つ以上の適切な機械的に係合する構成要素を含み得、1つ以上の適切な機械的に係合する構成要素は、ジョー部材110および120がそれらの間に組織を係合し把持するため、互いに対して旋回可能であるように電極アセンブリ105を確実に受け取り係合するように設計される。
【0018】
シャフト12の近位端14は、回転アセンブリ80を機械的に係合して、電極アセンブリ105の回転を容易にする。図面およびそれらに続く説明において、用語「近位」は、従来のように、ユーザにより近い、鉗子10の端部をいい、一方、用語「遠位」は、ユーザからより遠くにある端部をいう。シャフト12および回転アセンブリ80の機械的に協働する構成要素に関する詳細は、2003年6月13日に出願され、表題が「VESSEL SEALER AND DIVIDER FOR USE WITH SMALL TROCARS AND CANNULAS」である、同一出願人所有の米国特許出願第10/460,926号(現在、米国特許第7,156,846号)に説明されている。
【0019】
ハンドルアセンブリ30は、固定ハンドル50と、可動ハンドル40とを含む。より詳細に以下に説明されるように、固定ハンドル50は、ハウジング20と一体に関連付けられ、ハンドル40は、電極アセンブリ105の向かい合うジョー部材110および120を作動させるように固定ハンドル50に対して可動である。可動ハンドル40およびナイフアクチュエータ70は、単体構造であり、組み立て工程中にハウジング20および固定ハンドル50に動作可能に接続される。ハウジング20は、組み立て工程中にシャフト12の近位端14の周りに組み立てられる2つの構成要素半分20aおよび20bから構成される。スイッチアセンブリ200は、電気エネルギーを電極アセンブリ105に選択可能に提供するように構成される。
【0020】
上記に言及されたように、電極アセンブリ105は、シャフト12の遠位端16に取り付けられ、向かい合うジョー部材110および120を含む。ハンドルアセンブリ30の可動ハンドル40は、ジョー部材110および120が互いに対して間隔を空けた関係で配置される開放位置からジョー部材110および120がそれらの間に組織を把持するように協働するクランプ締め位置または閉鎖位置までのジョー部材110および120を動きを与える。
【0021】
ここで図2を参照すると、開放鉗子100は、一対の細長いシャフト部分112aおよび112bを含み、細長いシャフト部分112aは近位端114aと遠位端116aとを有し、細長いシャフト部分112bは近位端114bと遠位端116bとを有する。鉗子100は、ジョー部材120および110を含み、ジョー部材120はシャフト112aの遠位端116aに取り付けられ、ジョー部材110はシャフト112bの遠位端116bに取り付けられる。ジョー部材110および120は、旋回ピン119の周りに接続され、旋回ピン119は、ジョー部材110および120が組織を治療するために第1の位置から第2の位置まで互いに対して旋回することを可能にする。電極アセンブリ105は、向かい合うジョー部材110および120に接続され、旋回ピン119を介するかまたは旋回ピン119の周りに電気的接続を含み得る。ジョー部材との様々な電気的接続の実施例は、同一出願人所有の米国特許出願第10/474,170号(現在、米国特許第7,582,087号)、第10/284,562号(現在、米国特許第7,267,677号)、第10/472,295号(現在、米国特許第7,101,372号)、第10/116,944号(現在、米国特許第7,083,618号)および第10/179,863号(現在、米国特許第7,101,371号)に示されている。
【0022】
シャフト112aはシャフト112aの近位端114aに配置されるハンドル117aを含み、ハンドル117aはユーザの指を受け取る指穴118aを規定し、シャフト112bはシャフト112bの近位端114bに配置されるハンドル117bを含み、ハンドル117bはユーザの指を受け取る指穴118bを規定する。理解され得るように、指穴118aおよび118bは、シャフト112aおよび112bの互いに対する動きを容易にし、このことは、次いでジョー部材110および120が互いに対して間隔を空けた関係で配置される開放位置からジョー部材110および120がそれらの間に組織を把持するように協働するクランプ締め位置または閉鎖位置までジョー部材110および120を旋回させる。旋回中、様々な位置に互いに対してジョー部材110および120を選択可能にロックするために、ラチェット130が含まれ得る。
【0023】
より詳細には、ラチェット130は、シャフト112aに関連付けられる第1の機械的インターフェイス130aと、シャフト112bに関連付けられる第2の嵌合する機械的インターフェイス130bとを含む。協働するラチェットインターフェイス130aおよび130bに関連付けられる各位置は、シャフト部材112aおよび112bにおける特定のすなわち一定のひずみエネルギーを保持し、このことは、次いで特定の閉鎖する力をジョー部材110および120に伝える。ラチェット130は、目盛または他の視覚マーキングを含み得、それらは、ジョー部材110と120との間における所望の閉鎖力の量をユーザが容易にかつ迅速に確認し制御することを可能にする。
【0024】
図2に最も良く見られるように、鉗子100はまた、電気インターフェイスまたはプラグ200を含み、電気インターフェイスまたはプラグ200は、例えば、図1に示される発電機500と類似した電気外科発電機などの電気外科エネルギーの供給源に鉗子100を接続する。プラグ202は、少なくとも2つのプロング部材202aおよび202bを含み、2つのプロング部材202aおよび202bは、鉗子100を電気外科発電機500(図1を参照されたい)に機械的かつ電気的に接続するように寸法設定される。電気ケーブル210はプラグ202から延び、ケーブル210は鉗子100に確実に接続する。ケーブル210は、シャフト112b内において内部的に分割され、様々な電気供給経路を通って電極アセンブリ105に電気外科エネルギーを伝える。
【0025】
例えば112bなどのシャフトのうちの1つは、近位シャフトコネクタ/フランジ140を含み、近位シャフトコネクタ/フランジ140は、電気外科発電機500などの電気外科エネルギーの供給源に鉗子100を接続するように設計される。より詳細には、フランジ140は、ユーザが必要に応じて選択可能に電気外科エネルギーを加え得るように電気外科ケーブル210を鉗子100に機械的に固定する。
【0026】
図3を参照すると、本開示の一実施形態に従うエンドエフェクタアセンブリが、全体的にエンドエフェクタ300として示される。エンドエフェクタアセンブリ300は、鉗子10および/または鉗子100の遠位端に示される電極アセンブリ105と実質的に類似している。エンドエフェクタアセンブリ300は、上部ジョー部材310と、下部ジョー部材320とを含む。ジョー部材310および320は、その間に脈管301を把持するために用いられる。ジョー部材310および320は、RFエネルギーを脈管301に提供して脈管301を封鎖するために1つ以上の電極(図示されていない)を含み得る。
【0027】
図3に示されるように、ジョー部材310は、機械的摂動をジョー部材310に与えるアクチベータ305を含む。アクチベータ305は、ジョー部材310に機械的または磁気的に連結され得る。例えば、アクチベータ305は、ジョー部材310の中に挿入される前にアクチベータ305に接着剤が塗布され得るか、またはアクチベータ305は、ジョー部材310に半田付けされ得る。さらに、アクチベータ305は、例えば、ジョー部材310における対応する機械的インターフェイスと協働するノッチまたは突起部などの機械的インターフェイスを有し得る。図示されていないが、アクチベータ305はまた、ジョー部材320またはジョー部材310および320の両方に含まれ得る。アクチベータ305は、ジョー部材320に対する、ジョー部材310を通って規定される長手方向軸「A」に沿う、ジョー部材310の前進および/または後退の動きを提供する(図3の矢印「X」を参照されたい)。ジョー部材310と320との互いに対する前進および/または後退の動きは、圧縮力および剪断力により脈管301を変形させる。圧縮力および剪断力の印加は、脈管301の内層302の破壊を引き起こし、この破壊は、封鎖サイクル中、エラスチンおよび/またはコラーゲンを解放し混合する。
【0028】
剪断力は、長手方向軸「A」に沿うジョー部材310の動きによって生成される。内層302の最大変形は、圧縮された脈管の湾曲が最大である場合に起る(307)。剪断力は、領域307を広げ、内層302の破壊を加速し、ならびに内層に配置されるエラスチンおよびコラーゲンの解放を加速する。さらに、ジョー部材320の前進および後退の動きによって組織に生成される脈管301の内壁間の摩擦は、内層302の破壊の一因となる。
【0029】
アクチベータ305は、アクチュエータ330に機械的、電気的、または磁気的に連結され得る。アクチュエータ330は、モータ、電磁石、またはアクチベータ305に動きを与え、それによって、軸「X」に沿う長手方向にアクチベータ305を動かす任意の他のデバイスであり得る。アクチュエータ330は、発電機500によって制御され得るか、またはユーザによって制御され得る。
【0030】
発電機500は、メモリ510と、プロセッサ520とを含む。メモリ510は、プロセッサ520によって実行される脈管封鎖手順を行うプログラムまたはルーチンを格納し得る。発電機500は、メモリ510に格納されているプログラムまたはルーチンに従ってエンドエフェクタアセンブリ300に電気外科エネルギーを提供する。発電機500はまた、メモリ510に格納されているプログラムまたはルーチンに従ってアクチュエータ330を制御する。封鎖が完了する前に外組織層を損傷することを避けるために、発電機500は、アクチュータ330を制御して、アクチベータ305の動きを制限する。
【0031】
図4を参照すると、本開示の別の実施形態に従うエンドエフェクタアセンブリが、全体的に400として示される。エンドエフェクタアセンブリ400は、上部ジョー部材410と、下部ジョー部材420とを含む。上部ジョー部材410は、トランスデューサ405を含み、トランスデューサ405は、エネルギー源430から電気エネルギーを受け取り、電気エネルギーを超音波に変換して、機械的摂動をジョー部材410に与える。エネルギー源430は、スタンドアロンユニットであり得るか、鉗子10もしくは鉗子100に組み込まれ得るか、または発電機500に含まれ得る。
【0032】
トランスデューサ405は、ジョー部材410に機械的または磁気的に連結され得る。
例えば、トランスデューサ405は、ジョー部材410の中に挿入される前にトランスデューサ405に接着剤が塗布され得るか、またはトランスデューサ405は、ジョー部材410に半田付けされ得る。さらに、トランスデューサ405は、例えば、ジョー部材410における対応する機械的インターフェイスと協働するノッチまたは突起部などの機械的インターフェイスを有し得る。
【0033】
トランスデューサ405によって提供される超音波は、上部ジョー部材410に周期的な動きを引き起こし、結果として、脈管301の内層302の付加的な加熱および破壊をもたらす。トランスデューサ405は、上部ジョー部材310、下部ジョー部材320または両方のジョー部材に位置を定められ得る。
【0034】
上記に説明されたように、発電機500は、メモリ510と、プロセッサ520とを含む。メモリ510は、プロセッサ520によって実行される脈管封鎖手順を行うプログラムまたはルーチンを格納し得る。発電機500は、メモリ510に格納されているプログラムまたはルーチンに従ってエンドエフェクタアセンブリ400に電気外科エネルギーを提供する。発電機500はまた、メモリ510に格納されているプログラムまたはルーチンに従ってエネルギー源430を制御する。封鎖が完了する前に外側組織層を損傷することを避けるために、発電機500は、エネルギー源430を制御して、トランスデューサ405の周期的な動きの振幅を制限する。
【0035】
本開示のいくつかの実施形態が、図面に示されかつ/または本明細書において考察されたが、本開示がそれらの実施形態に限定されることは意図されないで、開示の範囲は技術が許容される限りできるだけ広くあるべきこと、および明細書は同様に読まれるべきことが意図される。従って、上記の説明は、限定することとしてではなく、単に特定の実施形態の例証として解釈されるべきである。特許請求の範囲は、ハードウェア、ソフトウェア、またはこれらの組み合わせにおける複数の実施形態を包含し得る。当業者は、本明細書に添付された特許請求の範囲の範囲および精神内における他の修正形態を想定する。
【符号の説明】
【0036】
10 双極鉗子
12 シャフト
20 ハウジング
30 ハンドルアセンブリ
40 ハンドル
50 固定ハンドル
70 ナイフアクチュエータ
80 回転アセンブリ
105 電気アセンブリ
110 ジョー部材
120 ジョー部材
【特許請求の範囲】
【請求項1】
組織を封鎖するために器具と共に用いるエンドエフェクタアセンブリであって、該エンドエフェクタアセンブリは、
一対の向かい合うジョー部材であって、該ジョー部材は、それらの間に組織を把持するように構成され、少なくとも1つのジョー部材は、封鎖プロセス中、ジョー部材間に配置された組織を封鎖するために電気外科エネルギーの供給源に接続するように適合される、一対の向かい合うジョー部材と、
アクチベータであって、少なくとも1つのジョー部材に連結され、該封鎖プロセス中、少なくとも1つのジョー部材に機械的摂動を選択可能に与えるように構成される、アクチベータと
を備えている、エンドエフェクタアセンブリ。
【請求項2】
前記アクチベータは、前記少なくとも1つのジョー部材を通って規定される長手方向軸に沿う、該少なくとも1つのジョー部材の前進および/または後退の動きによって引き起される剪断力を提供する、請求項1に記載のエンドエフェクタアセンブリ。
【請求項3】
前記アクチベータは、トランスデューサであり、該トランスデューサは、前記封鎖プロセス中、超音波を提供して、前記少なくとも1つのジョー部材に機械的摂動を与える、請求項1に記載のエンドエフェクタアセンブリ。
【請求項4】
前記アクチベータは、前記少なくとも1つのジョー部材に磁気的に連結される、請求項1に記載のエンドエフェクタアセンブリ。
【請求項5】
前記アクチベータは、前記少なくとも1つのジョー部材に機械的に連結される、請求項1に記載のエンドエフェクタアセンブリ。
【請求項6】
少なくとも1つのシャフトであって、該少なくとも1つのシャフトは、該シャフトの遠位端においてエンドエフェクタアセンブリを支持し、該エンドエフェクタアセンブリは、一対の向かい合うジョー部材を含み、該ジョー部材のうちの少なくとも1つは、それらの間に組織を把持するために他方に対して可動であり、該ジョー部材のうちの少なくとも1つは、封鎖プロセス中、ジョー部材間に配置される組織を封鎖するために電気外科エネルギーの供給源に接続するように適合される、シャフトと、
アクチベータであって、少なくとも1つのジョー部材に連結され、該封鎖プロセス中、該少なくとも1つのジョー部材に機械的摂動を選択可能に与えるように構成される、アクチベータと
を備えている、電気外科器具。
【請求項7】
前記アクチベータは、前記少なくとも1つのジョー部材を通って規定される長手方向軸に沿う、該少なくとも1つのジョー部材の前進および/または後退の動きによって引き起される剪断力を提供する、請求項6に記載の電気外科器具。
【請求項8】
前記アクチベータは、トランスデューサであり、該トランスデューサは、前記封鎖プロセス中、超音波を提供して、前記少なくとも1つのジョー部材に機械的摂動を与える、請求項6に記載の電気外科器具。
【請求項9】
前記アクチベータに連結されるアクチュエータをさらに備えている、請求項6に記載の電気外科器具。
【請求項10】
前記アクチュエータは、モータである、請求項9に記載の電気外科器具。
【請求項11】
前記アクチュエータは、電磁石である、請求項9に記載の電気外科器具。
【請求項12】
前記アクチュエータは、前記アクチベータに機械的に連結される、請求項9に記載の電気外科器具。
【請求項13】
前記アクチュエータは、前記アクチベータに磁気的に連結される、請求項9に記載の電気外科器具。
【請求項14】
前記アクチュエータは、前記アクチベータに電気的に連結される、請求項9に記載の電気外科器具。
【請求項1】
組織を封鎖するために器具と共に用いるエンドエフェクタアセンブリであって、該エンドエフェクタアセンブリは、
一対の向かい合うジョー部材であって、該ジョー部材は、それらの間に組織を把持するように構成され、少なくとも1つのジョー部材は、封鎖プロセス中、ジョー部材間に配置された組織を封鎖するために電気外科エネルギーの供給源に接続するように適合される、一対の向かい合うジョー部材と、
アクチベータであって、少なくとも1つのジョー部材に連結され、該封鎖プロセス中、少なくとも1つのジョー部材に機械的摂動を選択可能に与えるように構成される、アクチベータと
を備えている、エンドエフェクタアセンブリ。
【請求項2】
前記アクチベータは、前記少なくとも1つのジョー部材を通って規定される長手方向軸に沿う、該少なくとも1つのジョー部材の前進および/または後退の動きによって引き起される剪断力を提供する、請求項1に記載のエンドエフェクタアセンブリ。
【請求項3】
前記アクチベータは、トランスデューサであり、該トランスデューサは、前記封鎖プロセス中、超音波を提供して、前記少なくとも1つのジョー部材に機械的摂動を与える、請求項1に記載のエンドエフェクタアセンブリ。
【請求項4】
前記アクチベータは、前記少なくとも1つのジョー部材に磁気的に連結される、請求項1に記載のエンドエフェクタアセンブリ。
【請求項5】
前記アクチベータは、前記少なくとも1つのジョー部材に機械的に連結される、請求項1に記載のエンドエフェクタアセンブリ。
【請求項6】
少なくとも1つのシャフトであって、該少なくとも1つのシャフトは、該シャフトの遠位端においてエンドエフェクタアセンブリを支持し、該エンドエフェクタアセンブリは、一対の向かい合うジョー部材を含み、該ジョー部材のうちの少なくとも1つは、それらの間に組織を把持するために他方に対して可動であり、該ジョー部材のうちの少なくとも1つは、封鎖プロセス中、ジョー部材間に配置される組織を封鎖するために電気外科エネルギーの供給源に接続するように適合される、シャフトと、
アクチベータであって、少なくとも1つのジョー部材に連結され、該封鎖プロセス中、該少なくとも1つのジョー部材に機械的摂動を選択可能に与えるように構成される、アクチベータと
を備えている、電気外科器具。
【請求項7】
前記アクチベータは、前記少なくとも1つのジョー部材を通って規定される長手方向軸に沿う、該少なくとも1つのジョー部材の前進および/または後退の動きによって引き起される剪断力を提供する、請求項6に記載の電気外科器具。
【請求項8】
前記アクチベータは、トランスデューサであり、該トランスデューサは、前記封鎖プロセス中、超音波を提供して、前記少なくとも1つのジョー部材に機械的摂動を与える、請求項6に記載の電気外科器具。
【請求項9】
前記アクチベータに連結されるアクチュエータをさらに備えている、請求項6に記載の電気外科器具。
【請求項10】
前記アクチュエータは、モータである、請求項9に記載の電気外科器具。
【請求項11】
前記アクチュエータは、電磁石である、請求項9に記載の電気外科器具。
【請求項12】
前記アクチュエータは、前記アクチベータに機械的に連結される、請求項9に記載の電気外科器具。
【請求項13】
前記アクチュエータは、前記アクチベータに磁気的に連結される、請求項9に記載の電気外科器具。
【請求項14】
前記アクチュエータは、前記アクチベータに電気的に連結される、請求項9に記載の電気外科器具。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−239899(P2012−239899A)
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願番号】特願2012−111668(P2012−111668)
【出願日】平成24年5月15日(2012.5.15)
【出願人】(501289751)タイコ ヘルスケア グループ リミテッド パートナーシップ (320)
【Fターム(参考)】
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願日】平成24年5月15日(2012.5.15)
【出願人】(501289751)タイコ ヘルスケア グループ リミテッド パートナーシップ (320)
【Fターム(参考)】
[ Back to top ]