
エネルギー効率の良いロボットシステム
受動型の動歩行を伴うエネルギー効率の良い二足歩行のロボットシステムは、枠を有する本体を含む。エネルギー回復機構は枠内に懸架される。エネルギー回復機構は荷重、荷重と枠とを相互接続する機械的エネルギー蓄積機構、及び荷重と枠に固定されたガイド手段を含む。機械的エネルギー入力機構は荷重と電気エネルギー発生機構とを相互接続する。出力手段は生成された電気エネルギーをエネルギー蓄積装置に移す。ロボットはまた本体部分に接続された脚を含む。受動型の動歩行中の周期的な脚の運動は、機械的エネルギー蓄積機構を通じて荷重に伝達され、結果として生じる荷重の振動運動は、機械的エネルギー入力機構によって電気エネルギー発生機構に移される。
【発明の詳細な説明】
【技術分野】
【0001】
関連出願の相互参照
本出願は、参照により内容が本明細書に援用される、2007年5月25日に出願された米国特許出願第11/753,715号明細書について優先権を主張する。
【0002】
本発明は、一般にエネルギー効率の良いロボットシステムに関し、より具体的には受動型の動歩行を伴うエネルギー効率の良いロボットシステムに関する。
【背景技術】
【0003】
移動、会話、物体の操縦等、人間の機能を模倣する、様々なタイプのロボットシステムが知られている。人間の歩行は腕及び脳と同様に、足、足首、脚部、及び臀部の統合された活動を含む複雑な機能である。歩く能力及び人間に近い姿を有するロボットシステムの一例は、二足歩行ロボットである。二足歩行ロボットは、ロボットの重心ができる限り同じ高さのままであるように、脚部及び足における、あらゆる継手の角度を能動的に制御することによって人間の歩行を模倣するため、精密なアクチュエータ及び高度な制御手段を必要とする。しかしながら、このタイプの制御された歩き方は、実際の人間が歩く足取りよりも大幅に非効率である。その結果、二足歩行ロボットは同等な大きさの人間の歩行と比較して、より大きなエネルギー消費を必要とする。
【0004】
つい最近、質量の中心が各々の足の運びと共に振動するように上昇及び下降する、あまり滑らかでない歩き方を伴う歩行が、運動効率の大幅な向上を提供し、それによって人間の歩行にさらに類似したレベルまで、エネルギー出力レベルを低減することが実証されている。振動する歩き方を伴うロボットシステムの一例は、受動型の動的歩行機である。受動型の動的歩行機は、受動的な機械構造としてのロボットの脚部をかたどり、機械を推進するためにロボットの振れる手足の動的な運動を利用する、単純な機械である。初期の動的歩行機は、斜面を歩いて下りるためには重力に頼っていた。つい最近、機械が水平な地面の上を歩くことを可能にする、少なくとも1つの能動的動力源を活用する受動型の動的歩行機が開発された。その受動型の動的歩行機の歩き方は非常に人間に近く、足が地面を打ち次に地面から離れて上向きに押すとき、重心の上下運動と似ている。受動型の動的歩行機は本来、継手の角度を制御するための定常的にエネルギーを与えられる制御器及びアクチュエータに依存しないため、それは同程度の二足歩行ロボットよりも少ないエネルギーを使用する。
【発明の概要】
【発明が解決しようとする課題】
【0005】
ロボットシステムの制御能力は近年増加している。しかしながら、大部分のロボットシステムのエネルギー蓄積容量は依然として基本的な限界に留まっている。前述の受動型の動的歩行機は動的なロボットシステムよりも少ないエネルギーで済むが、受動型の動的歩行機ロボットシステムは依然として動力の要件により制限される。従って、ロボットシステムのエネルギー使用の効率を増すために、再生可能なエネルギー源を内蔵する、受動型の動的ロボットシステムが当該技術分野で必要とされている。
【課題を解決するための手段】
【0006】
従って、本発明は受動型の動歩行を伴うエネルギー効率の良い二足歩行ロボットシステムである。本システムは枠を有する本体部分を含む。エネルギー回復機構は枠内に懸架されている。エネルギー回復機構は荷重、荷重と枠とを相互接続する機械的エネルギー蓄積機構、及び枠に対して荷重の運動をガイドするための、荷重に固定されたガイド手段を含む。機械的エネルギー入力機構は、荷重の機械的運動から電気エネルギーを発生させるための電気エネルギー発生機構と、荷重とを相互接続する。出力手段は生成された電気エネルギーをエネルギー蓄積装置に移す。ロボットはまた本体部分に接続された脚を含む。受動型の動歩行中の脚の周期的運動は、機械的エネルギー蓄積機構を通じて荷重へ伝達され、脚の周期的運動から生じる荷重の振動運動は、電気エネルギーを発生させるための電気エネルギー発生機構に対する機械的エネルギー入力部としての、機械的エネルギー入力機構により伝達される。生成された電気エネルギーは、ロボットシステムによる使用のためエネルギー蓄積装置に移される。
【0007】
本発明の1つの利点は、受動型の動歩行に依存するエネルギー効率の良い二足歩行ロボットシステムが提供されることである。本発明の別の利点は、持ち運びできる、再生可能なエネルギー源を含むロボットシステムが提供されることである。本発明のさらに他の利点は、バッテリーを再充電するために移動中のロボットの周期的運動を利用する、再充電可能なバッテリーを含むロボットシステムが提供されることである。本発明のさらなる利点は、そのままでは失われるであろうエネルギーを再度回復させるため、受動型の動的二足歩行ロボットのエネルギー効率が良いことである。本発明のさらに他の利点は、受動型の動的二足歩行ロボットが、ばねに基づく機械的エネルギー蓄積装置と、発電機に基づく電気エネルギー再生装置の双方を組み合わせることである。
【0008】
本発明のその他の特徴及び利点は、それらが添付図面と併せて取り上げられる、以下の説明を読んだ後でより良く理解されるようになるため、容易にわかるであろう。
【図面の簡単な説明】
【0009】
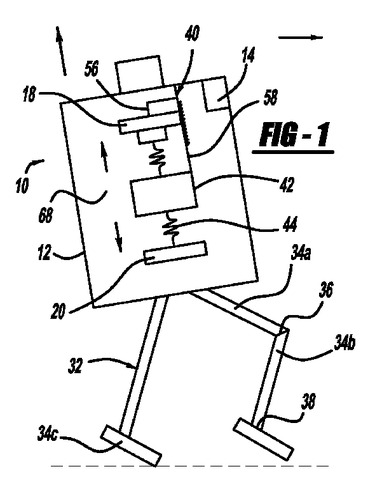
【図1】本発明による、エネルギー効率が良いロボットシステムの側面図である。
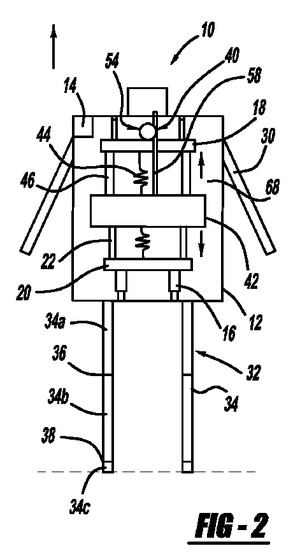
【図2】本発明による、図1のエネルギー効率が良いロボットシステムの正面図である。
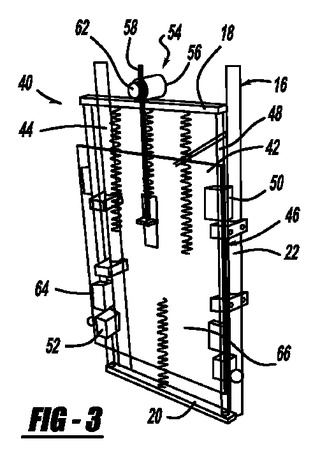
【図3】本発明による、図1のエネルギー効率が良いロボットシステム・モデル用の、エネルギー回復機構の斜視図である。
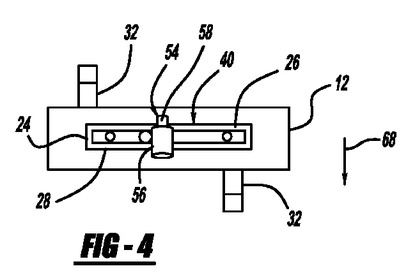
【図4】本発明による、図1のエネルギー回復機構システムの上面図である。
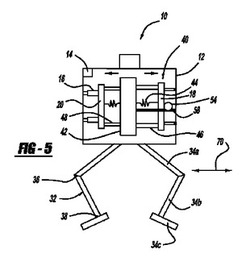
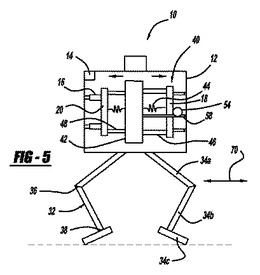
【図5】本発明による、エネルギー効率が良いロボットシステムの、別の例の正面図である。
【発明を実施するための形態】
【0010】
図1〜5を参照すると、エネルギー効率の良いロボットシステムが例示されている。この例において、ロボットシステムは電動の二足歩行の可動ロボット10であり、とりわけ受動型の動的歩行ロボット10である。受動型の動的歩行ロボット10は、表面に沿った移動中に垂直方向の周期的変動又は振動的変動を受ける。
【0011】
ロボットシステム10は本体部分12を含む。本体部分12はハウジングを備える。この例において、本体部分12は箱状の形を有するが、その形状は限定されない。本体はロボットの機能性を制御するための制御機構14を収納する。例えば、制御機構はプロセッサ、メモリ、及び入力/出力装置を含む制御器である。本体部分12はまた、ロボット用の所定レベルの運転動力を提供する、後述のエネルギー回復機構も収納する。本体部分12は枠支持構造16を含む。例えば、枠支持構造は上部枠部材18、下部枠部材20、及び上部枠部材18と下部枠部材20とを相互接続する側方枠部材22を含み得る。別の例において、枠支持構造16はまた前方枠部分26と後方枠部分28とを相互接続する横部材24を含むことができ、前方枠部分と後方枠部分の各々は上部枠部材18、下部枠部材20、及び側方枠部材22を含む。他の構造例が考えられることを理解されたい。
【0012】
ロボットシステム10はまた腕30を含む。腕の上端は本体部分12に動作可能なように接続される。腕30は継手又はアクチュエータを介して相互接続されている個々の棒部材を含み得る。腕30の下端は(図示せず)手に動作可能なように接続され得る。手は特定の作業を動作可能なように実行する、複数の相互接続された手の部材を含み得る。
【0013】
ロボットシステム10はまた本体部分から下向きに延びている脚32、望ましくは2本の脚を含む。脚32は立っている間は本体部分12を支持し、ロボットシステム10の移動を容易にすることを理解されたい。各脚32は膝継手36により相互接続された、複数の脚部材34を含む。第1の脚部材34aの上端は人間における股関節と同様に、本体部分12に動作可能なように取り付けられる。第2の脚部材34bの下端は、人間の足根関節に類似の足継手38を介して、足の部分34cに動作可能なように接続される。足の部分34cは移動の間、表面と接触する。
【0014】
ロボットシステム10の移動は様々な形をとることができる。1つの例は脚32が真直ぐに保たれ、腕30が脚32に対して互い違いに振れる、受動型の動的歩行である。受動型の動的ロボットは、あらゆる追加のエネルギー入力を最小限に保つため、重力又は他のタイプの最小限度の作動のような、単純な動力源を利用する。例えば、エネルギーの使用量を最小化するために、足継手38だけがアクチュエータを利用する。ロボットシステム10が動くと、各足34cは地面を離れて、左右の動きで交互に持ち上げられる。その足の運びは左右の衝撃を最小化し、ロボットシステム10のバランスを助けるために用いられる。ロボットシステム10の結果的な動きは、ほぼ垂直な成分を伴う振動性の動きである。制御器は移動中に表面との接触を検出するセンサーを通じて、ロボットの足34cの一歩一歩の運動を制御し得ることを理解されたい。さらに制御器は、ロボットシステム10が移動中に様々な表面に適応するために、学習の概念を用い得る。
【0015】
エネルギー回復機構40は、移動中にロボットシステム10の振動運動を用い、それをロボットシステム10の動作に寄与するための電気エネルギーに変換する装置である。エネルギー回復機構40は、移動中の変位ひいてはエネルギーの回復を最大限にするために、本体部分12内の枠支持構造16から懸架される。エネルギー回復機構40は、機械的に振動するエネルギー回復機構40に対して追加的な安定性を提供するように、ロボットシステム10の重心付近に置かれ得る。
【0016】
エネルギー回復機構40は荷重42又は質量を含む。この例において、荷重42はバッテリーのようなエネルギー蓄積装置である。エネルギー蓄積装置の別の例は燃料電池、コンデンサ、フライホイール、あるいは他のタイプの動力源である。図3に示すように、荷重は板と一体化されてもよい。
【0017】
エネルギー回復機構40は又、ばね等のような機械的エネルギー蓄積機構44を少なくとも1つは含む。様々なタイプのばねが適し、ばねは様々な場所に設置され得る。例えば、ばね44は荷重42に取り付けられた一端、及び枠支持構造16に取り付けられた第二端を有する。別の例においては、1つの上部ばね及び下部ばねがある。上部ばね44は荷重42に取り付けられた一端、及び上部枠部材18に取り付けられた第二端を有する。同様に、下部ばね44は荷重42に取り付けられた一端、及び下部枠部材20に取り付けられた第二端を有する。ばね位置の別の例が利用できる。
【0018】
エネルギー回復機構40はまた荷重42の運動を円滑に方向付け、安定させるガイド手段46を含む。ガイド手段46は、望ましくは荷重の運動から生じる摩擦を最小化する。1つの例において、ガイド手段46は上部枠部材18と下部枠部材20との間に延びる、垂直方向のロッド48である。ブッシュ50は荷重42と垂直ロッド48を相互接続し、垂直ロッド48の長さに沿った荷重42の垂直運動を容易にする。エネルギー回復機構40は、ロボットシステムの運動の結果としての、垂直ロッド48に沿った荷重42の垂直運動を測定するための線形変換器52を含み得る。ガイド手段の別の例は前述のロッド48、及びロッドに摺動可能に連結された車輪である。摺動可能な接続の別の例が本発明の範囲内で考えられる。
【0019】
エネルギー回復機構40は発電機、歯車付き直流モータ等のような、電気エネルギー発生手段54を含む。この例においては、発電機56は上部枠部材18に固定して取り付けられる。歯付きの梁58は荷重と発電機56の小歯車62とを相互接続する。荷重42の振動運動から生じる歯付きの梁58の運動は、機械的エネルギーを電気に変換するために、発電機ハウジングに搭載された小歯車62を回転させる。ベルトや、コイルを通じて振動する電磁石等のような他の機構を用いて、機械的エネルギーを蓄積し、そして後で再利用するために回収するように、振動する質量を動力伝達システムに連結し得ることを理解されたい。さらに、これらの機構は、エネルギー回収機構40のエネルギー回収効率を最大にし、特定のロボット動作の必要性に適合させるように質量の振動の機械リアクタンスを調整するために用いられ得る。その上、ロボットの歩く足取りのような移動は、システムの機械的、電気的、又は組み合わせた効率を最大にするためさらに最適化され得る。効率は、システムが有利にもロボットシステムの移動に必要な動力と、荷重に伝達され従って再利用のために回収される動力の双方を考慮に入れることを可能にする。
【0020】
エネルギー回復機構40は又、ショックアブソーバのような減衰要素64、あるいは他のタイプの適応できる機械的に反応の速い機構を含み得る。減衰要素64は様々な特性又は品質を含む。これらの特性又は品質は静的あるいは動的である。さらに、これらの特性又は品質は、エネルギー効率の良いロボットシステム10の環境、活動レベル、システムの状態等に適応するために選択され、調整され、又は調節され得る。例えば減衰システムのタイプは、荷重の振動を、エネルギー効率の良いロボットシステム10の目的の用途に対して適応させるように選択される。品質の一例は荷重振動のQ因子である。別の例において、荷重振動の共振は、歩行又は走行等の移動によって誘起される動作の周波数に近づけるために、機械的に調整され得る。さらに別の例において、使用者は例えば速度又は表面の変化に起因する、荷重、歩き方、又は歩き方の周期等の変動に適応するため、リアルタイムでエネルギー回復機構を順応して変更し得る。さらに別の例において、使用者は荷重の変動に尚一層適応するために、リアルタイムで減衰要素64を調整し得る。さらに別の例において、所定の特性又は品質は変化に応じ順応して更新され得る。所定のイベントに対する応答が学習され、類似の状況における使用のために保存される、学習プロセスが用いられても良い。
【0021】
発電機56の電気出力は、バッテリーの充電、又はロボットシステム10への追加的電力供給等のような別の目的に、あるいはその他の目的に使用され得ることを理解されたい。
【0022】
運転において、ロボットが歩くとき、ロボットの歩行はその重心において幾らかの垂直振動運動を誘起する。これは重心における振動運動及び振動の力の、荷重42への移動をもたらす。荷重のばね負荷は周期的な上向きの運動を発生し、それはロボットシステムの歩行の周波数に合わせられたとき、類似の条件における人間の移動に類似した、さらに高い歩行の効率を可能にするため、ロボットの他方の脚の重量を抜くことを容易にするであろう。これは電気エネルギー発生手段又は電気エネルギー蓄積装置からの、電気エネルギーの消費を必要とする代わりに、ばねの中に蓄えられた機械的エネルギーを通じて生じる。垂直の振動運動は、ばね44の特性選択により増幅され得ることを理解されたい。
【0023】
結果として生じる梁58の線形運動は、発電機56を駆動するために小歯車62を駆動する。発電機56は電気エネルギーを生み出し、それはこの例のバッテリーに戻されるか、又は本システムによる後での使用のため、あるいはロボットシステム10による別の用途のために、別の電気エネルギー蓄積装置に移され得る。電力の発生は、荷重42の重量及び荷重42の垂直変位に依存することを理解されたい。さらに、ロボットのエネルギー利用の全体効率、及び実用的な電荷の継続時間はエネルギーの蓄積を通じて増加し得る。
【0024】
この例において、ロボットの重心は68で示すようにほぼ垂直な面内で振動する。一般的に、動力は歩行周期のあらゆる局面を通しては供給されない。バッテリーは本体部分12の内部に位置し得るか、あるいは枠支持構造16に接続され得ることが考えられる。さらに、振動する物体はロボットの手足又は別のレバー・アーム等のような、他の適切な質量であり得る。
【0025】
振動運動は、垂直でない別のタイプの振動運動又は回転運動であり得ることを理解されたい。例えば、エネルギー回復機構は回転運動を捉え、振動運動は発電機を回転駆動する。図5に示す他の例において、移動は70で示すように左右の、又は双方向の振動する歩き方である。このタイプの歩き方は水平面に沿ったバッテリーの左右又はほぼ水平の振動を誘起する。この例に示すように、エネルギー回復機構もまたほぼ水平の方向を有することができる。これらの動きのいずれも、ロボットシステム10のエネルギー効率を増すために、同じように発電機につながれ得る。
【0026】
ロボットシステム10はその機能を行なうために必要な、その他の構成要素又は特徴を含み得る。例えば、ばねは様々な動きに関する振動を最大化するために、適応して調整され、従ってエネルギーのゲインを改善し得る。同様に、ロボットシステムは振動が長い期間又は運動に関して起きるロボット上の、様々な場所に位置する複数のより小さなエネルギー回復システムを含み得る。例えば、ロボットの手足が振動するワイピング機能を実行したとき、継手に作用しワイピング周波数を活用するために調整されたエネルギー再生システムは、ワイピングの仕事を行なうために用いられるエネルギーを潜在的に低減し得る。他のエネルギー低減が、大きなワイピングアームを動かすために小さなエネルギー入力を増幅する、機械的ばねの使用を最適化することにより、そしてエネルギーを再生し、それを後で使用するために蓄積することにより、さらに達成され得る。別の例においては、ロボットは車輪を含んでもよく、その運動は同様に回復される。さらに別の例において、機械的エネルギーを電気に変換するために回転して作動するエネルギー回復機構を用いて、回転運動が得られる。
【0027】
本発明は例示的に記載されている。用いられている専門用語は、限定的ではなく説明的な言葉の性質を帯びるように意図されていることを理解されたい。
【0028】
本発明の多くの変更及び変形が、上記の教示を踏まえて可能である。それゆえ、添付された特許請求の範囲内で、本発明は具体的に記載されているもの以外において実施され得る。
【技術分野】
【0001】
関連出願の相互参照
本出願は、参照により内容が本明細書に援用される、2007年5月25日に出願された米国特許出願第11/753,715号明細書について優先権を主張する。
【0002】
本発明は、一般にエネルギー効率の良いロボットシステムに関し、より具体的には受動型の動歩行を伴うエネルギー効率の良いロボットシステムに関する。
【背景技術】
【0003】
移動、会話、物体の操縦等、人間の機能を模倣する、様々なタイプのロボットシステムが知られている。人間の歩行は腕及び脳と同様に、足、足首、脚部、及び臀部の統合された活動を含む複雑な機能である。歩く能力及び人間に近い姿を有するロボットシステムの一例は、二足歩行ロボットである。二足歩行ロボットは、ロボットの重心ができる限り同じ高さのままであるように、脚部及び足における、あらゆる継手の角度を能動的に制御することによって人間の歩行を模倣するため、精密なアクチュエータ及び高度な制御手段を必要とする。しかしながら、このタイプの制御された歩き方は、実際の人間が歩く足取りよりも大幅に非効率である。その結果、二足歩行ロボットは同等な大きさの人間の歩行と比較して、より大きなエネルギー消費を必要とする。
【0004】
つい最近、質量の中心が各々の足の運びと共に振動するように上昇及び下降する、あまり滑らかでない歩き方を伴う歩行が、運動効率の大幅な向上を提供し、それによって人間の歩行にさらに類似したレベルまで、エネルギー出力レベルを低減することが実証されている。振動する歩き方を伴うロボットシステムの一例は、受動型の動的歩行機である。受動型の動的歩行機は、受動的な機械構造としてのロボットの脚部をかたどり、機械を推進するためにロボットの振れる手足の動的な運動を利用する、単純な機械である。初期の動的歩行機は、斜面を歩いて下りるためには重力に頼っていた。つい最近、機械が水平な地面の上を歩くことを可能にする、少なくとも1つの能動的動力源を活用する受動型の動的歩行機が開発された。その受動型の動的歩行機の歩き方は非常に人間に近く、足が地面を打ち次に地面から離れて上向きに押すとき、重心の上下運動と似ている。受動型の動的歩行機は本来、継手の角度を制御するための定常的にエネルギーを与えられる制御器及びアクチュエータに依存しないため、それは同程度の二足歩行ロボットよりも少ないエネルギーを使用する。
【発明の概要】
【発明が解決しようとする課題】
【0005】
ロボットシステムの制御能力は近年増加している。しかしながら、大部分のロボットシステムのエネルギー蓄積容量は依然として基本的な限界に留まっている。前述の受動型の動的歩行機は動的なロボットシステムよりも少ないエネルギーで済むが、受動型の動的歩行機ロボットシステムは依然として動力の要件により制限される。従って、ロボットシステムのエネルギー使用の効率を増すために、再生可能なエネルギー源を内蔵する、受動型の動的ロボットシステムが当該技術分野で必要とされている。
【課題を解決するための手段】
【0006】
従って、本発明は受動型の動歩行を伴うエネルギー効率の良い二足歩行ロボットシステムである。本システムは枠を有する本体部分を含む。エネルギー回復機構は枠内に懸架されている。エネルギー回復機構は荷重、荷重と枠とを相互接続する機械的エネルギー蓄積機構、及び枠に対して荷重の運動をガイドするための、荷重に固定されたガイド手段を含む。機械的エネルギー入力機構は、荷重の機械的運動から電気エネルギーを発生させるための電気エネルギー発生機構と、荷重とを相互接続する。出力手段は生成された電気エネルギーをエネルギー蓄積装置に移す。ロボットはまた本体部分に接続された脚を含む。受動型の動歩行中の脚の周期的運動は、機械的エネルギー蓄積機構を通じて荷重へ伝達され、脚の周期的運動から生じる荷重の振動運動は、電気エネルギーを発生させるための電気エネルギー発生機構に対する機械的エネルギー入力部としての、機械的エネルギー入力機構により伝達される。生成された電気エネルギーは、ロボットシステムによる使用のためエネルギー蓄積装置に移される。
【0007】
本発明の1つの利点は、受動型の動歩行に依存するエネルギー効率の良い二足歩行ロボットシステムが提供されることである。本発明の別の利点は、持ち運びできる、再生可能なエネルギー源を含むロボットシステムが提供されることである。本発明のさらに他の利点は、バッテリーを再充電するために移動中のロボットの周期的運動を利用する、再充電可能なバッテリーを含むロボットシステムが提供されることである。本発明のさらなる利点は、そのままでは失われるであろうエネルギーを再度回復させるため、受動型の動的二足歩行ロボットのエネルギー効率が良いことである。本発明のさらに他の利点は、受動型の動的二足歩行ロボットが、ばねに基づく機械的エネルギー蓄積装置と、発電機に基づく電気エネルギー再生装置の双方を組み合わせることである。
【0008】
本発明のその他の特徴及び利点は、それらが添付図面と併せて取り上げられる、以下の説明を読んだ後でより良く理解されるようになるため、容易にわかるであろう。
【図面の簡単な説明】
【0009】
【図1】本発明による、エネルギー効率が良いロボットシステムの側面図である。
【図2】本発明による、図1のエネルギー効率が良いロボットシステムの正面図である。
【図3】本発明による、図1のエネルギー効率が良いロボットシステム・モデル用の、エネルギー回復機構の斜視図である。
【図4】本発明による、図1のエネルギー回復機構システムの上面図である。
【図5】本発明による、エネルギー効率が良いロボットシステムの、別の例の正面図である。
【発明を実施するための形態】
【0010】
図1〜5を参照すると、エネルギー効率の良いロボットシステムが例示されている。この例において、ロボットシステムは電動の二足歩行の可動ロボット10であり、とりわけ受動型の動的歩行ロボット10である。受動型の動的歩行ロボット10は、表面に沿った移動中に垂直方向の周期的変動又は振動的変動を受ける。
【0011】
ロボットシステム10は本体部分12を含む。本体部分12はハウジングを備える。この例において、本体部分12は箱状の形を有するが、その形状は限定されない。本体はロボットの機能性を制御するための制御機構14を収納する。例えば、制御機構はプロセッサ、メモリ、及び入力/出力装置を含む制御器である。本体部分12はまた、ロボット用の所定レベルの運転動力を提供する、後述のエネルギー回復機構も収納する。本体部分12は枠支持構造16を含む。例えば、枠支持構造は上部枠部材18、下部枠部材20、及び上部枠部材18と下部枠部材20とを相互接続する側方枠部材22を含み得る。別の例において、枠支持構造16はまた前方枠部分26と後方枠部分28とを相互接続する横部材24を含むことができ、前方枠部分と後方枠部分の各々は上部枠部材18、下部枠部材20、及び側方枠部材22を含む。他の構造例が考えられることを理解されたい。
【0012】
ロボットシステム10はまた腕30を含む。腕の上端は本体部分12に動作可能なように接続される。腕30は継手又はアクチュエータを介して相互接続されている個々の棒部材を含み得る。腕30の下端は(図示せず)手に動作可能なように接続され得る。手は特定の作業を動作可能なように実行する、複数の相互接続された手の部材を含み得る。
【0013】
ロボットシステム10はまた本体部分から下向きに延びている脚32、望ましくは2本の脚を含む。脚32は立っている間は本体部分12を支持し、ロボットシステム10の移動を容易にすることを理解されたい。各脚32は膝継手36により相互接続された、複数の脚部材34を含む。第1の脚部材34aの上端は人間における股関節と同様に、本体部分12に動作可能なように取り付けられる。第2の脚部材34bの下端は、人間の足根関節に類似の足継手38を介して、足の部分34cに動作可能なように接続される。足の部分34cは移動の間、表面と接触する。
【0014】
ロボットシステム10の移動は様々な形をとることができる。1つの例は脚32が真直ぐに保たれ、腕30が脚32に対して互い違いに振れる、受動型の動的歩行である。受動型の動的ロボットは、あらゆる追加のエネルギー入力を最小限に保つため、重力又は他のタイプの最小限度の作動のような、単純な動力源を利用する。例えば、エネルギーの使用量を最小化するために、足継手38だけがアクチュエータを利用する。ロボットシステム10が動くと、各足34cは地面を離れて、左右の動きで交互に持ち上げられる。その足の運びは左右の衝撃を最小化し、ロボットシステム10のバランスを助けるために用いられる。ロボットシステム10の結果的な動きは、ほぼ垂直な成分を伴う振動性の動きである。制御器は移動中に表面との接触を検出するセンサーを通じて、ロボットの足34cの一歩一歩の運動を制御し得ることを理解されたい。さらに制御器は、ロボットシステム10が移動中に様々な表面に適応するために、学習の概念を用い得る。
【0015】
エネルギー回復機構40は、移動中にロボットシステム10の振動運動を用い、それをロボットシステム10の動作に寄与するための電気エネルギーに変換する装置である。エネルギー回復機構40は、移動中の変位ひいてはエネルギーの回復を最大限にするために、本体部分12内の枠支持構造16から懸架される。エネルギー回復機構40は、機械的に振動するエネルギー回復機構40に対して追加的な安定性を提供するように、ロボットシステム10の重心付近に置かれ得る。
【0016】
エネルギー回復機構40は荷重42又は質量を含む。この例において、荷重42はバッテリーのようなエネルギー蓄積装置である。エネルギー蓄積装置の別の例は燃料電池、コンデンサ、フライホイール、あるいは他のタイプの動力源である。図3に示すように、荷重は板と一体化されてもよい。
【0017】
エネルギー回復機構40は又、ばね等のような機械的エネルギー蓄積機構44を少なくとも1つは含む。様々なタイプのばねが適し、ばねは様々な場所に設置され得る。例えば、ばね44は荷重42に取り付けられた一端、及び枠支持構造16に取り付けられた第二端を有する。別の例においては、1つの上部ばね及び下部ばねがある。上部ばね44は荷重42に取り付けられた一端、及び上部枠部材18に取り付けられた第二端を有する。同様に、下部ばね44は荷重42に取り付けられた一端、及び下部枠部材20に取り付けられた第二端を有する。ばね位置の別の例が利用できる。
【0018】
エネルギー回復機構40はまた荷重42の運動を円滑に方向付け、安定させるガイド手段46を含む。ガイド手段46は、望ましくは荷重の運動から生じる摩擦を最小化する。1つの例において、ガイド手段46は上部枠部材18と下部枠部材20との間に延びる、垂直方向のロッド48である。ブッシュ50は荷重42と垂直ロッド48を相互接続し、垂直ロッド48の長さに沿った荷重42の垂直運動を容易にする。エネルギー回復機構40は、ロボットシステムの運動の結果としての、垂直ロッド48に沿った荷重42の垂直運動を測定するための線形変換器52を含み得る。ガイド手段の別の例は前述のロッド48、及びロッドに摺動可能に連結された車輪である。摺動可能な接続の別の例が本発明の範囲内で考えられる。
【0019】
エネルギー回復機構40は発電機、歯車付き直流モータ等のような、電気エネルギー発生手段54を含む。この例においては、発電機56は上部枠部材18に固定して取り付けられる。歯付きの梁58は荷重と発電機56の小歯車62とを相互接続する。荷重42の振動運動から生じる歯付きの梁58の運動は、機械的エネルギーを電気に変換するために、発電機ハウジングに搭載された小歯車62を回転させる。ベルトや、コイルを通じて振動する電磁石等のような他の機構を用いて、機械的エネルギーを蓄積し、そして後で再利用するために回収するように、振動する質量を動力伝達システムに連結し得ることを理解されたい。さらに、これらの機構は、エネルギー回収機構40のエネルギー回収効率を最大にし、特定のロボット動作の必要性に適合させるように質量の振動の機械リアクタンスを調整するために用いられ得る。その上、ロボットの歩く足取りのような移動は、システムの機械的、電気的、又は組み合わせた効率を最大にするためさらに最適化され得る。効率は、システムが有利にもロボットシステムの移動に必要な動力と、荷重に伝達され従って再利用のために回収される動力の双方を考慮に入れることを可能にする。
【0020】
エネルギー回復機構40は又、ショックアブソーバのような減衰要素64、あるいは他のタイプの適応できる機械的に反応の速い機構を含み得る。減衰要素64は様々な特性又は品質を含む。これらの特性又は品質は静的あるいは動的である。さらに、これらの特性又は品質は、エネルギー効率の良いロボットシステム10の環境、活動レベル、システムの状態等に適応するために選択され、調整され、又は調節され得る。例えば減衰システムのタイプは、荷重の振動を、エネルギー効率の良いロボットシステム10の目的の用途に対して適応させるように選択される。品質の一例は荷重振動のQ因子である。別の例において、荷重振動の共振は、歩行又は走行等の移動によって誘起される動作の周波数に近づけるために、機械的に調整され得る。さらに別の例において、使用者は例えば速度又は表面の変化に起因する、荷重、歩き方、又は歩き方の周期等の変動に適応するため、リアルタイムでエネルギー回復機構を順応して変更し得る。さらに別の例において、使用者は荷重の変動に尚一層適応するために、リアルタイムで減衰要素64を調整し得る。さらに別の例において、所定の特性又は品質は変化に応じ順応して更新され得る。所定のイベントに対する応答が学習され、類似の状況における使用のために保存される、学習プロセスが用いられても良い。
【0021】
発電機56の電気出力は、バッテリーの充電、又はロボットシステム10への追加的電力供給等のような別の目的に、あるいはその他の目的に使用され得ることを理解されたい。
【0022】
運転において、ロボットが歩くとき、ロボットの歩行はその重心において幾らかの垂直振動運動を誘起する。これは重心における振動運動及び振動の力の、荷重42への移動をもたらす。荷重のばね負荷は周期的な上向きの運動を発生し、それはロボットシステムの歩行の周波数に合わせられたとき、類似の条件における人間の移動に類似した、さらに高い歩行の効率を可能にするため、ロボットの他方の脚の重量を抜くことを容易にするであろう。これは電気エネルギー発生手段又は電気エネルギー蓄積装置からの、電気エネルギーの消費を必要とする代わりに、ばねの中に蓄えられた機械的エネルギーを通じて生じる。垂直の振動運動は、ばね44の特性選択により増幅され得ることを理解されたい。
【0023】
結果として生じる梁58の線形運動は、発電機56を駆動するために小歯車62を駆動する。発電機56は電気エネルギーを生み出し、それはこの例のバッテリーに戻されるか、又は本システムによる後での使用のため、あるいはロボットシステム10による別の用途のために、別の電気エネルギー蓄積装置に移され得る。電力の発生は、荷重42の重量及び荷重42の垂直変位に依存することを理解されたい。さらに、ロボットのエネルギー利用の全体効率、及び実用的な電荷の継続時間はエネルギーの蓄積を通じて増加し得る。
【0024】
この例において、ロボットの重心は68で示すようにほぼ垂直な面内で振動する。一般的に、動力は歩行周期のあらゆる局面を通しては供給されない。バッテリーは本体部分12の内部に位置し得るか、あるいは枠支持構造16に接続され得ることが考えられる。さらに、振動する物体はロボットの手足又は別のレバー・アーム等のような、他の適切な質量であり得る。
【0025】
振動運動は、垂直でない別のタイプの振動運動又は回転運動であり得ることを理解されたい。例えば、エネルギー回復機構は回転運動を捉え、振動運動は発電機を回転駆動する。図5に示す他の例において、移動は70で示すように左右の、又は双方向の振動する歩き方である。このタイプの歩き方は水平面に沿ったバッテリーの左右又はほぼ水平の振動を誘起する。この例に示すように、エネルギー回復機構もまたほぼ水平の方向を有することができる。これらの動きのいずれも、ロボットシステム10のエネルギー効率を増すために、同じように発電機につながれ得る。
【0026】
ロボットシステム10はその機能を行なうために必要な、その他の構成要素又は特徴を含み得る。例えば、ばねは様々な動きに関する振動を最大化するために、適応して調整され、従ってエネルギーのゲインを改善し得る。同様に、ロボットシステムは振動が長い期間又は運動に関して起きるロボット上の、様々な場所に位置する複数のより小さなエネルギー回復システムを含み得る。例えば、ロボットの手足が振動するワイピング機能を実行したとき、継手に作用しワイピング周波数を活用するために調整されたエネルギー再生システムは、ワイピングの仕事を行なうために用いられるエネルギーを潜在的に低減し得る。他のエネルギー低減が、大きなワイピングアームを動かすために小さなエネルギー入力を増幅する、機械的ばねの使用を最適化することにより、そしてエネルギーを再生し、それを後で使用するために蓄積することにより、さらに達成され得る。別の例においては、ロボットは車輪を含んでもよく、その運動は同様に回復される。さらに別の例において、機械的エネルギーを電気に変換するために回転して作動するエネルギー回復機構を用いて、回転運動が得られる。
【0027】
本発明は例示的に記載されている。用いられている専門用語は、限定的ではなく説明的な言葉の性質を帯びるように意図されていることを理解されたい。
【0028】
本発明の多くの変更及び変形が、上記の教示を踏まえて可能である。それゆえ、添付された特許請求の範囲内で、本発明は具体的に記載されているもの以外において実施され得る。
【特許請求の範囲】
【請求項1】
受動型の動歩行を伴うエネルギー効率の良い二足歩行のロボットシステムであって、
枠を含む本体部分と、
荷重、前記荷重と前記枠を相互接続する機械的エネルギー蓄積機構、前記枠に対して前記荷重の運動をガイドするための、前記荷重に固定されたガイド手段、荷重の機械的運動から電気エネルギーを発生させるための、電気エネルギー発生機構と前記荷重とを相互接続する機械的エネルギー入力機構、及び生成された電気エネルギーをエネルギー蓄積装置に移す出力手段を含む、前記枠内に懸架されたエネルギー回復機構と、
受動型の動歩行中の周期的な脚の運動が、機械的エネルギー蓄積機構を通じて前記荷重に伝達され、前記脚の周期的運動から生じる前記荷重の振動運動が、電気エネルギーを発生させるために、機械的エネルギー入力部としての前記機械的エネルギー入力機構によって、前記電気エネルギー発生機構に伝達され、生成された電気エネルギーがロボットシステムによる使用のために前記エネルギー蓄積装置に移される、前記本体部分に接続された脚と
を備えるロボットシステム。
【請求項2】
前記ロボットシステムが前記本体部分に動作可能なように接続された腕を含む、請求項1に記載のロボットシステム。
【請求項3】
前記腕が移動中に前記脚と互い違いに振れる、請求項2に記載のロボットシステム。
【請求項4】
前記枠が前方枠部分及び後方枠部分を含み、各々が上部枠部材、下部枠部材、前記上部枠部材と下部枠部材とを相互接続する側方枠部材、及び前方枠部分と後方枠部分とを相互接続する横部材を有する、請求項1に記載のロボットシステム。
【請求項5】
前記振動運動が垂直方向の運動である、請求項1に記載のロボットシステム。
【請求項6】
前記エネルギー回復機構が水平に向いており、そして振動運動が水平方向の運動である、請求項1に記載のロボットシステム。
【請求項7】
前記エネルギー回復機構が回転運動を捉え、振動運動がエネルギー発生機構を回転駆動する、請求項1に記載のロボットシステム。
【請求項8】
前記荷重及び前記エネルギー蓄積装置がバッテリーである、請求項1に記載のロボットシステム。
【請求項9】
2本の脚をさらに備え、各々の脚が膝のアクチュエータにより相互接続された2本の脚部材を含み、前記第2の脚部材の下端が足首のアクチュエータにより足と相互接続される、請求項1に記載のロボットシステム。
【請求項10】
移動中の荷重のばね負荷が、歩行の効率を増すため交互に各々の脚の重量を抜く、周期的な上向きの運動を生み出す、請求項9に記載のロボットシステム。
【請求項11】
前記機械的エネルギー蓄積機構が選択的に調整可能である、請求項1に記載のロボットシステム。
【請求項12】
前記ガイド手段が、前記上部枠部材と前記下部枠部材との間に延びる、垂直に向いたロッドであり、前記荷重が前記ガイド手段に対して動く、請求項1に記載のロボットシステム。
【請求項13】
前記電気エネルギー発生手段が発電機であり、歯付きの梁が前記荷重を前記発電機に動作可能なように接続されている小歯車と相互接続する、請求項1に記載のロボットシステム。
【請求項14】
受動型の動歩行を伴うエネルギー効率の良い二足歩行のロボットシステムであって、
枠を含む本体部分と、
エネルギー蓄積装置、前記エネルギー蓄積装置と前記枠を相互接続するばね、前記枠に対して前記エネルギー蓄積装置の運動をガイドするための、前記エネルギー蓄積装置に固定されたガイド手段、エネルギー蓄積装置の機械的運動から電気エネルギーを発生させるための、電気エネルギー発生機構と前記エネルギー蓄積装置とを相互接続する機械的エネルギー入力機構、及び生成された電気エネルギーを前記エネルギー蓄積装置に移す出力手段を含む、前記枠内に懸架されたエネルギー回復機構と、
受動型の動歩行中の周期的な脚の運動が、ばねを通じて前記エネルギー蓄積装置に伝達され、前記脚の周期的運動から生じる前記エネルギー蓄積装置の振動運動が、電気エネルギーを発生させるために、機械的エネルギー入力部としての前記機械的エネルギー入力機構によって、前記電気エネルギー発生手段に伝達され、前記電気エネルギーがロボットシステムによる使用のために前記エネルギー蓄積装置に移される、前記本体部分に接続された一対の脚と
を備えるロボットシステム。
【請求項15】
前記本体部分に動作可能なように接続された腕をさらに備え、前記腕が移動中に前記脚と互い違いに振れる、請求項14に記載のロボットシステム。
【請求項16】
前記枠が前方枠部分及び後方枠部分を含み、各々が上部枠部材、下部枠部材、前記上部枠部材と前記下部枠部材とを相互接続する側方枠部材、及び前方枠部分と後方枠部分とを相互接続する横部材を有する、請求項14に記載のロボットシステム。
【請求項17】
前記振動運動が垂直方向の運動である、請求項14に記載のロボットシステム。
【請求項18】
前記エネルギー回復機構が水平に向いており、そして振動運動が水平方向の運動である、請求項14に記載のロボットシステム。
【請求項19】
前記エネルギー回復機構が回転運動を捉え、振動運動がエネルギー発生機構を回転駆動する、請求項14に記載のロボットシステム。
【請求項20】
前記脚の各々が膝のアクチュエータにより相互接続された2本の脚部材を含み、前記第2の脚部材の下端が足首のアクチュエータにより足と相互接続される、請求項14に記載のロボットシステム。
【請求項21】
前記エネルギー蓄積装置がバッテリーである、請求項14に記載のロボットシステム。
【請求項22】
移動中の前記エネルギー蓄積装置のばね負荷が、歩行の効率を増すため交互に各々の脚の重量を抜く、周期的な上向きの運動を生み出す、請求項14に記載のロボットシステム。
【請求項23】
前記ばねが選択的に調整可能である、請求項14に記載のロボットシステム。
【請求項24】
前記ばねがリアルタイムに順応して更新される、請求項23に記載のロボットシステム。
【請求項25】
前記ガイド手段が、前記上部枠部材と前記下部枠部材との間に延びる、垂直に向いたロッドであり、前記荷重が前記ロッドに対して動く、請求項14に記載のロボットシステム。
【請求項26】
前記機械的エネルギー入力機構が歯付きの梁であり、前記電気エネルギー発生手段が発電機であり、前記歯付きの梁が、前記エネルギー蓄積装置を前記発電機に動作可能なように接続されている小歯車と相互接続する、請求項14に記載のロボットシステム。
【請求項27】
受動型の動歩行を伴うエネルギー効率の良い二足歩行のロボットシステムであって、
前方枠部材及び後方枠部材を有し、各々が上部枠部材、下部枠部材、前記上部枠部材と前記下部枠部材とを相互接続する側方枠部材、及び前方枠部材と後方枠部材とを相互接続する横部材を有する枠を含む本体部分と、
前記本体部分と動作可能なように接続された腕と、
前記上部枠部材と前記下部枠部材との間に懸架されるエネルギー回復機構であって、エネルギー蓄積装置、前記エネルギー蓄積装置と前記上部枠部材との間に配置された少なくとも1つの上部ばね、前記エネルギー蓄積装置と前記下部枠部材との間に配置された少なくとも1つの下部ばね、前記枠に対して前記エネルギー蓄積装置の運動をガイドするための、前記エネルギー蓄積装置に固定されたガイド手段、前記エネルギー蓄積装置と、荷重の機械的運動から電気エネルギーを発生させるための電気エネルギー発生機構とを相互接続する、機械的エネルギー入力機構、及び生成された電気エネルギーを前記エネルギー蓄積装置に移すための出力手段を含む、エネルギー回復機構と、
受動型の動歩行中の脚の周期的運動が、ばねを通じて前記エネルギー蓄積装置に伝達され、前記脚の周期的運動から生じる前記エネルギー蓄積装置の振動運動が、電気エネルギーを発生させるために、機械的エネルギー入力部としての前記機械的エネルギー入力機構により、前記電気エネルギー発生手段に伝達され、そして電気エネルギーがロボットシステムによる使用のために前記エネルギー蓄積装置に移される、前記本体部分に接続された一対の脚と
を備えるロボットシステム。
【請求項28】
前記腕が移動中に前記脚と互い違いに振れる、請求項27に記載のロボットシステム。
【請求項29】
前記振動運動が垂直方向の運動である、請求項27に記載のロボットシステム。
【請求項30】
前記振動運動が水平方向の運動である、請求項27に記載のロボットシステム。
【請求項31】
前記エネルギー回復機構が回転運動を捉え、振動運動がエネルギー発生機構を回転駆動する、請求項27に記載のロボットシステム。
【請求項32】
前記ガイド手段が、前記上部枠部材と前記下部枠部材との間に延びる、垂直に向いたロッドであり、前記荷重が前記ロッドに対して動く、請求項27に記載のロボットシステム。
【請求項33】
前記機械的エネルギー入力機構が歯付きの梁であり、前記エネルギー発生手段が発電機であり、前記歯付きの梁が、前記エネルギー蓄積装置と前記発電機に動作可能なように接続されている小歯車とを相互接続する、請求項27に記載のロボットシステム。
【請求項34】
移動中の前記エネルギー蓄積装置のばね負荷が、歩行の効率を増すため交互に各々の脚の重量を抜く、周期的な上向きの運動を生み出す、請求項27に記載のロボットシステム。
【請求項35】
前記エネルギー蓄積装置がバッテリーである、請求項27に記載のロボットシステム。
【請求項36】
前記ばねが選択的に調整可能である、請求項27に記載のロボットシステム。
【請求項37】
前記ばねがリアルタイムに順応して更新される、請求項36に記載のロボットシステム。
【請求項1】
受動型の動歩行を伴うエネルギー効率の良い二足歩行のロボットシステムであって、
枠を含む本体部分と、
荷重、前記荷重と前記枠を相互接続する機械的エネルギー蓄積機構、前記枠に対して前記荷重の運動をガイドするための、前記荷重に固定されたガイド手段、荷重の機械的運動から電気エネルギーを発生させるための、電気エネルギー発生機構と前記荷重とを相互接続する機械的エネルギー入力機構、及び生成された電気エネルギーをエネルギー蓄積装置に移す出力手段を含む、前記枠内に懸架されたエネルギー回復機構と、
受動型の動歩行中の周期的な脚の運動が、機械的エネルギー蓄積機構を通じて前記荷重に伝達され、前記脚の周期的運動から生じる前記荷重の振動運動が、電気エネルギーを発生させるために、機械的エネルギー入力部としての前記機械的エネルギー入力機構によって、前記電気エネルギー発生機構に伝達され、生成された電気エネルギーがロボットシステムによる使用のために前記エネルギー蓄積装置に移される、前記本体部分に接続された脚と
を備えるロボットシステム。
【請求項2】
前記ロボットシステムが前記本体部分に動作可能なように接続された腕を含む、請求項1に記載のロボットシステム。
【請求項3】
前記腕が移動中に前記脚と互い違いに振れる、請求項2に記載のロボットシステム。
【請求項4】
前記枠が前方枠部分及び後方枠部分を含み、各々が上部枠部材、下部枠部材、前記上部枠部材と下部枠部材とを相互接続する側方枠部材、及び前方枠部分と後方枠部分とを相互接続する横部材を有する、請求項1に記載のロボットシステム。
【請求項5】
前記振動運動が垂直方向の運動である、請求項1に記載のロボットシステム。
【請求項6】
前記エネルギー回復機構が水平に向いており、そして振動運動が水平方向の運動である、請求項1に記載のロボットシステム。
【請求項7】
前記エネルギー回復機構が回転運動を捉え、振動運動がエネルギー発生機構を回転駆動する、請求項1に記載のロボットシステム。
【請求項8】
前記荷重及び前記エネルギー蓄積装置がバッテリーである、請求項1に記載のロボットシステム。
【請求項9】
2本の脚をさらに備え、各々の脚が膝のアクチュエータにより相互接続された2本の脚部材を含み、前記第2の脚部材の下端が足首のアクチュエータにより足と相互接続される、請求項1に記載のロボットシステム。
【請求項10】
移動中の荷重のばね負荷が、歩行の効率を増すため交互に各々の脚の重量を抜く、周期的な上向きの運動を生み出す、請求項9に記載のロボットシステム。
【請求項11】
前記機械的エネルギー蓄積機構が選択的に調整可能である、請求項1に記載のロボットシステム。
【請求項12】
前記ガイド手段が、前記上部枠部材と前記下部枠部材との間に延びる、垂直に向いたロッドであり、前記荷重が前記ガイド手段に対して動く、請求項1に記載のロボットシステム。
【請求項13】
前記電気エネルギー発生手段が発電機であり、歯付きの梁が前記荷重を前記発電機に動作可能なように接続されている小歯車と相互接続する、請求項1に記載のロボットシステム。
【請求項14】
受動型の動歩行を伴うエネルギー効率の良い二足歩行のロボットシステムであって、
枠を含む本体部分と、
エネルギー蓄積装置、前記エネルギー蓄積装置と前記枠を相互接続するばね、前記枠に対して前記エネルギー蓄積装置の運動をガイドするための、前記エネルギー蓄積装置に固定されたガイド手段、エネルギー蓄積装置の機械的運動から電気エネルギーを発生させるための、電気エネルギー発生機構と前記エネルギー蓄積装置とを相互接続する機械的エネルギー入力機構、及び生成された電気エネルギーを前記エネルギー蓄積装置に移す出力手段を含む、前記枠内に懸架されたエネルギー回復機構と、
受動型の動歩行中の周期的な脚の運動が、ばねを通じて前記エネルギー蓄積装置に伝達され、前記脚の周期的運動から生じる前記エネルギー蓄積装置の振動運動が、電気エネルギーを発生させるために、機械的エネルギー入力部としての前記機械的エネルギー入力機構によって、前記電気エネルギー発生手段に伝達され、前記電気エネルギーがロボットシステムによる使用のために前記エネルギー蓄積装置に移される、前記本体部分に接続された一対の脚と
を備えるロボットシステム。
【請求項15】
前記本体部分に動作可能なように接続された腕をさらに備え、前記腕が移動中に前記脚と互い違いに振れる、請求項14に記載のロボットシステム。
【請求項16】
前記枠が前方枠部分及び後方枠部分を含み、各々が上部枠部材、下部枠部材、前記上部枠部材と前記下部枠部材とを相互接続する側方枠部材、及び前方枠部分と後方枠部分とを相互接続する横部材を有する、請求項14に記載のロボットシステム。
【請求項17】
前記振動運動が垂直方向の運動である、請求項14に記載のロボットシステム。
【請求項18】
前記エネルギー回復機構が水平に向いており、そして振動運動が水平方向の運動である、請求項14に記載のロボットシステム。
【請求項19】
前記エネルギー回復機構が回転運動を捉え、振動運動がエネルギー発生機構を回転駆動する、請求項14に記載のロボットシステム。
【請求項20】
前記脚の各々が膝のアクチュエータにより相互接続された2本の脚部材を含み、前記第2の脚部材の下端が足首のアクチュエータにより足と相互接続される、請求項14に記載のロボットシステム。
【請求項21】
前記エネルギー蓄積装置がバッテリーである、請求項14に記載のロボットシステム。
【請求項22】
移動中の前記エネルギー蓄積装置のばね負荷が、歩行の効率を増すため交互に各々の脚の重量を抜く、周期的な上向きの運動を生み出す、請求項14に記載のロボットシステム。
【請求項23】
前記ばねが選択的に調整可能である、請求項14に記載のロボットシステム。
【請求項24】
前記ばねがリアルタイムに順応して更新される、請求項23に記載のロボットシステム。
【請求項25】
前記ガイド手段が、前記上部枠部材と前記下部枠部材との間に延びる、垂直に向いたロッドであり、前記荷重が前記ロッドに対して動く、請求項14に記載のロボットシステム。
【請求項26】
前記機械的エネルギー入力機構が歯付きの梁であり、前記電気エネルギー発生手段が発電機であり、前記歯付きの梁が、前記エネルギー蓄積装置を前記発電機に動作可能なように接続されている小歯車と相互接続する、請求項14に記載のロボットシステム。
【請求項27】
受動型の動歩行を伴うエネルギー効率の良い二足歩行のロボットシステムであって、
前方枠部材及び後方枠部材を有し、各々が上部枠部材、下部枠部材、前記上部枠部材と前記下部枠部材とを相互接続する側方枠部材、及び前方枠部材と後方枠部材とを相互接続する横部材を有する枠を含む本体部分と、
前記本体部分と動作可能なように接続された腕と、
前記上部枠部材と前記下部枠部材との間に懸架されるエネルギー回復機構であって、エネルギー蓄積装置、前記エネルギー蓄積装置と前記上部枠部材との間に配置された少なくとも1つの上部ばね、前記エネルギー蓄積装置と前記下部枠部材との間に配置された少なくとも1つの下部ばね、前記枠に対して前記エネルギー蓄積装置の運動をガイドするための、前記エネルギー蓄積装置に固定されたガイド手段、前記エネルギー蓄積装置と、荷重の機械的運動から電気エネルギーを発生させるための電気エネルギー発生機構とを相互接続する、機械的エネルギー入力機構、及び生成された電気エネルギーを前記エネルギー蓄積装置に移すための出力手段を含む、エネルギー回復機構と、
受動型の動歩行中の脚の周期的運動が、ばねを通じて前記エネルギー蓄積装置に伝達され、前記脚の周期的運動から生じる前記エネルギー蓄積装置の振動運動が、電気エネルギーを発生させるために、機械的エネルギー入力部としての前記機械的エネルギー入力機構により、前記電気エネルギー発生手段に伝達され、そして電気エネルギーがロボットシステムによる使用のために前記エネルギー蓄積装置に移される、前記本体部分に接続された一対の脚と
を備えるロボットシステム。
【請求項28】
前記腕が移動中に前記脚と互い違いに振れる、請求項27に記載のロボットシステム。
【請求項29】
前記振動運動が垂直方向の運動である、請求項27に記載のロボットシステム。
【請求項30】
前記振動運動が水平方向の運動である、請求項27に記載のロボットシステム。
【請求項31】
前記エネルギー回復機構が回転運動を捉え、振動運動がエネルギー発生機構を回転駆動する、請求項27に記載のロボットシステム。
【請求項32】
前記ガイド手段が、前記上部枠部材と前記下部枠部材との間に延びる、垂直に向いたロッドであり、前記荷重が前記ロッドに対して動く、請求項27に記載のロボットシステム。
【請求項33】
前記機械的エネルギー入力機構が歯付きの梁であり、前記エネルギー発生手段が発電機であり、前記歯付きの梁が、前記エネルギー蓄積装置と前記発電機に動作可能なように接続されている小歯車とを相互接続する、請求項27に記載のロボットシステム。
【請求項34】
移動中の前記エネルギー蓄積装置のばね負荷が、歩行の効率を増すため交互に各々の脚の重量を抜く、周期的な上向きの運動を生み出す、請求項27に記載のロボットシステム。
【請求項35】
前記エネルギー蓄積装置がバッテリーである、請求項27に記載のロボットシステム。
【請求項36】
前記ばねが選択的に調整可能である、請求項27に記載のロボットシステム。
【請求項37】
前記ばねがリアルタイムに順応して更新される、請求項36に記載のロボットシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公表番号】特表2010−527803(P2010−527803A)
【公表日】平成22年8月19日(2010.8.19)
【国際特許分類】
【出願番号】特願2010−509421(P2010−509421)
【出願日】平成20年4月27日(2008.4.27)
【国際出願番号】PCT/US2008/061700
【国際公開番号】WO2008/147615
【国際公開日】平成20年12月4日(2008.12.4)
【出願人】(507342261)トヨタ モーター エンジニアリング アンド マニュファクチャリング ノース アメリカ,インコーポレイティド (135)
【Fターム(参考)】
【公表日】平成22年8月19日(2010.8.19)
【国際特許分類】
【出願日】平成20年4月27日(2008.4.27)
【国際出願番号】PCT/US2008/061700
【国際公開番号】WO2008/147615
【国際公開日】平成20年12月4日(2008.12.4)
【出願人】(507342261)トヨタ モーター エンジニアリング アンド マニュファクチャリング ノース アメリカ,インコーポレイティド (135)
【Fターム(参考)】
[ Back to top ]