
エネルギー消費量推定装置、エネルギー消費量推定方法、エネルギー消費量推定プログラムおよび記録媒体
【課題】旅行区間におけるエネルギー消費量を正確に推定し、かつ、車両の走行可能な範囲を正確に推定すること。
【解決手段】走行距離推定装置100は、移動体の走行する所定の区間(以下、「旅行区間」という)における移動体の走行距離を推定する。現在位置取得部101は、移動体の現在位置を取得する。変数取得部102は、旅行区間における移動体の速度に関する情報を取得する。推定部103は、消費エネルギー推定式に基づいて、旅行区間を走行する際のエネルギー消費量や走行可能距離を推定する。補正部104は、消費エネルギー推定式の変数として用いる移動体に関する情報を補正する。記憶部105は、移動体の走行履歴にかかる道路に関する情報を記憶する。表示部110は、推定部103によって算出された走行可能距離に関する情報を含む地図データを表示する。
【解決手段】走行距離推定装置100は、移動体の走行する所定の区間(以下、「旅行区間」という)における移動体の走行距離を推定する。現在位置取得部101は、移動体の現在位置を取得する。変数取得部102は、旅行区間における移動体の速度に関する情報を取得する。推定部103は、消費エネルギー推定式に基づいて、旅行区間を走行する際のエネルギー消費量や走行可能距離を推定する。補正部104は、消費エネルギー推定式の変数として用いる移動体に関する情報を補正する。記憶部105は、移動体の走行履歴にかかる道路に関する情報を記憶する。表示部110は、推定部103によって算出された走行可能距離に関する情報を含む地図データを表示する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、移動体の残存エネルギー量に基づいて移動体の走行距離を推定する走行距離推定装置、走行距離推定方法、走行距離推定プログラムおよび記録媒体に関する。ただし、この発明の利用は、走行距離推定装置、走行距離推定方法、走行距離推定プログラムおよび記録媒体に限らない。
【背景技術】
【0002】
従来、移動体の燃料消費量に基づいて、目的地点に到達するまでの経路を探索する経路探索装置が知られている(たとえば、下記特許文献1,2参照。)。下記特許文献1では、ユーザが選択した運転時の加速度合いを示す加速度情報に基づいて一般的な車両状態に応じた燃費情報を補正し、燃料消費量に基づくコストが最小となる経路を探索している。下記特許文献2では、出発地点から目的地点までの距離、地図情報に関連付けられた法定速度、道路の勾配情報や混雑情報などに基づいて燃料消費量を算出し、燃料消費量が最小となる経路を選択している。
【0003】
また、走行状況に基づいて、移動体の燃料消費量を推定する燃料消費量推定システムが知られている(たとえば、下記特許文献3参照。)。下記特許文献3では、過去の走行履歴の加速度情報のうち、現在の加速度合いに類似する加速度情報を検索し、過去の加速度情報を用いて求めた燃費傾向に基づいて、走行予定経路における燃料消費量を推定している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−300780号公報
【特許文献2】特開2000−002553号公報
【特許文献3】特開2009−031046号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述した特許文献1の技術では、一般的な加速度合いで分類された数種類の加速度情報の中から、ユーザに自身の走行状況に最も近い加速度情報を選択させ、ユーザにより選択された加速度情報に基づいて、燃料消費量が算出されている。また、上述した特許文献2の技術では、地図情報に関連付けられた法定速度に基づいて燃料消費量が算出されている。また、上述した特許文献3の技術では、現在の加速度合いに類似するということだけで検索された過去の加速度情報のみに基づいて、燃料消費量が算出されている。
【0006】
実際に道路を走行する場合、たとえば、平坦な道路を走行している場合、加速時に消費されるエネルギーの多くが車両の前進の運動エネルギーおよび回転機構の運動エネルギーとして保存される。また、たとえば、アクセルを離しブレーキを踏んでいない状態では、慣性走行で速度を低下させながら走り続ける。この場合、加速時に保存された上記運動エネルギーが、路面の摩擦抵抗や空気抵抗等の走行抵抗等の仕事として消費される。このため、上述した従来文献の技術では、このような走行する道路における実際の走行状況および道路状況を反映して燃料消費量を算出するのが困難であるという問題点が一例として挙げられる。
【0007】
また、上述した従来文献の技術では、ガソリン車、ディーゼル車、EV(Electric Vehicle)車、HV(Hybrid Vehicle)車、PHV(Plug−in Hybrid Vehicle)車などの車両情報を考慮して燃料消費量を算出していない。たとえば、EV車では、走行距離を向上させる手段として、回生制御によるエネルギー回収がある。加速のために必要なエネルギーは車両の前進の運動エネルギーおよび回転機構の運動エネルギーに変換され蓄えられている。これらのエネルギーは,減速時には前述の路面摩擦抵抗や空気抵抗などの仕事として消費される他、電気的回生エネルギーとして回収される。このように、走行時の加速度情報に基づくエネルギー消費量は車両情報によって大きく異なるので、上述した従来文献の技術では、車両情報が異なる場合、エネルギー消費量を正確に算出するのが困難であるという問題点が一例として挙げられる。
【課題を解決するための手段】
【0008】
上述した課題を解決し、目的を達成するため、請求項1の発明にかかるエネルギー消費量推定装置は、移動体に備えられた装備品により消費されるエネルギーに関する第一情報と、前記移動体の加減速時に消費および回収されるエネルギーに関する第二情報と、前記移動体の走行時に生じる抵抗により消費されるエネルギーに関する第三情報と、からなる消費エネルギー推定式に基づいて、前記移動体が所定の区間(以下、「旅行区間」という)を走行する際のエネルギー消費量を推定する推定手段と、前記旅行区間を走行する前記移動体の速度を前記第二情報および前記第三情報に関する変数として取得し、かつ、前記旅行区間を走行する前記移動体の加速度を前記第二情報に関する変数として取得する変数取得手段と、を備えることを特徴とする。
【0009】
また、請求項3の発明にかかるエネルギー消費量推定方法は、移動体のエネルギー消費量を推定するエネルギー消費量推定装置におけるエネルギー消費量推定方法であって、前記移動体に備えられた装備品により消費されるエネルギーに関する第一情報と、前記移動体の加減速時に消費および回収されるエネルギーに関する第二情報と、前記移動体の走行時に生じる抵抗により消費されるエネルギーに関する第三情報と、からなる消費エネルギー推定式に基づいて、前記移動体が所定の区間(以下、「旅行区間」という)を走行する際のエネルギー消費量を推定し、前記旅行区間を走行する前記移動体の速度を前記第二情報および前記第三情報に関する変数として取得し、かつ、前記旅行区間を走行する前記移動体の加速度を前記第二情報に関する変数として取得することを特徴とする。
【0010】
また、請求項4の発明にかかるエネルギー消費量推定プログラムは、請求項3に記載のエネルギー消費量推定方法をコンピュータに実行させることを特徴とする。
【0011】
また、請求項5の発明にかかる記録媒体は、請求項4に記載のエネルギー消費量推定プログラムをコンピュータに読み取り可能な状態で記録したことを特徴とする。
【図面の簡単な説明】
【0012】
【図1】実施の形態にかかる走行距離推定装置の機能的構成を示すブロック図である。
【図2】走行距離推定装置による走行距離推定処理の手順を示すフローチャートである。
【図3】ナビゲーション装置のハードウェア構成を示すブロック図である。
【図4】ナビゲーション装置による走行距離推定処理の手順を示すフローチャートである。
【図5】ナビゲーション装置による補正処理の手順を示すフローチャートである。
【図6】ナビゲーション装置による補正処理の他の手順を示すフローチャートである。
【図7】勾配がある道路を走行する車両にかかる加速度を模式的に示した説明図である。
【図8】ナビゲーション装置による走行距離推定処理における道路情報の一例を示す説明図である。
【図9】EV車の回収率の算出方法について示す説明図である。
【図10】EV車の速度と出力との関係を示す特性図である。
【図11】EV車の走行状況別のエネルギー消費量を示す特性図である。
【図12】ナビゲーション装置のディスプレイに表示される表示画面の一例を示す説明図である。
【発明を実施するための形態】
【0013】
以下に添付図面を参照して、この発明にかかる走行距離推定装置、走行距離推定方法、走行距離推定プログラムおよび記録媒体の好適な実施の形態を詳細に説明する。
【0014】
(実施の形態)
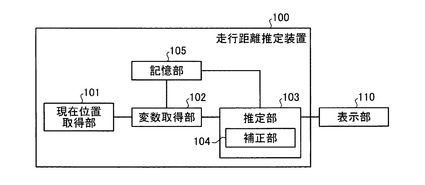
図1は、実施の形態にかかる走行距離推定装置の機能的構成を示すブロック図である。実施の形態にかかる走行距離推定装置100は、移動体の残存エネルギー量に基づいて移動体の走行距離を推定する。また、走行距離推定装置100は、現在位置取得部101、変数取得部102、推定部103、補正部104、記憶部105によって構成される。
【0015】
ここで、エネルギーとは、たとえば、EV車,HV車,PHV車など(以下、単に「EV車」という)の場合、たとえば、電気などに基づくエネルギーである。また、エネルギーとは、たとえば、ガソリン車,ディーゼル車など(以下、単に「ガソリン車」という)の場合、たとえば、ガソリンや軽油、ガスなどに基づくエネルギーである。残存エネルギーとは、たとえば、移動体の燃料タンクやバッテリー内に残っているエネルギーであり、後の移動体の走行に用いることのできるエネルギーである。
【0016】
現在位置取得部101は、走行距離推定装置100を搭載した移動体の現在位置を取得する。具体的には、現在位置取得部101は、たとえば、GPS衛星から受信したGPS情報などを用いて、自装置の現在位置を算出することによって位置情報を取得する。
【0017】
変数取得部102は、移動体の走行する所定の区間(以下、「旅行区間」という)における移動体の速度に関する情報を取得し、消費エネルギー推定式の変数として用いる。旅行区間とは、移動体が一旦発進して走行した後に停止して、次に発進するまでに通過する区間である。具体的には、旅行区間とは、道路の所定の地点(以下、「ノード(道路点)」とする)と他のノードとの間の区間(以下、「リンク(道路区間)」とする)である。つまり、ノードとは、移動体が停止する地点であり、発進する地点である。
【0018】
リンクは、道路ネットワークを構成する要素の一つであり、ノードとノードの間を1つの単位とする。リンク情報には、たとえば、リンク長(距離)データと、走行日時における旅行速度や平均加速度の予想データなどが含まれる。たとえば、市街地走行では信号機等で移動体が停止する場合が多い。この場合、ノードとは、たとえば、信号機の設置された交差点である。リンクとは、たとえば、一の交差点と他の交差点との間の区間である。
【0019】
旅行区間は、一つのリンクからなる区間であってもよいし、複数の連続するリンクからなる区間であってもよい。たとえば、5つのノード(4つのリンク)からなる連続した区間において、移動体は、発進と停止を4回繰り返す可能性もあり、5つのノードを1回で走行し終える可能性もある。具体的には、5つのノードを信号機の設置された交差点とした場合、すべての交差点で移動体が停止する可能性があり、いずれの交差点でも移動体が停止しない可能性もある。そのため、詳細には、旅行区間は、移動体が発進および停止する可能性のある2つのノードからなる1つのリンク、または移動体が発進および停止する可能性のある3つ以上のノードからなる連続した複数のリンクである。望ましくは、旅行区間は、停止する可能性のある2つのノードからなる1つのリンクであるのがよい。その理由は、あらゆる方向に分岐するリンクを全て網羅して計算することができるからである。
【0020】
移動体の速度に関する情報とは、たとえば、移動体の速度、加速度である。消費エネルギー推定式とは、旅行区間における移動体のエネルギー消費量を推定する式である。具体的には、消費エネルギー推定式は、エネルギー消費量を増減させる要因の異なる第一情報、第二情報および第三情報からなる多項式である。また、道路勾配が明らかな場合、消費エネルギー推定式には、さらに第四情報が加えられる。消費エネルギー推定式の詳細については、後述する。
【0021】
第一情報は、駆動源が可動した状態における移動体の停止時に消費されるエネルギーに関する情報である。駆動源が可動した状態における移動体の停止時とは、移動体のエンジンに負荷がかからない程度に、エンジンを低速で空回りさせた状態である。具体的には、駆動源が可動した状態における移動体の停止時とは、アイドリング時である。
【0022】
具体的には、第一情報は、たとえば、エンジンをかけたまま停車しているときや、信号などで停止しているときに消費されるエネルギー量(以下、エネルギー消費量という)である。つまり、第一情報は、移動体の走行に関係しない要因で消費されるエネルギー消費量である。より具体的には、第一情報は、移動体に備えられたエアコンやオーディオなどによるエネルギー消費量である。第一情報は、EV車の場合、ほぼゼロとしてもよい。
【0023】
第二情報は、移動体の加減速時に消費および回収されるエネルギーに関する情報である。移動体の加減速時とは、移動体の速度が時間的に変化している走行状態である。具体的には、移動体の加減速時とは、所定の時間内において、移動体の速度が変化する走行状態である。所定の時間とは、一定間隔の時間の区切りであり、たとえば、単位時間あたりなどである。
【0024】
また、第二情報は、EV車の場合、移動体の加速時に消費されるエネルギー量と、移動体の減速時に回収されるエネルギー量との割合(以下、「回収率」という)であってもよい。回収されるエネルギーとは、EV車の場合、移動体の加速時に生じた運動エネルギーが減速時に電気エネルギーに変換されて回収されるエネルギーである。回収率についての詳細な説明は、後述する。
【0025】
また、回収エネルギーとは、ガソリン車の場合、必要以上にエネルギーを消費しないで節約することができるエネルギーである。詳細には、ガソリン車の場合、燃費を向上する運転方法として、アクセルを踏む時間を少なくする方法が知られている。つまり、ガソリン車では、移動体の加速時に生じる運動エネルギー(慣性力)によって移動体の走行を維持することで、燃料の消費を抑えることができる。また、移動体の減速時にエンジンブレーキを利用することで、ブレーキを踏むことによる燃料の消費を抑えることができる。つまり、ガソリン車の場合、消費される燃料を低減(燃料カット)して燃料を節約することであるが、ここではEV車と同様に回収されるエネルギーとする。
【0026】
第三情報は、移動体の走行時に生じる抵抗により消費されるエネルギーに関する情報である。移動体の走行時とは、所定の時間内において、移動体の速度が一定である走行状態である。移動体の走行時に生じる抵抗とは、移動体の走行時に移動体の走行状態を変化させる要因である。具体的には、移動体の走行時に生じる抵抗とは、気象状況、道路状況、車両状況などにより移動体に生じる抵抗である。
【0027】
気象状況により移動体に生じる抵抗とは、たとえば、雨,風などの気象変化による空気抵抗である。道路状況により移動体に生じる抵抗とは、道路勾配,路面の舗装状態などによる路面抵抗である。車両状況により移動体に生じる抵抗とは、タイヤの空気圧、乗車人数、積載重量などにより移動体にかかる負荷抵抗である。
【0028】
具体的には、第三情報は、空気抵抗や路面抵抗、負荷抵抗を受けた状態で、移動体を一定速度で走行させたときのエネルギー消費量である。より具体的には、第三情報は、たとえば、向かい風により移動体に生じる空気抵抗や、舗装されていない道路から受ける路面抵抗などを、移動体が一定速度で走行するときに消費されるエネルギー消費量である。
【0029】
第四情報は、移動体が位置する高度の変化により消費および回収されるエネルギーに関する情報である。移動体が位置する高度の変化とは、移動体の位置する高度が時間的に変化している状態である。具体的には、移動体が位置する高度の変化とは、所定の時間内において、移動体が勾配のある道路を走行することにより高度が変化する走行状態である。
【0030】
また、第四情報は、所定の区間内における道路勾配が明らかな場合に求めることができる付加的な情報であり、これによりエネルギー消費量の推定精度を向上することができる。なお、道路の傾斜が不明な場合、または計算を簡略化する場合、移動体が位置する高度の変化はないものとして、後述するエネルギー推定式における道路勾配θ=0としてエネルギー消費量を推定することができる。以下、特段の説明がある場合及び消費エネルギー推定式を説明する場合を除き、旅行区間における勾配の変化はないもの、すなわち、後述する消費エネルギー推定式におけるθ=0(第四情報は考慮しない)という前提で説明する。
【0031】
変数取得部102は、たとえば、CAN(Controller Area Network)など通信プロトコルによって動作する車内通信ネットワーク(以下、単に「CAN」という)を介して、たとえば、エレクトロニックコントロールユニット(ECU:Electronic Control Unit)によって管理されている移動体の速度、加速度を取得し、第一情報、第二情報および第三情報に関する変数として用いてもよい。
【0032】
また、変数取得部102は、旅行区間の走行に要する旅行時間を、消費エネルギー推定式の変数として取得する。具体的には、変数取得部102は、移動体が過去に同じ旅行区間を走行したときの所要時間を、旅行時間として取得する。
【0033】
また、変数取得部102は、移動体の残存エネルギー量に関する情報や、旅行区間における移動体の実エネルギー消費量を取得し、消費エネルギー推定式の変数として用いる。ここで、残存エネルギー量とは、移動体の燃料タンクまたはバッテリーに残っているエネルギー量である。つまり、EV車の場合には、回収されたエネルギー量も残存エネルギー量に含まれる。具体的には、変数取得部102は、たとえば、CANなど通信プロトコルによって動作する車内通信ネットワークを介して、たとえば、ECUによって管理されている残存エネルギー量や実エネルギー消費量を取得する。
【0034】
また、変数取得部102は、一の旅行区間または一の旅行区間に隣接する他の旅行区間が、移動体の現在位置の属する範囲内または特定の種別の旅行区間である場合、もしくはその両方を満たす場合、旅行区間を走行する移動体のその時点での速度に関する情報を、第一情報、第二情報および第三情報に関する変数として取得する。
【0035】
一の旅行区間とは、移動体の現在走行中の旅行区間である。一の旅行区間に隣接する他の旅行区間とは、一の旅行区間の終点となるノードにつながる旅行区間である。たとえば、一の旅行区間の終点となるノードが4差路である場合、一の旅行区間の終点となるノードから4方向に分岐する旅行区間のうち、一の旅行区間を除く3方向の旅行区間が他の旅行区間となる。
【0036】
移動体の現在位置の属する範囲とは、移動体が走行中である場合の、移動体の現在位置を含む範囲である。具体的には、移動体の現在位置の属する範囲とは、たとえば、10km2など、移動体の走行中の旅行区間を含む所定の面積を有する範囲であってもよいし、市町村など、行政区画で分割された範囲であってもよい。また、特定の種別の旅行区間とは、特定の種別で区分けされた範囲である。特定の種別とは、たとえば、道路種別などである。
【0037】
ここで、道路種別とは、法定速度や、道路の勾配、道路幅、信号の有無などの道路状態の違いにより区別することのできる道路の種類である。具体的には、道路種別とは、一般国道、高速道路、一般道路、市街地などを通る細い街路(以下、「細街路」という)などである。
【0038】
つまり、具体的には、変数取得部102は、一の旅行区間を走行中の移動体の実際の速度、加速度を、一の旅行区間における速度に関する情報として取得する。さらに、変数取得部102は、一の旅行区間および他の旅行区間が、移動体の現在位置の属する範囲内または特定の種別の旅行区間である場合に、一の旅行区間を走行中の移動体の実際の速度、加速度を、他の旅行区間における速度に関する情報として取得する。これにより、後述する推定部103は、旅行区間における移動体の実際のエネルギー消費量(以後、「実エネルギー消費量」という)に近いエネルギー消費量を推定することができる。
【0039】
また、変数取得部102は、一の旅行区間または他の旅行区間が、移動体の現在位置の属する範囲内および特定の種別の旅行区間のどちらの範囲でもない場合、移動体の走行履歴のうち、過去に旅行区間を走行した際の移動体の速度に関する情報(以下、「旅行速度に関する情報」という)を取得する。
【0040】
ここで、移動体の走行履歴とは、移動体が過去に旅行区間を走行したときの速度、加速度、旅行時間、実エネルギー消費量、車両情報などである。車両情報とは、車両重量、車両回転部の重量、効率、空気抵抗などである。移動体の走行履歴は、たとえば、旅行区間ごとや、道路種別ごとに記憶部105に記憶されている。
【0041】
具体的には、変数取得部102は、移動体が出発前である(一の旅行区間にいない)場合や他の旅行区間に到達していない場合に、移動体が過去に同じ旅行区間または同じ所定の範囲を走行したときの速度、加速度を、旅行速度に関する情報として取得する。所定の範囲とは、たとえば、残存エネルギー量がなくなるまでに到達可能な範囲や、都道府県、市町村などである。
【0042】
また、変数取得部102は、一の旅行区間または他の旅行区間が、移動体の現在位置の属する範囲内または特定の種別の旅行区間である場合でも、旅行速度に関する情報を取得してもよい。この場合、変数取得部102は、実際の速度に関する情報と、過去の旅行速度に関する情報との両方に基づいて、たとえば、これらの情報の平均値を算出してもよい。
【0043】
変数取得部102は、旅行区間における道路に関する情報を取得し、消費エネルギー推定式の変数として用いる。具体的には、変数取得部102は、たとえば、記憶部105に記憶された過去の走行履歴にかかる道路に関する情報を取得する。また、変数取得部102は、たとえば、記憶部105に記憶された地図情報から道路に関する情報を取得してもよいし、傾斜センサなどから道路勾配などを取得してもよい。
【0044】
ここで、道路に関する情報とは、たとえば、移動体の走行により消費または回収させるエネルギー量に変化を生じさせる道路情報である。具体的には、道路に関する情報とは、たとえば、道路種別や、道路勾配、路面状況などにより移動体に生じる走行抵抗である。走行抵抗は、たとえば、次の(1)式により算出することができる。一般的に、走行抵抗は、加速時や走行時に移動体に生じる。
【0045】
【数1】

【0046】
推定部103は、第一情報と、第二情報と、第三情報と、からなる消費エネルギー推定式に基づいて、旅行区間を走行する際のエネルギー消費量を推定する。具体的には、推定部103は、変数取得部102によって取得された移動体の速度に関する情報に基づいて、旅行区間における前記移動体のエネルギー消費量を推定する。なお、道路勾配が明らかな場合、推定部103は、さらに第四情報を加えた消費エネルギー推定式に基づいて、旅行区間を走行する際のエネルギー消費量を推定してもよい。
【0047】
より詳細には、推定部103は、次の(2)式または(3)式に示す消費エネルギー推定式、もしくはその両方の式に基づいて、単位時間当たりのエネルギー消費量を推定する。加速時および走行時における移動体のエネルギー消費量は、走行抵抗と走行距離と正味モータ効率と伝達効率との積であり、次の(2)式で表される。(2)式に示す消費エネルギー推定式は、加速時および走行時における単位時間当たりのエネルギー消費量を推定する理論式である。
【0048】
【数2】
【0049】
ここで、εは正味熱効率,ηは総伝達効率である。移動体の加速度αと道路勾配θから重力の加速度gとの合計を合成加速度|α|とすると、合成加速度|α|が負の場合の消費エネルギー推定式は、走行抵抗と走行距離と正味モータ効率と伝達効率の積であり、次の(3)式で表される。合成加速度|α|が負の場合とは、移動体の減速時である。(3)式に示す消費エネルギー推定式は、減速時における単位時間当たりのエネルギー消費量を推定する理論式である。
【0050】
【数3】
【0051】
上記(2)式および(3)式において、右辺第1項は、アイドリング時のエネルギー消費量(第一情報)である。右辺第2項は、勾配成分によるエネルギー消費量(第四情報)および転がり抵抗成分によるエネルギー消費量(第三情報)である。右辺第3項は、空気抵抗成分によるエネルギー消費量(第三情報)である。また、(2)式の右辺第4項は、加速成分によるエネルギー消費量(第二情報)である。(3)式の右辺第4項は、減速成分によるエネルギー消費量(第二情報)である。その他の変数が示す情報は、上記(1)式と同様である。
【0052】
また、上記(2)式および(3)式では、モータ効率と駆動効率は一定と見なしている。しかし、実際には、モータ効率および駆動効率はモータ回転数やトルクの影響により変動する。そこで、次の(4)式および(5)式に単位時間当たりの消費エネルギーを推定する実証式を示す。合成加速度|α+g・sinθ|が正の場合のエネルギー消費量を推定する実証式は、次の(4)式で表される。つまり、(4)式に示す消費エネルギー推定式は、加速時および走行時における単位時間当たりのエネルギー消費量を推定する実証式である。
【0053】
【数4】
【0054】
また、合成加速度|α+g・sinθ|が負の場合のエネルギー消費量を推定する実証式は、次の(5)式で表される。つまり、(5)式に示す消費エネルギー推定式は、減速時における単位時間当たりのエネルギー消費量を推定する実証式である。
【0055】
【数5】
【0056】
上記(4)式および(5)式において、係数a1,a2は、移動体の状況などに応じて設定される常数である。係数k1,k2,k3は、加速時におけるエネルギー消費量に基づく変数である。また、右辺第1項〜右辺第4項が示す情報は、上記(2)式および(3)式と同様である。
【0057】
理論式である上記(2)式と、実証式である上記(4)式は類似した構造となっている。(2)式および(4)式の右辺第1項はともに速度に依存しない成分であり、ともに第一情報である。(4)式の右辺第2項は、勾配抵抗と加速抵抗分のエネルギー消費量である。つまり、(4)式の右辺第2項は、速度増加による運動エネルギーの増分を表す第二情報と、高度変化による位置エネルギーの増分を表す第四情報であり、(2)式の右辺第4項の加速成分と、(2)式の右辺第2項の勾配成分とに対応する。(4)式の右辺第3項は第三情報であり、(2)式の右辺第2項の転がり抵抗成分と、(2)式の右辺第3項の空気抵抗成分に対応する。
【0058】
理論式である上記(3)式と、実証式である上記(5)式においても、上述した(2)式と(4)式の関係と同様に類似した構造となっている。(5)式の右辺第2項のβは、位置エネルギーと運動エネルギーの回収分(以下、「回収率」とする)である。
【0059】
推定部103は、上記(4)式または(5)式に示す消費エネルギー推定式、もしくはその両方の式を用いて、単位時間ごとの走行速度Vと走行加速度αを入力することにより、走行速度および走行加速度が取得された瞬間の消費エネルギーを推定してもよい。しかし、上記(4)式または(5)式を用いて走行可能範囲を推定する場合、これから走行する全旅行区間行程における単位時間ごとの速度と加速度をたとえば1秒ごとに取得し、かつ1秒ごとにエネルギー消費量を推定しようとすると,計算量が膨大になってしまう恐れがある。
【0060】
そこで、推定部103は、ある程度まとまった区間における走行速度の平均値、および走行加速度の平均値を用いて、この区間におけるエネルギー消費量を推定してもよい。ここで、ある程度まとまった区間とは、移動体が走行する区間であり、たとえば、旅行区間であってもよい。区間におけるエネルギー消費量は、上記(4)式または(5)式に基づいて定義される消費エネルギー推定式を用いて得ることができる。具体的には、推定部103は、第二情報として、移動体の加速時に消費する単位時間当たりのエネルギー消費量と、移動体の減速時に回収される単位時間当たりのエネルギー消費量とを平均する推定式を用いる。
【0061】
より具体的には、推定部103は、次の(6)式または(7)式に示す区間におけるエネルギー消費量の実証式、もしくはその両方の式を用いて、エネルギー消費量を推定してもよい。
【0062】
次の(6)式に示す消費エネルギー推定式は、移動体が走行する区間の高度差Δhが正の場合の、区間における消費エネルギー推定式である。高度差Δhが正の場合とは、移動体が上り坂を走行している場合である。
【0063】
【数6】
【0064】
一方、次の(7)式に示す消費エネルギー推定式は、移動体が走行する区間の高度差Δhが負の場合の、区間における消費エネルギー推定式である。高度差Δhが負の場合とは、移動体が下り坂を走行している場合である。
【0065】
【数7】
【0066】
上記(6)式および(7)式において、右辺第1項は、アイドリング時のエネルギー消費量(第一情報)である。右辺第2項は、加速抵抗によるエネルギー消費量(第二情報)である。右辺第3項は、位置エネルギーとして消費されるエネルギー消費量である(第四情報)。右辺第4項は、単位面積当たりに受ける空気抵抗および転がり抵抗(以下、これらをまとめて走行抵抗と称する)によるエネルギー消費量(第三情報)である。
【0067】
また、推定部103は、たとえば、メーカーによって提供された回収率βを取得してもよいし、変数取得部102によって取得された速度に関する情報に基づいて回収率βを算出してもよい。
【0068】
次に、回収率βの算出方法について説明する。上記(6)式において、右辺第2項を旅行区間における加速成分のエネルギー消費量Paccとすると、加速成分のエネルギー消費量Paccは、旅行区間における全エネルギー消費量(左辺)から、アイドリング時のエネルギー消費量(右辺第1項)と走行抵抗によるエネルギー消費量(右辺第4項)を減じたものであり、次の(8)式で表される。
【0069】
【数8】
【0070】
なお、上記(8)式では、移動体は道路勾配θの影響を受けていないこととする(θ=0)。すなわち、上記(6)式の右辺第3項をゼロとする。そして、上記(8)式を上記(6)式に代入することで、次の(9)式に示す回収率βの算出式を得ることができる。
【0071】
【数9】
【0072】
回収率βは、EV車では0.7〜0.9程度であり、HV車では0.6〜0.8程度であり、ガソリン車では0.2〜0.3程度である。なお、ガソリン車の回収率とは、移動体の加速時におけるエネルギー消費量と、減速時に燃料カットされるエネルギー量との割合である。
【0073】
また、推定部103は、上記(2)式〜(5)式に示す消費エネルギー推定式のいずれか一つ以上の式に基づいて、旅行区間を走行する際の単位時間当たりのエネルギー消費量を推定するとともに、これを旅行時間だけ積算して旅行区間を走行する際のエネルギー消費量を推定する。
【0074】
具体的には、推定部103は、実際の速度に関する情報または旅行速度に関する情報を用いて、消費エネルギー推定式に基づいて単位時間当たりのエネルギー消費量を推定し、変数取得部102によって取得された旅行時間で積分することにより、旅行区間におけるエネルギー消費量を推定する。旅行区間を移動体が過去に実際に走行した際の旅行時間を用いて旅行区間におけるエネルギー消費量を推定するため、より実エネルギー消費量に近いエネルギー消費量を推定することができる。
【0075】
また、推定部103は、残存エネルギー量を消費エネルギー推定式の解として用い、残存エネルギー量がなくなる地点を推定し、移動体の走行可能距離を算出する。具体的には、推定部103は、上記(2)式〜(7)式に示す消費エネルギー推定式に基づいて推定したエネルギー消費量と、変数取得部102によって取得された残存エネルギー量とに基づいて、残存エネルギー量がなくなる地点を推定し、移動体の走行可能距離を算出する。
【0076】
具体的には、推定部103は、連続する旅行区間のうち、一の旅行区間を走行する際のエネルギー消費量を推定し、その後、一の旅行区間に隣接する他の旅行区間を走行する際のエネルギー消費量を推定する処理を、移動体の現在位置から残存エネルギー量がなくなるまで繰り返すことによって残存エネルギー量がなくなる地点を推定する。
【0077】
補正部104は、変数取得部102によって取得された実エネルギー消費量に基づいて、消費エネルギー推定式の変数として用いる移動体に関する情報を補正する。具体的には、補正部104は、変数取得部102によって取得された実エネルギー消費量、この実エネルギー消費量を計測した時点における実際の速度、実際の加速度、道路に関する情報などに基づいて、消費エネルギー推定式の変数として用いる移動体に関する情報を補正する。
【0078】
ここで、移動体に関する情報とは、移動体の走行により消費または回収させるエネルギー量に変化を生じさせる情報である。具体的には、移動体に関する情報とは、たとえば、車両情報の整備状況など移動体自体に関する情報、道路の路面状況や、過去の走行履歴から変化した速度に関する情報など移動体の走行に関する情報である。
【0079】
また、補正部104は、旅行区間における過去の走行履歴と現在の走行状況とを比較し、過去の走行履歴と現在の走行状況とが異なっている場合に、移動体に関する情報を補正してもよい。補正部104により移動体に関する情報を補正することにより、移動体が旅行区間または所定の範囲を走行するごとに、現在の移動体に関する情報を消費エネルギー推定式に反映することができる。
【0080】
具体的には、補正部104は、変数取得部102によって取得された実エネルギー消費量、速度に関する情報に基づいて、消費エネルギー推定式の変数として用いられる移動体に関する情報を補正する。より具体的には、補正部104は、たとえば、1秒ごとに変数取得部102によって取得される実エネルギー消費量、速度、加速度、移動体の勾配に基づいて、上記(4)式および(5)式に示す消費エネルギー推定式を用いて、重回帰分析法や回帰分析法により、1秒ごとに第一情報Pidle、効率εη、移動体の重量M、などを算出する。
【0081】
記憶部105は、所定の範囲ごとに区分けされた地図情報と、旅行区間ごとの種別情報とを記憶する。具体的には、記憶部105は、たとえば、旅行区間ごとや、道路種別ごと、所定の範囲ごとの移動体の走行履歴、移動体の走行履歴にかかる道路に関する情報、地図情報などを記憶する。また、記憶部105は、推定部103によって推定されたエネルギー消費量、回収率β、走行可能距離などを記憶してもよい。また、記憶部105は、補正部104によって算出された上記(2)式〜(7)式に示す消費エネルギー推定式に用いる変数を補正する移動体に関する情報を記憶してもよい。
【0082】
表示部110は、推定部103によって推定された情報を地図データとともに表示する。具体的には、表示部110は、推定部103によって算出された走行可能距離に関する情報を含む地図データを表示する。より具体的には、表示部110は、推定部103によって算出された走行可能距離で到達することができる経路、エリアなどを地図データに表示する。
【0083】
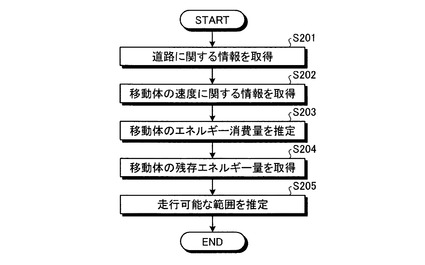
つづいて、走行距離推定装置100による走行距離推定処理について説明する。図2は、走行距離推定装置による走行距離推定処理の手順を示すフローチャートである。図2のフローチャートにおいて、走行距離推定装置100は、変数取得部102によって、移動体の走行する旅行区間における道路に関する情報を取得する(ステップS201)。つぎに、走行距離推定装置100は、変数取得部102によって、旅行区間における移動体の速度に関する情報を取得する(ステップS202)。
【0084】
つぎに、走行距離推定装置100は、推定部103によって、旅行区間における移動体の速度に関する情報に基づいて、第一情報と、第二情報と、第三情報と、からなる消費エネルギー推定式を用いて、旅行区間を走行する際のエネルギー消費量を推定する(ステップS203)。
【0085】
つぎに、走行距離推定装置100は、変数取得部102によって移動体の残存エネルギー量を取得する(ステップS204)。つぎに、走行距離推定装置100は、残存エネルギー量に基づいて、移動体の走行可能距離を推定し、移動体の走行可能な範囲を推定して(ステップS205)、本フローチャートによる処理を終了する。
【0086】
以上説明したように、実施の形態にかかる走行距離推定装置100は、第一情報と、第二情報と、第三情報と、からなる消費エネルギー推定式を用いて、旅行区間におけるエネルギー消費量を推定する。より詳細には、走行距離推定装置100は、移動体のアイドリング状態、加減速時および走行時に消費されるエネルギーと、移動体の加減速時に回収されるエネルギーに基づいて、消費エネルギー推定式を用いて、旅行区間におけるエネルギー消費量を推定する。このように、走行距離推定装置100は、消費されるエネルギー量の異なる走行状況ごとにエネルギー消費量を算出して推定するので、より正確にエネルギー消費量を推定することができる。
【0087】
また、走行距離推定装置100は、移動体の速度に関する情報に基づいて、旅行区間におけるエネルギー消費量を推定する。このため、走行距離推定装置100は、その旅行区間における実際の走行状況を反映させたエネルギー消費量を推定することができる。
【0088】
また、走行距離推定装置100は、移動体から取得した残存エネルギー量に基づいて、移動体の走行可能な範囲を推定する。このため、走行距離推定装置100は、現在の残存するエネルギー量でどの地点まで走行することができるのか、またはどの経路を走行すれば現在の残存するエネルギー量で目的地点まで到達することができるのかなどを推測することができる。
【0089】
また、上述した(1)式〜(9)式に示す消費エネルギー推定式は、車両情報や道路情報などを変数として含む。このため、走行距離推定装置100は、旅行区間における実際の移動体の状態や、実際の道路状況が反映されたエネルギー消費量や走行可能距離を推定することができる。
【実施例】
【0090】
以下に、本発明の実施例について説明する。本実施例では、車両に搭載されるナビゲーション装置300を走行距離推定装置100として、本発明を適用した場合の一例について説明する。
【0091】
(ナビゲーション装置300のハードウェア構成)
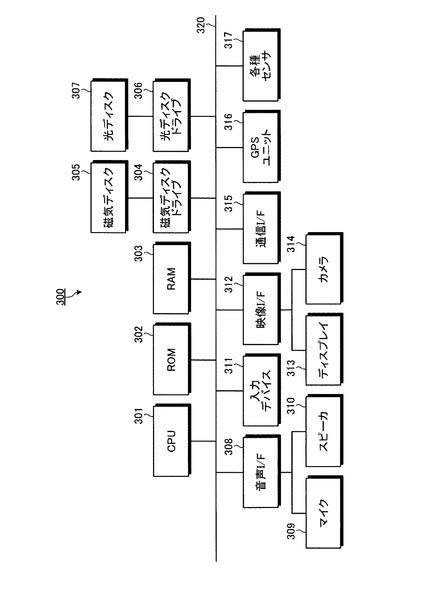
つぎに、ナビゲーション装置300のハードウェア構成について説明する。図3は、ナビゲーション装置のハードウェア構成を示すブロック図である。図3において、ナビゲーション装置300は、CPU301、ROM302、RAM303、磁気ディスクドライブ304、磁気ディスク305、光ディスクドライブ306、光ディスク307、音声I/F(インターフェース)308、マイク309、スピーカ310、入力デバイス311、映像I/F312、ディスプレイ313、カメラ314、通信I/F315、GPSユニット316、各種センサ317を備えている。各構成部301〜317は、バス320によってそれぞれ接続されている。
【0092】
CPU301は、ナビゲーション装置300の全体の制御を司る。ROM302は、ブートプログラム、走行距離推定プログラム、データ更新プログラム、地図データ表示プログラムなどのプログラムを記録している。RAM303は、CPU301のワークエリアとして使用される。すなわち、CPU301は、RAM303をワークエリアとして使用しながら、ROM302に記録された各種プログラムを実行することによって、ナビゲーション装置300の全体の制御を司る。
【0093】
磁気ディスクドライブ304は、CPU301の制御にしたがって磁気ディスク305に対するデータの読み取り/書き込みを制御する。磁気ディスク305は、磁気ディスクドライブ304の制御で書き込まれたデータを記録する。磁気ディスク305としては、たとえば、HD(ハードディスク)やFD(フレキシブルディスク)を用いることができる。
【0094】
また、光ディスクドライブ306は、CPU301の制御にしたがって光ディスク307に対するデータの読み取り/書き込みを制御する。光ディスク307は、光ディスクドライブ306の制御にしたがってデータが読み出される着脱自在な記録媒体である。光ディスク307は、書き込み可能な記録媒体を利用することもできる。着脱可能な記録媒体として、光ディスク307のほか、MO、メモリカードなどを用いることができる。
【0095】
磁気ディスク305および光ディスク307に記録される情報の一例としては、地図データ、車両情報、道路情報、走行履歴などが挙げられる。地図データは、カーナビゲーションシステムにおいて走行可能距離に関する情報を表示する際に用いられ、建物、河川、地表面などの地物(フィーチャ)をあらわす背景データ、道路の形状をリンクやノードなどであらわす道路形状データなどを含んでいる。ここで、車両情報、道路情報および走行履歴とは、上記(2)式〜(7)式に示す消費エネルギー推定式に変数として用いる道路に関するデータである。
【0096】
音声I/F308は、音声入力用のマイク309および音声出力用のスピーカ310に接続される。マイク309に受音された音声は、音声I/F308内でA/D変換される。マイク309は、たとえば、車両のダッシュボード部などに設置され、その数は単数でも複数でもよい。スピーカ310からは、所定の音声信号を音声I/F308内でD/A変換した音声が出力される。
【0097】
入力デバイス311は、文字、数値、各種指示などの入力のための複数のキーを備えたリモコン、キーボード、タッチパネルなどが挙げられる。入力デバイス311は、リモコン、キーボード、タッチパネルのうちいずれか1つの形態によって実現されてもよいが、複数の形態によって実現することも可能である。
【0098】
映像I/F312は、ディスプレイ313に接続される。映像I/F312は、具体的には、たとえば、ディスプレイ313全体を制御するグラフィックコントローラと、即時表示可能な画像情報を一時的に記録するVRAM(Video RAM)などのバッファメモリと、グラフィックコントローラから出力される画像データに基づいてディスプレイ313を制御する制御ICなどによって構成される。
【0099】
ディスプレイ313には、アイコン、カーソル、メニュー、ウインドウ、あるいは文字や画像などの各種データが表示される。ディスプレイ313としては、たとえば、TFT液晶ディスプレイ、有機ELディスプレイなどを用いることができる。
【0100】
カメラ314は、車両内部あるいは外部の映像を撮影する。映像は静止画あるいは動画のどちらでもよく、たとえば、カメラ314によって車両外部を撮影し、撮影した画像をCPU301において画像解析したり、映像I/F312を介して磁気ディスク305や光ディスク307などの記録媒体に出力したりする。
【0101】
通信I/F315は、無線を介してネットワークに接続され、ナビゲーション装置300およびCPU301のインターフェースとして機能する。ネットワークとして機能する通信網には、公衆回線網や携帯電話網、DSRC(Dedicated Short Range Communication)、LAN、WANなどがある。通信I/F315は、たとえば、公衆回線用接続モジュールやETC(ノンストップ自動料金支払いシステム)ユニット、FMチューナー、VICS(Vehicle Information and Communication System:登録商標)/ビーコンレシーバなどである。
【0102】
GPSユニット316は、GPS衛星からの電波を受信し、車両の現在位置を示す情報を出力する。GPSユニット316の出力情報は、後述する各種センサ317の出力値とともに、CPU301による車両の現在位置の算出に際して利用される。現在位置を示す情報は、たとえば、緯度・経度、高度などの、地図データ上の1点を特定する情報である。
【0103】
各種センサ317は、車速センサ、加速度センサ、角速度センサ、傾斜センサなどの、車両の位置や挙動を判断するための情報を出力する。各種センサ317の出力値は、CPU301による車両の現在位置の算出や、速度や方位の変化量の算出に用いられる。
【0104】
図1に示した走行距離推定装置100の現在位置取得部101、変数取得部102、推定部103、補正部104、記憶部105は、上述したナビゲーション装置300におけるROM302、RAM303、磁気ディスク305、光ディスク307などに記録されたプログラムやデータを用いて、CPU301が所定のプログラムを実行し、ナビゲーション装置300における各部を制御することによってその機能を実現する。
【0105】
(ナビゲーション装置300による消費エネルギー推定の概要)
本実施例のナビゲーション装置300は、車両の自装置が搭載された車両の走行中におけるエネルギー消費量を推定する。具体的には、ナビゲーション装置300は、たとえば、速度、加速度、車両の勾配に基づいて、次の(2)式〜(7)式に示す消費エネルギー推定式のいずれか一つ以上の式を用いて、車両のエネルギー消費量を推定する。
【0106】
【数10】
【0107】
【数11】
【0108】
上記(2)式に示す消費エネルギー推定式は、加速時および走行時における単位時間当たりの消費エネルギーを推定する理論式である。上記(3)式に示す消費エネルギー推定式は、減速時における単位時間当たりの消費エネルギーを推定する理論式である。
【0109】
また、上記(2)式および(3)式において、右辺第1項は、アイドリング時のエネルギー消費量(第一情報)である。右辺第2項は、勾配成分によるエネルギー消費量(第四情報)および転がり抵抗成分によるエネルギー消費量(第三情報)である。右辺第3項は、空気抵抗成分によるエネルギー消費量(第三情報)である。また、(2)式の右辺第4項は、加速成分によるエネルギー消費量(第二情報)である。(3)式の右辺第4項は、減速成分によるエネルギー消費量(第二情報)である。
【0110】
【数12】
【0111】
【数13】
【0112】
上記(4)式に示す消費エネルギー推定式は、加速時および走行時における単位時間当たりのエネルギー消費量を推定する実証式である。上記(5)式に示す消費エネルギー推定式は、減速時における単位時間当たりのエネルギー消費量を推定する実証式である。
【0113】
また、上記(4)式および(5)式において、係数a1,a2は、車両状況などに応じて設定される常数である。係数k1,k2,k3は、加速時におけるエネルギー消費量に基づく変数である。また、速度V、加速度Aとしており、その他の変数および右辺第1項〜右辺第4項にあたる部分が示す情報は、上記(2)式および(3)式と同様である。
【0114】
また、ナビゲーション装置300は、ある程度まとまった区間における車両の平均速度および平均加速度を用いて、次の(6)式または(7)式に示す消費エネルギー推定式に基づいて、車両の走行する区間におけるエネルギー消費量を推定してもよい。
【0115】
【数14】
【0116】
【数15】
【0117】
上記(6)式に示す消費エネルギー推定式は、移動体が走行する区間の高度差Δhが正の場合の、区間におけるエネルギー消費量を推定する理論式である。上記(7)式に示す消費エネルギー推定式は、移動体が走行する区間の高度差Δhが負の場合の、区間におけるエネルギー消費量を推定する理論式である。なお、高度差がない場合は、上記(6)式に示す消費エネルギー推定式を用いるのが好ましい。
【0118】
また、上記(6)式および(7)式において、右辺第1項は、アイドリング時のエネルギー消費量(第一情報)である。右辺第2項は、加速抵抗によるエネルギー消費量(第二情報)である。右辺第3項は、位置エネルギーとして消費されるエネルギー消費量である(第四情報)。右辺第4項は、単位面積当たりに受ける空気抵抗および転がり抵抗(走行抵抗)によるエネルギー消費量(第三情報)である。
【0119】
また、ナビゲーション装置300は、上記(4)式または(5)式に示す消費エネルギー推定式、もしくはその両方の式を用いて、重回帰分析法や回帰分析法により、1秒ごとに第一情報Pidle、効率εη、移動体の重量M、などを算出し、上記(2)式〜(7)式に示す消費エネルギー推定式の変数を補正してもよい。
【0120】
(ナビゲーション装置300における走行距離推定処理)
上述のように、ナビゲーション装置300は、旅行区間、旅行区間における車両の速度に関する情報を取得し、消費エネルギー推定式を用いて、旅行区間におけるエネルギー消費量を推定する。また、ナビゲーション装置300は、車両の残存エネルギー量を取得し、消費エネルギー推定式を用いて、車両の走行可能距離を推定する。以下、走行距離推定処理の詳細について説明する。
【0121】
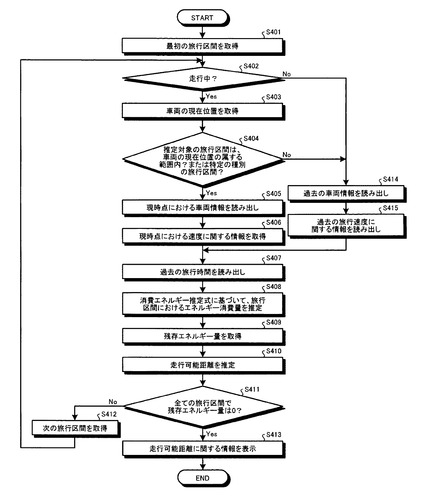
図4は、ナビゲーション装置による走行距離推定処理の手順を示すフローチャートである。図4のフローチャートにおいて、ナビゲーション装置300は、まず、たとえば、予め取得した車両の現在位置に基づいて、現在位置の属する旅行区間を、最初のエネルギー消費量の推定対象の旅行区間(以下、単に推定対象の旅行区間という)として取得する(ステップS401)。つぎに、ナビゲーション装置300は、たとえば車速センサ、加速度センサを介して、自装置が搭載された車両が走行中であるか否かを判断する(ステップS402)。
【0122】
車両が走行中である場合(ステップS402:Yes)、ナビゲーション装置300は、通信I/F315を介して、自装置が搭載された車両の現在位置を取得する(ステップS403)。このとき、ナビゲーション装置300は、車両の現在位置とともに、旅行区間の道路情報を取得する。道路情報には、たとえば、旅行区間内における天候、風向きおよび風速などが含まれていてもよい。
【0123】
つぎに、ナビゲーション装置300は、ステップS401において取得した旅行区間が、車両の現在位置の属する範囲内であるか否か、または特定の種別の旅行区間であるか否かを判断する(ステップS404)。なお、後述するように、推定対象の旅行区間が複数ある場合は、各々の旅行区間について判断し、それ以降の処理は各旅行区間で独立しておこなう。旅行区間がステップS404に示す範囲にある場合(ステップS404:Yes)、ナビゲーション装置300は、記憶装置(磁気ディスク305や光ディスク307)から、現時点における車両情報を読み出す(ステップS405)。車両情報は、たとえば、工場出荷時にメーカーから提供された情報であってもよいし、後述する補正処理により補正された情報であってもよい。
【0124】
ナビゲーション装置300は、たとえば車速センサ、加速度センサを介して、現時点における速度に関する情報を取得する(ステップS406)。速度に関する情報とは、車両の速度、加速度などである。つぎに、ナビゲーション装置300は、後述する記憶装置に記録されている走行履歴の中から、ステップS401において取得した旅行区間を過去に走行した際の旅行時間を読み出す(ステップS407)。
【0125】
つぎに、ナビゲーション装置300は、ステップS405において読み出した車両情報と、ステップS406において取得した速度に関する情報とを用いて、上記(2)式〜(7)式に示す消費エネルギー推定式のいずれか1つ以上の式に基づいて、ステップS401において取得した旅行区間におけるエネルギー消費量を推定する(ステップS408)。このとき、ナビゲーション装置300は、単位時間当たりのエネルギー消費量を推定した場合には、旅行区間における単位時間当たりのエネルギー消費量を過去の旅行時間で積算し、旅行区間のエネルギー消費量を推定する。
【0126】
つぎに、ナビゲーション装置300は、車内通信網を介して、車両の残存エネルギー量を取得する(ステップS409)。つぎに、ナビゲーション装置300は、ステップS409において取得した残存エネルギー量から推定対象の旅行区間のエネルギー消費量を引いて、車両の走行可能距離を推定する(ステップS410)。すなわち、ナビゲーション300は、残存エネルギー量が未だ残っている場合は、推定対象の旅行区間について現在の残存エネルギー量で走行可能であると推定する。
【0127】
つぎに、ナビゲーション装置300は、全ての推定対象の旅行区間について残存エネルギーがゼロでないかを判断する(ステップS411)。ここで、全ての旅行区間について残存エネルギーがゼロでない場合、推定対象の旅行区間に接続するその先の旅行区間について、まだ走行できる可能性がある。ナビゲーション装置300は、全ての旅行区間について残存エネルギーがゼロでない場合(ステップS411:No)、残存エネルギーがゼロにならなかった推定対象の旅行区間に隣接する次の旅行区間を取得する(ステップS412)。ここで、例えば交差点など、推定対象の旅行区間に隣接する次の旅行区間が複数ある場合は、全ての旅行区間を推定対象の旅行区間として取得する。その後、ナビゲーション装置300は、ステップS402に戻り、車両が走行中であるかの判断をおこなった後、以降の処理を繰り返しおこなう。
【0128】
一方、全ての旅行区間について残存エネルギーがゼロである場合(ステップS411:Yes)、ナビゲーション装置300は、たとえば、ディスプレイ313に表示する地図データとともに、走行可能距離に関する情報を表示し(ステップS413)、本フローチャートによる処理を終了する。ここで、走行可能距離に関する情報とは、地図上に車両の走行可能な範囲を表示するための画像情報や、走行可能な範囲を文字として表示するための文字情報などである。
【0129】
また、車両が走行中でない場合(ステップS402:No)、また、旅行区間がステップS404に示す範囲にない場合(ステップS404:No)、ナビゲーション装置300は、記憶装置から過去の車両情報を読み出す(ステップS414)。つぎに、ナビゲーション装置300は、記憶装置から過去の旅行速度に関する情報を読み出し(ステップS415)、ステップS407に移行し、以降の処理をおこなう。
【0130】
ここで、過去の車両情報および旅行速度に関する情報は、ステップS401またはステップS412において取得した旅行区間を過去に走行した際に、ナビゲーション装置300によって取得され、記憶装置に記憶された情報である。車両が走行中でない場合とは、たとえば、出発する前である場合である。なお、過去の車両情報および旅行速度に関する情報は、自分が過去に走行した際に記憶した情報でなく、ナビゲーション装置300は、サーバを介する通信システムに接続可能な場合、サーバによって収集された、他の車両が過去に走行した際の情報を使用してもよい。さらに、ナビゲーション装置300は、記憶装置に予め記録されている、各旅行区間に対応する旅行速度および車両情報に関する情報を使用してもよい。具体的には、ナビゲーション装置300の製造時、記憶装置に予め記憶される統計情報などが挙げられる。
【0131】
上述した走行距離推定処理では、ナビゲーション装置300は、車両の停止中だけでなく車両の走行中においても、車両の現在位置する旅行区間につながる他の旅行区間におけるエネルギー消費量を順次推定し、たとえば、現在の残存するエネルギー量でどの地点まで走行することができるかなどを推定することができる。
【0132】
また、ナビゲーション装置300は、目的地点までの経路が決定している場合、経路上の旅行区間のみを順次、取得してエネルギー消費量を積算すればよい。また、目的地点までの経路を探索している場合、目的地点に到達する複数の候補経路についてエネルギー消費量を積算し、たとえば、どの経路を走行すれば現在の残存するエネルギー量で到達地点まで到達することができるか、現在の残存エネルギー量では到達地点までたどり着けないなどを推測してもよい。
【0133】
また、ステップS410において、ナビゲーション装置300は、全ての旅行区間で残存エネルギー量がゼロになる場合、たとえば、ステップS413へ移行し、エネルギーを補給するために、残存エネルギー量で到達することができるEV車用充電スタンドや給油スタンド等までの経路をユーザに報知してもよい。また、走行距離推定処理中にナビゲーション装置300が取得するデータは、走行履歴として記憶装置に記録される。
【0134】
(ナビゲーション装置300における補正処理・その1)
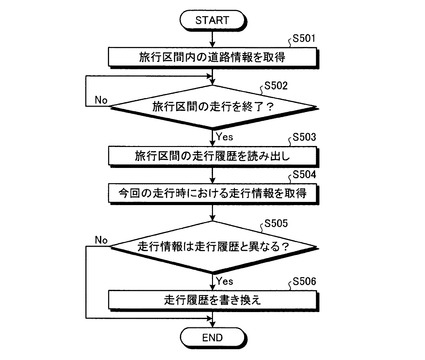
つづいて、ナビゲーション装置300における走行距離推定処理において、消費エネルギー推定式に変数として用いる走行履歴の補正処理について説明する。図5は、ナビゲーション装置による補正処理の手順を示すフローチャートである。図5に示すフローチャートでは、旅行区間を走行し終えた後に、走行履歴を補正する場合について説明する。
【0135】
図5のフローチャートにおいて、ナビゲーション装置300は、通信I/F315を介して、旅行区間内の道路情報を取得する(ステップS501)。ここで、ナビゲーション装置300は、走行距離推定処理(図4参照)のステップS403の処理がおこなわれたときにステップS501の処理をおこない、以降の処理をおこなってもよい。
【0136】
つぎに、ナビゲーション装置300は、車両が旅行区間の走行を終了するまで待機する(ステップS502:Noのループ)。車両が旅行区間の走行を終了した後(ステップS502:Yes)、ナビゲーション装置300は、記憶装置(磁気ディスク305や光ディスク307)に記憶されている走行履歴を読み出す(ステップS503)。
【0137】
ここで、ナビゲーション装置300が走行履歴の中から読み出す情報は、ステップS502において走行を終了したばかりの旅行区間の走行履歴である。具体的には、ナビゲーション装置300が走行履歴の中から読み出す情報は、消費エネルギー推定式の変数として用いられる情報であり、たとえば、速度、加速度、平均速度、平均加速度などである。
【0138】
つぎに、ナビゲーション装置300は、たとえば、車内通信網を介して、ステップS502において走行を終了したばかりの旅行区間の、今回の走行時における走行情報を取得する(ステップS504)。ここで、ナビゲーション装置300が取得する走行情報は、ステップS503においてナビゲーション装置300が記憶装置から読み出した走行履歴の比較となる情報であり、具体的には、たとえば、速度、加速度、平均速度、平均加速度などである。
【0139】
つぎに、ナビゲーション装置300がステップS504において取得した走行情報と、ステップS503において読み出した走行履歴とを比較し、走行情報が走行履歴と異なっているか否かを判断する(ステップS505)。つまり、旅行区間における今回の車両の走行が、同じ旅行区間における過去の走行と異なっているか否かを判断する。
【0140】
走行情報が走行履歴と異なっている場合(ステップS505:Yes)、ナビゲーション装置300は、記憶装置に記憶された走行履歴を今回の走行情報に書き換え(ステップS506)、本フローチャートによる処理を終了する。一方、走行情報が走行履歴と異なっていない場合には(ステップS505:No)、ナビゲーション装置300は、走行履歴を書き換えずに、本フローチャートによる処理を終了する。
【0141】
また、図5に示す補正処理では、ステップS502において、車両が所定の範囲をすべて走行し終えるまで待機した後に、それ以降の処理を行ってもよい。その場合、ステップS503において所定の範囲における過去の走行履歴を読み出し、ステップS504において今回走行し終えたばかりの所定の範囲における走行情報を取得してもよい。
【0142】
(ナビゲーション装置300における補正処理・その2)
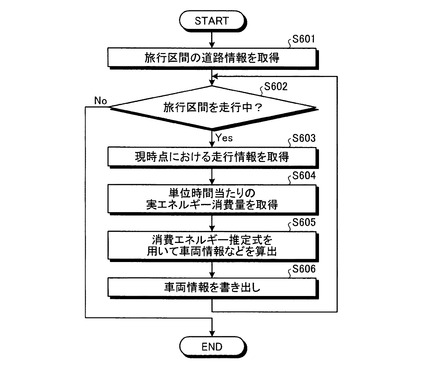
図6は、ナビゲーション装置による補正処理の他の手順を示すフローチャートである。図6に示すフローチャートでは、旅行区間を走行中に走行履歴を補正する場合について説明する。たとえば、図4に示す走行距離推定処理のステップS403〜S410と並行して、図6に示す補正処理を行ってもよい。
【0143】
図6のフローチャートにおいて、ナビゲーション装置300は、通信I/F315を介して、旅行区間の道路情報を取得する(ステップS601)。ここで、ナビゲーション装置300は、走行距離推定処理(図4参照)のステップS403の処理がおこなわれたときにステップS601の処理をおこない、以降の処理を続けておこなってもよい。
【0144】
つぎに、ナビゲーション装置300は、たとえば、通信I/F315を介して取得した車両の現在位置に基づいて、車両が旅行区間を走行中であるか否かを判断する(ステップS602)。車両が旅行区間を走行中である場合(ステップS602:Yes)、ナビゲーション装置300は、車内通信網を介して、現時点における走行情報を取得する(ステップS603)。ここで、現時点における走行情報とは、たとえば、単位時間当たりの速度や加速度である。
【0145】
つぎに、ナビゲーション装置300は、CANなどの車内通信網を介して、ステップS603において取得した走行情報に対応する単位時間当たりの実エネルギー消費量を取得する(ステップS604)。つぎに、ナビゲーション装置300は、ステップS603において取得した走行情報と、ステップS604において取得した単位時間当たりの実エネルギー消費量に基づいて、上述した(4)式または(5)式に示す消費エネルギー推定式、もしくはその両方の式を用いて、車両情報などを算出する(ステップS605)。
【0146】
ここで、ステップS605において算出される車両情報は、上記(2)式〜(7)式に示す消費エネルギー推定式に変数として用いる車両情報である。具体的には、ステップS605において算出される車両情報は、効率εη、アイドリング時に消費されるエネルギーPidle(第一情報)、車両の重量Mなどである。つまり、ナビゲーション装置300は、現時点における速度、加速度、単位時間当たりの実エネルギー消費量に基づいて、上記(2)式〜(7)式に示す消費エネルギー推定式に変数として用いる変数を決定する。
【0147】
つぎに、ナビゲーション装置300は、ステップS605において算出した車両情報を、記憶装置に書き出し(ステップS606)、ステップS602に戻る。つまり、ナビゲーション装置300は、車両が旅行区間を走行している間、ステップS602〜S606の処理をおこない続ける。一方、車両が旅行区間を走行し終えた場合(ステップS602:No)、本フローチャートによる処理を終了する。
【0148】
ナビゲーション装置300は、たとえば、車両の現在位置を取得する(ステップS403)ごとに、図5,6に示す補正処理を繰り返しおこなう。
【0149】
このように、ナビゲーション装置300によれば、車両の走行情報に基づいて、消費エネルギー推定式に変数として用いられる速度に関する情報を補正することができる。また、車両の走行情報や走行履歴に基づいて、消費エネルギー推定式に変数として用いられる車両情報を補正することができる。これにより、より正確に、旅行区間におけるエネルギー消費量を推定することができ、かつ、より正確に、車両の走行可能な範囲を推定することができる。
【0150】
(道路勾配について)
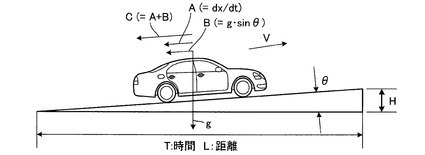
つづいて、上記式(1)式〜(5)式の右辺に変数として用いられる道路勾配θについて説明する。図7は、勾配がある道路を走行する車両にかかる加速度を模式的に示した説明図である。図7に示すように、道路勾配がθの坂道を走行する車両には、車両の走行に伴う加速度A(=dx/dt)と、重力加速度gの進行方向成分B(=g・sinθ)がかかる。上記式(1)の右辺第2項は、この車両の走行に伴う加速度Aと、重力加速度gの進行方向成分Bの合成加速度Cを示している。また、車両が走行する区間の距離Lとし、走行時間Tとし、走行速度Vとする。
【0151】
道路勾配θを考慮せずに燃費の推定を行った場合、道路勾配θが小さい領域では推定した燃費と実燃費との誤差が小さいが、道路勾配θが大きい領域では推定した燃費と実燃費との誤差が大きくなってしまう。このため、ナビゲーション装置300では、道路勾配、すなわち第四情報を考慮して燃費の推定を行うことで推定精度が向上する。
【0152】
車両が走行する道路の勾配は、たとえば、ナビゲーション装置300に搭載された傾斜計を用いて知ることができる。また、ナビゲーション装置300に傾斜計が搭載されていない場合は、たとえば、地図データに含まれる道路の勾配情報を用いることができる。
【0153】
(走行履歴について)
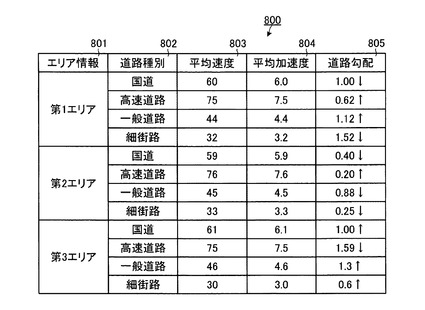
つづいて、上述した走行距離推定処理により、図4のステップS407で読み出す記憶装置に記録される情報について説明する。図8は、ナビゲーション装置による走行距離推定処理における道路情報の一例を示す説明図である。図8に示すように、道路情報データ800は、たとえば、エリア情報801および道路種別802を主キーとして、平均速度803と、平均加速度804と、道路勾配805とが1レコードごとに記録されたテーブルである。道路情報データ800は、ナビゲーション装置300によって読み出しおよび書き出しされる車両の走行履歴が記憶されている。
【0154】
エリア情報801は、たとえば、地名、地域名ごとに区切られた範囲(たとえば、所定の範囲)などである。道路種別802は、法定速度や、道路の勾配、道路幅、信号の有無などの道路状態の違いにより区別することのできる道路の種類である。具体的には、道路種別とは、国道、高速道路、一般道路、市街地などを通る細い街路(細街路)などである。
【0155】
平均速度803、平均加速度804および道路勾配805は、車両の走行時に取得された走行履歴である。図示省略するが、道路情報データ800には、車両が過去に旅行区間を走行したときの実エネルギー消費量、車両が過去に旅行区間を走行した際に要した時間(旅行時間)、車両情報などが記録されてもよい。なお、上述のように、これらの情報は、他の車両から通信を介して取得した情報を利用したり、装置に予め記憶されている統計情報を利用したりしてもよい。
【0156】
(走行抵抗について)
つづいて、車両に生じる走行抵抗について説明する。ナビゲーション装置300は、たとえば、次の(1)式により走行抵抗を算出する。一般的に、走行抵抗は、道路種別や、道路勾配、路面状況などにより、加速時や走行時に移動体に生じる。
【0157】
【数16】
【0158】
(回収率βの定義)
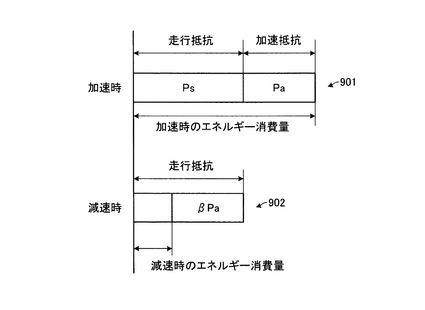
つづいて、EV車の回収率の概念について説明する。図9は、EV車の回収率の算出方法について示す説明図である。車両が旅行区間を走行するにあたり、出発地点から加速した後、一定の速度で走行し、その後減速して停止すると仮定した場合を例に、次の(10)式〜(13)式を用いて、回収率βを定義する。また、車両が旅行区間を実際に走行した際に計測されるエネルギー消費量(実エネルギー消費量)Ptとする。なお、旅行区間における道路勾配θ=0とする。
【0159】
図9において、加速時のエネルギー消費量901は、次の(10)式に示すように、走行抵抗によるエネルギー消費量Psと、加速抵抗によるエネルギー消費量Paとの和である。ここで、エネルギー消費量Ps、Paは、理論的に算出されたデータである。
【0160】
Pt=Ps+Pa ・・・(10)
【0161】
ここで、さらに、次のように仮定する。車両に生じる走行抵抗は、加速から減速に至る間に等しい。また、加速抵抗により生じる運動エネルギーは減速時に一部が電力に変換されて、回収されるエネルギー量として蓄えられる。つまり、車両の減速時、走行抵抗によりエネルギーが消費されるが、加速抵抗により生じる運動エネルギーが回収されるため、実際に消費されるエネルギー量は、走行抵抗によるエネルギー量から回収されるエネルギー量を引いた値となる。
【0162】
このため、加速抵抗による運動エネルギー量の、減速時に回収される割合(回収率)βとすると、減速時のエネルギー消費量902は、次の(11)式に示すように、走行抵抗によるエネルギー消費量Psと回収されるエネルギー量β・Paの差となる。
【0163】
Pt=Ps−β・Pa ・・・(11)
【0164】
実エネルギー消費量Ptは、次の(12)式に示すように、上記(10)式および(11)式の総和となる。
【0165】
Pt=Ps+(1−β)・Pa ・・・(12)
【0166】
ここで、実エネルギー消費量Pt、走行抵抗によるエネルギー消費量Ps、加速抵抗によるエネルギー消費量Paは既知の値であるため、回収率βは、次の(13)式を用いて算出することができる。
【0167】
β=1−(Pt−Ps)/(Pa) ・・・(13)
【0168】
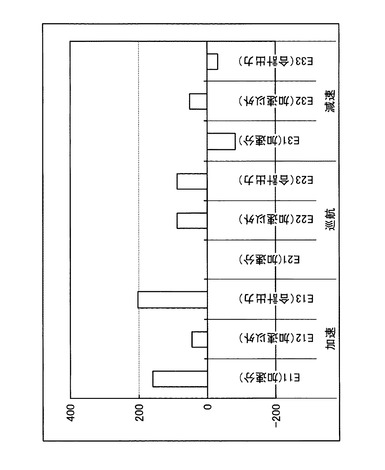
つづいて、車両の実際の走行に基づいて、回収率βを算出する方法について説明する。図10は、EV車の速度と出力との関係を示す特性図である。また、図11は、EV車の走行状況別のエネルギー消費量を示す特性図である。図10,11では、縦軸の正の部分をエネルギー消費量とし、縦軸の負の部分をエネルギー節約量とし、横軸を時間としている。まず、旅行区間を走行する車両の、速度、エネルギー消費量(出力)、加減以外の走行抵抗によるエネルギー量を所定の時間ごとに測定した。その結果を図10,11に示す。
【0169】
図10において、折れ線グラフ(以下、「速度」という)1001は、旅行区間を走行する車両の速度変化を示している。折れ線グラフ(以下、「出力」という)1002は、旅行区間を走行する車両の、エネルギー消費量と回収されるエネルギー量との差を示している。折れ線グラフ(以下、「走行抵抗」という)1003は、旅行区間を走行する車両の、加速時以外の走行抵抗によるエネルギー量を示している。
【0170】
図10に示す結果より、車両が加速しているとき(速度1001)、出力1002、走行抵抗1003ともに上昇している。そして、車両が一定の速度で走行しているとき、出力1002、走行抵抗1003ともに一定の値となっている。また、車両が減速しているとき、出力1002は減少して負の領域に至り、走行抵抗1003は正の領域を減少している。
【0171】
つまり、出力1002が示すように、減速時に、エネルギーが回収されていることがわかる。一方、走行抵抗1003は縦軸の正の領域のみを推移しているため、加速以外の走行抵抗では、エネルギー消費量のみが発生していることがわかる。このような出力1002、走行抵抗1003の変化を、たとえば、図11に示す。
【0172】
図11に示すように、加速時のエネルギー消費量E13は、次の(14)式に示すように、加速抵抗によるエネルギー消費量E11と、加減速以外の走行抵抗によるエネルギー消費量E12の和となる。加減速以外の走行抵抗によるエネルギー消費量とは、走行を維持するために消費されるエネルギー消費量である。
【0173】
E13=E11+E12 ・・・(14)
【0174】
また、一定速度(巡航)での走行時のエネルギー消費量E23は、次の(15)式に示すように、加減速以外の走行抵抗によるエネルギー消費量E22となる。
【0175】
E23=E22 ・・・(15)
【0176】
また、減速時のエネルギー消費量E33は、次の(16)式に示すように、減速時に回収されるエネルギー量E31と、加減速以外の走行抵抗によるエネルギー消費量E32の和となる。
【0177】
E33=E31+E32=E32−β×E11 ・・・(16)
【0178】
つまり、加速時のエネルギー消費量E11と、減速時に回収されるエネルギー量E31との割合である回収率βは、次の(17)式を用いて算出することができる。
【0179】
β=E33/E11 ・・・(17)
【0180】
つまり、上記(17)式は、次の(9)式に相当する。詳細には、次の(9)式に示す回収率の算出式は、次のように導き出される。上記(6)式において、右辺第2項を旅行区間における加速成分のエネルギー消費量Paccとすると、加速成分のエネルギー消費量Paccは、旅行区間における全エネルギー消費量(左辺)から、アイドリング時のエネルギー消費量(右辺第1項)と走行抵抗によるエネルギー消費量(右辺第4項)を減じたものであり、次の(8)式で表される。
【0181】
【数17】
【0182】
上記(8)式では、車両は道路勾配θの影響を受けていないこととする(θ=0)。そして、上記(8)式を上記(6)式に代入することで、次の(9)式に示す回収率βの算出式を得ることができる。
【0183】
【数18】
【0184】
回収率βは、EV車では0.7〜0.9程度であり、HV車では0.6〜0.8程度であり、ガソリン車では0.2〜0.3程度である。なお、ガソリン車の回収率とは、移動体の加速時におけるエネルギー消費量と、減速時に燃料カットされるエネルギー量との割合である。
【0185】
(走行可能な範囲の表示例)
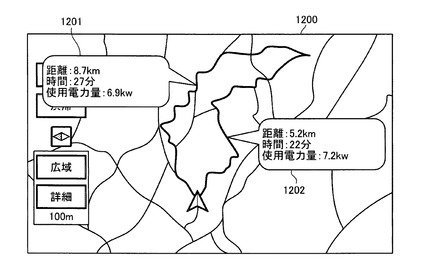
つづいて、上述した走行距離推定処理により、ディスプレイに表示される情報について説明する。図12は、ナビゲーション装置のディスプレイに表示される表示画面の一例を示す説明図である。図12に示すように、たとえば、ディスプレイ1200には、地図データとともに、ナビゲーション装置300によって推定された走行可能距離に基づいて経路探索された経路情報1201,1202が表示されている。これは、ナビゲーション装置300によって推定された走行可能距離で、車両の現在位置から目的地点まで到達できる場合に、ディスプレイに表示される情報の一例である。具体的には、図4のステップS413に示した処理が行われた状態である。
【0186】
具体的には、ナビゲーション装置300は、車両が出発時または走行中に、たとえば、推定したエネルギー推定量と車両の残存エネルギー量とに基づいて、車両の走行可能距離(目的地点まで走行可能な場合はそこまでのエネルギー消費量)を推定する。そして、ナビゲーション装置300は、走行可能距離に基づいて、たとえば、車両の残存エネルギー量で目的地点まで走行可能であるとして経路探索された経路情報1201,1202を、地図データとともにディスプレイ1200に表示する。ナビゲーション装置300は、経路情報1201,1202として、たとえば、現在位置から目的地点までの距離、所要時間、目的地点に到達するまでに消費されるエネルギー量などを、ディスプレイ1200に表示する。また、ナビゲーション装置300は、走行可能なエリアを、地図データとともにディスプレイ1200に表示してもよい。
【0187】
このように、ナビゲーション装置300は、走行可能距離に基づいて経路探索された経路情報、エリアなどを、地図データとともにディスプレイ1200に表示する。このため、ユーザは、車両の残存エネルギー量で到達することのできる複数の経路やエリアを視覚的に確認することができる。
【0188】
以上説明したように、ナビゲーション装置300によれば、車両のアイドリング状態、加減速時および走行時に消費されるエネルギーと、車両の加減速時に回収されるエネルギーに基づいて、消費エネルギー推定式を用いて、旅行区間におけるエネルギー消費量を推定する。このように、ナビゲーション装置300は、消費されるエネルギー量の異なる走行状況ごとにエネルギー消費量を算出して推定するので、より正確にエネルギー消費量を推定することができる。
【0189】
また、ナビゲーション装置300は、車両の速度、加速度に基づいて、旅行区間におけるエネルギー消費量を推定する。このため、ナビゲーション装置300は、その旅行区間における実際の走行状況を反映させたエネルギー消費量を推定することができる。
【0190】
また、ナビゲーション装置300は、車両から取得した残存エネルギー量に基づいて、車両の走行可能な範囲を推定する。このため、ナビゲーション装置300は、現在の残存するエネルギー量でどの地点まで走行することができるのか、またはどの経路を走行すれば現在の残存するエネルギー量で到達地点まで到達することができるのかなどを推測することができる。
【0191】
また、上述した(1)式〜(9)式は、車両情報や道路情報などを変数として含む。このため、ナビゲーション装置300は、旅行区間における実際の移動体の状態や、実際の道路状況が反映されたエネルギー消費量や走行可能距離を推定することができる。
【0192】
また、ナビゲーション装置300は、旅行区間における単位時間あたりのエネルギー消費量と、この旅行区間を移動体が過去に走行した際に要した時間(旅行時間)とに基づいて、旅行区間におけるエネルギー消費量を推定する。このため、ナビゲーション装置300は、その旅行区間におけるユーザの走行状況により要した走行時間が反映されたエネルギー消費量を推定することができる。
【0193】
また、ナビゲーション装置300は、車両の速度、加速度、残存エネルギー量に基づいて、上述した(2)式〜(7)式に示す消費エネルギー推定式のいずれか1つ以上の式を用いて、車両の走行可能距離を推定する。このように、ナビゲーション装置300は、旅行区間を車両が過去に実際に走行したときの走行状況と、実際の残存エネルギー量とに基づいて、車両の走行可能距離を推定するので、より正確に走行可能距離を推測することができる。
【0194】
また、ナビゲーション装置300は、移動体の加減速時に消費および回収されるエネルギーに関する第二情報として、移動体の加速時に消費する単位時間当たりのエネルギー量と、前記移動体の減速時に回収される単位時間当たりのエネルギー量とを平均する推定式を用いて、車両のエネルギー消費量を推定する。このため、ナビゲーション装置300は、加速時に消費するエネルギー量と減速時に回収するエネルギー量の両方を考慮して走行前の旅行区間におけるエネルギー消費量を推定することができる。
【0195】
なお、本実施の形態で説明した走行距離推定方法は、あらかじめ用意されたプログラムをパーソナル・コンピュータやワークステーションなどのコンピュータで実行することにより実現することができる。このプログラムは、ハードディスク、フレキシブルディスク、CD−ROM、MO、DVDなどのコンピュータで読み取り可能な記録媒体に記録され、コンピュータによって記録媒体から読み出されることによって実行される。またこのプログラムは、インターネットなどのネットワークを介して配布することが可能な伝送媒体であってもよい。
【符号の説明】
【0196】
100 走行距離推定装置
101 現在位置取得部
102 変数取得部
103 推定部
104 補正部
105 記憶部
110 表示部
【技術分野】
【0001】
この発明は、移動体の残存エネルギー量に基づいて移動体の走行距離を推定する走行距離推定装置、走行距離推定方法、走行距離推定プログラムおよび記録媒体に関する。ただし、この発明の利用は、走行距離推定装置、走行距離推定方法、走行距離推定プログラムおよび記録媒体に限らない。
【背景技術】
【0002】
従来、移動体の燃料消費量に基づいて、目的地点に到達するまでの経路を探索する経路探索装置が知られている(たとえば、下記特許文献1,2参照。)。下記特許文献1では、ユーザが選択した運転時の加速度合いを示す加速度情報に基づいて一般的な車両状態に応じた燃費情報を補正し、燃料消費量に基づくコストが最小となる経路を探索している。下記特許文献2では、出発地点から目的地点までの距離、地図情報に関連付けられた法定速度、道路の勾配情報や混雑情報などに基づいて燃料消費量を算出し、燃料消費量が最小となる経路を選択している。
【0003】
また、走行状況に基づいて、移動体の燃料消費量を推定する燃料消費量推定システムが知られている(たとえば、下記特許文献3参照。)。下記特許文献3では、過去の走行履歴の加速度情報のうち、現在の加速度合いに類似する加速度情報を検索し、過去の加速度情報を用いて求めた燃費傾向に基づいて、走行予定経路における燃料消費量を推定している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−300780号公報
【特許文献2】特開2000−002553号公報
【特許文献3】特開2009−031046号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述した特許文献1の技術では、一般的な加速度合いで分類された数種類の加速度情報の中から、ユーザに自身の走行状況に最も近い加速度情報を選択させ、ユーザにより選択された加速度情報に基づいて、燃料消費量が算出されている。また、上述した特許文献2の技術では、地図情報に関連付けられた法定速度に基づいて燃料消費量が算出されている。また、上述した特許文献3の技術では、現在の加速度合いに類似するということだけで検索された過去の加速度情報のみに基づいて、燃料消費量が算出されている。
【0006】
実際に道路を走行する場合、たとえば、平坦な道路を走行している場合、加速時に消費されるエネルギーの多くが車両の前進の運動エネルギーおよび回転機構の運動エネルギーとして保存される。また、たとえば、アクセルを離しブレーキを踏んでいない状態では、慣性走行で速度を低下させながら走り続ける。この場合、加速時に保存された上記運動エネルギーが、路面の摩擦抵抗や空気抵抗等の走行抵抗等の仕事として消費される。このため、上述した従来文献の技術では、このような走行する道路における実際の走行状況および道路状況を反映して燃料消費量を算出するのが困難であるという問題点が一例として挙げられる。
【0007】
また、上述した従来文献の技術では、ガソリン車、ディーゼル車、EV(Electric Vehicle)車、HV(Hybrid Vehicle)車、PHV(Plug−in Hybrid Vehicle)車などの車両情報を考慮して燃料消費量を算出していない。たとえば、EV車では、走行距離を向上させる手段として、回生制御によるエネルギー回収がある。加速のために必要なエネルギーは車両の前進の運動エネルギーおよび回転機構の運動エネルギーに変換され蓄えられている。これらのエネルギーは,減速時には前述の路面摩擦抵抗や空気抵抗などの仕事として消費される他、電気的回生エネルギーとして回収される。このように、走行時の加速度情報に基づくエネルギー消費量は車両情報によって大きく異なるので、上述した従来文献の技術では、車両情報が異なる場合、エネルギー消費量を正確に算出するのが困難であるという問題点が一例として挙げられる。
【課題を解決するための手段】
【0008】
上述した課題を解決し、目的を達成するため、請求項1の発明にかかるエネルギー消費量推定装置は、移動体に備えられた装備品により消費されるエネルギーに関する第一情報と、前記移動体の加減速時に消費および回収されるエネルギーに関する第二情報と、前記移動体の走行時に生じる抵抗により消費されるエネルギーに関する第三情報と、からなる消費エネルギー推定式に基づいて、前記移動体が所定の区間(以下、「旅行区間」という)を走行する際のエネルギー消費量を推定する推定手段と、前記旅行区間を走行する前記移動体の速度を前記第二情報および前記第三情報に関する変数として取得し、かつ、前記旅行区間を走行する前記移動体の加速度を前記第二情報に関する変数として取得する変数取得手段と、を備えることを特徴とする。
【0009】
また、請求項3の発明にかかるエネルギー消費量推定方法は、移動体のエネルギー消費量を推定するエネルギー消費量推定装置におけるエネルギー消費量推定方法であって、前記移動体に備えられた装備品により消費されるエネルギーに関する第一情報と、前記移動体の加減速時に消費および回収されるエネルギーに関する第二情報と、前記移動体の走行時に生じる抵抗により消費されるエネルギーに関する第三情報と、からなる消費エネルギー推定式に基づいて、前記移動体が所定の区間(以下、「旅行区間」という)を走行する際のエネルギー消費量を推定し、前記旅行区間を走行する前記移動体の速度を前記第二情報および前記第三情報に関する変数として取得し、かつ、前記旅行区間を走行する前記移動体の加速度を前記第二情報に関する変数として取得することを特徴とする。
【0010】
また、請求項4の発明にかかるエネルギー消費量推定プログラムは、請求項3に記載のエネルギー消費量推定方法をコンピュータに実行させることを特徴とする。
【0011】
また、請求項5の発明にかかる記録媒体は、請求項4に記載のエネルギー消費量推定プログラムをコンピュータに読み取り可能な状態で記録したことを特徴とする。
【図面の簡単な説明】
【0012】
【図1】実施の形態にかかる走行距離推定装置の機能的構成を示すブロック図である。
【図2】走行距離推定装置による走行距離推定処理の手順を示すフローチャートである。
【図3】ナビゲーション装置のハードウェア構成を示すブロック図である。
【図4】ナビゲーション装置による走行距離推定処理の手順を示すフローチャートである。
【図5】ナビゲーション装置による補正処理の手順を示すフローチャートである。
【図6】ナビゲーション装置による補正処理の他の手順を示すフローチャートである。
【図7】勾配がある道路を走行する車両にかかる加速度を模式的に示した説明図である。
【図8】ナビゲーション装置による走行距離推定処理における道路情報の一例を示す説明図である。
【図9】EV車の回収率の算出方法について示す説明図である。
【図10】EV車の速度と出力との関係を示す特性図である。
【図11】EV車の走行状況別のエネルギー消費量を示す特性図である。
【図12】ナビゲーション装置のディスプレイに表示される表示画面の一例を示す説明図である。
【発明を実施するための形態】
【0013】
以下に添付図面を参照して、この発明にかかる走行距離推定装置、走行距離推定方法、走行距離推定プログラムおよび記録媒体の好適な実施の形態を詳細に説明する。
【0014】
(実施の形態)
図1は、実施の形態にかかる走行距離推定装置の機能的構成を示すブロック図である。実施の形態にかかる走行距離推定装置100は、移動体の残存エネルギー量に基づいて移動体の走行距離を推定する。また、走行距離推定装置100は、現在位置取得部101、変数取得部102、推定部103、補正部104、記憶部105によって構成される。
【0015】
ここで、エネルギーとは、たとえば、EV車,HV車,PHV車など(以下、単に「EV車」という)の場合、たとえば、電気などに基づくエネルギーである。また、エネルギーとは、たとえば、ガソリン車,ディーゼル車など(以下、単に「ガソリン車」という)の場合、たとえば、ガソリンや軽油、ガスなどに基づくエネルギーである。残存エネルギーとは、たとえば、移動体の燃料タンクやバッテリー内に残っているエネルギーであり、後の移動体の走行に用いることのできるエネルギーである。
【0016】
現在位置取得部101は、走行距離推定装置100を搭載した移動体の現在位置を取得する。具体的には、現在位置取得部101は、たとえば、GPS衛星から受信したGPS情報などを用いて、自装置の現在位置を算出することによって位置情報を取得する。
【0017】
変数取得部102は、移動体の走行する所定の区間(以下、「旅行区間」という)における移動体の速度に関する情報を取得し、消費エネルギー推定式の変数として用いる。旅行区間とは、移動体が一旦発進して走行した後に停止して、次に発進するまでに通過する区間である。具体的には、旅行区間とは、道路の所定の地点(以下、「ノード(道路点)」とする)と他のノードとの間の区間(以下、「リンク(道路区間)」とする)である。つまり、ノードとは、移動体が停止する地点であり、発進する地点である。
【0018】
リンクは、道路ネットワークを構成する要素の一つであり、ノードとノードの間を1つの単位とする。リンク情報には、たとえば、リンク長(距離)データと、走行日時における旅行速度や平均加速度の予想データなどが含まれる。たとえば、市街地走行では信号機等で移動体が停止する場合が多い。この場合、ノードとは、たとえば、信号機の設置された交差点である。リンクとは、たとえば、一の交差点と他の交差点との間の区間である。
【0019】
旅行区間は、一つのリンクからなる区間であってもよいし、複数の連続するリンクからなる区間であってもよい。たとえば、5つのノード(4つのリンク)からなる連続した区間において、移動体は、発進と停止を4回繰り返す可能性もあり、5つのノードを1回で走行し終える可能性もある。具体的には、5つのノードを信号機の設置された交差点とした場合、すべての交差点で移動体が停止する可能性があり、いずれの交差点でも移動体が停止しない可能性もある。そのため、詳細には、旅行区間は、移動体が発進および停止する可能性のある2つのノードからなる1つのリンク、または移動体が発進および停止する可能性のある3つ以上のノードからなる連続した複数のリンクである。望ましくは、旅行区間は、停止する可能性のある2つのノードからなる1つのリンクであるのがよい。その理由は、あらゆる方向に分岐するリンクを全て網羅して計算することができるからである。
【0020】
移動体の速度に関する情報とは、たとえば、移動体の速度、加速度である。消費エネルギー推定式とは、旅行区間における移動体のエネルギー消費量を推定する式である。具体的には、消費エネルギー推定式は、エネルギー消費量を増減させる要因の異なる第一情報、第二情報および第三情報からなる多項式である。また、道路勾配が明らかな場合、消費エネルギー推定式には、さらに第四情報が加えられる。消費エネルギー推定式の詳細については、後述する。
【0021】
第一情報は、駆動源が可動した状態における移動体の停止時に消費されるエネルギーに関する情報である。駆動源が可動した状態における移動体の停止時とは、移動体のエンジンに負荷がかからない程度に、エンジンを低速で空回りさせた状態である。具体的には、駆動源が可動した状態における移動体の停止時とは、アイドリング時である。
【0022】
具体的には、第一情報は、たとえば、エンジンをかけたまま停車しているときや、信号などで停止しているときに消費されるエネルギー量(以下、エネルギー消費量という)である。つまり、第一情報は、移動体の走行に関係しない要因で消費されるエネルギー消費量である。より具体的には、第一情報は、移動体に備えられたエアコンやオーディオなどによるエネルギー消費量である。第一情報は、EV車の場合、ほぼゼロとしてもよい。
【0023】
第二情報は、移動体の加減速時に消費および回収されるエネルギーに関する情報である。移動体の加減速時とは、移動体の速度が時間的に変化している走行状態である。具体的には、移動体の加減速時とは、所定の時間内において、移動体の速度が変化する走行状態である。所定の時間とは、一定間隔の時間の区切りであり、たとえば、単位時間あたりなどである。
【0024】
また、第二情報は、EV車の場合、移動体の加速時に消費されるエネルギー量と、移動体の減速時に回収されるエネルギー量との割合(以下、「回収率」という)であってもよい。回収されるエネルギーとは、EV車の場合、移動体の加速時に生じた運動エネルギーが減速時に電気エネルギーに変換されて回収されるエネルギーである。回収率についての詳細な説明は、後述する。
【0025】
また、回収エネルギーとは、ガソリン車の場合、必要以上にエネルギーを消費しないで節約することができるエネルギーである。詳細には、ガソリン車の場合、燃費を向上する運転方法として、アクセルを踏む時間を少なくする方法が知られている。つまり、ガソリン車では、移動体の加速時に生じる運動エネルギー(慣性力)によって移動体の走行を維持することで、燃料の消費を抑えることができる。また、移動体の減速時にエンジンブレーキを利用することで、ブレーキを踏むことによる燃料の消費を抑えることができる。つまり、ガソリン車の場合、消費される燃料を低減(燃料カット)して燃料を節約することであるが、ここではEV車と同様に回収されるエネルギーとする。
【0026】
第三情報は、移動体の走行時に生じる抵抗により消費されるエネルギーに関する情報である。移動体の走行時とは、所定の時間内において、移動体の速度が一定である走行状態である。移動体の走行時に生じる抵抗とは、移動体の走行時に移動体の走行状態を変化させる要因である。具体的には、移動体の走行時に生じる抵抗とは、気象状況、道路状況、車両状況などにより移動体に生じる抵抗である。
【0027】
気象状況により移動体に生じる抵抗とは、たとえば、雨,風などの気象変化による空気抵抗である。道路状況により移動体に生じる抵抗とは、道路勾配,路面の舗装状態などによる路面抵抗である。車両状況により移動体に生じる抵抗とは、タイヤの空気圧、乗車人数、積載重量などにより移動体にかかる負荷抵抗である。
【0028】
具体的には、第三情報は、空気抵抗や路面抵抗、負荷抵抗を受けた状態で、移動体を一定速度で走行させたときのエネルギー消費量である。より具体的には、第三情報は、たとえば、向かい風により移動体に生じる空気抵抗や、舗装されていない道路から受ける路面抵抗などを、移動体が一定速度で走行するときに消費されるエネルギー消費量である。
【0029】
第四情報は、移動体が位置する高度の変化により消費および回収されるエネルギーに関する情報である。移動体が位置する高度の変化とは、移動体の位置する高度が時間的に変化している状態である。具体的には、移動体が位置する高度の変化とは、所定の時間内において、移動体が勾配のある道路を走行することにより高度が変化する走行状態である。
【0030】
また、第四情報は、所定の区間内における道路勾配が明らかな場合に求めることができる付加的な情報であり、これによりエネルギー消費量の推定精度を向上することができる。なお、道路の傾斜が不明な場合、または計算を簡略化する場合、移動体が位置する高度の変化はないものとして、後述するエネルギー推定式における道路勾配θ=0としてエネルギー消費量を推定することができる。以下、特段の説明がある場合及び消費エネルギー推定式を説明する場合を除き、旅行区間における勾配の変化はないもの、すなわち、後述する消費エネルギー推定式におけるθ=0(第四情報は考慮しない)という前提で説明する。
【0031】
変数取得部102は、たとえば、CAN(Controller Area Network)など通信プロトコルによって動作する車内通信ネットワーク(以下、単に「CAN」という)を介して、たとえば、エレクトロニックコントロールユニット(ECU:Electronic Control Unit)によって管理されている移動体の速度、加速度を取得し、第一情報、第二情報および第三情報に関する変数として用いてもよい。
【0032】
また、変数取得部102は、旅行区間の走行に要する旅行時間を、消費エネルギー推定式の変数として取得する。具体的には、変数取得部102は、移動体が過去に同じ旅行区間を走行したときの所要時間を、旅行時間として取得する。
【0033】
また、変数取得部102は、移動体の残存エネルギー量に関する情報や、旅行区間における移動体の実エネルギー消費量を取得し、消費エネルギー推定式の変数として用いる。ここで、残存エネルギー量とは、移動体の燃料タンクまたはバッテリーに残っているエネルギー量である。つまり、EV車の場合には、回収されたエネルギー量も残存エネルギー量に含まれる。具体的には、変数取得部102は、たとえば、CANなど通信プロトコルによって動作する車内通信ネットワークを介して、たとえば、ECUによって管理されている残存エネルギー量や実エネルギー消費量を取得する。
【0034】
また、変数取得部102は、一の旅行区間または一の旅行区間に隣接する他の旅行区間が、移動体の現在位置の属する範囲内または特定の種別の旅行区間である場合、もしくはその両方を満たす場合、旅行区間を走行する移動体のその時点での速度に関する情報を、第一情報、第二情報および第三情報に関する変数として取得する。
【0035】
一の旅行区間とは、移動体の現在走行中の旅行区間である。一の旅行区間に隣接する他の旅行区間とは、一の旅行区間の終点となるノードにつながる旅行区間である。たとえば、一の旅行区間の終点となるノードが4差路である場合、一の旅行区間の終点となるノードから4方向に分岐する旅行区間のうち、一の旅行区間を除く3方向の旅行区間が他の旅行区間となる。
【0036】
移動体の現在位置の属する範囲とは、移動体が走行中である場合の、移動体の現在位置を含む範囲である。具体的には、移動体の現在位置の属する範囲とは、たとえば、10km2など、移動体の走行中の旅行区間を含む所定の面積を有する範囲であってもよいし、市町村など、行政区画で分割された範囲であってもよい。また、特定の種別の旅行区間とは、特定の種別で区分けされた範囲である。特定の種別とは、たとえば、道路種別などである。
【0037】
ここで、道路種別とは、法定速度や、道路の勾配、道路幅、信号の有無などの道路状態の違いにより区別することのできる道路の種類である。具体的には、道路種別とは、一般国道、高速道路、一般道路、市街地などを通る細い街路(以下、「細街路」という)などである。
【0038】
つまり、具体的には、変数取得部102は、一の旅行区間を走行中の移動体の実際の速度、加速度を、一の旅行区間における速度に関する情報として取得する。さらに、変数取得部102は、一の旅行区間および他の旅行区間が、移動体の現在位置の属する範囲内または特定の種別の旅行区間である場合に、一の旅行区間を走行中の移動体の実際の速度、加速度を、他の旅行区間における速度に関する情報として取得する。これにより、後述する推定部103は、旅行区間における移動体の実際のエネルギー消費量(以後、「実エネルギー消費量」という)に近いエネルギー消費量を推定することができる。
【0039】
また、変数取得部102は、一の旅行区間または他の旅行区間が、移動体の現在位置の属する範囲内および特定の種別の旅行区間のどちらの範囲でもない場合、移動体の走行履歴のうち、過去に旅行区間を走行した際の移動体の速度に関する情報(以下、「旅行速度に関する情報」という)を取得する。
【0040】
ここで、移動体の走行履歴とは、移動体が過去に旅行区間を走行したときの速度、加速度、旅行時間、実エネルギー消費量、車両情報などである。車両情報とは、車両重量、車両回転部の重量、効率、空気抵抗などである。移動体の走行履歴は、たとえば、旅行区間ごとや、道路種別ごとに記憶部105に記憶されている。
【0041】
具体的には、変数取得部102は、移動体が出発前である(一の旅行区間にいない)場合や他の旅行区間に到達していない場合に、移動体が過去に同じ旅行区間または同じ所定の範囲を走行したときの速度、加速度を、旅行速度に関する情報として取得する。所定の範囲とは、たとえば、残存エネルギー量がなくなるまでに到達可能な範囲や、都道府県、市町村などである。
【0042】
また、変数取得部102は、一の旅行区間または他の旅行区間が、移動体の現在位置の属する範囲内または特定の種別の旅行区間である場合でも、旅行速度に関する情報を取得してもよい。この場合、変数取得部102は、実際の速度に関する情報と、過去の旅行速度に関する情報との両方に基づいて、たとえば、これらの情報の平均値を算出してもよい。
【0043】
変数取得部102は、旅行区間における道路に関する情報を取得し、消費エネルギー推定式の変数として用いる。具体的には、変数取得部102は、たとえば、記憶部105に記憶された過去の走行履歴にかかる道路に関する情報を取得する。また、変数取得部102は、たとえば、記憶部105に記憶された地図情報から道路に関する情報を取得してもよいし、傾斜センサなどから道路勾配などを取得してもよい。
【0044】
ここで、道路に関する情報とは、たとえば、移動体の走行により消費または回収させるエネルギー量に変化を生じさせる道路情報である。具体的には、道路に関する情報とは、たとえば、道路種別や、道路勾配、路面状況などにより移動体に生じる走行抵抗である。走行抵抗は、たとえば、次の(1)式により算出することができる。一般的に、走行抵抗は、加速時や走行時に移動体に生じる。
【0045】
【数1】
【0046】
推定部103は、第一情報と、第二情報と、第三情報と、からなる消費エネルギー推定式に基づいて、旅行区間を走行する際のエネルギー消費量を推定する。具体的には、推定部103は、変数取得部102によって取得された移動体の速度に関する情報に基づいて、旅行区間における前記移動体のエネルギー消費量を推定する。なお、道路勾配が明らかな場合、推定部103は、さらに第四情報を加えた消費エネルギー推定式に基づいて、旅行区間を走行する際のエネルギー消費量を推定してもよい。
【0047】
より詳細には、推定部103は、次の(2)式または(3)式に示す消費エネルギー推定式、もしくはその両方の式に基づいて、単位時間当たりのエネルギー消費量を推定する。加速時および走行時における移動体のエネルギー消費量は、走行抵抗と走行距離と正味モータ効率と伝達効率との積であり、次の(2)式で表される。(2)式に示す消費エネルギー推定式は、加速時および走行時における単位時間当たりのエネルギー消費量を推定する理論式である。
【0048】
【数2】
【0049】
ここで、εは正味熱効率,ηは総伝達効率である。移動体の加速度αと道路勾配θから重力の加速度gとの合計を合成加速度|α|とすると、合成加速度|α|が負の場合の消費エネルギー推定式は、走行抵抗と走行距離と正味モータ効率と伝達効率の積であり、次の(3)式で表される。合成加速度|α|が負の場合とは、移動体の減速時である。(3)式に示す消費エネルギー推定式は、減速時における単位時間当たりのエネルギー消費量を推定する理論式である。
【0050】
【数3】
【0051】
上記(2)式および(3)式において、右辺第1項は、アイドリング時のエネルギー消費量(第一情報)である。右辺第2項は、勾配成分によるエネルギー消費量(第四情報)および転がり抵抗成分によるエネルギー消費量(第三情報)である。右辺第3項は、空気抵抗成分によるエネルギー消費量(第三情報)である。また、(2)式の右辺第4項は、加速成分によるエネルギー消費量(第二情報)である。(3)式の右辺第4項は、減速成分によるエネルギー消費量(第二情報)である。その他の変数が示す情報は、上記(1)式と同様である。
【0052】
また、上記(2)式および(3)式では、モータ効率と駆動効率は一定と見なしている。しかし、実際には、モータ効率および駆動効率はモータ回転数やトルクの影響により変動する。そこで、次の(4)式および(5)式に単位時間当たりの消費エネルギーを推定する実証式を示す。合成加速度|α+g・sinθ|が正の場合のエネルギー消費量を推定する実証式は、次の(4)式で表される。つまり、(4)式に示す消費エネルギー推定式は、加速時および走行時における単位時間当たりのエネルギー消費量を推定する実証式である。
【0053】
【数4】
【0054】
また、合成加速度|α+g・sinθ|が負の場合のエネルギー消費量を推定する実証式は、次の(5)式で表される。つまり、(5)式に示す消費エネルギー推定式は、減速時における単位時間当たりのエネルギー消費量を推定する実証式である。
【0055】
【数5】
【0056】
上記(4)式および(5)式において、係数a1,a2は、移動体の状況などに応じて設定される常数である。係数k1,k2,k3は、加速時におけるエネルギー消費量に基づく変数である。また、右辺第1項〜右辺第4項が示す情報は、上記(2)式および(3)式と同様である。
【0057】
理論式である上記(2)式と、実証式である上記(4)式は類似した構造となっている。(2)式および(4)式の右辺第1項はともに速度に依存しない成分であり、ともに第一情報である。(4)式の右辺第2項は、勾配抵抗と加速抵抗分のエネルギー消費量である。つまり、(4)式の右辺第2項は、速度増加による運動エネルギーの増分を表す第二情報と、高度変化による位置エネルギーの増分を表す第四情報であり、(2)式の右辺第4項の加速成分と、(2)式の右辺第2項の勾配成分とに対応する。(4)式の右辺第3項は第三情報であり、(2)式の右辺第2項の転がり抵抗成分と、(2)式の右辺第3項の空気抵抗成分に対応する。
【0058】
理論式である上記(3)式と、実証式である上記(5)式においても、上述した(2)式と(4)式の関係と同様に類似した構造となっている。(5)式の右辺第2項のβは、位置エネルギーと運動エネルギーの回収分(以下、「回収率」とする)である。
【0059】
推定部103は、上記(4)式または(5)式に示す消費エネルギー推定式、もしくはその両方の式を用いて、単位時間ごとの走行速度Vと走行加速度αを入力することにより、走行速度および走行加速度が取得された瞬間の消費エネルギーを推定してもよい。しかし、上記(4)式または(5)式を用いて走行可能範囲を推定する場合、これから走行する全旅行区間行程における単位時間ごとの速度と加速度をたとえば1秒ごとに取得し、かつ1秒ごとにエネルギー消費量を推定しようとすると,計算量が膨大になってしまう恐れがある。
【0060】
そこで、推定部103は、ある程度まとまった区間における走行速度の平均値、および走行加速度の平均値を用いて、この区間におけるエネルギー消費量を推定してもよい。ここで、ある程度まとまった区間とは、移動体が走行する区間であり、たとえば、旅行区間であってもよい。区間におけるエネルギー消費量は、上記(4)式または(5)式に基づいて定義される消費エネルギー推定式を用いて得ることができる。具体的には、推定部103は、第二情報として、移動体の加速時に消費する単位時間当たりのエネルギー消費量と、移動体の減速時に回収される単位時間当たりのエネルギー消費量とを平均する推定式を用いる。
【0061】
より具体的には、推定部103は、次の(6)式または(7)式に示す区間におけるエネルギー消費量の実証式、もしくはその両方の式を用いて、エネルギー消費量を推定してもよい。
【0062】
次の(6)式に示す消費エネルギー推定式は、移動体が走行する区間の高度差Δhが正の場合の、区間における消費エネルギー推定式である。高度差Δhが正の場合とは、移動体が上り坂を走行している場合である。
【0063】
【数6】
【0064】
一方、次の(7)式に示す消費エネルギー推定式は、移動体が走行する区間の高度差Δhが負の場合の、区間における消費エネルギー推定式である。高度差Δhが負の場合とは、移動体が下り坂を走行している場合である。
【0065】
【数7】
【0066】
上記(6)式および(7)式において、右辺第1項は、アイドリング時のエネルギー消費量(第一情報)である。右辺第2項は、加速抵抗によるエネルギー消費量(第二情報)である。右辺第3項は、位置エネルギーとして消費されるエネルギー消費量である(第四情報)。右辺第4項は、単位面積当たりに受ける空気抵抗および転がり抵抗(以下、これらをまとめて走行抵抗と称する)によるエネルギー消費量(第三情報)である。
【0067】
また、推定部103は、たとえば、メーカーによって提供された回収率βを取得してもよいし、変数取得部102によって取得された速度に関する情報に基づいて回収率βを算出してもよい。
【0068】
次に、回収率βの算出方法について説明する。上記(6)式において、右辺第2項を旅行区間における加速成分のエネルギー消費量Paccとすると、加速成分のエネルギー消費量Paccは、旅行区間における全エネルギー消費量(左辺)から、アイドリング時のエネルギー消費量(右辺第1項)と走行抵抗によるエネルギー消費量(右辺第4項)を減じたものであり、次の(8)式で表される。
【0069】
【数8】
【0070】
なお、上記(8)式では、移動体は道路勾配θの影響を受けていないこととする(θ=0)。すなわち、上記(6)式の右辺第3項をゼロとする。そして、上記(8)式を上記(6)式に代入することで、次の(9)式に示す回収率βの算出式を得ることができる。
【0071】
【数9】
【0072】
回収率βは、EV車では0.7〜0.9程度であり、HV車では0.6〜0.8程度であり、ガソリン車では0.2〜0.3程度である。なお、ガソリン車の回収率とは、移動体の加速時におけるエネルギー消費量と、減速時に燃料カットされるエネルギー量との割合である。
【0073】
また、推定部103は、上記(2)式〜(5)式に示す消費エネルギー推定式のいずれか一つ以上の式に基づいて、旅行区間を走行する際の単位時間当たりのエネルギー消費量を推定するとともに、これを旅行時間だけ積算して旅行区間を走行する際のエネルギー消費量を推定する。
【0074】
具体的には、推定部103は、実際の速度に関する情報または旅行速度に関する情報を用いて、消費エネルギー推定式に基づいて単位時間当たりのエネルギー消費量を推定し、変数取得部102によって取得された旅行時間で積分することにより、旅行区間におけるエネルギー消費量を推定する。旅行区間を移動体が過去に実際に走行した際の旅行時間を用いて旅行区間におけるエネルギー消費量を推定するため、より実エネルギー消費量に近いエネルギー消費量を推定することができる。
【0075】
また、推定部103は、残存エネルギー量を消費エネルギー推定式の解として用い、残存エネルギー量がなくなる地点を推定し、移動体の走行可能距離を算出する。具体的には、推定部103は、上記(2)式〜(7)式に示す消費エネルギー推定式に基づいて推定したエネルギー消費量と、変数取得部102によって取得された残存エネルギー量とに基づいて、残存エネルギー量がなくなる地点を推定し、移動体の走行可能距離を算出する。
【0076】
具体的には、推定部103は、連続する旅行区間のうち、一の旅行区間を走行する際のエネルギー消費量を推定し、その後、一の旅行区間に隣接する他の旅行区間を走行する際のエネルギー消費量を推定する処理を、移動体の現在位置から残存エネルギー量がなくなるまで繰り返すことによって残存エネルギー量がなくなる地点を推定する。
【0077】
補正部104は、変数取得部102によって取得された実エネルギー消費量に基づいて、消費エネルギー推定式の変数として用いる移動体に関する情報を補正する。具体的には、補正部104は、変数取得部102によって取得された実エネルギー消費量、この実エネルギー消費量を計測した時点における実際の速度、実際の加速度、道路に関する情報などに基づいて、消費エネルギー推定式の変数として用いる移動体に関する情報を補正する。
【0078】
ここで、移動体に関する情報とは、移動体の走行により消費または回収させるエネルギー量に変化を生じさせる情報である。具体的には、移動体に関する情報とは、たとえば、車両情報の整備状況など移動体自体に関する情報、道路の路面状況や、過去の走行履歴から変化した速度に関する情報など移動体の走行に関する情報である。
【0079】
また、補正部104は、旅行区間における過去の走行履歴と現在の走行状況とを比較し、過去の走行履歴と現在の走行状況とが異なっている場合に、移動体に関する情報を補正してもよい。補正部104により移動体に関する情報を補正することにより、移動体が旅行区間または所定の範囲を走行するごとに、現在の移動体に関する情報を消費エネルギー推定式に反映することができる。
【0080】
具体的には、補正部104は、変数取得部102によって取得された実エネルギー消費量、速度に関する情報に基づいて、消費エネルギー推定式の変数として用いられる移動体に関する情報を補正する。より具体的には、補正部104は、たとえば、1秒ごとに変数取得部102によって取得される実エネルギー消費量、速度、加速度、移動体の勾配に基づいて、上記(4)式および(5)式に示す消費エネルギー推定式を用いて、重回帰分析法や回帰分析法により、1秒ごとに第一情報Pidle、効率εη、移動体の重量M、などを算出する。
【0081】
記憶部105は、所定の範囲ごとに区分けされた地図情報と、旅行区間ごとの種別情報とを記憶する。具体的には、記憶部105は、たとえば、旅行区間ごとや、道路種別ごと、所定の範囲ごとの移動体の走行履歴、移動体の走行履歴にかかる道路に関する情報、地図情報などを記憶する。また、記憶部105は、推定部103によって推定されたエネルギー消費量、回収率β、走行可能距離などを記憶してもよい。また、記憶部105は、補正部104によって算出された上記(2)式〜(7)式に示す消費エネルギー推定式に用いる変数を補正する移動体に関する情報を記憶してもよい。
【0082】
表示部110は、推定部103によって推定された情報を地図データとともに表示する。具体的には、表示部110は、推定部103によって算出された走行可能距離に関する情報を含む地図データを表示する。より具体的には、表示部110は、推定部103によって算出された走行可能距離で到達することができる経路、エリアなどを地図データに表示する。
【0083】
つづいて、走行距離推定装置100による走行距離推定処理について説明する。図2は、走行距離推定装置による走行距離推定処理の手順を示すフローチャートである。図2のフローチャートにおいて、走行距離推定装置100は、変数取得部102によって、移動体の走行する旅行区間における道路に関する情報を取得する(ステップS201)。つぎに、走行距離推定装置100は、変数取得部102によって、旅行区間における移動体の速度に関する情報を取得する(ステップS202)。
【0084】
つぎに、走行距離推定装置100は、推定部103によって、旅行区間における移動体の速度に関する情報に基づいて、第一情報と、第二情報と、第三情報と、からなる消費エネルギー推定式を用いて、旅行区間を走行する際のエネルギー消費量を推定する(ステップS203)。
【0085】
つぎに、走行距離推定装置100は、変数取得部102によって移動体の残存エネルギー量を取得する(ステップS204)。つぎに、走行距離推定装置100は、残存エネルギー量に基づいて、移動体の走行可能距離を推定し、移動体の走行可能な範囲を推定して(ステップS205)、本フローチャートによる処理を終了する。
【0086】
以上説明したように、実施の形態にかかる走行距離推定装置100は、第一情報と、第二情報と、第三情報と、からなる消費エネルギー推定式を用いて、旅行区間におけるエネルギー消費量を推定する。より詳細には、走行距離推定装置100は、移動体のアイドリング状態、加減速時および走行時に消費されるエネルギーと、移動体の加減速時に回収されるエネルギーに基づいて、消費エネルギー推定式を用いて、旅行区間におけるエネルギー消費量を推定する。このように、走行距離推定装置100は、消費されるエネルギー量の異なる走行状況ごとにエネルギー消費量を算出して推定するので、より正確にエネルギー消費量を推定することができる。
【0087】
また、走行距離推定装置100は、移動体の速度に関する情報に基づいて、旅行区間におけるエネルギー消費量を推定する。このため、走行距離推定装置100は、その旅行区間における実際の走行状況を反映させたエネルギー消費量を推定することができる。
【0088】
また、走行距離推定装置100は、移動体から取得した残存エネルギー量に基づいて、移動体の走行可能な範囲を推定する。このため、走行距離推定装置100は、現在の残存するエネルギー量でどの地点まで走行することができるのか、またはどの経路を走行すれば現在の残存するエネルギー量で目的地点まで到達することができるのかなどを推測することができる。
【0089】
また、上述した(1)式〜(9)式に示す消費エネルギー推定式は、車両情報や道路情報などを変数として含む。このため、走行距離推定装置100は、旅行区間における実際の移動体の状態や、実際の道路状況が反映されたエネルギー消費量や走行可能距離を推定することができる。
【実施例】
【0090】
以下に、本発明の実施例について説明する。本実施例では、車両に搭載されるナビゲーション装置300を走行距離推定装置100として、本発明を適用した場合の一例について説明する。
【0091】
(ナビゲーション装置300のハードウェア構成)
つぎに、ナビゲーション装置300のハードウェア構成について説明する。図3は、ナビゲーション装置のハードウェア構成を示すブロック図である。図3において、ナビゲーション装置300は、CPU301、ROM302、RAM303、磁気ディスクドライブ304、磁気ディスク305、光ディスクドライブ306、光ディスク307、音声I/F(インターフェース)308、マイク309、スピーカ310、入力デバイス311、映像I/F312、ディスプレイ313、カメラ314、通信I/F315、GPSユニット316、各種センサ317を備えている。各構成部301〜317は、バス320によってそれぞれ接続されている。
【0092】
CPU301は、ナビゲーション装置300の全体の制御を司る。ROM302は、ブートプログラム、走行距離推定プログラム、データ更新プログラム、地図データ表示プログラムなどのプログラムを記録している。RAM303は、CPU301のワークエリアとして使用される。すなわち、CPU301は、RAM303をワークエリアとして使用しながら、ROM302に記録された各種プログラムを実行することによって、ナビゲーション装置300の全体の制御を司る。
【0093】
磁気ディスクドライブ304は、CPU301の制御にしたがって磁気ディスク305に対するデータの読み取り/書き込みを制御する。磁気ディスク305は、磁気ディスクドライブ304の制御で書き込まれたデータを記録する。磁気ディスク305としては、たとえば、HD(ハードディスク)やFD(フレキシブルディスク)を用いることができる。
【0094】
また、光ディスクドライブ306は、CPU301の制御にしたがって光ディスク307に対するデータの読み取り/書き込みを制御する。光ディスク307は、光ディスクドライブ306の制御にしたがってデータが読み出される着脱自在な記録媒体である。光ディスク307は、書き込み可能な記録媒体を利用することもできる。着脱可能な記録媒体として、光ディスク307のほか、MO、メモリカードなどを用いることができる。
【0095】
磁気ディスク305および光ディスク307に記録される情報の一例としては、地図データ、車両情報、道路情報、走行履歴などが挙げられる。地図データは、カーナビゲーションシステムにおいて走行可能距離に関する情報を表示する際に用いられ、建物、河川、地表面などの地物(フィーチャ)をあらわす背景データ、道路の形状をリンクやノードなどであらわす道路形状データなどを含んでいる。ここで、車両情報、道路情報および走行履歴とは、上記(2)式〜(7)式に示す消費エネルギー推定式に変数として用いる道路に関するデータである。
【0096】
音声I/F308は、音声入力用のマイク309および音声出力用のスピーカ310に接続される。マイク309に受音された音声は、音声I/F308内でA/D変換される。マイク309は、たとえば、車両のダッシュボード部などに設置され、その数は単数でも複数でもよい。スピーカ310からは、所定の音声信号を音声I/F308内でD/A変換した音声が出力される。
【0097】
入力デバイス311は、文字、数値、各種指示などの入力のための複数のキーを備えたリモコン、キーボード、タッチパネルなどが挙げられる。入力デバイス311は、リモコン、キーボード、タッチパネルのうちいずれか1つの形態によって実現されてもよいが、複数の形態によって実現することも可能である。
【0098】
映像I/F312は、ディスプレイ313に接続される。映像I/F312は、具体的には、たとえば、ディスプレイ313全体を制御するグラフィックコントローラと、即時表示可能な画像情報を一時的に記録するVRAM(Video RAM)などのバッファメモリと、グラフィックコントローラから出力される画像データに基づいてディスプレイ313を制御する制御ICなどによって構成される。
【0099】
ディスプレイ313には、アイコン、カーソル、メニュー、ウインドウ、あるいは文字や画像などの各種データが表示される。ディスプレイ313としては、たとえば、TFT液晶ディスプレイ、有機ELディスプレイなどを用いることができる。
【0100】
カメラ314は、車両内部あるいは外部の映像を撮影する。映像は静止画あるいは動画のどちらでもよく、たとえば、カメラ314によって車両外部を撮影し、撮影した画像をCPU301において画像解析したり、映像I/F312を介して磁気ディスク305や光ディスク307などの記録媒体に出力したりする。
【0101】
通信I/F315は、無線を介してネットワークに接続され、ナビゲーション装置300およびCPU301のインターフェースとして機能する。ネットワークとして機能する通信網には、公衆回線網や携帯電話網、DSRC(Dedicated Short Range Communication)、LAN、WANなどがある。通信I/F315は、たとえば、公衆回線用接続モジュールやETC(ノンストップ自動料金支払いシステム)ユニット、FMチューナー、VICS(Vehicle Information and Communication System:登録商標)/ビーコンレシーバなどである。
【0102】
GPSユニット316は、GPS衛星からの電波を受信し、車両の現在位置を示す情報を出力する。GPSユニット316の出力情報は、後述する各種センサ317の出力値とともに、CPU301による車両の現在位置の算出に際して利用される。現在位置を示す情報は、たとえば、緯度・経度、高度などの、地図データ上の1点を特定する情報である。
【0103】
各種センサ317は、車速センサ、加速度センサ、角速度センサ、傾斜センサなどの、車両の位置や挙動を判断するための情報を出力する。各種センサ317の出力値は、CPU301による車両の現在位置の算出や、速度や方位の変化量の算出に用いられる。
【0104】
図1に示した走行距離推定装置100の現在位置取得部101、変数取得部102、推定部103、補正部104、記憶部105は、上述したナビゲーション装置300におけるROM302、RAM303、磁気ディスク305、光ディスク307などに記録されたプログラムやデータを用いて、CPU301が所定のプログラムを実行し、ナビゲーション装置300における各部を制御することによってその機能を実現する。
【0105】
(ナビゲーション装置300による消費エネルギー推定の概要)
本実施例のナビゲーション装置300は、車両の自装置が搭載された車両の走行中におけるエネルギー消費量を推定する。具体的には、ナビゲーション装置300は、たとえば、速度、加速度、車両の勾配に基づいて、次の(2)式〜(7)式に示す消費エネルギー推定式のいずれか一つ以上の式を用いて、車両のエネルギー消費量を推定する。
【0106】
【数10】
【0107】
【数11】
【0108】
上記(2)式に示す消費エネルギー推定式は、加速時および走行時における単位時間当たりの消費エネルギーを推定する理論式である。上記(3)式に示す消費エネルギー推定式は、減速時における単位時間当たりの消費エネルギーを推定する理論式である。
【0109】
また、上記(2)式および(3)式において、右辺第1項は、アイドリング時のエネルギー消費量(第一情報)である。右辺第2項は、勾配成分によるエネルギー消費量(第四情報)および転がり抵抗成分によるエネルギー消費量(第三情報)である。右辺第3項は、空気抵抗成分によるエネルギー消費量(第三情報)である。また、(2)式の右辺第4項は、加速成分によるエネルギー消費量(第二情報)である。(3)式の右辺第4項は、減速成分によるエネルギー消費量(第二情報)である。
【0110】
【数12】
【0111】
【数13】
【0112】
上記(4)式に示す消費エネルギー推定式は、加速時および走行時における単位時間当たりのエネルギー消費量を推定する実証式である。上記(5)式に示す消費エネルギー推定式は、減速時における単位時間当たりのエネルギー消費量を推定する実証式である。
【0113】
また、上記(4)式および(5)式において、係数a1,a2は、車両状況などに応じて設定される常数である。係数k1,k2,k3は、加速時におけるエネルギー消費量に基づく変数である。また、速度V、加速度Aとしており、その他の変数および右辺第1項〜右辺第4項にあたる部分が示す情報は、上記(2)式および(3)式と同様である。
【0114】
また、ナビゲーション装置300は、ある程度まとまった区間における車両の平均速度および平均加速度を用いて、次の(6)式または(7)式に示す消費エネルギー推定式に基づいて、車両の走行する区間におけるエネルギー消費量を推定してもよい。
【0115】
【数14】
【0116】
【数15】
【0117】
上記(6)式に示す消費エネルギー推定式は、移動体が走行する区間の高度差Δhが正の場合の、区間におけるエネルギー消費量を推定する理論式である。上記(7)式に示す消費エネルギー推定式は、移動体が走行する区間の高度差Δhが負の場合の、区間におけるエネルギー消費量を推定する理論式である。なお、高度差がない場合は、上記(6)式に示す消費エネルギー推定式を用いるのが好ましい。
【0118】
また、上記(6)式および(7)式において、右辺第1項は、アイドリング時のエネルギー消費量(第一情報)である。右辺第2項は、加速抵抗によるエネルギー消費量(第二情報)である。右辺第3項は、位置エネルギーとして消費されるエネルギー消費量である(第四情報)。右辺第4項は、単位面積当たりに受ける空気抵抗および転がり抵抗(走行抵抗)によるエネルギー消費量(第三情報)である。
【0119】
また、ナビゲーション装置300は、上記(4)式または(5)式に示す消費エネルギー推定式、もしくはその両方の式を用いて、重回帰分析法や回帰分析法により、1秒ごとに第一情報Pidle、効率εη、移動体の重量M、などを算出し、上記(2)式〜(7)式に示す消費エネルギー推定式の変数を補正してもよい。
【0120】
(ナビゲーション装置300における走行距離推定処理)
上述のように、ナビゲーション装置300は、旅行区間、旅行区間における車両の速度に関する情報を取得し、消費エネルギー推定式を用いて、旅行区間におけるエネルギー消費量を推定する。また、ナビゲーション装置300は、車両の残存エネルギー量を取得し、消費エネルギー推定式を用いて、車両の走行可能距離を推定する。以下、走行距離推定処理の詳細について説明する。
【0121】
図4は、ナビゲーション装置による走行距離推定処理の手順を示すフローチャートである。図4のフローチャートにおいて、ナビゲーション装置300は、まず、たとえば、予め取得した車両の現在位置に基づいて、現在位置の属する旅行区間を、最初のエネルギー消費量の推定対象の旅行区間(以下、単に推定対象の旅行区間という)として取得する(ステップS401)。つぎに、ナビゲーション装置300は、たとえば車速センサ、加速度センサを介して、自装置が搭載された車両が走行中であるか否かを判断する(ステップS402)。
【0122】
車両が走行中である場合(ステップS402:Yes)、ナビゲーション装置300は、通信I/F315を介して、自装置が搭載された車両の現在位置を取得する(ステップS403)。このとき、ナビゲーション装置300は、車両の現在位置とともに、旅行区間の道路情報を取得する。道路情報には、たとえば、旅行区間内における天候、風向きおよび風速などが含まれていてもよい。
【0123】
つぎに、ナビゲーション装置300は、ステップS401において取得した旅行区間が、車両の現在位置の属する範囲内であるか否か、または特定の種別の旅行区間であるか否かを判断する(ステップS404)。なお、後述するように、推定対象の旅行区間が複数ある場合は、各々の旅行区間について判断し、それ以降の処理は各旅行区間で独立しておこなう。旅行区間がステップS404に示す範囲にある場合(ステップS404:Yes)、ナビゲーション装置300は、記憶装置(磁気ディスク305や光ディスク307)から、現時点における車両情報を読み出す(ステップS405)。車両情報は、たとえば、工場出荷時にメーカーから提供された情報であってもよいし、後述する補正処理により補正された情報であってもよい。
【0124】
ナビゲーション装置300は、たとえば車速センサ、加速度センサを介して、現時点における速度に関する情報を取得する(ステップS406)。速度に関する情報とは、車両の速度、加速度などである。つぎに、ナビゲーション装置300は、後述する記憶装置に記録されている走行履歴の中から、ステップS401において取得した旅行区間を過去に走行した際の旅行時間を読み出す(ステップS407)。
【0125】
つぎに、ナビゲーション装置300は、ステップS405において読み出した車両情報と、ステップS406において取得した速度に関する情報とを用いて、上記(2)式〜(7)式に示す消費エネルギー推定式のいずれか1つ以上の式に基づいて、ステップS401において取得した旅行区間におけるエネルギー消費量を推定する(ステップS408)。このとき、ナビゲーション装置300は、単位時間当たりのエネルギー消費量を推定した場合には、旅行区間における単位時間当たりのエネルギー消費量を過去の旅行時間で積算し、旅行区間のエネルギー消費量を推定する。
【0126】
つぎに、ナビゲーション装置300は、車内通信網を介して、車両の残存エネルギー量を取得する(ステップS409)。つぎに、ナビゲーション装置300は、ステップS409において取得した残存エネルギー量から推定対象の旅行区間のエネルギー消費量を引いて、車両の走行可能距離を推定する(ステップS410)。すなわち、ナビゲーション300は、残存エネルギー量が未だ残っている場合は、推定対象の旅行区間について現在の残存エネルギー量で走行可能であると推定する。
【0127】
つぎに、ナビゲーション装置300は、全ての推定対象の旅行区間について残存エネルギーがゼロでないかを判断する(ステップS411)。ここで、全ての旅行区間について残存エネルギーがゼロでない場合、推定対象の旅行区間に接続するその先の旅行区間について、まだ走行できる可能性がある。ナビゲーション装置300は、全ての旅行区間について残存エネルギーがゼロでない場合(ステップS411:No)、残存エネルギーがゼロにならなかった推定対象の旅行区間に隣接する次の旅行区間を取得する(ステップS412)。ここで、例えば交差点など、推定対象の旅行区間に隣接する次の旅行区間が複数ある場合は、全ての旅行区間を推定対象の旅行区間として取得する。その後、ナビゲーション装置300は、ステップS402に戻り、車両が走行中であるかの判断をおこなった後、以降の処理を繰り返しおこなう。
【0128】
一方、全ての旅行区間について残存エネルギーがゼロである場合(ステップS411:Yes)、ナビゲーション装置300は、たとえば、ディスプレイ313に表示する地図データとともに、走行可能距離に関する情報を表示し(ステップS413)、本フローチャートによる処理を終了する。ここで、走行可能距離に関する情報とは、地図上に車両の走行可能な範囲を表示するための画像情報や、走行可能な範囲を文字として表示するための文字情報などである。
【0129】
また、車両が走行中でない場合(ステップS402:No)、また、旅行区間がステップS404に示す範囲にない場合(ステップS404:No)、ナビゲーション装置300は、記憶装置から過去の車両情報を読み出す(ステップS414)。つぎに、ナビゲーション装置300は、記憶装置から過去の旅行速度に関する情報を読み出し(ステップS415)、ステップS407に移行し、以降の処理をおこなう。
【0130】
ここで、過去の車両情報および旅行速度に関する情報は、ステップS401またはステップS412において取得した旅行区間を過去に走行した際に、ナビゲーション装置300によって取得され、記憶装置に記憶された情報である。車両が走行中でない場合とは、たとえば、出発する前である場合である。なお、過去の車両情報および旅行速度に関する情報は、自分が過去に走行した際に記憶した情報でなく、ナビゲーション装置300は、サーバを介する通信システムに接続可能な場合、サーバによって収集された、他の車両が過去に走行した際の情報を使用してもよい。さらに、ナビゲーション装置300は、記憶装置に予め記録されている、各旅行区間に対応する旅行速度および車両情報に関する情報を使用してもよい。具体的には、ナビゲーション装置300の製造時、記憶装置に予め記憶される統計情報などが挙げられる。
【0131】
上述した走行距離推定処理では、ナビゲーション装置300は、車両の停止中だけでなく車両の走行中においても、車両の現在位置する旅行区間につながる他の旅行区間におけるエネルギー消費量を順次推定し、たとえば、現在の残存するエネルギー量でどの地点まで走行することができるかなどを推定することができる。
【0132】
また、ナビゲーション装置300は、目的地点までの経路が決定している場合、経路上の旅行区間のみを順次、取得してエネルギー消費量を積算すればよい。また、目的地点までの経路を探索している場合、目的地点に到達する複数の候補経路についてエネルギー消費量を積算し、たとえば、どの経路を走行すれば現在の残存するエネルギー量で到達地点まで到達することができるか、現在の残存エネルギー量では到達地点までたどり着けないなどを推測してもよい。
【0133】
また、ステップS410において、ナビゲーション装置300は、全ての旅行区間で残存エネルギー量がゼロになる場合、たとえば、ステップS413へ移行し、エネルギーを補給するために、残存エネルギー量で到達することができるEV車用充電スタンドや給油スタンド等までの経路をユーザに報知してもよい。また、走行距離推定処理中にナビゲーション装置300が取得するデータは、走行履歴として記憶装置に記録される。
【0134】
(ナビゲーション装置300における補正処理・その1)
つづいて、ナビゲーション装置300における走行距離推定処理において、消費エネルギー推定式に変数として用いる走行履歴の補正処理について説明する。図5は、ナビゲーション装置による補正処理の手順を示すフローチャートである。図5に示すフローチャートでは、旅行区間を走行し終えた後に、走行履歴を補正する場合について説明する。
【0135】
図5のフローチャートにおいて、ナビゲーション装置300は、通信I/F315を介して、旅行区間内の道路情報を取得する(ステップS501)。ここで、ナビゲーション装置300は、走行距離推定処理(図4参照)のステップS403の処理がおこなわれたときにステップS501の処理をおこない、以降の処理をおこなってもよい。
【0136】
つぎに、ナビゲーション装置300は、車両が旅行区間の走行を終了するまで待機する(ステップS502:Noのループ)。車両が旅行区間の走行を終了した後(ステップS502:Yes)、ナビゲーション装置300は、記憶装置(磁気ディスク305や光ディスク307)に記憶されている走行履歴を読み出す(ステップS503)。
【0137】
ここで、ナビゲーション装置300が走行履歴の中から読み出す情報は、ステップS502において走行を終了したばかりの旅行区間の走行履歴である。具体的には、ナビゲーション装置300が走行履歴の中から読み出す情報は、消費エネルギー推定式の変数として用いられる情報であり、たとえば、速度、加速度、平均速度、平均加速度などである。
【0138】
つぎに、ナビゲーション装置300は、たとえば、車内通信網を介して、ステップS502において走行を終了したばかりの旅行区間の、今回の走行時における走行情報を取得する(ステップS504)。ここで、ナビゲーション装置300が取得する走行情報は、ステップS503においてナビゲーション装置300が記憶装置から読み出した走行履歴の比較となる情報であり、具体的には、たとえば、速度、加速度、平均速度、平均加速度などである。
【0139】
つぎに、ナビゲーション装置300がステップS504において取得した走行情報と、ステップS503において読み出した走行履歴とを比較し、走行情報が走行履歴と異なっているか否かを判断する(ステップS505)。つまり、旅行区間における今回の車両の走行が、同じ旅行区間における過去の走行と異なっているか否かを判断する。
【0140】
走行情報が走行履歴と異なっている場合(ステップS505:Yes)、ナビゲーション装置300は、記憶装置に記憶された走行履歴を今回の走行情報に書き換え(ステップS506)、本フローチャートによる処理を終了する。一方、走行情報が走行履歴と異なっていない場合には(ステップS505:No)、ナビゲーション装置300は、走行履歴を書き換えずに、本フローチャートによる処理を終了する。
【0141】
また、図5に示す補正処理では、ステップS502において、車両が所定の範囲をすべて走行し終えるまで待機した後に、それ以降の処理を行ってもよい。その場合、ステップS503において所定の範囲における過去の走行履歴を読み出し、ステップS504において今回走行し終えたばかりの所定の範囲における走行情報を取得してもよい。
【0142】
(ナビゲーション装置300における補正処理・その2)
図6は、ナビゲーション装置による補正処理の他の手順を示すフローチャートである。図6に示すフローチャートでは、旅行区間を走行中に走行履歴を補正する場合について説明する。たとえば、図4に示す走行距離推定処理のステップS403〜S410と並行して、図6に示す補正処理を行ってもよい。
【0143】
図6のフローチャートにおいて、ナビゲーション装置300は、通信I/F315を介して、旅行区間の道路情報を取得する(ステップS601)。ここで、ナビゲーション装置300は、走行距離推定処理(図4参照)のステップS403の処理がおこなわれたときにステップS601の処理をおこない、以降の処理を続けておこなってもよい。
【0144】
つぎに、ナビゲーション装置300は、たとえば、通信I/F315を介して取得した車両の現在位置に基づいて、車両が旅行区間を走行中であるか否かを判断する(ステップS602)。車両が旅行区間を走行中である場合(ステップS602:Yes)、ナビゲーション装置300は、車内通信網を介して、現時点における走行情報を取得する(ステップS603)。ここで、現時点における走行情報とは、たとえば、単位時間当たりの速度や加速度である。
【0145】
つぎに、ナビゲーション装置300は、CANなどの車内通信網を介して、ステップS603において取得した走行情報に対応する単位時間当たりの実エネルギー消費量を取得する(ステップS604)。つぎに、ナビゲーション装置300は、ステップS603において取得した走行情報と、ステップS604において取得した単位時間当たりの実エネルギー消費量に基づいて、上述した(4)式または(5)式に示す消費エネルギー推定式、もしくはその両方の式を用いて、車両情報などを算出する(ステップS605)。
【0146】
ここで、ステップS605において算出される車両情報は、上記(2)式〜(7)式に示す消費エネルギー推定式に変数として用いる車両情報である。具体的には、ステップS605において算出される車両情報は、効率εη、アイドリング時に消費されるエネルギーPidle(第一情報)、車両の重量Mなどである。つまり、ナビゲーション装置300は、現時点における速度、加速度、単位時間当たりの実エネルギー消費量に基づいて、上記(2)式〜(7)式に示す消費エネルギー推定式に変数として用いる変数を決定する。
【0147】
つぎに、ナビゲーション装置300は、ステップS605において算出した車両情報を、記憶装置に書き出し(ステップS606)、ステップS602に戻る。つまり、ナビゲーション装置300は、車両が旅行区間を走行している間、ステップS602〜S606の処理をおこない続ける。一方、車両が旅行区間を走行し終えた場合(ステップS602:No)、本フローチャートによる処理を終了する。
【0148】
ナビゲーション装置300は、たとえば、車両の現在位置を取得する(ステップS403)ごとに、図5,6に示す補正処理を繰り返しおこなう。
【0149】
このように、ナビゲーション装置300によれば、車両の走行情報に基づいて、消費エネルギー推定式に変数として用いられる速度に関する情報を補正することができる。また、車両の走行情報や走行履歴に基づいて、消費エネルギー推定式に変数として用いられる車両情報を補正することができる。これにより、より正確に、旅行区間におけるエネルギー消費量を推定することができ、かつ、より正確に、車両の走行可能な範囲を推定することができる。
【0150】
(道路勾配について)
つづいて、上記式(1)式〜(5)式の右辺に変数として用いられる道路勾配θについて説明する。図7は、勾配がある道路を走行する車両にかかる加速度を模式的に示した説明図である。図7に示すように、道路勾配がθの坂道を走行する車両には、車両の走行に伴う加速度A(=dx/dt)と、重力加速度gの進行方向成分B(=g・sinθ)がかかる。上記式(1)の右辺第2項は、この車両の走行に伴う加速度Aと、重力加速度gの進行方向成分Bの合成加速度Cを示している。また、車両が走行する区間の距離Lとし、走行時間Tとし、走行速度Vとする。
【0151】
道路勾配θを考慮せずに燃費の推定を行った場合、道路勾配θが小さい領域では推定した燃費と実燃費との誤差が小さいが、道路勾配θが大きい領域では推定した燃費と実燃費との誤差が大きくなってしまう。このため、ナビゲーション装置300では、道路勾配、すなわち第四情報を考慮して燃費の推定を行うことで推定精度が向上する。
【0152】
車両が走行する道路の勾配は、たとえば、ナビゲーション装置300に搭載された傾斜計を用いて知ることができる。また、ナビゲーション装置300に傾斜計が搭載されていない場合は、たとえば、地図データに含まれる道路の勾配情報を用いることができる。
【0153】
(走行履歴について)
つづいて、上述した走行距離推定処理により、図4のステップS407で読み出す記憶装置に記録される情報について説明する。図8は、ナビゲーション装置による走行距離推定処理における道路情報の一例を示す説明図である。図8に示すように、道路情報データ800は、たとえば、エリア情報801および道路種別802を主キーとして、平均速度803と、平均加速度804と、道路勾配805とが1レコードごとに記録されたテーブルである。道路情報データ800は、ナビゲーション装置300によって読み出しおよび書き出しされる車両の走行履歴が記憶されている。
【0154】
エリア情報801は、たとえば、地名、地域名ごとに区切られた範囲(たとえば、所定の範囲)などである。道路種別802は、法定速度や、道路の勾配、道路幅、信号の有無などの道路状態の違いにより区別することのできる道路の種類である。具体的には、道路種別とは、国道、高速道路、一般道路、市街地などを通る細い街路(細街路)などである。
【0155】
平均速度803、平均加速度804および道路勾配805は、車両の走行時に取得された走行履歴である。図示省略するが、道路情報データ800には、車両が過去に旅行区間を走行したときの実エネルギー消費量、車両が過去に旅行区間を走行した際に要した時間(旅行時間)、車両情報などが記録されてもよい。なお、上述のように、これらの情報は、他の車両から通信を介して取得した情報を利用したり、装置に予め記憶されている統計情報を利用したりしてもよい。
【0156】
(走行抵抗について)
つづいて、車両に生じる走行抵抗について説明する。ナビゲーション装置300は、たとえば、次の(1)式により走行抵抗を算出する。一般的に、走行抵抗は、道路種別や、道路勾配、路面状況などにより、加速時や走行時に移動体に生じる。
【0157】
【数16】
【0158】
(回収率βの定義)
つづいて、EV車の回収率の概念について説明する。図9は、EV車の回収率の算出方法について示す説明図である。車両が旅行区間を走行するにあたり、出発地点から加速した後、一定の速度で走行し、その後減速して停止すると仮定した場合を例に、次の(10)式〜(13)式を用いて、回収率βを定義する。また、車両が旅行区間を実際に走行した際に計測されるエネルギー消費量(実エネルギー消費量)Ptとする。なお、旅行区間における道路勾配θ=0とする。
【0159】
図9において、加速時のエネルギー消費量901は、次の(10)式に示すように、走行抵抗によるエネルギー消費量Psと、加速抵抗によるエネルギー消費量Paとの和である。ここで、エネルギー消費量Ps、Paは、理論的に算出されたデータである。
【0160】
Pt=Ps+Pa ・・・(10)
【0161】
ここで、さらに、次のように仮定する。車両に生じる走行抵抗は、加速から減速に至る間に等しい。また、加速抵抗により生じる運動エネルギーは減速時に一部が電力に変換されて、回収されるエネルギー量として蓄えられる。つまり、車両の減速時、走行抵抗によりエネルギーが消費されるが、加速抵抗により生じる運動エネルギーが回収されるため、実際に消費されるエネルギー量は、走行抵抗によるエネルギー量から回収されるエネルギー量を引いた値となる。
【0162】
このため、加速抵抗による運動エネルギー量の、減速時に回収される割合(回収率)βとすると、減速時のエネルギー消費量902は、次の(11)式に示すように、走行抵抗によるエネルギー消費量Psと回収されるエネルギー量β・Paの差となる。
【0163】
Pt=Ps−β・Pa ・・・(11)
【0164】
実エネルギー消費量Ptは、次の(12)式に示すように、上記(10)式および(11)式の総和となる。
【0165】
Pt=Ps+(1−β)・Pa ・・・(12)
【0166】
ここで、実エネルギー消費量Pt、走行抵抗によるエネルギー消費量Ps、加速抵抗によるエネルギー消費量Paは既知の値であるため、回収率βは、次の(13)式を用いて算出することができる。
【0167】
β=1−(Pt−Ps)/(Pa) ・・・(13)
【0168】
つづいて、車両の実際の走行に基づいて、回収率βを算出する方法について説明する。図10は、EV車の速度と出力との関係を示す特性図である。また、図11は、EV車の走行状況別のエネルギー消費量を示す特性図である。図10,11では、縦軸の正の部分をエネルギー消費量とし、縦軸の負の部分をエネルギー節約量とし、横軸を時間としている。まず、旅行区間を走行する車両の、速度、エネルギー消費量(出力)、加減以外の走行抵抗によるエネルギー量を所定の時間ごとに測定した。その結果を図10,11に示す。
【0169】
図10において、折れ線グラフ(以下、「速度」という)1001は、旅行区間を走行する車両の速度変化を示している。折れ線グラフ(以下、「出力」という)1002は、旅行区間を走行する車両の、エネルギー消費量と回収されるエネルギー量との差を示している。折れ線グラフ(以下、「走行抵抗」という)1003は、旅行区間を走行する車両の、加速時以外の走行抵抗によるエネルギー量を示している。
【0170】
図10に示す結果より、車両が加速しているとき(速度1001)、出力1002、走行抵抗1003ともに上昇している。そして、車両が一定の速度で走行しているとき、出力1002、走行抵抗1003ともに一定の値となっている。また、車両が減速しているとき、出力1002は減少して負の領域に至り、走行抵抗1003は正の領域を減少している。
【0171】
つまり、出力1002が示すように、減速時に、エネルギーが回収されていることがわかる。一方、走行抵抗1003は縦軸の正の領域のみを推移しているため、加速以外の走行抵抗では、エネルギー消費量のみが発生していることがわかる。このような出力1002、走行抵抗1003の変化を、たとえば、図11に示す。
【0172】
図11に示すように、加速時のエネルギー消費量E13は、次の(14)式に示すように、加速抵抗によるエネルギー消費量E11と、加減速以外の走行抵抗によるエネルギー消費量E12の和となる。加減速以外の走行抵抗によるエネルギー消費量とは、走行を維持するために消費されるエネルギー消費量である。
【0173】
E13=E11+E12 ・・・(14)
【0174】
また、一定速度(巡航)での走行時のエネルギー消費量E23は、次の(15)式に示すように、加減速以外の走行抵抗によるエネルギー消費量E22となる。
【0175】
E23=E22 ・・・(15)
【0176】
また、減速時のエネルギー消費量E33は、次の(16)式に示すように、減速時に回収されるエネルギー量E31と、加減速以外の走行抵抗によるエネルギー消費量E32の和となる。
【0177】
E33=E31+E32=E32−β×E11 ・・・(16)
【0178】
つまり、加速時のエネルギー消費量E11と、減速時に回収されるエネルギー量E31との割合である回収率βは、次の(17)式を用いて算出することができる。
【0179】
β=E33/E11 ・・・(17)
【0180】
つまり、上記(17)式は、次の(9)式に相当する。詳細には、次の(9)式に示す回収率の算出式は、次のように導き出される。上記(6)式において、右辺第2項を旅行区間における加速成分のエネルギー消費量Paccとすると、加速成分のエネルギー消費量Paccは、旅行区間における全エネルギー消費量(左辺)から、アイドリング時のエネルギー消費量(右辺第1項)と走行抵抗によるエネルギー消費量(右辺第4項)を減じたものであり、次の(8)式で表される。
【0181】
【数17】
【0182】
上記(8)式では、車両は道路勾配θの影響を受けていないこととする(θ=0)。そして、上記(8)式を上記(6)式に代入することで、次の(9)式に示す回収率βの算出式を得ることができる。
【0183】
【数18】
【0184】
回収率βは、EV車では0.7〜0.9程度であり、HV車では0.6〜0.8程度であり、ガソリン車では0.2〜0.3程度である。なお、ガソリン車の回収率とは、移動体の加速時におけるエネルギー消費量と、減速時に燃料カットされるエネルギー量との割合である。
【0185】
(走行可能な範囲の表示例)
つづいて、上述した走行距離推定処理により、ディスプレイに表示される情報について説明する。図12は、ナビゲーション装置のディスプレイに表示される表示画面の一例を示す説明図である。図12に示すように、たとえば、ディスプレイ1200には、地図データとともに、ナビゲーション装置300によって推定された走行可能距離に基づいて経路探索された経路情報1201,1202が表示されている。これは、ナビゲーション装置300によって推定された走行可能距離で、車両の現在位置から目的地点まで到達できる場合に、ディスプレイに表示される情報の一例である。具体的には、図4のステップS413に示した処理が行われた状態である。
【0186】
具体的には、ナビゲーション装置300は、車両が出発時または走行中に、たとえば、推定したエネルギー推定量と車両の残存エネルギー量とに基づいて、車両の走行可能距離(目的地点まで走行可能な場合はそこまでのエネルギー消費量)を推定する。そして、ナビゲーション装置300は、走行可能距離に基づいて、たとえば、車両の残存エネルギー量で目的地点まで走行可能であるとして経路探索された経路情報1201,1202を、地図データとともにディスプレイ1200に表示する。ナビゲーション装置300は、経路情報1201,1202として、たとえば、現在位置から目的地点までの距離、所要時間、目的地点に到達するまでに消費されるエネルギー量などを、ディスプレイ1200に表示する。また、ナビゲーション装置300は、走行可能なエリアを、地図データとともにディスプレイ1200に表示してもよい。
【0187】
このように、ナビゲーション装置300は、走行可能距離に基づいて経路探索された経路情報、エリアなどを、地図データとともにディスプレイ1200に表示する。このため、ユーザは、車両の残存エネルギー量で到達することのできる複数の経路やエリアを視覚的に確認することができる。
【0188】
以上説明したように、ナビゲーション装置300によれば、車両のアイドリング状態、加減速時および走行時に消費されるエネルギーと、車両の加減速時に回収されるエネルギーに基づいて、消費エネルギー推定式を用いて、旅行区間におけるエネルギー消費量を推定する。このように、ナビゲーション装置300は、消費されるエネルギー量の異なる走行状況ごとにエネルギー消費量を算出して推定するので、より正確にエネルギー消費量を推定することができる。
【0189】
また、ナビゲーション装置300は、車両の速度、加速度に基づいて、旅行区間におけるエネルギー消費量を推定する。このため、ナビゲーション装置300は、その旅行区間における実際の走行状況を反映させたエネルギー消費量を推定することができる。
【0190】
また、ナビゲーション装置300は、車両から取得した残存エネルギー量に基づいて、車両の走行可能な範囲を推定する。このため、ナビゲーション装置300は、現在の残存するエネルギー量でどの地点まで走行することができるのか、またはどの経路を走行すれば現在の残存するエネルギー量で到達地点まで到達することができるのかなどを推測することができる。
【0191】
また、上述した(1)式〜(9)式は、車両情報や道路情報などを変数として含む。このため、ナビゲーション装置300は、旅行区間における実際の移動体の状態や、実際の道路状況が反映されたエネルギー消費量や走行可能距離を推定することができる。
【0192】
また、ナビゲーション装置300は、旅行区間における単位時間あたりのエネルギー消費量と、この旅行区間を移動体が過去に走行した際に要した時間(旅行時間)とに基づいて、旅行区間におけるエネルギー消費量を推定する。このため、ナビゲーション装置300は、その旅行区間におけるユーザの走行状況により要した走行時間が反映されたエネルギー消費量を推定することができる。
【0193】
また、ナビゲーション装置300は、車両の速度、加速度、残存エネルギー量に基づいて、上述した(2)式〜(7)式に示す消費エネルギー推定式のいずれか1つ以上の式を用いて、車両の走行可能距離を推定する。このように、ナビゲーション装置300は、旅行区間を車両が過去に実際に走行したときの走行状況と、実際の残存エネルギー量とに基づいて、車両の走行可能距離を推定するので、より正確に走行可能距離を推測することができる。
【0194】
また、ナビゲーション装置300は、移動体の加減速時に消費および回収されるエネルギーに関する第二情報として、移動体の加速時に消費する単位時間当たりのエネルギー量と、前記移動体の減速時に回収される単位時間当たりのエネルギー量とを平均する推定式を用いて、車両のエネルギー消費量を推定する。このため、ナビゲーション装置300は、加速時に消費するエネルギー量と減速時に回収するエネルギー量の両方を考慮して走行前の旅行区間におけるエネルギー消費量を推定することができる。
【0195】
なお、本実施の形態で説明した走行距離推定方法は、あらかじめ用意されたプログラムをパーソナル・コンピュータやワークステーションなどのコンピュータで実行することにより実現することができる。このプログラムは、ハードディスク、フレキシブルディスク、CD−ROM、MO、DVDなどのコンピュータで読み取り可能な記録媒体に記録され、コンピュータによって記録媒体から読み出されることによって実行される。またこのプログラムは、インターネットなどのネットワークを介して配布することが可能な伝送媒体であってもよい。
【符号の説明】
【0196】
100 走行距離推定装置
101 現在位置取得部
102 変数取得部
103 推定部
104 補正部
105 記憶部
110 表示部
【特許請求の範囲】
【請求項1】
移動体に備えられた装備品により消費されるエネルギーに関する第一情報と、前記移動体の加減速時に消費および回収されるエネルギーに関する第二情報と、前記移動体の走行時に生じる抵抗により消費されるエネルギーに関する第三情報と、からなる消費エネルギー推定式に基づいて、前記移動体が所定の区間(以下、「旅行区間」という)を走行する際のエネルギー消費量を推定する推定手段と、
前記旅行区間を走行する前記移動体の速度を前記第二情報および前記第三情報に関する変数として取得し、かつ、前記旅行区間を走行する前記移動体の加速度を前記第二情報に関する変数として取得する変数取得手段と、
を備えることを特徴とするエネルギー消費量推定装置。
【請求項2】
前記推定手段は、前記消費エネルギー推定式として下記(1)式または(2)式に基づいて前記旅行区間におけるエネルギー消費量を推定することを特徴とする請求項1に記載のエネルギー消費量推定装置。
【数1】
【請求項3】
移動体のエネルギー消費量を推定するエネルギー消費量推定装置におけるエネルギー消費量推定方法であって、
前記移動体に備えられた装備品により消費されるエネルギーに関する第一情報と、前記移動体の加減速時に消費および回収されるエネルギーに関する第二情報と、前記移動体の走行時に生じる抵抗により消費されるエネルギーに関する第三情報と、からなる消費エネルギー推定式に基づいて、前記移動体が所定の区間(以下、「旅行区間」という)を走行する際のエネルギー消費量を推定し、
前記旅行区間を走行する前記移動体の速度を前記第二情報および前記第三情報に関する変数として取得し、かつ、前記旅行区間を走行する前記移動体の加速度を前記第二情報に関する変数として取得することを特徴とするエネルギー消費量推定方法。
【請求項4】
請求項3に記載のエネルギー消費量推定方法をコンピュータに実行させることを特徴とするエネルギー消費量推定プログラム。
【請求項5】
請求項4に記載のエネルギー消費量推定プログラムをコンピュータに読み取り可能な状態で記録したことを特徴とする記録媒体。
【請求項1】
移動体に備えられた装備品により消費されるエネルギーに関する第一情報と、前記移動体の加減速時に消費および回収されるエネルギーに関する第二情報と、前記移動体の走行時に生じる抵抗により消費されるエネルギーに関する第三情報と、からなる消費エネルギー推定式に基づいて、前記移動体が所定の区間(以下、「旅行区間」という)を走行する際のエネルギー消費量を推定する推定手段と、
前記旅行区間を走行する前記移動体の速度を前記第二情報および前記第三情報に関する変数として取得し、かつ、前記旅行区間を走行する前記移動体の加速度を前記第二情報に関する変数として取得する変数取得手段と、
を備えることを特徴とするエネルギー消費量推定装置。
【請求項2】
前記推定手段は、前記消費エネルギー推定式として下記(1)式または(2)式に基づいて前記旅行区間におけるエネルギー消費量を推定することを特徴とする請求項1に記載のエネルギー消費量推定装置。
【数1】
【請求項3】
移動体のエネルギー消費量を推定するエネルギー消費量推定装置におけるエネルギー消費量推定方法であって、
前記移動体に備えられた装備品により消費されるエネルギーに関する第一情報と、前記移動体の加減速時に消費および回収されるエネルギーに関する第二情報と、前記移動体の走行時に生じる抵抗により消費されるエネルギーに関する第三情報と、からなる消費エネルギー推定式に基づいて、前記移動体が所定の区間(以下、「旅行区間」という)を走行する際のエネルギー消費量を推定し、
前記旅行区間を走行する前記移動体の速度を前記第二情報および前記第三情報に関する変数として取得し、かつ、前記旅行区間を走行する前記移動体の加速度を前記第二情報に関する変数として取得することを特徴とするエネルギー消費量推定方法。
【請求項4】
請求項3に記載のエネルギー消費量推定方法をコンピュータに実行させることを特徴とするエネルギー消費量推定プログラム。
【請求項5】
請求項4に記載のエネルギー消費量推定プログラムをコンピュータに読み取り可能な状態で記録したことを特徴とする記録媒体。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】

【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2012−63358(P2012−63358A)
【公開日】平成24年3月29日(2012.3.29)
【国際特許分類】
【出願番号】特願2011−242904(P2011−242904)
【出願日】平成23年11月4日(2011.11.4)
【分割の表示】特願2011−521407(P2011−521407)の分割
【原出願日】平成22年9月17日(2010.9.17)
【特許番号】特許第4890659号(P4890659)
【特許公報発行日】平成24年3月7日(2012.3.7)
【出願人】(000005016)パイオニア株式会社 (3,620)
【Fターム(参考)】
【公開日】平成24年3月29日(2012.3.29)
【国際特許分類】
【出願日】平成23年11月4日(2011.11.4)
【分割の表示】特願2011−521407(P2011−521407)の分割
【原出願日】平成22年9月17日(2010.9.17)
【特許番号】特許第4890659号(P4890659)
【特許公報発行日】平成24年3月7日(2012.3.7)
【出願人】(000005016)パイオニア株式会社 (3,620)
【Fターム(参考)】
[ Back to top ]