
エネルギー消費量計算装置とそのエネルギー消費量計算方法
【課題】 本発明の目的は、より簡易な方法で、より高い精度の消費エネルギーの推定を実現することにある。
【解決手段】
所定の区間におけるエネルギー消費量を推定するエネルギー消費量推定手段と、エネルギーを供給するエネルギー供給手段が所定の区間において実際に供給したエネルギー消費実績量を特定するエネルギー消費実績量特定手段と、エネルギー消費量推定手段が推定した所定の区間におけるエネルギー消費量と所定の区間におけるエネルギー消費実績量との差に応じて、エネルギー消費量推定手段が推定した所定の区間のエネルギー消費量を補正するエネルギー消費量補正手段と、エネルギー消費量補正手段により補正した所定の区間のエネルギー消費量を用いてエネルギー供給手段が供給可能なエネルギー量で移動可能な範囲を特定して表示する表示手段と、を備えることを特徴とする。
【解決手段】
所定の区間におけるエネルギー消費量を推定するエネルギー消費量推定手段と、エネルギーを供給するエネルギー供給手段が所定の区間において実際に供給したエネルギー消費実績量を特定するエネルギー消費実績量特定手段と、エネルギー消費量推定手段が推定した所定の区間におけるエネルギー消費量と所定の区間におけるエネルギー消費実績量との差に応じて、エネルギー消費量推定手段が推定した所定の区間のエネルギー消費量を補正するエネルギー消費量補正手段と、エネルギー消費量補正手段により補正した所定の区間のエネルギー消費量を用いてエネルギー供給手段が供給可能なエネルギー量で移動可能な範囲を特定して表示する表示手段と、を備えることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、エネルギー消費量計算装置の技術に関するものである。
【背景技術】
【0002】
従来、ナビゲーション装置では、消費するエネルギーを予測し表示する技術が用いられている。特許文献1には、このようなナビゲーション装置についての技術が記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−107459号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のようなナビゲーション装置では、エネルギー保存則を応用して消費エネルギーを推定するが、例えば突発的な風の影響や路面状況等、全てのエネルギー推定要因を事前にモデリングするのは限界があり、推定値には一定の誤差が含まれる。しかし、当該誤差は無視できるほどの誤差とは限らず、推定精度にばらつきが生じる場合がある。したがって、移動可能な範囲の表示等において、予想の範囲と実際に移動可能な範囲と、に相違が出てしまう。
【0005】
本発明の目的は、より簡易な方法で、より高い精度の消費エネルギーの推定を実現する技術を提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決すべく、本発明に係るエネルギー消費量計算装置は、所定の区間におけるエネルギー消費量を推定するエネルギー消費量推定手段と、エネルギーを供給するエネルギー供給手段が前記所定の区間において実際に供給したエネルギー消費実績量を特定するエネルギー消費実績量特定手段と、前記エネルギー消費量推定手段が推定した前記所定の区間におけるエネルギー消費量と、当該所定の区間における前記エネルギー消費実績量特定手段が特定したエネルギー消費実績量と、の差に応じて、前記エネルギー消費量推定手段が推定した所定の区間のエネルギー消費量を補正するエネルギー消費量補正手段と、を備えることを特徴とする。
【0007】
また、本発明のエネルギー消費量計算方法は、エネルギー消費量計算装置によるエネルギー消費量計算方法であって、前記エネルギー消費量計算装置は、所定の区間におけるエネルギー消費量を推定するエネルギー消費量推定ステップと、エネルギーを供給するエネルギー供給手段が前記所定の区間において実際に供給したエネルギー消費実績量を特定するエネルギー消費実績量特定ステップと、前記エネルギー消費量推定ステップにおいて推定した前記所定の区間におけるエネルギー消費量と、当該所定の区間における前記エネルギー消費実績量特定ステップにおいて特定したエネルギー消費実績量と、の差に応じて、前記エネルギー消費量推定ステップにおいてが推定した所定の区間のエネルギー消費量を補正するエネルギー消費量補正ステップと、を実施することを特徴とする。
【図面の簡単な説明】
【0008】
【図1】ナビゲーション装置の概略構成図である。
【図2】リンクテーブルの構成を示す図である。
【図3】車両情報テーブルの構成例を示す図である。
【図4】物理情報テーブルの構成例を示す図である。
【図5】走行履歴テーブルの構成例を示す図である。
【図6】演算処理部の機能構成図である。
【図7】消費電力補正処理のフロー図である。
【図8】消費電力補正処理の概念を示す図である。
【図9】消費電力補正処理の概念を示す図である。
【図10】消費電力補正処理の変形例を示すフロー図である。
【図11】リンクテーブルの変形例の構成を示す図である。
【図12】消費電力補正処理の変形例を示すフロー図である。
【図13】移動可能範囲の表示例を示す図である。
【図14】航続可能エリア表示処理を示すフロー図である。
【図15】航続可能エリアの表示例を示す図である。
【発明を実施するための形態】
【0009】
以下に、本発明の第一の実施形態を適用した車載装置であるナビゲーション装置100について、図面を参照して説明する。
【0010】
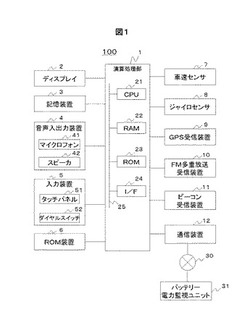
図1に、ナビゲーション装置100の構成図を示す。ナビゲーション装置100は、演算処理部1と、ディスプレイ2と、記憶装置3と、音声入出力装置4(音声入力装置としてマイクロフォン41、音声出力装置としてスピーカ42を備える)と、入力装置5と、ROM装置6と、車速センサ7と、ジャイロセンサ8と、GPS(Global Positioning System)受信装置9と、FM多重放送受信装置10と、ビーコン受信装置11と、通信装置12と、を備えている。
【0011】
演算処理部1は、様々な処理を行う中心的ユニットである。例えば各種センサ7,8やGPS受信装置9、FM多重放送受信装置10等から出力される情報を基にして現在地を検出する。また、得られた現在地情報に基づいて、表示に必要な地図データを記憶装置3あるいはROM装置6から読み出す。
【0012】
また、演算処理部1は、読み出した地図データをグラフィックス展開し、そこに現在地を示すマークを重ねてディスプレイ2へ表示する。また、記憶装置3あるいはROM装置6に記憶されている地図データ等を用いて、現在地あるいはユーザから指示された出発地と、目的地(または、経由地や立ち寄り地)とを結ぶ最適な経路(推奨経路)を探索する。また、演算処理部1は、スピーカ42やディスプレイ2を用いてユーザを誘導する。
【0013】
ナビゲーション装置100の演算処理部1は、各デバイス間をバス25で接続した構成である。演算処理部1は、数値演算及び各デバイスを制御するといった様々な処理を実行するCPU(Central Processing Unit)21と、記憶装置3から読み出した地図データ、演算データなどを格納するRAM(Random Access Memory)22と、プログラムやデータを格納するROM(Read Only Memory)23と、各種ハードウェアを演算処理部1と接続するためのI/F(インターフェイス)24と、を有する。
【0014】
ディスプレイ2は、演算処理部1等で生成されたグラフィックス情報を表示するユニットである。ディスプレイ2は、液晶ディスプレイ、有機ELディスプレイなどで構成される。
【0015】
記憶装置3は、HDD(Hard Disk Drive)や不揮発性メモリカードといった、少なくとも読み書きが可能な記憶媒体で構成される。
【0016】
この記憶媒体には、通常の経路探索装置に必要な地図データ(地図上の道路を構成するリンクのリンクデータを含む)であるリンクテーブル200、車両の情報を格納する車両情報テーブル300、各種演算等に用いる物理定数等を格納する物理情報テーブル400、走行した履歴の情報を格納する走行履歴テーブル500等が記憶されている。
【0017】
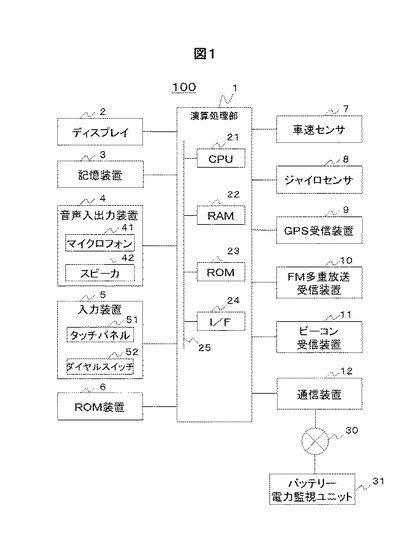
図2は、リンクテーブル200の構成を示す図である。リンクテーブル200は、地図上の区画された領域であるメッシュの識別コード(メッシュID)201ごとに、そのメッシュ領域に含まれる道路を構成する各リンクのリンクデータ202を含んでいる。
【0018】
リンクデータ202は、リンクの識別子であるリンクID211ごとに、リンクを構成する2つのノード(開始ノード、終了ノード)の座標情報222と、リンクを含む道路の種別を示す道路種別223と、当該リンクの開始ノードに接続するリンクである開始接続リンクと、当該リンクの終了ノードに接続するリンクである終了接続リンクと、を特定する開始接続リンク、終了接続リンク224と、高さを考慮しない二次元平面上でのリンクの長さを示す2Dリンク長225と、高さを考慮したリンクの長さを示す3Dリンク長226と、当該リンク内に存在する上り坂部分の累積標高増加量を示すリンク内標高アップ距離227と、当該リンク内に存在する下り坂部分の累積標高減少量を示すリンク内標高ダウン距離228と、当該リンクの始点と終点の標高差を始点から終点までの距離で割った平均勾配を示す平均勾配値229と、当該リンクの平均的な路面抵抗係数を示す平均路面抵抗係数230と、当該リンクを走行する平均速度として予め記憶された平均速度推定値231と、当該リンクを走行する平均時間として予め記憶された平均リンク旅行時間232と、当該リンクを走行するのに必要と推定されるモデル上の推定消費電力(E0)233と、推定消費電力を実績に基づいて補正した値である補正推定消費電力(E1)234と、を含んでいる。
【0019】
なお、ここでは、リンクを構成する2つのノードについて開始ノードと終了ノードとを区別することで、同じ道路の上り方向と下り方向とを、それぞれ別のリンクとして管理するようにしている。
【0020】
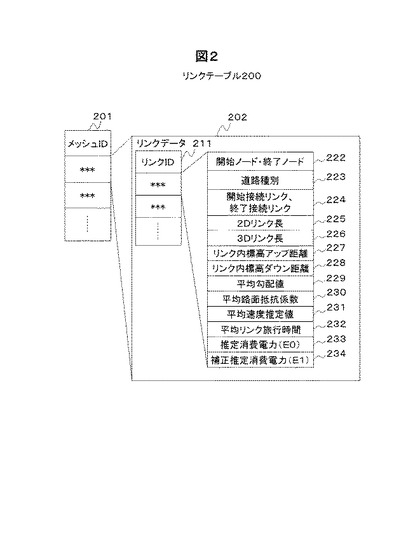
図3は、車両情報テーブル300の構成を示す図である。車両情報テーブル300は、ナビゲーション装置100が搭載される車両についての種々の情報を含んでいる。すなわち、ナビゲーション装置100が搭載される車両の車種や型、グレード等に応じて、格納される情報が異なる。
【0021】
車両情報テーブル300は、車両の重量を特定する情報である車両重量(W)301と、車両の空気抵抗係数を特定する情報である空気抵抗係数(Cd)302と、車両前面の投影面積を特定する情報である車両前面投影面積(S)303と、基礎的な消費電力を特定する情報である基礎消費電力(Eeloss)304と、動力源(ガソリンや電気等)から取り出す走行エネルギーの変換効率を特定する情報である走行エネルギー変換効率(β)305と、電力の回生に関する効率を特定する情報である電力回生効率(γ)306と、を含んでいる。これらの各値は、複数の車両用の組合せが格納されていて、ナビゲーション装置100が車両に搭載される際に指定された当該車両のモデルに応じた値が選択的に有効化されるものであってもよいし、固定的に当該車両の情報が予め格納されていても良い。
【0022】
図4は、物理情報テーブル400の構成を示す図である。物理情報テーブル400は、予め定められた物理定数についての種々の情報を含んでいる。
【0023】
物理情報テーブル400は、重力加速度Gを特定する情報である重力加速度(g)401と、空気密度を特定する情報である空気密度(ρ)402と、を含んでいる。これらの各値は、ナビゲーション装置100が搭載される車両が販売される地域ごとにあらかじめ定められた値が複数含まれていて、車両へ搭載される際に選択的に有効化されるものであってもよいし、所定の情報が予め格納されていても良い。または、図示しないが、重力加速度および空気密度を測定するセンサ等を介して、ナビゲーション装置100が搭載された車両が存在する環境に応じた値がリアルタイムに反映されるようにしてもよい。
【0024】
図5は、走行履歴テーブル500の構成を示す図である。走行履歴テーブル500は、ナビゲーション装置100が搭載された車両が走行した履歴と、実際に消費したエネルギー(電力)についての種々の情報を含んでいる。
【0025】
走行履歴テーブル500は、走行したリンクを特定する情報であるリンクID501と、当該リンクへ進入した日時を特定する情報である進入日時502と、当該リンクから退出した日時を特定する情報である退出日時503と、当該リンクを走行する間に消費した電力を特定する情報である実消費電力(Ereal)504と、を含んでいる。これらの各値は、ナビゲーション装置100が起動している間、ナビゲーション装置100が備える履歴記憶機能により自動的に記録される。とくに、実消費電力504については、バッテリー電力監視ユニット31から定期的に(例えば、100msごとに)車内ネットワーク30上に発信されるバッテリーの消費量を、現在地が属するリンクごとに積算し、当該リンクから退出した際に退出した該リンクに対応付けて記録される。
【0026】
図1に戻って説明する。音声入出力装置4は、音声入力装置としてマイクロフォン41と、音声出力装置としてスピーカ42と、を備える。マイクロフォン41は、使用者やその他の搭乗者が発した声などのナビゲーション装置100の外部の音声を取得する。
【0027】
スピーカ42は、演算処理部1で生成された使用者へのメッセージを音声信号として出力する。マイクロフォン41とスピーカ42は、車両の所定の部位に、別個に配されている。ただし、一体の筐体に収納されていても良い。ナビゲーション装置100は、マイクロフォン41及びスピーカ42を、それぞれ複数備えることができる。
【0028】
入力装置5は、使用者からの指示を使用者による操作を介して受け付ける装置である。入力装置5は、タッチパネル51と、ダイヤルスイッチ52と、その他のハードスイッチ(図示しない)であるスクロールキー、縮尺変更キーなどで構成される。
【0029】
タッチパネル51は、ディスプレイ2の表示面側に搭載され、表示画面を透視可能である。タッチパネル51は、ディスプレイ2に表示された画像のXY座標と対応したタッチ位置を特定し、タッチ位置を座標に変換して出力する。タッチパネル51は、感圧式または静電式の入力検出素子などにより構成される。
【0030】
ダイヤルスイッチ52は、時計回り及び反時計回りに回転可能に構成され、所定の角度の回転ごとにパルス信号を発生し、演算処理部1に出力する。演算処理部1では、パルス信号の数から、回転角度を求める。
【0031】
ROM装置6は、CD-ROMやDVD-ROM等のROM(Read Only Memory)や、IC(Integrated Circuit)カードといった、少なくとも読み取りが可能な記憶媒体で構成されている。この記憶媒体には、例えば、動画データや、音声データなどが記憶されている。
【0032】
車速センサ7,ジャイロセンサ8およびGPS受信装置9は、ナビゲーション装置100で現在地を検出するために使用されるものである。
【0033】
車速センサ7は、車速を算出するのに用いる値を出力するセンサである。
【0034】
ジャイロセンサ8は、光ファイバジャイロや振動ジャイロ等で構成され、移動体の回転による角速度を検出するものである。
【0035】
GPS受信装置9は、GPS衛星からの信号を受信し移動体とGPS衛星間の距離と距離の変化率とを3個以上の衛星に対して測定することで移動体の現在地、進行速度および進行方位を測定するものである。
【0036】
FM多重放送受信装置10は、FM放送局から送られてくるFM多重放送信号を受信する。FM多重放送には、VICS(Vehicle Information Communication System:登録商標)情報の概略現況交通情報、規制情報、SA/PA(サービスエリア/パーキングエリア)情報、駐車場情報、天気情報などやFM多重一般情報としてラジオ局が提供する文字情報などがある。
【0037】
ビーコン受信装置11は、VICS情報などの概略現況交通情報、規制情報、SA/PA(サービスエリア/パーキングエリア)情報、駐車場情報、天気情報や緊急警報などを受信する。例えば、光により通信する光ビーコン、電波により通信する電波ビーコン等の受信装置である。
【0038】
通信装置12は、ナビゲーション装置100が搭載される車両に設けられている車内ネットワーク30を介して、他の装置と通信を行うためのネットワークインターフェース装置である。車内ネットワーク30は、例えば、CAN(Controller Area Netowork)やFlexRay等のプロトコルによって接続される機器が通信可能なネットワークであるが、これに限られるものではない。
【0039】
ナビゲーション装置100は、通信装置12および車内ネットワーク30を介して、車両に搭載されたエネルギーを供給するバッテリーに接続された装置であるバッテリー電力監視ユニット31等と通信を行うことが可能である。バッテリー電力監視ユニット31は、電気自動車等の車両に搭載された動力源となる電気を蓄積/放出するバッテリー装置のバッテリー容量を監視して管理するとともに、所定の周期で(例えば100ms周期で)、当該周期内において消費された電力の実績値をCAN上に送出する。したがってナビゲーション装置100の演算処理部1は、当該送出された消費電力の実績値を、通信装置12を介して取得することが可能である。
【0040】
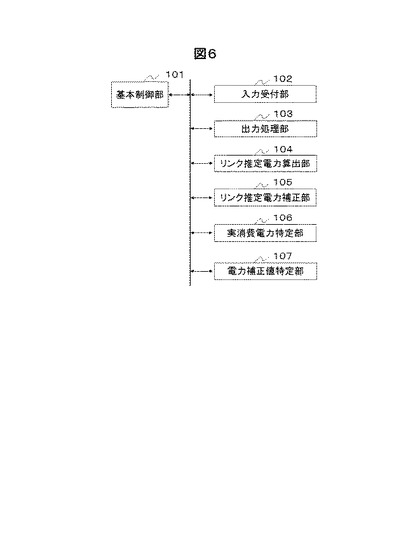
図6は、演算処理部1の機能ブロック図である。図示するように、演算処理部1は、基本制御部101と、入力受付部102と、出力処理部103と、リンク推定電力算出部104と、リンク推定電力補正部105と、実消費電力特定部106と、電力補正値特定部107と、を有する。
【0041】
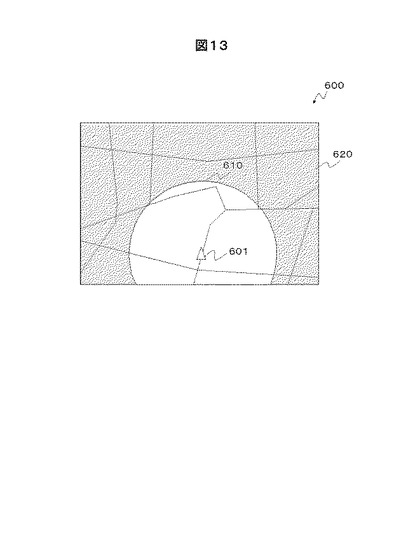
基本制御部101は、様々な処理を行う中心的な機能部であり、処理内容に応じて、他の処理部を制御する。また、各種センサ、GPS受信装置9等の情報を取得し、マップマッチング処理等を行って現在地と車両の正面が向いている方向である車両方位を特定する。また、随時、走行した日付および時刻と、位置と、を対応付けて、リンクごとに走行履歴を走行履歴テーブル500に記憶する。具体的には、基本制御部101は、走行履歴テーブル500に対して、現在地が属していたリンクのリンクIDをリンクID501へ格納し、当該リンクへ進入した日時を特定する情報を進入日時502へ格納し、当該リンクから退出した日時を特定する情報を退出日時503へ格納する。さらに、各処理部からの要求に応じて、現在時刻を出力する。また、現在地またはユーザから指示された出発地と、目的地とを結ぶ最適な経路(推奨経路)を探索し、推奨経路から逸脱しないよう、スピーカ42やディスプレイ2を用いてユーザを経路誘導する。また、基本制御部101は、車載の動力源であるバッテリーの残量を用いて移動可能な範囲を、予測される消費電力を用いて算出し、地図上の移動可能な範囲より遠い部分を暗く表示するよう出力処理部103に指示して、図13に示すように移動可能範囲を強調して表示する。なお、図13は、移動可能範囲表示画面600の例であり、現在地を示すマーク601と、移動可能範囲610と、移動可能でない範囲620と、が示されており、移動可能でない範囲620に相当する地図上の領域は、移動可能範囲610に比べて暗く表示されている。
【0042】
入力受付部102は、入力装置5またはマイクロフォン41を介して入力された使用者からの指示を受け付け、その要求内容を基本制御部101へ送信する。
【0043】
出力処理部103は、表示させる画面情報を受け取り、ディスプレイ2に描画するための信号に変換してディスプレイ2に対して描画する指示を行う。
【0044】
リンク推定電力算出部104は、所定の範囲のリンクのそれぞれについて、走行するのに必要なエネルギーである電力の推定値を算出する。具体的には、リンク推定電力算出部104は、所定の範囲内(例えば、現在地を中心とする半径5km以内、あるいは推奨経路が設定されている場合には、当該推奨経路を構成するリンクの一部または全部)に含まれるリンクのそれぞれについて、エネルギー保存則を利用した所定のモデルデータに従って、車両の情報と、道路の情報と、を用いて、走行にかかる基本的な電力である推定消費電力E0を算出する。
【0045】
より具体的に、リンク推定電力算出部104がリンクごとの推定消費電力E0を算出する手段について説明する。リンク推定電力算出部104は、所定のリンクについて、車両加速に伴うエネルギー損失である加速抵抗損失電力Ep1を、下式(1)に従って算出する。
【0046】
Ep1=車両重量(Vehicle_weight)×車両走行加速度(dV/dt)×移動距離(L)×走行エネルギー変換効率(β)・・・式(1)
【0047】
なお、ここで、リンク推定電力算出部104は、車両重量は、車両情報テーブル300の車両重量(W)301から取得し、車両走行加速度は、リンクテーブル200の平均速度推定値231を平均リンク旅行時間232で除算して求め、移動距離は、リンクテーブル200の3Dリンク長226から取得し、走行エネルギー変換効率は、車両情報テーブル300の走行エネルギー変換効率(β)305から取得して、上記式(1)を演算する。
【0048】
そして、リンク推定電力算出部104は、当該リンクについて、車両減速に伴うエネルギー利得である減速抵抗利得電力Ep1´を、下式(1)´に従って算出する。
【0049】
Ep1´=車両重量(Vehicle_weight)×車両走行加速度(dV/dt)×移動距離(L)×電力回生効率(γ)・・・式(1)´
【0050】
なお、ここで、リンク推定電力算出部104は、車両重量は、車両情報テーブル300の車両重量(W)301から取得し、車両走行加速度は、リンクテーブル200の平均速度推定値231を平均リンク旅行時間232で除算して求め、移動距離は、リンクテーブル200の3Dリンク長226から取得し、電力回生効率は、車両情報テーブル300の電力回生効率(γ)306から取得して、上記式(1)´を演算する。
【0051】
また、リンク推定電力算出部104は、当該リンクについて、相対的な標高の増加に伴うエネルギー損失である勾配抵抗損失電力Ep2を、下式(2)に従って算出する。
【0052】
Ep2=車両重量(Vehicle_weight)×重力加速度(g)×リンク内標高アップ距離(ΔH)×移動距離(L)×走行エネルギー変換効率(β)・・・式(2)
【0053】
なお、ここで、リンク推定電力算出部104は、車両重量は、車両情報テーブル300の車両重量(W)301から取得し、重力加速度は、物理情報テーブル400の重力加速度401から取得し、リンク内標高アップ距離は、リンクテーブル200のリンク内標高アップ距離227から取得し、移動距離は、リンクテーブル200の3Dリンク長226から取得し、走行エネルギー変換効率は、車両情報テーブル300の走行エネルギー変換効率(β)305から取得して、上記式(2)を演算する。
【0054】
そして、リンク推定電力算出部104は、当該リンクについて、相対的な標高の減少に伴うエネルギー利得である勾配抵抗利得電力Ep2´を、下式(2)´に従って算出する。
【0055】
Ep2´=車両重量(Vehicle_weight)×重力加速度(g)×リンク内標高ダウン距離(ΔH´)×移動距離(L)×電力回生効率(γ)・・・式(2)´
【0056】
なお、ここで、リンク推定電力算出部104は、車両重量は、車両情報テーブル300の車両重量(W)301から取得し、重力加速度は、物理情報テーブル400の重力加速度401から取得し、リンク内標高ダウン距離は、リンクテーブル200のリンク内標高ダウン距離228から取得し、移動距離は、リンクテーブル200の3Dリンク長226から取得し、走行エネルギー変換効率は、車両情報テーブル300の電力回生効率(γ)306から取得して、上記式(2)´を演算する。
【0057】
また、リンク推定電力算出部104は、当該リンクについて、路面との摩擦抵抗に伴うエネルギー損失である路面抵抗損失電力Ep3を、下式(3)に従って算出する。
【0058】
Ep3=車両重量(Vehicle_weight)×重力加速度(g)×路面抵抗係数(Road_resistance_coefficient)×垂直抗力補正係数(cosθ)×移動距離(L)×走行エネルギー変換効率(β)・・・式(3)
【0059】
なお、ここで、リンク推定電力算出部104は、車両重量は、車両情報テーブル300の車両重量(W)301から取得し、重力加速度は、物理情報テーブル400の重力加速度401から取得し、路面抵抗係数は、リンクテーブル200の平均路面抵抗係数230から取得し、垂直抗力補正係数は、リンクテーブル200の3Dリンク長226を2Dリンク長225で除算した値を算出して用い、移動距離は、リンクテーブル200の3Dリンク長226から取得し、走行エネルギー変換効率は、車両情報テーブル300の走行エネルギー変換効率(β)305から取得して、上記式(3)を演算する。
【0060】
また、リンク推定電力算出部104は、当該リンクについて、空気抵抗に伴うエネルギー損失である空気抵抗損失電力Ep4を、下式(4)に従って算出する。
【0061】
Ep4=空気抵抗係数(Aerodynamics_coefficient)×空気密度(Rou_a)×車両前面投影面積(Front_projection_area)×車両走行速度(V)の二乗×移動距離(L)×走行エネルギー変換効率(β)・・・式(4)
【0062】
なお、ここで、リンク推定電力算出部104は、空気抵抗係数は、車両情報テーブル300の空気抵抗係数(Cd)302から取得し、空気密度は、物理情報テーブル400の空気密度(ρ)402から取得し、車両前面投影面積は、車両情報テーブル300の車両前面投影面積(S)303から取得し、車両走行速度は、リンクテーブル200の平均速度推定値231から取得し、移動距離は、リンクテーブル200の3Dリンク長226から取得し、走行エネルギー変換効率は、車両情報テーブル300の走行エネルギー変換効率(β)305から取得して、上記式(4)を演算する。
【0063】
また、リンク推定電力算出部104は、リンク毎に、上記した式(1)、式(1)´、式(2)、式(2)´、式(3)、式(4)により求めたEp1、Ep1´、Ep2、Ep2´、Ep3、Ep4を合算して、全走行消費電力EpALL_RUNを算出する。
【0064】
また、リンク推定電力算出部104は、当該リンクにおいて、車両電装品が消費する電力損失EpALL_UNITを、下式(5)に従って算出する。
【0065】
EpALL_UNIT=基礎消費電力(Eeloss)×平均リンク旅行時間(T)・・・式(5)
【0066】
なお、ここで、リンク推定電力算出部104は、基礎消費電力は、車両情報テーブル300の基礎消費電力(Eeloss)304から取得して、平均リンク旅行時間は、リンクテーブル200の平均リンク旅行時間232から取得して、上記式(5)を演算する。
【0067】
そして、リンク推定電力算出部104は、リンクごとに、当該リンクにおける推定消費電力E0として、上記全走行消費電力EpALL_RUNと、車両電装品が消費する電力損失EpALL_UNITと、を合計した値を算出する。
【0068】
リンク推定電力補正部105は、電力補正値特定部107が特定した電力補正値を用いて、リンク推定電力算出部104が算出した推定消費電力E0を補正し、補正推定消費電力E1を算出する。
【0069】
実消費電力特定部106は、実際に使用された電力を、リンクごとに特定する。具体的には、実消費電力特定部106は、現在地が属していたリンクごとに、当該リンクに現在地が属していた期間にバッテリー電力監視ユニット31から車内ネットワーク30へ所定周期で送出された消費電力の量を積算することで消費電力を特定する。そして、走行履歴テーブル500に退出日時が記録されたリンクについて、特定した消費電力を対応付けて実消費電力(Ereal)504へ格納する。
【0070】
電力補正値特定部107は、実消費電力と、推定消費電力と、の差に基づいて、推定消費電力を補正するための補正値を特定する。具体的には、電力補正値特定部107は、推定消費電力の最大誤差率を含めた値を実消費電力が越えている場合には、その超過度合いに応じて推定消費電力を増加させる補正値を算出し、推定消費電力の最小誤差率を含めた値を実消費電力が下回る場合には、推定消費電力を維持する補正値を算出し、推定消費電力の最小誤差率を含めた値と推定消費電力の最大誤差率を含めた値との範囲内に実消費電力が収まる場合には、既に設定された補正値と同一の補正値を特定する。
【0071】
上記した演算処理部1の各機能部、すなわち基本制御部101、入力受付部102、出力処理部103、リンク推定電力算出部104、リンク推定電力補正部105、実消費電力特定部106、電力補正値特定部107は、CPU21が所定のプログラムを読み込み実行することにより構築される。そのため、RAM22には、各機能部の処理を実現するためのプログラムが記憶されている。
【0072】
なお、上記した各構成要素は、ナビゲーション装置100の構成を、理解を容易にするために、主な処理内容に応じて分類したものである。そのため、構成要素の分類の仕方やその名称によって、本願発明が制限されることはない。ナビゲーション装置100の構成は、処理内容に応じて、さらに多くの構成要素に分類することもできる。また、1つの構成要素がさらに多くの処理を実行するように分類することもできる。
【0073】
また、各機能部は、ハードウェア(ASIC、GPUなど)により構築されてもよい。また、各機能部の処理が一つのハードウェアで実行されてもよいし、複数のハードウェアで実行されてもよい。
【0074】
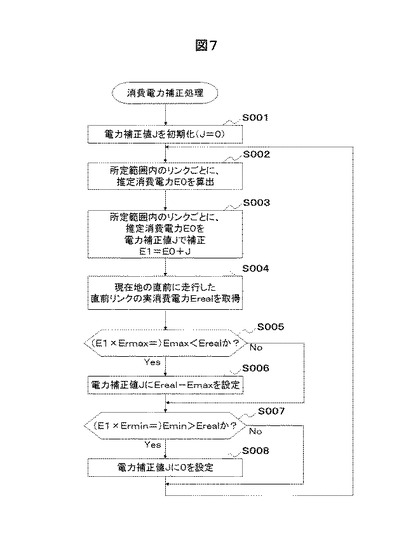
[動作の説明]次に、ナビゲーション装置100の動作について説明する。図7は、消費電力補正処理のフロー図である。このフローは、ナビゲーション装置100が稼働を開始すると、開始される。
【0075】
まず、電力補正値特定部107は、電力補正値Jを初期化する(ステップS001)。具体的には、電力補正値特定部107は、電力補正値として用いる電力補正値Jの値にゼロを設定する。
【0076】
そして、リンク推定電力算出部104は、所定範囲内のリンクごとに、推定消費電力E0を算出する(ステップS002)。具体的には、リンク推定電力算出部104は、基本制御部101から現在地を特定する情報を取得し、当該現在地を基準とした所定の範囲(例えば、現在地を中心とする半径5km以内、あるいは推奨経路が設定されている場合には、当該推奨経路を構成するリンクの一部または全部)に含まれる1または複数のリンクの抽出を基本制御部101に依頼して、基本制御部101から抽出されたリンクのリンクIDを取得する。そして、取得したリンクIDで特定される各リンクについて、上記した演算により推定消費電力E0を算出し、リンクテーブル200の推定消費電力(E0)233に格納する。
【0077】
そして、リンク推定電力補正部105は、所定範囲内のリンクごとに、推定消費電力E0を電力補正値Jで補正し、補正推定消費電力E1を算出する(ステップS003)。具体的には、リンク推定電力補正部105は、ステップS002にて特定したリンクIDにより特定される各リンクについて、推定消費電力E0に電力補正値Jの値を加算して、補正推定消費電力E1を算出する。そして、リンク推定電力補正部105は、算出した各リンクのE1を、リンクテーブル200の補正推定消費電力(E1)234に格納する。
【0078】
そして、実消費電力特定部106は、現在地の直前に走行した直前リンクの実消費電力Erealを特定する情報を取得する(ステップS004)。具体的には、実消費電力特定部106は、現在地が属するリンクのリンクIDを基本制御部101から取得し、現在地が属するリンクの直前に走行したリンクについて走行履歴テーブル500を検索して特定する。そして、当該リンクにおいて実際に消費した電力の積算量を特定する実消費電力(Ereal)504の値を取得する。
【0079】
そして、電力補正値特定部107は、取得したErealの情報が、推定消費電力の最大誤差率を含めた値であるEmaxの値を超えているか否かを判定する(ステップS005)。具体的には、電力補正値特定部107は、ステップS004にて取得した直前に走行したリンクの実消費電力であるErealの値と、当該リンクについて算出した補正推定消費電力E1の値に所定の最大誤差率(例えば、120%)をかけて算出した値であるEmaxの値と、を比較し、Erealの値がEmaxの値を上回るか否かを判定する。なお、最大誤差率は、予め定められた許容できる最大の誤差の範囲を特定する値である。Erealの値がEmaxの値を上回らない場合、すなわち同値かそれ以下である場合、電力補正値特定部107は、制御を後述するステップS007へ進める。
【0080】
Erealの値がEmaxの値を上回る場合(ステップS005にて「Yes」の場合)、電力補正値特定部107は、電力補正値JにErealとEmaxの差分を設定する(ステップS006)。具体的には、電力補正値特定部107は、ErealからEmaxの値を減算し、減算した値を電力補正値Jとして設定する。
【0081】
そして、電力補正値特定部107は、取得したErealの情報が、推定消費電力の最小誤差率を含めた値であるEminの値を下回るか否かを判定する(ステップS007)。具体的には、電力補正値特定部107は、ステップS004にて取得した直前に走行したリンクの実消費電力であるErealの値と、当該リンクについて算出した補正推定消費電力E1の値に所定の最小誤差率(例えば、80%)をかけて算出した値であるEminの値と、を比較し、Erealの値がEminの値を下回るか否かを判定する。なお、最小誤差率は、予め定められた許容できる最小の誤差の範囲を特定する値である。Erealの値がEmaxの値を下回らない場合、すなわち同値かそれ以上である場合、電力補正値特定部107は、制御をステップS002へ戻す。
【0082】
Erealの値がEminの値を下回る場合(ステップS007にて「Yes」の場合)、電力補正値特定部107は、電力補正値Jにゼロを設定する(ステップS008)。具体的には、電力補正値特定部107は、電力補正値Jをゼロに設定する。そして、電力補正値特定部107は、制御をステップS002へ戻す。
【0083】
以上が、消費電力補正処理の処理フローである。消費電力補正処理によれば、直前に走行を終えたリンクについての推定される電力消費量と、実際に消費した電力消費量との乖離に基づいて、以降の消費電力推定に用いる補正値を変更することができる。つまり、推定されたエネルギー消費量と、エネルギー消費の実績量と、の差が所定の閾値以上であれば、推定した所定の区間のエネルギー消費量を補正することができるといえる。これにより、例えば、風の強い日に、風により変化する消費量を実測値に基づいて特定し、補正量に反映させて、より精度の高い推定をすることができるといえる。特に、電気自動車(EV)では、バッテリーの性能等を考慮すると、動力源となる電気を蓄積可能な量が十分に大きいとはいえないため、航続可能距離が予想外の外的要因により受ける影響が相対的に大きいことを考慮すると、精度の高い推定が可能となることの効果は大きいといえる。
【0084】
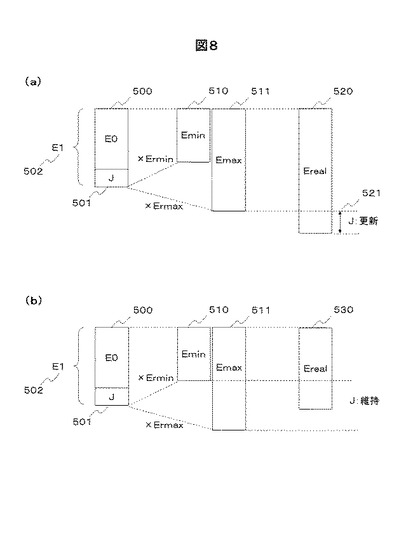
図8(a)、図8(b)および図9、を用いて、消費電力補正処理の概念を説明する。図8(a)は、実消費電力Erealの値が、当該リンクの推定消費電力E1に最大誤差率を加味したEmaxの値を超える場合のJの値の特定処理の概要を示す図である。すなわち、当該状況では、事前に推定された推定消費電力(E0)500に電力補正値J501を加えた補正推定消費電力(E1)502に最小誤差率Erminを反映させたEmin510の値と、当該補正推定消費電力(E1)502に最大誤差率Ermaxを反映させたEmax511の値と、が特定されているものとする。ここで、実消費電力Ereal520の値はEmaxを超えているため、その超過分521を用いて、電力補正値Jが更新される。
【0085】
図8(b)は、実消費電力Erealの値が、当該リンクの推定消費電力E1に最大誤差率を加味したEmaxの値以下であって、当該リンクの推定消費電力E1に最小誤差率を加味したEminの値以上である場合のJの値の特定処理の概要を示す図である。すなわち、当該状況では、事前に推定された推定消費電力(E0)500に電力補正値J501を加えた補正推定消費電力(E1)502に最小誤差率Erminを反映させたEmin510の値と、当該補正推定消費電力(E1)502に最大誤差率Ermaxを反映させたEmax511の値と、が特定されているものとする。ここで、実消費電力Ereal520の値はEmin以上Emax以下であるため、電力補正値Jは更新されず、維持される。
【0086】
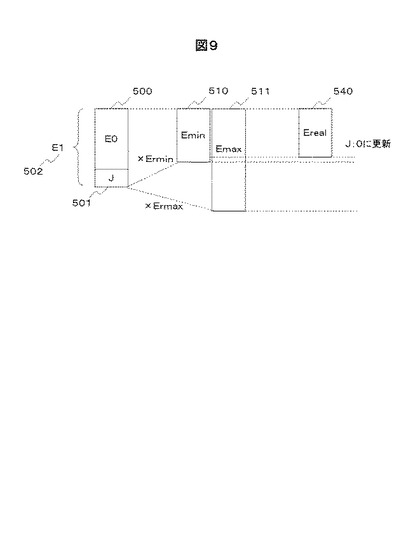
図9は、実消費電力Erealの値が、当該リンクの推定消費電力E1に最小誤差率を加味したEminの値を下回る場合のJの値の特定処理の概要を示す図である。すなわち、当該状況では、事前に推定された推定消費電力(E0)500に電力補正値J501を加えた補正推定消費電力(E1)502に最小誤差率Erminを反映させたEmin510の値と、当該補正推定消費電力(E1)502に最大誤差率Ermaxを反映させたEmax511の値と、が特定されているものとする。ここで、実消費電力Ereal520の値はEminを下回るため、電力補正値Jにはゼロが設定される。なお、ここで、電力補正値Jの値をEminとの差分としていないのは、推定する消費電力量が増える場合には、走行可能距離が短くなる等運転上の支障が出る可能性が高いのに対して、消費電力量が減る場合には走行可能距離が長くなる等の状況が考えられ、そのような場合に運転上の支障は出にくいと予想されるからである。
【0087】
以上、本発明の第一の実施形態について説明した。
【0088】
本発明の第一の実施形態によると、ナビゲーション装置100は、より簡易な方法で、より高い精度の消費エネルギーの推定を実現することができる。より具体的には、ナビゲーション装置100は、所定のモデルに従ってリンクの走行に係る消費エネルギーを算出した推定値を、実績値と推定値との差分に基づく補正値により補正して、消費エネルギーの推定を行うため、モデルに含まれない環境誤差等による影響を考慮した電力消費量の推定を行うことができるといえる。このことは、例えば、当該補正した推定消費エネルギー(電力)を用いて、航続可能範囲を算出し、地図上の当該範囲外の部分を暗く表示して航続可能範囲を強調して表示する機能を実現する場合において、より精度の高い機能を実現することができるといえる。その他、推奨経路に沿って経路誘導を行う場合に、使用エネルギーの予測値およびエネルギーの補充可能な施設(充電スタンド等)の位置の情報を用いて、エネルギーの補充場所について注意喚起を行う機能に応用することもできる。その他、エネルギーの予測消費量が最も少なくなる経路を優先的に探索するいわゆるエコロジー経路探索機能等の機能を実現する場合においても、より精度の高い機能を実現することができるようになるといえる。
【0089】
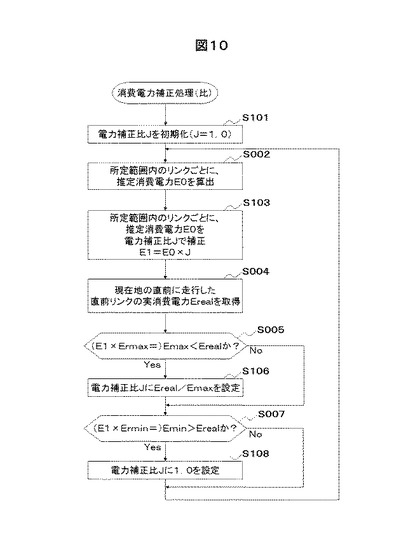
本発明は、上記第一の実施形態に制限されない。上記第一の実施形態は、本発明の技術的思想の範囲内で様々な変形が可能である。例えば、上記第一の実施形態の消費電力補正処理においては、電力補正値Jを推定消費電力E0に加算して各リンクの消費電力を補正しているが、これに限られない。例えば、電力補正値Jを電力補正比Jに置き代えて、電力補正比Jの値を推定消費電力E0の値に乗算して補正を行うようにしてもよい。このように変形すると、実際にはリンク毎に異なるリンク長の差異による補正度合いの相違を吸収することが可能となり、より現実に即した推定を行うことができるようになる。このような変形例について、図10を用いて具体的に説明する。
【0090】
図10は、消費電力補正処理の変形例を示すフロー図である。当該変形例においては、基本的に第一の実施形態に示したフロー図と同様であるが、一部異なる処理が存在する。そのため、相違点を中心に説明する。
【0091】
第一の実施形態の消費電力補正処理のステップS001では、電力補正値Jをゼロで初期化しているが、当該処理に相当するステップS101では、電力補正比Jを「1.0」で初期化している(ステップS101)。
【0092】
また、ステップS103では、所定範囲内のリンクごとに、推定消費電力E0に電力補正比Jを乗算することで補正推定消費電力E1を算出する(ステップS103)。
【0093】
また、ステップS106の処理は、Erealの値がEmaxの値を超える場合の処理であるが、電力補正比JにErealをEmaxで割った値を設定する(ステップS106)。
【0094】
また、ステップS108の処理は、Erealの値がEminの値を下回る場合の処理であるが、電力補正比Jに初期値「1.0」を設定する(ステップS108)。
【0095】
以上が、変形例の説明である。以上のように変形することで、各リンクの距離の相違を考慮した補正を行うことができるため、ナビゲーション装置100は、より現実に即した推定を行うことができるようになるといえる。
【0096】
なお、上記した第一の実施形態の変形例では、電力補正値Jを電力補正比Jに置き換えたが、これに限られない。例えば、第一の実施形態における消費電力補正処理のステップS003において、Erealを取得したリンクの距離と、補正対象のリンクの距離との比を電力補正値Jの値に乗じて換算電力補正値J´を算出し、当該換算電力補正値J´を補正対象のリンクの推定消費電力E0に加算し、補正推定消費電力E1を算出するようにしてもよい。
【0097】
また、上記した第一の実施形態においては、他の車両に搭載されたナビゲーション装置100が使用した実績値を流用することはできないが、ナビゲーション装置100が、他のナビゲーション装置100において実測された補正値を利用するようにしてもよい。このような第二の実施形態について、以下に説明する。
【0098】
第二の実施形態は、上記した第一の実施形態と基本的に同様に構成される。そのため、同様の構成についての説明は省略して説明する。ナビゲーション装置100は、第一の実施形態と同様の構成に加えて、さらに、外部のネットワーク、例えばインターネット等に接続するための携帯電話網等を利用した無線通信装置を備える。したがって、外部のネットワークを介して、他の装置と通信を行うことができる。
【0099】
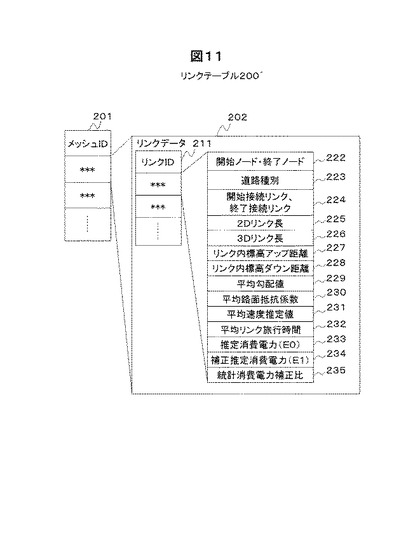
また、図11に示すように、第一の実施形態におけるリンクテーブル200に、さらに、リンクID211ごとのデータとして、統計的に処理された消費電力の補正を行うための補正比の値である統計消費電力補正比235を備える。
【0100】
統計消費電力補正比235は、上記した無線通信装置を介して、ネットワークに接続された図示しない情報センター等から受信する電力補正比を格納する。
【0101】
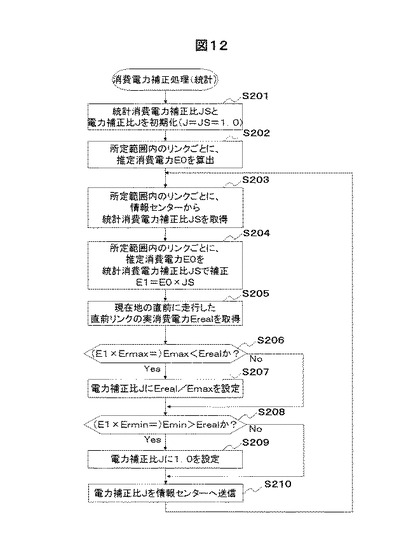
図12は、第二の実施形態における消費電力補正処理のフローを示す図である。このフローは、ナビゲーション装置100が稼働を開始すると、開始される。
【0102】
まず、電力補正値特定部107は、統計消費電力補正比JSと、電力補正比Jと、を初期化する(ステップS201)。具体的には、電力補正値特定部107は、リンクごとの統計消費電力補正比JSとして用いる統計消費電力補正比JSの値と、電力補正比として用いる電力補正比Jの値と、に「1.0」を設定する。なお、統計消費電力補正比JSは、リンクごとの統計消費電力補正比を有する配列やテーブルなどのデータ構造を有することを想定している。
【0103】
そして、リンク推定電力算出部104は、所定範囲内のリンクごとに、推定消費電力E0を算出する(ステップS202)。当該処理は、第一の実施形態における消費電力補正処理のステップS002の処理と同様である。したがって、取得したリンクIDで特定される各リンクについて、上記した演算により推定消費電力E0が算出され、リンクテーブル200の推定消費電力(E0)233に格納される。
【0104】
そして、リンク推定電力補正部105は、所定範囲内のリンクごとに、インターネット等のネットワークに接続された図示しない情報センターから、統計消費電力補正比JSの値を取得する(ステップS203)。具体的には、リンク推定電力補正部105は、ステップS202において推定消費電力E0を算出した対象のリンクについて、情報センターに当該リンクに関する統計消費電力補正比JSの値を要求し、取得する。そして、リンク推定電力補正部105は、リンクテーブル200の統計消費電力補正比235に統計消費電力補正比JSの各リンクに相当する比の値を格納する。
【0105】
そして、リンク推定電力補正部105は、所定範囲内のリンクごとに、推定消費電力E0を統計消費電力補正比JSで補正し、補正推定消費電力E1を算出する(ステップS204)。具体的には、リンク推定電力補正部105は、ステップS202にて特定したリンクIDにより特定される各リンクについて、推定消費電力E0に当該リンクに関する統計消費電力補正比JSの値を乗算することで、補正推定消費電力E1を算出する。そして、リンク推定電力補正部105は、算出した各リンクのE1を、リンクテーブル200の補正推定消費電力(E1)234に格納する。
【0106】
そして、実消費電力特定部106は、現在地の直前に走行した直前リンクの実消費電力Erealを特定する情報を取得する(ステップS205)。当該処理は、第一の実施形態における消費電力補正処理のステップS002の処理と同様である。したがって、当該直前に走行したリンクにおいて実際に消費した電力の積算量を特定する実消費電力(Ereal)504の値が取得される。
【0107】
そして、電力補正値特定部107は、取得したErealの情報が、推定消費電力の最大誤差率を含めた値であるEmaxの値を超えているか否かを判定する(ステップS206)。具体的には、電力補正値特定部107は、ステップS205にて取得した直前に走行したリンクの実消費電力であるErealの値と、当該リンクについて算出した補正推定消費電力E1の値に所定の最大誤差率(例えば、120%)をかけて算出した値であるEmaxの値と、を比較し、Erealの値がEmaxの値を上回るか否かを判定する。Erealの値がEmaxの値を上回らない場合、すなわち同値かそれ以下である場合、電力補正値特定部107は、制御を後述するステップS208へ進める。
【0108】
Erealの値がEmaxの値を上回る場合(ステップS206にて「Yes」の場合)、電力補正値特定部107は、電力補正比JにErealをEmaxで割った値を設定する(ステップS207)。
【0109】
そして、電力補正値特定部107は、取得したErealの情報が、推定消費電力の最小誤差率を含めた値であるEminの値を下回るか否かを判定する(ステップS208)。具体的には、電力補正値特定部107は、ステップS205にて取得した直前に走行したリンクの実消費電力であるErealの値と、当該リンクについて算出した補正推定消費電力E1の値に所定の最小誤差率(例えば、80%)をかけて算出した値であるEminの値と、を比較し、Erealの値がEminの値を下回るか否かを判定する。Erealの値がEmaxの値を下回らない場合、すなわち同値かそれ以上である場合、電力補正値特定部107は、制御を後述するステップS210へ進める。
【0110】
Erealの値がEminの値を下回る場合(ステップS208にて「Yes」の場合)、電力補正値特定部107は、電力補正比Jに「1.0」を設定する(ステップS209)。そして、電力補正値特定部107は、制御を後述するステップS210へ進める。
【0111】
そして、電力補正値特定部107は、電力補正比Jの値を、当該直前に走行したリンクを特定するリンクIDと対応付けて情報センターへ送信する(ステップS210)。なお、当該処理において、電力補正比Jの値が所定の範囲を逸脱する(例えば、所定の下限値と上限値の間の範囲に含まれない)場合には、電力補正値特定部107は、電力補正比Jの値を下限値あるいは上限値に丸めて情報センターへ送信するようにしてもよい。そして、電力補正値特定部107は、ステップS203に処理を戻す。
【0112】
なお、情報センターへ送信された電力補正比Jの値は、情報センターが有する演算装置等により、対応するリンクごとに他の車両に搭載されたナビゲーション装置100から送信された電力補正比の値と合わせて統計処理されて、統計消費電力補正比JSに組み込まれることとなる。
【0113】
以上が、第二の実施形態における消費電力補正処理の処理フローである。第二の実施形態における消費電力補正処理によれば、直前に走行を終えたリンクについての推定される電力消費量と、統計的に処理された他のナビゲーション装置の情報をも含む実際に消費した電力消費量との乖離に基づいて、以降の消費電力推定に用いる補正比を変更することができる。これにより、例えば、自車が向かう先のリンクを既に走行している車両から提供される実測の値を補正量に反映させて、より精度の高い推定をすることができるといえる。
【0114】
なお、上記第二の実施形態においては、電力補正比に基づいて推定消費電力を補正しているが、これに限られない。すなわち、上述した第一の実施形態におけるように、電力補正値に基づいて推定消費電力を補正してもよいし、第一の実施形態の変形例に示したように、電力補正値をリンクの距離に応じた比で修正して補正に用いるようにしてもよい。このようにすることで、さらに精度の高い推定を行うことができるようになる。
【0115】
図14および図15は、上記した実施形態を具体的なアプリケーション機能(使用者が意図して使用する機能)として実現させる場合についての、処理フローと画面表示例とを示す図である。
【0116】
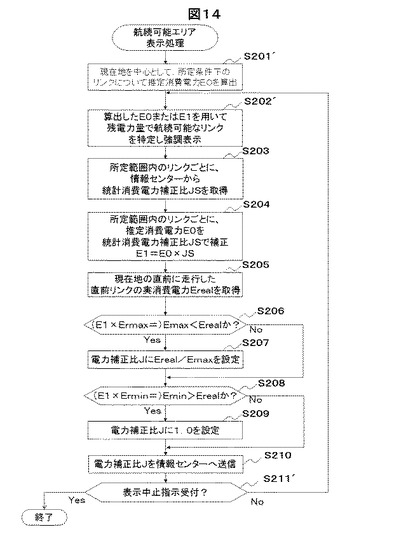
図14は、第二の実施形態における推定消費電力の補正に基づくアプリケーション機能として、航続可能エリア表示処理の処理フローを示す。以下に当該処理フローの説明を説明するが、基本的には第二の実施形態における処理フローと同様であるため、相違を中心に説明する。なお、航続可能エリア表示処理は、残電力で移動可能な領域を地図上に重畳させて表示する機能を実現させる処理をいい、ナビゲーション装置100に対して所定の機能開始指示を受け付けると、開始される。
【0117】
まず、リンク推定電力算出部104は、所定条件下のリンクについて推定消費電力E0を算出する(ステップS201´)。当該処理は、第二の実施形態における推定消費電力の補正処理のステップS201およびステップS202とほぼ同様の処理を含む。しかし、例えば、現在地から所定の距離内のリンクを対象とする、または現在地と車両の向きに基づいて所定の方位にあるリンクを対象とする、または所定の道路種別(例えば、高速道路、国道、都道府県道等)に限定されたリンクを対象とする、または地図データが複数の階層を用いて詳細化されている(主要道路のみの階層、詳細道路を含む詳細な階層等)ものであれば、所定の階層に限定されたリンクを対象とする、あるいはこれらの組み合わせにより、E0を算出する対象とするリンクを限定しうる点で、第二の実施形態と差異を有する。
【0118】
そして、リンク推定電力算出部104は、所定条件下のリンクごとに、推定消費電力E0を算出する。当該処理は、第一の実施形態における消費電力補正処理のステップS002の処理と同様である。したがって、特定したリンクIDで特定される各リンクについて、上記した演算により推定消費電力E0が算出され、リンクテーブル200の推定消費電力(E0)233に格納される。
【0119】
そして、基本制御部101は、算出された推定消費電力E0を用いて、残電力量で後続可能なリンクを特定し、地図データ上の該当するリンクを強調表示させる(ステップS202´)。その際、基本制御部101は、算出された推定消費電力E0を用いるのではなく、ステップS204において算出された統計消費電力補正比JSを用いてE0を補正したE1が存在する場合には、当該E1の値を優先的に用いる。なお、当該後続可能なリンクについては、当該リンクへ至る経路探索と同様に、リンクの推定消費電力E0あるいはE1の値を当該リンク走行により消費する電力量として扱い、最も消費する電力量が小さくなるよう経路を探索し、当該リンクへ到達しうるか否かを判定する。
【0120】
以降、ステップS203〜ステップS210については、第二の実施形態における推定消費電力の補正処理のステップS203〜ステップS210の処理と同様の処理が実施される。
【0121】
ステップS210の処理後、基本制御部101は、表示中止指示を受け付けたか否かを判定する(ステップS211´)。具体的には、基本制御部101は、使用者からナビゲーション装置100に対して、残電力で移動可能な領域を地図上に重畳させて表示する機能を実現させる処理の終了指示(例えば、機能の終了ボタンの押下)を受け付けたか否かを判定する。
【0122】
終了指示を受け付けた場合(ステップS211において「Yes」の場合)には、基本制御部101は、航続可能エリア表示処理を終了させる。
【0123】
終了指示を受け付けていない場合(ステップS211において「No」の場合)には、基本制御部101は、ステップS202´に制御を戻す。すなわち、補正されたE1等を用いて航続可能なリンクを強調表示する。
【0124】
以上が、航続可能エリア表示処理の処理フローである。当該処理によると、補正されたE1の値を用いて、残電力で移動可能なエリアを地図上に重畳表示することができる。
【0125】
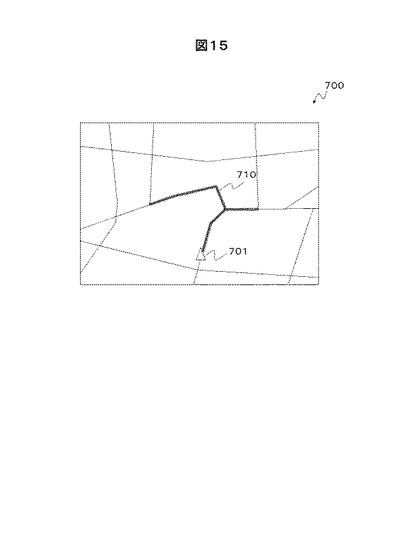
図15は、航続可能エリア表示処理において表示される地図の表示画面例700を示す図である。当該画面例700においては、現在地701が地図上に表示されているとともに、残電力で到達可能なリンク710について、リンクが太三本線表示されることで、強調されて表示されている。なお、当該強調表示は一例に過ぎず、他の方法により、例えば所定の時間間隔で明滅する明滅表示としてもよいし、他のリンクとは異なる色により彩色表示されるものであってもよい。
【0126】
以上、第二の実施形態の具体的な適用例について、図14、図15を用いて説明した。当該適用例によると、補正されたE1について、補正の度合いが変化することにより、新たにE1が求められ、それにより到達可能なエリアの表示が変更されて表示される。したがって、精度の高い到達範囲を表示することができるといえる。
【0127】
なお、上記実施形態においては、推定消費電力E0の値は、消費電力補正処理のフロー内で算出されるものであるが、これに限らず、地図情報を更新した際等にあらかじめ算出されるものであってもよい。このようにすることで、推定消費電力E0の演算に係る演算負荷を分散させることができるため、演算性能を抑えたコストパフォーマンス重視のハードウェア構成等においても本願発明を実現しやすくなる。
【0128】
さらに、上記第一の実施形態、第二の実施形態およびそれらの変形として記載されたそれぞれの発明技術の全てあるいはいくつかを組み合わせてもよい。
【0129】
以上、本発明について、実施形態に基づいて説明した。
【0130】
なお、上記の各実施形態では、本発明を電気自動車の車載ナビゲーション装置に適用した例について説明したが、本発明は電気自動車の車載ナビゲーション装置に限らず、燃料自動車に用いるナビゲーション装置や各種移動体のナビゲーション装置等、エネルギー消費量を計算する装置全般に適用することができる。
【符号の説明】
【0131】
1・・・演算処理部、2・・・ディスプレイ、3・・・記憶装置、4・・・音声出入力装置、5・・・入力装置、6・・・ROM装置、7・・・車速センサ、8・・・ジャイロセンサ、9・・・GPS受信装置、10・・・FM多重放送受信装置、11・・・ビーコン受信装置、12・・・通信装置、21・・・CPU、22・・・RAM、23・・・ROM、24・・・I/F、25・・・バス、30・・・ネットワーク、31・・・バッテリー電力監視ユニット、41・・・マイクロフォン、42・・・スピーカ、51・・・タッチパネル、52・・・ダイヤルスイッチ、100・・・ナビゲーション装置、101・・・基本制御部、102・・・入力受付部、103・・・出力処理部、104・・・リンク推定電力算出部、105・・・リンク推定電力補正部、106・・・実消費電力特定部、107・・・電力補正値特定部、200・・・リンクテーブル、300・・・車両情報テーブル、400・・・物理情報テーブル、500・・・走行履歴テーブル、600・・・画面例
【技術分野】
【0001】
本発明は、エネルギー消費量計算装置の技術に関するものである。
【背景技術】
【0002】
従来、ナビゲーション装置では、消費するエネルギーを予測し表示する技術が用いられている。特許文献1には、このようなナビゲーション装置についての技術が記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−107459号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のようなナビゲーション装置では、エネルギー保存則を応用して消費エネルギーを推定するが、例えば突発的な風の影響や路面状況等、全てのエネルギー推定要因を事前にモデリングするのは限界があり、推定値には一定の誤差が含まれる。しかし、当該誤差は無視できるほどの誤差とは限らず、推定精度にばらつきが生じる場合がある。したがって、移動可能な範囲の表示等において、予想の範囲と実際に移動可能な範囲と、に相違が出てしまう。
【0005】
本発明の目的は、より簡易な方法で、より高い精度の消費エネルギーの推定を実現する技術を提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決すべく、本発明に係るエネルギー消費量計算装置は、所定の区間におけるエネルギー消費量を推定するエネルギー消費量推定手段と、エネルギーを供給するエネルギー供給手段が前記所定の区間において実際に供給したエネルギー消費実績量を特定するエネルギー消費実績量特定手段と、前記エネルギー消費量推定手段が推定した前記所定の区間におけるエネルギー消費量と、当該所定の区間における前記エネルギー消費実績量特定手段が特定したエネルギー消費実績量と、の差に応じて、前記エネルギー消費量推定手段が推定した所定の区間のエネルギー消費量を補正するエネルギー消費量補正手段と、を備えることを特徴とする。
【0007】
また、本発明のエネルギー消費量計算方法は、エネルギー消費量計算装置によるエネルギー消費量計算方法であって、前記エネルギー消費量計算装置は、所定の区間におけるエネルギー消費量を推定するエネルギー消費量推定ステップと、エネルギーを供給するエネルギー供給手段が前記所定の区間において実際に供給したエネルギー消費実績量を特定するエネルギー消費実績量特定ステップと、前記エネルギー消費量推定ステップにおいて推定した前記所定の区間におけるエネルギー消費量と、当該所定の区間における前記エネルギー消費実績量特定ステップにおいて特定したエネルギー消費実績量と、の差に応じて、前記エネルギー消費量推定ステップにおいてが推定した所定の区間のエネルギー消費量を補正するエネルギー消費量補正ステップと、を実施することを特徴とする。
【図面の簡単な説明】
【0008】
【図1】ナビゲーション装置の概略構成図である。
【図2】リンクテーブルの構成を示す図である。
【図3】車両情報テーブルの構成例を示す図である。
【図4】物理情報テーブルの構成例を示す図である。
【図5】走行履歴テーブルの構成例を示す図である。
【図6】演算処理部の機能構成図である。
【図7】消費電力補正処理のフロー図である。
【図8】消費電力補正処理の概念を示す図である。
【図9】消費電力補正処理の概念を示す図である。
【図10】消費電力補正処理の変形例を示すフロー図である。
【図11】リンクテーブルの変形例の構成を示す図である。
【図12】消費電力補正処理の変形例を示すフロー図である。
【図13】移動可能範囲の表示例を示す図である。
【図14】航続可能エリア表示処理を示すフロー図である。
【図15】航続可能エリアの表示例を示す図である。
【発明を実施するための形態】
【0009】
以下に、本発明の第一の実施形態を適用した車載装置であるナビゲーション装置100について、図面を参照して説明する。
【0010】
図1に、ナビゲーション装置100の構成図を示す。ナビゲーション装置100は、演算処理部1と、ディスプレイ2と、記憶装置3と、音声入出力装置4(音声入力装置としてマイクロフォン41、音声出力装置としてスピーカ42を備える)と、入力装置5と、ROM装置6と、車速センサ7と、ジャイロセンサ8と、GPS(Global Positioning System)受信装置9と、FM多重放送受信装置10と、ビーコン受信装置11と、通信装置12と、を備えている。
【0011】
演算処理部1は、様々な処理を行う中心的ユニットである。例えば各種センサ7,8やGPS受信装置9、FM多重放送受信装置10等から出力される情報を基にして現在地を検出する。また、得られた現在地情報に基づいて、表示に必要な地図データを記憶装置3あるいはROM装置6から読み出す。
【0012】
また、演算処理部1は、読み出した地図データをグラフィックス展開し、そこに現在地を示すマークを重ねてディスプレイ2へ表示する。また、記憶装置3あるいはROM装置6に記憶されている地図データ等を用いて、現在地あるいはユーザから指示された出発地と、目的地(または、経由地や立ち寄り地)とを結ぶ最適な経路(推奨経路)を探索する。また、演算処理部1は、スピーカ42やディスプレイ2を用いてユーザを誘導する。
【0013】
ナビゲーション装置100の演算処理部1は、各デバイス間をバス25で接続した構成である。演算処理部1は、数値演算及び各デバイスを制御するといった様々な処理を実行するCPU(Central Processing Unit)21と、記憶装置3から読み出した地図データ、演算データなどを格納するRAM(Random Access Memory)22と、プログラムやデータを格納するROM(Read Only Memory)23と、各種ハードウェアを演算処理部1と接続するためのI/F(インターフェイス)24と、を有する。
【0014】
ディスプレイ2は、演算処理部1等で生成されたグラフィックス情報を表示するユニットである。ディスプレイ2は、液晶ディスプレイ、有機ELディスプレイなどで構成される。
【0015】
記憶装置3は、HDD(Hard Disk Drive)や不揮発性メモリカードといった、少なくとも読み書きが可能な記憶媒体で構成される。
【0016】
この記憶媒体には、通常の経路探索装置に必要な地図データ(地図上の道路を構成するリンクのリンクデータを含む)であるリンクテーブル200、車両の情報を格納する車両情報テーブル300、各種演算等に用いる物理定数等を格納する物理情報テーブル400、走行した履歴の情報を格納する走行履歴テーブル500等が記憶されている。
【0017】
図2は、リンクテーブル200の構成を示す図である。リンクテーブル200は、地図上の区画された領域であるメッシュの識別コード(メッシュID)201ごとに、そのメッシュ領域に含まれる道路を構成する各リンクのリンクデータ202を含んでいる。
【0018】
リンクデータ202は、リンクの識別子であるリンクID211ごとに、リンクを構成する2つのノード(開始ノード、終了ノード)の座標情報222と、リンクを含む道路の種別を示す道路種別223と、当該リンクの開始ノードに接続するリンクである開始接続リンクと、当該リンクの終了ノードに接続するリンクである終了接続リンクと、を特定する開始接続リンク、終了接続リンク224と、高さを考慮しない二次元平面上でのリンクの長さを示す2Dリンク長225と、高さを考慮したリンクの長さを示す3Dリンク長226と、当該リンク内に存在する上り坂部分の累積標高増加量を示すリンク内標高アップ距離227と、当該リンク内に存在する下り坂部分の累積標高減少量を示すリンク内標高ダウン距離228と、当該リンクの始点と終点の標高差を始点から終点までの距離で割った平均勾配を示す平均勾配値229と、当該リンクの平均的な路面抵抗係数を示す平均路面抵抗係数230と、当該リンクを走行する平均速度として予め記憶された平均速度推定値231と、当該リンクを走行する平均時間として予め記憶された平均リンク旅行時間232と、当該リンクを走行するのに必要と推定されるモデル上の推定消費電力(E0)233と、推定消費電力を実績に基づいて補正した値である補正推定消費電力(E1)234と、を含んでいる。
【0019】
なお、ここでは、リンクを構成する2つのノードについて開始ノードと終了ノードとを区別することで、同じ道路の上り方向と下り方向とを、それぞれ別のリンクとして管理するようにしている。
【0020】
図3は、車両情報テーブル300の構成を示す図である。車両情報テーブル300は、ナビゲーション装置100が搭載される車両についての種々の情報を含んでいる。すなわち、ナビゲーション装置100が搭載される車両の車種や型、グレード等に応じて、格納される情報が異なる。
【0021】
車両情報テーブル300は、車両の重量を特定する情報である車両重量(W)301と、車両の空気抵抗係数を特定する情報である空気抵抗係数(Cd)302と、車両前面の投影面積を特定する情報である車両前面投影面積(S)303と、基礎的な消費電力を特定する情報である基礎消費電力(Eeloss)304と、動力源(ガソリンや電気等)から取り出す走行エネルギーの変換効率を特定する情報である走行エネルギー変換効率(β)305と、電力の回生に関する効率を特定する情報である電力回生効率(γ)306と、を含んでいる。これらの各値は、複数の車両用の組合せが格納されていて、ナビゲーション装置100が車両に搭載される際に指定された当該車両のモデルに応じた値が選択的に有効化されるものであってもよいし、固定的に当該車両の情報が予め格納されていても良い。
【0022】
図4は、物理情報テーブル400の構成を示す図である。物理情報テーブル400は、予め定められた物理定数についての種々の情報を含んでいる。
【0023】
物理情報テーブル400は、重力加速度Gを特定する情報である重力加速度(g)401と、空気密度を特定する情報である空気密度(ρ)402と、を含んでいる。これらの各値は、ナビゲーション装置100が搭載される車両が販売される地域ごとにあらかじめ定められた値が複数含まれていて、車両へ搭載される際に選択的に有効化されるものであってもよいし、所定の情報が予め格納されていても良い。または、図示しないが、重力加速度および空気密度を測定するセンサ等を介して、ナビゲーション装置100が搭載された車両が存在する環境に応じた値がリアルタイムに反映されるようにしてもよい。
【0024】
図5は、走行履歴テーブル500の構成を示す図である。走行履歴テーブル500は、ナビゲーション装置100が搭載された車両が走行した履歴と、実際に消費したエネルギー(電力)についての種々の情報を含んでいる。
【0025】
走行履歴テーブル500は、走行したリンクを特定する情報であるリンクID501と、当該リンクへ進入した日時を特定する情報である進入日時502と、当該リンクから退出した日時を特定する情報である退出日時503と、当該リンクを走行する間に消費した電力を特定する情報である実消費電力(Ereal)504と、を含んでいる。これらの各値は、ナビゲーション装置100が起動している間、ナビゲーション装置100が備える履歴記憶機能により自動的に記録される。とくに、実消費電力504については、バッテリー電力監視ユニット31から定期的に(例えば、100msごとに)車内ネットワーク30上に発信されるバッテリーの消費量を、現在地が属するリンクごとに積算し、当該リンクから退出した際に退出した該リンクに対応付けて記録される。
【0026】
図1に戻って説明する。音声入出力装置4は、音声入力装置としてマイクロフォン41と、音声出力装置としてスピーカ42と、を備える。マイクロフォン41は、使用者やその他の搭乗者が発した声などのナビゲーション装置100の外部の音声を取得する。
【0027】
スピーカ42は、演算処理部1で生成された使用者へのメッセージを音声信号として出力する。マイクロフォン41とスピーカ42は、車両の所定の部位に、別個に配されている。ただし、一体の筐体に収納されていても良い。ナビゲーション装置100は、マイクロフォン41及びスピーカ42を、それぞれ複数備えることができる。
【0028】
入力装置5は、使用者からの指示を使用者による操作を介して受け付ける装置である。入力装置5は、タッチパネル51と、ダイヤルスイッチ52と、その他のハードスイッチ(図示しない)であるスクロールキー、縮尺変更キーなどで構成される。
【0029】
タッチパネル51は、ディスプレイ2の表示面側に搭載され、表示画面を透視可能である。タッチパネル51は、ディスプレイ2に表示された画像のXY座標と対応したタッチ位置を特定し、タッチ位置を座標に変換して出力する。タッチパネル51は、感圧式または静電式の入力検出素子などにより構成される。
【0030】
ダイヤルスイッチ52は、時計回り及び反時計回りに回転可能に構成され、所定の角度の回転ごとにパルス信号を発生し、演算処理部1に出力する。演算処理部1では、パルス信号の数から、回転角度を求める。
【0031】
ROM装置6は、CD-ROMやDVD-ROM等のROM(Read Only Memory)や、IC(Integrated Circuit)カードといった、少なくとも読み取りが可能な記憶媒体で構成されている。この記憶媒体には、例えば、動画データや、音声データなどが記憶されている。
【0032】
車速センサ7,ジャイロセンサ8およびGPS受信装置9は、ナビゲーション装置100で現在地を検出するために使用されるものである。
【0033】
車速センサ7は、車速を算出するのに用いる値を出力するセンサである。
【0034】
ジャイロセンサ8は、光ファイバジャイロや振動ジャイロ等で構成され、移動体の回転による角速度を検出するものである。
【0035】
GPS受信装置9は、GPS衛星からの信号を受信し移動体とGPS衛星間の距離と距離の変化率とを3個以上の衛星に対して測定することで移動体の現在地、進行速度および進行方位を測定するものである。
【0036】
FM多重放送受信装置10は、FM放送局から送られてくるFM多重放送信号を受信する。FM多重放送には、VICS(Vehicle Information Communication System:登録商標)情報の概略現況交通情報、規制情報、SA/PA(サービスエリア/パーキングエリア)情報、駐車場情報、天気情報などやFM多重一般情報としてラジオ局が提供する文字情報などがある。
【0037】
ビーコン受信装置11は、VICS情報などの概略現況交通情報、規制情報、SA/PA(サービスエリア/パーキングエリア)情報、駐車場情報、天気情報や緊急警報などを受信する。例えば、光により通信する光ビーコン、電波により通信する電波ビーコン等の受信装置である。
【0038】
通信装置12は、ナビゲーション装置100が搭載される車両に設けられている車内ネットワーク30を介して、他の装置と通信を行うためのネットワークインターフェース装置である。車内ネットワーク30は、例えば、CAN(Controller Area Netowork)やFlexRay等のプロトコルによって接続される機器が通信可能なネットワークであるが、これに限られるものではない。
【0039】
ナビゲーション装置100は、通信装置12および車内ネットワーク30を介して、車両に搭載されたエネルギーを供給するバッテリーに接続された装置であるバッテリー電力監視ユニット31等と通信を行うことが可能である。バッテリー電力監視ユニット31は、電気自動車等の車両に搭載された動力源となる電気を蓄積/放出するバッテリー装置のバッテリー容量を監視して管理するとともに、所定の周期で(例えば100ms周期で)、当該周期内において消費された電力の実績値をCAN上に送出する。したがってナビゲーション装置100の演算処理部1は、当該送出された消費電力の実績値を、通信装置12を介して取得することが可能である。
【0040】
図6は、演算処理部1の機能ブロック図である。図示するように、演算処理部1は、基本制御部101と、入力受付部102と、出力処理部103と、リンク推定電力算出部104と、リンク推定電力補正部105と、実消費電力特定部106と、電力補正値特定部107と、を有する。
【0041】
基本制御部101は、様々な処理を行う中心的な機能部であり、処理内容に応じて、他の処理部を制御する。また、各種センサ、GPS受信装置9等の情報を取得し、マップマッチング処理等を行って現在地と車両の正面が向いている方向である車両方位を特定する。また、随時、走行した日付および時刻と、位置と、を対応付けて、リンクごとに走行履歴を走行履歴テーブル500に記憶する。具体的には、基本制御部101は、走行履歴テーブル500に対して、現在地が属していたリンクのリンクIDをリンクID501へ格納し、当該リンクへ進入した日時を特定する情報を進入日時502へ格納し、当該リンクから退出した日時を特定する情報を退出日時503へ格納する。さらに、各処理部からの要求に応じて、現在時刻を出力する。また、現在地またはユーザから指示された出発地と、目的地とを結ぶ最適な経路(推奨経路)を探索し、推奨経路から逸脱しないよう、スピーカ42やディスプレイ2を用いてユーザを経路誘導する。また、基本制御部101は、車載の動力源であるバッテリーの残量を用いて移動可能な範囲を、予測される消費電力を用いて算出し、地図上の移動可能な範囲より遠い部分を暗く表示するよう出力処理部103に指示して、図13に示すように移動可能範囲を強調して表示する。なお、図13は、移動可能範囲表示画面600の例であり、現在地を示すマーク601と、移動可能範囲610と、移動可能でない範囲620と、が示されており、移動可能でない範囲620に相当する地図上の領域は、移動可能範囲610に比べて暗く表示されている。
【0042】
入力受付部102は、入力装置5またはマイクロフォン41を介して入力された使用者からの指示を受け付け、その要求内容を基本制御部101へ送信する。
【0043】
出力処理部103は、表示させる画面情報を受け取り、ディスプレイ2に描画するための信号に変換してディスプレイ2に対して描画する指示を行う。
【0044】
リンク推定電力算出部104は、所定の範囲のリンクのそれぞれについて、走行するのに必要なエネルギーである電力の推定値を算出する。具体的には、リンク推定電力算出部104は、所定の範囲内(例えば、現在地を中心とする半径5km以内、あるいは推奨経路が設定されている場合には、当該推奨経路を構成するリンクの一部または全部)に含まれるリンクのそれぞれについて、エネルギー保存則を利用した所定のモデルデータに従って、車両の情報と、道路の情報と、を用いて、走行にかかる基本的な電力である推定消費電力E0を算出する。
【0045】
より具体的に、リンク推定電力算出部104がリンクごとの推定消費電力E0を算出する手段について説明する。リンク推定電力算出部104は、所定のリンクについて、車両加速に伴うエネルギー損失である加速抵抗損失電力Ep1を、下式(1)に従って算出する。
【0046】
Ep1=車両重量(Vehicle_weight)×車両走行加速度(dV/dt)×移動距離(L)×走行エネルギー変換効率(β)・・・式(1)
【0047】
なお、ここで、リンク推定電力算出部104は、車両重量は、車両情報テーブル300の車両重量(W)301から取得し、車両走行加速度は、リンクテーブル200の平均速度推定値231を平均リンク旅行時間232で除算して求め、移動距離は、リンクテーブル200の3Dリンク長226から取得し、走行エネルギー変換効率は、車両情報テーブル300の走行エネルギー変換効率(β)305から取得して、上記式(1)を演算する。
【0048】
そして、リンク推定電力算出部104は、当該リンクについて、車両減速に伴うエネルギー利得である減速抵抗利得電力Ep1´を、下式(1)´に従って算出する。
【0049】
Ep1´=車両重量(Vehicle_weight)×車両走行加速度(dV/dt)×移動距離(L)×電力回生効率(γ)・・・式(1)´
【0050】
なお、ここで、リンク推定電力算出部104は、車両重量は、車両情報テーブル300の車両重量(W)301から取得し、車両走行加速度は、リンクテーブル200の平均速度推定値231を平均リンク旅行時間232で除算して求め、移動距離は、リンクテーブル200の3Dリンク長226から取得し、電力回生効率は、車両情報テーブル300の電力回生効率(γ)306から取得して、上記式(1)´を演算する。
【0051】
また、リンク推定電力算出部104は、当該リンクについて、相対的な標高の増加に伴うエネルギー損失である勾配抵抗損失電力Ep2を、下式(2)に従って算出する。
【0052】
Ep2=車両重量(Vehicle_weight)×重力加速度(g)×リンク内標高アップ距離(ΔH)×移動距離(L)×走行エネルギー変換効率(β)・・・式(2)
【0053】
なお、ここで、リンク推定電力算出部104は、車両重量は、車両情報テーブル300の車両重量(W)301から取得し、重力加速度は、物理情報テーブル400の重力加速度401から取得し、リンク内標高アップ距離は、リンクテーブル200のリンク内標高アップ距離227から取得し、移動距離は、リンクテーブル200の3Dリンク長226から取得し、走行エネルギー変換効率は、車両情報テーブル300の走行エネルギー変換効率(β)305から取得して、上記式(2)を演算する。
【0054】
そして、リンク推定電力算出部104は、当該リンクについて、相対的な標高の減少に伴うエネルギー利得である勾配抵抗利得電力Ep2´を、下式(2)´に従って算出する。
【0055】
Ep2´=車両重量(Vehicle_weight)×重力加速度(g)×リンク内標高ダウン距離(ΔH´)×移動距離(L)×電力回生効率(γ)・・・式(2)´
【0056】
なお、ここで、リンク推定電力算出部104は、車両重量は、車両情報テーブル300の車両重量(W)301から取得し、重力加速度は、物理情報テーブル400の重力加速度401から取得し、リンク内標高ダウン距離は、リンクテーブル200のリンク内標高ダウン距離228から取得し、移動距離は、リンクテーブル200の3Dリンク長226から取得し、走行エネルギー変換効率は、車両情報テーブル300の電力回生効率(γ)306から取得して、上記式(2)´を演算する。
【0057】
また、リンク推定電力算出部104は、当該リンクについて、路面との摩擦抵抗に伴うエネルギー損失である路面抵抗損失電力Ep3を、下式(3)に従って算出する。
【0058】
Ep3=車両重量(Vehicle_weight)×重力加速度(g)×路面抵抗係数(Road_resistance_coefficient)×垂直抗力補正係数(cosθ)×移動距離(L)×走行エネルギー変換効率(β)・・・式(3)
【0059】
なお、ここで、リンク推定電力算出部104は、車両重量は、車両情報テーブル300の車両重量(W)301から取得し、重力加速度は、物理情報テーブル400の重力加速度401から取得し、路面抵抗係数は、リンクテーブル200の平均路面抵抗係数230から取得し、垂直抗力補正係数は、リンクテーブル200の3Dリンク長226を2Dリンク長225で除算した値を算出して用い、移動距離は、リンクテーブル200の3Dリンク長226から取得し、走行エネルギー変換効率は、車両情報テーブル300の走行エネルギー変換効率(β)305から取得して、上記式(3)を演算する。
【0060】
また、リンク推定電力算出部104は、当該リンクについて、空気抵抗に伴うエネルギー損失である空気抵抗損失電力Ep4を、下式(4)に従って算出する。
【0061】
Ep4=空気抵抗係数(Aerodynamics_coefficient)×空気密度(Rou_a)×車両前面投影面積(Front_projection_area)×車両走行速度(V)の二乗×移動距離(L)×走行エネルギー変換効率(β)・・・式(4)
【0062】
なお、ここで、リンク推定電力算出部104は、空気抵抗係数は、車両情報テーブル300の空気抵抗係数(Cd)302から取得し、空気密度は、物理情報テーブル400の空気密度(ρ)402から取得し、車両前面投影面積は、車両情報テーブル300の車両前面投影面積(S)303から取得し、車両走行速度は、リンクテーブル200の平均速度推定値231から取得し、移動距離は、リンクテーブル200の3Dリンク長226から取得し、走行エネルギー変換効率は、車両情報テーブル300の走行エネルギー変換効率(β)305から取得して、上記式(4)を演算する。
【0063】
また、リンク推定電力算出部104は、リンク毎に、上記した式(1)、式(1)´、式(2)、式(2)´、式(3)、式(4)により求めたEp1、Ep1´、Ep2、Ep2´、Ep3、Ep4を合算して、全走行消費電力EpALL_RUNを算出する。
【0064】
また、リンク推定電力算出部104は、当該リンクにおいて、車両電装品が消費する電力損失EpALL_UNITを、下式(5)に従って算出する。
【0065】
EpALL_UNIT=基礎消費電力(Eeloss)×平均リンク旅行時間(T)・・・式(5)
【0066】
なお、ここで、リンク推定電力算出部104は、基礎消費電力は、車両情報テーブル300の基礎消費電力(Eeloss)304から取得して、平均リンク旅行時間は、リンクテーブル200の平均リンク旅行時間232から取得して、上記式(5)を演算する。
【0067】
そして、リンク推定電力算出部104は、リンクごとに、当該リンクにおける推定消費電力E0として、上記全走行消費電力EpALL_RUNと、車両電装品が消費する電力損失EpALL_UNITと、を合計した値を算出する。
【0068】
リンク推定電力補正部105は、電力補正値特定部107が特定した電力補正値を用いて、リンク推定電力算出部104が算出した推定消費電力E0を補正し、補正推定消費電力E1を算出する。
【0069】
実消費電力特定部106は、実際に使用された電力を、リンクごとに特定する。具体的には、実消費電力特定部106は、現在地が属していたリンクごとに、当該リンクに現在地が属していた期間にバッテリー電力監視ユニット31から車内ネットワーク30へ所定周期で送出された消費電力の量を積算することで消費電力を特定する。そして、走行履歴テーブル500に退出日時が記録されたリンクについて、特定した消費電力を対応付けて実消費電力(Ereal)504へ格納する。
【0070】
電力補正値特定部107は、実消費電力と、推定消費電力と、の差に基づいて、推定消費電力を補正するための補正値を特定する。具体的には、電力補正値特定部107は、推定消費電力の最大誤差率を含めた値を実消費電力が越えている場合には、その超過度合いに応じて推定消費電力を増加させる補正値を算出し、推定消費電力の最小誤差率を含めた値を実消費電力が下回る場合には、推定消費電力を維持する補正値を算出し、推定消費電力の最小誤差率を含めた値と推定消費電力の最大誤差率を含めた値との範囲内に実消費電力が収まる場合には、既に設定された補正値と同一の補正値を特定する。
【0071】
上記した演算処理部1の各機能部、すなわち基本制御部101、入力受付部102、出力処理部103、リンク推定電力算出部104、リンク推定電力補正部105、実消費電力特定部106、電力補正値特定部107は、CPU21が所定のプログラムを読み込み実行することにより構築される。そのため、RAM22には、各機能部の処理を実現するためのプログラムが記憶されている。
【0072】
なお、上記した各構成要素は、ナビゲーション装置100の構成を、理解を容易にするために、主な処理内容に応じて分類したものである。そのため、構成要素の分類の仕方やその名称によって、本願発明が制限されることはない。ナビゲーション装置100の構成は、処理内容に応じて、さらに多くの構成要素に分類することもできる。また、1つの構成要素がさらに多くの処理を実行するように分類することもできる。
【0073】
また、各機能部は、ハードウェア(ASIC、GPUなど)により構築されてもよい。また、各機能部の処理が一つのハードウェアで実行されてもよいし、複数のハードウェアで実行されてもよい。
【0074】
[動作の説明]次に、ナビゲーション装置100の動作について説明する。図7は、消費電力補正処理のフロー図である。このフローは、ナビゲーション装置100が稼働を開始すると、開始される。
【0075】
まず、電力補正値特定部107は、電力補正値Jを初期化する(ステップS001)。具体的には、電力補正値特定部107は、電力補正値として用いる電力補正値Jの値にゼロを設定する。
【0076】
そして、リンク推定電力算出部104は、所定範囲内のリンクごとに、推定消費電力E0を算出する(ステップS002)。具体的には、リンク推定電力算出部104は、基本制御部101から現在地を特定する情報を取得し、当該現在地を基準とした所定の範囲(例えば、現在地を中心とする半径5km以内、あるいは推奨経路が設定されている場合には、当該推奨経路を構成するリンクの一部または全部)に含まれる1または複数のリンクの抽出を基本制御部101に依頼して、基本制御部101から抽出されたリンクのリンクIDを取得する。そして、取得したリンクIDで特定される各リンクについて、上記した演算により推定消費電力E0を算出し、リンクテーブル200の推定消費電力(E0)233に格納する。
【0077】
そして、リンク推定電力補正部105は、所定範囲内のリンクごとに、推定消費電力E0を電力補正値Jで補正し、補正推定消費電力E1を算出する(ステップS003)。具体的には、リンク推定電力補正部105は、ステップS002にて特定したリンクIDにより特定される各リンクについて、推定消費電力E0に電力補正値Jの値を加算して、補正推定消費電力E1を算出する。そして、リンク推定電力補正部105は、算出した各リンクのE1を、リンクテーブル200の補正推定消費電力(E1)234に格納する。
【0078】
そして、実消費電力特定部106は、現在地の直前に走行した直前リンクの実消費電力Erealを特定する情報を取得する(ステップS004)。具体的には、実消費電力特定部106は、現在地が属するリンクのリンクIDを基本制御部101から取得し、現在地が属するリンクの直前に走行したリンクについて走行履歴テーブル500を検索して特定する。そして、当該リンクにおいて実際に消費した電力の積算量を特定する実消費電力(Ereal)504の値を取得する。
【0079】
そして、電力補正値特定部107は、取得したErealの情報が、推定消費電力の最大誤差率を含めた値であるEmaxの値を超えているか否かを判定する(ステップS005)。具体的には、電力補正値特定部107は、ステップS004にて取得した直前に走行したリンクの実消費電力であるErealの値と、当該リンクについて算出した補正推定消費電力E1の値に所定の最大誤差率(例えば、120%)をかけて算出した値であるEmaxの値と、を比較し、Erealの値がEmaxの値を上回るか否かを判定する。なお、最大誤差率は、予め定められた許容できる最大の誤差の範囲を特定する値である。Erealの値がEmaxの値を上回らない場合、すなわち同値かそれ以下である場合、電力補正値特定部107は、制御を後述するステップS007へ進める。
【0080】
Erealの値がEmaxの値を上回る場合(ステップS005にて「Yes」の場合)、電力補正値特定部107は、電力補正値JにErealとEmaxの差分を設定する(ステップS006)。具体的には、電力補正値特定部107は、ErealからEmaxの値を減算し、減算した値を電力補正値Jとして設定する。
【0081】
そして、電力補正値特定部107は、取得したErealの情報が、推定消費電力の最小誤差率を含めた値であるEminの値を下回るか否かを判定する(ステップS007)。具体的には、電力補正値特定部107は、ステップS004にて取得した直前に走行したリンクの実消費電力であるErealの値と、当該リンクについて算出した補正推定消費電力E1の値に所定の最小誤差率(例えば、80%)をかけて算出した値であるEminの値と、を比較し、Erealの値がEminの値を下回るか否かを判定する。なお、最小誤差率は、予め定められた許容できる最小の誤差の範囲を特定する値である。Erealの値がEmaxの値を下回らない場合、すなわち同値かそれ以上である場合、電力補正値特定部107は、制御をステップS002へ戻す。
【0082】
Erealの値がEminの値を下回る場合(ステップS007にて「Yes」の場合)、電力補正値特定部107は、電力補正値Jにゼロを設定する(ステップS008)。具体的には、電力補正値特定部107は、電力補正値Jをゼロに設定する。そして、電力補正値特定部107は、制御をステップS002へ戻す。
【0083】
以上が、消費電力補正処理の処理フローである。消費電力補正処理によれば、直前に走行を終えたリンクについての推定される電力消費量と、実際に消費した電力消費量との乖離に基づいて、以降の消費電力推定に用いる補正値を変更することができる。つまり、推定されたエネルギー消費量と、エネルギー消費の実績量と、の差が所定の閾値以上であれば、推定した所定の区間のエネルギー消費量を補正することができるといえる。これにより、例えば、風の強い日に、風により変化する消費量を実測値に基づいて特定し、補正量に反映させて、より精度の高い推定をすることができるといえる。特に、電気自動車(EV)では、バッテリーの性能等を考慮すると、動力源となる電気を蓄積可能な量が十分に大きいとはいえないため、航続可能距離が予想外の外的要因により受ける影響が相対的に大きいことを考慮すると、精度の高い推定が可能となることの効果は大きいといえる。
【0084】
図8(a)、図8(b)および図9、を用いて、消費電力補正処理の概念を説明する。図8(a)は、実消費電力Erealの値が、当該リンクの推定消費電力E1に最大誤差率を加味したEmaxの値を超える場合のJの値の特定処理の概要を示す図である。すなわち、当該状況では、事前に推定された推定消費電力(E0)500に電力補正値J501を加えた補正推定消費電力(E1)502に最小誤差率Erminを反映させたEmin510の値と、当該補正推定消費電力(E1)502に最大誤差率Ermaxを反映させたEmax511の値と、が特定されているものとする。ここで、実消費電力Ereal520の値はEmaxを超えているため、その超過分521を用いて、電力補正値Jが更新される。
【0085】
図8(b)は、実消費電力Erealの値が、当該リンクの推定消費電力E1に最大誤差率を加味したEmaxの値以下であって、当該リンクの推定消費電力E1に最小誤差率を加味したEminの値以上である場合のJの値の特定処理の概要を示す図である。すなわち、当該状況では、事前に推定された推定消費電力(E0)500に電力補正値J501を加えた補正推定消費電力(E1)502に最小誤差率Erminを反映させたEmin510の値と、当該補正推定消費電力(E1)502に最大誤差率Ermaxを反映させたEmax511の値と、が特定されているものとする。ここで、実消費電力Ereal520の値はEmin以上Emax以下であるため、電力補正値Jは更新されず、維持される。
【0086】
図9は、実消費電力Erealの値が、当該リンクの推定消費電力E1に最小誤差率を加味したEminの値を下回る場合のJの値の特定処理の概要を示す図である。すなわち、当該状況では、事前に推定された推定消費電力(E0)500に電力補正値J501を加えた補正推定消費電力(E1)502に最小誤差率Erminを反映させたEmin510の値と、当該補正推定消費電力(E1)502に最大誤差率Ermaxを反映させたEmax511の値と、が特定されているものとする。ここで、実消費電力Ereal520の値はEminを下回るため、電力補正値Jにはゼロが設定される。なお、ここで、電力補正値Jの値をEminとの差分としていないのは、推定する消費電力量が増える場合には、走行可能距離が短くなる等運転上の支障が出る可能性が高いのに対して、消費電力量が減る場合には走行可能距離が長くなる等の状況が考えられ、そのような場合に運転上の支障は出にくいと予想されるからである。
【0087】
以上、本発明の第一の実施形態について説明した。
【0088】
本発明の第一の実施形態によると、ナビゲーション装置100は、より簡易な方法で、より高い精度の消費エネルギーの推定を実現することができる。より具体的には、ナビゲーション装置100は、所定のモデルに従ってリンクの走行に係る消費エネルギーを算出した推定値を、実績値と推定値との差分に基づく補正値により補正して、消費エネルギーの推定を行うため、モデルに含まれない環境誤差等による影響を考慮した電力消費量の推定を行うことができるといえる。このことは、例えば、当該補正した推定消費エネルギー(電力)を用いて、航続可能範囲を算出し、地図上の当該範囲外の部分を暗く表示して航続可能範囲を強調して表示する機能を実現する場合において、より精度の高い機能を実現することができるといえる。その他、推奨経路に沿って経路誘導を行う場合に、使用エネルギーの予測値およびエネルギーの補充可能な施設(充電スタンド等)の位置の情報を用いて、エネルギーの補充場所について注意喚起を行う機能に応用することもできる。その他、エネルギーの予測消費量が最も少なくなる経路を優先的に探索するいわゆるエコロジー経路探索機能等の機能を実現する場合においても、より精度の高い機能を実現することができるようになるといえる。
【0089】
本発明は、上記第一の実施形態に制限されない。上記第一の実施形態は、本発明の技術的思想の範囲内で様々な変形が可能である。例えば、上記第一の実施形態の消費電力補正処理においては、電力補正値Jを推定消費電力E0に加算して各リンクの消費電力を補正しているが、これに限られない。例えば、電力補正値Jを電力補正比Jに置き代えて、電力補正比Jの値を推定消費電力E0の値に乗算して補正を行うようにしてもよい。このように変形すると、実際にはリンク毎に異なるリンク長の差異による補正度合いの相違を吸収することが可能となり、より現実に即した推定を行うことができるようになる。このような変形例について、図10を用いて具体的に説明する。
【0090】
図10は、消費電力補正処理の変形例を示すフロー図である。当該変形例においては、基本的に第一の実施形態に示したフロー図と同様であるが、一部異なる処理が存在する。そのため、相違点を中心に説明する。
【0091】
第一の実施形態の消費電力補正処理のステップS001では、電力補正値Jをゼロで初期化しているが、当該処理に相当するステップS101では、電力補正比Jを「1.0」で初期化している(ステップS101)。
【0092】
また、ステップS103では、所定範囲内のリンクごとに、推定消費電力E0に電力補正比Jを乗算することで補正推定消費電力E1を算出する(ステップS103)。
【0093】
また、ステップS106の処理は、Erealの値がEmaxの値を超える場合の処理であるが、電力補正比JにErealをEmaxで割った値を設定する(ステップS106)。
【0094】
また、ステップS108の処理は、Erealの値がEminの値を下回る場合の処理であるが、電力補正比Jに初期値「1.0」を設定する(ステップS108)。
【0095】
以上が、変形例の説明である。以上のように変形することで、各リンクの距離の相違を考慮した補正を行うことができるため、ナビゲーション装置100は、より現実に即した推定を行うことができるようになるといえる。
【0096】
なお、上記した第一の実施形態の変形例では、電力補正値Jを電力補正比Jに置き換えたが、これに限られない。例えば、第一の実施形態における消費電力補正処理のステップS003において、Erealを取得したリンクの距離と、補正対象のリンクの距離との比を電力補正値Jの値に乗じて換算電力補正値J´を算出し、当該換算電力補正値J´を補正対象のリンクの推定消費電力E0に加算し、補正推定消費電力E1を算出するようにしてもよい。
【0097】
また、上記した第一の実施形態においては、他の車両に搭載されたナビゲーション装置100が使用した実績値を流用することはできないが、ナビゲーション装置100が、他のナビゲーション装置100において実測された補正値を利用するようにしてもよい。このような第二の実施形態について、以下に説明する。
【0098】
第二の実施形態は、上記した第一の実施形態と基本的に同様に構成される。そのため、同様の構成についての説明は省略して説明する。ナビゲーション装置100は、第一の実施形態と同様の構成に加えて、さらに、外部のネットワーク、例えばインターネット等に接続するための携帯電話網等を利用した無線通信装置を備える。したがって、外部のネットワークを介して、他の装置と通信を行うことができる。
【0099】
また、図11に示すように、第一の実施形態におけるリンクテーブル200に、さらに、リンクID211ごとのデータとして、統計的に処理された消費電力の補正を行うための補正比の値である統計消費電力補正比235を備える。
【0100】
統計消費電力補正比235は、上記した無線通信装置を介して、ネットワークに接続された図示しない情報センター等から受信する電力補正比を格納する。
【0101】
図12は、第二の実施形態における消費電力補正処理のフローを示す図である。このフローは、ナビゲーション装置100が稼働を開始すると、開始される。
【0102】
まず、電力補正値特定部107は、統計消費電力補正比JSと、電力補正比Jと、を初期化する(ステップS201)。具体的には、電力補正値特定部107は、リンクごとの統計消費電力補正比JSとして用いる統計消費電力補正比JSの値と、電力補正比として用いる電力補正比Jの値と、に「1.0」を設定する。なお、統計消費電力補正比JSは、リンクごとの統計消費電力補正比を有する配列やテーブルなどのデータ構造を有することを想定している。
【0103】
そして、リンク推定電力算出部104は、所定範囲内のリンクごとに、推定消費電力E0を算出する(ステップS202)。当該処理は、第一の実施形態における消費電力補正処理のステップS002の処理と同様である。したがって、取得したリンクIDで特定される各リンクについて、上記した演算により推定消費電力E0が算出され、リンクテーブル200の推定消費電力(E0)233に格納される。
【0104】
そして、リンク推定電力補正部105は、所定範囲内のリンクごとに、インターネット等のネットワークに接続された図示しない情報センターから、統計消費電力補正比JSの値を取得する(ステップS203)。具体的には、リンク推定電力補正部105は、ステップS202において推定消費電力E0を算出した対象のリンクについて、情報センターに当該リンクに関する統計消費電力補正比JSの値を要求し、取得する。そして、リンク推定電力補正部105は、リンクテーブル200の統計消費電力補正比235に統計消費電力補正比JSの各リンクに相当する比の値を格納する。
【0105】
そして、リンク推定電力補正部105は、所定範囲内のリンクごとに、推定消費電力E0を統計消費電力補正比JSで補正し、補正推定消費電力E1を算出する(ステップS204)。具体的には、リンク推定電力補正部105は、ステップS202にて特定したリンクIDにより特定される各リンクについて、推定消費電力E0に当該リンクに関する統計消費電力補正比JSの値を乗算することで、補正推定消費電力E1を算出する。そして、リンク推定電力補正部105は、算出した各リンクのE1を、リンクテーブル200の補正推定消費電力(E1)234に格納する。
【0106】
そして、実消費電力特定部106は、現在地の直前に走行した直前リンクの実消費電力Erealを特定する情報を取得する(ステップS205)。当該処理は、第一の実施形態における消費電力補正処理のステップS002の処理と同様である。したがって、当該直前に走行したリンクにおいて実際に消費した電力の積算量を特定する実消費電力(Ereal)504の値が取得される。
【0107】
そして、電力補正値特定部107は、取得したErealの情報が、推定消費電力の最大誤差率を含めた値であるEmaxの値を超えているか否かを判定する(ステップS206)。具体的には、電力補正値特定部107は、ステップS205にて取得した直前に走行したリンクの実消費電力であるErealの値と、当該リンクについて算出した補正推定消費電力E1の値に所定の最大誤差率(例えば、120%)をかけて算出した値であるEmaxの値と、を比較し、Erealの値がEmaxの値を上回るか否かを判定する。Erealの値がEmaxの値を上回らない場合、すなわち同値かそれ以下である場合、電力補正値特定部107は、制御を後述するステップS208へ進める。
【0108】
Erealの値がEmaxの値を上回る場合(ステップS206にて「Yes」の場合)、電力補正値特定部107は、電力補正比JにErealをEmaxで割った値を設定する(ステップS207)。
【0109】
そして、電力補正値特定部107は、取得したErealの情報が、推定消費電力の最小誤差率を含めた値であるEminの値を下回るか否かを判定する(ステップS208)。具体的には、電力補正値特定部107は、ステップS205にて取得した直前に走行したリンクの実消費電力であるErealの値と、当該リンクについて算出した補正推定消費電力E1の値に所定の最小誤差率(例えば、80%)をかけて算出した値であるEminの値と、を比較し、Erealの値がEminの値を下回るか否かを判定する。Erealの値がEmaxの値を下回らない場合、すなわち同値かそれ以上である場合、電力補正値特定部107は、制御を後述するステップS210へ進める。
【0110】
Erealの値がEminの値を下回る場合(ステップS208にて「Yes」の場合)、電力補正値特定部107は、電力補正比Jに「1.0」を設定する(ステップS209)。そして、電力補正値特定部107は、制御を後述するステップS210へ進める。
【0111】
そして、電力補正値特定部107は、電力補正比Jの値を、当該直前に走行したリンクを特定するリンクIDと対応付けて情報センターへ送信する(ステップS210)。なお、当該処理において、電力補正比Jの値が所定の範囲を逸脱する(例えば、所定の下限値と上限値の間の範囲に含まれない)場合には、電力補正値特定部107は、電力補正比Jの値を下限値あるいは上限値に丸めて情報センターへ送信するようにしてもよい。そして、電力補正値特定部107は、ステップS203に処理を戻す。
【0112】
なお、情報センターへ送信された電力補正比Jの値は、情報センターが有する演算装置等により、対応するリンクごとに他の車両に搭載されたナビゲーション装置100から送信された電力補正比の値と合わせて統計処理されて、統計消費電力補正比JSに組み込まれることとなる。
【0113】
以上が、第二の実施形態における消費電力補正処理の処理フローである。第二の実施形態における消費電力補正処理によれば、直前に走行を終えたリンクについての推定される電力消費量と、統計的に処理された他のナビゲーション装置の情報をも含む実際に消費した電力消費量との乖離に基づいて、以降の消費電力推定に用いる補正比を変更することができる。これにより、例えば、自車が向かう先のリンクを既に走行している車両から提供される実測の値を補正量に反映させて、より精度の高い推定をすることができるといえる。
【0114】
なお、上記第二の実施形態においては、電力補正比に基づいて推定消費電力を補正しているが、これに限られない。すなわち、上述した第一の実施形態におけるように、電力補正値に基づいて推定消費電力を補正してもよいし、第一の実施形態の変形例に示したように、電力補正値をリンクの距離に応じた比で修正して補正に用いるようにしてもよい。このようにすることで、さらに精度の高い推定を行うことができるようになる。
【0115】
図14および図15は、上記した実施形態を具体的なアプリケーション機能(使用者が意図して使用する機能)として実現させる場合についての、処理フローと画面表示例とを示す図である。
【0116】
図14は、第二の実施形態における推定消費電力の補正に基づくアプリケーション機能として、航続可能エリア表示処理の処理フローを示す。以下に当該処理フローの説明を説明するが、基本的には第二の実施形態における処理フローと同様であるため、相違を中心に説明する。なお、航続可能エリア表示処理は、残電力で移動可能な領域を地図上に重畳させて表示する機能を実現させる処理をいい、ナビゲーション装置100に対して所定の機能開始指示を受け付けると、開始される。
【0117】
まず、リンク推定電力算出部104は、所定条件下のリンクについて推定消費電力E0を算出する(ステップS201´)。当該処理は、第二の実施形態における推定消費電力の補正処理のステップS201およびステップS202とほぼ同様の処理を含む。しかし、例えば、現在地から所定の距離内のリンクを対象とする、または現在地と車両の向きに基づいて所定の方位にあるリンクを対象とする、または所定の道路種別(例えば、高速道路、国道、都道府県道等)に限定されたリンクを対象とする、または地図データが複数の階層を用いて詳細化されている(主要道路のみの階層、詳細道路を含む詳細な階層等)ものであれば、所定の階層に限定されたリンクを対象とする、あるいはこれらの組み合わせにより、E0を算出する対象とするリンクを限定しうる点で、第二の実施形態と差異を有する。
【0118】
そして、リンク推定電力算出部104は、所定条件下のリンクごとに、推定消費電力E0を算出する。当該処理は、第一の実施形態における消費電力補正処理のステップS002の処理と同様である。したがって、特定したリンクIDで特定される各リンクについて、上記した演算により推定消費電力E0が算出され、リンクテーブル200の推定消費電力(E0)233に格納される。
【0119】
そして、基本制御部101は、算出された推定消費電力E0を用いて、残電力量で後続可能なリンクを特定し、地図データ上の該当するリンクを強調表示させる(ステップS202´)。その際、基本制御部101は、算出された推定消費電力E0を用いるのではなく、ステップS204において算出された統計消費電力補正比JSを用いてE0を補正したE1が存在する場合には、当該E1の値を優先的に用いる。なお、当該後続可能なリンクについては、当該リンクへ至る経路探索と同様に、リンクの推定消費電力E0あるいはE1の値を当該リンク走行により消費する電力量として扱い、最も消費する電力量が小さくなるよう経路を探索し、当該リンクへ到達しうるか否かを判定する。
【0120】
以降、ステップS203〜ステップS210については、第二の実施形態における推定消費電力の補正処理のステップS203〜ステップS210の処理と同様の処理が実施される。
【0121】
ステップS210の処理後、基本制御部101は、表示中止指示を受け付けたか否かを判定する(ステップS211´)。具体的には、基本制御部101は、使用者からナビゲーション装置100に対して、残電力で移動可能な領域を地図上に重畳させて表示する機能を実現させる処理の終了指示(例えば、機能の終了ボタンの押下)を受け付けたか否かを判定する。
【0122】
終了指示を受け付けた場合(ステップS211において「Yes」の場合)には、基本制御部101は、航続可能エリア表示処理を終了させる。
【0123】
終了指示を受け付けていない場合(ステップS211において「No」の場合)には、基本制御部101は、ステップS202´に制御を戻す。すなわち、補正されたE1等を用いて航続可能なリンクを強調表示する。
【0124】
以上が、航続可能エリア表示処理の処理フローである。当該処理によると、補正されたE1の値を用いて、残電力で移動可能なエリアを地図上に重畳表示することができる。
【0125】
図15は、航続可能エリア表示処理において表示される地図の表示画面例700を示す図である。当該画面例700においては、現在地701が地図上に表示されているとともに、残電力で到達可能なリンク710について、リンクが太三本線表示されることで、強調されて表示されている。なお、当該強調表示は一例に過ぎず、他の方法により、例えば所定の時間間隔で明滅する明滅表示としてもよいし、他のリンクとは異なる色により彩色表示されるものであってもよい。
【0126】
以上、第二の実施形態の具体的な適用例について、図14、図15を用いて説明した。当該適用例によると、補正されたE1について、補正の度合いが変化することにより、新たにE1が求められ、それにより到達可能なエリアの表示が変更されて表示される。したがって、精度の高い到達範囲を表示することができるといえる。
【0127】
なお、上記実施形態においては、推定消費電力E0の値は、消費電力補正処理のフロー内で算出されるものであるが、これに限らず、地図情報を更新した際等にあらかじめ算出されるものであってもよい。このようにすることで、推定消費電力E0の演算に係る演算負荷を分散させることができるため、演算性能を抑えたコストパフォーマンス重視のハードウェア構成等においても本願発明を実現しやすくなる。
【0128】
さらに、上記第一の実施形態、第二の実施形態およびそれらの変形として記載されたそれぞれの発明技術の全てあるいはいくつかを組み合わせてもよい。
【0129】
以上、本発明について、実施形態に基づいて説明した。
【0130】
なお、上記の各実施形態では、本発明を電気自動車の車載ナビゲーション装置に適用した例について説明したが、本発明は電気自動車の車載ナビゲーション装置に限らず、燃料自動車に用いるナビゲーション装置や各種移動体のナビゲーション装置等、エネルギー消費量を計算する装置全般に適用することができる。
【符号の説明】
【0131】
1・・・演算処理部、2・・・ディスプレイ、3・・・記憶装置、4・・・音声出入力装置、5・・・入力装置、6・・・ROM装置、7・・・車速センサ、8・・・ジャイロセンサ、9・・・GPS受信装置、10・・・FM多重放送受信装置、11・・・ビーコン受信装置、12・・・通信装置、21・・・CPU、22・・・RAM、23・・・ROM、24・・・I/F、25・・・バス、30・・・ネットワーク、31・・・バッテリー電力監視ユニット、41・・・マイクロフォン、42・・・スピーカ、51・・・タッチパネル、52・・・ダイヤルスイッチ、100・・・ナビゲーション装置、101・・・基本制御部、102・・・入力受付部、103・・・出力処理部、104・・・リンク推定電力算出部、105・・・リンク推定電力補正部、106・・・実消費電力特定部、107・・・電力補正値特定部、200・・・リンクテーブル、300・・・車両情報テーブル、400・・・物理情報テーブル、500・・・走行履歴テーブル、600・・・画面例
【特許請求の範囲】
【請求項1】
所定の区間におけるエネルギー消費量を推定するエネルギー消費量推定手段と、
エネルギーを供給するエネルギー供給手段が前記所定の区間において実際に供給したエネルギー消費実績量を特定するエネルギー消費実績量特定手段と、
前記エネルギー消費量推定手段が推定した前記所定の区間におけるエネルギー消費量と、当該所定の区間における前記エネルギー消費実績量特定手段が特定したエネルギー消費実績量と、の差に応じて、前記エネルギー消費量推定手段が推定した所定の区間のエネルギー消費量を補正するエネルギー消費量補正手段と、
前記エネルギー消費量補正手段により補正した所定の区間のエネルギー消費量を用いて、前記エネルギー供給手段が供給可能なエネルギー量で移動可能な範囲を特定して表示する表示手段と、
を備えることを特徴とするエネルギー消費量計算装置。
【請求項2】
請求項1に記載のエネルギー消費量計算装置であって、
前記エネルギー消費量補正手段は、前記推定されたエネルギー消費量と、前記エネルギー消費実績量と、の差が所定の閾値以上であれば、前記エネルギー消費量推定手段が推定した所定の区間のエネルギー消費量を補正する、
ことを特徴とするエネルギー消費量計算装置。
【請求項3】
請求項1または2に記載のエネルギー消費量計算装置であって、
前記エネルギー消費量補正手段は、前記エネルギー消費実績量が、前記推定されたエネルギー消費量を所定の閾値より上回る場合に、前記エネルギー消費量推定手段が推定した所定の区間のエネルギー消費量を補正する、
ことを特徴とするエネルギー消費量計算装置。
【請求項4】
請求項1〜3のいずれか一項に記載のエネルギー消費量計算装置であって、
前記エネルギー消費量補正手段は、前記エネルギー消費量推定手段が推定した前記所定の区間におけるエネルギー消費量に所定の許容する最大の誤差率を加えた量と、当該所定の区間における前記エネルギー消費実績量特定手段が特定したエネルギー消費実績量と、の差を補正量として特定し、前記エネルギー消費量推定手段が推定した所定の区間のエネルギー消費量に前記補正量を加算する、
ことを特徴とするエネルギー消費量計算装置。
【請求項5】
請求項1〜3のいずれか一項に記載のエネルギー消費量計算装置であって、さらに、
前記所定の区間における統計処理されたエネルギー消費量補正量を外部のセンターからネットワークを介して取得する統計補正量取得手段を備え、
前記エネルギー消費量補正手段は、前記統計処理されたエネルギー消費量補正量を用いて、前記エネルギー消費量推定手段が推定した所定の区間のエネルギー消費量を補正する、
ことを特徴とするエネルギー消費量計算装置。
【請求項6】
請求項5に記載のエネルギー消費量計算装置であって、さらに、
前記推定されたエネルギー消費量と、前記エネルギー消費実績量と、の差に応じてエネルギー消費量補正量を算出し、算出した前記エネルギー消費量補正量を、前記外部のセンターへ前記ネットワークを介して送信するエネルギー消費量補正量送信手段、
を備えることを特徴とするエネルギー消費量計算装置。
【請求項7】
請求項1〜6のいずれか一項に記載のエネルギー消費量計算装置であって、さらに、
所定の推奨経路を誘導する経路誘導手段を備え、
前記所定の区間は、前記推奨経路を構成する所定の区間である、
ことを特徴とするエネルギー消費量計算装置。
【請求項8】
請求項1〜7のいずれか一項に記載のエネルギー消費量計算装置であって、さらに、
車両に関する情報と、道路の構成に関する情報と、を予め記憶する記憶手段を備え、
前記エネルギー消費量推定手段は、前記車両に関する情報と、前記道路の構成に関する情報と、を用いて前記所定の区間におけるエネルギー消費量を推定する、
ことを特徴とするエネルギー消費量計算装置。
【請求項9】
エネルギー消費量計算装置によるエネルギー消費量計算方法であって、
前記エネルギー消費量計算装置は、
所定の区間におけるエネルギー消費量を推定するエネルギー消費量推定ステップと、
エネルギーを供給するエネルギー供給手段が前記所定の区間において実際に供給したエネルギー消費実績量を特定するエネルギー消費実績量特定ステップと、
前記エネルギー消費量推定ステップにおいて推定した前記所定の区間におけるエネルギー消費量と、当該所定の区間における前記エネルギー消費実績量特定ステップにおいて特定したエネルギー消費実績量と、の差に応じて、前記エネルギー消費量推定ステップにおいてが推定した所定の区間のエネルギー消費量を補正するエネルギー消費量補正ステップと、
前記エネルギー消費量補正ステップにおいて補正した所定の区間のエネルギー消費量を用いて、前記エネルギー供給手段が供給可能なエネルギー量で移動可能な範囲を特定して表示する表示ステップと、
を実施することを特徴とするエネルギー消費量計算方法。
【請求項1】
所定の区間におけるエネルギー消費量を推定するエネルギー消費量推定手段と、
エネルギーを供給するエネルギー供給手段が前記所定の区間において実際に供給したエネルギー消費実績量を特定するエネルギー消費実績量特定手段と、
前記エネルギー消費量推定手段が推定した前記所定の区間におけるエネルギー消費量と、当該所定の区間における前記エネルギー消費実績量特定手段が特定したエネルギー消費実績量と、の差に応じて、前記エネルギー消費量推定手段が推定した所定の区間のエネルギー消費量を補正するエネルギー消費量補正手段と、
前記エネルギー消費量補正手段により補正した所定の区間のエネルギー消費量を用いて、前記エネルギー供給手段が供給可能なエネルギー量で移動可能な範囲を特定して表示する表示手段と、
を備えることを特徴とするエネルギー消費量計算装置。
【請求項2】
請求項1に記載のエネルギー消費量計算装置であって、
前記エネルギー消費量補正手段は、前記推定されたエネルギー消費量と、前記エネルギー消費実績量と、の差が所定の閾値以上であれば、前記エネルギー消費量推定手段が推定した所定の区間のエネルギー消費量を補正する、
ことを特徴とするエネルギー消費量計算装置。
【請求項3】
請求項1または2に記載のエネルギー消費量計算装置であって、
前記エネルギー消費量補正手段は、前記エネルギー消費実績量が、前記推定されたエネルギー消費量を所定の閾値より上回る場合に、前記エネルギー消費量推定手段が推定した所定の区間のエネルギー消費量を補正する、
ことを特徴とするエネルギー消費量計算装置。
【請求項4】
請求項1〜3のいずれか一項に記載のエネルギー消費量計算装置であって、
前記エネルギー消費量補正手段は、前記エネルギー消費量推定手段が推定した前記所定の区間におけるエネルギー消費量に所定の許容する最大の誤差率を加えた量と、当該所定の区間における前記エネルギー消費実績量特定手段が特定したエネルギー消費実績量と、の差を補正量として特定し、前記エネルギー消費量推定手段が推定した所定の区間のエネルギー消費量に前記補正量を加算する、
ことを特徴とするエネルギー消費量計算装置。
【請求項5】
請求項1〜3のいずれか一項に記載のエネルギー消費量計算装置であって、さらに、
前記所定の区間における統計処理されたエネルギー消費量補正量を外部のセンターからネットワークを介して取得する統計補正量取得手段を備え、
前記エネルギー消費量補正手段は、前記統計処理されたエネルギー消費量補正量を用いて、前記エネルギー消費量推定手段が推定した所定の区間のエネルギー消費量を補正する、
ことを特徴とするエネルギー消費量計算装置。
【請求項6】
請求項5に記載のエネルギー消費量計算装置であって、さらに、
前記推定されたエネルギー消費量と、前記エネルギー消費実績量と、の差に応じてエネルギー消費量補正量を算出し、算出した前記エネルギー消費量補正量を、前記外部のセンターへ前記ネットワークを介して送信するエネルギー消費量補正量送信手段、
を備えることを特徴とするエネルギー消費量計算装置。
【請求項7】
請求項1〜6のいずれか一項に記載のエネルギー消費量計算装置であって、さらに、
所定の推奨経路を誘導する経路誘導手段を備え、
前記所定の区間は、前記推奨経路を構成する所定の区間である、
ことを特徴とするエネルギー消費量計算装置。
【請求項8】
請求項1〜7のいずれか一項に記載のエネルギー消費量計算装置であって、さらに、
車両に関する情報と、道路の構成に関する情報と、を予め記憶する記憶手段を備え、
前記エネルギー消費量推定手段は、前記車両に関する情報と、前記道路の構成に関する情報と、を用いて前記所定の区間におけるエネルギー消費量を推定する、
ことを特徴とするエネルギー消費量計算装置。
【請求項9】
エネルギー消費量計算装置によるエネルギー消費量計算方法であって、
前記エネルギー消費量計算装置は、
所定の区間におけるエネルギー消費量を推定するエネルギー消費量推定ステップと、
エネルギーを供給するエネルギー供給手段が前記所定の区間において実際に供給したエネルギー消費実績量を特定するエネルギー消費実績量特定ステップと、
前記エネルギー消費量推定ステップにおいて推定した前記所定の区間におけるエネルギー消費量と、当該所定の区間における前記エネルギー消費実績量特定ステップにおいて特定したエネルギー消費実績量と、の差に応じて、前記エネルギー消費量推定ステップにおいてが推定した所定の区間のエネルギー消費量を補正するエネルギー消費量補正ステップと、
前記エネルギー消費量補正ステップにおいて補正した所定の区間のエネルギー消費量を用いて、前記エネルギー供給手段が供給可能なエネルギー量で移動可能な範囲を特定して表示する表示ステップと、
を実施することを特徴とするエネルギー消費量計算方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2012−255757(P2012−255757A)
【公開日】平成24年12月27日(2012.12.27)
【国際特許分類】
【出願番号】特願2011−130324(P2011−130324)
【出願日】平成23年6月10日(2011.6.10)
【出願人】(000001487)クラリオン株式会社 (1,722)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成24年12月27日(2012.12.27)
【国際特許分類】
【出願日】平成23年6月10日(2011.6.10)
【出願人】(000001487)クラリオン株式会社 (1,722)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]