
エネルギー源の位置を決める方法およびシステム
患者の心房細動を治療する切除システムは、近位端および遠位端ならびにそれらの間の内腔を有する内側シャフトを備えている。遠位先端アセンブリは、内側シャフト遠位端に隣接し、遠位先端アセンブリは、エネルギー源とセンサとを備えている。エネルギー源は、標的組織に切除帯を作るように標的組織にエネルギーを送達するように適合されている。このことは、異常な電気的活動をブロックし、従って患者の心房細動を減少させるかまたは除去する。システムはまた、近位端および遠位端ならびに近位端と遠位端との間の内腔を有する外側シャフトを有する。内側シャフトは、外側シャフト内腔にスライド可能に配置され、内側シャフトは、外側シャフトに対して回転可能であり、屈曲可能であり、直線状にスライド可能である。外側シャフトは、標的組織に対して回転可能であり、屈曲可能であり、直線状にスライド可能である。

【発明の詳細な説明】
【技術分野】
【0001】
(発明の背景)
(発明の分野)
本発明は、概して医療デバイス、システムおよび方法に関し、より具体的には組織に切除帯を作るための改良されたデバイス、システムおよび方法に関する。本デバイスは、心房細動を治療するために用いられ得る。
【背景技術】
【0002】
心房細動(AF)の状態は、心筋の正常な同期の動き(「正常洞調律」)から調子が外れる、心臓の左心房の異常な(通常非常に速い)拍動を特徴とする。正常洞調律において、電気的インパルスは、右心房にある洞房結節(「SA結節(node)」)において生じる。心房の心筋の異常な拍動は、細動として公知であり、肺静脈(「PV」)において代わりに生じる電気的インパルスによって引き起こされる(非特許文献1)。
【0003】
様々な成功の度合いを有する、この状態に対する薬理学的治療がある。さらに、PVから左心房(「LA」)への迷入の電気的経路を除去することを意図する、Cox−Maze III Procedureなどの外科手術的介入がある(非特許文献2)(非特許文献3)(非特許文献4)。この処置は99%有効であることが示される(非特許文献5)が、特別の外科手術的スキルを必要とし、時間がかかる。
【0004】
より少ない侵襲的で経皮カテーテルベースのアプローチのためにCox−Maze処置(procedure)をまねる相当な努力がなされてきた。異常な信号がPVにおいて生じる迷入の焦点を囲む組織を切除する(または殺す)ある形態のエネルギーを用いることを伴う侵襲性の少ない治療が開発されてきた。最も一般的な方法論は、無線周波数(「RF」)電気的エネルギーを用いて、筋肉組織を加熱し、それによって筋肉組織を切除することである。迷入の電気的インパルスは次いで、PVから心房に伝わることが妨げられ(心臓組織内の伝導ブロックを達成し)、従って心房筋の細動を回避する。マイクロ波、レーザ、および超音波などの他のエネルギー源が、伝導ブロックを達成するために利用されてきた。さらに凍結切除、エタノールの投与などの技術もまた用いられてきた。
【0005】
無線周波数(RF)エネルギーを用いるAFの治療のためにカテーテルベースのシステムを開発する相当な努力がなされてきた。そのような方法の1つは、Haissaguerreらへの特許文献1に説明されている。このアプローチにおいて、カテーテルは、先端が遠位および近位の電極から作られる。カテーテルは、J形状に曲げられ得、肺静脈内に位置を決められ得る。PVの内壁の組織は、迷入の心臓活動源を殺す試みにおいて切除される。他のRFベースのカテーテルは、Schwartzらへの特許文献2、Maguireらへの特許文献3、Leshへの特許文献4、およびStewartらへの特許文献5に説明される。
【0006】
切除に用いられる別の供給源は、マイクロ波である。そのようなデバイスの1つは、Dr.Mark Levinsonによる非特許文献6およびMaessenらの非特許文献7に説明される。この術中デバイスは、心房組織を切除する能力を有する可鍛性アンテナを有するプローブから成る。他のマイクロ波ベースのカテーテルは、Walinskyへの特許文献6、Langbergへの特許文献7、Grundyらへの特許文献8、およびStemらへの特許文献9に説明される。
【0007】
別のカテーテルベースの方法は、心房の組織が−60℃より低い温度で凍結される冷凍技術を利用する。これは、結果として、PVの近くの組織を殺すことになり、それによって、AFを引き起こす迷入信号のための通路を除去する(非特許文献8)。冷凍ベースの技術は、部分的Maze処置の一部である(非特許文献9および非特許文献10)。より最近では、Dr.Coxおよび彼のグループ(非特許文献11および非特許文献12)は、冷凍プローブ(冷凍Maze)を用い、Cox−Maze III処置の本質的要素を二重にした。他の冷凍ベースのデバイスは、Lafintaineへの特許文献10および特許文献11、ならびにCoxらへの特許文献12に説明される。
【0008】
AF治療に対するより最近のアプローチは、超音波エネルギーを用いることを伴う。肺静脈を囲む領域の標的組織は、1つ以上の超音波トランスデューサによって放出される超音波エネルギーによって加熱される。そのようなアプローチの1つは、Leshらによって特許文献13に説明される。ここでカテーテル遠位先端部分は、超音波要素を含むバルーンが装備される。バルーンは、肺静脈にカテーテルの先端を固定する(secure)固定(anchoring)手段として働く。カテーテルのバルーン部分は選択された肺静脈に位置を決められ、バルーンは、超音波エネルギーに透明である流体で膨張させられる。トランスデューサは、超音波エネルギーを放出し、その超音波エネルギーは、肺静脈におけるまたは肺静脈の近くの標的組織に伝わり、その標的組織を切除する。意図された療法は、肺静脈の周りの電気的伝導経路を破壊し、それによって正常洞調律を回復する。療法は、必要に応じて個々の肺静脈の周りに多数の外傷を作ることを伴う。発明者らは、エネルギー放出器およびアンカ機構の様々な構成を説明する。
【0009】
超音波エネルギーを用いるさらに別のカテーテルデバイスは、Gentryらによる特許文献13に説明される。ここで、カテーテル先端は、標的組織の三次元像を作る目的で、格子パターンの超音波要素の配列から作られる。画像化グリッドを取り囲むリング形状の切除超音波トランスデューサが提供される。切除トランスデューサは、10MHz周波数の超音波のリングを放出する。別の公開(非特許文献14)において、著者らは、デバイスの説明において肺静脈が画像化され得ることを主張する。
【0010】
これらのデバイスおよび方法は有望であるが、切除帯など組織の加熱帯を作る改良されたデバイスおよび方法が必要とされる。さらに、心房細動を少なくするかまたは防ぐために、そのようなデバイスが1つまたは複数の切除帯を作り得、心臓の異常な電気的活動をブロックし得ることもまた望ましい。そのようなデバイスが、血液または他の体組織が存在するとき、凝固させるかまたは超音波トランスデューサの動きを妨害することなく、用いられ得ることもまた望ましい。そのようなデバイスおよび方法は、使いやすく、最小侵襲性であり、費用効率が高く、製造が単純であるべきである。
【0011】
背景技術の説明。周囲の外傷を作る超音波エネルギーに基づく他のデバイスは、Maguireらへの米国特許第6,997,925号、第6,966,908号、第6,964,660号、第6,954,977号、第6,953,460号、第6,652,515号、第6,547,788号、および第6,514,249号、Leshへの第6,955,173号、第6,052,576号、第6,305,378号、第6,164,283号、および第6,012,457号、Leshらへの第6,872,205号、第6,416,511号、第6,254,599号、第6,245,064号、および第6,024,740号、Diederichらへの第6,383,151号、第6,117,101号、および国際公開第99/02096号、Fijieldらへの米国特許第6,635,054号、Jimenezらへの第6,780,183号、Ackerらへの第6,605,084号、Marcusらへの第5,295,484号、およびWongらへの国際公開第2005/117734号に説明される。
【先行技術文献】
【特許文献】
【0012】
【特許文献1】米国特許第6,064,902号明細書
【特許文献2】米国特許第6,814,733号明細書
【特許文献3】米国特許第6,996,908号明細書
【特許文献4】米国特許第6,955,173号明細書
【特許文献5】米国特許第6,949,097号明細書
【特許文献6】米国特許第4,641,649号明細書
【特許文献7】米国特許第5,246,438号明細書
【特許文献8】米国特許第5,405,346号明細書
【特許文献9】米国特許第5,314,466号明細書
【特許文献10】米国特許第6,929,639号明細書
【特許文献11】米国特許第6,666,858号明細書
【特許文献12】米国特許第6,161,543号明細書
【特許文献13】米国特許第6,502,576号明細書
【非特許文献】
【0013】
【非特許文献1】Haissaguerre,M.ら、「Spontaneous Initiation of Atrial Fibrillation by Ectopic Beats Originating in the Pulmonary Veins」,New England J Med.,Vol.339:659−666
【非特許文献2】J.L.Coxら、「The development of the Maze procedure for the treatment of atrial fibrillation」,Seminars in Thoracic & Cardiovascular Surgery,2000;12:2−14
【非特許文献3】J.L.Coxら、「Electrophysiologic basis,surgical development,and clinical results of the maze procedure for atrial flutter and atrial fibrillation」,Advances in Cardiac Surgery,1995;6:1−67
【非特許文献4】J.L.Coxら、「Modification of the maze procedure for atrial flutter and atrial fibrillation.II,Surgical technique of the maze III procedure」,Journal of Thoracic & Cardiovascular Surgery,1995;2110:485−95
【非特許文献5】J.L.Cox,N.Ad,T.Palazzoら「Current status of the Maze procedure for the treatment of atrial fibrillation」, Seminars in Thoracic & Cardiovascular Surgery,2000;12:15−19
【非特許文献6】「Endocardial Microwave Ablation:A New Surgical Approach for Atrial Fibrillation」;The Heart Surgery Forum,2006
【非特許文献7】Maessenらの「Beating heart surgical treatment of atrial fibrillation with microwave ablation」.Ann Thorac Surg74:1160−8,2002
【非特許文献8】A.M.Gillinov,E.H.BlackstoneおよびP.M.McCarthy,「Atrial fibrillation:current surgical options and their assessment」,Annals of Thoracic Surgery 2002;74:2210−7
【非特許文献9】Sueda T.,Nagata H.,Orihashi K.ら、「Efficasy of a simple left atrial procedure for chronic atrial fibrillation in mitral valve operations」、Ann Thorac Surg 1997;63:1070−1075
【非特許文献10】Sueda T.,Nagata H.,Shikata H.ら、「Simple left atrial procedure for chronic atrial fibrillation associated with mitral valve disease」、Ann Thorac Surg 1996;62:1796−1800
【非特許文献11】Nathan H.,Eliakim M.,「The junction between the left atrium and the pulmonary veins」,An annatomic study of human hearts、Circulation 1966;34:412−422)、
【非特許文献12】Cox J.L.Schuessler R.B.,Boineau J.P.,「The development of the Maze procedure for the treatment of atrial fibrillation」、Semin Thorac Cardiovasc Surg 2000;12:2−14
【非特許文献13】「Integrated Catheter for 3−D Intracardiac Echocardiograpy and Ultrasound Ablation」,IEEE Transactions on Ultrasonics,Ferroelectrics,and Frequency Control,Vol.51,No.7,pp 799−807
【非特許文献14】「Medical Device Link」,Medical Device and Diagnostic Industry,February 2006
【発明の概要】
【発明が解決しようとする課題】
【0014】
(発明の概要)
本発明は、概して医療デバイスおよび方法に関し、より具体的には、心房細動および他の医学状態のための治療として組織にエネルギーを送達するために用いられる医療デバイスおよび方法に関する。
【課題を解決するための手段】
【0015】
本発明の第1の局面において、患者の心房細動を治療する切除システムは、近位端と、遠位端と、それらの間に内腔とを有する細長い内側シャフトを備えている。システムはまた、内側シャフトの遠位端に隣接する遠位先端アセンブリを有する。遠位先端アセンブリは、エネルギー源とセンサとを備えている。エネルギー源は、異常な電気的活動をブロックし、それによって患者の心房細動を減少させるかまたは除去する切除帯を標的組織に作るように、標的組織にエネルギーを送達するように適合されている。システムはまた、近位端と、遠位端と、それらの間に内腔とを有する細長い外側シャフトとを有する。内側シャフトは、外側シャフト内腔にスライド可能に配置される。内側シャフトは、外側シャフトに対して、回転可能であり、屈曲可能であり、直線状にスライド可能であり、外側シャフトは、標的組織に対して、回転可能であり、屈曲可能であり、直線状にスライド可能である。
【0016】
遠位先端アセンブリは、外側ハウジングを備え得、外側ハウジング内にエネルギー源とセンサとが配置され得る。外側ハウジングは、開放端を備え得、キャストレイテッド領域を形成する一端に複数のスロットを有し得る。
【0017】
エネルギー源は、エネルギー源がエネルギーを送達したとき、エネルギー源が標的組織または血液などの周囲の流体と接触しないようにハウジングの遠位端から引っ込み得る。エネルギー源は、超音波トランスデューサを備え得る。エネルギー源は、無線周波数エネルギー、マイクロ波、フォトニックエネルギー、熱エネルギー、および低温エネルギーのうちの1つを送達し得る。エネルギー源は、標的組織の表面に対して65度〜115度であるビームのエネルギーを送達し得る。切除帯は弓形または直線の経路をたどり得る。
【0018】
センサは、標的組織の表面とエネルギー源との間の間隙距離を検出し得る。センサはまた、エネルギー源と標的組織の表面との間の角度を検出することが可能であり得る。センサは、標的組織の厚さなどの標的組織の特性を決定することが可能であり得る。いくつかの実施形態において、センサは、超音波トランスデューサを備えている。エネルギー源はまた、超音波トランスデューサであり得、いくつかの実施形態において、超音波トランスデューサは、エネルギー源およびセンサの両方として働く。センサはまた、赤外線センサまたは無線周波数センサを備え得る。
【0019】
センサは、外側シャフトの遠位端に隣接する位置決め機構を備え得る。位置決め機構は、解剖学的構造の位置設定を容易にするように適合され得、また解剖学的構造に切除システムを固定するように適合され得る。位置決め機構はまた、解剖学的構造に対する切除システムの位置の目に見える表示か、聴取可能表示かまたは触知可能表示を提供し得る。切除システム内側シャフトは、位置決め機構の周りに回転可能であり得る。
【0020】
位置決め機構は、外側シャフト内腔内に位置決め可能であり得、位置決め機構は、外側シャフト内腔に配置されている間、実質的に直線の構成であり得る。位置決め機構は、コイル、または制約されないとき放射状に外側に広がるように付勢される複数のワイヤを備え得る。位置決め機構は、解剖学的構造に対して外側への付勢力を加え、それによって解剖学的組織に切除システムを固定させ得る。標的組織は肺静脈を備え得、位置決め機構は内側シャフトが肺静脈の中に入る角度を示すように適合され得る。
【0021】
システムはガイドカテーテルをさらに備え得、外側シャフトはガイドカテーテル内にスライド可能に位置を決められ得る。標的組織は、心臓組織、肺静脈または肺静脈に隣接する組織を含み得る。内側シャフトまたは外側シャフトは、編組部分またはスプリングコイルを備え得る。システムはまた、切除システムに連結され、遠位先端アセンブリを安定させるように構成されるアンカ機構を備え得る。アンカ機構は、バルーンなどの拡張可能部材を備え得る。アンカ機構はまた、標的組織に連結可能であり得る形成可能ワイヤを備え得る。アンカはまた、組織と係合する1つ以上のバーブまたはフックを有し得る。
【0022】
システムは、内側シャフトに動作可能に連結される屈曲機構をさらに備え得る。いくつかの実施形態において、屈曲機構は、内側シャフトの遠位端に隣接して動作可能に連結されるプルワイヤを備え得、プルワイヤの一部分は、プルワイヤが作動させられたとき、内側シャフトが内側シャフトの外部のプルワイヤの部分に対して放射状に内側または外側に片寄るように、内側シャフトの外側表面に沿って配置され、プルワイヤの部分は実質的に直線の構成のままである。屈曲機構は、第1および第2のプルワイヤを備え得る。第1のプルワイヤは内側シャフトの遠位領域に連結され得、第2のプルワイヤは内側シャフトの近位領域に連結され得る。プルワイヤは2つの位置すなわち第1の曲げおよび第2の曲げにおいて内側シャフトを曲げるように適合され得る。システムは、アクチュエータを含み得、アクチュータは、内側シャフトの近位端の近くに配置され、プルワイヤを作動させるように適合されており、それによって、内側シャフトを曲げ、内側シャフトに沿って第1の曲げおよび第2の曲げを形成する。第1の曲げおよび第2の曲げは、異なる平面にあり得る。システムは、外側シャフトに動作可能に連結される屈曲機構を備え得る。屈曲機構は、第1および第2のプルワイヤを備え得る。第1のプルワイヤは外側シャフトの遠位領域に連結され得、第2のプルワイヤは外側シャフトの近位領域に連結され得る。プルワイヤは2つの位置すなわち第1の曲げおよび第2の曲げにおいて外側シャフトを曲げるように適合され得る。システムはまた、アクチュエータをさらに備え、アクチュータは、外側シャフトの近位端の近くに配置され得、プルワイヤを作動させるように適合され得、それによって、内側シャフトを曲げ、内側シャフトに沿って第1の曲げおよび第2の曲げを形成し得る。第1の曲げおよび第2の曲げは、異なる平面にあり得る。
【0023】
本発明の第2の局面において、組織を切除することによって患者の心房細動を治療する方法は、外側シャフトと内側シャフトとを備えている切除システムを提供することを包含する。内側シャフトは、エネルギー源とセンサとを備えている遠位先端アセンブリを有する。外側シャフトは、内側シャフトの少なくとも一部分の上にスライド可能に配置される。遠位先端アセンブリは組織に隣接して位置を決められ、内側シャフトまたは外側シャフトは組織に対して所望の位置にエネルギー源を配置するように操作される。エネルギーは、エネルギー源から組織に送達され、部分的または完全な切除帯は、組織に作られ、それによって、異常な電気的活動をブロックし、心房細動を減少させるかまたは除去する。
【0024】
切除システムはガイドシースをさらに備え得、方法は患者の心臓の心房中隔を横切ってガイドシースの遠位部分の位置を決めることを含み得る。システムの位置を決めることは、患者の心臓の中に遠位先端アセンブリを血管内に前進させることを包含し得る。
【0025】
操作するステップは、外側シャフトに対して内側シャフトをスライドして動かすことを包含し得る。操作することはまた、外側シャフトに対して内側シャフトを回転させることまたは内側シャフトを曲げることを含み得る。曲げることはまた、同じ平面にあり得るかまたは異なる平面にあり得る2つ以上の位置において内側シャフトを曲げることを包含し得る。曲げることは、内側シャフトに連結される1つ以上のプルワイヤを作動させることによって達成され得る。操作するステップはまた、外側シャフトをスライドして動かすか、回転させるか、または曲げることを含み得る。外側シャフトは、2つ以上の位置において曲げられ得る。2つ以上の曲げは、同じ平面にあり得るかまたは異なる平面にあり得る。外側シャフトを曲げることは、外側シャフトに連結される1つ以上のプルワイヤを作動させることによって達成され得る。操作するステップは、第1の方向に内側シャフトまたは外側シャフトのいずれかを第1の方向に回転させること、および内側シャフトまたは外側シャフトにおける曲げまたはトルク増強を減少させるように第1の方向とは反対の第2の方向に内側シャフトまたは外側シャフトを回転させることを包含し得る。操作するステップは、ラスタパターンでエネルギー源から組織にエネルギーを向けるようにエネルギー源を動かすことを包含し得る。操作するステップは、エネルギー源の運動を患者の心拍数に同期させることを包含し得る。
【0026】
エネルギー源は超音波トランスデューサを備え得、エネルギーを送達するステップはトランスデューサから組織に超音波ビームを送達することを包含し得る。エネルギーを送達するステップは、無線周波数エネルギー、マイクロ波エネルギー、フォトニックエネルギー、熱エネルギー、および低温エネルギーのうちの1つを送達することを包含し得る。
【0027】
切除帯を作るステップは、直線の切除経路、または少なくとも1つの肺静脈を取り囲み得る円形の切除経路を形成することを包含し得る。切除システムはセンサをさらに備え得、方法は、センサによって組織の特性を感知することを包含し得る。センサは超音波トランスデューサを備え得、いくつかの実施形態において、エネルギー源はセンサと同じ超音波トランスデューサを備え得る。方法は、超音波トランスデューサからのエネルギーを送達するモードと超音波トランスデューサによって感知するモードとを切り替えることをさらに包含し得る。感知された組織特性は、組織とエネルギー源の表面との間の間隙距離など、エネルギー源に対する組織の位置を含み得る。位置は、エネルギー源と組織との間の相対角度を含み得る。組織特性は、組織厚および/または領域の深さを含み得る。
【0028】
センサは位置決め機構を備え得、方法は内側シャフトまたは外側シャフトのいずれかから組織または組織に隣接する組織の中に位置決め機構を前進させることを含み得る。位置決め機構は解剖学的構造を位置設定することを容易にし得る。位置決め機構は複数のワイヤを備え得、方法はワイヤの形状および配向を観察しながら肺静脈の中にワイヤの位置を決めることをさらに包含し得る。
【0029】
方法は、感知された組織特性に基づいてエネルギーを導くことをさらに包含し得る。方法はまた、所望の値にエネルギー源と組織表面との間の間隙を維持することを含み得る。組織は、左心房組織、肺静脈または肺静脈に隣接する組織を含み得る。いくつかの実施形態において、方法は、エネルギー源を冷却するかまたは組織に対して遠位先端アセンブリを固定することをさらに包含する。固定することは、ワイヤを組織に連結すること、またはバルーンなど、外側シャフトに連結される拡張可能部材を拡張させることを包含し得る。
【0030】
これらおよび他の実施形態は、添付の図面に関係する以下の説明においてさらに詳細に説明される。
【図面の簡単な説明】
【0031】
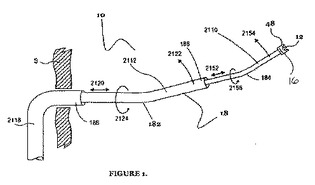
【図1】図1は、本発明の好ましい実施形態のシステムの曲げ運動、回転運動および直線運動の図面である。
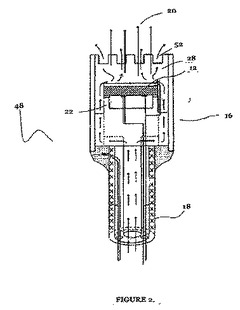
【図2】図2は、本発明の好ましい実施形態のシステムの遠位先端アセンブリの図面である。
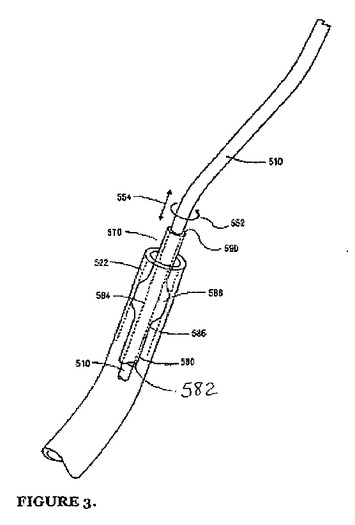
【図3】図3は、本発明の好ましい実施形態のシステムのアンカ機構の第1の変種の図面である。
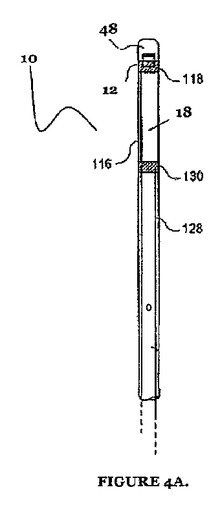
【図4A】図4A〜図4Cは、本発明の好ましい実施形態のシステムの曲げ運動の図面である。
【図4B】図4A〜図4Cは、本発明の好ましい実施形態のシステムの曲げ運動の図面である。
【図4C】図4A〜図4Cは、本発明の好ましい実施形態のシステムの曲げ運動の図面である。
【図5】図5は、本発明の好ましい実施形態のシステムの「シェパードフック(Sheppard’s hook)」曲げ運動の図面である。
【図6A】図6Aおよび図6Bは、本発明の好ましい実施形態のシステムの曲げ運動の第2の変種の図面である。
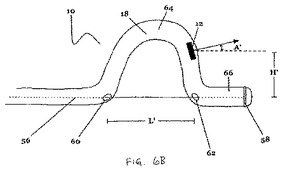
【図6B】図6Aおよび図6Bは、本発明の好ましい実施形態のシステムの曲げ運動の第2の変種の図面である。
【図7】図7は、運動パターンの図面である。
【図8】図8は、心周期の心電図(ECG)追跡の図面である。
【図9】図9は、好ましい実施形態のコネクタコンソールの図面である。
【図10A】図10A〜図13は、本発明の好ましい実施形態のシステムの位置決め機構の図面である。
【図10B】図10A〜図13は、本発明の好ましい実施形態のシステムの位置決め機構の図面である。
【図11】図10A〜図13は、本発明の好ましい実施形態のシステムの位置決め機構の図面である。
【図12A】図10A〜図13は、本発明の好ましい実施形態のシステムの位置決め機構の図面である。
【図12B】図10A〜図13は、本発明の好ましい実施形態のシステムの位置決め機構の図面である。
【図13】図10A〜図13は、本発明の好ましい実施形態のシステムの位置決め機構の図面である。
【発明を実施するための形態】
【0032】
(発明の詳細な説明)
本発明の好ましい実施形態の以下の説明は、これらの実施形態に本発明を限定することを意図するものではなく、むしろ当業者が本発明を作りそして用いることを可能にすることを意図する。
【0033】
図1に示されるように、好ましい実施形態のシステム10は、細長い部材18と遠位先端アセンブリ48とを含み、遠位先端アセンブリ48は、細長い部材18の遠位部分に連結され、エネルギー源12およびセンサのうちの少なくとも1つを含む。細長い部材18は、エネルギー源12および/またはセンサと共に遠位先端アセンブリ48を動かし、そしてその位置を決めるように機能を果たす。細長い部材18および遠位先端アセンブリ48は、エネルギー源12および/またはセンサを標的組織の方に向けるように協同して機能を果たす。システム10は、好ましくは、患者内にエネルギー源の位置を決め、組織にエネルギーを送達するように設計され、より具体的には、患者の心房細動の治療のために、典型的には左心房の肺静脈から生じる異常な電気的活動の伝導ブロック−伝導通路の絶縁および/またはブロックを作るように設計される。しかしながら、システム10は、代わりに任意の適切な環境において任意の適切な理由で任意の適切な組織に対して用いられ得る。
【0034】
細長い部材。図1に示されるように、好ましい実施形態の細長い部材18は、遠位先端アセンブリ48ならびに遠位先端アセンブリ48内のエネルギー源12および/またはセンサを動かし、それらの位置を決めるように機能を果たす。細長い部材18は、好ましくは可撓性の複数内腔管(multi−lumen tube)から作られるカテーテルであるが、代わりに、カニューレ、管または1つ以上の内腔を有する任意の他の適切な細長い構造であり得る。細長い部材18はまた、プルワイヤ、流体、気体、エネルギー源、電気的連結部、治療カテーテル、誘導(navigation)カテーテル、ペーシング(pacing)カテーテル、および/または任意の他の適切なデバイスまたは要素を収容するように機能を果たし得る。
【0035】
細長い部材は、好ましくはいくつかの変種のうちの1つである。第1の変種において、図1に示されるように、細長い部材18は、好ましくは、治療カテーテル2110と、外側カテーテル2112と、ガイドシース2118とを含む。細長い部材18は、代わりに単一のカテーテルまたは任意の他の適切な数のカテーテルおよび/またはシースを含み得る。カテーテルは、好ましくは互いに同心で配置されるが、代わりに任意の他の適切な態様で配置され得る。治療カテーテル2110は好ましくは外側カテーテル2112にスライド可能に含まれ、治療カテーテル2110および外側カテーテル2112は好ましくはガイドシース2118において放射状に自由に動かされ得る結合セットを形成する。外側カテーテル2112は、好ましくは、少なくとも3つの独立した運動、すなわち軸方向運動2120、回転運動2124、および曲げ運動2122が可能である。ガイドシース2118の端部分186は、好ましくは、外側カテーテル2112が回転している間2124、外側カテーテル2112上にグリップを提供するように外側カテーテル2112の上にスナッグフィット(snug fit)を有する。アンカ機構は、図3に示され、以下に説明されるように、好ましくは、外側カテーテル2112が回転しているか、曲がっているか、軸方向に動いているか、または任意の他の適切な態様で動いている間、ガイドシース2118に対して外側カテーテル2112を固定するために用いられる。外側カテーテル2112は、方法2120でガイドシース2118内において軸方向に動かされ得る。さらに外側カテーテル2112の一部分は、方法2122で旋回点182の近くで曲げられ得る。さらに、外側カテーテル2112は、点182に加えて任意の適切な数の位置において曲がり得る。
【0036】
外側カテーテル2112と同様に、図1に示されるように、治療カテーテル2110はまた、少なくとも3つの独立した運動、すなわち軸方向運動2152、回転運動2156、および曲げ運動2154が可能である。外側カテーテル2112の端部分188は、好ましくは、治療カテーテル2110が回転している間2156、治療カテーテル2110上にグリップを提供するように治療カテーテル2110の上にスナッグフィットを有する。治療カテーテル2110はまた、方法2152でガイドシース2112内において軸方向に動かされ得る。さらに治療カテーテル2110の一部分は、方法2154で旋回点184の近くで曲げられ得る。治療カテーテル2110は、点184に加えて任意の適切な数の位置において曲がり得る。
【0037】
遠位先端アセンブリ。図1および図2に示されるように、好ましい実施形態の遠位先端アセンブリ48は、細長い部材18の遠位部分に連結され、エネルギー源12およびセンサのうちの少なくとも1つを含む。図1に示されるように、遠位先端アセンブリ48は、好ましくはエネルギー源12に連結されたハウジング16を含む。ハウジング16は、好ましくは開放の管状形状を有するが、代わりにエネルギー源12を囲む閉鎖端ハウジングであり得る。閉鎖端ハウジングの少なくとも一部分は、好ましくは、ポリ4−メチル、1−ペンテン(PMP)材料などの超音波エネルギーに対して透明である材料など、エネルギービーム20に対して透明である材料、または任意の他の適切な材料から作られる。図2に示されるように、開放の管状ハウジングは、好ましくは、ハウジングが複数のスロット52を規定するように「城上部」構成を有する。スロット52は、流れる流体28のための出口ポートを提供するように機能を果たす。システム10の使用中に、遠位先端アセンブリ48の前部先端が組織または他の構造に接触するかまたは隣接するとき、スロット52は、冷却流体28がエネルギー源12を通過し、組織の表面に沿って流れることを維持するように機能を果たす。流体流れ線30は、バッキング22における溝に沿って流れ、エネルギー源12を浸し、流体柱を形成し、城上部ハウジング16においてスロット52を通って出る。閉鎖端ハウジングにおいて、ハウジングは、好ましくは、ハウジング16の遠位端の方への小さな穴などの複数のアパーチャを含む。これらの穴は、流れる流体のための出口経路を提供する。アパーチャは、格子、ふるい、穴、ドリップ穴、水抜き構造または任意の多数の適切なアパーチャである。代わりに、閉鎖端ハウジングは、流体を出すことを可能にするアパーチャを規定しない場合があり、むしろハウジングは、ハウジング内に流体を含み、エネルギー源12を通過して流体をリサイクルする。
【0038】
遠位チップアセンブリ48のハウジング16は、さらにエネルギー源12の面と心臓の心房など患者内にある血液との間に障壁を提供するようにさらに機能を果たす。流体の流れが組み込まれなく、トランスデューサ面が血液と直接接触する場合、血液はエネルギー源12の表面において凝固する。さらに、エネルギー源12と周囲の血液との間の界面に血塊を形成する可能性がある。エネルギー源はハウジングの遠位端から引っ込んでおり、冷却流体28の流れは血液がエネルギー源12と接触しないように保つので、血塊の形成が回避される。流量は、好ましくは毎分1ml以上(例えば、毎分10ml)であるが、代わりに、流体柱を維持し、血液とエネルギー源12の面との分離を保ち、エネルギー源12を冷却し、かつ/または組織276を冷却する任意の他の適切な流量であり得る。ハウジング16およびその中の構成要素についてのさらなる詳細は、米国特許出願第12/480,256号(代理人整理番号027680−000310US)、第12/483,174号(代理人整理番号027680−000410US)、および第12/482,640号(代理人整理番号027680−000510US)に、より詳細に開示され、各特許出願の全内容は、参照によって本明細書に援用される。
【0039】
エネルギー源。図2に示されるように、好ましい実施形態のエネルギー源12は、切除エネルギーの供給源を提供するように機能を果たし、エネルギービーム20を放出する。エネルギー源12は、好ましくは超音波ビームを放出する超音波トランスデューサであるが、代わりに切除エネルギーの任意の適切な供給源を提供するように機能を果たす任意の適切なエネルギー源であり得る。切除エネルギーの適切な供給源のいくつかの例は、無線周波数(RF)エネルギーと、マイクロ波と、フォトニックエネルギーと、熱エネルギーとを含む。療法は、代わりに冷却流体(例えば、低温流体)を用いて達成され得る。遠位先端アセンブリ48は、好ましくは単一のエネルギー源12を含むが、代わりに任意の適切な数のエネルギー源12を含み得る。超音波トランスデューサは、好ましくは、PZT(ジルコン酸チタン酸鉛)もしくはPVDF(フッ化ポリビニリデン二フッ化物(polyvinylidine difluoride))などの圧電材料、または任意の他の適切な超音波ビーム放出材料から作られる。トランスデューサは、金属の薄い層などのコーティング層をさらに含み得る。いくつかの適切なトランスデューサコーティング金属は、金、ステンレス鋼、ニッケルカドミウム、銀、および金属合金を含み得る。
【0040】
センサ。好ましい実施形態の遠位先端アセンブリ48はまた、センサを含み、そのセンサは、間隙(すなわち、エネルギー源12からの組織表面の距離)と、組織に対する、遠位先端アセンブリ48、エネルギー源12および/またはセンサ自体の角度と、切除の標的とされる組織の厚さと、切除された組織の特性と、任意の他の適切なパラメータもしくは特性とを検出するように機能を果たす。この情報を検出することによって、センサからの情報は、好ましくは組織の切除によって提供される療法を導き、どこにシステムの位置を決めるべきか、適切な間隙距離を維持するために遠位先端アセンブリに対してエネルギー源をどの位置に有すべきか、そして何の設定においてエネルギー源12および任意の他の適切な要素を用いるのかについての情報を提供する。センサによって検出された情報に応答して、細長い部材18および外側カテーテル2112と療法カテーテル2110との任意の適切な組み合わせは、患者内において遠位先端アセンブリ48、エネルギー源12および/またはセンサを動かし、位置を決めるために、軸方向に、回転して、曲げ運動で、またはこれらの運動の任意の適切な組み合わせで動かされ得、十分な間隙距離を維持し、切除された組織に望ましい適切な特性および質を提供する。センサは、療法の前、療法の全体(療法と同時にまたは交互に)、療法の後、および/またはこれらの任意の組み合わせにおいて標的組織の質、間隙距離などを検出するように動作させられ得る。
【0041】
センサは、好ましくはいくつかの変種のうちの1つである。第1の変種において、センサは、超音波トランスデューサであるが、代わりに、間隙と、組織に対する、遠位先端アセンブリ48、エネルギー源12および/またはセンサ自体の角度と、切除の標的とされる組織の厚さと、切除された組織の特性と、任意の他の適切なパラメータもしくは特性とを検出する、IRセンサまたはRFセンサなどの任意の適切なセンサであり得る。超音波トランスデューサは、好ましくは、概して組織を加熱するのに十分ではない短い継続時間の超音波のパルスを利用する。これは、当該分野においてAモードまたは振幅モード像(Amplitude Mode imaging)と呼ばれる超音波画像化技術である。センサは、好ましくは、異なるモード(上記に説明されるAモードなど)で動作するエネルギー源のトランスデューサと同じトランスデューサであるか、または代わりに、別個の超音波トランスデューサであり得る。別個の超音波トランスデューサは、エネルギー源12のトランスデューサに連結され得るかまたは別個の位置にあり得る。
【0042】
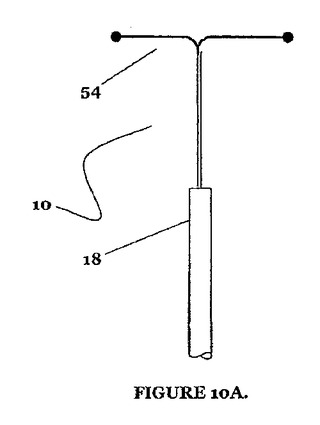
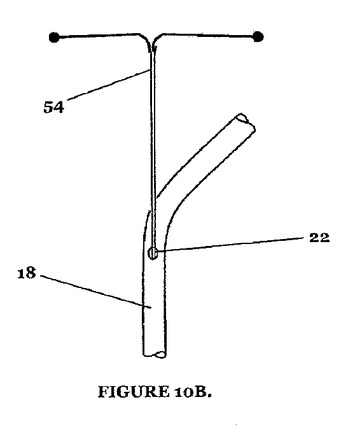
第2の変種において、図10Aおよび図10Bに示されるように、センサは位置決め機構54である。位置決め機構は、好ましくは細長い部材18の遠位部分に連結される。いくつかの変種において、位置決め機構54は細長い部材18の中に引っ込められる。位置決め機構54は、解剖学的構造に対して位置決め機構54がどこにあるかの表示を提供することによって、解剖学的構造を位置設定することを容易にするように機能を果たす。表示は、好ましくは目に見える表示であるが(蛍光透視鏡などの医療画像システムによる)、代わりにまたはさらに、触知可能または聴取可能な表示である。さらに、細長い部材18およびまたは位置決め機構54は、距離を表示するマーキングなどのインディシアを含み得、そのインディシアは解剖学的構造の位置を表示し、かつ/または解剖学的構造が位置を定められる、システム10の挿入の深さを表示する。
【0043】
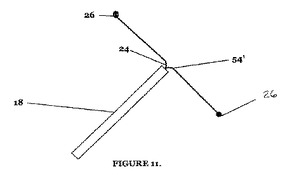
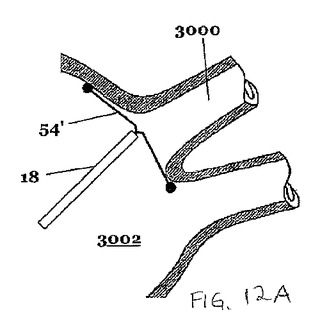
図11、図12Aおよび図12Bに示されるように、位置決め機構54’の第1のバージョンは、複数のワイヤであって、各々が第1の端部24と第2の端部26とを有する、複数のワイヤを含む。第1の端部24は、好ましくは細長い部材18の遠位先端に連結されるが、代わりに任意の他の適切な位置に取り付けられ得る。第2の端部26は、好ましくは、細長い部材の遠位先端から延び、図11に示されるように、十分に延ばされた位置で位置を決められる。第2の端部26は、好ましくは、図12Aおよび図12Bに示されるように、表面との接触により片寄る。第2の端部26は、好ましくは十分に延ばされた位置の方に付勢されるが、代わりに任意の他の適切な位置の方に付勢され得る。
【0044】
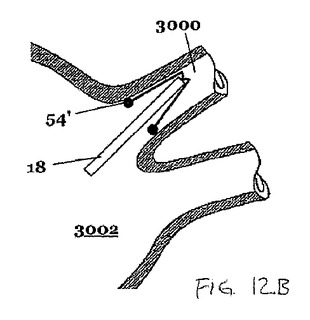
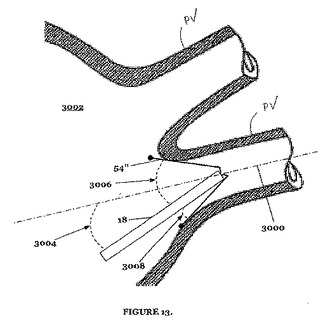
図12Aおよび図12Bに示されるように、複数のワイヤは、ワイヤが解剖学的構造に接触すると曲がることによって解剖学的構造を位置設定することを容易にするように機能を果たす。例えば、ワイヤが心臓3002の左心房において妨げられないとき、ワイヤは、細長い部材18から十分に延ばされたままである。システム10が心臓3002の左心房内において動かされ、肺静脈3000の口(開口部)に接触し始めると、複数のワイヤは、図12Aに示されるように部分的に片寄り始める。システム10が肺静脈3000の中に動かされると、ワイヤは、図12Bに示されるように、より劇的に片寄る。システムが肺静脈の中により深く動かされると、ワイヤは、全く片寄らないわけではないが、それほど片寄らないで、システム10のセンサおよび/またはオペレータは、システム10の位置決め機構54が肺静脈内に正しく位置を定められた時を決定することが可能である。さらに、図13に示されるように、システム10が肺静脈3000に入る、肺静脈3000の長手方向軸に対する角度3004が決定され得る。角度3004が検出されると、遠位先端アセンブリ48は、好ましくは、エネルギー源12と組織との間の角度が適切な角度となるように動かされる。放出されたエネルギービーム20は、好ましくは組織に対して20〜160度の角度で標的組織と接触し、より好ましくは組織に対して45〜135度の角度で標的組織と接触し、最も好ましくは組織に対して65〜115度の角度で標的組織と接触する。
【0045】
システムの位置決め。図10A〜図10B、図11、図12A〜図12Bおよび図13は、位置決め機構のいくつかの実施形態を例示する。細長い部材18および遠位先端アセンブリ48は、エネルギー源12および/またはセンサを標的組織の方に向けるように協同して機能を果たす。細長い部材18は、好ましくは、遠位先端アセンブリ48、ならびに遠位先端アセンブリ48内のエネルギー源12および/またはセンサを動かし、それらの位置を決める。遠位先端アセンブリは、好ましくは患者内において動かされ、位置を決められ、好ましくは心臓の左心房内に(または任意の他の適切な位置に)動かされ、一旦そこに位置を決められると、好ましくは適切な角度で標的組織の方にセンサおよび/またはエネルギー源12ならびに放出されたエネルギービーム20を向けるように動かされる。放出されたエネルギービーム20は、好ましくは組織に対して20〜160度の角度で標的組織と接触し、より好ましくは組織に対して45〜135度の角度で標的組織と接触し、最も好ましくは組織に対して65〜115度の角度で標的組織と接触する。
【0046】
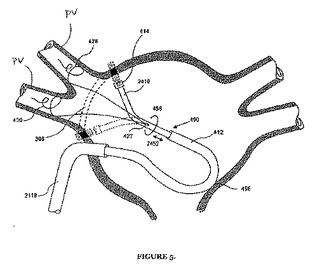
遠位先端アセンブリ48、ならびに遠位先端アセンブリ48内のエネルギー源12(および/またはセンサ)は、好ましくは、エネルギー源12が切除経路に沿って部分的または完全な切除帯(および/または経路に沿って組織の診断)を提供するように切除経路(および/または画像化経路)に沿って動かされる。例えば、図5に示されるように、切除経路308は、2つの肺静脈PVを取り囲む。切除経路は、代わりに任意の適切な形状を有し得、任意の適切な位置に位置を決められ得る。切除経路に沿った切除帯は、好ましくは、患者の心房細動の治療のための伝導ブロックを提供することなど、療法を提供するために任意の適切な形状を有する。切除経路に沿った切除帯は、代わりに、患者のために任意の他の適切な療法を提供し得る。画像化経路は、好ましくは、間隙(すなわち、エネルギー源12からの組織表面の距離)、組織に対する、遠位先端アセンブリ48、エネルギー源12および/またはセンサ自体の角度、切除の標的とされる組織の厚さ、切除された組織の特性、ならびに任意の他の適切なパラメータもしくは特性などの標的組織の特性にアクセスするために任意の適切な形状を有する。
【0047】
細長い部材18は、好ましくは、所望の切除経路および/または画像化経路を得るために、屈曲機構およびアンカ機構などの機構のいくつかの変種を用いて軸方向(細長い部材の軸方向に沿った前後)運動、回転運動および曲げ運動などの運動のいくつかの変種で動かすことによって、遠位先端アセンブリ48、ならびに遠位先端アセンブリ48内のエネルギー源12および/またはセンサを動かし、それらの位置を決める。例えば、直線の切除経路は、好ましくは、曲げ運動で遠位先端アセンブリおよび遠位先端アセンブリ内のエネルギー源12を動かすことによって作られる。さらに、概ね円形の切除経路は、好ましくは、軸の周りに遠位先端アセンブリおよび遠位先端アセンブリ内のエネルギー源12を回転させることによって作られ、楕円形の経路は曲げ運動および回転運動の組み合わせによって作られる。
【0048】
回転運動。上記に説明され、そして図1に示されるように、細長い部材18および細長い部材18の任意のカテーテルは、好ましくは、矢印2124および2156によって示されるように細長い部材の中心軸の周りに回転させられる。従来、カテーテルが第2のカテーテル内において回転させられると、2つのカテーテルは、概して静止摩擦のために互いに巻き付き、くっつき得、滑らかな回転運動を妨げ得る。この巻き付きおよび/またはトルク増強を防ぎかつ/または解放するために、カテーテルの管挿入は、好ましくは低摩擦材料のジャケットに覆われている編組に包まれる。カテーテルは、代わりにスプリング、スプリングラッピング、またはフォイルのラッピングに包まれ得る。編組の材料は、好ましくは、丸いかまたは平らな金属ワイヤ、プラスチックフィラメント、またはKevlarである。
【0049】
編組の代わりにまたは編組の他に、システム10の回転運動は、好ましくは、局所的振動運動(第1の回転運動とは反対の方向の、第1の回転運動より小さい第2の回転運動)を含む。局所的振動運動は、この巻き付きおよび/またはトルク増強を防ぎかつ/または解放するように機能を果たす。例えば、図1に示されるように、療法カテーテル2110の回転運動2156が数度(または任意の他の適切な距離)だけ時計回りである場合、療法カテーテル2110の局所的振動運動(図示されていない)は、より少ない度数で反時計回りである。あらゆる前進の回転運動に対してより小さい後退する回転運動を行うことによって、巻き付きおよびトルク増強は最小限にされ(かつ/または防がれ)、カテーテルの回転運動は、好ましくは、実質的に一様であり、飛び跳ね(skipping and jumping)がなくなる。
【0050】
システム10のエネルギー源12は、この局所的振動運動に比類なく適している。例えば、エネルギー源12が、電力を通され、エネルギービーム20(好ましくは超音波エネルギービーム)を標的組織に送達し、切除経路に沿って回転させられると、局所的振動運動(前後運動)は、エネルギー源12およびエネルギービーム20を切除経路の特定の部分の上に2回以上持って行く。超音波エネルギーの特性および外傷形成特性のために、組織は、エネルギービーム20によって2回以上接触されることによって損傷されたりしなく、さもなければ不利に影響されない。これは動物実験で検証されている。
【0051】
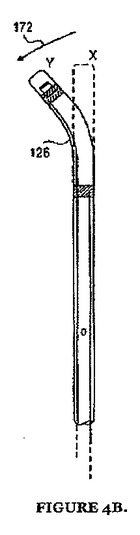
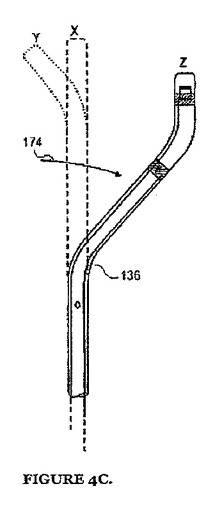
屈曲機構および曲げ運動。図4A〜図4Cに示されるように、好ましい実施形態のシステム10は、いくつかの位置のうちの少なくとも1つにおいて細長い部材18の遠位部分を曲げるように機能を果たす屈曲機構をさらに含む。屈曲機構は、複数のワイヤ、リボン、ケーブル、ひも、繊維、フィラメントまたは任意の他の張力部材を含む。屈曲機構は、好ましくはいくつかの変種のうちの1つである。第1の変種において、図4A〜図4Cに示されるように屈曲機構は、好ましくは、例えば遠位位置および近位位置における曲がりを誘導する遠位プルワイヤおよび近位プルワイヤなどの1つ以上のプルワイヤを含む。遠位プルワイヤおよび近位プルワイヤは、好ましくは、接着バンドによって細長い部材18に取り付けられる。代わりにプルワイヤは、接着剤、溶接、ピンおよび/またはねじなどの任意の適切な取り付け機構を用いて細長い部材18に連結され得る。プルワイヤは、好ましくは細長い部材18の1つまたは別個の内腔内に配置されるが、代わりに任意の適切な位置に保持され得る。プルワイヤは各々、好ましくは、屈曲機構18の様々な特徴に影響する様々な作動機構を好ましくは含む近位ハウジングにおけるスライダにおいて終端する。図4A〜図4Cに示されるように、遠位プルワイヤ116は、遠位接着バンド118によって細長い部材18の遠位部分に固定される。図4Bに示されるように、使用時、遠位プルワイヤ116が第1のスライダ(図示されていない)を動かすことによって引かれると、細長い部材は、172の方向に位置126において曲げられ、それによって、X位置からY位置に動く。図4Cに示されるように、近位接着バンド130によってある位置の細長い部材内腔に固定される近位プルワイヤ128は、第2のスライダ(図示されていない)を動かすことによって引かれ、細長い部材は位置136において曲がり、カテーテルの長手方向軸から離れるように方向174に位置Zの方に動く。代わりに両方のプルワイヤは、単一のスライダ機構によって引かれ得、図4Cに例示される形状はこの方法で達成され得る。
【0052】
プルワイヤ取り付け点および対応するデバイスにおける曲げ位置は、好ましくは任意の多くの方法で構成可能である。例えば、単一のプルワイヤまたは他の曲げ誘導機構が用いられ得る。代わりに、3つ以上のそのような機構が用いられ得る。曲げ誘導機構の取り付け点に関して、遠位先端アセンブリならびにカテーテル遠位部分に沿った任意の適切な位置は、適切な随意の取り付け点である。デバイスにおける曲げ位置の数および位置に関して、適切な曲げ位置の範囲が提供され得る。例えば、1つおよび2つの曲げが本明細書に例示されているが、3つ以上の曲げが、所望のカテーテル構成および/またはデバイスを用いるエネルギーの印加を達成するために用いられ得る。細長い部材が形状および構成のいくつかの変種に曲げられるように、屈曲機構は、好ましくは任意の適切な数の曲げ位置(旋回点)を含む。図4A〜図4Cに例証されるように、屈曲機構の2つの曲げが同じ平面にあり得るが、屈曲機構は好ましくは任意の適切な平面において曲がり、2つの曲げは2つの異なる面において起り得る。形状および構成のいくつかの変種は、好ましくは、細長い部材が患者の領域全体(好ましくは患者の心臓の左心房の全体)に遠位先端アセンブリの位置を決め、心房の任意の切片または部分内の標的組織にアクセスすることを可能にする形状を含む。例えば、ガイドシースが左心房の天井壁(ceiling wall)に隣接する(または、その近くの)左心房の中隔壁を通って入る場合、心房天井から離れるように細長い部材を下に曲げ、肺静脈の方に上に戻ることが有益である。さらなる例において、典型的には中隔壁における入り口点により近くにある右肺静脈にアクセスするために、細長い部材の「シェパードフック」構成が有益であり、この場合、細長い部材は、心房に入り、次いで右肺静脈の方に戻るように曲がる。図5に示されるように、外側カテーテル412は、心房に配置されたとき右肺静脈の方に向かうように「シェパードフック」の事前設定の形状を有する。
【0053】
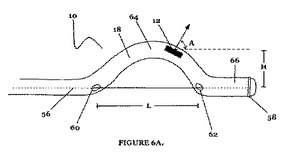
第2の変種において、図6Aおよび図6Bに示されるように、屈曲機構は、好ましくは、細長い部材における「虫様の」曲げを好ましくは誘導する少なくとも1つのプルワイヤ56を含む。プルワイヤは、好ましくは、接着バンド58によって細長い部材18に取り付けられる。代わりにプルワイヤは、接着剤、溶接、ピンおよび/またはねじなどの任意の適切な取り付け機構を用いて細長い部材18に連結され得る。プルワイヤは、好ましくは細長い部材18の内腔内に配置され、ノッチ60および62を通って出るが、代わりに任意の適切な位置に保持され得る。プルワイヤは、好ましくは、屈曲機構18の様々な特徴に影響する様々な作動機構を好ましくは含む近位ハウジング(図示されていない)におけるスライダにおいて終端する。使用時、プルワイヤ56が第1のスライダ(図示されていない)を動かすことによって引かれると、細長い部材は、位置64において曲げられ、一方、細長い材の遠位先端部分66および近位部分は、曲げられないままであり、その結果、中心部分は点64の周りに外に曲がり(buckle)、そして曲がり(bend)、それによって、エネルギー源12を動かし、その結果、エネルギー源12は、遠位先端部分66から離れるように動き(距離H)、細長い部材18の中心軸から角度Aに動く。細長い部材18が点64において曲げられると、概ね直線の遠位先端部分66および近位部分は、互いから距離Lを動く。図6Bに示されるように、第1のスライダ(図示されていない)がさらに動かされると、細長い部材18は遠位先端(距離H’、この場合、距離H’は距離Hより大きい)から離れるように、そして細長い部材の中心軸から角度A’にさらに動く。細長い部材18が点64においてさらに曲げられると、概ね直線の遠位先端部分66および近位部分は、互いからの距離L’の方に動く。距離L’は、好ましくは距離Lより短い。
【0054】
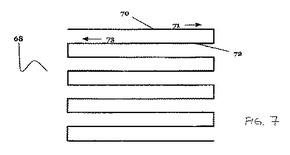
屈曲機構は、いくつかの位置の少なくとも1つの位置において細長い部材18の遠位部分を曲げるように機能を果たす。ここで図7を参照すると、屈曲機構は、遠位先端アセンブリ48ならびにエネルギー源および/またはセンサがパターン68(切除経路または画像経路など)に沿って動くように、一連の曲げ運動によって細長い部材18を動かすようにさらに機能を果たす。パターンは、好ましくはいくつかの変種のうちの1つである。第1の変種において、図7に示されるようにパターン68はラスタパターンである。図7の線は、遠位先端アセンブリならびに遠位先端アセンブリ内のエネルギー源および/またはセンサが細長い部材18によってパターン68を通って動かされるときに通る経路を表す
。ラスタパターンは、好ましくは一連の左および右の曲げを一連の上および/または下の曲げと組み合せることによって形成される。例えば、図7に示されるように、遠位先端アセンブリ48がパターン68の上左手角の方に向けられ始めるとすると、細長い部材はまず、遠位先端アセンブリ48が、態様71で右の方に動き、パターン68の第1のレッグ70を作るように曲がる。細長い部材は次いで、好ましくは前と同じ位置において曲がり、その結果、遠位先端アセンブリは、パターン68の第2のレッグ72を始めるために下に動き、そこから細長い部材は、遠位先端アセンブリ48が態様73で左の方に動いて戻るように曲がり、パターン68の第2のレッグ72を作る、などである。細長い部材18は、任意の適切な位置において曲がり得、遠位先端アセンブリ48は、遠位先端アセンブリ48が心臓の室の壁または部分などの領域の大部分を横切って掃引するように、エネルギー源および/またはセンサを前後に動かすために任意の適切な方向に曲がり得る。
【0055】
屈曲機構はさらに、曲げ運動が、呼吸、心拍数または任意の他の適切な運動などの患者の運動に同期するように一連の曲げ運動によって細長い部材18を動かすように機能を果たし得る。この変種において屈曲機構は、好ましくは、時間の経過に従い心臓の電気的活動を記録する心電計などの心拍数モニタに連結される。心臓の電波は、心筋がポンプ作用をするようにさせ、従って、時間の経過に従い概ね予測可能な態様で動く。屈曲機構を心電計に連結することによって、屈曲機構は、心臓の運動に適応するような方法で、曲げ得るか、またはパターン68によって運動中にセンサから受信されたデータは、心臓の運動の原因となるように変化させられ得る。さらに、パターン68によって運動中にセンサによって収集されたデータは、図8に示されるように、心電計によって生成される心臓の全鼓動を表示するグラフである心電計(ECGまたはEKG)に集められ、かつ/または心電計に表示され得る。ECGは、心拍(または心周期)の一連の追跡を表示する。概して、単一の追跡は、図8に示されるように、P波、QRS群およびT波を含む。第1のバージョンにおいて、センサによって収集されたデータは、好ましくは連続して収集され、ECGに表示される。例えば、表示されるデータの部分は、好ましくは心拍(または心周期)のECG追跡の各々の同じ点において取られたデータの部分である。第2のバージョンにおいて、センサによって収集されたデータは、好ましくは心周期ごとに1度のみ収集され、好ましくは心周期に沿って同じ点において収集される。センサデータは、好ましくはこれらの2つのバージョンのうちの1つにおいて収集され、表示されるが、データは、代わりに任意の他の適切な態様で収集され、表示される。
【0056】
アンカ機構。図3に示されるように、好ましい実施形態のシステム10は、アンカ機構をさらに含み、そのアンカ機構は、例えば心臓の心房などの室内の組織に対して比較的予測可能である位置に細長い部材18の遠位端を保持するように機能を果たす。アンカ機構は、アンカ機構と組織との間に堅固な接触および/または安定化を提供するように機能を果たし、軸であって、カテーテルシャフトのすべてまたは一部分がその軸の周り回転させられ得る、軸を提供する。
【0057】
アンカ機構は、好ましくはいくつかの変種のうちの1つである。図3に示されるように、切除デバイスのアンカ機構570は、内壁584と外壁586との間に環582を有する二重壁管580を含む。アンカ機構570は、療法カテーテル510の遠位部分から実質的にデバイスの近位部分(図示されていない)に及ぶ細長い構造である。アンカ機構570の遠位部分は、例えば膨張性のバルーンなどの拡張可能部材588を含み、膨張性バルーンは、アンカ機構570の近位端における例えばルアフィッティング(luer fitting)(図示されていない)などのコネクタと連絡し得る。バルーンは例示的な拡張可能部材として説明されるが、ケージまたはステントなどの拡張可能部材が用いられ得ることが想定される。アンカ機構570の内腔590は、内腔内においてカテーテルが軸方向554にそして回転して552自由に動くように、療法カテーテル510のための通路を提供する。図3に示されるよう、使用中、アンカ機構570は、ガイドシース522内に位置を決められ得、拡張可能部材588がガイドシース522の端部に実質的に近位にあるガイドシース522内にある状態で、アンカ機構570の遠位部分がガイドシース522を越えて延びるまで、遠位に前進させられ得る。別の実装においてアンカ機構の拡張可能部材の少なくとも一部分は、ガイドカテーテル内にあるままであり、一方、拡張可能部材の別の部分はガイドカテーテル端(図示されていない)を越えて遠位に延びる。
【0058】
固定を達成するために、バルーンは、アンカ機構の遠位部分がガイドカテーテルに堅固に保持されるように、適切な流体(例えば、食塩水またはCO2)で十分に膨張させられ得る。療法カテーテル510は、次いで、アンカ570の内腔590を通って(図3の矢印554によって示されるように)前進させられ得る。図3に示されるように、拡張可能部材588が膨張させられたとき、アンカ機構570から出るカテーテル510の遠位部分は、長手方向軸の周りに態様552で自由に回転するが、ガイドシース522に堅固に保持される。必要に応じて、カテーテル遠位部分は、上記に説明されるように所望の位置に曲げることによって形作られ得る(図4A〜図4Cに示されるように)。ガイドシース522の端部に固定されると、療法カテーテル510の遠位部分は、カテーテルが回転させられるかまたはそうでなければ心室内において導かれて切除帯を作るとき揺れまたはさまよいの影響受けることなく、固定した回転経路をたどるようにさせられ得る。
【0059】
第2の変種において、アンカ機構は成形済ワイヤループを含む。ワイヤループは、好ましくは例えばニチノール(ニッケル−チタン合金)などの形状記憶材料から作られる成形可能ワイヤから作られ、ループが説明されるが、湾曲および/または角のある、二次元および/または三次元の任意の多数の形状が必要とされる固定を提供し得ることが想定される。アンカは、細長い部材18の内腔(図示されていない)に存在し得、細長い部材18から細長い部材の遠位端の近くのノッチを通って出得、アンカは組織に対してシステム10を固定するように組織に連結する。アンカ部材は、例えば膨張可能バルーンなど膨張可能なディスクの形状であり得る。第4の変種において、アンカ機構の遠位部分は、1つ以上のバーブ部材または類似の組織係合フックを含む。
【0060】
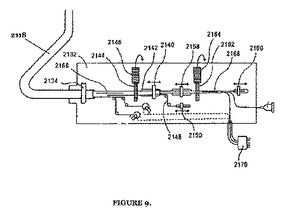
コネクタコンソール。図9に示されるように、好ましい実施形態のシステム10は、コネクタコンソール2132をさらに含み、コネクタコンソール2132は、運動の任意の適切な組み合わせで細長い部材18(ガイドシース、外側カテーテル、療法カテーテル、など)を動かし、システム10の様々な機構(アンカ機構、屈曲機構など)を駆動するように機能を果たす。以下に説明される運動のすべては、代わりに手動またはコンソール2132内または別個もしくは追加の駆動デバイス内の任意の他の適切なモータ、リンク仕掛けおよびアクチュエータを用いることによって、かつ/またはこれらの任意の組み合わせによって、達成され得る。図9に示されるように、ガイドシース2118の近位端において様々なカテーテル要素は、コネクタコンソール2132内の様々な制御器に接続される。患者内に遠位先端アセンブリ48を配置後(一例において、好ましくは心臓の中隔を貫いて左心房の中に)、ガイドシース2118は、好ましくはレバー2134によって適切な位置にロックされる。図9に関連して図1に示されるように、外側カテーテル2112は、好ましくは、少なくとも3つの独立した運動、すなわち軸方向運動2120、回転運動2124、および曲げ運動2122が可能である。ガイドシース2118内の外側カテーテル2112の軸方向運動2120は、好ましくはスロット2142内を直線状に動くスライダ2140を動かすことによって達成されるが、代わりに任意の適切な態様で達成され得る。一旦カテーテル2112の所望の位置が達成されると、スライダ2140は好ましくは適切な位置にロックされる。外側カテーテル2112の回転運動2124は、好ましくはギア機構2144および2146によって達成されるが、代わりに任意の他の適切な態様で達成され得る。ギア2144は好ましくは外側カテーテル2112の近位端に連結される。ギア2144はピニオン2146によって駆動され、ピニオン2146は、モータ(図示されていない)に連結される。カテーテル2112の遠位先端の旋回点182の周りの曲げ運動2122は、好ましくは、スライダ機構2150で終端するプルワイヤ2148によって達成されるが、代わりに任意の他の適切な態様で達成され得る。一旦カテーテル2112の曲げの所望の位置が達成されると、スライダ2150は好ましくはロック可能である。さらに、外側カテーテル2112は、点182の他に任意の適切な数の位置において曲がり得る。
【0061】
外側カテーテル2112と同様に、療法カテーテル2110もまた、少なくとも3つの独立した運動、すなわち軸方向運動2152、回転運動2156、および曲げ運動2154が可能である。カテーテル2110は、運動2152によって示されるように、カテーテル2112内において軸方向に動かされ得る。この運動2152は、好ましくはスライダ2158によって近位端において制御されるが、代わりに任意の適切な態様で達成され得る。一旦療法カテーテル2110の所望の位置が外側カテーテル2112に達成されると、スライダ2158は好ましくはロック可能である。カテーテル2110の遠位部分は、好ましくは近位端コンソール2132におけるスライダ機構2160に接続されたプルワイヤ(図示されていない)によって旋回点184の周りに態様2154で曲げられ得るが、代わりに任意の他の適切な態様で曲げ運動を達成し得る。再び、一旦療法カテーテル2110の先端の曲げの所望の位置が達成されると、スライダ2160は好ましくは適切な位置にロック可能である。さらに、療法カテーテル2110は、点184の他に任意の適切な数の位置において曲がり得る。カテーテル2110は、2156として示される態様で外側カテーテル2112内において回転させられ得る。外側カテーテル2112の端部分188は、好ましくはカテーテル2110を掴み、カテーテル2110の回転2156中、支持を提供し、カテーテル2110は、好ましくは態様2152で外側カテーテル2112内において自由に可動である。この動作は、好ましくはコンソール2132内のギア機構2162および2164によって影響されるが、代わりに任意の他の適切な機構によって達成され得る。ギア2162は、好ましくはカテーテル2110の近位端に連結され、好ましくはピニオン2164によって駆動され、ピニオン2164はモータ(図示されていない)に接続される。カテーテル2110および2112は、好ましくはカテーテル2110および2112のシャフトに提供される対応する配向マークを含む。コンソールはまた、コネクタ2170を含み、コネクタ2170は、発電機およびコントローラ(図示されていない)に電気的に接続する。コネクタ2170はまた、エネルギー源12および/または遠位先端アセンブリ48のセンサに電気的接続を提供する。
【0062】
システムの位置を決める方法。患者内にエネルギー源12の位置を決め、組織にエネルギーを送達する方法、より具体的には、心臓の組織などの組織に切除エネルギーを送達し、患者の心房細動の治療のための伝導を作る方法は、以下のステップを含む。方法は、代わりに任意の他の適切なステップ、または任意の他の適切な目的および/または療法のためのステップの組み合わせを含み得る。
【0063】
ガイドシースは、(図1および図5に示されるように)従来の方法で心臓の心房中隔Sを横切って位置を決められる。ガイドシースの開口部は、好ましくは心臓室の肺静脈の方に向けられる。図5において、ガイドシース2118は、心房中隔を横切って左心房の中に前進させられる。外側カテーテル412は、ガイドカテーテル2118から延び、外側カテーテルの遠位先端が肺静脈の方に向くように、湾曲498に曲げられる。遠位ハウジング414を有する療法カテーテル2410は、外側カテーテルから延び、矢印2452によって示される方向に外側カテーテルから離れるようにまたは外側カテーテルの中にスライドして動かされ得る。療法カテーテルはまた、外側カテーテルに対して方向456(または反対の方向)に回転させられ得る。療法カテーテルはまた、療法カテーテルの長さに沿って曲げられ得、治療されるべき組織の中にエネルギーを向ける遠位アセンブリの位置をさらに調整し得る。この実施形態において、療法カテーテルにおいてアパーチャ427から延びる複数の巻きワイヤ428は、治療領域に対してデバイス400を固定することを助けるために肺静脈の中に位置を決められ得る。遠位アセンブリは、従って、位置決めワイヤ428および430の周りに回転させられ、両肺静脈の周りに実質的に円形の切除帯を作る。
【0064】
図3に示されるように(この場合、細長い部材は図1に示されるように心臓室内に位置を決められる)、アンカ機構570は、アンカ機構522が概ね肺静脈(PV)(図示されていない)によって囲まれる組織の一部の方に向くように、ガイドシース522を通り、ガイドシース522開放端を越えて、PVの中間における組織領域の方に前進させられる。
【0065】
なおも図3を参照すると、アンカ機構570の拡張可能部材588は、アンカ機構570の遠位部分がガイドシース522に堅固に保持されるように流体によって膨張させられる。
【0066】
療法カテーテル510は、アンカ機構570の内腔590を通って心臓室の中に前進させられる。
【0067】
図4A〜図4Cに示されるように、細長い部材18の遠位先端アセンブリ48は、屈曲機構を用いてある形状に曲げられる。このステップにおいて、細長い部材は、任意の適切な目的(例えば、療法および/または診断)のために、上記に説明されるように、任意の適切な構成に曲げられ得る。
【0068】
一旦心臓室内にあるとき、遠位先端アセンブリ48および遠位先端アセンブリ48内のセンサは、好ましくは、センサが組織の関連する特性および組織に対するエネルギー源12の位置を検出し得るように室の周りに動かされる。センサは、好ましくは、意図される切除経路と同じである画像経路に沿って動かされ、かつ/または、センサは、図7におけるパターン68によって示されるように、好ましくは画像掃引に沿って動かされる。
【0069】
一旦、システムが所望の構成で、標的組織に対して所望の位置内に位置を決められ、任意の所望の画像掃引(画像掃引の一例は図7におけるパターン68によって示される)が行われると、エネルギー源12は、好ましくは発電機(図示されていない)によって電力を通され、標的組織に当る、放出された超音波エネルギーのエネルギービーム20を提供する。このエネルギービーム20は、所望の(そして検証された)切除経路に沿って組織に切除帯を作る。
【0070】
再び図3を参照すると、カテーテル510は、先端アセンブリおよび音ビームが心臓室内おいて実質的に円形の切除経路において横断するように、態様552で軸の周りに前進するように回転させられる。代わりに、カテーテルは、適切な組み合わせで回転され、曲げられ得、直線または非円形の切除経路を作り得る。切除経路に沿った組織の治療は、部分的または完全な経壁厚の切除が全切除経路に沿って達成されるまで継続される。療法カテーテル510が回転させられると、回転運動は、好ましくは、カテーテルが急に動かないようにそして滑らかに回転するようにトルク増強/または静電摩擦を減少させるために、上記のように局所振動運動を含む。
【0071】
追加の特徴として、システムは、タイムシェアベースで規則的に、切除モードから画像モードに一時的に変換(例えば、エネルギー源12の起動からセンサへの変換、または両方を同時に実行)し得る。このような方法で、正しい間隙または他のパラメータは、切除中、監視され得る。完全な切除リングは、すべての標的の肺静脈の周りに作られ、それによって伝導ブロックを達成する。説明されるように、切除経路は、概ね円形であるが、代わりに、楕円形、直線、湾曲、および/または、好ましくは伝導ブロックを達成する形状の任意の適切な組み合わせであり得る。
【0072】
細長い部材は、それぞれのプルワイヤ(図示されていない)上の引き張力を解放することによって緩和された位置に戻され、療法カテーテル510は、アンカ機構によって引っ込められる。
【0073】
アンカ機構570の拡張可能部材588は収縮させられ、アンカ機構570はガイドシース522によって引っ込められ、ガイドシース522は本体から取り外される。
【0074】
簡潔さのため省略されているが、好ましい実施形態は、様々な細長い部材18、遠位先端アセンブリ48、エネルギー源12、センサ、屈曲機構、およびアンカ機構のあらゆる組み合わせおよび入れ替えを含む。
【0075】
当業者は前述の詳細な説明ならびに図および特許請求の範囲から認識するように、修正および変更は、以下の特許請求の範囲に定義される本発明の範囲から逸脱することなく、本発明の好ましい実施形態に対してなされ得る。
【技術分野】
【0001】
(発明の背景)
(発明の分野)
本発明は、概して医療デバイス、システムおよび方法に関し、より具体的には組織に切除帯を作るための改良されたデバイス、システムおよび方法に関する。本デバイスは、心房細動を治療するために用いられ得る。
【背景技術】
【0002】
心房細動(AF)の状態は、心筋の正常な同期の動き(「正常洞調律」)から調子が外れる、心臓の左心房の異常な(通常非常に速い)拍動を特徴とする。正常洞調律において、電気的インパルスは、右心房にある洞房結節(「SA結節(node)」)において生じる。心房の心筋の異常な拍動は、細動として公知であり、肺静脈(「PV」)において代わりに生じる電気的インパルスによって引き起こされる(非特許文献1)。
【0003】
様々な成功の度合いを有する、この状態に対する薬理学的治療がある。さらに、PVから左心房(「LA」)への迷入の電気的経路を除去することを意図する、Cox−Maze III Procedureなどの外科手術的介入がある(非特許文献2)(非特許文献3)(非特許文献4)。この処置は99%有効であることが示される(非特許文献5)が、特別の外科手術的スキルを必要とし、時間がかかる。
【0004】
より少ない侵襲的で経皮カテーテルベースのアプローチのためにCox−Maze処置(procedure)をまねる相当な努力がなされてきた。異常な信号がPVにおいて生じる迷入の焦点を囲む組織を切除する(または殺す)ある形態のエネルギーを用いることを伴う侵襲性の少ない治療が開発されてきた。最も一般的な方法論は、無線周波数(「RF」)電気的エネルギーを用いて、筋肉組織を加熱し、それによって筋肉組織を切除することである。迷入の電気的インパルスは次いで、PVから心房に伝わることが妨げられ(心臓組織内の伝導ブロックを達成し)、従って心房筋の細動を回避する。マイクロ波、レーザ、および超音波などの他のエネルギー源が、伝導ブロックを達成するために利用されてきた。さらに凍結切除、エタノールの投与などの技術もまた用いられてきた。
【0005】
無線周波数(RF)エネルギーを用いるAFの治療のためにカテーテルベースのシステムを開発する相当な努力がなされてきた。そのような方法の1つは、Haissaguerreらへの特許文献1に説明されている。このアプローチにおいて、カテーテルは、先端が遠位および近位の電極から作られる。カテーテルは、J形状に曲げられ得、肺静脈内に位置を決められ得る。PVの内壁の組織は、迷入の心臓活動源を殺す試みにおいて切除される。他のRFベースのカテーテルは、Schwartzらへの特許文献2、Maguireらへの特許文献3、Leshへの特許文献4、およびStewartらへの特許文献5に説明される。
【0006】
切除に用いられる別の供給源は、マイクロ波である。そのようなデバイスの1つは、Dr.Mark Levinsonによる非特許文献6およびMaessenらの非特許文献7に説明される。この術中デバイスは、心房組織を切除する能力を有する可鍛性アンテナを有するプローブから成る。他のマイクロ波ベースのカテーテルは、Walinskyへの特許文献6、Langbergへの特許文献7、Grundyらへの特許文献8、およびStemらへの特許文献9に説明される。
【0007】
別のカテーテルベースの方法は、心房の組織が−60℃より低い温度で凍結される冷凍技術を利用する。これは、結果として、PVの近くの組織を殺すことになり、それによって、AFを引き起こす迷入信号のための通路を除去する(非特許文献8)。冷凍ベースの技術は、部分的Maze処置の一部である(非特許文献9および非特許文献10)。より最近では、Dr.Coxおよび彼のグループ(非特許文献11および非特許文献12)は、冷凍プローブ(冷凍Maze)を用い、Cox−Maze III処置の本質的要素を二重にした。他の冷凍ベースのデバイスは、Lafintaineへの特許文献10および特許文献11、ならびにCoxらへの特許文献12に説明される。
【0008】
AF治療に対するより最近のアプローチは、超音波エネルギーを用いることを伴う。肺静脈を囲む領域の標的組織は、1つ以上の超音波トランスデューサによって放出される超音波エネルギーによって加熱される。そのようなアプローチの1つは、Leshらによって特許文献13に説明される。ここでカテーテル遠位先端部分は、超音波要素を含むバルーンが装備される。バルーンは、肺静脈にカテーテルの先端を固定する(secure)固定(anchoring)手段として働く。カテーテルのバルーン部分は選択された肺静脈に位置を決められ、バルーンは、超音波エネルギーに透明である流体で膨張させられる。トランスデューサは、超音波エネルギーを放出し、その超音波エネルギーは、肺静脈におけるまたは肺静脈の近くの標的組織に伝わり、その標的組織を切除する。意図された療法は、肺静脈の周りの電気的伝導経路を破壊し、それによって正常洞調律を回復する。療法は、必要に応じて個々の肺静脈の周りに多数の外傷を作ることを伴う。発明者らは、エネルギー放出器およびアンカ機構の様々な構成を説明する。
【0009】
超音波エネルギーを用いるさらに別のカテーテルデバイスは、Gentryらによる特許文献13に説明される。ここで、カテーテル先端は、標的組織の三次元像を作る目的で、格子パターンの超音波要素の配列から作られる。画像化グリッドを取り囲むリング形状の切除超音波トランスデューサが提供される。切除トランスデューサは、10MHz周波数の超音波のリングを放出する。別の公開(非特許文献14)において、著者らは、デバイスの説明において肺静脈が画像化され得ることを主張する。
【0010】
これらのデバイスおよび方法は有望であるが、切除帯など組織の加熱帯を作る改良されたデバイスおよび方法が必要とされる。さらに、心房細動を少なくするかまたは防ぐために、そのようなデバイスが1つまたは複数の切除帯を作り得、心臓の異常な電気的活動をブロックし得ることもまた望ましい。そのようなデバイスが、血液または他の体組織が存在するとき、凝固させるかまたは超音波トランスデューサの動きを妨害することなく、用いられ得ることもまた望ましい。そのようなデバイスおよび方法は、使いやすく、最小侵襲性であり、費用効率が高く、製造が単純であるべきである。
【0011】
背景技術の説明。周囲の外傷を作る超音波エネルギーに基づく他のデバイスは、Maguireらへの米国特許第6,997,925号、第6,966,908号、第6,964,660号、第6,954,977号、第6,953,460号、第6,652,515号、第6,547,788号、および第6,514,249号、Leshへの第6,955,173号、第6,052,576号、第6,305,378号、第6,164,283号、および第6,012,457号、Leshらへの第6,872,205号、第6,416,511号、第6,254,599号、第6,245,064号、および第6,024,740号、Diederichらへの第6,383,151号、第6,117,101号、および国際公開第99/02096号、Fijieldらへの米国特許第6,635,054号、Jimenezらへの第6,780,183号、Ackerらへの第6,605,084号、Marcusらへの第5,295,484号、およびWongらへの国際公開第2005/117734号に説明される。
【先行技術文献】
【特許文献】
【0012】
【特許文献1】米国特許第6,064,902号明細書
【特許文献2】米国特許第6,814,733号明細書
【特許文献3】米国特許第6,996,908号明細書
【特許文献4】米国特許第6,955,173号明細書
【特許文献5】米国特許第6,949,097号明細書
【特許文献6】米国特許第4,641,649号明細書
【特許文献7】米国特許第5,246,438号明細書
【特許文献8】米国特許第5,405,346号明細書
【特許文献9】米国特許第5,314,466号明細書
【特許文献10】米国特許第6,929,639号明細書
【特許文献11】米国特許第6,666,858号明細書
【特許文献12】米国特許第6,161,543号明細書
【特許文献13】米国特許第6,502,576号明細書
【非特許文献】
【0013】
【非特許文献1】Haissaguerre,M.ら、「Spontaneous Initiation of Atrial Fibrillation by Ectopic Beats Originating in the Pulmonary Veins」,New England J Med.,Vol.339:659−666
【非特許文献2】J.L.Coxら、「The development of the Maze procedure for the treatment of atrial fibrillation」,Seminars in Thoracic & Cardiovascular Surgery,2000;12:2−14
【非特許文献3】J.L.Coxら、「Electrophysiologic basis,surgical development,and clinical results of the maze procedure for atrial flutter and atrial fibrillation」,Advances in Cardiac Surgery,1995;6:1−67
【非特許文献4】J.L.Coxら、「Modification of the maze procedure for atrial flutter and atrial fibrillation.II,Surgical technique of the maze III procedure」,Journal of Thoracic & Cardiovascular Surgery,1995;2110:485−95
【非特許文献5】J.L.Cox,N.Ad,T.Palazzoら「Current status of the Maze procedure for the treatment of atrial fibrillation」, Seminars in Thoracic & Cardiovascular Surgery,2000;12:15−19
【非特許文献6】「Endocardial Microwave Ablation:A New Surgical Approach for Atrial Fibrillation」;The Heart Surgery Forum,2006
【非特許文献7】Maessenらの「Beating heart surgical treatment of atrial fibrillation with microwave ablation」.Ann Thorac Surg74:1160−8,2002
【非特許文献8】A.M.Gillinov,E.H.BlackstoneおよびP.M.McCarthy,「Atrial fibrillation:current surgical options and their assessment」,Annals of Thoracic Surgery 2002;74:2210−7
【非特許文献9】Sueda T.,Nagata H.,Orihashi K.ら、「Efficasy of a simple left atrial procedure for chronic atrial fibrillation in mitral valve operations」、Ann Thorac Surg 1997;63:1070−1075
【非特許文献10】Sueda T.,Nagata H.,Shikata H.ら、「Simple left atrial procedure for chronic atrial fibrillation associated with mitral valve disease」、Ann Thorac Surg 1996;62:1796−1800
【非特許文献11】Nathan H.,Eliakim M.,「The junction between the left atrium and the pulmonary veins」,An annatomic study of human hearts、Circulation 1966;34:412−422)、
【非特許文献12】Cox J.L.Schuessler R.B.,Boineau J.P.,「The development of the Maze procedure for the treatment of atrial fibrillation」、Semin Thorac Cardiovasc Surg 2000;12:2−14
【非特許文献13】「Integrated Catheter for 3−D Intracardiac Echocardiograpy and Ultrasound Ablation」,IEEE Transactions on Ultrasonics,Ferroelectrics,and Frequency Control,Vol.51,No.7,pp 799−807
【非特許文献14】「Medical Device Link」,Medical Device and Diagnostic Industry,February 2006
【発明の概要】
【発明が解決しようとする課題】
【0014】
(発明の概要)
本発明は、概して医療デバイスおよび方法に関し、より具体的には、心房細動および他の医学状態のための治療として組織にエネルギーを送達するために用いられる医療デバイスおよび方法に関する。
【課題を解決するための手段】
【0015】
本発明の第1の局面において、患者の心房細動を治療する切除システムは、近位端と、遠位端と、それらの間に内腔とを有する細長い内側シャフトを備えている。システムはまた、内側シャフトの遠位端に隣接する遠位先端アセンブリを有する。遠位先端アセンブリは、エネルギー源とセンサとを備えている。エネルギー源は、異常な電気的活動をブロックし、それによって患者の心房細動を減少させるかまたは除去する切除帯を標的組織に作るように、標的組織にエネルギーを送達するように適合されている。システムはまた、近位端と、遠位端と、それらの間に内腔とを有する細長い外側シャフトとを有する。内側シャフトは、外側シャフト内腔にスライド可能に配置される。内側シャフトは、外側シャフトに対して、回転可能であり、屈曲可能であり、直線状にスライド可能であり、外側シャフトは、標的組織に対して、回転可能であり、屈曲可能であり、直線状にスライド可能である。
【0016】
遠位先端アセンブリは、外側ハウジングを備え得、外側ハウジング内にエネルギー源とセンサとが配置され得る。外側ハウジングは、開放端を備え得、キャストレイテッド領域を形成する一端に複数のスロットを有し得る。
【0017】
エネルギー源は、エネルギー源がエネルギーを送達したとき、エネルギー源が標的組織または血液などの周囲の流体と接触しないようにハウジングの遠位端から引っ込み得る。エネルギー源は、超音波トランスデューサを備え得る。エネルギー源は、無線周波数エネルギー、マイクロ波、フォトニックエネルギー、熱エネルギー、および低温エネルギーのうちの1つを送達し得る。エネルギー源は、標的組織の表面に対して65度〜115度であるビームのエネルギーを送達し得る。切除帯は弓形または直線の経路をたどり得る。
【0018】
センサは、標的組織の表面とエネルギー源との間の間隙距離を検出し得る。センサはまた、エネルギー源と標的組織の表面との間の角度を検出することが可能であり得る。センサは、標的組織の厚さなどの標的組織の特性を決定することが可能であり得る。いくつかの実施形態において、センサは、超音波トランスデューサを備えている。エネルギー源はまた、超音波トランスデューサであり得、いくつかの実施形態において、超音波トランスデューサは、エネルギー源およびセンサの両方として働く。センサはまた、赤外線センサまたは無線周波数センサを備え得る。
【0019】
センサは、外側シャフトの遠位端に隣接する位置決め機構を備え得る。位置決め機構は、解剖学的構造の位置設定を容易にするように適合され得、また解剖学的構造に切除システムを固定するように適合され得る。位置決め機構はまた、解剖学的構造に対する切除システムの位置の目に見える表示か、聴取可能表示かまたは触知可能表示を提供し得る。切除システム内側シャフトは、位置決め機構の周りに回転可能であり得る。
【0020】
位置決め機構は、外側シャフト内腔内に位置決め可能であり得、位置決め機構は、外側シャフト内腔に配置されている間、実質的に直線の構成であり得る。位置決め機構は、コイル、または制約されないとき放射状に外側に広がるように付勢される複数のワイヤを備え得る。位置決め機構は、解剖学的構造に対して外側への付勢力を加え、それによって解剖学的組織に切除システムを固定させ得る。標的組織は肺静脈を備え得、位置決め機構は内側シャフトが肺静脈の中に入る角度を示すように適合され得る。
【0021】
システムはガイドカテーテルをさらに備え得、外側シャフトはガイドカテーテル内にスライド可能に位置を決められ得る。標的組織は、心臓組織、肺静脈または肺静脈に隣接する組織を含み得る。内側シャフトまたは外側シャフトは、編組部分またはスプリングコイルを備え得る。システムはまた、切除システムに連結され、遠位先端アセンブリを安定させるように構成されるアンカ機構を備え得る。アンカ機構は、バルーンなどの拡張可能部材を備え得る。アンカ機構はまた、標的組織に連結可能であり得る形成可能ワイヤを備え得る。アンカはまた、組織と係合する1つ以上のバーブまたはフックを有し得る。
【0022】
システムは、内側シャフトに動作可能に連結される屈曲機構をさらに備え得る。いくつかの実施形態において、屈曲機構は、内側シャフトの遠位端に隣接して動作可能に連結されるプルワイヤを備え得、プルワイヤの一部分は、プルワイヤが作動させられたとき、内側シャフトが内側シャフトの外部のプルワイヤの部分に対して放射状に内側または外側に片寄るように、内側シャフトの外側表面に沿って配置され、プルワイヤの部分は実質的に直線の構成のままである。屈曲機構は、第1および第2のプルワイヤを備え得る。第1のプルワイヤは内側シャフトの遠位領域に連結され得、第2のプルワイヤは内側シャフトの近位領域に連結され得る。プルワイヤは2つの位置すなわち第1の曲げおよび第2の曲げにおいて内側シャフトを曲げるように適合され得る。システムは、アクチュエータを含み得、アクチュータは、内側シャフトの近位端の近くに配置され、プルワイヤを作動させるように適合されており、それによって、内側シャフトを曲げ、内側シャフトに沿って第1の曲げおよび第2の曲げを形成する。第1の曲げおよび第2の曲げは、異なる平面にあり得る。システムは、外側シャフトに動作可能に連結される屈曲機構を備え得る。屈曲機構は、第1および第2のプルワイヤを備え得る。第1のプルワイヤは外側シャフトの遠位領域に連結され得、第2のプルワイヤは外側シャフトの近位領域に連結され得る。プルワイヤは2つの位置すなわち第1の曲げおよび第2の曲げにおいて外側シャフトを曲げるように適合され得る。システムはまた、アクチュエータをさらに備え、アクチュータは、外側シャフトの近位端の近くに配置され得、プルワイヤを作動させるように適合され得、それによって、内側シャフトを曲げ、内側シャフトに沿って第1の曲げおよび第2の曲げを形成し得る。第1の曲げおよび第2の曲げは、異なる平面にあり得る。
【0023】
本発明の第2の局面において、組織を切除することによって患者の心房細動を治療する方法は、外側シャフトと内側シャフトとを備えている切除システムを提供することを包含する。内側シャフトは、エネルギー源とセンサとを備えている遠位先端アセンブリを有する。外側シャフトは、内側シャフトの少なくとも一部分の上にスライド可能に配置される。遠位先端アセンブリは組織に隣接して位置を決められ、内側シャフトまたは外側シャフトは組織に対して所望の位置にエネルギー源を配置するように操作される。エネルギーは、エネルギー源から組織に送達され、部分的または完全な切除帯は、組織に作られ、それによって、異常な電気的活動をブロックし、心房細動を減少させるかまたは除去する。
【0024】
切除システムはガイドシースをさらに備え得、方法は患者の心臓の心房中隔を横切ってガイドシースの遠位部分の位置を決めることを含み得る。システムの位置を決めることは、患者の心臓の中に遠位先端アセンブリを血管内に前進させることを包含し得る。
【0025】
操作するステップは、外側シャフトに対して内側シャフトをスライドして動かすことを包含し得る。操作することはまた、外側シャフトに対して内側シャフトを回転させることまたは内側シャフトを曲げることを含み得る。曲げることはまた、同じ平面にあり得るかまたは異なる平面にあり得る2つ以上の位置において内側シャフトを曲げることを包含し得る。曲げることは、内側シャフトに連結される1つ以上のプルワイヤを作動させることによって達成され得る。操作するステップはまた、外側シャフトをスライドして動かすか、回転させるか、または曲げることを含み得る。外側シャフトは、2つ以上の位置において曲げられ得る。2つ以上の曲げは、同じ平面にあり得るかまたは異なる平面にあり得る。外側シャフトを曲げることは、外側シャフトに連結される1つ以上のプルワイヤを作動させることによって達成され得る。操作するステップは、第1の方向に内側シャフトまたは外側シャフトのいずれかを第1の方向に回転させること、および内側シャフトまたは外側シャフトにおける曲げまたはトルク増強を減少させるように第1の方向とは反対の第2の方向に内側シャフトまたは外側シャフトを回転させることを包含し得る。操作するステップは、ラスタパターンでエネルギー源から組織にエネルギーを向けるようにエネルギー源を動かすことを包含し得る。操作するステップは、エネルギー源の運動を患者の心拍数に同期させることを包含し得る。
【0026】
エネルギー源は超音波トランスデューサを備え得、エネルギーを送達するステップはトランスデューサから組織に超音波ビームを送達することを包含し得る。エネルギーを送達するステップは、無線周波数エネルギー、マイクロ波エネルギー、フォトニックエネルギー、熱エネルギー、および低温エネルギーのうちの1つを送達することを包含し得る。
【0027】
切除帯を作るステップは、直線の切除経路、または少なくとも1つの肺静脈を取り囲み得る円形の切除経路を形成することを包含し得る。切除システムはセンサをさらに備え得、方法は、センサによって組織の特性を感知することを包含し得る。センサは超音波トランスデューサを備え得、いくつかの実施形態において、エネルギー源はセンサと同じ超音波トランスデューサを備え得る。方法は、超音波トランスデューサからのエネルギーを送達するモードと超音波トランスデューサによって感知するモードとを切り替えることをさらに包含し得る。感知された組織特性は、組織とエネルギー源の表面との間の間隙距離など、エネルギー源に対する組織の位置を含み得る。位置は、エネルギー源と組織との間の相対角度を含み得る。組織特性は、組織厚および/または領域の深さを含み得る。
【0028】
センサは位置決め機構を備え得、方法は内側シャフトまたは外側シャフトのいずれかから組織または組織に隣接する組織の中に位置決め機構を前進させることを含み得る。位置決め機構は解剖学的構造を位置設定することを容易にし得る。位置決め機構は複数のワイヤを備え得、方法はワイヤの形状および配向を観察しながら肺静脈の中にワイヤの位置を決めることをさらに包含し得る。
【0029】
方法は、感知された組織特性に基づいてエネルギーを導くことをさらに包含し得る。方法はまた、所望の値にエネルギー源と組織表面との間の間隙を維持することを含み得る。組織は、左心房組織、肺静脈または肺静脈に隣接する組織を含み得る。いくつかの実施形態において、方法は、エネルギー源を冷却するかまたは組織に対して遠位先端アセンブリを固定することをさらに包含する。固定することは、ワイヤを組織に連結すること、またはバルーンなど、外側シャフトに連結される拡張可能部材を拡張させることを包含し得る。
【0030】
これらおよび他の実施形態は、添付の図面に関係する以下の説明においてさらに詳細に説明される。
【図面の簡単な説明】
【0031】
【図1】図1は、本発明の好ましい実施形態のシステムの曲げ運動、回転運動および直線運動の図面である。
【図2】図2は、本発明の好ましい実施形態のシステムの遠位先端アセンブリの図面である。
【図3】図3は、本発明の好ましい実施形態のシステムのアンカ機構の第1の変種の図面である。
【図4A】図4A〜図4Cは、本発明の好ましい実施形態のシステムの曲げ運動の図面である。
【図4B】図4A〜図4Cは、本発明の好ましい実施形態のシステムの曲げ運動の図面である。
【図4C】図4A〜図4Cは、本発明の好ましい実施形態のシステムの曲げ運動の図面である。
【図5】図5は、本発明の好ましい実施形態のシステムの「シェパードフック(Sheppard’s hook)」曲げ運動の図面である。
【図6A】図6Aおよび図6Bは、本発明の好ましい実施形態のシステムの曲げ運動の第2の変種の図面である。
【図6B】図6Aおよび図6Bは、本発明の好ましい実施形態のシステムの曲げ運動の第2の変種の図面である。
【図7】図7は、運動パターンの図面である。
【図8】図8は、心周期の心電図(ECG)追跡の図面である。
【図9】図9は、好ましい実施形態のコネクタコンソールの図面である。
【図10A】図10A〜図13は、本発明の好ましい実施形態のシステムの位置決め機構の図面である。
【図10B】図10A〜図13は、本発明の好ましい実施形態のシステムの位置決め機構の図面である。
【図11】図10A〜図13は、本発明の好ましい実施形態のシステムの位置決め機構の図面である。
【図12A】図10A〜図13は、本発明の好ましい実施形態のシステムの位置決め機構の図面である。
【図12B】図10A〜図13は、本発明の好ましい実施形態のシステムの位置決め機構の図面である。
【図13】図10A〜図13は、本発明の好ましい実施形態のシステムの位置決め機構の図面である。
【発明を実施するための形態】
【0032】
(発明の詳細な説明)
本発明の好ましい実施形態の以下の説明は、これらの実施形態に本発明を限定することを意図するものではなく、むしろ当業者が本発明を作りそして用いることを可能にすることを意図する。
【0033】
図1に示されるように、好ましい実施形態のシステム10は、細長い部材18と遠位先端アセンブリ48とを含み、遠位先端アセンブリ48は、細長い部材18の遠位部分に連結され、エネルギー源12およびセンサのうちの少なくとも1つを含む。細長い部材18は、エネルギー源12および/またはセンサと共に遠位先端アセンブリ48を動かし、そしてその位置を決めるように機能を果たす。細長い部材18および遠位先端アセンブリ48は、エネルギー源12および/またはセンサを標的組織の方に向けるように協同して機能を果たす。システム10は、好ましくは、患者内にエネルギー源の位置を決め、組織にエネルギーを送達するように設計され、より具体的には、患者の心房細動の治療のために、典型的には左心房の肺静脈から生じる異常な電気的活動の伝導ブロック−伝導通路の絶縁および/またはブロックを作るように設計される。しかしながら、システム10は、代わりに任意の適切な環境において任意の適切な理由で任意の適切な組織に対して用いられ得る。
【0034】
細長い部材。図1に示されるように、好ましい実施形態の細長い部材18は、遠位先端アセンブリ48ならびに遠位先端アセンブリ48内のエネルギー源12および/またはセンサを動かし、それらの位置を決めるように機能を果たす。細長い部材18は、好ましくは可撓性の複数内腔管(multi−lumen tube)から作られるカテーテルであるが、代わりに、カニューレ、管または1つ以上の内腔を有する任意の他の適切な細長い構造であり得る。細長い部材18はまた、プルワイヤ、流体、気体、エネルギー源、電気的連結部、治療カテーテル、誘導(navigation)カテーテル、ペーシング(pacing)カテーテル、および/または任意の他の適切なデバイスまたは要素を収容するように機能を果たし得る。
【0035】
細長い部材は、好ましくはいくつかの変種のうちの1つである。第1の変種において、図1に示されるように、細長い部材18は、好ましくは、治療カテーテル2110と、外側カテーテル2112と、ガイドシース2118とを含む。細長い部材18は、代わりに単一のカテーテルまたは任意の他の適切な数のカテーテルおよび/またはシースを含み得る。カテーテルは、好ましくは互いに同心で配置されるが、代わりに任意の他の適切な態様で配置され得る。治療カテーテル2110は好ましくは外側カテーテル2112にスライド可能に含まれ、治療カテーテル2110および外側カテーテル2112は好ましくはガイドシース2118において放射状に自由に動かされ得る結合セットを形成する。外側カテーテル2112は、好ましくは、少なくとも3つの独立した運動、すなわち軸方向運動2120、回転運動2124、および曲げ運動2122が可能である。ガイドシース2118の端部分186は、好ましくは、外側カテーテル2112が回転している間2124、外側カテーテル2112上にグリップを提供するように外側カテーテル2112の上にスナッグフィット(snug fit)を有する。アンカ機構は、図3に示され、以下に説明されるように、好ましくは、外側カテーテル2112が回転しているか、曲がっているか、軸方向に動いているか、または任意の他の適切な態様で動いている間、ガイドシース2118に対して外側カテーテル2112を固定するために用いられる。外側カテーテル2112は、方法2120でガイドシース2118内において軸方向に動かされ得る。さらに外側カテーテル2112の一部分は、方法2122で旋回点182の近くで曲げられ得る。さらに、外側カテーテル2112は、点182に加えて任意の適切な数の位置において曲がり得る。
【0036】
外側カテーテル2112と同様に、図1に示されるように、治療カテーテル2110はまた、少なくとも3つの独立した運動、すなわち軸方向運動2152、回転運動2156、および曲げ運動2154が可能である。外側カテーテル2112の端部分188は、好ましくは、治療カテーテル2110が回転している間2156、治療カテーテル2110上にグリップを提供するように治療カテーテル2110の上にスナッグフィットを有する。治療カテーテル2110はまた、方法2152でガイドシース2112内において軸方向に動かされ得る。さらに治療カテーテル2110の一部分は、方法2154で旋回点184の近くで曲げられ得る。治療カテーテル2110は、点184に加えて任意の適切な数の位置において曲がり得る。
【0037】
遠位先端アセンブリ。図1および図2に示されるように、好ましい実施形態の遠位先端アセンブリ48は、細長い部材18の遠位部分に連結され、エネルギー源12およびセンサのうちの少なくとも1つを含む。図1に示されるように、遠位先端アセンブリ48は、好ましくはエネルギー源12に連結されたハウジング16を含む。ハウジング16は、好ましくは開放の管状形状を有するが、代わりにエネルギー源12を囲む閉鎖端ハウジングであり得る。閉鎖端ハウジングの少なくとも一部分は、好ましくは、ポリ4−メチル、1−ペンテン(PMP)材料などの超音波エネルギーに対して透明である材料など、エネルギービーム20に対して透明である材料、または任意の他の適切な材料から作られる。図2に示されるように、開放の管状ハウジングは、好ましくは、ハウジングが複数のスロット52を規定するように「城上部」構成を有する。スロット52は、流れる流体28のための出口ポートを提供するように機能を果たす。システム10の使用中に、遠位先端アセンブリ48の前部先端が組織または他の構造に接触するかまたは隣接するとき、スロット52は、冷却流体28がエネルギー源12を通過し、組織の表面に沿って流れることを維持するように機能を果たす。流体流れ線30は、バッキング22における溝に沿って流れ、エネルギー源12を浸し、流体柱を形成し、城上部ハウジング16においてスロット52を通って出る。閉鎖端ハウジングにおいて、ハウジングは、好ましくは、ハウジング16の遠位端の方への小さな穴などの複数のアパーチャを含む。これらの穴は、流れる流体のための出口経路を提供する。アパーチャは、格子、ふるい、穴、ドリップ穴、水抜き構造または任意の多数の適切なアパーチャである。代わりに、閉鎖端ハウジングは、流体を出すことを可能にするアパーチャを規定しない場合があり、むしろハウジングは、ハウジング内に流体を含み、エネルギー源12を通過して流体をリサイクルする。
【0038】
遠位チップアセンブリ48のハウジング16は、さらにエネルギー源12の面と心臓の心房など患者内にある血液との間に障壁を提供するようにさらに機能を果たす。流体の流れが組み込まれなく、トランスデューサ面が血液と直接接触する場合、血液はエネルギー源12の表面において凝固する。さらに、エネルギー源12と周囲の血液との間の界面に血塊を形成する可能性がある。エネルギー源はハウジングの遠位端から引っ込んでおり、冷却流体28の流れは血液がエネルギー源12と接触しないように保つので、血塊の形成が回避される。流量は、好ましくは毎分1ml以上(例えば、毎分10ml)であるが、代わりに、流体柱を維持し、血液とエネルギー源12の面との分離を保ち、エネルギー源12を冷却し、かつ/または組織276を冷却する任意の他の適切な流量であり得る。ハウジング16およびその中の構成要素についてのさらなる詳細は、米国特許出願第12/480,256号(代理人整理番号027680−000310US)、第12/483,174号(代理人整理番号027680−000410US)、および第12/482,640号(代理人整理番号027680−000510US)に、より詳細に開示され、各特許出願の全内容は、参照によって本明細書に援用される。
【0039】
エネルギー源。図2に示されるように、好ましい実施形態のエネルギー源12は、切除エネルギーの供給源を提供するように機能を果たし、エネルギービーム20を放出する。エネルギー源12は、好ましくは超音波ビームを放出する超音波トランスデューサであるが、代わりに切除エネルギーの任意の適切な供給源を提供するように機能を果たす任意の適切なエネルギー源であり得る。切除エネルギーの適切な供給源のいくつかの例は、無線周波数(RF)エネルギーと、マイクロ波と、フォトニックエネルギーと、熱エネルギーとを含む。療法は、代わりに冷却流体(例えば、低温流体)を用いて達成され得る。遠位先端アセンブリ48は、好ましくは単一のエネルギー源12を含むが、代わりに任意の適切な数のエネルギー源12を含み得る。超音波トランスデューサは、好ましくは、PZT(ジルコン酸チタン酸鉛)もしくはPVDF(フッ化ポリビニリデン二フッ化物(polyvinylidine difluoride))などの圧電材料、または任意の他の適切な超音波ビーム放出材料から作られる。トランスデューサは、金属の薄い層などのコーティング層をさらに含み得る。いくつかの適切なトランスデューサコーティング金属は、金、ステンレス鋼、ニッケルカドミウム、銀、および金属合金を含み得る。
【0040】
センサ。好ましい実施形態の遠位先端アセンブリ48はまた、センサを含み、そのセンサは、間隙(すなわち、エネルギー源12からの組織表面の距離)と、組織に対する、遠位先端アセンブリ48、エネルギー源12および/またはセンサ自体の角度と、切除の標的とされる組織の厚さと、切除された組織の特性と、任意の他の適切なパラメータもしくは特性とを検出するように機能を果たす。この情報を検出することによって、センサからの情報は、好ましくは組織の切除によって提供される療法を導き、どこにシステムの位置を決めるべきか、適切な間隙距離を維持するために遠位先端アセンブリに対してエネルギー源をどの位置に有すべきか、そして何の設定においてエネルギー源12および任意の他の適切な要素を用いるのかについての情報を提供する。センサによって検出された情報に応答して、細長い部材18および外側カテーテル2112と療法カテーテル2110との任意の適切な組み合わせは、患者内において遠位先端アセンブリ48、エネルギー源12および/またはセンサを動かし、位置を決めるために、軸方向に、回転して、曲げ運動で、またはこれらの運動の任意の適切な組み合わせで動かされ得、十分な間隙距離を維持し、切除された組織に望ましい適切な特性および質を提供する。センサは、療法の前、療法の全体(療法と同時にまたは交互に)、療法の後、および/またはこれらの任意の組み合わせにおいて標的組織の質、間隙距離などを検出するように動作させられ得る。
【0041】
センサは、好ましくはいくつかの変種のうちの1つである。第1の変種において、センサは、超音波トランスデューサであるが、代わりに、間隙と、組織に対する、遠位先端アセンブリ48、エネルギー源12および/またはセンサ自体の角度と、切除の標的とされる組織の厚さと、切除された組織の特性と、任意の他の適切なパラメータもしくは特性とを検出する、IRセンサまたはRFセンサなどの任意の適切なセンサであり得る。超音波トランスデューサは、好ましくは、概して組織を加熱するのに十分ではない短い継続時間の超音波のパルスを利用する。これは、当該分野においてAモードまたは振幅モード像(Amplitude Mode imaging)と呼ばれる超音波画像化技術である。センサは、好ましくは、異なるモード(上記に説明されるAモードなど)で動作するエネルギー源のトランスデューサと同じトランスデューサであるか、または代わりに、別個の超音波トランスデューサであり得る。別個の超音波トランスデューサは、エネルギー源12のトランスデューサに連結され得るかまたは別個の位置にあり得る。
【0042】
第2の変種において、図10Aおよび図10Bに示されるように、センサは位置決め機構54である。位置決め機構は、好ましくは細長い部材18の遠位部分に連結される。いくつかの変種において、位置決め機構54は細長い部材18の中に引っ込められる。位置決め機構54は、解剖学的構造に対して位置決め機構54がどこにあるかの表示を提供することによって、解剖学的構造を位置設定することを容易にするように機能を果たす。表示は、好ましくは目に見える表示であるが(蛍光透視鏡などの医療画像システムによる)、代わりにまたはさらに、触知可能または聴取可能な表示である。さらに、細長い部材18およびまたは位置決め機構54は、距離を表示するマーキングなどのインディシアを含み得、そのインディシアは解剖学的構造の位置を表示し、かつ/または解剖学的構造が位置を定められる、システム10の挿入の深さを表示する。
【0043】
図11、図12Aおよび図12Bに示されるように、位置決め機構54’の第1のバージョンは、複数のワイヤであって、各々が第1の端部24と第2の端部26とを有する、複数のワイヤを含む。第1の端部24は、好ましくは細長い部材18の遠位先端に連結されるが、代わりに任意の他の適切な位置に取り付けられ得る。第2の端部26は、好ましくは、細長い部材の遠位先端から延び、図11に示されるように、十分に延ばされた位置で位置を決められる。第2の端部26は、好ましくは、図12Aおよび図12Bに示されるように、表面との接触により片寄る。第2の端部26は、好ましくは十分に延ばされた位置の方に付勢されるが、代わりに任意の他の適切な位置の方に付勢され得る。
【0044】
図12Aおよび図12Bに示されるように、複数のワイヤは、ワイヤが解剖学的構造に接触すると曲がることによって解剖学的構造を位置設定することを容易にするように機能を果たす。例えば、ワイヤが心臓3002の左心房において妨げられないとき、ワイヤは、細長い部材18から十分に延ばされたままである。システム10が心臓3002の左心房内において動かされ、肺静脈3000の口(開口部)に接触し始めると、複数のワイヤは、図12Aに示されるように部分的に片寄り始める。システム10が肺静脈3000の中に動かされると、ワイヤは、図12Bに示されるように、より劇的に片寄る。システムが肺静脈の中により深く動かされると、ワイヤは、全く片寄らないわけではないが、それほど片寄らないで、システム10のセンサおよび/またはオペレータは、システム10の位置決め機構54が肺静脈内に正しく位置を定められた時を決定することが可能である。さらに、図13に示されるように、システム10が肺静脈3000に入る、肺静脈3000の長手方向軸に対する角度3004が決定され得る。角度3004が検出されると、遠位先端アセンブリ48は、好ましくは、エネルギー源12と組織との間の角度が適切な角度となるように動かされる。放出されたエネルギービーム20は、好ましくは組織に対して20〜160度の角度で標的組織と接触し、より好ましくは組織に対して45〜135度の角度で標的組織と接触し、最も好ましくは組織に対して65〜115度の角度で標的組織と接触する。
【0045】
システムの位置決め。図10A〜図10B、図11、図12A〜図12Bおよび図13は、位置決め機構のいくつかの実施形態を例示する。細長い部材18および遠位先端アセンブリ48は、エネルギー源12および/またはセンサを標的組織の方に向けるように協同して機能を果たす。細長い部材18は、好ましくは、遠位先端アセンブリ48、ならびに遠位先端アセンブリ48内のエネルギー源12および/またはセンサを動かし、それらの位置を決める。遠位先端アセンブリは、好ましくは患者内において動かされ、位置を決められ、好ましくは心臓の左心房内に(または任意の他の適切な位置に)動かされ、一旦そこに位置を決められると、好ましくは適切な角度で標的組織の方にセンサおよび/またはエネルギー源12ならびに放出されたエネルギービーム20を向けるように動かされる。放出されたエネルギービーム20は、好ましくは組織に対して20〜160度の角度で標的組織と接触し、より好ましくは組織に対して45〜135度の角度で標的組織と接触し、最も好ましくは組織に対して65〜115度の角度で標的組織と接触する。
【0046】
遠位先端アセンブリ48、ならびに遠位先端アセンブリ48内のエネルギー源12(および/またはセンサ)は、好ましくは、エネルギー源12が切除経路に沿って部分的または完全な切除帯(および/または経路に沿って組織の診断)を提供するように切除経路(および/または画像化経路)に沿って動かされる。例えば、図5に示されるように、切除経路308は、2つの肺静脈PVを取り囲む。切除経路は、代わりに任意の適切な形状を有し得、任意の適切な位置に位置を決められ得る。切除経路に沿った切除帯は、好ましくは、患者の心房細動の治療のための伝導ブロックを提供することなど、療法を提供するために任意の適切な形状を有する。切除経路に沿った切除帯は、代わりに、患者のために任意の他の適切な療法を提供し得る。画像化経路は、好ましくは、間隙(すなわち、エネルギー源12からの組織表面の距離)、組織に対する、遠位先端アセンブリ48、エネルギー源12および/またはセンサ自体の角度、切除の標的とされる組織の厚さ、切除された組織の特性、ならびに任意の他の適切なパラメータもしくは特性などの標的組織の特性にアクセスするために任意の適切な形状を有する。
【0047】
細長い部材18は、好ましくは、所望の切除経路および/または画像化経路を得るために、屈曲機構およびアンカ機構などの機構のいくつかの変種を用いて軸方向(細長い部材の軸方向に沿った前後)運動、回転運動および曲げ運動などの運動のいくつかの変種で動かすことによって、遠位先端アセンブリ48、ならびに遠位先端アセンブリ48内のエネルギー源12および/またはセンサを動かし、それらの位置を決める。例えば、直線の切除経路は、好ましくは、曲げ運動で遠位先端アセンブリおよび遠位先端アセンブリ内のエネルギー源12を動かすことによって作られる。さらに、概ね円形の切除経路は、好ましくは、軸の周りに遠位先端アセンブリおよび遠位先端アセンブリ内のエネルギー源12を回転させることによって作られ、楕円形の経路は曲げ運動および回転運動の組み合わせによって作られる。
【0048】
回転運動。上記に説明され、そして図1に示されるように、細長い部材18および細長い部材18の任意のカテーテルは、好ましくは、矢印2124および2156によって示されるように細長い部材の中心軸の周りに回転させられる。従来、カテーテルが第2のカテーテル内において回転させられると、2つのカテーテルは、概して静止摩擦のために互いに巻き付き、くっつき得、滑らかな回転運動を妨げ得る。この巻き付きおよび/またはトルク増強を防ぎかつ/または解放するために、カテーテルの管挿入は、好ましくは低摩擦材料のジャケットに覆われている編組に包まれる。カテーテルは、代わりにスプリング、スプリングラッピング、またはフォイルのラッピングに包まれ得る。編組の材料は、好ましくは、丸いかまたは平らな金属ワイヤ、プラスチックフィラメント、またはKevlarである。
【0049】
編組の代わりにまたは編組の他に、システム10の回転運動は、好ましくは、局所的振動運動(第1の回転運動とは反対の方向の、第1の回転運動より小さい第2の回転運動)を含む。局所的振動運動は、この巻き付きおよび/またはトルク増強を防ぎかつ/または解放するように機能を果たす。例えば、図1に示されるように、療法カテーテル2110の回転運動2156が数度(または任意の他の適切な距離)だけ時計回りである場合、療法カテーテル2110の局所的振動運動(図示されていない)は、より少ない度数で反時計回りである。あらゆる前進の回転運動に対してより小さい後退する回転運動を行うことによって、巻き付きおよびトルク増強は最小限にされ(かつ/または防がれ)、カテーテルの回転運動は、好ましくは、実質的に一様であり、飛び跳ね(skipping and jumping)がなくなる。
【0050】
システム10のエネルギー源12は、この局所的振動運動に比類なく適している。例えば、エネルギー源12が、電力を通され、エネルギービーム20(好ましくは超音波エネルギービーム)を標的組織に送達し、切除経路に沿って回転させられると、局所的振動運動(前後運動)は、エネルギー源12およびエネルギービーム20を切除経路の特定の部分の上に2回以上持って行く。超音波エネルギーの特性および外傷形成特性のために、組織は、エネルギービーム20によって2回以上接触されることによって損傷されたりしなく、さもなければ不利に影響されない。これは動物実験で検証されている。
【0051】
屈曲機構および曲げ運動。図4A〜図4Cに示されるように、好ましい実施形態のシステム10は、いくつかの位置のうちの少なくとも1つにおいて細長い部材18の遠位部分を曲げるように機能を果たす屈曲機構をさらに含む。屈曲機構は、複数のワイヤ、リボン、ケーブル、ひも、繊維、フィラメントまたは任意の他の張力部材を含む。屈曲機構は、好ましくはいくつかの変種のうちの1つである。第1の変種において、図4A〜図4Cに示されるように屈曲機構は、好ましくは、例えば遠位位置および近位位置における曲がりを誘導する遠位プルワイヤおよび近位プルワイヤなどの1つ以上のプルワイヤを含む。遠位プルワイヤおよび近位プルワイヤは、好ましくは、接着バンドによって細長い部材18に取り付けられる。代わりにプルワイヤは、接着剤、溶接、ピンおよび/またはねじなどの任意の適切な取り付け機構を用いて細長い部材18に連結され得る。プルワイヤは、好ましくは細長い部材18の1つまたは別個の内腔内に配置されるが、代わりに任意の適切な位置に保持され得る。プルワイヤは各々、好ましくは、屈曲機構18の様々な特徴に影響する様々な作動機構を好ましくは含む近位ハウジングにおけるスライダにおいて終端する。図4A〜図4Cに示されるように、遠位プルワイヤ116は、遠位接着バンド118によって細長い部材18の遠位部分に固定される。図4Bに示されるように、使用時、遠位プルワイヤ116が第1のスライダ(図示されていない)を動かすことによって引かれると、細長い部材は、172の方向に位置126において曲げられ、それによって、X位置からY位置に動く。図4Cに示されるように、近位接着バンド130によってある位置の細長い部材内腔に固定される近位プルワイヤ128は、第2のスライダ(図示されていない)を動かすことによって引かれ、細長い部材は位置136において曲がり、カテーテルの長手方向軸から離れるように方向174に位置Zの方に動く。代わりに両方のプルワイヤは、単一のスライダ機構によって引かれ得、図4Cに例示される形状はこの方法で達成され得る。
【0052】
プルワイヤ取り付け点および対応するデバイスにおける曲げ位置は、好ましくは任意の多くの方法で構成可能である。例えば、単一のプルワイヤまたは他の曲げ誘導機構が用いられ得る。代わりに、3つ以上のそのような機構が用いられ得る。曲げ誘導機構の取り付け点に関して、遠位先端アセンブリならびにカテーテル遠位部分に沿った任意の適切な位置は、適切な随意の取り付け点である。デバイスにおける曲げ位置の数および位置に関して、適切な曲げ位置の範囲が提供され得る。例えば、1つおよび2つの曲げが本明細書に例示されているが、3つ以上の曲げが、所望のカテーテル構成および/またはデバイスを用いるエネルギーの印加を達成するために用いられ得る。細長い部材が形状および構成のいくつかの変種に曲げられるように、屈曲機構は、好ましくは任意の適切な数の曲げ位置(旋回点)を含む。図4A〜図4Cに例証されるように、屈曲機構の2つの曲げが同じ平面にあり得るが、屈曲機構は好ましくは任意の適切な平面において曲がり、2つの曲げは2つの異なる面において起り得る。形状および構成のいくつかの変種は、好ましくは、細長い部材が患者の領域全体(好ましくは患者の心臓の左心房の全体)に遠位先端アセンブリの位置を決め、心房の任意の切片または部分内の標的組織にアクセスすることを可能にする形状を含む。例えば、ガイドシースが左心房の天井壁(ceiling wall)に隣接する(または、その近くの)左心房の中隔壁を通って入る場合、心房天井から離れるように細長い部材を下に曲げ、肺静脈の方に上に戻ることが有益である。さらなる例において、典型的には中隔壁における入り口点により近くにある右肺静脈にアクセスするために、細長い部材の「シェパードフック」構成が有益であり、この場合、細長い部材は、心房に入り、次いで右肺静脈の方に戻るように曲がる。図5に示されるように、外側カテーテル412は、心房に配置されたとき右肺静脈の方に向かうように「シェパードフック」の事前設定の形状を有する。
【0053】
第2の変種において、図6Aおよび図6Bに示されるように、屈曲機構は、好ましくは、細長い部材における「虫様の」曲げを好ましくは誘導する少なくとも1つのプルワイヤ56を含む。プルワイヤは、好ましくは、接着バンド58によって細長い部材18に取り付けられる。代わりにプルワイヤは、接着剤、溶接、ピンおよび/またはねじなどの任意の適切な取り付け機構を用いて細長い部材18に連結され得る。プルワイヤは、好ましくは細長い部材18の内腔内に配置され、ノッチ60および62を通って出るが、代わりに任意の適切な位置に保持され得る。プルワイヤは、好ましくは、屈曲機構18の様々な特徴に影響する様々な作動機構を好ましくは含む近位ハウジング(図示されていない)におけるスライダにおいて終端する。使用時、プルワイヤ56が第1のスライダ(図示されていない)を動かすことによって引かれると、細長い部材は、位置64において曲げられ、一方、細長い材の遠位先端部分66および近位部分は、曲げられないままであり、その結果、中心部分は点64の周りに外に曲がり(buckle)、そして曲がり(bend)、それによって、エネルギー源12を動かし、その結果、エネルギー源12は、遠位先端部分66から離れるように動き(距離H)、細長い部材18の中心軸から角度Aに動く。細長い部材18が点64において曲げられると、概ね直線の遠位先端部分66および近位部分は、互いから距離Lを動く。図6Bに示されるように、第1のスライダ(図示されていない)がさらに動かされると、細長い部材18は遠位先端(距離H’、この場合、距離H’は距離Hより大きい)から離れるように、そして細長い部材の中心軸から角度A’にさらに動く。細長い部材18が点64においてさらに曲げられると、概ね直線の遠位先端部分66および近位部分は、互いからの距離L’の方に動く。距離L’は、好ましくは距離Lより短い。
【0054】
屈曲機構は、いくつかの位置の少なくとも1つの位置において細長い部材18の遠位部分を曲げるように機能を果たす。ここで図7を参照すると、屈曲機構は、遠位先端アセンブリ48ならびにエネルギー源および/またはセンサがパターン68(切除経路または画像経路など)に沿って動くように、一連の曲げ運動によって細長い部材18を動かすようにさらに機能を果たす。パターンは、好ましくはいくつかの変種のうちの1つである。第1の変種において、図7に示されるようにパターン68はラスタパターンである。図7の線は、遠位先端アセンブリならびに遠位先端アセンブリ内のエネルギー源および/またはセンサが細長い部材18によってパターン68を通って動かされるときに通る経路を表す
。ラスタパターンは、好ましくは一連の左および右の曲げを一連の上および/または下の曲げと組み合せることによって形成される。例えば、図7に示されるように、遠位先端アセンブリ48がパターン68の上左手角の方に向けられ始めるとすると、細長い部材はまず、遠位先端アセンブリ48が、態様71で右の方に動き、パターン68の第1のレッグ70を作るように曲がる。細長い部材は次いで、好ましくは前と同じ位置において曲がり、その結果、遠位先端アセンブリは、パターン68の第2のレッグ72を始めるために下に動き、そこから細長い部材は、遠位先端アセンブリ48が態様73で左の方に動いて戻るように曲がり、パターン68の第2のレッグ72を作る、などである。細長い部材18は、任意の適切な位置において曲がり得、遠位先端アセンブリ48は、遠位先端アセンブリ48が心臓の室の壁または部分などの領域の大部分を横切って掃引するように、エネルギー源および/またはセンサを前後に動かすために任意の適切な方向に曲がり得る。
【0055】
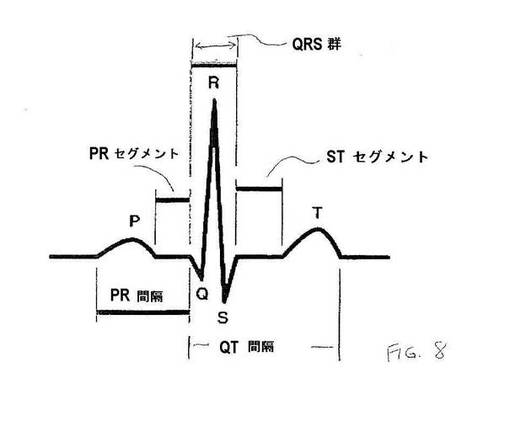
屈曲機構はさらに、曲げ運動が、呼吸、心拍数または任意の他の適切な運動などの患者の運動に同期するように一連の曲げ運動によって細長い部材18を動かすように機能を果たし得る。この変種において屈曲機構は、好ましくは、時間の経過に従い心臓の電気的活動を記録する心電計などの心拍数モニタに連結される。心臓の電波は、心筋がポンプ作用をするようにさせ、従って、時間の経過に従い概ね予測可能な態様で動く。屈曲機構を心電計に連結することによって、屈曲機構は、心臓の運動に適応するような方法で、曲げ得るか、またはパターン68によって運動中にセンサから受信されたデータは、心臓の運動の原因となるように変化させられ得る。さらに、パターン68によって運動中にセンサによって収集されたデータは、図8に示されるように、心電計によって生成される心臓の全鼓動を表示するグラフである心電計(ECGまたはEKG)に集められ、かつ/または心電計に表示され得る。ECGは、心拍(または心周期)の一連の追跡を表示する。概して、単一の追跡は、図8に示されるように、P波、QRS群およびT波を含む。第1のバージョンにおいて、センサによって収集されたデータは、好ましくは連続して収集され、ECGに表示される。例えば、表示されるデータの部分は、好ましくは心拍(または心周期)のECG追跡の各々の同じ点において取られたデータの部分である。第2のバージョンにおいて、センサによって収集されたデータは、好ましくは心周期ごとに1度のみ収集され、好ましくは心周期に沿って同じ点において収集される。センサデータは、好ましくはこれらの2つのバージョンのうちの1つにおいて収集され、表示されるが、データは、代わりに任意の他の適切な態様で収集され、表示される。
【0056】
アンカ機構。図3に示されるように、好ましい実施形態のシステム10は、アンカ機構をさらに含み、そのアンカ機構は、例えば心臓の心房などの室内の組織に対して比較的予測可能である位置に細長い部材18の遠位端を保持するように機能を果たす。アンカ機構は、アンカ機構と組織との間に堅固な接触および/または安定化を提供するように機能を果たし、軸であって、カテーテルシャフトのすべてまたは一部分がその軸の周り回転させられ得る、軸を提供する。
【0057】
アンカ機構は、好ましくはいくつかの変種のうちの1つである。図3に示されるように、切除デバイスのアンカ機構570は、内壁584と外壁586との間に環582を有する二重壁管580を含む。アンカ機構570は、療法カテーテル510の遠位部分から実質的にデバイスの近位部分(図示されていない)に及ぶ細長い構造である。アンカ機構570の遠位部分は、例えば膨張性のバルーンなどの拡張可能部材588を含み、膨張性バルーンは、アンカ機構570の近位端における例えばルアフィッティング(luer fitting)(図示されていない)などのコネクタと連絡し得る。バルーンは例示的な拡張可能部材として説明されるが、ケージまたはステントなどの拡張可能部材が用いられ得ることが想定される。アンカ機構570の内腔590は、内腔内においてカテーテルが軸方向554にそして回転して552自由に動くように、療法カテーテル510のための通路を提供する。図3に示されるよう、使用中、アンカ機構570は、ガイドシース522内に位置を決められ得、拡張可能部材588がガイドシース522の端部に実質的に近位にあるガイドシース522内にある状態で、アンカ機構570の遠位部分がガイドシース522を越えて延びるまで、遠位に前進させられ得る。別の実装においてアンカ機構の拡張可能部材の少なくとも一部分は、ガイドカテーテル内にあるままであり、一方、拡張可能部材の別の部分はガイドカテーテル端(図示されていない)を越えて遠位に延びる。
【0058】
固定を達成するために、バルーンは、アンカ機構の遠位部分がガイドカテーテルに堅固に保持されるように、適切な流体(例えば、食塩水またはCO2)で十分に膨張させられ得る。療法カテーテル510は、次いで、アンカ570の内腔590を通って(図3の矢印554によって示されるように)前進させられ得る。図3に示されるように、拡張可能部材588が膨張させられたとき、アンカ機構570から出るカテーテル510の遠位部分は、長手方向軸の周りに態様552で自由に回転するが、ガイドシース522に堅固に保持される。必要に応じて、カテーテル遠位部分は、上記に説明されるように所望の位置に曲げることによって形作られ得る(図4A〜図4Cに示されるように)。ガイドシース522の端部に固定されると、療法カテーテル510の遠位部分は、カテーテルが回転させられるかまたはそうでなければ心室内において導かれて切除帯を作るとき揺れまたはさまよいの影響受けることなく、固定した回転経路をたどるようにさせられ得る。
【0059】
第2の変種において、アンカ機構は成形済ワイヤループを含む。ワイヤループは、好ましくは例えばニチノール(ニッケル−チタン合金)などの形状記憶材料から作られる成形可能ワイヤから作られ、ループが説明されるが、湾曲および/または角のある、二次元および/または三次元の任意の多数の形状が必要とされる固定を提供し得ることが想定される。アンカは、細長い部材18の内腔(図示されていない)に存在し得、細長い部材18から細長い部材の遠位端の近くのノッチを通って出得、アンカは組織に対してシステム10を固定するように組織に連結する。アンカ部材は、例えば膨張可能バルーンなど膨張可能なディスクの形状であり得る。第4の変種において、アンカ機構の遠位部分は、1つ以上のバーブ部材または類似の組織係合フックを含む。
【0060】
コネクタコンソール。図9に示されるように、好ましい実施形態のシステム10は、コネクタコンソール2132をさらに含み、コネクタコンソール2132は、運動の任意の適切な組み合わせで細長い部材18(ガイドシース、外側カテーテル、療法カテーテル、など)を動かし、システム10の様々な機構(アンカ機構、屈曲機構など)を駆動するように機能を果たす。以下に説明される運動のすべては、代わりに手動またはコンソール2132内または別個もしくは追加の駆動デバイス内の任意の他の適切なモータ、リンク仕掛けおよびアクチュエータを用いることによって、かつ/またはこれらの任意の組み合わせによって、達成され得る。図9に示されるように、ガイドシース2118の近位端において様々なカテーテル要素は、コネクタコンソール2132内の様々な制御器に接続される。患者内に遠位先端アセンブリ48を配置後(一例において、好ましくは心臓の中隔を貫いて左心房の中に)、ガイドシース2118は、好ましくはレバー2134によって適切な位置にロックされる。図9に関連して図1に示されるように、外側カテーテル2112は、好ましくは、少なくとも3つの独立した運動、すなわち軸方向運動2120、回転運動2124、および曲げ運動2122が可能である。ガイドシース2118内の外側カテーテル2112の軸方向運動2120は、好ましくはスロット2142内を直線状に動くスライダ2140を動かすことによって達成されるが、代わりに任意の適切な態様で達成され得る。一旦カテーテル2112の所望の位置が達成されると、スライダ2140は好ましくは適切な位置にロックされる。外側カテーテル2112の回転運動2124は、好ましくはギア機構2144および2146によって達成されるが、代わりに任意の他の適切な態様で達成され得る。ギア2144は好ましくは外側カテーテル2112の近位端に連結される。ギア2144はピニオン2146によって駆動され、ピニオン2146は、モータ(図示されていない)に連結される。カテーテル2112の遠位先端の旋回点182の周りの曲げ運動2122は、好ましくは、スライダ機構2150で終端するプルワイヤ2148によって達成されるが、代わりに任意の他の適切な態様で達成され得る。一旦カテーテル2112の曲げの所望の位置が達成されると、スライダ2150は好ましくはロック可能である。さらに、外側カテーテル2112は、点182の他に任意の適切な数の位置において曲がり得る。
【0061】
外側カテーテル2112と同様に、療法カテーテル2110もまた、少なくとも3つの独立した運動、すなわち軸方向運動2152、回転運動2156、および曲げ運動2154が可能である。カテーテル2110は、運動2152によって示されるように、カテーテル2112内において軸方向に動かされ得る。この運動2152は、好ましくはスライダ2158によって近位端において制御されるが、代わりに任意の適切な態様で達成され得る。一旦療法カテーテル2110の所望の位置が外側カテーテル2112に達成されると、スライダ2158は好ましくはロック可能である。カテーテル2110の遠位部分は、好ましくは近位端コンソール2132におけるスライダ機構2160に接続されたプルワイヤ(図示されていない)によって旋回点184の周りに態様2154で曲げられ得るが、代わりに任意の他の適切な態様で曲げ運動を達成し得る。再び、一旦療法カテーテル2110の先端の曲げの所望の位置が達成されると、スライダ2160は好ましくは適切な位置にロック可能である。さらに、療法カテーテル2110は、点184の他に任意の適切な数の位置において曲がり得る。カテーテル2110は、2156として示される態様で外側カテーテル2112内において回転させられ得る。外側カテーテル2112の端部分188は、好ましくはカテーテル2110を掴み、カテーテル2110の回転2156中、支持を提供し、カテーテル2110は、好ましくは態様2152で外側カテーテル2112内において自由に可動である。この動作は、好ましくはコンソール2132内のギア機構2162および2164によって影響されるが、代わりに任意の他の適切な機構によって達成され得る。ギア2162は、好ましくはカテーテル2110の近位端に連結され、好ましくはピニオン2164によって駆動され、ピニオン2164はモータ(図示されていない)に接続される。カテーテル2110および2112は、好ましくはカテーテル2110および2112のシャフトに提供される対応する配向マークを含む。コンソールはまた、コネクタ2170を含み、コネクタ2170は、発電機およびコントローラ(図示されていない)に電気的に接続する。コネクタ2170はまた、エネルギー源12および/または遠位先端アセンブリ48のセンサに電気的接続を提供する。
【0062】
システムの位置を決める方法。患者内にエネルギー源12の位置を決め、組織にエネルギーを送達する方法、より具体的には、心臓の組織などの組織に切除エネルギーを送達し、患者の心房細動の治療のための伝導を作る方法は、以下のステップを含む。方法は、代わりに任意の他の適切なステップ、または任意の他の適切な目的および/または療法のためのステップの組み合わせを含み得る。
【0063】
ガイドシースは、(図1および図5に示されるように)従来の方法で心臓の心房中隔Sを横切って位置を決められる。ガイドシースの開口部は、好ましくは心臓室の肺静脈の方に向けられる。図5において、ガイドシース2118は、心房中隔を横切って左心房の中に前進させられる。外側カテーテル412は、ガイドカテーテル2118から延び、外側カテーテルの遠位先端が肺静脈の方に向くように、湾曲498に曲げられる。遠位ハウジング414を有する療法カテーテル2410は、外側カテーテルから延び、矢印2452によって示される方向に外側カテーテルから離れるようにまたは外側カテーテルの中にスライドして動かされ得る。療法カテーテルはまた、外側カテーテルに対して方向456(または反対の方向)に回転させられ得る。療法カテーテルはまた、療法カテーテルの長さに沿って曲げられ得、治療されるべき組織の中にエネルギーを向ける遠位アセンブリの位置をさらに調整し得る。この実施形態において、療法カテーテルにおいてアパーチャ427から延びる複数の巻きワイヤ428は、治療領域に対してデバイス400を固定することを助けるために肺静脈の中に位置を決められ得る。遠位アセンブリは、従って、位置決めワイヤ428および430の周りに回転させられ、両肺静脈の周りに実質的に円形の切除帯を作る。
【0064】
図3に示されるように(この場合、細長い部材は図1に示されるように心臓室内に位置を決められる)、アンカ機構570は、アンカ機構522が概ね肺静脈(PV)(図示されていない)によって囲まれる組織の一部の方に向くように、ガイドシース522を通り、ガイドシース522開放端を越えて、PVの中間における組織領域の方に前進させられる。
【0065】
なおも図3を参照すると、アンカ機構570の拡張可能部材588は、アンカ機構570の遠位部分がガイドシース522に堅固に保持されるように流体によって膨張させられる。
【0066】
療法カテーテル510は、アンカ機構570の内腔590を通って心臓室の中に前進させられる。
【0067】
図4A〜図4Cに示されるように、細長い部材18の遠位先端アセンブリ48は、屈曲機構を用いてある形状に曲げられる。このステップにおいて、細長い部材は、任意の適切な目的(例えば、療法および/または診断)のために、上記に説明されるように、任意の適切な構成に曲げられ得る。
【0068】
一旦心臓室内にあるとき、遠位先端アセンブリ48および遠位先端アセンブリ48内のセンサは、好ましくは、センサが組織の関連する特性および組織に対するエネルギー源12の位置を検出し得るように室の周りに動かされる。センサは、好ましくは、意図される切除経路と同じである画像経路に沿って動かされ、かつ/または、センサは、図7におけるパターン68によって示されるように、好ましくは画像掃引に沿って動かされる。
【0069】
一旦、システムが所望の構成で、標的組織に対して所望の位置内に位置を決められ、任意の所望の画像掃引(画像掃引の一例は図7におけるパターン68によって示される)が行われると、エネルギー源12は、好ましくは発電機(図示されていない)によって電力を通され、標的組織に当る、放出された超音波エネルギーのエネルギービーム20を提供する。このエネルギービーム20は、所望の(そして検証された)切除経路に沿って組織に切除帯を作る。
【0070】
再び図3を参照すると、カテーテル510は、先端アセンブリおよび音ビームが心臓室内おいて実質的に円形の切除経路において横断するように、態様552で軸の周りに前進するように回転させられる。代わりに、カテーテルは、適切な組み合わせで回転され、曲げられ得、直線または非円形の切除経路を作り得る。切除経路に沿った組織の治療は、部分的または完全な経壁厚の切除が全切除経路に沿って達成されるまで継続される。療法カテーテル510が回転させられると、回転運動は、好ましくは、カテーテルが急に動かないようにそして滑らかに回転するようにトルク増強/または静電摩擦を減少させるために、上記のように局所振動運動を含む。
【0071】
追加の特徴として、システムは、タイムシェアベースで規則的に、切除モードから画像モードに一時的に変換(例えば、エネルギー源12の起動からセンサへの変換、または両方を同時に実行)し得る。このような方法で、正しい間隙または他のパラメータは、切除中、監視され得る。完全な切除リングは、すべての標的の肺静脈の周りに作られ、それによって伝導ブロックを達成する。説明されるように、切除経路は、概ね円形であるが、代わりに、楕円形、直線、湾曲、および/または、好ましくは伝導ブロックを達成する形状の任意の適切な組み合わせであり得る。
【0072】
細長い部材は、それぞれのプルワイヤ(図示されていない)上の引き張力を解放することによって緩和された位置に戻され、療法カテーテル510は、アンカ機構によって引っ込められる。
【0073】
アンカ機構570の拡張可能部材588は収縮させられ、アンカ機構570はガイドシース522によって引っ込められ、ガイドシース522は本体から取り外される。
【0074】
簡潔さのため省略されているが、好ましい実施形態は、様々な細長い部材18、遠位先端アセンブリ48、エネルギー源12、センサ、屈曲機構、およびアンカ機構のあらゆる組み合わせおよび入れ替えを含む。
【0075】
当業者は前述の詳細な説明ならびに図および特許請求の範囲から認識するように、修正および変更は、以下の特許請求の範囲に定義される本発明の範囲から逸脱することなく、本発明の好ましい実施形態に対してなされ得る。
【特許請求の範囲】
【請求項1】
患者の心房細動を治療する切除システムであって、該システムは、
近位端と、遠位端と、該近位端と該遠位端との間の内腔とを有する細長い内側シャフトと、
該内側シャフトの該遠位端に隣接する遠位先端アセンブリであって、該遠位先端アセンブリは、エネルギー源とセンサとを備え、該エネルギー源は、異常な電気的活動をブロックすることによって該患者の心房細動を減少させるかまたは除去する切除帯を標的組織内に作るように、該標的組織にエネルギーを送達するように適合されている、遠位先端アセンブリと、
近位端と、遠位端と、該近位端と該遠位端との間の内腔とを有する細長い外側シャフトと
を備え、
該内側シャフトは、該外側シャフト内腔にスライド可能に配置され、該内側シャフトは、該外側シャフトに対して、回転可能であり、屈曲可能であり、直線状にスライド可能であり、該外側シャフトは、該標的組織に対して、回転可能であり、屈曲可能であり、直線状にスライド可能である、システム。
【請求項2】
前記遠位先端アセンブリは、外側ハウジングを備え、前記エネルギー源とセンサとは、該外側ハウジング内に配置されている、請求項1に記載のシステム。
【請求項3】
前記外側ハウジングは、開放端を備えている、請求項2に記載のシステム。
【請求項4】
前記ハウジングは、一端に複数のスロットを備え、キャストレイテッド領域を形成する、請求項2に記載のシステム。
【請求項5】
前記エネルギー源は、該エネルギー源がエネルギーを送達したとき、該エネルギー源が前記標的組織と接触しないように前記ハウジングの遠位端から引っ込んでいる、請求項2に記載のシステム。
【請求項6】
前記エネルギー源は、超音波トランスデューサを備えている、請求項1に記載のシステム。
【請求項7】
前記エネルギー源は、無線周波数エネルギー、マイクロ波、フォトニックエネルギー、熱エネルギー、および低温エネルギーのうちの1つを送達する、請求項1に記載のシステム。
【請求項8】
前記エネルギー源は、前記標的組織の表面に対して65度〜115度の範囲内の角度でエネルギーを送達する、請求項1に記載のシステム。
【請求項9】
前記切除帯は弓形の経路をたどる、請求項1に記載のシステム。
【請求項10】
前記切除帯は直線状の経路をたどる、請求項1に記載のシステム。
【請求項11】
前記センサは、前記標的組織の表面と前記エネルギー源との間の間隙距離を検出するように適合されている、請求項1に記載のシステム。
【請求項12】
前記センサは、前記エネルギー源と前記標的組織の表面との間の角度を検出するように適合されている、請求項1に記載のシステム。
【請求項13】
前記センサは、前記標的組織の厚さを検出するように適合されている、請求項1に記載のシステム。
【請求項14】
前記センサは、前記標的組織の特性を検出するように適合されている、請求項1に記載のシステム。
【請求項15】
前記センサは、超音波トランスデューサを備えている、請求項1に記載のシステム。
【請求項16】
前記エネルギー源は、同じ超音波トランスデューサを備えている、請求項15に記載のシステム。
【請求項17】
前記センサは、赤外線センサおよび無線周波数センサのうちの1つを備えている、請求項1に記載のシステム。
【請求項18】
前記センサは、前記外側シャフトの遠位端に隣接する位置決め機構を備え、該位置決め機構は、解剖学的構造の位置設定を容易にするように適合されており、また、該解剖学的構造に前記切除システムを固定するように適合されている、請求項1に記載のシステム。
【請求項19】
前記内側シャフトは、前記位置決め機構の周りに回転可能である、請求項18に記載のシステム。
【請求項20】
前記位置決め機構は、前記外側シャフト内腔内に位置決め可能であり、該位置決め機構は、該外側シャフト内腔に配置されている間、実質的に直線状の構成である、請求項18に記載のシステム。
【請求項21】
前記位置決め機構は、コイルを備えている、請求項18に記載のシステム。
【請求項22】
前記位置決め機構は、制約されないとき放射状に外側に付勢される複数のワイヤを備えている、請求項18に記載のシステム。
【請求項23】
前記位置決め機構は、前記解剖学的構造に対して外側への付勢力を加え、それによって該解剖学的組織に前記切除システムを固定させる、請求項18に記載のシステム。
【請求項24】
前記解剖学的構造は、肺静脈を含み、前記位置決め機構は、該肺静脈に位置決め可能であり、前記内側シャフトが該肺静脈の中に入る角度を示すように適合されている、請求項18に記載のシステム。
【請求項25】
ガイドカテーテルをさらに備え、前記外側シャフトは、該ガイドカテーテル内にスライド可能に位置を決められる、請求項1に記載のシステム。
【請求項26】
前記標的組織は、心臓組織を含む、請求項1に記載のシステム。
【請求項27】
前記標的組織は、肺静脈または該肺静脈に隣接する組織を含む、請求項1に記載のシステム。
【請求項28】
前記内側シャフトまたは前記外側シャフトは編組部分を備えている、請求項1に記載のシステム。
【請求項29】
前記内側シャフトまたは前記外側シャフトはスプリングコイルを備えている、請求項1に記載のシステム。
【請求項30】
前記切除システムに連結され、前記遠位先端アセンブリを安定させるように構成されるアンカ機構をさらに備えている、請求項25に記載のシステム。
【請求項31】
前記アンカ機構は、拡張可能部材を備えている、請求項30に記載のシステム。
【請求項32】
前記拡張可能部材は、バルーンを備えている、請求項31に記載のシステム。
【請求項33】
前記アンカ部材は、前記標的組織に連結可能である形成可能ワイヤを備えている、請求項30に記載のシステム。
【請求項34】
前記アンカ部材は、組織と係合する1つ以上のバーブまたはフックを備えている、請求項30に記載のシステム。
【請求項35】
前記内側シャフトに動作可能に連結される屈曲機構をさらに備えている、請求項1に記載のシステム。
【請求項36】
前記屈曲機構は、前記内側シャフトの前記遠位端に隣接して動作可能に連結されるプルワイヤを備え、該プルワイヤの一部分は、該プルワイヤが作動させられたとき、該内側シャフトが該内側シャフトの外部の該プルワイヤの該部分に対して放射状に内側または外側に片寄るように、該内側シャフトの外側表面に沿って配置され、該プルワイヤの該部分は実質的に直線の構成のままである、請求項35に記載のシステム。
【請求項37】
前記屈曲機構は、第1および第2のプルワイヤを備え、該第1のプルワイヤは前記内側シャフトの遠位領域に連結され、該第2のプルワイヤは該内側シャフトの近位領域に連結され、該プルワイヤは2つの位置すなわち第1の屈曲および第2の屈曲において該内側シャフトを曲げるように適合されている、請求項35に記載のシステム。
【請求項38】
アクチュエータをさらに備え、該アクチュータは、前記内側シャフトの近位端の近くに配置され、前記プルワイヤを作動させるように適合されており、それによって、該内側シャフトを曲げ、該内側シャフトに沿って前記第1の屈曲および前記第2の屈曲を形成する、請求項37に記載のシステム。
【請求項39】
前記第1の屈曲および前記第2の屈曲は、異なる平面にある、請求項38に記載のシステム。
【請求項40】
前記外側シャフトに動作可能に連結される屈曲機構をさらに備えている、請求項1に記載のシステム。
【請求項41】
前記屈曲機構は、第1および第2のプルワイヤを備え、該第1のプルワイヤは前記外側シャフトの遠位領域に連結され、該第2のプルワイヤは該外側シャフトの近位領域に連結され、該プルワイヤは2つの位置すなわち第1の屈曲および第2の屈曲において該外側シャフトを曲げるように適合されている、請求項40に記載のシステム。
【請求項42】
アクチュエータをさらに備え、該アクチュータは、前記外側シャフトの近位端の近くに配置され、前記プルワイヤを作動させるように適合されており、それによって、該内側シャフトを曲げ、該内側シャフトに沿って前記第1の屈曲および前記第2の屈曲を形成する、請求項41に記載のシステム。
【請求項43】
前記第1の屈曲および前記第2の屈曲は、異なる平面にある、請求項42に記載のシステム。
【請求項44】
組織を切除することによって患者の心房細動を治療する方法であって、該方法は、
外側シャフトと、遠位先端アセンブリを有する内側シャフトとを備えている切除システムを提供することであって、該遠位先端アセンブリは、エネルギー源とセンサとを備え、該外側シャフトは、該内側シャフトの少なくとも一部分の上にスライド可能に配置される、ことと、
該組織に隣接して該遠位先端アセンブリの位置を決めることと、
該組織に対して所望の位置に該エネルギー源を配置するように該内側シャフトまたは該外側シャフトを操作することと、
該エネルギー源から該組織にエネルギーを送達することと、
該組織に部分的または完全な切除帯を作り、それによって、異常な電気的活動をブロックし、該心房細動を減少させるかまたは除去することと
を包含する、方法。
【請求項45】
前記切除システムはガイドシースをさらに備え、前記方法は前記患者の心臓の心房中隔を横切って該ガイドシースの遠位部分の位置を決めることをさらに包含する、請求項44に記載の方法。
【請求項46】
前記位置決めするステップは、前記患者の心臓の中に前記遠位先端アセンブリを血管内に前進させることを包含する、請求項44に記載の方法。
【請求項47】
前記操作するステップは、前記外側シャフトに対して前記内側シャフトをスライドして動かすことを包含する、請求項44に記載の方法。
【請求項48】
前記操作するステップは、前記外側シャフトに対して前記内側シャフトを回転させることを包含する、請求項44に記載の方法。
【請求項49】
前記操作するステップは、前記外側シャフトに対して前記内側シャフトを曲げることを包含する、請求項44に記載の方法。
【請求項50】
前記操作するステップは、2つ以上の位置において前記内側シャフトを曲げることを包含する、請求項49に記載の方法。
【請求項51】
前記2つ以上の屈曲は同じ平面にある、請求項50に記載の方法。
【請求項52】
前記曲げることは、前記内側シャフトに連結される1つ以上のプルワイヤを作動させることを包含する、請求項49に記載の方法。
【請求項53】
前記操作するステップは、前記外側シャフトをスライドして動かすことを包含する、請求項44に記載の方法。
【請求項54】
前記操作するステップは、前記外側シャフトを回転させることを包含する、請求項44に記載の方法。
【請求項55】
前記操作するステップは、前記外側シャフトを曲げることを包含する、請求項44に記載の方法。
【請求項56】
前記曲げることは、2つ以上の位置において前記外側シャフトを曲げることを包含する、請求項55に記載の方法。
【請求項57】
前記2つ以上の屈曲は同じ平面にある、請求項56に記載の方法。
【請求項58】
前記曲げることは、前記外側シャフトに連結される1つ以上のプルワイヤを作動させることを包含する、請求項55に記載の方法。
【請求項59】
前記操作するステップは、第1の方向に前記内側シャフトまたは前記外側シャフトのいずれかを回転させること、および該内側シャフトまたは該外側シャフトにおける屈曲またはトルク増強を減少させるように該第1の方向とは反対の第2の方向に該内側シャフトまたは該外側シャフトのいずれかを回転させることを包含する、請求項44に記載の方法。
【請求項60】
前記操作するステップは、ラスタパターンで前記エネルギー源から前記組織に前記エネルギーを向けるように該エネルギー源を動かすことを包含する、請求項44に記載の方法。
【請求項61】
前記操作するステップは、前記エネルギー源の運動を前記患者の心拍数に同期させることを包含する、請求項44に記載の方法。
【請求項62】
前記エネルギー源は超音波トランスデューサを備え、前記エネルギーを送達するステップは該トランスデューサから前記組織に超音波ビームを送達することを包含する、請求項44に記載の方法。
【請求項63】
前記エネルギーを送達するステップは、無線周波数エネルギー、マイクロ波エネルギー、フォトニックエネルギー、熱エネルギー、および低温エネルギーのうちの1つを送達することを包含する、請求項44に記載の方法。
【請求項64】
前記切除帯を作るステップは、円形の切除経路を形成することを包含する、請求項44に記載の方法。
【請求項65】
前記切除経路は、少なくとも1つの肺静脈を取り囲む、請求項64に記載の方法。
【請求項66】
前記切除帯を作るステップは、直線の切除経路を形成することを包含する、請求項44に記載の方法。
【請求項67】
前記切除システムはセンサをさらに備え、前記方法は、該センサによって前記組織の特性を感知することをさらに包含する、請求項44に記載の方法。
【請求項68】
前記センサは、超音波トランスデューサを備えている、請求項67に記載の方法。
【請求項69】
前記エネルギー源は、同じ超音波トランスデューサを備えている、請求項68に記載の方法。
【請求項70】
前記超音波トランスデューサからのエネルギーを送達するモードと前記超音波トランスデューサによって感知するモードとを切り替えることをさらに包含する、請求項69に記載の方法。
【請求項71】
前記組織の前記特性は、前記エネルギー源に対する該組織の位置を含む、請求項67に記載の方法。
【請求項72】
前記位置は、前記組織と前記エネルギー源の表面との間の間隙距離を含む、請求項71に記載の方法。
【請求項73】
前記位置は、前記エネルギー源と前記組織との間の相対角度を含む、請求項71に記載の方法。
【請求項74】
前記組織の前記特性は、該組織の厚さまたは前記切除帯の厚さを含む、請求項71に記載の方法。
【請求項75】
前記センサは位置決め機構を備え、前記方法は前記内側シャフトまたは前記外側シャフトのいずれかから前記組織または該組織に隣接する組織の中に該位置決め機構を前進させることをさらに包含し、該位置決め機構は解剖学的構造を位置設定することを容易にする、請求項67に記載の方法。
【請求項76】
前記位置決め機構は複数のワイヤを備え、前記方法は、該ワイヤの形状を観察しながら肺静脈の中に該ワイヤの位置を決めることをさらに包含する、請求項75に記載の方法。
【請求項77】
感知された特性に基づいて前記エネルギーを導くことをさらに包含する、請求項71に記載の方法。
【請求項78】
所望の値に前記間隙を維持することをさらに包含する、請求項72に記載の方法。
【請求項79】
前記組織は、左心房組織を含む、請求項44に記載の方法。
【請求項80】
前記組織は、肺静脈または該肺静脈に隣接する組織を含む、請求項44に記載の方法。
【請求項81】
前記エネルギー源を冷却することをさらに包含する、請求項44に記載の方法。
【請求項82】
前記組織に対して前記遠位先端アセンブリを固定することをさらに包含する、請求項44に記載の方法。
【請求項83】
前記固定するステップは、ワイヤを前記組織に連結することを包含する、請求項82に記載の方法。
【請求項84】
前記固定するステップは、前記外側シャフトに配置される拡張可能部材を拡張させることを包含する、請求項82に記載の方法。
【請求項85】
前記拡張可能部材は、バルーンを備えている、請求項84に記載の方法。
【請求項1】
患者の心房細動を治療する切除システムであって、該システムは、
近位端と、遠位端と、該近位端と該遠位端との間の内腔とを有する細長い内側シャフトと、
該内側シャフトの該遠位端に隣接する遠位先端アセンブリであって、該遠位先端アセンブリは、エネルギー源とセンサとを備え、該エネルギー源は、異常な電気的活動をブロックすることによって該患者の心房細動を減少させるかまたは除去する切除帯を標的組織内に作るように、該標的組織にエネルギーを送達するように適合されている、遠位先端アセンブリと、
近位端と、遠位端と、該近位端と該遠位端との間の内腔とを有する細長い外側シャフトと
を備え、
該内側シャフトは、該外側シャフト内腔にスライド可能に配置され、該内側シャフトは、該外側シャフトに対して、回転可能であり、屈曲可能であり、直線状にスライド可能であり、該外側シャフトは、該標的組織に対して、回転可能であり、屈曲可能であり、直線状にスライド可能である、システム。
【請求項2】
前記遠位先端アセンブリは、外側ハウジングを備え、前記エネルギー源とセンサとは、該外側ハウジング内に配置されている、請求項1に記載のシステム。
【請求項3】
前記外側ハウジングは、開放端を備えている、請求項2に記載のシステム。
【請求項4】
前記ハウジングは、一端に複数のスロットを備え、キャストレイテッド領域を形成する、請求項2に記載のシステム。
【請求項5】
前記エネルギー源は、該エネルギー源がエネルギーを送達したとき、該エネルギー源が前記標的組織と接触しないように前記ハウジングの遠位端から引っ込んでいる、請求項2に記載のシステム。
【請求項6】
前記エネルギー源は、超音波トランスデューサを備えている、請求項1に記載のシステム。
【請求項7】
前記エネルギー源は、無線周波数エネルギー、マイクロ波、フォトニックエネルギー、熱エネルギー、および低温エネルギーのうちの1つを送達する、請求項1に記載のシステム。
【請求項8】
前記エネルギー源は、前記標的組織の表面に対して65度〜115度の範囲内の角度でエネルギーを送達する、請求項1に記載のシステム。
【請求項9】
前記切除帯は弓形の経路をたどる、請求項1に記載のシステム。
【請求項10】
前記切除帯は直線状の経路をたどる、請求項1に記載のシステム。
【請求項11】
前記センサは、前記標的組織の表面と前記エネルギー源との間の間隙距離を検出するように適合されている、請求項1に記載のシステム。
【請求項12】
前記センサは、前記エネルギー源と前記標的組織の表面との間の角度を検出するように適合されている、請求項1に記載のシステム。
【請求項13】
前記センサは、前記標的組織の厚さを検出するように適合されている、請求項1に記載のシステム。
【請求項14】
前記センサは、前記標的組織の特性を検出するように適合されている、請求項1に記載のシステム。
【請求項15】
前記センサは、超音波トランスデューサを備えている、請求項1に記載のシステム。
【請求項16】
前記エネルギー源は、同じ超音波トランスデューサを備えている、請求項15に記載のシステム。
【請求項17】
前記センサは、赤外線センサおよび無線周波数センサのうちの1つを備えている、請求項1に記載のシステム。
【請求項18】
前記センサは、前記外側シャフトの遠位端に隣接する位置決め機構を備え、該位置決め機構は、解剖学的構造の位置設定を容易にするように適合されており、また、該解剖学的構造に前記切除システムを固定するように適合されている、請求項1に記載のシステム。
【請求項19】
前記内側シャフトは、前記位置決め機構の周りに回転可能である、請求項18に記載のシステム。
【請求項20】
前記位置決め機構は、前記外側シャフト内腔内に位置決め可能であり、該位置決め機構は、該外側シャフト内腔に配置されている間、実質的に直線状の構成である、請求項18に記載のシステム。
【請求項21】
前記位置決め機構は、コイルを備えている、請求項18に記載のシステム。
【請求項22】
前記位置決め機構は、制約されないとき放射状に外側に付勢される複数のワイヤを備えている、請求項18に記載のシステム。
【請求項23】
前記位置決め機構は、前記解剖学的構造に対して外側への付勢力を加え、それによって該解剖学的組織に前記切除システムを固定させる、請求項18に記載のシステム。
【請求項24】
前記解剖学的構造は、肺静脈を含み、前記位置決め機構は、該肺静脈に位置決め可能であり、前記内側シャフトが該肺静脈の中に入る角度を示すように適合されている、請求項18に記載のシステム。
【請求項25】
ガイドカテーテルをさらに備え、前記外側シャフトは、該ガイドカテーテル内にスライド可能に位置を決められる、請求項1に記載のシステム。
【請求項26】
前記標的組織は、心臓組織を含む、請求項1に記載のシステム。
【請求項27】
前記標的組織は、肺静脈または該肺静脈に隣接する組織を含む、請求項1に記載のシステム。
【請求項28】
前記内側シャフトまたは前記外側シャフトは編組部分を備えている、請求項1に記載のシステム。
【請求項29】
前記内側シャフトまたは前記外側シャフトはスプリングコイルを備えている、請求項1に記載のシステム。
【請求項30】
前記切除システムに連結され、前記遠位先端アセンブリを安定させるように構成されるアンカ機構をさらに備えている、請求項25に記載のシステム。
【請求項31】
前記アンカ機構は、拡張可能部材を備えている、請求項30に記載のシステム。
【請求項32】
前記拡張可能部材は、バルーンを備えている、請求項31に記載のシステム。
【請求項33】
前記アンカ部材は、前記標的組織に連結可能である形成可能ワイヤを備えている、請求項30に記載のシステム。
【請求項34】
前記アンカ部材は、組織と係合する1つ以上のバーブまたはフックを備えている、請求項30に記載のシステム。
【請求項35】
前記内側シャフトに動作可能に連結される屈曲機構をさらに備えている、請求項1に記載のシステム。
【請求項36】
前記屈曲機構は、前記内側シャフトの前記遠位端に隣接して動作可能に連結されるプルワイヤを備え、該プルワイヤの一部分は、該プルワイヤが作動させられたとき、該内側シャフトが該内側シャフトの外部の該プルワイヤの該部分に対して放射状に内側または外側に片寄るように、該内側シャフトの外側表面に沿って配置され、該プルワイヤの該部分は実質的に直線の構成のままである、請求項35に記載のシステム。
【請求項37】
前記屈曲機構は、第1および第2のプルワイヤを備え、該第1のプルワイヤは前記内側シャフトの遠位領域に連結され、該第2のプルワイヤは該内側シャフトの近位領域に連結され、該プルワイヤは2つの位置すなわち第1の屈曲および第2の屈曲において該内側シャフトを曲げるように適合されている、請求項35に記載のシステム。
【請求項38】
アクチュエータをさらに備え、該アクチュータは、前記内側シャフトの近位端の近くに配置され、前記プルワイヤを作動させるように適合されており、それによって、該内側シャフトを曲げ、該内側シャフトに沿って前記第1の屈曲および前記第2の屈曲を形成する、請求項37に記載のシステム。
【請求項39】
前記第1の屈曲および前記第2の屈曲は、異なる平面にある、請求項38に記載のシステム。
【請求項40】
前記外側シャフトに動作可能に連結される屈曲機構をさらに備えている、請求項1に記載のシステム。
【請求項41】
前記屈曲機構は、第1および第2のプルワイヤを備え、該第1のプルワイヤは前記外側シャフトの遠位領域に連結され、該第2のプルワイヤは該外側シャフトの近位領域に連結され、該プルワイヤは2つの位置すなわち第1の屈曲および第2の屈曲において該外側シャフトを曲げるように適合されている、請求項40に記載のシステム。
【請求項42】
アクチュエータをさらに備え、該アクチュータは、前記外側シャフトの近位端の近くに配置され、前記プルワイヤを作動させるように適合されており、それによって、該内側シャフトを曲げ、該内側シャフトに沿って前記第1の屈曲および前記第2の屈曲を形成する、請求項41に記載のシステム。
【請求項43】
前記第1の屈曲および前記第2の屈曲は、異なる平面にある、請求項42に記載のシステム。
【請求項44】
組織を切除することによって患者の心房細動を治療する方法であって、該方法は、
外側シャフトと、遠位先端アセンブリを有する内側シャフトとを備えている切除システムを提供することであって、該遠位先端アセンブリは、エネルギー源とセンサとを備え、該外側シャフトは、該内側シャフトの少なくとも一部分の上にスライド可能に配置される、ことと、
該組織に隣接して該遠位先端アセンブリの位置を決めることと、
該組織に対して所望の位置に該エネルギー源を配置するように該内側シャフトまたは該外側シャフトを操作することと、
該エネルギー源から該組織にエネルギーを送達することと、
該組織に部分的または完全な切除帯を作り、それによって、異常な電気的活動をブロックし、該心房細動を減少させるかまたは除去することと
を包含する、方法。
【請求項45】
前記切除システムはガイドシースをさらに備え、前記方法は前記患者の心臓の心房中隔を横切って該ガイドシースの遠位部分の位置を決めることをさらに包含する、請求項44に記載の方法。
【請求項46】
前記位置決めするステップは、前記患者の心臓の中に前記遠位先端アセンブリを血管内に前進させることを包含する、請求項44に記載の方法。
【請求項47】
前記操作するステップは、前記外側シャフトに対して前記内側シャフトをスライドして動かすことを包含する、請求項44に記載の方法。
【請求項48】
前記操作するステップは、前記外側シャフトに対して前記内側シャフトを回転させることを包含する、請求項44に記載の方法。
【請求項49】
前記操作するステップは、前記外側シャフトに対して前記内側シャフトを曲げることを包含する、請求項44に記載の方法。
【請求項50】
前記操作するステップは、2つ以上の位置において前記内側シャフトを曲げることを包含する、請求項49に記載の方法。
【請求項51】
前記2つ以上の屈曲は同じ平面にある、請求項50に記載の方法。
【請求項52】
前記曲げることは、前記内側シャフトに連結される1つ以上のプルワイヤを作動させることを包含する、請求項49に記載の方法。
【請求項53】
前記操作するステップは、前記外側シャフトをスライドして動かすことを包含する、請求項44に記載の方法。
【請求項54】
前記操作するステップは、前記外側シャフトを回転させることを包含する、請求項44に記載の方法。
【請求項55】
前記操作するステップは、前記外側シャフトを曲げることを包含する、請求項44に記載の方法。
【請求項56】
前記曲げることは、2つ以上の位置において前記外側シャフトを曲げることを包含する、請求項55に記載の方法。
【請求項57】
前記2つ以上の屈曲は同じ平面にある、請求項56に記載の方法。
【請求項58】
前記曲げることは、前記外側シャフトに連結される1つ以上のプルワイヤを作動させることを包含する、請求項55に記載の方法。
【請求項59】
前記操作するステップは、第1の方向に前記内側シャフトまたは前記外側シャフトのいずれかを回転させること、および該内側シャフトまたは該外側シャフトにおける屈曲またはトルク増強を減少させるように該第1の方向とは反対の第2の方向に該内側シャフトまたは該外側シャフトのいずれかを回転させることを包含する、請求項44に記載の方法。
【請求項60】
前記操作するステップは、ラスタパターンで前記エネルギー源から前記組織に前記エネルギーを向けるように該エネルギー源を動かすことを包含する、請求項44に記載の方法。
【請求項61】
前記操作するステップは、前記エネルギー源の運動を前記患者の心拍数に同期させることを包含する、請求項44に記載の方法。
【請求項62】
前記エネルギー源は超音波トランスデューサを備え、前記エネルギーを送達するステップは該トランスデューサから前記組織に超音波ビームを送達することを包含する、請求項44に記載の方法。
【請求項63】
前記エネルギーを送達するステップは、無線周波数エネルギー、マイクロ波エネルギー、フォトニックエネルギー、熱エネルギー、および低温エネルギーのうちの1つを送達することを包含する、請求項44に記載の方法。
【請求項64】
前記切除帯を作るステップは、円形の切除経路を形成することを包含する、請求項44に記載の方法。
【請求項65】
前記切除経路は、少なくとも1つの肺静脈を取り囲む、請求項64に記載の方法。
【請求項66】
前記切除帯を作るステップは、直線の切除経路を形成することを包含する、請求項44に記載の方法。
【請求項67】
前記切除システムはセンサをさらに備え、前記方法は、該センサによって前記組織の特性を感知することをさらに包含する、請求項44に記載の方法。
【請求項68】
前記センサは、超音波トランスデューサを備えている、請求項67に記載の方法。
【請求項69】
前記エネルギー源は、同じ超音波トランスデューサを備えている、請求項68に記載の方法。
【請求項70】
前記超音波トランスデューサからのエネルギーを送達するモードと前記超音波トランスデューサによって感知するモードとを切り替えることをさらに包含する、請求項69に記載の方法。
【請求項71】
前記組織の前記特性は、前記エネルギー源に対する該組織の位置を含む、請求項67に記載の方法。
【請求項72】
前記位置は、前記組織と前記エネルギー源の表面との間の間隙距離を含む、請求項71に記載の方法。
【請求項73】
前記位置は、前記エネルギー源と前記組織との間の相対角度を含む、請求項71に記載の方法。
【請求項74】
前記組織の前記特性は、該組織の厚さまたは前記切除帯の厚さを含む、請求項71に記載の方法。
【請求項75】
前記センサは位置決め機構を備え、前記方法は前記内側シャフトまたは前記外側シャフトのいずれかから前記組織または該組織に隣接する組織の中に該位置決め機構を前進させることをさらに包含し、該位置決め機構は解剖学的構造を位置設定することを容易にする、請求項67に記載の方法。
【請求項76】
前記位置決め機構は複数のワイヤを備え、前記方法は、該ワイヤの形状を観察しながら肺静脈の中に該ワイヤの位置を決めることをさらに包含する、請求項75に記載の方法。
【請求項77】
感知された特性に基づいて前記エネルギーを導くことをさらに包含する、請求項71に記載の方法。
【請求項78】
所望の値に前記間隙を維持することをさらに包含する、請求項72に記載の方法。
【請求項79】
前記組織は、左心房組織を含む、請求項44に記載の方法。
【請求項80】
前記組織は、肺静脈または該肺静脈に隣接する組織を含む、請求項44に記載の方法。
【請求項81】
前記エネルギー源を冷却することをさらに包含する、請求項44に記載の方法。
【請求項82】
前記組織に対して前記遠位先端アセンブリを固定することをさらに包含する、請求項44に記載の方法。
【請求項83】
前記固定するステップは、ワイヤを前記組織に連結することを包含する、請求項82に記載の方法。
【請求項84】
前記固定するステップは、前記外側シャフトに配置される拡張可能部材を拡張させることを包含する、請求項82に記載の方法。
【請求項85】
前記拡張可能部材は、バルーンを備えている、請求項84に記載の方法。
【図1】

【図2】
【図3】
【図4A】
【図4B】
【図4C】
【図5】
【図6A】
【図6B】
【図7】
【図9】
【図10A】
【図10B】
【図11】
【図12A】
【図12B】
【図13】
【図8】
【図2】
【図3】
【図4A】
【図4B】
【図4C】
【図5】
【図6A】
【図6B】
【図7】
【図9】
【図10A】
【図10B】
【図11】
【図12A】
【図12B】
【図13】
【図8】
【公表番号】特表2011−528581(P2011−528581A)
【公表日】平成23年11月24日(2011.11.24)
【国際特許分類】
【出願番号】特願2011−518959(P2011−518959)
【出願日】平成21年7月20日(2009.7.20)
【国際出願番号】PCT/US2009/051166
【国際公開番号】WO2010/009473
【国際公開日】平成22年1月21日(2010.1.21)
【出願人】(510325891)バイトロナス, インコーポレイテッド (7)
【Fターム(参考)】
【公表日】平成23年11月24日(2011.11.24)
【国際特許分類】
【出願日】平成21年7月20日(2009.7.20)
【国際出願番号】PCT/US2009/051166
【国際公開番号】WO2010/009473
【国際公開日】平成22年1月21日(2010.1.21)
【出願人】(510325891)バイトロナス, インコーポレイテッド (7)
【Fターム(参考)】
[ Back to top ]