
エネルギー源管理装置、エネルギー源管理方法
【課題】ハイブリッド車における電力と燃料の両方の使用を考慮した支援を可能とするエネルギー源管理装置、エネルギー源管理方法を提供する。
【解決手段】バッテリ14に蓄電された電力をエネルギー源として回転するモータ18及び燃料タンク7に貯留されたエネルギー源である燃料を燃焼させて動力を発生させる内燃機関8を備えると共に、それらの少なくとも一つを駆動源に利用して走行可能な車両に搭載されるナビゲーションシステム12であって、制御部30は、バッテリ14に蓄電された残電力量と、燃料タンク7内の残燃料量と、入力されたバッテリ14を充電する充電許容時間とを取得し、残電力量と残燃料量と充電許容時間とに基づいて車両が目的地まで走行する際に必要な燃料の補給量を必要補給燃料量として算出し、算出した必要補給燃料量をディスプレイ37に表示させる。
【解決手段】バッテリ14に蓄電された電力をエネルギー源として回転するモータ18及び燃料タンク7に貯留されたエネルギー源である燃料を燃焼させて動力を発生させる内燃機関8を備えると共に、それらの少なくとも一つを駆動源に利用して走行可能な車両に搭載されるナビゲーションシステム12であって、制御部30は、バッテリ14に蓄電された残電力量と、燃料タンク7内の残燃料量と、入力されたバッテリ14を充電する充電許容時間とを取得し、残電力量と残燃料量と充電許容時間とに基づいて車両が目的地まで走行する際に必要な燃料の補給量を必要補給燃料量として算出し、算出した必要補給燃料量をディスプレイ37に表示させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電力をエネルギー源として回転するモータ及びエネルギー源としての燃料を燃焼させて動力を発生させる内燃機関のうち少なくとも一方を駆動源に利用して走行するハイブリッド車に搭載されるエネルギー源管理装置、エネルギー源管理方法に関する。
【背景技術】
【0002】
従来から、電力(エネルギー源)を蓄電池に蓄電すると共に、蓄電した電力をモータに供給して走行する電気自動車が知られている。このような電気自動車には、例えば特許文献1に記載されるように、蓄電池に蓄電された電力量に基づいて充電の必要性を報知するナビゲーションシステムを搭載したものがある。
【0003】
すなわち、このナビゲーションシステムは、ユーザによって目的地が設定されると、まず現在地(現在位置)から目的地まで走行するのに必要な電力量を推定する。そして、必要な電力量よりも蓄電池に蓄電されている電力量の方が少ないと判断した場合に、使用者に対して充電を促していた。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−294463号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、特許文献1のナビゲーションシステムの場合は、蓄電池に蓄電された電力量では目的地まで走行することができない場合に充電を促していた。しかし、燃料(エネルギー源)を燃焼させて動力を発生させる内燃機関とモータとを搭載したハイブリッド車では、電力量が不足する場合であっても、内燃機関を利用して目的地まで走行することが可能である。そのため、使用者が必ずしも電力のみで目的地まで走行することを希望するとは限らず、電力と燃料の両方を考慮した支援が望まれている。すなわち、特許文献1のナビゲーションシステムのように蓄電池に蓄電された電力量では目的地まで走行することができない場合に充電を促すことが、使用者にとって適切な支援とならない可能性がある。
【0006】
本発明は、上記問題点に鑑みてなされたものであり、その目的はハイブリッド車における電力と燃料の両方の使用を考慮した支援を可能とするエネルギー源管理装置、エネルギー源管理方法を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明に係るエネルギー源管理装置は、蓄電池に蓄電された電力をエネルギー源として回転するモータ及び燃料タンクに貯留されたエネルギー源である燃料を燃焼させて動力を発生させる内燃機関を備えると共に、それらの少なくとも一つを駆動源に利用して走行可能な車両に搭載されるエネルギー源管理装置であって、前記蓄電池に蓄電された電力量を残電力量として取得する残電力量取得手段と、前記燃料タンク内の前記燃料の残量を残燃料量として取得する残燃料量取得手段と、入力手段によって入力された前記蓄電池を充電する充電許容時間を取得する充電許容時間取得手段と、前記残電力量と前記残燃料量と前記充電許容時間とに基づいて前記車両が目的地まで走行する際に必要な前記燃料の補給量を必要補給燃料量として算出する必要補給燃料量算出手段と、該必要補給燃料量算出手段が算出した前記必要補給燃料量を報知部に報知させる報知制御手段とを備えることを要旨とする。
【0008】
上記構成によれば、車両が目的地まで走行する際に必要な燃料の補給量を必要補給燃料量として報知することができる。そして、この必要補給燃料量は、入力手段によって入力された充電許容時間だけ蓄電池が充電された場合に補給が必要となる燃料の量であるため、使用者は、希望する充電許容時間に対してどれくらいの燃料の補給が必要になるかを確認することができる。すなわち、予め使用者に対して必要補給燃料量を報知することができるため、使用者に意図しない燃料の補給を強いる虞を低減することができ、ハイブリッド車における電力と燃料の両方の使用を考慮した支援が可能となる。
【0009】
また、本発明に係るエネルギー源管理装置は、前記入力手段によって入力された消費許容燃料量を取得する消費許容燃料量取得手段と、前記残電力量と前記消費許容燃料量とに基づいて前記車両が目的地まで走行する際に必要な必要充電時間を算出する必要充電時間算出手段とをさらに備え、前記報知制御手段は、前記入力手段によって前記消費許容燃料量が入力された場合には、前記必要充電時間算出手段が算出した前記必要充電時間を前記報知部に報知させることを要旨とする。
【0010】
上記構成によれば、消費許容燃料量が入力された場合には、車両が目的地まで走行する際に必要な必要消費燃料量を消費許容燃料量以下とするために必要な必要充電時間を報知することができる。すなわち、使用者は、希望する消費許容燃料量に対してどれくらいの充電が必要になるかを確認することができるため、利便性を向上させることができる。
【0011】
また、本発明に係るエネルギー源管理装置は、前記車両が走行する道路種別と対応付けて単位距離あたりに消費する電力量及び燃料量を記憶する記憶手段と、前記目的地までの経路を取得する経路取得手段とをさらに備え、前記必要補給燃料量算出手段は、前記経路を構成する道路区間を特定し、特定された各道路区間の道路種別を判断し、前記記憶手段に記憶された前記電力量及び前記燃料量に基づいて前記必要補給燃料量を算出することを要旨とする。
【0012】
上記構成によれば、単位距離あたりに消費する電力量及び燃料量に基づいて必要補給燃料量を容易に算出することができる。また、消費する電力量及び燃料量は道路種別と対応付けて記憶されているため、道路種別と関係なく消費する電力量及び燃料量を記憶している場合と比べて算出される必要補給燃料量の信頼性を向上させることができる。
【0013】
また、本発明に係るエネルギー源管理装置は、前記車両の走行に伴って消費する電力量及び燃料量を道路区間毎に記憶する記憶手段と、前記目的地までの経路を取得する経路取得手段とをさらに備え、前記必要補給燃料量算出手段は、前記経路を構成する道路区間を特定し、前記記憶手段に記憶された前記電力量及び前記燃料量に基づいて前記必要補給燃料量を算出することを要旨とする。
【0014】
上記構成によれば、道路区画毎に記憶された車両の走行に伴って消費する電力量及び燃料量に基づいて必要補給燃料量を算出することにより、車両が目的地まで走行する際に必要な必要補給燃料量の信頼性をより向上させることができる。
【0015】
一方、本発明に係るエネルギー源管理方法は、蓄電池に蓄電された電力をエネルギー源として回転するモータ及び燃料タンクに貯留されたエネルギー源である燃料を燃焼させて動力を発生させる内燃機関を備えると共に、それらの少なくとも一つを駆動源に利用して走行可能な車両において使用する前記電力と前記燃料とを管理するエネルギー源管理方法であって、前記蓄電池に蓄電された電力量を残電力量として取得する残電力量取得段階と、前記燃料タンク内の前記燃料の残量を残燃料量として取得する残燃料量取得段階と、入力手段によって入力された前記蓄電池を充電する充電許容時間を取得する充電許容時間取得段階と、前記残電力量と前記残燃料量と前記充電許容時間とに基づいて前記車両が目的地まで走行する際に必要な前記燃料の補給量を必要補給燃料量として算出する必要補給燃料量算出段階と、該必要補給燃料量算出段階で算出した前記必要補給燃料量を報知部に報知させる報知制御段階とを備えることを要旨とする。
【0016】
この構成によれば、上記エネルギー源管理装置に係る発明と同様の作用効果を奏し得る。
【図面の簡単な説明】
【0017】
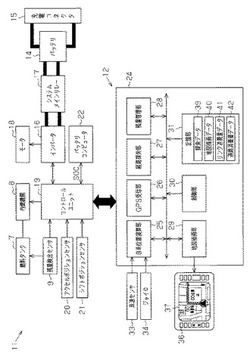
【図1】駆動システムとナビゲーションシステムとを示すブロック図。
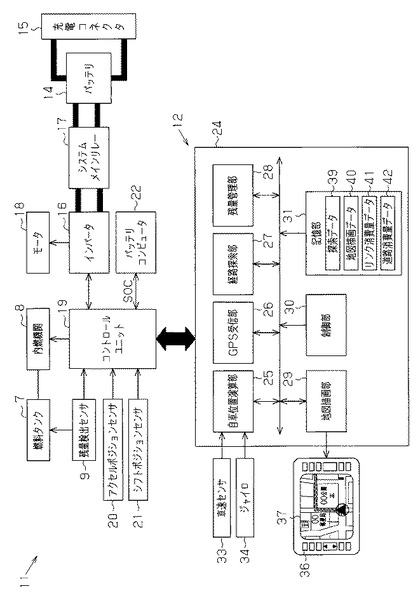
【図2】リンク消費量データを示す表。
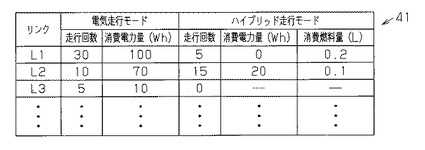
【図3】制御部が実行する消費量記憶ルーチンを示すフローチャート。
【図4】充電案内ルーチンを示すフローチャート。
【図5】想定消費燃料量算出ルーチンを示すフローチャート。
【図6】道路消費量データを示す表。
【図7】(a)は補給燃料量及び消費燃料量を報知するディスプレイの画面図、(b)は数値を変更した場合のディスプレイの画面図。
【発明を実施するための形態】
【0018】
以下、本発明を、モータと内燃機関とを駆動源として備え、外部電源と接続されることによりバッテリの充電が可能なプラグインハイブリッド自動車に搭載されるナビゲーションシステムに具体化した一実施形態を図1〜図7に従って説明する。
【0019】
図1に示すように、プラグインハイブリッド自動車は、車両を走行させるための駆動システム11と、車両に搭載されたエネルギー源管理装置としてのナビゲーションシステム12とを備えている。
【0020】
まず、駆動システム11は、燃料(エネルギー源)を貯留可能な燃料タンク7と、燃料タンク7から供給された燃料を燃焼させることにより動力を発生させる内燃機関8とを備えている。なお、燃料タンク7には、燃料タンク7内に貯留された燃料の残量(残燃料量)を検出するための残量検出センサ9が接続されている。
【0021】
また、駆動システム11は、電池モジュールを有する蓄電池としてのバッテリ14と、外部からバッテリ14に充電を行うための充電コネクタ15とを備えている。そして、このバッテリ14は、充電コネクタ15と一般家庭用のコンセントや充電スタンドとをケーブルなどの充電機器を介して接続することにより、商用電源などの外部電源から充電が可能になっている。
【0022】
また、バッテリ14には、インバータ16がシステムメインリレー17を介して高電圧大電流用の電線等により接続されている。さらに、インバータ16には、モータ18が高電圧大電流用の電線等により接続されている。そのため、バッテリ14から出力された直流電流は、インバータ16によって交流電流に変換された後、モータ18に供給される。すなわち、モータ18は、バッテリ14に蓄電された電力(エネルギー源)が供給されることにより回転して動力を発生させる。そのため、車両はモータ18及び内燃機関8の双方を駆動源として備えたことにより、それらの少なくとも一つの駆動力を利用して走行可能となっている。
【0023】
さらに、システムメインリレー17は、コントロールユニット19の制御により、高電圧回路の接続と遮断とを切り替える。すなわち、コントロールユニット19は、アクセルポジションセンサ20から出力されたアクセル開度、及びシフトポジションセンサ21から出力されたシフトポジションや各種センサ(図示略)からの検出信号に基づき、モータトルク等を求める。そして、コントロールユニット19は、求めたモータトルク等に応じてインバータ16等に要求値を出力するとともに、内燃機関8の駆動を制御することにより駆動システム11の駆動力を制御する。
【0024】
また、駆動システム11に備えられたバッテリコンピュータ22は、図示しない電流センサから取得した電流値に基づき、バッテリ14の充放電電流を積算してバッテリ14に蓄電された電力量(残電力量)を示すSOC(State of Charge;充電状態)値を算出する。そして、バッテリコンピュータ22は、算出したSOC値をコントロールユニット19に出力する。また、コントロールユニット19には、残量検出センサ9が検出した残燃料量が出力されるようになっている。
【0025】
そして、コントロールユニット19は、取得したSOC値及び残燃料量に基づいて、内燃機関8とモータ18とのうち何れの駆動源を利用して車両を走行させるかを判断する。なお、本実施形態では、コントロールユニット19は、SOC値が充電閾値以上であるか否かを判断し、SOC値が充電閾値以上ある場合には、モータ18のみを駆動源に利用する電気走行モードで車両を走行させると判断する。一方、SOC値が充電閾値未満である場合には、コントロールユニット19は、少なくとも内燃機関8を駆動源に利用するハイブリッド走行モードで車両を走行させると判断する。ちなみに、充電閾値とは、車両の走行モードを切り替える際に基準となる閾値であって、ハイブリッド走行モードにおいて使用する電力量や車載設備の使用によって消費される電力量、及びバッテリ14の劣化を考慮して設定されている。
【0026】
さらに、コントロールユニット19は、ナビゲーションシステム12のナビコントロールユニット24にCAN(Controller Area Network)通信等により接続されている。そして、コントロールユニット19は、バッテリコンピュータ22から取得したSOC値と、残量検出センサ9から取得した残燃料量とをナビコントロールユニット24に出力する。なお、本実施形態のナビゲーションシステム12は、取得したSOC値と残燃料量に基づいてバッテリ14の充電を案内するとともに、目的地が設定された場合には、現在位置から目的地までの経路を案内するようになっている。
【0027】
具体的には、ナビコントロールユニット24は、自車位置演算部25、GPS受信部26、経路探索部27、残量管理部28、地図描画部29、制御部30、記憶手段としての記憶部31を有している。
【0028】
まず、自車位置演算部25は、GPS(Global Positioning System)衛星からGPS受信部26が受信した、緯度・経度等の座標を示す位置検出信号を入力して、電波航法により車両の絶対位置を算出する。また、自車位置演算部25は、自車に設けられた車速センサ33及びジャイロ34から車速パルス、角速度をそれぞれ取得する。そして、自車位置演算部25は、車速パルス及び角速度を用いる自律航法により、基準位置からの相対位置を算出し、電波航法で算出した絶対位置と組み合わせて車両の現在位置を特定する。
【0029】
そして、経路探索部27は、入力手段としてのボタン36の操作に基づいて設定された目的地を取得してメモリ(図示略)に一時記憶するとともに、目的地までの経路を探索する。
【0030】
さらに、残量管理部28は、コントロールユニット19から出力されたSOC値(残電力量)と残燃料量を取得し、メモリ(図示略)に一時記憶する。なお、SOC値と残燃料量は、車両の走行や車両に搭載された設備の利用などによって変化するため、随時更新される。
【0031】
そして、地図描画部29は、車両の現在位置周辺に相当する地図をディスプレイ37に出力することにより、ディスプレイ37に現在位置から目的地までの経路を地図画面と共に表示させる。なお、本実施形態のディスプレイ37は、画像の表示と入力操作が可能なタッチパネルであって、ボタン36と同様に入力手段としても機能している。
【0032】
制御部30は、経路探索部27が探索した経路を取得すると共に、地図描画部29を制御してディスプレイ37に地図画像と経路とを表示し、自車位置演算部25が特定した現在位置から目的地までの経路を案内する。したがって、制御部30は、経路取得手段としても機能している。
【0033】
そして、記憶部31は、内蔵ハードディスク、又は光ディスク等の外部記憶媒体である。この記憶部31には、目的地までの経路を探索するための探索データ39と、ディスプレイ37に地図画面を出力するための地図描画データ40と、リンク消費量データ41と、道路消費量データ42とが格納されている。
【0034】
なお、探索データ39は、全国を区画したメッシュ内の道路に関するデータであり、具体的には、各メッシュの識別子であるメッシュIDと、交差点、インターチェンジ、道路の端点等を示す要素であるノードのノードデータと、各ノードを接続する要素である道路区間としてのリンクのリンクデータとを有している。
【0035】
また、地図描画データ40は、全国の地図を分割したメッシュ毎に格納され、広域の地図から狭域の地図まで階層毎に分かれている。そして、地図描画データ40は、メッシュID、背景データ、道路データ等を有している。なお、背景データは、道路、市街地、河川等を描画する描画データである。また、道路データは、道路の形状を表すデータであって、リンクデータに対応させてノード座標、形状補間点の座標、幅員、勾配、路面状態、道路種別等が記憶されている。
【0036】
そして、図2に示すように、リンク消費量データ41は、車両が実際に道路を走行した際に消費した消費電力量と消費燃料量が、リンク毎に記憶されている。具体的には、電気走行モード及びハイブリッド走行モードで走行した走行回数とそれぞれの走行モードで消費した消費電力量及び消費燃料量の平均とがリンクと対応付けて記憶されている。
【0037】
次に、図2に示すリンク消費量データ41の追加及び更新の方法について、図3に示すフローチャートに基づいて説明する。なお、この消費量記憶ルーチンは、内燃機関8もしくはモータ18が始動されて車両が走行可能な状態になった場合に、内燃機関8及びモータ18が止められるまで繰り返し実行される。
【0038】
さて、図3に示すように、ステップS101において、制御部30は、自車位置演算部25が特定した車両の現在位置を取得するとともに、ステップS102において、現在位置と探索データ39とに基づいて車両が位置しているリンクを取得する。
【0039】
そして、ステップS103において、制御部30は、リンクが変更になったか否かを判断する。具体的には、車両が同じリンクを走行している間は、先に取得しているリンクと、今回取得したリンクとが変わらないため(ステップS103:NO)、制御部30はステップS101〜S103を繰り返し実行する。一方、例えば車両が交差点(ノード)を通過した場合には、リンクが変更になるため(ステップS103:YES)、ステップS104において、制御部30は、残量管理部28に記憶された残燃料量を取得する。さらに、ステップS105において、制御部30は、残量管理部28に記憶された残電力量(SOC値)を取得する。なお、このとき取得した残燃料量と残電力量は、先に走行していたリンクの走行終了時及び次に走行するリンクの走行開始時の残燃料量と残電力量とに相当する。
【0040】
そして、続くステップS106以降のステップにおいて、制御部30は、取得した残燃料量と残電力量とに基づいて、先のリンクを走行するために消費した消費燃料量と消費電力量とを算出し、リンク消費量データ41を更新もしくは追加する。
【0041】
具体的には、ステップS106において、制御部30は、先のリンクを走行するために使用した燃料量がゼロであるか否かを判断する。すなわち、制御部30は、先のリンクの走行開始時に取得していた残燃料量と、先のリンクの走行終了時に取得した残燃料量とを比較する。そして、双方の残燃料量が同じである場合には、使用した燃料量がゼロとなるため(ステップS106:YES)、制御部30は、車両が先のリンクを内燃機関8を使用しない電気走行モードで走行したと判断する。
【0042】
続くステップS107において、制御部30は、先のリンクに対応する電気走行モードの走行回数を1つ増加させるように更新する。また、車両がリンクを初めて走行した場合には、リンク消費量データ41に走行したリンクに対応するデータが記憶されていないため、新たにデータを作成する。
【0043】
さらに、ステップS108において、制御部30は、先のリンクの走行開始時に取得していた残電力量と先のリンクの走行終了時に取得した残電力量との差を、先のリンクの走行によって消費した消費電力量として算出し、電気走行モードの消費電力量を更新する。具体的には、電気走行モードに対応付けて記録されていた走行回数及び消費電力量、さらに算出した消費電力量に基づいて、消費電力量を平均値で更新する。
【0044】
一方、ステップS106において、使用した燃料量がゼロではない場合には(ステップS106:NO)、制御部30は、車両が先のリンクをハイブリッド走行モードで走行したものと判断する。そして、ステップS109において、制御部30は、先のリンクに対応するハイブリッド走行モードの走行回数を1つ増加させるように更新する。また、車両がリンクを初めて走行した場合には、リンク消費量データ41に走行したリンクに対応するデータが記憶されていないため、新たにデータを作成する。
【0045】
さらに、ステップS110において、制御部30は、先のリンクの走行開始時に取得した残燃料量と先のリンクの走行終了時に取得した残燃料量との差を、先のリンクを走行した際に消費した消費燃料量として算出し、ハイブリッド走行モードの消費燃料量を更新する。具体的には、ハイブリッド走行モードに対応付けて記憶されていた走行回数及び消費燃料量、さらに算出した消費燃料量に基づいて、消費燃料量を平均値で更新する。
【0046】
続いて、ステップS111において、制御部30は、先のリンクの走行開始時に取得した残電力量と先のリンクの走行終了時に取得した残電力量との差を、先のリンクの走行によって消費した消費電力量として算出し、ハイブリッド走行モードの消費電力量を更新する。具体的には、ハイブリッド走行モードに対応付けて記録されていた走行回数及び消費電力量、さらに算出した消費電力量に基づいて消費電力量を平均値で更新し、消費量記憶ルーチンを終了する。
【0047】
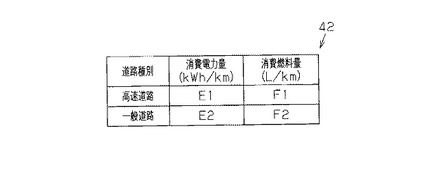
また、道路消費量データ42は、図6に示すように車両が走行する道路種別と対応付けて単位距離あたりに消費する消費電力量及び消費燃料量が記憶されている。具体的には、高速道路と一般道路を、それぞれ電気走行モードで走行した場合の消費電力量(E1,E2)と、ハイブリッド走行モードで走行した場合の消費燃料量(F1,F2)とがそれぞれ記憶されている。なお、この消費電力量と消費燃料量は、車種ごとに予め設定されて記憶されている。
【0048】
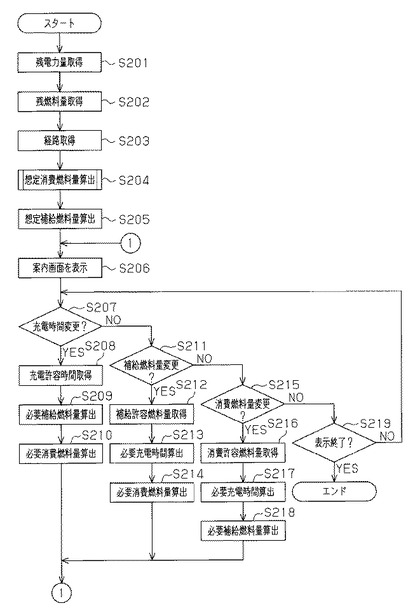
次に、使用者にバッテリ14の充電を案内する充電案内ルーチン(エネルギー源管理方法)を、図4に示すフローチャートに基づいて説明する。なお、この充電案内ルーチンは、使用者がボタン36を操作して目的地を入力した場合に実行される。
【0049】
まず、ステップS201において、制御部30は、残量管理部28に記憶された残電力量(SOC値)を取得する(残電力量取得段階)。さらに、ステップS202において、制御部30は、残量管理部28に記憶された残燃料量を取得する(残燃料量取得段階)。したがって、制御部30は、残電力量取得手段及び残燃料量取得手段としても機能している。そして、ステップS203において、制御部30は、経路探索部27が探索した現在位置から目的地までの経路を取得する。
【0050】
続くステップS204において、制御部30は、想定消費燃料量算出ルーチンを実行し、車両がステップS203において取得した経路に沿って目的地まで走行する場合に消費するであろうと想定される想定消費燃料量を算出する。また、ステップS205において、制御部30は、ステップS202において取得した残燃料量と、ステップS204において算出した想定消費燃料量とに基づいて、目的地まで走行する場合に必要になるであろうと想定される想定補給燃料量を算出する。具体的には、想定消費燃料量から残燃料量を引いた値が想定補給燃料量となる。
【0051】
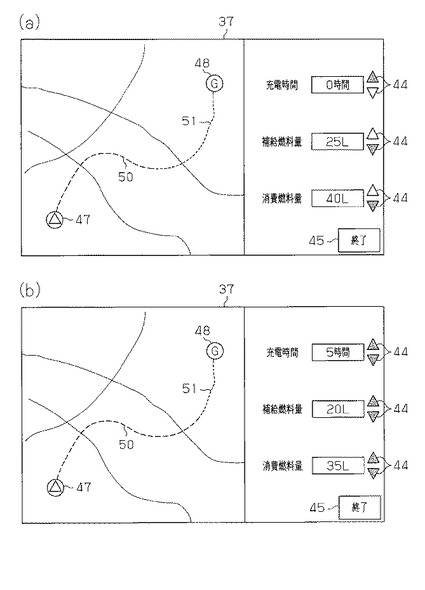
さらに、ステップS206において、制御部30は、地図描画部29を制御し、算出した想定補給燃料量と想定消費燃料量とを、目的地までの走行する際に必要となる補給燃料量及び消費燃料量としてディスプレイ37に表示する。なお、想定消費燃料量と想定補給燃料量は、現段階でバッテリ14に蓄電されている残電力量に基づいて算出されているため、制御部30は、充電時間をゼロ時間と表示する。そして、このとき制御部30は、充電時間、想定補給燃料量、想定消費燃料量を数値で表示するとともに、使用者がディスプレイ37にタッチすることにより各数値を変更可能な変更ボタン44と、充電案内を終了する終了ボタン45とをディスプレイ37に表示する(図7参照)。
【0052】
その後、ステップS207〜ステップS219において、制御部30は、使用者による変更ボタン44及び終了ボタン45の操作に基づいてディスプレイ37の表示を更新する。
【0053】
すなわち、まずステップS207において、制御部30は、使用者により変更ボタン44が操作されて充電時間が変更されたか否かを判定する。そして、充電時間が変更されたと判定した場合には(ステップS207:YES)、次のステップS208において、制御部30は、変更された充電時間を充電許容時間として取得する(充電許容時間取得段階)。したがって、制御部30は、充電許容時間取得手段としても機能している。
【0054】
そして、ステップS209において、制御部30は、充電許容時間だけバッテリ14が充電された場合に、車両が目的地まで走行する場合に必要となる必要補給燃料量を、残電力量と残燃料量と充電許容時間とに基づいて算出する(必要補給燃料量算出段階)。したがって、制御部30は、必要補給燃料量算出手段としても機能している。さらに、ステップS210において、制御部30は、充電許容時間だけバッテリ14が充電された場合に、車両が目的地まで走行する場合に必要となる必要消費燃料量を算出する。
【0055】
具体的には、1時間の充電によって増加する車両の走行距離がAkm、1L(リットル)の燃料での走行距離(燃費)がBkmである場合には、1時間の充電によってA/BL(リットル)の燃料の消費を抑制することができる。したがって、例えば使用者が変更ボタン44を操作して充電時間を1時間増加させた場合には、必要補給燃料量はA/BL(リットル)だけ減少する。同様に、必要消費燃料量もA/BL(リットル)だけ減少する。
【0056】
その後、再びステップS206へ移行し、制御部30は、地図描画部29を制御することにより、ディスプレイ37に表示された充電時間、補給燃料量、消費燃料量を更新する。すなわち、制御部30は、充電時間を充電許容時間として取得した値に変更すると共に、補給燃料量及び消費燃料量をそれぞれ必要補給燃料量、必要消費燃料量として算出した値に変更し、必要補給燃料量及び必要消費燃料量を報知させる(報知制御段階)。したがって、制御部30は、報知部としてのディスプレイ37に必要補給燃料量を報知させる報知制御手段としても機能している。
【0057】
一方、先のステップS207において、充電時間は変更されないと判定した場合(ステップS207:NO)、制御部30は、その処理をステップS211に移行する。そして、このステップS211において、制御部30は、使用者により変更ボタン44が操作されて補給燃料量が変更されたか否かを判定する。そして、補給燃料量が変更されたと判定した場合には(ステップS211:YES)、次のステップS212において、制御部30は、変更された補給燃料量を補給許容燃料量として取得する。したがって、制御部30は、補給許容燃料量取得手段としても機能している。
【0058】
そして、ステップS213において、制御部30は、目的地まで走行する際に必要な必要補給燃料量を補給許容燃料量以下とするために必要な必要充電時間を、残電力量と残燃料量と補給許容燃料量とに基づいて算出する。したがって、制御部30は、必要充電時間算出手段としても機能している。さらに、ステップS214において、制御部30は、目的地まで走行する際に必要な必要補給燃料量を補給許容燃料量とした場合の必要消費燃料量を算出する。
【0059】
ここで、必要充電時間は、想定補給燃料量と補給許容燃料量との差の燃料量によって走行可能な距離を、モータ18のみを用いて走行が可能となるだけの時間である。すなわち、1時間の充電によって増加する車両の走行距離がAkm、1L(リットル)の燃料での走行距離(燃費)がBkm、想定補給燃料量と補給許容燃料量との差がCL(リットル)である場合には、B×C/A時間となる。また、必要補給燃料量は、必要消費燃料量と残燃料量との差である。したがって、必要消費燃料量は、補給許容燃料量と残燃料量との合計となり、例えば使用者が変更ボタン44を操作して補給燃料量を1L(リットル)減少させた場合には、必要補給燃料量も1L(リットル)減少する。
【0060】
その後、再びステップS206へ移行し、制御部30は、地図描画部29を制御することにより、ディスプレイ37に表示された充電時間、補給燃料量、消費燃料量を更新する。すなわち、制御部30は、充電時間及び消費燃料量を必要充電時間及び必要消費燃料量として算出した値に変更すると共に、補給燃料量を補給許容燃料量として取得した値に変更し、必要充電時間及び必要消費燃料量を報知させる(報知制御段階)。したがって、制御部30は、報知部としてのディスプレイ37に必要充電時間を報知させる報知制御手段としても機能している。
【0061】
一方、先のステップS211において、補給燃料量は変更されないと判定した場合(ステップS211:NO)、制御部30は、その処理をステップS215に移行する。そして、このステップS215において、制御部30は、使用者により変更ボタン44が操作されて消費燃料量が変更されたか否かを判定する。そして、消費燃料量が変更されたと判定した場合には(ステップS215:YES)、次のステップS216において、制御部30は、変更された消費燃料量を消費許容燃料量として取得する(消費許容燃料量取得段階)。したがって、制御部30は、消費許容燃料量取得手段としても機能している。
【0062】
そして、ステップS217において、制御部30は、目的地まで走行する際に必要な必要消費燃料量を消費許容燃料量以下とするために必要な必要充電時間を、残電力量と消費許容燃料量とに基づいて算出する(必要充電時間算出段階)。したがって、制御部30は、必要充電時間算出手段としても機能している。さらに、ステップS218において、制御部30は、目的地まで走行する際に必要な必要消費燃料量を消費許容燃料量とするために必要な必要補給燃料量を算出する。
【0063】
ここで、必要充電時間は、想定消費燃料量と消費許容燃料量との差の燃料量によって走行可能な距離を、モータ18のみを用いて走行が可能となるだけの時間である。すなわち、1時間の充電によって増加する車両の走行距離がAkm、1L(リットル)の燃料での走行距離(燃費)がBkm、想定消費燃料量と消費許容燃料量との差がDL(リットル)である場合には、B×D/A時間となる。また、必要補給燃料量は、必要消費燃料量と残燃料量との差であるため、例えば使用者が変更ボタン44を操作して消費燃料量を1L(リットル)減少させた場合には、必要補給燃料量も1L(リットル)減少する。
【0064】
その後、再びステップS206へ移行し、制御部30は、地図描画部29を制御することにより、ディスプレイ37に表示された充電時間、補給燃料量、消費燃料量を更新する。すなわち、制御部30は、充電時間及び補給燃料量を必要充電時間及び必要補給燃料量として算出した値に変更すると共に、消費燃料量を消費許容燃料量として取得した値に変更し、必要充電時間及び必要補給燃料量を報知させる(報知制御段階)。したがって、制御部30は、報知部としてのディスプレイ37に必要充電時間及び必要補給燃料量を報知させる報知制御手段としても機能している。
【0065】
一方、先のステップS215において、消費燃料量は変更されないと判定した場合(ステップS215:NO)、制御部30は、その処理をステップS219に移行する。そして、このステップS219において、制御部30は、表示終了のために使用者により終了ボタン45が操作されたか否かを判定する。そして、終了ボタン45は操作されないと判定した場合には(ステップS219:NO)、再びステップS207へ移行し、このステップ207以降の処理を繰り返す。その一方、ステップS219において、使用者により終了ボタン45が操作されたと判定した場合(ステップS219:YES)、制御部30は、本充電案内ルーチンを終了する。
【0066】
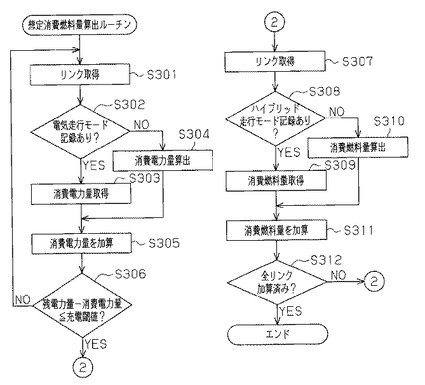
次に、先のステップS204における想定消費燃料量算出ルーチンについて、図5に示すフローチャートに基づいて説明する。なお、現在位置から目的地までの経路を構成するリンクは特定されているものとする。
【0067】
さて、本ルーチンの処理が開始されると、まずステップS301において、制御部30は、経路を構成するリンクのうち、現在位置と隣り合うリンクを取得し、ステップS302において、取得したリンクの電気走行モードがリンク消費量データ41に記憶されているか否かを判断する。
【0068】
そして、電気走行モードがリンク消費量データ41に記憶されていると判定した場合には(ステップS302:YES)、ステップS303において、制御部30は、取得したリンクに対応する電気走行モードの消費電力量を取得する。
【0069】
一方、取得したリンクの電気走行モードがリンク消費量データ41に記憶されていないと判定した場合には(ステップS302:NO)、ステップS304において、制御部30は、道路消費量データ42(図6参照)に基づいてリンクを電気走行モードで走行する際に消費する消費電力量を算出する。
【0070】
すなわち、ステップS304において、制御部30は、まず地図描画データ40に基づいてリンクの道路種別と距離とを判断し、リンクの距離に道路種別と対応する消費電力量を掛けることによって、リンクを走行する際に消費する消費電力量を算出する。具体的には、例えばGkmの一般道路を走行する場合の消費電力量は、G×E2kWhとなる。
【0071】
そして、ステップS305において、制御部30は、ステップS303もしくはステップS304において取得(算出)した消費電力量を先に取得していた消費電力量と加算する。なお、初めて消費電力量を加算する場合には、先に取得していた消費電力量がゼロであるため、取得した消費電力量と加算後の消費電力量は同じ値となる。
【0072】
続くステップS306において、制御部30は、加算後の消費電力量と残電力量との差が、充電閾値以下であるか否かを判断する。なお、充電閾値とは、車両の走行モードを切り替える際に基準となる閾値であって、ハイブリッド走行モードにおいて使用する電力量や車載設備の使用によって消費される電力量、及びバッテリ14の劣化を考慮して予め設定されている値である。そして、本実施形態では、車両は、残電力量が充電閾値以上である場合には電気走行モードで走行し、残電力量が充電閾値未満である場合にはハイブリッド走行モードで走行するようになっている。
【0073】
そのため、消費電力量と残電力量との差が充電閾値よりも大きい場合には(ステップS306:NO)、制御部30は、今までに消費電力量を取得したリンクを電気走行モードで走行できると判断し、再びステップS301に移行する。そして、このステップS301において、制御部30は、経路を構成するリンクのうち、今までに消費電力量を取得したリンクよりも目的地側に位置する次のリンクを取得し、既述したステップS302〜ステップS305の処理を再び実行して消費電力量を加算する。したがって、制御部30は、経路を構成するリンクの消費電力量を現在位置側から順次加算し、加算した消費電力量と残電力量との差が充電閾値以下となるまで、ステップS301〜ステップS306を繰り返し実行することになる。
【0074】
そして、残電力量と消費電力量との差が充電閾値以下になったと判定した場合には(ステップS306:YES)、制御部30は、加算された消費電力量と対応するリンクの直前のリンクまでを電気走行モードで走行可能なリンクであると判断する。その一方、制御部30は、目的地までの経路において、電気走行モードで走行不可能なリンクをハイブリッド走行モードで走行するリンクであると判断する。
【0075】
続いて、ステップS307において、制御部30は、ハイブリッド走行モードで走行するリンクを取得し、ステップS308において、取得したリンクのハイブリッド走行モードが記憶されているか否かを判断する。
【0076】
そして、ハイブリッド走行モードがリンク消費量データ41に記憶されていると判定した場合には(ステップS307:YES)、ステップS309において、制御部30は、取得したリンクに対応するハイブリッド走行モードの消費燃料量を取得する。
【0077】
一方、取得したリンクのハイブリッド走行モードがリンク消費量データ41に記憶されていないと判定した場合には(ステップS308:NO)、ステップS310において、制御部30は、道路消費量データ42に基づいてリンクをハイブリッド走行モードで走行する際に消費する消費燃料量を算出する。具体的には、制御部30は、まず地図描画データ40に基づいて取得したリンクの道路種別と距離とを判断し、リンクの距離に道路種別と対応する道路消費量データ42の消費燃料量を掛けることによって、リンクを走行する際に消費する消費燃料量を算出する。
【0078】
そして、ステップS311において、制御部30は、ステップS309もしくはステップS310において取得(算出)した消費燃料量を先に取得していた消費燃料量と加算して推定消費燃料量を算出する。なお、初めて消費燃料量を加算する場合には、先に取得していた消費燃料量がゼロであるため、取得した消費燃料量と加算後の消費燃料量は同じ値となる。
【0079】
続くステップS312において、制御部30は、ハイブリッドモードで走行する全てのリンクの消費燃料量を加算したか否かを判断し、加算していないと判定した場合には(ステップS312:NO)、再びステップS307に移行して加算していないリンクを取得する。そして、制御部30は、ハイブリッド走行モードで走行するリンクの消費燃料量を全て加算するまで、再びステップS307〜ステップS312を繰り返し実行する。なお、ハイブリッド走行モードで走行するリンクにおける消費燃料量の積算値が、車両が目的地まで走行する際に必要となると想定される想定消費燃料量となる。その一方、ステップS312において、全てのリンクの消費燃料量を加算したと判定した場合(ステップS312:YES)、制御部30は、本想定消費燃料量算出ルーチンを終了する。
【0080】
次に、使用者が目的地を入力した場合に充電の必要性を案内するナビゲーションシステム12の作用について説明する。ただし、本実施形態では、1時間の充電によって走行可能となる距離と、1Lの燃料によって走行可能な距離が同じである場合を例に以下説明する。
【0081】
さて、使用者がボタン36を操作して目的地を入力すると、図7(a)に示すように、ディスプレイ37には、現在位置から目的地までの経路が、現在位置を示すアイコン47と目的地を示すアイコン48と共に表示される。また、このとき経路は、電気走行モードで走行する区間50と、ハイブリッド走行モードで走行する区間51とが色分け(図7では線種分け)表示されている。
【0082】
また、ディスプレイ37には、地図と共に充電時間が0時間である場合の、想定補給燃料量と想定消費燃料量とが補給燃料量及び消費燃料量として表示される。また、充電時間、補給燃料量、消費燃料量の右側には、それぞれの数値を変更可能な変更ボタン44が、表示されている。具体的には、図7(a)に示すように、操作可能な変更ボタン44は網掛け表示で表され、操作不能な変更ボタン44は白抜きで表示される。そして、網掛け表示された変更ボタン44を使用者がタッチすると、対応する充電時間、補給燃料量、消費燃料量がそれぞれ変更される。
【0083】
具体的には、例えば使用者が充電時間に対応する変更ボタン44をタッチして、充電時間を1時間ずつ増加させる操作をした場合には、補給燃料量と消費燃料量とが1Lずつ減少し、例えば充電時間を5時間分増加させた場合を例示する図7(b)に示すように、すべての変更ボタン44が操作可能となる。そのため、この状態において、使用者が充電時間を1時間ずつ減少させる操作を5回した場合には図7(a)に示す状態に戻るのに対し、使用者がさらに充電時間を1時間ずつ増加させる操作をした場合には、補給燃料量と消費燃料量はさらに1Lずつ減少する。
【0084】
また、使用者が補給燃料量を1L減少させる操作をした場合には、充電時間が1時間増加すると共に、消費燃料量が1L減少する。同様に、消費燃料量を1L減少させる操作をした場合には、充電時間が1時間増加すると共に、補給燃料量が1L減少する。
【0085】
したがって、図7(b)に示すように、充電時間が5時間分となるような操作がされた場合には、ディスプレイ37には補給燃料量及び消費燃料量がそれぞれ5Lずつ減少した値が充電時間と共に表示される。すなわち、充電時間に対する補給燃料量及び消費燃料量を使用者が視認できるようになる。
【0086】
さらに、このように充電時間、補給燃料量、消費燃料量のいずれかが変更された場合には、その変化量に合わせて地図に表示された電気走行モードで走行する区間50と、ハイブリッド走行モードで走行する区間51とが変更されるようになる。
【0087】
上記実施形態によれば、以下のような効果を得ることができる。
(1)車両が目的地まで走行する際に必要な必要補給燃料量を補給燃料量としてディスプレイ37に表示することができる。そして、この必要補給燃料量は、変更ボタン44が操作されて入力された充電許容時間だけバッテリ14が充電された場合に補給が必要となる燃料の量であるため、使用者は、希望する充電時間に対してどれくらいの燃料の補給が必要になるかを確認することができる。すなわち、予め使用者に対して必要補給燃料量を報知することができるため、使用者に意図しない燃料の補給を強いる虞を低減することができ、ハイブリッド車における電力と燃料の両方の使用を考慮した支援が可能となる。
【0088】
(2)消費許容燃料量が入力された場合には、車両が目的地まで走行する際に必要な必要消費燃料量を消費許容燃料量以下とするために必要な必要充電時間をディスプレイ37に表示させることができる。すなわち、使用者は、希望する消費許容燃料量に対してどれくらいの充電が必要になるかを確認することができるため、利便性を向上させることができる。
【0089】
(3)道路消費量データ42を用いることにより、単位距離あたりに消費する電力量及び燃料量に基づいて必要充電時間、必要補給燃料量、必要消費燃料量を容易に算出することができる。また、道路消費量データ42には、消費する電力量及び燃料量が道路種別と対応付けて記憶されているため、道路種別と関係なく消費する電力量及び燃料量を記憶している場合と比べて算出される必要充電時間、必要補給燃料量、必要消費燃料量の信頼性を向上させることができる。
【0090】
(4)リンク消費量データ41にリンク毎に記憶された車両の走行に伴って消費する電力量及び燃料量に基づいて必要充電時間、必要補給燃料量、必要消費燃料量を算出することにより、車両が目的地まで走行する際に必要な必要充電時間、必要補給燃料量、必要消費燃料量の信頼性をより向上させることができる。
【0091】
(5)車両が目的地まで走行する際に必要な必要消費燃料量を使用者が入力した消費許容燃料量以下とするために必要な必要充電時間をディスプレイ37に表示することができる。したがって、使用者は、車両を目的地まで走行させる前に、自らが希望する消費許容燃料量に合わせた充電を実施することができるため、ハイブリッド車における電力と燃料の両方の使用を考慮した支援が可能となる。
【0092】
(6)車両が目的地まで走行する際に必要となる必要補給燃料量を使用者が入力した補給許容燃料量以下とするために必要な必要充電時間をディスプレイ37に表示することができる。すなわち、使用者は、補給許容燃料量か消費許容燃料量のいずれかを入力することによって必要な必要充電時間を知ることができるため、利便性を向上させることができる。
【0093】
なお、上記実施形態は以下のように変更してもよい。
・上記実施形態において、リンク消費量データ41を記憶せずに、全てのリンクについて道路消費量データ42に基づいて想定補給燃料量、想定消費燃料量を算出するようにしてもよい。また、リンク消費量データ41は、気象条件や時間帯、混雑状態、車載設備の使用状態などに基づいて実際に消費した消費電力量及び消費燃料量を補正して記憶させるようにしてもよい。また、リンク消費量データ41に基づいて必要充電時間、必要補給燃料量、必要消費燃料量を算出する際に、気象条件や時間帯、混雑状態、車載設備の使用状態などを考慮するようにしてもよい。
【0094】
・上記実施形態において、道路消費量データ42は、道路種別とは関係なく、単位距離あたりに消費する電力量と燃料量とを記憶させておいてもよい。また、単位電力量あたりに走行可能な距離(電費)及び単位燃料量あたりに走行可能な距離(燃費)を道路消費量データ42として記憶させておき、リンクの距離を道路消費量データ42で割ることによってリンクを走行する際に消費する消費燃料量及び消費電力量を算出してもよい。
【0095】
・上記実施形態において、道路消費量データ42として記憶しておく消費電力量及び消費燃料量は、道路種別に限らずに道路の幅員や制限速度、勾配、車線数、道路の形状(カーブの有無など)などに応じて種別分けをしてもよい。
【0096】
・上記実施形態において、想定消費燃料量は、同じ種類の道路をまとめて計算することにより算出してもよい。具体的には、例えば経路が全て一般道路である場合には、制御部30は、残電力量と充電閾値との差分を一般道路の消費電力量(図6ではE2kWh/km)で割ることにより、電力走行モードで走行が可能な距離を算出する。そして、制御部30は、経路における電気走行モードで走行不能な距離をハイブリッド走行モードで走行する距離であると判断し、この距離に一般道路の消費燃料量(図6ではF2L/km)を掛けることにより、想定消費燃料量を算出するようにしてもよい。
【0097】
・上記実施形態において、ディスプレイ37に表示する消費燃料量と補給燃料量は、何れか一方のみを表示させてもよく、また、使用者が表示する項目を選択できるようにしてもよい。
【0098】
・上記実施形態において、ディスプレイ37に充電時間、補給燃料量、消費燃料量を表示する前に、利用者に充電許容時間、補給許容燃料量、消費許容燃料量の何れかを入力させ、入力された結果に基づいて充電時間、補給燃料量、消費燃料量をディスプレイ37に表示するようにしてもよい。この場合には、想定消費燃料量と想定補給燃料量とを算出しなくてもよい。すなわち、入力された充電許容時間、補給許容燃料量、消費許容燃料量の何れかと、リンク消費量データ41もしくは道路消費量データ42とに基づいて必要充電時間、必要補給燃料量、必要消費燃料量を直接算出するようにしてもよい。
【0099】
・上記実施形態において、現在位置と目的地と出発時の残電力量と目的地までの走行に伴って消費した消費燃料量とを記憶し、次回以降の走行において、現在位置と目的地と出発時の残電力量が一致した場合には、対応付けて記憶されている消費燃料量を必要消費燃料量として取得するようにしてもよい。
【0100】
具体的には、目的地が入力された際に、現在位置と目的地と残電力量が一致すると見做せるデータが記憶されているか否かを判断し、一致するデータがあれば消費燃料量を必要消費燃料量として取得する。一方、一致するデータがなければ、制御部30は、現在位置(出発時)における残電力量と残燃料量とを取得して一時記憶し、さらに車両が目的地に到達した際(到達時)に残燃料量を取得する。そして、残燃料量の差分が目的地までの走行に伴って消費した消費燃料量となるため、現在位置と目的地と出発時における残電力量に対応付けて記憶する。
【0101】
このように消費燃料量を記憶しておくことにより、実際の走行に伴って消費した消費燃料量を取得することができるため、信頼性の高い消費燃料量を容易に取得することができる。また、このように現在位置(地点)を記憶している場合には、記憶されている地点で車両が停止した際に、次回の走行で目的地まで走行すると推定して必要補給燃料量、必要消費燃料量を報知してもよい。
【0102】
・上記実施形態において、ハイブリッド車は、例えば道路の走行条件に合わせて電気走行モードとハイブリッド走行モードとを切り替えるようにしてもよい。すなわち、例えば、目的地までの経路において渋滞が予想される区間を電気走行モードで走行するように走行計画を作成してもよい。ただし、この走行計画は、目的地に到達する前にバッテリ14の残電力量が充電閾値となるように作成されるのが好ましい。このような走行計画に従って走行する場合であっても、目的地までの走行に必要な必要消費燃料量は、残電力量が充電閾値以下となるまで電気走行モードで走行する場合と同程度となる。
【0103】
・上記実施形態において、使用する充電設備と対応付けて単位充電時間当たりの走行可能距離を記憶させておき、例えば充電時間を表示する際に使用する充電設備を選択させてもよい。すなわち、単位充電時間あたりの走行可能となる距離は、電源の大きさ(例えば200V,100V)や急速充電器の使用などによって変化する。そのため、充電設備を考慮した充電案内を行うことにより、より利便性を向上させることができる。
【0104】
・上記実施形態において、エネルギー源管理装置は、車両外に持ち運び可能なポータブル装置、パソコン、携帯電話やスマートフォンや、これらの端末と通信可能なサーバとしてもよい。
【0105】
例えば、パソコンや携帯電話の場合には、車両と無線もしくは有線を用いて通信可能な状態で車両から出力された残電力量と残燃料量を取得すると共に、サーバや内臓ソフトにより目的地までの経路を取得する。そして、キーボードなどのボタン(入力手段)が利用者によって操作され、充電許容時間、消費許容燃料量、補給許容燃料量の何れかが入力されると、必要充電時間、必要消費燃料量、必要補給燃料量を算出してディスプレイ(報知部)に表示(報知)する。またこの場合には、目的地、経路、充電時間を設定した後、これらのデータを車両へ出力するようにしてもよい。
【0106】
さらに、エネルギー源管理装置がサーバである場合には、車両から残電力量、残燃料量を取得する。さらに、充電許容時間、消費許容燃料量、補給許容燃料量の何れかと、目的地とを端末から取得する。そして、必要充電時間、必要消費燃料量、必要補給燃料量を算出して端末に出力することにより、端末のディスプレイ(報知部)に必要充電時間、必要消費燃料量、必要補給燃料量を表示(報知)させる。
【符号の説明】
【0107】
7…燃料タンク、8…内燃機関、12…ナビゲーションシステム(エネルギー源管理装置)、14…バッテリ(蓄電池)、18…モータ、30…制御部(残電力量取得手段、残燃料量取得手段、充電許容時間取得手段、補給許容燃料量取得手段、消費許容燃料量取得手段、必要充電時間算出手段、必要補給燃料量算出手段、報知制御手段、経路取得手段)、31…記憶部(記憶手段)、36…ボタン(入力手段)、37…ディスプレイ(入力手段、報知部)。
【技術分野】
【0001】
本発明は、電力をエネルギー源として回転するモータ及びエネルギー源としての燃料を燃焼させて動力を発生させる内燃機関のうち少なくとも一方を駆動源に利用して走行するハイブリッド車に搭載されるエネルギー源管理装置、エネルギー源管理方法に関する。
【背景技術】
【0002】
従来から、電力(エネルギー源)を蓄電池に蓄電すると共に、蓄電した電力をモータに供給して走行する電気自動車が知られている。このような電気自動車には、例えば特許文献1に記載されるように、蓄電池に蓄電された電力量に基づいて充電の必要性を報知するナビゲーションシステムを搭載したものがある。
【0003】
すなわち、このナビゲーションシステムは、ユーザによって目的地が設定されると、まず現在地(現在位置)から目的地まで走行するのに必要な電力量を推定する。そして、必要な電力量よりも蓄電池に蓄電されている電力量の方が少ないと判断した場合に、使用者に対して充電を促していた。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−294463号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、特許文献1のナビゲーションシステムの場合は、蓄電池に蓄電された電力量では目的地まで走行することができない場合に充電を促していた。しかし、燃料(エネルギー源)を燃焼させて動力を発生させる内燃機関とモータとを搭載したハイブリッド車では、電力量が不足する場合であっても、内燃機関を利用して目的地まで走行することが可能である。そのため、使用者が必ずしも電力のみで目的地まで走行することを希望するとは限らず、電力と燃料の両方を考慮した支援が望まれている。すなわち、特許文献1のナビゲーションシステムのように蓄電池に蓄電された電力量では目的地まで走行することができない場合に充電を促すことが、使用者にとって適切な支援とならない可能性がある。
【0006】
本発明は、上記問題点に鑑みてなされたものであり、その目的はハイブリッド車における電力と燃料の両方の使用を考慮した支援を可能とするエネルギー源管理装置、エネルギー源管理方法を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明に係るエネルギー源管理装置は、蓄電池に蓄電された電力をエネルギー源として回転するモータ及び燃料タンクに貯留されたエネルギー源である燃料を燃焼させて動力を発生させる内燃機関を備えると共に、それらの少なくとも一つを駆動源に利用して走行可能な車両に搭載されるエネルギー源管理装置であって、前記蓄電池に蓄電された電力量を残電力量として取得する残電力量取得手段と、前記燃料タンク内の前記燃料の残量を残燃料量として取得する残燃料量取得手段と、入力手段によって入力された前記蓄電池を充電する充電許容時間を取得する充電許容時間取得手段と、前記残電力量と前記残燃料量と前記充電許容時間とに基づいて前記車両が目的地まで走行する際に必要な前記燃料の補給量を必要補給燃料量として算出する必要補給燃料量算出手段と、該必要補給燃料量算出手段が算出した前記必要補給燃料量を報知部に報知させる報知制御手段とを備えることを要旨とする。
【0008】
上記構成によれば、車両が目的地まで走行する際に必要な燃料の補給量を必要補給燃料量として報知することができる。そして、この必要補給燃料量は、入力手段によって入力された充電許容時間だけ蓄電池が充電された場合に補給が必要となる燃料の量であるため、使用者は、希望する充電許容時間に対してどれくらいの燃料の補給が必要になるかを確認することができる。すなわち、予め使用者に対して必要補給燃料量を報知することができるため、使用者に意図しない燃料の補給を強いる虞を低減することができ、ハイブリッド車における電力と燃料の両方の使用を考慮した支援が可能となる。
【0009】
また、本発明に係るエネルギー源管理装置は、前記入力手段によって入力された消費許容燃料量を取得する消費許容燃料量取得手段と、前記残電力量と前記消費許容燃料量とに基づいて前記車両が目的地まで走行する際に必要な必要充電時間を算出する必要充電時間算出手段とをさらに備え、前記報知制御手段は、前記入力手段によって前記消費許容燃料量が入力された場合には、前記必要充電時間算出手段が算出した前記必要充電時間を前記報知部に報知させることを要旨とする。
【0010】
上記構成によれば、消費許容燃料量が入力された場合には、車両が目的地まで走行する際に必要な必要消費燃料量を消費許容燃料量以下とするために必要な必要充電時間を報知することができる。すなわち、使用者は、希望する消費許容燃料量に対してどれくらいの充電が必要になるかを確認することができるため、利便性を向上させることができる。
【0011】
また、本発明に係るエネルギー源管理装置は、前記車両が走行する道路種別と対応付けて単位距離あたりに消費する電力量及び燃料量を記憶する記憶手段と、前記目的地までの経路を取得する経路取得手段とをさらに備え、前記必要補給燃料量算出手段は、前記経路を構成する道路区間を特定し、特定された各道路区間の道路種別を判断し、前記記憶手段に記憶された前記電力量及び前記燃料量に基づいて前記必要補給燃料量を算出することを要旨とする。
【0012】
上記構成によれば、単位距離あたりに消費する電力量及び燃料量に基づいて必要補給燃料量を容易に算出することができる。また、消費する電力量及び燃料量は道路種別と対応付けて記憶されているため、道路種別と関係なく消費する電力量及び燃料量を記憶している場合と比べて算出される必要補給燃料量の信頼性を向上させることができる。
【0013】
また、本発明に係るエネルギー源管理装置は、前記車両の走行に伴って消費する電力量及び燃料量を道路区間毎に記憶する記憶手段と、前記目的地までの経路を取得する経路取得手段とをさらに備え、前記必要補給燃料量算出手段は、前記経路を構成する道路区間を特定し、前記記憶手段に記憶された前記電力量及び前記燃料量に基づいて前記必要補給燃料量を算出することを要旨とする。
【0014】
上記構成によれば、道路区画毎に記憶された車両の走行に伴って消費する電力量及び燃料量に基づいて必要補給燃料量を算出することにより、車両が目的地まで走行する際に必要な必要補給燃料量の信頼性をより向上させることができる。
【0015】
一方、本発明に係るエネルギー源管理方法は、蓄電池に蓄電された電力をエネルギー源として回転するモータ及び燃料タンクに貯留されたエネルギー源である燃料を燃焼させて動力を発生させる内燃機関を備えると共に、それらの少なくとも一つを駆動源に利用して走行可能な車両において使用する前記電力と前記燃料とを管理するエネルギー源管理方法であって、前記蓄電池に蓄電された電力量を残電力量として取得する残電力量取得段階と、前記燃料タンク内の前記燃料の残量を残燃料量として取得する残燃料量取得段階と、入力手段によって入力された前記蓄電池を充電する充電許容時間を取得する充電許容時間取得段階と、前記残電力量と前記残燃料量と前記充電許容時間とに基づいて前記車両が目的地まで走行する際に必要な前記燃料の補給量を必要補給燃料量として算出する必要補給燃料量算出段階と、該必要補給燃料量算出段階で算出した前記必要補給燃料量を報知部に報知させる報知制御段階とを備えることを要旨とする。
【0016】
この構成によれば、上記エネルギー源管理装置に係る発明と同様の作用効果を奏し得る。
【図面の簡単な説明】
【0017】
【図1】駆動システムとナビゲーションシステムとを示すブロック図。
【図2】リンク消費量データを示す表。
【図3】制御部が実行する消費量記憶ルーチンを示すフローチャート。
【図4】充電案内ルーチンを示すフローチャート。
【図5】想定消費燃料量算出ルーチンを示すフローチャート。
【図6】道路消費量データを示す表。
【図7】(a)は補給燃料量及び消費燃料量を報知するディスプレイの画面図、(b)は数値を変更した場合のディスプレイの画面図。
【発明を実施するための形態】
【0018】
以下、本発明を、モータと内燃機関とを駆動源として備え、外部電源と接続されることによりバッテリの充電が可能なプラグインハイブリッド自動車に搭載されるナビゲーションシステムに具体化した一実施形態を図1〜図7に従って説明する。
【0019】
図1に示すように、プラグインハイブリッド自動車は、車両を走行させるための駆動システム11と、車両に搭載されたエネルギー源管理装置としてのナビゲーションシステム12とを備えている。
【0020】
まず、駆動システム11は、燃料(エネルギー源)を貯留可能な燃料タンク7と、燃料タンク7から供給された燃料を燃焼させることにより動力を発生させる内燃機関8とを備えている。なお、燃料タンク7には、燃料タンク7内に貯留された燃料の残量(残燃料量)を検出するための残量検出センサ9が接続されている。
【0021】
また、駆動システム11は、電池モジュールを有する蓄電池としてのバッテリ14と、外部からバッテリ14に充電を行うための充電コネクタ15とを備えている。そして、このバッテリ14は、充電コネクタ15と一般家庭用のコンセントや充電スタンドとをケーブルなどの充電機器を介して接続することにより、商用電源などの外部電源から充電が可能になっている。
【0022】
また、バッテリ14には、インバータ16がシステムメインリレー17を介して高電圧大電流用の電線等により接続されている。さらに、インバータ16には、モータ18が高電圧大電流用の電線等により接続されている。そのため、バッテリ14から出力された直流電流は、インバータ16によって交流電流に変換された後、モータ18に供給される。すなわち、モータ18は、バッテリ14に蓄電された電力(エネルギー源)が供給されることにより回転して動力を発生させる。そのため、車両はモータ18及び内燃機関8の双方を駆動源として備えたことにより、それらの少なくとも一つの駆動力を利用して走行可能となっている。
【0023】
さらに、システムメインリレー17は、コントロールユニット19の制御により、高電圧回路の接続と遮断とを切り替える。すなわち、コントロールユニット19は、アクセルポジションセンサ20から出力されたアクセル開度、及びシフトポジションセンサ21から出力されたシフトポジションや各種センサ(図示略)からの検出信号に基づき、モータトルク等を求める。そして、コントロールユニット19は、求めたモータトルク等に応じてインバータ16等に要求値を出力するとともに、内燃機関8の駆動を制御することにより駆動システム11の駆動力を制御する。
【0024】
また、駆動システム11に備えられたバッテリコンピュータ22は、図示しない電流センサから取得した電流値に基づき、バッテリ14の充放電電流を積算してバッテリ14に蓄電された電力量(残電力量)を示すSOC(State of Charge;充電状態)値を算出する。そして、バッテリコンピュータ22は、算出したSOC値をコントロールユニット19に出力する。また、コントロールユニット19には、残量検出センサ9が検出した残燃料量が出力されるようになっている。
【0025】
そして、コントロールユニット19は、取得したSOC値及び残燃料量に基づいて、内燃機関8とモータ18とのうち何れの駆動源を利用して車両を走行させるかを判断する。なお、本実施形態では、コントロールユニット19は、SOC値が充電閾値以上であるか否かを判断し、SOC値が充電閾値以上ある場合には、モータ18のみを駆動源に利用する電気走行モードで車両を走行させると判断する。一方、SOC値が充電閾値未満である場合には、コントロールユニット19は、少なくとも内燃機関8を駆動源に利用するハイブリッド走行モードで車両を走行させると判断する。ちなみに、充電閾値とは、車両の走行モードを切り替える際に基準となる閾値であって、ハイブリッド走行モードにおいて使用する電力量や車載設備の使用によって消費される電力量、及びバッテリ14の劣化を考慮して設定されている。
【0026】
さらに、コントロールユニット19は、ナビゲーションシステム12のナビコントロールユニット24にCAN(Controller Area Network)通信等により接続されている。そして、コントロールユニット19は、バッテリコンピュータ22から取得したSOC値と、残量検出センサ9から取得した残燃料量とをナビコントロールユニット24に出力する。なお、本実施形態のナビゲーションシステム12は、取得したSOC値と残燃料量に基づいてバッテリ14の充電を案内するとともに、目的地が設定された場合には、現在位置から目的地までの経路を案内するようになっている。
【0027】
具体的には、ナビコントロールユニット24は、自車位置演算部25、GPS受信部26、経路探索部27、残量管理部28、地図描画部29、制御部30、記憶手段としての記憶部31を有している。
【0028】
まず、自車位置演算部25は、GPS(Global Positioning System)衛星からGPS受信部26が受信した、緯度・経度等の座標を示す位置検出信号を入力して、電波航法により車両の絶対位置を算出する。また、自車位置演算部25は、自車に設けられた車速センサ33及びジャイロ34から車速パルス、角速度をそれぞれ取得する。そして、自車位置演算部25は、車速パルス及び角速度を用いる自律航法により、基準位置からの相対位置を算出し、電波航法で算出した絶対位置と組み合わせて車両の現在位置を特定する。
【0029】
そして、経路探索部27は、入力手段としてのボタン36の操作に基づいて設定された目的地を取得してメモリ(図示略)に一時記憶するとともに、目的地までの経路を探索する。
【0030】
さらに、残量管理部28は、コントロールユニット19から出力されたSOC値(残電力量)と残燃料量を取得し、メモリ(図示略)に一時記憶する。なお、SOC値と残燃料量は、車両の走行や車両に搭載された設備の利用などによって変化するため、随時更新される。
【0031】
そして、地図描画部29は、車両の現在位置周辺に相当する地図をディスプレイ37に出力することにより、ディスプレイ37に現在位置から目的地までの経路を地図画面と共に表示させる。なお、本実施形態のディスプレイ37は、画像の表示と入力操作が可能なタッチパネルであって、ボタン36と同様に入力手段としても機能している。
【0032】
制御部30は、経路探索部27が探索した経路を取得すると共に、地図描画部29を制御してディスプレイ37に地図画像と経路とを表示し、自車位置演算部25が特定した現在位置から目的地までの経路を案内する。したがって、制御部30は、経路取得手段としても機能している。
【0033】
そして、記憶部31は、内蔵ハードディスク、又は光ディスク等の外部記憶媒体である。この記憶部31には、目的地までの経路を探索するための探索データ39と、ディスプレイ37に地図画面を出力するための地図描画データ40と、リンク消費量データ41と、道路消費量データ42とが格納されている。
【0034】
なお、探索データ39は、全国を区画したメッシュ内の道路に関するデータであり、具体的には、各メッシュの識別子であるメッシュIDと、交差点、インターチェンジ、道路の端点等を示す要素であるノードのノードデータと、各ノードを接続する要素である道路区間としてのリンクのリンクデータとを有している。
【0035】
また、地図描画データ40は、全国の地図を分割したメッシュ毎に格納され、広域の地図から狭域の地図まで階層毎に分かれている。そして、地図描画データ40は、メッシュID、背景データ、道路データ等を有している。なお、背景データは、道路、市街地、河川等を描画する描画データである。また、道路データは、道路の形状を表すデータであって、リンクデータに対応させてノード座標、形状補間点の座標、幅員、勾配、路面状態、道路種別等が記憶されている。
【0036】
そして、図2に示すように、リンク消費量データ41は、車両が実際に道路を走行した際に消費した消費電力量と消費燃料量が、リンク毎に記憶されている。具体的には、電気走行モード及びハイブリッド走行モードで走行した走行回数とそれぞれの走行モードで消費した消費電力量及び消費燃料量の平均とがリンクと対応付けて記憶されている。
【0037】
次に、図2に示すリンク消費量データ41の追加及び更新の方法について、図3に示すフローチャートに基づいて説明する。なお、この消費量記憶ルーチンは、内燃機関8もしくはモータ18が始動されて車両が走行可能な状態になった場合に、内燃機関8及びモータ18が止められるまで繰り返し実行される。
【0038】
さて、図3に示すように、ステップS101において、制御部30は、自車位置演算部25が特定した車両の現在位置を取得するとともに、ステップS102において、現在位置と探索データ39とに基づいて車両が位置しているリンクを取得する。
【0039】
そして、ステップS103において、制御部30は、リンクが変更になったか否かを判断する。具体的には、車両が同じリンクを走行している間は、先に取得しているリンクと、今回取得したリンクとが変わらないため(ステップS103:NO)、制御部30はステップS101〜S103を繰り返し実行する。一方、例えば車両が交差点(ノード)を通過した場合には、リンクが変更になるため(ステップS103:YES)、ステップS104において、制御部30は、残量管理部28に記憶された残燃料量を取得する。さらに、ステップS105において、制御部30は、残量管理部28に記憶された残電力量(SOC値)を取得する。なお、このとき取得した残燃料量と残電力量は、先に走行していたリンクの走行終了時及び次に走行するリンクの走行開始時の残燃料量と残電力量とに相当する。
【0040】
そして、続くステップS106以降のステップにおいて、制御部30は、取得した残燃料量と残電力量とに基づいて、先のリンクを走行するために消費した消費燃料量と消費電力量とを算出し、リンク消費量データ41を更新もしくは追加する。
【0041】
具体的には、ステップS106において、制御部30は、先のリンクを走行するために使用した燃料量がゼロであるか否かを判断する。すなわち、制御部30は、先のリンクの走行開始時に取得していた残燃料量と、先のリンクの走行終了時に取得した残燃料量とを比較する。そして、双方の残燃料量が同じである場合には、使用した燃料量がゼロとなるため(ステップS106:YES)、制御部30は、車両が先のリンクを内燃機関8を使用しない電気走行モードで走行したと判断する。
【0042】
続くステップS107において、制御部30は、先のリンクに対応する電気走行モードの走行回数を1つ増加させるように更新する。また、車両がリンクを初めて走行した場合には、リンク消費量データ41に走行したリンクに対応するデータが記憶されていないため、新たにデータを作成する。
【0043】
さらに、ステップS108において、制御部30は、先のリンクの走行開始時に取得していた残電力量と先のリンクの走行終了時に取得した残電力量との差を、先のリンクの走行によって消費した消費電力量として算出し、電気走行モードの消費電力量を更新する。具体的には、電気走行モードに対応付けて記録されていた走行回数及び消費電力量、さらに算出した消費電力量に基づいて、消費電力量を平均値で更新する。
【0044】
一方、ステップS106において、使用した燃料量がゼロではない場合には(ステップS106:NO)、制御部30は、車両が先のリンクをハイブリッド走行モードで走行したものと判断する。そして、ステップS109において、制御部30は、先のリンクに対応するハイブリッド走行モードの走行回数を1つ増加させるように更新する。また、車両がリンクを初めて走行した場合には、リンク消費量データ41に走行したリンクに対応するデータが記憶されていないため、新たにデータを作成する。
【0045】
さらに、ステップS110において、制御部30は、先のリンクの走行開始時に取得した残燃料量と先のリンクの走行終了時に取得した残燃料量との差を、先のリンクを走行した際に消費した消費燃料量として算出し、ハイブリッド走行モードの消費燃料量を更新する。具体的には、ハイブリッド走行モードに対応付けて記憶されていた走行回数及び消費燃料量、さらに算出した消費燃料量に基づいて、消費燃料量を平均値で更新する。
【0046】
続いて、ステップS111において、制御部30は、先のリンクの走行開始時に取得した残電力量と先のリンクの走行終了時に取得した残電力量との差を、先のリンクの走行によって消費した消費電力量として算出し、ハイブリッド走行モードの消費電力量を更新する。具体的には、ハイブリッド走行モードに対応付けて記録されていた走行回数及び消費電力量、さらに算出した消費電力量に基づいて消費電力量を平均値で更新し、消費量記憶ルーチンを終了する。
【0047】
また、道路消費量データ42は、図6に示すように車両が走行する道路種別と対応付けて単位距離あたりに消費する消費電力量及び消費燃料量が記憶されている。具体的には、高速道路と一般道路を、それぞれ電気走行モードで走行した場合の消費電力量(E1,E2)と、ハイブリッド走行モードで走行した場合の消費燃料量(F1,F2)とがそれぞれ記憶されている。なお、この消費電力量と消費燃料量は、車種ごとに予め設定されて記憶されている。
【0048】
次に、使用者にバッテリ14の充電を案内する充電案内ルーチン(エネルギー源管理方法)を、図4に示すフローチャートに基づいて説明する。なお、この充電案内ルーチンは、使用者がボタン36を操作して目的地を入力した場合に実行される。
【0049】
まず、ステップS201において、制御部30は、残量管理部28に記憶された残電力量(SOC値)を取得する(残電力量取得段階)。さらに、ステップS202において、制御部30は、残量管理部28に記憶された残燃料量を取得する(残燃料量取得段階)。したがって、制御部30は、残電力量取得手段及び残燃料量取得手段としても機能している。そして、ステップS203において、制御部30は、経路探索部27が探索した現在位置から目的地までの経路を取得する。
【0050】
続くステップS204において、制御部30は、想定消費燃料量算出ルーチンを実行し、車両がステップS203において取得した経路に沿って目的地まで走行する場合に消費するであろうと想定される想定消費燃料量を算出する。また、ステップS205において、制御部30は、ステップS202において取得した残燃料量と、ステップS204において算出した想定消費燃料量とに基づいて、目的地まで走行する場合に必要になるであろうと想定される想定補給燃料量を算出する。具体的には、想定消費燃料量から残燃料量を引いた値が想定補給燃料量となる。
【0051】
さらに、ステップS206において、制御部30は、地図描画部29を制御し、算出した想定補給燃料量と想定消費燃料量とを、目的地までの走行する際に必要となる補給燃料量及び消費燃料量としてディスプレイ37に表示する。なお、想定消費燃料量と想定補給燃料量は、現段階でバッテリ14に蓄電されている残電力量に基づいて算出されているため、制御部30は、充電時間をゼロ時間と表示する。そして、このとき制御部30は、充電時間、想定補給燃料量、想定消費燃料量を数値で表示するとともに、使用者がディスプレイ37にタッチすることにより各数値を変更可能な変更ボタン44と、充電案内を終了する終了ボタン45とをディスプレイ37に表示する(図7参照)。
【0052】
その後、ステップS207〜ステップS219において、制御部30は、使用者による変更ボタン44及び終了ボタン45の操作に基づいてディスプレイ37の表示を更新する。
【0053】
すなわち、まずステップS207において、制御部30は、使用者により変更ボタン44が操作されて充電時間が変更されたか否かを判定する。そして、充電時間が変更されたと判定した場合には(ステップS207:YES)、次のステップS208において、制御部30は、変更された充電時間を充電許容時間として取得する(充電許容時間取得段階)。したがって、制御部30は、充電許容時間取得手段としても機能している。
【0054】
そして、ステップS209において、制御部30は、充電許容時間だけバッテリ14が充電された場合に、車両が目的地まで走行する場合に必要となる必要補給燃料量を、残電力量と残燃料量と充電許容時間とに基づいて算出する(必要補給燃料量算出段階)。したがって、制御部30は、必要補給燃料量算出手段としても機能している。さらに、ステップS210において、制御部30は、充電許容時間だけバッテリ14が充電された場合に、車両が目的地まで走行する場合に必要となる必要消費燃料量を算出する。
【0055】
具体的には、1時間の充電によって増加する車両の走行距離がAkm、1L(リットル)の燃料での走行距離(燃費)がBkmである場合には、1時間の充電によってA/BL(リットル)の燃料の消費を抑制することができる。したがって、例えば使用者が変更ボタン44を操作して充電時間を1時間増加させた場合には、必要補給燃料量はA/BL(リットル)だけ減少する。同様に、必要消費燃料量もA/BL(リットル)だけ減少する。
【0056】
その後、再びステップS206へ移行し、制御部30は、地図描画部29を制御することにより、ディスプレイ37に表示された充電時間、補給燃料量、消費燃料量を更新する。すなわち、制御部30は、充電時間を充電許容時間として取得した値に変更すると共に、補給燃料量及び消費燃料量をそれぞれ必要補給燃料量、必要消費燃料量として算出した値に変更し、必要補給燃料量及び必要消費燃料量を報知させる(報知制御段階)。したがって、制御部30は、報知部としてのディスプレイ37に必要補給燃料量を報知させる報知制御手段としても機能している。
【0057】
一方、先のステップS207において、充電時間は変更されないと判定した場合(ステップS207:NO)、制御部30は、その処理をステップS211に移行する。そして、このステップS211において、制御部30は、使用者により変更ボタン44が操作されて補給燃料量が変更されたか否かを判定する。そして、補給燃料量が変更されたと判定した場合には(ステップS211:YES)、次のステップS212において、制御部30は、変更された補給燃料量を補給許容燃料量として取得する。したがって、制御部30は、補給許容燃料量取得手段としても機能している。
【0058】
そして、ステップS213において、制御部30は、目的地まで走行する際に必要な必要補給燃料量を補給許容燃料量以下とするために必要な必要充電時間を、残電力量と残燃料量と補給許容燃料量とに基づいて算出する。したがって、制御部30は、必要充電時間算出手段としても機能している。さらに、ステップS214において、制御部30は、目的地まで走行する際に必要な必要補給燃料量を補給許容燃料量とした場合の必要消費燃料量を算出する。
【0059】
ここで、必要充電時間は、想定補給燃料量と補給許容燃料量との差の燃料量によって走行可能な距離を、モータ18のみを用いて走行が可能となるだけの時間である。すなわち、1時間の充電によって増加する車両の走行距離がAkm、1L(リットル)の燃料での走行距離(燃費)がBkm、想定補給燃料量と補給許容燃料量との差がCL(リットル)である場合には、B×C/A時間となる。また、必要補給燃料量は、必要消費燃料量と残燃料量との差である。したがって、必要消費燃料量は、補給許容燃料量と残燃料量との合計となり、例えば使用者が変更ボタン44を操作して補給燃料量を1L(リットル)減少させた場合には、必要補給燃料量も1L(リットル)減少する。
【0060】
その後、再びステップS206へ移行し、制御部30は、地図描画部29を制御することにより、ディスプレイ37に表示された充電時間、補給燃料量、消費燃料量を更新する。すなわち、制御部30は、充電時間及び消費燃料量を必要充電時間及び必要消費燃料量として算出した値に変更すると共に、補給燃料量を補給許容燃料量として取得した値に変更し、必要充電時間及び必要消費燃料量を報知させる(報知制御段階)。したがって、制御部30は、報知部としてのディスプレイ37に必要充電時間を報知させる報知制御手段としても機能している。
【0061】
一方、先のステップS211において、補給燃料量は変更されないと判定した場合(ステップS211:NO)、制御部30は、その処理をステップS215に移行する。そして、このステップS215において、制御部30は、使用者により変更ボタン44が操作されて消費燃料量が変更されたか否かを判定する。そして、消費燃料量が変更されたと判定した場合には(ステップS215:YES)、次のステップS216において、制御部30は、変更された消費燃料量を消費許容燃料量として取得する(消費許容燃料量取得段階)。したがって、制御部30は、消費許容燃料量取得手段としても機能している。
【0062】
そして、ステップS217において、制御部30は、目的地まで走行する際に必要な必要消費燃料量を消費許容燃料量以下とするために必要な必要充電時間を、残電力量と消費許容燃料量とに基づいて算出する(必要充電時間算出段階)。したがって、制御部30は、必要充電時間算出手段としても機能している。さらに、ステップS218において、制御部30は、目的地まで走行する際に必要な必要消費燃料量を消費許容燃料量とするために必要な必要補給燃料量を算出する。
【0063】
ここで、必要充電時間は、想定消費燃料量と消費許容燃料量との差の燃料量によって走行可能な距離を、モータ18のみを用いて走行が可能となるだけの時間である。すなわち、1時間の充電によって増加する車両の走行距離がAkm、1L(リットル)の燃料での走行距離(燃費)がBkm、想定消費燃料量と消費許容燃料量との差がDL(リットル)である場合には、B×D/A時間となる。また、必要補給燃料量は、必要消費燃料量と残燃料量との差であるため、例えば使用者が変更ボタン44を操作して消費燃料量を1L(リットル)減少させた場合には、必要補給燃料量も1L(リットル)減少する。
【0064】
その後、再びステップS206へ移行し、制御部30は、地図描画部29を制御することにより、ディスプレイ37に表示された充電時間、補給燃料量、消費燃料量を更新する。すなわち、制御部30は、充電時間及び補給燃料量を必要充電時間及び必要補給燃料量として算出した値に変更すると共に、消費燃料量を消費許容燃料量として取得した値に変更し、必要充電時間及び必要補給燃料量を報知させる(報知制御段階)。したがって、制御部30は、報知部としてのディスプレイ37に必要充電時間及び必要補給燃料量を報知させる報知制御手段としても機能している。
【0065】
一方、先のステップS215において、消費燃料量は変更されないと判定した場合(ステップS215:NO)、制御部30は、その処理をステップS219に移行する。そして、このステップS219において、制御部30は、表示終了のために使用者により終了ボタン45が操作されたか否かを判定する。そして、終了ボタン45は操作されないと判定した場合には(ステップS219:NO)、再びステップS207へ移行し、このステップ207以降の処理を繰り返す。その一方、ステップS219において、使用者により終了ボタン45が操作されたと判定した場合(ステップS219:YES)、制御部30は、本充電案内ルーチンを終了する。
【0066】
次に、先のステップS204における想定消費燃料量算出ルーチンについて、図5に示すフローチャートに基づいて説明する。なお、現在位置から目的地までの経路を構成するリンクは特定されているものとする。
【0067】
さて、本ルーチンの処理が開始されると、まずステップS301において、制御部30は、経路を構成するリンクのうち、現在位置と隣り合うリンクを取得し、ステップS302において、取得したリンクの電気走行モードがリンク消費量データ41に記憶されているか否かを判断する。
【0068】
そして、電気走行モードがリンク消費量データ41に記憶されていると判定した場合には(ステップS302:YES)、ステップS303において、制御部30は、取得したリンクに対応する電気走行モードの消費電力量を取得する。
【0069】
一方、取得したリンクの電気走行モードがリンク消費量データ41に記憶されていないと判定した場合には(ステップS302:NO)、ステップS304において、制御部30は、道路消費量データ42(図6参照)に基づいてリンクを電気走行モードで走行する際に消費する消費電力量を算出する。
【0070】
すなわち、ステップS304において、制御部30は、まず地図描画データ40に基づいてリンクの道路種別と距離とを判断し、リンクの距離に道路種別と対応する消費電力量を掛けることによって、リンクを走行する際に消費する消費電力量を算出する。具体的には、例えばGkmの一般道路を走行する場合の消費電力量は、G×E2kWhとなる。
【0071】
そして、ステップS305において、制御部30は、ステップS303もしくはステップS304において取得(算出)した消費電力量を先に取得していた消費電力量と加算する。なお、初めて消費電力量を加算する場合には、先に取得していた消費電力量がゼロであるため、取得した消費電力量と加算後の消費電力量は同じ値となる。
【0072】
続くステップS306において、制御部30は、加算後の消費電力量と残電力量との差が、充電閾値以下であるか否かを判断する。なお、充電閾値とは、車両の走行モードを切り替える際に基準となる閾値であって、ハイブリッド走行モードにおいて使用する電力量や車載設備の使用によって消費される電力量、及びバッテリ14の劣化を考慮して予め設定されている値である。そして、本実施形態では、車両は、残電力量が充電閾値以上である場合には電気走行モードで走行し、残電力量が充電閾値未満である場合にはハイブリッド走行モードで走行するようになっている。
【0073】
そのため、消費電力量と残電力量との差が充電閾値よりも大きい場合には(ステップS306:NO)、制御部30は、今までに消費電力量を取得したリンクを電気走行モードで走行できると判断し、再びステップS301に移行する。そして、このステップS301において、制御部30は、経路を構成するリンクのうち、今までに消費電力量を取得したリンクよりも目的地側に位置する次のリンクを取得し、既述したステップS302〜ステップS305の処理を再び実行して消費電力量を加算する。したがって、制御部30は、経路を構成するリンクの消費電力量を現在位置側から順次加算し、加算した消費電力量と残電力量との差が充電閾値以下となるまで、ステップS301〜ステップS306を繰り返し実行することになる。
【0074】
そして、残電力量と消費電力量との差が充電閾値以下になったと判定した場合には(ステップS306:YES)、制御部30は、加算された消費電力量と対応するリンクの直前のリンクまでを電気走行モードで走行可能なリンクであると判断する。その一方、制御部30は、目的地までの経路において、電気走行モードで走行不可能なリンクをハイブリッド走行モードで走行するリンクであると判断する。
【0075】
続いて、ステップS307において、制御部30は、ハイブリッド走行モードで走行するリンクを取得し、ステップS308において、取得したリンクのハイブリッド走行モードが記憶されているか否かを判断する。
【0076】
そして、ハイブリッド走行モードがリンク消費量データ41に記憶されていると判定した場合には(ステップS307:YES)、ステップS309において、制御部30は、取得したリンクに対応するハイブリッド走行モードの消費燃料量を取得する。
【0077】
一方、取得したリンクのハイブリッド走行モードがリンク消費量データ41に記憶されていないと判定した場合には(ステップS308:NO)、ステップS310において、制御部30は、道路消費量データ42に基づいてリンクをハイブリッド走行モードで走行する際に消費する消費燃料量を算出する。具体的には、制御部30は、まず地図描画データ40に基づいて取得したリンクの道路種別と距離とを判断し、リンクの距離に道路種別と対応する道路消費量データ42の消費燃料量を掛けることによって、リンクを走行する際に消費する消費燃料量を算出する。
【0078】
そして、ステップS311において、制御部30は、ステップS309もしくはステップS310において取得(算出)した消費燃料量を先に取得していた消費燃料量と加算して推定消費燃料量を算出する。なお、初めて消費燃料量を加算する場合には、先に取得していた消費燃料量がゼロであるため、取得した消費燃料量と加算後の消費燃料量は同じ値となる。
【0079】
続くステップS312において、制御部30は、ハイブリッドモードで走行する全てのリンクの消費燃料量を加算したか否かを判断し、加算していないと判定した場合には(ステップS312:NO)、再びステップS307に移行して加算していないリンクを取得する。そして、制御部30は、ハイブリッド走行モードで走行するリンクの消費燃料量を全て加算するまで、再びステップS307〜ステップS312を繰り返し実行する。なお、ハイブリッド走行モードで走行するリンクにおける消費燃料量の積算値が、車両が目的地まで走行する際に必要となると想定される想定消費燃料量となる。その一方、ステップS312において、全てのリンクの消費燃料量を加算したと判定した場合(ステップS312:YES)、制御部30は、本想定消費燃料量算出ルーチンを終了する。
【0080】
次に、使用者が目的地を入力した場合に充電の必要性を案内するナビゲーションシステム12の作用について説明する。ただし、本実施形態では、1時間の充電によって走行可能となる距離と、1Lの燃料によって走行可能な距離が同じである場合を例に以下説明する。
【0081】
さて、使用者がボタン36を操作して目的地を入力すると、図7(a)に示すように、ディスプレイ37には、現在位置から目的地までの経路が、現在位置を示すアイコン47と目的地を示すアイコン48と共に表示される。また、このとき経路は、電気走行モードで走行する区間50と、ハイブリッド走行モードで走行する区間51とが色分け(図7では線種分け)表示されている。
【0082】
また、ディスプレイ37には、地図と共に充電時間が0時間である場合の、想定補給燃料量と想定消費燃料量とが補給燃料量及び消費燃料量として表示される。また、充電時間、補給燃料量、消費燃料量の右側には、それぞれの数値を変更可能な変更ボタン44が、表示されている。具体的には、図7(a)に示すように、操作可能な変更ボタン44は網掛け表示で表され、操作不能な変更ボタン44は白抜きで表示される。そして、網掛け表示された変更ボタン44を使用者がタッチすると、対応する充電時間、補給燃料量、消費燃料量がそれぞれ変更される。
【0083】
具体的には、例えば使用者が充電時間に対応する変更ボタン44をタッチして、充電時間を1時間ずつ増加させる操作をした場合には、補給燃料量と消費燃料量とが1Lずつ減少し、例えば充電時間を5時間分増加させた場合を例示する図7(b)に示すように、すべての変更ボタン44が操作可能となる。そのため、この状態において、使用者が充電時間を1時間ずつ減少させる操作を5回した場合には図7(a)に示す状態に戻るのに対し、使用者がさらに充電時間を1時間ずつ増加させる操作をした場合には、補給燃料量と消費燃料量はさらに1Lずつ減少する。
【0084】
また、使用者が補給燃料量を1L減少させる操作をした場合には、充電時間が1時間増加すると共に、消費燃料量が1L減少する。同様に、消費燃料量を1L減少させる操作をした場合には、充電時間が1時間増加すると共に、補給燃料量が1L減少する。
【0085】
したがって、図7(b)に示すように、充電時間が5時間分となるような操作がされた場合には、ディスプレイ37には補給燃料量及び消費燃料量がそれぞれ5Lずつ減少した値が充電時間と共に表示される。すなわち、充電時間に対する補給燃料量及び消費燃料量を使用者が視認できるようになる。
【0086】
さらに、このように充電時間、補給燃料量、消費燃料量のいずれかが変更された場合には、その変化量に合わせて地図に表示された電気走行モードで走行する区間50と、ハイブリッド走行モードで走行する区間51とが変更されるようになる。
【0087】
上記実施形態によれば、以下のような効果を得ることができる。
(1)車両が目的地まで走行する際に必要な必要補給燃料量を補給燃料量としてディスプレイ37に表示することができる。そして、この必要補給燃料量は、変更ボタン44が操作されて入力された充電許容時間だけバッテリ14が充電された場合に補給が必要となる燃料の量であるため、使用者は、希望する充電時間に対してどれくらいの燃料の補給が必要になるかを確認することができる。すなわち、予め使用者に対して必要補給燃料量を報知することができるため、使用者に意図しない燃料の補給を強いる虞を低減することができ、ハイブリッド車における電力と燃料の両方の使用を考慮した支援が可能となる。
【0088】
(2)消費許容燃料量が入力された場合には、車両が目的地まで走行する際に必要な必要消費燃料量を消費許容燃料量以下とするために必要な必要充電時間をディスプレイ37に表示させることができる。すなわち、使用者は、希望する消費許容燃料量に対してどれくらいの充電が必要になるかを確認することができるため、利便性を向上させることができる。
【0089】
(3)道路消費量データ42を用いることにより、単位距離あたりに消費する電力量及び燃料量に基づいて必要充電時間、必要補給燃料量、必要消費燃料量を容易に算出することができる。また、道路消費量データ42には、消費する電力量及び燃料量が道路種別と対応付けて記憶されているため、道路種別と関係なく消費する電力量及び燃料量を記憶している場合と比べて算出される必要充電時間、必要補給燃料量、必要消費燃料量の信頼性を向上させることができる。
【0090】
(4)リンク消費量データ41にリンク毎に記憶された車両の走行に伴って消費する電力量及び燃料量に基づいて必要充電時間、必要補給燃料量、必要消費燃料量を算出することにより、車両が目的地まで走行する際に必要な必要充電時間、必要補給燃料量、必要消費燃料量の信頼性をより向上させることができる。
【0091】
(5)車両が目的地まで走行する際に必要な必要消費燃料量を使用者が入力した消費許容燃料量以下とするために必要な必要充電時間をディスプレイ37に表示することができる。したがって、使用者は、車両を目的地まで走行させる前に、自らが希望する消費許容燃料量に合わせた充電を実施することができるため、ハイブリッド車における電力と燃料の両方の使用を考慮した支援が可能となる。
【0092】
(6)車両が目的地まで走行する際に必要となる必要補給燃料量を使用者が入力した補給許容燃料量以下とするために必要な必要充電時間をディスプレイ37に表示することができる。すなわち、使用者は、補給許容燃料量か消費許容燃料量のいずれかを入力することによって必要な必要充電時間を知ることができるため、利便性を向上させることができる。
【0093】
なお、上記実施形態は以下のように変更してもよい。
・上記実施形態において、リンク消費量データ41を記憶せずに、全てのリンクについて道路消費量データ42に基づいて想定補給燃料量、想定消費燃料量を算出するようにしてもよい。また、リンク消費量データ41は、気象条件や時間帯、混雑状態、車載設備の使用状態などに基づいて実際に消費した消費電力量及び消費燃料量を補正して記憶させるようにしてもよい。また、リンク消費量データ41に基づいて必要充電時間、必要補給燃料量、必要消費燃料量を算出する際に、気象条件や時間帯、混雑状態、車載設備の使用状態などを考慮するようにしてもよい。
【0094】
・上記実施形態において、道路消費量データ42は、道路種別とは関係なく、単位距離あたりに消費する電力量と燃料量とを記憶させておいてもよい。また、単位電力量あたりに走行可能な距離(電費)及び単位燃料量あたりに走行可能な距離(燃費)を道路消費量データ42として記憶させておき、リンクの距離を道路消費量データ42で割ることによってリンクを走行する際に消費する消費燃料量及び消費電力量を算出してもよい。
【0095】
・上記実施形態において、道路消費量データ42として記憶しておく消費電力量及び消費燃料量は、道路種別に限らずに道路の幅員や制限速度、勾配、車線数、道路の形状(カーブの有無など)などに応じて種別分けをしてもよい。
【0096】
・上記実施形態において、想定消費燃料量は、同じ種類の道路をまとめて計算することにより算出してもよい。具体的には、例えば経路が全て一般道路である場合には、制御部30は、残電力量と充電閾値との差分を一般道路の消費電力量(図6ではE2kWh/km)で割ることにより、電力走行モードで走行が可能な距離を算出する。そして、制御部30は、経路における電気走行モードで走行不能な距離をハイブリッド走行モードで走行する距離であると判断し、この距離に一般道路の消費燃料量(図6ではF2L/km)を掛けることにより、想定消費燃料量を算出するようにしてもよい。
【0097】
・上記実施形態において、ディスプレイ37に表示する消費燃料量と補給燃料量は、何れか一方のみを表示させてもよく、また、使用者が表示する項目を選択できるようにしてもよい。
【0098】
・上記実施形態において、ディスプレイ37に充電時間、補給燃料量、消費燃料量を表示する前に、利用者に充電許容時間、補給許容燃料量、消費許容燃料量の何れかを入力させ、入力された結果に基づいて充電時間、補給燃料量、消費燃料量をディスプレイ37に表示するようにしてもよい。この場合には、想定消費燃料量と想定補給燃料量とを算出しなくてもよい。すなわち、入力された充電許容時間、補給許容燃料量、消費許容燃料量の何れかと、リンク消費量データ41もしくは道路消費量データ42とに基づいて必要充電時間、必要補給燃料量、必要消費燃料量を直接算出するようにしてもよい。
【0099】
・上記実施形態において、現在位置と目的地と出発時の残電力量と目的地までの走行に伴って消費した消費燃料量とを記憶し、次回以降の走行において、現在位置と目的地と出発時の残電力量が一致した場合には、対応付けて記憶されている消費燃料量を必要消費燃料量として取得するようにしてもよい。
【0100】
具体的には、目的地が入力された際に、現在位置と目的地と残電力量が一致すると見做せるデータが記憶されているか否かを判断し、一致するデータがあれば消費燃料量を必要消費燃料量として取得する。一方、一致するデータがなければ、制御部30は、現在位置(出発時)における残電力量と残燃料量とを取得して一時記憶し、さらに車両が目的地に到達した際(到達時)に残燃料量を取得する。そして、残燃料量の差分が目的地までの走行に伴って消費した消費燃料量となるため、現在位置と目的地と出発時における残電力量に対応付けて記憶する。
【0101】
このように消費燃料量を記憶しておくことにより、実際の走行に伴って消費した消費燃料量を取得することができるため、信頼性の高い消費燃料量を容易に取得することができる。また、このように現在位置(地点)を記憶している場合には、記憶されている地点で車両が停止した際に、次回の走行で目的地まで走行すると推定して必要補給燃料量、必要消費燃料量を報知してもよい。
【0102】
・上記実施形態において、ハイブリッド車は、例えば道路の走行条件に合わせて電気走行モードとハイブリッド走行モードとを切り替えるようにしてもよい。すなわち、例えば、目的地までの経路において渋滞が予想される区間を電気走行モードで走行するように走行計画を作成してもよい。ただし、この走行計画は、目的地に到達する前にバッテリ14の残電力量が充電閾値となるように作成されるのが好ましい。このような走行計画に従って走行する場合であっても、目的地までの走行に必要な必要消費燃料量は、残電力量が充電閾値以下となるまで電気走行モードで走行する場合と同程度となる。
【0103】
・上記実施形態において、使用する充電設備と対応付けて単位充電時間当たりの走行可能距離を記憶させておき、例えば充電時間を表示する際に使用する充電設備を選択させてもよい。すなわち、単位充電時間あたりの走行可能となる距離は、電源の大きさ(例えば200V,100V)や急速充電器の使用などによって変化する。そのため、充電設備を考慮した充電案内を行うことにより、より利便性を向上させることができる。
【0104】
・上記実施形態において、エネルギー源管理装置は、車両外に持ち運び可能なポータブル装置、パソコン、携帯電話やスマートフォンや、これらの端末と通信可能なサーバとしてもよい。
【0105】
例えば、パソコンや携帯電話の場合には、車両と無線もしくは有線を用いて通信可能な状態で車両から出力された残電力量と残燃料量を取得すると共に、サーバや内臓ソフトにより目的地までの経路を取得する。そして、キーボードなどのボタン(入力手段)が利用者によって操作され、充電許容時間、消費許容燃料量、補給許容燃料量の何れかが入力されると、必要充電時間、必要消費燃料量、必要補給燃料量を算出してディスプレイ(報知部)に表示(報知)する。またこの場合には、目的地、経路、充電時間を設定した後、これらのデータを車両へ出力するようにしてもよい。
【0106】
さらに、エネルギー源管理装置がサーバである場合には、車両から残電力量、残燃料量を取得する。さらに、充電許容時間、消費許容燃料量、補給許容燃料量の何れかと、目的地とを端末から取得する。そして、必要充電時間、必要消費燃料量、必要補給燃料量を算出して端末に出力することにより、端末のディスプレイ(報知部)に必要充電時間、必要消費燃料量、必要補給燃料量を表示(報知)させる。
【符号の説明】
【0107】
7…燃料タンク、8…内燃機関、12…ナビゲーションシステム(エネルギー源管理装置)、14…バッテリ(蓄電池)、18…モータ、30…制御部(残電力量取得手段、残燃料量取得手段、充電許容時間取得手段、補給許容燃料量取得手段、消費許容燃料量取得手段、必要充電時間算出手段、必要補給燃料量算出手段、報知制御手段、経路取得手段)、31…記憶部(記憶手段)、36…ボタン(入力手段)、37…ディスプレイ(入力手段、報知部)。
【特許請求の範囲】
【請求項1】
蓄電池に蓄電された電力をエネルギー源として回転するモータ及び燃料タンクに貯留されたエネルギー源である燃料を燃焼させて動力を発生させる内燃機関を備えると共に、それらの少なくとも一つを駆動源に利用して走行可能な車両に搭載されるエネルギー源管理装置であって、
前記蓄電池に蓄電された電力量を残電力量として取得する残電力量取得手段と、
前記燃料タンク内の前記燃料の残量を残燃料量として取得する残燃料量取得手段と、
入力手段によって入力された前記蓄電池を充電する充電許容時間を取得する充電許容時間取得手段と、
前記残電力量と前記残燃料量と前記充電許容時間とに基づいて前記車両が目的地まで走行する際に必要な前記燃料の補給量を必要補給燃料量として算出する必要補給燃料量算出手段と、
該必要補給燃料量算出手段が算出した前記必要補給燃料量を報知部に報知させる報知制御手段とを備えることを特徴とするエネルギー源管理装置。
【請求項2】
前記入力手段によって入力された消費許容燃料量を取得する消費許容燃料量取得手段と、
前記残電力量と前記消費許容燃料量とに基づいて前記車両が目的地まで走行する際に必要な必要充電時間を算出する必要充電時間算出手段と
をさらに備え、
前記報知制御手段は、前記入力手段によって前記消費許容燃料量が入力された場合には、前記必要充電時間算出手段が算出した前記必要充電時間を前記報知部に報知させることを特徴とする請求項1に記載のエネルギー源管理装置。
【請求項3】
前記車両が走行する道路種別と対応付けて単位距離あたりに消費する電力量及び燃料量を記憶する記憶手段と、
前記目的地までの経路を取得する経路取得手段と
をさらに備え、
前記必要補給燃料量算出手段は、前記経路を構成する道路区間を特定し、特定された各道路区間の道路種別を判断し、前記記憶手段に記憶された前記電力量及び前記燃料量に基づいて前記必要補給燃料量を算出することを特徴とする請求項1又は請求項2に記載のエネルギー源管理装置。
【請求項4】
前記車両の走行に伴って消費する電力量及び燃料量を道路区間毎に記憶する記憶手段と、
前記目的地までの経路を取得する経路取得手段と
をさらに備え、
前記必要補給燃料量算出手段は、前記経路を構成する道路区間を特定し、前記記憶手段に記憶された前記電力量及び前記燃料量に基づいて前記必要補給燃料量を算出することを特徴とする請求項1〜請求項3のうち何れか一項に記載のエネルギー源管理装置。
【請求項5】
蓄電池に蓄電された電力をエネルギー源として回転するモータ及び燃料タンクに貯留されたエネルギー源である燃料を燃焼させて動力を発生させる内燃機関を備えると共に、それらの少なくとも一つを駆動源に利用して走行可能な車両において使用する前記電力と前記燃料とを管理するエネルギー源管理方法であって、
前記蓄電池に蓄電された電力量を残電力量として取得する残電力量取得段階と、
前記燃料タンク内の前記燃料の残量を残燃料量として取得する残燃料量取得段階と、
入力手段によって入力された前記蓄電池を充電する充電許容時間を取得する充電許容時間取得段階と、
前記残電力量と前記残燃料量と前記充電許容時間とに基づいて前記車両が目的地まで走行する際に必要な前記燃料の補給量を必要補給燃料量として算出する必要補給燃料量算出段階と、
該必要補給燃料量算出段階で算出した前記必要補給燃料量を報知部に報知させる報知制御段階と
を備えることを特徴とするエネルギー源管理方法。
【請求項1】
蓄電池に蓄電された電力をエネルギー源として回転するモータ及び燃料タンクに貯留されたエネルギー源である燃料を燃焼させて動力を発生させる内燃機関を備えると共に、それらの少なくとも一つを駆動源に利用して走行可能な車両に搭載されるエネルギー源管理装置であって、
前記蓄電池に蓄電された電力量を残電力量として取得する残電力量取得手段と、
前記燃料タンク内の前記燃料の残量を残燃料量として取得する残燃料量取得手段と、
入力手段によって入力された前記蓄電池を充電する充電許容時間を取得する充電許容時間取得手段と、
前記残電力量と前記残燃料量と前記充電許容時間とに基づいて前記車両が目的地まで走行する際に必要な前記燃料の補給量を必要補給燃料量として算出する必要補給燃料量算出手段と、
該必要補給燃料量算出手段が算出した前記必要補給燃料量を報知部に報知させる報知制御手段とを備えることを特徴とするエネルギー源管理装置。
【請求項2】
前記入力手段によって入力された消費許容燃料量を取得する消費許容燃料量取得手段と、
前記残電力量と前記消費許容燃料量とに基づいて前記車両が目的地まで走行する際に必要な必要充電時間を算出する必要充電時間算出手段と
をさらに備え、
前記報知制御手段は、前記入力手段によって前記消費許容燃料量が入力された場合には、前記必要充電時間算出手段が算出した前記必要充電時間を前記報知部に報知させることを特徴とする請求項1に記載のエネルギー源管理装置。
【請求項3】
前記車両が走行する道路種別と対応付けて単位距離あたりに消費する電力量及び燃料量を記憶する記憶手段と、
前記目的地までの経路を取得する経路取得手段と
をさらに備え、
前記必要補給燃料量算出手段は、前記経路を構成する道路区間を特定し、特定された各道路区間の道路種別を判断し、前記記憶手段に記憶された前記電力量及び前記燃料量に基づいて前記必要補給燃料量を算出することを特徴とする請求項1又は請求項2に記載のエネルギー源管理装置。
【請求項4】
前記車両の走行に伴って消費する電力量及び燃料量を道路区間毎に記憶する記憶手段と、
前記目的地までの経路を取得する経路取得手段と
をさらに備え、
前記必要補給燃料量算出手段は、前記経路を構成する道路区間を特定し、前記記憶手段に記憶された前記電力量及び前記燃料量に基づいて前記必要補給燃料量を算出することを特徴とする請求項1〜請求項3のうち何れか一項に記載のエネルギー源管理装置。
【請求項5】
蓄電池に蓄電された電力をエネルギー源として回転するモータ及び燃料タンクに貯留されたエネルギー源である燃料を燃焼させて動力を発生させる内燃機関を備えると共に、それらの少なくとも一つを駆動源に利用して走行可能な車両において使用する前記電力と前記燃料とを管理するエネルギー源管理方法であって、
前記蓄電池に蓄電された電力量を残電力量として取得する残電力量取得段階と、
前記燃料タンク内の前記燃料の残量を残燃料量として取得する残燃料量取得段階と、
入力手段によって入力された前記蓄電池を充電する充電許容時間を取得する充電許容時間取得段階と、
前記残電力量と前記残燃料量と前記充電許容時間とに基づいて前記車両が目的地まで走行する際に必要な前記燃料の補給量を必要補給燃料量として算出する必要補給燃料量算出段階と、
該必要補給燃料量算出段階で算出した前記必要補給燃料量を報知部に報知させる報知制御段階と
を備えることを特徴とするエネルギー源管理方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−136041(P2012−136041A)
【公開日】平成24年7月19日(2012.7.19)
【国際特許分類】
【出願番号】特願2010−287674(P2010−287674)
【出願日】平成22年12月24日(2010.12.24)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成24年7月19日(2012.7.19)
【国際特許分類】
【出願日】平成22年12月24日(2010.12.24)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]