
エフェメリス拡張システムとGNSSでの使用方法
【課題】全地球的航法衛星システム(GNSS)受信機の性能を改善するためのシステム、方法及び装置を提示する。特に、受信機がGNSS衛星から放送されているエフェメリスデータを直接受信する能力が劣化している場合において、衛星の位置又は受信機の位置を計算する能力を改善することを提示する。
【解決手段】放送されているアルマナックなどの概ね長期の衛星位置モデルに対して、補正項を適用するものである。
【解決手段】放送されているアルマナックなどの概ね長期の衛星位置モデルに対して、補正項を適用するものである。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、全体的に、衛星航法システム(GPS)又はGalileoなどの全地球的航法衛星システム(GNSS)の航法分野に関する。
【背景技術】
【0002】
GNSSでは、地球周回軌道上の衛星が信号を放送しており、それらの信号を検出するために配備された受信機により信号を受信することが可能である。それらの信号は、受信機が、適切な信号状態において、信号の伝送時間を計測することができるような形で伝送されている。受信機は、そのような四つの信号を受信することにより、ローカルタイム及びそれ自身の三次元座標系内の位置を計測することができる。
【0003】
そのようなシステムは、多くの場合衛星と受信機間の距離を計測する能力に依存している。そのような三つの距離を知ることにより、それぞれ一つの特定の衛星を中心とし、衛星から受信機までの測定した距離に等しい半径を有する三つの球面の最も可能性の高い交差点を決定することにより、精確な位置の推定を行うことができる。
【0004】
勿論、そのような位置計測を行うためには、受信機が各衛星位置の推定値を持っている必要が有る。そのような推定位置は、衛星の位置を推定するために使用することができるデータである衛星エフェメリスデータを用いて生成される。
【0005】
そのような衛星エフェメリスデータは、通常時間の関数として推定位置を生成するための既知の衛星軌道モデルで使用することができるパラメータの形で保存されている。例えば、GPSに対するエフェメリスの計算は、非特許文献1に記載されており、ここに参照して組み込むものとする。
【0006】
例えば、GPSシステムでのエフェメリスデータは、各衛星により放送されており、二つの形式で到来する。第一に、GPS衛星は、エフェメリスデータの一つの形式である「アルマナックデータ」を放送しているが、従来技術では、一般的にそのようなデータとして言及されていない。アルマナックデータの目的は、ダウンロード後の数時間以上の期間に対して衛星の粗い推定位置を計測するために使用することである。それは、例えば、受信機がそれ自身で粗い推定位置も持っていれば、どの衛星が受信機の視野内に有るのかを受信機が決定するのに活用することができる。アルマナックデータの精度は、典型的には、数時間に対して数キロメートル以内である。
【0007】
GPS衛星は、「エフェメリスデータ」と呼ばれる、より精確なデータセットも放送している。GPSエフェメリスデータの精度は、典型的には、数時間に対して数メートル以内である。しかし、このデータの精度は、数時間後には急速に劣化する。
【0008】
GPSアルマナックデータとGPSエフェメリスデータの両方は、CDMA擬似ランダム雑音コードに重畳された航法データメッセージの一部として、各衛星により放送されている。特定の衛星に関するエフェメリスデータは、典型的(空が晴れて、視界を遮る物が無い場合)には、ダウンロードするのに30秒かかる。これらのデータは、信号が弱い(−145dBm未満)場合にはダウンロードすることができない。信号が弱い状態では、エフェメリスデータは、典型的には、補助ネットワークからA−GPS受信機に伝送される。屋内で経験するような信号電力が低い状態では、多くの場合GPS航法メッセージを再生すること、従ってGPSエフェメリスデータを再生することは非常に難しい。それは、数時間晴れた空を見ることができなったGPS受信機が、各衛星の最新位置の不精確な推定にもとづき測位精度の劣化を被ることを意味する。
【0009】
従って、ダッシュボード又はフロントガラス上にPND(携帯ナビゲーション端末)又はGPS受信機を搭載した車両が屋内の車庫に夜通し駐車していた場合、GPS機能は、通常車両が翌日車庫を出た後相当長い時間が経過するまで、位置を提示することができない。GPSが4時間(放送されているエフェメリスの一般的な最大有効期間)を越える期間停止状態であったために、エフェメリスデータが失効してしまったためである。ここで、「有効」という用語は、予め設定された許容範囲内の誤差を生じさせることを意味する。都会におけるビルの谷間の環境では、信号レベルが低い状態と受信信号がしばしば大きく妨害される特性のために、GPS部分は、衛星から放送されているエフェメリスを再生するのに長い時間(10分まで)かかる。たとえ衛星を追尾していても、放送されているエフェメリスが再生されるまで測位することができない。
【特許文献1】特開平10−031061号公報
【非特許文献1】GPS−ICD−200C
【発明の概要】
【0010】
以上のことから、エフェメリスデータの精度と、エフェメリスデータが精確な測位点を提供することができる時間長とを向上、改善する必要が有る。
【0011】
この発明の一つの実施形態は、アルマナックデータの補正を行う工程を含む、受信機の位置の精度を改善する方法に関する。任意選択として、この方法は、アルマナックデータの補正を行う工程が、予測ファイルから補正項を取得する工程と、その項を推定衛星位置に適用する工程とを含む形で実施することができる。この方法は、約2キロメートル以内の精度のアルマナックデータの補正を行う工程から、数メートル(30メートル以内であるが、好ましくは5メートル以内)の精度の補正した推定衛星位置が得られる形で実施することもできる。好ましくは、この補正は、ネットワークから受信したデータにもとづき、そのデータにより、ネットワークからデータを受信した時間後7日以内に対して、補正した推定衛星位置の精度を数メートル以内とすることができるものである。
【0012】
この発明の一定の実施形態は、拡張されたエフェメリス予測ファイルを生成する方法であって、衛星軌道の予測値を含むデータを取得する工程と、衛星軌道の予測値とアルマナックデータから得られる第二の予測値との間の差に関連する補正項を計算する工程とを含み、予測ファイルは、少なくとも7日間有効であり、60480バイト未満で構成される方法に関する。任意選択として、この方法は、衛星軌道の予測値とアルマナックデータから得られる第二の予測値との間の差に関連する補正項を計算する工程が、更に、ハーモニックモデルと多項式モデルの両方を使用する工程を含む形で実施することができる。この方法は、更に、衛星クロックデータに関する補正項を計算する工程とSUPLネットワークを介して予測ファイルを伝送する工程とを含むことができる。好ましくは、予測ファイルは、有効な1日当り1キロバイト未満で構成される。好ましい実施形態では、衛星軌道の予測値とアルマナックデータから得られる第二の予測値との間の差に関連する補正項を計算する工程が、更に、衛星軌道の予測値と第二の予測値との間の差を最小化するために最小二乗法を適用する工程を含むとともに、更に、より遠い将来における衛星軌道の予測値からのデータに、より近い将来における衛星軌道の予測値からのデータよりも少なく重みを付ける工程を含むものである。
【0013】
この発明の更に別の実施形態は、コンピュータコードを組み込んだ、コンピュータが読み取り可能な媒体であって、コンピュータコードは、実行された際に、衛星軌道の予測値を含むデータを取得する工程と、衛星軌道の予測値とアルマナックデータから得られる第二の予測値との間の差に関連する補正項を計算する工程とを含み、予測ファイルが、少なくとも7日間有効であり、60480バイト未満で構成される、拡張されたエフェメリス予測ファイルを生成する方法を実行するものである、コンピュータが読み取り可能な媒体に関する。これらの命令により実行される方法は、衛星軌道の予測値とアルマナックデータから得られる第二の予測値との間の差に関連する補正項を計算する工程が、更に、ハーモニックモデルと多項式モデルの両方を使用する工程を含む形で実施することができる。任意選択として、これらの命令により実行される方法は、更に、衛星クロックデータに関する補正項を計算する工程と、SUPLネットワークを介して予測ファイルを伝送する工程とを含む。好ましい実施形態では、予測ファイルは、有効な1日当り1キロバイト未満で構成される。好ましくは、衛星軌道の予測値とアルマナックデータから得られる第二の予測値との間の差に関連する補正項を計算する工程が、更に、衛星軌道の予測値と第二の予測値との間の差を最小化するために最小二乗法を用いる工程と、より遠い将来における衛星軌道の予測値からのデータに、より近い将来における衛星軌道の予測値からのデータよりも少なく重みを付ける工程とを含む。
【0014】
この発明の更に別の実施形態は、アルマナック補正モデルを受信するための通信ポートと、アルマナックデータを保存するためのメモリと、GNSS信号を受信するための回路と、受信したGNSS信号とアルマナックデータ及びアルマナック補正モデルから計算したGNSS送信機の位置とにもとづき受信機の位置を計算するためのプロセッサとを備えたGNSS受信機に関する。任意選択として、受信したGNSS信号とアルマナックデータ及びアルマナック補正モデルから計算したGNSS送信機の位置とにもとづき受信機の位置を計算するためのプロセッサは、ハーモニック補正モデル及び多項式補正モデルにもとづき、GNSS送信機の補正された推定位置を計算するように構成される。
【詳細な説明】
【0015】
「エフェメリスの拡張」とは、本来の2時間よりもずっと長い時間間隔、典型的には、数日に渡って、一連のエフェメリスを予測することを可能とする技術である。4日後には、この時間に関する拡張が、本当のエフェメリスから計算した位置に対して精度の劣化を含むようになる。エフェメリスの拡張が良好であれば、初期測位時間(TTFF)が、あらゆる状態において常に5〜15秒となり、それは、コールド又はウォームスタートがもはや存在しないことを意味する。その効果は、(2時間を越える)長い時間間隔後に、特に、難しい環境(例えば、都会のビルの谷間)において、受信機を始動した場合に明らかとなる。信号が弱い環境では、リアルタイムの補助データが無くても依然として測位が可能である。使用者が(4日後に)精度が悪くなった測位を許容することができるのであれば、長い期間に渡って、リアルタイムの補助を受ける必要は無い。
【0016】
再び駐車用車庫を出た車両を例に挙げると、この発明の実施形態では、車両が車庫を出た後最大5〜10秒以内に初期測位が可能となる。一つの主要な点は、航法メッセージの放送とは異なる手段(例えば、インターネット接続、無線接続、ファイルのダウンロード)によりロードされる一連の長期間有効なエフェメリスをGPS受信機内に保存していることである。長期間有効なエフェメリスは、通常衛星の精確な最新位置、基準局で行われる実際の計測から取得した速度と加速度の知識から得られる。その位置は、精確な力学モデル(精密重力モデル、重力の一時的変化、太陽と月の引力効果、太陽放射線の圧力、ヨーバイアス補正等)を用いて生成される。最新のクロックオフセット、ドリフトモデル及びドリフトレートモデルを含む衛星クロック予測も行われる。衛星クロックには、精確には予測することができないランダムな要素も存在する。
【0017】
予測フェーズの生の結果は、典型的には15分単位で、衛星毎に精確に予測した位置のシーケンスとクロックバイアスモデルである。次に、この情報は、圧縮してGPS受信機に送信する必要が有り、GPS受信機では、圧縮を解除して、航法用に使用する。
【0018】
この発明の実施形態は、衛星軌道全体の良好な長期間モデル(アルマナック)を使用する工程と、このアルマナックモデルに適用する補正の推定値を計算する工程とを含む。これらの補正は、相当に小さく(通常2km以下)、非常になだらか(高周波成分が無く、その結果比較的少ない数のパラメータで捕捉することができる)である。これらの補正は、最適には衛星の公転周期又はその倍数に等しい周期を持つハーモニック補正項と、初期オフセット項、線形ドリフト項及びドリフトレートを反映した二次項から成る多項式補正項とを持つことができる。所望の精度に依存して、項を追加することも可能である。
【0019】
これらの補正項は、前記のモデルと、例えば、空間(x,y及びz)及び時間(t)座標形式の衛星位置予測データとの間の差に適合した最小二乗法のパラメータを適用することによって推定することができる。これらの座標は、将来に向かっての一定の時間期間に対して規定することができ、基準局、例えば、NASAジェット推進研究所(JPL)の基準局で収集したデータから生成される。そのようなコヒーレントファイルとして収集したデータの例が図1に図示されている。JPL予測データの利点は、十分に試験されており、精確であり、低いリスクで速い確認を可能とすることである。
【0020】
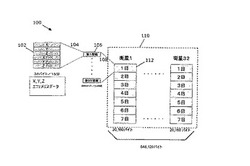
図1は、拡張されたエフェメリス予測ファイルシステムのフローを図示している。ここで、「予測ファイル」という用語は、エフェメリスの予測を改善するのに有用なデータの集まりを意味する。システム100では、JPLから入手可能なデータなどのX,Y,Z形式のデータ102が集められている。それらのデータは、例えば、各衛星に関して、X座標、Y座標及びZ座標、並びにこれらの座標の所与の各時点tn における時間に関する一次導関数Xドット、Yドット及びZドットで表すことができる。各tn とtn+1 間の時間は、如何なる大きさの時間とすることもできるが、図1に図示されている実施形態では、15分に等しい。図1に図示されている実施形態では、座標及び座標の導関数は、それぞれ5バイトのデータワードで表されており、その結果各tn に関するデータは、30バイトのデータを表すこととなる。
【0021】
工程104において、データ102からデータを集めて、96個の時間間隔から成る1日分の有効なデータ106又は一つの衛星に対して1日当り2880バイトの有効なデータを構成する。32個の衛星の各々に対して7日分の有効な予測データ112を考慮した予測ファイル110では、全体のファイルサイズは、645,120バイトとなる。勿論、予測ファイルの長さは、システムの要件に依存して日数を加算又は減算すること、従って、利用可能な予測データの長さに対する精度とファイルサイズを綜合的に斟酌することにより変更することができる。
【0022】
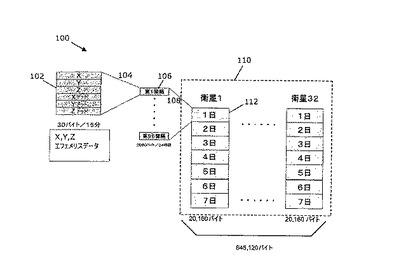
図2は、第二の拡張されたエフェメリス予測ファイルシステムのフロー200を図示している。システム200は、図1に図示されている15分の間隔に代わって、4時間の間隔で一連の衛星予測データ206を表している。このシステムは、4時間の期間に渡って衛星予測データを取得し、それを標準的に放送されているエフェメリスパラメータ202を用いてモデル化することにより、そのように表されている。工程204で、各4時間の間隔は、一連の4時間の間隔に集められる。4時間の間隔の各セットは、各衛星(ここでは32個として図示されている)に関する一定の日数分(ここでは7日分として図示されている)の有効な予測データを含む予測ファイル210に纏められる。
【0023】
エフェメリスパラメータを使用して複数時間の間隔のデータをモデル化することにより、データを圧縮することができる。図1に図示されているシステムと比べて、24時間分の有効なデータが、僅か270バイトで構成され、7日分の有効なデータが1890バイトで構成される。そのため、32個の衛星に関する7日分の予測ファイルが、60480バイトで構成されることとなる。
【0024】
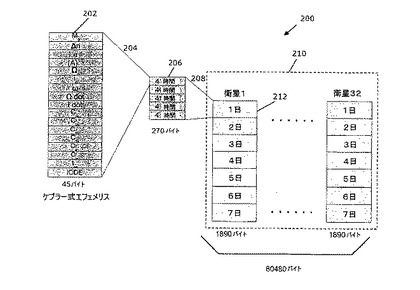
予測ファイルのサイズは、図3に図示されている通り、更にアルマナックパラメータを使用してデータの間隔をモデル化することによって、一層削減することができる。ここで、「アルマナックデータ」という用語は、衛星軌道の長期間モデルに関するパラメータの集まりを示すものであり、通常受信機の位置を特定するのに十分良好な予測値を提供しない。図3は、アルマナックデータの使用にもとづく第三の拡張されたエフェメリス予測ファイルシステムのフロー300を図示している。このシステムは、ケプラー式アルマナックデータ302を使用して、図3に図示された、より長い間隔のデータを全週分のデータとしてモデル化している。一つの衛星に関するケプラー式アルマナック302は、10個のパラメータを有し、そのパラメータは、有利な実施形態では、32バイトで表される。ケプラー式アルマナックに追加して、ハーモニック補正項306と多項式補正項308から成る補正項が生成されている。好ましい実施形態では、補正項306と308は、全体として40バイトで構成される。
【0025】
工程304と310で、ケプラー式アルマナック302と補正項306及び308は、予測ファイルとして集められている。好ましい実施形態では、各衛星は、67バイトのデータを有し、このデータは、ケプラー式アルマナックパラメータ314と、ハーモニック補正係数306及び多項式補正係数308を含むことができる補正係数316とで構成される。勿論、当業者は、正にこのようにして選定したモデルパラメータを修正して、所望の精度レベルと予測ファイルサイズを得ることが可能であることを理解している。このため、図3の実施形態で図示されている予測ファイルの合計サイズは、32個の衛星に対して1日当り1キロバイト未満に、好ましい実施形態では、32個の衛星に対して7日当り2,144バイトとすることができる。
【0026】
予測位置(x,y,z,t)は、予測期間の始めには極めて良好であるが、時間の経過と共に劣化するので、最小二乗法による推定の間に使用する重み付けを時間に関して低減することができる(時間に関する二乗法)。それにより、限定された数ではあるが、モデル化による誤差が期間の始めでは依然として小さく、時間と共に上昇する形で補正パラメータを得ることが可能となり、この場合その影響は、予測誤差も相当大きいので、それ程重大とはならない。その結果、ダウンロードするファイルサイズが、図2で図示されている通り、7日分の期間に対してダウンロードするファイルサイズが約60kBにもなる、放送されているエフェメリスの予測よりも小さくなる(図3で図示されている通り、3kB未満)。
【0027】
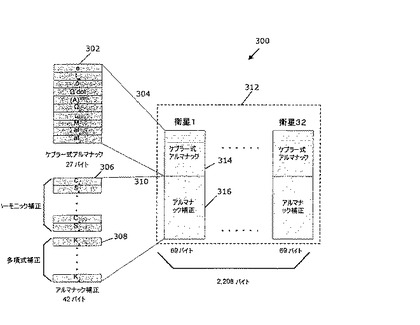
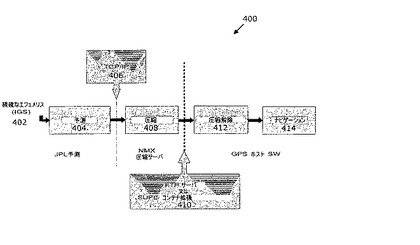
図4に図示されているシステムを参照して、動作原理を述べる。図4は、拡張されたエフェメリス予測ファイルから位置を推定するために用いられるシステム400を図示している。一連の基準局(図示されていない)は、衛星(図示されていない)から計測値402を受信する。各衛星に関する計測値から、最新の位置、速度、加速度、ジャークを計算する。工程404で、力学モデルを用いて、(モデルの緻密さに依存して)7日分までの期間に関する計算により、位置、速度、加速度のシーケンスを導き出す。好ましい実施形態では、位置時点間の間隔は15分である。並行して、衛星クロックの観測から、クロックモデルを計算、使用して、次の7日分に対するクロック誤差とドリフトを予測する。
【0028】
好ましい実施形態では、時間とクロック誤差及びドリフトによる衛星の位置を示すデータは、TCP/IPネットワーク408を介して送信され、このネットワークは、インターネットなどのネットワークとすることができるとともに、陸上線路、衛星又はその他の無線ネットワークで構成することができる。工程408では、予測から位置が入手可能となると同時に、所与の衛星に関する最新のアルマナックを選定、使用して、その後の同じ7日分に関する一連の衛星位置を計算する。それは、図3に図示した方法にもとづく好ましい実施形態では、時間とクロック誤差により衛星の位置を示すデータを圧縮するのに効果的である。工程408では、アルマナック予測値と精確な予測値との間のx,y,zによる位置の差を時間間隔全体に渡って計算する。予備的な解析では、この誤差は1週間の期間に対して2kmを越えず、この差は非常になだらかであることが示されている。
【0029】
時間の関数による誤差の推定は、ハーモニック及び多項式モデルを用いて計算される。このモデルの係数は、剰余の二乗の合計を最小化する最小二乗法を用いて決定される。パラメータの数は、ハーモニックモデルに対して8個と、多項式モデルに対して3個と推定される。最小二乗法に代わって、その他の推定技術を用いることもできる。
【0030】
工程408でも、拡張されたエフェメリス予測ファイルが生成され、そのファイルは、好ましい実施形態では、電離層補正パラメータ(合計30バイト)と、衛星毎に、最新のアルマナック(ICD−GPS200Cの圧縮形式で27バイトの10パラメータ)、X方向に関する6個の補正パラメータ、Y方向に関する6個の補正パラメータ、Z方向に関する6個の補正パラメータ及び衛星クロック補正に関する3個のパラメータとを有する。従って、32個の衛星に対して、補正パラメータの全数は、32*(6*3+3)=672個のパラメータとなる。パラメータ当り2バイトを使用すると、ファイルサイズは、電離層補正パラメータを除いて、図3に図示されている通り、約3kB(30+32*27+2*672=2238バイト)となる。
【0031】
ファイルは、例えば、PDA(携帯情報端末)では同期の間のダウンロード、A−GPS(アシステッドGPS)のセッション間におけるウェブからの補助的な情報としてのFTP(ファイル転送プロトコル)を含む、可能な如何なる手段によっても、GPS受信機にロードされる。FTPサービスを用いたダウンロード又はSUPL(セキュア・ユーザー・プレーン・ロケーション)のコンテナ拡張によるダウンロード410の例が、図4に図示されている。
【0032】
(工程410で垂直の破線で表示した通り)受信機で予測ファイルを受信したら、圧縮解除工程を実行することができる。位置を計算する必要が有る場合、GNSS受信機は、少なくとも4個の衛星を捕捉して、それらに関する計測値(放送されているエフェメリスデータではない)を入手した後、第一に、受信機内に保存したファイルからアルマナックを取り出して、アルマナックモデルから所要の時間におけるX,Y,Zの位置を計算する。並行して、受信機は、ハーモニック及び多項式補正項を取得して、所要の時間に関するX,Y,Zの補正値を計算する。この発明の意味する範囲において、補正項を取得するとは、メモリ内の項を直接参照するか、或いはメモリ内のデータから項を導き出すことを意味する。次に、これらの補正項をアルマナックモデルから得たX,Y,Zに適用する。勿論、補正項は、如何なる数の数学的演算を含む如何なる数の手法によっても適用することができるとともに、アルマナックパラメータの代わりになるものを直接含むことができる。これらの補正項は、最終的に推定衛星位置に作用する。この明細書で使用する通り、「推定衛星位置」とは、座標系での座標などの衛星の位置に関連するデータを意味する。
【0033】
この発明の一定の実施形態の利点には、ファイルサイズが、ネットワーク帯域幅でダウンロード時間内に保存される程比較的小さいことが有る。更に、ファイルサイズが小さいことにより、アシステッドGPSの環境において、例えば、SUPL標準を用いて、拡張されたエフェメリスがより良好に活用される。補正パラメータに適合した最小二乗法の適切な重み付けは、拡張されたエフェメリスデータの有効期間の最初の数日間に大きな誤差が生じる可能性を低減させる。非常に精確な時間を用いて、補正項を計算する必要が無いことにも留意されたい(数秒の精度で十分である)。それは、補正項がなだらかなためであり、そのことは、更に、1週間以上に渡って平均して正しく調整された、アルマナックにより行われる予測が全体的に良好であることによる。
【0034】
この発明の特別な実施形態は、位置を計算する方法であって、補正したアルマナックモデルを用いて、少なくとも一つの衛星の位置を計算する工程と、少なくとも一つの衛星から受信した信号を用いて、その少なくとも一つの衛星の位置から使用者の位置を計算する工程とを含む方法に関する。
【0035】
この発明の別の実施形態は、アルマナック補正モデルを受信するための通信ポートと、アルマナックデータを保存するためのメモリと、GNSS信号を受信するための回路と、受信したGNSS信号とアルマナックデータ及びアルマナック補正モデルから計算したGNSS送信機の位置とにもとづき受信機の位置を計算するためのプロセッサとを備えたGNSS受信機である。
【0036】
この発明の別の実施形態は、長期間有効な衛星位置データを提供する方法であって、利用可能なモデルにもとづき、3km以内の精度で衛星軌道モデルを構成する工程と、補正値と共に使用して、衛星軌道モデルによる予測精度を向上するための補正データを提供する工程とを含む方法である。
【0037】
この発明の更に別の実施形態は、第一の衛星軌道モデルを生成する方法であって、軌道上の衛星の予測位置に関するデータを受信する工程と、第二の衛星軌道モデルを用いて、別の一連の予測値を生成する工程と、第二の衛星軌道モデルの結果を補正して第一の衛星軌道モデルの結果とするための一連の補正項を生成する工程とを含む方法に関する。
【0038】
この発明の更に別の実施形態は、第一の衛星軌道モデルを生成する方法であって、軌道上の衛星の予測位置に関するデータを受信する工程と、第二の衛星軌道モデルを用いて、別の一連の予測値を生成する工程と、第二の衛星軌道モデルの結果を補正して第一の衛星軌道モデルの結果とするための一連の補正項を生成する工程とを含み、一連の補正項を生成する工程が、最小二乗法を用いて複数日の期間に関する一連の補正項を生成する工程を含むとともに、一連の補正項を生成する工程が、更に、衛星の予測位置に関する現在に近い方のデータに対して、衛星の予測位置に関する現在から遠い方のデータよりも大きい重みを付ける工程を含む方法に関する。
【図面の簡単な説明】
【0039】
【図1】第一の拡張されたエフェメリス予測ファイルシステムのフロー
【図2】第二の拡張されたエフェメリス予測ファイルシステムのフロー
【図3】第三の拡張されたエフェメリス予測ファイルシステムのフロー
【図4】拡張されたエフェメリスを利用するのに有用なシステム
【符号の説明】
【0040】
100 この発明によるシステムフロー
102 データ
104 工程
106 データ
108 工程
110 予測ファイル
112 予測データ
200 この発明によるシステムフロー
202 エフェメリスパラメータ
204 工程
206 データ
208 工程
210 予測ファイル
212 予測データ
300 この発明によるシステムフロー
302 アルマナックデータ
304 工程
306 補正項
308 補正項
310 工程
312 予測ファイル
314 ケプラー式アルマナックパラメータ
316 補正係数
400 この発明によるシステム
402 衛星からの計測値
404〜414 工程
【技術分野】
【0001】
この発明は、全体的に、衛星航法システム(GPS)又はGalileoなどの全地球的航法衛星システム(GNSS)の航法分野に関する。
【背景技術】
【0002】
GNSSでは、地球周回軌道上の衛星が信号を放送しており、それらの信号を検出するために配備された受信機により信号を受信することが可能である。それらの信号は、受信機が、適切な信号状態において、信号の伝送時間を計測することができるような形で伝送されている。受信機は、そのような四つの信号を受信することにより、ローカルタイム及びそれ自身の三次元座標系内の位置を計測することができる。
【0003】
そのようなシステムは、多くの場合衛星と受信機間の距離を計測する能力に依存している。そのような三つの距離を知ることにより、それぞれ一つの特定の衛星を中心とし、衛星から受信機までの測定した距離に等しい半径を有する三つの球面の最も可能性の高い交差点を決定することにより、精確な位置の推定を行うことができる。
【0004】
勿論、そのような位置計測を行うためには、受信機が各衛星位置の推定値を持っている必要が有る。そのような推定位置は、衛星の位置を推定するために使用することができるデータである衛星エフェメリスデータを用いて生成される。
【0005】
そのような衛星エフェメリスデータは、通常時間の関数として推定位置を生成するための既知の衛星軌道モデルで使用することができるパラメータの形で保存されている。例えば、GPSに対するエフェメリスの計算は、非特許文献1に記載されており、ここに参照して組み込むものとする。
【0006】
例えば、GPSシステムでのエフェメリスデータは、各衛星により放送されており、二つの形式で到来する。第一に、GPS衛星は、エフェメリスデータの一つの形式である「アルマナックデータ」を放送しているが、従来技術では、一般的にそのようなデータとして言及されていない。アルマナックデータの目的は、ダウンロード後の数時間以上の期間に対して衛星の粗い推定位置を計測するために使用することである。それは、例えば、受信機がそれ自身で粗い推定位置も持っていれば、どの衛星が受信機の視野内に有るのかを受信機が決定するのに活用することができる。アルマナックデータの精度は、典型的には、数時間に対して数キロメートル以内である。
【0007】
GPS衛星は、「エフェメリスデータ」と呼ばれる、より精確なデータセットも放送している。GPSエフェメリスデータの精度は、典型的には、数時間に対して数メートル以内である。しかし、このデータの精度は、数時間後には急速に劣化する。
【0008】
GPSアルマナックデータとGPSエフェメリスデータの両方は、CDMA擬似ランダム雑音コードに重畳された航法データメッセージの一部として、各衛星により放送されている。特定の衛星に関するエフェメリスデータは、典型的(空が晴れて、視界を遮る物が無い場合)には、ダウンロードするのに30秒かかる。これらのデータは、信号が弱い(−145dBm未満)場合にはダウンロードすることができない。信号が弱い状態では、エフェメリスデータは、典型的には、補助ネットワークからA−GPS受信機に伝送される。屋内で経験するような信号電力が低い状態では、多くの場合GPS航法メッセージを再生すること、従ってGPSエフェメリスデータを再生することは非常に難しい。それは、数時間晴れた空を見ることができなったGPS受信機が、各衛星の最新位置の不精確な推定にもとづき測位精度の劣化を被ることを意味する。
【0009】
従って、ダッシュボード又はフロントガラス上にPND(携帯ナビゲーション端末)又はGPS受信機を搭載した車両が屋内の車庫に夜通し駐車していた場合、GPS機能は、通常車両が翌日車庫を出た後相当長い時間が経過するまで、位置を提示することができない。GPSが4時間(放送されているエフェメリスの一般的な最大有効期間)を越える期間停止状態であったために、エフェメリスデータが失効してしまったためである。ここで、「有効」という用語は、予め設定された許容範囲内の誤差を生じさせることを意味する。都会におけるビルの谷間の環境では、信号レベルが低い状態と受信信号がしばしば大きく妨害される特性のために、GPS部分は、衛星から放送されているエフェメリスを再生するのに長い時間(10分まで)かかる。たとえ衛星を追尾していても、放送されているエフェメリスが再生されるまで測位することができない。
【特許文献1】特開平10−031061号公報
【非特許文献1】GPS−ICD−200C
【発明の概要】
【0010】
以上のことから、エフェメリスデータの精度と、エフェメリスデータが精確な測位点を提供することができる時間長とを向上、改善する必要が有る。
【0011】
この発明の一つの実施形態は、アルマナックデータの補正を行う工程を含む、受信機の位置の精度を改善する方法に関する。任意選択として、この方法は、アルマナックデータの補正を行う工程が、予測ファイルから補正項を取得する工程と、その項を推定衛星位置に適用する工程とを含む形で実施することができる。この方法は、約2キロメートル以内の精度のアルマナックデータの補正を行う工程から、数メートル(30メートル以内であるが、好ましくは5メートル以内)の精度の補正した推定衛星位置が得られる形で実施することもできる。好ましくは、この補正は、ネットワークから受信したデータにもとづき、そのデータにより、ネットワークからデータを受信した時間後7日以内に対して、補正した推定衛星位置の精度を数メートル以内とすることができるものである。
【0012】
この発明の一定の実施形態は、拡張されたエフェメリス予測ファイルを生成する方法であって、衛星軌道の予測値を含むデータを取得する工程と、衛星軌道の予測値とアルマナックデータから得られる第二の予測値との間の差に関連する補正項を計算する工程とを含み、予測ファイルは、少なくとも7日間有効であり、60480バイト未満で構成される方法に関する。任意選択として、この方法は、衛星軌道の予測値とアルマナックデータから得られる第二の予測値との間の差に関連する補正項を計算する工程が、更に、ハーモニックモデルと多項式モデルの両方を使用する工程を含む形で実施することができる。この方法は、更に、衛星クロックデータに関する補正項を計算する工程とSUPLネットワークを介して予測ファイルを伝送する工程とを含むことができる。好ましくは、予測ファイルは、有効な1日当り1キロバイト未満で構成される。好ましい実施形態では、衛星軌道の予測値とアルマナックデータから得られる第二の予測値との間の差に関連する補正項を計算する工程が、更に、衛星軌道の予測値と第二の予測値との間の差を最小化するために最小二乗法を適用する工程を含むとともに、更に、より遠い将来における衛星軌道の予測値からのデータに、より近い将来における衛星軌道の予測値からのデータよりも少なく重みを付ける工程を含むものである。
【0013】
この発明の更に別の実施形態は、コンピュータコードを組み込んだ、コンピュータが読み取り可能な媒体であって、コンピュータコードは、実行された際に、衛星軌道の予測値を含むデータを取得する工程と、衛星軌道の予測値とアルマナックデータから得られる第二の予測値との間の差に関連する補正項を計算する工程とを含み、予測ファイルが、少なくとも7日間有効であり、60480バイト未満で構成される、拡張されたエフェメリス予測ファイルを生成する方法を実行するものである、コンピュータが読み取り可能な媒体に関する。これらの命令により実行される方法は、衛星軌道の予測値とアルマナックデータから得られる第二の予測値との間の差に関連する補正項を計算する工程が、更に、ハーモニックモデルと多項式モデルの両方を使用する工程を含む形で実施することができる。任意選択として、これらの命令により実行される方法は、更に、衛星クロックデータに関する補正項を計算する工程と、SUPLネットワークを介して予測ファイルを伝送する工程とを含む。好ましい実施形態では、予測ファイルは、有効な1日当り1キロバイト未満で構成される。好ましくは、衛星軌道の予測値とアルマナックデータから得られる第二の予測値との間の差に関連する補正項を計算する工程が、更に、衛星軌道の予測値と第二の予測値との間の差を最小化するために最小二乗法を用いる工程と、より遠い将来における衛星軌道の予測値からのデータに、より近い将来における衛星軌道の予測値からのデータよりも少なく重みを付ける工程とを含む。
【0014】
この発明の更に別の実施形態は、アルマナック補正モデルを受信するための通信ポートと、アルマナックデータを保存するためのメモリと、GNSS信号を受信するための回路と、受信したGNSS信号とアルマナックデータ及びアルマナック補正モデルから計算したGNSS送信機の位置とにもとづき受信機の位置を計算するためのプロセッサとを備えたGNSS受信機に関する。任意選択として、受信したGNSS信号とアルマナックデータ及びアルマナック補正モデルから計算したGNSS送信機の位置とにもとづき受信機の位置を計算するためのプロセッサは、ハーモニック補正モデル及び多項式補正モデルにもとづき、GNSS送信機の補正された推定位置を計算するように構成される。
【詳細な説明】
【0015】
「エフェメリスの拡張」とは、本来の2時間よりもずっと長い時間間隔、典型的には、数日に渡って、一連のエフェメリスを予測することを可能とする技術である。4日後には、この時間に関する拡張が、本当のエフェメリスから計算した位置に対して精度の劣化を含むようになる。エフェメリスの拡張が良好であれば、初期測位時間(TTFF)が、あらゆる状態において常に5〜15秒となり、それは、コールド又はウォームスタートがもはや存在しないことを意味する。その効果は、(2時間を越える)長い時間間隔後に、特に、難しい環境(例えば、都会のビルの谷間)において、受信機を始動した場合に明らかとなる。信号が弱い環境では、リアルタイムの補助データが無くても依然として測位が可能である。使用者が(4日後に)精度が悪くなった測位を許容することができるのであれば、長い期間に渡って、リアルタイムの補助を受ける必要は無い。
【0016】
再び駐車用車庫を出た車両を例に挙げると、この発明の実施形態では、車両が車庫を出た後最大5〜10秒以内に初期測位が可能となる。一つの主要な点は、航法メッセージの放送とは異なる手段(例えば、インターネット接続、無線接続、ファイルのダウンロード)によりロードされる一連の長期間有効なエフェメリスをGPS受信機内に保存していることである。長期間有効なエフェメリスは、通常衛星の精確な最新位置、基準局で行われる実際の計測から取得した速度と加速度の知識から得られる。その位置は、精確な力学モデル(精密重力モデル、重力の一時的変化、太陽と月の引力効果、太陽放射線の圧力、ヨーバイアス補正等)を用いて生成される。最新のクロックオフセット、ドリフトモデル及びドリフトレートモデルを含む衛星クロック予測も行われる。衛星クロックには、精確には予測することができないランダムな要素も存在する。
【0017】
予測フェーズの生の結果は、典型的には15分単位で、衛星毎に精確に予測した位置のシーケンスとクロックバイアスモデルである。次に、この情報は、圧縮してGPS受信機に送信する必要が有り、GPS受信機では、圧縮を解除して、航法用に使用する。
【0018】
この発明の実施形態は、衛星軌道全体の良好な長期間モデル(アルマナック)を使用する工程と、このアルマナックモデルに適用する補正の推定値を計算する工程とを含む。これらの補正は、相当に小さく(通常2km以下)、非常になだらか(高周波成分が無く、その結果比較的少ない数のパラメータで捕捉することができる)である。これらの補正は、最適には衛星の公転周期又はその倍数に等しい周期を持つハーモニック補正項と、初期オフセット項、線形ドリフト項及びドリフトレートを反映した二次項から成る多項式補正項とを持つことができる。所望の精度に依存して、項を追加することも可能である。
【0019】
これらの補正項は、前記のモデルと、例えば、空間(x,y及びz)及び時間(t)座標形式の衛星位置予測データとの間の差に適合した最小二乗法のパラメータを適用することによって推定することができる。これらの座標は、将来に向かっての一定の時間期間に対して規定することができ、基準局、例えば、NASAジェット推進研究所(JPL)の基準局で収集したデータから生成される。そのようなコヒーレントファイルとして収集したデータの例が図1に図示されている。JPL予測データの利点は、十分に試験されており、精確であり、低いリスクで速い確認を可能とすることである。
【0020】
図1は、拡張されたエフェメリス予測ファイルシステムのフローを図示している。ここで、「予測ファイル」という用語は、エフェメリスの予測を改善するのに有用なデータの集まりを意味する。システム100では、JPLから入手可能なデータなどのX,Y,Z形式のデータ102が集められている。それらのデータは、例えば、各衛星に関して、X座標、Y座標及びZ座標、並びにこれらの座標の所与の各時点tn における時間に関する一次導関数Xドット、Yドット及びZドットで表すことができる。各tn とtn+1 間の時間は、如何なる大きさの時間とすることもできるが、図1に図示されている実施形態では、15分に等しい。図1に図示されている実施形態では、座標及び座標の導関数は、それぞれ5バイトのデータワードで表されており、その結果各tn に関するデータは、30バイトのデータを表すこととなる。
【0021】
工程104において、データ102からデータを集めて、96個の時間間隔から成る1日分の有効なデータ106又は一つの衛星に対して1日当り2880バイトの有効なデータを構成する。32個の衛星の各々に対して7日分の有効な予測データ112を考慮した予測ファイル110では、全体のファイルサイズは、645,120バイトとなる。勿論、予測ファイルの長さは、システムの要件に依存して日数を加算又は減算すること、従って、利用可能な予測データの長さに対する精度とファイルサイズを綜合的に斟酌することにより変更することができる。
【0022】
図2は、第二の拡張されたエフェメリス予測ファイルシステムのフロー200を図示している。システム200は、図1に図示されている15分の間隔に代わって、4時間の間隔で一連の衛星予測データ206を表している。このシステムは、4時間の期間に渡って衛星予測データを取得し、それを標準的に放送されているエフェメリスパラメータ202を用いてモデル化することにより、そのように表されている。工程204で、各4時間の間隔は、一連の4時間の間隔に集められる。4時間の間隔の各セットは、各衛星(ここでは32個として図示されている)に関する一定の日数分(ここでは7日分として図示されている)の有効な予測データを含む予測ファイル210に纏められる。
【0023】
エフェメリスパラメータを使用して複数時間の間隔のデータをモデル化することにより、データを圧縮することができる。図1に図示されているシステムと比べて、24時間分の有効なデータが、僅か270バイトで構成され、7日分の有効なデータが1890バイトで構成される。そのため、32個の衛星に関する7日分の予測ファイルが、60480バイトで構成されることとなる。
【0024】
予測ファイルのサイズは、図3に図示されている通り、更にアルマナックパラメータを使用してデータの間隔をモデル化することによって、一層削減することができる。ここで、「アルマナックデータ」という用語は、衛星軌道の長期間モデルに関するパラメータの集まりを示すものであり、通常受信機の位置を特定するのに十分良好な予測値を提供しない。図3は、アルマナックデータの使用にもとづく第三の拡張されたエフェメリス予測ファイルシステムのフロー300を図示している。このシステムは、ケプラー式アルマナックデータ302を使用して、図3に図示された、より長い間隔のデータを全週分のデータとしてモデル化している。一つの衛星に関するケプラー式アルマナック302は、10個のパラメータを有し、そのパラメータは、有利な実施形態では、32バイトで表される。ケプラー式アルマナックに追加して、ハーモニック補正項306と多項式補正項308から成る補正項が生成されている。好ましい実施形態では、補正項306と308は、全体として40バイトで構成される。
【0025】
工程304と310で、ケプラー式アルマナック302と補正項306及び308は、予測ファイルとして集められている。好ましい実施形態では、各衛星は、67バイトのデータを有し、このデータは、ケプラー式アルマナックパラメータ314と、ハーモニック補正係数306及び多項式補正係数308を含むことができる補正係数316とで構成される。勿論、当業者は、正にこのようにして選定したモデルパラメータを修正して、所望の精度レベルと予測ファイルサイズを得ることが可能であることを理解している。このため、図3の実施形態で図示されている予測ファイルの合計サイズは、32個の衛星に対して1日当り1キロバイト未満に、好ましい実施形態では、32個の衛星に対して7日当り2,144バイトとすることができる。
【0026】
予測位置(x,y,z,t)は、予測期間の始めには極めて良好であるが、時間の経過と共に劣化するので、最小二乗法による推定の間に使用する重み付けを時間に関して低減することができる(時間に関する二乗法)。それにより、限定された数ではあるが、モデル化による誤差が期間の始めでは依然として小さく、時間と共に上昇する形で補正パラメータを得ることが可能となり、この場合その影響は、予測誤差も相当大きいので、それ程重大とはならない。その結果、ダウンロードするファイルサイズが、図2で図示されている通り、7日分の期間に対してダウンロードするファイルサイズが約60kBにもなる、放送されているエフェメリスの予測よりも小さくなる(図3で図示されている通り、3kB未満)。
【0027】
図4に図示されているシステムを参照して、動作原理を述べる。図4は、拡張されたエフェメリス予測ファイルから位置を推定するために用いられるシステム400を図示している。一連の基準局(図示されていない)は、衛星(図示されていない)から計測値402を受信する。各衛星に関する計測値から、最新の位置、速度、加速度、ジャークを計算する。工程404で、力学モデルを用いて、(モデルの緻密さに依存して)7日分までの期間に関する計算により、位置、速度、加速度のシーケンスを導き出す。好ましい実施形態では、位置時点間の間隔は15分である。並行して、衛星クロックの観測から、クロックモデルを計算、使用して、次の7日分に対するクロック誤差とドリフトを予測する。
【0028】
好ましい実施形態では、時間とクロック誤差及びドリフトによる衛星の位置を示すデータは、TCP/IPネットワーク408を介して送信され、このネットワークは、インターネットなどのネットワークとすることができるとともに、陸上線路、衛星又はその他の無線ネットワークで構成することができる。工程408では、予測から位置が入手可能となると同時に、所与の衛星に関する最新のアルマナックを選定、使用して、その後の同じ7日分に関する一連の衛星位置を計算する。それは、図3に図示した方法にもとづく好ましい実施形態では、時間とクロック誤差により衛星の位置を示すデータを圧縮するのに効果的である。工程408では、アルマナック予測値と精確な予測値との間のx,y,zによる位置の差を時間間隔全体に渡って計算する。予備的な解析では、この誤差は1週間の期間に対して2kmを越えず、この差は非常になだらかであることが示されている。
【0029】
時間の関数による誤差の推定は、ハーモニック及び多項式モデルを用いて計算される。このモデルの係数は、剰余の二乗の合計を最小化する最小二乗法を用いて決定される。パラメータの数は、ハーモニックモデルに対して8個と、多項式モデルに対して3個と推定される。最小二乗法に代わって、その他の推定技術を用いることもできる。
【0030】
工程408でも、拡張されたエフェメリス予測ファイルが生成され、そのファイルは、好ましい実施形態では、電離層補正パラメータ(合計30バイト)と、衛星毎に、最新のアルマナック(ICD−GPS200Cの圧縮形式で27バイトの10パラメータ)、X方向に関する6個の補正パラメータ、Y方向に関する6個の補正パラメータ、Z方向に関する6個の補正パラメータ及び衛星クロック補正に関する3個のパラメータとを有する。従って、32個の衛星に対して、補正パラメータの全数は、32*(6*3+3)=672個のパラメータとなる。パラメータ当り2バイトを使用すると、ファイルサイズは、電離層補正パラメータを除いて、図3に図示されている通り、約3kB(30+32*27+2*672=2238バイト)となる。
【0031】
ファイルは、例えば、PDA(携帯情報端末)では同期の間のダウンロード、A−GPS(アシステッドGPS)のセッション間におけるウェブからの補助的な情報としてのFTP(ファイル転送プロトコル)を含む、可能な如何なる手段によっても、GPS受信機にロードされる。FTPサービスを用いたダウンロード又はSUPL(セキュア・ユーザー・プレーン・ロケーション)のコンテナ拡張によるダウンロード410の例が、図4に図示されている。
【0032】
(工程410で垂直の破線で表示した通り)受信機で予測ファイルを受信したら、圧縮解除工程を実行することができる。位置を計算する必要が有る場合、GNSS受信機は、少なくとも4個の衛星を捕捉して、それらに関する計測値(放送されているエフェメリスデータではない)を入手した後、第一に、受信機内に保存したファイルからアルマナックを取り出して、アルマナックモデルから所要の時間におけるX,Y,Zの位置を計算する。並行して、受信機は、ハーモニック及び多項式補正項を取得して、所要の時間に関するX,Y,Zの補正値を計算する。この発明の意味する範囲において、補正項を取得するとは、メモリ内の項を直接参照するか、或いはメモリ内のデータから項を導き出すことを意味する。次に、これらの補正項をアルマナックモデルから得たX,Y,Zに適用する。勿論、補正項は、如何なる数の数学的演算を含む如何なる数の手法によっても適用することができるとともに、アルマナックパラメータの代わりになるものを直接含むことができる。これらの補正項は、最終的に推定衛星位置に作用する。この明細書で使用する通り、「推定衛星位置」とは、座標系での座標などの衛星の位置に関連するデータを意味する。
【0033】
この発明の一定の実施形態の利点には、ファイルサイズが、ネットワーク帯域幅でダウンロード時間内に保存される程比較的小さいことが有る。更に、ファイルサイズが小さいことにより、アシステッドGPSの環境において、例えば、SUPL標準を用いて、拡張されたエフェメリスがより良好に活用される。補正パラメータに適合した最小二乗法の適切な重み付けは、拡張されたエフェメリスデータの有効期間の最初の数日間に大きな誤差が生じる可能性を低減させる。非常に精確な時間を用いて、補正項を計算する必要が無いことにも留意されたい(数秒の精度で十分である)。それは、補正項がなだらかなためであり、そのことは、更に、1週間以上に渡って平均して正しく調整された、アルマナックにより行われる予測が全体的に良好であることによる。
【0034】
この発明の特別な実施形態は、位置を計算する方法であって、補正したアルマナックモデルを用いて、少なくとも一つの衛星の位置を計算する工程と、少なくとも一つの衛星から受信した信号を用いて、その少なくとも一つの衛星の位置から使用者の位置を計算する工程とを含む方法に関する。
【0035】
この発明の別の実施形態は、アルマナック補正モデルを受信するための通信ポートと、アルマナックデータを保存するためのメモリと、GNSS信号を受信するための回路と、受信したGNSS信号とアルマナックデータ及びアルマナック補正モデルから計算したGNSS送信機の位置とにもとづき受信機の位置を計算するためのプロセッサとを備えたGNSS受信機である。
【0036】
この発明の別の実施形態は、長期間有効な衛星位置データを提供する方法であって、利用可能なモデルにもとづき、3km以内の精度で衛星軌道モデルを構成する工程と、補正値と共に使用して、衛星軌道モデルによる予測精度を向上するための補正データを提供する工程とを含む方法である。
【0037】
この発明の更に別の実施形態は、第一の衛星軌道モデルを生成する方法であって、軌道上の衛星の予測位置に関するデータを受信する工程と、第二の衛星軌道モデルを用いて、別の一連の予測値を生成する工程と、第二の衛星軌道モデルの結果を補正して第一の衛星軌道モデルの結果とするための一連の補正項を生成する工程とを含む方法に関する。
【0038】
この発明の更に別の実施形態は、第一の衛星軌道モデルを生成する方法であって、軌道上の衛星の予測位置に関するデータを受信する工程と、第二の衛星軌道モデルを用いて、別の一連の予測値を生成する工程と、第二の衛星軌道モデルの結果を補正して第一の衛星軌道モデルの結果とするための一連の補正項を生成する工程とを含み、一連の補正項を生成する工程が、最小二乗法を用いて複数日の期間に関する一連の補正項を生成する工程を含むとともに、一連の補正項を生成する工程が、更に、衛星の予測位置に関する現在に近い方のデータに対して、衛星の予測位置に関する現在から遠い方のデータよりも大きい重みを付ける工程を含む方法に関する。
【図面の簡単な説明】
【0039】
【図1】第一の拡張されたエフェメリス予測ファイルシステムのフロー
【図2】第二の拡張されたエフェメリス予測ファイルシステムのフロー
【図3】第三の拡張されたエフェメリス予測ファイルシステムのフロー
【図4】拡張されたエフェメリスを利用するのに有用なシステム
【符号の説明】
【0040】
100 この発明によるシステムフロー
102 データ
104 工程
106 データ
108 工程
110 予測ファイル
112 予測データ
200 この発明によるシステムフロー
202 エフェメリスパラメータ
204 工程
206 データ
208 工程
210 予測ファイル
212 予測データ
300 この発明によるシステムフロー
302 アルマナックデータ
304 工程
306 補正項
308 補正項
310 工程
312 予測ファイル
314 ケプラー式アルマナックパラメータ
316 補正係数
400 この発明によるシステム
402 衛星からの計測値
404〜414 工程
【特許請求の範囲】
【請求項1】
受信機の位置の精度を改善する方法であって、アルマナックデータの補正を行う工程を含む方法。
【請求項2】
前記アルマナックデータの補正を行う工程が、予測ファイルから補正項を取得する工程と、前記補正項を推定衛星位置に適用する工程とを含む請求項1に記載の方法。
【請求項3】
前記アルマナックデータの補正を行う工程から、補正した推定衛星位置が得られ、前記補正した推定衛星位置の精度が、約30メートル以内である請求項1に記載の方法。
【請求項4】
前記補正が、ネットワークから受信したデータにもとづくものであり、
前記データにより、前記補正した推定衛星位置の精度を、前記ネットワークから前記データを受信した時間後数日以内で約30メートル以内とすることができる請求項3に記載の方法。
【請求項5】
拡張されたエフェメリス予測ファイルを生成する方法であって、
衛星軌道の予測値を含むデータを取得する工程と、
前記衛星軌道の予測値とアルマナックデータから得られる第二の予測値との間の差に関連する補正項を計算する工程とを含み、
前記予測ファイルが、少なくとも7日間有効であり、60480バイト未満で構成される方法。
【請求項6】
前記衛星軌道の予測値とアルマナックデータから得られる第二の予測値との間の差に関連する補正項を計算する工程が、更に、ハーモニックモデル及び多項式モデルの両方を使用する工程を含む請求項5に記載の方法。
【請求項7】
更に、衛星クロックデータに関する補正項を計算する工程を含む請求項5に記載の方法。
【請求項8】
更に、前記予測ファイルをSUPLネットワークを介して伝送する工程を含む請求項5に記載の方法。
【請求項9】
前記予測ファイルが、有効な1日当り1キロバイト未満で構成される請求項5に記載の方法。
【請求項10】
前記衛星軌道の予測値とアルマナックデータから得られる第二の予測値との間の差に関連する補正項を計算する工程が、更に、前記衛星軌道の予測値と前記第二の予測値との間の差を最小化するために最小二乗法を用いる工程を含む請求項5に記載の方法。
【請求項11】
前記衛星軌道の予測値と第二の予測値との間の差を最小化するために最小二乗法を用いる工程が、更に、より遠い将来における衛星軌道の予測値からのデータに、より近い将来における衛星軌道の予測値からのデータよりも少なく重みを付ける工程を含む請求項10に記載の方法。
【請求項12】
コンピュータコードを組み込んだ、コンピュータが読み取り可能な媒体であって、前記コンピュータコードは、実行された際に、拡張されたエフェメリス予測ファイルを生成する方法であって、
衛星軌道の予測値を含むデータを取得する工程と、
前記衛星軌道の予測値とアルマナックデータから得られる第二の予測値との間の差に関連する補正項を計算する工程と
を含み、前記予測ファイルが、少なくとも7日間有効であり、60480バイト未満で構成される方法を実行するものである、コンピュータが読み取り可能な媒体。
【請求項13】
前記衛星軌道の予測値とアルマナックデータから得られる第二の予測値との間の差に関連する補正項を計算する方法の工程が、更に、ハーモニックモデルと多項式モデルの両方を使用する工程を含む請求項12に記載のコンピュータが読み取り可能な媒体。
【請求項14】
前記方法が、更に、衛星クロックデータに関する補正項を計算する工程を含む請求項12に記載のコンピュータが読み取り可能な媒体。
【請求項15】
前記方法が、更に、前記予測ファイルをSUPLネットワークを介して伝送する工程を含む請求項5に記載のコンピュータが読み取り可能な媒体。
【請求項16】
前記予測ファイルが、有効な1日当り1キロバイト未満で構成される請求項5に記載のコンピュータが読み取り可能な媒体。
【請求項17】
前記衛星軌道の予測値とアルマナックデータから得られる第二の予測値との間の差に関連する補正項を計算する工程が、更に、前記衛星軌道の予測値と前記第二の予測値との間の差を最小化するために最小二乗法を用いる工程を含む請求項5に記載のコンピュータが読み取り可能な媒体。
【請求項18】
前記衛星軌道の予測値と第二の予測値との間の差を最小化するために最小二乗法を用いる工程が、更に、より遠い将来における衛星軌道の予測値からのデータに、より近い将来における衛星軌道の予測値からのデータよりも少なく重みを付ける工程を含む請求項10に記載のコンピュータが読み取り可能な媒体。
【請求項19】
GNSS受信機であって、
アルマナック補正モデルを受信するための通信ポートと、
アルマナックデータを保存するためのメモリと、
GNSS信号を受信するための回路と、
前記受信したGNSS信号と、アルマナックデータ及びアルマナック補正モデルから計算したGNSS送信機の位置と、にもとづき、前記受信機の位置を計算するためのプロセッサと、
を備えたGNSS受信機。
【請求項20】
前記受信したGNSS信号と、アルマナックデータ及びアルマナック補正モデルから計算したGNSS送信機の位置と、にもとづき、受信機の位置を計算するためのプロセッサが、ハーモニック補正モデル及び多項式補正モデルにもとづき、GNSS送信機の補正した推定位置を計算するように構成されている請求項19に記載のGNSS受信機。
【請求項1】
受信機の位置の精度を改善する方法であって、アルマナックデータの補正を行う工程を含む方法。
【請求項2】
前記アルマナックデータの補正を行う工程が、予測ファイルから補正項を取得する工程と、前記補正項を推定衛星位置に適用する工程とを含む請求項1に記載の方法。
【請求項3】
前記アルマナックデータの補正を行う工程から、補正した推定衛星位置が得られ、前記補正した推定衛星位置の精度が、約30メートル以内である請求項1に記載の方法。
【請求項4】
前記補正が、ネットワークから受信したデータにもとづくものであり、
前記データにより、前記補正した推定衛星位置の精度を、前記ネットワークから前記データを受信した時間後数日以内で約30メートル以内とすることができる請求項3に記載の方法。
【請求項5】
拡張されたエフェメリス予測ファイルを生成する方法であって、
衛星軌道の予測値を含むデータを取得する工程と、
前記衛星軌道の予測値とアルマナックデータから得られる第二の予測値との間の差に関連する補正項を計算する工程とを含み、
前記予測ファイルが、少なくとも7日間有効であり、60480バイト未満で構成される方法。
【請求項6】
前記衛星軌道の予測値とアルマナックデータから得られる第二の予測値との間の差に関連する補正項を計算する工程が、更に、ハーモニックモデル及び多項式モデルの両方を使用する工程を含む請求項5に記載の方法。
【請求項7】
更に、衛星クロックデータに関する補正項を計算する工程を含む請求項5に記載の方法。
【請求項8】
更に、前記予測ファイルをSUPLネットワークを介して伝送する工程を含む請求項5に記載の方法。
【請求項9】
前記予測ファイルが、有効な1日当り1キロバイト未満で構成される請求項5に記載の方法。
【請求項10】
前記衛星軌道の予測値とアルマナックデータから得られる第二の予測値との間の差に関連する補正項を計算する工程が、更に、前記衛星軌道の予測値と前記第二の予測値との間の差を最小化するために最小二乗法を用いる工程を含む請求項5に記載の方法。
【請求項11】
前記衛星軌道の予測値と第二の予測値との間の差を最小化するために最小二乗法を用いる工程が、更に、より遠い将来における衛星軌道の予測値からのデータに、より近い将来における衛星軌道の予測値からのデータよりも少なく重みを付ける工程を含む請求項10に記載の方法。
【請求項12】
コンピュータコードを組み込んだ、コンピュータが読み取り可能な媒体であって、前記コンピュータコードは、実行された際に、拡張されたエフェメリス予測ファイルを生成する方法であって、
衛星軌道の予測値を含むデータを取得する工程と、
前記衛星軌道の予測値とアルマナックデータから得られる第二の予測値との間の差に関連する補正項を計算する工程と
を含み、前記予測ファイルが、少なくとも7日間有効であり、60480バイト未満で構成される方法を実行するものである、コンピュータが読み取り可能な媒体。
【請求項13】
前記衛星軌道の予測値とアルマナックデータから得られる第二の予測値との間の差に関連する補正項を計算する方法の工程が、更に、ハーモニックモデルと多項式モデルの両方を使用する工程を含む請求項12に記載のコンピュータが読み取り可能な媒体。
【請求項14】
前記方法が、更に、衛星クロックデータに関する補正項を計算する工程を含む請求項12に記載のコンピュータが読み取り可能な媒体。
【請求項15】
前記方法が、更に、前記予測ファイルをSUPLネットワークを介して伝送する工程を含む請求項5に記載のコンピュータが読み取り可能な媒体。
【請求項16】
前記予測ファイルが、有効な1日当り1キロバイト未満で構成される請求項5に記載のコンピュータが読み取り可能な媒体。
【請求項17】
前記衛星軌道の予測値とアルマナックデータから得られる第二の予測値との間の差に関連する補正項を計算する工程が、更に、前記衛星軌道の予測値と前記第二の予測値との間の差を最小化するために最小二乗法を用いる工程を含む請求項5に記載のコンピュータが読み取り可能な媒体。
【請求項18】
前記衛星軌道の予測値と第二の予測値との間の差を最小化するために最小二乗法を用いる工程が、更に、より遠い将来における衛星軌道の予測値からのデータに、より近い将来における衛星軌道の予測値からのデータよりも少なく重みを付ける工程を含む請求項10に記載のコンピュータが読み取り可能な媒体。
【請求項19】
GNSS受信機であって、
アルマナック補正モデルを受信するための通信ポートと、
アルマナックデータを保存するためのメモリと、
GNSS信号を受信するための回路と、
前記受信したGNSS信号と、アルマナックデータ及びアルマナック補正モデルから計算したGNSS送信機の位置と、にもとづき、前記受信機の位置を計算するためのプロセッサと、
を備えたGNSS受信機。
【請求項20】
前記受信したGNSS信号と、アルマナックデータ及びアルマナック補正モデルから計算したGNSS送信機の位置と、にもとづき、受信機の位置を計算するためのプロセッサが、ハーモニック補正モデル及び多項式補正モデルにもとづき、GNSS送信機の補正した推定位置を計算するように構成されている請求項19に記載のGNSS受信機。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−211906(P2012−211906A)
【公開日】平成24年11月1日(2012.11.1)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−116629(P2012−116629)
【出願日】平成24年5月22日(2012.5.22)
【分割の表示】特願2007−113121(P2007−113121)の分割
【原出願日】平成19年4月23日(2007.4.23)
【出願人】(595020643)クゥアルコム・インコーポレイテッド (7,166)
【氏名又は名称原語表記】QUALCOMM INCORPORATED
【Fターム(参考)】
【公開日】平成24年11月1日(2012.11.1)
【国際特許分類】
【出願番号】特願2012−116629(P2012−116629)
【出願日】平成24年5月22日(2012.5.22)
【分割の表示】特願2007−113121(P2007−113121)の分割
【原出願日】平成19年4月23日(2007.4.23)
【出願人】(595020643)クゥアルコム・インコーポレイテッド (7,166)
【氏名又は名称原語表記】QUALCOMM INCORPORATED
【Fターム(参考)】
[ Back to top ]