
エリア調査支援システム、エリア調査支援方法及びエリア調査支援装置

【課題】予め学習データを用意せずに、誤分類の可能性を減らして、調査員が実際に行く調査エリア数や移動距離をできる限り抑制しながらも、精度よく未調査のエリア情報を推定する。
【解決手段】ネットワークに接続された端末装置とエリア調査支援装置を備えて、エリア調査支援装置が端末装置に推薦経路を送信するエリア調査支援方法であって、エリア調査支援装置が、同一属性情報を持つと想定される空間的に連続した区域であるエリアの調査情報と位置情報を前記端末装置から受け付け、前記エリアの調査情報と位置情報から、予め格納した画像データベースから未調査のエリアの画像データを取得して、前記調査情報と画像データから未調査のエリアの属性情報を推定し、推定した属性情報の精度パラメータを算出し、推定した属性情報と算出された精度パラメータとエリアの形状情報及び位置情報とを得して調査の推薦経路を演算する。
【解決手段】ネットワークに接続された端末装置とエリア調査支援装置を備えて、エリア調査支援装置が端末装置に推薦経路を送信するエリア調査支援方法であって、エリア調査支援装置が、同一属性情報を持つと想定される空間的に連続した区域であるエリアの調査情報と位置情報を前記端末装置から受け付け、前記エリアの調査情報と位置情報から、予め格納した画像データベースから未調査のエリアの画像データを取得して、前記調査情報と画像データから未調査のエリアの属性情報を推定し、推定した属性情報の精度パラメータを算出し、推定した属性情報と算出された精度パラメータとエリアの形状情報及び位置情報とを得して調査の推薦経路を演算する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、同一属性情報を持つと想定される空間的に連続したエリアの現地調査を支援するシステムに関するものである。
【背景技術】
【0002】
広大な農作地域を対象とした農業情報地図や、市街地等を対象としたカーナビゲーション用地図等は、現実世界の各エリアの保持する情報が時間変化に伴い変化していくため、定期的に各エリアの属性情報を収集して地図へ反映することが求められている。ここでいうエリアとは、同一属性情報を持つと想定される空間的に連続した区域のことを指し、属性情報とは、農作地域の場合であれば、各エリアの保有者や耕作従事者、またそこで栽培されている農作物の種類や収穫量等の情報を指す。市街地の場合であれば、属性情報は、道路や建物、また建物の種類や材質、高さ等の情報を指す。現在、エリアの属性情報は調査員を現地の各々のエリアまで派遣することにより、調査し把握しているという状況である。
【0003】
しかし、対象とする地域が広くなればなるほど、現地調査は調査員の作業量が大きくなり、その結果として必要となる時間や費用が大きくなるため、現地調査の負担、費用を削減するような支援システムが求められている。
【0004】
このようなニーズに対して、特許文献1、2に示すような技術が知られている。特許文献1では、過去の地図データベース中に存在する建物の外観画像と、現在の撮影画像が不一致である箇所に関してのみ、市街地の地図データベースの更新を行うことにより、調査員の負担を削減する調査支援システムが開示されている。
【0005】
特許文献2では、衛星や航空機によって撮影された画像を用い、広大な農作地域の作物の収穫量を予測する予測装置及び方法が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2000−47578号公報
【特許文献2】特開2003−6612号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
現地調査員の負担や費用を削減する手段として、上記の特許文献1にように、過去のデータベース中の画像を用い、過去画像と現在の撮影画像が不一致な箇所のみデータベースの更新を行うことが考えられる。しかし農作地域等の区域が持つ属性情報は作物の生育や収穫などによって絶えず変化していくため、ほぼ全域にわたって調査をする必要があり、調査員の負担や費用をあまり削減できない場合も多い。
【0008】
また上記の特許文献2のように、衛星や航空機に搭載されたセンサによって得られた調査地域の画像を入力とし、これらの画像から得られたスペクトルを用いてエリアの情報を計算機に推定させることにより、調査を全て自動化して、現地調査員の負担や費用を削減することが考えられる。ここでスペクトルとは、画像中に含まれる1つのピクセルの画素値を波長ごとに並べたデータを指す。
【0009】
しかし上記調査の自動化のためには大量の学習データが必要となる。ここでいう学習データとは、エリアの属性情報と、属性情報に対応するスペクトルの組のことである。特に農作地域のエリアの属性情報を推定する際は、作物の成長時期によってスペクトルが変化するため、様々な時期のスペクトルが必要となり、これらのスペクトルがいつでも用意されているとは限らない。
【0010】
一方、学習データを用意せず、入力とした画像データのみを用いて、エリア情報を推定することも可能である。農作地域の作物情報を調査する場合であれば、各エリアをA、B、C・・・とラベルづけすることができる。これを教師なし分類と呼ぶ。Aが水稲、Bが大豆等、といったように各ラベルがどの属性情報に対応するかは不明であるため、教師なし分類の後、それぞれのラベルの中の代表的なエリアを調査する必要があるが、全てのエリアを調査する必要はなく、負担や費用を削減することが可能である。
【0011】
しかし、教師なし分類では、同一の属性情報を別のラベルとみなしていたり、別々のラベルを同一と見なしていたりと誤分類が起きる可能性が高い。
【0012】
以上の二点の観点より、予め学習データを用意できるわけではないという問題と、予め学習データを用意しない場合は、誤分類が起きる可能性が高いという問題がある。
【0013】
そこで本発明は、上記問題点に鑑みてなされたもので、予め学習データを用意せずに、誤分類の可能性を減らして、調査員が実際に行く調査エリア数や移動距離をできる限り抑制しながらも、精度よく未調査のエリア情報を推定することを目的とする。
【課題を解決するための手段】
【0014】
本発明は、ネットワークに接続される端末装置と、前記ネットワークに接続されるエリア調査支援装置と、を備えるエリア調査支援システムであって、前記端末装置は、前記ネットワークに接続される通信部と、情報を入力する入力操作部と、情報を出力するデータ表示部と、位置情報を取得する位置情報取得部と、を備え、前記エリア調査支援装置は、前記端末装置から、同一属性情報を持つと想定される空間的に連続した区域であるエリアの調査情報と位置情報を受け付けるデータ受信部と、前記エリアの調査情報と位置情報から、予め格納した画像データベースから未調査のエリアの画像データを取得して、前記調査情報と画像データを入力として、前記未調査のエリアの属性情報を推定し、当該推定した属性情報の妥当性を示す精度パラメータを算出する画像解析部と、前記データ受信部で前記端末装置から推薦経路の要求を受け付けたときには、前記画像解析部で推定した属性情報と、前記算出された精度パラメータと、前記エリアの形状情報及び位置情報と、を取得して調査の推薦経路を演算する推薦経路選択部と、前記画像解析部で推定した属性情報と前記精度パラメータを取得して、前記調査を終了するか否かを判定する終了条件判定部と、前記終了条件判定部が、前記調査の終了を判定したときには調査終了の信号を前記端末装置へ送信し、前記終了条件判定部が、前記調査の継続を判定したときには、前記推薦経路を前記端末装置へ送信するデータ送信部と、を備え、前記推薦経路選択部は、前記属性情報の推定精度と正の相関を持つ一つ以上の精度パラメータと、前記調査によって得られる情報量と当該調査に必要な時間の比と正の相関を持つ一つ以上の効率パラメータと、からコストを付加した経路を生成するエリアグラフ作成部と、前記エリアグラフ作成部にて生成した経路のうち、前記コストが最小の経路を探索する最適経路探索部と、を備える。
【発明の効果】
【0015】
本発明によれば、予め学習データを用意する必要はなく、エリア調査の際に調査員に調査するエリアを指示することにより、調査員が実際に行く調査エリア数や移動距離をできる限り少なくしつつ、精度よく未調査のエリア情報を推定することができる。また効率面と精度面でどちらを重視するかのバランスをユーザ側で決定することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の第1の実施形態を示し、エリア調査支援システムの基本構成を表すブロック図である。
【図2】本発明の第1の実施形態を示し、画像解析部の構成を示すブロック図である。
【図3】本発明の第1の実施形態を示し、推薦経路選択部の構成を示すブロック図である。
【図4】本発明の第1の実施形態を示し、端末装置とエリア調査支援装置の間で行われる処理を表わすシーケンス図である。
【図5】本発明の第1の実施形態を示し、端末装置の内部構成を表わすブロック図である。
【図6】本発明の第1の実施形態を示し、端末装置のデータ表示部を示した画面である。
【図7A】本発明の第1の実施形態を示し、エリア情報テーブルのデータ構成の一例を示す説明図である。
【図7B】本発明の第1の実施形態を示し、クラス情報テーブルのデータ構成の一例を示す説明図である。
【図8】本発明の第1の実施形態を示し、エリアポリゴンDBのデータ構成の一例を示す説明図である。
【図9A】本発明の第1の実施形態を示し、エリアスペクトルDBのデータ構成の説明図である。
【図9B】本発明の第1の実施形態を示し、クラススペクトルDBのデータ構成の説明図である。
【図10】本発明の第1の実施形態を示し、地図DBのデータ構成の説明図である。
【図11】本発明の第1の実施形態を示し、スペクトル算出部で行われる処理の説明図である。
【図12】本発明の第2の実施形態を示し、地図DBのデータ構成の説明図である。
【図13】本発明の第2の実施形態を示し、推薦経路選択部を表わすブロック図である。
【図14】本発明の第2の実施形態を示し、経路隣接カウント部で行われる処理の説明図である。
【図15】本発明の第3の実施形態を示し、推薦経路選択部の構成を示すブロック図である。
【図16】本発明の第1の実施形態を示し、エリアグラフ作成部で行われるグラフ作成の例を示す説明図である。
【図17】本発明の第3の実施形態を示し、エリアグラフ作成部で行われるグラフ作成の説明図である。
【図18】本発明の第1の実施形態を示し、エリア調査支援装置のハードウェアを示すブロック図である。
【図19】本発明の第1の実施形態を示し、推薦経路選択部で行われる処理の一例を示すフローチャートである。
【図20】本発明の第2の実施形態を示し、推薦経路選択部で行われる処理の一例を示すフローチャートである。
【図21】本発明の第3の実施形態を示し、推薦経路選択部で行われる処理の一例を示すフローチャートである。
【図22】本発明の第3の実施形態を示し、推薦経路選択部で行われる処理の一例を示す説明図である。
【発明を実施するための形態】
【0017】
以下、本発明の一実施形態を添付図面に基づいて説明する。
【0018】
本発明は、調査員が現地にてエリアの調査を行う際に、調査を支援する計算機システムに関するものである。ここでいうエリアとは、同一属性情報を持つと想定される空間的に連続した区域を表す。調査によって得られる情報は、エリアに付随する属性情報のことを指す。例えば、農地の調査の例であれば、各エリアで栽培されている作物の種類や収穫量なども属性情報と見なすことができる。本発明では、調査員が一部のエリアを調査するのみで、残りのエリアに関しては、衛星や航空機に搭載されたセンサによって得られた調査地域の画像を用いて推定することにより、調査員の負担や調査にかかる費用の削減を行う。
【0019】
本発明の概要は、調査員がエリアを調査する度に、調査によって取得した情報と前記の画像を用いて、残りのエリアの属性情報を推定する。さらに、この推定結果を用いて、精度が高く、かつ効率的に調査できるようなエリアの巡回経路を調査員に指示するという調査と巡回経路の指示を繰り返し、全エリアを調査せずとも、終了条件を満たせば、調査を終了するというものである。ここでいう精度とは、エリアの属性情報の推定精度を表し、効率とは調査の際に一定時間ごとに得られる情報量のことを表す。
【0020】
本発明の実施の形態では、エリアの属性情報に作物の種類や建物の材質等のような離散的なカテゴリが相当する例をあげるが、属性情報が作物の収穫量や建物の高さ等の連続的な値を持つ量である場合でも、その量を量子化し、離散カテゴリとして扱うことにより対応可能である。
【0021】
以下、本発明の実施形態を、図面を参照して詳細に説明する。
【0022】
<第1の実施形態>
図1は、エリア調査支援システムの基本構成を表すブロック図である。
【0023】
本実施形態のエリア調査支援システムは、エリア調査支援装置100と1つ以上の端末装置101を備える。1つ以上の端末装置101はネットワーク112を介してエリア調査支援装置100に接続される。
【0024】
エリア調査支援装置100は、調査員が使用する端末装置101にエリア調査の推薦経路を提供し、また未調査エリアの情報を、調査済みのエリアの情報を用いて推定する。調査員が使用する端末装置101に提供される推薦経路は、調査によって得られる情報量と調査にかかる時間の比に正の相関を持つ効率パラメータと、調査終了時の推定精度に正の相関を持つ精度パラメータを、できる限り大きくするような経路が選択される。これらのパラメータの詳細や経路を選択する方法については、後述する。また前記の機能を実現するために、エリア調査支援装置100は、データ受信部102、画像解析部103、終了条件判定部104、推薦経路選択部105、データ送信部106、画像データベース(DB)107、エリアクラスDB108、スペクトルDB109、エリアポリゴンDB110、地図DB111と、を備える。なお、データ受信部102とデータ送信部106はデータ送受信部として一体で構成されてもよい。
【0025】
画像DB107は、少なくとも撮影日時、画像位置情報をヘッダ情報に含むような、衛星、または航空機に搭載されたセンサによって得られた画像データを格納する。ここで撮影日時は、当該画像データがいつ撮影されたかを表し、画像位置情報とは、画像の四隅の位置情報を表す。なお、画像位置情報は、例えば、世界測地系で用いられる緯度、経度の情報であってもよい。
【0026】
端末装置101は、位置情報取得機能、通信機能を有する持ち運び可能な端末である。例えば、端末装置101は、出力装置を備え、出力装置を用いて情報を提示する計算機、または携帯電話等であってもよい。例えば出力装置は、画像を表示するスクリーンや音声を出力するスピーカである。端末装置101は、操作入力部1015及びデータ表示部1012を備えて調査員の入力した情報を、ネットワーク112を介してエリア調査支援装置100内のデータ受信部102へ送信する。端末装置101がデータを送信する際には、端末装置101の現在の位置情報等を付加して送信してもよい。この位置情報は、例えば、上述したように世界測地系で用いられる緯度、経度の情報であってもよい。端末装置101で行われる詳細な処理については後述する。
【0027】
ネットワーク112はエリア調査支援装置100と端末装置101の間のデータ転送のための経路を提供する。ネットワーク112は任意の種類のデータ転送経路を提供してもよい。例えば、ネットワーク112は有線LAN(Local Area Network)、無線LAN、または携帯電話網等であってもよい。
【0028】
データ受信部102は、画像解析部103、エリアクラスDB108と通信する。データ受信部102は、ネットワーク112を介して端末装置101から、調査員が調査したエリアを識別するIDと、当該IDのエリアのクラス情報を受信する。ここでいうクラス情報とは、衛星または航空機に搭載されたセンサによって得られた画像から推定することのできるエリアの属性情報である。
【0029】
データ送信部106は、エリアポリゴンDB110、終了条件判定部104、推薦経路選択部105に接続と通信する。データ送信部106は、終了条件判定部104より受信した調査終了の信号、推薦経路選択部105より受信した推薦経路の情報などを、ネットワーク112を介し、端末装置101へ送信する。なお、調査を開始した直後のみ、データ送信部106は、エリアポリゴンDB110から受信した各エリアの形状情報をネットワーク112を介し、端末装置101へ送信する。
【0030】
各DBは、図1においてエリア調査支援装置100に内蔵されているが、エリア調査支援装置100の外部に存在してもよい。
【0031】
また、上記各部が実行する処理、各部間で転送されるデータ、各DBに格納されるデータについては後述する。
【0032】
図18は本発明の実施形態のエリア調査支援装置100のハードウェア構成である。
【0033】
本実施形態のエリア調査支援装置100は、プロセッサ1811、メインメモリ1812、記憶装置1860、通信部1830、操作部1840、表示部1850を備える計算機である。
【0034】
プロセッサ1811は、メインメモリ1812に格納されたプログラムを実行する。
【0035】
メインメモリ1811は、例えば半導体メモリであり、プロセッサ1811によって実行されるプログラム及びプロセッサ1811によって参照されるデータを格納する。具体的には、記憶装置1860に格納されたプログラム及びデータの少なくとも一部が、必要に応じてメインメモリ1811にコピーされる。
【0036】
プロセッサ1811は、各機能部のプログラムに従って動作することによって、所定の機能を実現する機能部として動作する。例えば、CPU1811は、画像解析プログラムに従って動作することで画像解析部103として機能する。他のプログラムについても同様であり、プロセッサ1811は、各プログラムが実行する複数の処理のそれぞれを実現する機能部としても動作する。エリア調査支援装置100は、これらの機能部を含む装置及びシステムである。
【0037】
操作部1840は、ユーザ又はシステム管理者からの入力操作を受ける。操作部は、例えばキーボード又はマウス等を含んでもよい。
【0038】
表示部1850は、ユーザ又はシステム管理者へ情報を出力する。表示部1850は、例えば液晶ディスプレイのような画像表示装置であってもよい。
【0039】
通信部1830は、ネットワーク112に接続され、端末装置101と通信する。通信部1830は、データ受信部102と、データ送信部106を提供する格納される。
【0040】
記憶装置1860は、例えばハードディスク装置(HDD)又はフラッシュメモリのような不揮発性の記憶装置である。本実施形態の記憶装置1860は、少なくとも画像解析部103、終了条件判定部104、推薦経路選択部105が格納される。なお、各DBも記憶装置1860に格納されてもよい。
【0041】
また、エリア調査支援装置100の各機能を実現するプログラム、テーブル等の情報は、記憶装置1860や不揮発性半導体メモリ、ハードディスク装置、SSD(Solid State Drive)等の記憶デバイス、または、ICカード、SDカード、DVD等の計算機読み取り可能な非一時的データ記憶媒体に格納することができる。
【0042】
図2は本発明の実施形態の画像解析部103の構成を表すブロック図である。
【0043】
画像解析部103は、画像DB107に記録されている画像データとエリアポリゴンDB110に記録されているエリアの形状情報を入力として、各エリアや各クラスのスペクトルデータを算出する機能と、スペクトルDB108に格納されているスペクトルデータを用い、未調査エリアのクラスを推定する機能と、を備える。
【0044】
このような機能を実現するために、画像解析部103は、スペクトル算出部1031とエリアクラス推定部1032とを備える。
【0045】
スペクトル算出部1031は調査地域のエリアの形状情報と画像データを用い、エリア内に含まれる画像データのピクセルのスペクトルを抽出し、抽出したスペクトルと対応するエリアIDの組を、スペクトルDB109のエリアスペクトルテーブル901へ格納する。以下、画像データからエリア内に含まれるピクセルのスペクトルを抽出することを、エリアマスキングと記載する。
【0046】
画像DB107に複数の画像データが含まれる場合、それらの画像データが位置的に重複するところも存在し、画像データが重複する部分にエリアが存在する場合もある。この場合は、画像データが重複するエリアに雲がかかっていない画像の中で撮影日時が最も新しい画像について、エリアマスキングを行う。なおエリアマスキングの詳細は後述する。
【0047】
エリアクラス推定部1032は、スペクトルDB108内に格納されているスペクトルデータを用いて、未調査エリアのクラスを推定する。エリアクラス推定部1032は、スペクトルDB108のクラススペクトルテーブル内のスペクトルを学習データとして用い、エリアスペクトルテーブル内のスペクトルをテストデータとして用いる。ここでいう学習データとは、クラス情報が付加されているデータのことであり、テストデータとは、クラス情報が付加されていないデータのことである。
【0048】
なお未調査エリアのクラスの推定を行う際に、エリアクラス推定部1032は、各スペクトルを所定の特徴量へ変換し、この特徴量に基づいてクラスを推定してもよい。ここでいう特徴量とは、スペクトルに対し、所定の演算をすることによって得られるパラメータのことであり、例えば、近赤外の画素値から赤の画素値を引いた値と、近赤外の画素値と赤の画素値の和の比である正規化植生指数等も特徴量である。
【0049】
エリアクラス推定部1032は、上述の学習データで学習を行い、テストデータで分類を行う教師あり分類を行ってもよいし、学習データとテストデータの両方を学習に用いる半教師あり学習の枠組みで分類を行ってもよい。ただし、クラススペクトルテーブル内にデータが存在しない時は、エリアスペクトルテーブルのテストデータのみから教師なし学習の枠組みで分類を行う。半教師あり学習、教師あり学習、教師なし学習、いずれの枠組みでも混合正規分布等を用いることができる。ただし、いずれの場合でも、クラス数も決定する必要がある。これは、例えば赤池情報量基準等を用いてもよいし、分類を行う手段として、ノンパラメトリックベイズの枠組みを用いて、分類とクラス数の推定を同時に行ってもよい。
【0050】
またクラス情報の推定と同時に、クラス情報に対する信頼度、エリア内分散、クラス内分散、クラス内エリア数等の値も算出する。これらのパラメータの定義や算出方法の例は後述する。エリアIDに対応するクラスID、また算出した信頼度、エリア内分散、クラス内分散、クラス内エリア数等の値は、エリアクラスDB108へ格納する。また、信頼度、エリア内分散、クラス内分散またはクラス内エリア数のうちの少なくとも一つが、上記推定されたクラス情報の妥当性を示す指標が精度パラメータとして算出される。
【0051】
図3は本発明の実施形態の推薦経路選択部105の構成を表すブロック図である。
【0052】
推薦経路選択部105は、エリアクラスDB108内の格納データを用いて、調査員が使用する端末装置101へ次に調査すべきエリアと、当該エリアに至るまでの経路を出力する機能を備える。この機能を実現するために、推薦経路選択部105は、エリアクラス再分類部1051とエリアグラフ作成部1052と最適経路探索部1053と、を備える。
【0053】
上記画像解析部103にて推定されたクラス情報が全て正しいとすると、調査員は分類されたクラスの代表的なエリアのみを巡回すればよいと考えられるが、学習データが十分ではなく、画像解析部103でエリアのクラス情報を誤分類している可能性があり得る。
【0054】
画像解析部103で誤分類している例として、本来複数のエリア間で同一クラスのものを別のクラスと見なしている場合と、別のクラスのものを同一クラスと見なしている場合がある。エリア間で同一クラスのものを別のクラスと見なしている場合、分類されたクラスの代表的なエリアのみを巡回すれば、両方のクラスを実際に巡回することになるため、各エリアのクラスを正しいクラス情報に訂正することが可能である。しかし、別のクラスのものを同一クラスとして見なしている場合、それぞれのクラスに所属するエリアを調べない限りは、正しいクラス情報に訂正することができない。
【0055】
このため推薦経路選択部105は、画像解析部103のクラスの推定結果を見ると、エリア間で同一クラスと見なされているが、実際には別のクラスである可能性があるようなエリアを、信頼度、エリア内分散、クラス内分散、クラス内エリア数等の値を用いて判定し、別々のクラスである可能性がある代表的なエリアを巡回するという手段を取る。エリアを巡回するため、推薦経路選択部105では、エリア間を結ぶコスト付きグラフを作成し、演算したコストを最小とするエリアを巡回エリアとして選択し、出力する。
【0056】
推薦経路選択部105で行われる処理の一例を図19のフローチャートに示す。ステップS1で、推薦経路選択部105は、画像解析部103のエリアの分類結果を、信頼度、エリア内分散、クラス内分散、クラス内エリア数等の値(精度パラメータ)から再分類する。
【0057】
次に、ステップS2で、画像解析部103のエリアの再分類結果から、信頼度、エリア内分散、クラス内分散等の値を加味したコスト付きのエリアグラフを複数算出する。
【0058】
ステップS3で、推薦経路選択部105は、複数のエリアグラフの中から最もコストが小さくなる経路を巡回に推薦するエリアとして出力する。
【0059】
エリアクラス再分類部1051は、エリアグラフ作成部1052とエリアクラスDB108と通信する。エリアクラス再分類部1051では、エリア間で同一クラスと見なされているが、実際には別のクラスである可能性があるようなエリアを、信頼度、エリア内分散、クラス内分散等の値を用いて判定する。この判定結果から、別のクラスである可能性があるようなエリアの再分類を行う。この再分類は、信頼度が一定の閾値以下であるエリアを別のクラスである可能性があると判定する。またクラス内分散が一定の閾値以上のクラスを選び、当該クラス内で信頼度が一定の閾値以下であるエリアを別のクラスの可能性があると判定してもよいし、エリア内分散が一定の閾値以上であるエリアを別のクラスである可能性があると判定してもよい。もし条件を満たすエリアがない場合は、画像解析部103で推定された分類結果をそのまま用いる。エリアクラス再分類部1051で得た再分類結果はエリアIDと再分類したクラスIDの組というデータ形式として、エリアグラフ作成部1052へ送信する。なお新しいクラスIDの付け方に関しては、例えば画像解析部103にてクラスIDがAと分類されたが、エリアクラス再分類部1051にて3つのクラスに分類されると判定された場合、それぞれのクラスIDはA、A’、A”とし、エリアIDと対応付けてエリアグラフ作成部1052へ送信する。以後、この再分類の際のクラスIDを再分類クラスIDと記載する。
【0060】
エリアグラフ作成部1052は、エリアクラス再分類部1051とエリアクラスDB108とエリアポリゴンDB110と最適経路探索部1053と通信する。
【0061】
エリアグラフ作成部1052は、まずエリアクラス再分類部1051より受信したエリアIDと再分類クラスIDの組をもとに、複数のグラフを作成する。グラフ作成の詳細については、後述する。次にエリアグラフ作成部1052は、それぞれのグラフの各ノード(経路の分岐点)や、エッジ(エリア間を結ぶ経路)に対して設けるコストを算出し、最適経路探索部1053へ出力する。各ノード、エッジのコストは、調査終了時のエリアの推定精度に正の相関を持つパラメータや、調査により得られる情報量と、調査にかかる時間の比と、正の相関を持つパラメータと、を用いてエリアグラフ作成部1052で後述するように算出される。ここでいう、調査終了時のエリアの推定精度に正の相関を持つパラメータは、例えばエリアクラスDB108に含まれる信頼度704をすべて掛け合わせたものでもよい。
【0062】
以後、前記調査終了時のエリアの推定精度に正の相関を持つパラメータを精度パラメータと記載し、調査により得られる情報量と調査にかかる時間の比と、正の相関を持つパラメータを効率パラメータと記載する。
【0063】
各ノードに関するコストは、精度パラメータと効率パラメータに対し、事前にエリア調査支援装置100を管理する管理者によって決定されるか、もしくは端末装置101を使用する調査員が調整したスライダー505(図6参照)によって決定される精度係数と効率係数を用いる。
【0064】
精度係数は、エリアの推定精度をどれだけ重視した調査にするかを表した量であり、精度係数の値が大きいほど、エリアの推定精度が高くなることが期待される。効率係数は、短時間でより多くの情報量を取得することを、どれだけ重視した調査にするかを表した量であり、効率係数の値が大きいほど、一定時間ごとに得られる情報量が大きくなることが期待される。
【0065】
端末装置101で調査員が決定した精度係数と効率係数は、エリア調査支援装置100のデータ受信部102に送信される。
【0066】
以下、精度パラメータ、効率パラメータの選び方や各パラメータの効果について述べる。
【0067】
精度パラメータは、エリアクラスDB108のエリア情報テーブル108A(図7A参照)とクラス情報テーブル108B(図7B参照)に格納される信頼度704と、クラス内分散707と、エリア内分散705と、クラス内エリア数708と、エリアポリゴンDB110に格納される面積803と、のうち少なくとも一つのパラメータを用いて算出されるパラメータである。なお精度パラメータは、前記信頼度704、クラス内分散707、エリア内分散705、クラス内エリア数708、面積803の値そのものを用いてもよい。
【0068】
効率パラメータは図10の地図DB111に格納される距離1003と、図7Bのクラス情報テーブル108Bに格納される未調査パラメータ709と、を用いてエリア調査支援装置100で算出されるパラメータである。なお効率パラメータは、前記距離1003、未調査パラメータ709の値そのものを用いてもよい。
【0069】
例えば、精度パラメータに信頼度704の値そのものを用い、効率パラメータに未調査パラメータ709の値そのものを用いてもよい。また、各ノードに設けるコストを、精度係数と精度パラメータの積と、効率係数と(1−効率パラメータ)の積の和としてもよい。ここで、精度係数と効率係数は、事前にエリア調査支援装置100を管理する管理者によって決定される。
【0070】
この場合、エリアの信頼度704が低い方が、コストが小さくなるため、信頼度704が低いエリアが、巡回対象として選択されやすくなる。これにより、信頼度704の低いエリアを調査することで減らすことになり、未調査エリアの推定精度を向上する効果がある。また、効率パラメータに未調査パラメータ709を用いることにより、未だにクラス名が不明なエリアを重点的に調査させることができるという効果がある。
【0071】
また前記の例において、精度パラメータは、図7Aのエリア情報テーブル108Aのエリア内分散705と、図8のエリアポリゴンDB110の面積803の積としてもよい。この場合、エリア内のスペクトルのばらつきが大きく、面積が大きいエリアを重点的に調査させることになる。これにより、エリアクラス推定部1032にて使用される学習データが豊富となり、推定精度が向上することが期待される。
【0072】
各エッジに関するコストは、効率パラメータと効率係数を用いて算出されるパラメータとする。例えば、エッジのコストは、対応するエリア間の距離1003と、地図DB111に格納される距離1003の最大値の比に効率係数を掛けた値を用いる。これにより、できる限り調査員の移動距離が短くなるようなエリアが巡回対象として選ばれるという効果がある。
【0073】
前記の例において、エリア調査支援装置100を管理する管理者が精度係数を大きくすると、精度パラメータの効果が大きくなり、推定精度を向上するような調査となる。逆に効率係数を大きくすると、効率パラメータの効果が大きくなり、調査員の総移動距離が小さく、クラス名が不明なエリアを重点的に巡回するような調査となる。
【0074】
最適経路探索部1053は、エリアグラフ作成部1052とデータ送信部106と通信する。最適経路探索部1053は、エリアグラフ作成部1052で作成された複数のエリアグラフを用いて推薦経路を出力し、データ送信部106へ送信する。出力される推薦経路は、最後に調査したエリアをスタートとし、エリアグラフの全ノードを巡回する経路であり、最適経路探索部1053に入力された全エリアグラフの中で、最小のコストとなる経路である。コストが最小の経路を選択するために、周知または公知の効率的なアルゴリズムを用いてもよいし、例えば、総当たりで全ての経路のコストを算出した後に、コストが最小となる経路を選択してもよい。
【0075】
図16は、エリアグラフ作成部1052内で行われるグラフ作成の例を示す説明図である。
【0076】
ノード1601は、グラフのスタート点を表す。ノード1601は、端末装置101を用いる調査員が最後に調査したエリアがエリア調査支援装置100のエリアグラフ作成部1052で選択される。エッジ1602は、エリア間を結ぶ経路である。
【0077】
エリアグラフ作成部1052は、ノード1601以外の全てのノードに、エリアクラス再分類部1051より受信した全ての再分類クラスが一回ずつ表れるようなエリアを選択する。例えば、再分類クラスがA、A’、B、B’の4種類の場合だと、図16の例において、スタート点以外のノードは、再分類クラスAのエリア2、再分類クラスA’のエリア6、再分類クラスBのエリア7、再分類クラスB’のエリア11が選択されている。エリアグラフ作成部1052では、このようなエリアの選び方を全通り行い、全通り分のグラフを作成する。図16の例において、グラフは3の4乗通り存在する。
【0078】
図4は、エリア調査支援装置100が端末装置101から送信された調査エリアと、当該エリアのクラス情報を受信してDB更新を行う処理と、エリア調査支援装置100が端末装置101から推薦経路表示の要請を受信し端末装置101へ調査員への指示を送信するまでの処理手順を示すシーケンス図である。
【0079】
まず、エリア調査支援装置100が端末装置101から送信された調査エリアと、当該エリアのクラス情報を受信し各DB更新を行うまでの処理手順を示す。
【0080】
端末装置101は、調査員の操作入力により、調査員が調査したエリアのIDと当該エリアのクラス情報をデータ受信部102へ送信する(ステップ601)。
【0081】
データ受信部102は端末装置101から、調査エリアのIDと当該エリアのクラス情報を受信すると、エリアクラスDB108のデータを更新する(ステップ602)。データ受信部102は、エリアクラスDB108のエリア情報テーブル108A内で、受信した調査エリアのID701のデータに対し、図7Aに示す調査フラグ703を「False」から「True」へ更新し、クラスID702を受信したクラス情報の値で更新する。クラスID702の更新に関しては、クラス情報テーブル108Bのクラス名706の列を上記入力されたクラス情報で検索して、対応するクラスID702を選択する。検索した結果、入力されたクラス情に報該当するクラス名706が存在しなかった場合は、クラス情報管理テーブル108Bに新しい列を追加する。列の内容は、新しいクラスIDと入力されたクラス名706(クラス情報)とする。
【0082】
エリアクラスDB108は、データ受信部102からデータを更新されると、スペクトルDB109を更新する(ステップ603)。
【0083】
スペクトルDB109は、図9A、図9Bで示すようにエリアスペクトルテーブル901と、クラススペクトルテーブル902の2つのテーブルから構成される。スペクトルDB109はエリアスペクトルテーブル901の中で、エリアクラスDB108がデータ受信部102から受信したエリアID903に相当する列のスペクトル904を、クラススペクトルテーブル902Bへコピーする。この時のクラスID905はデータ受信部102から受信したエリアに対応するクラスIDとする。その後、コピーしたエリアスペクトルテーブル901の列は削除する。
【0084】
ステップ603の処理を行うときに、スペクトルDB109のエリアスペクトルテーブル109A内が空の時は、ステップ603を行う前に、画像解析部103内のスペクトル算出部1031にて、エリアポリゴンDB110のクラスID801と座標データ802を受信し(ステップ604)、さらに画像DB107の地理情報が付加された画像を受信し(ステップ605)、エリアスペクトルテーブル901のエリアID903とスペクトル904を更新する(ステップ606)。次に、ステップ603を行う。
【0085】
次に、エリア調査支援装置100が端末装置101から推薦経路表示の要請を受信して端末装置101へ調査員への指示を送信するまでの処理を示す。
【0086】
端末装置101は、調査員の操作入力により、エリア調査の推薦経路表示の要求をデータ受信部102へ送信する(ステップ616)。
【0087】
データ受信部102は端末装置101より、推薦経路表示の要請を受信すると、スペクトルDB108へ、トリガーを送信する(ステップ617)。
【0088】
スペクトルDB109は、データ受信部102によりトリガーを受信すると、画像解析部103のエリアクラス推定部1032に学習データとテストデータを送信する(ステップ607)。この時の学習データは、スペクトルDB109のクラススペクトルテーブル902のクラスID905とスペクトルを対応付けたものとし、テストデータはスペクトルDB109のエリアスペクトルテーブル901のエリアID903とスペクトル904を対応付けたものとする。
【0089】
画像解析部103は、スペクトルDB109より学習データとテストデータを受信すると、未調査エリアのクラス情報を推定し、エリアクラスDB108の更新を行う(ステップ608)。この時、エリアクラスDB108のテーブルのエリアごとのクラスやその信頼度、エリア内分散、クラス内分散、クラス内エリア数等は、画像解析部103のエリアクラス推定部1032で算出された値に更新される。
【0090】
エリアクラスDB108は、画像解析部103によってテーブルを更新されると、終了条件判定部104にエリアクラスDB108のテーブル内に含まれる、エリアごとに推定したクラス706や当該クラスの信頼度、エリア内分散、クラス内分散、クラス内エリア数等を送信する(ステップ609)。
【0091】
終了条件判定部104は、エリアクラスDB108より前記データを受信すると終了判定を行う。
【0092】
終了条件判定部104では、精度パラメータと効率パラメータについて、事前にエリア調査支援装置100を管理する管理者によってそれぞれ決定された閾値で処理の終了または継続を判定する。もしくは端末装置101を使用する調査員が調整したスライダー505によって算出される精度係数と効率係数を、加味した算出結果を用いて、終了、もしくは継続という判定を行う。ここでいう算出結果とは、例えば精度係数×精度パラメータ+効率係数×(1−効率パラメータ)等でもよい。
【0093】
上記の判定方法について、パラメータの具体的な例を以下に述べる。
【0094】
終了条件判定部104における精度パラメータは、前記図7Aの信頼度704、図7Bのクラス内分散707、エリア内分散705等のうち少なくとも一つのパラメータを用いて表され、終了条件判定部104における効率パラメータは、距離1003と未調査パラメータ709のうち少なくとも一つのパラメータを用いて表される。なお終了条件判定部104における精度パラメータは、前記信頼度704、クラス内分散707、エリア内分散705そのものの値を用いてもよいし、終了条件判定部104における効率パラメータは、距離1003、未調査パラメータ709そのものの値を用いてもよい。
【0095】
例えば、精度パラメータとして、未調査であるエリアの信頼度704の最小値を選び、効率パラメータとして、全てのエリアに関する未調査パラメータ709の和を選んだ場合、終了判定は、効率パラメータが1以上の時、及び精度パラメータに、精度係数と効率係数の比を掛けたものが一定の閾値以下の時に継続判定を出力し、その他の場合に終了と判定する。
【0096】
この場合、全調査が終了したとき、未調査エリアの推定に関して一定の閾値以上の精度であることと、クラス名706が不明なクラスが存在しないということを保証してくれるという効果が得られる。
【0097】
また、精度パラメータと効率パラメータを各エリアごとに定義して終了判定をしてもよい。例えば、精度パラメータとして、各エリアの信頼度704を選択し、効率パラメータとして、各エリアから最後に調査したエリアまでの距離1003と距離1003の最大値の比を選択した場合の例をあげる。精度パラメータと精度係数の積から、効率パラメータと効率係数の積を引いたパラメータをエリアごとに算出し、このパラメータをエリアごとに比較した時の最大値が一定の閾値以上である場合、終了と判定し、それ以外の場合を継続と判定してもよい。
【0098】
この場合、調査終了時に、できれば高精度な推定結果を保証したいが、移動時間が非常に大きい場合等は、現在の推定精度で良いとすると判断される効果がある。
【0099】
なお終了条件判定部104における精度パラメータ、効率パラメータは、必ずしもエリアグラフ作成部1052にて算出される精度パラメータ、効率パラメータと同一である必要はない。
【0100】
終了条件判定部104の判定が終了判定であった場合、終了条件判定部104はデータ送信部102に調査終了の情報を送信する(ステップ610)。
【0101】
終了条件判定部104の判定結果が継続であった場合、終了条件判定部104は推薦経路選択部105へエリアごとに推定したクラスや当該クラスの信頼度704、エリア内分散705、クラス内分散707、クラス内エリア数706等を推薦経路選択部105へ送信する(ステップ611)。地図DB111は、エリア間経路1001の情報を推薦経路選択部105へ送信し(ステップ612)、ポリゴンエリアDB110はエリアの座標データ802を経路選択部105へ送信する(ステップ613)。
【0102】
また、推薦経路選択部105は、推薦経路を選択し、データ送信部103へ選択した推薦経路を送信する(ステップ614)。なお出力される推薦経路のデータ形式は、経路の座標情報を並べたものである。
【0103】
データ送信部103は、終了条件判定部104より調査終了の情報を受信、または推薦経路105より推薦経路を受信すると、ネットワーク112を介して端末装置101へ調査員への指示を送信する(ステップ615)。
【0104】
図5は端末装置101の内部構成の説明図である。
【0105】
端末装置101は通信部1011、データ表示部1012、位置情報取得部1013、データ記憶部1014、操作入力部1015を備える。
【0106】
通信部1011は、ネットワーク112を介してエリア調査支援装置100と通信し、端末装置101の現在位置や推薦経路経路等の情報を送受信する。
【0107】
データ表示部1012は、端末装置101を利用する調査員に対し、位置情報取得部1013で取得した位置情報と調査地域のエリアの位置、推薦経路等を表示する。
【0108】
位置情報取得部1013は、端末装置101の現在位置をGPS(Global Positioning System)を用いて取得する。
【0109】
データ記憶部1014は、エリア調査支援システム100から受信したエリアの形状情報や推薦された経路情報等の情報を保持する。
【0110】
操作入力部1015は、端末装置101を利用する調査員がエリアを調査し、調査結果を端末装置101へ入力するときの操作部である。操作入力部1015は、Enterキーのような決定ボタンを保持し、文字や数字等を入力でき、矢印キーやマウスのようなデータ表示部のカーソルを動かすことのできる機能を含むものなら何でもよい。
【0111】
図6は端末装置101内のデータ表示部1012の画面イメージである。データ表示部1012は、端末装置101を使用する調査員がエリアIDと、当該エリアのクラス情報とを入力するテキストボックス506、507を表示する機能と、次に調査する推薦エリアと、当該推薦エリアまでの経路を画面上に表示する機能と、を備える。図6は、調査員が調査したエリアのクラス情報等を入力し、次に調査する推薦エリアまでの経路を表示した時の例である。
【0112】
テキストボックス506、507は、端末装置101を使用する調査員が調査したエリアに関する情報を入力するテキストボックスである。調査員は、入力操作部1015を通して、テキストボックス506にエリアIDを、テキストボックス507にクラス情報を入力する。
【0113】
ボタン508は、調査員が調査したエリアに関する情報をエリア調査支援装置100へ送信するボタンである。テキストボックス506、507の中に情報が入力された状態でボタン508が選択されると、図4のステップ601が行われる。もしテキストボックス506、507の中に入力された情報が不十分であったとき、例えば空欄であった場合や、テキストボックス506に存在しないIDを入力されている場合に、ボタン508が選択されても、図4のステップ601は行われない。
【0114】
ボタン509は、推薦された次に調査するエリアの位置と、当該推薦エリアまでの経路をエリア調査支援装置100に要求し、取得した情報をデータ表示部1012に表示するボタンである。ボタン509が選択されると、図4のステップ616が行われる。なおボタン508、509の選択は、操作入力部1015を通して行われる。
【0115】
図6の例において、エリア501は、調査員が調査し終わったエリアで、エリア504はエリア調査支援装置100により推薦されたエリアである。また符号512は対応するエリアのIDである。
【0116】
ノード502は調査員の現在位置である。なお現在位置の情報は位置情報取得部1013にて取得した情報を用いる。経路503はノード502からエリア504までの経路を表す。
【0117】
スライダー505は、調査を行う際に、精度重視で調査を行うか、効率重視で調査を行うかを調整する。図6の例において、スライダー505の精度と効率のバランスは、調査員本人が調整できるが、エリア調査支援装置100の管理者が事前に決めている場合もあり、調査員本人が調整できない場合もあってよい。調査員が実際に精度と効率のバランスを決定するときは、操作入力部1015を通してスライダー505を調整する。精度重視の度合いを表す精度係数と効率重視の度合いを表す効率係数は、スライダー505の位置によって決定される。精度係数、効率係数は両方0以上であり、足して1となる。スライダー505が精度重視の方に寄っている時ほど、精度係数は大きくなっていき、最終的に1となるのに対し、効率係数は小さくなっていき、最終的に0となる。またスライダー505が効率重視の方に寄っている時ほど、効率係数は大きくなっていき、最終的に1となるのに対し、精度係数は小さくなっていき、最終的に0となる。
【0118】
地図表示画面510は、調査員の現在地の近傍の地理情報を表示する画面である。調査員の現在地であるノード502と、当該ノード502の近傍の調査対象であるエリアの形状情報と、エリア調査支援装置100によって出力された経路503を表示する。なお画像DB107から画像データを受信し、エリア501、504、ノード502や経路503の下等に受信した画像データを表示してもよい。
【0119】
アイコン511は、データ表示部1012でエリア情報入力や推薦経路表示等の操作を行うために用いられるカーソルである。操作入力部1015の中の矢印キーやマウスなどを用いることにより、アイコン511はデータ表示部1012内を動くことができる。調査員が実際に操作を行うときは、505〜509の上までアイコン511を動かし、選択することで各操作を行う。
【0120】
図7A、図7BはエリアクラスDB108の説明図である。図7Aは、エリアクラスDB108を構成するエリア情報テーブル108Aを示し、図7Bは、エリアクラスDB108を構成するクラス情報テーブル108Bを示す。エリアクラスDB108には画像解析部103によって推定された、もしくは現地の調査によって得たエリアの情報701〜708が格納される。図7A、図7Bの例において、エリアクラスDB108はエリア情報テーブル108Aとクラス情報テーブル108Bの二つで構成されているが、必ずしも二つである必要はなく、701〜709の情報を格納できる形式であれば、一つ、もしくは三つ以上のテーブルでもよい。
【0121】
エリア情報テーブル108Aは、エリアID701、クラスID702、調査フラグ703、信頼度704、エリア内分散705を含むエントリで構成される。クラス情報テーブル108Bは、クラスID702、クラス名706、クラス内分散707、クラス内エリア数708、未調査パラメータ709を含むエントリで構成される。
【0122】
エリアID701は、調査対象であるエリアを識別するためのラベルである。クラスID702は、エリアのクラスを識別するためのラベルである。調査フラグ703は、各エリアについて調査済みか否かを示す情報であり、調査済みの場合は「True」が、まだ調査していないエリアについては「False」が格納される。なお調査フラグ703が「True」の時にクラスID702に格納されている情報は、実際に調査員によって調査されて格納されたものであり、「False」の時にクラスID702に格納されているものは、画像解析部103によって推定されたクラスIDである。
【0123】
信頼度704は、画像解析部103によって推定されたクラスIDが信頼できる確率を表している。例えば、クラスmの平均スペクトルをCmとし、エリア内の平均スペクトルをxとし、当該エリアの推定クラスがnであるとすると、信頼度は、
【0124】
【数1】

【0125】
という形で表すことができる。
【0126】
エリア内分散705は、同一エリア内のスペクトルのばらつきを表している。例えば、エリア内の平均スペクトルをxとし、エリア内のn番目のピクセルのスペクトルをynとし、エリア内のピクセルの総数をNとすると、エリア内分散は、
【0127】
【数2】
【0128】
と表わしてもよい。
【0129】
クラス名706は、クラスID702に対応するラベル名に当たる。例えば、農作地域の栽培作物の種類を調査する場合、水稲、大豆、小麦、等の名前を格納してもよい。また画像解析部103によって各エリアのクラス情報を推定する際、エリアによっては調査したことのないクラスIDが割り当てられる可能性もある。この場合、クラス名706は不明であるため、NULLとしてもよいし、空欄にしてもよい。
【0130】
クラス内分散707は、同一クラス内でのスペクトルのばらつきを表したものである。例えば、クラスiの平均スペクトルをとし、クラスiに割り当てられたエリア内のピクセ
ルのうち、n番目のスペクトルをSnとし、クラスi内のピクセルの総数をNとすると、
クラスiのクラス内分散は、
【0131】
【数3】
【0132】
としても良い。
【0133】
クラス内エリア数708は、未調査のエリアの中で、対応するクラスに割り当てられたエリアの数を示す。
【0134】
未調査パラメータ709は、対応するクラスのクラス名706が不明である時、上記の例で言うとクラス名706が空欄であったり、NULLが格納されている場合に「1」となり、その他の場合は「0」となるパラメータのことである。未調査パラメータ709が「1」であるときは、対応するクラスに割り当てられたエリアはまだ一つも調査していないことになる。
【0135】
図8はエリアポリゴンDB110の説明図である。エリアポリゴンDB110は、事前に用意しておいた各エリアの座標や形状に関するデータ801〜803を格納する。
【0136】
エリアID801は、調査対象であるエリアを識別するためのラベルであり、エリアクラスDB108のエリアID701と一致する。
【0137】
座標データ802は各エリアの形状を多角形としたときの、各頂点の座標を並べたものである。座標データ802に格納される座標は任意の座標系でよく、例えば世界測地系の緯度、経度を格納してもよい。
【0138】
面積803は各エリアの面積を表す。面積の単位は任意であり、例えば平方メートル等でもよい。
【0139】
図9A、図9BはスペクトルDB109の説明図である。スペクトルDB109には、画像解析部103より算出された各エリア、各クラスのスペクトルデータが格納されており、図9Aのエリアスペクトルテーブル901と図9Bのクラススペクトルテーブル902より構成される。
【0140】
エリアスペクトルテーブル901は、各エリア内のスペクトルデータが格納される。ただし、未調査のエリアについてのみのスペクトルデータである。
【0141】
エリアID903は、調査対象であるエリアを識別するためのラベルであり、エリアクラスDB108のエリアID701と一致する。
【0142】
スペクトル904は、画像解析部103より算出された各エリアのピクセルごとのスペクトルデータである。スペクトルデータは、多次元数値データである。各スペクトルデータの次元数は画像DB107に含まれる画像データのバンド数(または色チャネル数)と等しい。
【0143】
クラススペクトルテーブル902は、各クラス内のスペクトルデータが格納される。ただし、調査をしたエリアが所属するクラスについてのみのスペクトルデータである。
【0144】
クラスID905は、エリアのクラスを識別するためのラベルであり、エリアクラスDB108のクラスID702と一致する。ただし、クラススペクトルテーブル902に格納されるクラスIDは、調査済みエリアのクラスのみである。
【0145】
スペクトル906は画像解析部103より算出された各クラスのピクセルごとのスペクトルデータである。エリアスペクトルテーブル901のスペクトル904と同様、このスペクトルデータは多次元数値データであり、次元数は画像DB107に含まれる画像データのバンド数と等しい。
【0146】
図10は地図DB111の説明図である。地図DB111には事前に用意したエリア間の経路に関するデータ1001〜1004が格納される。
【0147】
エリア間経路1001は、異なるエリア間の経路を識別するものであり、二つのエリアIDをハイフンでつないで並べたものである。
【0148】
距離1003は、対応するエリア間の経路の距離である。距離の単位は任意であり、例えばメートル等でもよい。
【0149】
経路情報1004は、対応するエリア間の経路情報である。経路情報1004のデータは経路を折れ線と見なした時の各頂点の座標を順に並べた形式とする。なお各頂点の座標は、例えば、世界測地系の緯度、経度の情報でもよい。
【0150】
図11は、スペクトル算出部1031にてエリアマスキングを行うときの説明図であり、画像1101に対し、エリア1102内に含まれるピクセルを抽出する時の例である。ピクセル1103は、エリア1102近傍のピクセルの集合である。
【0151】
画像1101の四隅の位置情報を左上:(sx1、sy1)、右上:(sx2、sy1)、左下:(sx1、sy2)、右下:(sx2、sy2)とし、エリア1102の各頂点の位置情報を(x1、y1)、(x2、y2)、(x3、y3)、(x4、y4)・・・とすると、画像1101の位置座標とエリア1102の位置座標を比較することにより、画像内の各ピクセルがエリア内に含まれるか否かを調べることができる。エリア内に含まれるピクセルが、スペクトル算出部1031のエリアマスキングの出力となる。
【0152】
なおエリア1102をまたぐピクセル1104が存在することが多々ある。この場合、各々のピクセルがエリア内にどれだけ含まれるかの割合が半分以上の時は、そのピクセルをエリアマスキングの出力に加える。
【0153】
以下、エリア調査支援システムの具体的な処理の流れについて述べる。
【0154】
まず調査員がエリアの調査を開始すると同時に、調査員の持つ端末装置101は、エリアの形状情報をエリア調査支援装置100から受信し、端末装置101のデータ表示部1012には調査員の現在位置502と近傍のエリアが表示される。
【0155】
調査員は最初に適当なエリアを選んで調査する必要がある。そして選んだエリアに関して、調査員は端末装置101の操作入力部1015を操作して、エリアIDとクラス情報の調査結果を入力し、エリア調査支援装置100へ送信する(ステップ601)。調査員は、端末装置101の操作入力部1015を操作して、推薦経路表示の要求を行い(ステップ616)、推薦経路をエリア調査支援装置100から受信する(ステップ615)。受信した推薦経路は、データ表示部1012に表示される。
【0156】
その後、調査員は端末装置101が受信した推薦経路503に従い、エリア調査を行う。この時、調査員は、一つのエリアを調査する度に、端末装置101からエリア情報の入力を行う。
【0157】
調査員は、エリア情報入力と推薦経路表示を繰り返し、エリア調査を進めていく。なお端末装置101を使用する調査員は、エリア情報の入力を一回行う度に、推薦経路表示の要求を行い、推薦経路を更新してもよい。あるいは、端末装置101を使用する調査員がエリア情報の入力を複数回行った後に、推薦経路表示の要求をエリア調査支援装置100に行い、推薦経路を更新してもよい。推薦経路の更新を行いながら、エリア調査を進めていくと、精度向上のために、調査員が巡回すべきエリアが新しく出現したり、効率よく調査するために、回らなくてもよいと判断されるエリアが出現する。これによりエリア調査を精度と効率の両面を考慮しつつ、進めていくことができる。エリア調査は、エリア調査支援装置100で終了判定が行われると終了する。
【0158】
以上のように、調査員がエリアを調査する度に、調査によって取得したクラス情報と前記の画像を用いて、エリア調査支援装置100は残りのエリアの属性情報を推定する。さらに、この推定結果を用いて、エリア調査支援装置100は、精度が高く、かつ効率的に調査できるようなエリアの巡回経路を調査員に指示することで、全てのエリアを調査せずとも、終了条件を満たせば、調査を終了することがえきる。このように、予め学習データを用意する必要はなく、エリア調査の際に調査員に調査するエリアを指示することにより、調査エリア数や移動距離をできる限り少なくしつつ、精度よく未調査のエリア情報を推定することができる。また調査の効率面と精度面の何れを重視するかを端末装置101を利用するユーザ側で決定することができる。
【0159】
<第2の実施形態>
以下、本発明の第2の実施形態について図面を参照して説明する。
【0160】
本発明の第1の実施形態では、端末装置101を使用する調査員がエリア調査支援装置100に推薦されたエリアのみを調査する場合についてのエリア調査支援システムを示した。この第1実施形態の場合、各エリアの調査に時間がかかることを想定している。したがって効率的な調査のために、短時間で、より多くの情報量を取得できるようなエリアのみを巡回し、その他のエリアは調査しても、あまり多くの情報量を取得できないため、時間が無駄になると考え、できる限り調査しないという方針に基づく処理が、推薦経路選択部105に含まれている。
【0161】
第1の実施形態に対して、第2の実施形態では、推薦されたエリアへ移動する間に、経路に隣接するエリアも調査する場合についてのエリア調査支援システムを示す。この場合、各エリアの調査にほとんど時間を費やさない状況を想定し、推定されたクラス情報の精度を向上させるため、推薦されたエリアへ向かう途中に通るエリアも調査するという考え方に基づく。エリア調査にあまり時間を費やさない場合として、例えば、各エリアで栽培されている農作物の種類を調査する場合等が考えられる。
【0162】
第2の実施形態は、地図DB111に格納される情報と、推薦経路選択部105で行われる処理以外は、第1の実施形態と同じである。具体的には、図1〜図9B、図11、図16、図18は第2の実施形態でも適用される。以下、第2の実施形態について、第1の実施形態と異なる点のみを説明する。
【0163】
図12は本発明の第2の実施形態における地図DB111の説明図である。
【0164】
エリア間経路1301、距離1303、経路情報1304はそれぞれ、第1の実施形態のエリア間経路1001、距離1003、経路情報1004と同じである。
【0165】
経路中エリア数1302は、対応するエリア間の経路中で、経路に隣接するエリアのうち、まだ調査していないエリアの数である。
【0166】
図13は本発明の第2の実施形態における推薦経路選択部105のブロック図である。
【0167】
第2の実施形態の推薦経路選択部105は、エリアクラス再分類部1401とエリアグラフ作成部1402と最適経路探索部1403と経路隣接エリアカウント部1404、を備える。エリアクラス再分類部1401と最適経路探索部1403は、それぞれ第1の実施形態のエリア再分類部1051と最適経路探索部1053と同じである。推薦経路選択部105の内部処理の中で、第1の実施形態と異なる点は、エリアクラス再分類部1401にて処理を行った後、経路隣接エリアカウント部1404が地図DB111の更新を行う点と、エリアグラフ作成部1402の処理内容である。
【0168】
経路隣接エリアカウント部1404は、エリアクラス再分類部1401とエリアクラスDB108と地図DB111と通信する。経路隣接エリアカウント部1404は、エリアクラス再分類部1401の処理が終了すると、地図DB111内に含まれる全てのエリア間経路1301の中で、対応する経路と隣接するエリアを、経路情報1304とエリアポリゴンDB110内の座標データ802を用いることにより検索する。経路隣接エリアカウント部1404は、経路に隣接するエリアの中で対応する調査フラグ703が「False」となっているエリアの数をカウントし、地図DB111の経路中エリア数1302をカウントした値に更新する。経路中エリア数1302のカウントのことを、以後、未調査エリアカウントと記載する。なお未調査エリアカウントの詳細については、後述する。
【0169】
エリアグラフ作成部1402で、第1の実施形態と異なる点は、効率パラメータの算出に用いるパラメータの種類である。第1の実施形態では、効率パラメータは地図DB111に格納される距離1003と、未調査パラメータ709と、を用いて算出されるパラメータである。それに対し、第2の実施形態では、効率パラメータの算出に経路中エリア数1302を用いる。
【0170】
第2の実施形態では、効率パラメータは、例えば距離1303と経路中エリア数1302の比でもよい。この場合、エリアからエリアへ移動する時の距離が多少大きくても、移動途中にて、ついでに他のエリアも調査することができる。第2の実施形態では、エリアの調査に時間がかからず、エリア間の移動にのみ時間がかかる場合を想定しているため、短時間でより多くの情報を得ることができ、効率的な調査をすることができる。
【0171】
図14は経路隣接エリアカウント部1404にて行われる未調査エリアカウントに関しての説明図である。
【0172】
道1205は、調査員の移動手段で通行可能な道を表す。経路1206は、エリア1201、1203を結ぶ経路の中で距離が最短となる経路である。図14は、エリア1201とエリア1203の間の経路に隣接するエリアをカウントする例である。
【0173】
ここで経路1206とエリアの外周を結ぶ線分の中で、長さが最小となるような線分について、当該線分の長さが予め設定した閾値以下であり、当該線分上に他のエリアが存在しない場合、当該線分で雪像されるエリアは経路1206に隣接する、と定義する。
【0174】
未調査エリアカウントは、エリアポリゴンDB110に格納される全てのエリアに対し、経路1206に隣接しているかを調べ、隣接しているエリアの中で、対応する調査フラグ703が「False」となるエリア1207をカウントする。
【0175】
端末装置101を利用する調査員は、経路1206に隣接する未調査のエリア1207についても端末装置101から情報を得ることができ、当該隣接するエリア1207のクラス情報の調査も実施することが可能となる。
【0176】
図20は、推薦経路選択部105で行われる処理の一例を示すフローチャートである。まず、ステップS11で、推薦経路選択部105は、地図DB111内に含まれる全てのエリア間経路1301で、各経路に隣接するエリアを経路情報1304とエリアポリゴンDB110内の座標データ802から検索する。そして、推薦経路選択部105は、経路に隣接するエリアについて上述の未調査エリアカウントを算出する。未調査エリアカウントの値は、地図DB111の経路中エリア数1302に格納される。
【0177】
ステップS12では、推薦経路選択部105が、前記第1実施形態と同様に、画像解析部103のエリアの分類結果を、信頼度、エリア内分散、クラス内分散、クラス内エリア数等の値から再分類する。そして、ステップS13では、この再分類の結果に信頼度、エリア内分散、クラス内分散及び経路中エリア数1302からコスト付きのエリアグラフを複数算出する。
【0178】
ステップS14で、推薦経路選択部105は、複数のエリアグラフの中から最もコストが小さい経路を算出し、端末装置101に送信する。
【0179】
以上の処理によって、端末装置101には、調査対象のエリアの推薦経路に加え、経路に隣接するエリアも表示される。これにより、端末装置101を利用する調査員は、調査対象のエリアに加えて、推薦される経路に隣接するエリア1207の調査も行うことが可能となる。
【0180】
<第3の実施形態>
以下、本発明の第3の実施形態について図面を参照して説明する。
【0181】
本発明の第1の実施形態では、エリアの調査を行う際、一人の調査員が一つの端末装置101を用いて調査する場合のエリア調査支援装置システムについて示した。それに対し、本発明の第3の実施形態では、二つ以上の端末装置101を用いて複数の調査員がエリアを調査する場合のエリア調査支援装置システムについて説明する。なお以下では、複数の端末装置101を識別するため、端末装置101にIDを設け、装置1、装置2、・・・と記載して、識別する。
【0182】
第3の実施形態は、推薦経路選択部105で行われる処理以外は、第1の実施形態と同じである。具体的には図1〜図2、図4〜11、図18は第3の実施形態でも適用される。以下、第3の実施形態について、第1の実施形態と異なる点のみを説明する。
【0183】
図15は、本発明の第3の実施形態における推薦経路選択部105のブロック図である。推薦経路選択部105は、現地調査に用いられている複数の端末装置101に対し、それぞれ別々の推薦経路を出力する。推薦経路選択部105は、エリアクラス再分類部1501と巡回クラス割当部1502とエリアグラフ作成部1503と最適経路探索部1504と、を備える。エリアクラス再分類部1501は、第1の実施形態のエリアクラス再分類部1051と同じである。
【0184】
巡回クラス割当部1502は、エリアクラスDB108とエリアグラフ作成部1503と通信する。巡回クラス割当部1502では、エリアクラスDB108内に格納される全てのクラスIDを複数の端末装置101(複数の調査員)へ割り当てる処理が行われる。この時、全ての組み合わせの割当をエリアグラフ作成部1503へ送信する。
【0185】
例えば、エリアクラスDB108内に格納されるクラスIDがA、B、Cの3種類ある場合を考える。端末装置101の数が二つで、それぞれ装置1、装置2とすると、{装置1:(A、B)、装置2:(C)}、{装置1:(A)、装置2:(B、C)}、{装置1:(A、C)、装置2:(B)}、{装置1:(B、C)、装置2:(A)}、{装置1:(B)、装置2:(A、C)}、{装置1:(C)、装置2:(A、B)}の6通りの割当をエリアグラフ作成部1503へ送信する。
【0186】
以後、上記割当のことをクラス割当と記載する。なお{装置1:(A、B)、装置2:(C)}は、装置1にクラスA、Bが割り当てられ、装置2にクラスCが割り当てられていることを表す。
【0187】
エリアグラフ作成部1503は、エリアクラス再分類部1501と巡回クラス割当部1502とエリアクラスDB108とエリアポリゴンDB110と地図DB111と通信する。
【0188】
エリアグラフ作成部1503は、エリアクラス再分類部1501からエリアIDと再分類により得られたクラスIDの組を受信し、巡回クラス割当部1502から全通りのクラス割当を受信すると、それぞれのクラス割当に関して、各端末装置101に対応するコスト付きグラフを複数作成し、それぞれのグラフに、対応する端末装置101と、対応するクラス割当を関連付けて最適経路探索部1504へ送信する。例えば、上記の巡回クラス割当部1502の例の場合、6通りそれぞれのクラス割当に関して、装置1と装置2のグラフを複数作成し、それぞれのグラフに各ノード、エッジにコストを設けて作成された各グラフに対し、対応するクラス割当と、対応する端末装置101を関連付けた組を最適経路探索部1504へ送信する。各ノード、エッジに設けるコストは第1の実施形態と同じである。エリアグラフ作成部1503の内部で行われるグラフ作成の方法については、後述する。
【0189】
最適経路探索部1504は、エリアグラフ作成部1503とデータ送信部106と通信する。最適経路探索部1504は、エリアグラフ作成部1503より複数のグラフと対応するクラス割当、端末装置101を受信すると、各端末装置101に対し、推薦経路を出力する。
【0190】
具体的には、まず最適経路探索部1504は、エリアグラフ作成部1503より複数のグラフを受信すると、巡回クラス割当部1502で出力されたそれぞれのクラス割当に対し、各端末装置101のコスト最小の経路を求める。その後、各クラス割当に関して、複数の端末装置101の中でコスト最小の経路を求め、この最小のコストの中から最大値を求める。そして、最適経路探索部1504は、この最大値が各クラス割当の中で最小となるクラス割当を選択する。そして当該クラス割当に対応する、各端末装置101のコスト最小経路をデータ送信部106へ送信する。この際、コスト最小の経路は、周知または公知の効率的なアルゴリズムを用いて求めてもよいし、全ての組み合わせのコストを計算することにより求めてもよい。
【0191】
図17は、前記巡回クラス割当部1502の例に関して、クラス割当が{装置1:(A、B)、装置2:(C)}となる場合についてのグラフ作成例の説明図である。
【0192】
以下、エリアグラフ作成部1503の内部で行われるそれぞれの割当に関してのエリアグラフ作成について、図17を例にあげて詳細を述べる。
【0193】
ノード1701、1703は、グラフのスタート点を表す。ノード1701は、装置1を用いる調査員が最後に調査したエリアが選択され、ノード1703は、装置2を用いる調査員が最後に調査したエリアが選択される。エッジ1702は、エリア間を結ぶ経路である。
【0194】
各端末装置101に関するグラフの作成時、エリアグラフ作成部1503は、グラフのスタート点となるノード以外の全てのノードに、各端末装置101に割り当てられた全ての再分類クラスが一回ずつ表れるようなエリアを選択する。図17の例において、装置1に割り当てられた再分類クラスはA、A’、B、B’の4種類であり、スタート点以外のノードは、再分類クラスAのエリア2、再分類クラスA’のエリア6、再分類クラスBのエリア7、再分類クラスB’のエリア11が選択されている。
【0195】
同様に、図17の例において、装置2に割り当てられた再分類クラスはC、C’の2種類であり、スタート点以外のノードは、再分類クラスCのエリア13、再分類クラスC’のエリア18が選択されている。このようなエリアの選び方を全通り行い、全通り分のグラフを作成する。図17の例において、装置1に関するグラフは3の4乗通り存在し、装置2に関するグラフは3の2乗通り存在する。
【0196】
このクラス割当による効果を以下に述べる。本発明では、調査員がエリアに関する調査を続け、調査によって得た情報を端末装置101から入力することにより、学習データが増え、エリアクラス推定部1032で行われるエリアの推定精度が向上することを期待している。もちろん前記信頼度704、クラス内分散707、エリア内分散705等の推定の妥当性を表す指標は、調査する度に更新されていく。これにより、ある端末装置101を使用する調査員がエリア調査を行った後、推薦経路表示を行うと、それまでは巡回エリアとして選ばれていたエリアに行かなくてもよいと指示される可能性がある。この場合、もし別の端末装置101が当該行かなくてもよいと指示されたエリアに向かっていた場合、無駄が生じることとなるため、このような無駄を避ける効果がある。
【0197】
クラス割当による効果の具体的な例を以下に述べる。装置1に指示されたエリアの行き先が(再分類クラスBのエリア7→再分類クラスAのエリア2→再分類クラスCのエリア13)という順で表示されており、装置2に指示されたエリアの行き先が(再分類クラスA’のエリア6→再分類クラスB’のエリア11→再分類クラスC’のエリア18)という順で表示されている例を考える。
【0198】
装置2の調査員がA’のエリア6を調査した後、もし装置1の調査員がAのエリア2を調査することにより、実はA’のエリア6は調査しなくてよかったと判断されると、装置2の調査員は無駄にエリアを調査したということになる。それに比べ、同一クラスでも再分類クラスは異なっているエリアを、できるだけ一人の調査員で巡回することにより、この無駄を回避することができる。例えば装置1の調査員は、(再分類クラスAのエリア2→再分類クラスA’のエリア6→再分類クラスBのエリア7→再分類クラスB’のエリア11)と巡回し、装置2の調査員は、(再分類クラスCのエリア13→再分類クラスC’のエリア18)と巡回する。これにより、複数の端末装置101の間での巡回エリアの更新の影響を抑えつつ、より効率的に巡回エリアを選択することができる。
【0199】
図21は、第3実施形態の推薦経路選択部105で行われる処理の一例を示すフローチャートである。
【0200】
まず、ステップS21で、推薦経路選択部105は、画像解析部103の調査対象エリアの分類結果を、信頼度、エリア内分散、クラス内分散、クラス内エリア数等の値から再分類する。
【0201】
次に、ステップS22で、推薦経路選択部105は、複数の端末装置101(または調査員)にクラスを割り当てる。このクラスの割り当ては、この処理では、各端末装置101に複数のクラスを割り当てることができるが、ひとつのクラスを複数の端末装置101に分けて割り当てない。
【0202】
ステップS23では、上記ステップS21の再分類の結果、各エリアのクラスの信頼度や分散等を加味して、推薦経路選択部105がコスト付きのエリアグラフを複数算出する。そして、ステップS24で、推薦経路選択部105は、端末装置101毎にそれぞれのクラス割り当ての中からコストが最小となる経路を選択する。
【0203】
ステップS25で、推薦経路選択部105は、複数のクラス割り当ての中で、複数の端末装置101(調査員)間で最小のコストを比較して、最小のコストの中の最大値を選択する。そして、ステップS26では、推薦経路選択部105はステップS25で選択されたコストの最大値を、クラス割り当て間で比較して最大値が最小となるクラス割り当てを選択し、各端末装置101に推薦経路として送信する。
【0204】
いま、図22で示すように、端末装置101の内、装置1にクラスID=A,Bのエリアを割り当て、装置2にクラスID=Cのエリアを割り当てるクラス割り当てパターンXと、装置1にクラスID=Aのエリアを割り当て、装置2にクラスID=B、Cのエリアを割り当てるクラス割り当てパターンYを比較する例を示す。
【0205】
まず、推薦経路選択部105は、クラス割り当てパターンXで、装置1と装置2でコストの最小値を演算し、装置1のクラス割り当て(A、B)の最小コストが10、装置2のクラス割り当て(C)でコストの最小値が7を演算する。
【0206】
同様に、推薦経路選択部105は、クラス割り当てパターンYで、装置1と装置2でコストの最小値を演算し、装置1のクラス割り当て(A)の最小コストが8、装置2のクラス割り当て(B,C)でコストの最小値が6を演算する。
【0207】
次に、推薦経路選択部105は、クラス割り当てパターンXの各装置1、2の最小コストの中から最大値を選択し、装置1の最小コストの最大値=10を得る。同様に、クラス割り当てパターンYの各装置1、2の最小コストの中から最大値を選択し、装置1の最小コストの最大値=8を得る。
【0208】
推薦経路選択部105は、クラス割り当てパターンXの最大値10と、クラス割り当てパターンYの最大値8を比較し、最大値が最小(8)となるクラス割り当てパターンYを推薦経路として選択する。したがって、エリア調査支援装置100は装置1にクラス割り当てAを送信し、装置2にクラス割り当てB、Cを送信することになる。
【0209】
上記処理より、複数の端末装置101を用いて複数の調査員がエリア調査を行う場合には、全てのコストが最小となるクラス割り当てを演算することができる。
【産業上の利用可能性】
【0210】
以上のように、本発明は、地図情報にクラス情報を入力する端末装置へ、最適な巡回経路を送信するエリア調査支援装置とを備えたエリア調査支援システム及びエリア調査支援方法に適用することができる。
【符号の説明】
【0211】
100 エリア調査支援装置
101 端末装置
102 データ受信部
103 画像解析部
104 終了条件判定部
105 推薦経路選択部
106 データ送信部
107 画像DB
108 エリアクラスDB
109 スペクトルDB
110 エリアポリゴンDB
111 地図DB
112 ネットワーク
1031 スペクトル算出部
1032 エリアクラス推定部
1051 エリアクラス再分類部
1052 エリアグラフ作成部
1053 最適経路探索部
1011 通信部
1012 データ表示部
1013 位置情報取得部
1014 データ記憶部
1015 操作入力部
1811 プロセッサ
1812 メインメモリ
1830 通信部
1840 操作部
1850 表示部
1860 記憶装置
【技術分野】
【0001】
本発明は、同一属性情報を持つと想定される空間的に連続したエリアの現地調査を支援するシステムに関するものである。
【背景技術】
【0002】
広大な農作地域を対象とした農業情報地図や、市街地等を対象としたカーナビゲーション用地図等は、現実世界の各エリアの保持する情報が時間変化に伴い変化していくため、定期的に各エリアの属性情報を収集して地図へ反映することが求められている。ここでいうエリアとは、同一属性情報を持つと想定される空間的に連続した区域のことを指し、属性情報とは、農作地域の場合であれば、各エリアの保有者や耕作従事者、またそこで栽培されている農作物の種類や収穫量等の情報を指す。市街地の場合であれば、属性情報は、道路や建物、また建物の種類や材質、高さ等の情報を指す。現在、エリアの属性情報は調査員を現地の各々のエリアまで派遣することにより、調査し把握しているという状況である。
【0003】
しかし、対象とする地域が広くなればなるほど、現地調査は調査員の作業量が大きくなり、その結果として必要となる時間や費用が大きくなるため、現地調査の負担、費用を削減するような支援システムが求められている。
【0004】
このようなニーズに対して、特許文献1、2に示すような技術が知られている。特許文献1では、過去の地図データベース中に存在する建物の外観画像と、現在の撮影画像が不一致である箇所に関してのみ、市街地の地図データベースの更新を行うことにより、調査員の負担を削減する調査支援システムが開示されている。
【0005】
特許文献2では、衛星や航空機によって撮影された画像を用い、広大な農作地域の作物の収穫量を予測する予測装置及び方法が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2000−47578号公報
【特許文献2】特開2003−6612号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
現地調査員の負担や費用を削減する手段として、上記の特許文献1にように、過去のデータベース中の画像を用い、過去画像と現在の撮影画像が不一致な箇所のみデータベースの更新を行うことが考えられる。しかし農作地域等の区域が持つ属性情報は作物の生育や収穫などによって絶えず変化していくため、ほぼ全域にわたって調査をする必要があり、調査員の負担や費用をあまり削減できない場合も多い。
【0008】
また上記の特許文献2のように、衛星や航空機に搭載されたセンサによって得られた調査地域の画像を入力とし、これらの画像から得られたスペクトルを用いてエリアの情報を計算機に推定させることにより、調査を全て自動化して、現地調査員の負担や費用を削減することが考えられる。ここでスペクトルとは、画像中に含まれる1つのピクセルの画素値を波長ごとに並べたデータを指す。
【0009】
しかし上記調査の自動化のためには大量の学習データが必要となる。ここでいう学習データとは、エリアの属性情報と、属性情報に対応するスペクトルの組のことである。特に農作地域のエリアの属性情報を推定する際は、作物の成長時期によってスペクトルが変化するため、様々な時期のスペクトルが必要となり、これらのスペクトルがいつでも用意されているとは限らない。
【0010】
一方、学習データを用意せず、入力とした画像データのみを用いて、エリア情報を推定することも可能である。農作地域の作物情報を調査する場合であれば、各エリアをA、B、C・・・とラベルづけすることができる。これを教師なし分類と呼ぶ。Aが水稲、Bが大豆等、といったように各ラベルがどの属性情報に対応するかは不明であるため、教師なし分類の後、それぞれのラベルの中の代表的なエリアを調査する必要があるが、全てのエリアを調査する必要はなく、負担や費用を削減することが可能である。
【0011】
しかし、教師なし分類では、同一の属性情報を別のラベルとみなしていたり、別々のラベルを同一と見なしていたりと誤分類が起きる可能性が高い。
【0012】
以上の二点の観点より、予め学習データを用意できるわけではないという問題と、予め学習データを用意しない場合は、誤分類が起きる可能性が高いという問題がある。
【0013】
そこで本発明は、上記問題点に鑑みてなされたもので、予め学習データを用意せずに、誤分類の可能性を減らして、調査員が実際に行く調査エリア数や移動距離をできる限り抑制しながらも、精度よく未調査のエリア情報を推定することを目的とする。
【課題を解決するための手段】
【0014】
本発明は、ネットワークに接続される端末装置と、前記ネットワークに接続されるエリア調査支援装置と、を備えるエリア調査支援システムであって、前記端末装置は、前記ネットワークに接続される通信部と、情報を入力する入力操作部と、情報を出力するデータ表示部と、位置情報を取得する位置情報取得部と、を備え、前記エリア調査支援装置は、前記端末装置から、同一属性情報を持つと想定される空間的に連続した区域であるエリアの調査情報と位置情報を受け付けるデータ受信部と、前記エリアの調査情報と位置情報から、予め格納した画像データベースから未調査のエリアの画像データを取得して、前記調査情報と画像データを入力として、前記未調査のエリアの属性情報を推定し、当該推定した属性情報の妥当性を示す精度パラメータを算出する画像解析部と、前記データ受信部で前記端末装置から推薦経路の要求を受け付けたときには、前記画像解析部で推定した属性情報と、前記算出された精度パラメータと、前記エリアの形状情報及び位置情報と、を取得して調査の推薦経路を演算する推薦経路選択部と、前記画像解析部で推定した属性情報と前記精度パラメータを取得して、前記調査を終了するか否かを判定する終了条件判定部と、前記終了条件判定部が、前記調査の終了を判定したときには調査終了の信号を前記端末装置へ送信し、前記終了条件判定部が、前記調査の継続を判定したときには、前記推薦経路を前記端末装置へ送信するデータ送信部と、を備え、前記推薦経路選択部は、前記属性情報の推定精度と正の相関を持つ一つ以上の精度パラメータと、前記調査によって得られる情報量と当該調査に必要な時間の比と正の相関を持つ一つ以上の効率パラメータと、からコストを付加した経路を生成するエリアグラフ作成部と、前記エリアグラフ作成部にて生成した経路のうち、前記コストが最小の経路を探索する最適経路探索部と、を備える。
【発明の効果】
【0015】
本発明によれば、予め学習データを用意する必要はなく、エリア調査の際に調査員に調査するエリアを指示することにより、調査員が実際に行く調査エリア数や移動距離をできる限り少なくしつつ、精度よく未調査のエリア情報を推定することができる。また効率面と精度面でどちらを重視するかのバランスをユーザ側で決定することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の第1の実施形態を示し、エリア調査支援システムの基本構成を表すブロック図である。
【図2】本発明の第1の実施形態を示し、画像解析部の構成を示すブロック図である。
【図3】本発明の第1の実施形態を示し、推薦経路選択部の構成を示すブロック図である。
【図4】本発明の第1の実施形態を示し、端末装置とエリア調査支援装置の間で行われる処理を表わすシーケンス図である。
【図5】本発明の第1の実施形態を示し、端末装置の内部構成を表わすブロック図である。
【図6】本発明の第1の実施形態を示し、端末装置のデータ表示部を示した画面である。
【図7A】本発明の第1の実施形態を示し、エリア情報テーブルのデータ構成の一例を示す説明図である。
【図7B】本発明の第1の実施形態を示し、クラス情報テーブルのデータ構成の一例を示す説明図である。
【図8】本発明の第1の実施形態を示し、エリアポリゴンDBのデータ構成の一例を示す説明図である。
【図9A】本発明の第1の実施形態を示し、エリアスペクトルDBのデータ構成の説明図である。
【図9B】本発明の第1の実施形態を示し、クラススペクトルDBのデータ構成の説明図である。
【図10】本発明の第1の実施形態を示し、地図DBのデータ構成の説明図である。
【図11】本発明の第1の実施形態を示し、スペクトル算出部で行われる処理の説明図である。
【図12】本発明の第2の実施形態を示し、地図DBのデータ構成の説明図である。
【図13】本発明の第2の実施形態を示し、推薦経路選択部を表わすブロック図である。
【図14】本発明の第2の実施形態を示し、経路隣接カウント部で行われる処理の説明図である。
【図15】本発明の第3の実施形態を示し、推薦経路選択部の構成を示すブロック図である。
【図16】本発明の第1の実施形態を示し、エリアグラフ作成部で行われるグラフ作成の例を示す説明図である。
【図17】本発明の第3の実施形態を示し、エリアグラフ作成部で行われるグラフ作成の説明図である。
【図18】本発明の第1の実施形態を示し、エリア調査支援装置のハードウェアを示すブロック図である。
【図19】本発明の第1の実施形態を示し、推薦経路選択部で行われる処理の一例を示すフローチャートである。
【図20】本発明の第2の実施形態を示し、推薦経路選択部で行われる処理の一例を示すフローチャートである。
【図21】本発明の第3の実施形態を示し、推薦経路選択部で行われる処理の一例を示すフローチャートである。
【図22】本発明の第3の実施形態を示し、推薦経路選択部で行われる処理の一例を示す説明図である。
【発明を実施するための形態】
【0017】
以下、本発明の一実施形態を添付図面に基づいて説明する。
【0018】
本発明は、調査員が現地にてエリアの調査を行う際に、調査を支援する計算機システムに関するものである。ここでいうエリアとは、同一属性情報を持つと想定される空間的に連続した区域を表す。調査によって得られる情報は、エリアに付随する属性情報のことを指す。例えば、農地の調査の例であれば、各エリアで栽培されている作物の種類や収穫量なども属性情報と見なすことができる。本発明では、調査員が一部のエリアを調査するのみで、残りのエリアに関しては、衛星や航空機に搭載されたセンサによって得られた調査地域の画像を用いて推定することにより、調査員の負担や調査にかかる費用の削減を行う。
【0019】
本発明の概要は、調査員がエリアを調査する度に、調査によって取得した情報と前記の画像を用いて、残りのエリアの属性情報を推定する。さらに、この推定結果を用いて、精度が高く、かつ効率的に調査できるようなエリアの巡回経路を調査員に指示するという調査と巡回経路の指示を繰り返し、全エリアを調査せずとも、終了条件を満たせば、調査を終了するというものである。ここでいう精度とは、エリアの属性情報の推定精度を表し、効率とは調査の際に一定時間ごとに得られる情報量のことを表す。
【0020】
本発明の実施の形態では、エリアの属性情報に作物の種類や建物の材質等のような離散的なカテゴリが相当する例をあげるが、属性情報が作物の収穫量や建物の高さ等の連続的な値を持つ量である場合でも、その量を量子化し、離散カテゴリとして扱うことにより対応可能である。
【0021】
以下、本発明の実施形態を、図面を参照して詳細に説明する。
【0022】
<第1の実施形態>
図1は、エリア調査支援システムの基本構成を表すブロック図である。
【0023】
本実施形態のエリア調査支援システムは、エリア調査支援装置100と1つ以上の端末装置101を備える。1つ以上の端末装置101はネットワーク112を介してエリア調査支援装置100に接続される。
【0024】
エリア調査支援装置100は、調査員が使用する端末装置101にエリア調査の推薦経路を提供し、また未調査エリアの情報を、調査済みのエリアの情報を用いて推定する。調査員が使用する端末装置101に提供される推薦経路は、調査によって得られる情報量と調査にかかる時間の比に正の相関を持つ効率パラメータと、調査終了時の推定精度に正の相関を持つ精度パラメータを、できる限り大きくするような経路が選択される。これらのパラメータの詳細や経路を選択する方法については、後述する。また前記の機能を実現するために、エリア調査支援装置100は、データ受信部102、画像解析部103、終了条件判定部104、推薦経路選択部105、データ送信部106、画像データベース(DB)107、エリアクラスDB108、スペクトルDB109、エリアポリゴンDB110、地図DB111と、を備える。なお、データ受信部102とデータ送信部106はデータ送受信部として一体で構成されてもよい。
【0025】
画像DB107は、少なくとも撮影日時、画像位置情報をヘッダ情報に含むような、衛星、または航空機に搭載されたセンサによって得られた画像データを格納する。ここで撮影日時は、当該画像データがいつ撮影されたかを表し、画像位置情報とは、画像の四隅の位置情報を表す。なお、画像位置情報は、例えば、世界測地系で用いられる緯度、経度の情報であってもよい。
【0026】
端末装置101は、位置情報取得機能、通信機能を有する持ち運び可能な端末である。例えば、端末装置101は、出力装置を備え、出力装置を用いて情報を提示する計算機、または携帯電話等であってもよい。例えば出力装置は、画像を表示するスクリーンや音声を出力するスピーカである。端末装置101は、操作入力部1015及びデータ表示部1012を備えて調査員の入力した情報を、ネットワーク112を介してエリア調査支援装置100内のデータ受信部102へ送信する。端末装置101がデータを送信する際には、端末装置101の現在の位置情報等を付加して送信してもよい。この位置情報は、例えば、上述したように世界測地系で用いられる緯度、経度の情報であってもよい。端末装置101で行われる詳細な処理については後述する。
【0027】
ネットワーク112はエリア調査支援装置100と端末装置101の間のデータ転送のための経路を提供する。ネットワーク112は任意の種類のデータ転送経路を提供してもよい。例えば、ネットワーク112は有線LAN(Local Area Network)、無線LAN、または携帯電話網等であってもよい。
【0028】
データ受信部102は、画像解析部103、エリアクラスDB108と通信する。データ受信部102は、ネットワーク112を介して端末装置101から、調査員が調査したエリアを識別するIDと、当該IDのエリアのクラス情報を受信する。ここでいうクラス情報とは、衛星または航空機に搭載されたセンサによって得られた画像から推定することのできるエリアの属性情報である。
【0029】
データ送信部106は、エリアポリゴンDB110、終了条件判定部104、推薦経路選択部105に接続と通信する。データ送信部106は、終了条件判定部104より受信した調査終了の信号、推薦経路選択部105より受信した推薦経路の情報などを、ネットワーク112を介し、端末装置101へ送信する。なお、調査を開始した直後のみ、データ送信部106は、エリアポリゴンDB110から受信した各エリアの形状情報をネットワーク112を介し、端末装置101へ送信する。
【0030】
各DBは、図1においてエリア調査支援装置100に内蔵されているが、エリア調査支援装置100の外部に存在してもよい。
【0031】
また、上記各部が実行する処理、各部間で転送されるデータ、各DBに格納されるデータについては後述する。
【0032】
図18は本発明の実施形態のエリア調査支援装置100のハードウェア構成である。
【0033】
本実施形態のエリア調査支援装置100は、プロセッサ1811、メインメモリ1812、記憶装置1860、通信部1830、操作部1840、表示部1850を備える計算機である。
【0034】
プロセッサ1811は、メインメモリ1812に格納されたプログラムを実行する。
【0035】
メインメモリ1811は、例えば半導体メモリであり、プロセッサ1811によって実行されるプログラム及びプロセッサ1811によって参照されるデータを格納する。具体的には、記憶装置1860に格納されたプログラム及びデータの少なくとも一部が、必要に応じてメインメモリ1811にコピーされる。
【0036】
プロセッサ1811は、各機能部のプログラムに従って動作することによって、所定の機能を実現する機能部として動作する。例えば、CPU1811は、画像解析プログラムに従って動作することで画像解析部103として機能する。他のプログラムについても同様であり、プロセッサ1811は、各プログラムが実行する複数の処理のそれぞれを実現する機能部としても動作する。エリア調査支援装置100は、これらの機能部を含む装置及びシステムである。
【0037】
操作部1840は、ユーザ又はシステム管理者からの入力操作を受ける。操作部は、例えばキーボード又はマウス等を含んでもよい。
【0038】
表示部1850は、ユーザ又はシステム管理者へ情報を出力する。表示部1850は、例えば液晶ディスプレイのような画像表示装置であってもよい。
【0039】
通信部1830は、ネットワーク112に接続され、端末装置101と通信する。通信部1830は、データ受信部102と、データ送信部106を提供する格納される。
【0040】
記憶装置1860は、例えばハードディスク装置(HDD)又はフラッシュメモリのような不揮発性の記憶装置である。本実施形態の記憶装置1860は、少なくとも画像解析部103、終了条件判定部104、推薦経路選択部105が格納される。なお、各DBも記憶装置1860に格納されてもよい。
【0041】
また、エリア調査支援装置100の各機能を実現するプログラム、テーブル等の情報は、記憶装置1860や不揮発性半導体メモリ、ハードディスク装置、SSD(Solid State Drive)等の記憶デバイス、または、ICカード、SDカード、DVD等の計算機読み取り可能な非一時的データ記憶媒体に格納することができる。
【0042】
図2は本発明の実施形態の画像解析部103の構成を表すブロック図である。
【0043】
画像解析部103は、画像DB107に記録されている画像データとエリアポリゴンDB110に記録されているエリアの形状情報を入力として、各エリアや各クラスのスペクトルデータを算出する機能と、スペクトルDB108に格納されているスペクトルデータを用い、未調査エリアのクラスを推定する機能と、を備える。
【0044】
このような機能を実現するために、画像解析部103は、スペクトル算出部1031とエリアクラス推定部1032とを備える。
【0045】
スペクトル算出部1031は調査地域のエリアの形状情報と画像データを用い、エリア内に含まれる画像データのピクセルのスペクトルを抽出し、抽出したスペクトルと対応するエリアIDの組を、スペクトルDB109のエリアスペクトルテーブル901へ格納する。以下、画像データからエリア内に含まれるピクセルのスペクトルを抽出することを、エリアマスキングと記載する。
【0046】
画像DB107に複数の画像データが含まれる場合、それらの画像データが位置的に重複するところも存在し、画像データが重複する部分にエリアが存在する場合もある。この場合は、画像データが重複するエリアに雲がかかっていない画像の中で撮影日時が最も新しい画像について、エリアマスキングを行う。なおエリアマスキングの詳細は後述する。
【0047】
エリアクラス推定部1032は、スペクトルDB108内に格納されているスペクトルデータを用いて、未調査エリアのクラスを推定する。エリアクラス推定部1032は、スペクトルDB108のクラススペクトルテーブル内のスペクトルを学習データとして用い、エリアスペクトルテーブル内のスペクトルをテストデータとして用いる。ここでいう学習データとは、クラス情報が付加されているデータのことであり、テストデータとは、クラス情報が付加されていないデータのことである。
【0048】
なお未調査エリアのクラスの推定を行う際に、エリアクラス推定部1032は、各スペクトルを所定の特徴量へ変換し、この特徴量に基づいてクラスを推定してもよい。ここでいう特徴量とは、スペクトルに対し、所定の演算をすることによって得られるパラメータのことであり、例えば、近赤外の画素値から赤の画素値を引いた値と、近赤外の画素値と赤の画素値の和の比である正規化植生指数等も特徴量である。
【0049】
エリアクラス推定部1032は、上述の学習データで学習を行い、テストデータで分類を行う教師あり分類を行ってもよいし、学習データとテストデータの両方を学習に用いる半教師あり学習の枠組みで分類を行ってもよい。ただし、クラススペクトルテーブル内にデータが存在しない時は、エリアスペクトルテーブルのテストデータのみから教師なし学習の枠組みで分類を行う。半教師あり学習、教師あり学習、教師なし学習、いずれの枠組みでも混合正規分布等を用いることができる。ただし、いずれの場合でも、クラス数も決定する必要がある。これは、例えば赤池情報量基準等を用いてもよいし、分類を行う手段として、ノンパラメトリックベイズの枠組みを用いて、分類とクラス数の推定を同時に行ってもよい。
【0050】
またクラス情報の推定と同時に、クラス情報に対する信頼度、エリア内分散、クラス内分散、クラス内エリア数等の値も算出する。これらのパラメータの定義や算出方法の例は後述する。エリアIDに対応するクラスID、また算出した信頼度、エリア内分散、クラス内分散、クラス内エリア数等の値は、エリアクラスDB108へ格納する。また、信頼度、エリア内分散、クラス内分散またはクラス内エリア数のうちの少なくとも一つが、上記推定されたクラス情報の妥当性を示す指標が精度パラメータとして算出される。
【0051】
図3は本発明の実施形態の推薦経路選択部105の構成を表すブロック図である。
【0052】
推薦経路選択部105は、エリアクラスDB108内の格納データを用いて、調査員が使用する端末装置101へ次に調査すべきエリアと、当該エリアに至るまでの経路を出力する機能を備える。この機能を実現するために、推薦経路選択部105は、エリアクラス再分類部1051とエリアグラフ作成部1052と最適経路探索部1053と、を備える。
【0053】
上記画像解析部103にて推定されたクラス情報が全て正しいとすると、調査員は分類されたクラスの代表的なエリアのみを巡回すればよいと考えられるが、学習データが十分ではなく、画像解析部103でエリアのクラス情報を誤分類している可能性があり得る。
【0054】
画像解析部103で誤分類している例として、本来複数のエリア間で同一クラスのものを別のクラスと見なしている場合と、別のクラスのものを同一クラスと見なしている場合がある。エリア間で同一クラスのものを別のクラスと見なしている場合、分類されたクラスの代表的なエリアのみを巡回すれば、両方のクラスを実際に巡回することになるため、各エリアのクラスを正しいクラス情報に訂正することが可能である。しかし、別のクラスのものを同一クラスとして見なしている場合、それぞれのクラスに所属するエリアを調べない限りは、正しいクラス情報に訂正することができない。
【0055】
このため推薦経路選択部105は、画像解析部103のクラスの推定結果を見ると、エリア間で同一クラスと見なされているが、実際には別のクラスである可能性があるようなエリアを、信頼度、エリア内分散、クラス内分散、クラス内エリア数等の値を用いて判定し、別々のクラスである可能性がある代表的なエリアを巡回するという手段を取る。エリアを巡回するため、推薦経路選択部105では、エリア間を結ぶコスト付きグラフを作成し、演算したコストを最小とするエリアを巡回エリアとして選択し、出力する。
【0056】
推薦経路選択部105で行われる処理の一例を図19のフローチャートに示す。ステップS1で、推薦経路選択部105は、画像解析部103のエリアの分類結果を、信頼度、エリア内分散、クラス内分散、クラス内エリア数等の値(精度パラメータ)から再分類する。
【0057】
次に、ステップS2で、画像解析部103のエリアの再分類結果から、信頼度、エリア内分散、クラス内分散等の値を加味したコスト付きのエリアグラフを複数算出する。
【0058】
ステップS3で、推薦経路選択部105は、複数のエリアグラフの中から最もコストが小さくなる経路を巡回に推薦するエリアとして出力する。
【0059】
エリアクラス再分類部1051は、エリアグラフ作成部1052とエリアクラスDB108と通信する。エリアクラス再分類部1051では、エリア間で同一クラスと見なされているが、実際には別のクラスである可能性があるようなエリアを、信頼度、エリア内分散、クラス内分散等の値を用いて判定する。この判定結果から、別のクラスである可能性があるようなエリアの再分類を行う。この再分類は、信頼度が一定の閾値以下であるエリアを別のクラスである可能性があると判定する。またクラス内分散が一定の閾値以上のクラスを選び、当該クラス内で信頼度が一定の閾値以下であるエリアを別のクラスの可能性があると判定してもよいし、エリア内分散が一定の閾値以上であるエリアを別のクラスである可能性があると判定してもよい。もし条件を満たすエリアがない場合は、画像解析部103で推定された分類結果をそのまま用いる。エリアクラス再分類部1051で得た再分類結果はエリアIDと再分類したクラスIDの組というデータ形式として、エリアグラフ作成部1052へ送信する。なお新しいクラスIDの付け方に関しては、例えば画像解析部103にてクラスIDがAと分類されたが、エリアクラス再分類部1051にて3つのクラスに分類されると判定された場合、それぞれのクラスIDはA、A’、A”とし、エリアIDと対応付けてエリアグラフ作成部1052へ送信する。以後、この再分類の際のクラスIDを再分類クラスIDと記載する。
【0060】
エリアグラフ作成部1052は、エリアクラス再分類部1051とエリアクラスDB108とエリアポリゴンDB110と最適経路探索部1053と通信する。
【0061】
エリアグラフ作成部1052は、まずエリアクラス再分類部1051より受信したエリアIDと再分類クラスIDの組をもとに、複数のグラフを作成する。グラフ作成の詳細については、後述する。次にエリアグラフ作成部1052は、それぞれのグラフの各ノード(経路の分岐点)や、エッジ(エリア間を結ぶ経路)に対して設けるコストを算出し、最適経路探索部1053へ出力する。各ノード、エッジのコストは、調査終了時のエリアの推定精度に正の相関を持つパラメータや、調査により得られる情報量と、調査にかかる時間の比と、正の相関を持つパラメータと、を用いてエリアグラフ作成部1052で後述するように算出される。ここでいう、調査終了時のエリアの推定精度に正の相関を持つパラメータは、例えばエリアクラスDB108に含まれる信頼度704をすべて掛け合わせたものでもよい。
【0062】
以後、前記調査終了時のエリアの推定精度に正の相関を持つパラメータを精度パラメータと記載し、調査により得られる情報量と調査にかかる時間の比と、正の相関を持つパラメータを効率パラメータと記載する。
【0063】
各ノードに関するコストは、精度パラメータと効率パラメータに対し、事前にエリア調査支援装置100を管理する管理者によって決定されるか、もしくは端末装置101を使用する調査員が調整したスライダー505(図6参照)によって決定される精度係数と効率係数を用いる。
【0064】
精度係数は、エリアの推定精度をどれだけ重視した調査にするかを表した量であり、精度係数の値が大きいほど、エリアの推定精度が高くなることが期待される。効率係数は、短時間でより多くの情報量を取得することを、どれだけ重視した調査にするかを表した量であり、効率係数の値が大きいほど、一定時間ごとに得られる情報量が大きくなることが期待される。
【0065】
端末装置101で調査員が決定した精度係数と効率係数は、エリア調査支援装置100のデータ受信部102に送信される。
【0066】
以下、精度パラメータ、効率パラメータの選び方や各パラメータの効果について述べる。
【0067】
精度パラメータは、エリアクラスDB108のエリア情報テーブル108A(図7A参照)とクラス情報テーブル108B(図7B参照)に格納される信頼度704と、クラス内分散707と、エリア内分散705と、クラス内エリア数708と、エリアポリゴンDB110に格納される面積803と、のうち少なくとも一つのパラメータを用いて算出されるパラメータである。なお精度パラメータは、前記信頼度704、クラス内分散707、エリア内分散705、クラス内エリア数708、面積803の値そのものを用いてもよい。
【0068】
効率パラメータは図10の地図DB111に格納される距離1003と、図7Bのクラス情報テーブル108Bに格納される未調査パラメータ709と、を用いてエリア調査支援装置100で算出されるパラメータである。なお効率パラメータは、前記距離1003、未調査パラメータ709の値そのものを用いてもよい。
【0069】
例えば、精度パラメータに信頼度704の値そのものを用い、効率パラメータに未調査パラメータ709の値そのものを用いてもよい。また、各ノードに設けるコストを、精度係数と精度パラメータの積と、効率係数と(1−効率パラメータ)の積の和としてもよい。ここで、精度係数と効率係数は、事前にエリア調査支援装置100を管理する管理者によって決定される。
【0070】
この場合、エリアの信頼度704が低い方が、コストが小さくなるため、信頼度704が低いエリアが、巡回対象として選択されやすくなる。これにより、信頼度704の低いエリアを調査することで減らすことになり、未調査エリアの推定精度を向上する効果がある。また、効率パラメータに未調査パラメータ709を用いることにより、未だにクラス名が不明なエリアを重点的に調査させることができるという効果がある。
【0071】
また前記の例において、精度パラメータは、図7Aのエリア情報テーブル108Aのエリア内分散705と、図8のエリアポリゴンDB110の面積803の積としてもよい。この場合、エリア内のスペクトルのばらつきが大きく、面積が大きいエリアを重点的に調査させることになる。これにより、エリアクラス推定部1032にて使用される学習データが豊富となり、推定精度が向上することが期待される。
【0072】
各エッジに関するコストは、効率パラメータと効率係数を用いて算出されるパラメータとする。例えば、エッジのコストは、対応するエリア間の距離1003と、地図DB111に格納される距離1003の最大値の比に効率係数を掛けた値を用いる。これにより、できる限り調査員の移動距離が短くなるようなエリアが巡回対象として選ばれるという効果がある。
【0073】
前記の例において、エリア調査支援装置100を管理する管理者が精度係数を大きくすると、精度パラメータの効果が大きくなり、推定精度を向上するような調査となる。逆に効率係数を大きくすると、効率パラメータの効果が大きくなり、調査員の総移動距離が小さく、クラス名が不明なエリアを重点的に巡回するような調査となる。
【0074】
最適経路探索部1053は、エリアグラフ作成部1052とデータ送信部106と通信する。最適経路探索部1053は、エリアグラフ作成部1052で作成された複数のエリアグラフを用いて推薦経路を出力し、データ送信部106へ送信する。出力される推薦経路は、最後に調査したエリアをスタートとし、エリアグラフの全ノードを巡回する経路であり、最適経路探索部1053に入力された全エリアグラフの中で、最小のコストとなる経路である。コストが最小の経路を選択するために、周知または公知の効率的なアルゴリズムを用いてもよいし、例えば、総当たりで全ての経路のコストを算出した後に、コストが最小となる経路を選択してもよい。
【0075】
図16は、エリアグラフ作成部1052内で行われるグラフ作成の例を示す説明図である。
【0076】
ノード1601は、グラフのスタート点を表す。ノード1601は、端末装置101を用いる調査員が最後に調査したエリアがエリア調査支援装置100のエリアグラフ作成部1052で選択される。エッジ1602は、エリア間を結ぶ経路である。
【0077】
エリアグラフ作成部1052は、ノード1601以外の全てのノードに、エリアクラス再分類部1051より受信した全ての再分類クラスが一回ずつ表れるようなエリアを選択する。例えば、再分類クラスがA、A’、B、B’の4種類の場合だと、図16の例において、スタート点以外のノードは、再分類クラスAのエリア2、再分類クラスA’のエリア6、再分類クラスBのエリア7、再分類クラスB’のエリア11が選択されている。エリアグラフ作成部1052では、このようなエリアの選び方を全通り行い、全通り分のグラフを作成する。図16の例において、グラフは3の4乗通り存在する。
【0078】
図4は、エリア調査支援装置100が端末装置101から送信された調査エリアと、当該エリアのクラス情報を受信してDB更新を行う処理と、エリア調査支援装置100が端末装置101から推薦経路表示の要請を受信し端末装置101へ調査員への指示を送信するまでの処理手順を示すシーケンス図である。
【0079】
まず、エリア調査支援装置100が端末装置101から送信された調査エリアと、当該エリアのクラス情報を受信し各DB更新を行うまでの処理手順を示す。
【0080】
端末装置101は、調査員の操作入力により、調査員が調査したエリアのIDと当該エリアのクラス情報をデータ受信部102へ送信する(ステップ601)。
【0081】
データ受信部102は端末装置101から、調査エリアのIDと当該エリアのクラス情報を受信すると、エリアクラスDB108のデータを更新する(ステップ602)。データ受信部102は、エリアクラスDB108のエリア情報テーブル108A内で、受信した調査エリアのID701のデータに対し、図7Aに示す調査フラグ703を「False」から「True」へ更新し、クラスID702を受信したクラス情報の値で更新する。クラスID702の更新に関しては、クラス情報テーブル108Bのクラス名706の列を上記入力されたクラス情報で検索して、対応するクラスID702を選択する。検索した結果、入力されたクラス情に報該当するクラス名706が存在しなかった場合は、クラス情報管理テーブル108Bに新しい列を追加する。列の内容は、新しいクラスIDと入力されたクラス名706(クラス情報)とする。
【0082】
エリアクラスDB108は、データ受信部102からデータを更新されると、スペクトルDB109を更新する(ステップ603)。
【0083】
スペクトルDB109は、図9A、図9Bで示すようにエリアスペクトルテーブル901と、クラススペクトルテーブル902の2つのテーブルから構成される。スペクトルDB109はエリアスペクトルテーブル901の中で、エリアクラスDB108がデータ受信部102から受信したエリアID903に相当する列のスペクトル904を、クラススペクトルテーブル902Bへコピーする。この時のクラスID905はデータ受信部102から受信したエリアに対応するクラスIDとする。その後、コピーしたエリアスペクトルテーブル901の列は削除する。
【0084】
ステップ603の処理を行うときに、スペクトルDB109のエリアスペクトルテーブル109A内が空の時は、ステップ603を行う前に、画像解析部103内のスペクトル算出部1031にて、エリアポリゴンDB110のクラスID801と座標データ802を受信し(ステップ604)、さらに画像DB107の地理情報が付加された画像を受信し(ステップ605)、エリアスペクトルテーブル901のエリアID903とスペクトル904を更新する(ステップ606)。次に、ステップ603を行う。
【0085】
次に、エリア調査支援装置100が端末装置101から推薦経路表示の要請を受信して端末装置101へ調査員への指示を送信するまでの処理を示す。
【0086】
端末装置101は、調査員の操作入力により、エリア調査の推薦経路表示の要求をデータ受信部102へ送信する(ステップ616)。
【0087】
データ受信部102は端末装置101より、推薦経路表示の要請を受信すると、スペクトルDB108へ、トリガーを送信する(ステップ617)。
【0088】
スペクトルDB109は、データ受信部102によりトリガーを受信すると、画像解析部103のエリアクラス推定部1032に学習データとテストデータを送信する(ステップ607)。この時の学習データは、スペクトルDB109のクラススペクトルテーブル902のクラスID905とスペクトルを対応付けたものとし、テストデータはスペクトルDB109のエリアスペクトルテーブル901のエリアID903とスペクトル904を対応付けたものとする。
【0089】
画像解析部103は、スペクトルDB109より学習データとテストデータを受信すると、未調査エリアのクラス情報を推定し、エリアクラスDB108の更新を行う(ステップ608)。この時、エリアクラスDB108のテーブルのエリアごとのクラスやその信頼度、エリア内分散、クラス内分散、クラス内エリア数等は、画像解析部103のエリアクラス推定部1032で算出された値に更新される。
【0090】
エリアクラスDB108は、画像解析部103によってテーブルを更新されると、終了条件判定部104にエリアクラスDB108のテーブル内に含まれる、エリアごとに推定したクラス706や当該クラスの信頼度、エリア内分散、クラス内分散、クラス内エリア数等を送信する(ステップ609)。
【0091】
終了条件判定部104は、エリアクラスDB108より前記データを受信すると終了判定を行う。
【0092】
終了条件判定部104では、精度パラメータと効率パラメータについて、事前にエリア調査支援装置100を管理する管理者によってそれぞれ決定された閾値で処理の終了または継続を判定する。もしくは端末装置101を使用する調査員が調整したスライダー505によって算出される精度係数と効率係数を、加味した算出結果を用いて、終了、もしくは継続という判定を行う。ここでいう算出結果とは、例えば精度係数×精度パラメータ+効率係数×(1−効率パラメータ)等でもよい。
【0093】
上記の判定方法について、パラメータの具体的な例を以下に述べる。
【0094】
終了条件判定部104における精度パラメータは、前記図7Aの信頼度704、図7Bのクラス内分散707、エリア内分散705等のうち少なくとも一つのパラメータを用いて表され、終了条件判定部104における効率パラメータは、距離1003と未調査パラメータ709のうち少なくとも一つのパラメータを用いて表される。なお終了条件判定部104における精度パラメータは、前記信頼度704、クラス内分散707、エリア内分散705そのものの値を用いてもよいし、終了条件判定部104における効率パラメータは、距離1003、未調査パラメータ709そのものの値を用いてもよい。
【0095】
例えば、精度パラメータとして、未調査であるエリアの信頼度704の最小値を選び、効率パラメータとして、全てのエリアに関する未調査パラメータ709の和を選んだ場合、終了判定は、効率パラメータが1以上の時、及び精度パラメータに、精度係数と効率係数の比を掛けたものが一定の閾値以下の時に継続判定を出力し、その他の場合に終了と判定する。
【0096】
この場合、全調査が終了したとき、未調査エリアの推定に関して一定の閾値以上の精度であることと、クラス名706が不明なクラスが存在しないということを保証してくれるという効果が得られる。
【0097】
また、精度パラメータと効率パラメータを各エリアごとに定義して終了判定をしてもよい。例えば、精度パラメータとして、各エリアの信頼度704を選択し、効率パラメータとして、各エリアから最後に調査したエリアまでの距離1003と距離1003の最大値の比を選択した場合の例をあげる。精度パラメータと精度係数の積から、効率パラメータと効率係数の積を引いたパラメータをエリアごとに算出し、このパラメータをエリアごとに比較した時の最大値が一定の閾値以上である場合、終了と判定し、それ以外の場合を継続と判定してもよい。
【0098】
この場合、調査終了時に、できれば高精度な推定結果を保証したいが、移動時間が非常に大きい場合等は、現在の推定精度で良いとすると判断される効果がある。
【0099】
なお終了条件判定部104における精度パラメータ、効率パラメータは、必ずしもエリアグラフ作成部1052にて算出される精度パラメータ、効率パラメータと同一である必要はない。
【0100】
終了条件判定部104の判定が終了判定であった場合、終了条件判定部104はデータ送信部102に調査終了の情報を送信する(ステップ610)。
【0101】
終了条件判定部104の判定結果が継続であった場合、終了条件判定部104は推薦経路選択部105へエリアごとに推定したクラスや当該クラスの信頼度704、エリア内分散705、クラス内分散707、クラス内エリア数706等を推薦経路選択部105へ送信する(ステップ611)。地図DB111は、エリア間経路1001の情報を推薦経路選択部105へ送信し(ステップ612)、ポリゴンエリアDB110はエリアの座標データ802を経路選択部105へ送信する(ステップ613)。
【0102】
また、推薦経路選択部105は、推薦経路を選択し、データ送信部103へ選択した推薦経路を送信する(ステップ614)。なお出力される推薦経路のデータ形式は、経路の座標情報を並べたものである。
【0103】
データ送信部103は、終了条件判定部104より調査終了の情報を受信、または推薦経路105より推薦経路を受信すると、ネットワーク112を介して端末装置101へ調査員への指示を送信する(ステップ615)。
【0104】
図5は端末装置101の内部構成の説明図である。
【0105】
端末装置101は通信部1011、データ表示部1012、位置情報取得部1013、データ記憶部1014、操作入力部1015を備える。
【0106】
通信部1011は、ネットワーク112を介してエリア調査支援装置100と通信し、端末装置101の現在位置や推薦経路経路等の情報を送受信する。
【0107】
データ表示部1012は、端末装置101を利用する調査員に対し、位置情報取得部1013で取得した位置情報と調査地域のエリアの位置、推薦経路等を表示する。
【0108】
位置情報取得部1013は、端末装置101の現在位置をGPS(Global Positioning System)を用いて取得する。
【0109】
データ記憶部1014は、エリア調査支援システム100から受信したエリアの形状情報や推薦された経路情報等の情報を保持する。
【0110】
操作入力部1015は、端末装置101を利用する調査員がエリアを調査し、調査結果を端末装置101へ入力するときの操作部である。操作入力部1015は、Enterキーのような決定ボタンを保持し、文字や数字等を入力でき、矢印キーやマウスのようなデータ表示部のカーソルを動かすことのできる機能を含むものなら何でもよい。
【0111】
図6は端末装置101内のデータ表示部1012の画面イメージである。データ表示部1012は、端末装置101を使用する調査員がエリアIDと、当該エリアのクラス情報とを入力するテキストボックス506、507を表示する機能と、次に調査する推薦エリアと、当該推薦エリアまでの経路を画面上に表示する機能と、を備える。図6は、調査員が調査したエリアのクラス情報等を入力し、次に調査する推薦エリアまでの経路を表示した時の例である。
【0112】
テキストボックス506、507は、端末装置101を使用する調査員が調査したエリアに関する情報を入力するテキストボックスである。調査員は、入力操作部1015を通して、テキストボックス506にエリアIDを、テキストボックス507にクラス情報を入力する。
【0113】
ボタン508は、調査員が調査したエリアに関する情報をエリア調査支援装置100へ送信するボタンである。テキストボックス506、507の中に情報が入力された状態でボタン508が選択されると、図4のステップ601が行われる。もしテキストボックス506、507の中に入力された情報が不十分であったとき、例えば空欄であった場合や、テキストボックス506に存在しないIDを入力されている場合に、ボタン508が選択されても、図4のステップ601は行われない。
【0114】
ボタン509は、推薦された次に調査するエリアの位置と、当該推薦エリアまでの経路をエリア調査支援装置100に要求し、取得した情報をデータ表示部1012に表示するボタンである。ボタン509が選択されると、図4のステップ616が行われる。なおボタン508、509の選択は、操作入力部1015を通して行われる。
【0115】
図6の例において、エリア501は、調査員が調査し終わったエリアで、エリア504はエリア調査支援装置100により推薦されたエリアである。また符号512は対応するエリアのIDである。
【0116】
ノード502は調査員の現在位置である。なお現在位置の情報は位置情報取得部1013にて取得した情報を用いる。経路503はノード502からエリア504までの経路を表す。
【0117】
スライダー505は、調査を行う際に、精度重視で調査を行うか、効率重視で調査を行うかを調整する。図6の例において、スライダー505の精度と効率のバランスは、調査員本人が調整できるが、エリア調査支援装置100の管理者が事前に決めている場合もあり、調査員本人が調整できない場合もあってよい。調査員が実際に精度と効率のバランスを決定するときは、操作入力部1015を通してスライダー505を調整する。精度重視の度合いを表す精度係数と効率重視の度合いを表す効率係数は、スライダー505の位置によって決定される。精度係数、効率係数は両方0以上であり、足して1となる。スライダー505が精度重視の方に寄っている時ほど、精度係数は大きくなっていき、最終的に1となるのに対し、効率係数は小さくなっていき、最終的に0となる。またスライダー505が効率重視の方に寄っている時ほど、効率係数は大きくなっていき、最終的に1となるのに対し、精度係数は小さくなっていき、最終的に0となる。
【0118】
地図表示画面510は、調査員の現在地の近傍の地理情報を表示する画面である。調査員の現在地であるノード502と、当該ノード502の近傍の調査対象であるエリアの形状情報と、エリア調査支援装置100によって出力された経路503を表示する。なお画像DB107から画像データを受信し、エリア501、504、ノード502や経路503の下等に受信した画像データを表示してもよい。
【0119】
アイコン511は、データ表示部1012でエリア情報入力や推薦経路表示等の操作を行うために用いられるカーソルである。操作入力部1015の中の矢印キーやマウスなどを用いることにより、アイコン511はデータ表示部1012内を動くことができる。調査員が実際に操作を行うときは、505〜509の上までアイコン511を動かし、選択することで各操作を行う。
【0120】
図7A、図7BはエリアクラスDB108の説明図である。図7Aは、エリアクラスDB108を構成するエリア情報テーブル108Aを示し、図7Bは、エリアクラスDB108を構成するクラス情報テーブル108Bを示す。エリアクラスDB108には画像解析部103によって推定された、もしくは現地の調査によって得たエリアの情報701〜708が格納される。図7A、図7Bの例において、エリアクラスDB108はエリア情報テーブル108Aとクラス情報テーブル108Bの二つで構成されているが、必ずしも二つである必要はなく、701〜709の情報を格納できる形式であれば、一つ、もしくは三つ以上のテーブルでもよい。
【0121】
エリア情報テーブル108Aは、エリアID701、クラスID702、調査フラグ703、信頼度704、エリア内分散705を含むエントリで構成される。クラス情報テーブル108Bは、クラスID702、クラス名706、クラス内分散707、クラス内エリア数708、未調査パラメータ709を含むエントリで構成される。
【0122】
エリアID701は、調査対象であるエリアを識別するためのラベルである。クラスID702は、エリアのクラスを識別するためのラベルである。調査フラグ703は、各エリアについて調査済みか否かを示す情報であり、調査済みの場合は「True」が、まだ調査していないエリアについては「False」が格納される。なお調査フラグ703が「True」の時にクラスID702に格納されている情報は、実際に調査員によって調査されて格納されたものであり、「False」の時にクラスID702に格納されているものは、画像解析部103によって推定されたクラスIDである。
【0123】
信頼度704は、画像解析部103によって推定されたクラスIDが信頼できる確率を表している。例えば、クラスmの平均スペクトルをCmとし、エリア内の平均スペクトルをxとし、当該エリアの推定クラスがnであるとすると、信頼度は、
【0124】
【数1】
【0125】
という形で表すことができる。
【0126】
エリア内分散705は、同一エリア内のスペクトルのばらつきを表している。例えば、エリア内の平均スペクトルをxとし、エリア内のn番目のピクセルのスペクトルをynとし、エリア内のピクセルの総数をNとすると、エリア内分散は、
【0127】
【数2】
【0128】
と表わしてもよい。
【0129】
クラス名706は、クラスID702に対応するラベル名に当たる。例えば、農作地域の栽培作物の種類を調査する場合、水稲、大豆、小麦、等の名前を格納してもよい。また画像解析部103によって各エリアのクラス情報を推定する際、エリアによっては調査したことのないクラスIDが割り当てられる可能性もある。この場合、クラス名706は不明であるため、NULLとしてもよいし、空欄にしてもよい。
【0130】
クラス内分散707は、同一クラス内でのスペクトルのばらつきを表したものである。例えば、クラスiの平均スペクトルをとし、クラスiに割り当てられたエリア内のピクセ
ルのうち、n番目のスペクトルをSnとし、クラスi内のピクセルの総数をNとすると、
クラスiのクラス内分散は、
【0131】
【数3】
【0132】
としても良い。
【0133】
クラス内エリア数708は、未調査のエリアの中で、対応するクラスに割り当てられたエリアの数を示す。
【0134】
未調査パラメータ709は、対応するクラスのクラス名706が不明である時、上記の例で言うとクラス名706が空欄であったり、NULLが格納されている場合に「1」となり、その他の場合は「0」となるパラメータのことである。未調査パラメータ709が「1」であるときは、対応するクラスに割り当てられたエリアはまだ一つも調査していないことになる。
【0135】
図8はエリアポリゴンDB110の説明図である。エリアポリゴンDB110は、事前に用意しておいた各エリアの座標や形状に関するデータ801〜803を格納する。
【0136】
エリアID801は、調査対象であるエリアを識別するためのラベルであり、エリアクラスDB108のエリアID701と一致する。
【0137】
座標データ802は各エリアの形状を多角形としたときの、各頂点の座標を並べたものである。座標データ802に格納される座標は任意の座標系でよく、例えば世界測地系の緯度、経度を格納してもよい。
【0138】
面積803は各エリアの面積を表す。面積の単位は任意であり、例えば平方メートル等でもよい。
【0139】
図9A、図9BはスペクトルDB109の説明図である。スペクトルDB109には、画像解析部103より算出された各エリア、各クラスのスペクトルデータが格納されており、図9Aのエリアスペクトルテーブル901と図9Bのクラススペクトルテーブル902より構成される。
【0140】
エリアスペクトルテーブル901は、各エリア内のスペクトルデータが格納される。ただし、未調査のエリアについてのみのスペクトルデータである。
【0141】
エリアID903は、調査対象であるエリアを識別するためのラベルであり、エリアクラスDB108のエリアID701と一致する。
【0142】
スペクトル904は、画像解析部103より算出された各エリアのピクセルごとのスペクトルデータである。スペクトルデータは、多次元数値データである。各スペクトルデータの次元数は画像DB107に含まれる画像データのバンド数(または色チャネル数)と等しい。
【0143】
クラススペクトルテーブル902は、各クラス内のスペクトルデータが格納される。ただし、調査をしたエリアが所属するクラスについてのみのスペクトルデータである。
【0144】
クラスID905は、エリアのクラスを識別するためのラベルであり、エリアクラスDB108のクラスID702と一致する。ただし、クラススペクトルテーブル902に格納されるクラスIDは、調査済みエリアのクラスのみである。
【0145】
スペクトル906は画像解析部103より算出された各クラスのピクセルごとのスペクトルデータである。エリアスペクトルテーブル901のスペクトル904と同様、このスペクトルデータは多次元数値データであり、次元数は画像DB107に含まれる画像データのバンド数と等しい。
【0146】
図10は地図DB111の説明図である。地図DB111には事前に用意したエリア間の経路に関するデータ1001〜1004が格納される。
【0147】
エリア間経路1001は、異なるエリア間の経路を識別するものであり、二つのエリアIDをハイフンでつないで並べたものである。
【0148】
距離1003は、対応するエリア間の経路の距離である。距離の単位は任意であり、例えばメートル等でもよい。
【0149】
経路情報1004は、対応するエリア間の経路情報である。経路情報1004のデータは経路を折れ線と見なした時の各頂点の座標を順に並べた形式とする。なお各頂点の座標は、例えば、世界測地系の緯度、経度の情報でもよい。
【0150】
図11は、スペクトル算出部1031にてエリアマスキングを行うときの説明図であり、画像1101に対し、エリア1102内に含まれるピクセルを抽出する時の例である。ピクセル1103は、エリア1102近傍のピクセルの集合である。
【0151】
画像1101の四隅の位置情報を左上:(sx1、sy1)、右上:(sx2、sy1)、左下:(sx1、sy2)、右下:(sx2、sy2)とし、エリア1102の各頂点の位置情報を(x1、y1)、(x2、y2)、(x3、y3)、(x4、y4)・・・とすると、画像1101の位置座標とエリア1102の位置座標を比較することにより、画像内の各ピクセルがエリア内に含まれるか否かを調べることができる。エリア内に含まれるピクセルが、スペクトル算出部1031のエリアマスキングの出力となる。
【0152】
なおエリア1102をまたぐピクセル1104が存在することが多々ある。この場合、各々のピクセルがエリア内にどれだけ含まれるかの割合が半分以上の時は、そのピクセルをエリアマスキングの出力に加える。
【0153】
以下、エリア調査支援システムの具体的な処理の流れについて述べる。
【0154】
まず調査員がエリアの調査を開始すると同時に、調査員の持つ端末装置101は、エリアの形状情報をエリア調査支援装置100から受信し、端末装置101のデータ表示部1012には調査員の現在位置502と近傍のエリアが表示される。
【0155】
調査員は最初に適当なエリアを選んで調査する必要がある。そして選んだエリアに関して、調査員は端末装置101の操作入力部1015を操作して、エリアIDとクラス情報の調査結果を入力し、エリア調査支援装置100へ送信する(ステップ601)。調査員は、端末装置101の操作入力部1015を操作して、推薦経路表示の要求を行い(ステップ616)、推薦経路をエリア調査支援装置100から受信する(ステップ615)。受信した推薦経路は、データ表示部1012に表示される。
【0156】
その後、調査員は端末装置101が受信した推薦経路503に従い、エリア調査を行う。この時、調査員は、一つのエリアを調査する度に、端末装置101からエリア情報の入力を行う。
【0157】
調査員は、エリア情報入力と推薦経路表示を繰り返し、エリア調査を進めていく。なお端末装置101を使用する調査員は、エリア情報の入力を一回行う度に、推薦経路表示の要求を行い、推薦経路を更新してもよい。あるいは、端末装置101を使用する調査員がエリア情報の入力を複数回行った後に、推薦経路表示の要求をエリア調査支援装置100に行い、推薦経路を更新してもよい。推薦経路の更新を行いながら、エリア調査を進めていくと、精度向上のために、調査員が巡回すべきエリアが新しく出現したり、効率よく調査するために、回らなくてもよいと判断されるエリアが出現する。これによりエリア調査を精度と効率の両面を考慮しつつ、進めていくことができる。エリア調査は、エリア調査支援装置100で終了判定が行われると終了する。
【0158】
以上のように、調査員がエリアを調査する度に、調査によって取得したクラス情報と前記の画像を用いて、エリア調査支援装置100は残りのエリアの属性情報を推定する。さらに、この推定結果を用いて、エリア調査支援装置100は、精度が高く、かつ効率的に調査できるようなエリアの巡回経路を調査員に指示することで、全てのエリアを調査せずとも、終了条件を満たせば、調査を終了することがえきる。このように、予め学習データを用意する必要はなく、エリア調査の際に調査員に調査するエリアを指示することにより、調査エリア数や移動距離をできる限り少なくしつつ、精度よく未調査のエリア情報を推定することができる。また調査の効率面と精度面の何れを重視するかを端末装置101を利用するユーザ側で決定することができる。
【0159】
<第2の実施形態>
以下、本発明の第2の実施形態について図面を参照して説明する。
【0160】
本発明の第1の実施形態では、端末装置101を使用する調査員がエリア調査支援装置100に推薦されたエリアのみを調査する場合についてのエリア調査支援システムを示した。この第1実施形態の場合、各エリアの調査に時間がかかることを想定している。したがって効率的な調査のために、短時間で、より多くの情報量を取得できるようなエリアのみを巡回し、その他のエリアは調査しても、あまり多くの情報量を取得できないため、時間が無駄になると考え、できる限り調査しないという方針に基づく処理が、推薦経路選択部105に含まれている。
【0161】
第1の実施形態に対して、第2の実施形態では、推薦されたエリアへ移動する間に、経路に隣接するエリアも調査する場合についてのエリア調査支援システムを示す。この場合、各エリアの調査にほとんど時間を費やさない状況を想定し、推定されたクラス情報の精度を向上させるため、推薦されたエリアへ向かう途中に通るエリアも調査するという考え方に基づく。エリア調査にあまり時間を費やさない場合として、例えば、各エリアで栽培されている農作物の種類を調査する場合等が考えられる。
【0162】
第2の実施形態は、地図DB111に格納される情報と、推薦経路選択部105で行われる処理以外は、第1の実施形態と同じである。具体的には、図1〜図9B、図11、図16、図18は第2の実施形態でも適用される。以下、第2の実施形態について、第1の実施形態と異なる点のみを説明する。
【0163】
図12は本発明の第2の実施形態における地図DB111の説明図である。
【0164】
エリア間経路1301、距離1303、経路情報1304はそれぞれ、第1の実施形態のエリア間経路1001、距離1003、経路情報1004と同じである。
【0165】
経路中エリア数1302は、対応するエリア間の経路中で、経路に隣接するエリアのうち、まだ調査していないエリアの数である。
【0166】
図13は本発明の第2の実施形態における推薦経路選択部105のブロック図である。
【0167】
第2の実施形態の推薦経路選択部105は、エリアクラス再分類部1401とエリアグラフ作成部1402と最適経路探索部1403と経路隣接エリアカウント部1404、を備える。エリアクラス再分類部1401と最適経路探索部1403は、それぞれ第1の実施形態のエリア再分類部1051と最適経路探索部1053と同じである。推薦経路選択部105の内部処理の中で、第1の実施形態と異なる点は、エリアクラス再分類部1401にて処理を行った後、経路隣接エリアカウント部1404が地図DB111の更新を行う点と、エリアグラフ作成部1402の処理内容である。
【0168】
経路隣接エリアカウント部1404は、エリアクラス再分類部1401とエリアクラスDB108と地図DB111と通信する。経路隣接エリアカウント部1404は、エリアクラス再分類部1401の処理が終了すると、地図DB111内に含まれる全てのエリア間経路1301の中で、対応する経路と隣接するエリアを、経路情報1304とエリアポリゴンDB110内の座標データ802を用いることにより検索する。経路隣接エリアカウント部1404は、経路に隣接するエリアの中で対応する調査フラグ703が「False」となっているエリアの数をカウントし、地図DB111の経路中エリア数1302をカウントした値に更新する。経路中エリア数1302のカウントのことを、以後、未調査エリアカウントと記載する。なお未調査エリアカウントの詳細については、後述する。
【0169】
エリアグラフ作成部1402で、第1の実施形態と異なる点は、効率パラメータの算出に用いるパラメータの種類である。第1の実施形態では、効率パラメータは地図DB111に格納される距離1003と、未調査パラメータ709と、を用いて算出されるパラメータである。それに対し、第2の実施形態では、効率パラメータの算出に経路中エリア数1302を用いる。
【0170】
第2の実施形態では、効率パラメータは、例えば距離1303と経路中エリア数1302の比でもよい。この場合、エリアからエリアへ移動する時の距離が多少大きくても、移動途中にて、ついでに他のエリアも調査することができる。第2の実施形態では、エリアの調査に時間がかからず、エリア間の移動にのみ時間がかかる場合を想定しているため、短時間でより多くの情報を得ることができ、効率的な調査をすることができる。
【0171】
図14は経路隣接エリアカウント部1404にて行われる未調査エリアカウントに関しての説明図である。
【0172】
道1205は、調査員の移動手段で通行可能な道を表す。経路1206は、エリア1201、1203を結ぶ経路の中で距離が最短となる経路である。図14は、エリア1201とエリア1203の間の経路に隣接するエリアをカウントする例である。
【0173】
ここで経路1206とエリアの外周を結ぶ線分の中で、長さが最小となるような線分について、当該線分の長さが予め設定した閾値以下であり、当該線分上に他のエリアが存在しない場合、当該線分で雪像されるエリアは経路1206に隣接する、と定義する。
【0174】
未調査エリアカウントは、エリアポリゴンDB110に格納される全てのエリアに対し、経路1206に隣接しているかを調べ、隣接しているエリアの中で、対応する調査フラグ703が「False」となるエリア1207をカウントする。
【0175】
端末装置101を利用する調査員は、経路1206に隣接する未調査のエリア1207についても端末装置101から情報を得ることができ、当該隣接するエリア1207のクラス情報の調査も実施することが可能となる。
【0176】
図20は、推薦経路選択部105で行われる処理の一例を示すフローチャートである。まず、ステップS11で、推薦経路選択部105は、地図DB111内に含まれる全てのエリア間経路1301で、各経路に隣接するエリアを経路情報1304とエリアポリゴンDB110内の座標データ802から検索する。そして、推薦経路選択部105は、経路に隣接するエリアについて上述の未調査エリアカウントを算出する。未調査エリアカウントの値は、地図DB111の経路中エリア数1302に格納される。
【0177】
ステップS12では、推薦経路選択部105が、前記第1実施形態と同様に、画像解析部103のエリアの分類結果を、信頼度、エリア内分散、クラス内分散、クラス内エリア数等の値から再分類する。そして、ステップS13では、この再分類の結果に信頼度、エリア内分散、クラス内分散及び経路中エリア数1302からコスト付きのエリアグラフを複数算出する。
【0178】
ステップS14で、推薦経路選択部105は、複数のエリアグラフの中から最もコストが小さい経路を算出し、端末装置101に送信する。
【0179】
以上の処理によって、端末装置101には、調査対象のエリアの推薦経路に加え、経路に隣接するエリアも表示される。これにより、端末装置101を利用する調査員は、調査対象のエリアに加えて、推薦される経路に隣接するエリア1207の調査も行うことが可能となる。
【0180】
<第3の実施形態>
以下、本発明の第3の実施形態について図面を参照して説明する。
【0181】
本発明の第1の実施形態では、エリアの調査を行う際、一人の調査員が一つの端末装置101を用いて調査する場合のエリア調査支援装置システムについて示した。それに対し、本発明の第3の実施形態では、二つ以上の端末装置101を用いて複数の調査員がエリアを調査する場合のエリア調査支援装置システムについて説明する。なお以下では、複数の端末装置101を識別するため、端末装置101にIDを設け、装置1、装置2、・・・と記載して、識別する。
【0182】
第3の実施形態は、推薦経路選択部105で行われる処理以外は、第1の実施形態と同じである。具体的には図1〜図2、図4〜11、図18は第3の実施形態でも適用される。以下、第3の実施形態について、第1の実施形態と異なる点のみを説明する。
【0183】
図15は、本発明の第3の実施形態における推薦経路選択部105のブロック図である。推薦経路選択部105は、現地調査に用いられている複数の端末装置101に対し、それぞれ別々の推薦経路を出力する。推薦経路選択部105は、エリアクラス再分類部1501と巡回クラス割当部1502とエリアグラフ作成部1503と最適経路探索部1504と、を備える。エリアクラス再分類部1501は、第1の実施形態のエリアクラス再分類部1051と同じである。
【0184】
巡回クラス割当部1502は、エリアクラスDB108とエリアグラフ作成部1503と通信する。巡回クラス割当部1502では、エリアクラスDB108内に格納される全てのクラスIDを複数の端末装置101(複数の調査員)へ割り当てる処理が行われる。この時、全ての組み合わせの割当をエリアグラフ作成部1503へ送信する。
【0185】
例えば、エリアクラスDB108内に格納されるクラスIDがA、B、Cの3種類ある場合を考える。端末装置101の数が二つで、それぞれ装置1、装置2とすると、{装置1:(A、B)、装置2:(C)}、{装置1:(A)、装置2:(B、C)}、{装置1:(A、C)、装置2:(B)}、{装置1:(B、C)、装置2:(A)}、{装置1:(B)、装置2:(A、C)}、{装置1:(C)、装置2:(A、B)}の6通りの割当をエリアグラフ作成部1503へ送信する。
【0186】
以後、上記割当のことをクラス割当と記載する。なお{装置1:(A、B)、装置2:(C)}は、装置1にクラスA、Bが割り当てられ、装置2にクラスCが割り当てられていることを表す。
【0187】
エリアグラフ作成部1503は、エリアクラス再分類部1501と巡回クラス割当部1502とエリアクラスDB108とエリアポリゴンDB110と地図DB111と通信する。
【0188】
エリアグラフ作成部1503は、エリアクラス再分類部1501からエリアIDと再分類により得られたクラスIDの組を受信し、巡回クラス割当部1502から全通りのクラス割当を受信すると、それぞれのクラス割当に関して、各端末装置101に対応するコスト付きグラフを複数作成し、それぞれのグラフに、対応する端末装置101と、対応するクラス割当を関連付けて最適経路探索部1504へ送信する。例えば、上記の巡回クラス割当部1502の例の場合、6通りそれぞれのクラス割当に関して、装置1と装置2のグラフを複数作成し、それぞれのグラフに各ノード、エッジにコストを設けて作成された各グラフに対し、対応するクラス割当と、対応する端末装置101を関連付けた組を最適経路探索部1504へ送信する。各ノード、エッジに設けるコストは第1の実施形態と同じである。エリアグラフ作成部1503の内部で行われるグラフ作成の方法については、後述する。
【0189】
最適経路探索部1504は、エリアグラフ作成部1503とデータ送信部106と通信する。最適経路探索部1504は、エリアグラフ作成部1503より複数のグラフと対応するクラス割当、端末装置101を受信すると、各端末装置101に対し、推薦経路を出力する。
【0190】
具体的には、まず最適経路探索部1504は、エリアグラフ作成部1503より複数のグラフを受信すると、巡回クラス割当部1502で出力されたそれぞれのクラス割当に対し、各端末装置101のコスト最小の経路を求める。その後、各クラス割当に関して、複数の端末装置101の中でコスト最小の経路を求め、この最小のコストの中から最大値を求める。そして、最適経路探索部1504は、この最大値が各クラス割当の中で最小となるクラス割当を選択する。そして当該クラス割当に対応する、各端末装置101のコスト最小経路をデータ送信部106へ送信する。この際、コスト最小の経路は、周知または公知の効率的なアルゴリズムを用いて求めてもよいし、全ての組み合わせのコストを計算することにより求めてもよい。
【0191】
図17は、前記巡回クラス割当部1502の例に関して、クラス割当が{装置1:(A、B)、装置2:(C)}となる場合についてのグラフ作成例の説明図である。
【0192】
以下、エリアグラフ作成部1503の内部で行われるそれぞれの割当に関してのエリアグラフ作成について、図17を例にあげて詳細を述べる。
【0193】
ノード1701、1703は、グラフのスタート点を表す。ノード1701は、装置1を用いる調査員が最後に調査したエリアが選択され、ノード1703は、装置2を用いる調査員が最後に調査したエリアが選択される。エッジ1702は、エリア間を結ぶ経路である。
【0194】
各端末装置101に関するグラフの作成時、エリアグラフ作成部1503は、グラフのスタート点となるノード以外の全てのノードに、各端末装置101に割り当てられた全ての再分類クラスが一回ずつ表れるようなエリアを選択する。図17の例において、装置1に割り当てられた再分類クラスはA、A’、B、B’の4種類であり、スタート点以外のノードは、再分類クラスAのエリア2、再分類クラスA’のエリア6、再分類クラスBのエリア7、再分類クラスB’のエリア11が選択されている。
【0195】
同様に、図17の例において、装置2に割り当てられた再分類クラスはC、C’の2種類であり、スタート点以外のノードは、再分類クラスCのエリア13、再分類クラスC’のエリア18が選択されている。このようなエリアの選び方を全通り行い、全通り分のグラフを作成する。図17の例において、装置1に関するグラフは3の4乗通り存在し、装置2に関するグラフは3の2乗通り存在する。
【0196】
このクラス割当による効果を以下に述べる。本発明では、調査員がエリアに関する調査を続け、調査によって得た情報を端末装置101から入力することにより、学習データが増え、エリアクラス推定部1032で行われるエリアの推定精度が向上することを期待している。もちろん前記信頼度704、クラス内分散707、エリア内分散705等の推定の妥当性を表す指標は、調査する度に更新されていく。これにより、ある端末装置101を使用する調査員がエリア調査を行った後、推薦経路表示を行うと、それまでは巡回エリアとして選ばれていたエリアに行かなくてもよいと指示される可能性がある。この場合、もし別の端末装置101が当該行かなくてもよいと指示されたエリアに向かっていた場合、無駄が生じることとなるため、このような無駄を避ける効果がある。
【0197】
クラス割当による効果の具体的な例を以下に述べる。装置1に指示されたエリアの行き先が(再分類クラスBのエリア7→再分類クラスAのエリア2→再分類クラスCのエリア13)という順で表示されており、装置2に指示されたエリアの行き先が(再分類クラスA’のエリア6→再分類クラスB’のエリア11→再分類クラスC’のエリア18)という順で表示されている例を考える。
【0198】
装置2の調査員がA’のエリア6を調査した後、もし装置1の調査員がAのエリア2を調査することにより、実はA’のエリア6は調査しなくてよかったと判断されると、装置2の調査員は無駄にエリアを調査したということになる。それに比べ、同一クラスでも再分類クラスは異なっているエリアを、できるだけ一人の調査員で巡回することにより、この無駄を回避することができる。例えば装置1の調査員は、(再分類クラスAのエリア2→再分類クラスA’のエリア6→再分類クラスBのエリア7→再分類クラスB’のエリア11)と巡回し、装置2の調査員は、(再分類クラスCのエリア13→再分類クラスC’のエリア18)と巡回する。これにより、複数の端末装置101の間での巡回エリアの更新の影響を抑えつつ、より効率的に巡回エリアを選択することができる。
【0199】
図21は、第3実施形態の推薦経路選択部105で行われる処理の一例を示すフローチャートである。
【0200】
まず、ステップS21で、推薦経路選択部105は、画像解析部103の調査対象エリアの分類結果を、信頼度、エリア内分散、クラス内分散、クラス内エリア数等の値から再分類する。
【0201】
次に、ステップS22で、推薦経路選択部105は、複数の端末装置101(または調査員)にクラスを割り当てる。このクラスの割り当ては、この処理では、各端末装置101に複数のクラスを割り当てることができるが、ひとつのクラスを複数の端末装置101に分けて割り当てない。
【0202】
ステップS23では、上記ステップS21の再分類の結果、各エリアのクラスの信頼度や分散等を加味して、推薦経路選択部105がコスト付きのエリアグラフを複数算出する。そして、ステップS24で、推薦経路選択部105は、端末装置101毎にそれぞれのクラス割り当ての中からコストが最小となる経路を選択する。
【0203】
ステップS25で、推薦経路選択部105は、複数のクラス割り当ての中で、複数の端末装置101(調査員)間で最小のコストを比較して、最小のコストの中の最大値を選択する。そして、ステップS26では、推薦経路選択部105はステップS25で選択されたコストの最大値を、クラス割り当て間で比較して最大値が最小となるクラス割り当てを選択し、各端末装置101に推薦経路として送信する。
【0204】
いま、図22で示すように、端末装置101の内、装置1にクラスID=A,Bのエリアを割り当て、装置2にクラスID=Cのエリアを割り当てるクラス割り当てパターンXと、装置1にクラスID=Aのエリアを割り当て、装置2にクラスID=B、Cのエリアを割り当てるクラス割り当てパターンYを比較する例を示す。
【0205】
まず、推薦経路選択部105は、クラス割り当てパターンXで、装置1と装置2でコストの最小値を演算し、装置1のクラス割り当て(A、B)の最小コストが10、装置2のクラス割り当て(C)でコストの最小値が7を演算する。
【0206】
同様に、推薦経路選択部105は、クラス割り当てパターンYで、装置1と装置2でコストの最小値を演算し、装置1のクラス割り当て(A)の最小コストが8、装置2のクラス割り当て(B,C)でコストの最小値が6を演算する。
【0207】
次に、推薦経路選択部105は、クラス割り当てパターンXの各装置1、2の最小コストの中から最大値を選択し、装置1の最小コストの最大値=10を得る。同様に、クラス割り当てパターンYの各装置1、2の最小コストの中から最大値を選択し、装置1の最小コストの最大値=8を得る。
【0208】
推薦経路選択部105は、クラス割り当てパターンXの最大値10と、クラス割り当てパターンYの最大値8を比較し、最大値が最小(8)となるクラス割り当てパターンYを推薦経路として選択する。したがって、エリア調査支援装置100は装置1にクラス割り当てAを送信し、装置2にクラス割り当てB、Cを送信することになる。
【0209】
上記処理より、複数の端末装置101を用いて複数の調査員がエリア調査を行う場合には、全てのコストが最小となるクラス割り当てを演算することができる。
【産業上の利用可能性】
【0210】
以上のように、本発明は、地図情報にクラス情報を入力する端末装置へ、最適な巡回経路を送信するエリア調査支援装置とを備えたエリア調査支援システム及びエリア調査支援方法に適用することができる。
【符号の説明】
【0211】
100 エリア調査支援装置
101 端末装置
102 データ受信部
103 画像解析部
104 終了条件判定部
105 推薦経路選択部
106 データ送信部
107 画像DB
108 エリアクラスDB
109 スペクトルDB
110 エリアポリゴンDB
111 地図DB
112 ネットワーク
1031 スペクトル算出部
1032 エリアクラス推定部
1051 エリアクラス再分類部
1052 エリアグラフ作成部
1053 最適経路探索部
1011 通信部
1012 データ表示部
1013 位置情報取得部
1014 データ記憶部
1015 操作入力部
1811 プロセッサ
1812 メインメモリ
1830 通信部
1840 操作部
1850 表示部
1860 記憶装置
【特許請求の範囲】
【請求項1】
ネットワークに接続される端末装置と、前記ネットワークに接続されるエリア調査支援装置と、を備えるエリア調査支援システムであって、
前記端末装置は、
前記ネットワークに接続される通信部と、情報を入力する入力操作部と、情報を出力するデータ表示部と、位置情報を取得する位置情報取得部と、を備え、
前記エリア調査支援装置は、
前記端末装置から、同一属性情報を持つと想定される空間的に連続した区域であるエリアの調査情報と位置情報を受け付けるデータ受信部と、
前記エリアの調査情報と位置情報から、予め格納した画像データベースから未調査のエリアの画像データを取得して、前記調査情報と画像データを入力として、前記未調査のエリアの属性情報を推定し、当該推定した属性情報の妥当性を示す精度パラメータを算出する画像解析部と、
前記データ受信部で前記端末装置から推薦経路の要求を受け付けたときには、前記画像解析部で推定した属性情報と、前記算出された精度パラメータと、前記エリアの形状情報及び位置情報と、を取得して調査の推薦経路を演算する推薦経路選択部と、
前記画像解析部で推定した属性情報と前記精度パラメータを取得して、前記調査を終了するか否かを判定する終了条件判定部と、
前記終了条件判定部が、前記調査の終了を判定したときには調査終了の信号を前記端末装置へ送信し、前記終了条件判定部が、前記調査の継続を判定したときには、前記推薦経路を前記端末装置へ送信するデータ送信部と、
を備え、
前記推薦経路選択部は、
前記属性情報の推定精度と正の相関を持つ一つ以上の精度パラメータと、前記調査によって得られる情報量と当該調査に必要な時間の比と正の相関を持つ一つ以上の効率パラメータと、からコストを付加した経路を生成するエリアグラフ作成部と、
前記エリアグラフ作成部にて生成した経路のうち、前記コストが最小の経路を探索する最適経路探索部と、
を備えることを特徴とするエリア調査支援システム。
【請求項2】
請求項1に記載のエリア調査支援システムであって、
前記端末装置は、
調査終了時の推定精度に正の相関を持つ第1の係数と、一定時間の調査により得られる情報量と正の相関を持つ第2の係数と、を決定して前記データ受信部へ送信し、
前記終了条件判定部は、
前記精度パラメータと、前記効率パラメータと、前記第1の係数と、前記第2の係数が所定の条件を満たしたときに、調査の終了を判定することを特徴とするエリア調査支援システム。
【請求項3】
請求項1に記載のエリア調査支援システムであって、
前記推薦経路選択部は、
前記画像解析部で推定した属性情報及び前記算出した精度パラメータに基づいて前記エリアの属性情報を再度推定するエリアクラス再分類部と、
を備え、
前記エリアグラフ作成部は、
前記エリアクラス再分類部にて推定された属性情報と、前記一つ以上の精度パラメータと前記一つ以上の効率パラメータとから推薦経路を出力することを特徴とするエリア調査支援システム。
【請求項4】
請求項1に記載のエリア調査支援システムであって、
前記推薦経路選択部は、
前記エリア間を結ぶ経路に隣接する未調査のエリアの数をカウントする隣接エリアカウント部と、
を備え、
前記効率パラメータの算出に前記未調査のエリアの数を用いることを特徴とするエリア調査支援システム。
【請求項5】
請求項3に記載のエリア調査支援システムであって、
前記端末装置を複数備え、
前記推薦経路選択部は、
前記精度パラメータを用いることにより、優先的に調査するエリアを複数の前記端末装置で分担する巡回クラス割当部と、
を備えることを特徴とするエリア調査支援システム。
【請求項6】
請求項1に記載のエリア調査支援システムであって、
前記精度パラメータは、
前記推定した属性情報が正しい確率である信頼度と、
前記推定した属性情報の分散と、
前記推定したエリア内の分散と、
前記推定した属性情報を保持するエリアの数と、
のうち少なくとも一つを含むことを特徴とするエリア調査支援システム。
【請求項7】
請求項1に記載のエリア調査支援システムであって、
前記精度パラメータは、
前記推定した属性情報が正しい確率である信頼度と、
前記推定した属性情報の分散と、
前記推定したエリア内の分散と、
前記エリアの面積と、
前記推定した属性情報を保持するエリアの数と、
のうちのいずれかであるか、またはこれらのうちの少なくとも一つを用いて算出されることを特徴とするエリア調査支援システム。
【請求項8】
請求項1に記載のエリア調査支援システムであって、
前記効率パラメータは、
前記エリア間の移動にかかる時間と、
前記エリアの推定した属性情報が、一度でも調査した属性情報であったときに0を、それ以外の時に1を返すパラメータと、
前記エリア間を結ぶ最短経路に隣接する未調査のエリアの数と、
のうちのいずれかであるか、またはこれらのうちの少なくとも一つを用いて算出されることを特徴とするエリア調査支援システム。
【請求項9】
ネットワークに接続された端末装置とエリア調査支援装置を備えて、前記エリア調査支援装置が端末装置に推薦経路を送信するエリア調査支援方法であって、
前記エリア調査支援装置が、同一属性情報を持つと想定される空間的に連続した区域であるエリアの調査情報と位置情報を前記端末装置から受け付ける第1のステップと、
前記エリア調査支援装置が、前記エリアの調査情報と位置情報から、予め格納した画像データベースから未調査のエリアの画像データを取得して、前記調査情報と画像データを入力として、未調査のエリアの属性情報を推定し、当該推定した属性情報の妥当性を示す精度パラメータを算出する第2のステップと、
前記エリア調査支援装置が、前記端末装置から推薦経路の要求を受け付けたときには、前記推定した属性情報と、前記算出された精度パラメータと、前記エリアの形状情報及び位置情報と、を取得して調査の推薦経路を演算して送信する第3のステップと、
を含み、
前記第3のステップは、
前記属性情報の推定精度と正の相関を持つ一つ以上の精度パラメータと、前記調査によって得られる情報量と当該調査に必要な時間の比と正の相関を持つ一つ以上の効率パラメータと、からコストを付加した経路を生成する第4のステップと、
前記生成した経路のうち、前記コストが最小の経路を探索する第5のステップと、
を含むことを特徴とするエリア調査支援方法。
【請求項10】
プロセッサとメモリを備えて推薦経路を送信するエリア調査支援装置であって、
前記エリア調査支援装置は、
同一属性情報を持つと想定される空間的に連続した区域であるエリアの調査情報と位置情報を受け付けるデータ受信部と、
前記エリアの調査情報と位置情報から、予め格納した画像データベースから未調査のエリアの画像データを取得して、前記調査情報と画像データを入力として、前記未調査のエリアの属性情報を推定し、当該推定した属性情報の妥当性を示す精度パラメータを算出する画像解析部と、
前記データ受信部が推薦経路の要求を受け付けたときには、前記画像解析部で推定した属性情報と、前記算出された精度パラメータと、前記エリアの形状情報及び位置情報と、を取得して調査の推薦経路を演算する推薦経路選択部と、
前記推薦経路を送信するデータ送信部と、
を備え、
前記推薦経路選択部は、
前記属性情報の推定精度と正の相関を持つ一つ以上の精度パラメータと、前記調査によって得られる情報量と当該調査に必要な時間の比と正の相関を持つ一つ以上の効率パラメータと、からコストを付加した経路を生成するエリアグラフ作成部と、
前記エリアグラフ作成部にて生成した経路のうち、前記コストが最小の経路を探索する最適経路探索部と、
を備えることを特徴とするエリア調査支援装置。
【請求項1】
ネットワークに接続される端末装置と、前記ネットワークに接続されるエリア調査支援装置と、を備えるエリア調査支援システムであって、
前記端末装置は、
前記ネットワークに接続される通信部と、情報を入力する入力操作部と、情報を出力するデータ表示部と、位置情報を取得する位置情報取得部と、を備え、
前記エリア調査支援装置は、
前記端末装置から、同一属性情報を持つと想定される空間的に連続した区域であるエリアの調査情報と位置情報を受け付けるデータ受信部と、
前記エリアの調査情報と位置情報から、予め格納した画像データベースから未調査のエリアの画像データを取得して、前記調査情報と画像データを入力として、前記未調査のエリアの属性情報を推定し、当該推定した属性情報の妥当性を示す精度パラメータを算出する画像解析部と、
前記データ受信部で前記端末装置から推薦経路の要求を受け付けたときには、前記画像解析部で推定した属性情報と、前記算出された精度パラメータと、前記エリアの形状情報及び位置情報と、を取得して調査の推薦経路を演算する推薦経路選択部と、
前記画像解析部で推定した属性情報と前記精度パラメータを取得して、前記調査を終了するか否かを判定する終了条件判定部と、
前記終了条件判定部が、前記調査の終了を判定したときには調査終了の信号を前記端末装置へ送信し、前記終了条件判定部が、前記調査の継続を判定したときには、前記推薦経路を前記端末装置へ送信するデータ送信部と、
を備え、
前記推薦経路選択部は、
前記属性情報の推定精度と正の相関を持つ一つ以上の精度パラメータと、前記調査によって得られる情報量と当該調査に必要な時間の比と正の相関を持つ一つ以上の効率パラメータと、からコストを付加した経路を生成するエリアグラフ作成部と、
前記エリアグラフ作成部にて生成した経路のうち、前記コストが最小の経路を探索する最適経路探索部と、
を備えることを特徴とするエリア調査支援システム。
【請求項2】
請求項1に記載のエリア調査支援システムであって、
前記端末装置は、
調査終了時の推定精度に正の相関を持つ第1の係数と、一定時間の調査により得られる情報量と正の相関を持つ第2の係数と、を決定して前記データ受信部へ送信し、
前記終了条件判定部は、
前記精度パラメータと、前記効率パラメータと、前記第1の係数と、前記第2の係数が所定の条件を満たしたときに、調査の終了を判定することを特徴とするエリア調査支援システム。
【請求項3】
請求項1に記載のエリア調査支援システムであって、
前記推薦経路選択部は、
前記画像解析部で推定した属性情報及び前記算出した精度パラメータに基づいて前記エリアの属性情報を再度推定するエリアクラス再分類部と、
を備え、
前記エリアグラフ作成部は、
前記エリアクラス再分類部にて推定された属性情報と、前記一つ以上の精度パラメータと前記一つ以上の効率パラメータとから推薦経路を出力することを特徴とするエリア調査支援システム。
【請求項4】
請求項1に記載のエリア調査支援システムであって、
前記推薦経路選択部は、
前記エリア間を結ぶ経路に隣接する未調査のエリアの数をカウントする隣接エリアカウント部と、
を備え、
前記効率パラメータの算出に前記未調査のエリアの数を用いることを特徴とするエリア調査支援システム。
【請求項5】
請求項3に記載のエリア調査支援システムであって、
前記端末装置を複数備え、
前記推薦経路選択部は、
前記精度パラメータを用いることにより、優先的に調査するエリアを複数の前記端末装置で分担する巡回クラス割当部と、
を備えることを特徴とするエリア調査支援システム。
【請求項6】
請求項1に記載のエリア調査支援システムであって、
前記精度パラメータは、
前記推定した属性情報が正しい確率である信頼度と、
前記推定した属性情報の分散と、
前記推定したエリア内の分散と、
前記推定した属性情報を保持するエリアの数と、
のうち少なくとも一つを含むことを特徴とするエリア調査支援システム。
【請求項7】
請求項1に記載のエリア調査支援システムであって、
前記精度パラメータは、
前記推定した属性情報が正しい確率である信頼度と、
前記推定した属性情報の分散と、
前記推定したエリア内の分散と、
前記エリアの面積と、
前記推定した属性情報を保持するエリアの数と、
のうちのいずれかであるか、またはこれらのうちの少なくとも一つを用いて算出されることを特徴とするエリア調査支援システム。
【請求項8】
請求項1に記載のエリア調査支援システムであって、
前記効率パラメータは、
前記エリア間の移動にかかる時間と、
前記エリアの推定した属性情報が、一度でも調査した属性情報であったときに0を、それ以外の時に1を返すパラメータと、
前記エリア間を結ぶ最短経路に隣接する未調査のエリアの数と、
のうちのいずれかであるか、またはこれらのうちの少なくとも一つを用いて算出されることを特徴とするエリア調査支援システム。
【請求項9】
ネットワークに接続された端末装置とエリア調査支援装置を備えて、前記エリア調査支援装置が端末装置に推薦経路を送信するエリア調査支援方法であって、
前記エリア調査支援装置が、同一属性情報を持つと想定される空間的に連続した区域であるエリアの調査情報と位置情報を前記端末装置から受け付ける第1のステップと、
前記エリア調査支援装置が、前記エリアの調査情報と位置情報から、予め格納した画像データベースから未調査のエリアの画像データを取得して、前記調査情報と画像データを入力として、未調査のエリアの属性情報を推定し、当該推定した属性情報の妥当性を示す精度パラメータを算出する第2のステップと、
前記エリア調査支援装置が、前記端末装置から推薦経路の要求を受け付けたときには、前記推定した属性情報と、前記算出された精度パラメータと、前記エリアの形状情報及び位置情報と、を取得して調査の推薦経路を演算して送信する第3のステップと、
を含み、
前記第3のステップは、
前記属性情報の推定精度と正の相関を持つ一つ以上の精度パラメータと、前記調査によって得られる情報量と当該調査に必要な時間の比と正の相関を持つ一つ以上の効率パラメータと、からコストを付加した経路を生成する第4のステップと、
前記生成した経路のうち、前記コストが最小の経路を探索する第5のステップと、
を含むことを特徴とするエリア調査支援方法。
【請求項10】
プロセッサとメモリを備えて推薦経路を送信するエリア調査支援装置であって、
前記エリア調査支援装置は、
同一属性情報を持つと想定される空間的に連続した区域であるエリアの調査情報と位置情報を受け付けるデータ受信部と、
前記エリアの調査情報と位置情報から、予め格納した画像データベースから未調査のエリアの画像データを取得して、前記調査情報と画像データを入力として、前記未調査のエリアの属性情報を推定し、当該推定した属性情報の妥当性を示す精度パラメータを算出する画像解析部と、
前記データ受信部が推薦経路の要求を受け付けたときには、前記画像解析部で推定した属性情報と、前記算出された精度パラメータと、前記エリアの形状情報及び位置情報と、を取得して調査の推薦経路を演算する推薦経路選択部と、
前記推薦経路を送信するデータ送信部と、
を備え、
前記推薦経路選択部は、
前記属性情報の推定精度と正の相関を持つ一つ以上の精度パラメータと、前記調査によって得られる情報量と当該調査に必要な時間の比と正の相関を持つ一つ以上の効率パラメータと、からコストを付加した経路を生成するエリアグラフ作成部と、
前記エリアグラフ作成部にて生成した経路のうち、前記コストが最小の経路を探索する最適経路探索部と、
を備えることを特徴とするエリア調査支援装置。
【図1】

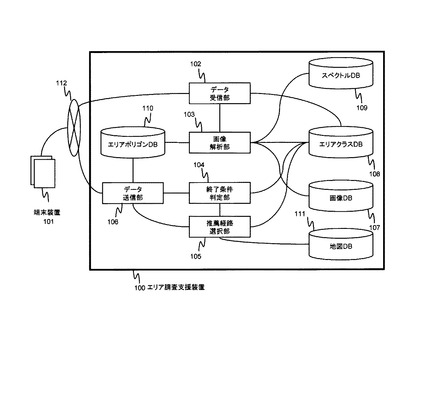
【図2】

【図3】
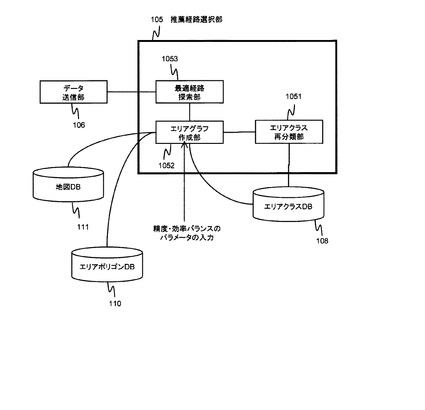
【図4】
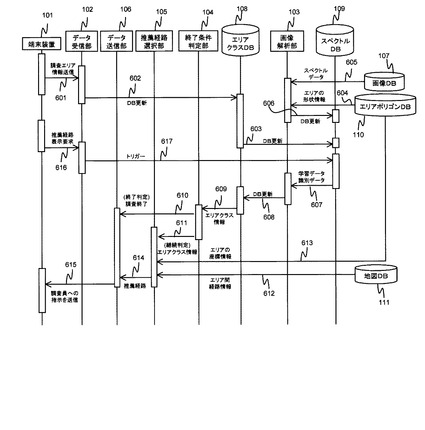
【図5】
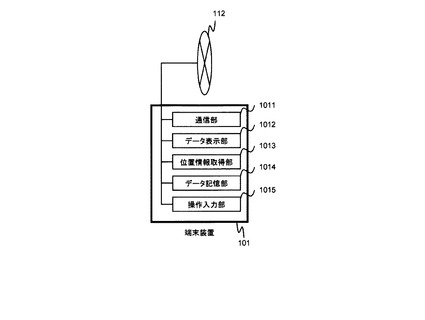
【図6】
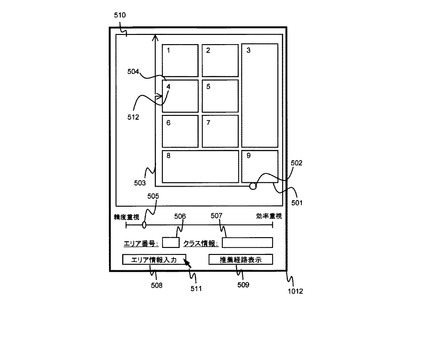
【図7A】
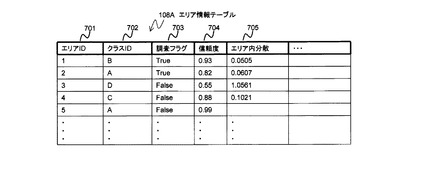
【図7B】
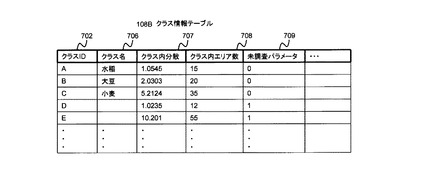
【図8】

【図9A】
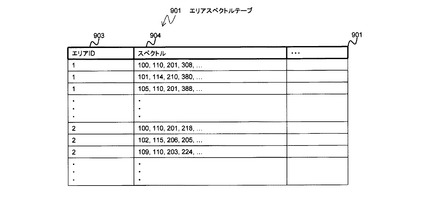
【図9B】
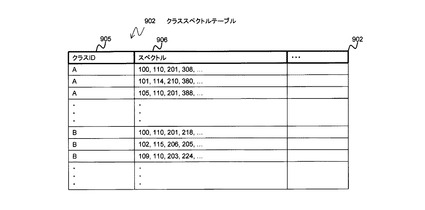
【図10】

【図12】

【図13】
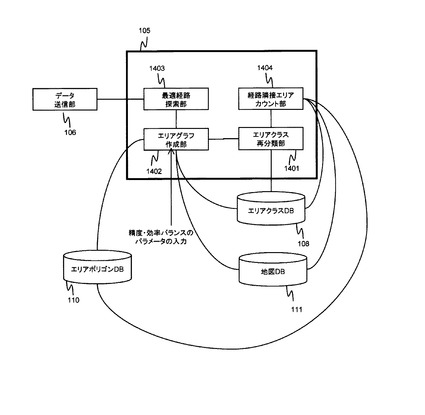
【図14】
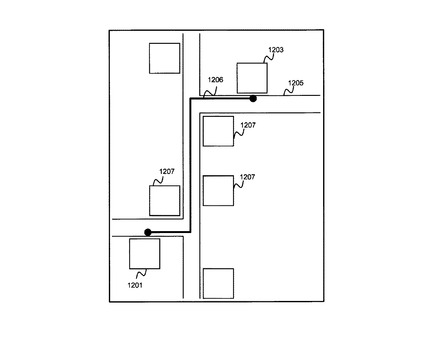
【図15】
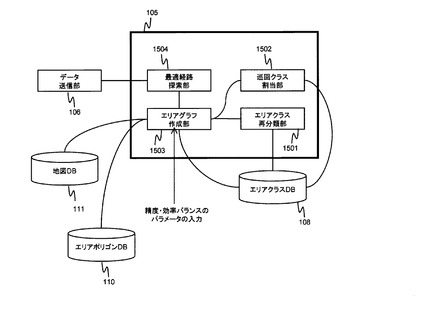
【図16】
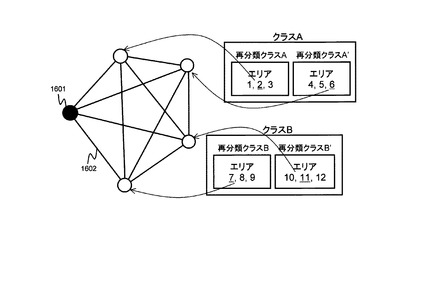
【図17】
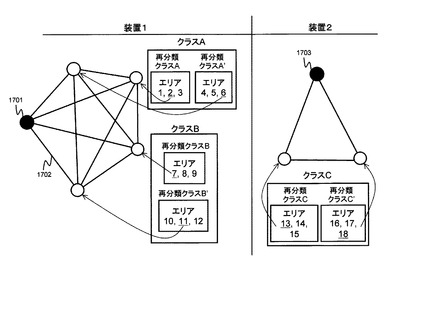
【図18】
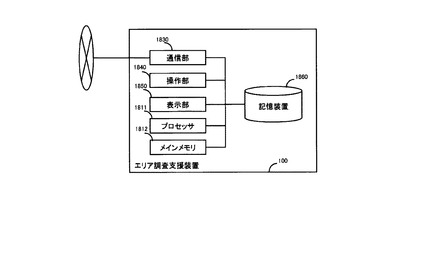
【図19】
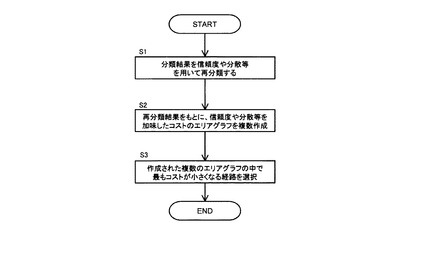
【図20】
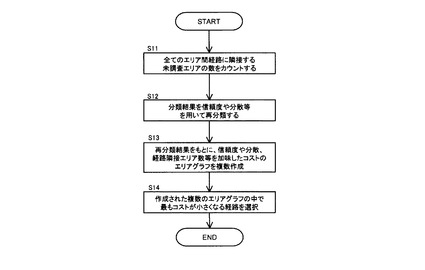
【図21】

【図22】
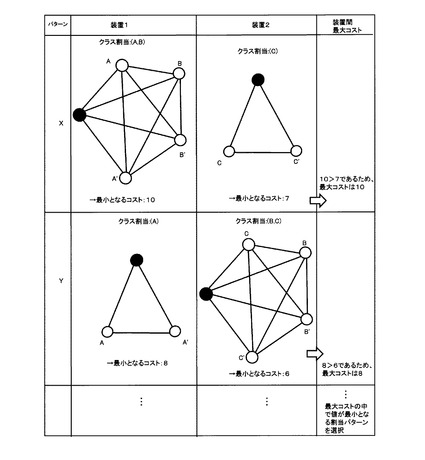
【図11】
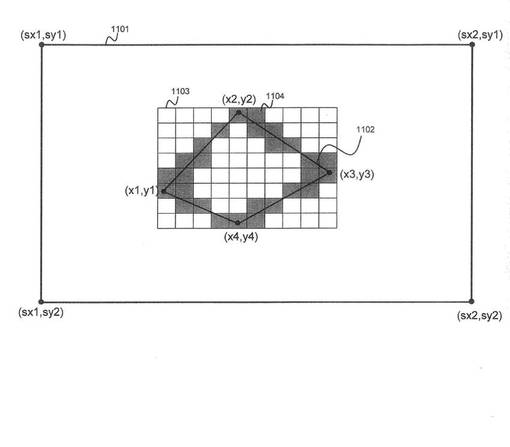
【図2】
【図3】
【図4】
【図5】
【図6】
【図7A】
【図7B】
【図8】
【図9A】
【図9B】
【図10】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図11】
【公開番号】特開2013−33346(P2013−33346A)
【公開日】平成25年2月14日(2013.2.14)
【国際特許分類】
【出願番号】特願2011−168472(P2011−168472)
【出願日】平成23年8月1日(2011.8.1)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成25年2月14日(2013.2.14)
【国際特許分類】
【出願日】平成23年8月1日(2011.8.1)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]