
エレベータのドア制御装置
【課題】ドア開閉動作を阻害する過負荷要因を判別して再開閉時に適切なドア速度に設定することが可能なエレベータのドア制御装置を提供すること。
【解決手段】エレベータのドア制御装置21は、ドア開閉動作が阻害されたときに過負荷を検出する過負荷検出判定器28と、過負荷検出時直前のドアの動作データ変化量に基づいて、ドア開閉動作を阻害した過負荷要因が弾性に富むものであるか否かを判別する挟まれ異物判別器32とを備えている。過負荷要因が弾性に富む人体等であると判定された場合は、利用者の安全に配慮して再開閉時のドア速度を低速に切り替える。また、過負荷要因が弾性に乏しい小石等の硬い異物であると判定された場合は、異物を除去できるように再開閉時のドア速度を高速に切り替える。
【解決手段】エレベータのドア制御装置21は、ドア開閉動作が阻害されたときに過負荷を検出する過負荷検出判定器28と、過負荷検出時直前のドアの動作データ変化量に基づいて、ドア開閉動作を阻害した過負荷要因が弾性に富むものであるか否かを判別する挟まれ異物判別器32とを備えている。過負荷要因が弾性に富む人体等であると判定された場合は、利用者の安全に配慮して再開閉時のドア速度を低速に切り替える。また、過負荷要因が弾性に乏しい小石等の硬い異物であると判定された場合は、異物を除去できるように再開閉時のドア速度を高速に切り替える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、エレベータのドアに人や物が挟まれたことを検出可能な過負荷検出手段を備えたエレベータのドア制御装置に関するものである。
【背景技術】
【0002】
エレベータの戸閉時や戸開時に人や物がドアに挟まれると、ドアモータを駆動制御するトルクが急激に大きく変化するため、従来より、このトルク値の変化に基づいてドアに人や物が挟まれたことを過負荷として検出するようにしたドア制御装置が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−182477号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に開示されているような従来のドア制御装置では、エレベータのドアに人が挟まれた場合と、ドアの敷居溝に小石等の異物が嵌まり込んだ場合とを判別することができないため、過負荷を検出してドアを反転移動後に再開閉させる際に適切なドア速度に設定できないという不具合があった。すなわち、エレベータのドアに人が挟まれた場合には、利用者の安全に配慮して再開閉時のドア速度を低速に設定することが望ましいが、ドアの敷居溝に小石等の異物が嵌まり込んだ場合には、再開閉時のドア速度を高速に設定すれば異物を除去しやすくなる。
【0005】
本発明は、このような従来技術の実情に鑑みてなされたもので、その目的は、ドア開閉動作を阻害する過負荷要因を判別して再開閉時に適切なドア速度に設定することが可能なエレベータのドア制御装置を提供することにある。
【課題を解決するための手段】
【0006】
上記の目的を達成するために、本発明は、ドア開閉動作が阻害されたときにこれを検出する過負荷検出手段を備えたエレベータのドア制御装置において、前記過負荷検出手段が過負荷を検出したときに、その検出時直前の単位時間当たりのドアの動作データ変化量に基づいて、ドア開閉動作を阻害した過負荷要因が弾性に富むものであるか否かを判別する異物判別手段を備えるという構成にした。
【0007】
このような異物判別手段をエレベータのドア制御装置が備えていると、ドア開閉動作時に過負荷検出手段が過負荷を検出したときに、弾性に富む人体等がドア開閉動作を阻害したのか、それとも弾性に乏しい小石等の硬い物体がドア開閉動作を阻害したのかを判別できるため、ドアを反転移動後に再開閉させる際に適切なドア速度に設定することが可能となる。例えば、異物判別手段が、ドア開閉動作を阻害した過負荷要因が弾性に富むもの(硬くないもの)であると判定した場合、ドアに人が挟まれた可能性が高いため、再開閉時のドア速度を通常速度から低速に切り替えることにすれば、利用者の安全に配慮したドア開閉制御が行える。
【0008】
上記の構成のドア制御装置において、動作データ変化量として、ドアモータを駆動制御するトルクの変化量を用いると、弾性に乏しい小石等の硬い物体によってドアの移動が阻害されたときにトルク値が急激に増大するのに対し、弾性に富む人体等によってドア開閉動作が阻害されたときはトルク値が比較的緩やかに増大するため、ドア開閉動作を阻害した過負荷要因が弾性に富むものであるか否かを的確に判別しやすくなる。
【0009】
また、上記の構成のドア制御装置において、動作データ変化量として、ドア位置の変化量を用いると、弾性に乏しい小石等の硬い物体によってドア開閉動作が阻害されたときには、ドアの急停止に伴ってドア位置が急に変化しなくなるのに対し、弾性に富む人体等によってドア開閉動作が阻害されたときには、ドア位置を若干変化させながらドアが停止するため、ドア開閉動作を阻害した過負荷要因が弾性に富むものであるか否かを的確に判別しやすくなる。
【0010】
上記の構成のドア制御装置において、異物判別手段が、ドア開閉動作を阻害した過負荷要因が弾性に乏しい硬い物体であると判定した場合、ドアに人が挟まれているのではなく、敷居溝に小石等の異物が嵌まり込んでいる可能性が高いため、再開閉時のドア速度を通常速度から高速に切り替えることにすれば異物を除去しやすくなる。
【0011】
この場合において、過負荷検出手段が過負荷を検出したときのドア位置(過負荷検出位置)の情報に基づいてドア速度を制御するようにしてあると、過負荷検出後の再開閉時のドア速度をきめ細かく設定することができるため好ましい。例えば、異物判別手段が、弾性に乏しい硬い物体がドア開閉動作を阻害したものと判定し、再開閉時のドア速度が通常速度から高速に切り替えられた場合、この再開閉時に前回検出された過負荷検出位置をドアが所定距離だけ通過した時点でドア速度を通常速度に戻すように設定しておけば、敷居溝に嵌まり込んだ小石等の硬い異物を除去した後にはドアの勢いが弱まるため、利用者がドアに挟まれにくくなる。また、異物判別手段が、弾性に乏しい硬い物体がドア開閉動作を阻害したものと判定したときに、その過負荷検出位置が戸閉時の閉じ端近傍または戸開時の開端近傍である場合には、再開閉時のドア速度を高速に切り替えることを禁止するように設定しておけば、ドア速度が高速の場合に懸念される閉じ端近傍や開端近傍での挟み込みを回避できるため、利用者の安全を優先したドア開閉制御が行えるようになる。
【発明の効果】
【0012】
本発明のエレベータのドア制御装置によれば、ドア開閉動作時に過負荷が検出されると、その検出時直前の単位時間当たりのドアの動作データ変化量に基づいて、ドア開閉動作を阻害した過負荷要因が人体等の弾性に富むものであるのか否かを判別できるため、ドアを再開閉させる際に適切なドア速度に設定しやすくなって実用的価値が高まる。例えば、ドアに人が挟まれた場合には、利用者の安全に配慮したドア開閉制御が行え、敷居溝に小石等の異物が嵌まり込んだ場合には、異物を除去しやすいドア開閉制御が行えるようになる。また、ドアの動作データ変化量として、ドアモータを駆動制御するトルクの変化量やドア位置の変化量を用いると、ドア開閉動作を阻害した過負荷要因が弾性に富むものであるか否かを的確に判別しやすくなる。
【図面の簡単な説明】
【0013】
【図1】本発明の実施形態例に係るエレベータのドア付近の概略構成を示す説明図である。
【図2】図1中のドア制御装置の詳細な構成を示すブロック図である。
【図3】該ドア制御装置における各種信号の変化の様子を示すタイミングチャートである。
【図4】該ドア制御装置において過負荷要因が小石等の硬い物体である場合のトルク変化を示すタイミングチャートの一部である。
【図5】該ドア制御装置において過負荷要因が人体である場合のトルク変化を示すタイミングチャートの一部である。
【図6】該ドア制御装置において過負荷要因が小石等の硬い物体である場合のドア位置変化を示すタイミングチャートの一部である。
【図7】該ドア制御装置において過負荷要因が人体である場合のドア位置変化を示すタイミングチャートの一部である。
【図8】該ドア制御装置で適用されるドア開閉速度パターンを例示したタイミングチャートである。
【図9】該ドア制御装置においてドア速度を高速から通常速度へ切り替えた場合のドア開閉速度パターンを示すタイミングチャートである。
【図10】該ドア制御装置における制御処理を示すフローチャートである。
【発明を実施するための形態】
【0014】
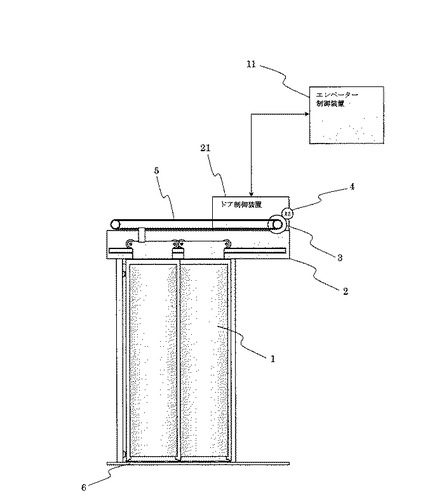
以下、本発明の実施形態例に係るエレベータのドア制御装置ついて図面を参照しながら説明する。図1はエレベータのドアパネル1やドア開閉機構2等を正面から見た説明図であり、同図に示すように、ドアモータ3の回転駆動力がドア駆動ベルト5を介してドア開閉機構2に伝達されることによって、ドアパネル1の開閉動作(戸開動作や戸閉動作)が行われるようになっている。その際、ドアパネル1の下端部は敷居6の溝(敷居溝)に案内されてスライド移動し、また、ドアモータ3に同期してパルス信号を発生するロータリエンコーダ4がドア位置やドア速度を検出する。ドアモータ3はドア制御装置21によって駆動制御され、このドア制御装置21はエレベータ制御装置11からの指令によってドア開閉制御を行う。
【0015】
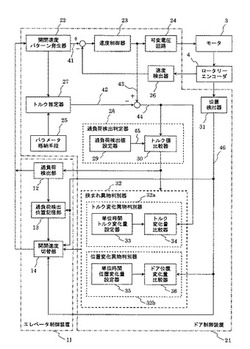
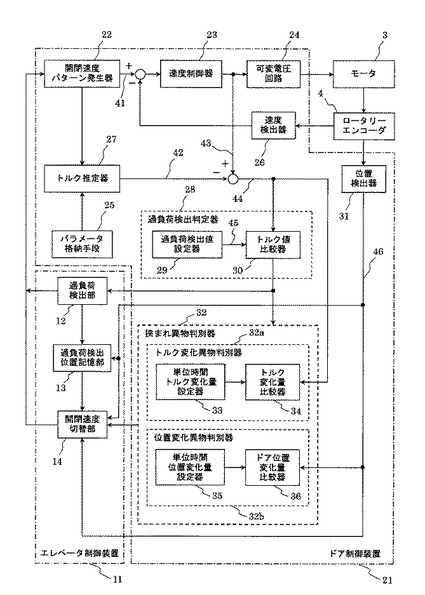
図2に示すように、ドア制御装置21は、開閉速度パターン発生器22や速度制御器23、可変電圧回路24、パラメータ格納手段25、速度検出器26、トルク推定器27、過負荷検出判定器28、位置検出器31、挟まれ異物判別器32等によって構成されている。ここで、開閉速度パターン発生器22は、ドア開閉速度のパターン信号を演算して開閉速度パターン信号41を発生する。また、過負荷検出判定器28は過負荷検出値設定器29とトルク値比較器30とを備えており、挟まれ異物判別器32はトルク変化異物判別器32aと位置変化異物判別器32bとを備えている。さらに、トルク変化異物判別器32aは単位時間トルク変化量設定器33とトルク変化量比較器34とを備えており、位置変化異物判別器32bは単位時間位置変化量設定器35とドア位置変化量比較器36とを備えている。
【0016】
このドア制御装置21においては、開閉速度パターン発生器22のデータ(開閉速度パターン信号41)とドアモータ3に同期するロータリエンコーダ4のパルス信号を速度検出器26にて変換した速度データとを突き合わせて得られる差分値信号が速度制御器23に与えられて、この速度制御器23がトルク指令値信号43を形成する。そして、可変電圧回路24がこのトルク指令値信号43に応じて形成した可変電圧出力をドアモータ3に与えることにより、ドアモータ3が回転駆動してドアパネル1の開閉動作が行われるようになっている。また、トルク推定器27は、開閉速度パターン信号41とパラメータ格納手段25からのドアパラメータとを参照してトルク推定値信号42を形成する。そして、このトルク推定値信号42と速度制御器23からのトルク指令値信号43とを突き合わせて得られるトルク差分値信号44がトルク値比較器30に与えられ、このトルク差分値信号44を過負荷検出値設定器29にて形成される過負荷閾値信号45と比較することによって、過負荷検出判定器28が過負荷判定を行うようになっている。
【0017】
ドア制御装置21の動作について詳しく説明すると、開閉速度パターン発生器22から出力された開閉速度パターン信号41が速度制御器23に与えられてトルク指令値信号43が形成されると、このトルク指令値信号43に基づいて可変電圧回路24からドアモータ3に可変電圧出力が与えられてドアモータ3が回転駆動する。このドアモータ3の駆動力によってドア開閉動作が行われると共に、ドアモータ3の回転速度が速度検出器26で検出されて速度制御器23に帰還される。一方、開閉速度パターン信号41はトルク推定器27にも与えられ、このトルク推定器27がパラメータ格納手段25からのドアパラメータを参照してトルク推定値信号42を形成する。このトルク推定値信号42と速度制御器23の出力であるトルク指令値信号43とを突き合わせてトルク差分値信号44が形成され、このトルク差分値信号44がトルク値比較器30にて過負荷検出値設定器29の出力(過負荷閾値信号45)と対比されて過負荷検出信号が形成される。この過負荷検出信号は、挟まれ異物判別器32に与えられると共に、エレベータ制御装置11の過負荷検出部12にも与えられる。なお、パラメータ格納手段25のドアパラメータとは、ドア開閉速度パターンの最高速度や加減速度、摩擦力、ドア自閉力等のことである。
【0018】
エレベータ制御装置11は、エレベータの図示せぬかごの運転を制御すると共に、ドア制御装置21に対するドア開閉指令を制御する。また、このエレベータ制御装置11は、前記過負荷検出部12と過負荷検出位置記憶部13と開閉速度切替部14とを備えている。過負荷検出部12は、ドア開閉動作が阻害されたときにこれを過負荷として検出するためのものである。過負荷検出位置記憶部13は、ドア制御装置21の位置検出器31から出力されるドア位置信号46を過負荷検出時に記憶する。開閉速度切替部14は、ドア制御装置21の挟まれ異物判別器32から異物判別結果に応じて出力された開閉速度切替信号と、過負荷検出位置記憶部13から出力された過負荷検出位置信号とに基づいて、ドア開閉速度を切り替えるための信号をドア制御装置21の開閉速度パターン発生器22に対して出力する。
【0019】
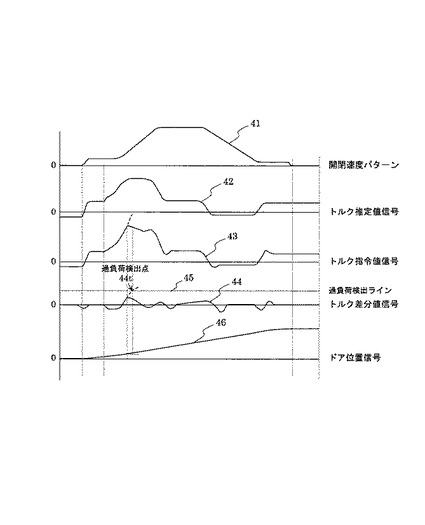
図3は、ドア制御装置21における各種信号の変化の様子を示すタイミングチャートであり、上から順に、前記開閉速度パターン信号41、前記トルク推定値信号42、前記トルク指令値信号43、前記トルク差分値信号44、前記ドア位置信号46の変化の様子を示している。
【0020】
図3において、ドア開閉動作が開閉速度パターン発生器22の発生する図示の如き開閉速度パターン信号41に基づいて行われ、トルク推定器27から図示の如きトルク推定値信号42が得られたものとする。その場合、速度制御器23から得られるトルク指令値信号43は、トルク推定値信号42と若干異なるが類似した経時的変化形状の信号となる。また、トルク指令値信号43からトルク推定値信号42を差し引いたトルク差分値信号44は、ゼロレベルを中心に凹凸を繰り返す経時的変化形状の信号となる。このトルク差分値信号44は、トルク値比較器30において、過負荷検出値設定器29から出力される過負荷閾値信号45(図3中の過負荷検出ライン)と比較される。そして、トルク差分値信号44のレベルが図3に破線で示すように過負荷閾値信号45のレベルを超えたときには、過負荷検出点44tにおいて何らかの理由(例えば人がドアに挟まれる等)により、ドア開閉動作が阻害されたものと判定し、過負荷検出判定器28から挟まれ異物判別器32とエレベータ制御装置11の過負荷検出部12とに過負荷検出信号が出力される。
【0021】
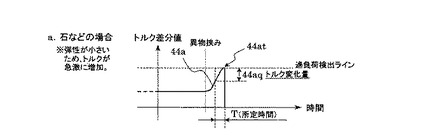
図4は、戸閉時の過負荷要因が小石等の硬い物体である場合のトルク変化を示すタイミングチャートの一部であり、過負荷検出に至るまでのトルク差分値信号の変化を示している。小石等の硬い異物が敷居6の溝に嵌まり込むなどして戸閉動作が阻害された場合、図4に示すように、トルク差分値信号44aのレベルは急激に増大して過負荷検出点44atで過負荷閾値信号のレベル(過負荷検出ライン)に到達する。したがって、過負荷検出に至る直前の所定単位時間Tにおけるトルク差分値の変化量は、図示の如く大きめな値44aqになる。
【0022】
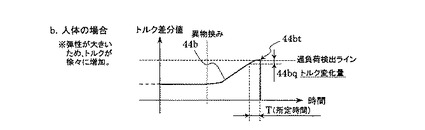
これに対して、図5は、戸閉時の過負荷要因が人体である場合のトルク変化を示すタイミングチャートの一部であり、過負荷検出に至るまでのトルク差分値信号の変化を示している。弾性に富む人体がドアに挟まれて戸閉動作が阻害された場合、図5に示すように、トルク差分値信号44bのレベルは緩やかに増大して過負荷検出点44btで過負荷閾値信号のレベル(過負荷検出ライン)に到達する。したがって、過負荷検出に至る直前の所定単位時間Tにおけるトルク差分値の変化量は、図示の如く小さめな値44bqになり、前記値44aqとは明らかに異なる。それゆえ、トルク差分値信号を挟まれ異物判別器32のトルク変化異物判別器32aに与えて、過負荷検出に至る直前の所定単位時間Tにおけるトルク差分値の変化量を予め定めた所定値(第1の基準値)と比較することによって、戸閉動作を阻害した過負荷要因が弾性に富む人体等であるか否かを的確に判別することができる。
【0023】
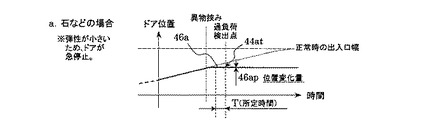
図6は、戸閉時の過負荷要因が小石等の硬い物体である場合のドア位置変化を示すタイミングチャートの一部であり、過負荷検出に至るまでのドア位置信号の変化を示している。小石等の硬い異物が敷居6の溝に嵌まり込むなどして戸閉動作が阻害された場合、ドアは急停止するため、図6に示すように、ドア位置信号46aの表す位置データは過負荷検出点44atの直前からほとんど変化しなくなる。したがって、過負荷検出に至る直前の所定単位時間Tにおけるドア位置の変化量は、図示の如く近似的にゼロと見なせる値46apになる。
【0024】
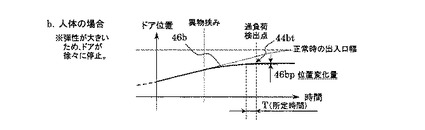
これに対して、図7は、戸閉時の過負荷要因が人体である場合のドア位置変化を示すタイミングチャートの一部であり、過負荷検出に至るまでのドア位置信号の変化を示している。弾性に富む人体がドアに挟まれて戸閉動作が阻害された場合、ドアは人体を押し込みながら停止するため、図7に示すように、ドア位置信号46bの表す位置データは過負荷検出点44btの直前でも僅かに変化する。したがって、過負荷検出に至る直前の所定単位時間Tにおけるドア位置の変化量は、図示の如く小さいながらも近似的にゼロと見なすことができない値46bpになり、前記値46apとは明らかに異なる。それゆえ、ドア位置信号を挟まれ異物判別器32の位置変化異物判別器32bに与えて、過負荷検出に至る直前の所定単位時間Tにおけるドア位置の変化量を予め定めた所定値(第2の基準値)と比較することによって、戸閉動作を阻害した過負荷要因が弾性に富む人体等であるか否かを的確に判別することができる。
【0025】
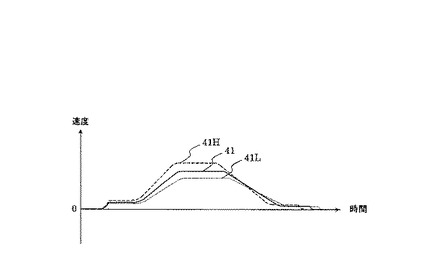
図8は、ドア制御装置21で適用されるドア開閉速度パターンを例示したタイミングチャートであり、通常の開閉速度パターン41と高速の開閉速度パターン41Hと低速の開閉速度パターン41Lの3種類を示している。
【0026】
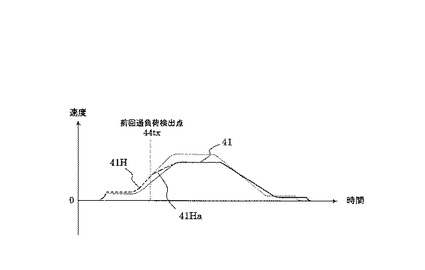
図9は、ドア制御装置21においてドア速度を高速から通常速度へ切り替えた場合のドア開閉速度パターンを示すタイミングチャートである。すなわち、敷居6の溝に小石等の異物が嵌まり込んで戸閉動作が阻害された場合、再戸閉時のドア速度を通常速度から高速に切り替えることによって異物を除去しやすくなるが、異物を除去した後もドア速度が高速のままだと利用者がドアに挟まれやすくなる。そのため、このドア制御装置21では利用者の安全に配慮して、エレベータ制御装置11の過負荷検出位置記憶部13に記憶されている前回戸閉時の過負荷検出位置をドアが所定量通過した時点、つまり異物の除去が確認された時点で、ドア速度を高速から通常速度に戻すように設定している。
【0027】
これを図9に基づいて説明すると、通常のドア開閉速度パターン41で戸閉中に過負荷検出点44txにて戸閉動作が阻害され、その過負荷要因は弾性に乏しい小石等の異物であるという判定が挟まれ異物判別器32にてなされた場合、再戸閉時には異物を除去するためにまず高速のドア開閉速度パターン41Hを適用する。そして、過負荷検出点44txに対応する過負荷検出位置をドアが確実に通過したなら、ドア速度を減速して通常速度に戻し、以後、戸閉動作が完了するまで通常のドア開閉速度パターン41を適用する。ただし、戸閉動作中にドア開閉速度パターンを切り替える移行期、例えば、図9に示すようにドア開閉速度パターン41Hからドア開閉速度パターン41へ移行する過程では、同図中に符号41Haで示すような移行期特有のドア開閉速度パターンが適用される。なお、図9では再戸閉時に高速のドア開閉速度パターン41Hで加速移動中のドアを通常のドア開閉速度パターン41へ移行させる場合について例示しているが、ドア開閉速度パターンを移行させるタイミングは過負荷検出位置に応じて決定されるので、例えば、ドア開閉速度パターン41Hで定速移動中あるいは減速移動中のドアを通常のドア開閉速度パターン41へ移行させる場合もある。
【0028】
また、本実施形態例では、過負荷検出位置が閉じ端近傍である場合には、再戸閉時のドア速度を高速に切り替えるという設定を禁止することによって、利用者の安全を優先している。さらに、本実施形態例においては、通常のドア開閉速度パターン41で戸閉中に過負荷検出点にて戸閉動作が阻害され、その過負荷要因が弾性に富む人体等であるという判定が挟まれ異物判別器32にてなされた場合には、再戸閉時のドア速度を通常速度から低速に切り替える(つまり低速のドア開閉速度パターン41Lを適用する)ことによって、利用者の安全に配慮している。
【0029】
なお、上記の動作説明ならびに以下の動作説明では、ドア開閉動作のうち戸閉動作を阻害する過負荷が検出された場合について述べているが、戸開動作を阻害する過負荷が検出された場合の動作も、説明文中の「開」と「閉」が逆になるだけで基本的には同等である。
【0030】
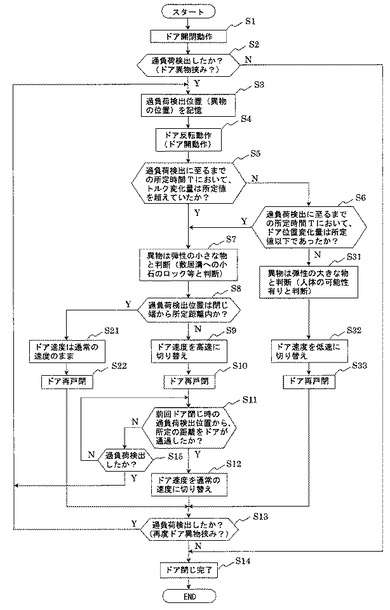
次に、図10のフローチャートを参照しながら、本実施形態例で戸閉時に過負荷が検出された場合の動作についてさらに詳しく説明する。エレベータのかごが目的階に到着したときや開ボタンが押されたとき、図10のステップS1においてドア開閉動作が行われ、その戸閉時にステップS2以下の制御処理が実施される。
【0031】
ステップS2において、ドア制御装置21は過負荷が検出されたか否か、つまりドアに異物が挟まれるなどして戸閉動作が阻害されたか否かを判定する。この判定は過負荷検出判定器28が行う。具体的には、トルク値比較器30にトルク推定器27からのトルク推定値信号42と速度制御器23からのトルク指令値信号43とを突き合わせて形成されたトルク差分値信号44が与えられ、このトルク差分値信号44を過負荷検出値設定値29にて形成される過負荷閾値信号45と比較することによって、トルク値比較器30が過負荷判定を行う。このステップS2において、過負荷が検出されない場合は、ステップS14へ進んで正常に戸閉動作が完了するが、過負荷が検出された場合は、過負荷検出判定器28が過負荷検出信号を出力してステップS3へ進み、さらにステップS4、ステップS5へと進む。
【0032】
ステップS3では、エレベータ制御装置11が、過負荷検出判定器28から過負荷検出部12に与えられた過負荷検出信号と、位置検出器31から過負荷検出位置記憶部13に与えられたドア位置信号46とに基づき、過負荷検出時のドア位置を過負荷検出位置記憶部13に記憶させる。
【0033】
次なるステップS4では、エレベータ制御装置11がドア制御装置21に対してドアを反転移動させる制御指令を出力する。すなわち、過負荷を検出して戸閉動作が阻害されたときには、通常のドア速度で一旦ドアを逆向きに移動(戸開)させる。
【0034】
次なるステップS5では、ドア制御装置21の挟まれ異物判別器32が、過負荷検出判定器28から過負荷検出信号が与えられた段階で、戸閉動作を阻害した過負荷要因が弾性に富むものであるか否かを判定する。つまり、トルク変化異物判別器32aが、過負荷検出時直前の所定単位時間Tにおいて、トルク差分値信号44の変化量が所定値(予め定めた第1の基準値)を超えているか否かを判定し、超えていなければステップS6へ進み、超えていればステップS7へ進む。その際、トルク変化異物判別器32aでは、トルク変化量比較器34が過負荷検出に至るまでの所定単位時間Tにおけるトルク差分値信号44を監視し、過負荷検出判定器28から過負荷検出信号を受けた時点で、このトルク差分値信号44の変化量を単位時間トルク変化量設定器33に予め設定しておいた所定単位時間T当たりの第1の基準値と比較する。なお、トルク差分値信号44を監視する代わりに、トルク指令値信号43を直接監視する構成にしてもよい。また、トルク差分値の変化量ではなく実際のトルクの変化量を求め、このトルク変化量に基づいて過負荷要因を判別するようしてもよい。
【0035】
弾性に乏しい硬い物体によって戸閉動作が阻害された場合、図4で説明したように、過負荷検出時直前の所定単位時間Tにトルク差分値信号44のレベルが急激に増大してトルク変化量(図4中の符号44aq)は大きな値となり、その値は予め定めた第1の基準値を超えるため、ステップS5での判定は「Yes」となってステップS7へ進む。そして、ステップS7において、弾性に乏しい小石等の硬い異物が敷居溝に嵌まり込むなどして戸閉動作が阻害されたものと判断し、ステップS8へ進む。
【0036】
一方、弾性に富む人体等によって戸閉動作が阻害された場合は、図5で説明したように、過負荷検出時直前の所定単位時間Tにトルク差分値信号44のレベルは緩やかに増大してトルク変化量(図5中の符号44bq)は小さな値となり、その値は第1の基準値を超えないため、ステップS5での判定は「No」となってステップS6へ進む。ただし、小石等の硬い異物が戸閉時のドアに徐々に押し込まれて敷居溝に嵌まってしまう場合などは、過負荷検出時直前の所定単位時間Tにトルク差分値信号44のレベルはやや緩やかに増大するため、トルク変化量が第1の基準値を超えない可能性もある。そこでステップS6では、戸閉動作を阻害した過負荷要因を再度判別する。この判別はドア制御装置21の位置変化異物判別器32bが行い、過負荷要因が弾性に富む人体等であると判定された場合はステップS31へ進み、過負荷要因が弾性に乏しい硬い物体であると判定された場合はステップS7へ進む。
【0037】
すなわち、ステップS6では、位置変化異物判別器32bのドア位置変化量比較器36が過負荷検出に至るまでの所定単位時間Tにおけるドア位置信号46を監視し、過負荷検出判定器28から過負荷検出信号を受けた時点で、このドア位置信号46の変化量を単位時間位置変化量設定器35に予め設定しておいた所定単位時間T当たりの所定値(第2の基準値)と比較することによって、判別処理が行われる。
【0038】
弾性に乏しい硬い物体によって戸閉動作が阻害された場合、ドアは急停止するため、図6で説明したように、過負荷検出時直前の所定単位時間Tにおけるドア位置の変化量(図6中の符号46ap)は近似的にゼロと見なせる値となり、その値は予め定めた第2の基準値以下となるため、ステップS6での判定は「Yes」となり、ステップS7へ進む。そして、ステップS7において、弾性に乏しい小石等の硬い異物が敷居溝に嵌まり込むなどして戸閉動作が阻害されたものと判断し、ステップS8へ進む。
【0039】
一方、弾性に富む人体等によって戸閉動作が阻害された場合は、図7で説明したように、過負荷検出時直前の所定単位時間Tにおけるドア位置の変化量(図7中の符号46bp)は近似的にゼロと見なすことができない値となり、その値は第2の基準値よりも大きくなるため、ステップS6での判定は「No」となってステップS31へ進む。そして、ステップS31において、弾性に富む人体等が戸閉動作を阻害しているものと判断してステップS32へ進む。
【0040】
このステップS32では、ドアに人が挟まれた可能性が高いことから、ドア制御装置21の挟まれ異物判別器32がエレベータ制御装置11の開閉速度切替部14に対してドア速度を低速に切り替えるように信号(開閉速度切替信号)を出力し、この信号に基づく指令信号が開閉速度切替部14からドア制御装置21の開閉速度パターン発生器22に対して出力される。そのため、次なるステップS33でドアの再戸閉動作が行われるときには、低速のドア開閉速度パターン41Lが適用される。つまり、この場合は、ドアに人が挟まれたことによって戸閉動作が阻害された可能性が高いため、ステップS32で低速のドア速度に切り替えてからステップS33で再戸閉動作を行うことによって、利用者の安全に配慮している。なお、ステップS33の後はステップS13へ進む。
【0041】
ステップS5またはステップS6からステップS7へ進んだ場合は、弾性に乏しい小石等の硬い異物が敷居溝に嵌まり込むなどして戸閉動作が阻害されたものと判断された場合なので、次なるステップS8において、過負荷検出位置が閉じ端から所定の至近距離内(閉じ端近傍)か否かを判定する。そして、ステップS8で、過負荷検出位置が閉じ端近傍でないと判定された場合は、ステップS9へ進んでドア速度を高速に切り替えた後、次なるステップS10で再戸閉動作を行い、ステップS11へと進む。すなわち、ステップS9では、ドア制御装置21の挟まれ異物判別器32がエレベータ制御装置11の開閉速度切替部14に対してドア速度を高速に切り替えるように信号(開閉速度切替信号)を出力し、この信号に基づく指令信号が開閉速度切替部14からドア制御装置21の開閉速度パターン発生器22に対して出力される。そのため、次なるステップS10でドアの再戸閉動作が行われるときには高速のドア開閉速度パターン41Hが適用され、これにより、小石等の異物が敷居溝に嵌まり込んでいても再戸閉時にその異物を除去しやすくなる。
【0042】
一方、ステップS8において、過負荷検出位置が閉じ端近傍であると判定された場合はステップS21へ進み、ドア開閉速度パターンを切り替えることなく、つまり通常のドア速度のまま、次なるステップS22で再戸閉動作を行ってステップS13へと進む。つまり、過負荷検出位置が閉じ端近傍の場合は再戸閉時のドア速度を高速に切り替える設定(ステップS9での設定)を行わないようにしてあり、こうすることによって、ドア速度が高速の場合に懸念される閉じ端近傍での挟み込みが回避されるため、利用者の安全を優先したドア開閉制御が行えることになる。
【0043】
また、ステップS8からステップS9、ステップS10へと進んだ場合は、弾性に乏しい小石等の硬い異物が敷居溝に嵌まり込んでいる可能性があり、かつ、過負荷検出位置が閉じ端近傍でないことから再戸閉時のドア速度を高速に切り替えた場合なので、次なるステップS11において、ドアが前回戸閉時の過負荷検出位置を通過して所定の動作確認距離だけ移動したか否かを判定する。そして、ステップS11の判定結果が「Yes」の場合は、ドアの再戸閉によって異物の除去が成功したものと判断できるので、ステップS12へ進んで、ドア速度を高速から通常速度に戻す。こうすることによって、敷居溝に嵌まり込んだ小石等の異物の除去に成功した後の戸閉動作時におけるドアの勢いを弱めることができるため、利用者がドアに挟まれにくくなって安全性が向上する。
【0044】
具体的には、エレベータ制御装置11の開閉速度切替部14がドア位置信号46に基づき戸閉時のドア位置を監視しているので、これを過負荷検出位置記憶部13に記憶されている前回戸閉時の過負荷検出位置と比較することによって、ステップS11で、ドアが該過負荷検出位置から所定距離(動作確認距離)だけ進んだか否かが判定できる。また、ステップS12では、ドア制御装置21の挟まれ異物判別器32がエレベータ制御装置11の開閉速度切替部14に対してドア速度を通常速度に切り替えるように信号(開閉速度切替信号)を出力し、この信号に基づく指令信号が開閉速度切替部14からドア制御装置21の開閉速度パターン発生器22に対して出力される。その結果、開閉速度パターン発生器22は、ドアが前回戸閉時の過負荷検出位置を確実に通過した時点で、高速のドア開閉速度パターン41Hを通常のドア開閉速度パターン41に切り替えるが、速度パターン41Hから速度パターン41へ移行する過程では、図9中に符号41Haで示したような移行期特有の速度パターンが適用される。
【0045】
また、ステップS11の判定結果が「No」の場合はステップS15へ進み、再び過負荷が検出されたか否かを判定する。そして、ステップS15において過負荷が検出されなければステップS11へ戻って、ドアが前回戸閉時の過負荷検出位置を通過して所定の動作確認距離だけ移動したか否かを判定する。一方、ステップS15において再び過負荷が検出された場合は、ドアが前回戸閉時の過負荷検出位置を確実に通過できず、何らかの硬い異物が依然として戸閉動作を阻害しているものと判断できるので、ステップS3へ戻って前述した制御処理を繰り返す。
【0046】
また、ステップS11の判定結果が「Yes」でステップS12、ステップS13へと進んだ場合には、このステップS13において、戸閉動作が完了するまでの間に再び過負荷が検出されたか否かを判定する。この判定も前述したようにドア制御装置21の過負荷検出判定器28にて行われる。そして、ステップS13で過負荷が検出されなければ、ステップS14へ進んで戸閉動作を完了させ、一連の制御処理が終了する。また、ステップS13で再び過負荷が検出された場合には、ステップS3へ戻って前述した制御処理を繰り返す。
【0047】
なお、上記の実施形態例においては、トルク変化量に基づくステップS5の条件とドア位置に基づくステップS6の条件のいずれか一方が成立すれば、戸閉動作を阻害する過負荷要因が弾性に乏しい硬い物体であると判断しているが、ステップS5およびステップS6の条件が両方とも成立した場合に過負荷要因が硬い物体であると判断するようにしてもよい。
【符号の説明】
【0048】
1 ドアパネル
2 ドア開閉機構
3 ドアモータ
4 ロータリエンコーダ
5 ドア駆動ベルト
6 敷居
11 エレベータ制御装置
12 過負荷検出部
13 過負荷検出位置記憶部
14 開閉速度切替部
21 ドア制御装置
22 開閉速度パターン発生器
23 速度制御器
24 可変電圧回路
25 パラメータ格納手段
26 速度検出器
27 トルク推定器
28 過負荷検出判定器(過負荷検出手段)
29 過負荷検出値設定器
30 トルク値比較器
31 位置検出器
32 挟まれ異物判別器(異物判別手段)
32a トルク変化異物判別器
32b 位置変化異物判別器
33 単位時間トルク変化量設定器
34 トルク変化量比較器
35 単位時間位置変化量設定器
36 ドア位置変化量比較器
41 開閉速度パターン(通常)
41H 開閉速度パターン(高速)
41L 開閉速度パターン(低速)
42 トルク推定値信号
43 トルク指令値信号
44 トルク差分値信号
45 過負荷閾値信号
46 ドア位置信号
【技術分野】
【0001】
本発明は、エレベータのドアに人や物が挟まれたことを検出可能な過負荷検出手段を備えたエレベータのドア制御装置に関するものである。
【背景技術】
【0002】
エレベータの戸閉時や戸開時に人や物がドアに挟まれると、ドアモータを駆動制御するトルクが急激に大きく変化するため、従来より、このトルク値の変化に基づいてドアに人や物が挟まれたことを過負荷として検出するようにしたドア制御装置が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−182477号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に開示されているような従来のドア制御装置では、エレベータのドアに人が挟まれた場合と、ドアの敷居溝に小石等の異物が嵌まり込んだ場合とを判別することができないため、過負荷を検出してドアを反転移動後に再開閉させる際に適切なドア速度に設定できないという不具合があった。すなわち、エレベータのドアに人が挟まれた場合には、利用者の安全に配慮して再開閉時のドア速度を低速に設定することが望ましいが、ドアの敷居溝に小石等の異物が嵌まり込んだ場合には、再開閉時のドア速度を高速に設定すれば異物を除去しやすくなる。
【0005】
本発明は、このような従来技術の実情に鑑みてなされたもので、その目的は、ドア開閉動作を阻害する過負荷要因を判別して再開閉時に適切なドア速度に設定することが可能なエレベータのドア制御装置を提供することにある。
【課題を解決するための手段】
【0006】
上記の目的を達成するために、本発明は、ドア開閉動作が阻害されたときにこれを検出する過負荷検出手段を備えたエレベータのドア制御装置において、前記過負荷検出手段が過負荷を検出したときに、その検出時直前の単位時間当たりのドアの動作データ変化量に基づいて、ドア開閉動作を阻害した過負荷要因が弾性に富むものであるか否かを判別する異物判別手段を備えるという構成にした。
【0007】
このような異物判別手段をエレベータのドア制御装置が備えていると、ドア開閉動作時に過負荷検出手段が過負荷を検出したときに、弾性に富む人体等がドア開閉動作を阻害したのか、それとも弾性に乏しい小石等の硬い物体がドア開閉動作を阻害したのかを判別できるため、ドアを反転移動後に再開閉させる際に適切なドア速度に設定することが可能となる。例えば、異物判別手段が、ドア開閉動作を阻害した過負荷要因が弾性に富むもの(硬くないもの)であると判定した場合、ドアに人が挟まれた可能性が高いため、再開閉時のドア速度を通常速度から低速に切り替えることにすれば、利用者の安全に配慮したドア開閉制御が行える。
【0008】
上記の構成のドア制御装置において、動作データ変化量として、ドアモータを駆動制御するトルクの変化量を用いると、弾性に乏しい小石等の硬い物体によってドアの移動が阻害されたときにトルク値が急激に増大するのに対し、弾性に富む人体等によってドア開閉動作が阻害されたときはトルク値が比較的緩やかに増大するため、ドア開閉動作を阻害した過負荷要因が弾性に富むものであるか否かを的確に判別しやすくなる。
【0009】
また、上記の構成のドア制御装置において、動作データ変化量として、ドア位置の変化量を用いると、弾性に乏しい小石等の硬い物体によってドア開閉動作が阻害されたときには、ドアの急停止に伴ってドア位置が急に変化しなくなるのに対し、弾性に富む人体等によってドア開閉動作が阻害されたときには、ドア位置を若干変化させながらドアが停止するため、ドア開閉動作を阻害した過負荷要因が弾性に富むものであるか否かを的確に判別しやすくなる。
【0010】
上記の構成のドア制御装置において、異物判別手段が、ドア開閉動作を阻害した過負荷要因が弾性に乏しい硬い物体であると判定した場合、ドアに人が挟まれているのではなく、敷居溝に小石等の異物が嵌まり込んでいる可能性が高いため、再開閉時のドア速度を通常速度から高速に切り替えることにすれば異物を除去しやすくなる。
【0011】
この場合において、過負荷検出手段が過負荷を検出したときのドア位置(過負荷検出位置)の情報に基づいてドア速度を制御するようにしてあると、過負荷検出後の再開閉時のドア速度をきめ細かく設定することができるため好ましい。例えば、異物判別手段が、弾性に乏しい硬い物体がドア開閉動作を阻害したものと判定し、再開閉時のドア速度が通常速度から高速に切り替えられた場合、この再開閉時に前回検出された過負荷検出位置をドアが所定距離だけ通過した時点でドア速度を通常速度に戻すように設定しておけば、敷居溝に嵌まり込んだ小石等の硬い異物を除去した後にはドアの勢いが弱まるため、利用者がドアに挟まれにくくなる。また、異物判別手段が、弾性に乏しい硬い物体がドア開閉動作を阻害したものと判定したときに、その過負荷検出位置が戸閉時の閉じ端近傍または戸開時の開端近傍である場合には、再開閉時のドア速度を高速に切り替えることを禁止するように設定しておけば、ドア速度が高速の場合に懸念される閉じ端近傍や開端近傍での挟み込みを回避できるため、利用者の安全を優先したドア開閉制御が行えるようになる。
【発明の効果】
【0012】
本発明のエレベータのドア制御装置によれば、ドア開閉動作時に過負荷が検出されると、その検出時直前の単位時間当たりのドアの動作データ変化量に基づいて、ドア開閉動作を阻害した過負荷要因が人体等の弾性に富むものであるのか否かを判別できるため、ドアを再開閉させる際に適切なドア速度に設定しやすくなって実用的価値が高まる。例えば、ドアに人が挟まれた場合には、利用者の安全に配慮したドア開閉制御が行え、敷居溝に小石等の異物が嵌まり込んだ場合には、異物を除去しやすいドア開閉制御が行えるようになる。また、ドアの動作データ変化量として、ドアモータを駆動制御するトルクの変化量やドア位置の変化量を用いると、ドア開閉動作を阻害した過負荷要因が弾性に富むものであるか否かを的確に判別しやすくなる。
【図面の簡単な説明】
【0013】
【図1】本発明の実施形態例に係るエレベータのドア付近の概略構成を示す説明図である。
【図2】図1中のドア制御装置の詳細な構成を示すブロック図である。
【図3】該ドア制御装置における各種信号の変化の様子を示すタイミングチャートである。
【図4】該ドア制御装置において過負荷要因が小石等の硬い物体である場合のトルク変化を示すタイミングチャートの一部である。
【図5】該ドア制御装置において過負荷要因が人体である場合のトルク変化を示すタイミングチャートの一部である。
【図6】該ドア制御装置において過負荷要因が小石等の硬い物体である場合のドア位置変化を示すタイミングチャートの一部である。
【図7】該ドア制御装置において過負荷要因が人体である場合のドア位置変化を示すタイミングチャートの一部である。
【図8】該ドア制御装置で適用されるドア開閉速度パターンを例示したタイミングチャートである。
【図9】該ドア制御装置においてドア速度を高速から通常速度へ切り替えた場合のドア開閉速度パターンを示すタイミングチャートである。
【図10】該ドア制御装置における制御処理を示すフローチャートである。
【発明を実施するための形態】
【0014】
以下、本発明の実施形態例に係るエレベータのドア制御装置ついて図面を参照しながら説明する。図1はエレベータのドアパネル1やドア開閉機構2等を正面から見た説明図であり、同図に示すように、ドアモータ3の回転駆動力がドア駆動ベルト5を介してドア開閉機構2に伝達されることによって、ドアパネル1の開閉動作(戸開動作や戸閉動作)が行われるようになっている。その際、ドアパネル1の下端部は敷居6の溝(敷居溝)に案内されてスライド移動し、また、ドアモータ3に同期してパルス信号を発生するロータリエンコーダ4がドア位置やドア速度を検出する。ドアモータ3はドア制御装置21によって駆動制御され、このドア制御装置21はエレベータ制御装置11からの指令によってドア開閉制御を行う。
【0015】
図2に示すように、ドア制御装置21は、開閉速度パターン発生器22や速度制御器23、可変電圧回路24、パラメータ格納手段25、速度検出器26、トルク推定器27、過負荷検出判定器28、位置検出器31、挟まれ異物判別器32等によって構成されている。ここで、開閉速度パターン発生器22は、ドア開閉速度のパターン信号を演算して開閉速度パターン信号41を発生する。また、過負荷検出判定器28は過負荷検出値設定器29とトルク値比較器30とを備えており、挟まれ異物判別器32はトルク変化異物判別器32aと位置変化異物判別器32bとを備えている。さらに、トルク変化異物判別器32aは単位時間トルク変化量設定器33とトルク変化量比較器34とを備えており、位置変化異物判別器32bは単位時間位置変化量設定器35とドア位置変化量比較器36とを備えている。
【0016】
このドア制御装置21においては、開閉速度パターン発生器22のデータ(開閉速度パターン信号41)とドアモータ3に同期するロータリエンコーダ4のパルス信号を速度検出器26にて変換した速度データとを突き合わせて得られる差分値信号が速度制御器23に与えられて、この速度制御器23がトルク指令値信号43を形成する。そして、可変電圧回路24がこのトルク指令値信号43に応じて形成した可変電圧出力をドアモータ3に与えることにより、ドアモータ3が回転駆動してドアパネル1の開閉動作が行われるようになっている。また、トルク推定器27は、開閉速度パターン信号41とパラメータ格納手段25からのドアパラメータとを参照してトルク推定値信号42を形成する。そして、このトルク推定値信号42と速度制御器23からのトルク指令値信号43とを突き合わせて得られるトルク差分値信号44がトルク値比較器30に与えられ、このトルク差分値信号44を過負荷検出値設定器29にて形成される過負荷閾値信号45と比較することによって、過負荷検出判定器28が過負荷判定を行うようになっている。
【0017】
ドア制御装置21の動作について詳しく説明すると、開閉速度パターン発生器22から出力された開閉速度パターン信号41が速度制御器23に与えられてトルク指令値信号43が形成されると、このトルク指令値信号43に基づいて可変電圧回路24からドアモータ3に可変電圧出力が与えられてドアモータ3が回転駆動する。このドアモータ3の駆動力によってドア開閉動作が行われると共に、ドアモータ3の回転速度が速度検出器26で検出されて速度制御器23に帰還される。一方、開閉速度パターン信号41はトルク推定器27にも与えられ、このトルク推定器27がパラメータ格納手段25からのドアパラメータを参照してトルク推定値信号42を形成する。このトルク推定値信号42と速度制御器23の出力であるトルク指令値信号43とを突き合わせてトルク差分値信号44が形成され、このトルク差分値信号44がトルク値比較器30にて過負荷検出値設定器29の出力(過負荷閾値信号45)と対比されて過負荷検出信号が形成される。この過負荷検出信号は、挟まれ異物判別器32に与えられると共に、エレベータ制御装置11の過負荷検出部12にも与えられる。なお、パラメータ格納手段25のドアパラメータとは、ドア開閉速度パターンの最高速度や加減速度、摩擦力、ドア自閉力等のことである。
【0018】
エレベータ制御装置11は、エレベータの図示せぬかごの運転を制御すると共に、ドア制御装置21に対するドア開閉指令を制御する。また、このエレベータ制御装置11は、前記過負荷検出部12と過負荷検出位置記憶部13と開閉速度切替部14とを備えている。過負荷検出部12は、ドア開閉動作が阻害されたときにこれを過負荷として検出するためのものである。過負荷検出位置記憶部13は、ドア制御装置21の位置検出器31から出力されるドア位置信号46を過負荷検出時に記憶する。開閉速度切替部14は、ドア制御装置21の挟まれ異物判別器32から異物判別結果に応じて出力された開閉速度切替信号と、過負荷検出位置記憶部13から出力された過負荷検出位置信号とに基づいて、ドア開閉速度を切り替えるための信号をドア制御装置21の開閉速度パターン発生器22に対して出力する。
【0019】
図3は、ドア制御装置21における各種信号の変化の様子を示すタイミングチャートであり、上から順に、前記開閉速度パターン信号41、前記トルク推定値信号42、前記トルク指令値信号43、前記トルク差分値信号44、前記ドア位置信号46の変化の様子を示している。
【0020】
図3において、ドア開閉動作が開閉速度パターン発生器22の発生する図示の如き開閉速度パターン信号41に基づいて行われ、トルク推定器27から図示の如きトルク推定値信号42が得られたものとする。その場合、速度制御器23から得られるトルク指令値信号43は、トルク推定値信号42と若干異なるが類似した経時的変化形状の信号となる。また、トルク指令値信号43からトルク推定値信号42を差し引いたトルク差分値信号44は、ゼロレベルを中心に凹凸を繰り返す経時的変化形状の信号となる。このトルク差分値信号44は、トルク値比較器30において、過負荷検出値設定器29から出力される過負荷閾値信号45(図3中の過負荷検出ライン)と比較される。そして、トルク差分値信号44のレベルが図3に破線で示すように過負荷閾値信号45のレベルを超えたときには、過負荷検出点44tにおいて何らかの理由(例えば人がドアに挟まれる等)により、ドア開閉動作が阻害されたものと判定し、過負荷検出判定器28から挟まれ異物判別器32とエレベータ制御装置11の過負荷検出部12とに過負荷検出信号が出力される。
【0021】
図4は、戸閉時の過負荷要因が小石等の硬い物体である場合のトルク変化を示すタイミングチャートの一部であり、過負荷検出に至るまでのトルク差分値信号の変化を示している。小石等の硬い異物が敷居6の溝に嵌まり込むなどして戸閉動作が阻害された場合、図4に示すように、トルク差分値信号44aのレベルは急激に増大して過負荷検出点44atで過負荷閾値信号のレベル(過負荷検出ライン)に到達する。したがって、過負荷検出に至る直前の所定単位時間Tにおけるトルク差分値の変化量は、図示の如く大きめな値44aqになる。
【0022】
これに対して、図5は、戸閉時の過負荷要因が人体である場合のトルク変化を示すタイミングチャートの一部であり、過負荷検出に至るまでのトルク差分値信号の変化を示している。弾性に富む人体がドアに挟まれて戸閉動作が阻害された場合、図5に示すように、トルク差分値信号44bのレベルは緩やかに増大して過負荷検出点44btで過負荷閾値信号のレベル(過負荷検出ライン)に到達する。したがって、過負荷検出に至る直前の所定単位時間Tにおけるトルク差分値の変化量は、図示の如く小さめな値44bqになり、前記値44aqとは明らかに異なる。それゆえ、トルク差分値信号を挟まれ異物判別器32のトルク変化異物判別器32aに与えて、過負荷検出に至る直前の所定単位時間Tにおけるトルク差分値の変化量を予め定めた所定値(第1の基準値)と比較することによって、戸閉動作を阻害した過負荷要因が弾性に富む人体等であるか否かを的確に判別することができる。
【0023】
図6は、戸閉時の過負荷要因が小石等の硬い物体である場合のドア位置変化を示すタイミングチャートの一部であり、過負荷検出に至るまでのドア位置信号の変化を示している。小石等の硬い異物が敷居6の溝に嵌まり込むなどして戸閉動作が阻害された場合、ドアは急停止するため、図6に示すように、ドア位置信号46aの表す位置データは過負荷検出点44atの直前からほとんど変化しなくなる。したがって、過負荷検出に至る直前の所定単位時間Tにおけるドア位置の変化量は、図示の如く近似的にゼロと見なせる値46apになる。
【0024】
これに対して、図7は、戸閉時の過負荷要因が人体である場合のドア位置変化を示すタイミングチャートの一部であり、過負荷検出に至るまでのドア位置信号の変化を示している。弾性に富む人体がドアに挟まれて戸閉動作が阻害された場合、ドアは人体を押し込みながら停止するため、図7に示すように、ドア位置信号46bの表す位置データは過負荷検出点44btの直前でも僅かに変化する。したがって、過負荷検出に至る直前の所定単位時間Tにおけるドア位置の変化量は、図示の如く小さいながらも近似的にゼロと見なすことができない値46bpになり、前記値46apとは明らかに異なる。それゆえ、ドア位置信号を挟まれ異物判別器32の位置変化異物判別器32bに与えて、過負荷検出に至る直前の所定単位時間Tにおけるドア位置の変化量を予め定めた所定値(第2の基準値)と比較することによって、戸閉動作を阻害した過負荷要因が弾性に富む人体等であるか否かを的確に判別することができる。
【0025】
図8は、ドア制御装置21で適用されるドア開閉速度パターンを例示したタイミングチャートであり、通常の開閉速度パターン41と高速の開閉速度パターン41Hと低速の開閉速度パターン41Lの3種類を示している。
【0026】
図9は、ドア制御装置21においてドア速度を高速から通常速度へ切り替えた場合のドア開閉速度パターンを示すタイミングチャートである。すなわち、敷居6の溝に小石等の異物が嵌まり込んで戸閉動作が阻害された場合、再戸閉時のドア速度を通常速度から高速に切り替えることによって異物を除去しやすくなるが、異物を除去した後もドア速度が高速のままだと利用者がドアに挟まれやすくなる。そのため、このドア制御装置21では利用者の安全に配慮して、エレベータ制御装置11の過負荷検出位置記憶部13に記憶されている前回戸閉時の過負荷検出位置をドアが所定量通過した時点、つまり異物の除去が確認された時点で、ドア速度を高速から通常速度に戻すように設定している。
【0027】
これを図9に基づいて説明すると、通常のドア開閉速度パターン41で戸閉中に過負荷検出点44txにて戸閉動作が阻害され、その過負荷要因は弾性に乏しい小石等の異物であるという判定が挟まれ異物判別器32にてなされた場合、再戸閉時には異物を除去するためにまず高速のドア開閉速度パターン41Hを適用する。そして、過負荷検出点44txに対応する過負荷検出位置をドアが確実に通過したなら、ドア速度を減速して通常速度に戻し、以後、戸閉動作が完了するまで通常のドア開閉速度パターン41を適用する。ただし、戸閉動作中にドア開閉速度パターンを切り替える移行期、例えば、図9に示すようにドア開閉速度パターン41Hからドア開閉速度パターン41へ移行する過程では、同図中に符号41Haで示すような移行期特有のドア開閉速度パターンが適用される。なお、図9では再戸閉時に高速のドア開閉速度パターン41Hで加速移動中のドアを通常のドア開閉速度パターン41へ移行させる場合について例示しているが、ドア開閉速度パターンを移行させるタイミングは過負荷検出位置に応じて決定されるので、例えば、ドア開閉速度パターン41Hで定速移動中あるいは減速移動中のドアを通常のドア開閉速度パターン41へ移行させる場合もある。
【0028】
また、本実施形態例では、過負荷検出位置が閉じ端近傍である場合には、再戸閉時のドア速度を高速に切り替えるという設定を禁止することによって、利用者の安全を優先している。さらに、本実施形態例においては、通常のドア開閉速度パターン41で戸閉中に過負荷検出点にて戸閉動作が阻害され、その過負荷要因が弾性に富む人体等であるという判定が挟まれ異物判別器32にてなされた場合には、再戸閉時のドア速度を通常速度から低速に切り替える(つまり低速のドア開閉速度パターン41Lを適用する)ことによって、利用者の安全に配慮している。
【0029】
なお、上記の動作説明ならびに以下の動作説明では、ドア開閉動作のうち戸閉動作を阻害する過負荷が検出された場合について述べているが、戸開動作を阻害する過負荷が検出された場合の動作も、説明文中の「開」と「閉」が逆になるだけで基本的には同等である。
【0030】
次に、図10のフローチャートを参照しながら、本実施形態例で戸閉時に過負荷が検出された場合の動作についてさらに詳しく説明する。エレベータのかごが目的階に到着したときや開ボタンが押されたとき、図10のステップS1においてドア開閉動作が行われ、その戸閉時にステップS2以下の制御処理が実施される。
【0031】
ステップS2において、ドア制御装置21は過負荷が検出されたか否か、つまりドアに異物が挟まれるなどして戸閉動作が阻害されたか否かを判定する。この判定は過負荷検出判定器28が行う。具体的には、トルク値比較器30にトルク推定器27からのトルク推定値信号42と速度制御器23からのトルク指令値信号43とを突き合わせて形成されたトルク差分値信号44が与えられ、このトルク差分値信号44を過負荷検出値設定値29にて形成される過負荷閾値信号45と比較することによって、トルク値比較器30が過負荷判定を行う。このステップS2において、過負荷が検出されない場合は、ステップS14へ進んで正常に戸閉動作が完了するが、過負荷が検出された場合は、過負荷検出判定器28が過負荷検出信号を出力してステップS3へ進み、さらにステップS4、ステップS5へと進む。
【0032】
ステップS3では、エレベータ制御装置11が、過負荷検出判定器28から過負荷検出部12に与えられた過負荷検出信号と、位置検出器31から過負荷検出位置記憶部13に与えられたドア位置信号46とに基づき、過負荷検出時のドア位置を過負荷検出位置記憶部13に記憶させる。
【0033】
次なるステップS4では、エレベータ制御装置11がドア制御装置21に対してドアを反転移動させる制御指令を出力する。すなわち、過負荷を検出して戸閉動作が阻害されたときには、通常のドア速度で一旦ドアを逆向きに移動(戸開)させる。
【0034】
次なるステップS5では、ドア制御装置21の挟まれ異物判別器32が、過負荷検出判定器28から過負荷検出信号が与えられた段階で、戸閉動作を阻害した過負荷要因が弾性に富むものであるか否かを判定する。つまり、トルク変化異物判別器32aが、過負荷検出時直前の所定単位時間Tにおいて、トルク差分値信号44の変化量が所定値(予め定めた第1の基準値)を超えているか否かを判定し、超えていなければステップS6へ進み、超えていればステップS7へ進む。その際、トルク変化異物判別器32aでは、トルク変化量比較器34が過負荷検出に至るまでの所定単位時間Tにおけるトルク差分値信号44を監視し、過負荷検出判定器28から過負荷検出信号を受けた時点で、このトルク差分値信号44の変化量を単位時間トルク変化量設定器33に予め設定しておいた所定単位時間T当たりの第1の基準値と比較する。なお、トルク差分値信号44を監視する代わりに、トルク指令値信号43を直接監視する構成にしてもよい。また、トルク差分値の変化量ではなく実際のトルクの変化量を求め、このトルク変化量に基づいて過負荷要因を判別するようしてもよい。
【0035】
弾性に乏しい硬い物体によって戸閉動作が阻害された場合、図4で説明したように、過負荷検出時直前の所定単位時間Tにトルク差分値信号44のレベルが急激に増大してトルク変化量(図4中の符号44aq)は大きな値となり、その値は予め定めた第1の基準値を超えるため、ステップS5での判定は「Yes」となってステップS7へ進む。そして、ステップS7において、弾性に乏しい小石等の硬い異物が敷居溝に嵌まり込むなどして戸閉動作が阻害されたものと判断し、ステップS8へ進む。
【0036】
一方、弾性に富む人体等によって戸閉動作が阻害された場合は、図5で説明したように、過負荷検出時直前の所定単位時間Tにトルク差分値信号44のレベルは緩やかに増大してトルク変化量(図5中の符号44bq)は小さな値となり、その値は第1の基準値を超えないため、ステップS5での判定は「No」となってステップS6へ進む。ただし、小石等の硬い異物が戸閉時のドアに徐々に押し込まれて敷居溝に嵌まってしまう場合などは、過負荷検出時直前の所定単位時間Tにトルク差分値信号44のレベルはやや緩やかに増大するため、トルク変化量が第1の基準値を超えない可能性もある。そこでステップS6では、戸閉動作を阻害した過負荷要因を再度判別する。この判別はドア制御装置21の位置変化異物判別器32bが行い、過負荷要因が弾性に富む人体等であると判定された場合はステップS31へ進み、過負荷要因が弾性に乏しい硬い物体であると判定された場合はステップS7へ進む。
【0037】
すなわち、ステップS6では、位置変化異物判別器32bのドア位置変化量比較器36が過負荷検出に至るまでの所定単位時間Tにおけるドア位置信号46を監視し、過負荷検出判定器28から過負荷検出信号を受けた時点で、このドア位置信号46の変化量を単位時間位置変化量設定器35に予め設定しておいた所定単位時間T当たりの所定値(第2の基準値)と比較することによって、判別処理が行われる。
【0038】
弾性に乏しい硬い物体によって戸閉動作が阻害された場合、ドアは急停止するため、図6で説明したように、過負荷検出時直前の所定単位時間Tにおけるドア位置の変化量(図6中の符号46ap)は近似的にゼロと見なせる値となり、その値は予め定めた第2の基準値以下となるため、ステップS6での判定は「Yes」となり、ステップS7へ進む。そして、ステップS7において、弾性に乏しい小石等の硬い異物が敷居溝に嵌まり込むなどして戸閉動作が阻害されたものと判断し、ステップS8へ進む。
【0039】
一方、弾性に富む人体等によって戸閉動作が阻害された場合は、図7で説明したように、過負荷検出時直前の所定単位時間Tにおけるドア位置の変化量(図7中の符号46bp)は近似的にゼロと見なすことができない値となり、その値は第2の基準値よりも大きくなるため、ステップS6での判定は「No」となってステップS31へ進む。そして、ステップS31において、弾性に富む人体等が戸閉動作を阻害しているものと判断してステップS32へ進む。
【0040】
このステップS32では、ドアに人が挟まれた可能性が高いことから、ドア制御装置21の挟まれ異物判別器32がエレベータ制御装置11の開閉速度切替部14に対してドア速度を低速に切り替えるように信号(開閉速度切替信号)を出力し、この信号に基づく指令信号が開閉速度切替部14からドア制御装置21の開閉速度パターン発生器22に対して出力される。そのため、次なるステップS33でドアの再戸閉動作が行われるときには、低速のドア開閉速度パターン41Lが適用される。つまり、この場合は、ドアに人が挟まれたことによって戸閉動作が阻害された可能性が高いため、ステップS32で低速のドア速度に切り替えてからステップS33で再戸閉動作を行うことによって、利用者の安全に配慮している。なお、ステップS33の後はステップS13へ進む。
【0041】
ステップS5またはステップS6からステップS7へ進んだ場合は、弾性に乏しい小石等の硬い異物が敷居溝に嵌まり込むなどして戸閉動作が阻害されたものと判断された場合なので、次なるステップS8において、過負荷検出位置が閉じ端から所定の至近距離内(閉じ端近傍)か否かを判定する。そして、ステップS8で、過負荷検出位置が閉じ端近傍でないと判定された場合は、ステップS9へ進んでドア速度を高速に切り替えた後、次なるステップS10で再戸閉動作を行い、ステップS11へと進む。すなわち、ステップS9では、ドア制御装置21の挟まれ異物判別器32がエレベータ制御装置11の開閉速度切替部14に対してドア速度を高速に切り替えるように信号(開閉速度切替信号)を出力し、この信号に基づく指令信号が開閉速度切替部14からドア制御装置21の開閉速度パターン発生器22に対して出力される。そのため、次なるステップS10でドアの再戸閉動作が行われるときには高速のドア開閉速度パターン41Hが適用され、これにより、小石等の異物が敷居溝に嵌まり込んでいても再戸閉時にその異物を除去しやすくなる。
【0042】
一方、ステップS8において、過負荷検出位置が閉じ端近傍であると判定された場合はステップS21へ進み、ドア開閉速度パターンを切り替えることなく、つまり通常のドア速度のまま、次なるステップS22で再戸閉動作を行ってステップS13へと進む。つまり、過負荷検出位置が閉じ端近傍の場合は再戸閉時のドア速度を高速に切り替える設定(ステップS9での設定)を行わないようにしてあり、こうすることによって、ドア速度が高速の場合に懸念される閉じ端近傍での挟み込みが回避されるため、利用者の安全を優先したドア開閉制御が行えることになる。
【0043】
また、ステップS8からステップS9、ステップS10へと進んだ場合は、弾性に乏しい小石等の硬い異物が敷居溝に嵌まり込んでいる可能性があり、かつ、過負荷検出位置が閉じ端近傍でないことから再戸閉時のドア速度を高速に切り替えた場合なので、次なるステップS11において、ドアが前回戸閉時の過負荷検出位置を通過して所定の動作確認距離だけ移動したか否かを判定する。そして、ステップS11の判定結果が「Yes」の場合は、ドアの再戸閉によって異物の除去が成功したものと判断できるので、ステップS12へ進んで、ドア速度を高速から通常速度に戻す。こうすることによって、敷居溝に嵌まり込んだ小石等の異物の除去に成功した後の戸閉動作時におけるドアの勢いを弱めることができるため、利用者がドアに挟まれにくくなって安全性が向上する。
【0044】
具体的には、エレベータ制御装置11の開閉速度切替部14がドア位置信号46に基づき戸閉時のドア位置を監視しているので、これを過負荷検出位置記憶部13に記憶されている前回戸閉時の過負荷検出位置と比較することによって、ステップS11で、ドアが該過負荷検出位置から所定距離(動作確認距離)だけ進んだか否かが判定できる。また、ステップS12では、ドア制御装置21の挟まれ異物判別器32がエレベータ制御装置11の開閉速度切替部14に対してドア速度を通常速度に切り替えるように信号(開閉速度切替信号)を出力し、この信号に基づく指令信号が開閉速度切替部14からドア制御装置21の開閉速度パターン発生器22に対して出力される。その結果、開閉速度パターン発生器22は、ドアが前回戸閉時の過負荷検出位置を確実に通過した時点で、高速のドア開閉速度パターン41Hを通常のドア開閉速度パターン41に切り替えるが、速度パターン41Hから速度パターン41へ移行する過程では、図9中に符号41Haで示したような移行期特有の速度パターンが適用される。
【0045】
また、ステップS11の判定結果が「No」の場合はステップS15へ進み、再び過負荷が検出されたか否かを判定する。そして、ステップS15において過負荷が検出されなければステップS11へ戻って、ドアが前回戸閉時の過負荷検出位置を通過して所定の動作確認距離だけ移動したか否かを判定する。一方、ステップS15において再び過負荷が検出された場合は、ドアが前回戸閉時の過負荷検出位置を確実に通過できず、何らかの硬い異物が依然として戸閉動作を阻害しているものと判断できるので、ステップS3へ戻って前述した制御処理を繰り返す。
【0046】
また、ステップS11の判定結果が「Yes」でステップS12、ステップS13へと進んだ場合には、このステップS13において、戸閉動作が完了するまでの間に再び過負荷が検出されたか否かを判定する。この判定も前述したようにドア制御装置21の過負荷検出判定器28にて行われる。そして、ステップS13で過負荷が検出されなければ、ステップS14へ進んで戸閉動作を完了させ、一連の制御処理が終了する。また、ステップS13で再び過負荷が検出された場合には、ステップS3へ戻って前述した制御処理を繰り返す。
【0047】
なお、上記の実施形態例においては、トルク変化量に基づくステップS5の条件とドア位置に基づくステップS6の条件のいずれか一方が成立すれば、戸閉動作を阻害する過負荷要因が弾性に乏しい硬い物体であると判断しているが、ステップS5およびステップS6の条件が両方とも成立した場合に過負荷要因が硬い物体であると判断するようにしてもよい。
【符号の説明】
【0048】
1 ドアパネル
2 ドア開閉機構
3 ドアモータ
4 ロータリエンコーダ
5 ドア駆動ベルト
6 敷居
11 エレベータ制御装置
12 過負荷検出部
13 過負荷検出位置記憶部
14 開閉速度切替部
21 ドア制御装置
22 開閉速度パターン発生器
23 速度制御器
24 可変電圧回路
25 パラメータ格納手段
26 速度検出器
27 トルク推定器
28 過負荷検出判定器(過負荷検出手段)
29 過負荷検出値設定器
30 トルク値比較器
31 位置検出器
32 挟まれ異物判別器(異物判別手段)
32a トルク変化異物判別器
32b 位置変化異物判別器
33 単位時間トルク変化量設定器
34 トルク変化量比較器
35 単位時間位置変化量設定器
36 ドア位置変化量比較器
41 開閉速度パターン(通常)
41H 開閉速度パターン(高速)
41L 開閉速度パターン(低速)
42 トルク推定値信号
43 トルク指令値信号
44 トルク差分値信号
45 過負荷閾値信号
46 ドア位置信号
【特許請求の範囲】
【請求項1】
ドア開閉動作が阻害されたときにこれを検出する過負荷検出手段を備えたエレベータのドア制御装置において、
前記過負荷検出手段が過負荷を検出したときに、その検出時直前の単位時間当たりのドアの動作データ変化量に基づいて、ドア開閉動作を阻害した過負荷要因が弾性に富むものであるか否かを判別する異物判別手段を備えたことを特徴とするエレベータのドア制御装置。
【請求項2】
請求項1の記載において、前記異物判別手段が、前記過負荷要因が弾性に富むものであると判定した場合、再開閉時のドア速度を通常速度から低速に切り替えるようにしたことを特徴とするエレベータのドア制御装置。
【請求項3】
請求項1または2の記載において、前記動作データ変化量として、ドアモータを駆動制御するトルクの変化量を用いていることを特徴とするエレベータのドア制御装置。
【請求項4】
請求項1または2の記載において、前記動作データ変化量として、ドア位置の変化量を用いていることを特徴とするエレベータのドア制御装置。
【請求項5】
請求項3または4の記載において、前記異物判別手段が、前記過負荷要因が弾性に乏しい硬い物体であると判定した場合、前記再開閉時のドア速度を通常速度から高速に切り替えるようにしたことを特徴とするエレベータのドア制御装置。
【請求項6】
請求項5の記載において、前記過負荷検出手段が過負荷を検出したときのドア位置の情報に基づいてドア速度を制御するようにしたことを特徴とするエレベータのドア制御装置。
【請求項7】
請求項6の記載において、前記再開閉時に、前記過負荷検出手段が過負荷を前回検出したときのドア位置から前記ドアが所定距離だけ通過した時点で、ドア速度を通常速度に戻すようにしたことを特徴とするエレベータのドア制御装置。
【請求項8】
請求項6の記載において、前記過負荷検出手段が過負荷を検出したときのドア位置が戸閉時の閉じ端近傍または戸開時の開端近傍である場合、前記再開閉時のドア速度を高速に切り替えることを禁止するようにしたことを特徴とするエレベータのドア制御装置。
【請求項1】
ドア開閉動作が阻害されたときにこれを検出する過負荷検出手段を備えたエレベータのドア制御装置において、
前記過負荷検出手段が過負荷を検出したときに、その検出時直前の単位時間当たりのドアの動作データ変化量に基づいて、ドア開閉動作を阻害した過負荷要因が弾性に富むものであるか否かを判別する異物判別手段を備えたことを特徴とするエレベータのドア制御装置。
【請求項2】
請求項1の記載において、前記異物判別手段が、前記過負荷要因が弾性に富むものであると判定した場合、再開閉時のドア速度を通常速度から低速に切り替えるようにしたことを特徴とするエレベータのドア制御装置。
【請求項3】
請求項1または2の記載において、前記動作データ変化量として、ドアモータを駆動制御するトルクの変化量を用いていることを特徴とするエレベータのドア制御装置。
【請求項4】
請求項1または2の記載において、前記動作データ変化量として、ドア位置の変化量を用いていることを特徴とするエレベータのドア制御装置。
【請求項5】
請求項3または4の記載において、前記異物判別手段が、前記過負荷要因が弾性に乏しい硬い物体であると判定した場合、前記再開閉時のドア速度を通常速度から高速に切り替えるようにしたことを特徴とするエレベータのドア制御装置。
【請求項6】
請求項5の記載において、前記過負荷検出手段が過負荷を検出したときのドア位置の情報に基づいてドア速度を制御するようにしたことを特徴とするエレベータのドア制御装置。
【請求項7】
請求項6の記載において、前記再開閉時に、前記過負荷検出手段が過負荷を前回検出したときのドア位置から前記ドアが所定距離だけ通過した時点で、ドア速度を通常速度に戻すようにしたことを特徴とするエレベータのドア制御装置。
【請求項8】
請求項6の記載において、前記過負荷検出手段が過負荷を検出したときのドア位置が戸閉時の閉じ端近傍または戸開時の開端近傍である場合、前記再開閉時のドア速度を高速に切り替えることを禁止するようにしたことを特徴とするエレベータのドア制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−101921(P2012−101921A)
【公開日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願番号】特願2010−253148(P2010−253148)
【出願日】平成22年11月11日(2010.11.11)
【出願人】(000232955)株式会社日立ビルシステム (895)
【Fターム(参考)】
【公開日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願日】平成22年11月11日(2010.11.11)
【出願人】(000232955)株式会社日立ビルシステム (895)
【Fターム(参考)】
[ Back to top ]