
エレベータのドア制御装置
【課題】乗客の安全を確保しつつ、ドラフト等の外乱発生時にも確実に戸閉動作を行うことのできるエレベータのドア制御装置を提供することである。
【解決手段】本実施形態のエレベータのドア制御装置は、速度制御器15と電流制御器16との間にトルクリミッタ21が設けられ、戸閉開始から加速終了後または全行程の1/3を過ぎたタイミングで、トルクリミッタ21の値をドア駆動用モータ11の定格トルクに応じて設定された第1のリミット値から上記第1のリミット値よりも低く設定された第2のリミット値に切り換えるトルクリミッタ制御部22を備える。
【解決手段】本実施形態のエレベータのドア制御装置は、速度制御器15と電流制御器16との間にトルクリミッタ21が設けられ、戸閉開始から加速終了後または全行程の1/3を過ぎたタイミングで、トルクリミッタ21の値をドア駆動用モータ11の定格トルクに応じて設定された第1のリミット値から上記第1のリミット値よりも低く設定された第2のリミット値に切り換えるトルクリミッタ制御部22を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、エレベータのドア(かごドア)を開閉制御するエレベータのドア制御装置に関する。
【背景技術】
【0002】
高昇降行程のエレベータでは、エレベータ昇降路内と建物外との内外気圧差からドラフトと呼ばれる風の流れが発生し、エレベータの最下階から最上階に向けて上昇気流が発生する。この上昇気流によりドアパネルに対して風圧が発生する。その際、ドアパネルに作用する力の特徴として、上方階ではドラフトによる風圧が扉を閉めようとする方向(戸開を阻止)に働き、下方階では扉を開けようとする方向(戸閉を阻止)に働く。
【0003】
この結果、下方階では、戸閉時の挟まれ保護(過負荷検出)が誤動作し易くなる。これは、ドラフトにより戸閉時のトルクが上がってしまい、乗客の挟まれによる過負荷状態と誤検出してしまうからである。逆に、上方階では、戸閉時の挟まれ保護(過負荷検出)が動作し難くなる事象が発生する。これは、ドラフトにより戸閉時のトルクが下がり、乗客が挟まれた状態にあっても過負荷状態を正しく検知できないからである。
【0004】
ここで、従来の過負荷検出では、ドア重量、走行抵抗から開閉時の走行トルク=推定トルクを算出し、その推定トルクと開閉中の実トルクとを比較して過負荷であるか否かを判定していた。その際、乗客がドアパネルに挟まれたときに受ける力を低減するため、過負荷を検出するまでの時間(検出ディレー)を短く設定している(例えば40ms程度)。このため、ドラフト等による瞬時的な外力が加わっただけで、過負荷状態つまり乗客の挟まれと誤検出する可能性がある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第3540509号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述したような瞬時的な外力による誤検出を回避するために、過負荷検出の時間を長くすると、乗客以外の外力に対しては、トルクが大きくなり確実な戸閉が可能となる。しかし、乗客が挟まれた場合には安全が確保できなくなる。さらには、法規要求(挟まれ力150(N)以下:EN規格、GB規格、国内法規)を満足できなくなるという問題がある。
【0007】
本発明が解決しようとする課題は、乗客の安全を確保しつつ、ドラフト等の外乱発生時にも確実に戸閉動作を行うことのできるエレベータのドア制御装置を提供することである。
【課題を解決するための手段】
【0008】
本実施形態に係るエレベータのドア制御装置は、ドア駆動用モータの速度が速度指令に追従するようにトルク指令値を出力する速度制御手段と、この速度制御手段から出力された上記トルク指令値に基づいて上記ドア駆動用モータの電流を制御する電流制御手段と、上記速度制御手段と上記電流制御手段との間に介在され、上記トルク指令値に対する出力制限を行うトルクリミッタと、戸閉開始から加速終了後または全行程の1/3を過ぎたタイミングで、上記トルクリミッタの値を上記ドア駆動用モータの定格トルクに応じて設定された第1のリミット値から上記第1のリミット値よりも低く設定された第2のリミット値に切り換えるトルクリミッタ制御手段とを具備する。
【図面の簡単な説明】
【0009】
【図1】図1は第1の実施形態に係るエレベータのドア制御装置の構成を示すブロック図である。
【図2】図2は本実施形態の方式における戸閉時の速度パターンと過負荷検出値とトルク出力との関係を示す図である。
【図3】図3は従来方式における戸閉時の速度パターンと過負荷検出値とトルク出力との関係を示す図である。
【図4】図4は第2の実施形態に係るエレベータのドア制御装置の構成を示すブロック図である。
【図5】図5は同実施形態におけるエレベータのドア制御装置の処理動作を示すフローチャートである。
【図6】図6は第3の実施形態におけるエレベータのドア制御装置の処理動作を示すフローチャートである。
【図7】図7は第4の実施形態に係るエレベータのドア制御装置の構成を示すブロック図である。
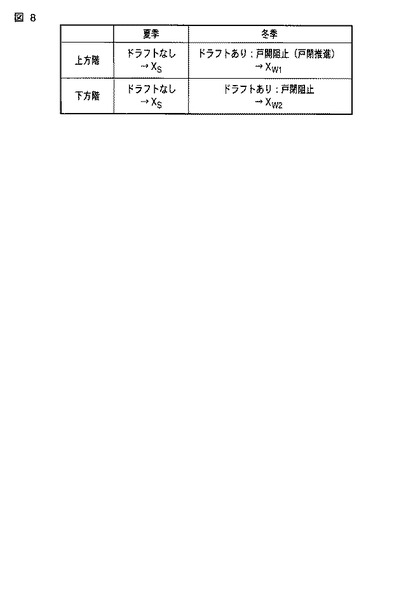
【図8】図8は同実施形態におけるトルクリミッタの切り換え条件を説明するための図である。
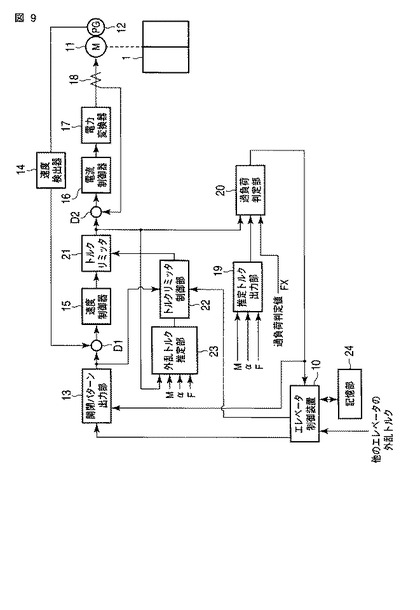
【図9】図9は第5の実施形態に係るエレベータのドア制御装置の構成を示すブロック図である。
【図10】図10は同実施形態における同一昇降路内の他のエレベータの外乱トルクの情報を記憶する記憶部の一例を示す図である。
【発明を実施するための形態】
【0010】
以下、図面を参照して実施形態を説明する。
【0011】
(第1の実施形態)
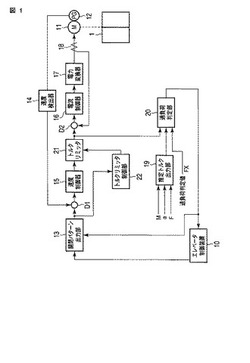
図1は第1の実施形態に係るエレベータのドア制御装置の構成を示すブロック図である。なお、図中のD1,D2は減算器である。
【0012】
図1に示すように、本実施形態におけるドア制御装置には、エレベータ主制御装置10、ドア駆動用モータ11、パルスエンコーダ(PG)12、開閉パターン出力部13、速度検出器14、速度制御器15、電流制御器16、電力変換器17、電流検出器18が備えられている。
【0013】
エレベータ主制御装置10は、ドア制御を含むエレベータ全体の制御を行うものであり、ここではドア開閉指令を開閉パターン出力部13に出力する。
【0014】
ドア駆動用モータ11は、図示せぬ乗りかごのドア(以下、かごドアと称す)1に駆動用モータ11が設置されており、この駆動用モータ11の駆動によりかごドア1が開閉動作する。なお、図示せぬ乗場に設置されたドア(以下、乗場ドアと称す)は乗りかごの着床時にかごドア1に係合して戸閉動作する。
【0015】
パルスエンコーダ12は、このドア駆動用モータ11の回転軸などに取り付けられており、ドア駆動用モータ11の回転速度に応じてパルス信号を出力する。このパルス信号を基に所定の開閉パターンに追従して制御する速度フィードバック制御系が構成される。開閉パターン出力部13は、エレベータ制御装置10からのドア開閉指令を受け、戸開または戸閉の速度指令を生成する。
【0016】
一方、パルスエンコーダ12の出力であるモータ回転角が速度検出器14に与えられ、ドア駆動用モータ11の実速度が算出される。開閉パターン出力部13から出力された速度指令と実速度との偏差が速度制御器15に入力される。速度制御器15は、速度偏差に応じたトルク指令を出力する。
【0017】
電流制御器16は、速度制御器15から出力されたトルク指令すなわち電流指令と電流検出器18で検出された電流との偏差に基づき、電力変換器17に対する電力制御指令を生成する。電力変換器17は、電流制御器16から出力される電力制御指令によりドア駆動用モータ11に所要の電力を供給する。
【0018】
以上は速度フィードバック制御系の基本的な構成である。
本実施形態では、戸閉時の挟まれ保護(過負荷検出)を実現するための構成要素として、さらに推定トルク出力部19、過負荷判定部20、トルクリミッタ21、トルクリミッタ制御部22が備えられている。
【0019】
推定トルク出力部19は、ドア重量M、加速度α、走行抵抗Fに基づいて、かごドア1の駆動に必要なトルクを推定する。推定トルクは、「M×α+F」となる。
【0020】
過負荷判定部20は、推定トルク出力部19によって推定されたトルクに過負荷判定値FXを加算した値「M×α+F+FX」を過負荷検出値として求め、この過負荷検出値と実際のトルク指令とを比較する。その結果、トルク指令が過負荷検出値を上回り、かつ、第1の検出時間Taの間、その状態が継続した場合に、過負荷判定部20は過負荷状態であると判定する。なお、上記第1の検出時間Taは、従来の過負荷検出で用いられていた時間であり、挟まれ時に乗客に対して加わるトルクを低減するために、例えば40ms程度と非常に短い時間に設定されている。
【0021】
また、過負荷判定部20は、過負荷状態を検出すると、開閉パターン出力部13に対してモータ停止指令を出力する。これにより、開閉パターン出力部13では、速度指令を零に設定して、ドア駆動用モータ11を停止制御する。さらに、エレベータ制御装置10に対して過負荷検出信号が発報される。これにより、エレベータ制御装置10は、開閉パターン出力部13に対して戸開指令を出力し、戸閉状態から停止中となっているかごドア1を反転させる。
【0022】
トルクリミッタ21とトルクリミッタ制御部22は本実施形態の特徴的な部分である。トルクリミッタ21は、速度制御器15と電流制御器16との間に介在され、図2に示すように第1のリミット値Laと、この第1のリミット値Laよりも低く設定された第2のリミット値Lbを有してトルク指令値に対する出力制限を行う。
【0023】
第1のリミット値Laは、従来方式から使われている通常のトルクリミッタに相当し、ドア駆動用モータ11の定格トルクの数倍に設定されている。第2のリミット値Lbは、戸閉時の乗客の挟まれを保護するために設けられた保護用トルクリミッタに相当し、加速終了後の推定トルクに合わせて設定されている。
【0024】
トルクリミッタ制御部22は、かごドア1の戸閉開始から所定時間経過またはかごドア1が所定位置に到達したタイミングで、より詳しくは加速終了後または全行程の1/3を過ぎたタイミングで、トルクリミッタ21の値を第1のリミット値Laから第2のリミット値Lbに切り換える。
【0025】
第2のリミット値Lbに切り換わった場合において、ドラフトや乗客の挟まれによる外乱トルクが発生すると、トルク指令は第2のリミット値Lbで制限され、それ以上のトルクが出力されることはない。
【0026】
このとき、過負荷判定部20はトルク指令が第2のリミット値Lbで制限されているかどうかを判別し、所定の時間つまり第2の時間Tbの間、制限が継続された場合に過負荷状態であると判定する。なお、上記第2の時間Tbは、従来の過負荷検出で用いられていた第1の検出時間Taよりも長く、例えば1s程度に設定されている。
【0027】
その後の保護動作は従来の過負荷検出と同様である。すなわち、過負荷判定部20によって過負荷状態が検出されると、開閉パターン出力部13に対してモータ停止指令が出力され、ドア駆動用モータ11が停止する。さらに、エレベータ制御装置10に対して過負荷検出信号が発報され、かごドア1が戸開方向へ反転動作する。
【0028】
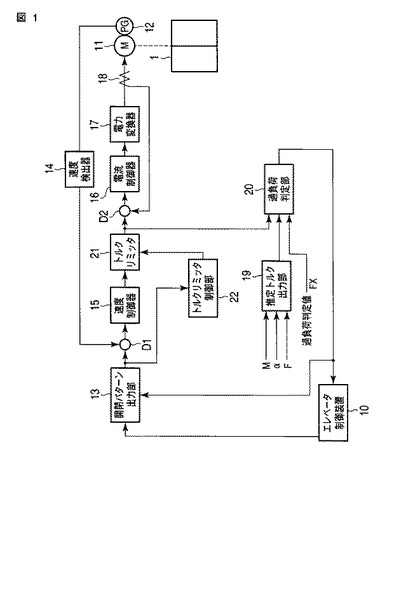
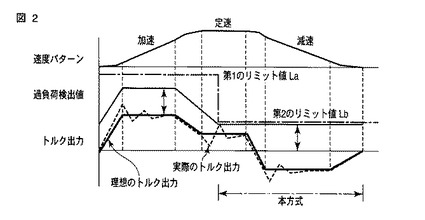
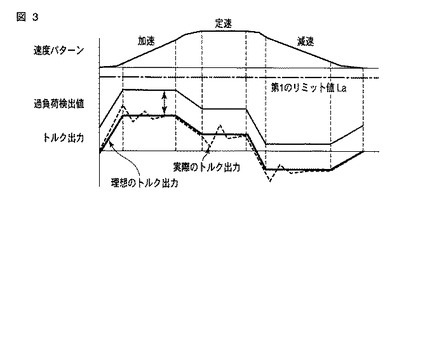
ここで、本方式と従来方式の過負荷検出の違いについて説明する。
図2および図3は戸閉時の速度パターンと過負荷検出値とトルク出力との関係を示す図であり、図2は本方式、図3は従来方式である。
【0029】
図3に示すように、従来方式では、加速、定速、減速の各区間に関係なく、トルクリミッタ21の値が一定であり、定格トルクの数倍に設定されている(第1のリミット値La)。したがって、常に過負荷検出値(推定トルク+過負荷判定値)を基準にして過負荷状態が検出される。その際、乗客がドアパネル(かごドア1)に挟まれたときに受ける力を低減するため、過負荷を検出するまでの時間が短く設定されている(第1の検出時間Ta=40ms程度)。このため、ドラフト等による瞬時的な外力が加わると、過負荷状態つまり乗客の挟まれと誤検出する可能性がある。
【0030】
これに対し、図2に示すように、本方式では、加速終了後または全行程の1/3を過ぎたタイミングで、トルクリミッタ21の値が第1のリミット値Laよりも低く設定された第2のリミット値Lbに切り換えられる。したがって、戸閉動作の後半は、過負荷の検出時間を長くしても(第2の検出時間Tb=1s程度)、第2のリミット値Lbまでしか力が加わらないので、乗客がドアパネルに挟まれたときの安全を確保できる。また、過負荷の検出時間を長く取っておくことで、ドラフト等の外乱が瞬時的に加わっても誤検出することなく確実に戸閉することが可能となる。
【0031】
このように第1の実施形態によれば、戸閉時に所定の区間でのみトルクリミッタの値を第1のリミット値Laよりも低く設定された第2のリミット値Lbに切り換えることで、乗客の安全を確保しつつ、ドラフト等の外乱発生時にも確実に戸閉動作を行うことができる。
【0032】
(第2の実施形態)
次に、第2の実施形態を説明する。
【0033】
第2の実施形態では、上記第1の実施形態の構成に加え、戸開時の外乱トルクから戸閉時の外乱トルクを推定し、トルクリミッタの設定に反映させるようにしたものである。
【0034】
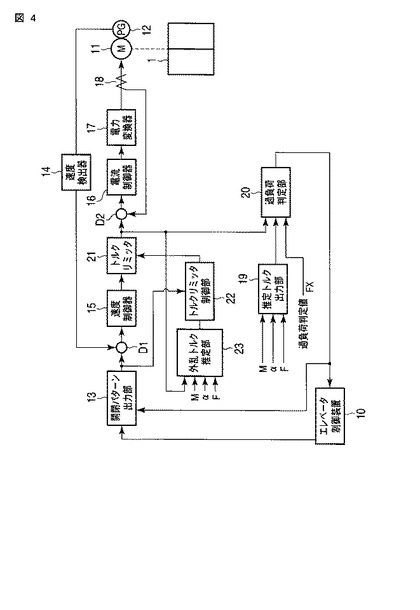
図4は第2の実施形態に係るエレベータのドア制御装置の構成を示すブロック図である。なお、上記第1の実施形態における図1の構成と同一部分には同一符号を付して、その説明を省略するものとする。
【0035】
図1の構成に加え、外乱トルク推定部23が設けられている。第2の実施形態において、この外乱トルク推定部23は、着床時にかごドア1を戸開したときの走行トルクから戸閉時の外乱トルクを推定する機能を備える。
【0036】
戸開時の走行トルクは、以下のような式で表される。
【0037】
戸開時の走行トルク=走行抵抗トルク+加減速トルク+外乱トルク …(1)
走行抵抗トルクと加減速トルクは予め算出できるので、上記(1)式により戸開時の外乱トルクを求めることができる。この戸開時の外乱トルクを戸閉時の外乱トルクとして保護用トルクリミッタ(第2のリミット値Lb)に加算してトルクリミッタ21を設定する。
【0038】
ここで、
戸開外乱トルク=−戸閉外乱トルク
の関係がある。
【0039】
トルクリミッタ=保護用トルクリミッタ+戸閉外乱トルク
ドラフトが戸開方向、すなわち、戸閉を妨げる方向に発生している場合には、戸開外乱トルクが負、戸閉外乱トルクが正となり、通常時(ドラフトなしの状態)のトルクリミッタ21の第2のリミット値Lbよりも大きい値となる。これは、ドラフトが戸閉を妨げる方向に発生しているので、第2のリミット値Lbを上げて、戸閉時の走行トルクを通常時よりも大きく出せる状態にしておかないと、乗客がドアパネルに軽く触れただけで過負荷状態となり、簡単に戸閉しまうからである。
【0040】
逆に、ドラフトが戸閉方向、すなわち、戸開を妨げる方向に発生している場合には、戸開外乱トルクが正、戸閉外乱トルクが負となり、通常時(ドラフトなしの状態)のトルクリミッタ21の第2のリミット値Lbよりも小さい値となる。これは、ドラフトが戸開を妨げる方向つまり戸閉を推進する方向に発生しているので、第2のリミット値Lbを下げて、戸閉時の走行トルクを通常時よりも制限しておかないと、過負荷検出が遅れて、乗客がドアパネルに挟まれる可能性が高くなるからである。
【0041】
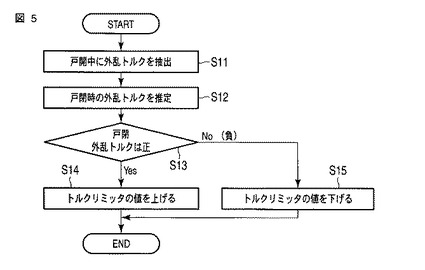
図5は同実施形態におけるエレベータのドア制御装置の処理動作を示すフローチャートである。
【0042】
外乱トルク推定部23は、戸開中に外乱トルクを抽出して、内部メモリに記憶する(ステップS11)。そして、戸閉の際に、外乱トルク推定部23は上記記憶した戸開時の走行トルクから戸閉時の外乱トルクを推定して、トルクリミッタ制御部22に与える(ステップS12)。
【0043】
ここで、外乱トルク推定部23によって与えられた外乱トルクが正であれば(ステップS13のYes)、トルクリミッタ制御部22は、戸閉時にトルクリミッタ21の第2のリミット値Lbを上げる(ステップS14)。これにより、図2に示した第2のリミット値Lbが通常時よりも上がり、戸閉動作の後半では、その第2のリミット値Lbを上限として過負荷検出が行われることになる。
【0044】
一方、外乱トルク推定部23によって与えられた外乱トルクが負であれば(ステップS13のNo)、トルクリミッタ制御部22は、戸閉時にトルクリミッタ21の第2のリミット値Lbを下げる(ステップS15)。これにより、図2に示した第2のリミット値Lbが通常時よりも下がり、戸閉動作の後半では、その第2のリミット値Lbを上限として過負荷検出が行われることになる。
【0045】
このように第2の実施形態によれば、戸開時の外乱トルクから戸閉時の外乱トルクを推定してトルクリミッタの設定に反映させることで、ドラフト等の外乱発生が発生している場合にトルクリミッタを最適化して、乗客の安全確保と共に確実な戸閉動作を行うことができる。
【0046】
(第3の実施形態)
次に、第3の実施形態について説明する。
【0047】
第3の実施形態では、上記第1の実施形態の構成に加え、戸閉開始からトルクリミッタの値を切り換えるまでの期間に外乱トルクを推定してトルクリミッタの設定に反映させるようにしたものである。
【0048】
装置構成は図4と同様のため、ここでは図6を用いて説明する。
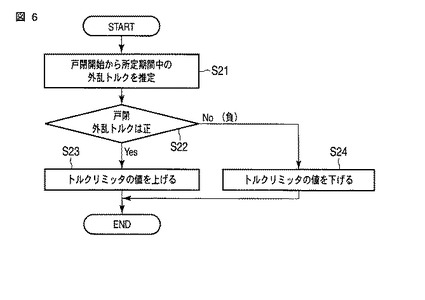
図6は第3の実施形態におけるエレベータのドア制御装置の処理動作を示すフローチャートである。
【0049】
かごドア1を戸閉するときに、外乱トルク推定部23は、その戸閉開始から所定期間までの外乱トルクを推定する。戸閉開始から所定期間までとは、戸閉開始からトルクリミッタ21の値を切り換えるまでの間であり、具体的には図2に示したように、戸閉開始から加速終了後または全行程の1/3を過ぎるまでの間である。外乱トルク推定部23は、この間の走行抵抗の増減傾向から外乱トルクを推定して、トルクリミッタ制御部22に与える(ステップS21)。
【0050】
ここで、外乱トルク推定部23によって与えられた外乱トルクが正であれば(ステップS22のYes)、トルクリミッタ制御部22は、戸閉時にトルクリミッタ21の第2のリミット値Lbを上げる(ステップS23)。これにより、図2に示した第2のリミット値Lbが通常時よりも上がり、戸閉動作の後半では、その第2のリミット値Lbを上限として過負荷検出が行われることになる。
【0051】
一方、外乱トルク推定部23によって与えられた外乱トルクが負であれば(ステップS22のNo)、トルクリミッタ制御部22は、戸閉時にトルクリミッタ21の第2のリミット値Lbを下げる(ステップS24)。これにより、図2に示した第2のリミット値Lbが通常時よりも下がり、戸閉動作の後半では、その第2のリミット値Lbを上限として過負荷検出が行われることになる。
【0052】
このように第3の実施形態によれば、戸閉中に外乱トルクを推定してトルクリミッタの設定に反映させることで、ドラフト等の外乱発生が発生している場合にトルクリミッタを最適化して、乗客の安全確保と共に確実な戸閉動作を行うことができる。
【0053】
(第4の実施形態)
次に、第4の実施形態について説明する。
【0054】
第4の実施形態では、ドラフトの発生期間および階床に応じてトルクリミッタを切り換えるようにしたものである。
【0055】
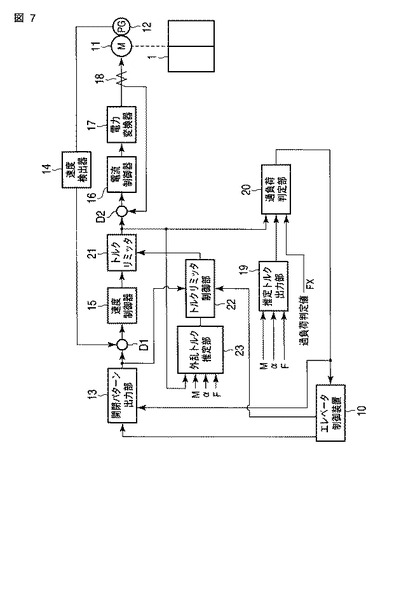
図7は第4の実施形態に係るエレベータのドア制御装置の構成を示すブロック図である。なお、上記第2の実施形態における図4の構成と同一部分には同一符号を付して、その説明を省略するものとする。
【0056】
第4の実施形態において、トルクリミッタ制御部22は、昇降路内のドラフトの発生期間とドラフトの影響を受ける階床に応じてトルクリミッタ21の第2のリミット値Lbを設定する機能を備える。
【0057】
すなわち、図8に示すように、通常、ドラフトは冬季に発生し、夏季には発生しない傾向にある。したがって、冬季はトルクリミッタ21の第2のリミット値Lbを所定量だけ増加し、夏季はその増加分の設定しないようにする。また、ドラフトが発生している場合は上方階、下方階によってドアパネルが受ける力の方向が異なる。具体的には下方階では戸閉を妨げる方向に力が働き、上方階では戸開を妨げる方向、言い換えれば、戸閉を推進する方向に力が働く。このような上方階と下方階でドアパネルが受ける力が異なるので、階床に応じてトルクリミッタ21の第2のリミット値Lbを所定量だけ増減させて設定する。
【0058】
ここで、戸閉時における夏季の「ドラフトなし」の第2のリミット値LbをXs、冬季の「ドラフトあり」の上方階の第2のリミット値LbをXw1、下方階の第2のリミット値LbをXw2とすると、Xw1<Xs<Xw2となり、冬季の「ドラフトあり」の上方階の第2のリミット値Lbが最も低く設定されることになる。
【0059】
図8に基づくトルク制限値の切り換え指令は、エレベータ制御装置10からトルクリミッタ制御部22に対して出力される。トルクリミッタ制御部22では、この切り換え指令に従って戸閉時におけるトルクリミッタ21の第2のリミット値Lbを設定する。
【0060】
なお、図8の例では、ドラフトの発生期間として夏季(例えば4月〜9月)と冬季(例えば10月〜3月)の2つの期間に大きく分けたが、期間をもっと細かく分けて、各期間のドラフト発生量を加味して第2のリミット値Lbを設定することでも良い。
【0061】
また、階床についても、「上方階」と「下方階」の2つに大きく分けるのではなく、各階床毎に細かく分けて、それぞれの階床でのドラフト発生量を加味して第2のリミット値Lbを設定することでも良い。
【0062】
このように第4の実施形態によれば、ドラフトの発生期間および階床に応じてトルクリミッタを切り換えることで、ドラフトの影響を考慮した精度の高い戸閉動作を行うことができる。
【0063】
なお、上記第4の実施形態では、ドラフトの発生期間および階床の両方の条件でトルクリミッタの切り換えるものとしたが、少なくともどちらか一方の条件でトルクリミッタを切り換えることでも良い。
【0064】
さらに、上記第2または第3の実施形態と組み合わせて、ドラフトの発生期間および階床に応じてトルクリミッタを切り換えた上で、各階床で戸閉するときに外乱トルク推定部23による外乱トルクの推定結果を用いて第2のリミット値Lbを適宜設定するような構成であっても良い。
【0065】
(第5の実施形態)
次に、第5の実施形態について説明する。
【0066】
第5の実施形態では、同一昇降路内の他のエレベータの外乱トルクの情報を取得して、自機のエレベータのトルクリミッタの設定に反映させるようにしたものである。
【0067】
図9は第5の実施形態に係るエレベータのドア制御装置の構成を示すブロック図である。なお、上記第2の実施形態における図4の構成と同一部分には同一符号を付して、その説明を省略するものとする。
【0068】
第5の実施形態において、トルクリミッタ制御部22は、同一昇降路内の他のエレベータの外乱トルクの情報を考慮してトルクリミッタ21の第2のリミット値Lbを設定する機能を備える。
【0069】
エレベータ制御装置10は、同一昇降路内の他のエレベータから外乱トルクの情報を階床情報と共に取得して、図10に示すように記憶部24に記憶しておく。そして、自機のエレベータが同じ階床で戸閉するときに、エレベータ制御装置10は上記記憶部24に記憶された外乱トルクの情報をトルクリミッタ制御部22に与える。これにより、トルクリミッタ制御部22では、戸閉時にエレベータ制御装置10から与えられた他のエレベータの外乱トルクの情報を参照してトルクリミッタ21の第2のリミット値Lbを設定する。
【0070】
この場合、他のエレベータの外乱トルクをそのまま第2のリミット値Lbの設定に反映させるのではなく、自機に備えられた外乱トルク推定部23によって推定された外乱トルクの検証用として使うことが好ましい。
【0071】
すなわち、トルクリミッタ制御部22では、各階床毎に他のエレベータの外乱トルクと自機に備えられた外乱トルク推定部23によって推定された外乱トルクとを比較し、両者の差が所定範囲内であれば、自機の外乱トルクを有効として第2のリミット値Lbを設定する。一方、両者の差が所定範囲を超える場合、つまり、他のエレベータの外乱トルクと自機の外乱トルクとが大きく違う場合には、トルクリミッタ制御部22は、当該階床における自機の外乱トルクを無効として、他のエレベータの外乱トルクを用いて第2のリミット値Lbを設定するか、あるいは、前の階床で推定された外乱トルクを用いて第2のリミット値Lbを設定する。
【0072】
このように第5の実施形態によれば、同一昇降路内の他のエレベータの外乱トルクの情報を自機のエレベータのトルクリミッタの設定に反映させることで、戸閉時により適切な第2のリミット値Lbを設定して戸閉動作を行うことができる。
【0073】
以上述べた少なくとも1つの実施形態によれば、戸閉時に所定のタイミングでトルクリミッタを切り換えるようにしたことで、乗客の安全を確保しつつ、ドラフト等の外乱発生時にも確実に戸閉動作を行うことのできるエレベータのドア制御装置を提供することができる。
【0074】
なお、本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0075】
10…エレベータ制御装置、11…ドア駆動用モータ、12…パルスエンコーダ、13…開閉パターン出力部、14…速度検出器、15…速度制御器、16…電流制御器、17…電力変換器、18…電流検出器、19…推定トルク出力部、20…過負荷判定部、21…トルクリミッタ、22…トルクリミッタ制御部、23…外乱トルク推定部、24…記憶部、D1,D2…減算器、M…ドア重量、α…加速度、F…走行抵抗。
【技術分野】
【0001】
本発明の実施形態は、エレベータのドア(かごドア)を開閉制御するエレベータのドア制御装置に関する。
【背景技術】
【0002】
高昇降行程のエレベータでは、エレベータ昇降路内と建物外との内外気圧差からドラフトと呼ばれる風の流れが発生し、エレベータの最下階から最上階に向けて上昇気流が発生する。この上昇気流によりドアパネルに対して風圧が発生する。その際、ドアパネルに作用する力の特徴として、上方階ではドラフトによる風圧が扉を閉めようとする方向(戸開を阻止)に働き、下方階では扉を開けようとする方向(戸閉を阻止)に働く。
【0003】
この結果、下方階では、戸閉時の挟まれ保護(過負荷検出)が誤動作し易くなる。これは、ドラフトにより戸閉時のトルクが上がってしまい、乗客の挟まれによる過負荷状態と誤検出してしまうからである。逆に、上方階では、戸閉時の挟まれ保護(過負荷検出)が動作し難くなる事象が発生する。これは、ドラフトにより戸閉時のトルクが下がり、乗客が挟まれた状態にあっても過負荷状態を正しく検知できないからである。
【0004】
ここで、従来の過負荷検出では、ドア重量、走行抵抗から開閉時の走行トルク=推定トルクを算出し、その推定トルクと開閉中の実トルクとを比較して過負荷であるか否かを判定していた。その際、乗客がドアパネルに挟まれたときに受ける力を低減するため、過負荷を検出するまでの時間(検出ディレー)を短く設定している(例えば40ms程度)。このため、ドラフト等による瞬時的な外力が加わっただけで、過負荷状態つまり乗客の挟まれと誤検出する可能性がある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第3540509号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述したような瞬時的な外力による誤検出を回避するために、過負荷検出の時間を長くすると、乗客以外の外力に対しては、トルクが大きくなり確実な戸閉が可能となる。しかし、乗客が挟まれた場合には安全が確保できなくなる。さらには、法規要求(挟まれ力150(N)以下:EN規格、GB規格、国内法規)を満足できなくなるという問題がある。
【0007】
本発明が解決しようとする課題は、乗客の安全を確保しつつ、ドラフト等の外乱発生時にも確実に戸閉動作を行うことのできるエレベータのドア制御装置を提供することである。
【課題を解決するための手段】
【0008】
本実施形態に係るエレベータのドア制御装置は、ドア駆動用モータの速度が速度指令に追従するようにトルク指令値を出力する速度制御手段と、この速度制御手段から出力された上記トルク指令値に基づいて上記ドア駆動用モータの電流を制御する電流制御手段と、上記速度制御手段と上記電流制御手段との間に介在され、上記トルク指令値に対する出力制限を行うトルクリミッタと、戸閉開始から加速終了後または全行程の1/3を過ぎたタイミングで、上記トルクリミッタの値を上記ドア駆動用モータの定格トルクに応じて設定された第1のリミット値から上記第1のリミット値よりも低く設定された第2のリミット値に切り換えるトルクリミッタ制御手段とを具備する。
【図面の簡単な説明】
【0009】
【図1】図1は第1の実施形態に係るエレベータのドア制御装置の構成を示すブロック図である。
【図2】図2は本実施形態の方式における戸閉時の速度パターンと過負荷検出値とトルク出力との関係を示す図である。
【図3】図3は従来方式における戸閉時の速度パターンと過負荷検出値とトルク出力との関係を示す図である。
【図4】図4は第2の実施形態に係るエレベータのドア制御装置の構成を示すブロック図である。
【図5】図5は同実施形態におけるエレベータのドア制御装置の処理動作を示すフローチャートである。
【図6】図6は第3の実施形態におけるエレベータのドア制御装置の処理動作を示すフローチャートである。
【図7】図7は第4の実施形態に係るエレベータのドア制御装置の構成を示すブロック図である。
【図8】図8は同実施形態におけるトルクリミッタの切り換え条件を説明するための図である。
【図9】図9は第5の実施形態に係るエレベータのドア制御装置の構成を示すブロック図である。
【図10】図10は同実施形態における同一昇降路内の他のエレベータの外乱トルクの情報を記憶する記憶部の一例を示す図である。
【発明を実施するための形態】
【0010】
以下、図面を参照して実施形態を説明する。
【0011】
(第1の実施形態)
図1は第1の実施形態に係るエレベータのドア制御装置の構成を示すブロック図である。なお、図中のD1,D2は減算器である。
【0012】
図1に示すように、本実施形態におけるドア制御装置には、エレベータ主制御装置10、ドア駆動用モータ11、パルスエンコーダ(PG)12、開閉パターン出力部13、速度検出器14、速度制御器15、電流制御器16、電力変換器17、電流検出器18が備えられている。
【0013】
エレベータ主制御装置10は、ドア制御を含むエレベータ全体の制御を行うものであり、ここではドア開閉指令を開閉パターン出力部13に出力する。
【0014】
ドア駆動用モータ11は、図示せぬ乗りかごのドア(以下、かごドアと称す)1に駆動用モータ11が設置されており、この駆動用モータ11の駆動によりかごドア1が開閉動作する。なお、図示せぬ乗場に設置されたドア(以下、乗場ドアと称す)は乗りかごの着床時にかごドア1に係合して戸閉動作する。
【0015】
パルスエンコーダ12は、このドア駆動用モータ11の回転軸などに取り付けられており、ドア駆動用モータ11の回転速度に応じてパルス信号を出力する。このパルス信号を基に所定の開閉パターンに追従して制御する速度フィードバック制御系が構成される。開閉パターン出力部13は、エレベータ制御装置10からのドア開閉指令を受け、戸開または戸閉の速度指令を生成する。
【0016】
一方、パルスエンコーダ12の出力であるモータ回転角が速度検出器14に与えられ、ドア駆動用モータ11の実速度が算出される。開閉パターン出力部13から出力された速度指令と実速度との偏差が速度制御器15に入力される。速度制御器15は、速度偏差に応じたトルク指令を出力する。
【0017】
電流制御器16は、速度制御器15から出力されたトルク指令すなわち電流指令と電流検出器18で検出された電流との偏差に基づき、電力変換器17に対する電力制御指令を生成する。電力変換器17は、電流制御器16から出力される電力制御指令によりドア駆動用モータ11に所要の電力を供給する。
【0018】
以上は速度フィードバック制御系の基本的な構成である。
本実施形態では、戸閉時の挟まれ保護(過負荷検出)を実現するための構成要素として、さらに推定トルク出力部19、過負荷判定部20、トルクリミッタ21、トルクリミッタ制御部22が備えられている。
【0019】
推定トルク出力部19は、ドア重量M、加速度α、走行抵抗Fに基づいて、かごドア1の駆動に必要なトルクを推定する。推定トルクは、「M×α+F」となる。
【0020】
過負荷判定部20は、推定トルク出力部19によって推定されたトルクに過負荷判定値FXを加算した値「M×α+F+FX」を過負荷検出値として求め、この過負荷検出値と実際のトルク指令とを比較する。その結果、トルク指令が過負荷検出値を上回り、かつ、第1の検出時間Taの間、その状態が継続した場合に、過負荷判定部20は過負荷状態であると判定する。なお、上記第1の検出時間Taは、従来の過負荷検出で用いられていた時間であり、挟まれ時に乗客に対して加わるトルクを低減するために、例えば40ms程度と非常に短い時間に設定されている。
【0021】
また、過負荷判定部20は、過負荷状態を検出すると、開閉パターン出力部13に対してモータ停止指令を出力する。これにより、開閉パターン出力部13では、速度指令を零に設定して、ドア駆動用モータ11を停止制御する。さらに、エレベータ制御装置10に対して過負荷検出信号が発報される。これにより、エレベータ制御装置10は、開閉パターン出力部13に対して戸開指令を出力し、戸閉状態から停止中となっているかごドア1を反転させる。
【0022】
トルクリミッタ21とトルクリミッタ制御部22は本実施形態の特徴的な部分である。トルクリミッタ21は、速度制御器15と電流制御器16との間に介在され、図2に示すように第1のリミット値Laと、この第1のリミット値Laよりも低く設定された第2のリミット値Lbを有してトルク指令値に対する出力制限を行う。
【0023】
第1のリミット値Laは、従来方式から使われている通常のトルクリミッタに相当し、ドア駆動用モータ11の定格トルクの数倍に設定されている。第2のリミット値Lbは、戸閉時の乗客の挟まれを保護するために設けられた保護用トルクリミッタに相当し、加速終了後の推定トルクに合わせて設定されている。
【0024】
トルクリミッタ制御部22は、かごドア1の戸閉開始から所定時間経過またはかごドア1が所定位置に到達したタイミングで、より詳しくは加速終了後または全行程の1/3を過ぎたタイミングで、トルクリミッタ21の値を第1のリミット値Laから第2のリミット値Lbに切り換える。
【0025】
第2のリミット値Lbに切り換わった場合において、ドラフトや乗客の挟まれによる外乱トルクが発生すると、トルク指令は第2のリミット値Lbで制限され、それ以上のトルクが出力されることはない。
【0026】
このとき、過負荷判定部20はトルク指令が第2のリミット値Lbで制限されているかどうかを判別し、所定の時間つまり第2の時間Tbの間、制限が継続された場合に過負荷状態であると判定する。なお、上記第2の時間Tbは、従来の過負荷検出で用いられていた第1の検出時間Taよりも長く、例えば1s程度に設定されている。
【0027】
その後の保護動作は従来の過負荷検出と同様である。すなわち、過負荷判定部20によって過負荷状態が検出されると、開閉パターン出力部13に対してモータ停止指令が出力され、ドア駆動用モータ11が停止する。さらに、エレベータ制御装置10に対して過負荷検出信号が発報され、かごドア1が戸開方向へ反転動作する。
【0028】
ここで、本方式と従来方式の過負荷検出の違いについて説明する。
図2および図3は戸閉時の速度パターンと過負荷検出値とトルク出力との関係を示す図であり、図2は本方式、図3は従来方式である。
【0029】
図3に示すように、従来方式では、加速、定速、減速の各区間に関係なく、トルクリミッタ21の値が一定であり、定格トルクの数倍に設定されている(第1のリミット値La)。したがって、常に過負荷検出値(推定トルク+過負荷判定値)を基準にして過負荷状態が検出される。その際、乗客がドアパネル(かごドア1)に挟まれたときに受ける力を低減するため、過負荷を検出するまでの時間が短く設定されている(第1の検出時間Ta=40ms程度)。このため、ドラフト等による瞬時的な外力が加わると、過負荷状態つまり乗客の挟まれと誤検出する可能性がある。
【0030】
これに対し、図2に示すように、本方式では、加速終了後または全行程の1/3を過ぎたタイミングで、トルクリミッタ21の値が第1のリミット値Laよりも低く設定された第2のリミット値Lbに切り換えられる。したがって、戸閉動作の後半は、過負荷の検出時間を長くしても(第2の検出時間Tb=1s程度)、第2のリミット値Lbまでしか力が加わらないので、乗客がドアパネルに挟まれたときの安全を確保できる。また、過負荷の検出時間を長く取っておくことで、ドラフト等の外乱が瞬時的に加わっても誤検出することなく確実に戸閉することが可能となる。
【0031】
このように第1の実施形態によれば、戸閉時に所定の区間でのみトルクリミッタの値を第1のリミット値Laよりも低く設定された第2のリミット値Lbに切り換えることで、乗客の安全を確保しつつ、ドラフト等の外乱発生時にも確実に戸閉動作を行うことができる。
【0032】
(第2の実施形態)
次に、第2の実施形態を説明する。
【0033】
第2の実施形態では、上記第1の実施形態の構成に加え、戸開時の外乱トルクから戸閉時の外乱トルクを推定し、トルクリミッタの設定に反映させるようにしたものである。
【0034】
図4は第2の実施形態に係るエレベータのドア制御装置の構成を示すブロック図である。なお、上記第1の実施形態における図1の構成と同一部分には同一符号を付して、その説明を省略するものとする。
【0035】
図1の構成に加え、外乱トルク推定部23が設けられている。第2の実施形態において、この外乱トルク推定部23は、着床時にかごドア1を戸開したときの走行トルクから戸閉時の外乱トルクを推定する機能を備える。
【0036】
戸開時の走行トルクは、以下のような式で表される。
【0037】
戸開時の走行トルク=走行抵抗トルク+加減速トルク+外乱トルク …(1)
走行抵抗トルクと加減速トルクは予め算出できるので、上記(1)式により戸開時の外乱トルクを求めることができる。この戸開時の外乱トルクを戸閉時の外乱トルクとして保護用トルクリミッタ(第2のリミット値Lb)に加算してトルクリミッタ21を設定する。
【0038】
ここで、
戸開外乱トルク=−戸閉外乱トルク
の関係がある。
【0039】
トルクリミッタ=保護用トルクリミッタ+戸閉外乱トルク
ドラフトが戸開方向、すなわち、戸閉を妨げる方向に発生している場合には、戸開外乱トルクが負、戸閉外乱トルクが正となり、通常時(ドラフトなしの状態)のトルクリミッタ21の第2のリミット値Lbよりも大きい値となる。これは、ドラフトが戸閉を妨げる方向に発生しているので、第2のリミット値Lbを上げて、戸閉時の走行トルクを通常時よりも大きく出せる状態にしておかないと、乗客がドアパネルに軽く触れただけで過負荷状態となり、簡単に戸閉しまうからである。
【0040】
逆に、ドラフトが戸閉方向、すなわち、戸開を妨げる方向に発生している場合には、戸開外乱トルクが正、戸閉外乱トルクが負となり、通常時(ドラフトなしの状態)のトルクリミッタ21の第2のリミット値Lbよりも小さい値となる。これは、ドラフトが戸開を妨げる方向つまり戸閉を推進する方向に発生しているので、第2のリミット値Lbを下げて、戸閉時の走行トルクを通常時よりも制限しておかないと、過負荷検出が遅れて、乗客がドアパネルに挟まれる可能性が高くなるからである。
【0041】
図5は同実施形態におけるエレベータのドア制御装置の処理動作を示すフローチャートである。
【0042】
外乱トルク推定部23は、戸開中に外乱トルクを抽出して、内部メモリに記憶する(ステップS11)。そして、戸閉の際に、外乱トルク推定部23は上記記憶した戸開時の走行トルクから戸閉時の外乱トルクを推定して、トルクリミッタ制御部22に与える(ステップS12)。
【0043】
ここで、外乱トルク推定部23によって与えられた外乱トルクが正であれば(ステップS13のYes)、トルクリミッタ制御部22は、戸閉時にトルクリミッタ21の第2のリミット値Lbを上げる(ステップS14)。これにより、図2に示した第2のリミット値Lbが通常時よりも上がり、戸閉動作の後半では、その第2のリミット値Lbを上限として過負荷検出が行われることになる。
【0044】
一方、外乱トルク推定部23によって与えられた外乱トルクが負であれば(ステップS13のNo)、トルクリミッタ制御部22は、戸閉時にトルクリミッタ21の第2のリミット値Lbを下げる(ステップS15)。これにより、図2に示した第2のリミット値Lbが通常時よりも下がり、戸閉動作の後半では、その第2のリミット値Lbを上限として過負荷検出が行われることになる。
【0045】
このように第2の実施形態によれば、戸開時の外乱トルクから戸閉時の外乱トルクを推定してトルクリミッタの設定に反映させることで、ドラフト等の外乱発生が発生している場合にトルクリミッタを最適化して、乗客の安全確保と共に確実な戸閉動作を行うことができる。
【0046】
(第3の実施形態)
次に、第3の実施形態について説明する。
【0047】
第3の実施形態では、上記第1の実施形態の構成に加え、戸閉開始からトルクリミッタの値を切り換えるまでの期間に外乱トルクを推定してトルクリミッタの設定に反映させるようにしたものである。
【0048】
装置構成は図4と同様のため、ここでは図6を用いて説明する。
図6は第3の実施形態におけるエレベータのドア制御装置の処理動作を示すフローチャートである。
【0049】
かごドア1を戸閉するときに、外乱トルク推定部23は、その戸閉開始から所定期間までの外乱トルクを推定する。戸閉開始から所定期間までとは、戸閉開始からトルクリミッタ21の値を切り換えるまでの間であり、具体的には図2に示したように、戸閉開始から加速終了後または全行程の1/3を過ぎるまでの間である。外乱トルク推定部23は、この間の走行抵抗の増減傾向から外乱トルクを推定して、トルクリミッタ制御部22に与える(ステップS21)。
【0050】
ここで、外乱トルク推定部23によって与えられた外乱トルクが正であれば(ステップS22のYes)、トルクリミッタ制御部22は、戸閉時にトルクリミッタ21の第2のリミット値Lbを上げる(ステップS23)。これにより、図2に示した第2のリミット値Lbが通常時よりも上がり、戸閉動作の後半では、その第2のリミット値Lbを上限として過負荷検出が行われることになる。
【0051】
一方、外乱トルク推定部23によって与えられた外乱トルクが負であれば(ステップS22のNo)、トルクリミッタ制御部22は、戸閉時にトルクリミッタ21の第2のリミット値Lbを下げる(ステップS24)。これにより、図2に示した第2のリミット値Lbが通常時よりも下がり、戸閉動作の後半では、その第2のリミット値Lbを上限として過負荷検出が行われることになる。
【0052】
このように第3の実施形態によれば、戸閉中に外乱トルクを推定してトルクリミッタの設定に反映させることで、ドラフト等の外乱発生が発生している場合にトルクリミッタを最適化して、乗客の安全確保と共に確実な戸閉動作を行うことができる。
【0053】
(第4の実施形態)
次に、第4の実施形態について説明する。
【0054】
第4の実施形態では、ドラフトの発生期間および階床に応じてトルクリミッタを切り換えるようにしたものである。
【0055】
図7は第4の実施形態に係るエレベータのドア制御装置の構成を示すブロック図である。なお、上記第2の実施形態における図4の構成と同一部分には同一符号を付して、その説明を省略するものとする。
【0056】
第4の実施形態において、トルクリミッタ制御部22は、昇降路内のドラフトの発生期間とドラフトの影響を受ける階床に応じてトルクリミッタ21の第2のリミット値Lbを設定する機能を備える。
【0057】
すなわち、図8に示すように、通常、ドラフトは冬季に発生し、夏季には発生しない傾向にある。したがって、冬季はトルクリミッタ21の第2のリミット値Lbを所定量だけ増加し、夏季はその増加分の設定しないようにする。また、ドラフトが発生している場合は上方階、下方階によってドアパネルが受ける力の方向が異なる。具体的には下方階では戸閉を妨げる方向に力が働き、上方階では戸開を妨げる方向、言い換えれば、戸閉を推進する方向に力が働く。このような上方階と下方階でドアパネルが受ける力が異なるので、階床に応じてトルクリミッタ21の第2のリミット値Lbを所定量だけ増減させて設定する。
【0058】
ここで、戸閉時における夏季の「ドラフトなし」の第2のリミット値LbをXs、冬季の「ドラフトあり」の上方階の第2のリミット値LbをXw1、下方階の第2のリミット値LbをXw2とすると、Xw1<Xs<Xw2となり、冬季の「ドラフトあり」の上方階の第2のリミット値Lbが最も低く設定されることになる。
【0059】
図8に基づくトルク制限値の切り換え指令は、エレベータ制御装置10からトルクリミッタ制御部22に対して出力される。トルクリミッタ制御部22では、この切り換え指令に従って戸閉時におけるトルクリミッタ21の第2のリミット値Lbを設定する。
【0060】
なお、図8の例では、ドラフトの発生期間として夏季(例えば4月〜9月)と冬季(例えば10月〜3月)の2つの期間に大きく分けたが、期間をもっと細かく分けて、各期間のドラフト発生量を加味して第2のリミット値Lbを設定することでも良い。
【0061】
また、階床についても、「上方階」と「下方階」の2つに大きく分けるのではなく、各階床毎に細かく分けて、それぞれの階床でのドラフト発生量を加味して第2のリミット値Lbを設定することでも良い。
【0062】
このように第4の実施形態によれば、ドラフトの発生期間および階床に応じてトルクリミッタを切り換えることで、ドラフトの影響を考慮した精度の高い戸閉動作を行うことができる。
【0063】
なお、上記第4の実施形態では、ドラフトの発生期間および階床の両方の条件でトルクリミッタの切り換えるものとしたが、少なくともどちらか一方の条件でトルクリミッタを切り換えることでも良い。
【0064】
さらに、上記第2または第3の実施形態と組み合わせて、ドラフトの発生期間および階床に応じてトルクリミッタを切り換えた上で、各階床で戸閉するときに外乱トルク推定部23による外乱トルクの推定結果を用いて第2のリミット値Lbを適宜設定するような構成であっても良い。
【0065】
(第5の実施形態)
次に、第5の実施形態について説明する。
【0066】
第5の実施形態では、同一昇降路内の他のエレベータの外乱トルクの情報を取得して、自機のエレベータのトルクリミッタの設定に反映させるようにしたものである。
【0067】
図9は第5の実施形態に係るエレベータのドア制御装置の構成を示すブロック図である。なお、上記第2の実施形態における図4の構成と同一部分には同一符号を付して、その説明を省略するものとする。
【0068】
第5の実施形態において、トルクリミッタ制御部22は、同一昇降路内の他のエレベータの外乱トルクの情報を考慮してトルクリミッタ21の第2のリミット値Lbを設定する機能を備える。
【0069】
エレベータ制御装置10は、同一昇降路内の他のエレベータから外乱トルクの情報を階床情報と共に取得して、図10に示すように記憶部24に記憶しておく。そして、自機のエレベータが同じ階床で戸閉するときに、エレベータ制御装置10は上記記憶部24に記憶された外乱トルクの情報をトルクリミッタ制御部22に与える。これにより、トルクリミッタ制御部22では、戸閉時にエレベータ制御装置10から与えられた他のエレベータの外乱トルクの情報を参照してトルクリミッタ21の第2のリミット値Lbを設定する。
【0070】
この場合、他のエレベータの外乱トルクをそのまま第2のリミット値Lbの設定に反映させるのではなく、自機に備えられた外乱トルク推定部23によって推定された外乱トルクの検証用として使うことが好ましい。
【0071】
すなわち、トルクリミッタ制御部22では、各階床毎に他のエレベータの外乱トルクと自機に備えられた外乱トルク推定部23によって推定された外乱トルクとを比較し、両者の差が所定範囲内であれば、自機の外乱トルクを有効として第2のリミット値Lbを設定する。一方、両者の差が所定範囲を超える場合、つまり、他のエレベータの外乱トルクと自機の外乱トルクとが大きく違う場合には、トルクリミッタ制御部22は、当該階床における自機の外乱トルクを無効として、他のエレベータの外乱トルクを用いて第2のリミット値Lbを設定するか、あるいは、前の階床で推定された外乱トルクを用いて第2のリミット値Lbを設定する。
【0072】
このように第5の実施形態によれば、同一昇降路内の他のエレベータの外乱トルクの情報を自機のエレベータのトルクリミッタの設定に反映させることで、戸閉時により適切な第2のリミット値Lbを設定して戸閉動作を行うことができる。
【0073】
以上述べた少なくとも1つの実施形態によれば、戸閉時に所定のタイミングでトルクリミッタを切り換えるようにしたことで、乗客の安全を確保しつつ、ドラフト等の外乱発生時にも確実に戸閉動作を行うことのできるエレベータのドア制御装置を提供することができる。
【0074】
なお、本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0075】
10…エレベータ制御装置、11…ドア駆動用モータ、12…パルスエンコーダ、13…開閉パターン出力部、14…速度検出器、15…速度制御器、16…電流制御器、17…電力変換器、18…電流検出器、19…推定トルク出力部、20…過負荷判定部、21…トルクリミッタ、22…トルクリミッタ制御部、23…外乱トルク推定部、24…記憶部、D1,D2…減算器、M…ドア重量、α…加速度、F…走行抵抗。
【特許請求の範囲】
【請求項1】
ドア駆動用モータの速度が速度指令に追従するようにトルク指令値を出力する速度制御手段と、
この速度制御手段から出力された上記トルク指令値に基づいて上記ドア駆動用モータの電流を制御する電流制御手段と、
上記速度制御手段と上記電流制御手段との間に介在され、上記トルク指令値に対する出力制限を行うトルクリミッタと、
戸閉開始から加速終了後または全行程の1/3を過ぎたタイミングで、上記トルクリミッタの値を上記ドア駆動用モータの定格トルクに応じて設定された第1のリミット値から上記第1のリミット値よりも低く設定された第2のリミット値に切り換えるトルクリミッタ制御手段と
を具備したことを特徴とするエレベータのドア制御装置。
【請求項2】
上記トルクリミッタ制御手段によって上記第2のリミット値に切り換えられた場合に、上記トルク指令が上記第2のリミット値で制限されているか否かを判断し、所定の時間の間、制限が継続されている場合に過負荷状態にあると判定して、上記ドア駆動用モータの駆動を停止させる過負荷判定手段をさらに具備したことを特徴とする請求項1記載のエレベータのドア制御装置。
【請求項3】
戸開時の走行トルクから戸閉時の外乱トルクを推定する外乱トルク推定手段をさらに具備し、
上記トルクリミッタ制御手段は、
上記外乱トルク推定手段によって推定された外乱トルクを上記トルクリミッタの設定に反映させることを特徴とする請求項1記載のエレベータのドア制御装置。
【請求項4】
戸閉開始から上記トルクリミッタの値を切り換えるまでの期間において戸閉時の外乱トルクを推定する外乱トルク推定手段をさらに具備し、
上記トルクリミッタ制御手段は、
上記外乱トルク推定手段によって推定された外乱トルクを上記トルクリミッタの設定に反映させることを特徴とする請求項1記載のエレベータのドア制御装置。
【請求項5】
上記トルクリミッタ制御手段は、
昇降路内のドラフトの発生期間を考慮して上記トルクリミッタを設定することを特徴とする請求項1記載のエレベータのドア制御装置。
【請求項6】
上記トルクリミッタ制御手段は、
昇降路内のドラフトの影響を受ける階床を考慮して上記トルクリミッタを設定することを特徴とする請求項1記載のエレベータのドア制御装置。
【請求項7】
上記トルクリミッタ制御手段は、
昇降路内の他のエレベータの外乱トルクを考慮して上記トルクリミッタを設定することを特徴とする請求項1記載のエレベータのドア制御装置。
【請求項1】
ドア駆動用モータの速度が速度指令に追従するようにトルク指令値を出力する速度制御手段と、
この速度制御手段から出力された上記トルク指令値に基づいて上記ドア駆動用モータの電流を制御する電流制御手段と、
上記速度制御手段と上記電流制御手段との間に介在され、上記トルク指令値に対する出力制限を行うトルクリミッタと、
戸閉開始から加速終了後または全行程の1/3を過ぎたタイミングで、上記トルクリミッタの値を上記ドア駆動用モータの定格トルクに応じて設定された第1のリミット値から上記第1のリミット値よりも低く設定された第2のリミット値に切り換えるトルクリミッタ制御手段と
を具備したことを特徴とするエレベータのドア制御装置。
【請求項2】
上記トルクリミッタ制御手段によって上記第2のリミット値に切り換えられた場合に、上記トルク指令が上記第2のリミット値で制限されているか否かを判断し、所定の時間の間、制限が継続されている場合に過負荷状態にあると判定して、上記ドア駆動用モータの駆動を停止させる過負荷判定手段をさらに具備したことを特徴とする請求項1記載のエレベータのドア制御装置。
【請求項3】
戸開時の走行トルクから戸閉時の外乱トルクを推定する外乱トルク推定手段をさらに具備し、
上記トルクリミッタ制御手段は、
上記外乱トルク推定手段によって推定された外乱トルクを上記トルクリミッタの設定に反映させることを特徴とする請求項1記載のエレベータのドア制御装置。
【請求項4】
戸閉開始から上記トルクリミッタの値を切り換えるまでの期間において戸閉時の外乱トルクを推定する外乱トルク推定手段をさらに具備し、
上記トルクリミッタ制御手段は、
上記外乱トルク推定手段によって推定された外乱トルクを上記トルクリミッタの設定に反映させることを特徴とする請求項1記載のエレベータのドア制御装置。
【請求項5】
上記トルクリミッタ制御手段は、
昇降路内のドラフトの発生期間を考慮して上記トルクリミッタを設定することを特徴とする請求項1記載のエレベータのドア制御装置。
【請求項6】
上記トルクリミッタ制御手段は、
昇降路内のドラフトの影響を受ける階床を考慮して上記トルクリミッタを設定することを特徴とする請求項1記載のエレベータのドア制御装置。
【請求項7】
上記トルクリミッタ制御手段は、
昇降路内の他のエレベータの外乱トルクを考慮して上記トルクリミッタを設定することを特徴とする請求項1記載のエレベータのドア制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−240792(P2012−240792A)
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願番号】特願2011−112461(P2011−112461)
【出願日】平成23年5月19日(2011.5.19)
【出願人】(390025265)東芝エレベータ株式会社 (2,543)
【Fターム(参考)】
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願日】平成23年5月19日(2011.5.19)
【出願人】(390025265)東芝エレベータ株式会社 (2,543)
【Fターム(参考)】
[ Back to top ]