
エレベータのドア制御装置
【課題】本発明の実施形態は故障箇所を特定するエレベータのドア制御装置を提供することを目的とする。
【解決手段】本発明の実施形態に係るエレベータのドア制御装置は、エレベータのかごドアを駆動させるドアモータ3の速度を制御する速度制御部9と、ドアモータ3の回転位置を検出するドアモータ位置検出器6と、ドアモータ位置検出器6から得られるドアモータ3の速度と速度制御部9の指令速度とを比較し、適切な電圧指令をインバータ11に出力するように電流を制御する電流制御部10と、インバータ11からドアモータ3に出力される電流を検出する電流検出器12と、予め定められた電圧指令値をインバータ11に出力する固定電圧指令部13と、インバータ11との接続対象を電流制御部10または固定電圧司令部13のいずれかに切り替える電圧指令切替部14と、電流検出器12から出力される電流脈動を検出、記憶する異常診断部15とを備える。
【解決手段】本発明の実施形態に係るエレベータのドア制御装置は、エレベータのかごドアを駆動させるドアモータ3の速度を制御する速度制御部9と、ドアモータ3の回転位置を検出するドアモータ位置検出器6と、ドアモータ位置検出器6から得られるドアモータ3の速度と速度制御部9の指令速度とを比較し、適切な電圧指令をインバータ11に出力するように電流を制御する電流制御部10と、インバータ11からドアモータ3に出力される電流を検出する電流検出器12と、予め定められた電圧指令値をインバータ11に出力する固定電圧指令部13と、インバータ11との接続対象を電流制御部10または固定電圧司令部13のいずれかに切り替える電圧指令切替部14と、電流検出器12から出力される電流脈動を検出、記憶する異常診断部15とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、故障箇所を特定するエレベータのドア制御装置に関する。
【背景技術】
【0002】
一般的に、エレベータドアの制御は速度制御部によって指令される速度指令とドアモータ位置検出器によって検出されるドアモータの速度とを比較し、適切な速度トルク指令を電流制御部へ出力している。電流制御部はインバータからドアモータに流れる電流量を測定する電流検出器から得られる実際の電流値からドアモータが実際に発生しているトルクを計算する。そして電流制御部は速度トルク指令と実際に発生しているトルクが一致するように、適切な電圧指令をインバータに出力している。電圧指令を受けたインバータが電圧指令に応じた電圧をドアモータに出力し、ドアモータを駆動させている。これらのフィードバックを繰り返し行うことにより適切なドア制御を行っている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−22096号公報
【特許文献2】特開2008−230742号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来のエレベータドア制御装置では、速度制御部、電流制御部、電流検出器の各装置が何らかの原因により故障を起こすと、ドアの戸開閉動作が異常となり正常にドア制御を行うことができなくなる。また、このような場合ドア制御装置に異常が生じていることは判断できるが、どの部分が故障しているのかまでは判断できていない。
【0005】
そこで、本発明に係る実施形態は、故障箇所を特定できるエレベータのドア制御装置の提供を目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明の実施形態に係るエレベータのドア制御装置は、エレベータのかごドアを駆動させるドアモータの速度を制御する速度制御部と、前記ドアモータの回転位置を検出するドアモータ位置検出器と、前記ドアモータ位置検出器から得られるドアモータの速度と前記速度制御部の指令速度とを比較し、適切な電圧指令をインバータに出力するように電流を制御する電流制御部と、前記インバータから前記ドアモータに出力される電流を検出する電流検出器と、予め定められた電圧指令値を前記インバータに出力する固定電圧指令部と、前記インバータとの接続対象を前記電流制御部または前記固定電圧司令部のいずれかに切り替える電圧指令切替部と、前記電流検出器から出力される電流脈動を検出、記憶する異常診断部と、を備えることを特徴とする。
【図面の簡単な説明】
【0007】
【図1】一般的なエレベータドアの構成を示す構成図である。
【図2】一般的なエレベータのドア制御装置の構成を示す構成図である。
【図3】本発明の第1の実施形態に係るエレベータのドア制御装置の構成を示す構成図である。
【図4】本発明の第1の実施形態に係る電流制御部の異常診断のフローチャートである。
【図5】本発明の第2の実施形態に係るエレベータのドア制御装置の構成を示す構成図である。
【図6】本発明の第2の実施形態に係る速度制御部の異常診断のフローチャートである。
【図7】本発明の第3の実施形態に係るエレベータのドア制御装置の構成を示す構成図である。
【図8】本発明の第3の実施形態に係る電流検出器の異常診断のフローチャートである。
【発明を実施するための形態】
【0008】
以下、本発明の実施形態について図面を参照して説明する。
【0009】
(第1の実施形態)
図1は、一般的なエレベータドアの構成を示す構成図である。図2は、一般的なエレベータのドア制御装置の構成を示す構成図である。図3は、本発明の第1の実施形態に係るエレベータのドア制御装置の構成を示す構成図である。図4は、本発明の第1の実施形態に係る電流制御部の異常診断のフローチャートである。
【0010】
まず、図1を用いてエレベータドアの構成及び動作を説明する。
【0011】
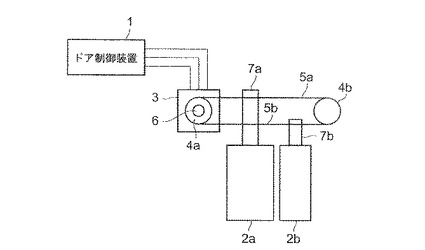
図1に示すように、ドア制御装置1はドア2を開閉動作させるためのドアモータ3に接続されている。そしてドアモータ3の駆動力は、図示しないヘッダー内部の両端付近に回転軸を水平にして設けられる一対のドア用プーリ4a、4bのうちの一方であるドア用プーリ4aに伝達される。ドア用プーリ4a、4bはベルト5を介して一体となって回転する。ドアモータ3には、ドアモータ3の回転位置を検出するドアモータ位置検出器6が備えられている。
【0012】
一対のドア用プーリ4a、4bが回転軸を水平にして設けられていることから、ベルト5は上段側と下段側が平行に、それぞれが反対方向に水平移動する。そして上段側ベルト5aにはドアハンガー7aの上部が固定され、下段側ベルト5bにはドアハンガー7bの上部が固定される。ドアハンガー7aの下部にはドア2aが、ドアハンガー7bの下部にはドア2bがそれぞれ固定されている。そして、ドアモータ3が駆動すると、ベルト5a、5bはそれぞれ反対方向に移動するため、ドアモータ3の回転方向に応じてドア2a、2bがそれぞれ戸開閉動作を行うようになっている。
【0013】
次に本発明の第1の実施形態に係るドア制御装置の構成を説明する。
【0014】
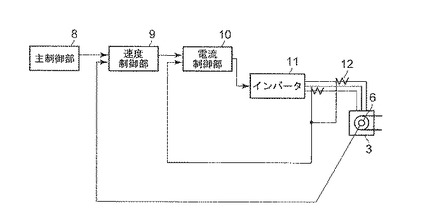
まず図2を用いてドア制御の基本構成を説明する。図2に示すように一般的なドア制御装置は、異常診断の制御指令を行う主制御部8と、主制御部8と電気的に接続され速度指令を受ける速度制御部9、速度制御部9と電気的に接続され速度トルク指令を受け取る電流制御部10、電流制御部10と電気的に接続され電圧指令を受け取るインバータ11を備えている。そして、速度制御部9はドアモータ位置検出器6から出力されるドアモータ3の速度と、主制御部8から受け取る速度指令とを比較し、適切な速度トルク指令を電流制御部10に出力している。また、電流制御部10は、インバータ11とドアモータ3の間に備えられる電流検出器12から実際に出力されている電流値に基づいて、ドアモータ3が発生しているトルク値を計算する。そして算出されたトルク値と速度制御部9から受け取る速度トルク指令とを比較し、両者の値が一致するように電圧指令をインバータ11に出力する。そしてインバータはその電圧指令に応じた電圧をドアモータ3に供給し、ドアモータ3を駆動する。
【0015】
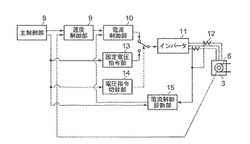
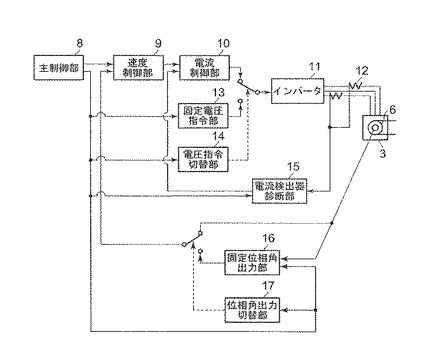
これに対して、図3に示すように本実施形態に係るエレベータのドア制御装置は、上記の構成に加え、さらに固定電圧指令部13、電圧指令切替部14及び電流制御診断部(異常診断部)15を備えている。固定電圧指令部13は予め定められている固定電圧値をインバータに出力する。電圧指令切替部14は主制御部8から異常診断を行う制御指令を受けると電流制御部10とインバータ11との接続から固定電圧指令部13とインバータ11との接続に切り替える。電流制御診断部15は電流検出器12から得られる電流の脈動から電流制御部10の異常を診断する。
【0016】
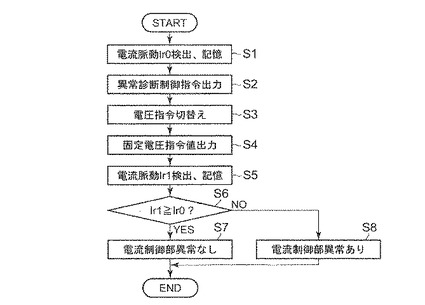
次に、図4のフローチャートを用いて本実施形態に係るエレベータのドア制御装置による異常診断を説明する。
【0017】
電流検出器12と接続されている電流制御診断部15は、周期的あるいは任意のタイミングで電流検出器12から出力される電流値の脈動(電流脈動Ir0)を検出し、記憶する(S1)。
【0018】
そして主制御部8が一定時間以上戸閉状態の継続を検出すると、主制御部8は異常診断を行う制御指令を固定電圧指令部13と電圧指令切替部14及び電流制御診断部15とに出力する(S2)。
【0019】
異常診断の制御指令を受け取ると電圧指令切替部14は、インバータ11への電圧指令の指令元を電流制御部10から固定電圧指令部13に切り替える(S3)。インバータ11への電圧指令元が固定電圧指令部13に切り替わると、予め定められた固定電圧値をインバータ11に出力する(S4)。固定電圧指令値がインバータ11に出力されると、電流制御診断部15は電圧固定時の電流の脈動(電流脈動Ir1)を記憶する(S5)。
【0020】
そして、電流制御診断部15は異常診断前に記憶した電流脈動Ir0と電流脈動Ir1とを比較する(S6)。なお、電流脈動の値が小さいほど電流の大きさの周期的変化が小さいということであるから、エレベータの乗り心地はよくなるものである。
【0021】
電流制御診断部15が電流脈動Ir0と電流脈動Ir1とを比較した結果、電圧固定後の電流脈動Ir1が電流固定前の電流脈動Ir0よりも大きい場合(S6のYES)、電流制御診断部15は電流制御部10に異常はないと判断する(S7)。
【0022】
一方、電圧固定前の電流脈動Ir0が電流固定後の電流脈動Ir1よりも大きい場合(S6のNO)、電流制御診断部15は電流制御部10に異常があると判断する(S8)。
【0023】
以上のようにして、インバータ11に出力する電圧指令値を固定し、電流脈動を比較することで、本実施形態に係るエレベータのドア制御装置は電流制御部10の異常診断を行うことができる。
【0024】
(第2の実施形態)
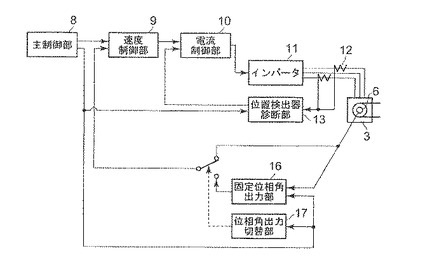
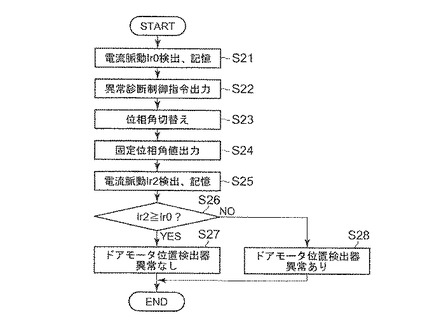
次に第2の実施形態について説明する。図5は本発明の第2の実施形態に係るエレベータのドア制御装置の構成を示す構成図である。図6は本発明の第2の実施形態に係るドアモータ位置検出器の異常診断のフローチャートである。
【0025】
第1の実施形態では電圧指令を固定することにより電流制御部10の異常診断を行ったが、第2の実施形態ではドアモータ位置検出器6から出力される位相角を固定することによって、ドアモータ位置検出器6の異常診断を行う。
【0026】
まずドア制御の基本構成を説明する。一般的なドア制御装置は、異常診断の制御指令を行う主制御部8と、主制御部8と電気的に接続され速度指令を受ける速度制御部9、速度制御部9と電気的に接続され速度トルク指令を受け取る電流制御部10、電流制御部10と電気的に接続され電圧指令を受け取るインバータ11を備えている。そして、速度制御部9はドアモータ位置検出器6から出力されるドアモータ3の速度と、主制御部8から受け取る速度指令とを比較し、適切な速度トルク指令を電流制御部10に出力している。また、電流制御部10は、インバータ11とドアモータ3の間に備えられる電流検出器12から実際に出力されている電流値に基づいて、ドアモータ3が発生しているトルク値を計算する。そして算出されたトルク値と速度制御部9から受け取る速度トルク指令とを比較し、両者の値が一致するように電圧指令をインバータ11に出力する。そしてインバータはその電圧指令に応じた電圧をドアモータ3に供給し、ドアモータ3を駆動する。
【0027】
これに対して、図5に示すように本実施形態に係るエレベータのドア制御装置は、上記の構成に加え、さらに固定位相角出力部16、位相角出力切替部17及び位置検出器診断部18を備えている。固定位相角出力部16は予め定められている固定位相角値を速度制御部9に出力する。位相角出力切替部17は主制御部8から異常診断を行う制御指令を受けるとドアモータ位置検出器6と速度制御部9との接続から固定位相角出力部16と速度制御部9との接続に切り替える。位置検出器診断部(異常診断部)18は電流検出器12から得られる電流の脈動からドアモータ位置検出器6の異常を診断する。
【0028】
次に、図6のフローチャートを用いて本実施形態に係るエレベータのドア制御装置による異常診断を説明する。
【0029】
電流検出器12と接続されている位置検出器診断部18は、周期的あるいは任意のタイミングで電流検出器12から出力される電流値の脈動(電流脈動Ir0)を検出し、記憶する(S21)。
【0030】
そして主制御部8が一定時間以上戸閉状態の継続を検出すると、主制御部8は異常診断を行う制御指令を固定位相角出力部16と位相角出力切替部17及び位置検出部診断部18とに出力する(S22)。
【0031】
異常診断の制御指令を受け取ると位相角出力切替部17は、速度制御部9への位相角出力の出力元をドアモータ位置検出器6から固定位相角出力部17に切り替える(S23)。速度制御部9への位相角出力元が固定位相角出力部17に切り替わると、予め定められた固定位相角を速度制御部9に出力する(S24)。固定位相角値が速度制御部9に出力されると、位置検出器診断部18は位相角固定時の電流の脈動(電流脈動Ir2)を検出し、記憶する(S25)。
【0032】
そして、位置検出器診断部18は異常診断前に記憶した電流脈動Ir0と電流脈動Ir1とを比較する(S26)。なお、電流脈動の値が小さいほど電流の大きさの周期的変化が小さいということであるから、エレベータの乗り心地はよくなるものである。
【0033】
位置検出器診断部18が電流脈動Ir0と電流脈動Ir1とを比較した結果、位相角固定後の電流脈動Ir2が位相角固定前の電流脈動Ir0よりも大きい場合(S26のYES)、位置検出器診断部18はドアモータ位置検出器6に異常はないと判断する(S27)。
【0034】
一方、位相角固定前の電流脈動Ir0が位相角固定後の電流脈動Ir2よりも大きい場合(S26のNO)、位置検出器診断部18はドアモータ位置検出器6に異常があると判断する(S28)。
【0035】
以上のようにして、速度制御部9に出力する位相角出力値を固定し、電流脈動を比較することで、本実施形態に係るエレベータのドア制御装置はドアモータ位置検出器6の異常診断を行うことができる。
【0036】
(第3の実施形態)
次に第3の実施形態について説明する。図7は本発明の第3の実施形態に係るエレベータのドア制御装置の構成を示す構成図である。図8は本発明の第3の実施形態に係る電流検出器の異常診断のフローチャートである。第1の実施形態では、電圧指令を固定することにより電流制御部10の異常診断を行ったが、第3の実施形態ではインバータ11への電圧指令を固定し、かつドアモータ位置検出器6から出力される位相角を固定することによって、電流検出器12の異常診断を行う。
【0037】
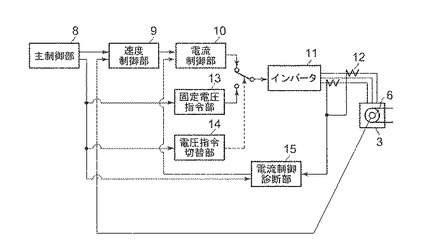
図7に示すように第3の実施形態に係るエレベータのドア制御装置の構成は、既述の第1の実施形態に係るエレベータのドア制御装置の構成に加え、第2の実施形態に係るエレベータのドア制御装置の構成を加えた構成となっている。ただし、第1の実施形態に係る電流制御診断部15及び第2の実施形態に係る位置検出器診断部18の代わりに電流検出器診断部(異常診断部)19が備えられる。
【0038】
以下、図8のフローチャートを用いて第3の実施形態に係るエレベータのドア制御装置による異常診断を説明する。
【0039】
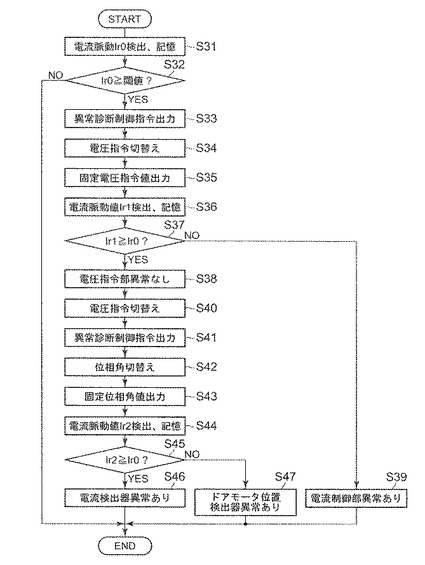
電流検出器12と接続されている電流検出器診断部19は、周期的あるいは任意のタイミングで電流検出器12から出力される電流値の脈動(電流脈動Ir0)を検出し、記憶する(S31)。電流検出器診断部19は検出した電流脈動Ir0が予め定められる閾値よりも大きいか否か判断する(S32)。電流脈動Ir0が閾値よりも小さい場合(S32のNO)、ドア制御装置に異常はないものとして判断し、処理を終了する。
【0040】
一方、電流脈動Ir0が閾値よりも大きい場合(S32のYES)、主制御部8が一定時間以上戸閉状態の継続を検出した後、主制御部8は異常診断を行う制御指令を固定電圧指令部13と電圧指令切替部14及び電流検出器診断部19とに出力する(S33)。
【0041】
異常診断の制御指令を受け取ると電圧指令切替部14は、インバータ11への電圧指令の指令元を電流制御部10から固定電圧指令部13に切り替える(S34)。インバータ11への電圧指令元が固定電圧指令部13に切り替わると、予め定められた固定電圧値をインバータ11に出力する(S35)。固定電圧指令値がインバータ11に出力されると、電流検出器診断部19は電圧固定時の電流の脈動(電流脈動Ir1)を検出し、記憶する(S36)。
【0042】
そして、電流検出器診断部19は異常診断前に記憶した電流脈動Ir0と電流脈動Ir1とを比較する(S37)。電流検出器診断部19が電流脈動Ir0と電流脈動Ir1とを比較した結果、電圧固定後の電流脈動Ir1が電流固定前の電流脈動Ir0よりも大きい場合(S37のYES)、電流検出器診断部19は電流制御部10に異常はないと判断する(S38)。一方、電圧固定前の電流脈動Ir0が電流固定後の電流脈動Ir1よりも大きい場合(S37のNO)、電流検出器診断部19は電流制御部10に異常があると判断する(S39)。
【0043】
ここで、上記電流検出器診断部19による異常判断によって電流制御部10に異常がないと判断された場合、電圧指令切替部14はインバータ11への電圧指令の指令元を固定電圧指令部13から電流制御部10に切り替える(S40)。そしてその後、第2の実施形態と同様に位相角を固定し、ドアモータ位置検出器6の異常診断を行う。
【0044】
主制御部8は上述のように電流検出器診断部19による電流制御部10の異常診断が終わると、異常診断の制御指令を固定位相角出力部16と位相角出力切替部17及び電流検出器19とに出力する(S41)。
【0045】
異常診断の制御指令を受け取ると位相角出力切替部17は、速度制御部9への位相角出力の出力元をドアモータ位置検出器6から固定位相角出力部17に切り替える(S42)。速度制御部9への位相角出力元が固定位相角出力部16に切り替わると、予め定められた固定位相角を速度制御部9に出力する(S43)。固定位相角値が速度制御部9に出力されると、電流検出器診断部19は位相角固定時の電流の脈動(電流脈動Ir2)を検出し、記憶する(S44)。
【0046】
そして、電流検出器診断部19は異常診断前に記憶した電流脈動Ir0と電流脈動Ir2とを比較する(S45)。電流検出器診断部19が電流脈動Ir0と電流脈動Ir2とを比較した結果、位相角固定後の電流脈動Ir2が位相角固定前の電流脈動Ir0よりも大きい場合(S45のYES)、電流検出器診断部19はドアモータ位置検出器6に異常はなく、電流検出器12に異常があると判断する(S46)。
【0047】
一方、位相角固定前の電流脈動Ir0が位相角固定後の電流脈動Ir2よりも大きい場合(S45のNO)、電流検出器診断部19はドアモータ位置検出器6に異常があると判断する(S47)。
【0048】
したがって、本実施形態において、電流脈動Ir0が閾値を超えているにもかかわらず、上記電流検出器診断部19による異常判断によって電流制御部10及びドアモータ位置検出器6に異常がないと判断された場合、電流検出器診断部19は電流検出器12に異常があると判断し、電流検出器異常診断を終了する。
【0049】
以上のようにして、インバータ11に出力する電圧指令値を固定し、電流脈動を比較することで、本実施形態に係るエレベータのドア制御装置は電流制御部10の異常診断を行うことができる。また、電流制御部10に異常はないと判断された場合、速度制御部9に出力する位相角出力値を固定し、電流脈動を比較することで、本実施形態に係るエレベータのドア制御装置はドアモータ位置検出器6の異常診断を行うことができる。また、ドアモータ位置検出器にも異常はないと判断された場合、本実施形態に係るエレベータのドア制御装置は電流検出器12の異常を検出することができる。
【符号の説明】
【0050】
1…ドア制御装置
2…ドア
3…ドアモータ
4…ドア用プーリ
5…ベルト
6…ドアモータ位置検出器
7…ドアハンガー
8…主制御部
9…速度制御部
10…電流制御部
11…インバータ
12…電流検出器
13…固定電圧指令部
14…電圧指令切替部
15…電流制御診断部
16…固定位相角出力部
17…位相角出力切替部
18…位置検出部診断部
19…電流検出器診断部
【技術分野】
【0001】
本発明の実施形態は、故障箇所を特定するエレベータのドア制御装置に関する。
【背景技術】
【0002】
一般的に、エレベータドアの制御は速度制御部によって指令される速度指令とドアモータ位置検出器によって検出されるドアモータの速度とを比較し、適切な速度トルク指令を電流制御部へ出力している。電流制御部はインバータからドアモータに流れる電流量を測定する電流検出器から得られる実際の電流値からドアモータが実際に発生しているトルクを計算する。そして電流制御部は速度トルク指令と実際に発生しているトルクが一致するように、適切な電圧指令をインバータに出力している。電圧指令を受けたインバータが電圧指令に応じた電圧をドアモータに出力し、ドアモータを駆動させている。これらのフィードバックを繰り返し行うことにより適切なドア制御を行っている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−22096号公報
【特許文献2】特開2008−230742号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来のエレベータドア制御装置では、速度制御部、電流制御部、電流検出器の各装置が何らかの原因により故障を起こすと、ドアの戸開閉動作が異常となり正常にドア制御を行うことができなくなる。また、このような場合ドア制御装置に異常が生じていることは判断できるが、どの部分が故障しているのかまでは判断できていない。
【0005】
そこで、本発明に係る実施形態は、故障箇所を特定できるエレベータのドア制御装置の提供を目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明の実施形態に係るエレベータのドア制御装置は、エレベータのかごドアを駆動させるドアモータの速度を制御する速度制御部と、前記ドアモータの回転位置を検出するドアモータ位置検出器と、前記ドアモータ位置検出器から得られるドアモータの速度と前記速度制御部の指令速度とを比較し、適切な電圧指令をインバータに出力するように電流を制御する電流制御部と、前記インバータから前記ドアモータに出力される電流を検出する電流検出器と、予め定められた電圧指令値を前記インバータに出力する固定電圧指令部と、前記インバータとの接続対象を前記電流制御部または前記固定電圧司令部のいずれかに切り替える電圧指令切替部と、前記電流検出器から出力される電流脈動を検出、記憶する異常診断部と、を備えることを特徴とする。
【図面の簡単な説明】
【0007】
【図1】一般的なエレベータドアの構成を示す構成図である。
【図2】一般的なエレベータのドア制御装置の構成を示す構成図である。
【図3】本発明の第1の実施形態に係るエレベータのドア制御装置の構成を示す構成図である。
【図4】本発明の第1の実施形態に係る電流制御部の異常診断のフローチャートである。
【図5】本発明の第2の実施形態に係るエレベータのドア制御装置の構成を示す構成図である。
【図6】本発明の第2の実施形態に係る速度制御部の異常診断のフローチャートである。
【図7】本発明の第3の実施形態に係るエレベータのドア制御装置の構成を示す構成図である。
【図8】本発明の第3の実施形態に係る電流検出器の異常診断のフローチャートである。
【発明を実施するための形態】
【0008】
以下、本発明の実施形態について図面を参照して説明する。
【0009】
(第1の実施形態)
図1は、一般的なエレベータドアの構成を示す構成図である。図2は、一般的なエレベータのドア制御装置の構成を示す構成図である。図3は、本発明の第1の実施形態に係るエレベータのドア制御装置の構成を示す構成図である。図4は、本発明の第1の実施形態に係る電流制御部の異常診断のフローチャートである。
【0010】
まず、図1を用いてエレベータドアの構成及び動作を説明する。
【0011】
図1に示すように、ドア制御装置1はドア2を開閉動作させるためのドアモータ3に接続されている。そしてドアモータ3の駆動力は、図示しないヘッダー内部の両端付近に回転軸を水平にして設けられる一対のドア用プーリ4a、4bのうちの一方であるドア用プーリ4aに伝達される。ドア用プーリ4a、4bはベルト5を介して一体となって回転する。ドアモータ3には、ドアモータ3の回転位置を検出するドアモータ位置検出器6が備えられている。
【0012】
一対のドア用プーリ4a、4bが回転軸を水平にして設けられていることから、ベルト5は上段側と下段側が平行に、それぞれが反対方向に水平移動する。そして上段側ベルト5aにはドアハンガー7aの上部が固定され、下段側ベルト5bにはドアハンガー7bの上部が固定される。ドアハンガー7aの下部にはドア2aが、ドアハンガー7bの下部にはドア2bがそれぞれ固定されている。そして、ドアモータ3が駆動すると、ベルト5a、5bはそれぞれ反対方向に移動するため、ドアモータ3の回転方向に応じてドア2a、2bがそれぞれ戸開閉動作を行うようになっている。
【0013】
次に本発明の第1の実施形態に係るドア制御装置の構成を説明する。
【0014】
まず図2を用いてドア制御の基本構成を説明する。図2に示すように一般的なドア制御装置は、異常診断の制御指令を行う主制御部8と、主制御部8と電気的に接続され速度指令を受ける速度制御部9、速度制御部9と電気的に接続され速度トルク指令を受け取る電流制御部10、電流制御部10と電気的に接続され電圧指令を受け取るインバータ11を備えている。そして、速度制御部9はドアモータ位置検出器6から出力されるドアモータ3の速度と、主制御部8から受け取る速度指令とを比較し、適切な速度トルク指令を電流制御部10に出力している。また、電流制御部10は、インバータ11とドアモータ3の間に備えられる電流検出器12から実際に出力されている電流値に基づいて、ドアモータ3が発生しているトルク値を計算する。そして算出されたトルク値と速度制御部9から受け取る速度トルク指令とを比較し、両者の値が一致するように電圧指令をインバータ11に出力する。そしてインバータはその電圧指令に応じた電圧をドアモータ3に供給し、ドアモータ3を駆動する。
【0015】
これに対して、図3に示すように本実施形態に係るエレベータのドア制御装置は、上記の構成に加え、さらに固定電圧指令部13、電圧指令切替部14及び電流制御診断部(異常診断部)15を備えている。固定電圧指令部13は予め定められている固定電圧値をインバータに出力する。電圧指令切替部14は主制御部8から異常診断を行う制御指令を受けると電流制御部10とインバータ11との接続から固定電圧指令部13とインバータ11との接続に切り替える。電流制御診断部15は電流検出器12から得られる電流の脈動から電流制御部10の異常を診断する。
【0016】
次に、図4のフローチャートを用いて本実施形態に係るエレベータのドア制御装置による異常診断を説明する。
【0017】
電流検出器12と接続されている電流制御診断部15は、周期的あるいは任意のタイミングで電流検出器12から出力される電流値の脈動(電流脈動Ir0)を検出し、記憶する(S1)。
【0018】
そして主制御部8が一定時間以上戸閉状態の継続を検出すると、主制御部8は異常診断を行う制御指令を固定電圧指令部13と電圧指令切替部14及び電流制御診断部15とに出力する(S2)。
【0019】
異常診断の制御指令を受け取ると電圧指令切替部14は、インバータ11への電圧指令の指令元を電流制御部10から固定電圧指令部13に切り替える(S3)。インバータ11への電圧指令元が固定電圧指令部13に切り替わると、予め定められた固定電圧値をインバータ11に出力する(S4)。固定電圧指令値がインバータ11に出力されると、電流制御診断部15は電圧固定時の電流の脈動(電流脈動Ir1)を記憶する(S5)。
【0020】
そして、電流制御診断部15は異常診断前に記憶した電流脈動Ir0と電流脈動Ir1とを比較する(S6)。なお、電流脈動の値が小さいほど電流の大きさの周期的変化が小さいということであるから、エレベータの乗り心地はよくなるものである。
【0021】
電流制御診断部15が電流脈動Ir0と電流脈動Ir1とを比較した結果、電圧固定後の電流脈動Ir1が電流固定前の電流脈動Ir0よりも大きい場合(S6のYES)、電流制御診断部15は電流制御部10に異常はないと判断する(S7)。
【0022】
一方、電圧固定前の電流脈動Ir0が電流固定後の電流脈動Ir1よりも大きい場合(S6のNO)、電流制御診断部15は電流制御部10に異常があると判断する(S8)。
【0023】
以上のようにして、インバータ11に出力する電圧指令値を固定し、電流脈動を比較することで、本実施形態に係るエレベータのドア制御装置は電流制御部10の異常診断を行うことができる。
【0024】
(第2の実施形態)
次に第2の実施形態について説明する。図5は本発明の第2の実施形態に係るエレベータのドア制御装置の構成を示す構成図である。図6は本発明の第2の実施形態に係るドアモータ位置検出器の異常診断のフローチャートである。
【0025】
第1の実施形態では電圧指令を固定することにより電流制御部10の異常診断を行ったが、第2の実施形態ではドアモータ位置検出器6から出力される位相角を固定することによって、ドアモータ位置検出器6の異常診断を行う。
【0026】
まずドア制御の基本構成を説明する。一般的なドア制御装置は、異常診断の制御指令を行う主制御部8と、主制御部8と電気的に接続され速度指令を受ける速度制御部9、速度制御部9と電気的に接続され速度トルク指令を受け取る電流制御部10、電流制御部10と電気的に接続され電圧指令を受け取るインバータ11を備えている。そして、速度制御部9はドアモータ位置検出器6から出力されるドアモータ3の速度と、主制御部8から受け取る速度指令とを比較し、適切な速度トルク指令を電流制御部10に出力している。また、電流制御部10は、インバータ11とドアモータ3の間に備えられる電流検出器12から実際に出力されている電流値に基づいて、ドアモータ3が発生しているトルク値を計算する。そして算出されたトルク値と速度制御部9から受け取る速度トルク指令とを比較し、両者の値が一致するように電圧指令をインバータ11に出力する。そしてインバータはその電圧指令に応じた電圧をドアモータ3に供給し、ドアモータ3を駆動する。
【0027】
これに対して、図5に示すように本実施形態に係るエレベータのドア制御装置は、上記の構成に加え、さらに固定位相角出力部16、位相角出力切替部17及び位置検出器診断部18を備えている。固定位相角出力部16は予め定められている固定位相角値を速度制御部9に出力する。位相角出力切替部17は主制御部8から異常診断を行う制御指令を受けるとドアモータ位置検出器6と速度制御部9との接続から固定位相角出力部16と速度制御部9との接続に切り替える。位置検出器診断部(異常診断部)18は電流検出器12から得られる電流の脈動からドアモータ位置検出器6の異常を診断する。
【0028】
次に、図6のフローチャートを用いて本実施形態に係るエレベータのドア制御装置による異常診断を説明する。
【0029】
電流検出器12と接続されている位置検出器診断部18は、周期的あるいは任意のタイミングで電流検出器12から出力される電流値の脈動(電流脈動Ir0)を検出し、記憶する(S21)。
【0030】
そして主制御部8が一定時間以上戸閉状態の継続を検出すると、主制御部8は異常診断を行う制御指令を固定位相角出力部16と位相角出力切替部17及び位置検出部診断部18とに出力する(S22)。
【0031】
異常診断の制御指令を受け取ると位相角出力切替部17は、速度制御部9への位相角出力の出力元をドアモータ位置検出器6から固定位相角出力部17に切り替える(S23)。速度制御部9への位相角出力元が固定位相角出力部17に切り替わると、予め定められた固定位相角を速度制御部9に出力する(S24)。固定位相角値が速度制御部9に出力されると、位置検出器診断部18は位相角固定時の電流の脈動(電流脈動Ir2)を検出し、記憶する(S25)。
【0032】
そして、位置検出器診断部18は異常診断前に記憶した電流脈動Ir0と電流脈動Ir1とを比較する(S26)。なお、電流脈動の値が小さいほど電流の大きさの周期的変化が小さいということであるから、エレベータの乗り心地はよくなるものである。
【0033】
位置検出器診断部18が電流脈動Ir0と電流脈動Ir1とを比較した結果、位相角固定後の電流脈動Ir2が位相角固定前の電流脈動Ir0よりも大きい場合(S26のYES)、位置検出器診断部18はドアモータ位置検出器6に異常はないと判断する(S27)。
【0034】
一方、位相角固定前の電流脈動Ir0が位相角固定後の電流脈動Ir2よりも大きい場合(S26のNO)、位置検出器診断部18はドアモータ位置検出器6に異常があると判断する(S28)。
【0035】
以上のようにして、速度制御部9に出力する位相角出力値を固定し、電流脈動を比較することで、本実施形態に係るエレベータのドア制御装置はドアモータ位置検出器6の異常診断を行うことができる。
【0036】
(第3の実施形態)
次に第3の実施形態について説明する。図7は本発明の第3の実施形態に係るエレベータのドア制御装置の構成を示す構成図である。図8は本発明の第3の実施形態に係る電流検出器の異常診断のフローチャートである。第1の実施形態では、電圧指令を固定することにより電流制御部10の異常診断を行ったが、第3の実施形態ではインバータ11への電圧指令を固定し、かつドアモータ位置検出器6から出力される位相角を固定することによって、電流検出器12の異常診断を行う。
【0037】
図7に示すように第3の実施形態に係るエレベータのドア制御装置の構成は、既述の第1の実施形態に係るエレベータのドア制御装置の構成に加え、第2の実施形態に係るエレベータのドア制御装置の構成を加えた構成となっている。ただし、第1の実施形態に係る電流制御診断部15及び第2の実施形態に係る位置検出器診断部18の代わりに電流検出器診断部(異常診断部)19が備えられる。
【0038】
以下、図8のフローチャートを用いて第3の実施形態に係るエレベータのドア制御装置による異常診断を説明する。
【0039】
電流検出器12と接続されている電流検出器診断部19は、周期的あるいは任意のタイミングで電流検出器12から出力される電流値の脈動(電流脈動Ir0)を検出し、記憶する(S31)。電流検出器診断部19は検出した電流脈動Ir0が予め定められる閾値よりも大きいか否か判断する(S32)。電流脈動Ir0が閾値よりも小さい場合(S32のNO)、ドア制御装置に異常はないものとして判断し、処理を終了する。
【0040】
一方、電流脈動Ir0が閾値よりも大きい場合(S32のYES)、主制御部8が一定時間以上戸閉状態の継続を検出した後、主制御部8は異常診断を行う制御指令を固定電圧指令部13と電圧指令切替部14及び電流検出器診断部19とに出力する(S33)。
【0041】
異常診断の制御指令を受け取ると電圧指令切替部14は、インバータ11への電圧指令の指令元を電流制御部10から固定電圧指令部13に切り替える(S34)。インバータ11への電圧指令元が固定電圧指令部13に切り替わると、予め定められた固定電圧値をインバータ11に出力する(S35)。固定電圧指令値がインバータ11に出力されると、電流検出器診断部19は電圧固定時の電流の脈動(電流脈動Ir1)を検出し、記憶する(S36)。
【0042】
そして、電流検出器診断部19は異常診断前に記憶した電流脈動Ir0と電流脈動Ir1とを比較する(S37)。電流検出器診断部19が電流脈動Ir0と電流脈動Ir1とを比較した結果、電圧固定後の電流脈動Ir1が電流固定前の電流脈動Ir0よりも大きい場合(S37のYES)、電流検出器診断部19は電流制御部10に異常はないと判断する(S38)。一方、電圧固定前の電流脈動Ir0が電流固定後の電流脈動Ir1よりも大きい場合(S37のNO)、電流検出器診断部19は電流制御部10に異常があると判断する(S39)。
【0043】
ここで、上記電流検出器診断部19による異常判断によって電流制御部10に異常がないと判断された場合、電圧指令切替部14はインバータ11への電圧指令の指令元を固定電圧指令部13から電流制御部10に切り替える(S40)。そしてその後、第2の実施形態と同様に位相角を固定し、ドアモータ位置検出器6の異常診断を行う。
【0044】
主制御部8は上述のように電流検出器診断部19による電流制御部10の異常診断が終わると、異常診断の制御指令を固定位相角出力部16と位相角出力切替部17及び電流検出器19とに出力する(S41)。
【0045】
異常診断の制御指令を受け取ると位相角出力切替部17は、速度制御部9への位相角出力の出力元をドアモータ位置検出器6から固定位相角出力部17に切り替える(S42)。速度制御部9への位相角出力元が固定位相角出力部16に切り替わると、予め定められた固定位相角を速度制御部9に出力する(S43)。固定位相角値が速度制御部9に出力されると、電流検出器診断部19は位相角固定時の電流の脈動(電流脈動Ir2)を検出し、記憶する(S44)。
【0046】
そして、電流検出器診断部19は異常診断前に記憶した電流脈動Ir0と電流脈動Ir2とを比較する(S45)。電流検出器診断部19が電流脈動Ir0と電流脈動Ir2とを比較した結果、位相角固定後の電流脈動Ir2が位相角固定前の電流脈動Ir0よりも大きい場合(S45のYES)、電流検出器診断部19はドアモータ位置検出器6に異常はなく、電流検出器12に異常があると判断する(S46)。
【0047】
一方、位相角固定前の電流脈動Ir0が位相角固定後の電流脈動Ir2よりも大きい場合(S45のNO)、電流検出器診断部19はドアモータ位置検出器6に異常があると判断する(S47)。
【0048】
したがって、本実施形態において、電流脈動Ir0が閾値を超えているにもかかわらず、上記電流検出器診断部19による異常判断によって電流制御部10及びドアモータ位置検出器6に異常がないと判断された場合、電流検出器診断部19は電流検出器12に異常があると判断し、電流検出器異常診断を終了する。
【0049】
以上のようにして、インバータ11に出力する電圧指令値を固定し、電流脈動を比較することで、本実施形態に係るエレベータのドア制御装置は電流制御部10の異常診断を行うことができる。また、電流制御部10に異常はないと判断された場合、速度制御部9に出力する位相角出力値を固定し、電流脈動を比較することで、本実施形態に係るエレベータのドア制御装置はドアモータ位置検出器6の異常診断を行うことができる。また、ドアモータ位置検出器にも異常はないと判断された場合、本実施形態に係るエレベータのドア制御装置は電流検出器12の異常を検出することができる。
【符号の説明】
【0050】
1…ドア制御装置
2…ドア
3…ドアモータ
4…ドア用プーリ
5…ベルト
6…ドアモータ位置検出器
7…ドアハンガー
8…主制御部
9…速度制御部
10…電流制御部
11…インバータ
12…電流検出器
13…固定電圧指令部
14…電圧指令切替部
15…電流制御診断部
16…固定位相角出力部
17…位相角出力切替部
18…位置検出部診断部
19…電流検出器診断部
【特許請求の範囲】
【請求項1】
エレベータのかごドアを駆動させるドアモータの速度を制御する速度制御部と、
前記ドアモータの回転位置を検出するドアモータ位置検出器と、
前記ドアモータ位置検出器から得られるドアモータの速度と前記速度制御部の指令速度とを比較し、適切な電圧指令をインバータに出力するように電流を制御する電流制御部と、
前記インバータから前記ドアモータに出力される電流を検出する電流検出器と、
予め定められた電圧指令値を前記インバータに出力する固定電圧指令部と、
前記インバータとの接続対象を前記電流制御部または前記固定電圧司令部のいずれかに切り替える電圧指令切替部と、
前記電流検出器から出力される電流脈動を検出、記憶する異常診断部と、
を備えることを特徴とするエレベータのドア制御装置。
【請求項2】
エレベータのかごドアを駆動させるドアモータの速度を制御する速度制御部と、
前記ドアモータの回転位置を検出するドアモータ位置検出器と、
前記ドアモータ位置検出器から得られるドアモータの速度と前記速度制御部の指令速度とを比較し、適切な電圧指令をインバータに出力するように電流を制御する電流制御部と、
前記インバータから前記ドアモータに出力される電流を検出する電流検出器と、
予め定められた位相角を前記電流制御部に出力する固定位相角出力部と、
前記電流制御部との接続対象を前記ドアモータ位置検出器または前記固定位相角出力部のいずれかに切り替える位相角出力切替部と、
前記電流検出器から出力される電流脈動を検出、記憶する異常診断部と、
を備えることを特徴とするエレベータのドア制御装置。
【請求項3】
エレベータのかごドアを駆動させるドアモータの速度を制御する速度制御部と、
前記ドアモータの回転位置を検出するドアモータ位置検出器と、
前記ドアモータ位置検出器から得られるドアモータの速度と前記速度制御部の指令速度とを比較し、適切な電圧指令をインバータに出力するように電流を制御する電流制御部と、
前記インバータから前記ドアモータに出力される電流を検出する電流検出器と、
予め定められた電圧指令値を前記インバータに出力する固定電圧指令部と、
予め定められた位相角を前記電流制御部に出力する固定位相角出力部と、
前記インバータとの接続対象を前記電流制御部または前記固定電圧指令部のいずれかに切り替える電圧指令切替部と、
前記電流制御部との接続対象を前記ドアモータ位置検出器または前記固定位相角出力部のいずれかに切り替える位相角出力切替部と、
前記電流検出器から出力される電流脈動を検出、記憶する異常診断部と、
を備えることを特徴とするエレベータのドア制御装置。
【請求項1】
エレベータのかごドアを駆動させるドアモータの速度を制御する速度制御部と、
前記ドアモータの回転位置を検出するドアモータ位置検出器と、
前記ドアモータ位置検出器から得られるドアモータの速度と前記速度制御部の指令速度とを比較し、適切な電圧指令をインバータに出力するように電流を制御する電流制御部と、
前記インバータから前記ドアモータに出力される電流を検出する電流検出器と、
予め定められた電圧指令値を前記インバータに出力する固定電圧指令部と、
前記インバータとの接続対象を前記電流制御部または前記固定電圧司令部のいずれかに切り替える電圧指令切替部と、
前記電流検出器から出力される電流脈動を検出、記憶する異常診断部と、
を備えることを特徴とするエレベータのドア制御装置。
【請求項2】
エレベータのかごドアを駆動させるドアモータの速度を制御する速度制御部と、
前記ドアモータの回転位置を検出するドアモータ位置検出器と、
前記ドアモータ位置検出器から得られるドアモータの速度と前記速度制御部の指令速度とを比較し、適切な電圧指令をインバータに出力するように電流を制御する電流制御部と、
前記インバータから前記ドアモータに出力される電流を検出する電流検出器と、
予め定められた位相角を前記電流制御部に出力する固定位相角出力部と、
前記電流制御部との接続対象を前記ドアモータ位置検出器または前記固定位相角出力部のいずれかに切り替える位相角出力切替部と、
前記電流検出器から出力される電流脈動を検出、記憶する異常診断部と、
を備えることを特徴とするエレベータのドア制御装置。
【請求項3】
エレベータのかごドアを駆動させるドアモータの速度を制御する速度制御部と、
前記ドアモータの回転位置を検出するドアモータ位置検出器と、
前記ドアモータ位置検出器から得られるドアモータの速度と前記速度制御部の指令速度とを比較し、適切な電圧指令をインバータに出力するように電流を制御する電流制御部と、
前記インバータから前記ドアモータに出力される電流を検出する電流検出器と、
予め定められた電圧指令値を前記インバータに出力する固定電圧指令部と、
予め定められた位相角を前記電流制御部に出力する固定位相角出力部と、
前記インバータとの接続対象を前記電流制御部または前記固定電圧指令部のいずれかに切り替える電圧指令切替部と、
前記電流制御部との接続対象を前記ドアモータ位置検出器または前記固定位相角出力部のいずれかに切り替える位相角出力切替部と、
前記電流検出器から出力される電流脈動を検出、記憶する異常診断部と、
を備えることを特徴とするエレベータのドア制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−112458(P2013−112458A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−259119(P2011−259119)
【出願日】平成23年11月28日(2011.11.28)
【出願人】(390025265)東芝エレベータ株式会社 (2,543)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月28日(2011.11.28)
【出願人】(390025265)東芝エレベータ株式会社 (2,543)
【Fターム(参考)】
[ Back to top ]