
エレベータの乗場機器施工用マーカ
【課題】昇降路内の乗場機器の加工位置の位置決め作業を効率的に行うことができるエレベータの乗場機器施工用マーカを提供する。
【解決手段】レーザービーム発生装置21A,21Bは、レーザービームα,βの水平方向及び鉛直方向への光軸角度を変更可能である。レーザービーム発生装置21A,21Bのレーザービームα,βの出射開始・出射停止及び光軸角度は、レーザービーム発生制御装置23によって制御される。レーザービーム発生制御装置23は、設計情報に基づいて、算出した乗場機器30側のレーザービームα,βの入射位置が加工位置と一致するように、レーザービーム発生装置21A,21Bのレーザービームα,βの光軸角度を制御し、レーザービーム発生装置21A,21Bからレーザービームα,βを出射させる。
【解決手段】レーザービーム発生装置21A,21Bは、レーザービームα,βの水平方向及び鉛直方向への光軸角度を変更可能である。レーザービーム発生装置21A,21Bのレーザービームα,βの出射開始・出射停止及び光軸角度は、レーザービーム発生制御装置23によって制御される。レーザービーム発生制御装置23は、設計情報に基づいて、算出した乗場機器30側のレーザービームα,βの入射位置が加工位置と一致するように、レーザービーム発生装置21A,21Bのレーザービームα,βの光軸角度を制御し、レーザービーム発生装置21A,21Bからレーザービームα,βを出射させる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、エレベータの据付工事又は改修工事等に用いられ、乗場機器の位置決めをするためのエレベータの乗場機器施工用マーカに関する。
【背景技術】
【0002】
エレベータの据付工事又は改修工事の際に、昇降路の壁面や乗場機器への加工が必要な場合、従来方式では、下記の(i)及び(ii)の作業が必要である(例えば、特許文献1参照)。
(i)その乗場階の乗場機器の基準寸法を下げ振り・コンベックススケール等を利用して測定し、基準位置を決める。
(ii)加工位置を基準寸法から測定して位置決めし、加工し、調整する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−24387号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のような(i)及び(ii)の作業は、エレベータの停止数分繰り返される場合が多く、作業性が低下していた。特に、高速エレベータ等、停止階が比較的多い場合、作業時間の増大が顕著であった。また、部品の位置決めの際には、対象部品に対して、罫書き線を引く作業が発生するが、対象部品の意匠面に対して、罫書き線を引けない場合もある。
【0005】
この発明は、上記のような課題を解決するためになされたものであり、昇降路内の乗場機器の加工位置の位置決め作業を効率的に行うことができるエレベータの乗場機器施工用マーカを得ることを目的とする。
【課題を解決するための手段】
【0006】
この発明のエレベータの乗場機器施工用マーカは、エレベータのかごに設けられ、レーザービームの水平方向及び鉛直方向への光軸角度を変更可能なレーザービーム出射手段と、入力された設計情報に基づいて、加工対象の乗場機器の加工位置をレーザービームの入射位置で示すように、前記レーザービーム出射手段のレーザービームの光軸角度を制御する出射制御部とを備える。
【発明の効果】
【0007】
この発明のエレベータの乗場機器施工用マーカによれば、出射制御部が、入力された設計情報に基づいて、加工対象の乗場機器の加工位置をレーザービームの入射位置で示すように、レーザービーム出射手段のレーザービームの光軸角度を制御するので、従来方式のような(i)及び(ii)の作業が不要となるとともに、意匠面であっても加工位置を示すことができることから、昇降路内の乗場機器の加工位置の位置決め作業を効率的に行うことができる。
【図面の簡単な説明】
【0008】
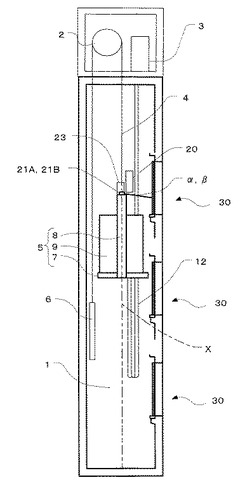
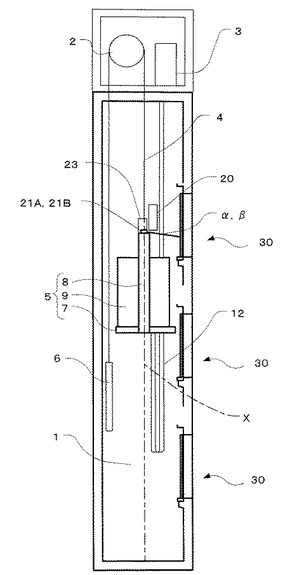
【図1】この発明の実施の形態1によるエレベータを示す構成図である。
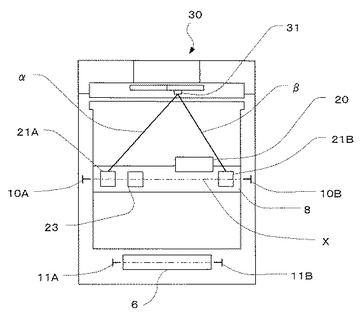
【図2】図1のかごを示す平面図である。
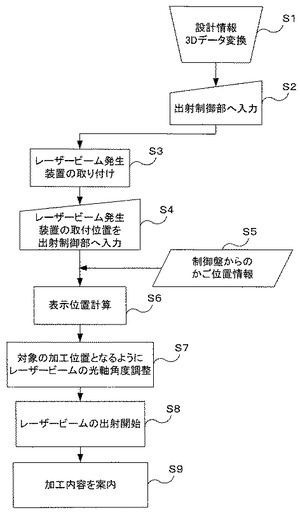
【図3】レーザービームを用いた位置決め作業を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、この発明を実施するための形態について、図面を参照して説明する。
実施の形態1.
図1は、この発明の実施の形態1によるエレベータを示す構成図である。図2は、図1のかご5を示す平面図である。
図1,2において、昇降路1の上部には、巻上機2及び制御盤(主制御部)3が設けられている。また、昇降路1の各階の乗場には、例えば乗場ドア装置や乗場三方枠等を含む乗場機器30が設置されている。
【0010】
巻上機2は、駆動シーブと、駆動シーブを回転させる巻上機モータと、駆動シーブの回転を制動する巻上機ブレーキとを有している。巻上機2には、駆動シーブの回転に応じたパルス信号を生成するパルスエンコーダ(図示せず)が取り付けられている。パルスエンコーダのパルス信号は、制御盤3へ送られる。制御盤3は、パルスエンコーダのパルス信号を用いて、昇降路1内におけるかご5の位置を監視する。
【0011】
駆動シーブには、ロープ4が巻き掛けられている。ロープ4の一端部には、かご5が吊り下げられている。ロープ4の他端部には、釣合おもり6が吊り下げられている。かご5は、かご床7と、かご枠8と、かご室9とを有している。かご枠8は、下梁、上梁、及び一対の縦柱を有している。かご床7は、かご枠8の下梁の上面に固定されている。かご室9は、かご床7の上面に固定されている。なお、ロープ4の一端部は、上梁に接続されている。
【0012】
かご5及び釣合おもり6は、巻上機2の駆動力によって、昇降路1内を昇降される。また、かご5の昇降は、昇降路1内に立てて設けられた一対のかごガイドレール10A,10Bによって案内される。さらに、釣合おもり6の昇降は、昇降路1内に立てて設けられた一対のおもりガイドレール11A,11Bによって案内される。また、かご5及び釣合おもり6の昇降は、制御盤3によって制御される。
【0013】
次に、かご5の上部には、かご側制御装置(かご側制御部)20と、一対のレーザービーム発生装置(レーザービーム出射手段)21A,21Bと、レーザービーム発生制御装置(出射制御部)23とが設けられている。かご側制御装置20は、かご枠8の上梁の上面に、支持部材を介して取り付けられている。また、かご側制御装置20は、昇降路1の上部とかご5とを繋ぐ制御ケーブル12を介して、制御盤3と通信可能である。
【0014】
一対のレーザービーム発生装置21A,21B及びレーザービーム発生制御装置23は、かご枠8の上梁の上面に、着脱可能に取り付けられている。また、一対のレーザービーム発生装置21A,21Bは、一対のかごガイドレール10A,10B同士が対向する方向(図2の左右方向)に間隔をおいて配置されている。ここで、かご枠8は、水平方向で一対のかごガイドレール10A,10B同士を結ぶように、即ち水平方向でかごガイドレール10A,10Bのレール芯(基準線X)と一致するように配置されている。一対のレーザービーム発生装置21A,21Bも、水平方向でかごガイドレール10A,10Bのレール芯と一致するように配置されている。
【0015】
レーザービーム発生装置21A,21Bは、それぞれレーザービームα,βを出射する。また、レーザービーム発生装置21A,21Bは、レーザービームα,βの水平方向及び鉛直方向への光軸角度(照射角度)を変更可能である(光軸角度調整機構を有している)。レーザービーム発生装置21A,21Bのレーザービームα,βの出射開始・出射停止及び光軸角度は、レーザービーム発生制御装置23によって制御される。レーザービーム発生制御装置23は、かご側制御装置20に接続されており、かご側制御装置20と通信可能である。
【0016】
レーザービーム発生制御装置23には、3D(3次元)データに予め変換された設計情報が入力されて登録されている。この設計情報は、昇降路1内の各機器のレイアウトを示す情報であり、乗場機器30の加工位置等を含む情報である。また、レーザービーム発生制御装置23には、かご5を基準とするレーザービーム発生装置21A,21Bの位置情報が予め入力されて登録されている。
【0017】
さらに、レーザービーム発生制御装置23は、かご側制御装置20及び制御ケーブル12を介して、制御盤3からかご位置情報を受ける。また、レーザービーム発生制御装置23は、かご5におけるレーザービーム発生装置21A,21Bの位置情報と、かご位置情報とに基づいて、昇降路1内におけるレーザービーム発生装置21A,21Bの位置を算出する。
【0018】
さらに、レーザービーム発生制御装置23は、昇降路1内におけるレーザービーム発生装置21A,21Bの位置から、乗場機器30側のレーザービームα,βの入射位置を算出する。そして、レーザービーム発生制御装置23は、設計情報に基づいて、算出した乗場機器30側のレーザービームα,βの入射位置(表示位置)が加工位置と一致するように、レーザービーム発生装置21A,21Bのレーザービームα,βの光軸角度を制御し、レーザービーム発生装置21A,21Bからレーザービームα,βを出射させる。
【0019】
ここで、同一の乗場階で加工位置が複数ある場合、複数の加工位置のそれぞれに関するレーザービーム発生制御装置23によるレーザービームα,βの光軸角度の制御内容がプログラムパターン化されている。このようにプログラムパターン化されることによって、予め登録された加工順序で、複数の加工位置を順次切替えて示すことができる。また、各乗場階で、レーザービーム発生制御装置23が同様の動作パターンで複数の加工位置を順次切替えて示すことができる。
【0020】
また、レーザービーム発生制御装置23は、作業用端末・コンピュータ等(図示せず)と通信可能であり、作業員の要求に応じた加工位置を乗場機器30に示すようにレーザービームα,βの光軸角度を制御することもできる。さらに、レーザービーム発生制御装置23は、作業用端末・コンピュータ等から、一つの作業工程が終了したことを示す終了操作を受け、作業手順に対応させて、複数の加工位置を順に示すようにレーザービーム発生装置21A,21Bのレーザービームα,βの光軸角度を制御する。
【0021】
さらに、レーザービーム発生制御装置23は、加工対象の乗場機器30の加工位置についての情報を、作業用端末・コンピュータ、又はかご室9内のスピーカ等の報知手段(図示せず)に出力し、この報知手段を介して、文字、映像及び音声の少なくともいずれか1つにより加工順序及び加工内容を作業員に案内(指示)する。これにより、作業員に対する作業手順ガイドとしても機能する。
【0022】
次に、レーザービームα,βを用いた位置決め作業について説明する。図3は、レーザービームα,βを用いた位置決め作業を示すフローチャートである。なお、図3では、簡略化のため、レーザービーム発生制御装置23を出射制御部として記載する。図3において、事前に設計情報が3Dデータに変換され(ステップS1)、その変換後の設計情報がレーザービーム発生制御装置23に入力される(ステップS2)。
【0023】
そして、かご枠8の上梁にレーザービーム発生装置21A,21B及びレーザービーム発生制御装置23が作業員によって取り付けられ(ステップS3)、レーザービーム発生装置21A,21Bの取付位置が作業員によってレーザービーム発生制御装置23に入力される(ステップS4)。これとともに、制御盤3からかご位置情報がレーザービーム発生制御装置23に入力される(ステップS5)。
【0024】
そして、レーザービーム発生制御装置23は、表示位置(レーザービームα,βの入射位置)を計算し(ステップS6)、レーザービームα,βの入射位置が対象の加工位置となるように、レーザービーム発生装置21A,21Bのレーザービームα,βの光軸角度を調整する(ステップS7)。
【0025】
次に、レーザービーム発生制御装置23は、レーザービーム発生装置21A,21Bからのレーザービームα,βの出射を開始する(ステップS8)。そして、レーザービーム発生制御装置23は、ガイド情報を報知手段に出力し、作業員に対して、音声等により加工内容を案内する(ステップS9)。
【0026】
この後、その加工位置での作業が終了した場合には、作業員によって作業用端末から終了操作がレーザービーム発生制御装置23に入力され、レーザービーム発生制御装置23は、次の加工位置を示すように、レーザービームα,βの光軸角度を調整し、レーザービームα,βの入射位置を変更する。そして、その乗場階で全ての加工作業が終了するまで図3のステップS5〜S9の動作を繰り返す。
【0027】
また、かご5が昇降し、作業対象の乗場階が変更になった場合には、その乗場階での乗場機器30の加工位置を示すように、図3のステップS5〜S9の動作を繰り返す。なお、昇降路1内での全ての作業が終了すると、レーザービーム発生装置21A,21B及びレーザービーム発生制御装置23は、かご5から取り外される。
【0028】
上記のような実施の形態1によれば、レーザービーム発生制御装置23が、入力された設計情報に基づいて、加工対象の乗場機器30の加工位置をレーザービームα,βの入射位置で示すように、レーザービーム発生装置21A,21Bのレーザービームα,βの光軸角度を制御する。この構成により、従来方式のような(i)及び(ii)の作業が不要となるとともに、意匠面であっても加工位置を示すことができることから、昇降路1内の乗場機器30の加工位置の位置決め作業を効率的に行うことができ、乗場機器30への加工作業時間を短縮することができる。これに加えて、指向性や収束性に優れたレーザービームα,βを用いているので、加工位置をより精確に示すことができる。
【0029】
また、2本のレーザービームα,βを使用しているので、仮想の奥行きも表すことができる。これに加えて、既存の乗場機器30の加工の位置決め以外に、部品を追加する際の部品位置決め及び調整にも適用することができる。
【0030】
さらに、レーザービーム発生制御装置23が、かご位置情報を用いて、レーザービーム発生装置21A,21Bの位置を算出し、その算出したレーザービーム発生装置21A,21Bの位置と設計情報とから、レーザービームα,βの入射位置を算出する。この構成により、かご5の位置に対応して、レーザービーム発生装置21A,21Bのレーザービームα,βの光軸角度を制御することができる。
【0031】
また、同一の乗場階に複数の加工位置が存在する場合に、レーザービーム発生制御装置23が、予め登録された加工順序で複数の加工位置を示すように、レーザービーム発生装置21A,21Bのレーザービームα,βの光軸角度を制御する。これにより、作業員に作業手順を案内することができる。
【0032】
さらに、レーザービーム発生制御装置23が、加工対象の乗場機器30の加工位置についての情報を加工順序に従って報知手段に出力し、報知手段を介して、文字、映像及び音声の少なくともいずれか1つにより、加工順序及び加工内容の少なくともいずれか一方を作業員に報知する。これにより、作業員に作業手順及び加工内容を案内することができる。
【0033】
また、レーザービーム発生装置21A,21Bがかご5に着脱可能に取り付けられているので、レーザービーム発生装置21A,21Bを、他のエレベータの据付工事又は改修工事に流用することができる。
【0034】
なお、実施の形態1では、レーザービーム発生装置21A,21Bによる2本のレーザービームα,βを用いた。しかしながら、レーザービームの本数は2本に限定するものではなく、1本又は3本以上であってもよい。
【0035】
また、実施の形態1では、出射制御部としてレーザービーム発生制御装置23を用いた。しかしながら、制御盤又はかご側制御装置のハードウェアによって、出射制御部の機能を実現してもよい。
【0036】
さらに、実施の形態1では、レーザービーム発生装置21A,21Bがかご枠8の上梁に取り付けられていた。しかしながら、レーザービーム発生装置21A,21Bの取り付け位置については、この例に限定するものではなく、例えばレーザービーム発生装置21A,21Bがかご枠8の下梁や、かご床7や、かご室9の外面等であってもよい。
【符号の説明】
【0037】
1 昇降路、2 巻上機、3 制御盤、4 ロープ、5 かご、6 釣合おもり、7 かご床、8 かご枠、9 かご室、10A,10B かごガイドレール、11A,11B おもりガイドレール、12 制御ケーブル、20 かご側制御装置、21A,21B レーザービーム発生装置(レーザービーム出射手段)、23 レーザービーム発生制御装置(出射制御部)、30 乗場機器、α,β レーザービーム。
【技術分野】
【0001】
この発明は、エレベータの据付工事又は改修工事等に用いられ、乗場機器の位置決めをするためのエレベータの乗場機器施工用マーカに関する。
【背景技術】
【0002】
エレベータの据付工事又は改修工事の際に、昇降路の壁面や乗場機器への加工が必要な場合、従来方式では、下記の(i)及び(ii)の作業が必要である(例えば、特許文献1参照)。
(i)その乗場階の乗場機器の基準寸法を下げ振り・コンベックススケール等を利用して測定し、基準位置を決める。
(ii)加工位置を基準寸法から測定して位置決めし、加工し、調整する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−24387号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のような(i)及び(ii)の作業は、エレベータの停止数分繰り返される場合が多く、作業性が低下していた。特に、高速エレベータ等、停止階が比較的多い場合、作業時間の増大が顕著であった。また、部品の位置決めの際には、対象部品に対して、罫書き線を引く作業が発生するが、対象部品の意匠面に対して、罫書き線を引けない場合もある。
【0005】
この発明は、上記のような課題を解決するためになされたものであり、昇降路内の乗場機器の加工位置の位置決め作業を効率的に行うことができるエレベータの乗場機器施工用マーカを得ることを目的とする。
【課題を解決するための手段】
【0006】
この発明のエレベータの乗場機器施工用マーカは、エレベータのかごに設けられ、レーザービームの水平方向及び鉛直方向への光軸角度を変更可能なレーザービーム出射手段と、入力された設計情報に基づいて、加工対象の乗場機器の加工位置をレーザービームの入射位置で示すように、前記レーザービーム出射手段のレーザービームの光軸角度を制御する出射制御部とを備える。
【発明の効果】
【0007】
この発明のエレベータの乗場機器施工用マーカによれば、出射制御部が、入力された設計情報に基づいて、加工対象の乗場機器の加工位置をレーザービームの入射位置で示すように、レーザービーム出射手段のレーザービームの光軸角度を制御するので、従来方式のような(i)及び(ii)の作業が不要となるとともに、意匠面であっても加工位置を示すことができることから、昇降路内の乗場機器の加工位置の位置決め作業を効率的に行うことができる。
【図面の簡単な説明】
【0008】
【図1】この発明の実施の形態1によるエレベータを示す構成図である。
【図2】図1のかごを示す平面図である。
【図3】レーザービームを用いた位置決め作業を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、この発明を実施するための形態について、図面を参照して説明する。
実施の形態1.
図1は、この発明の実施の形態1によるエレベータを示す構成図である。図2は、図1のかご5を示す平面図である。
図1,2において、昇降路1の上部には、巻上機2及び制御盤(主制御部)3が設けられている。また、昇降路1の各階の乗場には、例えば乗場ドア装置や乗場三方枠等を含む乗場機器30が設置されている。
【0010】
巻上機2は、駆動シーブと、駆動シーブを回転させる巻上機モータと、駆動シーブの回転を制動する巻上機ブレーキとを有している。巻上機2には、駆動シーブの回転に応じたパルス信号を生成するパルスエンコーダ(図示せず)が取り付けられている。パルスエンコーダのパルス信号は、制御盤3へ送られる。制御盤3は、パルスエンコーダのパルス信号を用いて、昇降路1内におけるかご5の位置を監視する。
【0011】
駆動シーブには、ロープ4が巻き掛けられている。ロープ4の一端部には、かご5が吊り下げられている。ロープ4の他端部には、釣合おもり6が吊り下げられている。かご5は、かご床7と、かご枠8と、かご室9とを有している。かご枠8は、下梁、上梁、及び一対の縦柱を有している。かご床7は、かご枠8の下梁の上面に固定されている。かご室9は、かご床7の上面に固定されている。なお、ロープ4の一端部は、上梁に接続されている。
【0012】
かご5及び釣合おもり6は、巻上機2の駆動力によって、昇降路1内を昇降される。また、かご5の昇降は、昇降路1内に立てて設けられた一対のかごガイドレール10A,10Bによって案内される。さらに、釣合おもり6の昇降は、昇降路1内に立てて設けられた一対のおもりガイドレール11A,11Bによって案内される。また、かご5及び釣合おもり6の昇降は、制御盤3によって制御される。
【0013】
次に、かご5の上部には、かご側制御装置(かご側制御部)20と、一対のレーザービーム発生装置(レーザービーム出射手段)21A,21Bと、レーザービーム発生制御装置(出射制御部)23とが設けられている。かご側制御装置20は、かご枠8の上梁の上面に、支持部材を介して取り付けられている。また、かご側制御装置20は、昇降路1の上部とかご5とを繋ぐ制御ケーブル12を介して、制御盤3と通信可能である。
【0014】
一対のレーザービーム発生装置21A,21B及びレーザービーム発生制御装置23は、かご枠8の上梁の上面に、着脱可能に取り付けられている。また、一対のレーザービーム発生装置21A,21Bは、一対のかごガイドレール10A,10B同士が対向する方向(図2の左右方向)に間隔をおいて配置されている。ここで、かご枠8は、水平方向で一対のかごガイドレール10A,10B同士を結ぶように、即ち水平方向でかごガイドレール10A,10Bのレール芯(基準線X)と一致するように配置されている。一対のレーザービーム発生装置21A,21Bも、水平方向でかごガイドレール10A,10Bのレール芯と一致するように配置されている。
【0015】
レーザービーム発生装置21A,21Bは、それぞれレーザービームα,βを出射する。また、レーザービーム発生装置21A,21Bは、レーザービームα,βの水平方向及び鉛直方向への光軸角度(照射角度)を変更可能である(光軸角度調整機構を有している)。レーザービーム発生装置21A,21Bのレーザービームα,βの出射開始・出射停止及び光軸角度は、レーザービーム発生制御装置23によって制御される。レーザービーム発生制御装置23は、かご側制御装置20に接続されており、かご側制御装置20と通信可能である。
【0016】
レーザービーム発生制御装置23には、3D(3次元)データに予め変換された設計情報が入力されて登録されている。この設計情報は、昇降路1内の各機器のレイアウトを示す情報であり、乗場機器30の加工位置等を含む情報である。また、レーザービーム発生制御装置23には、かご5を基準とするレーザービーム発生装置21A,21Bの位置情報が予め入力されて登録されている。
【0017】
さらに、レーザービーム発生制御装置23は、かご側制御装置20及び制御ケーブル12を介して、制御盤3からかご位置情報を受ける。また、レーザービーム発生制御装置23は、かご5におけるレーザービーム発生装置21A,21Bの位置情報と、かご位置情報とに基づいて、昇降路1内におけるレーザービーム発生装置21A,21Bの位置を算出する。
【0018】
さらに、レーザービーム発生制御装置23は、昇降路1内におけるレーザービーム発生装置21A,21Bの位置から、乗場機器30側のレーザービームα,βの入射位置を算出する。そして、レーザービーム発生制御装置23は、設計情報に基づいて、算出した乗場機器30側のレーザービームα,βの入射位置(表示位置)が加工位置と一致するように、レーザービーム発生装置21A,21Bのレーザービームα,βの光軸角度を制御し、レーザービーム発生装置21A,21Bからレーザービームα,βを出射させる。
【0019】
ここで、同一の乗場階で加工位置が複数ある場合、複数の加工位置のそれぞれに関するレーザービーム発生制御装置23によるレーザービームα,βの光軸角度の制御内容がプログラムパターン化されている。このようにプログラムパターン化されることによって、予め登録された加工順序で、複数の加工位置を順次切替えて示すことができる。また、各乗場階で、レーザービーム発生制御装置23が同様の動作パターンで複数の加工位置を順次切替えて示すことができる。
【0020】
また、レーザービーム発生制御装置23は、作業用端末・コンピュータ等(図示せず)と通信可能であり、作業員の要求に応じた加工位置を乗場機器30に示すようにレーザービームα,βの光軸角度を制御することもできる。さらに、レーザービーム発生制御装置23は、作業用端末・コンピュータ等から、一つの作業工程が終了したことを示す終了操作を受け、作業手順に対応させて、複数の加工位置を順に示すようにレーザービーム発生装置21A,21Bのレーザービームα,βの光軸角度を制御する。
【0021】
さらに、レーザービーム発生制御装置23は、加工対象の乗場機器30の加工位置についての情報を、作業用端末・コンピュータ、又はかご室9内のスピーカ等の報知手段(図示せず)に出力し、この報知手段を介して、文字、映像及び音声の少なくともいずれか1つにより加工順序及び加工内容を作業員に案内(指示)する。これにより、作業員に対する作業手順ガイドとしても機能する。
【0022】
次に、レーザービームα,βを用いた位置決め作業について説明する。図3は、レーザービームα,βを用いた位置決め作業を示すフローチャートである。なお、図3では、簡略化のため、レーザービーム発生制御装置23を出射制御部として記載する。図3において、事前に設計情報が3Dデータに変換され(ステップS1)、その変換後の設計情報がレーザービーム発生制御装置23に入力される(ステップS2)。
【0023】
そして、かご枠8の上梁にレーザービーム発生装置21A,21B及びレーザービーム発生制御装置23が作業員によって取り付けられ(ステップS3)、レーザービーム発生装置21A,21Bの取付位置が作業員によってレーザービーム発生制御装置23に入力される(ステップS4)。これとともに、制御盤3からかご位置情報がレーザービーム発生制御装置23に入力される(ステップS5)。
【0024】
そして、レーザービーム発生制御装置23は、表示位置(レーザービームα,βの入射位置)を計算し(ステップS6)、レーザービームα,βの入射位置が対象の加工位置となるように、レーザービーム発生装置21A,21Bのレーザービームα,βの光軸角度を調整する(ステップS7)。
【0025】
次に、レーザービーム発生制御装置23は、レーザービーム発生装置21A,21Bからのレーザービームα,βの出射を開始する(ステップS8)。そして、レーザービーム発生制御装置23は、ガイド情報を報知手段に出力し、作業員に対して、音声等により加工内容を案内する(ステップS9)。
【0026】
この後、その加工位置での作業が終了した場合には、作業員によって作業用端末から終了操作がレーザービーム発生制御装置23に入力され、レーザービーム発生制御装置23は、次の加工位置を示すように、レーザービームα,βの光軸角度を調整し、レーザービームα,βの入射位置を変更する。そして、その乗場階で全ての加工作業が終了するまで図3のステップS5〜S9の動作を繰り返す。
【0027】
また、かご5が昇降し、作業対象の乗場階が変更になった場合には、その乗場階での乗場機器30の加工位置を示すように、図3のステップS5〜S9の動作を繰り返す。なお、昇降路1内での全ての作業が終了すると、レーザービーム発生装置21A,21B及びレーザービーム発生制御装置23は、かご5から取り外される。
【0028】
上記のような実施の形態1によれば、レーザービーム発生制御装置23が、入力された設計情報に基づいて、加工対象の乗場機器30の加工位置をレーザービームα,βの入射位置で示すように、レーザービーム発生装置21A,21Bのレーザービームα,βの光軸角度を制御する。この構成により、従来方式のような(i)及び(ii)の作業が不要となるとともに、意匠面であっても加工位置を示すことができることから、昇降路1内の乗場機器30の加工位置の位置決め作業を効率的に行うことができ、乗場機器30への加工作業時間を短縮することができる。これに加えて、指向性や収束性に優れたレーザービームα,βを用いているので、加工位置をより精確に示すことができる。
【0029】
また、2本のレーザービームα,βを使用しているので、仮想の奥行きも表すことができる。これに加えて、既存の乗場機器30の加工の位置決め以外に、部品を追加する際の部品位置決め及び調整にも適用することができる。
【0030】
さらに、レーザービーム発生制御装置23が、かご位置情報を用いて、レーザービーム発生装置21A,21Bの位置を算出し、その算出したレーザービーム発生装置21A,21Bの位置と設計情報とから、レーザービームα,βの入射位置を算出する。この構成により、かご5の位置に対応して、レーザービーム発生装置21A,21Bのレーザービームα,βの光軸角度を制御することができる。
【0031】
また、同一の乗場階に複数の加工位置が存在する場合に、レーザービーム発生制御装置23が、予め登録された加工順序で複数の加工位置を示すように、レーザービーム発生装置21A,21Bのレーザービームα,βの光軸角度を制御する。これにより、作業員に作業手順を案内することができる。
【0032】
さらに、レーザービーム発生制御装置23が、加工対象の乗場機器30の加工位置についての情報を加工順序に従って報知手段に出力し、報知手段を介して、文字、映像及び音声の少なくともいずれか1つにより、加工順序及び加工内容の少なくともいずれか一方を作業員に報知する。これにより、作業員に作業手順及び加工内容を案内することができる。
【0033】
また、レーザービーム発生装置21A,21Bがかご5に着脱可能に取り付けられているので、レーザービーム発生装置21A,21Bを、他のエレベータの据付工事又は改修工事に流用することができる。
【0034】
なお、実施の形態1では、レーザービーム発生装置21A,21Bによる2本のレーザービームα,βを用いた。しかしながら、レーザービームの本数は2本に限定するものではなく、1本又は3本以上であってもよい。
【0035】
また、実施の形態1では、出射制御部としてレーザービーム発生制御装置23を用いた。しかしながら、制御盤又はかご側制御装置のハードウェアによって、出射制御部の機能を実現してもよい。
【0036】
さらに、実施の形態1では、レーザービーム発生装置21A,21Bがかご枠8の上梁に取り付けられていた。しかしながら、レーザービーム発生装置21A,21Bの取り付け位置については、この例に限定するものではなく、例えばレーザービーム発生装置21A,21Bがかご枠8の下梁や、かご床7や、かご室9の外面等であってもよい。
【符号の説明】
【0037】
1 昇降路、2 巻上機、3 制御盤、4 ロープ、5 かご、6 釣合おもり、7 かご床、8 かご枠、9 かご室、10A,10B かごガイドレール、11A,11B おもりガイドレール、12 制御ケーブル、20 かご側制御装置、21A,21B レーザービーム発生装置(レーザービーム出射手段)、23 レーザービーム発生制御装置(出射制御部)、30 乗場機器、α,β レーザービーム。
【特許請求の範囲】
【請求項1】
エレベータのかごに設けられ、レーザービームの水平方向及び鉛直方向への光軸角度を変更可能なレーザービーム出射手段と、
入力された設計情報に基づいて、加工対象の乗場機器の加工位置をレーザービームの入射位置で示すように、前記レーザービーム出射手段のレーザービームの光軸角度を制御する出射制御部と
を備えることを特徴とするエレベータの乗場機器施工用マーカ。
【請求項2】
前記レーザービーム出射手段は、水平方向に互いに間隔をおいて一対配置されており、
前記出射制御部は、同一の加工対象の乗場機器の加工位置を一対のレーザービームの入射位置で示すように、一対の前記レーザービーム出射手段のそれぞれの光軸角度を制御する
ことを特徴とする請求項1記載のエレベータの乗場機器施工用マーカ。
【請求項3】
前記出射制御部は、
昇降路内の前記かごの位置を示すかご位置情報が外部から入力され、
予め登録され前記かごを基準とする前記レーザービーム出射手段の位置の情報と、前記かご位置情報とから前記レーザービーム出射手段の昇降路内の位置を算出し、その算出した前記レーザービーム出射手段の昇降路内の位置と前記設計情報とに基づいて、前記レーザービーム出射手段のレーザービームの光軸角度を制御する
ことを特徴とする請求項1又は請求項2に記載のエレベータの乗場機器施工用マーカ。
【請求項4】
前記出射制御部は、同一の乗場階に複数の加工位置が存在する場合に、予め登録された加工順序で前記複数の加工位置を示すように、前記レーザービーム出射手段のレーザービームの光軸角度を制御する
ことを特徴とする請求項1から請求項3までのいずれか1項に記載のエレベータの乗場機器施工用マーカ。
【請求項5】
前記出射制御部は、加工対象の乗場機器の加工位置についての情報を前記加工順序に従って報知手段に出力し、前記報知手段を介して、文字、映像及び音声の少なくともいずれか1つにより、加工内容及び加工手順の少なくともいずれか一方を作業員に報知する
ことを特徴とする請求項4記載のエレベータの乗場機器施工用マーカ。
【請求項6】
前記レーザービーム出射手段は、前記かごの昇降を案内するかごガイドレールのレール芯と水平方向で一致するように配置されている
ことを特徴とする請求項1から請求項5までのいずれか1項に記載のエレベータの乗場機器施工用マーカ。
【請求項7】
前記レーザービーム出射手段は、着脱可能に前記かごに取り付けられている
ことを特徴とする請求項1から請求項6までのいずれか1項に記載のエレベータの乗場機器施工用マーカ。
【請求項1】
エレベータのかごに設けられ、レーザービームの水平方向及び鉛直方向への光軸角度を変更可能なレーザービーム出射手段と、
入力された設計情報に基づいて、加工対象の乗場機器の加工位置をレーザービームの入射位置で示すように、前記レーザービーム出射手段のレーザービームの光軸角度を制御する出射制御部と
を備えることを特徴とするエレベータの乗場機器施工用マーカ。
【請求項2】
前記レーザービーム出射手段は、水平方向に互いに間隔をおいて一対配置されており、
前記出射制御部は、同一の加工対象の乗場機器の加工位置を一対のレーザービームの入射位置で示すように、一対の前記レーザービーム出射手段のそれぞれの光軸角度を制御する
ことを特徴とする請求項1記載のエレベータの乗場機器施工用マーカ。
【請求項3】
前記出射制御部は、
昇降路内の前記かごの位置を示すかご位置情報が外部から入力され、
予め登録され前記かごを基準とする前記レーザービーム出射手段の位置の情報と、前記かご位置情報とから前記レーザービーム出射手段の昇降路内の位置を算出し、その算出した前記レーザービーム出射手段の昇降路内の位置と前記設計情報とに基づいて、前記レーザービーム出射手段のレーザービームの光軸角度を制御する
ことを特徴とする請求項1又は請求項2に記載のエレベータの乗場機器施工用マーカ。
【請求項4】
前記出射制御部は、同一の乗場階に複数の加工位置が存在する場合に、予め登録された加工順序で前記複数の加工位置を示すように、前記レーザービーム出射手段のレーザービームの光軸角度を制御する
ことを特徴とする請求項1から請求項3までのいずれか1項に記載のエレベータの乗場機器施工用マーカ。
【請求項5】
前記出射制御部は、加工対象の乗場機器の加工位置についての情報を前記加工順序に従って報知手段に出力し、前記報知手段を介して、文字、映像及び音声の少なくともいずれか1つにより、加工内容及び加工手順の少なくともいずれか一方を作業員に報知する
ことを特徴とする請求項4記載のエレベータの乗場機器施工用マーカ。
【請求項6】
前記レーザービーム出射手段は、前記かごの昇降を案内するかごガイドレールのレール芯と水平方向で一致するように配置されている
ことを特徴とする請求項1から請求項5までのいずれか1項に記載のエレベータの乗場機器施工用マーカ。
【請求項7】
前記レーザービーム出射手段は、着脱可能に前記かごに取り付けられている
ことを特徴とする請求項1から請求項6までのいずれか1項に記載のエレベータの乗場機器施工用マーカ。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2012−218864(P2012−218864A)
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願番号】特願2011−85255(P2011−85255)
【出願日】平成23年4月7日(2011.4.7)
【出願人】(000006013)三菱電機株式会社 (33,312)
【出願人】(000236056)三菱電機ビルテクノサービス株式会社 (1,792)
【Fターム(参考)】
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願日】平成23年4月7日(2011.4.7)
【出願人】(000006013)三菱電機株式会社 (33,312)
【出願人】(000236056)三菱電機ビルテクノサービス株式会社 (1,792)
【Fターム(参考)】
[ Back to top ]