
エレベータの乗降検出装置およびエレベータ装置、並びにエレベータの乗降検出方法
【課題】かごに対する人および物体の出入りを検出して、かご容積に対する人および物体の占有率を低コストかつ高精度に算出するエレベータの乗降検出装置、検出結果に応じてエレベータを駆動するエレベータ装置、並びにエレベータの乗降検出方法を得る。
【解決手段】エレベータの出入り口に設けられ、出入り口を通過する人および物体を線状画像としてそれぞれ検出する第1、第2ラインセンサ11a、11bと、第1、第2ラインセンサ11a、11bで検出された線状画像から、人および物体の投影面積を算出する投影面積算出部131と、第1、第2ラインセンサ11a、11bで検出された線状画像から、人および物体の移動方向を判定する移動方向判定部132と、投影面積および移動方向に基づいて、エレベータのかご容積に対する人および物体の占有率を算出する占有率算出部133とを備えている。
【解決手段】エレベータの出入り口に設けられ、出入り口を通過する人および物体を線状画像としてそれぞれ検出する第1、第2ラインセンサ11a、11bと、第1、第2ラインセンサ11a、11bで検出された線状画像から、人および物体の投影面積を算出する投影面積算出部131と、第1、第2ラインセンサ11a、11bで検出された線状画像から、人および物体の移動方向を判定する移動方向判定部132と、投影面積および移動方向に基づいて、エレベータのかご容積に対する人および物体の占有率を算出する占有率算出部133とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、かごに対する人および物体の出入りを検出するエレベータの乗降検出装置、検出結果に応じてエレベータを駆動するエレベータ装置、並びにエレベータの乗降検出方法に関する。
【背景技術】
【0002】
従来のエレベータ装置は、かごを乗降する乗客の検知を行う光電装置と、音声により乗客への指示を行う音声案内手段とを備え、光電装置での乗客検知時間が所定時間よりも短い場合は、音声案内手段による乗客への指示を行わず、乗客検知時間が所定時間よりも長い場合は、音声案内手段による乗客への指示を行う(例えば、特許文献1参照)。
【0003】
また、従来のエレベータの満載通過装置は、各階にホール呼び登録する呼び装置を備え、かご内に積載される荷物の大小を識別する装置と直行運転の設定を行う釦とをかごに設け、この識別装置により、大きな荷物の積載が検知され、かつ設定釦の操作が行われると、呼び装置に関係なくかごを乗客の指定階へ直行運転させる手段を備えている(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第4349229号公報
【特許文献2】特開平5−201629号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来技術には、以下のような課題がある。
特許文献1のものでは、1個の光電装置でかごを乗降する乗客を検知しているので、乗客の移動方向を判断することができず、乗客の乗降状況を正確に把握することができないという問題がある。
【0006】
また、特許文献2のものでは、かご内に積載される荷物の大小を、複数の光電管装置を用いて検出しているが、光電管装置の死角が多く、かご内全体を認識しているとはいえず、検出精度が低いという問題もある。また、検出精度を向上させるために、光電管装置を多く設置すると、コストが高くなるという問題もある。
【0007】
この発明は、上記のような課題を解決するためになされたものであり、かごに対する人および物体の出入りを検出して、かご容積に対する人および物体の占有率を低コストかつ高精度に算出するエレベータの乗降検出装置、検出結果に応じてエレベータを駆動するエレベータ装置、並びにエレベータの乗降検出方法を得ることを目的とする。
【課題を解決するための手段】
【0008】
この発明に係るエレベータの乗降検出装置は、エレベータの出入り口に設けられ、出入り口を通過する人および物体を線状画像としてそれぞれ検出する複数の画像検出部と、複数の画像検出部で検出された線状画像から、人および物体の投影面積を算出する投影面積算出部と、複数の画像検出部で検出された線状画像から、人および物体の移動方向を判定する移動方向判定部と、投影面積および移動方向に基づいて、エレベータのかご容積に対する人および物体の占有率を算出する占有率算出部と、を備えたものである。
【0009】
また、この発明に係るエレベータの乗降検出方法は、エレベータの出入り口を通過する人および物体を同時に複数の線状画像として検出する画像検出ステップと、画像検出ステップで検出された複数の線状画像から、人および物体の投影面積を算出する投影面積算出ステップと、画像検出ステップで検出された複数の線状画像から、人および物体の移動方向を判定する移動方向判定ステップと、投影面積および移動方向に基づいて、エレベータのかご容積に対する人および物体の占有率を算出する占有率算出ステップと、を備えたものである。
【発明の効果】
【0010】
この発明に係るエレベータの乗降検出装置およびエレベータの乗降検出方法によれば、複数の画像検出部(ステップ)は、エレベータの出入り口を通過する人および物体を線状画像としてそれぞれ検出し、投影面積算出部(ステップ)は、検出された複数の線状画像から、人および物体の投影面積を算出し、移動方向判定部(ステップ)は、検出された複数の線状画像から、人および物体の移動方向を判定し、占有率算出部(ステップ)は、投影面積および移動方向に基づいて、エレベータのかご容積に対する人および物体の占有率を算出する。
そのため、かごに対する人および物体の出入りを検出して、かご容積に対する人および物体の占有率を低コストかつ高精度に算出するエレベータの乗降検出装置、検出結果に応じてエレベータを駆動するエレベータ装置、並びにエレベータの乗降検出方法を得ることができる。
【図面の簡単な説明】
【0011】
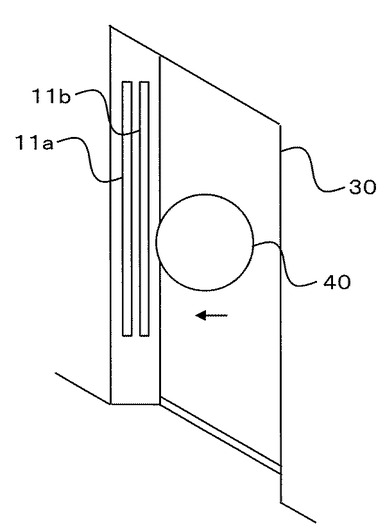
【図1】この発明の実施の形態1に係るエレベータの乗降検出装置を含むエレベータ装置を示す全体構成図である。
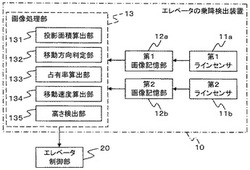
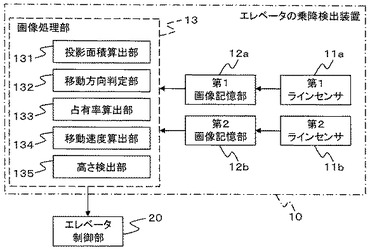
【図2】この発明の実施の形態1に係るエレベータの乗降検出装置を示すブロック構成図である。
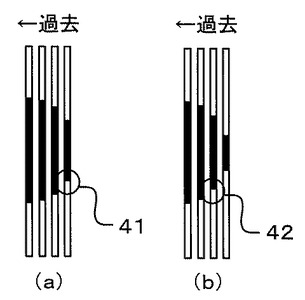
【図3】(a)、(b)は、この発明の実施の形態1に係るエレベータの乗降検出装置の複数の画像検出部が検出した線状画像を、時系列で並べて示す説明図である。
【図4】この発明の実施の形態1に係るエレベータの乗降検出装置の複数の画像検出部が検出した線状画像を、画像処理して求めた物体の投影面積および移動方向を示す説明図である。
【発明を実施するための形態】
【0012】
以下、この発明に係るエレベータの乗降検出装置およびエレベータ装置、並びにエレベータの乗降検出方法の好適な実施の形態につき図面を用いて説明するが、各図において同一、または相当する部分については、同一符号を付して説明する。
【0013】
実施の形態1.
図1は、この発明の実施の形態1に係るエレベータの乗降検出装置10を含むエレベータ装置を示す全体構成図である。また、図2は、この発明の実施の形態1に係るエレベータの乗降検出装置10をエレベータ制御部20とともに示すブロック構成図である。
【0014】
図1、2において、エレベータの出入り口30には、出入り口30を通過する物体40(人および物体)を線状画像としてそれぞれ検出する2本のラインセンサ(画像検出部)11a、11bが設けられている。以下、第1ラインセンサ11a、第2ラインセンサ11bと称する。
【0015】
エレベータの乗降検出装置10は、第1ラインセンサ11a、第2ラインセンサ11b、第1画像記憶部12a、第2画像記憶部12bおよび画像処理部13を備えている。また、エレベータの乗降検出装置10は、エレベータの乗降検出装置10の検出結果に基づいて、エレベータの動作を制御するエレベータ制御部20と接続されている。
【0016】
第1画像記憶部12aおよび第2画像記憶部12bは、それぞれ第1ラインセンサ11aおよび第2ラインセンサ11bで検出された線状画像を、あらかじめ定められた時間毎に蓄積する。第1画像記憶部12aおよび第2画像記憶部12bに記憶される線状画像の例を図3に示す。
【0017】
図3(a)は、第1ラインセンサ11aで検出された線状画像を時系列で並べて示し、図3(b)は、第2ラインセンサ11bで検出された線状画像を時系列で並べて示している。例えば、図1に示すように、丸い物体40が出入り口30を通過した場合には、第1画像記憶部12aには、図3(a)のような線状画像が連続で記憶され、第2画像記憶部12bには、図3(b)のような線状画像が連続で記憶される。
【0018】
画像処理部13は、投影面積算出部131、移動方向判定部132、占有率算出部133、移動速度算出部134および高さ検出部135を有している。画像処理部13は、第1画像記憶部12aおよび第2画像記憶部12bに記憶された線状画像における物体40の境界を識別したり、互いの線状画像の一致、不一致を照合したりすることができる。
【0019】
例えば、図3に示すように、第1ラインセンサ11aの現在の境界41が、第2ラインセンサ11bの1つ過去の境界42と一致すれば、境界41は、1単位時間分左に移動したものとみなすことができる。各境界について照合を行うことにより、図4に示されるように、境界の移動量から、通過した物体40の投影面積、移動方向および移動速度を得ることができる。
【0020】
具体的には、投影面積算出部131は、第1画像記憶部12aおよび第2画像記憶部12bに記憶された線状画像から、人および物体の投影面積を算出する。移動方向判定部132は、第1画像記憶部12aおよび第2画像記憶部12bに記憶された線状画像から、人および物体の移動方向を判定する。
【0021】
占有率算出部133は、投影面積算出部131で算出された投影面積および移動方向判定部132で判定された移動方向に基づいて、エレベータのかご容積に対する人および物体の占有率を算出する。なお、かご容積は、占有率算出部133にあらかじめ設定されている。また、人および物体の幅は、あらかじめ任意の値が設定されている。
【0022】
すなわち、占有率算出部133は、出入り口30を通過した人および物体の投影面積と、移動方向とから、エレベータに乗り込んだ人および物体の投影面積を加算、降りた人および物体の投影面積を減算して累積し、エレベータのかご容積に対する人および物体の占有率を算出する。
【0023】
移動速度算出部134は、第1画像記憶部12aおよび第2画像記憶部12bに記憶された線状画像から、人および物体の移動速度を算出する。高さ検出部135は、第1画像記憶部12aおよび第2画像記憶部12bに記憶された線状画像から、人および物体の高さを検出する。
【0024】
エレベータ制御部20は、第1ラインセンサ11aおよび第2ラインセンサ11bが人または物体を検出している最中には、エレベータの戸の戸閉動作を停止または反転させる。これにより、エレベータの乗降検出装置10をエレベータの戸の安全装置として用いることができる。
【0025】
また、エレベータ制御部20は、占有率算出部133で算出されたエレベータのかご容積に対する人および物体の占有率が、所定の占有率以上である場合に、乗り場呼びをキャンセルする。これにより、かごが満員の場合に、エレベータの運転を効率化することができる。
【0026】
また、エレベータ制御部20は、移動速度算出部134で算出された人および物体の移動速度が所定の移動速度以下である場合に、エレベータの戸の開閉速度を通常時よりも低減する。これにより、ゆっくり戸を通過する人および物体を、例えば高齢者や運動の不自由な者とみなして、戸開時間を長めにしたり、戸閉速度を遅くしたりして安全を確保することができる。なお、実際に移動速度を算出することにより、高精度な制御が可能となる。
【0027】
また、エレベータ制御部20は、高さ検出部135で検出された人および物体の高さが所定高さ以下である場合であって、一定時間かご内動作が行われなかったときに、エレベータの戸を開放する。これにより、背の低い人および物体を、例えば子供やペットとみなし、一定時間かご内操作が行われなかった場合に、エレベータの戸を開放して閉じ込めを防止することができる。なお、移動方向から乗り降りを区別することができるので、高精度な制御が可能となる。
【0028】
以上のように、実施の形態1によれば、複数の画像検出部は、エレベータの出入り口を通過する人および物体を線状画像としてそれぞれ検出し、投影面積算出部は、検出された複数の線状画像から、人および物体の投影面積を算出し、移動方向判定部は、検出された複数の線状画像から、人および物体の移動方向を判定し、占有率算出部は、投影面積および移動方向に基づいて、エレベータのかご容積に対する人および物体の占有率を算出する。
そのため、かごに対する人および物体の出入りを検出して、かご容積に対する人および物体の占有率を低コストかつ高精度に算出するエレベータの乗降検出装置、検出結果に応じてエレベータを駆動するエレベータ装置、並びにエレベータの乗降検出方法を得ることができる。
【0029】
なお、上記実施の形態1では、ラインセンサが2本の場合を示しているが、ラインセンサは、3本以上であってもよい。また、ラインセンサは、出入り口かごの戸、または乗り場の戸に設けられてもよい。
【符号の説明】
【0030】
10 乗降検出装置、11a 第1ラインセンサ(画像検出部)、11b 第2ラインセンサ(画像検出部)、12a 第1画像記憶部、12b 第2画像記憶部、13 画像処理部、20 エレベータ制御部、30 出入り口、40 物体、41、42 境界、131 投影面積算出部、132 移動方向判定部、133 占有率算出部、134 移動速度算出部、135 高さ検出部。
【技術分野】
【0001】
この発明は、かごに対する人および物体の出入りを検出するエレベータの乗降検出装置、検出結果に応じてエレベータを駆動するエレベータ装置、並びにエレベータの乗降検出方法に関する。
【背景技術】
【0002】
従来のエレベータ装置は、かごを乗降する乗客の検知を行う光電装置と、音声により乗客への指示を行う音声案内手段とを備え、光電装置での乗客検知時間が所定時間よりも短い場合は、音声案内手段による乗客への指示を行わず、乗客検知時間が所定時間よりも長い場合は、音声案内手段による乗客への指示を行う(例えば、特許文献1参照)。
【0003】
また、従来のエレベータの満載通過装置は、各階にホール呼び登録する呼び装置を備え、かご内に積載される荷物の大小を識別する装置と直行運転の設定を行う釦とをかごに設け、この識別装置により、大きな荷物の積載が検知され、かつ設定釦の操作が行われると、呼び装置に関係なくかごを乗客の指定階へ直行運転させる手段を備えている(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第4349229号公報
【特許文献2】特開平5−201629号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来技術には、以下のような課題がある。
特許文献1のものでは、1個の光電装置でかごを乗降する乗客を検知しているので、乗客の移動方向を判断することができず、乗客の乗降状況を正確に把握することができないという問題がある。
【0006】
また、特許文献2のものでは、かご内に積載される荷物の大小を、複数の光電管装置を用いて検出しているが、光電管装置の死角が多く、かご内全体を認識しているとはいえず、検出精度が低いという問題もある。また、検出精度を向上させるために、光電管装置を多く設置すると、コストが高くなるという問題もある。
【0007】
この発明は、上記のような課題を解決するためになされたものであり、かごに対する人および物体の出入りを検出して、かご容積に対する人および物体の占有率を低コストかつ高精度に算出するエレベータの乗降検出装置、検出結果に応じてエレベータを駆動するエレベータ装置、並びにエレベータの乗降検出方法を得ることを目的とする。
【課題を解決するための手段】
【0008】
この発明に係るエレベータの乗降検出装置は、エレベータの出入り口に設けられ、出入り口を通過する人および物体を線状画像としてそれぞれ検出する複数の画像検出部と、複数の画像検出部で検出された線状画像から、人および物体の投影面積を算出する投影面積算出部と、複数の画像検出部で検出された線状画像から、人および物体の移動方向を判定する移動方向判定部と、投影面積および移動方向に基づいて、エレベータのかご容積に対する人および物体の占有率を算出する占有率算出部と、を備えたものである。
【0009】
また、この発明に係るエレベータの乗降検出方法は、エレベータの出入り口を通過する人および物体を同時に複数の線状画像として検出する画像検出ステップと、画像検出ステップで検出された複数の線状画像から、人および物体の投影面積を算出する投影面積算出ステップと、画像検出ステップで検出された複数の線状画像から、人および物体の移動方向を判定する移動方向判定ステップと、投影面積および移動方向に基づいて、エレベータのかご容積に対する人および物体の占有率を算出する占有率算出ステップと、を備えたものである。
【発明の効果】
【0010】
この発明に係るエレベータの乗降検出装置およびエレベータの乗降検出方法によれば、複数の画像検出部(ステップ)は、エレベータの出入り口を通過する人および物体を線状画像としてそれぞれ検出し、投影面積算出部(ステップ)は、検出された複数の線状画像から、人および物体の投影面積を算出し、移動方向判定部(ステップ)は、検出された複数の線状画像から、人および物体の移動方向を判定し、占有率算出部(ステップ)は、投影面積および移動方向に基づいて、エレベータのかご容積に対する人および物体の占有率を算出する。
そのため、かごに対する人および物体の出入りを検出して、かご容積に対する人および物体の占有率を低コストかつ高精度に算出するエレベータの乗降検出装置、検出結果に応じてエレベータを駆動するエレベータ装置、並びにエレベータの乗降検出方法を得ることができる。
【図面の簡単な説明】
【0011】
【図1】この発明の実施の形態1に係るエレベータの乗降検出装置を含むエレベータ装置を示す全体構成図である。
【図2】この発明の実施の形態1に係るエレベータの乗降検出装置を示すブロック構成図である。
【図3】(a)、(b)は、この発明の実施の形態1に係るエレベータの乗降検出装置の複数の画像検出部が検出した線状画像を、時系列で並べて示す説明図である。
【図4】この発明の実施の形態1に係るエレベータの乗降検出装置の複数の画像検出部が検出した線状画像を、画像処理して求めた物体の投影面積および移動方向を示す説明図である。
【発明を実施するための形態】
【0012】
以下、この発明に係るエレベータの乗降検出装置およびエレベータ装置、並びにエレベータの乗降検出方法の好適な実施の形態につき図面を用いて説明するが、各図において同一、または相当する部分については、同一符号を付して説明する。
【0013】
実施の形態1.
図1は、この発明の実施の形態1に係るエレベータの乗降検出装置10を含むエレベータ装置を示す全体構成図である。また、図2は、この発明の実施の形態1に係るエレベータの乗降検出装置10をエレベータ制御部20とともに示すブロック構成図である。
【0014】
図1、2において、エレベータの出入り口30には、出入り口30を通過する物体40(人および物体)を線状画像としてそれぞれ検出する2本のラインセンサ(画像検出部)11a、11bが設けられている。以下、第1ラインセンサ11a、第2ラインセンサ11bと称する。
【0015】
エレベータの乗降検出装置10は、第1ラインセンサ11a、第2ラインセンサ11b、第1画像記憶部12a、第2画像記憶部12bおよび画像処理部13を備えている。また、エレベータの乗降検出装置10は、エレベータの乗降検出装置10の検出結果に基づいて、エレベータの動作を制御するエレベータ制御部20と接続されている。
【0016】
第1画像記憶部12aおよび第2画像記憶部12bは、それぞれ第1ラインセンサ11aおよび第2ラインセンサ11bで検出された線状画像を、あらかじめ定められた時間毎に蓄積する。第1画像記憶部12aおよび第2画像記憶部12bに記憶される線状画像の例を図3に示す。
【0017】
図3(a)は、第1ラインセンサ11aで検出された線状画像を時系列で並べて示し、図3(b)は、第2ラインセンサ11bで検出された線状画像を時系列で並べて示している。例えば、図1に示すように、丸い物体40が出入り口30を通過した場合には、第1画像記憶部12aには、図3(a)のような線状画像が連続で記憶され、第2画像記憶部12bには、図3(b)のような線状画像が連続で記憶される。
【0018】
画像処理部13は、投影面積算出部131、移動方向判定部132、占有率算出部133、移動速度算出部134および高さ検出部135を有している。画像処理部13は、第1画像記憶部12aおよび第2画像記憶部12bに記憶された線状画像における物体40の境界を識別したり、互いの線状画像の一致、不一致を照合したりすることができる。
【0019】
例えば、図3に示すように、第1ラインセンサ11aの現在の境界41が、第2ラインセンサ11bの1つ過去の境界42と一致すれば、境界41は、1単位時間分左に移動したものとみなすことができる。各境界について照合を行うことにより、図4に示されるように、境界の移動量から、通過した物体40の投影面積、移動方向および移動速度を得ることができる。
【0020】
具体的には、投影面積算出部131は、第1画像記憶部12aおよび第2画像記憶部12bに記憶された線状画像から、人および物体の投影面積を算出する。移動方向判定部132は、第1画像記憶部12aおよび第2画像記憶部12bに記憶された線状画像から、人および物体の移動方向を判定する。
【0021】
占有率算出部133は、投影面積算出部131で算出された投影面積および移動方向判定部132で判定された移動方向に基づいて、エレベータのかご容積に対する人および物体の占有率を算出する。なお、かご容積は、占有率算出部133にあらかじめ設定されている。また、人および物体の幅は、あらかじめ任意の値が設定されている。
【0022】
すなわち、占有率算出部133は、出入り口30を通過した人および物体の投影面積と、移動方向とから、エレベータに乗り込んだ人および物体の投影面積を加算、降りた人および物体の投影面積を減算して累積し、エレベータのかご容積に対する人および物体の占有率を算出する。
【0023】
移動速度算出部134は、第1画像記憶部12aおよび第2画像記憶部12bに記憶された線状画像から、人および物体の移動速度を算出する。高さ検出部135は、第1画像記憶部12aおよび第2画像記憶部12bに記憶された線状画像から、人および物体の高さを検出する。
【0024】
エレベータ制御部20は、第1ラインセンサ11aおよび第2ラインセンサ11bが人または物体を検出している最中には、エレベータの戸の戸閉動作を停止または反転させる。これにより、エレベータの乗降検出装置10をエレベータの戸の安全装置として用いることができる。
【0025】
また、エレベータ制御部20は、占有率算出部133で算出されたエレベータのかご容積に対する人および物体の占有率が、所定の占有率以上である場合に、乗り場呼びをキャンセルする。これにより、かごが満員の場合に、エレベータの運転を効率化することができる。
【0026】
また、エレベータ制御部20は、移動速度算出部134で算出された人および物体の移動速度が所定の移動速度以下である場合に、エレベータの戸の開閉速度を通常時よりも低減する。これにより、ゆっくり戸を通過する人および物体を、例えば高齢者や運動の不自由な者とみなして、戸開時間を長めにしたり、戸閉速度を遅くしたりして安全を確保することができる。なお、実際に移動速度を算出することにより、高精度な制御が可能となる。
【0027】
また、エレベータ制御部20は、高さ検出部135で検出された人および物体の高さが所定高さ以下である場合であって、一定時間かご内動作が行われなかったときに、エレベータの戸を開放する。これにより、背の低い人および物体を、例えば子供やペットとみなし、一定時間かご内操作が行われなかった場合に、エレベータの戸を開放して閉じ込めを防止することができる。なお、移動方向から乗り降りを区別することができるので、高精度な制御が可能となる。
【0028】
以上のように、実施の形態1によれば、複数の画像検出部は、エレベータの出入り口を通過する人および物体を線状画像としてそれぞれ検出し、投影面積算出部は、検出された複数の線状画像から、人および物体の投影面積を算出し、移動方向判定部は、検出された複数の線状画像から、人および物体の移動方向を判定し、占有率算出部は、投影面積および移動方向に基づいて、エレベータのかご容積に対する人および物体の占有率を算出する。
そのため、かごに対する人および物体の出入りを検出して、かご容積に対する人および物体の占有率を低コストかつ高精度に算出するエレベータの乗降検出装置、検出結果に応じてエレベータを駆動するエレベータ装置、並びにエレベータの乗降検出方法を得ることができる。
【0029】
なお、上記実施の形態1では、ラインセンサが2本の場合を示しているが、ラインセンサは、3本以上であってもよい。また、ラインセンサは、出入り口かごの戸、または乗り場の戸に設けられてもよい。
【符号の説明】
【0030】
10 乗降検出装置、11a 第1ラインセンサ(画像検出部)、11b 第2ラインセンサ(画像検出部)、12a 第1画像記憶部、12b 第2画像記憶部、13 画像処理部、20 エレベータ制御部、30 出入り口、40 物体、41、42 境界、131 投影面積算出部、132 移動方向判定部、133 占有率算出部、134 移動速度算出部、135 高さ検出部。
【特許請求の範囲】
【請求項1】
エレベータの出入り口に設けられ、前記出入り口を通過する人および物体を線状画像としてそれぞれ検出する複数の画像検出部と、
前記複数の画像検出部で検出された線状画像から、前記人および物体の投影面積を算出する投影面積算出部と、
前記複数の画像検出部で検出された線状画像から、前記人および物体の移動方向を判定する移動方向判定部と、
前記投影面積および前記移動方向に基づいて、前記エレベータのかご容積に対する人および物体の占有率を算出する占有率算出部と、
を備えたことを特徴とするエレベータの乗降検出装置。
【請求項2】
請求項1に記載のエレベータの乗降検出装置と、
前記エレベータの乗降検出装置の検出結果に基づいて、前記エレベータの動作を制御するエレベータ制御部と、
を備えたことを特徴とするエレベータ装置。
【請求項3】
前記エレベータ制御部は、前記複数の画像検出部が人または物体を検出している最中には、前記エレベータの戸の戸閉動作を停止または反転させる
ことを特徴とする請求項2に記載のエレベータ装置。
【請求項4】
前記エレベータ制御部は、前記占有率が所定の占有率以上である場合に、乗り場呼びをキャンセルする
ことを特徴とする請求項2または請求項3に記載のエレベータ装置。
【請求項5】
前記複数の画像検出部で検出された線状画像から、前記人および物体の移動速度を算出する移動速度算出部をさらに備え、
前記エレベータ制御部は、前記移動速度が所定の移動速度以下である場合に、前記エレベータの戸の開閉速度を通常時よりも低減する
ことを特徴とする請求項2から請求項4までの何れか1項に記載のエレベータ装置。
【請求項6】
前記複数の画像検出部で検出された線状画像から、前記人および物体の高さを検出する高さ検出部をさらに備え、
前記エレベータ制御部は、前記人および物体の高さが所定高さ以下である場合であって、一定時間かご内動作が行われなかったときに、前記エレベータの戸を開放する
ことを特徴とする請求項2から請求項5までの何れか1項に記載のエレベータ装置。
【請求項7】
エレベータの出入り口を通過する人および物体を同時に複数の線状画像として検出する画像検出ステップと、
前記画像検出ステップで検出された複数の線状画像から、前記人および物体の投影面積を算出する投影面積算出ステップと、
前記画像検出ステップで検出された複数の線状画像から、前記人および物体の移動方向を判定する移動方向判定ステップと、
前記投影面積および前記移動方向に基づいて、前記エレベータのかご容積に対する人および物体の占有率を算出する占有率算出ステップと、
を備えたことを特徴とするエレベータの乗降検出方法。
【請求項1】
エレベータの出入り口に設けられ、前記出入り口を通過する人および物体を線状画像としてそれぞれ検出する複数の画像検出部と、
前記複数の画像検出部で検出された線状画像から、前記人および物体の投影面積を算出する投影面積算出部と、
前記複数の画像検出部で検出された線状画像から、前記人および物体の移動方向を判定する移動方向判定部と、
前記投影面積および前記移動方向に基づいて、前記エレベータのかご容積に対する人および物体の占有率を算出する占有率算出部と、
を備えたことを特徴とするエレベータの乗降検出装置。
【請求項2】
請求項1に記載のエレベータの乗降検出装置と、
前記エレベータの乗降検出装置の検出結果に基づいて、前記エレベータの動作を制御するエレベータ制御部と、
を備えたことを特徴とするエレベータ装置。
【請求項3】
前記エレベータ制御部は、前記複数の画像検出部が人または物体を検出している最中には、前記エレベータの戸の戸閉動作を停止または反転させる
ことを特徴とする請求項2に記載のエレベータ装置。
【請求項4】
前記エレベータ制御部は、前記占有率が所定の占有率以上である場合に、乗り場呼びをキャンセルする
ことを特徴とする請求項2または請求項3に記載のエレベータ装置。
【請求項5】
前記複数の画像検出部で検出された線状画像から、前記人および物体の移動速度を算出する移動速度算出部をさらに備え、
前記エレベータ制御部は、前記移動速度が所定の移動速度以下である場合に、前記エレベータの戸の開閉速度を通常時よりも低減する
ことを特徴とする請求項2から請求項4までの何れか1項に記載のエレベータ装置。
【請求項6】
前記複数の画像検出部で検出された線状画像から、前記人および物体の高さを検出する高さ検出部をさらに備え、
前記エレベータ制御部は、前記人および物体の高さが所定高さ以下である場合であって、一定時間かご内動作が行われなかったときに、前記エレベータの戸を開放する
ことを特徴とする請求項2から請求項5までの何れか1項に記載のエレベータ装置。
【請求項7】
エレベータの出入り口を通過する人および物体を同時に複数の線状画像として検出する画像検出ステップと、
前記画像検出ステップで検出された複数の線状画像から、前記人および物体の投影面積を算出する投影面積算出ステップと、
前記画像検出ステップで検出された複数の線状画像から、前記人および物体の移動方向を判定する移動方向判定ステップと、
前記投影面積および前記移動方向に基づいて、前記エレベータのかご容積に対する人および物体の占有率を算出する占有率算出ステップと、
を備えたことを特徴とするエレベータの乗降検出方法。
【図1】


【図2】
【図3】
【図4】

【図2】
【図3】
【図4】
【公開番号】特開2013−43711(P2013−43711A)
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願番号】特願2011−180516(P2011−180516)
【出願日】平成23年8月22日(2011.8.22)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願日】平成23年8月22日(2011.8.22)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]